
情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置
【課題】情報処理装置の進行する方位を迅速に検出できるとともに、電子コンパスの外部干渉による影響を低減できるコンピュータプログラムを提供する。
【解決手段】複数の異なる時刻において、各時刻における情報処理装置1の現在位置を検出するステップと、検出された各時刻における情報処理装置の現在位置を示す位置データを記憶するステップと、記憶されている位置データに基づいて、情報処理装置が進行している第2の方位を算出するステップと、第2の方位を反映させて、地図データに基づく地図画像をディスプレイに表示させるとともに、地図画像上に情報処理装置の現在位置を表示させるステップと、所定の表示切替条件が満たされたか否かの判定を行うステップとが実現され、判定ステップによって表示切替条件が満たされたと判定された場合には、第2の方位が反映されてディスプレイ上に表示されている地図画像を、第1の方位を反映させた表示に切替る。
【解決手段】複数の異なる時刻において、各時刻における情報処理装置1の現在位置を検出するステップと、検出された各時刻における情報処理装置の現在位置を示す位置データを記憶するステップと、記憶されている位置データに基づいて、情報処理装置が進行している第2の方位を算出するステップと、第2の方位を反映させて、地図データに基づく地図画像をディスプレイに表示させるとともに、地図画像上に情報処理装置の現在位置を表示させるステップと、所定の表示切替条件が満たされたか否かの判定を行うステップとが実現され、判定ステップによって表示切替条件が満たされたと判定された場合には、第2の方位が反映されてディスプレイ上に表示されている地図画像を、第1の方位を反映させた表示に切替る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報処理装置、特に汎用性のある可搬型情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置に関する。
【背景技術】
【0002】
従来、地図表示装置として、例えば、カーナビゲーション装置やPND(Personal/Portable Navigation Device)等が知られている。
【0003】
カーナビゲーション装置やPNDのような専用の地図表示装置では、GPS(Global
Positioning System)等によって位置を検出するだけでなく、加速度センサによる加速度、ジャイロコンパスによる車両の回転角度等を検出している。これにより、車両の現在位置を道路上に一致させるリンクマッチング、車両の進行方向が上になるように地図を表示させるヘディングアップ表示等、できる限り正確な車両位置を地図上に表示するとともに、車両が進行する方位を迅速に地図上に反映させていた。
【発明の概要】
【発明が解決しようとする課題】
【0004】
他方、近年では、携帯電話機に代表される汎用型の情報処理装置であっても、地図データを処理するためのコンピュータプログラムを実現できる機種がある。これらの機種は、GPS機能に代表されるような位置検出機能を有する。しかし、これらの情報処理装置は、上述したような専用の地図表示装置ではないため、加速度センサ及びジャイロコンパス等の自律センサを全く搭載していない簡易なものも多い。このような汎用型の情報処理装置では、情報処理装置が進行する方位の検出をも位置情報に基づいて行わなければならなかった。従ってこの場合、検出した複数の位置と、各位置を検出した時刻とから進行する方位を算出していた。このため、正しい方位を地図上に反映するのに非常に時間がかかるという問題が生じた。
【0005】
上記の問題について、正しい方位を迅速に検出するために、汎用型の情報処理装置で実現される地図データを処理するためのコンピュータプログラムにおいて、電子コンパスが検出する方位を適用させようと、発明者は試みた。携帯電話機等の汎用型の情報処理装置には、すでに電子コンパスが搭載されている機種もある。このため、地図表示プログラムに電子コンパスで検出される方位を適用するのは非常に簡易だからである。電子コンパスとは、半導体を用いた地磁気センサ(方位センサ)を内蔵した装置であって、地球が生じている南北の地磁気信号を検出して、地磁気信号から電子コンパスの向き(方位)を算出する機能を有するものである。電子コンパスには、X,Yの2軸から方位を検出するものと、X、Y、Zの3軸から方位を検出するものとがある。
【0006】
しかし、電子コンパスは、外部干渉を受けやすく非常に不安定である。特に、鉄橋や大型のトラックなどの障害物の傍では、電子コンパスによって検出される方位の精度は非常に悪い。従って、GPS受信信号による位置と電子コンパスによる方位とを単に併用したのでは、情報処理装置が障害物の傍を通る度に、ディスプレイ上の地図の方位が激しく変化する等の不具合が起こるという課題が生じた。
【0007】
本発明は、情報処理装置の進行する方位を迅速に検出できるとともに、電子コンパスの外部干渉による影響を低減できるコンピュータプログラム、方法及び地図表示装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一つの実施態様に従うコンピュータプログラムは、第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、前記情報処理装置に実行されると、複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させる表示制御ステップと、所定の表示切替条件が満たされたか否かの判定を行うステップと、が実現され、前記判定ステップによって前記表示切替条件が満たされたと判定された場合には、前記表示制御ステップは、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする。
【0009】
好適な実施態様では、前記位置データ記憶手段に記憶されている位置データに基づいて、前記情報処理装置の移動速度を算出するステップがさらに実現され、前記表示切替条件は、前記情報処理装置の移動速度が閾値以下であるか否かであって、前記判定ステップによって、前記移動速度が閾値以下であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0010】
好適な実施態様では、前記表示切替条件は、前記情報処理装置の現在位置が高速道路上にないか否かであって、前記判定ステップによって、前記現在位置が高速道路上にないと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0011】
好適な実施態様では、前記条件は、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したか否かであって、前記判定ステップによって、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0012】
好適な実施態様では、前記情報処理装置の出発地から目的地までのルートを検索するステップと、前記ルート検索ステップによって検索されたルート内において、所定角度以上ルートが曲がる屈曲ポイントを抽出するステップと、がさらに実現され、前記表示切替条件は、移動する情報処理装置の現在位置が屈曲ポイント周辺であるか否かであって、前記判定ステップによって、前記情報処理装置の現在位置が前記抽出ステップによって抽出された屈曲ポイント周辺であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0013】
本発明の別の実施態様に従うコンピュータプログラムは、第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶された地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、前記情報処理装置に実行されると、複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、前記位置検出ステップが、第1の時刻より後、所定時間以上継続して現在位置を検出できないとき、第1の時刻よりも前の位置データ及び移動速度に基づいて前記情報処理装置の現在位置を予測するステップと、第1の時刻以前に電子コンパスが検出した第1の方位と第1の時刻より後に電子コンパスが検出した第1の方位との変化量が所定量以下であるか否かを判定するステップと、が実現され、前記判定ステップによって、前記第1の時刻以前に前記電子コンパスが検出した第1の方位と前記第1の時刻以降に前記電子コンパスが検出した第1の方位との変化量が所定量以下であると判定された場合には、前記表示制御ステップは、前記予測ステップにより予測された前記情報処理装置の現在位置を前記ディスプレイの地図画像上に表示させることを特徴とする。
【0014】
本発明のさらに別の実施態様に従うコンピュータプログラムは、第1の方位を検出する電子コンパスと、ディスプレイと、当該ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、前記情報処理装置に実行されると、複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、リンクマッチングを行うステップと、前記リンクマッチングステップが第1の時刻の現在位置をマッチングさせた第1のリンクと、前記リンクマッチングステップが、第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないとき、第1の時刻と第2の時刻との間に前記電子コンパスが検出した方位に基づいて、第2のリンクに対するマッチングの正否を判定するステップと、前記正否判定ステップの判定結果に基づいて、前記リンクマッチングステップによるリンクマッチングの結果を修正するステップと、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記リンクマッチングステップ及びリンクマッチング修正ステップによる処理結果に基づいて、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、が実現されることを特徴とする。
【0015】
本発明の一の実施態様に従う地図表示装置は、ディスプレイと、第1の方位を検出する電子コンパスと、前記ディスプレイに地図画像を表示するための地図データが記憶される手段と、複数の異なる時刻において、各時刻における前記地図表示装置の現在位置を検出する位置検出手段と、前記検出手段によって検出された各時刻における前記地図表示装置の現在位置を示す位置データを記憶する記憶手段と、前記記憶手段に記憶されている位置データに基づいて、前記地図表示装置が進行している第2の方位を算出する第2方位算出手段と、前記第2方位算出手段が算出した第2方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記地図表示装置の現在位置を表示させる表示制御手段と、所定の表示切替条件が満たされたか否かの判定を行う判定手段と、を備え、前記判定手段によって前記表示切替条件が満たされたと判定された場合には、前記表示制御手段は、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本発明の好適な実施形態に係るコンピュータプログラムがインストールされた地図表示装置の概念図である。
【図2】図1の地図表示装置の構成図である。
【図3】図2の位置DB内のデータ構造の一例を示す図である。
【図4】図2の第1方位DB内のデータ構造の一例を示す図である。
【図5】第一の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図6】第二の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図7】第三の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図8】第四の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図9】位置予測機能を説明する説明図である。
【図10】第五の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図11】リンクマッチング及びリンクマッチング修正機能を説明する説明図である。
【図12】図2のマッチング記憶部内のデータ構造の一例を示す図である。
【図13】第六の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の好適な実施形態に係る携帯電話機に実現される地図表示装置について説明する。本実施形態に係る地図表示装置1は、携帯電話機に、所定のコンピュータプログラムをインストールすることにより実現される。地図表示装置1を実現するには、携帯電話機に限らず他の汎用性のある情報処理装置を用いてもよい。本実施形態にあっては、携帯電話機には、カーナビゲーションプログラムがインストールされる。しかしながら、インストールされるプログラムは、例えば歩行者用のナビゲーションプログラム等でもよいし、ナビゲーションプログラムではなく、単に現在位置を検出し地図上に表示するプログラムであってもよい。
【0018】
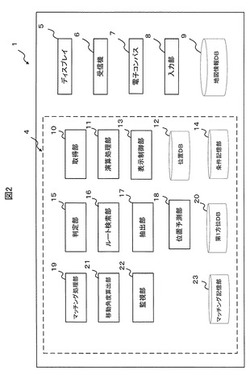
図1は、本実施形態に係る地図表示装置1の概念図である。例えば、地図表示装置1は、GPS衛星2からのGPS信号を受信する受信機6を備えてもよい。地図表示装置1は、例えば、車両3のインストルメントパネル上に専用のフォルダを設けることで車両3に着脱自在に固定されてもよい。また例えば、地図表示装置1は、ユーザ(例えば助手席の人)が手で持っていてもよい。
【0019】
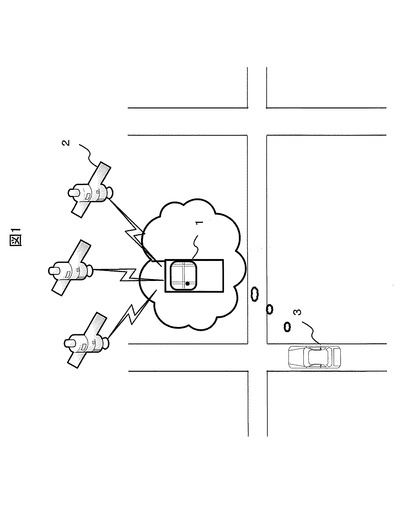
図2は、地図表示装置1の構成図である。
【0020】
地図表示装置1は、地図データ処理部4、ディスプレイ5、受信機6、電子コンパス7、入力部8及び地図情報データベース(以下、地図情報DBという)9を備える。地図データ処理部4は、携帯電話機の図示しないプロセッサ及びメモリを用いて所定のプログラムを実行することにより実現される。
【0021】
受信機6は、複数のGPS衛星2からGPS信号を受信する。受信機6は、受信したGPS信号を地図データ処理部4の演算処理部11へ通知する。
【0022】
電子コンパス7は方位を検出する。例えば図1において、電子コンパス7は、地図表示装置1の上側がどちらの方位を向いているかを検出するようにしてもよい。以下、電子コンパス7が検出する方位を第1方位という。例えば、電子コンパス7は、検出した第1方位を後述する地図データ処理部4の判定部15に通知する。電子コンパスはまた、検出した第1方位を検出時刻とともに、後述する地図データ処理部4の第1方位データベース(以下、第1方位DBという)20に記憶する。
【0023】
ディスプレイ5は、地図表示装置1が備える周知のディスプレイ5であって、ディスプレイ5上のアイコン等を指等で操作できるタッチパネルのような形態も含む。ディスプレイ5には、後述する表示制御部13によって、地図画像及び地図表示装置1の現在位置等が表示される。
【0024】
入力部8には、ユーザによって、目的地やスタート地点が入力される。入力部8への入力は、地図表示装置1のボタンによる操作や、タッチパネル形態のディスプレイ5からの操作によって行われる。入力部8から入力された情報は、後述する地図データ処理部4のルート検索部16へ送信される。
【0025】
地図情報DB9には、ディスプレイ5上に地図画像を表示するための地図データが記憶される。地図情報DB9には、例えば、ネットワークを通じて取得された地図データが一時的に記憶されてもよいし、また例えば、日本道路地図のように所定地域の地図データが常に格納されていてもよい。
【0026】
地図データ処理部4は、取得部10、演算処理部11、位置データベース(以下、位置DBという)12、表示制御部13、条件記憶部14及び判定部15を備える。地図データ処理部4はまた、ルート検索部16、抽出部17、位置予測部18、マッチング処理部19、第1方位DB20、移動角度算出部21、監視部22及びマッチング記憶部23を備えてもよい。地図データ処理部4内の各構成要素を以下に説明する。
【0027】
取得部10は、ディスプレイ5に地図画像を表示するために、現在位置周辺の地図データを地図情報DB9から取得し、表示制御部13に送信する。取得部10は、現在位置周辺の地図データを地図情報DB9から取得するため、現在時刻31の位置データ32(図3参照)を位置DB12から取得してもよい。この場合、例えば、取得部10は現在位置を中心とした周辺地図データを取得してもよい。また、現在位置周辺の地図画像がディスプレイ5に表示されている場合等は、取得部10は、表示されている画像の地図データと、現在位置を中心とした周辺地図データとの差分のみを取得してもよい。
【0028】
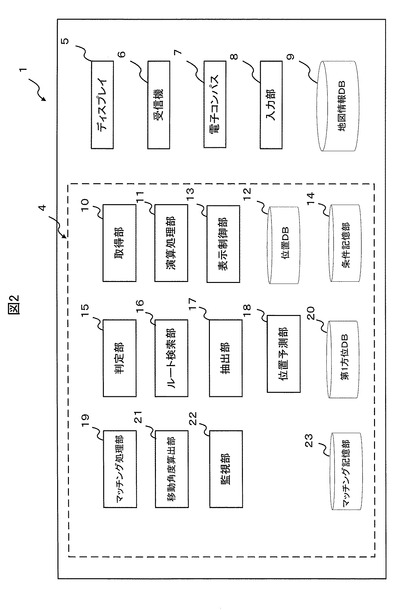
図3は、位置DB12内のデータ構造の一例である位置データテーブル30を示した図である。位置データテーブル30は、そのデータ構造として、時刻31と、その時刻の地図表示装置1の位置データ32としての緯度データ32a及び経度データ32bと、地図表示装置1の移動速度33と、地図表示装置1の第2方位34とを有する。詳細は後述する。
【0029】
演算処理部11は、複数の異なる時刻において、各時刻における地図表示装置1の現在位置を検出する。例えば、演算処理部11は、受信機6から通知されたGPS信号から、地図表示装置1の現在位置を検出してもよい。現在位置は、例えば、GPS信号から算出した地図表示装置1の現時点の緯度データ32a・経度データ32bを含む位置データ32である。
演算処理部11はまた、各時刻における地図表示装置1の現在位置を示す位置データ32を位置DB12に記憶する。例えば、演算処理部11は、検出した位置データ32を、その位置データ32を検出した時刻31とともに位置DB12に記憶してもよい。
【0030】
演算処理部11は、位置DB12に記憶されている位置データ32に基づいて、地図表示装置1の移動速度33を算出する。演算処理部11は、位置DB12を参照し、複数の位置データ32と、それら位置データ32の各検出時刻31とから、地図表示装置1の移動速度33を算出してもよい。例えば、演算処理部11は、ある時刻の位置データ32及びその検出時刻31と、それ以前に検出された一つ以上の位置データ32及びその検出時刻31と、に基づいて移動速度33を算出する。また例えば、演算処理部11は、算出した移動速度33を位置DB12に記憶する。図3にあっては、演算処理部11は、検出時刻31が「17:00:00」のときの位置データ32と、検出時刻31が「17:00:02」のときの位置データ32とからこの間の移動速度33を算出し、算出された移動速度33「30km/h」を、時刻31が「17:00:02」のときの移動速度33として記憶している。
【0031】
演算処理部11は、位置DB12に記憶されている位置データ32に基づいて、地図表示装置1が進行している方位を算出する。演算処理部11は、位置DB12を参照し、複数の位置データ32と、それら位置データ32の各検出時刻31とから、地図表示装置1の進行した方位を算出してもよい。以降、演算処理部11によって算出される方位を、第2方位34と呼ぶ。例えば、演算処理部11は、ある時刻の位置データ32及びその検出時刻31と、それ以前に検出された一つ以上の位置データ32及びその検出時刻31とに基づいて第2方位34を算出する。第2方位34は、例えば北を基準(0度)として全方位360度で算出してもよい。また例えば、演算処理部11は、算出した地図表示装置1の第2方位34を位置DB12に記憶する。図3にあっては、演算処理部11は、検出時刻31が「17:00:00」のときの位置データ32と、検出時刻31が「17:00:02」のときの位置データ32とから第2方位34を算出し、算出された第2方位「180°」を、時刻31が「17:00:02」のときの第2方位34として記憶している。
【0032】
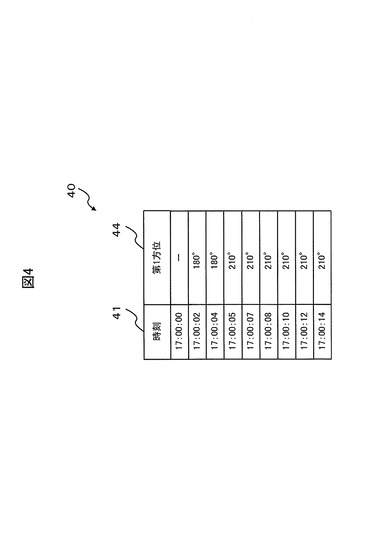
第1方位DB20には、電子コンパス7から通知された第1方位が、第1方位の検出時刻とともに記憶される。図4は、第1方位DB20のデータ構造の一例としての第1方位テーブル40である。第1方位テーブル40は、そのデータ構造として、電子コンパス7が検出した第1方位44と、第1方位が検出された時刻41とを有する。第2方位44は、例えば北を基準(0度)として全方位360度で算出してもよい。
【0033】
表示制御部13は、演算処理部11が算出した第2方位に反映させて、地図データに基づく地図画像をディスプレイ5に表示させるとともに、地図画像上に地図表示装置1の現在位置を表示させる。例えば、表示制御部13は、取得部10から受信した地図データに基づき、ディスプレイ5に地図画像を表示する。さらに例えば、表示制御部13は、位置DB12から現在時刻31における位置データ32を取得し、地図表示装置1の現在位置を、地図画像に順次表示する。これにより、地図表示装置1の移動の軌跡が地図画像上に表示されようにしてもよい。なお、表示制御部13が地図画像を表示するために取得する現在位置の位置データは、演算処理部11から通知された最新の時刻における位置データであってもよい。
表示制御部13は、また、演算処理部11で算出された第2方位34を地図画像に反映させる。第2方位34の地図画像への反映は、例えば、第2方位34に基づくヘディングアップ表示によって行われる。
【0034】
表示制御部13はまた、後述する判定部15の判定結果に基づき、第2方位が反映されてディスプレイ5上に表示されている地図画像を、電子コンパスが検出した第1方位を反映させた表示に切替る。例えば、表示制御部13は、判定部15から、所定の切替表示条件を満たしているという判定結果が通知された場合には、第1方位DB20から現在若しくは最新の第1方位44を取得し、これに基づいたヘディングアップ表示に切替る。
【0035】
条件記憶部14には、表示切替条件が記憶される。表示切替条件は、例えば、判定部15が判定する際の条件である。表示切替条件は、移動速度に基づいた条件や移動方向の変化に基づく条件であってもよい。例えば、表示切替条件は、「移動速度が閾値以下であるか否か」、「現在位置が高速道路上であるか否か」、「所定時間以内に、地図表示装置1の進行する方位が閾値以上変化したか否か」、「現在位置が屈曲ポイント周辺あるであるか否か」等のように設定してもよい。条件記憶部14に記憶される条件は予め登録しておいてもよいし、使用の都度登録してもよい。また、登録してある条件の中から、ユーザが使用の際に適宜選択してもよい。
【0036】
判定部15は、表示切替条件が満たされたか否かの判定を行う。例えば、判定部15は、条件記憶部14内の一または複数の条件が満たされたか否かの判定を行う。このとき、判定部15は、表示切替条件に応じて、必要なデータ等を取得してもよい。例えば、「移動速度が閾値以下であるか否か」という条件を満たしたか否かの判定を行う場合には、判定部15は、位置DB12内の位置データテーブル30を参照し、現在の移動速度33を取得する。そして、判定部15は、現在の移動速度33が、閾値として設定されている時速(または分速や秒速)以下か否かを判定する。判定部15は、判定結果を表示制御部13に通知する。
【0037】
判定部15によって、表示切替条件が満たされたと判定された場合には、表示制御部13は、演算処理部11が算出した第2方位34が反映されてディスプレイ5上に表示されている地図画像を、電子コンパス7が検出した第1方位を反映した表示に切替る。例えば、判定部15から「条件が満たされた」との通知をうけた場合には、表示制御部13は、第2方位34に基づいたヘディングアップ表示されている地図画像を、第1方位に基づくヘディングアップ表示に切替るようにしてもよい。
【0038】
次に、本実施形態に係る地図表示装置1の動作を説明する。
【0039】
本実施形態においては、カーナビゲーションプログラムを実行することにより、ディスプレイ5上に現在位置周辺の地図を表示する地図表示機能、ディスプレイ5に表示された地図上に現在位置を表示する現在位置表示機能、検出された現在位置のずれを補正するリンクマッチング機能、出発地点から目的地までのルートを検索するルート検索機能、検索したルートに添ってナビゲーションを行うナビゲーション機能等の主要機能が地図表示装置1で実現される。これに加えて、カーナビゲーションプログラムを実行することによって、ヘディングアップ機能、位置予測機能、リンクマッチング修正機能等の種々の機能を地図表示装置1で実現するようにしてもよい。
【0040】
以下には、本実施形態に係る地図表示装置1の動作を、ヘディングアップ機能、位置予測機能、リンクマッチング修正機能という種々の機能ごとに説明する。
【0041】
まず、ヘディングアップ機能を備えた地図表示装置1について以下に説明する。以下の説明では、判定部15が判定する表示切替条件毎に、各々の動作を図5〜図8のフローチャートを参照して説明する。
【0042】
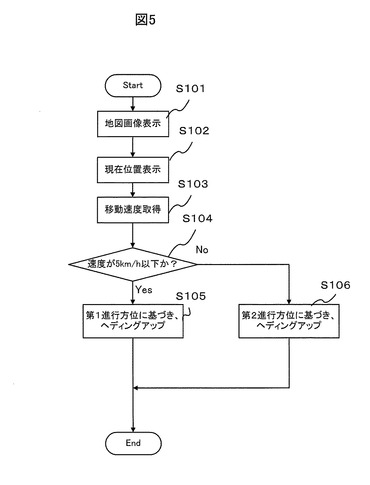
一般に、車両3の移動速度は、交差点の付近等、方向転換をなう前には所定値以下に低下するものと想定される。図5は、この想定のもと、表示切替条件として、「地図表示装置1の速度が閾値以下に低下するか否か」という条件が設定された場合の地図表示装置1の動作を示すフローチャートである。なお、本例では、閾値は時速5km/hとするが、閾値はどのように設定してもよい。
【0043】
図5のフローチャートは、地図表示装置1が起動してから終了するまでの間、所定間隔で行われる。
【0044】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS101)。
【0045】
表示制御部13は、位置DB12を参照し、現在(最新)の位置データ32に基づきディスプレイ5の地図画像上に現在位置を表示する(ステップS102)。
【0046】
判定部15は、位置DB12から現在(最新)の移動速度33を取得する(ステップS103)。
【0047】
判定部15は、条件記憶部14内の切替表示条件を抽出する。ここでは、例えば、「速度が時速5km/h以下である」という条件が抽出される。そして、判定部15は、ステップS103で位置DB12から取得した現在(最新)の移動速度33が、時速5km/h以下であるか否かを判定する(ステップS104)。
【0048】
現在(最新)の移動速度33が時速5km/h以下であった場合、すなわち条件が満たされた場合には(ステップS104:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0049】
通知を受けた表示制御部13は、第1方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS105)。
【0050】
一方、現在(最新)の移動速度33が時速5km/hより速い場合、すなわち条件が満たされなかった場合には(ステップS104:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0051】
通知を受けた表示制御部13は、位置DB12内の現在(最新)の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS106)。
上記動作が行われることにより、地図表示装置1は、その移動速度33が所定値(本例では5km/h)以下の場合のみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。地図表示装置1の移動速度33が所定値以下のときには、上述したように交差点に進入したときである等、地図表示装置1が方向転換する可能性も高い。このため、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0052】
次に、ヘディングアップ機能を備えた地図表示装置1について、「地図表示装置1の現在位置が高速道路上にないか否か」という表示切替条件が設定された場合を説明する。なお、上記の構成要素について、その機能が追加される場合は以下に追記する。
【0053】
判定部15は、地図情報DB9から現在位置周辺の地図データを取得するとともに、取得した地図データに基づいて、地図上の道路が高速道路であるか一般道路等の高速道路以外の道路であるかを識別する。また判定部15は、位置データ32に基づいた現在位置が高速道路上にあるか否かを判定する。
【0054】
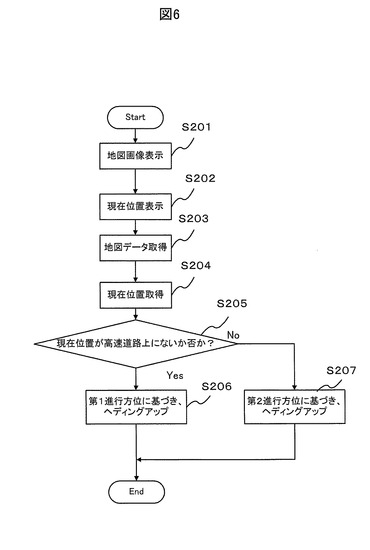
図6は、表示切替条件として、「地図表示装置1の現在位置が高速道路上にないか否か」という条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【0055】
図6のフローチャートは、地図表示装置1が起動してから終了するまでの間、所定間隔で行われる。
【0056】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS201)
【0057】
表示制御部13は、位置DB12を参照し、現在(最新)の位置データ32に基づきディスプレイ5の地図画像上に現在位置を表示する(ステップS202)。
【0058】
判定部15は、例えば、地図情報DB9から現在位置周辺の地図データを取得する(ステップS203)。
【0059】
また、判定部15は、位置DB12から現在(最新)の位置データ32を取得する(ステップS204)
【0060】
さらに、判定部15は、条件記憶部14内の切替表示条件を抽出する。切替表示条件は、前述したように「地図表示装置1の現在位置が高速道路上にないか否か」である。そして、判定部15は、ステップS204で取得した地図データと、ステップS204で取得した現在(最新)の位置データ32とを比較し、現在位置が高速道路上にないか否かを判定する(ステップS205)。
【0061】
現在位置が高速道路上にない場合、すなわち条件が満たされた場合には(ステップS205:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0062】
通知を受けた表示制御部13は、第1方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS206)。
【0063】
一方、現在位置が高速道路上にある場合、すなわち条件が満たされなかった場合には(ステップS205:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0064】
通知を受けた表示制御部13は、位置DB12内の現在の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS207)。
上記動作が行われることにより、地図表示装置1は、その現在位置が高速道路以外の場合(一般道路上にある場合等)のみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。地図表示装置1は、高速道路を走行しているときよりも、それ以外の一般道路等を走行しているときのほうが方向転換する可能性が高い。このため、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0065】
次に、ヘディングアップ機能を備えた地図表示装置1について、「所定時間以内に、地図表示装置1の移動角度が閾値以上変化したか否か」という表示切替条件が設定された場合を説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0066】
移動角度算出部21は、第1方位DB20を参照し、複数の第1方位44に基づいて地図表示装置1の移動角度を算出する。移動角度算出部21は、例えば、第1DB20内の直近の2つの第1方位44に基づき、地図表示装置1の角度の差を算出してもよいし、直近から遡った複数個の第1方位と、それ以前の複数個の第1方位とを対比し、地図表示装置1の移動角度を検出してもよい。移動角度算出部21は、例えば、算出した地図表示装置1の移動角度を判定部15に通知する。
【0067】
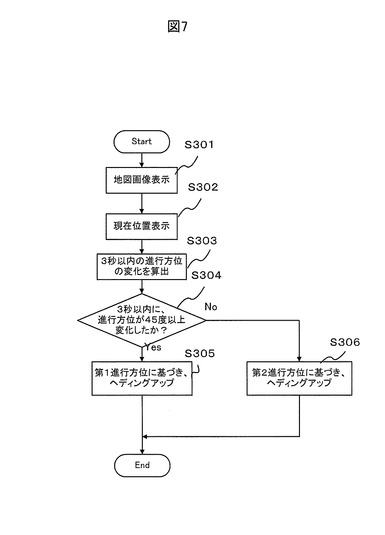
図7は、表示切替条件として、「所定時間以内に、地図表示装置1の移動角度が閾値以上変化したか否か」という条件が設定された場合の地図表示装置1の動作を示す例である。なお、本例では、所定時間を3秒、閾値を45度とするが、時間及び閾値はどのように設定してもよい。
【0068】
図7のフローチャートは、地図表示装置1が起動してから終了するまでの間、所定間隔で行われる。
【0069】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS301)。
【0070】
表示制御部13は、位置DB12を参照し、現在(最新)の位置データ32に基づきディスプレイ5の地図画像に現在位置を表示する(ステップS302)。
【0071】
移動角度算出部21は、例えば、第1方位DB20を参照し、現在(最新)時刻41の第1方位44を取得するとともに、現在時刻41との差が3秒以内の、1又は複数の時刻の第1方位44を取得する。そして、移動角度算出部21は、現在時刻41の第1方位44を基準として、他の第1方位44がどれだけ変化したかを移動角度として算出する(ステップS303)。移動角度算出部21は、算出した移動角度を判定部15に通知する。
【0072】
判定部15は、条件記憶部14内の切替表示条件を抽出する。切替表示条件は、前述したように「3秒以内に、地図表示装置1の移動角度が45度以上変化したか否か」である。そして、判定部15は、移動角度算出部21から通知された角度が45度以上か否かを判定する(ステップS304)。
【0073】
移動角度が45度以上変化した場合、すなわち条件が満たされた場合には(ステップS304:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0074】
通知を受けた表示制御部13は、第1方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS305)。
【0075】
一方、移動角度が45度以上変化していない場合、すなわち条件が満たされなかった場合には(ステップS304:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0076】
通知を受けた表示制御部13は、位置DB12内の現在(最新)の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS306)。
上記動作が行われることにより、地図表示装置1は、所定時間以内の移動角度が閾値以上変化した場合のみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。地図表示装置1の所定時間以内の移動角度が閾値以上変化したときというのは、交差点に進入した場合等、地図表示装置1が方向転換する可能性も高い。これにより、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0077】
次に、ヘディングアップ機能を備えた地図表示装置1について、「現在位置が抽出部17によって抽出された屈曲ポイント周辺であるか否か」という表示切替条件が設定された場合を説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0078】
ルート検索部16は、地図表示装置1の出発地から目的地までのルートを検索する。出発地は、例えば現在位置であってもよいし、また例えばユーザ設定したスタート地点であってもよい。ルート検索部16は、検索したルートを表示制御部13及び抽出部17へ通知する。
【0079】
表示制御部13は、ルート検索部16からルートが通知されたときには、通知のあったルートを、ディスプレイ5上の地図画像に反映する。
【0080】
抽出部17は、ルート検索部16が通知したルートを受信する。抽出部17は、受信したルート内において、所定角度以上ルートが曲がる屈曲ポイントの位置データを抽出する。抽出部17は、例えば、ルート検索部16によって検索されたスタート地点(または現在地)から目的地までのルート内において屈曲ポイントがあった場合に、それら屈曲ポイントを抽出する。屈曲ポイントは、交差点、湾曲した道等、ルートが所定角度以上屈曲するポイントである。例えば、屈曲ポイントは、直進を0度としたとき、地図データ中でノードを介して連続するリンク同士の角度が、所定以上である場合のノードのことであってもよい。屈曲ポイントの角度は、予め設定しておいてもよい。抽出された屈曲ポイントの位置データは、判定部15へ通知される。
【0081】
判定部15は、表示切替条件を満たすか否かを判定する。表示切替条件は「現在位置が抽出部17によって抽出された屈曲ポイント周辺であるか否か」である。表示切替条件を満たした場合には、判定部15は、その旨を表示制御部13に通知する。通知を受けた表示制御部13は、第2進行方位が反映されてディスプレイ5上に表示されている地図画像を、電子コンパスが検出した方位を反映させた表示に切替る。
【0082】
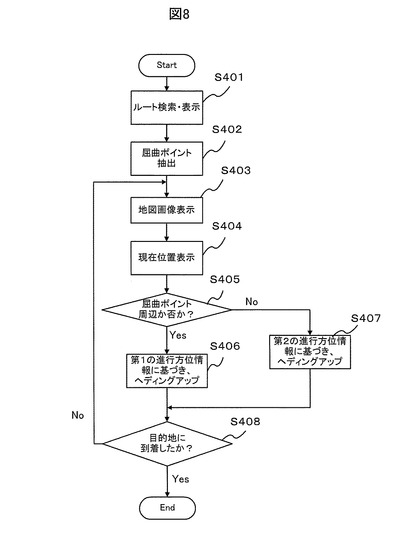
図8は、表示切替条件として、「現在位置が抽出部17によって抽出された屈曲ポイント周辺であるか否か」という条件が設定された場合の地図表示装置1の動作を示す例である。
【0083】
ルート検索部16は、例えば、ユーザが入力部に入力した目的地と、現在位置の位置データ32とに基づき、現在位置から目的地までのルートを検索する。ルート検索部16は、検索したルートを、表示制御部13及び抽出部17へ通知する。表示制御部13は、ルート検索部16から通知を受けたルートを、地図画像とともに表示する(ステップS401)。
【0084】
抽出部17は、ルート検索部16からルートを受信する。抽出部17は、受信したルート内の屈曲ポイントの位置データを抽出し、判定部15へ通知する(ステップS402)。
【0085】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき、現在位置周辺の地図画像をディスプレイに表示する(ステップS403)。
【0086】
表示制御部13は、位置DB12から現在位置の位置データ32を取得し、ディスプレイ5の地図画像に表示する(ステップS404)。
【0087】
判定部15は、ステップS404で取得した位置データ32に基づく現在位置が、ステップS402で判定部15に通知された位置データに基づく屈曲ポイント周辺か否かを判定する(ステップS405)。
【0088】
現在位置が屈曲ポイント周辺である場合、すなわち条件が満たされた場合には(ステップS405:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0089】
通知を受けた表示制御部13は、第1進行方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS406)。
【0090】
一方、現在位置が屈曲ポイント周辺でない場合、すなわち条件が満たされなかった場合には(ステップS405:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0091】
通知を受けた表示制御部13は、位置DB12内の現在の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS407)。
【0092】
ステップS406又はステップS407においてヘディングアップを行った後、判定部15は、目的地に到着したか否かの判定を行う(ステップS408)。目的地に到着した場合には(ステップS408:Yes)終了する。一方、未だ目的地に到着していない場合には、ステップS403に戻る。
上記動作が行われることにより、地図表示装置1は、現在位置が予め検索されたルート内の屈曲ポイント周辺にあるときのみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。屈曲ポイントでは、地図表示装置1が方向転換する可能性が極めて高い。これにより、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0093】
上述したヘディングアップ機能を有する地図表示装置1にあっては、通常は、演算処理部11が算出した第2方位を反映させてディスプレイ5に表示される地図画像に、所定の表示切替条件が満たされた場合のみ、電子コンパス7が検出した第1方位を反映する。これにより、所定の表示切替条件が満たされたときは、方位の反映を迅速に行えるとともに、電子コンパスの外部干渉による影響を低減することができる。
【0094】
次に、位置予測機能を備えた地図表示装置1について以下に説明する。
【0095】
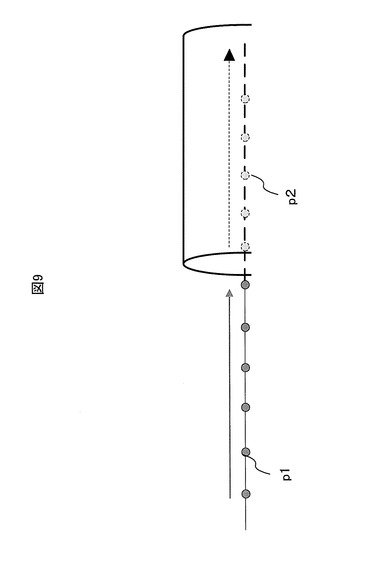
位置予測機能は、地図表示装置1の現在位置が一定時間検出できない場合に実現される機能である。この機能は、例えば図9に示すように、地図表示装置1がトンネル内を移動通過中であって、トンネルにより、GPS衛星2からGPS信号を受信できない場合に実現される。図示例では、実線で示された位置データp1は検出されているが、トンネル内の破線で示された位置データp2は検出されていない。このような場合、図示例のように進行方向が一定であれば、地図表示装置1は位置データp2で示すような軌跡をたどるはずである。従って、現在位置が一定時間検出されない場合、検出されていた時の位置データ32及び移動速度33から予測される予測位置データを算出し、第1方位44に基づく移動角度が所定値以内であるならば、予測位置データを地図画像に表示する。
【0096】
位置表示機能を備えた地図表示装置1について、「第1の時刻より後、継続して現在位置を検出できない場合に、第1の時刻以前に電子コンパスが検出した第1方位と、第1の時刻より後に電子コンパスが検出した第1方位との変化量が所定量以下であるか否か」という表示切替条件が設定された場合を説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0097】
監視部22は、位置DB12内の位置データテーブル30を監視する。監視部22は、位置データテーブル30が所定時間更新されないときは、その旨を更新された最後の時刻31とともに判定部15に通知する。
【0098】
判定部15は、条件記憶部14内の切替表示条件を抽出する。ここでは、「第1の時刻より後、継続して現在位置を検出できない場合に、第1の時刻以前に電子コンパスが検出した第1方位と、第1の時刻より後に電子コンパスが検出した第1方位との変化量が所定量以下であるか否か」という切替表示条件が抽出される。
【0099】
判定部15は、監視部22から位置データテーブル30が所定時間更新されない旨の通知及び最後に更新された時刻31を受け取ると、必要なデータを取得し、上記判定を行う。例えば、判定部15は、監視部22からの通知を受け取った後、第1方位DB20を参照して、現在(最新)の第1方位と、位置データテーブル30が最後に更新された時刻31より以前であって、かつ、当該時刻31に最も近い時刻における第1方位(以下、最終時刻第1方位という)とを取得し、この2点間の第1方位の変化量を算出する。なお、変化量は、現在の第1方位と、最終時刻第1方位との2点間から算出しなくてもよく、これらの間の複数点間の第1方位から算出してもよい。
【0100】
判定部15は、算出された変化量が所定量以下であるか否かの判定を行う。
【0101】
位置予測部18は、演算処理部11が、第1の時刻より後、継続して現在位置を検出できないとき、第1の時刻以前の位置データ32及び移動速度33に基づいて、地図表示装置1の現在位置を予測する。位置予測部18は、判定部15からの通知を受信する。監視部22からの通知を受信した位置予測部18は、位置DB12内の位置データテーブル30の各データに基づき、現在位置として予測される予測位置を算出する。位置予測部18は、例えば、位置データテーブル30の、直近の時刻31(最後の更新時刻及びそれ近辺の時刻)の一又は複数の位置データ32と移動速度33とから、地図表示装置1の予測位置を算出する。位置予測部18は、算出した予測位置を取得部10及び表示制御部13に通知する。
【0102】
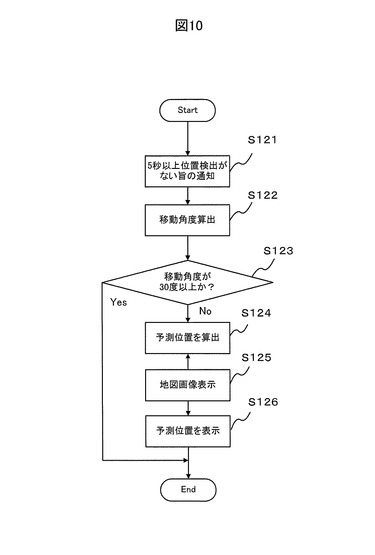
図10は、「第1の時刻より後、継続して現在位置を検出できない場合に、第1の時刻以前に電子コンパスが検出した第1方位と、第1の時刻より後に電子コンパスが検出した第1方位との変化量が所定量以下であるか否か」という表示切替条件が設定された場合の地図表示装置1の動作を示す例である。なお、本例では、継続して現在位置を検出できない時間を5秒、変化量が30度として詳細に説明すが、それらの値はどのように設定してもよい。
【0103】
監視部22は、位置DB12内を監視し、位置データテーブル30が5秒以上更新されていないときは、その旨を位置データテーブル30の最終の更新時刻31とともに判定部15に通知する。判定部15は、監視部22からの通知を受け取る(ステップS121)。
【0104】
監視部22からの通知を受け取った判定部15は、例えば第1方位DB20内を参照して、現在(最新)の第1方位44と、最終時刻第1方位44とを取得する。この際、判定部15は、これら2点の第1方位44とともに、この間の時刻における一部又は全部の第1方位44を取得してもよい。そして、判定部15は、これら第1方位44を移動角度算出部21に送信する。
【0105】
移動角度算出部21は、受信した複数の第1方位44から地図表示装置1の移動角度を算出し、判定部15へ返す(ステップS122)。
【0106】
判定部15は、移動角度算出部21から通知された移動角度が30度以上か否かの判定を行う(ステップS123)。
【0107】
移動角度が30度より大きい場合は(ステップS123:No)、処理を終了する。一方、移動角度が30度以下の場合には(ステップS123:Yes)、判定部15は、判定結果を位置予測部18に通知する。
【0108】
通知を受けた位置予測部18は、位置DB12内を参照し、位置データテーブル30の各データ31、32、33に基づき、現在位置として予測される予測位置データを算出する(ステップS124)。位置予測部18は、算出した予測位置データを取得部10及び表示制御部13に通知する。
【0109】
取得部10は、受信した予測位置データに基づく予測位置周辺の地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS125)。
【0110】
表示制御部13は、地図画像上に予測位置データに基づく予測位置を表示する(ステップS126)。
【0111】
位置予測機能を備えた地図表示装置1にあっては、例えばGPS信号を受信できず、継続して現在位置を検出できない場合であっても、既に検出された位置データ及び移動速度とともに、電子コンパスによって検出される方位を使用することで、現在位置を予測して表示することができる。
【0112】
次に、リンクマッチング修正機能を備えた地図表示装置1について以下に説明する。図11は、リンクマッチング及びリンクマッチング修正機能を説明するための説明図である。
【0113】
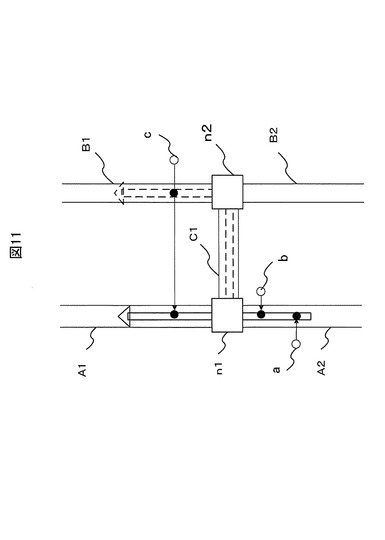
ここでまず、リンクマッチングについて説明する。リンクマッチングは、道路を、ノードと、ノードを介して接続されたリンクとで表す地図データにおいて、位置データ32に基づく現在位置が道路からはずれた場合に、その誤差を補正する機能である。図示例にあっては、ノードn1には、これを介してリンクA1、A2及びC1が接続されている。また、ノードn2には、これを介してリンクC1、B1及びB2が接続されている。「○」のポイントは、前述の演算処理部11が検出した実測位置である。これを進行方向なども勘案して、道路上の最適なポイントへ補正する。補正後の補正位置は図11に「●」で示される。検出された実測位置a及びbは、最も近いリンクA2上に補正される。
【0114】
次に、リンクマッチング修正機能について説明する。リンクマッチング修正機能は、リンクマッチングされた補正位置が正しいか否かを判定し、正しくない場合には修正を行う機能である。図示例において、演算処理部11が検出した実測位置cは、リンクB1が最も近い。このため、実測位置cはリンクB1にリンクマッチングされるはずである。しかしながら、リンクA2及びリンクB1間には、n1及びn2の2つのノードがあり、リンクA2とB1とは連続していない。従って、地図表示装置1は、リンクA2から、ノードn1、リンクC1及びノードn2を介してリンクB1上に移動したのではなく、ノードn1のみを介してリンクA1を移動した可能性も考えられる。このような場合、検出された位置cについて、その補正位置をリンクB1上に表示する前に、補正位置が正しいか否かを電子コンパスによって検出された第1方位に基づいて判断し、最適な補正位置を推定する。
【0115】
リンクマッチング修正機能を備えた地図表示装置1について、「マッチング処理部19が第1の時刻の現在位置をマッチングさせた第1のリンクと、マッチング処理部19が、第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないか否か」という表示切替条件が設定された場合を以下に説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0116】
マッチング処理部19は、リンクマッチングを行う。マッチング処理部19は、例えば、位置DB12を参照し、現在位置の位置データ32を、最も近いリンク上に補正する。マッチング処理部19はまた、位置DB12から取得した現在位置(以下、実測位置という)の位置データ32と、実測位置の位置データ32が検出された時刻31とを、補正した現在位置(以下、補正位置という)の位置データと、補正位置が存在するリンクとに対応づけて、マッチング記憶部23に記憶する。
【0117】
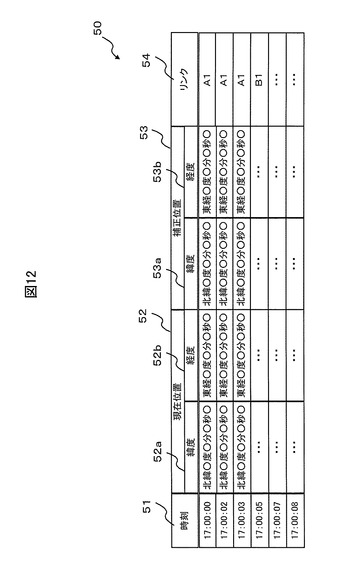
図12は、マッチング記憶部23内の構造の一例であるマッチングデータテーブル50を示す図である。マッチングデータテーブル50は、そのデータ構造として、時刻51と、現在位置の位置データ52である緯度データ52a及び経度データ52bと、補正位置の位置データ53である緯度データ53a及び経度データ53bと、補正位置が存在するリンク54とを有する。
【0118】
判定部15は、条件記憶部14内の切替表示条件を抽出する。ここでは、例えば「マッチング処理部19が第1の時刻の現在位置をマッチングさせた第1のリンクと、マッチング処理部19が第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないか否か」という切替表示条件が抽出される。この切替表示条件は、換言すれば、「第1の時刻の補正位置が存在する第1のリンクと、第1の時刻より後の第2の時刻の補正位置が存在する第2のリンクとが連続していないか否か」である。判定部15は、マッチング記憶部23を参照し、第2の時刻である現在(最新)時刻51の補正位置の位置データ53が存在する第2のリンク54と、第1の時刻である現在(最新)時刻の1つ前の時刻51の補正位置の位置データ53が存在する第1のリンク54と、が連続するか否かを判定する。
【0119】
さらに判定部15は、第1のリンク54と、第2のリンク54とが連続していないとき、第1の時刻51と第2の時刻51との間に電子コンパス7が検出した方位に基づいて、第2のリンク54に対するマッチングの正否(すなわち、補正位置が正しいか否か)を判定する。例えば、判定部15は、第1のリンク54と第2のリンク54とが連続していないと判定した場合に、第1方位DB20を参照し、現在(最新)の時刻31とその1つ前の時刻31の間の第1方位44の変化を算出し、現在位置が第2のリンク54に存在するか否かを判定する。これは例えば、判定部15が算出した現在(最新)の時刻31とその1つ前の時刻31の間の第1方位44の変化が所定の角度以上か否かで判定される。判定部15は、位置DB20を参照し、この間における第1方位44の変化が所定角度以上であるか否かを判定する。そして、判定部15は、第1方位44の変化が所定角度以上であると判断した場合に、現在位置が第2のリンク54上に存在すると判定し、第1方位44の変化が所定角度より小さかった場合に、現在位置が第2のリンク上に存在しないと判定する。判定部15は、現在位置が第2のリンク54に存在するか否かの判定結果を、を表示制御部13に通知する。
【0120】
表示制御部13は、判定部15から判定結果の通知を受信する。判定結果が「現在位置が第2のリンク54に存在する」であった場合には、表示制御部13は、マッチング記憶部23を参照し、補正位置の位置データ53を抽出する。そして、表示制御部13は、取得部10から受信した地図データに基づいて、地図画像をディスプレイ5に表示するとともに、マッチング記憶部23から補正位置の位置データ53を取得し、地図画像に表示する。
【0121】
判定結果が「現在位置が第2のリンク54に存在しない」であった場合には、表示制御部13は、その結果をマッチング処理部19に通知して、再度のリンクマッチングを依頼する。そして、表示制御部13は、取得部10から受信した地図データに基づいて、地図画像をディスプレイ5に表示するとともに、マッチング記憶部23から、再度の補正をした補正位置の位置データ53を取得し、地図画像に表示する。
【0122】
表示制御部13から「現在位置が第2のリンク54に存在しない」との判定結果を受け取ったマッチング処理部19は、実測位置のリンクマッチングを再度行う。この場合のリンクマッチングは、第1方位DB20の第1方位44も参照して行う。マッチング処理部19は再度のリンクマッチングによる補正位置の位置データ53及びリンク54をマッチング記憶部23に記憶する。
【0123】
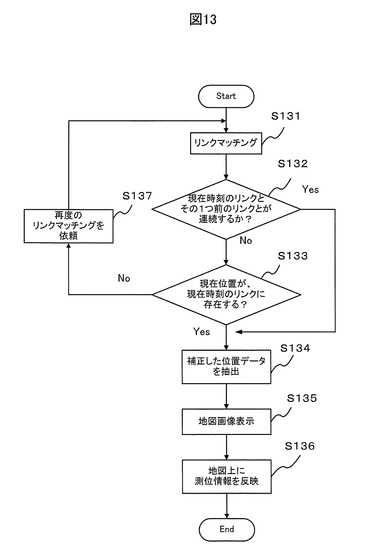
図13は、表示切替条件として「第1の時刻の補正位置が存在する第1のリンクと、第1の時刻より後の第2の時刻の補正位置が存在する第2のリンクとが連続していないか否か」という条件が設定された場合の地図表示装置1の動作を表すフローチャートである。
【0124】
マッチング処理部19は、現在時刻51の実測位置のリンクマッチングを行う(ステップS131)。そして、その結果となる補正位置の位置データ53及びリンク54をマッチング記憶部23に記憶する。
【0125】
判定部15は、マッチング記憶部23を参照し、現在時刻51のリンク54と、現在時刻より1つ前の時刻51のリンク54とが連続するか否かを判定する(ステップS132)。
【0126】
現在時刻51のリンク54と、現在時刻より1つ前の時刻51のリンク54とが連続すると判定された場合には(ステップS132:Yes)、判定部15は、その判定結果を表示制御部13に通知する。
【0127】
判定部15から通知を受けた表示制御部13は、マッチング記憶部23を参照し、現在時刻51の補正位置の位置データ53を抽出する(ステップS134)。そして、表示制御部13は、取得部10から受信した地図データに基づいて、地図画像をディスプレイ5に表示するとともに(ステップS135)、マッチング記憶部23から補正位置の位置データ53を取得し、地図画像に表示する(ステップS136)。
【0128】
現在時刻51のリンク54と、現在時刻より1つ前の時刻51のリンク54とが連続しないと判定された場合には(ステップS132:No)、判定部15は、続いて「現在位置が、現在時刻51のリンク54上に存在する」か否かの判定を行う(ステップS133)。前述したように、判定は、ステップS132において判定部15が連続していないと判定した現在時刻51と現在時刻より1つ前の時刻51との間に、第1方位44が所定角度以上変化したか否かに基づいて行われる。第1方位44の変化が所定角度以上であると判断した場合には、現在位置が第2のリンク54上に存在すると判定され、第1方位44の変化が所定角度より小さかった場合には、現在位置が第2のリンク上に存在しないと判定される。
【0129】
ステップS133の判定結果が「現在位置が、現在時刻51のリンク54上に存在する」であった場合には(ステップS133:Yes)、ステップS134に進む。
【0130】
ステップS133の判定結果が「現在位置が、現在時刻51のリンク54上に存在しない」であった場合には(ステップS133:No)、表示制御部13は、その結果をマッチング処理部19に通知して、再度のリンクマッチングを依頼する(ステップS137)。
【0131】
ステップS137で依頼を受けたマッチング処理部19は、ステップS131へ戻り、現在時刻51の実測位置に対するリンクマッチングを再度行う(ステップS131)。マッチング処理部19は再度のリンクマッチングによる結果をマッチング記憶部23に記憶する。
【0132】
本実施形態にあっては、リンクマッチングの結果が大きくずれた場合に、電子コンパスで検出された方位を参照して、リンクマッチングを再度行う。これにより、リンクマッチングの精度が向上する。
【0133】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。当業者は、本発明の要旨を逸脱することなしに、他の様々な態様で本発明を実施することができる。
【符号の説明】
【0134】
1 地図表示装置
2 GPS衛星
3 車両
4 地図データ処理部
5 ディスプレイ
6 受信機
7 電子コンパス
8 入力部
9 地図データベース
10 取得部
11 演算処理部
12 位置データベース
13 表示制御部
14 電子コンパス
15 判定部
16 ルート検索部
17 抽出部
18 位置予測部
19 マッチング処理部
【技術分野】
【0001】
本発明は、情報処理装置、特に汎用性のある可搬型情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置に関する。
【背景技術】
【0002】
従来、地図表示装置として、例えば、カーナビゲーション装置やPND(Personal/Portable Navigation Device)等が知られている。
【0003】
カーナビゲーション装置やPNDのような専用の地図表示装置では、GPS(Global
Positioning System)等によって位置を検出するだけでなく、加速度センサによる加速度、ジャイロコンパスによる車両の回転角度等を検出している。これにより、車両の現在位置を道路上に一致させるリンクマッチング、車両の進行方向が上になるように地図を表示させるヘディングアップ表示等、できる限り正確な車両位置を地図上に表示するとともに、車両が進行する方位を迅速に地図上に反映させていた。
【発明の概要】
【発明が解決しようとする課題】
【0004】
他方、近年では、携帯電話機に代表される汎用型の情報処理装置であっても、地図データを処理するためのコンピュータプログラムを実現できる機種がある。これらの機種は、GPS機能に代表されるような位置検出機能を有する。しかし、これらの情報処理装置は、上述したような専用の地図表示装置ではないため、加速度センサ及びジャイロコンパス等の自律センサを全く搭載していない簡易なものも多い。このような汎用型の情報処理装置では、情報処理装置が進行する方位の検出をも位置情報に基づいて行わなければならなかった。従ってこの場合、検出した複数の位置と、各位置を検出した時刻とから進行する方位を算出していた。このため、正しい方位を地図上に反映するのに非常に時間がかかるという問題が生じた。
【0005】
上記の問題について、正しい方位を迅速に検出するために、汎用型の情報処理装置で実現される地図データを処理するためのコンピュータプログラムにおいて、電子コンパスが検出する方位を適用させようと、発明者は試みた。携帯電話機等の汎用型の情報処理装置には、すでに電子コンパスが搭載されている機種もある。このため、地図表示プログラムに電子コンパスで検出される方位を適用するのは非常に簡易だからである。電子コンパスとは、半導体を用いた地磁気センサ(方位センサ)を内蔵した装置であって、地球が生じている南北の地磁気信号を検出して、地磁気信号から電子コンパスの向き(方位)を算出する機能を有するものである。電子コンパスには、X,Yの2軸から方位を検出するものと、X、Y、Zの3軸から方位を検出するものとがある。
【0006】
しかし、電子コンパスは、外部干渉を受けやすく非常に不安定である。特に、鉄橋や大型のトラックなどの障害物の傍では、電子コンパスによって検出される方位の精度は非常に悪い。従って、GPS受信信号による位置と電子コンパスによる方位とを単に併用したのでは、情報処理装置が障害物の傍を通る度に、ディスプレイ上の地図の方位が激しく変化する等の不具合が起こるという課題が生じた。
【0007】
本発明は、情報処理装置の進行する方位を迅速に検出できるとともに、電子コンパスの外部干渉による影響を低減できるコンピュータプログラム、方法及び地図表示装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一つの実施態様に従うコンピュータプログラムは、第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、前記情報処理装置に実行されると、複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させる表示制御ステップと、所定の表示切替条件が満たされたか否かの判定を行うステップと、が実現され、前記判定ステップによって前記表示切替条件が満たされたと判定された場合には、前記表示制御ステップは、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする。
【0009】
好適な実施態様では、前記位置データ記憶手段に記憶されている位置データに基づいて、前記情報処理装置の移動速度を算出するステップがさらに実現され、前記表示切替条件は、前記情報処理装置の移動速度が閾値以下であるか否かであって、前記判定ステップによって、前記移動速度が閾値以下であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0010】
好適な実施態様では、前記表示切替条件は、前記情報処理装置の現在位置が高速道路上にないか否かであって、前記判定ステップによって、前記現在位置が高速道路上にないと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0011】
好適な実施態様では、前記条件は、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したか否かであって、前記判定ステップによって、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0012】
好適な実施態様では、前記情報処理装置の出発地から目的地までのルートを検索するステップと、前記ルート検索ステップによって検索されたルート内において、所定角度以上ルートが曲がる屈曲ポイントを抽出するステップと、がさらに実現され、前記表示切替条件は、移動する情報処理装置の現在位置が屈曲ポイント周辺であるか否かであって、前記判定ステップによって、前記情報処理装置の現在位置が前記抽出ステップによって抽出された屈曲ポイント周辺であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替てもよい。
【0013】
本発明の別の実施態様に従うコンピュータプログラムは、第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶された地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、前記情報処理装置に実行されると、複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、前記位置検出ステップが、第1の時刻より後、所定時間以上継続して現在位置を検出できないとき、第1の時刻よりも前の位置データ及び移動速度に基づいて前記情報処理装置の現在位置を予測するステップと、第1の時刻以前に電子コンパスが検出した第1の方位と第1の時刻より後に電子コンパスが検出した第1の方位との変化量が所定量以下であるか否かを判定するステップと、が実現され、前記判定ステップによって、前記第1の時刻以前に前記電子コンパスが検出した第1の方位と前記第1の時刻以降に前記電子コンパスが検出した第1の方位との変化量が所定量以下であると判定された場合には、前記表示制御ステップは、前記予測ステップにより予測された前記情報処理装置の現在位置を前記ディスプレイの地図画像上に表示させることを特徴とする。
【0014】
本発明のさらに別の実施態様に従うコンピュータプログラムは、第1の方位を検出する電子コンパスと、ディスプレイと、当該ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、前記情報処理装置に実行されると、複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、リンクマッチングを行うステップと、前記リンクマッチングステップが第1の時刻の現在位置をマッチングさせた第1のリンクと、前記リンクマッチングステップが、第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないとき、第1の時刻と第2の時刻との間に前記電子コンパスが検出した方位に基づいて、第2のリンクに対するマッチングの正否を判定するステップと、前記正否判定ステップの判定結果に基づいて、前記リンクマッチングステップによるリンクマッチングの結果を修正するステップと、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記リンクマッチングステップ及びリンクマッチング修正ステップによる処理結果に基づいて、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、が実現されることを特徴とする。
【0015】
本発明の一の実施態様に従う地図表示装置は、ディスプレイと、第1の方位を検出する電子コンパスと、前記ディスプレイに地図画像を表示するための地図データが記憶される手段と、複数の異なる時刻において、各時刻における前記地図表示装置の現在位置を検出する位置検出手段と、前記検出手段によって検出された各時刻における前記地図表示装置の現在位置を示す位置データを記憶する記憶手段と、前記記憶手段に記憶されている位置データに基づいて、前記地図表示装置が進行している第2の方位を算出する第2方位算出手段と、前記第2方位算出手段が算出した第2方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記地図表示装置の現在位置を表示させる表示制御手段と、所定の表示切替条件が満たされたか否かの判定を行う判定手段と、を備え、前記判定手段によって前記表示切替条件が満たされたと判定された場合には、前記表示制御手段は、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本発明の好適な実施形態に係るコンピュータプログラムがインストールされた地図表示装置の概念図である。
【図2】図1の地図表示装置の構成図である。
【図3】図2の位置DB内のデータ構造の一例を示す図である。
【図4】図2の第1方位DB内のデータ構造の一例を示す図である。
【図5】第一の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図6】第二の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図7】第三の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図8】第四の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図9】位置予測機能を説明する説明図である。
【図10】第五の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【図11】リンクマッチング及びリンクマッチング修正機能を説明する説明図である。
【図12】図2のマッチング記憶部内のデータ構造の一例を示す図である。
【図13】第六の表示切替条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の好適な実施形態に係る携帯電話機に実現される地図表示装置について説明する。本実施形態に係る地図表示装置1は、携帯電話機に、所定のコンピュータプログラムをインストールすることにより実現される。地図表示装置1を実現するには、携帯電話機に限らず他の汎用性のある情報処理装置を用いてもよい。本実施形態にあっては、携帯電話機には、カーナビゲーションプログラムがインストールされる。しかしながら、インストールされるプログラムは、例えば歩行者用のナビゲーションプログラム等でもよいし、ナビゲーションプログラムではなく、単に現在位置を検出し地図上に表示するプログラムであってもよい。
【0018】
図1は、本実施形態に係る地図表示装置1の概念図である。例えば、地図表示装置1は、GPS衛星2からのGPS信号を受信する受信機6を備えてもよい。地図表示装置1は、例えば、車両3のインストルメントパネル上に専用のフォルダを設けることで車両3に着脱自在に固定されてもよい。また例えば、地図表示装置1は、ユーザ(例えば助手席の人)が手で持っていてもよい。
【0019】
図2は、地図表示装置1の構成図である。
【0020】
地図表示装置1は、地図データ処理部4、ディスプレイ5、受信機6、電子コンパス7、入力部8及び地図情報データベース(以下、地図情報DBという)9を備える。地図データ処理部4は、携帯電話機の図示しないプロセッサ及びメモリを用いて所定のプログラムを実行することにより実現される。
【0021】
受信機6は、複数のGPS衛星2からGPS信号を受信する。受信機6は、受信したGPS信号を地図データ処理部4の演算処理部11へ通知する。
【0022】
電子コンパス7は方位を検出する。例えば図1において、電子コンパス7は、地図表示装置1の上側がどちらの方位を向いているかを検出するようにしてもよい。以下、電子コンパス7が検出する方位を第1方位という。例えば、電子コンパス7は、検出した第1方位を後述する地図データ処理部4の判定部15に通知する。電子コンパスはまた、検出した第1方位を検出時刻とともに、後述する地図データ処理部4の第1方位データベース(以下、第1方位DBという)20に記憶する。
【0023】
ディスプレイ5は、地図表示装置1が備える周知のディスプレイ5であって、ディスプレイ5上のアイコン等を指等で操作できるタッチパネルのような形態も含む。ディスプレイ5には、後述する表示制御部13によって、地図画像及び地図表示装置1の現在位置等が表示される。
【0024】
入力部8には、ユーザによって、目的地やスタート地点が入力される。入力部8への入力は、地図表示装置1のボタンによる操作や、タッチパネル形態のディスプレイ5からの操作によって行われる。入力部8から入力された情報は、後述する地図データ処理部4のルート検索部16へ送信される。
【0025】
地図情報DB9には、ディスプレイ5上に地図画像を表示するための地図データが記憶される。地図情報DB9には、例えば、ネットワークを通じて取得された地図データが一時的に記憶されてもよいし、また例えば、日本道路地図のように所定地域の地図データが常に格納されていてもよい。
【0026】
地図データ処理部4は、取得部10、演算処理部11、位置データベース(以下、位置DBという)12、表示制御部13、条件記憶部14及び判定部15を備える。地図データ処理部4はまた、ルート検索部16、抽出部17、位置予測部18、マッチング処理部19、第1方位DB20、移動角度算出部21、監視部22及びマッチング記憶部23を備えてもよい。地図データ処理部4内の各構成要素を以下に説明する。
【0027】
取得部10は、ディスプレイ5に地図画像を表示するために、現在位置周辺の地図データを地図情報DB9から取得し、表示制御部13に送信する。取得部10は、現在位置周辺の地図データを地図情報DB9から取得するため、現在時刻31の位置データ32(図3参照)を位置DB12から取得してもよい。この場合、例えば、取得部10は現在位置を中心とした周辺地図データを取得してもよい。また、現在位置周辺の地図画像がディスプレイ5に表示されている場合等は、取得部10は、表示されている画像の地図データと、現在位置を中心とした周辺地図データとの差分のみを取得してもよい。
【0028】
図3は、位置DB12内のデータ構造の一例である位置データテーブル30を示した図である。位置データテーブル30は、そのデータ構造として、時刻31と、その時刻の地図表示装置1の位置データ32としての緯度データ32a及び経度データ32bと、地図表示装置1の移動速度33と、地図表示装置1の第2方位34とを有する。詳細は後述する。
【0029】
演算処理部11は、複数の異なる時刻において、各時刻における地図表示装置1の現在位置を検出する。例えば、演算処理部11は、受信機6から通知されたGPS信号から、地図表示装置1の現在位置を検出してもよい。現在位置は、例えば、GPS信号から算出した地図表示装置1の現時点の緯度データ32a・経度データ32bを含む位置データ32である。
演算処理部11はまた、各時刻における地図表示装置1の現在位置を示す位置データ32を位置DB12に記憶する。例えば、演算処理部11は、検出した位置データ32を、その位置データ32を検出した時刻31とともに位置DB12に記憶してもよい。
【0030】
演算処理部11は、位置DB12に記憶されている位置データ32に基づいて、地図表示装置1の移動速度33を算出する。演算処理部11は、位置DB12を参照し、複数の位置データ32と、それら位置データ32の各検出時刻31とから、地図表示装置1の移動速度33を算出してもよい。例えば、演算処理部11は、ある時刻の位置データ32及びその検出時刻31と、それ以前に検出された一つ以上の位置データ32及びその検出時刻31と、に基づいて移動速度33を算出する。また例えば、演算処理部11は、算出した移動速度33を位置DB12に記憶する。図3にあっては、演算処理部11は、検出時刻31が「17:00:00」のときの位置データ32と、検出時刻31が「17:00:02」のときの位置データ32とからこの間の移動速度33を算出し、算出された移動速度33「30km/h」を、時刻31が「17:00:02」のときの移動速度33として記憶している。
【0031】
演算処理部11は、位置DB12に記憶されている位置データ32に基づいて、地図表示装置1が進行している方位を算出する。演算処理部11は、位置DB12を参照し、複数の位置データ32と、それら位置データ32の各検出時刻31とから、地図表示装置1の進行した方位を算出してもよい。以降、演算処理部11によって算出される方位を、第2方位34と呼ぶ。例えば、演算処理部11は、ある時刻の位置データ32及びその検出時刻31と、それ以前に検出された一つ以上の位置データ32及びその検出時刻31とに基づいて第2方位34を算出する。第2方位34は、例えば北を基準(0度)として全方位360度で算出してもよい。また例えば、演算処理部11は、算出した地図表示装置1の第2方位34を位置DB12に記憶する。図3にあっては、演算処理部11は、検出時刻31が「17:00:00」のときの位置データ32と、検出時刻31が「17:00:02」のときの位置データ32とから第2方位34を算出し、算出された第2方位「180°」を、時刻31が「17:00:02」のときの第2方位34として記憶している。
【0032】
第1方位DB20には、電子コンパス7から通知された第1方位が、第1方位の検出時刻とともに記憶される。図4は、第1方位DB20のデータ構造の一例としての第1方位テーブル40である。第1方位テーブル40は、そのデータ構造として、電子コンパス7が検出した第1方位44と、第1方位が検出された時刻41とを有する。第2方位44は、例えば北を基準(0度)として全方位360度で算出してもよい。
【0033】
表示制御部13は、演算処理部11が算出した第2方位に反映させて、地図データに基づく地図画像をディスプレイ5に表示させるとともに、地図画像上に地図表示装置1の現在位置を表示させる。例えば、表示制御部13は、取得部10から受信した地図データに基づき、ディスプレイ5に地図画像を表示する。さらに例えば、表示制御部13は、位置DB12から現在時刻31における位置データ32を取得し、地図表示装置1の現在位置を、地図画像に順次表示する。これにより、地図表示装置1の移動の軌跡が地図画像上に表示されようにしてもよい。なお、表示制御部13が地図画像を表示するために取得する現在位置の位置データは、演算処理部11から通知された最新の時刻における位置データであってもよい。
表示制御部13は、また、演算処理部11で算出された第2方位34を地図画像に反映させる。第2方位34の地図画像への反映は、例えば、第2方位34に基づくヘディングアップ表示によって行われる。
【0034】
表示制御部13はまた、後述する判定部15の判定結果に基づき、第2方位が反映されてディスプレイ5上に表示されている地図画像を、電子コンパスが検出した第1方位を反映させた表示に切替る。例えば、表示制御部13は、判定部15から、所定の切替表示条件を満たしているという判定結果が通知された場合には、第1方位DB20から現在若しくは最新の第1方位44を取得し、これに基づいたヘディングアップ表示に切替る。
【0035】
条件記憶部14には、表示切替条件が記憶される。表示切替条件は、例えば、判定部15が判定する際の条件である。表示切替条件は、移動速度に基づいた条件や移動方向の変化に基づく条件であってもよい。例えば、表示切替条件は、「移動速度が閾値以下であるか否か」、「現在位置が高速道路上であるか否か」、「所定時間以内に、地図表示装置1の進行する方位が閾値以上変化したか否か」、「現在位置が屈曲ポイント周辺あるであるか否か」等のように設定してもよい。条件記憶部14に記憶される条件は予め登録しておいてもよいし、使用の都度登録してもよい。また、登録してある条件の中から、ユーザが使用の際に適宜選択してもよい。
【0036】
判定部15は、表示切替条件が満たされたか否かの判定を行う。例えば、判定部15は、条件記憶部14内の一または複数の条件が満たされたか否かの判定を行う。このとき、判定部15は、表示切替条件に応じて、必要なデータ等を取得してもよい。例えば、「移動速度が閾値以下であるか否か」という条件を満たしたか否かの判定を行う場合には、判定部15は、位置DB12内の位置データテーブル30を参照し、現在の移動速度33を取得する。そして、判定部15は、現在の移動速度33が、閾値として設定されている時速(または分速や秒速)以下か否かを判定する。判定部15は、判定結果を表示制御部13に通知する。
【0037】
判定部15によって、表示切替条件が満たされたと判定された場合には、表示制御部13は、演算処理部11が算出した第2方位34が反映されてディスプレイ5上に表示されている地図画像を、電子コンパス7が検出した第1方位を反映した表示に切替る。例えば、判定部15から「条件が満たされた」との通知をうけた場合には、表示制御部13は、第2方位34に基づいたヘディングアップ表示されている地図画像を、第1方位に基づくヘディングアップ表示に切替るようにしてもよい。
【0038】
次に、本実施形態に係る地図表示装置1の動作を説明する。
【0039】
本実施形態においては、カーナビゲーションプログラムを実行することにより、ディスプレイ5上に現在位置周辺の地図を表示する地図表示機能、ディスプレイ5に表示された地図上に現在位置を表示する現在位置表示機能、検出された現在位置のずれを補正するリンクマッチング機能、出発地点から目的地までのルートを検索するルート検索機能、検索したルートに添ってナビゲーションを行うナビゲーション機能等の主要機能が地図表示装置1で実現される。これに加えて、カーナビゲーションプログラムを実行することによって、ヘディングアップ機能、位置予測機能、リンクマッチング修正機能等の種々の機能を地図表示装置1で実現するようにしてもよい。
【0040】
以下には、本実施形態に係る地図表示装置1の動作を、ヘディングアップ機能、位置予測機能、リンクマッチング修正機能という種々の機能ごとに説明する。
【0041】
まず、ヘディングアップ機能を備えた地図表示装置1について以下に説明する。以下の説明では、判定部15が判定する表示切替条件毎に、各々の動作を図5〜図8のフローチャートを参照して説明する。
【0042】
一般に、車両3の移動速度は、交差点の付近等、方向転換をなう前には所定値以下に低下するものと想定される。図5は、この想定のもと、表示切替条件として、「地図表示装置1の速度が閾値以下に低下するか否か」という条件が設定された場合の地図表示装置1の動作を示すフローチャートである。なお、本例では、閾値は時速5km/hとするが、閾値はどのように設定してもよい。
【0043】
図5のフローチャートは、地図表示装置1が起動してから終了するまでの間、所定間隔で行われる。
【0044】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS101)。
【0045】
表示制御部13は、位置DB12を参照し、現在(最新)の位置データ32に基づきディスプレイ5の地図画像上に現在位置を表示する(ステップS102)。
【0046】
判定部15は、位置DB12から現在(最新)の移動速度33を取得する(ステップS103)。
【0047】
判定部15は、条件記憶部14内の切替表示条件を抽出する。ここでは、例えば、「速度が時速5km/h以下である」という条件が抽出される。そして、判定部15は、ステップS103で位置DB12から取得した現在(最新)の移動速度33が、時速5km/h以下であるか否かを判定する(ステップS104)。
【0048】
現在(最新)の移動速度33が時速5km/h以下であった場合、すなわち条件が満たされた場合には(ステップS104:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0049】
通知を受けた表示制御部13は、第1方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS105)。
【0050】
一方、現在(最新)の移動速度33が時速5km/hより速い場合、すなわち条件が満たされなかった場合には(ステップS104:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0051】
通知を受けた表示制御部13は、位置DB12内の現在(最新)の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS106)。
上記動作が行われることにより、地図表示装置1は、その移動速度33が所定値(本例では5km/h)以下の場合のみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。地図表示装置1の移動速度33が所定値以下のときには、上述したように交差点に進入したときである等、地図表示装置1が方向転換する可能性も高い。このため、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0052】
次に、ヘディングアップ機能を備えた地図表示装置1について、「地図表示装置1の現在位置が高速道路上にないか否か」という表示切替条件が設定された場合を説明する。なお、上記の構成要素について、その機能が追加される場合は以下に追記する。
【0053】
判定部15は、地図情報DB9から現在位置周辺の地図データを取得するとともに、取得した地図データに基づいて、地図上の道路が高速道路であるか一般道路等の高速道路以外の道路であるかを識別する。また判定部15は、位置データ32に基づいた現在位置が高速道路上にあるか否かを判定する。
【0054】
図6は、表示切替条件として、「地図表示装置1の現在位置が高速道路上にないか否か」という条件が設定された場合の地図表示装置1の動作を示すフローチャートである。
【0055】
図6のフローチャートは、地図表示装置1が起動してから終了するまでの間、所定間隔で行われる。
【0056】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS201)
【0057】
表示制御部13は、位置DB12を参照し、現在(最新)の位置データ32に基づきディスプレイ5の地図画像上に現在位置を表示する(ステップS202)。
【0058】
判定部15は、例えば、地図情報DB9から現在位置周辺の地図データを取得する(ステップS203)。
【0059】
また、判定部15は、位置DB12から現在(最新)の位置データ32を取得する(ステップS204)
【0060】
さらに、判定部15は、条件記憶部14内の切替表示条件を抽出する。切替表示条件は、前述したように「地図表示装置1の現在位置が高速道路上にないか否か」である。そして、判定部15は、ステップS204で取得した地図データと、ステップS204で取得した現在(最新)の位置データ32とを比較し、現在位置が高速道路上にないか否かを判定する(ステップS205)。
【0061】
現在位置が高速道路上にない場合、すなわち条件が満たされた場合には(ステップS205:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0062】
通知を受けた表示制御部13は、第1方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS206)。
【0063】
一方、現在位置が高速道路上にある場合、すなわち条件が満たされなかった場合には(ステップS205:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0064】
通知を受けた表示制御部13は、位置DB12内の現在の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS207)。
上記動作が行われることにより、地図表示装置1は、その現在位置が高速道路以外の場合(一般道路上にある場合等)のみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。地図表示装置1は、高速道路を走行しているときよりも、それ以外の一般道路等を走行しているときのほうが方向転換する可能性が高い。このため、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0065】
次に、ヘディングアップ機能を備えた地図表示装置1について、「所定時間以内に、地図表示装置1の移動角度が閾値以上変化したか否か」という表示切替条件が設定された場合を説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0066】
移動角度算出部21は、第1方位DB20を参照し、複数の第1方位44に基づいて地図表示装置1の移動角度を算出する。移動角度算出部21は、例えば、第1DB20内の直近の2つの第1方位44に基づき、地図表示装置1の角度の差を算出してもよいし、直近から遡った複数個の第1方位と、それ以前の複数個の第1方位とを対比し、地図表示装置1の移動角度を検出してもよい。移動角度算出部21は、例えば、算出した地図表示装置1の移動角度を判定部15に通知する。
【0067】
図7は、表示切替条件として、「所定時間以内に、地図表示装置1の移動角度が閾値以上変化したか否か」という条件が設定された場合の地図表示装置1の動作を示す例である。なお、本例では、所定時間を3秒、閾値を45度とするが、時間及び閾値はどのように設定してもよい。
【0068】
図7のフローチャートは、地図表示装置1が起動してから終了するまでの間、所定間隔で行われる。
【0069】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS301)。
【0070】
表示制御部13は、位置DB12を参照し、現在(最新)の位置データ32に基づきディスプレイ5の地図画像に現在位置を表示する(ステップS302)。
【0071】
移動角度算出部21は、例えば、第1方位DB20を参照し、現在(最新)時刻41の第1方位44を取得するとともに、現在時刻41との差が3秒以内の、1又は複数の時刻の第1方位44を取得する。そして、移動角度算出部21は、現在時刻41の第1方位44を基準として、他の第1方位44がどれだけ変化したかを移動角度として算出する(ステップS303)。移動角度算出部21は、算出した移動角度を判定部15に通知する。
【0072】
判定部15は、条件記憶部14内の切替表示条件を抽出する。切替表示条件は、前述したように「3秒以内に、地図表示装置1の移動角度が45度以上変化したか否か」である。そして、判定部15は、移動角度算出部21から通知された角度が45度以上か否かを判定する(ステップS304)。
【0073】
移動角度が45度以上変化した場合、すなわち条件が満たされた場合には(ステップS304:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0074】
通知を受けた表示制御部13は、第1方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS305)。
【0075】
一方、移動角度が45度以上変化していない場合、すなわち条件が満たされなかった場合には(ステップS304:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0076】
通知を受けた表示制御部13は、位置DB12内の現在(最新)の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS306)。
上記動作が行われることにより、地図表示装置1は、所定時間以内の移動角度が閾値以上変化した場合のみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。地図表示装置1の所定時間以内の移動角度が閾値以上変化したときというのは、交差点に進入した場合等、地図表示装置1が方向転換する可能性も高い。これにより、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0077】
次に、ヘディングアップ機能を備えた地図表示装置1について、「現在位置が抽出部17によって抽出された屈曲ポイント周辺であるか否か」という表示切替条件が設定された場合を説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0078】
ルート検索部16は、地図表示装置1の出発地から目的地までのルートを検索する。出発地は、例えば現在位置であってもよいし、また例えばユーザ設定したスタート地点であってもよい。ルート検索部16は、検索したルートを表示制御部13及び抽出部17へ通知する。
【0079】
表示制御部13は、ルート検索部16からルートが通知されたときには、通知のあったルートを、ディスプレイ5上の地図画像に反映する。
【0080】
抽出部17は、ルート検索部16が通知したルートを受信する。抽出部17は、受信したルート内において、所定角度以上ルートが曲がる屈曲ポイントの位置データを抽出する。抽出部17は、例えば、ルート検索部16によって検索されたスタート地点(または現在地)から目的地までのルート内において屈曲ポイントがあった場合に、それら屈曲ポイントを抽出する。屈曲ポイントは、交差点、湾曲した道等、ルートが所定角度以上屈曲するポイントである。例えば、屈曲ポイントは、直進を0度としたとき、地図データ中でノードを介して連続するリンク同士の角度が、所定以上である場合のノードのことであってもよい。屈曲ポイントの角度は、予め設定しておいてもよい。抽出された屈曲ポイントの位置データは、判定部15へ通知される。
【0081】
判定部15は、表示切替条件を満たすか否かを判定する。表示切替条件は「現在位置が抽出部17によって抽出された屈曲ポイント周辺であるか否か」である。表示切替条件を満たした場合には、判定部15は、その旨を表示制御部13に通知する。通知を受けた表示制御部13は、第2進行方位が反映されてディスプレイ5上に表示されている地図画像を、電子コンパスが検出した方位を反映させた表示に切替る。
【0082】
図8は、表示切替条件として、「現在位置が抽出部17によって抽出された屈曲ポイント周辺であるか否か」という条件が設定された場合の地図表示装置1の動作を示す例である。
【0083】
ルート検索部16は、例えば、ユーザが入力部に入力した目的地と、現在位置の位置データ32とに基づき、現在位置から目的地までのルートを検索する。ルート検索部16は、検索したルートを、表示制御部13及び抽出部17へ通知する。表示制御部13は、ルート検索部16から通知を受けたルートを、地図画像とともに表示する(ステップS401)。
【0084】
抽出部17は、ルート検索部16からルートを受信する。抽出部17は、受信したルート内の屈曲ポイントの位置データを抽出し、判定部15へ通知する(ステップS402)。
【0085】
取得部10は、現在位置の周辺地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき、現在位置周辺の地図画像をディスプレイに表示する(ステップS403)。
【0086】
表示制御部13は、位置DB12から現在位置の位置データ32を取得し、ディスプレイ5の地図画像に表示する(ステップS404)。
【0087】
判定部15は、ステップS404で取得した位置データ32に基づく現在位置が、ステップS402で判定部15に通知された位置データに基づく屈曲ポイント周辺か否かを判定する(ステップS405)。
【0088】
現在位置が屈曲ポイント周辺である場合、すなわち条件が満たされた場合には(ステップS405:Yes)、判定部15はその判定結果を表示制御部13へ通知する。
【0089】
通知を受けた表示制御部13は、第1進行方位DB20から現在(最新)時刻41の第1方位44を取得して、これに基づいてヘディングアップを行う。(ステップS406)。
【0090】
一方、現在位置が屈曲ポイント周辺でない場合、すなわち条件が満たされなかった場合には(ステップS405:No)、判定部15はその判定結果を表示制御部13へ通知する。
【0091】
通知を受けた表示制御部13は、位置DB12内の現在の第2方位34を取得して、これに基づいてヘディングアップを行う(ステップS407)。
【0092】
ステップS406又はステップS407においてヘディングアップを行った後、判定部15は、目的地に到着したか否かの判定を行う(ステップS408)。目的地に到着した場合には(ステップS408:Yes)終了する。一方、未だ目的地に到着していない場合には、ステップS403に戻る。
上記動作が行われることにより、地図表示装置1は、現在位置が予め検索されたルート内の屈曲ポイント周辺にあるときのみ、電子コンパス7で検出された第1方位44の適用によるヘディングアップ表示をおこなうことができる。屈曲ポイントでは、地図表示装置1が方向転換する可能性が極めて高い。これにより、迅速、かつ、外部干渉の多い電子コンパスによる第1方位を効率よく適用して、ヘディングアップ表示することが可能となる。
【0093】
上述したヘディングアップ機能を有する地図表示装置1にあっては、通常は、演算処理部11が算出した第2方位を反映させてディスプレイ5に表示される地図画像に、所定の表示切替条件が満たされた場合のみ、電子コンパス7が検出した第1方位を反映する。これにより、所定の表示切替条件が満たされたときは、方位の反映を迅速に行えるとともに、電子コンパスの外部干渉による影響を低減することができる。
【0094】
次に、位置予測機能を備えた地図表示装置1について以下に説明する。
【0095】
位置予測機能は、地図表示装置1の現在位置が一定時間検出できない場合に実現される機能である。この機能は、例えば図9に示すように、地図表示装置1がトンネル内を移動通過中であって、トンネルにより、GPS衛星2からGPS信号を受信できない場合に実現される。図示例では、実線で示された位置データp1は検出されているが、トンネル内の破線で示された位置データp2は検出されていない。このような場合、図示例のように進行方向が一定であれば、地図表示装置1は位置データp2で示すような軌跡をたどるはずである。従って、現在位置が一定時間検出されない場合、検出されていた時の位置データ32及び移動速度33から予測される予測位置データを算出し、第1方位44に基づく移動角度が所定値以内であるならば、予測位置データを地図画像に表示する。
【0096】
位置表示機能を備えた地図表示装置1について、「第1の時刻より後、継続して現在位置を検出できない場合に、第1の時刻以前に電子コンパスが検出した第1方位と、第1の時刻より後に電子コンパスが検出した第1方位との変化量が所定量以下であるか否か」という表示切替条件が設定された場合を説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0097】
監視部22は、位置DB12内の位置データテーブル30を監視する。監視部22は、位置データテーブル30が所定時間更新されないときは、その旨を更新された最後の時刻31とともに判定部15に通知する。
【0098】
判定部15は、条件記憶部14内の切替表示条件を抽出する。ここでは、「第1の時刻より後、継続して現在位置を検出できない場合に、第1の時刻以前に電子コンパスが検出した第1方位と、第1の時刻より後に電子コンパスが検出した第1方位との変化量が所定量以下であるか否か」という切替表示条件が抽出される。
【0099】
判定部15は、監視部22から位置データテーブル30が所定時間更新されない旨の通知及び最後に更新された時刻31を受け取ると、必要なデータを取得し、上記判定を行う。例えば、判定部15は、監視部22からの通知を受け取った後、第1方位DB20を参照して、現在(最新)の第1方位と、位置データテーブル30が最後に更新された時刻31より以前であって、かつ、当該時刻31に最も近い時刻における第1方位(以下、最終時刻第1方位という)とを取得し、この2点間の第1方位の変化量を算出する。なお、変化量は、現在の第1方位と、最終時刻第1方位との2点間から算出しなくてもよく、これらの間の複数点間の第1方位から算出してもよい。
【0100】
判定部15は、算出された変化量が所定量以下であるか否かの判定を行う。
【0101】
位置予測部18は、演算処理部11が、第1の時刻より後、継続して現在位置を検出できないとき、第1の時刻以前の位置データ32及び移動速度33に基づいて、地図表示装置1の現在位置を予測する。位置予測部18は、判定部15からの通知を受信する。監視部22からの通知を受信した位置予測部18は、位置DB12内の位置データテーブル30の各データに基づき、現在位置として予測される予測位置を算出する。位置予測部18は、例えば、位置データテーブル30の、直近の時刻31(最後の更新時刻及びそれ近辺の時刻)の一又は複数の位置データ32と移動速度33とから、地図表示装置1の予測位置を算出する。位置予測部18は、算出した予測位置を取得部10及び表示制御部13に通知する。
【0102】
図10は、「第1の時刻より後、継続して現在位置を検出できない場合に、第1の時刻以前に電子コンパスが検出した第1方位と、第1の時刻より後に電子コンパスが検出した第1方位との変化量が所定量以下であるか否か」という表示切替条件が設定された場合の地図表示装置1の動作を示す例である。なお、本例では、継続して現在位置を検出できない時間を5秒、変化量が30度として詳細に説明すが、それらの値はどのように設定してもよい。
【0103】
監視部22は、位置DB12内を監視し、位置データテーブル30が5秒以上更新されていないときは、その旨を位置データテーブル30の最終の更新時刻31とともに判定部15に通知する。判定部15は、監視部22からの通知を受け取る(ステップS121)。
【0104】
監視部22からの通知を受け取った判定部15は、例えば第1方位DB20内を参照して、現在(最新)の第1方位44と、最終時刻第1方位44とを取得する。この際、判定部15は、これら2点の第1方位44とともに、この間の時刻における一部又は全部の第1方位44を取得してもよい。そして、判定部15は、これら第1方位44を移動角度算出部21に送信する。
【0105】
移動角度算出部21は、受信した複数の第1方位44から地図表示装置1の移動角度を算出し、判定部15へ返す(ステップS122)。
【0106】
判定部15は、移動角度算出部21から通知された移動角度が30度以上か否かの判定を行う(ステップS123)。
【0107】
移動角度が30度より大きい場合は(ステップS123:No)、処理を終了する。一方、移動角度が30度以下の場合には(ステップS123:Yes)、判定部15は、判定結果を位置予測部18に通知する。
【0108】
通知を受けた位置予測部18は、位置DB12内を参照し、位置データテーブル30の各データ31、32、33に基づき、現在位置として予測される予測位置データを算出する(ステップS124)。位置予測部18は、算出した予測位置データを取得部10及び表示制御部13に通知する。
【0109】
取得部10は、受信した予測位置データに基づく予測位置周辺の地図データを地図情報DB9から取得し、表示制御部13に送信する。表示制御部13は、取得部10から受信した地図データに基づき地図画像をディスプレイ5に表示する(ステップS125)。
【0110】
表示制御部13は、地図画像上に予測位置データに基づく予測位置を表示する(ステップS126)。
【0111】
位置予測機能を備えた地図表示装置1にあっては、例えばGPS信号を受信できず、継続して現在位置を検出できない場合であっても、既に検出された位置データ及び移動速度とともに、電子コンパスによって検出される方位を使用することで、現在位置を予測して表示することができる。
【0112】
次に、リンクマッチング修正機能を備えた地図表示装置1について以下に説明する。図11は、リンクマッチング及びリンクマッチング修正機能を説明するための説明図である。
【0113】
ここでまず、リンクマッチングについて説明する。リンクマッチングは、道路を、ノードと、ノードを介して接続されたリンクとで表す地図データにおいて、位置データ32に基づく現在位置が道路からはずれた場合に、その誤差を補正する機能である。図示例にあっては、ノードn1には、これを介してリンクA1、A2及びC1が接続されている。また、ノードn2には、これを介してリンクC1、B1及びB2が接続されている。「○」のポイントは、前述の演算処理部11が検出した実測位置である。これを進行方向なども勘案して、道路上の最適なポイントへ補正する。補正後の補正位置は図11に「●」で示される。検出された実測位置a及びbは、最も近いリンクA2上に補正される。
【0114】
次に、リンクマッチング修正機能について説明する。リンクマッチング修正機能は、リンクマッチングされた補正位置が正しいか否かを判定し、正しくない場合には修正を行う機能である。図示例において、演算処理部11が検出した実測位置cは、リンクB1が最も近い。このため、実測位置cはリンクB1にリンクマッチングされるはずである。しかしながら、リンクA2及びリンクB1間には、n1及びn2の2つのノードがあり、リンクA2とB1とは連続していない。従って、地図表示装置1は、リンクA2から、ノードn1、リンクC1及びノードn2を介してリンクB1上に移動したのではなく、ノードn1のみを介してリンクA1を移動した可能性も考えられる。このような場合、検出された位置cについて、その補正位置をリンクB1上に表示する前に、補正位置が正しいか否かを電子コンパスによって検出された第1方位に基づいて判断し、最適な補正位置を推定する。
【0115】
リンクマッチング修正機能を備えた地図表示装置1について、「マッチング処理部19が第1の時刻の現在位置をマッチングさせた第1のリンクと、マッチング処理部19が、第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないか否か」という表示切替条件が設定された場合を以下に説明する。なお、上記した構成要素について、その機能が追加される場合は以下に追記する。
【0116】
マッチング処理部19は、リンクマッチングを行う。マッチング処理部19は、例えば、位置DB12を参照し、現在位置の位置データ32を、最も近いリンク上に補正する。マッチング処理部19はまた、位置DB12から取得した現在位置(以下、実測位置という)の位置データ32と、実測位置の位置データ32が検出された時刻31とを、補正した現在位置(以下、補正位置という)の位置データと、補正位置が存在するリンクとに対応づけて、マッチング記憶部23に記憶する。
【0117】
図12は、マッチング記憶部23内の構造の一例であるマッチングデータテーブル50を示す図である。マッチングデータテーブル50は、そのデータ構造として、時刻51と、現在位置の位置データ52である緯度データ52a及び経度データ52bと、補正位置の位置データ53である緯度データ53a及び経度データ53bと、補正位置が存在するリンク54とを有する。
【0118】
判定部15は、条件記憶部14内の切替表示条件を抽出する。ここでは、例えば「マッチング処理部19が第1の時刻の現在位置をマッチングさせた第1のリンクと、マッチング処理部19が第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないか否か」という切替表示条件が抽出される。この切替表示条件は、換言すれば、「第1の時刻の補正位置が存在する第1のリンクと、第1の時刻より後の第2の時刻の補正位置が存在する第2のリンクとが連続していないか否か」である。判定部15は、マッチング記憶部23を参照し、第2の時刻である現在(最新)時刻51の補正位置の位置データ53が存在する第2のリンク54と、第1の時刻である現在(最新)時刻の1つ前の時刻51の補正位置の位置データ53が存在する第1のリンク54と、が連続するか否かを判定する。
【0119】
さらに判定部15は、第1のリンク54と、第2のリンク54とが連続していないとき、第1の時刻51と第2の時刻51との間に電子コンパス7が検出した方位に基づいて、第2のリンク54に対するマッチングの正否(すなわち、補正位置が正しいか否か)を判定する。例えば、判定部15は、第1のリンク54と第2のリンク54とが連続していないと判定した場合に、第1方位DB20を参照し、現在(最新)の時刻31とその1つ前の時刻31の間の第1方位44の変化を算出し、現在位置が第2のリンク54に存在するか否かを判定する。これは例えば、判定部15が算出した現在(最新)の時刻31とその1つ前の時刻31の間の第1方位44の変化が所定の角度以上か否かで判定される。判定部15は、位置DB20を参照し、この間における第1方位44の変化が所定角度以上であるか否かを判定する。そして、判定部15は、第1方位44の変化が所定角度以上であると判断した場合に、現在位置が第2のリンク54上に存在すると判定し、第1方位44の変化が所定角度より小さかった場合に、現在位置が第2のリンク上に存在しないと判定する。判定部15は、現在位置が第2のリンク54に存在するか否かの判定結果を、を表示制御部13に通知する。
【0120】
表示制御部13は、判定部15から判定結果の通知を受信する。判定結果が「現在位置が第2のリンク54に存在する」であった場合には、表示制御部13は、マッチング記憶部23を参照し、補正位置の位置データ53を抽出する。そして、表示制御部13は、取得部10から受信した地図データに基づいて、地図画像をディスプレイ5に表示するとともに、マッチング記憶部23から補正位置の位置データ53を取得し、地図画像に表示する。
【0121】
判定結果が「現在位置が第2のリンク54に存在しない」であった場合には、表示制御部13は、その結果をマッチング処理部19に通知して、再度のリンクマッチングを依頼する。そして、表示制御部13は、取得部10から受信した地図データに基づいて、地図画像をディスプレイ5に表示するとともに、マッチング記憶部23から、再度の補正をした補正位置の位置データ53を取得し、地図画像に表示する。
【0122】
表示制御部13から「現在位置が第2のリンク54に存在しない」との判定結果を受け取ったマッチング処理部19は、実測位置のリンクマッチングを再度行う。この場合のリンクマッチングは、第1方位DB20の第1方位44も参照して行う。マッチング処理部19は再度のリンクマッチングによる補正位置の位置データ53及びリンク54をマッチング記憶部23に記憶する。
【0123】
図13は、表示切替条件として「第1の時刻の補正位置が存在する第1のリンクと、第1の時刻より後の第2の時刻の補正位置が存在する第2のリンクとが連続していないか否か」という条件が設定された場合の地図表示装置1の動作を表すフローチャートである。
【0124】
マッチング処理部19は、現在時刻51の実測位置のリンクマッチングを行う(ステップS131)。そして、その結果となる補正位置の位置データ53及びリンク54をマッチング記憶部23に記憶する。
【0125】
判定部15は、マッチング記憶部23を参照し、現在時刻51のリンク54と、現在時刻より1つ前の時刻51のリンク54とが連続するか否かを判定する(ステップS132)。
【0126】
現在時刻51のリンク54と、現在時刻より1つ前の時刻51のリンク54とが連続すると判定された場合には(ステップS132:Yes)、判定部15は、その判定結果を表示制御部13に通知する。
【0127】
判定部15から通知を受けた表示制御部13は、マッチング記憶部23を参照し、現在時刻51の補正位置の位置データ53を抽出する(ステップS134)。そして、表示制御部13は、取得部10から受信した地図データに基づいて、地図画像をディスプレイ5に表示するとともに(ステップS135)、マッチング記憶部23から補正位置の位置データ53を取得し、地図画像に表示する(ステップS136)。
【0128】
現在時刻51のリンク54と、現在時刻より1つ前の時刻51のリンク54とが連続しないと判定された場合には(ステップS132:No)、判定部15は、続いて「現在位置が、現在時刻51のリンク54上に存在する」か否かの判定を行う(ステップS133)。前述したように、判定は、ステップS132において判定部15が連続していないと判定した現在時刻51と現在時刻より1つ前の時刻51との間に、第1方位44が所定角度以上変化したか否かに基づいて行われる。第1方位44の変化が所定角度以上であると判断した場合には、現在位置が第2のリンク54上に存在すると判定され、第1方位44の変化が所定角度より小さかった場合には、現在位置が第2のリンク上に存在しないと判定される。
【0129】
ステップS133の判定結果が「現在位置が、現在時刻51のリンク54上に存在する」であった場合には(ステップS133:Yes)、ステップS134に進む。
【0130】
ステップS133の判定結果が「現在位置が、現在時刻51のリンク54上に存在しない」であった場合には(ステップS133:No)、表示制御部13は、その結果をマッチング処理部19に通知して、再度のリンクマッチングを依頼する(ステップS137)。
【0131】
ステップS137で依頼を受けたマッチング処理部19は、ステップS131へ戻り、現在時刻51の実測位置に対するリンクマッチングを再度行う(ステップS131)。マッチング処理部19は再度のリンクマッチングによる結果をマッチング記憶部23に記憶する。
【0132】
本実施形態にあっては、リンクマッチングの結果が大きくずれた場合に、電子コンパスで検出された方位を参照して、リンクマッチングを再度行う。これにより、リンクマッチングの精度が向上する。
【0133】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。当業者は、本発明の要旨を逸脱することなしに、他の様々な態様で本発明を実施することができる。
【符号の説明】
【0134】
1 地図表示装置
2 GPS衛星
3 車両
4 地図データ処理部
5 ディスプレイ
6 受信機
7 電子コンパス
8 入力部
9 地図データベース
10 取得部
11 演算処理部
12 位置データベース
13 表示制御部
14 電子コンパス
15 判定部
16 ルート検索部
17 抽出部
18 位置予測部
19 マッチング処理部
【特許請求の範囲】
【請求項1】
第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、
前記情報処理装置に実行されると、
複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、
前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させる表示制御ステップと、
所定の表示切替条件が満たされたか否かの判定を行うステップと、が実現され、
前記判定ステップによって前記表示切替条件が満たされたと判定された場合には、前記表示制御ステップは、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とするコンピュータプログラム。
【請求項2】
前記位置データ記憶手段に記憶されている位置データに基づいて、前記情報処理装置の移動速度を算出するステップがさらに実現され、
前記表示切替条件は、前記情報処理装置の移動速度が閾値以下であるか否かであって、
前記判定ステップによって、前記移動速度が閾値以下であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項3】
前記表示切替条件は、前記情報処理装置の現在位置が高速道路上にないか否かであって、
前記判定ステップによって、前記現在位置が高速道路上にないと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項4】
前記条件は、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したか否かであって、
前記判定ステップによって、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項5】
前記情報処理装置の出発地から目的地までのルートを検索するステップと、
前記ルート検索ステップによって検索されたルート内において、所定角度以上ルートが曲がる屈曲ポイントを抽出するステップと、がさらに実現され、
前記表示切替条件は、移動する情報処理装置の現在位置が屈曲ポイント周辺であるか否かであって、
前記判定ステップによって、前記情報処理装置の現在位置が前記抽出ステップによって抽出された屈曲ポイント周辺であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項6】
第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶された地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、
前記情報処理装置に実行されると、
複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、
前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、
前記位置検出ステップが、第1の時刻より後、所定時間以上継続して現在位置を検出できないとき、第1の時刻よりも前の位置データ及び移動速度に基づいて前記情報処理装置の現在位置を予測するステップと、
第1の時刻以前に電子コンパスが検出した第1の方位と第1の時刻より後に電子コンパスが検出した第1の方位との変化量が所定量以下であるか否かを判定するステップと、が実現され、
前記判定ステップによって、前記第1の時刻以前に前記電子コンパスが検出した第1の方位と前記第1の時刻以降に前記電子コンパスが検出した第1の方位との変化量が所定量以下であると判定された場合には、前記表示制御ステップは、前記予測ステップにより予測された前記情報処理装置の現在位置を前記ディスプレイの地図画像上に表示させることを特徴とするコンピュータプログラム
【請求項7】
第1の方位を検出する電子コンパスと、ディスプレイと、当該ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、
前記情報処理装置に実行されると、
複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
リンクマッチングを行うステップと、
前記リンクマッチングステップが第1の時刻の現在位置をマッチングさせた第1のリンクと、前記リンクマッチングステップが、第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないとき、第1の時刻と第2の時刻との間に前記電子コンパスが検出した方位に基づいて、第2のリンクに対するマッチングの正否を判定するステップと、
前記正否判定ステップの判定結果に基づいて、前記リンクマッチングステップによるリンクマッチングの結果を修正するステップと、
前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記リンクマッチングステップ及びリンクマッチング修正ステップによる処理結果に基づいて、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、が実現されることを特徴とするコンピュータプログラム。
【請求項8】
第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置に地図を表示させる方法であって、
複数の異なる時刻において、各時刻における前記地図表示装置の位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記地図表示装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
前記位置データ手段に記憶されている位置データに基づいて、前記地図表示装置が進行している第2の方位を算出するステップと、
前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記地図表示装置の現在位置を表示させるステップと、
所定の表示切替条件が満たされたか否かの判定を行うステップと、が実行され、
前記判定ステップによって前記表示切替条件が満たされたと判定された場合には、前記表示制御ステップは、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする方法。
【請求項9】
地図表示装置であって、
ディスプレイと、
第1の方位を検出する電子コンパスと、
前記ディスプレイに地図画像を表示するための地図データが記憶される手段と、
複数の異なる時刻において、各時刻における前記地図表示装置の現在位置を検出する位置検出手段と、
前記検出手段によって検出された各時刻における前記地図表示装置の現在位置を示す位置データを記憶する記憶手段と、
前記記憶手段に記憶されている位置データに基づいて、前記地図表示装置が進行している第2の方位を算出する第2方位算出手段と、
前記第2方位算出手段が算出した第2方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記地図表示装置の現在位置を表示させる表示制御手段と、
所定の表示切替条件が満たされたか否かの判定を行う判定手段と、を備え、
前記判定手段によって前記表示切替条件が満たされたと判定された場合には、前記表示制御手段は、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする地図表示装置。
【請求項1】
第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、
前記情報処理装置に実行されると、
複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、
前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させる表示制御ステップと、
所定の表示切替条件が満たされたか否かの判定を行うステップと、が実現され、
前記判定ステップによって前記表示切替条件が満たされたと判定された場合には、前記表示制御ステップは、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とするコンピュータプログラム。
【請求項2】
前記位置データ記憶手段に記憶されている位置データに基づいて、前記情報処理装置の移動速度を算出するステップがさらに実現され、
前記表示切替条件は、前記情報処理装置の移動速度が閾値以下であるか否かであって、
前記判定ステップによって、前記移動速度が閾値以下であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項3】
前記表示切替条件は、前記情報処理装置の現在位置が高速道路上にないか否かであって、
前記判定ステップによって、前記現在位置が高速道路上にないと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項4】
前記条件は、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したか否かであって、
前記判定ステップによって、所定時間以内に、前記情報処理装置の前記第2の方位が閾値以上変化したと判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項5】
前記情報処理装置の出発地から目的地までのルートを検索するステップと、
前記ルート検索ステップによって検索されたルート内において、所定角度以上ルートが曲がる屈曲ポイントを抽出するステップと、がさらに実現され、
前記表示切替条件は、移動する情報処理装置の現在位置が屈曲ポイント周辺であるか否かであって、
前記判定ステップによって、前記情報処理装置の現在位置が前記抽出ステップによって抽出された屈曲ポイント周辺であると判定された場合には、前記表示制御ステップは、前記ディスプレイ上に、前記第2の方位に基づいてヘディングアップ表示されている地図画像を、前記第1の方位に基づくヘディングアップ表示に切替る、請求項1に記載のコンピュータプログラム。
【請求項6】
第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶された地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、
前記情報処理装置に実行されると、
複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
前記位置データ手段に記憶されている位置データに基づいて、前記情報処理装置が進行している第2の方位を算出するステップと、
前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、
前記位置検出ステップが、第1の時刻より後、所定時間以上継続して現在位置を検出できないとき、第1の時刻よりも前の位置データ及び移動速度に基づいて前記情報処理装置の現在位置を予測するステップと、
第1の時刻以前に電子コンパスが検出した第1の方位と第1の時刻より後に電子コンパスが検出した第1の方位との変化量が所定量以下であるか否かを判定するステップと、が実現され、
前記判定ステップによって、前記第1の時刻以前に前記電子コンパスが検出した第1の方位と前記第1の時刻以降に前記電子コンパスが検出した第1の方位との変化量が所定量以下であると判定された場合には、前記表示制御ステップは、前記予測ステップにより予測された前記情報処理装置の現在位置を前記ディスプレイの地図画像上に表示させることを特徴とするコンピュータプログラム
【請求項7】
第1の方位を検出する電子コンパスと、ディスプレイと、当該ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置で実行される地図データを処理するためのコンピュータプログラムであって、
前記情報処理装置に実行されると、
複数の異なる時刻において、各時刻における前記情報処理装置の現在位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記情報処理装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
リンクマッチングを行うステップと、
前記リンクマッチングステップが第1の時刻の現在位置をマッチングさせた第1のリンクと、前記リンクマッチングステップが、第1の時刻より後の第2の時刻の現在位置をマッチングさせた第2のリンクとが連続していないとき、第1の時刻と第2の時刻との間に前記電子コンパスが検出した方位に基づいて、第2のリンクに対するマッチングの正否を判定するステップと、
前記正否判定ステップの判定結果に基づいて、前記リンクマッチングステップによるリンクマッチングの結果を修正するステップと、
前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記リンクマッチングステップ及びリンクマッチング修正ステップによる処理結果に基づいて、前記地図画像上に前記情報処理装置の現在位置を表示させるステップと、が実現されることを特徴とするコンピュータプログラム。
【請求項8】
第1の方位を検出する電子コンパスと、ディスプレイと、前記ディスプレイに地図画像を表示するための地図データが記憶される地図データ記憶手段と、を備えた情報処理装置に地図を表示させる方法であって、
複数の異なる時刻において、各時刻における前記地図表示装置の位置を検出するステップと、
前記位置検出ステップによって検出された各時刻における前記地図表示装置の現在位置を示す位置データを位置データ記憶手段に記憶するステップと、
前記位置データ手段に記憶されている位置データに基づいて、前記地図表示装置が進行している第2の方位を算出するステップと、
前記第2方位算出ステップが算出した第2の方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記地図表示装置の現在位置を表示させるステップと、
所定の表示切替条件が満たされたか否かの判定を行うステップと、が実行され、
前記判定ステップによって前記表示切替条件が満たされたと判定された場合には、前記表示制御ステップは、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする方法。
【請求項9】
地図表示装置であって、
ディスプレイと、
第1の方位を検出する電子コンパスと、
前記ディスプレイに地図画像を表示するための地図データが記憶される手段と、
複数の異なる時刻において、各時刻における前記地図表示装置の現在位置を検出する位置検出手段と、
前記検出手段によって検出された各時刻における前記地図表示装置の現在位置を示す位置データを記憶する記憶手段と、
前記記憶手段に記憶されている位置データに基づいて、前記地図表示装置が進行している第2の方位を算出する第2方位算出手段と、
前記第2方位算出手段が算出した第2方位を反映させて、前記地図データに基づく地図画像をディスプレイに表示させるとともに、前記地図画像上に前記地図表示装置の現在位置を表示させる表示制御手段と、
所定の表示切替条件が満たされたか否かの判定を行う判定手段と、を備え、
前記判定手段によって前記表示切替条件が満たされたと判定された場合には、前記表示制御手段は、前記第2の方位が反映されて前記ディスプレイ上に表示されている地図画像を、前記第1の方位を反映させた表示に切替ることを特徴とする地図表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−169631(P2011−169631A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−31425(P2010−31425)
【出願日】平成22年2月16日(2010.2.16)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月16日(2010.2.16)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
[ Back to top ]