
情報処理装置、情報処理方法、反射体、および通信システム
【課題】従来の情報処理装置においては、精度良く所定の位置に存在するRFIDタグに選択的な処理を実行させることができないという課題があった。
【解決手段】RFIDタグ1から送信される1つのフレームからなる信号である反射信号を、受信アンテナ4を介して受信する受信処理部6と、受信処理部6において受信した反射信号から、RFIDタグ1の位置に関する情報である位置情報を取得する位置測定部208と、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定し判定結果を取得する位置判定部210と、判定結果に基づいて所定の処理を行なう処理部212とを具備する。
【解決手段】RFIDタグ1から送信される1つのフレームからなる信号である反射信号を、受信アンテナ4を介して受信する受信処理部6と、受信処理部6において受信した反射信号から、RFIDタグ1の位置に関する情報である位置情報を取得する位置測定部208と、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定し判定結果を取得する位置判定部210と、判定結果に基づいて所定の処理を行なう処理部212とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電波を介して反射体と無線通信を行う情報処理装置および情報処理方法、反射体、ならびに通信システムに関するものである。
【背景技術】
【0002】
近年、RFID(Radio Frequency Identification)タグ(無線タグ)の利用が普及しつつある。RFIDタグは、バーコードを代替するものとして特に物流の分野において期待を集めており、近い将来において広く普及することが予想されている。
【0003】
現在、RFIDタグ向けの周波数帯域としては、13.56MHz帯、800MHz〜950MHz前後のいわゆるUHF帯、2.45GHz帯などがある。このうち、UHF帯や2.45GHz帯の電波(Radio Wave)は、13.56MHz帯の電波に比べて通信距離を伸長し易いという利点がある。また、UHF帯の電波は、2.4GHz帯の電波に比べて、物陰に回り込み易いという利点がある。このため、UHF帯の電波を利用するRFIDタグおよびリーダライタの開発が進められている。
【0004】
UHF帯の電波を利用する場合、現在主流である13.56MHz帯の電波を利用する場合に比べて、リーダライタが無線タグと通信可能な距離を数10cm程度から数m程度に伸長することができる。よって、UHF帯の電波を利用すれば、リーダライタが無線タグと通信可能な空間領域である通信エリアを比較的広範囲に拡大することが可能となる。
【0005】
このようなRFIDタグの位置を推定するために、RFIDタグと通信を行う通信局との距離を測定する技術が提案されている。1つの例としては、RFIDタグとしてのアクティブICタグからの信号を多数の基地局が受信し、それぞれの基地局での該アクティブICタグからの受信信号に基づいて、距離および位置を推定する技術がある。この例では、各基地局と該アクティブICタグとの距離は、アクティブICタグからの受信信号の強度に基づいて推定される。すなわち、受信信号の強度と距離との間に相関があることを利用して距離が推定される。また、位置が既知のアクセスポイントを設け、アクティブICタグと該アクセスポイントとから同時に信号を送出させることによって、受信タイミングの遅延量を測定することによってアクティブICタグの距離を推定する手法も採用されている。
【0006】
また、特許文献1には、図38に示すように、RF通信システムにおいて、リーダとしてのインターロゲータ36からRFタグ38に対して、互いに異なる周波数の信号40・42を送信し、この2つの信号を重ね合わせた合成波のヌル・ポイントの数をカウントすることによって、インターロゲータ36とRFタグ38との間の距離を推定する技術が開示されている。
【0007】
また、特許文献2には、図39に示すように、RFIDタグと無線通信を行う通信装置138において、RFIDタグからの反射信号をアンテナ140を介して受信し、サーキュレータ92から入力された受信信号と、サーキュレータ90及びスプリッタ98から入力された搬送信号とをミキサ100,102にて掛け合わせる事によりI信号およびQ信号を生成し、このI信号およびQ信号に基づいてRFIDタグからの反射信号の振幅および位相を算出する技術が開示されている。また、搬送信号とRFIDタグの反射信号との位相差を利用して、RFIDタグまでの距離を求める事が開示されている。
【0008】
一方、このようなRFIDタグまでの距離を計測する技術を利用して、RFIDタグが、所定の領域内に存在するか否かを検出する技術が提案されている。
【0009】
例えば、特許文献3には、模型駒のタグを読み出す読み出し装置を、区画搭載面毎に配置して、区画搭載面に配置された模型駒のタグの情報を読み出すものが開示されている。
【0010】
また、特許文献4には、犬の首輪に設けられたGPS等を有する位置検出装置から得られる情報が、所定の迷い犬検出領域外に位置することを示すか否かに基づいて、犬が迷い犬となった状態であるか否かを判断する技術が開示されている。
【0011】
また、特許文献5には、複数の移動ローカライザの全てが内部警戒面の内側に入った場合に、自動的に、在宅警戒処理が実行されるようにした技術が開示されている。
【特許文献1】特表2004−507714号公報(第2図等)
【特許文献2】欧州特許出願公開第1239634号明細書(第3図等)
【特許文献3】実用新案登録第3069344号公報(第1頁、第1図等)
【特許文献4】米国特許出願公開第2004/0189477号明細書(第1頁、第1図等)
【特許文献5】米国特許出願公開第2005/0073404号明細書(第1頁、第1図等)
【発明の開示】
【発明が解決しようとする課題】
【0012】
UHF帯の電波を利用したRFID通信システムを用いる場合、長距離通信が可能となることによって、処理を行う必要のない遠方のRFIDタグに対しても通信が可能となり、このようなRFIDタグに対する不要な処理が発生するという問題や、マルチパスの影響を受けることによる応答性能の劣化などの問題が生じる。これらの問題を解決するために、リーダライタが各RFIDタグまでの距離を求めることによって、データ部の解析/書き換え等の処理を行うべき対象となるRFIDタグを分別する手法が考えられる。ここで、リーダライタとRFIDタグとの距離を求める手法として、上記した従来技術を用いた場合には、次のような問題がある。
【0013】
まず、RFIDタグからの信号の受信強度や、遅延時間に基づいて距離を推定する場合、距離の測定精度が低いという問題がある。このような方式で距離を推定する場合の精度は、実際にはおよそ1m〜数m程度となる。例えば物流管理システムなどに適用する場合には、この程度の精度では実用的ではなく、より高い距離測定精度が必要となる。
【0014】
また、特許文献1に開示されている技術では、互いに異なる周波数の2つの信号を重ね合わせた合成波のヌル・ポイントの数をカウントすることによって距離を推定しているので、距離の精度が非常に悪いという問題がある。より詳細には、特許文献1の段落[0025]に記載されている例によれば、880MHzの第1信号と884MHzの第2信号を使用したとき、インターロゲータ36から約37.5mのところにヌル・ポイントが生じ、その後約75mごとに追加のヌル・ポイントが生じる。例えば、インターロゲータ36とRFタグ38の間に3つのヌルがカウントされたとすると、推定されるインターロゲータ36とRFタグ38の距離は187.5m以上262.5m未満ということになり、誤差範囲は75mとなる。マルチパスが生じていると、無線信号の伝播距離が長くなり、実際のRFIDタグの距離とは異なる距離が算出されるという問題がある。
【0015】
このように、従来の技術においては距離測定精度を高くすることができなかったため、距離測定の結果に基づいて算出されるRFIDタグの位置の測定精度も高くすることができなかった。したがって、RFIDタグの位置を検出し、そのRFIDタグが所定の位置に存在するか否かを判断することで、データ部の解析/書き換え等の処理を行うべき対象となるRFIDタグであるか否かを分別する処理を行う場合、RFIDタグの位置を検出する精度が高くないため、RFIDタグが所定の位置に存在するか否かの判断を精度良く行うことができず、この結果、処理を行うべき対象となるRFIDタグを分別する精度が低くなり、処理の精度が低くなってしまうという課題があった。
【0016】
本発明は、上記の問題点に鑑みてなされたものであり、その目的は、RFIDタグの距離を精度よく測定することを可能とする情報処理装置、情報処理方法、反射体、および通信システムを提供することにある。また、その目的としては、特殊なRFIDタグを用いずに、RFIDタグの距離を測定することを可能とする情報処理装置、情報処理方法、反射体、および通信システムを提供することが挙げられる。さらに、その目的は、RFIDタグの存在する位置に応じて、処理の対象となるRFIDタグを高精度に分別し、分別したRFIDタグに対して異なる処理を行なうことが可能な情報処理装置、情報処理方法、反射体、および通信システムを提供することにある。
【課題を解決するための手段】
【0017】
上記の課題を解決するために、本発明に係る情報処理装置は、異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信手段と、前記送信手段で送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信手段と、前記受信手段が受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得部と、前記位相情報取得部によって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出部と、前記距離算出部が算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得部と、前記位置情報取得部が取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定部と、前記判定結果に基づいて所定の処理を行う処理部と、を備えたものである。
【0018】
ここで、反射体は、例えば、無線通信用IC(Integrated Circuit)、記憶部、およびアンテナなどを備えたRFIDタグである。RFIDタグとしては、電池などの電源を有しておらず、リーダライタから電波で送電された電力によって回路が動作し、リーダライタと無線通信を行うパッシブタイプのRFIDタグや、電池などの電源を有するアクティブタイプのRFIDタグが含まれる。また、固有のID情報を有しているRFIDタグも含まれる。
【0019】
かかる構成により、反射信号の各搬送周波数における信号の位相変化量が取得され、この位相変化量と搬送周波数とによって前記の距離が算出される。ここで、詳細は後述するが、複数の搬送周波数による信号の位相変化量と搬送周波数とが求められれば、精度良く距離を算出することが可能となる。特に、複数のフレームの反射信号を用いて距離を算出する場合、反射体が移動していると、反射信号が順次送信される間に反射体が移動することにより、算出される距離にも大きな誤差が生じる場合があるが、本発明においては、1つのフレームからなる反射信号により距離算出が可能とすることで、反射体が移動している場合においてもこのような複数の反射信号を送信するための反射信号間の間隔により生じる距離算出の誤差を低減させることができる。すなわち、前記のような構成によれば、反射体から送信される反射信号を受信することによって、前記距離の算出を精度良く的確に行うことが可能となり、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0020】
また、本発明の情報処理装置は、前記情報処理装置において、前記受信手段は、複数のアンテナを介して、それぞれ前記反射信号を受信し、前記位相情報取得部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに、前記位相の変化量を算出し、前記距離算出部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに算出された前記位相の変化量に基づいて、前記複数のアンテナと前記反射体との間の距離をそれぞれ算出し、前記位置情報取得部は、前記複数のアンテナと前記反射体との間の距離に基づいて、前記反射体の位置情報を取得する情報処理装置である。
【0021】
かかる構成により、反射体の詳細な位置、例えばx座標やy座標、z座標等、を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0022】
また、本発明の情報処理装置は、前記情報処理装置において、所定の領域についての情報であるエリア情報を記憶するエリア情報記憶部をさらに備え、前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記エリア情報とを比較することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する情報処理装置である。
【0023】
かかる構成により、反射体が所定の領域に存在するか否かにより、異なる処理を行うことができる。
【0024】
また、本発明の情報処理装置は、前記情報処理装置において、前記情報処理装置は、自機器の位置に関する情報である自位置情報を取得する自位置情報取得部を、さらに備え、前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記自位置情報とが所定の関係を満たすか否かを判定することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する情報処理装置である。
【0025】
かかる構成により、反射体と情報処理装置の相対的な位置関係により、異なる処理を行うことができる。
【0026】
また、本発明の情報処理装置は、前記情報処理装置において、前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記受信手段が受信した反射信号を出力する情報処理装置である。
【0027】
かかる構成により、所定の位置に存在する反射体から受信した反射信号だけを、例えば他の装置等に出力することが可能となる。
【0028】
また、本発明の情報処理装置は、前記情報処理装置において、前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記反射体に対して所定の情報を送信する情報処理装置である。
【0029】
かかる構成により、所定の位置に存在する反射体だけに、所定の情報を送信することが可能となる。
【0030】
また、本発明の情報処理装置は、前記情報処理装置において、前記処理部は、前記判定結果に基づいて、前記反射体との通信を制御する制御信号を出力する情報処理装置である。
【0031】
かかる構成により、例えば、所定の位置に存在する反射体だけとの、通信を可能とすることが可能となる。
【0032】
また、本発明の情報処理装置は、前記情報処理装置において、前記反射体と前記アンテナとの間の通信路に配置されている障害物の情報である障害物情報が格納され得る障害情報格納部と、前記障害物情報に基づいて前記反射体の位置情報を補正する補正部とをさらに具備し、前記位置判定部は、前記補正部が補正した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を取得する情報処理装置である。
【0033】
かかる構成により、障害物の影響によって、誤検出された反射体の位置情報を補正することができ、精度の高い反射体の位置情報を得ることができる。その結果、反射体のより正確な位置に応じて、異なる動作を行なうことができる。
【0034】
また、本発明の情報処理装置は、前記情報処理装置において、前記送信手段が、1つの要求信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御する情報処理装置である。
【0035】
かかる構成により、1つの反射信号の送信を行うのみによって距離の算出を行うことができるので、距離の算出を行うために必要とされる信号の送受信を低減することが可能となり、これにより通信効率を落とさずに距離算出を行うことができる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0036】
また、本発明の情報処理装置は、前記情報処理装置において、前記送信手段が、前記要求信号が互いに異なる搬送周波数成分からなる1つの搬送周波数によって送信されるように制御する情報処理装置である。
【0037】
かかる構成により、1つの反射信号の送信を行うのみによって距離の算出を行うことができるので、距離の算出を行うために必要とされる信号の送受信を低減することが可能となり、これにより通信効率を落とさずに距離算出を行うことができる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0038】
また、本発明の情報処理装置は、前記情報処理装置において、前記反射体から、互いに異なる3つ以上の搬送周波数によって反射信号が送信されるとともに、前記位相情報取得部が、各搬送周波数の信号のうち、信号の状態が距離を算出する上で所定の基準を満たしている2つの搬送周波数の信号を選択して、位相変化量を取得する情報処理装置である。
【0039】
反射信号において、搬送周波数によっては、例えばマルチパスが発生することなどにより信号の状態が距離の算出に適していない状態となっていることも考えられる。これに対して、前記の構成および方法によれば、互いに異なる3つ以上の搬送周波数のうち、信号の状態が距離を算出する上で所定の基準を満たしている2つの搬送周波数の信号が選択されて、これらに基づいて位相変化量の検知が行われるので、位相変化量の検知の精度を高めることが可能となる。よって、距離の算出の精度も高めることが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0040】
また、本発明の情報処理装置は、前記情報処理装置において、前記受信手段は、受信された反射信号の周波数変換処理を行う周波数変換部を備え、前記周波数変換部が、前記反射信号をI信号とQ信号とに変換する情報処理装置である。
【0041】
かかる構成により、受信された反射信号がI信号とQ信号とに変換されることによって周波数変換が行われる。これにより、位相の検出を行うことが容易となる。
【0042】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、高分解能スペクトラム解析法を用いて前記距離を算出する情報処理装置である。
【0043】
従来、高分解能スペクトラム解析法は、複数のアンテナ素子によって受信された受信信号を入力とすることによって、電波の到来方向を推定する用途で用いられている。これに対して、前記の構成および方法では、従来の高分解能スペクトラム解析法による到来方向推定における各アンテナ素子からの受信信号を、前記の各搬送周波数の受信信号に置き換え、高分解能スペクトラム解析法における適用モデルを変えることによって、前記距離の推定を行うようになっている。
【0044】
このような高分解能スペクトラム解析法では、推定対象の値を最も確からしい値で算出することが可能であるので、たとえマルチパスが生じていたとしても、このマルチパスによる距離を除外することが可能となる。すなわち、前記の構成および方法によれば、マルチパスが生じていても、的確に距離を算出することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0045】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、前記高分解能スペクトラム解析法としてMUSIC(Multiple Signal Classification)法を用い、該MUSIC法の入力として、互いに異なる複数の搬送周波数によって受信された反射信号を用い、モードベクトルを前記距離の関数としてMUSIC評価関数を求め、該MUSIC評価関数のピーク値を求めることによって前記距離を算出する情報処理装置である。
【0046】
ここで、MUSIC評価関数のピーク値は通常一箇所にのみ表れるが、例えばマルチパスが生じている場合には、複数箇所にピーク値が表れることもある。この場合でも、マルチパスに相当する距離は、算出すべき距離よりも長くなるので、ピークが生じている距離のうち、最も小さい距離を算出すべき距離とすることによって、マルチパスが生じていても、的確に距離を算出することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0047】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、受信された反射信号の受信強度を併用して前記距離を算出する情報処理装置である。
【0048】
かかる構成により、距離の算出が、反射信号の受信強度にも基づいて行われるので、例えば距離の値の候補が複数ある場合に、受信強度を考慮することによって、的確な距離を選択するなどが可能となり、より正確に距離を算出することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0049】
また、本発明の情報処理装置は、前記情報処理装置において、前記反射信号に含まれるデータ部の情報を取得するとともに、前記距離算出部によって算出された前記距離情報と前記データ部の情報とを結びつけて外部に出力する受信制御部を備える情報処理装置である。
【0050】
かかる構成により、前記反射信号に含まれるデータ部の情報によって、例えば該反射信号を送信した反射体を識別する情報などを認識することができる。また、受信制御部は、距離算出部によって測定された前記距離の情報と、前記データ部の情報とを結びつけてこれを認識する。これにより、情報処理装置が通信する反射体が複数存在した場合でも、各反射体の距離を区別して認識することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0051】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、前記反射信号に基づいて、該反射信号を送信した反射体の位置する方向を測定する情報処理装置である。
【0052】
かかる構成により、反射体の距離とともに、その存在位置方向をも認識することが可能となる。これにより、該反射体の存在位置を認識することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0053】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、前記反射信号のプリアンブル部における信号を解析することによって前記距離を算出する情報処理装置である。
【0054】
かかる構成により、反射信号のプリアンブル部における信号が解析されることによって前記距離が算出される。ここで、プリアンブル部は、反射信号の始まりを示すデータを示しており、同一規格(例えばEPC)内であれば、全ての反射体に共通の所定のデータとなっている。したがって、プリアンブル部の長さは、どの反射体からの信号であっても同じになるので、信号の解析を確実に行うことが可能となる。また、プリアンブル部における信号は全て共通となるので、例えばPSK変調が行われる場合でも距離の算出を行うことが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0055】
また、本発明の情報処理方法は、異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、前記判定結果に基づいて所定の処理を行う処理ステップと、を備えている情報処理方法である。
【0056】
かかる構成により、反射体から送信される反射信号を受信することによって、前記距離の算出を精度良く的確に行うことが可能となり、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0057】
また、本発明に係る通信システムは、前記本発明に係る情報処理装置と、前記情報処理装置によって前記反射体と通信が行われた結果に基づいて、該反射体と関連付けられている物品、人、および生物のうち少なくともいずれか1つを管理する管理装置とを備える通信システムである。
【0058】
かかる構成により、反射体と関連付けられている物品、人、および生物を管理する上で、その位置情報に応じた処理を実行させることが可能なシステムを容易に構築することが可能となる。
【発明の効果】
【0059】
本発明に係る情報処理装置は、以上のように、反射体から、互いに異なる複数の搬送周波数によって送信された反射信号を受信する処理を行う距離測定装置において、上記反射体から送信された上記反射信号を解析することによって、該反射体と当該距離測定装置との距離を算出する距離算出部を備える構成である。これにより、反射体と距離測定装置との距離をより精度よく算出することが可能となる。
【0060】
そして、これらの構成を用いることで、RFIDタグの存在する位置に応じて、処理の対象となるRFIDタグを高精度に分別し、分別したRFIDタグに対して異なる処理を行なうことが可能となるという効果を奏する。
【発明を実施するための最良の形態】
【0061】
以下、本発明の一実施形態として、情報処理装置について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
【0062】
(実施の形態1)
(リーダライタの構成)
図2は、本実施形態に係るRFIDタグとリーダライタとからなる通信システムの概略構成を示すブロック図である。同図に示すように、通信システムは、1つ以上のRFIDタグl(反射体)…およびリーダライタ(情報処理装置)2を備えた構成となっている。
【0063】
RFIDタグ1は、各種物品に取り付けられるものであり、取り付けられている物品あるいはそれに関連する物や人に関する情報を記億するものである。このRFIDタグ1は、無線通信用IC(Integrated Circuit)、記憶部、およびアンテナなどを備えた構成となっている。
【0064】
本実施形態においては、RFIDタグ1として、電池などの電源を有しておらず、リーダライタ2から電波で送電された電力によって回路が動作し、リーダライタ2と無線通信を行うパッシブタイプのRFIDタグを用いることが想定されている。なお、本実施形態において用いられるRFIDタグは、上記のようなパッシブタイプのRFIDタグに限定されるものではなく、電池などの電源を有するアクティブタイプのRFIDタグであっても構わない。
【0065】
リーダライタ2は、各RFIDタグ1との間で無線通信を行い、RFIDタグ1に記憶されている情報の読み書きを行う装置である。なお、本実施形態では、リーダライタ2は、RFIDタグ1に記憶されている情報の読み書きを行うものとしているが、これに限定されるものではなく、RFIDタグ1に記憶されている情報の読み出しのみを行うRFIDリーダであってもよい。
【0066】
本実施形態では、リーダライタ2が送受信する電波の周波数帯域は、800MHz〜960MHz前後のいわゆるUHF帯としている。このような周波数帯域の電波を用いることにより、リーダライタ2は、数m〜数10m程度の距離範囲内に位置するRFIDタグ1と通信可能となる。なお、本実施形態においては、UHF帯を用いた通信を想定しているが、これに限定されるものではなく、RFIDタグ向けの周波数帯域としての、13.56MHz帯、2.45GHz帯などの周波数帯域を用いてもよく、さらには、無線による通信を行うことが可能なその他の周波数帯による通信が行われても構わない。
【0067】
リーダライタ2は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部8、外部通信部9,エリア判定部10、およびエリア情報記憶部11を備えた構成となっている。
【0068】
送信アンテナ3は、RFIDタグ1…に対して電波を送信するアンテナであり、受信アンテナ4は、RFIDタグ1…から送られてきた電波を受信するアンテナである。この送信アンテナ3および受信アンテナ4は、例えばパッチアンテナやアレーアンテナなどによって構成される。なお、本構成例では、送信アンテナ3と受信アンテナ4とをそれぞれ別に設けているが、1つのアンテナを送信アンテナ3および受信アンテナ4の両方の機能を有するものとして用いる構成としてもよい。
【0069】
送信処理部5は、送信アンテナ3から送信される送信信号の変調、増幅などの処理を行う。また、受信処理部6は、受信アンテナ4において受信された受信信号の増幅、復調などの処理を行う。
【0070】
通信制御部7は、通信対象となるRFIDタグ1に対して、送信アンテナ3および/または受信アンテナ4を介して情報の読み出しおよび/または書き込み制御を行う。
【0071】
なお、送信処理部5と通信制御部7の送信に関する処理を行う部分とが、RFIDタグ1に対して送信信号を送信する送信手段を構成する。なお、この送信手段は、送信アンテナ3を含むものとしてもよい。また、この送信手段に、通信制御部7を含めないようにしても良い。
また、受信処理部6と通信制御部7の受信に関する処理を行う部分とが、RFIDタグ1から送信される信号、例えば反射信号、を受信する受信手段を構成する。なお、この受信手段は、受信アンテナ4を含むものとしてもよい。また、この送信手段に、通信制御部7を含めないようにしても良い。
【0072】
位置測定部8は、RFIDタグ1から受信した受信信号に基づいて、該RFIDタグlの位置を測定する。詳細は後述するが、RFIDタグ1の位置の測定としては、リーダライタ2とRFIDタグ1との距離の測定、リーダライタ2から見た際のRFIDタグ1の方向の測定、および、RFIDタグ1の空間的な位置の測定などが挙げられる。なお、リーダライタ2とRFIDタグ1との距離とは、厳密には、リーダライタ2における送信アンテナ3とRFIDタグ1との距離と、RFIDタグ1と受信アンテナ4との距離の加算平均に相当する。なお、RFIDタグ1がアクティブタイプの場合には、受信アンテナ4とRFIDタグ1との距離に相当する。
【0073】
エリア判定部10は、位置測定部8において測定された位置に基づいて、該RFIDタグ1が所定の空間領域(通信エリア)内に位置しているか否かを判定する。通信エリアがどのような空間領域であるかについてのエリア情報は、エリア情報記憶部11に記憶されている。エリア判定部10は、位置測定部8において測定された位置が、上記エリア情報で規定される通信エリア内に存在するか否かを判定することによって、該RFIDタグ1が通信エリア内に存在しているかを判定する。
【0074】
外部通信部9は、リーダライタ2において読み出されたRFIDタグ1の情報を外部装置に送信したり、外部装置からのRFIDタグ1に対する書き込み情報を受信したりする。外部装置と外部通信部9との間は、有線または無線によって通信接続されている。ここで、リーダライタ2によるRFIDタグ1に対する読み書き処理に基づいて動作する外部装置が、該リーダライタ2を内蔵する構成であっても構わない。
【0075】
なお、エリア情報記憶部11に記憶されているエリア情報は、リーダライタ2が設置される環境に応じて設定されることになる。このエリア情報の設定は、例えば外部通信部9を介して外部装置から行われるようになっていてもよいし、リーダライタ2に、エリア情報を入力するためのユーザインターフェースが備えられていてもよい。
【0076】
なお、上記リーダライタ2が備える通信制御部7、位置測定部8、エリア判定部10、および外部通信部9は、ハードウェアロジックによって構成されていてもよいし、CPUなどの演算手段が、ROM(Read Only Memory)やRAMなどの記憶手段に記憶されたプログラムを実行することにより実現する構成となっていてもよい。
【0077】
CPUなどの演算手段および記憶手段によって上記の各構成を構成する場合、これらの手段を有するコンピュータが、上記プログラムを記録した記録媒体を読み取り、当該プログラムを実行することによって、通信制御部7、位置測定部8、エリア判定部10、および外部通信部9の各種機能および各種処理を実現することができる。また、上記プログラムをリムーバブルな記録媒体に記録することにより、任意のコンピュータ上で上記の各種機能および各種処理を実現することができる。
【0078】
この記録媒体としては、コンピュータで処理を行うために図示しないメモリ、例えばROMのようなものがプログラムメディアであっても良いし、また、図示していないが外部記憶装置としてプログラム読取り装置が設けられ、そこに記録媒体を挿入することにより読取り可能なプログラムメディアであっても良い。
【0079】
また、何れの場合でも、格納されているプログラムは、マイクロプロセッサがアクセスして実行される構成であることが好ましい。さらに、プログラムを読み出し、読み出されたプログラムは、マイクロコンピュータのプログラム記憶エリアにダウンロードされて、そのプログラムが実行される方式であることが好ましい。なお、このダウンロード用のプログラムは予め本体装置に格納されているものとする。
【0080】
また、インターネットを含む通信ネットワークを接続可能なシステム構成であれば、通信ネットワークからプログラムをダウンロードするように流動的にプログラムを担持する記録媒体であることが好ましい。
【0081】
さらに、このように通信ネットワークからプログラムをダウンロードする場合には、そのダウンロード用のプログラムは予め本体装置に格納しておくか、あるいは別の記録媒体からインストールされるものであることが好ましい。
【0082】
(距離測定に関する構成)
次に、リーダライタ2において、RFIDタグ1と当該リーダライタ2との距離を測定するための構成について図1を参照しながら説明する。同図に示すように、送信処理部5は、周波数調整部としてのPLL(Phase Locked Loop)部5A、変調部5B、電力増幅部5C、および発信器5Dを備えている。また、受信処理部6は、増幅部6A、および周波数変換部6Bを備えている。また、位置測定部8は、位相情報取得部8A、および距離算出部8Bを備えている。また、通信制御部7は、周波数制御部7A、送信制御部7B、および受信制御部7Cを備えている。
【0083】
送信処理部5において、PLL部5Aは、送信アンテナ3から送信される送信信号の搬送周波数を設定するものであり、PLL回路によって構成される。変調部5Bは、PLL部5Aおよび発信器5Dによって生成された搬送信号に変調を加えて送信信号にデータを重畳させる処理を行う。本実施形態においては、変調部5Bは、ASK(Amplitude Shift Keying)変調によって送信信号を生成する。なお、送信信号の変調方式としては、上記のASK変調に限定されるものではなく、FSK(Frequency Shift Keying)変調、PSK(Phase Shift Keying)変調など、その他のデジタル変調方式を採用してもよい。電力増幅部5Cは、送信信号の増幅を行う。
【0084】
受信処理部6において、増幅部6Aは、受信アンテナ4において受信された受信信号の増幅を行う。周波数変換部6Bは、増幅部6Aにおいて増幅された受信信号の周波数を変換して、より低周波の信号に変換する処理を行う。
【0085】
位置測定部8において、位相情報取得部8Aは、周波数変換部6Bによって周波数変換された受信信号の位相の変化量を検出し、これを位相情報として取得する。なお、受信信号の位相の変化量とは、該受信信号が所定の距離を伝播することによって生じる位相の変化量を示している。
【0086】
より詳しくは、PLL部5Aから出力される搬送信号をsin2πf1tとすると、周波数変換部6Bはこの搬送信号sin2πf1tと増幅部6Aから入力された受信信号D(t)Asin(2πf1t+φ)とを掛け合わせて求めた値(D(t)Acosφ)を位相情報取得部8Aに送出する。位相情報取得部8Aは、周波数変換部6Bから送出された値に基づいて位相の変化量φを算出する。ここで、tは時間、D(t)は変調部5BにおいてASK変調が行われた場合のベースバンド信号、Aは搬送信号自体の振幅、φは往復2rの距離を伝搬することによる位相の変化量をそれぞれ示している。
【0087】
距離算出部8Bは、位相情報取得部8Aによって取得された位相の変化量情報に基づいて、該当RFIDタグ1とリーダライタ2との距離を算出する。この距離の算出方法の詳細については後述する。
【0088】
通信制御部7において、周波数制御部7Aは、PLL部5Aによって設定される搬送信号の周波数を制御する。送信制御部7Bは、変調部5Bに対して、送信信号を変調すべきデータを入力する。受信制御部7Cは、距離算出部8Bによって算出された距離情報を通信制御部7が受信する処理を行う。
【0089】
(距離測定の詳細)
次に、距離測定処理の詳細について説明する。本実施形態においては、リーダライタ2がRFIDタグ1に対してR/W要求信号(要求信号)を送信し、RFIDタグ1がこれに応じて応答信号(反射信号)を返信するようになっている。この様子を図3(a)〜図3(c)に示す。図3(a)は、リーダライタとRFIDタグとの間でR/W要求信号および応答信号の送受信が行われる状態を示す図である。図3(b)は、リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。図3(c)は、RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【0090】
リーダライタ2は、常に特定の信号(RFIDタグ1への電力供給を行うための信号)を送信している一方、RFIDタグ1に対して応答信号(以下、タグ応答信号とする)を送信することを要求する時に、図3(b)に示すように、タグ応答信号の返信を要求するR/W要求信号を送信する。すなわち、リーダライタ2における送信制御部7Bは、定常状態では定常状態を示すデータを送信するように変調部5Bを制御し、タグ応答信号を要求する際には、R/W要求信号を構成するデータを送信するように変調部5Bを制御する。RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形でタグ応答信号を送信する。
【0091】
より詳しくは、リーダライタ2は、R/W要求信号およびCW(連続搬送波)からなる1フレームの信号を送信する。RFIDタグ1は、リーダライタ2からR/W要求信号およびCW(連続搬送波)を受け取ると、CW(連続搬送波)の周波数に応じた搬送周波数f1からなるタグ応答信号をリーダライタ2へ送信する。図3(b)および(c)では、R/W要求信号およびCW(連続搬送波)は搬送周波数f1によって送信され、また、これに応じてタグ応答信号は搬送周波数f1によって送信されている。
【0092】
タグ応答信号は、図3(c)に示すように、プリアンブル部とデータ部とを有するフレームによって構成されている。プリアンブル部は、タグ応答信号の始まりを示すデータを示しており、同一規格(例えばEPC)内であれば、全てのRFIDタグ1に共通の所定のデータとなっている。データ部は、プリアンブル部に引き続いて送信されるものであり、RFIDタグ1から送信される実質的な情報を示すデータを示している。このデータ部に含まれる情報としては、例えば各RFIDタグ1に固有のID情報などが挙げられるが、RFIDタグ1から送信すべき情報、例えばRFIDタグ1内の記憶部に格納されている各種情報などを含んでいてもよい。
【0093】
そして、リーダライタ2は、R/W要求信号を2回送信するとともに、各R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の送信における搬送周波数を互いに異ならせている。すなわち、リーダライタ2における周波数制御部7Aは、1回目のR/W要求信号の送信時には、第1の周波数f1で搬送信号を出力するようにPLL部5Aを制御し、2回目のR/W要求信号の送信時には、第1の周波数f1とは異なる第2の周波数f2で搬送信号を出力するようにPLL部5Aを制御する。
【0094】
図1および図3に示すように、第1の周波数f1で送信されたR/W要求信号をRFIDタグ1が受信すると、同じく第1の周波数f1でタグ応答信号が返信される。そして、リーダライタ2では、位相情報取得部8Aが受信したタグ応答信号のプリアンブル部を解析することによって、タグ応答信号の位相の変化量を示すφ1を検出する。同様に、第2の周波数f2で送信されたR/W要求信号をRFIDタグ1が受信すると、同じく第2の周波数f2でタグ応答信号が返信される。そして、リーダライタ2では、位相情報取得部8Aが受信したタグ応答信号のプリアンブル部を解析することによって、タグ応答信号の位相の変化量を示すφ2を検出する。ここで述べる解析とは、タグ応答信号の位相の変化量を検出する処理のことである。
【0095】
なお、上記の例では、タグ応答信号の位相の変化量は、プリアンブル部を解析することによって検出するようになっているが、これに限定されるものではなく、データ部をも含めて位相の変化量を検出してもよいし、データ部において位相の変化量を検出してもよい。ただし、変調方式がPSKである場合には、内容が変化しうるデータ部に基づいて、距離に伴う位相の変化量を検出することは困難となるので、内容が固定であるプリアンブル部において位相の変化量を検出することが好ましい。なお、プリアンブル部あるいはデータ部を解析する具体例については後述する。
【0096】
以上のようにして、位相情報取得部8Aが位相の変化量φ1およびφ2を検出すると、この位相の変化量の情報が距離算出部8Bに伝送される。距離算出部8Bは、φ1およびφ2に基づいて、RFIDタグ1とリーダライタ2との距離を以下のように算出する。
【0097】
まず、送信アンテナ3からRFIDタグlまでの距離、および、受信アンテナ4からRFIDタグ1までの距離を等しいものと仮定し、これを距離rとする。第1の周波数f1および第2の周波数f2によって搬送される信号が往復2rの距離を伝搬することによって生じる位相の変化量φ1およびφ2は、次の式で表される。
【数1】

【0098】
上式において、cは光速を表している。上記の2つの式に基づいて、距離rは、次の式で求められる。
【数2】
【0099】
以上のようにして、位相の変化量φ1およびφ2に基づいて、送信アンテナ3からRFIDタグ1までの距離rを求めることができる。なお、RFIDタグlにおいて、R/W要求信号を受信してからタグ応答信号を送信する間に、位相のずれが生じることが予想されるが、この位相のずれは、第1の周波数f1および第2の周波数f2によって搬送される信号のどちらにおいても同じ量となる。よって、RFIDタグlにおける信号の送受信時に生じる位相のずれは、上記の距離の算出に影響を与えることばない。
【0100】
なお、数2において、φ2が2π以上となっている場合には、距離rを的確に算出することができない。すなわち、測定可能な距離rの最大値rmaxは、Δφ=2πの時であり、次の式で表される。
【数3】
【0101】
ここで、例えば第1の周波数f1と第2の周波数f2との差を5MHzとした場合、数3より最大距離rmaxは30mとなる。また、同様に、第1の周波数f1と第2の周波数f2との差を2MHzとした場合、数3より最大距離rmaxは75mとなる。UHF帯を利用したRFID通信システムにおいて、想定される最大通信距離は10m程度であるので、上記のような測定は実用上問題がないことがわかる。
【0102】
なお、上記の最大距離rmax以上の測定が必要となる場合であっても、例えば受信信号の受信強度の測定を併用することによって、距離rの測定を行うことが可能である。具体的には、Δφが2π以上となる可能性がある場合、距離rの候補r'は、r'=r+n・rmax(nは0以上の整数)となる。よって、受信信号の受信強度は、距離rが長くなる程小さくなることを利用することによって、上記のnの値を特定することが可能となる。
【0103】
なお、アクティブタイプのRFIDタグを用いる場合には、リーダライタ2側からR/W要求信号を送信せずに、RFIDタグ側から能動的に送られるタグ応答信号に基づいて、距離の測定を行うようになっていてもよい。
【0104】
(受信処理部の具体例)
以上の距離測定においては、受信信号の位相の変化量を検出する処理が行われているが、この位相の変化量の検出を行うことを可能とする受信処理部6の具体的な構成について、図4を参照しながら以下に説明する。この具体例では、受信処理部6は、受信信号をI信号とQ信号とに分離して位置測定部8に入力することによって、位置測定部8における位相の変化量の検出処理を可能とさせるものとなっている。同図に示すように、受信処理部6は、増幅部6Aとしての2つの増幅部6A1・6A2、周波数変換部6Bとしてのミキサ6B1・6B2および90°移相部6B3を備えている。
【0105】
受信アンテナ4で受信された受信信号は、2つの経路に分岐し、一方は増幅部6A1に入力され、他方は増幅部6A2に入力される。増幅部6A1は、入力された受信信号を増幅してミキサ6B1に入力する。増幅部6A2は、入力された受信信号を増幅してミキサ6B2に入力する。
【0106】
ミキサ6B1は、増幅部6A1から入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによってI信号を出力し、このI信号を位相情報取得部8Aに入力する。ミキサ6B2は、増幅部6A2から入力された受信信号と、PLL部5Aから出力され、90°移相部6B3を介して位相が90°変化させられた搬送信号とを掛け合わせることによってQ信号を出力し、このQ信号を位相情報取得部8Aに入力する。
【0107】
以上の構成において行われる受信処理および距離rの算出処理の詳細について以下に説明する。
【0108】
往復2rの距離を伝搬してリーダライタ2において受信される信号は、搬送信号の周波数をf1とすると、次の式で表される。
【数4】
【0109】
上式において、tは時間、s1(t)は周波数f1の搬送信号によって伝送される信号の状態、D(t)は変調部5BにおいてASK変調が行われた場合のベースバンド信号、Aは搬送信号自体の振幅、φ1は往復2rの距離を伝搬することによる位相の変化量をそれぞれ示している。この場合、ミキサ6B1によって出力されるI信号の状態を示すI1(t)、および、ミキサ6Blによって出力されるQ信号の状態を示すQ1(t)は、次の式で表される。
【数5】
【数6】
【0110】
以上より、I信号およびQ信号に基づいて、周波数f1の搬送信号による信号の位相の変化量φ1は、次の式で求められる。
【数7】
【0111】
同様に、周波数f2の搬送信号による信号の位相の変化量φ2は、次の式で求められる。
【数8】
【0112】
以上のようにして、位相情報取得部8Aは、入力されたI信号およびQ信号に基づいて、位相の変化量φ1およびφ2を取得する。そして、距離算出部8Bは、距離rを次の式によって算出する。
【数9】
【0113】
(距離測定処理の流れ)
次に、図5に示すフローチャートを参照しながら、リーダライタ2における上記の距離測定処理の流れについて説明する。
【0114】
まず、距離測定処理が開始されると、ステップ1(以降、Slのように称する)において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0115】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S2)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S3)。
【0116】
RFIDタグ1はR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S4)、そして位相情報取得部8Aが位相情報取得処理を行う(S5)。
【0117】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数7の数式に基づいて、第1の周波数f1の位相の変化量φ1を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。
【0118】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S6)、位相情報取得部8Aは位相情報取得処理を終了する(S7)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち1フレームからなる信号の送信を終了する(S8)。受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合(S9においてNO)には、S1からの処理に戻る。ここで、上記の例では、受信信号の周波数としては、第1の周波数f1および第2の周波数f2が想定されているので、受信制御部7Cは、第1の周波数f1および第2の周波数f2の受信信号をともに受信したか否かを判定することになる。
【0119】
この時点では、第1の周波数f1の受信信号のみを受信しているので、Slからの処理が行われることになる。そして、2回目のS1の処理において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(およびCW(連続搬送波))の周波数を第2の周波数f2となるようにPLL部5Aを制御する。その後、第2の周波数f2について、第一の周波数f1に対してと同様に、S2〜S8の処理が行われ、受信すべき全ての周波数の受信信号を受信したと判定され(S9においてYES)、S10の処理に移行する。
【0120】
S10では、取得された位相情報に基づいて、距離算出部8BがRFIDタグ1とリーダライタ2との距離を上記した手法によって算出する。より詳しくは、距離算出部8Bは、前記テーブルから周波数毎の位相の変化量を取り出して、上述の数9の数式に基づいて距離rを算出する。算出された距離情報は、受信制御部7Cに伝送される。以上により、距離測定処理が完了する。
【0121】
ここで、ステップS5における位相情報取得部8Aが行なう位相情報を解析する処理について、I信号およびQ信号を求めた後の具体的な処理を例に挙げて説明する。まず、タグ応答信号が、「0」と「1」により構成されるデジタル信号を伝送する信号であるとする。また、タグ応答信号内の「0」と「1」との周波数が異なるもの、すなわち各「0」と「1」との期間が異なるもの、であるとする。位相情報取得部8Aは、周波数変換部6Bから受け取ったI信号に対して、フーリエ変換を行なう。このフーリエ変換を行なうことにより、例えば、タグ応答信号を構成する「0」の周波数と「1」の周波数のそれぞれの位置に、ピークが現れる。同様に、位相情報取得部8Aは、周波数変換部6Bから受け取ったQ信号に対して、フーリエ変換を行なうと、「0」および「1」のそれぞれの周波数の位置に、ピークが現れる。「0」の周波数の位置に現れるピークの高さは、タグ応答信号内の「0」の数に比例し、「1」の周波数の位置に現れるピークの高さは、タグ応答信号内の「1」の数に比例する。そして、I信号から得られた「1」(および「0」)のピークの高さは、I1(t)に比例するものとなり、Q信号から得られた「1」(および「0」)のピークの高さは、Q1(t)に比例するものとなる。このため、位相情報取得部8Aは、I信号から得られた「1」のピークの高さと、Q信号から得られた「1」のピークの高さを、それぞれ、上述した数7のI1(t)およびQ1(t)の代わりに代入することにより、φ1を算出することができる。そして、算出したφ1を、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。このとき、「1」のピークの高さの代わりに、I信号から得られた「0」のピークの高さと、Q信号から得られた「0」のピークの高さを用いるようにしてもよい。なお、タグ応答信号の伝送される状態等による、「0」や「1」の周波数の変動や、誤差等の発生により、フーリエ変換により得られる「0」や「1」のピークは、「0」や「1」の周波数の近傍にばらついて発生することが多いことから、通常は、フーリエ変換して得られた結果から、「0」や「1」の周波数の近傍のピークを検出して、得られたピークを、フーリエ変換して得られた「0」や「1」のピークとする。
【0122】
ここで、上述したようにタグ応答信号内の「0」と「1」との周波数が異なるものである場合、フーリエ変換して得られた結果から、「0」と「1」のいずれかのピークを検出する必要があるが、タグ応答信号のデータ部に含まれるデータは、内容が変化するため、「0」または「1」の一方の数が極端に少なくなったりして、ピークが十分に検出できない可能性がある。このため、データ部をフーリエ変換して得られた結果からピークの高さを求める場合、まず、「0」の周波数付近と「1」の周波数付近の両方でピークを検出する必要があり、検出に時間がかかり、リアルタイムに近い処理を行なう場合に不都合が生じる恐れがある。これに対し、フレーム内のプリアンブル部は、同一規格内であればデータの内容が固定であるため、「0」と「1」との数を予め知ることができる。このため、フーリエ変換して得られるピークのうち、「0」と「1」との数の多い方のピークを検出することを予め決定しておけば、その決定した「0」あるいは「1」の周波数の近傍のみでピークを検出すればよく、データ部をフーリエ変換して得られる結果からピークを検出する場合よりも、ピーク検出の処理を短縮することが可能となる。このため、プリアンブル部を上記のように解析してφ1を算出することが、位相情報取得処理を高速に行なう上では好ましい。
【0123】
なお、タグ応答信号を構成する「0」の周波数と「1」の周波数とが同じであれば、フーリエ変換を行なって得られるピークは1つとなり、その高さは、タグ応答信号内の「0」と「1」の数の和に比例したものとなり、位相情報取得部8Aは、I信号から得られた「0」および「1」のピークの高さと、Q信号から得られた「0」および「1」のピークの高さを、上述した数7のI1(t)およびQ1(t)の代わりに代入することにより、φ1を求めることができる。
【0124】
なお、このような処理は、φ2を求める場合においても同様である。
【0125】
また、位相情報取得部8Aが行なう位相情報取得処理は、上記以外の処理であってもよい。
【0126】
(多周波を用いた距離測定)
上記の例では、互いに異なる2つの周波数の受信信号を受信することによって距離を測定するようになっていたが、以下に示すように、互いに異なる3つ以上の周波数の受信信号を受信する構成としてもよい。
【0127】
リーダライタ2とRFIDタグ1との間で信号が送受信される場合、基本的には、リーダライタ2から送信された信号が直接RFIDタグ1に到達し、RFIDタグ1から送信された信号が直接リーダライタ2に到達することになる。しかしながら、リーダライタ2とRFIDタグ1上の間で信号が直接到達するのではなく、周囲の何らかの物体に反射した上で到達する(マルチパス)ことが考えられる。この場合、リーダライタ2で受信される受信信号は、マルチパスによる影響を受けることによって、本来の位相の状態に対してノイズが混じり、S/Nが劣化することが考えられる。すなわち、位相に基づいて距離を算出する方法において、取得される位相情報の精度が悪くなることによって、算出される距離の精度も劣化することになる。
【0128】
また、上記の例において、受信信号をI信号とQ信号とに分離し、これらに基づいて位相の変化量を検出する手法を示したが、位相の状態によっては、I信号およびQ信号のいずれかが著しく小さくなることがありうる。この場合、著しく小さくなっている方の信号の測定誤差の影響が、位相の算出に大きな影響を与えることになる。すなわち、I信号およびQ信号のいずれかが著しく小さくなっている場合には、測定される位相の誤差が大きくなり、算出される距離の精度も劣化することになる。
【0129】
そこで、次のような処理を行うことによって、上記の問題を解決することが可能である。すなわち、まず、リーダライタ2が、互いに異なる周波数からなる3つ以上のR/W要求信号を送信し、それぞれに対するタグ応答信号を受信する。そして、受信信号のうちで、S/Nがより高く、かつ、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行う。
【0130】
(多周波を用いた距離測定処理の流れ)
次に、図6に示すフローチャートを参照しながら、リーダライタ2における上記の多周波を用いた距離測定処理の流れについて説明する。
【0131】
まず、距離測定処理が開始されると、S11において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0132】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S12)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S13)。
【0133】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(Sl4)、そして位相情報取得部8Aが位相情報取得処理を行う(S15)。
【0134】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、第1の周波数f1の位相の変化量φ1およびφ2を算出すると共に、下記の数10の数式に基づき、信号レベルs(t)を求める。そして、位相情報取得部8Aは、求めた位相の変化量および信号レベルを、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。
【数10】
【0135】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S16)、位相情報取得部8Aは位相情報取得処理を終了する(S17)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S18)。その後、受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し(S19)、全て受信していないと判定された場合には、S11からの処理に戻る。ここで、受信信号の周波数としては、第1〜第4の周波数を設定しているものとすると、受信制御部7Cは、第1〜第4の周波数の受信信号を全て受信したか否かを判定することになる。
【0136】
S20では、位相情報取得部8Aによる周波数選択処理、および距離算出部8Bによる距離算出処理が行われ、距離測定処理が終了する。
【0137】
次に、図7に示すフローチャートを参照しながら、上記のS20における位相情報取得部8Aによる周波数選択処理、および距離算出部8Bによる距離算出処理の流れについて説明する。
【0138】
まず、S21において、位相情報取得部8Aは、前記テーブルから受信した全ての周波数の受信信号の信号レベルを取得する。
【0139】
次に、S22において、位相情報取得部8Aは、各周波数の受信信号の信号レベルが所定のしきい値を超えているか否かを判定する。この所定のしきい値は、距離算出において十分な精度を得ることが可能な最低限度の値として予め設定される。そして、位相情報取得部8Aは、上記所定のしきい値を超えている受信信号の周波数の数が2未満であるか、2より大きいか、2であるかを判定する。
【0140】
所定のしきい値を超えている受信信号の周波数の数が2未満であると判定された場合、S23において、位相情報取得部8Aは、他の周波数による受信信号を再取込するように、通信制御部7に対して他の周波数にてR/W要求信号を送信することを指示する。
【0141】
一方、所定のしきい値を超えている受信信号の周波数の数が2より大きいと判定された場合、まずS24において、位相情報取得部8Aは、所定のしきい値を超えない受信信号の周波数を選択候補から削除する。そして、S25において、位相情報取得部8Aは、選択候補として残った受信信号の周波数のそれぞれについて、I信号およびQ信号のうち、信号レベルが小さい方の成分を最小成分として抽出する。その後、S25において、位相情報取得部8Aは、各周波数の最小成分のうち、信号レベルが大きい方から2つ選択する。選択された2つの最小成分に対応する周波数の受信信号に関して、位相情報取得部8Aは、前記テーブルから位相情報を取得し、これを距離算出部8Bに伝送する。そして、S27において、距離算出部8Bが、受信した位相情報に基づいて距離算出処理を行う。
【0142】
さらに一方、所定のしきい値を超えている受信信号の数が2であると判定された場合、位相情報取得部8Aは、この2つの受信信号に関して位相情報を取得し、これを距離算出部8Bに伝送する。そして、S27において、距離算出部8Bが、受信した位相情報に基づいて距離算出処理を行う。
【0143】
図8は、上記の周波数選択処理の一例を模式的に示している。この例では、f1〜f4の周波数による受信信号を受信した場合を想定している。周波数f1の受信信号におけるI信号成分をI1,Q信号成分をQ1、および受信信号レベルをS1とし、周波数f2の受信信号におけるI信号成分をI2、Q信号成分をQ2、および受信信号レベルをS2とし、周波数f3の受信信号におけるI信号成分をI3,Q信号成分をQ3、および受信信号レベルをS3とし、周波数f4の受信信号におけるI信号成分をI4,Q信号成分をQ4、および受信信号レベルをS4としている。
【0144】
まず、上記のS22において、S1〜S4の信号レベルのうち、S2が所定のしきい値以下であると判定され、S24の処理により、周波数f2の受信信号が選択候補から削除されている。次に、S25の処理により、最小成分として、周波数f1はQ1、周波数f3はI3、周波数f4はQ4が選択されている。そして、S25の処理により、Q,I3,Q4のうち、信号レベルがより大きいQ1,I3が選択されることによって、周波数f1および周波数f3の受信信号が選択されている。
【0145】
以上の処理によって、距離算出に用いられる2つの周波数の受信信号を、マルチパスによる影響を受けることによってS/Nが劣化している受信信号や、I信号およびQ信号のいずれかが著しく小さくなっている受信信号を排除して選択することが可能となる。これにより、距離算出の精度をどのような状況でも高い状態に保つことが可能となる。
【0146】
(MUSIC法を応用した距離算出方法)
次に、距離算出方法の他の例について説明する。上記の例では、2つの周波数における受信信号の位相の変化量を検出し、これらに基づいて上記数9の式によって距離rを算出している。これに対して、以下に示すように、高分解能スペクトラム解析法の1つであるMUSIC(Multiple Signal Classification)法の考え方を応用することによって距離rを算出することが可能となる。
【0147】
MUSIC法とは、従来、電波の到来方向を推定する手法として広く知られている。このMUSIC法では、複数のアンテナ素子によって受信された受信信号を解析することによって、電波の到来方向を推定するようになっている。このMUSIC法において、到来方向推定における各アンテナ素子からの受信信号を、上記の各周波数の受信信号に置き換え、MUSIC法における適用モデル(到来方向推定で用いられるモードベクトルa(θi))(以下の数11)を距離推定で用いられるモードベクトルa(ri)(以下の数12)に変えることによって、距離rの推定を行うことが可能となる。このように距離rの推定においてMUSIC法を応用することによって、以下に示すように、マルチパスの発生等のある実環境下において、マルチパスの影響をさらに低減することが可能となり、さらに精度を高めることができる。
【0148】
すなわち、アレーアンテナの素子数をK、到来波の波長をλ、到来波数をL、第i到来波の到来角をθi(i =1…L)とすると、第i到来波に対するアレーレスポンス・ベクトルa(θi)はa(θi)=[exp{jΦ1(θi)}, …, exp{jΦK(θi)}]T;ΦN(θi )=-(2π/λ)dNsin(θi)(ΦN(θi)は第N番目のアンテナ素子における第i波の受信位相、Tは転置、dNはN番目のアンテナ素子位置)となる(数11)。
【0149】
そして、数11において、K:アレーアンテナの素子数を使用する周波数の数(f1、f2、f3…fK)に、第i到来波の到来角θiを第i番目のタグまでの距離ri(r1…rL)に、第i到来波に対するアレーレスポンス・ベクトルa(θi)を第i番目のタグに対するアレーレスポンスベクトルa(ri)に、第N番目のアンテナ素子における第i波の受信位相ΦN(θi)を第N番目の周波数における第i番目のタグからの信号の受信位相ΦN(ri)(ΦN(ri)=-2πfN・2ri/c、(c:光速(3x108)))にそれぞれ置き換えることにより、モードベクトルa(ri)(数12)が導かれる(図9(c)参照)。
【数11】
【数12】
【0150】
以下に、MUSIC法を応用した距離測定処理(距離推定MUSIC法と称する)の詳細について説明する。なお、以下で示す距離測定処理は、位置測定部8において行われる。
【0151】
周波数f1の受信信号において、I信号の状態を示すI1(t)、および、Q信号の状態を示すQ1(t)は、前記した数5および数6のように表される。ここで、周波数f1の受信信号を複素表現で表したx1(t)は、次の式で表される。
【数13】
【0152】
同様に、周波数fNの受信信号を複素表現で表したxN(t)は、次の式で表される。
【数14】
【0153】
ここで、受信信号をK通りの周波数で受信した場合を考えると、周波数f1〜fKの受信信号に基づいて、以下に示される相関行列Rxxが生成される。
【数15】
【0154】
上式において、Hは複素共役転置、E[]は時間平均を示している。次に、上記で求められた相関行列Rxxの固有値分解を次式のように行う。
【数16】
【0155】
上式において、eiはRxxの固有ベクトル、μiは固有値、σ2は雑音電力を示している。これらより以下の関係が成り立つ。
【数17】
【数18】
【0156】
上記より、距離推定MUSIC法におけるモードベクトルおよびMUSIC評価関数PMUSICは以下のように与えられる。
【数19】
【0157】
上式において、rを変化させることによって、図9(b)に示すようなグラフが得られる。このグラフにおいて、横軸をr、縦軸をPMUSlCとしている。このグラフに示すように、評価関数PMUSICにはピークが生じており、このピークが生じているrの値が、算出すべき距離rに相当することになる。
【0158】
なお、図9(b)に示すグラフでは、評価関数PMUSICのピークは一箇所にのみ表れているが、他の箇所にもピークが表れることもある。これは、図9(a)に示すように、マルチパスの影響を受けた場合に、そのマルチパスに相当する距離の部分でピークが表れるからである。しかしながら、マルチパスに相当する距離は、算出すべき距離rよりも長くなるので、ピークが生じている距離のうち、最も小さいrを算出すべき距離rとすることによって、マルチパスが生じていても、的確に距離rを算出することが可能となる。
【0159】
なお、上記の例では、高分解能スペクトラム解析法としてのMUSIC法を距離測定に応用しているが、他の高分解能スペクトラム解析法、例えば、Beamformer法、Capon法、LP(Linear Prediction)法、Min−Norm法、およびESPRIT法などを距離測定に応用してもよい。
【0160】
(MUSIC法を応用した距離測定処理の流れ)
次に、図10および図11に示すフローチャートを参照しながら、リーダライタ2における上記のMUSIC法を応用した距離測定処理の流れについて説明する。
【0161】
まず、距離測定処理が開始されると、S31において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0162】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S32)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S33)。
【0163】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S34)、そして位相情報取得部8Aが位相情報取得処理を行う(S35)。
【0164】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数13から14の数式に基づいて、第1の周波数f1の受信信号を複素表現で表したx1(t)を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。
【0165】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S36)、位相情報取得部8Aは位相情報取得処理を終了する(S37)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S38)。その後、受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合には、S31からの処理に戻る。ここで、受信信号の周波数としては、第1〜第Nの周波数を設定しているものとすると、受信制御部7Cは、第1〜第Nの周波数の受信信号を全て受信したか否かを判定することになる。
【0166】
この時点では、第1の周波数f1の受信信号のみを受信しているので、S31からの処理が行われることになる。そして、2回目のS31の処理において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(およびCW(連続搬送波))の周波数を第2の周波数f2となるようにPLL部5Aを制御する。その後、S32〜S38の処理が行われ、これが第Nの周波数の受信信号の受信が全て確認されるまで繰り返される。そして、S39において、受信すべき全ての周波数の受信信号を受信したと判定された場合には、S40の処理に移行する。
【0167】
S40では、位置測定部8が、前記テーブルから各周波数の受信信号xn(t)を読み出し、各周波数の受信信号に基づいて相関行列Rxxを作成する。次に、位置測定部8が、相関行列Rxxの固有値分解を行い、雑音成分を分解し(S41)、MUSIC評価関数PMUSICのスペクトラムを作成することによって、ピーク値の探索を行う(S42)。これにより、S43において距離rが算出される。
【0168】
(1フレーム内での周波数切り替え)
上記では、リーダライタ2は、R/W要求信号を複数回数送信し、各送信において搬送周波数を変化させることによって、それぞれ搬送信号の周波数が異なるタグ応答信号を受信するようになっている。これに対して、1フレームからなるR/W要求信号およびCW(連続搬送波)を送信する途中で搬送周波数を1回以上変化させることによって、途中で搬送周波数が1回以上変化する1フレームからなるタグ応答信号を受信し、これに基づいて距離測定を行う構成とすることが可能である。
【0169】
図12(a)に示すように、リーダライタ2は、常に特定の信号を送信している一方、RFIDタグ1に対してタグ応答信号を送信することを要求する時に、タグ応答信号の返信を要求するR/W要求信号を送信する。ここで、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように、PLL部5Aを制御する。図12(a)に示す例では、3つの分割期間を設定し、第1の分割期間において周波数f1、第2の分割期間において周波数f2、第3の分割期間において周波数f3となるように制御が行われている。
【0170】
RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形でタグ応答信号を送信する。ここで、タグ応答信号は、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))における搬送周波数の時間変化に応じて、搬送周波数が変化する。図12(b)に示す例では、タグ応答信号における第1の期間では周波数f1、第2の期問では周波数f2、第3の期間では周波数f3となっている。
【0171】
このようなタグ応答信号を受信することによって、位置測定部8は、互いに異なる複数の周波数における受信信号の状態を検知することが可能となる。なお、受信処理部6におけるタグ応答信号の周波数変換処理のタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定される。
【0172】
ここで、タグ応答信号において、搬送周波数が切り替えられている期間は、プリアンブル部の期間内とすることが好ましい。これは、タグ応答信号において、データ部の長さは変動する一方、プリアンブル部の長さは固定であるので、搬送周波数が切り替えられている期間を確実に確保できるからである。
【0173】
(1フレーム内での周波数切り替えを伴う距離測定処理の流れ)
次に、図13に示すフローチャートを参照しながら、リーダライタ2における上記の1フレーム内での周波数切り替えを伴う距離測定処理の流れについて説明する。
【0174】
まず、距離測定処理が開始されると、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の周波数を上記複数の分割期間ごとに切り替えるようにPLL部5Aを制御する。そして、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S51)。R/W要求信号が送信されると続いてCW(連続搬送波)が上記複数の分割期間ごとに異なる周波数で送信される(S53、S55、S58)。これにより、各分割期間ごとに周波数が切り替えられたR/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))が送信される。
【0175】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の搬送周波数(周波数f1,f2,f3)の時間変化に応じて変化した搬送周波数(周波数f1,f2,f3)からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S53、S56、S59)、そして位相情報取得部8Aが位相情報取得処理を行う(S54、S57、S60)。ここで受信されるタグ応答信号は、R/W要求信号後のCW(連続搬送波)における搬送周波数の時間変化に応じて、搬送周波数が変化していることになる。
【0176】
すなわち、受信処理部6において、周波数変換部6Bは、タグ応答信号におけるプリアンブル部を認識し、上述の数4から6の数式に基づいて、このプリアンブル部における各分割期間の周波数に対するI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6Bから各周波数のI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、各周波数の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数に対応させてテーブルに記憶する。ここで、各分割期間の切り替えタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定される。
【0177】
受信処理部6および位相情報取得部8Aにおけるタグ応答信号のプレアンブル部における各分割期間の各周波数(周波数f1,f2,f3)に対する周波数変換および位相情報取得処理は、送信処理部5にて対応する周波数のCW(連続搬送波)が送信されている間に行なわれる。例えば、送信処理部5が第1の周波数f1にてCW(連続搬送波)の送信を開始すると(S52)、RFIDタグ1はタグ応答信号のプリアンブル部における最初の分割期間の信号を第1の周波数f1にて返信する。受信処理部6は該周波数f1のタグ応答信号を受信し(S53)、そして位相情報取得部8Aは周波数f1の位相情報を取得する(S54)。一定時間が経過すると、送信処理部5は第2の周波数f2にてCW(連続搬送波)の送信を開始する(S55)。RFIDタグ1はこの第2の周波数f2のCW(連続搬送波)を受信すると、タグ応答信号のプリアンブル部における次の分割期間の信号を第2の周波数f2にて送信する。受信処理部6は、該周波数f2のタグ応答信号を受信し(S56)、そして位相情報取得部8Aは、周波数f2の位相情報を取得する(S57)。一定時間が経過すると、次に、第3の周波数f3に対して送信処理部5、受信処理部6および位相情報取得部8Aは同じ動作を繰り返す(S58からS60)。
【0178】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S61)、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(62)。その後、上記テーブルに記憶された互いに異なる複数の周波数における位相情報に基づいて、距離算出部8Bが距離rを算出することにより処理が終了する(S63)。
【0179】
なお、上記の例では、位相に基づいて距離rを算出するようになっているが、上記したMUSIC法を応用した距離測定処理であっても、同様に適用することが可能である。また、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行うことも可能である。
【0180】
(各RFIDタグの距離の認識)
上記のように、タグ応答信号にはデータ部が含まれている。このデータ部に各RFIDタグ1に固有のID情報が含まれている場合、タグ応答信号によって上記のように測定した距離を、該タグ応答信号を送信したRFIDタグ1と結びつけて認識することが可能となる。以下にこれを実現する構成について図14を参照しながら説明する。
【0181】
同図に示す構成は、前記した図4に示す構成において、受信処理部6にプリアンブル抽出部6Cが設けられている点で異なっている。その他の構成については図4に示す構成と同様であるのでここではその説明を省略する。
【0182】
プリアンブル抽出部6Cは、ミキサ6B1およびミキサ6B2から出力されるI信号およびQ信号を入力し、タグ応答信号におけるプリアンブル部を抽出してこれを位置測定部8に伝送するとともに、タグ応答信号におけるデータ部を受信フレームとして通信制御部7における受信制御部7Cに伝送する。位置測定部8は、プリアンブル部を解析することによって上記のように距離を測定し、測定した情報を上記受信制御部7Cに伝送する。
【0183】
通信制御部7における受信制御部7Cは、プリアンブル抽出部6Cから受信したデータ部を解析することによって、該タグ応答信号を送信したRFIDタグ1のID情報を認識する。また、受信制御部7Cは、位置測定部8によって測定された該RFIDタグ1の距離測定結果と、上記ID情報とを結びつけてこれを認識する。これにより、RFIDタグ通信システムにおいて複数のRFIDタグ1が存在した場合でも、各RFIDタグ1の距離を区別して認識することが可能となる。
【0184】
なお、上記の距離の情報と結びつけて認識する情報としては、各RFIDタグ1に固有のID情報に限定されるものではなく、タグ応答信号に含まれるデータ部によって示されている情報であれば、どのような情報であってもよい。
【0185】
(各RFIDタグを識別した距離測定処理の流れ)
次に、図15に示すフローチャートを参照しながら、リーダライタ2における上記の各RFIDタグを識別した距離測定処理の流れについて説明する。
【0186】
まず、距離測定処理が開始されると、S71において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0187】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S72)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S73)。
【0188】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S74)、そして位相情報取得部8Aが位相情報取得処理を行う(S75)。
【0189】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。プリアンブル抽出部6Cは、受信したタグ応答信号(I信号およびQ信号)におけるプリアンブル部を抽出してこれを位置測定部8に伝送するとともに、タグ応答信号におけるデータ部を受信制御部7Cに伝送する。位置測定部8は、プリアンブル抽出部6Cからプリアンブル部を受信すると、上述の数7から8の数式に基づいて、第1の周波数f1の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する(S75)。
【0190】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S76)、位置測定8は位相情報取得処理を終了する(S77)。その後、送信処理部5はCW(連続搬送波)の送信を終了する(S78)。受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合(S79においてNO)には、S71からの処理に戻る。一方、受信すべき全ての周波数の受信信号を受信したと判定された場合(S79においてYES)、S80の処理に移行する。
【0191】
一方、受信制御部7Cは、プリアンブル抽出部6Cからデータ部を受信すると、これに基づいて該タグ応答信号を送信したRFIDタグ1のID情報を確認する(S81)。そして、受信制御部7Cは、位置測定部8から受信した距離情報とRFIDタグ1のID情報とを結びつけて登録する(S82)。なお、RFIDタグ1のID情報と距離とを組み合わせた情報は、通信制御部7内に設けられる図示しない記録部に登録した後に、図2に示す外部通信部9を介して外部装置に送信される。以上により、距離測定処理が完了する。
【0192】
(位置推定処理)
上記では、各RFIDタグ1の距離を測定することについて説明したが、さらに、リーダライタ2から見た際の各RFIDタグ1の存在位置方向も測定するようにしてもよい。これを行うことによって、各RFlDタグ1の距離と方向とを特定することができるので、各RFIDタグ1の存在位置を特定することが可能となる。RFIDタグ1の存在位置方固を推定する方法としては、受信アンテナ4のアンテナ素子を複数アレー状に並べて、各アンテナ素子で受信される信号の位相の差異を検出する方法がある。以下に、このRFIDタグ1の存在位置方向の推定処理について説明する。
【0193】
図16は、RFIDタグ1の存在位置方向の推定処理を模式的に示す図である。同図において、受信アンテナ4は、第1アンテナ素子4A、および第2アンテナ素子4Bの2つのアンテナ素子によって構成されている。また、θは、RFIDタグ1の存在位置方向を示す角度である。このθは、第1アンテナ素子4A、および第2アンテナ素子4Bにおける電波受信ポイントをともに含む平面の法線方向を0°とした場合の角度となっている。
【0194】
第1アンテナ素子4A、および第2アンテナ素子4Bにおける電波受信ポイント同士の間隔をdとすると、第1アンテナ素子4A、および第2アンテナ素子4Bで受信される信号の位相差△φは次の式で表される。
【数20】
【0195】
ここで、d=λ/2とすれば、位相差△φは次の式で表される。
【数21】
よって、位相差△φに基づいて、存在位置方向θは次の式で表される。
【数22】
すなわち、位相差△φを求めることによって、存在位置方向θを求めることができる。
【0196】
図17は、方向算出を行う場合のリーダライタ2の構成を示している。同図に示す構成は、前記した図4に示す構成において、位置測定部8に方向算出部8Cが設けられている点、および、受信処理部5にセレクタ6Dが設けられている点で異なっている。その他の構成については図4に示す構成と同様であるのでここではその説明を省略する。
【0197】
セレクタ6Dは、受信アンテナ4における第1アンテナ素子4Aにおいて受信された信号と第2アンテナ素子4Bにおいて受信された信号とを選択的に切り替えて増幅部6A1および増幅部6A2に伝送する。このセレクタ6Dの選択の制御は、受信制御部7Cによって行われる。
【0198】
方向算出部8Cは、第1アンテナ素子4Aにおいて受信された信号と、第2アンテナ素子4Bにおいて受信された信号との位相差についての情報を位相情報取得部8Aから取得し、これに基づいて上記の処理によってRFIDタグ1の存在位置方向θを算出する。そして、受信制御部7Cは、距離算出部8Bによって算出された距離情報、および方向算出部8Cによって算出された存在位置方向情報を取得し、この情報を図2に示したエリア判定部10に伝送する。
【0199】
エリア判定部10は、位置情報としての上記距離情報および存在位置方向情報に基づいて、該RFIDタグ1が所定の空問領域(通信エリア)内に位置しているか否かを判定する。この際に、エリア判定部10は、エリア情報記憶部11に記憶されているエリア情報に基づいて、RFIDタグ1が通信エリア内に存在しているかを判定する。
【0200】
なお、RFIDタグ1の存在位置方向θを求める手法としては、上記の手法に限定されるものではなく、公知の様々な手法を用いることができる。例えば、電波の到来方向(DOA(Direction Of Arrival)を推定する技術としては、Beamformer法、Capon法、LP(Linear Prediction)法、Min−Norm法、MUSIC法、およびESPRIT法などが挙げられる。
【0201】
(位置推定処理の流れ)
次に、図18および図19に示すフローチャートを参照しながら、リーダライタ2における上記の位置推定処理の流れについて説明する。
【0202】
まず、位置推定処理が開始されると、S91において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0203】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S92)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S93)。
【0204】
その後、RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信する。この時点では、セレクタ6Dは、第1アンテナ素子4Aを選択しており、第1アンテナ素子4Aで受信された信号に基づいて、受信処理部6が受信処理を行い(S94)、そして位相情報取得部8Aは位相情報取得処理を行う(S95)。
【0205】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、第1の周波数f1の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する(S95)。
【0206】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S96)、位相情報取得部8Aは位相情報取得処理を終了する(S97)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S98)。受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合(S99においてNO)には、S91からの処理に戻る。一方、受信すべき全ての周波数の受信信号を受信したと判定された場合(S99においてYES)、距離算出部8Bにて距離演算が行なわれて(S100)、S101の処理に移行する。なお、位置測定部8は、距離の算出を位相情報に基づいて行うだけでなく、上記したようにMUSIC法を応用した手法によって距離を算出してもよい。また、距離演算は、後述するS111、S112の前後に行なわれても良い。
【0207】
S101では、セレクタ6Dが、第2アンテナ素子4Bを選択するように切り替えられる。そして、送信制御部7Bの制御に基づいて第1の周波数f1によりR/W要求信号およびCW(連続搬送波)が送信される(S102からS104)。RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信する。この時点では、セレクタ6Dは、第2アンテナ素子4Bを選択しており、第2アンテナ素子4Bで受信された信号に基づいて、受信処理部6が受信処理を行う(S105)。
【0208】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求めて位相情報取得部8Aに出力する。受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S106)、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S107)。
【0209】
次に、方向算出処理に関してS108からS109の処理が行われる。
【0210】
S108では、位相情報取得部8Aが、第1アンテナ素子4Aによって受信された信号と、第2アンテナ素子4Bによって受信された信号との位相差を検出し、これに基づいて方向算出部8CがRFIDタグ1の存在位置方向(存在方向)を算出する(S109)。なお、上記のようにアンテナ素子間の位相差に基づいて方向推定を行う際には、ある(同一の)周波数での位相差を比較することが必要である。
【0211】
その後、受信制御部7Cは、距離算出部8Bによって算出された距離情報、および方向算出部8Cによって算出された存在位置方向情報を取得し、この情報をエリア判定部10に伝送する。エリア判定部10は、上記距離情報および存在位置方向情報に基づいて、該RFIDタグlの位置を算出する(S110)。以上により、位置測定処理が完了する。
(1フレーム内での複数周波数同時送信)
【0212】
上記では、リーダライタ2は、1フレームからなるR/W要求信号およびCW(連続搬送波)を送信する途中で搬送周波数を1回以上変化させることによって、途中で搬送周波数が1回以上変化する1フレームからなるタグ応答信号を受信し、これに基づいて距離測定を行うようになっている。これに対して、1フレームからなるR/W要求信号およびCW(連続搬送波)を送信する搬送周波数を複数の周波数成分から構成することによって、複数の周波数成分を持った搬送周波数の1フレームからなるタグ応答信号を受信し、これに基づいて距離測定を行う構成とすることが可能である。
【0213】
図20(a)に示すように、リーダライタ2は、常に特定の信号を送信している一方、RFIDタグ1に対してタグ応答信号を送信することを要求する時に、タグ応答信号の返信を要求するR/W要求信号を送信する。ここで、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の搬送周波数が、複数の周波数成分から構成されるようにPLL部5Aを制御する。図20(a)に示す例では、搬送周波数が第1の周波数f1、第2の周波数f2、第3の周波数f3から構成するように制御が行われている。
【0214】
RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形でタグ応答信号を送信する。ここで、タグ応答信号は、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))における複数の周波数成分からなる搬送周波数に応じた搬送周波数により送信される。図20(b)に示す例では、タグ応答信号における第1の期間では周波数f1、第2の期問では周波数f2、第3の期間では周波数f3となっている。
【0215】
このようなタグ応答信号を受信することによって、位置測定部8は、互いに異なる複数の周波数における受信信号の状態を検知することが可能となる。
【0216】
以下にこれを実現する構成について図21を参照しながら説明する。
【0217】
同図に示す構成は、前記した図4に示す構成において、送信処理部5に各周波数に対応する発信器5D1・5D2・5D3および合成器5Eが設けられていると共に、受信処理部6に帯域通過フィルタ6C1・6C2・6C3および周波数変換部6Bとしてのミキサ6B3・6B4・6B5が設けられている点で異なっている。その他の構成については図4に示す構成と同様であるのでここではその説明を省略する。
【0218】
通信制御部7において、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の搬送周波数が、複数の周波数成分から構成されるようにPLL部5Aを制御する。PLL部5Aおよび発信器5D1・5D2・5Dによって生成された搬送信号は合成器5Eにて合成された後、変調部5Bおよび電力増幅部5Cを介して送信される。
【0219】
受信アンテナ4で受信された受信信号は、増幅部6Aを経由して、3つの経路に分岐し、帯域通過フィルタ6C1・6C2・6C3にそれぞれ入力される。各帯域通過フィルタ6C1・6C2・6C3は入力された受信信号から特定の周波数成分の信号を取り出し、ミキサ6B3・6B4・6B5に入力する。
【0220】
ミキサ6B3・6B4・6B5にて求められた各周波数成分のI信号およびQ信号は位相情報取得部8Aに入力されて各周波数成分の位相の変化量およびそれに基づく距離算出が行なわれる。
【0221】
上記図4および図13の実施形態と同様に、受信処理部6は、送信処理部5がCW(連続搬送波)を送信している間に、各周波数成分の位相の変化量の算出を行う。
【0222】
なお、上記の例では、位相に基づいて距離rを算出するようになっているが、上記したMUSIC法を応用した距離測定処理であっても、同様に適用することが可能である。また、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行うことも可能である。
【0223】
(アクティブタイプのRFIDタグ)
上記では、RFIDタグ1がパッシブタイプである構成について説明したが、前記したように、RFIDタグ1がアクティブタイプである構成であってもよい。この場合、RFIDタグ1は、電源部を備えるとともに、タグ応答信号を生成する信号生成部と、上記信号生成部によって生成されたタグ応答信号を、互いに異なる複数の搬送周波数によって送信されるように制御する周波数制御部とを備えた構成とすることが考えられる。この場合、リーダライタ2において、R/W要求信号を送信する必要性をなくすことができる。
【0224】
また、RFIDタグ1における上記周波数制御部が、前記した周波数制御部7Aと同様に、1つのタグ応答信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御するようにすることも可能であり、上記タグ応答信号の送信の回数毎にそれぞれ互いに異なる搬送周波数となるように制御するようにすることも可能である。また、搬送周波数が、複数の周波数成分から構成されるように制御することも可能である。
【0225】
(RFIDタグを用いた通信システムの適用例)
次に、本実施形態に係るRFIDタグを用いた通信システムを具体的なシステムに適用する例について説明する。図22は、物品の流通が行われるシステムにおいて、流通される物品の検査確認などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示している。同図に示す例では、複数のベルトコンベアによって、RFIDタグ1が取り付けられた物品が搬送されている。また、ベルトコンベアから離れた場所にも、RFIDタグ1が貼り付けられた物品が積み上げられている。そして、ベルトコンベアによって搬送された物品を検査するために、リーダライタ2が各RFIDタグ1と通信を行う。これにより、各物品の流通を管理することが可能となる。
【0226】
なお、このようなRFIDタグを用いた通信システムでは、リーダライタ2と通信を行う上記外部装置として、流通物品の管理を行う管理装置が備えられることになる。
【0227】
このようなシステムの場合、通信エリアが明確に設定されないRFIDタグ通信システムであると、通信を行う必要のない、ベルトコンベアから離れた位置にあるRFIDタグ1とも通信を行ってしまうことになる。これに対して、本実施形態に係るRFIDタグ通信システムによれば、リーダライタ2における処理によって名RFlDタグ1の距離(もしくは位置)を検知することができるので、通信すべきRFIDタグ1とのみ通信を行うことが可能となる。
【0228】
また、本実施形態に係るRFIDタグを用いた通信システムによれば、比較的高精度に各RFIDタグ1の距離(もしくは位置)を検知できるので、どのベルトコンベアのラインに搬送されているRFIDタグ1であるかについても、リーダライタ2側で認識することが可能となる。
【0229】
また、このような機能を有するRFIDタグを用いた通信システムを構築するためには、リーダライタ2を1台設置するだけでよいことになる。すなわち、例えば電波の届く範囲を制限するための部材を設ける必要性や、リーダライタ2を複数台設置する必要性などをなくすことができる。よって、本実施形態に係るRFIDタグを用いた通信システムによれば、設置環境によらずに容易にセッティングを行うことが可能となる。
【0230】
図23(a)は、店舗などにおいて、商品や在庫物品などの盗難監視などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示している。この例では、通信エリアを、対象となるRFIDタグ1が取り付けられた物品が本来存在しうる範囲に設定するとともに、この通信エリアから物品がなくなったことを検知することによって、該当物品の盗難が行われた可能性があると判定する。また、図23(b)は、窓やドアなどにRFIDタグ1を取り付け、このRFIDタグ1の位置を監視することによって、該窓やドアが開けられたことを検知する防犯システム適用例を示している。以上のような防犯システムを構築する際にも、対象物に従来から用いられているRFIDタグ1を取り付けるという簡単なセッティングを行うだけでよいことになる。また、様々な環境において柔軟にRFIDタグを用いた通信システムを構築することが可能となる。
【0231】
なお、この例においても、RFIDタグを用いた通信システムに、リーダライタ2と通信を行う上記外部装置として、防犯管理を行う管理装置が備えられることになる。
【0232】
図24は、例えば駅や映画館などの改札が必要となる場所に本RFIDタグ通信システムを適用した場合の例を示している。昨今では、例えば駅の改札において、RFIDタグを用いた改札を行うシステムが普及しているが、このシステムでは、ゲートにリーダライタを設けることによって改札を行っている。これに対して、本実施形態に係るRFIDタグ通信システムによれば、改札が行われる通路の全体を通信エリアに設定することによって、ゲートを設けることなく改札を行うことが可能となる。なお、この場合には、RFIDタグ1を利用者が所持する携帯電話機に内蔵させた構成としてもよい。
【0233】
なお、この図24に示すシステム適用例において、RFIDタグ1との通信結果により、通過を許可できない利用者が存在した場合、その不許可利用者を特定する必要が生じることが考えられる。この場合、リーダライタ2によって特定された不許可利用者の位置に向けて監視カメラによる撮影を行うことによって、不許可利用者の特定およびその証拠を残すことが可能となる。
【0234】
また、この例においても、RFIDタグを用いた通信システムに、リーダライタ2と通信を行う上記外部装置として、通行許可管理を行う管理装置が備えられることになる。そして、この管理装置が、上記監視カメラの撮影制御を行うことになる。
【0235】
図25は、自動車などのキーレスエントリシステムに、本RFIDタグを用いた通信システムを適用した場合の例を示している。自動車の内部にリーダライタ2が設けられているとともに、利用者がRFIDタグ1を内蔵したキーを所持している。リーダライタ2は、利用者に所持されているキーに内蔵されているRFIDタグ1が自動車の周囲の所定範囲に入ったことを検知すると、キーのロックを解除するように指示を行う。これにより、利用者は、キーを所持した状態で自動車に近づくことのみによってロックを解除させることが可能となる。
【0236】
なお、この例においても、RFIDタグを用いた通信システムに、リーダライタ2と通信を行う上記外部装置として、キーの施錠状態を制御管理する管理装置が備えられることになる。
【0237】
(実施の形態2)
本実施の形態2にかかる通信システムは、上記実施の形態1において説明した通信システムのうちの、1フレーム内において周波数切り替えを伴う距離測定処理を行なう構成を用いて反射体の位置情報を取得し、その取得した位置情報から、反射体が、所定の位置に位置するか否かを判定して、その判定結果に基づいて異なる処理を行うようにしたものである。
【0238】
以下、反射体がRFIDタグである場合を例に挙げて説明する。
【0239】
図26は、本実施の形態2に係るRFIDタグとリーダライタとからなる通信システムの構成を示すブロック図である。同図に示すように、通信システムは、1つ以上のRFIDタグl(反射体)…およびリーダライタ(情報処理装置)200を備えた構成となっている。RFIDタグ1と、リーダライタ200とは無線による情報の送受信が可能である。なお、ここでは、RFIDタグ1として複数のRFIDタグ1を備えている場合について説明するが、RFIDタグは1つであっても良い。
【0240】
RFIDタグ1の構成は、上記実施の形態1と同様の構成を備えている。ここでは特に、RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形で図12(b)に示すような、タグ応答信号を送信する。ここで、タグ応答信号は、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))における搬送周波数の時間変化に応じて、搬送周波数が変化する。タグ応答信号における第1の期間では周波数f1、第2の期問では周波数f2、第3の期間では周波数f3となっている。なお、各RFIDタグは、図示しない記憶部に、それぞれを他のRFIDタグと識別するための情報である識別情報(ID情報)等の情報を格納していてもよい。
【0241】
リーダライタ200は、各RFIDタグ1との間で無線通信を行い、RFIDタグ1に記憶されている情報の読み書きを行う装置である。なお、本実施形態では、リーダライタ200は、RFIDタグ1に記憶されている情報の読み書きを行うものとしているが、これに限定されるものではなく、RFIDタグ1に記憶されている情報の読み出しのみを行うRFIDリーダであってもよい。
【0242】
本実施形態では、リーダライタ200が送受信する電波の周波数帯域は、800MHz〜960MHz前後のいわゆるUHF帯としている。このような周波数帯域の電波を用いることにより、リーダライタ200は、数m〜数10m程度の距離範囲内に位置するRFIDタグ1と通信可能となる。なお、本実施形態においては、UHF帯を用いた通信を想定しているが、これに限定されるものではなく、RFIDタグ向けの周波数帯域としての、13.56MHz帯、2.45GHz帯などの周波数帯域を用いてもよく、さらには、無線による通信を行うことが可能なその他の周波数帯による通信が行われても構わない。
【0243】
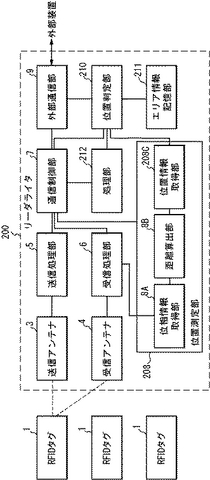
リーダライタ200は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9,位置判定部210、エリア情報記憶部211、および処理部212を具備する。
【0244】
位置測定部208は、さらに、位相情報取得部8A、距離算出部8B、位置情報取得部208Cを備えている。
【0245】
送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、および外部通信部9の構成については、上述した実施の形態1と同様であるので説明は省略する。なお、リーダライタ200は、受信アンテナ4を、1つだけ備えていても複数備えていても良い。また、複数の受信アンテナ4を介してそれぞれ受信される信号の受信処理を行う複数の受信処理部6等を有していてもよいし、複数の受信アンテナ4を介してそれぞれ受信される信号の受信処理を一つの受信処理部6により行うようにしてもよい。アンテナ3および4は、リーダライタ2の外部に設けられていてもよい。また、アンテナ3および4は、リーダライタ2とは異なる位置に配置されていてもよい。
【0246】
リーダライタ2は、ここでは、常に特定の信号を送信している一方、RFIDタグ1に対してタグ応答信号を送信することを要求する時に、図12(a)に示すようなタグ応答信号の返信を要求するR/W要求信号を送信するものとする。このため、上記実施の形態1において説明したように、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように、PLL部5Aを制御する。図12(a)に示す例では、3つの分割期間を設定し、第1の分割期間において周波数f1、第2の分割期間において周波数f2、第3の分割期間において周波数f3となるように制御が行われている。
【0247】
なお、上記実施の形態1において説明したように、受信処理部6におけるタグ応答信号の周波数変換処理のタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定されているものとする。
【0248】
また、上記実施の形態1において説明したように、タグ応答信号において、搬送周波数が切り替えられている期間は、プリアンブル部の期間内とすることが好ましい。これは、タグ応答信号において、データ部の長さは変動する一方、プリアンブル部の長さは固定であるので、搬送周波数が切り替えられている期間を確実に確保できるからである。
【0249】
位置測定部208は、RFIDタグ1から受信した受信信号に基づいて、該RFIDタグ1の位置を測定し、RFIDタグ1の位置に関する情報である位置情報を取得する。「位置情報」とは、RFIDタグ1の位置を示すことのできる情報であれば、どのような情報であってもよく、例えば、RFIDタグの座標情報である。この座標情報は、緯度、経度等の絶対的な座標情報であっても良いし、所定の位置、例えば情報処理装置200や受信アンテナ4の位置等を基準とした相対的な座標情報であってもよい。また、「位置情報」は、基準となる軸に対する角度等の情報を含んでいても良い。また、「位置情報」は、通常、3次元の情報であるが、1次元の情報であっても、2次元の情報であっても良い。例えば、RFIDタグ1の存在する位置のx軸とy軸とz軸とを指定する情報であっても良いし、x軸とy軸とのみを指定する情報であっても良いし、x軸の値だけを指定する情報であっても良い。詳細は後述するが、位置測定部208によるRFIDタグ1の位置の測定は、リーダライタ2とRFIDタグ1との距離の測定、リーダライタ2から見た際のRFIDタグ1の方向の測定などを用いて行なわれる。なお、リーダライタ2とRFIDタグ1との距離とは、厳密には、リーダライタ2における送信アンテナ3とRFIDタグ1との距離と、RFIDタグ1と受信アンテナ4との距離の加算平均に相当する。なお、RFIDタグ1がアクティブタイプの場合には、受信アンテナ4とRFIDタグ1との距離に相当する。なお、本実施の形態においては、便宜上、各受信アンテナ4が受信したタグ応答信号に基づいて得られたリーダライタ2とRFIDタグ1との距離を、特に、受信アンテナ4とRFIDタグ1の距離と称す。ここでは、位置測定部208が、上記実施の形態において説明したように、1フレーム内において周波数切り替えされたタグ応答情報に基づいて、距離測定処理を行なう場合について説明する。位置測定部208は、図12(b)に示したようなタグ応答信号を受信することによって、互いに異なる複数の周波数における受信信号の状態を検知する。位置測定部208は、通常、MPUやメモリ等から実現され得る。位置測定部208の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0250】
位置測定部208内の位相情報取得部8A、および距離算出部8Bの構成については、図1と同様であるので説明は省略する。
【0251】
位置測定部208内の位置情報取得部208Cは、距離算出部8Bによって算出された距離に基づいて、RFIDタグ1の存在する位置を特定する。例えば、RFIDタグ1がパッシブ型であり、受信アンテナ4が複数設けられている場合、各受信アンテナ4が受信するタグ応答信号に基づき、距離算出部8Bによって受信アンテナ4とRFIDタグ1との距離と、送信アンテナ3とRFIDタグ1との距離との和が、各受信アンテナ4それぞれについて算出されることとなる。そして、各受信アンテナ4と送信アンテナ3との位置情報(例えば座標情報)が既知であるとすると、位置情報取得部208Cは、複数の距離情報と、各受信アンテナ4の位置情報に基づいて、RFIDタグ1の位置を2次元座標(例えば、受信アンテナが3つで、得られた距離が3種類の場合に、各受信アンテナ4の座標と送信アンテナ3の座標とからの距離の和が、前記距離算出部8Bにより得られた距離と等しい点の集合である3つの楕円の交点として求めた2次元座標)または3次元座標(例えば、受信アンテナが4つで、得られた距離が4種類の場合に、各受信アンテナ4の座標と送信アンテナ3の座標とからの距離の和が、前記距離算出部8Bにより得られた距離と等しい点の集合である4つの楕円の回転体の交点として求めた3次元座標)等として特定することができる。この特定されたRFIDタグ1の座標情報が、RFIDタグ1の位置情報である。
【0252】
位置判定部210は、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定し、判定結果を取得する。「所定の位置」とは、緯度や経度等で表される絶対的な位置であっても、リーダライタ200等の位置に対する相対的な位置であっても良い。また、「所定の位置」とは、例えば、「所定の領域内の任意の位置」であり、具体的には、「所定の空間領域(通信エリア)内の任意の位置」である。位置判定部210は、例えば、RFIDタグ1が、予め設定された座標系内の所定の通信エリア内に存在するか否か等を判定することにより、RFIDタグ1が、所定の位置に存在するか否かを判定する。通信エリアがどのような空間領域であるかについて設定する情報であるエリア情報は、例えば、エリア情報記憶部211に記憶されている。ここでは、位置判定部210が、位置測定部208において測定された位置が、上記エリア情報で設定される通信エリア内に存在するか否かを判定することによって、該RFIDタグ1が所定の位置に存在するか否かを判定する場合について説明する。この判定処理の詳細については、後述する。位置判定部210は、通常、MPUやメモリ等から実現され得る。位置判定部210の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0253】
エリア情報記憶部211は、所定のエリア(領域)についての情報であるエリア情報を記憶する。ここで述べる「エリア」とは、空間内の領域、面内の領域、線上の領域、または点上の領域のうちのいずれであってもよい。「エリア情報」とは、所定の領域を特定するための情報である。「エリア情報」は、例えば、1以上の1次元の情報、2次元の情報、3次元の情報等で構成される。例えば、エリア情報は、x=0で定義される面上の全ての領域を指定する情報であってもよい。また、エリア情報は、(x,y)=(10,20)、(x,y)=(60,50)という2点を両端とする線分上の領域を指定する情報であってもよい。エリア情報が指定する領域の形状は問わない。例えば、エリア情報が指定する領域の形状は、領域が3次元の空間の領域であれば、球状の領域であっても良いし、直方体の形状であってもよい。エリア情報記憶部211に記憶されているエリア情報は、リーダライタ200が設置される環境等に応じて設定されることになる。このエリア情報の設定は、例えば外部通信部9を介して外部装置から行われるようになっていてもよいし、リーダライタ2に、エリア情報を入力するためのユーザインターフェースが備えられていてもよい。エリア情報記憶部211は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。
【0254】
処理部212は、位置判定部210の判定結果に基づいて所定の処理を行なう。「判定結果に基づいて所定の処理を行なう」とは、具体的には、判定結果が、RFIDタグが所定の位置に存在することを示す場合にのみ所定の処理を行ない、RFIDタグが所定の位置に存在しないことを示す場合には所定の処理を行なわないということや、判定結果が、RFIDタグが所定の位置に存在しないことを示す場合にのみ所定の処理を行ない、RFIDタグが所定の位置に存在することを示す場合には所定の処理を行なわないということや、判定結果が、RFIDタグが所定の位置に存在することを示す場合と、RFIDタグが所定の位置に存在しないことを示す場合とで、互いに異なる所定の処理を行なうということを含む概念である。「所定の処理」とはどのような動作であっても良く、例えば、RFIDタグ1に関連した処理である。具体的には、RFIDタグ1が所定の位置に存在していること、あるいは存在していないことを示す情報を、外部通信部9等を通じて外部に出力する処理や、RFIDタグ1から送信された情報を外部通信部9等を通じて出力したりする処理や、RFIDタグ1に対して、所定の情報を送信する処理等である。例えば、判定結果が、複数のRFIDタグ1のうちの1以上のRFIDタグ1が所定の位置に配置されていることを示す場合に、処理部212は、この所定の位置に配置されているRFIDタグ1から受信処理部6が受信した識別情報等の情報を、外部通信部9等を通じて図示しない外部装置等に出力する。ここで述べる出力とは、ディスプレイへの表示、他の装置への送信、プリンタへの出力、メモリ等の記憶媒体への一時記憶を含む概念である。処理部212はディスプレイ等の出力デバイスを含むと考えても、考えなくても良い。また、判定結果が、RFIDタグ1のうちの1以上のRFIDタグ1が所定の位置に配置されていることを示す場合に、処理部212は、この所定の位置に配置されているRFIDタグ1に対して、送信処理部5を通じて所定の情報を送信する。この所定の情報は、例えば、RFIDタグ1に対する、タグ内の情報の読み出しを要求する要求信号や、タグ内の情報の書き換えや所定の情報の送信等の処理を指示するコマンド等である。また、この所定の情報には、処理部212が送信するコマンド等により動作するRFIDタグを指定するための情報として、受信処理部6が受信した識別情報等を含むようにしてもよい。また、処理部212の行なう処理は、図示しない受付部等を介してユーザから受け付けた指示に応じて、設定されるようにしても良い。処理部212は、通常、MPUやメモリ等から実現され得る。処理部212の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0255】
次に、本実施の形態の通信システムの動作について説明する。
【0256】
まず、RFIDタグ1の複数の周波数を有する一フレームからなるタグ応答信号を出力する動作については、上記実施の形態1と同様であるので、説明は省略する。
【0257】
次に、情報処理装置200の動作について、図27のフローチャートを用いて説明する。なお、図において、図13と同一符号は、同一または相当する処理ステップを示している。
【0258】
まず、距離測定処理が開始されると、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の周波数を上記複数の分割期間ごとに切り替えるようにPLL部5Aを制御する。そして、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S51)。R/W要求信号が送信されると続いてCW(連続搬送波)が上記複数の分割期間ごとに異なる周波数で送信される(S53、S55、S58)。これにより、各分割期間ごとに周波数が切り替えられたR/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))が送信される。
【0259】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の搬送周波数(周波数f1,f2,f3)の時間変化に応じて変化した搬送周波数(周波数f1,f2,f3)からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S53、S56、S59)、そして位相情報取得部8Aが位相情報取得処理を行う(S54、S57、S60)。ここで受信されるタグ応答信号は、R/W要求信号後のCW(連続搬送波)における搬送周波数の時間変化に応じて、搬送周波数が変化していることになる。
【0260】
すなわち、受信処理部6において、周波数変換部6Bは、タグ応答信号におけるプリアンブル部を認識し、上述の数4から6の数式に基づいて、このプリアンブル部における各分割期間の周波数に対するI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6Bから各周波数のI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、各周波数の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数に対応させてテーブルに記憶する。ここで、各分割期間の切り替えタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定される。
【0261】
受信処理部6および位相情報取得部8Aにおけるタグ応答信号のプレアンブル部における各分割期間の各周波数(周波数f1,f2,f3)に対する周波数変換および位相情報取得処理は、送信処理部5にて対応する周波数のCW(連続搬送波)が送信されている間に行なわれる。例えば、送信処理部5が第1の周波数f1にてCW(連続搬送波)の送信を開始すると(S52)、RFIDタグ1はタグ応答信号のプリアンブル部における最初の分割期間の信号を第1の周波数f1にて返信する。受信処理部6は該周波数f1のタグ応答信号を受信し(S53)、そして位相情報取得部8Aは周波数f1の位相情報を取得する(S54)。一定時間が経過すると、送信処理部5は第2の周波数f2にてCW(連続搬送波)の送信を開始する(S55)。RFIDタグ1はこの第2の周波数f2のCW(連続搬送波)を受信すると、タグ応答信号のプリアンブル部における次の分割期間の信号を第2の周波数f2にて送信する。受信処理部6は、該周波数f2のタグ応答信号を受信し(S56)、そして位相情報取得部8Aは、周波数f2の位相情報を取得する(S57)。一定時間が経過すると、次に、第3の周波数f3に対して送信処理部5、受信処理部6および位相情報取得部8Aは同じ動作を繰り返す(S58からS60)。
【0262】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S61)、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S62)。その後、上記テーブルに記憶された互いに異なる複数の周波数における位相情報に基づいて、距離算出部8Bが距離rを算出する(S63)。
【0263】
ここで、受信アンテナ4が2以上であれば、上記のステップS53、S54、S56、S57、S59、S60、S61、S63等の処理を、各受信アンテナごとに、順番に、あるいは並列に処理して、各受信アンテナについて、距離rを求めるようにする。
【0264】
位置測定部208は、ステップS63において算出した距離rに基づいて位置情報を取得する(S2701)。例えば、位置測定部8は、受信アンテナ4が一つであれば、送信アンテナ3からRFIDタグ1を経て受信アンテナ4に至る経路の距離が、2rとなる位置の情報を位置情報として取得する。また、位置測定部8は、受信アンテナ4が複数であれば、送信アンテナ3からRFIDタグ1を経て各受信アンテナ4に至る経路の距離が2r(ただし、rはそれぞれの受信アンテナ4が受信したタグ応答信号に基づいて算出された距離)となる条件を満たす位置の情報を位置情報として取得する。また、厳密な位置情報が不要であれば、各受信アンテナ4等を中心とした半径r(ただし、rはそれぞれの受信アンテナ4が受信したタグ応答信号に基づいて算出された距離)となる円や球の交点の位置情報をRFIDタグ1の位置情報として取得してもよい。ただし、受信アンテナ4と送信アンテナ3の位置情報はあらかじめ設定されているものとする。
【0265】
位置判定部210は、ステップS2701において取得した位置情報と、エリア情報記憶部211に格納されているエリア情報とを取得し、RFIDタグ1が、所定の位置に存在するか否かを判定する(S2702)。位置判定部210は、例えば、エリア情報が指定する領域内に、ステップS2701において取得した位置情報(座標情報)が存在する場合、RFIDタグ1が、所定の位置に存在すると判定し、エリア情報が指定する領域内に、ステップS2705において取得した位置情報が存在しない場合、RFIDタグ1が、所定の位置に存在しないと判定する。RFIDタグ1が、所定の位置に存在する場合、ステップS2703に進み、存在しない場合、ステップS2704に進む。
【0266】
処理部212は、第一の所定の処理を行なう(S2703)。例えば、図示しない受付部等を介して、ユーザから、RFIDタグ1の識別情報をリーダライタ200の外部に出力する指示を受け付けていた場合、処理部212は、所定の位置に存在すると判定したRFIDタグ1の識別情報を、受信したタグ応答信号に基づいて取得し、外部通信部9等を介して外部に出力する。また、処理部212が、RFIDタグ1に対して所定の要求信号、例えば、所定の情報を書き込む要求信号(例えばwriteコマンド)や、情報の変更を不可に設定する要求信号(例えばlockコマンド)や、RFIDタグ1を不活性化したり、動作不能にするための要求信号(例えばkillコマンド)等、を送信するよう設定されていた場合、処理部212は、通信制御部7に、これらの要求信号を、所定の位置に存在すると判定したRFIDタグ1の識別情報とともに送信させる指示を出す。通信制御部7は、この指示に基づいて、送信処理部5を制御して送信アンテナ3を介してRFIDタグ1の識別情報と要求信号とを出力させる。第一の所定の処理は、ここでは、何も処理を行わないことであってもよい。そして、処理を終了する。
【0267】
処理部212は、第二の所定の処理を行なう(S2704)。第二の所定の処理は、第一の所定の処理とは異なる処理とする。ただし、第二の所定の処理は、第一の所定の処理と異なる処理であれば、上述した第一の所定の処理の例として述べた処理と同様の処理であってもよい。そして、処理を終了する。
【0268】
また、図27のフローチャートにおいては、受信処理部6がステップS53、S56、S59等で受信するタグ応答信号は、一つのRFIDタグ1から送信されるタグ応答信号だけであってもよいし、複数のRFIDタグ1から送信される複数のタグ応答信号であってもよい。RFIDタグ1の数が予めわかっている場合、タグ応答信号を受信する処理(S53、S56、S59)等の後に、受信処理部6が所定の回数だけ信号を受信したか否かを判定するステップ等を設け、所定の回数だけ信号を受信していない場合、所定数に達するまで、ステップS53、S56、S59等の処理を繰り返すようにしてもよい。また、ステップS53、S56、S59等の処理の後に、送信処理部5が送信処理を行なった後、所定時間経過したか否かを判定するステップ等を設け、所定時間を経過していない場合、所定時間に達するまで、ステップS53、S56、S59等の処理を繰り返すようにしてもよい。
【0269】
なお、図27のフローチャートにおいて、RFIDタグ1が自発的に信号を送信するアクティブタイプのタグである場合、要求信号やCW(連続搬送波)を送信する処理等は省略してもよい。
【0270】
次に、通信システムの具体的な動作について説明する。
【0271】
ここでは、情報処理装置200は、座標が既知である受信アンテナ4を4つ以上備えているものとする。また、ここでは、各受信アンテナ4により受信したタグ応答信号により求めた距離rは、各受信アンテナ4の座標からの距離とみなすものとする。また、1つのRFIDタグ1についての位置情報が複数得られた場合、それらの位置情報間の中心となる位置情報等を、位置情報に設定するものとする。
【0272】
まず、各受信アンテナ4により受信したタグ応答信号に基づいて、位置測定部208が、それぞれ距離rを算出する処理については、上記実施の形態1と同様であるので、説明は省略する。
【0273】
次に、位置測定部208が、各受信アンテナ4から、距離r(ただし、ここでのrはそれぞれの受信アンテナ4が受信したタグ応答信号に基づいて算出された距離)となる条件を満たす位置の座標を求める。なお、このような条件を満たす位置の座標が複数得られた場合、ここでは、得られた複数の座標間の中心となる座標を求める。この座標を、RFIDタグ1の位置情報(ここでは、座標情報)とする。
【0274】
ここで、例えば、エリア情報記憶部11が格納しているエリア情報が、図28に示すように、直方体状の空間の領域60を指定する情報であり、このエリア情報が、x軸方向の最小値をx1、最大値をx2、y軸方向の最小値y1、最大値をy2、z軸方向の最小値をz1、最大値をz2に指定する情報であったとする。そして、位置情報取得部208Cが取得した位置情報が、(x3,y3,z3)であったとすると、次の3つの条件式を全て満たせば、RFIDタグ1が、エリア情報が指定する領域内に存在すると考えられる。
【数23】
【0275】
したがって、位置判定部210は、RFIDタグ1の位置情報が、上記の3つの条件式を満たす場合には、図28に示すようにRFIDタグ1が所定の位置に存在すると判定する。また、一つでも条件式を満たさない場合、RFIDタグ1が所定の位置に存在しないと判定する。
【0276】
ここでは、位置判定部210により、RFIDタグ1が、所定の位置に存在しないと判定された場合、所定の処理として、何も処理を行なわない、という処理を選択して、このRFIDタグ1についての処理は終了する。
【0277】
位置判定部210により、RFIDタグ1が、所定の位置に存在すると判定された場合、処理部212は、RFIDタグ1から取得した識別情報を用いて、予め設定されていた所定の動作や、ユーザから指示を受けた動作等を行なう。
【0278】
例えば、所定の位置に存在するRFIDタグ1に格納されている情報を所定の情報に書き換える指示を、図示しない受付部等を介して予めユーザから受け付けていた場合、処理部212は、上述した要求信号をRFIDタグ1に送信した処理と同様に、RFIDタグ1に格納されている情報を所定の情報に書き換える要求情報を送信する。ただし、ここでは、所定の位置にあると判定されたRFIDタグ1を要求情報の送信先に限定するための情報、具体的には、受信処理部6が受信したRFIDタグ1の識別情報を含む情報も要求情報とともに、あるいは要求情報内に含めて送信する。
【0279】
この要求情報を受信した各RFIDタグ1は、それぞれが図示しない記憶部等に格納している識別情報が、要求情報とともに送信された識別情報と一致するか否か判定し、一致する場合のみ、受信した要求情報により指示される処理を実行する。この場合には、識別情報が一致するRFIDタグ1は、要求情報により指示される処理を実行して、記憶部に記憶している情報の一部、または全部を、所定の情報に書き換える。
【0280】
また、所定の位置に存在するRFIDタグ1の識別情報を、図示しない他の装置に送信することが、予め設定されていた場合、処理部212は、受信処理部6が受信したRFIDタグ1の識別情報を、他の装置に対して、有線や無線の通信により送信する。
【0281】
なお、上記の具体例においては、図28に示すように、エリア情報が指定する領域が直方体状である場合について説明したが、本発明においては、上述したように領域の形状は問わない。例えば、エリア情報が指定する領域は、球形状であってもよいし、空間内の1点であってもよい。また、エリア情報が指定する領域は、空間内の直線や線分内の領域であってもよい。
【0282】
以下、エリア情報が指定する領域が球形状である場合の位置判定部210の処理の例について図28(b)に基づいて説明する。
【0283】
例えば、エリア情報記憶部211が格納しているエリア情報が、図29に示すように、球形状の空間の領域61を指定する情報であり、このエリア情報が、球の中心点の座標A(x1,y1,z1)と、球の半径rを指定する情報であったとする。そして、位置情報取得部208Cが取得した位置情報が、座標B(x2,y2,z2)であったとする。この場合、中心点の座標Aと位置情報である座標Bとの距離Lを求め、L≦rが成り立てば、RFIDタグ1は、エリア情報が示す領域内に存在すると考えられる。距離Lは、次の式で求められる。
【数24】
【0284】
したがって、位置判定部210は、距離Lをこの式を用いて算出し、L≦rであれば、RFIDタグ1が所定の位置に存在すると判定し、L>rであれば、RFIDタグ1が所定の位置に存在しないと判定する。
【0285】
また、本実施の形態においては、エリア情報が、2次元の領域や1次元の領域を指定する情報であってもよい。例えば、エリア情報が、2次元の領域を指定する情報、例えば領域のx軸の範囲とy軸の範囲等だけを指定する情報である場合には、RFIDタグ1の位置情報のうちの2次元の情報、例えばx座標の値とy座標の値とが、エリア情報の指定する範囲内に含まれるか否かを判定することで、RFIDタグ1が所定の位置に存在するか否かを判定することができる。
【0286】
同様に、エリア情報が1次元の領域を指定する情報、例えば領域のx軸の値の範囲だけを指定する情報である場合には、RFIDタグ1の位置情報のうちの1次元の情報、例えばx座標の値が、エリア情報の指定する範囲内に含まれるか否かを判定することで、RFIDタグ1が所定の位置に存在するか否かを判定することができる。
【0287】
図30は、この情報処理装置200を用いた荷物分別システム70の例を示す図である。この荷物分別システム70は、情報処理装置200がベルトコンベア71上を流れる複数の荷物72〜74に取り付けられたRFIDタグ1の情報を読み出して各荷物の配送先の情報を取得し、荷物を分別するための装置である分別装置77が、この取得した情報に基づいて、ベルトコンベア71上の荷物72〜74を、それぞれの配送先に対応したベルトコンベア71a、71b等に載せることで、荷物72〜74を配送先別に分別できるようにしたものである。分別装置77は、例えば、その上部に配置された荷物を、ベルトコンベア71aまたはベルトコンベア71bに移動させる機構を有しているものとする。
【0288】
ここでは、エリア情報記憶部211が格納しているエリア情報は、分別装置77上方に位置する領域79を設定している。情報処理装置200は、RFIDタグ1の位置情報を取得し、このRFIDタグ1が、領域79内に位置すると判定された場合、そのRFIDタグの識別情報を、有線または無線の通信により、分別装置77に送信する。分別装置77は、RFIDタグ1内の識別情報と、各荷物の送付先の情報とが対応付けられた情報を格納しているデータベース(図示せず)を有しており、RFIDタグ1の識別情報を情報処理装置200から受信すると、その識別情報に基づいて、データベースからRFIDタグ1が貼り付けられた荷物の送付先の情報を取得し、その送付先の情報に応じて、分別装置77上の荷物、ここでは、領域79内の荷物73を、ベルトコンベア71aまたはベルトコンベア71bのいずれかに載置する。なお、ベルトコンベア71、71a、71b等の構成や分別装置77が荷物を所定のベルトコンベア71a、71bに載置する構成等については、公知技術であるので説明は省略する。
【0289】
この荷物分別システム70においては、情報処理装置200は、分別装置77上の領域79内の荷物73に貼り付けられているRFIDタグ1のみを所定の位置に存在するRFIDタグ1であると判定して、このRFIDタグ1の識別情報だけを分別装置77に送信する。また、ベルトコンベア71上を移動する荷物74に貼り付けられているRFIDタグ1や、ベルトコンベア71a上の荷物72に貼り付けられているRFIDタグ1等の、現時点では、読み取りが不要なRFIDタグ、すなわち領域79内にないRFIDタグについては、タグ内の情報を読み取らないようにすることができる。このため、情報処理装置200から送信される識別情報が、分別装置77上の荷物に貼り付けられたRFIDタグ1の識別情報であるため、分別装置77は、この識別情報に基づいて分別装置77上の荷物についての配送先を判断することができ、荷物を配送先に応じて分別することができる。
【0290】
このようなシステムに、従来のRFIDタグを読み出す装置、いわゆるタグリーダ等を利用した場合、分別装置77の上方に、通信距離の短いタグリーダを配置することで、分別装置77の情報に移動してきた荷物のRFIDタグのみをタグリーダで読み出せるようにしたり、電波遮断構造等を設けて、通信可能領域を限定させたりする必要がある。しかし、通信距離の短いタグリーダを用いた場合、常にタグリーダを、分別装置77の近傍に設ける必要があるが、場所によっては、タグリーダの配置が困難であり、タグリーダが配置できない、という問題が生じる。さらに、現場の運用が変更になり、分別装置77の位置等を変更する場合や、荷物のRFIDタグを読み出す位置を変更する際には、その変更にあわせて、タグリーダを設ける位置も変更する必要があり、作業を容易に行うことができない。また、電波遮断構造等を用いた場合においても、電波遮断構造等の配置や設定を、分別装置77の配置の変更等にあわせて変更する必要があり、通信距離の短いタグリーダを用いた場合と同様の問題が生じる。
【0291】
これに対し、本実施の形態に係る情報処理装置200を用いれば、エリア情報を、分別装置77上の空間の領域に設定すればよいため、情報処理装置200自身の配置は自由であり、情報処理装置200の配置場所がない、という問題等が生じない。また、分別装置77の位置や、RFIDタグの読み出し位置等を変更する場合においても、エリア情報を変更して、エリア情報が指定する領域を変更すればよいため、取り扱いが非常に容易であり、システム運用上の利便性も高い。
【0292】
以上、本実施の形態によれば、RFIDタグ1の位置情報を取得し、この位置情報に基づいてRFIDタグ1が所定の位置に存在するか否かを判定するようにしたので、RFIDタグの存在する位置に応じて、異なる所定の動作を行なうことができる。例えば、情報処理装置は、所定の位置、例えば領域、に存在するRFIDタグの識別情報等の情報を選択的に取得し、その他の位置に存在するRFIDタグの情報を取得しないようにすることが可能となる。
【0293】
また、1フレーム内において複数の分割期間が設定されているとともに、各分割期間が異なる搬送周波数によって送信される、タグ応答信号を用いて、受信アンテナ4等と、RFIDタグ1との距離を算出し、位置情報を取得するようにしたので、位置測定部208は、一つのタグ応答信号における各分割期間における信号の状態を解析することによって、距離の算出を行なうことが可能となる。この結果、搬送周波数の異なる複数フレームのタグ応答信号に基づいて、距離を算出する必要がなく、RFIDタグ1が移動中であっても、複数フレームのタグ応答信号を受信する場合のように、タグ応答信号とタグ応答信号との送信間隔におけるRFIDタグ1の移動による位置検出の誤差を減少させることができる。この結果、位置測定部208が取得するRFIDタグ1の位置情報の精度を向上させることができる。また、一つの要求信号および一つの反射信号の送受信を行なうのみによって距離の算出を行なうことができ、距離の算出を行なうために必要とされる信号の送受信を低減することが可能となり、これにより、通信効率を落とさずに、距離算出を行なうことができる。
【0294】
また、エリア情報が指定する領域内に、RFIDタグ1の位置情報が存在するか否かを判定することで、RFIDタグ1が所定の位置に存在するか否かを判定するようにしたので、エリア情報を変更するだけで、RFIDタグの存在する位置を判定するために利用されるエリアを情報処理装置の移動等を行なうことなく容易に変更することができる。
【0295】
なお、本実施の形態では、上記実施の形態1における1フレーム内において周波数が異なるタグ応答情報を利用して情報処理装置200とRFIDタグ1までの距離rを算出する構成を用いて、RFIDタグ1の位置情報を取得するようにしたが、本発明においては、上記実施の形態1において説明した他の距離測定処理を行なう構成(例えば、図1、図4、図14、図17、図21等に示した構成等)等を用いてRFIDタグ1の位置情報を取得してもよいし、また、上記実施の形態1において説明した構成を、どのように組み合わせて、RFIDタグ1の位置情報を取得するようにしてもよい。例えば、上記実施の形態1において説明したMUSIC法を応用した距離測定処理であっても、同様に適用することが可能である。また、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行うことも可能である。
【0296】
また、上記の例においては、一以上の受信アンテナ4等の位置情報と、受信アンテナ4が受信したタグ応答情報から算出した距離情報とに基づいてRFIDタグ1の位置情報を特定しているが、本発明においては、このような構成に特定されるものではない。例えば、本実施の形態の位置測定部208を、図17を用いて説明したような方向算出部8Cを有する位置算出部8に、位置情報取得部208Cを設けた構成とし、受信アンテナ4等からみた際のRFIDタグ1の方向を検出することによって、この方向の情報と、距離情報と、受信アンテナ4等の位置情報等を適宜組み合わせてRFIDタグ1の位置情報を特定するようにしてもよい。
【0297】
なお、本実施の形態において、RFIDタグ1が所定の位置に存在するか否かを検出する装置と、RFIDタグ1の格納している情報を読み出したり、RFIDタグに対して情報を書き込んだり、要求情報を出力したりする装置とを、異なる装置としてもよい。かかることは他の実施の形態においても同様である。
【0298】
なお、上記実施の形態において、各構成要素は専用のハードウェアにより構成されてもよく、あるいは、ソフトウェアにより実現可能な構成要素については、プログラムを実行することによって実現されてもよい。例えば、ハードディスクや半導体メモリ等の記録媒体に記録されたソフトウェア・プログラムをCPU等のプログラム実行部が読み出して実行することによって、各構成要素が実現され得る。かかることは他の実施の形態においても同様である。なお、上記実施の形態における情報処理装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、コンピュータに、異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、前記判定結果に基づいて所定の処理を行う処理ステップと、を実行させるためのプログラムである。
【0299】
なお、上記プログラムにおいて、情報を送信する送信ステップや、情報を受信する受信ステップなどでは、ハードウェアによって行われる処理、例えば、送信ステップにおけるモデムやインターフェースカードなどで行われる処理(ハードウェアでしか行われない処理)は含まれない。かかることは他の実施の形態においても同様である。
【0300】
また、このプログラムは、サーバなどからダウンロードされることによって実行されてもよく、所定の記録媒体(例えば、CD−ROMなどの光ディスクや磁気ディスク、半導体メモリなど)に記録されたプログラムが読み出されることによって実行されてもよい。
【0301】
また、このプログラムを実行するコンピュータは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、あるいは分散処理を行ってもよい。かかることは他の実施の形態においても同様である。
【0302】
(実施の形態3)
本実施の形態に係る情報処理装置は、上述した情報処理装置において、反射体が、所定の領域内に存在するか否かを判定して、反射体が所定の位置に存在するか否かを判定する代わりに、反射体の位置と、情報処理装置の位置との相対的な位置関係が、所定の関係を満たすか否かにより、反射体が所定の位置に存在するか否かを判定するようにしたものである。
【0303】
以下、反射体が、RFIDタグである場合を例に挙げて説明する。
【0304】
図31は、本実施の形態に係るリーダライタ(情報処理装置)202を備えた通信システムの構成を示すブロック図である。RFIDタグ1の構成については、図26と同様であるので説明は省略する。
【0305】
リーダライタ202は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9、処理部212、自位置情報取得部410、および位置判定部411を具備する。送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9、および処理部212の構成については、図26と同様であるので説明は省略する。
【0306】
自位置情報取得部410は、自機器の位置に関する情報である自位置情報を取得する。ここで述べる自機器とは、具体的には、リーダライタ202のことである。自位置情報とは、RFIDタグではなくリーダライタ202の位置に関する情報であることを除けば、RFIDタグの位置情報と同様である。受信アンテナ4がリーダライタ202本体から離れて配置されている場合、この受信アンテナ4の一つの位置を自位置情報としてもよい。自位置情報取得部410は、リーダライタ202のどの部分の位置に関する情報を自位置情報としてもよい。自位置情報を、位置情報を取得する処理を行う位置に関する情報としてもよい。また、自位置情報取得部410は、どのように自位置情報を取得してもよい。例えば、あらかじめ設定されたリーダライタ202の座標情報が、自位置情報として、図示しないメモリ等の記憶媒体に記憶されていてもよい。また、必要に応じて、他の機器等から送信される自位置情報を、図示しない受信部等を介して受信して取得してもよい。また、自位置情報が緯度や経度等の絶対座標である場合、リーダライタ202や受信アンテナ4が絶対座標を取得するための手段としてGPS(global positioning system)受信機(図示せず)を備えるようにし、このGPS受信機が取得した絶対座標の情報をリーダライタ202および受信アンテナ4のそれぞれの自位置情報としてよい。また、PHS等の位置を測定するシステムの原理を利用してもよい。また、リーダライタ202にRFIDタグ1と同様のRFIDタグを設けておき、このRFIDタグの位置情報を、位置測定部208と同様の処理によって取得するようにし、この取得した位置情報をリーダライタ202の位置情報としてもよい。なお、リーダライタ202本体と同じ位置にない受信アンテナ4の位置の情報については、RFIDタグ1の位置情報を取得する際等に必要となるため、予め設定しておくか、何らかの手段により取得しておく必要がある。例えば受信アンテナ4の位置情報については、予め位置情報が既知である位置決め用のRFIDタグを1以上設けておき、このRFIDタグの位置を、受信アンテナ4を用いて検出することにより受信アンテナ4の位置を求めるようにしてもよい。また、GPS受信機等を受信アンテナ4に設けて、このGPS受信機を用いて受信アンテナ4の位置の情報を取得してもよい。自位置情報取得部410は、通常、MPUやメモリ等から実現され得る。自位置情報取得部410の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0307】
位置判定部411は、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定する。具体的には、RFIDタグ1の位置情報と、リーダライタ202(または受信アンテナ4)の自位置情報とが、所定の関係を満たすか否かを判定することにより、RFIDタグ1が、所定の位置に存在するか否かを判定する。ここで述べる「所定の関係」とは、リーダライタ202(または受信アンテナ4)の位置と、RFIDタグ1位置との位置関係を特定できる関係であれば、どのような関係であってもよい。位置判定部411は、例えば、リーダライタ202の位置と、RFIDタグ1の位置との間の距離が、所定の範囲内にあれば、所定の関係を満たすと判断してもよい。また、リーダライタ202に対して、RFIDタグ1の位置する方向が、所定の方向であれば、所定の関係を満たすと判断してもよい。あるいは、リーダライタ202とRFIDタグ1とのx、y、z座標のそれぞれの値の差が、全て所定の範囲内にあれば、所定の関係を満たすと判定してもよい。RFIDタグ1の位置情報と、情報処理装置202の自位置情報とが、所定の関係を満たすか否かの判定は、例えば、図示しないメモリ等に格納されている判定条件を設定する情報である判定情報に基づいて行なわれる。この判定情報は、位置判定部411が有していてもよい。位置判定部411は、通常、MPUやメモリ等から実現され得る。位置判定部411の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0308】
次に、リーダライタ202の動作について、図32のフローチャートを用いて説明する。なお、図32において、図27と同一符号は、同一または相当する処理ステップを示しており、その説明は省略する。
【0309】
(ステップS3201)自位置情報取得部410は、自位置情報を取得する。自位置情報取得部410は、例えば予めメモリ等に格納されている自位置情報を取得してもよい。また、予めリーダライタ202にRFIDタグを設けておき、このRFIDタグから送信されるタグ応答情報に基づいて、ステップS51〜ステップS63およびステップS2701の処理と同様の処理等により当該RFIDタグの位置情報を取得し、この位置情報を自位置情報としてもよい。なお、ステップS3201の処理は、ステップS51の前の処理としても実行してもよい。
【0310】
(ステップS3202)位置判定部411は、ステップS3201において取得した自位置情報と、ステップS2701において取得したRFIDタグ1の位置情報とが所定の関係を満たすか否かを判定する。所定の関係を満たす場合、ステップS2703に進み、所定の関係を満たさない場合、ステップS2704に戻る。
【0311】
なお、図32のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
【0312】
次に具体例について説明する。図33は、駅の自動改札システムとして、本実施の形態のリーダライタ202を用いた場合の例を示す概略図である。図43に示すように、リーダライタ202は、駅の改札口に設置されている。ここで、リーダライタ202の自位置情報は、予め(x1,y1,z1)に設定されており、位置判定部411が判定の条件として利用する判定情報としては、リーダライタ202から、改札口の最も離れた位置までの距離の値Rが設定されているものとする。
【0313】
まず、リーダライタ202は定期的に、RFIDタグ1の情報を読み出すためのコマンド(R/W要求信号)を送信しているとする。
【0314】
いま、RFIDタグ1を内蔵した定期券を持ったユーザ2001aが、改札口から駅構内に入ろうとした場合(入場方向)、ユーザの定期券内のRFIDタグ1が、RFIDタグ1内に格納している識別情報等を応答信号(反射信号)として送信する。リーダライタ202が受信アンテナ4を介してこのRFIDタグ1からの信号を受信すると、位置測定部208がRFIDタグ1の位置情報である座標情報を取得する。この座標情報は、(x2,y2,z2)であったとする。また、自位置情報取得部410はメモリ等に格納されている自位置情報である座標情報(x1,y1,z1)を取得する。
【0315】
次に、位置判定部411は、自位置情報とRFIDタグ1の位置情報とが、判定情報により設定される所定の条件を満たすか否かを判定する。具体的には、自位置情報が示す位置とRFIDタグ1の位置情報が示す位置との距離が、R以下であるか否かを判定する。すなわち、以下の式を満たすか否かを判定する。
【数25】
【0316】
上記の式を満たす場合、RFIDタグ1が改札エリア内(または改札通路内)に存在すると判断して、リーダライタ202がRFIDタグ1内の情報を読み取り、ユーザ2001aが改札を通過してよいか否かを判定する。すなわち、改札口を含む領域2000内にRFIDタグ1があれば、そのRFIDタグ1の情報は読み出される。
【0317】
また、RFIDタグ1を持つユーザ2001bが、改札口から離れていた場合、リーダライタ202は、同様に、RFIDタグ1の位置情報を取得するが、この位置情報は、上述した式を満たさず、自位置情報と所定の関係を満たさないと判断され、このRFIDタグ1の情報は読み出されない。すなわち、リーダライタ202は、改札口から離れているユーザ2001bの定期券内のRFIDタグ1については、情報を読み取らない。
【0318】
以上のように、本実施の形態によれば、RFIDタグ1の位置情報とリーダライタ202の自位置情報とを取得し、この位置情報と自位置情報とが所定の関係を満たすか否かを判定し、判定結果を出力するようにし、この判定結果を利用して、RFIDタグ1に対して所定の動作を行うか否かを判定するようにした。この結果、RFIDタグ1と、リーダライタ202との相対的な位置関係に基づいて、リーダライタ202の動作を決定することができる。例えば、情報処理装置は、所定の相対的な位置関係にあるRFIDタグの識別情報等の情報を選択的に取得することができる。
【0319】
また、所定の関係を満たすかないかの判断の条件等を変更するだけで、リーダライタ202に所定の動作を実行させるための、リーダライタ202の位置に対するRFIDタグ1が配置される相対的なエリアを情報処理装置の移動等を行なうことなく容易に変更することができる。
【0320】
また、上記のような自動改札システムにおいて、上記実施の形態2において説明した情報処理装置200を適用するようにしてもよい。この場合、領域2000をエリア情報により設定するようにすればよい。
【0321】
なお、入場出場(乗車降車)兼用タイプの自動改札機(自動改札通路)システムに適用した場合、リーダライタ202が処理部212等において、RFIDタグ1の位置情報とリーダライタ202の自位置情報との位置関係の経時的変化から、RFIDタグ1がどの方向から改札口(改札通路)に接近してきているのか否かを判断するようにし、RFIDタグ1を所持した乗降客が、どの方向から改札口(改札通路)へ接近(あるいは改札口を含む領域2000内への進入)するかに応じて、自動改札システムの処理方向(具体的には通過許可方向)を、入場方向または出場方向に、動的に切替えるようにしても良い。さらに、自動改札システムが複数台設置(例えば5台)されている場合、リーダライタ202が処理部212等において、改札口への方向別の乗降客の接近人数(接近するRFIDタグの数)あるいは人数比を算出し、算出した方向別の乗降客の接近人数(接近するRFIDタグの数)あるいは人数比に応じて、複数台の自働改札システムの処理方向(通過許可方向)の割合を、例えば2対3や3対2に、動的に切替えれば良い。例えば、リーダライタ202の判断の結果、改札口(改札通路)に対して、駅構内に入ろうとする客と、駅構内から出ようとする客との比が、1対4であった場合、5台の自動改札システムのうち、1台だけを駅構内に入る方向にのみ通過できるように通過許可方向を制御し、残りの4台を駅構内から出る方向にのみ通過できるように通過許可方向を制御する。自動改札システムの通過許可方向の制御は、例えば、通過を許可しない方向からの通過を不許可とするためのゲートをおろしたり、通過ができない旨の表示を行なったりすることで行なわれる。
【0322】
従来は、複数の自動改札システムを備えていても、自動改札システムに向かう詳細な人数に基づいて、自動改札システムの処理方向(通過許可方向)が動的に制御されていなかった。このため、改札口を通って駅構内に入る客と出る客との構成比が変化しても、通過許可方向が駅構内に入る方向である自動改札システムと、通過許可方向が駅構内から出る方向である自動改札システムとの構成比が、動的に制御されていなかった。この結果、通過方向別の客の構成比と、通過許可方向別の自動改札システムの構成比とが、大きく異なる場合が発生し、改札口が混雑してしまうことが多かった。しかしながら、上記のような構成とすることで、自動改札システムに向かう客の方向と、人数とに基づいて、動的に複数の自動改札システムの通過許可方向を制御して、通過方向別の客の構成比と、通過許可方向別の自動改札システムの構成比とが、ほぼ同じ比率となるようにすることができ、改札口の混雑を解消することが可能である。
【0323】
また、従来の、RFIDタグを内蔵した乗車券を用いた非接触のカードタッチの判定により改札を行なうシステムにおいては、乗車客と降車客とが同時にカードタッチして自動改札機(自動改札通路)に進入した場合、どちらの客を優先して通過させればよいか判定できず、客同士が改札通路内で立ち往生することがあったが、本件を適用すれば、改札口の混雑が解消できる。
【0324】
なお、上記のような自動改札システムに用いる情報処理装置として、リーダライタ202の代わりに、上記実施の形態2において説明した情報処理装置200等を用いるようにしてもよい。この場合、例えば、改札口の付近に複数のエリアを設定し、情報処理装置200の動作部206等により、RFIDタグ1が経時にどのエリアからどのエリアに移動したかを判断することで、客がどの方向から、改札口に接近しているかを判断するようにすればよい。
【0325】
なお、ここで、1つの受信アンテナ4の位置を、予め位置情報が設定されているRFIDタグである位置決め用のRFIDタグを用いて求める処理について説明する。ここでは、例として位置決め用のパッシブ型のRFIDタグの位置情報と、このRFIDタグから送信される信号に基づいて取得されたRFIDタグから受信アンテナ4までの距離とから、受信アンテナ4の座標を取得する処理について説明する。
【0326】
図34(a)、および図34(b)は、受信アンテナ4の位置を検出する処理を説明するための概略図である。ここでは、位置検出用のRFIDタグとして、位置情報が予め設定されているアクティブ型の2つのRFIDタグ1aおよびRFID1bを用いた場合について説明する。RFIDタグ1aの位置情報は、座標A(xa,ya,za)とし、RFID1bの位置情報は、座標B(xb、yb、zb)とする。なお、リーダライタ202の受信アンテナ4以外の構成についてはここでは省略する。また、ここでは、受信アンテナ4と送信アンテナとを兼用しているものとする。
【0327】
まず、図44(a)に示すように、上記実施の形態2等と同様の処理により、受信アンテナ4とRFIDタグ1aおよびRFIDタグ1bとの距離をそれぞれ求める。すなわち、送信アンテナ(ここでは受信アンテナ4を利用)から要求信号を送信し、これに対応してRFIDタグ1aから送信される1フレームのタグ応答信号とRFIDタグ1bから送信される1フレームのタグ応答信号とを1つの受信アンテナ4において受信する。そして、これらのタグ応答信号に基づいて、上記実施の形態2において説明した処理と同様の処理により、受信アンテナ4とRFIDタグ1aとの距離Raを求める。同様にして、受信アンテナ4とRFIDタグ1bとの距離Rbを求める。
【0328】
次に、RFIDタグ1aの座標A(xa,ya,za)と、RFIDタグ1bの座標B(xb、yb、zb)とに基づいて、RFIDタグ1aからの距離が距離Raで、RFIDタグ1bからの距離が距離Rbである位置の座標Cを求める。この座標C(xc、yc、zc)が、アンテナ201の座標となる。この座標Cは、図34(b)に示すように、座標Aを中心とした距離Raの円の円周と、座標Bを中心とした距離Rbの円の円周との交点の座標で表すことができる。
【0329】
なお、2つのRFIDタグを用いた場合、座標Aからの距離が距離Raであって、座標Bからの距離が距離Rbである座標は、通常2つ算出される。このため、この交点の座標のうちのいずれか一方は、リーダライタ202の配置されている部屋等の条件等に基づいて除外する。例えば、得られた座標の一方が、リーダライタ202が配置されている部屋の外の座標となる場合等には、この座標はリーダライタ202の位置情報である座標Cではあり得ないことから、除外すればよい。
【0330】
また、ここでは、位置情報が予め設定されている2つのRFIDタグを用いた場合について説明したが、本発明においては、位置情報が予め設定されている3以上のRFIDタグを用いて受信アンテナ4の位置を算出してもよい。3以上のRFIDタグを用いることで、受信アンテナ4の位置情報を取得する精度を向上させることができる。
【0331】
また、各RFIDタグ1a、1bの位置情報は、各RFIDタグ1a、1bから送信されてもよいし、各RFIDタグ1a、1bの識別情報と対応付けられた状態で、情報処理装置内の記憶媒体等に予め格納されているようにして、各RFIDタグから識別情報を受信した場合に、受信した識別情報に対応する位置情報を記憶媒体から取得してもよい。
【0332】
(実施の形態4)
本実施の形態に係る情報処理装置は、上記実施の形態に係る情報処理装置において、通信可能なエリア内に障害物が存在する場合においても、反射体の位置情報を正確に取得できるようにしたものである。
【0333】
以下、反射体がRFIDタグである場合を例に挙げて説明する。
【0334】
図35は、本実施の形態に係るリーダライタ(情報処理装置)203を備えた通信システムの構成を示すブロック図である。RFIDタグ1の構成については、図26と同様であるので説明は省略する。
【0335】
リーダライタ203は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9,位置判定部210、エリア情報記憶部211、処理部212、障害情報格納部451、および補正部452を具備する。送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9,位置判定部210、エリア情報記憶部211、および処理部212の構成については、図26と同様であるので説明は省略する。
【0336】
障害情報格納部451は、RFIDタグ1とリーダライタ203の受信アンテナ4との間の通信路に配置されている障害物の情報である障害物情報が格納可能である。障害情報格納部451は、具体的には、通信が可能なエリア内に配置されている障害物の情報を格納している。障害物とは、ここでは、電波の通信を妨げるものであり、具体的には、電波を反射させるものや、電波を吸収したり増幅したりするもの、不要な電波を出力するもの等である。たとえば、部屋の壁や天井、床なども、障害物と考えてもよい。障害物情報は、例えば、障害物の座標等の位置や、形状、大きさ、反射率、電波の吸収率等の障害物が通信に影響を与える要素についての情報を格納している。障害物情報は、例えば、図示しない受付部を介して障害情報格納部451に蓄積される。障害情報格納部451は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。
【0337】
補正部452は、障害情報格納部451が格納している障害物情報に基づいて位置測定部208が取得した位置情報を補正する。具体的には、補正部452は、補正が必要であるか否かを判定し、必要であると考えられる場合には、補正を行ない、不要であると考えられる場合には、補正を行なわない。補正部452は、例えば、RFIDタグと受信処理部6との通信路、具体的には、位置測定部208が取得した位置情報が示す位置と受信アンテナ4の位置とを結んだ経路上に障害物が存在する場合に、補正が必要であると判定する。あるいは、補正部452は、例えば、通信路の障害物により受けたと推定される変更内容を打ち消すような補正を行なう。例えば、補正部452は、位置測定部208が取得したRFIDタグ1の位置を示す位置情報が示す位置と受信アンテナ4の位置とを結んだ経路上に、電波を反射する障害物があると判定した場合、障害物上の反射面に対称に、位置測定部208が取得した位置情報を移動させて得られる位置情報を、補正したRFIDタグ1の位置情報として出力する。補正部452は、通常、MPUやメモリ等から実現され得る。補正部452の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0338】
次に、リーダライタ203の動作について、図36のフローチャートを用いて説明する。なお、図36において、図27と同一符号は、同一または相当する処理ステップを示しており、その説明は省略する。
【0339】
(ステップS3601)補正部452は、障害情報格納部451から障害物情報を取得し、ステップS2701において、取得した位置情報について、補正が必要か否かを判定する。例えば、位置測定部208が取得した位置情報が示す位置と受信アンテナ4の位置とを結んだ経路上に障害物が存在する場合に、補正部452は、補正が必要であると判定する。例えば、受信アンテナ4からみて、本来、電波が通過しない障害物内や、障害物を越えた位置にRFIDタグ1が存在することを、位置情報が示しているということは、電波が障害物の表面等で反射されて、当該位置情報が示す位置の方向から受信アンテナ4に入射していると考えられるからである。例えば、位置測定部208が取得した位置情報が示す位置と受信アンテナ4の位置とを結んだ経路は、それぞれの座標情報に基づいて算出可能である。また、経路上に障害物が存在するか否かは、障害物情報から、各障害物の座標情報等を取得し、補正部452が算出した上記の経路上にいずれかの障害物が存在するか否かを判定することで検出可能である。補正が必要と判定された場合、ステップS3602へ進み、補正が不要である場合、ステップS32702に進む。
【0340】
(ステップS3602)補正部452は、障害物情報に基づいて、ステップS2701において取得した位置情報を補正する。例えば、経路上に存在する障害物の表面で、電波が反射されたと仮定した場合の位置情報を算出する。そして、ステップS2702に進む。
【0341】
なお、図36のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
【0342】
次に、具体例について説明する。リーダライタ203が、RFIDタグ1から電波を受け付け、RFIDタグ1から受信した信号に基づいて位置情報を取得する処理については、上記実施の形態2と同様であるので、説明は省略する。
【0343】
図37は本実施の形態に係るリーダライタ203によるRFIDタグの位置情報の補正の処理を説明するための図である。例えば、図37に示すように、リーダライタ203の受信アンテナ4とRFIDタグ1との間に、障害物2300と、障害物である床2401が設けられていたとする。ここでは、障害物2300と床2401の配置等を示す座標情報等の情報や、障害物2300と床2401の電波を反射する性質の有無等の情報が、障害物情報として、予め、障害情報格納部451に格納されているものとする。また、現在のRFIDタグ1の位置は、エリア情報記憶部211が格納しているエリア情報が指定する領域2310内に存在しているものとする。
【0344】
ここで、RFIDタグ1から受信した信号に基づいて取得した位置情報が位置A(x1,y1,z1)であったとし、障害情報から位置情報が指定する位置Aが床内に位置していたとする。
【0345】
この場合、補正部452は、障害情報に基づいて、位置情報が指定する位置Aと受信アンテナ4の位置とを結んだ経路上に電波を反射する床2401が存在することを認識し、補正が必要であることを判定する。
【0346】
そして、補正部452は、床2401の表面に対して、点Aに対称な位置の座標を算出する。例えば床に対する高さ方向がy軸方向であり、床の表面がy=0であったとすると、算出される位置の座標は、(x1,−y1,z1)となる。そしてこの座標の値を補正したRFIDタグ1の位置情報として、位置判定部210に出力する。
【0347】
位置判定部210においては、エリア情報と補正した位置情報とに基づいて、RFIDタグ1が所定の位置に存在すると判定する。その他の処理については、上記実施の形態1と同様であるので省略する。
【0348】
以上、本実施の形態によれば、位置測定部208が取得した位置情報を障害物の情報により補正するようにしたので、RFIDタグの位置検出の精度を向上させて、RFIDタグのより正確な位置に応じて、異なる行動を行なうことが可能となる。
【0349】
なお、本実施の形態において説明した障害情報に基づいてRFIDタグの位置情報を補正する構成を、上記実施の形態3に係る情報処理装置に適用しても良い。
【0350】
また、本実施の形態においては、RFIDタグと受信処理部6との通信路、具体的には、位置測定部208が取得した位置情報が示す位置とアンテナ201の位置とを結んだ経路上に障害物が存在する場合に、補正が必要であると判定し、補正を行なうようにしたが、必要に応じて、補正を行なわずに、誤検出が行なわれたことを示すエラー出力等を行なったり、このような位置情報を使用しないようにしてもよい。
【0351】
また、本実施の形態において、通信路上に障害物があるか否かを判断することで、補正の要否を判断したが、本発明においては、障害情報として、予めRFIDタグが存在し得ない領域を設定する情報を用意しておき、検出されたRFIDタグの位置が、本来存在し得ない領域内に位置するか否かを判断して、本来存在し得ない位置に位置すると判断された場合に、補正が必要であると判断するようにしてもよい。
【0352】
なお、上記各実施の形態において、各処理(各機能)は、単一の装置(システム)によって集中処理されることによって実現されてもよく、あるいは、複数の装置によって分散処理されることによって実現されてもよい。
【0353】
また、上記各実施の形態において、一の装置に存在する2以上の通信手段(送信部など)は、物理的に一の媒体で実現されても良いことは言うまでもない。
【0354】
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【0355】
また、本発明は請求項に示した範囲で種々の変更が可能である。すなわち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【0356】
本発明を詳細にまた特定の実施態様を参照して説明したが、本発明の精神と範囲を逸脱することなく様々な変更や修正を加えることができることは当業者にとって明らかである。
【産業上の利用可能性】
【0357】
本発明に係る情報処理装置およびこれを備えた通信システム等は、例えば上述した流通される物品の検査・確認などを行うシステム、店舗などにおいて、商品の盗難監視などを行うシステム、駅や映画館などの改札が必要となる場所に設置される改札システム、キーレスエントリシステムなどの用途に適用可能である。
【図面の簡単な説明】
【0358】
【図1】本実施形態に係るRFIDタグを用いた通信システムが備えるリーダライタにおいて、RFIDタグと当該リーダライタとの距離を測定するための構成の概略を示すブロック図である。
【図2】上記RFIDタグを用いた通信システムの概略構成を示すブロック図である。
【図3(a)】リーダライタとRFIDタグとの間でR/W要求信号およびタグ応答信号の送受信が行われる状態を示す図である。
【図3(b)】リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。
【図3(c)】RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【図4】位相の検出を行うことを可能とする受信処理部の具体的な構成を含むリーダライタの概略構成を示すブロック図である。
【図5】距離測定処理の流れを示すフローチャートである。
【図6】多周波を用いた距離測定処理の流れを示すフローチャートである。
【図7】周波数選択処理、および距離算出処理の流れを示すフローチャートである。
【図8】周波数選択処理の一例を模式的に示す図である。
【図9(a)】リーダライタとRFIDタグとの通信においてマルチパスが生じている状態を示す図である。
【図9(b)】距離に対するMUSIC評価関数の変化を示すグラフである。
【図9(c)】到来方向推定処理を説明するための図である。
【図l0】MUSIC法を応用した距離測定処理の流れの前半を示すフローチャートである。
【図ll】MUSIC法を応用した距離測定処理の流れの後半を示すフローチャートである。
【図12(a)】1フレーム内での周波数を切り替える場合における、リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。
【図12(b)】1フレーム内での周波数を切り替える場合における、RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【図13】1フレーム内での周波数切り替えを伴う距離測定処理の流れを示すフローチャートである。
【図14】各RFIDタグとその距離とを結びつけて認識することを可能とするリーダライタの概略構成を示すブロック図である。
【図15】各RFIDタグを識別した距離測定処理の流れを示すフローチャートである。
【図l6】RFIDタグの存在位置方向の推定処理を模式的に示す図である。
【図17】方向算出を行う場合のリーダライタの概略構成を示すブロック図である。
【図18】位置推定処理の流れの前半を示すフローチャートである。
【図19】位置推定処理の流れの後半を示すフローチャートである。
【図20(a)】1フレーム内での複数周波数を同時送信する場合における、リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。
【図20(b)】1フレーム内での複数周波数を同時送信する場合における、RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【図21】1フレーム内での複数周波数を同時送信する場合における、リーダライタの概略構成を示すブロック図である。
【図22】流通される物品の検査・確認などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示す図である。
【図23(a)】商品や在庫物品などの盗難監視などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示す図である。
【図23(b)】窓やドアなどにRFIDタグlを取り付け、このRFIDタグ1の位置を監視することによって、該窓やドアが開けられたことを検知する防犯システム適用例を示す図である。
【図24】例えば駅や映画館などの改札が必要となる場所に本RFIDタグ通信システムを適用した場合の例を示す図である。
【図25】自動車などのキーレスエントリシステムに、本RFIDタグを用いた通信システムを適用した場合の例を示す図である。
【図26】本発明の実施の形態2に係るRFIDタグを用いた通信システムが備えるリーダライタの構成を示すブロック図である。
【図27】同リーダライタの動作を説明するためのフローチャートである。
【図28】同リーダライタの位置判定の動作を説明するための図である。
【図29】同リーダライタの位置判定の動作を説明するための図である。
【図30】同具体例を説明するための図である。
【図31】本発明の実施の形態3に係るRFIDタグを用いた通信システムが備えるリーダライタの構成を示すブロック図である。
【図32】同リーダライタの動作を説明するためのフローチャートである。
【図33】同具体例を説明するための図である。
【図34】(a)同受信アンテナと、位置情報が既知であるタグとの距離を測定する処理を説明するための図、(b)同受信アンテナの位置を検出する処理を説明するための図である。
【図35】本発明の実施の形態4に係るRFIDタグを用いた通信システムが備えるリーダライタの構成を示すブロック図である。
【図36】同リーダライタの動作を説明するためのフローチャートである。
【図37】同具体例を説明するための図である。
【図38】従来技術のRF通信システムの構成を示すブロック図である。
【図39】従来技術のRFIDタグと無線通信を行なう通信装置の構成を示すブロック図である。
【符号の説明】
【0359】
1、1a、1b RFIDタグ
2 リーダライタ
3 送信アンテナ
4 受信アンテナ
4A 第1アンテナ素子
4B 第2アンテナ素子
5 送信処理部
5A PLL部
5B 変調部
5C 電力増幅部
6 受信処理部
6A・6A1・6A2 増幅部
6B 周波数変換部
6B1・6B2 ミキサ
6B3 90°移相部
6C プリアンブル抽出部
6D セレクタ
7 通信制御部
7A 周波数制御部
7B 送信制御部
7C 受信制御部
8、208 位置測定部
8A 位相情報取得部
8B 距離算出部
8C 方向算出部
9 外部通信部
10 エリア判定部
11、211 エリア情報記憶部
70 荷物分別システム
77 分別装置
200、202 情報処理装置(リーダライタ)
208C 位置情報取得部
210、411 位置判定部
212 処理部
410 自位置情報取得部
451 障害情報格納部
452 補正部
【技術分野】
【0001】
本発明は、電波を介して反射体と無線通信を行う情報処理装置および情報処理方法、反射体、ならびに通信システムに関するものである。
【背景技術】
【0002】
近年、RFID(Radio Frequency Identification)タグ(無線タグ)の利用が普及しつつある。RFIDタグは、バーコードを代替するものとして特に物流の分野において期待を集めており、近い将来において広く普及することが予想されている。
【0003】
現在、RFIDタグ向けの周波数帯域としては、13.56MHz帯、800MHz〜950MHz前後のいわゆるUHF帯、2.45GHz帯などがある。このうち、UHF帯や2.45GHz帯の電波(Radio Wave)は、13.56MHz帯の電波に比べて通信距離を伸長し易いという利点がある。また、UHF帯の電波は、2.4GHz帯の電波に比べて、物陰に回り込み易いという利点がある。このため、UHF帯の電波を利用するRFIDタグおよびリーダライタの開発が進められている。
【0004】
UHF帯の電波を利用する場合、現在主流である13.56MHz帯の電波を利用する場合に比べて、リーダライタが無線タグと通信可能な距離を数10cm程度から数m程度に伸長することができる。よって、UHF帯の電波を利用すれば、リーダライタが無線タグと通信可能な空間領域である通信エリアを比較的広範囲に拡大することが可能となる。
【0005】
このようなRFIDタグの位置を推定するために、RFIDタグと通信を行う通信局との距離を測定する技術が提案されている。1つの例としては、RFIDタグとしてのアクティブICタグからの信号を多数の基地局が受信し、それぞれの基地局での該アクティブICタグからの受信信号に基づいて、距離および位置を推定する技術がある。この例では、各基地局と該アクティブICタグとの距離は、アクティブICタグからの受信信号の強度に基づいて推定される。すなわち、受信信号の強度と距離との間に相関があることを利用して距離が推定される。また、位置が既知のアクセスポイントを設け、アクティブICタグと該アクセスポイントとから同時に信号を送出させることによって、受信タイミングの遅延量を測定することによってアクティブICタグの距離を推定する手法も採用されている。
【0006】
また、特許文献1には、図38に示すように、RF通信システムにおいて、リーダとしてのインターロゲータ36からRFタグ38に対して、互いに異なる周波数の信号40・42を送信し、この2つの信号を重ね合わせた合成波のヌル・ポイントの数をカウントすることによって、インターロゲータ36とRFタグ38との間の距離を推定する技術が開示されている。
【0007】
また、特許文献2には、図39に示すように、RFIDタグと無線通信を行う通信装置138において、RFIDタグからの反射信号をアンテナ140を介して受信し、サーキュレータ92から入力された受信信号と、サーキュレータ90及びスプリッタ98から入力された搬送信号とをミキサ100,102にて掛け合わせる事によりI信号およびQ信号を生成し、このI信号およびQ信号に基づいてRFIDタグからの反射信号の振幅および位相を算出する技術が開示されている。また、搬送信号とRFIDタグの反射信号との位相差を利用して、RFIDタグまでの距離を求める事が開示されている。
【0008】
一方、このようなRFIDタグまでの距離を計測する技術を利用して、RFIDタグが、所定の領域内に存在するか否かを検出する技術が提案されている。
【0009】
例えば、特許文献3には、模型駒のタグを読み出す読み出し装置を、区画搭載面毎に配置して、区画搭載面に配置された模型駒のタグの情報を読み出すものが開示されている。
【0010】
また、特許文献4には、犬の首輪に設けられたGPS等を有する位置検出装置から得られる情報が、所定の迷い犬検出領域外に位置することを示すか否かに基づいて、犬が迷い犬となった状態であるか否かを判断する技術が開示されている。
【0011】
また、特許文献5には、複数の移動ローカライザの全てが内部警戒面の内側に入った場合に、自動的に、在宅警戒処理が実行されるようにした技術が開示されている。
【特許文献1】特表2004−507714号公報(第2図等)
【特許文献2】欧州特許出願公開第1239634号明細書(第3図等)
【特許文献3】実用新案登録第3069344号公報(第1頁、第1図等)
【特許文献4】米国特許出願公開第2004/0189477号明細書(第1頁、第1図等)
【特許文献5】米国特許出願公開第2005/0073404号明細書(第1頁、第1図等)
【発明の開示】
【発明が解決しようとする課題】
【0012】
UHF帯の電波を利用したRFID通信システムを用いる場合、長距離通信が可能となることによって、処理を行う必要のない遠方のRFIDタグに対しても通信が可能となり、このようなRFIDタグに対する不要な処理が発生するという問題や、マルチパスの影響を受けることによる応答性能の劣化などの問題が生じる。これらの問題を解決するために、リーダライタが各RFIDタグまでの距離を求めることによって、データ部の解析/書き換え等の処理を行うべき対象となるRFIDタグを分別する手法が考えられる。ここで、リーダライタとRFIDタグとの距離を求める手法として、上記した従来技術を用いた場合には、次のような問題がある。
【0013】
まず、RFIDタグからの信号の受信強度や、遅延時間に基づいて距離を推定する場合、距離の測定精度が低いという問題がある。このような方式で距離を推定する場合の精度は、実際にはおよそ1m〜数m程度となる。例えば物流管理システムなどに適用する場合には、この程度の精度では実用的ではなく、より高い距離測定精度が必要となる。
【0014】
また、特許文献1に開示されている技術では、互いに異なる周波数の2つの信号を重ね合わせた合成波のヌル・ポイントの数をカウントすることによって距離を推定しているので、距離の精度が非常に悪いという問題がある。より詳細には、特許文献1の段落[0025]に記載されている例によれば、880MHzの第1信号と884MHzの第2信号を使用したとき、インターロゲータ36から約37.5mのところにヌル・ポイントが生じ、その後約75mごとに追加のヌル・ポイントが生じる。例えば、インターロゲータ36とRFタグ38の間に3つのヌルがカウントされたとすると、推定されるインターロゲータ36とRFタグ38の距離は187.5m以上262.5m未満ということになり、誤差範囲は75mとなる。マルチパスが生じていると、無線信号の伝播距離が長くなり、実際のRFIDタグの距離とは異なる距離が算出されるという問題がある。
【0015】
このように、従来の技術においては距離測定精度を高くすることができなかったため、距離測定の結果に基づいて算出されるRFIDタグの位置の測定精度も高くすることができなかった。したがって、RFIDタグの位置を検出し、そのRFIDタグが所定の位置に存在するか否かを判断することで、データ部の解析/書き換え等の処理を行うべき対象となるRFIDタグであるか否かを分別する処理を行う場合、RFIDタグの位置を検出する精度が高くないため、RFIDタグが所定の位置に存在するか否かの判断を精度良く行うことができず、この結果、処理を行うべき対象となるRFIDタグを分別する精度が低くなり、処理の精度が低くなってしまうという課題があった。
【0016】
本発明は、上記の問題点に鑑みてなされたものであり、その目的は、RFIDタグの距離を精度よく測定することを可能とする情報処理装置、情報処理方法、反射体、および通信システムを提供することにある。また、その目的としては、特殊なRFIDタグを用いずに、RFIDタグの距離を測定することを可能とする情報処理装置、情報処理方法、反射体、および通信システムを提供することが挙げられる。さらに、その目的は、RFIDタグの存在する位置に応じて、処理の対象となるRFIDタグを高精度に分別し、分別したRFIDタグに対して異なる処理を行なうことが可能な情報処理装置、情報処理方法、反射体、および通信システムを提供することにある。
【課題を解決するための手段】
【0017】
上記の課題を解決するために、本発明に係る情報処理装置は、異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信手段と、前記送信手段で送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信手段と、前記受信手段が受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得部と、前記位相情報取得部によって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出部と、前記距離算出部が算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得部と、前記位置情報取得部が取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定部と、前記判定結果に基づいて所定の処理を行う処理部と、を備えたものである。
【0018】
ここで、反射体は、例えば、無線通信用IC(Integrated Circuit)、記憶部、およびアンテナなどを備えたRFIDタグである。RFIDタグとしては、電池などの電源を有しておらず、リーダライタから電波で送電された電力によって回路が動作し、リーダライタと無線通信を行うパッシブタイプのRFIDタグや、電池などの電源を有するアクティブタイプのRFIDタグが含まれる。また、固有のID情報を有しているRFIDタグも含まれる。
【0019】
かかる構成により、反射信号の各搬送周波数における信号の位相変化量が取得され、この位相変化量と搬送周波数とによって前記の距離が算出される。ここで、詳細は後述するが、複数の搬送周波数による信号の位相変化量と搬送周波数とが求められれば、精度良く距離を算出することが可能となる。特に、複数のフレームの反射信号を用いて距離を算出する場合、反射体が移動していると、反射信号が順次送信される間に反射体が移動することにより、算出される距離にも大きな誤差が生じる場合があるが、本発明においては、1つのフレームからなる反射信号により距離算出が可能とすることで、反射体が移動している場合においてもこのような複数の反射信号を送信するための反射信号間の間隔により生じる距離算出の誤差を低減させることができる。すなわち、前記のような構成によれば、反射体から送信される反射信号を受信することによって、前記距離の算出を精度良く的確に行うことが可能となり、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0020】
また、本発明の情報処理装置は、前記情報処理装置において、前記受信手段は、複数のアンテナを介して、それぞれ前記反射信号を受信し、前記位相情報取得部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに、前記位相の変化量を算出し、前記距離算出部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに算出された前記位相の変化量に基づいて、前記複数のアンテナと前記反射体との間の距離をそれぞれ算出し、前記位置情報取得部は、前記複数のアンテナと前記反射体との間の距離に基づいて、前記反射体の位置情報を取得する情報処理装置である。
【0021】
かかる構成により、反射体の詳細な位置、例えばx座標やy座標、z座標等、を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0022】
また、本発明の情報処理装置は、前記情報処理装置において、所定の領域についての情報であるエリア情報を記憶するエリア情報記憶部をさらに備え、前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記エリア情報とを比較することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する情報処理装置である。
【0023】
かかる構成により、反射体が所定の領域に存在するか否かにより、異なる処理を行うことができる。
【0024】
また、本発明の情報処理装置は、前記情報処理装置において、前記情報処理装置は、自機器の位置に関する情報である自位置情報を取得する自位置情報取得部を、さらに備え、前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記自位置情報とが所定の関係を満たすか否かを判定することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する情報処理装置である。
【0025】
かかる構成により、反射体と情報処理装置の相対的な位置関係により、異なる処理を行うことができる。
【0026】
また、本発明の情報処理装置は、前記情報処理装置において、前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記受信手段が受信した反射信号を出力する情報処理装置である。
【0027】
かかる構成により、所定の位置に存在する反射体から受信した反射信号だけを、例えば他の装置等に出力することが可能となる。
【0028】
また、本発明の情報処理装置は、前記情報処理装置において、前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記反射体に対して所定の情報を送信する情報処理装置である。
【0029】
かかる構成により、所定の位置に存在する反射体だけに、所定の情報を送信することが可能となる。
【0030】
また、本発明の情報処理装置は、前記情報処理装置において、前記処理部は、前記判定結果に基づいて、前記反射体との通信を制御する制御信号を出力する情報処理装置である。
【0031】
かかる構成により、例えば、所定の位置に存在する反射体だけとの、通信を可能とすることが可能となる。
【0032】
また、本発明の情報処理装置は、前記情報処理装置において、前記反射体と前記アンテナとの間の通信路に配置されている障害物の情報である障害物情報が格納され得る障害情報格納部と、前記障害物情報に基づいて前記反射体の位置情報を補正する補正部とをさらに具備し、前記位置判定部は、前記補正部が補正した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を取得する情報処理装置である。
【0033】
かかる構成により、障害物の影響によって、誤検出された反射体の位置情報を補正することができ、精度の高い反射体の位置情報を得ることができる。その結果、反射体のより正確な位置に応じて、異なる動作を行なうことができる。
【0034】
また、本発明の情報処理装置は、前記情報処理装置において、前記送信手段が、1つの要求信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御する情報処理装置である。
【0035】
かかる構成により、1つの反射信号の送信を行うのみによって距離の算出を行うことができるので、距離の算出を行うために必要とされる信号の送受信を低減することが可能となり、これにより通信効率を落とさずに距離算出を行うことができる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0036】
また、本発明の情報処理装置は、前記情報処理装置において、前記送信手段が、前記要求信号が互いに異なる搬送周波数成分からなる1つの搬送周波数によって送信されるように制御する情報処理装置である。
【0037】
かかる構成により、1つの反射信号の送信を行うのみによって距離の算出を行うことができるので、距離の算出を行うために必要とされる信号の送受信を低減することが可能となり、これにより通信効率を落とさずに距離算出を行うことができる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0038】
また、本発明の情報処理装置は、前記情報処理装置において、前記反射体から、互いに異なる3つ以上の搬送周波数によって反射信号が送信されるとともに、前記位相情報取得部が、各搬送周波数の信号のうち、信号の状態が距離を算出する上で所定の基準を満たしている2つの搬送周波数の信号を選択して、位相変化量を取得する情報処理装置である。
【0039】
反射信号において、搬送周波数によっては、例えばマルチパスが発生することなどにより信号の状態が距離の算出に適していない状態となっていることも考えられる。これに対して、前記の構成および方法によれば、互いに異なる3つ以上の搬送周波数のうち、信号の状態が距離を算出する上で所定の基準を満たしている2つの搬送周波数の信号が選択されて、これらに基づいて位相変化量の検知が行われるので、位相変化量の検知の精度を高めることが可能となる。よって、距離の算出の精度も高めることが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0040】
また、本発明の情報処理装置は、前記情報処理装置において、前記受信手段は、受信された反射信号の周波数変換処理を行う周波数変換部を備え、前記周波数変換部が、前記反射信号をI信号とQ信号とに変換する情報処理装置である。
【0041】
かかる構成により、受信された反射信号がI信号とQ信号とに変換されることによって周波数変換が行われる。これにより、位相の検出を行うことが容易となる。
【0042】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、高分解能スペクトラム解析法を用いて前記距離を算出する情報処理装置である。
【0043】
従来、高分解能スペクトラム解析法は、複数のアンテナ素子によって受信された受信信号を入力とすることによって、電波の到来方向を推定する用途で用いられている。これに対して、前記の構成および方法では、従来の高分解能スペクトラム解析法による到来方向推定における各アンテナ素子からの受信信号を、前記の各搬送周波数の受信信号に置き換え、高分解能スペクトラム解析法における適用モデルを変えることによって、前記距離の推定を行うようになっている。
【0044】
このような高分解能スペクトラム解析法では、推定対象の値を最も確からしい値で算出することが可能であるので、たとえマルチパスが生じていたとしても、このマルチパスによる距離を除外することが可能となる。すなわち、前記の構成および方法によれば、マルチパスが生じていても、的確に距離を算出することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0045】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、前記高分解能スペクトラム解析法としてMUSIC(Multiple Signal Classification)法を用い、該MUSIC法の入力として、互いに異なる複数の搬送周波数によって受信された反射信号を用い、モードベクトルを前記距離の関数としてMUSIC評価関数を求め、該MUSIC評価関数のピーク値を求めることによって前記距離を算出する情報処理装置である。
【0046】
ここで、MUSIC評価関数のピーク値は通常一箇所にのみ表れるが、例えばマルチパスが生じている場合には、複数箇所にピーク値が表れることもある。この場合でも、マルチパスに相当する距離は、算出すべき距離よりも長くなるので、ピークが生じている距離のうち、最も小さい距離を算出すべき距離とすることによって、マルチパスが生じていても、的確に距離を算出することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0047】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、受信された反射信号の受信強度を併用して前記距離を算出する情報処理装置である。
【0048】
かかる構成により、距離の算出が、反射信号の受信強度にも基づいて行われるので、例えば距離の値の候補が複数ある場合に、受信強度を考慮することによって、的確な距離を選択するなどが可能となり、より正確に距離を算出することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0049】
また、本発明の情報処理装置は、前記情報処理装置において、前記反射信号に含まれるデータ部の情報を取得するとともに、前記距離算出部によって算出された前記距離情報と前記データ部の情報とを結びつけて外部に出力する受信制御部を備える情報処理装置である。
【0050】
かかる構成により、前記反射信号に含まれるデータ部の情報によって、例えば該反射信号を送信した反射体を識別する情報などを認識することができる。また、受信制御部は、距離算出部によって測定された前記距離の情報と、前記データ部の情報とを結びつけてこれを認識する。これにより、情報処理装置が通信する反射体が複数存在した場合でも、各反射体の距離を区別して認識することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0051】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、前記反射信号に基づいて、該反射信号を送信した反射体の位置する方向を測定する情報処理装置である。
【0052】
かかる構成により、反射体の距離とともに、その存在位置方向をも認識することが可能となる。これにより、該反射体の存在位置を認識することが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0053】
また、本発明の情報処理装置は、前記情報処理装置において、前記距離算出部が、前記反射信号のプリアンブル部における信号を解析することによって前記距離を算出する情報処理装置である。
【0054】
かかる構成により、反射信号のプリアンブル部における信号が解析されることによって前記距離が算出される。ここで、プリアンブル部は、反射信号の始まりを示すデータを示しており、同一規格(例えばEPC)内であれば、全ての反射体に共通の所定のデータとなっている。したがって、プリアンブル部の長さは、どの反射体からの信号であっても同じになるので、信号の解析を確実に行うことが可能となる。また、プリアンブル部における信号は全て共通となるので、例えばPSK変調が行われる場合でも距離の算出を行うことが可能となる。この結果、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0055】
また、本発明の情報処理方法は、異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、前記判定結果に基づいて所定の処理を行う処理ステップと、を備えている情報処理方法である。
【0056】
かかる構成により、反射体から送信される反射信号を受信することによって、前記距離の算出を精度良く的確に行うことが可能となり、反射体の位置を精度良く検出でき、反射体の位置に応じた処理を精度良く行うことが可能となる。
【0057】
また、本発明に係る通信システムは、前記本発明に係る情報処理装置と、前記情報処理装置によって前記反射体と通信が行われた結果に基づいて、該反射体と関連付けられている物品、人、および生物のうち少なくともいずれか1つを管理する管理装置とを備える通信システムである。
【0058】
かかる構成により、反射体と関連付けられている物品、人、および生物を管理する上で、その位置情報に応じた処理を実行させることが可能なシステムを容易に構築することが可能となる。
【発明の効果】
【0059】
本発明に係る情報処理装置は、以上のように、反射体から、互いに異なる複数の搬送周波数によって送信された反射信号を受信する処理を行う距離測定装置において、上記反射体から送信された上記反射信号を解析することによって、該反射体と当該距離測定装置との距離を算出する距離算出部を備える構成である。これにより、反射体と距離測定装置との距離をより精度よく算出することが可能となる。
【0060】
そして、これらの構成を用いることで、RFIDタグの存在する位置に応じて、処理の対象となるRFIDタグを高精度に分別し、分別したRFIDタグに対して異なる処理を行なうことが可能となるという効果を奏する。
【発明を実施するための最良の形態】
【0061】
以下、本発明の一実施形態として、情報処理装置について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
【0062】
(実施の形態1)
(リーダライタの構成)
図2は、本実施形態に係るRFIDタグとリーダライタとからなる通信システムの概略構成を示すブロック図である。同図に示すように、通信システムは、1つ以上のRFIDタグl(反射体)…およびリーダライタ(情報処理装置)2を備えた構成となっている。
【0063】
RFIDタグ1は、各種物品に取り付けられるものであり、取り付けられている物品あるいはそれに関連する物や人に関する情報を記億するものである。このRFIDタグ1は、無線通信用IC(Integrated Circuit)、記憶部、およびアンテナなどを備えた構成となっている。
【0064】
本実施形態においては、RFIDタグ1として、電池などの電源を有しておらず、リーダライタ2から電波で送電された電力によって回路が動作し、リーダライタ2と無線通信を行うパッシブタイプのRFIDタグを用いることが想定されている。なお、本実施形態において用いられるRFIDタグは、上記のようなパッシブタイプのRFIDタグに限定されるものではなく、電池などの電源を有するアクティブタイプのRFIDタグであっても構わない。
【0065】
リーダライタ2は、各RFIDタグ1との間で無線通信を行い、RFIDタグ1に記憶されている情報の読み書きを行う装置である。なお、本実施形態では、リーダライタ2は、RFIDタグ1に記憶されている情報の読み書きを行うものとしているが、これに限定されるものではなく、RFIDタグ1に記憶されている情報の読み出しのみを行うRFIDリーダであってもよい。
【0066】
本実施形態では、リーダライタ2が送受信する電波の周波数帯域は、800MHz〜960MHz前後のいわゆるUHF帯としている。このような周波数帯域の電波を用いることにより、リーダライタ2は、数m〜数10m程度の距離範囲内に位置するRFIDタグ1と通信可能となる。なお、本実施形態においては、UHF帯を用いた通信を想定しているが、これに限定されるものではなく、RFIDタグ向けの周波数帯域としての、13.56MHz帯、2.45GHz帯などの周波数帯域を用いてもよく、さらには、無線による通信を行うことが可能なその他の周波数帯による通信が行われても構わない。
【0067】
リーダライタ2は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部8、外部通信部9,エリア判定部10、およびエリア情報記憶部11を備えた構成となっている。
【0068】
送信アンテナ3は、RFIDタグ1…に対して電波を送信するアンテナであり、受信アンテナ4は、RFIDタグ1…から送られてきた電波を受信するアンテナである。この送信アンテナ3および受信アンテナ4は、例えばパッチアンテナやアレーアンテナなどによって構成される。なお、本構成例では、送信アンテナ3と受信アンテナ4とをそれぞれ別に設けているが、1つのアンテナを送信アンテナ3および受信アンテナ4の両方の機能を有するものとして用いる構成としてもよい。
【0069】
送信処理部5は、送信アンテナ3から送信される送信信号の変調、増幅などの処理を行う。また、受信処理部6は、受信アンテナ4において受信された受信信号の増幅、復調などの処理を行う。
【0070】
通信制御部7は、通信対象となるRFIDタグ1に対して、送信アンテナ3および/または受信アンテナ4を介して情報の読み出しおよび/または書き込み制御を行う。
【0071】
なお、送信処理部5と通信制御部7の送信に関する処理を行う部分とが、RFIDタグ1に対して送信信号を送信する送信手段を構成する。なお、この送信手段は、送信アンテナ3を含むものとしてもよい。また、この送信手段に、通信制御部7を含めないようにしても良い。
また、受信処理部6と通信制御部7の受信に関する処理を行う部分とが、RFIDタグ1から送信される信号、例えば反射信号、を受信する受信手段を構成する。なお、この受信手段は、受信アンテナ4を含むものとしてもよい。また、この送信手段に、通信制御部7を含めないようにしても良い。
【0072】
位置測定部8は、RFIDタグ1から受信した受信信号に基づいて、該RFIDタグlの位置を測定する。詳細は後述するが、RFIDタグ1の位置の測定としては、リーダライタ2とRFIDタグ1との距離の測定、リーダライタ2から見た際のRFIDタグ1の方向の測定、および、RFIDタグ1の空間的な位置の測定などが挙げられる。なお、リーダライタ2とRFIDタグ1との距離とは、厳密には、リーダライタ2における送信アンテナ3とRFIDタグ1との距離と、RFIDタグ1と受信アンテナ4との距離の加算平均に相当する。なお、RFIDタグ1がアクティブタイプの場合には、受信アンテナ4とRFIDタグ1との距離に相当する。
【0073】
エリア判定部10は、位置測定部8において測定された位置に基づいて、該RFIDタグ1が所定の空間領域(通信エリア)内に位置しているか否かを判定する。通信エリアがどのような空間領域であるかについてのエリア情報は、エリア情報記憶部11に記憶されている。エリア判定部10は、位置測定部8において測定された位置が、上記エリア情報で規定される通信エリア内に存在するか否かを判定することによって、該RFIDタグ1が通信エリア内に存在しているかを判定する。
【0074】
外部通信部9は、リーダライタ2において読み出されたRFIDタグ1の情報を外部装置に送信したり、外部装置からのRFIDタグ1に対する書き込み情報を受信したりする。外部装置と外部通信部9との間は、有線または無線によって通信接続されている。ここで、リーダライタ2によるRFIDタグ1に対する読み書き処理に基づいて動作する外部装置が、該リーダライタ2を内蔵する構成であっても構わない。
【0075】
なお、エリア情報記憶部11に記憶されているエリア情報は、リーダライタ2が設置される環境に応じて設定されることになる。このエリア情報の設定は、例えば外部通信部9を介して外部装置から行われるようになっていてもよいし、リーダライタ2に、エリア情報を入力するためのユーザインターフェースが備えられていてもよい。
【0076】
なお、上記リーダライタ2が備える通信制御部7、位置測定部8、エリア判定部10、および外部通信部9は、ハードウェアロジックによって構成されていてもよいし、CPUなどの演算手段が、ROM(Read Only Memory)やRAMなどの記憶手段に記憶されたプログラムを実行することにより実現する構成となっていてもよい。
【0077】
CPUなどの演算手段および記憶手段によって上記の各構成を構成する場合、これらの手段を有するコンピュータが、上記プログラムを記録した記録媒体を読み取り、当該プログラムを実行することによって、通信制御部7、位置測定部8、エリア判定部10、および外部通信部9の各種機能および各種処理を実現することができる。また、上記プログラムをリムーバブルな記録媒体に記録することにより、任意のコンピュータ上で上記の各種機能および各種処理を実現することができる。
【0078】
この記録媒体としては、コンピュータで処理を行うために図示しないメモリ、例えばROMのようなものがプログラムメディアであっても良いし、また、図示していないが外部記憶装置としてプログラム読取り装置が設けられ、そこに記録媒体を挿入することにより読取り可能なプログラムメディアであっても良い。
【0079】
また、何れの場合でも、格納されているプログラムは、マイクロプロセッサがアクセスして実行される構成であることが好ましい。さらに、プログラムを読み出し、読み出されたプログラムは、マイクロコンピュータのプログラム記憶エリアにダウンロードされて、そのプログラムが実行される方式であることが好ましい。なお、このダウンロード用のプログラムは予め本体装置に格納されているものとする。
【0080】
また、インターネットを含む通信ネットワークを接続可能なシステム構成であれば、通信ネットワークからプログラムをダウンロードするように流動的にプログラムを担持する記録媒体であることが好ましい。
【0081】
さらに、このように通信ネットワークからプログラムをダウンロードする場合には、そのダウンロード用のプログラムは予め本体装置に格納しておくか、あるいは別の記録媒体からインストールされるものであることが好ましい。
【0082】
(距離測定に関する構成)
次に、リーダライタ2において、RFIDタグ1と当該リーダライタ2との距離を測定するための構成について図1を参照しながら説明する。同図に示すように、送信処理部5は、周波数調整部としてのPLL(Phase Locked Loop)部5A、変調部5B、電力増幅部5C、および発信器5Dを備えている。また、受信処理部6は、増幅部6A、および周波数変換部6Bを備えている。また、位置測定部8は、位相情報取得部8A、および距離算出部8Bを備えている。また、通信制御部7は、周波数制御部7A、送信制御部7B、および受信制御部7Cを備えている。
【0083】
送信処理部5において、PLL部5Aは、送信アンテナ3から送信される送信信号の搬送周波数を設定するものであり、PLL回路によって構成される。変調部5Bは、PLL部5Aおよび発信器5Dによって生成された搬送信号に変調を加えて送信信号にデータを重畳させる処理を行う。本実施形態においては、変調部5Bは、ASK(Amplitude Shift Keying)変調によって送信信号を生成する。なお、送信信号の変調方式としては、上記のASK変調に限定されるものではなく、FSK(Frequency Shift Keying)変調、PSK(Phase Shift Keying)変調など、その他のデジタル変調方式を採用してもよい。電力増幅部5Cは、送信信号の増幅を行う。
【0084】
受信処理部6において、増幅部6Aは、受信アンテナ4において受信された受信信号の増幅を行う。周波数変換部6Bは、増幅部6Aにおいて増幅された受信信号の周波数を変換して、より低周波の信号に変換する処理を行う。
【0085】
位置測定部8において、位相情報取得部8Aは、周波数変換部6Bによって周波数変換された受信信号の位相の変化量を検出し、これを位相情報として取得する。なお、受信信号の位相の変化量とは、該受信信号が所定の距離を伝播することによって生じる位相の変化量を示している。
【0086】
より詳しくは、PLL部5Aから出力される搬送信号をsin2πf1tとすると、周波数変換部6Bはこの搬送信号sin2πf1tと増幅部6Aから入力された受信信号D(t)Asin(2πf1t+φ)とを掛け合わせて求めた値(D(t)Acosφ)を位相情報取得部8Aに送出する。位相情報取得部8Aは、周波数変換部6Bから送出された値に基づいて位相の変化量φを算出する。ここで、tは時間、D(t)は変調部5BにおいてASK変調が行われた場合のベースバンド信号、Aは搬送信号自体の振幅、φは往復2rの距離を伝搬することによる位相の変化量をそれぞれ示している。
【0087】
距離算出部8Bは、位相情報取得部8Aによって取得された位相の変化量情報に基づいて、該当RFIDタグ1とリーダライタ2との距離を算出する。この距離の算出方法の詳細については後述する。
【0088】
通信制御部7において、周波数制御部7Aは、PLL部5Aによって設定される搬送信号の周波数を制御する。送信制御部7Bは、変調部5Bに対して、送信信号を変調すべきデータを入力する。受信制御部7Cは、距離算出部8Bによって算出された距離情報を通信制御部7が受信する処理を行う。
【0089】
(距離測定の詳細)
次に、距離測定処理の詳細について説明する。本実施形態においては、リーダライタ2がRFIDタグ1に対してR/W要求信号(要求信号)を送信し、RFIDタグ1がこれに応じて応答信号(反射信号)を返信するようになっている。この様子を図3(a)〜図3(c)に示す。図3(a)は、リーダライタとRFIDタグとの間でR/W要求信号および応答信号の送受信が行われる状態を示す図である。図3(b)は、リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。図3(c)は、RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【0090】
リーダライタ2は、常に特定の信号(RFIDタグ1への電力供給を行うための信号)を送信している一方、RFIDタグ1に対して応答信号(以下、タグ応答信号とする)を送信することを要求する時に、図3(b)に示すように、タグ応答信号の返信を要求するR/W要求信号を送信する。すなわち、リーダライタ2における送信制御部7Bは、定常状態では定常状態を示すデータを送信するように変調部5Bを制御し、タグ応答信号を要求する際には、R/W要求信号を構成するデータを送信するように変調部5Bを制御する。RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形でタグ応答信号を送信する。
【0091】
より詳しくは、リーダライタ2は、R/W要求信号およびCW(連続搬送波)からなる1フレームの信号を送信する。RFIDタグ1は、リーダライタ2からR/W要求信号およびCW(連続搬送波)を受け取ると、CW(連続搬送波)の周波数に応じた搬送周波数f1からなるタグ応答信号をリーダライタ2へ送信する。図3(b)および(c)では、R/W要求信号およびCW(連続搬送波)は搬送周波数f1によって送信され、また、これに応じてタグ応答信号は搬送周波数f1によって送信されている。
【0092】
タグ応答信号は、図3(c)に示すように、プリアンブル部とデータ部とを有するフレームによって構成されている。プリアンブル部は、タグ応答信号の始まりを示すデータを示しており、同一規格(例えばEPC)内であれば、全てのRFIDタグ1に共通の所定のデータとなっている。データ部は、プリアンブル部に引き続いて送信されるものであり、RFIDタグ1から送信される実質的な情報を示すデータを示している。このデータ部に含まれる情報としては、例えば各RFIDタグ1に固有のID情報などが挙げられるが、RFIDタグ1から送信すべき情報、例えばRFIDタグ1内の記憶部に格納されている各種情報などを含んでいてもよい。
【0093】
そして、リーダライタ2は、R/W要求信号を2回送信するとともに、各R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の送信における搬送周波数を互いに異ならせている。すなわち、リーダライタ2における周波数制御部7Aは、1回目のR/W要求信号の送信時には、第1の周波数f1で搬送信号を出力するようにPLL部5Aを制御し、2回目のR/W要求信号の送信時には、第1の周波数f1とは異なる第2の周波数f2で搬送信号を出力するようにPLL部5Aを制御する。
【0094】
図1および図3に示すように、第1の周波数f1で送信されたR/W要求信号をRFIDタグ1が受信すると、同じく第1の周波数f1でタグ応答信号が返信される。そして、リーダライタ2では、位相情報取得部8Aが受信したタグ応答信号のプリアンブル部を解析することによって、タグ応答信号の位相の変化量を示すφ1を検出する。同様に、第2の周波数f2で送信されたR/W要求信号をRFIDタグ1が受信すると、同じく第2の周波数f2でタグ応答信号が返信される。そして、リーダライタ2では、位相情報取得部8Aが受信したタグ応答信号のプリアンブル部を解析することによって、タグ応答信号の位相の変化量を示すφ2を検出する。ここで述べる解析とは、タグ応答信号の位相の変化量を検出する処理のことである。
【0095】
なお、上記の例では、タグ応答信号の位相の変化量は、プリアンブル部を解析することによって検出するようになっているが、これに限定されるものではなく、データ部をも含めて位相の変化量を検出してもよいし、データ部において位相の変化量を検出してもよい。ただし、変調方式がPSKである場合には、内容が変化しうるデータ部に基づいて、距離に伴う位相の変化量を検出することは困難となるので、内容が固定であるプリアンブル部において位相の変化量を検出することが好ましい。なお、プリアンブル部あるいはデータ部を解析する具体例については後述する。
【0096】
以上のようにして、位相情報取得部8Aが位相の変化量φ1およびφ2を検出すると、この位相の変化量の情報が距離算出部8Bに伝送される。距離算出部8Bは、φ1およびφ2に基づいて、RFIDタグ1とリーダライタ2との距離を以下のように算出する。
【0097】
まず、送信アンテナ3からRFIDタグlまでの距離、および、受信アンテナ4からRFIDタグ1までの距離を等しいものと仮定し、これを距離rとする。第1の周波数f1および第2の周波数f2によって搬送される信号が往復2rの距離を伝搬することによって生じる位相の変化量φ1およびφ2は、次の式で表される。
【数1】
【0098】
上式において、cは光速を表している。上記の2つの式に基づいて、距離rは、次の式で求められる。
【数2】
【0099】
以上のようにして、位相の変化量φ1およびφ2に基づいて、送信アンテナ3からRFIDタグ1までの距離rを求めることができる。なお、RFIDタグlにおいて、R/W要求信号を受信してからタグ応答信号を送信する間に、位相のずれが生じることが予想されるが、この位相のずれは、第1の周波数f1および第2の周波数f2によって搬送される信号のどちらにおいても同じ量となる。よって、RFIDタグlにおける信号の送受信時に生じる位相のずれは、上記の距離の算出に影響を与えることばない。
【0100】
なお、数2において、φ2が2π以上となっている場合には、距離rを的確に算出することができない。すなわち、測定可能な距離rの最大値rmaxは、Δφ=2πの時であり、次の式で表される。
【数3】
【0101】
ここで、例えば第1の周波数f1と第2の周波数f2との差を5MHzとした場合、数3より最大距離rmaxは30mとなる。また、同様に、第1の周波数f1と第2の周波数f2との差を2MHzとした場合、数3より最大距離rmaxは75mとなる。UHF帯を利用したRFID通信システムにおいて、想定される最大通信距離は10m程度であるので、上記のような測定は実用上問題がないことがわかる。
【0102】
なお、上記の最大距離rmax以上の測定が必要となる場合であっても、例えば受信信号の受信強度の測定を併用することによって、距離rの測定を行うことが可能である。具体的には、Δφが2π以上となる可能性がある場合、距離rの候補r'は、r'=r+n・rmax(nは0以上の整数)となる。よって、受信信号の受信強度は、距離rが長くなる程小さくなることを利用することによって、上記のnの値を特定することが可能となる。
【0103】
なお、アクティブタイプのRFIDタグを用いる場合には、リーダライタ2側からR/W要求信号を送信せずに、RFIDタグ側から能動的に送られるタグ応答信号に基づいて、距離の測定を行うようになっていてもよい。
【0104】
(受信処理部の具体例)
以上の距離測定においては、受信信号の位相の変化量を検出する処理が行われているが、この位相の変化量の検出を行うことを可能とする受信処理部6の具体的な構成について、図4を参照しながら以下に説明する。この具体例では、受信処理部6は、受信信号をI信号とQ信号とに分離して位置測定部8に入力することによって、位置測定部8における位相の変化量の検出処理を可能とさせるものとなっている。同図に示すように、受信処理部6は、増幅部6Aとしての2つの増幅部6A1・6A2、周波数変換部6Bとしてのミキサ6B1・6B2および90°移相部6B3を備えている。
【0105】
受信アンテナ4で受信された受信信号は、2つの経路に分岐し、一方は増幅部6A1に入力され、他方は増幅部6A2に入力される。増幅部6A1は、入力された受信信号を増幅してミキサ6B1に入力する。増幅部6A2は、入力された受信信号を増幅してミキサ6B2に入力する。
【0106】
ミキサ6B1は、増幅部6A1から入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによってI信号を出力し、このI信号を位相情報取得部8Aに入力する。ミキサ6B2は、増幅部6A2から入力された受信信号と、PLL部5Aから出力され、90°移相部6B3を介して位相が90°変化させられた搬送信号とを掛け合わせることによってQ信号を出力し、このQ信号を位相情報取得部8Aに入力する。
【0107】
以上の構成において行われる受信処理および距離rの算出処理の詳細について以下に説明する。
【0108】
往復2rの距離を伝搬してリーダライタ2において受信される信号は、搬送信号の周波数をf1とすると、次の式で表される。
【数4】
【0109】
上式において、tは時間、s1(t)は周波数f1の搬送信号によって伝送される信号の状態、D(t)は変調部5BにおいてASK変調が行われた場合のベースバンド信号、Aは搬送信号自体の振幅、φ1は往復2rの距離を伝搬することによる位相の変化量をそれぞれ示している。この場合、ミキサ6B1によって出力されるI信号の状態を示すI1(t)、および、ミキサ6Blによって出力されるQ信号の状態を示すQ1(t)は、次の式で表される。
【数5】
【数6】
【0110】
以上より、I信号およびQ信号に基づいて、周波数f1の搬送信号による信号の位相の変化量φ1は、次の式で求められる。
【数7】
【0111】
同様に、周波数f2の搬送信号による信号の位相の変化量φ2は、次の式で求められる。
【数8】
【0112】
以上のようにして、位相情報取得部8Aは、入力されたI信号およびQ信号に基づいて、位相の変化量φ1およびφ2を取得する。そして、距離算出部8Bは、距離rを次の式によって算出する。
【数9】
【0113】
(距離測定処理の流れ)
次に、図5に示すフローチャートを参照しながら、リーダライタ2における上記の距離測定処理の流れについて説明する。
【0114】
まず、距離測定処理が開始されると、ステップ1(以降、Slのように称する)において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0115】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S2)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S3)。
【0116】
RFIDタグ1はR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S4)、そして位相情報取得部8Aが位相情報取得処理を行う(S5)。
【0117】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数7の数式に基づいて、第1の周波数f1の位相の変化量φ1を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。
【0118】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S6)、位相情報取得部8Aは位相情報取得処理を終了する(S7)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち1フレームからなる信号の送信を終了する(S8)。受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合(S9においてNO)には、S1からの処理に戻る。ここで、上記の例では、受信信号の周波数としては、第1の周波数f1および第2の周波数f2が想定されているので、受信制御部7Cは、第1の周波数f1および第2の周波数f2の受信信号をともに受信したか否かを判定することになる。
【0119】
この時点では、第1の周波数f1の受信信号のみを受信しているので、Slからの処理が行われることになる。そして、2回目のS1の処理において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(およびCW(連続搬送波))の周波数を第2の周波数f2となるようにPLL部5Aを制御する。その後、第2の周波数f2について、第一の周波数f1に対してと同様に、S2〜S8の処理が行われ、受信すべき全ての周波数の受信信号を受信したと判定され(S9においてYES)、S10の処理に移行する。
【0120】
S10では、取得された位相情報に基づいて、距離算出部8BがRFIDタグ1とリーダライタ2との距離を上記した手法によって算出する。より詳しくは、距離算出部8Bは、前記テーブルから周波数毎の位相の変化量を取り出して、上述の数9の数式に基づいて距離rを算出する。算出された距離情報は、受信制御部7Cに伝送される。以上により、距離測定処理が完了する。
【0121】
ここで、ステップS5における位相情報取得部8Aが行なう位相情報を解析する処理について、I信号およびQ信号を求めた後の具体的な処理を例に挙げて説明する。まず、タグ応答信号が、「0」と「1」により構成されるデジタル信号を伝送する信号であるとする。また、タグ応答信号内の「0」と「1」との周波数が異なるもの、すなわち各「0」と「1」との期間が異なるもの、であるとする。位相情報取得部8Aは、周波数変換部6Bから受け取ったI信号に対して、フーリエ変換を行なう。このフーリエ変換を行なうことにより、例えば、タグ応答信号を構成する「0」の周波数と「1」の周波数のそれぞれの位置に、ピークが現れる。同様に、位相情報取得部8Aは、周波数変換部6Bから受け取ったQ信号に対して、フーリエ変換を行なうと、「0」および「1」のそれぞれの周波数の位置に、ピークが現れる。「0」の周波数の位置に現れるピークの高さは、タグ応答信号内の「0」の数に比例し、「1」の周波数の位置に現れるピークの高さは、タグ応答信号内の「1」の数に比例する。そして、I信号から得られた「1」(および「0」)のピークの高さは、I1(t)に比例するものとなり、Q信号から得られた「1」(および「0」)のピークの高さは、Q1(t)に比例するものとなる。このため、位相情報取得部8Aは、I信号から得られた「1」のピークの高さと、Q信号から得られた「1」のピークの高さを、それぞれ、上述した数7のI1(t)およびQ1(t)の代わりに代入することにより、φ1を算出することができる。そして、算出したφ1を、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。このとき、「1」のピークの高さの代わりに、I信号から得られた「0」のピークの高さと、Q信号から得られた「0」のピークの高さを用いるようにしてもよい。なお、タグ応答信号の伝送される状態等による、「0」や「1」の周波数の変動や、誤差等の発生により、フーリエ変換により得られる「0」や「1」のピークは、「0」や「1」の周波数の近傍にばらついて発生することが多いことから、通常は、フーリエ変換して得られた結果から、「0」や「1」の周波数の近傍のピークを検出して、得られたピークを、フーリエ変換して得られた「0」や「1」のピークとする。
【0122】
ここで、上述したようにタグ応答信号内の「0」と「1」との周波数が異なるものである場合、フーリエ変換して得られた結果から、「0」と「1」のいずれかのピークを検出する必要があるが、タグ応答信号のデータ部に含まれるデータは、内容が変化するため、「0」または「1」の一方の数が極端に少なくなったりして、ピークが十分に検出できない可能性がある。このため、データ部をフーリエ変換して得られた結果からピークの高さを求める場合、まず、「0」の周波数付近と「1」の周波数付近の両方でピークを検出する必要があり、検出に時間がかかり、リアルタイムに近い処理を行なう場合に不都合が生じる恐れがある。これに対し、フレーム内のプリアンブル部は、同一規格内であればデータの内容が固定であるため、「0」と「1」との数を予め知ることができる。このため、フーリエ変換して得られるピークのうち、「0」と「1」との数の多い方のピークを検出することを予め決定しておけば、その決定した「0」あるいは「1」の周波数の近傍のみでピークを検出すればよく、データ部をフーリエ変換して得られる結果からピークを検出する場合よりも、ピーク検出の処理を短縮することが可能となる。このため、プリアンブル部を上記のように解析してφ1を算出することが、位相情報取得処理を高速に行なう上では好ましい。
【0123】
なお、タグ応答信号を構成する「0」の周波数と「1」の周波数とが同じであれば、フーリエ変換を行なって得られるピークは1つとなり、その高さは、タグ応答信号内の「0」と「1」の数の和に比例したものとなり、位相情報取得部8Aは、I信号から得られた「0」および「1」のピークの高さと、Q信号から得られた「0」および「1」のピークの高さを、上述した数7のI1(t)およびQ1(t)の代わりに代入することにより、φ1を求めることができる。
【0124】
なお、このような処理は、φ2を求める場合においても同様である。
【0125】
また、位相情報取得部8Aが行なう位相情報取得処理は、上記以外の処理であってもよい。
【0126】
(多周波を用いた距離測定)
上記の例では、互いに異なる2つの周波数の受信信号を受信することによって距離を測定するようになっていたが、以下に示すように、互いに異なる3つ以上の周波数の受信信号を受信する構成としてもよい。
【0127】
リーダライタ2とRFIDタグ1との間で信号が送受信される場合、基本的には、リーダライタ2から送信された信号が直接RFIDタグ1に到達し、RFIDタグ1から送信された信号が直接リーダライタ2に到達することになる。しかしながら、リーダライタ2とRFIDタグ1上の間で信号が直接到達するのではなく、周囲の何らかの物体に反射した上で到達する(マルチパス)ことが考えられる。この場合、リーダライタ2で受信される受信信号は、マルチパスによる影響を受けることによって、本来の位相の状態に対してノイズが混じり、S/Nが劣化することが考えられる。すなわち、位相に基づいて距離を算出する方法において、取得される位相情報の精度が悪くなることによって、算出される距離の精度も劣化することになる。
【0128】
また、上記の例において、受信信号をI信号とQ信号とに分離し、これらに基づいて位相の変化量を検出する手法を示したが、位相の状態によっては、I信号およびQ信号のいずれかが著しく小さくなることがありうる。この場合、著しく小さくなっている方の信号の測定誤差の影響が、位相の算出に大きな影響を与えることになる。すなわち、I信号およびQ信号のいずれかが著しく小さくなっている場合には、測定される位相の誤差が大きくなり、算出される距離の精度も劣化することになる。
【0129】
そこで、次のような処理を行うことによって、上記の問題を解決することが可能である。すなわち、まず、リーダライタ2が、互いに異なる周波数からなる3つ以上のR/W要求信号を送信し、それぞれに対するタグ応答信号を受信する。そして、受信信号のうちで、S/Nがより高く、かつ、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行う。
【0130】
(多周波を用いた距離測定処理の流れ)
次に、図6に示すフローチャートを参照しながら、リーダライタ2における上記の多周波を用いた距離測定処理の流れについて説明する。
【0131】
まず、距離測定処理が開始されると、S11において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0132】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S12)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S13)。
【0133】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(Sl4)、そして位相情報取得部8Aが位相情報取得処理を行う(S15)。
【0134】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、第1の周波数f1の位相の変化量φ1およびφ2を算出すると共に、下記の数10の数式に基づき、信号レベルs(t)を求める。そして、位相情報取得部8Aは、求めた位相の変化量および信号レベルを、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。
【数10】
【0135】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S16)、位相情報取得部8Aは位相情報取得処理を終了する(S17)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S18)。その後、受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し(S19)、全て受信していないと判定された場合には、S11からの処理に戻る。ここで、受信信号の周波数としては、第1〜第4の周波数を設定しているものとすると、受信制御部7Cは、第1〜第4の周波数の受信信号を全て受信したか否かを判定することになる。
【0136】
S20では、位相情報取得部8Aによる周波数選択処理、および距離算出部8Bによる距離算出処理が行われ、距離測定処理が終了する。
【0137】
次に、図7に示すフローチャートを参照しながら、上記のS20における位相情報取得部8Aによる周波数選択処理、および距離算出部8Bによる距離算出処理の流れについて説明する。
【0138】
まず、S21において、位相情報取得部8Aは、前記テーブルから受信した全ての周波数の受信信号の信号レベルを取得する。
【0139】
次に、S22において、位相情報取得部8Aは、各周波数の受信信号の信号レベルが所定のしきい値を超えているか否かを判定する。この所定のしきい値は、距離算出において十分な精度を得ることが可能な最低限度の値として予め設定される。そして、位相情報取得部8Aは、上記所定のしきい値を超えている受信信号の周波数の数が2未満であるか、2より大きいか、2であるかを判定する。
【0140】
所定のしきい値を超えている受信信号の周波数の数が2未満であると判定された場合、S23において、位相情報取得部8Aは、他の周波数による受信信号を再取込するように、通信制御部7に対して他の周波数にてR/W要求信号を送信することを指示する。
【0141】
一方、所定のしきい値を超えている受信信号の周波数の数が2より大きいと判定された場合、まずS24において、位相情報取得部8Aは、所定のしきい値を超えない受信信号の周波数を選択候補から削除する。そして、S25において、位相情報取得部8Aは、選択候補として残った受信信号の周波数のそれぞれについて、I信号およびQ信号のうち、信号レベルが小さい方の成分を最小成分として抽出する。その後、S25において、位相情報取得部8Aは、各周波数の最小成分のうち、信号レベルが大きい方から2つ選択する。選択された2つの最小成分に対応する周波数の受信信号に関して、位相情報取得部8Aは、前記テーブルから位相情報を取得し、これを距離算出部8Bに伝送する。そして、S27において、距離算出部8Bが、受信した位相情報に基づいて距離算出処理を行う。
【0142】
さらに一方、所定のしきい値を超えている受信信号の数が2であると判定された場合、位相情報取得部8Aは、この2つの受信信号に関して位相情報を取得し、これを距離算出部8Bに伝送する。そして、S27において、距離算出部8Bが、受信した位相情報に基づいて距離算出処理を行う。
【0143】
図8は、上記の周波数選択処理の一例を模式的に示している。この例では、f1〜f4の周波数による受信信号を受信した場合を想定している。周波数f1の受信信号におけるI信号成分をI1,Q信号成分をQ1、および受信信号レベルをS1とし、周波数f2の受信信号におけるI信号成分をI2、Q信号成分をQ2、および受信信号レベルをS2とし、周波数f3の受信信号におけるI信号成分をI3,Q信号成分をQ3、および受信信号レベルをS3とし、周波数f4の受信信号におけるI信号成分をI4,Q信号成分をQ4、および受信信号レベルをS4としている。
【0144】
まず、上記のS22において、S1〜S4の信号レベルのうち、S2が所定のしきい値以下であると判定され、S24の処理により、周波数f2の受信信号が選択候補から削除されている。次に、S25の処理により、最小成分として、周波数f1はQ1、周波数f3はI3、周波数f4はQ4が選択されている。そして、S25の処理により、Q,I3,Q4のうち、信号レベルがより大きいQ1,I3が選択されることによって、周波数f1および周波数f3の受信信号が選択されている。
【0145】
以上の処理によって、距離算出に用いられる2つの周波数の受信信号を、マルチパスによる影響を受けることによってS/Nが劣化している受信信号や、I信号およびQ信号のいずれかが著しく小さくなっている受信信号を排除して選択することが可能となる。これにより、距離算出の精度をどのような状況でも高い状態に保つことが可能となる。
【0146】
(MUSIC法を応用した距離算出方法)
次に、距離算出方法の他の例について説明する。上記の例では、2つの周波数における受信信号の位相の変化量を検出し、これらに基づいて上記数9の式によって距離rを算出している。これに対して、以下に示すように、高分解能スペクトラム解析法の1つであるMUSIC(Multiple Signal Classification)法の考え方を応用することによって距離rを算出することが可能となる。
【0147】
MUSIC法とは、従来、電波の到来方向を推定する手法として広く知られている。このMUSIC法では、複数のアンテナ素子によって受信された受信信号を解析することによって、電波の到来方向を推定するようになっている。このMUSIC法において、到来方向推定における各アンテナ素子からの受信信号を、上記の各周波数の受信信号に置き換え、MUSIC法における適用モデル(到来方向推定で用いられるモードベクトルa(θi))(以下の数11)を距離推定で用いられるモードベクトルa(ri)(以下の数12)に変えることによって、距離rの推定を行うことが可能となる。このように距離rの推定においてMUSIC法を応用することによって、以下に示すように、マルチパスの発生等のある実環境下において、マルチパスの影響をさらに低減することが可能となり、さらに精度を高めることができる。
【0148】
すなわち、アレーアンテナの素子数をK、到来波の波長をλ、到来波数をL、第i到来波の到来角をθi(i =1…L)とすると、第i到来波に対するアレーレスポンス・ベクトルa(θi)はa(θi)=[exp{jΦ1(θi)}, …, exp{jΦK(θi)}]T;ΦN(θi )=-(2π/λ)dNsin(θi)(ΦN(θi)は第N番目のアンテナ素子における第i波の受信位相、Tは転置、dNはN番目のアンテナ素子位置)となる(数11)。
【0149】
そして、数11において、K:アレーアンテナの素子数を使用する周波数の数(f1、f2、f3…fK)に、第i到来波の到来角θiを第i番目のタグまでの距離ri(r1…rL)に、第i到来波に対するアレーレスポンス・ベクトルa(θi)を第i番目のタグに対するアレーレスポンスベクトルa(ri)に、第N番目のアンテナ素子における第i波の受信位相ΦN(θi)を第N番目の周波数における第i番目のタグからの信号の受信位相ΦN(ri)(ΦN(ri)=-2πfN・2ri/c、(c:光速(3x108)))にそれぞれ置き換えることにより、モードベクトルa(ri)(数12)が導かれる(図9(c)参照)。
【数11】
【数12】
【0150】
以下に、MUSIC法を応用した距離測定処理(距離推定MUSIC法と称する)の詳細について説明する。なお、以下で示す距離測定処理は、位置測定部8において行われる。
【0151】
周波数f1の受信信号において、I信号の状態を示すI1(t)、および、Q信号の状態を示すQ1(t)は、前記した数5および数6のように表される。ここで、周波数f1の受信信号を複素表現で表したx1(t)は、次の式で表される。
【数13】
【0152】
同様に、周波数fNの受信信号を複素表現で表したxN(t)は、次の式で表される。
【数14】
【0153】
ここで、受信信号をK通りの周波数で受信した場合を考えると、周波数f1〜fKの受信信号に基づいて、以下に示される相関行列Rxxが生成される。
【数15】
【0154】
上式において、Hは複素共役転置、E[]は時間平均を示している。次に、上記で求められた相関行列Rxxの固有値分解を次式のように行う。
【数16】
【0155】
上式において、eiはRxxの固有ベクトル、μiは固有値、σ2は雑音電力を示している。これらより以下の関係が成り立つ。
【数17】
【数18】
【0156】
上記より、距離推定MUSIC法におけるモードベクトルおよびMUSIC評価関数PMUSICは以下のように与えられる。
【数19】
【0157】
上式において、rを変化させることによって、図9(b)に示すようなグラフが得られる。このグラフにおいて、横軸をr、縦軸をPMUSlCとしている。このグラフに示すように、評価関数PMUSICにはピークが生じており、このピークが生じているrの値が、算出すべき距離rに相当することになる。
【0158】
なお、図9(b)に示すグラフでは、評価関数PMUSICのピークは一箇所にのみ表れているが、他の箇所にもピークが表れることもある。これは、図9(a)に示すように、マルチパスの影響を受けた場合に、そのマルチパスに相当する距離の部分でピークが表れるからである。しかしながら、マルチパスに相当する距離は、算出すべき距離rよりも長くなるので、ピークが生じている距離のうち、最も小さいrを算出すべき距離rとすることによって、マルチパスが生じていても、的確に距離rを算出することが可能となる。
【0159】
なお、上記の例では、高分解能スペクトラム解析法としてのMUSIC法を距離測定に応用しているが、他の高分解能スペクトラム解析法、例えば、Beamformer法、Capon法、LP(Linear Prediction)法、Min−Norm法、およびESPRIT法などを距離測定に応用してもよい。
【0160】
(MUSIC法を応用した距離測定処理の流れ)
次に、図10および図11に示すフローチャートを参照しながら、リーダライタ2における上記のMUSIC法を応用した距離測定処理の流れについて説明する。
【0161】
まず、距離測定処理が開始されると、S31において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0162】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S32)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S33)。
【0163】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S34)、そして位相情報取得部8Aが位相情報取得処理を行う(S35)。
【0164】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数13から14の数式に基づいて、第1の周波数f1の受信信号を複素表現で表したx1(t)を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する。
【0165】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S36)、位相情報取得部8Aは位相情報取得処理を終了する(S37)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S38)。その後、受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合には、S31からの処理に戻る。ここで、受信信号の周波数としては、第1〜第Nの周波数を設定しているものとすると、受信制御部7Cは、第1〜第Nの周波数の受信信号を全て受信したか否かを判定することになる。
【0166】
この時点では、第1の周波数f1の受信信号のみを受信しているので、S31からの処理が行われることになる。そして、2回目のS31の処理において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(およびCW(連続搬送波))の周波数を第2の周波数f2となるようにPLL部5Aを制御する。その後、S32〜S38の処理が行われ、これが第Nの周波数の受信信号の受信が全て確認されるまで繰り返される。そして、S39において、受信すべき全ての周波数の受信信号を受信したと判定された場合には、S40の処理に移行する。
【0167】
S40では、位置測定部8が、前記テーブルから各周波数の受信信号xn(t)を読み出し、各周波数の受信信号に基づいて相関行列Rxxを作成する。次に、位置測定部8が、相関行列Rxxの固有値分解を行い、雑音成分を分解し(S41)、MUSIC評価関数PMUSICのスペクトラムを作成することによって、ピーク値の探索を行う(S42)。これにより、S43において距離rが算出される。
【0168】
(1フレーム内での周波数切り替え)
上記では、リーダライタ2は、R/W要求信号を複数回数送信し、各送信において搬送周波数を変化させることによって、それぞれ搬送信号の周波数が異なるタグ応答信号を受信するようになっている。これに対して、1フレームからなるR/W要求信号およびCW(連続搬送波)を送信する途中で搬送周波数を1回以上変化させることによって、途中で搬送周波数が1回以上変化する1フレームからなるタグ応答信号を受信し、これに基づいて距離測定を行う構成とすることが可能である。
【0169】
図12(a)に示すように、リーダライタ2は、常に特定の信号を送信している一方、RFIDタグ1に対してタグ応答信号を送信することを要求する時に、タグ応答信号の返信を要求するR/W要求信号を送信する。ここで、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように、PLL部5Aを制御する。図12(a)に示す例では、3つの分割期間を設定し、第1の分割期間において周波数f1、第2の分割期間において周波数f2、第3の分割期間において周波数f3となるように制御が行われている。
【0170】
RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形でタグ応答信号を送信する。ここで、タグ応答信号は、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))における搬送周波数の時間変化に応じて、搬送周波数が変化する。図12(b)に示す例では、タグ応答信号における第1の期間では周波数f1、第2の期問では周波数f2、第3の期間では周波数f3となっている。
【0171】
このようなタグ応答信号を受信することによって、位置測定部8は、互いに異なる複数の周波数における受信信号の状態を検知することが可能となる。なお、受信処理部6におけるタグ応答信号の周波数変換処理のタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定される。
【0172】
ここで、タグ応答信号において、搬送周波数が切り替えられている期間は、プリアンブル部の期間内とすることが好ましい。これは、タグ応答信号において、データ部の長さは変動する一方、プリアンブル部の長さは固定であるので、搬送周波数が切り替えられている期間を確実に確保できるからである。
【0173】
(1フレーム内での周波数切り替えを伴う距離測定処理の流れ)
次に、図13に示すフローチャートを参照しながら、リーダライタ2における上記の1フレーム内での周波数切り替えを伴う距離測定処理の流れについて説明する。
【0174】
まず、距離測定処理が開始されると、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の周波数を上記複数の分割期間ごとに切り替えるようにPLL部5Aを制御する。そして、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S51)。R/W要求信号が送信されると続いてCW(連続搬送波)が上記複数の分割期間ごとに異なる周波数で送信される(S53、S55、S58)。これにより、各分割期間ごとに周波数が切り替えられたR/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))が送信される。
【0175】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の搬送周波数(周波数f1,f2,f3)の時間変化に応じて変化した搬送周波数(周波数f1,f2,f3)からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S53、S56、S59)、そして位相情報取得部8Aが位相情報取得処理を行う(S54、S57、S60)。ここで受信されるタグ応答信号は、R/W要求信号後のCW(連続搬送波)における搬送周波数の時間変化に応じて、搬送周波数が変化していることになる。
【0176】
すなわち、受信処理部6において、周波数変換部6Bは、タグ応答信号におけるプリアンブル部を認識し、上述の数4から6の数式に基づいて、このプリアンブル部における各分割期間の周波数に対するI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6Bから各周波数のI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、各周波数の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数に対応させてテーブルに記憶する。ここで、各分割期間の切り替えタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定される。
【0177】
受信処理部6および位相情報取得部8Aにおけるタグ応答信号のプレアンブル部における各分割期間の各周波数(周波数f1,f2,f3)に対する周波数変換および位相情報取得処理は、送信処理部5にて対応する周波数のCW(連続搬送波)が送信されている間に行なわれる。例えば、送信処理部5が第1の周波数f1にてCW(連続搬送波)の送信を開始すると(S52)、RFIDタグ1はタグ応答信号のプリアンブル部における最初の分割期間の信号を第1の周波数f1にて返信する。受信処理部6は該周波数f1のタグ応答信号を受信し(S53)、そして位相情報取得部8Aは周波数f1の位相情報を取得する(S54)。一定時間が経過すると、送信処理部5は第2の周波数f2にてCW(連続搬送波)の送信を開始する(S55)。RFIDタグ1はこの第2の周波数f2のCW(連続搬送波)を受信すると、タグ応答信号のプリアンブル部における次の分割期間の信号を第2の周波数f2にて送信する。受信処理部6は、該周波数f2のタグ応答信号を受信し(S56)、そして位相情報取得部8Aは、周波数f2の位相情報を取得する(S57)。一定時間が経過すると、次に、第3の周波数f3に対して送信処理部5、受信処理部6および位相情報取得部8Aは同じ動作を繰り返す(S58からS60)。
【0178】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S61)、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(62)。その後、上記テーブルに記憶された互いに異なる複数の周波数における位相情報に基づいて、距離算出部8Bが距離rを算出することにより処理が終了する(S63)。
【0179】
なお、上記の例では、位相に基づいて距離rを算出するようになっているが、上記したMUSIC法を応用した距離測定処理であっても、同様に適用することが可能である。また、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行うことも可能である。
【0180】
(各RFIDタグの距離の認識)
上記のように、タグ応答信号にはデータ部が含まれている。このデータ部に各RFIDタグ1に固有のID情報が含まれている場合、タグ応答信号によって上記のように測定した距離を、該タグ応答信号を送信したRFIDタグ1と結びつけて認識することが可能となる。以下にこれを実現する構成について図14を参照しながら説明する。
【0181】
同図に示す構成は、前記した図4に示す構成において、受信処理部6にプリアンブル抽出部6Cが設けられている点で異なっている。その他の構成については図4に示す構成と同様であるのでここではその説明を省略する。
【0182】
プリアンブル抽出部6Cは、ミキサ6B1およびミキサ6B2から出力されるI信号およびQ信号を入力し、タグ応答信号におけるプリアンブル部を抽出してこれを位置測定部8に伝送するとともに、タグ応答信号におけるデータ部を受信フレームとして通信制御部7における受信制御部7Cに伝送する。位置測定部8は、プリアンブル部を解析することによって上記のように距離を測定し、測定した情報を上記受信制御部7Cに伝送する。
【0183】
通信制御部7における受信制御部7Cは、プリアンブル抽出部6Cから受信したデータ部を解析することによって、該タグ応答信号を送信したRFIDタグ1のID情報を認識する。また、受信制御部7Cは、位置測定部8によって測定された該RFIDタグ1の距離測定結果と、上記ID情報とを結びつけてこれを認識する。これにより、RFIDタグ通信システムにおいて複数のRFIDタグ1が存在した場合でも、各RFIDタグ1の距離を区別して認識することが可能となる。
【0184】
なお、上記の距離の情報と結びつけて認識する情報としては、各RFIDタグ1に固有のID情報に限定されるものではなく、タグ応答信号に含まれるデータ部によって示されている情報であれば、どのような情報であってもよい。
【0185】
(各RFIDタグを識別した距離測定処理の流れ)
次に、図15に示すフローチャートを参照しながら、リーダライタ2における上記の各RFIDタグを識別した距離測定処理の流れについて説明する。
【0186】
まず、距離測定処理が開始されると、S71において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0187】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S72)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S73)。
【0188】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S74)、そして位相情報取得部8Aが位相情報取得処理を行う(S75)。
【0189】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。プリアンブル抽出部6Cは、受信したタグ応答信号(I信号およびQ信号)におけるプリアンブル部を抽出してこれを位置測定部8に伝送するとともに、タグ応答信号におけるデータ部を受信制御部7Cに伝送する。位置測定部8は、プリアンブル抽出部6Cからプリアンブル部を受信すると、上述の数7から8の数式に基づいて、第1の周波数f1の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する(S75)。
【0190】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S76)、位置測定8は位相情報取得処理を終了する(S77)。その後、送信処理部5はCW(連続搬送波)の送信を終了する(S78)。受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合(S79においてNO)には、S71からの処理に戻る。一方、受信すべき全ての周波数の受信信号を受信したと判定された場合(S79においてYES)、S80の処理に移行する。
【0191】
一方、受信制御部7Cは、プリアンブル抽出部6Cからデータ部を受信すると、これに基づいて該タグ応答信号を送信したRFIDタグ1のID情報を確認する(S81)。そして、受信制御部7Cは、位置測定部8から受信した距離情報とRFIDタグ1のID情報とを結びつけて登録する(S82)。なお、RFIDタグ1のID情報と距離とを組み合わせた情報は、通信制御部7内に設けられる図示しない記録部に登録した後に、図2に示す外部通信部9を介して外部装置に送信される。以上により、距離測定処理が完了する。
【0192】
(位置推定処理)
上記では、各RFIDタグ1の距離を測定することについて説明したが、さらに、リーダライタ2から見た際の各RFIDタグ1の存在位置方向も測定するようにしてもよい。これを行うことによって、各RFlDタグ1の距離と方向とを特定することができるので、各RFIDタグ1の存在位置を特定することが可能となる。RFIDタグ1の存在位置方固を推定する方法としては、受信アンテナ4のアンテナ素子を複数アレー状に並べて、各アンテナ素子で受信される信号の位相の差異を検出する方法がある。以下に、このRFIDタグ1の存在位置方向の推定処理について説明する。
【0193】
図16は、RFIDタグ1の存在位置方向の推定処理を模式的に示す図である。同図において、受信アンテナ4は、第1アンテナ素子4A、および第2アンテナ素子4Bの2つのアンテナ素子によって構成されている。また、θは、RFIDタグ1の存在位置方向を示す角度である。このθは、第1アンテナ素子4A、および第2アンテナ素子4Bにおける電波受信ポイントをともに含む平面の法線方向を0°とした場合の角度となっている。
【0194】
第1アンテナ素子4A、および第2アンテナ素子4Bにおける電波受信ポイント同士の間隔をdとすると、第1アンテナ素子4A、および第2アンテナ素子4Bで受信される信号の位相差△φは次の式で表される。
【数20】
【0195】
ここで、d=λ/2とすれば、位相差△φは次の式で表される。
【数21】
よって、位相差△φに基づいて、存在位置方向θは次の式で表される。
【数22】
すなわち、位相差△φを求めることによって、存在位置方向θを求めることができる。
【0196】
図17は、方向算出を行う場合のリーダライタ2の構成を示している。同図に示す構成は、前記した図4に示す構成において、位置測定部8に方向算出部8Cが設けられている点、および、受信処理部5にセレクタ6Dが設けられている点で異なっている。その他の構成については図4に示す構成と同様であるのでここではその説明を省略する。
【0197】
セレクタ6Dは、受信アンテナ4における第1アンテナ素子4Aにおいて受信された信号と第2アンテナ素子4Bにおいて受信された信号とを選択的に切り替えて増幅部6A1および増幅部6A2に伝送する。このセレクタ6Dの選択の制御は、受信制御部7Cによって行われる。
【0198】
方向算出部8Cは、第1アンテナ素子4Aにおいて受信された信号と、第2アンテナ素子4Bにおいて受信された信号との位相差についての情報を位相情報取得部8Aから取得し、これに基づいて上記の処理によってRFIDタグ1の存在位置方向θを算出する。そして、受信制御部7Cは、距離算出部8Bによって算出された距離情報、および方向算出部8Cによって算出された存在位置方向情報を取得し、この情報を図2に示したエリア判定部10に伝送する。
【0199】
エリア判定部10は、位置情報としての上記距離情報および存在位置方向情報に基づいて、該RFIDタグ1が所定の空問領域(通信エリア)内に位置しているか否かを判定する。この際に、エリア判定部10は、エリア情報記憶部11に記憶されているエリア情報に基づいて、RFIDタグ1が通信エリア内に存在しているかを判定する。
【0200】
なお、RFIDタグ1の存在位置方向θを求める手法としては、上記の手法に限定されるものではなく、公知の様々な手法を用いることができる。例えば、電波の到来方向(DOA(Direction Of Arrival)を推定する技術としては、Beamformer法、Capon法、LP(Linear Prediction)法、Min−Norm法、MUSIC法、およびESPRIT法などが挙げられる。
【0201】
(位置推定処理の流れ)
次に、図18および図19に示すフローチャートを参照しながら、リーダライタ2における上記の位置推定処理の流れについて説明する。
【0202】
まず、位置推定処理が開始されると、S91において、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号の周波数を第1の周波数f1となるようにPLL部5Aを制御する。
【0203】
次に、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S92)。R/W要求信号が送信されると続いてCW(連続搬送波)が第1の周波数f1で送信される(S93)。
【0204】
その後、RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信する。この時点では、セレクタ6Dは、第1アンテナ素子4Aを選択しており、第1アンテナ素子4Aで受信された信号に基づいて、受信処理部6が受信処理を行い(S94)、そして位相情報取得部8Aは位相情報取得処理を行う(S95)。
【0205】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6BからI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、第1の周波数f1の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数(第1の周波数f1)に対応させてテーブルに記憶する(S95)。
【0206】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S96)、位相情報取得部8Aは位相情報取得処理を終了する(S97)。その後、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S98)。受信制御部7Cは、受信すべき全ての周波数の受信信号を受信したか否かを判定し、全て受信していないと判定された場合(S99においてNO)には、S91からの処理に戻る。一方、受信すべき全ての周波数の受信信号を受信したと判定された場合(S99においてYES)、距離算出部8Bにて距離演算が行なわれて(S100)、S101の処理に移行する。なお、位置測定部8は、距離の算出を位相情報に基づいて行うだけでなく、上記したようにMUSIC法を応用した手法によって距離を算出してもよい。また、距離演算は、後述するS111、S112の前後に行なわれても良い。
【0207】
S101では、セレクタ6Dが、第2アンテナ素子4Bを選択するように切り替えられる。そして、送信制御部7Bの制御に基づいて第1の周波数f1によりR/W要求信号およびCW(連続搬送波)が送信される(S102からS104)。RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の第1の周波数f1に応じた搬送周波数からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信する。この時点では、セレクタ6Dは、第2アンテナ素子4Bを選択しており、第2アンテナ素子4Bで受信された信号に基づいて、受信処理部6が受信処理を行う(S105)。
【0208】
すなわち、受信処理部6において、周波数変換部6Bは、上述の数4から6の数式に基づいて、増幅部6Aから入力された受信信号と、PLL部5Aから出力された搬送信号とを掛け合わせることによりI信号およびQ信号を求めて位相情報取得部8Aに出力する。受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S106)、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S107)。
【0209】
次に、方向算出処理に関してS108からS109の処理が行われる。
【0210】
S108では、位相情報取得部8Aが、第1アンテナ素子4Aによって受信された信号と、第2アンテナ素子4Bによって受信された信号との位相差を検出し、これに基づいて方向算出部8CがRFIDタグ1の存在位置方向(存在方向)を算出する(S109)。なお、上記のようにアンテナ素子間の位相差に基づいて方向推定を行う際には、ある(同一の)周波数での位相差を比較することが必要である。
【0211】
その後、受信制御部7Cは、距離算出部8Bによって算出された距離情報、および方向算出部8Cによって算出された存在位置方向情報を取得し、この情報をエリア判定部10に伝送する。エリア判定部10は、上記距離情報および存在位置方向情報に基づいて、該RFIDタグlの位置を算出する(S110)。以上により、位置測定処理が完了する。
(1フレーム内での複数周波数同時送信)
【0212】
上記では、リーダライタ2は、1フレームからなるR/W要求信号およびCW(連続搬送波)を送信する途中で搬送周波数を1回以上変化させることによって、途中で搬送周波数が1回以上変化する1フレームからなるタグ応答信号を受信し、これに基づいて距離測定を行うようになっている。これに対して、1フレームからなるR/W要求信号およびCW(連続搬送波)を送信する搬送周波数を複数の周波数成分から構成することによって、複数の周波数成分を持った搬送周波数の1フレームからなるタグ応答信号を受信し、これに基づいて距離測定を行う構成とすることが可能である。
【0213】
図20(a)に示すように、リーダライタ2は、常に特定の信号を送信している一方、RFIDタグ1に対してタグ応答信号を送信することを要求する時に、タグ応答信号の返信を要求するR/W要求信号を送信する。ここで、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の搬送周波数が、複数の周波数成分から構成されるようにPLL部5Aを制御する。図20(a)に示す例では、搬送周波数が第1の周波数f1、第2の周波数f2、第3の周波数f3から構成するように制御が行われている。
【0214】
RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形でタグ応答信号を送信する。ここで、タグ応答信号は、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))における複数の周波数成分からなる搬送周波数に応じた搬送周波数により送信される。図20(b)に示す例では、タグ応答信号における第1の期間では周波数f1、第2の期問では周波数f2、第3の期間では周波数f3となっている。
【0215】
このようなタグ応答信号を受信することによって、位置測定部8は、互いに異なる複数の周波数における受信信号の状態を検知することが可能となる。
【0216】
以下にこれを実現する構成について図21を参照しながら説明する。
【0217】
同図に示す構成は、前記した図4に示す構成において、送信処理部5に各周波数に対応する発信器5D1・5D2・5D3および合成器5Eが設けられていると共に、受信処理部6に帯域通過フィルタ6C1・6C2・6C3および周波数変換部6Bとしてのミキサ6B3・6B4・6B5が設けられている点で異なっている。その他の構成については図4に示す構成と同様であるのでここではその説明を省略する。
【0218】
通信制御部7において、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の搬送周波数が、複数の周波数成分から構成されるようにPLL部5Aを制御する。PLL部5Aおよび発信器5D1・5D2・5Dによって生成された搬送信号は合成器5Eにて合成された後、変調部5Bおよび電力増幅部5Cを介して送信される。
【0219】
受信アンテナ4で受信された受信信号は、増幅部6Aを経由して、3つの経路に分岐し、帯域通過フィルタ6C1・6C2・6C3にそれぞれ入力される。各帯域通過フィルタ6C1・6C2・6C3は入力された受信信号から特定の周波数成分の信号を取り出し、ミキサ6B3・6B4・6B5に入力する。
【0220】
ミキサ6B3・6B4・6B5にて求められた各周波数成分のI信号およびQ信号は位相情報取得部8Aに入力されて各周波数成分の位相の変化量およびそれに基づく距離算出が行なわれる。
【0221】
上記図4および図13の実施形態と同様に、受信処理部6は、送信処理部5がCW(連続搬送波)を送信している間に、各周波数成分の位相の変化量の算出を行う。
【0222】
なお、上記の例では、位相に基づいて距離rを算出するようになっているが、上記したMUSIC法を応用した距離測定処理であっても、同様に適用することが可能である。また、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行うことも可能である。
【0223】
(アクティブタイプのRFIDタグ)
上記では、RFIDタグ1がパッシブタイプである構成について説明したが、前記したように、RFIDタグ1がアクティブタイプである構成であってもよい。この場合、RFIDタグ1は、電源部を備えるとともに、タグ応答信号を生成する信号生成部と、上記信号生成部によって生成されたタグ応答信号を、互いに異なる複数の搬送周波数によって送信されるように制御する周波数制御部とを備えた構成とすることが考えられる。この場合、リーダライタ2において、R/W要求信号を送信する必要性をなくすことができる。
【0224】
また、RFIDタグ1における上記周波数制御部が、前記した周波数制御部7Aと同様に、1つのタグ応答信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御するようにすることも可能であり、上記タグ応答信号の送信の回数毎にそれぞれ互いに異なる搬送周波数となるように制御するようにすることも可能である。また、搬送周波数が、複数の周波数成分から構成されるように制御することも可能である。
【0225】
(RFIDタグを用いた通信システムの適用例)
次に、本実施形態に係るRFIDタグを用いた通信システムを具体的なシステムに適用する例について説明する。図22は、物品の流通が行われるシステムにおいて、流通される物品の検査確認などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示している。同図に示す例では、複数のベルトコンベアによって、RFIDタグ1が取り付けられた物品が搬送されている。また、ベルトコンベアから離れた場所にも、RFIDタグ1が貼り付けられた物品が積み上げられている。そして、ベルトコンベアによって搬送された物品を検査するために、リーダライタ2が各RFIDタグ1と通信を行う。これにより、各物品の流通を管理することが可能となる。
【0226】
なお、このようなRFIDタグを用いた通信システムでは、リーダライタ2と通信を行う上記外部装置として、流通物品の管理を行う管理装置が備えられることになる。
【0227】
このようなシステムの場合、通信エリアが明確に設定されないRFIDタグ通信システムであると、通信を行う必要のない、ベルトコンベアから離れた位置にあるRFIDタグ1とも通信を行ってしまうことになる。これに対して、本実施形態に係るRFIDタグ通信システムによれば、リーダライタ2における処理によって名RFlDタグ1の距離(もしくは位置)を検知することができるので、通信すべきRFIDタグ1とのみ通信を行うことが可能となる。
【0228】
また、本実施形態に係るRFIDタグを用いた通信システムによれば、比較的高精度に各RFIDタグ1の距離(もしくは位置)を検知できるので、どのベルトコンベアのラインに搬送されているRFIDタグ1であるかについても、リーダライタ2側で認識することが可能となる。
【0229】
また、このような機能を有するRFIDタグを用いた通信システムを構築するためには、リーダライタ2を1台設置するだけでよいことになる。すなわち、例えば電波の届く範囲を制限するための部材を設ける必要性や、リーダライタ2を複数台設置する必要性などをなくすことができる。よって、本実施形態に係るRFIDタグを用いた通信システムによれば、設置環境によらずに容易にセッティングを行うことが可能となる。
【0230】
図23(a)は、店舗などにおいて、商品や在庫物品などの盗難監視などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示している。この例では、通信エリアを、対象となるRFIDタグ1が取り付けられた物品が本来存在しうる範囲に設定するとともに、この通信エリアから物品がなくなったことを検知することによって、該当物品の盗難が行われた可能性があると判定する。また、図23(b)は、窓やドアなどにRFIDタグ1を取り付け、このRFIDタグ1の位置を監視することによって、該窓やドアが開けられたことを検知する防犯システム適用例を示している。以上のような防犯システムを構築する際にも、対象物に従来から用いられているRFIDタグ1を取り付けるという簡単なセッティングを行うだけでよいことになる。また、様々な環境において柔軟にRFIDタグを用いた通信システムを構築することが可能となる。
【0231】
なお、この例においても、RFIDタグを用いた通信システムに、リーダライタ2と通信を行う上記外部装置として、防犯管理を行う管理装置が備えられることになる。
【0232】
図24は、例えば駅や映画館などの改札が必要となる場所に本RFIDタグ通信システムを適用した場合の例を示している。昨今では、例えば駅の改札において、RFIDタグを用いた改札を行うシステムが普及しているが、このシステムでは、ゲートにリーダライタを設けることによって改札を行っている。これに対して、本実施形態に係るRFIDタグ通信システムによれば、改札が行われる通路の全体を通信エリアに設定することによって、ゲートを設けることなく改札を行うことが可能となる。なお、この場合には、RFIDタグ1を利用者が所持する携帯電話機に内蔵させた構成としてもよい。
【0233】
なお、この図24に示すシステム適用例において、RFIDタグ1との通信結果により、通過を許可できない利用者が存在した場合、その不許可利用者を特定する必要が生じることが考えられる。この場合、リーダライタ2によって特定された不許可利用者の位置に向けて監視カメラによる撮影を行うことによって、不許可利用者の特定およびその証拠を残すことが可能となる。
【0234】
また、この例においても、RFIDタグを用いた通信システムに、リーダライタ2と通信を行う上記外部装置として、通行許可管理を行う管理装置が備えられることになる。そして、この管理装置が、上記監視カメラの撮影制御を行うことになる。
【0235】
図25は、自動車などのキーレスエントリシステムに、本RFIDタグを用いた通信システムを適用した場合の例を示している。自動車の内部にリーダライタ2が設けられているとともに、利用者がRFIDタグ1を内蔵したキーを所持している。リーダライタ2は、利用者に所持されているキーに内蔵されているRFIDタグ1が自動車の周囲の所定範囲に入ったことを検知すると、キーのロックを解除するように指示を行う。これにより、利用者は、キーを所持した状態で自動車に近づくことのみによってロックを解除させることが可能となる。
【0236】
なお、この例においても、RFIDタグを用いた通信システムに、リーダライタ2と通信を行う上記外部装置として、キーの施錠状態を制御管理する管理装置が備えられることになる。
【0237】
(実施の形態2)
本実施の形態2にかかる通信システムは、上記実施の形態1において説明した通信システムのうちの、1フレーム内において周波数切り替えを伴う距離測定処理を行なう構成を用いて反射体の位置情報を取得し、その取得した位置情報から、反射体が、所定の位置に位置するか否かを判定して、その判定結果に基づいて異なる処理を行うようにしたものである。
【0238】
以下、反射体がRFIDタグである場合を例に挙げて説明する。
【0239】
図26は、本実施の形態2に係るRFIDタグとリーダライタとからなる通信システムの構成を示すブロック図である。同図に示すように、通信システムは、1つ以上のRFIDタグl(反射体)…およびリーダライタ(情報処理装置)200を備えた構成となっている。RFIDタグ1と、リーダライタ200とは無線による情報の送受信が可能である。なお、ここでは、RFIDタグ1として複数のRFIDタグ1を備えている場合について説明するが、RFIDタグは1つであっても良い。
【0240】
RFIDタグ1の構成は、上記実施の形態1と同様の構成を備えている。ここでは特に、RFIDタグ1は、常にリーダライタ2から送られてくる信号を監視し、R/W要求信号を受信したことを検知すると、それに応答する形で図12(b)に示すような、タグ応答信号を送信する。ここで、タグ応答信号は、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))における搬送周波数の時間変化に応じて、搬送周波数が変化する。タグ応答信号における第1の期間では周波数f1、第2の期問では周波数f2、第3の期間では周波数f3となっている。なお、各RFIDタグは、図示しない記憶部に、それぞれを他のRFIDタグと識別するための情報である識別情報(ID情報)等の情報を格納していてもよい。
【0241】
リーダライタ200は、各RFIDタグ1との間で無線通信を行い、RFIDタグ1に記憶されている情報の読み書きを行う装置である。なお、本実施形態では、リーダライタ200は、RFIDタグ1に記憶されている情報の読み書きを行うものとしているが、これに限定されるものではなく、RFIDタグ1に記憶されている情報の読み出しのみを行うRFIDリーダであってもよい。
【0242】
本実施形態では、リーダライタ200が送受信する電波の周波数帯域は、800MHz〜960MHz前後のいわゆるUHF帯としている。このような周波数帯域の電波を用いることにより、リーダライタ200は、数m〜数10m程度の距離範囲内に位置するRFIDタグ1と通信可能となる。なお、本実施形態においては、UHF帯を用いた通信を想定しているが、これに限定されるものではなく、RFIDタグ向けの周波数帯域としての、13.56MHz帯、2.45GHz帯などの周波数帯域を用いてもよく、さらには、無線による通信を行うことが可能なその他の周波数帯による通信が行われても構わない。
【0243】
リーダライタ200は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9,位置判定部210、エリア情報記憶部211、および処理部212を具備する。
【0244】
位置測定部208は、さらに、位相情報取得部8A、距離算出部8B、位置情報取得部208Cを備えている。
【0245】
送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、および外部通信部9の構成については、上述した実施の形態1と同様であるので説明は省略する。なお、リーダライタ200は、受信アンテナ4を、1つだけ備えていても複数備えていても良い。また、複数の受信アンテナ4を介してそれぞれ受信される信号の受信処理を行う複数の受信処理部6等を有していてもよいし、複数の受信アンテナ4を介してそれぞれ受信される信号の受信処理を一つの受信処理部6により行うようにしてもよい。アンテナ3および4は、リーダライタ2の外部に設けられていてもよい。また、アンテナ3および4は、リーダライタ2とは異なる位置に配置されていてもよい。
【0246】
リーダライタ2は、ここでは、常に特定の信号を送信している一方、RFIDタグ1に対してタグ応答信号を送信することを要求する時に、図12(a)に示すようなタグ応答信号の返信を要求するR/W要求信号を送信するものとする。このため、上記実施の形態1において説明したように、周波数制御部7Aは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように、PLL部5Aを制御する。図12(a)に示す例では、3つの分割期間を設定し、第1の分割期間において周波数f1、第2の分割期間において周波数f2、第3の分割期間において周波数f3となるように制御が行われている。
【0247】
なお、上記実施の形態1において説明したように、受信処理部6におけるタグ応答信号の周波数変換処理のタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定されているものとする。
【0248】
また、上記実施の形態1において説明したように、タグ応答信号において、搬送周波数が切り替えられている期間は、プリアンブル部の期間内とすることが好ましい。これは、タグ応答信号において、データ部の長さは変動する一方、プリアンブル部の長さは固定であるので、搬送周波数が切り替えられている期間を確実に確保できるからである。
【0249】
位置測定部208は、RFIDタグ1から受信した受信信号に基づいて、該RFIDタグ1の位置を測定し、RFIDタグ1の位置に関する情報である位置情報を取得する。「位置情報」とは、RFIDタグ1の位置を示すことのできる情報であれば、どのような情報であってもよく、例えば、RFIDタグの座標情報である。この座標情報は、緯度、経度等の絶対的な座標情報であっても良いし、所定の位置、例えば情報処理装置200や受信アンテナ4の位置等を基準とした相対的な座標情報であってもよい。また、「位置情報」は、基準となる軸に対する角度等の情報を含んでいても良い。また、「位置情報」は、通常、3次元の情報であるが、1次元の情報であっても、2次元の情報であっても良い。例えば、RFIDタグ1の存在する位置のx軸とy軸とz軸とを指定する情報であっても良いし、x軸とy軸とのみを指定する情報であっても良いし、x軸の値だけを指定する情報であっても良い。詳細は後述するが、位置測定部208によるRFIDタグ1の位置の測定は、リーダライタ2とRFIDタグ1との距離の測定、リーダライタ2から見た際のRFIDタグ1の方向の測定などを用いて行なわれる。なお、リーダライタ2とRFIDタグ1との距離とは、厳密には、リーダライタ2における送信アンテナ3とRFIDタグ1との距離と、RFIDタグ1と受信アンテナ4との距離の加算平均に相当する。なお、RFIDタグ1がアクティブタイプの場合には、受信アンテナ4とRFIDタグ1との距離に相当する。なお、本実施の形態においては、便宜上、各受信アンテナ4が受信したタグ応答信号に基づいて得られたリーダライタ2とRFIDタグ1との距離を、特に、受信アンテナ4とRFIDタグ1の距離と称す。ここでは、位置測定部208が、上記実施の形態において説明したように、1フレーム内において周波数切り替えされたタグ応答情報に基づいて、距離測定処理を行なう場合について説明する。位置測定部208は、図12(b)に示したようなタグ応答信号を受信することによって、互いに異なる複数の周波数における受信信号の状態を検知する。位置測定部208は、通常、MPUやメモリ等から実現され得る。位置測定部208の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0250】
位置測定部208内の位相情報取得部8A、および距離算出部8Bの構成については、図1と同様であるので説明は省略する。
【0251】
位置測定部208内の位置情報取得部208Cは、距離算出部8Bによって算出された距離に基づいて、RFIDタグ1の存在する位置を特定する。例えば、RFIDタグ1がパッシブ型であり、受信アンテナ4が複数設けられている場合、各受信アンテナ4が受信するタグ応答信号に基づき、距離算出部8Bによって受信アンテナ4とRFIDタグ1との距離と、送信アンテナ3とRFIDタグ1との距離との和が、各受信アンテナ4それぞれについて算出されることとなる。そして、各受信アンテナ4と送信アンテナ3との位置情報(例えば座標情報)が既知であるとすると、位置情報取得部208Cは、複数の距離情報と、各受信アンテナ4の位置情報に基づいて、RFIDタグ1の位置を2次元座標(例えば、受信アンテナが3つで、得られた距離が3種類の場合に、各受信アンテナ4の座標と送信アンテナ3の座標とからの距離の和が、前記距離算出部8Bにより得られた距離と等しい点の集合である3つの楕円の交点として求めた2次元座標)または3次元座標(例えば、受信アンテナが4つで、得られた距離が4種類の場合に、各受信アンテナ4の座標と送信アンテナ3の座標とからの距離の和が、前記距離算出部8Bにより得られた距離と等しい点の集合である4つの楕円の回転体の交点として求めた3次元座標)等として特定することができる。この特定されたRFIDタグ1の座標情報が、RFIDタグ1の位置情報である。
【0252】
位置判定部210は、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定し、判定結果を取得する。「所定の位置」とは、緯度や経度等で表される絶対的な位置であっても、リーダライタ200等の位置に対する相対的な位置であっても良い。また、「所定の位置」とは、例えば、「所定の領域内の任意の位置」であり、具体的には、「所定の空間領域(通信エリア)内の任意の位置」である。位置判定部210は、例えば、RFIDタグ1が、予め設定された座標系内の所定の通信エリア内に存在するか否か等を判定することにより、RFIDタグ1が、所定の位置に存在するか否かを判定する。通信エリアがどのような空間領域であるかについて設定する情報であるエリア情報は、例えば、エリア情報記憶部211に記憶されている。ここでは、位置判定部210が、位置測定部208において測定された位置が、上記エリア情報で設定される通信エリア内に存在するか否かを判定することによって、該RFIDタグ1が所定の位置に存在するか否かを判定する場合について説明する。この判定処理の詳細については、後述する。位置判定部210は、通常、MPUやメモリ等から実現され得る。位置判定部210の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0253】
エリア情報記憶部211は、所定のエリア(領域)についての情報であるエリア情報を記憶する。ここで述べる「エリア」とは、空間内の領域、面内の領域、線上の領域、または点上の領域のうちのいずれであってもよい。「エリア情報」とは、所定の領域を特定するための情報である。「エリア情報」は、例えば、1以上の1次元の情報、2次元の情報、3次元の情報等で構成される。例えば、エリア情報は、x=0で定義される面上の全ての領域を指定する情報であってもよい。また、エリア情報は、(x,y)=(10,20)、(x,y)=(60,50)という2点を両端とする線分上の領域を指定する情報であってもよい。エリア情報が指定する領域の形状は問わない。例えば、エリア情報が指定する領域の形状は、領域が3次元の空間の領域であれば、球状の領域であっても良いし、直方体の形状であってもよい。エリア情報記憶部211に記憶されているエリア情報は、リーダライタ200が設置される環境等に応じて設定されることになる。このエリア情報の設定は、例えば外部通信部9を介して外部装置から行われるようになっていてもよいし、リーダライタ2に、エリア情報を入力するためのユーザインターフェースが備えられていてもよい。エリア情報記憶部211は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。
【0254】
処理部212は、位置判定部210の判定結果に基づいて所定の処理を行なう。「判定結果に基づいて所定の処理を行なう」とは、具体的には、判定結果が、RFIDタグが所定の位置に存在することを示す場合にのみ所定の処理を行ない、RFIDタグが所定の位置に存在しないことを示す場合には所定の処理を行なわないということや、判定結果が、RFIDタグが所定の位置に存在しないことを示す場合にのみ所定の処理を行ない、RFIDタグが所定の位置に存在することを示す場合には所定の処理を行なわないということや、判定結果が、RFIDタグが所定の位置に存在することを示す場合と、RFIDタグが所定の位置に存在しないことを示す場合とで、互いに異なる所定の処理を行なうということを含む概念である。「所定の処理」とはどのような動作であっても良く、例えば、RFIDタグ1に関連した処理である。具体的には、RFIDタグ1が所定の位置に存在していること、あるいは存在していないことを示す情報を、外部通信部9等を通じて外部に出力する処理や、RFIDタグ1から送信された情報を外部通信部9等を通じて出力したりする処理や、RFIDタグ1に対して、所定の情報を送信する処理等である。例えば、判定結果が、複数のRFIDタグ1のうちの1以上のRFIDタグ1が所定の位置に配置されていることを示す場合に、処理部212は、この所定の位置に配置されているRFIDタグ1から受信処理部6が受信した識別情報等の情報を、外部通信部9等を通じて図示しない外部装置等に出力する。ここで述べる出力とは、ディスプレイへの表示、他の装置への送信、プリンタへの出力、メモリ等の記憶媒体への一時記憶を含む概念である。処理部212はディスプレイ等の出力デバイスを含むと考えても、考えなくても良い。また、判定結果が、RFIDタグ1のうちの1以上のRFIDタグ1が所定の位置に配置されていることを示す場合に、処理部212は、この所定の位置に配置されているRFIDタグ1に対して、送信処理部5を通じて所定の情報を送信する。この所定の情報は、例えば、RFIDタグ1に対する、タグ内の情報の読み出しを要求する要求信号や、タグ内の情報の書き換えや所定の情報の送信等の処理を指示するコマンド等である。また、この所定の情報には、処理部212が送信するコマンド等により動作するRFIDタグを指定するための情報として、受信処理部6が受信した識別情報等を含むようにしてもよい。また、処理部212の行なう処理は、図示しない受付部等を介してユーザから受け付けた指示に応じて、設定されるようにしても良い。処理部212は、通常、MPUやメモリ等から実現され得る。処理部212の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0255】
次に、本実施の形態の通信システムの動作について説明する。
【0256】
まず、RFIDタグ1の複数の周波数を有する一フレームからなるタグ応答信号を出力する動作については、上記実施の形態1と同様であるので、説明は省略する。
【0257】
次に、情報処理装置200の動作について、図27のフローチャートを用いて説明する。なお、図において、図13と同一符号は、同一または相当する処理ステップを示している。
【0258】
まず、距離測定処理が開始されると、周波数制御部7Aが、R/W要求信号を送信する際の搬送信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))の周波数を上記複数の分割期間ごとに切り替えるようにPLL部5Aを制御する。そして、送信制御部7Bが、R/W要求信号を示すデータを搬送信号に重畳させるように変調部5Bを制御する。そして、変調部5Bによって変調された送信信号が、電力増幅部5Cによって増幅された後に送信アンテナ3から出力される(S51)。R/W要求信号が送信されると続いてCW(連続搬送波)が上記複数の分割期間ごとに異なる周波数で送信される(S53、S55、S58)。これにより、各分割期間ごとに周波数が切り替えられたR/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))が送信される。
【0259】
RFIDタグ1がR/W要求信号を検出すると、続いて検出したCW(連続搬送波)の搬送周波数(周波数f1,f2,f3)の時間変化に応じて変化した搬送周波数(周波数f1,f2,f3)からなるタグ応答信号を返信する。このタグ応答信号を受信アンテナ4が受信し、受信処理部6が受信処理を行い(S53、S56、S59)、そして位相情報取得部8Aが位相情報取得処理を行う(S54、S57、S60)。ここで受信されるタグ応答信号は、R/W要求信号後のCW(連続搬送波)における搬送周波数の時間変化に応じて、搬送周波数が変化していることになる。
【0260】
すなわち、受信処理部6において、周波数変換部6Bは、タグ応答信号におけるプリアンブル部を認識し、上述の数4から6の数式に基づいて、このプリアンブル部における各分割期間の周波数に対するI信号およびQ信号を求める。位相情報取得部8Aは、周波数変換部6Bから各周波数のI信号およびQ信号を受け取ると、上述の数7から8の数式に基づいて、各周波数の位相の変化量φ1およびφ2を算出し、搬送信号として使用された周波数に対応させてテーブルに記憶する。ここで、各分割期間の切り替えタイミングは、R/W要求信号(より詳しくは、R/W要求信号に続くCW(連続搬送波))送信時における周波数切り替えタイミングに基づいて設定される。
【0261】
受信処理部6および位相情報取得部8Aにおけるタグ応答信号のプレアンブル部における各分割期間の各周波数(周波数f1,f2,f3)に対する周波数変換および位相情報取得処理は、送信処理部5にて対応する周波数のCW(連続搬送波)が送信されている間に行なわれる。例えば、送信処理部5が第1の周波数f1にてCW(連続搬送波)の送信を開始すると(S52)、RFIDタグ1はタグ応答信号のプリアンブル部における最初の分割期間の信号を第1の周波数f1にて返信する。受信処理部6は該周波数f1のタグ応答信号を受信し(S53)、そして位相情報取得部8Aは周波数f1の位相情報を取得する(S54)。一定時間が経過すると、送信処理部5は第2の周波数f2にてCW(連続搬送波)の送信を開始する(S55)。RFIDタグ1はこの第2の周波数f2のCW(連続搬送波)を受信すると、タグ応答信号のプリアンブル部における次の分割期間の信号を第2の周波数f2にて送信する。受信処理部6は、該周波数f2のタグ応答信号を受信し(S56)、そして位相情報取得部8Aは、周波数f2の位相情報を取得する(S57)。一定時間が経過すると、次に、第3の周波数f3に対して送信処理部5、受信処理部6および位相情報取得部8Aは同じ動作を繰り返す(S58からS60)。
【0262】
受信処理部6においてRFIDタグ1からのタグ応答信号の受信が終了すると(S61)、送信処理部5はCW(連続搬送波)の送信、すなわち、1フレームからなる信号の送信を終了する(S62)。その後、上記テーブルに記憶された互いに異なる複数の周波数における位相情報に基づいて、距離算出部8Bが距離rを算出する(S63)。
【0263】
ここで、受信アンテナ4が2以上であれば、上記のステップS53、S54、S56、S57、S59、S60、S61、S63等の処理を、各受信アンテナごとに、順番に、あるいは並列に処理して、各受信アンテナについて、距離rを求めるようにする。
【0264】
位置測定部208は、ステップS63において算出した距離rに基づいて位置情報を取得する(S2701)。例えば、位置測定部8は、受信アンテナ4が一つであれば、送信アンテナ3からRFIDタグ1を経て受信アンテナ4に至る経路の距離が、2rとなる位置の情報を位置情報として取得する。また、位置測定部8は、受信アンテナ4が複数であれば、送信アンテナ3からRFIDタグ1を経て各受信アンテナ4に至る経路の距離が2r(ただし、rはそれぞれの受信アンテナ4が受信したタグ応答信号に基づいて算出された距離)となる条件を満たす位置の情報を位置情報として取得する。また、厳密な位置情報が不要であれば、各受信アンテナ4等を中心とした半径r(ただし、rはそれぞれの受信アンテナ4が受信したタグ応答信号に基づいて算出された距離)となる円や球の交点の位置情報をRFIDタグ1の位置情報として取得してもよい。ただし、受信アンテナ4と送信アンテナ3の位置情報はあらかじめ設定されているものとする。
【0265】
位置判定部210は、ステップS2701において取得した位置情報と、エリア情報記憶部211に格納されているエリア情報とを取得し、RFIDタグ1が、所定の位置に存在するか否かを判定する(S2702)。位置判定部210は、例えば、エリア情報が指定する領域内に、ステップS2701において取得した位置情報(座標情報)が存在する場合、RFIDタグ1が、所定の位置に存在すると判定し、エリア情報が指定する領域内に、ステップS2705において取得した位置情報が存在しない場合、RFIDタグ1が、所定の位置に存在しないと判定する。RFIDタグ1が、所定の位置に存在する場合、ステップS2703に進み、存在しない場合、ステップS2704に進む。
【0266】
処理部212は、第一の所定の処理を行なう(S2703)。例えば、図示しない受付部等を介して、ユーザから、RFIDタグ1の識別情報をリーダライタ200の外部に出力する指示を受け付けていた場合、処理部212は、所定の位置に存在すると判定したRFIDタグ1の識別情報を、受信したタグ応答信号に基づいて取得し、外部通信部9等を介して外部に出力する。また、処理部212が、RFIDタグ1に対して所定の要求信号、例えば、所定の情報を書き込む要求信号(例えばwriteコマンド)や、情報の変更を不可に設定する要求信号(例えばlockコマンド)や、RFIDタグ1を不活性化したり、動作不能にするための要求信号(例えばkillコマンド)等、を送信するよう設定されていた場合、処理部212は、通信制御部7に、これらの要求信号を、所定の位置に存在すると判定したRFIDタグ1の識別情報とともに送信させる指示を出す。通信制御部7は、この指示に基づいて、送信処理部5を制御して送信アンテナ3を介してRFIDタグ1の識別情報と要求信号とを出力させる。第一の所定の処理は、ここでは、何も処理を行わないことであってもよい。そして、処理を終了する。
【0267】
処理部212は、第二の所定の処理を行なう(S2704)。第二の所定の処理は、第一の所定の処理とは異なる処理とする。ただし、第二の所定の処理は、第一の所定の処理と異なる処理であれば、上述した第一の所定の処理の例として述べた処理と同様の処理であってもよい。そして、処理を終了する。
【0268】
また、図27のフローチャートにおいては、受信処理部6がステップS53、S56、S59等で受信するタグ応答信号は、一つのRFIDタグ1から送信されるタグ応答信号だけであってもよいし、複数のRFIDタグ1から送信される複数のタグ応答信号であってもよい。RFIDタグ1の数が予めわかっている場合、タグ応答信号を受信する処理(S53、S56、S59)等の後に、受信処理部6が所定の回数だけ信号を受信したか否かを判定するステップ等を設け、所定の回数だけ信号を受信していない場合、所定数に達するまで、ステップS53、S56、S59等の処理を繰り返すようにしてもよい。また、ステップS53、S56、S59等の処理の後に、送信処理部5が送信処理を行なった後、所定時間経過したか否かを判定するステップ等を設け、所定時間を経過していない場合、所定時間に達するまで、ステップS53、S56、S59等の処理を繰り返すようにしてもよい。
【0269】
なお、図27のフローチャートにおいて、RFIDタグ1が自発的に信号を送信するアクティブタイプのタグである場合、要求信号やCW(連続搬送波)を送信する処理等は省略してもよい。
【0270】
次に、通信システムの具体的な動作について説明する。
【0271】
ここでは、情報処理装置200は、座標が既知である受信アンテナ4を4つ以上備えているものとする。また、ここでは、各受信アンテナ4により受信したタグ応答信号により求めた距離rは、各受信アンテナ4の座標からの距離とみなすものとする。また、1つのRFIDタグ1についての位置情報が複数得られた場合、それらの位置情報間の中心となる位置情報等を、位置情報に設定するものとする。
【0272】
まず、各受信アンテナ4により受信したタグ応答信号に基づいて、位置測定部208が、それぞれ距離rを算出する処理については、上記実施の形態1と同様であるので、説明は省略する。
【0273】
次に、位置測定部208が、各受信アンテナ4から、距離r(ただし、ここでのrはそれぞれの受信アンテナ4が受信したタグ応答信号に基づいて算出された距離)となる条件を満たす位置の座標を求める。なお、このような条件を満たす位置の座標が複数得られた場合、ここでは、得られた複数の座標間の中心となる座標を求める。この座標を、RFIDタグ1の位置情報(ここでは、座標情報)とする。
【0274】
ここで、例えば、エリア情報記憶部11が格納しているエリア情報が、図28に示すように、直方体状の空間の領域60を指定する情報であり、このエリア情報が、x軸方向の最小値をx1、最大値をx2、y軸方向の最小値y1、最大値をy2、z軸方向の最小値をz1、最大値をz2に指定する情報であったとする。そして、位置情報取得部208Cが取得した位置情報が、(x3,y3,z3)であったとすると、次の3つの条件式を全て満たせば、RFIDタグ1が、エリア情報が指定する領域内に存在すると考えられる。
【数23】
【0275】
したがって、位置判定部210は、RFIDタグ1の位置情報が、上記の3つの条件式を満たす場合には、図28に示すようにRFIDタグ1が所定の位置に存在すると判定する。また、一つでも条件式を満たさない場合、RFIDタグ1が所定の位置に存在しないと判定する。
【0276】
ここでは、位置判定部210により、RFIDタグ1が、所定の位置に存在しないと判定された場合、所定の処理として、何も処理を行なわない、という処理を選択して、このRFIDタグ1についての処理は終了する。
【0277】
位置判定部210により、RFIDタグ1が、所定の位置に存在すると判定された場合、処理部212は、RFIDタグ1から取得した識別情報を用いて、予め設定されていた所定の動作や、ユーザから指示を受けた動作等を行なう。
【0278】
例えば、所定の位置に存在するRFIDタグ1に格納されている情報を所定の情報に書き換える指示を、図示しない受付部等を介して予めユーザから受け付けていた場合、処理部212は、上述した要求信号をRFIDタグ1に送信した処理と同様に、RFIDタグ1に格納されている情報を所定の情報に書き換える要求情報を送信する。ただし、ここでは、所定の位置にあると判定されたRFIDタグ1を要求情報の送信先に限定するための情報、具体的には、受信処理部6が受信したRFIDタグ1の識別情報を含む情報も要求情報とともに、あるいは要求情報内に含めて送信する。
【0279】
この要求情報を受信した各RFIDタグ1は、それぞれが図示しない記憶部等に格納している識別情報が、要求情報とともに送信された識別情報と一致するか否か判定し、一致する場合のみ、受信した要求情報により指示される処理を実行する。この場合には、識別情報が一致するRFIDタグ1は、要求情報により指示される処理を実行して、記憶部に記憶している情報の一部、または全部を、所定の情報に書き換える。
【0280】
また、所定の位置に存在するRFIDタグ1の識別情報を、図示しない他の装置に送信することが、予め設定されていた場合、処理部212は、受信処理部6が受信したRFIDタグ1の識別情報を、他の装置に対して、有線や無線の通信により送信する。
【0281】
なお、上記の具体例においては、図28に示すように、エリア情報が指定する領域が直方体状である場合について説明したが、本発明においては、上述したように領域の形状は問わない。例えば、エリア情報が指定する領域は、球形状であってもよいし、空間内の1点であってもよい。また、エリア情報が指定する領域は、空間内の直線や線分内の領域であってもよい。
【0282】
以下、エリア情報が指定する領域が球形状である場合の位置判定部210の処理の例について図28(b)に基づいて説明する。
【0283】
例えば、エリア情報記憶部211が格納しているエリア情報が、図29に示すように、球形状の空間の領域61を指定する情報であり、このエリア情報が、球の中心点の座標A(x1,y1,z1)と、球の半径rを指定する情報であったとする。そして、位置情報取得部208Cが取得した位置情報が、座標B(x2,y2,z2)であったとする。この場合、中心点の座標Aと位置情報である座標Bとの距離Lを求め、L≦rが成り立てば、RFIDタグ1は、エリア情報が示す領域内に存在すると考えられる。距離Lは、次の式で求められる。
【数24】
【0284】
したがって、位置判定部210は、距離Lをこの式を用いて算出し、L≦rであれば、RFIDタグ1が所定の位置に存在すると判定し、L>rであれば、RFIDタグ1が所定の位置に存在しないと判定する。
【0285】
また、本実施の形態においては、エリア情報が、2次元の領域や1次元の領域を指定する情報であってもよい。例えば、エリア情報が、2次元の領域を指定する情報、例えば領域のx軸の範囲とy軸の範囲等だけを指定する情報である場合には、RFIDタグ1の位置情報のうちの2次元の情報、例えばx座標の値とy座標の値とが、エリア情報の指定する範囲内に含まれるか否かを判定することで、RFIDタグ1が所定の位置に存在するか否かを判定することができる。
【0286】
同様に、エリア情報が1次元の領域を指定する情報、例えば領域のx軸の値の範囲だけを指定する情報である場合には、RFIDタグ1の位置情報のうちの1次元の情報、例えばx座標の値が、エリア情報の指定する範囲内に含まれるか否かを判定することで、RFIDタグ1が所定の位置に存在するか否かを判定することができる。
【0287】
図30は、この情報処理装置200を用いた荷物分別システム70の例を示す図である。この荷物分別システム70は、情報処理装置200がベルトコンベア71上を流れる複数の荷物72〜74に取り付けられたRFIDタグ1の情報を読み出して各荷物の配送先の情報を取得し、荷物を分別するための装置である分別装置77が、この取得した情報に基づいて、ベルトコンベア71上の荷物72〜74を、それぞれの配送先に対応したベルトコンベア71a、71b等に載せることで、荷物72〜74を配送先別に分別できるようにしたものである。分別装置77は、例えば、その上部に配置された荷物を、ベルトコンベア71aまたはベルトコンベア71bに移動させる機構を有しているものとする。
【0288】
ここでは、エリア情報記憶部211が格納しているエリア情報は、分別装置77上方に位置する領域79を設定している。情報処理装置200は、RFIDタグ1の位置情報を取得し、このRFIDタグ1が、領域79内に位置すると判定された場合、そのRFIDタグの識別情報を、有線または無線の通信により、分別装置77に送信する。分別装置77は、RFIDタグ1内の識別情報と、各荷物の送付先の情報とが対応付けられた情報を格納しているデータベース(図示せず)を有しており、RFIDタグ1の識別情報を情報処理装置200から受信すると、その識別情報に基づいて、データベースからRFIDタグ1が貼り付けられた荷物の送付先の情報を取得し、その送付先の情報に応じて、分別装置77上の荷物、ここでは、領域79内の荷物73を、ベルトコンベア71aまたはベルトコンベア71bのいずれかに載置する。なお、ベルトコンベア71、71a、71b等の構成や分別装置77が荷物を所定のベルトコンベア71a、71bに載置する構成等については、公知技術であるので説明は省略する。
【0289】
この荷物分別システム70においては、情報処理装置200は、分別装置77上の領域79内の荷物73に貼り付けられているRFIDタグ1のみを所定の位置に存在するRFIDタグ1であると判定して、このRFIDタグ1の識別情報だけを分別装置77に送信する。また、ベルトコンベア71上を移動する荷物74に貼り付けられているRFIDタグ1や、ベルトコンベア71a上の荷物72に貼り付けられているRFIDタグ1等の、現時点では、読み取りが不要なRFIDタグ、すなわち領域79内にないRFIDタグについては、タグ内の情報を読み取らないようにすることができる。このため、情報処理装置200から送信される識別情報が、分別装置77上の荷物に貼り付けられたRFIDタグ1の識別情報であるため、分別装置77は、この識別情報に基づいて分別装置77上の荷物についての配送先を判断することができ、荷物を配送先に応じて分別することができる。
【0290】
このようなシステムに、従来のRFIDタグを読み出す装置、いわゆるタグリーダ等を利用した場合、分別装置77の上方に、通信距離の短いタグリーダを配置することで、分別装置77の情報に移動してきた荷物のRFIDタグのみをタグリーダで読み出せるようにしたり、電波遮断構造等を設けて、通信可能領域を限定させたりする必要がある。しかし、通信距離の短いタグリーダを用いた場合、常にタグリーダを、分別装置77の近傍に設ける必要があるが、場所によっては、タグリーダの配置が困難であり、タグリーダが配置できない、という問題が生じる。さらに、現場の運用が変更になり、分別装置77の位置等を変更する場合や、荷物のRFIDタグを読み出す位置を変更する際には、その変更にあわせて、タグリーダを設ける位置も変更する必要があり、作業を容易に行うことができない。また、電波遮断構造等を用いた場合においても、電波遮断構造等の配置や設定を、分別装置77の配置の変更等にあわせて変更する必要があり、通信距離の短いタグリーダを用いた場合と同様の問題が生じる。
【0291】
これに対し、本実施の形態に係る情報処理装置200を用いれば、エリア情報を、分別装置77上の空間の領域に設定すればよいため、情報処理装置200自身の配置は自由であり、情報処理装置200の配置場所がない、という問題等が生じない。また、分別装置77の位置や、RFIDタグの読み出し位置等を変更する場合においても、エリア情報を変更して、エリア情報が指定する領域を変更すればよいため、取り扱いが非常に容易であり、システム運用上の利便性も高い。
【0292】
以上、本実施の形態によれば、RFIDタグ1の位置情報を取得し、この位置情報に基づいてRFIDタグ1が所定の位置に存在するか否かを判定するようにしたので、RFIDタグの存在する位置に応じて、異なる所定の動作を行なうことができる。例えば、情報処理装置は、所定の位置、例えば領域、に存在するRFIDタグの識別情報等の情報を選択的に取得し、その他の位置に存在するRFIDタグの情報を取得しないようにすることが可能となる。
【0293】
また、1フレーム内において複数の分割期間が設定されているとともに、各分割期間が異なる搬送周波数によって送信される、タグ応答信号を用いて、受信アンテナ4等と、RFIDタグ1との距離を算出し、位置情報を取得するようにしたので、位置測定部208は、一つのタグ応答信号における各分割期間における信号の状態を解析することによって、距離の算出を行なうことが可能となる。この結果、搬送周波数の異なる複数フレームのタグ応答信号に基づいて、距離を算出する必要がなく、RFIDタグ1が移動中であっても、複数フレームのタグ応答信号を受信する場合のように、タグ応答信号とタグ応答信号との送信間隔におけるRFIDタグ1の移動による位置検出の誤差を減少させることができる。この結果、位置測定部208が取得するRFIDタグ1の位置情報の精度を向上させることができる。また、一つの要求信号および一つの反射信号の送受信を行なうのみによって距離の算出を行なうことができ、距離の算出を行なうために必要とされる信号の送受信を低減することが可能となり、これにより、通信効率を落とさずに、距離算出を行なうことができる。
【0294】
また、エリア情報が指定する領域内に、RFIDタグ1の位置情報が存在するか否かを判定することで、RFIDタグ1が所定の位置に存在するか否かを判定するようにしたので、エリア情報を変更するだけで、RFIDタグの存在する位置を判定するために利用されるエリアを情報処理装置の移動等を行なうことなく容易に変更することができる。
【0295】
なお、本実施の形態では、上記実施の形態1における1フレーム内において周波数が異なるタグ応答情報を利用して情報処理装置200とRFIDタグ1までの距離rを算出する構成を用いて、RFIDタグ1の位置情報を取得するようにしたが、本発明においては、上記実施の形態1において説明した他の距離測定処理を行なう構成(例えば、図1、図4、図14、図17、図21等に示した構成等)等を用いてRFIDタグ1の位置情報を取得してもよいし、また、上記実施の形態1において説明した構成を、どのように組み合わせて、RFIDタグ1の位置情報を取得するようにしてもよい。例えば、上記実施の形態1において説明したMUSIC法を応用した距離測定処理であっても、同様に適用することが可能である。また、I信号・Q信号のレベルがより高い受信信号を2つ選択し、この選択した2つの受信信号に基づいて位相の変化量検出および位置算出を行うことも可能である。
【0296】
また、上記の例においては、一以上の受信アンテナ4等の位置情報と、受信アンテナ4が受信したタグ応答情報から算出した距離情報とに基づいてRFIDタグ1の位置情報を特定しているが、本発明においては、このような構成に特定されるものではない。例えば、本実施の形態の位置測定部208を、図17を用いて説明したような方向算出部8Cを有する位置算出部8に、位置情報取得部208Cを設けた構成とし、受信アンテナ4等からみた際のRFIDタグ1の方向を検出することによって、この方向の情報と、距離情報と、受信アンテナ4等の位置情報等を適宜組み合わせてRFIDタグ1の位置情報を特定するようにしてもよい。
【0297】
なお、本実施の形態において、RFIDタグ1が所定の位置に存在するか否かを検出する装置と、RFIDタグ1の格納している情報を読み出したり、RFIDタグに対して情報を書き込んだり、要求情報を出力したりする装置とを、異なる装置としてもよい。かかることは他の実施の形態においても同様である。
【0298】
なお、上記実施の形態において、各構成要素は専用のハードウェアにより構成されてもよく、あるいは、ソフトウェアにより実現可能な構成要素については、プログラムを実行することによって実現されてもよい。例えば、ハードディスクや半導体メモリ等の記録媒体に記録されたソフトウェア・プログラムをCPU等のプログラム実行部が読み出して実行することによって、各構成要素が実現され得る。かかることは他の実施の形態においても同様である。なお、上記実施の形態における情報処理装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、コンピュータに、異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、前記判定結果に基づいて所定の処理を行う処理ステップと、を実行させるためのプログラムである。
【0299】
なお、上記プログラムにおいて、情報を送信する送信ステップや、情報を受信する受信ステップなどでは、ハードウェアによって行われる処理、例えば、送信ステップにおけるモデムやインターフェースカードなどで行われる処理(ハードウェアでしか行われない処理)は含まれない。かかることは他の実施の形態においても同様である。
【0300】
また、このプログラムは、サーバなどからダウンロードされることによって実行されてもよく、所定の記録媒体(例えば、CD−ROMなどの光ディスクや磁気ディスク、半導体メモリなど)に記録されたプログラムが読み出されることによって実行されてもよい。
【0301】
また、このプログラムを実行するコンピュータは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、あるいは分散処理を行ってもよい。かかることは他の実施の形態においても同様である。
【0302】
(実施の形態3)
本実施の形態に係る情報処理装置は、上述した情報処理装置において、反射体が、所定の領域内に存在するか否かを判定して、反射体が所定の位置に存在するか否かを判定する代わりに、反射体の位置と、情報処理装置の位置との相対的な位置関係が、所定の関係を満たすか否かにより、反射体が所定の位置に存在するか否かを判定するようにしたものである。
【0303】
以下、反射体が、RFIDタグである場合を例に挙げて説明する。
【0304】
図31は、本実施の形態に係るリーダライタ(情報処理装置)202を備えた通信システムの構成を示すブロック図である。RFIDタグ1の構成については、図26と同様であるので説明は省略する。
【0305】
リーダライタ202は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9、処理部212、自位置情報取得部410、および位置判定部411を具備する。送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9、および処理部212の構成については、図26と同様であるので説明は省略する。
【0306】
自位置情報取得部410は、自機器の位置に関する情報である自位置情報を取得する。ここで述べる自機器とは、具体的には、リーダライタ202のことである。自位置情報とは、RFIDタグではなくリーダライタ202の位置に関する情報であることを除けば、RFIDタグの位置情報と同様である。受信アンテナ4がリーダライタ202本体から離れて配置されている場合、この受信アンテナ4の一つの位置を自位置情報としてもよい。自位置情報取得部410は、リーダライタ202のどの部分の位置に関する情報を自位置情報としてもよい。自位置情報を、位置情報を取得する処理を行う位置に関する情報としてもよい。また、自位置情報取得部410は、どのように自位置情報を取得してもよい。例えば、あらかじめ設定されたリーダライタ202の座標情報が、自位置情報として、図示しないメモリ等の記憶媒体に記憶されていてもよい。また、必要に応じて、他の機器等から送信される自位置情報を、図示しない受信部等を介して受信して取得してもよい。また、自位置情報が緯度や経度等の絶対座標である場合、リーダライタ202や受信アンテナ4が絶対座標を取得するための手段としてGPS(global positioning system)受信機(図示せず)を備えるようにし、このGPS受信機が取得した絶対座標の情報をリーダライタ202および受信アンテナ4のそれぞれの自位置情報としてよい。また、PHS等の位置を測定するシステムの原理を利用してもよい。また、リーダライタ202にRFIDタグ1と同様のRFIDタグを設けておき、このRFIDタグの位置情報を、位置測定部208と同様の処理によって取得するようにし、この取得した位置情報をリーダライタ202の位置情報としてもよい。なお、リーダライタ202本体と同じ位置にない受信アンテナ4の位置の情報については、RFIDタグ1の位置情報を取得する際等に必要となるため、予め設定しておくか、何らかの手段により取得しておく必要がある。例えば受信アンテナ4の位置情報については、予め位置情報が既知である位置決め用のRFIDタグを1以上設けておき、このRFIDタグの位置を、受信アンテナ4を用いて検出することにより受信アンテナ4の位置を求めるようにしてもよい。また、GPS受信機等を受信アンテナ4に設けて、このGPS受信機を用いて受信アンテナ4の位置の情報を取得してもよい。自位置情報取得部410は、通常、MPUやメモリ等から実現され得る。自位置情報取得部410の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0307】
位置判定部411は、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定する。具体的には、RFIDタグ1の位置情報と、リーダライタ202(または受信アンテナ4)の自位置情報とが、所定の関係を満たすか否かを判定することにより、RFIDタグ1が、所定の位置に存在するか否かを判定する。ここで述べる「所定の関係」とは、リーダライタ202(または受信アンテナ4)の位置と、RFIDタグ1位置との位置関係を特定できる関係であれば、どのような関係であってもよい。位置判定部411は、例えば、リーダライタ202の位置と、RFIDタグ1の位置との間の距離が、所定の範囲内にあれば、所定の関係を満たすと判断してもよい。また、リーダライタ202に対して、RFIDタグ1の位置する方向が、所定の方向であれば、所定の関係を満たすと判断してもよい。あるいは、リーダライタ202とRFIDタグ1とのx、y、z座標のそれぞれの値の差が、全て所定の範囲内にあれば、所定の関係を満たすと判定してもよい。RFIDタグ1の位置情報と、情報処理装置202の自位置情報とが、所定の関係を満たすか否かの判定は、例えば、図示しないメモリ等に格納されている判定条件を設定する情報である判定情報に基づいて行なわれる。この判定情報は、位置判定部411が有していてもよい。位置判定部411は、通常、MPUやメモリ等から実現され得る。位置判定部411の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0308】
次に、リーダライタ202の動作について、図32のフローチャートを用いて説明する。なお、図32において、図27と同一符号は、同一または相当する処理ステップを示しており、その説明は省略する。
【0309】
(ステップS3201)自位置情報取得部410は、自位置情報を取得する。自位置情報取得部410は、例えば予めメモリ等に格納されている自位置情報を取得してもよい。また、予めリーダライタ202にRFIDタグを設けておき、このRFIDタグから送信されるタグ応答情報に基づいて、ステップS51〜ステップS63およびステップS2701の処理と同様の処理等により当該RFIDタグの位置情報を取得し、この位置情報を自位置情報としてもよい。なお、ステップS3201の処理は、ステップS51の前の処理としても実行してもよい。
【0310】
(ステップS3202)位置判定部411は、ステップS3201において取得した自位置情報と、ステップS2701において取得したRFIDタグ1の位置情報とが所定の関係を満たすか否かを判定する。所定の関係を満たす場合、ステップS2703に進み、所定の関係を満たさない場合、ステップS2704に戻る。
【0311】
なお、図32のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
【0312】
次に具体例について説明する。図33は、駅の自動改札システムとして、本実施の形態のリーダライタ202を用いた場合の例を示す概略図である。図43に示すように、リーダライタ202は、駅の改札口に設置されている。ここで、リーダライタ202の自位置情報は、予め(x1,y1,z1)に設定されており、位置判定部411が判定の条件として利用する判定情報としては、リーダライタ202から、改札口の最も離れた位置までの距離の値Rが設定されているものとする。
【0313】
まず、リーダライタ202は定期的に、RFIDタグ1の情報を読み出すためのコマンド(R/W要求信号)を送信しているとする。
【0314】
いま、RFIDタグ1を内蔵した定期券を持ったユーザ2001aが、改札口から駅構内に入ろうとした場合(入場方向)、ユーザの定期券内のRFIDタグ1が、RFIDタグ1内に格納している識別情報等を応答信号(反射信号)として送信する。リーダライタ202が受信アンテナ4を介してこのRFIDタグ1からの信号を受信すると、位置測定部208がRFIDタグ1の位置情報である座標情報を取得する。この座標情報は、(x2,y2,z2)であったとする。また、自位置情報取得部410はメモリ等に格納されている自位置情報である座標情報(x1,y1,z1)を取得する。
【0315】
次に、位置判定部411は、自位置情報とRFIDタグ1の位置情報とが、判定情報により設定される所定の条件を満たすか否かを判定する。具体的には、自位置情報が示す位置とRFIDタグ1の位置情報が示す位置との距離が、R以下であるか否かを判定する。すなわち、以下の式を満たすか否かを判定する。
【数25】
【0316】
上記の式を満たす場合、RFIDタグ1が改札エリア内(または改札通路内)に存在すると判断して、リーダライタ202がRFIDタグ1内の情報を読み取り、ユーザ2001aが改札を通過してよいか否かを判定する。すなわち、改札口を含む領域2000内にRFIDタグ1があれば、そのRFIDタグ1の情報は読み出される。
【0317】
また、RFIDタグ1を持つユーザ2001bが、改札口から離れていた場合、リーダライタ202は、同様に、RFIDタグ1の位置情報を取得するが、この位置情報は、上述した式を満たさず、自位置情報と所定の関係を満たさないと判断され、このRFIDタグ1の情報は読み出されない。すなわち、リーダライタ202は、改札口から離れているユーザ2001bの定期券内のRFIDタグ1については、情報を読み取らない。
【0318】
以上のように、本実施の形態によれば、RFIDタグ1の位置情報とリーダライタ202の自位置情報とを取得し、この位置情報と自位置情報とが所定の関係を満たすか否かを判定し、判定結果を出力するようにし、この判定結果を利用して、RFIDタグ1に対して所定の動作を行うか否かを判定するようにした。この結果、RFIDタグ1と、リーダライタ202との相対的な位置関係に基づいて、リーダライタ202の動作を決定することができる。例えば、情報処理装置は、所定の相対的な位置関係にあるRFIDタグの識別情報等の情報を選択的に取得することができる。
【0319】
また、所定の関係を満たすかないかの判断の条件等を変更するだけで、リーダライタ202に所定の動作を実行させるための、リーダライタ202の位置に対するRFIDタグ1が配置される相対的なエリアを情報処理装置の移動等を行なうことなく容易に変更することができる。
【0320】
また、上記のような自動改札システムにおいて、上記実施の形態2において説明した情報処理装置200を適用するようにしてもよい。この場合、領域2000をエリア情報により設定するようにすればよい。
【0321】
なお、入場出場(乗車降車)兼用タイプの自動改札機(自動改札通路)システムに適用した場合、リーダライタ202が処理部212等において、RFIDタグ1の位置情報とリーダライタ202の自位置情報との位置関係の経時的変化から、RFIDタグ1がどの方向から改札口(改札通路)に接近してきているのか否かを判断するようにし、RFIDタグ1を所持した乗降客が、どの方向から改札口(改札通路)へ接近(あるいは改札口を含む領域2000内への進入)するかに応じて、自動改札システムの処理方向(具体的には通過許可方向)を、入場方向または出場方向に、動的に切替えるようにしても良い。さらに、自動改札システムが複数台設置(例えば5台)されている場合、リーダライタ202が処理部212等において、改札口への方向別の乗降客の接近人数(接近するRFIDタグの数)あるいは人数比を算出し、算出した方向別の乗降客の接近人数(接近するRFIDタグの数)あるいは人数比に応じて、複数台の自働改札システムの処理方向(通過許可方向)の割合を、例えば2対3や3対2に、動的に切替えれば良い。例えば、リーダライタ202の判断の結果、改札口(改札通路)に対して、駅構内に入ろうとする客と、駅構内から出ようとする客との比が、1対4であった場合、5台の自動改札システムのうち、1台だけを駅構内に入る方向にのみ通過できるように通過許可方向を制御し、残りの4台を駅構内から出る方向にのみ通過できるように通過許可方向を制御する。自動改札システムの通過許可方向の制御は、例えば、通過を許可しない方向からの通過を不許可とするためのゲートをおろしたり、通過ができない旨の表示を行なったりすることで行なわれる。
【0322】
従来は、複数の自動改札システムを備えていても、自動改札システムに向かう詳細な人数に基づいて、自動改札システムの処理方向(通過許可方向)が動的に制御されていなかった。このため、改札口を通って駅構内に入る客と出る客との構成比が変化しても、通過許可方向が駅構内に入る方向である自動改札システムと、通過許可方向が駅構内から出る方向である自動改札システムとの構成比が、動的に制御されていなかった。この結果、通過方向別の客の構成比と、通過許可方向別の自動改札システムの構成比とが、大きく異なる場合が発生し、改札口が混雑してしまうことが多かった。しかしながら、上記のような構成とすることで、自動改札システムに向かう客の方向と、人数とに基づいて、動的に複数の自動改札システムの通過許可方向を制御して、通過方向別の客の構成比と、通過許可方向別の自動改札システムの構成比とが、ほぼ同じ比率となるようにすることができ、改札口の混雑を解消することが可能である。
【0323】
また、従来の、RFIDタグを内蔵した乗車券を用いた非接触のカードタッチの判定により改札を行なうシステムにおいては、乗車客と降車客とが同時にカードタッチして自動改札機(自動改札通路)に進入した場合、どちらの客を優先して通過させればよいか判定できず、客同士が改札通路内で立ち往生することがあったが、本件を適用すれば、改札口の混雑が解消できる。
【0324】
なお、上記のような自動改札システムに用いる情報処理装置として、リーダライタ202の代わりに、上記実施の形態2において説明した情報処理装置200等を用いるようにしてもよい。この場合、例えば、改札口の付近に複数のエリアを設定し、情報処理装置200の動作部206等により、RFIDタグ1が経時にどのエリアからどのエリアに移動したかを判断することで、客がどの方向から、改札口に接近しているかを判断するようにすればよい。
【0325】
なお、ここで、1つの受信アンテナ4の位置を、予め位置情報が設定されているRFIDタグである位置決め用のRFIDタグを用いて求める処理について説明する。ここでは、例として位置決め用のパッシブ型のRFIDタグの位置情報と、このRFIDタグから送信される信号に基づいて取得されたRFIDタグから受信アンテナ4までの距離とから、受信アンテナ4の座標を取得する処理について説明する。
【0326】
図34(a)、および図34(b)は、受信アンテナ4の位置を検出する処理を説明するための概略図である。ここでは、位置検出用のRFIDタグとして、位置情報が予め設定されているアクティブ型の2つのRFIDタグ1aおよびRFID1bを用いた場合について説明する。RFIDタグ1aの位置情報は、座標A(xa,ya,za)とし、RFID1bの位置情報は、座標B(xb、yb、zb)とする。なお、リーダライタ202の受信アンテナ4以外の構成についてはここでは省略する。また、ここでは、受信アンテナ4と送信アンテナとを兼用しているものとする。
【0327】
まず、図44(a)に示すように、上記実施の形態2等と同様の処理により、受信アンテナ4とRFIDタグ1aおよびRFIDタグ1bとの距離をそれぞれ求める。すなわち、送信アンテナ(ここでは受信アンテナ4を利用)から要求信号を送信し、これに対応してRFIDタグ1aから送信される1フレームのタグ応答信号とRFIDタグ1bから送信される1フレームのタグ応答信号とを1つの受信アンテナ4において受信する。そして、これらのタグ応答信号に基づいて、上記実施の形態2において説明した処理と同様の処理により、受信アンテナ4とRFIDタグ1aとの距離Raを求める。同様にして、受信アンテナ4とRFIDタグ1bとの距離Rbを求める。
【0328】
次に、RFIDタグ1aの座標A(xa,ya,za)と、RFIDタグ1bの座標B(xb、yb、zb)とに基づいて、RFIDタグ1aからの距離が距離Raで、RFIDタグ1bからの距離が距離Rbである位置の座標Cを求める。この座標C(xc、yc、zc)が、アンテナ201の座標となる。この座標Cは、図34(b)に示すように、座標Aを中心とした距離Raの円の円周と、座標Bを中心とした距離Rbの円の円周との交点の座標で表すことができる。
【0329】
なお、2つのRFIDタグを用いた場合、座標Aからの距離が距離Raであって、座標Bからの距離が距離Rbである座標は、通常2つ算出される。このため、この交点の座標のうちのいずれか一方は、リーダライタ202の配置されている部屋等の条件等に基づいて除外する。例えば、得られた座標の一方が、リーダライタ202が配置されている部屋の外の座標となる場合等には、この座標はリーダライタ202の位置情報である座標Cではあり得ないことから、除外すればよい。
【0330】
また、ここでは、位置情報が予め設定されている2つのRFIDタグを用いた場合について説明したが、本発明においては、位置情報が予め設定されている3以上のRFIDタグを用いて受信アンテナ4の位置を算出してもよい。3以上のRFIDタグを用いることで、受信アンテナ4の位置情報を取得する精度を向上させることができる。
【0331】
また、各RFIDタグ1a、1bの位置情報は、各RFIDタグ1a、1bから送信されてもよいし、各RFIDタグ1a、1bの識別情報と対応付けられた状態で、情報処理装置内の記憶媒体等に予め格納されているようにして、各RFIDタグから識別情報を受信した場合に、受信した識別情報に対応する位置情報を記憶媒体から取得してもよい。
【0332】
(実施の形態4)
本実施の形態に係る情報処理装置は、上記実施の形態に係る情報処理装置において、通信可能なエリア内に障害物が存在する場合においても、反射体の位置情報を正確に取得できるようにしたものである。
【0333】
以下、反射体がRFIDタグである場合を例に挙げて説明する。
【0334】
図35は、本実施の形態に係るリーダライタ(情報処理装置)203を備えた通信システムの構成を示すブロック図である。RFIDタグ1の構成については、図26と同様であるので説明は省略する。
【0335】
リーダライタ203は、送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9,位置判定部210、エリア情報記憶部211、処理部212、障害情報格納部451、および補正部452を具備する。送信アンテナ3、受信アンテナ4、送信処理部5、受信処理部6、通信制御部7、位置測定部208、外部通信部9,位置判定部210、エリア情報記憶部211、および処理部212の構成については、図26と同様であるので説明は省略する。
【0336】
障害情報格納部451は、RFIDタグ1とリーダライタ203の受信アンテナ4との間の通信路に配置されている障害物の情報である障害物情報が格納可能である。障害情報格納部451は、具体的には、通信が可能なエリア内に配置されている障害物の情報を格納している。障害物とは、ここでは、電波の通信を妨げるものであり、具体的には、電波を反射させるものや、電波を吸収したり増幅したりするもの、不要な電波を出力するもの等である。たとえば、部屋の壁や天井、床なども、障害物と考えてもよい。障害物情報は、例えば、障害物の座標等の位置や、形状、大きさ、反射率、電波の吸収率等の障害物が通信に影響を与える要素についての情報を格納している。障害物情報は、例えば、図示しない受付部を介して障害情報格納部451に蓄積される。障害情報格納部451は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。
【0337】
補正部452は、障害情報格納部451が格納している障害物情報に基づいて位置測定部208が取得した位置情報を補正する。具体的には、補正部452は、補正が必要であるか否かを判定し、必要であると考えられる場合には、補正を行ない、不要であると考えられる場合には、補正を行なわない。補正部452は、例えば、RFIDタグと受信処理部6との通信路、具体的には、位置測定部208が取得した位置情報が示す位置と受信アンテナ4の位置とを結んだ経路上に障害物が存在する場合に、補正が必要であると判定する。あるいは、補正部452は、例えば、通信路の障害物により受けたと推定される変更内容を打ち消すような補正を行なう。例えば、補正部452は、位置測定部208が取得したRFIDタグ1の位置を示す位置情報が示す位置と受信アンテナ4の位置とを結んだ経路上に、電波を反射する障害物があると判定した場合、障害物上の反射面に対称に、位置測定部208が取得した位置情報を移動させて得られる位置情報を、補正したRFIDタグ1の位置情報として出力する。補正部452は、通常、MPUやメモリ等から実現され得る。補正部452の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0338】
次に、リーダライタ203の動作について、図36のフローチャートを用いて説明する。なお、図36において、図27と同一符号は、同一または相当する処理ステップを示しており、その説明は省略する。
【0339】
(ステップS3601)補正部452は、障害情報格納部451から障害物情報を取得し、ステップS2701において、取得した位置情報について、補正が必要か否かを判定する。例えば、位置測定部208が取得した位置情報が示す位置と受信アンテナ4の位置とを結んだ経路上に障害物が存在する場合に、補正部452は、補正が必要であると判定する。例えば、受信アンテナ4からみて、本来、電波が通過しない障害物内や、障害物を越えた位置にRFIDタグ1が存在することを、位置情報が示しているということは、電波が障害物の表面等で反射されて、当該位置情報が示す位置の方向から受信アンテナ4に入射していると考えられるからである。例えば、位置測定部208が取得した位置情報が示す位置と受信アンテナ4の位置とを結んだ経路は、それぞれの座標情報に基づいて算出可能である。また、経路上に障害物が存在するか否かは、障害物情報から、各障害物の座標情報等を取得し、補正部452が算出した上記の経路上にいずれかの障害物が存在するか否かを判定することで検出可能である。補正が必要と判定された場合、ステップS3602へ進み、補正が不要である場合、ステップS32702に進む。
【0340】
(ステップS3602)補正部452は、障害物情報に基づいて、ステップS2701において取得した位置情報を補正する。例えば、経路上に存在する障害物の表面で、電波が反射されたと仮定した場合の位置情報を算出する。そして、ステップS2702に進む。
【0341】
なお、図36のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
【0342】
次に、具体例について説明する。リーダライタ203が、RFIDタグ1から電波を受け付け、RFIDタグ1から受信した信号に基づいて位置情報を取得する処理については、上記実施の形態2と同様であるので、説明は省略する。
【0343】
図37は本実施の形態に係るリーダライタ203によるRFIDタグの位置情報の補正の処理を説明するための図である。例えば、図37に示すように、リーダライタ203の受信アンテナ4とRFIDタグ1との間に、障害物2300と、障害物である床2401が設けられていたとする。ここでは、障害物2300と床2401の配置等を示す座標情報等の情報や、障害物2300と床2401の電波を反射する性質の有無等の情報が、障害物情報として、予め、障害情報格納部451に格納されているものとする。また、現在のRFIDタグ1の位置は、エリア情報記憶部211が格納しているエリア情報が指定する領域2310内に存在しているものとする。
【0344】
ここで、RFIDタグ1から受信した信号に基づいて取得した位置情報が位置A(x1,y1,z1)であったとし、障害情報から位置情報が指定する位置Aが床内に位置していたとする。
【0345】
この場合、補正部452は、障害情報に基づいて、位置情報が指定する位置Aと受信アンテナ4の位置とを結んだ経路上に電波を反射する床2401が存在することを認識し、補正が必要であることを判定する。
【0346】
そして、補正部452は、床2401の表面に対して、点Aに対称な位置の座標を算出する。例えば床に対する高さ方向がy軸方向であり、床の表面がy=0であったとすると、算出される位置の座標は、(x1,−y1,z1)となる。そしてこの座標の値を補正したRFIDタグ1の位置情報として、位置判定部210に出力する。
【0347】
位置判定部210においては、エリア情報と補正した位置情報とに基づいて、RFIDタグ1が所定の位置に存在すると判定する。その他の処理については、上記実施の形態1と同様であるので省略する。
【0348】
以上、本実施の形態によれば、位置測定部208が取得した位置情報を障害物の情報により補正するようにしたので、RFIDタグの位置検出の精度を向上させて、RFIDタグのより正確な位置に応じて、異なる行動を行なうことが可能となる。
【0349】
なお、本実施の形態において説明した障害情報に基づいてRFIDタグの位置情報を補正する構成を、上記実施の形態3に係る情報処理装置に適用しても良い。
【0350】
また、本実施の形態においては、RFIDタグと受信処理部6との通信路、具体的には、位置測定部208が取得した位置情報が示す位置とアンテナ201の位置とを結んだ経路上に障害物が存在する場合に、補正が必要であると判定し、補正を行なうようにしたが、必要に応じて、補正を行なわずに、誤検出が行なわれたことを示すエラー出力等を行なったり、このような位置情報を使用しないようにしてもよい。
【0351】
また、本実施の形態において、通信路上に障害物があるか否かを判断することで、補正の要否を判断したが、本発明においては、障害情報として、予めRFIDタグが存在し得ない領域を設定する情報を用意しておき、検出されたRFIDタグの位置が、本来存在し得ない領域内に位置するか否かを判断して、本来存在し得ない位置に位置すると判断された場合に、補正が必要であると判断するようにしてもよい。
【0352】
なお、上記各実施の形態において、各処理(各機能)は、単一の装置(システム)によって集中処理されることによって実現されてもよく、あるいは、複数の装置によって分散処理されることによって実現されてもよい。
【0353】
また、上記各実施の形態において、一の装置に存在する2以上の通信手段(送信部など)は、物理的に一の媒体で実現されても良いことは言うまでもない。
【0354】
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【0355】
また、本発明は請求項に示した範囲で種々の変更が可能である。すなわち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【0356】
本発明を詳細にまた特定の実施態様を参照して説明したが、本発明の精神と範囲を逸脱することなく様々な変更や修正を加えることができることは当業者にとって明らかである。
【産業上の利用可能性】
【0357】
本発明に係る情報処理装置およびこれを備えた通信システム等は、例えば上述した流通される物品の検査・確認などを行うシステム、店舗などにおいて、商品の盗難監視などを行うシステム、駅や映画館などの改札が必要となる場所に設置される改札システム、キーレスエントリシステムなどの用途に適用可能である。
【図面の簡単な説明】
【0358】
【図1】本実施形態に係るRFIDタグを用いた通信システムが備えるリーダライタにおいて、RFIDタグと当該リーダライタとの距離を測定するための構成の概略を示すブロック図である。
【図2】上記RFIDタグを用いた通信システムの概略構成を示すブロック図である。
【図3(a)】リーダライタとRFIDタグとの間でR/W要求信号およびタグ応答信号の送受信が行われる状態を示す図である。
【図3(b)】リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。
【図3(c)】RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【図4】位相の検出を行うことを可能とする受信処理部の具体的な構成を含むリーダライタの概略構成を示すブロック図である。
【図5】距離測定処理の流れを示すフローチャートである。
【図6】多周波を用いた距離測定処理の流れを示すフローチャートである。
【図7】周波数選択処理、および距離算出処理の流れを示すフローチャートである。
【図8】周波数選択処理の一例を模式的に示す図である。
【図9(a)】リーダライタとRFIDタグとの通信においてマルチパスが生じている状態を示す図である。
【図9(b)】距離に対するMUSIC評価関数の変化を示すグラフである。
【図9(c)】到来方向推定処理を説明するための図である。
【図l0】MUSIC法を応用した距離測定処理の流れの前半を示すフローチャートである。
【図ll】MUSIC法を応用した距離測定処理の流れの後半を示すフローチャートである。
【図12(a)】1フレーム内での周波数を切り替える場合における、リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。
【図12(b)】1フレーム内での周波数を切り替える場合における、RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【図13】1フレーム内での周波数切り替えを伴う距離測定処理の流れを示すフローチャートである。
【図14】各RFIDタグとその距離とを結びつけて認識することを可能とするリーダライタの概略構成を示すブロック図である。
【図15】各RFIDタグを識別した距離測定処理の流れを示すフローチャートである。
【図l6】RFIDタグの存在位置方向の推定処理を模式的に示す図である。
【図17】方向算出を行う場合のリーダライタの概略構成を示すブロック図である。
【図18】位置推定処理の流れの前半を示すフローチャートである。
【図19】位置推定処理の流れの後半を示すフローチャートである。
【図20(a)】1フレーム内での複数周波数を同時送信する場合における、リーダライタからRFIDタグへ送信される信号及びその搬送周波数を時間軸で示した図である。
【図20(b)】1フレーム内での複数周波数を同時送信する場合における、RFIDタグからリーダライタへ送信される信号およびその搬送周波数を時間軸で示した図である。
【図21】1フレーム内での複数周波数を同時送信する場合における、リーダライタの概略構成を示すブロック図である。
【図22】流通される物品の検査・確認などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示す図である。
【図23(a)】商品や在庫物品などの盗難監視などを行うシステムに本RFIDタグを用いた通信システムを適用した場合の例を示す図である。
【図23(b)】窓やドアなどにRFIDタグlを取り付け、このRFIDタグ1の位置を監視することによって、該窓やドアが開けられたことを検知する防犯システム適用例を示す図である。
【図24】例えば駅や映画館などの改札が必要となる場所に本RFIDタグ通信システムを適用した場合の例を示す図である。
【図25】自動車などのキーレスエントリシステムに、本RFIDタグを用いた通信システムを適用した場合の例を示す図である。
【図26】本発明の実施の形態2に係るRFIDタグを用いた通信システムが備えるリーダライタの構成を示すブロック図である。
【図27】同リーダライタの動作を説明するためのフローチャートである。
【図28】同リーダライタの位置判定の動作を説明するための図である。
【図29】同リーダライタの位置判定の動作を説明するための図である。
【図30】同具体例を説明するための図である。
【図31】本発明の実施の形態3に係るRFIDタグを用いた通信システムが備えるリーダライタの構成を示すブロック図である。
【図32】同リーダライタの動作を説明するためのフローチャートである。
【図33】同具体例を説明するための図である。
【図34】(a)同受信アンテナと、位置情報が既知であるタグとの距離を測定する処理を説明するための図、(b)同受信アンテナの位置を検出する処理を説明するための図である。
【図35】本発明の実施の形態4に係るRFIDタグを用いた通信システムが備えるリーダライタの構成を示すブロック図である。
【図36】同リーダライタの動作を説明するためのフローチャートである。
【図37】同具体例を説明するための図である。
【図38】従来技術のRF通信システムの構成を示すブロック図である。
【図39】従来技術のRFIDタグと無線通信を行なう通信装置の構成を示すブロック図である。
【符号の説明】
【0359】
1、1a、1b RFIDタグ
2 リーダライタ
3 送信アンテナ
4 受信アンテナ
4A 第1アンテナ素子
4B 第2アンテナ素子
5 送信処理部
5A PLL部
5B 変調部
5C 電力増幅部
6 受信処理部
6A・6A1・6A2 増幅部
6B 周波数変換部
6B1・6B2 ミキサ
6B3 90°移相部
6C プリアンブル抽出部
6D セレクタ
7 通信制御部
7A 周波数制御部
7B 送信制御部
7C 受信制御部
8、208 位置測定部
8A 位相情報取得部
8B 距離算出部
8C 方向算出部
9 外部通信部
10 エリア判定部
11、211 エリア情報記憶部
70 荷物分別システム
77 分別装置
200、202 情報処理装置(リーダライタ)
208C 位置情報取得部
210、411 位置判定部
212 処理部
410 自位置情報取得部
451 障害情報格納部
452 補正部
【特許請求の範囲】
【請求項1】
異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信手段と、
前記送信手段で送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信手段と、
前記受信手段が受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得部と、
前記位相情報取得部によって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出部と、
前記距離算出部が算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得部と、
前記位置情報取得部が取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定部と、
前記判定結果に基づいて所定の処理を行う処理部と、を備えている情報処理装置。
【請求項2】
前記受信手段は、複数のアンテナを介して、それぞれ前記反射信号を受信し、
前記位相情報取得部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに、前記位相の変化量を算出し、
前記距離算出部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに算出された前記位相の変化量に基づいて、前記複数のアンテナと前記反射体との間の距離をそれぞれ算出し、
前記位置情報取得部は、前記複数のアンテナと前記反射体との間の距離に基づいて、前記反射体の位置情報を取得する請求項1記載の情報処理装置。
【請求項3】
所定の領域についての情報であるエリア情報を記憶するエリア情報記憶部をさらに備え、
前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記エリア情報とを比較することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項1記載の情報処理装置。
【請求項4】
前記情報処理装置は、自機器の位置に関する情報である自位置情報を取得する自位置情報取得部を、さらに備え、
前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記自位置情報とが所定の関係を満たすか否かを判定することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項1記載の情報処理装置。
【請求項5】
前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記受信手段が受信した反射信号を出力する請求項1記載の情報処理装置。
【請求項6】
前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記反射体に対して所定の情報を送信する請求項1記載の情報処理装置。
【請求項7】
前記処理部は、前記判定結果に基づいて、前記反射体との通信を制御する制御信号を出力する請求項1記載の情報処理装置。
【請求項8】
前記反射体と前記アンテナとの間の通信路に配置されている障害物の情報である障害物情報が格納され得る障害情報格納部と、
前記障害物情報に基づいて前記反射体の位置情報を補正する補正部とをさらに具備し、
前記位置判定部は、前記補正部が補正した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を取得する請求項1記載の情報処理装置。
【請求項9】
前記送信手段が、1つの要求信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御する請求項1記載の情報処理装置。
【請求項10】
前記送信手段が、前記要求信号が互いに異なる搬送周波数成分からなる1つの搬送周波数によって送信されるように制御する請求項1記載の情報処理装置。
【請求項11】
前記反射体から、互いに異なる3つ以上の搬送周波数によって反射信号が送信されるとともに、
前記位相情報取得部が、各搬送周波数の信号のうち、信号の状態が距離を算出する上で所定の基準を満たしている2つの搬送周波数の信号を選択して、位相変化量を取得する請求項1記載の情報処理装置。
【請求項12】
前記受信手段は、
受信された反射信号の周波数変換処理を行う周波数変換部を備え、
前記周波数変換部が、前記反射信号をI信号とQ信号とに変換する請求項1記載の情報処理装置。
【請求項13】
前記距離算出部が、高分解能スペクトラム解析法を用いて前記距離を算出する請求項1記載の情報処理装置。
【請求項14】
前記距離算出部が、前記高分解能スペクトラム解析法としてMUSIC(Multiple Signal Classification)法を用い、該MUSIC法の入力として、互いに異なる複数の搬送周波数によって受信された反射信号を用い、モードベクトルを前記距離の関数としてMUSIC評価関数を求め、該MUSIC評価関数のピーク値を求めることによって前記距離を算出する請求項13記載の情報処理装置。
【請求項15】
前記距離算出部が、受信された反射信号の受信強度を併用して前記距離を算出する請求項1記載の情報処理装置。
【請求項16】
前記反射信号に含まれるデータ部の情報を取得するとともに、前記距離算出部によって算出された前記距離情報と前記データ部の情報とを結びつけて外部に出力する受信制御部を備える請求項1記載の情報処理装置。
【請求項17】
前記距離算出部が、前記反射信号に基づいて、該反射信号を送信した反射体の位置する方向を測定する請求項1記載の情報処理装置。
【請求項18】
前記距離算出部が、前記反射信号のプリアンブル部における信号を解析することによって前記距離を算出する請求項1記載の情報処理装置。
【請求項19】
請求項1ないし18のいずれか一項に記載の情報処理装置と、
前記情報処理装置と無線通信を行う少なくとも1つの反射体とを備える通信システム。
【請求項20】
請求項1ないし18のいずれか一項に記載の情報処理装置と、
前記情報処理装置によって前記反射体と通信が行われた結果に基づいて、該反射体と関連付けられている物品、人、および生物のうち少なくともいずれか1つを管理する管理装置とを備える通信システム。
【請求項21】
異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、
前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、
前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、
前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、
前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、
前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、
前記判定結果に基づいて所定の処理を行う処理ステップと、を備えている情報処理方法。
【請求項22】
前記受信ステップは、複数のアンテナを介して、それぞれ前記反射信号を受信し、
前記位相情報取得ステップは、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに、前記位相の変化量を算出し、
前記距離算出ステップは、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに算出された前記位相の変化量に基づいて、前記複数のアンテナと前記反射体との間の距離をそれぞれ算出し、
前記位置情報取得ステップは、前記複数のアンテナと前記反射体との間の距離に基づいて、前記反射体の位置情報を取得する請求項21記載の情報処理方法。
【請求項23】
前記位置判定ステップは、前記位置情報取得ステップで取得した位置情報と、記憶されている所定の領域についての情報であるエリア情報とを比較することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項21記載の情報処理方法。
【請求項24】
前記位置情報を取得する処理を行う位置に関する情報である自位置情報を取得する自位置情報取得ステップを、さらに備え、
前記位置判定ステップは、前記位置情報取得ステップで取得した位置情報と、前記自位置情報とが所定の関係を満たすか否かを判定することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項21記載の情報処理方法。
【請求項25】
前記処理ステップは、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記受信ステップで受信した反射信号を出力する請求項21記載の情報処理方法。
【請求項26】
前記処理ステップは、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記反射体に対して所定の情報を送信する請求項21記載の情報処理方法。
【請求項27】
前記処理ステップは、前記判定結果に基づいて、前記反射体との通信を制御する制御信号を出力する請求項21記載の情報処理方法。
【請求項28】
前前記反射体と前記アンテナとの間の通信路に配置されている障害物の情報である障害物情報に基づいて前記反射体の位置情報を補正する補正ステップをさらに具備し、
前記位置判定ステップは、前記補正ステップで補正した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を取得する請求項21記載の情報処理方法。
【請求項29】
前記送信ステップが、1つの要求信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御する請求項21記載の情報処理方法。
【請求項30】
前記送信ステップが、前記要求信号が互いに異なる搬送周波数成分からなる1つの搬送周波数によって送信されるように制御する請求項21記載の情報処理方法。
【請求項31】
前記反射体から、互いに異なる3つ以上の搬送周波数によって反射信号が送信されるとともに、
前記位相情報取得ステップが、各搬送周波数の信号のうち、信号の状態が距離を算出する上で
所定の基準を満たしている2つの搬送周波数の信号を選択して、位相変化量を取得する請求項21記載の情報処理方法。
【請求項32】
前記受信ステップは、
受信された反射信号の周波数変換処理を行う周波数変換ステップを備え、
前記周波数変換ステップにおいて、前記反射信号をI信号とQ信号とに変換する請求項21記載の情報処理方法。
【請求項33】
前記距離算出ステップは、高分解能スペクトラム解析法を用いて前記距離を算出する請求項21記載の情報処理方法。
【請求項34】
前記距離算出ステップは、前記高分解能スペクトラム解析法としてMUSIC法を用い、該MUSIC法の入力として、互いに異なる複数の搬送周波数によって受信された反射信号を用い、モードベクトルを前記距離の関数としてMUSIC評価関数を求め、該MUSIC評価関数のピーク値を求めることによって前記距離を算出する請求項33記載の情報処理方法。
【請求項35】
前記距離算出ステップは、受信された反射信号の受信強度を併用して前記距離を算出する請求項21記載の情報処理方法。
【請求項36】
前記反射信号に含まれるデータ部の情報を取得するとともに、前記距離算出ステップによって算出された前記距離情報と前記データ部の情報とを結びつけて外部に出力する受信制御ステップを備える請求項21記載の情報処理方法。
【請求項37】
前記距離算出ステップは、前記反射信号に基づいて、該反射信号を送信した反射体の位置する方向を測定する請求項21記載の情報処理方法。
【請求項38】
前記距離算出ステップは、前記反射信号のプリアンブル部における信号を解析することによって前記距離を算出する請求項21記載の情報処理方法。
【請求項39】
コンピュータに、
異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、
前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、
前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、
前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、
前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、
前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、
前記判定結果に基づいて所定の処理を行う処理ステップと、を実行させるためのプログラム。
【請求項1】
異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信手段と、
前記送信手段で送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信手段と、
前記受信手段が受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得部と、
前記位相情報取得部によって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出部と、
前記距離算出部が算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得部と、
前記位置情報取得部が取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定部と、
前記判定結果に基づいて所定の処理を行う処理部と、を備えている情報処理装置。
【請求項2】
前記受信手段は、複数のアンテナを介して、それぞれ前記反射信号を受信し、
前記位相情報取得部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに、前記位相の変化量を算出し、
前記距離算出部は、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに算出された前記位相の変化量に基づいて、前記複数のアンテナと前記反射体との間の距離をそれぞれ算出し、
前記位置情報取得部は、前記複数のアンテナと前記反射体との間の距離に基づいて、前記反射体の位置情報を取得する請求項1記載の情報処理装置。
【請求項3】
所定の領域についての情報であるエリア情報を記憶するエリア情報記憶部をさらに備え、
前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記エリア情報とを比較することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項1記載の情報処理装置。
【請求項4】
前記情報処理装置は、自機器の位置に関する情報である自位置情報を取得する自位置情報取得部を、さらに備え、
前記位置判定部は、前記位置情報取得部が取得した位置情報と、前記自位置情報とが所定の関係を満たすか否かを判定することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項1記載の情報処理装置。
【請求項5】
前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記受信手段が受信した反射信号を出力する請求項1記載の情報処理装置。
【請求項6】
前記処理部は、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記反射体に対して所定の情報を送信する請求項1記載の情報処理装置。
【請求項7】
前記処理部は、前記判定結果に基づいて、前記反射体との通信を制御する制御信号を出力する請求項1記載の情報処理装置。
【請求項8】
前記反射体と前記アンテナとの間の通信路に配置されている障害物の情報である障害物情報が格納され得る障害情報格納部と、
前記障害物情報に基づいて前記反射体の位置情報を補正する補正部とをさらに具備し、
前記位置判定部は、前記補正部が補正した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を取得する請求項1記載の情報処理装置。
【請求項9】
前記送信手段が、1つの要求信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御する請求項1記載の情報処理装置。
【請求項10】
前記送信手段が、前記要求信号が互いに異なる搬送周波数成分からなる1つの搬送周波数によって送信されるように制御する請求項1記載の情報処理装置。
【請求項11】
前記反射体から、互いに異なる3つ以上の搬送周波数によって反射信号が送信されるとともに、
前記位相情報取得部が、各搬送周波数の信号のうち、信号の状態が距離を算出する上で所定の基準を満たしている2つの搬送周波数の信号を選択して、位相変化量を取得する請求項1記載の情報処理装置。
【請求項12】
前記受信手段は、
受信された反射信号の周波数変換処理を行う周波数変換部を備え、
前記周波数変換部が、前記反射信号をI信号とQ信号とに変換する請求項1記載の情報処理装置。
【請求項13】
前記距離算出部が、高分解能スペクトラム解析法を用いて前記距離を算出する請求項1記載の情報処理装置。
【請求項14】
前記距離算出部が、前記高分解能スペクトラム解析法としてMUSIC(Multiple Signal Classification)法を用い、該MUSIC法の入力として、互いに異なる複数の搬送周波数によって受信された反射信号を用い、モードベクトルを前記距離の関数としてMUSIC評価関数を求め、該MUSIC評価関数のピーク値を求めることによって前記距離を算出する請求項13記載の情報処理装置。
【請求項15】
前記距離算出部が、受信された反射信号の受信強度を併用して前記距離を算出する請求項1記載の情報処理装置。
【請求項16】
前記反射信号に含まれるデータ部の情報を取得するとともに、前記距離算出部によって算出された前記距離情報と前記データ部の情報とを結びつけて外部に出力する受信制御部を備える請求項1記載の情報処理装置。
【請求項17】
前記距離算出部が、前記反射信号に基づいて、該反射信号を送信した反射体の位置する方向を測定する請求項1記載の情報処理装置。
【請求項18】
前記距離算出部が、前記反射信号のプリアンブル部における信号を解析することによって前記距離を算出する請求項1記載の情報処理装置。
【請求項19】
請求項1ないし18のいずれか一項に記載の情報処理装置と、
前記情報処理装置と無線通信を行う少なくとも1つの反射体とを備える通信システム。
【請求項20】
請求項1ないし18のいずれか一項に記載の情報処理装置と、
前記情報処理装置によって前記反射体と通信が行われた結果に基づいて、該反射体と関連付けられている物品、人、および生物のうち少なくともいずれか1つを管理する管理装置とを備える通信システム。
【請求項21】
異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、
前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、
前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、
前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、
前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、
前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、
前記判定結果に基づいて所定の処理を行う処理ステップと、を備えている情報処理方法。
【請求項22】
前記受信ステップは、複数のアンテナを介して、それぞれ前記反射信号を受信し、
前記位相情報取得ステップは、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに、前記位相の変化量を算出し、
前記距離算出ステップは、前記複数のアンテナを介してそれぞれ受信された反射信号ごとに算出された前記位相の変化量に基づいて、前記複数のアンテナと前記反射体との間の距離をそれぞれ算出し、
前記位置情報取得ステップは、前記複数のアンテナと前記反射体との間の距離に基づいて、前記反射体の位置情報を取得する請求項21記載の情報処理方法。
【請求項23】
前記位置判定ステップは、前記位置情報取得ステップで取得した位置情報と、記憶されている所定の領域についての情報であるエリア情報とを比較することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項21記載の情報処理方法。
【請求項24】
前記位置情報を取得する処理を行う位置に関する情報である自位置情報を取得する自位置情報取得ステップを、さらに備え、
前記位置判定ステップは、前記位置情報取得ステップで取得した位置情報と、前記自位置情報とが所定の関係を満たすか否かを判定することで、前記反射体が、前記所定の位置に配置されているか否かを判定し、判定結果を取得する請求項21記載の情報処理方法。
【請求項25】
前記処理ステップは、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記受信ステップで受信した反射信号を出力する請求項21記載の情報処理方法。
【請求項26】
前記処理ステップは、前記判定結果が、前記反射体が前記所定の位置に存在することを示す場合に、前記反射体に対して所定の情報を送信する請求項21記載の情報処理方法。
【請求項27】
前記処理ステップは、前記判定結果に基づいて、前記反射体との通信を制御する制御信号を出力する請求項21記載の情報処理方法。
【請求項28】
前前記反射体と前記アンテナとの間の通信路に配置されている障害物の情報である障害物情報に基づいて前記反射体の位置情報を補正する補正ステップをさらに具備し、
前記位置判定ステップは、前記補正ステップで補正した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を取得する請求項21記載の情報処理方法。
【請求項29】
前記送信ステップが、1つの要求信号を送信する期間内に複数の分割期間を設定し、各分割期間において互いに異なる搬送周波数となるように制御する請求項21記載の情報処理方法。
【請求項30】
前記送信ステップが、前記要求信号が互いに異なる搬送周波数成分からなる1つの搬送周波数によって送信されるように制御する請求項21記載の情報処理方法。
【請求項31】
前記反射体から、互いに異なる3つ以上の搬送周波数によって反射信号が送信されるとともに、
前記位相情報取得ステップが、各搬送周波数の信号のうち、信号の状態が距離を算出する上で
所定の基準を満たしている2つの搬送周波数の信号を選択して、位相変化量を取得する請求項21記載の情報処理方法。
【請求項32】
前記受信ステップは、
受信された反射信号の周波数変換処理を行う周波数変換ステップを備え、
前記周波数変換ステップにおいて、前記反射信号をI信号とQ信号とに変換する請求項21記載の情報処理方法。
【請求項33】
前記距離算出ステップは、高分解能スペクトラム解析法を用いて前記距離を算出する請求項21記載の情報処理方法。
【請求項34】
前記距離算出ステップは、前記高分解能スペクトラム解析法としてMUSIC法を用い、該MUSIC法の入力として、互いに異なる複数の搬送周波数によって受信された反射信号を用い、モードベクトルを前記距離の関数としてMUSIC評価関数を求め、該MUSIC評価関数のピーク値を求めることによって前記距離を算出する請求項33記載の情報処理方法。
【請求項35】
前記距離算出ステップは、受信された反射信号の受信強度を併用して前記距離を算出する請求項21記載の情報処理方法。
【請求項36】
前記反射信号に含まれるデータ部の情報を取得するとともに、前記距離算出ステップによって算出された前記距離情報と前記データ部の情報とを結びつけて外部に出力する受信制御ステップを備える請求項21記載の情報処理方法。
【請求項37】
前記距離算出ステップは、前記反射信号に基づいて、該反射信号を送信した反射体の位置する方向を測定する請求項21記載の情報処理方法。
【請求項38】
前記距離算出ステップは、前記反射信号のプリアンブル部における信号を解析することによって前記距離を算出する請求項21記載の情報処理方法。
【請求項39】
コンピュータに、
異なる複数の搬送周波数の電波により1つのフレームからなる信号である要求信号を外部に送信する送信ステップと、
前記送信ステップで送信された前記要求信号が、反射体によって所定の変調を受けながら反射されて発生した、1つのフレームからなる信号である反射信号を、アンテナを介して受信する受信ステップと、
前記受信ステップで受信した反射信号と前記要求信号との間の位相の変化量を、前記送信手段が送信した搬送周波数ごとに算出する位相情報取得ステップと、
前記位相情報取得ステップによって取得された搬送周波数ごとの位相の変化量と搬送周波数とに基づいて、前記アンテナと前記反射体との間の距離を算出する距離算出ステップと、
前記距離算出ステップで算出した距離に基づいて、前記反射体の位置に関する情報である位置情報を取得する位置情報取得ステップと、
前記位置情報取得ステップで取得した位置情報に基づいて、前記反射体が、所定の位置に存在するか否かを判定し、判定結果を出力する位置判定ステップと、
前記判定結果に基づいて所定の処理を行う処理ステップと、を実行させるためのプログラム。
【図1】


【図2】
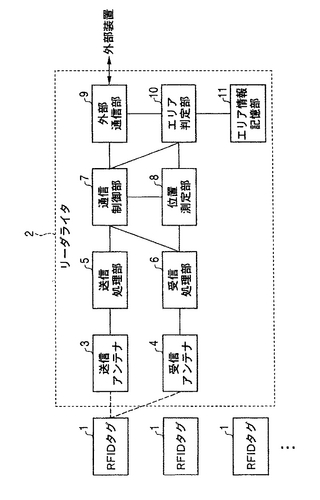
【図3(a)】
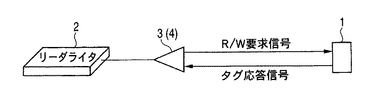
【図3(b)】
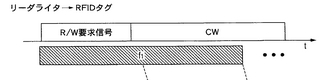
【図3(c)】
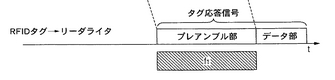
【図4】
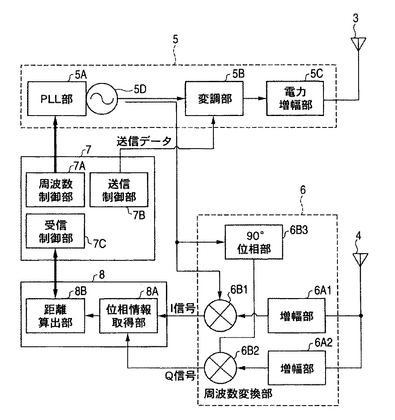
【図5】
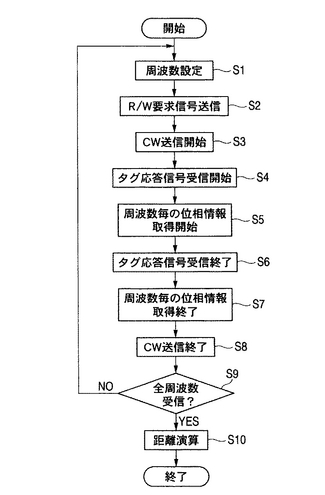
【図6】
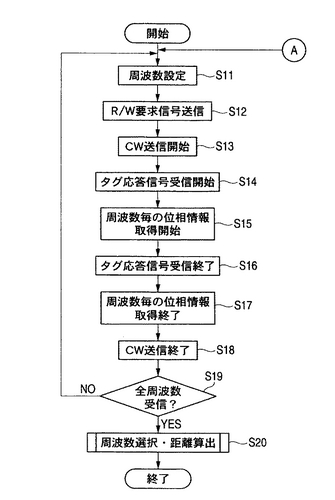
【図7】

【図8】

【図9(a)】
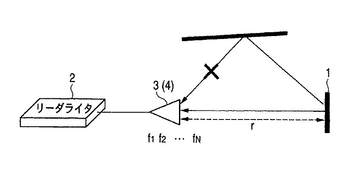
【図9(b)】
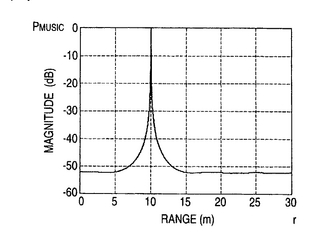
【図9(c)】
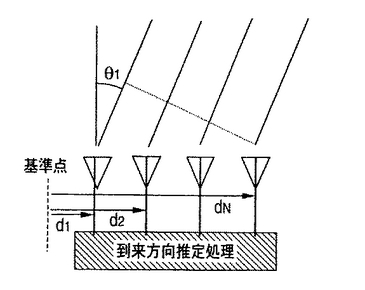
【図l0】
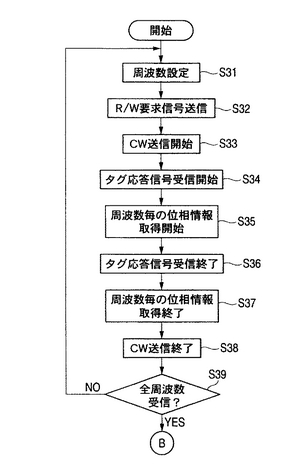
【図ll】
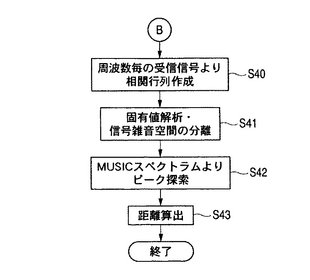
【図12(a)】
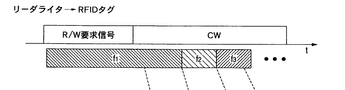
【図12(b)】
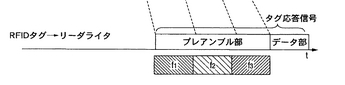
【図13】

【図14】

【図15】
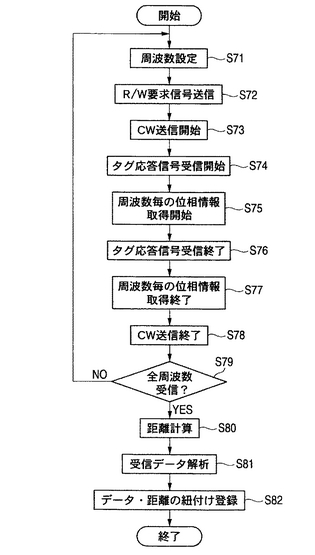
【図l6】
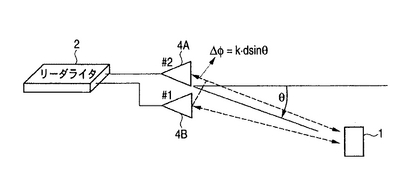
【図17】
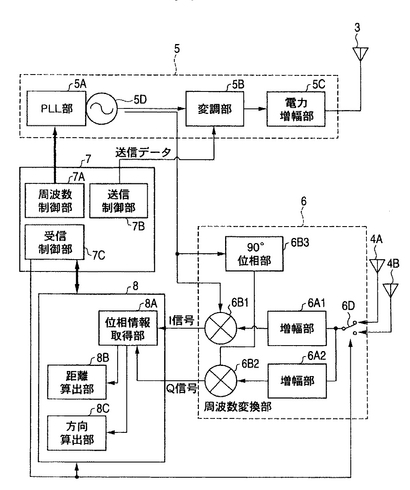
【図18】
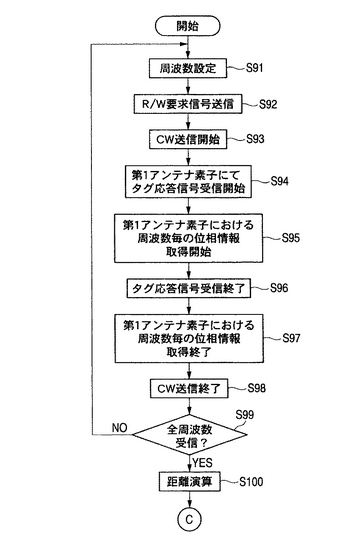
【図19】
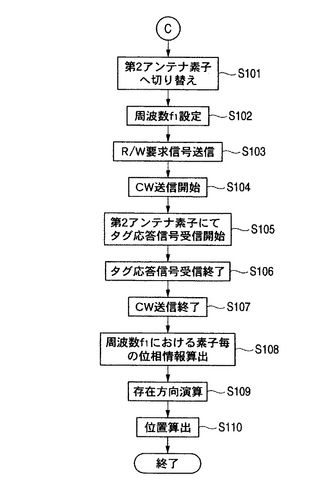
【図20(a)】
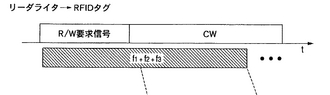
【図20(b)】
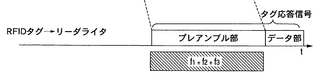
【図21】
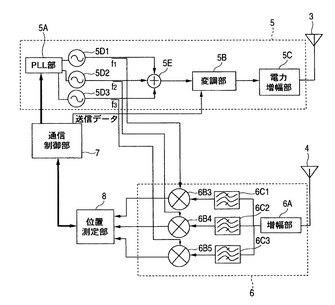
【図22】
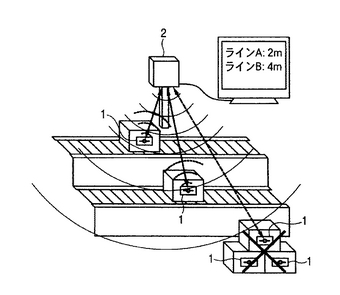
【図23(a)】

【図23(b)】
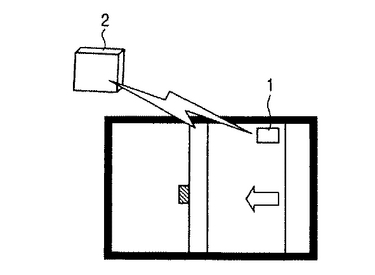
【図24】
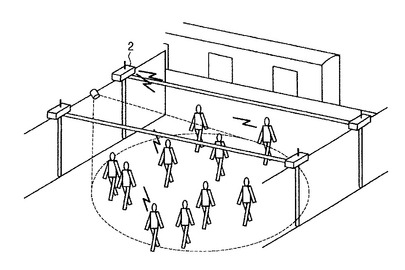
【図25】
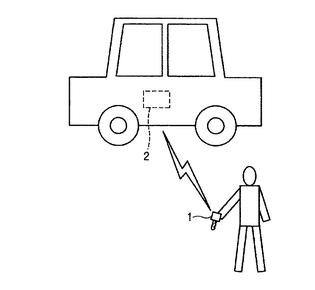
【図26】
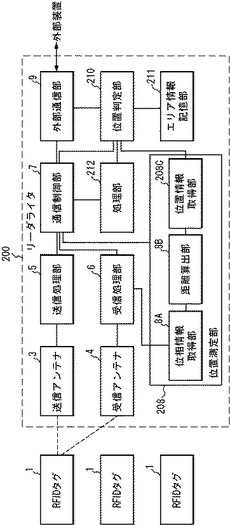
【図27】
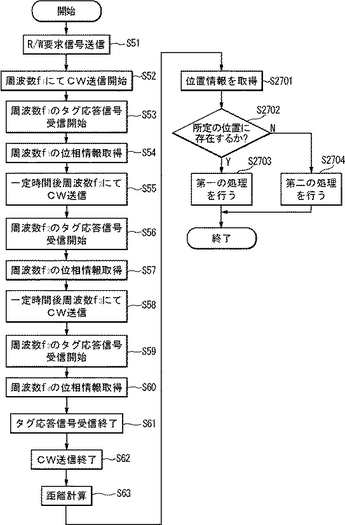
【図28】
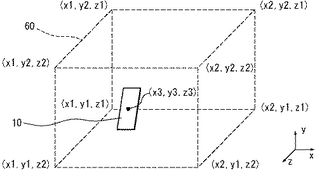
【図29】
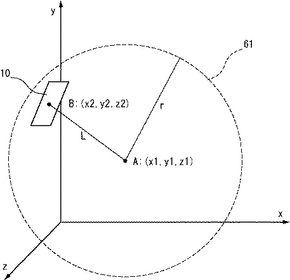
【図30】

【図31】
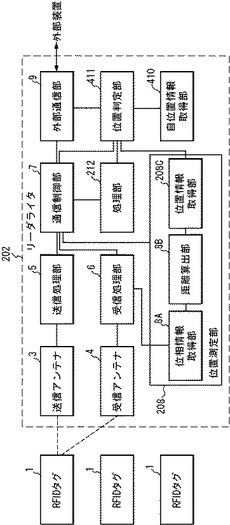
【図32】
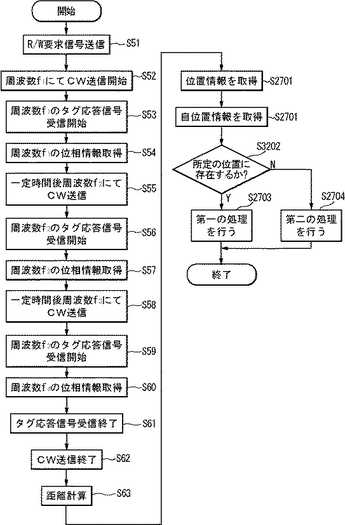
【図33】
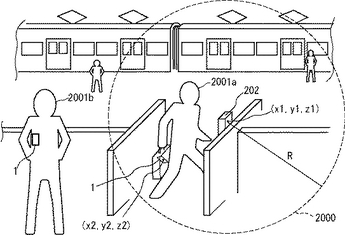
【図34】
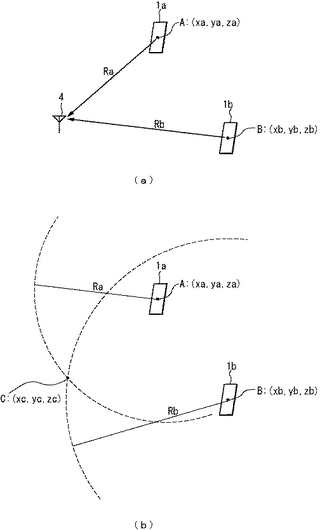
【図35】
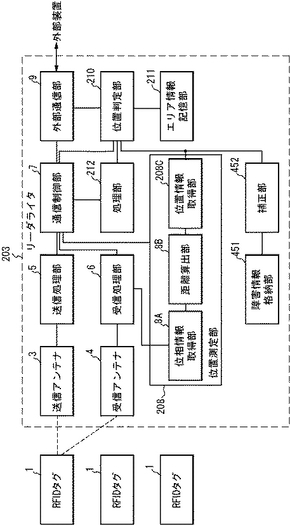
【図36】
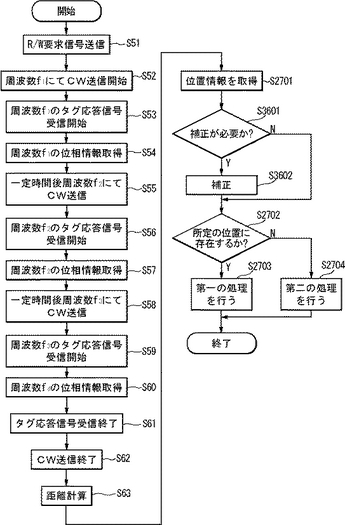
【図37】
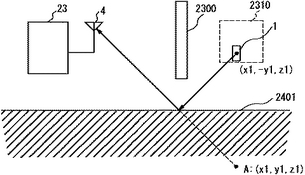
【図38】
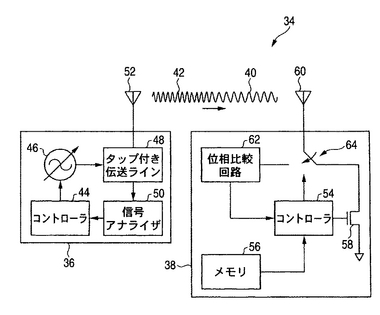
【図39】
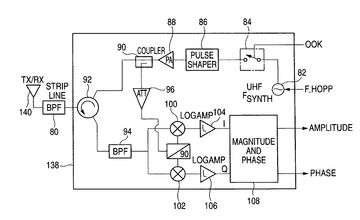
【図2】
【図3(a)】
【図3(b)】
【図3(c)】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9(a)】
【図9(b)】
【図9(c)】
【図l0】
【図ll】
【図12(a)】
【図12(b)】
【図13】
【図14】
【図15】
【図l6】
【図17】
【図18】
【図19】
【図20(a)】
【図20(b)】
【図21】
【図22】
【図23(a)】
【図23(b)】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【公開番号】特開2006−284557(P2006−284557A)
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願番号】特願2006−42542(P2006−42542)
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]