
情報処理装置及び情報処理プログラム
【課題】複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正するようにした情報処理装置を提供する。
【解決手段】情報処理装置の解析手段は、行動情報に基づいて、対象者の位置を少なくとも含む状態を解析し、集合場所決定手段は、前記解析手段によって解析された状態、行動情報内の対象者の位置情報又は方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定し、補正手段は、集合場所の位置に基づいて、対象者の位置情報を補正する。
【解決手段】情報処理装置の解析手段は、行動情報に基づいて、対象者の位置を少なくとも含む状態を解析し、集合場所決定手段は、前記解析手段によって解析された状態、行動情報内の対象者の位置情報又は方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定し、補正手段は、集合場所の位置に基づいて、対象者の位置情報を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報処理装置及び情報処理プログラムに関する。
【背景技術】
【0002】
対象者の行動を検知する技術がある。
これに関連する技術として、例えば、特許文献1には、ユーザに対して現在位置の近隣の情報を提供する情報提供システムを提供することを課題とし、表示・入力装置は一定の間隔を設けて街頭に設置され、ユーザによって携帯される無線タグをセンシングして、ユーザを検出し、無線タグからユーザIDを読み出しサーバに送信し、サーバは、ユーザの至近に位置する表示・入力装置を特定し、当該表示・入力装置の近隣の店舗情報及びイベント情報を当該表示・入力装置に送信し、表示・入力装置はサーバから送信された店舗情報及びイベント情報を表示エリアに表示することが開示されている。
【0003】
また、例えば、特許文献2には、疎遠になりがちな現代社会において、休憩室内に居る者同士が実際に会話をしてコミュニケーションを図る契機を与えることを課題とし、休憩室を利用する利用者同士のコミュニケーションを促進するためのコミュニケーション促進装置において、利用者識別情報に基づいて前記共有空間内における利用者に関する現在の位置情報を検出する位置情報検出手段を用いて検出した利用者識別情報と関連付けられた利用者情報を、位置情報検出手段を用いて検出した現在の位置情報と対応付け、前記利用者の移動に合わせて連続的に前記利用者情報の表示態様を変化させながら、前記共有空間内に表示する利用者情報表示手段を具備するコミュニケーション促進装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−026311号公報
【特許文献2】特開2007−140800号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正するようにした情報処理装置及び情報処理プログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
かかる目的を達成するための本発明の要旨とするところは、次の各項の発明に存する。
請求項1の発明は、対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段を具備することを特徴とする情報処理装置である。
【0007】
請求項2の発明は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を決定する起点決定手段をさらに具備し、前記補正手段は、さらに前記起点決定手段によって決定された他の対象者の起点の位置に基づいて、対象者の位置情報を補正することを特徴とする請求項1に記載の情報処理装置である。
【0008】
請求項3の発明は、前記解析手段は、複数の対象者が予め定められた距離以内で同期して移動している場合は、複数の該対象者の予め定められた歩幅を合わせるように修正して、移動の状態を解析することを特徴とする請求項1又は2に記載の情報処理装置である。
【0009】
請求項4の発明は、前記補正手段は、前記集合場所の位置に他の対象者が移動した場合であって、集合している対象者の方向情報と該他の対象者の方向情報、又は、集合している該対象者と該他の対象者との間の関係を示す情報である関係情報に基づいて、該集合場所の位置に移動してきた他の対象者の位置を補正することを特徴とする請求項1から3のいずれか一項に記載の情報処理装置である。
【0010】
請求項5の発明は、前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段をさらに具備し、前記行動情報には、対象者が有している装置同士が通信を行ったことを示す情報である通信情報が含まれており、前記解析手段は、前記行動情報内の通信情報に基づいて、通信を行った対象者の組み合わせを抽出し、前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更することを特徴とする請求項1から4のいずれか一項に記載の情報処理装置である。
【0011】
請求項6の発明は、前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段をさらに具備し、前記行動情報には、対象者の方向を示す情報である方向情報と位置を示す位置情報が含まれており、前記解析手段は、前記行動情報内の方向情報と位置情報に基づいて、通信を行った対象者の組み合わせ又は互いに会っている対象者の組み合わせを抽出し、前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更することを特徴とする請求項1から4のいずれか一項に記載の情報処理装置である。
【0012】
請求項7の発明は、前記解析手段は、対象者間の関係を示す情報である関係情報に基づいて、対象者の組み合わせを抽出することを特徴とする請求項6に記載の情報処理装置である。
【0013】
請求項8の発明は、前記起点を机の位置であるとし、対象者の移動した経路を通路であるとして、地図を生成する地図生成手段をさらに具備することを特徴とする請求項1から7のいずれか一項に記載の情報処理装置である。
【0014】
請求項9の発明は、コンピュータを、対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段として機能させるための情報処理プログラムである。
【発明の効果】
【0015】
請求項1の情報処理装置によれば、複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正することができる。
【0016】
請求項2の情報処理装置によれば、他の対象者の起点の位置に基づいて、対象者の位置情報を補正することができる。
【0017】
請求項3の情報処理装置によれば、複数の対象者が同期して移動する場合の歩幅を修正して、対象者の状態を解析することができる。
【0018】
請求項4の情報処理装置によれば、集合場所の位置に他の対象者が移動した場合に、他の対象者の位置を補正することができる。
【0019】
請求項5の情報処理装置によれば、対象者が絶対座標の位置を有している装置によって検知されていない場合であっても、その対象者の起点の絶対座標の位置を得ることができる。
【0020】
請求項6の情報処理装置によれば、対象者が絶対座標の位置を有している装置によって検知されていない場合であっても、その対象者の起点の絶対座標の位置を得ることができる。
【0021】
請求項7の情報処理装置によれば、対象者間の関係を用いて対象者の組み合わせを抽出することができる。
【0022】
請求項8の情報処理装置によれば、予め地図に関する情報がない状態から地図を生成することができる。
【0023】
請求項9の情報処理プログラムによれば、複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正することができる。
【図面の簡単な説明】
【0024】
【図1】本実施の形態の構成例についての概念的なモジュール構成図である。
【図2】本実施の形態による処理例を示すフローチャートである。
【図3】本実施の形態による処理例を示す説明図である。
【図4】センサー・ユーザ対応テーブルのデータ構造例を示す説明図である。
【図5】処理対象とする計測データの例を示す説明図である。
【図6】本実施の形態による処理例を示す説明図である。
【図7】計測データの歩数カウントの例を示す説明図である。
【図8】計測データの方向の例を示す説明図である。
【図9】本実施の形態による処理例を示す説明図である。
【図10】本実施の形態による処理例を示すフローチャートである。
【図11】本実施の形態による処理例を示す説明図である。
【図12】計測データテーブルのデータ構造例を示す説明図である。
【図13】関係性テーブルのデータ構造例を示す説明図である。
【図14】本実施の形態による処理例を示すフローチャートである。
【図15】本実施の形態による処理例を示す説明図である。
【図16】本実施の形態による処理例を示す説明図である。
【図17】計測データテーブルのデータ構造例を示す説明図である。
【図18】本実施の形態による処理例を示す説明図である。
【図19】計測データテーブルのデータ構造例を示す説明図である。
【図20】本実施の形態による処理例を示す説明図である。
【図21】計測データテーブルのデータ構造例を示す説明図である。
【図22】対象者の経路に関する処理例を示す説明図である。
【図23】本実施の形態による処理例を示すフローチャートである。
【図24】本実施の形態による処理例を示す説明図である。
【図25】同期が始まった時期の例を示す説明図である。
【図26】本実施の形態による処理例を示す説明図である。
【図27】本実施の形態を実現するコンピュータのハードウェア構成例を示すブロック図である。
【発明を実施するための形態】
【0025】
以下、図面に基づき本発明を実現するにあたっての好適な一実施の形態の例を説明する。
図1は、本実施の形態の構成例についての概念的なモジュール構成図を示している。
なお、モジュールとは、一般的に論理的に分離可能なソフトウェア(コンピュータ・プログラム)、ハードウェア等の部品を指す。したがって、本実施の形態におけるモジュールはコンピュータ・プログラムにおけるモジュールのことだけでなく、ハードウェア構成におけるモジュールも指す。それゆえ、本実施の形態は、それらのモジュールとして機能させるためのコンピュータ・プログラム(コンピュータにそれぞれの手順を実行させるためのプログラム、コンピュータをそれぞれの手段として機能させるためのプログラム、コンピュータにそれぞれの機能を実現させるためのプログラム)、システム及び方法の説明をも兼ねている。ただし、説明の都合上、「記憶する」、「記憶させる」、これらと同等の文言を用いるが、これらの文言は、実施の形態がコンピュータ・プログラムの場合は、記憶装置に記憶させる、又は記憶装置に記憶させるように制御するの意である。また、モジュールは機能に一対一に対応していてもよいが、実装においては、1モジュールを1プログラムで構成してもよいし、複数モジュールを1プログラムで構成してもよく、逆に1モジュールを複数プログラムで構成してもよい。また、複数モジュールは1コンピュータによって実行されてもよいし、分散又は並列環境におけるコンピュータによって1モジュールが複数コンピュータで実行されてもよい。なお、1つのモジュールに他のモジュールが含まれていてもよい。また、以下、「接続」とは物理的な接続の他、論理的な接続(データの授受、指示、データ間の参照関係等)の場合にも用いる。「予め定められた」とは、対象としている処理の前に定まっていることをいい、本実施の形態による処理が始まる前はもちろんのこと、本実施の形態による処理が始まった後であっても、対象としている処理の前であれば、そのときの状況・状態に応じて、又はそれまでの状況・状態に応じて定まることの意を含めて用いる。また、「Aである場合、Bをする」という意味を有する記載は、「Aであるか否かを判断し、Aであると判断した場合はBをする」の意味で用いる。ただし、Aであるか否かの判断が不要である場合を除く。
また、システム又は装置とは、複数のコンピュータ、ハードウェア、装置等がネットワーク(一対一対応の通信接続を含む)等の通信手段で接続されて構成されるほか、1つのコンピュータ、ハードウェア、装置等によって実現される場合も含まれる。「装置」と「システム」とは、互いに同義の用語として用いる。もちろんのことながら、「システム」には、人為的な取り決めである社会的な「仕組み」(社会システム)にすぎないものは含まない。
また、各モジュールによる処理毎に又はモジュール内で複数の処理を行う場合はその処理毎に、対象となる情報を記憶装置から読み込み、その処理を行った後に、処理結果を記憶装置に書き出すものである。したがって、処理前の記憶装置からの読み込み、処理後の記憶装置への書き出しについては、説明を省略する場合がある。なお、ここでの記憶装置としては、ハードディスク、RAM(Random Access Memory)、外部記憶媒体、通信回線を介した記憶装置、CPU(Central Processing Unit)内のレジスタ等を含んでいてもよい。
【0026】
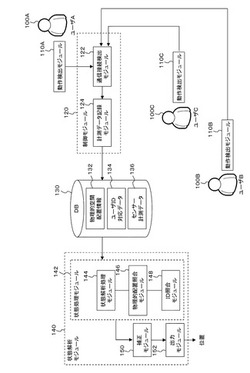
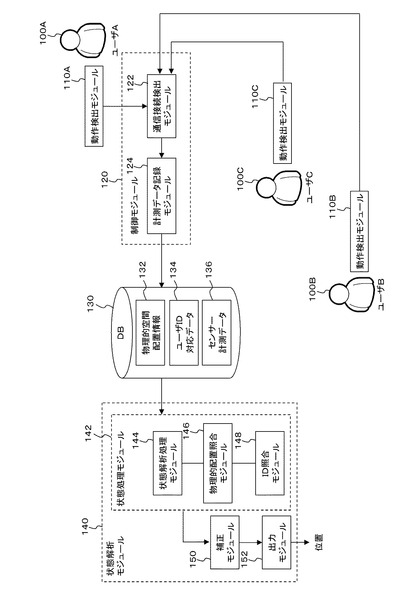
本実施の形態である情報処理装置は、対象者(以下、ユーザともいう)が身につけている動作検出モジュール110が計測した行動情報を利用して地図を生成するものである。図1の例に示すように、情報処理装置は、ユーザ100が身につけた動作検出モジュール110、制御モジュール120、DB(DataBase)130、状態解析モジュール140を有している。
【0027】
ユーザA:100Aは動作検出モジュール110Aを身につけており、ユーザB:100Bは動作検出モジュール110Bを身につけており、ユーザC:100Cは動作検出モジュール110Cを身につけている。これらのユーザ100は、本実施の形態による対象者である。本実施の形態は、これらのユーザ100が働いている部屋(オフィス)内の地図を生成する。なお、地図とは、ユーザ100の座席位置と通路を少なくとも含むものである。
オフィス内での行動は、一般的に限られている。例えば、座位、立位、歩行、ノートに文字を書いている、キーボードを用いたタイピング、ホワイトボードへの書き込み等がある。座位等の行動を行った場合に、動作検出モジュール110が検知する行動情報から特徴を抽出し、それらの特徴を記憶している辞書を予め作成する。これにより、動作検出モジュール110が検知する行動情報に基づいて、辞書とのパターンマッチングによって、対象者がどのような行動を行ったかを判断することができる。
【0028】
動作検出モジュール110A、動作検出モジュール110B、動作検出モジュール110Cは、通信接続検出モジュール122と接続されている。動作検出モジュール110は、ユーザ100が身につけるものであり、そのユーザ100の行動を検知するセンサー、又は他のユーザ100が身につけている動作検出モジュール110と通信を行う通信装置である。動作検出モジュール110は、その検知した情報である行動情報(計測データともいう)を通信接続検出モジュール122に渡す。通信接続検出モジュール122へ行動情報を渡すには、一般的には無線通信によって行う。別の方法として、有線通信を用いて、通信接続検出モジュール122へ行動情報を渡してもよいし、動作検出モジュール110内の記憶装置に行動情報を記憶しておき、後に、その記憶装置から通信接続検出モジュール122が読み出すようにしてもよい。
また、動作検出モジュール110は、ユーザ100の行動を検知するセンサー、通信装置の機能を有していれば、携帯電話等に内蔵されていてもよいし、カード等の形態であってもよいし、腕に固定するように腕輪等に組み込まれていてもよい。
【0029】
行動情報として、その対象者が身につけているセンサーによる計測データ、又はその対象者が身につけている通信装置による通信結果の通信情報等がある。
センサーとして、例えば、加速度センサー(加速度センサーを身につけている対象者の加速度等を計測する)、コンパス(コンパスを身につけている対象者の向き等を計測する)、ジャイロスコープ(ジャイロスコープを身につけている対象者の角度、角速度等を検出する)等がある。本実施の形態では、この3つのセンサーの計測データを主に例示して説明する。計測データとしては、動作検出モジュール110を本実施の形態によって一意に識別し得る情報であるセンサーID、加速度、方向、角度、角速度等の他に計測した日時(年、月、日、分、秒、秒以下等のいずれか1つ以上の組み合わせ)がある。なお、行動情報に含まれる位置に関する情報は、主に、相対座標の位置に関するものであって、絶対座標の位置に関するものは含まれない、又は、検知する絶対座標の位置の精度が悪いものである。例えば、室内であるオフィスではGPS(Global Positioning System)等の精度が悪い、又は位置を計測できない。
また、通信装置としては、近距離通信(例えば、Bluetooth(登録商標)等)を行うものを例示して説明する。通信装置によって通信を行った場合、その通信装置を本実施の形態において一意に識別し得る通信装置ID(A)、通信を行った先である相手側の通信装置を本実施の形態において一意に識別し得る通信装置ID(B)、その通信日時等が通信情報となる。
【0030】
制御モジュール120は、通信接続検出モジュール122、計測データ記録モジュール124を有している。制御モジュール120は、動作検出モジュール110から行動情報を受け取り、DB130へ記憶させる。
通信接続検出モジュール122は、動作検出モジュール110A、動作検出モジュール110B、動作検出モジュール110C、計測データ記録モジュール124と接続されている。通信接続検出モジュール122は、動作検出モジュール110との通信が可能であるか否かを判断する。そして、動作検出モジュール110と通信が可能であると判断したならば、通信接続検出モジュール122は、その動作検出モジュール110から行動情報を受け取り、計測データ記録モジュール124に渡す。
計測データ記録モジュール124は、通信接続検出モジュール122、DB130と接続されている。計測データ記録モジュール124は、通信接続検出モジュール122から計測データを受け取り、DB130のセンサー計測データ136に記憶させる。なお、後述するユーザID対応データ134を検索して、ユーザIDと関連付けて行動情報をセンサー計測データ136に記憶させるようにしてもよい。
【0031】
DB130は、計測データ記録モジュール124、状態処理モジュール142と接続されている。そして、DB130は、物理的空間配置情報132、ユーザID対応データ134、センサー計測データ136を記憶している。
物理的空間配置情報132は、ユーザ100が身につけている動作検出モジュール110等を検知する装置であって、その装置に関する情報を記憶している。例えば、装置に関する情報として、その装置自体は固定されているものであって、装置を本実施の形態において一意に識別し得る装置IDとその装置がある場所の絶対座標の位置に関する情報がある。物理的空間配置情報132は、それらの装置IDと絶対座標の位置を対応させて記憶するテーブル等を記憶している。この装置としては、例えば、フラッパーゲート(入退室を管理するものであって、動作検出モジュール110等を検知する。なお、検知するものは必ずしも動作検出モジュール110である必要はなく、ユーザを特定できればよい)、複写機(その複写機を利用するには、その人が身につけている動作検出モジュール110等を読み込ませる必要がある)等がある。つまり、これらの装置が動作検出モジュール110等を検知した場合は、動作検出モジュール110等を身につけているユーザがその時点でその場所にいたということになる。なお、ここでの絶対座標とは、緯度、経度によって特定される座標であってもよいし、本実施の形態が生成する地図において、その装置の示す位置が固定した位置であればよい。
また、物理的空間配置情報132は、絶対座標の位置を有している装置を一意に識別し得る装置IDと、その装置IDの装置が検知したユーザIDを対応させて記憶しているテーブル等を記憶している。
【0032】
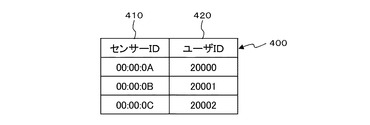
ユーザID対応データ134は、ユーザ100を本実施の形態によって一意に識別し得る情報であるユーザIDを記憶する。例えば、図4の例に示すセンサー・ユーザ対応テーブル400を記憶していてもよい。センサー・ユーザ対応テーブル400は、センサーID欄410、ユーザID欄420を有している。センサーID欄410は、動作検出モジュール110を本実施の形態によって一意に識別し得る情報であるセンサーIDを記憶している。ユーザID欄420は、そのセンサーIDの動作検出モジュール110を身につけているユーザIDを記憶している。このセンサー・ユーザ対応テーブル400を利用することによって、計測データとユーザIDを関連付けることができる。
また、ユーザID対応データ134は、ユーザIDに対応させて、動作検出モジュール110内の通信装置を本実施の形態で一意に識別し得る情報である通信装置IDを記憶していてもよい。このユーザID対応データ134を利用することによって、通信装置とユーザIDを関連付けることができる。
また、ユーザID対応データ134は、ユーザIDに対応させて、そのユーザの歩幅を記憶していてもよい。このユーザID対応データ134と歩数を利用することによって、移動距離を算出できる。
また、ユーザID対応データ134は、後述する状態解析処理モジュール144によって決定された行動起点の位置をユーザIDと対応させて記憶してもよい。
センサー計測データ136は、計測データ記録モジュール124から渡された行動情報を記憶する。前述したように、行動情報として、センサーID、計測した日時、そのセンサーが計測したデータが含まれている。また、この行動情報にユーザIDを対応させてもよい。したがって、センサー計測データ136内の行動情報を解析することによって、誰がいつどのような行動をしたかを判別することができる。
【0033】
状態解析モジュール140は、状態処理モジュール142、補正モジュール150、出力モジュール152を有している。
状態処理モジュール142は、DB130、補正モジュール150と接続されている。そして、状態処理モジュール142は、状態解析処理モジュール144、物理的配置照合モジュール146、ID照合モジュール148を有している。
状態解析処理モジュール144は、物理的配置照合モジュール146と接続されている。状態解析処理モジュール144は、ユーザの行動情報に基づいて、そのユーザの状態を解析する。ユーザの状態として、そのユーザの位置を少なくとも含む。そして、状態解析処理モジュール144は、解析した状態に基づいて、そのユーザの行動の起点である位置を相対座標の位置として決定する。ここで、行動の起点とは、その対象者が他の場所よりも長くとどまっている場所である。例えば、その対象者の座席位置(一般的に自席ともいわれる)である。そして、状態解析処理モジュール144は、その行動起点の位置をDB130内のユーザID対応データ134に、ユーザIDと対応させて記憶させる。
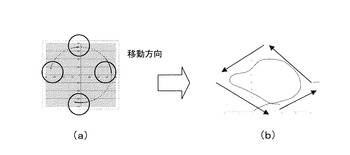
解析するユーザの状態としては、座位、立位、歩行、ノートに文字を書いている、キーボードを用いたタイピング、ホワイトボードへの書き込み等がある。さらに、日時情報とその日時におけるユーザの方向、歩行している場合は歩数、その歩数と前述のユーザID対応データ134が記憶している歩幅によって算出した歩行距離等が解析結果となる。図5は、処理対象とする計測データ(加速度センサーの計測データ)の例を示す説明図である。前述したように、計測データの特徴抽出を行い、状態の辞書とのパターンマッチングを行うことによって、状態を解析する。例えば、周波数解析によって、図5(a)の例では、立位区間510と座位区間520に分けることができる。図5(b)の例では、ノートに文字を書いている状態であると解析しており、図5(c)の例では、キーボードを用いたタイピングをしている状態であると解析しており、図5(d)の例では、ホワイトボードへの書き込みをしている状態であると解析する。また、図7の例に示すように、加速度センサーの計測データの山の位置をカウントすることによって、歩数をカウントする。そして、状態解析処理モジュール144は、その計測データを検知した動作検出モジュール110を身につけているユーザ100のユーザIDを、センサー・ユーザ対応テーブル400を用いて抽出し、そのユーザIDに対応する歩幅をユーザID対応データ134から抽出し、歩数と歩幅の乗算によって移動距離を算出してもよい。また、図8(a)の例に示すようなコンパスの計測データと移動距離に基づいて、図8(b)の例に示すような移動経路(軌跡)を算出してもよい。なお、移動経路が地図における通路になる。
【0034】
行動の起点であるか否かの判断手法を説明する。状態解析処理モジュール144は、ユーザが座位の状態であって、デスクワークをしている状態(前述のノートに文字を書いている状態、キーボードを用いたタイピングをしている状態等)が予め定められた時間以上続いている場合の位置を行動の起点であると判断する。なお、予め定められた時間以上続いているのは、座位の状態だけであってもよいし、座位の状態かつデスクワークをしている状態を条件としてもよい。なお、ここでの行動の起点の位置とは、相対座標の位置であり、例えば、そのユーザ100における座標の原点(0,0)としてもよい。
また、行動情報には、対象者が有している動作検出モジュール110内の通信装置同士が通信を行ったことを示す情報である通信情報が含まれている。状態解析処理モジュール144は、その行動情報内の通信情報に基づいて、通信を行った対象者の組み合わせを抽出してもよい。つまり、状態解析処理モジュール144は、その通信を行った通信装置ID(A)と通信装置ID(B)を特定し、ユーザID対応データ134を用いて、通信装置ID(A)、通信装置ID(B)の通信装置を身につけているユーザIDを抽出すればよい。そして、状態解析処理モジュール144は、通信装置ID(A)側で抽出した通信装置ID(B)に対応するユーザIDと、通信装置ID(B)側で抽出した通信装置ID(A)に対応するユーザIDとから構成されるユーザ同士が会っている状態であると判断する。具体的に説明する。このユーザIDのユーザ同士について状態解析処理モジュール144は、他方のユーザIDを抽出した時点で、抽出したユーザIDに対応するユーザと会っている状態であると判断する。なお、対象者の組み合わせの抽出は、この通信が予め定められた時間以上続いていることを条件としてもよい。
また、行動情報には、対象者の方向を示す情報である方向情報と位置を示す位置情報が含まれている。状態解析処理モジュール144は、その行動情報内の方向情報と位置情報に基づいて、通信を行った対象者の組み合わせを抽出してもよい。つまり、状態解析処理モジュール144は、その方向情報と位置情報を検知した複数の動作検出モジュール110のセンサーIDを特定し、ユーザID対応データ134を用いて、そのセンサーIDの動作検出モジュール110を身につけているユーザIDを抽出すればよい。そして、状態解析処理モジュール144は、抽出したユーザIDの組み合わせから構成されるユーザ同士が通信を行っている状態であると判断する。具体的に説明する。このユーザIDのユーザ同士について、状態解析処理モジュール144は、ユーザIDを抽出した時点で、抽出したユーザIDに対応するユーザと通信を行っている状態であると判断する。なお、対象者の組み合わせの抽出は、この通信が予め定められた時間以上取得できたことを条件として、互いに通信を行っている対象者の組み合わせを抽出してもよい。
また、状態解析処理モジュール144は、通信装置同士の通信に関する情報を用いずに、その行動情報内の方向情報と位置情報に基づいて、互いに会っている対象者の組み合わせを抽出してもよい。つまり、状態解析モジュール144は、その方向情報と位置情報を検知した複数の動作検出モジュール110のセンサーIDを特定し、ユーザID対応データ134を用いて、そのセンサーIDの動作検出モジュール110を身につけているユーザIDを抽出すればよい。そして、状態解析処理モジュール144は、抽出したユーザIDの組み合わせから構成されるユーザ同士が互いに会っている状態であると判断する。具体的に説明する。このユーザIDのユーザ同士については、状態解析処理モジュール144は、ユーザIDを抽出したその時点で、抽出したユーザIDに対応するユーザと互いに会っている状態であると判断する。なお、対象者の組み合わせの抽出は、この状態が予め定められた時間以上続いていることを条件として、対象者の組み合わせを抽出してもよい。
【0035】
また、状態解析処理モジュール144は、複数のユーザが予め定められた距離以内で同期して移動している場合は、その複数のユーザの予め定められた歩幅を合わせるように修正して、移動の状態を解析するようにしてもよい。同期して移動しているとは、いわゆる連れだって歩いている状態をいう。同期しているか否かについての判断等については、図24、図25を用いて後述する。なお、予め定められた歩幅は、DB130のユーザID対応データ134に記憶されている。移動の状態を解析するとは、修正した歩幅と歩数に基づいて移動距離を算出することである。
【0036】
物理的配置照合モジュール146は、状態解析処理モジュール144、ID照合モジュール148と接続されている。物理的配置照合モジュール146は、状態解析処理モジュール144によって決定された行動起点の相対座標位置を、絶対座標の位置に変換する機能を有する。なお、物理的配置照合モジュール146は、そのユーザ又は他のユーザの行動によって、絶対座標の位置を有している装置がそのユーザ又は他のユーザを検知している場合に相対座標位置を絶対座標位置に変換する機能を実行してもよい。
例えば、対象としているユーザ100がフラッパーゲートを通過した場合、そのフラッパーゲートを通過した時点からの移動距離、ユーザ100から見た場合のフラッパーゲートの方向、そのフラッパーゲートの絶対座標の位置に基づいて、行動起点の相対座標の位置を絶対座標の位置に変換する。
また、物理的配置照合モジュール146は、状態解析処理モジュール144によって抽出されたユーザの組み合わせに基づいて、他のユーザの行動起点の位置としての絶対座標位置を用いて、対象としているユーザの行動起点としての相対座標としての位置を絶対座標としての位置に変更するようにしてもよい。例えば、他のユーザがフラッパーゲートを通過したことによって、他のユーザの行動起点の絶対座標位置となる。そして、他のユーザの行動起点の絶対座標位置と他のユーザと対象としているユーザが会った位置から、対象としているユーザの行動起点の絶対座標位置を算出すればよい。
また、物理的配置照合モジュール146は、ユーザ間の関係を示す情報である関係情報に基づいて、ユーザの組み合わせを抽出するようにしてもよい。関係情報については、図13の例に示す関係性テーブル1300を用いて後述する。
また、物理的配置照合モジュール146は、行動起点を机の位置であるとし、ユーザの移動した経路を通路であるとして、地図を生成するようにしてもよい。
【0037】
ID照合モジュール148は、物理的配置照合モジュール146と接続されている。ID照合モジュール148は、前述の識別情報に対応する情報をユーザID対応データ134から抽出する。これは、ID照合モジュール148は、状態解析処理モジュール144、物理的配置照合モジュール146からの要求に基づいて抽出処理を行い、その結果を要求した状態解析処理モジュール144、物理的配置照合モジュール146に渡す。抽出する情報としては、例えば、センサーIDに対応するユーザID、通信装置IDに対応するユーザID、ユーザIDに対応する歩幅等が該当する。
【0038】
補正モジュール150は、状態処理モジュール142、出力モジュール152と接続されている。補正モジュール150は、物理的配置照合モジュール146によって生成された各ユーザの行動起点の位置、地図等について、補正を行う。パーソナルコンピュータ等の電子機器が多いオフィスでは、コンパス等のセンサーの精度が落ちる場合がある。そのために、例えば、補正モジュール150は、複数人のユーザの行動情報、ユーザの複数日分の行動情報を用いて、各ユーザの行動起点の位置、地図等を複数生成して、その統計的値である平均値、最頻値、中央値等を用いて補正する。
補正モジュール150は、状態解析処理モジュール144によって解析された状態、行動情報内のユーザの方向情報又は位置情報に基づいて、複数のユーザが集合している場所である集合場所の位置を決定する。そして、補正モジュール150は、集合場所の位置に基づいて、ユーザの位置情報を補正する。集合場所とは、後述するユーザが立ち止まることがある箇所に含まれる。補正モジュール150による集合場所の判断は、2人以上のユーザの位置がその時点で予め定められた距離以内にあることを条件、又はそれらのユーザが互いに向き合っている方向であることを条件としている。また、集合場所の位置は、絶対座標の位置であってもよいし、相対座標の位置であってもよい。また、集合場所は行動起点ともなり得る。
また、補正モジュール150は、さらに状態解析処理モジュール144によって決定された他のユーザの行動起点の位置に基づいて、ユーザの位置情報を補正するようにしてもよい。行動起点は集合場所になりやすいことを利用したものである。
また、補正モジュール150は、集合場所の位置に他のユーザが移動した場合であって、集合しているユーザの方向情報と他のユーザの方向情報、又は、集合しているユーザと他のユーザとの間の関係を示す情報である関係情報に基づいて、集合場所の位置に移動してきた他のユーザの位置を補正するようにしてもよい。
【0039】
出力モジュール152は、補正モジュール150と接続されている。出力モジュール152は、補正モジュール150によって補正された各ユーザの行動起点の位置、地図等を出力する。例えば、出力モジュール152は、地図をプリンタ等の印刷装置で印刷すること、ディスプレイ等の表示装置に表示すること、地図データベース等の情報処理装置へ渡すこと、メモリーカード等の記憶媒体に記憶すること等を行う。
【0040】
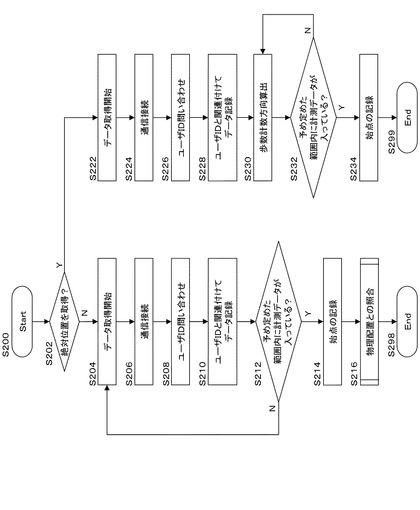
図2は、本実施の形態による処理例を示すフローチャートである。
ステップS202では、状態解析処理モジュール144が、対象としているユーザについて絶対位置を取得したか否かを判断し、そのユーザについて絶対座標を取得している場合はステップS222へ進み、それ以外の場合はステップS204へ進む。例えば、対象としているユーザが前述のフラッパーゲートを通過した場合は、ステップS222へ進むことになる。なお、状態解析処理モジュール144が、物理的空間配置情報132を検索することによって、そのユーザについて絶対位置を取得したか否かを判断する。
【0041】
ステップS204では、動作検出モジュール110が、データ取得を開始する。例えば、動作検出モジュール110内の各センサーがユーザの行動を検知する。
ステップS206では、通信接続検出モジュール122が、動作検出モジュール110との間で通信接続を行う。
ステップS208では、計測データ記録モジュール124が、ユーザIDを問い合わせる。つまり、ユーザID対応データ134を検索してセンサーIDからユーザIDを抽出する。
ステップS210では、計測データ記録モジュール124が、ユーザIDと関連付けて、センサー計測データ136に計測データを記録する。
ステップS212では、状態解析処理モジュール144が、予め定めた範囲内に計測データが入っているか否かを判断し、入っている場合はステップS214へ進み、それ以外の場合はステップS204からの処理を行う。
ステップS214では、状態解析処理モジュール144が、対象としているユーザの行動起点を記録する。ここでの行動起点は相対座標の位置である。
ステップS216では、物理的配置照合モジュール146が、物理配置との照合を行う。この処理については、図10等を用いて後述する。
【0042】
ステップS222では、動作検出モジュール110が、データ取得を開始する。例えば、動作検出モジュール110内の各センサーがユーザの行動を検知する。
ステップS224では、通信接続検出モジュール122が、動作検出モジュール110との間で通信接続を行う。
ステップS226では、計測データ記録モジュール124が、ユーザIDを問い合わせる。つまり、ユーザID対応データ134を検索してセンサーIDからユーザIDを抽出する。
ステップS228では、計測データ記録モジュール124が、ユーザIDと関連付けて、センサー計測データ136に計測データを記録する。
ステップS230では、状態解析処理モジュール144が、歩数を計数し、方向を算出する。つまり、ステップS202で判断対象となった絶対位置からの移動距離、方向を算出することになる。
ステップS232では、状態解析処理モジュール144が、予め定めた範囲内に計測データが入っているか否かを判断し、入っている場合はステップS234へ進み、それ以外の場合はステップS230からの処理を行う。
ステップS234では、状態解析処理モジュール144が、対象としているユーザの行動起点を記録する。ここでの行動起点は絶対座標の位置である。
この処理によって、絶対座標としての行動起点を有するユーザと相対座標としての行動起点を有するユーザとが混在することがある。
なお、ステップS212、ステップS232の判断で用いる予め定めた範囲としては、前述したように、座位の状態であって、デスクワークをしている状態が予め定められた時間以上続いている場合をいう。
【0043】
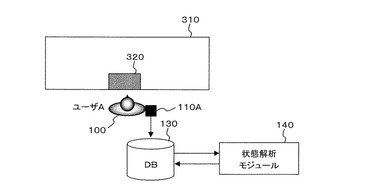
図3は、本実施の形態による処理例を示す説明図である。
図3の例は、オフィス内の複数の机からなるブロック310内の机320の前に動作検出モジュール110Aが座っている状態を示している。なお、図1の例では、動作検出モジュール110Aから制御モジュール120を介してDB130に行動情報が記憶されるが、この図では制御モジュール120を省略している。
動作検出モジュール110Aは、ユーザ100の行動を検知して、行動情報の取得を開始する。そして、動作検出モジュール110Aは、DB130(制御モジュール120)と通信状態にある動作検出モジュール110のセンサーIDとユーザIDを照合し、ユーザA:100Aを特定する。例えば、ユーザID対応データ134内の図4に例示しているセンサー・ユーザ対応テーブル400を用いて、センサーIDからユーザIDを抽出する。
【0044】
次に、状態解析モジュール140内の状態解析処理モジュール144は、加速度センサーの計測データを利用して座位状態であるか否かを、判定する。前述したように、図5(a)の例では、状態解析処理モジュール144は、計測データを立位区間510と座位区間520に分ける。
そして、状態解析処理モジュール144は、加速度センサーの計測データに対して周波数解析を行い、デスクワークであるか、会議中であるかを判定する。前述したように、図5(b)、図5(c)の例の状態では、デスクワークをしている状態と判断し、図5(d)の例の状態では、会議中である状態と判断する。
状態解析処理モジュール144は、座位状態が予め定められた時間以上続いており、デスクワークをしている状態であれば、オフィス(居室)における仕事中であると判定し、ここの行動起点(自席)にセットする。
【0045】
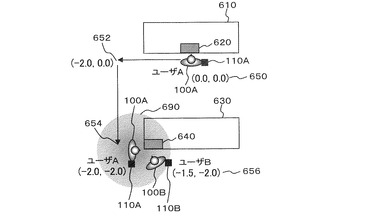
図6は、本実施の形態による処理例を示す説明図である。立ち止まることがある箇所(前述の集合場所を含み、以下、ノードともいう)を登録する例である。
ユーザA:100Aの自席(机620)、ユーザB:100Bの自席(机640)は、既に前述の処理によって行動起点として登録されている。つまり、ユーザA:100Aの行動起点は位置650であり、ユーザB:100Bの行動起点は位置656である。
ユーザA:100AがユーザB:100Bの机640まで移動した場合、加速度データから歩数をカウントし(図7の例参照)、さらにコンパスによって移動方向を算出することによって(図8の例参照)、移動先(例えば、机640の隣の位置)が把握できる。
しかしながら、オフィスではセンサーであるコンパスの精度が落ちること、また広い廊下と椅子の間の歩行では歩幅が変化するということ等がある。例えば、図6の例では、実際は、ユーザA:100Aは机640の隣の位置(−2.0,−2.0)にいるにもかかわらず、ユーザA:100Aは位置654にいると判断してしまうことがありえる。なお、図6の例で、観測した位置654は、位置(−2.0,−2.0)より左上の位置にある。
そこで、机640の近傍にユーザA:100Aが存在している場合(具体的には、ユーザA:100Aを中心とした補正対象範囲690内に机640がある場合)、ユーザA:100Aの向き(その時点での動作検出モジュール110A内のコンパスの計測データ)、ユーザB:100Bの向き(その時点での動作検出モジュール110B内のコンパスの計測データ)、滞在時間(ユーザA:100Aが立ち止まっている(立位であって歩数が0)と判断された時間)から、ユーザA:100AとユーザB:100Bとは“会っている(対話)”と判定する。そして、ユーザA:100AとユーザB:100Bの往来履歴の平均値、最頻値、中央値等を用いて、ユーザA:100AとユーザB:100Bの行動起点の相対的な位置を特定する。なお、“会っている(対話)”と判定するのに、動作検出モジュール110Aと動作検出モジュール110B内の通信装置が通信を行っていることを条件としてもよい。
【0046】
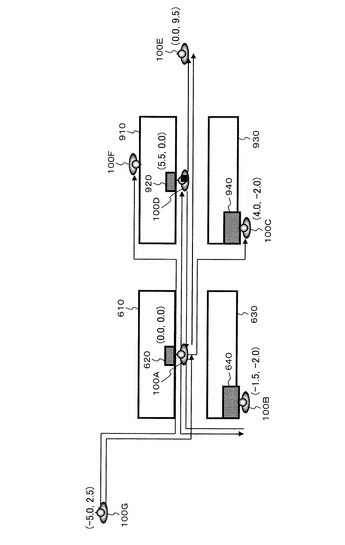
もちろんのことながら、2人のユーザ間だけでなく、3人以上のユーザの計測データを解析することもできる。図9は、本実施の形態による処理例を示す説明図である。ユーザA:100Aが、ユーザB:100B、ユーザC:100C、ユーザD:100Dの自席でそれぞれのユーザと会ったり、ユーザG:100Gが、ユーザF:100Fの自席でユーザF:100Fと会ったり、ユーザE:100Eと会ったりしていることから、計測データの蓄積ができ、オフィス全体の地図ができあがるようになる。つまり、各ユーザの行動起点の位置に机があり、その机はそのユーザの自席と、状態解析モジュール140は判断する。そして、ユーザの移動した経路(図9の例では矢印線)を通路であると、状態解析モジュール140は判断して、地図を生成する。
また、ユーザA:100Aが直接にユーザF:100Fの自席に行っていなかった場合であっても、ユーザG:100GがユーザA:100Aの自席を通って、ユーザF:100Fの自席に行ったことがあるので、その行動履歴(計測データ)から、ユーザA:100Aの行動起点からのユーザF:100Fの相対座標の位置を特定することが可能である。つまり、ユーザA:100Aが行動起点からユーザF:100Fの行動起点へ行ったことがない場合には、他のユーザでユーザA:100Aの行動起点を通ってユーザF:100Fの行動起点へ行った場合の経路を抽出し、その経路を利用して、ユーザA:100Aの行動起点とユーザF:100Fの行動起点の相対座標の位置関係を定めるようにしてもよい。
【0047】
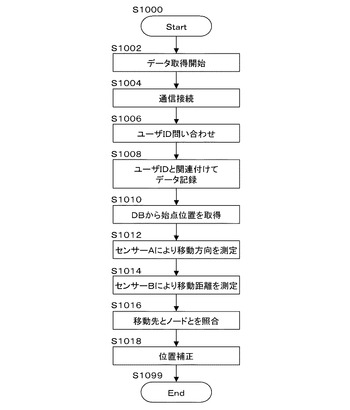
図10は、本実施の形態による処理例を示すフローチャートである。
ステップS1002では、動作検出モジュール110が、データ取得を開始する。例えば、動作検出モジュール110内の各センサーがユーザの行動を検知する。
ステップS1004では、通信接続検出モジュール122が、動作検出モジュール110との間で通信接続を行う。
ステップS1006では、計測データ記録モジュール124が、ユーザIDを問い合わせる。つまり、ユーザID対応データ134を検索してセンサーIDからユーザIDを抽出する。
ステップS1008では、計測データ記録モジュール124が、ユーザIDと関連付けて、センサー計測データ136に計測データを記録する。
ステップS1010では、物理的配置照合モジュール146は、DB130のユーザID対応データ134から対象としているユーザIDに対応する行動起点の位置を取得する。
ステップS1012では、物理的配置照合モジュール146は、センサーAによる計測データを用いて移動方向を測定する。
ステップS1014では、物理的配置照合モジュール146は、センサーBによる計測データを用いて移動距離を測定する。
【0048】
ステップS1016では、物理的配置照合モジュール146は、移動先とノードとを照合する。ここでのノードとは、図6を用いて説明したように、立ち止まることがある箇所である。前述のように、往来履歴の平均値、最頻値、中央値等を用いて定められた位置である。ここでの照合とは、移動先の位置と予め定められた距離以内にあるノードを抽出することである。また、ノードには、フラッパーゲートのような絶対座標の位置を有している装置の位置としてもよい。
ステップS1018では、補正モジュール150は、移動先の位置をノードの位置によって補正する。例えば、移動先の位置をノードの位置にしてもよいし、予め定められた重みに基づいて移動先の位置をノードの位置へ移動するようにしてもよい。また、物理的配置照合モジュール146は、ノードが、絶対座標の位置を有している装置の位置であれば、相対座標の位置を絶対座標の位置に変更する。つまり、移動先の位置の相対座標を、その装置の絶対座標の位置に変更する。そして、それまで生成した相対座標の位置と移動先の相対座標の位置との差分を、移動先の絶対座標の位置に加算又は減算すればよい。また、図11、図12、図13の例を用いて後述する補正を用いてもよい。
【0049】
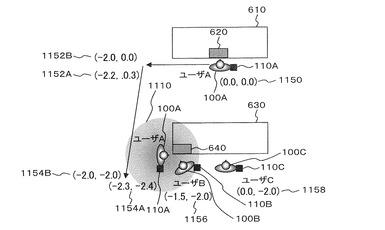
図11は、本実施の形態による処理例を示す説明図である。ユーザA:100Aが位置1150から計測位置1152を通ってユーザB:100Bと会うために計測位置1154へ移動したとする。また、ユーザB:100Bの隣にはユーザC:100Cもいる。
図6の例と同様に、ユーザA:100AとユーザB:100Bとは“会っている(対話)”(集合場所にいる)と、補正モジュール150が判定した場合に、通常の会話距離(50cm〜100cm)の範囲に存在しているとして位置を補正モジュール150が補正する。
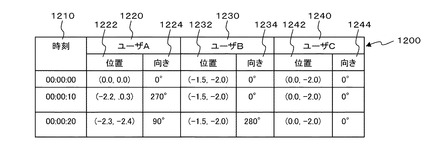
例えば、図11の例では、ユーザA:100Aの移動先の計測位置1154Aが計測データから(−2.3,−2.4)であった場合に、ユーザB:100Bの行動起点が位置1156(−1.5,−2.0)であることから、その時点でのユーザA:100Aの位置を、集合場所の位置(ユーザB:100Bの行動起点である位置1156)に基づいて、ユーザA:100Aの計測位置1154A(−2.3,−2.4)を補正位置1154B(−2.0,−2.0)と、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル1200(図12)に基づいて補正を行う。時刻欄1210が00:00:20の時点において、ユーザA:100AとユーザB:100Bの距離は予め定められた範囲内にある。この場合、予め定められた範囲として、x座標、y座標ともに1.0以内であるとしている。具体的に数値で示すと、
(−2.3,−2.4)−(−1.5,−2.0)<=(1.0,1.0)
となっている。したがって、この場合、ユーザA:100AとユーザB:100Bは、位置情報に関する条件を満たしている。なお、ユーザA:100AとユーザC:100Cは、位置情報に関する条件を満たしていない。そこで、ユーザA:100AとユーザB:100Bによって集合場所が形成されており、補正モジュール150がユーザA:100Aの計測位置1154Aを補正する。その時点でのユーザA:100A;の方向、ユーザB:100Bの方向のいずれか又は両方に基づいて、補正モジュール150が、ユーザB:100Bの行動起点である位置1156(−1.5,−2.0)のx座標に−0.5を加算して、計測位置1154A(−2.3,−2.4)を補正位置1154B(−2.0,−2.0)と補正している。より具体的には、ユーザA:100Aの方向が右(90°)であるので、x座標だけを会話距離(予め定められた値、例えば、50cm)だけ離れるように補正したものである。なお、補正モジュール150は補正するのに、ユーザB:100Bの行動起点の位置を用いたが、ユーザB:100Bのその時点における位置(計測データ)を用いるようにしてもよい。
また、補正モジュール150は、補正する際に、補正前の位置と補正後の位置との距離が予め定められた距離内であることを確認するようにしてもよい。具体的には、ユーザA:100Aの補正前の位置である計測位置1154A(−2.3,−2.4)と補正後の位置である補正位置1154B(−2.0,−2.0)との距離が補正範囲1110(予め定められた値、例えば、0.5以内)内であれば、その補正を行い、その補正範囲1110外である場合は、その補正は行わないようにする。
【0050】
さらに、補正モジュール150が補正を行った場合は、その補正を行った時点の前後におけるユーザA:100Aの位置を補正するようにしてもよい。例えば、補正モジュール150がユーザA:100Aの計測位置1154Aを補正位置1154Bと補正したので、その前の時点(計測データテーブル1200の時刻欄1210での00:00:10)における計測位置1152Aを補正位置1152Bと、補正モジュール150が補正している。補正モジュール150によるこの補正は、補正位置1154B(−2.0,−2.0)から直線的に移動したとして、補正位置1152B(−2.0,0.0)へ補正モジュール150が補正している。補正モジュール150によるこの補正において、さらに、その時点よりも前の時点(計測データテーブル1200の時刻欄1210での00:00:00)が行動起点であるか否かを、補正モジュール150が判断する。行動起点である場合は、補正モジュール150が、その行動起点の位置も利用して補正するようにしてもよい。例えば、その行動起点からは直線的に移動したとする場合の位置の変更である。
【0051】
さらに、ユーザA:100AがユーザB:100Bの行動起点付近でもあり、ユーザC:100Cの行動起点付近でもある場所で立ち止まっている場合、ユーザA:100AとユーザB:100BとユーザC:100Cとの関係性を示す関係性テーブル1300を用いて、関係性が高いと判断した場合は、ユーザA:100AはユーザB:100Bの行動起点付近にいるとして、ユーザA:100Aの移動先の位置を補正する。前述の補正と同等の補正を行うようにしてもよい。
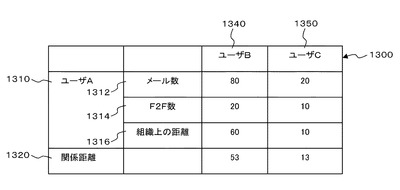
図13は、関係性テーブル1300のデータ構造例を示す説明図である。関係性テーブル1300は、行方向にユーザA欄1310、ユーザAとの関係距離欄1320を有し、列方向にユーザB欄1340、ユーザC欄1350を有している。
ユーザA欄1310は、メール数欄1312、F2F数欄1314、組織上の距離欄1316を有している。メール数欄1312は、ユーザAと他のユーザ(ユーザB、ユーザC)との間で行われたメール数、F2F数欄1314は、ユーザAと他のユーザ(ユーザB、ユーザC)と実際に会った回数、組織上の距離欄1316は、ユーザAと他のユーザ(ユーザB、ユーザC)と組織上の距離(例えば、組織図の木構造を対象として、ユーザAと他のユーザとの間にあるパスの数の逆数を100倍した値)を記憶している。ユーザAとの関係距離欄1320は、これらの平均値を記憶している。ここでは値が多いほど関係性が高いと、状態解析モジュール140は判断する。この値が予め定められた値以上であって、ユーザA:100AとユーザB:100Bの位置が予め定められた距離以内である場合は、両者が会っていると、状態解析モジュール140は判断する。なお、ユーザA:100AとユーザC:100CとのユーザAとの関係距離欄1320の値は、予め定められた値以上ではないので、両者は会ってはいないと、状態解析モジュール140は判断する。
【0052】
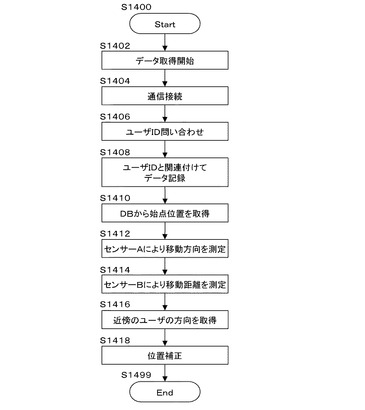
図14は、本実施の形態による処理例を示すフローチャートである。
ステップS1402からステップS1414までの処理は、図10の例に示したフローチャート内のステップS1002からステップ1014の処理を同等である。
ステップS1416では、補正モジュール150は、移動先の近傍にいるユーザの方向を取得する。ここで近傍とは、移動先の位置(実測値)から予め定められた範囲内にあることをいう。
ステップS1418では、補正モジュール150は、移動先の位置を補正する。複数人のユーザがいる場合は、移動したユーザの方向と他のユーザの方向との関係から、前述の図11、図12の例を用いて説明した補正を行う。つまり、補正モジュール150は、移動したユーザの方向と他のユーザの方向との関係から、会話をしているであろうユーザを抽出し、そのユーザの行動起点の位置を集合場所とする。そして、補正モジュール150は、集合場所の位置から、対象としているユーザの位置を補正する。また、この補正として、他のユーザの過去の補正と同等の補正を行うようにしてもよい。
【0053】
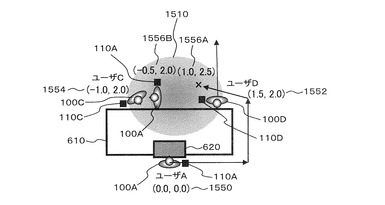
図15は、本実施の形態による処理例を示す説明図である。ユーザA:100Aは、位置1550から位置1554にいるユーザC:100Cと対話をするために移動したとする。この場合、センサーの位置精度が悪く、その位置は計測位置1556Aと測定されてしまい、むしろ、ユーザD:100Dの位置に近くなっているとする。つまり、位置情報だけを用いると、ユーザA:100AとユーザD:100Dとによって形成される集合場所になってしまう。そこで、ユーザA:100A、ユーザC:100C、ユーザD:100Dの方向情報を用いて、集合場所を判断する。なお、方向情報を用いた集合場所の判断については、図16〜19を用いて後述する。図15の場合は、ユーザA:100AとユーザC:100Cが向き合っており、ユーザA:100AとユーザD:100Dは向き合っていないので、ユーザA:100AとユーザC:100Cとによって形成される集合場所と判断されることになる。つまり、ユーザC:100Cの行動起点である位置1554に基づいて、ユーザA:100Aの移動先の計測位置1556Aを補正位置1556Bに補正する。補正の方法は、前述の方法と同等である。
【0054】
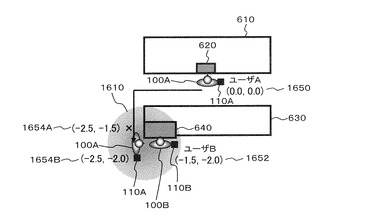
図16は、本実施の形態による処理例を示す説明図である。ユーザA:100Aは、位置1650から位置1652にいるユーザB:100Bと対話をするために移動したとする。
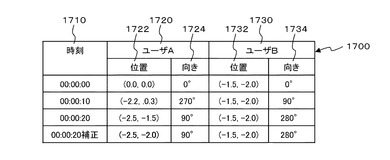
例えば、ユーザA:100Aの移動先の計測位置1654が計測データから(−2.5,−1.5)であった場合に、ユーザB:100Bの行動起点が位置1652(−1.5,−2.0)であることから、その時点でのユーザA:100Aの位置を、集合場所の位置(ユーザB:100Bの行動起点である位置1156)に基づいて、ユーザA:100Aの計測位置1654Aを補正位置1654Bと、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル1700(図17)に基づいて補正を行う。時刻欄1710が00:00:20の時点において、ユーザA:100AとユーザB:100Bの方向(向き)は予め定められた範囲内にある。この場合、予め定められた範囲として、180°±30°以内であるとしている。具体的に数値で示すと、
|90°−280°|<180°±30°
となっている。したがって、この場合、方向情報に関する条件を満たしている。ユーザA:100AとユーザB:100Bによって集合場所が形成されており、補正モジュール150がユーザA:100Aの計測位置1654Aを補正する。具体的には、補正モジュール150が、ユーザB:100Bの行動起点である位置1652(−1.5,−2.0)のx座標に−1.0を加算して、補正位置1654B(−2.5,−2.0)と補正している。なお、補正モジュール150は補正するのに、ユーザB:100Bの行動起点の位置を用いたが、ユーザB:100Bのその時点における位置(計測データ)を用いるようにしてもよい。
【0055】
図18は、本実施の形態による処理例を示す説明図である。ユーザA:100Aは、位置1850から位置1852にいるユーザC:100Cと対話をするために移動したとする。
例えば、ユーザA:100Aの移動先の計測位置1854が計測データから(−2.5,0.0)であった場合に、ユーザB:100Bの行動起点が位置1852(−1.5,0.0)であることから、その時点でのユーザA:100Aの位置を、集合場所の位置(ユーザC:100Cの行動起点である位置1852)に基づいて、ユーザA:100Aの計測位置1854Aを補正位置1854Bと、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル1900(図19)に基づいて補正を行う。時刻欄1910が00:00:10の時点において、ユーザA:100AとユーザC:100Cの距離は予め定められた範囲内にある。この場合、予め定められた範囲として、x座標、y座標ともに1.0以内であるとしている。具体的に数値で示すと、
(−2.5,−0.0)−(−1.5,0.0)<=(1.0,1.0)
また、ユーザA:100AとユーザC:100Cの方向(向き)は予め定められた範囲内にある。この場合、予め定められた範囲として、180°±30°以内であるとしている。具体的に数値で示すと、
|90°−280°|<180°±30°
となっている。したがって、この場合、位置情報に関する条件及び方向情報に関する条件を満たしている。ユーザA:100AとユーザC:100Cによって集合場所が形成されており、補正モジュール150がユーザA:100Aの計測位置1854Aを補正する。具体的には、補正モジュール150が、ユーザC:100Cの行動起点である位置1852(−1.5,0.0)のx座標に−0.5を加算して、補正位置1854B(−2.0,0.0)と補正している。なお、補正モジュール150は補正するのに、ユーザC:100Cの行動起点の位置を用いたが、ユーザC:100Cのその時点における位置(計測データ)を用いるようにしてもよい。
【0056】
図20は、本実施の形態による処理例を示す説明図である。前述の例では、ユーザの行動情報が統計的に十分に蓄積されており、前述の統計的値を用いていたとする。しかし、ユーザによっては、行動情報が統計的に十分に蓄積されているとは限らない。そのような場合に、補正モジュール150は、行動情報が統計的に十分に蓄積されている他のユーザの行動情報を用いて補正を行うようにしてもよい。
図20の例では、ユーザC:100Cは、位置2054から位置2052にいるユーザB:100Bと対話をするために移動したとする。ただし、ユーザA:100Aについては行動情報が統計的に十分に蓄積されているが、ユーザB:100BとユーザC:100Cについては行動情報は統計的に十分に蓄積されていないとする。
例えば、ユーザC:100Cの移動先の計測位置が計測データから2056A(−2.5,−1.5)であった場合に、ユーザB:100Bの行動起点が位置2052(−1.5,−2.0)であることから、その時点でのユーザB:100Bの位置を、集合場所の位置(ユーザC:100Cの行動起点である位置2052)に基づいて、ユーザC:100Cの計測位置2056A(−2.5,−1.5)を補正位置2056B(−2.5,−2.0)と、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル2100(図21)に基づいて補正を行う。時刻欄2110が00:00:20の時点において、ユーザC:100CとユーザB:100Bの距離は予め定められた範囲内にある。この場合、予め定められた範囲として、x座標、y座標ともに1.0以内であるとしている。具体的に数値で示すと、
(−2.5,−1.5)−(−1.5,−2.0)<=(1.0,1.0)
また、ユーザC:100CとユーザB:100Bの方向(向き)は予め定められた範囲内にある。この場合、予め定められた範囲として、180°±30°以内であるとしている。具体的に数値で示すと、
|90°−280°|<180°±30°
となっている。したがって、この場合、位置情報に関する条件及び方向情報に関する条件を満たしている。
【0057】
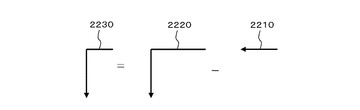
一方、ユーザA:100Aについての行動情報が統計的に十分に蓄積されており、ユーザB:100Bと会った場合の補正も統計的に十分に蓄積されているとする。蓄積は、計測テーブル2100の例に示すように、補正前後の情報を合わせて記憶することで実現されている。なお、蓄積とは、ある種のデータについて時系列で複数記憶していることである。また、補正モジュール150による補正が統計的に十分に蓄積されているか否かは、記憶された補正前後の情報を計数し、その回数が統計的に十分な数であるか否かを、補正モジュール150が判断すればよい。
そして、ユーザA:100AのユーザB:100Bと会った場合の過去の補正と同等の補正をユーザC:100Cの移動先の位置に対しても、補正モジュール150が行うようにする。これを模式的に表すと、図22の例に示すように、ユーザA:100AがユーザC:100Cと会った場合の経路である軌跡2220からユーザA:100AがユーザC:100Cと会った場合の経路である軌跡2210を補正モジュール150が取り除くことによって、ユーザC:100CがユーザB:100Bと会った場合の経路である軌跡2230を得るようにしていることになる。
ユーザC:100Cの移動先の計測位置2056Aを、過去のユーザA:100AのユーザB:100Bと会った場合の補正と同等の補正を補正モジュール150が行う。つまり、図16の例で示したように、ユーザB:100Bの行動起点である位置2052(−1.5,−2.0)のx座標に−1.0を加算して、補正位置2056B(−2.5,−2.0)と、補正モジュール150が補正している。
つまり、ユーザB:100Bと会ったユーザC:100Cの移動先の位置を補正モジュール150が補正するにあたって、そのユーザB:100Bと会ったことによって、移動先の位置を補正モジュール150が補正したことがあるユーザA:100Aの補正と同等の補正を、補正モジュール150が行うようにようしたものである。
【0058】
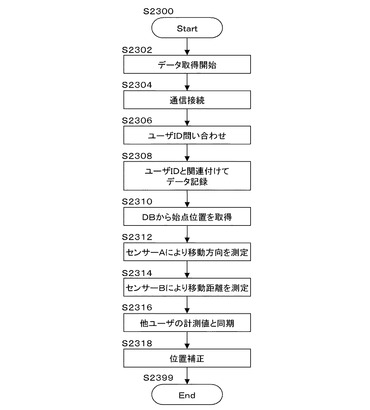
図23は、本実施の形態による処理例を示すフローチャートである。
ステップS2302からステップS2314までの処理は、図10の例に示したフローチャート内のステップS1002からステップ1014の処理を同等である。
ステップS2316では、他ユーザの計測値と同期させる。例えば、状態解析処理モジュール144は、ユーザ間の同期行動を検知した場合は、歩幅を変更する。
ステップS2318では、補正モジュール150は、集合場所の位置に他のユーザが移動した場合、集合場所の位置に移動してきた他のユーザの位置を補正する。
【0059】
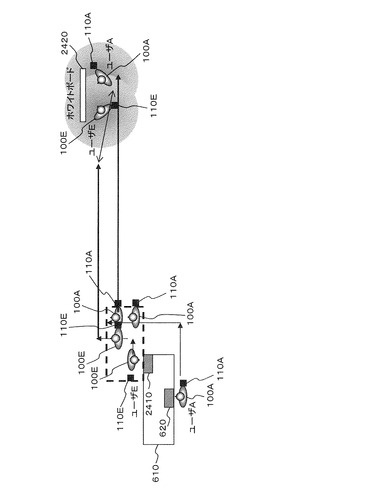
図24は、本実施の形態による処理例を示す説明図である。
移動距離は、加速度センサーの計測データを用いて、歩数を計数し、歩数×歩幅によって算出する。歩幅決定には例えば、予め各ユーザが10歩歩き、そこから算出するなどして、ユーザ毎の値を設定するようにしてもよい。図24の例に示すように、複数人のユーザが同行して歩行している場合、ユーザA:100AとユーザE:100Eの歩幅が異なって設定されていたとしても、同じ歩幅となる場合がある。したがって、算出される両者の移動距離は異なり、結果として移動先の位置も異なってしまうことがある。そこで、移動先を特定する場合、2人以上が一緒に移動するとき、歩幅が動的に変化するのに対応するために、補正モジュール150が、ユーザの行動情報から同期現象を特定し、歩幅を動的に補正するようにしている。つまり、お互いの移動距離を同等にし、最終的な停留(立ち話)の状態を検知して、移動先の位置を算出する。
【0060】
図24の例では、机620の位置にいるユーザA:100Aが、机2410の位置にいるユーザE:100Eと連れだって歩き、ホワイトボード2420の前まで移動する経過を示している。
図25は、同期が始まった時期の例を示す説明図である。図25(a)はユーザA:100Aの加速度データ、図25(b)はユーザE:100Eの加速度データを示している。状態解析処理モジュール144は、この加速度データを解析することによって、ユーザA:100AがユーザE:100Eの位置で立ち止まったこと(短時間の滞留)を検出し、ユーザE:100Eが立ち上がり、歩行を開始したことを検出する。そして、歩数のカウントの周期が同じになる同期開始時刻2510を抽出し、その時刻から同期して歩行が行われていることを判別する。
そして、同期歩行が開始されたことが判別された場合は、補正モジュール150が歩幅を変更する。この場合、2人の平均値を利用するようにしてもよいし、短い歩幅に合わせるようにしてもよい。又は、同期して歩行する際の特徴から、補正モジュール150が歩幅を設定してもよい。例えば、複数人の同期歩行の場合、歩幅が予め定められた範囲内に収まるという特徴から、予め定められた上限値以下の歩幅に変更する。
さらに、移動先が地図に既に登録されている装置の位置(例えば、ホワイトボード2420の前、掲示板の前等)と予め定められた範囲内にある場合は、補正モジュール150が、その登録されている装置の位置を利用して、移動先の位置を補正するようにしてもよい。
【0061】
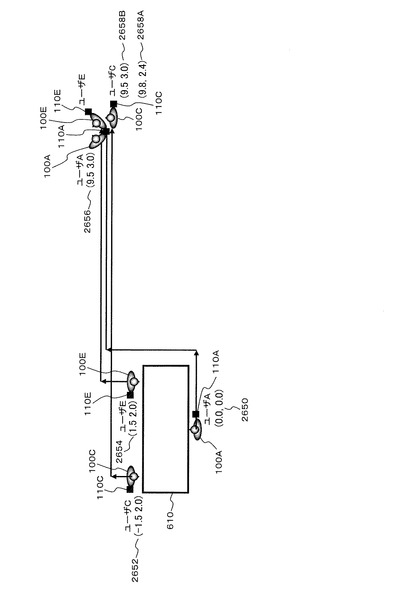
図26は、本実施の形態による処理例を示す説明図である。前述の例では、主に行動起点の位置、既に登録されている装置の位置を利用することを示したが、複数人のユーザの集合場所を利用して、補正モジュール150が補正するようにしてもよい。なお、集合場所として、行動起点の位置を例として挙げて説明していたが、行動起点以外の動的に生成された集合場所を以下に示す。
図26の例では、ユーザA:100AとユーザE:100Eが連れだって歩行して行き、位置2656で立ち止まって会話しているとする。その後に、ユーザC:100Cが位置2652からユーザA:100AとユーザE:100Eが会話している位置まで歩いて行き、会話に加わったとする。この場合、前述のようにしてユーザA:100AとユーザE:100Eの集合場所をノードとして検出する。次に、ユーザC:100Cの計測データから、ユーザC:100Cが立ち止まった位置を検出する。ユーザC:100Cが立ち止まった位置と集合場所の位置が予め定められた範囲内にある場合は、ユーザA:100A、ユーザE:100E、ユーザC:100Cの方向情報、ユーザA:100AとユーザC:100Cとの関係情報、ユーザE:100EとユーザC:100Cとの関係情報に基づいて、ユーザC:100Cの位置を補正モジュール150が補正する。補正モジュール150による方向情報を用いる補正については、図16、図17の例を用いて説明した補正モジュール150による補正の方法を用いればよい。また、補正モジュール150による関係情報を用いる補正については、図11、図13の例を用いて説明した補正モジュール150による補正の方法を用いればよい。また、お互いがホワイトボードに向かって会話している状態、すなわちユーザ間で向き合っていない状態に対応するために、関係情報だけを用いて補正モジュール150が補正するようにしてもよい。
【0062】
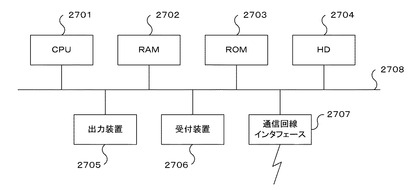
なお、本実施の形態としてのプログラムが実行されるコンピュータのハードウェア構成は、図27に例示するように、一般的なコンピュータであり、具体的にはパーソナルコンピュータ、サーバとなり得るコンピュータ等である。つまり、具体例として、処理部(演算部)としてCPU2701を用い、記憶装置としてRAM2702、ROM2703、HD2704を用いている。HD2704として、例えばハードディスクを用いてもよい。通信接続検出モジュール122、計測データ記録モジュール124、状態解析処理モジュール144、物理的配置照合モジュール146、ID照合モジュール148、補正モジュール150、出力モジュール152等のプログラムを実行するCPU2701と、そのプログラムやデータを記憶するRAM2702と、本コンピュータを起動するためのプログラム等が格納されているROM2703と、補助記憶装置であるHD2704と、キーボード、マウス、タッチパネル等に対する利用者の操作に基づいてデータを受け付ける受付装置2706と、CRT、液晶ディスプレイ等の出力装置2705と、ネットワークインタフェースカード等の通信ネットワークと接続するための通信回線インタフェース2707、そして、それらをつないでデータのやりとりをするためのバス2708により構成されている。これらのコンピュータが複数台互いにネットワークによって接続されていてもよい。
【0063】
なお、前述の実施の形態では、主に、相対座標を絶対座標に変換した後に、補正モジュール150が、対象者の位置情報を補正しているが、相対座標を対象として、対象者の位置情報を補正してもよい。また、前述の実施の形態では、主に、起点である位置を決定した後に、補正モジュール150が、対象者の位置情報を補正しているが、集合場所を決定した後であれば、起点である位置を決定しないで(又は起点である位置を決定する前に)対象者の位置情報を補正してもよい。
【0064】
前述の実施の形態のうち、コンピュータ・プログラムによるものについては、本ハードウェア構成のシステムにソフトウェアであるコンピュータ・プログラムを読み込ませ、ソフトウェアとハードウェア資源とが協働して、前述の実施の形態が実現される。
なお、図27に示すハードウェア構成は、1つの構成例を示すものであり、本実施の形態は、図27に示す構成に限らず、本実施の形態において説明したモジュールを実行可能な構成であればよい。例えば、一部のモジュールを専用のハードウェア(例えばASIC等)で構成してもよく、一部のモジュールは外部のシステム内にあり通信回線で接続しているような形態でもよく、さらに図27に示すシステムが複数互いに通信回線によって接続されていて互いに協調動作するようにしてもよい。また、特に、パーソナルコンピュータの他、情報家電、複写機、ファックス、スキャナ、プリンタ、複合機(スキャナ、プリンタ、複写機、ファックス等のいずれか2つ以上の機能を有している画像処理装置)などに組み込まれていてもよい。
【0065】
なお、前述の実施の形態内の処理を組み合わせてもよく、また、各モジュールの処理内容として背景技術で説明した技術を採用してもよい。
また、前述の実施の形態の説明において、予め定められた値との比較において、「以上」、「以下」、「より大きい」、「より小さい(未満)」としたものは、その組み合わせに矛盾が生じない限り、それぞれ「より大きい」、「より小さい(未満)」、「以上」、「以下」としてもよい。
【0066】
なお、説明したプログラムについては、記録媒体に格納して提供してもよく、また、そのプログラムを通信手段によって提供してもよい。その場合、例えば、前記説明したプログラムについて、「プログラムを記録したコンピュータ読み取り可能な記録媒体」の発明として捉えてもよい。
「プログラムを記録したコンピュータ読み取り可能な記録媒体」とは、プログラムのインストール、実行、プログラムの流通などのために用いられる、プログラムが記録されたコンピュータで読み取り可能な記録媒体をいう。
なお、記録媒体としては、例えば、デジタル・バーサタイル・ディスク(DVD)であって、DVDフォーラムで策定された規格である「DVD−R、DVD−RW、DVD−RAM等」、DVD+RWで策定された規格である「DVD+R、DVD+RW等」、コンパクトディスク(CD)であって、読出し専用メモリ(CD−ROM)、CDレコーダブル(CD−R)、CDリライタブル(CD−RW)等、ブルーレイ・ディスク(Blu−ray Disc(登録商標))、光磁気ディスク(MO)、フレキシブルディスク(FD)、磁気テープ、ハードディスク、読出し専用メモリ(ROM)、電気的消去及び書換可能な読出し専用メモリ(EEPROM(登録商標))、フラッシュ・メモリ、ランダム・アクセス・メモリ(RAM)、SD(Secure Digital)メモリーカード等が含まれる。
そして、前記のプログラム又はその一部は、前記記録媒体に記録して保存や流通等させてもよい。また、通信によって、例えば、ローカル・エリア・ネットワーク(LAN)、メトロポリタン・エリア・ネットワーク(MAN)、ワイド・エリア・ネットワーク(WAN)、インターネット、イントラネット、エクストラネット等に用いられる有線ネットワーク、あるいは無線通信ネットワーク、さらにこれらの組み合わせ等の伝送媒体を用いて伝送させてもよく、また、搬送波に乗せて搬送させてもよい。
さらに、前記のプログラムは、他のプログラムの一部分であってもよく、あるいは別個のプログラムと共に記録媒体に記録されていてもよい。また、複数の記録媒体に分割して
記録されていてもよい。また、圧縮や暗号化など、復元可能であればどのような態様で記録されていてもよい。
【符号の説明】
【0067】
100…ユーザ
110…動作検出モジュール
120…制御モジュール
122…通信接続検出モジュール
124…計測データ記録モジュール
130…DB
132…物理的空間配置情報
134…ユーザID対応データ
136…センサー計測データ
140…状態解析モジュール
142…状態処理モジュール
144…状態解析処理モジュール
146…物理的配置照合モジュール
148…ID照合モジュール
150…補正モジュール
152…出力モジュール
【技術分野】
【0001】
本発明は、情報処理装置及び情報処理プログラムに関する。
【背景技術】
【0002】
対象者の行動を検知する技術がある。
これに関連する技術として、例えば、特許文献1には、ユーザに対して現在位置の近隣の情報を提供する情報提供システムを提供することを課題とし、表示・入力装置は一定の間隔を設けて街頭に設置され、ユーザによって携帯される無線タグをセンシングして、ユーザを検出し、無線タグからユーザIDを読み出しサーバに送信し、サーバは、ユーザの至近に位置する表示・入力装置を特定し、当該表示・入力装置の近隣の店舗情報及びイベント情報を当該表示・入力装置に送信し、表示・入力装置はサーバから送信された店舗情報及びイベント情報を表示エリアに表示することが開示されている。
【0003】
また、例えば、特許文献2には、疎遠になりがちな現代社会において、休憩室内に居る者同士が実際に会話をしてコミュニケーションを図る契機を与えることを課題とし、休憩室を利用する利用者同士のコミュニケーションを促進するためのコミュニケーション促進装置において、利用者識別情報に基づいて前記共有空間内における利用者に関する現在の位置情報を検出する位置情報検出手段を用いて検出した利用者識別情報と関連付けられた利用者情報を、位置情報検出手段を用いて検出した現在の位置情報と対応付け、前記利用者の移動に合わせて連続的に前記利用者情報の表示態様を変化させながら、前記共有空間内に表示する利用者情報表示手段を具備するコミュニケーション促進装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−026311号公報
【特許文献2】特開2007−140800号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正するようにした情報処理装置及び情報処理プログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
かかる目的を達成するための本発明の要旨とするところは、次の各項の発明に存する。
請求項1の発明は、対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段を具備することを特徴とする情報処理装置である。
【0007】
請求項2の発明は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を決定する起点決定手段をさらに具備し、前記補正手段は、さらに前記起点決定手段によって決定された他の対象者の起点の位置に基づいて、対象者の位置情報を補正することを特徴とする請求項1に記載の情報処理装置である。
【0008】
請求項3の発明は、前記解析手段は、複数の対象者が予め定められた距離以内で同期して移動している場合は、複数の該対象者の予め定められた歩幅を合わせるように修正して、移動の状態を解析することを特徴とする請求項1又は2に記載の情報処理装置である。
【0009】
請求項4の発明は、前記補正手段は、前記集合場所の位置に他の対象者が移動した場合であって、集合している対象者の方向情報と該他の対象者の方向情報、又は、集合している該対象者と該他の対象者との間の関係を示す情報である関係情報に基づいて、該集合場所の位置に移動してきた他の対象者の位置を補正することを特徴とする請求項1から3のいずれか一項に記載の情報処理装置である。
【0010】
請求項5の発明は、前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段をさらに具備し、前記行動情報には、対象者が有している装置同士が通信を行ったことを示す情報である通信情報が含まれており、前記解析手段は、前記行動情報内の通信情報に基づいて、通信を行った対象者の組み合わせを抽出し、前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更することを特徴とする請求項1から4のいずれか一項に記載の情報処理装置である。
【0011】
請求項6の発明は、前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段をさらに具備し、前記行動情報には、対象者の方向を示す情報である方向情報と位置を示す位置情報が含まれており、前記解析手段は、前記行動情報内の方向情報と位置情報に基づいて、通信を行った対象者の組み合わせ又は互いに会っている対象者の組み合わせを抽出し、前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更することを特徴とする請求項1から4のいずれか一項に記載の情報処理装置である。
【0012】
請求項7の発明は、前記解析手段は、対象者間の関係を示す情報である関係情報に基づいて、対象者の組み合わせを抽出することを特徴とする請求項6に記載の情報処理装置である。
【0013】
請求項8の発明は、前記起点を机の位置であるとし、対象者の移動した経路を通路であるとして、地図を生成する地図生成手段をさらに具備することを特徴とする請求項1から7のいずれか一項に記載の情報処理装置である。
【0014】
請求項9の発明は、コンピュータを、対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段として機能させるための情報処理プログラムである。
【発明の効果】
【0015】
請求項1の情報処理装置によれば、複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正することができる。
【0016】
請求項2の情報処理装置によれば、他の対象者の起点の位置に基づいて、対象者の位置情報を補正することができる。
【0017】
請求項3の情報処理装置によれば、複数の対象者が同期して移動する場合の歩幅を修正して、対象者の状態を解析することができる。
【0018】
請求項4の情報処理装置によれば、集合場所の位置に他の対象者が移動した場合に、他の対象者の位置を補正することができる。
【0019】
請求項5の情報処理装置によれば、対象者が絶対座標の位置を有している装置によって検知されていない場合であっても、その対象者の起点の絶対座標の位置を得ることができる。
【0020】
請求項6の情報処理装置によれば、対象者が絶対座標の位置を有している装置によって検知されていない場合であっても、その対象者の起点の絶対座標の位置を得ることができる。
【0021】
請求項7の情報処理装置によれば、対象者間の関係を用いて対象者の組み合わせを抽出することができる。
【0022】
請求項8の情報処理装置によれば、予め地図に関する情報がない状態から地図を生成することができる。
【0023】
請求項9の情報処理プログラムによれば、複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正することができる。
【図面の簡単な説明】
【0024】
【図1】本実施の形態の構成例についての概念的なモジュール構成図である。
【図2】本実施の形態による処理例を示すフローチャートである。
【図3】本実施の形態による処理例を示す説明図である。
【図4】センサー・ユーザ対応テーブルのデータ構造例を示す説明図である。
【図5】処理対象とする計測データの例を示す説明図である。
【図6】本実施の形態による処理例を示す説明図である。
【図7】計測データの歩数カウントの例を示す説明図である。
【図8】計測データの方向の例を示す説明図である。
【図9】本実施の形態による処理例を示す説明図である。
【図10】本実施の形態による処理例を示すフローチャートである。
【図11】本実施の形態による処理例を示す説明図である。
【図12】計測データテーブルのデータ構造例を示す説明図である。
【図13】関係性テーブルのデータ構造例を示す説明図である。
【図14】本実施の形態による処理例を示すフローチャートである。
【図15】本実施の形態による処理例を示す説明図である。
【図16】本実施の形態による処理例を示す説明図である。
【図17】計測データテーブルのデータ構造例を示す説明図である。
【図18】本実施の形態による処理例を示す説明図である。
【図19】計測データテーブルのデータ構造例を示す説明図である。
【図20】本実施の形態による処理例を示す説明図である。
【図21】計測データテーブルのデータ構造例を示す説明図である。
【図22】対象者の経路に関する処理例を示す説明図である。
【図23】本実施の形態による処理例を示すフローチャートである。
【図24】本実施の形態による処理例を示す説明図である。
【図25】同期が始まった時期の例を示す説明図である。
【図26】本実施の形態による処理例を示す説明図である。
【図27】本実施の形態を実現するコンピュータのハードウェア構成例を示すブロック図である。
【発明を実施するための形態】
【0025】
以下、図面に基づき本発明を実現するにあたっての好適な一実施の形態の例を説明する。
図1は、本実施の形態の構成例についての概念的なモジュール構成図を示している。
なお、モジュールとは、一般的に論理的に分離可能なソフトウェア(コンピュータ・プログラム)、ハードウェア等の部品を指す。したがって、本実施の形態におけるモジュールはコンピュータ・プログラムにおけるモジュールのことだけでなく、ハードウェア構成におけるモジュールも指す。それゆえ、本実施の形態は、それらのモジュールとして機能させるためのコンピュータ・プログラム(コンピュータにそれぞれの手順を実行させるためのプログラム、コンピュータをそれぞれの手段として機能させるためのプログラム、コンピュータにそれぞれの機能を実現させるためのプログラム)、システム及び方法の説明をも兼ねている。ただし、説明の都合上、「記憶する」、「記憶させる」、これらと同等の文言を用いるが、これらの文言は、実施の形態がコンピュータ・プログラムの場合は、記憶装置に記憶させる、又は記憶装置に記憶させるように制御するの意である。また、モジュールは機能に一対一に対応していてもよいが、実装においては、1モジュールを1プログラムで構成してもよいし、複数モジュールを1プログラムで構成してもよく、逆に1モジュールを複数プログラムで構成してもよい。また、複数モジュールは1コンピュータによって実行されてもよいし、分散又は並列環境におけるコンピュータによって1モジュールが複数コンピュータで実行されてもよい。なお、1つのモジュールに他のモジュールが含まれていてもよい。また、以下、「接続」とは物理的な接続の他、論理的な接続(データの授受、指示、データ間の参照関係等)の場合にも用いる。「予め定められた」とは、対象としている処理の前に定まっていることをいい、本実施の形態による処理が始まる前はもちろんのこと、本実施の形態による処理が始まった後であっても、対象としている処理の前であれば、そのときの状況・状態に応じて、又はそれまでの状況・状態に応じて定まることの意を含めて用いる。また、「Aである場合、Bをする」という意味を有する記載は、「Aであるか否かを判断し、Aであると判断した場合はBをする」の意味で用いる。ただし、Aであるか否かの判断が不要である場合を除く。
また、システム又は装置とは、複数のコンピュータ、ハードウェア、装置等がネットワーク(一対一対応の通信接続を含む)等の通信手段で接続されて構成されるほか、1つのコンピュータ、ハードウェア、装置等によって実現される場合も含まれる。「装置」と「システム」とは、互いに同義の用語として用いる。もちろんのことながら、「システム」には、人為的な取り決めである社会的な「仕組み」(社会システム)にすぎないものは含まない。
また、各モジュールによる処理毎に又はモジュール内で複数の処理を行う場合はその処理毎に、対象となる情報を記憶装置から読み込み、その処理を行った後に、処理結果を記憶装置に書き出すものである。したがって、処理前の記憶装置からの読み込み、処理後の記憶装置への書き出しについては、説明を省略する場合がある。なお、ここでの記憶装置としては、ハードディスク、RAM(Random Access Memory)、外部記憶媒体、通信回線を介した記憶装置、CPU(Central Processing Unit)内のレジスタ等を含んでいてもよい。
【0026】
本実施の形態である情報処理装置は、対象者(以下、ユーザともいう)が身につけている動作検出モジュール110が計測した行動情報を利用して地図を生成するものである。図1の例に示すように、情報処理装置は、ユーザ100が身につけた動作検出モジュール110、制御モジュール120、DB(DataBase)130、状態解析モジュール140を有している。
【0027】
ユーザA:100Aは動作検出モジュール110Aを身につけており、ユーザB:100Bは動作検出モジュール110Bを身につけており、ユーザC:100Cは動作検出モジュール110Cを身につけている。これらのユーザ100は、本実施の形態による対象者である。本実施の形態は、これらのユーザ100が働いている部屋(オフィス)内の地図を生成する。なお、地図とは、ユーザ100の座席位置と通路を少なくとも含むものである。
オフィス内での行動は、一般的に限られている。例えば、座位、立位、歩行、ノートに文字を書いている、キーボードを用いたタイピング、ホワイトボードへの書き込み等がある。座位等の行動を行った場合に、動作検出モジュール110が検知する行動情報から特徴を抽出し、それらの特徴を記憶している辞書を予め作成する。これにより、動作検出モジュール110が検知する行動情報に基づいて、辞書とのパターンマッチングによって、対象者がどのような行動を行ったかを判断することができる。
【0028】
動作検出モジュール110A、動作検出モジュール110B、動作検出モジュール110Cは、通信接続検出モジュール122と接続されている。動作検出モジュール110は、ユーザ100が身につけるものであり、そのユーザ100の行動を検知するセンサー、又は他のユーザ100が身につけている動作検出モジュール110と通信を行う通信装置である。動作検出モジュール110は、その検知した情報である行動情報(計測データともいう)を通信接続検出モジュール122に渡す。通信接続検出モジュール122へ行動情報を渡すには、一般的には無線通信によって行う。別の方法として、有線通信を用いて、通信接続検出モジュール122へ行動情報を渡してもよいし、動作検出モジュール110内の記憶装置に行動情報を記憶しておき、後に、その記憶装置から通信接続検出モジュール122が読み出すようにしてもよい。
また、動作検出モジュール110は、ユーザ100の行動を検知するセンサー、通信装置の機能を有していれば、携帯電話等に内蔵されていてもよいし、カード等の形態であってもよいし、腕に固定するように腕輪等に組み込まれていてもよい。
【0029】
行動情報として、その対象者が身につけているセンサーによる計測データ、又はその対象者が身につけている通信装置による通信結果の通信情報等がある。
センサーとして、例えば、加速度センサー(加速度センサーを身につけている対象者の加速度等を計測する)、コンパス(コンパスを身につけている対象者の向き等を計測する)、ジャイロスコープ(ジャイロスコープを身につけている対象者の角度、角速度等を検出する)等がある。本実施の形態では、この3つのセンサーの計測データを主に例示して説明する。計測データとしては、動作検出モジュール110を本実施の形態によって一意に識別し得る情報であるセンサーID、加速度、方向、角度、角速度等の他に計測した日時(年、月、日、分、秒、秒以下等のいずれか1つ以上の組み合わせ)がある。なお、行動情報に含まれる位置に関する情報は、主に、相対座標の位置に関するものであって、絶対座標の位置に関するものは含まれない、又は、検知する絶対座標の位置の精度が悪いものである。例えば、室内であるオフィスではGPS(Global Positioning System)等の精度が悪い、又は位置を計測できない。
また、通信装置としては、近距離通信(例えば、Bluetooth(登録商標)等)を行うものを例示して説明する。通信装置によって通信を行った場合、その通信装置を本実施の形態において一意に識別し得る通信装置ID(A)、通信を行った先である相手側の通信装置を本実施の形態において一意に識別し得る通信装置ID(B)、その通信日時等が通信情報となる。
【0030】
制御モジュール120は、通信接続検出モジュール122、計測データ記録モジュール124を有している。制御モジュール120は、動作検出モジュール110から行動情報を受け取り、DB130へ記憶させる。
通信接続検出モジュール122は、動作検出モジュール110A、動作検出モジュール110B、動作検出モジュール110C、計測データ記録モジュール124と接続されている。通信接続検出モジュール122は、動作検出モジュール110との通信が可能であるか否かを判断する。そして、動作検出モジュール110と通信が可能であると判断したならば、通信接続検出モジュール122は、その動作検出モジュール110から行動情報を受け取り、計測データ記録モジュール124に渡す。
計測データ記録モジュール124は、通信接続検出モジュール122、DB130と接続されている。計測データ記録モジュール124は、通信接続検出モジュール122から計測データを受け取り、DB130のセンサー計測データ136に記憶させる。なお、後述するユーザID対応データ134を検索して、ユーザIDと関連付けて行動情報をセンサー計測データ136に記憶させるようにしてもよい。
【0031】
DB130は、計測データ記録モジュール124、状態処理モジュール142と接続されている。そして、DB130は、物理的空間配置情報132、ユーザID対応データ134、センサー計測データ136を記憶している。
物理的空間配置情報132は、ユーザ100が身につけている動作検出モジュール110等を検知する装置であって、その装置に関する情報を記憶している。例えば、装置に関する情報として、その装置自体は固定されているものであって、装置を本実施の形態において一意に識別し得る装置IDとその装置がある場所の絶対座標の位置に関する情報がある。物理的空間配置情報132は、それらの装置IDと絶対座標の位置を対応させて記憶するテーブル等を記憶している。この装置としては、例えば、フラッパーゲート(入退室を管理するものであって、動作検出モジュール110等を検知する。なお、検知するものは必ずしも動作検出モジュール110である必要はなく、ユーザを特定できればよい)、複写機(その複写機を利用するには、その人が身につけている動作検出モジュール110等を読み込ませる必要がある)等がある。つまり、これらの装置が動作検出モジュール110等を検知した場合は、動作検出モジュール110等を身につけているユーザがその時点でその場所にいたということになる。なお、ここでの絶対座標とは、緯度、経度によって特定される座標であってもよいし、本実施の形態が生成する地図において、その装置の示す位置が固定した位置であればよい。
また、物理的空間配置情報132は、絶対座標の位置を有している装置を一意に識別し得る装置IDと、その装置IDの装置が検知したユーザIDを対応させて記憶しているテーブル等を記憶している。
【0032】
ユーザID対応データ134は、ユーザ100を本実施の形態によって一意に識別し得る情報であるユーザIDを記憶する。例えば、図4の例に示すセンサー・ユーザ対応テーブル400を記憶していてもよい。センサー・ユーザ対応テーブル400は、センサーID欄410、ユーザID欄420を有している。センサーID欄410は、動作検出モジュール110を本実施の形態によって一意に識別し得る情報であるセンサーIDを記憶している。ユーザID欄420は、そのセンサーIDの動作検出モジュール110を身につけているユーザIDを記憶している。このセンサー・ユーザ対応テーブル400を利用することによって、計測データとユーザIDを関連付けることができる。
また、ユーザID対応データ134は、ユーザIDに対応させて、動作検出モジュール110内の通信装置を本実施の形態で一意に識別し得る情報である通信装置IDを記憶していてもよい。このユーザID対応データ134を利用することによって、通信装置とユーザIDを関連付けることができる。
また、ユーザID対応データ134は、ユーザIDに対応させて、そのユーザの歩幅を記憶していてもよい。このユーザID対応データ134と歩数を利用することによって、移動距離を算出できる。
また、ユーザID対応データ134は、後述する状態解析処理モジュール144によって決定された行動起点の位置をユーザIDと対応させて記憶してもよい。
センサー計測データ136は、計測データ記録モジュール124から渡された行動情報を記憶する。前述したように、行動情報として、センサーID、計測した日時、そのセンサーが計測したデータが含まれている。また、この行動情報にユーザIDを対応させてもよい。したがって、センサー計測データ136内の行動情報を解析することによって、誰がいつどのような行動をしたかを判別することができる。
【0033】
状態解析モジュール140は、状態処理モジュール142、補正モジュール150、出力モジュール152を有している。
状態処理モジュール142は、DB130、補正モジュール150と接続されている。そして、状態処理モジュール142は、状態解析処理モジュール144、物理的配置照合モジュール146、ID照合モジュール148を有している。
状態解析処理モジュール144は、物理的配置照合モジュール146と接続されている。状態解析処理モジュール144は、ユーザの行動情報に基づいて、そのユーザの状態を解析する。ユーザの状態として、そのユーザの位置を少なくとも含む。そして、状態解析処理モジュール144は、解析した状態に基づいて、そのユーザの行動の起点である位置を相対座標の位置として決定する。ここで、行動の起点とは、その対象者が他の場所よりも長くとどまっている場所である。例えば、その対象者の座席位置(一般的に自席ともいわれる)である。そして、状態解析処理モジュール144は、その行動起点の位置をDB130内のユーザID対応データ134に、ユーザIDと対応させて記憶させる。
解析するユーザの状態としては、座位、立位、歩行、ノートに文字を書いている、キーボードを用いたタイピング、ホワイトボードへの書き込み等がある。さらに、日時情報とその日時におけるユーザの方向、歩行している場合は歩数、その歩数と前述のユーザID対応データ134が記憶している歩幅によって算出した歩行距離等が解析結果となる。図5は、処理対象とする計測データ(加速度センサーの計測データ)の例を示す説明図である。前述したように、計測データの特徴抽出を行い、状態の辞書とのパターンマッチングを行うことによって、状態を解析する。例えば、周波数解析によって、図5(a)の例では、立位区間510と座位区間520に分けることができる。図5(b)の例では、ノートに文字を書いている状態であると解析しており、図5(c)の例では、キーボードを用いたタイピングをしている状態であると解析しており、図5(d)の例では、ホワイトボードへの書き込みをしている状態であると解析する。また、図7の例に示すように、加速度センサーの計測データの山の位置をカウントすることによって、歩数をカウントする。そして、状態解析処理モジュール144は、その計測データを検知した動作検出モジュール110を身につけているユーザ100のユーザIDを、センサー・ユーザ対応テーブル400を用いて抽出し、そのユーザIDに対応する歩幅をユーザID対応データ134から抽出し、歩数と歩幅の乗算によって移動距離を算出してもよい。また、図8(a)の例に示すようなコンパスの計測データと移動距離に基づいて、図8(b)の例に示すような移動経路(軌跡)を算出してもよい。なお、移動経路が地図における通路になる。
【0034】
行動の起点であるか否かの判断手法を説明する。状態解析処理モジュール144は、ユーザが座位の状態であって、デスクワークをしている状態(前述のノートに文字を書いている状態、キーボードを用いたタイピングをしている状態等)が予め定められた時間以上続いている場合の位置を行動の起点であると判断する。なお、予め定められた時間以上続いているのは、座位の状態だけであってもよいし、座位の状態かつデスクワークをしている状態を条件としてもよい。なお、ここでの行動の起点の位置とは、相対座標の位置であり、例えば、そのユーザ100における座標の原点(0,0)としてもよい。
また、行動情報には、対象者が有している動作検出モジュール110内の通信装置同士が通信を行ったことを示す情報である通信情報が含まれている。状態解析処理モジュール144は、その行動情報内の通信情報に基づいて、通信を行った対象者の組み合わせを抽出してもよい。つまり、状態解析処理モジュール144は、その通信を行った通信装置ID(A)と通信装置ID(B)を特定し、ユーザID対応データ134を用いて、通信装置ID(A)、通信装置ID(B)の通信装置を身につけているユーザIDを抽出すればよい。そして、状態解析処理モジュール144は、通信装置ID(A)側で抽出した通信装置ID(B)に対応するユーザIDと、通信装置ID(B)側で抽出した通信装置ID(A)に対応するユーザIDとから構成されるユーザ同士が会っている状態であると判断する。具体的に説明する。このユーザIDのユーザ同士について状態解析処理モジュール144は、他方のユーザIDを抽出した時点で、抽出したユーザIDに対応するユーザと会っている状態であると判断する。なお、対象者の組み合わせの抽出は、この通信が予め定められた時間以上続いていることを条件としてもよい。
また、行動情報には、対象者の方向を示す情報である方向情報と位置を示す位置情報が含まれている。状態解析処理モジュール144は、その行動情報内の方向情報と位置情報に基づいて、通信を行った対象者の組み合わせを抽出してもよい。つまり、状態解析処理モジュール144は、その方向情報と位置情報を検知した複数の動作検出モジュール110のセンサーIDを特定し、ユーザID対応データ134を用いて、そのセンサーIDの動作検出モジュール110を身につけているユーザIDを抽出すればよい。そして、状態解析処理モジュール144は、抽出したユーザIDの組み合わせから構成されるユーザ同士が通信を行っている状態であると判断する。具体的に説明する。このユーザIDのユーザ同士について、状態解析処理モジュール144は、ユーザIDを抽出した時点で、抽出したユーザIDに対応するユーザと通信を行っている状態であると判断する。なお、対象者の組み合わせの抽出は、この通信が予め定められた時間以上取得できたことを条件として、互いに通信を行っている対象者の組み合わせを抽出してもよい。
また、状態解析処理モジュール144は、通信装置同士の通信に関する情報を用いずに、その行動情報内の方向情報と位置情報に基づいて、互いに会っている対象者の組み合わせを抽出してもよい。つまり、状態解析モジュール144は、その方向情報と位置情報を検知した複数の動作検出モジュール110のセンサーIDを特定し、ユーザID対応データ134を用いて、そのセンサーIDの動作検出モジュール110を身につけているユーザIDを抽出すればよい。そして、状態解析処理モジュール144は、抽出したユーザIDの組み合わせから構成されるユーザ同士が互いに会っている状態であると判断する。具体的に説明する。このユーザIDのユーザ同士については、状態解析処理モジュール144は、ユーザIDを抽出したその時点で、抽出したユーザIDに対応するユーザと互いに会っている状態であると判断する。なお、対象者の組み合わせの抽出は、この状態が予め定められた時間以上続いていることを条件として、対象者の組み合わせを抽出してもよい。
【0035】
また、状態解析処理モジュール144は、複数のユーザが予め定められた距離以内で同期して移動している場合は、その複数のユーザの予め定められた歩幅を合わせるように修正して、移動の状態を解析するようにしてもよい。同期して移動しているとは、いわゆる連れだって歩いている状態をいう。同期しているか否かについての判断等については、図24、図25を用いて後述する。なお、予め定められた歩幅は、DB130のユーザID対応データ134に記憶されている。移動の状態を解析するとは、修正した歩幅と歩数に基づいて移動距離を算出することである。
【0036】
物理的配置照合モジュール146は、状態解析処理モジュール144、ID照合モジュール148と接続されている。物理的配置照合モジュール146は、状態解析処理モジュール144によって決定された行動起点の相対座標位置を、絶対座標の位置に変換する機能を有する。なお、物理的配置照合モジュール146は、そのユーザ又は他のユーザの行動によって、絶対座標の位置を有している装置がそのユーザ又は他のユーザを検知している場合に相対座標位置を絶対座標位置に変換する機能を実行してもよい。
例えば、対象としているユーザ100がフラッパーゲートを通過した場合、そのフラッパーゲートを通過した時点からの移動距離、ユーザ100から見た場合のフラッパーゲートの方向、そのフラッパーゲートの絶対座標の位置に基づいて、行動起点の相対座標の位置を絶対座標の位置に変換する。
また、物理的配置照合モジュール146は、状態解析処理モジュール144によって抽出されたユーザの組み合わせに基づいて、他のユーザの行動起点の位置としての絶対座標位置を用いて、対象としているユーザの行動起点としての相対座標としての位置を絶対座標としての位置に変更するようにしてもよい。例えば、他のユーザがフラッパーゲートを通過したことによって、他のユーザの行動起点の絶対座標位置となる。そして、他のユーザの行動起点の絶対座標位置と他のユーザと対象としているユーザが会った位置から、対象としているユーザの行動起点の絶対座標位置を算出すればよい。
また、物理的配置照合モジュール146は、ユーザ間の関係を示す情報である関係情報に基づいて、ユーザの組み合わせを抽出するようにしてもよい。関係情報については、図13の例に示す関係性テーブル1300を用いて後述する。
また、物理的配置照合モジュール146は、行動起点を机の位置であるとし、ユーザの移動した経路を通路であるとして、地図を生成するようにしてもよい。
【0037】
ID照合モジュール148は、物理的配置照合モジュール146と接続されている。ID照合モジュール148は、前述の識別情報に対応する情報をユーザID対応データ134から抽出する。これは、ID照合モジュール148は、状態解析処理モジュール144、物理的配置照合モジュール146からの要求に基づいて抽出処理を行い、その結果を要求した状態解析処理モジュール144、物理的配置照合モジュール146に渡す。抽出する情報としては、例えば、センサーIDに対応するユーザID、通信装置IDに対応するユーザID、ユーザIDに対応する歩幅等が該当する。
【0038】
補正モジュール150は、状態処理モジュール142、出力モジュール152と接続されている。補正モジュール150は、物理的配置照合モジュール146によって生成された各ユーザの行動起点の位置、地図等について、補正を行う。パーソナルコンピュータ等の電子機器が多いオフィスでは、コンパス等のセンサーの精度が落ちる場合がある。そのために、例えば、補正モジュール150は、複数人のユーザの行動情報、ユーザの複数日分の行動情報を用いて、各ユーザの行動起点の位置、地図等を複数生成して、その統計的値である平均値、最頻値、中央値等を用いて補正する。
補正モジュール150は、状態解析処理モジュール144によって解析された状態、行動情報内のユーザの方向情報又は位置情報に基づいて、複数のユーザが集合している場所である集合場所の位置を決定する。そして、補正モジュール150は、集合場所の位置に基づいて、ユーザの位置情報を補正する。集合場所とは、後述するユーザが立ち止まることがある箇所に含まれる。補正モジュール150による集合場所の判断は、2人以上のユーザの位置がその時点で予め定められた距離以内にあることを条件、又はそれらのユーザが互いに向き合っている方向であることを条件としている。また、集合場所の位置は、絶対座標の位置であってもよいし、相対座標の位置であってもよい。また、集合場所は行動起点ともなり得る。
また、補正モジュール150は、さらに状態解析処理モジュール144によって決定された他のユーザの行動起点の位置に基づいて、ユーザの位置情報を補正するようにしてもよい。行動起点は集合場所になりやすいことを利用したものである。
また、補正モジュール150は、集合場所の位置に他のユーザが移動した場合であって、集合しているユーザの方向情報と他のユーザの方向情報、又は、集合しているユーザと他のユーザとの間の関係を示す情報である関係情報に基づいて、集合場所の位置に移動してきた他のユーザの位置を補正するようにしてもよい。
【0039】
出力モジュール152は、補正モジュール150と接続されている。出力モジュール152は、補正モジュール150によって補正された各ユーザの行動起点の位置、地図等を出力する。例えば、出力モジュール152は、地図をプリンタ等の印刷装置で印刷すること、ディスプレイ等の表示装置に表示すること、地図データベース等の情報処理装置へ渡すこと、メモリーカード等の記憶媒体に記憶すること等を行う。
【0040】
図2は、本実施の形態による処理例を示すフローチャートである。
ステップS202では、状態解析処理モジュール144が、対象としているユーザについて絶対位置を取得したか否かを判断し、そのユーザについて絶対座標を取得している場合はステップS222へ進み、それ以外の場合はステップS204へ進む。例えば、対象としているユーザが前述のフラッパーゲートを通過した場合は、ステップS222へ進むことになる。なお、状態解析処理モジュール144が、物理的空間配置情報132を検索することによって、そのユーザについて絶対位置を取得したか否かを判断する。
【0041】
ステップS204では、動作検出モジュール110が、データ取得を開始する。例えば、動作検出モジュール110内の各センサーがユーザの行動を検知する。
ステップS206では、通信接続検出モジュール122が、動作検出モジュール110との間で通信接続を行う。
ステップS208では、計測データ記録モジュール124が、ユーザIDを問い合わせる。つまり、ユーザID対応データ134を検索してセンサーIDからユーザIDを抽出する。
ステップS210では、計測データ記録モジュール124が、ユーザIDと関連付けて、センサー計測データ136に計測データを記録する。
ステップS212では、状態解析処理モジュール144が、予め定めた範囲内に計測データが入っているか否かを判断し、入っている場合はステップS214へ進み、それ以外の場合はステップS204からの処理を行う。
ステップS214では、状態解析処理モジュール144が、対象としているユーザの行動起点を記録する。ここでの行動起点は相対座標の位置である。
ステップS216では、物理的配置照合モジュール146が、物理配置との照合を行う。この処理については、図10等を用いて後述する。
【0042】
ステップS222では、動作検出モジュール110が、データ取得を開始する。例えば、動作検出モジュール110内の各センサーがユーザの行動を検知する。
ステップS224では、通信接続検出モジュール122が、動作検出モジュール110との間で通信接続を行う。
ステップS226では、計測データ記録モジュール124が、ユーザIDを問い合わせる。つまり、ユーザID対応データ134を検索してセンサーIDからユーザIDを抽出する。
ステップS228では、計測データ記録モジュール124が、ユーザIDと関連付けて、センサー計測データ136に計測データを記録する。
ステップS230では、状態解析処理モジュール144が、歩数を計数し、方向を算出する。つまり、ステップS202で判断対象となった絶対位置からの移動距離、方向を算出することになる。
ステップS232では、状態解析処理モジュール144が、予め定めた範囲内に計測データが入っているか否かを判断し、入っている場合はステップS234へ進み、それ以外の場合はステップS230からの処理を行う。
ステップS234では、状態解析処理モジュール144が、対象としているユーザの行動起点を記録する。ここでの行動起点は絶対座標の位置である。
この処理によって、絶対座標としての行動起点を有するユーザと相対座標としての行動起点を有するユーザとが混在することがある。
なお、ステップS212、ステップS232の判断で用いる予め定めた範囲としては、前述したように、座位の状態であって、デスクワークをしている状態が予め定められた時間以上続いている場合をいう。
【0043】
図3は、本実施の形態による処理例を示す説明図である。
図3の例は、オフィス内の複数の机からなるブロック310内の机320の前に動作検出モジュール110Aが座っている状態を示している。なお、図1の例では、動作検出モジュール110Aから制御モジュール120を介してDB130に行動情報が記憶されるが、この図では制御モジュール120を省略している。
動作検出モジュール110Aは、ユーザ100の行動を検知して、行動情報の取得を開始する。そして、動作検出モジュール110Aは、DB130(制御モジュール120)と通信状態にある動作検出モジュール110のセンサーIDとユーザIDを照合し、ユーザA:100Aを特定する。例えば、ユーザID対応データ134内の図4に例示しているセンサー・ユーザ対応テーブル400を用いて、センサーIDからユーザIDを抽出する。
【0044】
次に、状態解析モジュール140内の状態解析処理モジュール144は、加速度センサーの計測データを利用して座位状態であるか否かを、判定する。前述したように、図5(a)の例では、状態解析処理モジュール144は、計測データを立位区間510と座位区間520に分ける。
そして、状態解析処理モジュール144は、加速度センサーの計測データに対して周波数解析を行い、デスクワークであるか、会議中であるかを判定する。前述したように、図5(b)、図5(c)の例の状態では、デスクワークをしている状態と判断し、図5(d)の例の状態では、会議中である状態と判断する。
状態解析処理モジュール144は、座位状態が予め定められた時間以上続いており、デスクワークをしている状態であれば、オフィス(居室)における仕事中であると判定し、ここの行動起点(自席)にセットする。
【0045】
図6は、本実施の形態による処理例を示す説明図である。立ち止まることがある箇所(前述の集合場所を含み、以下、ノードともいう)を登録する例である。
ユーザA:100Aの自席(机620)、ユーザB:100Bの自席(机640)は、既に前述の処理によって行動起点として登録されている。つまり、ユーザA:100Aの行動起点は位置650であり、ユーザB:100Bの行動起点は位置656である。
ユーザA:100AがユーザB:100Bの机640まで移動した場合、加速度データから歩数をカウントし(図7の例参照)、さらにコンパスによって移動方向を算出することによって(図8の例参照)、移動先(例えば、机640の隣の位置)が把握できる。
しかしながら、オフィスではセンサーであるコンパスの精度が落ちること、また広い廊下と椅子の間の歩行では歩幅が変化するということ等がある。例えば、図6の例では、実際は、ユーザA:100Aは机640の隣の位置(−2.0,−2.0)にいるにもかかわらず、ユーザA:100Aは位置654にいると判断してしまうことがありえる。なお、図6の例で、観測した位置654は、位置(−2.0,−2.0)より左上の位置にある。
そこで、机640の近傍にユーザA:100Aが存在している場合(具体的には、ユーザA:100Aを中心とした補正対象範囲690内に机640がある場合)、ユーザA:100Aの向き(その時点での動作検出モジュール110A内のコンパスの計測データ)、ユーザB:100Bの向き(その時点での動作検出モジュール110B内のコンパスの計測データ)、滞在時間(ユーザA:100Aが立ち止まっている(立位であって歩数が0)と判断された時間)から、ユーザA:100AとユーザB:100Bとは“会っている(対話)”と判定する。そして、ユーザA:100AとユーザB:100Bの往来履歴の平均値、最頻値、中央値等を用いて、ユーザA:100AとユーザB:100Bの行動起点の相対的な位置を特定する。なお、“会っている(対話)”と判定するのに、動作検出モジュール110Aと動作検出モジュール110B内の通信装置が通信を行っていることを条件としてもよい。
【0046】
もちろんのことながら、2人のユーザ間だけでなく、3人以上のユーザの計測データを解析することもできる。図9は、本実施の形態による処理例を示す説明図である。ユーザA:100Aが、ユーザB:100B、ユーザC:100C、ユーザD:100Dの自席でそれぞれのユーザと会ったり、ユーザG:100Gが、ユーザF:100Fの自席でユーザF:100Fと会ったり、ユーザE:100Eと会ったりしていることから、計測データの蓄積ができ、オフィス全体の地図ができあがるようになる。つまり、各ユーザの行動起点の位置に机があり、その机はそのユーザの自席と、状態解析モジュール140は判断する。そして、ユーザの移動した経路(図9の例では矢印線)を通路であると、状態解析モジュール140は判断して、地図を生成する。
また、ユーザA:100Aが直接にユーザF:100Fの自席に行っていなかった場合であっても、ユーザG:100GがユーザA:100Aの自席を通って、ユーザF:100Fの自席に行ったことがあるので、その行動履歴(計測データ)から、ユーザA:100Aの行動起点からのユーザF:100Fの相対座標の位置を特定することが可能である。つまり、ユーザA:100Aが行動起点からユーザF:100Fの行動起点へ行ったことがない場合には、他のユーザでユーザA:100Aの行動起点を通ってユーザF:100Fの行動起点へ行った場合の経路を抽出し、その経路を利用して、ユーザA:100Aの行動起点とユーザF:100Fの行動起点の相対座標の位置関係を定めるようにしてもよい。
【0047】
図10は、本実施の形態による処理例を示すフローチャートである。
ステップS1002では、動作検出モジュール110が、データ取得を開始する。例えば、動作検出モジュール110内の各センサーがユーザの行動を検知する。
ステップS1004では、通信接続検出モジュール122が、動作検出モジュール110との間で通信接続を行う。
ステップS1006では、計測データ記録モジュール124が、ユーザIDを問い合わせる。つまり、ユーザID対応データ134を検索してセンサーIDからユーザIDを抽出する。
ステップS1008では、計測データ記録モジュール124が、ユーザIDと関連付けて、センサー計測データ136に計測データを記録する。
ステップS1010では、物理的配置照合モジュール146は、DB130のユーザID対応データ134から対象としているユーザIDに対応する行動起点の位置を取得する。
ステップS1012では、物理的配置照合モジュール146は、センサーAによる計測データを用いて移動方向を測定する。
ステップS1014では、物理的配置照合モジュール146は、センサーBによる計測データを用いて移動距離を測定する。
【0048】
ステップS1016では、物理的配置照合モジュール146は、移動先とノードとを照合する。ここでのノードとは、図6を用いて説明したように、立ち止まることがある箇所である。前述のように、往来履歴の平均値、最頻値、中央値等を用いて定められた位置である。ここでの照合とは、移動先の位置と予め定められた距離以内にあるノードを抽出することである。また、ノードには、フラッパーゲートのような絶対座標の位置を有している装置の位置としてもよい。
ステップS1018では、補正モジュール150は、移動先の位置をノードの位置によって補正する。例えば、移動先の位置をノードの位置にしてもよいし、予め定められた重みに基づいて移動先の位置をノードの位置へ移動するようにしてもよい。また、物理的配置照合モジュール146は、ノードが、絶対座標の位置を有している装置の位置であれば、相対座標の位置を絶対座標の位置に変更する。つまり、移動先の位置の相対座標を、その装置の絶対座標の位置に変更する。そして、それまで生成した相対座標の位置と移動先の相対座標の位置との差分を、移動先の絶対座標の位置に加算又は減算すればよい。また、図11、図12、図13の例を用いて後述する補正を用いてもよい。
【0049】
図11は、本実施の形態による処理例を示す説明図である。ユーザA:100Aが位置1150から計測位置1152を通ってユーザB:100Bと会うために計測位置1154へ移動したとする。また、ユーザB:100Bの隣にはユーザC:100Cもいる。
図6の例と同様に、ユーザA:100AとユーザB:100Bとは“会っている(対話)”(集合場所にいる)と、補正モジュール150が判定した場合に、通常の会話距離(50cm〜100cm)の範囲に存在しているとして位置を補正モジュール150が補正する。
例えば、図11の例では、ユーザA:100Aの移動先の計測位置1154Aが計測データから(−2.3,−2.4)であった場合に、ユーザB:100Bの行動起点が位置1156(−1.5,−2.0)であることから、その時点でのユーザA:100Aの位置を、集合場所の位置(ユーザB:100Bの行動起点である位置1156)に基づいて、ユーザA:100Aの計測位置1154A(−2.3,−2.4)を補正位置1154B(−2.0,−2.0)と、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル1200(図12)に基づいて補正を行う。時刻欄1210が00:00:20の時点において、ユーザA:100AとユーザB:100Bの距離は予め定められた範囲内にある。この場合、予め定められた範囲として、x座標、y座標ともに1.0以内であるとしている。具体的に数値で示すと、
(−2.3,−2.4)−(−1.5,−2.0)<=(1.0,1.0)
となっている。したがって、この場合、ユーザA:100AとユーザB:100Bは、位置情報に関する条件を満たしている。なお、ユーザA:100AとユーザC:100Cは、位置情報に関する条件を満たしていない。そこで、ユーザA:100AとユーザB:100Bによって集合場所が形成されており、補正モジュール150がユーザA:100Aの計測位置1154Aを補正する。その時点でのユーザA:100A;の方向、ユーザB:100Bの方向のいずれか又は両方に基づいて、補正モジュール150が、ユーザB:100Bの行動起点である位置1156(−1.5,−2.0)のx座標に−0.5を加算して、計測位置1154A(−2.3,−2.4)を補正位置1154B(−2.0,−2.0)と補正している。より具体的には、ユーザA:100Aの方向が右(90°)であるので、x座標だけを会話距離(予め定められた値、例えば、50cm)だけ離れるように補正したものである。なお、補正モジュール150は補正するのに、ユーザB:100Bの行動起点の位置を用いたが、ユーザB:100Bのその時点における位置(計測データ)を用いるようにしてもよい。
また、補正モジュール150は、補正する際に、補正前の位置と補正後の位置との距離が予め定められた距離内であることを確認するようにしてもよい。具体的には、ユーザA:100Aの補正前の位置である計測位置1154A(−2.3,−2.4)と補正後の位置である補正位置1154B(−2.0,−2.0)との距離が補正範囲1110(予め定められた値、例えば、0.5以内)内であれば、その補正を行い、その補正範囲1110外である場合は、その補正は行わないようにする。
【0050】
さらに、補正モジュール150が補正を行った場合は、その補正を行った時点の前後におけるユーザA:100Aの位置を補正するようにしてもよい。例えば、補正モジュール150がユーザA:100Aの計測位置1154Aを補正位置1154Bと補正したので、その前の時点(計測データテーブル1200の時刻欄1210での00:00:10)における計測位置1152Aを補正位置1152Bと、補正モジュール150が補正している。補正モジュール150によるこの補正は、補正位置1154B(−2.0,−2.0)から直線的に移動したとして、補正位置1152B(−2.0,0.0)へ補正モジュール150が補正している。補正モジュール150によるこの補正において、さらに、その時点よりも前の時点(計測データテーブル1200の時刻欄1210での00:00:00)が行動起点であるか否かを、補正モジュール150が判断する。行動起点である場合は、補正モジュール150が、その行動起点の位置も利用して補正するようにしてもよい。例えば、その行動起点からは直線的に移動したとする場合の位置の変更である。
【0051】
さらに、ユーザA:100AがユーザB:100Bの行動起点付近でもあり、ユーザC:100Cの行動起点付近でもある場所で立ち止まっている場合、ユーザA:100AとユーザB:100BとユーザC:100Cとの関係性を示す関係性テーブル1300を用いて、関係性が高いと判断した場合は、ユーザA:100AはユーザB:100Bの行動起点付近にいるとして、ユーザA:100Aの移動先の位置を補正する。前述の補正と同等の補正を行うようにしてもよい。
図13は、関係性テーブル1300のデータ構造例を示す説明図である。関係性テーブル1300は、行方向にユーザA欄1310、ユーザAとの関係距離欄1320を有し、列方向にユーザB欄1340、ユーザC欄1350を有している。
ユーザA欄1310は、メール数欄1312、F2F数欄1314、組織上の距離欄1316を有している。メール数欄1312は、ユーザAと他のユーザ(ユーザB、ユーザC)との間で行われたメール数、F2F数欄1314は、ユーザAと他のユーザ(ユーザB、ユーザC)と実際に会った回数、組織上の距離欄1316は、ユーザAと他のユーザ(ユーザB、ユーザC)と組織上の距離(例えば、組織図の木構造を対象として、ユーザAと他のユーザとの間にあるパスの数の逆数を100倍した値)を記憶している。ユーザAとの関係距離欄1320は、これらの平均値を記憶している。ここでは値が多いほど関係性が高いと、状態解析モジュール140は判断する。この値が予め定められた値以上であって、ユーザA:100AとユーザB:100Bの位置が予め定められた距離以内である場合は、両者が会っていると、状態解析モジュール140は判断する。なお、ユーザA:100AとユーザC:100CとのユーザAとの関係距離欄1320の値は、予め定められた値以上ではないので、両者は会ってはいないと、状態解析モジュール140は判断する。
【0052】
図14は、本実施の形態による処理例を示すフローチャートである。
ステップS1402からステップS1414までの処理は、図10の例に示したフローチャート内のステップS1002からステップ1014の処理を同等である。
ステップS1416では、補正モジュール150は、移動先の近傍にいるユーザの方向を取得する。ここで近傍とは、移動先の位置(実測値)から予め定められた範囲内にあることをいう。
ステップS1418では、補正モジュール150は、移動先の位置を補正する。複数人のユーザがいる場合は、移動したユーザの方向と他のユーザの方向との関係から、前述の図11、図12の例を用いて説明した補正を行う。つまり、補正モジュール150は、移動したユーザの方向と他のユーザの方向との関係から、会話をしているであろうユーザを抽出し、そのユーザの行動起点の位置を集合場所とする。そして、補正モジュール150は、集合場所の位置から、対象としているユーザの位置を補正する。また、この補正として、他のユーザの過去の補正と同等の補正を行うようにしてもよい。
【0053】
図15は、本実施の形態による処理例を示す説明図である。ユーザA:100Aは、位置1550から位置1554にいるユーザC:100Cと対話をするために移動したとする。この場合、センサーの位置精度が悪く、その位置は計測位置1556Aと測定されてしまい、むしろ、ユーザD:100Dの位置に近くなっているとする。つまり、位置情報だけを用いると、ユーザA:100AとユーザD:100Dとによって形成される集合場所になってしまう。そこで、ユーザA:100A、ユーザC:100C、ユーザD:100Dの方向情報を用いて、集合場所を判断する。なお、方向情報を用いた集合場所の判断については、図16〜19を用いて後述する。図15の場合は、ユーザA:100AとユーザC:100Cが向き合っており、ユーザA:100AとユーザD:100Dは向き合っていないので、ユーザA:100AとユーザC:100Cとによって形成される集合場所と判断されることになる。つまり、ユーザC:100Cの行動起点である位置1554に基づいて、ユーザA:100Aの移動先の計測位置1556Aを補正位置1556Bに補正する。補正の方法は、前述の方法と同等である。
【0054】
図16は、本実施の形態による処理例を示す説明図である。ユーザA:100Aは、位置1650から位置1652にいるユーザB:100Bと対話をするために移動したとする。
例えば、ユーザA:100Aの移動先の計測位置1654が計測データから(−2.5,−1.5)であった場合に、ユーザB:100Bの行動起点が位置1652(−1.5,−2.0)であることから、その時点でのユーザA:100Aの位置を、集合場所の位置(ユーザB:100Bの行動起点である位置1156)に基づいて、ユーザA:100Aの計測位置1654Aを補正位置1654Bと、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル1700(図17)に基づいて補正を行う。時刻欄1710が00:00:20の時点において、ユーザA:100AとユーザB:100Bの方向(向き)は予め定められた範囲内にある。この場合、予め定められた範囲として、180°±30°以内であるとしている。具体的に数値で示すと、
|90°−280°|<180°±30°
となっている。したがって、この場合、方向情報に関する条件を満たしている。ユーザA:100AとユーザB:100Bによって集合場所が形成されており、補正モジュール150がユーザA:100Aの計測位置1654Aを補正する。具体的には、補正モジュール150が、ユーザB:100Bの行動起点である位置1652(−1.5,−2.0)のx座標に−1.0を加算して、補正位置1654B(−2.5,−2.0)と補正している。なお、補正モジュール150は補正するのに、ユーザB:100Bの行動起点の位置を用いたが、ユーザB:100Bのその時点における位置(計測データ)を用いるようにしてもよい。
【0055】
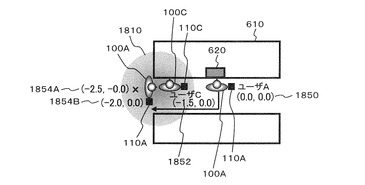
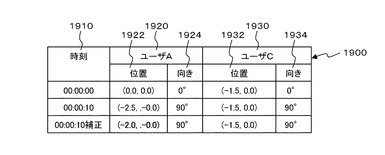
図18は、本実施の形態による処理例を示す説明図である。ユーザA:100Aは、位置1850から位置1852にいるユーザC:100Cと対話をするために移動したとする。
例えば、ユーザA:100Aの移動先の計測位置1854が計測データから(−2.5,0.0)であった場合に、ユーザB:100Bの行動起点が位置1852(−1.5,0.0)であることから、その時点でのユーザA:100Aの位置を、集合場所の位置(ユーザC:100Cの行動起点である位置1852)に基づいて、ユーザA:100Aの計測位置1854Aを補正位置1854Bと、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル1900(図19)に基づいて補正を行う。時刻欄1910が00:00:10の時点において、ユーザA:100AとユーザC:100Cの距離は予め定められた範囲内にある。この場合、予め定められた範囲として、x座標、y座標ともに1.0以内であるとしている。具体的に数値で示すと、
(−2.5,−0.0)−(−1.5,0.0)<=(1.0,1.0)
また、ユーザA:100AとユーザC:100Cの方向(向き)は予め定められた範囲内にある。この場合、予め定められた範囲として、180°±30°以内であるとしている。具体的に数値で示すと、
|90°−280°|<180°±30°
となっている。したがって、この場合、位置情報に関する条件及び方向情報に関する条件を満たしている。ユーザA:100AとユーザC:100Cによって集合場所が形成されており、補正モジュール150がユーザA:100Aの計測位置1854Aを補正する。具体的には、補正モジュール150が、ユーザC:100Cの行動起点である位置1852(−1.5,0.0)のx座標に−0.5を加算して、補正位置1854B(−2.0,0.0)と補正している。なお、補正モジュール150は補正するのに、ユーザC:100Cの行動起点の位置を用いたが、ユーザC:100Cのその時点における位置(計測データ)を用いるようにしてもよい。
【0056】
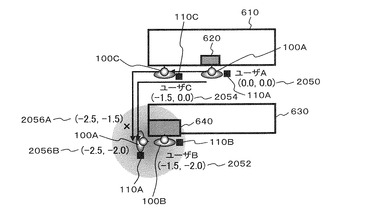
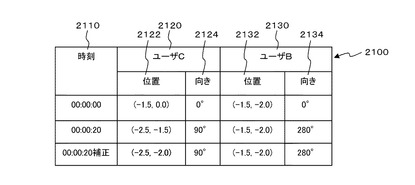
図20は、本実施の形態による処理例を示す説明図である。前述の例では、ユーザの行動情報が統計的に十分に蓄積されており、前述の統計的値を用いていたとする。しかし、ユーザによっては、行動情報が統計的に十分に蓄積されているとは限らない。そのような場合に、補正モジュール150は、行動情報が統計的に十分に蓄積されている他のユーザの行動情報を用いて補正を行うようにしてもよい。
図20の例では、ユーザC:100Cは、位置2054から位置2052にいるユーザB:100Bと対話をするために移動したとする。ただし、ユーザA:100Aについては行動情報が統計的に十分に蓄積されているが、ユーザB:100BとユーザC:100Cについては行動情報は統計的に十分に蓄積されていないとする。
例えば、ユーザC:100Cの移動先の計測位置が計測データから2056A(−2.5,−1.5)であった場合に、ユーザB:100Bの行動起点が位置2052(−1.5,−2.0)であることから、その時点でのユーザB:100Bの位置を、集合場所の位置(ユーザC:100Cの行動起点である位置2052)に基づいて、ユーザC:100Cの計測位置2056A(−2.5,−1.5)を補正位置2056B(−2.5,−2.0)と、補正モジュール150が補正してもよい。具体的には、補正モジュール150が、行動情報である計測データテーブル2100(図21)に基づいて補正を行う。時刻欄2110が00:00:20の時点において、ユーザC:100CとユーザB:100Bの距離は予め定められた範囲内にある。この場合、予め定められた範囲として、x座標、y座標ともに1.0以内であるとしている。具体的に数値で示すと、
(−2.5,−1.5)−(−1.5,−2.0)<=(1.0,1.0)
また、ユーザC:100CとユーザB:100Bの方向(向き)は予め定められた範囲内にある。この場合、予め定められた範囲として、180°±30°以内であるとしている。具体的に数値で示すと、
|90°−280°|<180°±30°
となっている。したがって、この場合、位置情報に関する条件及び方向情報に関する条件を満たしている。
【0057】
一方、ユーザA:100Aについての行動情報が統計的に十分に蓄積されており、ユーザB:100Bと会った場合の補正も統計的に十分に蓄積されているとする。蓄積は、計測テーブル2100の例に示すように、補正前後の情報を合わせて記憶することで実現されている。なお、蓄積とは、ある種のデータについて時系列で複数記憶していることである。また、補正モジュール150による補正が統計的に十分に蓄積されているか否かは、記憶された補正前後の情報を計数し、その回数が統計的に十分な数であるか否かを、補正モジュール150が判断すればよい。
そして、ユーザA:100AのユーザB:100Bと会った場合の過去の補正と同等の補正をユーザC:100Cの移動先の位置に対しても、補正モジュール150が行うようにする。これを模式的に表すと、図22の例に示すように、ユーザA:100AがユーザC:100Cと会った場合の経路である軌跡2220からユーザA:100AがユーザC:100Cと会った場合の経路である軌跡2210を補正モジュール150が取り除くことによって、ユーザC:100CがユーザB:100Bと会った場合の経路である軌跡2230を得るようにしていることになる。
ユーザC:100Cの移動先の計測位置2056Aを、過去のユーザA:100AのユーザB:100Bと会った場合の補正と同等の補正を補正モジュール150が行う。つまり、図16の例で示したように、ユーザB:100Bの行動起点である位置2052(−1.5,−2.0)のx座標に−1.0を加算して、補正位置2056B(−2.5,−2.0)と、補正モジュール150が補正している。
つまり、ユーザB:100Bと会ったユーザC:100Cの移動先の位置を補正モジュール150が補正するにあたって、そのユーザB:100Bと会ったことによって、移動先の位置を補正モジュール150が補正したことがあるユーザA:100Aの補正と同等の補正を、補正モジュール150が行うようにようしたものである。
【0058】
図23は、本実施の形態による処理例を示すフローチャートである。
ステップS2302からステップS2314までの処理は、図10の例に示したフローチャート内のステップS1002からステップ1014の処理を同等である。
ステップS2316では、他ユーザの計測値と同期させる。例えば、状態解析処理モジュール144は、ユーザ間の同期行動を検知した場合は、歩幅を変更する。
ステップS2318では、補正モジュール150は、集合場所の位置に他のユーザが移動した場合、集合場所の位置に移動してきた他のユーザの位置を補正する。
【0059】
図24は、本実施の形態による処理例を示す説明図である。
移動距離は、加速度センサーの計測データを用いて、歩数を計数し、歩数×歩幅によって算出する。歩幅決定には例えば、予め各ユーザが10歩歩き、そこから算出するなどして、ユーザ毎の値を設定するようにしてもよい。図24の例に示すように、複数人のユーザが同行して歩行している場合、ユーザA:100AとユーザE:100Eの歩幅が異なって設定されていたとしても、同じ歩幅となる場合がある。したがって、算出される両者の移動距離は異なり、結果として移動先の位置も異なってしまうことがある。そこで、移動先を特定する場合、2人以上が一緒に移動するとき、歩幅が動的に変化するのに対応するために、補正モジュール150が、ユーザの行動情報から同期現象を特定し、歩幅を動的に補正するようにしている。つまり、お互いの移動距離を同等にし、最終的な停留(立ち話)の状態を検知して、移動先の位置を算出する。
【0060】
図24の例では、机620の位置にいるユーザA:100Aが、机2410の位置にいるユーザE:100Eと連れだって歩き、ホワイトボード2420の前まで移動する経過を示している。
図25は、同期が始まった時期の例を示す説明図である。図25(a)はユーザA:100Aの加速度データ、図25(b)はユーザE:100Eの加速度データを示している。状態解析処理モジュール144は、この加速度データを解析することによって、ユーザA:100AがユーザE:100Eの位置で立ち止まったこと(短時間の滞留)を検出し、ユーザE:100Eが立ち上がり、歩行を開始したことを検出する。そして、歩数のカウントの周期が同じになる同期開始時刻2510を抽出し、その時刻から同期して歩行が行われていることを判別する。
そして、同期歩行が開始されたことが判別された場合は、補正モジュール150が歩幅を変更する。この場合、2人の平均値を利用するようにしてもよいし、短い歩幅に合わせるようにしてもよい。又は、同期して歩行する際の特徴から、補正モジュール150が歩幅を設定してもよい。例えば、複数人の同期歩行の場合、歩幅が予め定められた範囲内に収まるという特徴から、予め定められた上限値以下の歩幅に変更する。
さらに、移動先が地図に既に登録されている装置の位置(例えば、ホワイトボード2420の前、掲示板の前等)と予め定められた範囲内にある場合は、補正モジュール150が、その登録されている装置の位置を利用して、移動先の位置を補正するようにしてもよい。
【0061】
図26は、本実施の形態による処理例を示す説明図である。前述の例では、主に行動起点の位置、既に登録されている装置の位置を利用することを示したが、複数人のユーザの集合場所を利用して、補正モジュール150が補正するようにしてもよい。なお、集合場所として、行動起点の位置を例として挙げて説明していたが、行動起点以外の動的に生成された集合場所を以下に示す。
図26の例では、ユーザA:100AとユーザE:100Eが連れだって歩行して行き、位置2656で立ち止まって会話しているとする。その後に、ユーザC:100Cが位置2652からユーザA:100AとユーザE:100Eが会話している位置まで歩いて行き、会話に加わったとする。この場合、前述のようにしてユーザA:100AとユーザE:100Eの集合場所をノードとして検出する。次に、ユーザC:100Cの計測データから、ユーザC:100Cが立ち止まった位置を検出する。ユーザC:100Cが立ち止まった位置と集合場所の位置が予め定められた範囲内にある場合は、ユーザA:100A、ユーザE:100E、ユーザC:100Cの方向情報、ユーザA:100AとユーザC:100Cとの関係情報、ユーザE:100EとユーザC:100Cとの関係情報に基づいて、ユーザC:100Cの位置を補正モジュール150が補正する。補正モジュール150による方向情報を用いる補正については、図16、図17の例を用いて説明した補正モジュール150による補正の方法を用いればよい。また、補正モジュール150による関係情報を用いる補正については、図11、図13の例を用いて説明した補正モジュール150による補正の方法を用いればよい。また、お互いがホワイトボードに向かって会話している状態、すなわちユーザ間で向き合っていない状態に対応するために、関係情報だけを用いて補正モジュール150が補正するようにしてもよい。
【0062】
なお、本実施の形態としてのプログラムが実行されるコンピュータのハードウェア構成は、図27に例示するように、一般的なコンピュータであり、具体的にはパーソナルコンピュータ、サーバとなり得るコンピュータ等である。つまり、具体例として、処理部(演算部)としてCPU2701を用い、記憶装置としてRAM2702、ROM2703、HD2704を用いている。HD2704として、例えばハードディスクを用いてもよい。通信接続検出モジュール122、計測データ記録モジュール124、状態解析処理モジュール144、物理的配置照合モジュール146、ID照合モジュール148、補正モジュール150、出力モジュール152等のプログラムを実行するCPU2701と、そのプログラムやデータを記憶するRAM2702と、本コンピュータを起動するためのプログラム等が格納されているROM2703と、補助記憶装置であるHD2704と、キーボード、マウス、タッチパネル等に対する利用者の操作に基づいてデータを受け付ける受付装置2706と、CRT、液晶ディスプレイ等の出力装置2705と、ネットワークインタフェースカード等の通信ネットワークと接続するための通信回線インタフェース2707、そして、それらをつないでデータのやりとりをするためのバス2708により構成されている。これらのコンピュータが複数台互いにネットワークによって接続されていてもよい。
【0063】
なお、前述の実施の形態では、主に、相対座標を絶対座標に変換した後に、補正モジュール150が、対象者の位置情報を補正しているが、相対座標を対象として、対象者の位置情報を補正してもよい。また、前述の実施の形態では、主に、起点である位置を決定した後に、補正モジュール150が、対象者の位置情報を補正しているが、集合場所を決定した後であれば、起点である位置を決定しないで(又は起点である位置を決定する前に)対象者の位置情報を補正してもよい。
【0064】
前述の実施の形態のうち、コンピュータ・プログラムによるものについては、本ハードウェア構成のシステムにソフトウェアであるコンピュータ・プログラムを読み込ませ、ソフトウェアとハードウェア資源とが協働して、前述の実施の形態が実現される。
なお、図27に示すハードウェア構成は、1つの構成例を示すものであり、本実施の形態は、図27に示す構成に限らず、本実施の形態において説明したモジュールを実行可能な構成であればよい。例えば、一部のモジュールを専用のハードウェア(例えばASIC等)で構成してもよく、一部のモジュールは外部のシステム内にあり通信回線で接続しているような形態でもよく、さらに図27に示すシステムが複数互いに通信回線によって接続されていて互いに協調動作するようにしてもよい。また、特に、パーソナルコンピュータの他、情報家電、複写機、ファックス、スキャナ、プリンタ、複合機(スキャナ、プリンタ、複写機、ファックス等のいずれか2つ以上の機能を有している画像処理装置)などに組み込まれていてもよい。
【0065】
なお、前述の実施の形態内の処理を組み合わせてもよく、また、各モジュールの処理内容として背景技術で説明した技術を採用してもよい。
また、前述の実施の形態の説明において、予め定められた値との比較において、「以上」、「以下」、「より大きい」、「より小さい(未満)」としたものは、その組み合わせに矛盾が生じない限り、それぞれ「より大きい」、「より小さい(未満)」、「以上」、「以下」としてもよい。
【0066】
なお、説明したプログラムについては、記録媒体に格納して提供してもよく、また、そのプログラムを通信手段によって提供してもよい。その場合、例えば、前記説明したプログラムについて、「プログラムを記録したコンピュータ読み取り可能な記録媒体」の発明として捉えてもよい。
「プログラムを記録したコンピュータ読み取り可能な記録媒体」とは、プログラムのインストール、実行、プログラムの流通などのために用いられる、プログラムが記録されたコンピュータで読み取り可能な記録媒体をいう。
なお、記録媒体としては、例えば、デジタル・バーサタイル・ディスク(DVD)であって、DVDフォーラムで策定された規格である「DVD−R、DVD−RW、DVD−RAM等」、DVD+RWで策定された規格である「DVD+R、DVD+RW等」、コンパクトディスク(CD)であって、読出し専用メモリ(CD−ROM)、CDレコーダブル(CD−R)、CDリライタブル(CD−RW)等、ブルーレイ・ディスク(Blu−ray Disc(登録商標))、光磁気ディスク(MO)、フレキシブルディスク(FD)、磁気テープ、ハードディスク、読出し専用メモリ(ROM)、電気的消去及び書換可能な読出し専用メモリ(EEPROM(登録商標))、フラッシュ・メモリ、ランダム・アクセス・メモリ(RAM)、SD(Secure Digital)メモリーカード等が含まれる。
そして、前記のプログラム又はその一部は、前記記録媒体に記録して保存や流通等させてもよい。また、通信によって、例えば、ローカル・エリア・ネットワーク(LAN)、メトロポリタン・エリア・ネットワーク(MAN)、ワイド・エリア・ネットワーク(WAN)、インターネット、イントラネット、エクストラネット等に用いられる有線ネットワーク、あるいは無線通信ネットワーク、さらにこれらの組み合わせ等の伝送媒体を用いて伝送させてもよく、また、搬送波に乗せて搬送させてもよい。
さらに、前記のプログラムは、他のプログラムの一部分であってもよく、あるいは別個のプログラムと共に記録媒体に記録されていてもよい。また、複数の記録媒体に分割して
記録されていてもよい。また、圧縮や暗号化など、復元可能であればどのような態様で記録されていてもよい。
【符号の説明】
【0067】
100…ユーザ
110…動作検出モジュール
120…制御モジュール
122…通信接続検出モジュール
124…計測データ記録モジュール
130…DB
132…物理的空間配置情報
134…ユーザID対応データ
136…センサー計測データ
140…状態解析モジュール
142…状態処理モジュール
144…状態解析処理モジュール
146…物理的配置照合モジュール
148…ID照合モジュール
150…補正モジュール
152…出力モジュール
【特許請求の範囲】
【請求項1】
対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、
前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、
前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段
を具備することを特徴とする情報処理装置。
【請求項2】
前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を決定する起点決定手段
をさらに具備し、
前記補正手段は、さらに前記起点決定手段によって決定された他の対象者の起点の位置に基づいて、対象者の位置情報を補正する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記解析手段は、複数の対象者が予め定められた距離以内で同期して移動している場合は、複数の該対象者の予め定められた歩幅を合わせるように修正して、移動の状態を解析する
ことを特徴とする請求項1又は2に記載の情報処理装置。
【請求項4】
前記補正手段は、前記集合場所の位置に他の対象者が移動した場合であって、集合している対象者の方向情報と該他の対象者の方向情報、又は、集合している該対象者と該他の対象者との間の関係を示す情報である関係情報に基づいて、該集合場所の位置に移動してきた他の対象者の位置を補正する
ことを特徴とする請求項1から3のいずれか一項に記載の情報処理装置。
【請求項5】
前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、
前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段
をさらに具備し、
前記行動情報には、対象者が有している装置同士が通信を行ったことを示す情報である通信情報が含まれており、
前記解析手段は、前記行動情報内の通信情報に基づいて、通信を行った対象者の組み合わせを抽出し、
前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更する
ことを特徴とする請求項1から4のいずれか一項に記載の情報処理装置。
【請求項6】
前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、
前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段
をさらに具備し、
前記行動情報には、対象者の方向を示す情報である方向情報と位置を示す位置情報が含まれており、
前記解析手段は、前記行動情報内の方向情報と位置情報に基づいて、通信を行った対象者の組み合わせ又は互いに会っている対象者の組み合わせを抽出し、
前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更する
ことを特徴とする請求項1から4のいずれか一項に記載の情報処理装置。
【請求項7】
前記解析手段は、対象者間の関係を示す情報である関係情報に基づいて、対象者の組み合わせを抽出する
ことを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記起点を机の位置であるとし、対象者の移動した経路を通路であるとして、地図を生成する地図生成手段
をさらに具備することを特徴とする請求項1から7のいずれか一項に記載の情報処理装置。
【請求項9】
コンピュータを、
対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、
前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、
前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段
として機能させるための情報処理プログラム。
【請求項1】
対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、
前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、
前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段
を具備することを特徴とする情報処理装置。
【請求項2】
前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を決定する起点決定手段
をさらに具備し、
前記補正手段は、さらに前記起点決定手段によって決定された他の対象者の起点の位置に基づいて、対象者の位置情報を補正する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記解析手段は、複数の対象者が予め定められた距離以内で同期して移動している場合は、複数の該対象者の予め定められた歩幅を合わせるように修正して、移動の状態を解析する
ことを特徴とする請求項1又は2に記載の情報処理装置。
【請求項4】
前記補正手段は、前記集合場所の位置に他の対象者が移動した場合であって、集合している対象者の方向情報と該他の対象者の方向情報、又は、集合している該対象者と該他の対象者との間の関係を示す情報である関係情報に基づいて、該集合場所の位置に移動してきた他の対象者の位置を補正する
ことを特徴とする請求項1から3のいずれか一項に記載の情報処理装置。
【請求項5】
前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、
前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段
をさらに具備し、
前記行動情報には、対象者が有している装置同士が通信を行ったことを示す情報である通信情報が含まれており、
前記解析手段は、前記行動情報内の通信情報に基づいて、通信を行った対象者の組み合わせを抽出し、
前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更する
ことを特徴とする請求項1から4のいずれか一項に記載の情報処理装置。
【請求項6】
前記起点決定手段は、前記解析手段によって解析された状態に基づいて、前記対象者の行動の起点である位置を相対座標の位置として決定し、
前記対象者又は他の対象者の行動によって、絶対座標の位置を有している装置が、該対象者又は他の対象者を検知している旨の情報を保有する場合は、該絶対座標の位置に基づいて、前記起点決定手段によって決定された起点の相対座標の位置を絶対座標の位置に変換する座標変換手段
をさらに具備し、
前記行動情報には、対象者の方向を示す情報である方向情報と位置を示す位置情報が含まれており、
前記解析手段は、前記行動情報内の方向情報と位置情報に基づいて、通信を行った対象者の組み合わせ又は互いに会っている対象者の組み合わせを抽出し、
前記座標変換手段は、前記解析手段によって抽出された対象者の組み合わせに基づいて、他の対象者の起点の位置としての絶対座標の位置を用いて、前記対象者の起点としての相対座標としての位置を絶対座標としての位置に変更する
ことを特徴とする請求項1から4のいずれか一項に記載の情報処理装置。
【請求項7】
前記解析手段は、対象者間の関係を示す情報である関係情報に基づいて、対象者の組み合わせを抽出する
ことを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記起点を机の位置であるとし、対象者の移動した経路を通路であるとして、地図を生成する地図生成手段
をさらに具備することを特徴とする請求項1から7のいずれか一項に記載の情報処理装置。
【請求項9】
コンピュータを、
対象者の行動を検知した情報である行動情報に基づいて、該対象者の位置を少なくとも含む状態を解析する解析手段と、
前記解析手段によって解析された状態、前記行動情報内の対象者の位置を示す位置情報又は方向を示す情報である方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定する集合場所決定手段と、
前記集合場所決定手段によって決定された集合場所の位置に基づいて、対象者の位置情報を補正する補正手段
として機能させるための情報処理プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】

【図26】
【図27】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2013−83613(P2013−83613A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−225304(P2011−225304)
【出願日】平成23年10月12日(2011.10.12)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月12日(2011.10.12)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
[ Back to top ]