
情報提供装置、及び走行支援システム
【課題】情報提供装置において、自車両の走行状態に合致した報知を実現すること。
【解決手段】情報報知処理では、走行時状況が「進行許可」であれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行する(S150)。一方、走行時状況が「進行禁止(ただし、矢印信号の出力中は除く)」であれば、情報の報知を実行しない(即ち、無実行である)(S155)。ただし、走行時状況が「矢印信号」である場合には、その「矢印信号」によって進行が許可される道路に、自車進行路が合致していれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行し(S150)、自車進行路が合致していなければ、情報の報知を実行しない(即ち、無実行である)(S155)。
【解決手段】情報報知処理では、走行時状況が「進行許可」であれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行する(S150)。一方、走行時状況が「進行禁止(ただし、矢印信号の出力中は除く)」であれば、情報の報知を実行しない(即ち、無実行である)(S155)。ただし、走行時状況が「矢印信号」である場合には、その「矢印信号」によって進行が許可される道路に、自車進行路が合致していれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行し(S150)、自車進行路が合致していなければ、情報の報知を実行しない(即ち、無実行である)(S155)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、交通信号機が設けられた交差点の通行に関する情報を報知する情報提供装置、及び走行支援システムに関する。
【背景技術】
【0002】
従来、交差点の交通整理を行う交通信号機の灯色を制御すると共に、その交通信号機の灯色に関する情報である灯色情報(例えば、各種類の灯色を点灯するタイミングと各灯色を点灯している期間とからなるサイクルなど)を送信する信号制御装置と、信号制御装置からの灯色情報に基づく情報を報知する情報提供装置とを備えた走行支援システムが知られている(例えば、特許文献1参照)。
【0003】
この特許文献1に記載の情報提供装置では、自車両が交差点に接近したことに従って信号制御装置から受信した灯色情報を用いた判定の結果、対象交差点への進入前に自車両が停止することが必要な停止必要状態であれば、自車両が停止線に到達する6〜7秒前までに、注意喚起の報知を実行する。
【0004】
ただし、ここでいう停止必要状態とは、灯色情報を受信した時点での自車両から交差点までの距離と、その灯色情報を受信した時点での自車両の走行速度とに基づいて推定される対象交差点の到達時刻での交通信号機の灯色が「進行禁止(例えば、赤色)」であることである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−245326号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、交通信号機の中には、灯色が「進行禁止(赤色)」でありながら、特定の道路について進行を許可する「矢印信号」が点灯するものがある。このような交通信号機によって交通整理が実行される交差点を自動車が通過する際には、交通信号機の灯色が「進行禁止」でありながら、「矢印信号」によって進行が許可された道路へと進む状況も考えられる。
【0007】
このような状況下においては、交差点に到達した自車両が、「矢印信号」によって進行が許可された道路へと進行可能であっても、自車両が交差点に到達した時点での交通信号機の灯色が「進入禁止」であることから、特許文献1に記載の情報提供装置では、停止必要状態と判定し、注意喚起の報知を実行する。
【0008】
つまり、特許文献1に記載の情報提供装置では、不必要な注意喚起の報知が実行され、その報知の態様が自車両の走行状態に合致してないという問題があった。
そこで、本発明は、情報提供装置において、自車両の走行状態に合致した報知を実現することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた本発明は、車両に搭載される情報提供装置に関する。この本発明の情報提供装置では、灯色情報取得手段が、自車両が進入する交差点(以下、対象交差点)の交通整理を行う交通信号機の灯色に関する情報(以下、灯色情報)を取得し、速度取得手段が、自車両の走行速度を取得する。これと共に、少なくとも、灯色情報、走行速度、及び対象交差点と自車両との位置関係に基づき、通過判定手段が、交通信号機の灯色によって対象交差点の進行が許可されている期間に、対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定して、その判定の結果に基づく情報の報知を、情報報知手段が実行する。
【0010】
ただし、本発明のうち、第一発明である請求項1に係る情報提供装置においては、灯色情報に、交通信号機の灯色の一つである進行禁止と並行して出力される灯色の一つであり、対象交差点における特定の道路について進行を許可する矢印信号に関する情報が含まれている。
【0011】
そして、第一発明における通過判定手段は、行路推定手段が、自車両が進む行路を表す自車進行路を推定した上で、交通信号機の灯色が進行許可である期間(以下、進行許可期間)、または矢印信号が出力される期間(以下、矢印期間)に、自車両が対象交差点に到達し、かつ該到達時での交通信号機の灯色によって進行が許可される道路に自車進行路が合致すれば、サイクル内通過が可能であるものと判定する。さらに、第一発明における情報報知手段は、通過判定手段での判定の結果、サイクル内通過が可能であれば、サイクル内通過が可能である旨を認識可能な態様の報知を、サイクル内通過が不可能であれば、サイクル内通過が不可能である旨を認識可能な態様の報知を実行する。
【0012】
つまり、第一発明の情報提供装置では、対象交差点への自車両の到達時に進行が許可される道路に自車進行路が合致する場合、及び不一致である場合、共に、それぞれに該当する状態である旨を認識可能な態様の報知が実行される。
【0013】
この結果、本発明の情報提供装置によれば、不必要な情報の報知が実行されることを防止でき、自車両の走行状態に合致した報知の態様を実現できる。
特に、第一発明においては、灯色情報に矢印信号が含まれているため、矢印信号が出力される交差点を対象交差点として自車両が進入する際には、該対象交差点での矢印期間についても、サイクル内通過が可能であるか否かを判定して報知することができる。換言すれば、本発明の情報提供装置によれば、上記特許文献1に記載された情報提供装置と異なり、矢印期間中に矢印信号によって進行が許可される道路へ進む場合に注意喚起が実行されるといった、自車両の走行状態に合致しない情報が報知されることを防止できる。
【0014】
なお、本発明において、「対象交差点と自車両との位置関係」とは、少なくとも、自車両から対象交差点までの距離を含むものである。また、本発明における交通信号機の灯色のうち、「進行許可」とは、対象交差点への進行を許可するものであり、例えば、青色灯色を含むものである。また、「進行禁止」とは、対象交差点への進行を禁止するものであり、少なくとも、赤色灯色を含むものである。
【0015】
ところで、交差点に設置される交通信号機の中には、矢印信号が出力されない交通信号機も存在する。このような交通信号機の灯色情報には、矢印信号に関する情報が必ずしも含まれていない。
【0016】
このため、本発明の第二発明として、請求項2に係る情報提供装置が考えられる。この第二発明における通過判定手段では、矢印判定手段が、灯色情報に基づき、交通信号機の灯色の一つである進行禁止と並行して出力される灯色の一つであり、対象交差点における特定の道路への進行を許可する矢印信号が、灯色情報に含まれているか否かを判定し、行路推定手段が、自車両が進む行路を表す自車進行路を推定する。その上で、第二発明の通過判定手段では、灯色情報に矢印信号が含まれていなければ、進行許可期間に自車両が対象交差点に到達し、かつ該到達時での交通信号機の灯色により進行が許可される道路に自車進行路が合致すれば、サイクル内通過が可能であるものと判定し、灯色情報に矢印信号が含まれていれば、進行許可期間及び矢印期間に、自車両が対象交差点に到達し、かつ該到達時での交通信号機の灯色により進行が許可される道路に自車進行路が合致すれば、サイクル内通過が可能であるものと判定する。
【0017】
さらに、情報報知手段では、サイクル内通過が可能であれば、サイクル内通過が可能である旨を認識可能な態様の報知を、サイクル内通過が不可能であれば、サイクル内通過が不可能である旨を認識可能な態様の報知を実行する。
【0018】
このような第二発明の情報提供装置であっても、不必要な情報の報知が実行されることを防止でき、自車両の走行状態に合致した報知の態様を実現することができる。
特に、第二発明の情報提供装置によれば、矢印信号を出力しない交通信号機が設けられた交差点を対象交差点として自車両が進入する場合であっても、自車両についてサイクル内通過が可能であるか否かを判定することができる。
【0019】
また、本発明(第一,第二発明の両方)の情報提供装置では、物体情報取得手段が、対象交差点の周辺に存在する移動体の位置及び挙動を少なくとも含む情報(以下、周辺物体情報とする)を取得しても良い。さらに、本発明の通過判定手段では、周辺状況判定手段が、灯色情報、自車両の走行速度、自車両と対象交差点との位置関係、及び物体情報取得手段で取得した周辺物体情報に基づく対象交差点の周辺の交通状況が、予め規定された規定状況に適合すれば、サイクル内通過が不可能であると判定しても良い(請求項3)。
【0020】
このような情報提供装置によれば、サイクル内通過が可能であるか否かについての判定を、対象交差点の周辺の交通状況、特に、対象交差点の周辺に存在する移動体の状況に応じて実行することができる。
【0021】
なお、本発明における「移動体」とは、自動車などの車両や、軽車両、歩行者などを少なくとも含むものである。また、本発明における「挙動」とは、移動体の現在位置、移動速度、及び進行方向を少なくとも含むものである。
【0022】
ところで、自車両が対象交差点に進入する際の一般的な状況として、自車両と対象交差点との間に移動体(即ち、前方車両)が存在する状況が考えられる。このような状況下においては、その前方車両が交差点に到達した時の交通信号機の灯色が進行禁止であれば、自車両は、対象交差点に進入する前に停止する必要がある。
【0023】
そこで、本発明の周辺状況判定手段は、周辺物体情報に対応する移動体の中に、自車両と対象交差点との間に存在する移動体である前方車両が存在すれば、該前方車両が対象交差点に到達時の交通信号機の灯色が進行禁止であることを、周辺交通状況が規定状況に適合したものとしても良い(請求項4)。
【0024】
このような情報提供装置によれば、前方車両が存在する場合であっても、自車両について、サイクル内通過が可能であるか否かを判定することができる。
また、自車両が対象交差点を右折する際の一般的な状況として、自車両よりも先に右折待ちをしている移動体(即ち、右折車両)が存在する状況が考えられる。このような状況下においては、それらの右折車両の全てが、交通信号機の灯色が進行許可である期間、及び右折先の道路への進行を許可する矢印信号が表示される期間のうちの少なくとも一方に右折を完了しなければ、自車両は、対象交差点に進入する前に停止する必要がある。
【0025】
そこで、本発明の周辺状況判定手段は、周辺物体情報に対応する移動体の中に、対象交差点にて右折する移動体である右折車両が存在すれば、該右折車両の一つが、右折が完了したことを表す領域として規定された右折完了領域へと、進行許可期間及び矢印期間のうち少なくとも一方に未到達であることを、周辺交通状況が規定状況に適合したものとしても良い(請求項5)。
【0026】
このような情報提供装置によれば、右折車両が存在する場合であっても、自車両について、サイクル内通過が可能であるか否かを判定することができる。
また、自車両が対象交差点にて右折待ちをしている際の一般的な状況として、対象交差点に向かって対向車線を移動する移動体(即ち、対向車両)が、進行許可期間及び矢印期間のうちの少なくとも一方の期間中に対象交差点に到達する状況がある。このような状況下において、自車両が右折を開始して右折完了領域への移動が終了するタイミングが、対向車両が対象交差点に到達するタイミングに一致すると、自車両の右折は、対向車両が対象交差点を通過した後に実行可能となる。
【0027】
そこで、本発明の周辺状況判定手段は、周辺物体情報に対応する移動体の中に、自車両が走行する走行車線の対向車線を走行する移動体である対向車両が存在すれば、進行許可期間及び矢印期間内であって、右折が完了したことを表す領域として規定された右折完了領域に自車両が移動するタイミングが、前記対向車両が対象交差点を通過するタイミングを基準として予め規定された時間の範囲内であることを、周辺交通状況が規定状況に適合したものとしても良い(請求項6)。
【0028】
このような情報提供装置によれば、対向車両が存在する場合であっても、自車両について、サイクル内通過が可能であるか否かを判定することができる。
これらの(請求項4〜請求項6に係る)情報提供装置によれば、報知の態様を、対象交差点の周辺に存在する移動体(ここでは、他車両)の走行状況に合致させることができる。
【0029】
本発明における行路推定手段は、自車両に搭載された方向指示器の操作状態を取得し、その取得した方向指示器の操作状態によって指し示される方向の道路を自車進行路として推定しても良い(請求項7)。
【0030】
このようにすれば、車両に設けられている方向指示器の操作状態から自車進行路を推定することができ、自車進行路の推定のために、新たな機器を設ける必要がない。
また、本発明における行路推定手段は、自車両に搭載され、目的地までの経路を案内する経路案内装置から、目的地までの経路を取得し、その取得した経路を自車進行路として推定しても良い(請求項8)。
【0031】
このような自車進行路の推定方法であれば、自車両が実際に走行する可能性が高い道路を自車進行路として推定することができ、その自車進行路の推定精度を高いものとすることができる。この結果、本発明の情報提供装置によれば、報知の態様を、自車両の走行状況により適切に合致させることができる。
【0032】
さらに、本発明における行路推定手段は、自車両が走行する車線を表す走行レーンを特定し、その特定した走行レーンに対して進行が許可された道路を、自車進行路として推定しても良い(請求項9)。
【0033】
このように、自車進行路の推定は、走行レーンに基づいて実行することもできる。
なお、本発明において、走行レーンの特定は、経路案内装置などに用いられている周知の技術を用いても良いし、対象交差点の周辺を撮影した画像から自車両が走行している車線を特定することで行っても良い。
【0034】
そして、本発明において、情報報知手段は、サイクル内通過が不可能であれば、情報の報知を無実行であることを、サイクル内通過が不可能であることを認識可能な態様としても良い(請求項10)。
【0035】
このような情報提供装置によれば、サイクル内通過が可能であれば、情報の報知が実行され、サイクル内通過が不可能であれば、情報の報知が無実行であるため、自車両の乗員らは、サイクル内通過が可能であるか否かを認識することができる。
【0036】
本発明の情報報知手段は、サイクル内通過が不可能であれば、サイクル内通過が不可能である旨の注意喚起を、サイクル内通過が不可能であることを認識可能な態様として報知しても良い(請求項11)。
【0037】
このような情報提供装置によれば、自車両の乗員に、サイクル内通過が不可能である旨をより確実に認識させることができる。
さらに、本発明において、通過判定手段は、灯色情報を取得する毎に、サイクル内通過が可能であるか否かを判定しても良い(請求項12)。
【0038】
このような情報提供装置では、対象交差点に自車両が到達するまでに変化する自車両の走行状態や対象交差点の周辺の交通状況に応じて、サイクル内通過が可能であるか否かを繰り返し判定することができる。この結果、本発明の情報提供装置によれば、時々刻々と変化する状況に応じて、より適切な態様にて報知を実行することができる。
【0039】
なお、本発明は、対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を無線により送信する信号制御装置と、情報提供装置とを備える走行支援システムとしてなされていても良い。
【0040】
本発明が、このような走行支援システムとしてなされている場合、走行支援システムを構成する情報提供装置は、灯色情報取得手段が灯色情報を取得する取得元が、信号制御装置となることを除けば、第一発明の情報提供装置と同様に構成されていても良いし、第二発明の情報提供装置と同様に構成されていても良い。
【0041】
本発明の走行支援システムにおいては、前者の場合、請求項1に係る情報提供装置と同様の効果を得ることができ、後者の場合、請求項2に係る情報提供装置と同様の効果を得ることができる。
【図面の簡単な説明】
【0042】
【図1】本発明が適用された走行支援システムの概略構成を示すブロック図である。
【図2】灯色情報の概要を説明する説明図である。
【図3】情報報知処理の処理手順を示すフローチャートである。
【図4】進行適否判定処理の処理手順を示すフローチャートである。
【図5】通過可否判定処理の処理手順を示すフローチャートである。
【図6】前方車両判定処理の処理手順を示すフローチャートである。
【図7】前方車両判定処理の動作例を説明する説明図である。
【図8】右折車両判定処理の処理手順を示すフローチャートである。
【図9】対向車両判定処理の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0043】
以下に本発明の実施形態を図面と共に説明する。
〈走行支援システムの全体構成について〉
図1に示すように、走行支援システム100は、道路交差点に設置された交通信号機40の灯色を制御する信号制御装置30と、信号制御装置30との間で無線による情報通信を行う少なくとも一台の情報提供装置1とを備えている。
【0044】
このうち、信号制御装置30は、無線通信部31、移動情報取得部32、灯色情報データベース33、及び路側制御部34を備える。
無線通信部31は、情報提供装置1との間で無線通信(路車間通信)を行う通信装置である。この路車間通信に用いる通信様式としては、例えば、ノンストップ自動料金収受(いわゆるETC(登録商標))システム等で用いられる狭域通信(DSRC)や、道路交通情報通信システム(いわゆるVICS(登録商標))等で用いられる電波ビーコン及び光ビーコンの技術を用いることが考えられる。あるいは、2011年(予定)のアナログテレビ放送の終了後に利用区分が再編される予定である700MHz帯の電波を利用することも考えられる。この700MHz帯の電波は、DSRCで用いられる5.8GHz帯の電波と比較して波長が長いため、回折を起こし易い。このため、建築物が密集する都市部において、建物の影からでも良好に通信を行うことができる。
【0045】
移動情報取得部32は、道路交差点から規定範囲(例えば、100m)内に存在する移動体に関する情報(以下、移動体情報とする)を取得し、この取得した移動体情報を路側制御部34に入力する。この移動情報取得部32にて取得する移動体情報は、道路交差点内を移動中の各移動体(即ち、自動車や歩行者、自転車など)、若しくは道路交差点に進入しようとしている各移動体の存否、各移動体の位置、移動方向、移動速度など、移動体の挙動を少なくとも含むものである。
【0046】
本実施形態における移動情報取得部32は、いわゆる路側センサであり、撮像装置にて画像を撮像する毎に、その撮像した画像中の移動体を認識して移動体情報を導出する画像処理装置(図示略)によって実現されていても良いし、周知のレーダ装置や、路上に設けられたセンサなどによって実現されていても良い。
【0047】
灯色情報データベース33は、交通信号機40の灯色に関する情報(以下、灯色情報)として、少なくとも、灯色の変化のパターンを表す信号パターンを格納する。
このうち、信号パターンは、交通信号機40の各灯色の点灯が開始されるタイミング(時刻)及び各灯色が点灯される期間(即ち、灯色が遷移する周期)を少なくとも含むものである。
【0048】
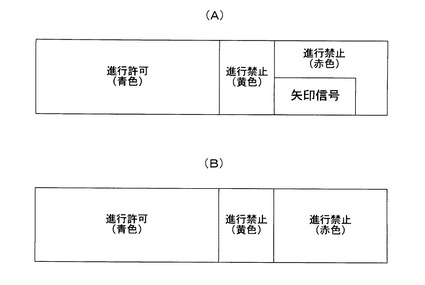
この交通信号機40にて表示される灯色の種類としては、道路交差点から流出する全ての道路に対して進行が許可される「進行許可(青色)」、道路交差点から流出する全ての道路に対して進行が禁止される「進行禁止(黄色,赤色)」がある。さらに、道路交差点によっては、「進行許可(青色)」、「進行禁止(黄色,赤色)」に加えて、矢印の方向に合致する特定の道路に対して進行が許可される「矢印信号」が、灯色の種類として含まれている。
【0049】
本実施形態の交通信号機40において、灯色の種類として「矢印信号」が含まれている場合、灯色が遷移する周期は、例えば、図2(A)に示すように、「進行禁止(赤色)」から「進行許可(青色)」、「進行禁止(黄色)」、「進行禁止(赤色)、及び矢印信号」、「進行禁止(赤色)」の順序が一般的である。なお、ここでの「矢印信号」とは、「進行許可(青色)」、「進行禁止(黄色)」、「進行禁止(赤色)」の灯色とは別体に設けられた表示部に、交通信号機の灯色が「進行禁止」である期間に並行して出力される。
【0050】
一方、灯色の種類として「矢印信号」が含まれていない場合には、灯色が遷移する周期は、例えば、図2(B)に示すように、「進行禁止(赤色)」から「進行許可(青色)」、「進行禁止(黄色)」、「進行禁止(赤色)」の順序が一般的である。
【0051】
なお、灯色が遷移する周期は、ここで示したもの以外にも様々な態様があり得る。
路側制御部34は、CPU,ROM,RAMを少なくとも備えた周知のコンピュータ装置によって構成されており、信号制御装置30の各部31,32,33を統括制御すると共に、ROM等に記憶されたプログラムに従って各種処理を実行する。
【0052】
なお、路側制御部34が実行する処理の一つとして、予め規定された規定時間間隔で、灯色情報データベース33に格納された灯色情報、及び現時点での灯色を、無線通信部31を介して送信する灯色情報送信処理がある。この灯色情報送信処理によって規定時間毎に送信される情報に、移動体情報を加えても良い。
〈情報提供装置の構成について〉
次に、情報提供装置1は、車両(本実施形態では、自動車)に搭載される車載装置であり、位置特定部10、外部機器接続部11、表示部12、音声出力部13、無線通信部15、及び車側制御部16を備えている。
【0053】
このうち、外部機器接続部11は、自車両に搭載されている各種機器との間で通信を行うためのインタフェースであり、各機器から送信されるデータを車側制御部16に入力する。この外部機器接続部11には、自車両の走行速度を検出する車速センサ20と、GPS衛星からの信号を受信するGPS受信機21と、自車両に加わる角速度を検出するジャイロスコープ22とが接続されている。さらに、外部機器接続部11には、周知のナビゲーション装置23(本発明の経路案内装置)と、自車両の進行方向を自車両の外部に通知する方向指示器24とが接続されている。
【0054】
位置特定部10は、車速センサ20や、GPS受信機21、ジャイロスコープ22等からのデータに基づいて、周知の手法を用いて特定した自車両の現在位置や進行方向を車側制御部16に入力する。
【0055】
表示部12は、画像を表示する表示面(例えば、液晶パネル等)を備えた表示装置であり、車側制御部16からの制御に基づいて各種の画像を表示する。音声出力部13は、音声を出力する装置(例えば、スピーカ)であり、車側制御部16からの制御に基づいて各種の案内音声を出力する。
【0056】
なお、外部機器接続部11に接続されるナビゲーション装置23は、現在位置や進行方向を特定する位置特定部と、地図データを格納する格納部と、表示部と、音声出力部と、情報の入力を受け付ける操作受付部と、ナビゲーション装置23の各部を制御する制御部とを備えた周知の装置である。本実施形態におけるナビゲーション装置23は、予め設定された目的地までの経路を設定して、その設定された経路を、表示部や音声出力部からの出力によって案内する機能に加えて、自車両の現在位置を地図データ上の位置に照合することで自車両が走行している車線(以下、走行レーンとする)を特定する機能など周知の機能を有している。このようなナビゲーション装置23の位置特定部、表示部、音声出力部、制御部は、情報提供装置1の位置特定部10、表示部12、音声出力部13、車側制御部16と共通であっても良いし、ナビゲーション装置23に専用に設けられていても良い。
【0057】
さらに、無線通信部15は、他車両に搭載された情報提供装置1との間で双方向の無線通信(車車間通信)、または信号制御装置30との間で無線通信(路車間通信)を行う通信装置である。この路車間通信に用いる通信様式としては、上述の信号制御装置30と同様のものを用いる。
【0058】
車側制御部16は、CPU,ROM,RAMを少なくとも備えた周知のコンピュータ装置を中心に構成されており、情報提供装置1の各部10〜13,15を統括制御することに加えて、ROM等に記憶されたプログラムに従って各種処理を実行する。
【0059】
この車側制御部16が実行する処理の一つとして、位置特定部10にて取得した自車両の現在位置や進行方向、外部機器接続部11を介して取得した自車両の走行速度、自車両の現在位置の周辺における経路などを含む情報を車両情報として、無線通信部15を介して送信する車両情報送信処理がある。
【0060】
また、車側制御部16が実行する処理の一つとして、無線通信部15を介して取得した交通信号機40の灯色情報、及び他車両の車両情報に基づいて、交通信号機40の灯色が「進行禁止(赤色)」として継続することが確定する前に、自車両が進行する対象交差点を通過するサイクル内通過が可能であるか否かを判定し、その判定結果に基づく情報を報知する情報報知処理がある。
【0061】
なお、対象交差点とは、信号制御装置30が制御対象とする交通信号機40によって交通整理が行われる道路交差点のうち、自車両が進行する道路交差点である。
〈情報報知処理の処理内容について〉
次に、車側制御部16が実行する情報報知処理の処理内容について説明する。
【0062】
この情報報知処理は、車側制御部16に電力が供給される(例えば、イグニッションスイッチがオンされる)と起動されるものである。
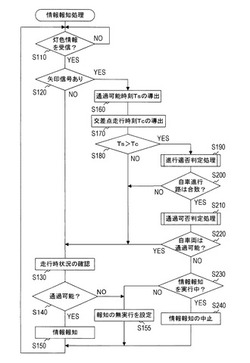
そして、情報報知処理は、起動されると、図3に示すように、まず、無線通信部15を介して交通信号機40の灯色情報を受信したか否かを判定する(S110)。その判定の結果、灯色情報を受信していなければ(S110:NO)、灯色情報を受信するまで待機する。
【0063】
そして、灯色情報を受信すると(S110:YES)、その受信した灯色情報の中に、矢印信号に関する情報(以下、矢印情報)が含まれているか否かを判定する(S120)。そのS120での判定の結果、灯色情報中に矢印情報が含まれていれば(S120:YES)、対象交差点が、矢印信号を出力する交通信号機40によって交通整理が実行される交差点であるものと判断して、詳しくは後述するS160へと移行する。一方、S120での判定の結果、灯色情報の中に矢印情報が含まれていなければ(S120:NO)、対象交差点が、矢印信号を出力しない交通信号機40によって交通整理が実行される交差点であるものと判断して、S130へと移行する。
【0064】
そのS130では、自車両の現在位置と対象交差点との位置関係、自車両の走行速度、及び交通信号機40の灯色情報に基づいて、自車両が対象交差点を走行する時点における交通信号機40の灯色の状態(以下、走行時状況とする)を確認する。
【0065】
本実施形態のS130では、自車両が対象交差点を走行する時刻(以下、交差点走行時刻Tc)を導出し、その交差点走行時刻Tcでの交通信号機40の灯色を、走行時状況として取得(確認)する。なお、本実施形態における交差点走行時刻Tcは、自車両が対象交差点に到達する時刻であっても良いし、自車両が対象交差点を通過する時刻であっても良い。前者の場合、交差点走行時刻Tcの導出は、位置特定部10にて特定した自車両の現在位置から、対象交差点(例えば、停止線)までの距離を、現時点での自車両の走行速度にて走行した場合に要する時間長を、現在の時刻に加算することで実行する。また、後者の場合、交差点走行時刻Tcの導出は、自車両の現在位置から、対象交差点を通過完了した位置として予め規定された通過完了位置までの距離を、現時点での自車両の走行速度にて走行した場合に要する時間長を、現在の時刻に加算することで実行する。
【0066】
続いて、S130にて確認した走行時状況がサイクル内通過を可能であることを表しているか否かを判定する(S140)。
そのS140での判定の結果、走行時状況が、サイクル内通過を可能であることを表していれば、(S140:YES)、対象交差点について、サイクル内通過を可能である旨を認識可能な態様の情報の報知を実行する(S150)。このS150での報知は、表示部12の表示面への表示、及び音声出力部13から音声での出力のうち、少なくとも一方により実行される。そして、このS150での報知は、自車両が対象交差点を通過するまでの間、継続して実行される。その後、S110へと戻り、灯色情報を受信するまで待機する。
【0067】
一方、S140での判定の結果、走行時状況が、サイクル内通過が不可能であることを表していれば(S140:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。
【0068】
なお、本実施形態の情報報知処理においては、S120からS130へと移行した場合、走行時状況が、「進行許可(青色)」へと変更される前の「進行禁止(赤色)」を継続している期間(以下、進行禁止継続期間とする)であれば、サイクル内通過を不可能であると判定し(S140:NO)、走行時状況が「進行許可」(即ち、本発明の進行許可期間に相当)であれば、サイクル内通過を可能であると判定する(S140:YES)。また、この場合のS150にて報知する「サイクル内通過を可能である旨を認識可能な態様の情報」とは、例えば、対象交差点を進行可能であることや、対象交差点に到達時の交通信号機40の灯色が「進行許可(青色)」であることなどである。
【0069】
次に、S120での判定の結果、灯色情報に矢印信号が含まれている場合に移行するS160では、対象交差点についてサイクル内通過が可能な限界の時刻である通過可能時刻Tsを導出する。本実施形態の通過可能時刻Tsは、灯色情報に基づく「矢印信号」の出力が終了する時刻とする。
【0070】
続いて、交差点走行時刻Tcを導出する(S170)。その導出した交差点走行時刻Tcが、通過可能時刻Tsよりも前であるか否かを判定する(S180)。
そのS180での判定の結果、交差点走行時刻Tcが通過可能時刻Ts以降であれば(S180:NO)、S130へと進む。そのS130にて、前述したように走行時状況を確認した結果、走行時状況が進行禁止継続期間であるため、サイクル内通過を不可能であると判断して(S140:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。
【0071】
一方、S180での判定の結果、交差点走行時刻Tcが通過可能時刻Tsよりも前であれば(S180:YES)、自車両が進行する行路(以下、自車進行路)が、自車両が対象交差点に到達する時点での交通信号機40の灯色によって進行が許可される道路(以下、進行許可道路)に合致するか否かを判定する進行適否判定処理を実行する。
【0072】
続いて、進行適否判定処理での判定の結果、自車進行路が進行許可道路に合致していなければ(S200:NO)、S130へと進む。そのS130では、前述したように走行時状況を確認した結果、走行時状況は、「矢印信号」が出力されているものの、自車進行路に対する交通信号機40の灯色が進行禁止継続状態である。このため、サイクル内通過が不可能であると判断して(S140:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。
【0073】
一方、進行適否判定処理での判定の結果、自車進行路が進行許可道路に合致していれば(S200:YES)、対象交差点の周辺に存在する移動体である他車両の挙動に基づき、サイクル内通過を可能であるか否かを判定する通過可否判定処理を実行する(S210)。
【0074】
続いて、通過可否判定処理での判定の結果、対象交差点について、自車両がサイクル内通過を可能であれば(S220:YES)、S130へと進む。そのS130では、前述したように走行時状況を確認した結果、走行時状況は、自車進行路に対する交通信号機40の灯色が「進行許可(ここでは、矢印信号を含む)」となる。このため、サイクル内通過が可能であると判断し(S140:YES)、S150での報知を実行した後、S110へと戻る。この場合のS150にて報知する「サイクル内通過を可能である旨を認識可能な態様の情報」とは、例えば、自車進行路に沿って対象交差点を進行可能であることや、対象交差点に到達時の交通信号機40の灯色が「進行許可(青色)」または「矢印信号」であること、自車両が進行可能な道路(即ち、進行許可道路)が位置する方向などである。
【0075】
一方、通過可否判定処理での判定の結果、対象交差点について、自車両がサイクル内通過を不可能であれば(S220:NO)、S150による情報の報知を実行中であるか否かを判定する(S230)。そのS230での判定の結果、S150による情報の報知を実行中でなければ(S230:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。なお、S230での判定の結果、S150による情報の報知を実行中であれば(S230:YES)、S150による情報の報知を中止して(S240)、S110へと戻る。
〈進行適否判定処理の処理内容について〉
次に、情報報知処理のS190にて起動される進行適否判定処理の処理内容について説明する。
【0076】
この進行適否判定処理は、起動されると、図4に示すように、まず、外部機器接続部11を介してナビゲーション装置23から、目的地までの自車両の経路を自車進行路として取得する(S310)。続いて、S310にて取得した自車進行路が、進行許可道路に合致するか否かを判定する(S320)。なお、本実施形態における進行許可道路とは、自車両が対象交差点に到達する時点での交通信号機40の灯色が「矢印信号」であれば、その出力されている個々の「矢印信号」によって進行が許可される道路であり、交通信号機40の灯色が「進行許可(青色)」であれば、対象交差点にて接続する全ての道路である。
【0077】
続いて、S320での判定の結果、自車進行路(即ち、自車両の経路)が進行許可道路に合致していれば(S320:YES)、S390へと移行する。そのS390では、自車進行路が進行許可道路に合致していることを表す合致情報を設定する。そして、その後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。
【0078】
一方、S320での判定の結果、自車進行路が進行許可道路に合致していなければ(S320:NO)、外部機器接続部11を介してナビゲーション装置23から、自車両の走行レーンを取得する(S330)。続いて、S330にて取得した走行レーンに対して進行が許可された道路を自車進行路として、進行許可道路に合致するか否かを判定する(S340)。
【0079】
そのS340での判定の結果、自車進行路が進行許可道路に合致していれば(S340:YES)、S390へと移行する。そのS390では、前述したように、合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。一方、S340での判定の結果、自車進行路が進行許可道路に合致していなければ(S340:NO)、走行レーンに対して進行が許可された道路が、進行が常時許可された道路であるか否かを判定する(S350)。
【0080】
そのS350での判定の結果、走行レーンに対して進行が許可された道路が、常時進行が許可された道路であれば(S350:YES)、S390へと移行する。そのS390では、前述したように、合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。一方、S350での判定の結果、走行レーンに対して進行が許可された道路が、常時進行が許可された道路でなければ(S350:NO)、外部機器接続部11を介して方向指示器24から、方向指示器24の操作状態(以下、方向指示と称す)を取得する(S360)。
【0081】
続いて、S360にて取得した方向指示によって指し示された方向に存在する道路を自車進行路として、進行許可道路に合致するか否かを判定する(S370)。そのS370での判定の結果、自車進行路が進行許可道路に合致すれば(S370:YES)、S390へと移行する。そのS390では、前述したように、合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと戻る。一方、S370での判定の結果、自車進行路が進行許可道路に合致しなければ(S370:NO)、S380へと進む。
【0082】
そのS380では、自車進行路が進行許可道路に合致していないことを表す不合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。
なお、本実施形態の情報報知処理におけるS200では、合致情報または不合致情報に基づいて、自車両進行路が進行許可道路に合致するか否かを判定する。
【0083】
つまり、本実施形態の進行適否判定処理では、ナビゲーション装置23から取得した目的地までの自車両の経路、自車両の走行レーンに対して進行が許可された道路、方向指示器24の操作状態によって指し示された方向に存在する道路を、それぞれ、自車進行路として、進行許可道路に合致するか否かを判定する。
〈通過可否判定処理の処理内容について〉
次に、情報報知処理のS210にて起動される通過可否判定処理の処理内容について説明する。
【0084】
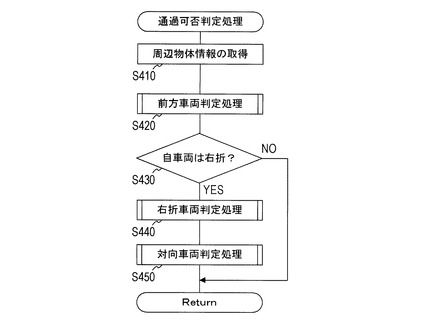
この通過可否判定処理は、起動されると、図5に示すように、まず、車車間通信によって取得した他車両の車両情報の中から、他車両の現在位置が、対象交差点から予め規定された規定範囲内である車両情報を、周辺物体情報として取得する(S410)。このS410では、信号制御装置30から送信された移動体情報を、周辺物体情報として取得しても良い。
【0085】
そして、S410にて取得した周辺物体情報に基づいて、自車両と対象交差点との間に存在する他車両(以下、前方車両)に起因して、対象交差点について自車両がサイクル内通過できなくなる可能性を判定する前方車両判定処理を実行する(S420)。
【0086】
続いて、対象交差点において、自車両が右折するか否かを判定する(S430)。その判定の結果、自車両が右折しない場合(S430:NO)には、情報報知処理のS220へと進む。なお、本実施形態のS430では、例えば、先の進行適否判定処理において認識した自車進行路が、自車両が右折する方向の道路であれば、対象交差点において、自車両が右折するものと判定する。
【0087】
一方、S430での判定の結果、自車両が右折するものと判定された場合(S430:YES)、S410にて取得した周辺物体情報に基づいて、対象交差点にて右折待ちをしている他車両(以下、右折車両)に起因して、対象交差点について自車両がサイクル内通過できなくなる可能性を判定する右折車両判定処理を実行する(S440)。
【0088】
続いて、S410にて取得した周辺物体情報に基づいて、対象交差点に向かって対向車線を走行する他車両(以下、対向車両とする)に起因して、対象交差点について自車両がサイクル内通過できなくなる可能性を判定する対向車両判定処理を実行する(S450)。
【0089】
その後、本通過可否判定処理を終了して、情報報知処理のS220へと進む。
〈前方車両判定処理の処理内容について〉
次に、通過可否判定処理のS420にて起動される前方車両判定処理の処理内容について説明する。
【0090】
この前方車両判定処理は、起動されると、図6に示すように、先のS410にて取得した周辺物体情報に基づいて、前方車両が存在するか否かを判定する(S510)。本実施形態のS510では、周辺物体情報中の他車両の現在位置が、自車両の現在位置と対象交差点が存在する位置との間の位置である他車両を、前方車両として判定する。
【0091】
そのS510での判定の結果、前方車両が存在しなければ(S510:NO)、詳しくは後述するS550へと進む。一方、S510での判定の結果、前方車両が存在すれば(S510:YES)、前方車両が対象交差点に到達する時刻(以下、前方車到達時刻とする)を導出する(S520)。このS520における前方車到達時刻は、周辺物体情報中の前方車両の現在位置から対象交差点の位置(例えば、停止線)までの距離を当該周辺物体情報中の走行速度にて走行した場合に要する時間長を、現在の時刻に加算することで導出される。
【0092】
続いて、S520にて導出された前方車到達時刻での交通信号機40の灯色が、進行禁止継続期間であるか否か、即ち、前方車両が、対象交差点を通過可能であるか否かを判定する(S530)。そのS530での判定の結果、前方車到達時刻での交通信号機40の灯色が、進行禁止継続期間であれば(S530:NO)、前方車両が対象交差点を通過不可能であると判断して、S540へと進む。
【0093】
そのS540では、前方車両が対象交差点への進入前に停止することに起因して、自車両について対象交差点をサイクル内通過が不可能である可能性が高いものとし、自車両について、サイクル内通過が不可能である可能性があることを表す不可情報を設定する。その後、本前方車両判定処理を終了して、通過可否判定処理のS430へと進む。
【0094】
一方、S530での判定の結果、前方車到達時刻での交通信号機40の灯色が「進行許可(ここでは、矢印信号も含む)」であれば(S530:YES)、前方車両が対象交差点を通過可能であると判断して、S550へと進む。
【0095】
そのS550では、前方車両の存否についての判定を、周辺物体情報を取得した全ての他車両に対して実行したか否かを判定する。その判定の結果、周辺物体情報を取得した全ての他車両に対して判定を実行していなければ(S550:NO)、S510へと戻り、前方車両が存在すれば、S520へと進む。
【0096】
一方、S550での判定の結果、周辺物体情報を取得した全ての他車両に対して判定を実行していれば(S50:YES)、前方車両が対象交差点への進入前に停止する必要がないものとし、自車両について、サイクル内通過が可能である可能性が高いことを表す可能情報を設定(S560)する。その後、本前方車両判定処理を終了して、通過可否判定処理のS430へと進む。
【0097】
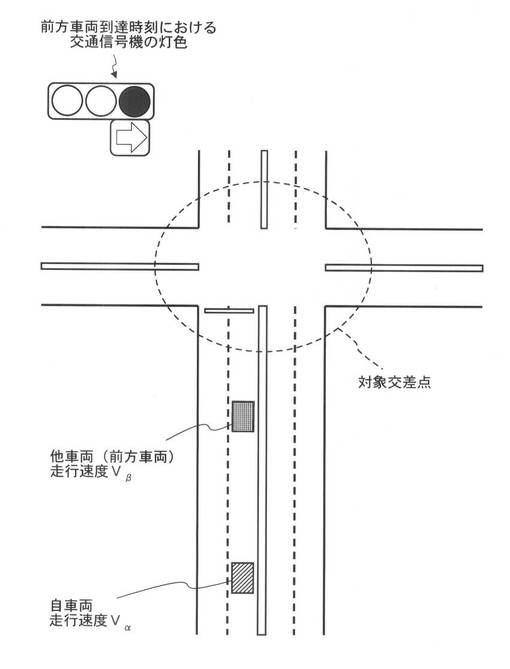
例えば、図7に示すように、前方車両の走行速度Vβが、自車両の走行速度Vαに比べて低速である場合(Vβ<Vα)に、前方車到達時刻における交通信号機40の灯色が、進行禁止継続期間であれば、前方車両は、対象交差点をサイクル内通過できない。このとき、走行速度が速い自車両は、前方車両が存在していなければ、対象交差点をサイクル内通過することが可能であっても、前方車両が対象交差点への進入前に停止することに起因して、サイクル内通過が不可能となる。このため、このような状況下における本実施形態の前方車両判定処理では、不可情報を設定する。
〈右折車両判定処理の処理内容について〉
次に、通過可否判定処理のS440にて起動される右折車両判定処理の処理内容について説明する。
【0098】
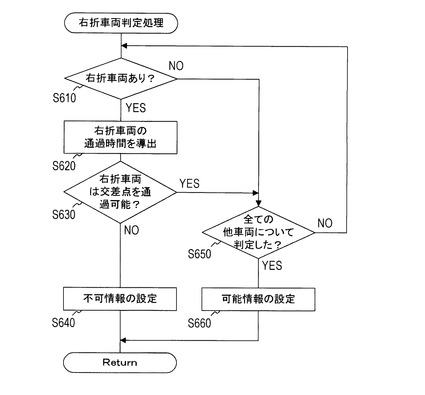
この右折車両判定処理は、起動されると、図8に示すように、まず、右折車両が存在するか否かを判定する(S610)。本実施形態のS610では、周辺物体情報中の他車両の現在位置が、対象交差点から予め設定された設定範囲内であり、かつ灯色情報における交通信号機40の灯色が「進行許可(青色)」である期間中に、周辺物体情報中の走行速度が停止しているものとみなせる極低速(例えば、5[km/h])以下であれば、当該周辺物体情報に対応する他車両を、右折車両として判定する。
【0099】
そのS610での判定の結果、右折車両が存在しなければ(S610:NO)、詳しくは後述するS650へと進む。一方、S610での判定の結果、右折車両が存在すれば(S610:YES)、右折車両が対象交差点の通過を完了する時刻(以下、右折車両通過時刻)を導出する(S620)。なお、本実施形態のS620における右折車両通過時刻は、対象交差点内において右折待ちをしている先頭車両が存在する位置とした予め規定された先頭位置から通過完了位置まで走行することに要する時間長と、対象となる右折車両が、その右折車両の現在位置から先頭位置まで走行することに要する時間長との和を、現在の時刻に加算することで導出する。ここでの通過完了位置は、右折が完了したことを表す位置として予め規定されたものであり、本発明の右折完了領域に相当する。
【0100】
続いて、当該右折車両が対象交差点を通過可能であるか否かを判定する(S630)。具体的に、本実施形態のS630では、S620にて導出された右折車両通過時刻が、先のS160にて導出された通過可能時刻Tsよりも前であれば、当該右折車両が対象交差点を通過可能と判定し、右折車両通過時刻が通過可能時刻Ts以降であれば、当該右折車両が対象交差点を通過可能と判定する。
【0101】
このS630での判定の結果、当該右折車両が対象交差点を通過不可能であれば(S630:NO)、右折車両が対象交差点に進入する前に停止することに起因して、自車両について対象交差点をサイクル内通過が不可能である可能性が高いものと判断して、不可情報を設定する(S640)。その後、本右折車両判定処理を終了し、通過可否判定処理のS450へと進む。
【0102】
一方、S630での判定の結果、当該右折車両が対象交差点を通過可能であれば(S630:YES)、S650へと進む。
そのS650では、右折車両の存否についての判定を、周辺物体情報を取得した全ての他車両について実行したか否かを判定する。その判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していなければ(S650:NO)、S610へと戻り、右折車両が存在すれば(S610:YES)、S620へと進む。
【0103】
一方、S650での判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していれば(S650:YES)、右折車両が、通過可能時刻Tsまでに自車両が右折することを妨げないものと判断して、可能情報を設定する(S560)。その後、本右折車両判定処理を終了して、通過可否判定処理のS430へと進む。
〈対向車両判定処理の処理内容について〉
次に、通過可否判定処理のS450にて起動される対向車両判定処理の処理内容について説明する。
【0104】
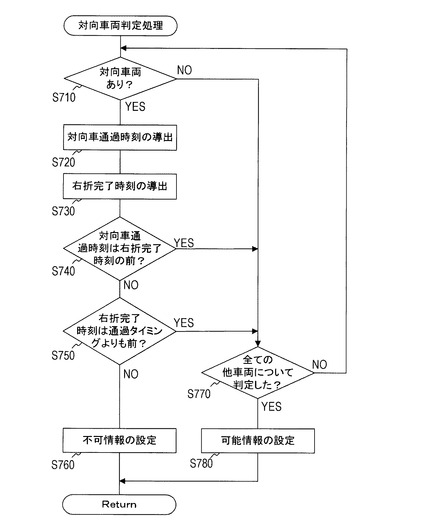
この対向車両判定処理は、起動されると、図9に示すように、まず、対向車両が存在するか否かを判定する(S710)。本実施形態のS710では、周辺物体情報中の他車両の現在位置が、対象交差点から予め設定された特定範囲内における対向車線上であり、かつ周辺物体情報中の進行方向が対象交差点に向かっていることを表していれば、当該周辺物体情報に対応する他車両を、対向車両として判定する。
【0105】
そのS710での判定の結果、対向車両が存在しなければ(S710:NO)、詳しくは後述するS770へと進む。一方、S710での判定の結果、対向車両が存在すれば(S710:YES)、当該対向車両が対象交差点を通過する時刻である対向車通過時刻を導出する(S720)。なお、本実施形態のS720における対向車通過時刻は、当該対向車両の現在位置から通過完了位置までの移動に要する時間長を、現在の時刻に加算することで導出する。
【0106】
続いて、自車両が、対象交差点の通過を完了する時刻である右折完了時刻を導出する(S730)。このS730における右折完了時刻の導出方法は、S620における右折車両通過時刻の導出方法と同様であり、S620の説明における右折車両を自車両に読み替えるものとする。
【0107】
続いて、S720にて導出された対向車通過時刻が、S730にて導出した右折完了時刻よりも前であるか否かを判定する(S740)。その判定の結果、対向車通過時刻が右折完了時刻よりも前であれば(S740:YES)、対向車両が対象交差点を通過した後に自車両が右折するため、自車両と対向車両とがバッティングすることがないと判断して、S770へと進む。一方、対向車通過時刻が右折完了時刻以降であれば、(S740:NO)、S750へと進む。
【0108】
そのS750では、予め規定された時間長を対向車通過時刻から減算した通過タイミングよりも、右折完了時刻が前であるか否かを判定し、その判定の結果、右折完了時刻が通過タイミング以降であれば(S750:NO)、対向車両が、自車両の右折の妨げとなる可能性が高いものと判断して、不可情報を設定する(S760)。その後、本対向車両判定処理を終了して、通過可否判定処理へと戻る。
【0109】
一方、S750での判定の結果、右折完了時刻が通過タイミングよりも前であれば(S750:YES)、S770へと進む。
そのS770では、対向車両の存否についての判定を、周辺物体情報を取得した全ての他車両について実行したか否かを判定する。その判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していなければ(S770:NO)、S710へと戻り、対向車両が存在すれば(S710:YES)、S720へと進む。
【0110】
一方、S770での判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していれば(S770:YES)、対向車両が、自車両の右折の妨げとなることがないものと判断して、可能情報を設定する(S780)。その後、本対向車両判定処理を終了して、通過可否判定処理へと戻る。
【0111】
以上説明したように、本実施形態の情報報知処理では、走行時状況が「進行許可」であれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行する。一方、走行時状況が「進行禁止(ただし、矢印信号の出力中は除く)」であれば、情報の報知を実行しない(即ち、無実行である)。ただし、走行時状況が「矢印信号」である場合には、その「矢印信号」によって進行が許可される道路に、自車進行路が合致していれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行し、自車進行路が合致していなければ、情報の報知を実行しない(即ち、無実行である)。
【0112】
さらに、自車進行路が進行許可道路に合致していても、周辺物体情報を取得した他車両の挙動に起因して、自車両が、サイクル内通過を不可能となる場合には、情報の報知を実行中であれば、その実行中の情報の報知を中止し、情報の報知を実行していなければ、情報の報知を無実行である状態を維持する。
[実施形態の効果]
したがって、本実施形態の情報提供装置1によれば、自車両の走行状態に合致しない不必要な情報の報知が実行されることを防止できる。換言すれば、情報提供装置1によれば、自車両の走行状態に合致した報知の態様を実現することができる。
【0113】
そして、情報提供装置1では、灯色情報中に矢印情報が含まれているか否かを判定した上で、自車両が対象交差点を通過するときの交通信号機40の灯色を判定する。このため、情報提供装置1によれば、矢印信号を出力する交通信号機40のみならず、矢印信号を出力しない交通信号機40が設けられた交差点を対象交差点として自車両が進入する場合であっても、自車両についてサイクル内通過が可能であるか否かを判定することができる。
【0114】
さらに、情報提供装置1では、自車進行路が進行許可道路に合致していても、周辺物体情報を取得した他車両の挙動に起因して、自車両が、サイクル内通過を不可能となる場合には、情報の報知を実行しない。このため、情報提供装置1によれば、より適切な態様にて報知を実行することができる。
【0115】
特に、情報提供装置1では、サイクル内通過が可能であるか否かについての判定、及び情報の報知を実行するか否かについての判定を、灯色情報を受信する毎に実行している。よって、情報提供装置1によれば、対象交差点に自車両が到達するまでに変化する自車両の走行状態や対象交差点の周辺の時々刻々と変化する交通状況に応じて、より適切な態様にて報知を実行することができる。
【0116】
なお、情報提供装置1では、サイクル内通過が可能であれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知が実行され、サイクル内通過が不可能であれば、情報の報知が無実行である。このため、情報提供装置1によれば、自車両の乗員らに、サイクル内通過が可能であるか否かを認識させることができる
[その他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0117】
例えば、上記実施形態の情報報知処理では、通過可否判定処理を実行して、対象交差点の周辺の交通状況に応じて、サイクル内通過が可能であるか否かを判定していたが、この通過可否判定処理は実行されていなくとも良い。すなわち、情報報知処理におけるS210,S220は省略されていても良い。
【0118】
また、上記実施形態における進行適否判定処理では、自車進行路が進行許可道路に合致しているか否かの判定を、ナビゲーション装置23から取得した経路、自車両の走行レーン、及び方向指示器24から取得した方向指示それぞれから推定した自車進行路に対して実行していたが、当該判定は、ナビゲーション装置23から取得した経路、自車両の走行レーン、及び方向指示器24から取得した方向指示のうち、少なくとも一つから推定した自車進行路に対して実行されていても良い。つまり、進行適否判定処理においては、S310,320の組、S330,340の組、S360,370の組のうち少なくとも一つが実行されれば良い。
【0119】
なお、上記実施形態の情報提供装置1では、走行レーンの特定を、ナビゲーション装置23に備えられた周知の技術により実行していたが、走行レーンの特定は、ナビゲーション装置23にて実行されたものでなくとも良く、例えば、対象交差点の周辺を撮影した画像から自車両が走行している車線を特定することで行っても良い。
【0120】
また、上記実施形態における情報報知処理では、S155にて、情報の報知を無実行とするように設定していたが、情報報知処理のS155にて実行する処理内容は、これに限るものではない。このS155にて実行する処理内容として、例えば、自車両の走行状況、及び対象交差点の周辺を走行する他車両の走行状況に応じた情報を報知しても良い。このような場合においてS155から報知される情報は、自車両が安全に走行されるように注意喚起を促すものであっても良い。
【0121】
この注意喚起の一つとして、例えば、自車両が対象交差点に接近する際には、交通信号機40の灯色が「進行許可(青色)」であるが、走行時状況が「進行禁止(赤色)」となる場合には、「赤信号注意」が設定されていても良い。また、注意喚起の一つとして、例えば、前方車両が存在していることに起因して、走行時状況が進行禁止継続期間となる場合には、「追突注意」が設定されていても良い。さらに、注意喚起の一つとして、右折車両が存在することに起因して、走行時状況が進行禁止継続期間となる場合には、「前方注意」や「信号注意」、「追突注意」が設定されていても良い。なお。注意喚起の一つとして、対向車両が右折待ちしている場合には、「対向車注意」が設定されていても良い。さらには、注意喚起の一つとして、自車両の走行速度が、法定速度よりも高い場合には、「速度注意」が設定されていても良い。
【0122】
また、上記実施形態の情報報知処理では、S120において、灯色情報中に矢印情報が含まれているか否かを判定していたが、情報報知処理では、灯色情報中に矢印情報が含まれているか否かを判定しなくとも良い。この場合、情報報知処理のS110にて、矢印信号が含まれている灯色情報を受信したときに肯定判定して(S110:YES)、S160へと移行するようになされていれば良い。すなわち、情報報知処理におけるS120は省略されていても良い。
【0123】
情報報知処理がこのようになされていれば、「矢印信号」が出力される交差点を対象交差点として自車両が進入する際には、該対象交差点において「矢印信号」が出力される期間(即ち、矢印期間)についても、サイクル内通過が可能であるか否かを判定して報知することができる。
[実施形態と特許請求の範囲との対応関係]
最後に、上記実施形態の記載と、特許請求の範囲の記載との関係を説明する。
【0124】
上記実施形態における情報提供装置1の無線通信部15が、本発明の灯色情報取得手段に相当し、外部機器接続部11が、速度取得手段に相当する。そして、上記実施形態の情報報知処理におけるS120〜S140,S160〜S220が、本発明の通過判定手段に相当し、S150,S155,S230,S240が、本発明の情報報知手段に相当する。さらに、上記実施形態の進行適否判定処理におけるS310,S330,S360が、本発明の行路推定手段に相当する。
【0125】
また、上記実施形態の通過可否判定処理におけるS410が、本発明の物体情報取得手段に相当し、S420〜S450が、本発明の周辺状況判定手段に相当する。さらに、上記実施形態の情報報知処理におけるS120が、本発明の矢印判定手段に相当する。
【符号の説明】
【0126】
1…情報提供装置 10…位置特定部 11…外部機器接続部 12…表示部 13…音声出力部 15…無線通信部 16…及び車側制御部 16…車側制御部 20…車速センサ 21…GPS受信機 22…ジャイロスコープ 23…ナビゲーション装置 24…方向指示器 30…信号制御装置 31…無線通信部 32…移動情報取得部 33…灯色情報データベース 34…路側制御部 40…交通信号機 100…走行支援システム
【技術分野】
【0001】
本発明は、車両に搭載され、交通信号機が設けられた交差点の通行に関する情報を報知する情報提供装置、及び走行支援システムに関する。
【背景技術】
【0002】
従来、交差点の交通整理を行う交通信号機の灯色を制御すると共に、その交通信号機の灯色に関する情報である灯色情報(例えば、各種類の灯色を点灯するタイミングと各灯色を点灯している期間とからなるサイクルなど)を送信する信号制御装置と、信号制御装置からの灯色情報に基づく情報を報知する情報提供装置とを備えた走行支援システムが知られている(例えば、特許文献1参照)。
【0003】
この特許文献1に記載の情報提供装置では、自車両が交差点に接近したことに従って信号制御装置から受信した灯色情報を用いた判定の結果、対象交差点への進入前に自車両が停止することが必要な停止必要状態であれば、自車両が停止線に到達する6〜7秒前までに、注意喚起の報知を実行する。
【0004】
ただし、ここでいう停止必要状態とは、灯色情報を受信した時点での自車両から交差点までの距離と、その灯色情報を受信した時点での自車両の走行速度とに基づいて推定される対象交差点の到達時刻での交通信号機の灯色が「進行禁止(例えば、赤色)」であることである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−245326号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、交通信号機の中には、灯色が「進行禁止(赤色)」でありながら、特定の道路について進行を許可する「矢印信号」が点灯するものがある。このような交通信号機によって交通整理が実行される交差点を自動車が通過する際には、交通信号機の灯色が「進行禁止」でありながら、「矢印信号」によって進行が許可された道路へと進む状況も考えられる。
【0007】
このような状況下においては、交差点に到達した自車両が、「矢印信号」によって進行が許可された道路へと進行可能であっても、自車両が交差点に到達した時点での交通信号機の灯色が「進入禁止」であることから、特許文献1に記載の情報提供装置では、停止必要状態と判定し、注意喚起の報知を実行する。
【0008】
つまり、特許文献1に記載の情報提供装置では、不必要な注意喚起の報知が実行され、その報知の態様が自車両の走行状態に合致してないという問題があった。
そこで、本発明は、情報提供装置において、自車両の走行状態に合致した報知を実現することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた本発明は、車両に搭載される情報提供装置に関する。この本発明の情報提供装置では、灯色情報取得手段が、自車両が進入する交差点(以下、対象交差点)の交通整理を行う交通信号機の灯色に関する情報(以下、灯色情報)を取得し、速度取得手段が、自車両の走行速度を取得する。これと共に、少なくとも、灯色情報、走行速度、及び対象交差点と自車両との位置関係に基づき、通過判定手段が、交通信号機の灯色によって対象交差点の進行が許可されている期間に、対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定して、その判定の結果に基づく情報の報知を、情報報知手段が実行する。
【0010】
ただし、本発明のうち、第一発明である請求項1に係る情報提供装置においては、灯色情報に、交通信号機の灯色の一つである進行禁止と並行して出力される灯色の一つであり、対象交差点における特定の道路について進行を許可する矢印信号に関する情報が含まれている。
【0011】
そして、第一発明における通過判定手段は、行路推定手段が、自車両が進む行路を表す自車進行路を推定した上で、交通信号機の灯色が進行許可である期間(以下、進行許可期間)、または矢印信号が出力される期間(以下、矢印期間)に、自車両が対象交差点に到達し、かつ該到達時での交通信号機の灯色によって進行が許可される道路に自車進行路が合致すれば、サイクル内通過が可能であるものと判定する。さらに、第一発明における情報報知手段は、通過判定手段での判定の結果、サイクル内通過が可能であれば、サイクル内通過が可能である旨を認識可能な態様の報知を、サイクル内通過が不可能であれば、サイクル内通過が不可能である旨を認識可能な態様の報知を実行する。
【0012】
つまり、第一発明の情報提供装置では、対象交差点への自車両の到達時に進行が許可される道路に自車進行路が合致する場合、及び不一致である場合、共に、それぞれに該当する状態である旨を認識可能な態様の報知が実行される。
【0013】
この結果、本発明の情報提供装置によれば、不必要な情報の報知が実行されることを防止でき、自車両の走行状態に合致した報知の態様を実現できる。
特に、第一発明においては、灯色情報に矢印信号が含まれているため、矢印信号が出力される交差点を対象交差点として自車両が進入する際には、該対象交差点での矢印期間についても、サイクル内通過が可能であるか否かを判定して報知することができる。換言すれば、本発明の情報提供装置によれば、上記特許文献1に記載された情報提供装置と異なり、矢印期間中に矢印信号によって進行が許可される道路へ進む場合に注意喚起が実行されるといった、自車両の走行状態に合致しない情報が報知されることを防止できる。
【0014】
なお、本発明において、「対象交差点と自車両との位置関係」とは、少なくとも、自車両から対象交差点までの距離を含むものである。また、本発明における交通信号機の灯色のうち、「進行許可」とは、対象交差点への進行を許可するものであり、例えば、青色灯色を含むものである。また、「進行禁止」とは、対象交差点への進行を禁止するものであり、少なくとも、赤色灯色を含むものである。
【0015】
ところで、交差点に設置される交通信号機の中には、矢印信号が出力されない交通信号機も存在する。このような交通信号機の灯色情報には、矢印信号に関する情報が必ずしも含まれていない。
【0016】
このため、本発明の第二発明として、請求項2に係る情報提供装置が考えられる。この第二発明における通過判定手段では、矢印判定手段が、灯色情報に基づき、交通信号機の灯色の一つである進行禁止と並行して出力される灯色の一つであり、対象交差点における特定の道路への進行を許可する矢印信号が、灯色情報に含まれているか否かを判定し、行路推定手段が、自車両が進む行路を表す自車進行路を推定する。その上で、第二発明の通過判定手段では、灯色情報に矢印信号が含まれていなければ、進行許可期間に自車両が対象交差点に到達し、かつ該到達時での交通信号機の灯色により進行が許可される道路に自車進行路が合致すれば、サイクル内通過が可能であるものと判定し、灯色情報に矢印信号が含まれていれば、進行許可期間及び矢印期間に、自車両が対象交差点に到達し、かつ該到達時での交通信号機の灯色により進行が許可される道路に自車進行路が合致すれば、サイクル内通過が可能であるものと判定する。
【0017】
さらに、情報報知手段では、サイクル内通過が可能であれば、サイクル内通過が可能である旨を認識可能な態様の報知を、サイクル内通過が不可能であれば、サイクル内通過が不可能である旨を認識可能な態様の報知を実行する。
【0018】
このような第二発明の情報提供装置であっても、不必要な情報の報知が実行されることを防止でき、自車両の走行状態に合致した報知の態様を実現することができる。
特に、第二発明の情報提供装置によれば、矢印信号を出力しない交通信号機が設けられた交差点を対象交差点として自車両が進入する場合であっても、自車両についてサイクル内通過が可能であるか否かを判定することができる。
【0019】
また、本発明(第一,第二発明の両方)の情報提供装置では、物体情報取得手段が、対象交差点の周辺に存在する移動体の位置及び挙動を少なくとも含む情報(以下、周辺物体情報とする)を取得しても良い。さらに、本発明の通過判定手段では、周辺状況判定手段が、灯色情報、自車両の走行速度、自車両と対象交差点との位置関係、及び物体情報取得手段で取得した周辺物体情報に基づく対象交差点の周辺の交通状況が、予め規定された規定状況に適合すれば、サイクル内通過が不可能であると判定しても良い(請求項3)。
【0020】
このような情報提供装置によれば、サイクル内通過が可能であるか否かについての判定を、対象交差点の周辺の交通状況、特に、対象交差点の周辺に存在する移動体の状況に応じて実行することができる。
【0021】
なお、本発明における「移動体」とは、自動車などの車両や、軽車両、歩行者などを少なくとも含むものである。また、本発明における「挙動」とは、移動体の現在位置、移動速度、及び進行方向を少なくとも含むものである。
【0022】
ところで、自車両が対象交差点に進入する際の一般的な状況として、自車両と対象交差点との間に移動体(即ち、前方車両)が存在する状況が考えられる。このような状況下においては、その前方車両が交差点に到達した時の交通信号機の灯色が進行禁止であれば、自車両は、対象交差点に進入する前に停止する必要がある。
【0023】
そこで、本発明の周辺状況判定手段は、周辺物体情報に対応する移動体の中に、自車両と対象交差点との間に存在する移動体である前方車両が存在すれば、該前方車両が対象交差点に到達時の交通信号機の灯色が進行禁止であることを、周辺交通状況が規定状況に適合したものとしても良い(請求項4)。
【0024】
このような情報提供装置によれば、前方車両が存在する場合であっても、自車両について、サイクル内通過が可能であるか否かを判定することができる。
また、自車両が対象交差点を右折する際の一般的な状況として、自車両よりも先に右折待ちをしている移動体(即ち、右折車両)が存在する状況が考えられる。このような状況下においては、それらの右折車両の全てが、交通信号機の灯色が進行許可である期間、及び右折先の道路への進行を許可する矢印信号が表示される期間のうちの少なくとも一方に右折を完了しなければ、自車両は、対象交差点に進入する前に停止する必要がある。
【0025】
そこで、本発明の周辺状況判定手段は、周辺物体情報に対応する移動体の中に、対象交差点にて右折する移動体である右折車両が存在すれば、該右折車両の一つが、右折が完了したことを表す領域として規定された右折完了領域へと、進行許可期間及び矢印期間のうち少なくとも一方に未到達であることを、周辺交通状況が規定状況に適合したものとしても良い(請求項5)。
【0026】
このような情報提供装置によれば、右折車両が存在する場合であっても、自車両について、サイクル内通過が可能であるか否かを判定することができる。
また、自車両が対象交差点にて右折待ちをしている際の一般的な状況として、対象交差点に向かって対向車線を移動する移動体(即ち、対向車両)が、進行許可期間及び矢印期間のうちの少なくとも一方の期間中に対象交差点に到達する状況がある。このような状況下において、自車両が右折を開始して右折完了領域への移動が終了するタイミングが、対向車両が対象交差点に到達するタイミングに一致すると、自車両の右折は、対向車両が対象交差点を通過した後に実行可能となる。
【0027】
そこで、本発明の周辺状況判定手段は、周辺物体情報に対応する移動体の中に、自車両が走行する走行車線の対向車線を走行する移動体である対向車両が存在すれば、進行許可期間及び矢印期間内であって、右折が完了したことを表す領域として規定された右折完了領域に自車両が移動するタイミングが、前記対向車両が対象交差点を通過するタイミングを基準として予め規定された時間の範囲内であることを、周辺交通状況が規定状況に適合したものとしても良い(請求項6)。
【0028】
このような情報提供装置によれば、対向車両が存在する場合であっても、自車両について、サイクル内通過が可能であるか否かを判定することができる。
これらの(請求項4〜請求項6に係る)情報提供装置によれば、報知の態様を、対象交差点の周辺に存在する移動体(ここでは、他車両)の走行状況に合致させることができる。
【0029】
本発明における行路推定手段は、自車両に搭載された方向指示器の操作状態を取得し、その取得した方向指示器の操作状態によって指し示される方向の道路を自車進行路として推定しても良い(請求項7)。
【0030】
このようにすれば、車両に設けられている方向指示器の操作状態から自車進行路を推定することができ、自車進行路の推定のために、新たな機器を設ける必要がない。
また、本発明における行路推定手段は、自車両に搭載され、目的地までの経路を案内する経路案内装置から、目的地までの経路を取得し、その取得した経路を自車進行路として推定しても良い(請求項8)。
【0031】
このような自車進行路の推定方法であれば、自車両が実際に走行する可能性が高い道路を自車進行路として推定することができ、その自車進行路の推定精度を高いものとすることができる。この結果、本発明の情報提供装置によれば、報知の態様を、自車両の走行状況により適切に合致させることができる。
【0032】
さらに、本発明における行路推定手段は、自車両が走行する車線を表す走行レーンを特定し、その特定した走行レーンに対して進行が許可された道路を、自車進行路として推定しても良い(請求項9)。
【0033】
このように、自車進行路の推定は、走行レーンに基づいて実行することもできる。
なお、本発明において、走行レーンの特定は、経路案内装置などに用いられている周知の技術を用いても良いし、対象交差点の周辺を撮影した画像から自車両が走行している車線を特定することで行っても良い。
【0034】
そして、本発明において、情報報知手段は、サイクル内通過が不可能であれば、情報の報知を無実行であることを、サイクル内通過が不可能であることを認識可能な態様としても良い(請求項10)。
【0035】
このような情報提供装置によれば、サイクル内通過が可能であれば、情報の報知が実行され、サイクル内通過が不可能であれば、情報の報知が無実行であるため、自車両の乗員らは、サイクル内通過が可能であるか否かを認識することができる。
【0036】
本発明の情報報知手段は、サイクル内通過が不可能であれば、サイクル内通過が不可能である旨の注意喚起を、サイクル内通過が不可能であることを認識可能な態様として報知しても良い(請求項11)。
【0037】
このような情報提供装置によれば、自車両の乗員に、サイクル内通過が不可能である旨をより確実に認識させることができる。
さらに、本発明において、通過判定手段は、灯色情報を取得する毎に、サイクル内通過が可能であるか否かを判定しても良い(請求項12)。
【0038】
このような情報提供装置では、対象交差点に自車両が到達するまでに変化する自車両の走行状態や対象交差点の周辺の交通状況に応じて、サイクル内通過が可能であるか否かを繰り返し判定することができる。この結果、本発明の情報提供装置によれば、時々刻々と変化する状況に応じて、より適切な態様にて報知を実行することができる。
【0039】
なお、本発明は、対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を無線により送信する信号制御装置と、情報提供装置とを備える走行支援システムとしてなされていても良い。
【0040】
本発明が、このような走行支援システムとしてなされている場合、走行支援システムを構成する情報提供装置は、灯色情報取得手段が灯色情報を取得する取得元が、信号制御装置となることを除けば、第一発明の情報提供装置と同様に構成されていても良いし、第二発明の情報提供装置と同様に構成されていても良い。
【0041】
本発明の走行支援システムにおいては、前者の場合、請求項1に係る情報提供装置と同様の効果を得ることができ、後者の場合、請求項2に係る情報提供装置と同様の効果を得ることができる。
【図面の簡単な説明】
【0042】
【図1】本発明が適用された走行支援システムの概略構成を示すブロック図である。
【図2】灯色情報の概要を説明する説明図である。
【図3】情報報知処理の処理手順を示すフローチャートである。
【図4】進行適否判定処理の処理手順を示すフローチャートである。
【図5】通過可否判定処理の処理手順を示すフローチャートである。
【図6】前方車両判定処理の処理手順を示すフローチャートである。
【図7】前方車両判定処理の動作例を説明する説明図である。
【図8】右折車両判定処理の処理手順を示すフローチャートである。
【図9】対向車両判定処理の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0043】
以下に本発明の実施形態を図面と共に説明する。
〈走行支援システムの全体構成について〉
図1に示すように、走行支援システム100は、道路交差点に設置された交通信号機40の灯色を制御する信号制御装置30と、信号制御装置30との間で無線による情報通信を行う少なくとも一台の情報提供装置1とを備えている。
【0044】
このうち、信号制御装置30は、無線通信部31、移動情報取得部32、灯色情報データベース33、及び路側制御部34を備える。
無線通信部31は、情報提供装置1との間で無線通信(路車間通信)を行う通信装置である。この路車間通信に用いる通信様式としては、例えば、ノンストップ自動料金収受(いわゆるETC(登録商標))システム等で用いられる狭域通信(DSRC)や、道路交通情報通信システム(いわゆるVICS(登録商標))等で用いられる電波ビーコン及び光ビーコンの技術を用いることが考えられる。あるいは、2011年(予定)のアナログテレビ放送の終了後に利用区分が再編される予定である700MHz帯の電波を利用することも考えられる。この700MHz帯の電波は、DSRCで用いられる5.8GHz帯の電波と比較して波長が長いため、回折を起こし易い。このため、建築物が密集する都市部において、建物の影からでも良好に通信を行うことができる。
【0045】
移動情報取得部32は、道路交差点から規定範囲(例えば、100m)内に存在する移動体に関する情報(以下、移動体情報とする)を取得し、この取得した移動体情報を路側制御部34に入力する。この移動情報取得部32にて取得する移動体情報は、道路交差点内を移動中の各移動体(即ち、自動車や歩行者、自転車など)、若しくは道路交差点に進入しようとしている各移動体の存否、各移動体の位置、移動方向、移動速度など、移動体の挙動を少なくとも含むものである。
【0046】
本実施形態における移動情報取得部32は、いわゆる路側センサであり、撮像装置にて画像を撮像する毎に、その撮像した画像中の移動体を認識して移動体情報を導出する画像処理装置(図示略)によって実現されていても良いし、周知のレーダ装置や、路上に設けられたセンサなどによって実現されていても良い。
【0047】
灯色情報データベース33は、交通信号機40の灯色に関する情報(以下、灯色情報)として、少なくとも、灯色の変化のパターンを表す信号パターンを格納する。
このうち、信号パターンは、交通信号機40の各灯色の点灯が開始されるタイミング(時刻)及び各灯色が点灯される期間(即ち、灯色が遷移する周期)を少なくとも含むものである。
【0048】
この交通信号機40にて表示される灯色の種類としては、道路交差点から流出する全ての道路に対して進行が許可される「進行許可(青色)」、道路交差点から流出する全ての道路に対して進行が禁止される「進行禁止(黄色,赤色)」がある。さらに、道路交差点によっては、「進行許可(青色)」、「進行禁止(黄色,赤色)」に加えて、矢印の方向に合致する特定の道路に対して進行が許可される「矢印信号」が、灯色の種類として含まれている。
【0049】
本実施形態の交通信号機40において、灯色の種類として「矢印信号」が含まれている場合、灯色が遷移する周期は、例えば、図2(A)に示すように、「進行禁止(赤色)」から「進行許可(青色)」、「進行禁止(黄色)」、「進行禁止(赤色)、及び矢印信号」、「進行禁止(赤色)」の順序が一般的である。なお、ここでの「矢印信号」とは、「進行許可(青色)」、「進行禁止(黄色)」、「進行禁止(赤色)」の灯色とは別体に設けられた表示部に、交通信号機の灯色が「進行禁止」である期間に並行して出力される。
【0050】
一方、灯色の種類として「矢印信号」が含まれていない場合には、灯色が遷移する周期は、例えば、図2(B)に示すように、「進行禁止(赤色)」から「進行許可(青色)」、「進行禁止(黄色)」、「進行禁止(赤色)」の順序が一般的である。
【0051】
なお、灯色が遷移する周期は、ここで示したもの以外にも様々な態様があり得る。
路側制御部34は、CPU,ROM,RAMを少なくとも備えた周知のコンピュータ装置によって構成されており、信号制御装置30の各部31,32,33を統括制御すると共に、ROM等に記憶されたプログラムに従って各種処理を実行する。
【0052】
なお、路側制御部34が実行する処理の一つとして、予め規定された規定時間間隔で、灯色情報データベース33に格納された灯色情報、及び現時点での灯色を、無線通信部31を介して送信する灯色情報送信処理がある。この灯色情報送信処理によって規定時間毎に送信される情報に、移動体情報を加えても良い。
〈情報提供装置の構成について〉
次に、情報提供装置1は、車両(本実施形態では、自動車)に搭載される車載装置であり、位置特定部10、外部機器接続部11、表示部12、音声出力部13、無線通信部15、及び車側制御部16を備えている。
【0053】
このうち、外部機器接続部11は、自車両に搭載されている各種機器との間で通信を行うためのインタフェースであり、各機器から送信されるデータを車側制御部16に入力する。この外部機器接続部11には、自車両の走行速度を検出する車速センサ20と、GPS衛星からの信号を受信するGPS受信機21と、自車両に加わる角速度を検出するジャイロスコープ22とが接続されている。さらに、外部機器接続部11には、周知のナビゲーション装置23(本発明の経路案内装置)と、自車両の進行方向を自車両の外部に通知する方向指示器24とが接続されている。
【0054】
位置特定部10は、車速センサ20や、GPS受信機21、ジャイロスコープ22等からのデータに基づいて、周知の手法を用いて特定した自車両の現在位置や進行方向を車側制御部16に入力する。
【0055】
表示部12は、画像を表示する表示面(例えば、液晶パネル等)を備えた表示装置であり、車側制御部16からの制御に基づいて各種の画像を表示する。音声出力部13は、音声を出力する装置(例えば、スピーカ)であり、車側制御部16からの制御に基づいて各種の案内音声を出力する。
【0056】
なお、外部機器接続部11に接続されるナビゲーション装置23は、現在位置や進行方向を特定する位置特定部と、地図データを格納する格納部と、表示部と、音声出力部と、情報の入力を受け付ける操作受付部と、ナビゲーション装置23の各部を制御する制御部とを備えた周知の装置である。本実施形態におけるナビゲーション装置23は、予め設定された目的地までの経路を設定して、その設定された経路を、表示部や音声出力部からの出力によって案内する機能に加えて、自車両の現在位置を地図データ上の位置に照合することで自車両が走行している車線(以下、走行レーンとする)を特定する機能など周知の機能を有している。このようなナビゲーション装置23の位置特定部、表示部、音声出力部、制御部は、情報提供装置1の位置特定部10、表示部12、音声出力部13、車側制御部16と共通であっても良いし、ナビゲーション装置23に専用に設けられていても良い。
【0057】
さらに、無線通信部15は、他車両に搭載された情報提供装置1との間で双方向の無線通信(車車間通信)、または信号制御装置30との間で無線通信(路車間通信)を行う通信装置である。この路車間通信に用いる通信様式としては、上述の信号制御装置30と同様のものを用いる。
【0058】
車側制御部16は、CPU,ROM,RAMを少なくとも備えた周知のコンピュータ装置を中心に構成されており、情報提供装置1の各部10〜13,15を統括制御することに加えて、ROM等に記憶されたプログラムに従って各種処理を実行する。
【0059】
この車側制御部16が実行する処理の一つとして、位置特定部10にて取得した自車両の現在位置や進行方向、外部機器接続部11を介して取得した自車両の走行速度、自車両の現在位置の周辺における経路などを含む情報を車両情報として、無線通信部15を介して送信する車両情報送信処理がある。
【0060】
また、車側制御部16が実行する処理の一つとして、無線通信部15を介して取得した交通信号機40の灯色情報、及び他車両の車両情報に基づいて、交通信号機40の灯色が「進行禁止(赤色)」として継続することが確定する前に、自車両が進行する対象交差点を通過するサイクル内通過が可能であるか否かを判定し、その判定結果に基づく情報を報知する情報報知処理がある。
【0061】
なお、対象交差点とは、信号制御装置30が制御対象とする交通信号機40によって交通整理が行われる道路交差点のうち、自車両が進行する道路交差点である。
〈情報報知処理の処理内容について〉
次に、車側制御部16が実行する情報報知処理の処理内容について説明する。
【0062】
この情報報知処理は、車側制御部16に電力が供給される(例えば、イグニッションスイッチがオンされる)と起動されるものである。
そして、情報報知処理は、起動されると、図3に示すように、まず、無線通信部15を介して交通信号機40の灯色情報を受信したか否かを判定する(S110)。その判定の結果、灯色情報を受信していなければ(S110:NO)、灯色情報を受信するまで待機する。
【0063】
そして、灯色情報を受信すると(S110:YES)、その受信した灯色情報の中に、矢印信号に関する情報(以下、矢印情報)が含まれているか否かを判定する(S120)。そのS120での判定の結果、灯色情報中に矢印情報が含まれていれば(S120:YES)、対象交差点が、矢印信号を出力する交通信号機40によって交通整理が実行される交差点であるものと判断して、詳しくは後述するS160へと移行する。一方、S120での判定の結果、灯色情報の中に矢印情報が含まれていなければ(S120:NO)、対象交差点が、矢印信号を出力しない交通信号機40によって交通整理が実行される交差点であるものと判断して、S130へと移行する。
【0064】
そのS130では、自車両の現在位置と対象交差点との位置関係、自車両の走行速度、及び交通信号機40の灯色情報に基づいて、自車両が対象交差点を走行する時点における交通信号機40の灯色の状態(以下、走行時状況とする)を確認する。
【0065】
本実施形態のS130では、自車両が対象交差点を走行する時刻(以下、交差点走行時刻Tc)を導出し、その交差点走行時刻Tcでの交通信号機40の灯色を、走行時状況として取得(確認)する。なお、本実施形態における交差点走行時刻Tcは、自車両が対象交差点に到達する時刻であっても良いし、自車両が対象交差点を通過する時刻であっても良い。前者の場合、交差点走行時刻Tcの導出は、位置特定部10にて特定した自車両の現在位置から、対象交差点(例えば、停止線)までの距離を、現時点での自車両の走行速度にて走行した場合に要する時間長を、現在の時刻に加算することで実行する。また、後者の場合、交差点走行時刻Tcの導出は、自車両の現在位置から、対象交差点を通過完了した位置として予め規定された通過完了位置までの距離を、現時点での自車両の走行速度にて走行した場合に要する時間長を、現在の時刻に加算することで実行する。
【0066】
続いて、S130にて確認した走行時状況がサイクル内通過を可能であることを表しているか否かを判定する(S140)。
そのS140での判定の結果、走行時状況が、サイクル内通過を可能であることを表していれば、(S140:YES)、対象交差点について、サイクル内通過を可能である旨を認識可能な態様の情報の報知を実行する(S150)。このS150での報知は、表示部12の表示面への表示、及び音声出力部13から音声での出力のうち、少なくとも一方により実行される。そして、このS150での報知は、自車両が対象交差点を通過するまでの間、継続して実行される。その後、S110へと戻り、灯色情報を受信するまで待機する。
【0067】
一方、S140での判定の結果、走行時状況が、サイクル内通過が不可能であることを表していれば(S140:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。
【0068】
なお、本実施形態の情報報知処理においては、S120からS130へと移行した場合、走行時状況が、「進行許可(青色)」へと変更される前の「進行禁止(赤色)」を継続している期間(以下、進行禁止継続期間とする)であれば、サイクル内通過を不可能であると判定し(S140:NO)、走行時状況が「進行許可」(即ち、本発明の進行許可期間に相当)であれば、サイクル内通過を可能であると判定する(S140:YES)。また、この場合のS150にて報知する「サイクル内通過を可能である旨を認識可能な態様の情報」とは、例えば、対象交差点を進行可能であることや、対象交差点に到達時の交通信号機40の灯色が「進行許可(青色)」であることなどである。
【0069】
次に、S120での判定の結果、灯色情報に矢印信号が含まれている場合に移行するS160では、対象交差点についてサイクル内通過が可能な限界の時刻である通過可能時刻Tsを導出する。本実施形態の通過可能時刻Tsは、灯色情報に基づく「矢印信号」の出力が終了する時刻とする。
【0070】
続いて、交差点走行時刻Tcを導出する(S170)。その導出した交差点走行時刻Tcが、通過可能時刻Tsよりも前であるか否かを判定する(S180)。
そのS180での判定の結果、交差点走行時刻Tcが通過可能時刻Ts以降であれば(S180:NO)、S130へと進む。そのS130にて、前述したように走行時状況を確認した結果、走行時状況が進行禁止継続期間であるため、サイクル内通過を不可能であると判断して(S140:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。
【0071】
一方、S180での判定の結果、交差点走行時刻Tcが通過可能時刻Tsよりも前であれば(S180:YES)、自車両が進行する行路(以下、自車進行路)が、自車両が対象交差点に到達する時点での交通信号機40の灯色によって進行が許可される道路(以下、進行許可道路)に合致するか否かを判定する進行適否判定処理を実行する。
【0072】
続いて、進行適否判定処理での判定の結果、自車進行路が進行許可道路に合致していなければ(S200:NO)、S130へと進む。そのS130では、前述したように走行時状況を確認した結果、走行時状況は、「矢印信号」が出力されているものの、自車進行路に対する交通信号機40の灯色が進行禁止継続状態である。このため、サイクル内通過が不可能であると判断して(S140:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。
【0073】
一方、進行適否判定処理での判定の結果、自車進行路が進行許可道路に合致していれば(S200:YES)、対象交差点の周辺に存在する移動体である他車両の挙動に基づき、サイクル内通過を可能であるか否かを判定する通過可否判定処理を実行する(S210)。
【0074】
続いて、通過可否判定処理での判定の結果、対象交差点について、自車両がサイクル内通過を可能であれば(S220:YES)、S130へと進む。そのS130では、前述したように走行時状況を確認した結果、走行時状況は、自車進行路に対する交通信号機40の灯色が「進行許可(ここでは、矢印信号を含む)」となる。このため、サイクル内通過が可能であると判断し(S140:YES)、S150での報知を実行した後、S110へと戻る。この場合のS150にて報知する「サイクル内通過を可能である旨を認識可能な態様の情報」とは、例えば、自車進行路に沿って対象交差点を進行可能であることや、対象交差点に到達時の交通信号機40の灯色が「進行許可(青色)」または「矢印信号」であること、自車両が進行可能な道路(即ち、進行許可道路)が位置する方向などである。
【0075】
一方、通過可否判定処理での判定の結果、対象交差点について、自車両がサイクル内通過を不可能であれば(S220:NO)、S150による情報の報知を実行中であるか否かを判定する(S230)。そのS230での判定の結果、S150による情報の報知を実行中でなければ(S230:NO)、情報の報知を無実行とするように設定し(S155)、即ち、情報の報知を実行することなく、S110へと戻る。なお、S230での判定の結果、S150による情報の報知を実行中であれば(S230:YES)、S150による情報の報知を中止して(S240)、S110へと戻る。
〈進行適否判定処理の処理内容について〉
次に、情報報知処理のS190にて起動される進行適否判定処理の処理内容について説明する。
【0076】
この進行適否判定処理は、起動されると、図4に示すように、まず、外部機器接続部11を介してナビゲーション装置23から、目的地までの自車両の経路を自車進行路として取得する(S310)。続いて、S310にて取得した自車進行路が、進行許可道路に合致するか否かを判定する(S320)。なお、本実施形態における進行許可道路とは、自車両が対象交差点に到達する時点での交通信号機40の灯色が「矢印信号」であれば、その出力されている個々の「矢印信号」によって進行が許可される道路であり、交通信号機40の灯色が「進行許可(青色)」であれば、対象交差点にて接続する全ての道路である。
【0077】
続いて、S320での判定の結果、自車進行路(即ち、自車両の経路)が進行許可道路に合致していれば(S320:YES)、S390へと移行する。そのS390では、自車進行路が進行許可道路に合致していることを表す合致情報を設定する。そして、その後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。
【0078】
一方、S320での判定の結果、自車進行路が進行許可道路に合致していなければ(S320:NO)、外部機器接続部11を介してナビゲーション装置23から、自車両の走行レーンを取得する(S330)。続いて、S330にて取得した走行レーンに対して進行が許可された道路を自車進行路として、進行許可道路に合致するか否かを判定する(S340)。
【0079】
そのS340での判定の結果、自車進行路が進行許可道路に合致していれば(S340:YES)、S390へと移行する。そのS390では、前述したように、合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。一方、S340での判定の結果、自車進行路が進行許可道路に合致していなければ(S340:NO)、走行レーンに対して進行が許可された道路が、進行が常時許可された道路であるか否かを判定する(S350)。
【0080】
そのS350での判定の結果、走行レーンに対して進行が許可された道路が、常時進行が許可された道路であれば(S350:YES)、S390へと移行する。そのS390では、前述したように、合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。一方、S350での判定の結果、走行レーンに対して進行が許可された道路が、常時進行が許可された道路でなければ(S350:NO)、外部機器接続部11を介して方向指示器24から、方向指示器24の操作状態(以下、方向指示と称す)を取得する(S360)。
【0081】
続いて、S360にて取得した方向指示によって指し示された方向に存在する道路を自車進行路として、進行許可道路に合致するか否かを判定する(S370)。そのS370での判定の結果、自車進行路が進行許可道路に合致すれば(S370:YES)、S390へと移行する。そのS390では、前述したように、合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと戻る。一方、S370での判定の結果、自車進行路が進行許可道路に合致しなければ(S370:NO)、S380へと進む。
【0082】
そのS380では、自車進行路が進行許可道路に合致していないことを表す不合致情報を設定した後、本進行適否判定処理を終了して、情報報知処理のS200へと進む。
なお、本実施形態の情報報知処理におけるS200では、合致情報または不合致情報に基づいて、自車両進行路が進行許可道路に合致するか否かを判定する。
【0083】
つまり、本実施形態の進行適否判定処理では、ナビゲーション装置23から取得した目的地までの自車両の経路、自車両の走行レーンに対して進行が許可された道路、方向指示器24の操作状態によって指し示された方向に存在する道路を、それぞれ、自車進行路として、進行許可道路に合致するか否かを判定する。
〈通過可否判定処理の処理内容について〉
次に、情報報知処理のS210にて起動される通過可否判定処理の処理内容について説明する。
【0084】
この通過可否判定処理は、起動されると、図5に示すように、まず、車車間通信によって取得した他車両の車両情報の中から、他車両の現在位置が、対象交差点から予め規定された規定範囲内である車両情報を、周辺物体情報として取得する(S410)。このS410では、信号制御装置30から送信された移動体情報を、周辺物体情報として取得しても良い。
【0085】
そして、S410にて取得した周辺物体情報に基づいて、自車両と対象交差点との間に存在する他車両(以下、前方車両)に起因して、対象交差点について自車両がサイクル内通過できなくなる可能性を判定する前方車両判定処理を実行する(S420)。
【0086】
続いて、対象交差点において、自車両が右折するか否かを判定する(S430)。その判定の結果、自車両が右折しない場合(S430:NO)には、情報報知処理のS220へと進む。なお、本実施形態のS430では、例えば、先の進行適否判定処理において認識した自車進行路が、自車両が右折する方向の道路であれば、対象交差点において、自車両が右折するものと判定する。
【0087】
一方、S430での判定の結果、自車両が右折するものと判定された場合(S430:YES)、S410にて取得した周辺物体情報に基づいて、対象交差点にて右折待ちをしている他車両(以下、右折車両)に起因して、対象交差点について自車両がサイクル内通過できなくなる可能性を判定する右折車両判定処理を実行する(S440)。
【0088】
続いて、S410にて取得した周辺物体情報に基づいて、対象交差点に向かって対向車線を走行する他車両(以下、対向車両とする)に起因して、対象交差点について自車両がサイクル内通過できなくなる可能性を判定する対向車両判定処理を実行する(S450)。
【0089】
その後、本通過可否判定処理を終了して、情報報知処理のS220へと進む。
〈前方車両判定処理の処理内容について〉
次に、通過可否判定処理のS420にて起動される前方車両判定処理の処理内容について説明する。
【0090】
この前方車両判定処理は、起動されると、図6に示すように、先のS410にて取得した周辺物体情報に基づいて、前方車両が存在するか否かを判定する(S510)。本実施形態のS510では、周辺物体情報中の他車両の現在位置が、自車両の現在位置と対象交差点が存在する位置との間の位置である他車両を、前方車両として判定する。
【0091】
そのS510での判定の結果、前方車両が存在しなければ(S510:NO)、詳しくは後述するS550へと進む。一方、S510での判定の結果、前方車両が存在すれば(S510:YES)、前方車両が対象交差点に到達する時刻(以下、前方車到達時刻とする)を導出する(S520)。このS520における前方車到達時刻は、周辺物体情報中の前方車両の現在位置から対象交差点の位置(例えば、停止線)までの距離を当該周辺物体情報中の走行速度にて走行した場合に要する時間長を、現在の時刻に加算することで導出される。
【0092】
続いて、S520にて導出された前方車到達時刻での交通信号機40の灯色が、進行禁止継続期間であるか否か、即ち、前方車両が、対象交差点を通過可能であるか否かを判定する(S530)。そのS530での判定の結果、前方車到達時刻での交通信号機40の灯色が、進行禁止継続期間であれば(S530:NO)、前方車両が対象交差点を通過不可能であると判断して、S540へと進む。
【0093】
そのS540では、前方車両が対象交差点への進入前に停止することに起因して、自車両について対象交差点をサイクル内通過が不可能である可能性が高いものとし、自車両について、サイクル内通過が不可能である可能性があることを表す不可情報を設定する。その後、本前方車両判定処理を終了して、通過可否判定処理のS430へと進む。
【0094】
一方、S530での判定の結果、前方車到達時刻での交通信号機40の灯色が「進行許可(ここでは、矢印信号も含む)」であれば(S530:YES)、前方車両が対象交差点を通過可能であると判断して、S550へと進む。
【0095】
そのS550では、前方車両の存否についての判定を、周辺物体情報を取得した全ての他車両に対して実行したか否かを判定する。その判定の結果、周辺物体情報を取得した全ての他車両に対して判定を実行していなければ(S550:NO)、S510へと戻り、前方車両が存在すれば、S520へと進む。
【0096】
一方、S550での判定の結果、周辺物体情報を取得した全ての他車両に対して判定を実行していれば(S50:YES)、前方車両が対象交差点への進入前に停止する必要がないものとし、自車両について、サイクル内通過が可能である可能性が高いことを表す可能情報を設定(S560)する。その後、本前方車両判定処理を終了して、通過可否判定処理のS430へと進む。
【0097】
例えば、図7に示すように、前方車両の走行速度Vβが、自車両の走行速度Vαに比べて低速である場合(Vβ<Vα)に、前方車到達時刻における交通信号機40の灯色が、進行禁止継続期間であれば、前方車両は、対象交差点をサイクル内通過できない。このとき、走行速度が速い自車両は、前方車両が存在していなければ、対象交差点をサイクル内通過することが可能であっても、前方車両が対象交差点への進入前に停止することに起因して、サイクル内通過が不可能となる。このため、このような状況下における本実施形態の前方車両判定処理では、不可情報を設定する。
〈右折車両判定処理の処理内容について〉
次に、通過可否判定処理のS440にて起動される右折車両判定処理の処理内容について説明する。
【0098】
この右折車両判定処理は、起動されると、図8に示すように、まず、右折車両が存在するか否かを判定する(S610)。本実施形態のS610では、周辺物体情報中の他車両の現在位置が、対象交差点から予め設定された設定範囲内であり、かつ灯色情報における交通信号機40の灯色が「進行許可(青色)」である期間中に、周辺物体情報中の走行速度が停止しているものとみなせる極低速(例えば、5[km/h])以下であれば、当該周辺物体情報に対応する他車両を、右折車両として判定する。
【0099】
そのS610での判定の結果、右折車両が存在しなければ(S610:NO)、詳しくは後述するS650へと進む。一方、S610での判定の結果、右折車両が存在すれば(S610:YES)、右折車両が対象交差点の通過を完了する時刻(以下、右折車両通過時刻)を導出する(S620)。なお、本実施形態のS620における右折車両通過時刻は、対象交差点内において右折待ちをしている先頭車両が存在する位置とした予め規定された先頭位置から通過完了位置まで走行することに要する時間長と、対象となる右折車両が、その右折車両の現在位置から先頭位置まで走行することに要する時間長との和を、現在の時刻に加算することで導出する。ここでの通過完了位置は、右折が完了したことを表す位置として予め規定されたものであり、本発明の右折完了領域に相当する。
【0100】
続いて、当該右折車両が対象交差点を通過可能であるか否かを判定する(S630)。具体的に、本実施形態のS630では、S620にて導出された右折車両通過時刻が、先のS160にて導出された通過可能時刻Tsよりも前であれば、当該右折車両が対象交差点を通過可能と判定し、右折車両通過時刻が通過可能時刻Ts以降であれば、当該右折車両が対象交差点を通過可能と判定する。
【0101】
このS630での判定の結果、当該右折車両が対象交差点を通過不可能であれば(S630:NO)、右折車両が対象交差点に進入する前に停止することに起因して、自車両について対象交差点をサイクル内通過が不可能である可能性が高いものと判断して、不可情報を設定する(S640)。その後、本右折車両判定処理を終了し、通過可否判定処理のS450へと進む。
【0102】
一方、S630での判定の結果、当該右折車両が対象交差点を通過可能であれば(S630:YES)、S650へと進む。
そのS650では、右折車両の存否についての判定を、周辺物体情報を取得した全ての他車両について実行したか否かを判定する。その判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していなければ(S650:NO)、S610へと戻り、右折車両が存在すれば(S610:YES)、S620へと進む。
【0103】
一方、S650での判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していれば(S650:YES)、右折車両が、通過可能時刻Tsまでに自車両が右折することを妨げないものと判断して、可能情報を設定する(S560)。その後、本右折車両判定処理を終了して、通過可否判定処理のS430へと進む。
〈対向車両判定処理の処理内容について〉
次に、通過可否判定処理のS450にて起動される対向車両判定処理の処理内容について説明する。
【0104】
この対向車両判定処理は、起動されると、図9に示すように、まず、対向車両が存在するか否かを判定する(S710)。本実施形態のS710では、周辺物体情報中の他車両の現在位置が、対象交差点から予め設定された特定範囲内における対向車線上であり、かつ周辺物体情報中の進行方向が対象交差点に向かっていることを表していれば、当該周辺物体情報に対応する他車両を、対向車両として判定する。
【0105】
そのS710での判定の結果、対向車両が存在しなければ(S710:NO)、詳しくは後述するS770へと進む。一方、S710での判定の結果、対向車両が存在すれば(S710:YES)、当該対向車両が対象交差点を通過する時刻である対向車通過時刻を導出する(S720)。なお、本実施形態のS720における対向車通過時刻は、当該対向車両の現在位置から通過完了位置までの移動に要する時間長を、現在の時刻に加算することで導出する。
【0106】
続いて、自車両が、対象交差点の通過を完了する時刻である右折完了時刻を導出する(S730)。このS730における右折完了時刻の導出方法は、S620における右折車両通過時刻の導出方法と同様であり、S620の説明における右折車両を自車両に読み替えるものとする。
【0107】
続いて、S720にて導出された対向車通過時刻が、S730にて導出した右折完了時刻よりも前であるか否かを判定する(S740)。その判定の結果、対向車通過時刻が右折完了時刻よりも前であれば(S740:YES)、対向車両が対象交差点を通過した後に自車両が右折するため、自車両と対向車両とがバッティングすることがないと判断して、S770へと進む。一方、対向車通過時刻が右折完了時刻以降であれば、(S740:NO)、S750へと進む。
【0108】
そのS750では、予め規定された時間長を対向車通過時刻から減算した通過タイミングよりも、右折完了時刻が前であるか否かを判定し、その判定の結果、右折完了時刻が通過タイミング以降であれば(S750:NO)、対向車両が、自車両の右折の妨げとなる可能性が高いものと判断して、不可情報を設定する(S760)。その後、本対向車両判定処理を終了して、通過可否判定処理へと戻る。
【0109】
一方、S750での判定の結果、右折完了時刻が通過タイミングよりも前であれば(S750:YES)、S770へと進む。
そのS770では、対向車両の存否についての判定を、周辺物体情報を取得した全ての他車両について実行したか否かを判定する。その判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していなければ(S770:NO)、S710へと戻り、対向車両が存在すれば(S710:YES)、S720へと進む。
【0110】
一方、S770での判定の結果、周辺物体情報を取得した全ての他車両について判定を実行していれば(S770:YES)、対向車両が、自車両の右折の妨げとなることがないものと判断して、可能情報を設定する(S780)。その後、本対向車両判定処理を終了して、通過可否判定処理へと戻る。
【0111】
以上説明したように、本実施形態の情報報知処理では、走行時状況が「進行許可」であれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行する。一方、走行時状況が「進行禁止(ただし、矢印信号の出力中は除く)」であれば、情報の報知を実行しない(即ち、無実行である)。ただし、走行時状況が「矢印信号」である場合には、その「矢印信号」によって進行が許可される道路に、自車進行路が合致していれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知を実行し、自車進行路が合致していなければ、情報の報知を実行しない(即ち、無実行である)。
【0112】
さらに、自車進行路が進行許可道路に合致していても、周辺物体情報を取得した他車両の挙動に起因して、自車両が、サイクル内通過を不可能となる場合には、情報の報知を実行中であれば、その実行中の情報の報知を中止し、情報の報知を実行していなければ、情報の報知を無実行である状態を維持する。
[実施形態の効果]
したがって、本実施形態の情報提供装置1によれば、自車両の走行状態に合致しない不必要な情報の報知が実行されることを防止できる。換言すれば、情報提供装置1によれば、自車両の走行状態に合致した報知の態様を実現することができる。
【0113】
そして、情報提供装置1では、灯色情報中に矢印情報が含まれているか否かを判定した上で、自車両が対象交差点を通過するときの交通信号機40の灯色を判定する。このため、情報提供装置1によれば、矢印信号を出力する交通信号機40のみならず、矢印信号を出力しない交通信号機40が設けられた交差点を対象交差点として自車両が進入する場合であっても、自車両についてサイクル内通過が可能であるか否かを判定することができる。
【0114】
さらに、情報提供装置1では、自車進行路が進行許可道路に合致していても、周辺物体情報を取得した他車両の挙動に起因して、自車両が、サイクル内通過を不可能となる場合には、情報の報知を実行しない。このため、情報提供装置1によれば、より適切な態様にて報知を実行することができる。
【0115】
特に、情報提供装置1では、サイクル内通過が可能であるか否かについての判定、及び情報の報知を実行するか否かについての判定を、灯色情報を受信する毎に実行している。よって、情報提供装置1によれば、対象交差点に自車両が到達するまでに変化する自車両の走行状態や対象交差点の周辺の時々刻々と変化する交通状況に応じて、より適切な態様にて報知を実行することができる。
【0116】
なお、情報提供装置1では、サイクル内通過が可能であれば、自車両がサイクル内通過を可能である旨を認識可能な態様の情報の報知が実行され、サイクル内通過が不可能であれば、情報の報知が無実行である。このため、情報提供装置1によれば、自車両の乗員らに、サイクル内通過が可能であるか否かを認識させることができる
[その他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、様々な態様にて実施することが可能である。
【0117】
例えば、上記実施形態の情報報知処理では、通過可否判定処理を実行して、対象交差点の周辺の交通状況に応じて、サイクル内通過が可能であるか否かを判定していたが、この通過可否判定処理は実行されていなくとも良い。すなわち、情報報知処理におけるS210,S220は省略されていても良い。
【0118】
また、上記実施形態における進行適否判定処理では、自車進行路が進行許可道路に合致しているか否かの判定を、ナビゲーション装置23から取得した経路、自車両の走行レーン、及び方向指示器24から取得した方向指示それぞれから推定した自車進行路に対して実行していたが、当該判定は、ナビゲーション装置23から取得した経路、自車両の走行レーン、及び方向指示器24から取得した方向指示のうち、少なくとも一つから推定した自車進行路に対して実行されていても良い。つまり、進行適否判定処理においては、S310,320の組、S330,340の組、S360,370の組のうち少なくとも一つが実行されれば良い。
【0119】
なお、上記実施形態の情報提供装置1では、走行レーンの特定を、ナビゲーション装置23に備えられた周知の技術により実行していたが、走行レーンの特定は、ナビゲーション装置23にて実行されたものでなくとも良く、例えば、対象交差点の周辺を撮影した画像から自車両が走行している車線を特定することで行っても良い。
【0120】
また、上記実施形態における情報報知処理では、S155にて、情報の報知を無実行とするように設定していたが、情報報知処理のS155にて実行する処理内容は、これに限るものではない。このS155にて実行する処理内容として、例えば、自車両の走行状況、及び対象交差点の周辺を走行する他車両の走行状況に応じた情報を報知しても良い。このような場合においてS155から報知される情報は、自車両が安全に走行されるように注意喚起を促すものであっても良い。
【0121】
この注意喚起の一つとして、例えば、自車両が対象交差点に接近する際には、交通信号機40の灯色が「進行許可(青色)」であるが、走行時状況が「進行禁止(赤色)」となる場合には、「赤信号注意」が設定されていても良い。また、注意喚起の一つとして、例えば、前方車両が存在していることに起因して、走行時状況が進行禁止継続期間となる場合には、「追突注意」が設定されていても良い。さらに、注意喚起の一つとして、右折車両が存在することに起因して、走行時状況が進行禁止継続期間となる場合には、「前方注意」や「信号注意」、「追突注意」が設定されていても良い。なお。注意喚起の一つとして、対向車両が右折待ちしている場合には、「対向車注意」が設定されていても良い。さらには、注意喚起の一つとして、自車両の走行速度が、法定速度よりも高い場合には、「速度注意」が設定されていても良い。
【0122】
また、上記実施形態の情報報知処理では、S120において、灯色情報中に矢印情報が含まれているか否かを判定していたが、情報報知処理では、灯色情報中に矢印情報が含まれているか否かを判定しなくとも良い。この場合、情報報知処理のS110にて、矢印信号が含まれている灯色情報を受信したときに肯定判定して(S110:YES)、S160へと移行するようになされていれば良い。すなわち、情報報知処理におけるS120は省略されていても良い。
【0123】
情報報知処理がこのようになされていれば、「矢印信号」が出力される交差点を対象交差点として自車両が進入する際には、該対象交差点において「矢印信号」が出力される期間(即ち、矢印期間)についても、サイクル内通過が可能であるか否かを判定して報知することができる。
[実施形態と特許請求の範囲との対応関係]
最後に、上記実施形態の記載と、特許請求の範囲の記載との関係を説明する。
【0124】
上記実施形態における情報提供装置1の無線通信部15が、本発明の灯色情報取得手段に相当し、外部機器接続部11が、速度取得手段に相当する。そして、上記実施形態の情報報知処理におけるS120〜S140,S160〜S220が、本発明の通過判定手段に相当し、S150,S155,S230,S240が、本発明の情報報知手段に相当する。さらに、上記実施形態の進行適否判定処理におけるS310,S330,S360が、本発明の行路推定手段に相当する。
【0125】
また、上記実施形態の通過可否判定処理におけるS410が、本発明の物体情報取得手段に相当し、S420〜S450が、本発明の周辺状況判定手段に相当する。さらに、上記実施形態の情報報知処理におけるS120が、本発明の矢印判定手段に相当する。
【符号の説明】
【0126】
1…情報提供装置 10…位置特定部 11…外部機器接続部 12…表示部 13…音声出力部 15…無線通信部 16…及び車側制御部 16…車側制御部 20…車速センサ 21…GPS受信機 22…ジャイロスコープ 23…ナビゲーション装置 24…方向指示器 30…信号制御装置 31…無線通信部 32…移動情報取得部 33…灯色情報データベース 34…路側制御部 40…交通信号機 100…走行支援システム
【特許請求の範囲】
【請求項1】
車両に搭載され、自車両が進入する交差点である対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を取得する灯色情報取得手段と、
自車両の走行速度を取得する速度取得手段と、
少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、
前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段と
を備える情報提供装置であって、
前記灯色情報には、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路について進行を許可する矢印信号に関する情報が含まれており、
前記通過判定手段は、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段を備え、
前記交通信号機の灯色が進行許可である期間を表す進行許可期間、または前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色によって進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする情報提供装置。
【請求項2】
車両に搭載され、自車両が進入する交差点である対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を取得する灯色情報取得手段と、
自車両の走行速度を取得する速度取得手段と、
少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、
前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段と
を備える情報提供装置であって、
前記通過判定手段は、
前記灯色情報に基づき、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路への進行を許可する矢印信号が、前記灯色情報に含まれているか否かを判定する矢印判定手段と、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段とを備え、
前記矢印判定手段での判定の結果、前記灯色情報に前記矢印信号が含まれていなければ、前記交通信号機の灯色が進行許可である期間を表す進行許可期間に、前記灯色情報に前記矢印信号が含まれていれば、前記進行許可期間、及び前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色により進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする情報提供装置。
【請求項3】
前記対象交差点の周辺に存在する移動体の位置及び挙動を少なくとも含む情報を表す周辺物体情報を取得する物体情報取得手段を備え、
前記通過判定手段は、
前記灯色情報、自車両の走行速度、前記自車両と対象交差点との位置関係、及び前記物体情報取得手段で取得した周辺物体情報に基づく前記対象交差点の周辺の交通状況を表す周辺交通状況が、予め規定された規定状況に適合すれば、前記サイクル内通過が不可能であると判定する周辺状況判定手段
を備えることを特徴とする請求項1または請求項2に記載の情報提供装置。
【請求項4】
前記周辺状況判定手段は、
前記物体情報取得手段にて取得した周辺物体情報に対応する移動体の中に、自車両と前記対象交差点との間に存在する移動体である前方車両が存在すれば、該前方車両が前記対象交差点に到達時の前記交通信号機の灯色が進行禁止であることを、前記周辺交通状況が前記規定状況に適合したものとすることを特徴とする請求項3に記載の情報提供装置。
【請求項5】
前記周辺状況判定手段は、
前記物体情報取得手段にて取得した周辺物体情報に対応する移動体の中に、前記対象交差点にて右折する移動体である右折車両が存在すれば、該右折車両の一つが、右折が完了したことを表す領域として規定された右折完了領域へと、前記進行許可期間及び前記矢印期間のうち少なくとも一方に未到達であることを、前記周辺交通状況が前記規定状況に適合したものとすることを特徴とする請求項3または請求項4に記載の情報提供装置。
【請求項6】
前記周辺状況判定手段は、
前記物体情報取得手段にて取得した周辺物体情報に対応する移動体の中に、自車両が走行する走行車線の対向車線を走行する移動体である対向車両が存在すれば、前記進行許可期間及び前記矢印期間内であって、右折が完了したことを表す領域として規定された右折完了領域に自車両が移動するタイミングが、前記対向車両が対象交差点を通過するタイミングを基準として予め規定された時間の範囲内であることを、前記周辺交通状況が前記規定状況に適合したものとすることを特徴とする請求項3から請求項5のいずれか一項に記載の情報提供装置。
【請求項7】
前記行路推定手段は、
自車両に搭載された方向指示器の操作状態を取得し、その取得した方向指示器の操作状態によって指し示される方向の道路を前記自車進行路として推定することを特徴とする請求項1から請求項6のいずれか一項に記載の情報提供装置。
【請求項8】
前記行路推定手段は、
自車両に搭載され、目的地までの経路を案内する経路案内装置から、前記目的地までの経路を取得し、その取得した経路を前記自車進行路として推定することを特徴とする請求項1から請求項7のいずれか一項に記載の情報提供装置。
【請求項9】
前記行路推定手段は、
自車両が走行する車線を表す走行レーンを特定し、その特定した走行レーンに対して進行が許可された道路を、前記自車進行路として推定することを特徴とする請求項1から請求項8のいずれか一項に記載の情報提供装置。
【請求項10】
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が不可能であれば、情報の報知を無実行であることを、前記サイクル内通過が不可能であることを認識可能な態様とすることを特徴とする請求項1から請求項9のいずれか一項に記載の情報提供装置。
【請求項11】
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が不可能であれば、サイクル内通過が不可能である旨の注意喚起を、前記サイクル内通過が不可能であることを認識可能な態様として報知することを特徴とする請求項1から請求項10のいずれか一項に記載の情報提供装置。
【請求項12】
前記通過判定手段は、
前記灯色情報取得手段にて灯色情報を取得する毎に、前記サイクル内通過が可能であるか否かを判定することを特徴とする請求項1から請求項11のいずれか一項に記載の情報提供装置。
【請求項13】
対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を、無線により送信する信号制御装置、及び、
車両に搭載され、前記信号制御装置からの灯色情報を取得する灯色情報取得手段と、自車両の走行速度を取得する速度取得手段と、少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段とを有する情報提供装置
を備える走行支援システムであって、
前記灯色情報には、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路について進行を許可する矢印信号に関する情報が含まれており、
前記通過判定手段は、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段を備え、
前記交通信号機の灯色が進行許可である期間を表す進行許可期間、または前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色によって進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする走行支援システム。
【請求項14】
対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を、無線により送信する信号制御装置、及び、
車両に搭載され、前記信号制御装置からの灯色情報を取得する灯色情報取得手段と、自車両の走行速度を取得する速度取得手段と、少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段とを有する情報提供装置
を備える走行支援システムであって、
前記通過判定手段は、
前記灯色情報に基づき、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路への進行を許可する矢印信号が、前記灯色情報に含まれているか否かを判定する矢印判定手段と、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段とを備え、
前記矢印判定手段での判定の結果、前記灯色情報に前記矢印信号が含まれていなければ、前記交通信号機の灯色が進行許可である期間を表す進行許可期間に、前記灯色情報に前記矢印信号が含まれていれば、前記進行許可期間、及び前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色により進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする走行支援システム。
【請求項1】
車両に搭載され、自車両が進入する交差点である対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を取得する灯色情報取得手段と、
自車両の走行速度を取得する速度取得手段と、
少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、
前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段と
を備える情報提供装置であって、
前記灯色情報には、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路について進行を許可する矢印信号に関する情報が含まれており、
前記通過判定手段は、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段を備え、
前記交通信号機の灯色が進行許可である期間を表す進行許可期間、または前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色によって進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする情報提供装置。
【請求項2】
車両に搭載され、自車両が進入する交差点である対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を取得する灯色情報取得手段と、
自車両の走行速度を取得する速度取得手段と、
少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、
前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段と
を備える情報提供装置であって、
前記通過判定手段は、
前記灯色情報に基づき、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路への進行を許可する矢印信号が、前記灯色情報に含まれているか否かを判定する矢印判定手段と、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段とを備え、
前記矢印判定手段での判定の結果、前記灯色情報に前記矢印信号が含まれていなければ、前記交通信号機の灯色が進行許可である期間を表す進行許可期間に、前記灯色情報に前記矢印信号が含まれていれば、前記進行許可期間、及び前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色により進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする情報提供装置。
【請求項3】
前記対象交差点の周辺に存在する移動体の位置及び挙動を少なくとも含む情報を表す周辺物体情報を取得する物体情報取得手段を備え、
前記通過判定手段は、
前記灯色情報、自車両の走行速度、前記自車両と対象交差点との位置関係、及び前記物体情報取得手段で取得した周辺物体情報に基づく前記対象交差点の周辺の交通状況を表す周辺交通状況が、予め規定された規定状況に適合すれば、前記サイクル内通過が不可能であると判定する周辺状況判定手段
を備えることを特徴とする請求項1または請求項2に記載の情報提供装置。
【請求項4】
前記周辺状況判定手段は、
前記物体情報取得手段にて取得した周辺物体情報に対応する移動体の中に、自車両と前記対象交差点との間に存在する移動体である前方車両が存在すれば、該前方車両が前記対象交差点に到達時の前記交通信号機の灯色が進行禁止であることを、前記周辺交通状況が前記規定状況に適合したものとすることを特徴とする請求項3に記載の情報提供装置。
【請求項5】
前記周辺状況判定手段は、
前記物体情報取得手段にて取得した周辺物体情報に対応する移動体の中に、前記対象交差点にて右折する移動体である右折車両が存在すれば、該右折車両の一つが、右折が完了したことを表す領域として規定された右折完了領域へと、前記進行許可期間及び前記矢印期間のうち少なくとも一方に未到達であることを、前記周辺交通状況が前記規定状況に適合したものとすることを特徴とする請求項3または請求項4に記載の情報提供装置。
【請求項6】
前記周辺状況判定手段は、
前記物体情報取得手段にて取得した周辺物体情報に対応する移動体の中に、自車両が走行する走行車線の対向車線を走行する移動体である対向車両が存在すれば、前記進行許可期間及び前記矢印期間内であって、右折が完了したことを表す領域として規定された右折完了領域に自車両が移動するタイミングが、前記対向車両が対象交差点を通過するタイミングを基準として予め規定された時間の範囲内であることを、前記周辺交通状況が前記規定状況に適合したものとすることを特徴とする請求項3から請求項5のいずれか一項に記載の情報提供装置。
【請求項7】
前記行路推定手段は、
自車両に搭載された方向指示器の操作状態を取得し、その取得した方向指示器の操作状態によって指し示される方向の道路を前記自車進行路として推定することを特徴とする請求項1から請求項6のいずれか一項に記載の情報提供装置。
【請求項8】
前記行路推定手段は、
自車両に搭載され、目的地までの経路を案内する経路案内装置から、前記目的地までの経路を取得し、その取得した経路を前記自車進行路として推定することを特徴とする請求項1から請求項7のいずれか一項に記載の情報提供装置。
【請求項9】
前記行路推定手段は、
自車両が走行する車線を表す走行レーンを特定し、その特定した走行レーンに対して進行が許可された道路を、前記自車進行路として推定することを特徴とする請求項1から請求項8のいずれか一項に記載の情報提供装置。
【請求項10】
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が不可能であれば、情報の報知を無実行であることを、前記サイクル内通過が不可能であることを認識可能な態様とすることを特徴とする請求項1から請求項9のいずれか一項に記載の情報提供装置。
【請求項11】
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が不可能であれば、サイクル内通過が不可能である旨の注意喚起を、前記サイクル内通過が不可能であることを認識可能な態様として報知することを特徴とする請求項1から請求項10のいずれか一項に記載の情報提供装置。
【請求項12】
前記通過判定手段は、
前記灯色情報取得手段にて灯色情報を取得する毎に、前記サイクル内通過が可能であるか否かを判定することを特徴とする請求項1から請求項11のいずれか一項に記載の情報提供装置。
【請求項13】
対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を、無線により送信する信号制御装置、及び、
車両に搭載され、前記信号制御装置からの灯色情報を取得する灯色情報取得手段と、自車両の走行速度を取得する速度取得手段と、少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段とを有する情報提供装置
を備える走行支援システムであって、
前記灯色情報には、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路について進行を許可する矢印信号に関する情報が含まれており、
前記通過判定手段は、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段を備え、
前記交通信号機の灯色が進行許可である期間を表す進行許可期間、または前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色によって進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする走行支援システム。
【請求項14】
対象交差点の交通整理を行う交通信号機の灯色に関する情報を表す灯色情報を、無線により送信する信号制御装置、及び、
車両に搭載され、前記信号制御装置からの灯色情報を取得する灯色情報取得手段と、自車両の走行速度を取得する速度取得手段と、少なくとも、前記灯色情報取得手段で取得した灯色情報、前記速度取得手段で取得した走行速度、及び前記対象交差点と自車両との位置関係に基づき、前記交通信号機の灯色によって対象交差点の進行が許可されている期間に、前記対象交差点に自車両が到達して該対象交差点を通過するサイクル内通過が可能であるか否かを判定する通過判定手段と、前記通過判定手段での判定の結果に基づく情報の報知を実行する情報報知手段とを有する情報提供装置
を備える走行支援システムであって、
前記通過判定手段は、
前記灯色情報に基づき、前記交通信号機の灯色の一つである進行禁止と並行して出力される前記灯色の一つであり、前記対象交差点における特定の道路への進行を許可する矢印信号が、前記灯色情報に含まれているか否かを判定する矢印判定手段と、
前記自車両が進む行路を表す自車進行路を推定する行路推定手段とを備え、
前記矢印判定手段での判定の結果、前記灯色情報に前記矢印信号が含まれていなければ、前記交通信号機の灯色が進行許可である期間を表す進行許可期間に、前記灯色情報に前記矢印信号が含まれていれば、前記進行許可期間、及び前記矢印信号が出力される期間を表す矢印期間に、自車両が前記対象交差点に到達し、かつ該到達時での前記交通信号機の灯色により進行が許可される道路に、前記行路推定手段で推定した自車進行路が合致すれば、前記サイクル内通過が可能であるものと判定し、
前記情報報知手段は、
前記通過判定手段での判定の結果、前記サイクル内通過が可能であれば、前記サイクル内通過が可能である旨を認識可能な態様の報知を、前記サイクル内通過が不可能であれば、前記サイクル内通過が不可能である旨を認識可能な態様の報知を実行する
ことを特徴とする走行支援システム。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】

【図8】
【図9】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図7】
【公開番号】特開2012−48459(P2012−48459A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−189494(P2010−189494)
【出願日】平成22年8月26日(2010.8.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月26日(2010.8.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]