
情報処理装置、情報処理方法、並びにプログラム
【課題】精度を向上させた位置情報の記憶を行う。
【解決手段】自己の位置を測位する測位部と、測位部により測位された位置情報を記憶する記憶部と、測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、予想部で予想された距離が、第1の時間に対応する閾値を超えたか否かを判断し、距離が閾値を超えたと判断された場合、記憶部に記憶されている最新の位置情報を、記憶部からクリアするように制御する制御部とを備える。本技術は、ナビゲーションシステムに適用できる。
【解決手段】自己の位置を測位する測位部と、測位部により測位された位置情報を記憶する記憶部と、測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、予想部で予想された距離が、第1の時間に対応する閾値を超えたか否かを判断し、距離が閾値を超えたと判断された場合、記憶部に記憶されている最新の位置情報を、記憶部からクリアするように制御する制御部とを備える。本技術は、ナビゲーションシステムに適用できる。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、情報処理装置、情報処理方法、並びにプログラムに関する。詳しくは、位置情報を取得し、記録する情報処理装置、情報処理方法、並びにプログラムに関する。
【背景技術】
【0002】
GPS(Global Positioning System)を用いて位置情報を取得し、その位置情報を利用することが行われている。例えば、道案内を行い、車載されるカーナビゲーションシステムなどがある。また、近年では、撮影した場所を特定するために、GPSからの信号を受信し、位置情報を取得し、記憶するデジタルカメラなどもある。
【0003】
一方で、GPSからの信号は、どの位置でも必ず取得できることが保障されているわけではない。例えば、建物の中やトンネル内では、GPSからの信号が受信できず、位置情報が取得できないことがある。このような取得できないときの対処について、特許文献1では、地磁気センサと加速度センサを用いて自立的な測位を行うことを提案している。また、特許文献2では、GPSからの信号が受信できず、位置情報が取得できないときでも、記録媒体に記録されている位置情報を読み出し、代用することが提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010-145180号公報
【特許文献2】特開2010-62704号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
位置情報が取得できないときに、特許文献1のように、自立的な測位を行うことで、位置情報を補うことができるが、自立的な測位は、GPSによる測位よりも精度が低い。例えば、位置情報が取得できない間に移動した距離が大きくなると、自立的な測位による誤差も大きくなる可能性が高い。よって、位置情報を補うことができても、誤差が大きくなり、精度が低い可能性がある。
【0006】
また同様に、特許文献2においても、位置情報が取得できない間に移動した距離が大きくなると、記録媒体に記録されている位置情報との差が大きくなり、位置情報を補うことができても、精度が低い位置情報となってしまう。
【0007】
本技術は、このような状況に鑑みてなされたものであり、精度の低い位置情報が、位置情報として採用されないようにし、記録される位置情報の精度を向上させることができるようにするものである。
【課題を解決するための手段】
【0008】
本技術の一側面の情報処理装置は、自己の位置を測位する測位部と、前記測位部により測位された位置情報を記憶する記憶部と、前記測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、前記予想部で予想された前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離が前記閾値を超えたと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするように制御する制御部とを備える。
【0009】
前記予想部は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時刻のときの移動速度に関連付けられている第2の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値を算出し、その差分値を、前記第1の時刻と前記第2の時刻の差分値で除算することで平均速度を算出し、前記平均速度と前記第1の時間を乗算して、前記距離を予想するようにすることができる。
【0010】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出するようにすることができる。
【0011】
移動速度に応じた複数のモードが設けられ、モード毎に前記第2の時間が設定され、前記予想部は、前記第1の時刻のときの移動速度が該当するモードを判断し、そのモードに設定されている前記第2の時間を用いて、前記距離を予想するようにすることができる。
【0012】
前記距離が前記閾値を超えていないと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記第1の時間内で取得された位置情報として前記記憶部に記憶するようにすることができる。
【0013】
前記閾値は、予め設定されている速度と、前記第1の時間を乗算して算出される値であるようにすることができる。
【0014】
前記閾値は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値であるようにすることができる。
【0015】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出するようにすることができる。
【0016】
前記制御部は、前記第1の時間が、所定の時間以上になった時点で、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするようにすることができる。
【0017】
前記制御部は、前記第1の時間だけ、前記第1の時刻よりも遡った時刻の位置情報が、前記記憶部に記憶されていないと判断した場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部にからクリアするようにすることができる。
【0018】
本技術の一側面の情報処理方法は、自己の位置を測位する測位部と、前記測位部により測位された位置情報を記憶する記憶部とを備える情報処理装置の情報処理方法において、前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするステップを含む。
【0019】
本技術の一側面のプログラムは、自己の位置を測位する測位部と、前記測位部により測位された位置情報を記憶する記憶部とを備える情報処理装置を制御するコンピュータに、前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするステップを含む処理を実行させる。
【0020】
本技術の一側面の情報処理装置、情報処理方法、並びにプログラムにおいては、自己の位置が測位され、その位置情報が記憶される。測位が行えていないと判断される場合、測位が行えない時間内で移動した距離が予想され、距離が、第1の時間に対応する閾値を超えたと判断されたとき、記憶部に記憶されている最新の位置情報が記憶部からクリアされる。
【発明の効果】
【0021】
本技術の一側面によれば、位置情報が取得されないときに、位置情報を補足するような場合に、精度の低い位置情報が、位置情報として採用されないようにし、記録される位置情報の精度を向上させることができる。
【図面の簡単な説明】
【0022】
【図1】本技術を適用した情報処理装置の一実施の形態の構成を示す図である。
【図2】情報処理装置の機能を説明するための図である。
【図3】情報処理装置の動作について説明するためのフローチャートである。
【図4】未測位時の処理について説明するためのフローチャートである。
【図5】移動経路距離について説明するための図である。
【図6】測位時と未測位時の時間と位置の関係について説明するための図である。
【図7】画面例を示す図である。
【図8】画面例を示す図である。
【図9】情報処理装置の動作について説明するためのフローチャートである。
【図10】他の構成例を示す図である。
【図11】記録媒体について説明するための図である。
【発明を実施するための形態】
【0023】
以下に、本技術の実施の形態について図面を参照して説明する。
【0024】
[情報処理装置の構成について]
図1は、本技術を適用した情報処理装置の一実施の形態の構成を示す図である。図1に示した情報処理装置10は、測位部11、記憶部12、制御部13、操作部14、および表示部15を備える構成とされる。
【0025】
情報処理装置10は、GPS(Global Positioning System)を用いた測位を行い、記憶する機能を有する。情報処理装置10は、ナビゲーションシステムなどと称される道案内を行う装置に適用できる。また、情報処理装置10を、カメラなどの撮影装置に組み込み、撮影位置を取得し、記録するように構成することもできる。
【0026】
測位部11は、GPSを用いた測位を行い、その測位された結果(以下、適宜、位置情報と記述する)を記憶部12に供給する。位置情報として、緯度、経度が含まれる。また、情報処理装置10自体の移動速度や、GPSからの信号に含まれる時刻なども取得され、記憶部12に供給されるように構成することも可能である。記憶部12は、測位部11からの位置情報を取得時間と関連付けて記憶する。取得時間は、GPSの信号に含まれる時刻でも良いし、後述するように、測位が開始されてからの経過時間でも良い。
【0027】
また測位部11は、ここでは、GPSからの信号により自己の位置を測位することで、位置情報を取得するとして説明をするが、GPSからの信号による測位に限定されるわけではない。例えば、情報処理装置10を携帯電話機などに適用することもでき、携帯電話機の場合には、携帯電話機の基地局から位置情報を取得することもできる。
【0028】
制御部13は、情報処理装置10内の各部を制御する。操作部14は、ユーザインタフェースとして機能し、ユーザからの指示を受け付けるボタンなどから構成されている。表示部15は、ユーザに対して情報を提供する。表示部15がタッチパネルで構成される場合、操作部14と一体化された構造とされる。操作部14が操作されることで指示されたユーザからの指示は、制御部13に供給され、その指示内容に応じた処理が実行される。
【0029】
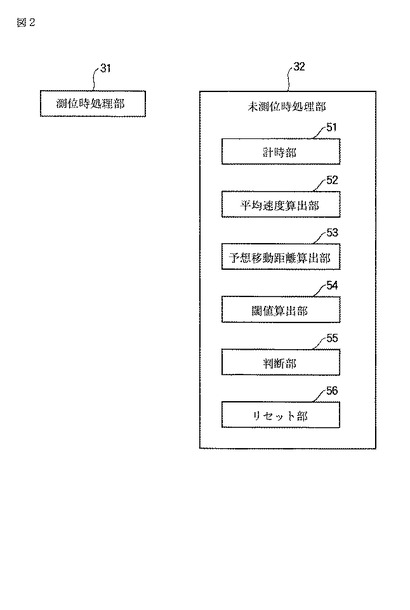
図2は、例えば、記憶部12に記憶されているプログラムが実行され、そのプログラムに応じて制御部13が制御を行うことで、情報処理装置10内に実現される機能について説明するための図である。情報処理装置10は、正常に測位部11で測位できているときの処理を行う測位時処理部31と、正常に測位部11で測位できていないときの処理を行う未測位時処理部32を備える。未測位時処理部32は、計時部51、平均速度算出部52、予想移動距離算出部53、閾値算出部54、判断部55、およびリセット部56を備える。これら各部が行う処理について、以下に説明を加える。
【0030】
[情報処理装置の動作について]
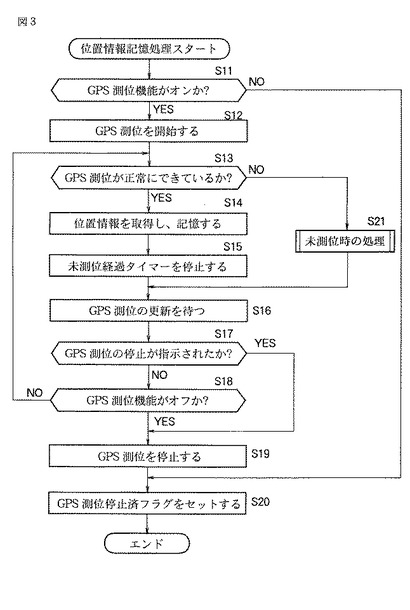
次に、情報処理装置10の動作について説明する。図3のフローチャートは、情報処理装置10の電源がオンにされたときに開始される処理である。ステップS11において、GPS測位機能がオンであるか否かが判断される。制御部13は、電源がオンにされたときに、測位部11による測位がオンにされているか否かを判断する。ステップS11において、測位機能がオンであると判断された場合、ステップS12に処理が進められる。ステップS12において、測位部11により、GPS測位が開始される。GPS測位とは、GPSの衛星からの信号を受信し、その受信された信号から、情報処理装置10が位置する緯度や経度を算出することを意味する。
【0031】
ステップS13において、GPS測位が正常にできているか否かが判断される。GPSによる測位は、衛星からの信号を受信することで行われるため、例えば、建物内やトンネル内に位置すると、衛星からの信号が受信しづらくなり、正常に測位が行えない可能性がある。そこで、ステップS13において、正常に衛星からの信号を受信し、測位が行われているか否かが判断される。ステップS13において、測位が正常に行われていると判断された場合、ステップS14に処理が進められる。このように、正常に測位が行われているときの処理は、測位時処理部31により処理が行われる。
【0032】
ステップS14において、測位部11により測位された結果(位置情報)が、記憶部12に供給され、記憶される。この際、位置情報が取得された時刻、情報処理装置10の移動速度なども関連付けられて記憶されるようにしても良い。また記憶部12をリングバッファで構成し、そのリングバッファに、位置情報や取得時刻が組み合わされて追記されることで記憶されるように構成することも可能である。なお、ここでは、取得時刻は、GPSの信号から得られる時刻ではなく、電源がオンにされたときからの経過時間をタイムスタンプとし、そのタイムスタンプが、少なくとも位置情報と関連付けられて記憶されるとして説明を続ける。
【0033】
ステップS15において、未測位経過タイマーが停止される。この未測位経過タイマーについての詳細は後述するが、測位部11により正常に測位が行えない状態になった時点から計時を開始するタイマーである。この計時は、計時部51で行われる。ステップS15において、計時部51による計時が停止される。
【0034】
ステップS16において、GPS測位の更新待ち(待機状態)とされ、ステップS17に処理が進められる。ステップS17において、GPS測位停止要求があるか否かが判断される。ユーザが操作部14を操作し、測位部11による測位の停止を指示した場合、ステップS17において、GPS測位停止要求があったと判断され、ステップS19に処理が進められる。一方で、ステップS17において、GPS測位停止要求はなかったと判断された場合、ステップS18に処理が進められる。
【0035】
ステップS18において、GPS測位機能がオフであるか否かが判断され、オフであると判断された場合、ステップS19に処理が進められる。ステップS19において、GPS測位が停止される。すなわちこの場合、ステップS17において、GPS測位停止の要求がユーザから指示された場合、または、ステップS18において、GPS測位機能がオフにされていると判断された場合であるため、測位部11による測位処理が停止される。そして、ステップS20に処理が進められる。
【0036】
このステップS20の処理には、ステップS11において、GPS測位機能がオンではないと判断された場合、すなわち、オフであると判断されたときにも来る。ステップS20において、GPS測位停止済フラグがセットされる。このフラグがセットされることで、測位処理が終了される。
【0037】
一方で、ステップS18において、GPS測位機能はオフではないと判断された場合、すなわちオンであると判断された場合、ステップS13に処理が戻され、それ以降の処理が繰り返される。
【0038】
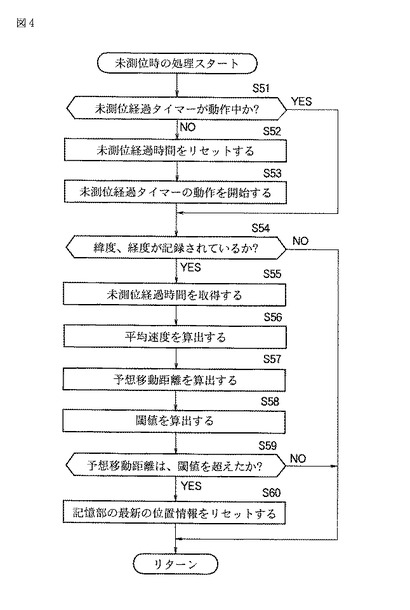
一方で、ステップS13において、GPS測位が正常に行われていないと判断された場合、ステップS21に処理が進められる。ステップS21において、未測位の処理が実行される。ステップS21において実行される未測位の処理について、図4のフローチャートを参照して説明する。図4に示したフローチャートの処理は、未測位時処理部32により実行される。
【0039】
[未測位時の処理について]
ステップS51において、未測位経過タイマーが動作中であるか否かが判断される。未測位経過タイマーは、計時部51が計時を行うことで実現されるため、計時部51が計時を行っているか否かが判断されることでステップS51における処理が実行される。ステップS51において、未測位経過タイマーが動作中ではないと判断された場合、ステップS52に処理が進められる。ステップS52において、未測位経過時間がリセットされる。すなわちこの場合、計時部51の計時時間が0にセットされる。
【0040】
そして、ステップS53において、未測位経過タイマーの動作が開始される。すなわちこの場合、計時部51による計時が開始される。未測位経過タイマーは、GPS測位が正常に行えない時間を計時するためのタイマーであり、未測位の間は停止されることなく動作し、その時間を計時するように構成されている。
【0041】
ステップS54において、緯度、経度が記憶部12に記憶されているか否かが判断される。ステップS54の処理には、ステップS51において、未測位経過タイマーが動作中であると判断されたときにも来る。すなわち、計時部51における計時が行われているとき、ステップS54の処理が実行される。ステップS54において、記憶部12に緯度、経度(位置情報)が記憶されていると判断された場合、ステップS55に処理が進められる。
【0042】
ステップS55において、未測位経過時間が取得される。すなわち、この時点で、計時部51が計時している時間を、予想移動距離算出部53と閾値算出部54は、それぞれ取得する。ステップS56において、平均速度算出部52は、平均速度を算出する。この平均速度は、測位できていたときのユーザ(情報処理装置10)の移動速度の平均を求めることで算出される。
【0043】
ステップS57において、予想移動距離算出部53は、予想移動距離を算出する。この予想移動距離とは、測位ができなくなった時点から、ユーザ(情報処理装置10)が移動したと予想される距離である。予想移動距離は、未測位経過時間と平均速度から求められる。
【0044】
ステップS58において、閾値算出部54は、閾値を算出する。閾値算出部54において算出される閾値は、予想移動距離と比較される閾値である。閾値は、未測位経過時間に基づいて算出される値である。
【0045】
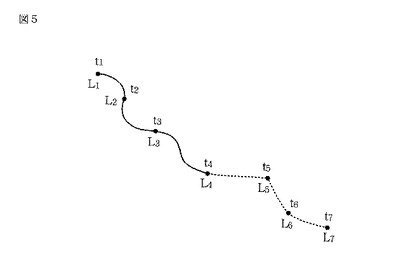
ステップS55乃至S58までの処理について、図5、図6を参照して説明する。図5は、ユーザ(情報処理装置10)が移動した軌跡を表す。時刻t1のときに、位置L1に位置し、時刻t2のときに、位置L2まで移動し、時刻t3のときに、位置L3まで移動し、時刻t4のときに、位置L4まで移動し、時刻t5のときに、位置L5まで移動し、時刻t6のときに、位置L6まで移動し、時刻t7のときに、位置L7まで移動したとする。また、時刻t1から時刻t4までの間は、測位できている状態であったが、時刻t4から時刻t7までの間は未測位の状態であったとする。
【0046】
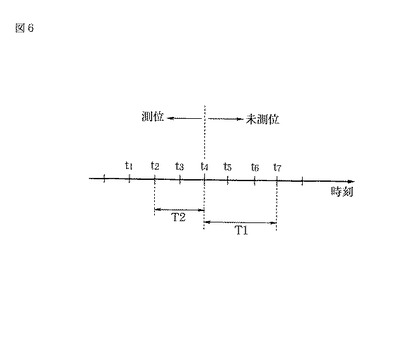
測位は、所定の時間間隔で行われる。ここでは、所定の時間間隔を5分として説明を続けるが、この時間間隔は5分に限定されることを示す記載ではない。図5に示したような移動が行われ、測位または未測位の状態が切り替わった状態を、時間軸で表すと、図6のようになる。時刻t1乃至t7は、5分間隔なので、等間隔に時間軸上に配置される。時刻t4より前の時間は位置情報が取得できている状態であり、時刻t4より後の時間は未測位の状態である。また、ここでは、図4に示したフローチャートの処理が、時刻t7において実行された場合を例として説明を続ける。
【0047】
ステップS55における処理が、時刻t7において実行されると、未測位経過時間として取得されるのは、時刻t4から時刻t7までの時間である。このステップS55において取得される未測位経過時間を時間T1とする。よって、時間T1は、
時間T1=時刻t7―時刻t4
となる。この場合、5分毎に測位されているため、時間T1は、15分となる。ステップS55においては、時間T1=15分という未測位経過時間が取得される。
【0048】
次に、平均速度の算出について説明する。平均速度は、時間T2が用いられて算出される。時間T2は、未測位となった時刻(この場合、時刻t4)のときに設定されているモードまたは時速により設定される時間である。例えば、以下のような関係が予め設定されている。
時速10キロメータ以下 (徒歩モード) 時間T2は10分
時速10〜30キロメータ (自転車モード) 時間T2は5分
時速30〜50キロメータ (バイクモード) 時間T2は3分
時速50キロメータ以上 (車モード) 時間T2は2分
【0049】
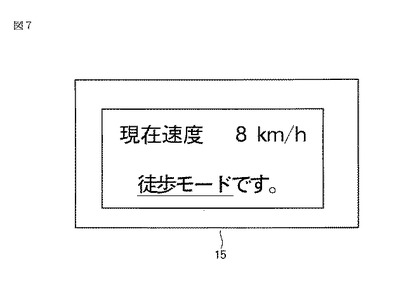
時速は、例えば、測位できているときに、2点間の距離と時間を用いて算出することができる。よって、測位が正常に行えているときに時速を計算し、記憶しておき、測位ができなくなった時点で、記憶されている時速に基づく時間T2が設定されるように構成することが可能である。また、ユーザに、どのモードが設定されているのかを認識させるために図7に示すような画面が、表示部15に表示されるようにしても良い。
【0050】
図7に示した表示部15に表示される画面例は、“現在速度 8km/h 徒歩モードです。”といったメッセージが表示されている。この現在速度は、情報処理装置10側で算出した値であり、その算出された値に紐付けられているモードが表示される。このようなメッセージが表示されることで、ユーザは、例えば、未測位時のモードを確認することができる。また、ユーザがモードを確認し、間違ったモードに設定されていることを認識した場合、図8に示すような画面が表示部15に表示されるようにし、ユーザが訂正できるようにしても良い。
【0051】
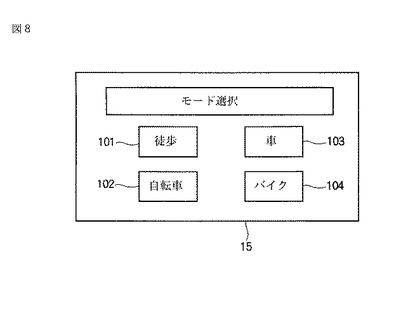
図8に示した画面例は、ユーザがモード選択を行うときに表示部15に表示される画面である。図8に示した画面例では、“徒歩”というモードを選択するときに操作される選択肢101、“自転車” ”というモードを選択するときに操作される選択肢102、“車”というモードを選択するときに操作される選択肢103、および“バイク”というモードを選択するときに操作される選択肢104が表示されている。これらの選択肢のうち、ユーザが自己の状態を表すモードに対応する選択肢、例えば歩いている状態であれば徒歩モードを選択するための選択肢101を操作することで、モードが設定される。
【0052】
このように設定されたモードの情報が、図7に示したように常時、またはユーザの指示があったときなどに、表示部15に表示されるようにしても良い。または、図8に示した画面が、例えば、情報処理装置10の電源がオンにされた時点で、表示部15に表示され、その画面を参照して、ユーザが操作部14を操作することで、モードが設定されるようにしても良い。
【0053】
また情報処理装置10が、例えば、カーナビゲーションシステムなどと称される車載され、道案内を行う装置に適用された場合、車載されているので、“車”モードが設定されていればよい。また、ポータブルなナビゲーションシステムもあり、このような持ち運びされ、徒歩のときに用いられることが前提とされているような装置の場合、“徒歩”モードが設定されていればよい。このように、情報処理装置10が含まれるシステムにより、所定のモードが設定されており、ユーザや計測により可変のモードとしないように構成することも可能である。
【0054】
このようにして、ユーザもしくはGPS測位により得られる位置情報を用いて時速を計算することで、モードが決定される。または予め設定されているモードが決定される。そして、決定されたモードに基づいて、時間T2が決定され、予想移動距離が算出される。
【0055】
ここでは、未測位になった時刻t4のときには、徒歩モードが設定されていた場合を例に挙げて説明する。徒歩モードのときの時間T2は、10分と設定されている。平均速度は、未測位になった時点から、時間T2だけ遡った時点までの間の速度とされる。図6を参照するに、この場合、時間T2は10分と設定されているので、時刻t4より10分前の時刻は、時刻t2と特定される。この時刻t2から時刻t4までの間の速度が平均速度として算出される。この時刻t2から時刻t4までは測位できている状態なので、平均速度は、実測された位置情報に基づいて算出することができる。
【0056】
図5を参照するに、時刻t2の位置情報は位置L2であり、時刻t3の位置情報は位置L3であり、時刻t4の位置情報は位置L4である。これらの位置情報は、測位できている状態のときの位置情報なので、記憶部12に記憶されている。
【0057】
記憶部12から読み出される位置L2と位置L4から時間T2における平均速度が算出される。平均速度は、位置L2と位置L4との差分を時間T2で除算することで求めることができるが、位置L2と位置L4との差分は、2通り考えられる。まず、位置L2から位置L4を減算し、その絶対値を差分とする。この場合、位置L2と位置L4とを結ぶ直線の距離となる。
【0058】
図5に示すように、時刻T2のときに、位置L2に情報処理装置10が位置し、その次の時刻T3のときに、位置L3に移動し、時刻T4のときに、位置L4に移動したような場合も考えられる。この位置L3も、測位できているときの時間内なので、記憶部12に記憶されている位置情報から取得することができる。
【0059】
そこで、位置L2と位置L3の差分を求め、位置L3と位置L4の差分を求め、これらの差分値を加算した値を、平均速度を求めるときの距離とすることもできる。この場合、移動経路にあった距離となる。
【0060】
直線的な距離、または移動経路にあった距離が求められ、時間T2で除算することで、平均速度が求められる。このようにして平均速度が求められる。例えば、直線的な距離、または移動経路にあった距離が、1kmと算出された場合、時間T2は10分なので、平均時速は6km/時と算出される。
【0061】
求められた平均速度に、未測位経過時間である時間T1を乗算することで、予想移動距離が算出される。すなわち、測位ができているときの平均速度のまま、未測位のときも移動していると仮定し、その平均速度で、どれだけの時間移動したかを判断し、乗算することで、移動距離が算出される。上記した例では、平均時速が6km/時と算出され、時間T1が15分なので、予想移動距離は、1.5km(=6×0.25)と算出される。
【0062】
ステップS57においては、このようにして、未測位時にどれだけ移動したかを予想した予想移動距離が算出される。
【0063】
なお、ここでは、未測位になった時点から時間T2だけ遡った時点と、未測位になった時点までの平均速度が求められるとして説明したが、時間T2だけ遡る基準となる時点(上記例では、時刻t4)は、未測位になった時点に限定されるわけではない。例えば、測位できている時間内の時間T2分の移動距離が算出されることで、平均速度が算出されるようにしても良い。例えば、時刻t1から時刻t3までの間に移動した移動距離が算出され、平均速度が算出されるようにしても良い。
【0064】
ただし、未測位になった時点を基準の時点として、時間T2分の移動距離を算出して、平均時速を算出する方が、未測位の状況のときと一致している可能性が高いため、未測位のときの平均時速に近い値で、予想移動距離が算出できる可能性が高い。
【0065】
時間T2は、上記したように、未測位になった時点でのモード(移動速度)に応じて設定される。例えば、移動速度が速いと、未測位になった時点で記録された位置(測位できていたときの最後に記録された位置)と、実際に情報処理装置10が位置する位置との差が大きくなると考えられる。しかしながら、未測位になった時点でのモード(移動速度)に応じて、時間T2が設定されるので、移動速度が速いとき、移動速度が遅いとき、いずれのときでも適切に対応することができる。換言すれば、移動速度によらず、情報処理装置10が実際に移動したと予想される予想移動距離を算出することができる。
【0066】
次に、予想移動距離と比較される閾値の算出について説明する。閾値は、以下のように算出される。まず移動速度が遅い場合、例えば、徒歩モードに設定されている場合の算出方法について説明する。徒歩モードのような場合、速度を、例えば時速5キロメートルと仮定し、未測位経過時間(時間T1)と、人が歩く速度を掛け合わせた値が閾値として設定される。
【0067】
この場合、未測位経過時間(時間T1)が、1時間であれば、閾値は5キロメートルとなり、30分であれば、閾値は2.5キロメートルとなり、1分であれば、83メートル程度となる。このように、時速(分速)を仮定し、その時速と未測位経過時間を乗算することで、閾値が算出される。なおここでは、徒歩モードを例に挙げて説明したが、他のモードのときも同様に、モードに適した時速が上記したように仮定されており、その時速と未測位経過時間が乗算されることで、閾値が算出(算出の仕方1とする)される。
【0068】
他の算出の仕方として、まず、測位できなくなった時点から時間T1だけ遡った時点の位置を求める。例えば、未測位になってから15分経過しているときには、時刻T4(図5、図6参照)から15分前の位置情報が、記憶部12から読み出される。図5に示した例の場合、時刻t4から時間T1(=15分)だけ遡ると、時刻t1となる。この時刻t1における位置は、位置L1である。記憶部12からは、時刻t1のときの位置情報である位置L1と、時刻t4のときの位置情報である位置L4が読み出される。
【0069】
この位置L1と位置L4との差分が、閾値として設定される(算出の仕方2とする)。このとき、図5を参照して説明した場合と同様に、直線的な距離として位置L1と位置L4との差分を算出することもできるし、または移動した経路にあった距離として位置L1と位置L4との差分を算出することもできる。例えば、未測位経過時間が短い場合(所定の閾値以下の場合)、直線的な距離が算出されるようにし、未測位経過時間が長い場合、移動した経路にあった距離が算出されるようにしても良い。
【0070】
算出の仕方1は、徒歩モードのときに適用され、算出の仕方2は、徒歩モード以外のときに適用されるように構成することも可能である。算出の仕方1は、予め設定されている速度の値を用いるため、場合によっては誤差が大きくなる可能性がある。しかしながら、徒歩モードのように、他のモードと比較して、単位時間あたりの移動距離が比較的短いときには、誤差が発生したとしても小さい誤差で収まると考えられる。そこで、徒歩モードのときには、算出の仕方1を適用し、他のモードのときには算出の仕方2が適用されるようにしても良い。
【0071】
ステップS58において、いずれかの方法で閾値が算出されると、ステップS59に処理が進められる。ステップS59において、予想移動距離は、閾値を超えたか否かが判断される。予想移動距離が閾値を超えたと判断された場合、ステップS60に処理が進められる。ステップS60において、記憶部12の最新の位置情報がリセットされる。
【0072】
最新の位置情報は、未測位のときに、位置情報として用いられる情報としてホールド(保持)されている。例えば、情報処理装置10が、撮像装置に組み込まれているような場合、撮影された場所を特定するために、情報処理装置10により取得され、記憶された位置情報が用いられる。そのような撮影時に未測位の場合、未測位になる前の時点で最新の位置情報(例えば図5においては時刻t4における位置L4の情報)を、撮影時の位置情報として適用することができる。しかしながら、未測位であるため、その適用されている位置情報が適切な情報であるとは限らない。
【0073】
ステップS60において、記憶部12の最新の位置情報がリセットされるとは、未測位時の位置情報として、最新の位置情報を用いないように設定することを意味する。換言すれば、ホールドされている位置情報を、ホールドしていない状態にリセット(クリア)することを意味する。よって、ステップS59において、予想移動距離は閾値を超えていないと判断された場合は、ステップS60の処理はスキップされる。
【0074】
ステップS60の処理がスキップされることで、記憶部12の最新の位置情報はリセットされないので、最新の位置情報は、未測位時の位置情報として採用される状態が維持される。一方で、予想移動距離は閾値を超えていると判断された場合は、ステップS60の処理で、リセットが行われることで、その後、未測位時の位置情報として用いられない設定とされる(ホールドされている位置情報が削除される)。
【0075】
このようにして、予想移動距離が閾値を超えた場合には、記憶部12に記憶されている位置情報のうちの最新の位置情報が、未測位時の位置情報として用いられないように設定される。予想移動距離が閾値を超える状況は、記憶部12に記憶されている位置情報のうちの最新の位置情報と、実際の位置との誤差が大きい場合と考えられる。
【0076】
このような処理が行われることで、誤差が大きい状況のときに、記憶部12に記憶されている位置情報のうちの最新の位置情報が、未測位時の位置情報として用いられないように設定することができ、誤差の大きい情報が用いられるようなことを防ぐことが可能となる。
【0077】
なお、このようなリセット(クリア)は、上記した予想移動距離が閾値を超えた場合のみに行われるのではなく、以下のときにも行われるようにしても良い。例えば、未測位になってからの経過時間(時間T1)が所定の時間以上になった場合、上記したリセットが行われるようにしても良い。所定の時間として、日付が変わった場合なども含まれる。
【0078】
また、測位できていた時間よりも、未測位の時間が長くなった場合、リセットが行われるようにしても良い。換言すれば、測位ができなくなった時点(時刻t4)から未測位の時間T1だけ遡った時点に、位置情報が記憶部12に記憶されていなかった場合、リセットが行われるようにしても良い。
【0079】
このような未測位時の処理が行われると、処理は、ステップS16(図3)に進められる。ステップS16以降の処理については既に説明したので、その詳細な説明は省略するが、ステップS16において、GPS測位の更新が待たれるため、未測位時の処理が実行されても、測位が正常に行われる状態になれば、その正常な状態に復帰できるようになされている。
【0080】
例えば、一時的に建物内に入り、測位できている状態から未測位の状態に変化したような場合、建物内にいるときには未測位の処理が行われ、測位できているときに取得された位置情報が、適宜用いられる。そして、建物の外に出て、測位ができる状態になると、位置情報が取得されるので、その取得される位置情報が用いられる。このような切り換えが、適切に行えるようになる。
【0081】
また例えば、電車などの乗り物に乗り込み、測位できている状態から未測位の状態に変化したような場合、電車内にいるときには未測位の処理が行われ、測位できているときに取得された位置情報が、適宜用いられる。しかしながら、上記したような処理にて、予想移動距離が閾値を超えると、記憶されている位置情報(ホールドされている位置情報)が用いられなくなるため、電車での移動距離が長くなり、ホールドされている位置情報との誤差が大きくなった場合には、ホールドされている位置情報をリセットし、用いられない状態に切り換えることができるようになる。そして、電車から降りて、測位ができる状態になると、正確な位置情報を用いることができる状態に適切に切り換えが行われるようにすることができる。
【0082】
[電源オフ時の処理について]
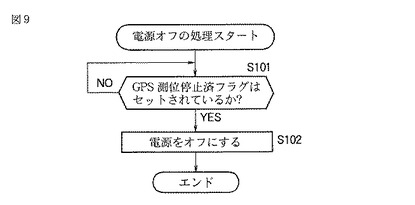
上述した測位時、および未測位時における処理が実行されているときに、割り込み処理として、情報処理装置10の電源がオフにされたときの処理がある。図9のフローチャートを参照して、電源がオフにされたときの処理について説明する。
【0083】
ユーザにより操作部14が操作され、情報処理装置10の電源のオフが指示された場合、ステップS101において、GPS測位停止済フラグがセットされているか否かが判断される。このGPS測位停止済フラグとは、上記したように、GPS測位の機能がオフとされているときにセットされるフラグである。そして、このGPS測位停止済フラグは、ステップS20(図3)においてセットされるフラグである。
【0084】
再度図3のフローチャートを参照するに、ステップS20において、GPS測位停止済フラグがセットされる。このステップS20への処理は、ステップS11において、GPS測位機能がオフであると判断されたときに来る。このときは、GPS測位機能がオフであるため、GPS測位停止済フラグはセットされている状態であるが、再度、ステップS20においてセットされる。
【0085】
またステップS20への処理には、ステップS17においてGPS測位の停止が指示されたと判断され、ステップS19においてGPS測位が停止された場合、またはステップS18において、GPS測位機能がオフであると判断され、ステップS19においてGPS測位が停止された場合にもくる。いずれの場合も、GPS測位が停止された場合に、ステップS20においてGPS測位停止済フラグがセットされる。
【0086】
電源のオフが指示されると、ステップS101(図9)において、GPS測位停止済フラグがセットされているか否かが判断されるが、セットされていないと判断されるまで待機状態が維持される。待機状態が維持される一方で、図3に示したフローチャートの処理が継続して行われているため、例えばステップS17において、GPS測位の停止が指示されたと判断され、ステップS19の処理を経て、ステップS20においてGPS測位停止済フラグがセットされるまで、電源のオフは実行されない。
【0087】
GPS測位停止済フラグがセットされると、ステップS101(図9)においてGPS測位停止済フラグがセットされていると判断されるため、ステップS102に処理が進められ、情報処理装置10の電源がオフにされる。このように、GPS測位停止済フラグがセットされているときには、情報処理装置10の電源がオフにされるが、GPS測位停止済フラグがセットされていないときには、情報処理装置10の電源はオフにはされない。
【0088】
情報処理装置10の電源がオフにされず、GPS測位停止済フラグがセットされていない状態が継続されている間は、図3に示したフローチャートの処理、そして場合によっては図4に示したフローチャートの処理が実行される。よって、測位の処理(位置情報の取得と記憶に係わる処理)は、継続して行われる状態とされている。例えば、情報処理装置10がカメラなどの撮像装置の一部を構成しているような場合、撮像装置の撮像機能に関してはオフの状態であるが、情報処理装置10が実行する位置情報の取得や記憶に関する機能はオンの状態とすることができる。よって、撮影はしなくても、移動の軌跡は記憶しておきたいといったユーザのニーズにも対応することができる。
【0089】
なお、ここではGPS測位停止済フラグを設けて、上記したように処理が行われるとして説明をしたが、電源がオフされたときには、GPS測位停止済フラグがセットされているか否かに係わらず、情報処理装置10の電源がオフとされるように構成することも可能である。
【0090】
[他の構成について]
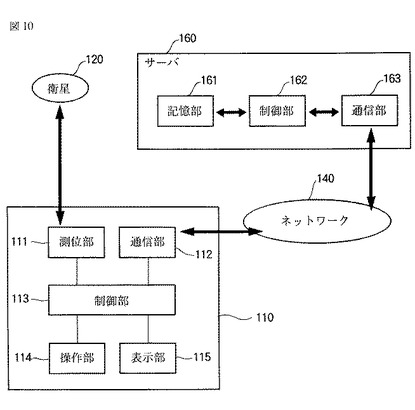
図10に他の構成例を示す。図10に示した構成は、情報処理装置110が、ネットワーク140を介してサーバ160と通信を行う構成とされている。情報処理装置110は、測位部111、通信部112、制御部113、操作部114、および表示部115から構成されている。この測位部111、制御部113、操作部114、および表示部115は、図1に示した情報処理装置10の測位部11、制御部13、操作部14、および表示部15と同様な構成とすることができる。ここでは、これらの各部についての説明は省略する。
【0091】
すなわち、図10に示した情報処理装置110は、図1に示した情報処理装置10の記憶部12を通信部112に代えた構成とされている点が異なり、他の構成は同様とされている。情報処理装置110は、衛星120(GPS)からの信号を測位部111で受信し、測位し、その結果を、通信部112の処理で、ネットワーク140を介してサーバ160に送信する構成とされている。
【0092】
サーバ160は、記憶部161、制御部162、および通信部163を含む構成とされる。サーバ160の通信部163は、ネットワーク140を介して情報処理装置110からの位置情報を受信すると、その位置情報を、制御部162に供給する。制御部162は、どの情報処理装置110からの位置情報であるのかを、IDなどを参照して判断し、その判断に基づき、記憶部161に供給された位置情報を記憶する。
【0093】
このように、情報処理装置110は、衛星120からの信号を受信することで、自己の位置を判断し、その結果を、サーバ160に送信し、サーバ160は、情報処理装置110からの位置情報を記憶する。また、サーバ160は、上述した情報処理装置10が行っていた処理の一部を行う。具体的には、サーバ160は、情報処理装置110が測位を正常に行っているときには、その測位された位置情報を記憶する。また、受信された位置情報から、情報処理装置110の移動速度や、モードの判断を行う。
【0094】
情報処理装置110は、正常に測位できていないときには、そのことを知らせる情報を、サーバ160に送信する。サーバ160は、そのような情報を受信すると、基本的に図4に示した未測位時の処理と同様の処理を実行する。すなわち、ホールドされている位置情報をクリアするか否かの判断を行い、その判断を行うために、予想移動距離や閾値を算出する。
【0095】
このような構成とすることで、測位できていない状態でも、サーバ160との通信を行えれば、測位されている位置情報の記憶や、未測位時の処理などをサーバ160側で行うことが可能となる。またサーバ160が、情報処理装置110よりも処理能力が高い場合、より細かな予想移動距離や閾値の算出などを行うようにすることもできる。また、情報処理装置110が撮像装置の一部として組み込まれているような場合、撮像装置で撮像された画像や映像などが、サーバ160に位置情報とともに送信され、サーバ160の記憶部161に記憶されるようにしても良い。
【0096】
このように、本技術を適用することで、GPS(衛星)からの信号を受信できず、測位が正常に行えないような状況のときに過去に測位した位置情報(ホールドされている位置情報)を用いるような場合であっても、推定の移動距離を計算し、その推定の移動距離が大きい際には、ホールドされている位置情報をクリアすることが可能となる。
【0097】
ホールドされている位置情報がクリアされることで、ホールドされている位置情報と、実際の位置情報との差が大きくなってしまったような場合に、そのような誤差を含む位置情報が記録されてしまうようなことを防ぐことが可能となる。誤差を含む位置情報が記録されることがないように制御することで、記録される位置情報の精度を向上させることが可能となる。このようなホールドされている位置情報のクリアに係わる処理は、ユーザの手を煩わすことなく行われるため、使い勝手が向上し、利便性を向上させることが可能となる。
【0098】
[記録媒体について]
上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
【0099】
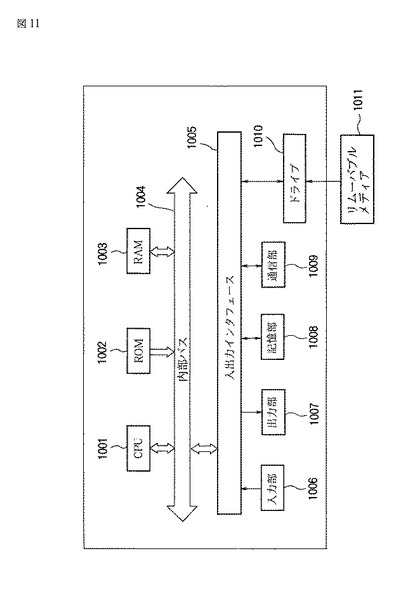
図11は、上述した一連の処理をプログラムにより実行するコンピュータのハードウエアの構成例を示すブロック図である。コンピュータにおいて、CPU(Central Processing Unit)1001、ROM(Read Only Memory)1002、RAM(Random Access Memory)1003は、バス1004により相互に接続されている。バス1004には、さらに、入出力インタフェース1005が接続されている。入出力インタフェース1005には、入力部1006、出力部1007、記憶部1008、通信部1009、およびドライブ1010が接続されている。
【0100】
入力部1006は、キーボード、マウス、マイクロフォンなどよりなる。出力部1007は、ディスプレイ、スピーカなどよりなる。記憶部1008は、ハードディスクや不揮発性のメモリなどよりなる。通信部1009は、ネットワークインタフェースなどよりなる。ドライブ1010は、磁気ディスク、光ディスク、光磁気ディスク、または半導体メモリなどのリムーバブルメディア1011を駆動する。
【0101】
以上のように構成されるコンピュータでは、CPU1001が、例えば、記憶部1008に記憶されているプログラムを、入出力インタフェース1005およびバス1004を介して、RAM1003にロードして実行することにより、上述した一連の処理が行われる。
【0102】
コンピュータ(CPU1001)が実行するプログラムは、例えば、パッケージメディア等としてのリムーバブルメディア1011に記録して提供することができる。また、プログラムは、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の伝送媒体を介して提供することができる。
【0103】
コンピュータでは、プログラムは、リムーバブルメディア1011をドライブ1010に装着することにより、入出力インタフェース1005を介して、記憶部1008にインストールすることができる。また、プログラムは、有線または無線の伝送媒体を介して、通信部1009で受信し、記憶部1008にインストールすることができる。その他、プログラムは、ROM1002や記憶部1008に、予めインストールしておくことができる。
【0104】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであっても良いし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであっても良い。
【0105】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0106】
なお、本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
【0107】
なお、本技術は以下のような構成も取ることができる。
【0108】
(1)
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と、
前記測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、
前記予想部で予想された前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離が前記閾値を超えたと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするように制御する制御部と
を備える情報処理装置。
(2)
前記予想部は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時刻のときの移動速度に関連付けられている第2の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値を算出し、その差分値を、前記第1の時刻と前記第2の時刻の差分値で除算することで平均速度を算出し、
前記平均速度と前記第1の時間を乗算して、前記距離を予想する
前記(1)に記載の情報処理装置。
(3)
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
前記(2)に記載の情報処理装置。
(4)
移動速度に応じた複数のモードが設けられ、モード毎に前記第2の時間が設定され、
前記予想部は、前記第1の時刻のときの移動速度が該当するモードを判断し、そのモードに設定されている前記第2の時間を用いて、前記距離を予想する
前記(2)に記載の情報処理装置。
(5)
前記距離が前記閾値を超えていないと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記第1の時間内で取得された位置情報として前記記憶部に記憶する
前記(1)乃至(4)のいずれかに記載の情報処理装置。
(6)
前記閾値は、予め設定されている速度と、前記第1の時間を乗算して算出される値である
前記(1)乃至(5)のいずれかに記載の情報処理装置。
(7)
前記閾値は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値である
前記(1)乃至(5)のいずれかに記載の情報処理装置。
(8)
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
前記(7)に記載の情報処理装置。
(9)
前記制御部は、前記第1の時間が、所定の時間以上になった時点で、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
前記(1)乃至(8)のいずれかに記載の情報処理装置。
(10)
前記制御部は、前記第1の時間だけ、前記第1の時刻よりも遡った時刻の位置情報が、前記記憶部に記憶されていないと判断した場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部にからクリアする
前記(1)乃至(9)のいずれかに記載の情報処理装置。
(11)
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置の情報処理方法において、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む情報処理方法。
(12)
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置を制御するコンピュータに、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む処理を実行させるためのプログラム。
【符号の説明】
【0109】
10 情報処理装置, 11 測位部, 12 記憶部, 13 制御部, 14 操作部, 15 表示部, 110 情報処理装置, 111 測位部, 112 通信部, 113 制御部, 114 操作部, 115 表示部
【技術分野】
【0001】
本技術は、情報処理装置、情報処理方法、並びにプログラムに関する。詳しくは、位置情報を取得し、記録する情報処理装置、情報処理方法、並びにプログラムに関する。
【背景技術】
【0002】
GPS(Global Positioning System)を用いて位置情報を取得し、その位置情報を利用することが行われている。例えば、道案内を行い、車載されるカーナビゲーションシステムなどがある。また、近年では、撮影した場所を特定するために、GPSからの信号を受信し、位置情報を取得し、記憶するデジタルカメラなどもある。
【0003】
一方で、GPSからの信号は、どの位置でも必ず取得できることが保障されているわけではない。例えば、建物の中やトンネル内では、GPSからの信号が受信できず、位置情報が取得できないことがある。このような取得できないときの対処について、特許文献1では、地磁気センサと加速度センサを用いて自立的な測位を行うことを提案している。また、特許文献2では、GPSからの信号が受信できず、位置情報が取得できないときでも、記録媒体に記録されている位置情報を読み出し、代用することが提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010-145180号公報
【特許文献2】特開2010-62704号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
位置情報が取得できないときに、特許文献1のように、自立的な測位を行うことで、位置情報を補うことができるが、自立的な測位は、GPSによる測位よりも精度が低い。例えば、位置情報が取得できない間に移動した距離が大きくなると、自立的な測位による誤差も大きくなる可能性が高い。よって、位置情報を補うことができても、誤差が大きくなり、精度が低い可能性がある。
【0006】
また同様に、特許文献2においても、位置情報が取得できない間に移動した距離が大きくなると、記録媒体に記録されている位置情報との差が大きくなり、位置情報を補うことができても、精度が低い位置情報となってしまう。
【0007】
本技術は、このような状況に鑑みてなされたものであり、精度の低い位置情報が、位置情報として採用されないようにし、記録される位置情報の精度を向上させることができるようにするものである。
【課題を解決するための手段】
【0008】
本技術の一側面の情報処理装置は、自己の位置を測位する測位部と、前記測位部により測位された位置情報を記憶する記憶部と、前記測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、前記予想部で予想された前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離が前記閾値を超えたと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするように制御する制御部とを備える。
【0009】
前記予想部は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時刻のときの移動速度に関連付けられている第2の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値を算出し、その差分値を、前記第1の時刻と前記第2の時刻の差分値で除算することで平均速度を算出し、前記平均速度と前記第1の時間を乗算して、前記距離を予想するようにすることができる。
【0010】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出するようにすることができる。
【0011】
移動速度に応じた複数のモードが設けられ、モード毎に前記第2の時間が設定され、前記予想部は、前記第1の時刻のときの移動速度が該当するモードを判断し、そのモードに設定されている前記第2の時間を用いて、前記距離を予想するようにすることができる。
【0012】
前記距離が前記閾値を超えていないと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記第1の時間内で取得された位置情報として前記記憶部に記憶するようにすることができる。
【0013】
前記閾値は、予め設定されている速度と、前記第1の時間を乗算して算出される値であるようにすることができる。
【0014】
前記閾値は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値であるようにすることができる。
【0015】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出するようにすることができる。
【0016】
前記制御部は、前記第1の時間が、所定の時間以上になった時点で、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするようにすることができる。
【0017】
前記制御部は、前記第1の時間だけ、前記第1の時刻よりも遡った時刻の位置情報が、前記記憶部に記憶されていないと判断した場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部にからクリアするようにすることができる。
【0018】
本技術の一側面の情報処理方法は、自己の位置を測位する測位部と、前記測位部により測位された位置情報を記憶する記憶部とを備える情報処理装置の情報処理方法において、前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするステップを含む。
【0019】
本技術の一側面のプログラムは、自己の位置を測位する測位部と、前記測位部により測位された位置情報を記憶する記憶部とを備える情報処理装置を制御するコンピュータに、前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするステップを含む処理を実行させる。
【0020】
本技術の一側面の情報処理装置、情報処理方法、並びにプログラムにおいては、自己の位置が測位され、その位置情報が記憶される。測位が行えていないと判断される場合、測位が行えない時間内で移動した距離が予想され、距離が、第1の時間に対応する閾値を超えたと判断されたとき、記憶部に記憶されている最新の位置情報が記憶部からクリアされる。
【発明の効果】
【0021】
本技術の一側面によれば、位置情報が取得されないときに、位置情報を補足するような場合に、精度の低い位置情報が、位置情報として採用されないようにし、記録される位置情報の精度を向上させることができる。
【図面の簡単な説明】
【0022】
【図1】本技術を適用した情報処理装置の一実施の形態の構成を示す図である。
【図2】情報処理装置の機能を説明するための図である。
【図3】情報処理装置の動作について説明するためのフローチャートである。
【図4】未測位時の処理について説明するためのフローチャートである。
【図5】移動経路距離について説明するための図である。
【図6】測位時と未測位時の時間と位置の関係について説明するための図である。
【図7】画面例を示す図である。
【図8】画面例を示す図である。
【図9】情報処理装置の動作について説明するためのフローチャートである。
【図10】他の構成例を示す図である。
【図11】記録媒体について説明するための図である。
【発明を実施するための形態】
【0023】
以下に、本技術の実施の形態について図面を参照して説明する。
【0024】
[情報処理装置の構成について]
図1は、本技術を適用した情報処理装置の一実施の形態の構成を示す図である。図1に示した情報処理装置10は、測位部11、記憶部12、制御部13、操作部14、および表示部15を備える構成とされる。
【0025】
情報処理装置10は、GPS(Global Positioning System)を用いた測位を行い、記憶する機能を有する。情報処理装置10は、ナビゲーションシステムなどと称される道案内を行う装置に適用できる。また、情報処理装置10を、カメラなどの撮影装置に組み込み、撮影位置を取得し、記録するように構成することもできる。
【0026】
測位部11は、GPSを用いた測位を行い、その測位された結果(以下、適宜、位置情報と記述する)を記憶部12に供給する。位置情報として、緯度、経度が含まれる。また、情報処理装置10自体の移動速度や、GPSからの信号に含まれる時刻なども取得され、記憶部12に供給されるように構成することも可能である。記憶部12は、測位部11からの位置情報を取得時間と関連付けて記憶する。取得時間は、GPSの信号に含まれる時刻でも良いし、後述するように、測位が開始されてからの経過時間でも良い。
【0027】
また測位部11は、ここでは、GPSからの信号により自己の位置を測位することで、位置情報を取得するとして説明をするが、GPSからの信号による測位に限定されるわけではない。例えば、情報処理装置10を携帯電話機などに適用することもでき、携帯電話機の場合には、携帯電話機の基地局から位置情報を取得することもできる。
【0028】
制御部13は、情報処理装置10内の各部を制御する。操作部14は、ユーザインタフェースとして機能し、ユーザからの指示を受け付けるボタンなどから構成されている。表示部15は、ユーザに対して情報を提供する。表示部15がタッチパネルで構成される場合、操作部14と一体化された構造とされる。操作部14が操作されることで指示されたユーザからの指示は、制御部13に供給され、その指示内容に応じた処理が実行される。
【0029】
図2は、例えば、記憶部12に記憶されているプログラムが実行され、そのプログラムに応じて制御部13が制御を行うことで、情報処理装置10内に実現される機能について説明するための図である。情報処理装置10は、正常に測位部11で測位できているときの処理を行う測位時処理部31と、正常に測位部11で測位できていないときの処理を行う未測位時処理部32を備える。未測位時処理部32は、計時部51、平均速度算出部52、予想移動距離算出部53、閾値算出部54、判断部55、およびリセット部56を備える。これら各部が行う処理について、以下に説明を加える。
【0030】
[情報処理装置の動作について]
次に、情報処理装置10の動作について説明する。図3のフローチャートは、情報処理装置10の電源がオンにされたときに開始される処理である。ステップS11において、GPS測位機能がオンであるか否かが判断される。制御部13は、電源がオンにされたときに、測位部11による測位がオンにされているか否かを判断する。ステップS11において、測位機能がオンであると判断された場合、ステップS12に処理が進められる。ステップS12において、測位部11により、GPS測位が開始される。GPS測位とは、GPSの衛星からの信号を受信し、その受信された信号から、情報処理装置10が位置する緯度や経度を算出することを意味する。
【0031】
ステップS13において、GPS測位が正常にできているか否かが判断される。GPSによる測位は、衛星からの信号を受信することで行われるため、例えば、建物内やトンネル内に位置すると、衛星からの信号が受信しづらくなり、正常に測位が行えない可能性がある。そこで、ステップS13において、正常に衛星からの信号を受信し、測位が行われているか否かが判断される。ステップS13において、測位が正常に行われていると判断された場合、ステップS14に処理が進められる。このように、正常に測位が行われているときの処理は、測位時処理部31により処理が行われる。
【0032】
ステップS14において、測位部11により測位された結果(位置情報)が、記憶部12に供給され、記憶される。この際、位置情報が取得された時刻、情報処理装置10の移動速度なども関連付けられて記憶されるようにしても良い。また記憶部12をリングバッファで構成し、そのリングバッファに、位置情報や取得時刻が組み合わされて追記されることで記憶されるように構成することも可能である。なお、ここでは、取得時刻は、GPSの信号から得られる時刻ではなく、電源がオンにされたときからの経過時間をタイムスタンプとし、そのタイムスタンプが、少なくとも位置情報と関連付けられて記憶されるとして説明を続ける。
【0033】
ステップS15において、未測位経過タイマーが停止される。この未測位経過タイマーについての詳細は後述するが、測位部11により正常に測位が行えない状態になった時点から計時を開始するタイマーである。この計時は、計時部51で行われる。ステップS15において、計時部51による計時が停止される。
【0034】
ステップS16において、GPS測位の更新待ち(待機状態)とされ、ステップS17に処理が進められる。ステップS17において、GPS測位停止要求があるか否かが判断される。ユーザが操作部14を操作し、測位部11による測位の停止を指示した場合、ステップS17において、GPS測位停止要求があったと判断され、ステップS19に処理が進められる。一方で、ステップS17において、GPS測位停止要求はなかったと判断された場合、ステップS18に処理が進められる。
【0035】
ステップS18において、GPS測位機能がオフであるか否かが判断され、オフであると判断された場合、ステップS19に処理が進められる。ステップS19において、GPS測位が停止される。すなわちこの場合、ステップS17において、GPS測位停止の要求がユーザから指示された場合、または、ステップS18において、GPS測位機能がオフにされていると判断された場合であるため、測位部11による測位処理が停止される。そして、ステップS20に処理が進められる。
【0036】
このステップS20の処理には、ステップS11において、GPS測位機能がオンではないと判断された場合、すなわち、オフであると判断されたときにも来る。ステップS20において、GPS測位停止済フラグがセットされる。このフラグがセットされることで、測位処理が終了される。
【0037】
一方で、ステップS18において、GPS測位機能はオフではないと判断された場合、すなわちオンであると判断された場合、ステップS13に処理が戻され、それ以降の処理が繰り返される。
【0038】
一方で、ステップS13において、GPS測位が正常に行われていないと判断された場合、ステップS21に処理が進められる。ステップS21において、未測位の処理が実行される。ステップS21において実行される未測位の処理について、図4のフローチャートを参照して説明する。図4に示したフローチャートの処理は、未測位時処理部32により実行される。
【0039】
[未測位時の処理について]
ステップS51において、未測位経過タイマーが動作中であるか否かが判断される。未測位経過タイマーは、計時部51が計時を行うことで実現されるため、計時部51が計時を行っているか否かが判断されることでステップS51における処理が実行される。ステップS51において、未測位経過タイマーが動作中ではないと判断された場合、ステップS52に処理が進められる。ステップS52において、未測位経過時間がリセットされる。すなわちこの場合、計時部51の計時時間が0にセットされる。
【0040】
そして、ステップS53において、未測位経過タイマーの動作が開始される。すなわちこの場合、計時部51による計時が開始される。未測位経過タイマーは、GPS測位が正常に行えない時間を計時するためのタイマーであり、未測位の間は停止されることなく動作し、その時間を計時するように構成されている。
【0041】
ステップS54において、緯度、経度が記憶部12に記憶されているか否かが判断される。ステップS54の処理には、ステップS51において、未測位経過タイマーが動作中であると判断されたときにも来る。すなわち、計時部51における計時が行われているとき、ステップS54の処理が実行される。ステップS54において、記憶部12に緯度、経度(位置情報)が記憶されていると判断された場合、ステップS55に処理が進められる。
【0042】
ステップS55において、未測位経過時間が取得される。すなわち、この時点で、計時部51が計時している時間を、予想移動距離算出部53と閾値算出部54は、それぞれ取得する。ステップS56において、平均速度算出部52は、平均速度を算出する。この平均速度は、測位できていたときのユーザ(情報処理装置10)の移動速度の平均を求めることで算出される。
【0043】
ステップS57において、予想移動距離算出部53は、予想移動距離を算出する。この予想移動距離とは、測位ができなくなった時点から、ユーザ(情報処理装置10)が移動したと予想される距離である。予想移動距離は、未測位経過時間と平均速度から求められる。
【0044】
ステップS58において、閾値算出部54は、閾値を算出する。閾値算出部54において算出される閾値は、予想移動距離と比較される閾値である。閾値は、未測位経過時間に基づいて算出される値である。
【0045】
ステップS55乃至S58までの処理について、図5、図6を参照して説明する。図5は、ユーザ(情報処理装置10)が移動した軌跡を表す。時刻t1のときに、位置L1に位置し、時刻t2のときに、位置L2まで移動し、時刻t3のときに、位置L3まで移動し、時刻t4のときに、位置L4まで移動し、時刻t5のときに、位置L5まで移動し、時刻t6のときに、位置L6まで移動し、時刻t7のときに、位置L7まで移動したとする。また、時刻t1から時刻t4までの間は、測位できている状態であったが、時刻t4から時刻t7までの間は未測位の状態であったとする。
【0046】
測位は、所定の時間間隔で行われる。ここでは、所定の時間間隔を5分として説明を続けるが、この時間間隔は5分に限定されることを示す記載ではない。図5に示したような移動が行われ、測位または未測位の状態が切り替わった状態を、時間軸で表すと、図6のようになる。時刻t1乃至t7は、5分間隔なので、等間隔に時間軸上に配置される。時刻t4より前の時間は位置情報が取得できている状態であり、時刻t4より後の時間は未測位の状態である。また、ここでは、図4に示したフローチャートの処理が、時刻t7において実行された場合を例として説明を続ける。
【0047】
ステップS55における処理が、時刻t7において実行されると、未測位経過時間として取得されるのは、時刻t4から時刻t7までの時間である。このステップS55において取得される未測位経過時間を時間T1とする。よって、時間T1は、
時間T1=時刻t7―時刻t4
となる。この場合、5分毎に測位されているため、時間T1は、15分となる。ステップS55においては、時間T1=15分という未測位経過時間が取得される。
【0048】
次に、平均速度の算出について説明する。平均速度は、時間T2が用いられて算出される。時間T2は、未測位となった時刻(この場合、時刻t4)のときに設定されているモードまたは時速により設定される時間である。例えば、以下のような関係が予め設定されている。
時速10キロメータ以下 (徒歩モード) 時間T2は10分
時速10〜30キロメータ (自転車モード) 時間T2は5分
時速30〜50キロメータ (バイクモード) 時間T2は3分
時速50キロメータ以上 (車モード) 時間T2は2分
【0049】
時速は、例えば、測位できているときに、2点間の距離と時間を用いて算出することができる。よって、測位が正常に行えているときに時速を計算し、記憶しておき、測位ができなくなった時点で、記憶されている時速に基づく時間T2が設定されるように構成することが可能である。また、ユーザに、どのモードが設定されているのかを認識させるために図7に示すような画面が、表示部15に表示されるようにしても良い。
【0050】
図7に示した表示部15に表示される画面例は、“現在速度 8km/h 徒歩モードです。”といったメッセージが表示されている。この現在速度は、情報処理装置10側で算出した値であり、その算出された値に紐付けられているモードが表示される。このようなメッセージが表示されることで、ユーザは、例えば、未測位時のモードを確認することができる。また、ユーザがモードを確認し、間違ったモードに設定されていることを認識した場合、図8に示すような画面が表示部15に表示されるようにし、ユーザが訂正できるようにしても良い。
【0051】
図8に示した画面例は、ユーザがモード選択を行うときに表示部15に表示される画面である。図8に示した画面例では、“徒歩”というモードを選択するときに操作される選択肢101、“自転車” ”というモードを選択するときに操作される選択肢102、“車”というモードを選択するときに操作される選択肢103、および“バイク”というモードを選択するときに操作される選択肢104が表示されている。これらの選択肢のうち、ユーザが自己の状態を表すモードに対応する選択肢、例えば歩いている状態であれば徒歩モードを選択するための選択肢101を操作することで、モードが設定される。
【0052】
このように設定されたモードの情報が、図7に示したように常時、またはユーザの指示があったときなどに、表示部15に表示されるようにしても良い。または、図8に示した画面が、例えば、情報処理装置10の電源がオンにされた時点で、表示部15に表示され、その画面を参照して、ユーザが操作部14を操作することで、モードが設定されるようにしても良い。
【0053】
また情報処理装置10が、例えば、カーナビゲーションシステムなどと称される車載され、道案内を行う装置に適用された場合、車載されているので、“車”モードが設定されていればよい。また、ポータブルなナビゲーションシステムもあり、このような持ち運びされ、徒歩のときに用いられることが前提とされているような装置の場合、“徒歩”モードが設定されていればよい。このように、情報処理装置10が含まれるシステムにより、所定のモードが設定されており、ユーザや計測により可変のモードとしないように構成することも可能である。
【0054】
このようにして、ユーザもしくはGPS測位により得られる位置情報を用いて時速を計算することで、モードが決定される。または予め設定されているモードが決定される。そして、決定されたモードに基づいて、時間T2が決定され、予想移動距離が算出される。
【0055】
ここでは、未測位になった時刻t4のときには、徒歩モードが設定されていた場合を例に挙げて説明する。徒歩モードのときの時間T2は、10分と設定されている。平均速度は、未測位になった時点から、時間T2だけ遡った時点までの間の速度とされる。図6を参照するに、この場合、時間T2は10分と設定されているので、時刻t4より10分前の時刻は、時刻t2と特定される。この時刻t2から時刻t4までの間の速度が平均速度として算出される。この時刻t2から時刻t4までは測位できている状態なので、平均速度は、実測された位置情報に基づいて算出することができる。
【0056】
図5を参照するに、時刻t2の位置情報は位置L2であり、時刻t3の位置情報は位置L3であり、時刻t4の位置情報は位置L4である。これらの位置情報は、測位できている状態のときの位置情報なので、記憶部12に記憶されている。
【0057】
記憶部12から読み出される位置L2と位置L4から時間T2における平均速度が算出される。平均速度は、位置L2と位置L4との差分を時間T2で除算することで求めることができるが、位置L2と位置L4との差分は、2通り考えられる。まず、位置L2から位置L4を減算し、その絶対値を差分とする。この場合、位置L2と位置L4とを結ぶ直線の距離となる。
【0058】
図5に示すように、時刻T2のときに、位置L2に情報処理装置10が位置し、その次の時刻T3のときに、位置L3に移動し、時刻T4のときに、位置L4に移動したような場合も考えられる。この位置L3も、測位できているときの時間内なので、記憶部12に記憶されている位置情報から取得することができる。
【0059】
そこで、位置L2と位置L3の差分を求め、位置L3と位置L4の差分を求め、これらの差分値を加算した値を、平均速度を求めるときの距離とすることもできる。この場合、移動経路にあった距離となる。
【0060】
直線的な距離、または移動経路にあった距離が求められ、時間T2で除算することで、平均速度が求められる。このようにして平均速度が求められる。例えば、直線的な距離、または移動経路にあった距離が、1kmと算出された場合、時間T2は10分なので、平均時速は6km/時と算出される。
【0061】
求められた平均速度に、未測位経過時間である時間T1を乗算することで、予想移動距離が算出される。すなわち、測位ができているときの平均速度のまま、未測位のときも移動していると仮定し、その平均速度で、どれだけの時間移動したかを判断し、乗算することで、移動距離が算出される。上記した例では、平均時速が6km/時と算出され、時間T1が15分なので、予想移動距離は、1.5km(=6×0.25)と算出される。
【0062】
ステップS57においては、このようにして、未測位時にどれだけ移動したかを予想した予想移動距離が算出される。
【0063】
なお、ここでは、未測位になった時点から時間T2だけ遡った時点と、未測位になった時点までの平均速度が求められるとして説明したが、時間T2だけ遡る基準となる時点(上記例では、時刻t4)は、未測位になった時点に限定されるわけではない。例えば、測位できている時間内の時間T2分の移動距離が算出されることで、平均速度が算出されるようにしても良い。例えば、時刻t1から時刻t3までの間に移動した移動距離が算出され、平均速度が算出されるようにしても良い。
【0064】
ただし、未測位になった時点を基準の時点として、時間T2分の移動距離を算出して、平均時速を算出する方が、未測位の状況のときと一致している可能性が高いため、未測位のときの平均時速に近い値で、予想移動距離が算出できる可能性が高い。
【0065】
時間T2は、上記したように、未測位になった時点でのモード(移動速度)に応じて設定される。例えば、移動速度が速いと、未測位になった時点で記録された位置(測位できていたときの最後に記録された位置)と、実際に情報処理装置10が位置する位置との差が大きくなると考えられる。しかしながら、未測位になった時点でのモード(移動速度)に応じて、時間T2が設定されるので、移動速度が速いとき、移動速度が遅いとき、いずれのときでも適切に対応することができる。換言すれば、移動速度によらず、情報処理装置10が実際に移動したと予想される予想移動距離を算出することができる。
【0066】
次に、予想移動距離と比較される閾値の算出について説明する。閾値は、以下のように算出される。まず移動速度が遅い場合、例えば、徒歩モードに設定されている場合の算出方法について説明する。徒歩モードのような場合、速度を、例えば時速5キロメートルと仮定し、未測位経過時間(時間T1)と、人が歩く速度を掛け合わせた値が閾値として設定される。
【0067】
この場合、未測位経過時間(時間T1)が、1時間であれば、閾値は5キロメートルとなり、30分であれば、閾値は2.5キロメートルとなり、1分であれば、83メートル程度となる。このように、時速(分速)を仮定し、その時速と未測位経過時間を乗算することで、閾値が算出される。なおここでは、徒歩モードを例に挙げて説明したが、他のモードのときも同様に、モードに適した時速が上記したように仮定されており、その時速と未測位経過時間が乗算されることで、閾値が算出(算出の仕方1とする)される。
【0068】
他の算出の仕方として、まず、測位できなくなった時点から時間T1だけ遡った時点の位置を求める。例えば、未測位になってから15分経過しているときには、時刻T4(図5、図6参照)から15分前の位置情報が、記憶部12から読み出される。図5に示した例の場合、時刻t4から時間T1(=15分)だけ遡ると、時刻t1となる。この時刻t1における位置は、位置L1である。記憶部12からは、時刻t1のときの位置情報である位置L1と、時刻t4のときの位置情報である位置L4が読み出される。
【0069】
この位置L1と位置L4との差分が、閾値として設定される(算出の仕方2とする)。このとき、図5を参照して説明した場合と同様に、直線的な距離として位置L1と位置L4との差分を算出することもできるし、または移動した経路にあった距離として位置L1と位置L4との差分を算出することもできる。例えば、未測位経過時間が短い場合(所定の閾値以下の場合)、直線的な距離が算出されるようにし、未測位経過時間が長い場合、移動した経路にあった距離が算出されるようにしても良い。
【0070】
算出の仕方1は、徒歩モードのときに適用され、算出の仕方2は、徒歩モード以外のときに適用されるように構成することも可能である。算出の仕方1は、予め設定されている速度の値を用いるため、場合によっては誤差が大きくなる可能性がある。しかしながら、徒歩モードのように、他のモードと比較して、単位時間あたりの移動距離が比較的短いときには、誤差が発生したとしても小さい誤差で収まると考えられる。そこで、徒歩モードのときには、算出の仕方1を適用し、他のモードのときには算出の仕方2が適用されるようにしても良い。
【0071】
ステップS58において、いずれかの方法で閾値が算出されると、ステップS59に処理が進められる。ステップS59において、予想移動距離は、閾値を超えたか否かが判断される。予想移動距離が閾値を超えたと判断された場合、ステップS60に処理が進められる。ステップS60において、記憶部12の最新の位置情報がリセットされる。
【0072】
最新の位置情報は、未測位のときに、位置情報として用いられる情報としてホールド(保持)されている。例えば、情報処理装置10が、撮像装置に組み込まれているような場合、撮影された場所を特定するために、情報処理装置10により取得され、記憶された位置情報が用いられる。そのような撮影時に未測位の場合、未測位になる前の時点で最新の位置情報(例えば図5においては時刻t4における位置L4の情報)を、撮影時の位置情報として適用することができる。しかしながら、未測位であるため、その適用されている位置情報が適切な情報であるとは限らない。
【0073】
ステップS60において、記憶部12の最新の位置情報がリセットされるとは、未測位時の位置情報として、最新の位置情報を用いないように設定することを意味する。換言すれば、ホールドされている位置情報を、ホールドしていない状態にリセット(クリア)することを意味する。よって、ステップS59において、予想移動距離は閾値を超えていないと判断された場合は、ステップS60の処理はスキップされる。
【0074】
ステップS60の処理がスキップされることで、記憶部12の最新の位置情報はリセットされないので、最新の位置情報は、未測位時の位置情報として採用される状態が維持される。一方で、予想移動距離は閾値を超えていると判断された場合は、ステップS60の処理で、リセットが行われることで、その後、未測位時の位置情報として用いられない設定とされる(ホールドされている位置情報が削除される)。
【0075】
このようにして、予想移動距離が閾値を超えた場合には、記憶部12に記憶されている位置情報のうちの最新の位置情報が、未測位時の位置情報として用いられないように設定される。予想移動距離が閾値を超える状況は、記憶部12に記憶されている位置情報のうちの最新の位置情報と、実際の位置との誤差が大きい場合と考えられる。
【0076】
このような処理が行われることで、誤差が大きい状況のときに、記憶部12に記憶されている位置情報のうちの最新の位置情報が、未測位時の位置情報として用いられないように設定することができ、誤差の大きい情報が用いられるようなことを防ぐことが可能となる。
【0077】
なお、このようなリセット(クリア)は、上記した予想移動距離が閾値を超えた場合のみに行われるのではなく、以下のときにも行われるようにしても良い。例えば、未測位になってからの経過時間(時間T1)が所定の時間以上になった場合、上記したリセットが行われるようにしても良い。所定の時間として、日付が変わった場合なども含まれる。
【0078】
また、測位できていた時間よりも、未測位の時間が長くなった場合、リセットが行われるようにしても良い。換言すれば、測位ができなくなった時点(時刻t4)から未測位の時間T1だけ遡った時点に、位置情報が記憶部12に記憶されていなかった場合、リセットが行われるようにしても良い。
【0079】
このような未測位時の処理が行われると、処理は、ステップS16(図3)に進められる。ステップS16以降の処理については既に説明したので、その詳細な説明は省略するが、ステップS16において、GPS測位の更新が待たれるため、未測位時の処理が実行されても、測位が正常に行われる状態になれば、その正常な状態に復帰できるようになされている。
【0080】
例えば、一時的に建物内に入り、測位できている状態から未測位の状態に変化したような場合、建物内にいるときには未測位の処理が行われ、測位できているときに取得された位置情報が、適宜用いられる。そして、建物の外に出て、測位ができる状態になると、位置情報が取得されるので、その取得される位置情報が用いられる。このような切り換えが、適切に行えるようになる。
【0081】
また例えば、電車などの乗り物に乗り込み、測位できている状態から未測位の状態に変化したような場合、電車内にいるときには未測位の処理が行われ、測位できているときに取得された位置情報が、適宜用いられる。しかしながら、上記したような処理にて、予想移動距離が閾値を超えると、記憶されている位置情報(ホールドされている位置情報)が用いられなくなるため、電車での移動距離が長くなり、ホールドされている位置情報との誤差が大きくなった場合には、ホールドされている位置情報をリセットし、用いられない状態に切り換えることができるようになる。そして、電車から降りて、測位ができる状態になると、正確な位置情報を用いることができる状態に適切に切り換えが行われるようにすることができる。
【0082】
[電源オフ時の処理について]
上述した測位時、および未測位時における処理が実行されているときに、割り込み処理として、情報処理装置10の電源がオフにされたときの処理がある。図9のフローチャートを参照して、電源がオフにされたときの処理について説明する。
【0083】
ユーザにより操作部14が操作され、情報処理装置10の電源のオフが指示された場合、ステップS101において、GPS測位停止済フラグがセットされているか否かが判断される。このGPS測位停止済フラグとは、上記したように、GPS測位の機能がオフとされているときにセットされるフラグである。そして、このGPS測位停止済フラグは、ステップS20(図3)においてセットされるフラグである。
【0084】
再度図3のフローチャートを参照するに、ステップS20において、GPS測位停止済フラグがセットされる。このステップS20への処理は、ステップS11において、GPS測位機能がオフであると判断されたときに来る。このときは、GPS測位機能がオフであるため、GPS測位停止済フラグはセットされている状態であるが、再度、ステップS20においてセットされる。
【0085】
またステップS20への処理には、ステップS17においてGPS測位の停止が指示されたと判断され、ステップS19においてGPS測位が停止された場合、またはステップS18において、GPS測位機能がオフであると判断され、ステップS19においてGPS測位が停止された場合にもくる。いずれの場合も、GPS測位が停止された場合に、ステップS20においてGPS測位停止済フラグがセットされる。
【0086】
電源のオフが指示されると、ステップS101(図9)において、GPS測位停止済フラグがセットされているか否かが判断されるが、セットされていないと判断されるまで待機状態が維持される。待機状態が維持される一方で、図3に示したフローチャートの処理が継続して行われているため、例えばステップS17において、GPS測位の停止が指示されたと判断され、ステップS19の処理を経て、ステップS20においてGPS測位停止済フラグがセットされるまで、電源のオフは実行されない。
【0087】
GPS測位停止済フラグがセットされると、ステップS101(図9)においてGPS測位停止済フラグがセットされていると判断されるため、ステップS102に処理が進められ、情報処理装置10の電源がオフにされる。このように、GPS測位停止済フラグがセットされているときには、情報処理装置10の電源がオフにされるが、GPS測位停止済フラグがセットされていないときには、情報処理装置10の電源はオフにはされない。
【0088】
情報処理装置10の電源がオフにされず、GPS測位停止済フラグがセットされていない状態が継続されている間は、図3に示したフローチャートの処理、そして場合によっては図4に示したフローチャートの処理が実行される。よって、測位の処理(位置情報の取得と記憶に係わる処理)は、継続して行われる状態とされている。例えば、情報処理装置10がカメラなどの撮像装置の一部を構成しているような場合、撮像装置の撮像機能に関してはオフの状態であるが、情報処理装置10が実行する位置情報の取得や記憶に関する機能はオンの状態とすることができる。よって、撮影はしなくても、移動の軌跡は記憶しておきたいといったユーザのニーズにも対応することができる。
【0089】
なお、ここではGPS測位停止済フラグを設けて、上記したように処理が行われるとして説明をしたが、電源がオフされたときには、GPS測位停止済フラグがセットされているか否かに係わらず、情報処理装置10の電源がオフとされるように構成することも可能である。
【0090】
[他の構成について]
図10に他の構成例を示す。図10に示した構成は、情報処理装置110が、ネットワーク140を介してサーバ160と通信を行う構成とされている。情報処理装置110は、測位部111、通信部112、制御部113、操作部114、および表示部115から構成されている。この測位部111、制御部113、操作部114、および表示部115は、図1に示した情報処理装置10の測位部11、制御部13、操作部14、および表示部15と同様な構成とすることができる。ここでは、これらの各部についての説明は省略する。
【0091】
すなわち、図10に示した情報処理装置110は、図1に示した情報処理装置10の記憶部12を通信部112に代えた構成とされている点が異なり、他の構成は同様とされている。情報処理装置110は、衛星120(GPS)からの信号を測位部111で受信し、測位し、その結果を、通信部112の処理で、ネットワーク140を介してサーバ160に送信する構成とされている。
【0092】
サーバ160は、記憶部161、制御部162、および通信部163を含む構成とされる。サーバ160の通信部163は、ネットワーク140を介して情報処理装置110からの位置情報を受信すると、その位置情報を、制御部162に供給する。制御部162は、どの情報処理装置110からの位置情報であるのかを、IDなどを参照して判断し、その判断に基づき、記憶部161に供給された位置情報を記憶する。
【0093】
このように、情報処理装置110は、衛星120からの信号を受信することで、自己の位置を判断し、その結果を、サーバ160に送信し、サーバ160は、情報処理装置110からの位置情報を記憶する。また、サーバ160は、上述した情報処理装置10が行っていた処理の一部を行う。具体的には、サーバ160は、情報処理装置110が測位を正常に行っているときには、その測位された位置情報を記憶する。また、受信された位置情報から、情報処理装置110の移動速度や、モードの判断を行う。
【0094】
情報処理装置110は、正常に測位できていないときには、そのことを知らせる情報を、サーバ160に送信する。サーバ160は、そのような情報を受信すると、基本的に図4に示した未測位時の処理と同様の処理を実行する。すなわち、ホールドされている位置情報をクリアするか否かの判断を行い、その判断を行うために、予想移動距離や閾値を算出する。
【0095】
このような構成とすることで、測位できていない状態でも、サーバ160との通信を行えれば、測位されている位置情報の記憶や、未測位時の処理などをサーバ160側で行うことが可能となる。またサーバ160が、情報処理装置110よりも処理能力が高い場合、より細かな予想移動距離や閾値の算出などを行うようにすることもできる。また、情報処理装置110が撮像装置の一部として組み込まれているような場合、撮像装置で撮像された画像や映像などが、サーバ160に位置情報とともに送信され、サーバ160の記憶部161に記憶されるようにしても良い。
【0096】
このように、本技術を適用することで、GPS(衛星)からの信号を受信できず、測位が正常に行えないような状況のときに過去に測位した位置情報(ホールドされている位置情報)を用いるような場合であっても、推定の移動距離を計算し、その推定の移動距離が大きい際には、ホールドされている位置情報をクリアすることが可能となる。
【0097】
ホールドされている位置情報がクリアされることで、ホールドされている位置情報と、実際の位置情報との差が大きくなってしまったような場合に、そのような誤差を含む位置情報が記録されてしまうようなことを防ぐことが可能となる。誤差を含む位置情報が記録されることがないように制御することで、記録される位置情報の精度を向上させることが可能となる。このようなホールドされている位置情報のクリアに係わる処理は、ユーザの手を煩わすことなく行われるため、使い勝手が向上し、利便性を向上させることが可能となる。
【0098】
[記録媒体について]
上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
【0099】
図11は、上述した一連の処理をプログラムにより実行するコンピュータのハードウエアの構成例を示すブロック図である。コンピュータにおいて、CPU(Central Processing Unit)1001、ROM(Read Only Memory)1002、RAM(Random Access Memory)1003は、バス1004により相互に接続されている。バス1004には、さらに、入出力インタフェース1005が接続されている。入出力インタフェース1005には、入力部1006、出力部1007、記憶部1008、通信部1009、およびドライブ1010が接続されている。
【0100】
入力部1006は、キーボード、マウス、マイクロフォンなどよりなる。出力部1007は、ディスプレイ、スピーカなどよりなる。記憶部1008は、ハードディスクや不揮発性のメモリなどよりなる。通信部1009は、ネットワークインタフェースなどよりなる。ドライブ1010は、磁気ディスク、光ディスク、光磁気ディスク、または半導体メモリなどのリムーバブルメディア1011を駆動する。
【0101】
以上のように構成されるコンピュータでは、CPU1001が、例えば、記憶部1008に記憶されているプログラムを、入出力インタフェース1005およびバス1004を介して、RAM1003にロードして実行することにより、上述した一連の処理が行われる。
【0102】
コンピュータ(CPU1001)が実行するプログラムは、例えば、パッケージメディア等としてのリムーバブルメディア1011に記録して提供することができる。また、プログラムは、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の伝送媒体を介して提供することができる。
【0103】
コンピュータでは、プログラムは、リムーバブルメディア1011をドライブ1010に装着することにより、入出力インタフェース1005を介して、記憶部1008にインストールすることができる。また、プログラムは、有線または無線の伝送媒体を介して、通信部1009で受信し、記憶部1008にインストールすることができる。その他、プログラムは、ROM1002や記憶部1008に、予めインストールしておくことができる。
【0104】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであっても良いし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであっても良い。
【0105】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0106】
なお、本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
【0107】
なお、本技術は以下のような構成も取ることができる。
【0108】
(1)
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と、
前記測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、
前記予想部で予想された前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離が前記閾値を超えたと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするように制御する制御部と
を備える情報処理装置。
(2)
前記予想部は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時刻のときの移動速度に関連付けられている第2の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値を算出し、その差分値を、前記第1の時刻と前記第2の時刻の差分値で除算することで平均速度を算出し、
前記平均速度と前記第1の時間を乗算して、前記距離を予想する
前記(1)に記載の情報処理装置。
(3)
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
前記(2)に記載の情報処理装置。
(4)
移動速度に応じた複数のモードが設けられ、モード毎に前記第2の時間が設定され、
前記予想部は、前記第1の時刻のときの移動速度が該当するモードを判断し、そのモードに設定されている前記第2の時間を用いて、前記距離を予想する
前記(2)に記載の情報処理装置。
(5)
前記距離が前記閾値を超えていないと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記第1の時間内で取得された位置情報として前記記憶部に記憶する
前記(1)乃至(4)のいずれかに記載の情報処理装置。
(6)
前記閾値は、予め設定されている速度と、前記第1の時間を乗算して算出される値である
前記(1)乃至(5)のいずれかに記載の情報処理装置。
(7)
前記閾値は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値である
前記(1)乃至(5)のいずれかに記載の情報処理装置。
(8)
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
前記(7)に記載の情報処理装置。
(9)
前記制御部は、前記第1の時間が、所定の時間以上になった時点で、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
前記(1)乃至(8)のいずれかに記載の情報処理装置。
(10)
前記制御部は、前記第1の時間だけ、前記第1の時刻よりも遡った時刻の位置情報が、前記記憶部に記憶されていないと判断した場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部にからクリアする
前記(1)乃至(9)のいずれかに記載の情報処理装置。
(11)
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置の情報処理方法において、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む情報処理方法。
(12)
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置を制御するコンピュータに、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む処理を実行させるためのプログラム。
【符号の説明】
【0109】
10 情報処理装置, 11 測位部, 12 記憶部, 13 制御部, 14 操作部, 15 表示部, 110 情報処理装置, 111 測位部, 112 通信部, 113 制御部, 114 操作部, 115 表示部
【特許請求の範囲】
【請求項1】
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と、
前記測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、
前記予想部で予想された前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離が前記閾値を超えたと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするように制御する制御部と
を備える情報処理装置。
【請求項2】
前記予想部は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時刻のときの移動速度に関連付けられている第2の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値を算出し、その差分値を、前記第1の時刻と前記第2の時刻の差分値で除算することで平均速度を算出し、
前記平均速度と前記第1の時間を乗算して、前記距離を予想する
請求項1に記載の情報処理装置。
【請求項3】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
請求項2に記載の情報処理装置。
【請求項4】
移動速度に応じた複数のモードが設けられ、モード毎に前記第2の時間が設定され、
前記予想部は、前記第1の時刻のときの移動速度が該当するモードを判断し、そのモードに設定されている前記第2の時間を用いて、前記距離を予想する
請求項2に記載の情報処理装置。
【請求項5】
前記距離が前記閾値を超えていないと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記第1の時間内で取得された位置情報として前記記憶部に記憶する
請求項1に記載の情報処理装置。
【請求項6】
前記閾値は、予め設定されている速度と、前記第1の時間を乗算して算出される値である
請求項1に記載の情報処理装置。
【請求項7】
前記閾値は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値である
請求項1に記載の情報処理装置。
【請求項8】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
請求項7に記載の情報処理装置。
【請求項9】
前記制御部は、前記第1の時間が、所定の時間以上になった時点で、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
請求項1に記載の情報処理装置。
【請求項10】
前記制御部は、前記第1の時間だけ、前記第1の時刻よりも遡った時刻の位置情報が、前記記憶部に記憶されていないと判断した場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部にからクリアする
請求項1に記載の情報処理装置。
【請求項11】
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置の情報処理方法において、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む情報処理方法。
【請求項12】
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置を制御するコンピュータに、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む処理を実行させるためのプログラム。
【請求項1】
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と、
前記測位部による測位が行えていないと判断される場合、測位が行えない第1の時間内で移動した距離を予想する予想部と、
前記予想部で予想された前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離が前記閾値を超えたと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアするように制御する制御部と
を備える情報処理装置。
【請求項2】
前記予想部は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時刻のときの移動速度に関連付けられている第2の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値を算出し、その差分値を、前記第1の時刻と前記第2の時刻の差分値で除算することで平均速度を算出し、
前記平均速度と前記第1の時間を乗算して、前記距離を予想する
請求項1に記載の情報処理装置。
【請求項3】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
請求項2に記載の情報処理装置。
【請求項4】
移動速度に応じた複数のモードが設けられ、モード毎に前記第2の時間が設定され、
前記予想部は、前記第1の時刻のときの移動速度が該当するモードを判断し、そのモードに設定されている前記第2の時間を用いて、前記距離を予想する
請求項2に記載の情報処理装置。
【請求項5】
前記距離が前記閾値を超えていないと判断された場合、前記記憶部に記憶されている最新の位置情報を、前記第1の時間内で取得された位置情報として前記記憶部に記憶する
請求項1に記載の情報処理装置。
【請求項6】
前記閾値は、予め設定されている速度と、前記第1の時間を乗算して算出される値である
請求項1に記載の情報処理装置。
【請求項7】
前記閾値は、前記測位部による測位が行えなくなった第1の時刻のときに記憶された位置情報が示す第1の位置と、前記第1の時間だけ、前記第1の時刻よりも前の第2の時刻に記憶された位置情報が示す第2の位置との差分値である
請求項1に記載の情報処理装置。
【請求項8】
前記第1の位置と前記第2の位置を直線で結んだときの距離を、前記差分値として算出するか、または、前記第1の時刻と前記第2の時刻との間の時間に記憶された位置情報に基づく位置毎の差分を加算することで前記差分値を算出する
請求項7に記載の情報処理装置。
【請求項9】
前記制御部は、前記第1の時間が、所定の時間以上になった時点で、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
請求項1に記載の情報処理装置。
【請求項10】
前記制御部は、前記第1の時間だけ、前記第1の時刻よりも遡った時刻の位置情報が、前記記憶部に記憶されていないと判断した場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部にからクリアする
請求項1に記載の情報処理装置。
【請求項11】
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置の情報処理方法において、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む情報処理方法。
【請求項12】
自己の位置を測位する測位部と、
前記測位部により測位された位置情報を記憶する記憶部と
を備える情報処理装置を制御するコンピュータに、
前記測位部による測位が行えていないと判断される場合、測位が行えない時間内で移動した距離を予想し、
前記距離が、前記第1の時間に対応する閾値を超えたか否かを判断し、前記距離は前記閾値を超えたとの判断である場合、前記記憶部に記憶されている最新の位置情報を、前記記憶部からクリアする
ステップを含む処理を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−64620(P2013−64620A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−202667(P2011−202667)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]