
情報処理装置、情報処理方法、及びプログラム
【課題】被写体画像を仮想空間に配置して表示させる際に、被写体が撮像された環境等も容易に把握できる方法を提案する。
【解決手段】被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、を備え、前記表示制御部は、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置。
【解決手段】被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、を備え、前記表示制御部は、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法、及びプログラムに関する。
【背景技術】
【0002】
近年、撮像装置は多機能化されており、例えば撮像装置で撮像された大量の写真画像を、サムネイル画像として並べて表示する技術が存在する。このような技術としては、例えば複数のサムネイル画像がマトリクス状に表示されるもののほか、下記の特許文献1に記載された技術が存在する。
【0003】
特許文献1には、撮像位置、撮像距離、撮像方位に関する撮像情報に基づいて、撮像者の撮像地点の位置を表示領域内に設定し、該撮像地点に対する被写体の位置及び方位を判別可能とするように写真画像の配置位置を設定する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−78842号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
また、写真画像の閲覧性を向上させる観点等から、撮影情報に基づいて、写真画像を仮想空間内に配置して表示させる技術が提案されている。かかる技術によれば、ユーザは、仮想空間に配置された写真画像を見れば、被写体の撮像位置や撮像方位等を把握しやすい。
【0006】
ところで、写真画像は、主に被写体を中心に撮像したものであり、被写体の周囲の状況は撮像されていないケースが多い。このため、被写体を撮像した写真画像を仮想空間に表示した際に、被写体の撮像位置等は把握できても、被写体がどのような環境下で撮像されたかは把握され難い。
【0007】
本開示は、被写体画像を仮想空間に配置して表示させる際に、被写体が撮像された環境等も容易に把握できる方法を提案する。
【課題を解決するための手段】
【0008】
本開示によれば、被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、を備え、前記表示制御部は、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置が提供される。
【0009】
また、本開示によれば、被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、を含む、情報処理方法が提供される。
【0010】
また、本開示によれば、コンピュータに、被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、を実行させるためのプログラムが提供される。
【0011】
そして、本開示によれば、表示制御部は、仮想空間に被写体画像を描画する際に、広範囲画像も共に描画する。ここで、広範囲画像は、被写体の撮像位置を含み被写体を撮像する際の視野よりも広範囲の視野で撮像された画像であるので、ユーザは、被写体画像と共に描画された広範囲画像によって被写体が撮像された環境等を容易に把握することが可能となる。
【発明の効果】
【0012】
以上説明したように本開示によれば、被写体画像を仮想空間に配置して表示させる際に、被写体が撮像された環境等も容易に把握することが可能となる。
【図面の簡単な説明】
【0013】
【図1】一実施形態に係る画像表示システムの概略構成を示す図である。
【図2】一実施形態に係る画像表示システムの構成を示すブロック図である。
【図3】一実施形態に係る画像表示システムの構成の変形例を示すブロック図である。
【図4】一実施形態に係る撮像装置の詳細構成を示すブロック図である。
【図5】一実施形態に係る表示装置の詳細構成を示すブロック図である。
【図6】表示制御装置の機能構成を示すブロック図である。
【図7】回転雲台の回転角度と、撮像装置により撮像された被写体画像との関係を示す図である。
【図8】図7に示す回転角度で撮像された被写体画像が配置された仮想三次元空間を概念的に示す図である。
【図9】図8に示す仮想三次元空間を上方から捉えた図である。
【図10】電子コンパスの方位と、回転雲台の回転角度との関係を示す図です。
【図11】表示部又は大画面表示装置による被写体画像が配置された仮想三次元空間の表示例を示す図である。
【図12】仮想三次元空間上の被写体画像とパノラマ画像の描画位置を説明するための図である。
【図13】表示部又は大画面表示装置による被写体画像とパノラマ画像の表示例を示す図である。
【図14】第1取得部から取得した被写体画像が、仮想三次元空間上に描画するまでの流れを説明するための模式図である。
【図15】表示部又は大画面表示装置による被写体画像の表示例を示す図である。
【図16】仮想三次元空間上の視点の移動を説明するための図である。
【図17】仮想三次元空間上の被写体画像とパノラマ画像の表示処理を示すフローチャートである。
【図18】仮想三次元空間上の視点の方位角等を説明するための図である。
【図19】パノラマ画像と表示装置の表示画面の関係を示す図である。
【図20】パノラマ画像と表示装置の表示画面の関係を示す図である。
【図21】自動撮像された被写体画像の仮想三次元空間上の描画処理を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
なお、説明は以下の順序で行うものとする。
1.画像表示システムの構成
2.撮像装置の構成
3.表示装置の構成
4.表示制御装置の構成
4−1.仮想三次元空間上の被写体画像の配置
4−2.仮想三次元空間上の被写体画像とパノラマ画像の表示
4−3.被写体画像の仮想三次元空間上の描画の流れ
4−4.視点移動に伴うパノラマ画像の切替表示
5.画像表示システムの動作
6.まとめ
【0016】
<1.画像表示システムの構成>
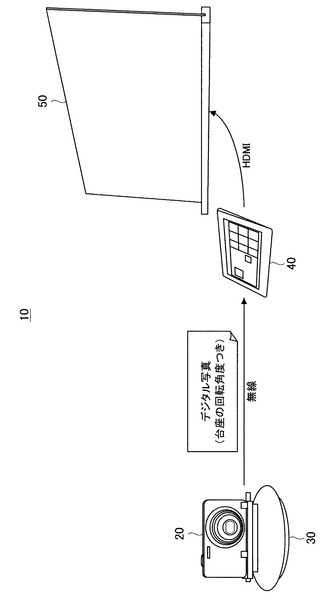
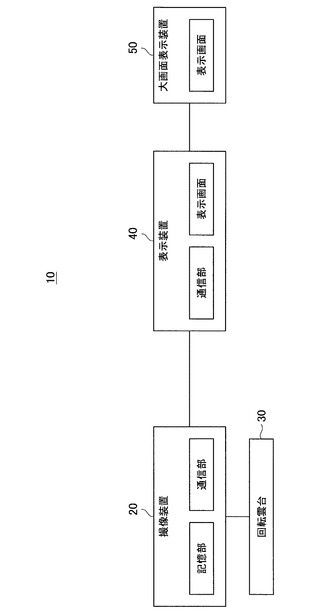
図1及び図2を参照しながら、本開示の一実施形態に係る画像表示システム10の構成について説明する。図1は、一実施形態に係る画像表示システム10の概略構成を示す図である。図2は、一実施形態に係る画像表示システム10の構成を示すブロック図である。
【0017】
画像表示システム10は、撮像された被写体画像を仮想空間の一例である仮想三次元空間内に配置し、被写体画像が配置された仮想三次元空間を二次元画像として表示する。図1、図2に示すように、画像表示システム10は、撮像装置20と、回転雲台30と、表示装置40と、大画面表示装置50とを有する。
【0018】
撮像装置20は、例えばデジタルスチルカメラであり、被写体を撮像する。撮像装置20は、広範囲画像の一例であるパノラマ画像も撮像可能である。撮像装置20は、例えばパーティ等の集まりの場において、自動的に回転(パン)・角度調整(チルト)・ズームを行なって被写体の顔を検出し、自動撮像する機能(パーティショット機能)を実行可能である。撮像装置20は、撮像した画像を記憶部に記憶する。
【0019】
回転雲台30は、撮像装置20が載置された状態で、360度回転可能な雲台である。回転雲台30は、パン・チルト・ズームの各動き及び被写体の顔の自動追尾機能を有する。載置された撮像装置20と回転雲台30が接続されることで、上記のパーティショット機能が実現される。なお、回転雲台30には、パノラマ画像を撮像するための操作部が設けられても良い。
【0020】
撮像装置20は、無線ネットワーク等を介して表示装置40と通信を行うことが可能である。そして、撮像装置20は、パーティショット機能で自動撮像した被写体画像(記憶部に記憶された被写体画像)を、表示装置40に送信する。この際、撮像装置20は、被写体画像と共に、被写体画像を撮像した際の回転雲台30の回転角度等の情報も送信する。なお、撮像装置20の詳細構成については、後述する。
【0021】
表示装置40は、表示画面に各種画像を表示する。撮像装置20から受信した被写体画像(パーティショット機能で自動撮像された被写体画像)を仮想三次元空間内に配置し、被写体画像が配置された仮想三次元空間を二次元画像として表示する。表示装置40は、仮想三次元空間を、表示装置40の表示画面、又は、表示装置40に接続された大画面表示装置50に表示させる。なお、仮想三次元空間の詳細については、後述する。
【0022】
大画面表示装置50は、表示装置40と接続され、データのやり取りを行う。大画面表示装置50は、撮像装置20で自動撮像された被写体画像が配置された仮想三次元空間を表示画面に表示する。
【0023】
なお、上記では、撮像装置20がデジタルスチルカメラであることとしたが、これに限定されない。撮像装置20は、被写体を撮像する機能を有すれば良く、例えば携帯電話機、スマートフォン、PDA(Personal Digital Assistant)、携帯型AVプレイヤー、電子ブック、電子辞書等であっても良い。
【0024】
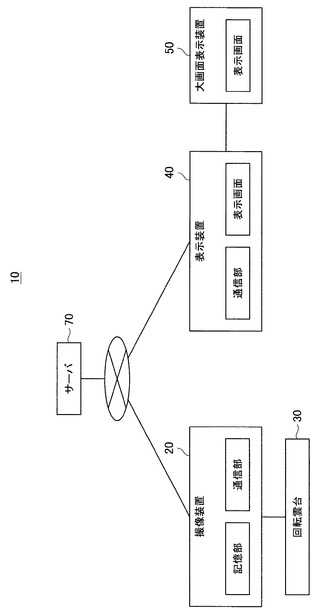
また、上記では、表示装置40は、仮想三次元空間に配置させる被写体画像を撮像装置20から受信することとしたが、これに限定されない。例えば、表示装置40は、図3に示すように、サーバ上に格納された被写体画像を受信し、受信した被写体画像を仮想三次元空間上に配置して表示させることとしても良い。
【0025】
図3は、一実施形態に係る画像表示システム10の構成の変形例を示すブロック図である。図3の変形例に係る撮像装置20は、表示装置40の代わりに、無線ネットワーク等を介してサーバ70に自動撮像した被写体画像を送信する。サーバ70は、撮像装置20から受信した被写体画像を格納し、表示装置40からの要求に応じて被写体画像を表示装置40に送信する。
【0026】
<2.撮像装置の構成>
図4を参照しながら、本開示の一実施形態に係る撮像装置20の詳細構成について説明する。図4は、一実施形態に係る撮像装置20の詳細構成を示すブロック図である。
【0027】
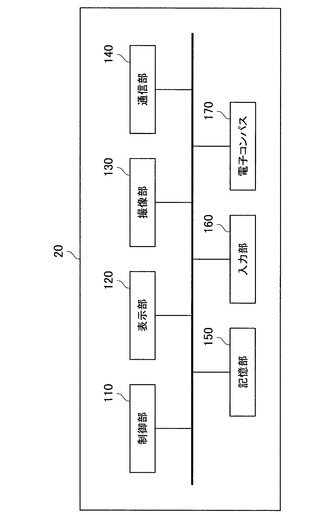
図4に示すように、撮像装置20は、制御部110と、表示部120と、撮像部130と、通信部140と、記憶部150と、入力部160と、電子コンパス170と、を有する。
【0028】
制御部110は、撮像装置20の各ブロックと信号をやり取りして各種演算を行い、撮像装置20の動作全体を制御する。制御部110は、例えばCPU、ROM、RAMを含む。
【0029】
表示部120は、例えばTFT(Thin Film Transistor)等のLCDやOELD(Organic Electro-Luminescence Display)であり、表示画面に各種画像を表示する。表示部120は、例えば撮像時のプレビュー画像を表示する。
【0030】
撮像部130は、例えばCMOS(Complementary Metal Oxide Semiconductor)やCCD(Charge Coupled Devices)センサ等の撮像素子により、静止画(写真)や動画等の被写体画像を撮像する。撮像部130は、被写体の顔を検出する機能を有し、笑顔を検出した場合に被写体を自動撮像する。また、撮像部130は、パノラマ画像を撮像しうる。なお、撮像部130は、パーティショット機能の実行中は、複数の被写体画像を自動撮像する。
【0031】
撮像部130は、被写体画像のみならず、撮像時刻や撮像位置の情報も取得可能である。撮像時刻は、撮像装置20に内蔵された時計(不図示)から取得される。内蔵時計の時刻は、例えばGPS衛星からGPSセンサ(不図示)により受信される時刻情報に基づいて補正されても良い。なお、時刻は、一日の中での時としてではなく、年月日の中での時の概念を含む。
【0032】
通信部140は、例えばネットワークインタフェースカードやモデム等を有し、インターネットやLAN(Local Area Network)等のネットワークを介して、他の機器との間で通信処理を行う。通信部140は、無線LANモージュル、又はWWAN(Wireless Wide Area Network)モージュルを有していても良い。通信部140は、撮像された被写体画像やパノラマ画像を他の機器(表示装置40等)に送信する。
【0033】
記憶部150は、例えばフラッシュメモリであり、撮像部130により撮像された被写体画像を記憶する。また、記憶部150は、制御部110が実行する制御プログラムを記憶する。
【0034】
入力部160は、ユーザの操作を受け付け、入力信号を制御部110に出力する。入力部160は、例えば電源スイッチ、シャッターボタン等を含む。入力部160は、表示部120と一体的に設けられたタッチパネルを有しても良い。
【0035】
電子コンパス170は、地球が発する地磁気を検知する磁気センサを有し、検知された地磁気に基づいて、撮像装置20が向いている方向(方位)を算出する。電子コンパス170は、算出した撮像装置20の方位を制御部110に出力する。
【0036】
<3.表示装置の構成>
図5を参照しながら、本開示の一実施形態に係る表示装置40の詳細構成について説明する。図5は、一実施形態に係る表示装置40の詳細構成を示すブロック図である。
【0037】
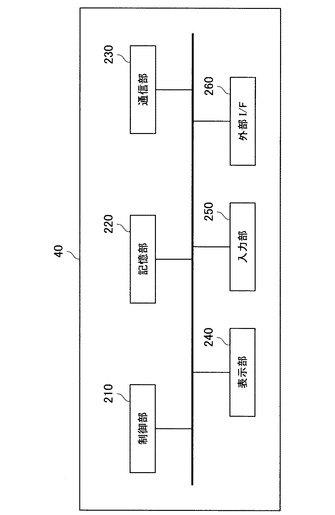
図5に示すように、表示装置40は、制御部210と、記憶部220と、通信部230と、表示部240と、入力部250と、外部I/F(インターフェース)260と、を有する。
【0038】
制御部210は、表示装置40の各ブロックと信号をやり取りして各種演算を行い、表示装置40の動作全体を制御する。制御部210は、後述する仮想三次元空間への被写体画像の配置処理等を実行する。制御部210は、例えばCPU、ROM、RAMを含む。
【0039】
記憶部220は、例えばフラッシュメモリやHDD(Hard Disk Drive)であり、撮像装置20から受信した被写体画像を記憶する。また、記憶部220は、制御部210が実行する制御プログラムを記憶する。
【0040】
通信部230は、例えばネットワークインタフェースカードやモデム等を有し、インターネットやLAN(Local Area Network)等のネットワークを介して、他の機器(撮像装置20やサーバ70)との間で通信処理を行う。通信部230は、撮像装置20又はサーバ70(撮像装置20等とも呼ぶ)から、撮像装置20により自動撮像された被写体画像を受信する。
【0041】
表示部240は、例えばTFT(Thin Film Transistor)等のLCDやOELD(Organic Electro-Luminescence Display)である。表示部240は、通信部230が撮像装置20から受信した被写体画像を仮想三次元空間内に配置し、被写体画像が配置された仮想三次元空間を二次元画像として表示画面に表示する。
【0042】
入力部250は、例えば表示部240と一体的に設けられたタッチパネルである。入力部250は、例えば画像表示アプリケーションの実行により画像やGUI(Graphical User Interface)が表示された状態で、ユーザのタッチ操作を検出し、制御部210に出力する。また、タッチパネルは、画像表示アプリケーションの実行中に、ユーザが画像を選択して全画面表示をしたり、視点を移動(ズームイン、ズームアウト)したりするのに用いられる。
【0043】
外部I/F260は、例えばHDMI(High-Definition Multimedia Interface)やUSB(Universal Serial Bus)等の各種規格に準じて、外部機器(例えば、大画面表示装置50)と接続し、データのやり取りを行う。例えば、表示装置40は、外部I/F260を介して、大画面表示装置50の表示画面に表示させる被写体画像やパノラマ画像を送信する。
【0044】
<4.表示制御装置の構成>
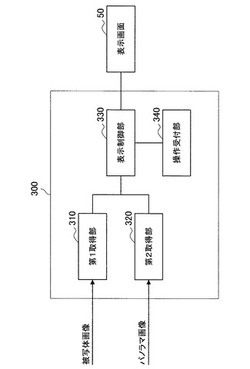
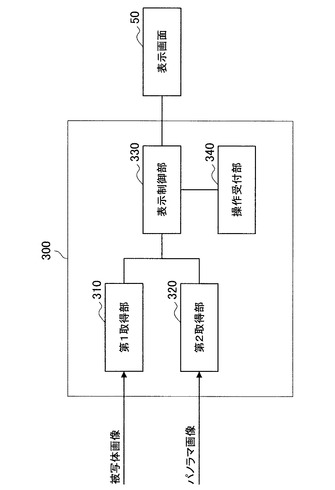
図6を参照しながら、画像表示システム10において画像表示を制御する情報処理装置の一例である表示制御装置300の機能構成について説明する。図6は、表示制御装置300の機能構成を示すブロック図である。
【0045】
表示制御装置300は、撮像装置20によって撮像された被写体画像とパノラマ画像の表示装置40の表示部120又は大画面表示装置50の表示画面への表示を制御する。図6に示すように、表示制御装置300は、第1取得部310と、第2取得部320と、表示制御部330と、操作受付部340とを有する。なお、第1取得部310、第2取得部320、表示制御部330、操作受付部340は、例えば表示装置40の制御部210により構成される。
【0046】
第1取得部310は、被写体を撮像した被写体画像を取得する。例えば、第1取得部310は、撮像装置20又はサーバ70から被写体画像を取得する。被写体画像は、回転自在な回転雲台30に載置され回転雲台30の回転に連動して回転する撮像装置20によって撮像されている。なお、撮像装置20によって複数の被写体画像が自動撮像された場合には、複数の被写体画像を順次取得する。
【0047】
第1取得部310は、被写体画像を取得する際に、被写体画像の撮像位置を示す第1撮像位置情報を取得する。また、第1取得部310は、被写体画像を取得する際に、被写体画像の撮像時刻を示す第1撮像時刻情報も取得可能である。第1取得部310は、被写体画像と第1撮像時刻情報と第1撮像位置情報を対応付けて取得する。第1取得部310は、取得した被写体画像、第1撮像時刻情報、第1撮像位置情報を表示制御部330に出力する。
【0048】
第2取得部320は、被写体の撮像位置を含み被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像の一例であるパノラマ画像を取得する。パノラマ画像も、回転雲台30の回転に連動して回転する撮像装置20によって撮像されている。第2取得部320は、撮像装置20によって複数のパノラマ画像(例えば、撮像時刻が異なる複数のパノラマ画像)が自動撮像された場合には、複数のパノラマ画像を取得する。
【0049】
第2取得部320は、パノラマ画像を取得する際に、パノラマ画像の撮像時刻を示す第2撮像時刻情報と、パノラマ画像の撮像位置を示す第2撮像位置情報も取得する。第2取得部320は、取得したパノラマ画像、第2撮像時刻情報、第2撮像位置情報を表示制御部330に出力する。
【0050】
表示制御部330は、第1取得部310から入力された被写体画像と、第2取得部320から入力されたパノラマ画像の、表示装置40の表示部120又は大画面表示装置50の表示画面への表示を制御する。また、表示制御部330は、仮想三次元空間を画像化して、表示部120又は大画面表示装置50の表示画面に表示させる。
【0051】
(4−1.仮想三次元空間上の被写体画像の配置)
以下では、説明の便宜上、大画面表示装置50の表示画面に仮想三次元空間が表示されるものとして説明する。また、仮想三次元空間上に配置される被写体画像は、パーティショット機能で自動撮像された被写体画像であるものとする。
【0052】
仮想三次元空間は、空間内の基準点(例えば、ユーザの視点)を中心とする円の半径方向に撮像時刻に対応する時間軸を有し、かつ円の円周方向に撮像位置に対応する方位軸を有する仮想の空間である。そして、表示制御部330は、画像化される仮想三次元空間の、第1取得部310により取得された第1撮像時刻情報及び第1撮像位置情報に基づいた描画位置に、被写体画像を描画する。
【0053】
以下において、仮想三次元空間上で被写体画像をどのように描画するかについて、具体的に説明する。
【0054】
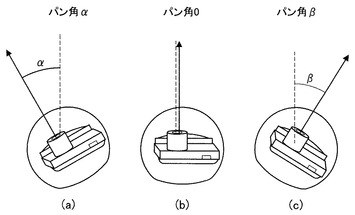
図7は、回転雲台30の回転角度と、撮像装置20により撮像された被写体画像との関係を示す図である。前述したように、撮像装置20は、パーティショット機能で回転雲台30に載置され回転雲台30の回転に連動して回転しながら、被写体を自動撮像する。図7では、回転雲台30の回転角度(パン角)が基準となる北向きから反時計方向に角度αである場合に被写体画像I1が撮像され、回転角度が0度である場合に被写体画像I2が撮像され、回転角度が時計方向に角度βである場合に被写体画像I3が撮像されるものとする。
【0055】
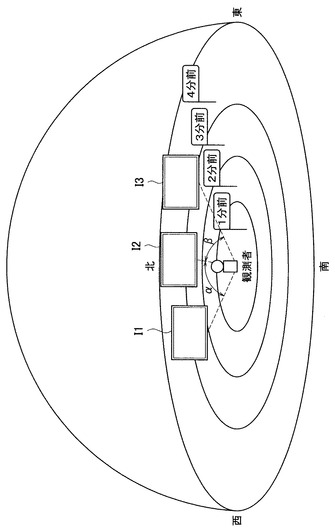
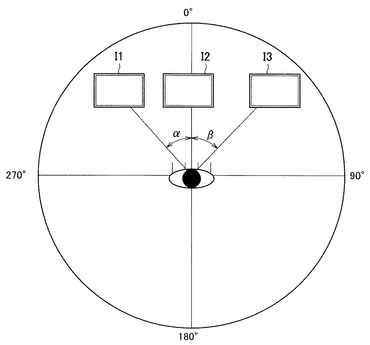
図8は、図7に示す回転角度で撮像された被写体画像が配置された仮想三次元空間を概念的に示す図である。図9は、図8に示す仮想三次元空間を上方から捉えた図である。仮想三次元空間は、図8に示すように、観測者(撮像装置20のユーザの視点)を中心として同心円を描き、同心円の半径方向を奥行き、同心円の円周方向を方位に対応させ、360°の広がりを持った半球状の空間である。
【0056】
表示制御部330は、仮想三次元空間内に自動撮像された複数の被写体画像を撮像時刻及び撮像位置を反映させた位置に配置させる。図8、図9に示すように、図7に示す回転雲台30の回転角度に応じた位置に、被写体画像I1〜I3が配置される。なお、図9では、角度0°の方向が北を示し、角度90°の方向が東を示す。また、円の中央に位置する目の画像は、視点を示す。
【0057】
上記では、被写体画像の撮像位置が、回転雲台30の回転角度に応じて設定されている。ところで、撮像装置20は、前述したように電子コンパス170を有しており、電子コンパス170により取得された絶対方位と、回転雲台30の回転角度に応じて、被写体画像の撮像位置が設定されても良い。
【0058】
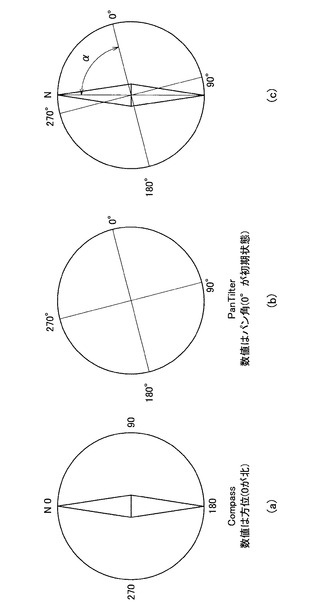
図10は、電子コンパス170の方位と、回転雲台30の回転角度との関係を示す図です。第1取得部310は、自動撮像された被写体画像を取得する際に、撮像時の回転雲台30の回転角度の情報(図10(b)に示す0°〜359°の角度情報)も関連付けて取得する。また、第1取得部310は、被写体画像を取得する際に、電子コンパス170によって測定された撮像時の絶対方位の情報(図10(a)に示す方位)も関連付けて取得する。
【0059】
この2つの情報を活用するために、表示制御装置300は、撮像開始時に、回転雲台30の初期角度と電子コンパス170の絶対方位の差を示すオフセット角度(図10(c)に示すオフセット角度α)を決定する。そして、表示制御装置300は、電子コンパス170にはゆらぎがあるため、オフセット角度αと回転雲台30の回転角度とを加えた角度を、撮像装置20の撮像方位として採用する。これにより、より高精度に撮像方位を決定できる。
【0060】
図11は、表示部120又は大画面表示装置50による被写体画像が配置された仮想三次元空間の表示例を示す図である。図11に示すように、表示制御部330は、仮想三次元空間をユーザの視点から見た風景となるように描画して表示する。図11において、仮想三次元空間の横軸が方位に、縦軸が高度に、奥行き軸が時間に、それぞれ対応する。すなわち、横軸が、撮像装置20の現在位置から見た被写体画像が撮像された場所の方位を示す。奥行き軸は、現在時刻から見た被写体画像が撮像された時刻を示す。縦軸は、被写体画像が撮像された場所の地表からの高度を示す。
【0061】
なお、高度情報が被写体画像と共に記録されていない場合には、高度は0とされ、被写体画像は地表(仮想三次元空間の底面)に沿って配置される。また、奥行き方向への被写体画像の配置間隔は、例えば1時間間隔、1日間隔等の固定間隔であっても良いし、例えば1時間、1日、1年、10年等、視点からの距離が大きくなるに従って間隔が指数関数的に大きくなるような可変間隔であっても良い。
【0062】
図11においては、撮像時刻が異なり、かつ撮像された方位も異なる5個の被写体画像I1〜I5が、仮想三次元空間上に配置されて2次元画像として表示されている。また、図11に示す仮想三次元空間は、奥行き方向に遠近感を有しており、現在位置からの被写体画像の距離に応じて、被写体画像の大きさが異なる。すなわち、現在位置に最も近い被写体画像I1が最も大きく、現在位置から最も離れた被写体画像I5が最も小さい。なお、仮想三次元空間が、奥行き方向に遠近感を有さず、被写体画像I1〜I5の大きさが同じ大きさであっても良い。このように表示することで、ユーザは、複数の被写体画像の撮像位置や撮像時刻の関係が容易に把握できる。
【0063】
(4−2.仮想三次元空間上の被写体画像とパノラマ画像の表示)
図6に戻って、説明を続ける。表示制御部330は、被写体の自動撮像時の撮像環境を容易に把握できるように、被写体画像を仮想三次元空間の描画位置に描画する際に、第2取得部320で取得されたパノラマ画像も共に描画する。
【0064】
具体的には、表示制御部330は、画像化して表示される仮想三次元空間の背景部分に、パノラマ画像を描画する。また、表示制御部330は、被写体画像とパノラマ画像の撮像方位が同期するように、第2取得部で取得された第2撮像位置情報に基づいてパノラマ画像を描画する。
【0065】
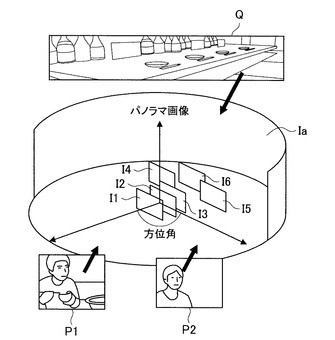
ここで、図12を参照しながら、仮想三次元空間上の被写体画像とパノラマ画像の表示について、具体的に説明する。図12は、仮想三次元空間上の被写体画像とパノラマ画像の描画位置を説明するための図である。
【0066】
図12に示すように、表示制御部330は、仮想三次元空間に被写体画像P1、P2を配置して描画すると共に、パノラマ画像Qも描画する。ここで、パノラマ画像は、仮想三次元空間の外周から上方に延びた面上に配置される。この際、表示制御部330は、仮想三次元空間上でパノラマ画像と被写体画像の撮像方位が同期するように、パノラマ画像と被写体画像を描画する。
【0067】
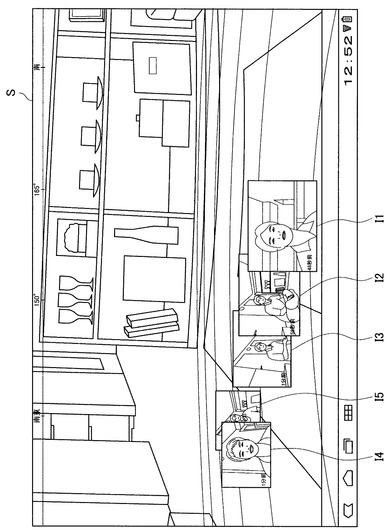
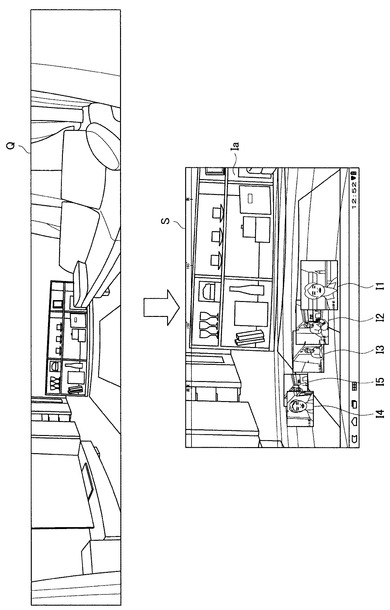
図13は、表示部120又は大画面表示装置50による被写体画像とパノラマ画像の表示例を示す図である。図13に示すように、表示画面Sの下方の仮想三次元空間の底面上に被写体画像I1〜I5が描画され、表示画面Sの上方の仮想三次元空間の背景部分にパノラマ画像Iaが描画されている。パノラマ画像と被写体画像は分けて描画されているので、描画されたパノラマ画像をユーザが認識しやすい。また、図13に示すように、表示画面Sに描画されるパノラマ画像Iaは、表示画面のサイズに対応した第2取得部320が取得したパノラマ画像Qの一部である。
【0068】
このように、被写体画像に加えて、仮想三次元空間の背景部分にパノラマ画像を配置させて表示することで、被写体が自動撮像された撮影環境の知覚しやすくなる。特に、撮像される被写体画像は被写体の顔を中心に撮像されるため、被写体画像で占める被写体の顔の面積が大きい。このため、被写体画像のみを表示させると被写体以外の部分(例えば、撮像された背景)を把握し難いが、背景部分にパノラマ画像を表示することで、被写体撮像時の撮像環境を容易に把握できる。
【0069】
(4−3.被写体画像の仮想三次元空間上の描画の流れ)
図6に戻って、説明を続ける。表示制御部330は、被写体画像の撮像位置に対応した方位に仮想三次元空間を回転表示させ、被写体画像を、回転表示された仮想三次元空間の描画位置に描画する。
【0070】
具体的には、表示制御部330は、被写体画像を所定時間だけ拡大表示させた後に、被写体画像を非表示にした状態で仮想三次元空間を回転表示させ、仮想三次元空間の回転表示後に、被写体画像を再度表示させて描画位置に描画する。また、表示制御部330は、被写体画像を、回転表示された仮想三次元空間上でバウンドさせた後に描画位置に描画する。
【0071】
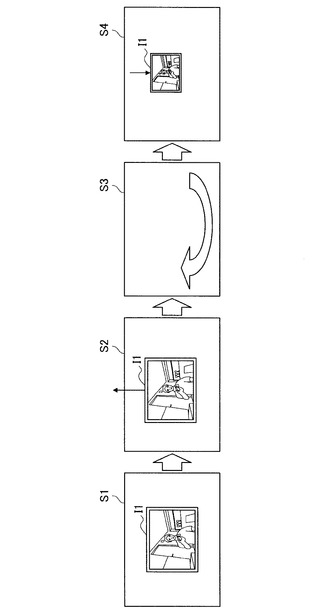
ここで、図14を参照しながら、表示制御部330が、第1取得部310から取得した被写体画像を、仮想三次元空間上に描画するまでの流れを説明する。図14は、第1取得部310から取得した被写体画像が、仮想三次元空間上に描画されるまでの流れを説明するための模式図である。
【0072】
表示制御部330は、第1取得部310から被写体画像が入力されると、表示画面S1に示すように、一つの被写体画像I1を大きいサイズで所定時間だけ表示する。このように大きいサイズで被写体画像I1が表示されることで、自動撮像された画像であることを知覚しやすい。
【0073】
表示制御部330は、所定時間が経過すると、表示画面S2に示すように、被写体画像I1を画面外に向けてスライドさせる。これにより、被写体画像I1が、画面から消える。ここでは、被写体画像I1は、画面の上側にスライドアウトしている。
【0074】
表示制御部330は、被写体画像I1がスライドアウトされた後に、被写体画像I1の撮影方位となるように、表示画面S3に示すように仮想三次元空間を回転させて表示する(すなわち、表示画面をスクロールする)。そして、表示制御部330は、仮想三次元空間の回転表示後、表示画面S4に示すように、仮想三次元空間内に被写体画像I1を落とす(下方へスライドする)表示を行う。
【0075】
ここで、仮想三次元空間が回転するので、表示画面S4の被写体画像I1の背景部分と、表示画面S1、S2の被写体画像I1の背景部分の画像が異なる。このように、仮想三次元空間を回転させて表示することで、被写体画像が、回転雲台30上に載置され回転する撮像装置20によって撮像されたことを知覚できる。
【0076】
更に、表示制御部330は、被写体画像I1を仮想三次元空間の底面の描画位置上でバウンドさせる演出を行う。このような演出を行うことで、被写体画像I1の撮像位置を視覚的に把握しやすくなる。
【0077】
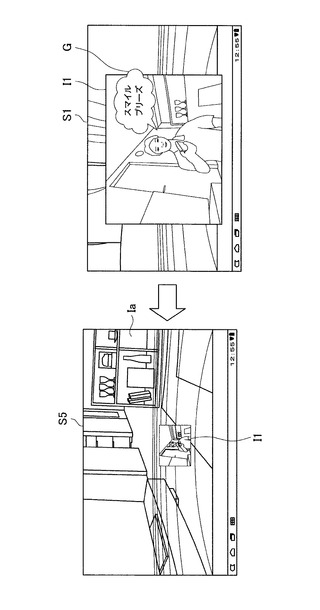
図15は、表示部120又は大画面表示装置50による被写体画像の表示例を示す図である。図15の表示画面S1に示すように、被写体画像I1が大きさサイズで表示されている。この際、表示制御部330は、コメントが記載された吹出しGを表示させても良い。コメントは、例えば被写体画像I1の被写体に対する第三者の客観的なコメントである。コメントは、被写体画像I1の被写体のコメントであっても良い。図15の表示画面S5には、仮想三次元空間の回転表示後に被写体画像I1が描画位置に描画されている状態が示されている。
【0078】
(4−4.視点移動に伴うパノラマ画像の切替表示)
図6に戻って、説明を続ける。操作受付部340は、表示画面に表示された仮想三次元空間において、ユーザの視点の仮想三次元空間の移動操作を受け付ける。例えば、操作受付部340は、表示装置40の入力部250(タッチパネル)によるタッチ操作を検知することで、仮想三次元空間において視点の仮想三次元空間の時間軸上の移動操作を受け付ける。
【0079】
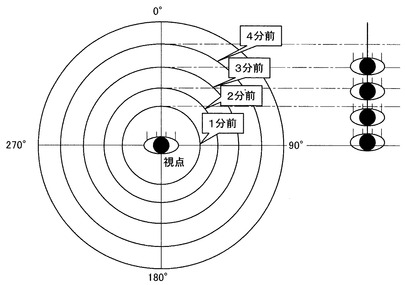
表示制御部330は、操作受付部340が受け付けた視点の移動操作に応じて、パノラマ画像を切替えて描画する。例えば、表示制御部330は、移動した視点の時間軸上の位置に対応した撮像時刻に撮像されたパノラマ画像に切替えて描画する。これにより、撮像時刻に応じた撮像風景を把握できる。なお、切替描画されるパノラマ画像は、予め所定間隔で撮像されていても良く、またシーンが切り替わる度に撮像されていても良い。
【0080】
ここで、図16を参照しながら、仮想三次元空間上の視点移動に伴うパノラマ画像の切替表示について説明する。図16は、仮想三次元空間上の視点の移動を説明するための図である。
【0081】
図16では、仮想三次元空間の時間軸である半径方向において、ユーザが視点を上方へ移動させると、表示制御部330は、現在表示されているパノラマ画像よりも所定時間前に撮像されたパノラマ画像に表示を切り替える。このように、仮想三次元空間上の視点移動に応じてパノラマ画像を切替えることで、描画されるパノラマ画像の時間変化を知覚できる。
【0082】
なお、上記では、仮想空間として、円の円周方向に方位軸を、円の半径方向に時間軸を有する仮想三次元空間を例に挙げて説明したが、これに限定されない。例えば、仮想空間は空間内の基準点を中心とする円の円周方向に被写体画像の撮像位置に対応する方位軸を有すればよく、半径方向は時間軸以外の軸(例えば、距離の軸)であっても良い。
【0083】
<5.画像表示システムの動作>
(仮想三次元空間上の被写体画像とパノラマ画像の表示処理)
図17〜図19を参照しながら、仮想三次元空間上の被写体画像とパノラマ画像の表示処理について説明する。
【0084】
図17は、仮想三次元空間上の被写体画像とパノラマ画像の表示処理を示すフローチャートである。図18は、仮想三次元空間上の視点の方位角等を説明するための図である。図19は、パノラマ画像と表示画面の関係を示す図である。図17に示すフローチャートは、撮像装置20によって被写体画像とパノラマ画像が撮像されたところから開始される。
【0085】
本処理は、CPUがROMに格納されているプログラムを実行することによって、実現される。なお、実行されるプログラムは、CD(Compact Disk)、DVD(Digital Versatile Disk)、メモリカード等の記録媒体に記憶されても良く、インターネットを介してサーバ等からダウンロードされても良い。
【0086】
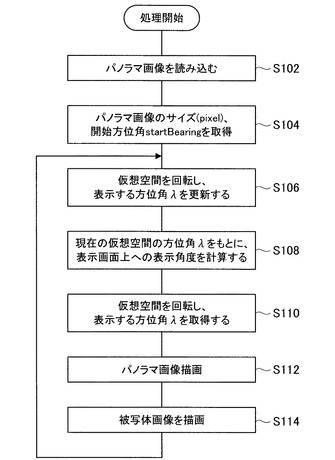
まず、表示制御部330は、第2取得部320が撮像装置20から取得したパノラマ画像を読み込む(ステップS102)。そして、表示制御部330は、図19(b)に示すパノラマ画像のサイズ(Pixel)、開始方位角startBearingを取得する(ステップS104)。
【0087】
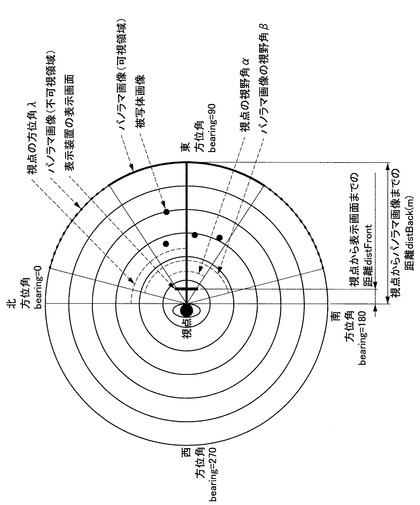
次に、表示制御部330は、描画される仮想三次元空間を回転し、表示する視点の方位角λ(図18)を更新する(ステップS106)。そして、表示制御部330は、現在の仮想空間の方位角λに基づいて、表示画面上への表示角度を計算する(ステップS108)。
【0088】
次に、表示制御部330は、仮想三次元空間を回転し、表示する視点の方位角λを取得する(ステップS110)。図18では、視点は東を向いており、方位角λは90°である。
【0089】
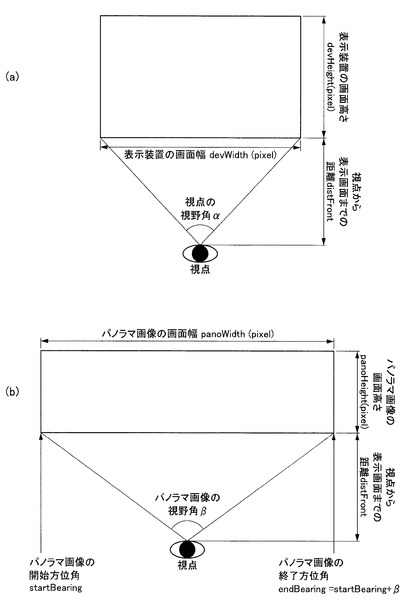
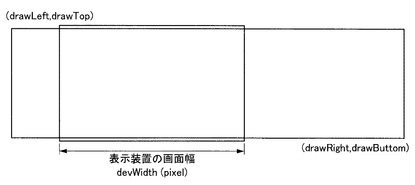
次に、表示制御部330は、仮想三次元空間の背景部分にパノラマ画像を描画する(ステップS112)。ここで、パノラマ画像を描画する際の計算方法について、図20を参照しながら説明する。図20は、パノラマ画像と表示装置の表示画面の関係を示す図である。
【0090】
まず、図19(a)に示す視点の視野1度あたりのPixel数(pixPerAngleEye)は、下記の式で求められる。
pixPerAngleEye = devWidth / α
【0091】
また、図19(b)に示すパノラマ画像の視野1度あたりのPixel数(pixPerAnglePano)は、下記の式で求められる。
pixPerAnglePano = panoWidth / β
【0092】
すると、パノラマ画像の表示画面の座標系への変換係数(convCoefficients)は、下記の式で求められる。
convCoefficients = pixPerAngleEye / pixPerAnglePano
【0093】
そして、表示画面にパノラマ画像を配置するときに、図20に示すパノラマ画像の左端の座標drawLeftは、表示画面中心の座標をdevWidth/2 とし、パノラマ画像の開始方位角startBearingと視点の方位角λから、下記の式で求められる。
drawLeft=(devWidth /2)+ (startBearing - λ) * pixPerAngleEye
【0094】
同様に、図20に示すパノラマ画像の右端の座標drawRightは、下記の式で求められる。
drawRight= drawLeft + panoWidth * convCoefficients
【0095】
また、パノラマ画像の上端の座標drawTopと、下端drawButtomは、それぞれ下記の式で求められる。
drawTop = 0
drawButtom= panoHeight * convCoeffients
上記の計算結果に基づいて、パノラマ画像が描画される。
【0096】
図17に戻って説明を続ける。表示制御部330は、仮想三次元空間の所定の描画位置に被写体画像を描画する(ステップS114)。これにより、例えば図13に示すように、仮想三次元空間上にパノラマ画像と被写体画像が共に表示され、被写体画像が撮像された環境を容易に把握できる。
【0097】
(被写体画像の仮想三次元空間上の描画処理)
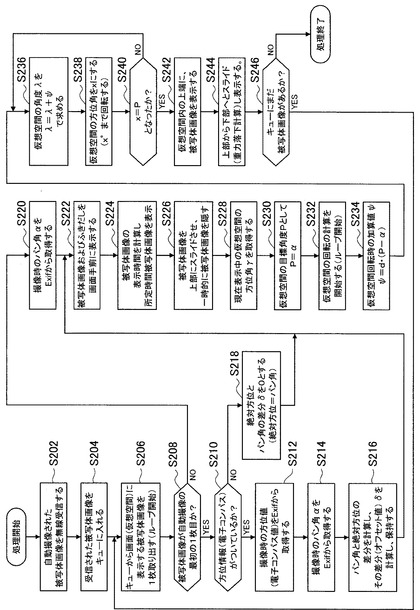
図21を参照しながら、自動撮像された被写体画像を仮想三次元空間上に配置する描画処理について説明する。図21は、自動撮像された被写体画像の仮想三次元空間上の描画処理を示すフローチャートである。本フローチャートは、撮像装置20によって被写体画像が自動撮像されたところから開始される。
【0098】
第1取得部310は、自動撮像された被写体画像を受信し(ステップS202)、受信した被写体画像を記憶部のキューに格納する(ステップS204)。ここで、第1取得部310は、複数の被写体画像を受信するものとする。
【0099】
次に、表示制御部330は、キューから画面(仮想三次元空間)に表示する被写体画像を一つ取り出す(ステップS206)。そして、表示制御部330は、取り出した被写体画像が自動撮像された複数の被写体画像のうちの最初の一枚目か否かを判定する(ステップS208)。
【0100】
ステップS208で被写体画像が最初の一枚目であると判定された場合には(Yes)。表示制御部330は、さらに、被写体画像に方位情報がついているか否かを判定する(ステップS210)。そして、ステップS210で被写体画像に方位情報がついている場合には(Yes)、表示制御部330は、撮像時の方位値(電子コンパスの値)をExif(方位等の撮像情報)から取得する(ステップS212)。
【0101】
また、表示制御部330は、被写体の撮像時の回転雲台30のパン角αをExifから取得する(ステップS214)。そして、表示制御部330は、回転雲台30のパン角と絶対方位の差分を計算し、その差分(オフセット値)δを計算し、保持する(ステップS216)。
【0102】
ステップS210で被写体画像の方位情報がついていない場合には(No)、表示制御部330は、絶対方位と回転雲台30のパン角の差分δを0とする(ステップS218)。すなわち、絶対方位と回転雲台30のパン角が同じ大きさとなる。
【0103】
次に、表示制御部330は、被写体画像及び吹出しを画面手前に表示する(ステップS222)。そして、表示制御部330は、被写体画像の表示時間を計算し、所定時間被写体画像を表示する(ステップS224)。その後、表示制御部330は、被写体画像を上部にスライドさせ、一時的に被写体画像を隠す(ステップS226)。
【0104】
次に、表示制御部330は、現在表示中の仮想三次元空間の方位角γを取得する(ステップS228)。そして、表示制御部330は、仮想三次元空間の目標角度Pを、パン角αとする(ステップS230)。
【0105】
次に、表示制御部330は、仮想三次元空間の回転の計算を開始する(ステップS232)。表示制御部330は、仮想三次元空間の回転時の加算値ψを、下記の式により求める(ステップS234)。
ψ=d*(P−α)
【0106】
次に、表示制御部330は、仮想三次元空間の角度λを、下記の式により求める(ステップS236)。
λ=λ+ψ
【0107】
次に、表示制御部330は、仮想三次元空間の方位角をxにする(ステップS238)。すなわち、表示制御部330は、x°まで仮想三次元空間を回転させる。そして、表示制御部330は、方位角xが目標角度Pと同じになったか否かを判定する(ステップS240)。
【0108】
ステップS240で方位角xが目標角度Pに達していない場合には(No)、表示制御部330は、上述したステップS238、S240を繰り返す。ステップS240で方位角xが目標角度Pに達した場合には(Yes)、表示制御部330は、仮想三次元空間の上端に被写体画像を表示する(ステップS242)。そして、表示制御部330は、被写体画像を上部から下部へとスライド表示する(ステップS244)。
【0109】
次に、表示制御部330は、キューに被写体画像がまだ格納されているか否かを判定する(ステップS246)。ステップS246でキューに被写体画像がまだ格納されている場合には(Yes)、表示制御部330は、上述した処理を繰り返すことになる。ただし、この場合、キューからとり出される被写体画像は2枚目以降であるので、表示制御部330は、ステップS210〜S218を実行する代わりに、撮像時のパン角αをExifから取得する(ステップS220)。ステップS246でキューに被写体画像が無い場合には(No)、本処理が終了する。
【0110】
<6.まとめ>
上述したように、情報処理装置は、仮想三次元空間(仮想空間)の描画位置に被写体画像を描画する際に、パノラマ画像(広範囲画像)も共に描画する。ここで、パノラマ画像は、被写体を撮像する際の視野よりも広範囲の視野で撮像された画像であるので、被写体画像と共に描画されたパノラマ画像によって被写体が撮像された環境等を容易に把握することが可能となる。特に、パーティショット機能では、自動撮像される被写体画像において被写体の顔が大きく撮像される特性がある。このため、被写体画像のみを仮想三次元空間上に配置させると撮像環境が把握し難いが、パノラマ画像も一緒に描画することでかかる問題を解決できる。
【0111】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
【0112】
また、上記の実施形態のフローチャートに示されたステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的に又は個別的に実行される処理をも含む。また時系列的に処理されるステップでも、場合によっては適宜順序を変更することが可能であることは言うまでもない。
【0113】
本明細書において説明した表示制御装置による処理は、ソフトウェア、ハードウェア、及びソフトウェアとハードウェアとの組合せのいずれを用いて実現されてもよい。ソフトウェアを構成するプログラムは、例えば、各装置の内部又は外部に設けられる記憶媒体に予め格納される。そして、各プログラムは、例えば、実行時にRAM(Random Access Memory)に読み込まれ、CPUなどのプロセッサにより実行される。
【0114】
なお、以下のような構成も本開示の技術的範囲に属する。
(1)被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、
を備え、
前記表示制御部は、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、
前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置。
【0115】
(2)前記被写体画像は、前記被写体の顔を撮像した画像であり、
前記広範囲画像は、パノラマ画像である、前記(1)に記載の情報処理装置。
【0116】
(3)前記表示制御部は、画像化して表示される前記仮想空間の背景部分に、前記第2撮像位置情報に基づいて前記広範囲画像を描画する、前記(1)又は(2)に記載の情報処理装置。
【0117】
(4)前記被写体画像及び前記パノラマ画像は、回転自在な回転雲台に載置され前記回転雲台の回転に連動して回転する撮像装置によって撮像された画像である、前記(1)〜(3)のいずれか1項に記載の情報処理装置。
【0118】
(5)前記表示制御部は、
前記被写体画像の前記撮像位置に対応した方位に前記仮想空間を回転表示させ、
前記被写体画像を、回転表示された前記仮想空間の前記描画位置に描画する、前記(1)〜(4)のいずれか1項に記載の情報処理装置。
【0119】
(6)前記表示制御部は、前記被写体画像を、回転表示された前記仮想空間上でバウンドさせた後に前記描画位置に描画する、前記(5)に記載の情報処理装置。
【0120】
(7)前記表示制御部は、
前記被写体画像を所定時間だけ拡大表示させた後に、前記被写体画像を非表示にした状態で前記仮想空間を回転表示させ、
前記仮想空間の回転表示後に、前記被写体画像を再度表示させて前記描画位置に描画する、前記(5)又は(6)に記載の情報処理装置。
【0121】
(8)前記第1取得部は、前記被写体画像の撮像時刻を示す第1撮像時刻情報を更に取得し、
前記表示制御部は、仮想空間の基準点を中心とする円の半径方向を時間軸とし、前記仮想空間の、前記第1撮像時刻情報及び前記第1撮像位置情報に基づいた描画位置に前記被写体画像を描画する、前記(1)〜(7)のいずれか1項に記載の情報処理装置。
【0122】
(9)前記第2取得部は、複数の広範囲画像を取得し、
表示された前記仮想空間において、ユーザの視点の前記仮想空間の移動操作を受け付ける操作受付部を更に備え、
前記表示制御部は、前記操作受付部が受け付けた前記視点の移動操作に応じて広範囲画像に切替えて描画する、前記(8)に記載の情報処理装置。
【0123】
(10)前記複数の広範囲画像は、撮像時刻が異なり、
前記操作受付部は、表示された前記仮想空間において、ユーザによる視点の前記仮想空間の前記時間軸上の移動操作を受け付け、
前記表示制御部は、移動した前記視点の前記時間軸上の位置に対応した撮像時刻に撮像された広範囲画像に切替えて描画する、前記(9)に記載の情報処理装置。
【0124】
(11)前記第1撮像位置情報の前記撮像位置は、前記撮像装置の撮像時の回転角度と、前記撮像装置の絶対方位とに基づいて設定される、前記(4)に記載の情報処理装置。
【0125】
(12)被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を含む、情報処理方法。
【0126】
(13)コンピュータに、
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を実行させるためのプログラム。
【符号の説明】
【0127】
10 画像表示システム
20 撮像装置
30 回転雲台
40 表示装置
50 大画面表示装置
70 サーバ
110 制御部
120 表示部
130 撮像部
140 通信部
150 記憶部
160 入力部
170 電子コンパス
210 制御部
220 記憶部
230 通信部
240 表示部
250 入力部
260 外部I/F
300 表示制御装置
310 第1取得部
320 第2取得部
330 表示制御部
340 操作受付部
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法、及びプログラムに関する。
【背景技術】
【0002】
近年、撮像装置は多機能化されており、例えば撮像装置で撮像された大量の写真画像を、サムネイル画像として並べて表示する技術が存在する。このような技術としては、例えば複数のサムネイル画像がマトリクス状に表示されるもののほか、下記の特許文献1に記載された技術が存在する。
【0003】
特許文献1には、撮像位置、撮像距離、撮像方位に関する撮像情報に基づいて、撮像者の撮像地点の位置を表示領域内に設定し、該撮像地点に対する被写体の位置及び方位を判別可能とするように写真画像の配置位置を設定する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−78842号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
また、写真画像の閲覧性を向上させる観点等から、撮影情報に基づいて、写真画像を仮想空間内に配置して表示させる技術が提案されている。かかる技術によれば、ユーザは、仮想空間に配置された写真画像を見れば、被写体の撮像位置や撮像方位等を把握しやすい。
【0006】
ところで、写真画像は、主に被写体を中心に撮像したものであり、被写体の周囲の状況は撮像されていないケースが多い。このため、被写体を撮像した写真画像を仮想空間に表示した際に、被写体の撮像位置等は把握できても、被写体がどのような環境下で撮像されたかは把握され難い。
【0007】
本開示は、被写体画像を仮想空間に配置して表示させる際に、被写体が撮像された環境等も容易に把握できる方法を提案する。
【課題を解決するための手段】
【0008】
本開示によれば、被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、を備え、前記表示制御部は、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置が提供される。
【0009】
また、本開示によれば、被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、を含む、情報処理方法が提供される。
【0010】
また、本開示によれば、コンピュータに、被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、を実行させるためのプログラムが提供される。
【0011】
そして、本開示によれば、表示制御部は、仮想空間に被写体画像を描画する際に、広範囲画像も共に描画する。ここで、広範囲画像は、被写体の撮像位置を含み被写体を撮像する際の視野よりも広範囲の視野で撮像された画像であるので、ユーザは、被写体画像と共に描画された広範囲画像によって被写体が撮像された環境等を容易に把握することが可能となる。
【発明の効果】
【0012】
以上説明したように本開示によれば、被写体画像を仮想空間に配置して表示させる際に、被写体が撮像された環境等も容易に把握することが可能となる。
【図面の簡単な説明】
【0013】
【図1】一実施形態に係る画像表示システムの概略構成を示す図である。
【図2】一実施形態に係る画像表示システムの構成を示すブロック図である。
【図3】一実施形態に係る画像表示システムの構成の変形例を示すブロック図である。
【図4】一実施形態に係る撮像装置の詳細構成を示すブロック図である。
【図5】一実施形態に係る表示装置の詳細構成を示すブロック図である。
【図6】表示制御装置の機能構成を示すブロック図である。
【図7】回転雲台の回転角度と、撮像装置により撮像された被写体画像との関係を示す図である。
【図8】図7に示す回転角度で撮像された被写体画像が配置された仮想三次元空間を概念的に示す図である。
【図9】図8に示す仮想三次元空間を上方から捉えた図である。
【図10】電子コンパスの方位と、回転雲台の回転角度との関係を示す図です。
【図11】表示部又は大画面表示装置による被写体画像が配置された仮想三次元空間の表示例を示す図である。
【図12】仮想三次元空間上の被写体画像とパノラマ画像の描画位置を説明するための図である。
【図13】表示部又は大画面表示装置による被写体画像とパノラマ画像の表示例を示す図である。
【図14】第1取得部から取得した被写体画像が、仮想三次元空間上に描画するまでの流れを説明するための模式図である。
【図15】表示部又は大画面表示装置による被写体画像の表示例を示す図である。
【図16】仮想三次元空間上の視点の移動を説明するための図である。
【図17】仮想三次元空間上の被写体画像とパノラマ画像の表示処理を示すフローチャートである。
【図18】仮想三次元空間上の視点の方位角等を説明するための図である。
【図19】パノラマ画像と表示装置の表示画面の関係を示す図である。
【図20】パノラマ画像と表示装置の表示画面の関係を示す図である。
【図21】自動撮像された被写体画像の仮想三次元空間上の描画処理を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
なお、説明は以下の順序で行うものとする。
1.画像表示システムの構成
2.撮像装置の構成
3.表示装置の構成
4.表示制御装置の構成
4−1.仮想三次元空間上の被写体画像の配置
4−2.仮想三次元空間上の被写体画像とパノラマ画像の表示
4−3.被写体画像の仮想三次元空間上の描画の流れ
4−4.視点移動に伴うパノラマ画像の切替表示
5.画像表示システムの動作
6.まとめ
【0016】
<1.画像表示システムの構成>
図1及び図2を参照しながら、本開示の一実施形態に係る画像表示システム10の構成について説明する。図1は、一実施形態に係る画像表示システム10の概略構成を示す図である。図2は、一実施形態に係る画像表示システム10の構成を示すブロック図である。
【0017】
画像表示システム10は、撮像された被写体画像を仮想空間の一例である仮想三次元空間内に配置し、被写体画像が配置された仮想三次元空間を二次元画像として表示する。図1、図2に示すように、画像表示システム10は、撮像装置20と、回転雲台30と、表示装置40と、大画面表示装置50とを有する。
【0018】
撮像装置20は、例えばデジタルスチルカメラであり、被写体を撮像する。撮像装置20は、広範囲画像の一例であるパノラマ画像も撮像可能である。撮像装置20は、例えばパーティ等の集まりの場において、自動的に回転(パン)・角度調整(チルト)・ズームを行なって被写体の顔を検出し、自動撮像する機能(パーティショット機能)を実行可能である。撮像装置20は、撮像した画像を記憶部に記憶する。
【0019】
回転雲台30は、撮像装置20が載置された状態で、360度回転可能な雲台である。回転雲台30は、パン・チルト・ズームの各動き及び被写体の顔の自動追尾機能を有する。載置された撮像装置20と回転雲台30が接続されることで、上記のパーティショット機能が実現される。なお、回転雲台30には、パノラマ画像を撮像するための操作部が設けられても良い。
【0020】
撮像装置20は、無線ネットワーク等を介して表示装置40と通信を行うことが可能である。そして、撮像装置20は、パーティショット機能で自動撮像した被写体画像(記憶部に記憶された被写体画像)を、表示装置40に送信する。この際、撮像装置20は、被写体画像と共に、被写体画像を撮像した際の回転雲台30の回転角度等の情報も送信する。なお、撮像装置20の詳細構成については、後述する。
【0021】
表示装置40は、表示画面に各種画像を表示する。撮像装置20から受信した被写体画像(パーティショット機能で自動撮像された被写体画像)を仮想三次元空間内に配置し、被写体画像が配置された仮想三次元空間を二次元画像として表示する。表示装置40は、仮想三次元空間を、表示装置40の表示画面、又は、表示装置40に接続された大画面表示装置50に表示させる。なお、仮想三次元空間の詳細については、後述する。
【0022】
大画面表示装置50は、表示装置40と接続され、データのやり取りを行う。大画面表示装置50は、撮像装置20で自動撮像された被写体画像が配置された仮想三次元空間を表示画面に表示する。
【0023】
なお、上記では、撮像装置20がデジタルスチルカメラであることとしたが、これに限定されない。撮像装置20は、被写体を撮像する機能を有すれば良く、例えば携帯電話機、スマートフォン、PDA(Personal Digital Assistant)、携帯型AVプレイヤー、電子ブック、電子辞書等であっても良い。
【0024】
また、上記では、表示装置40は、仮想三次元空間に配置させる被写体画像を撮像装置20から受信することとしたが、これに限定されない。例えば、表示装置40は、図3に示すように、サーバ上に格納された被写体画像を受信し、受信した被写体画像を仮想三次元空間上に配置して表示させることとしても良い。
【0025】
図3は、一実施形態に係る画像表示システム10の構成の変形例を示すブロック図である。図3の変形例に係る撮像装置20は、表示装置40の代わりに、無線ネットワーク等を介してサーバ70に自動撮像した被写体画像を送信する。サーバ70は、撮像装置20から受信した被写体画像を格納し、表示装置40からの要求に応じて被写体画像を表示装置40に送信する。
【0026】
<2.撮像装置の構成>
図4を参照しながら、本開示の一実施形態に係る撮像装置20の詳細構成について説明する。図4は、一実施形態に係る撮像装置20の詳細構成を示すブロック図である。
【0027】
図4に示すように、撮像装置20は、制御部110と、表示部120と、撮像部130と、通信部140と、記憶部150と、入力部160と、電子コンパス170と、を有する。
【0028】
制御部110は、撮像装置20の各ブロックと信号をやり取りして各種演算を行い、撮像装置20の動作全体を制御する。制御部110は、例えばCPU、ROM、RAMを含む。
【0029】
表示部120は、例えばTFT(Thin Film Transistor)等のLCDやOELD(Organic Electro-Luminescence Display)であり、表示画面に各種画像を表示する。表示部120は、例えば撮像時のプレビュー画像を表示する。
【0030】
撮像部130は、例えばCMOS(Complementary Metal Oxide Semiconductor)やCCD(Charge Coupled Devices)センサ等の撮像素子により、静止画(写真)や動画等の被写体画像を撮像する。撮像部130は、被写体の顔を検出する機能を有し、笑顔を検出した場合に被写体を自動撮像する。また、撮像部130は、パノラマ画像を撮像しうる。なお、撮像部130は、パーティショット機能の実行中は、複数の被写体画像を自動撮像する。
【0031】
撮像部130は、被写体画像のみならず、撮像時刻や撮像位置の情報も取得可能である。撮像時刻は、撮像装置20に内蔵された時計(不図示)から取得される。内蔵時計の時刻は、例えばGPS衛星からGPSセンサ(不図示)により受信される時刻情報に基づいて補正されても良い。なお、時刻は、一日の中での時としてではなく、年月日の中での時の概念を含む。
【0032】
通信部140は、例えばネットワークインタフェースカードやモデム等を有し、インターネットやLAN(Local Area Network)等のネットワークを介して、他の機器との間で通信処理を行う。通信部140は、無線LANモージュル、又はWWAN(Wireless Wide Area Network)モージュルを有していても良い。通信部140は、撮像された被写体画像やパノラマ画像を他の機器(表示装置40等)に送信する。
【0033】
記憶部150は、例えばフラッシュメモリであり、撮像部130により撮像された被写体画像を記憶する。また、記憶部150は、制御部110が実行する制御プログラムを記憶する。
【0034】
入力部160は、ユーザの操作を受け付け、入力信号を制御部110に出力する。入力部160は、例えば電源スイッチ、シャッターボタン等を含む。入力部160は、表示部120と一体的に設けられたタッチパネルを有しても良い。
【0035】
電子コンパス170は、地球が発する地磁気を検知する磁気センサを有し、検知された地磁気に基づいて、撮像装置20が向いている方向(方位)を算出する。電子コンパス170は、算出した撮像装置20の方位を制御部110に出力する。
【0036】
<3.表示装置の構成>
図5を参照しながら、本開示の一実施形態に係る表示装置40の詳細構成について説明する。図5は、一実施形態に係る表示装置40の詳細構成を示すブロック図である。
【0037】
図5に示すように、表示装置40は、制御部210と、記憶部220と、通信部230と、表示部240と、入力部250と、外部I/F(インターフェース)260と、を有する。
【0038】
制御部210は、表示装置40の各ブロックと信号をやり取りして各種演算を行い、表示装置40の動作全体を制御する。制御部210は、後述する仮想三次元空間への被写体画像の配置処理等を実行する。制御部210は、例えばCPU、ROM、RAMを含む。
【0039】
記憶部220は、例えばフラッシュメモリやHDD(Hard Disk Drive)であり、撮像装置20から受信した被写体画像を記憶する。また、記憶部220は、制御部210が実行する制御プログラムを記憶する。
【0040】
通信部230は、例えばネットワークインタフェースカードやモデム等を有し、インターネットやLAN(Local Area Network)等のネットワークを介して、他の機器(撮像装置20やサーバ70)との間で通信処理を行う。通信部230は、撮像装置20又はサーバ70(撮像装置20等とも呼ぶ)から、撮像装置20により自動撮像された被写体画像を受信する。
【0041】
表示部240は、例えばTFT(Thin Film Transistor)等のLCDやOELD(Organic Electro-Luminescence Display)である。表示部240は、通信部230が撮像装置20から受信した被写体画像を仮想三次元空間内に配置し、被写体画像が配置された仮想三次元空間を二次元画像として表示画面に表示する。
【0042】
入力部250は、例えば表示部240と一体的に設けられたタッチパネルである。入力部250は、例えば画像表示アプリケーションの実行により画像やGUI(Graphical User Interface)が表示された状態で、ユーザのタッチ操作を検出し、制御部210に出力する。また、タッチパネルは、画像表示アプリケーションの実行中に、ユーザが画像を選択して全画面表示をしたり、視点を移動(ズームイン、ズームアウト)したりするのに用いられる。
【0043】
外部I/F260は、例えばHDMI(High-Definition Multimedia Interface)やUSB(Universal Serial Bus)等の各種規格に準じて、外部機器(例えば、大画面表示装置50)と接続し、データのやり取りを行う。例えば、表示装置40は、外部I/F260を介して、大画面表示装置50の表示画面に表示させる被写体画像やパノラマ画像を送信する。
【0044】
<4.表示制御装置の構成>
図6を参照しながら、画像表示システム10において画像表示を制御する情報処理装置の一例である表示制御装置300の機能構成について説明する。図6は、表示制御装置300の機能構成を示すブロック図である。
【0045】
表示制御装置300は、撮像装置20によって撮像された被写体画像とパノラマ画像の表示装置40の表示部120又は大画面表示装置50の表示画面への表示を制御する。図6に示すように、表示制御装置300は、第1取得部310と、第2取得部320と、表示制御部330と、操作受付部340とを有する。なお、第1取得部310、第2取得部320、表示制御部330、操作受付部340は、例えば表示装置40の制御部210により構成される。
【0046】
第1取得部310は、被写体を撮像した被写体画像を取得する。例えば、第1取得部310は、撮像装置20又はサーバ70から被写体画像を取得する。被写体画像は、回転自在な回転雲台30に載置され回転雲台30の回転に連動して回転する撮像装置20によって撮像されている。なお、撮像装置20によって複数の被写体画像が自動撮像された場合には、複数の被写体画像を順次取得する。
【0047】
第1取得部310は、被写体画像を取得する際に、被写体画像の撮像位置を示す第1撮像位置情報を取得する。また、第1取得部310は、被写体画像を取得する際に、被写体画像の撮像時刻を示す第1撮像時刻情報も取得可能である。第1取得部310は、被写体画像と第1撮像時刻情報と第1撮像位置情報を対応付けて取得する。第1取得部310は、取得した被写体画像、第1撮像時刻情報、第1撮像位置情報を表示制御部330に出力する。
【0048】
第2取得部320は、被写体の撮像位置を含み被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像の一例であるパノラマ画像を取得する。パノラマ画像も、回転雲台30の回転に連動して回転する撮像装置20によって撮像されている。第2取得部320は、撮像装置20によって複数のパノラマ画像(例えば、撮像時刻が異なる複数のパノラマ画像)が自動撮像された場合には、複数のパノラマ画像を取得する。
【0049】
第2取得部320は、パノラマ画像を取得する際に、パノラマ画像の撮像時刻を示す第2撮像時刻情報と、パノラマ画像の撮像位置を示す第2撮像位置情報も取得する。第2取得部320は、取得したパノラマ画像、第2撮像時刻情報、第2撮像位置情報を表示制御部330に出力する。
【0050】
表示制御部330は、第1取得部310から入力された被写体画像と、第2取得部320から入力されたパノラマ画像の、表示装置40の表示部120又は大画面表示装置50の表示画面への表示を制御する。また、表示制御部330は、仮想三次元空間を画像化して、表示部120又は大画面表示装置50の表示画面に表示させる。
【0051】
(4−1.仮想三次元空間上の被写体画像の配置)
以下では、説明の便宜上、大画面表示装置50の表示画面に仮想三次元空間が表示されるものとして説明する。また、仮想三次元空間上に配置される被写体画像は、パーティショット機能で自動撮像された被写体画像であるものとする。
【0052】
仮想三次元空間は、空間内の基準点(例えば、ユーザの視点)を中心とする円の半径方向に撮像時刻に対応する時間軸を有し、かつ円の円周方向に撮像位置に対応する方位軸を有する仮想の空間である。そして、表示制御部330は、画像化される仮想三次元空間の、第1取得部310により取得された第1撮像時刻情報及び第1撮像位置情報に基づいた描画位置に、被写体画像を描画する。
【0053】
以下において、仮想三次元空間上で被写体画像をどのように描画するかについて、具体的に説明する。
【0054】
図7は、回転雲台30の回転角度と、撮像装置20により撮像された被写体画像との関係を示す図である。前述したように、撮像装置20は、パーティショット機能で回転雲台30に載置され回転雲台30の回転に連動して回転しながら、被写体を自動撮像する。図7では、回転雲台30の回転角度(パン角)が基準となる北向きから反時計方向に角度αである場合に被写体画像I1が撮像され、回転角度が0度である場合に被写体画像I2が撮像され、回転角度が時計方向に角度βである場合に被写体画像I3が撮像されるものとする。
【0055】
図8は、図7に示す回転角度で撮像された被写体画像が配置された仮想三次元空間を概念的に示す図である。図9は、図8に示す仮想三次元空間を上方から捉えた図である。仮想三次元空間は、図8に示すように、観測者(撮像装置20のユーザの視点)を中心として同心円を描き、同心円の半径方向を奥行き、同心円の円周方向を方位に対応させ、360°の広がりを持った半球状の空間である。
【0056】
表示制御部330は、仮想三次元空間内に自動撮像された複数の被写体画像を撮像時刻及び撮像位置を反映させた位置に配置させる。図8、図9に示すように、図7に示す回転雲台30の回転角度に応じた位置に、被写体画像I1〜I3が配置される。なお、図9では、角度0°の方向が北を示し、角度90°の方向が東を示す。また、円の中央に位置する目の画像は、視点を示す。
【0057】
上記では、被写体画像の撮像位置が、回転雲台30の回転角度に応じて設定されている。ところで、撮像装置20は、前述したように電子コンパス170を有しており、電子コンパス170により取得された絶対方位と、回転雲台30の回転角度に応じて、被写体画像の撮像位置が設定されても良い。
【0058】
図10は、電子コンパス170の方位と、回転雲台30の回転角度との関係を示す図です。第1取得部310は、自動撮像された被写体画像を取得する際に、撮像時の回転雲台30の回転角度の情報(図10(b)に示す0°〜359°の角度情報)も関連付けて取得する。また、第1取得部310は、被写体画像を取得する際に、電子コンパス170によって測定された撮像時の絶対方位の情報(図10(a)に示す方位)も関連付けて取得する。
【0059】
この2つの情報を活用するために、表示制御装置300は、撮像開始時に、回転雲台30の初期角度と電子コンパス170の絶対方位の差を示すオフセット角度(図10(c)に示すオフセット角度α)を決定する。そして、表示制御装置300は、電子コンパス170にはゆらぎがあるため、オフセット角度αと回転雲台30の回転角度とを加えた角度を、撮像装置20の撮像方位として採用する。これにより、より高精度に撮像方位を決定できる。
【0060】
図11は、表示部120又は大画面表示装置50による被写体画像が配置された仮想三次元空間の表示例を示す図である。図11に示すように、表示制御部330は、仮想三次元空間をユーザの視点から見た風景となるように描画して表示する。図11において、仮想三次元空間の横軸が方位に、縦軸が高度に、奥行き軸が時間に、それぞれ対応する。すなわち、横軸が、撮像装置20の現在位置から見た被写体画像が撮像された場所の方位を示す。奥行き軸は、現在時刻から見た被写体画像が撮像された時刻を示す。縦軸は、被写体画像が撮像された場所の地表からの高度を示す。
【0061】
なお、高度情報が被写体画像と共に記録されていない場合には、高度は0とされ、被写体画像は地表(仮想三次元空間の底面)に沿って配置される。また、奥行き方向への被写体画像の配置間隔は、例えば1時間間隔、1日間隔等の固定間隔であっても良いし、例えば1時間、1日、1年、10年等、視点からの距離が大きくなるに従って間隔が指数関数的に大きくなるような可変間隔であっても良い。
【0062】
図11においては、撮像時刻が異なり、かつ撮像された方位も異なる5個の被写体画像I1〜I5が、仮想三次元空間上に配置されて2次元画像として表示されている。また、図11に示す仮想三次元空間は、奥行き方向に遠近感を有しており、現在位置からの被写体画像の距離に応じて、被写体画像の大きさが異なる。すなわち、現在位置に最も近い被写体画像I1が最も大きく、現在位置から最も離れた被写体画像I5が最も小さい。なお、仮想三次元空間が、奥行き方向に遠近感を有さず、被写体画像I1〜I5の大きさが同じ大きさであっても良い。このように表示することで、ユーザは、複数の被写体画像の撮像位置や撮像時刻の関係が容易に把握できる。
【0063】
(4−2.仮想三次元空間上の被写体画像とパノラマ画像の表示)
図6に戻って、説明を続ける。表示制御部330は、被写体の自動撮像時の撮像環境を容易に把握できるように、被写体画像を仮想三次元空間の描画位置に描画する際に、第2取得部320で取得されたパノラマ画像も共に描画する。
【0064】
具体的には、表示制御部330は、画像化して表示される仮想三次元空間の背景部分に、パノラマ画像を描画する。また、表示制御部330は、被写体画像とパノラマ画像の撮像方位が同期するように、第2取得部で取得された第2撮像位置情報に基づいてパノラマ画像を描画する。
【0065】
ここで、図12を参照しながら、仮想三次元空間上の被写体画像とパノラマ画像の表示について、具体的に説明する。図12は、仮想三次元空間上の被写体画像とパノラマ画像の描画位置を説明するための図である。
【0066】
図12に示すように、表示制御部330は、仮想三次元空間に被写体画像P1、P2を配置して描画すると共に、パノラマ画像Qも描画する。ここで、パノラマ画像は、仮想三次元空間の外周から上方に延びた面上に配置される。この際、表示制御部330は、仮想三次元空間上でパノラマ画像と被写体画像の撮像方位が同期するように、パノラマ画像と被写体画像を描画する。
【0067】
図13は、表示部120又は大画面表示装置50による被写体画像とパノラマ画像の表示例を示す図である。図13に示すように、表示画面Sの下方の仮想三次元空間の底面上に被写体画像I1〜I5が描画され、表示画面Sの上方の仮想三次元空間の背景部分にパノラマ画像Iaが描画されている。パノラマ画像と被写体画像は分けて描画されているので、描画されたパノラマ画像をユーザが認識しやすい。また、図13に示すように、表示画面Sに描画されるパノラマ画像Iaは、表示画面のサイズに対応した第2取得部320が取得したパノラマ画像Qの一部である。
【0068】
このように、被写体画像に加えて、仮想三次元空間の背景部分にパノラマ画像を配置させて表示することで、被写体が自動撮像された撮影環境の知覚しやすくなる。特に、撮像される被写体画像は被写体の顔を中心に撮像されるため、被写体画像で占める被写体の顔の面積が大きい。このため、被写体画像のみを表示させると被写体以外の部分(例えば、撮像された背景)を把握し難いが、背景部分にパノラマ画像を表示することで、被写体撮像時の撮像環境を容易に把握できる。
【0069】
(4−3.被写体画像の仮想三次元空間上の描画の流れ)
図6に戻って、説明を続ける。表示制御部330は、被写体画像の撮像位置に対応した方位に仮想三次元空間を回転表示させ、被写体画像を、回転表示された仮想三次元空間の描画位置に描画する。
【0070】
具体的には、表示制御部330は、被写体画像を所定時間だけ拡大表示させた後に、被写体画像を非表示にした状態で仮想三次元空間を回転表示させ、仮想三次元空間の回転表示後に、被写体画像を再度表示させて描画位置に描画する。また、表示制御部330は、被写体画像を、回転表示された仮想三次元空間上でバウンドさせた後に描画位置に描画する。
【0071】
ここで、図14を参照しながら、表示制御部330が、第1取得部310から取得した被写体画像を、仮想三次元空間上に描画するまでの流れを説明する。図14は、第1取得部310から取得した被写体画像が、仮想三次元空間上に描画されるまでの流れを説明するための模式図である。
【0072】
表示制御部330は、第1取得部310から被写体画像が入力されると、表示画面S1に示すように、一つの被写体画像I1を大きいサイズで所定時間だけ表示する。このように大きいサイズで被写体画像I1が表示されることで、自動撮像された画像であることを知覚しやすい。
【0073】
表示制御部330は、所定時間が経過すると、表示画面S2に示すように、被写体画像I1を画面外に向けてスライドさせる。これにより、被写体画像I1が、画面から消える。ここでは、被写体画像I1は、画面の上側にスライドアウトしている。
【0074】
表示制御部330は、被写体画像I1がスライドアウトされた後に、被写体画像I1の撮影方位となるように、表示画面S3に示すように仮想三次元空間を回転させて表示する(すなわち、表示画面をスクロールする)。そして、表示制御部330は、仮想三次元空間の回転表示後、表示画面S4に示すように、仮想三次元空間内に被写体画像I1を落とす(下方へスライドする)表示を行う。
【0075】
ここで、仮想三次元空間が回転するので、表示画面S4の被写体画像I1の背景部分と、表示画面S1、S2の被写体画像I1の背景部分の画像が異なる。このように、仮想三次元空間を回転させて表示することで、被写体画像が、回転雲台30上に載置され回転する撮像装置20によって撮像されたことを知覚できる。
【0076】
更に、表示制御部330は、被写体画像I1を仮想三次元空間の底面の描画位置上でバウンドさせる演出を行う。このような演出を行うことで、被写体画像I1の撮像位置を視覚的に把握しやすくなる。
【0077】
図15は、表示部120又は大画面表示装置50による被写体画像の表示例を示す図である。図15の表示画面S1に示すように、被写体画像I1が大きさサイズで表示されている。この際、表示制御部330は、コメントが記載された吹出しGを表示させても良い。コメントは、例えば被写体画像I1の被写体に対する第三者の客観的なコメントである。コメントは、被写体画像I1の被写体のコメントであっても良い。図15の表示画面S5には、仮想三次元空間の回転表示後に被写体画像I1が描画位置に描画されている状態が示されている。
【0078】
(4−4.視点移動に伴うパノラマ画像の切替表示)
図6に戻って、説明を続ける。操作受付部340は、表示画面に表示された仮想三次元空間において、ユーザの視点の仮想三次元空間の移動操作を受け付ける。例えば、操作受付部340は、表示装置40の入力部250(タッチパネル)によるタッチ操作を検知することで、仮想三次元空間において視点の仮想三次元空間の時間軸上の移動操作を受け付ける。
【0079】
表示制御部330は、操作受付部340が受け付けた視点の移動操作に応じて、パノラマ画像を切替えて描画する。例えば、表示制御部330は、移動した視点の時間軸上の位置に対応した撮像時刻に撮像されたパノラマ画像に切替えて描画する。これにより、撮像時刻に応じた撮像風景を把握できる。なお、切替描画されるパノラマ画像は、予め所定間隔で撮像されていても良く、またシーンが切り替わる度に撮像されていても良い。
【0080】
ここで、図16を参照しながら、仮想三次元空間上の視点移動に伴うパノラマ画像の切替表示について説明する。図16は、仮想三次元空間上の視点の移動を説明するための図である。
【0081】
図16では、仮想三次元空間の時間軸である半径方向において、ユーザが視点を上方へ移動させると、表示制御部330は、現在表示されているパノラマ画像よりも所定時間前に撮像されたパノラマ画像に表示を切り替える。このように、仮想三次元空間上の視点移動に応じてパノラマ画像を切替えることで、描画されるパノラマ画像の時間変化を知覚できる。
【0082】
なお、上記では、仮想空間として、円の円周方向に方位軸を、円の半径方向に時間軸を有する仮想三次元空間を例に挙げて説明したが、これに限定されない。例えば、仮想空間は空間内の基準点を中心とする円の円周方向に被写体画像の撮像位置に対応する方位軸を有すればよく、半径方向は時間軸以外の軸(例えば、距離の軸)であっても良い。
【0083】
<5.画像表示システムの動作>
(仮想三次元空間上の被写体画像とパノラマ画像の表示処理)
図17〜図19を参照しながら、仮想三次元空間上の被写体画像とパノラマ画像の表示処理について説明する。
【0084】
図17は、仮想三次元空間上の被写体画像とパノラマ画像の表示処理を示すフローチャートである。図18は、仮想三次元空間上の視点の方位角等を説明するための図である。図19は、パノラマ画像と表示画面の関係を示す図である。図17に示すフローチャートは、撮像装置20によって被写体画像とパノラマ画像が撮像されたところから開始される。
【0085】
本処理は、CPUがROMに格納されているプログラムを実行することによって、実現される。なお、実行されるプログラムは、CD(Compact Disk)、DVD(Digital Versatile Disk)、メモリカード等の記録媒体に記憶されても良く、インターネットを介してサーバ等からダウンロードされても良い。
【0086】
まず、表示制御部330は、第2取得部320が撮像装置20から取得したパノラマ画像を読み込む(ステップS102)。そして、表示制御部330は、図19(b)に示すパノラマ画像のサイズ(Pixel)、開始方位角startBearingを取得する(ステップS104)。
【0087】
次に、表示制御部330は、描画される仮想三次元空間を回転し、表示する視点の方位角λ(図18)を更新する(ステップS106)。そして、表示制御部330は、現在の仮想空間の方位角λに基づいて、表示画面上への表示角度を計算する(ステップS108)。
【0088】
次に、表示制御部330は、仮想三次元空間を回転し、表示する視点の方位角λを取得する(ステップS110)。図18では、視点は東を向いており、方位角λは90°である。
【0089】
次に、表示制御部330は、仮想三次元空間の背景部分にパノラマ画像を描画する(ステップS112)。ここで、パノラマ画像を描画する際の計算方法について、図20を参照しながら説明する。図20は、パノラマ画像と表示装置の表示画面の関係を示す図である。
【0090】
まず、図19(a)に示す視点の視野1度あたりのPixel数(pixPerAngleEye)は、下記の式で求められる。
pixPerAngleEye = devWidth / α
【0091】
また、図19(b)に示すパノラマ画像の視野1度あたりのPixel数(pixPerAnglePano)は、下記の式で求められる。
pixPerAnglePano = panoWidth / β
【0092】
すると、パノラマ画像の表示画面の座標系への変換係数(convCoefficients)は、下記の式で求められる。
convCoefficients = pixPerAngleEye / pixPerAnglePano
【0093】
そして、表示画面にパノラマ画像を配置するときに、図20に示すパノラマ画像の左端の座標drawLeftは、表示画面中心の座標をdevWidth/2 とし、パノラマ画像の開始方位角startBearingと視点の方位角λから、下記の式で求められる。
drawLeft=(devWidth /2)+ (startBearing - λ) * pixPerAngleEye
【0094】
同様に、図20に示すパノラマ画像の右端の座標drawRightは、下記の式で求められる。
drawRight= drawLeft + panoWidth * convCoefficients
【0095】
また、パノラマ画像の上端の座標drawTopと、下端drawButtomは、それぞれ下記の式で求められる。
drawTop = 0
drawButtom= panoHeight * convCoeffients
上記の計算結果に基づいて、パノラマ画像が描画される。
【0096】
図17に戻って説明を続ける。表示制御部330は、仮想三次元空間の所定の描画位置に被写体画像を描画する(ステップS114)。これにより、例えば図13に示すように、仮想三次元空間上にパノラマ画像と被写体画像が共に表示され、被写体画像が撮像された環境を容易に把握できる。
【0097】
(被写体画像の仮想三次元空間上の描画処理)
図21を参照しながら、自動撮像された被写体画像を仮想三次元空間上に配置する描画処理について説明する。図21は、自動撮像された被写体画像の仮想三次元空間上の描画処理を示すフローチャートである。本フローチャートは、撮像装置20によって被写体画像が自動撮像されたところから開始される。
【0098】
第1取得部310は、自動撮像された被写体画像を受信し(ステップS202)、受信した被写体画像を記憶部のキューに格納する(ステップS204)。ここで、第1取得部310は、複数の被写体画像を受信するものとする。
【0099】
次に、表示制御部330は、キューから画面(仮想三次元空間)に表示する被写体画像を一つ取り出す(ステップS206)。そして、表示制御部330は、取り出した被写体画像が自動撮像された複数の被写体画像のうちの最初の一枚目か否かを判定する(ステップS208)。
【0100】
ステップS208で被写体画像が最初の一枚目であると判定された場合には(Yes)。表示制御部330は、さらに、被写体画像に方位情報がついているか否かを判定する(ステップS210)。そして、ステップS210で被写体画像に方位情報がついている場合には(Yes)、表示制御部330は、撮像時の方位値(電子コンパスの値)をExif(方位等の撮像情報)から取得する(ステップS212)。
【0101】
また、表示制御部330は、被写体の撮像時の回転雲台30のパン角αをExifから取得する(ステップS214)。そして、表示制御部330は、回転雲台30のパン角と絶対方位の差分を計算し、その差分(オフセット値)δを計算し、保持する(ステップS216)。
【0102】
ステップS210で被写体画像の方位情報がついていない場合には(No)、表示制御部330は、絶対方位と回転雲台30のパン角の差分δを0とする(ステップS218)。すなわち、絶対方位と回転雲台30のパン角が同じ大きさとなる。
【0103】
次に、表示制御部330は、被写体画像及び吹出しを画面手前に表示する(ステップS222)。そして、表示制御部330は、被写体画像の表示時間を計算し、所定時間被写体画像を表示する(ステップS224)。その後、表示制御部330は、被写体画像を上部にスライドさせ、一時的に被写体画像を隠す(ステップS226)。
【0104】
次に、表示制御部330は、現在表示中の仮想三次元空間の方位角γを取得する(ステップS228)。そして、表示制御部330は、仮想三次元空間の目標角度Pを、パン角αとする(ステップS230)。
【0105】
次に、表示制御部330は、仮想三次元空間の回転の計算を開始する(ステップS232)。表示制御部330は、仮想三次元空間の回転時の加算値ψを、下記の式により求める(ステップS234)。
ψ=d*(P−α)
【0106】
次に、表示制御部330は、仮想三次元空間の角度λを、下記の式により求める(ステップS236)。
λ=λ+ψ
【0107】
次に、表示制御部330は、仮想三次元空間の方位角をxにする(ステップS238)。すなわち、表示制御部330は、x°まで仮想三次元空間を回転させる。そして、表示制御部330は、方位角xが目標角度Pと同じになったか否かを判定する(ステップS240)。
【0108】
ステップS240で方位角xが目標角度Pに達していない場合には(No)、表示制御部330は、上述したステップS238、S240を繰り返す。ステップS240で方位角xが目標角度Pに達した場合には(Yes)、表示制御部330は、仮想三次元空間の上端に被写体画像を表示する(ステップS242)。そして、表示制御部330は、被写体画像を上部から下部へとスライド表示する(ステップS244)。
【0109】
次に、表示制御部330は、キューに被写体画像がまだ格納されているか否かを判定する(ステップS246)。ステップS246でキューに被写体画像がまだ格納されている場合には(Yes)、表示制御部330は、上述した処理を繰り返すことになる。ただし、この場合、キューからとり出される被写体画像は2枚目以降であるので、表示制御部330は、ステップS210〜S218を実行する代わりに、撮像時のパン角αをExifから取得する(ステップS220)。ステップS246でキューに被写体画像が無い場合には(No)、本処理が終了する。
【0110】
<6.まとめ>
上述したように、情報処理装置は、仮想三次元空間(仮想空間)の描画位置に被写体画像を描画する際に、パノラマ画像(広範囲画像)も共に描画する。ここで、パノラマ画像は、被写体を撮像する際の視野よりも広範囲の視野で撮像された画像であるので、被写体画像と共に描画されたパノラマ画像によって被写体が撮像された環境等を容易に把握することが可能となる。特に、パーティショット機能では、自動撮像される被写体画像において被写体の顔が大きく撮像される特性がある。このため、被写体画像のみを仮想三次元空間上に配置させると撮像環境が把握し難いが、パノラマ画像も一緒に描画することでかかる問題を解決できる。
【0111】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
【0112】
また、上記の実施形態のフローチャートに示されたステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的に又は個別的に実行される処理をも含む。また時系列的に処理されるステップでも、場合によっては適宜順序を変更することが可能であることは言うまでもない。
【0113】
本明細書において説明した表示制御装置による処理は、ソフトウェア、ハードウェア、及びソフトウェアとハードウェアとの組合せのいずれを用いて実現されてもよい。ソフトウェアを構成するプログラムは、例えば、各装置の内部又は外部に設けられる記憶媒体に予め格納される。そして、各プログラムは、例えば、実行時にRAM(Random Access Memory)に読み込まれ、CPUなどのプロセッサにより実行される。
【0114】
なお、以下のような構成も本開示の技術的範囲に属する。
(1)被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、
を備え、
前記表示制御部は、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、
前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置。
【0115】
(2)前記被写体画像は、前記被写体の顔を撮像した画像であり、
前記広範囲画像は、パノラマ画像である、前記(1)に記載の情報処理装置。
【0116】
(3)前記表示制御部は、画像化して表示される前記仮想空間の背景部分に、前記第2撮像位置情報に基づいて前記広範囲画像を描画する、前記(1)又は(2)に記載の情報処理装置。
【0117】
(4)前記被写体画像及び前記パノラマ画像は、回転自在な回転雲台に載置され前記回転雲台の回転に連動して回転する撮像装置によって撮像された画像である、前記(1)〜(3)のいずれか1項に記載の情報処理装置。
【0118】
(5)前記表示制御部は、
前記被写体画像の前記撮像位置に対応した方位に前記仮想空間を回転表示させ、
前記被写体画像を、回転表示された前記仮想空間の前記描画位置に描画する、前記(1)〜(4)のいずれか1項に記載の情報処理装置。
【0119】
(6)前記表示制御部は、前記被写体画像を、回転表示された前記仮想空間上でバウンドさせた後に前記描画位置に描画する、前記(5)に記載の情報処理装置。
【0120】
(7)前記表示制御部は、
前記被写体画像を所定時間だけ拡大表示させた後に、前記被写体画像を非表示にした状態で前記仮想空間を回転表示させ、
前記仮想空間の回転表示後に、前記被写体画像を再度表示させて前記描画位置に描画する、前記(5)又は(6)に記載の情報処理装置。
【0121】
(8)前記第1取得部は、前記被写体画像の撮像時刻を示す第1撮像時刻情報を更に取得し、
前記表示制御部は、仮想空間の基準点を中心とする円の半径方向を時間軸とし、前記仮想空間の、前記第1撮像時刻情報及び前記第1撮像位置情報に基づいた描画位置に前記被写体画像を描画する、前記(1)〜(7)のいずれか1項に記載の情報処理装置。
【0122】
(9)前記第2取得部は、複数の広範囲画像を取得し、
表示された前記仮想空間において、ユーザの視点の前記仮想空間の移動操作を受け付ける操作受付部を更に備え、
前記表示制御部は、前記操作受付部が受け付けた前記視点の移動操作に応じて広範囲画像に切替えて描画する、前記(8)に記載の情報処理装置。
【0123】
(10)前記複数の広範囲画像は、撮像時刻が異なり、
前記操作受付部は、表示された前記仮想空間において、ユーザによる視点の前記仮想空間の前記時間軸上の移動操作を受け付け、
前記表示制御部は、移動した前記視点の前記時間軸上の位置に対応した撮像時刻に撮像された広範囲画像に切替えて描画する、前記(9)に記載の情報処理装置。
【0124】
(11)前記第1撮像位置情報の前記撮像位置は、前記撮像装置の撮像時の回転角度と、前記撮像装置の絶対方位とに基づいて設定される、前記(4)に記載の情報処理装置。
【0125】
(12)被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を含む、情報処理方法。
【0126】
(13)コンピュータに、
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を実行させるためのプログラム。
【符号の説明】
【0127】
10 画像表示システム
20 撮像装置
30 回転雲台
40 表示装置
50 大画面表示装置
70 サーバ
110 制御部
120 表示部
130 撮像部
140 通信部
150 記憶部
160 入力部
170 電子コンパス
210 制御部
220 記憶部
230 通信部
240 表示部
250 入力部
260 外部I/F
300 表示制御装置
310 第1取得部
320 第2取得部
330 表示制御部
340 操作受付部
【特許請求の範囲】
【請求項1】
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、
を備え、
前記表示制御部は、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、
前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置。
【請求項2】
前記被写体画像は、前記被写体の顔を撮像した画像であり、
前記広範囲画像は、パノラマ画像である、請求項1に記載の情報処理装置。
【請求項3】
前記表示制御部は、画像化して表示される前記仮想空間の背景部分に、前記第2撮像位置情報に基づいて前記広範囲画像を描画する、請求項1に記載の情報処理装置。
【請求項4】
前記被写体画像及び前記広範囲画像は、回転自在な回転雲台に載置され前記回転雲台の回転に連動して回転する撮像装置によって撮像された画像である、請求項1に記載の情報処理装置。
【請求項5】
前記表示制御部は、
前記被写体画像の前記撮像位置に対応した方位に前記仮想空間を回転表示させ、
前記被写体画像を、回転表示された前記仮想空間の前記描画位置に描画する、請求項1に記載の情報処理装置。
【請求項6】
前記表示制御部は、前記被写体画像を、回転表示された前記仮想空間上でバウンドさせた後に前記描画位置に描画する、請求項5に記載の情報処理装置。
【請求項7】
前記表示制御部は、
前記被写体画像を所定時間だけ拡大表示させた後に、前記被写体画像を非表示にした状態で前記仮想空間を回転表示させ、
前記仮想空間の回転表示後に、前記被写体画像を再度表示させて前記描画位置に描画する、請求項5に記載の情報処理装置。
【請求項8】
前記第1取得部は、前記被写体画像の撮像時刻を示す第1撮像時刻情報を更に取得し、
前記表示制御部は、仮想空間の基準点を中心とする円の半径方向を時間軸とし、前記仮想空間の、前記第1撮像時刻情報及び前記第1撮像位置情報に基づいた描画位置に前記被写体画像を描画する、請求項1に記載の情報処理装置。
【請求項9】
前記第2取得部は、複数の広範囲画像を取得し、
表示された前記仮想空間において、ユーザの視点の前記仮想空間の移動操作を受け付ける操作受付部を更に備え、
前記表示制御部は、前記操作受付部が受け付けた前記視点の移動操作に応じて広範囲画像に切替えて描画する、請求項8に記載の情報処理装置。
【請求項10】
前記複数の広範囲画像は、撮像時刻が異なり、
前記操作受付部は、表示された前記仮想空間において、ユーザによる視点の前記仮想空間の前記時間軸上の移動操作を受け付け、
前記表示制御部は、移動した前記視点の前記時間軸上の位置に対応した撮像時刻に撮像された広範囲画像に切替えて描画する、請求項9に記載の情報処理装置。
【請求項11】
前記第1撮像位置情報の前記撮像位置は、前記撮像装置の撮像時の回転角度と、前記撮像装置の絶対方位とに基づいて設定される、請求項4に記載の情報処理装置。
【請求項12】
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を含む、情報処理方法。
【請求項13】
コンピュータに、
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を実行させるためのプログラム。
【請求項1】
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得する第1取得部と、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得する第2取得部と、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させる表示制御部と、
を備え、
前記表示制御部は、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、
前記第2撮像位置情報に基づいて、前記広範囲画像も共に描画する、情報処理装置。
【請求項2】
前記被写体画像は、前記被写体の顔を撮像した画像であり、
前記広範囲画像は、パノラマ画像である、請求項1に記載の情報処理装置。
【請求項3】
前記表示制御部は、画像化して表示される前記仮想空間の背景部分に、前記第2撮像位置情報に基づいて前記広範囲画像を描画する、請求項1に記載の情報処理装置。
【請求項4】
前記被写体画像及び前記広範囲画像は、回転自在な回転雲台に載置され前記回転雲台の回転に連動して回転する撮像装置によって撮像された画像である、請求項1に記載の情報処理装置。
【請求項5】
前記表示制御部は、
前記被写体画像の前記撮像位置に対応した方位に前記仮想空間を回転表示させ、
前記被写体画像を、回転表示された前記仮想空間の前記描画位置に描画する、請求項1に記載の情報処理装置。
【請求項6】
前記表示制御部は、前記被写体画像を、回転表示された前記仮想空間上でバウンドさせた後に前記描画位置に描画する、請求項5に記載の情報処理装置。
【請求項7】
前記表示制御部は、
前記被写体画像を所定時間だけ拡大表示させた後に、前記被写体画像を非表示にした状態で前記仮想空間を回転表示させ、
前記仮想空間の回転表示後に、前記被写体画像を再度表示させて前記描画位置に描画する、請求項5に記載の情報処理装置。
【請求項8】
前記第1取得部は、前記被写体画像の撮像時刻を示す第1撮像時刻情報を更に取得し、
前記表示制御部は、仮想空間の基準点を中心とする円の半径方向を時間軸とし、前記仮想空間の、前記第1撮像時刻情報及び前記第1撮像位置情報に基づいた描画位置に前記被写体画像を描画する、請求項1に記載の情報処理装置。
【請求項9】
前記第2取得部は、複数の広範囲画像を取得し、
表示された前記仮想空間において、ユーザの視点の前記仮想空間の移動操作を受け付ける操作受付部を更に備え、
前記表示制御部は、前記操作受付部が受け付けた前記視点の移動操作に応じて広範囲画像に切替えて描画する、請求項8に記載の情報処理装置。
【請求項10】
前記複数の広範囲画像は、撮像時刻が異なり、
前記操作受付部は、表示された前記仮想空間において、ユーザによる視点の前記仮想空間の前記時間軸上の移動操作を受け付け、
前記表示制御部は、移動した前記視点の前記時間軸上の位置に対応した撮像時刻に撮像された広範囲画像に切替えて描画する、請求項9に記載の情報処理装置。
【請求項11】
前記第1撮像位置情報の前記撮像位置は、前記撮像装置の撮像時の回転角度と、前記撮像装置の絶対方位とに基づいて設定される、請求項4に記載の情報処理装置。
【請求項12】
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を含む、情報処理方法。
【請求項13】
コンピュータに、
被写体を撮像した被写体画像と、前記被写体画像の撮像位置を示す第1撮像位置情報とを取得することと、
前記被写体を撮像する際の視野よりも広範囲の視野で撮像された広範囲画像と、前記広範囲画像の撮像位置を示す第2撮像位置情報とを取得することと、
仮想空間内の基準点を中心とする円の円周方向に前記撮像位置に対応する方位軸を有する仮想空間を、画像化して表示させることと、
前記仮想空間の、前記第1撮像位置情報に基づいた描画位置に、前記被写体画像を描画する際に、前記第2撮像位置情報に基づいて前記広範囲画像も共に描画することと、
を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−97094(P2013−97094A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−238477(P2011−238477)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]