
情報処理装置、表示制御方法、およびプログラム
【課題】より自然な表現で実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることが可能な情報処理装置、表示制御方法、およびプログラムを提供する。
【解決手段】予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、を備える、情報処理装置。
【解決手段】予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、を備える、情報処理装置。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、情報処理装置、表示制御方法、およびプログラムに関する。
【背景技術】
【0002】
仮想的な試着システムとして、ユーザを撮像した撮像画像に衣服の画像を合成する試着画像生成技術が様々提案されている。
【0003】
例えば、特許文献1では、ユーザの身体画像に衣服画像を合成する処理が開示されている。具体的には、特許文献1に記載の画像処理サーバは、ユーザの身体画像に添付されている身体プロファイルデータ(身長、肩幅等)および画像における身体の向きなどの情報に基づき、衣服画像のサイズ変更および向きの調整を行い、身体画像に合成する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−304331号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されるような試着画像生成技術では、合成する衣服画像の大きさは身体プロフィールデータに基づき、身体の大きさに合うようサイズ変更される。
【0006】
また、撮像された画像内のユーザの動作に合わせて仮想衣服を重畳表示する仮想試着システムでは、画像内においてユーザの身体より大きいまたは小さい衣服画像がそのまま重畳表示されていた。若しくは、ユーザの指示に応じて衣服画像が拡大または縮小された上で、そのまま重畳表示されていた。
【0007】
しかしながら、実際は、身体より大きい衣服を試着すると衣服が垂れ下がり、また、身体より小さい衣服を試着すると衣服が伸びるので、上述したような衣服画像をそのまま合成した試着画像では不自然な表現となる。また、衣服画像を拡大/縮小した上でそのまま重畳表示する仮想試着技術では、衣服のサイズをユーザに認識させることが困難であった。
【0008】
そこで、本開示では、より自然な表現で実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることが可能な、新規かつ改良された情報処理装置、表示制御方法およびプログラムを提案する。
【課題を解決するための手段】
【0009】
本開示によれば、予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、を備える情報処理装置を提案する。
【0010】
本開示によれば、予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較するステップと、前記比較するステップによる比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示するステップと、を含む表示制御方法を提案する。
【0011】
本開示によれば、予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する処理と、前記比較する処理による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する処理と、をコンピュータに実行させる、プログラムを提案する。
【発明の効果】
【0012】
以上説明したように本開示によれば、より自然な表現で実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることが可能となる。
【図面の簡単な説明】
【0013】
【図1】本開示の一実施形態によるAR試着システムの概要を説明するための図である。
【図2】通常の仮想的な試着システムにおいて仮想衣服がそのまま合成される場合を説明するための図である。
【図3】本開示の一実施形態による情報処理装置の構成を示すブロック図である。
【図4】実空間におけるカメラと被写体の位置関係、および被写体を撮像した撮像画像を説明するための図である。
【図5】本開示の一実施形態による骨格情報を説明するための図である。
【図6】仮想空間における仮想カメラと仮想衣服の位置関係、および仮想衣服を投影した仮想的な衣服画像を説明するための図である。
【図7】本開示の一実施形態によるAR試着画像表示における基本的な表示制御処理を示すフローチャートである。
【図8】本開示の一実施形態による仮想衣服の変形処理を示すフローチャートである。
【図9】被写体より小さい仮想衣服の変形を説明するための図である。
【図10】被写体より大きい仮想衣服の変形を説明するための図である。
【図11】本開示の一実施形態による仮想的なソファーカバーの変形を説明するための図である。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
また、説明は以下の順序で行うものとする。
1.本開示の一実施形態によるAR試着システムの概要
2.情報処理装置の構成
3.表示制御
3−1.基本的な表示制御
3−2.仮想衣服の変形制御
4.まとめ
【0016】
<1.本開示の一実施形態によるAR試着システムの概要>
近年、実世界に付加的な情報を重畳してユーザに呈示する拡張現実(AR:Augmented Reality)と呼ばれる技術が注目されている。AR技術においてユーザに呈示される情報は、テキスト、アイコン又はアニメーションなどの様々な形態の仮想的なオブジェクトを用いて可視化され得る。AR技術の主要な適用分野の1つは、実世界でのユーザ活動の支援である。以下では、このAR技術を試着システムに適用する。
【0017】
AR技術を利用した試着システムは、ユーザの動作に合わせて仮想的な衣服画像を重畳表示することで、リアルタイムに仮想試着を体験することができる。また、本開示の一実施形態によるAR試着システムは、実空間の物体である被写体の大きさと仮想物体である仮想衣服の大きさとの比較結果に基づいて仮想衣服を変形し、被写体に重畳表示する。これにより、より自然なAR試着画像を表示でき、また、実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることができる。
【0018】
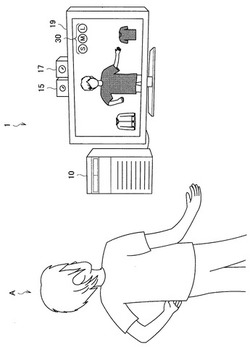
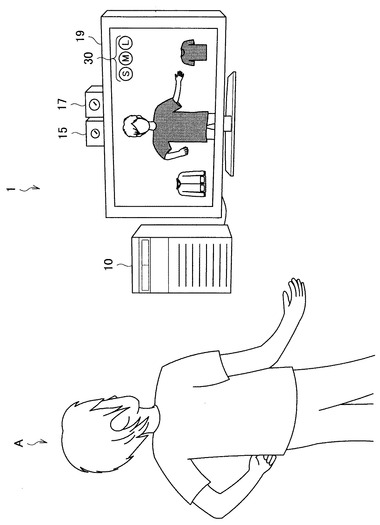
このような本開示の一実施形態によるAR試着システムの概要を、図1を参照しながら説明する。図1に示すように、本開示の一実施形態によるAR試着システム1は、情報処理装置10、カメラ15、センサ17、および表示装置19を有する。なお、AR試着システム1が設置される場所は特に限定されない。例えば、AR試着システム1は、ユーザの自宅内に設置されてもよいし、店頭に設置されてもよい。
【0019】
また、図1に示した例では、AR試着システム1を構成する複数の装置(情報処理装置10、カメラ15、センサ17および表示装置19)が別体に構成されているが、本開示によるAR試着システム1の構成はこれに限定されない。例えば、AR試着システム1を構成する上記複数の装置のいずれかの組み合わせが一体化されていてもよい。また、例えば、AR試着システム1を構成する複数の装置は、スマートフォン、PDA(Personal Digital Assistants)、携帯電話、携帯用音楽再生装置、携帯用映像処理装置または携帯用ゲーム機器に内蔵されていてもよい。
【0020】
カメラ15(撮像装置)は、実空間に存在する物体を撮像する。実空間に存在する物体は、特に限定されないが、例えば、人物や動物などの生き物であってもよく、車庫やテレビ台などといった生き物以外であってもよい。図1に示した例では、実空間に存在する物体として被写体A(例えば、人物)がカメラ15により撮像される。カメラ15により撮像された画像(撮像画像とも称す)は表示装置19に表示される。表示装置19に表示される撮像画像は、RGB画像であってもよい。また、カメラ15は、撮像画像を情報処理装置10に送る。
【0021】
センサ17は、実空間からパラメータを検出する機能を有し、検出データを情報処理装置10に送る。例えば、センサ17が赤外線センサにより構成されている場合、センサ部17は、実空間から赤外線を検出し、赤外線量に応じた電気信号を検出データとして情報処理装置10に供給することができる。情報処理装置10は、例えば、検出データに基づいて実空間に存在する物体を認識することができる。センサ17の種類は、赤外線センサに限定されない。なお、図1に示した例では、検出データがセンサ17から情報処理装置10に供給されることとしているが、情報処理装置10に供給される検出データは、カメラ15により撮像された画像であってもよい。
【0022】
情報処理装置10は、実空間に存在する物体の認識結果に応じて、撮像画像に対して仮想オブジェクトを合成したり撮像画像を変形したりすることにより、撮像画像を処理することができる。表示装置19は、情報処理装置10により処理された画像を表示することも可能である。
【0023】
例えば、図1に示すように、情報処理装置10は、実空間の被写体Aを認識し、衣服画像を合成した試着画像を表示装置19にリアルタイムに表示させることができる。ここでは、ユーザの身体が実空間の映像であり、試着対象の衣服画像が実空間の映像に重畳表示された仮想オブジェクトである。これにより、AR試着システム1は、仮想的な試着をリアルタイムに提供することができる。
【0024】
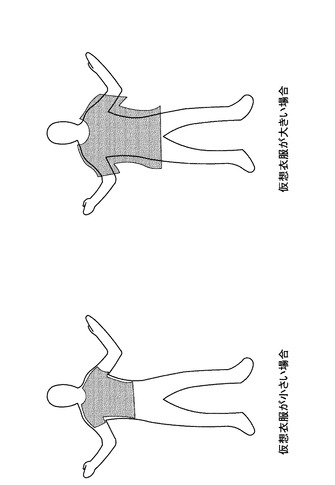
ここで、通常の仮想的な試着システムでは、被写体に重畳表示される仮想衣服の大きさが被写体より大きい/小さいまま上書きされていた。図2は、このような通常の仮想的な試着システムにおいて仮想衣服がそのまま合成される場合について説明するための図である。
【0025】
図2左に示すように、仮想衣服が撮像画像内の被写体より小さいまま仮想衣服が合成されると、被写体の領域が仮想衣服からはみ出てしまう。しかし、実際に身体より小さい衣服を試着すると、衣服は伸びるので、図2左に示すような試着画像は不自然な表現である。
【0026】
また、図2右に示すように、仮想衣服が撮像画像内の被写体より大きいまま仮想衣服が合成されると、被写体より仮想衣服の領域が大きいために、被写体の肩から仮想衣服が浮いたり、垂れ下がったりしない。しかし、実際に身体より大きい衣服の試着時は衣服が全体的に垂れ下がるので、図2右に示すような試着画像では不自然な表現となり、リアリティに欠ける。
【0027】
また、上述したように、衣服画像を拡大/縮小した上でそのまま撮像画像(身体画像)に重畳表示する場合、実在する衣服のサイズとは無関係に衣服画像が調整される。しかし、インターネットを利用して衣服の購入を行う場合等、仮想試着システムを実在する衣服の購入検討に利用する場合は、実在の衣服のサイズを考慮した試着画像の生成が求められる。
【0028】
そこで、本開示の一実施形態によるAR試着システムでは、実空間の物体(ここでは、被写体)の大きさと仮想物体(ここでは、仮想衣服)の大きさの比較結果に基づいて仮想物体を変形し、被写体に重畳表示する。例えば、図1に示すように、被写体Aに重畳表示される仮想衣服が重力方向に全体的に垂れ下がるよう変形されることで、被写体Aは、仮想衣服のサイズが自分の身体より大きいことを直感的に認識することができる。なお、被写体Aは、仮想衣服の大きさを、図1に示すように、表示装置19に表示される「S」「M」「L」等のサイズアイコン群30から任意に選択することができる。これにより、被写体Aは、様々なサイズの仮想衣服を仮想試着することができる。
【0029】
<2.情報処理装置の構成>
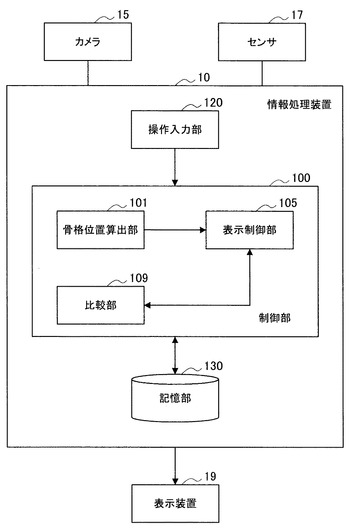
次に、本開示によるAR試着システムを実現する情報処理装置10の構成について、図3を参照して説明する。図3に示すように、情報処理装置10は、制御部100、操作入力部120、および記憶部130を有する。制御部100は、骨格位置算出部101、表示制御部105、および比較部109を有する。また、情報処理装置10には、カメラ15、センサ17および表示装置19が、有線または無線により接続されている。
【0030】
制御部100は、CPU(Central Processing Unit)またはDSP(Digital Signal Processor)などのプロセッサに相当する。制御部100は、記憶部130または他の記憶媒体に記憶されるプログラムを実行することにより、後に説明する制御部100の様々な機能を動作させる。なお、制御部100を構成する各ブロックは、全てが同一の装置に組み込まれていなくてもよく、一部が他の装置(例えば、サーバ)に組み込まれていてもよい。
【0031】
記憶部130は、半導体メモリまたはハードディスクなどの記憶媒体を用いて、情報処理装置10による処理のためのプログラムおよびデータを記憶する。例えば、制御部100としてコンピュータを機能させるためのプログラムを記憶する。さらに、例えば、記憶部130は、制御部100により使用されるデータを記憶する。また、本実施形態による記憶部130は、表示対象となる仮想オブジェクトとして、服飾品の3次元データを記憶する。また、本実施形態による記憶部130は、服飾品の3次元データに関連付けて、服飾品のサイズ情報を記憶する。サイズ情報とは、身丈、肩幅、身幅、袖丈、および袖幅等の服飾品の実寸情報である。実寸情報は、センチメートル単位で記憶されていてもよい。また、実寸情報は、服飾品のサイズ(S、M、L等)毎に記憶されていてもよい。なお、本明細書において、服飾品とは、衣服または装飾品を含む。また、装飾品とは、メガネ、帽子およびベルトなどを含む。
【0032】
操作入力部120は、マウス、キーボード、タッチパネル、ボタン、マイク、スイッチ、レバーおよびリモートコントローラーなどユーザが情報を入力するための入力手段と、ユーザによる入力に基づいて入力信号を生成し、制御部100に出力する入力制御回路などから構成されている。ユーザは、操作入力部120を操作することにより、情報処理装置10の電源ON/OFFや、AR試着システムプログラムの起動などを指示したりすることができる。
【0033】
カメラ15(撮像装置)は、CCD(Charge Coupled Device)またはCMOS(Complementary Metal Oxide Semiconductor)などの撮像素子を用いて実空間を撮像することにより、撮像画像を生成する。本開示の実施形態においては、カメラ15が情報処理装置10と別体に構成されていることを想定しているが、カメラ15は、情報処理装置10の一部であってもよい。
【0034】
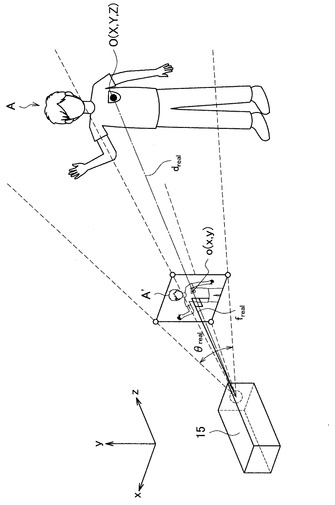
また、カメラ15は、撮像時におけるカメラ15の設定情報を情報処理装置10に供給する。ここで、図4に、実空間におけるカメラ15と被写体Aの位置関係、および被写体Aを撮像した撮像画像A’を説明するための図を示す。図4では、カメラ15のレンズ(不図示)の光学的な中心である主点から、カメラ15の撮像素子(不図示)までの焦点距離frealと、撮像素子に写る被写体A(3次元、xyz座標)の撮像画像A’(2次元、xy座標)を、便宜上被写体側に示す。カメラ15から被写体Aまでの距離drealは、後述するように深度情報として算出される。また、カメラ15の画角θrealは、主に焦点距離frealに応じて決定される。カメラ15は、カメラ15の設定情報として、例えば焦点距離freal(または画角θreal)および撮像画像A’の画素数(すなわちピクセル数)を、情報処理装置10に供給する。
【0035】
センサ17は、実空間からパラメータを検出する機能を有している。例えば、センサ17が赤外線センサにより構成されている場合、センサ17は、実空間から赤外線を検出し、赤外線量に応じた電気信号を検出データとして情報処理装置10に供給することができる。センサ17の種類は、赤外線センサに限定されない。なお、カメラ15により撮像された画像が検出データとして情報処理装置10に供給される場合には、センサ17は存在しなくてもよい。
【0036】
表示装置19は、LCD(Liquid Crystal Display)、OLED(Organic light−Emitting Diode)またはCRT(Cathode Ray Tube)などにより構成される表示モジュールである。本開示の実施形態においては、表示装置19が情報処理装置10と別体に構成されていることを想定しているが、表示装置19は、情報処理装置10の一部であってもよい。
【0037】
続いて、上記制御部100の機能構成について説明する。上述したように、制御部100は、骨格位置算出部101、表示制御部105、および比較部109を有する。
【0038】
(骨格位置算出部101)
骨格位置算出部101は、検出データに基づいて撮像画像に映る物体の骨格位置を算出する。撮像画像に映る物体の実空間上の骨格位置を算出する手法は特に限定されない。例えば、骨格位置算出部101は、まず、撮像画像において物体の存在する領域(以下、「物体存在領域」とも称す。)を認識するとともに、撮像画像内の物体の深度情報を取得する。そして、骨格位置算出部101は、物体存在領域の深度と形(特徴量)に基づいて、撮像画像に映る物体の実空間上の部位(頭、左肩、右肩、腹部など)を認識し、各部位における中心位置を骨格位置として算出してもよい。ここで、骨格位置算出部101は、記憶部130に記憶された特徴量辞書を用いて、撮像画像から決定される特徴量を、当該特徴量辞書に予め登録された物体の部位ごとの特徴量と照合することにより、撮像画像に含まれる物体の部位を認識することができる。
【0039】
物体存在領域を認識する手法としては様々な手法が想定される。例えば、撮像画像が検出データとして情報処理装置10に供給された場合には、骨格位置算出部101は、物体が映る前の撮像画像と物体が映っている撮像画像との差分値に基づいて、物体存在領域を認識することができる。より詳細には、骨格位置算出部101は、物体が映る前の撮像画像と物体が映っている撮像画像との差分値が閾値を超える領域を、物体存在領域として認識することができる。
【0040】
また、例えば、センサ17により検出されたパラメータが検出データとして情報処理装置10に供給された場合には、骨格位置算出部101は、検出データに基づいて、物体存在領域を認識することができる。より詳細には、骨格位置算出部101は、検出される赤外線量が閾値を超える領域を、物体存在領域として認識することができる。
【0041】
また、撮像画像内の物体の深度情報を取得する手法として様々な手法が想定される。例えば、カメラ15と物体との距離をあらかじめ定めておくことが可能である。すなわち、あらかじめ定められた距離だけカメラ15から離れた位置に物体が配置されるような制限を設ければよい。このような制限を設ければ、骨格位置算出部101は、物体の深度情報(ここでは、カメラ15と物体との距離)を固定値(例えば、2mなど)として扱うことができる。
【0042】
また、骨格位置算出部101は、撮像画像内の物体の深度情報を、センサ17により検出されたパラメータに基づいて算出することも可能である。より詳細には、骨格位置算出部101は、図示しない照射装置から赤外線などの光を物体に向けて照射した場合に、センサ17により検出された光を解析することにより、撮像画像内の物体の深度情報を算出することができる。
【0043】
また、例えば骨格位置算出部101は、センサ17により検出された光の位相遅れに基づいて、撮像画像内の物体の深度情報を算出することができる。この手法は、TOF(Time Of Flight)方式とも言われる。あるいは、図示しない照射装置から照射される光が既知のパターンから構成される場合には、骨格位置算出部101は、センサ17により検出された光を構成するパターンの歪み具合を解析することにより、撮像画像内の物体の深度情報を算出してもよい。
【0044】
なお、撮像画像内の物体の深度情報を算出する機能を有する撮像装置はデプスカメラと称され、ステレオカメラやレーザーレンジスキャナにより実現され得る。骨格位置算出部101は、情報処理装置10に接続されるデプスカメラから深度情報を取得してもよい。
【0045】
以上説明した各手法により取得した物体存在領域の深度と形(特徴量)に基づいて、骨格位置算出部101は、撮像画像に映る物体の実空間上の部位(頭、肩など)を認識し、各部位の骨格位置の座標を算出する。次に、骨格位置算出部101が算出した被写体Aを構成する1以上の部位の骨格位置を含む骨格情報について図5を参照して説明する。
【0046】
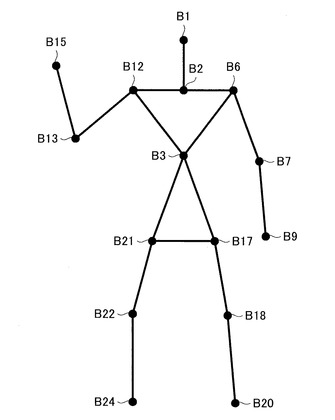
図5は、被写体Aを構成する1以上の部位の骨格位置(座標)を含む骨格情報を説明するための図である。図5に示した例では、骨格情報は、被写体Aを構成する15の部位の位置を示す座標B1〜B3、B6、B7、B9、B12、B13、B15、B17、B18、B20〜B22、B24として示されているが、骨格情報に含まれる部位の数は特に限定されない。
【0047】
なお、座標B1は「Head」の座標を示し、座標B2は「Neck」の座標を示し、座標B3は「Torso」の座標を示し、座標B6は「Right Shoulder」の座標を示し、座標B7は「Right Elbow」の座標を示している。また、座標B9は「Right Hand」の座標を示し、座標B12は「Left Shoulder」の座標を示し、座標B13は「Left Elbow」の座標を示し、座標B15は「Left Hand」の座標を示している。
【0048】
座標B17は「Right Hip」の座標を示し、座標B18は「Right Knee」の座標を示し、座標B20は「Right Foot」の座標を示し、座標B21は「left Hip」の座標を示している。座標B22は「Left Knee」の座標を示し、座標B24は「Left Foot」の座標を示している。
【0049】
また、本実施形態による骨格位置算出部101は、上述したように、撮像画像内の物体の深度情報を取得するが、具体的には、例えば深度の深さに応じて濃淡が変化する撮像画像(不図示)として上記デプスカメラから取得してもよい。
【0050】
(比較部109)
比較部109は、サイズ情報(予め設定された寸法)に基づく仮想的な服飾品(ここでは、仮想衣服)の大きさと、撮像された被写体Aの大きさとを比較し、比較結果を表示制御部105に出力する。なお、本実施形態による比較部109が行う大きさの比較の手法は様々想定され、特に限定されない。
【0051】
例えば、被写体Aと仮想衣服の大きさを2次元水準で比較する手法であってもよい。具体的には、比較部109は、まず撮像画像から被写体Aの領域をピクセル単位でセグメンテーションし、被写体Aの部分は白、その他の部分は黒で塗りつぶした被写体マスク画像を作成する。次に、被写体Aに重畳表示する仮想衣服が描かれる部分を白、描かれない部分を黒で塗りつぶした衣服マスク画像を作成する。なお、被写体Aに重畳表示する仮想衣服の領域は、後述する仮想空間において被写体Aの骨格位置に合わせて置かれた仮想衣服Cを仮想カメラ25によりレンダリングして取得した仮想画像C’に基づいて決定されてもよい。また、仮想空間に置かれる仮想衣服Cは、予めモデリングされた3次元データ、およびサイズ情報(身丈、肩幅および身幅等の実寸)に基づいて生成される。
【0052】
そして、比較部109は、「被写体マスク画像において白く、衣服マスク画像において黒い領域」と、「被写体マスク画像において黒く、衣服マスク画像において白い領域」との面積(ピクセル数)を比較し、比較結果を表示制御部105に出力する。
【0053】
なお、「被写体マスク画像において白く、衣服マスク画像において黒い領域」は、被写体Aの領域内であって、かつ仮想衣服が描画されない領域である。また、「被写体マスク画像において黒く、衣服マスク画像において白い領域」は、被写体Aの領域外であって、かつ仮想衣服が描画される領域である。
【0054】
よって、「被写体マスク画像において白く、衣服マスク画像において黒い領域」の方が多い場合、被写体Aより仮想衣服が小さいと言える。また、「被写体マスク画像において黒く、衣服マスク画像において白い領域」の方が多い場合、被写体Aより仮想衣服が大きいと言える。
【0055】
また、被写体Aと仮想衣服の大きさを3次元水準で比較する手法であってもよい。具体的には、比較部109は、被写体Aの形状の特徴を示す特徴点の3次元座標(図4に示す座標O参照。)に基づき、被写体Aの身丈、肩幅および身幅等の実寸(例えばセンチメートル単位)を認識する。なお、比較部109は、被写体Aの特徴点(3次元座標)を上述した深度情報を用いて算出してもよい。
【0056】
次に、比較部109は、被写体Aに重畳表示される仮想衣服Cのサイズ情報(身丈、肩幅および身幅等の実寸、例えばセンチメートル単位)を記憶部130から抽出する。
【0057】
そして、比較部109は、被写体Aの身丈、肩幅等の実寸と、仮想衣服Cの身丈、肩幅等の実寸を比較し、比較結果を表示制御部105に出力する。
【0058】
(表示制御部105)
表示制御部105は、撮像画像に映る被写体に仮想衣服を重畳表示したAR試着画像を生成し、表示装置19に表示させる制御を行う。また、本実施形態による表示制御部105は、比較部109から出力された比較結果に基づき、被写体Aに重畳表示する仮想衣服Cを変形させることで、実際の試着時の状態をより自然に表現できる。具体的には、表示制御部105は、被写体Aより仮想衣服Cが大きい場合、仮想衣服Cが全体的に重力方向に垂れ下がるよう変形させる。また、表示制御部105は、被写体Aより仮想衣服Cが小さい場合、仮想衣服Cが被写体Aの大きさに合わせて伸びたように変形させる。
【0059】
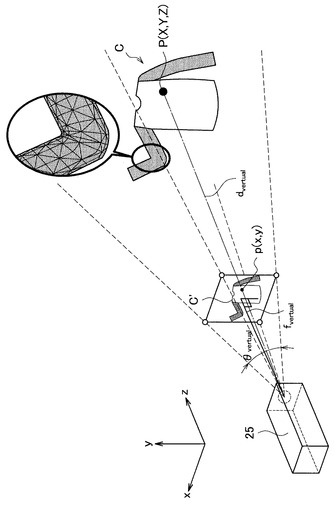
ここで、撮像画像に重畳する仮想画像の生成について、図6を参照して説明する。図6は、仮想空間における仮想カメラ25と仮想衣服Cの位置関係、および仮想衣服Cを投影(レンダリング)した仮想的な衣服画像C’(仮想画像とも称す)を説明するための図を示す。図6では、図4に示す実空間を撮像した撮像画像A’と同様に、レンダリングした仮想的な衣服画像C’を、仮想衣服側に示す。
【0060】
仮想カメラ25の設定(内部パラメータ)は、実空間を撮像するカメラ15の設定(内部パラメータ)に合わせて決定される。カメラの設定(内部パラメータ)とは、例えば、焦点距離f、画角θおよび画素数等である。表示制御部105は、仮想カメラ25の設定を、実空間のカメラ15と一致するよう設定する(初期化とも称す)。
【0061】
次に、表示制御部105は、撮像画像内の物体の深度情報に基づいて、実空間におけるカメラ15から被写体Aまでの距離drealと同じ距離dvertualだけ仮想カメラ25から離れた位置に、被写体の骨格位置に合わせて仮想衣服Cを配置する。表示制御部105は、仮想衣服Cを、予めモデリングされた3次元データに基づいて生成してもよい。また、表示制御部105は、例えば図6に示すように、仮想衣服Cの表面を三角形のポリゴンの集合により構成することで、仮想衣服の3次元形状をよりリアルに表現することができる。また、被写体Aの骨格位置が時間経過と共に変化する場合、表示制御部105は、骨格位置をトラッキングするよう仮想衣服Cの配置を変化させることができる。
【0062】
さらに、本実施形態による表示制御部105は、仮想衣服Cを予めモデリングされた3次元データに基づき生成する際、当該仮想衣服Cの3次元データに関連付けて記憶されているサイズ情報を利用する。なお、仮想衣服Cのサイズが複数ある場合(S、M、L等)、表示制御部105は、図1に示すようなサイズアイコン群30を表示し、被写体Aに任意のサイズを選択させてもよい。
【0063】
次に、表示制御部105は、仮想カメラ25でレンダリング、すなわち3次元の衣服画像Cを2次元の平面画像に投影することで、衣服画像C’(仮想画像)を取得する。そして、表示制御部105は、撮像画像A’(図4参照)に仮想的な衣服画像C’を重畳表示することでAR試着画像を生成することができる。
【0064】
ここで、本実施形態による表示制御部105は、上述したように、比較部109から出力された比較結果に基づき、被写体Aに重畳表示する仮想衣服Cを変形させることで、実際の試着時の状態をより自然に表現する。例えば、表示制御部105は、仮想衣服Cの輪郭上の点(特徴点)と、これに最も近い被写体Aの輪郭上の点(特徴点)を取得し、仮想衣服Cの特徴点を被写体Aの特徴点、または重力方向に移動させることで、より自然な表現を実現する。なお、表示制御部105によるAR試着画像の表示制御については、次の<3.表示制御>において詳細に説明する。
【0065】
以上、本開示の一実施形態によるAR試着システムを実現する情報処理装置10の構成について詳細に説明した。続いて、情報処理装置10によるAR試着画像の表示制御について説明する。
【0066】
<3.表示制御>
[3−1.基本的な表示制御]
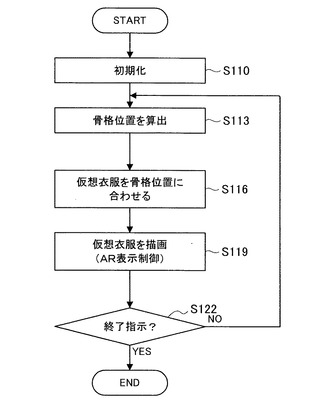
図7は、情報処理装置10によるAR試着画像の基本的な表示制御処理を示すフローチャートである。図7に示すように、まず、ステップS110において、表示制御部105は、仮想空間における仮想カメラ25の設定を、実空間のカメラ15の設定に一致させる初期化を行う。
【0067】
次いで、ステップS113において、骨格位置算出部101は、撮像した実空間における被写体Aの骨格位置(xyz座標)を算出し、表示制御部105に出力する。
【0068】
次に、ステップS116において、表示制御部105は、仮想空間において、仮想衣服Cを被写体Aの骨格位置(xyz座標)に合わせて配置する。
【0069】
そして、ステップS119において、表示制御部105は、仮想衣服Cをレンダリングして衣服画像C’(仮想画像)を取得し、衣服画像C’を撮像画像A’に重ねてAR試着画像を描画し、表示装置19に表示するよう制御する(AR表示制御)。
【0070】
また、情報処理装置10は、ステップS122において、終了指示がなされるまで上記ステップS113からS119を繰り返し行う。これにより、情報処理装置10は、被写体Aの動きをトラッキングするAR試着画像をリアルタイムで提供することができる。
【0071】
以上、基本的な表示制御処理について説明した。さらに、本実施形態による情報処理装置10は、被写体Aと仮想衣服Cの大きさを比較し、被写体Aに重畳表示する仮想衣服Cを変形させることができる。以下、本実施形態による仮想衣服の変形制御について図8を参照して具体的に説明する。
【0072】
[3−2.仮想衣服の変形制御]
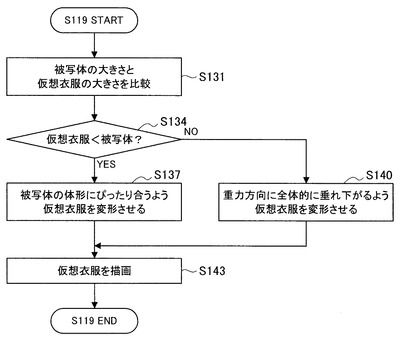
図8は、本実施形態の情報処理装置10による仮想衣服の変形処理を示すフローチャートである。より具体的には、図8では、図7に示すステップS119のAR表示制御の際に、被写体Aの大きさと仮想衣服Cの大きさの比較結果に基づき、被写体Aに重畳表示される仮想衣服Cの変形処理が行われる。
【0073】
まず、図8のステップS131において、比較部109は、被写体Aの大きさと、被写体Aに重畳表示する仮想衣服Cの大きさを比較する。
【0074】
次いで、ステップS134において、比較部109による比較の結果、被写体Aより仮想衣服Cの方が小さい場合、ステップS137において、表示制御部105は、仮想衣服Cを、被写体Aの体形にぴったり合うよう変形させる。
【0075】
一方、ステップS134において、比較部109による比較の結果、被写体Aより仮想衣服Cの方が大きい場合、ステップS140において、表示制御部105は、仮想衣服Cが全体的に重力方向(鉛直下向き)に垂れ下がるよう、仮想衣服Cを変形させる。
【0076】
そして、ステップS143において、表示制御部105は、比較部109による比較結果に基づいて変形させた仮想衣服Cを被写体Aに重ねて描画し、AR試着画像を生成する。
【0077】
以上、本実施形態による仮想衣服Cの変形処理について説明した。次に、上述したステップS137およびS140における仮想衣服の変形について、具体例を挙げて説明する。
【0078】
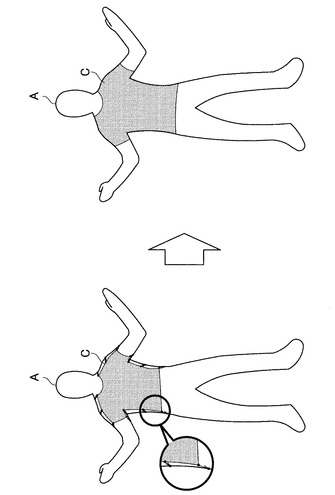
(変形例1)
上述したステップS137では、表示制御部105は、仮想衣服Cが被写体Aより小さい場合に、仮想衣服Cを被写体Aの体形にぴったり合うよう変形させる。以下、具体的な表示制御について図9を参照して説明する。
【0079】
図9に示すように、仮想衣服Cの輪郭上の点(特徴点)を、当該特徴点に近い被写体Aの輪郭上の点(特徴点)に移動させることで、表示制御部105は、仮想衣服Cを被写体Aの体形にぴったり合うように変形させる。このとき、表示制御部105は、仮想衣服Cの輪郭上の特徴点の移動に応じて、仮想衣服C内の特徴点を補完しながら移動させてもよい。
【0080】
このように、仮想衣服Cが被写体Aの体形にぴったり合うよう仮想衣服Cを変形させて被写体Aに重畳表示することで、仮想衣服Cのサイズが被写体Aより小さいことを認識させ、かつ実際試着した場合に近い、より自然なAR試着画像を提供することができる。
【0081】
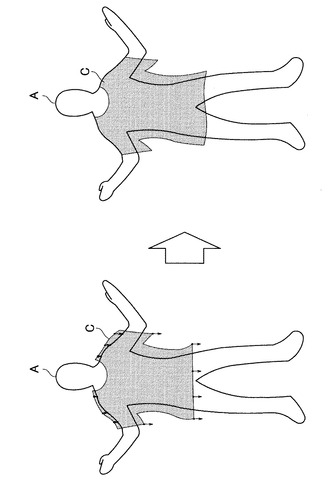
(変形例2)
上述したステップS140では、表示制御部105は、仮想衣服Cが被写体Aより大きい場合に、仮想衣服Cが重力方向(鉛直下向き)に全体的に垂れ下がるよう変形させる。以下、具体的な表示制御について図10を参照して説明する。
【0082】
図10に示すように、仮想衣服Cの輪郭上の点(特徴点)を、重力方向に移動させるが、肩など、仮想衣服Cの特徴点より下方向に被写体Aの輪郭がある場合は、当該被写体Aの輪郭上の特徴点まで移動させる。また、裾など、仮想衣服Cの特徴点より下方向に被写体Aの輪郭がない場合は、鉛直下向きに仮想衣服Cの輪郭上の特徴点を移動させ、たるみを表現する。
【0083】
このように、仮想衣服Cが全体的に垂れ下がるよう仮想衣服Cを変形させて被写体Aに重畳表示することで、仮想衣服Cのサイズが被写体Aより大きいことを認識させ、かつ実際試着した場合に近い、より自然なAR試着画像を提供することができる。
【0084】
なお、表示制御部105は、衣服のたるみを誇張し、想定される実物の衣服のたるみより大きく表現してもよい。たるみを大きく表現することで、仮想衣服Cのサイズが大きいことを、より顕著に表現することができる。具体的には、仮想衣服Cの裾などの特徴点を鉛直下向きに移動させる距離を、想定より長くすることで、衣服のたるみを誇張して表現することができる。
【0085】
以上、変形例1および変形例2を挙げて、仮想衣服Cの変形について具体的に説明した。なお、上記特徴点の移動による仮想衣服Cの変形は、仮想カメラ25がレンダリングして取得した衣服画像C’上の特徴点(2次元座標(x,y))を移動することにより実現してもよい。若しくは、仮想空間に置かれた3次元の仮想衣服Cの形状の特徴を示す特徴点(3次元座標(x,y,z))を移動することにより実現してもよい。
【0086】
<4.まとめ>
上述したように、本開示の一実施形態によるAR試着システムでは、被写体Aと仮想衣服Cの大きさの比較結果に基づいて仮想衣服Cを変形させた上で、仮想衣服Cを被写体Aに重畳表示する。これにより、被写体Aと仮想衣服Cの大きさの違いを、より自然な表現で直感的にユーザに認識させることができる。
【0087】
例えば、仮想衣服Cが被写体Aより小さい場合、仮想衣服Cを被写体Aの体形にぴったり合うよう変形させる。また、仮想衣服Cが被写体Aより大きい場合、仮想衣服Cを全体的に重力方向に垂れ下がるよう変形させる。
【0088】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本技術はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属
するものと了解される。
【0089】
例えば、上述したAR試着システムでは、主に仮想衣服の試着を例として説明したが、試着対象は衣服に限らず、例えばメガネ、帽子およびベルトなどの装飾品であってもよい。
【0090】
また、上述したAR試着システムでは、被写体が人物の場合について説明したが、被写体は人物に限定されず、例えば犬や猫などの動物であってもよい。この場合、動物を撮像した撮像画像に、例えばペット用の衣服画像を重畳表示するAR試着システムを提供することができる。
【0091】
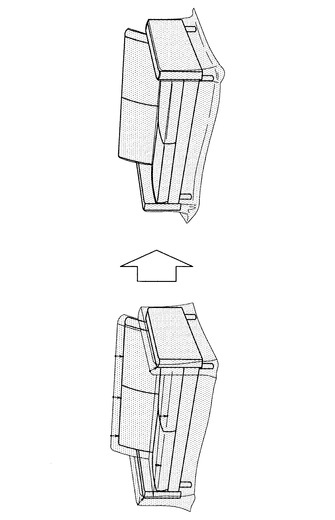
また、上記実施形態では、現実の物体として被写体A、仮想的な物体として仮想衣服Cを例に挙げたが、本実施形態による現実の物体と仮想的な物体の組み合わせ例はこれに限られない。仮想的な物体は、布素材など変形可能な素材が想定される他の物体であってもよい。例えば、現実の物体として、椅子、ソファー、およびベッド等の家具が挙げられ、仮想的な物体として、椅子カバー、ソファーカバー、およびベッドカバー等が挙げられる。
【0092】
以下、実空間のソファーを撮像した撮像画像に、仮想的なソファーカバーを重畳表示する場合について図11を参照して説明する。
【0093】
図11に示すように、表示制御部105は、仮想的なソファーカバーの輪郭上の特徴点を、重力方向に移動させることで、実際ソファーにソファーカバーを装着させた場合の状態をより自然に表現することができる。なお、表示制御部105は、仮想的なソファーカバーの輪郭上の特徴点の移動において、ソファーが置かれた床も考慮することで、さらに自然なAR画像を表示することができる。
【0094】
なお、本技術は以下のような構成も取ることができる。
(1)
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、
前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、
を備える、情報処理装置。
(2)
前記表示制御部は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、前記(1)に記載の情報処理装置。
(3)
前記表示制御部は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、前記(1)または(2)に記載の情報処理装置。
(4)
前記表示制御部は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、前記(1)から(3)のいずれか1項に記載の情報処理装置。
(5)
前記比較部は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、前記(1)から(4)のいずれか1項に記載の情報処理装置。
(6)
前記特徴点は、2次元座標または3次元座標である、前記(2)に記載の情報処理装置。
(7)
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較するステップと、
前記比較するステップによる比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示するステップと、
を含む、表示制御方法。
(8)
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する処理と、
前記比較する処理による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する処理と、
をコンピュータに実行させる、プログラム。
(9)
前記表示する処理は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、前記(8)に記載のプログラム。
(10)
前記表示する処理は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、前記(8)または(9)に記載のプログラム。
(11)
前記表示する処理は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、前記(8)から(10)のいずれか1項に記載のプログラム。
(12)
前記比較する処理は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、前記(8)から(11)のいずれか1項に記載の情報処理装置。
(13)
前記特徴点は、2次元座標または3次元座標である、前記(8)に記載のプログラム。
【符号の説明】
【0095】
10 情報処理装置
15 カメラ
17 センサ
19 表示装置
100 制御部
101 骨格位置算出部
105 表示制御部
109 比較部
120 操作入力部
130 記憶部
A 被写体
B 座標(骨格位置)
C 仮想衣服
【技術分野】
【0001】
本開示は、情報処理装置、表示制御方法、およびプログラムに関する。
【背景技術】
【0002】
仮想的な試着システムとして、ユーザを撮像した撮像画像に衣服の画像を合成する試着画像生成技術が様々提案されている。
【0003】
例えば、特許文献1では、ユーザの身体画像に衣服画像を合成する処理が開示されている。具体的には、特許文献1に記載の画像処理サーバは、ユーザの身体画像に添付されている身体プロファイルデータ(身長、肩幅等)および画像における身体の向きなどの情報に基づき、衣服画像のサイズ変更および向きの調整を行い、身体画像に合成する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−304331号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されるような試着画像生成技術では、合成する衣服画像の大きさは身体プロフィールデータに基づき、身体の大きさに合うようサイズ変更される。
【0006】
また、撮像された画像内のユーザの動作に合わせて仮想衣服を重畳表示する仮想試着システムでは、画像内においてユーザの身体より大きいまたは小さい衣服画像がそのまま重畳表示されていた。若しくは、ユーザの指示に応じて衣服画像が拡大または縮小された上で、そのまま重畳表示されていた。
【0007】
しかしながら、実際は、身体より大きい衣服を試着すると衣服が垂れ下がり、また、身体より小さい衣服を試着すると衣服が伸びるので、上述したような衣服画像をそのまま合成した試着画像では不自然な表現となる。また、衣服画像を拡大/縮小した上でそのまま重畳表示する仮想試着技術では、衣服のサイズをユーザに認識させることが困難であった。
【0008】
そこで、本開示では、より自然な表現で実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることが可能な、新規かつ改良された情報処理装置、表示制御方法およびプログラムを提案する。
【課題を解決するための手段】
【0009】
本開示によれば、予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、を備える情報処理装置を提案する。
【0010】
本開示によれば、予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較するステップと、前記比較するステップによる比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示するステップと、を含む表示制御方法を提案する。
【0011】
本開示によれば、予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する処理と、前記比較する処理による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する処理と、をコンピュータに実行させる、プログラムを提案する。
【発明の効果】
【0012】
以上説明したように本開示によれば、より自然な表現で実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることが可能となる。
【図面の簡単な説明】
【0013】
【図1】本開示の一実施形態によるAR試着システムの概要を説明するための図である。
【図2】通常の仮想的な試着システムにおいて仮想衣服がそのまま合成される場合を説明するための図である。
【図3】本開示の一実施形態による情報処理装置の構成を示すブロック図である。
【図4】実空間におけるカメラと被写体の位置関係、および被写体を撮像した撮像画像を説明するための図である。
【図5】本開示の一実施形態による骨格情報を説明するための図である。
【図6】仮想空間における仮想カメラと仮想衣服の位置関係、および仮想衣服を投影した仮想的な衣服画像を説明するための図である。
【図7】本開示の一実施形態によるAR試着画像表示における基本的な表示制御処理を示すフローチャートである。
【図8】本開示の一実施形態による仮想衣服の変形処理を示すフローチャートである。
【図9】被写体より小さい仮想衣服の変形を説明するための図である。
【図10】被写体より大きい仮想衣服の変形を説明するための図である。
【図11】本開示の一実施形態による仮想的なソファーカバーの変形を説明するための図である。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
また、説明は以下の順序で行うものとする。
1.本開示の一実施形態によるAR試着システムの概要
2.情報処理装置の構成
3.表示制御
3−1.基本的な表示制御
3−2.仮想衣服の変形制御
4.まとめ
【0016】
<1.本開示の一実施形態によるAR試着システムの概要>
近年、実世界に付加的な情報を重畳してユーザに呈示する拡張現実(AR:Augmented Reality)と呼ばれる技術が注目されている。AR技術においてユーザに呈示される情報は、テキスト、アイコン又はアニメーションなどの様々な形態の仮想的なオブジェクトを用いて可視化され得る。AR技術の主要な適用分野の1つは、実世界でのユーザ活動の支援である。以下では、このAR技術を試着システムに適用する。
【0017】
AR技術を利用した試着システムは、ユーザの動作に合わせて仮想的な衣服画像を重畳表示することで、リアルタイムに仮想試着を体験することができる。また、本開示の一実施形態によるAR試着システムは、実空間の物体である被写体の大きさと仮想物体である仮想衣服の大きさとの比較結果に基づいて仮想衣服を変形し、被写体に重畳表示する。これにより、より自然なAR試着画像を表示でき、また、実空間の物体と仮想的な物体の大きさの違いを直感的にユーザに認識させることができる。
【0018】
このような本開示の一実施形態によるAR試着システムの概要を、図1を参照しながら説明する。図1に示すように、本開示の一実施形態によるAR試着システム1は、情報処理装置10、カメラ15、センサ17、および表示装置19を有する。なお、AR試着システム1が設置される場所は特に限定されない。例えば、AR試着システム1は、ユーザの自宅内に設置されてもよいし、店頭に設置されてもよい。
【0019】
また、図1に示した例では、AR試着システム1を構成する複数の装置(情報処理装置10、カメラ15、センサ17および表示装置19)が別体に構成されているが、本開示によるAR試着システム1の構成はこれに限定されない。例えば、AR試着システム1を構成する上記複数の装置のいずれかの組み合わせが一体化されていてもよい。また、例えば、AR試着システム1を構成する複数の装置は、スマートフォン、PDA(Personal Digital Assistants)、携帯電話、携帯用音楽再生装置、携帯用映像処理装置または携帯用ゲーム機器に内蔵されていてもよい。
【0020】
カメラ15(撮像装置)は、実空間に存在する物体を撮像する。実空間に存在する物体は、特に限定されないが、例えば、人物や動物などの生き物であってもよく、車庫やテレビ台などといった生き物以外であってもよい。図1に示した例では、実空間に存在する物体として被写体A(例えば、人物)がカメラ15により撮像される。カメラ15により撮像された画像(撮像画像とも称す)は表示装置19に表示される。表示装置19に表示される撮像画像は、RGB画像であってもよい。また、カメラ15は、撮像画像を情報処理装置10に送る。
【0021】
センサ17は、実空間からパラメータを検出する機能を有し、検出データを情報処理装置10に送る。例えば、センサ17が赤外線センサにより構成されている場合、センサ部17は、実空間から赤外線を検出し、赤外線量に応じた電気信号を検出データとして情報処理装置10に供給することができる。情報処理装置10は、例えば、検出データに基づいて実空間に存在する物体を認識することができる。センサ17の種類は、赤外線センサに限定されない。なお、図1に示した例では、検出データがセンサ17から情報処理装置10に供給されることとしているが、情報処理装置10に供給される検出データは、カメラ15により撮像された画像であってもよい。
【0022】
情報処理装置10は、実空間に存在する物体の認識結果に応じて、撮像画像に対して仮想オブジェクトを合成したり撮像画像を変形したりすることにより、撮像画像を処理することができる。表示装置19は、情報処理装置10により処理された画像を表示することも可能である。
【0023】
例えば、図1に示すように、情報処理装置10は、実空間の被写体Aを認識し、衣服画像を合成した試着画像を表示装置19にリアルタイムに表示させることができる。ここでは、ユーザの身体が実空間の映像であり、試着対象の衣服画像が実空間の映像に重畳表示された仮想オブジェクトである。これにより、AR試着システム1は、仮想的な試着をリアルタイムに提供することができる。
【0024】
ここで、通常の仮想的な試着システムでは、被写体に重畳表示される仮想衣服の大きさが被写体より大きい/小さいまま上書きされていた。図2は、このような通常の仮想的な試着システムにおいて仮想衣服がそのまま合成される場合について説明するための図である。
【0025】
図2左に示すように、仮想衣服が撮像画像内の被写体より小さいまま仮想衣服が合成されると、被写体の領域が仮想衣服からはみ出てしまう。しかし、実際に身体より小さい衣服を試着すると、衣服は伸びるので、図2左に示すような試着画像は不自然な表現である。
【0026】
また、図2右に示すように、仮想衣服が撮像画像内の被写体より大きいまま仮想衣服が合成されると、被写体より仮想衣服の領域が大きいために、被写体の肩から仮想衣服が浮いたり、垂れ下がったりしない。しかし、実際に身体より大きい衣服の試着時は衣服が全体的に垂れ下がるので、図2右に示すような試着画像では不自然な表現となり、リアリティに欠ける。
【0027】
また、上述したように、衣服画像を拡大/縮小した上でそのまま撮像画像(身体画像)に重畳表示する場合、実在する衣服のサイズとは無関係に衣服画像が調整される。しかし、インターネットを利用して衣服の購入を行う場合等、仮想試着システムを実在する衣服の購入検討に利用する場合は、実在の衣服のサイズを考慮した試着画像の生成が求められる。
【0028】
そこで、本開示の一実施形態によるAR試着システムでは、実空間の物体(ここでは、被写体)の大きさと仮想物体(ここでは、仮想衣服)の大きさの比較結果に基づいて仮想物体を変形し、被写体に重畳表示する。例えば、図1に示すように、被写体Aに重畳表示される仮想衣服が重力方向に全体的に垂れ下がるよう変形されることで、被写体Aは、仮想衣服のサイズが自分の身体より大きいことを直感的に認識することができる。なお、被写体Aは、仮想衣服の大きさを、図1に示すように、表示装置19に表示される「S」「M」「L」等のサイズアイコン群30から任意に選択することができる。これにより、被写体Aは、様々なサイズの仮想衣服を仮想試着することができる。
【0029】
<2.情報処理装置の構成>
次に、本開示によるAR試着システムを実現する情報処理装置10の構成について、図3を参照して説明する。図3に示すように、情報処理装置10は、制御部100、操作入力部120、および記憶部130を有する。制御部100は、骨格位置算出部101、表示制御部105、および比較部109を有する。また、情報処理装置10には、カメラ15、センサ17および表示装置19が、有線または無線により接続されている。
【0030】
制御部100は、CPU(Central Processing Unit)またはDSP(Digital Signal Processor)などのプロセッサに相当する。制御部100は、記憶部130または他の記憶媒体に記憶されるプログラムを実行することにより、後に説明する制御部100の様々な機能を動作させる。なお、制御部100を構成する各ブロックは、全てが同一の装置に組み込まれていなくてもよく、一部が他の装置(例えば、サーバ)に組み込まれていてもよい。
【0031】
記憶部130は、半導体メモリまたはハードディスクなどの記憶媒体を用いて、情報処理装置10による処理のためのプログラムおよびデータを記憶する。例えば、制御部100としてコンピュータを機能させるためのプログラムを記憶する。さらに、例えば、記憶部130は、制御部100により使用されるデータを記憶する。また、本実施形態による記憶部130は、表示対象となる仮想オブジェクトとして、服飾品の3次元データを記憶する。また、本実施形態による記憶部130は、服飾品の3次元データに関連付けて、服飾品のサイズ情報を記憶する。サイズ情報とは、身丈、肩幅、身幅、袖丈、および袖幅等の服飾品の実寸情報である。実寸情報は、センチメートル単位で記憶されていてもよい。また、実寸情報は、服飾品のサイズ(S、M、L等)毎に記憶されていてもよい。なお、本明細書において、服飾品とは、衣服または装飾品を含む。また、装飾品とは、メガネ、帽子およびベルトなどを含む。
【0032】
操作入力部120は、マウス、キーボード、タッチパネル、ボタン、マイク、スイッチ、レバーおよびリモートコントローラーなどユーザが情報を入力するための入力手段と、ユーザによる入力に基づいて入力信号を生成し、制御部100に出力する入力制御回路などから構成されている。ユーザは、操作入力部120を操作することにより、情報処理装置10の電源ON/OFFや、AR試着システムプログラムの起動などを指示したりすることができる。
【0033】
カメラ15(撮像装置)は、CCD(Charge Coupled Device)またはCMOS(Complementary Metal Oxide Semiconductor)などの撮像素子を用いて実空間を撮像することにより、撮像画像を生成する。本開示の実施形態においては、カメラ15が情報処理装置10と別体に構成されていることを想定しているが、カメラ15は、情報処理装置10の一部であってもよい。
【0034】
また、カメラ15は、撮像時におけるカメラ15の設定情報を情報処理装置10に供給する。ここで、図4に、実空間におけるカメラ15と被写体Aの位置関係、および被写体Aを撮像した撮像画像A’を説明するための図を示す。図4では、カメラ15のレンズ(不図示)の光学的な中心である主点から、カメラ15の撮像素子(不図示)までの焦点距離frealと、撮像素子に写る被写体A(3次元、xyz座標)の撮像画像A’(2次元、xy座標)を、便宜上被写体側に示す。カメラ15から被写体Aまでの距離drealは、後述するように深度情報として算出される。また、カメラ15の画角θrealは、主に焦点距離frealに応じて決定される。カメラ15は、カメラ15の設定情報として、例えば焦点距離freal(または画角θreal)および撮像画像A’の画素数(すなわちピクセル数)を、情報処理装置10に供給する。
【0035】
センサ17は、実空間からパラメータを検出する機能を有している。例えば、センサ17が赤外線センサにより構成されている場合、センサ17は、実空間から赤外線を検出し、赤外線量に応じた電気信号を検出データとして情報処理装置10に供給することができる。センサ17の種類は、赤外線センサに限定されない。なお、カメラ15により撮像された画像が検出データとして情報処理装置10に供給される場合には、センサ17は存在しなくてもよい。
【0036】
表示装置19は、LCD(Liquid Crystal Display)、OLED(Organic light−Emitting Diode)またはCRT(Cathode Ray Tube)などにより構成される表示モジュールである。本開示の実施形態においては、表示装置19が情報処理装置10と別体に構成されていることを想定しているが、表示装置19は、情報処理装置10の一部であってもよい。
【0037】
続いて、上記制御部100の機能構成について説明する。上述したように、制御部100は、骨格位置算出部101、表示制御部105、および比較部109を有する。
【0038】
(骨格位置算出部101)
骨格位置算出部101は、検出データに基づいて撮像画像に映る物体の骨格位置を算出する。撮像画像に映る物体の実空間上の骨格位置を算出する手法は特に限定されない。例えば、骨格位置算出部101は、まず、撮像画像において物体の存在する領域(以下、「物体存在領域」とも称す。)を認識するとともに、撮像画像内の物体の深度情報を取得する。そして、骨格位置算出部101は、物体存在領域の深度と形(特徴量)に基づいて、撮像画像に映る物体の実空間上の部位(頭、左肩、右肩、腹部など)を認識し、各部位における中心位置を骨格位置として算出してもよい。ここで、骨格位置算出部101は、記憶部130に記憶された特徴量辞書を用いて、撮像画像から決定される特徴量を、当該特徴量辞書に予め登録された物体の部位ごとの特徴量と照合することにより、撮像画像に含まれる物体の部位を認識することができる。
【0039】
物体存在領域を認識する手法としては様々な手法が想定される。例えば、撮像画像が検出データとして情報処理装置10に供給された場合には、骨格位置算出部101は、物体が映る前の撮像画像と物体が映っている撮像画像との差分値に基づいて、物体存在領域を認識することができる。より詳細には、骨格位置算出部101は、物体が映る前の撮像画像と物体が映っている撮像画像との差分値が閾値を超える領域を、物体存在領域として認識することができる。
【0040】
また、例えば、センサ17により検出されたパラメータが検出データとして情報処理装置10に供給された場合には、骨格位置算出部101は、検出データに基づいて、物体存在領域を認識することができる。より詳細には、骨格位置算出部101は、検出される赤外線量が閾値を超える領域を、物体存在領域として認識することができる。
【0041】
また、撮像画像内の物体の深度情報を取得する手法として様々な手法が想定される。例えば、カメラ15と物体との距離をあらかじめ定めておくことが可能である。すなわち、あらかじめ定められた距離だけカメラ15から離れた位置に物体が配置されるような制限を設ければよい。このような制限を設ければ、骨格位置算出部101は、物体の深度情報(ここでは、カメラ15と物体との距離)を固定値(例えば、2mなど)として扱うことができる。
【0042】
また、骨格位置算出部101は、撮像画像内の物体の深度情報を、センサ17により検出されたパラメータに基づいて算出することも可能である。より詳細には、骨格位置算出部101は、図示しない照射装置から赤外線などの光を物体に向けて照射した場合に、センサ17により検出された光を解析することにより、撮像画像内の物体の深度情報を算出することができる。
【0043】
また、例えば骨格位置算出部101は、センサ17により検出された光の位相遅れに基づいて、撮像画像内の物体の深度情報を算出することができる。この手法は、TOF(Time Of Flight)方式とも言われる。あるいは、図示しない照射装置から照射される光が既知のパターンから構成される場合には、骨格位置算出部101は、センサ17により検出された光を構成するパターンの歪み具合を解析することにより、撮像画像内の物体の深度情報を算出してもよい。
【0044】
なお、撮像画像内の物体の深度情報を算出する機能を有する撮像装置はデプスカメラと称され、ステレオカメラやレーザーレンジスキャナにより実現され得る。骨格位置算出部101は、情報処理装置10に接続されるデプスカメラから深度情報を取得してもよい。
【0045】
以上説明した各手法により取得した物体存在領域の深度と形(特徴量)に基づいて、骨格位置算出部101は、撮像画像に映る物体の実空間上の部位(頭、肩など)を認識し、各部位の骨格位置の座標を算出する。次に、骨格位置算出部101が算出した被写体Aを構成する1以上の部位の骨格位置を含む骨格情報について図5を参照して説明する。
【0046】
図5は、被写体Aを構成する1以上の部位の骨格位置(座標)を含む骨格情報を説明するための図である。図5に示した例では、骨格情報は、被写体Aを構成する15の部位の位置を示す座標B1〜B3、B6、B7、B9、B12、B13、B15、B17、B18、B20〜B22、B24として示されているが、骨格情報に含まれる部位の数は特に限定されない。
【0047】
なお、座標B1は「Head」の座標を示し、座標B2は「Neck」の座標を示し、座標B3は「Torso」の座標を示し、座標B6は「Right Shoulder」の座標を示し、座標B7は「Right Elbow」の座標を示している。また、座標B9は「Right Hand」の座標を示し、座標B12は「Left Shoulder」の座標を示し、座標B13は「Left Elbow」の座標を示し、座標B15は「Left Hand」の座標を示している。
【0048】
座標B17は「Right Hip」の座標を示し、座標B18は「Right Knee」の座標を示し、座標B20は「Right Foot」の座標を示し、座標B21は「left Hip」の座標を示している。座標B22は「Left Knee」の座標を示し、座標B24は「Left Foot」の座標を示している。
【0049】
また、本実施形態による骨格位置算出部101は、上述したように、撮像画像内の物体の深度情報を取得するが、具体的には、例えば深度の深さに応じて濃淡が変化する撮像画像(不図示)として上記デプスカメラから取得してもよい。
【0050】
(比較部109)
比較部109は、サイズ情報(予め設定された寸法)に基づく仮想的な服飾品(ここでは、仮想衣服)の大きさと、撮像された被写体Aの大きさとを比較し、比較結果を表示制御部105に出力する。なお、本実施形態による比較部109が行う大きさの比較の手法は様々想定され、特に限定されない。
【0051】
例えば、被写体Aと仮想衣服の大きさを2次元水準で比較する手法であってもよい。具体的には、比較部109は、まず撮像画像から被写体Aの領域をピクセル単位でセグメンテーションし、被写体Aの部分は白、その他の部分は黒で塗りつぶした被写体マスク画像を作成する。次に、被写体Aに重畳表示する仮想衣服が描かれる部分を白、描かれない部分を黒で塗りつぶした衣服マスク画像を作成する。なお、被写体Aに重畳表示する仮想衣服の領域は、後述する仮想空間において被写体Aの骨格位置に合わせて置かれた仮想衣服Cを仮想カメラ25によりレンダリングして取得した仮想画像C’に基づいて決定されてもよい。また、仮想空間に置かれる仮想衣服Cは、予めモデリングされた3次元データ、およびサイズ情報(身丈、肩幅および身幅等の実寸)に基づいて生成される。
【0052】
そして、比較部109は、「被写体マスク画像において白く、衣服マスク画像において黒い領域」と、「被写体マスク画像において黒く、衣服マスク画像において白い領域」との面積(ピクセル数)を比較し、比較結果を表示制御部105に出力する。
【0053】
なお、「被写体マスク画像において白く、衣服マスク画像において黒い領域」は、被写体Aの領域内であって、かつ仮想衣服が描画されない領域である。また、「被写体マスク画像において黒く、衣服マスク画像において白い領域」は、被写体Aの領域外であって、かつ仮想衣服が描画される領域である。
【0054】
よって、「被写体マスク画像において白く、衣服マスク画像において黒い領域」の方が多い場合、被写体Aより仮想衣服が小さいと言える。また、「被写体マスク画像において黒く、衣服マスク画像において白い領域」の方が多い場合、被写体Aより仮想衣服が大きいと言える。
【0055】
また、被写体Aと仮想衣服の大きさを3次元水準で比較する手法であってもよい。具体的には、比較部109は、被写体Aの形状の特徴を示す特徴点の3次元座標(図4に示す座標O参照。)に基づき、被写体Aの身丈、肩幅および身幅等の実寸(例えばセンチメートル単位)を認識する。なお、比較部109は、被写体Aの特徴点(3次元座標)を上述した深度情報を用いて算出してもよい。
【0056】
次に、比較部109は、被写体Aに重畳表示される仮想衣服Cのサイズ情報(身丈、肩幅および身幅等の実寸、例えばセンチメートル単位)を記憶部130から抽出する。
【0057】
そして、比較部109は、被写体Aの身丈、肩幅等の実寸と、仮想衣服Cの身丈、肩幅等の実寸を比較し、比較結果を表示制御部105に出力する。
【0058】
(表示制御部105)
表示制御部105は、撮像画像に映る被写体に仮想衣服を重畳表示したAR試着画像を生成し、表示装置19に表示させる制御を行う。また、本実施形態による表示制御部105は、比較部109から出力された比較結果に基づき、被写体Aに重畳表示する仮想衣服Cを変形させることで、実際の試着時の状態をより自然に表現できる。具体的には、表示制御部105は、被写体Aより仮想衣服Cが大きい場合、仮想衣服Cが全体的に重力方向に垂れ下がるよう変形させる。また、表示制御部105は、被写体Aより仮想衣服Cが小さい場合、仮想衣服Cが被写体Aの大きさに合わせて伸びたように変形させる。
【0059】
ここで、撮像画像に重畳する仮想画像の生成について、図6を参照して説明する。図6は、仮想空間における仮想カメラ25と仮想衣服Cの位置関係、および仮想衣服Cを投影(レンダリング)した仮想的な衣服画像C’(仮想画像とも称す)を説明するための図を示す。図6では、図4に示す実空間を撮像した撮像画像A’と同様に、レンダリングした仮想的な衣服画像C’を、仮想衣服側に示す。
【0060】
仮想カメラ25の設定(内部パラメータ)は、実空間を撮像するカメラ15の設定(内部パラメータ)に合わせて決定される。カメラの設定(内部パラメータ)とは、例えば、焦点距離f、画角θおよび画素数等である。表示制御部105は、仮想カメラ25の設定を、実空間のカメラ15と一致するよう設定する(初期化とも称す)。
【0061】
次に、表示制御部105は、撮像画像内の物体の深度情報に基づいて、実空間におけるカメラ15から被写体Aまでの距離drealと同じ距離dvertualだけ仮想カメラ25から離れた位置に、被写体の骨格位置に合わせて仮想衣服Cを配置する。表示制御部105は、仮想衣服Cを、予めモデリングされた3次元データに基づいて生成してもよい。また、表示制御部105は、例えば図6に示すように、仮想衣服Cの表面を三角形のポリゴンの集合により構成することで、仮想衣服の3次元形状をよりリアルに表現することができる。また、被写体Aの骨格位置が時間経過と共に変化する場合、表示制御部105は、骨格位置をトラッキングするよう仮想衣服Cの配置を変化させることができる。
【0062】
さらに、本実施形態による表示制御部105は、仮想衣服Cを予めモデリングされた3次元データに基づき生成する際、当該仮想衣服Cの3次元データに関連付けて記憶されているサイズ情報を利用する。なお、仮想衣服Cのサイズが複数ある場合(S、M、L等)、表示制御部105は、図1に示すようなサイズアイコン群30を表示し、被写体Aに任意のサイズを選択させてもよい。
【0063】
次に、表示制御部105は、仮想カメラ25でレンダリング、すなわち3次元の衣服画像Cを2次元の平面画像に投影することで、衣服画像C’(仮想画像)を取得する。そして、表示制御部105は、撮像画像A’(図4参照)に仮想的な衣服画像C’を重畳表示することでAR試着画像を生成することができる。
【0064】
ここで、本実施形態による表示制御部105は、上述したように、比較部109から出力された比較結果に基づき、被写体Aに重畳表示する仮想衣服Cを変形させることで、実際の試着時の状態をより自然に表現する。例えば、表示制御部105は、仮想衣服Cの輪郭上の点(特徴点)と、これに最も近い被写体Aの輪郭上の点(特徴点)を取得し、仮想衣服Cの特徴点を被写体Aの特徴点、または重力方向に移動させることで、より自然な表現を実現する。なお、表示制御部105によるAR試着画像の表示制御については、次の<3.表示制御>において詳細に説明する。
【0065】
以上、本開示の一実施形態によるAR試着システムを実現する情報処理装置10の構成について詳細に説明した。続いて、情報処理装置10によるAR試着画像の表示制御について説明する。
【0066】
<3.表示制御>
[3−1.基本的な表示制御]
図7は、情報処理装置10によるAR試着画像の基本的な表示制御処理を示すフローチャートである。図7に示すように、まず、ステップS110において、表示制御部105は、仮想空間における仮想カメラ25の設定を、実空間のカメラ15の設定に一致させる初期化を行う。
【0067】
次いで、ステップS113において、骨格位置算出部101は、撮像した実空間における被写体Aの骨格位置(xyz座標)を算出し、表示制御部105に出力する。
【0068】
次に、ステップS116において、表示制御部105は、仮想空間において、仮想衣服Cを被写体Aの骨格位置(xyz座標)に合わせて配置する。
【0069】
そして、ステップS119において、表示制御部105は、仮想衣服Cをレンダリングして衣服画像C’(仮想画像)を取得し、衣服画像C’を撮像画像A’に重ねてAR試着画像を描画し、表示装置19に表示するよう制御する(AR表示制御)。
【0070】
また、情報処理装置10は、ステップS122において、終了指示がなされるまで上記ステップS113からS119を繰り返し行う。これにより、情報処理装置10は、被写体Aの動きをトラッキングするAR試着画像をリアルタイムで提供することができる。
【0071】
以上、基本的な表示制御処理について説明した。さらに、本実施形態による情報処理装置10は、被写体Aと仮想衣服Cの大きさを比較し、被写体Aに重畳表示する仮想衣服Cを変形させることができる。以下、本実施形態による仮想衣服の変形制御について図8を参照して具体的に説明する。
【0072】
[3−2.仮想衣服の変形制御]
図8は、本実施形態の情報処理装置10による仮想衣服の変形処理を示すフローチャートである。より具体的には、図8では、図7に示すステップS119のAR表示制御の際に、被写体Aの大きさと仮想衣服Cの大きさの比較結果に基づき、被写体Aに重畳表示される仮想衣服Cの変形処理が行われる。
【0073】
まず、図8のステップS131において、比較部109は、被写体Aの大きさと、被写体Aに重畳表示する仮想衣服Cの大きさを比較する。
【0074】
次いで、ステップS134において、比較部109による比較の結果、被写体Aより仮想衣服Cの方が小さい場合、ステップS137において、表示制御部105は、仮想衣服Cを、被写体Aの体形にぴったり合うよう変形させる。
【0075】
一方、ステップS134において、比較部109による比較の結果、被写体Aより仮想衣服Cの方が大きい場合、ステップS140において、表示制御部105は、仮想衣服Cが全体的に重力方向(鉛直下向き)に垂れ下がるよう、仮想衣服Cを変形させる。
【0076】
そして、ステップS143において、表示制御部105は、比較部109による比較結果に基づいて変形させた仮想衣服Cを被写体Aに重ねて描画し、AR試着画像を生成する。
【0077】
以上、本実施形態による仮想衣服Cの変形処理について説明した。次に、上述したステップS137およびS140における仮想衣服の変形について、具体例を挙げて説明する。
【0078】
(変形例1)
上述したステップS137では、表示制御部105は、仮想衣服Cが被写体Aより小さい場合に、仮想衣服Cを被写体Aの体形にぴったり合うよう変形させる。以下、具体的な表示制御について図9を参照して説明する。
【0079】
図9に示すように、仮想衣服Cの輪郭上の点(特徴点)を、当該特徴点に近い被写体Aの輪郭上の点(特徴点)に移動させることで、表示制御部105は、仮想衣服Cを被写体Aの体形にぴったり合うように変形させる。このとき、表示制御部105は、仮想衣服Cの輪郭上の特徴点の移動に応じて、仮想衣服C内の特徴点を補完しながら移動させてもよい。
【0080】
このように、仮想衣服Cが被写体Aの体形にぴったり合うよう仮想衣服Cを変形させて被写体Aに重畳表示することで、仮想衣服Cのサイズが被写体Aより小さいことを認識させ、かつ実際試着した場合に近い、より自然なAR試着画像を提供することができる。
【0081】
(変形例2)
上述したステップS140では、表示制御部105は、仮想衣服Cが被写体Aより大きい場合に、仮想衣服Cが重力方向(鉛直下向き)に全体的に垂れ下がるよう変形させる。以下、具体的な表示制御について図10を参照して説明する。
【0082】
図10に示すように、仮想衣服Cの輪郭上の点(特徴点)を、重力方向に移動させるが、肩など、仮想衣服Cの特徴点より下方向に被写体Aの輪郭がある場合は、当該被写体Aの輪郭上の特徴点まで移動させる。また、裾など、仮想衣服Cの特徴点より下方向に被写体Aの輪郭がない場合は、鉛直下向きに仮想衣服Cの輪郭上の特徴点を移動させ、たるみを表現する。
【0083】
このように、仮想衣服Cが全体的に垂れ下がるよう仮想衣服Cを変形させて被写体Aに重畳表示することで、仮想衣服Cのサイズが被写体Aより大きいことを認識させ、かつ実際試着した場合に近い、より自然なAR試着画像を提供することができる。
【0084】
なお、表示制御部105は、衣服のたるみを誇張し、想定される実物の衣服のたるみより大きく表現してもよい。たるみを大きく表現することで、仮想衣服Cのサイズが大きいことを、より顕著に表現することができる。具体的には、仮想衣服Cの裾などの特徴点を鉛直下向きに移動させる距離を、想定より長くすることで、衣服のたるみを誇張して表現することができる。
【0085】
以上、変形例1および変形例2を挙げて、仮想衣服Cの変形について具体的に説明した。なお、上記特徴点の移動による仮想衣服Cの変形は、仮想カメラ25がレンダリングして取得した衣服画像C’上の特徴点(2次元座標(x,y))を移動することにより実現してもよい。若しくは、仮想空間に置かれた3次元の仮想衣服Cの形状の特徴を示す特徴点(3次元座標(x,y,z))を移動することにより実現してもよい。
【0086】
<4.まとめ>
上述したように、本開示の一実施形態によるAR試着システムでは、被写体Aと仮想衣服Cの大きさの比較結果に基づいて仮想衣服Cを変形させた上で、仮想衣服Cを被写体Aに重畳表示する。これにより、被写体Aと仮想衣服Cの大きさの違いを、より自然な表現で直感的にユーザに認識させることができる。
【0087】
例えば、仮想衣服Cが被写体Aより小さい場合、仮想衣服Cを被写体Aの体形にぴったり合うよう変形させる。また、仮想衣服Cが被写体Aより大きい場合、仮想衣服Cを全体的に重力方向に垂れ下がるよう変形させる。
【0088】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本技術はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属
するものと了解される。
【0089】
例えば、上述したAR試着システムでは、主に仮想衣服の試着を例として説明したが、試着対象は衣服に限らず、例えばメガネ、帽子およびベルトなどの装飾品であってもよい。
【0090】
また、上述したAR試着システムでは、被写体が人物の場合について説明したが、被写体は人物に限定されず、例えば犬や猫などの動物であってもよい。この場合、動物を撮像した撮像画像に、例えばペット用の衣服画像を重畳表示するAR試着システムを提供することができる。
【0091】
また、上記実施形態では、現実の物体として被写体A、仮想的な物体として仮想衣服Cを例に挙げたが、本実施形態による現実の物体と仮想的な物体の組み合わせ例はこれに限られない。仮想的な物体は、布素材など変形可能な素材が想定される他の物体であってもよい。例えば、現実の物体として、椅子、ソファー、およびベッド等の家具が挙げられ、仮想的な物体として、椅子カバー、ソファーカバー、およびベッドカバー等が挙げられる。
【0092】
以下、実空間のソファーを撮像した撮像画像に、仮想的なソファーカバーを重畳表示する場合について図11を参照して説明する。
【0093】
図11に示すように、表示制御部105は、仮想的なソファーカバーの輪郭上の特徴点を、重力方向に移動させることで、実際ソファーにソファーカバーを装着させた場合の状態をより自然に表現することができる。なお、表示制御部105は、仮想的なソファーカバーの輪郭上の特徴点の移動において、ソファーが置かれた床も考慮することで、さらに自然なAR画像を表示することができる。
【0094】
なお、本技術は以下のような構成も取ることができる。
(1)
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、
前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、
を備える、情報処理装置。
(2)
前記表示制御部は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、前記(1)に記載の情報処理装置。
(3)
前記表示制御部は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、前記(1)または(2)に記載の情報処理装置。
(4)
前記表示制御部は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、前記(1)から(3)のいずれか1項に記載の情報処理装置。
(5)
前記比較部は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、前記(1)から(4)のいずれか1項に記載の情報処理装置。
(6)
前記特徴点は、2次元座標または3次元座標である、前記(2)に記載の情報処理装置。
(7)
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較するステップと、
前記比較するステップによる比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示するステップと、
を含む、表示制御方法。
(8)
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する処理と、
前記比較する処理による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する処理と、
をコンピュータに実行させる、プログラム。
(9)
前記表示する処理は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、前記(8)に記載のプログラム。
(10)
前記表示する処理は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、前記(8)または(9)に記載のプログラム。
(11)
前記表示する処理は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、前記(8)から(10)のいずれか1項に記載のプログラム。
(12)
前記比較する処理は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、前記(8)から(11)のいずれか1項に記載の情報処理装置。
(13)
前記特徴点は、2次元座標または3次元座標である、前記(8)に記載のプログラム。
【符号の説明】
【0095】
10 情報処理装置
15 カメラ
17 センサ
19 表示装置
100 制御部
101 骨格位置算出部
105 表示制御部
109 比較部
120 操作入力部
130 記憶部
A 被写体
B 座標(骨格位置)
C 仮想衣服
【特許請求の範囲】
【請求項1】
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、
前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、
を備える、情報処理装置。
【請求項2】
前記表示制御部は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、請求項1に記載の情報処理装置。
【請求項3】
前記表示制御部は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、請求項1に記載の情報処理装置。
【請求項4】
前記表示制御部は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、請求項1に記載の情報処理装置。
【請求項5】
前記比較部は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、請求項1に記載の情報処理装置。
【請求項6】
前記特徴点は、2次元座標または3次元座標である、請求項2に記載の情報処理装置。
【請求項7】
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較するステップと、
前記比較するステップによる比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示するステップと、
を含む、表示制御方法。
【請求項8】
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する処理と、
前記比較する処理による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する処理と、
をコンピュータに実行させる、プログラム。
【請求項9】
前記表示する処理は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、請求項8に記載のプログラム。
【請求項10】
前記表示する処理は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、請求項8に記載のプログラム。
【請求項11】
前記表示する処理は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、請求項8に記載のプログラム。
【請求項12】
前記比較する処理は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、請求項8に記載の情報処理装置。
【請求項13】
前記特徴点は、2次元座標または3次元座標である、請求項9に記載のプログラム。
【請求項1】
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する比較部と、
前記比較部による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する表示制御部と、
を備える、情報処理装置。
【請求項2】
前記表示制御部は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、請求項1に記載の情報処理装置。
【請求項3】
前記表示制御部は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、請求項1に記載の情報処理装置。
【請求項4】
前記表示制御部は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、請求項1に記載の情報処理装置。
【請求項5】
前記比較部は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、請求項1に記載の情報処理装置。
【請求項6】
前記特徴点は、2次元座標または3次元座標である、請求項2に記載の情報処理装置。
【請求項7】
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較するステップと、
前記比較するステップによる比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示するステップと、
を含む、表示制御方法。
【請求項8】
予め設定された寸法に基づく仮想的な服飾品の大きさと、撮像された被写体の大きさとを比較する処理と、
前記比較する処理による比較結果に応じて、前記仮想的な服飾品を変形させ、前記被写体に重畳して表示する処理と、
をコンピュータに実行させる、プログラム。
【請求項9】
前記表示する処理は、前記仮想的な服飾品の形状の特徴を示す各特徴点を、前記被写体の輪郭上の特徴点まで、または重力方向に移動させることで、前記仮想的な服飾品を変形させる、請求項8に記載のプログラム。
【請求項10】
前記表示する処理は、前記仮想的な服飾品の方が小さい場合、前記仮想的な服飾品の輪郭が前記被写体の輪郭に合うよう前記仮想的な服飾品を変形させる、請求項8に記載のプログラム。
【請求項11】
前記表示する処理は、前記仮想的な服飾品の方が大きい場合、前記仮想的な服飾品の輪郭が重力方向に垂れ下がるよう前記仮想的な服飾品を変形させる、請求項8に記載のプログラム。
【請求項12】
前記比較する処理は、2次元または3次元において前記仮想的な服飾品と前記被写体の大きさを比較する、請求項8に記載の情報処理装置。
【請求項13】
前記特徴点は、2次元座標または3次元座標である、請求項9に記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−101529(P2013−101529A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−245305(P2011−245305)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]