
情報提供システム
【課題】ナビゲーション装置を要することなく、後続車両運転者に対する経路案内を行うことが可能な情報提供システムを提供する。
【解決手段】本発明の情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする。
【解決手段】本発明の情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、所定のルートを走行した先行車両からこれに追随する後続車両に当該ルートに関する情報を提供するために用いられる情報提供システムに関する。
【背景技術】
【0002】
複数の車両で、共通の目的地に向かって走行するような場合に用いられるシステムとして、先頭を走行している先行車両が、その後方を走行している後続車両に対して何らかの経路案内データ等を送信し、後続車両ではこれを受信し、適切なタイミングでこれを後続車両運転者が参照できるようにし、先行車両に対して追随走行するためのアシストを行うように構成されたシステムが提案されている。
【0003】
このようなシステムの一例として、特許文献1(特開2008−241417号公報)には、先行車両において動作し、制御手段と経路探索手段と経路案内作成手段と通信手段と、を備えるナビゲーション装置と、後続車両において動作し、該後続車両の現在位置を検出する現在位置検出手段と通信手段と、を備える端末装置と、を備えるナビゲーションシステムにおいて、前記ナビゲーション装置は更に、前記経路案内作成手段において作成された経路案内を一旦記憶する経路案内記憶手段を備え、前記制御手段は、前記先行車両における前記ナビゲーション装置と前記後続車両における端末装置が所定の距離範囲内にある場合は、前記経路案内作成手段において作成された経路案内を前記端末装置に送信し、前記先行車両における前記ナビゲーション装置と前記後続車両における端末装置が所定の距離範囲より外にある場合は、前記作成された経路案内を前記経路案内記憶手段に一旦記憶し、該経路案内記憶手段に記憶された経路案内を前記端末装置の位置に応じて該端末装置に送信することを特徴とするナビゲーションシステムが開示されている。
【特許文献1】特開2008−241417号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のシステムにおいては、後続車両に情報を提供するためには、先行車両にナビゲーション装置が搭載されていることが必須の要件であり、ナビゲーション装置を搭載しない先行車両は、後続車両に対して経路案内を行うことができない、という問題があった。また、これまでのシステムでは、先行車両にナビゲーション装置を搭載しなければならなかったので、システムを構成する上での自由度が制約される、という問題があった。
【課題を解決するための手段】
【0005】
上記問題点を解決するために、請求項1に係る発明は、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする。
【0006】
また、請求項2に係る発明は、請求項1に記載の情報提供システムにおいて、前記案内ポイントデータは一定時間経過毎に取得されることを特徴とする。
【0007】
また、請求項3に係る発明は、請求項1又は請求項2に記載の情報提供システムにおいて、前記案内ポイントデータは一定距離進行毎に取得されることを特徴とする。
【発明の効果】
【0008】
本発明に係る情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータが先行する情報取得主体(先行車両や先行者携帯端末)によって取得され、この案内ポイントデータが後続車両運転者(又は後続者)に提示されるので、後続車両運転者(又は後続者)は先行車両や先行者からの情報に基づいて経路案内されることとなる。そして、このような本発明に係る情報提供システムによれば、先行車両や先行者がナビゲーション装置を設けることなく、後続車両運転者(又は後続者)に対する経路案内を行うことが可能となる。
【0009】
また、本発明に係る情報提供システムによれば、先行する情報取得主体(先行車両や先行者携帯端末)にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る情報提供システムの概念を模式的に説明する図である。
【図2】本発明の実施形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロック図である。
【図3】本発明の実施形態に係る情報提供システムにおいてセンターに設けられるシステムのブロック図である。
【図4】本発明の実施形態に係る情報提供システムにおいて後続車両に搭載されるシステムのブロック図である。
【図5】本発明の実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。
【図6】本発明の実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。
【図7】本発明の実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図8】本発明の実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。
【図9】本発明の実施形態に係る情報提供システムにおける“案内指示”タグ付加処理サブルーチンのフローチャートと案内ポイントデータのデータ構造イメージを示す図である。
【図10】本発明の実施形態に係る情報提供システムにおける“案内指示”タグの概念を説明する図である。
【図11】本発明の実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。
【図12】本発明の実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。
【図13】本発明の実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【図14】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図15】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図16】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図17】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図18】本発明の第2実施形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロック図である。
【図19】本発明の第2実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。
【図20】本発明の第2実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。
【図21】本発明の第2実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図22】本発明の第2実施形態に係る情報提供システムにおける後続車判定処理サブルーチンのフローチャートを示す図である。
【図23】本発明の第2実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【図24】本発明の第2実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。
【図25】本発明の第2実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。
【図26】本発明の第2実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。
【図27】本発明の第2実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。
【図28】本発明の第2実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【図29】本発明の第2実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図30】本発明の第2実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図31】本発明の第3実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。
【図32】本発明の第3実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図33】本発明の第3実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【図34】本発明の第3実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【図35】本発明の第3実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。
【図36】本発明の第3実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。
【図37】本発明の第3実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。
【図38】本発明の第3実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【図39】本発明の第4実施形態に係る情報提供システムの概念を模式的に説明する図である。
【図40】本発明の第4実施形態に係る情報提供システムにおいて先行者及び後続者が携帯する移動体端末装置400のブロック図である。
【図41】本発明の第4実施形態に係る情報提供システムにおける先行者携帯の移動体端末装置400の処理フローを示す図である。
【図42】本発明の第4実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。
【図43】本発明の第4実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図44】本発明の第4実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。
【図45】本発明の第4実施形態に係る情報提供システムにおける後続者携帯の移動体端末装置400の処理フローを示す図である。
【図46】本発明の第4実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。
【図47】本発明の第4実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【発明を実施するための形態】
【0011】
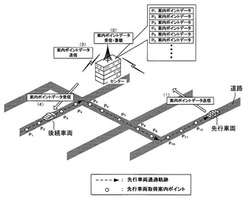
以下、本発明の実施の形態を図面を参照しつつ説明する。図1は本発明の実施の形態に係る情報提供システムの概念を模式的に説明する図である。本実施形態に係る情報提供システム情報提供システムにおいては、先行車両が通った経路に係る情報を、後続車両に対して通知(経路案内)することによって、後続車両が先行車両と同じ行程を走行することができるようにアシストするものである。
【0012】
上記を達成するために、まず、先行車両は適当な間隔のポイント(以下、「案内ポイント」と称する)で、当該ポイントにおける位置データ(緯度、経度データ)と、当該ポイントにおける車両前方の画像データなどの参考情報を取得する。このような案内ポイントについては、図1においてP1、P2、P3・・・P12として示されている。また、案内ポイントで取得されたデータは案内ポイントデータと称することとする。
【0013】
以上のように先行車両によって、適当な間隔で取得された案内ポイントデータは、(1)に示されるように、随時、先行車両からセンター(本実施形態に係る情報提供システムを総合的に管理するセンター)へと送信される。そして、このセンターでは、(2)に示すように、先行車両から受信した案内ポイントデータを、当該センターに設置されているサーバーなどの記憶部に蓄積する。なお、センターに蓄積された案内ポイントデータは、先行車両の走行後、十分長い期間経過後(例えば、1ヶ月後など)にも利用することができるにように設定することが好ましい。
【0014】
上記のようにして、センターにおいてサーバーなどの記憶部に蓄積された案内ポイントに係るデータ(P1の案内ポイントデータ、P2の案内ポイントデータ、P3の案内ポイントデータ、・・・・・・・Pnの案内ポイントデータ)は、次に、(3)に示すようにセンターから当該案内ポイントデータを必要とする後続車両に対して送信される。
【0015】
後続車両は、センターから送信された案内ポイントデータを受信し、これを適宜後続車両運転者に対して提示することで、後続車両運転者はこれを参照して、先行車両に対して追随し走行を行うことが可能となる。
【0016】
以上のような本実施形態に係る情報提供システムでは、先行車両にナビゲーション装置を設ける必要がなく、後続車両の運転者に対して経路案内を行うことが可能となる。また、先行車両にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【0017】
次に、以上のような本実施形態に係る情報提供システムを実現するためのシステム構成について説明する。まず、先行車両のシステム構成について具体的に説明する。図2は本発明の実施の形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロ
ック図である。図2において、100は処理コンピュータ、110は計時部、120は記憶部、130は車両前方画像撮像部、140は位置取得部、150は入出力インターフェイス部、160は車両情報取得部、170は通信部をそれぞれ示している。
【0018】
処理コンピュータ100は、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。処理コンピュータ100は、図示されている処理コンピュータ100と接続される各構成と協働・動作する。また、処理コンピュータ100は、本実施形態の情報提供システムの先行車両における種々の制御処理は、処理コンピュータ100内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。
【0019】
計時部110は、時刻、時間を計測することが可能であり、かつ、計測した時刻情報、時間情報を記憶・保持するものである。また、記憶部120は不揮発性で、かつ、書き換え可能なメモリであり、案内ポイントデータや案内指示タグデータなどのためのバッファなどとして機能することが可能なものである。
【0020】
車両前方画像撮像部130は先行車両の前方部に設けられたカメラなどの撮像装置であり、先行車両の前方の画像データを取得するものである。このような車両前方画像撮像部130に用いるカメラとしては、静止画像データを取得するもの、動画像データを取得するもののいずれを用いることもできるが、本実施形態では、車両前方画像撮像部13が静止画像データを取得するものとして説明する。
【0021】
位置取得部140は、GPS衛星からのGPS信号を受信して自らの位置を計算するGPS測位部を用いることによって、車両の現在位置情報(緯度データ、経度データ)を取得するものである。なお、位置取得部140は、位置情報を取得することができれば、このようなGPS測位法によらずとも、その他の測位法を用いることができる。
【0022】
入出力インターフェイス部150は車両の運転席部(不図示)に設けられ、運転者に対し車両の走行状態等に係る情報などを提供したり、或いは運転者に対して所定のワーニングを行ったりするための構成である。
【0023】
入出力インターフェイス部150におけるディスプレイは液晶などの表示装置であり、このディスプレイに文字・図形情報等を表示することによって、運転者に対して視覚的に所定の情報を報知することを可能とする。また、入出力インターフェイス部150におけるタッチパネルは、ディスプレイを覆うようにして設けられており、運転者の操作によりシステムに対して入力を可能とする入力デバイスとして機能する。また、入出力インターフェイス部150は、スピーカーも含んでおり、必要に応じて運転者に対して、音声による案内や警告を行い得るようになっている。
【0024】
車両情報取得部160は、運転席に設けられたステアリング(不図示)の舵角に関する情報を取得したり、或いは、車両に搭載されているジャイロセンサから車両の傾きに係る情報や、車両加速度に係る情報を取得したりするものである。
【0025】
通信部170は、携帯電話やその他の適当な通信規格による通信プロトコルに基づいて、データの送受信を行うことを可能とする通信用のモジュールであり、これにより先行車両で取得された案内ポイントデータや案内指示タグデータなどをセンター側に送信する。
【0026】
次に、本実施形態に係る情報提供システムを実現するためのセンターにおけるシステム構成について説明する。図3は本発明の実施の形態に係る情報提供システムにおいてセンターに設けられるシステムのブロック図である。図3において、200は処理コンピュー
タ、220は記憶部、270は通信部をそれぞれ示している。
【0027】
処理コンピュータ200は、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。処理コンピュータ200は、図示されている処理コンピュータ200と接続される各構成と協働・動作する。また、処理コンピュータ200は、本実施形態の情報提供システムのセンターにおける種々の制御処理は、処理コンピュータ200内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。
【0028】
記憶部220は、ハードディスクなどの大容量の記憶手段であり、先行車両(或いは、先行者が携帯する端末)から送信される案内ポイントデータや案内指示タグデータなどをログとして長期間にわたって蓄積可能とするものである。
【0029】
また、通信部270は、携帯電話やその他の適当な通信規格による通信プロトコルに基づいて、データの送受信を行うことを可能とする通信用のモジュールであり、これにより先行車両で取得された案内ポイントデータや案内指示タグデータなどを受信したり、或いは、記憶部220に蓄積されている案内ポイントデータや案内指示タグデータなどを後続車両に送信したりする。
【0030】
次に、本実施形態に係る情報提供システムを実現するための後続車両におけるシステム構成について説明する。図4は本発明の実施の形態に係る情報提供システムにおいて後続車両に搭載されるシステムのブロック図である。図4において、300は処理コンピュータ、320は記憶部、340は位置取得部、350は入出力インターフェイス部、370は通信部をそれぞれ示している。
【0031】
処理コンピュータ300は、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。処理コンピュータ300は、図示されている処理コンピュータ300と接続される各構成と協働・動作する。また、処理コンピュータ300は、本実施形態の情報提供システムの後続車両における種々の制御処理は、処理コンピュータ300内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。
【0032】
記憶部320は不揮発性で、かつ、書き換え可能なメモリであり、案内ポイントデータや案内指示タグデータなどのためのバッファなどとして機能することが可能なものである。
【0033】
位置取得部340は、GPS衛星からのGPS信号を受信して自らの位置を計算するGPS測位部を用いることによって、車両の現在位置情報(緯度データ、経度データ)を取得するものである。なお、位置取得部340は、位置情報を取得することができれば、このようなGPS測位法によらずとも、その他の測位法を用いることができる。
【0034】
入出力インターフェイス部350は車両の運転席部(不図示)に設けられ、運転者に対し車両の走行状態等に係る情報などを提供したり、或いは運転者に対して所定のワーニングを行ったりするための構成である。
【0035】
入出力インターフェイス部350におけるディスプレイは液晶などの表示装置であり、このディスプレイに文字・図形情報等を表示することによって、運転者に対して視覚的に所定の情報を報知することを可能とする。また、入出力インターフェイス部350におけるタッチパネルは、ディスプレイを覆うようにして設けられており、運転者の操作によりシステムに対して入力を可能とする入力デバイスとして機能する。また、入出力インター
フェイス部350は、スピーカーも含んでおり、必要に応じて運転者に対して、音声による案内や警告を行い得るようになっている。
【0036】
また、通信部370は、携帯電話やその他の適当な通信規格による通信プロトコルに基づいて、データの送受信を行うことを可能とする通信用のモジュールであり、これによりセンターから送信される案内ポイントデータや案内指示タグデータなどを受信する。
【0037】
なお、特許請求の範囲における「送信手段」は「通信部170」を、「第1受信手段」は「通信部270」「記憶手段」は「記憶部220」を、「再送信手段」は「通信部270」を、「第2受信手段」は「通信部370」を、「提示手段」は「入出力インターフェイス部350」を、それぞれ示している。
【0038】
次に、以上のように構成される本実施形態の情報提供システムの処理・動作について説明する。すでに説明した通り、本実施形態の情報提供システムは、先行車両のシステムから、センターのシステムに、案内ポイントデータや案内指示タグデータを送信し、センターのシステム側では、これを蓄積しておき、適宜後続車両に配信するものである。
【0039】
以下に説明する情報提供システムの処理においては、後続車両が、同時刻に(例えば数10〜100m程度の比較的短い距離間隔をおいて)、先行車両を追跡しているような例を想定しているが、本実施形態の情報提供システムの利用形態としては、後続車両が、同時刻に(例えば数10〜100m程度の距離をおいて)、先行車両を追跡するような形態で利用されるものに留まるものではない。すなわち、後続車両は、例えば、1ヶ月前に先行車両が走行した行程をたどることができるように、センター側が案内ポイントデータや案内指示タグデータを適宜後続車両に配信することも想定されるものである。このような形態で利用する場合には、センター側システムと後続車両システムとの間のデータの送受を行うこととなるが、このためのフローやタイミングチャートについては、以下に説明する実施形態に基づいて、これを応用・変形することで当業者が適宜構成することができる。
【0040】
以下、先行車両に搭載されるシステムと、後続車両に搭載されるシステムとについては、フローを用いて、また、先行車両、センター、後続車両との間のデータの送受関係についてはタイミングチャートを用いて説明する。特に、センター側システムにおける処理フローについては、以下に示されるタイミングチャートから容易に当業者が構成し得るものを採用することができる。
【0041】
また、案内ポイントデータや案内指示タグデータなどをバッファしておく機能については、先行車両のシステム、センターのシステム、後続車両のシステムのいずれにも設けられており、いずれのバッファに、案内ポイントデータや案内指示タグデータなどを蓄積するように構成しても良いし、或いは、適当なタイミングに応じて、いずれかのシステムにこれらデータをバッファするように切り換えるようにしても良い。
【0042】
図5は本発明の実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。図5において、ステップS100で、先行車両に搭載されるシステムの処理が開始されると、続いて、ステップS101に進み、設定変更の指示が在ったか否かが判定される。ここで、ステップS101における設定とは、案内ポイントデータをどのようなタイミングで取得するかに係る設定などである。ステップS101における判定がYESであるときには、ステップS102の設定変更処理のサブルーチンが実行される。このサブルーチンについては後述する。
【0043】
また、ステップS103では、先行車両が目的地に到着したか否かが判定される。この
ような判定のために、先行車両には、目的地を緯度データ、経度データで目的地を設定する機能が設けられている。ステップS103における判定結果がYESであるときにはステップS105に進み目的地到着処理のサブルーチンを実行し、判定結果がNOであるときにはステップS104に進み、案内中処理のサブルーチンを実行する。ステップS106では、走行が終了したか否かが判定され、判定がYESであると、ステップS107に進み、処理を終了する。
【0044】
次に、先のフローチャートにおける設定変更処理のサブルーチンについて説明する。図6は本発明の実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、先行車両運転者がどのようなトリガーによって案内ポイントデータを取得するかを設定するためのものである。
【0045】
図6において、ステップS200において、設定変更処理のサブルーチンが開始されると、続いて、ステップS201に進み、案内ポイントデータを取得するトリガーを“一定時間”経過毎のトリガーによるものと設定したか否かが判定される。ステップS201の判定がYESであるときにはステップS202に進み、“一定時間t”をトリガーとして設定し、判定がNOであるときにはステップS203に進み、“一定時間t”をトリガーとして解除する。
【0046】
ステップS204では、案内ポイントデータを取得するトリガーを“一定距離”間隔毎のトリガーによるものと設定したか否かが判定される。ステップS204の判定がYESであるときにはステップS205に進み、“一定距離m”をトリガーとして設定し、判定がNOであるときにはステップS206に進み、“一定距離m”をトリガーとして解除する。
【0047】
上記のような“一定時間t”、“一定距離m”の各トリガーは定期的に案内ポイントデータを取得するトリガーであるので、定期トリガーとも称する。
【0048】
ステップS207では、案内ポイントデータを取得するトリガーとして、車両情報取得部160におけるステア舵角センサ情報によるものと設定したか否かが判定される。ステップS207の判定がYESであるときにはステップS208に進み、“ステア舵角d”をトリガーとして設定し、判定がNOであるときにはステップS209に進み、“ステア舵角d”をトリガーとして解除する。ステップS210では、元のルーチンにリターンする。
【0049】
なお、ステア舵角dが案内ポイントデータ取得のトリガーとして設定されている場合には、車両情報取得部160におけるステア舵角センサが、既定ステア舵角d以上を検出すると、すなわち、運転者が一定以上にハンドルをいった場合に、案内ポイントデータが取得されることとなる。トリガーとして、・規定ステア舵角以上の検出(ハンドルを一定以上切った。)以外にも、規定ステア舵角以上の検出の後規定ステア舵角未満を検出(元のニュートラルな位置に戻した。)など、も考えられる。また、ステア舵角センサ情報によるトリガーは、車両センサからの情報によるものなので、車両センサトリガーとも称する。
【0050】
次に、先のフローチャートにおける案内中処理のサブルーチンについて説明する。図7は本発明の実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。この案内中処理サブルーチンは、基本的には、先行車両から案内ポイントデータを送信するときの処理を行うものである。なお、ステア舵角センサ情報によるトリガーがある場合には、案内ポイントデータの情報にさらに付加的に案内指示タグデータという概念のデータを追加するようにしている。
【0051】
図7において、ステップS300で、案内中処理のサブルーチンが開始されると、続く、ステップS301では、計時部110から時間情報が取得され、次のステップS302では、位置取得部140から現在位置データが取得され、ステップS303では、両情報取得部160におけるステア舵角センサからステア舵角情報が取得される。
【0052】
ステップS304では、定期トリガーがOnであり、かつ設定された時間が経過したか、或いは、設定された距離が走行されたかが判定される。ステップS304の判定結果がYESであるときにはステップS305に進み、NOであるときにはステップS308へと進む。
【0053】
ステップS305では、車両前方画像撮像部130によって、車両の前方画像データを取得する。また、続くステップS306では、現在位置などを“案内ポイント”として記憶部120に記録する。そして、ステップS307では、案内ポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。
【0054】
ステップS308では、車両センサトリガーがOnであるかが判定される。ステップS308の判定結果がYESであるときにはステップS309に進み、NOであるときにはステップS3013に進み、元のルーチンにリターンする。
【0055】
ステップS309では、車両前方画像撮像部130によって、車両の前方画像データを取得する。また、続くステップS310では、現在位置などを“案内ポイント”として記憶部120に記録する。そして、ステップS311では、案内ポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。ステップS312においては、“案内指示”タグ付加処理のサブルーチンが実行される。この“案内指示”タグ付加処理のサブルーチンについては後述する。
【0056】
次に、先のフローチャートにおける目的地到着処理のサブルーチンについて説明する。図8は本発明の実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。図8において、ステップS400で目的地到着処理のサブルーチンが開始されると、続いてステップS401に進み、位置取得部140から現在位置データが取得され、ステップS402で、車両前方画像撮像部130によって、車両の前方画像データが取得される。
【0057】
ステップS403では、現在位置などを“目的地”として記憶部120に記録する。そして、ステップS404では、目的地のポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。ステップS405でメインルーチンにリターンする。
【0058】
次に、先のフローチャートにおけ“案内指示”タグ付加処理のサブルーチンについて説明する。図9は本発明の実施形態に係る情報提供システムにおける“案内指示”タグ付加処理サブルーチンのフローチャートと案内ポイントデータのデータ構造イメージを示す図である。また、図10は本発明の実施形態に係る情報提供システムにおける“案内指示”タグの概念を説明する図である。
【0059】
“案内指示”タグは、ある案内ポイントデータAから次の案内ポイントデータBとの間で、先行車両が、大きく方向を変更したときに、案内ポイントデータAにこれを付加して
おき、もって、後続車両の後続車両運転者に、大きな方向変化を予め知らしめようにするためのものである。すなわち、案内指示タグデータは、既に取得された案内ポイントデータに後から付加的に追加される。この案内指示タグデータは、「大きく右に方向変更」する旨を示すデータ或いは「大きく左に方向変更」する旨を示すデータが最も簡単なものであるが、より細かく変更方向を規定するようなデータであっても構わない。
【0060】
図9及び図10を参照して、“案内指示”タグを選択するときの処理についてより詳細に説明する。ステップS500で“案内指示”タグ付加処理のサブルーチンが開始されると、続いてステップS501に進み、既に記憶部120に記録されている案内ポイントデータ数が所定数以上であるかが判定される。ステップS501における判定がNOであるときにはステップS510に
進みリターンし、YESであるときにはステップS502に進む。
【0061】
ステップS502では、最新から3つ分の“案内ポイント”位置のデータを抽出する。すなわち、ステップS502で抽出されるのは、「最新案内ポイントに係るデータ」、「最新案内ポイントから1つ前のデータ」、「最新案内ポイントデータから2つ前のデータ」の3つのデータである。ここで、「最新案内ポイントに係るデータ」が取得された位置をPm、「最新案内ポイントから1つ前のデータ」が取得された位置をPm-1、「最新案内ポイントデータから2つ前のデータ」が取得された位置をPm-2とする。ステップS503では、“案内方向:Dir”が計算される。この案内方向Dirは、前述したような「大きく右に方向変更」する旨を示すデータであるのか、或いは「大きく左に方向変更」する旨を示すデータであるかの別を示すものである。
【0062】
次のステップS504では、“変化角度:Deg”が計算される。この変化確度Degは、図10に示すような、現在車両位置と案内ポイント位置との間のなす角度として定義することができる。より詳しくは、変化角度:Degは、先の3つの案内ポイント位置Pm、Pm-1、Pm-2から、下式(1)のように表すことができる。
【0063】
【数1】

ステップS505では、上記のように計算された“変化角度:Deg”が規定以上であるか否かが判定される。ステップS505の判定結果がNOであるときにはステップS510に進み元のルーチンにリターンし、YESであるときにはステップS506に進む。
【0064】
ステップS506では、“案内距離:Dist”が算出される。この案内距離:Distは図10に示すような、現在車両位置と案内ポイント位置との間の距離として定義されるものである。ただし、図10(C)に示すように、案内距離:Distが既定の距離以上の案内ポイントのみがタグ付加対象の案内ポイントとして採用される。以上のようにして、ステップS507では、“案内指示”タグを付加する“案内ポイント”が設定される。
【0065】
ステップS508では、設定された案内ポイントデータに“案内指示”タグデータが付加される。そして、ステップS509では、“案内指示タグ”データが通信部170によって送信される。ステップS510で、元のルーチンにリターンする。
【0066】
次に、以上のようにして、情報提供車両である先行車両から提供される案内ポイントデータや案内指示タグデータを後続車両において利用するための処理について説明する。図11は本発明の実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理
フローを示す図である。図11において、ステップS600で、後続車両に搭載されるシステムの処理が開始されると、続いて、ステップS601に進み、提供情報受信処理のサブルーチンを実行し、さらにステップS602に進み、提示処理のサブルーチンを実行する。ステップS603では、後続車両の走行が終了であるか否かが判定され、判定結果がYESであるときにはステップS604に進み、処理を終了する。
【0067】
次に、先のフローチャートにおける提供情報受信処理のサブルーチンについて説明する。図12は本発明の実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。図12において、ステップS700で提供情報受信処理のサブルーチンが開始すると、次に、ステップS701に進み、“案内ポイント/目的地”を受信したか否かが判定される。ステップS701の判定結果がYESであるときにはステップS702に進み、NOであるときにはステップS703に進む。ステップS702では、受信した“案内ポイント/目的地”を記憶部120に追加格納する。
【0068】
ステップS703では、案内指示タグを受信したか否かが判定される。ステップS703の判定結果がYESであるときにはステップS704に進み、NOであるときにはステップS705に進み、リターンする。ステップS704では、受信した案内指示タグを記憶部120に追加格納する。
【0069】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図13は本発明の実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0070】
ステップS800で、提示処理のサブルーチンが開始されると、続いてステップS801に進み、位置取得部340によって、車両の現在位置を取得する。ステップS802では、“現在位置”=“案内ポイント”であるか否かが判定される。ステップS802における判定結果がYESであるときにはステップS803に進み、NOであるときにはステップS806に進む。
【0071】
ステップS803では、案内ポイント(S802の判定で用いられた案内ポイント)に“案内指示”タグ が付加されているか否かが判定される。ステップS803の判定がYESであるときにはステップS804で、案内ポイントデータ報知時における追加情報として“案内距離:Dist”、“案内方向:Dir”を付加する。
【0072】
ステップS805では、(通過予定のS802の判定で用いられた案内ポイント)の案内ポイントデータ(前方カメラ画像・案内ポイント(緯度、経度データ等)情報)を入出力インターフェイス部350によって、表示・音声等で報知する。
【0073】
また、ステップS806では、現在位置=“目的地”であるかが判定される。ステップS806の判定がYESであるときにはステップS807に進み、現時位置が“目的地”
であることを、入出力インターフェイス部350によって、表示・音声等で報知する。当該判定がNOであるときにはステップS808に進み、元のルーチンにリターンする。
【0074】
なお、目的地までの案内ポイントデータを含む、1つの行程の全案内ポイントデータを後続車両のシステムが格納した後、後続車両の現在位置と任意の案内ポイントデータとの間の距離が拡大していることが判明した場合には、入出力インターフェイス部350に何らかの警告を行うようなルーチンを採用することもできる。このようなルーチンを採用することで、後続車両のルートはずれに対して、適切なワーニングを行うことが可能となる。
【0075】
次に、先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換プロセスの一例について説明する。図14乃至図15は、本発明の実施形態に係る情報提供システムにおける先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換のタイミングチャートを示す図である。
【0076】
図14には、先行車両からセンター側システムを介して、後続車両に案内ポイントデータを送信するときのやりとりが示されている。図14において、タイミングT101では、先行車両搭載システムから、センター側システムに、案内ポイントデータが送信される。次のタイミングT102では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT103では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT104では、センター側システムから、後続車両搭載システムに、案内ポイントデータが送信される。次のタイミングT105では、後続車両搭載システムから、センター側システムに、“案内ポイントデータ”受領通知が送信される。次のタイミングT106では、センター側システムから、先行車両搭載システムに、案内ポイントデータ受領通知が送信される。
【0077】
図15には、先行車両において車両センサトリガーがONとなったときにおける、先行車両からセンター側システムを介して、後続車両に案内ポイントデータ、案内指示タグデータを送信するときのやりとりが示されている。図15において、タイミングT201では、先行車両搭載システムから、センター側システムに、案内ポイントデータが送信される。次のタイミングT202では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT203では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT204では、センター側システムから、後続車両搭載システムに、案内ポイントデータが送信される。次のタイミングT205では、後続車両搭載システムから、センター側システムに、“案内ポイントデータ”受領通知が送信される。次のタイミングT206では、センター側システムから、先行車両搭載システムに、“案内ポイントデータ”受領通知が送信される。次のタイミングT207では、先行車両搭載システムから、センター側システムに、案内指示タグデータが送信される。次のタイミングT208では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT209では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT210では、センター側システムから、後続車両搭載システムに、案内指示タグデータが送信される。次のタイミングT211では、後続車両搭載システムから、センター側システムに、“案内指示タグデータ”受領通知が送信される。次のタイミングT212では、センター側システムから、先行車両搭載システムに、“案内指示タグデータ”受領通知が送信される。
【0078】
図16には、先行車両が目的地に到着したときにおける、先行車両、センター側システム、後続車両のやりとりが示されている。図16において、タイミングT301では、先行車両搭載システムから、センター側システムに、目的地の(案内ポイントデータ)が送信される。次のタイミングT302では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT303では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT304では、センター側システムから、後続車両搭載システムに、目的地の(案内ポイントデータ)が送信される。次のタイミングT305では、後続車両搭載システムから、センター側システムに、“目的地データ”受領通知が送信される。次のタイミングT306では、センター側システムから、先行車両搭載システムに、“目的地データ”受領通知が送信される。
【0079】
図17には、後続車両が目的地に到着したときにおける、先行車両、センター側システ
ム、後続車両のやりとりが示されている。図17において、タイミングT401では、後続車両搭載システムから、センター側システムに、後続車両の目的地到着通知が送信される。次のタイミングT402では、センター側システムから、先行車両搭載システムに、後続車両の目的地到着通知が送信される。次のタイミングT403では、先行車両搭載システムから、センター側システムに、目的地到着通知の受領通知が送信される。次のタイミングT404では、センター側システムから、後続車両搭載システムに、目的地到着通知の受領通知が送信される。
【0080】
以上のように、本発明に係る情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータが先行する情報取得主体(先行車両)によって取得され、この案内ポイントデータが後続車両の後続車両運転者に提示されるので、この後続車両運転者は先行車両からの情報に基づいて経路案内されることとなる。そして、このような本発明に係る情報提供システムによれば、先行車両や先行者がナビゲーション装置を設けることなく、後続車両運転者に対する経路案内を行うことが可能となる。
【0081】
また、本発明に係る情報提供システムによれば、先行する情報取得主体(先行車両)にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【0082】
次に、本発明の第2の実施形態について説明する。先に説明した第1の実施形態は、先行車両には、ナビゲーション装置が搭載されていない場合における情報提供であったが、先行車両にナビゲーション装置が搭載されていれば、先行車両からセンターシステムを介する形で、後続車両に対して、よりきめの細かい案内情報を提供することが可能となる。本発明の第2の実施形態は、先行車両にナビゲーションシステムが搭載されている場合の情報提供システムの例である。
【0083】
次に、以上のような第2実施形態に係る情報提供システムを実現するためのシステム構成について説明する。第2実施形態では、先行車両のシステム構成が先の実施形態と異なるのみであるので、先行車両のシステム構成についてのみ説明する。図18は本発明の第2実施形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロック図である。図18において、図2と同一の参照番号が付された構成は、同様の構成であるので説明を省略する。図18の先行車両に搭載されるシステムが先のものと異なる点は、ナビゲーション部180を有する点である。
このナビゲーション部180は、GPS測位部である位置取得部140によって、得られた車両の現在位置情報と、道路情報、施設情報などが記憶されているナビゲーションシステム用データベース(不図示)の情報とを重ね合わせて、自車両の地図上の位置を把握できたり、或いは、出発地点から目的地までのルートを当該データベースから抽出することができたりするものであり、現在広く用いられているものを用いることができる。
【0084】
以上のようなナビゲーション部180が搭載されている先行車両が、後続車両に先立って所定のルートを走行し、これに基づいて後続車両を案内する場合の実施形態について説明する。図19は本発明の第2実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。図19において、ステップS900で、先行車両に搭載されるシステムの処理が開始されると、続いてステップS901に進み、初期設定処理のサブルーチンが実行される。次のステップS902では、自車両の走行が終了であるか否かが判定される。ステップS902の判定結果がYESであるときにはステップS903に進み、NOであるときにはステップS904に進む。ステップS904では、現在位置が目的地であるか否かが判定され、当該判定がYESであるときには、ステップS906に進み、目的地到着処理のサブルーチンが実行される。この目的地到着処理サブル
ーチンについては、先に説明したものと同様のものを用いることができるので説明を省略する。
【0085】
また、ステップS904における判定がNOであるときにはステップS905に進み、案内中処理のサブルーチンが実行される。ステップS903では、後続車両の走行が終了であるか否かが判定される。ステップS903の判定結果がYESであるときにはステップS908に進み、処理が終了とされ、NOであるときにはステップS907に進み、後続車判定処理のサブルーチンが実行される。
【0086】
次に、先のフローチャートにおける初期設定処理のサブルーチンについて説明する。図20は本発明の第2実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、ナビゲーション部180で案内ポイントを選定する処理、及び、先行車両運転者がどのような車両センサトリガーによって案内指示タグデータを取得するかを設定するためのものである。
【0087】
図20において、ステップS1000で、初期設定処理サブルーチンが開始されると、次にステップS1001においては、先行車両運転者がナビゲーション部180に入力した目的地及び経由地を取得する。ステップS1002では、取得された目的地及び経由地から案内経路を算出する。ステップS1003では、求められた案内経路中における適当なポイント交差点・分岐点の手前何百m、交差点・分岐点などを“案内ポイント”として選定する。
【0088】
ステップステップS1004では、案内ポイントデータを取得するトリガーとして、車両情報取得部160におけるステア舵角センサ情報によるものと設定したか否かが判定される。ステップS1004の判定がYESであるときにはステップS1005に進み、“ステア舵角d”をトリガーとして設定し、判定がNOであるときにはステップステップS1006に進み、“ステア舵角d”をトリガーとして解除する。ステップS1007では、元のルーチンにリターンする。なお、このステア舵角dに関連する概念については、第1の実施形態において説明したものと同様である。
【0089】
次に先のフローチャートにおける案内中処理のサブルーチンについて説明する。図21は本発明の第2実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【0090】
図21において、ステップS1100で、案内中処理サブルーチンが開始されると、次のステップS1101では、位置取得部140によって現在位置が取得される。続く、ステップS1102では、取得された現在位置が予め選定されている案内ポイントであるかが判定される。ステップS1102の判定がYESであるとステップS1103に進み、NOであるとステップS1105に進む。
【0091】
ステップS1103では、車両前方画像撮像部130によって、車両の前方の風景の画像データが取得される。ステップS1104では、案内ポイントデータ(現在位置データと、現在位置データと関連づけられた車両前方画像撮像部130による画像データ)を通信部170によってセンター側に送信する。
【0092】
ステップS1105では、車両センサトリガーがOnであるかが判定される。ステップS1105の判定結果がYESであるときにはステップS1106に進み、NOであるときにはステップS11010に進み、元のルーチンにリターンする。
【0093】
ステップS1106では、車両前方画像撮像部130によって、車両の前方画像データ
を取得する。また、続くステップS1107では、現在位置などを“案内ポイント”として記憶部120に記録する。そして、ステップS1108では、案内ポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。ステップS1109においては、“案内指示”タグ付加処理のサブルーチンが実行される。この“案内指示”タグ付加処理のサブルーチンについては先に説明したものと同様である。
【0094】
次に先のフローチャートにおける後続車判定処理のサブルーチンについて説明する。図22は本発明の第2実施形態に係る情報提供システムにおける後続車判定処理サブルーチンのフローチャートを示す図である。
【0095】
図22において、ステップS1200で、後続車判定処理サブルーチンの処理が開始されると、ステップS1201において、後続車の現在位置を要求する。ステップS1202では、後続車の現在位置を受信したか否かが判定される。この判定がNOであるときにはステップS1205に進みリターンし、YESであるときにはステップS1203に進み、後続車・Onルート判定処理サブルーチンを実行する。引き続き、ステップS1204では、後続車・“案内ポイント/目的地”到着判定処理サブルーチンを実行する。
【0096】
次に先のフローチャートにおける後続車・Onルート判定処理のサブルーチンについて説明する。図23は本発明の第2実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【0097】
図23において、ステップS1300で、後続車・Onルート判定処理のサブルーチンが開始されると、続いてステップS1301において、後続車両が既定のルート上に存在するか否かが判定される。このステップの判定結果がYESであれば、ステップS1307に進み、メインルーチンにリターンし、NOであればステップS1302に、これまで用いていた案内経路を記憶部などに一時退避する。そして、ステップS1303では、最も近い“案内ポイント”をセットし、ステップS1304で、後続車両の復帰経路を計算する。ステップS1305では、もとのルート復帰への新“案内ポイント”を設定する。ステップS1306では、新“案内ポイント”を記憶部120に記録し、ステップS1307で元のルーチンにリターンする。
【0098】
次に先のフローチャートにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのサブルーチンについて説明する。図24は本発明の第2実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。図24において、ステップS1400で、後続車・“案内ポイント/目的地”到着判定処理サブルーチンが開始されると、ステップS1401で、後続車両から、案内ポイント又は目的地到達通知が受信されたか否かが判定される。この判定結果がYESであればステップS1402に進み、NOであればリターンする。ステップS1402においては、後続車両の案内ポイント通過を確認し、ステップS1403で、元のルーチンにリターンする。
【0099】
次に、以上のようにして、情報提供車両である先行車両から提供される案内ポイントデータや案内指示タグデータを後続車両において利用するための処理について説明する。図25は本発明の第2実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。図25において、ステップS1500で、後続車両に搭載されるシステムの処理が開始されると、続いて、ステップS1501に進み、提供情報受信処理のサブルーチンを実行し、次に、ステップS1502に進み、現在位置送信処理のサブルーチンを実行する。さらにステップS1503に進み、提示処理のサブルーチンを実行する。ステップS1504では、後続車両の走行が終了であるか否かが判定され、判定
結果がYESであるときにはステップS1505に進み、処理を終了する。
【0100】
次に、先のフローチャートにおける提供情報受信処理のサブルーチンについて説明する。図26は本発明の第2実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。図26において、ステップS1600で提供情報受信処理のサブルーチンが開始すると、次に、ステップS1601に進み、“案内ポイント/目的地”を受信したか否かが判定される。ステップS1601の判定結果がYESであるときにはステップS1602に進み、NOであるときにはステップS1603に進む。ステップS1602では、受信した“案内ポイント/目的地”を記憶部120に追加格納する。
【0101】
ステップS1603では、案内指示タグを受信したか否かが判定される。ステップS1603の判定結果がYESであるときにはステップS1604に進み、NOであるときにはステップS1605に進み、リターンする。ステップS1604では、受信した案内指示タグを記憶部120に追加格納する。
【0102】
次に、先のフローチャートにおける現在位置送信処理のサブルーチンについて説明する。図27は本発明の第2実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。図27において、ステップS1700で、現在位置送信処理サブルーチンがスタートすると、次に、ステップS1701で、位置取得部340から車両の現在位置を取得する。ステップS1702では、(センターを介する形で)先行車両からの現在位置要求があるか否かが判定される。ステップS1702の判定結果がYESであるときには、ステップS1703に進み、車両の現在位置データ(緯度データ、経度データ)を送信し、NOで在るときには、ステップS1704に進み、元のルーチンにリターンする。
【0103】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図28は本発明の第2実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0104】
ステップS1800で、提示処理のサブルーチンが開始されると、続いてステップS1801に進み、位置取得部340によって、車両の現在位置を取得する。ステップS1802では、“現在位置”=“案内ポイント”であるか否かが判定される。ステップS1802における判定結果がYESであるときにはステップS1803に進み、NOであるときにはステップS1806に進む。
【0105】
ステップS1803では、案内ポイント(S1802の判定で用いられた案内ポイント)に“案内指示”タグ が付加されているか否かが判定される。ステップS1803の判定がYESであるときにはステップS1804で、案内ポイントデータ報知時における追加情報として“案内距離:Dist”、“案内方向:Dir”を付加する。
【0106】
ステップS1805では、(通過予定のS1802の判定で用いられた案内ポイント)の案内ポイントデータ(前方カメラ画像・案内ポイント(緯度、経度データ等)情報)を入出力インターフェイス部350によって、表示・音声等で報知する。
【0107】
また、ステップS1806では、現在位置=“目的地”であるかが判定される。ステップS1806の判定がYESであるときにはステップS1807に進み、現時位置が“目的地” であることを、入出力インターフェイス部350によって、表示・音声等で報知する。また、ステップS1808では、目的地に到達した旨、(センターを介する形で)先行車両側に送信する。ステップS1806の判定がNOであるときにはステップS18
09に進み、元のルーチンにリターンする。
【0108】
次に、先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換プロセスの一例について説明する。図29及び図30は、本発明の第2実施形態に係る情報提供システムにおける先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換のタイミングチャートを示す図である。
【0109】
図29には、先行車両からセンター側システムを介して、後続車両に対して現在位置要求を行ったときのやりとりが示されている。図29において、タイミングT501では、先行車両搭載システムから、センター側システムに、後続車両の現在位置要求が送信される。次のタイミングT502では、センター側システムから、後続車両搭載システムに、現在位置要求が送信される。次のタイミングT503では、後続車両搭載システムから、センター側システムに、後続車両によって取得された現在位置が送信される。次のタイミングT504では、センター側システムから、後続車両搭載システムに、現在位置受領通知が送信される。次のタイミングT505では、センター側システムから、先行車両搭載システムに、後続車両の現在位置が送信される。
【0110】
図30には、後続車両が案内経理(既定ルート)を逸脱したときのやりとりが示されている。図30において、タイミングT601では、先行車両搭載システムから、センター側システムに、後続車両の現在位置要求が送信される。次のタイミングT602では、センター側システムから、後続車両搭載システムに、後続車両の現在位置要求が送信される。次のタイミングT603では、後続車両搭載システムから、センター側システムに、後続車両の現在位置が送信される。次のタイミングT604では、センター側システムから、後続車両搭載システムに、現在位置受領通知が送信される。次のタイミングT605では、センター側システムから、先行車両搭載システムに、現在位置が送信される。次のタイミングT606では、先行車両搭載システムから、センター側システムに、経路再計算によるOnルート復帰の為の新“案内ポイントデータ”が送信される。次のタイミングT607では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT608では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT609では、センター側システムから、後続車両搭載システムに、経路再計算によるOnルート復帰の為の新“案内ポイントデータ”が送信される。次のタイミングT610では、後続車両搭載システムから、センター側システムに、案内ポイントデータ受領通知が送信される。次のタイミングT611では、センター側システムから、先行車両搭載システムに、案内ポイントデータ受領通知が送信される。
【0111】
以上のように、本発明に係る第2情報提供システムによれば、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータと共に、ナビゲーション部によって取得されたデータを後続車両運転者に提供するので、後続車両運転者はより詳細な情報を得た上で、先行車両と同様のルートを走行することができ、ルートを逸脱する可能性を抑制できる。また、本発明に係る第2情報提供システムによれば、ルート逸脱時に対する復帰経路についても、後続車両運転者に提供されるので、後続車両運転者は余裕をもって走行を行うことができる。
【0112】
次に、本発明の第3の実施形態について説明する。先に説明した第2の実施形態は、先行車両にナビゲーション装置が搭載される共に、先行車両が情報提供するルートを実際に走行して案内ポイントを取得する実施形態であった。しかし、先行車両にナビゲーション装置が搭載されている場合には、後続車両に対して情報を提供するために、先行車両が実際に走行を行う必要は必ずしも必要はない。本発明の第3の実施形態は、先行車両にナビゲーションシステムが搭載されている場合で、先行車両が情報提供ルートを走行しない場
合の情報提供システムの例である。
【0113】
このような第3実施形態に係る情報提供システムを実現するためのシステム構成については、第2の実施形態のシステム構成と同様のものを用いることができるので、これについて説明は省略する。
【0114】
ナビゲーション部180が搭載されている先行車両が、後続車両に先立って所定のルートを走行せずに、後続車両を案内する場合の実施形態について説明する。図31は本発明の第3実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。図31において、ステップS1900で、先行車両に搭載されるシステムの処理が開始されると、続いてステップS1901に進み、初期設定処理のサブルーチンが実行される。次のステップS1902では、案内中処理のサブルーチンが実行される。ステップS1903では、後続車両の走行が終了であるか否かが判定される。ステップS1903の判定結果がYESであるときにはステップS1904に進み、処理が終了とされ、NOであるときにはステップS1902に進み、案内中処理のサブルーチンが実行される。
【0115】
次に、先のフローチャートにおける初期設定処理のサブルーチンについて説明する。図32は本発明の第3実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、ナビゲーション部180で案内ポイントを選定する処理を行い、及び、そして、選定された全ての案内ポイントを送信するためのものである。
【0116】
図32において、ステップS2000で、初期設定処理サブルーチンが開始されると、次にステップS2001においては、先行車両運転者がナビゲーション部180に入力した目的地及び経由地を取得する。ステップS2002では、取得された目的地及び経由地から案内経路を算出する。ステップS2003では、求められた案内経路中における適当なポイントを“案内ポイント”として選定する。ステップS2004では、選定された全ての“案内ポイント”に係るデータ(緯度データ、経度データ)を送信し、ステップS2005に進み、元のルーチンにリターンする。
【0117】
次に先のフローチャートにおける案内中処理のサブルーチンについて説明する。図33は本発明の第3実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【0118】
図33において、ステップS2100で、案内中処理サブルーチンが開始されると、次のステップS2101では、後続車両の現在の位置情報の要求を行う。ステップS2102で後続車両の現在の位置情報を受信したかが判定される。この判定結果がYESであるときにはステップS2103に進み、NOであるときにはステップS2105に進み、元のルーチンにリターンする。ステップS2103では、後続車・Onルート判定処理サブルーチンを実行する。続く、ステップS2104では、後続車・“案内ポイント/目的地”到着判定処理サブルーチンを実行する。
【0119】
次に先のフローチャートにおける後続車・Onルート判定処理のサブルーチンについて説明する。図34は本発明の第3実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【0120】
図34において、ステップS2200で、後続車・Onルート判定処理のサブルーチンが開始されると、続いてステップS2201において、後続車両が既定のルート上に存在するか否かが判定される。このステップの判定結果がYESであれば、ステップS220
7に進み、メインルーチンにリターンし、NOであればステップS2202に、これまで用いていた案内経路を記憶部などに一時退避する。そして、ステップS2203では、最も近い“案内ポイント”をセットし、ステップS2204で、後続車両の復帰経路を計算する。ステップS2205では、もとのルート復帰への新“案内ポイント”を設定する。ステップS2206では、新“案内ポイント”を記憶部120に記録し、ステップS2207で元のルーチンにリターンする。
【0121】
次に先のフローチャートにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのサブルーチンについて説明する。図35は本発明の第3実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。図35において、ステップS2300で、後続車・“案内ポイント/目的地”到着判定処理サブルーチンが開始されると、ステップS2301で、後続車両から、案内ポイント又は目的地到達通知が受信されたか否かが判定される。この判定結果がYESであればステップS2302に進み、NOであればリターンする。ステップS2302においては、後続車両の案内ポイント通過を確認し、ステップS2303で、元のルーチンにリターンする。
【0122】
次に、以上のようにして、情報提供車両である先行車両から提供される案内ポイントデータや案内指示タグデータを後続車両において利用するための処理について説明する。図36は本発明の第3実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。図36において、ステップS2400で、後続車両に搭載されるシステムの処理が開始されると、ステップS2401に進み、全ての案内ポイントデータの受信処理が行われる。続いて、ステップS2402に進み、現在位置送信処理のサブルーチンを実行する。さらにステップS2403に進み、提示処理のサブルーチンを実行する。ステップS2404では、後続車両の走行が終了であるか否かが判定され、判定結果がYESであるときにはステップS2405に進み、処理を終了する。
【0123】
次に、先のフローチャートにおける現在位置送信処理のサブルーチンについて説明する。図37は本発明の第3実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。図37において、ステップS2500で、現在位置送信処理サブルーチンがスタートすると、次に、ステップS2501で、位置取得部340から車両の現在位置を取得する。ステップS2502では、(センターを介する形で)先行車両からの現在位置要求があるか否かが判定される。ステップS2502の判定結果がYESであるときには、ステップS2503に進み、車両の現在位置データ(緯度データ、経度データ)を送信し、NOで在るときには、ステップS2504に進み、元のルーチンにリターンする。
【0124】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図38は本発明の第3実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0125】
ステップS2600で、提示処理のサブルーチンが開始されると、続いてステップS2601に進み、位置取得部340によって、車両の現在位置を取得する。ステップS2602では、“現在位置”=“案内ポイント”であるか否かが判定され、判定結果がYESであればステップS2603に進み、NOであればステップS2604に進む。
【0126】
ステップS2603では、(通過予定のS2602の判定で用いられた案内ポイント)の案内ポイントデータ(緯度、経度データ)、案内経路情報等を入出力インターフェイス部350によって、表示・音声等で報知する。
【0127】
また、ステップS2604では、現在位置=“目的地”であるかが判定される。ステップS2604の判定がYESであるときにはステップS2609に進み、現時位置が“目的地” であることを、入出力インターフェイス部350によって、表示・音声等で報知する。また、ステップS2609では、目的地に到達した旨、(センターを介する形で)先行車両側に送信する。ステップS2604の判定がNOであるときにはステップS2607に進み、元のルーチンにリターンする。
【0128】
以上のように、本発明に係る第3情報提供システムによれば、ナビゲーション部によって取得された案内ポイントをユ後続車両運転者に提供するので、先行車両は実際に走行することなく、後方車両にルート情報を提供することが可能となる。
【0129】
次に、本発明の第4の実施形態について説明する。これまでに説明した実施形態は、統括すると、先行車両で取得した情報を、センターを介する形で、後方車両に伝達する技術に関するものであったが、本発明の情報提供システムはこれに限らず、情報取得主体が、携帯電話などの移動体端末装置400を所有する先行者で、この先行者が取得した情報(案内ポイントデータ)を、センターを介する形で、後を追随する後方者に伝達する技術をも内包するものである。
【0130】
以上のような第4の実施形態の概念について説明する。図39は本発明の第4実施形態に係る情報提供システムの概念を模式的に説明する図である。本実施形態に係る情報提供システム情報提供システムにおいては、先行者が通った経路に係る情報を、後続者に対して通知(経路案内)することによって、後続者が先行者と同じ行程を走行することができるようにアシストするものである。
【0131】
上記を達成するために、まず、先行者が所有する移動体端末装置400によって、適当な間隔のポイント(以下、「案内ポイント」と称する)で、当該ポイントにおける位置データ(緯度、経度データ、及び画像データが取得された方位に関するデータ)と、当該ポイントにおける画像データなどの参考情報を取得する。このような案内ポイントについては、図1においてP1、P2、P3・・・P12として示されている。
【0132】
以上のように先行者によって、適当な間隔で取得された案内ポイントデータは、(1)に示されるように、随時、先行者の移動体端末装置400からセンター(本実施形態に係る情報提供システムを総合的に管理するセンター)へと送信される。そして、このセンターでは、(2)に示すように、先行者から受信した案内ポイントデータを、当該センターに設置されているサーバーなどの記憶部に蓄積する。なお、センターに蓄積された案内ポイントデータは、先行者の歩行後、十分長い期間経過後(例えば、1ヶ月後など)にも利用することができるにように設定することが好ましい。
【0133】
上記のようにして、センターにおいてサーバーなどの記憶部に蓄積された案内ポイントに係るデータ(P1の案内ポイントデータD1、P2の案内ポイントデータD2、P3の案内ポイントデータD3、・・・・・・・Pnの案内ポイントデータDn)は、次に、(3)に示すようにセンターから当該案内ポイントデータを必要とする後続者の移動体端末装置400に対して送信される。
【0134】
後続者の移動体端末装置400は、センターから送信された案内ポイントデータを受信し、これを適宜後続者に対して提示することで、後続者はこれを参照して、先行者に対して追随し歩行を行うことが可能となる。
【0135】
以上のような本実施形態に係る情報提供システムでは、先行者の移動体端末装置400にナビゲーション装置を設ける必要がなく、後続者に対して経路案内を行うことが可能と
なる。また、先行者の移動体端末装置400にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【0136】
次に、以上のような本実施形態に係る情報提供システムを実現するためのシステム構成について説明する。ここで、先行者及び後続者が携帯する移動体端末装置400のシステム構成について具体的に説明する。なお、センター側におけるシステムについては、これまでに説明したものと同様のものを用いることができるので説明を省略する。
【0137】
次に、移動体端末装置400を構成する上で好適なハードウエアの概略について説明する。図40は本発明の第4実施形態に係る情報提供システムにおいて先行者及び後続者が携帯する移動体端末装置400のブロック図である。
【0138】
図39において、400は移動体端末装置、401はCPU、402はバス、404はRAM、405は入力操作部、406は入力回路、407は計時部、408は音声制御回路、409はマイクロフォン、412はスピーカ、414は表示制御回路、415はディスプレイ、416は通信制御回路、419はGPS受信部、420はデータ記憶部、421は撮像部をそれぞれ示している。
【0139】
移動体端末装置400は、CPU(中央処理装置)401を搭載している。CPU401はバス402を通じて装置内の各部と接続されている。このうちROM403はこの移動体端末装置400の各部を制御するためのプログラムを格納したリード・オンリ・メモリである。RAM404はプログラムを実行するときに必要となるデータを一時的に格納するランダム・アクセス・メモリである。
【0140】
入力操作部405は利用者が操作するキースイッチ群から構成されており、この入力操作部405の操作により発生した信号は入力回路406を介してバス402に伝達されるようになっている。また、計時407は、時刻、時間を計測することが可能であり、かつ、計測した時刻情報、時間情報を記憶・保持するものである。
【0141】
音声制御回路408は音声の入出力を行う回路で、マイクロフォン409から音声を入力すると共に、スピーカ412から音声を出力するようになっている。表示制御回路414は、ディスプレイ415の表示を制御するようになっている。通信制御回路416は、不図示の無線基地局と無線で通信を行うになっている。GPS受信部419は不図示のGPS衛星の複数から電波を受信して移動体端末装置400の現在位置を特定する装置である。現在位置データとしては、緯度、経度データを特定することができるようになっている。
【0142】
データ記憶部420は電源が切れた時でもデータを保持できるようになっている記憶部であり、例えばフラッシュメモリー、ハードディスク等である。
【0143】
また、撮像部421は移動体端末装置400に内蔵されているカメラであり、静止画像データや動画像データなどを取得し、必要に応じてディスプレイ415で閲覧したり、或いは、画像データを通信制御回路416から外部に送信したりすることができるようになっている。
【0144】
また、方位計測センサ422は、MR素子や磁気インピーダンス素子などセンサからなり、地磁気を感知することによって、移動体端末装置400の撮像部421が撮像しようとしている方角などを検知するものである。
【0145】
本発明に係る情報提供システムを実現するためのプログラムはROM403に記憶させ
ておくことができるし、或いはデータ記憶部420に記憶させておくことができる。
【0146】
次に、以上のように構成される本実施形態の情報提供システムの処理・動作について説明する。すでに説明した通り、本実施形態の情報提供システムは、先行者両が携帯する移動体端末装置400から、センターのシステムに、案内ポイントデータや案内指示タグデータを送信し、センターのシステム側では、これを蓄積しておき、適宜後続者が携帯する移動体端末装置400に配信するものである。
【0147】
以下に説明する情報提供システムの処理においては、後続者が、例えば数10〜100m程度の比較的短い距離間隔をおいて、先行者を追跡しているような例を想定しているが、本実施形態の情報提供システムの利用形態としては、後続者が、例えば数10〜100m程度の距離をおいて、先行者を追跡するような形態で利用されるものに留まるものではない。すなわち、後続者は、例えば、1ヶ月前に先行者が歩行した行程をたどることができるように、センター側が案内ポイントデータを適宜後続者の移動体端末装置400に配信することも想定されるものである。このような形態で利用する場合には、センター側システムと後続者の移動体端末装置400との間のデータの送受を行うこととなるが、このためのフローやタイミングチャートについては、以下に説明する実施形態に基づいて、これを応用・変形することで当業者が適宜構成することができる。
【0148】
以下、先行者が携帯する移動体端末装置400と、後続者が携帯する移動体端末装置400とについては、フローを用いて説明する。特に、センター側システムにおける処理フローについては、以下に示されるタイミングチャートから容易に当業者が構成し得るものを採用することができる。
【0149】
また、案内ポイントデータをバッファしておく機能については、先行者の移動体端末装置400、センターのシステム、後続者の移動体端末装置400のいずれにも設けられており、いずれのバッファに、案内ポイントデータを蓄積するように構成しても良いし、或いは、適当なタイミングに応じて、いずれかに案内ポイントデータをバッファするように切り換えるようにしても良い。
【0150】
図41は本発明の第4実施形態に係る情報提供システムにおける先行者携帯の移動体端末装置400の処理フローを示す図である。図41において、ステップS2700で、先行者携帯の移動体端末装置400の処理が開始されると、続いて、ステップS2701に進み、設定変更の指示が在ったか否かが判定される。ここで、ステップS2701における設定とは、案内ポイントデータをどのようなタイミングで取得するかに係る設定などである。ステップS2701における判定がYESであるときには、ステップS2702の設定変更処理のサブルーチンが実行される。このサブルーチンについては後述する。
【0151】
また、ステップS2703では、先行者が目的地に到着したか否かが判定される。このような判定のために、先行者の移動体端末装置400には、目的地を緯度データ、経度データで目的地を設定する機能が設けられている。ステップS2703における判定結果がYESであるときにはステップS2705に進み目的地到着処理のサブルーチンを実行し、判定結果がNOであるときにはステップS2704に進み、案内中処理のサブルーチンを実行する。ステップS2706では、歩行が終了したか否かが判定され、判定がYESであると、ステップS2707に進み、処理を終了する。
【0152】
次に、先のフローチャートにおける設定変更処理のサブルーチンについて説明する。図42は本発明の第4実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、先行者がどのようなトリガーによって案内ポイントデータを取得するかを設定するためのものである。
【0153】
図42において、ステップS2800において、設定変更処理のサブルーチンが開始されると、続いて、ステップS2801に進み、案内ポイントデータを取得するトリガーを“一定時間”経過毎のトリガーによるものと設定したか否かが判定される。ステップS2801の判定がYESであるときにはステップS2802に進み、“一定時間t”をトリガーとして設定し、判定がNOであるときにはステップS2803に進み、“一定時間t”をトリガーとして解除する。
【0154】
ステップS2804では、案内ポイントデータを取得するトリガーを“一定距離”間隔毎のトリガーによるものと設定したか否かが判定される。ステップS2804の判定がYESであるときにはステップS2805に進み、“一定距離m”をトリガーとして設定し、判定がNOであるときにはステップS2806に進み、“一定距離m”をトリガーとして解除する。
【0155】
上記のような“一定時間t”、“一定距離m”の各トリガーは定期的に案内ポイントデータを取得するトリガーであるので、定期トリガーとも称する。ステップS2807では、元のルーチンにリターンする。
【0156】
次に、先のフローチャートにおける案内中処理のサブルーチンについて説明する。図43は本発明の第4実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。この案内中処理サブルーチンにおいては、基本的には、先行者の移動体端末装置400で案内ポイントデータを取得し、この案内ポイントデータを送信するときの処理を行うものである。移動体端末装置400によって案内ポイントデータを取得するためには、先行者に対して移動体端末装置400によって画像データを取得するよう促さなくてはならない。このフローチャートでは、このための処理も実施される。また、これまでの実施形態と異なり、移動体端末装置400を利用した実施形態では、案内ポイントで取得される画像データは、どの方位に撮像部421を向けて取得したものであるのかを特定しないと利用しにくい。したがって、本実施形態における案内ポイントデータは、案内ポイントの位置データと、案内ポイントで取得された画像データ、及びび画像データが取得された方位に関する方位データがセットとなっている。
【0157】
図43において、ステップS2900で、案内中処理のサブルーチンが開始されると、続く、ステップS2901では、計時部407から時間情報が取得され、次のステップS2902では、GPS受信部419から現在位置データが取得される。
【0158】
ステップS2903では、定期トリガーがOnであり、かつ設定された時間が経過したか、或いは、設定された距離が進んだかが判定される。ステップS2903の判定結果がYESであるときにはステップS2904に進み、NOであるときにはステップS2911へと進む。
【0159】
ステップS2904では、スピーカ412やディスプレイ415などのインターフェイス構成を用いて、先行者に対して、撮像部421で周囲の風景を撮影するように促す。ステップS2905では、撮像部421が先行者によって操作され稼動したか否かが判定される。この判定結果がYESであるときにステップS2906に進み、撮像部421から撮像データを取得し、続くステップS2907で、方位計測センサ422から方位データを取得し、さらにステップS2908で、GPS受信部419からあらためて現在位置データを取得する。ステップS2909では、ステップS2907乃至ステップS2909で取得された各データを組とし、案内ポイントデータとなしてデータ記憶部420に記録する。ステップS2910では、この案内ポイントデータを、通信制御回路416によって送信し、ステップS2911でもとのルーチンにリターンする。
【0160】
次に、先のフローチャートにおける目的地到着処理のサブルーチンについて説明する。図44は本発明の第4実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。
【0161】
図44において、ステップS3000で目的地到着処理のサブルーチンが開始されると、ステップS3001では、スピーカ412やディスプレイ415などのインターフェイス構成を用いて、先行者に対して、撮像部421で周囲の風景を撮影するように促す。ステップS3002では、撮像部421が先行者によって操作され稼動したか否かが判定される。この判定結果がYESであるときにステップS3003に進み、撮像部421から撮像データを取得し、続くステップS3004で、方位計測センサ422から方位データを取得し、さらにステップS3005で、GPS受信部419からあらためて現在位置データを取得する。ステップS3006では、ステップS3003乃至ステップS3005で取得された各データを組とし、“目的地”の案内ポイントデータとなしてデータ記憶部420に記録する。ステップS3007では、この“目的地”の案内ポイントデータを、通信制御回路416によって送信し、ステップS3008でもとのルーチンにリターンする。
【0162】
次に、以上のようにして、情報提供者である先行者の移動体端末装置400から提供される案内ポイントデータを後続者携帯の移動体端末装置400において利用するための処理について説明する。図45は本発明の第4実施形態に係る情報提供システムにおける後続者携帯の移動体端末装置400の処理フローを示す図である。図45において、ステップS3100で、後続者携帯の移動体端末装置400の処理が開始されると、続いて、ステップS3101に進み、提供情報受信処理のサブルーチンを実行し、さらにステップS3102に進み、提示処理のサブルーチンを実行する。ステップS3103では、後続者の歩行が終了(或いは、案内ポイントによるアシスト要求の終了)であるか否かが判定され、判定結果がYESであるときにはステップS3104に進み、処理を終了する。
【0163】
次に、先のフローチャートにおける提供情報受信処理のサブルーチンについて説明する。図46は本発明の第4実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。図46において、ステップS3200で提供情報受信処理のサブルーチンが開始すると、次に、ステップS3201に進み、“案内ポイント/目的地”を受信したか否かが判定される。ステップS3201の判定結果がYESであるときにはステップS3202に進み、NOであるときにはステップS3203に進み、元のルーチンにリターンする。ステップS3202では、受信した“案内ポイント/目的地”に係る案内ポイントデータをデータ記憶部420に追加格納する。
【0164】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図47は本発明の第4実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0165】
ステップS3300で、提示処理のサブルーチンが開始されると、続いてステップS3301に進み、GPS受信部419によって、移動体端末装置400の現在位置を取得する。ステップS3302では、現在位置=“案内ポイン位置”であるかが判定される。ステップS3302における判定結果がYESであるときにはステップS3303に進み、NOであるときにはステップS3304に進む。
【0166】
ステップS3303では、(通過予定のS3302の判定で用いられた案内ポイント)の案内ポイントデータ(位置データ(緯度、経度データ等)、撮影画像データ、方位データ(撮影方向データ))をスピーカ412やディスプレイ415などのインターフェイス
構成を用いて、表示・音声等で報知する。
【0167】
また、ステップS3304では、現在位置=“目的地”であるかが判定される。ステップS3304の判定がYESであるときにはステップS3305に進み、現時位置が“目的地” であり、その案内ポイントデータを、スピーカ412やディスプレイ415などのインターフェイス構成を用いて、表示・音声等で報知する。当該判定がNOであるときにはステップS3306に進み、元のルーチンにリターンする。
【0168】
本発明に係る情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータが先行する情報取得主体(先行者携帯の移動体端末装置400)によって取得され、この案内ポイントデータが後続者に提示されるので、後続者は先行者からの情報に基づいて経路案内されることとなる。そして、このような本発明に係る情報提供システムによれば、先行者がナビゲーション装置を用意することなく、後続者に対する経路案内を行うことが可能となる。
【0169】
また、本発明に係る情報提供システムによれば、先行する情報取得主体(先行者携帯の移動体端末装置400)にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【符号の説明】
【0170】
100・・・処理コンピュータ、110・・・計時部、120・・・記憶部、130・・・車両前方画像撮像部、140・・・位置取得部、150・・・入出力インターフェイス部、160・・・車両情報取得部、170・・・通信部、180・・・ナビゲーション部、200・・・処理コンピュータ、220・・・記憶部、270・・・通信部、300・・・処理コンピュータ、320・・・記憶部、340・・・位置取得部、350・・・入出力インターフェイス部、370・・・通信部、400・・・移動体端末装置、401・・・CPU、402・・・バス、404・・・RAM、405・・・入力操作部、406・・・入力回路、407・・・計時部、408・・・音声制御回路、409・・・マイクロフォン、412・・・スピーカ、414・・・表示制御回路、415・・・ディスプレイ、416・・・通信制御回路、419・・・GPS受信部、420・・・データ記憶部、421・・・撮像部、422・・・方位計測センサ
【技術分野】
【0001】
本発明は、例えば、所定のルートを走行した先行車両からこれに追随する後続車両に当該ルートに関する情報を提供するために用いられる情報提供システムに関する。
【背景技術】
【0002】
複数の車両で、共通の目的地に向かって走行するような場合に用いられるシステムとして、先頭を走行している先行車両が、その後方を走行している後続車両に対して何らかの経路案内データ等を送信し、後続車両ではこれを受信し、適切なタイミングでこれを後続車両運転者が参照できるようにし、先行車両に対して追随走行するためのアシストを行うように構成されたシステムが提案されている。
【0003】
このようなシステムの一例として、特許文献1(特開2008−241417号公報)には、先行車両において動作し、制御手段と経路探索手段と経路案内作成手段と通信手段と、を備えるナビゲーション装置と、後続車両において動作し、該後続車両の現在位置を検出する現在位置検出手段と通信手段と、を備える端末装置と、を備えるナビゲーションシステムにおいて、前記ナビゲーション装置は更に、前記経路案内作成手段において作成された経路案内を一旦記憶する経路案内記憶手段を備え、前記制御手段は、前記先行車両における前記ナビゲーション装置と前記後続車両における端末装置が所定の距離範囲内にある場合は、前記経路案内作成手段において作成された経路案内を前記端末装置に送信し、前記先行車両における前記ナビゲーション装置と前記後続車両における端末装置が所定の距離範囲より外にある場合は、前記作成された経路案内を前記経路案内記憶手段に一旦記憶し、該経路案内記憶手段に記憶された経路案内を前記端末装置の位置に応じて該端末装置に送信することを特徴とするナビゲーションシステムが開示されている。
【特許文献1】特開2008−241417号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のシステムにおいては、後続車両に情報を提供するためには、先行車両にナビゲーション装置が搭載されていることが必須の要件であり、ナビゲーション装置を搭載しない先行車両は、後続車両に対して経路案内を行うことができない、という問題があった。また、これまでのシステムでは、先行車両にナビゲーション装置を搭載しなければならなかったので、システムを構成する上での自由度が制約される、という問題があった。
【課題を解決するための手段】
【0005】
上記問題点を解決するために、請求項1に係る発明は、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする。
【0006】
また、請求項2に係る発明は、請求項1に記載の情報提供システムにおいて、前記案内ポイントデータは一定時間経過毎に取得されることを特徴とする。
【0007】
また、請求項3に係る発明は、請求項1又は請求項2に記載の情報提供システムにおいて、前記案内ポイントデータは一定距離進行毎に取得されることを特徴とする。
【発明の効果】
【0008】
本発明に係る情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータが先行する情報取得主体(先行車両や先行者携帯端末)によって取得され、この案内ポイントデータが後続車両運転者(又は後続者)に提示されるので、後続車両運転者(又は後続者)は先行車両や先行者からの情報に基づいて経路案内されることとなる。そして、このような本発明に係る情報提供システムによれば、先行車両や先行者がナビゲーション装置を設けることなく、後続車両運転者(又は後続者)に対する経路案内を行うことが可能となる。
【0009】
また、本発明に係る情報提供システムによれば、先行する情報取得主体(先行車両や先行者携帯端末)にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る情報提供システムの概念を模式的に説明する図である。
【図2】本発明の実施形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロック図である。
【図3】本発明の実施形態に係る情報提供システムにおいてセンターに設けられるシステムのブロック図である。
【図4】本発明の実施形態に係る情報提供システムにおいて後続車両に搭載されるシステムのブロック図である。
【図5】本発明の実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。
【図6】本発明の実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。
【図7】本発明の実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図8】本発明の実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。
【図9】本発明の実施形態に係る情報提供システムにおける“案内指示”タグ付加処理サブルーチンのフローチャートと案内ポイントデータのデータ構造イメージを示す図である。
【図10】本発明の実施形態に係る情報提供システムにおける“案内指示”タグの概念を説明する図である。
【図11】本発明の実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。
【図12】本発明の実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。
【図13】本発明の実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【図14】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図15】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図16】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図17】本発明の実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図18】本発明の第2実施形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロック図である。
【図19】本発明の第2実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。
【図20】本発明の第2実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。
【図21】本発明の第2実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図22】本発明の第2実施形態に係る情報提供システムにおける後続車判定処理サブルーチンのフローチャートを示す図である。
【図23】本発明の第2実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【図24】本発明の第2実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。
【図25】本発明の第2実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。
【図26】本発明の第2実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。
【図27】本発明の第2実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。
【図28】本発明の第2実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【図29】本発明の第2実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図30】本発明の第2実施形態に係る情報提供システムにおけるデータ交換のタイミングチャートを示す図である。
【図31】本発明の第3実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。
【図32】本発明の第3実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図33】本発明の第3実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【図34】本発明の第3実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【図35】本発明の第3実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。
【図36】本発明の第3実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。
【図37】本発明の第3実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。
【図38】本発明の第3実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【図39】本発明の第4実施形態に係る情報提供システムの概念を模式的に説明する図である。
【図40】本発明の第4実施形態に係る情報提供システムにおいて先行者及び後続者が携帯する移動体端末装置400のブロック図である。
【図41】本発明の第4実施形態に係る情報提供システムにおける先行者携帯の移動体端末装置400の処理フローを示す図である。
【図42】本発明の第4実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。
【図43】本発明の第4実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【図44】本発明の第4実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。
【図45】本発明の第4実施形態に係る情報提供システムにおける後続者携帯の移動体端末装置400の処理フローを示す図である。
【図46】本発明の第4実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。
【図47】本発明の第4実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態を図面を参照しつつ説明する。図1は本発明の実施の形態に係る情報提供システムの概念を模式的に説明する図である。本実施形態に係る情報提供システム情報提供システムにおいては、先行車両が通った経路に係る情報を、後続車両に対して通知(経路案内)することによって、後続車両が先行車両と同じ行程を走行することができるようにアシストするものである。
【0012】
上記を達成するために、まず、先行車両は適当な間隔のポイント(以下、「案内ポイント」と称する)で、当該ポイントにおける位置データ(緯度、経度データ)と、当該ポイントにおける車両前方の画像データなどの参考情報を取得する。このような案内ポイントについては、図1においてP1、P2、P3・・・P12として示されている。また、案内ポイントで取得されたデータは案内ポイントデータと称することとする。
【0013】
以上のように先行車両によって、適当な間隔で取得された案内ポイントデータは、(1)に示されるように、随時、先行車両からセンター(本実施形態に係る情報提供システムを総合的に管理するセンター)へと送信される。そして、このセンターでは、(2)に示すように、先行車両から受信した案内ポイントデータを、当該センターに設置されているサーバーなどの記憶部に蓄積する。なお、センターに蓄積された案内ポイントデータは、先行車両の走行後、十分長い期間経過後(例えば、1ヶ月後など)にも利用することができるにように設定することが好ましい。
【0014】
上記のようにして、センターにおいてサーバーなどの記憶部に蓄積された案内ポイントに係るデータ(P1の案内ポイントデータ、P2の案内ポイントデータ、P3の案内ポイントデータ、・・・・・・・Pnの案内ポイントデータ)は、次に、(3)に示すようにセンターから当該案内ポイントデータを必要とする後続車両に対して送信される。
【0015】
後続車両は、センターから送信された案内ポイントデータを受信し、これを適宜後続車両運転者に対して提示することで、後続車両運転者はこれを参照して、先行車両に対して追随し走行を行うことが可能となる。
【0016】
以上のような本実施形態に係る情報提供システムでは、先行車両にナビゲーション装置を設ける必要がなく、後続車両の運転者に対して経路案内を行うことが可能となる。また、先行車両にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【0017】
次に、以上のような本実施形態に係る情報提供システムを実現するためのシステム構成について説明する。まず、先行車両のシステム構成について具体的に説明する。図2は本発明の実施の形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロ
ック図である。図2において、100は処理コンピュータ、110は計時部、120は記憶部、130は車両前方画像撮像部、140は位置取得部、150は入出力インターフェイス部、160は車両情報取得部、170は通信部をそれぞれ示している。
【0018】
処理コンピュータ100は、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。処理コンピュータ100は、図示されている処理コンピュータ100と接続される各構成と協働・動作する。また、処理コンピュータ100は、本実施形態の情報提供システムの先行車両における種々の制御処理は、処理コンピュータ100内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。
【0019】
計時部110は、時刻、時間を計測することが可能であり、かつ、計測した時刻情報、時間情報を記憶・保持するものである。また、記憶部120は不揮発性で、かつ、書き換え可能なメモリであり、案内ポイントデータや案内指示タグデータなどのためのバッファなどとして機能することが可能なものである。
【0020】
車両前方画像撮像部130は先行車両の前方部に設けられたカメラなどの撮像装置であり、先行車両の前方の画像データを取得するものである。このような車両前方画像撮像部130に用いるカメラとしては、静止画像データを取得するもの、動画像データを取得するもののいずれを用いることもできるが、本実施形態では、車両前方画像撮像部13が静止画像データを取得するものとして説明する。
【0021】
位置取得部140は、GPS衛星からのGPS信号を受信して自らの位置を計算するGPS測位部を用いることによって、車両の現在位置情報(緯度データ、経度データ)を取得するものである。なお、位置取得部140は、位置情報を取得することができれば、このようなGPS測位法によらずとも、その他の測位法を用いることができる。
【0022】
入出力インターフェイス部150は車両の運転席部(不図示)に設けられ、運転者に対し車両の走行状態等に係る情報などを提供したり、或いは運転者に対して所定のワーニングを行ったりするための構成である。
【0023】
入出力インターフェイス部150におけるディスプレイは液晶などの表示装置であり、このディスプレイに文字・図形情報等を表示することによって、運転者に対して視覚的に所定の情報を報知することを可能とする。また、入出力インターフェイス部150におけるタッチパネルは、ディスプレイを覆うようにして設けられており、運転者の操作によりシステムに対して入力を可能とする入力デバイスとして機能する。また、入出力インターフェイス部150は、スピーカーも含んでおり、必要に応じて運転者に対して、音声による案内や警告を行い得るようになっている。
【0024】
車両情報取得部160は、運転席に設けられたステアリング(不図示)の舵角に関する情報を取得したり、或いは、車両に搭載されているジャイロセンサから車両の傾きに係る情報や、車両加速度に係る情報を取得したりするものである。
【0025】
通信部170は、携帯電話やその他の適当な通信規格による通信プロトコルに基づいて、データの送受信を行うことを可能とする通信用のモジュールであり、これにより先行車両で取得された案内ポイントデータや案内指示タグデータなどをセンター側に送信する。
【0026】
次に、本実施形態に係る情報提供システムを実現するためのセンターにおけるシステム構成について説明する。図3は本発明の実施の形態に係る情報提供システムにおいてセンターに設けられるシステムのブロック図である。図3において、200は処理コンピュー
タ、220は記憶部、270は通信部をそれぞれ示している。
【0027】
処理コンピュータ200は、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。処理コンピュータ200は、図示されている処理コンピュータ200と接続される各構成と協働・動作する。また、処理コンピュータ200は、本実施形態の情報提供システムのセンターにおける種々の制御処理は、処理コンピュータ200内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。
【0028】
記憶部220は、ハードディスクなどの大容量の記憶手段であり、先行車両(或いは、先行者が携帯する端末)から送信される案内ポイントデータや案内指示タグデータなどをログとして長期間にわたって蓄積可能とするものである。
【0029】
また、通信部270は、携帯電話やその他の適当な通信規格による通信プロトコルに基づいて、データの送受信を行うことを可能とする通信用のモジュールであり、これにより先行車両で取得された案内ポイントデータや案内指示タグデータなどを受信したり、或いは、記憶部220に蓄積されている案内ポイントデータや案内指示タグデータなどを後続車両に送信したりする。
【0030】
次に、本実施形態に係る情報提供システムを実現するための後続車両におけるシステム構成について説明する。図4は本発明の実施の形態に係る情報提供システムにおいて後続車両に搭載されるシステムのブロック図である。図4において、300は処理コンピュータ、320は記憶部、340は位置取得部、350は入出力インターフェイス部、370は通信部をそれぞれ示している。
【0031】
処理コンピュータ300は、CPUとCPU上で動作するプログラムを保持するROMとCPUのワークエリアであるRAMなどからなる汎用の情報処理機構である。処理コンピュータ300は、図示されている処理コンピュータ300と接続される各構成と協働・動作する。また、処理コンピュータ300は、本実施形態の情報提供システムの後続車両における種々の制御処理は、処理コンピュータ300内のROMなどの記憶手段に記憶保持されるプログラムやデータに基づいて実行されるものである。
【0032】
記憶部320は不揮発性で、かつ、書き換え可能なメモリであり、案内ポイントデータや案内指示タグデータなどのためのバッファなどとして機能することが可能なものである。
【0033】
位置取得部340は、GPS衛星からのGPS信号を受信して自らの位置を計算するGPS測位部を用いることによって、車両の現在位置情報(緯度データ、経度データ)を取得するものである。なお、位置取得部340は、位置情報を取得することができれば、このようなGPS測位法によらずとも、その他の測位法を用いることができる。
【0034】
入出力インターフェイス部350は車両の運転席部(不図示)に設けられ、運転者に対し車両の走行状態等に係る情報などを提供したり、或いは運転者に対して所定のワーニングを行ったりするための構成である。
【0035】
入出力インターフェイス部350におけるディスプレイは液晶などの表示装置であり、このディスプレイに文字・図形情報等を表示することによって、運転者に対して視覚的に所定の情報を報知することを可能とする。また、入出力インターフェイス部350におけるタッチパネルは、ディスプレイを覆うようにして設けられており、運転者の操作によりシステムに対して入力を可能とする入力デバイスとして機能する。また、入出力インター
フェイス部350は、スピーカーも含んでおり、必要に応じて運転者に対して、音声による案内や警告を行い得るようになっている。
【0036】
また、通信部370は、携帯電話やその他の適当な通信規格による通信プロトコルに基づいて、データの送受信を行うことを可能とする通信用のモジュールであり、これによりセンターから送信される案内ポイントデータや案内指示タグデータなどを受信する。
【0037】
なお、特許請求の範囲における「送信手段」は「通信部170」を、「第1受信手段」は「通信部270」「記憶手段」は「記憶部220」を、「再送信手段」は「通信部270」を、「第2受信手段」は「通信部370」を、「提示手段」は「入出力インターフェイス部350」を、それぞれ示している。
【0038】
次に、以上のように構成される本実施形態の情報提供システムの処理・動作について説明する。すでに説明した通り、本実施形態の情報提供システムは、先行車両のシステムから、センターのシステムに、案内ポイントデータや案内指示タグデータを送信し、センターのシステム側では、これを蓄積しておき、適宜後続車両に配信するものである。
【0039】
以下に説明する情報提供システムの処理においては、後続車両が、同時刻に(例えば数10〜100m程度の比較的短い距離間隔をおいて)、先行車両を追跡しているような例を想定しているが、本実施形態の情報提供システムの利用形態としては、後続車両が、同時刻に(例えば数10〜100m程度の距離をおいて)、先行車両を追跡するような形態で利用されるものに留まるものではない。すなわち、後続車両は、例えば、1ヶ月前に先行車両が走行した行程をたどることができるように、センター側が案内ポイントデータや案内指示タグデータを適宜後続車両に配信することも想定されるものである。このような形態で利用する場合には、センター側システムと後続車両システムとの間のデータの送受を行うこととなるが、このためのフローやタイミングチャートについては、以下に説明する実施形態に基づいて、これを応用・変形することで当業者が適宜構成することができる。
【0040】
以下、先行車両に搭載されるシステムと、後続車両に搭載されるシステムとについては、フローを用いて、また、先行車両、センター、後続車両との間のデータの送受関係についてはタイミングチャートを用いて説明する。特に、センター側システムにおける処理フローについては、以下に示されるタイミングチャートから容易に当業者が構成し得るものを採用することができる。
【0041】
また、案内ポイントデータや案内指示タグデータなどをバッファしておく機能については、先行車両のシステム、センターのシステム、後続車両のシステムのいずれにも設けられており、いずれのバッファに、案内ポイントデータや案内指示タグデータなどを蓄積するように構成しても良いし、或いは、適当なタイミングに応じて、いずれかのシステムにこれらデータをバッファするように切り換えるようにしても良い。
【0042】
図5は本発明の実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。図5において、ステップS100で、先行車両に搭載されるシステムの処理が開始されると、続いて、ステップS101に進み、設定変更の指示が在ったか否かが判定される。ここで、ステップS101における設定とは、案内ポイントデータをどのようなタイミングで取得するかに係る設定などである。ステップS101における判定がYESであるときには、ステップS102の設定変更処理のサブルーチンが実行される。このサブルーチンについては後述する。
【0043】
また、ステップS103では、先行車両が目的地に到着したか否かが判定される。この
ような判定のために、先行車両には、目的地を緯度データ、経度データで目的地を設定する機能が設けられている。ステップS103における判定結果がYESであるときにはステップS105に進み目的地到着処理のサブルーチンを実行し、判定結果がNOであるときにはステップS104に進み、案内中処理のサブルーチンを実行する。ステップS106では、走行が終了したか否かが判定され、判定がYESであると、ステップS107に進み、処理を終了する。
【0044】
次に、先のフローチャートにおける設定変更処理のサブルーチンについて説明する。図6は本発明の実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、先行車両運転者がどのようなトリガーによって案内ポイントデータを取得するかを設定するためのものである。
【0045】
図6において、ステップS200において、設定変更処理のサブルーチンが開始されると、続いて、ステップS201に進み、案内ポイントデータを取得するトリガーを“一定時間”経過毎のトリガーによるものと設定したか否かが判定される。ステップS201の判定がYESであるときにはステップS202に進み、“一定時間t”をトリガーとして設定し、判定がNOであるときにはステップS203に進み、“一定時間t”をトリガーとして解除する。
【0046】
ステップS204では、案内ポイントデータを取得するトリガーを“一定距離”間隔毎のトリガーによるものと設定したか否かが判定される。ステップS204の判定がYESであるときにはステップS205に進み、“一定距離m”をトリガーとして設定し、判定がNOであるときにはステップS206に進み、“一定距離m”をトリガーとして解除する。
【0047】
上記のような“一定時間t”、“一定距離m”の各トリガーは定期的に案内ポイントデータを取得するトリガーであるので、定期トリガーとも称する。
【0048】
ステップS207では、案内ポイントデータを取得するトリガーとして、車両情報取得部160におけるステア舵角センサ情報によるものと設定したか否かが判定される。ステップS207の判定がYESであるときにはステップS208に進み、“ステア舵角d”をトリガーとして設定し、判定がNOであるときにはステップS209に進み、“ステア舵角d”をトリガーとして解除する。ステップS210では、元のルーチンにリターンする。
【0049】
なお、ステア舵角dが案内ポイントデータ取得のトリガーとして設定されている場合には、車両情報取得部160におけるステア舵角センサが、既定ステア舵角d以上を検出すると、すなわち、運転者が一定以上にハンドルをいった場合に、案内ポイントデータが取得されることとなる。トリガーとして、・規定ステア舵角以上の検出(ハンドルを一定以上切った。)以外にも、規定ステア舵角以上の検出の後規定ステア舵角未満を検出(元のニュートラルな位置に戻した。)など、も考えられる。また、ステア舵角センサ情報によるトリガーは、車両センサからの情報によるものなので、車両センサトリガーとも称する。
【0050】
次に、先のフローチャートにおける案内中処理のサブルーチンについて説明する。図7は本発明の実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。この案内中処理サブルーチンは、基本的には、先行車両から案内ポイントデータを送信するときの処理を行うものである。なお、ステア舵角センサ情報によるトリガーがある場合には、案内ポイントデータの情報にさらに付加的に案内指示タグデータという概念のデータを追加するようにしている。
【0051】
図7において、ステップS300で、案内中処理のサブルーチンが開始されると、続く、ステップS301では、計時部110から時間情報が取得され、次のステップS302では、位置取得部140から現在位置データが取得され、ステップS303では、両情報取得部160におけるステア舵角センサからステア舵角情報が取得される。
【0052】
ステップS304では、定期トリガーがOnであり、かつ設定された時間が経過したか、或いは、設定された距離が走行されたかが判定される。ステップS304の判定結果がYESであるときにはステップS305に進み、NOであるときにはステップS308へと進む。
【0053】
ステップS305では、車両前方画像撮像部130によって、車両の前方画像データを取得する。また、続くステップS306では、現在位置などを“案内ポイント”として記憶部120に記録する。そして、ステップS307では、案内ポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。
【0054】
ステップS308では、車両センサトリガーがOnであるかが判定される。ステップS308の判定結果がYESであるときにはステップS309に進み、NOであるときにはステップS3013に進み、元のルーチンにリターンする。
【0055】
ステップS309では、車両前方画像撮像部130によって、車両の前方画像データを取得する。また、続くステップS310では、現在位置などを“案内ポイント”として記憶部120に記録する。そして、ステップS311では、案内ポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。ステップS312においては、“案内指示”タグ付加処理のサブルーチンが実行される。この“案内指示”タグ付加処理のサブルーチンについては後述する。
【0056】
次に、先のフローチャートにおける目的地到着処理のサブルーチンについて説明する。図8は本発明の実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。図8において、ステップS400で目的地到着処理のサブルーチンが開始されると、続いてステップS401に進み、位置取得部140から現在位置データが取得され、ステップS402で、車両前方画像撮像部130によって、車両の前方画像データが取得される。
【0057】
ステップS403では、現在位置などを“目的地”として記憶部120に記録する。そして、ステップS404では、目的地のポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。ステップS405でメインルーチンにリターンする。
【0058】
次に、先のフローチャートにおけ“案内指示”タグ付加処理のサブルーチンについて説明する。図9は本発明の実施形態に係る情報提供システムにおける“案内指示”タグ付加処理サブルーチンのフローチャートと案内ポイントデータのデータ構造イメージを示す図である。また、図10は本発明の実施形態に係る情報提供システムにおける“案内指示”タグの概念を説明する図である。
【0059】
“案内指示”タグは、ある案内ポイントデータAから次の案内ポイントデータBとの間で、先行車両が、大きく方向を変更したときに、案内ポイントデータAにこれを付加して
おき、もって、後続車両の後続車両運転者に、大きな方向変化を予め知らしめようにするためのものである。すなわち、案内指示タグデータは、既に取得された案内ポイントデータに後から付加的に追加される。この案内指示タグデータは、「大きく右に方向変更」する旨を示すデータ或いは「大きく左に方向変更」する旨を示すデータが最も簡単なものであるが、より細かく変更方向を規定するようなデータであっても構わない。
【0060】
図9及び図10を参照して、“案内指示”タグを選択するときの処理についてより詳細に説明する。ステップS500で“案内指示”タグ付加処理のサブルーチンが開始されると、続いてステップS501に進み、既に記憶部120に記録されている案内ポイントデータ数が所定数以上であるかが判定される。ステップS501における判定がNOであるときにはステップS510に
進みリターンし、YESであるときにはステップS502に進む。
【0061】
ステップS502では、最新から3つ分の“案内ポイント”位置のデータを抽出する。すなわち、ステップS502で抽出されるのは、「最新案内ポイントに係るデータ」、「最新案内ポイントから1つ前のデータ」、「最新案内ポイントデータから2つ前のデータ」の3つのデータである。ここで、「最新案内ポイントに係るデータ」が取得された位置をPm、「最新案内ポイントから1つ前のデータ」が取得された位置をPm-1、「最新案内ポイントデータから2つ前のデータ」が取得された位置をPm-2とする。ステップS503では、“案内方向:Dir”が計算される。この案内方向Dirは、前述したような「大きく右に方向変更」する旨を示すデータであるのか、或いは「大きく左に方向変更」する旨を示すデータであるかの別を示すものである。
【0062】
次のステップS504では、“変化角度:Deg”が計算される。この変化確度Degは、図10に示すような、現在車両位置と案内ポイント位置との間のなす角度として定義することができる。より詳しくは、変化角度:Degは、先の3つの案内ポイント位置Pm、Pm-1、Pm-2から、下式(1)のように表すことができる。
【0063】
【数1】
ステップS505では、上記のように計算された“変化角度:Deg”が規定以上であるか否かが判定される。ステップS505の判定結果がNOであるときにはステップS510に進み元のルーチンにリターンし、YESであるときにはステップS506に進む。
【0064】
ステップS506では、“案内距離:Dist”が算出される。この案内距離:Distは図10に示すような、現在車両位置と案内ポイント位置との間の距離として定義されるものである。ただし、図10(C)に示すように、案内距離:Distが既定の距離以上の案内ポイントのみがタグ付加対象の案内ポイントとして採用される。以上のようにして、ステップS507では、“案内指示”タグを付加する“案内ポイント”が設定される。
【0065】
ステップS508では、設定された案内ポイントデータに“案内指示”タグデータが付加される。そして、ステップS509では、“案内指示タグ”データが通信部170によって送信される。ステップS510で、元のルーチンにリターンする。
【0066】
次に、以上のようにして、情報提供車両である先行車両から提供される案内ポイントデータや案内指示タグデータを後続車両において利用するための処理について説明する。図11は本発明の実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理
フローを示す図である。図11において、ステップS600で、後続車両に搭載されるシステムの処理が開始されると、続いて、ステップS601に進み、提供情報受信処理のサブルーチンを実行し、さらにステップS602に進み、提示処理のサブルーチンを実行する。ステップS603では、後続車両の走行が終了であるか否かが判定され、判定結果がYESであるときにはステップS604に進み、処理を終了する。
【0067】
次に、先のフローチャートにおける提供情報受信処理のサブルーチンについて説明する。図12は本発明の実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。図12において、ステップS700で提供情報受信処理のサブルーチンが開始すると、次に、ステップS701に進み、“案内ポイント/目的地”を受信したか否かが判定される。ステップS701の判定結果がYESであるときにはステップS702に進み、NOであるときにはステップS703に進む。ステップS702では、受信した“案内ポイント/目的地”を記憶部120に追加格納する。
【0068】
ステップS703では、案内指示タグを受信したか否かが判定される。ステップS703の判定結果がYESであるときにはステップS704に進み、NOであるときにはステップS705に進み、リターンする。ステップS704では、受信した案内指示タグを記憶部120に追加格納する。
【0069】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図13は本発明の実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0070】
ステップS800で、提示処理のサブルーチンが開始されると、続いてステップS801に進み、位置取得部340によって、車両の現在位置を取得する。ステップS802では、“現在位置”=“案内ポイント”であるか否かが判定される。ステップS802における判定結果がYESであるときにはステップS803に進み、NOであるときにはステップS806に進む。
【0071】
ステップS803では、案内ポイント(S802の判定で用いられた案内ポイント)に“案内指示”タグ が付加されているか否かが判定される。ステップS803の判定がYESであるときにはステップS804で、案内ポイントデータ報知時における追加情報として“案内距離:Dist”、“案内方向:Dir”を付加する。
【0072】
ステップS805では、(通過予定のS802の判定で用いられた案内ポイント)の案内ポイントデータ(前方カメラ画像・案内ポイント(緯度、経度データ等)情報)を入出力インターフェイス部350によって、表示・音声等で報知する。
【0073】
また、ステップS806では、現在位置=“目的地”であるかが判定される。ステップS806の判定がYESであるときにはステップS807に進み、現時位置が“目的地”
であることを、入出力インターフェイス部350によって、表示・音声等で報知する。当該判定がNOであるときにはステップS808に進み、元のルーチンにリターンする。
【0074】
なお、目的地までの案内ポイントデータを含む、1つの行程の全案内ポイントデータを後続車両のシステムが格納した後、後続車両の現在位置と任意の案内ポイントデータとの間の距離が拡大していることが判明した場合には、入出力インターフェイス部350に何らかの警告を行うようなルーチンを採用することもできる。このようなルーチンを採用することで、後続車両のルートはずれに対して、適切なワーニングを行うことが可能となる。
【0075】
次に、先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換プロセスの一例について説明する。図14乃至図15は、本発明の実施形態に係る情報提供システムにおける先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換のタイミングチャートを示す図である。
【0076】
図14には、先行車両からセンター側システムを介して、後続車両に案内ポイントデータを送信するときのやりとりが示されている。図14において、タイミングT101では、先行車両搭載システムから、センター側システムに、案内ポイントデータが送信される。次のタイミングT102では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT103では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT104では、センター側システムから、後続車両搭載システムに、案内ポイントデータが送信される。次のタイミングT105では、後続車両搭載システムから、センター側システムに、“案内ポイントデータ”受領通知が送信される。次のタイミングT106では、センター側システムから、先行車両搭載システムに、案内ポイントデータ受領通知が送信される。
【0077】
図15には、先行車両において車両センサトリガーがONとなったときにおける、先行車両からセンター側システムを介して、後続車両に案内ポイントデータ、案内指示タグデータを送信するときのやりとりが示されている。図15において、タイミングT201では、先行車両搭載システムから、センター側システムに、案内ポイントデータが送信される。次のタイミングT202では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT203では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT204では、センター側システムから、後続車両搭載システムに、案内ポイントデータが送信される。次のタイミングT205では、後続車両搭載システムから、センター側システムに、“案内ポイントデータ”受領通知が送信される。次のタイミングT206では、センター側システムから、先行車両搭載システムに、“案内ポイントデータ”受領通知が送信される。次のタイミングT207では、先行車両搭載システムから、センター側システムに、案内指示タグデータが送信される。次のタイミングT208では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT209では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT210では、センター側システムから、後続車両搭載システムに、案内指示タグデータが送信される。次のタイミングT211では、後続車両搭載システムから、センター側システムに、“案内指示タグデータ”受領通知が送信される。次のタイミングT212では、センター側システムから、先行車両搭載システムに、“案内指示タグデータ”受領通知が送信される。
【0078】
図16には、先行車両が目的地に到着したときにおける、先行車両、センター側システム、後続車両のやりとりが示されている。図16において、タイミングT301では、先行車両搭載システムから、センター側システムに、目的地の(案内ポイントデータ)が送信される。次のタイミングT302では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT303では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT304では、センター側システムから、後続車両搭載システムに、目的地の(案内ポイントデータ)が送信される。次のタイミングT305では、後続車両搭載システムから、センター側システムに、“目的地データ”受領通知が送信される。次のタイミングT306では、センター側システムから、先行車両搭載システムに、“目的地データ”受領通知が送信される。
【0079】
図17には、後続車両が目的地に到着したときにおける、先行車両、センター側システ
ム、後続車両のやりとりが示されている。図17において、タイミングT401では、後続車両搭載システムから、センター側システムに、後続車両の目的地到着通知が送信される。次のタイミングT402では、センター側システムから、先行車両搭載システムに、後続車両の目的地到着通知が送信される。次のタイミングT403では、先行車両搭載システムから、センター側システムに、目的地到着通知の受領通知が送信される。次のタイミングT404では、センター側システムから、後続車両搭載システムに、目的地到着通知の受領通知が送信される。
【0080】
以上のように、本発明に係る情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータが先行する情報取得主体(先行車両)によって取得され、この案内ポイントデータが後続車両の後続車両運転者に提示されるので、この後続車両運転者は先行車両からの情報に基づいて経路案内されることとなる。そして、このような本発明に係る情報提供システムによれば、先行車両や先行者がナビゲーション装置を設けることなく、後続車両運転者に対する経路案内を行うことが可能となる。
【0081】
また、本発明に係る情報提供システムによれば、先行する情報取得主体(先行車両)にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【0082】
次に、本発明の第2の実施形態について説明する。先に説明した第1の実施形態は、先行車両には、ナビゲーション装置が搭載されていない場合における情報提供であったが、先行車両にナビゲーション装置が搭載されていれば、先行車両からセンターシステムを介する形で、後続車両に対して、よりきめの細かい案内情報を提供することが可能となる。本発明の第2の実施形態は、先行車両にナビゲーションシステムが搭載されている場合の情報提供システムの例である。
【0083】
次に、以上のような第2実施形態に係る情報提供システムを実現するためのシステム構成について説明する。第2実施形態では、先行車両のシステム構成が先の実施形態と異なるのみであるので、先行車両のシステム構成についてのみ説明する。図18は本発明の第2実施形態に係る情報提供システムにおいて先行車両に搭載されるシステムのブロック図である。図18において、図2と同一の参照番号が付された構成は、同様の構成であるので説明を省略する。図18の先行車両に搭載されるシステムが先のものと異なる点は、ナビゲーション部180を有する点である。
このナビゲーション部180は、GPS測位部である位置取得部140によって、得られた車両の現在位置情報と、道路情報、施設情報などが記憶されているナビゲーションシステム用データベース(不図示)の情報とを重ね合わせて、自車両の地図上の位置を把握できたり、或いは、出発地点から目的地までのルートを当該データベースから抽出することができたりするものであり、現在広く用いられているものを用いることができる。
【0084】
以上のようなナビゲーション部180が搭載されている先行車両が、後続車両に先立って所定のルートを走行し、これに基づいて後続車両を案内する場合の実施形態について説明する。図19は本発明の第2実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。図19において、ステップS900で、先行車両に搭載されるシステムの処理が開始されると、続いてステップS901に進み、初期設定処理のサブルーチンが実行される。次のステップS902では、自車両の走行が終了であるか否かが判定される。ステップS902の判定結果がYESであるときにはステップS903に進み、NOであるときにはステップS904に進む。ステップS904では、現在位置が目的地であるか否かが判定され、当該判定がYESであるときには、ステップS906に進み、目的地到着処理のサブルーチンが実行される。この目的地到着処理サブル
ーチンについては、先に説明したものと同様のものを用いることができるので説明を省略する。
【0085】
また、ステップS904における判定がNOであるときにはステップS905に進み、案内中処理のサブルーチンが実行される。ステップS903では、後続車両の走行が終了であるか否かが判定される。ステップS903の判定結果がYESであるときにはステップS908に進み、処理が終了とされ、NOであるときにはステップS907に進み、後続車判定処理のサブルーチンが実行される。
【0086】
次に、先のフローチャートにおける初期設定処理のサブルーチンについて説明する。図20は本発明の第2実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、ナビゲーション部180で案内ポイントを選定する処理、及び、先行車両運転者がどのような車両センサトリガーによって案内指示タグデータを取得するかを設定するためのものである。
【0087】
図20において、ステップS1000で、初期設定処理サブルーチンが開始されると、次にステップS1001においては、先行車両運転者がナビゲーション部180に入力した目的地及び経由地を取得する。ステップS1002では、取得された目的地及び経由地から案内経路を算出する。ステップS1003では、求められた案内経路中における適当なポイント交差点・分岐点の手前何百m、交差点・分岐点などを“案内ポイント”として選定する。
【0088】
ステップステップS1004では、案内ポイントデータを取得するトリガーとして、車両情報取得部160におけるステア舵角センサ情報によるものと設定したか否かが判定される。ステップS1004の判定がYESであるときにはステップS1005に進み、“ステア舵角d”をトリガーとして設定し、判定がNOであるときにはステップステップS1006に進み、“ステア舵角d”をトリガーとして解除する。ステップS1007では、元のルーチンにリターンする。なお、このステア舵角dに関連する概念については、第1の実施形態において説明したものと同様である。
【0089】
次に先のフローチャートにおける案内中処理のサブルーチンについて説明する。図21は本発明の第2実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【0090】
図21において、ステップS1100で、案内中処理サブルーチンが開始されると、次のステップS1101では、位置取得部140によって現在位置が取得される。続く、ステップS1102では、取得された現在位置が予め選定されている案内ポイントであるかが判定される。ステップS1102の判定がYESであるとステップS1103に進み、NOであるとステップS1105に進む。
【0091】
ステップS1103では、車両前方画像撮像部130によって、車両の前方の風景の画像データが取得される。ステップS1104では、案内ポイントデータ(現在位置データと、現在位置データと関連づけられた車両前方画像撮像部130による画像データ)を通信部170によってセンター側に送信する。
【0092】
ステップS1105では、車両センサトリガーがOnであるかが判定される。ステップS1105の判定結果がYESであるときにはステップS1106に進み、NOであるときにはステップS11010に進み、元のルーチンにリターンする。
【0093】
ステップS1106では、車両前方画像撮像部130によって、車両の前方画像データ
を取得する。また、続くステップS1107では、現在位置などを“案内ポイント”として記憶部120に記録する。そして、ステップS1108では、案内ポイントデータ(現在位置データと、この現在位置データと関連づけられた車両前方画像撮像部130による画像撮像データ)を通信部170によってセンター側に送信する。ステップS1109においては、“案内指示”タグ付加処理のサブルーチンが実行される。この“案内指示”タグ付加処理のサブルーチンについては先に説明したものと同様である。
【0094】
次に先のフローチャートにおける後続車判定処理のサブルーチンについて説明する。図22は本発明の第2実施形態に係る情報提供システムにおける後続車判定処理サブルーチンのフローチャートを示す図である。
【0095】
図22において、ステップS1200で、後続車判定処理サブルーチンの処理が開始されると、ステップS1201において、後続車の現在位置を要求する。ステップS1202では、後続車の現在位置を受信したか否かが判定される。この判定がNOであるときにはステップS1205に進みリターンし、YESであるときにはステップS1203に進み、後続車・Onルート判定処理サブルーチンを実行する。引き続き、ステップS1204では、後続車・“案内ポイント/目的地”到着判定処理サブルーチンを実行する。
【0096】
次に先のフローチャートにおける後続車・Onルート判定処理のサブルーチンについて説明する。図23は本発明の第2実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【0097】
図23において、ステップS1300で、後続車・Onルート判定処理のサブルーチンが開始されると、続いてステップS1301において、後続車両が既定のルート上に存在するか否かが判定される。このステップの判定結果がYESであれば、ステップS1307に進み、メインルーチンにリターンし、NOであればステップS1302に、これまで用いていた案内経路を記憶部などに一時退避する。そして、ステップS1303では、最も近い“案内ポイント”をセットし、ステップS1304で、後続車両の復帰経路を計算する。ステップS1305では、もとのルート復帰への新“案内ポイント”を設定する。ステップS1306では、新“案内ポイント”を記憶部120に記録し、ステップS1307で元のルーチンにリターンする。
【0098】
次に先のフローチャートにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのサブルーチンについて説明する。図24は本発明の第2実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。図24において、ステップS1400で、後続車・“案内ポイント/目的地”到着判定処理サブルーチンが開始されると、ステップS1401で、後続車両から、案内ポイント又は目的地到達通知が受信されたか否かが判定される。この判定結果がYESであればステップS1402に進み、NOであればリターンする。ステップS1402においては、後続車両の案内ポイント通過を確認し、ステップS1403で、元のルーチンにリターンする。
【0099】
次に、以上のようにして、情報提供車両である先行車両から提供される案内ポイントデータや案内指示タグデータを後続車両において利用するための処理について説明する。図25は本発明の第2実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。図25において、ステップS1500で、後続車両に搭載されるシステムの処理が開始されると、続いて、ステップS1501に進み、提供情報受信処理のサブルーチンを実行し、次に、ステップS1502に進み、現在位置送信処理のサブルーチンを実行する。さらにステップS1503に進み、提示処理のサブルーチンを実行する。ステップS1504では、後続車両の走行が終了であるか否かが判定され、判定
結果がYESであるときにはステップS1505に進み、処理を終了する。
【0100】
次に、先のフローチャートにおける提供情報受信処理のサブルーチンについて説明する。図26は本発明の第2実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。図26において、ステップS1600で提供情報受信処理のサブルーチンが開始すると、次に、ステップS1601に進み、“案内ポイント/目的地”を受信したか否かが判定される。ステップS1601の判定結果がYESであるときにはステップS1602に進み、NOであるときにはステップS1603に進む。ステップS1602では、受信した“案内ポイント/目的地”を記憶部120に追加格納する。
【0101】
ステップS1603では、案内指示タグを受信したか否かが判定される。ステップS1603の判定結果がYESであるときにはステップS1604に進み、NOであるときにはステップS1605に進み、リターンする。ステップS1604では、受信した案内指示タグを記憶部120に追加格納する。
【0102】
次に、先のフローチャートにおける現在位置送信処理のサブルーチンについて説明する。図27は本発明の第2実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。図27において、ステップS1700で、現在位置送信処理サブルーチンがスタートすると、次に、ステップS1701で、位置取得部340から車両の現在位置を取得する。ステップS1702では、(センターを介する形で)先行車両からの現在位置要求があるか否かが判定される。ステップS1702の判定結果がYESであるときには、ステップS1703に進み、車両の現在位置データ(緯度データ、経度データ)を送信し、NOで在るときには、ステップS1704に進み、元のルーチンにリターンする。
【0103】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図28は本発明の第2実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0104】
ステップS1800で、提示処理のサブルーチンが開始されると、続いてステップS1801に進み、位置取得部340によって、車両の現在位置を取得する。ステップS1802では、“現在位置”=“案内ポイント”であるか否かが判定される。ステップS1802における判定結果がYESであるときにはステップS1803に進み、NOであるときにはステップS1806に進む。
【0105】
ステップS1803では、案内ポイント(S1802の判定で用いられた案内ポイント)に“案内指示”タグ が付加されているか否かが判定される。ステップS1803の判定がYESであるときにはステップS1804で、案内ポイントデータ報知時における追加情報として“案内距離:Dist”、“案内方向:Dir”を付加する。
【0106】
ステップS1805では、(通過予定のS1802の判定で用いられた案内ポイント)の案内ポイントデータ(前方カメラ画像・案内ポイント(緯度、経度データ等)情報)を入出力インターフェイス部350によって、表示・音声等で報知する。
【0107】
また、ステップS1806では、現在位置=“目的地”であるかが判定される。ステップS1806の判定がYESであるときにはステップS1807に進み、現時位置が“目的地” であることを、入出力インターフェイス部350によって、表示・音声等で報知する。また、ステップS1808では、目的地に到達した旨、(センターを介する形で)先行車両側に送信する。ステップS1806の判定がNOであるときにはステップS18
09に進み、元のルーチンにリターンする。
【0108】
次に、先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換プロセスの一例について説明する。図29及び図30は、本発明の第2実施形態に係る情報提供システムにおける先行車両搭載システムとセンター側システムと後続車両搭載システムとの間のデータ交換のタイミングチャートを示す図である。
【0109】
図29には、先行車両からセンター側システムを介して、後続車両に対して現在位置要求を行ったときのやりとりが示されている。図29において、タイミングT501では、先行車両搭載システムから、センター側システムに、後続車両の現在位置要求が送信される。次のタイミングT502では、センター側システムから、後続車両搭載システムに、現在位置要求が送信される。次のタイミングT503では、後続車両搭載システムから、センター側システムに、後続車両によって取得された現在位置が送信される。次のタイミングT504では、センター側システムから、後続車両搭載システムに、現在位置受領通知が送信される。次のタイミングT505では、センター側システムから、先行車両搭載システムに、後続車両の現在位置が送信される。
【0110】
図30には、後続車両が案内経理(既定ルート)を逸脱したときのやりとりが示されている。図30において、タイミングT601では、先行車両搭載システムから、センター側システムに、後続車両の現在位置要求が送信される。次のタイミングT602では、センター側システムから、後続車両搭載システムに、後続車両の現在位置要求が送信される。次のタイミングT603では、後続車両搭載システムから、センター側システムに、後続車両の現在位置が送信される。次のタイミングT604では、センター側システムから、後続車両搭載システムに、現在位置受領通知が送信される。次のタイミングT605では、センター側システムから、先行車両搭載システムに、現在位置が送信される。次のタイミングT606では、先行車両搭載システムから、センター側システムに、経路再計算によるOnルート復帰の為の新“案内ポイントデータ”が送信される。次のタイミングT607では、センター側システムから、後続車両搭載システムに、記憶部更新通知が送信される。次のタイミングT608では、後続車両搭載システムから、センター側システムに、情報取得要求が送信される。次のタイミングT609では、センター側システムから、後続車両搭載システムに、経路再計算によるOnルート復帰の為の新“案内ポイントデータ”が送信される。次のタイミングT610では、後続車両搭載システムから、センター側システムに、案内ポイントデータ受領通知が送信される。次のタイミングT611では、センター側システムから、先行車両搭載システムに、案内ポイントデータ受領通知が送信される。
【0111】
以上のように、本発明に係る第2情報提供システムによれば、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータと共に、ナビゲーション部によって取得されたデータを後続車両運転者に提供するので、後続車両運転者はより詳細な情報を得た上で、先行車両と同様のルートを走行することができ、ルートを逸脱する可能性を抑制できる。また、本発明に係る第2情報提供システムによれば、ルート逸脱時に対する復帰経路についても、後続車両運転者に提供されるので、後続車両運転者は余裕をもって走行を行うことができる。
【0112】
次に、本発明の第3の実施形態について説明する。先に説明した第2の実施形態は、先行車両にナビゲーション装置が搭載される共に、先行車両が情報提供するルートを実際に走行して案内ポイントを取得する実施形態であった。しかし、先行車両にナビゲーション装置が搭載されている場合には、後続車両に対して情報を提供するために、先行車両が実際に走行を行う必要は必ずしも必要はない。本発明の第3の実施形態は、先行車両にナビゲーションシステムが搭載されている場合で、先行車両が情報提供ルートを走行しない場
合の情報提供システムの例である。
【0113】
このような第3実施形態に係る情報提供システムを実現するためのシステム構成については、第2の実施形態のシステム構成と同様のものを用いることができるので、これについて説明は省略する。
【0114】
ナビゲーション部180が搭載されている先行車両が、後続車両に先立って所定のルートを走行せずに、後続車両を案内する場合の実施形態について説明する。図31は本発明の第3実施形態に係る情報提供システムの先行車両に搭載されるシステムの処理フローを示す図である。図31において、ステップS1900で、先行車両に搭載されるシステムの処理が開始されると、続いてステップS1901に進み、初期設定処理のサブルーチンが実行される。次のステップS1902では、案内中処理のサブルーチンが実行される。ステップS1903では、後続車両の走行が終了であるか否かが判定される。ステップS1903の判定結果がYESであるときにはステップS1904に進み、処理が終了とされ、NOであるときにはステップS1902に進み、案内中処理のサブルーチンが実行される。
【0115】
次に、先のフローチャートにおける初期設定処理のサブルーチンについて説明する。図32は本発明の第3実施形態に係る情報提供システムにおける初期設定処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、ナビゲーション部180で案内ポイントを選定する処理を行い、及び、そして、選定された全ての案内ポイントを送信するためのものである。
【0116】
図32において、ステップS2000で、初期設定処理サブルーチンが開始されると、次にステップS2001においては、先行車両運転者がナビゲーション部180に入力した目的地及び経由地を取得する。ステップS2002では、取得された目的地及び経由地から案内経路を算出する。ステップS2003では、求められた案内経路中における適当なポイントを“案内ポイント”として選定する。ステップS2004では、選定された全ての“案内ポイント”に係るデータ(緯度データ、経度データ)を送信し、ステップS2005に進み、元のルーチンにリターンする。
【0117】
次に先のフローチャートにおける案内中処理のサブルーチンについて説明する。図33は本発明の第3実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。
【0118】
図33において、ステップS2100で、案内中処理サブルーチンが開始されると、次のステップS2101では、後続車両の現在の位置情報の要求を行う。ステップS2102で後続車両の現在の位置情報を受信したかが判定される。この判定結果がYESであるときにはステップS2103に進み、NOであるときにはステップS2105に進み、元のルーチンにリターンする。ステップS2103では、後続車・Onルート判定処理サブルーチンを実行する。続く、ステップS2104では、後続車・“案内ポイント/目的地”到着判定処理サブルーチンを実行する。
【0119】
次に先のフローチャートにおける後続車・Onルート判定処理のサブルーチンについて説明する。図34は本発明の第3実施形態に係る情報提供システムにおける後続車・Onルート判定処理サブルーチンのフローチャートを示す図である。
【0120】
図34において、ステップS2200で、後続車・Onルート判定処理のサブルーチンが開始されると、続いてステップS2201において、後続車両が既定のルート上に存在するか否かが判定される。このステップの判定結果がYESであれば、ステップS220
7に進み、メインルーチンにリターンし、NOであればステップS2202に、これまで用いていた案内経路を記憶部などに一時退避する。そして、ステップS2203では、最も近い“案内ポイント”をセットし、ステップS2204で、後続車両の復帰経路を計算する。ステップS2205では、もとのルート復帰への新“案内ポイント”を設定する。ステップS2206では、新“案内ポイント”を記憶部120に記録し、ステップS2207で元のルーチンにリターンする。
【0121】
次に先のフローチャートにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのサブルーチンについて説明する。図35は本発明の第3実施形態に係る情報提供システムにおける後続車・“案内ポイント/目的地”到着判定処理サブルーチンのフローチャートを示す図である。図35において、ステップS2300で、後続車・“案内ポイント/目的地”到着判定処理サブルーチンが開始されると、ステップS2301で、後続車両から、案内ポイント又は目的地到達通知が受信されたか否かが判定される。この判定結果がYESであればステップS2302に進み、NOであればリターンする。ステップS2302においては、後続車両の案内ポイント通過を確認し、ステップS2303で、元のルーチンにリターンする。
【0122】
次に、以上のようにして、情報提供車両である先行車両から提供される案内ポイントデータや案内指示タグデータを後続車両において利用するための処理について説明する。図36は本発明の第3実施形態に係る情報提供システムの後続車両に搭載されるシステムの処理フローを示す図である。図36において、ステップS2400で、後続車両に搭載されるシステムの処理が開始されると、ステップS2401に進み、全ての案内ポイントデータの受信処理が行われる。続いて、ステップS2402に進み、現在位置送信処理のサブルーチンを実行する。さらにステップS2403に進み、提示処理のサブルーチンを実行する。ステップS2404では、後続車両の走行が終了であるか否かが判定され、判定結果がYESであるときにはステップS2405に進み、処理を終了する。
【0123】
次に、先のフローチャートにおける現在位置送信処理のサブルーチンについて説明する。図37は本発明の第3実施形態に係る情報提供システムにおける現在位置送信処理サブルーチンのフローチャートを示す図である。図37において、ステップS2500で、現在位置送信処理サブルーチンがスタートすると、次に、ステップS2501で、位置取得部340から車両の現在位置を取得する。ステップS2502では、(センターを介する形で)先行車両からの現在位置要求があるか否かが判定される。ステップS2502の判定結果がYESであるときには、ステップS2503に進み、車両の現在位置データ(緯度データ、経度データ)を送信し、NOで在るときには、ステップS2504に進み、元のルーチンにリターンする。
【0124】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図38は本発明の第3実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0125】
ステップS2600で、提示処理のサブルーチンが開始されると、続いてステップS2601に進み、位置取得部340によって、車両の現在位置を取得する。ステップS2602では、“現在位置”=“案内ポイント”であるか否かが判定され、判定結果がYESであればステップS2603に進み、NOであればステップS2604に進む。
【0126】
ステップS2603では、(通過予定のS2602の判定で用いられた案内ポイント)の案内ポイントデータ(緯度、経度データ)、案内経路情報等を入出力インターフェイス部350によって、表示・音声等で報知する。
【0127】
また、ステップS2604では、現在位置=“目的地”であるかが判定される。ステップS2604の判定がYESであるときにはステップS2609に進み、現時位置が“目的地” であることを、入出力インターフェイス部350によって、表示・音声等で報知する。また、ステップS2609では、目的地に到達した旨、(センターを介する形で)先行車両側に送信する。ステップS2604の判定がNOであるときにはステップS2607に進み、元のルーチンにリターンする。
【0128】
以上のように、本発明に係る第3情報提供システムによれば、ナビゲーション部によって取得された案内ポイントをユ後続車両運転者に提供するので、先行車両は実際に走行することなく、後方車両にルート情報を提供することが可能となる。
【0129】
次に、本発明の第4の実施形態について説明する。これまでに説明した実施形態は、統括すると、先行車両で取得した情報を、センターを介する形で、後方車両に伝達する技術に関するものであったが、本発明の情報提供システムはこれに限らず、情報取得主体が、携帯電話などの移動体端末装置400を所有する先行者で、この先行者が取得した情報(案内ポイントデータ)を、センターを介する形で、後を追随する後方者に伝達する技術をも内包するものである。
【0130】
以上のような第4の実施形態の概念について説明する。図39は本発明の第4実施形態に係る情報提供システムの概念を模式的に説明する図である。本実施形態に係る情報提供システム情報提供システムにおいては、先行者が通った経路に係る情報を、後続者に対して通知(経路案内)することによって、後続者が先行者と同じ行程を走行することができるようにアシストするものである。
【0131】
上記を達成するために、まず、先行者が所有する移動体端末装置400によって、適当な間隔のポイント(以下、「案内ポイント」と称する)で、当該ポイントにおける位置データ(緯度、経度データ、及び画像データが取得された方位に関するデータ)と、当該ポイントにおける画像データなどの参考情報を取得する。このような案内ポイントについては、図1においてP1、P2、P3・・・P12として示されている。
【0132】
以上のように先行者によって、適当な間隔で取得された案内ポイントデータは、(1)に示されるように、随時、先行者の移動体端末装置400からセンター(本実施形態に係る情報提供システムを総合的に管理するセンター)へと送信される。そして、このセンターでは、(2)に示すように、先行者から受信した案内ポイントデータを、当該センターに設置されているサーバーなどの記憶部に蓄積する。なお、センターに蓄積された案内ポイントデータは、先行者の歩行後、十分長い期間経過後(例えば、1ヶ月後など)にも利用することができるにように設定することが好ましい。
【0133】
上記のようにして、センターにおいてサーバーなどの記憶部に蓄積された案内ポイントに係るデータ(P1の案内ポイントデータD1、P2の案内ポイントデータD2、P3の案内ポイントデータD3、・・・・・・・Pnの案内ポイントデータDn)は、次に、(3)に示すようにセンターから当該案内ポイントデータを必要とする後続者の移動体端末装置400に対して送信される。
【0134】
後続者の移動体端末装置400は、センターから送信された案内ポイントデータを受信し、これを適宜後続者に対して提示することで、後続者はこれを参照して、先行者に対して追随し歩行を行うことが可能となる。
【0135】
以上のような本実施形態に係る情報提供システムでは、先行者の移動体端末装置400にナビゲーション装置を設ける必要がなく、後続者に対して経路案内を行うことが可能と
なる。また、先行者の移動体端末装置400にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【0136】
次に、以上のような本実施形態に係る情報提供システムを実現するためのシステム構成について説明する。ここで、先行者及び後続者が携帯する移動体端末装置400のシステム構成について具体的に説明する。なお、センター側におけるシステムについては、これまでに説明したものと同様のものを用いることができるので説明を省略する。
【0137】
次に、移動体端末装置400を構成する上で好適なハードウエアの概略について説明する。図40は本発明の第4実施形態に係る情報提供システムにおいて先行者及び後続者が携帯する移動体端末装置400のブロック図である。
【0138】
図39において、400は移動体端末装置、401はCPU、402はバス、404はRAM、405は入力操作部、406は入力回路、407は計時部、408は音声制御回路、409はマイクロフォン、412はスピーカ、414は表示制御回路、415はディスプレイ、416は通信制御回路、419はGPS受信部、420はデータ記憶部、421は撮像部をそれぞれ示している。
【0139】
移動体端末装置400は、CPU(中央処理装置)401を搭載している。CPU401はバス402を通じて装置内の各部と接続されている。このうちROM403はこの移動体端末装置400の各部を制御するためのプログラムを格納したリード・オンリ・メモリである。RAM404はプログラムを実行するときに必要となるデータを一時的に格納するランダム・アクセス・メモリである。
【0140】
入力操作部405は利用者が操作するキースイッチ群から構成されており、この入力操作部405の操作により発生した信号は入力回路406を介してバス402に伝達されるようになっている。また、計時407は、時刻、時間を計測することが可能であり、かつ、計測した時刻情報、時間情報を記憶・保持するものである。
【0141】
音声制御回路408は音声の入出力を行う回路で、マイクロフォン409から音声を入力すると共に、スピーカ412から音声を出力するようになっている。表示制御回路414は、ディスプレイ415の表示を制御するようになっている。通信制御回路416は、不図示の無線基地局と無線で通信を行うになっている。GPS受信部419は不図示のGPS衛星の複数から電波を受信して移動体端末装置400の現在位置を特定する装置である。現在位置データとしては、緯度、経度データを特定することができるようになっている。
【0142】
データ記憶部420は電源が切れた時でもデータを保持できるようになっている記憶部であり、例えばフラッシュメモリー、ハードディスク等である。
【0143】
また、撮像部421は移動体端末装置400に内蔵されているカメラであり、静止画像データや動画像データなどを取得し、必要に応じてディスプレイ415で閲覧したり、或いは、画像データを通信制御回路416から外部に送信したりすることができるようになっている。
【0144】
また、方位計測センサ422は、MR素子や磁気インピーダンス素子などセンサからなり、地磁気を感知することによって、移動体端末装置400の撮像部421が撮像しようとしている方角などを検知するものである。
【0145】
本発明に係る情報提供システムを実現するためのプログラムはROM403に記憶させ
ておくことができるし、或いはデータ記憶部420に記憶させておくことができる。
【0146】
次に、以上のように構成される本実施形態の情報提供システムの処理・動作について説明する。すでに説明した通り、本実施形態の情報提供システムは、先行者両が携帯する移動体端末装置400から、センターのシステムに、案内ポイントデータや案内指示タグデータを送信し、センターのシステム側では、これを蓄積しておき、適宜後続者が携帯する移動体端末装置400に配信するものである。
【0147】
以下に説明する情報提供システムの処理においては、後続者が、例えば数10〜100m程度の比較的短い距離間隔をおいて、先行者を追跡しているような例を想定しているが、本実施形態の情報提供システムの利用形態としては、後続者が、例えば数10〜100m程度の距離をおいて、先行者を追跡するような形態で利用されるものに留まるものではない。すなわち、後続者は、例えば、1ヶ月前に先行者が歩行した行程をたどることができるように、センター側が案内ポイントデータを適宜後続者の移動体端末装置400に配信することも想定されるものである。このような形態で利用する場合には、センター側システムと後続者の移動体端末装置400との間のデータの送受を行うこととなるが、このためのフローやタイミングチャートについては、以下に説明する実施形態に基づいて、これを応用・変形することで当業者が適宜構成することができる。
【0148】
以下、先行者が携帯する移動体端末装置400と、後続者が携帯する移動体端末装置400とについては、フローを用いて説明する。特に、センター側システムにおける処理フローについては、以下に示されるタイミングチャートから容易に当業者が構成し得るものを採用することができる。
【0149】
また、案内ポイントデータをバッファしておく機能については、先行者の移動体端末装置400、センターのシステム、後続者の移動体端末装置400のいずれにも設けられており、いずれのバッファに、案内ポイントデータを蓄積するように構成しても良いし、或いは、適当なタイミングに応じて、いずれかに案内ポイントデータをバッファするように切り換えるようにしても良い。
【0150】
図41は本発明の第4実施形態に係る情報提供システムにおける先行者携帯の移動体端末装置400の処理フローを示す図である。図41において、ステップS2700で、先行者携帯の移動体端末装置400の処理が開始されると、続いて、ステップS2701に進み、設定変更の指示が在ったか否かが判定される。ここで、ステップS2701における設定とは、案内ポイントデータをどのようなタイミングで取得するかに係る設定などである。ステップS2701における判定がYESであるときには、ステップS2702の設定変更処理のサブルーチンが実行される。このサブルーチンについては後述する。
【0151】
また、ステップS2703では、先行者が目的地に到着したか否かが判定される。このような判定のために、先行者の移動体端末装置400には、目的地を緯度データ、経度データで目的地を設定する機能が設けられている。ステップS2703における判定結果がYESであるときにはステップS2705に進み目的地到着処理のサブルーチンを実行し、判定結果がNOであるときにはステップS2704に進み、案内中処理のサブルーチンを実行する。ステップS2706では、歩行が終了したか否かが判定され、判定がYESであると、ステップS2707に進み、処理を終了する。
【0152】
次に、先のフローチャートにおける設定変更処理のサブルーチンについて説明する。図42は本発明の第4実施形態に係る情報提供システムにおける設定変更処理サブルーチンのフローチャートを示す図である。この設定変更処理サブルーチンは、先行者がどのようなトリガーによって案内ポイントデータを取得するかを設定するためのものである。
【0153】
図42において、ステップS2800において、設定変更処理のサブルーチンが開始されると、続いて、ステップS2801に進み、案内ポイントデータを取得するトリガーを“一定時間”経過毎のトリガーによるものと設定したか否かが判定される。ステップS2801の判定がYESであるときにはステップS2802に進み、“一定時間t”をトリガーとして設定し、判定がNOであるときにはステップS2803に進み、“一定時間t”をトリガーとして解除する。
【0154】
ステップS2804では、案内ポイントデータを取得するトリガーを“一定距離”間隔毎のトリガーによるものと設定したか否かが判定される。ステップS2804の判定がYESであるときにはステップS2805に進み、“一定距離m”をトリガーとして設定し、判定がNOであるときにはステップS2806に進み、“一定距離m”をトリガーとして解除する。
【0155】
上記のような“一定時間t”、“一定距離m”の各トリガーは定期的に案内ポイントデータを取得するトリガーであるので、定期トリガーとも称する。ステップS2807では、元のルーチンにリターンする。
【0156】
次に、先のフローチャートにおける案内中処理のサブルーチンについて説明する。図43は本発明の第4実施形態に係る情報提供システムにおける案内中処理サブルーチンのフローチャートを示す図である。この案内中処理サブルーチンにおいては、基本的には、先行者の移動体端末装置400で案内ポイントデータを取得し、この案内ポイントデータを送信するときの処理を行うものである。移動体端末装置400によって案内ポイントデータを取得するためには、先行者に対して移動体端末装置400によって画像データを取得するよう促さなくてはならない。このフローチャートでは、このための処理も実施される。また、これまでの実施形態と異なり、移動体端末装置400を利用した実施形態では、案内ポイントで取得される画像データは、どの方位に撮像部421を向けて取得したものであるのかを特定しないと利用しにくい。したがって、本実施形態における案内ポイントデータは、案内ポイントの位置データと、案内ポイントで取得された画像データ、及びび画像データが取得された方位に関する方位データがセットとなっている。
【0157】
図43において、ステップS2900で、案内中処理のサブルーチンが開始されると、続く、ステップS2901では、計時部407から時間情報が取得され、次のステップS2902では、GPS受信部419から現在位置データが取得される。
【0158】
ステップS2903では、定期トリガーがOnであり、かつ設定された時間が経過したか、或いは、設定された距離が進んだかが判定される。ステップS2903の判定結果がYESであるときにはステップS2904に進み、NOであるときにはステップS2911へと進む。
【0159】
ステップS2904では、スピーカ412やディスプレイ415などのインターフェイス構成を用いて、先行者に対して、撮像部421で周囲の風景を撮影するように促す。ステップS2905では、撮像部421が先行者によって操作され稼動したか否かが判定される。この判定結果がYESであるときにステップS2906に進み、撮像部421から撮像データを取得し、続くステップS2907で、方位計測センサ422から方位データを取得し、さらにステップS2908で、GPS受信部419からあらためて現在位置データを取得する。ステップS2909では、ステップS2907乃至ステップS2909で取得された各データを組とし、案内ポイントデータとなしてデータ記憶部420に記録する。ステップS2910では、この案内ポイントデータを、通信制御回路416によって送信し、ステップS2911でもとのルーチンにリターンする。
【0160】
次に、先のフローチャートにおける目的地到着処理のサブルーチンについて説明する。図44は本発明の第4実施形態に係る情報提供システムにおける目的地到着処理サブルーチンのフローチャートを示す図である。
【0161】
図44において、ステップS3000で目的地到着処理のサブルーチンが開始されると、ステップS3001では、スピーカ412やディスプレイ415などのインターフェイス構成を用いて、先行者に対して、撮像部421で周囲の風景を撮影するように促す。ステップS3002では、撮像部421が先行者によって操作され稼動したか否かが判定される。この判定結果がYESであるときにステップS3003に進み、撮像部421から撮像データを取得し、続くステップS3004で、方位計測センサ422から方位データを取得し、さらにステップS3005で、GPS受信部419からあらためて現在位置データを取得する。ステップS3006では、ステップS3003乃至ステップS3005で取得された各データを組とし、“目的地”の案内ポイントデータとなしてデータ記憶部420に記録する。ステップS3007では、この“目的地”の案内ポイントデータを、通信制御回路416によって送信し、ステップS3008でもとのルーチンにリターンする。
【0162】
次に、以上のようにして、情報提供者である先行者の移動体端末装置400から提供される案内ポイントデータを後続者携帯の移動体端末装置400において利用するための処理について説明する。図45は本発明の第4実施形態に係る情報提供システムにおける後続者携帯の移動体端末装置400の処理フローを示す図である。図45において、ステップS3100で、後続者携帯の移動体端末装置400の処理が開始されると、続いて、ステップS3101に進み、提供情報受信処理のサブルーチンを実行し、さらにステップS3102に進み、提示処理のサブルーチンを実行する。ステップS3103では、後続者の歩行が終了(或いは、案内ポイントによるアシスト要求の終了)であるか否かが判定され、判定結果がYESであるときにはステップS3104に進み、処理を終了する。
【0163】
次に、先のフローチャートにおける提供情報受信処理のサブルーチンについて説明する。図46は本発明の第4実施形態に係る情報提供システムにおける提供情報受信処理サブルーチンのフローチャートを示す図である。図46において、ステップS3200で提供情報受信処理のサブルーチンが開始すると、次に、ステップS3201に進み、“案内ポイント/目的地”を受信したか否かが判定される。ステップS3201の判定結果がYESであるときにはステップS3202に進み、NOであるときにはステップS3203に進み、元のルーチンにリターンする。ステップS3202では、受信した“案内ポイント/目的地”に係る案内ポイントデータをデータ記憶部420に追加格納する。
【0164】
次に、先のフローチャートにおける提示処理のサブルーチンについて説明する。図47は本発明の第4実施形態に係る情報提供システムにおける提示処理サブルーチンのフローチャートを示す図である。
【0165】
ステップS3300で、提示処理のサブルーチンが開始されると、続いてステップS3301に進み、GPS受信部419によって、移動体端末装置400の現在位置を取得する。ステップS3302では、現在位置=“案内ポイン位置”であるかが判定される。ステップS3302における判定結果がYESであるときにはステップS3303に進み、NOであるときにはステップS3304に進む。
【0166】
ステップS3303では、(通過予定のS3302の判定で用いられた案内ポイント)の案内ポイントデータ(位置データ(緯度、経度データ等)、撮影画像データ、方位データ(撮影方向データ))をスピーカ412やディスプレイ415などのインターフェイス
構成を用いて、表示・音声等で報知する。
【0167】
また、ステップS3304では、現在位置=“目的地”であるかが判定される。ステップS3304の判定がYESであるときにはステップS3305に進み、現時位置が“目的地” であり、その案内ポイントデータを、スピーカ412やディスプレイ415などのインターフェイス構成を用いて、表示・音声等で報知する。当該判定がNOであるときにはステップS3306に進み、元のルーチンにリターンする。
【0168】
本発明に係る情報提供システムは、位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータが先行する情報取得主体(先行者携帯の移動体端末装置400)によって取得され、この案内ポイントデータが後続者に提示されるので、後続者は先行者からの情報に基づいて経路案内されることとなる。そして、このような本発明に係る情報提供システムによれば、先行者がナビゲーション装置を用意することなく、後続者に対する経路案内を行うことが可能となる。
【0169】
また、本発明に係る情報提供システムによれば、先行する情報取得主体(先行者携帯の移動体端末装置400)にナビゲーション装置を搭載する必要がないので、システムを構成する上での自由度が向上する。
【符号の説明】
【0170】
100・・・処理コンピュータ、110・・・計時部、120・・・記憶部、130・・・車両前方画像撮像部、140・・・位置取得部、150・・・入出力インターフェイス部、160・・・車両情報取得部、170・・・通信部、180・・・ナビゲーション部、200・・・処理コンピュータ、220・・・記憶部、270・・・通信部、300・・・処理コンピュータ、320・・・記憶部、340・・・位置取得部、350・・・入出力インターフェイス部、370・・・通信部、400・・・移動体端末装置、401・・・CPU、402・・・バス、404・・・RAM、405・・・入力操作部、406・・・入力回路、407・・・計時部、408・・・音声制御回路、409・・・マイクロフォン、412・・・スピーカ、414・・・表示制御回路、415・・・ディスプレイ、416・・・通信制御回路、419・・・GPS受信部、420・・・データ記憶部、421・・・撮像部、422・・・方位計測センサ
【特許請求の範囲】
【請求項1】
位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、
前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、
前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、
前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、
前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、
前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする情報提供システム。
【請求項2】
前記案内ポイントデータは一定時間経過毎に取得されることを特徴とする請求項1に記載の情報提供システム。
【請求項3】
前記案内ポイントデータは一定距離進行毎に取得されることを特徴とする請求項1又は請求項2に記載の情報提供システム。
【請求項1】
位置データと、当該位置データと関連づけられた画像データとを含む案内ポイントデータを送信する送信手段と、
前記送信手段から送信された案内ポイントデータを受信する第1受信手段と、
前記第1受信手段によって受信された案内ポイントデータを記憶する記憶手段と、
前記記憶手段に記憶される案内ポイントデータを再送信する再送信手段と、
前記再送信手段から再送信された案内ポイントデータを受信する第2受信手段と、
前第2記受信手段によって受信された案内ポイントデータを提示する提示手段と、からなることを特徴とする情報提供システム。
【請求項2】
前記案内ポイントデータは一定時間経過毎に取得されることを特徴とする請求項1に記載の情報提供システム。
【請求項3】
前記案内ポイントデータは一定距離進行毎に取得されることを特徴とする請求項1又は請求項2に記載の情報提供システム。
【図1】

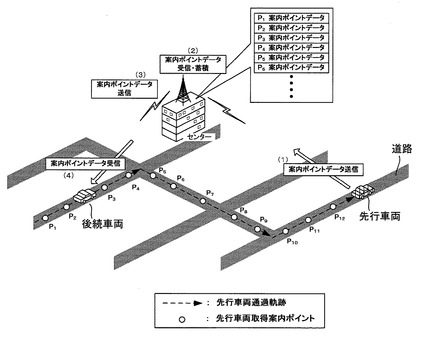
【図2】
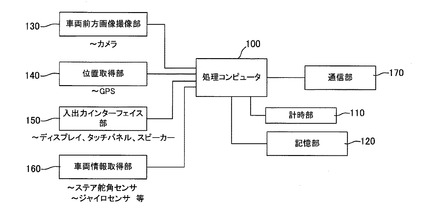
【図3】
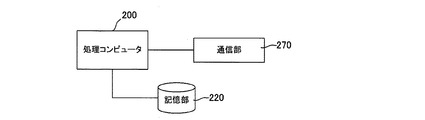
【図4】
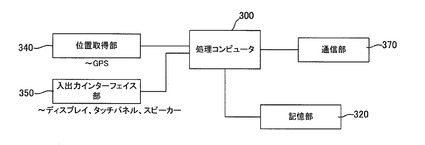
【図5】
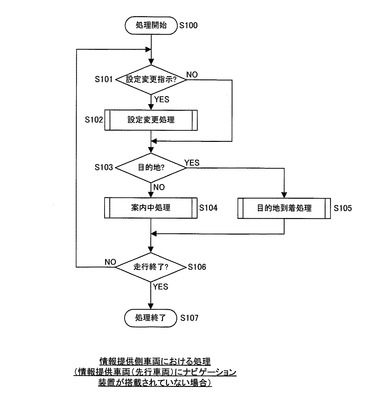
【図6】
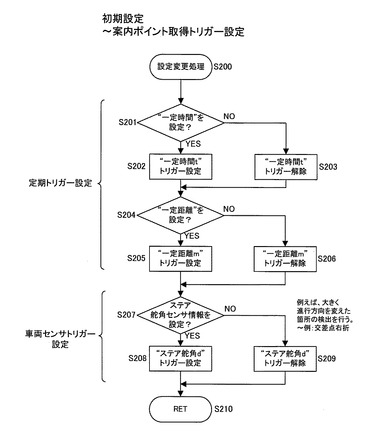
【図7】
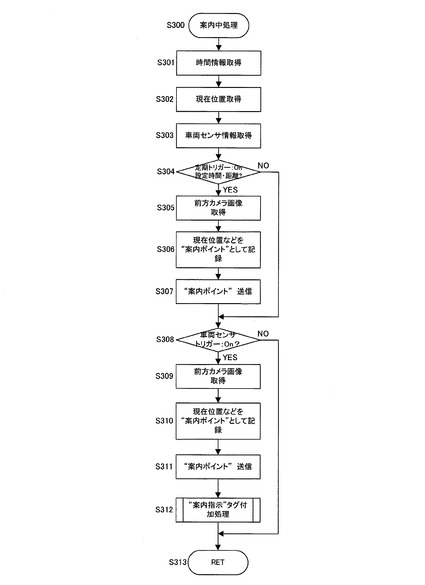
【図8】
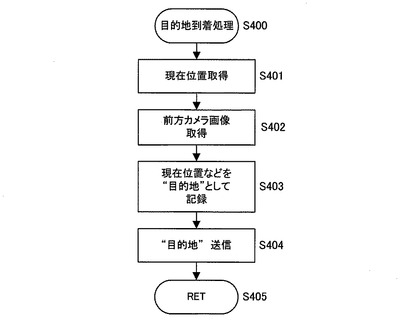
【図9】
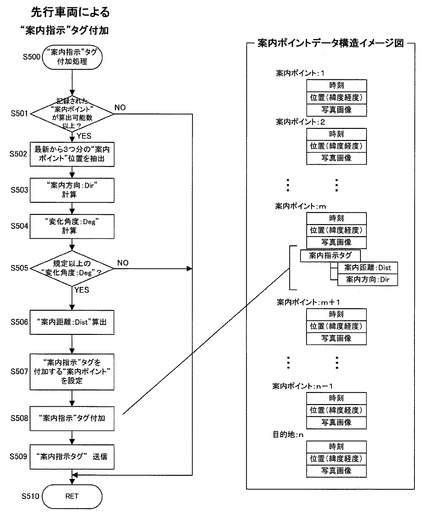
【図10】
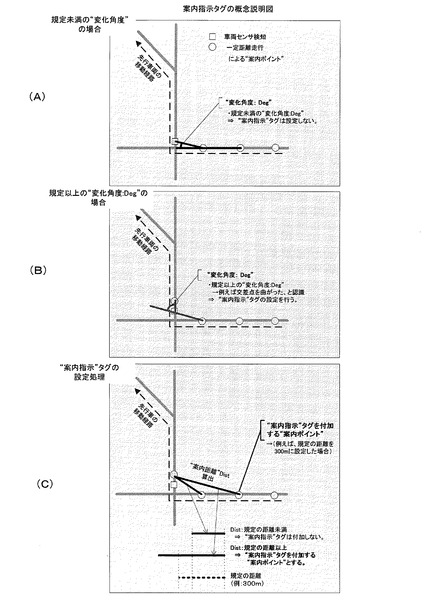
【図11】
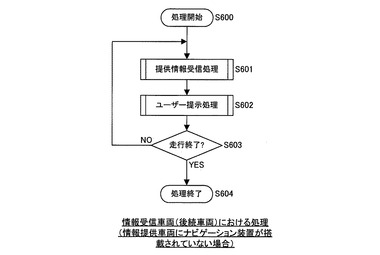
【図12】
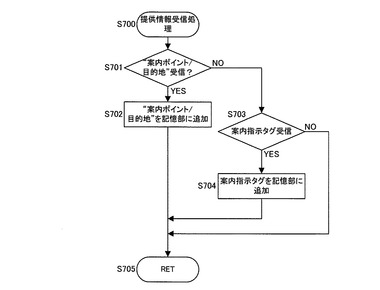
【図13】
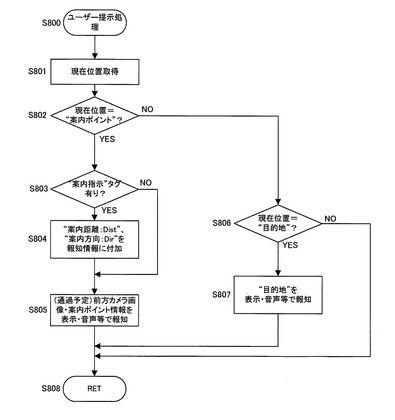
【図14】
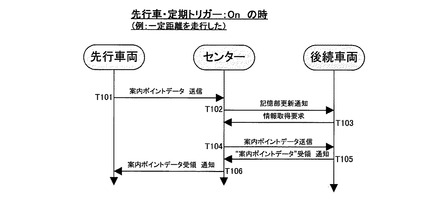
【図15】
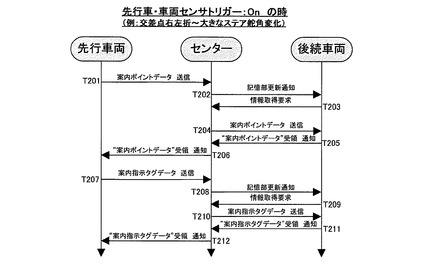
【図16】
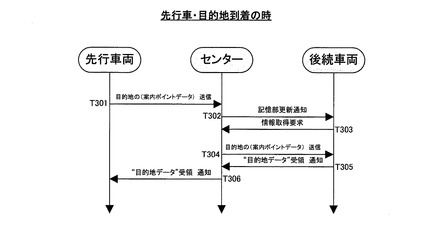
【図17】
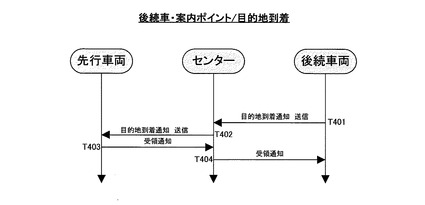
【図18】
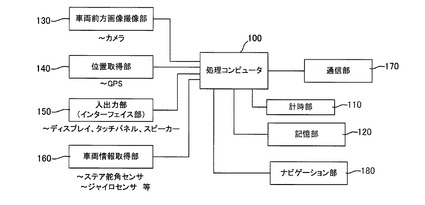
【図19】
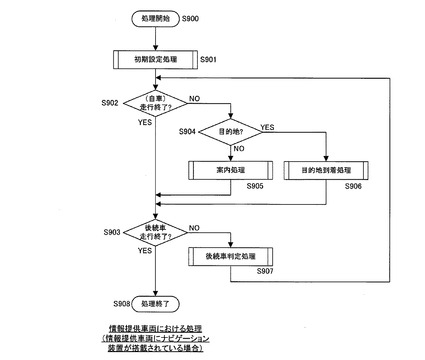
【図20】
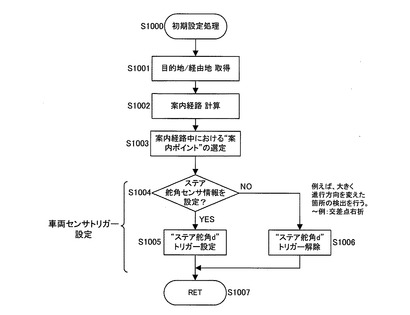
【図21】
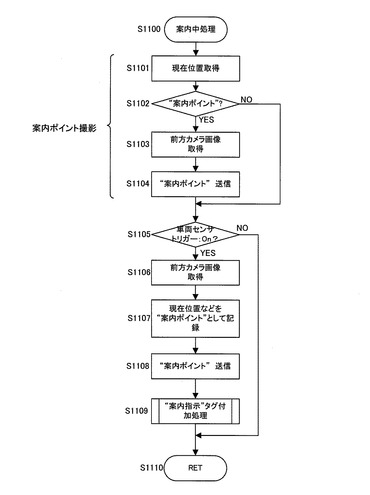
【図22】
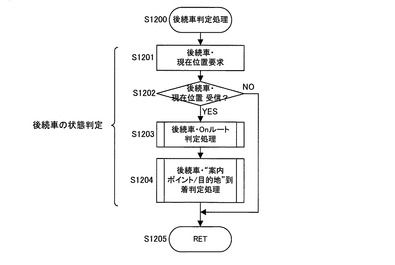
【図23】
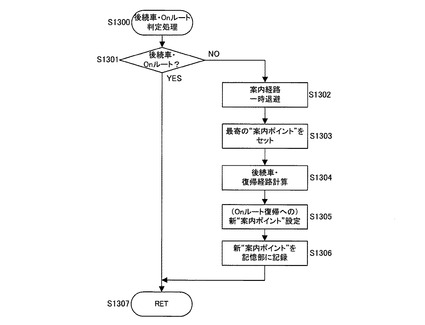
【図24】
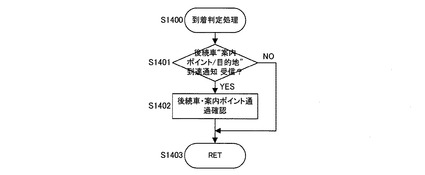
【図25】
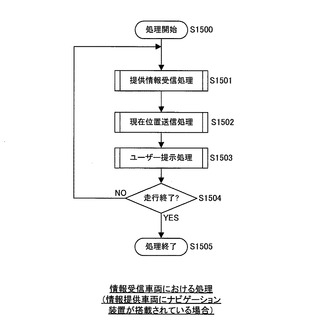
【図26】
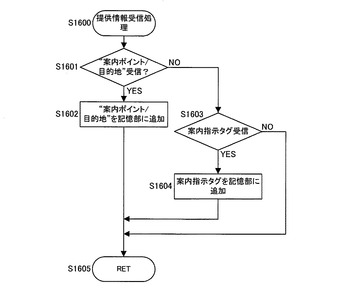
【図27】
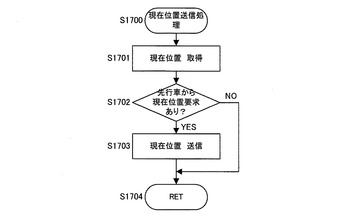
【図28】
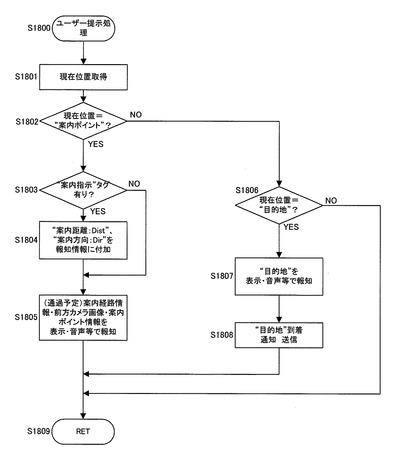
【図29】
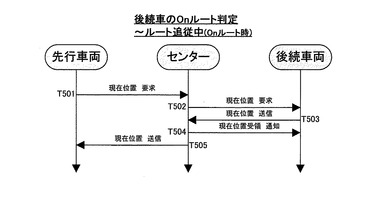
【図30】
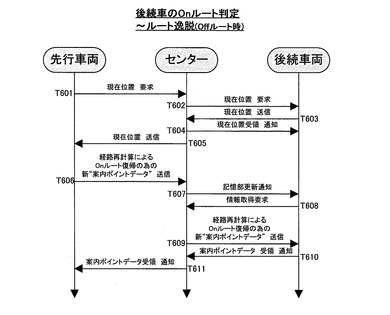
【図31】
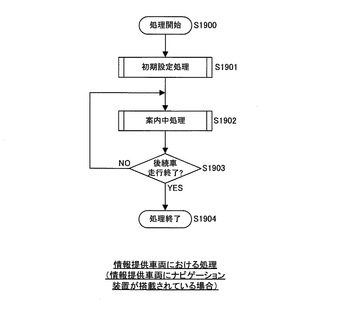
【図32】
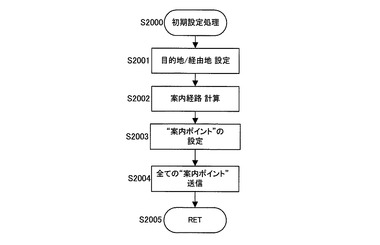
【図33】
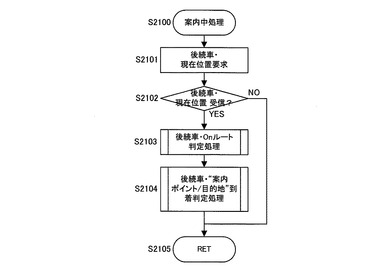
【図34】
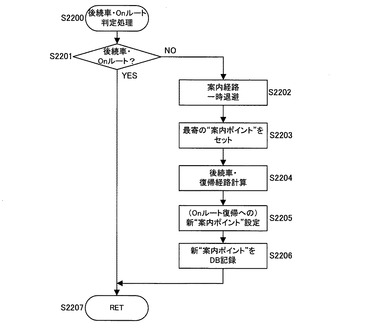
【図35】
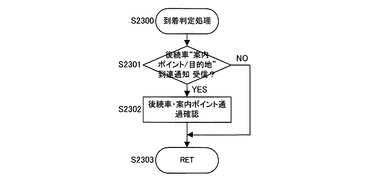
【図36】
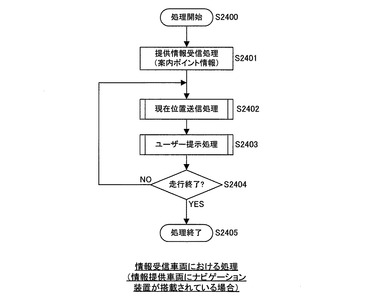
【図37】
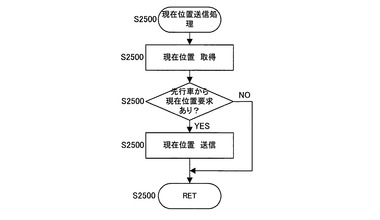
【図38】

【図39】
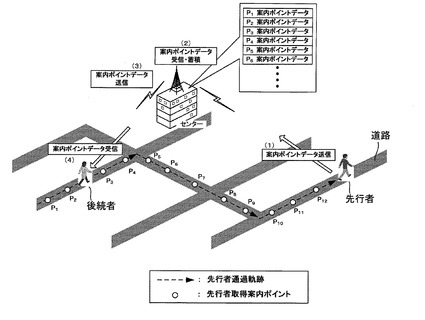
【図40】
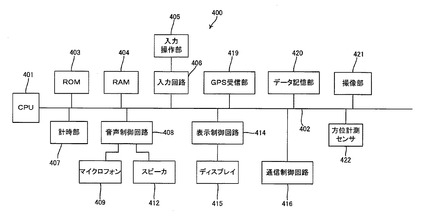
【図41】
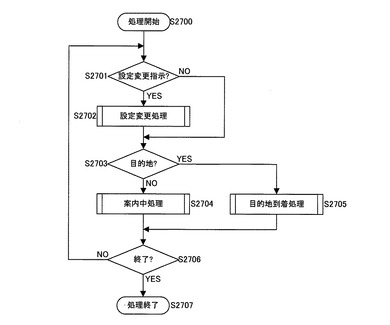
【図42】
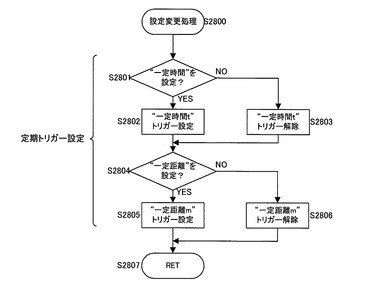
【図43】
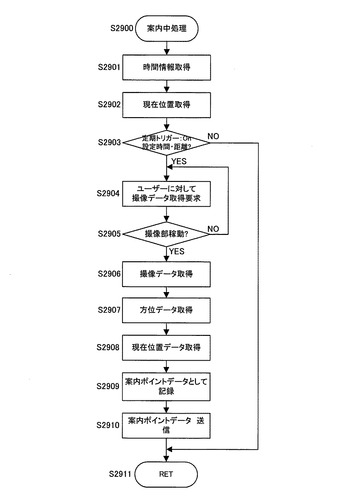
【図44】
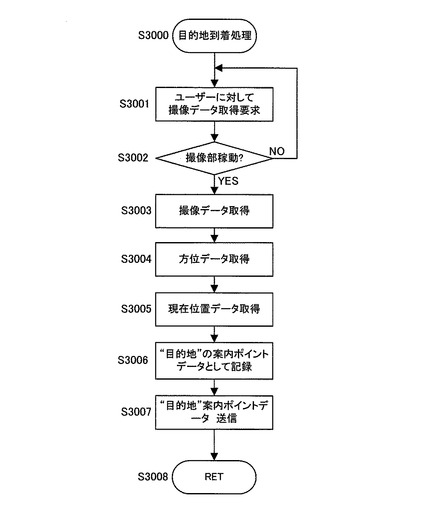
【図45】
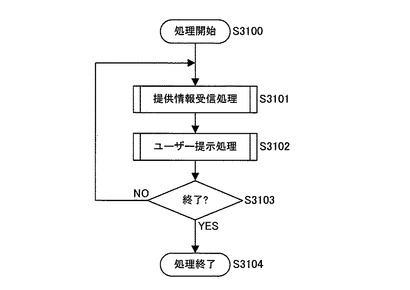
【図46】
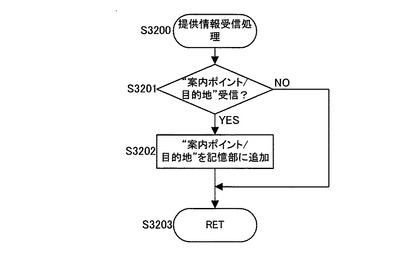
【図47】
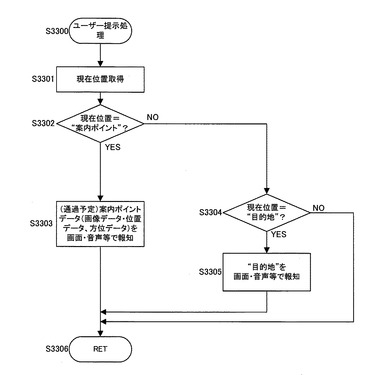
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【公開番号】特開2011−134161(P2011−134161A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−293910(P2009−293910)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]