
情報提供プログラム、情報提供装置および情報提供方法
【課題】停止禁止となる特定領域内の停止を防ぎ他者の通行を妨げず潤滑な交通を支援すること。
【解決手段】情報提供装置は、移動体(全長x)の進行方向に沿って移動体を検知するカメラ101が設置されている。そして、カメラ101から取得された移動体の画像を用いて、移動体の物理量を計測することによって、停止禁止領域(図1の例ではx座標0に位置する横断歩道)の前後の領域に位置する移動体の走行状況を特定することができる。その後、特定された走行状況に基づいて、停止禁止領域の手前の移動体に対して情報提供を行う。
【解決手段】情報提供装置は、移動体(全長x)の進行方向に沿って移動体を検知するカメラ101が設置されている。そして、カメラ101から取得された移動体の画像を用いて、移動体の物理量を計測することによって、停止禁止領域(図1の例ではx座標0に位置する横断歩道)の前後の領域に位置する移動体の走行状況を特定することができる。その後、特定された走行状況に基づいて、停止禁止領域の手前の移動体に対して情報提供を行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、走行中の移動体に交通状況に関する情報を提供する情報提供プログラム、情報提供装置および情報提供方法に関する。
【背景技術】
【0002】
従来より、安全かつ混雑の少ない交通環境を提供するために、横断歩道や交差点など、移動体同士が交差する可能性のある箇所での通行を潤滑に行わせるための技術の提供が求められてきた。移動体同士が交差する可能性のある箇所では、道路の混雑状況や、移動体の判断ミスによって、本来交差する移動体の走行を阻害してしまうことがある。
【0003】
そこで、歩行者の横断を補助する交通制御システムの提供例として、歩行者用押しボタン装置や視覚障害者用信号補助スピーカ装置などが挙げられる。歩行者用押しボタン装置は、交通量の多い幹線道路などにおいて、車両の円滑な交通とともに歩行者が安全に横断することを可能にしている。また、視覚障害者用信号補助スピーカ装置は、音声によって横断の可否を判断できるように視覚障害者の横断を補助している。
【0004】
ところが、信号機の切り替え機能は、あらかじめ与えられた制御システムに依存するため、実際の歩行者や車両の交通状況とは独立して動作する。したがって、高齢者や杖などの歩行支援器具の利用者など、歩行速度の遅い人々が横断歩道を通過する場合、横断の途中であっても信号機が切り替わってしまうような事態も発生していた。信号機が切り替わると、横断歩道の上であっても、交差する道路を通過しようとする車両や自転車などの妨げになってしまう。さらに、最悪の場合は車両や自転車と衝突といった交通事故を起こす可能性があり、非常に危険であった。
【0005】
そこで、高齢者などの横断歩道の通過に時間を要する歩行者でも安全に横断できるように、信号機の切り替え時間を制御する技術が開示されている。上述の技術を適用することによって、信号が切り替わっても、横断歩道内に歩行者が取り残されるような事態を防ぎ、横断歩道内での交通事故を防ぐことができる(たとえば、下記特許文献1参照)。
【0006】
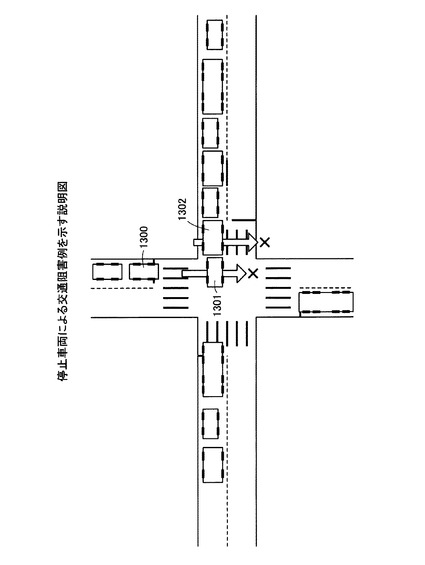
図13は、停止車両による交通阻害例を示す説明図である。上記特許文献1の技術を利用した場合であっても、図13のように、交通渋滞箇所では、横断歩道や交差点の先に十分な空間がないにも関わらず進入する車両1301,1302によって、横断歩道や交差点内に車両が停止してしまうことがある。したがって、歩行者や他の車両1300の通行の妨げとなる事態が日常的に発生している。
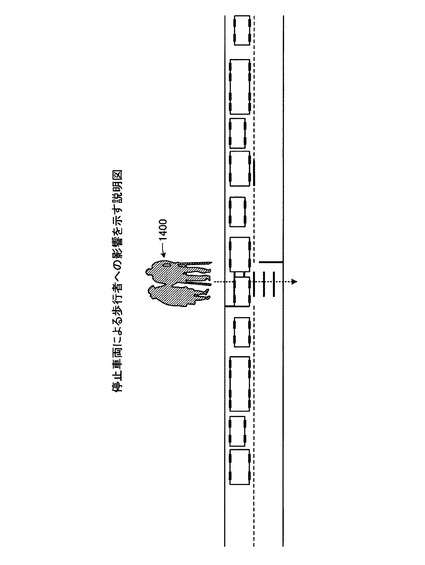
【0007】
また、図14は、停止車両による歩行者への影響を示す説明図である。図14のように、高齢者や車椅子や松葉杖を利用する歩行者1400は、横断歩道内の停止車両を適切に回避して横断することは困難な場合が多い。さらに、最悪の場合には、停止車両と接触してしまう恐れもあった。したがって、横断歩道や交差点内に車両が停止してしまうことは車両の運転者や通常の歩行者が想定するよりも非常に危険な行為となることがある。
【0008】
そこで、交差点での車両通行に関して、交差点への進入におけるジレンマ状態とオプション状態と呼ばれる状態を回避するため、交差点手前で安全に停止または通過させるための情報を提供する技術も開示されている(たとえば、下記特許文献2,3参照。)。さらに、交差点と交差点の手前に設置した2通りの車両検知器により、駐車場や近隣施設からの車両の出入りを加味した交通流量を算出し、算出された交通流量に応じて信号時間を調整する信号制御システムも開示されている(たとえば、下記特許文献4参照。)。
【0009】
また、自車の周囲の環境情報を取得し、取得情報に基づいて適切な運転動作を指令する信号を自動生成することによって、運転者に対して安全な走行を支援する技術も開示されている。具体的には、自車の前方を走行する直前車両の進行状況(位置・速度)に基づいて交差点通過後に進入する空間が確保できるかを判定することによって、交差点手前で停止可能か否かを判定して、運転者に判定結果に応じた信号を提供することができる(たとえば、下記特許文献5参照。)。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−101576号公報
【特許文献2】特開2009−43174号公報
【特許文献3】特開2009−70000号公報
【特許文献4】特開2003−77091号公報
【特許文献5】特開2001−52297号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上述の従来技術を利用した場合であっても、道路状況は常に変化するため、交差する道路の双方の車両の運転者や歩行者がそれぞれ余裕を持った移動を実現させることは困難であった。
【0012】
たとえば、上記特許文献2,3の技術の場合であっても、交差点の手前(上流)における交通状況しか考慮されておらず、交差点の先(下流)の車両の混み具合に応じて交差点に進入してよいかどうかという判断はなされていない。同様に、上記特許文献4の場合も交差点より上流における交通状況しか考慮されておらず、下流側の交通状況は右左折の分岐車と横断歩行者との交錯を計測誤差として取り入れているのみであった。したがって、下流の車両の混み具合に応じて交差点に進入してよいかどうかという判断ができないという問題があった。
【0013】
また、上記特許文献5の技術では、直前車両の進行状況だけで進入可否の判定を行なう。しかし、上述の技術では判定基準が厳しすぎるため、実用的ではないという問題があった。また、車両側に安全走行支援装置を搭載する必要があり、たとえ、有効な技術であっても、その恩恵が車載機を搭載している車両だけに限定されてしまう。すなわち、依然として多くの場合、横断歩道や交差点の先に十分な空間があるか否かの判断は、運転者の経験や勘によってなされている。したがって、運転者の経験や勘に依存せず、どのような運転者であっても横断歩道や交差点内で車両を停止させない運転ができるよう情報提供を可能にする技術が求められている。
【0014】
本開示技術は、上述した従来技術による問題点を解消するため、通行車両の停止禁止領域内の停止を防ぐことによって他者の通行を妨げず潤滑な交通を支援する情報提供プログラム、情報提供装置および情報提供方法を提供することを目的とする。
【課題を解決するための手段】
【0015】
上述した課題を解決し、目的を達成するため、本開示技術は、道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する処理と、前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両と前記停止禁止領域の後方に存在する先頭車両との車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する処理と、取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する処理と、算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過できるか否か判定する処理と、判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する、を含むことを要件とする。
【発明の効果】
【0016】
本情報提供プログラム、情報提供装置および情報提供方法によれば、通行車両の停止禁止領域内の停止を防ぐことによって他者の通行を妨げず潤滑な交通を支援することができるという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】本実施の形態にかかる情報提供処理の一例を示す説明図である。
【図2】撮影画像を用いた物理量算出の手法を示す説明図である。
【図3】各要素と車間距離との関連を示す図表である。
【図4】各要素を細分化した図表である。
【図5】進入可能時の検知例を示す説明図である。
【図6】進入不可時の検知例を示す説明図である。
【図7】情報提供装置のハードウェア構成を示すブロック図である。
【図8−1】情報提供装置の機能的構成を示すブロック図である。
【図8−2】情報提供処理の手順を示すフローチャートである。
【図9】撮影画像を利用した情報提供処理の手順を示すフローチャートである。
【図10】車両検知処理の手順を示すフローチャートである。
【図11】進入可否判定処理の手順を示すフローチャートである。
【図12】情報提供器の表示例を示す説明図である。
【図13】停止車両による交通阻害例を示す説明図である。
【図14】停止車両による歩行者への影響を示す説明図である。
【発明を実施するための形態】
【0018】
以下に添付図面を参照して、この発明にかかる情報提供プログラム、情報提供装置および情報提供方法の好適な実施の形態を詳細に説明する。
【0019】
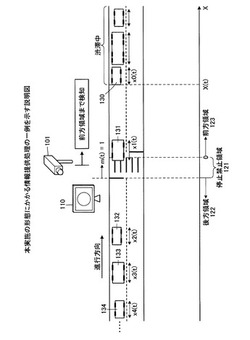
図1は、本実施の形態にかかる情報提供処理の一例を示す説明図である。なお、以下の説明では、交差点や横断歩道などを停止禁止領域121とする。また、停止禁止領域の手前(上流側)を後方領域122、停止禁止領域の先(下流側)を前方領域123と呼んで適宜説明する。
【0020】
図1のように、本実施の形態では、車両(全長x)の進行方向に沿って車両を検知するカメラ101が設置されている。そして、カメラ101から取得された車両の画像を用いて、車両に関する物理量を計測することによって、停止禁止領域121(図1の例ではx座標0に位置する横断歩道)および前方領域123,後方領域122に位置する車両の走行状況を特定することができる。その後、特定された走行状況に基づいて、後方領域122に存在する車両に対して情報提供を行う。
【0021】
本実施の形態にかかる情報提供処理の場合、以下の5点に留意して処理を行う。
【0022】
1)後方領域122の交通状況ばかりでなく、前方領域123の交通状況を検知することにより、これまで解決できなかった停止禁止領域121での停止を防ぐよう情報を提供する。
【0023】
2)後方領域122の交通に比べて、前方領域123の交通は注目している停止禁止領域121との相関が小さい。したがって、前方領域123の交通状況を判断する基準が従来技術では特定されていなかった。そこで本実施の形態では、前方領域123に存在する渋滞の最後尾の停止車両130を基準とする。
【0024】
3)渋滞の最後尾の停止車両130の停止をイベントトリガとして、後続車両の侵入可否判定を開始する。
【0025】
4)車両停止時の予想車間距離を、車両型式、その道路の交通量、法定速度、時刻などに応じて1〜5メートル程度の範囲で設定する。
【0026】
5)交通集中を単一の物理量として単純化し、簡単な四則演算により進入可否判定を行う。
【0027】
したがって、図1のように本実施の形態では、停止禁止領域121および前方領域123,後方領域122に存在する車両を検知するカメラ101が少なくとも1台設置される。カメラ101には道路を走行する車両の位置・大きさを検知する機能と車両の速度を検知する機能とが備わっている。なお、カメラ101は、車両の位置・大きさと速度をともに測定することができ、特に、昼夜の変化による画像への影響が少ない、遠赤外線カメラが望ましい。
【0028】
また、情報提供処理は、情報提供器110を利用して、停止禁止領域121への進入可否の判定結果を表示する。情報提供器110では、進入可否についての判定結果を、点灯/消灯、○/×、進/止といった可/不可を2段階で表示してもよいし、あと何台進入可能かを具体的な数字で表示してもよい。さらに、表示にとどまらず、警告音などを発生してもよい。
【0029】
なお、本実施の形態にかかる情報提供処理は上述の以下の処理1〜処理5を実行している。
【0030】
処理1:道路内の停止禁止領域121および停止禁止領域の前後領域122,123を含む対象領域内に存在する車両130〜134の全長および速度、すなわち車両に関する物理量を算出する。
【0031】
処理2:対象領域(121,122,123)内に存在する車両130〜134のうち、停止禁止領域の前方領域123に存在する渋滞の最後尾の停止車両130から停止禁止領域の後方領域122に存在する先頭車両132までの予想車間距離を、細分化された交通状況に基づいて決定する。
【0032】
処理3:先頭車両132の全長と、先頭車両132から最後尾の停止車両130までの領域に存在する車両の全長と、決定された予想車間距離とを加算することにより、先頭車両の132停止に要する領域の長さを算出する。
【0033】
処理4:算出された先頭車両132の停止に要する領域の長さと、最後尾の停止車両130から停止禁止領域121までの距離とを比較して、先頭車両132が停止禁止領域121を通過可能か否か判定する。
【0034】
処理5:判定結果を先頭車両132へ情報提供を行う情報提供器110へ出力する。
【0035】
そこで、以下には各処理の詳細な内容について説明する(参照する図面、数式の関係により、一部説明する処理の順序が前後する)。
【0036】
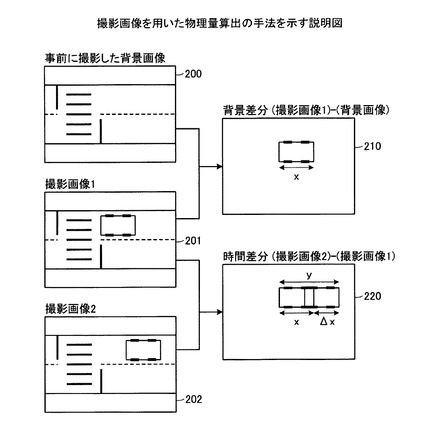
<車両に関する物理量の算出処理:処理1>
図2は、撮影画像を用いた物理量算出の手法を示す説明図である。図2を用いて、カメラ101の撮影画像を用いた車両の物理量の算出について説明する。図2のように、ある時点で撮影した撮影画像1(画像201)と事前に撮影しておいた背景画像(画像200)との背景差分(画像210)を作成することによって、車両の形状を得ることができる。したがって、画像210の形状から車両の全長xを求めることができる。また、画像201上での形状の位置から撮影時の車両の位置を求めることができる。
【0037】
続いて、Δtの時間差で撮影した撮影画像2(画像202)と撮影画像1(画像201)の時間差分(画像220)を作成することによって、Δt間の車両の軌跡が特定される。特定された軌跡には、車両がΔt間に移動した位置変化量Δxと車両の全長xが含まれる。そこで、軌跡の長さyから車両の全長xを差し引くことで、位置変化量Δxが得られる。この位置変化量Δxを時間差Δtで除すると、この車両のΔt間の速度を求めることができる。
【0038】
<停止に要する領域の長さの決定処理:処理3>
上述のように、車両についての物理量が算出され、さらに、停止禁止領域の前方領域123において、ある時刻tに停止車両を検知した場合について、図1に示した各値を下記のように特定する。
【0039】
・最後尾の停止車両(すなわち渋滞の最後尾の車両)130から停止禁止領域121までの距離
X(t)
・最後尾の停止車両130より後方の全ての車両の全長
x1(t),x2(t),x3(t),…,x(t),…
・最後尾の停止車両130より後方、かつ、停止禁止領域121を通過あるいは到達している車両131の台数
m(t)
【0040】
上記の各値は、カメラ101が検知できる可能な範囲内で一時的に記録される。そして、以上の各値と物理量とを利用して、車両と予想車間距離の和を下記(1)式のように算出する。なお、下記(1)式のように算出した、予想される車両の全長と車間距離の和、すなわち渋滞の最後尾の停止車両130から数えてn台目までの車両が停止に要する領域の長さをL(n,t)とおく。なお、添え字nやtなどは、それらを強調する場合以外は省略する(L(n,t)の場合、Lと省略する)。
【0041】
【数1】

【0042】
<予想車間距離の決定処理:処理2>
上記(1)において、Int(n,t)は、時刻tにおけるn台目の車両停止時の予想車間距離であり、1.道路の法定速度、2.道路の交通量、3.時刻、4.車両型式(または、直前車両の全長)などに応じて1〜5メートル程度の範囲の中から適宜決定される。
【0043】
上記1.〜4.を予想車間距離に反映させるためには、各項目に基づき交通状況を細分化する。そして、予想車間距離は、カメラ101から次々に求まる実車間距離を用いて、細分化した交通状況におけるデータベースとして平均を取ることにより算出される。
【0044】
具体的には、まず、1.〜4.の各項目が車間距離に与える影響を箇条書きに示す。上記の1.の法定速度が速い場合、追突時の多重衝突を避けるため、停止時の車間距離は広く取る傾向がある。反対に、法定速度が遅い場合、車間距離は縮まる傾向にある。
【0045】
また、上記2.の交通量が多いほど混雑が起きやすく、車間距離は縮まる傾向にある。反対に、交通量が少ない場合は広がる傾向にある。
【0046】
また、上記3.の時刻は、平日の朝、夕の通勤・帰宅時間帯は混雑が起きやすく、車間距離は縮まる傾向がある。一方、夜間や休日は混雑が起きにくく、車間距離は広がる傾向がある。
【0047】
また、上記4.の車両型式は、直前にトラックやバスなどの大型車が走行していると視界が悪くなるため、後続車は車間距離を大きく取る傾向がある。一方、直前が軽自動車や車高が低い車両の場合には逆の傾向がある。しかし、カメラ101から正確な車両型式や高さを判断するのは難しいため、直前車両(n−1台目)の全長をパラメータとする。
【0048】
図3は、各要素と車間距離との関連を示す図表である。上述した各要素と車間距離との関連を一覧にまとめると、図3の図表のようになる。
【0049】
つぎに、上述した各要素を複数の交通状況に細分化する。図4は、各要素を細分化した図表である。図4の図表は、上記の各要素を、それぞれ3通り以上に細分化した例を示している。ここで、上記1.の法定速度に関しては、カメラ101が設置される道路によって決まる定数であるため、図4の図表の場合、法定速度以外の要素の組み合わせによって、36通りの交通状況として細分化することができる。
【0050】
図4の図表より、法定速度を定数とすると36通りの交通状況が考えられる。ある交通状況をP、これまでに測定された交通状況Pの実車間距離の数をN、N台目の実車間距離をINT(P,N)とすると、次の車両の予想車間距離Int(P,N)は、下記(2)式によって求めることができる。
【0051】
【数2】
【0052】
ただしN=0の場合、Int(P,0)は、標準的な停止時の車間距離とされる3mとする。Int(P,N)はNが大きくなるほどその道路における最適値へと収束する。このInt(P,N)を、時刻tにおけるn台目の車両停止時の予想車間距離に適用したものがInt(n,t)である。なお、ここでは図4の図表を元にした36通りに細分化した交通状況を示したが、上記3.の時刻をより細かく場合分けするなど各要素を異なる方法で細分化してもよい。
【0053】
<通過可否の判定処理、情報提供を行う任意の機器への出力処理:処理4,5>
上述のように予想車間距離が決定されると、渋滞の最後尾の停止車両130から数えてn台目までの車両が停止に要する領域の長さL(n,t)が求まる。この長さL(n,t)を渋滞の最後尾の停止車両130から停止禁止領域121までの距離X(t)と比較し、L(n,t)<X(t)となる最大の車両台数n(t)を求める。この車両台数n(t)から既に停止禁止領域121へ進入している車両131の台数m(t)を差し引くことで、停止禁止領域121に進入できる最大の車両台数をn(t)−m(t)として求めることができる。このn(t)−m(t)が正の整数であれば、m(t)+1台目の車両も進入可能となる。
【0054】
ここで、図5は、進入可能時の検知例を示す説明図であり、図6は、進入不可時の検知例を示す説明図である。図5は、n(t)−m(t)>0の事例を表している。具体的には、上記変数において、m(t)=2,n(t)=3となるため、n(t)−m(t)>0となる。したがって、つぎに停止禁止領域121に進入するm(t)+1台目の車両も進入可能であるので、情報提供器110には、「○」や「進」といった情報を情報提供装置により提供する。
【0055】
また、図6は、n(t’)−m(t’)≦0の事例を表している。具体的には、上記変数において、m(t’)=1,n(t’)=1となるため、n(t’)−m(t’)=0となる。したがって、これ以上の車両の進入は不可能であるので、情報提供器110に「×」や「止」といった情報を提供する。したがって、次に停止禁止領域121に進入するm(t’)+1台目の車両が進入するのを抑制し、停止禁止領域121の白線の手前に停止させることができる。
【0056】
以上説明したように、本実施の形態にかかる情報提供処理を利用することによって、運転者の経験や勘に依存せず、簡易な処理のみで、直前車両の位置・速度だけで判定していた従来の進入可否判定よりも正確に、進入可否の判定を実現することができる。また、本実施の形態では、特別な車載機を必要としないため、従来技術のように適用可能な車両が限定されず、幅広く適用させることができる。
【0057】
本実施の形態にかかる情報提供処理を利用することによって、歩行者はより安全に道路を横断できる。また、他方向の車両交通を妨げないため、余計な渋滞の発生を減らすことが可能である。また、本実施の形態にかかる情報提供処理は、車両に特別な車載機を搭載することなく単独動作でも十分な機能を発揮できるが、通信機能を付加することによって、広域交通管制システムに車両混雑状況を送信してもよい。さらに、車載機を搭載した車両に停止信号を送信してもよい。
【0058】
なお、上述した情報提供処理は、特に、警察署・病院のような緊急車両の出入口や踏切を停止禁止領域として適用することによって、より効果的に利用することができる。また移動体は車両に限定されず、歩行者の列を分断する用途などに用いることも有効である。さらに、測定する物理量は長さに限定されず、面積など他の物理量を用いてもよい。
【0059】
以下に、上述した情報提供処理を実現する情報提供装置100の具体的な構成や処理手順について説明する。
【0060】
(情報提供装置のハードウェア構成)
図7は、情報提供装置のハードウェア構成を示すブロック図である。図7において、情報提供装置100は、CPU(Central Processing Unit)701と、ROM(Read‐Only Memory)702と、RAM(Random Access Memory)703と、磁気ディスクドライブ704と、磁気ディスク705と、光ディスクドライブ706と、光ディスク707と、ディスプレイ708と、I/F(Interface)709と、キーボード710と、マウス711と、イメージングデバイス712と、プリンタ713と、を備えている。また、各構成部はバス700によってそれぞれ接続されている。
【0061】
ここで、CPU701は、情報提供装置100の全体の制御を司る。ROM702は、ブートプログラムや、情報提供処理を実現するための情報提供プログラムなどの各種プログラムを記憶している。RAM703は、CPU701のワークエリアとして使用される。磁気ディスクドライブ704は、CPU701の制御にしたがって磁気ディスク705に対するデータのリード/ライトを制御する。磁気ディスク705は、磁気ディスクドライブ704の制御で書き込まれたデータを記憶したり、磁気ディスク705に記憶されたデータをコンピュータに読み取らせたりする。
【0062】
光ディスクドライブ706は、CPU701の制御にしたがって光ディスク707に対するデータのリード/ライトを制御する。光ディスク707は、光ディスクドライブ706の制御で書き込まれたデータを記憶したり、光ディスク707に記憶されたデータをコンピュータに読み取らせたりする。
【0063】
ディスプレイ708は、カーソル、アイコンあるいはツールボックスをはじめ、文書、画像、機能情報などのデータを表示する。このディスプレイ708は、たとえば、CRT、TFT液晶ディスプレイ、プラズマディスプレイなどを採用することができる。
【0064】
インターフェース(以下、「I/F」と略する。)709は、通信回線を通じてLAN(Local Area Network)、WAN(Wide Area Network)、インターネットなどのネットワーク714に接続され、このネットワーク714を介して他の装置に接続される。そして、I/F709は、ネットワーク714と内部のインターフェースを司り、外部装置からのデータの入出力を制御する。I/F709には、たとえばモデムやLANアダプタなどを採用することができる。
【0065】
キーボード710は、文字、数字、各種指示などの入力のためのキーを備え、データの入力を行う。また、タッチパネル式の入力パッドやテンキーなどであってもよい。マウス711は、カーソルの移動や範囲選択、あるいはウィンドウの移動やサイズの変更などを行う。ポインティングデバイスとして同様に機能を備えるものであれば、トラックボールやジョイスティックなどであってもよい。
【0066】
イメージングデバイス712は、画像を光学的に読み取り、情報処理装置100内に画像データを取り込む。イメージングデバイス712には、移動体を検知するカメラ101の他に、スキャナなどを採用することができる。なお、イメージングデバイス712は、OCR(Optical Character Reader)機能を持たせてもよい。また、プリンタ713は、画像データや文書データを印刷する。プリンタ713には、たとえば、レーザプリンタやインクジェットプリンタを採用することができる。
【0067】
(情報提供装置の機能的構成)
図8−1は、情報提供装置の機能的構成を示すブロック図である。情報提供装置100は、取得部801と、決定部802と、算出部803と、判定部804と、出力部805と、特定部806と、画像処理部810と、を含む構成である。この制御部となる機能(取得部801〜画像処理部810)は、具体的には、たとえば、図7に示したROM702、RAM703、磁気ディスク705、光ディスク707などの記憶装置に記憶されたプログラムをCPU701に実行させることにより、または、I/F709により、その機能を実現する。
【0068】
取得部801は、対象領域内に存在する車両に関する情報を取得する機能を有する。車両に関する情報とは、イメージングデバイス712またはI/F709から入力される、対象領域(道路内の停止禁止領域121および前方領域123,後方領域122を含む領域)内に存在する車両の全長や速度を含んだ車両情報111や、単純に対象領域を撮影した撮影画像112を意味する。取得された情報(車両情報111もしくは撮影画像112)は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0069】
なお、取得部801が車両情報111を取得した場合には、そのまま後述する機能部(決定部802、算出部803、判定部804)によって、対象車両への提供情報113を作成する。一方、撮影画像112を取得した場合には、後述する画像処理部810によって、対象となる車両の全長や速度を特定した後、提供情報113を作成する。
【0070】
決定部802は、対象領域内の特定車両が停止する場合に必要な前方車両との予想車間距離を決定する機能を有する。具体的には、決定部802は、対象領域内に存在する車両のうち、前方領域123に存在する最後尾の停止車両130から、後方領域122に存在する先頭車両132までの各予想車間距離を決定する。決定部802は、細分化された複数の交通状況の中から最適な交通状況Pを選択し、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶された予想車間距離のリストから、交通状況Pに対応する予想車間距離を読み出すことで、n台目とn−1台目との予想車間距離Int(n,t)を決定する。
【0071】
なお、予想車間距離Intを決定する際には、上述した交通状況とは別に、時刻をより細かく場合分けするなど各要素を異なる方法で細分化した交通状況を用いてもよい。さらに、車両の走行速度や周辺道路の混雑状況など様々な要素を利用してもよい。決定された予想車間距離Intは、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0072】
算出部803は、対象領域内の特定車両の停止に要する領域の長さを算出する機能を有する。具体的には、算出部803は、取得部801によって取得された先頭車両132の全長と、先頭車両132から最後尾の停止車両130までの間に存在するm台の車両131の各全長と、決定部802によって決定された予想車間距離Intとを加算する。この加算結果が、すなわち、先頭車両の停止に要する領域の長さとなる。また、先頭車両132から最後尾の停止車両130までの間に車両が存在しない場合(m=0)、算出部803は、先頭車両132の全長と車間距離Intだけを加算すればよい。算出された停止に要する領域の長さは、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0073】
判定部804は、上述した先頭車両132が停止禁止領域121を、通過可能か否かを判定する機能を有する。停止禁止領域121を通過可能とは、すなわち、前方領域123に停止可能か否かの判定である。前方領域123に停止できることが、先頭車両132が停止禁止領域121上で停止しないための必須条件となる。具体的には、判定部804は、算出部803によって算出された先頭車両132の停止に要する領域の長さと、最後尾の停止車両130から停止禁止領域121までの距離Xとを比較して、先頭車両132が停止禁止領域121を通過できるか否か判定する。判定結果は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0074】
なお、取得部801において、最後尾の停止車両130の停止に関する車両情報111が取得されなかった場合には、前方領域123に十分な空き領域があることを意味する。したがって、判定部804では、上述のように最後尾の停止車両130の停止に関する車両情報111が取得されなかった場合には、決定部802および算出部803の処理を省略して、即座に、先頭車両132が停止禁止領域121を通過できると判定することができる。
【0075】
出力部805は、判定部804によって判定された判定結果を先頭車両132の運転者へ出力する機能を有する。具体的には、出力部805は、先頭車両へ情報提供を行う任意の機器へ出力している。任意の機器としては、たとえば、停止禁止領域121の近傍に設定された情報提供器110が挙げられる。また出力部805は無線通信を利用して、先頭車両の車載機器(ナビゲーション機器や各種AV機器)へ直接判断結果を出力してもよい。出力形式としては、たとえば、ディスプレイ708への表示、プリンタ713への印刷出力、I/F709による外部装置への送信がある。また、出力する提供情報113をRAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶することとしてもよい。
【0076】
上述したように、情報提供装置100の出力部805では、判定部804による判定結果を出力する。その他にも、情報提供装置100は、取得部801によって得られた情報と算出部803によって算出された情報とを利用して、空き領域に進入可能な車両の台数nを特定して、提供情報113として出力させることもできる。
【0077】
特定部806は、後方領域122に存在する先頭車両132や車両133,134のうち、停止禁止領域121に進入可能な台数を特定する機能を有する。具体的には、特定部806は、算出部803によって算出された各車両の全長と予想車間距離の和L(n,t)に基づいて、停止禁止領域121に進入可能な後続の先頭車両132や車両133,134の台数n−mを特定する。特定された後続の先頭車両132や車両133,134の台数は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。そして、出力部805は、特定部806によって特定された進入可能な後続の先頭車両132や車両133,134の台数を提供情報113として出力してもよい。
【0078】
画像処理部810は、取得部801によって対象領域を撮影した撮影画像112を利用して対象領域内に存在する車両の全長と速度とを特定する機能を有する。具体的には、画像処理部810は、抽出部811と、検知部812と、全長算出部813とを含む構成である。情報提供装置100が、車両情報111を取得できない場合や、車両情報111を生成する各種装置が用意されていない場合には、画像処理部810によって車両の全長や速度を特定して情報提供処理を実現することができる。
【0079】
画像処理部810の抽出部811は、撮影画像112から所定の画像を抽出する機能を有する。具体的には、抽出部811は、取得部801が対象領域を撮影した撮影画像112を取得した場合、撮影画像112から前方領域123に存在する渋滞の最後尾の停止車両130の画像と、後方領域122に存在する先頭車両132の画像とを抽出する。抽出された画像は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0080】
検知部812は、撮影画像112内の特定の車両の速度を検知する機能を有する。具体的には、検知部812は、撮影画像112と、撮影画像112の前後の時刻に撮影された撮影画像との差分から、抽出部811によって抽出された前方領域123に存在する渋滞の最後尾の停止車両130の停止を検知する。なお、全長と速度の検知は、図2にて説明した物理量算出の手法を利用する。車両の全長および速度は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0081】
全長算出部813は、撮影画像112の内の特定の車両の全長を算出する機能を有する。具体的には、全長算出部813では、検知部812によって検知された先頭車両の画像の長さから先頭車両の全長を算出する。算出された特定の車両の全長は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0082】
上述のように、画像処理部810の各機能を利用した場合、決定部802では、検知部812によって検知された交通状況Pに基づいて最後尾の停止車両130から先頭車両132までの予想車間距離を決定する。同様に、算出部803では、全長算出部813によって算出された先頭車両132の全長と先頭車両132から最後尾の停止車両130までの間に存在するm台の車両131の各全長と、決定部802によって決定された予想車間距離とを加算することにより、先頭車両132の停止に要する領域の長さを算出する。
【0083】
その後、判定部804においても、算出部803によって算出された先頭車両132の停止に要する領域の長さと、撮影画像112が示す最後尾の停止車両130から停止禁止領域121までの距離Xとを比較して、先頭車両132が停止禁止領域121を通過できるか否か判定する。したがって、画像処理部810を備えることによって、車両情報111が取得できない場合であっても、撮影画像112を取得できれば、車両情報111を取得した場合と同様に、混雑状況に応じて適切な提供情報113を出力することができる。
【0084】
なお、図8−1では、どのような道路にも設定できるように、画像処理部810を含んだ構成の情報処理装置100を例示したが、あらかじめ車両情報111が取得できる道路であれば、画像処理部810の機能は不要となる。したがって、図8−1に例示した機能的構成から画像処理部810を省いた構成の情報提供装置100を設定してもよい。
【0085】
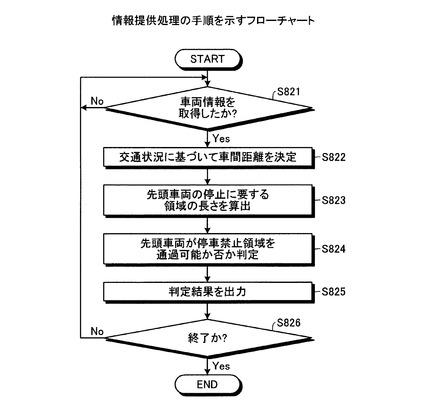
(情報提供処理の手順)
図8−2は、情報提供処理の手順を示すフローチャートである。図8−2のフローチャートは、対象領域内の道路の混雑状況に基づいて、後方領域122に存在する先頭車両132や車両133,134に対して、停止禁止領域121を通過可能か否かについての情報を提供するまでの手順を示している。図8−2の各処理を実行することによって、後方領域122に存在する先頭車両132や車両133,134の安全な走行を支援することができる。
【0086】
図8−2において、情報提供装置100は、まず、取得部801によって、車両情報111を取得したか否かを判断する(ステップS821)。情報提供装置100は、ステップS821において車両情報111が取得されたと判断されるまで待機状態となる(ステップS821:Noのループ)。
【0087】
ステップS821において、車両情報111が取得されると(ステップS821:Yes)、情報提供装置100は、決定部802によって、交通状況に基づいて予想車間距離を決定する(ステップS822)。ステップS822では、交通状況の各要素に基づいて、予想車間距離を決定している。具体的には、細分化された複数の交通状況の中から最適な交通状況Pを選択し、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶された予想車間距離のリストから、交通状況Pに対応する予想車間距離を読み出すことで、n台目とn−1台目との予想車間距離Int(n,t)を決定する。
【0088】
その後、情報提供装置100は、算出部803によって、後方領域122に存在する先頭車両132の停止に要する領域の長さを算出する(ステップS823)。そして、情報提供装置100は、判定部804によって、先頭車両132が停止禁止領域121を、通過可能か否かを判定する(ステップS824)。
【0089】
情報提供装置100は、ステップS823によって算出された先頭車両132の停止に要する領域の長さが、最後尾の停止車両130から停止禁止領域121までの距離Xより短ければ通過可能と判定する。反対に、情報提供装置100は、ステップS823によって算出された先頭車両の停止に要する領域の長さが、最後尾の停止車両130から停止禁止領域までの距離Xより長ければ通過不可と判定する。
【0090】
その後、情報提供装置100は、出力部805によって、ステップS824の判定結果を出力する(ステップS825)。ステップS825によって出力された判定結果は、上述した先頭車両132に向けた提供情報113である。したがって、先頭車両は提供情報113に応じて進入もしくは停止することによって、停止禁止領域121に停止することのない安全な走行を実現することができる。
【0091】
その後、情報提供装置100は、装置管理者や上位システムによって終了指示を受け付けたか否かを判断する(ステップS826)。情報提供装置100は、ステップS826によって、終了指示を受け付けるまでは(ステップS826:No)、ステップS821の処理に戻り、引き続き、情報提供処理を行う。そして、情報提供装置100は、ステップS826において、終了指示を受け付けると(ステップS826:Yes)、そのまま一連の処理を終了する。なお、情報提供装置100は、道路脇に設定されるという特性から、対象となる道路が一時的に通行止めになる場合や、点検を行う場合など、特定の状況以外では、常時動作しているものとする。
【0092】
以上説明したように、本実施の形態にかかる情報提供装置100は、後方領域を走行する車両132,134に対して、そのまま走行しても停止禁止領域121上で停止せずに済むのか、もしくは、一旦停止すべきかを指示する情報を提供することができる。
【0093】
図8−1および図8−2を用いて説明した処理は、本実施の形態にかかる情報提供処理のもっとも基本的な例であり、実際には、取得される情報や、情報提供装置100の設置環境に応じて、詳細な処理手順は変化する。そこで、以下には、情報提供装置100による情報提供処理の一実施例として、道路脇に対象領域を撮影するカメラ101を設置した場合の処理手順について説明する。
【0094】
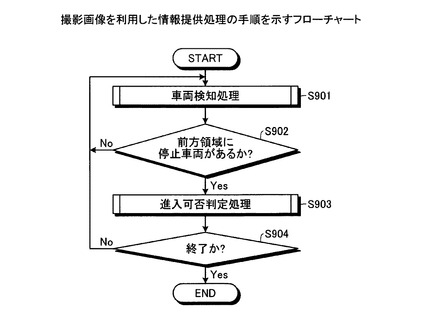
<撮影画像を利用した情報提供処理の手順>
図9は、撮影画像を利用した情報提供処理の手順を示すフローチャートである。図9において、情報提供装置100は、まず、路面の混雑状態を把握するため、車両検知処理を行う(ステップS901)。その後、情報提供装置100は、ステップS901の車両検知処理の結果を参照して、前方領域123に停止車両130があるか否かを判断する(ステップS902)。
【0095】
ステップS902において、前方領域123に停止車両130がないと判断された場合(ステップS902:No)、情報提供装置100は、ステップS901の処理に戻り、引き続き車両検知処理を行う。一方、ステップS902において、前方領域123に停止車両130があると判断された場合(ステップS902:Yes)、情報提供装置100は、停止車両130に続く後続車両について、進入可否判定処理を行う(ステップS903)。
【0096】
なお、ステップS902において、進入可否判定処理では、前方領域123に停止車両130がないと判断された場合(ステップS902:No)、前方領域123は十分に空き領域のある状況であるため、ステップS901の処理に移行する。なお、上述のように、前方領域123に十分に空き領域のある状況の場合、情報提供装置100は、即座に、情報提供器110に進入可能を示す表示を行わせてもよい。
【0097】
ステップS903の処理が終了すると、情報提供装置100は、装置管理者や上位システムによって終了指示を受け付けたか否かを判断する(ステップS904)。情報提供装置100は、ステップS904によって、終了指示を受け付けるまでは(ステップS904:No)、ステップS901の処理に戻り、引き続き、情報提供処理を行う。そして、情報提供装置100は、ステップS904において、終了指示を受けると(ステップS904:Yes)、そのまま一連の処理を終了する。
【0098】
以下には、図9のステップS901,S903の詳細な処理内容について説明する。
【0099】
<車両検知処理の手順>
図10は、車両検知処理の手順を示すフローチャートである。図10のフローチャートは、図9のステップS901の車両検知処理の詳細な手順を示している。図10の各処理を実行することによって、対象領域内に存在する車両を検知するとともに、進入可否判定処理に用いる車両の大きさや速度を検知することができる。
【0100】
図10において、情報提供装置100は、まず、対象領域の撮影を開始する(ステップS1001)。その後、情報提供装置100は、撮影画像の背景差分を求め、車両の位置と大きさを検知する(ステップS1002)。また、情報提供装置100は、撮影画像の時間差分を求め、車両の速度を検知する(ステップS1003)。なお、ステップS1002,S1003の処理の順序は問わず、可能であれば並列に処理を行ってもよい。これらステップS1002,S1003の検知処理がともに完了すると、ステップS902の処理(図9参照)に移行する。
【0101】
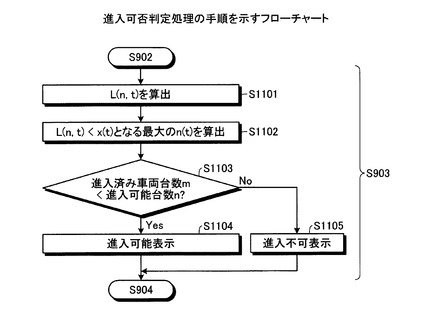
<進入可否判定処理の手順>
図11は、進入可否判定処理の手順を示すフローチャートである。図11のフローチャートは、図9のステップS903の進入可否判定処理の詳細な手順を示している。図11の各処理を実行することによって、後方領域122の先頭車両132や車両133,134が停止禁止領域121を、通過可能か否かを判断することができる。
【0102】
図11において、情報提供装置100は、まず、車両と車間距離の和L(n,t)を算出する(ステップS1101)。その後、情報提供装置100は、ステップS1101において算出したL(n,t)<x(t)となる最大の進入可能台数n(t)を算出する(ステップS1102)。
【0103】
その後、情報提供装置100は、進入済み車両台数mが、ステップS1102によって算出された進入可能台数n未満となるか否かを判断する(ステップS1103)。ステップS1103において、進入済み車両台数mが、進入可能台数n未満になると判断された場合(ステップS1103:Yes)、情報提供装置100は、後方領域122の先頭車両132に対して進入可能表示を行い(ステップS1104)、ステップS904の処理に移行する。
【0104】
一方、ステップS1103において、進入済み車両台数mが、ステップS1102によって算出された進入可能台数n以上となる場合(ステップS1103:No)、情報提供装置100は、後方領域122の先頭車両132に対して進入不可表示を行い(ステップS1105)、ステップS904の処理に移行する。
【0105】
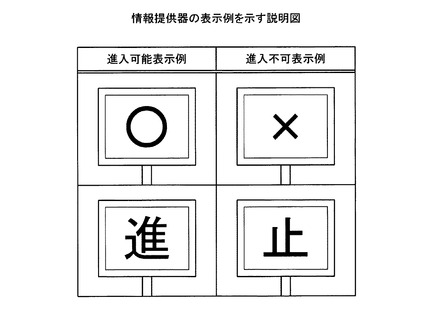
(情報提供器の表示例)
図12は、情報提供器の表示例を示す説明図である。図12を用いて、情報提供装置100から提供された情報の表示例について説明する。情報提供器110は、図11のステップS1104,S1105の処理内容に応じて情報提供装置100によって生成された提供情報113に基づいた表示を行っている。
【0106】
図12のように、情報提供装置100によって、先頭車両132が停止禁止領域121を通過できると判定された場合には、進入可能表示例として「○」や「進」を表示させ、先頭車両132の走行を促す。反対に、情報処理装置100によって、先頭車両132が停止禁止領域121を通過できないと判定された場合には、進入不可表示例として「×」や「止」を表示させ、先頭車両132の停止禁止領域121手前での停止を促す。
【0107】
また、図12の表示例の他にも、情報提供装置100によって、先頭車両132の後続車両134のうち、停止禁止領域121に進入可能な台数が特定された場合には、先頭車両132を含めた進入可能台数n−mを表示させてもよい。先頭車両132だけでなく、後続車両134を含んだ提供情報113を表示させることによって、後続車両134の運転者は、停止禁止領域121に到達するまでに余裕を持って走行もしくは停止するべきかを判断することができる。
【0108】
以上説明したように、情報提供プログラム、情報提供装置および情報提供方法によれば、停止禁止領域121とその前方領域123,後方領域122を走行する車両の交通状況を特定することによって、次に停止禁止領域121に到達する先頭車両132が停止禁止領域121に進入可能か否かを判定し、対象車両に対して進入可能か否かの判定結果を提供することができる。したがって、停止禁止領域121を含む道路における潤滑な交通を支援することができる。
【0109】
また、上記技術では、さらに、前方領域に存在する最後尾の停止車両130の停止に関する情報が取得されなかった場合には、一意的に対象車両に対して進入可能か否かの判定結果を提供することができる。したがって、車両の全長や速度を特定する処理が省略され、効率的に情報を提供することができる。
【0110】
また、上記技術では、さらに、後方領域122に存在する先頭車両132の停止に要する領域の長さと、先頭車両の全長とに基づいて、先頭車両132を含めた侵入可能台数n−mを特定する機能を備えることもできる。したがって、進入可能か否かの判定結果のみでなく、進入可能な車両の台数についての情報を提供することができる。
【0111】
また、上記技術では、さらに、予想車間距離Intを、道路の法定速度や交通量、時刻、車両の全長などの各要素で細分化された交通状況に基づいて決定している。したがって、様々な道路環境に応じて最適な予想車間距離を決定することができる。
【0112】
また、上記技術では、さらに、対象領域を撮影した撮影画像112を取得した場合には、撮影画像112の時間変化を利用して車両の全長や速度を特定する機能を備えることもできる。上述の機能を備えることによって、対象領域内に存在する車両についての車両情報111を得る機能を備えたカメラやセンサを用意せずとも、撮影画像112を取得することによって、車両情報111を取得した場合と同等に情報提供処理を実行することができる。したがって、撮影画像112を取得する機能を備えた道路であれば、容易に情報提供処理を導入することができる。
【0113】
なお、本実施の形態で説明した情報提供方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。本情報提供プログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。また本情報提供プログラムは、インターネットなどのネットワークを介して配布してもよい。
【0114】
また、本実施の形態で説明した情報提供装置100は、スタンダードセルやストラクチャードASIC(Application Specific Integrated Circuit)などの特定用途向けIC(以下、単に「ASIC」と称す。)やFPGAなどのPLD(Programmable Logic Device)によっても実現することができる。具体的には、たとえば、上述した情報提供装置100の機能(取得部801〜全長算出部813)をHDL記述によって機能定義し、そのHDL記述を論理合成してASICやPLDに与えることにより、情報提供装置100を製造することができる。
【0115】
上述した実施の形態に関し、さらに以下の付記を開示する。
【0116】
(付記1)道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
をコンピュータに実行させることを特徴とする情報提供プログラム。
【0117】
(付記2)前記判定工程では、前記最後尾の車両の全長および速度が取得されなかった場合、前記先頭車両が前記停止禁止領域を通過できると判定することを特徴とする付記1に記載の情報提供プログラム。
【0118】
(付記3)前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記先頭車両の全長とに基づいて、前記最後尾の停止車両から前記停止禁止領域までに進入可能な前記先頭車両の後続車両の台数を特定する特定工程を、前記コンピュータに実行させ、
前記出力工程では、前記特定工程によって特定された進入可能な後続車両の台数を、前記機器へ出力することを特徴とする付記1または2に記載の情報提供プログラム。
【0119】
(付記4)前記決定工程では、前記道路の法定速度に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0120】
(付記5)前記決定工程では、前記道路の交通量に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0121】
(付記6)前記決定工程では、現在時刻に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0122】
(付記7)前記決定工程では、前記先頭車両の全長に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0123】
(付記8)前記取得工程において、前記対象領域を撮影した撮影画像を取得した場合、当該撮影画像から前記最後尾の車両が含まれる画像と、前記先頭車両が含まれる画像とを抽出する抽出工程と、
前記撮影画像と、前記撮影画像の前後の時刻に撮影された撮影画像との差分から、前記抽出工程によって抽出された車両の速度を検知する検知工程と、
前記検知工程によって検知された車両の画像の長さから前記車両の全長を算出する全長算出工程と、をコンピュータに実行させ、
前記決定工程では、前記検知工程によって検知された交通状況に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定し、
前記算出工程では、前記全長算出工程によって算出された前記先頭車両の全長と当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出し、
前記判定工程では、前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記撮影画像が示す前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定することを特徴とする付記1〜7のいずれか一つに記載の情報提供プログラム。
【0124】
(付記9)道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得手段と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得手段によって取得された前記先頭車両の速度に基づいて決定する決定手段と、
前記取得手段によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定手段によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出手段と、
前記算出手段によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定手段と、
前記判定手段によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力手段と、
を備えることを特徴とする情報提供装置。
【0125】
(付記10)取得手段と決定手段と算出手段と判定手段と出力手段とを備えたコンピュータが、
前記取得手段によって、道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記決定手段によって、前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記算出手段によって、前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記判定手段によって、前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記出力手段によって、前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
を実行することを特徴とする情報提供方法。
【符号の説明】
【0126】
100 情報提供装置
101 カメラ
110 情報提供器
111 車両情報
112 撮影画像
113 提供情報
121 停止禁止領域
122 後方領域
123 前方領域
130 停止車両
132 先頭車両
131,133,134 車両
700 バス
701 CPU
702 ROM
703 RAM
704 磁気ディスクドライブ
705 磁気ディスク
706 光ディスクドライブ
707 光ディスク
708 ディスプレイ
709 I/F(インターフェース)
710 キーボード
711 マウス
712 イメージングデバイス
713 プリンタ
714 ネットワーク
801 取得部
802 決定部
803 算出部
804 判定部
805 出力部
806 特定部
810 画像処理部
811 抽出部
812 検知部
813 全長算出部
【技術分野】
【0001】
この発明は、走行中の移動体に交通状況に関する情報を提供する情報提供プログラム、情報提供装置および情報提供方法に関する。
【背景技術】
【0002】
従来より、安全かつ混雑の少ない交通環境を提供するために、横断歩道や交差点など、移動体同士が交差する可能性のある箇所での通行を潤滑に行わせるための技術の提供が求められてきた。移動体同士が交差する可能性のある箇所では、道路の混雑状況や、移動体の判断ミスによって、本来交差する移動体の走行を阻害してしまうことがある。
【0003】
そこで、歩行者の横断を補助する交通制御システムの提供例として、歩行者用押しボタン装置や視覚障害者用信号補助スピーカ装置などが挙げられる。歩行者用押しボタン装置は、交通量の多い幹線道路などにおいて、車両の円滑な交通とともに歩行者が安全に横断することを可能にしている。また、視覚障害者用信号補助スピーカ装置は、音声によって横断の可否を判断できるように視覚障害者の横断を補助している。
【0004】
ところが、信号機の切り替え機能は、あらかじめ与えられた制御システムに依存するため、実際の歩行者や車両の交通状況とは独立して動作する。したがって、高齢者や杖などの歩行支援器具の利用者など、歩行速度の遅い人々が横断歩道を通過する場合、横断の途中であっても信号機が切り替わってしまうような事態も発生していた。信号機が切り替わると、横断歩道の上であっても、交差する道路を通過しようとする車両や自転車などの妨げになってしまう。さらに、最悪の場合は車両や自転車と衝突といった交通事故を起こす可能性があり、非常に危険であった。
【0005】
そこで、高齢者などの横断歩道の通過に時間を要する歩行者でも安全に横断できるように、信号機の切り替え時間を制御する技術が開示されている。上述の技術を適用することによって、信号が切り替わっても、横断歩道内に歩行者が取り残されるような事態を防ぎ、横断歩道内での交通事故を防ぐことができる(たとえば、下記特許文献1参照)。
【0006】
図13は、停止車両による交通阻害例を示す説明図である。上記特許文献1の技術を利用した場合であっても、図13のように、交通渋滞箇所では、横断歩道や交差点の先に十分な空間がないにも関わらず進入する車両1301,1302によって、横断歩道や交差点内に車両が停止してしまうことがある。したがって、歩行者や他の車両1300の通行の妨げとなる事態が日常的に発生している。
【0007】
また、図14は、停止車両による歩行者への影響を示す説明図である。図14のように、高齢者や車椅子や松葉杖を利用する歩行者1400は、横断歩道内の停止車両を適切に回避して横断することは困難な場合が多い。さらに、最悪の場合には、停止車両と接触してしまう恐れもあった。したがって、横断歩道や交差点内に車両が停止してしまうことは車両の運転者や通常の歩行者が想定するよりも非常に危険な行為となることがある。
【0008】
そこで、交差点での車両通行に関して、交差点への進入におけるジレンマ状態とオプション状態と呼ばれる状態を回避するため、交差点手前で安全に停止または通過させるための情報を提供する技術も開示されている(たとえば、下記特許文献2,3参照。)。さらに、交差点と交差点の手前に設置した2通りの車両検知器により、駐車場や近隣施設からの車両の出入りを加味した交通流量を算出し、算出された交通流量に応じて信号時間を調整する信号制御システムも開示されている(たとえば、下記特許文献4参照。)。
【0009】
また、自車の周囲の環境情報を取得し、取得情報に基づいて適切な運転動作を指令する信号を自動生成することによって、運転者に対して安全な走行を支援する技術も開示されている。具体的には、自車の前方を走行する直前車両の進行状況(位置・速度)に基づいて交差点通過後に進入する空間が確保できるかを判定することによって、交差点手前で停止可能か否かを判定して、運転者に判定結果に応じた信号を提供することができる(たとえば、下記特許文献5参照。)。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−101576号公報
【特許文献2】特開2009−43174号公報
【特許文献3】特開2009−70000号公報
【特許文献4】特開2003−77091号公報
【特許文献5】特開2001−52297号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上述の従来技術を利用した場合であっても、道路状況は常に変化するため、交差する道路の双方の車両の運転者や歩行者がそれぞれ余裕を持った移動を実現させることは困難であった。
【0012】
たとえば、上記特許文献2,3の技術の場合であっても、交差点の手前(上流)における交通状況しか考慮されておらず、交差点の先(下流)の車両の混み具合に応じて交差点に進入してよいかどうかという判断はなされていない。同様に、上記特許文献4の場合も交差点より上流における交通状況しか考慮されておらず、下流側の交通状況は右左折の分岐車と横断歩行者との交錯を計測誤差として取り入れているのみであった。したがって、下流の車両の混み具合に応じて交差点に進入してよいかどうかという判断ができないという問題があった。
【0013】
また、上記特許文献5の技術では、直前車両の進行状況だけで進入可否の判定を行なう。しかし、上述の技術では判定基準が厳しすぎるため、実用的ではないという問題があった。また、車両側に安全走行支援装置を搭載する必要があり、たとえ、有効な技術であっても、その恩恵が車載機を搭載している車両だけに限定されてしまう。すなわち、依然として多くの場合、横断歩道や交差点の先に十分な空間があるか否かの判断は、運転者の経験や勘によってなされている。したがって、運転者の経験や勘に依存せず、どのような運転者であっても横断歩道や交差点内で車両を停止させない運転ができるよう情報提供を可能にする技術が求められている。
【0014】
本開示技術は、上述した従来技術による問題点を解消するため、通行車両の停止禁止領域内の停止を防ぐことによって他者の通行を妨げず潤滑な交通を支援する情報提供プログラム、情報提供装置および情報提供方法を提供することを目的とする。
【課題を解決するための手段】
【0015】
上述した課題を解決し、目的を達成するため、本開示技術は、道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する処理と、前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両と前記停止禁止領域の後方に存在する先頭車両との車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する処理と、取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する処理と、算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過できるか否か判定する処理と、判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する、を含むことを要件とする。
【発明の効果】
【0016】
本情報提供プログラム、情報提供装置および情報提供方法によれば、通行車両の停止禁止領域内の停止を防ぐことによって他者の通行を妨げず潤滑な交通を支援することができるという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】本実施の形態にかかる情報提供処理の一例を示す説明図である。
【図2】撮影画像を用いた物理量算出の手法を示す説明図である。
【図3】各要素と車間距離との関連を示す図表である。
【図4】各要素を細分化した図表である。
【図5】進入可能時の検知例を示す説明図である。
【図6】進入不可時の検知例を示す説明図である。
【図7】情報提供装置のハードウェア構成を示すブロック図である。
【図8−1】情報提供装置の機能的構成を示すブロック図である。
【図8−2】情報提供処理の手順を示すフローチャートである。
【図9】撮影画像を利用した情報提供処理の手順を示すフローチャートである。
【図10】車両検知処理の手順を示すフローチャートである。
【図11】進入可否判定処理の手順を示すフローチャートである。
【図12】情報提供器の表示例を示す説明図である。
【図13】停止車両による交通阻害例を示す説明図である。
【図14】停止車両による歩行者への影響を示す説明図である。
【発明を実施するための形態】
【0018】
以下に添付図面を参照して、この発明にかかる情報提供プログラム、情報提供装置および情報提供方法の好適な実施の形態を詳細に説明する。
【0019】
図1は、本実施の形態にかかる情報提供処理の一例を示す説明図である。なお、以下の説明では、交差点や横断歩道などを停止禁止領域121とする。また、停止禁止領域の手前(上流側)を後方領域122、停止禁止領域の先(下流側)を前方領域123と呼んで適宜説明する。
【0020】
図1のように、本実施の形態では、車両(全長x)の進行方向に沿って車両を検知するカメラ101が設置されている。そして、カメラ101から取得された車両の画像を用いて、車両に関する物理量を計測することによって、停止禁止領域121(図1の例ではx座標0に位置する横断歩道)および前方領域123,後方領域122に位置する車両の走行状況を特定することができる。その後、特定された走行状況に基づいて、後方領域122に存在する車両に対して情報提供を行う。
【0021】
本実施の形態にかかる情報提供処理の場合、以下の5点に留意して処理を行う。
【0022】
1)後方領域122の交通状況ばかりでなく、前方領域123の交通状況を検知することにより、これまで解決できなかった停止禁止領域121での停止を防ぐよう情報を提供する。
【0023】
2)後方領域122の交通に比べて、前方領域123の交通は注目している停止禁止領域121との相関が小さい。したがって、前方領域123の交通状況を判断する基準が従来技術では特定されていなかった。そこで本実施の形態では、前方領域123に存在する渋滞の最後尾の停止車両130を基準とする。
【0024】
3)渋滞の最後尾の停止車両130の停止をイベントトリガとして、後続車両の侵入可否判定を開始する。
【0025】
4)車両停止時の予想車間距離を、車両型式、その道路の交通量、法定速度、時刻などに応じて1〜5メートル程度の範囲で設定する。
【0026】
5)交通集中を単一の物理量として単純化し、簡単な四則演算により進入可否判定を行う。
【0027】
したがって、図1のように本実施の形態では、停止禁止領域121および前方領域123,後方領域122に存在する車両を検知するカメラ101が少なくとも1台設置される。カメラ101には道路を走行する車両の位置・大きさを検知する機能と車両の速度を検知する機能とが備わっている。なお、カメラ101は、車両の位置・大きさと速度をともに測定することができ、特に、昼夜の変化による画像への影響が少ない、遠赤外線カメラが望ましい。
【0028】
また、情報提供処理は、情報提供器110を利用して、停止禁止領域121への進入可否の判定結果を表示する。情報提供器110では、進入可否についての判定結果を、点灯/消灯、○/×、進/止といった可/不可を2段階で表示してもよいし、あと何台進入可能かを具体的な数字で表示してもよい。さらに、表示にとどまらず、警告音などを発生してもよい。
【0029】
なお、本実施の形態にかかる情報提供処理は上述の以下の処理1〜処理5を実行している。
【0030】
処理1:道路内の停止禁止領域121および停止禁止領域の前後領域122,123を含む対象領域内に存在する車両130〜134の全長および速度、すなわち車両に関する物理量を算出する。
【0031】
処理2:対象領域(121,122,123)内に存在する車両130〜134のうち、停止禁止領域の前方領域123に存在する渋滞の最後尾の停止車両130から停止禁止領域の後方領域122に存在する先頭車両132までの予想車間距離を、細分化された交通状況に基づいて決定する。
【0032】
処理3:先頭車両132の全長と、先頭車両132から最後尾の停止車両130までの領域に存在する車両の全長と、決定された予想車間距離とを加算することにより、先頭車両の132停止に要する領域の長さを算出する。
【0033】
処理4:算出された先頭車両132の停止に要する領域の長さと、最後尾の停止車両130から停止禁止領域121までの距離とを比較して、先頭車両132が停止禁止領域121を通過可能か否か判定する。
【0034】
処理5:判定結果を先頭車両132へ情報提供を行う情報提供器110へ出力する。
【0035】
そこで、以下には各処理の詳細な内容について説明する(参照する図面、数式の関係により、一部説明する処理の順序が前後する)。
【0036】
<車両に関する物理量の算出処理:処理1>
図2は、撮影画像を用いた物理量算出の手法を示す説明図である。図2を用いて、カメラ101の撮影画像を用いた車両の物理量の算出について説明する。図2のように、ある時点で撮影した撮影画像1(画像201)と事前に撮影しておいた背景画像(画像200)との背景差分(画像210)を作成することによって、車両の形状を得ることができる。したがって、画像210の形状から車両の全長xを求めることができる。また、画像201上での形状の位置から撮影時の車両の位置を求めることができる。
【0037】
続いて、Δtの時間差で撮影した撮影画像2(画像202)と撮影画像1(画像201)の時間差分(画像220)を作成することによって、Δt間の車両の軌跡が特定される。特定された軌跡には、車両がΔt間に移動した位置変化量Δxと車両の全長xが含まれる。そこで、軌跡の長さyから車両の全長xを差し引くことで、位置変化量Δxが得られる。この位置変化量Δxを時間差Δtで除すると、この車両のΔt間の速度を求めることができる。
【0038】
<停止に要する領域の長さの決定処理:処理3>
上述のように、車両についての物理量が算出され、さらに、停止禁止領域の前方領域123において、ある時刻tに停止車両を検知した場合について、図1に示した各値を下記のように特定する。
【0039】
・最後尾の停止車両(すなわち渋滞の最後尾の車両)130から停止禁止領域121までの距離
X(t)
・最後尾の停止車両130より後方の全ての車両の全長
x1(t),x2(t),x3(t),…,x(t),…
・最後尾の停止車両130より後方、かつ、停止禁止領域121を通過あるいは到達している車両131の台数
m(t)
【0040】
上記の各値は、カメラ101が検知できる可能な範囲内で一時的に記録される。そして、以上の各値と物理量とを利用して、車両と予想車間距離の和を下記(1)式のように算出する。なお、下記(1)式のように算出した、予想される車両の全長と車間距離の和、すなわち渋滞の最後尾の停止車両130から数えてn台目までの車両が停止に要する領域の長さをL(n,t)とおく。なお、添え字nやtなどは、それらを強調する場合以外は省略する(L(n,t)の場合、Lと省略する)。
【0041】
【数1】
【0042】
<予想車間距離の決定処理:処理2>
上記(1)において、Int(n,t)は、時刻tにおけるn台目の車両停止時の予想車間距離であり、1.道路の法定速度、2.道路の交通量、3.時刻、4.車両型式(または、直前車両の全長)などに応じて1〜5メートル程度の範囲の中から適宜決定される。
【0043】
上記1.〜4.を予想車間距離に反映させるためには、各項目に基づき交通状況を細分化する。そして、予想車間距離は、カメラ101から次々に求まる実車間距離を用いて、細分化した交通状況におけるデータベースとして平均を取ることにより算出される。
【0044】
具体的には、まず、1.〜4.の各項目が車間距離に与える影響を箇条書きに示す。上記の1.の法定速度が速い場合、追突時の多重衝突を避けるため、停止時の車間距離は広く取る傾向がある。反対に、法定速度が遅い場合、車間距離は縮まる傾向にある。
【0045】
また、上記2.の交通量が多いほど混雑が起きやすく、車間距離は縮まる傾向にある。反対に、交通量が少ない場合は広がる傾向にある。
【0046】
また、上記3.の時刻は、平日の朝、夕の通勤・帰宅時間帯は混雑が起きやすく、車間距離は縮まる傾向がある。一方、夜間や休日は混雑が起きにくく、車間距離は広がる傾向がある。
【0047】
また、上記4.の車両型式は、直前にトラックやバスなどの大型車が走行していると視界が悪くなるため、後続車は車間距離を大きく取る傾向がある。一方、直前が軽自動車や車高が低い車両の場合には逆の傾向がある。しかし、カメラ101から正確な車両型式や高さを判断するのは難しいため、直前車両(n−1台目)の全長をパラメータとする。
【0048】
図3は、各要素と車間距離との関連を示す図表である。上述した各要素と車間距離との関連を一覧にまとめると、図3の図表のようになる。
【0049】
つぎに、上述した各要素を複数の交通状況に細分化する。図4は、各要素を細分化した図表である。図4の図表は、上記の各要素を、それぞれ3通り以上に細分化した例を示している。ここで、上記1.の法定速度に関しては、カメラ101が設置される道路によって決まる定数であるため、図4の図表の場合、法定速度以外の要素の組み合わせによって、36通りの交通状況として細分化することができる。
【0050】
図4の図表より、法定速度を定数とすると36通りの交通状況が考えられる。ある交通状況をP、これまでに測定された交通状況Pの実車間距離の数をN、N台目の実車間距離をINT(P,N)とすると、次の車両の予想車間距離Int(P,N)は、下記(2)式によって求めることができる。
【0051】
【数2】
【0052】
ただしN=0の場合、Int(P,0)は、標準的な停止時の車間距離とされる3mとする。Int(P,N)はNが大きくなるほどその道路における最適値へと収束する。このInt(P,N)を、時刻tにおけるn台目の車両停止時の予想車間距離に適用したものがInt(n,t)である。なお、ここでは図4の図表を元にした36通りに細分化した交通状況を示したが、上記3.の時刻をより細かく場合分けするなど各要素を異なる方法で細分化してもよい。
【0053】
<通過可否の判定処理、情報提供を行う任意の機器への出力処理:処理4,5>
上述のように予想車間距離が決定されると、渋滞の最後尾の停止車両130から数えてn台目までの車両が停止に要する領域の長さL(n,t)が求まる。この長さL(n,t)を渋滞の最後尾の停止車両130から停止禁止領域121までの距離X(t)と比較し、L(n,t)<X(t)となる最大の車両台数n(t)を求める。この車両台数n(t)から既に停止禁止領域121へ進入している車両131の台数m(t)を差し引くことで、停止禁止領域121に進入できる最大の車両台数をn(t)−m(t)として求めることができる。このn(t)−m(t)が正の整数であれば、m(t)+1台目の車両も進入可能となる。
【0054】
ここで、図5は、進入可能時の検知例を示す説明図であり、図6は、進入不可時の検知例を示す説明図である。図5は、n(t)−m(t)>0の事例を表している。具体的には、上記変数において、m(t)=2,n(t)=3となるため、n(t)−m(t)>0となる。したがって、つぎに停止禁止領域121に進入するm(t)+1台目の車両も進入可能であるので、情報提供器110には、「○」や「進」といった情報を情報提供装置により提供する。
【0055】
また、図6は、n(t’)−m(t’)≦0の事例を表している。具体的には、上記変数において、m(t’)=1,n(t’)=1となるため、n(t’)−m(t’)=0となる。したがって、これ以上の車両の進入は不可能であるので、情報提供器110に「×」や「止」といった情報を提供する。したがって、次に停止禁止領域121に進入するm(t’)+1台目の車両が進入するのを抑制し、停止禁止領域121の白線の手前に停止させることができる。
【0056】
以上説明したように、本実施の形態にかかる情報提供処理を利用することによって、運転者の経験や勘に依存せず、簡易な処理のみで、直前車両の位置・速度だけで判定していた従来の進入可否判定よりも正確に、進入可否の判定を実現することができる。また、本実施の形態では、特別な車載機を必要としないため、従来技術のように適用可能な車両が限定されず、幅広く適用させることができる。
【0057】
本実施の形態にかかる情報提供処理を利用することによって、歩行者はより安全に道路を横断できる。また、他方向の車両交通を妨げないため、余計な渋滞の発生を減らすことが可能である。また、本実施の形態にかかる情報提供処理は、車両に特別な車載機を搭載することなく単独動作でも十分な機能を発揮できるが、通信機能を付加することによって、広域交通管制システムに車両混雑状況を送信してもよい。さらに、車載機を搭載した車両に停止信号を送信してもよい。
【0058】
なお、上述した情報提供処理は、特に、警察署・病院のような緊急車両の出入口や踏切を停止禁止領域として適用することによって、より効果的に利用することができる。また移動体は車両に限定されず、歩行者の列を分断する用途などに用いることも有効である。さらに、測定する物理量は長さに限定されず、面積など他の物理量を用いてもよい。
【0059】
以下に、上述した情報提供処理を実現する情報提供装置100の具体的な構成や処理手順について説明する。
【0060】
(情報提供装置のハードウェア構成)
図7は、情報提供装置のハードウェア構成を示すブロック図である。図7において、情報提供装置100は、CPU(Central Processing Unit)701と、ROM(Read‐Only Memory)702と、RAM(Random Access Memory)703と、磁気ディスクドライブ704と、磁気ディスク705と、光ディスクドライブ706と、光ディスク707と、ディスプレイ708と、I/F(Interface)709と、キーボード710と、マウス711と、イメージングデバイス712と、プリンタ713と、を備えている。また、各構成部はバス700によってそれぞれ接続されている。
【0061】
ここで、CPU701は、情報提供装置100の全体の制御を司る。ROM702は、ブートプログラムや、情報提供処理を実現するための情報提供プログラムなどの各種プログラムを記憶している。RAM703は、CPU701のワークエリアとして使用される。磁気ディスクドライブ704は、CPU701の制御にしたがって磁気ディスク705に対するデータのリード/ライトを制御する。磁気ディスク705は、磁気ディスクドライブ704の制御で書き込まれたデータを記憶したり、磁気ディスク705に記憶されたデータをコンピュータに読み取らせたりする。
【0062】
光ディスクドライブ706は、CPU701の制御にしたがって光ディスク707に対するデータのリード/ライトを制御する。光ディスク707は、光ディスクドライブ706の制御で書き込まれたデータを記憶したり、光ディスク707に記憶されたデータをコンピュータに読み取らせたりする。
【0063】
ディスプレイ708は、カーソル、アイコンあるいはツールボックスをはじめ、文書、画像、機能情報などのデータを表示する。このディスプレイ708は、たとえば、CRT、TFT液晶ディスプレイ、プラズマディスプレイなどを採用することができる。
【0064】
インターフェース(以下、「I/F」と略する。)709は、通信回線を通じてLAN(Local Area Network)、WAN(Wide Area Network)、インターネットなどのネットワーク714に接続され、このネットワーク714を介して他の装置に接続される。そして、I/F709は、ネットワーク714と内部のインターフェースを司り、外部装置からのデータの入出力を制御する。I/F709には、たとえばモデムやLANアダプタなどを採用することができる。
【0065】
キーボード710は、文字、数字、各種指示などの入力のためのキーを備え、データの入力を行う。また、タッチパネル式の入力パッドやテンキーなどであってもよい。マウス711は、カーソルの移動や範囲選択、あるいはウィンドウの移動やサイズの変更などを行う。ポインティングデバイスとして同様に機能を備えるものであれば、トラックボールやジョイスティックなどであってもよい。
【0066】
イメージングデバイス712は、画像を光学的に読み取り、情報処理装置100内に画像データを取り込む。イメージングデバイス712には、移動体を検知するカメラ101の他に、スキャナなどを採用することができる。なお、イメージングデバイス712は、OCR(Optical Character Reader)機能を持たせてもよい。また、プリンタ713は、画像データや文書データを印刷する。プリンタ713には、たとえば、レーザプリンタやインクジェットプリンタを採用することができる。
【0067】
(情報提供装置の機能的構成)
図8−1は、情報提供装置の機能的構成を示すブロック図である。情報提供装置100は、取得部801と、決定部802と、算出部803と、判定部804と、出力部805と、特定部806と、画像処理部810と、を含む構成である。この制御部となる機能(取得部801〜画像処理部810)は、具体的には、たとえば、図7に示したROM702、RAM703、磁気ディスク705、光ディスク707などの記憶装置に記憶されたプログラムをCPU701に実行させることにより、または、I/F709により、その機能を実現する。
【0068】
取得部801は、対象領域内に存在する車両に関する情報を取得する機能を有する。車両に関する情報とは、イメージングデバイス712またはI/F709から入力される、対象領域(道路内の停止禁止領域121および前方領域123,後方領域122を含む領域)内に存在する車両の全長や速度を含んだ車両情報111や、単純に対象領域を撮影した撮影画像112を意味する。取得された情報(車両情報111もしくは撮影画像112)は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0069】
なお、取得部801が車両情報111を取得した場合には、そのまま後述する機能部(決定部802、算出部803、判定部804)によって、対象車両への提供情報113を作成する。一方、撮影画像112を取得した場合には、後述する画像処理部810によって、対象となる車両の全長や速度を特定した後、提供情報113を作成する。
【0070】
決定部802は、対象領域内の特定車両が停止する場合に必要な前方車両との予想車間距離を決定する機能を有する。具体的には、決定部802は、対象領域内に存在する車両のうち、前方領域123に存在する最後尾の停止車両130から、後方領域122に存在する先頭車両132までの各予想車間距離を決定する。決定部802は、細分化された複数の交通状況の中から最適な交通状況Pを選択し、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶された予想車間距離のリストから、交通状況Pに対応する予想車間距離を読み出すことで、n台目とn−1台目との予想車間距離Int(n,t)を決定する。
【0071】
なお、予想車間距離Intを決定する際には、上述した交通状況とは別に、時刻をより細かく場合分けするなど各要素を異なる方法で細分化した交通状況を用いてもよい。さらに、車両の走行速度や周辺道路の混雑状況など様々な要素を利用してもよい。決定された予想車間距離Intは、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0072】
算出部803は、対象領域内の特定車両の停止に要する領域の長さを算出する機能を有する。具体的には、算出部803は、取得部801によって取得された先頭車両132の全長と、先頭車両132から最後尾の停止車両130までの間に存在するm台の車両131の各全長と、決定部802によって決定された予想車間距離Intとを加算する。この加算結果が、すなわち、先頭車両の停止に要する領域の長さとなる。また、先頭車両132から最後尾の停止車両130までの間に車両が存在しない場合(m=0)、算出部803は、先頭車両132の全長と車間距離Intだけを加算すればよい。算出された停止に要する領域の長さは、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0073】
判定部804は、上述した先頭車両132が停止禁止領域121を、通過可能か否かを判定する機能を有する。停止禁止領域121を通過可能とは、すなわち、前方領域123に停止可能か否かの判定である。前方領域123に停止できることが、先頭車両132が停止禁止領域121上で停止しないための必須条件となる。具体的には、判定部804は、算出部803によって算出された先頭車両132の停止に要する領域の長さと、最後尾の停止車両130から停止禁止領域121までの距離Xとを比較して、先頭車両132が停止禁止領域121を通過できるか否か判定する。判定結果は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0074】
なお、取得部801において、最後尾の停止車両130の停止に関する車両情報111が取得されなかった場合には、前方領域123に十分な空き領域があることを意味する。したがって、判定部804では、上述のように最後尾の停止車両130の停止に関する車両情報111が取得されなかった場合には、決定部802および算出部803の処理を省略して、即座に、先頭車両132が停止禁止領域121を通過できると判定することができる。
【0075】
出力部805は、判定部804によって判定された判定結果を先頭車両132の運転者へ出力する機能を有する。具体的には、出力部805は、先頭車両へ情報提供を行う任意の機器へ出力している。任意の機器としては、たとえば、停止禁止領域121の近傍に設定された情報提供器110が挙げられる。また出力部805は無線通信を利用して、先頭車両の車載機器(ナビゲーション機器や各種AV機器)へ直接判断結果を出力してもよい。出力形式としては、たとえば、ディスプレイ708への表示、プリンタ713への印刷出力、I/F709による外部装置への送信がある。また、出力する提供情報113をRAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶することとしてもよい。
【0076】
上述したように、情報提供装置100の出力部805では、判定部804による判定結果を出力する。その他にも、情報提供装置100は、取得部801によって得られた情報と算出部803によって算出された情報とを利用して、空き領域に進入可能な車両の台数nを特定して、提供情報113として出力させることもできる。
【0077】
特定部806は、後方領域122に存在する先頭車両132や車両133,134のうち、停止禁止領域121に進入可能な台数を特定する機能を有する。具体的には、特定部806は、算出部803によって算出された各車両の全長と予想車間距離の和L(n,t)に基づいて、停止禁止領域121に進入可能な後続の先頭車両132や車両133,134の台数n−mを特定する。特定された後続の先頭車両132や車両133,134の台数は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。そして、出力部805は、特定部806によって特定された進入可能な後続の先頭車両132や車両133,134の台数を提供情報113として出力してもよい。
【0078】
画像処理部810は、取得部801によって対象領域を撮影した撮影画像112を利用して対象領域内に存在する車両の全長と速度とを特定する機能を有する。具体的には、画像処理部810は、抽出部811と、検知部812と、全長算出部813とを含む構成である。情報提供装置100が、車両情報111を取得できない場合や、車両情報111を生成する各種装置が用意されていない場合には、画像処理部810によって車両の全長や速度を特定して情報提供処理を実現することができる。
【0079】
画像処理部810の抽出部811は、撮影画像112から所定の画像を抽出する機能を有する。具体的には、抽出部811は、取得部801が対象領域を撮影した撮影画像112を取得した場合、撮影画像112から前方領域123に存在する渋滞の最後尾の停止車両130の画像と、後方領域122に存在する先頭車両132の画像とを抽出する。抽出された画像は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0080】
検知部812は、撮影画像112内の特定の車両の速度を検知する機能を有する。具体的には、検知部812は、撮影画像112と、撮影画像112の前後の時刻に撮影された撮影画像との差分から、抽出部811によって抽出された前方領域123に存在する渋滞の最後尾の停止車両130の停止を検知する。なお、全長と速度の検知は、図2にて説明した物理量算出の手法を利用する。車両の全長および速度は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0081】
全長算出部813は、撮影画像112の内の特定の車両の全長を算出する機能を有する。具体的には、全長算出部813では、検知部812によって検知された先頭車両の画像の長さから先頭車両の全長を算出する。算出された特定の車両の全長は、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶される。
【0082】
上述のように、画像処理部810の各機能を利用した場合、決定部802では、検知部812によって検知された交通状況Pに基づいて最後尾の停止車両130から先頭車両132までの予想車間距離を決定する。同様に、算出部803では、全長算出部813によって算出された先頭車両132の全長と先頭車両132から最後尾の停止車両130までの間に存在するm台の車両131の各全長と、決定部802によって決定された予想車間距離とを加算することにより、先頭車両132の停止に要する領域の長さを算出する。
【0083】
その後、判定部804においても、算出部803によって算出された先頭車両132の停止に要する領域の長さと、撮影画像112が示す最後尾の停止車両130から停止禁止領域121までの距離Xとを比較して、先頭車両132が停止禁止領域121を通過できるか否か判定する。したがって、画像処理部810を備えることによって、車両情報111が取得できない場合であっても、撮影画像112を取得できれば、車両情報111を取得した場合と同様に、混雑状況に応じて適切な提供情報113を出力することができる。
【0084】
なお、図8−1では、どのような道路にも設定できるように、画像処理部810を含んだ構成の情報処理装置100を例示したが、あらかじめ車両情報111が取得できる道路であれば、画像処理部810の機能は不要となる。したがって、図8−1に例示した機能的構成から画像処理部810を省いた構成の情報提供装置100を設定してもよい。
【0085】
(情報提供処理の手順)
図8−2は、情報提供処理の手順を示すフローチャートである。図8−2のフローチャートは、対象領域内の道路の混雑状況に基づいて、後方領域122に存在する先頭車両132や車両133,134に対して、停止禁止領域121を通過可能か否かについての情報を提供するまでの手順を示している。図8−2の各処理を実行することによって、後方領域122に存在する先頭車両132や車両133,134の安全な走行を支援することができる。
【0086】
図8−2において、情報提供装置100は、まず、取得部801によって、車両情報111を取得したか否かを判断する(ステップS821)。情報提供装置100は、ステップS821において車両情報111が取得されたと判断されるまで待機状態となる(ステップS821:Noのループ)。
【0087】
ステップS821において、車両情報111が取得されると(ステップS821:Yes)、情報提供装置100は、決定部802によって、交通状況に基づいて予想車間距離を決定する(ステップS822)。ステップS822では、交通状況の各要素に基づいて、予想車間距離を決定している。具体的には、細分化された複数の交通状況の中から最適な交通状況Pを選択し、RAM703、磁気ディスク705、光ディスク707などの記憶領域に記憶された予想車間距離のリストから、交通状況Pに対応する予想車間距離を読み出すことで、n台目とn−1台目との予想車間距離Int(n,t)を決定する。
【0088】
その後、情報提供装置100は、算出部803によって、後方領域122に存在する先頭車両132の停止に要する領域の長さを算出する(ステップS823)。そして、情報提供装置100は、判定部804によって、先頭車両132が停止禁止領域121を、通過可能か否かを判定する(ステップS824)。
【0089】
情報提供装置100は、ステップS823によって算出された先頭車両132の停止に要する領域の長さが、最後尾の停止車両130から停止禁止領域121までの距離Xより短ければ通過可能と判定する。反対に、情報提供装置100は、ステップS823によって算出された先頭車両の停止に要する領域の長さが、最後尾の停止車両130から停止禁止領域までの距離Xより長ければ通過不可と判定する。
【0090】
その後、情報提供装置100は、出力部805によって、ステップS824の判定結果を出力する(ステップS825)。ステップS825によって出力された判定結果は、上述した先頭車両132に向けた提供情報113である。したがって、先頭車両は提供情報113に応じて進入もしくは停止することによって、停止禁止領域121に停止することのない安全な走行を実現することができる。
【0091】
その後、情報提供装置100は、装置管理者や上位システムによって終了指示を受け付けたか否かを判断する(ステップS826)。情報提供装置100は、ステップS826によって、終了指示を受け付けるまでは(ステップS826:No)、ステップS821の処理に戻り、引き続き、情報提供処理を行う。そして、情報提供装置100は、ステップS826において、終了指示を受け付けると(ステップS826:Yes)、そのまま一連の処理を終了する。なお、情報提供装置100は、道路脇に設定されるという特性から、対象となる道路が一時的に通行止めになる場合や、点検を行う場合など、特定の状況以外では、常時動作しているものとする。
【0092】
以上説明したように、本実施の形態にかかる情報提供装置100は、後方領域を走行する車両132,134に対して、そのまま走行しても停止禁止領域121上で停止せずに済むのか、もしくは、一旦停止すべきかを指示する情報を提供することができる。
【0093】
図8−1および図8−2を用いて説明した処理は、本実施の形態にかかる情報提供処理のもっとも基本的な例であり、実際には、取得される情報や、情報提供装置100の設置環境に応じて、詳細な処理手順は変化する。そこで、以下には、情報提供装置100による情報提供処理の一実施例として、道路脇に対象領域を撮影するカメラ101を設置した場合の処理手順について説明する。
【0094】
<撮影画像を利用した情報提供処理の手順>
図9は、撮影画像を利用した情報提供処理の手順を示すフローチャートである。図9において、情報提供装置100は、まず、路面の混雑状態を把握するため、車両検知処理を行う(ステップS901)。その後、情報提供装置100は、ステップS901の車両検知処理の結果を参照して、前方領域123に停止車両130があるか否かを判断する(ステップS902)。
【0095】
ステップS902において、前方領域123に停止車両130がないと判断された場合(ステップS902:No)、情報提供装置100は、ステップS901の処理に戻り、引き続き車両検知処理を行う。一方、ステップS902において、前方領域123に停止車両130があると判断された場合(ステップS902:Yes)、情報提供装置100は、停止車両130に続く後続車両について、進入可否判定処理を行う(ステップS903)。
【0096】
なお、ステップS902において、進入可否判定処理では、前方領域123に停止車両130がないと判断された場合(ステップS902:No)、前方領域123は十分に空き領域のある状況であるため、ステップS901の処理に移行する。なお、上述のように、前方領域123に十分に空き領域のある状況の場合、情報提供装置100は、即座に、情報提供器110に進入可能を示す表示を行わせてもよい。
【0097】
ステップS903の処理が終了すると、情報提供装置100は、装置管理者や上位システムによって終了指示を受け付けたか否かを判断する(ステップS904)。情報提供装置100は、ステップS904によって、終了指示を受け付けるまでは(ステップS904:No)、ステップS901の処理に戻り、引き続き、情報提供処理を行う。そして、情報提供装置100は、ステップS904において、終了指示を受けると(ステップS904:Yes)、そのまま一連の処理を終了する。
【0098】
以下には、図9のステップS901,S903の詳細な処理内容について説明する。
【0099】
<車両検知処理の手順>
図10は、車両検知処理の手順を示すフローチャートである。図10のフローチャートは、図9のステップS901の車両検知処理の詳細な手順を示している。図10の各処理を実行することによって、対象領域内に存在する車両を検知するとともに、進入可否判定処理に用いる車両の大きさや速度を検知することができる。
【0100】
図10において、情報提供装置100は、まず、対象領域の撮影を開始する(ステップS1001)。その後、情報提供装置100は、撮影画像の背景差分を求め、車両の位置と大きさを検知する(ステップS1002)。また、情報提供装置100は、撮影画像の時間差分を求め、車両の速度を検知する(ステップS1003)。なお、ステップS1002,S1003の処理の順序は問わず、可能であれば並列に処理を行ってもよい。これらステップS1002,S1003の検知処理がともに完了すると、ステップS902の処理(図9参照)に移行する。
【0101】
<進入可否判定処理の手順>
図11は、進入可否判定処理の手順を示すフローチャートである。図11のフローチャートは、図9のステップS903の進入可否判定処理の詳細な手順を示している。図11の各処理を実行することによって、後方領域122の先頭車両132や車両133,134が停止禁止領域121を、通過可能か否かを判断することができる。
【0102】
図11において、情報提供装置100は、まず、車両と車間距離の和L(n,t)を算出する(ステップS1101)。その後、情報提供装置100は、ステップS1101において算出したL(n,t)<x(t)となる最大の進入可能台数n(t)を算出する(ステップS1102)。
【0103】
その後、情報提供装置100は、進入済み車両台数mが、ステップS1102によって算出された進入可能台数n未満となるか否かを判断する(ステップS1103)。ステップS1103において、進入済み車両台数mが、進入可能台数n未満になると判断された場合(ステップS1103:Yes)、情報提供装置100は、後方領域122の先頭車両132に対して進入可能表示を行い(ステップS1104)、ステップS904の処理に移行する。
【0104】
一方、ステップS1103において、進入済み車両台数mが、ステップS1102によって算出された進入可能台数n以上となる場合(ステップS1103:No)、情報提供装置100は、後方領域122の先頭車両132に対して進入不可表示を行い(ステップS1105)、ステップS904の処理に移行する。
【0105】
(情報提供器の表示例)
図12は、情報提供器の表示例を示す説明図である。図12を用いて、情報提供装置100から提供された情報の表示例について説明する。情報提供器110は、図11のステップS1104,S1105の処理内容に応じて情報提供装置100によって生成された提供情報113に基づいた表示を行っている。
【0106】
図12のように、情報提供装置100によって、先頭車両132が停止禁止領域121を通過できると判定された場合には、進入可能表示例として「○」や「進」を表示させ、先頭車両132の走行を促す。反対に、情報処理装置100によって、先頭車両132が停止禁止領域121を通過できないと判定された場合には、進入不可表示例として「×」や「止」を表示させ、先頭車両132の停止禁止領域121手前での停止を促す。
【0107】
また、図12の表示例の他にも、情報提供装置100によって、先頭車両132の後続車両134のうち、停止禁止領域121に進入可能な台数が特定された場合には、先頭車両132を含めた進入可能台数n−mを表示させてもよい。先頭車両132だけでなく、後続車両134を含んだ提供情報113を表示させることによって、後続車両134の運転者は、停止禁止領域121に到達するまでに余裕を持って走行もしくは停止するべきかを判断することができる。
【0108】
以上説明したように、情報提供プログラム、情報提供装置および情報提供方法によれば、停止禁止領域121とその前方領域123,後方領域122を走行する車両の交通状況を特定することによって、次に停止禁止領域121に到達する先頭車両132が停止禁止領域121に進入可能か否かを判定し、対象車両に対して進入可能か否かの判定結果を提供することができる。したがって、停止禁止領域121を含む道路における潤滑な交通を支援することができる。
【0109】
また、上記技術では、さらに、前方領域に存在する最後尾の停止車両130の停止に関する情報が取得されなかった場合には、一意的に対象車両に対して進入可能か否かの判定結果を提供することができる。したがって、車両の全長や速度を特定する処理が省略され、効率的に情報を提供することができる。
【0110】
また、上記技術では、さらに、後方領域122に存在する先頭車両132の停止に要する領域の長さと、先頭車両の全長とに基づいて、先頭車両132を含めた侵入可能台数n−mを特定する機能を備えることもできる。したがって、進入可能か否かの判定結果のみでなく、進入可能な車両の台数についての情報を提供することができる。
【0111】
また、上記技術では、さらに、予想車間距離Intを、道路の法定速度や交通量、時刻、車両の全長などの各要素で細分化された交通状況に基づいて決定している。したがって、様々な道路環境に応じて最適な予想車間距離を決定することができる。
【0112】
また、上記技術では、さらに、対象領域を撮影した撮影画像112を取得した場合には、撮影画像112の時間変化を利用して車両の全長や速度を特定する機能を備えることもできる。上述の機能を備えることによって、対象領域内に存在する車両についての車両情報111を得る機能を備えたカメラやセンサを用意せずとも、撮影画像112を取得することによって、車両情報111を取得した場合と同等に情報提供処理を実行することができる。したがって、撮影画像112を取得する機能を備えた道路であれば、容易に情報提供処理を導入することができる。
【0113】
なお、本実施の形態で説明した情報提供方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。本情報提供プログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。また本情報提供プログラムは、インターネットなどのネットワークを介して配布してもよい。
【0114】
また、本実施の形態で説明した情報提供装置100は、スタンダードセルやストラクチャードASIC(Application Specific Integrated Circuit)などの特定用途向けIC(以下、単に「ASIC」と称す。)やFPGAなどのPLD(Programmable Logic Device)によっても実現することができる。具体的には、たとえば、上述した情報提供装置100の機能(取得部801〜全長算出部813)をHDL記述によって機能定義し、そのHDL記述を論理合成してASICやPLDに与えることにより、情報提供装置100を製造することができる。
【0115】
上述した実施の形態に関し、さらに以下の付記を開示する。
【0116】
(付記1)道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
をコンピュータに実行させることを特徴とする情報提供プログラム。
【0117】
(付記2)前記判定工程では、前記最後尾の車両の全長および速度が取得されなかった場合、前記先頭車両が前記停止禁止領域を通過できると判定することを特徴とする付記1に記載の情報提供プログラム。
【0118】
(付記3)前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記先頭車両の全長とに基づいて、前記最後尾の停止車両から前記停止禁止領域までに進入可能な前記先頭車両の後続車両の台数を特定する特定工程を、前記コンピュータに実行させ、
前記出力工程では、前記特定工程によって特定された進入可能な後続車両の台数を、前記機器へ出力することを特徴とする付記1または2に記載の情報提供プログラム。
【0119】
(付記4)前記決定工程では、前記道路の法定速度に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0120】
(付記5)前記決定工程では、前記道路の交通量に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0121】
(付記6)前記決定工程では、現在時刻に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0122】
(付記7)前記決定工程では、前記先頭車両の全長に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする付記1〜3のいずれか一つに記載の情報提供プログラム。
【0123】
(付記8)前記取得工程において、前記対象領域を撮影した撮影画像を取得した場合、当該撮影画像から前記最後尾の車両が含まれる画像と、前記先頭車両が含まれる画像とを抽出する抽出工程と、
前記撮影画像と、前記撮影画像の前後の時刻に撮影された撮影画像との差分から、前記抽出工程によって抽出された車両の速度を検知する検知工程と、
前記検知工程によって検知された車両の画像の長さから前記車両の全長を算出する全長算出工程と、をコンピュータに実行させ、
前記決定工程では、前記検知工程によって検知された交通状況に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定し、
前記算出工程では、前記全長算出工程によって算出された前記先頭車両の全長と当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出し、
前記判定工程では、前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記撮影画像が示す前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定することを特徴とする付記1〜7のいずれか一つに記載の情報提供プログラム。
【0124】
(付記9)道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得手段と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得手段によって取得された前記先頭車両の速度に基づいて決定する決定手段と、
前記取得手段によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定手段によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出手段と、
前記算出手段によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定手段と、
前記判定手段によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力手段と、
を備えることを特徴とする情報提供装置。
【0125】
(付記10)取得手段と決定手段と算出手段と判定手段と出力手段とを備えたコンピュータが、
前記取得手段によって、道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記決定手段によって、前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記算出手段によって、前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記判定手段によって、前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記出力手段によって、前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
を実行することを特徴とする情報提供方法。
【符号の説明】
【0126】
100 情報提供装置
101 カメラ
110 情報提供器
111 車両情報
112 撮影画像
113 提供情報
121 停止禁止領域
122 後方領域
123 前方領域
130 停止車両
132 先頭車両
131,133,134 車両
700 バス
701 CPU
702 ROM
703 RAM
704 磁気ディスクドライブ
705 磁気ディスク
706 光ディスクドライブ
707 光ディスク
708 ディスプレイ
709 I/F(インターフェース)
710 キーボード
711 マウス
712 イメージングデバイス
713 プリンタ
714 ネットワーク
801 取得部
802 決定部
803 算出部
804 判定部
805 出力部
806 特定部
810 画像処理部
811 抽出部
812 検知部
813 全長算出部
【特許請求の範囲】
【請求項1】
道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
をコンピュータに実行させることを特徴とする情報提供プログラム。
【請求項2】
前記判定工程では、前記停止禁止領域の前方に存在する最後尾の車両の全長および速度が取得されなかった場合、前記先頭車両が前記停止禁止領域を通過できると判定することを特徴とする請求項1に記載の情報提供プログラム。
【請求項3】
前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記先頭車両の全長とに基づいて、前記最後尾の停止車両から前記停止禁止領域までに進入可能な前記先頭車両の後続車両の台数を特定する特定工程を、前記コンピュータに実行させ、
前記出力工程では、前記特定工程によって特定された進入可能な後続車両の台数を、前記機器へ出力することを特徴とする請求項1または2に記載の情報提供プログラム。
【請求項4】
前記決定工程では、前記道路の法定速度に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする請求項1〜3のいずれか一つに記載の情報提供プログラム。
【請求項5】
前記決定工程では、前記道路の交通量に基づいて前記最後尾の車両から前記先頭車両までの予想車間距離を決定することを特徴とする請求項1〜3のいずれか一つに記載の情報提供プログラム。
【請求項6】
道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得手段と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得手段によって取得された前記先頭車両の速度に基づいて決定する決定手段と、
前記取得手段によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定手段によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出手段と、
前記算出手段によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定手段と、
前記判定手段によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力手段と、
を備えることを特徴とする情報提供装置。
【請求項7】
取得手段と決定手段と算出手段と判定手段と出力手段とを備えたコンピュータが、
前記取得手段によって、道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記決定手段によって、前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記算出手段によって、前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記判定手段によって、前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記出力手段によって、前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
を実行することを特徴とする情報提供方法。
【請求項1】
道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
をコンピュータに実行させることを特徴とする情報提供プログラム。
【請求項2】
前記判定工程では、前記停止禁止領域の前方に存在する最後尾の車両の全長および速度が取得されなかった場合、前記先頭車両が前記停止禁止領域を通過できると判定することを特徴とする請求項1に記載の情報提供プログラム。
【請求項3】
前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記先頭車両の全長とに基づいて、前記最後尾の停止車両から前記停止禁止領域までに進入可能な前記先頭車両の後続車両の台数を特定する特定工程を、前記コンピュータに実行させ、
前記出力工程では、前記特定工程によって特定された進入可能な後続車両の台数を、前記機器へ出力することを特徴とする請求項1または2に記載の情報提供プログラム。
【請求項4】
前記決定工程では、前記道路の法定速度に基づいて前記最後尾の停止車両から前記先頭車両までの予想車間距離を決定することを特徴とする請求項1〜3のいずれか一つに記載の情報提供プログラム。
【請求項5】
前記決定工程では、前記道路の交通量に基づいて前記最後尾の車両から前記先頭車両までの予想車間距離を決定することを特徴とする請求項1〜3のいずれか一つに記載の情報提供プログラム。
【請求項6】
道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得手段と、
前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得手段によって取得された前記先頭車両の速度に基づいて決定する決定手段と、
前記取得手段によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定手段によって決定された予想車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出手段と、
前記算出手段によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定手段と、
前記判定手段によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力手段と、
を備えることを特徴とする情報提供装置。
【請求項7】
取得手段と決定手段と算出手段と判定手段と出力手段とを備えたコンピュータが、
前記取得手段によって、道路内の停止禁止領域および当該停止禁止領域の前後領域を含む対象領域内に存在する車両の全長および速度を取得する取得工程と、
前記決定手段によって、前記対象領域内に存在する車両のうち、前記停止禁止領域の前方に存在する最後尾の停止車両から前記停止禁止領域の後方に存在する先頭車両までの予想車間距離を、前記取得工程によって取得された前記先頭車両の速度に基づいて決定する決定工程と、
前記算出手段によって、前記取得工程によって取得された前記先頭車両の全長と、当該先頭車両から前記最後尾の停止車両までの領域に存在する車両の全長と、前記決定工程によって決定された車間距離とを加算することにより、前記先頭車両の停止に要する領域の長さを算出する算出工程と、
前記判定手段によって、前記算出工程によって算出された前記先頭車両の停止に要する領域の長さと、前記最後尾の停止車両から前記停止禁止領域までの距離とを比較して、前記先頭車両が前記停止禁止領域を通過可能か否か判定する判定工程と、
前記出力手段によって、前記判定工程によって判定された判定結果を、前記先頭車両へ情報提供を行う機器へ出力する出力工程と、
を実行することを特徴とする情報提供方法。
【図1】


【図2】
【図3】

【図4】

【図5】

【図6】
【図7】

【図8−1】

【図8−2】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8−1】
【図8−2】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−198142(P2011−198142A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−65179(P2010−65179)
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]