
情報処理装置、撮像装置、情報処理方法およびプログラム
【課題】撮像動作時における設定内容を適切に決定する。
【解決手段】情報処理装置は、制御部を備える。制御部は、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、その撮像部の撮像動作時における設定内容を決定するための制御を行う。また、情報処理装置は、音取得部により取得された周囲の音に基づいてその音を発する対象物を判定する第1判定部と、撮像部により生成された画像に基づいてその画像に含まれる対象物を判定する第2判定部とをさらに具備するようにしてもよい。この場合に、制御部は、第1判定部による判定結果と、第2判定部による判定結果とに基づいて、その設定内容を決定する。
【解決手段】情報処理装置は、制御部を備える。制御部は、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、その撮像部の撮像動作時における設定内容を決定するための制御を行う。また、情報処理装置は、音取得部により取得された周囲の音に基づいてその音を発する対象物を判定する第1判定部と、撮像部により生成された画像に基づいてその画像に含まれる対象物を判定する第2判定部とをさらに具備するようにしてもよい。この場合に、制御部は、第1判定部による判定結果と、第2判定部による判定結果とに基づいて、その設定内容を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、情報処理装置に関する。詳しくは、撮像動作を制御する情報処理装置、撮像装置および情報処理方法ならびに当該方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
近年、人物等の被写体を撮像して画像(画像データ)を生成し、この生成された画像(画像データ)を画像コンテンツ(画像ファイル)として記録する情報処理装置(例えば、デジタルスチルカメラ等の撮像装置)が普及している。この情報処理装置が撮像動作を行う場合には、記録される画像(画像データ)を綺麗に記録するため、その撮像動作に関する各パラメータを適切に設定することが重要となる。このため、撮像動作に関する各パラメータを適切に設定するための技術が多数提案されている。
【0003】
また、例えば、被写体の撮像動作時に取得された音声信号の特徴量を分析し、この分析された音声信号の特徴量に基づいて、画像処理パラメータを制御する撮像装置が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−147587号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の従来技術では、被写体の撮像動作時に取得された音声信号を用いて、その撮像動作に関する各パラメータを制御することができる。
【0006】
しかしながら、例えば、撮像範囲に含まれる対象物以外の対象物(すなわち、撮像範囲に含まれない対象物)が音を発していることも想定される。また、撮像範囲に含まれる対象物のうち、主要対象物(例えば、撮影者がフォーカスを合わせている対象物)以外の対象物が音を発していることも想定される。このため、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することが重要である。
【0007】
本技術はこのような状況に鑑みて生み出されたものであり、撮像動作時における設定内容を適切に決定することを目的とする。
【課題を解決するための手段】
【0008】
本技術は、上述の問題点を解消するためになされたものであり、その第1の側面は、音取得部により取得された周囲の音と撮像部により生成された画像とに基づいて上記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部を具備する情報処理装置およびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0009】
また、この第1の側面において、上記音取得部により取得された周囲の音に基づいて当該音を発する対象物を判定する第1判定部と、上記撮像部により生成された画像に基づいて当該画像に含まれる対象物を判定する第2判定部とをさらに具備し、上記制御部は、上記第1判定部による判定結果と上記第2判定部による判定結果とに基づいて上記設定内容を決定するようにしてもよい。これにより、第1判定部による判定結果と、第2判定部による判定結果とに基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0010】
また、この第1の側面において、上記制御部は、上記第1判定部により判定された対象物である第1対象物と、上記第2判定部により判定された対象物である第2対象物との比較結果に基づいて上記設定内容を決定するようにしてもよい。これにより、第1判定部により判定された対象物(第1対象物)と、第2判定部により判定された対象物(第2対象物)との比較結果に基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0011】
また、この第1の側面において、上記制御部は、上記設定内容に関するパラメータである第1パラメータを上記第1対象物に基づいて決定し、上記設定内容に関するパラメータである第2パラメータを上記第2対象物に基づいて決定し、上記第1対象物および上記第2対象物が一致するか否かに基づいて上記第1パラメータおよび上記第2パラメータの何れかを用いて上記設定内容を決定するようにしてもよい。これにより、第1対象物および第2対象物が一致するか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0012】
また、この第1の側面において、上記制御部は、上記第1対象物および上記第2対象物が一致する場合には上記第1パラメータを用いて上記設定内容を決定し、上記第1対象物および上記第2対象物が一致しない場合には上記第2パラメータを用いて上記設定内容を決定するようにしてもよい。これにより、第1対象物および第2対象物が一致する場合には、第1パラメータを用いて、撮像部の撮像動作時における設定内容を決定し、第1対象物および第2対象物が一致しない場合には、第2パラメータを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0013】
また、この第1の側面において、上記第1判定部は、上記第1対象物と当該第1対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、上記制御部は、上記第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて上記第1パラメータを補正するようにしてもよい。これにより、第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第1パラメータを補正するという作用をもたらす。
【0014】
また、この第1の側面において、上記第2判定部は、上記第2対象物と当該第2対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、上記制御部は、上記第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて上記第2パラメータを補正するようにしてもよい。これにより、第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第2パラメータを補正するという作用をもたらす。
【0015】
また、この第1の側面において、上記撮像部により生成された画像に含まれる各対象物に係る被写体距離を取得する被写体距離取得部をさらに具備し、上記制御部は、上記第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が上記撮像部により生成された画像に含まれるか否かに基づいて上記第1パラメータおよび上記第2パラメータの何れかを用いて上記設定内容を決定するようにしてもよい。これにより、第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部により生成された画像に含まれるか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0016】
また、この第1の側面において、上記第2判定部は、上記撮像部により生成された画像に特定対象物が含まれるか否かを判定し、上記制御部は、上記撮像部により生成された画像に上記特定対象物が含まれるか否かに基づいて上記第1パラメータおよび上記第2パラメータの何れかを用いて上記設定内容を決定するようにしてもよい。これにより、撮像部により生成された画像に特定対象物が含まれるか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0017】
また、この第1の側面において、上記第2判定部は、上記特定対象物として人物の顔が含まれるか否かを判定するようにしてもよい。これにより、特定対象物として人物の顔が含まれるか否かを判定するという作用をもたらす。
【0018】
また、本技術の第2の側面は、周囲の音を取得する音取得部と、被写体を撮像して画像を生成する撮像部と、上記音取得部により取得された周囲の音と、上記撮像部により生成された画像とに基づいて上記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部とを具備する撮像装置およびその制御方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【発明の効果】
【0019】
本技術によれば、撮像動作時における設定内容を適切に決定することができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0020】
【図1】本技術の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。
【図2】本技術の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。
【図3】本技術の第1の実施の形態における画像判定情報記憶部310の記憶内容の一例を模式的に示す図である。
【図4】本技術の第1の実施の形態における音判定情報記憶部320の記憶内容の一例を模式的に示す図である。
【図5】本技術の第1の実施の形態におけるパラメータ補正情報記憶部330の記憶内容の一例を模式的に示す図である。
【図6】本技術の第1の実施の形態におけるプログラム線図記憶部340に記憶されているプログラム線図の一例を示す図である。
【図7】本技術の第1の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図8】本技術の第1の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図9】本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図10】本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図11】本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図12】本技術の第1の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【図13】本技術の第2の実施の形態における撮像部220により生成された画像430と、画像430の奥行マップとの関係を示す図である。
【図14】本技術の第2の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図15】本技術の第2の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図16】本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図17】本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図18】本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図19】本技術の第2の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【図20】本技術の第3の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図21】本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図22】本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図23】本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図24】本技術の第3の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本技術を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(カメラ制御パラメータ決定制御:撮像装置の周囲の音と、撮像部により生成された画像とに基づいてカメラ制御パラメータを決定する例)
2.第2の実施の形態(カメラ制御パラメータ決定制御:被写体距離が異なる複数の対象物が撮像範囲に含まれるか否かに基づいてカメラ制御パラメータを決定する例)
3.第3の実施の形態(カメラ制御パラメータ決定制御:撮像範囲に人物が含まれるか否かに基づいてカメラ制御パラメータを決定する例)
【0022】
<1.第1の実施の形態>
[撮像装置の構成例]
図1は、本技術の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。
【0023】
撮像装置100は、レンズ群111と、絞り112と、光学系制御部113と、シャッターユニット121と、シャッター制御部122と、撮像素子131と、AFE(Analog Front End)132とを備える。また、撮像装置100は、画像処理部133と、測光部135と、コンテンツ記憶部140と、マイクロフォン151と、A/D(Analog/Digital)変換部152と、音声分析処理部153とを備える。また、撮像装置100は、不揮発性メモリ160と、操作受付部170と、表示部180と、メイン制御部190とを備える。また、撮像装置100は、例えば、被写体を撮像して画像データ(画像)を生成し、この生成された画像データを画像コンテンツ(静止画コンテンツまたは動画コンテンツ)として記録するデジタルスチルカメラにより実現される。なお、撮像装置100は、特許請求の範囲に記載の情報処理装置および撮像装置の一例である。
【0024】
レンズ群111は、被写体からの入射光を集光するレンズ群であり、これらのレンズ群により集光された光が絞り112を介して撮像素子131に入射される。なお、レンズ群111は、焦点を調整するためのフォーカスレンズや、画像に含まれる被写体の倍率を調整するためのズームレンズ等により構成されるが、これらの具体的な配置構成等については、図示および説明を省略する。また、レンズ群111を構成する各レンズは、光学系制御部113により駆動され、被写体に対して前後に移動する。これにより、フォーカス機能およびズーム機能が実現される。
【0025】
絞り112は、レンズ群111を通過する入射光の光量を調整するものであり、その調整後の光が撮像素子131に入射される。すなわち、絞り112により、レンズ群111を通過する入射光の光量が調整され、撮像素子131に供給される光量(すなわち、露出)が決定される。また、絞り112は、光学系制御部113により駆動され、絞りの開度が調節される。
【0026】
光学系制御部113は、メイン制御部190からの指示に基づいて、レンズ群111を構成する各レンズと、絞り112とを駆動させるものである。また、光学系制御部113は、レンズ群111を構成する各レンズの位置と、絞り112の状態(開閉の状態)とを取得し、これらをメイン制御部190に順次出力する。
【0027】
シャッターユニット121は、撮像素子131に入射する被写体からの入射光の光路の開口および遮断を、上下方向に移動する幕体により行うものであり、シャッター制御部122により駆動される。例えば、シャッターユニット121は、光路が開口している場合には、被写体からの入射光を撮像素子131に供給する。
【0028】
シャッター制御部122は、メイン制御部190からの指示に基づいて、シャッターユニット121を駆動させるものである。
【0029】
撮像素子131は、被写体からの入射光を光電変換することにより電気信号(アナログ信号)を生成するものであり、生成された電気信号を画像信号としてAFE132に供給する。撮像素子131として、例えば、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)等を用いることができる。
【0030】
また、撮像素子131として、例えば、射出瞳が異なる部分を透過した透過光を受光することにより、位相差検出方式の焦点検出(位相差AF(Auto Focus))を行う撮像素子を用いることができる。この位相差AFを行う撮像素子からは、画像信号(アナログ信号)とともに、位相差検出信号が出力される。このため、画像処理部133は、撮像素子131から出力された位相差検出信号に基づいて、撮像素子131から出力された画像信号に対応する画像における各領域の被写体距離を算出することができる。なお、被写体距離は、撮像装置100から被写体までの距離である。
【0031】
AFE132は、メイン制御部190からの指示に基づいて、撮像素子131から供給される画像信号(アナログ信号)に所定の信号処理を施すとともに、所定の信号処理が施された画像信号をデジタル信号に変換するものである。そして、AFE132は、生成された画像信号(デジタル信号)を画像処理部133に供給する。例えば、AFE132は、所定の信号処理として、画像信号(アナログ信号)に対してノイズ除去および信号増幅等の信号処理を行う。また、AFE132は、メイン制御部190から供給される基準クロックに基づいて、撮像素子131の撮像動作に関するタイミングパルスを生成し、その生成したタイミングパルスを撮像素子131に供給する。
【0032】
画像処理部133は、メイン制御部190からの指示に基づいて、AFE132から供給された画像信号(デジタル信号)に対して所定の信号処理を施して画像データ(画像信号)を生成するものである。そして、画像処理部133は、生成された画像データを圧縮してコンテンツ記憶部140に供給する。例えば、画像処理部133は、所定の信号処理として、AFE132から供給された画像信号(デジタル信号)に対してホワイトバランス補正、ガンマ補正、黒レベル補正、画像圧縮、画素補間処理、色変換処理等の信号処理を行う。また、画像処理部133は、生成された画像データ(画像信号)を用いて所定の演算処理を行い、コントラスト、明度、彩度、ホワイトバランス、シャープネス等の画像処理を行う。
【0033】
測光部135は、自動露出処理を行うための測光部であり、被写体の周辺部の明るさを測る際に用いられる。すなわち、撮像素子131により光学像として結像された被写体の露出状態を測光部135により測定することができる。
【0034】
コンテンツ記憶部140は、メイン制御部190からの指示に基づいて、画像処理部133から供給される画像データを画像コンテンツ(画像ファイル)として記憶するものである。
【0035】
マイクロフォン151は、撮像装置100に内蔵されているマイクロフォンであり、撮像装置100の周囲の音を入力する。そして、マイクロフォン151は、入力された周囲の音を電気信号(アナログ信号)に変換し、この変換により生成された電気信号を音声信号(アナログ信号)としてA/D変換部152に供給する。
【0036】
A/D変換部152は、マイクロフォン151から出力された音声信号(アナログ信号)をデジタル信号に変換するものであり、この変換により生成された音声信号(デジタル信号)を音声分析処理部153に出力する。
【0037】
音声分析処理部153は、A/D変換部152から供給された音声信号を分析することにより、その音声信号から特徴量を抽出するものであり、抽出された特徴量をメイン制御部190に出力する。音声分析処理部153は、例えば、音声信号の特徴量として音声信号の音量や周波数分布を抽出することが可能なスペクトルアナライザ回路により実現される。
【0038】
不揮発性メモリ160は、電源供給が行われていない状態でも記憶内容を保持することが可能な半導体メモリである。不揮発性メモリ160として、例えば、フラッシュメモリやEEPROM(Electrically Erasable and Programmable Read Only Memory)を用いることができる。
【0039】
操作受付部170は、ユーザにより行われた操作を受け付ける操作受付部であり、受け付けられた操作内容に応じた制御信号(操作信号)をメイン制御部190に出力する。操作受付部170は、例えば、シャッターボタン171(図7(a)等に示す)、モードダイアル等に対応する。このモードダイアルは、各撮像モードを設定するための操作部材である。このモードダイアルにより、特定撮像モード(例えば、音/画像判定モード)が設定された場合には、本技術の第1の実施の形態に示す撮像モードが設定される。
【0040】
シャッターボタン171は、静止画を記録するための各操作(半押し操作および全押し操作)を行う際に用いられるボタンである。半押し操作が行われた場合には、例えば、AF(オートフォーカス)処理、AE(自動露出)処理、AWB(オートホワイトバランス)処理、EF(フラッシュ調光)処理等が開始される。また、全押し操作が行われた場合には、撮像素子131から読み出された画像信号(アナログ信号)を画像コンテンツ(画像ファイル)としてコンテンツ記憶部140に記録するための各処理が行われる。
【0041】
表示部180は、メイン制御部190からの指示に基づいて、画像処理部133から出力された画像データを表示する表示パネル(例えば、液晶ファインダー)である。例えば、表示部180は、各種設定を行うための設定画面や、撮像素子131により生成された画像(いわゆる、スルー画像、ライブビュー画像)を表示する。表示部180として、例えば、LCD(Liquid Crystal Display)、有機EL(Electro Luminescence)パネル等の表示パネルを用いることができる。
【0042】
メイン制御部190は、メモリ(例えば、不揮発性メモリ160)に格納されている制御プログラムに基づいて撮像装置100における各部を制御するものである。メイン制御部190は、例えば、マイクロプロセッサにより構成される。
【0043】
[撮像装置の機能構成例]
図2は、本技術の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。
【0044】
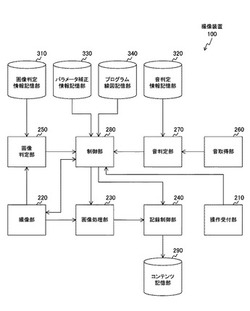
撮像装置100は、操作受付部210と、撮像部220と、画像処理部230と、記録制御部240と、画像判定部250と、音取得部260と、音判定部270と、制御部280と、コンテンツ記憶部290とを備える。また、撮像装置100は、画像判定情報記憶部310と、音判定情報記憶部320と、パラメータ補正情報記憶部330と、プログラム線図記憶部340とを備える。なお、操作受付部210は、例えば、図1に示す操作受付部170に対応し、コンテンツ記憶部290は、例えば、図1に示すコンテンツ記憶部140に対応する。
【0045】
撮像部220は、制御部280からの指示に基づいて、被写体を撮像して画像(画像データ)を生成するものであり、生成された画像を画像処理部230と、画像判定部250と、制御部280とに供給する。また、撮像部220は、制御部280により決定された設定内容に基づいて撮像動作を行う。なお、撮像部220は、例えば、図1に示すレンズ群111と、絞り112と、光学系制御部113と、シャッターユニット121と、シャッター制御部122と、撮像素子131と、AFE132とに対応する。
【0046】
画像処理部230は、制御部280からの指示に基づいて、撮像部220から供給された画像(画像データ)に対して所定の信号処理を施すものであり、この信号処理が施された画像(画像データ)を記録制御部240に供給する。なお、画像処理部230は、例えば、図1に示す画像処理部133に対応する。
【0047】
記録制御部240は、制御部280からの指示に基づいて、画像処理部230から供給された画像(画像データ)を圧縮して画像コンテンツ(画像ファイル)としてコンテンツ記憶部290に記録させるものである。なお、記録制御部240は、例えば、図1に示す画像処理部133、メイン制御部190に対応する。
【0048】
画像判定部250は、画像判定情報記憶部310に記憶されている画像判定情報を用いて、撮像部220により生成された画像に含まれる対象物の種類を判定するものであり、その判定結果を制御部280に出力する。
【0049】
例えば、対象物の種類を判定する判定方法として、マッチング処理を用いた判定方法を用いることができる。このマッチング処理は、比較対象となる2つの画像における特徴量を比較してこの比較結果に基づいて、2つの画像における特徴量の類似度を算出し、この類似度に基づいて、2つの画像が一致するか否かを判定する処理である。例えば、算出された類似度が閾値未満である場合には、比較対象となる2つの画像が不一致であると判定され、算出された類似度が閾値以上である場合には、比較対象となる2つの画像が一致すると判定される。このマッチング処理として、例えば、各対象物(例えば、馬、魚、人物の顔)の輝度分布情報が記録されているテンプレートと実画像とのマッチングによる判定方法(例えば、特開2004−133637参照。)を用いることができる。また、判定対象となる対象物が人物の顔(特定対象物)である場合には、画像に含まれる肌色の部分や人間の顔の特徴量等に基づいた判定方法を用いることができる。
【0050】
また、例えば、画像における輝度の勾配強度および勾配方向を用いて、画像に含まれる対象物(人体、動物、電車、車等)を検出する検出方法を用いることができる(例えば、特開2010−67102号参照。)。
【0051】
また、画像判定部250は、対象物の移動状態および被写体距離を判定する。対象物の移動状態は、例えば、時間軸において隣接する2つの画像を構成する画素間のマッチング処理(すなわち、同一対象物の領域を判別するマッチング処理)を行い、各画像間において移動された画素数を算出することにより判定することができる。また、対象物の被写体距離は、例えば、判定された対象物の画像におけるサイズに基づいて算出することができる。また、上述したように、制御部280が、撮像部220(撮像素子131)から出力された各情報に基づいて被写体距離を算出するようにしてもよい。なお、画像判定部250は、例えば、図1に示すメイン制御部190に対応する。また、画像判定部250は、特許請求の範囲に記載の第2判定部の一例である。
【0052】
音取得部260は、撮像装置100の周囲の音声を取得するものであり、取得された音データ(音)を音判定部270に出力する。なお、音取得部260は、例えば、図1に示すマイクロフォン151に対応する。
【0053】
音判定部270は、音判定情報記憶部320に記憶されている音判定情報を用いて、音取得部260から出力された音データに基づいて、その音を発している被写体を判定するものであり、その判定結果を制御部280に出力する。例えば、音判定部270は、音取得部260から出力された音データから特徴量を抽出し、この抽出された特徴量と、音判定情報記憶部320に記憶されている音判定情報(音に関する特徴量)との比較により類似度を算出する。そして、音判定部270は、その算出された類似度が閾値を超えた場合には、その類似度が閾値を超えた音判定情報に関連付けられている対象物が存在すると判定する。例えば、音取得部260から出力された音データが、A/D変換処理によりサンプリングされ、デジタルデータに変換される。また、このデジタルデータに対して、適当な時間間隔で周波数分析等の処理が施され、スペクトルやその他の音声の音響的特徴を表すパラメータに変換される。これにより、音声に関する時系列の特徴量が抽出される。そして、音判定情報記憶部320に記憶されている音判定情報(音に関する特徴量)を用いて、その抽出された時系列の特徴量とのマッチング処理を行ない、このマッチング処理の結果として判定結果が出力される。なお、音声の解析方法および認識方法については、他の公知の各種方法を用いるようにしてもよい。また、音取得部260は、判定された対象物の移動状態および被写体距離を判定することができる。なお、対象物の移動状態は、移動時に対象物が発する特徴的な音の特徴量等に基づいて判定することができる。また、対象物の被写体距離は、音の音量等に基づいて判定することができる。なお、音判定部270は、例えば、図1に示すA/D変換部152と、音声分析処理部153と、メイン制御部190とに対応する。また、音判定部270は、特許請求の範囲に記載の第1判定部の一例である。
【0054】
制御部280は、各種制御プログラムに基づいて、撮像装置100の各部を制御するものである。例えば、制御部280は、音取得部260により取得された周囲の音と、撮像部220により生成された画像とに基づいて、撮像部220の撮像動作時における設定内容を決定するための制御を行う。
【0055】
具体的には、制御部280は、音判定部270による判定結果と、画像判定部250による判定結果とに基づいて、撮像部220の撮像動作時における設定内容を決定する。すなわち、制御部280は、音判定部270により判定された対象物(第1対象物)と、画像判定部250により判定された対象物(第2対象物)との比較結果に基づいて、撮像部220の撮像動作時における設定内容を決定する。
【0056】
この場合に、制御部280は、その設定内容に関するパラメータ(第1パラメータ)を第1対象物に基づいて決定し、その設定内容に関するパラメータ(第2パラメータ)を第2対象物に基づいて決定する。なお、制御部280は、第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第1パラメータを補正することができる。また、制御部280は、第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第2パラメータを補正することができる。そして、制御部280は、第1対象物および第2対象物が一致するか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部220の撮像動作時における設定内容を決定する。具体的には、制御部280は、第1対象物および第2対象物が一致する場合には、第1パラメータを用いて、撮像部220の撮像動作時における設定内容を決定する。一方、制御部280は、第1対象物および第2対象物が一致しない場合には、第2パラメータを用いて、撮像部220の撮像動作時における設定内容を決定する。なお、制御部280は、例えば、図1に示すメイン制御部190に対応する。
【0057】
画像判定情報記憶部310は、画像判定部250による判定処理に用いられる画像判定情報(画像に関する特徴量)を記憶するものであり、記憶されている画像判定情報を画像判定部250に供給する。なお、画像判定情報記憶部310の記憶内容については、図3を参照して詳細に説明する。また、画像判定情報記憶部310は、例えば、図1に示す不揮発性メモリ160に対応する。
【0058】
音判定情報記憶部320は、音判定部270による判定処理に用いられる音判定情報(音に関する特徴量)を記憶するものであり、記憶されている音判定情報を音判定部270に供給する。なお、音判定情報記憶部320の記憶内容については、図4を参照して詳細に説明する。また、音判定情報記憶部320は、例えば、図1に示す不揮発性メモリ160に対応する。
【0059】
パラメータ補正情報記憶部330は、制御部280によるカメラ制御パラメータ補正処理に用いられるパラメータ補正情報を記憶するものであり、記憶されているパラメータ補正情報を制御部280に供給する。なお、パラメータ補正情報記憶部330の記憶内容については、図5を参照して詳細に説明する。また、パラメータ補正情報記憶部330は、例えば、図1に示す不揮発性メモリ160に対応する。
【0060】
プログラム線図記憶部340は、制御部280によるカメラ制御パラメータ決定処理に用いられるプログラム線図を記憶するものであり、記憶されているプログラム線図を制御部280に供給する。なお、プログラム線図については、図6を参照して詳細に説明する。また、プログラム線図記憶部340は、例えば、図1に示す不揮発性メモリ160に対応する。
【0061】
[画像判定情報記憶部の内容例]
図3は、本技術の第1の実施の形態における画像判定情報記憶部310の記憶内容の一例を模式的に示す図である。
【0062】
画像判定情報記憶部310は、撮像部220により生成された画像に含まれる対象物の種類を判定するための判定情報(画像に関する判定情報)を記憶するものである。画像判定情報記憶部310には、対象物の種類311と、特徴量312と、カメラ制御パラメータ313とが関連付けて記憶されている。
【0063】
対象物の種類311は、撮像部220により生成された画像に含まれる対象物の種類である。なお、本技術の第1の実施の形態では、判定対象となる対象物の種類として、馬、魚、人物の顔等を一例として示す。
【0064】
特徴量312は、撮像部220により生成された画像に含まれる対象物の種類を判定するための判定情報(画像識別データ)である。すなわち、画像判定部250は、特徴量312を用いて、撮像部220により生成された画像に含まれる対象物の種類を判定する。
【0065】
上述したように、判定方法として、例えば、各被写体(例えば、馬、魚、人物の顔)の輝度分布情報が記録されているテンプレートと実画像とのマッチングによる判定方法を用いることができる。このように、判定方法としてマッチングによる判定方法を用いる場合には、各被写体の輝度分布情報が記録されているテンプレートが、特徴量312として格納される。
【0066】
カメラ制御パラメータ313は、撮像部220の撮像動作時に設定されるカメラ制御パラメータである。カメラ制御パラメータ313として、例えば、プログラム線図記憶部340に記憶されているプログラム線図における位置に関する情報が格納される。
【0067】
[音判定情報記憶部の内容例]
図4は、本技術の第1の実施の形態における音判定情報記憶部320の記憶内容の一例を模式的に示す図である。
【0068】
音判定情報記憶部320は、音取得部260により取得された音を発している対象物の種類を判定するための判定情報(音に関する判定情報)を記憶するものである。音判定情報記憶部320には、対象物の種類321と、特徴量322と、カメラ制御パラメータ323とが関連付けて記憶されている。
【0069】
対象物の種類321は、音取得部260により取得された音を発している対象物の種類である。なお、図4では、判定対象となる対象物の種類として、走る馬、滝、車等を一例として示す。
【0070】
特徴量322は、音取得部260により取得された音を発している対象物の種類を判定するための判定情報(音識別データ)である。すなわち、音判定部270は、特徴量322を用いて、音取得部260により取得された音を発している対象物の種類を判定する。なお、図4では、説明の容易のため、特徴量として、対象物が発する音を文字で擬似的に示す。
【0071】
上述したように、判定方法として、例えば、各対象物(例えば、馬、魚、人物の顔)が発する音に関する時系列の特徴量と、音取得部260により取得された音に関する時系列の特徴量とのマッチングによる判定方法を用いることができる。このように、判定方法としてマッチングによる判定方法を用いる場合には、各被写体が発する音に関する時系列の特徴量が、特徴量322として格納される。
【0072】
カメラ制御パラメータ323は、撮像部220の撮像動作時に設定されるカメラ制御パラメータである。カメラ制御パラメータ323として、例えば、プログラム線図記憶部340に記憶されているプログラム線図における位置に関する情報が格納される。なお、図3に示すカメラ制御パラメータ313は、画像情報に基づいて決定されるカメラ制御パラメータであるのに対して、カメラ制御パラメータ323は、音情報に基づいて決定されるカメラ制御パラメータである。
【0073】
[パラメータ補正情報記憶部の内容例]
図5は、本技術の第1の実施の形態におけるパラメータ補正情報記憶部330の記憶内容の一例を模式的に示す図である。
【0074】
パラメータ補正情報記憶部330は、制御部280により決定されるカメラ制御パラメータ(第1パラメータ)を補正するためのパラメータ補正情報を記憶するものである。パラメータ補正情報記憶部330には、対象物の種類331およびパラメータ補正情報332が関連付けて記憶されている。
【0075】
対象物の種類331は、音取得部260により取得された音を発している対象物の種類である。なお、本技術の第1の実施の形態では、判定対象となる対象物の種類として、移動する速度が速い物体、移動する速度が遅い物体等を一例として示す。
【0076】
パラメータ補正情報332は、音取得部260により取得された音を発している対象物の種類に基づいて、カメラ制御パラメータ(第1パラメータ)を補正するための情報である。すなわち、制御部280は、音取得部260により取得された音に基づいて決定されたカメラ制御パラメータ(第1パラメータ)を、パラメータ補正情報332を用いて補正する。なお、カメラ制御パラメータ(第1パラメータ)の補正については、図6を参照して詳細に説明する。
【0077】
[プログラム線図]
図6は、本技術の第1の実施の形態におけるプログラム線図記憶部340に記憶されているプログラム線図の一例を示す図である。なお、プログラム線図(プログラムAE(Automatic Exposure))は、被写体の明るさに応じて、絞りおよびシャッター速度(シャッタースピード)を決定する際に用いられるものである。
【0078】
図6に示すプログラム線図341において、縦軸は、レンズの絞り値(AV(Aperture Value))を示し、横軸は、シャッタースピード(TV(Time Value))を示す。また、斜線(点線で示す)は、露出値(EV(Exposure Value))を示す。
【0079】
上述したように、制御部280は、音判定部270により判定された被写体と、プログラム線図記憶部340に記憶されているプログラム線図とに基づいて、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0080】
また、制御部280は、画像判定部250により判定された被写体と、プログラム線図記憶部340に記憶されているプログラム線図とに基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0081】
例えば、音判定情報記憶部320において、対象物の種類321「馬」とカメラ制御パラメータ323「プログラム線図341における位置342」とが関連付けて記憶されている場合を想定する。この場合に、音判定部270により判定された被写体が馬である場合には、制御部280は、プログラム線図341における位置342に対応するカメラ制御パラメータ(第1パラメータ)を決定する。また、制御部280は、このように音情報に基づいて決定されたカメラ制御パラメータ(第1パラメータ)を、被写体(馬)の速度に応じて補正する。この被写体の速度については、音判定部270により判定することができる。例えば、音判定部270は、音判定情報記憶部320の音判定情報を用いて、速く走る馬(高速で移動する物体)と、遅く走る馬(低速で移動する物体)とを識別することができるものとする。
【0082】
例えば、音判定部270により速く走る馬が検出された場合には、シャッタースピードを上げることが好ましい。このため、制御部280は、プログラム線図341における実線345において、位置342を左側の位置343に遷移させたカメラ制御パラメータ(第1パラメータ)を決定する。一方、例えば、音判定部270により遅く走る馬が検出された場合には、シャッタースピードを下げることが好ましい。このため、制御部280は、プログラム線図341における実線345において、位置342を右側の位置344に遷移させたカメラ制御パラメータ(第1パラメータ)を決定する。
【0083】
このように、制御部280は、プログラム線図を用いて、音情報に基づくカメラ制御パラメータ(絞り値、シャッタースピード、露出値)を決定することができる。また、画像情報に基づくカメラ制御パラメータについても同様に決定することができる。
【0084】
なお、本技術の第1の実施の形態では、音判定情報記憶部320におけるカメラ制御パラメータ323を用いて最初のパラメータを決定し、このパラメータを、音判定部270により判定された対象物の速度を用いて補正する例を示す。ただし、例えば、測光部135により取得された明るさ情報に基づいて、プログラム線図における位置に対応するパラメータを決定し、このパラメータを、音判定部270により判定された対象物の速度を用いて補正するようにしてもよい。また、画像情報に基づくカメラ制御パラメータについても、これを適用して補正することができる。
【0085】
このように、制御部280は、対象物に係る移動状態および被写体距離の少なくとも一方に基づいて音情報に基づくカメラ制御パラメータを補正することができる。また、制御部280は、対象物に係る移動状態および被写体距離の少なくとも一方に基づいて画像情報に基づくカメラ制御パラメータを補正することができる。
【0086】
なお、点線349における位置346乃至348の遷移については、本技術の第2の実施の形態で示す。
【0087】
[撮像装置を用いた撮像状態例]
図7および図8は、本技術の第1の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【0088】
図7(a)および図8(a)には、撮像装置100および被写体をその側面から見た場合を示す。また、図7(b)および図8(b)には、撮像装置100の撮像対象となる被写体の撮像範囲を示す。
【0089】
図7には、走る馬401およびその周辺(例えば、山々402)を被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図7に示す例では、撮像装置100と走る馬401との距離が比較的近いため、走る馬401の走る音(図7(a)では、「パッカパッカ」で示す)が音取得部260により取得可能である場合を想定して説明する。
【0090】
ここで、図7(b)に示すように、撮像範囲405には、走る馬401が含まれないのに対し、撮像範囲406には、走る馬401が含まれる。このため、撮像部220の撮像対象が撮像範囲406である場合には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(馬)とが一致(略一致)することになる。しかしながら、撮像部220の撮像対象が撮像範囲405である場合には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(山々、草原)とが一致しない。この場合に、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定すると、撮像範囲に含まれていない対象物が発する音を用いてカメラ制御パラメータを決定することになる。このため、撮像範囲405に対応する画像については、適切なカメラ制御パラメータを設定することができないおそれがある。そこで、本技術の第1の実施の形態では、音情報とともに画像情報を用いてカメラ制御パラメータを決定する。
【0091】
図8には、止まっている馬411およびその周辺(例えば、山々412)を被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図8に示す例では、撮像装置100と止まっている馬411との距離が比較的近いが、止まっている馬411から音が発生していないため、止まっている馬411に関する音を音取得部260が取得することができない場合を想定して説明する。また、馬以外からも音は発生していないものとする。
【0092】
ここで、図8(b)に示すように、撮像範囲415には、止まっている馬411が含まれないのに対し、撮像範囲416には、止まっている馬411が含まれる。しかしながら、撮像部220の撮像対象が撮像範囲416である場合でも、音取得部260により音(止まっている馬411に関する音)が取得されない。このため、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(馬)とが一致しない。なお、撮像部220の撮像対象が撮像範囲415である場合には、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(山々、草原)とが一致しない。これらの場合についても、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定すると、図7に示す例と同様に、適切なカメラ制御パラメータを設定することができないおそれがある。
【0093】
[被写体およびカメラ制御パラメータの関係例]
図9乃至図11は、本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【0094】
ここで、図9(a)に示す画像421は、図7(b)に示す撮像範囲406に対応する画像である。また、図10(a)に示す画像422は、図7(b)に示す撮像範囲405と、図8(b)に示す撮像範囲415とに対応する画像である。また、図11(a)に示す画像423は、図8(b)に示す撮像範囲416に対応する画像である。
【0095】
図9(b)に示すように、図9(a)に示す画像421の撮像動作時には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(馬)とが一致(略一致)する。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0096】
ここで、図10(a)に示す画像422が、図7(b)に示す撮像範囲405に対応する画像である場合を想定する。この場合には、図10(b)に示すように、図10(a)に示す画像422の撮像動作時には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(草原、山々)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0097】
また、図10(a)に示す画像422が、図8(b)に示す撮像範囲415に対応する画像である場合を想定する。この場合には、図10(c)に示すように、図10(a)に示す画像422の撮像動作時には、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(草原、山々)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0098】
また、図11(b)に示すように、図11(a)に示す画像423の撮像動作時には、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(馬)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0099】
なお、馬が止まっている状態であっても、その馬が泣き声(例えば、ヒヒーン)を発していることも想定される。例えば、図11に示す例において、馬が泣き声(例えば、ヒヒーン)を発している場合には、音取得部260により取得される音により特定される対象物(馬)と、撮像部220により生成される画像により特定される対象物(馬)とが一致する。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定することができる。
【0100】
[撮像装置の動作例]
図12は、本技術の第1の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【0101】
最初に、制御部280は、シャッターボタン171の半押し操作が行われたか否かを判断し(ステップS901)、シャッターボタン171の半押し操作が行われていない場合には、監視を継続して行う。シャッターボタン171の半押し操作が行われた場合には(ステップS901)、音取得部260は、撮像装置100の周囲の音を取得する(ステップS902)。なお、ステップS902は、特許請求の範囲に記載の音取得手順の一例である。
【0102】
続いて、音判定部270は、音取得部260により取得された音を発している対象物の種類を判定する(ステップS903)。続いて、制御部280は、その判定結果に基づいて、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する(ステップS904)。
【0103】
続いて、制御部280は、シャッターボタン171の全押し操作が行われたか否かを判断する(ステップS905)。そして、全押し操作が行われていない場合には(ステップS905)、制御部280は、シャッターボタン171の半押し操作が解除されたか否かを判断し(ステップS912)、半押し操作が解除された場合には、ステップS901に戻る。一方、シャッターボタン171の半押し操作が解除されていない(ステップS912)、ステップS902に戻る。また、シャッターボタン171の全押し操作が行われた場合には(ステップS905)、撮像部220は、被写体を撮像して画像を生成する(ステップS906)。なお、ステップS906は、特許請求の範囲に記載の画像取得手順の一例である。
【0104】
続いて、画像判定部250は、撮像部220により生成された画像に含まれる対象物の種類を判定する(ステップS907)。続いて、制御部280は、その判定結果に基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する(ステップS908)。
【0105】
続いて、制御部280は、音判定部270による判定結果と、画像判定部250による判定結果とを比較して、これらが一致(または、略一致)するか否かを判断する(ステップS909)。すなわち、音判定部270により判定された対象物と、画像判定部250により判定された対象物とが一致(または、略一致)するか否かが判断される。ここで、略一致する場合は、例えば、音判定部270により判定された対象物が「走る馬」であり、画像判定部250により判定された対象物が「馬」である場合である。すなわち、対象物の種類が同一であるが、その状態が異なるような場合を意味する。
【0106】
音判定部270による判定結果と、画像判定部250による判定結果とが一致(または、略一致)する場合には(ステップS909)、制御部280は、第1パラメータを用いた撮像動作を行うための制御を行う(ステップS910)。すなわち、これらの判定結果が一致(または、略一致)する場合には(ステップS910)、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)が決定される(ステップS910)。そして、第1パラメータに基づいて撮像動作が行われる。この撮像動作により生成された画像が、画像コンテンツとしてコンテンツ記憶部290に記憶される。
【0107】
また、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない場合には(ステップS909)、制御部280は、第2パラメータを用いた撮像動作を行うための制御を行う(ステップS911)。すなわち、これらの判定結果が一致しない場合には(ステップS910)、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)が決定される(ステップS911)。そして、第2パラメータに基づいて撮像動作が行われる。この撮像動作により生成された画像が、画像コンテンツとしてコンテンツ記憶部290に記憶される。なお、ステップS909乃至S911は、特許請求の範囲に記載の決定手順の一例である。
【0108】
例えば、図9に示すように、撮像範囲に走る馬401が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(略一致)する(ステップS909)。このため、制御部280は、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。この音情報に基づくカメラ制御パラメータ(第1パラメータ)は、図6に示すように、シャッタースピードを上げる補正(位置342から位置343への補正)が行われたパラメータである。
【0109】
また、例えば、図10に示すように、撮像範囲に走る馬401が含まれない場合(馬の走る音がある場合とない場合を含む)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。なお、この画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物の種類(草原や山々)に応じて設定されるパラメータである。
【0110】
また、例えば、図11に示すように、撮像範囲に止まっている馬411が含まれる場合(ただし、馬の鳴く音がない場合)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。なお、上述したように、音取得部260により音が取得されない場合には、音情報に基づくカメラ制御パラメータ(第1パラメータ)は決定されない。また、この例で決定される画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物の種類(馬)に応じて設定されるパラメータである。
【0111】
このように、本技術の第1の実施の形態では、音取得部260により取得された音と、撮像部220により生成された画像とについて分析を行い、これらの分析結果を用いてカメラ制御パラメータを決定する。これにより、最適なカメラ制御パラメータを設定して撮像動作を行うことができる。例えば、音を発する対象物が撮像範囲に含まれている場合には、その対象物に対する最適なカメラ制御パラメータを設定して撮像動作を行うことができる。これにより、撮像範囲に含まれる対象物が発する音を考慮した臨場感のある画像を容易に得ることができる。また、音を発している対象物が撮像範囲外に存在する場合でも、撮像範囲内の画像情報に基づいて適切なカメラ制御パラメータを設定することができる。すなわち、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することができる。
【0112】
なお、本技術の第1の実施の形態では、音を発する対象物として山々を背景に位置する馬を例にして説明したが、音を発しない対象物と、音を発する対象物とが存在する他の状態において本技術の第1の実施の形態を適用することができる。例えば、音を発しない対象物が存在し、その手前に音を発する対象物が存在する状態において本技術の第1の実施の形態を適用することができる。例えば、飛行場における飛行機、レース場における車(モータースポーツ)等を撮像対象とする場合に本技術の第1の実施の形態を適用することができる。
【0113】
<2.第2の実施の形態>
本技術の第1の実施の形態では、音を発している対象物が画像に含まれている場合には、その音を考慮して撮像動作に用いられるカメラ制御パラメータを決定する例を示した。しかしながら、音を発している対象物が画像に含まれている場合であっても、その対象物以外の対象物が主要対象物(例えば、撮影者がフォーカスを合わせている対象物)となることも想定される。
【0114】
そこで、本技術の第2の実施の形態では、音を発している対象物が画像に含まれている場合であっても、その対象物以外の対象物がその画像に含まれている場合には、画像情報に基づくカメラ制御パラメータを決定する例を示す。なお、本技術の第2の実施の形態における撮像装置の構成については、図1および図2に示す例と略同様である。このため、本技術の第1の実施の形態と共通する部分については、その説明の一部を省略する。
【0115】
[複数の対象物を判定する例]
図13は、本技術の第2の実施の形態における撮像部220により生成された画像430と、画像430の奥行マップとの関係を示す図である。
【0116】
図13(a)には、撮像部220により生成された画像430を示す。画像430は、例えば、滝432の滝壺付近において、魚(例えば、鮭)431が飛び跳ねて川から飛び出た瞬間に撮影された画像であるものとする。このため、画像430には、空中に浮いている状態の魚431が含まれるものとする。
【0117】
図13(b)には、撮像部220により生成された画像430の奥行マップをヒストグラムにより示す。図13(b)に示すヒストグラムは、画像430に含まれる被写体に関する被写体距離の分布状況を示すヒストグラムである。
【0118】
ここで、制御部280は、撮像部220により生成された画像およびこの画像の生成時における各情報(例えば、レンズの位置および合焦位置)に基づいて、その画像に関する被写体距離を算出する。例えば、奥行マップ(いわゆる、デプスマップ(Depth Map))を生成し、この奥行マップに基づいて各領域に係る被写体距離を求めることができる。ここで、奥行マップは、被写体距離を表すデータにより構成されるマップである。この奥行マップの生成方法として、例えば、TOF(Time of flight)方式やボケ量解析(Depth from Defocus)等の方法を用いることができる。例えば、TOF方式は、光源から出射された光が対象物で反射し、センサに到達するまでの光の遅れ時間と光の速度とに基づいて被写体までの距離を算出する方法である。
【0119】
また、撮像素子131として、位相差AFを行う撮像素子を用いる場合には、この撮像素子から出力された位相差検出信号に基づいて、制御部280が奥行マップを生成することができる。すなわち、制御部280は、撮像部220により生成された画像に含まれる各対象物に係る被写体距離を取得する。なお、制御部280は、特許請求の範囲に記載の被写体距離取得部の一例である。
【0120】
例えば、図13(a)に示すように、画像430には、空中に浮いている魚431と、魚431の背景に存在する滝432およびその滝壺とが含まれる。このため、撮像装置100からの距離は、魚431よりも、滝432およびその滝壺が遠い。
【0121】
このように、被写体距離が異なる複数の対象物が画像に含まれる場合には、被写体距離の分布状況を示すヒストグラムにおいて、対象物毎に山が形成される。具体的には、図13(b)に示すように、撮像装置100から比較的近い魚431に対応する山435と、撮像装置100から比較的遠い滝432およびその滝壺に対応する山436とが形成される。
【0122】
このように、ヒストグラムに複数の山が存在する場合において、例えば、点線で示す閾値437以上の山が複数存在する場合には、複数の対象物が存在すると判定することができる。ただし、ヒストグラムに複数の山が存在する場合であっても、遠方に存在する対象物(例えば、背景となる山々)に係る山である場合には、複数の対象物が存在すると判定しないようにすることができる。例えば、点線で示す閾値438以上の山が存在する場合には、その山に対応する対象物の存在を考慮せずに判定することができる。
【0123】
ここで、画像情報に基づくカメラ制御パラメータ(第2パラメータ)の決定方法について説明する。本技術の第2の実施の形態では、制御部280は、算出された被写体距離と、画像判定部250による判定結果とに基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。具体的には、制御部280は、複数の対象物が存在すると判定された場合には、各対象物について算出された被写体距離に基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を対象物毎に決定する。この場合でも、パラメータ補正情報記憶部330に記憶されているパラメータ補正情報に基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を補正することができる。
【0124】
例えば、画像判定情報記憶部310において、対象物の種類311「魚」とカメラ制御パラメータ313「プログラム線図341における位置346」とが関連付けて記憶されている場合を想定する。この場合に、画像判定部250により判定された対象物が魚である場合には、制御部280は、プログラム線図341における位置346に対応するカメラ制御パラメータ(第2パラメータ)を決定する。また、制御部280は、このように画像情報に基づいて決定されたカメラ制御パラメータ(第2パラメータ)を、対象物(魚)の被写体距離に応じて補正する。
【0125】
例えば、被写体距離が近い場合には、シャッタースピードを上げることが好ましい。このため、制御部280は、プログラム線図341における点線349において、位置346を左側の位置347に遷移させたカメラ制御パラメータ(第2パラメータ)を決定する。一方、例えば、被写体距離が遠い場合には、シャッタースピードを下げることが好ましい。このため、制御部280は、プログラム線図341における点線349において、位置346を右側の位置348に遷移させたカメラ制御パラメータ(第2パラメータ)を決定する。
【0126】
このように、制御部280は、プログラム線図を用いて、画像情報に基づくカメラ制御パラメータ(絞り値、シャッタースピード、露出値)を決定することができる。
【0127】
[撮像装置を用いた撮像状態例]
図14および図15は、本技術の第2の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【0128】
図14(a)および図15(a)には、撮像装置100および被写体をその側面から見た場合を示す。また、図14(b)および図15(b)には、撮像装置100の撮像対象となる被写体の撮像範囲を示す。
【0129】
図14には、飛び跳ねて川から飛び出た魚(例えば、鮭)441と、滝442およびその滝壺付近とを被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図14に示す例では、撮像装置100と滝442との距離が比較的近いため、滝442の流れる音(図14(a)では、「ザーザー」で示す)を音取得部260により取得することができる場合を想定して説明する。
【0130】
ここで、図14(b)に示すように、撮像範囲445には、魚441が含まれないのに対し、撮像範囲446には、飛び跳ねて川から飛び出た魚441が含まれる。このため、撮像部220の撮像対象が撮像範囲446である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝、魚)とが一致(すなわち、一部が一致)する。また、撮像部220の撮像対象が撮像範囲445である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。
【0131】
ここで、音取得部260により取得される音により特定される対象物と、撮像部220により生成される画像により特定される対象物とが一致する場合には、本技術の第1の実施の形態では、音情報に基づくカメラ制御パラメータを決定する例を示した。しかしながら、撮像部220の撮像対象が撮像範囲446である場合には、背景の滝442よりも、飛び跳ねて川から飛び出た魚441を主要対象物として撮像動作が行われている可能性が高いと想定される。
【0132】
すなわち、音取得部260により取得される音により特定される対象物(滝)よりも、撮像部220により生成される画像により特定される対象物(魚)が重要であると想定される。この場合に、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定する場合には、撮像範囲446に含まれる被写体の画像については、適切なカメラ制御パラメータを設定することができないおそれがある。そこで、本技術の第2の実施の形態では、音により特定される対象物と画像により特定される対象物とが一致する場合であっても、撮像範囲に他の対象物が存在する場合には、画像情報に基づくカメラ制御パラメータを決定する例を示す。
【0133】
図15には、滝452およびその滝壺付近を被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図15に示す例では、撮像装置100と滝452との距離が比較的近いため、滝452の流れる音(図15(a)では、「ザーザー」で示す)を音取得部260により取得することができる場合を想定して説明する。
【0134】
ここで、図15(b)に示すように、撮像範囲455には滝452が含まれる。この場合は、図14(b)に示す撮像範囲445と同様に、カメラ制御パラメータを決定することができる。
【0135】
[被写体およびカメラ制御パラメータの関係例]
図16乃至図18は、本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【0136】
ここで、図16(a)に示す画像461は、図14(b)に示す撮像範囲446に対応する画像である。また、図17(a)に示す画像462は、図14(b)に示す撮像範囲445に対応する画像である。また、図18(a)に示す画像463は、図15(b)に示す撮像範囲455に対応する画像である。
【0137】
図16(b)に示すように、図16(a)に示す画像461の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(魚、滝)とが一致(一部が一致)する。しかしながら、その一致する対象物(滝)に係る被写体距離(遠い)とは異なる被写体距離(近い)に係る他の対象物(魚)が、撮像部220により生成された画像に含まれている。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0138】
また、図17(b)に示すように、図17(a)に示す画像462の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。また、その一致する対象物(滝)に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部220により生成された画像に含まれていない。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0139】
また、図18(b)に示すように、図18(a)に示す画像463の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。また、その一致する対象物(滝)に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部220により生成された画像に含まれていない。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0140】
このように、制御部280は、第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部220により生成された画像に含まれるか否かに基づいてカメラ制御パラメータを決定する。
【0141】
[撮像装置の動作例]
図19は、本技術の第2の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。なお、図19は、図12の変形例であるため、図12と共通する部分については、同一の符号を付して、その説明の一部を省略する。
【0142】
撮像部220により生成された画像に含まれる対象物の種類が判定された後に(ステップS907)、制御部280は、撮像範囲に含まれる各対象物の被写体距離を算出する(ステップS921)。続いて、制御部280は、算出された被写体距離と、画像判定部250による判定結果とに基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する(ステップS922)。
【0143】
また、音判定部270による判定結果と、画像判定部250による判定結果とが一致(または、略一致)した場合には(ステップS909)、制御部280は、その一致した対象物以外の対象物が撮像範囲に存在するか否かを判断する(ステップS923)。その一致した対象物以外の対象物が撮像範囲に存在しない場合には(ステップS923)、制御部280は、第1パラメータを用いた撮像動作を行うための制御を行う(ステップS910)。一方、その一致した対象物以外の対象物が撮像範囲に存在する場合には(ステップS923)、制御部280は、第2パラメータを用いた撮像動作を行うための制御を行う(ステップS911)。
【0144】
例えば、図9に示すように、撮像範囲に走る馬401が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(略一致)する(ステップS909)。また、走る馬401の背景(草原や山々)については、上述したように、他の対象物であると判定されないため、走る馬401以外の対象物が存在しない(ステップS923)。このため、制御部280は、本技術の第1の実施の形態と同様に、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。なお、音情報に基づくカメラ制御パラメータ(第1パラメータ)は、図6に示すように、シャッタースピードを上げる補正(位置342から位置343への補正)が行われたパラメータである。
【0145】
また、例えば、図10に示すように、撮像範囲に走る馬401が含まれない場合(馬の走る音がある場合とない場合を含む)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、本技術の第1の実施の形態と同様に、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。ただし、本技術の第2の実施の形態で決定される画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物(草原や山々)に係る被写体距離に応じて設定されるパラメータである。
【0146】
また、例えば、図11に示すように、撮像範囲に止まっている馬411が含まれる場合(ただし、馬の鳴く音がない場合)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。ただし、本技術の第2の実施の形態で決定される画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物(馬)に係る被写体距離に応じて設定されるパラメータである。
【0147】
また、例えば、図16に示すように、滝442が撮像範囲に含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(一部が一致)する(ステップS909)。しかしながら、上述したように、滝442以外の他の対象物(魚441)が存在すると判定される(ステップS923)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。
【0148】
なお、図16に示す例では、2つの対象物が存在するため、画像情報に基づくカメラ制御パラメータ(第2パラメータ)として、2つのパラメータ(魚441に基づくパラメータ、滝442およびその滝壺に基づくパラメータ)が決定される。例えば、魚441に基づくパラメータは、図6に示すように、シャッタースピードを上げる補正(位置346から位置347への補正)が行われたパラメータである。一方、滝442およびその滝壺に基づくパラメータは、図6に示すように、シャッタースピードを下げる補正(位置346から位置348への補正)が行われたパラメータである。
【0149】
このように、画像情報に基づくカメラ制御パラメータ(第2パラメータ)として、2つのパラメータが決定されるため、制御部280は、これらのうちの何れかのパラメータを用いた撮像動作を行うための制御を行う(ステップS911)。例えば、撮像範囲の中心に位置する対象物を主要対象物とする設定がされている場合には、魚441に基づくパラメータを用いた撮像動作を行うための制御を行う。
【0150】
また、例えば、図17に示すように、滝442のみが撮像範囲に含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致する(ステップS909)。また、滝442(その滝壷を含む)以外の対象物が存在しないため、複数の対象物が存在しないと判定される(ステップS923)。このため、制御部280は、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。
【0151】
また、図18に示す例についても、図17と同様であるため、ここでの説明を省略する。
【0152】
このように、本技術の第2の実施の形態では、音を発している対象物が画像に含まれている場合であっても、その対象物以外の対象物がその画像に含まれている場合には、画像情報に基づくカメラ制御パラメータを決定する。これにより、音を発している対象物が画像に含まれている場合において、その対象物以外の対象物が主要対象物となる場合でも、その主要対象物に対する最適なカメラ制御パラメータを設定して撮像動作を行うことができる。すなわち、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することができる。
【0153】
なお、本技術の第2の実施の形態では、音を発する対象物として、魚の背景に位置する滝を例にして説明したが、背景に音を発する対象物が存在し、その手前に異なる対象物が存在する他の状態においても本技術の第2の実施の形態を適用することができる。例えば、ステージ上に存在する対象物(音を発しない)の背景に多数の観客が存在し、この多数の観客が音を発しているような状態において本技術の第2の実施の形態を適用することができる。
【0154】
<3.第3の実施の形態>
本技術の第1の実施の形態では、音を発している対象物が画像に含まれている場合には、その音を考慮して撮像動作に用いられるカメラ制御パラメータを決定する例を示した。しかしながら、音を発している対象物(人物以外)が画像に含まれている場合であっても、その画像に人物が含まれている場合には、その人物が主要対象物となることも想定される。
【0155】
そこで、本技術の第3の実施の形態では、音を発している対象物(人物以外)が画像に含まれている場合であっても、その画像に人物が含まれている場合には、画像情報に基づくカメラ制御パラメータを撮像動作に用いる例を示す。なお、本技術の第3の実施の形態における撮像装置の構成については、図1および図2に示す例と略同様である。このため、本技術の第1の実施の形態と共通する部分については、その説明の一部を省略する。
【0156】
[撮像装置を用いた撮像状態例]
図20は、本技術の第3の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。図20(a)には、撮像装置100および被写体をその側面から見た場合を示す。また、図20(b)には、撮像装置100の撮像対象となる被写体の撮像範囲を示す。
【0157】
図20には、滝472を背景にして立っている人物471と、滝472(その滝壺および川)付近とを被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図20に示す例では、撮像装置100と滝472との距離が比較的近いため、滝472の流れる音(図20(a)では、「ザーザー」で示す)を音取得部260により取得することができる場合を想定して説明する。
【0158】
ここで、図20(b)に示すように、撮像範囲475には滝472が含まれないのに対し、撮像範囲476、477には滝472が含まれる。このため、撮像部220の撮像対象が撮像範囲476である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(人物、滝)とが一致(すなわち、一部が一致)する。また、撮像部220の撮像対象が撮像範囲477である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。
【0159】
ここで、音取得部260により取得される音により特定される対象物と、撮像部220により生成される画像により特定される対象物とが一致する場合には、本技術の第1の実施の形態では、音情報に基づくカメラ制御パラメータを決定する例を示した。しかしながら、撮像部220の撮像対象が撮像範囲476である場合には、背景の滝472よりも、その前に立っている人物471を主要対象物として撮像動作が行われている可能性が高いと想定される。
【0160】
すなわち、音取得部260により取得される音により特定される対象物(滝)よりも、撮像部220により生成される画像により特定される対象物(人物)が重要であると想定される。この場合に、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定する場合には、撮像範囲476に含まれる被写体の画像については、適切なカメラ制御パラメータを設定することができないおそれがある。そこで、本技術の第3の実施の形態では、音により特定される対象物と画像により特定される対象物とが一致する場合であっても、撮像範囲に人物が存在する場合には、画像情報に基づくカメラ制御パラメータを決定する例を示す。
【0161】
また、撮像範囲475には人物471が含まれる。この場合についても同様に、画像情報に基づくカメラ制御パラメータを決定する。
【0162】
[被写体およびカメラ制御パラメータの関係例]
図21乃至図23は、本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【0163】
ここで、図21(a)に示す画像481は、図20(b)に示す撮像範囲476に対応する画像である。また、図22(a)に示す画像482は、図20(b)に示す撮像範囲475に対応する画像である。また、図23(a)に示す画像483は、図20(b)に示す撮像範囲477に対応する画像である。
【0164】
図21(b)に示すように、図21(a)に示す画像481の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(人物、滝)とが一致(一部が一致)する。しかしながら、撮像部220により生成される画像には人物471の顔が含まれている。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0165】
また、図22(b)に示すように、図22(a)に示す画像482の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(人物、山々)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0166】
また、図23(b)に示すように、図23(a)に示す画像483の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。また、撮像部220により生成される画像には人物の顔が含まれていない。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0167】
このように、制御部280は、撮像部220により生成された画像に特定対象物(例えば、人物の顔)が含まれるか否かに基づいてカメラ制御パラメータを決定する。
【0168】
[撮像装置の動作例]
図24は、本技術の第3の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。なお、図24は、図12の変形例であるため、図12と共通する部分については、同一の符号を付して、その説明の一部を省略する。
【0169】
音判定部270による判定結果と、画像判定部250による判定結果とが一致(または、略一致)した場合には(ステップS909)、制御部280は、撮像範囲に人物(人物の顔)が存在するか否かを判断する(ステップS931)。撮像範囲に人物(人物の顔)が存在しない場合には(ステップS931)、制御部280は、第1パラメータを用いた撮像動作を行うための制御を行う(ステップS910)。一方、撮像範囲に人物(人物の顔)が存在する場合には(ステップS931)、制御部280は、第2パラメータを用いた撮像動作を行うための制御を行う(ステップS911)。
【0170】
例えば、図9乃至図11に示す例では、撮像範囲に人物が含まれないため、本技術の第1の実施の形態と同様の決定処理が行われる。
【0171】
同様に、例えば、図16乃至図18に示す例では、撮像範囲に人物が含まれないため、本技術の第2の実施の形態と同様の決定処理が行われる。
【0172】
また、例えば、図21に示すように、撮像範囲に滝472が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(一部が一致)する(ステップS909)。しかしながら、上述したように、撮像範囲に人物471が存在すると判定される(ステップS931)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。この場合には、制御部280は、人物471に基づくパラメータ(例えば、被写体情報を用いて決定されたパラメータ)を用いた撮像動作を行うための制御を行う(ステップS911)。
【0173】
また、例えば、図22に示すように、滝472が撮像範囲に含まれない場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。この場合についても、制御部280は、人物471に基づくパラメータを用いた撮像動作を行うための制御を行う(ステップS911)。
【0174】
また、例えば、図23に示すように、撮像範囲に滝472が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(一部が一致)する(ステップS909)。また、この場合には、撮像範囲に人物471が存在しないと判定される(ステップS931)。このため、制御部280は、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。
【0175】
このように、本技術の第3の実施の形態では、音を発している対象物が画像に含まれている場合であっても、その画像に人物が含まれている場合には、画像情報に基づくカメラ制御パラメータを決定する。これにより、音を発している対象物が画像に含まれている場合において、人物が主要対象物となる場合でも、その人物に対する最適なカメラ制御パラメータを設定して撮像動作を行うことができる。すなわち、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することができる。
【0176】
なお、本技術の実施の形態では、音判定部270により判定された対象物に基づいて決定されたパラメータについては、音判定部270による判定結果(例えば、その対象物の速度)を用いて補正する例を示した。ただし、音判定部270により判定された対象物に基づいて決定されたパラメータについて、画像判定部250による判定結果(例えば、その対象物の速度)を用いて補正するようにしてもよい。
【0177】
また、本技術の実施の形態では、画像判定部250により判定された対象物に基づいて決定されたパラメータについては、画像判定部250による判定結果(例えば、その対象物の速度)や被写体距離(その対象物の被写体距離)を用いて補正する例を示した。ただし、画像判定部250により判定された対象物に基づいて決定されたパラメータについて、音判定部270による判定結果(例えば、その対象物の速度や被写体距離)を用いて補正するようにしてもよい。
【0178】
また、制御部280は、音取得部260により取得された周囲の音と、撮像部220により生成された画像とに基づいて、他の決定方法により設定内容(撮像部220の撮像動作時における設定内容)を決定するようにしてもよい。
【0179】
例えば、制御部280は、音判定部270により花火の音が判定された場合には、画像判定部250により判定された対象物に基づいて決定されたパラメータを、花火に最適なパラメータとなるように補正するようにしてもよい。また、例えば、制御部280は、音判定部270により花火の音が判定された場合には、撮像モードとして花火モードを設定し、この花火モードの設定状態で、画像判定部250により判定された対象物に基づいて最適なパラメータを設定するようにしてもよい。これらにより、連続して打ち上げられる花火を撮影するような場合には、シャッターボタン171を半押し状態としておくことにより、花火に最適なパラメータを容易に設定することができる。
【0180】
また、本技術の実施の形態では、シャッターボタン171の半押し操作が行われてから全押し操作が行われるまでの期間を音判定期間とし、シャッターボタン171の全押し操作時を画像判定期間とする例を示す。ただし、静止画撮像モードが設定されている間を、音判定期間および画像判定期間として、音判定処理および画像判定処理を順次行うようにしてもよい。また、音判定期間および画像判定期間を、定期的または不定期に設定するようにしてもよく、撮像動作時において、カメラ制御パラメータを設定することが可能な他の期間に設定するようにしてもよい。
【0181】
また、本技術の実施の形態では、カメラ制御パラメータとして、絞り値、シャッタースピード、露出値を決定する例を示したが、他のカメラ制御パラメータを決定する場合についても、本技術の実施の形態を適用することができる。例えば、対象物に応じた最適な撮像パラメータや画像処理パラメータを対象物毎に関連付けて記憶しておき、これらの各パラメータを用いて撮像動作時における設定内容を決定することができる。
【0182】
なお、本技術の実施の形態では、撮像部を備える撮像装置100を例にして説明したが、撮像部を着脱可能な情報処理装置に本技術の実施の形態を適用することができる。また、撮像機能付き携帯電話機や撮像機能付き携帯端末装置等の情報処理装置に本技術の実施の形態を適用することができる。
【0183】
なお、上述の実施の形態は本技術を具現化するための一例を示したものであり、実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本技術の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本技術は実施の形態に限定されるものではなく、その要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
【0184】
また、上述の実施の形態において説明した処理手順は、これら一連の手順を有する方法として捉えてもよく、また、これら一連の手順をコンピュータに実行させるためのプログラム乃至そのプログラムを記憶する記録媒体として捉えてもよい。この記録媒体として、例えば、CD(Compact Disc)、MD(MiniDisc)、DVD(Digital Versatile Disk)、メモリカード、ブルーレイディスク(Blu-ray Disc(登録商標))等を用いることができる。
【0185】
なお、本技術は以下のような構成もとることができる。
(1) 音取得部により取得された周囲の音と撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部を具備する情報処理装置。
(2) 前記音取得部により取得された周囲の音に基づいて当該音を発する対象物を判定する第1判定部と、
前記撮像部により生成された画像に基づいて当該画像に含まれる対象物を判定する第2判定部とをさらに具備し、
前記制御部は、前記第1判定部による判定結果と前記第2判定部による判定結果とに基づいて前記設定内容を決定する
前記(1)に記載の情報処理装置。
(3) 前記制御部は、前記第1判定部により判定された対象物である第1対象物と、前記第2判定部により判定された対象物である第2対象物との比較結果に基づいて前記設定内容を決定する前記(2)に記載の情報処理装置。
(4) 前記制御部は、前記設定内容に関するパラメータである第1パラメータを前記第1対象物に基づいて決定し、前記設定内容に関するパラメータである第2パラメータを前記第2対象物に基づいて決定し、前記第1対象物および前記第2対象物が一致するか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する前記(3)に記載の情報処理装置。
(5) 前記制御部は、前記第1対象物および前記第2対象物が一致する場合には前記第1パラメータを用いて前記設定内容を決定し、前記第1対象物および前記第2対象物が一致しない場合には前記第2パラメータを用いて前記設定内容を決定する前記(4)に記載の情報処理装置。
(6) 前記第1判定部は、前記第1対象物と当該第1対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第1パラメータを補正する
前記(4)または(5)に記載の情報処理装置。
(7) 前記第2判定部は、前記第2対象物と当該第2対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第2パラメータを補正する
前記(4)から(6)のいずれかに記載の情報処理装置。
(8) 前記撮像部により生成された画像に含まれる各対象物に係る被写体距離を取得する被写体距離取得部をさらに具備し、
前記制御部は、前記第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が前記撮像部により生成された画像に含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
前記(4)から(7)のいずれかに記載の情報処理装置。
(9) 前記第2判定部は、前記撮像部により生成された画像に特定対象物が含まれるか否かを判定し、
前記制御部は、前記撮像部により生成された画像に前記特定対象物が含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
前記(4)から(7)のいずれかに記載の情報処理装置。
(10) 前記第2判定部は、前記特定対象物として人物の顔が含まれるか否かを判定する前記(9)に記載の情報処理装置。
(11) 周囲の音を取得する音取得部と、
被写体を撮像して画像を生成する撮像部と、
前記音取得部により取得された周囲の音と、前記撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部と
を具備する撮像装置。
(12) 情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
を具備する情報処理方法。
(13) 情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
をコンピュータに実行させるプログラム。
【符号の説明】
【0186】
100 撮像装置
111 レンズ群
112 絞り
113 光学系制御部
121 シャッターユニット
122 シャッター制御部
131 撮像素子
132 AFE
133 画像処理部
135 測光部
140 コンテンツ記憶部
151 マイクロフォン
152 A/D変換部
153 音声分析処理部
160 不揮発性メモリ
170 操作受付部
171 シャッターボタン
180 表示部
190 メイン制御部
210 操作受付部
220 撮像部
230 画像処理部
240 記録制御部
250 画像判定部
260 音取得部
270 音判定部
280 制御部
290 コンテンツ記憶部
310 画像判定情報記憶部
320 音判定情報記憶部
330 パラメータ補正情報記憶部
340 プログラム線図記憶部
【技術分野】
【0001】
本技術は、情報処理装置に関する。詳しくは、撮像動作を制御する情報処理装置、撮像装置および情報処理方法ならびに当該方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
近年、人物等の被写体を撮像して画像(画像データ)を生成し、この生成された画像(画像データ)を画像コンテンツ(画像ファイル)として記録する情報処理装置(例えば、デジタルスチルカメラ等の撮像装置)が普及している。この情報処理装置が撮像動作を行う場合には、記録される画像(画像データ)を綺麗に記録するため、その撮像動作に関する各パラメータを適切に設定することが重要となる。このため、撮像動作に関する各パラメータを適切に設定するための技術が多数提案されている。
【0003】
また、例えば、被写体の撮像動作時に取得された音声信号の特徴量を分析し、この分析された音声信号の特徴量に基づいて、画像処理パラメータを制御する撮像装置が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−147587号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の従来技術では、被写体の撮像動作時に取得された音声信号を用いて、その撮像動作に関する各パラメータを制御することができる。
【0006】
しかしながら、例えば、撮像範囲に含まれる対象物以外の対象物(すなわち、撮像範囲に含まれない対象物)が音を発していることも想定される。また、撮像範囲に含まれる対象物のうち、主要対象物(例えば、撮影者がフォーカスを合わせている対象物)以外の対象物が音を発していることも想定される。このため、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することが重要である。
【0007】
本技術はこのような状況に鑑みて生み出されたものであり、撮像動作時における設定内容を適切に決定することを目的とする。
【課題を解決するための手段】
【0008】
本技術は、上述の問題点を解消するためになされたものであり、その第1の側面は、音取得部により取得された周囲の音と撮像部により生成された画像とに基づいて上記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部を具備する情報処理装置およびその情報処理方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0009】
また、この第1の側面において、上記音取得部により取得された周囲の音に基づいて当該音を発する対象物を判定する第1判定部と、上記撮像部により生成された画像に基づいて当該画像に含まれる対象物を判定する第2判定部とをさらに具備し、上記制御部は、上記第1判定部による判定結果と上記第2判定部による判定結果とに基づいて上記設定内容を決定するようにしてもよい。これにより、第1判定部による判定結果と、第2判定部による判定結果とに基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0010】
また、この第1の側面において、上記制御部は、上記第1判定部により判定された対象物である第1対象物と、上記第2判定部により判定された対象物である第2対象物との比較結果に基づいて上記設定内容を決定するようにしてもよい。これにより、第1判定部により判定された対象物(第1対象物)と、第2判定部により判定された対象物(第2対象物)との比較結果に基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0011】
また、この第1の側面において、上記制御部は、上記設定内容に関するパラメータである第1パラメータを上記第1対象物に基づいて決定し、上記設定内容に関するパラメータである第2パラメータを上記第2対象物に基づいて決定し、上記第1対象物および上記第2対象物が一致するか否かに基づいて上記第1パラメータおよび上記第2パラメータの何れかを用いて上記設定内容を決定するようにしてもよい。これにより、第1対象物および第2対象物が一致するか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0012】
また、この第1の側面において、上記制御部は、上記第1対象物および上記第2対象物が一致する場合には上記第1パラメータを用いて上記設定内容を決定し、上記第1対象物および上記第2対象物が一致しない場合には上記第2パラメータを用いて上記設定内容を決定するようにしてもよい。これにより、第1対象物および第2対象物が一致する場合には、第1パラメータを用いて、撮像部の撮像動作時における設定内容を決定し、第1対象物および第2対象物が一致しない場合には、第2パラメータを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0013】
また、この第1の側面において、上記第1判定部は、上記第1対象物と当該第1対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、上記制御部は、上記第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて上記第1パラメータを補正するようにしてもよい。これにより、第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第1パラメータを補正するという作用をもたらす。
【0014】
また、この第1の側面において、上記第2判定部は、上記第2対象物と当該第2対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、上記制御部は、上記第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて上記第2パラメータを補正するようにしてもよい。これにより、第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第2パラメータを補正するという作用をもたらす。
【0015】
また、この第1の側面において、上記撮像部により生成された画像に含まれる各対象物に係る被写体距離を取得する被写体距離取得部をさらに具備し、上記制御部は、上記第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が上記撮像部により生成された画像に含まれるか否かに基づいて上記第1パラメータおよび上記第2パラメータの何れかを用いて上記設定内容を決定するようにしてもよい。これにより、第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部により生成された画像に含まれるか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0016】
また、この第1の側面において、上記第2判定部は、上記撮像部により生成された画像に特定対象物が含まれるか否かを判定し、上記制御部は、上記撮像部により生成された画像に上記特定対象物が含まれるか否かに基づいて上記第1パラメータおよび上記第2パラメータの何れかを用いて上記設定内容を決定するようにしてもよい。これにより、撮像部により生成された画像に特定対象物が含まれるか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【0017】
また、この第1の側面において、上記第2判定部は、上記特定対象物として人物の顔が含まれるか否かを判定するようにしてもよい。これにより、特定対象物として人物の顔が含まれるか否かを判定するという作用をもたらす。
【0018】
また、本技術の第2の側面は、周囲の音を取得する音取得部と、被写体を撮像して画像を生成する撮像部と、上記音取得部により取得された周囲の音と、上記撮像部により生成された画像とに基づいて上記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部とを具備する撮像装置およびその制御方法ならびに当該方法をコンピュータに実行させるプログラムである。これにより、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、撮像部の撮像動作時における設定内容を決定するという作用をもたらす。
【発明の効果】
【0019】
本技術によれば、撮像動作時における設定内容を適切に決定することができるという優れた効果を奏し得る。
【図面の簡単な説明】
【0020】
【図1】本技術の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。
【図2】本技術の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。
【図3】本技術の第1の実施の形態における画像判定情報記憶部310の記憶内容の一例を模式的に示す図である。
【図4】本技術の第1の実施の形態における音判定情報記憶部320の記憶内容の一例を模式的に示す図である。
【図5】本技術の第1の実施の形態におけるパラメータ補正情報記憶部330の記憶内容の一例を模式的に示す図である。
【図6】本技術の第1の実施の形態におけるプログラム線図記憶部340に記憶されているプログラム線図の一例を示す図である。
【図7】本技術の第1の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図8】本技術の第1の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図9】本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図10】本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図11】本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図12】本技術の第1の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【図13】本技術の第2の実施の形態における撮像部220により生成された画像430と、画像430の奥行マップとの関係を示す図である。
【図14】本技術の第2の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図15】本技術の第2の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図16】本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図17】本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図18】本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図19】本技術の第2の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【図20】本技術の第3の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【図21】本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図22】本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図23】本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【図24】本技術の第3の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本技術を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(カメラ制御パラメータ決定制御:撮像装置の周囲の音と、撮像部により生成された画像とに基づいてカメラ制御パラメータを決定する例)
2.第2の実施の形態(カメラ制御パラメータ決定制御:被写体距離が異なる複数の対象物が撮像範囲に含まれるか否かに基づいてカメラ制御パラメータを決定する例)
3.第3の実施の形態(カメラ制御パラメータ決定制御:撮像範囲に人物が含まれるか否かに基づいてカメラ制御パラメータを決定する例)
【0022】
<1.第1の実施の形態>
[撮像装置の構成例]
図1は、本技術の第1の実施の形態における撮像装置100の内部構成例を示すブロック図である。
【0023】
撮像装置100は、レンズ群111と、絞り112と、光学系制御部113と、シャッターユニット121と、シャッター制御部122と、撮像素子131と、AFE(Analog Front End)132とを備える。また、撮像装置100は、画像処理部133と、測光部135と、コンテンツ記憶部140と、マイクロフォン151と、A/D(Analog/Digital)変換部152と、音声分析処理部153とを備える。また、撮像装置100は、不揮発性メモリ160と、操作受付部170と、表示部180と、メイン制御部190とを備える。また、撮像装置100は、例えば、被写体を撮像して画像データ(画像)を生成し、この生成された画像データを画像コンテンツ(静止画コンテンツまたは動画コンテンツ)として記録するデジタルスチルカメラにより実現される。なお、撮像装置100は、特許請求の範囲に記載の情報処理装置および撮像装置の一例である。
【0024】
レンズ群111は、被写体からの入射光を集光するレンズ群であり、これらのレンズ群により集光された光が絞り112を介して撮像素子131に入射される。なお、レンズ群111は、焦点を調整するためのフォーカスレンズや、画像に含まれる被写体の倍率を調整するためのズームレンズ等により構成されるが、これらの具体的な配置構成等については、図示および説明を省略する。また、レンズ群111を構成する各レンズは、光学系制御部113により駆動され、被写体に対して前後に移動する。これにより、フォーカス機能およびズーム機能が実現される。
【0025】
絞り112は、レンズ群111を通過する入射光の光量を調整するものであり、その調整後の光が撮像素子131に入射される。すなわち、絞り112により、レンズ群111を通過する入射光の光量が調整され、撮像素子131に供給される光量(すなわち、露出)が決定される。また、絞り112は、光学系制御部113により駆動され、絞りの開度が調節される。
【0026】
光学系制御部113は、メイン制御部190からの指示に基づいて、レンズ群111を構成する各レンズと、絞り112とを駆動させるものである。また、光学系制御部113は、レンズ群111を構成する各レンズの位置と、絞り112の状態(開閉の状態)とを取得し、これらをメイン制御部190に順次出力する。
【0027】
シャッターユニット121は、撮像素子131に入射する被写体からの入射光の光路の開口および遮断を、上下方向に移動する幕体により行うものであり、シャッター制御部122により駆動される。例えば、シャッターユニット121は、光路が開口している場合には、被写体からの入射光を撮像素子131に供給する。
【0028】
シャッター制御部122は、メイン制御部190からの指示に基づいて、シャッターユニット121を駆動させるものである。
【0029】
撮像素子131は、被写体からの入射光を光電変換することにより電気信号(アナログ信号)を生成するものであり、生成された電気信号を画像信号としてAFE132に供給する。撮像素子131として、例えば、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)等を用いることができる。
【0030】
また、撮像素子131として、例えば、射出瞳が異なる部分を透過した透過光を受光することにより、位相差検出方式の焦点検出(位相差AF(Auto Focus))を行う撮像素子を用いることができる。この位相差AFを行う撮像素子からは、画像信号(アナログ信号)とともに、位相差検出信号が出力される。このため、画像処理部133は、撮像素子131から出力された位相差検出信号に基づいて、撮像素子131から出力された画像信号に対応する画像における各領域の被写体距離を算出することができる。なお、被写体距離は、撮像装置100から被写体までの距離である。
【0031】
AFE132は、メイン制御部190からの指示に基づいて、撮像素子131から供給される画像信号(アナログ信号)に所定の信号処理を施すとともに、所定の信号処理が施された画像信号をデジタル信号に変換するものである。そして、AFE132は、生成された画像信号(デジタル信号)を画像処理部133に供給する。例えば、AFE132は、所定の信号処理として、画像信号(アナログ信号)に対してノイズ除去および信号増幅等の信号処理を行う。また、AFE132は、メイン制御部190から供給される基準クロックに基づいて、撮像素子131の撮像動作に関するタイミングパルスを生成し、その生成したタイミングパルスを撮像素子131に供給する。
【0032】
画像処理部133は、メイン制御部190からの指示に基づいて、AFE132から供給された画像信号(デジタル信号)に対して所定の信号処理を施して画像データ(画像信号)を生成するものである。そして、画像処理部133は、生成された画像データを圧縮してコンテンツ記憶部140に供給する。例えば、画像処理部133は、所定の信号処理として、AFE132から供給された画像信号(デジタル信号)に対してホワイトバランス補正、ガンマ補正、黒レベル補正、画像圧縮、画素補間処理、色変換処理等の信号処理を行う。また、画像処理部133は、生成された画像データ(画像信号)を用いて所定の演算処理を行い、コントラスト、明度、彩度、ホワイトバランス、シャープネス等の画像処理を行う。
【0033】
測光部135は、自動露出処理を行うための測光部であり、被写体の周辺部の明るさを測る際に用いられる。すなわち、撮像素子131により光学像として結像された被写体の露出状態を測光部135により測定することができる。
【0034】
コンテンツ記憶部140は、メイン制御部190からの指示に基づいて、画像処理部133から供給される画像データを画像コンテンツ(画像ファイル)として記憶するものである。
【0035】
マイクロフォン151は、撮像装置100に内蔵されているマイクロフォンであり、撮像装置100の周囲の音を入力する。そして、マイクロフォン151は、入力された周囲の音を電気信号(アナログ信号)に変換し、この変換により生成された電気信号を音声信号(アナログ信号)としてA/D変換部152に供給する。
【0036】
A/D変換部152は、マイクロフォン151から出力された音声信号(アナログ信号)をデジタル信号に変換するものであり、この変換により生成された音声信号(デジタル信号)を音声分析処理部153に出力する。
【0037】
音声分析処理部153は、A/D変換部152から供給された音声信号を分析することにより、その音声信号から特徴量を抽出するものであり、抽出された特徴量をメイン制御部190に出力する。音声分析処理部153は、例えば、音声信号の特徴量として音声信号の音量や周波数分布を抽出することが可能なスペクトルアナライザ回路により実現される。
【0038】
不揮発性メモリ160は、電源供給が行われていない状態でも記憶内容を保持することが可能な半導体メモリである。不揮発性メモリ160として、例えば、フラッシュメモリやEEPROM(Electrically Erasable and Programmable Read Only Memory)を用いることができる。
【0039】
操作受付部170は、ユーザにより行われた操作を受け付ける操作受付部であり、受け付けられた操作内容に応じた制御信号(操作信号)をメイン制御部190に出力する。操作受付部170は、例えば、シャッターボタン171(図7(a)等に示す)、モードダイアル等に対応する。このモードダイアルは、各撮像モードを設定するための操作部材である。このモードダイアルにより、特定撮像モード(例えば、音/画像判定モード)が設定された場合には、本技術の第1の実施の形態に示す撮像モードが設定される。
【0040】
シャッターボタン171は、静止画を記録するための各操作(半押し操作および全押し操作)を行う際に用いられるボタンである。半押し操作が行われた場合には、例えば、AF(オートフォーカス)処理、AE(自動露出)処理、AWB(オートホワイトバランス)処理、EF(フラッシュ調光)処理等が開始される。また、全押し操作が行われた場合には、撮像素子131から読み出された画像信号(アナログ信号)を画像コンテンツ(画像ファイル)としてコンテンツ記憶部140に記録するための各処理が行われる。
【0041】
表示部180は、メイン制御部190からの指示に基づいて、画像処理部133から出力された画像データを表示する表示パネル(例えば、液晶ファインダー)である。例えば、表示部180は、各種設定を行うための設定画面や、撮像素子131により生成された画像(いわゆる、スルー画像、ライブビュー画像)を表示する。表示部180として、例えば、LCD(Liquid Crystal Display)、有機EL(Electro Luminescence)パネル等の表示パネルを用いることができる。
【0042】
メイン制御部190は、メモリ(例えば、不揮発性メモリ160)に格納されている制御プログラムに基づいて撮像装置100における各部を制御するものである。メイン制御部190は、例えば、マイクロプロセッサにより構成される。
【0043】
[撮像装置の機能構成例]
図2は、本技術の第1の実施の形態における撮像装置100の機能構成例を示すブロック図である。
【0044】
撮像装置100は、操作受付部210と、撮像部220と、画像処理部230と、記録制御部240と、画像判定部250と、音取得部260と、音判定部270と、制御部280と、コンテンツ記憶部290とを備える。また、撮像装置100は、画像判定情報記憶部310と、音判定情報記憶部320と、パラメータ補正情報記憶部330と、プログラム線図記憶部340とを備える。なお、操作受付部210は、例えば、図1に示す操作受付部170に対応し、コンテンツ記憶部290は、例えば、図1に示すコンテンツ記憶部140に対応する。
【0045】
撮像部220は、制御部280からの指示に基づいて、被写体を撮像して画像(画像データ)を生成するものであり、生成された画像を画像処理部230と、画像判定部250と、制御部280とに供給する。また、撮像部220は、制御部280により決定された設定内容に基づいて撮像動作を行う。なお、撮像部220は、例えば、図1に示すレンズ群111と、絞り112と、光学系制御部113と、シャッターユニット121と、シャッター制御部122と、撮像素子131と、AFE132とに対応する。
【0046】
画像処理部230は、制御部280からの指示に基づいて、撮像部220から供給された画像(画像データ)に対して所定の信号処理を施すものであり、この信号処理が施された画像(画像データ)を記録制御部240に供給する。なお、画像処理部230は、例えば、図1に示す画像処理部133に対応する。
【0047】
記録制御部240は、制御部280からの指示に基づいて、画像処理部230から供給された画像(画像データ)を圧縮して画像コンテンツ(画像ファイル)としてコンテンツ記憶部290に記録させるものである。なお、記録制御部240は、例えば、図1に示す画像処理部133、メイン制御部190に対応する。
【0048】
画像判定部250は、画像判定情報記憶部310に記憶されている画像判定情報を用いて、撮像部220により生成された画像に含まれる対象物の種類を判定するものであり、その判定結果を制御部280に出力する。
【0049】
例えば、対象物の種類を判定する判定方法として、マッチング処理を用いた判定方法を用いることができる。このマッチング処理は、比較対象となる2つの画像における特徴量を比較してこの比較結果に基づいて、2つの画像における特徴量の類似度を算出し、この類似度に基づいて、2つの画像が一致するか否かを判定する処理である。例えば、算出された類似度が閾値未満である場合には、比較対象となる2つの画像が不一致であると判定され、算出された類似度が閾値以上である場合には、比較対象となる2つの画像が一致すると判定される。このマッチング処理として、例えば、各対象物(例えば、馬、魚、人物の顔)の輝度分布情報が記録されているテンプレートと実画像とのマッチングによる判定方法(例えば、特開2004−133637参照。)を用いることができる。また、判定対象となる対象物が人物の顔(特定対象物)である場合には、画像に含まれる肌色の部分や人間の顔の特徴量等に基づいた判定方法を用いることができる。
【0050】
また、例えば、画像における輝度の勾配強度および勾配方向を用いて、画像に含まれる対象物(人体、動物、電車、車等)を検出する検出方法を用いることができる(例えば、特開2010−67102号参照。)。
【0051】
また、画像判定部250は、対象物の移動状態および被写体距離を判定する。対象物の移動状態は、例えば、時間軸において隣接する2つの画像を構成する画素間のマッチング処理(すなわち、同一対象物の領域を判別するマッチング処理)を行い、各画像間において移動された画素数を算出することにより判定することができる。また、対象物の被写体距離は、例えば、判定された対象物の画像におけるサイズに基づいて算出することができる。また、上述したように、制御部280が、撮像部220(撮像素子131)から出力された各情報に基づいて被写体距離を算出するようにしてもよい。なお、画像判定部250は、例えば、図1に示すメイン制御部190に対応する。また、画像判定部250は、特許請求の範囲に記載の第2判定部の一例である。
【0052】
音取得部260は、撮像装置100の周囲の音声を取得するものであり、取得された音データ(音)を音判定部270に出力する。なお、音取得部260は、例えば、図1に示すマイクロフォン151に対応する。
【0053】
音判定部270は、音判定情報記憶部320に記憶されている音判定情報を用いて、音取得部260から出力された音データに基づいて、その音を発している被写体を判定するものであり、その判定結果を制御部280に出力する。例えば、音判定部270は、音取得部260から出力された音データから特徴量を抽出し、この抽出された特徴量と、音判定情報記憶部320に記憶されている音判定情報(音に関する特徴量)との比較により類似度を算出する。そして、音判定部270は、その算出された類似度が閾値を超えた場合には、その類似度が閾値を超えた音判定情報に関連付けられている対象物が存在すると判定する。例えば、音取得部260から出力された音データが、A/D変換処理によりサンプリングされ、デジタルデータに変換される。また、このデジタルデータに対して、適当な時間間隔で周波数分析等の処理が施され、スペクトルやその他の音声の音響的特徴を表すパラメータに変換される。これにより、音声に関する時系列の特徴量が抽出される。そして、音判定情報記憶部320に記憶されている音判定情報(音に関する特徴量)を用いて、その抽出された時系列の特徴量とのマッチング処理を行ない、このマッチング処理の結果として判定結果が出力される。なお、音声の解析方法および認識方法については、他の公知の各種方法を用いるようにしてもよい。また、音取得部260は、判定された対象物の移動状態および被写体距離を判定することができる。なお、対象物の移動状態は、移動時に対象物が発する特徴的な音の特徴量等に基づいて判定することができる。また、対象物の被写体距離は、音の音量等に基づいて判定することができる。なお、音判定部270は、例えば、図1に示すA/D変換部152と、音声分析処理部153と、メイン制御部190とに対応する。また、音判定部270は、特許請求の範囲に記載の第1判定部の一例である。
【0054】
制御部280は、各種制御プログラムに基づいて、撮像装置100の各部を制御するものである。例えば、制御部280は、音取得部260により取得された周囲の音と、撮像部220により生成された画像とに基づいて、撮像部220の撮像動作時における設定内容を決定するための制御を行う。
【0055】
具体的には、制御部280は、音判定部270による判定結果と、画像判定部250による判定結果とに基づいて、撮像部220の撮像動作時における設定内容を決定する。すなわち、制御部280は、音判定部270により判定された対象物(第1対象物)と、画像判定部250により判定された対象物(第2対象物)との比較結果に基づいて、撮像部220の撮像動作時における設定内容を決定する。
【0056】
この場合に、制御部280は、その設定内容に関するパラメータ(第1パラメータ)を第1対象物に基づいて決定し、その設定内容に関するパラメータ(第2パラメータ)を第2対象物に基づいて決定する。なお、制御部280は、第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第1パラメータを補正することができる。また、制御部280は、第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて第2パラメータを補正することができる。そして、制御部280は、第1対象物および第2対象物が一致するか否かに基づいて、第1パラメータおよび第2パラメータの何れかを用いて、撮像部220の撮像動作時における設定内容を決定する。具体的には、制御部280は、第1対象物および第2対象物が一致する場合には、第1パラメータを用いて、撮像部220の撮像動作時における設定内容を決定する。一方、制御部280は、第1対象物および第2対象物が一致しない場合には、第2パラメータを用いて、撮像部220の撮像動作時における設定内容を決定する。なお、制御部280は、例えば、図1に示すメイン制御部190に対応する。
【0057】
画像判定情報記憶部310は、画像判定部250による判定処理に用いられる画像判定情報(画像に関する特徴量)を記憶するものであり、記憶されている画像判定情報を画像判定部250に供給する。なお、画像判定情報記憶部310の記憶内容については、図3を参照して詳細に説明する。また、画像判定情報記憶部310は、例えば、図1に示す不揮発性メモリ160に対応する。
【0058】
音判定情報記憶部320は、音判定部270による判定処理に用いられる音判定情報(音に関する特徴量)を記憶するものであり、記憶されている音判定情報を音判定部270に供給する。なお、音判定情報記憶部320の記憶内容については、図4を参照して詳細に説明する。また、音判定情報記憶部320は、例えば、図1に示す不揮発性メモリ160に対応する。
【0059】
パラメータ補正情報記憶部330は、制御部280によるカメラ制御パラメータ補正処理に用いられるパラメータ補正情報を記憶するものであり、記憶されているパラメータ補正情報を制御部280に供給する。なお、パラメータ補正情報記憶部330の記憶内容については、図5を参照して詳細に説明する。また、パラメータ補正情報記憶部330は、例えば、図1に示す不揮発性メモリ160に対応する。
【0060】
プログラム線図記憶部340は、制御部280によるカメラ制御パラメータ決定処理に用いられるプログラム線図を記憶するものであり、記憶されているプログラム線図を制御部280に供給する。なお、プログラム線図については、図6を参照して詳細に説明する。また、プログラム線図記憶部340は、例えば、図1に示す不揮発性メモリ160に対応する。
【0061】
[画像判定情報記憶部の内容例]
図3は、本技術の第1の実施の形態における画像判定情報記憶部310の記憶内容の一例を模式的に示す図である。
【0062】
画像判定情報記憶部310は、撮像部220により生成された画像に含まれる対象物の種類を判定するための判定情報(画像に関する判定情報)を記憶するものである。画像判定情報記憶部310には、対象物の種類311と、特徴量312と、カメラ制御パラメータ313とが関連付けて記憶されている。
【0063】
対象物の種類311は、撮像部220により生成された画像に含まれる対象物の種類である。なお、本技術の第1の実施の形態では、判定対象となる対象物の種類として、馬、魚、人物の顔等を一例として示す。
【0064】
特徴量312は、撮像部220により生成された画像に含まれる対象物の種類を判定するための判定情報(画像識別データ)である。すなわち、画像判定部250は、特徴量312を用いて、撮像部220により生成された画像に含まれる対象物の種類を判定する。
【0065】
上述したように、判定方法として、例えば、各被写体(例えば、馬、魚、人物の顔)の輝度分布情報が記録されているテンプレートと実画像とのマッチングによる判定方法を用いることができる。このように、判定方法としてマッチングによる判定方法を用いる場合には、各被写体の輝度分布情報が記録されているテンプレートが、特徴量312として格納される。
【0066】
カメラ制御パラメータ313は、撮像部220の撮像動作時に設定されるカメラ制御パラメータである。カメラ制御パラメータ313として、例えば、プログラム線図記憶部340に記憶されているプログラム線図における位置に関する情報が格納される。
【0067】
[音判定情報記憶部の内容例]
図4は、本技術の第1の実施の形態における音判定情報記憶部320の記憶内容の一例を模式的に示す図である。
【0068】
音判定情報記憶部320は、音取得部260により取得された音を発している対象物の種類を判定するための判定情報(音に関する判定情報)を記憶するものである。音判定情報記憶部320には、対象物の種類321と、特徴量322と、カメラ制御パラメータ323とが関連付けて記憶されている。
【0069】
対象物の種類321は、音取得部260により取得された音を発している対象物の種類である。なお、図4では、判定対象となる対象物の種類として、走る馬、滝、車等を一例として示す。
【0070】
特徴量322は、音取得部260により取得された音を発している対象物の種類を判定するための判定情報(音識別データ)である。すなわち、音判定部270は、特徴量322を用いて、音取得部260により取得された音を発している対象物の種類を判定する。なお、図4では、説明の容易のため、特徴量として、対象物が発する音を文字で擬似的に示す。
【0071】
上述したように、判定方法として、例えば、各対象物(例えば、馬、魚、人物の顔)が発する音に関する時系列の特徴量と、音取得部260により取得された音に関する時系列の特徴量とのマッチングによる判定方法を用いることができる。このように、判定方法としてマッチングによる判定方法を用いる場合には、各被写体が発する音に関する時系列の特徴量が、特徴量322として格納される。
【0072】
カメラ制御パラメータ323は、撮像部220の撮像動作時に設定されるカメラ制御パラメータである。カメラ制御パラメータ323として、例えば、プログラム線図記憶部340に記憶されているプログラム線図における位置に関する情報が格納される。なお、図3に示すカメラ制御パラメータ313は、画像情報に基づいて決定されるカメラ制御パラメータであるのに対して、カメラ制御パラメータ323は、音情報に基づいて決定されるカメラ制御パラメータである。
【0073】
[パラメータ補正情報記憶部の内容例]
図5は、本技術の第1の実施の形態におけるパラメータ補正情報記憶部330の記憶内容の一例を模式的に示す図である。
【0074】
パラメータ補正情報記憶部330は、制御部280により決定されるカメラ制御パラメータ(第1パラメータ)を補正するためのパラメータ補正情報を記憶するものである。パラメータ補正情報記憶部330には、対象物の種類331およびパラメータ補正情報332が関連付けて記憶されている。
【0075】
対象物の種類331は、音取得部260により取得された音を発している対象物の種類である。なお、本技術の第1の実施の形態では、判定対象となる対象物の種類として、移動する速度が速い物体、移動する速度が遅い物体等を一例として示す。
【0076】
パラメータ補正情報332は、音取得部260により取得された音を発している対象物の種類に基づいて、カメラ制御パラメータ(第1パラメータ)を補正するための情報である。すなわち、制御部280は、音取得部260により取得された音に基づいて決定されたカメラ制御パラメータ(第1パラメータ)を、パラメータ補正情報332を用いて補正する。なお、カメラ制御パラメータ(第1パラメータ)の補正については、図6を参照して詳細に説明する。
【0077】
[プログラム線図]
図6は、本技術の第1の実施の形態におけるプログラム線図記憶部340に記憶されているプログラム線図の一例を示す図である。なお、プログラム線図(プログラムAE(Automatic Exposure))は、被写体の明るさに応じて、絞りおよびシャッター速度(シャッタースピード)を決定する際に用いられるものである。
【0078】
図6に示すプログラム線図341において、縦軸は、レンズの絞り値(AV(Aperture Value))を示し、横軸は、シャッタースピード(TV(Time Value))を示す。また、斜線(点線で示す)は、露出値(EV(Exposure Value))を示す。
【0079】
上述したように、制御部280は、音判定部270により判定された被写体と、プログラム線図記憶部340に記憶されているプログラム線図とに基づいて、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0080】
また、制御部280は、画像判定部250により判定された被写体と、プログラム線図記憶部340に記憶されているプログラム線図とに基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0081】
例えば、音判定情報記憶部320において、対象物の種類321「馬」とカメラ制御パラメータ323「プログラム線図341における位置342」とが関連付けて記憶されている場合を想定する。この場合に、音判定部270により判定された被写体が馬である場合には、制御部280は、プログラム線図341における位置342に対応するカメラ制御パラメータ(第1パラメータ)を決定する。また、制御部280は、このように音情報に基づいて決定されたカメラ制御パラメータ(第1パラメータ)を、被写体(馬)の速度に応じて補正する。この被写体の速度については、音判定部270により判定することができる。例えば、音判定部270は、音判定情報記憶部320の音判定情報を用いて、速く走る馬(高速で移動する物体)と、遅く走る馬(低速で移動する物体)とを識別することができるものとする。
【0082】
例えば、音判定部270により速く走る馬が検出された場合には、シャッタースピードを上げることが好ましい。このため、制御部280は、プログラム線図341における実線345において、位置342を左側の位置343に遷移させたカメラ制御パラメータ(第1パラメータ)を決定する。一方、例えば、音判定部270により遅く走る馬が検出された場合には、シャッタースピードを下げることが好ましい。このため、制御部280は、プログラム線図341における実線345において、位置342を右側の位置344に遷移させたカメラ制御パラメータ(第1パラメータ)を決定する。
【0083】
このように、制御部280は、プログラム線図を用いて、音情報に基づくカメラ制御パラメータ(絞り値、シャッタースピード、露出値)を決定することができる。また、画像情報に基づくカメラ制御パラメータについても同様に決定することができる。
【0084】
なお、本技術の第1の実施の形態では、音判定情報記憶部320におけるカメラ制御パラメータ323を用いて最初のパラメータを決定し、このパラメータを、音判定部270により判定された対象物の速度を用いて補正する例を示す。ただし、例えば、測光部135により取得された明るさ情報に基づいて、プログラム線図における位置に対応するパラメータを決定し、このパラメータを、音判定部270により判定された対象物の速度を用いて補正するようにしてもよい。また、画像情報に基づくカメラ制御パラメータについても、これを適用して補正することができる。
【0085】
このように、制御部280は、対象物に係る移動状態および被写体距離の少なくとも一方に基づいて音情報に基づくカメラ制御パラメータを補正することができる。また、制御部280は、対象物に係る移動状態および被写体距離の少なくとも一方に基づいて画像情報に基づくカメラ制御パラメータを補正することができる。
【0086】
なお、点線349における位置346乃至348の遷移については、本技術の第2の実施の形態で示す。
【0087】
[撮像装置を用いた撮像状態例]
図7および図8は、本技術の第1の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【0088】
図7(a)および図8(a)には、撮像装置100および被写体をその側面から見た場合を示す。また、図7(b)および図8(b)には、撮像装置100の撮像対象となる被写体の撮像範囲を示す。
【0089】
図7には、走る馬401およびその周辺(例えば、山々402)を被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図7に示す例では、撮像装置100と走る馬401との距離が比較的近いため、走る馬401の走る音(図7(a)では、「パッカパッカ」で示す)が音取得部260により取得可能である場合を想定して説明する。
【0090】
ここで、図7(b)に示すように、撮像範囲405には、走る馬401が含まれないのに対し、撮像範囲406には、走る馬401が含まれる。このため、撮像部220の撮像対象が撮像範囲406である場合には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(馬)とが一致(略一致)することになる。しかしながら、撮像部220の撮像対象が撮像範囲405である場合には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(山々、草原)とが一致しない。この場合に、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定すると、撮像範囲に含まれていない対象物が発する音を用いてカメラ制御パラメータを決定することになる。このため、撮像範囲405に対応する画像については、適切なカメラ制御パラメータを設定することができないおそれがある。そこで、本技術の第1の実施の形態では、音情報とともに画像情報を用いてカメラ制御パラメータを決定する。
【0091】
図8には、止まっている馬411およびその周辺(例えば、山々412)を被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図8に示す例では、撮像装置100と止まっている馬411との距離が比較的近いが、止まっている馬411から音が発生していないため、止まっている馬411に関する音を音取得部260が取得することができない場合を想定して説明する。また、馬以外からも音は発生していないものとする。
【0092】
ここで、図8(b)に示すように、撮像範囲415には、止まっている馬411が含まれないのに対し、撮像範囲416には、止まっている馬411が含まれる。しかしながら、撮像部220の撮像対象が撮像範囲416である場合でも、音取得部260により音(止まっている馬411に関する音)が取得されない。このため、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(馬)とが一致しない。なお、撮像部220の撮像対象が撮像範囲415である場合には、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(山々、草原)とが一致しない。これらの場合についても、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定すると、図7に示す例と同様に、適切なカメラ制御パラメータを設定することができないおそれがある。
【0093】
[被写体およびカメラ制御パラメータの関係例]
図9乃至図11は、本技術の第1の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【0094】
ここで、図9(a)に示す画像421は、図7(b)に示す撮像範囲406に対応する画像である。また、図10(a)に示す画像422は、図7(b)に示す撮像範囲405と、図8(b)に示す撮像範囲415とに対応する画像である。また、図11(a)に示す画像423は、図8(b)に示す撮像範囲416に対応する画像である。
【0095】
図9(b)に示すように、図9(a)に示す画像421の撮像動作時には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(馬)とが一致(略一致)する。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0096】
ここで、図10(a)に示す画像422が、図7(b)に示す撮像範囲405に対応する画像である場合を想定する。この場合には、図10(b)に示すように、図10(a)に示す画像422の撮像動作時には、音取得部260により取得される音により特定される対象物(走る馬)と、撮像部220により生成される画像により特定される対象物(草原、山々)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0097】
また、図10(a)に示す画像422が、図8(b)に示す撮像範囲415に対応する画像である場合を想定する。この場合には、図10(c)に示すように、図10(a)に示す画像422の撮像動作時には、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(草原、山々)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0098】
また、図11(b)に示すように、図11(a)に示す画像423の撮像動作時には、音取得部260により取得される音により特定される対象物(なし)と、撮像部220により生成される画像により特定される対象物(馬)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0099】
なお、馬が止まっている状態であっても、その馬が泣き声(例えば、ヒヒーン)を発していることも想定される。例えば、図11に示す例において、馬が泣き声(例えば、ヒヒーン)を発している場合には、音取得部260により取得される音により特定される対象物(馬)と、撮像部220により生成される画像により特定される対象物(馬)とが一致する。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定することができる。
【0100】
[撮像装置の動作例]
図12は、本技術の第1の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。
【0101】
最初に、制御部280は、シャッターボタン171の半押し操作が行われたか否かを判断し(ステップS901)、シャッターボタン171の半押し操作が行われていない場合には、監視を継続して行う。シャッターボタン171の半押し操作が行われた場合には(ステップS901)、音取得部260は、撮像装置100の周囲の音を取得する(ステップS902)。なお、ステップS902は、特許請求の範囲に記載の音取得手順の一例である。
【0102】
続いて、音判定部270は、音取得部260により取得された音を発している対象物の種類を判定する(ステップS903)。続いて、制御部280は、その判定結果に基づいて、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する(ステップS904)。
【0103】
続いて、制御部280は、シャッターボタン171の全押し操作が行われたか否かを判断する(ステップS905)。そして、全押し操作が行われていない場合には(ステップS905)、制御部280は、シャッターボタン171の半押し操作が解除されたか否かを判断し(ステップS912)、半押し操作が解除された場合には、ステップS901に戻る。一方、シャッターボタン171の半押し操作が解除されていない(ステップS912)、ステップS902に戻る。また、シャッターボタン171の全押し操作が行われた場合には(ステップS905)、撮像部220は、被写体を撮像して画像を生成する(ステップS906)。なお、ステップS906は、特許請求の範囲に記載の画像取得手順の一例である。
【0104】
続いて、画像判定部250は、撮像部220により生成された画像に含まれる対象物の種類を判定する(ステップS907)。続いて、制御部280は、その判定結果に基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する(ステップS908)。
【0105】
続いて、制御部280は、音判定部270による判定結果と、画像判定部250による判定結果とを比較して、これらが一致(または、略一致)するか否かを判断する(ステップS909)。すなわち、音判定部270により判定された対象物と、画像判定部250により判定された対象物とが一致(または、略一致)するか否かが判断される。ここで、略一致する場合は、例えば、音判定部270により判定された対象物が「走る馬」であり、画像判定部250により判定された対象物が「馬」である場合である。すなわち、対象物の種類が同一であるが、その状態が異なるような場合を意味する。
【0106】
音判定部270による判定結果と、画像判定部250による判定結果とが一致(または、略一致)する場合には(ステップS909)、制御部280は、第1パラメータを用いた撮像動作を行うための制御を行う(ステップS910)。すなわち、これらの判定結果が一致(または、略一致)する場合には(ステップS910)、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)が決定される(ステップS910)。そして、第1パラメータに基づいて撮像動作が行われる。この撮像動作により生成された画像が、画像コンテンツとしてコンテンツ記憶部290に記憶される。
【0107】
また、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない場合には(ステップS909)、制御部280は、第2パラメータを用いた撮像動作を行うための制御を行う(ステップS911)。すなわち、これらの判定結果が一致しない場合には(ステップS910)、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)が決定される(ステップS911)。そして、第2パラメータに基づいて撮像動作が行われる。この撮像動作により生成された画像が、画像コンテンツとしてコンテンツ記憶部290に記憶される。なお、ステップS909乃至S911は、特許請求の範囲に記載の決定手順の一例である。
【0108】
例えば、図9に示すように、撮像範囲に走る馬401が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(略一致)する(ステップS909)。このため、制御部280は、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。この音情報に基づくカメラ制御パラメータ(第1パラメータ)は、図6に示すように、シャッタースピードを上げる補正(位置342から位置343への補正)が行われたパラメータである。
【0109】
また、例えば、図10に示すように、撮像範囲に走る馬401が含まれない場合(馬の走る音がある場合とない場合を含む)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。なお、この画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物の種類(草原や山々)に応じて設定されるパラメータである。
【0110】
また、例えば、図11に示すように、撮像範囲に止まっている馬411が含まれる場合(ただし、馬の鳴く音がない場合)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。なお、上述したように、音取得部260により音が取得されない場合には、音情報に基づくカメラ制御パラメータ(第1パラメータ)は決定されない。また、この例で決定される画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物の種類(馬)に応じて設定されるパラメータである。
【0111】
このように、本技術の第1の実施の形態では、音取得部260により取得された音と、撮像部220により生成された画像とについて分析を行い、これらの分析結果を用いてカメラ制御パラメータを決定する。これにより、最適なカメラ制御パラメータを設定して撮像動作を行うことができる。例えば、音を発する対象物が撮像範囲に含まれている場合には、その対象物に対する最適なカメラ制御パラメータを設定して撮像動作を行うことができる。これにより、撮像範囲に含まれる対象物が発する音を考慮した臨場感のある画像を容易に得ることができる。また、音を発している対象物が撮像範囲外に存在する場合でも、撮像範囲内の画像情報に基づいて適切なカメラ制御パラメータを設定することができる。すなわち、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することができる。
【0112】
なお、本技術の第1の実施の形態では、音を発する対象物として山々を背景に位置する馬を例にして説明したが、音を発しない対象物と、音を発する対象物とが存在する他の状態において本技術の第1の実施の形態を適用することができる。例えば、音を発しない対象物が存在し、その手前に音を発する対象物が存在する状態において本技術の第1の実施の形態を適用することができる。例えば、飛行場における飛行機、レース場における車(モータースポーツ)等を撮像対象とする場合に本技術の第1の実施の形態を適用することができる。
【0113】
<2.第2の実施の形態>
本技術の第1の実施の形態では、音を発している対象物が画像に含まれている場合には、その音を考慮して撮像動作に用いられるカメラ制御パラメータを決定する例を示した。しかしながら、音を発している対象物が画像に含まれている場合であっても、その対象物以外の対象物が主要対象物(例えば、撮影者がフォーカスを合わせている対象物)となることも想定される。
【0114】
そこで、本技術の第2の実施の形態では、音を発している対象物が画像に含まれている場合であっても、その対象物以外の対象物がその画像に含まれている場合には、画像情報に基づくカメラ制御パラメータを決定する例を示す。なお、本技術の第2の実施の形態における撮像装置の構成については、図1および図2に示す例と略同様である。このため、本技術の第1の実施の形態と共通する部分については、その説明の一部を省略する。
【0115】
[複数の対象物を判定する例]
図13は、本技術の第2の実施の形態における撮像部220により生成された画像430と、画像430の奥行マップとの関係を示す図である。
【0116】
図13(a)には、撮像部220により生成された画像430を示す。画像430は、例えば、滝432の滝壺付近において、魚(例えば、鮭)431が飛び跳ねて川から飛び出た瞬間に撮影された画像であるものとする。このため、画像430には、空中に浮いている状態の魚431が含まれるものとする。
【0117】
図13(b)には、撮像部220により生成された画像430の奥行マップをヒストグラムにより示す。図13(b)に示すヒストグラムは、画像430に含まれる被写体に関する被写体距離の分布状況を示すヒストグラムである。
【0118】
ここで、制御部280は、撮像部220により生成された画像およびこの画像の生成時における各情報(例えば、レンズの位置および合焦位置)に基づいて、その画像に関する被写体距離を算出する。例えば、奥行マップ(いわゆる、デプスマップ(Depth Map))を生成し、この奥行マップに基づいて各領域に係る被写体距離を求めることができる。ここで、奥行マップは、被写体距離を表すデータにより構成されるマップである。この奥行マップの生成方法として、例えば、TOF(Time of flight)方式やボケ量解析(Depth from Defocus)等の方法を用いることができる。例えば、TOF方式は、光源から出射された光が対象物で反射し、センサに到達するまでの光の遅れ時間と光の速度とに基づいて被写体までの距離を算出する方法である。
【0119】
また、撮像素子131として、位相差AFを行う撮像素子を用いる場合には、この撮像素子から出力された位相差検出信号に基づいて、制御部280が奥行マップを生成することができる。すなわち、制御部280は、撮像部220により生成された画像に含まれる各対象物に係る被写体距離を取得する。なお、制御部280は、特許請求の範囲に記載の被写体距離取得部の一例である。
【0120】
例えば、図13(a)に示すように、画像430には、空中に浮いている魚431と、魚431の背景に存在する滝432およびその滝壺とが含まれる。このため、撮像装置100からの距離は、魚431よりも、滝432およびその滝壺が遠い。
【0121】
このように、被写体距離が異なる複数の対象物が画像に含まれる場合には、被写体距離の分布状況を示すヒストグラムにおいて、対象物毎に山が形成される。具体的には、図13(b)に示すように、撮像装置100から比較的近い魚431に対応する山435と、撮像装置100から比較的遠い滝432およびその滝壺に対応する山436とが形成される。
【0122】
このように、ヒストグラムに複数の山が存在する場合において、例えば、点線で示す閾値437以上の山が複数存在する場合には、複数の対象物が存在すると判定することができる。ただし、ヒストグラムに複数の山が存在する場合であっても、遠方に存在する対象物(例えば、背景となる山々)に係る山である場合には、複数の対象物が存在すると判定しないようにすることができる。例えば、点線で示す閾値438以上の山が存在する場合には、その山に対応する対象物の存在を考慮せずに判定することができる。
【0123】
ここで、画像情報に基づくカメラ制御パラメータ(第2パラメータ)の決定方法について説明する。本技術の第2の実施の形態では、制御部280は、算出された被写体距離と、画像判定部250による判定結果とに基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。具体的には、制御部280は、複数の対象物が存在すると判定された場合には、各対象物について算出された被写体距離に基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を対象物毎に決定する。この場合でも、パラメータ補正情報記憶部330に記憶されているパラメータ補正情報に基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を補正することができる。
【0124】
例えば、画像判定情報記憶部310において、対象物の種類311「魚」とカメラ制御パラメータ313「プログラム線図341における位置346」とが関連付けて記憶されている場合を想定する。この場合に、画像判定部250により判定された対象物が魚である場合には、制御部280は、プログラム線図341における位置346に対応するカメラ制御パラメータ(第2パラメータ)を決定する。また、制御部280は、このように画像情報に基づいて決定されたカメラ制御パラメータ(第2パラメータ)を、対象物(魚)の被写体距離に応じて補正する。
【0125】
例えば、被写体距離が近い場合には、シャッタースピードを上げることが好ましい。このため、制御部280は、プログラム線図341における点線349において、位置346を左側の位置347に遷移させたカメラ制御パラメータ(第2パラメータ)を決定する。一方、例えば、被写体距離が遠い場合には、シャッタースピードを下げることが好ましい。このため、制御部280は、プログラム線図341における点線349において、位置346を右側の位置348に遷移させたカメラ制御パラメータ(第2パラメータ)を決定する。
【0126】
このように、制御部280は、プログラム線図を用いて、画像情報に基づくカメラ制御パラメータ(絞り値、シャッタースピード、露出値)を決定することができる。
【0127】
[撮像装置を用いた撮像状態例]
図14および図15は、本技術の第2の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。
【0128】
図14(a)および図15(a)には、撮像装置100および被写体をその側面から見た場合を示す。また、図14(b)および図15(b)には、撮像装置100の撮像対象となる被写体の撮像範囲を示す。
【0129】
図14には、飛び跳ねて川から飛び出た魚(例えば、鮭)441と、滝442およびその滝壺付近とを被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図14に示す例では、撮像装置100と滝442との距離が比較的近いため、滝442の流れる音(図14(a)では、「ザーザー」で示す)を音取得部260により取得することができる場合を想定して説明する。
【0130】
ここで、図14(b)に示すように、撮像範囲445には、魚441が含まれないのに対し、撮像範囲446には、飛び跳ねて川から飛び出た魚441が含まれる。このため、撮像部220の撮像対象が撮像範囲446である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝、魚)とが一致(すなわち、一部が一致)する。また、撮像部220の撮像対象が撮像範囲445である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。
【0131】
ここで、音取得部260により取得される音により特定される対象物と、撮像部220により生成される画像により特定される対象物とが一致する場合には、本技術の第1の実施の形態では、音情報に基づくカメラ制御パラメータを決定する例を示した。しかしながら、撮像部220の撮像対象が撮像範囲446である場合には、背景の滝442よりも、飛び跳ねて川から飛び出た魚441を主要対象物として撮像動作が行われている可能性が高いと想定される。
【0132】
すなわち、音取得部260により取得される音により特定される対象物(滝)よりも、撮像部220により生成される画像により特定される対象物(魚)が重要であると想定される。この場合に、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定する場合には、撮像範囲446に含まれる被写体の画像については、適切なカメラ制御パラメータを設定することができないおそれがある。そこで、本技術の第2の実施の形態では、音により特定される対象物と画像により特定される対象物とが一致する場合であっても、撮像範囲に他の対象物が存在する場合には、画像情報に基づくカメラ制御パラメータを決定する例を示す。
【0133】
図15には、滝452およびその滝壺付近を被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図15に示す例では、撮像装置100と滝452との距離が比較的近いため、滝452の流れる音(図15(a)では、「ザーザー」で示す)を音取得部260により取得することができる場合を想定して説明する。
【0134】
ここで、図15(b)に示すように、撮像範囲455には滝452が含まれる。この場合は、図14(b)に示す撮像範囲445と同様に、カメラ制御パラメータを決定することができる。
【0135】
[被写体およびカメラ制御パラメータの関係例]
図16乃至図18は、本技術の第2の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【0136】
ここで、図16(a)に示す画像461は、図14(b)に示す撮像範囲446に対応する画像である。また、図17(a)に示す画像462は、図14(b)に示す撮像範囲445に対応する画像である。また、図18(a)に示す画像463は、図15(b)に示す撮像範囲455に対応する画像である。
【0137】
図16(b)に示すように、図16(a)に示す画像461の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(魚、滝)とが一致(一部が一致)する。しかしながら、その一致する対象物(滝)に係る被写体距離(遠い)とは異なる被写体距離(近い)に係る他の対象物(魚)が、撮像部220により生成された画像に含まれている。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0138】
また、図17(b)に示すように、図17(a)に示す画像462の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。また、その一致する対象物(滝)に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部220により生成された画像に含まれていない。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0139】
また、図18(b)に示すように、図18(a)に示す画像463の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。また、その一致する対象物(滝)に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部220により生成された画像に含まれていない。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0140】
このように、制御部280は、第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が、撮像部220により生成された画像に含まれるか否かに基づいてカメラ制御パラメータを決定する。
【0141】
[撮像装置の動作例]
図19は、本技術の第2の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。なお、図19は、図12の変形例であるため、図12と共通する部分については、同一の符号を付して、その説明の一部を省略する。
【0142】
撮像部220により生成された画像に含まれる対象物の種類が判定された後に(ステップS907)、制御部280は、撮像範囲に含まれる各対象物の被写体距離を算出する(ステップS921)。続いて、制御部280は、算出された被写体距離と、画像判定部250による判定結果とに基づいて、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する(ステップS922)。
【0143】
また、音判定部270による判定結果と、画像判定部250による判定結果とが一致(または、略一致)した場合には(ステップS909)、制御部280は、その一致した対象物以外の対象物が撮像範囲に存在するか否かを判断する(ステップS923)。その一致した対象物以外の対象物が撮像範囲に存在しない場合には(ステップS923)、制御部280は、第1パラメータを用いた撮像動作を行うための制御を行う(ステップS910)。一方、その一致した対象物以外の対象物が撮像範囲に存在する場合には(ステップS923)、制御部280は、第2パラメータを用いた撮像動作を行うための制御を行う(ステップS911)。
【0144】
例えば、図9に示すように、撮像範囲に走る馬401が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(略一致)する(ステップS909)。また、走る馬401の背景(草原や山々)については、上述したように、他の対象物であると判定されないため、走る馬401以外の対象物が存在しない(ステップS923)。このため、制御部280は、本技術の第1の実施の形態と同様に、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。なお、音情報に基づくカメラ制御パラメータ(第1パラメータ)は、図6に示すように、シャッタースピードを上げる補正(位置342から位置343への補正)が行われたパラメータである。
【0145】
また、例えば、図10に示すように、撮像範囲に走る馬401が含まれない場合(馬の走る音がある場合とない場合を含む)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、本技術の第1の実施の形態と同様に、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。ただし、本技術の第2の実施の形態で決定される画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物(草原や山々)に係る被写体距離に応じて設定されるパラメータである。
【0146】
また、例えば、図11に示すように、撮像範囲に止まっている馬411が含まれる場合(ただし、馬の鳴く音がない場合)には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。ただし、本技術の第2の実施の形態で決定される画像情報に基づくカメラ制御パラメータ(第2パラメータ)は、画像判定部250により判定された対象物(馬)に係る被写体距離に応じて設定されるパラメータである。
【0147】
また、例えば、図16に示すように、滝442が撮像範囲に含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(一部が一致)する(ステップS909)。しかしながら、上述したように、滝442以外の他の対象物(魚441)が存在すると判定される(ステップS923)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。
【0148】
なお、図16に示す例では、2つの対象物が存在するため、画像情報に基づくカメラ制御パラメータ(第2パラメータ)として、2つのパラメータ(魚441に基づくパラメータ、滝442およびその滝壺に基づくパラメータ)が決定される。例えば、魚441に基づくパラメータは、図6に示すように、シャッタースピードを上げる補正(位置346から位置347への補正)が行われたパラメータである。一方、滝442およびその滝壺に基づくパラメータは、図6に示すように、シャッタースピードを下げる補正(位置346から位置348への補正)が行われたパラメータである。
【0149】
このように、画像情報に基づくカメラ制御パラメータ(第2パラメータ)として、2つのパラメータが決定されるため、制御部280は、これらのうちの何れかのパラメータを用いた撮像動作を行うための制御を行う(ステップS911)。例えば、撮像範囲の中心に位置する対象物を主要対象物とする設定がされている場合には、魚441に基づくパラメータを用いた撮像動作を行うための制御を行う。
【0150】
また、例えば、図17に示すように、滝442のみが撮像範囲に含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致する(ステップS909)。また、滝442(その滝壷を含む)以外の対象物が存在しないため、複数の対象物が存在しないと判定される(ステップS923)。このため、制御部280は、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。
【0151】
また、図18に示す例についても、図17と同様であるため、ここでの説明を省略する。
【0152】
このように、本技術の第2の実施の形態では、音を発している対象物が画像に含まれている場合であっても、その対象物以外の対象物がその画像に含まれている場合には、画像情報に基づくカメラ制御パラメータを決定する。これにより、音を発している対象物が画像に含まれている場合において、その対象物以外の対象物が主要対象物となる場合でも、その主要対象物に対する最適なカメラ制御パラメータを設定して撮像動作を行うことができる。すなわち、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することができる。
【0153】
なお、本技術の第2の実施の形態では、音を発する対象物として、魚の背景に位置する滝を例にして説明したが、背景に音を発する対象物が存在し、その手前に異なる対象物が存在する他の状態においても本技術の第2の実施の形態を適用することができる。例えば、ステージ上に存在する対象物(音を発しない)の背景に多数の観客が存在し、この多数の観客が音を発しているような状態において本技術の第2の実施の形態を適用することができる。
【0154】
<3.第3の実施の形態>
本技術の第1の実施の形態では、音を発している対象物が画像に含まれている場合には、その音を考慮して撮像動作に用いられるカメラ制御パラメータを決定する例を示した。しかしながら、音を発している対象物(人物以外)が画像に含まれている場合であっても、その画像に人物が含まれている場合には、その人物が主要対象物となることも想定される。
【0155】
そこで、本技術の第3の実施の形態では、音を発している対象物(人物以外)が画像に含まれている場合であっても、その画像に人物が含まれている場合には、画像情報に基づくカメラ制御パラメータを撮像動作に用いる例を示す。なお、本技術の第3の実施の形態における撮像装置の構成については、図1および図2に示す例と略同様である。このため、本技術の第1の実施の形態と共通する部分については、その説明の一部を省略する。
【0156】
[撮像装置を用いた撮像状態例]
図20は、本技術の第3の実施の形態における撮像装置100の撮像対象となる被写体と撮像範囲との関係を簡略化して示す図である。図20(a)には、撮像装置100および被写体をその側面から見た場合を示す。また、図20(b)には、撮像装置100の撮像対象となる被写体の撮像範囲を示す。
【0157】
図20には、滝472を背景にして立っている人物471と、滝472(その滝壺および川)付近とを被写体とする場合における被写体と撮像範囲との関係を示す。ここで、図20に示す例では、撮像装置100と滝472との距離が比較的近いため、滝472の流れる音(図20(a)では、「ザーザー」で示す)を音取得部260により取得することができる場合を想定して説明する。
【0158】
ここで、図20(b)に示すように、撮像範囲475には滝472が含まれないのに対し、撮像範囲476、477には滝472が含まれる。このため、撮像部220の撮像対象が撮像範囲476である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(人物、滝)とが一致(すなわち、一部が一致)する。また、撮像部220の撮像対象が撮像範囲477である場合には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。
【0159】
ここで、音取得部260により取得される音により特定される対象物と、撮像部220により生成される画像により特定される対象物とが一致する場合には、本技術の第1の実施の形態では、音情報に基づくカメラ制御パラメータを決定する例を示した。しかしながら、撮像部220の撮像対象が撮像範囲476である場合には、背景の滝472よりも、その前に立っている人物471を主要対象物として撮像動作が行われている可能性が高いと想定される。
【0160】
すなわち、音取得部260により取得される音により特定される対象物(滝)よりも、撮像部220により生成される画像により特定される対象物(人物)が重要であると想定される。この場合に、例えば、音取得部260により取得された音のみによりカメラ制御パラメータを決定する場合には、撮像範囲476に含まれる被写体の画像については、適切なカメラ制御パラメータを設定することができないおそれがある。そこで、本技術の第3の実施の形態では、音により特定される対象物と画像により特定される対象物とが一致する場合であっても、撮像範囲に人物が存在する場合には、画像情報に基づくカメラ制御パラメータを決定する例を示す。
【0161】
また、撮像範囲475には人物471が含まれる。この場合についても同様に、画像情報に基づくカメラ制御パラメータを決定する。
【0162】
[被写体およびカメラ制御パラメータの関係例]
図21乃至図23は、本技術の第3の実施の形態における撮像部220により生成された画像と、制御部280により決定されたカメラ制御パラメータとの関係を示す図である。
【0163】
ここで、図21(a)に示す画像481は、図20(b)に示す撮像範囲476に対応する画像である。また、図22(a)に示す画像482は、図20(b)に示す撮像範囲475に対応する画像である。また、図23(a)に示す画像483は、図20(b)に示す撮像範囲477に対応する画像である。
【0164】
図21(b)に示すように、図21(a)に示す画像481の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(人物、滝)とが一致(一部が一致)する。しかしながら、撮像部220により生成される画像には人物471の顔が含まれている。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0165】
また、図22(b)に示すように、図22(a)に示す画像482の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(人物、山々)とが一致しない。この場合には、制御部280は、撮像動作時における設定内容として、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定する。
【0166】
また、図23(b)に示すように、図23(a)に示す画像483の撮像動作時には、音取得部260により取得される音により特定される対象物(滝)と、撮像部220により生成される画像により特定される対象物(滝)とが一致する。また、撮像部220により生成される画像には人物の顔が含まれていない。この場合には、制御部280は、撮像動作時における設定内容として、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定する。
【0167】
このように、制御部280は、撮像部220により生成された画像に特定対象物(例えば、人物の顔)が含まれるか否かに基づいてカメラ制御パラメータを決定する。
【0168】
[撮像装置の動作例]
図24は、本技術の第3の実施の形態における撮像装置100によるカメラ制御パラメータ決定処理の処理手順の一例を示すフローチャートである。なお、図24は、図12の変形例であるため、図12と共通する部分については、同一の符号を付して、その説明の一部を省略する。
【0169】
音判定部270による判定結果と、画像判定部250による判定結果とが一致(または、略一致)した場合には(ステップS909)、制御部280は、撮像範囲に人物(人物の顔)が存在するか否かを判断する(ステップS931)。撮像範囲に人物(人物の顔)が存在しない場合には(ステップS931)、制御部280は、第1パラメータを用いた撮像動作を行うための制御を行う(ステップS910)。一方、撮像範囲に人物(人物の顔)が存在する場合には(ステップS931)、制御部280は、第2パラメータを用いた撮像動作を行うための制御を行う(ステップS911)。
【0170】
例えば、図9乃至図11に示す例では、撮像範囲に人物が含まれないため、本技術の第1の実施の形態と同様の決定処理が行われる。
【0171】
同様に、例えば、図16乃至図18に示す例では、撮像範囲に人物が含まれないため、本技術の第2の実施の形態と同様の決定処理が行われる。
【0172】
また、例えば、図21に示すように、撮像範囲に滝472が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(一部が一致)する(ステップS909)。しかしながら、上述したように、撮像範囲に人物471が存在すると判定される(ステップS931)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。この場合には、制御部280は、人物471に基づくパラメータ(例えば、被写体情報を用いて決定されたパラメータ)を用いた撮像動作を行うための制御を行う(ステップS911)。
【0173】
また、例えば、図22に示すように、滝472が撮像範囲に含まれない場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致しない(ステップS909)。このため、制御部280は、画像情報に基づくカメラ制御パラメータ(第2パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS911)。この場合についても、制御部280は、人物471に基づくパラメータを用いた撮像動作を行うための制御を行う(ステップS911)。
【0174】
また、例えば、図23に示すように、撮像範囲に滝472が含まれる場合には、音判定部270による判定結果と、画像判定部250による判定結果とが一致(一部が一致)する(ステップS909)。また、この場合には、撮像範囲に人物471が存在しないと判定される(ステップS931)。このため、制御部280は、音情報に基づくカメラ制御パラメータ(第1パラメータ)を決定し、これを用いた撮像動作を行うための制御を行う(ステップS910)。
【0175】
このように、本技術の第3の実施の形態では、音を発している対象物が画像に含まれている場合であっても、その画像に人物が含まれている場合には、画像情報に基づくカメラ制御パラメータを決定する。これにより、音を発している対象物が画像に含まれている場合において、人物が主要対象物となる場合でも、その人物に対する最適なカメラ制御パラメータを設定して撮像動作を行うことができる。すなわち、音を発している対象物と、この対象物以外の対象物との関係を考慮して、撮像動作時における設定内容を適切に決定することができる。
【0176】
なお、本技術の実施の形態では、音判定部270により判定された対象物に基づいて決定されたパラメータについては、音判定部270による判定結果(例えば、その対象物の速度)を用いて補正する例を示した。ただし、音判定部270により判定された対象物に基づいて決定されたパラメータについて、画像判定部250による判定結果(例えば、その対象物の速度)を用いて補正するようにしてもよい。
【0177】
また、本技術の実施の形態では、画像判定部250により判定された対象物に基づいて決定されたパラメータについては、画像判定部250による判定結果(例えば、その対象物の速度)や被写体距離(その対象物の被写体距離)を用いて補正する例を示した。ただし、画像判定部250により判定された対象物に基づいて決定されたパラメータについて、音判定部270による判定結果(例えば、その対象物の速度や被写体距離)を用いて補正するようにしてもよい。
【0178】
また、制御部280は、音取得部260により取得された周囲の音と、撮像部220により生成された画像とに基づいて、他の決定方法により設定内容(撮像部220の撮像動作時における設定内容)を決定するようにしてもよい。
【0179】
例えば、制御部280は、音判定部270により花火の音が判定された場合には、画像判定部250により判定された対象物に基づいて決定されたパラメータを、花火に最適なパラメータとなるように補正するようにしてもよい。また、例えば、制御部280は、音判定部270により花火の音が判定された場合には、撮像モードとして花火モードを設定し、この花火モードの設定状態で、画像判定部250により判定された対象物に基づいて最適なパラメータを設定するようにしてもよい。これらにより、連続して打ち上げられる花火を撮影するような場合には、シャッターボタン171を半押し状態としておくことにより、花火に最適なパラメータを容易に設定することができる。
【0180】
また、本技術の実施の形態では、シャッターボタン171の半押し操作が行われてから全押し操作が行われるまでの期間を音判定期間とし、シャッターボタン171の全押し操作時を画像判定期間とする例を示す。ただし、静止画撮像モードが設定されている間を、音判定期間および画像判定期間として、音判定処理および画像判定処理を順次行うようにしてもよい。また、音判定期間および画像判定期間を、定期的または不定期に設定するようにしてもよく、撮像動作時において、カメラ制御パラメータを設定することが可能な他の期間に設定するようにしてもよい。
【0181】
また、本技術の実施の形態では、カメラ制御パラメータとして、絞り値、シャッタースピード、露出値を決定する例を示したが、他のカメラ制御パラメータを決定する場合についても、本技術の実施の形態を適用することができる。例えば、対象物に応じた最適な撮像パラメータや画像処理パラメータを対象物毎に関連付けて記憶しておき、これらの各パラメータを用いて撮像動作時における設定内容を決定することができる。
【0182】
なお、本技術の実施の形態では、撮像部を備える撮像装置100を例にして説明したが、撮像部を着脱可能な情報処理装置に本技術の実施の形態を適用することができる。また、撮像機能付き携帯電話機や撮像機能付き携帯端末装置等の情報処理装置に本技術の実施の形態を適用することができる。
【0183】
なお、上述の実施の形態は本技術を具現化するための一例を示したものであり、実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本技術の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本技術は実施の形態に限定されるものではなく、その要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
【0184】
また、上述の実施の形態において説明した処理手順は、これら一連の手順を有する方法として捉えてもよく、また、これら一連の手順をコンピュータに実行させるためのプログラム乃至そのプログラムを記憶する記録媒体として捉えてもよい。この記録媒体として、例えば、CD(Compact Disc)、MD(MiniDisc)、DVD(Digital Versatile Disk)、メモリカード、ブルーレイディスク(Blu-ray Disc(登録商標))等を用いることができる。
【0185】
なお、本技術は以下のような構成もとることができる。
(1) 音取得部により取得された周囲の音と撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部を具備する情報処理装置。
(2) 前記音取得部により取得された周囲の音に基づいて当該音を発する対象物を判定する第1判定部と、
前記撮像部により生成された画像に基づいて当該画像に含まれる対象物を判定する第2判定部とをさらに具備し、
前記制御部は、前記第1判定部による判定結果と前記第2判定部による判定結果とに基づいて前記設定内容を決定する
前記(1)に記載の情報処理装置。
(3) 前記制御部は、前記第1判定部により判定された対象物である第1対象物と、前記第2判定部により判定された対象物である第2対象物との比較結果に基づいて前記設定内容を決定する前記(2)に記載の情報処理装置。
(4) 前記制御部は、前記設定内容に関するパラメータである第1パラメータを前記第1対象物に基づいて決定し、前記設定内容に関するパラメータである第2パラメータを前記第2対象物に基づいて決定し、前記第1対象物および前記第2対象物が一致するか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する前記(3)に記載の情報処理装置。
(5) 前記制御部は、前記第1対象物および前記第2対象物が一致する場合には前記第1パラメータを用いて前記設定内容を決定し、前記第1対象物および前記第2対象物が一致しない場合には前記第2パラメータを用いて前記設定内容を決定する前記(4)に記載の情報処理装置。
(6) 前記第1判定部は、前記第1対象物と当該第1対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第1パラメータを補正する
前記(4)または(5)に記載の情報処理装置。
(7) 前記第2判定部は、前記第2対象物と当該第2対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第2パラメータを補正する
前記(4)から(6)のいずれかに記載の情報処理装置。
(8) 前記撮像部により生成された画像に含まれる各対象物に係る被写体距離を取得する被写体距離取得部をさらに具備し、
前記制御部は、前記第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が前記撮像部により生成された画像に含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
前記(4)から(7)のいずれかに記載の情報処理装置。
(9) 前記第2判定部は、前記撮像部により生成された画像に特定対象物が含まれるか否かを判定し、
前記制御部は、前記撮像部により生成された画像に前記特定対象物が含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
前記(4)から(7)のいずれかに記載の情報処理装置。
(10) 前記第2判定部は、前記特定対象物として人物の顔が含まれるか否かを判定する前記(9)に記載の情報処理装置。
(11) 周囲の音を取得する音取得部と、
被写体を撮像して画像を生成する撮像部と、
前記音取得部により取得された周囲の音と、前記撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部と
を具備する撮像装置。
(12) 情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
を具備する情報処理方法。
(13) 情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
をコンピュータに実行させるプログラム。
【符号の説明】
【0186】
100 撮像装置
111 レンズ群
112 絞り
113 光学系制御部
121 シャッターユニット
122 シャッター制御部
131 撮像素子
132 AFE
133 画像処理部
135 測光部
140 コンテンツ記憶部
151 マイクロフォン
152 A/D変換部
153 音声分析処理部
160 不揮発性メモリ
170 操作受付部
171 シャッターボタン
180 表示部
190 メイン制御部
210 操作受付部
220 撮像部
230 画像処理部
240 記録制御部
250 画像判定部
260 音取得部
270 音判定部
280 制御部
290 コンテンツ記憶部
310 画像判定情報記憶部
320 音判定情報記憶部
330 パラメータ補正情報記憶部
340 プログラム線図記憶部
【特許請求の範囲】
【請求項1】
音取得部により取得された周囲の音と撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部を具備する情報処理装置。
【請求項2】
前記音取得部により取得された周囲の音に基づいて当該音を発する対象物を判定する第1判定部と、
前記撮像部により生成された画像に基づいて当該画像に含まれる対象物を判定する第2判定部とをさらに具備し、
前記制御部は、前記第1判定部による判定結果と前記第2判定部による判定結果とに基づいて前記設定内容を決定する
請求項1記載の情報処理装置。
【請求項3】
前記制御部は、前記第1判定部により判定された対象物である第1対象物と、前記第2判定部により判定された対象物である第2対象物との比較結果に基づいて前記設定内容を決定する請求項2記載の情報処理装置。
【請求項4】
前記制御部は、前記設定内容に関するパラメータである第1パラメータを前記第1対象物に基づいて決定し、前記設定内容に関するパラメータである第2パラメータを前記第2対象物に基づいて決定し、前記第1対象物および前記第2対象物が一致するか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する請求項3記載の情報処理装置。
【請求項5】
前記制御部は、前記第1対象物および前記第2対象物が一致する場合には前記第1パラメータを用いて前記設定内容を決定し、前記第1対象物および前記第2対象物が一致しない場合には前記第2パラメータを用いて前記設定内容を決定する請求項4記載の情報処理装置。
【請求項6】
前記第1判定部は、前記第1対象物と当該第1対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第1パラメータを補正する
請求項4記載の情報処理装置。
【請求項7】
前記第2判定部は、前記第2対象物と当該第2対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第2パラメータを補正する
請求項4記載の情報処理装置。
【請求項8】
前記撮像部により生成された画像に含まれる各対象物に係る被写体距離を取得する被写体距離取得部をさらに具備し、
前記制御部は、前記第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が前記撮像部により生成された画像に含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
請求項4記載の情報処理装置。
【請求項9】
前記第2判定部は、前記撮像部により生成された画像に特定対象物が含まれるか否かを判定し、
前記制御部は、前記撮像部により生成された画像に前記特定対象物が含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
請求項4記載の情報処理装置。
【請求項10】
前記第2判定部は、前記特定対象物として人物の顔が含まれるか否かを判定する請求項9記載の情報処理装置。
【請求項11】
周囲の音を取得する音取得部と、
被写体を撮像して画像を生成する撮像部と、
前記音取得部により取得された周囲の音と、前記撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部と
を具備する撮像装置。
【請求項12】
情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
を具備する情報処理方法。
【請求項13】
情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
をコンピュータに実行させるプログラム。
【請求項1】
音取得部により取得された周囲の音と撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部を具備する情報処理装置。
【請求項2】
前記音取得部により取得された周囲の音に基づいて当該音を発する対象物を判定する第1判定部と、
前記撮像部により生成された画像に基づいて当該画像に含まれる対象物を判定する第2判定部とをさらに具備し、
前記制御部は、前記第1判定部による判定結果と前記第2判定部による判定結果とに基づいて前記設定内容を決定する
請求項1記載の情報処理装置。
【請求項3】
前記制御部は、前記第1判定部により判定された対象物である第1対象物と、前記第2判定部により判定された対象物である第2対象物との比較結果に基づいて前記設定内容を決定する請求項2記載の情報処理装置。
【請求項4】
前記制御部は、前記設定内容に関するパラメータである第1パラメータを前記第1対象物に基づいて決定し、前記設定内容に関するパラメータである第2パラメータを前記第2対象物に基づいて決定し、前記第1対象物および前記第2対象物が一致するか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する請求項3記載の情報処理装置。
【請求項5】
前記制御部は、前記第1対象物および前記第2対象物が一致する場合には前記第1パラメータを用いて前記設定内容を決定し、前記第1対象物および前記第2対象物が一致しない場合には前記第2パラメータを用いて前記設定内容を決定する請求項4記載の情報処理装置。
【請求項6】
前記第1判定部は、前記第1対象物と当該第1対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第1対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第1パラメータを補正する
請求項4記載の情報処理装置。
【請求項7】
前記第2判定部は、前記第2対象物と当該第2対象物に係る移動状態および被写体距離の少なくとも一方とを判定し、
前記制御部は、前記第2対象物に係る移動状態および被写体距離の少なくとも一方に基づいて前記第2パラメータを補正する
請求項4記載の情報処理装置。
【請求項8】
前記撮像部により生成された画像に含まれる各対象物に係る被写体距離を取得する被写体距離取得部をさらに具備し、
前記制御部は、前記第1対象物に係る被写体距離とは異なる被写体距離に係る他の対象物が前記撮像部により生成された画像に含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
請求項4記載の情報処理装置。
【請求項9】
前記第2判定部は、前記撮像部により生成された画像に特定対象物が含まれるか否かを判定し、
前記制御部は、前記撮像部により生成された画像に前記特定対象物が含まれるか否かに基づいて前記第1パラメータおよび前記第2パラメータの何れかを用いて前記設定内容を決定する
請求項4記載の情報処理装置。
【請求項10】
前記第2判定部は、前記特定対象物として人物の顔が含まれるか否かを判定する請求項9記載の情報処理装置。
【請求項11】
周囲の音を取得する音取得部と、
被写体を撮像して画像を生成する撮像部と、
前記音取得部により取得された周囲の音と、前記撮像部により生成された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定するための制御を行う制御部と
を具備する撮像装置。
【請求項12】
情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
を具備する情報処理方法。
【請求項13】
情報処理装置の周囲の音を取得する音取得手順と、
撮像部により生成された画像を取得する画像取得手順と、
前記取得された音と前記取得された画像とに基づいて前記撮像部の撮像動作時における設定内容を決定する決定手順と
をコンピュータに実行させるプログラム。
【図1】


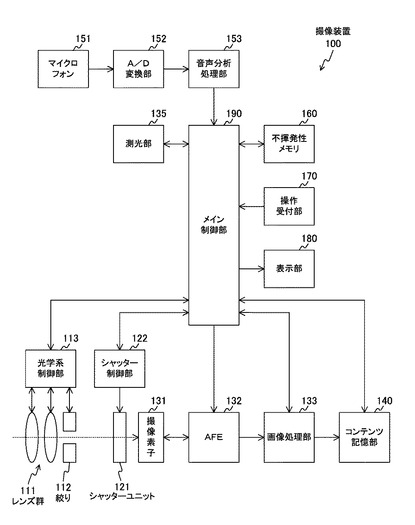
【図2】
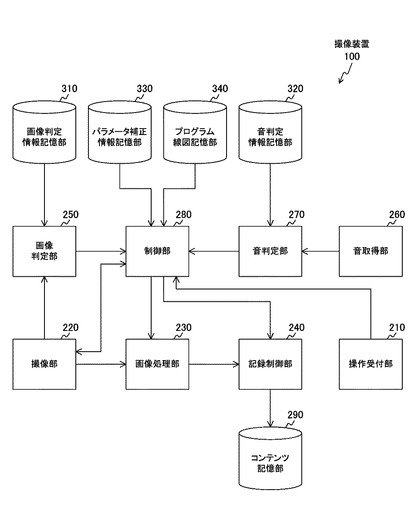
【図3】
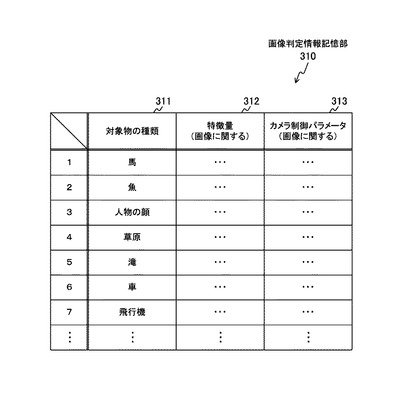
【図4】
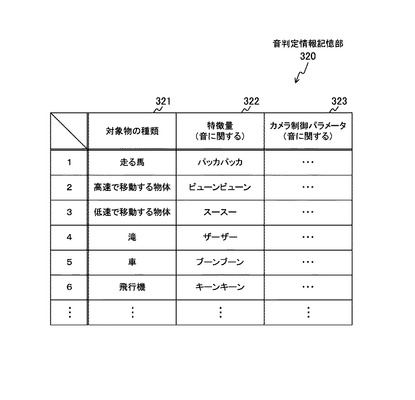
【図5】
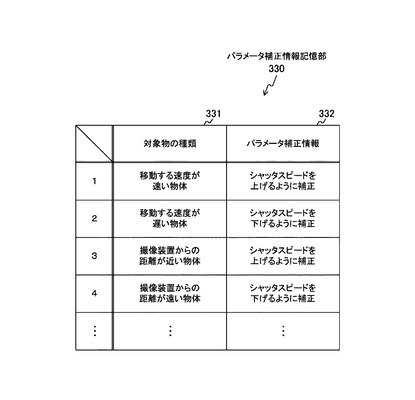
【図6】
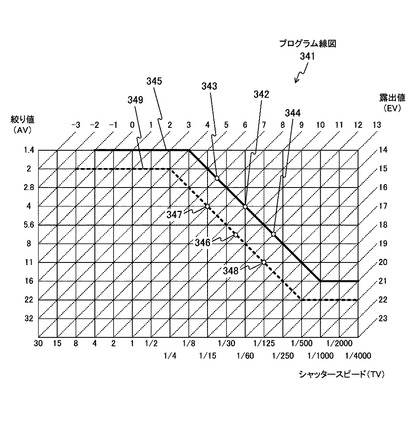
【図7】
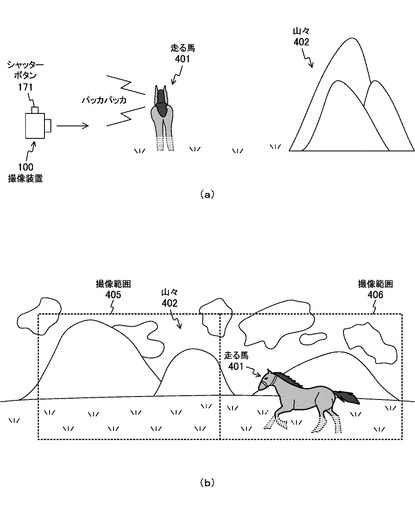
【図8】
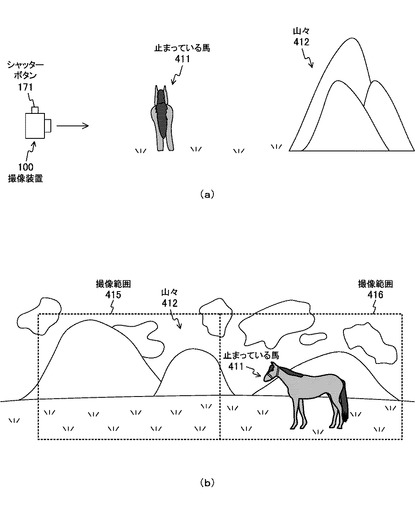
【図9】
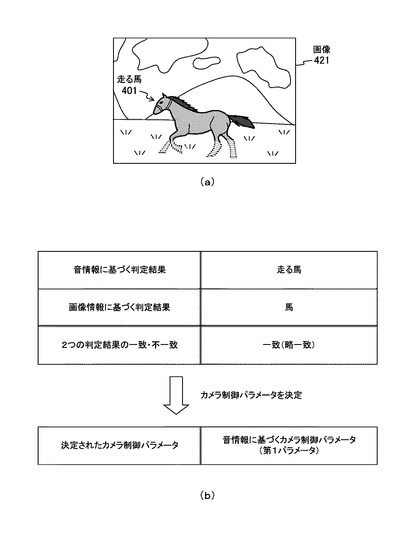
【図10】
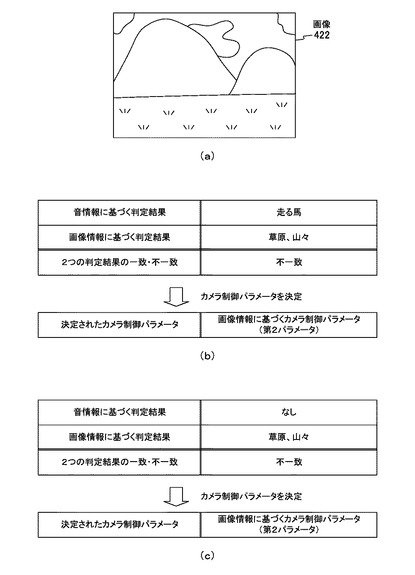
【図11】
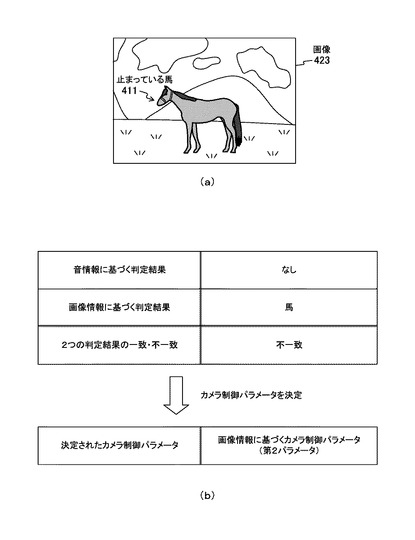
【図12】
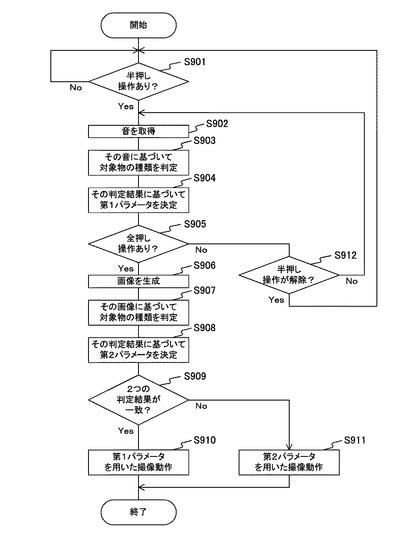
【図13】
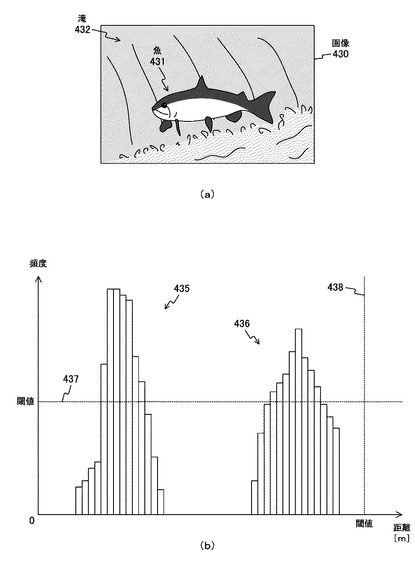
【図14】
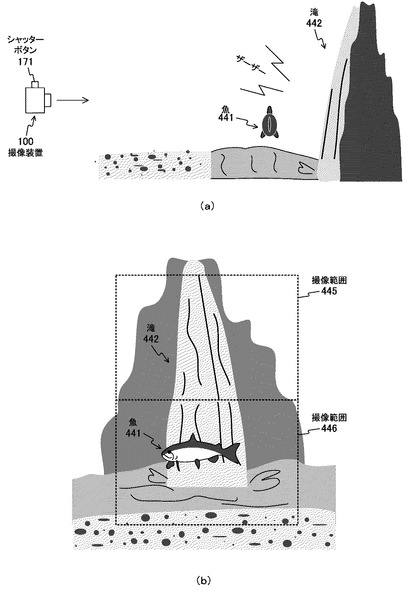
【図15】
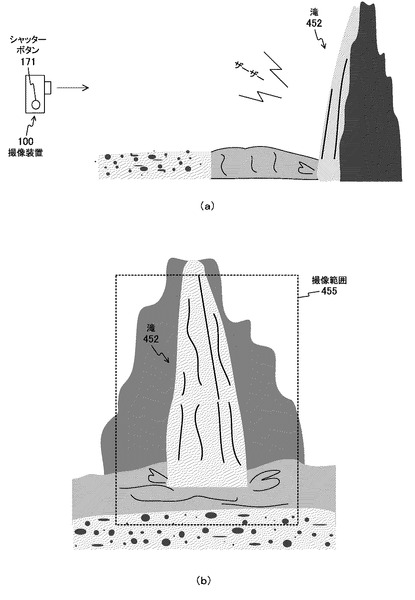
【図16】
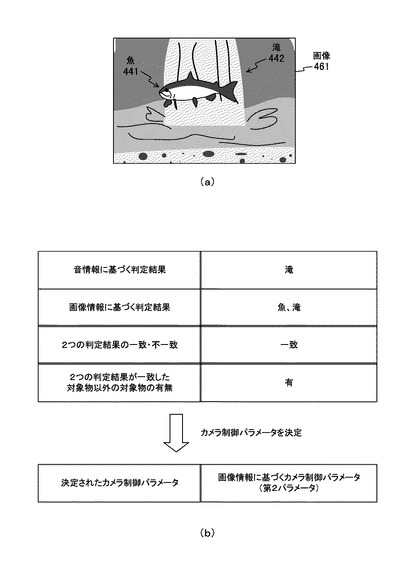
【図17】
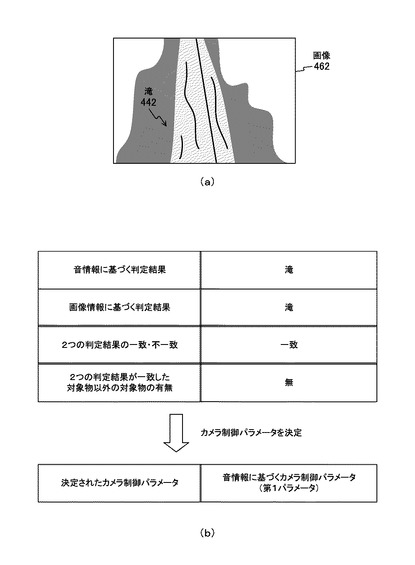
【図18】
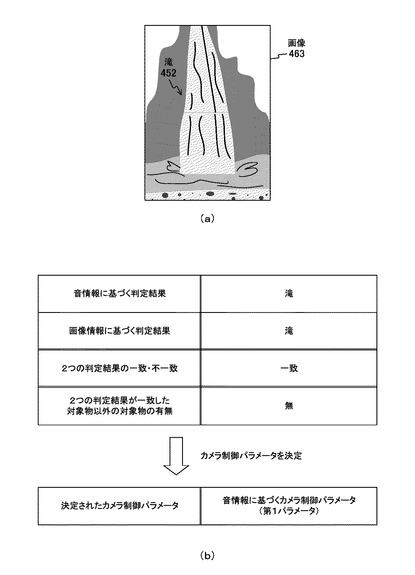
【図19】
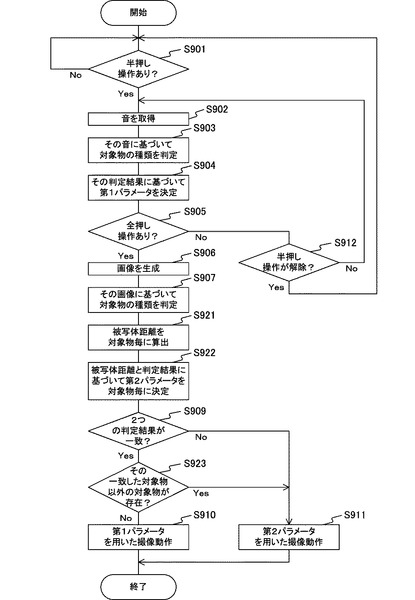
【図20】
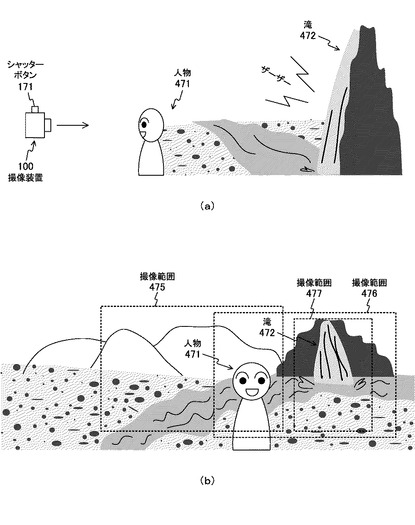
【図21】
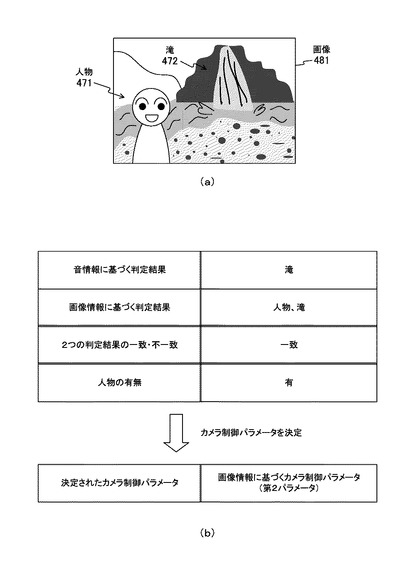
【図22】
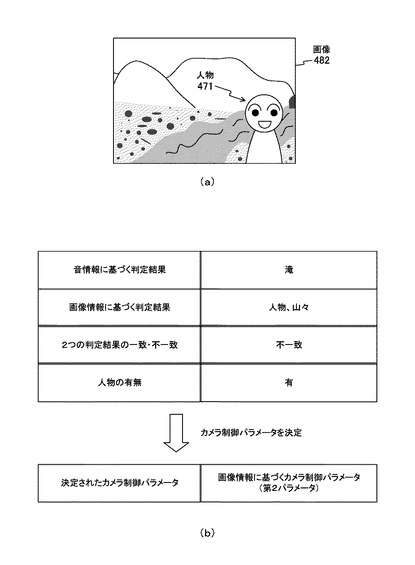
【図23】
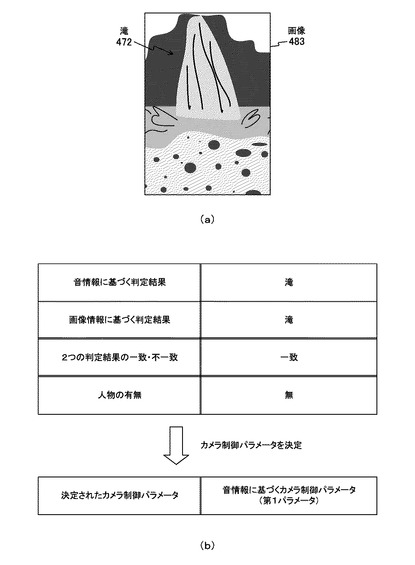
【図24】
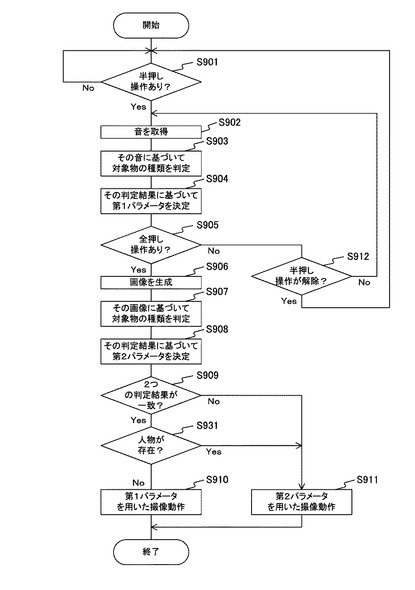
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−110551(P2013−110551A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253547(P2011−253547)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]