
情報提供方法
【課題】 ユーザの行き先に関する情報を、ユーザに煩雑な操作を強いることなく、的確に提供する。
【解決手段】 カーナビ1において、位置情報検出手段11は車の位置情報をGPSなどによって検出する。検出された位置情報を基にして得られた車の移動情報履歴が、移動情報履歴手段15に蓄積される。行動予測手段17はエンジンの起動などのイベントを検知したとき、現在までの移動経路と、蓄積された移動情報履歴とを参照して、車の行き先を予測する。予測された行き先に関する商用情報や交通情報が、情報取得手段18によってサーバ2から取得され、情報提供手段19によってディスプレイなどに提示される。
【解決手段】 カーナビ1において、位置情報検出手段11は車の位置情報をGPSなどによって検出する。検出された位置情報を基にして得られた車の移動情報履歴が、移動情報履歴手段15に蓄積される。行動予測手段17はエンジンの起動などのイベントを検知したとき、現在までの移動経路と、蓄積された移動情報履歴とを参照して、車の行き先を予測する。予測された行き先に関する商用情報や交通情報が、情報取得手段18によってサーバ2から取得され、情報提供手段19によってディスプレイなどに提示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報が検出可能なカーナビゲーションシステム(以下、「カーナビ」と略記する)やPDA(Personal Digital Assistant)等の情報機器を用いて、ユーザに情報を提供するための技術に属する。
【背景技術】
【0002】
近年、GPS(Global Positioning System)や携帯電話網のアンテナ等を利用して、カーナビやPDA、携帯電話によって位置情報が検出できるようになり、この位置検出機能を利用して多様なサービスが実現されてきている。
【0003】
カーナビに関しては、GPSによって捕捉した自車位置近辺の情報を、FM文字多重放送や光ビーコンから取り込んでディスプレイに表示させるサービスが実現されている。携帯電話に関しては、NTTドコモの「iエリア」やJフォンの「J−Sky」などのサービスにおいて、携帯電話を持つユーザがいるエリアを数百mから数Kmの範囲で限定し、そのエリアに関するイベント情報やサービス情報などを提供している。
【0004】
さらに、携帯電話にGPSのユニットを内蔵する端末も発売されており、精度が高いところでは数m程度の誤差で位置が検出できるようになり、今後、このような位置情報に関連した様々なサービスが登場することが予想される。
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、現在実現されている様々なサービスでは、ユーザ(が使用する情報端末)の現在位置を特定し、その現在位置に関連する情報をユーザに提供している。そして将来的には、ユーザの現在位置に関する情報だけではなくて、これから向かう行き先に関する情報についても、提供してほしいというニーズもあると考えられる。
【0006】
現在のカーナビなどのシステムでは、ユーザが目的地やルートを明示的に指定することができるので、このようなシステムでは、指定された目的地やルートに関連する情報をユーザに提供するような仕組みは、容易に実現可能である。ところが、目的地やルートを検索したり指定したりする操作は、実際には煩雑である。また、仮に運転者が運転中にこのような操作を行うと、注意が散漫になるために、安全運転の妨げになると考えられる。
【0007】
そこで、ユーザが特に操作をしなくても、ユーザの行き先に関する情報を的確に提供できるような技術が実現されれば、いまよりもさらに、快適で安全なカーライフを人々に提供することができる。
【0008】
前記の問題に鑑み、本発明は、ユーザに煩雑な操作を強いることなく、ユーザの行き先に関する情報を、的確に、提供可能にすることを課題とする。
【課題を解決するための手段】
【0009】
前記の課題を解決するために、本発明は、車の搭乗者に情報を提供する方法として、前記車に搭載された情報機器によって前記車の位置情報を検出するステップと、検出された位置情報から得た前記車の移動経路を、ノード間の遷移の形式で、移動情報履歴として蓄積するステップと、所定のイベントの発生を検知したとき、前記車の現在までの移動経路と蓄積された移動情報履歴とを参照して前記車の行き先を予測するステップと、予測された行き先に関する情報を前記情報機器を介して前記搭乗者に提供するステップとを備えたものである。
【0010】
この発明によると、所定のイベントの発生が検知されたとき、車の現在までの移動経路と、蓄積された過去の移動経路である移動情報履歴とが参照されて、車の行き先が予測される。そして、この予測された行き先に関する情報が、車に搭載された情報機器を介して搭乗者に提供される。このため、車の搭乗者は、特に何も操作をしなくても、自分の行き先に関する有益な情報を的確に受けることができ、快適かつ安全に、車で移動することができる。
【0011】
また、前記本発明に係る情報提供方法は、前記搭乗者の好みの場所に関する嗜好情報を蓄積するステップを備え、前記車の現在までの移動経路と蓄積された移動情報履歴とを参照した前記車の1つの行き先に加えて、前記嗜好情報を参照して前記車の別の行き先を予測し、予測された複数の行き先に関する情報を提供するものである。
【発明の効果】
【0012】
本発明によると、ユーザの移動情報履歴と、現在までの移動経路から、今後のユーザの行き先が予測されるので、ユーザが特に操作を行わなくても、行き先に関する施設や店舗などの情報を、ユーザに的確に提供することできる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0014】
なお、以下の各実施形態では、ユーザがカーナビの搭載された車を運転しているとき、情報提供を受ける場合を想定して説明を行うが、本発明は、カーナビに限らず、位置情報を取得可能なPDAや携帯電話などの情報機器を利用しても、実現することが可能である。
【0015】
また、以下の各実施形態では、「ランドマーク」および「エリア」という概念を用いる。「ランドマーク」とは、駅、デパート、観光名所、プレイスポット、自宅、職場などの施設、店舗または建造物を表し、「エリア」とは、複数のランドマークを包含する範囲(「神戸市街地」や「関西学研都市」など)を表すものとする。
【0016】
(第1の実施形態)
本発明の第1の実施形態で、蓄積されたユーザの行動パターンを基にして、当該ユーザの今後の行き先を予測し、予測した行き先に関する情報をユーザに提供するものである。
【0017】
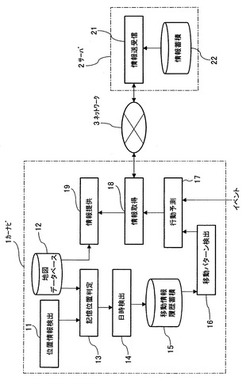
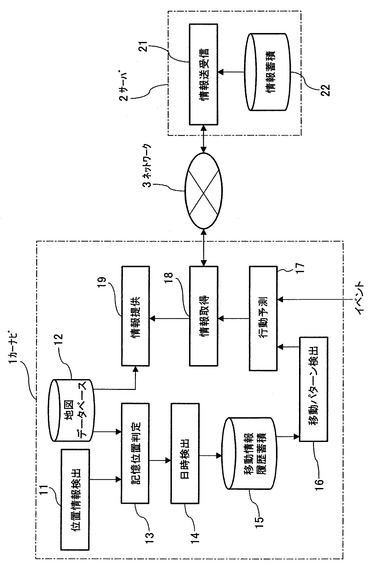
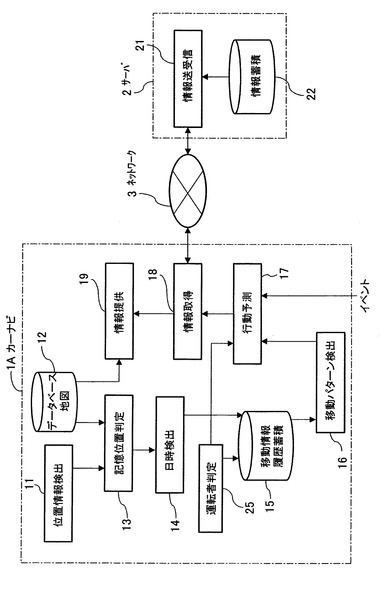
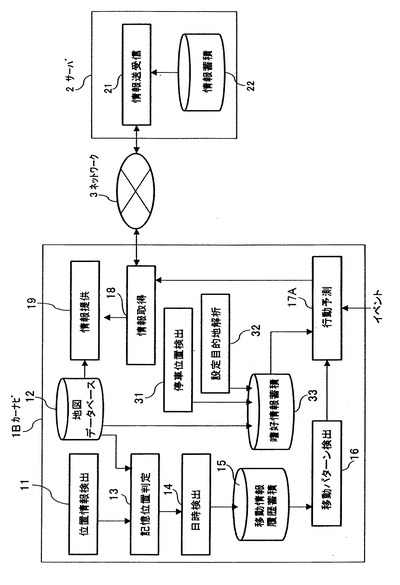
図1は本実施形態に係るシステムの全体構成を示す図である。図1において、1はユーザが乗った車に搭載されたカーナビ、2はカーナビ1からの要求に応じて情報を提供するためのサーバ、3はカーナビ1とサーバ2とをつなぐ例えばインターネットなどのネットワークである。ここで、搭乗者としてのユーザは、運転者であっても、それ以外であってもよい。、
カーナビ1において、11はGPSなどを用いてユーザの車の現在位置に関する情報を検出する位置情報検出手段であり、12は地図情報を記憶する地図データベースである。13は位置情報検出手段11によって検出された現在位置と地図データベース12とを参照して、検出した現在位置が記憶すべき場所であるか否か(後述するノードであるか否か)を判定する記憶位置判定手段、14は現在の日時を検出する日時検出手段、15は記憶位置判定手段13によって現在位置が記憶すべき場所であると判定されたとき、現在位置と日時検出手段14によって検出された現在の日時とを対にして時系列に記憶する移動情報履歴蓄積手段である。16は移動情報履歴蓄積手段15に記憶されている位置と日時の情報(移動情報)の履歴から、時系列の移動パターンを検出する移動パターン検出手段であり、17は所定のイベントが発生したとき、移動パターン検出手段16によって検出された移動パターンからユーザの車の行き先を予測する行動予測手段である。18は行動予測手段17によって予測されたユーザの行き先に関する情報をネットワーク3を介してサーバ2から取得する情報取得手段であり、19はユーザに対して、情報取得手段18によって取得した情報や地図データベース12に格納された地図情報を例えば液晶ディスプレイに表示する情報提供手段である。
【0018】
またサーバ2において、21はカーナビ1に対して情報を送受信するための情報送受信手段であり、22はカーナビ1に対して送信するための情報を記憶している情報蓄積手段である。
【0019】
図2は地図データベース12に格納されたデータの例を示す図であり、本実施形態で参照するデータの一部を抜粋したものである。本実施形態では、交差点やランドマーク、またはエリア名称などを「ノード」という概念で表すものとする。図2において、ノード番号は、これらノードに唯一に割り当てられたID番号を示し、ノードの種別および緯度・経度情報とともにそれぞれ記憶されている。緯度、経度情報はあくまでもそのノードの代表点の位置情報を示し、実際には、ノードの種類すなわち交差点、ランドマーク、エリアなどに応じて、範囲(代表点を中心とした半径など)を表す情報が存在する。例えば、交差点やランドマークであれば代表点を中心とした半径10mの範囲とし、エリアであれば代表点を中心とした半径1kmの範囲とする。もちろん、個々のエリアごとに、範囲が異なっていてもよい。
【0020】
また、「○○交差点」や「△△遊園地」などの固有名称以外でも、N123やN124のように「自宅」や「職場」などユーザに特有の場所をノードとして登録することができる。
【0021】
なお、ID番号の代わりに、交差点やランドマーク、エリアの名称を、各ノードが唯一に特定できるように記述しておいてもよい。すなわち、移動情報履歴蓄積手段15に蓄積される移動経路において、交差点、ランドマーク、エリアなどが特定できればよい。
【0022】
また、ここでは、カーナビ1内に設けられた地図データベース12において、各ノードの情報を管理するものとしたが、例えばノードID番号に係る情報はサーバ2に蓄えられており、カーナビ1がサーバ2に緯度・経度などの位置情報を送信すると、サーバ2がこれに対応するノードID番号をカーナビ1に通知するようにしてもよい。
【0023】
次に、車の移動経路が移動情報履歴として移動情報履歴蓄積手段15に蓄積される処理の流れについて、図3のフローチャートを用いて説明する。
【0024】
カーナビ1は、まず車のエンジンがかかっているか否かを位置情報検出手段11によって判定し(S11)、エンジンがかかっているとき(S11でNo)、車の現在位置を検出するタイミングであるか否かを位置情報検出手段11が判定する(S12)。ここでの判定は例えば、前回検出してから予め定められた所定時間、例えば3秒が経過したか否かを判断することによって行う。
【0025】
検出タイミングであると判定されたとき(S12でYes)、位置情報検出手段11は例えばGPSを利用してユーザの車の位置情報(経度、緯度)を検出する(S13)。そして記憶位置判定手段13は、検出された位置情報を基にして図2に示すような地図データベース12のデータを参照し、現在位置がいずれかのノードに含まれるか否かを判定する(S14)。ノードに含まれると判定されたときは(S14でYes)、日時検出手段14が現在の日時を検出する(S15)一方、ノードに含まれないと判定されたときは(S14でNo)、再びS11に戻り、判定が行われる。
【0026】
ステップS15で現在の日時が検出されると、車が現在存在するノードの番号と現在日時とを合わせて移動情報履歴蓄積手段15に記憶する(S16)。その後、ステップS11に戻り、再びエンジンがかかっているか否かの判定がなされる。
【0027】
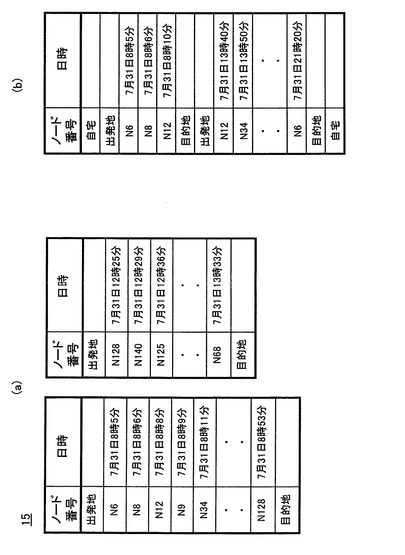
図4は移動情報履歴蓄積手段15に蓄積された移動情報履歴の例である。図4に示すように、ノード番号と通過日時は対になって時系列に記憶されている。例えば、7月31日の8時5分にノードN6を通過した後、同8時6分にノードN8を、さらに同8時8分にノードN12を通過したことを表している。
【0028】
図4(a)の例では、移動情報は、出発地から目的地までのセグメント単位、すなわちエンジンをスタートさせてから(出発地)ストップするまで(目的地)という単位でセグメントされている。一方、図4(b)の例では、「自宅を出発してから自宅に帰着するまで」というセグメントで蓄積されている。さらには、「同じ日付」というセグメントで蓄積してもよいし、セグメントなしに蓄積してもよい。
【0029】
なおここでは、時刻は月、日、時および分で表されているが、その他、年や秒、曜日も合わせて記憶してもよいし、逆にこれらの単位のいずれかを選択して記憶しておいてもよい。
【0030】
また、エンジンをスタートした時刻やストップした時刻を併せて記憶してもよい。さらに、エンジンのスタート時刻やストップ時刻を記憶するとともに、通過したノードについては、通過時刻は特に記憶させずに、そのノード番号のみを記憶するようにしてもよい。
【0031】
次に、移動パターン検出手段16の動作について説明する。移動パターン検出手段16は、移動情報履歴蓄積手段15に蓄積された図4のような移動情報履歴から、ユーザの車の移動傾向を抽出する。ここで、移動傾向とは例えば、「午前8時から午前11時の間に、N6,N8,N12,N9という経路を通過したときは、次に向かうノードはN34である確率が高い。」というような規則のことをいう。
【0032】
ここで人間の日常の行動について考えてみると、人間の日常的な行動パターンは、日々それほど変化するものでない。例えば、通勤に車を利用する人であれば、平日の朝は家から会社に向かうであろうし、平日の夕方は会社から家に向かうであろう。また、運転者が父親なら会社に向かうが、運転者が母親ならスーパーに行くことが多い、などの傾向が存在すると思われる。つまり、ユーザが現在いる位置情報、および現在に至るまでの移動情報を把握することによって、今後のユーザの行動がある程度予測できると考えられる。
【0033】
移動傾向は、次のような方法で抽出可能である。移動情報履歴蓄積手段15に蓄積された全ての移動情報履歴の中から、午前8時から午前11時の間にN6、N8,N12,N9という経路を走行しているデータを検索し、その後に進行したノード番号をその頻度と共に抽出する。例えば、N6,N8,N12,N9という経路を走行した後に、N34に17回、N18に2回、N17に1回移動したとすると、N6,N8,N12,N9という経路を走行した事象をRとしたとき、N34,N18,N17に移動する確率は、それぞれ
P(N34|R)=17/20
P(N18|R)=2/20
P(N17|R)=1/20
という事後確率で表されることになる。この確率の値が大きいノードほど、事象Rの後にその方向にユーザの車が向かう可能性が高いといえる。
【0034】
ここでは、現在位置のノードN9とその前の3個のノードN6,N8,N12を参照するものとしたが、参照ノードはこのような個数に限定されるものではなく、様々に考えることができる。例えば、移動情報が「出発地から目的地」というセグメントで蓄積されているときは、出発のノードから現在のノードまでのノード系列を参照するといったように、蓄積されたデータ構造に応じて適切な値に設定してもよい。また、ランドマークやエリアなどユーザが直前に立ち寄っていたノードと、現在ノードとを参照してもよい。さらに、ユーザが自宅を出発してから立ち寄ったランドマークやエリア、および現在のノードを全て参照してもよい。
【0035】
さらには、次のような手法も考えられる。一般に、参照ノード数が多いほど、条件が厳しくなるために予測の精度は向上するものの、蓄積した移動情報履歴の中から抽出できるデータ数は少なくなり、統計学の観点からすると、予測のために十分なデータが得られない可能性がある。そこで、現在のノードから過去にノードを順次遡ることによって参照ノード数を増加させていき、データ数が所定値を超えるという条件を満たす最大長さのノード系列を、参照ノードとして定める。遡るノードは、全ての種類のノードでもよいし、ランドマーク、エリア、交差点のいずれか、またはこれらの組み合わせに該当する種類のノードに限定してもかまわない。このような手法を用いることによって、予測のために必要な統計的なデータ数は満たしつつ、参照ノード数をできるだけ増やして条件を厳しくすることによって、予測の精度を高めることが可能となる。
【0036】
次に、ユーザの車の行動予測とそれに従ったユーザへの情報提供の処理について、図5のフローチャートを参照して説明する。
【0037】
所定のイベントの発生が検知されると(S21)、行動予測手段17は移動パターン検出手段16を参照して、ユーザの車の現在以降の行動を予測する(S22)。なお、上述した移動パターン検出手段16の動作は、予めなされていてもよいし、この所定のイベントを検知したときに行われるようにしてもかまわない。
【0038】
なお、所定のイベントとしては例えば、搭乗者の所定の行為としてのエンジン起動やカーナビの操作(例えば、情報提供の要求操作)などがあり、この他にも、交差点通過時(または通過後)、ランドマークやエリアに対する出発や到着、所定の時間間隔などの定期的なタイミング、または新たな情報の入手時等が考えられる。
【0039】
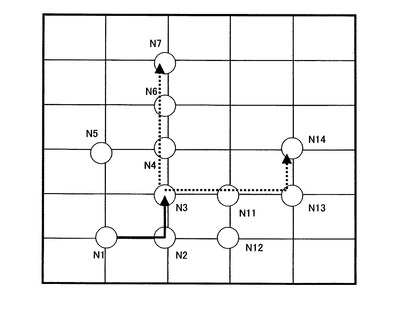
ここで、行動の予測方法について説明する。いま図6において、ユーザの車がN1,N2,N3という経路を走行し、現在N3に位置するものとする。N1,N2,N3という経路をRという事象で表現すると、N3の次にN4,N11に向かう事後確率は、移動情報履歴蓄積手段15に蓄積された移動情報履歴を参照して、それぞれP(N4|R),P(N11|R)で表現される。各ノードについてこのような事後確率がそれぞれ与えられるので、N7やN14に向かう確率は、この事後確率の積として、それぞれ、
P(N7)=P(N4|R)*P(N6|R∧N4)*P(N7|R∧N4∧N6)
P(N14)=P(N11|R)*P(N13|R∧N11)*P(N14|R∧N11∧N13)
で表現される。
【0040】
行動予測手段17は、このような確率値が所定の基準を満たすノードを、予測される行き先として選択する。所定の基準は例えば、予測の確からしさを示す閾値αを定めておき、確率値がこの閾値αよりも大きいこととする。例えば、P(N7)、P(N14)のうち閾値αよりも大きいものはP(N7)であるとすると、行動予測手段17はユーザの車が今後進む方向として、ノードN7を予測する。
【0041】
なおここでは、N7,N14に関して確率を計算したが、行動予測手段17が確率を計算するノードは、例えば現在のノード以降の全てのノードであってもよい。また、事後確率の積を計算していき、積が閾値α以下になるノードが出現するまで計算するようにしてもよいし、ユーザが過去に走行したことがあるノードについて計算するようにしてもよいし、ランドマークやエリアに関するノードについてのみ計算を行ってもよい。
【0042】
また、現在までの経路情報による事後確率では閾値αを超えるノードが存在しない場合には、現在以降のノードを通過する毎に確率を計算し直し、閾値αを超えるノードが見つかった時点で、進路に関して予測を行う、といったことが考えられる。
【0043】
また、ユーザへの情報提供を希望する観光施設やプレイスポット、店舗などが、自身のノードや付近の交差点に対応するノードなどを予めカーナビ1に通知しておき、行動予測手段17ではそのノードに至る経路に関して確率計算を行うようにしてもよい。もちろん、カーナビ1に緯度・経度などの位置情報を通知しておいて、カーナビ1内部で地図データベース12を参照して、緯度・経度とノードIDへのマッピングを行うようにしてもよい。
【0044】
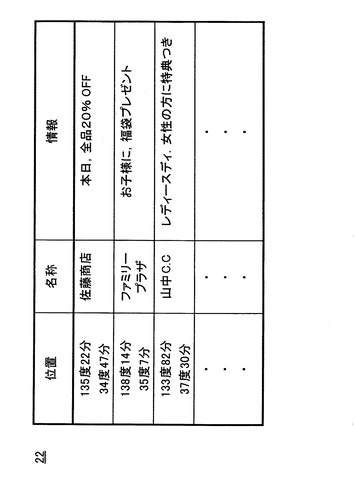
いずれかの方法により、行動予測手段17がユーザの車の行き先を例えばN7であると予測すると、情報取得手段18は、予測されたノードN7の位置情報をネットワーク3を介してサーバ2に送信する(S23)。図2によると、N7の位置情報は、東経135度22分35秒、北緯34度47分35秒である。サーバ2の情報送受信手段21において、カーナビ1からの位置情報の受信が確認されると(S31,S32)、情報蓄積手段22に蓄積された情報の中から、受信した位置情報に関連する情報の検索が行われる(S33)。
【0045】
図7は情報蓄積手段22に記憶された位置関連情報の例である。図7に示すように、情報蓄積手段22には、情報提供者の名称とその位置、および提供したい情報が蓄積されている。そして、カーナビ1から送信された位置情報が示す位置に近い情報提供者が提供する情報を、位置関連情報として選択する。近いか否かの判断は、例えば、送信された位置情報が示す位置、情報提供者の位置を中心とした所定の半径(例えば400mなど)の円の中に含まれるか否かによって行えばよい。あるいは、各情報提供者が情報提供を行う範囲を矩形で表し、その矩形を特定する情報(例えば、北東端と南西端など)を予め情報蓄積手段22で特定しておき、送信された位置情報が示す位置がその範囲に含まれるか否かによって、近いか否かを判断してもよい。
【0046】
ここでは、カーナビ1から送信した位置情報が示す位置に近い情報提供者として「佐藤商店」が選択され、提供する位置関連情報として「本日、全品20%OFF」が検索されたものとする。このようにして検索された位置関連情報は、情報送受信手段21からネットワーク3を介してカーナビ1に対して送信される。
【0047】
カーナビ1の情報取得手段18は、サーバ2からの位置関連情報の受信を待ち(S24)、位置関連情報を受信したと判定したとき(S25でYes)、情報提供手段19は受信した情報をユーザに表示する(S26)。提供方法としては例えば、ディスプレイ上に視覚的に表示したり、音声により聴覚的にユーザに伝達する方法などがある。
【0048】
なお、位置関連情報の検索は、他の方法でも実行可能である。例えば、カーナビ1とサーバ2とでノードID体系が共用されている場合には、図7の各情報にノードIDを対応付けておき、カーナビ1からは予測したノードのIDを位置情報として送信し、送信されたノードIDが対応付けられている情報提供者の情報を、位置関連情報として選択してもよい。
【0049】
また、カーナビ1からは、単なる位置情報に加えて、経路情報(例えば「N3→N4→N6→N7」)を送信し、ノードIDが一致するか否かに加えて、情報提供者の位置情報やノードIDが、経路情報が示す経路の延長線上に存在するか否かというような基準を用いて検索してもよい。
【0050】
以上のように本実施形態によると、ユーザの車の行き先を予測することが可能になり、このため、ユーザは、特に何も操作をしなくても、行き先に到着する前に、その場所に関する有益な情報を受けることができる。また、もしユーザがその方面に向かうつもりがない場合であっても、情報提供を行うことによって、その場所へ向かう動機をユーザに与えることが可能になる。
【0051】
また、本実施形態では、ユーザの車の移動経路を、交差点やランドマーク、エリアなどに対応するノード間の遷移の形式によって表している。このため、ユーザが出発してから各ノードを走行する毎に、ユーザの行き先を新たに予測し直すことができ、したがって、移動経路の途中において、目的地をできるだけ早く予測することが可能となる。
【0052】
なお、ここでは、カーナビ1からサーバ2に対して、ユーザの行き先の位置情報を送信するものとしたが、この代わりに、カーナビ1内部に、位置情報とノードの名称やIDとの関係を表すテーブルを設けておき、予測した位置情報からこのテーブルを参照して求めたノードの名称やIDをサーバ2に送信して、最新の情報を取得するようにしてもよい。
【0053】
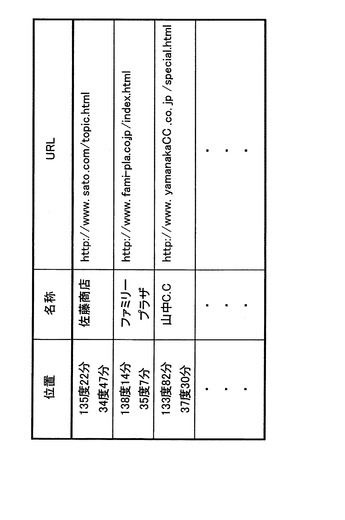
また、図8のような、位置情報と、その位置情報に関連する情報を提供するWebサイトのURLアドレスとの関係を表すテーブルをカーナビ1またはサーバ2に記憶させておき、位置情報が決定すると、このテーブルを参照して、これに対応するURLサイトから情報を取得するような仕組みにしてもよい。
【0054】
また、本実施形態では、ノードに関する位置情報を日時情報と併せて記憶するようにしたが、この代わりに、位置情報検出手段11が定期的に位置情報を検出し、ノードであるか否かに関係なく、その位置情報を、日時情報と併せて記憶するようにしてもよいし、日時情報を記憶しないようにしてもよい。
【0055】
また、今後の行き先を予測する際に、その行き先に到着するまでの予想所要時間を考慮に入れてもよい。というのは、ユーザが通過する可能性が高いノードが予測されたとしても、そのノードに到着するのが6時間後やあるいは翌日であったりする場合には、そのノードに関連する情報を提供することは必ずしも適切でないからである。すなわち、予想所要時間が所定を越える行き先については、予測の対象から外すことが好ましい。
【0056】
例えば、行動予測手段17がユーザの行き先として、ノードN100,N200という2個のノードを予測したとする。ここで、移動情報履歴蓄積手段15に蓄積された移動情報履歴には、検出された位置情報とそのときの日時が対になって記憶されている。このため、現在地からノードN100,N200に至るまでの所要時間は、蓄積された移動情報履歴から予想することができる。
【0057】
ここで、所要時間の閾値という概念を導入して、例えば「所要時間が3時間を越えるノードは予測の対象から外す。」という規則を利用するものとする。いま、ノードN100,N200への所要時間がそれぞれ、2時間および6時間と予想されたとする。この場合、所要時間が3時間を超えるノードN200については、予測の対象から外される。この結果、行動予測手段17は、ノードN100のみをユーザの行き先として予測する。
【0058】
また、本実施形態では、予測された行き先に関する情報として商用情報を提供するものとしたが、提供する情報はこれに限られるものではなく、例えば渋滞などを示す交通情報や、警察の交通取締り情報などを提供してもよい。
【0059】
また、本実施形態では、行き先の予測を行う際に、移動情報履歴の蓄積を行っているものとしたが、本発明はこれに限られるものではなく、例えばある程度の量の移動情報履歴が蓄積された後などでは、蓄積動作は行わないで、すでに蓄積された移動情報履歴を参照して、行き先の予測を行うようにしてもかまわない。
【0060】
(ノードの決定方法)
また本実施形態において、ノードは、予め地図データを参照して決定しておけばよい。基本的には、ユーザの車の走行経路と地図データとを参照して、停車地(ランドマークやエリア)や交差点をノードとする。さらに、ユーザの車の走行経路の情報を用いて、ノードを追加したり、あるいは削除したりすることができる。
【0061】
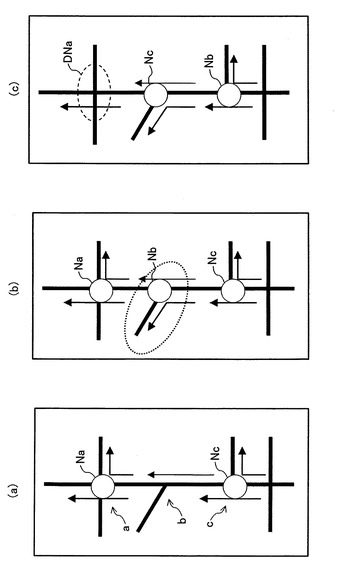
例えば図9(a)に示すように、交差点の中で、ユーザの車が2つ以上の方向に走行したことがあるものを、ノードとして定めてもよい。すなわち、交差点a,cについては、ユーザの車は2方向に走行したことがあるのでノードNa,Ncとして定める一方、交差点bについては、ユーザの車は1方向にしか走行していないのでノードとはしない。
【0062】
その後、図9(b)に示すように、交差点bについて、ユーザの車が新たな方向に走行したとすると、交差点bについてはユーザの車は2方向に走行したことがあるので、ノードNbとして追加する。あるいは図9(c)に示すように、交差点aについて、過去の所定期間において、ユーザの車が1方向にしか走行しなかった場合には、ノードNaを削除する。なお、このようなノードの設定には、地図データは必ずしも必要ではなく、ユーザの車の走行履歴のみを用いて行うことができる。
【0063】
(第2の実施形態)
図10は本発明の第2の実施形態に係るシステムの全体構成を示す図である。本実施形態では、同一のカーナビであっても、運転者が異なったとき、運転者に応じた行動の予測を行い、情報を提供する。図10を図1と対比すると、カーナビ1Aが運転者判定手段25を備えている点が異なる。
【0064】
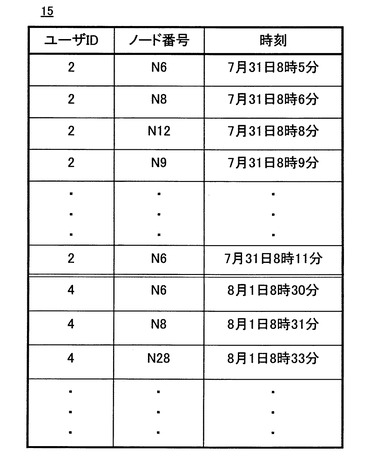
運転者判定手段25は、例えば車のエンジンがかけられたとき、運転者が誰であるかを判定する。判定の方法としては、運転者個別のキーや半導体カードによって行う方法や、運転者のもつ携帯電話と通信して電話番号を識別することによって行う方法などが考えられるが、その手法は特に問わない。そして、運転者判定手段25による判定結果は、図11に示すように、例えばユーザIDとして、第1の実施形態と同様にして求められたノード番号とその通過時刻とともに、移動情報履歴蓄積手段15に記憶される。
【0065】
これにより、ユーザ毎の移動情報履歴が記憶されることになり、したがって、ユーザ毎のノード間の遷移確率を計算することが可能になる。したがって、「ID“2”のユーザは、午前中ならN6,N8という経路の後はN12方面に向かう」が「ID“4”のユーザは、午前中ならN6,N8という経路の後はN28方面に向かう」というような、運転者個別の予測が可能となる。このような予測によって、個々のユーザに対して、より適したきめ細かな情報を提供することが可能となる。
【0066】
なお、運転者以外の搭乗者を判定するようにしてもよい。すなわち、運転者ではなく、同乗者が誰であるかという情報を移動情報履歴蓄積手段15に記憶することによって、例えば「運転者一人で運転するときはN5に行くが、家族が同乗で運転するときはN16方面に行く。」といった予測も可能となる。さらには、運転者情報と同乗者情報を併せて記憶するような構成も考えられる。
【0067】
また、運転者毎に記憶した方が好ましい情報としては、移動情報以外にも、例えば地図データベース12の情報が考えられる。第1の実施形態では、地図データベース12に記憶されるノードについてはユーザが登録することも可能であると述べた。ところが、例えば「職場」や「映画館」といった名称をユーザが登録する場合は、その指し示す対象がユーザ毎に異なることが考えられる。例えば「職場」というノードは、運転手が父親のときは「○×製造株式会社」であるが、長男のときは「□△商事株式会社」であるといった例が考えられる。
【0068】
そこで、地図データベース12には、固有名称以外のノードに関しては運転者ごとに記憶しておき、運転者判定手段25による判定結果に応じて、参照するノード情報を変更するようにしてもよい。さらには、運転者ごとのノード情報は、地図データベース12とは別に記録させておいてもよい。例えばメモリカードに記録しておき、メモリカードをカーナビ1Aに挿入させ、地図データベース12およびメモリカードを併せて参照するようにしてもよい。あるいは、ネットワーク上に存在させておいてもよい。
【0069】
(第3の実施形態)
図12は本発明の第3の実施形態に係るシステムの全体構成を示す図である。本実施形態では、ユーザの好みの場所に関する嗜好情報をカーナビに蓄積しておき、予測した行き先とともに、嗜好情報も加味して、ユーザに情報を提供する。ここでは、ユーザがカーナビに目的地設定した場所や、車のエンジンを切り所定時間以上停車した場所などを、ユーザの好みの場所として判断する。
【0070】
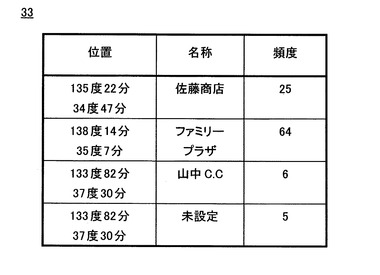
図12を図1と対比すると、カーナビ1Bが停車位置検出手段31、設定目的地解析手段32および嗜好情報蓄積手段33を備えている点が異なる。停車位置検出手段31は車のエンジンが切られ、所定時間以上停車した状態であるか否かを判定し、停車状態であるとき自車の位置情報として緯度・経度情報を検出する。設定目的地解析手段32はユーザによってカーナビ1Bに対して設定された目的地がどこであるかを解析する。嗜好情報蓄積手段33は地図データベース12を参照して、停車位置検出手段31によって検出された位置や設定目的地解析手段32によって解析された場所について、その頻度を表す情報を記憶する。
【0071】
図13は嗜好情報蓄積手段33に記憶されたデータの例である。図13では、各データ項目は位置、名称および頻度という属性を有している。ここで、ユーザが目的地を設定する場合は、地図上の位置、電話番号、名称などをキーとして地図データベース12の検索を行うので、設定目的地解析手段32によって解析される場所については、名称が必ずといっていいほど存在する。これに対して、停車位置検出手段31によって検出された位置情報については、地図データベース12を検索したとき、必ずしも名称が登録されているわけではない。このため、図13における最下行のように、名称が未設定のデータも存在することになる。もちろん、位置情報と対応するノードが存在するときは、ノードのIDや名称を記述しておけばよい。
【0072】
また、嗜好情報は次のように更新される。すなわち、停車位置検出手段31または設定目的地解析手段32によって検出された場所が、すでにデータに登録されているときは、その頻度を1だけ増加させ、未登録であれば新規にデータを追加し、頻度を1に設定する。
【0073】
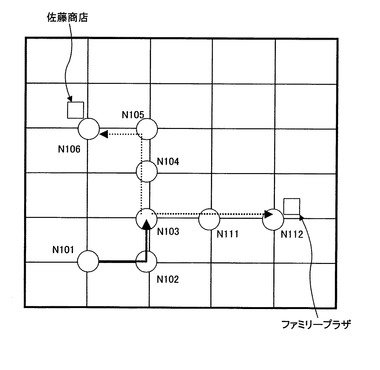
本実施形態における行動予測手段17Aの動作について、図14を参照して説明する。
【0074】
いま、ユーザの車が、ノードN101,N102を経由して、ノードN103にいるものとする。このとき、今後ユーザの車が、ノードN104,N105を経由してノードN106方面に進行する確率P(N106)、およびノードN111を経由してノードN112方面に進行する確率P(112)は、第1の実施形態で説明した方法によって求めることができる。いま、
P(N106)=0.6,P(N112)=0.4
とし、また閾値α=0.5とすると、第1の実施形態では、ノードN106方面にいく可能性が高いと判定する。
【0075】
本実施形態ではさらに、嗜好情報蓄積手段33も参照される。図13のデータから、ノードN112方面に存在するファミリープラザには非常に頻度よく立ち寄っていることが分かる。すべての停車地の中で、ファミリープラザに停車する割合P(famipla)は、0.64(=64/(25+64+6+5))である。そこで、
{P(N112)+P(famipla)}/2
のように、行動の予測と嗜好情報の両方を考慮した値を算出する式を定義し、計算すると、その値は0.52となり、閾値αを超える。このため、行動予測手段17Aはユーザの今後の行動の予測として、ノードN106方面とノードN112方面の2つを候補として出力する。
【0076】
情報取得手段18は、行動予測手段17Aからノード番号N106およびN112を受け取り、これをネットワーク3を介してサーバ2に送信する。以降の情報提供の動作は、第1の実施形態と同様である。なお、行動予測手段17Aは、ノード番号の代わりに、ノードN106およびN112の緯度・経度情報、または佐藤商店、ファミリープラザなどの施設、店舗名を出力してもよい。
【0077】
以上のように本実施形態によると、ユーザの行動予測だけでなく、ユーザの嗜好情報を加味して情報を提供するので、ユーザはこれから向かう場所以外の、自分の好みの場所に関する情報を取得できる。したがって、その情報を基に行動予定を変更する、など、ユーザにとって今後の行動の選択の幅が広くなり、ユーザに対する新たな行動の提案が可能となる。
【0078】
なお、本実施形態では、ユーザの嗜好場所に関する頻度の割合を、嗜好情報蓄積手段33に蓄積されたすべての場所の頻度を考慮して求めたが、この代わりに、進行が予想される嗜好場所のみの頻度を考慮して求めてもよい。
【0079】
なお、本実施形態では、行動予測を第1の実施形態で述べた方法によって行うものとしたが、これ以外のどのような行動予測方法であっても、本実施形態のように嗜好情報を加味する機能を付加することは可能であり、有効である。
【0080】
(第4の実施形態)
図15は本発明の第4の実施形態に係るシステムの全体構成を示す図である。本実施形態では、行動予測に加えて、スケジュール管理機能を併せて利用することによって、行動予測の精度を向上させる。図15を図1と対比すると、カーナビ1Cの行動予測手段17Bがユーザの行動を予測する際に、PDAなどのスケジュール管理機能を備えるスケジューラ41を参照する点が異なる。カーナビ1Cがスケジューラ41を参照する方法としては、PDAや携帯電話などのスケジュール機能を有する機器とケーブルや無線で通信する、SDカードなどのメモリカードを媒体にする、またはネットワーク上に存在するスケジュール情報を参照するなどの方法があるが、この限りではない。
【0081】
図16はスケジューラ41で管理されたスケジュール情報の一例である。図16のスケジュールから、ユーザは10時から本社で会議をした後、12時から14時の間に研究所に移動し、14時から研究所を見学し、18時に帰宅することが分かる。
【0082】
スケジューラ41を参照した行動予測の手順について、図17を参照して説明する。
【0083】
ユーザはノードN201付近の本社を出発し、ノードN202を経由して、現在ノードN203にいるものとする。現在時刻は13時とする。このとき、第1の実施形態における行動予測手段17では、移動情報履歴を参照して、研究所があるノードN206方面に進行する確率P(N206)および工場があるノードN212方面に進行する確率P(N206)として、それぞれ、
P(N206)=0.4,P(N212)=0.4
と算出するものとする。そして、予測の確信度を示す閾値が0.7であり、いずれの確率P(N206),P(N212)も閾値を超えておらず、進行方向をいずれとも判断しかねる状態であるとする。
【0084】
これに対して、本実施形態における行動予測手段17Bは、移動情報履歴に加えて、スケジューラ41からユーザのスケジュールを取得し、これを併せて参照する。スケジューラ41では、ユーザは14時から研究所を見学することが記述されている。研究所の位置が地図データベース12からノードN206であると判定されると、スケジュールから求めた、14時以前にユーザがN206方面へ進行する確率P(N206|スケジュール)は、例えば
P(N206|スケジュール)=0.5
と定める。
【0085】
そして行動予測手段17Bは、最終的な予測値として、移動情報履歴から得た予測値P(N206)(=0.4)と、スケジュールから求めた予測値P(N206|スケジュール)(=0.5)とを加算し、0.9を得る。この値は閾値0.7を超えているため、今後のユーザの行動としては、ノードN206方面に進む確率が高いことが分かる。この結果、行動予測手段17Bはユーザの進行方向としてノードN206方面を予測し、情報取得手段18はノードN206方面に関する情報を取得して、ユーザに提示することが可能となる。
【0086】
このように本実施形態によると、PDAなどのスケジューラ機能を持つ情報機器と連動してユーザのスケジュールを把握し、これを行き先の予測に加味することによって、さらに精度の高い予測を行うことが可能になる。例えば、移動情報履歴から得た予測値では、進行方向をいずれとも判断しかねる状態のときに、ユーザのスケジュールを参照して、スケジュールから求めた予測値を加算することによって、行き先を予測すればよい。
【0087】
なお、スケジュールから求めた予測値は、ここでは所定の値(0.5)として固定するものとしたが、これ以外でも例えば、ユーザが過去にスケジュール通りに行動したか否かの実績に基づいて求めたり、場所ごとに値を定め、過去にスケジュール通りに行動した場所に関しては値を相対的に高く設定する、など様々な方法が考えられる。
【0088】
また、スケジューラ41から取得する情報として、「研究所」などの名称だけでなく、その位置に関する情報(緯度・経度情報やノードIDなど)が含まれている場合には、地図データベース12に名称が存在しない場所についても予測を行うことができる。
【0089】
また、移動情報履歴から求めた行き先と、スケジューラ41から取得したスケジュールとが乖離している場合には、その旨を示すメッセージを表示するなどの処理を行ってもよい。図18はこのようなメッセージを表示させた場合のカーナビのディスプレイ画面の例である。図18のように、行動予測とスケジュールとが乖離する場合に、ユーザに、あなたの行き先は予定とは異なる旨のメッセージを表示する。このとき、メッセージに、スケジュールによると本来向かうべき先の住所や電話番号を表示してもよい。あるいは、ユーザの車に電話機能が付いている場合には、ユーザの要求に応じて自動的に電話をかけるようにすることもできる。さらには、スケジュールでの行き先を、カーナビの目的地としてあらためて設定して、そのルートをユーザに知らせることも可能である。
【0090】
なお、本実施形態では、行動予測を第1の実施形態で述べた方法によって行うものとしたが、これ以外のどのような行動予測方法であっても、本実施形態のようにスケジューラの参照機能を付加することは可能であり、有効である。
【0091】
(第5の実施形態)
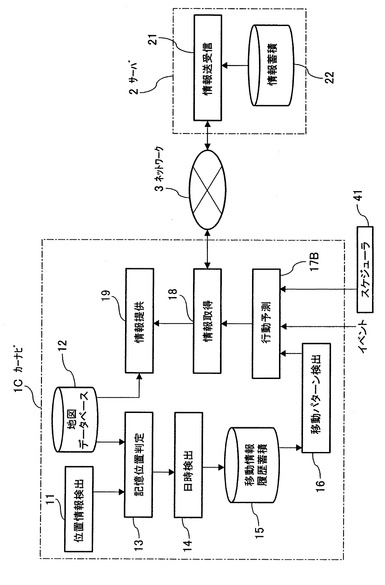
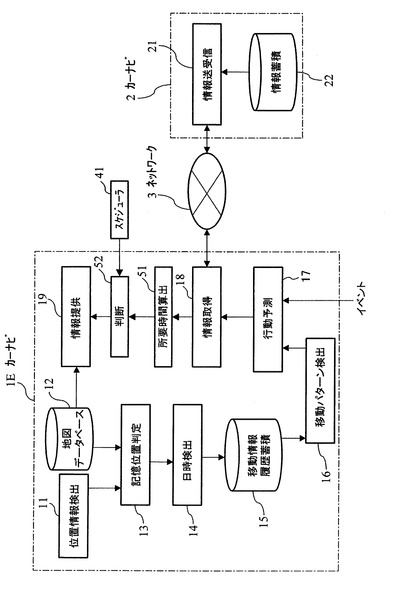
図19は本発明の第5の実施形態に係るシステムの全体構成を示す図である。本実施形態では、ユーザの行き先を予測するとともに、その行き先について、予想所要時間または到着予想時刻などの情報を提示する。図19を図1と対比すると、情報取得手段18がネットワーク3を介して取得した情報に基づいて、予測した行き先までの予想所要時間を算出する所要時間算出手段51を設けている点が異なる。
【0092】
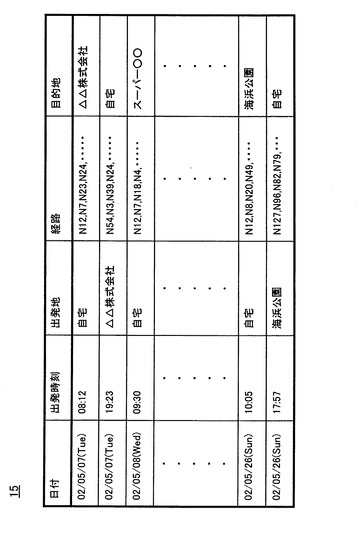
図20は本実施形態において、移動情報履歴蓄積手段15に蓄積された移動情報履歴の例である。図20の例では、移動情報として、日付、出発時刻、出発地、経路および目的地が蓄積されている。出発地はエンジンが始動した地点、目的地はエンジンが停止した地点である。
【0093】
出発地および目的地の表現方法としては、様々なものが考えられる。例えば、エンジンの停止位置が地図データベース12に記憶されたランドマークやエリアであった場合には、その名前やノードIDで表すことが可能である。また、エンジンの停止位置に対応するランドマークやエリアがない場合には、距離が近いか(所定距離以内)またはその場所に近い代表的な(有名)ランドマークやエリアの名前やノードIDで表してもよい。あるいは、その付近の交差点名やノードID、または住所で表してもよい。
【0094】
また、エンジンが頻度よく停止する場所に関しては、所定のタイミングで、ユーザに名称の登録を促すメッセージを出力してもよい。さらに、ユーザが持つ、またはネットワーク上に存在する住所録などを参照して、対応する名称(例えば「A子さんの家」など)を自動的に登録するようにしてもよい。
【0095】
移動パターン検出手段16は図20のような移動情報履歴を参照することによって、図21に示すような移動パターンを検出する。すなわち図20に示すようなユーザの過去の走行を、出発曜日や出発時刻などの区分ごとに分類し、各区分について、出発地、経路および目的地の組を、その平均所要時間と頻度でもって表現する。例えば図21において、平日の朝であれば、出発地が自宅の場合、目的地が△△株式会社、○×医院、スーパー○○である頻度はそれぞれ70%、25%、5%であったことを示している。
【0096】
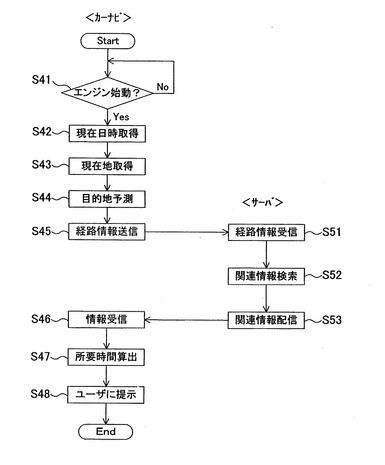
次に、本実施形態における行動予測とそれに従ったユーザへの情報提供の処理の流れについて、図22のフローチャートを参照して説明する。
【0097】
行動予測手段17は、所定のイベントとして例えばエンジンの始動を検知すると(S41)、現在の日時および現在地の情報を取得する(S42,S43)。現在地の情報は位置情報検出手段11を利用して得ることができるが、これ以外にも、移動情報履歴蓄積手段15を参照して前回走行時のエンジン停止位置を得て、これを現在地としてもよい。この方法によると、現在地情報を瞬時に得ることができる。
【0098】
いま、現在日時が平日の9時10分、現在地が自宅であったとすると、移動パターン検出手段16によって検出された図21に示すような情報を参照して、ユーザの行き先を予測する(S44)。図21において、平日の8時から11時の間に自宅を出発地とした場合の目的地は、△△株式会社、○×医院およびスーパー○○であり、頻度はそれぞれ70%、25%、5%である。第1の実施形態で示したような予測の確からしさを示す閾値の概念を導入し、頻度が20%以上の目的地を予測の候補とすると、△△株式会社および○×医院がその対象となる。行動予測手段17によって行き先が予測されると、情報取得手段18は、予測された行き先までの経路情報をサーバ2に対して送信する(S45)。
【0099】
サーバ2は、カーナビ1Dから経路情報を受信すると(S51)、情報蓄積手段22に蓄積された交通情報の中で受信した経路に関連する情報を検索し(S52)、検索した交通情報をカーナビ1Dに対して送信する(S53)。
【0100】
カーナビ1Dは、情報取得手段18において交通情報を受信すると(S46)、所要時間算出手段51において、受信した交通情報と図20に示す目的地までの所要時間などを参照して、それぞれの行き先地候補までの予想所要時間を算出する(S47)。例えば「自宅から△△株式会社への通常の所要時間は60分であり、交通情報を加味すると80分である」「自宅から○×医院への通常の所要時間は20分であり、渋滞はなし」というように、現在の交通情報を加味した予想所要時間が算出される。そして、現在時刻が9時10分であることから、△△株式会社への到着予想時刻は10時30分、○×医院への到着予想時刻は9時30分であると算出する。
【0101】
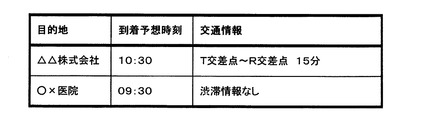
所要時間算出手段51によって各行き先候補までの到着予想時刻が算出されると、情報提供手段19はユーザに対してその情報を提供する(S48)。図23は、カーナビ1Dの画面上に提示される情報の例である。図23では、到着予想時刻に加えて、関連する交通情報をユーザに提供している。なお、到着予想時刻の代わりに、予想所要時間に関する情報を提供してもよい。
【0102】
なお、本実施形態では、予想された行き先までの所要時間を、ユーザが過去に走行したときの平均所要時間と現在の交通情報とを基にして算出したが、これ以外でも、現在地から目的地までの距離を地図データベース12を参照して測定し、車両の平均走行速度などを利用して所要時間を概算するといった方法も考えられる。
【0103】
<変形例>
さらに、予想所要時間や到着予想時刻とユーザのスケジュールとを対比して、空き時間の有無や、予定に遅れる可能性の有無を判断し、空き時間があるときや予定に遅れる可能性があるとき、新たな情報を提供することも可能である。
【0104】
図24は本実施形態の変形例に係るシステムの全体構成を示す図である。図19と対比すると、所要時間算出手段51による算出結果と、スケジューラ41から得たユーザのスケジュールとを対比する判断手段52が設けられている。判断手段52は、算出された予想所要時間または到着予想時刻とユーザのスケジュールとを対比して、空き時間がある場合や、予定に遅れる可能性がある場合を検知する。
【0105】
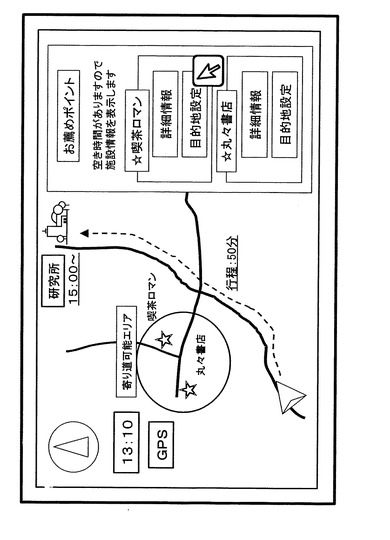
例えば、スケジューラ41ではユーザは15:00に研究所へ行く予定になっていたとする。現在時刻が13:10であり、現在地から研究所までの予想所要時間が50分であったとすると、1時間程度の空き時間が存在することが分かる。判断手段52が1時間程度の空き時間があることを検知すると、情報提供手段19は、その空き時間を潰せるような情報をユーザに提供する。例えば図25に示すように、研究所までのルートの近辺で1時間程度の空き時間で立ち寄れるお薦めポイント(喫茶店や書店など)の情報をユーザに提供する。
【0106】
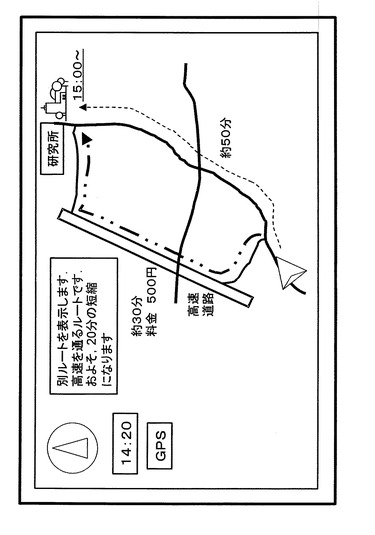
また、スケジューラ41ではユーザは15:00に研究所へ行く予定になっており、現在時刻が14:20であり、現在地から研究所までの予想所要時間が50分であったとすると、ユーザが多少予定に遅れる可能性があることが分かる。判断手段52が予定に遅れる可能性があることを検知すると、情報提供手段19は、目的地までの所要時間を短縮できるような別ルートの情報を提供する。例えば図26の例では、研究所までのルートと並行に走る高速道路の利用をユーザに薦めている。
【0107】
(第6の実施形態)
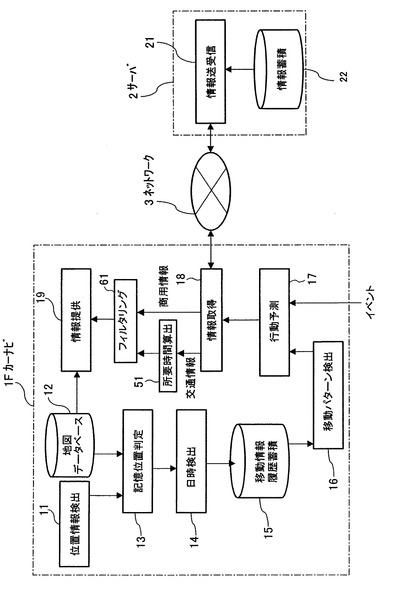
図27は本発明の第6の実施形態に係るシステムの全体構成を示す図である。図27を図1と対比すると、第5の実施形態で説明した所要時間算出手段51と、取得した商用情報について、所要時間算出手段51で得られた予想所要時間または到着予測時刻を参照して、フィルタリングをかけるフィルタリング手段61を備えている点が異なる。
【0108】
いま、行動予測手段17によって、ユーザの車の行き先としてノードA,Bが予測されたとする。このとき、情報取得手段18は、ノードA,Bまでのルートの交通情報と、ノードA,Bに関連する商用情報をネットワーク3を介してサーバ2から取得する。
【0109】
図28は取得された商用情報の例である。図28では、ノードAの子供プラザでは6月1日9時から6月2日15時までの期間、記念品の贈呈が行われており、ノードBのGS梅田店では、5月28日8時から6月3日17時までの期間、女性ドライバーに対してガソリン値引きが行われていることが示されている。ここで、所要時間算出手段51によって、ノードAへの到着時刻は6月2日15時20分、ノードBへの到着時刻は6月2日16時と予測されたとする。
【0110】
フィルタリング手段61は、予測された到着時刻が、商用情報における有効期間に含まれているか否かを判断し、含まれている情報のみを出力する。ここでは、ノードAの子供プラザについては、到着予測時刻の6月2日15時20分は有効期間を過ぎているので、提供する情報からは省く。一方、ノードBのGS梅田店については、到着予測時刻の6月2日16時は有効期間内であるので、ユーザにとって役に立つ情報であると判断して、情報提供手段19に出力する。
【0111】
また、到着予測時刻が有効期間を過ぎている商用情報については、省いてしまう代わりに、ユーザに、間に合わない可能性が高い旨のメッセージとともに提示してもよい。あるいは、間に合う可能性を数値で表示して、ユーザの注意を喚起してもよい。さらには、ユーザの車の進行状況や渋滞状況に応じて到着予測時刻を更新していき、これに応じて、間に合う可能性を示す数値を刻々と変化させていってもよい。
【0112】
なお、商用情報のフィルタリングは、サーバ2の方で実行させてもよい。
【0113】
(第7の実施形態)
図29は本発明の第7の実施形態に係るシステムの全体構成を示す図である。図29を図1と対比すると、移動履歴情報から、複数のノードを包含する「エリア」を生成するエリア化手段71を備えている点が異なる。
【0114】
いま、図30(a)に示すようなノード1〜7が存在するものとする。ここで、エリア化手段71は、移動情報履歴蓄積手段15に蓄積された移動情報履歴を参照して、所定の大きさの範囲内にあって、ユーザが過去に訪れた頻度が所定回数以上であるノードが複数ある場合に、これらのノードをまとめて「エリア」とする。図30(b)の例では、ノード2,3,5,6が1つのエリアにまとめられている。
【0115】
行動予測手段17は、ユーザの行き先はノード3であると予測したとき、エリア化手段71におけるエリアの情報を参照して、ノード3と同一エリアにノード2,5,6が存在することを認識する。そして、情報取得手段18に、ノード3に関連する情報だけではなく、ノード2,5,6に関連する情報も併せて取得するように指示する。この結果、ユーザには、ノード3の関連情報だけでなく、同一エリアに含まれたノード2,5,6の関連情報も提示される。
【0116】
なお、エリア化するノードの範囲は、ユーザが主として滞在する自宅や会社などからの距離に応じて変更してもよい。例えば、自宅から遠いほど、範囲を広くすればよい。また、ユーザの移動方法に応じて、変更してもよい。例えば、カーナビのように車の移動を前提とする場合は広く設定し、徒歩による移動を前提とする場合は狭く設定すればよい。
【0117】
なお、エリア化する手法は、ここで示されたものに限られるものではない。例えば図31に示すように、エリア化可能なノード群をエリア候補ごとに予め定めておく(例えばエリア1は「梅田エリア」、エリア2は「難波エリア」など)。そして、各エリア候補について、例えば、対応するノード群のうち所定数以上のノードについてユーザの訪問回数が所定回数を超えたというような条件を満たしたとき、そのエリア候補をエリアとして定める。また、同一の日付や同一時間帯にユーザが訪れたノードを、エリア化してもよい。さらに、あるノードが、複数のエリアに含まれるように設定してもよい。
【0118】
また、すでに生成したエリアを、ノードとみなして、上述のようなエリア化をさらに行ってもよい。
【0119】
また、予め広域のエリアを設定しておき(例えば「東大阪エリア」など)、その中のノードの個数が増えてきたら、そのエリアを分割していくようにして、エリア化を行ってもよい。分割してから新しくエリアを作成する場合には、上述の方法を用いればよい。
【0120】
なお、上述の各実施形態では、ユーザに情報を提供する機器としカーナビを想定して説明を行ったが、本発明において、情報機器はカーナビに限定されるものではなく、例えば携帯電話やPDAなどユーザが日常的にもつ情報端末などであっても、位置情報のセンシングが可能であれば、ここで示した各実施形態と同様の効果を得ることができる。
【0121】
また、上述の各実施形態では、ユーザは車で移動するものとしたが、車以外の手段、例えば徒歩、電車などで移動する場合であっても、情報機器を携帯している場合には、本発明は実現可能である。
【0122】
また、本実施形態では、移動情報履歴蓄積手段15、移動パターン検出手段16および行動予測手段17をカーナビなどの情報機器の内部に設ける例を示したが、これらの機能をネットワーク接続された外部のサーバに設けるような構成も考えられる。すなわち、位置情報検出手段11や日時検出手段14によって検出された情報が外部のサーバに送信され、そのサーバで蓄積されて、所定のイベントが発生したときに、サーバで今後の行動を予測して必要な情報をカーナビに対して送信する、といった構成も可能である。このような構成は、ユーザが用いる情報機器が、携帯電話やPDAであった場合に、特に有効となる。
【0123】
また、本実施形態では、移動パターンは、蓄積された移動情報履歴から抽出するものとしたが、この代わりに、ネットワークなど外部から移動パターンを取得したり、ユーザ自身が移動パターンを設定するようにしてもよい。例えば、情報提供者が「ノードA→ノードB→ノードCという経路を走行するユーザに、ノードT付近にある店舗Sの情報を提供したい」という要求を持っている場合、移動パターン検出手段16にこの条件を記憶させておく。そして実際に、ユーザがノードA→ノードB→ノードCという経路を走行した場合には、その後の進行方向としてノードTを予測し、情報取得手段18はサーバ2に対してノードT付近に関する情報を要求する。
【0124】
また、情報の取得のために、ネットワークを利用する代わりに、VICSや放送波などを利用してもよい。この場合、情報取得手段18は、行動予測手段17によって予測された行き先に関する情報のみを抽出して、ユーザに提供するようにしてもよい。
【産業上の利用可能性】
【0125】
本発明に係る情報提供方法および装置は、ユーザに煩雑な操作を強いることなく、ユーザの行き先に関する有益な情報を、的確に提供することができ、例えば、カーナビやPDA等の情報機器を用いたサービスの提供等に有用である。
【図面の簡単な説明】
【0126】
【図1】本発明の第1の実施形態に係るシステムの全体構成を示す図である。
【図2】地図データベースに格納されたデータの例である。
【図3】本発明の第1の実施形態において、移動情報の履歴を蓄積する処理を示すフローチャートである。
【図4】本発明の第1の実施形態において、蓄積された移動情報の履歴の例である。
【図5】本発明の第1の実施形態において、行動予測と情報提供の処理を示すフローチャートである。
【図6】ノードの遷移の一例を示す図である。
【図7】記憶された位置関連情報の例である。
【図8】位置情報と、これに関連する情報を提供するURLアドレスとの関係を表す情報である。
【図9】ノードの決定方法を示す図である。
【図10】本発明の第2の実施形態に係るシステムの全体構成を示す図である。
【図11】本発明の第2の実施形態において、蓄積された移動情報の履歴の例である。
【図12】本発明の第3の実施形態に係るシステムの全体構成を示す図である。
【図13】本発明の第3の実施形態における嗜好情報の例である。
【図14】本発明の第3の実施形態における行動予測を説明するための図である。
【図15】本発明の第4の実施形態に係るシステムの全体構成を示す図である。
【図16】スケジューラで管理されたユーザのスケジュールの例である。
【図17】本発明の第4の実施形態における行動予測を説明するための図である。
【図18】移動情報の履歴から求めた行動予測とスケジュールとが異なるときに表示するメッセージの例である。
【図19】本発明の第5の実施形態に係るシステムの全体構成を示す図である。
【図20】本発明の第5の実施形態において、蓄積された移動情報の履歴の例である。
【図21】図20の移動情報履歴から検出された移動パターンの例である。
【図22】本発明の第5の実施形態において、行動予測と情報提供の処理の流れを示すフローチャートである。
【図23】到着予想時刻をユーザに提供する情報の例である。
【図24】本発明の第5の実施形態の変形例に係るシステムの全体構成を示す図である。
【図25】空き時間があるときにユーザに提供する情報の例である。
【図26】予定に遅れる可能性があるときにユーザに提供する情報の例である。
【図27】本発明の第6の実施形態に係るシステムの全体構成を示す図である。
【図28】取得される商用情報の例である。
【図29】本発明の第7の実施形態に係るシステムの全体構成を示す図である。
【図30】ノードのエリア化を説明するための図である。
【図31】エリア候補を示す情報の例である。
【技術分野】
【0001】
本発明は、位置情報が検出可能なカーナビゲーションシステム(以下、「カーナビ」と略記する)やPDA(Personal Digital Assistant)等の情報機器を用いて、ユーザに情報を提供するための技術に属する。
【背景技術】
【0002】
近年、GPS(Global Positioning System)や携帯電話網のアンテナ等を利用して、カーナビやPDA、携帯電話によって位置情報が検出できるようになり、この位置検出機能を利用して多様なサービスが実現されてきている。
【0003】
カーナビに関しては、GPSによって捕捉した自車位置近辺の情報を、FM文字多重放送や光ビーコンから取り込んでディスプレイに表示させるサービスが実現されている。携帯電話に関しては、NTTドコモの「iエリア」やJフォンの「J−Sky」などのサービスにおいて、携帯電話を持つユーザがいるエリアを数百mから数Kmの範囲で限定し、そのエリアに関するイベント情報やサービス情報などを提供している。
【0004】
さらに、携帯電話にGPSのユニットを内蔵する端末も発売されており、精度が高いところでは数m程度の誤差で位置が検出できるようになり、今後、このような位置情報に関連した様々なサービスが登場することが予想される。
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、現在実現されている様々なサービスでは、ユーザ(が使用する情報端末)の現在位置を特定し、その現在位置に関連する情報をユーザに提供している。そして将来的には、ユーザの現在位置に関する情報だけではなくて、これから向かう行き先に関する情報についても、提供してほしいというニーズもあると考えられる。
【0006】
現在のカーナビなどのシステムでは、ユーザが目的地やルートを明示的に指定することができるので、このようなシステムでは、指定された目的地やルートに関連する情報をユーザに提供するような仕組みは、容易に実現可能である。ところが、目的地やルートを検索したり指定したりする操作は、実際には煩雑である。また、仮に運転者が運転中にこのような操作を行うと、注意が散漫になるために、安全運転の妨げになると考えられる。
【0007】
そこで、ユーザが特に操作をしなくても、ユーザの行き先に関する情報を的確に提供できるような技術が実現されれば、いまよりもさらに、快適で安全なカーライフを人々に提供することができる。
【0008】
前記の問題に鑑み、本発明は、ユーザに煩雑な操作を強いることなく、ユーザの行き先に関する情報を、的確に、提供可能にすることを課題とする。
【課題を解決するための手段】
【0009】
前記の課題を解決するために、本発明は、車の搭乗者に情報を提供する方法として、前記車に搭載された情報機器によって前記車の位置情報を検出するステップと、検出された位置情報から得た前記車の移動経路を、ノード間の遷移の形式で、移動情報履歴として蓄積するステップと、所定のイベントの発生を検知したとき、前記車の現在までの移動経路と蓄積された移動情報履歴とを参照して前記車の行き先を予測するステップと、予測された行き先に関する情報を前記情報機器を介して前記搭乗者に提供するステップとを備えたものである。
【0010】
この発明によると、所定のイベントの発生が検知されたとき、車の現在までの移動経路と、蓄積された過去の移動経路である移動情報履歴とが参照されて、車の行き先が予測される。そして、この予測された行き先に関する情報が、車に搭載された情報機器を介して搭乗者に提供される。このため、車の搭乗者は、特に何も操作をしなくても、自分の行き先に関する有益な情報を的確に受けることができ、快適かつ安全に、車で移動することができる。
【0011】
また、前記本発明に係る情報提供方法は、前記搭乗者の好みの場所に関する嗜好情報を蓄積するステップを備え、前記車の現在までの移動経路と蓄積された移動情報履歴とを参照した前記車の1つの行き先に加えて、前記嗜好情報を参照して前記車の別の行き先を予測し、予測された複数の行き先に関する情報を提供するものである。
【発明の効果】
【0012】
本発明によると、ユーザの移動情報履歴と、現在までの移動経路から、今後のユーザの行き先が予測されるので、ユーザが特に操作を行わなくても、行き先に関する施設や店舗などの情報を、ユーザに的確に提供することできる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0014】
なお、以下の各実施形態では、ユーザがカーナビの搭載された車を運転しているとき、情報提供を受ける場合を想定して説明を行うが、本発明は、カーナビに限らず、位置情報を取得可能なPDAや携帯電話などの情報機器を利用しても、実現することが可能である。
【0015】
また、以下の各実施形態では、「ランドマーク」および「エリア」という概念を用いる。「ランドマーク」とは、駅、デパート、観光名所、プレイスポット、自宅、職場などの施設、店舗または建造物を表し、「エリア」とは、複数のランドマークを包含する範囲(「神戸市街地」や「関西学研都市」など)を表すものとする。
【0016】
(第1の実施形態)
本発明の第1の実施形態で、蓄積されたユーザの行動パターンを基にして、当該ユーザの今後の行き先を予測し、予測した行き先に関する情報をユーザに提供するものである。
【0017】
図1は本実施形態に係るシステムの全体構成を示す図である。図1において、1はユーザが乗った車に搭載されたカーナビ、2はカーナビ1からの要求に応じて情報を提供するためのサーバ、3はカーナビ1とサーバ2とをつなぐ例えばインターネットなどのネットワークである。ここで、搭乗者としてのユーザは、運転者であっても、それ以外であってもよい。、
カーナビ1において、11はGPSなどを用いてユーザの車の現在位置に関する情報を検出する位置情報検出手段であり、12は地図情報を記憶する地図データベースである。13は位置情報検出手段11によって検出された現在位置と地図データベース12とを参照して、検出した現在位置が記憶すべき場所であるか否か(後述するノードであるか否か)を判定する記憶位置判定手段、14は現在の日時を検出する日時検出手段、15は記憶位置判定手段13によって現在位置が記憶すべき場所であると判定されたとき、現在位置と日時検出手段14によって検出された現在の日時とを対にして時系列に記憶する移動情報履歴蓄積手段である。16は移動情報履歴蓄積手段15に記憶されている位置と日時の情報(移動情報)の履歴から、時系列の移動パターンを検出する移動パターン検出手段であり、17は所定のイベントが発生したとき、移動パターン検出手段16によって検出された移動パターンからユーザの車の行き先を予測する行動予測手段である。18は行動予測手段17によって予測されたユーザの行き先に関する情報をネットワーク3を介してサーバ2から取得する情報取得手段であり、19はユーザに対して、情報取得手段18によって取得した情報や地図データベース12に格納された地図情報を例えば液晶ディスプレイに表示する情報提供手段である。
【0018】
またサーバ2において、21はカーナビ1に対して情報を送受信するための情報送受信手段であり、22はカーナビ1に対して送信するための情報を記憶している情報蓄積手段である。
【0019】
図2は地図データベース12に格納されたデータの例を示す図であり、本実施形態で参照するデータの一部を抜粋したものである。本実施形態では、交差点やランドマーク、またはエリア名称などを「ノード」という概念で表すものとする。図2において、ノード番号は、これらノードに唯一に割り当てられたID番号を示し、ノードの種別および緯度・経度情報とともにそれぞれ記憶されている。緯度、経度情報はあくまでもそのノードの代表点の位置情報を示し、実際には、ノードの種類すなわち交差点、ランドマーク、エリアなどに応じて、範囲(代表点を中心とした半径など)を表す情報が存在する。例えば、交差点やランドマークであれば代表点を中心とした半径10mの範囲とし、エリアであれば代表点を中心とした半径1kmの範囲とする。もちろん、個々のエリアごとに、範囲が異なっていてもよい。
【0020】
また、「○○交差点」や「△△遊園地」などの固有名称以外でも、N123やN124のように「自宅」や「職場」などユーザに特有の場所をノードとして登録することができる。
【0021】
なお、ID番号の代わりに、交差点やランドマーク、エリアの名称を、各ノードが唯一に特定できるように記述しておいてもよい。すなわち、移動情報履歴蓄積手段15に蓄積される移動経路において、交差点、ランドマーク、エリアなどが特定できればよい。
【0022】
また、ここでは、カーナビ1内に設けられた地図データベース12において、各ノードの情報を管理するものとしたが、例えばノードID番号に係る情報はサーバ2に蓄えられており、カーナビ1がサーバ2に緯度・経度などの位置情報を送信すると、サーバ2がこれに対応するノードID番号をカーナビ1に通知するようにしてもよい。
【0023】
次に、車の移動経路が移動情報履歴として移動情報履歴蓄積手段15に蓄積される処理の流れについて、図3のフローチャートを用いて説明する。
【0024】
カーナビ1は、まず車のエンジンがかかっているか否かを位置情報検出手段11によって判定し(S11)、エンジンがかかっているとき(S11でNo)、車の現在位置を検出するタイミングであるか否かを位置情報検出手段11が判定する(S12)。ここでの判定は例えば、前回検出してから予め定められた所定時間、例えば3秒が経過したか否かを判断することによって行う。
【0025】
検出タイミングであると判定されたとき(S12でYes)、位置情報検出手段11は例えばGPSを利用してユーザの車の位置情報(経度、緯度)を検出する(S13)。そして記憶位置判定手段13は、検出された位置情報を基にして図2に示すような地図データベース12のデータを参照し、現在位置がいずれかのノードに含まれるか否かを判定する(S14)。ノードに含まれると判定されたときは(S14でYes)、日時検出手段14が現在の日時を検出する(S15)一方、ノードに含まれないと判定されたときは(S14でNo)、再びS11に戻り、判定が行われる。
【0026】
ステップS15で現在の日時が検出されると、車が現在存在するノードの番号と現在日時とを合わせて移動情報履歴蓄積手段15に記憶する(S16)。その後、ステップS11に戻り、再びエンジンがかかっているか否かの判定がなされる。
【0027】
図4は移動情報履歴蓄積手段15に蓄積された移動情報履歴の例である。図4に示すように、ノード番号と通過日時は対になって時系列に記憶されている。例えば、7月31日の8時5分にノードN6を通過した後、同8時6分にノードN8を、さらに同8時8分にノードN12を通過したことを表している。
【0028】
図4(a)の例では、移動情報は、出発地から目的地までのセグメント単位、すなわちエンジンをスタートさせてから(出発地)ストップするまで(目的地)という単位でセグメントされている。一方、図4(b)の例では、「自宅を出発してから自宅に帰着するまで」というセグメントで蓄積されている。さらには、「同じ日付」というセグメントで蓄積してもよいし、セグメントなしに蓄積してもよい。
【0029】
なおここでは、時刻は月、日、時および分で表されているが、その他、年や秒、曜日も合わせて記憶してもよいし、逆にこれらの単位のいずれかを選択して記憶しておいてもよい。
【0030】
また、エンジンをスタートした時刻やストップした時刻を併せて記憶してもよい。さらに、エンジンのスタート時刻やストップ時刻を記憶するとともに、通過したノードについては、通過時刻は特に記憶させずに、そのノード番号のみを記憶するようにしてもよい。
【0031】
次に、移動パターン検出手段16の動作について説明する。移動パターン検出手段16は、移動情報履歴蓄積手段15に蓄積された図4のような移動情報履歴から、ユーザの車の移動傾向を抽出する。ここで、移動傾向とは例えば、「午前8時から午前11時の間に、N6,N8,N12,N9という経路を通過したときは、次に向かうノードはN34である確率が高い。」というような規則のことをいう。
【0032】
ここで人間の日常の行動について考えてみると、人間の日常的な行動パターンは、日々それほど変化するものでない。例えば、通勤に車を利用する人であれば、平日の朝は家から会社に向かうであろうし、平日の夕方は会社から家に向かうであろう。また、運転者が父親なら会社に向かうが、運転者が母親ならスーパーに行くことが多い、などの傾向が存在すると思われる。つまり、ユーザが現在いる位置情報、および現在に至るまでの移動情報を把握することによって、今後のユーザの行動がある程度予測できると考えられる。
【0033】
移動傾向は、次のような方法で抽出可能である。移動情報履歴蓄積手段15に蓄積された全ての移動情報履歴の中から、午前8時から午前11時の間にN6、N8,N12,N9という経路を走行しているデータを検索し、その後に進行したノード番号をその頻度と共に抽出する。例えば、N6,N8,N12,N9という経路を走行した後に、N34に17回、N18に2回、N17に1回移動したとすると、N6,N8,N12,N9という経路を走行した事象をRとしたとき、N34,N18,N17に移動する確率は、それぞれ
P(N34|R)=17/20
P(N18|R)=2/20
P(N17|R)=1/20
という事後確率で表されることになる。この確率の値が大きいノードほど、事象Rの後にその方向にユーザの車が向かう可能性が高いといえる。
【0034】
ここでは、現在位置のノードN9とその前の3個のノードN6,N8,N12を参照するものとしたが、参照ノードはこのような個数に限定されるものではなく、様々に考えることができる。例えば、移動情報が「出発地から目的地」というセグメントで蓄積されているときは、出発のノードから現在のノードまでのノード系列を参照するといったように、蓄積されたデータ構造に応じて適切な値に設定してもよい。また、ランドマークやエリアなどユーザが直前に立ち寄っていたノードと、現在ノードとを参照してもよい。さらに、ユーザが自宅を出発してから立ち寄ったランドマークやエリア、および現在のノードを全て参照してもよい。
【0035】
さらには、次のような手法も考えられる。一般に、参照ノード数が多いほど、条件が厳しくなるために予測の精度は向上するものの、蓄積した移動情報履歴の中から抽出できるデータ数は少なくなり、統計学の観点からすると、予測のために十分なデータが得られない可能性がある。そこで、現在のノードから過去にノードを順次遡ることによって参照ノード数を増加させていき、データ数が所定値を超えるという条件を満たす最大長さのノード系列を、参照ノードとして定める。遡るノードは、全ての種類のノードでもよいし、ランドマーク、エリア、交差点のいずれか、またはこれらの組み合わせに該当する種類のノードに限定してもかまわない。このような手法を用いることによって、予測のために必要な統計的なデータ数は満たしつつ、参照ノード数をできるだけ増やして条件を厳しくすることによって、予測の精度を高めることが可能となる。
【0036】
次に、ユーザの車の行動予測とそれに従ったユーザへの情報提供の処理について、図5のフローチャートを参照して説明する。
【0037】
所定のイベントの発生が検知されると(S21)、行動予測手段17は移動パターン検出手段16を参照して、ユーザの車の現在以降の行動を予測する(S22)。なお、上述した移動パターン検出手段16の動作は、予めなされていてもよいし、この所定のイベントを検知したときに行われるようにしてもかまわない。
【0038】
なお、所定のイベントとしては例えば、搭乗者の所定の行為としてのエンジン起動やカーナビの操作(例えば、情報提供の要求操作)などがあり、この他にも、交差点通過時(または通過後)、ランドマークやエリアに対する出発や到着、所定の時間間隔などの定期的なタイミング、または新たな情報の入手時等が考えられる。
【0039】
ここで、行動の予測方法について説明する。いま図6において、ユーザの車がN1,N2,N3という経路を走行し、現在N3に位置するものとする。N1,N2,N3という経路をRという事象で表現すると、N3の次にN4,N11に向かう事後確率は、移動情報履歴蓄積手段15に蓄積された移動情報履歴を参照して、それぞれP(N4|R),P(N11|R)で表現される。各ノードについてこのような事後確率がそれぞれ与えられるので、N7やN14に向かう確率は、この事後確率の積として、それぞれ、
P(N7)=P(N4|R)*P(N6|R∧N4)*P(N7|R∧N4∧N6)
P(N14)=P(N11|R)*P(N13|R∧N11)*P(N14|R∧N11∧N13)
で表現される。
【0040】
行動予測手段17は、このような確率値が所定の基準を満たすノードを、予測される行き先として選択する。所定の基準は例えば、予測の確からしさを示す閾値αを定めておき、確率値がこの閾値αよりも大きいこととする。例えば、P(N7)、P(N14)のうち閾値αよりも大きいものはP(N7)であるとすると、行動予測手段17はユーザの車が今後進む方向として、ノードN7を予測する。
【0041】
なおここでは、N7,N14に関して確率を計算したが、行動予測手段17が確率を計算するノードは、例えば現在のノード以降の全てのノードであってもよい。また、事後確率の積を計算していき、積が閾値α以下になるノードが出現するまで計算するようにしてもよいし、ユーザが過去に走行したことがあるノードについて計算するようにしてもよいし、ランドマークやエリアに関するノードについてのみ計算を行ってもよい。
【0042】
また、現在までの経路情報による事後確率では閾値αを超えるノードが存在しない場合には、現在以降のノードを通過する毎に確率を計算し直し、閾値αを超えるノードが見つかった時点で、進路に関して予測を行う、といったことが考えられる。
【0043】
また、ユーザへの情報提供を希望する観光施設やプレイスポット、店舗などが、自身のノードや付近の交差点に対応するノードなどを予めカーナビ1に通知しておき、行動予測手段17ではそのノードに至る経路に関して確率計算を行うようにしてもよい。もちろん、カーナビ1に緯度・経度などの位置情報を通知しておいて、カーナビ1内部で地図データベース12を参照して、緯度・経度とノードIDへのマッピングを行うようにしてもよい。
【0044】
いずれかの方法により、行動予測手段17がユーザの車の行き先を例えばN7であると予測すると、情報取得手段18は、予測されたノードN7の位置情報をネットワーク3を介してサーバ2に送信する(S23)。図2によると、N7の位置情報は、東経135度22分35秒、北緯34度47分35秒である。サーバ2の情報送受信手段21において、カーナビ1からの位置情報の受信が確認されると(S31,S32)、情報蓄積手段22に蓄積された情報の中から、受信した位置情報に関連する情報の検索が行われる(S33)。
【0045】
図7は情報蓄積手段22に記憶された位置関連情報の例である。図7に示すように、情報蓄積手段22には、情報提供者の名称とその位置、および提供したい情報が蓄積されている。そして、カーナビ1から送信された位置情報が示す位置に近い情報提供者が提供する情報を、位置関連情報として選択する。近いか否かの判断は、例えば、送信された位置情報が示す位置、情報提供者の位置を中心とした所定の半径(例えば400mなど)の円の中に含まれるか否かによって行えばよい。あるいは、各情報提供者が情報提供を行う範囲を矩形で表し、その矩形を特定する情報(例えば、北東端と南西端など)を予め情報蓄積手段22で特定しておき、送信された位置情報が示す位置がその範囲に含まれるか否かによって、近いか否かを判断してもよい。
【0046】
ここでは、カーナビ1から送信した位置情報が示す位置に近い情報提供者として「佐藤商店」が選択され、提供する位置関連情報として「本日、全品20%OFF」が検索されたものとする。このようにして検索された位置関連情報は、情報送受信手段21からネットワーク3を介してカーナビ1に対して送信される。
【0047】
カーナビ1の情報取得手段18は、サーバ2からの位置関連情報の受信を待ち(S24)、位置関連情報を受信したと判定したとき(S25でYes)、情報提供手段19は受信した情報をユーザに表示する(S26)。提供方法としては例えば、ディスプレイ上に視覚的に表示したり、音声により聴覚的にユーザに伝達する方法などがある。
【0048】
なお、位置関連情報の検索は、他の方法でも実行可能である。例えば、カーナビ1とサーバ2とでノードID体系が共用されている場合には、図7の各情報にノードIDを対応付けておき、カーナビ1からは予測したノードのIDを位置情報として送信し、送信されたノードIDが対応付けられている情報提供者の情報を、位置関連情報として選択してもよい。
【0049】
また、カーナビ1からは、単なる位置情報に加えて、経路情報(例えば「N3→N4→N6→N7」)を送信し、ノードIDが一致するか否かに加えて、情報提供者の位置情報やノードIDが、経路情報が示す経路の延長線上に存在するか否かというような基準を用いて検索してもよい。
【0050】
以上のように本実施形態によると、ユーザの車の行き先を予測することが可能になり、このため、ユーザは、特に何も操作をしなくても、行き先に到着する前に、その場所に関する有益な情報を受けることができる。また、もしユーザがその方面に向かうつもりがない場合であっても、情報提供を行うことによって、その場所へ向かう動機をユーザに与えることが可能になる。
【0051】
また、本実施形態では、ユーザの車の移動経路を、交差点やランドマーク、エリアなどに対応するノード間の遷移の形式によって表している。このため、ユーザが出発してから各ノードを走行する毎に、ユーザの行き先を新たに予測し直すことができ、したがって、移動経路の途中において、目的地をできるだけ早く予測することが可能となる。
【0052】
なお、ここでは、カーナビ1からサーバ2に対して、ユーザの行き先の位置情報を送信するものとしたが、この代わりに、カーナビ1内部に、位置情報とノードの名称やIDとの関係を表すテーブルを設けておき、予測した位置情報からこのテーブルを参照して求めたノードの名称やIDをサーバ2に送信して、最新の情報を取得するようにしてもよい。
【0053】
また、図8のような、位置情報と、その位置情報に関連する情報を提供するWebサイトのURLアドレスとの関係を表すテーブルをカーナビ1またはサーバ2に記憶させておき、位置情報が決定すると、このテーブルを参照して、これに対応するURLサイトから情報を取得するような仕組みにしてもよい。
【0054】
また、本実施形態では、ノードに関する位置情報を日時情報と併せて記憶するようにしたが、この代わりに、位置情報検出手段11が定期的に位置情報を検出し、ノードであるか否かに関係なく、その位置情報を、日時情報と併せて記憶するようにしてもよいし、日時情報を記憶しないようにしてもよい。
【0055】
また、今後の行き先を予測する際に、その行き先に到着するまでの予想所要時間を考慮に入れてもよい。というのは、ユーザが通過する可能性が高いノードが予測されたとしても、そのノードに到着するのが6時間後やあるいは翌日であったりする場合には、そのノードに関連する情報を提供することは必ずしも適切でないからである。すなわち、予想所要時間が所定を越える行き先については、予測の対象から外すことが好ましい。
【0056】
例えば、行動予測手段17がユーザの行き先として、ノードN100,N200という2個のノードを予測したとする。ここで、移動情報履歴蓄積手段15に蓄積された移動情報履歴には、検出された位置情報とそのときの日時が対になって記憶されている。このため、現在地からノードN100,N200に至るまでの所要時間は、蓄積された移動情報履歴から予想することができる。
【0057】
ここで、所要時間の閾値という概念を導入して、例えば「所要時間が3時間を越えるノードは予測の対象から外す。」という規則を利用するものとする。いま、ノードN100,N200への所要時間がそれぞれ、2時間および6時間と予想されたとする。この場合、所要時間が3時間を超えるノードN200については、予測の対象から外される。この結果、行動予測手段17は、ノードN100のみをユーザの行き先として予測する。
【0058】
また、本実施形態では、予測された行き先に関する情報として商用情報を提供するものとしたが、提供する情報はこれに限られるものではなく、例えば渋滞などを示す交通情報や、警察の交通取締り情報などを提供してもよい。
【0059】
また、本実施形態では、行き先の予測を行う際に、移動情報履歴の蓄積を行っているものとしたが、本発明はこれに限られるものではなく、例えばある程度の量の移動情報履歴が蓄積された後などでは、蓄積動作は行わないで、すでに蓄積された移動情報履歴を参照して、行き先の予測を行うようにしてもかまわない。
【0060】
(ノードの決定方法)
また本実施形態において、ノードは、予め地図データを参照して決定しておけばよい。基本的には、ユーザの車の走行経路と地図データとを参照して、停車地(ランドマークやエリア)や交差点をノードとする。さらに、ユーザの車の走行経路の情報を用いて、ノードを追加したり、あるいは削除したりすることができる。
【0061】
例えば図9(a)に示すように、交差点の中で、ユーザの車が2つ以上の方向に走行したことがあるものを、ノードとして定めてもよい。すなわち、交差点a,cについては、ユーザの車は2方向に走行したことがあるのでノードNa,Ncとして定める一方、交差点bについては、ユーザの車は1方向にしか走行していないのでノードとはしない。
【0062】
その後、図9(b)に示すように、交差点bについて、ユーザの車が新たな方向に走行したとすると、交差点bについてはユーザの車は2方向に走行したことがあるので、ノードNbとして追加する。あるいは図9(c)に示すように、交差点aについて、過去の所定期間において、ユーザの車が1方向にしか走行しなかった場合には、ノードNaを削除する。なお、このようなノードの設定には、地図データは必ずしも必要ではなく、ユーザの車の走行履歴のみを用いて行うことができる。
【0063】
(第2の実施形態)
図10は本発明の第2の実施形態に係るシステムの全体構成を示す図である。本実施形態では、同一のカーナビであっても、運転者が異なったとき、運転者に応じた行動の予測を行い、情報を提供する。図10を図1と対比すると、カーナビ1Aが運転者判定手段25を備えている点が異なる。
【0064】
運転者判定手段25は、例えば車のエンジンがかけられたとき、運転者が誰であるかを判定する。判定の方法としては、運転者個別のキーや半導体カードによって行う方法や、運転者のもつ携帯電話と通信して電話番号を識別することによって行う方法などが考えられるが、その手法は特に問わない。そして、運転者判定手段25による判定結果は、図11に示すように、例えばユーザIDとして、第1の実施形態と同様にして求められたノード番号とその通過時刻とともに、移動情報履歴蓄積手段15に記憶される。
【0065】
これにより、ユーザ毎の移動情報履歴が記憶されることになり、したがって、ユーザ毎のノード間の遷移確率を計算することが可能になる。したがって、「ID“2”のユーザは、午前中ならN6,N8という経路の後はN12方面に向かう」が「ID“4”のユーザは、午前中ならN6,N8という経路の後はN28方面に向かう」というような、運転者個別の予測が可能となる。このような予測によって、個々のユーザに対して、より適したきめ細かな情報を提供することが可能となる。
【0066】
なお、運転者以外の搭乗者を判定するようにしてもよい。すなわち、運転者ではなく、同乗者が誰であるかという情報を移動情報履歴蓄積手段15に記憶することによって、例えば「運転者一人で運転するときはN5に行くが、家族が同乗で運転するときはN16方面に行く。」といった予測も可能となる。さらには、運転者情報と同乗者情報を併せて記憶するような構成も考えられる。
【0067】
また、運転者毎に記憶した方が好ましい情報としては、移動情報以外にも、例えば地図データベース12の情報が考えられる。第1の実施形態では、地図データベース12に記憶されるノードについてはユーザが登録することも可能であると述べた。ところが、例えば「職場」や「映画館」といった名称をユーザが登録する場合は、その指し示す対象がユーザ毎に異なることが考えられる。例えば「職場」というノードは、運転手が父親のときは「○×製造株式会社」であるが、長男のときは「□△商事株式会社」であるといった例が考えられる。
【0068】
そこで、地図データベース12には、固有名称以外のノードに関しては運転者ごとに記憶しておき、運転者判定手段25による判定結果に応じて、参照するノード情報を変更するようにしてもよい。さらには、運転者ごとのノード情報は、地図データベース12とは別に記録させておいてもよい。例えばメモリカードに記録しておき、メモリカードをカーナビ1Aに挿入させ、地図データベース12およびメモリカードを併せて参照するようにしてもよい。あるいは、ネットワーク上に存在させておいてもよい。
【0069】
(第3の実施形態)
図12は本発明の第3の実施形態に係るシステムの全体構成を示す図である。本実施形態では、ユーザの好みの場所に関する嗜好情報をカーナビに蓄積しておき、予測した行き先とともに、嗜好情報も加味して、ユーザに情報を提供する。ここでは、ユーザがカーナビに目的地設定した場所や、車のエンジンを切り所定時間以上停車した場所などを、ユーザの好みの場所として判断する。
【0070】
図12を図1と対比すると、カーナビ1Bが停車位置検出手段31、設定目的地解析手段32および嗜好情報蓄積手段33を備えている点が異なる。停車位置検出手段31は車のエンジンが切られ、所定時間以上停車した状態であるか否かを判定し、停車状態であるとき自車の位置情報として緯度・経度情報を検出する。設定目的地解析手段32はユーザによってカーナビ1Bに対して設定された目的地がどこであるかを解析する。嗜好情報蓄積手段33は地図データベース12を参照して、停車位置検出手段31によって検出された位置や設定目的地解析手段32によって解析された場所について、その頻度を表す情報を記憶する。
【0071】
図13は嗜好情報蓄積手段33に記憶されたデータの例である。図13では、各データ項目は位置、名称および頻度という属性を有している。ここで、ユーザが目的地を設定する場合は、地図上の位置、電話番号、名称などをキーとして地図データベース12の検索を行うので、設定目的地解析手段32によって解析される場所については、名称が必ずといっていいほど存在する。これに対して、停車位置検出手段31によって検出された位置情報については、地図データベース12を検索したとき、必ずしも名称が登録されているわけではない。このため、図13における最下行のように、名称が未設定のデータも存在することになる。もちろん、位置情報と対応するノードが存在するときは、ノードのIDや名称を記述しておけばよい。
【0072】
また、嗜好情報は次のように更新される。すなわち、停車位置検出手段31または設定目的地解析手段32によって検出された場所が、すでにデータに登録されているときは、その頻度を1だけ増加させ、未登録であれば新規にデータを追加し、頻度を1に設定する。
【0073】
本実施形態における行動予測手段17Aの動作について、図14を参照して説明する。
【0074】
いま、ユーザの車が、ノードN101,N102を経由して、ノードN103にいるものとする。このとき、今後ユーザの車が、ノードN104,N105を経由してノードN106方面に進行する確率P(N106)、およびノードN111を経由してノードN112方面に進行する確率P(112)は、第1の実施形態で説明した方法によって求めることができる。いま、
P(N106)=0.6,P(N112)=0.4
とし、また閾値α=0.5とすると、第1の実施形態では、ノードN106方面にいく可能性が高いと判定する。
【0075】
本実施形態ではさらに、嗜好情報蓄積手段33も参照される。図13のデータから、ノードN112方面に存在するファミリープラザには非常に頻度よく立ち寄っていることが分かる。すべての停車地の中で、ファミリープラザに停車する割合P(famipla)は、0.64(=64/(25+64+6+5))である。そこで、
{P(N112)+P(famipla)}/2
のように、行動の予測と嗜好情報の両方を考慮した値を算出する式を定義し、計算すると、その値は0.52となり、閾値αを超える。このため、行動予測手段17Aはユーザの今後の行動の予測として、ノードN106方面とノードN112方面の2つを候補として出力する。
【0076】
情報取得手段18は、行動予測手段17Aからノード番号N106およびN112を受け取り、これをネットワーク3を介してサーバ2に送信する。以降の情報提供の動作は、第1の実施形態と同様である。なお、行動予測手段17Aは、ノード番号の代わりに、ノードN106およびN112の緯度・経度情報、または佐藤商店、ファミリープラザなどの施設、店舗名を出力してもよい。
【0077】
以上のように本実施形態によると、ユーザの行動予測だけでなく、ユーザの嗜好情報を加味して情報を提供するので、ユーザはこれから向かう場所以外の、自分の好みの場所に関する情報を取得できる。したがって、その情報を基に行動予定を変更する、など、ユーザにとって今後の行動の選択の幅が広くなり、ユーザに対する新たな行動の提案が可能となる。
【0078】
なお、本実施形態では、ユーザの嗜好場所に関する頻度の割合を、嗜好情報蓄積手段33に蓄積されたすべての場所の頻度を考慮して求めたが、この代わりに、進行が予想される嗜好場所のみの頻度を考慮して求めてもよい。
【0079】
なお、本実施形態では、行動予測を第1の実施形態で述べた方法によって行うものとしたが、これ以外のどのような行動予測方法であっても、本実施形態のように嗜好情報を加味する機能を付加することは可能であり、有効である。
【0080】
(第4の実施形態)
図15は本発明の第4の実施形態に係るシステムの全体構成を示す図である。本実施形態では、行動予測に加えて、スケジュール管理機能を併せて利用することによって、行動予測の精度を向上させる。図15を図1と対比すると、カーナビ1Cの行動予測手段17Bがユーザの行動を予測する際に、PDAなどのスケジュール管理機能を備えるスケジューラ41を参照する点が異なる。カーナビ1Cがスケジューラ41を参照する方法としては、PDAや携帯電話などのスケジュール機能を有する機器とケーブルや無線で通信する、SDカードなどのメモリカードを媒体にする、またはネットワーク上に存在するスケジュール情報を参照するなどの方法があるが、この限りではない。
【0081】
図16はスケジューラ41で管理されたスケジュール情報の一例である。図16のスケジュールから、ユーザは10時から本社で会議をした後、12時から14時の間に研究所に移動し、14時から研究所を見学し、18時に帰宅することが分かる。
【0082】
スケジューラ41を参照した行動予測の手順について、図17を参照して説明する。
【0083】
ユーザはノードN201付近の本社を出発し、ノードN202を経由して、現在ノードN203にいるものとする。現在時刻は13時とする。このとき、第1の実施形態における行動予測手段17では、移動情報履歴を参照して、研究所があるノードN206方面に進行する確率P(N206)および工場があるノードN212方面に進行する確率P(N206)として、それぞれ、
P(N206)=0.4,P(N212)=0.4
と算出するものとする。そして、予測の確信度を示す閾値が0.7であり、いずれの確率P(N206),P(N212)も閾値を超えておらず、進行方向をいずれとも判断しかねる状態であるとする。
【0084】
これに対して、本実施形態における行動予測手段17Bは、移動情報履歴に加えて、スケジューラ41からユーザのスケジュールを取得し、これを併せて参照する。スケジューラ41では、ユーザは14時から研究所を見学することが記述されている。研究所の位置が地図データベース12からノードN206であると判定されると、スケジュールから求めた、14時以前にユーザがN206方面へ進行する確率P(N206|スケジュール)は、例えば
P(N206|スケジュール)=0.5
と定める。
【0085】
そして行動予測手段17Bは、最終的な予測値として、移動情報履歴から得た予測値P(N206)(=0.4)と、スケジュールから求めた予測値P(N206|スケジュール)(=0.5)とを加算し、0.9を得る。この値は閾値0.7を超えているため、今後のユーザの行動としては、ノードN206方面に進む確率が高いことが分かる。この結果、行動予測手段17Bはユーザの進行方向としてノードN206方面を予測し、情報取得手段18はノードN206方面に関する情報を取得して、ユーザに提示することが可能となる。
【0086】
このように本実施形態によると、PDAなどのスケジューラ機能を持つ情報機器と連動してユーザのスケジュールを把握し、これを行き先の予測に加味することによって、さらに精度の高い予測を行うことが可能になる。例えば、移動情報履歴から得た予測値では、進行方向をいずれとも判断しかねる状態のときに、ユーザのスケジュールを参照して、スケジュールから求めた予測値を加算することによって、行き先を予測すればよい。
【0087】
なお、スケジュールから求めた予測値は、ここでは所定の値(0.5)として固定するものとしたが、これ以外でも例えば、ユーザが過去にスケジュール通りに行動したか否かの実績に基づいて求めたり、場所ごとに値を定め、過去にスケジュール通りに行動した場所に関しては値を相対的に高く設定する、など様々な方法が考えられる。
【0088】
また、スケジューラ41から取得する情報として、「研究所」などの名称だけでなく、その位置に関する情報(緯度・経度情報やノードIDなど)が含まれている場合には、地図データベース12に名称が存在しない場所についても予測を行うことができる。
【0089】
また、移動情報履歴から求めた行き先と、スケジューラ41から取得したスケジュールとが乖離している場合には、その旨を示すメッセージを表示するなどの処理を行ってもよい。図18はこのようなメッセージを表示させた場合のカーナビのディスプレイ画面の例である。図18のように、行動予測とスケジュールとが乖離する場合に、ユーザに、あなたの行き先は予定とは異なる旨のメッセージを表示する。このとき、メッセージに、スケジュールによると本来向かうべき先の住所や電話番号を表示してもよい。あるいは、ユーザの車に電話機能が付いている場合には、ユーザの要求に応じて自動的に電話をかけるようにすることもできる。さらには、スケジュールでの行き先を、カーナビの目的地としてあらためて設定して、そのルートをユーザに知らせることも可能である。
【0090】
なお、本実施形態では、行動予測を第1の実施形態で述べた方法によって行うものとしたが、これ以外のどのような行動予測方法であっても、本実施形態のようにスケジューラの参照機能を付加することは可能であり、有効である。
【0091】
(第5の実施形態)
図19は本発明の第5の実施形態に係るシステムの全体構成を示す図である。本実施形態では、ユーザの行き先を予測するとともに、その行き先について、予想所要時間または到着予想時刻などの情報を提示する。図19を図1と対比すると、情報取得手段18がネットワーク3を介して取得した情報に基づいて、予測した行き先までの予想所要時間を算出する所要時間算出手段51を設けている点が異なる。
【0092】
図20は本実施形態において、移動情報履歴蓄積手段15に蓄積された移動情報履歴の例である。図20の例では、移動情報として、日付、出発時刻、出発地、経路および目的地が蓄積されている。出発地はエンジンが始動した地点、目的地はエンジンが停止した地点である。
【0093】
出発地および目的地の表現方法としては、様々なものが考えられる。例えば、エンジンの停止位置が地図データベース12に記憶されたランドマークやエリアであった場合には、その名前やノードIDで表すことが可能である。また、エンジンの停止位置に対応するランドマークやエリアがない場合には、距離が近いか(所定距離以内)またはその場所に近い代表的な(有名)ランドマークやエリアの名前やノードIDで表してもよい。あるいは、その付近の交差点名やノードID、または住所で表してもよい。
【0094】
また、エンジンが頻度よく停止する場所に関しては、所定のタイミングで、ユーザに名称の登録を促すメッセージを出力してもよい。さらに、ユーザが持つ、またはネットワーク上に存在する住所録などを参照して、対応する名称(例えば「A子さんの家」など)を自動的に登録するようにしてもよい。
【0095】
移動パターン検出手段16は図20のような移動情報履歴を参照することによって、図21に示すような移動パターンを検出する。すなわち図20に示すようなユーザの過去の走行を、出発曜日や出発時刻などの区分ごとに分類し、各区分について、出発地、経路および目的地の組を、その平均所要時間と頻度でもって表現する。例えば図21において、平日の朝であれば、出発地が自宅の場合、目的地が△△株式会社、○×医院、スーパー○○である頻度はそれぞれ70%、25%、5%であったことを示している。
【0096】
次に、本実施形態における行動予測とそれに従ったユーザへの情報提供の処理の流れについて、図22のフローチャートを参照して説明する。
【0097】
行動予測手段17は、所定のイベントとして例えばエンジンの始動を検知すると(S41)、現在の日時および現在地の情報を取得する(S42,S43)。現在地の情報は位置情報検出手段11を利用して得ることができるが、これ以外にも、移動情報履歴蓄積手段15を参照して前回走行時のエンジン停止位置を得て、これを現在地としてもよい。この方法によると、現在地情報を瞬時に得ることができる。
【0098】
いま、現在日時が平日の9時10分、現在地が自宅であったとすると、移動パターン検出手段16によって検出された図21に示すような情報を参照して、ユーザの行き先を予測する(S44)。図21において、平日の8時から11時の間に自宅を出発地とした場合の目的地は、△△株式会社、○×医院およびスーパー○○であり、頻度はそれぞれ70%、25%、5%である。第1の実施形態で示したような予測の確からしさを示す閾値の概念を導入し、頻度が20%以上の目的地を予測の候補とすると、△△株式会社および○×医院がその対象となる。行動予測手段17によって行き先が予測されると、情報取得手段18は、予測された行き先までの経路情報をサーバ2に対して送信する(S45)。
【0099】
サーバ2は、カーナビ1Dから経路情報を受信すると(S51)、情報蓄積手段22に蓄積された交通情報の中で受信した経路に関連する情報を検索し(S52)、検索した交通情報をカーナビ1Dに対して送信する(S53)。
【0100】
カーナビ1Dは、情報取得手段18において交通情報を受信すると(S46)、所要時間算出手段51において、受信した交通情報と図20に示す目的地までの所要時間などを参照して、それぞれの行き先地候補までの予想所要時間を算出する(S47)。例えば「自宅から△△株式会社への通常の所要時間は60分であり、交通情報を加味すると80分である」「自宅から○×医院への通常の所要時間は20分であり、渋滞はなし」というように、現在の交通情報を加味した予想所要時間が算出される。そして、現在時刻が9時10分であることから、△△株式会社への到着予想時刻は10時30分、○×医院への到着予想時刻は9時30分であると算出する。
【0101】
所要時間算出手段51によって各行き先候補までの到着予想時刻が算出されると、情報提供手段19はユーザに対してその情報を提供する(S48)。図23は、カーナビ1Dの画面上に提示される情報の例である。図23では、到着予想時刻に加えて、関連する交通情報をユーザに提供している。なお、到着予想時刻の代わりに、予想所要時間に関する情報を提供してもよい。
【0102】
なお、本実施形態では、予想された行き先までの所要時間を、ユーザが過去に走行したときの平均所要時間と現在の交通情報とを基にして算出したが、これ以外でも、現在地から目的地までの距離を地図データベース12を参照して測定し、車両の平均走行速度などを利用して所要時間を概算するといった方法も考えられる。
【0103】
<変形例>
さらに、予想所要時間や到着予想時刻とユーザのスケジュールとを対比して、空き時間の有無や、予定に遅れる可能性の有無を判断し、空き時間があるときや予定に遅れる可能性があるとき、新たな情報を提供することも可能である。
【0104】
図24は本実施形態の変形例に係るシステムの全体構成を示す図である。図19と対比すると、所要時間算出手段51による算出結果と、スケジューラ41から得たユーザのスケジュールとを対比する判断手段52が設けられている。判断手段52は、算出された予想所要時間または到着予想時刻とユーザのスケジュールとを対比して、空き時間がある場合や、予定に遅れる可能性がある場合を検知する。
【0105】
例えば、スケジューラ41ではユーザは15:00に研究所へ行く予定になっていたとする。現在時刻が13:10であり、現在地から研究所までの予想所要時間が50分であったとすると、1時間程度の空き時間が存在することが分かる。判断手段52が1時間程度の空き時間があることを検知すると、情報提供手段19は、その空き時間を潰せるような情報をユーザに提供する。例えば図25に示すように、研究所までのルートの近辺で1時間程度の空き時間で立ち寄れるお薦めポイント(喫茶店や書店など)の情報をユーザに提供する。
【0106】
また、スケジューラ41ではユーザは15:00に研究所へ行く予定になっており、現在時刻が14:20であり、現在地から研究所までの予想所要時間が50分であったとすると、ユーザが多少予定に遅れる可能性があることが分かる。判断手段52が予定に遅れる可能性があることを検知すると、情報提供手段19は、目的地までの所要時間を短縮できるような別ルートの情報を提供する。例えば図26の例では、研究所までのルートと並行に走る高速道路の利用をユーザに薦めている。
【0107】
(第6の実施形態)
図27は本発明の第6の実施形態に係るシステムの全体構成を示す図である。図27を図1と対比すると、第5の実施形態で説明した所要時間算出手段51と、取得した商用情報について、所要時間算出手段51で得られた予想所要時間または到着予測時刻を参照して、フィルタリングをかけるフィルタリング手段61を備えている点が異なる。
【0108】
いま、行動予測手段17によって、ユーザの車の行き先としてノードA,Bが予測されたとする。このとき、情報取得手段18は、ノードA,Bまでのルートの交通情報と、ノードA,Bに関連する商用情報をネットワーク3を介してサーバ2から取得する。
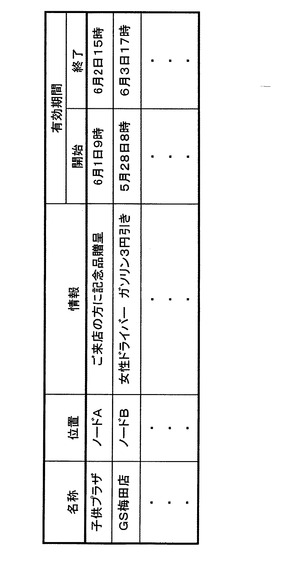
【0109】
図28は取得された商用情報の例である。図28では、ノードAの子供プラザでは6月1日9時から6月2日15時までの期間、記念品の贈呈が行われており、ノードBのGS梅田店では、5月28日8時から6月3日17時までの期間、女性ドライバーに対してガソリン値引きが行われていることが示されている。ここで、所要時間算出手段51によって、ノードAへの到着時刻は6月2日15時20分、ノードBへの到着時刻は6月2日16時と予測されたとする。
【0110】
フィルタリング手段61は、予測された到着時刻が、商用情報における有効期間に含まれているか否かを判断し、含まれている情報のみを出力する。ここでは、ノードAの子供プラザについては、到着予測時刻の6月2日15時20分は有効期間を過ぎているので、提供する情報からは省く。一方、ノードBのGS梅田店については、到着予測時刻の6月2日16時は有効期間内であるので、ユーザにとって役に立つ情報であると判断して、情報提供手段19に出力する。
【0111】
また、到着予測時刻が有効期間を過ぎている商用情報については、省いてしまう代わりに、ユーザに、間に合わない可能性が高い旨のメッセージとともに提示してもよい。あるいは、間に合う可能性を数値で表示して、ユーザの注意を喚起してもよい。さらには、ユーザの車の進行状況や渋滞状況に応じて到着予測時刻を更新していき、これに応じて、間に合う可能性を示す数値を刻々と変化させていってもよい。
【0112】
なお、商用情報のフィルタリングは、サーバ2の方で実行させてもよい。
【0113】
(第7の実施形態)
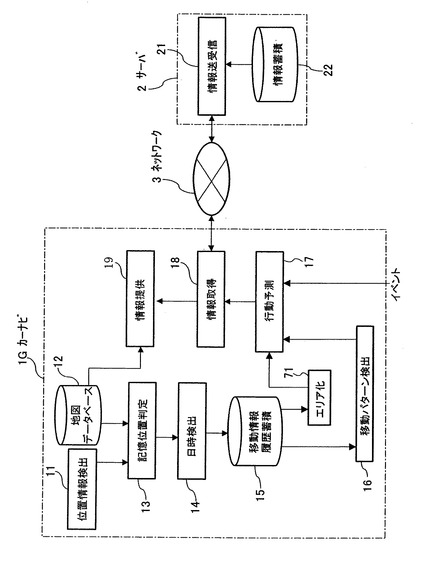
図29は本発明の第7の実施形態に係るシステムの全体構成を示す図である。図29を図1と対比すると、移動履歴情報から、複数のノードを包含する「エリア」を生成するエリア化手段71を備えている点が異なる。
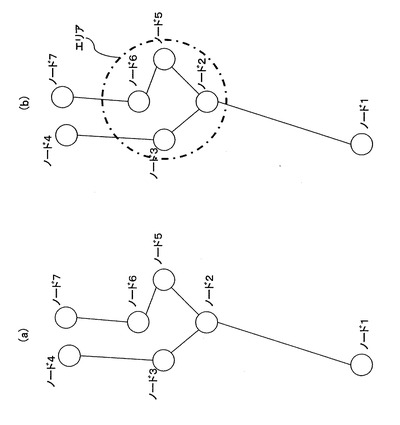
【0114】
いま、図30(a)に示すようなノード1〜7が存在するものとする。ここで、エリア化手段71は、移動情報履歴蓄積手段15に蓄積された移動情報履歴を参照して、所定の大きさの範囲内にあって、ユーザが過去に訪れた頻度が所定回数以上であるノードが複数ある場合に、これらのノードをまとめて「エリア」とする。図30(b)の例では、ノード2,3,5,6が1つのエリアにまとめられている。
【0115】
行動予測手段17は、ユーザの行き先はノード3であると予測したとき、エリア化手段71におけるエリアの情報を参照して、ノード3と同一エリアにノード2,5,6が存在することを認識する。そして、情報取得手段18に、ノード3に関連する情報だけではなく、ノード2,5,6に関連する情報も併せて取得するように指示する。この結果、ユーザには、ノード3の関連情報だけでなく、同一エリアに含まれたノード2,5,6の関連情報も提示される。
【0116】
なお、エリア化するノードの範囲は、ユーザが主として滞在する自宅や会社などからの距離に応じて変更してもよい。例えば、自宅から遠いほど、範囲を広くすればよい。また、ユーザの移動方法に応じて、変更してもよい。例えば、カーナビのように車の移動を前提とする場合は広く設定し、徒歩による移動を前提とする場合は狭く設定すればよい。
【0117】
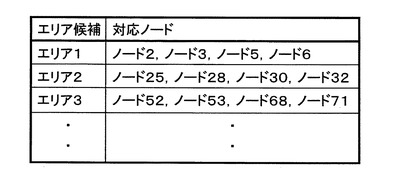
なお、エリア化する手法は、ここで示されたものに限られるものではない。例えば図31に示すように、エリア化可能なノード群をエリア候補ごとに予め定めておく(例えばエリア1は「梅田エリア」、エリア2は「難波エリア」など)。そして、各エリア候補について、例えば、対応するノード群のうち所定数以上のノードについてユーザの訪問回数が所定回数を超えたというような条件を満たしたとき、そのエリア候補をエリアとして定める。また、同一の日付や同一時間帯にユーザが訪れたノードを、エリア化してもよい。さらに、あるノードが、複数のエリアに含まれるように設定してもよい。
【0118】
また、すでに生成したエリアを、ノードとみなして、上述のようなエリア化をさらに行ってもよい。
【0119】
また、予め広域のエリアを設定しておき(例えば「東大阪エリア」など)、その中のノードの個数が増えてきたら、そのエリアを分割していくようにして、エリア化を行ってもよい。分割してから新しくエリアを作成する場合には、上述の方法を用いればよい。
【0120】
なお、上述の各実施形態では、ユーザに情報を提供する機器としカーナビを想定して説明を行ったが、本発明において、情報機器はカーナビに限定されるものではなく、例えば携帯電話やPDAなどユーザが日常的にもつ情報端末などであっても、位置情報のセンシングが可能であれば、ここで示した各実施形態と同様の効果を得ることができる。
【0121】
また、上述の各実施形態では、ユーザは車で移動するものとしたが、車以外の手段、例えば徒歩、電車などで移動する場合であっても、情報機器を携帯している場合には、本発明は実現可能である。
【0122】
また、本実施形態では、移動情報履歴蓄積手段15、移動パターン検出手段16および行動予測手段17をカーナビなどの情報機器の内部に設ける例を示したが、これらの機能をネットワーク接続された外部のサーバに設けるような構成も考えられる。すなわち、位置情報検出手段11や日時検出手段14によって検出された情報が外部のサーバに送信され、そのサーバで蓄積されて、所定のイベントが発生したときに、サーバで今後の行動を予測して必要な情報をカーナビに対して送信する、といった構成も可能である。このような構成は、ユーザが用いる情報機器が、携帯電話やPDAであった場合に、特に有効となる。
【0123】
また、本実施形態では、移動パターンは、蓄積された移動情報履歴から抽出するものとしたが、この代わりに、ネットワークなど外部から移動パターンを取得したり、ユーザ自身が移動パターンを設定するようにしてもよい。例えば、情報提供者が「ノードA→ノードB→ノードCという経路を走行するユーザに、ノードT付近にある店舗Sの情報を提供したい」という要求を持っている場合、移動パターン検出手段16にこの条件を記憶させておく。そして実際に、ユーザがノードA→ノードB→ノードCという経路を走行した場合には、その後の進行方向としてノードTを予測し、情報取得手段18はサーバ2に対してノードT付近に関する情報を要求する。
【0124】
また、情報の取得のために、ネットワークを利用する代わりに、VICSや放送波などを利用してもよい。この場合、情報取得手段18は、行動予測手段17によって予測された行き先に関する情報のみを抽出して、ユーザに提供するようにしてもよい。
【産業上の利用可能性】
【0125】
本発明に係る情報提供方法および装置は、ユーザに煩雑な操作を強いることなく、ユーザの行き先に関する有益な情報を、的確に提供することができ、例えば、カーナビやPDA等の情報機器を用いたサービスの提供等に有用である。
【図面の簡単な説明】
【0126】
【図1】本発明の第1の実施形態に係るシステムの全体構成を示す図である。
【図2】地図データベースに格納されたデータの例である。
【図3】本発明の第1の実施形態において、移動情報の履歴を蓄積する処理を示すフローチャートである。
【図4】本発明の第1の実施形態において、蓄積された移動情報の履歴の例である。
【図5】本発明の第1の実施形態において、行動予測と情報提供の処理を示すフローチャートである。
【図6】ノードの遷移の一例を示す図である。
【図7】記憶された位置関連情報の例である。
【図8】位置情報と、これに関連する情報を提供するURLアドレスとの関係を表す情報である。
【図9】ノードの決定方法を示す図である。
【図10】本発明の第2の実施形態に係るシステムの全体構成を示す図である。
【図11】本発明の第2の実施形態において、蓄積された移動情報の履歴の例である。
【図12】本発明の第3の実施形態に係るシステムの全体構成を示す図である。
【図13】本発明の第3の実施形態における嗜好情報の例である。
【図14】本発明の第3の実施形態における行動予測を説明するための図である。
【図15】本発明の第4の実施形態に係るシステムの全体構成を示す図である。
【図16】スケジューラで管理されたユーザのスケジュールの例である。
【図17】本発明の第4の実施形態における行動予測を説明するための図である。
【図18】移動情報の履歴から求めた行動予測とスケジュールとが異なるときに表示するメッセージの例である。
【図19】本発明の第5の実施形態に係るシステムの全体構成を示す図である。
【図20】本発明の第5の実施形態において、蓄積された移動情報の履歴の例である。
【図21】図20の移動情報履歴から検出された移動パターンの例である。
【図22】本発明の第5の実施形態において、行動予測と情報提供の処理の流れを示すフローチャートである。
【図23】到着予想時刻をユーザに提供する情報の例である。
【図24】本発明の第5の実施形態の変形例に係るシステムの全体構成を示す図である。
【図25】空き時間があるときにユーザに提供する情報の例である。
【図26】予定に遅れる可能性があるときにユーザに提供する情報の例である。
【図27】本発明の第6の実施形態に係るシステムの全体構成を示す図である。
【図28】取得される商用情報の例である。
【図29】本発明の第7の実施形態に係るシステムの全体構成を示す図である。
【図30】ノードのエリア化を説明するための図である。
【図31】エリア候補を示す情報の例である。
【特許請求の範囲】
【請求項1】
車の搭乗者に情報を提供する方法であって、
前記車に搭載された情報機器によって、前記車の位置情報を検出するステップと、
検出された位置情報から得た前記車の移動経路を、ノード間の遷移の形式で、移動情報履歴として蓄積するステップと、
前記搭乗者の好みの場所に関する嗜好情報を蓄積するステップと、
所定のイベントの発生を検知したとき、前記車の現在までの移動経路と、蓄積された移動情報履歴とを参照した前記車の1つの行き先と、前記嗜好情報を参照した前記車の別の行き先とを予測するステップと、
予測された複数の行き先に関する情報を、前記情報機器を介して、前記搭乗者に提供するステップとを備える、
ことを特徴とする情報提供方法。
【請求項1】
車の搭乗者に情報を提供する方法であって、
前記車に搭載された情報機器によって、前記車の位置情報を検出するステップと、
検出された位置情報から得た前記車の移動経路を、ノード間の遷移の形式で、移動情報履歴として蓄積するステップと、
前記搭乗者の好みの場所に関する嗜好情報を蓄積するステップと、
所定のイベントの発生を検知したとき、前記車の現在までの移動経路と、蓄積された移動情報履歴とを参照した前記車の1つの行き先と、前記嗜好情報を参照した前記車の別の行き先とを予測するステップと、
予測された複数の行き先に関する情報を、前記情報機器を介して、前記搭乗者に提供するステップとを備える、
ことを特徴とする情報提供方法。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】

【図18】

【図19】

【図20】
【図21】

【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【公開番号】特開2008−292498(P2008−292498A)
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願番号】特願2008−176645(P2008−176645)
【出願日】平成20年7月7日(2008.7.7)
【分割の表示】特願2006−33734(P2006−33734)の分割
【原出願日】平成14年8月5日(2002.8.5)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願日】平成20年7月7日(2008.7.7)
【分割の表示】特願2006−33734(P2006−33734)の分割
【原出願日】平成14年8月5日(2002.8.5)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]