
情報提供装置および情報提供方法
【課題】移動履歴を必要とせず、かつ、交通流計測地点を通過する必要もなく、移動体の移動先を予測して情報を提供する情報提供装置を提供する。
【解決手段】交通量を検出する地点である複数の交通量検出地における交通量の向き等を蓄積する交通量検出地蓄積部102と、移動体の現在位置を取得する現在地取得部101と、取得された現在位置から交通量検出地への向きを算出する向き算出部104と、交通量検出地蓄積部102に蓄積されている交通量検出地の一部等を移動先候補として選択し、選択した移動先候補の交通量検出地について、向き算出部104で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、その方向差が閾値の範囲内にある交通量検出地を特定し、それを移動体の移動先として予測する移動先予測部105と、予測された移動先に関する情報を提示する情報提供部106とを備える。
【解決手段】交通量を検出する地点である複数の交通量検出地における交通量の向き等を蓄積する交通量検出地蓄積部102と、移動体の現在位置を取得する現在地取得部101と、取得された現在位置から交通量検出地への向きを算出する向き算出部104と、交通量検出地蓄積部102に蓄積されている交通量検出地の一部等を移動先候補として選択し、選択した移動先候補の交通量検出地について、向き算出部104で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、その方向差が閾値の範囲内にある交通量検出地を特定し、それを移動体の移動先として予測する移動先予測部105と、予測された移動先に関する情報を提示する情報提供部106とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体に情報を提供する情報提供装置、特に、移動体の移動先を予測して情報を提供する装置に関する。
【背景技術】
【0002】
現在、カーナビゲーション装置や携帯電話などのモバイル端末などにおいて、ユーザの状況に応じて適切な情報を提供する様々な技術が提案されている。その際に、より適切な情報を提供するために、ユーザの状況に依存して提供する情報を変更することや、情報を提供するタイミングを変更する等の工夫がなされている。例えば、大量に存在するお店の情報の中から移動体の現在位置の近くにあるお店の情報だけをフィルタリングして提供するということが行われてきている。また、目的地や経由地、通過地といった移動体の移動先情報も情報提供に影響する重要な情報である。例えば、予めユーザに入力された目的地により、目的地までの経路や目的地近くの駐車場情報などの目的地に関連する情報を提供することや、目的地までの経路上にあるお店の情報や渋滞情報を移動体に提供するということがなされている。ところが、ユーザが移動先を入力することはユーザの負担が大きいため、装置が移動先を予測する手法が従来よりなされている。
【0003】
従来、移動先を予測する手法として、実際に移動体が移動した履歴を用いる方法がある(例えば、特許文献1等参照。)。この技術は、自車の走行履歴から走行目的地となり得る複数の走行目的地候補を算出して走行履歴データメモリに記憶しておき、自車が走行目的地未設定の状態で走行しているとき、自車の現在の走行路および過去に該走行路を経由して各走行目的地候補に到達した頻度から、走行目的地候補のうちの1つを走行目的地と推定して走行経路計画を行うというものである。
【0004】
また、現在地から移動先への交通流比を計測し、その値を用いて、道路に設置された情報提供装置が移動先を予測し、情報提供のフィルタリングを行う方法も提案されている(例えば、特許文献2等参照。)。この技術は、始点(O)から終点(D)までのOD交通量の比を計測し、始点を通った移動体がよく通る終点は現移動体が始点を通った場合に通る可能性が高いと予測する。
【特許文献1】特開平7−83678号公報
【特許文献2】特開2000−293790号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に開示された移動履歴を用いる移動先予測では、移動履歴が十分に蓄積されるまでは移動先が予測されないという問題がある。さらに、移動履歴に蓄積されていない場所は移動先として予測されないという問題もある。
【0006】
また、上記特許文献2に開示された交通流比の計測による移動先予測では、交通流の到達度については計測が困難であり、始点および終点共に光ビーコン設置点などの計測地点でなければならないという問題がある。つまり、移動体の現在地および移動先が共に計測地点でなければ移動先の予測ができない。ところが、光ビーコンは、いまだ全国の主要道路の一部にしか設置されていない。このために、少なくとも一つの交通流計測地点を通過するまでは移動先が予測できないという問題がある。
【0007】
そこで、本発明は、このような問題点に鑑みてなされたものであり、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要もなく、移動体の移動先を予測し、予測した移動先に関連した情報を提供することができる情報提供装置等を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る情報提供装置は、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置であって、交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段と、移動体の現在位置を取得する現在地取得手段と、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出手段と、前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出手段で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測手段と、前記移動先予測手段によって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供手段とを備えることを特徴とする。
【0009】
このように、本発明では、所定の地点の交通量を用いることで移動先を予測する。従来であれば、2地点間の交通流を計測するには2地点とも計測地点であり、しかも計測IDを照合するなど2地点間の情報を連携させる必要があるが、本発明では、交通量を利用しているので、単純に所定の地点を所定の向きに通過する車の数などを計測するだけで移動先を予測することができる。交通量が多い地点は移動体が通る可能性が高い場所なので、本情報提供装置から情報提供を受ける移動体が通る可能性も高い。このため、現在地点からの交通流情報が得られてなくても移動先を予測できる。
【0010】
また、本発明では交通量の向きの情報も用いる。交通量の向きの情報は、直接計測していなくても、車線情報を用いると道路の位置情報から簡単に求めることが出来る。交通量の向きを用いることで、移動体の現在位置に従った向きの交通量を用いて予測を行うことができるため、より精度の高い移動先予測が可能になる。
【0011】
なお、本発明は、このような情報提供装置として実現できるだけでなく、情報提供装置を構成する処理部をステップとする情報提供方法として実現したり、そのステップをコンピュータに実行させるプログラムとして実現したり、そのプログラムが記録されたCD−ROM等のコンピュータ読み取り可能な記録媒体として実現することもできる。
【発明の効果】
【0012】
本発明によれば、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要もなく、移動体の移動先を予測し、予測した移動先に関連した情報が提供される。つまり、移動先の履歴がなくても、交通量の情報を用いることで、移動先を予測することができる。そして、予測した移動先により、移動先への経路を提供することや、移動先やその経路上の店や交通情報、渋滞情報を提供することや提供情報のフィルタリングを行うことができる。
【0013】
また、移動先を予測することにより、現在地から移動先までの経路において、最もユーザに都合の良い地点で情報を提供するなど、情報提供のタイミングを制御することができる。
【0014】
よって、簡易な手法で便利な情報提供装置が実現され、カーナビゲーション装置や携帯電話等の移動体が普及した今日における本発明の実用的価値は極めて高い。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態について説明する。代表的な本発明の実施の形態における情報提供装置は、以下の通りである。
【0016】
本発明に係る第1の情報提供装置は、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置であって、交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段と、移動体の現在位置を取得する現在地取得手段と、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出手段と、前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出手段で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測手段と、前記移動先予測手段によって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供手段とを備えることを特徴とする。これによって、現在地と交通量検出地における交通量を用いて移動体の移動先が予測され、予測された移動先に関する情報が提供されるので、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要がない便利な情報提供装置が実現される。
【0017】
ここで、前記移動先予測手段は、例えば、前記交通量検出地蓄積手段に蓄積されている交通量検出地の中から、前記現在地取得手段で取得された現在位置から一定距離の範囲内にある交通量検出地を前記移動先候補として選択し、前記情報提供装置はさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの距離を算出する距離算出手段を備え、前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量の大きさを蓄積し、前記移動先予測手段は、前記方向差が予め定められた閾値の範囲内にある交通量検出地の中から、前記距離算出手段によって算出された距離が小さく、かつ、前記交通量検出地蓄積手段に蓄積されている交通量の大きさが大きい交通量検出地を選択し、選択した交通量検出地を前記移動体の移動先として予測するのが好ましい。
【0018】
また、本発明の第2の情報提供装置は、前記情報提供装置がさらに、地図情報を蓄積する地図情報蓄積手段と、前記地図情報蓄積手段に蓄積された地図情報と前記交通量検出地蓄積手段に蓄積されている交通量検出地を特定する情報とを用いて、前記交通量検出地の位置を変更し得る位置範囲を算出する交通量検出地位置範囲算出手段と、前記交通量検出地位置範囲算出手段によって算出された位置範囲内で、かつ、前記現在地取得手段で取得された現在位置に最も近い位置に、前記交通量検出地の位置を変更する交通量検出地位置変更手段とを備え、前記向き算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記向きを算出し、前記距離算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記距離を算出することを特徴とする。これによって、交通量検出地の位置が統一され、移動先の予測精度が向上される。
【0019】
また、本発明の第3の情報提供装置は、前記情報提供装置がさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への経路の遠回りの度合を示す遠回り度を算出する遠回り度算出手段を備え、前記移動先予測手段はさらに、前記遠回り度算出手段で算出された前記交通量検出地への経路の遠回り度が予め定められた値より大きい場合に、当該交通量検出地を前記移動先候補から除外することを特徴とする。これによって、遠回り度を考慮した移動先の予測が行われ、移動先の予測精度が向上される。
【0020】
また、本発明の第4の情報提供装置は、前記情報提供装置がさらに、地図情報を蓄積する地図情報蓄積手段と、前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段と、前記推奨経路算出手段で算出された推奨経路上に、当該推奨経路を算出した前記交通量検出地を除く他の交通量検出地が存在するか否かを判断することによって、冗長な交通量検出地が存在するか否かを示す冗長度を算出する冗長度算出手段と、前記冗長度算出手段によって算出された冗長度によって冗長な交通量検出地が存在すると示された場合に、当該交通量検出地を前記移動先候補から除外することを特徴とする。これよって、冗長な移動先が候補として選ばれることが排除されるので、移動先の予測精度が向上される。
【0021】
また、本発明の第5の情報提供装置は、前記移動先予測手段は、移動先として予測した交通量検出地について、予測の確からしさを示す評価値を算出し、算出した評価値が予め定められた基準を満たす場合に、当該交通量検出地を前記移動体の現在位置として、前記移動先の予測を繰り返すことを特徴とする。これによって、移動先の予測が繰り返されるので、現実の目的地に近い移動先が予測される。
【0022】
また、本発明の第6の情報提供装置は、前記交通量検出地蓄積手段が、前記複数の交通量検出地について、さらに、交通量検出地が道路であるか否かの情報を含む種別情報を蓄積し、前記移動先予測手段が、前記交通量検出地蓄積手段に蓄積された種別情報を参照することで、前記交通量検出地が道路であるか否か判定し、道路であると判定した場合に、当該交通量検出地を前記移動体の現在位置として、前記予測を繰り返すことを特徴とする。これによって、交通量検出地の種別が考慮され、例えば、道路上の地点であれば、さらにその先の移動先への予測が繰り返され、目的地に近い移動先が予測される。
【0023】
また、本発明の第7の情報提供装置は、前記情報提供装置がさらに、前記移動先予測手段で予測された移動先を提示する移動先提示手段と、前記移動先提示手段で提示された移動先に対するユーザからの選択指示を受け付ける移動先選択手段とを備え、情報提供手段は、前記移動先選択手段が受け付けた選択指示に対応する移動先に関する情報を取得して提示することを特徴とする。これによって、移動先が目的地候補として提示されるので、ユーザによる目的地設定が簡素化される。
【0024】
また、本発明の第8の情報提供装置は、前記情報提供装置がさらに、前記複数の交通量検出地の位置と前記交通量検出地での交通量の向きの類似性に基づいて、前記複数の交通量検出地での交通量の大きさを合成できるか否かを判定する合成可否判定手段と、前記合成可否判定手段が合成できると判定した場合に、前記複数の交通量検出地での交通量の大きさを合成することにより、前記交通量検出地での交通量の大きさを変更する合成手段とを備え、前記移動先予測手段は、前記合成手段によって合成された交通量の大きさを用いて、前記交通量検出地を選択することを特徴とする。これによって、類似する交通量検出地における交通量が合成されるので、現実の交通状態を反映した精度の高い移動先予測が可能になる。
【0025】
また、本発明の第9の情報提供装置は、前記情報提供装置がさらに、前記交通量検出地が存在する密度を地域別に蓄積する交通量検出地密度蓄積手段と、前記現在地取得手段で取得された現在位置と前記交通量検出地密度蓄積手段に蓄積された現在位置を含む地域の前記密度とから、移動先候補とする交通量検出地の位置範囲を算出するフィルタリング位置範囲算出手段と、前記フィルタリング位置範囲算出手段が算出した位置範囲に従って、前記交通量検出地蓄積手段に蓄積されている交通量検出地から移動先候補となるものをフィルタリングする移動先候補フィルタリング手段とを備え、前記移動先予測手段は、前記移動先候補フィルタリング手段によるフィルタリングによって移動先候補とされた交通量検出地の一部または全部を、前記移動先候補として選択することを特徴とする。これによって、交通量検出地の密度を考慮した移動先候補が決定されるので、処理負荷が軽減される。
【0026】
また、本発明の第10の情報提供装置は、前記情報提供装置がさらに、渋滞情報を蓄積する渋滞情報蓄積手段と、前記渋滞情報蓄積手段に蓄積された渋滞情報から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積することを特徴とする。これによって、渋滞情報から交通量が推定されるので、現実の交通量が特定できない場合であっても、移動先の予測と、その予測に基づく情報の提供とが可能になる。
【0027】
また、本発明の第11の情報提供装置は、前記情報提供装置がさらに、道路の所定の地点間を示すリンクについて、リンク旅行時間、リンク長、および、リンクの始点位置と終点位置を示す情報を蓄積するリンク旅行時間蓄積手段と、前記リンク旅行時間蓄積手段に蓄積されたリンク旅行時間、リンク長、および、リンクの始点位置と終点位置から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積することを特徴とする。これによって、リンク旅行時間から交通量が推定されるので、現実の交通量が特定できない場合であっても、移動先の予測と、その予測に基づく情報の提供とが可能になる。
【0028】
また、本発明の第12の情報提供装置は、前記情報提供装置がさらに、予測する移動先の数を決定する移動先予測数決定手段を備え、前記移動先予測手段は、前記移動先予測数決定手段で決定された数だけ移動先を予測することを特徴とする。これによって、各種状況に応じて、予測する移動先の数が変更されるので、自動的に複数の移動先に関する情報を得ることが可能になる。
【0029】
以下、本発明の各実施の形態における情報提供装置について、図面を用いて詳細に説明する。
【0030】
(実施の形態1)
まず、本発明の実施の形態1における情報提供装置について説明する。
【0031】
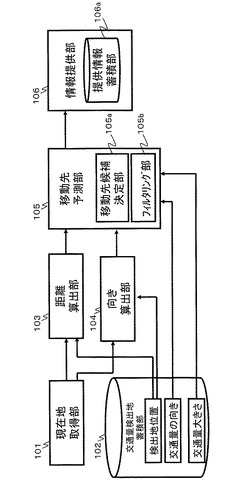
図1は、本実施の形態における情報提供装置の構成図を示す。図1の情報提供装置は、車等の移動体に備えられ、移動体の現在地と交通量取得地との間の距離と方向を利用して移動体の移動先を予測し、予測した移動先に関する情報を提供する装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106を備える。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0032】
現在地取得部101は、移動体の現在位置を取得する処理部であり、GPSアンテナまたはICタグ、通信、画像認識等により、移動体の現在地を検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。
【0033】
交通量検出地蓄積部102は、図2に示されるように、交通量を検出できる地点(交通量検出地)の検出点位置および検出した交通量の大きさと交通量の向きを蓄積するハードディスク等である。例えば、ID「001」は、位置の東経「134.5.27.7」、北緯「34.6.4.5」において交通量検出地が存在し、検出地における向き(方向角)「90度」への交通量の大きさが「400台/時間」であることを示す。向きは真北方向角であり、真北の方向を0度とし、真北の方向から右回りを正としている。交通量検出地の位置や交通量の情報は予め装置内に蓄積しておく。なお、VICS電波やネットワーク回線から最新の交通量情報を入手してもよい。交通量検出地は移動先の候補でもあり、本情報提供装置は交通量検出地の中から移動先を決定する。
【0034】
距離算出部103は、現在地取得部101で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する。
【0035】
向き算出部104は、現在地取得部101で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する。例えば現在地の位置から交通量検出地の位置へのベクトルの角度を向きとする。
【0036】
移動先予測部105は、交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、向き算出部104で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を移動体の移動先または移動先の方向として予測する処理部の一例であり、本実施の形態では、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。この移動先予測部105は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部105bとを有する。
【0037】
より詳しくは、移動先予測部105の移動先候補決定部105aは、まず、現在位置から一定距離の範囲内にある交通量検出地を移動先候補として選択する。例えば、図2に示されるように、交通量検出地の情報が蓄積されていたとする。このうち現在地からの距離が近いものから順に10個を選択し、図3に示されるように移動先の候補とする。本実施の形態では、交通量検出地の位置が移動先の候補位置であり、交通量検出地の交通量の向きが移動先の向き候補である。同じ位置に交通量の向きが複数あった場合、それぞれの向きについて移動先候補とする。つまり移動先候補とは位置候補と向き候補の組である。
【0038】
続いて、移動先予測部105のフィルタリング部105bは、移動先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。フィルタリング部105bは、交通量の向きと現在地−交通量検出地間の向きの方向差が閾値以内、例えば、90度の範囲内である交通量検出地を移動先の候補として選択し、方向差が90度より大きい移動先候補を移動先候補から除去する。方向差でフィルタリングを行う理由は、移動体が現在地から交通量検出地に移動するまでの方向と、交通量検出地から移動する方向が類似する傾向が高いためである。特に移動体は少しでも逆向きに進むことを避ける傾向が高いため、方向差を90度としている。
【0039】
例えば、図4に示されるように「ID005〜008(東経134.7.26.9、北緯34.4.49.2)」の交通量検出地をフィルタリングする場合、現在地から「ID005〜008」への向き(方向角)は110度である。「ID005〜008」付近まで110度の向きで移動した後、「ID005〜008」を逆方向である270度の方向で通過することは、一般的にほとんどない。よって、「ID005〜008」における交通量の向き「90度」「270度」「0度」「180度」のうち、110度±90度の範囲内である向き「90度」、「180度」がフィルタリング部105bによって選択される。例えば、図4に示される例では、向きから図5に示されるようにフィルタリングされる。このように、向きによりフィルタリングを行うことで、一般的に移動先とはならない移動先候補を除去することができるため、予測精度が向上する。
【0040】
なお、移動先の候補として一つも選択されなかった場合は、移動先の候補となる交通量検出地の数を増加させる。
【0041】
次に、移動先予測部105のフィルタリング部105bは、上記方向差が予め定められた閾値の範囲内にある交通量検出地の中から、距離算出部103によって算出された距離が小さく、かつ、交通量の大きさが大きい交通量検出地を選択し、選択した交通量検出地を移動体の移動先として予測する。つまり、交通量の大きさと現在地から交通量検出地までの距離で移動先を予測する。具体的には、交通量の大きさを距離で割った値を予測の確からしさを示す評価値とし、その評価値が最も大きいものを移動先とする。例えば、図6に示されるように「ID002・交通量の向き270度」への評価値は400/1.7、「ID003・交通量の向き90度」への評価値は400/1.6、「ID005・交通量の向き90度」への評価値は900/2.3、「ID008・交通量の向き180度」への評価値は100/2.3、「ID010・交通量の向き270度」への評価値は200/1.2となり、最も評価値の高い「ID005・交通量の向き90度」が移動先として選択される。これは、移動体が将来ID005の地点(経度134.7.26.9、緯度34.4.49.2)を90度の向きに移動することを予測している。
【0042】
なお、複数の候補地を移動先として予測してもよい。
情報提供部106は、提供する情報を予め蓄積した提供情報蓄積部106aを有し、移動先予測部105が予測した移動先に関する情報を提供情報蓄積部106aから読み出し、読み出した情報を、情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体が将来ID005の地点を90度の向きに移動することを予測した場合、図7に示されるようにID005の地点(東経134.7.26.9、北緯34.4.49.2)を90度の向きに通過するまでの経路の渋滞情報や推奨経路を提供することが出来る。なお、提供情報蓄積部106aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部106によって取得された情報等が含まれる。
【0043】
以下、本実施の形態1における情報提供装置の動作について、図8のフローチャートを用いて説明する。
【0044】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。距離算出部103は、現在地取得部101で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する(ステップS802)。向き算出部104は、現在地取得部101で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する(ステップS803)。
【0045】
移動先予測部105の移動先候補決定部105aは、距離算出部103が算出した現在地−交通量検出地間の距離により、複数の交通量検出地を移動先候補として選択する(ステップS804)。たとえば、移動先候補決定部105aは、交通量検出地蓄積部102に蓄積された交通量検出地の中から、現在地からの距離が近いものから順に10個を選択する。
【0046】
そして、移動先予測部105のフィルタリング部105bは、移動先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS805)。たとえば、フィルタリング部105bは、交通量の向きと現在地−交通量検出地間の向きとの方向差が90度の範囲内である交通量検出地を移動先の候補として選択する。
【0047】
さらに、フィルタリング部105bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離により、移動先を予測する(ステップS806)。たとえば、フィルタリング部105bは、交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。
【0048】
最後に、情報提供部106は、移動先予測部105が予測した移動先に関する情報を提供情報蓄積部106aから読み出し、その情報をユーザに提供する(ステップS807)。
【0049】
なお、ステップS804はなくてもよい。つまり、蓄積された交通量検出地をそのまま移動先候補としてもよい。
【0050】
以上のように、本実施の形態における情報提供装置によれば、現在地と交通量取得地との間の距離と方向を利用して移動先が予測され、予測された移動先に関する情報が提供される。よって、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要もなく、移動体の移動先が予測され、予測された移動先に関連した情報が提供される。
【0051】
なお、本実施の形態では、移動先予測部105が、現在地−交通量検出地間の向きと検出値における交通量の向きの方向差により移動先候補をフィルタリングする際に用いる閾値は90度などの固定値であった。しかし、移動体がそれまでと逆方向に進む可能性は移動体の出発地からの距離によって異なる。
【0052】
出発地を出た直後は道路の構造上の関係からそれまでとは逆方向に移動する場合もある。例えば、図9に示されるように、移動体の南西に目的地があったとする。この場合、移動体は最短距離を通る可能性が高いため、道路の構造上の関係から北西方向、交通量検出地ID001の位置に進む。そしてID001の位置からはそれまでとは逆の南方向(180度)の方向に進む。つまり、現在地―交通量検出地間の向き(300度)とID001の交通量の向き(180度)との方向差(120度)が90度より大きいが、フィルタリングするべきでない。これは出発直後では移動体が通ることのできる経路選択の幅が小さいので、通過予定地(交通量検出地)における進行方向と現在地から通過予定地への方向の相関も非常に低くなる。出発地から通過予定地(交通量検出地)の距離が大きくなると、移動体が通ることのできる経路選択の幅が大きいので、通過予定地(交通量検出地)における進行方向と現在地から通過予定地への方向の相関も非常に高くなる。
【0053】
よって、出発地から移動先候補への距離の大きさの増大に応じて、方向差の閾値を減少させてもよい。
【0054】
図10は、このような実施の形態1の変形例1における情報提供装置、つまり、方向差の閾値を出発位置から移動先候補への距離の大きさに応じて減少させる機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部1003、向き算出部104、移動先予測部1005、情報提供部106、出発地取得部1007を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、出発地取得部1007が追加されている点、および、それに関連する処理部が異なる。
【0055】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0056】
出発地取得部1007は、移動体が移動を開始した出発地の位置を取得する。例えば、移動体が車の場合、最後にエンジンを掛けた箇所である。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。なお出発地は移動体が最後に所定の時間以上停止していた場所、もしくは移動体が最後に滞在したランドマークとしてもよい。
【0057】
距離算出部1003は、現在地取得部101で取得した現在地の位置と交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離、および出発地取得部1007で取得した出発地の位置と交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する。
【0058】
移動先予測部1005は、距離算出部103が算出した現在地−交通量検出地間の距離と出発地―交通量検出地間の距離、向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。つまり、上記方向差の閾値として、距離算出部1003によって算出された距離の大きさに対して単調減少する値を採用して方向差と閾値とを比較することにより、方向差が閾値の範囲内にある交通量検出地を特定する。この移動先予測部1005は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部1005bとを有する。
【0059】
より詳しくは、移動先予測部1005の移動先候補決定部105aは、まず、実施の形態1と同様に、交通量検出地を移動先候補としたあと、フィルタリング部1005bは、出発地―交通量検出地間の距離と現在地−交通量検出地間の向きと検出地における交通量の向きにより、移動先候補をフィルタリングする。交通量の向きと現在地−交通量検出地間の向きの方向差が閾値より大きい移動先候補を移動先候補から除去する。このとき、フィルタリング部1005bは、閾値として、出発地―交通量検出地間の距離が大きくなるに従って小さくなる値を採用する。つまり、閾値は、出発地―交通量検出地間の距離に対して広義の単調減少となる。例えば、360度を初期値として、出発地―交通量検出地間の距離に比例して減少させ、最終的に30度にする。
【0060】
その後、実施の形態1と同様に、交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。
【0061】
以下、本実施の形態1の変形例1における情報提供装置の動作について、図11のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0062】
まず、出発地取得部1007が、GPS等により、出発地を取得する(ステップS1100)。実施の形態1と同様に現在地を取得した後、距離算出部103は、現在地取得部101で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離、および出発地取得部1007で取得した出発地の位置の交通量検出地の位置との間の距離を算出する(ステップS1102)。
【0063】
実施の形態1と同様に向きを計算し、移動先候補決定部105aが距離により移動先候補を選別した後、フィルタリング部1005bは、移動先候補となった交通量検出地の中から、出発地−交通量検出地間の距離と現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS1105)。このとき、フィルタリング部1005bは、移動先候補をフィルタリングする際に、現在地−交通量検出地間の向きと検出値における交通量の向きとの差が閾値よりも小さい交通量検出地を候補として選択するが、その閾値として、出発地−交通量検出地間の距離に応じて減少する値を採用する。以下、実施の形態1と同様である(ステップS806〜S807)。
【0064】
このように、方向差の閾値を出発位置から移動先候補への距離の大きさに応じて減少させる機能を備える実施の形態1の変形例1における情報提供装置により、より可能性の高い移動先候補に絞り込まれ、的確な情報提供が可能になる。
【0065】
なお、上記実施の形態1の変形例1では、移動先予測部1005が、現在地−交通量検出地間の向きと検出値における交通量の向きの方向差により移動先候補をフィルタリングする際に用いる閾値を、出発地から移動先候補への距離の大きさに応じて減少させていた。しかしながら、閾値は、出発地から移動先候補への距離ではなく、出発地から現在地までの距離の大きさに応じて減少させてもよい。つまり、方向差の閾値を出発位置から現在地までの距離の大きさに応じて減少させる機能を備える情報提供装置を、実施の形態1の変形例2における情報提供装置として実現してもよい。
【0066】
このような情報提供装置では、方向差の閾値は、出発地―現在地間の距離に対して広義の単調減少となる。現在地までの距離を用いることで、移動先候補ごとに別の閾値を用いる必要がなくなる。なお、同様に、出発地から現在地までの経過時間もしくは道路の右左折数の大きさに応じて閾値を減少させてもよい。つまり、閾値は出発地―現在地間の経過時間もしくは右左折数に対して広義の単調減少としてもよい。
【0067】
つまり、移動先予測部1005は、方向差の閾値として、距離算出部1003によって算出された距離、移動時間および右左折回数の少なくとも一つの大きさに対して単調減少する値を採用して方向差と閾値とを比較することにより、方向差が閾値の範囲内にある交通量検出地を特定してもよい。
【0068】
また、実施の形態1では、現在地−交通量検出地間の向きを現在地の位置から交通量検出地の位置へのベクトルの向きとしていた。しかし、実際に移動体が移動する方向は道路のリンク構造により異なる。そこで、地図情報を用いて、道路のリンク情報を参照することにより、現在地−交通量検出地間の向きを算出してもよい。地図情報を用いることで、移動体が実際に現在地から移動先候補に移動する際に通る経路の方向により移動先候補をフィルタリングすることができる。よって向きの精度が上がるため、効率よくフィルタリングでき、予測精度が向上する。
【0069】
図12は、このような本実施の形態1の変形例3における情報提供装置、つまり、現在位置と移動先候補の位置から推奨経路を算出して向きを算出する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部1204、移動先予測部105、情報提供部106、地図情報蓄積部1207および推奨経路算出部1208を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207および推奨経路算出部1208が追加されている点、および、それに関連する処理部が異なる。
【0070】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0071】
地図情報蓄積部1207は、道路の位置やリンク距離といった道路情報を蓄積するハードディスク等である。例えば、ノードの位置、接続ノード、ノード間を結ぶリンク距離が蓄積されている。
【0072】
推奨経路算出部1208は、地図情報蓄積部1207に蓄積された地図情報、例えば、道路の位置、接続ノード、リンク距離情報を用いて、現在地取得部101が取得した現在地の位置から交通量検出地蓄積部102が蓄積した交通量検出地の位置までの推奨経路を計算する。具体的には、現在地の位置から交通量検出地の位置までの各経路の経路コストを計算し、ダイキストラ法などにより、コストが最小の経路をもとめる。経路コストは、例えば、リンク距離の総和である。
【0073】
向き算出部1204は、推奨経路算出部1208が算出した現在地の位置から、交通量検出地の位置までの推奨経路により、現在地−交通量検出地間の向きを算出する。具体的には、移動体が推奨経路上を通る際の交通量検出地の位置での移動体の向きを現在地−交通量検出地間の向きとする。例えば、図13に示される例では、推奨経路上の交通量検出位置における移動体の向きが180度であるため、現在地−交通量検出地間の向きを180度とする。図13に示される例では、最終的な目的地が現在地の南西にあるが、道路の構造上の関係から移動体は通常北西に進み、交通量検出地ID001を南向きに通過すると思われる。このとき、現在地から交通量検出地ID001への向きは実施の形態1の手法で算出すると300度となる。よって交通量検出地ID001(向き180度)との方向差が120度となり、移動先候補から交通量検出地ID001は除外されてしまう。しかし、本変形例の手法を用いると、現在地から交通量検出地ID001への向きは180度となるため、方向差が0度となり、移動先候補から除去されない。つまり、本手法により道路の構造を考慮した向きを算出することができる。
【0074】
以下、本実施の形態1の変形例3における情報提供装置の動作について、図15のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0075】
実施の形態1と同様に、現在地を取得し、距離を算出した後、推奨経路算出部1208は、地図情報蓄積部1207に蓄積された地図情報を用いて現在地取得部101が取得した現在地の位置から交通量検出地蓄積部102が蓄積した交通量検出地の位置までの推奨経路を計算する(ステップS1403)。向き算出部1204は、推奨経路算出部1208が算出した推奨経路により、現在地から交通量検出地への向きを算出する(ステップS1404)。具体的には、向き算出部1204は、移動体が推奨経路上を通る際の交通量検出地の位置での移動体の向きを現在地−交通量検出地間の向きとする。以下、実施の形態1と同様である(ステップS804〜S807)。
【0076】
以上のように、本変形例における情報提供装置によれば、地図情報を用いることで、移動体が実際に現在地から移動先候補に移動する際に通る経路の方向により移動先候補がフィルタリングされる。よって、予測する移動の向きの精度が上がり、効率よくフィルタリングされるため、移動先の予測精度が向上する。
【0077】
なお、本変形例において取得した交通量検出地の位置の精度が十分高く、交通量検出地の位置一つに対して交通量の向きが1つ、あるいは、順逆の2方向しか存在しないとき、移動先予測部105は、向きをフィルタリングする際に用いる方向差の閾値を0にしてもよい。これは、位置の精度が高く推奨経路が限定できるときは、地図情報を用いることで移動体が移動先候補を通るときの向きを一つに限定できるためである。
【0078】
また、実施の形態1では、現在地−交通量検出地間の向きと、交通量の向きを比較することにより、移動先候補を選別していた。しかし、現在地−交通量検出地間の向きの代わりに、もしくは、現在地−交通量検出地間の向きに加えて移動体の現在の向きを用いても良い。つまり、現在の向きを用いて移動先を予測する情報提供装置を、実施の形態1の変形例4における情報提供装置として実現してもよい。
【0079】
例えば、移動体が移動を始めた直後は、駐車場や道路の位置、リンク構造の関係から移動先とは逆方向に移動する可能性がある。しかし、移動を始めてからある程度経たあとは、移動先と逆方向に移動する可能性が低い。よって、例えば移動体が移動を始めた出発地から現在地までの距離が所定の値より大きいときに現在の向きを移動先のフィルタリングに用いる。具体的には、移動先候補の向き候補、つまり交通量の向きと現在の向きとの方向差が所定の値、例えば90度より大きいときに、移動先候補を移動先候補から除去する。図15に示される例では、現在地−交通量検出地間の向きは90度である。このため、現在地−交通量検出地間の向きのみを用いると、「ID005〜008」の移動先候補は(東経134.7.26.9、北緯34.4.49.2)、向き情報からID006(270度)のみが除去される。しかし、一般的に移動体はUターンなどにより逆方向に移動することはほとんどないため90度の向きで「ID005〜008」を通過することもありえない。現在の向き(270度)を用いることで「ID005」(90度)の移動先候補もありえないことが予測できるため、移動先候補から除去できる。なお、移動体の現在の向きは現在地取得部101が検知する。
【0080】
このように、移動体の現在の向きを用いて移動先を予測することで、可能性の低い移動先候補が除去され、移動先予測の精度が向上する。
【0081】
なお、実施の形態1の変形例3では、地図情報により現在地の位置から移動先候補の位置までの推奨経路を算出し、推奨経路上での移動先候補の位置における移動体の向きと移動先候補の向き候補を比較することにより、移動先候補をフィルタリングしていた。このとき、移動先候補位置における向きを比較するのではなく、現在地の位置における向きを比較しても良い。つまり、地図情報により現在地の位置から移動先候補の位置までの推奨経路を算出し、推奨経路上での現在地の位置における理想的な移動体の向きと現在地の位置における実際の移動体の向きを比較する。移動体は基本的に最短経路を通る。よって、すぐにUターンをすることが推奨されるような場所が目的地となることはない。よって推奨経路上での現在地の位置の向きにより移動先候補のフィルタリングを行う。これにより、予測精度を向上させることができる。
【0082】
図16は、このような本実施の形態1の変形例5における情報提供装置、つまり、現在位置と移動先候補位置から推奨経路を算出し、現在位置の理想的な向きから移動先を予測する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部1601、交通量検出地蓄積部102、距離算出部103、向き算出部1604、移動先予測部1605、情報提供部106、地図情報蓄積部1207および推奨経路算出部1208を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が現在地取得部1601に置き換えられている点、地図情報蓄積部1207および推奨経路算出部1208が追加されている点、および、それに関連する処理部が異なる。
【0083】
前記実施の形態1および変形例3で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0084】
現在地取得部1601は、GPSアンテナまたはICタグ、通信、画像認識等により、移動体の現在の位置および現在の向きを検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報および「180度」といった方位角を検知する。
【0085】
向き算出部1604は、推奨経路算出部1208が算出した現在地の位置から、交通量検出地の位置までの推奨経路により、現在地−交通量検出地間の向き、および現在地の位置における理想的な向き、つまり理想現在位置向きを算出する。具体的には、移動体が推奨経路上を通る際の交通量検出地の位置での移動体の向きを現在地−交通量検出地間の向きとする。また、移動体が推奨経路上を通る際の現在地の位置での移動体の向きを理想現在位置向きとする。例えば、図17に示される例では、推奨経路上の交通量検出位置における移動体の向きが90度であるため、現在地−交通量検出地間の向きを90度とする。また、推奨系路上の現在位置における移動体の向きが300度であるため、理想現在位置向きを300度とする。
【0086】
移動先予測部1605は、距離算出部103が算出した現在地−交通量検出地間の距離と出発地―交通量検出地間の距離、向き算出部1604が算出した現在地−交通量検出地間の向き、理想現在位置向き、現在地取得部が取得した現在の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。この移動先予測部1605は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部1605bとを有する。
【0087】
より詳しくは、移動先予測部1605の移動先候補決定部105aは、実施の形態1と同様に、交通量検出地を移動先候補としたあと、移動先予測部1605のフィルタリング部1605bは、出発地―交通量検出地間の距離と現在地−交通量検出地間の向きと検出地における交通量の向きにより、移動先候補をフィルタリングする。つまり、フィルタリング部1605bは、まず、交通量の向きと現在地−交通量検出地間の向きの方向差が閾値より大きい移動先候補を移動先候補から除去する。そして、理想現在位置向きと現在の向きにより移動先候補をフィルタリングする。つまり、理想的案現在の向きと現在の向きの方向差が閾値より大きい移動先候補を移動先候補から除去する。閾値は例えば0度とする。これは、移動先候補が移動先となるならば、移動体は推奨経路上を移動することが想定できるため、現在の向きや移動先候補の向きも推奨経路上の向きと一致するからである。例えば、図17に示される例では、移動先候補ID001について、現在地−交通量検出地間の向き(90度)と交通量の向き(90度)の方向差は0度(90度―90度)であるが、理想現在位置向き(300度)と現在の向き(120度)との方向差は180度(300度―120度)であるため、移動先候補から除去する。これは、移動体がID001に向かう場合は普通現在の向きも300度となるからである。しかし、現在の向きおよび推奨経路から算出した理想現在位置向きを用いないとID001は移動先候補から除去できない。
【0088】
その後、実施の形態1と同様に、交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。
【0089】
以下、本実施の形態1の変形例5における情報提供装置の動作について、図18のフローチャートを用いて説明する。前記実施の形態1および変形例3で示した構成要素には同様の符号を付与し、説明を省略する。
【0090】
まず、現在地取得部1601は移動体の現在の位置および向きを取得する(ステップS1801)。実施の形態1の変形例3と同様に、距離と推奨経路を算出した後、向き算出部1604は、推奨経路算出部1208が算出した推奨経路により、現在地から交通量検出地への向きと理想現在位置向きを算出する(ステップS1804)。移動先予測部1605の移動先候補決定部105aは、距離により移動先候補を選別した後、フィルタリング部1605bは、移動先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向き、理想現在位置向きと実際の移動体の現在の向きにより、移動先候補を選別する(ステップS1805)。つまり、移動先候補の中から、現在地−交通量検出地間の向きと検出値における交通量の向きとが一定範囲内にあり、かつ、理想現在位置向きと実際の移動体の現在の向きとが一定範囲内にある移動先候補を選別する。以下、実施の形態1と同様である(ステップS806〜S807)。
【0091】
このように、本変形例における情報提供装置によれば、推奨経路上での現在地の位置の向きにより移動先候補のフィルタリングが行われるので、移動先の予測精度が向上される。
【0092】
また、本実施の形態1では、現在地−交通量検出地間のユークリッド距離により、移動先を予測していた。しかし、現在地−交通量検出地間のユークリッド距離の代わりに地図情報蓄積部1207を用いて算出した現在地−交通量検出地間の最小経路コストを利用しても良い。経路コストは、カーナビゲーション装置などで推奨経路を探索する際に計算されるコストであり、経路を移動するために必要なコストである。例えば、経路の移動時間や移動距離、道幅、右左折の回数などから経路コストは求められ、最小経路コストはダイキストラ法により、計算される。
【0093】
このように、距離ではなく経路コストを用いて移動先を予測する情報提供装置を、実施の形態1の変形例6における情報提供装置として実現してもよい。例えば、図19に示される例のように、交通量検出地点として「ID011・交通量の向き270度」と「ID012・交通量の向き270度」があったとする。ユークリッド距離を計算した場合、明らかに「ID011・交通量の向き270度」の方が「ID012・交通量の向き270度」に比べて現在地に近い。しかし、実際にはID011を270度の向きに通過しようとすると、大回りをしなくてはならず、非常に経路コストがかかるため、ID012を270度の向きに通過する可能性のほうが高い。
【0094】
このように、最小経路コストを計算することで、より精度の高い予測を行うことが出来る。なお、最小経路コストは、距離算出部103が算出する。
【0095】
また、本実施の形態1では、情報提供装置が移動先の予測および予測された移動先に基づく情報提供を移動体に対して行っていた。しかし、情報提供装置は、交通量を検出するビーコンや交通量情報管理サーバで構成し、カーナビゲーション装置などの移動体への情報提供端末に対して情報を提供する構成としても良い。
【0096】
つまり、情報提供機能と移動先予測機能とを分離したハードウェア構成を備えるシステムを、実施の形態1の変形例7における情報提供装置として実現してもよい。これにより、情報提供端末は、移動先を予測する必要がないため、交通量を蓄積しなくても良いという利点がある。
【0097】
(実施の形態2)
次に、本発明の実施の形態2における情報提供装置について説明する。
【0098】
実施の形態1では、交通量検出地蓄積部102に蓄積された交通量検出地の位置情報をそのまま用いて、現在地から交通量検出地の位置までの距離を算出し、算出した向きと距離により移動先を予測していた。しかし、道路の位置やリンク構造を用いることで交通量検出地の位置を変更できる場合がある。その上、交通量検出地の位置を別の位置に変更した方が、効果的に移動先が予測できる場合がある。
【0099】
例えば、図20に示される例のように、現在地から1kmの位置に交通量検出地「ID2001、交通量の向き270度、交通量の大きさ500(台/時間)」、2kmの位置に交通量検出地「ID2002、交通量の向き90度、交通量の大きさ700(台/時間)」が存在したとする。前記実施の形態1と同様に移動先予測を行うと、予測先は距離が最も近いID2001となる。しかし、図20に示される例では、交差点2003で90度の向きに進んだ後、ID2002を90度の向きに通るまでに分岐が存在しない。このため、ID2002の検出した交通量は交差点2003を90度の向きに進む交通量と同義である。しかし、交通量検出地ID2002は交差点2003から離れたところにあるため、移動先予測の際、評価値がID2001に比べて下がってしまう。ところが、交差点2003においては、270度の向きの交通量(ID2001)に比べて、90度の向きの交通量(ID2002)が大きいことから、90度の方向に移動する可能性が高い。そこで、道路の位置とリンク構造を用いて、ID2002の検出地位置を交差点2003の位置に変更することで、効果的に移動先を予測することが可能になる。
【0100】
そこで、本実施の形態では道路の位置とリンク構造を用いて交通量検出地の位置の変更を行う。これにより、より的確に移動先を予測することができる。
【0101】
図21は、本実施の形態2における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、道路の位置とリンク構造を用いて交通量検出地の位置の変更を行う機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、地図情報蓄積部1207、交通量検出地位置範囲算出部2108および交通量検出地位置変更部2109を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207、交通量検出地位置範囲算出部2108および交通量検出地位置変更部2109が追加されている点が異なる。
【0102】
前記実施の形態1およびその変形例で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0103】
交通量検出地位置範囲算出部2108は、交通量検出地蓄積部102に蓄積された交通量検出地の位置と地図情報蓄積部1207に蓄積された道路情報、例えば、ノード位置と接続ノード情報から、交通量が一定で、交通量検出地の位置の変更可能な位置範囲を算出する。具体的には、交通量検出地を含む道路において、交通量検出地の前後の分岐が存在しない範囲を変更可能位置範囲とする。分岐がないとは、交通量の流入および流出が一方向しか存在しないということである。例えば、図22の「ID2002」の交通量検出地の変更可能位置範囲は、分岐が存在しないため交通量が一定であると考えられる交差点2003から交差点2004までの位置範囲である。
【0104】
なお、分岐先の道路の道路幅が非常に小さい、つまり、所定の値未満であった場合、交通量の流入、流出がほとんど存在しないと仮定できるため、分岐が存在しないとしてもよい。つまり、交通量検出地の変更可能位置範囲は、道路幅が所定の値以上の分岐が存在しない範囲である。同様に、分岐先の道路が両側1車線である、もしくは、一方通行であるときも、分岐が存在しないとしてもよい。分岐による交通量の流入、流出がほとんど存在しないと仮定できる場合、もしくは流入、流出の交通量が同程度であるために、交通量が一定であると仮定できる場合は分岐が存在しないとし、交通量検出地変更可能位置範囲を大きくしてもよい。
【0105】
交通量検出地位置変更部2109は、現在地取得部101が取得した移動体の現在地と、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から交通量検出地の変更先の位置を決定する。具体的には、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から、現在地からの距離が最も短い位置に交通量検出地を変更する。例えば、図23に示される例では、現在地からの距離が最も短い位置は交差点2003であるため、交通量検出地ID2002の位置を交差点2003に変更する。
【0106】
以下、本実施の形態2における情報提供装置の動作について、図24のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0107】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。交通量検出地位置範囲算出部2108は、交通量検出地蓄積部102に蓄積された交通量検出地の位置と地図情報蓄積部1207に蓄積された道路情報から、交通量検出地の変更可能な位置の範囲を算出する(ステップS2402)。たとえば、交通量検出地を含む道路において、交通量検出地の前後の分岐が存在しない範囲を変更可能位置範囲とする。
【0108】
続いて、交通量検出地位置変更部2109は、現在地取得部101が取得した移動体の現在地と、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から交通量検出地の変更先の位置を決定する(ステップS2403)。たとえば、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から、現在地からの距離が最も短い位置に交通量検出地を変更する。以下、実施の形態1と同様である(ステップS802〜S807)。
【0109】
以上のように、本実施の形態における情報提供装置によれば、道路の位置とリンク構造を用いて交通量検出地の位置の変更が行われ、交通量検出地の位置が実情に即した位置に修正され、統一されるので、移動先の予測精度が向上する。
【0110】
なお、本実施の形態2では、交通量検出地の位置を変更することで、現在地―交通量検出地間の距離および向きが変更された。しかし、移動先候補における向き候補、つまり、交通量の向きも変更することで、さらに効果的に移動先を予測することができる。例えば、図25に示される例では、「ID2503」の交通量検出地の交通量の向きは120度である。現在地から「ID2503」の交通量検出地への向きは0度であるため0度の±90度でフィルタリングを行うと、「ID2503」の交通量検出地は移動先候補から外れる。しかし、道路の構造によっては、図25の「ID2503」のように、一時的に「120度」の向きに進むが、最終的には「0度」の向きに進む可能性がある。そこで道路の位置とリンク構造を用いて、交通量の向きを変更することで効果的に移動先予測が可能になる。
【0111】
図26は、このような本実施の形態2の変形例1における情報提供装置、つまり、実施の形態2の機能に加えて、交通量の向きも補正する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、地図情報蓄積部1207、交通量検出地位置範囲算出部2108、交通量検出地位置変更部2109および交通量検出地向き変更部2610を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207、交通量検出地位置範囲算出部2108、交通量検出地位置変更部2109および交通量検出地向き変更部2610が追加されている点が異なる。
【0112】
前記実施の形態1、2で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0113】
交通量検出地向き変更部2610は、交通量検出地蓄積部102に蓄積された位置を所定の向きで通過する移動体がとりうる、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲における交通量の向きを用いて変更後の交通量の向きを決定する。変更可能位置範囲における交通量の向きについては、地図情報蓄積部1207に蓄積された道路情報、例えば、ノード位置と接続ノードから算出する。変更後の交通量の向きは、例えば、変更可能位置範囲における交通量の向きの平均を用いる。例えば、図27の「ID2503」の交通量検出地の変更可能位置範囲は交差点2704から曲がり角2705を通る交差点2706までの道路である。交差点2704を120度の向きに進む場合、交差点2704から曲がり角2705までの1kmの間の交通量の向きは道路の構造から120度である。曲がり角2705から交差点2706までの3kmの間の交通量の向きは0度である。よって、図28に示されるように交通量の向きの平均30度{=(1×120+3×0)/(1+3)}をID2503の交通量の向きとする。
【0114】
以下、本実施の形態2の変形例1における情報提供装置の動作について、図29のフローチャートを用いて説明する。前記実施の形態1、2で示した構成要素には同様の符号を付与し、説明を省略する。
【0115】
実施の形態2と同様に現在地から交通量の位置の変更を行った後、地図情報蓄積部1207に蓄積された道路情報、交通量検出地蓄積部102に蓄積された検出地の位置と交通量の向き、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲を用いて交通量の向きの変更を行う(ステップS2904)。たとば、変更可能位置範囲における交通量の向きの平均を変更後の交通量の向きとする。以下、実施の形態1と同様である(ステップS802〜S807)。
【0116】
以上のように、本変形例における情報提供装置によれば、道路の位置とリンク構造を用いて、より実情に即するように、交通量検出地の位置だけでなく、交通量の向きも修正されるので、移動先の予測精度が向上される。
【0117】
(実施の形態3)
次に、本発明の実施の形態3における情報提供装置について説明する。
【0118】
実施の形態1、2では、現在地から移動先候補までの距離と向きと移動先候補の交通量の大きさ、向きによって移動先を予測していた。しかし、移動体は交通量の最も大きい場所には進まない場合もある。移動体が移動中に移動先を予測するときには、移動体が出発してから現在までの移動情報を用いることにより、そのような場合でも移動先を予測することができる。一般的に、移動体は移動先候補に向かう際に遠回りをせず、できるだけ経路コストが低くなるように移動先候補まで移動する。このため、移動体が移動先候補に向かう際に、出発地から現在までの移動によってどれだけ遠回りしているかを算出することによって予測を行う。
【0119】
例えば、図30に示されるように、移動体が出発地から現在地まで北西方向に移動を行ったとする。実施の形態1、2では、移動体は交通量の最も大きい「ID007」に向かうと予測する。しかし、移動体が実際に「ID007」に向かう場合は、移動体は出発地から現在地まで南東方向に移動するはずである。しかし、移動体は「ID007」に対して遠回りをしているため、「ID007」に向かっていると予測するのは間違いであり、次に交通量が大きく、遠回りをしていない「ID004」に向かっていると考えられる。これらは、出発地、現在地から移動先候補に対する遠回りの度合を示す遠回り度を求めることにより、判別できる。
【0120】
本実施の形態3では、出発地、現在地、移動先候補位置に対する経路コストにより算出された遠回り度も用いて移動先を予測する。
【0121】
図31は、本実施の形態3における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、出発地、現在地、移動先候補位置に対する経路コストにより算出された遠回り度も用いて移動先を予測する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、経路コスト算出部3103、向き算出部104、移動先予測部3105、情報提供部106、出発地取得部1007、地図情報蓄積部1207および遠回り度算出部3109を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、出発地取得部1007、地図情報蓄積部1207および遠回り度算出部3109が追加されている点、距離算出部103が経路コスト算出部3103に置き換えられている点、および、それに関連する処理部が異なる。
【0122】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0123】
経路コスト算出部3103は、地図情報蓄積部1207に蓄積された、ノードの位置、接続ノード、リンク距離といった道路情報を用いて、経路コストを算出する。現在地取得部101が取得した現在地と出発地取得部1007が取得した出発地との間の経路コスト、現在地取得部101が取得した現在地と交通量検出地蓄積部102に蓄積された交通量検出地との間の経路コスト、出発地取得部1007が取得した出発地と交通量検出地蓄積部102に蓄積された交通量検出地との間の経路コストを算出する。
【0124】
なお、経路コストを算出する際に向き情報を用いてもよい。つまり、現在地と交通量検出地の間の経路コストとは、現在地の位置と向きから交通量検出地を検出した交通量の向きに通過するまでの経路コストである。
【0125】
経路コストは、位置間の経路の距離、経路を走行する場合の所要時間、道路種別、道路規制情報、右左折回数などから算出する。例えば、位置間の最小距離経路の距離をリンク距離の総和により計算し、経路コストとする。例えば、図30に示されるように、現在地、出発地、交通量検出地、地図情報が取得されていたとき、交通量検出地つまり移動先候補「ID001」に関する経路コストを算出すると、図32に示されるように、現在出発地間経路コストは「1km」、移動先候補「ID001」についての出発候補地間経路コストは「6km」、現在候補地間経路コストは「5km」になる。
【0126】
なお、交通量検出地における交通量の向き、現在地の移動体の向き、出発地の移動体の向きを用いて、右左折数も考慮して経路コストを算出してもよい。右左折数1回が1kmの経路コストと同等だとすると。移動先候補「ID001」に関する出発地候補地間経路コストは「9km」(6km+1km×右左折3回)となる。
【0127】
遠回り度算出部3109は、経路コスト算出部3103で算出された経路コストから遠回り度を算出する。遠回り度は出発地から移動先までのコストが最小である経路のコストに対する、現在移動体が通っている経路のコストの差である。具体的には、現在出発地間経路コストと現在候補地間経路コストの和と、出発候補地間経路コストとの差が遠回り度となる。例えば、図32に示されるように経路コストが算出されていたとき、移動先候補「ID001」についての遠回り度は、現在出発地間経路コスト「1km」と現在候補地間経路コスト「5km」の和「6km」と、出発候補位置間経路コスト「6km」との差「0km」となる。
【0128】
移動先予測部3105は、経路コスト算出部3103が算出した現在地−交通量検出地間の経路コスト、つまり、現在候補地間経路コストと向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量検出地の交通量の大きさと交通量の向き、遠回り度算出部3109が算出した移動先候補となる交通量検出地に対する遠回り度により、移動先となる交通量検出地を予測する。この移動先予測部3105は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部3105bとを有する。
【0129】
例えば、移動先予測部3105の移動先候補決定部105aは、交通量検出地蓄積部102に蓄積された図30のような交通量検出地を移動先の候補とする。フィルタリング部3105bは、実施の形態1と同様に、移動先の候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の候補として選択する。例えば、図30に示される例では、向きから図33に示されるようにフィルタリングされる。
【0130】
次に、フィルタリング部3105bは、交通量検出地に対する遠回り度により移動先候補をさらにフィルタリングする。移動体は移動先を目指す場合に移動にかかる経路コストが小さくなるように移動する傾向がある。よって、最小コストに対するコスト差である遠回り度も小さくなる。具体的には、遠回り度が所定の値、例えば装置の渋滞に対する迂回経路許容距離の設定1km以下になる移動先候補のみを移動先候補として残す。図33に示される移動先候補の場合、遠回り度が図34に示されるようになったとすると、「ID001」「ID004」の交通量検出地に対する遠回り度は「0km」より、移動先候補として残す。「ID006」、「ID007」の交通量検出地に対する遠回り度は「7km」と「1km」より大きいので移動先候補から除去する。
【0131】
次に、移動先候補となる交通量検出地の交通量の大きさと交通量検出地から現在地からまでの経路コストで移動先を予測する。交通量の大きさを経路コストで割った評価値が最も大きいものを移動先とする。例えば、図35に示されるように「ID001・交通量の向き0度」への評価値は50/5、「ID004・交通量の向き180度」への評価値は400/4となり、最も評価値の高い「ID004・交通量の向き180度」が移動先として選択される。これは、移動体が将来ID004の地点を180度の向きに移動することを予測している。
【0132】
以下、本実施の形態3における情報提供装置の動作について、図36のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与する。
【0133】
まず、出発地取得部1007が、移動体が移動を開始した出発位置を取得する(ステップS1100)。現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。経路コスト算出部3103は、地図情報蓄積部1207に蓄積された道路情報を用いて、現在地と出発地との間の経路コスト、現在位置と移動先候補地となる交通量検出地との間の経路コスト、出発地と移動先候補地となる交通量検出地との間の経路コストを算出する(ステップS3602)。向き算出部104は現在地取得部101で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する(ステップS803)。
【0134】
遠回り度算出部3109は、経路コスト算出部3103で算出された経路コストから移動先候補に対する遠回り度を算出する(ステップS3604)。移動先予測部3105の移動先候補決定部105aは、移動先候補と特定し、フィルタリング部3105bは、その移動先候補である交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS805)。フィルタリング部3105bは、遠回り度算出部3109が算出した遠回り度から移動体の移動先候補を選別する(ステップS3606)。さらにフィルタリング部3105bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの経路コストにより、移動先を予測する(ステップS3607)。
【0135】
最後に、情報提供部106は、移動先予測部3105が予測した移動先に関する情報を提供情報蓄積部106aから読み出してユーザに提供する(ステップS807)。
【0136】
以上のように、本実施の形態における情報提供装置によれば、出発地、現在地、移動先候補位置に対する経路コストにより算出された遠回り度も用いて移動先が予測されるので、遠回り度の高い移動先、つまり、可能性の低い移動先が排除され、移動先の予測精度が向上される。
【0137】
(実施の形態4)
次に、本発明の実施の形態4における情報提供装置について説明する。
【0138】
実施の形態1〜3では、交通量検出地である移動先候補から交通量の大きさと現在地からの距離、方向を元に移動先を予測していた。しかし、複数の移動先候補A、B、Cのうち、A、Bの両方を通過する場合がある。つまり、Bを通過するときにはAを通過しなければない場合が存在する。こういった場合、Bという移動先候補にはAという移動先候補への通過も含まれているため、AとBとCを同等に扱うと予測精度が下がる場合がある。こういった場合、始めに移動先候補AとCの中から移動先を予測し、Aを通過すると予測した場合のみBを通過するかどうかを予測する方が、始めの予測にAの交通量を内包したBの交通量に影響されずに予測を行うことができる。また、Bという移動先を予測するときには、Aを通過するという情報を用いることができるため、より予測の精度が上がる。このBのような冗長移動先を予測の際に除去することでより効率的に移動先予測を行うことができる。
【0139】
図37は、本実施の形態4における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、道路のリンク構造に基づいて冗長な移動先の除去して予測する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、地図情報蓄積部1207、推奨経路計算部3708、冗長度算出部3709および冗長移動先除去部3710を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207、推奨経路計算部3708、冗長度算出部3709および冗長移動先除去部3710が追加されている点が異なる。
【0140】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0141】
推奨経路計算部3708は、地図情報蓄積部1207に蓄積された道路情報、例えば、ノード位置、接続ノード、リンク距離を用いて、現在地取得部101が取得した現在地から交通量検出地蓄積部102が蓄積した交通量検出位置を交通量の向きに通過する際の推奨経路を算出する。具体的には、現在地から交通量検出地までの各経路の経路コストを計算し、ダイキストラ法などによりコストが最小の経路をもとめる。経路コストは、例えば、リンク距離の総和である。
【0142】
冗長度算出部3709は、推奨経路計算部3708が算出した現在地から交通量検出地までの推奨経路を用いて、冗長な交通量検出地が存在するか否かを示す冗長度を算出する。具体的には、現在地から交通量検出地までの推奨経路の中に別の移動先候補つまり別の交通量検出地が存在していた場合、推奨経路を求めた交通量検出地は冗長度を真とする。逆に、別の交通量検出地が存在しなかった場合、推奨経路を求めた交通量検出地は冗長度を偽とする。例えば、図38に示される例のように、交通量検出地「ID022」を0度の向きに通過する場合の推奨経路内に別の交通量検出地「ID003・90度」が存在する場合、交通量検出地「ID022・0度」は冗長度を真とする。
【0143】
冗長移動先除去部3710は、交通量検出地蓄積部102が蓄積した交通量検出地のうち冗長度算出部3709が冗長度を真と判定したものを移動先候補から除去し、冗長度を偽と判定したものを移動先候補とする。
【0144】
移動先予測部3705は、冗長移動先除去部3710が移動先候補と判定した交通量検出地の中から、実施の形態1と同様に距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。この移動先予測部3705は、冗長移動先除去部3710が判定した移動先候補を移動先候補として決定する移動先候補決定部3705aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部105bとを有する。
【0145】
以下、本実施の形態4における情報提供装置の動作について、図39のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0146】
実施の形態1と同様に現在地からの距離と向きを算出した後、各移動先候補について、推奨経路計算部3708は、現在地から移動先候補までの推奨経路を計算する(ステップS3904)。そして、冗長度算出部3709は、移動先候補について、推奨経路内に他の移動先候補が存在するかによって冗長度の算出を行う(ステップS3905)。冗長移動先除去部3710は、移動先候補から冗長移動先を除去する((ステップS3906)。以下、実施の形態1と同様である(ステップS805〜S807)。
【0147】
以上のように、本実施の形態における情報提供装置によれば、冗長な移動先が予測の際に除去されるので、このような冗長な移動先候補に伴う予測精度の低下が防止される。
【0148】
(実施の形態5)
次に、本発明の実施の形態5における情報提供装置について説明する。
【0149】
実施の形態1〜4では、情報提供装置は交通量情報から距離の近い移動先を予測していた。しかし、予測した移動先を通過した後に到達する移動先をさらに予測してもよい。つまり。予測した移動先情報を用いて、さらに先の移動先を予測する。
【0150】
図40は、本実施の形態5における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、予測した移動先情報を用いて、さらに先の移動先を再帰的に予測する機能を備える情報提供装置であり、予測現在地取得部4001、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部4005および情報提供部4006を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部4001に置き換えられている点、および、それに関連する処理部が異なる。
【0151】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0152】
予測現在地取得部4001は、移動先予測部4005が予測した移動先を現在地として検知する。移動先予測部4005が移動先を予測していない場合は、GPSアンテナなどにより、移動体の現在地を検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。
【0153】
移動先予測部4005は、実施の形態1と同様に、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、実施の形態1や実施の形態2と同様の評価値を計算し、移動先となる交通量検出地を予測する。予測した評価値が他の移動先候補の評価値の2倍以上であった場合、予測された移動先は非常に信頼できるものであるとし、予測された移動先を予想現在地として予想現在地取得部に出力し、さらに移動先を予測する。たとえば、図41のようID005の地点(東経134.7.26.9、北緯34.4.49.2)を90度の向きに移動することを予測した場合、図42に示されるように予測現在地が90度の向きでID005の地点(東経134.7.26.9、北緯34.4.49.2)である場合に次にどの交通量検出点に移動するのか予測する。この移動先予測部4005は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部105bと、再帰的に予測を繰り返す制御をする繰り返し制御部4005cとを有する。
【0154】
情報提供部4006は、提供する情報を予め蓄積した提供情報蓄積部4006aを有し、移動先予測部4005が予測した移動先に関する情報を提供情報蓄積部4006aから読み出し、読み出した情報を、情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体が将来ID005の地点(C交差点)を90度の向きに移動し、次にID018の地点(F交差点)を180度の向きで通過することを予測した場合、図43に示されるように、画面外になるような遠くのF交差点近くの渋滞情報でも提供することが出来る。なお、提供情報蓄積部4006aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部4006によって取得された情報等が含まれる。
【0155】
以下、本実施の形態5における情報提供装置の動作について、図44のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0156】
移動先予測部4005の移動先候補決定部105aおよびフィルタリング部105bが実施の形態1と同様に現在地から移動先を予測した後、移動先予測部4005の繰り返し制御部4005cは、予測された移動先の評価値が非常に大きいかのどうかの判定を行う(ステップS4407)。他の移動先候補に比べて、評価値が、例えば、2倍以上であったときは(ステップS4407のyes)、ステップS4408へ、2倍未満であったときは、予測を終了し(ステップS4407のno)、ステップS4409に進む。評価値が非常に高い場合、予測現在地取得部4007は、予測された移動先を現在地として(ステップS4408)、ステップS802に進む。評価値が低い場合、情報提供部4006は、移動先予測部4005が予測した複数または単一の移動先に関する情報を提供情報蓄積部4006aから読み出してユーザに提供する(ステップS4409)。
【0157】
以上のように、本実施の形態における情報提供装置によれば、予測した移動先情報を用いて、さらに先の移動先が再帰的に予測されるので、現在地から近い範囲に限定されることなく、広い範囲での移動先予測が可能となる。
【0158】
なお、実施の形態4と同様に、予め冗長移動先を除去することで、さらに効率よく移動先を予測できる。なぜなら、移動先候補A、Bが存在し、移動先Bを通過するときにはAを通過しなければない場合、始めに移動先候補Bを除去し、Aを通過すると予測した後、Aを通過するという情報を用いてBを通過することを予測できるからである。
【0159】
なお、実施の形態5では、移動先を現在地として再帰的に移動先予測を行うかどうかの判定に、交通量の大きさと現在地からの距離からなる評価値を用いた。しかしながら、この判定に、予測した移動先に関わる情報の有無を用いても良い。
【0160】
つまり、移動先を現在地として再帰的に移動先予測を行うかどうかの判定に、予測した移動先に関わる情報の有無を用いる情報提供装置を、実施の形態5の変形例1における情報提供装置として実現してもよい。情報提供部4006は、予測された移動先に関わる情報が提供情報蓄積部4006aに存在しなかった場合、予測された移動先を現在地として予測現在地取得部4001に出力し、さらに移動先を予測する。予測された移動先に関わる情報が提供情報蓄積部4006aに存在した場合、情報提供部4006は移動先に関わる情報を提供する。例えば、現在地からID005の地点を90度の向きに移動することを予測したとする。このとき、現在地からID005の地点までの経路に関する提供すべき情報が提供情報蓄積部4006aになかったときに、ID005の地点を現在地としてさらに移動先を予測する。すると、次にID018の地点を180度の向きで通過することを予測し、ID018の地点の近くに関する提供すべき渋滞情報が提供情報蓄積部4006aにあった場合、その情報を提供する。
【0161】
これによって、ユーザにとって有益な情報が得られる地点が移動先として予測され、情報提供装置の利便性が向上される。
【0162】
また、実施の形態5では、移動先を現在地としてさらに移動先予測を行う際、交通量の大きさや向き、距離を用いて予測していた。しかし、交通量検出地に関して検出地を始点としたOD交通量や交通流比など交通流情報が存在することがある。例えば、交通量検出地が光ビーコンであった場合に、あるビーコンを通過した車がどこのビーコンを通過する可能性が高いかといったOD交通量などの交通流の情報を持っている。この交通流情報を用いるとさらに精度の良い予測が可能になる。よって、ある交通量検出地への移動を予測した後は、予測した移動先を始点とする交通流の情報を用いて、さらに移動先を予測しても良い。
【0163】
つまり、ある交通量検出地への移動を予測した後は、予測した移動先を始点とする交通流の情報を用いて、さらに移動先を予測する機能を備える情報提供装置を、実施の形態5の変形例2における情報提供装置として実現してもよい。
【0164】
具体的には予測された交通量検出地点を始点(O)とするOD交通量、もしくは、交通流比が高い終点(D)を移動先と予測する。従来は、どれかのビーコンを通らないと、未来に通過するビーコンが予測できなかった。本実施の形態を用いることで、ビーコンを通らなくても、精度よく未来に通過するビーコンを予測し、ビーコン間の交通情報を提供することが出来る。
【0165】
(実施の形態6)
次に、本発明の実施の形態6における情報提供装置について説明する。
【0166】
実施の形態1〜5では、予測した移動先は、道路上のビーコン、カメラなどの交通量検出地であったため、ほとんどの場合、移動体の通過地であって、目的地ではなかった。しかし、駅、店などのランドマークであったとしても、駐車場の検知器、カメラなどにより、店などに流入する交通量を計測することができる。また、駐車場の駐車台数や出入り口を通る人の数により、仮想的に流入交通量を計算することも可能である。よって、ランドマークを交通量検出地として、流入交通量の大きさを用いて移動先予測を行っても良い。この場合、通過地だけではなく、実施の形態5のように再帰的に予測を行うことで、最終的な目的地まで予測することが可能になる。
【0167】
図45は、本実施の形態6における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、ランドマークに対する流入交通量も含めて移動先を予測する機能を備える情報提供装置であり、予測現在地取得部4001、交通量検出地蓄積部4502、距離算出部103、向き算出部104、移動先予測部4505および情報提供部4506を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部4001に置き換えられ、交通量検出地蓄積部102が交通量検出地蓄積部4502に置き換えられている点、および、それに関連する処理部が異なる。
【0168】
前記実施の形態1、5で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0169】
交通量検出地蓄積部4502は、図46に示されるように、少なくとも交通量を検出できる地点の検出点位置および検出した交通量の大きさと交通量の向きに加えて検出地の種別を蓄積する。検出地の種別は、交通量検出地が移動先となったとき通過地となる道路であるか、目的地となるランドマークであるかを示す。例えば、ID「010」は検出地の種別「ランドマーク」、検出地の名前「Yアリーナ」、位置の東経「134.5.59.9」、北緯「34.6.4.6」において交通量検出地が存在し、検出地における向き「流入」への交通量の大きさが「70台/時間」であることを示す。図46では、便宜上、検出地の名前を記述しているが、実際はなくてもよい。交通量検出地の位置や交通量の情報は予め装置内に蓄積しておく。なお、VICS電波やネットワーク回線から最新の交通量情報を入手してもよい。交通量検出地は移動先の候補でもあり、本情報提供装置は交通量検出地の中から移動先を決定する。
【0170】
移動先予測部4505は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部4502に蓄積された交通量の大きさと交通量の向きに加えて、検出地の種別を用いて移動先となる交通量検出地を予測する。この移動先予測部4505は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部4505bと、再帰的に予測を繰り返す制御をする繰り返し制御部4005cとを有する。
【0171】
例えば、図46に示される例のように、交通量検出地が蓄積されていたとする。移動先予測部4505の移動先候補決定部105aは、このうち現在地からの距離が近いものから順に10個を選択し、図47のような交通量検出地を移動先の候補とする。そして、移動先予測部4505のフィルタリング部4505bは、移動先の候補となった交通量検出地の中から、検出地の種別が「道路」であるもののみ、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の候補として選択する。一方、検出地の種別「ランドマーク」については、交通量の向きは影響しないためフィルタリングを行わず、そのまま移動先候補とする。例えば、図47に示される例では、向きから、図48に示される例のように、フィルタリングされる。
【0172】
次に、移動先予測部4505の繰り返し制御部4005cは、交通量の大きさと現在地から交通量検出地までの距離で移動先を予測する。交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。例えば、図48に示される例では、「ID002・交通量の向き270度」への評価値は400/1.7、「ID003・交通量の向き90度」への評価値は400/1.6、「ID005・交通量の向き90度」への評価値は900/2.3、「ID008・交通量の向き180度」への評価値は100/2.3、「Sセンター・流入」への評価値は30/0.79、「Yアリーナ・流入」への評価値は70/1.5、となり、最も評価値の高い「ID005・交通量の向き90度」が移動先として選択される。これは、移動体が将来ID005の地点を90度の向きに移動することを予測している。
【0173】
なお、「ランドマーク」の評価値については、重みをつけてもよい。例えば、検出地の種別「ランドマーク」については評価値を10倍する。
【0174】
移動先予測部4505は、予測された移動先の検出地種別「道路」であったとき、移動先は通過場所であるので、予測された移動先を予想現在地として予測現在地取得部4001に出力し、さらに移動先を予測する。これを移動先が目的地、つまり検出地種別「ランドマーク」となるまで繰り返す。
【0175】
例えば、図49に示される例のように、ID005の地点を90度の向きに移動することを予測した場合、ID005が「道路」であるため、図50に示される例のように、現在地が90度の向きでID005の地点である場合に、次にどの交通量検出点に移動するのか予測する。このとき、「V道館・流入(検出地種別:ランドマーク)」を移動先として予測したとすると、「V道館・流入」は検出地種別がランドマークであり、目的地となるため、これ以上予測は繰り返さない。
【0176】
情報提供部4506は、提供する情報を予め蓄積した提供情報蓄積部4506aを有し、移動先予測部4505が予測した移動先に関する情報を提供情報蓄積部4506aから読み出し、読み出した情報を、情報提供装置の画面や音声によって、ユーザに提供する。これによって、通過地だけではなく、目的地まで予測しているため、目的地までの推奨経路を提供することや、ランドマークがコンサート会場の場合のチケット情報を提供するなど、目的地となるランドマークに関する情報を提供することが出来る。例えば、移動体が将来ID005の地点(C交差点)を90度の向きに移動し、V道館を目的地とすることを予測した場合、図51に示されるように「V道館」に関連する情報、例えばチケット情報を提供することが出来る。なお、提供情報蓄積部4506aに蓄積されている情報には、予め蓄積されたランドマークに関する情報、推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部4506によって取得された情報等が含まれる。
【0177】
以下、本実施の形態6における情報提供装置の動作について、図52のフローチャートを用いて説明する。前記実施の形態1、5で示した構成要素には同様の符号を付与し、説明を省略する。
【0178】
移動先予測部4505の移動先候補決定部105aは、実施の形態1と同様に現在地からの距離により移動先候補を選択した後、移動先予測部4505のフィルタリング部4505bは、移動先候補となった交通量検出地の中から、検出地の種別と現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS5205)。交通量の大きさと距離により移動先を予測した後、移動先予測部4505の繰り返し制御部4005cは、予測された移動先の検出地種別がランドマークであるか判定を行う(ステップS5207)。予測された移動先の検出地種別がランドマークでなかったときは(ステップS5207のNo)、ステップS4408へ、ランドマークであったときは、(ステップS5207のYes)、ステップS5209に進む。移動先がランドマークであった場合、情報提供部4506は、移動先予測部4505が予測した複数または単一の移動先に関する情報を提供情報蓄積部4506aから読み出してユーザに提供する(ステップS5209)。
【0179】
以上のように、本実施の形態における情報提供装置によれば、現在地−交通量検出地間の距離と向き、交通量検出地での交通量の大きさと向きに加えて、ランドマークに対する流入交通量も含めて移動先が予測されるので、現実の目的地となる可能性の高い地点が移動先として追加して予測され、移動先の予測精度が向上される。
【0180】
なお、ランドマークの流入交通量においても交通量の向きを検知し、現在地―交通量検出地の向きとの方向差により、フィルタリングをしてもよい。これにより、A店への流入交通量が0度の向きに300台/時、180度の向きに50台/時などA店への入り口が複数あり、向きにより交通量が異なる場合に、現在地からA店に入る向きとは異なる向きの交通量を除外できる。例えばA店より北側を通行していた場合、普通A店に入るときには180度の向きでA店に入る。こういったとき向きを考慮することで、0度の向きで流入する交通量に影響されない。
【0181】
なお、実施の形態6では、ランドマークを移動先として予測する際に、交通量の大きさや現在地からの距離から評価値を計算していた。しかし、ランドマークの嗜好情報により、評価値に重み付けを行ってもよい。
【0182】
図53は、このような本実施の形態6の変形例1における情報提供装置、つまり、ランドマークに対する嗜好情報も含めた予測機能を備える情報提供装置の構成図である。この情報提供装置は、予測現在地取得部4001、交通量検出地蓄積部5302、距離算出部103、向き算出部104、移動先予測部5305、情報提供部4506および嗜好情報蓄積部5307を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部4001に置き換えられ、交通量検出地蓄積部102が交通量検出地蓄積部5302に置き換えられ、嗜好情報蓄積部5307が追加されている点、および、それに関連する処理部が異なる。
【0183】
前記実施の形態1、5、6で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0184】
交通量検出地蓄積部5302は、図54に示されるように、交通量を検出できる地点の検出点位置および検出した交通量の大きさと交通量の向き、検出地の種別に加えてカテゴリを蓄積する。カテゴリは、交通量検出地がランドマークの場合、ランドマークのカテゴリを示す。例えば、ID「010」は検出地の種別「ランドマーク」、カテゴリ「コンサート」、検出地の名前「Yアリーナ」、位置の東経「134.5.59.9」、北緯「34.6.4.6」において交通量検出地が存在し、検出地における向き「流入」への交通量の大きさが「70台/時間」であることを示す。
【0185】
嗜好情報蓄積部5307は、図25に示されるように、ランドマークのカテゴリに対するユーザの評価を蓄積する。例えば、ID「004」は、カテゴリ「コンサート」に対する評価重みが「5」であることを示す。嗜好情報は予めユーザが入力しておく。
【0186】
移動先予測部5305は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部4502に蓄積された交通量の大きさと交通量の向き、検出地の種別に加えて、ランドマークのカテゴリを用いて移動先となる交通量検出地を予測する。具体的には、実施の形態1のように方向で移動先候補をフィルタリングした後、交通量の大きさを距離で割った値に評価重みをかけた評価値が最も大きいものを移動先とする。この移動先予測部5305は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部5305bと、再帰的に予測を繰り返す制御をする繰り返し制御部4005cとを有する。
【0187】
例えば、図54、図55に示されるように、交通量検出地情報と嗜好情報が蓄積されていた場合、図48に示される例のように、フィルタリング部5305bにより、現在地からYアリーナへの距離が1.5km、Yアリーナの交通量50、Yアリーナのカテゴリ「コンサート」の評価重みが5である場合にYアリーナへの評価値を計算すると、5×70/1.5となる。
【0188】
このように、ランドマークに対する嗜好情報も考慮して移動先が予測されるので、ユーザの個性を反映した精度の高い移動先予測が実現される。
【0189】
(実施の形態7)
次に、本発明の実施の形態7における情報提供装置について説明する。
【0190】
実施の形態1〜6では、ユーザからの入力を用いずに移動先を予測していた。本実施の形態7では、移動先の決定にユーザからの入力を用いる。つまり、本実施の形態では、装置が移動先を予測することで、ユーザによる目的地の設定の簡易化を行う。
【0191】
従来、目的地設定を行うには、目的地の候補が非常に多いため、ユーザが電話番号を入力する、地図から探して直接目的地の場所を入力する、名前を直接入力するなど、ユーザの負担が非常に大きかった。有名なランドマークやユーザが指定したカテゴリのランドマーク、訪問したことがあるランドマークのリストから入力する手法もあるが、図56に示されるように、提示する移動先候補の個数が非常に数の多いリストになり、入力したい目的地を探すだけでも非常に手間がかかる。
【0192】
そこで、本実施の形態4では、装置が交通量情報から移動先候補をフィルタリングし、フィルタリングされた移動先候補からユーザに選択させることで、目的地設定を簡易化させる。移動先候補には目的地候補だけではなく、通過地候補も含め、通過地が選択されたときには、選択された通過地情報を用いてさらに移動先を予測することで、ユーザに提示する移動先候補の個数を減少させ、より目的地設定を簡易化することができる。
【0193】
図57は、本実施の形態7における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、移動先の決定にユーザからの入力を用いる機能を備える情報提供装置であり、予測現在地取得部5701、交通量検出地蓄積部5702、距離算出部103、向き算出部104、移動先予測部5705、情報提供部5706、移動先提示部5707、移動先選択検知部5708および移動先選択部5709を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部5701に置き換えられ、交通量検出地蓄積部102が交通量検出地蓄積部5702に置き換えられ、移動先提示部5707、移動先選択検知部5708および移動先選択部5709が追加されている点、および、それに関連する処理部が異なる。
【0194】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0195】
予測現在地取得部5701は、移動先選択検知部5708が検知した通過地を現在地として検知する。移動先予測部が通過地入力を検知していない場合は、GPSアンテナなどにより、移動体の現在地を検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。
【0196】
交通量検出地蓄積部5702は、図46に示されるように、交通量を検出できる地点の検出点位置および検出した交通量の大きさと交通量の向き、検出地の種別に加えて検出地の名前を蓄積する。例えば、ID「010」は検出地の種別「ランドマーク」、検出地の名前「Yアリーナ」、位置の東経「134.5.59.9」、北緯「34.6.4.6」において交通量検出地が存在し、検出地における向き「流入」への交通量の大きさが「70台/時間」であることを示す。
【0197】
移動先予測部5705は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部5702に蓄積された交通量の大きさと交通量の向き、検出地の種別を用いて移動先となる交通量検出地を予測する。この移動先予測部5705は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部5705bとを有する。
【0198】
例えば、図46に示されるように、交通量検出地蓄積部5702に交通量検出地が蓄積されていたとする。移動先予測部5705の移動先候補決定部105aは、このうち、現在地から一定の距離以内、具体的には、装置の提示する地図画面内に存在するものを全て選択し、図58に示されるように、移動先の候補とする。移動先予測部5705のフィルタリング部5705bは、移動先の候補となった交通量検出地の中から、実施の形態6と同様にして移動先を予測する。ただし、移動先は評価値の高いものから順に複数、例えば、図59に示されるように、5個予測する。なお、「ランドマーク」の評価値については、重みをつけてもよい。例えば、検出地の種別「ランドマーク」については評価値を10倍する。
【0199】
移動先提示部5707は、図60に示されるように、移動先予測部5705で予測した複数の移動先をユーザに提示し、選択させる。具体的には検出地の名前、検出地の位置を提示する。なお、検出地の種別が「道路」であるときは、通過する方向、つまり、交通量の方向を、検出地種別が「ランドマーク」であるときは、目的地であることを提示してもよい。
【0200】
移動先選択部5709は、リモコン、音声入力など、図60に示されるように、移動先提示部5707が提示した複数の移動先の中からユーザが選択を行うための入力装置である。
【0201】
移動先選択検知部5708は、移動先提示部5707によって提示された複数の移動先の中から移動先選択部5709によって選択された移動先を検知する。検知した移動先が通過地、つまり、検出地種別が「道路」であるときは、検知した移動先を現在地として予測現在地取得部5701に出力し、予測をやり直す。検知した移動先が目的地、つまり、検出地種別が「ランドマーク」であるときは、検知した移動先を目的地として設定する。
【0202】
情報提供部5706は、提供する情報を予め蓄積した提供情報蓄積部5706aを有し、設定された目的地に関する情報を提供情報蓄積部5706aから読み出し、読み出した情報をユーザに提供する。例えば、図60に示されるように、予測された移動先から、「C交差点・90度通過」が選択され、図61に示されるように、「C交差点・90度通過」を現在地としたときの予測移動先から「G映画館・目的地」が選択されたとする。このとき、図62に示されるように、現在地から目的地「G映画館」に向かうユーザの予定経路での渋滞情報を表示し、目的地「G映画館」までの推奨経路情報を提供する。なお、提供情報蓄積部5706aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部5706によって取得された情報等が含まれる。
【0203】
以下、本実施の形態7における情報提供装置の動作について、図63のフローチャートを用いて説明する。前記実施の形態1、6で示した構成要素には同様の符号を付与し、説明を省略する。
【0204】
実施の形態1と同様に現在地からの距離と向きを算出した後、移動先予測部5705の移動先候補決定部105aは、距離算出部103が算出した現在地−交通量検出地間の距離により、端末の画面内にある複数の交通量検出地を移動先候補として選択する(ステップS6304)。移動先予測部5705のフィルタリング部5705bは、実施の形態1のように、移動先候補となった交通量検出地の中から、検出地の種別と現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS5205)。さらに移動先予測部5705のフィルタリング部5705bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離により、移動先を複数予測する(ステップS6306)。
【0205】
移動先提示部5707は、移動先予測部5705が予測した複数の移動先を、移動先の位置、名前と共にユーザに提示する(ステップS6307)。移動先選択部5709では、ユーザは移動先提示部5707が提示した移動先の中から移動先を選択する(ステップS6308)。移動先選択検知部5708は、移動先提示部5707が提示した移動先の中から移動先選択部5709によって選択された移動先を検知する(ステップS6309)。
【0206】
さらに移動先選択検知部5708は、選択された移動先の検出地種別が目的地であるか判定を行う(ステップS6310)。選択された移動先の検出地種別が目的地でなかったときは(ステップS6310のNo)、ステップS6311へ、目的地であったときは(ステップS6310のYes)、ステップS6312に進む。選択された移動先が目的地でなかったとき、予測現在地取得部は、選択された移動先を現在地として取得し(ステップS6311)、ステップS802に戻る。選択された移動先がランドマークであったとき、情報提供部5706は、移動先選択検知部5708が検知した選択移動先に関する情報を提供情報蓄積部5706aから読み出してユーザに提供する(ステップS6312)。なお、ステップS6304はなくてもよい。つまり蓄積された交通量検出地をそのまま移動先候補としてもよい。
【0207】
以上のように、本実施の形態における情報提供装置によれば、移動先の決定にユーザからの入力が使用されるので、ユーザが予定している目的地と異なる移動先の情報が提供される等の不具合が回避され、ユーザフレンドリな情報提供装置が実現される。
【0208】
また、実施の形態7では、目的地の候補は交通量を検出できるランドマークであって交通量情報によってフィルタリングを行っていた。しかし、目的地の候補は交通量を検出できなくなくてもよい。例えば、ユーザが訪問したことがあるランドマークや一般的に有名なランドマーク、一定面積以上のランドマーク、ユーザの嗜好に一致するランドマークなどのリストを目的地の候補として蓄積し、通過地の交通量から通過地予測を行い、ユーザに選択させ、ユーザが最終的に選択した通過地から一定の距離にある目的地候補のみをユーザに提示し、選択させることで、目的地設定の簡易化を行うことが可能である。また、ユーザの意図する目的地が目的地候補のリストに存在しない場合もある。そのような場合でも、ユーザが最終的に選択した通過地までの経路情報、および目的地が存在すると想定される範囲の情報を提供することができる。
【0209】
図64は、このような本実施の形態7の変形例1における情報提供装置、つまり、通過先を選択した後に目的地リストから目的地を選択する機能を備える情報提供装置の構成図である。この情報提供装置は、予測現在地取得部5701、交通量検出地蓄積部102、距離算出部103、向き算出部104、通過地予測部6405、通過地提示部6407、通過先選択検知部6408、目的地候補蓄積部6409、目的地提示部6410、目的地選択検知部6411、情報提供部6412、通過地選択部6413および目的地選択部6414を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部5701に置き換えられ、移動先予測部105が通過地予測部6405に置き換えられ、構成要素6407〜6411、6413および6414が追加されている点、および、それに関連する処理部が異なる。
【0210】
前記実施の形態1、7で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0211】
目的地候補蓄積部6409は、図65に示されるように、目的地候補の名前と位置を蓄積する。例えば、ID「001」は目的地候補の名前「Sセンター」、位置の東経「134.5.28.9」、北緯「34.5.15.7」を示す。目的地候補の名前や位置は予め装置内に蓄積しておく。目的地候補は例えば面積が一定以上であるランドマークのリストである。
【0212】
通過地予測部6405は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きを用いて通過地となる交通量検出地を予測する。実施の形態1の移動先予測部105と同様に例えば、図2に示されるように交通量検出地が蓄積されていたとする。このうち現在地から一定の距離以内、具体的には装置の提示する地図画面内に存在するものを全て選択し、実施の形態1と同様に移動先つまり通過地を予測する。ただし、通過地は評価値の高いものから順に複数、例えば図66に示されるように3個予測する。なお、ここでの交通量検出地は通過地となることが多いので通過地と呼んでいるが、目的地であってもよい。この通過地予測部6405は、通過地候補を決定する通過地候補決定部6405aと、決定された通過地候補から最終的な1以上の通過地を選別するフィルタリング部6405bとを有する。
【0213】
通過地提示部6407は、図67に示されるように通過地予測部6405で予測した複数の通過地をユーザに提示し、選択させる。具体的には検出地の位置と交通量の方向を提示する。同時に「どこも通過しない」という選択肢も提示する。
【0214】
通過地選択部6413は、リモコン、音声入力など図67に示されるように通過地提示部6407が提示した複数の移動先の中からユーザが選択を行うための入力処理部である。
【0215】
通過先選択検知部6408は、通過地提示部6407によって提示された複数の通過先の中から通過地選択部6413によって選択された通過先を検知する。検知した通過先を現在地として、予測現在地取得部5701に出力し、予測をやり直す。通過先を検知しなかった場合、つまり「どこも通過しない」ことが選択された場合には、予測を終了する。
【0216】
目的地提示部6410は、目的地候補蓄積部6409に蓄積された目的地候補の中から、ユーザによって最終的に選択された通過地、どこも選択されなかったときには現在地から既定の距離にある目的地候補を位置、名前と共に提示する。例えば、ユーザによって最終的に選択された通過値を現在地としたときに画面内に存在する目的地を提示する。例えば、図67に示されるように予測された通過先から、「ID005・90度通過」が選択され、図68に示されるように「ID005・90度通過」を現在地としたときの予測通過先から「ID018・180度通過」が選択され、図69に示されるように「ID018・180度通過」を現在地としたときの予測通過先から「どこも通過しない」が選択されたとする。このとき図70に示されるように「ID018」を90度に方向に移動する点を現在地としたときの画面内にある目的地候補を提示する。同時に「どこも目的地ではない」という選択肢も提示する。
【0217】
目的地選択部6414は、リモコン、音声入力など図70に示されるように目的地提示部6410が提示した複数の移動先の中からユーザが選択を行うための入力処理部である。
【0218】
目的地選択検知部6411は、目的地提示部6410によって提示された複数の目的地の中から目的地選択部6414によって選択された目的地を検知し、目的地設定を行う。目的地を検知しなかった場合、つまり「どこも目的地ではない」ことが選択された場合には最終的に選択された通過地を目的地の代用として用いる。
【0219】
情報提供部6412は、提供する情報を予め蓄積した提供情報蓄積部6412aを有し、選択された通過地および設定された目的地に関する情報を提供情報蓄積部6412aから読み出し、読み出した情報をユーザに提供する。例えば、図67に示されるように、予測された通過先から、「ID005・90度通過」が選択され、図68に示されるように「ID005・90度通過」を現在地としたときの予測通過先から「ID018・180度通過」が選択され、図69に示されるように「ID018・180度通過」を現在地としたときの予測通過先から「どこも通過しない」が選択され、図70に示されるように「ID018・180度通過」を現在地としたときの目的地候補から「どこも目的地ではない」が選択されたとする。このとき、図71に示されるように現在地から通過地「ID005」を90度の方向で通過し、「ID018」を180度の方向で通過するユーザの予定経路での渋滞情報を表示し、最終通過地「ID018・180度」までの推奨経路情報を提供する。なお、提供情報蓄積部6412aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部6412によって取得された情報等が含まれる。
【0220】
以下、本実施の形態7の変形例1における情報提供装置の動作について、図72のフローチャートを用いて説明する。
【0221】
まず、予測現在地取得部5701が、GPS等により、現在地を取得する(ステップS7201)。距離算出部103は、予測現在地取得部5701で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する(ステップS7202)。向き算出部104は予測現在地取得部5701で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する(ステップS7203)。通過地予測部6405の通過地候補決定部6405aは、距離算出部103が算出した現在地−交通量検出地間の距離により、端末の画面内にある複数の交通量検出地を通過先候補として選択する(ステップS7204)。通過地予測部6405のフィルタリング部6405bは、通過先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出地における交通量の向きにより、通過先候補を選別する(ステップS7205)。さらに通過地予測部6405のフィルタリング部6405bは、通過先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離により、通過先を複数予測する(ステップS7206)。
【0222】
通過地提示部6407は、通過地予測部6405が予測した複数の通過先を、通過先の位置、方向と共にユーザに提示する(ステップS7207)。通過地選択部6413では、ユーザは通過地提示部6407が提示した通過先の中から通過先を選択する(ステップS7208)。通過先選択検知部6408は、通過地提示部6407が提示した通過先の中から通過地選択部6413によって選択された通過先を検知する(ステップS7209)。
【0223】
さらに通過先選択検知部6408は、通過先が選択されたか判定を行う(ステップS7210)。通過先が選択されたときは(ステップS7210のNo)、ステップS7211へ、どこも通過しないが選択されたときは(ステップS7210のYes)、ステップS7212に進む。通過先が選択されたとき、予測現在地取得部5701は、選択された通過先を現在地として取得し(ステップS7211)、ステップS7202に戻る。どこも通過しないが選択されたとき、目的地提示部6410は、目的地候補蓄積部6409の中から最終的に選択された通過先から既定の距離内にある目的地候補を、目的地候補の位置、名前と共にユーザに提示する(ステップS7212)。目的地選択部6414では、ユーザは目的地提示部6410が提示した目的地の中から目的地を選択する(ステップS7213)。目的地選択検知部6411は、目的地提示部6410が提示した目的地の中から目的地選択部6414によって選択された目的地を検知する(ステップS7214)。
【0224】
さらに目的地選択検知部6411は、目的地が選択されたか判定を行う(ステップS7215)。目的地が選択されたときは(ステップS7215のNo)、ステップS7216へ、どこも目的地ではないが選択されたときは(ステップS7215のYes)、ステップS7217に進む。目的地が選択されたとき、情報提供部6412は、選択された目的地に関する情報を提供情報蓄積部6412aから読み出して提供する(ステップS7216)。目的地が選択されなかったとき、情報提供部6412は、選択された通過地に関する情報を提供情報蓄積部6412aから読み出して提供する(ステップ7217)。なお、ステップS7204はなくてもよい。つまり蓄積された交通量検出地をそのまま通過地候補としてもよい。
【0225】
以上のように、本変形例における情報提供装置によれば、装置が予測した移動先がユーザに提示され、ユーザからの入力を受け付けられるので、ユーザによる目的地の設定の簡易化が実現される。
【0226】
(実施の形態8)
次に、本発明の実施の形態8における情報提供装置について説明する。
【0227】
実施の形態2では、それぞれの交通量検出地について位置と向きの変更を行っていた。しかし、複数の交通量検出地を合成し、一つの交通量検出地として扱った方が移動先予測を効果的に扱える場合がある。最も単純な例では、図73に示される例では、どの交通量検出地も現在地からの距離が同等であるため、他の交通量検出地(交通量200)よりも交通量が大きいID7304(交通量300)を移動先として予測する。しかし、実際には、ID7301、7302、7303は車線が異なるだけであり、現在地を通過した移動体が通過する可能性はID7301、7302、7303のどれにおいても存在する。また、ID7301、7302、7303を通過した移動体がとりうる目的地の分布確率はどれも等しいと考えられる。よって、ID7301、7302、7303の交通量は同じものであると仮定できる。よって、交差点7305を90度へ進む交通量はID7301、7302、7303の交通量を合計したもの、つまり600(=200+200+200)である。よって、交差点7305をID7304つまり270度の向きではなく、90度の向きに進む可能性が高い。
【0228】
同様に、図74のID7402と7403の交通量検出地において、現在地を通過した移動体が通過する可能性は双方とも存在する。また、ID7402とID7403の交通量検出地の位置は非常に距離が近く、交通量の向きも同じであるため、ID7402を通過した移動体がとりうる目的地の分布確率と、ID7403を通過した移動体がとりうる目的地の分布確率はほぼ等しいと考えられる。よって、ID7402、7403の交通量は同じものであると仮定できるため、二つの交通量検出地を合成する。例えば、ID7402とID7403を同じ交通量検出地とし、交通量の大きさはID7403の交通量を加えた値600(200+400)とする。
【0229】
本実施の形態では、交通量検出地の位置と交通量の方向を用いて交通量検出地の交通量の合成を行う。これにより、効果的に移動先を予測することができる。
【0230】
図75は、本実施の形態8における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、交通量検出地の位置と交通量の方向を用いて交通量検出地の交通量の合成を行う機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、合成可否判定部7508および合成部7509を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、合成可否判定部7508および合成部7509が追加されている点が異なる。
【0231】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0232】
合成可否判定部7508は、交通量検出地蓄積部102に蓄積された複数の交通量検出地について、検出地の位置と交通量の向きの類似性から、複数の交通量検出地での交通量の大きさを合成できるか否か(合成の可否)を判定する。具体的には、複数の交通量検出地について、互いに交通量の向きが等しく、検出地の位置間の距離が所定の値、例えば500m以下であるときに合成を可とする。例えば、図74において、ID7401とID7403の交通量検出地は交通量の向きが異なるため、合成は不可とする。ID7402とID7403の交通量検出地は交通量の向きが等しく、検出地間の距離が400mと500m以下であるため合成は可とする。
【0233】
合成部7509は、合成可否判定部7508が合成可であると判定した複数の交通量検出地の合成を行う。具体的には、互いに合成可であると判定された交通量検出地について、同一の交通量検出地として扱う。交通量の大きさについては互いの交通量の大きさを加算する。例えば、図74に示されるように、ID7402とID7403の合成が可であると判定されたとき、ID7402とID7403の交通量検出地を同じ交通量検出地として扱う。同じ交通量検出地として扱うということは、合成された一方の交通量検出地、例えば、ID7402が移動先として予測されたときは、他方の交通量検出地ID7403も予測移動先とするということである。交通量の大きさは、図76に示されるように、ID7402の交通量400とID7403の交通量200を加えて600とする。検出地位置は、平均をとってもよいし、交通量の大きさの大きい検出地の位置にしてもよいし、現在地に最も近い交通量検出地の位置にしてもよい。
【0234】
以下、本実施の形態8における情報提供装置の動作について、図77のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0235】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。合成可否判定部7508は、交通量検出地蓄積部102に蓄積された複数の交通量検出地について、検出地の位置と交通量の向きから合成の可否を判定する(ステップS7702)。合成部7509は、合成可否判定部7508が合成可であると判定した複数の交通量検出地を合成する(ステップS7703)。以下、実施の形態1と同様である(ステップS802〜S807)。
【0236】
以上のように、本実施の形態における情報提供装置によれば、交通量検出地の位置と交通量の方向を用いて交通量検出地の交通量が合成され、合成された交通量に基づいて移動先が予測されるので、より実情に即した交通量に基づく移動先予測が行われ、移動先の予測精度が向上される。
【0237】
なお、実施の形態8では、交通量検出地の位置と向きのみを用いて合成の可否を判定していた。しかし、交通量検出地の位置と向きのみでは合成の可否が判断できない場合がある。例えば、図78に示される例では、ID7801とID7802の交通量検出地は向きが等しく、検出地間の距離も400mと近い。しかし、ID7801と7802は直列に接続されているため、ID7802の交通量はID7801の交通量がそのまま検出されていると考えられる。このため、ID7801とID7802では合成を行わず、現在地から遠いID7802を除去した方が、移動先予測を効果的に行うことが出来る。
【0238】
具体的には、実施の形態4と同様に、道路情報から推奨経路を求め、冗長移動先を除去し、残った移動先候補のみを合成に使用する。つまり、実施の形態4と同様に、道路情報から推奨経路を求め、冗長移動先を除去し、残った移動先候補のみを合成に使用する機能を備える情報提供装置を、実施の形態8の変形例1における情報提供装置として実現してもよい。
【0239】
これによって、道路の位置とリンク構造も用いて冗長な移動先を除去して交通量の合成可否が判定されるので、より精度の高い移動先予測が実現される。
【0240】
また、実施の形態8では、交通量検出地−交通量検出地間のユークリッド距離により、合成の可否を判定していた。しかし、交通量検出地−交通量検出地間のユークリッド距離の代わりに現在地−交通量検出地間の最小経路コストの差を利用しても良い。つまり、交通量の合成判定における複数の交通量検出地の位置の類似性については、最小経路コストの類似性を用いてもよい。
【0241】
経路コストは、例えば、移動距離でありリンク距離の総和である。例えば、図79に示される例では、ID7901とID7902の交通量検出地は交通量の向きが270度と等しく、ユークリッド距離も100mであり、非常に小さい。しかし、現在地からID7901を通過するためには大回りをしなければならず、ID7901を通過する状況とID7902を通過する状況は全く異なる。そこで、最小経路コストの差を用いることで効果的に合成の可否判定を行うことができる。
【0242】
例えば、図79に示される例では、現在地から交通量検出地ID7901への経路コストが7kmであり、現在地から交通量検出地ID7902への経路コストが1kmであることから、経路コストの差は6kmと大きく、合成は不可と判定する。
【0243】
これによって、交通量の合成可否の判定において、距離の代わりに現在地からの最小経路コストの差が用いられ、その差が大きい場合に交通量が合成されてしまうことが回避され、より実情に即した移動先予測が可能となる。
【0244】
(実施の形態9)
次に、本発明の実施の形態9における情報提供装置について説明する。
【0245】
移動先予測を行う際に、全ての交通量検出地において、現在地からの距離や方向、評価値を計算していたのでは、装置への負担が非常に大きい。そこで、予め移動先候補となる交通量検出地をフィルタリングすることが必要である。実施の形態1では、現在地の距離が小さい順に規定値、例えば10個の交通量検出地を移動先候補として選択した。しかし、それでも現在地からの距離については、全ての交通量検出地において計算しなければならないという問題がある。よって、個数によりフィルタリングを行う前段階においても移動先候補をフィルタリングする必要がある。
【0246】
また、実施の形態7では、装置の提示する地図画面全体、例えば東経134.5〜134.8かつ北緯34.4〜34.7からなる範囲区間に含まれる交通量検出地を移動先候補とした。これにより、現在地からの距離を計算しなくても、移動先候補のフィルタリングを行うことができる。また、ユーザに提示する地図画面の縮尺、表示を変更することなく、予測移動先の提示を行うことができる。しかし、交通量検出地の多い都会では、非常に多くの交通量検出地を候補としなければならないが、交通量検出地の少ない田舎では、移動先候補となる交通量検出地がほとんどないという問題が生じる。そのため、現在地域の交通量検出地の数に応じて移動先候補をフィルタリングする範囲の大きさを変更する必要がある。
【0247】
そこで、本実施の形態では現在地域の交通量検出地の数の密度により移動先候補をフィルタリングする範囲の大きさの変更を行う。これにより、移動先候補を地域の交通量検出地の数によらず、一律にフィルタリングすることができる。
【0248】
図80は、本実施の形態9における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、現在地域の交通量検出地の数の密度により移動先候補をフィルタリングする範囲の大きさの変更を行う機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、交通量検出地密度蓄積部8007、フィルタリング位置範囲算出部8008および移動先候補フィルタリング部8009を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、交通量検出地密度蓄積部8007、フィルタリング位置範囲算出部8008および移動先候補フィルタリング部8009が追加されている点が異なる。
【0249】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0250】
交通量検出地密度蓄積部8007は、交通量検出地が存在する密度を地域別に蓄積する。例えば、図81に示されるように、都道府県別に交通量検出地の密度を蓄積する。図50に示される例では、ID「001」は地域「東京」において交通量検出地の密度が「0.400(個/km2)」であることを示す。地域別の交通量検出地密度は予め交通量検出地蓄積部102に蓄積された交通量検出地情報から算出しておく。
【0251】
フィルタリング位置範囲算出部8008は、現在地取得部101が取得した現在地と、交通量検出地密度蓄積部8007に蓄積された現在地を含む地域の交通量検出地密度から、移動先候補とする交通量検出地をフィルタリングする位置範囲区間を算出する。例えば、現在地を中心とする交通量検出地が平均20個存在する範囲をフィルタリング範囲とする。現在地が東経「134.5」、北緯「34.5」であったとすると、現在地域は「徳島」であるため、図81に示されるように、「徳島」の検出地密度が「0.020(個/km2)」であることから、現在地を中心とする1000(km2)をフィルタリングの範囲とする。例えば、東経134.4〜134.6かつ北緯34.4〜34.6からなる面積約1000(km2)の長方形の範囲区間をフィルタリングの範囲とする。
【0252】
移動先候補フィルタリング部8009は、フィルタリング位置範囲算出部8008が算出したフィルタリング範囲に従って、交通量検出地蓄積部102に蓄積された交通量検出地から移動先候補となるものをフィルタリングする。例えば、フィルタリング範囲が東経134.4〜134.6かつ北緯34.4〜34.6であった場合、範囲内にある交通量検出地を移動先候補とする。
【0253】
以下、本実施の形態9における情報提供装置の動作について、図82のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0254】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。フィルタリング位置範囲算出部8008は、現在地取得部101が取得した現在地の位置から、交通量検出地密度蓄積部8007に蓄積された地域別の交通量検出地密度情報を用いて、現在地の交通量検出地密度を取得する(ステップS8202)。次に、フィルタリング位置範囲算出部8008は、取得した現在地の交通量検出地密度から移動先候補となる交通量検出地をフィルタリングする位置範囲を算出する(ステップS8203)。移動先候補フィルタリング部8009はフィルタリング位置範囲算出部8008が算出したフィルタリング位置範囲により、移動先候補となる交通量検出地をフィルタリングする(ステップS8204)。以下、実施の形態1と同様である(ステップS802〜S807)。
【0255】
以上のように、本実施の形態における情報提供装置によれば、移動先予測の候補となる交通量検出地をフィルタリングする範囲が交通量検出地の密度を用いて変更されるので、移動先予測に伴う処理負荷の軽減を図ることが可能となる。
【0256】
(実施の形態10)
次に、本発明の実施の形態10における情報提供装置について説明する。
【0257】
実施の形態1〜9では、交通量の大きさと向きを、予め蓄積しておいた交通量情報やビーコンや通信で獲得した交通量情報をそのまま利用していた。そのため、交通量検出地の位置や交通量の大きさや向きの情報がないと移動先を予測できない。ところが、交通量の大きさの情報は、リアルタイムでは移動体端末に配信されていない。移動体端末では、渋滞情報などに加工されて配信されている。また、交通量が一般的に公開されていない場所も多い。
【0258】
そこで、本実施の形態10では、交通量検出地の位置や交通量の大きさや向きといった交通量情報を、渋滞情報や制限速度、道路の幅といった道路情報から推定する。これにより、交通量がわからない場所でも、交通量検出地として仮想的に扱うことができる。また、渋滞情報を利用することで、交通量変動にリアルタイムに対応することができる。
【0259】
図83は、本実施の形態10における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、交通量を渋滞情報から推定する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、渋滞情報蓄積部8307および交通量推定部8308を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、渋滞情報蓄積部8307および交通量推定部8308が追加されている点が異なる。
【0260】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0261】
渋滞情報蓄積部8307は、図84に示されるようにVICSなどにより入手した渋滞情報を蓄積する。例えば、VICS情報の場合、渋滞の始点位置、終点位置、方向、渋滞の強度を示す渋滞度、渋滞長を入手できる。渋滞度は「渋滞」、「混雑」、「順調」の3値である。渋滞長とは、渋滞度が一定とされている区間の距離である。図84に示される例では、ID「001」は東経「134.5.27.7」、北緯「34.6.4.5」の始点から、東経「134.6.6.7」、北緯「34.6.4.5」の終点まで、渋滞度「渋滞」の渋滞が渋滞長「1km」発生していることを示す。
【0262】
交通量推定部8308は、渋滞情報蓄積部8307に蓄積された渋滞情報から交通量検出地の位置、交通量の向き、交通量の大きさを推定する。例えば、図84に示されるような渋滞情報が蓄積されている場合、交通量検出地の位置は渋滞の始点位置、交通量の向きは渋滞の始点から終点までの向きとする。向きは、始点位置と終点位置から算出する。交通量の大きさは渋滞度や渋滞長から仮想的に推定する。例えば、渋滞度「順調」を0、渋滞度「混雑」を1、渋滞度「渋滞」を2とし、交通量の大きさを渋滞度×渋滞長の長さとする。これは、一般的に渋滞度「渋滞」における混み具合は渋滞度「混雑」の約2倍であるからである。例えば、図84に示されるような渋滞情報を蓄積していたとき、ID001から交通量検出地位置は東経「134.5.27.7」、北緯「34.6.4.5」、交通量の向きは90度、交通量の大きさは「2」(2×1km)となる交通量情報が推定できる。推定された交通量情報を交通量検出地蓄積部102に蓄積する。
【0263】
以下、本実施の形態10における情報提供装置の動作について、図85のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0264】
交通量推定部8308は、渋滞情報蓄積部8307に蓄積された渋滞情報から交通量検出地の位置、交通量の大きさ、向きを推定し、交通量検出地蓄積部102に蓄積する(ステップS8500)。以下、実施の形態1と同様である(ステップS801〜S807)。
【0265】
以上のように、本実施の形態における情報提供装置によれば、交通量が渋滞情報から推定されるので、交通量がわからない場所でも、交通量検出地として仮想的に扱うことができる。また、渋滞情報を利用することで、交通量変動にリアルタイムに対応することができる。
【0266】
なお、本実施の形態10では、交通量検出地の位置を渋滞の始点としていた。しかし、交通量検出地の位置は道路上における渋滞の始点と終点の間のどの位置でもよい。つまり、実施の形態2のように、交通量検出地変更可能位置範囲を算出し、位置範囲の中で移動体の現在地に最も近い位置を交通量検出地の位置とする機能を備える情報提供装置を、実施の形態10の変形例1における情報提供装置として実現してもよい。
【0267】
具体的には、実施の形態4と同様に、道路情報から推奨経路を求め、冗長移動先を除去し、残った移動先候補のみを使用する。このとき、交通量検出地変更可能位置範囲とは、道路上における渋滞の始点と終点の間である。例えば、図86に示される例では、渋滞の始点位置が位置8602であり、終点位置が位置8603であるため、この渋滞から推測した交通量検出地ID8601の変更可能位置範囲は、始点位置8602から終点位置8603までの道路とする。
【0268】
これによって、交通量検出地変更可能位置範囲の中で移動体の現在地に最も近い位置を交通量検出地の位置とすることで、交通量検出地の位置に依存する評価のばらつきが排除され、移動先予測の精度が向上される。
【0269】
(実施の形態11)
次に、本発明の実施の形態11における情報提供装置について説明する。
【0270】
実施の形態10では、渋滞度や渋滞長情報を利用することで、交通量を推定していた。なお、VICSは道路の所定の地点間の移動時間であるリンク旅行時間もリアルタイムで提供するため、リンク旅行時間から交通量を推定してもよい。リンク旅行時間は渋滞度や渋滞長に比べて精度が高いため、より細かく交通量を推定できる。
【0271】
図87は、本実施の形態11における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、リンク旅行時間から交通量を推定する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、リンク旅行時間蓄積部8707および交通量推定部8708を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、リンク旅行時間蓄積部8707および交通量推定部8708が追加されている点が異なる。
【0272】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0273】
リンク旅行時間蓄積部8707は、図88に示されるように、VICSなどにより入手したリンク旅行時間とリンク長、リンクの始点位置と終点位置を蓄積する。図88に示される例では、ID「001」は東経「134.5.27.7」、北緯「34.6.4.5」の始点から、東経「134.6.6.7」、北緯「34.6.4.5」の終点まで、のリンク長「1km」のリンクにおいて旅行時間が「10分」であることを示す。
【0274】
交通量推定部8708は、リンク旅行時間蓄積部8707に蓄積されたリンクの始点位置、終点位置、リンク長、旅行時間から交通量検出地の位置、交通量の向き、交通量の大きさを推定する。例えば、図88に示されるようなリンク旅行時間が蓄積されている場合、交通量検出地の位置はリンクの始点位置、交通量の向きはリンクの始点から終点までの向きとする。向きは、始点位置と終点位置から算出する。交通量の大きさはリンク長とリンク旅行時間から仮想的に推定する。例えば、リンク旅行時間をリンク長で割った値を交通量の大きさとする。例えば、図88に示されるような渋滞情報を蓄積していたとき、ID001から交通量検出地位置は東経「134.5.27.7」、北緯「34.6.4.5」、交通量の向きは90度、交通量の大きさは「10(分/km)」(10分/1km)となる交通量情報が推定できる。推定された交通量情報を交通量検出地蓄積部102に蓄積する。
【0275】
なお、実施の形態10の変形例1と同様に、交通量検出位置は道路上におけるリンクの始点と終点の間のどの位置でもよい。
【0276】
以下、本実施の形態11における情報提供装置の動作について、図89のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0277】
交通量推定部8708は、リンク旅行時間蓄積部8707に蓄積されたリンクの始点位置、終点位置、リンク長、旅行時間から交通量検出地の位置、交通量の大きさ、向きを推定し、交通量検出地蓄積部102に蓄積する(ステップS8900)。以下、実施の形態1と同様である(ステップS801〜S807)。
【0278】
以上のように、本実施の形態における情報提供装置によれば、交通量がリンク旅行時間から推定されるので、その時間が渋滞度や渋滞長に比べて精度が高いことから、より細かく交通量が推定され、移動先予測の精度が向上される。
【0279】
(実施の形態12)
次に、本発明の実施の形態12における情報提供装置について説明する。
【0280】
実施の形態1〜11では、通過地点あるいは目的地となる移動先の位置を予測していた。しかし、現在地と交通量検出地における交通量の向きと大きさを用いて移動先の方向を予測してもよい。道路の工事情報など情報の数自体が少ない情報を提供する場合は、移動先の位置を厳密に限定しなくても情報の数を制限することができる。移動先の方向のみを予測することで、予測の適合率を向上することができる。
【0281】
図90は、本実施の形態12における情報提供装置の構成図である。この情報提供装置は、交通量の向きを用いて移動方向だけを予測し、予測した移動方向に関する情報を提供する情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先方向予測部9005および情報提供部9006を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先方向予測部9005に置き換えられ、情報提供部106が情報提供部9006に置き換えられている点が異なる。
【0282】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0283】
移動先方向予測部9005は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先の方向を予測する。この移動先方向予測部9005は、移動先候補を決定する移動先候補決定部9005aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部9005bとを有する。
【0284】
例えば、図2に示されるように交通量検出地が蓄積されていたとする。移動先方向予測部9005の移動先候補決定部9005aは、このうち現在地からの距離が近いものから順に10個を選択し、選択した交通量検出の交通量の向きを図91に示されるように移動先の方向の候補とする。移動先方向予測部9005のフィルタリング部9005bは、移動先の方向の候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出地における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の方向候補として選択する。なぜなら、一般的に、それまでと逆向きに移動することはほとんどないからである。例えば、図92に示されるように「ID005〜008(東経134.7.26.9、北緯34.4.49.2)」の交通量検出地をフィルタリングする場合、現在地から「ID005〜008」への向き(方向角)は110度である。「ID005〜008」付近まで110度の向きで移動した後、「ID005〜008」を逆方向である270度の方向で通過することは、一般的にほとんどない。よって、「ID005〜008」における交通量の向き「90度」「270度」「0度」「180度」のうち、110度±90度の範囲内である向き「90度」、「180度」が選択される。例えば、図92に示される例では、向きから図93に示されるようにフィルタリングされる。
【0285】
次に、移動先方向予測部9005のフィルタリング部9005bは、交通量の向きとの大きさにより移動先の方向を予測する。具体的には、交通量の向きごとに交通量の大きさを合計し、最も交通量の大きい向きを移動先の方向とする。例えば、図94に示されるように、90度の向きの交通量はID003の交通量400とID005の交通量900を加算して1300となる。また、180度の向きの交通量はID008の交通量から100、270度の向きの交通量はID002の交通量400とID010の交通量200を加算して600となる。よって、最も交通量の大きい90度の向きが移動先の方向として予測される。これは移動体の将来の移動先が現在地から90度の向きであることを予測している。
【0286】
なお、移動先の方向を予測する際、−45度〜45度、45度〜135度、135度〜225度、225度〜325度の4方向などに移動先の方向を限定してもよい。この場合、4方向についてそれぞれ交通量の大きさを合計し、最も交通量の大きい向きを移動先の方向とする。
【0287】
情報提供部9006は、提供する情報を予め蓄積した提供情報蓄積部9006aを有し、移動先方向予測部9005が予測した移動先の方向に関する情報を提供情報蓄積部9006aから読み出し、読み出した情報を情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体の将来の移動先が90度の向きであること予測した場合、図95に示されるように、現在地からおよそ90度の方向にある工事情報や渋滞情報を提供する。なお、提供情報蓄積部9006aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部9006によって取得された情報等が含まれる。
【0288】
以下、本実施の形態12における情報提供装置の動作について、図96のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0289】
実施の形態1と同様に、現在地からの距離と向きを算出した後、移動先方向予測部9005の移動先候補決定部9005aは、距離算出部103が算出した現在地−交通量検出地間の距離により、複数の交通量検出地の交通量の向きを移動先の方向候補として選択する(ステップS9604)。次に、移動先方向予測部9005のフィルタリング部9005bは、移動先の方向候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先の方向候補を選別する(ステップS9605)。さらに、移動先方向予測部9005のフィルタリング部9005bは、移動先の方向候補となった交通量検出地の中から、交通量の向きと大きさにより、移動先の方向を予測する(ステップS9606)。最後に、情報提供部9006は、移動先方向予測部9005が予測した移動先の方向に関する情報を提供情報蓄積部9006aから読み出してユーザに提供する(ステップS9607)。
【0290】
以上のように、本実施の形態における情報提供装置によれば、交通量の向きを用いて移動方向だけが予測され、予測された移動方向に関連した情報が提供されるので、移動先の位置を特定する処理が不要となり、処理が簡素化される。
【0291】
(実施の形態13)
次に、本発明の実施の形態13における情報提供装置について説明する。
【0292】
実施の形態1〜12では、予測される移動先の数は一定であった。しかし、情報提供に必要な移動先の数は、提供する情報の内容によって異なる。例えば、道路の工事情報であれば、情報の数が少ないため移動先をそれほど限定する必要がない。つまり、移動先の予測数が多くてもよい。しかし、店舗情報であれば、情報の数が多いため移動先を限定し、提供する情報をフィルタリングする必要がある。つまり、移動先の予測数は少なくしなければならない。
【0293】
そこで、本実施の形態13では、情報提供部が提供する情報の数に応じて、移動先の予測数を変更する。
【0294】
図97は、本実施の形態13における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、提供する情報の数に応じて、移動先の予測数を変更する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部9705、情報提供部9706および移動先予測数決定部9708を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先予測部9705に置き換えられ、情報提供部106が情報提供部9706に置き換えられ、移動先予測数決定部9708が追加されている点が異なる。
【0295】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0296】
提供情報取得部9707は、情報提供部9706が移動体に提供するべき情報を外部ネットワークなどから取得する。例えば、道路の工事情報を取得する。なお、提供情報は装置の内部に蓄積していてもよい。
【0297】
移動先予測数決定部9708は、提供情報取得部9707が取得した情報の数を用いて、移動先予測部9705が予測する移動先の数を決定する。例えば、情報の数の逆数に所定の値を掛けた値を移動先予測数とする。
【0298】
移動先予測部9705は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向き、移動先予測数決定部9708が決定した予測数より、移動先となる交通量検出地を予測する。この移動先予測部9705は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から、移動先予測数決定部9708で決定された個数の最終的な移動先を選別するフィルタリング部9705bとを有する。
【0299】
例えば、図2に示されるように、交通量検出地蓄積部102に交通量検出地が蓄積されていたとする。移動先予測部9705の移動先候補決定部105aは、このうち現在地からの距離が近いものから順に10個を選択し、図3に示されるように移動先の候補とする。移動先予測部9705のフィルタリング部9705bは、移動先の候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の候補として選択する。なぜなら、一般的に、それまでと逆向きに移動することはほとんどないからである。例えば、図4に示されるように、「ID005〜008(東経134.7.26.9、北緯34.4.49.2)」の交通量検出地をフィルタリングする場合、現在地から「ID005〜008」への向き(方向角)は110度である。「ID005〜008」付近まで110度の向きで移動した後、「ID005〜008」を逆方向である270度の方向で通過することは、一般的にほとんどない。よって、「ID005〜008」における交通量の向き「90度」「270度」「0度」「180度」のうち、110度±90度の範囲内である向き「90度」、「180度」が選択される。例えば、図4に示される例では、向きから図5に示されるようにフィルタリングされる。
【0300】
次に、移動先予測部9705のフィルタリング部9705bは、交通量の大きさと現在地から交通量検出地までの距離で移動先を予測する。交通量の大きさを距離で割った評価値が大きい順に、移動先予測数決定部9708が決定した移動先予測数の移動先を選別する。例えば、図98に示されるように、「ID002・交通量の向き270度」への評価値は400/1.7、「ID003・交通量の向き90度」への評価値は400/1.6、「ID005・交通量の向き90度」への評価値は900/2.3、「ID008・交通量の向き180度」への評価値は100/2.3、「ID010・交通量の向き270度」への評価値は200/1.2となる。移動先予測数決定部9708が決定した予測数が2個であったとすると、評価値の高い順に「ID005・交通量の向き90度」と「ID003・交通量の向き90度」が移動先として選択される。これは、移動体が将来ID005の地点(経度134.7.26.9、緯度34.4.49.2)を90度の向きに移動するか、もしくはID003の地点(経度134.6.20.0、緯度34.6.4.5)を90度の向きに移動することを予測している。
【0301】
情報提供部9706は、提供情報取得部9707が取得した情報を移動先予測部9705が予測した移動先に関する情報として、情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体が将来ID005の地点を90度の向きに移動する、もしくは、ID003の地点90度の向きに移動することを予測した場合、図99に示されるように、ID005の地点(東経134.7.26.9、北緯34.4.49.2)を90度の向きに通過するまでの経路、もしくはID003の地点(経度134.6.20.0、緯度34.6.4.5)を90度の向きに通過するまでの経路の渋滞情報や店舗情報を提供することが出来る。
【0302】
以下、本実施の形態13における情報提供装置の動作について、図100のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0303】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部9707は情報提供部9706が移動体に提供するべき情報を外部ネットワークなどから取得する(ステップS10002)。移動先予測数決定部9708は、提供情報取得部9707が取得した情報の数により、移動先を予測する数を決定する(ステップS10003)。移動先予測部9705の移動先候補決定部105aは、実施の形態1と同様に、現在地から交通量検出地までの距離と向きから、移動先候補を選別した後、移動先予測部9705のフィルタリング部9705bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離、移動先予測数決定部9708が決定した移動先予測数より、移動先を予測する(ステップS10006)。最後に、情報提供部9706は、移動先予測部105が予測した移動先に関する情報をユーザに提供する(ステップS10007)。
【0304】
以上のように、本実施の形態における情報提供装置によれば、提供する情報によって移動先の予測数が変更されるので、例えば、画面に表示できる限り多くの移動先に関する情報提供を行うことが可能となり、複数の移動先候補に関する情報提供が実現される。
【0305】
なお、実施の形態13では、提供する情報の内容を固定、あるいは内容の区別を行わず情報を一律に扱っていた。しかし、装置が工事情報も店舗情報も提供するなど複数の内容の情報を提供する場合は、情報の内容に応じてフィルタリングの度合いを変更する必要がある。この場合、情報内容ごとにそれぞれ移動先予測を行うことで、フィルタリングの度合いを変更することができる。つまり、情報内容ごとにそれぞれ移動先予測を行うことで、フィルタリングの度合いを変更する機能を備える情報提供装置を、実施の形態13の変形例1における情報提供装置として実現してもよい。
【0306】
これによって、店舗情報は数が多いので移動先予測数を少なくするが、工事情報は情報の数が少ないので移動先予測数を多くするなど、提供する情報の内容に応じて、予測数を変更し、移動先予測を提供する情報内容ごとに行うことで、内容に応じてフィルタリングの度合いを変更した情報提供を行うことが出来る。
【0307】
また、実施の形態13では、提供する情報の全体の数によって、移動先の予測数を決定していた。しかし、実際に提供する情報は移動体の現在地の周囲に関連する情報を提供することが多い。このため、提供情報に関連する位置情報を付属させ、移動体の現在地の周囲に関連する情報の数など、実際に移動体に提供する可能性が高い情報の数によって移動先の予測数を決定してもよい。
【0308】
つまり、移動体の現在地の周囲に関連する情報の数に応じて、移動先の予測数を変更する機能を備える情報提供装置を、実施の形態13の変形例2における情報提供装置として実現してもよい。
【0309】
図101は、このような本実施の形態13の変形例2における情報提供装置、つまり、提供情報に位置情報を付属させ、現在地の周りの提供情報の数から移動先の数を決定する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部9705、情報提供部9706および移動先予測数決定部10108を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先予測部9705に置き換えられ、情報提供部106が情報提供部9706に置き換えられ、移動先予測数決定部10108が追加されている点が異なる。
【0310】
前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0311】
提供情報取得部10107は、図102に示されるように、情報の内容が関連する位置情報を含んだ情報を取得する。例えば、「ID003」では、「C交差点工事中」という情報に関連する位置が東経「134.7.26.9」、北緯「34.4.49.2」であることを示す。
【0312】
移動先予測数決定部10108は、現在地取得部101が取得した現在地の位置に関連する情報の数、例えば現在地から周囲5kmの範囲内の位置に関連する提供情報の数を提供情報取得部10107が取得した情報から算出し、提供情報の数から移動先予測数を決定する。例えば、現在地の周囲の情報の数の逆数に所定の値を掛けた値を移動先予測数とする。
【0313】
以下、本実施の形態13の変形例2における情報提供装置の動作について、図103のフローチャートを用いて説明する。前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。
【0314】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部10107が情報提供部9706から、移動体に提供するべき位置情報を持った情報を外部ネットワークなどから取得する(ステップS10302)。移動先予測数決定部10108が、現在地取得部101が取得した現在地の周囲の位置に関連する提供情報の数を提供情報取得部10107から算出する(ステップS10303)。次に、移動先予測数決定部10108は、現在地の周囲の位置に関連する提供情報の数により、移動先を予測する数を決定する(ステップS10304)。以下、実施の形態1および13と同様である(ステップS802〜S805、S10006、S10007)。
【0315】
以上のように、本変形例における情報提供装置によれば、移動体の現在地の周囲に関連する情報の数に応じて、移動先の予測数が変更され、ユーザの現在の状況に即した情報提供が実現される。
【0316】
なお、実施の形態13の変形例2では、現在地の周囲に関連する情報の数によって移動先の予測数を決定していた。しかし実際に提供する情報は移動体の移動先に関連する情報であることが多い。よって、予測した移動先に関連する情報の数に応じて移動先の予測数を変更し、移動先予測を再び行ってもよい。
【0317】
つまり、予測した移動先の周囲に関連する情報の数に応じて、移動先の予測数を変更する機能を備える情報提供装置を、実施の形態13の変形例3における情報提供装置として実現してもよい。
【0318】
図104は、このような本実施の形態13の変形例3における情報提供装置、つまり、予測した移動先の周りの提供情報の数から移動先の数を決定する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部10405、情報提供部9706および移動先予測数決定部10408を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先予測部10405に置き換えられ、情報提供部106が情報提供部9706に置き換えられ、移動先予測数決定部10408が追加されている点が異なる。
【0319】
前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0320】
移動先予測数決定部10408は、移動先予測部10405が予測した移動先の位置に関連する情報の数、例えば移動先から周囲1kmの範囲内の位置に関連する提供情報の数を提供情報取得部10107が取得した情報から算出し、情報の数から移動先予測数を決定する。例えば、移動先予測数の初期値を1個とし、移動先の周囲の情報の数が0個であった場合は、移動先予測数を前回の値から1個増加させ、移動先予測部10405に移動先予測を再び行わせる。1個以上であれば、移動先予測数を前回の値から変化させず、移動先予測部は移動先予測を中止し、予測移動先を確定する。
【0321】
移動先予測部10405は、実施の形態13と同様に、移動先予測数決定部10408が決定した移動先予測数だけ移動先を予測する。しかし、移動先予測数決定部10108が決定した移動先予測数が変化しなくなるまで移動先予測を繰り返す。移動先予測数が変わらなかった場合、予測移動先を確定する。この移動先予測部10405は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から、移動先予測数決定部10408で決定された個数の最終的な移動先を選別するフィルタリング部10405bとを有する。
【0322】
以下、本実施の形態13の変形例3における情報提供装置の動作について、図105のフローチャートを用いて説明する。前記実施の形態1、11などで示した構成要素には同様の符号を付与し、説明を省略する。
【0323】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部10107が情報提供部9706から、移動体に提供するべき位置情報を持った情報を外部ネットワークなどから取得する(ステップS10302)。移動先予測数決定部10408は、移動先予測部10405が移動先を予測する数を1個と決定する(ステップS10504)。以下、実施の形態1と同様に移動先予測を行った後(ステップS802〜S805)、移動先予測数決定部10408は、移動先予測部10405が予測した移動先の周囲の位置に関連する提供情報の数を提供情報取得部10107から算出する(ステップS10507)。次に、移動先予測数決定部10108が、移動先の周囲の位置に関連する提供情報の数により、移動先を予測する数を決定する(ステップS10508)。移動先予測部10405のフィルタリング部10405bは、移動先予測数が変化したか判定を行う(ステップS10509)。移動先予測数が変化したときは(ステップS10509のNo)ステップS8006に戻る。移動先予測数が変化しなかったときは(ステップS10509のYes)ステップS8007に進む。
【0324】
以上のように、本変形例における情報提供装置によれば、予測した移動先の周りの提供情報の数から移動先の数が決定されるので、ユーザの移動先に即した情報提供が実現される。
【0325】
また、実施の形態13の変形例2では現在地、実施の形態13の変形例3では移動先の周囲に関連する情報の数によって移動先の予測数を決定していた。しかし、ダイキストラ法などにより現在地から移動先までの経路を計算し、経路の周囲の位置に関連する提供情報の数から移動先の予測数を決定してもよい。つまり、現在地から移動先までの経路を計算し、経路の周囲の位置に関連する提供情報の数から移動先の予測数を決定する機能を備える情報提供装置を、実施の形態13の変形例4における情報提供装置として実現してもよい。これにより、経路の提供情報を効率的にフィルタリングできるようになる。
【0326】
また、実施の形態13では、移動先の位置の予測において提供すべき情報の数から予測される移動先の数を決定していた。しかし、実施の形態12のように、移動先の方向の予測において、提供すべき情報の数から移動先の予測方向の範囲を決定してもよい。具体的には、移動先予測数決定部が、提供すべき情報の数から予測方向のクラスタの数を決定してもよい。つまり、移動体に提供する情報の数に応じて、移動方向の予測範囲を変更する機能を備える情報提供装置を、実施の形態13の変形例5における情報提供装置として実現してもよい。
【0327】
図106は、このような本実施の形態13の変形例5における情報提供装置、つまり、予測される移動先の数を移動方向のクラスタリングの数から決定する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先方向予測部10605、情報提供部10606および移動先予測数決定部10608を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先方向予測部10605に置き換えられ、情報提供部106が情報提供部10606に置き換えられ、移動先予測数決定部10608が追加されている点が異なる。
【0328】
前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0329】
移動先予測数決定部10608は、提供情報取得部9707が取得した情報の数を用いて、移動先方向予測部10605が予測する移動方向のクラスタの数を決定する。
【0330】
移動先方向予測部10605は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向き、および移動先予測数決定部が決定した移動方向のクラスタ数により、移動先の方向を予測する。例えば、情報の数を所定の値で割った値を移動方向のクラスタの数とする。
【0331】
この移動先方向予測部10605は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から、移動先予測数決定部10608決定された個数の最終的な移動先(移動先方向)を選別するフィルタリング部10605bとを有する。
【0332】
基本的に、実施の形態12と同様に、予測を行う。実施の形態12では、交通量の向きごとに交通量の大きさを合計し、最も交通量の大きい向きを移動先の方向としていた。しかし、本実施の形態では移動先予測数決定部10608が決定したクラスタの数により算出したクラスタごとに交通量の大きさを合計し、最も交通量の大きいクラスタを移動先の方向とする。例えば、クラスタの数が4個であった場合。0度〜360度の方向を4個のクラスタに分類する。例えば、等間隔に0度〜90度、90度〜180度、180度〜270度、270度〜360度に分類する。
【0333】
情報提供部10606は、提供情報取得部9707が取得した情報を移動先方向予測部10605が予測した移動先の方向に関する情報として、情報提供装置の画面や音声によって、ユーザに提供する。
【0334】
以下、本実施の形態13の変形例5における情報提供装置の動作について、図107のフローチャートを用いて説明する。前記実施の形態1、12、13などで示した構成要素には同様の符号を付与し、説明を省略する。
【0335】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部9707は情報提供部10606が移動体に提供するべき情報を外部ネットワークなどから取得する(ステップS10002)。移動先予測数決定部10608が、提供情報取得部9707が取得した情報の数により、移動先方向予測部10605が移動先を予測する際の移動方向のクラスタ数を決定する(ステップS10703)。以下、移動先方向予測部10605の移動先候補決定部105aは、実施の形態12と同様に、距離と向きにより移動先候補を選別した後(ステップS802〜S9605)、移動先方向予測部10605のフィルタリング部10605bは、移動先予測数決定部10608が決定した数だけ方向クラスタを決定し、移動先の方向候補となった交通量検出地を、交通量の向きにより、方向クラスタに分類し、クラスタ内の交通量検出地の交通量の大きさにより、移動先の方向を予測する(ステップS10706)。情報提供部10606は、提供情報取得部9707が取得した情報を移動先方向予測部10605が予測した移動先に関する情報をユーザに提供する(ステップS10707)。
【0336】
以上のように、本変形例における情報提供装置によれば、予測される移動先の数が移動方向のクラスタリングの数によって決定されるので、提供される情報の数が予測方向のクラスタの数に依存して決定されることとなり、提供する情報量の最適化が可能となる。
【0337】
また、実施の形態13では、移動先の位置の予測において提供すべき情報の数から移動先予測の数を決定していた。しかし、実施の形態5のように、提供すべき情報の数から再帰的に移動先を予測する際の移動先の予測数、つまり移動先予測を行う回数を決定してもよい。つまり、提供すべき情報の数から再帰的に移動先を予測する際の移動先の予測数、つまり移動先予測を行う回数を決定する機能を備える情報提供装置を、実施の形態13の変形例6における情報提供装置として実現してもよい。例えば、移動先予測数が2であった場合、移動先を予測した後、さらに予測した移動先を通過地として移動先予測を1回行う。
【0338】
これによって、提供する情報の数から再帰的に移動先を予測する際の移動先の予測数が決定され、提供する情報量の最適化が可能となる。
【0339】
なお、実施の形態13における各変形例をまとめると次にことが言える。つまり、移動先予測数決定部は、情報提供部が提供する提供情報の数、提供情報の内容、現在地取得部で特定される現在位置の周りに関する提供情報の数、移動先予測部で予測される移動先の周りに関する提供情報の数、現在位置から移動先への経路に関する提供情報の数、移動先予測部が予測する移動方向の数、および、移動先予測部が再帰的に移動先を予測する場合の予測回数の少なくとも一つに応じて、予測する移動先の数を決定してもよい。
【0340】
以上、本発明に係る情報提供装置について、実施の形態1〜13およびその変形例に基づいて説明したが、本発明は、これらの実施の形態および変形例に限定されるものではない。たとえば、各実施の形態および変形例における構成要素を任意に組み合わせて実現される実施の形態も本発明に含まれる。例として、移動体の移動先の方向だけを予測する実施の形態12と、実施の形態1の変形例3における向き算出部1204を組み合わせることで、推奨経路を用いた精度の高い移動方向だけの予測が可能となる。
【0341】
なお、特許請求の範囲における構成要素と実施の形態における構成要素との対応は、以下の通りである。
【0342】
つまり、特許請求の範囲における交通量検出地蓄積手段の一例が、実施の形態における交通量検出地蓄積部102、4502、5302であり、
同様に、現在地取得手段の一例が、現在地取得部101、1601であり、
向き算出手段の一例が、向き算出部104、1204、1604であり、
移動先予測手段の一例が、移動先予測部105、1005、1605、3105、3705、4005、4505、5305、9705、10405であり、
情報提供手段の一例が、情報提供部106、4006、4506、5706、6412、9006、9706、10606であり、
距離算出手段の一例が、距離算出部103、1003であり、
出発地取得手段の一例が、出発地取得部1007であり、
地図情報蓄積手段の一例が、地図情報蓄積部1207であり、
推奨経路算出手段の一例が、推奨経路算出部1208であり、
交通量検出地位置範囲算出手段の一例が、交通量検出地位置範囲算出部2108であり、
遠回り度算出手段の一例が、遠回り度算出部3109であり、
出発地取得手段の一例が、出発地取得部1007であり、
経路コスト算出手段の一例が、経路コスト算出部3103であり、
冗長度算出手段の一例が、冗長度算出部3709であり、
嗜好情報蓄積手段の一例が、嗜好情報蓄積部5307であり、
移動先提示手段の一例が、移動先提示部5707であり、
移動先選択手段の一例が、移動先選択検知部5709であり、
通過地提示手段の一例が、通過地提示部6407であり、
通過地選択手段の一例が、通過先選択検知部6408であり、
通過地選択検知手段の一例が、通過先選択検知部6408であり、
合成可否判定手段の一例が、合成可否判定部7508であり、
合成手段の一例が、合成部7509であり、
冗長度算出手段の一例が、冗長度算出部3709であり、
交通量検出地密度蓄積手段の一例が、交通量検出地密度蓄積部8007であり、
フィルタリング位置範囲算出手段の一例が、フィルタリング位置範囲算出部8008であり、
移動先候補フィルタリング手段の一例が、移動先候補フィルタリング部8009であり、
渋滞情報蓄積手段の一例が、渋滞情報蓄積部8307であり、
交通量推定手段の一例が、交通量推定部8308であり、
交通量検出地位置範囲算出手段の一例が、交通量検出地位置範囲算出部2108であり、交通量検出地位置変更手段の一例が、交通量検出地位置変更部2109であり、
リンク旅行時間蓄積手段の一例が、リンク旅行時間蓄積部8707であり、
交通量推定手段の一例が、交通量推定部8708であり、
移動先予測数決定手段の一例が、移動先予測数決定部9708、10108、10408、10608である。
【産業上の利用可能性】
【0343】
本発明は、移動体の移動先を予測し、予測した移動先に関する情報を移動体に提供する情報提供装置として、特に、交通量情報を用いて移動先を予測し、移動先に関連する情報を提供する装置として、例えば、カーナビゲーション装置や携帯電話等の移動体に情報を提供する装置として、有用である。
【図面の簡単な説明】
【0344】
【図1】本発明の実施の形態1における情報提供装置の構成を示すブロック図
【図2】交通量検出地蓄積部に蓄積された交通量検出地情報の例を示す図
【図3】移動先候補となる交通量検出地の例を示す図
【図4】移動先予測部が向きにより移動先候補をフィルタリングする例を示す図
【図5】交通量の向きによりフィルタリングされた移動先候補の例を示す図
【図6】移動先予測部が距離と交通量の大きさにより移動先を決定する例を示す図
【図7】情報提供部が予測した移動先に関連する情報を提供する例を示す図
【図8】本発明の実施の形態1における情報提供装置の動作の例を示すフローチャート
【図9】出発地からの距離が小さい場合の移動先の例を示す図
【図10】本発明の実施の形態1の変形例1における情報提供装置の構成を示すブロック図
【図11】本発明の実施の形態1の変形例1における情報提供装置の動作の例を示すフローチャート
【図12】本発明の実施の形態1の変形例3における情報提供装置の構成を示すブロック図
【図13】本発明の実施の形態1の変形例3における地図情報を用いた向き算出の例を示す図
【図14】本発明の実施の形態1の変形例3における情報提供装置の動作の例を示すフローチャート
【図15】移動先予測部が移動体の現在の向きにより移動先候補をフィルタリングする例を示す図
【図16】本発明の実施の形態1の変形例5における情報提供装置の構成を示すブロック図
【図17】本発明の実施の形態1の変形例5における理想現在位置向きの算出例を示す図
【図18】本発明の実施の形態1の変形例5における情報提供装置の構成を示すフローチャート
【図19】移動先予測部が最小経路コストにより移動先を決定する例を示す図
【図20】交通量検出地の位置の変更の例を示す図
【図21】本発明の実施の形態2における情報提供装置の構成を示すブロック図
【図22】交通量検出地位置範囲算出部が算出する交通量検出地変更可能位置範囲の例を示す図
【図23】交通量検出地位置変更部が交通量検出地の位置を変更する例を示す図
【図24】本発明の実施の形態2における情報提供装置の動作の例を示すフローチャート
【図25】交通量検出地の交通量の向きを変更する例を示す図
【図26】本発明の実施の形態2の変形例1における情報提供装置の構成を示すブロック図
【図27】交通量検出地位置範囲算出部によって算出された交通量検出変更可能位置範囲の例を示す図
【図28】交通量検出地向き変更部が交通量検出地の向きを変更する例を示す図
【図29】本発明の実施の形態2の変形例1における情報提供装置の動作の例を示すフローチャート
【図30】出発地から現在地までの移動の例を示す図
【図31】本発明の実施の形態3における情報提供装置の構成を示すブロック図
【図32】移動先候補までの経路コストの算出例を示す図
【図33】交通量の向きによりフィルタリングされた移動先候補の例を示す図
【図34】遠回り度による移動先候補のフィルタリング例を示す図
【図35】移動先予測部が経路コストと交通量の大きさにより移動先を決定する例を示す図
【図36】本発明の実施の形態3における情報提供装置の動作の例を示すフローチャート
【図37】本発明の実施の形態4における情報提供装置の構成を示すブロック図
【図38】冗長度算出部による冗長度の算出例を示す図
【図39】本発明の実施の形態4における情報提供装置の動作の例を示すフローチャート
【図40】本発明の実施の形態5における情報提供装置の構成を示すブロック図
【図41】移動先予測部による移動先予測結果の例を示す図
【図42】予測された移動先を現在地としてさらに移動先を予測する例を示す図
【図43】再帰的に予測された複数の移動先から算出した経路に関する情報を提供する例を示す図
【図44】本発明の実施の形態5における情報提供装置の動作の例を示すフローチャート
【図45】本発明の実施の形態6における情報提供装置の構成を示すブロック図
【図46】本発明の実施の形態6における交通量検出地蓄積部に蓄積された交通量検出地情報の例を示す図
【図47】本発明の実施の形態6における移動先候補となる交通量検出地の例を示す図
【図48】本発明の実施の形態6における交通量の向きによりフィルタリングされた移動先候補の例を示す図
【図49】本発明の実施の形態6における移動先予測部による移動先予測結果の例を示す図
【図50】本発明の実施の形態6における予測された移動先を現在地としてさらに移動先を予測する例を示す図
【図51】本発明の実施の形態6における再帰的に予測された複数の移動先から算出した経路に関する情報を提供する例を示す図
【図52】本発明の実施の形態6における情報提供装置の動作の例を示すフローチャート
【図53】本発明の実施の形態6の変形例1における情報提供装置の構成を示すブロック図
【図54】本発明の実施の形態6の変形例1における交通量検出地蓄積部に蓄積された交通量検出地情報の例を示す図
【図55】嗜好情報蓄積部に蓄積された嗜好情報の例を示す図
【図56】従来の目的地設定の例を示す図
【図57】本発明の実施の形態7における情報提供装置の構成を示すブロック図
【図58】移動先候補となる装置の画面内に存在する交通量検出地の例を示す図
【図59】本発明の実施の形態7における移動先予測部による移動先予測結果の例を示す図
【図60】移動先提示部による複数の移動先の提示例を示す図
【図61】選択された移動先を用いた予測移動先の提示と選択の例を示す図
【図62】選択・設定された目的地に関連する情報を提供する例を示す図
【図63】本発明の実施の形態7における情報提供装置の動作の例を示すフローチャート
【図64】本発明の実施の形態7の変形例1における情報提供装置の構成を示すブロック図
【図65】目的地候補蓄積部に蓄積された目的地候補情報の例を示す図
【図66】通過地予測部による通過地予測結果の例を示す図
【図67】通過地提示部による複数の通過地の提示の例を示す図
【図68】選択された通過地を用いた予測通過地の提示と選択の例を示す図
【図69】さらに選択された通過地を用いた予測通過地の提示と選択の例を示す図
【図70】目的地提示部による最終通過地を現在地とした目的地提示の例を示す図
【図71】選択された通過地および設定された目的地に関連する情報の提示の例を示す図
【図72】本発明の実施の形態7の変形例1における情報提供装置の動作の例を示すフローチャート
【図73】交通量検出地(交通量)の合成の例を示す図
【図74】交通量検出地(交通量)の合成の例を示す図
【図75】本発明の実施の形態8における情報提供装置の構成を示すブロック図
【図76】合成部による交通量検出地(交通量)の合成の例を示す図
【図77】本発明の実施の形態8における情報提供装置の動作の例を示すフローチャート
【図78】交通量検出地が合成不可である例を示す図
【図79】最小経路コストの差により交通量合成の可否を判定する例を示す図
【図80】本発明の実施の形態9における情報提供装置の構成を示すブロック図
【図81】交通量検出地密度蓄積部に蓄積された交通量検出地密度情報の例を示す図
【図82】本発明の実施の形態9における情報提供装置の動作の例を示すフローチャート
【図83】本発明の実施の形態10における情報提供装置の構成を示すブロック図
【図84】渋滞情報蓄積部に蓄積された渋滞情報の例を示す図
【図85】本発明の実施の形態10における情報提供装置の動作の例を示すフローチャート
【図86】交通量検出地位置範囲算出部が交通量検出地変更可能位置範囲を渋滞情報により算出する例を示す図
【図87】本発明の実施の形態11における情報提供装置の構成を示すブロック図
【図88】リンク旅行時間蓄積部に蓄積されたリンク旅行時間情報の例を示す図
【図89】本発明の実施の形態11における情報提供装置の動作の例を示すフローチャート
【図90】本発明の実施の形態12における情報提供装置の構成を示すブロック図
【図91】移動先の方向候補となる交通量検出地の例を示す図
【図92】移動先方向予測部が向きにより移動先の方向候補をフィルタリングする例を示す図
【図93】向きによりフィルタリングされた移動先の方向候補の例を示す図
【図94】移動先方向予測部が交通量の向きと大きさにより移動先の方向を決定する例を示す図
【図95】情報提供部が予測した移動先の方向に関連する情報を提供する例を示す図
【図96】本発明の実施の形態12における情報提供装置の動作の例を示すフローチャート
【図97】本発明の実施の形態13における情報提供装置の構成を示すブロック図
【図98】移動先予測部が距離と交通量の大きさと移動先予測数により移動先を決定する例を示す図
【図99】情報提供部が予測した複数の移動先に関連する情報を提供する例を示す図
【図100】本発明の実施の形態13における情報提供装置の動作の例を示すフローチャート
【図101】本発明の実施の形態13の変形例2における情報提供装置の構成を示すブロック図
【図102】提供情報取得部が取得する提供情報の例を示す図
【図103】本発明の実施の形態13の変形例2における情報提供装置の動作の例を示すフローチャート
【図104】本発明の実施の形態13の変形例3における情報提供装置の構成を示すブロック図
【図105】本発明の実施の形態13の変形例3における情報提供装置の動作の例を示すフローチャート
【図106】本発明の実施の形態13の変形例5における情報提供装置の構成を示すブロック図
【図107】本発明の実施の形態13の変形例5における情報提供装置の動作の例を示すフローチャート
【符号の説明】
【0345】
101、1601 現在地取得部
102、4502、5302 交通量検出地蓄積部
103、1003 距離算出部
104、1204、1604 向き算出部
105a、3705a、9005a 移動先候補決定部
105b、1005b、1605b、3105b、4505b、5305b、6405b、9005b、9705b、10405b、10605b フィルタリング部
106、4006、4506、5706、6412、9006、9706、10606 情報提供部
106a、4006a、4506a、6412a、9006a 提供情報蓄積部
1007 出発地取得部
1207 地図情報蓄積部
1208 推奨経路算出部
2108 交通量検出地位置範囲算出部
2109 交通量検出地位置変更部
2610 交通量検出地向き変変更部
3103 経路コスト算出部
3109 遠回り度算出部
3708 推奨経路計算部
3709 冗長度算出部
3710 冗長移動先除去部
4001 予測現在地取得部
4005c 繰り返し制御部
5307 嗜好情報蓄積部
5707 移動先提示部
5708 移動先選択検知部
5709 移動先選択部
6405 通過地予測部
6405a 通過地候補決定部
6407 通過地提示部
6408 通過先選択検知部
6409 目的地候補蓄積部
6410 目的地提示部
6411 目的地選択検知部
6413 通過地選択部
6414 目的地選択部
7508 合成可否判定部
7509 合成部
8007 交通量検出地密度蓄積部
8008 フィルタリング位置範囲算出部
8009 移動先候補フィルタリング部
8307 渋滞情報蓄積部
8308 交通量推定部
8707 リンク旅行時間蓄積部
8708 交通量推定部
9005、10605 移動先方向予測部
9707、10107 提供情報取得部
9708、10108、10408、10608 移動先予測数決定部
【技術分野】
【0001】
本発明は、移動体に情報を提供する情報提供装置、特に、移動体の移動先を予測して情報を提供する装置に関する。
【背景技術】
【0002】
現在、カーナビゲーション装置や携帯電話などのモバイル端末などにおいて、ユーザの状況に応じて適切な情報を提供する様々な技術が提案されている。その際に、より適切な情報を提供するために、ユーザの状況に依存して提供する情報を変更することや、情報を提供するタイミングを変更する等の工夫がなされている。例えば、大量に存在するお店の情報の中から移動体の現在位置の近くにあるお店の情報だけをフィルタリングして提供するということが行われてきている。また、目的地や経由地、通過地といった移動体の移動先情報も情報提供に影響する重要な情報である。例えば、予めユーザに入力された目的地により、目的地までの経路や目的地近くの駐車場情報などの目的地に関連する情報を提供することや、目的地までの経路上にあるお店の情報や渋滞情報を移動体に提供するということがなされている。ところが、ユーザが移動先を入力することはユーザの負担が大きいため、装置が移動先を予測する手法が従来よりなされている。
【0003】
従来、移動先を予測する手法として、実際に移動体が移動した履歴を用いる方法がある(例えば、特許文献1等参照。)。この技術は、自車の走行履歴から走行目的地となり得る複数の走行目的地候補を算出して走行履歴データメモリに記憶しておき、自車が走行目的地未設定の状態で走行しているとき、自車の現在の走行路および過去に該走行路を経由して各走行目的地候補に到達した頻度から、走行目的地候補のうちの1つを走行目的地と推定して走行経路計画を行うというものである。
【0004】
また、現在地から移動先への交通流比を計測し、その値を用いて、道路に設置された情報提供装置が移動先を予測し、情報提供のフィルタリングを行う方法も提案されている(例えば、特許文献2等参照。)。この技術は、始点(O)から終点(D)までのOD交通量の比を計測し、始点を通った移動体がよく通る終点は現移動体が始点を通った場合に通る可能性が高いと予測する。
【特許文献1】特開平7−83678号公報
【特許文献2】特開2000−293790号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に開示された移動履歴を用いる移動先予測では、移動履歴が十分に蓄積されるまでは移動先が予測されないという問題がある。さらに、移動履歴に蓄積されていない場所は移動先として予測されないという問題もある。
【0006】
また、上記特許文献2に開示された交通流比の計測による移動先予測では、交通流の到達度については計測が困難であり、始点および終点共に光ビーコン設置点などの計測地点でなければならないという問題がある。つまり、移動体の現在地および移動先が共に計測地点でなければ移動先の予測ができない。ところが、光ビーコンは、いまだ全国の主要道路の一部にしか設置されていない。このために、少なくとも一つの交通流計測地点を通過するまでは移動先が予測できないという問題がある。
【0007】
そこで、本発明は、このような問題点に鑑みてなされたものであり、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要もなく、移動体の移動先を予測し、予測した移動先に関連した情報を提供することができる情報提供装置等を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る情報提供装置は、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置であって、交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段と、移動体の現在位置を取得する現在地取得手段と、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出手段と、前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出手段で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測手段と、前記移動先予測手段によって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供手段とを備えることを特徴とする。
【0009】
このように、本発明では、所定の地点の交通量を用いることで移動先を予測する。従来であれば、2地点間の交通流を計測するには2地点とも計測地点であり、しかも計測IDを照合するなど2地点間の情報を連携させる必要があるが、本発明では、交通量を利用しているので、単純に所定の地点を所定の向きに通過する車の数などを計測するだけで移動先を予測することができる。交通量が多い地点は移動体が通る可能性が高い場所なので、本情報提供装置から情報提供を受ける移動体が通る可能性も高い。このため、現在地点からの交通流情報が得られてなくても移動先を予測できる。
【0010】
また、本発明では交通量の向きの情報も用いる。交通量の向きの情報は、直接計測していなくても、車線情報を用いると道路の位置情報から簡単に求めることが出来る。交通量の向きを用いることで、移動体の現在位置に従った向きの交通量を用いて予測を行うことができるため、より精度の高い移動先予測が可能になる。
【0011】
なお、本発明は、このような情報提供装置として実現できるだけでなく、情報提供装置を構成する処理部をステップとする情報提供方法として実現したり、そのステップをコンピュータに実行させるプログラムとして実現したり、そのプログラムが記録されたCD−ROM等のコンピュータ読み取り可能な記録媒体として実現することもできる。
【発明の効果】
【0012】
本発明によれば、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要もなく、移動体の移動先を予測し、予測した移動先に関連した情報が提供される。つまり、移動先の履歴がなくても、交通量の情報を用いることで、移動先を予測することができる。そして、予測した移動先により、移動先への経路を提供することや、移動先やその経路上の店や交通情報、渋滞情報を提供することや提供情報のフィルタリングを行うことができる。
【0013】
また、移動先を予測することにより、現在地から移動先までの経路において、最もユーザに都合の良い地点で情報を提供するなど、情報提供のタイミングを制御することができる。
【0014】
よって、簡易な手法で便利な情報提供装置が実現され、カーナビゲーション装置や携帯電話等の移動体が普及した今日における本発明の実用的価値は極めて高い。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態について説明する。代表的な本発明の実施の形態における情報提供装置は、以下の通りである。
【0016】
本発明に係る第1の情報提供装置は、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置であって、交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段と、移動体の現在位置を取得する現在地取得手段と、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出手段と、前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出手段で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測手段と、前記移動先予測手段によって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供手段とを備えることを特徴とする。これによって、現在地と交通量検出地における交通量を用いて移動体の移動先が予測され、予測された移動先に関する情報が提供されるので、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要がない便利な情報提供装置が実現される。
【0017】
ここで、前記移動先予測手段は、例えば、前記交通量検出地蓄積手段に蓄積されている交通量検出地の中から、前記現在地取得手段で取得された現在位置から一定距離の範囲内にある交通量検出地を前記移動先候補として選択し、前記情報提供装置はさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの距離を算出する距離算出手段を備え、前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量の大きさを蓄積し、前記移動先予測手段は、前記方向差が予め定められた閾値の範囲内にある交通量検出地の中から、前記距離算出手段によって算出された距離が小さく、かつ、前記交通量検出地蓄積手段に蓄積されている交通量の大きさが大きい交通量検出地を選択し、選択した交通量検出地を前記移動体の移動先として予測するのが好ましい。
【0018】
また、本発明の第2の情報提供装置は、前記情報提供装置がさらに、地図情報を蓄積する地図情報蓄積手段と、前記地図情報蓄積手段に蓄積された地図情報と前記交通量検出地蓄積手段に蓄積されている交通量検出地を特定する情報とを用いて、前記交通量検出地の位置を変更し得る位置範囲を算出する交通量検出地位置範囲算出手段と、前記交通量検出地位置範囲算出手段によって算出された位置範囲内で、かつ、前記現在地取得手段で取得された現在位置に最も近い位置に、前記交通量検出地の位置を変更する交通量検出地位置変更手段とを備え、前記向き算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記向きを算出し、前記距離算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記距離を算出することを特徴とする。これによって、交通量検出地の位置が統一され、移動先の予測精度が向上される。
【0019】
また、本発明の第3の情報提供装置は、前記情報提供装置がさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への経路の遠回りの度合を示す遠回り度を算出する遠回り度算出手段を備え、前記移動先予測手段はさらに、前記遠回り度算出手段で算出された前記交通量検出地への経路の遠回り度が予め定められた値より大きい場合に、当該交通量検出地を前記移動先候補から除外することを特徴とする。これによって、遠回り度を考慮した移動先の予測が行われ、移動先の予測精度が向上される。
【0020】
また、本発明の第4の情報提供装置は、前記情報提供装置がさらに、地図情報を蓄積する地図情報蓄積手段と、前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段と、前記推奨経路算出手段で算出された推奨経路上に、当該推奨経路を算出した前記交通量検出地を除く他の交通量検出地が存在するか否かを判断することによって、冗長な交通量検出地が存在するか否かを示す冗長度を算出する冗長度算出手段と、前記冗長度算出手段によって算出された冗長度によって冗長な交通量検出地が存在すると示された場合に、当該交通量検出地を前記移動先候補から除外することを特徴とする。これよって、冗長な移動先が候補として選ばれることが排除されるので、移動先の予測精度が向上される。
【0021】
また、本発明の第5の情報提供装置は、前記移動先予測手段は、移動先として予測した交通量検出地について、予測の確からしさを示す評価値を算出し、算出した評価値が予め定められた基準を満たす場合に、当該交通量検出地を前記移動体の現在位置として、前記移動先の予測を繰り返すことを特徴とする。これによって、移動先の予測が繰り返されるので、現実の目的地に近い移動先が予測される。
【0022】
また、本発明の第6の情報提供装置は、前記交通量検出地蓄積手段が、前記複数の交通量検出地について、さらに、交通量検出地が道路であるか否かの情報を含む種別情報を蓄積し、前記移動先予測手段が、前記交通量検出地蓄積手段に蓄積された種別情報を参照することで、前記交通量検出地が道路であるか否か判定し、道路であると判定した場合に、当該交通量検出地を前記移動体の現在位置として、前記予測を繰り返すことを特徴とする。これによって、交通量検出地の種別が考慮され、例えば、道路上の地点であれば、さらにその先の移動先への予測が繰り返され、目的地に近い移動先が予測される。
【0023】
また、本発明の第7の情報提供装置は、前記情報提供装置がさらに、前記移動先予測手段で予測された移動先を提示する移動先提示手段と、前記移動先提示手段で提示された移動先に対するユーザからの選択指示を受け付ける移動先選択手段とを備え、情報提供手段は、前記移動先選択手段が受け付けた選択指示に対応する移動先に関する情報を取得して提示することを特徴とする。これによって、移動先が目的地候補として提示されるので、ユーザによる目的地設定が簡素化される。
【0024】
また、本発明の第8の情報提供装置は、前記情報提供装置がさらに、前記複数の交通量検出地の位置と前記交通量検出地での交通量の向きの類似性に基づいて、前記複数の交通量検出地での交通量の大きさを合成できるか否かを判定する合成可否判定手段と、前記合成可否判定手段が合成できると判定した場合に、前記複数の交通量検出地での交通量の大きさを合成することにより、前記交通量検出地での交通量の大きさを変更する合成手段とを備え、前記移動先予測手段は、前記合成手段によって合成された交通量の大きさを用いて、前記交通量検出地を選択することを特徴とする。これによって、類似する交通量検出地における交通量が合成されるので、現実の交通状態を反映した精度の高い移動先予測が可能になる。
【0025】
また、本発明の第9の情報提供装置は、前記情報提供装置がさらに、前記交通量検出地が存在する密度を地域別に蓄積する交通量検出地密度蓄積手段と、前記現在地取得手段で取得された現在位置と前記交通量検出地密度蓄積手段に蓄積された現在位置を含む地域の前記密度とから、移動先候補とする交通量検出地の位置範囲を算出するフィルタリング位置範囲算出手段と、前記フィルタリング位置範囲算出手段が算出した位置範囲に従って、前記交通量検出地蓄積手段に蓄積されている交通量検出地から移動先候補となるものをフィルタリングする移動先候補フィルタリング手段とを備え、前記移動先予測手段は、前記移動先候補フィルタリング手段によるフィルタリングによって移動先候補とされた交通量検出地の一部または全部を、前記移動先候補として選択することを特徴とする。これによって、交通量検出地の密度を考慮した移動先候補が決定されるので、処理負荷が軽減される。
【0026】
また、本発明の第10の情報提供装置は、前記情報提供装置がさらに、渋滞情報を蓄積する渋滞情報蓄積手段と、前記渋滞情報蓄積手段に蓄積された渋滞情報から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積することを特徴とする。これによって、渋滞情報から交通量が推定されるので、現実の交通量が特定できない場合であっても、移動先の予測と、その予測に基づく情報の提供とが可能になる。
【0027】
また、本発明の第11の情報提供装置は、前記情報提供装置がさらに、道路の所定の地点間を示すリンクについて、リンク旅行時間、リンク長、および、リンクの始点位置と終点位置を示す情報を蓄積するリンク旅行時間蓄積手段と、前記リンク旅行時間蓄積手段に蓄積されたリンク旅行時間、リンク長、および、リンクの始点位置と終点位置から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積することを特徴とする。これによって、リンク旅行時間から交通量が推定されるので、現実の交通量が特定できない場合であっても、移動先の予測と、その予測に基づく情報の提供とが可能になる。
【0028】
また、本発明の第12の情報提供装置は、前記情報提供装置がさらに、予測する移動先の数を決定する移動先予測数決定手段を備え、前記移動先予測手段は、前記移動先予測数決定手段で決定された数だけ移動先を予測することを特徴とする。これによって、各種状況に応じて、予測する移動先の数が変更されるので、自動的に複数の移動先に関する情報を得ることが可能になる。
【0029】
以下、本発明の各実施の形態における情報提供装置について、図面を用いて詳細に説明する。
【0030】
(実施の形態1)
まず、本発明の実施の形態1における情報提供装置について説明する。
【0031】
図1は、本実施の形態における情報提供装置の構成図を示す。図1の情報提供装置は、車等の移動体に備えられ、移動体の現在地と交通量取得地との間の距離と方向を利用して移動体の移動先を予測し、予測した移動先に関する情報を提供する装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106を備える。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0032】
現在地取得部101は、移動体の現在位置を取得する処理部であり、GPSアンテナまたはICタグ、通信、画像認識等により、移動体の現在地を検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。
【0033】
交通量検出地蓄積部102は、図2に示されるように、交通量を検出できる地点(交通量検出地)の検出点位置および検出した交通量の大きさと交通量の向きを蓄積するハードディスク等である。例えば、ID「001」は、位置の東経「134.5.27.7」、北緯「34.6.4.5」において交通量検出地が存在し、検出地における向き(方向角)「90度」への交通量の大きさが「400台/時間」であることを示す。向きは真北方向角であり、真北の方向を0度とし、真北の方向から右回りを正としている。交通量検出地の位置や交通量の情報は予め装置内に蓄積しておく。なお、VICS電波やネットワーク回線から最新の交通量情報を入手してもよい。交通量検出地は移動先の候補でもあり、本情報提供装置は交通量検出地の中から移動先を決定する。
【0034】
距離算出部103は、現在地取得部101で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する。
【0035】
向き算出部104は、現在地取得部101で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する。例えば現在地の位置から交通量検出地の位置へのベクトルの角度を向きとする。
【0036】
移動先予測部105は、交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、向き算出部104で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を移動体の移動先または移動先の方向として予測する処理部の一例であり、本実施の形態では、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。この移動先予測部105は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部105bとを有する。
【0037】
より詳しくは、移動先予測部105の移動先候補決定部105aは、まず、現在位置から一定距離の範囲内にある交通量検出地を移動先候補として選択する。例えば、図2に示されるように、交通量検出地の情報が蓄積されていたとする。このうち現在地からの距離が近いものから順に10個を選択し、図3に示されるように移動先の候補とする。本実施の形態では、交通量検出地の位置が移動先の候補位置であり、交通量検出地の交通量の向きが移動先の向き候補である。同じ位置に交通量の向きが複数あった場合、それぞれの向きについて移動先候補とする。つまり移動先候補とは位置候補と向き候補の組である。
【0038】
続いて、移動先予測部105のフィルタリング部105bは、移動先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。フィルタリング部105bは、交通量の向きと現在地−交通量検出地間の向きの方向差が閾値以内、例えば、90度の範囲内である交通量検出地を移動先の候補として選択し、方向差が90度より大きい移動先候補を移動先候補から除去する。方向差でフィルタリングを行う理由は、移動体が現在地から交通量検出地に移動するまでの方向と、交通量検出地から移動する方向が類似する傾向が高いためである。特に移動体は少しでも逆向きに進むことを避ける傾向が高いため、方向差を90度としている。
【0039】
例えば、図4に示されるように「ID005〜008(東経134.7.26.9、北緯34.4.49.2)」の交通量検出地をフィルタリングする場合、現在地から「ID005〜008」への向き(方向角)は110度である。「ID005〜008」付近まで110度の向きで移動した後、「ID005〜008」を逆方向である270度の方向で通過することは、一般的にほとんどない。よって、「ID005〜008」における交通量の向き「90度」「270度」「0度」「180度」のうち、110度±90度の範囲内である向き「90度」、「180度」がフィルタリング部105bによって選択される。例えば、図4に示される例では、向きから図5に示されるようにフィルタリングされる。このように、向きによりフィルタリングを行うことで、一般的に移動先とはならない移動先候補を除去することができるため、予測精度が向上する。
【0040】
なお、移動先の候補として一つも選択されなかった場合は、移動先の候補となる交通量検出地の数を増加させる。
【0041】
次に、移動先予測部105のフィルタリング部105bは、上記方向差が予め定められた閾値の範囲内にある交通量検出地の中から、距離算出部103によって算出された距離が小さく、かつ、交通量の大きさが大きい交通量検出地を選択し、選択した交通量検出地を移動体の移動先として予測する。つまり、交通量の大きさと現在地から交通量検出地までの距離で移動先を予測する。具体的には、交通量の大きさを距離で割った値を予測の確からしさを示す評価値とし、その評価値が最も大きいものを移動先とする。例えば、図6に示されるように「ID002・交通量の向き270度」への評価値は400/1.7、「ID003・交通量の向き90度」への評価値は400/1.6、「ID005・交通量の向き90度」への評価値は900/2.3、「ID008・交通量の向き180度」への評価値は100/2.3、「ID010・交通量の向き270度」への評価値は200/1.2となり、最も評価値の高い「ID005・交通量の向き90度」が移動先として選択される。これは、移動体が将来ID005の地点(経度134.7.26.9、緯度34.4.49.2)を90度の向きに移動することを予測している。
【0042】
なお、複数の候補地を移動先として予測してもよい。
情報提供部106は、提供する情報を予め蓄積した提供情報蓄積部106aを有し、移動先予測部105が予測した移動先に関する情報を提供情報蓄積部106aから読み出し、読み出した情報を、情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体が将来ID005の地点を90度の向きに移動することを予測した場合、図7に示されるようにID005の地点(東経134.7.26.9、北緯34.4.49.2)を90度の向きに通過するまでの経路の渋滞情報や推奨経路を提供することが出来る。なお、提供情報蓄積部106aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部106によって取得された情報等が含まれる。
【0043】
以下、本実施の形態1における情報提供装置の動作について、図8のフローチャートを用いて説明する。
【0044】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。距離算出部103は、現在地取得部101で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する(ステップS802)。向き算出部104は、現在地取得部101で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する(ステップS803)。
【0045】
移動先予測部105の移動先候補決定部105aは、距離算出部103が算出した現在地−交通量検出地間の距離により、複数の交通量検出地を移動先候補として選択する(ステップS804)。たとえば、移動先候補決定部105aは、交通量検出地蓄積部102に蓄積された交通量検出地の中から、現在地からの距離が近いものから順に10個を選択する。
【0046】
そして、移動先予測部105のフィルタリング部105bは、移動先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS805)。たとえば、フィルタリング部105bは、交通量の向きと現在地−交通量検出地間の向きとの方向差が90度の範囲内である交通量検出地を移動先の候補として選択する。
【0047】
さらに、フィルタリング部105bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離により、移動先を予測する(ステップS806)。たとえば、フィルタリング部105bは、交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。
【0048】
最後に、情報提供部106は、移動先予測部105が予測した移動先に関する情報を提供情報蓄積部106aから読み出し、その情報をユーザに提供する(ステップS807)。
【0049】
なお、ステップS804はなくてもよい。つまり、蓄積された交通量検出地をそのまま移動先候補としてもよい。
【0050】
以上のように、本実施の形態における情報提供装置によれば、現在地と交通量取得地との間の距離と方向を利用して移動先が予測され、予測された移動先に関する情報が提供される。よって、移動履歴を必要とせず、かつ、移動体が交通流計測地点を通過する必要もなく、移動体の移動先が予測され、予測された移動先に関連した情報が提供される。
【0051】
なお、本実施の形態では、移動先予測部105が、現在地−交通量検出地間の向きと検出値における交通量の向きの方向差により移動先候補をフィルタリングする際に用いる閾値は90度などの固定値であった。しかし、移動体がそれまでと逆方向に進む可能性は移動体の出発地からの距離によって異なる。
【0052】
出発地を出た直後は道路の構造上の関係からそれまでとは逆方向に移動する場合もある。例えば、図9に示されるように、移動体の南西に目的地があったとする。この場合、移動体は最短距離を通る可能性が高いため、道路の構造上の関係から北西方向、交通量検出地ID001の位置に進む。そしてID001の位置からはそれまでとは逆の南方向(180度)の方向に進む。つまり、現在地―交通量検出地間の向き(300度)とID001の交通量の向き(180度)との方向差(120度)が90度より大きいが、フィルタリングするべきでない。これは出発直後では移動体が通ることのできる経路選択の幅が小さいので、通過予定地(交通量検出地)における進行方向と現在地から通過予定地への方向の相関も非常に低くなる。出発地から通過予定地(交通量検出地)の距離が大きくなると、移動体が通ることのできる経路選択の幅が大きいので、通過予定地(交通量検出地)における進行方向と現在地から通過予定地への方向の相関も非常に高くなる。
【0053】
よって、出発地から移動先候補への距離の大きさの増大に応じて、方向差の閾値を減少させてもよい。
【0054】
図10は、このような実施の形態1の変形例1における情報提供装置、つまり、方向差の閾値を出発位置から移動先候補への距離の大きさに応じて減少させる機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部1003、向き算出部104、移動先予測部1005、情報提供部106、出発地取得部1007を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、出発地取得部1007が追加されている点、および、それに関連する処理部が異なる。
【0055】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0056】
出発地取得部1007は、移動体が移動を開始した出発地の位置を取得する。例えば、移動体が車の場合、最後にエンジンを掛けた箇所である。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。なお出発地は移動体が最後に所定の時間以上停止していた場所、もしくは移動体が最後に滞在したランドマークとしてもよい。
【0057】
距離算出部1003は、現在地取得部101で取得した現在地の位置と交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離、および出発地取得部1007で取得した出発地の位置と交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する。
【0058】
移動先予測部1005は、距離算出部103が算出した現在地−交通量検出地間の距離と出発地―交通量検出地間の距離、向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。つまり、上記方向差の閾値として、距離算出部1003によって算出された距離の大きさに対して単調減少する値を採用して方向差と閾値とを比較することにより、方向差が閾値の範囲内にある交通量検出地を特定する。この移動先予測部1005は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部1005bとを有する。
【0059】
より詳しくは、移動先予測部1005の移動先候補決定部105aは、まず、実施の形態1と同様に、交通量検出地を移動先候補としたあと、フィルタリング部1005bは、出発地―交通量検出地間の距離と現在地−交通量検出地間の向きと検出地における交通量の向きにより、移動先候補をフィルタリングする。交通量の向きと現在地−交通量検出地間の向きの方向差が閾値より大きい移動先候補を移動先候補から除去する。このとき、フィルタリング部1005bは、閾値として、出発地―交通量検出地間の距離が大きくなるに従って小さくなる値を採用する。つまり、閾値は、出発地―交通量検出地間の距離に対して広義の単調減少となる。例えば、360度を初期値として、出発地―交通量検出地間の距離に比例して減少させ、最終的に30度にする。
【0060】
その後、実施の形態1と同様に、交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。
【0061】
以下、本実施の形態1の変形例1における情報提供装置の動作について、図11のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0062】
まず、出発地取得部1007が、GPS等により、出発地を取得する(ステップS1100)。実施の形態1と同様に現在地を取得した後、距離算出部103は、現在地取得部101で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離、および出発地取得部1007で取得した出発地の位置の交通量検出地の位置との間の距離を算出する(ステップS1102)。
【0063】
実施の形態1と同様に向きを計算し、移動先候補決定部105aが距離により移動先候補を選別した後、フィルタリング部1005bは、移動先候補となった交通量検出地の中から、出発地−交通量検出地間の距離と現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS1105)。このとき、フィルタリング部1005bは、移動先候補をフィルタリングする際に、現在地−交通量検出地間の向きと検出値における交通量の向きとの差が閾値よりも小さい交通量検出地を候補として選択するが、その閾値として、出発地−交通量検出地間の距離に応じて減少する値を採用する。以下、実施の形態1と同様である(ステップS806〜S807)。
【0064】
このように、方向差の閾値を出発位置から移動先候補への距離の大きさに応じて減少させる機能を備える実施の形態1の変形例1における情報提供装置により、より可能性の高い移動先候補に絞り込まれ、的確な情報提供が可能になる。
【0065】
なお、上記実施の形態1の変形例1では、移動先予測部1005が、現在地−交通量検出地間の向きと検出値における交通量の向きの方向差により移動先候補をフィルタリングする際に用いる閾値を、出発地から移動先候補への距離の大きさに応じて減少させていた。しかしながら、閾値は、出発地から移動先候補への距離ではなく、出発地から現在地までの距離の大きさに応じて減少させてもよい。つまり、方向差の閾値を出発位置から現在地までの距離の大きさに応じて減少させる機能を備える情報提供装置を、実施の形態1の変形例2における情報提供装置として実現してもよい。
【0066】
このような情報提供装置では、方向差の閾値は、出発地―現在地間の距離に対して広義の単調減少となる。現在地までの距離を用いることで、移動先候補ごとに別の閾値を用いる必要がなくなる。なお、同様に、出発地から現在地までの経過時間もしくは道路の右左折数の大きさに応じて閾値を減少させてもよい。つまり、閾値は出発地―現在地間の経過時間もしくは右左折数に対して広義の単調減少としてもよい。
【0067】
つまり、移動先予測部1005は、方向差の閾値として、距離算出部1003によって算出された距離、移動時間および右左折回数の少なくとも一つの大きさに対して単調減少する値を採用して方向差と閾値とを比較することにより、方向差が閾値の範囲内にある交通量検出地を特定してもよい。
【0068】
また、実施の形態1では、現在地−交通量検出地間の向きを現在地の位置から交通量検出地の位置へのベクトルの向きとしていた。しかし、実際に移動体が移動する方向は道路のリンク構造により異なる。そこで、地図情報を用いて、道路のリンク情報を参照することにより、現在地−交通量検出地間の向きを算出してもよい。地図情報を用いることで、移動体が実際に現在地から移動先候補に移動する際に通る経路の方向により移動先候補をフィルタリングすることができる。よって向きの精度が上がるため、効率よくフィルタリングでき、予測精度が向上する。
【0069】
図12は、このような本実施の形態1の変形例3における情報提供装置、つまり、現在位置と移動先候補の位置から推奨経路を算出して向きを算出する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部1204、移動先予測部105、情報提供部106、地図情報蓄積部1207および推奨経路算出部1208を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207および推奨経路算出部1208が追加されている点、および、それに関連する処理部が異なる。
【0070】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0071】
地図情報蓄積部1207は、道路の位置やリンク距離といった道路情報を蓄積するハードディスク等である。例えば、ノードの位置、接続ノード、ノード間を結ぶリンク距離が蓄積されている。
【0072】
推奨経路算出部1208は、地図情報蓄積部1207に蓄積された地図情報、例えば、道路の位置、接続ノード、リンク距離情報を用いて、現在地取得部101が取得した現在地の位置から交通量検出地蓄積部102が蓄積した交通量検出地の位置までの推奨経路を計算する。具体的には、現在地の位置から交通量検出地の位置までの各経路の経路コストを計算し、ダイキストラ法などにより、コストが最小の経路をもとめる。経路コストは、例えば、リンク距離の総和である。
【0073】
向き算出部1204は、推奨経路算出部1208が算出した現在地の位置から、交通量検出地の位置までの推奨経路により、現在地−交通量検出地間の向きを算出する。具体的には、移動体が推奨経路上を通る際の交通量検出地の位置での移動体の向きを現在地−交通量検出地間の向きとする。例えば、図13に示される例では、推奨経路上の交通量検出位置における移動体の向きが180度であるため、現在地−交通量検出地間の向きを180度とする。図13に示される例では、最終的な目的地が現在地の南西にあるが、道路の構造上の関係から移動体は通常北西に進み、交通量検出地ID001を南向きに通過すると思われる。このとき、現在地から交通量検出地ID001への向きは実施の形態1の手法で算出すると300度となる。よって交通量検出地ID001(向き180度)との方向差が120度となり、移動先候補から交通量検出地ID001は除外されてしまう。しかし、本変形例の手法を用いると、現在地から交通量検出地ID001への向きは180度となるため、方向差が0度となり、移動先候補から除去されない。つまり、本手法により道路の構造を考慮した向きを算出することができる。
【0074】
以下、本実施の形態1の変形例3における情報提供装置の動作について、図15のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0075】
実施の形態1と同様に、現在地を取得し、距離を算出した後、推奨経路算出部1208は、地図情報蓄積部1207に蓄積された地図情報を用いて現在地取得部101が取得した現在地の位置から交通量検出地蓄積部102が蓄積した交通量検出地の位置までの推奨経路を計算する(ステップS1403)。向き算出部1204は、推奨経路算出部1208が算出した推奨経路により、現在地から交通量検出地への向きを算出する(ステップS1404)。具体的には、向き算出部1204は、移動体が推奨経路上を通る際の交通量検出地の位置での移動体の向きを現在地−交通量検出地間の向きとする。以下、実施の形態1と同様である(ステップS804〜S807)。
【0076】
以上のように、本変形例における情報提供装置によれば、地図情報を用いることで、移動体が実際に現在地から移動先候補に移動する際に通る経路の方向により移動先候補がフィルタリングされる。よって、予測する移動の向きの精度が上がり、効率よくフィルタリングされるため、移動先の予測精度が向上する。
【0077】
なお、本変形例において取得した交通量検出地の位置の精度が十分高く、交通量検出地の位置一つに対して交通量の向きが1つ、あるいは、順逆の2方向しか存在しないとき、移動先予測部105は、向きをフィルタリングする際に用いる方向差の閾値を0にしてもよい。これは、位置の精度が高く推奨経路が限定できるときは、地図情報を用いることで移動体が移動先候補を通るときの向きを一つに限定できるためである。
【0078】
また、実施の形態1では、現在地−交通量検出地間の向きと、交通量の向きを比較することにより、移動先候補を選別していた。しかし、現在地−交通量検出地間の向きの代わりに、もしくは、現在地−交通量検出地間の向きに加えて移動体の現在の向きを用いても良い。つまり、現在の向きを用いて移動先を予測する情報提供装置を、実施の形態1の変形例4における情報提供装置として実現してもよい。
【0079】
例えば、移動体が移動を始めた直後は、駐車場や道路の位置、リンク構造の関係から移動先とは逆方向に移動する可能性がある。しかし、移動を始めてからある程度経たあとは、移動先と逆方向に移動する可能性が低い。よって、例えば移動体が移動を始めた出発地から現在地までの距離が所定の値より大きいときに現在の向きを移動先のフィルタリングに用いる。具体的には、移動先候補の向き候補、つまり交通量の向きと現在の向きとの方向差が所定の値、例えば90度より大きいときに、移動先候補を移動先候補から除去する。図15に示される例では、現在地−交通量検出地間の向きは90度である。このため、現在地−交通量検出地間の向きのみを用いると、「ID005〜008」の移動先候補は(東経134.7.26.9、北緯34.4.49.2)、向き情報からID006(270度)のみが除去される。しかし、一般的に移動体はUターンなどにより逆方向に移動することはほとんどないため90度の向きで「ID005〜008」を通過することもありえない。現在の向き(270度)を用いることで「ID005」(90度)の移動先候補もありえないことが予測できるため、移動先候補から除去できる。なお、移動体の現在の向きは現在地取得部101が検知する。
【0080】
このように、移動体の現在の向きを用いて移動先を予測することで、可能性の低い移動先候補が除去され、移動先予測の精度が向上する。
【0081】
なお、実施の形態1の変形例3では、地図情報により現在地の位置から移動先候補の位置までの推奨経路を算出し、推奨経路上での移動先候補の位置における移動体の向きと移動先候補の向き候補を比較することにより、移動先候補をフィルタリングしていた。このとき、移動先候補位置における向きを比較するのではなく、現在地の位置における向きを比較しても良い。つまり、地図情報により現在地の位置から移動先候補の位置までの推奨経路を算出し、推奨経路上での現在地の位置における理想的な移動体の向きと現在地の位置における実際の移動体の向きを比較する。移動体は基本的に最短経路を通る。よって、すぐにUターンをすることが推奨されるような場所が目的地となることはない。よって推奨経路上での現在地の位置の向きにより移動先候補のフィルタリングを行う。これにより、予測精度を向上させることができる。
【0082】
図16は、このような本実施の形態1の変形例5における情報提供装置、つまり、現在位置と移動先候補位置から推奨経路を算出し、現在位置の理想的な向きから移動先を予測する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部1601、交通量検出地蓄積部102、距離算出部103、向き算出部1604、移動先予測部1605、情報提供部106、地図情報蓄積部1207および推奨経路算出部1208を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が現在地取得部1601に置き換えられている点、地図情報蓄積部1207および推奨経路算出部1208が追加されている点、および、それに関連する処理部が異なる。
【0083】
前記実施の形態1および変形例3で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0084】
現在地取得部1601は、GPSアンテナまたはICタグ、通信、画像認識等により、移動体の現在の位置および現在の向きを検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報および「180度」といった方位角を検知する。
【0085】
向き算出部1604は、推奨経路算出部1208が算出した現在地の位置から、交通量検出地の位置までの推奨経路により、現在地−交通量検出地間の向き、および現在地の位置における理想的な向き、つまり理想現在位置向きを算出する。具体的には、移動体が推奨経路上を通る際の交通量検出地の位置での移動体の向きを現在地−交通量検出地間の向きとする。また、移動体が推奨経路上を通る際の現在地の位置での移動体の向きを理想現在位置向きとする。例えば、図17に示される例では、推奨経路上の交通量検出位置における移動体の向きが90度であるため、現在地−交通量検出地間の向きを90度とする。また、推奨系路上の現在位置における移動体の向きが300度であるため、理想現在位置向きを300度とする。
【0086】
移動先予測部1605は、距離算出部103が算出した現在地−交通量検出地間の距離と出発地―交通量検出地間の距離、向き算出部1604が算出した現在地−交通量検出地間の向き、理想現在位置向き、現在地取得部が取得した現在の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。この移動先予測部1605は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部1605bとを有する。
【0087】
より詳しくは、移動先予測部1605の移動先候補決定部105aは、実施の形態1と同様に、交通量検出地を移動先候補としたあと、移動先予測部1605のフィルタリング部1605bは、出発地―交通量検出地間の距離と現在地−交通量検出地間の向きと検出地における交通量の向きにより、移動先候補をフィルタリングする。つまり、フィルタリング部1605bは、まず、交通量の向きと現在地−交通量検出地間の向きの方向差が閾値より大きい移動先候補を移動先候補から除去する。そして、理想現在位置向きと現在の向きにより移動先候補をフィルタリングする。つまり、理想的案現在の向きと現在の向きの方向差が閾値より大きい移動先候補を移動先候補から除去する。閾値は例えば0度とする。これは、移動先候補が移動先となるならば、移動体は推奨経路上を移動することが想定できるため、現在の向きや移動先候補の向きも推奨経路上の向きと一致するからである。例えば、図17に示される例では、移動先候補ID001について、現在地−交通量検出地間の向き(90度)と交通量の向き(90度)の方向差は0度(90度―90度)であるが、理想現在位置向き(300度)と現在の向き(120度)との方向差は180度(300度―120度)であるため、移動先候補から除去する。これは、移動体がID001に向かう場合は普通現在の向きも300度となるからである。しかし、現在の向きおよび推奨経路から算出した理想現在位置向きを用いないとID001は移動先候補から除去できない。
【0088】
その後、実施の形態1と同様に、交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。
【0089】
以下、本実施の形態1の変形例5における情報提供装置の動作について、図18のフローチャートを用いて説明する。前記実施の形態1および変形例3で示した構成要素には同様の符号を付与し、説明を省略する。
【0090】
まず、現在地取得部1601は移動体の現在の位置および向きを取得する(ステップS1801)。実施の形態1の変形例3と同様に、距離と推奨経路を算出した後、向き算出部1604は、推奨経路算出部1208が算出した推奨経路により、現在地から交通量検出地への向きと理想現在位置向きを算出する(ステップS1804)。移動先予測部1605の移動先候補決定部105aは、距離により移動先候補を選別した後、フィルタリング部1605bは、移動先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向き、理想現在位置向きと実際の移動体の現在の向きにより、移動先候補を選別する(ステップS1805)。つまり、移動先候補の中から、現在地−交通量検出地間の向きと検出値における交通量の向きとが一定範囲内にあり、かつ、理想現在位置向きと実際の移動体の現在の向きとが一定範囲内にある移動先候補を選別する。以下、実施の形態1と同様である(ステップS806〜S807)。
【0091】
このように、本変形例における情報提供装置によれば、推奨経路上での現在地の位置の向きにより移動先候補のフィルタリングが行われるので、移動先の予測精度が向上される。
【0092】
また、本実施の形態1では、現在地−交通量検出地間のユークリッド距離により、移動先を予測していた。しかし、現在地−交通量検出地間のユークリッド距離の代わりに地図情報蓄積部1207を用いて算出した現在地−交通量検出地間の最小経路コストを利用しても良い。経路コストは、カーナビゲーション装置などで推奨経路を探索する際に計算されるコストであり、経路を移動するために必要なコストである。例えば、経路の移動時間や移動距離、道幅、右左折の回数などから経路コストは求められ、最小経路コストはダイキストラ法により、計算される。
【0093】
このように、距離ではなく経路コストを用いて移動先を予測する情報提供装置を、実施の形態1の変形例6における情報提供装置として実現してもよい。例えば、図19に示される例のように、交通量検出地点として「ID011・交通量の向き270度」と「ID012・交通量の向き270度」があったとする。ユークリッド距離を計算した場合、明らかに「ID011・交通量の向き270度」の方が「ID012・交通量の向き270度」に比べて現在地に近い。しかし、実際にはID011を270度の向きに通過しようとすると、大回りをしなくてはならず、非常に経路コストがかかるため、ID012を270度の向きに通過する可能性のほうが高い。
【0094】
このように、最小経路コストを計算することで、より精度の高い予測を行うことが出来る。なお、最小経路コストは、距離算出部103が算出する。
【0095】
また、本実施の形態1では、情報提供装置が移動先の予測および予測された移動先に基づく情報提供を移動体に対して行っていた。しかし、情報提供装置は、交通量を検出するビーコンや交通量情報管理サーバで構成し、カーナビゲーション装置などの移動体への情報提供端末に対して情報を提供する構成としても良い。
【0096】
つまり、情報提供機能と移動先予測機能とを分離したハードウェア構成を備えるシステムを、実施の形態1の変形例7における情報提供装置として実現してもよい。これにより、情報提供端末は、移動先を予測する必要がないため、交通量を蓄積しなくても良いという利点がある。
【0097】
(実施の形態2)
次に、本発明の実施の形態2における情報提供装置について説明する。
【0098】
実施の形態1では、交通量検出地蓄積部102に蓄積された交通量検出地の位置情報をそのまま用いて、現在地から交通量検出地の位置までの距離を算出し、算出した向きと距離により移動先を予測していた。しかし、道路の位置やリンク構造を用いることで交通量検出地の位置を変更できる場合がある。その上、交通量検出地の位置を別の位置に変更した方が、効果的に移動先が予測できる場合がある。
【0099】
例えば、図20に示される例のように、現在地から1kmの位置に交通量検出地「ID2001、交通量の向き270度、交通量の大きさ500(台/時間)」、2kmの位置に交通量検出地「ID2002、交通量の向き90度、交通量の大きさ700(台/時間)」が存在したとする。前記実施の形態1と同様に移動先予測を行うと、予測先は距離が最も近いID2001となる。しかし、図20に示される例では、交差点2003で90度の向きに進んだ後、ID2002を90度の向きに通るまでに分岐が存在しない。このため、ID2002の検出した交通量は交差点2003を90度の向きに進む交通量と同義である。しかし、交通量検出地ID2002は交差点2003から離れたところにあるため、移動先予測の際、評価値がID2001に比べて下がってしまう。ところが、交差点2003においては、270度の向きの交通量(ID2001)に比べて、90度の向きの交通量(ID2002)が大きいことから、90度の方向に移動する可能性が高い。そこで、道路の位置とリンク構造を用いて、ID2002の検出地位置を交差点2003の位置に変更することで、効果的に移動先を予測することが可能になる。
【0100】
そこで、本実施の形態では道路の位置とリンク構造を用いて交通量検出地の位置の変更を行う。これにより、より的確に移動先を予測することができる。
【0101】
図21は、本実施の形態2における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、道路の位置とリンク構造を用いて交通量検出地の位置の変更を行う機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、地図情報蓄積部1207、交通量検出地位置範囲算出部2108および交通量検出地位置変更部2109を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207、交通量検出地位置範囲算出部2108および交通量検出地位置変更部2109が追加されている点が異なる。
【0102】
前記実施の形態1およびその変形例で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0103】
交通量検出地位置範囲算出部2108は、交通量検出地蓄積部102に蓄積された交通量検出地の位置と地図情報蓄積部1207に蓄積された道路情報、例えば、ノード位置と接続ノード情報から、交通量が一定で、交通量検出地の位置の変更可能な位置範囲を算出する。具体的には、交通量検出地を含む道路において、交通量検出地の前後の分岐が存在しない範囲を変更可能位置範囲とする。分岐がないとは、交通量の流入および流出が一方向しか存在しないということである。例えば、図22の「ID2002」の交通量検出地の変更可能位置範囲は、分岐が存在しないため交通量が一定であると考えられる交差点2003から交差点2004までの位置範囲である。
【0104】
なお、分岐先の道路の道路幅が非常に小さい、つまり、所定の値未満であった場合、交通量の流入、流出がほとんど存在しないと仮定できるため、分岐が存在しないとしてもよい。つまり、交通量検出地の変更可能位置範囲は、道路幅が所定の値以上の分岐が存在しない範囲である。同様に、分岐先の道路が両側1車線である、もしくは、一方通行であるときも、分岐が存在しないとしてもよい。分岐による交通量の流入、流出がほとんど存在しないと仮定できる場合、もしくは流入、流出の交通量が同程度であるために、交通量が一定であると仮定できる場合は分岐が存在しないとし、交通量検出地変更可能位置範囲を大きくしてもよい。
【0105】
交通量検出地位置変更部2109は、現在地取得部101が取得した移動体の現在地と、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から交通量検出地の変更先の位置を決定する。具体的には、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から、現在地からの距離が最も短い位置に交通量検出地を変更する。例えば、図23に示される例では、現在地からの距離が最も短い位置は交差点2003であるため、交通量検出地ID2002の位置を交差点2003に変更する。
【0106】
以下、本実施の形態2における情報提供装置の動作について、図24のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0107】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。交通量検出地位置範囲算出部2108は、交通量検出地蓄積部102に蓄積された交通量検出地の位置と地図情報蓄積部1207に蓄積された道路情報から、交通量検出地の変更可能な位置の範囲を算出する(ステップS2402)。たとえば、交通量検出地を含む道路において、交通量検出地の前後の分岐が存在しない範囲を変更可能位置範囲とする。
【0108】
続いて、交通量検出地位置変更部2109は、現在地取得部101が取得した移動体の現在地と、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から交通量検出地の変更先の位置を決定する(ステップS2403)。たとえば、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲から、現在地からの距離が最も短い位置に交通量検出地を変更する。以下、実施の形態1と同様である(ステップS802〜S807)。
【0109】
以上のように、本実施の形態における情報提供装置によれば、道路の位置とリンク構造を用いて交通量検出地の位置の変更が行われ、交通量検出地の位置が実情に即した位置に修正され、統一されるので、移動先の予測精度が向上する。
【0110】
なお、本実施の形態2では、交通量検出地の位置を変更することで、現在地―交通量検出地間の距離および向きが変更された。しかし、移動先候補における向き候補、つまり、交通量の向きも変更することで、さらに効果的に移動先を予測することができる。例えば、図25に示される例では、「ID2503」の交通量検出地の交通量の向きは120度である。現在地から「ID2503」の交通量検出地への向きは0度であるため0度の±90度でフィルタリングを行うと、「ID2503」の交通量検出地は移動先候補から外れる。しかし、道路の構造によっては、図25の「ID2503」のように、一時的に「120度」の向きに進むが、最終的には「0度」の向きに進む可能性がある。そこで道路の位置とリンク構造を用いて、交通量の向きを変更することで効果的に移動先予測が可能になる。
【0111】
図26は、このような本実施の形態2の変形例1における情報提供装置、つまり、実施の形態2の機能に加えて、交通量の向きも補正する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、地図情報蓄積部1207、交通量検出地位置範囲算出部2108、交通量検出地位置変更部2109および交通量検出地向き変更部2610を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207、交通量検出地位置範囲算出部2108、交通量検出地位置変更部2109および交通量検出地向き変更部2610が追加されている点が異なる。
【0112】
前記実施の形態1、2で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0113】
交通量検出地向き変更部2610は、交通量検出地蓄積部102に蓄積された位置を所定の向きで通過する移動体がとりうる、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲における交通量の向きを用いて変更後の交通量の向きを決定する。変更可能位置範囲における交通量の向きについては、地図情報蓄積部1207に蓄積された道路情報、例えば、ノード位置と接続ノードから算出する。変更後の交通量の向きは、例えば、変更可能位置範囲における交通量の向きの平均を用いる。例えば、図27の「ID2503」の交通量検出地の変更可能位置範囲は交差点2704から曲がり角2705を通る交差点2706までの道路である。交差点2704を120度の向きに進む場合、交差点2704から曲がり角2705までの1kmの間の交通量の向きは道路の構造から120度である。曲がり角2705から交差点2706までの3kmの間の交通量の向きは0度である。よって、図28に示されるように交通量の向きの平均30度{=(1×120+3×0)/(1+3)}をID2503の交通量の向きとする。
【0114】
以下、本実施の形態2の変形例1における情報提供装置の動作について、図29のフローチャートを用いて説明する。前記実施の形態1、2で示した構成要素には同様の符号を付与し、説明を省略する。
【0115】
実施の形態2と同様に現在地から交通量の位置の変更を行った後、地図情報蓄積部1207に蓄積された道路情報、交通量検出地蓄積部102に蓄積された検出地の位置と交通量の向き、交通量検出地位置範囲算出部2108が算出した変更可能位置範囲を用いて交通量の向きの変更を行う(ステップS2904)。たとば、変更可能位置範囲における交通量の向きの平均を変更後の交通量の向きとする。以下、実施の形態1と同様である(ステップS802〜S807)。
【0116】
以上のように、本変形例における情報提供装置によれば、道路の位置とリンク構造を用いて、より実情に即するように、交通量検出地の位置だけでなく、交通量の向きも修正されるので、移動先の予測精度が向上される。
【0117】
(実施の形態3)
次に、本発明の実施の形態3における情報提供装置について説明する。
【0118】
実施の形態1、2では、現在地から移動先候補までの距離と向きと移動先候補の交通量の大きさ、向きによって移動先を予測していた。しかし、移動体は交通量の最も大きい場所には進まない場合もある。移動体が移動中に移動先を予測するときには、移動体が出発してから現在までの移動情報を用いることにより、そのような場合でも移動先を予測することができる。一般的に、移動体は移動先候補に向かう際に遠回りをせず、できるだけ経路コストが低くなるように移動先候補まで移動する。このため、移動体が移動先候補に向かう際に、出発地から現在までの移動によってどれだけ遠回りしているかを算出することによって予測を行う。
【0119】
例えば、図30に示されるように、移動体が出発地から現在地まで北西方向に移動を行ったとする。実施の形態1、2では、移動体は交通量の最も大きい「ID007」に向かうと予測する。しかし、移動体が実際に「ID007」に向かう場合は、移動体は出発地から現在地まで南東方向に移動するはずである。しかし、移動体は「ID007」に対して遠回りをしているため、「ID007」に向かっていると予測するのは間違いであり、次に交通量が大きく、遠回りをしていない「ID004」に向かっていると考えられる。これらは、出発地、現在地から移動先候補に対する遠回りの度合を示す遠回り度を求めることにより、判別できる。
【0120】
本実施の形態3では、出発地、現在地、移動先候補位置に対する経路コストにより算出された遠回り度も用いて移動先を予測する。
【0121】
図31は、本実施の形態3における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、出発地、現在地、移動先候補位置に対する経路コストにより算出された遠回り度も用いて移動先を予測する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、経路コスト算出部3103、向き算出部104、移動先予測部3105、情報提供部106、出発地取得部1007、地図情報蓄積部1207および遠回り度算出部3109を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、出発地取得部1007、地図情報蓄積部1207および遠回り度算出部3109が追加されている点、距離算出部103が経路コスト算出部3103に置き換えられている点、および、それに関連する処理部が異なる。
【0122】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0123】
経路コスト算出部3103は、地図情報蓄積部1207に蓄積された、ノードの位置、接続ノード、リンク距離といった道路情報を用いて、経路コストを算出する。現在地取得部101が取得した現在地と出発地取得部1007が取得した出発地との間の経路コスト、現在地取得部101が取得した現在地と交通量検出地蓄積部102に蓄積された交通量検出地との間の経路コスト、出発地取得部1007が取得した出発地と交通量検出地蓄積部102に蓄積された交通量検出地との間の経路コストを算出する。
【0124】
なお、経路コストを算出する際に向き情報を用いてもよい。つまり、現在地と交通量検出地の間の経路コストとは、現在地の位置と向きから交通量検出地を検出した交通量の向きに通過するまでの経路コストである。
【0125】
経路コストは、位置間の経路の距離、経路を走行する場合の所要時間、道路種別、道路規制情報、右左折回数などから算出する。例えば、位置間の最小距離経路の距離をリンク距離の総和により計算し、経路コストとする。例えば、図30に示されるように、現在地、出発地、交通量検出地、地図情報が取得されていたとき、交通量検出地つまり移動先候補「ID001」に関する経路コストを算出すると、図32に示されるように、現在出発地間経路コストは「1km」、移動先候補「ID001」についての出発候補地間経路コストは「6km」、現在候補地間経路コストは「5km」になる。
【0126】
なお、交通量検出地における交通量の向き、現在地の移動体の向き、出発地の移動体の向きを用いて、右左折数も考慮して経路コストを算出してもよい。右左折数1回が1kmの経路コストと同等だとすると。移動先候補「ID001」に関する出発地候補地間経路コストは「9km」(6km+1km×右左折3回)となる。
【0127】
遠回り度算出部3109は、経路コスト算出部3103で算出された経路コストから遠回り度を算出する。遠回り度は出発地から移動先までのコストが最小である経路のコストに対する、現在移動体が通っている経路のコストの差である。具体的には、現在出発地間経路コストと現在候補地間経路コストの和と、出発候補地間経路コストとの差が遠回り度となる。例えば、図32に示されるように経路コストが算出されていたとき、移動先候補「ID001」についての遠回り度は、現在出発地間経路コスト「1km」と現在候補地間経路コスト「5km」の和「6km」と、出発候補位置間経路コスト「6km」との差「0km」となる。
【0128】
移動先予測部3105は、経路コスト算出部3103が算出した現在地−交通量検出地間の経路コスト、つまり、現在候補地間経路コストと向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量検出地の交通量の大きさと交通量の向き、遠回り度算出部3109が算出した移動先候補となる交通量検出地に対する遠回り度により、移動先となる交通量検出地を予測する。この移動先予測部3105は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部3105bとを有する。
【0129】
例えば、移動先予測部3105の移動先候補決定部105aは、交通量検出地蓄積部102に蓄積された図30のような交通量検出地を移動先の候補とする。フィルタリング部3105bは、実施の形態1と同様に、移動先の候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の候補として選択する。例えば、図30に示される例では、向きから図33に示されるようにフィルタリングされる。
【0130】
次に、フィルタリング部3105bは、交通量検出地に対する遠回り度により移動先候補をさらにフィルタリングする。移動体は移動先を目指す場合に移動にかかる経路コストが小さくなるように移動する傾向がある。よって、最小コストに対するコスト差である遠回り度も小さくなる。具体的には、遠回り度が所定の値、例えば装置の渋滞に対する迂回経路許容距離の設定1km以下になる移動先候補のみを移動先候補として残す。図33に示される移動先候補の場合、遠回り度が図34に示されるようになったとすると、「ID001」「ID004」の交通量検出地に対する遠回り度は「0km」より、移動先候補として残す。「ID006」、「ID007」の交通量検出地に対する遠回り度は「7km」と「1km」より大きいので移動先候補から除去する。
【0131】
次に、移動先候補となる交通量検出地の交通量の大きさと交通量検出地から現在地からまでの経路コストで移動先を予測する。交通量の大きさを経路コストで割った評価値が最も大きいものを移動先とする。例えば、図35に示されるように「ID001・交通量の向き0度」への評価値は50/5、「ID004・交通量の向き180度」への評価値は400/4となり、最も評価値の高い「ID004・交通量の向き180度」が移動先として選択される。これは、移動体が将来ID004の地点を180度の向きに移動することを予測している。
【0132】
以下、本実施の形態3における情報提供装置の動作について、図36のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与する。
【0133】
まず、出発地取得部1007が、移動体が移動を開始した出発位置を取得する(ステップS1100)。現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。経路コスト算出部3103は、地図情報蓄積部1207に蓄積された道路情報を用いて、現在地と出発地との間の経路コスト、現在位置と移動先候補地となる交通量検出地との間の経路コスト、出発地と移動先候補地となる交通量検出地との間の経路コストを算出する(ステップS3602)。向き算出部104は現在地取得部101で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する(ステップS803)。
【0134】
遠回り度算出部3109は、経路コスト算出部3103で算出された経路コストから移動先候補に対する遠回り度を算出する(ステップS3604)。移動先予測部3105の移動先候補決定部105aは、移動先候補と特定し、フィルタリング部3105bは、その移動先候補である交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS805)。フィルタリング部3105bは、遠回り度算出部3109が算出した遠回り度から移動体の移動先候補を選別する(ステップS3606)。さらにフィルタリング部3105bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの経路コストにより、移動先を予測する(ステップS3607)。
【0135】
最後に、情報提供部106は、移動先予測部3105が予測した移動先に関する情報を提供情報蓄積部106aから読み出してユーザに提供する(ステップS807)。
【0136】
以上のように、本実施の形態における情報提供装置によれば、出発地、現在地、移動先候補位置に対する経路コストにより算出された遠回り度も用いて移動先が予測されるので、遠回り度の高い移動先、つまり、可能性の低い移動先が排除され、移動先の予測精度が向上される。
【0137】
(実施の形態4)
次に、本発明の実施の形態4における情報提供装置について説明する。
【0138】
実施の形態1〜3では、交通量検出地である移動先候補から交通量の大きさと現在地からの距離、方向を元に移動先を予測していた。しかし、複数の移動先候補A、B、Cのうち、A、Bの両方を通過する場合がある。つまり、Bを通過するときにはAを通過しなければない場合が存在する。こういった場合、Bという移動先候補にはAという移動先候補への通過も含まれているため、AとBとCを同等に扱うと予測精度が下がる場合がある。こういった場合、始めに移動先候補AとCの中から移動先を予測し、Aを通過すると予測した場合のみBを通過するかどうかを予測する方が、始めの予測にAの交通量を内包したBの交通量に影響されずに予測を行うことができる。また、Bという移動先を予測するときには、Aを通過するという情報を用いることができるため、より予測の精度が上がる。このBのような冗長移動先を予測の際に除去することでより効率的に移動先予測を行うことができる。
【0139】
図37は、本実施の形態4における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、道路のリンク構造に基づいて冗長な移動先の除去して予測する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、地図情報蓄積部1207、推奨経路計算部3708、冗長度算出部3709および冗長移動先除去部3710を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、地図情報蓄積部1207、推奨経路計算部3708、冗長度算出部3709および冗長移動先除去部3710が追加されている点が異なる。
【0140】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0141】
推奨経路計算部3708は、地図情報蓄積部1207に蓄積された道路情報、例えば、ノード位置、接続ノード、リンク距離を用いて、現在地取得部101が取得した現在地から交通量検出地蓄積部102が蓄積した交通量検出位置を交通量の向きに通過する際の推奨経路を算出する。具体的には、現在地から交通量検出地までの各経路の経路コストを計算し、ダイキストラ法などによりコストが最小の経路をもとめる。経路コストは、例えば、リンク距離の総和である。
【0142】
冗長度算出部3709は、推奨経路計算部3708が算出した現在地から交通量検出地までの推奨経路を用いて、冗長な交通量検出地が存在するか否かを示す冗長度を算出する。具体的には、現在地から交通量検出地までの推奨経路の中に別の移動先候補つまり別の交通量検出地が存在していた場合、推奨経路を求めた交通量検出地は冗長度を真とする。逆に、別の交通量検出地が存在しなかった場合、推奨経路を求めた交通量検出地は冗長度を偽とする。例えば、図38に示される例のように、交通量検出地「ID022」を0度の向きに通過する場合の推奨経路内に別の交通量検出地「ID003・90度」が存在する場合、交通量検出地「ID022・0度」は冗長度を真とする。
【0143】
冗長移動先除去部3710は、交通量検出地蓄積部102が蓄積した交通量検出地のうち冗長度算出部3709が冗長度を真と判定したものを移動先候補から除去し、冗長度を偽と判定したものを移動先候補とする。
【0144】
移動先予測部3705は、冗長移動先除去部3710が移動先候補と判定した交通量検出地の中から、実施の形態1と同様に距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先となる交通量検出地を予測する。この移動先予測部3705は、冗長移動先除去部3710が判定した移動先候補を移動先候補として決定する移動先候補決定部3705aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部105bとを有する。
【0145】
以下、本実施の形態4における情報提供装置の動作について、図39のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0146】
実施の形態1と同様に現在地からの距離と向きを算出した後、各移動先候補について、推奨経路計算部3708は、現在地から移動先候補までの推奨経路を計算する(ステップS3904)。そして、冗長度算出部3709は、移動先候補について、推奨経路内に他の移動先候補が存在するかによって冗長度の算出を行う(ステップS3905)。冗長移動先除去部3710は、移動先候補から冗長移動先を除去する((ステップS3906)。以下、実施の形態1と同様である(ステップS805〜S807)。
【0147】
以上のように、本実施の形態における情報提供装置によれば、冗長な移動先が予測の際に除去されるので、このような冗長な移動先候補に伴う予測精度の低下が防止される。
【0148】
(実施の形態5)
次に、本発明の実施の形態5における情報提供装置について説明する。
【0149】
実施の形態1〜4では、情報提供装置は交通量情報から距離の近い移動先を予測していた。しかし、予測した移動先を通過した後に到達する移動先をさらに予測してもよい。つまり。予測した移動先情報を用いて、さらに先の移動先を予測する。
【0150】
図40は、本実施の形態5における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、予測した移動先情報を用いて、さらに先の移動先を再帰的に予測する機能を備える情報提供装置であり、予測現在地取得部4001、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部4005および情報提供部4006を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部4001に置き換えられている点、および、それに関連する処理部が異なる。
【0151】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0152】
予測現在地取得部4001は、移動先予測部4005が予測した移動先を現在地として検知する。移動先予測部4005が移動先を予測していない場合は、GPSアンテナなどにより、移動体の現在地を検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。
【0153】
移動先予測部4005は、実施の形態1と同様に、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、実施の形態1や実施の形態2と同様の評価値を計算し、移動先となる交通量検出地を予測する。予測した評価値が他の移動先候補の評価値の2倍以上であった場合、予測された移動先は非常に信頼できるものであるとし、予測された移動先を予想現在地として予想現在地取得部に出力し、さらに移動先を予測する。たとえば、図41のようID005の地点(東経134.7.26.9、北緯34.4.49.2)を90度の向きに移動することを予測した場合、図42に示されるように予測現在地が90度の向きでID005の地点(東経134.7.26.9、北緯34.4.49.2)である場合に次にどの交通量検出点に移動するのか予測する。この移動先予測部4005は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部105bと、再帰的に予測を繰り返す制御をする繰り返し制御部4005cとを有する。
【0154】
情報提供部4006は、提供する情報を予め蓄積した提供情報蓄積部4006aを有し、移動先予測部4005が予測した移動先に関する情報を提供情報蓄積部4006aから読み出し、読み出した情報を、情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体が将来ID005の地点(C交差点)を90度の向きに移動し、次にID018の地点(F交差点)を180度の向きで通過することを予測した場合、図43に示されるように、画面外になるような遠くのF交差点近くの渋滞情報でも提供することが出来る。なお、提供情報蓄積部4006aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部4006によって取得された情報等が含まれる。
【0155】
以下、本実施の形態5における情報提供装置の動作について、図44のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0156】
移動先予測部4005の移動先候補決定部105aおよびフィルタリング部105bが実施の形態1と同様に現在地から移動先を予測した後、移動先予測部4005の繰り返し制御部4005cは、予測された移動先の評価値が非常に大きいかのどうかの判定を行う(ステップS4407)。他の移動先候補に比べて、評価値が、例えば、2倍以上であったときは(ステップS4407のyes)、ステップS4408へ、2倍未満であったときは、予測を終了し(ステップS4407のno)、ステップS4409に進む。評価値が非常に高い場合、予測現在地取得部4007は、予測された移動先を現在地として(ステップS4408)、ステップS802に進む。評価値が低い場合、情報提供部4006は、移動先予測部4005が予測した複数または単一の移動先に関する情報を提供情報蓄積部4006aから読み出してユーザに提供する(ステップS4409)。
【0157】
以上のように、本実施の形態における情報提供装置によれば、予測した移動先情報を用いて、さらに先の移動先が再帰的に予測されるので、現在地から近い範囲に限定されることなく、広い範囲での移動先予測が可能となる。
【0158】
なお、実施の形態4と同様に、予め冗長移動先を除去することで、さらに効率よく移動先を予測できる。なぜなら、移動先候補A、Bが存在し、移動先Bを通過するときにはAを通過しなければない場合、始めに移動先候補Bを除去し、Aを通過すると予測した後、Aを通過するという情報を用いてBを通過することを予測できるからである。
【0159】
なお、実施の形態5では、移動先を現在地として再帰的に移動先予測を行うかどうかの判定に、交通量の大きさと現在地からの距離からなる評価値を用いた。しかしながら、この判定に、予測した移動先に関わる情報の有無を用いても良い。
【0160】
つまり、移動先を現在地として再帰的に移動先予測を行うかどうかの判定に、予測した移動先に関わる情報の有無を用いる情報提供装置を、実施の形態5の変形例1における情報提供装置として実現してもよい。情報提供部4006は、予測された移動先に関わる情報が提供情報蓄積部4006aに存在しなかった場合、予測された移動先を現在地として予測現在地取得部4001に出力し、さらに移動先を予測する。予測された移動先に関わる情報が提供情報蓄積部4006aに存在した場合、情報提供部4006は移動先に関わる情報を提供する。例えば、現在地からID005の地点を90度の向きに移動することを予測したとする。このとき、現在地からID005の地点までの経路に関する提供すべき情報が提供情報蓄積部4006aになかったときに、ID005の地点を現在地としてさらに移動先を予測する。すると、次にID018の地点を180度の向きで通過することを予測し、ID018の地点の近くに関する提供すべき渋滞情報が提供情報蓄積部4006aにあった場合、その情報を提供する。
【0161】
これによって、ユーザにとって有益な情報が得られる地点が移動先として予測され、情報提供装置の利便性が向上される。
【0162】
また、実施の形態5では、移動先を現在地としてさらに移動先予測を行う際、交通量の大きさや向き、距離を用いて予測していた。しかし、交通量検出地に関して検出地を始点としたOD交通量や交通流比など交通流情報が存在することがある。例えば、交通量検出地が光ビーコンであった場合に、あるビーコンを通過した車がどこのビーコンを通過する可能性が高いかといったOD交通量などの交通流の情報を持っている。この交通流情報を用いるとさらに精度の良い予測が可能になる。よって、ある交通量検出地への移動を予測した後は、予測した移動先を始点とする交通流の情報を用いて、さらに移動先を予測しても良い。
【0163】
つまり、ある交通量検出地への移動を予測した後は、予測した移動先を始点とする交通流の情報を用いて、さらに移動先を予測する機能を備える情報提供装置を、実施の形態5の変形例2における情報提供装置として実現してもよい。
【0164】
具体的には予測された交通量検出地点を始点(O)とするOD交通量、もしくは、交通流比が高い終点(D)を移動先と予測する。従来は、どれかのビーコンを通らないと、未来に通過するビーコンが予測できなかった。本実施の形態を用いることで、ビーコンを通らなくても、精度よく未来に通過するビーコンを予測し、ビーコン間の交通情報を提供することが出来る。
【0165】
(実施の形態6)
次に、本発明の実施の形態6における情報提供装置について説明する。
【0166】
実施の形態1〜5では、予測した移動先は、道路上のビーコン、カメラなどの交通量検出地であったため、ほとんどの場合、移動体の通過地であって、目的地ではなかった。しかし、駅、店などのランドマークであったとしても、駐車場の検知器、カメラなどにより、店などに流入する交通量を計測することができる。また、駐車場の駐車台数や出入り口を通る人の数により、仮想的に流入交通量を計算することも可能である。よって、ランドマークを交通量検出地として、流入交通量の大きさを用いて移動先予測を行っても良い。この場合、通過地だけではなく、実施の形態5のように再帰的に予測を行うことで、最終的な目的地まで予測することが可能になる。
【0167】
図45は、本実施の形態6における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、ランドマークに対する流入交通量も含めて移動先を予測する機能を備える情報提供装置であり、予測現在地取得部4001、交通量検出地蓄積部4502、距離算出部103、向き算出部104、移動先予測部4505および情報提供部4506を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部4001に置き換えられ、交通量検出地蓄積部102が交通量検出地蓄積部4502に置き換えられている点、および、それに関連する処理部が異なる。
【0168】
前記実施の形態1、5で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0169】
交通量検出地蓄積部4502は、図46に示されるように、少なくとも交通量を検出できる地点の検出点位置および検出した交通量の大きさと交通量の向きに加えて検出地の種別を蓄積する。検出地の種別は、交通量検出地が移動先となったとき通過地となる道路であるか、目的地となるランドマークであるかを示す。例えば、ID「010」は検出地の種別「ランドマーク」、検出地の名前「Yアリーナ」、位置の東経「134.5.59.9」、北緯「34.6.4.6」において交通量検出地が存在し、検出地における向き「流入」への交通量の大きさが「70台/時間」であることを示す。図46では、便宜上、検出地の名前を記述しているが、実際はなくてもよい。交通量検出地の位置や交通量の情報は予め装置内に蓄積しておく。なお、VICS電波やネットワーク回線から最新の交通量情報を入手してもよい。交通量検出地は移動先の候補でもあり、本情報提供装置は交通量検出地の中から移動先を決定する。
【0170】
移動先予測部4505は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部4502に蓄積された交通量の大きさと交通量の向きに加えて、検出地の種別を用いて移動先となる交通量検出地を予測する。この移動先予測部4505は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部4505bと、再帰的に予測を繰り返す制御をする繰り返し制御部4005cとを有する。
【0171】
例えば、図46に示される例のように、交通量検出地が蓄積されていたとする。移動先予測部4505の移動先候補決定部105aは、このうち現在地からの距離が近いものから順に10個を選択し、図47のような交通量検出地を移動先の候補とする。そして、移動先予測部4505のフィルタリング部4505bは、移動先の候補となった交通量検出地の中から、検出地の種別が「道路」であるもののみ、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の候補として選択する。一方、検出地の種別「ランドマーク」については、交通量の向きは影響しないためフィルタリングを行わず、そのまま移動先候補とする。例えば、図47に示される例では、向きから、図48に示される例のように、フィルタリングされる。
【0172】
次に、移動先予測部4505の繰り返し制御部4005cは、交通量の大きさと現在地から交通量検出地までの距離で移動先を予測する。交通量の大きさを距離で割った評価値が最も大きいものを移動先とする。例えば、図48に示される例では、「ID002・交通量の向き270度」への評価値は400/1.7、「ID003・交通量の向き90度」への評価値は400/1.6、「ID005・交通量の向き90度」への評価値は900/2.3、「ID008・交通量の向き180度」への評価値は100/2.3、「Sセンター・流入」への評価値は30/0.79、「Yアリーナ・流入」への評価値は70/1.5、となり、最も評価値の高い「ID005・交通量の向き90度」が移動先として選択される。これは、移動体が将来ID005の地点を90度の向きに移動することを予測している。
【0173】
なお、「ランドマーク」の評価値については、重みをつけてもよい。例えば、検出地の種別「ランドマーク」については評価値を10倍する。
【0174】
移動先予測部4505は、予測された移動先の検出地種別「道路」であったとき、移動先は通過場所であるので、予測された移動先を予想現在地として予測現在地取得部4001に出力し、さらに移動先を予測する。これを移動先が目的地、つまり検出地種別「ランドマーク」となるまで繰り返す。
【0175】
例えば、図49に示される例のように、ID005の地点を90度の向きに移動することを予測した場合、ID005が「道路」であるため、図50に示される例のように、現在地が90度の向きでID005の地点である場合に、次にどの交通量検出点に移動するのか予測する。このとき、「V道館・流入(検出地種別:ランドマーク)」を移動先として予測したとすると、「V道館・流入」は検出地種別がランドマークであり、目的地となるため、これ以上予測は繰り返さない。
【0176】
情報提供部4506は、提供する情報を予め蓄積した提供情報蓄積部4506aを有し、移動先予測部4505が予測した移動先に関する情報を提供情報蓄積部4506aから読み出し、読み出した情報を、情報提供装置の画面や音声によって、ユーザに提供する。これによって、通過地だけではなく、目的地まで予測しているため、目的地までの推奨経路を提供することや、ランドマークがコンサート会場の場合のチケット情報を提供するなど、目的地となるランドマークに関する情報を提供することが出来る。例えば、移動体が将来ID005の地点(C交差点)を90度の向きに移動し、V道館を目的地とすることを予測した場合、図51に示されるように「V道館」に関連する情報、例えばチケット情報を提供することが出来る。なお、提供情報蓄積部4506aに蓄積されている情報には、予め蓄積されたランドマークに関する情報、推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部4506によって取得された情報等が含まれる。
【0177】
以下、本実施の形態6における情報提供装置の動作について、図52のフローチャートを用いて説明する。前記実施の形態1、5で示した構成要素には同様の符号を付与し、説明を省略する。
【0178】
移動先予測部4505の移動先候補決定部105aは、実施の形態1と同様に現在地からの距離により移動先候補を選択した後、移動先予測部4505のフィルタリング部4505bは、移動先候補となった交通量検出地の中から、検出地の種別と現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS5205)。交通量の大きさと距離により移動先を予測した後、移動先予測部4505の繰り返し制御部4005cは、予測された移動先の検出地種別がランドマークであるか判定を行う(ステップS5207)。予測された移動先の検出地種別がランドマークでなかったときは(ステップS5207のNo)、ステップS4408へ、ランドマークであったときは、(ステップS5207のYes)、ステップS5209に進む。移動先がランドマークであった場合、情報提供部4506は、移動先予測部4505が予測した複数または単一の移動先に関する情報を提供情報蓄積部4506aから読み出してユーザに提供する(ステップS5209)。
【0179】
以上のように、本実施の形態における情報提供装置によれば、現在地−交通量検出地間の距離と向き、交通量検出地での交通量の大きさと向きに加えて、ランドマークに対する流入交通量も含めて移動先が予測されるので、現実の目的地となる可能性の高い地点が移動先として追加して予測され、移動先の予測精度が向上される。
【0180】
なお、ランドマークの流入交通量においても交通量の向きを検知し、現在地―交通量検出地の向きとの方向差により、フィルタリングをしてもよい。これにより、A店への流入交通量が0度の向きに300台/時、180度の向きに50台/時などA店への入り口が複数あり、向きにより交通量が異なる場合に、現在地からA店に入る向きとは異なる向きの交通量を除外できる。例えばA店より北側を通行していた場合、普通A店に入るときには180度の向きでA店に入る。こういったとき向きを考慮することで、0度の向きで流入する交通量に影響されない。
【0181】
なお、実施の形態6では、ランドマークを移動先として予測する際に、交通量の大きさや現在地からの距離から評価値を計算していた。しかし、ランドマークの嗜好情報により、評価値に重み付けを行ってもよい。
【0182】
図53は、このような本実施の形態6の変形例1における情報提供装置、つまり、ランドマークに対する嗜好情報も含めた予測機能を備える情報提供装置の構成図である。この情報提供装置は、予測現在地取得部4001、交通量検出地蓄積部5302、距離算出部103、向き算出部104、移動先予測部5305、情報提供部4506および嗜好情報蓄積部5307を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部4001に置き換えられ、交通量検出地蓄積部102が交通量検出地蓄積部5302に置き換えられ、嗜好情報蓄積部5307が追加されている点、および、それに関連する処理部が異なる。
【0183】
前記実施の形態1、5、6で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0184】
交通量検出地蓄積部5302は、図54に示されるように、交通量を検出できる地点の検出点位置および検出した交通量の大きさと交通量の向き、検出地の種別に加えてカテゴリを蓄積する。カテゴリは、交通量検出地がランドマークの場合、ランドマークのカテゴリを示す。例えば、ID「010」は検出地の種別「ランドマーク」、カテゴリ「コンサート」、検出地の名前「Yアリーナ」、位置の東経「134.5.59.9」、北緯「34.6.4.6」において交通量検出地が存在し、検出地における向き「流入」への交通量の大きさが「70台/時間」であることを示す。
【0185】
嗜好情報蓄積部5307は、図25に示されるように、ランドマークのカテゴリに対するユーザの評価を蓄積する。例えば、ID「004」は、カテゴリ「コンサート」に対する評価重みが「5」であることを示す。嗜好情報は予めユーザが入力しておく。
【0186】
移動先予測部5305は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部4502に蓄積された交通量の大きさと交通量の向き、検出地の種別に加えて、ランドマークのカテゴリを用いて移動先となる交通量検出地を予測する。具体的には、実施の形態1のように方向で移動先候補をフィルタリングした後、交通量の大きさを距離で割った値に評価重みをかけた評価値が最も大きいものを移動先とする。この移動先予測部5305は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部5305bと、再帰的に予測を繰り返す制御をする繰り返し制御部4005cとを有する。
【0187】
例えば、図54、図55に示されるように、交通量検出地情報と嗜好情報が蓄積されていた場合、図48に示される例のように、フィルタリング部5305bにより、現在地からYアリーナへの距離が1.5km、Yアリーナの交通量50、Yアリーナのカテゴリ「コンサート」の評価重みが5である場合にYアリーナへの評価値を計算すると、5×70/1.5となる。
【0188】
このように、ランドマークに対する嗜好情報も考慮して移動先が予測されるので、ユーザの個性を反映した精度の高い移動先予測が実現される。
【0189】
(実施の形態7)
次に、本発明の実施の形態7における情報提供装置について説明する。
【0190】
実施の形態1〜6では、ユーザからの入力を用いずに移動先を予測していた。本実施の形態7では、移動先の決定にユーザからの入力を用いる。つまり、本実施の形態では、装置が移動先を予測することで、ユーザによる目的地の設定の簡易化を行う。
【0191】
従来、目的地設定を行うには、目的地の候補が非常に多いため、ユーザが電話番号を入力する、地図から探して直接目的地の場所を入力する、名前を直接入力するなど、ユーザの負担が非常に大きかった。有名なランドマークやユーザが指定したカテゴリのランドマーク、訪問したことがあるランドマークのリストから入力する手法もあるが、図56に示されるように、提示する移動先候補の個数が非常に数の多いリストになり、入力したい目的地を探すだけでも非常に手間がかかる。
【0192】
そこで、本実施の形態4では、装置が交通量情報から移動先候補をフィルタリングし、フィルタリングされた移動先候補からユーザに選択させることで、目的地設定を簡易化させる。移動先候補には目的地候補だけではなく、通過地候補も含め、通過地が選択されたときには、選択された通過地情報を用いてさらに移動先を予測することで、ユーザに提示する移動先候補の個数を減少させ、より目的地設定を簡易化することができる。
【0193】
図57は、本実施の形態7における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、移動先の決定にユーザからの入力を用いる機能を備える情報提供装置であり、予測現在地取得部5701、交通量検出地蓄積部5702、距離算出部103、向き算出部104、移動先予測部5705、情報提供部5706、移動先提示部5707、移動先選択検知部5708および移動先選択部5709を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部5701に置き換えられ、交通量検出地蓄積部102が交通量検出地蓄積部5702に置き換えられ、移動先提示部5707、移動先選択検知部5708および移動先選択部5709が追加されている点、および、それに関連する処理部が異なる。
【0194】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0195】
予測現在地取得部5701は、移動先選択検知部5708が検知した通過地を現在地として検知する。移動先予測部が通過地入力を検知していない場合は、GPSアンテナなどにより、移動体の現在地を検知する。例えば、東経「134.5.59.9」、北緯「34.5.15.6」のように移動体の経度、緯度の情報を検知する。
【0196】
交通量検出地蓄積部5702は、図46に示されるように、交通量を検出できる地点の検出点位置および検出した交通量の大きさと交通量の向き、検出地の種別に加えて検出地の名前を蓄積する。例えば、ID「010」は検出地の種別「ランドマーク」、検出地の名前「Yアリーナ」、位置の東経「134.5.59.9」、北緯「34.6.4.6」において交通量検出地が存在し、検出地における向き「流入」への交通量の大きさが「70台/時間」であることを示す。
【0197】
移動先予測部5705は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部5702に蓄積された交通量の大きさと交通量の向き、検出地の種別を用いて移動先となる交通量検出地を予測する。この移動先予測部5705は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部5705bとを有する。
【0198】
例えば、図46に示されるように、交通量検出地蓄積部5702に交通量検出地が蓄積されていたとする。移動先予測部5705の移動先候補決定部105aは、このうち、現在地から一定の距離以内、具体的には、装置の提示する地図画面内に存在するものを全て選択し、図58に示されるように、移動先の候補とする。移動先予測部5705のフィルタリング部5705bは、移動先の候補となった交通量検出地の中から、実施の形態6と同様にして移動先を予測する。ただし、移動先は評価値の高いものから順に複数、例えば、図59に示されるように、5個予測する。なお、「ランドマーク」の評価値については、重みをつけてもよい。例えば、検出地の種別「ランドマーク」については評価値を10倍する。
【0199】
移動先提示部5707は、図60に示されるように、移動先予測部5705で予測した複数の移動先をユーザに提示し、選択させる。具体的には検出地の名前、検出地の位置を提示する。なお、検出地の種別が「道路」であるときは、通過する方向、つまり、交通量の方向を、検出地種別が「ランドマーク」であるときは、目的地であることを提示してもよい。
【0200】
移動先選択部5709は、リモコン、音声入力など、図60に示されるように、移動先提示部5707が提示した複数の移動先の中からユーザが選択を行うための入力装置である。
【0201】
移動先選択検知部5708は、移動先提示部5707によって提示された複数の移動先の中から移動先選択部5709によって選択された移動先を検知する。検知した移動先が通過地、つまり、検出地種別が「道路」であるときは、検知した移動先を現在地として予測現在地取得部5701に出力し、予測をやり直す。検知した移動先が目的地、つまり、検出地種別が「ランドマーク」であるときは、検知した移動先を目的地として設定する。
【0202】
情報提供部5706は、提供する情報を予め蓄積した提供情報蓄積部5706aを有し、設定された目的地に関する情報を提供情報蓄積部5706aから読み出し、読み出した情報をユーザに提供する。例えば、図60に示されるように、予測された移動先から、「C交差点・90度通過」が選択され、図61に示されるように、「C交差点・90度通過」を現在地としたときの予測移動先から「G映画館・目的地」が選択されたとする。このとき、図62に示されるように、現在地から目的地「G映画館」に向かうユーザの予定経路での渋滞情報を表示し、目的地「G映画館」までの推奨経路情報を提供する。なお、提供情報蓄積部5706aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部5706によって取得された情報等が含まれる。
【0203】
以下、本実施の形態7における情報提供装置の動作について、図63のフローチャートを用いて説明する。前記実施の形態1、6で示した構成要素には同様の符号を付与し、説明を省略する。
【0204】
実施の形態1と同様に現在地からの距離と向きを算出した後、移動先予測部5705の移動先候補決定部105aは、距離算出部103が算出した現在地−交通量検出地間の距離により、端末の画面内にある複数の交通量検出地を移動先候補として選択する(ステップS6304)。移動先予測部5705のフィルタリング部5705bは、実施の形態1のように、移動先候補となった交通量検出地の中から、検出地の種別と現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先候補を選別する(ステップS5205)。さらに移動先予測部5705のフィルタリング部5705bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離により、移動先を複数予測する(ステップS6306)。
【0205】
移動先提示部5707は、移動先予測部5705が予測した複数の移動先を、移動先の位置、名前と共にユーザに提示する(ステップS6307)。移動先選択部5709では、ユーザは移動先提示部5707が提示した移動先の中から移動先を選択する(ステップS6308)。移動先選択検知部5708は、移動先提示部5707が提示した移動先の中から移動先選択部5709によって選択された移動先を検知する(ステップS6309)。
【0206】
さらに移動先選択検知部5708は、選択された移動先の検出地種別が目的地であるか判定を行う(ステップS6310)。選択された移動先の検出地種別が目的地でなかったときは(ステップS6310のNo)、ステップS6311へ、目的地であったときは(ステップS6310のYes)、ステップS6312に進む。選択された移動先が目的地でなかったとき、予測現在地取得部は、選択された移動先を現在地として取得し(ステップS6311)、ステップS802に戻る。選択された移動先がランドマークであったとき、情報提供部5706は、移動先選択検知部5708が検知した選択移動先に関する情報を提供情報蓄積部5706aから読み出してユーザに提供する(ステップS6312)。なお、ステップS6304はなくてもよい。つまり蓄積された交通量検出地をそのまま移動先候補としてもよい。
【0207】
以上のように、本実施の形態における情報提供装置によれば、移動先の決定にユーザからの入力が使用されるので、ユーザが予定している目的地と異なる移動先の情報が提供される等の不具合が回避され、ユーザフレンドリな情報提供装置が実現される。
【0208】
また、実施の形態7では、目的地の候補は交通量を検出できるランドマークであって交通量情報によってフィルタリングを行っていた。しかし、目的地の候補は交通量を検出できなくなくてもよい。例えば、ユーザが訪問したことがあるランドマークや一般的に有名なランドマーク、一定面積以上のランドマーク、ユーザの嗜好に一致するランドマークなどのリストを目的地の候補として蓄積し、通過地の交通量から通過地予測を行い、ユーザに選択させ、ユーザが最終的に選択した通過地から一定の距離にある目的地候補のみをユーザに提示し、選択させることで、目的地設定の簡易化を行うことが可能である。また、ユーザの意図する目的地が目的地候補のリストに存在しない場合もある。そのような場合でも、ユーザが最終的に選択した通過地までの経路情報、および目的地が存在すると想定される範囲の情報を提供することができる。
【0209】
図64は、このような本実施の形態7の変形例1における情報提供装置、つまり、通過先を選択した後に目的地リストから目的地を選択する機能を備える情報提供装置の構成図である。この情報提供装置は、予測現在地取得部5701、交通量検出地蓄積部102、距離算出部103、向き算出部104、通過地予測部6405、通過地提示部6407、通過先選択検知部6408、目的地候補蓄積部6409、目的地提示部6410、目的地選択検知部6411、情報提供部6412、通過地選択部6413および目的地選択部6414を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、現在地取得部101が予測現在地取得部5701に置き換えられ、移動先予測部105が通過地予測部6405に置き換えられ、構成要素6407〜6411、6413および6414が追加されている点、および、それに関連する処理部が異なる。
【0210】
前記実施の形態1、7で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0211】
目的地候補蓄積部6409は、図65に示されるように、目的地候補の名前と位置を蓄積する。例えば、ID「001」は目的地候補の名前「Sセンター」、位置の東経「134.5.28.9」、北緯「34.5.15.7」を示す。目的地候補の名前や位置は予め装置内に蓄積しておく。目的地候補は例えば面積が一定以上であるランドマークのリストである。
【0212】
通過地予測部6405は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きを用いて通過地となる交通量検出地を予測する。実施の形態1の移動先予測部105と同様に例えば、図2に示されるように交通量検出地が蓄積されていたとする。このうち現在地から一定の距離以内、具体的には装置の提示する地図画面内に存在するものを全て選択し、実施の形態1と同様に移動先つまり通過地を予測する。ただし、通過地は評価値の高いものから順に複数、例えば図66に示されるように3個予測する。なお、ここでの交通量検出地は通過地となることが多いので通過地と呼んでいるが、目的地であってもよい。この通過地予測部6405は、通過地候補を決定する通過地候補決定部6405aと、決定された通過地候補から最終的な1以上の通過地を選別するフィルタリング部6405bとを有する。
【0213】
通過地提示部6407は、図67に示されるように通過地予測部6405で予測した複数の通過地をユーザに提示し、選択させる。具体的には検出地の位置と交通量の方向を提示する。同時に「どこも通過しない」という選択肢も提示する。
【0214】
通過地選択部6413は、リモコン、音声入力など図67に示されるように通過地提示部6407が提示した複数の移動先の中からユーザが選択を行うための入力処理部である。
【0215】
通過先選択検知部6408は、通過地提示部6407によって提示された複数の通過先の中から通過地選択部6413によって選択された通過先を検知する。検知した通過先を現在地として、予測現在地取得部5701に出力し、予測をやり直す。通過先を検知しなかった場合、つまり「どこも通過しない」ことが選択された場合には、予測を終了する。
【0216】
目的地提示部6410は、目的地候補蓄積部6409に蓄積された目的地候補の中から、ユーザによって最終的に選択された通過地、どこも選択されなかったときには現在地から既定の距離にある目的地候補を位置、名前と共に提示する。例えば、ユーザによって最終的に選択された通過値を現在地としたときに画面内に存在する目的地を提示する。例えば、図67に示されるように予測された通過先から、「ID005・90度通過」が選択され、図68に示されるように「ID005・90度通過」を現在地としたときの予測通過先から「ID018・180度通過」が選択され、図69に示されるように「ID018・180度通過」を現在地としたときの予測通過先から「どこも通過しない」が選択されたとする。このとき図70に示されるように「ID018」を90度に方向に移動する点を現在地としたときの画面内にある目的地候補を提示する。同時に「どこも目的地ではない」という選択肢も提示する。
【0217】
目的地選択部6414は、リモコン、音声入力など図70に示されるように目的地提示部6410が提示した複数の移動先の中からユーザが選択を行うための入力処理部である。
【0218】
目的地選択検知部6411は、目的地提示部6410によって提示された複数の目的地の中から目的地選択部6414によって選択された目的地を検知し、目的地設定を行う。目的地を検知しなかった場合、つまり「どこも目的地ではない」ことが選択された場合には最終的に選択された通過地を目的地の代用として用いる。
【0219】
情報提供部6412は、提供する情報を予め蓄積した提供情報蓄積部6412aを有し、選択された通過地および設定された目的地に関する情報を提供情報蓄積部6412aから読み出し、読み出した情報をユーザに提供する。例えば、図67に示されるように、予測された通過先から、「ID005・90度通過」が選択され、図68に示されるように「ID005・90度通過」を現在地としたときの予測通過先から「ID018・180度通過」が選択され、図69に示されるように「ID018・180度通過」を現在地としたときの予測通過先から「どこも通過しない」が選択され、図70に示されるように「ID018・180度通過」を現在地としたときの目的地候補から「どこも目的地ではない」が選択されたとする。このとき、図71に示されるように現在地から通過地「ID005」を90度の方向で通過し、「ID018」を180度の方向で通過するユーザの予定経路での渋滞情報を表示し、最終通過地「ID018・180度」までの推奨経路情報を提供する。なお、提供情報蓄積部6412aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部6412によって取得された情報等が含まれる。
【0220】
以下、本実施の形態7の変形例1における情報提供装置の動作について、図72のフローチャートを用いて説明する。
【0221】
まず、予測現在地取得部5701が、GPS等により、現在地を取得する(ステップS7201)。距離算出部103は、予測現在地取得部5701で取得した現在地の位置と、交通量検出地蓄積部102に蓄積した交通量検出地の位置との間の距離を算出する(ステップS7202)。向き算出部104は予測現在地取得部5701で取得した現在地の位置から、交通量検出地蓄積部102に蓄積した交通量検出地の位置への向きを算出する(ステップS7203)。通過地予測部6405の通過地候補決定部6405aは、距離算出部103が算出した現在地−交通量検出地間の距離により、端末の画面内にある複数の交通量検出地を通過先候補として選択する(ステップS7204)。通過地予測部6405のフィルタリング部6405bは、通過先候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出地における交通量の向きにより、通過先候補を選別する(ステップS7205)。さらに通過地予測部6405のフィルタリング部6405bは、通過先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離により、通過先を複数予測する(ステップS7206)。
【0222】
通過地提示部6407は、通過地予測部6405が予測した複数の通過先を、通過先の位置、方向と共にユーザに提示する(ステップS7207)。通過地選択部6413では、ユーザは通過地提示部6407が提示した通過先の中から通過先を選択する(ステップS7208)。通過先選択検知部6408は、通過地提示部6407が提示した通過先の中から通過地選択部6413によって選択された通過先を検知する(ステップS7209)。
【0223】
さらに通過先選択検知部6408は、通過先が選択されたか判定を行う(ステップS7210)。通過先が選択されたときは(ステップS7210のNo)、ステップS7211へ、どこも通過しないが選択されたときは(ステップS7210のYes)、ステップS7212に進む。通過先が選択されたとき、予測現在地取得部5701は、選択された通過先を現在地として取得し(ステップS7211)、ステップS7202に戻る。どこも通過しないが選択されたとき、目的地提示部6410は、目的地候補蓄積部6409の中から最終的に選択された通過先から既定の距離内にある目的地候補を、目的地候補の位置、名前と共にユーザに提示する(ステップS7212)。目的地選択部6414では、ユーザは目的地提示部6410が提示した目的地の中から目的地を選択する(ステップS7213)。目的地選択検知部6411は、目的地提示部6410が提示した目的地の中から目的地選択部6414によって選択された目的地を検知する(ステップS7214)。
【0224】
さらに目的地選択検知部6411は、目的地が選択されたか判定を行う(ステップS7215)。目的地が選択されたときは(ステップS7215のNo)、ステップS7216へ、どこも目的地ではないが選択されたときは(ステップS7215のYes)、ステップS7217に進む。目的地が選択されたとき、情報提供部6412は、選択された目的地に関する情報を提供情報蓄積部6412aから読み出して提供する(ステップS7216)。目的地が選択されなかったとき、情報提供部6412は、選択された通過地に関する情報を提供情報蓄積部6412aから読み出して提供する(ステップ7217)。なお、ステップS7204はなくてもよい。つまり蓄積された交通量検出地をそのまま通過地候補としてもよい。
【0225】
以上のように、本変形例における情報提供装置によれば、装置が予測した移動先がユーザに提示され、ユーザからの入力を受け付けられるので、ユーザによる目的地の設定の簡易化が実現される。
【0226】
(実施の形態8)
次に、本発明の実施の形態8における情報提供装置について説明する。
【0227】
実施の形態2では、それぞれの交通量検出地について位置と向きの変更を行っていた。しかし、複数の交通量検出地を合成し、一つの交通量検出地として扱った方が移動先予測を効果的に扱える場合がある。最も単純な例では、図73に示される例では、どの交通量検出地も現在地からの距離が同等であるため、他の交通量検出地(交通量200)よりも交通量が大きいID7304(交通量300)を移動先として予測する。しかし、実際には、ID7301、7302、7303は車線が異なるだけであり、現在地を通過した移動体が通過する可能性はID7301、7302、7303のどれにおいても存在する。また、ID7301、7302、7303を通過した移動体がとりうる目的地の分布確率はどれも等しいと考えられる。よって、ID7301、7302、7303の交通量は同じものであると仮定できる。よって、交差点7305を90度へ進む交通量はID7301、7302、7303の交通量を合計したもの、つまり600(=200+200+200)である。よって、交差点7305をID7304つまり270度の向きではなく、90度の向きに進む可能性が高い。
【0228】
同様に、図74のID7402と7403の交通量検出地において、現在地を通過した移動体が通過する可能性は双方とも存在する。また、ID7402とID7403の交通量検出地の位置は非常に距離が近く、交通量の向きも同じであるため、ID7402を通過した移動体がとりうる目的地の分布確率と、ID7403を通過した移動体がとりうる目的地の分布確率はほぼ等しいと考えられる。よって、ID7402、7403の交通量は同じものであると仮定できるため、二つの交通量検出地を合成する。例えば、ID7402とID7403を同じ交通量検出地とし、交通量の大きさはID7403の交通量を加えた値600(200+400)とする。
【0229】
本実施の形態では、交通量検出地の位置と交通量の方向を用いて交通量検出地の交通量の合成を行う。これにより、効果的に移動先を予測することができる。
【0230】
図75は、本実施の形態8における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、交通量検出地の位置と交通量の方向を用いて交通量検出地の交通量の合成を行う機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、合成可否判定部7508および合成部7509を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、合成可否判定部7508および合成部7509が追加されている点が異なる。
【0231】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0232】
合成可否判定部7508は、交通量検出地蓄積部102に蓄積された複数の交通量検出地について、検出地の位置と交通量の向きの類似性から、複数の交通量検出地での交通量の大きさを合成できるか否か(合成の可否)を判定する。具体的には、複数の交通量検出地について、互いに交通量の向きが等しく、検出地の位置間の距離が所定の値、例えば500m以下であるときに合成を可とする。例えば、図74において、ID7401とID7403の交通量検出地は交通量の向きが異なるため、合成は不可とする。ID7402とID7403の交通量検出地は交通量の向きが等しく、検出地間の距離が400mと500m以下であるため合成は可とする。
【0233】
合成部7509は、合成可否判定部7508が合成可であると判定した複数の交通量検出地の合成を行う。具体的には、互いに合成可であると判定された交通量検出地について、同一の交通量検出地として扱う。交通量の大きさについては互いの交通量の大きさを加算する。例えば、図74に示されるように、ID7402とID7403の合成が可であると判定されたとき、ID7402とID7403の交通量検出地を同じ交通量検出地として扱う。同じ交通量検出地として扱うということは、合成された一方の交通量検出地、例えば、ID7402が移動先として予測されたときは、他方の交通量検出地ID7403も予測移動先とするということである。交通量の大きさは、図76に示されるように、ID7402の交通量400とID7403の交通量200を加えて600とする。検出地位置は、平均をとってもよいし、交通量の大きさの大きい検出地の位置にしてもよいし、現在地に最も近い交通量検出地の位置にしてもよい。
【0234】
以下、本実施の形態8における情報提供装置の動作について、図77のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0235】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。合成可否判定部7508は、交通量検出地蓄積部102に蓄積された複数の交通量検出地について、検出地の位置と交通量の向きから合成の可否を判定する(ステップS7702)。合成部7509は、合成可否判定部7508が合成可であると判定した複数の交通量検出地を合成する(ステップS7703)。以下、実施の形態1と同様である(ステップS802〜S807)。
【0236】
以上のように、本実施の形態における情報提供装置によれば、交通量検出地の位置と交通量の方向を用いて交通量検出地の交通量が合成され、合成された交通量に基づいて移動先が予測されるので、より実情に即した交通量に基づく移動先予測が行われ、移動先の予測精度が向上される。
【0237】
なお、実施の形態8では、交通量検出地の位置と向きのみを用いて合成の可否を判定していた。しかし、交通量検出地の位置と向きのみでは合成の可否が判断できない場合がある。例えば、図78に示される例では、ID7801とID7802の交通量検出地は向きが等しく、検出地間の距離も400mと近い。しかし、ID7801と7802は直列に接続されているため、ID7802の交通量はID7801の交通量がそのまま検出されていると考えられる。このため、ID7801とID7802では合成を行わず、現在地から遠いID7802を除去した方が、移動先予測を効果的に行うことが出来る。
【0238】
具体的には、実施の形態4と同様に、道路情報から推奨経路を求め、冗長移動先を除去し、残った移動先候補のみを合成に使用する。つまり、実施の形態4と同様に、道路情報から推奨経路を求め、冗長移動先を除去し、残った移動先候補のみを合成に使用する機能を備える情報提供装置を、実施の形態8の変形例1における情報提供装置として実現してもよい。
【0239】
これによって、道路の位置とリンク構造も用いて冗長な移動先を除去して交通量の合成可否が判定されるので、より精度の高い移動先予測が実現される。
【0240】
また、実施の形態8では、交通量検出地−交通量検出地間のユークリッド距離により、合成の可否を判定していた。しかし、交通量検出地−交通量検出地間のユークリッド距離の代わりに現在地−交通量検出地間の最小経路コストの差を利用しても良い。つまり、交通量の合成判定における複数の交通量検出地の位置の類似性については、最小経路コストの類似性を用いてもよい。
【0241】
経路コストは、例えば、移動距離でありリンク距離の総和である。例えば、図79に示される例では、ID7901とID7902の交通量検出地は交通量の向きが270度と等しく、ユークリッド距離も100mであり、非常に小さい。しかし、現在地からID7901を通過するためには大回りをしなければならず、ID7901を通過する状況とID7902を通過する状況は全く異なる。そこで、最小経路コストの差を用いることで効果的に合成の可否判定を行うことができる。
【0242】
例えば、図79に示される例では、現在地から交通量検出地ID7901への経路コストが7kmであり、現在地から交通量検出地ID7902への経路コストが1kmであることから、経路コストの差は6kmと大きく、合成は不可と判定する。
【0243】
これによって、交通量の合成可否の判定において、距離の代わりに現在地からの最小経路コストの差が用いられ、その差が大きい場合に交通量が合成されてしまうことが回避され、より実情に即した移動先予測が可能となる。
【0244】
(実施の形態9)
次に、本発明の実施の形態9における情報提供装置について説明する。
【0245】
移動先予測を行う際に、全ての交通量検出地において、現在地からの距離や方向、評価値を計算していたのでは、装置への負担が非常に大きい。そこで、予め移動先候補となる交通量検出地をフィルタリングすることが必要である。実施の形態1では、現在地の距離が小さい順に規定値、例えば10個の交通量検出地を移動先候補として選択した。しかし、それでも現在地からの距離については、全ての交通量検出地において計算しなければならないという問題がある。よって、個数によりフィルタリングを行う前段階においても移動先候補をフィルタリングする必要がある。
【0246】
また、実施の形態7では、装置の提示する地図画面全体、例えば東経134.5〜134.8かつ北緯34.4〜34.7からなる範囲区間に含まれる交通量検出地を移動先候補とした。これにより、現在地からの距離を計算しなくても、移動先候補のフィルタリングを行うことができる。また、ユーザに提示する地図画面の縮尺、表示を変更することなく、予測移動先の提示を行うことができる。しかし、交通量検出地の多い都会では、非常に多くの交通量検出地を候補としなければならないが、交通量検出地の少ない田舎では、移動先候補となる交通量検出地がほとんどないという問題が生じる。そのため、現在地域の交通量検出地の数に応じて移動先候補をフィルタリングする範囲の大きさを変更する必要がある。
【0247】
そこで、本実施の形態では現在地域の交通量検出地の数の密度により移動先候補をフィルタリングする範囲の大きさの変更を行う。これにより、移動先候補を地域の交通量検出地の数によらず、一律にフィルタリングすることができる。
【0248】
図80は、本実施の形態9における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、現在地域の交通量検出地の数の密度により移動先候補をフィルタリングする範囲の大きさの変更を行う機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、交通量検出地密度蓄積部8007、フィルタリング位置範囲算出部8008および移動先候補フィルタリング部8009を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、交通量検出地密度蓄積部8007、フィルタリング位置範囲算出部8008および移動先候補フィルタリング部8009が追加されている点が異なる。
【0249】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0250】
交通量検出地密度蓄積部8007は、交通量検出地が存在する密度を地域別に蓄積する。例えば、図81に示されるように、都道府県別に交通量検出地の密度を蓄積する。図50に示される例では、ID「001」は地域「東京」において交通量検出地の密度が「0.400(個/km2)」であることを示す。地域別の交通量検出地密度は予め交通量検出地蓄積部102に蓄積された交通量検出地情報から算出しておく。
【0251】
フィルタリング位置範囲算出部8008は、現在地取得部101が取得した現在地と、交通量検出地密度蓄積部8007に蓄積された現在地を含む地域の交通量検出地密度から、移動先候補とする交通量検出地をフィルタリングする位置範囲区間を算出する。例えば、現在地を中心とする交通量検出地が平均20個存在する範囲をフィルタリング範囲とする。現在地が東経「134.5」、北緯「34.5」であったとすると、現在地域は「徳島」であるため、図81に示されるように、「徳島」の検出地密度が「0.020(個/km2)」であることから、現在地を中心とする1000(km2)をフィルタリングの範囲とする。例えば、東経134.4〜134.6かつ北緯34.4〜34.6からなる面積約1000(km2)の長方形の範囲区間をフィルタリングの範囲とする。
【0252】
移動先候補フィルタリング部8009は、フィルタリング位置範囲算出部8008が算出したフィルタリング範囲に従って、交通量検出地蓄積部102に蓄積された交通量検出地から移動先候補となるものをフィルタリングする。例えば、フィルタリング範囲が東経134.4〜134.6かつ北緯34.4〜34.6であった場合、範囲内にある交通量検出地を移動先候補とする。
【0253】
以下、本実施の形態9における情報提供装置の動作について、図82のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0254】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。フィルタリング位置範囲算出部8008は、現在地取得部101が取得した現在地の位置から、交通量検出地密度蓄積部8007に蓄積された地域別の交通量検出地密度情報を用いて、現在地の交通量検出地密度を取得する(ステップS8202)。次に、フィルタリング位置範囲算出部8008は、取得した現在地の交通量検出地密度から移動先候補となる交通量検出地をフィルタリングする位置範囲を算出する(ステップS8203)。移動先候補フィルタリング部8009はフィルタリング位置範囲算出部8008が算出したフィルタリング位置範囲により、移動先候補となる交通量検出地をフィルタリングする(ステップS8204)。以下、実施の形態1と同様である(ステップS802〜S807)。
【0255】
以上のように、本実施の形態における情報提供装置によれば、移動先予測の候補となる交通量検出地をフィルタリングする範囲が交通量検出地の密度を用いて変更されるので、移動先予測に伴う処理負荷の軽減を図ることが可能となる。
【0256】
(実施の形態10)
次に、本発明の実施の形態10における情報提供装置について説明する。
【0257】
実施の形態1〜9では、交通量の大きさと向きを、予め蓄積しておいた交通量情報やビーコンや通信で獲得した交通量情報をそのまま利用していた。そのため、交通量検出地の位置や交通量の大きさや向きの情報がないと移動先を予測できない。ところが、交通量の大きさの情報は、リアルタイムでは移動体端末に配信されていない。移動体端末では、渋滞情報などに加工されて配信されている。また、交通量が一般的に公開されていない場所も多い。
【0258】
そこで、本実施の形態10では、交通量検出地の位置や交通量の大きさや向きといった交通量情報を、渋滞情報や制限速度、道路の幅といった道路情報から推定する。これにより、交通量がわからない場所でも、交通量検出地として仮想的に扱うことができる。また、渋滞情報を利用することで、交通量変動にリアルタイムに対応することができる。
【0259】
図83は、本実施の形態10における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、交通量を渋滞情報から推定する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、渋滞情報蓄積部8307および交通量推定部8308を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、渋滞情報蓄積部8307および交通量推定部8308が追加されている点が異なる。
【0260】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0261】
渋滞情報蓄積部8307は、図84に示されるようにVICSなどにより入手した渋滞情報を蓄積する。例えば、VICS情報の場合、渋滞の始点位置、終点位置、方向、渋滞の強度を示す渋滞度、渋滞長を入手できる。渋滞度は「渋滞」、「混雑」、「順調」の3値である。渋滞長とは、渋滞度が一定とされている区間の距離である。図84に示される例では、ID「001」は東経「134.5.27.7」、北緯「34.6.4.5」の始点から、東経「134.6.6.7」、北緯「34.6.4.5」の終点まで、渋滞度「渋滞」の渋滞が渋滞長「1km」発生していることを示す。
【0262】
交通量推定部8308は、渋滞情報蓄積部8307に蓄積された渋滞情報から交通量検出地の位置、交通量の向き、交通量の大きさを推定する。例えば、図84に示されるような渋滞情報が蓄積されている場合、交通量検出地の位置は渋滞の始点位置、交通量の向きは渋滞の始点から終点までの向きとする。向きは、始点位置と終点位置から算出する。交通量の大きさは渋滞度や渋滞長から仮想的に推定する。例えば、渋滞度「順調」を0、渋滞度「混雑」を1、渋滞度「渋滞」を2とし、交通量の大きさを渋滞度×渋滞長の長さとする。これは、一般的に渋滞度「渋滞」における混み具合は渋滞度「混雑」の約2倍であるからである。例えば、図84に示されるような渋滞情報を蓄積していたとき、ID001から交通量検出地位置は東経「134.5.27.7」、北緯「34.6.4.5」、交通量の向きは90度、交通量の大きさは「2」(2×1km)となる交通量情報が推定できる。推定された交通量情報を交通量検出地蓄積部102に蓄積する。
【0263】
以下、本実施の形態10における情報提供装置の動作について、図85のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0264】
交通量推定部8308は、渋滞情報蓄積部8307に蓄積された渋滞情報から交通量検出地の位置、交通量の大きさ、向きを推定し、交通量検出地蓄積部102に蓄積する(ステップS8500)。以下、実施の形態1と同様である(ステップS801〜S807)。
【0265】
以上のように、本実施の形態における情報提供装置によれば、交通量が渋滞情報から推定されるので、交通量がわからない場所でも、交通量検出地として仮想的に扱うことができる。また、渋滞情報を利用することで、交通量変動にリアルタイムに対応することができる。
【0266】
なお、本実施の形態10では、交通量検出地の位置を渋滞の始点としていた。しかし、交通量検出地の位置は道路上における渋滞の始点と終点の間のどの位置でもよい。つまり、実施の形態2のように、交通量検出地変更可能位置範囲を算出し、位置範囲の中で移動体の現在地に最も近い位置を交通量検出地の位置とする機能を備える情報提供装置を、実施の形態10の変形例1における情報提供装置として実現してもよい。
【0267】
具体的には、実施の形態4と同様に、道路情報から推奨経路を求め、冗長移動先を除去し、残った移動先候補のみを使用する。このとき、交通量検出地変更可能位置範囲とは、道路上における渋滞の始点と終点の間である。例えば、図86に示される例では、渋滞の始点位置が位置8602であり、終点位置が位置8603であるため、この渋滞から推測した交通量検出地ID8601の変更可能位置範囲は、始点位置8602から終点位置8603までの道路とする。
【0268】
これによって、交通量検出地変更可能位置範囲の中で移動体の現在地に最も近い位置を交通量検出地の位置とすることで、交通量検出地の位置に依存する評価のばらつきが排除され、移動先予測の精度が向上される。
【0269】
(実施の形態11)
次に、本発明の実施の形態11における情報提供装置について説明する。
【0270】
実施の形態10では、渋滞度や渋滞長情報を利用することで、交通量を推定していた。なお、VICSは道路の所定の地点間の移動時間であるリンク旅行時間もリアルタイムで提供するため、リンク旅行時間から交通量を推定してもよい。リンク旅行時間は渋滞度や渋滞長に比べて精度が高いため、より細かく交通量を推定できる。
【0271】
図87は、本実施の形態11における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、リンク旅行時間から交通量を推定する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部105、情報提供部106、リンク旅行時間蓄積部8707および交通量推定部8708を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、リンク旅行時間蓄積部8707および交通量推定部8708が追加されている点が異なる。
【0272】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0273】
リンク旅行時間蓄積部8707は、図88に示されるように、VICSなどにより入手したリンク旅行時間とリンク長、リンクの始点位置と終点位置を蓄積する。図88に示される例では、ID「001」は東経「134.5.27.7」、北緯「34.6.4.5」の始点から、東経「134.6.6.7」、北緯「34.6.4.5」の終点まで、のリンク長「1km」のリンクにおいて旅行時間が「10分」であることを示す。
【0274】
交通量推定部8708は、リンク旅行時間蓄積部8707に蓄積されたリンクの始点位置、終点位置、リンク長、旅行時間から交通量検出地の位置、交通量の向き、交通量の大きさを推定する。例えば、図88に示されるようなリンク旅行時間が蓄積されている場合、交通量検出地の位置はリンクの始点位置、交通量の向きはリンクの始点から終点までの向きとする。向きは、始点位置と終点位置から算出する。交通量の大きさはリンク長とリンク旅行時間から仮想的に推定する。例えば、リンク旅行時間をリンク長で割った値を交通量の大きさとする。例えば、図88に示されるような渋滞情報を蓄積していたとき、ID001から交通量検出地位置は東経「134.5.27.7」、北緯「34.6.4.5」、交通量の向きは90度、交通量の大きさは「10(分/km)」(10分/1km)となる交通量情報が推定できる。推定された交通量情報を交通量検出地蓄積部102に蓄積する。
【0275】
なお、実施の形態10の変形例1と同様に、交通量検出位置は道路上におけるリンクの始点と終点の間のどの位置でもよい。
【0276】
以下、本実施の形態11における情報提供装置の動作について、図89のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0277】
交通量推定部8708は、リンク旅行時間蓄積部8707に蓄積されたリンクの始点位置、終点位置、リンク長、旅行時間から交通量検出地の位置、交通量の大きさ、向きを推定し、交通量検出地蓄積部102に蓄積する(ステップS8900)。以下、実施の形態1と同様である(ステップS801〜S807)。
【0278】
以上のように、本実施の形態における情報提供装置によれば、交通量がリンク旅行時間から推定されるので、その時間が渋滞度や渋滞長に比べて精度が高いことから、より細かく交通量が推定され、移動先予測の精度が向上される。
【0279】
(実施の形態12)
次に、本発明の実施の形態12における情報提供装置について説明する。
【0280】
実施の形態1〜11では、通過地点あるいは目的地となる移動先の位置を予測していた。しかし、現在地と交通量検出地における交通量の向きと大きさを用いて移動先の方向を予測してもよい。道路の工事情報など情報の数自体が少ない情報を提供する場合は、移動先の位置を厳密に限定しなくても情報の数を制限することができる。移動先の方向のみを予測することで、予測の適合率を向上することができる。
【0281】
図90は、本実施の形態12における情報提供装置の構成図である。この情報提供装置は、交通量の向きを用いて移動方向だけを予測し、予測した移動方向に関する情報を提供する情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先方向予測部9005および情報提供部9006を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先方向予測部9005に置き換えられ、情報提供部106が情報提供部9006に置き換えられている点が異なる。
【0282】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0283】
移動先方向予測部9005は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向きにより、移動先の方向を予測する。この移動先方向予測部9005は、移動先候補を決定する移動先候補決定部9005aと、決定された移動先候補から最終的な1以上の移動先を選別するフィルタリング部9005bとを有する。
【0284】
例えば、図2に示されるように交通量検出地が蓄積されていたとする。移動先方向予測部9005の移動先候補決定部9005aは、このうち現在地からの距離が近いものから順に10個を選択し、選択した交通量検出の交通量の向きを図91に示されるように移動先の方向の候補とする。移動先方向予測部9005のフィルタリング部9005bは、移動先の方向の候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出地における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の方向候補として選択する。なぜなら、一般的に、それまでと逆向きに移動することはほとんどないからである。例えば、図92に示されるように「ID005〜008(東経134.7.26.9、北緯34.4.49.2)」の交通量検出地をフィルタリングする場合、現在地から「ID005〜008」への向き(方向角)は110度である。「ID005〜008」付近まで110度の向きで移動した後、「ID005〜008」を逆方向である270度の方向で通過することは、一般的にほとんどない。よって、「ID005〜008」における交通量の向き「90度」「270度」「0度」「180度」のうち、110度±90度の範囲内である向き「90度」、「180度」が選択される。例えば、図92に示される例では、向きから図93に示されるようにフィルタリングされる。
【0285】
次に、移動先方向予測部9005のフィルタリング部9005bは、交通量の向きとの大きさにより移動先の方向を予測する。具体的には、交通量の向きごとに交通量の大きさを合計し、最も交通量の大きい向きを移動先の方向とする。例えば、図94に示されるように、90度の向きの交通量はID003の交通量400とID005の交通量900を加算して1300となる。また、180度の向きの交通量はID008の交通量から100、270度の向きの交通量はID002の交通量400とID010の交通量200を加算して600となる。よって、最も交通量の大きい90度の向きが移動先の方向として予測される。これは移動体の将来の移動先が現在地から90度の向きであることを予測している。
【0286】
なお、移動先の方向を予測する際、−45度〜45度、45度〜135度、135度〜225度、225度〜325度の4方向などに移動先の方向を限定してもよい。この場合、4方向についてそれぞれ交通量の大きさを合計し、最も交通量の大きい向きを移動先の方向とする。
【0287】
情報提供部9006は、提供する情報を予め蓄積した提供情報蓄積部9006aを有し、移動先方向予測部9005が予測した移動先の方向に関する情報を提供情報蓄積部9006aから読み出し、読み出した情報を情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体の将来の移動先が90度の向きであること予測した場合、図95に示されるように、現在地からおよそ90度の方向にある工事情報や渋滞情報を提供する。なお、提供情報蓄積部9006aに蓄積されている情報には、予め蓄積された推奨経路等の地図情報や、VICS電波やネットワーク回線から最新の交通量情報等として情報提供部9006によって取得された情報等が含まれる。
【0288】
以下、本実施の形態12における情報提供装置の動作について、図96のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0289】
実施の形態1と同様に、現在地からの距離と向きを算出した後、移動先方向予測部9005の移動先候補決定部9005aは、距離算出部103が算出した現在地−交通量検出地間の距離により、複数の交通量検出地の交通量の向きを移動先の方向候補として選択する(ステップS9604)。次に、移動先方向予測部9005のフィルタリング部9005bは、移動先の方向候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、移動先の方向候補を選別する(ステップS9605)。さらに、移動先方向予測部9005のフィルタリング部9005bは、移動先の方向候補となった交通量検出地の中から、交通量の向きと大きさにより、移動先の方向を予測する(ステップS9606)。最後に、情報提供部9006は、移動先方向予測部9005が予測した移動先の方向に関する情報を提供情報蓄積部9006aから読み出してユーザに提供する(ステップS9607)。
【0290】
以上のように、本実施の形態における情報提供装置によれば、交通量の向きを用いて移動方向だけが予測され、予測された移動方向に関連した情報が提供されるので、移動先の位置を特定する処理が不要となり、処理が簡素化される。
【0291】
(実施の形態13)
次に、本発明の実施の形態13における情報提供装置について説明する。
【0292】
実施の形態1〜12では、予測される移動先の数は一定であった。しかし、情報提供に必要な移動先の数は、提供する情報の内容によって異なる。例えば、道路の工事情報であれば、情報の数が少ないため移動先をそれほど限定する必要がない。つまり、移動先の予測数が多くてもよい。しかし、店舗情報であれば、情報の数が多いため移動先を限定し、提供する情報をフィルタリングする必要がある。つまり、移動先の予測数は少なくしなければならない。
【0293】
そこで、本実施の形態13では、情報提供部が提供する情報の数に応じて、移動先の予測数を変更する。
【0294】
図97は、本実施の形態13における情報提供装置の構成図である。この情報提供装置は、実施の形態1の機能に加えて、提供する情報の数に応じて、移動先の予測数を変更する機能を備える情報提供装置であり、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部9705、情報提供部9706および移動先予測数決定部9708を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先予測部9705に置き換えられ、情報提供部106が情報提供部9706に置き換えられ、移動先予測数決定部9708が追加されている点が異なる。
【0295】
前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0296】
提供情報取得部9707は、情報提供部9706が移動体に提供するべき情報を外部ネットワークなどから取得する。例えば、道路の工事情報を取得する。なお、提供情報は装置の内部に蓄積していてもよい。
【0297】
移動先予測数決定部9708は、提供情報取得部9707が取得した情報の数を用いて、移動先予測部9705が予測する移動先の数を決定する。例えば、情報の数の逆数に所定の値を掛けた値を移動先予測数とする。
【0298】
移動先予測部9705は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向き、移動先予測数決定部9708が決定した予測数より、移動先となる交通量検出地を予測する。この移動先予測部9705は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から、移動先予測数決定部9708で決定された個数の最終的な移動先を選別するフィルタリング部9705bとを有する。
【0299】
例えば、図2に示されるように、交通量検出地蓄積部102に交通量検出地が蓄積されていたとする。移動先予測部9705の移動先候補決定部105aは、このうち現在地からの距離が近いものから順に10個を選択し、図3に示されるように移動先の候補とする。移動先予測部9705のフィルタリング部9705bは、移動先の候補となった交通量検出地の中から、現在地−交通量検出地間の向きと検出値における交通量の向きにより、さらにフィルタリングする。例えば、交通量の向きが現在地−交通量検出地間の向きの±90度の範囲内である交通量検出地を移動先の候補として選択する。なぜなら、一般的に、それまでと逆向きに移動することはほとんどないからである。例えば、図4に示されるように、「ID005〜008(東経134.7.26.9、北緯34.4.49.2)」の交通量検出地をフィルタリングする場合、現在地から「ID005〜008」への向き(方向角)は110度である。「ID005〜008」付近まで110度の向きで移動した後、「ID005〜008」を逆方向である270度の方向で通過することは、一般的にほとんどない。よって、「ID005〜008」における交通量の向き「90度」「270度」「0度」「180度」のうち、110度±90度の範囲内である向き「90度」、「180度」が選択される。例えば、図4に示される例では、向きから図5に示されるようにフィルタリングされる。
【0300】
次に、移動先予測部9705のフィルタリング部9705bは、交通量の大きさと現在地から交通量検出地までの距離で移動先を予測する。交通量の大きさを距離で割った評価値が大きい順に、移動先予測数決定部9708が決定した移動先予測数の移動先を選別する。例えば、図98に示されるように、「ID002・交通量の向き270度」への評価値は400/1.7、「ID003・交通量の向き90度」への評価値は400/1.6、「ID005・交通量の向き90度」への評価値は900/2.3、「ID008・交通量の向き180度」への評価値は100/2.3、「ID010・交通量の向き270度」への評価値は200/1.2となる。移動先予測数決定部9708が決定した予測数が2個であったとすると、評価値の高い順に「ID005・交通量の向き90度」と「ID003・交通量の向き90度」が移動先として選択される。これは、移動体が将来ID005の地点(経度134.7.26.9、緯度34.4.49.2)を90度の向きに移動するか、もしくはID003の地点(経度134.6.20.0、緯度34.6.4.5)を90度の向きに移動することを予測している。
【0301】
情報提供部9706は、提供情報取得部9707が取得した情報を移動先予測部9705が予測した移動先に関する情報として、情報提供装置の画面や音声によって、ユーザに提供する。例えば、移動体が将来ID005の地点を90度の向きに移動する、もしくは、ID003の地点90度の向きに移動することを予測した場合、図99に示されるように、ID005の地点(東経134.7.26.9、北緯34.4.49.2)を90度の向きに通過するまでの経路、もしくはID003の地点(経度134.6.20.0、緯度34.6.4.5)を90度の向きに通過するまでの経路の渋滞情報や店舗情報を提供することが出来る。
【0302】
以下、本実施の形態13における情報提供装置の動作について、図100のフローチャートを用いて説明する。前記実施の形態1で示した構成要素には同様の符号を付与し、説明を省略する。
【0303】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部9707は情報提供部9706が移動体に提供するべき情報を外部ネットワークなどから取得する(ステップS10002)。移動先予測数決定部9708は、提供情報取得部9707が取得した情報の数により、移動先を予測する数を決定する(ステップS10003)。移動先予測部9705の移動先候補決定部105aは、実施の形態1と同様に、現在地から交通量検出地までの距離と向きから、移動先候補を選別した後、移動先予測部9705のフィルタリング部9705bは、移動先候補となった交通量検出地の中から、交通量の大きさと現在地から交通量検出地までの距離、移動先予測数決定部9708が決定した移動先予測数より、移動先を予測する(ステップS10006)。最後に、情報提供部9706は、移動先予測部105が予測した移動先に関する情報をユーザに提供する(ステップS10007)。
【0304】
以上のように、本実施の形態における情報提供装置によれば、提供する情報によって移動先の予測数が変更されるので、例えば、画面に表示できる限り多くの移動先に関する情報提供を行うことが可能となり、複数の移動先候補に関する情報提供が実現される。
【0305】
なお、実施の形態13では、提供する情報の内容を固定、あるいは内容の区別を行わず情報を一律に扱っていた。しかし、装置が工事情報も店舗情報も提供するなど複数の内容の情報を提供する場合は、情報の内容に応じてフィルタリングの度合いを変更する必要がある。この場合、情報内容ごとにそれぞれ移動先予測を行うことで、フィルタリングの度合いを変更することができる。つまり、情報内容ごとにそれぞれ移動先予測を行うことで、フィルタリングの度合いを変更する機能を備える情報提供装置を、実施の形態13の変形例1における情報提供装置として実現してもよい。
【0306】
これによって、店舗情報は数が多いので移動先予測数を少なくするが、工事情報は情報の数が少ないので移動先予測数を多くするなど、提供する情報の内容に応じて、予測数を変更し、移動先予測を提供する情報内容ごとに行うことで、内容に応じてフィルタリングの度合いを変更した情報提供を行うことが出来る。
【0307】
また、実施の形態13では、提供する情報の全体の数によって、移動先の予測数を決定していた。しかし、実際に提供する情報は移動体の現在地の周囲に関連する情報を提供することが多い。このため、提供情報に関連する位置情報を付属させ、移動体の現在地の周囲に関連する情報の数など、実際に移動体に提供する可能性が高い情報の数によって移動先の予測数を決定してもよい。
【0308】
つまり、移動体の現在地の周囲に関連する情報の数に応じて、移動先の予測数を変更する機能を備える情報提供装置を、実施の形態13の変形例2における情報提供装置として実現してもよい。
【0309】
図101は、このような本実施の形態13の変形例2における情報提供装置、つまり、提供情報に位置情報を付属させ、現在地の周りの提供情報の数から移動先の数を決定する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部9705、情報提供部9706および移動先予測数決定部10108を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先予測部9705に置き換えられ、情報提供部106が情報提供部9706に置き換えられ、移動先予測数決定部10108が追加されている点が異なる。
【0310】
前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0311】
提供情報取得部10107は、図102に示されるように、情報の内容が関連する位置情報を含んだ情報を取得する。例えば、「ID003」では、「C交差点工事中」という情報に関連する位置が東経「134.7.26.9」、北緯「34.4.49.2」であることを示す。
【0312】
移動先予測数決定部10108は、現在地取得部101が取得した現在地の位置に関連する情報の数、例えば現在地から周囲5kmの範囲内の位置に関連する提供情報の数を提供情報取得部10107が取得した情報から算出し、提供情報の数から移動先予測数を決定する。例えば、現在地の周囲の情報の数の逆数に所定の値を掛けた値を移動先予測数とする。
【0313】
以下、本実施の形態13の変形例2における情報提供装置の動作について、図103のフローチャートを用いて説明する。前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。
【0314】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部10107が情報提供部9706から、移動体に提供するべき位置情報を持った情報を外部ネットワークなどから取得する(ステップS10302)。移動先予測数決定部10108が、現在地取得部101が取得した現在地の周囲の位置に関連する提供情報の数を提供情報取得部10107から算出する(ステップS10303)。次に、移動先予測数決定部10108は、現在地の周囲の位置に関連する提供情報の数により、移動先を予測する数を決定する(ステップS10304)。以下、実施の形態1および13と同様である(ステップS802〜S805、S10006、S10007)。
【0315】
以上のように、本変形例における情報提供装置によれば、移動体の現在地の周囲に関連する情報の数に応じて、移動先の予測数が変更され、ユーザの現在の状況に即した情報提供が実現される。
【0316】
なお、実施の形態13の変形例2では、現在地の周囲に関連する情報の数によって移動先の予測数を決定していた。しかし実際に提供する情報は移動体の移動先に関連する情報であることが多い。よって、予測した移動先に関連する情報の数に応じて移動先の予測数を変更し、移動先予測を再び行ってもよい。
【0317】
つまり、予測した移動先の周囲に関連する情報の数に応じて、移動先の予測数を変更する機能を備える情報提供装置を、実施の形態13の変形例3における情報提供装置として実現してもよい。
【0318】
図104は、このような本実施の形態13の変形例3における情報提供装置、つまり、予測した移動先の周りの提供情報の数から移動先の数を決定する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先予測部10405、情報提供部9706および移動先予測数決定部10408を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先予測部10405に置き換えられ、情報提供部106が情報提供部9706に置き換えられ、移動先予測数決定部10408が追加されている点が異なる。
【0319】
前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0320】
移動先予測数決定部10408は、移動先予測部10405が予測した移動先の位置に関連する情報の数、例えば移動先から周囲1kmの範囲内の位置に関連する提供情報の数を提供情報取得部10107が取得した情報から算出し、情報の数から移動先予測数を決定する。例えば、移動先予測数の初期値を1個とし、移動先の周囲の情報の数が0個であった場合は、移動先予測数を前回の値から1個増加させ、移動先予測部10405に移動先予測を再び行わせる。1個以上であれば、移動先予測数を前回の値から変化させず、移動先予測部は移動先予測を中止し、予測移動先を確定する。
【0321】
移動先予測部10405は、実施の形態13と同様に、移動先予測数決定部10408が決定した移動先予測数だけ移動先を予測する。しかし、移動先予測数決定部10108が決定した移動先予測数が変化しなくなるまで移動先予測を繰り返す。移動先予測数が変わらなかった場合、予測移動先を確定する。この移動先予測部10405は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から、移動先予測数決定部10408で決定された個数の最終的な移動先を選別するフィルタリング部10405bとを有する。
【0322】
以下、本実施の形態13の変形例3における情報提供装置の動作について、図105のフローチャートを用いて説明する。前記実施の形態1、11などで示した構成要素には同様の符号を付与し、説明を省略する。
【0323】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部10107が情報提供部9706から、移動体に提供するべき位置情報を持った情報を外部ネットワークなどから取得する(ステップS10302)。移動先予測数決定部10408は、移動先予測部10405が移動先を予測する数を1個と決定する(ステップS10504)。以下、実施の形態1と同様に移動先予測を行った後(ステップS802〜S805)、移動先予測数決定部10408は、移動先予測部10405が予測した移動先の周囲の位置に関連する提供情報の数を提供情報取得部10107から算出する(ステップS10507)。次に、移動先予測数決定部10108が、移動先の周囲の位置に関連する提供情報の数により、移動先を予測する数を決定する(ステップS10508)。移動先予測部10405のフィルタリング部10405bは、移動先予測数が変化したか判定を行う(ステップS10509)。移動先予測数が変化したときは(ステップS10509のNo)ステップS8006に戻る。移動先予測数が変化しなかったときは(ステップS10509のYes)ステップS8007に進む。
【0324】
以上のように、本変形例における情報提供装置によれば、予測した移動先の周りの提供情報の数から移動先の数が決定されるので、ユーザの移動先に即した情報提供が実現される。
【0325】
また、実施の形態13の変形例2では現在地、実施の形態13の変形例3では移動先の周囲に関連する情報の数によって移動先の予測数を決定していた。しかし、ダイキストラ法などにより現在地から移動先までの経路を計算し、経路の周囲の位置に関連する提供情報の数から移動先の予測数を決定してもよい。つまり、現在地から移動先までの経路を計算し、経路の周囲の位置に関連する提供情報の数から移動先の予測数を決定する機能を備える情報提供装置を、実施の形態13の変形例4における情報提供装置として実現してもよい。これにより、経路の提供情報を効率的にフィルタリングできるようになる。
【0326】
また、実施の形態13では、移動先の位置の予測において提供すべき情報の数から予測される移動先の数を決定していた。しかし、実施の形態12のように、移動先の方向の予測において、提供すべき情報の数から移動先の予測方向の範囲を決定してもよい。具体的には、移動先予測数決定部が、提供すべき情報の数から予測方向のクラスタの数を決定してもよい。つまり、移動体に提供する情報の数に応じて、移動方向の予測範囲を変更する機能を備える情報提供装置を、実施の形態13の変形例5における情報提供装置として実現してもよい。
【0327】
図106は、このような本実施の形態13の変形例5における情報提供装置、つまり、予測される移動先の数を移動方向のクラスタリングの数から決定する機能を備える情報提供装置の構成図である。この情報提供装置は、現在地取得部101、交通量検出地蓄積部102、距離算出部103、向き算出部104、移動先方向予測部10605、情報提供部10606および移動先予測数決定部10608を備える。この情報提供装置の構成は、実施の形態1の情報提供装置に比べ、移動先予測部105が移動先方向予測部10605に置き換えられ、情報提供部106が情報提供部10606に置き換えられ、移動先予測数決定部10608が追加されている点が異なる。
【0328】
前記実施の形態1、13で示した構成要素には同様の符号を付与し、説明を省略する。以下、まず各構成要素について図を用いて説明し、後に本情報提供装置の動作について説明する。
【0329】
移動先予測数決定部10608は、提供情報取得部9707が取得した情報の数を用いて、移動先方向予測部10605が予測する移動方向のクラスタの数を決定する。
【0330】
移動先方向予測部10605は、距離算出部103が算出した現在地−交通量検出地間の距離と向き算出部104が算出した現在地−交通量検出地間の向き、交通量検出地蓄積部102に蓄積された交通量の大きさと交通量の向き、および移動先予測数決定部が決定した移動方向のクラスタ数により、移動先の方向を予測する。例えば、情報の数を所定の値で割った値を移動方向のクラスタの数とする。
【0331】
この移動先方向予測部10605は、移動先候補を決定する移動先候補決定部105aと、決定された移動先候補から、移動先予測数決定部10608決定された個数の最終的な移動先(移動先方向)を選別するフィルタリング部10605bとを有する。
【0332】
基本的に、実施の形態12と同様に、予測を行う。実施の形態12では、交通量の向きごとに交通量の大きさを合計し、最も交通量の大きい向きを移動先の方向としていた。しかし、本実施の形態では移動先予測数決定部10608が決定したクラスタの数により算出したクラスタごとに交通量の大きさを合計し、最も交通量の大きいクラスタを移動先の方向とする。例えば、クラスタの数が4個であった場合。0度〜360度の方向を4個のクラスタに分類する。例えば、等間隔に0度〜90度、90度〜180度、180度〜270度、270度〜360度に分類する。
【0333】
情報提供部10606は、提供情報取得部9707が取得した情報を移動先方向予測部10605が予測した移動先の方向に関する情報として、情報提供装置の画面や音声によって、ユーザに提供する。
【0334】
以下、本実施の形態13の変形例5における情報提供装置の動作について、図107のフローチャートを用いて説明する。前記実施の形態1、12、13などで示した構成要素には同様の符号を付与し、説明を省略する。
【0335】
まず、現在地取得部101が、GPS等により、現在地を取得する(ステップS801)。提供情報取得部9707は情報提供部10606が移動体に提供するべき情報を外部ネットワークなどから取得する(ステップS10002)。移動先予測数決定部10608が、提供情報取得部9707が取得した情報の数により、移動先方向予測部10605が移動先を予測する際の移動方向のクラスタ数を決定する(ステップS10703)。以下、移動先方向予測部10605の移動先候補決定部105aは、実施の形態12と同様に、距離と向きにより移動先候補を選別した後(ステップS802〜S9605)、移動先方向予測部10605のフィルタリング部10605bは、移動先予測数決定部10608が決定した数だけ方向クラスタを決定し、移動先の方向候補となった交通量検出地を、交通量の向きにより、方向クラスタに分類し、クラスタ内の交通量検出地の交通量の大きさにより、移動先の方向を予測する(ステップS10706)。情報提供部10606は、提供情報取得部9707が取得した情報を移動先方向予測部10605が予測した移動先に関する情報をユーザに提供する(ステップS10707)。
【0336】
以上のように、本変形例における情報提供装置によれば、予測される移動先の数が移動方向のクラスタリングの数によって決定されるので、提供される情報の数が予測方向のクラスタの数に依存して決定されることとなり、提供する情報量の最適化が可能となる。
【0337】
また、実施の形態13では、移動先の位置の予測において提供すべき情報の数から移動先予測の数を決定していた。しかし、実施の形態5のように、提供すべき情報の数から再帰的に移動先を予測する際の移動先の予測数、つまり移動先予測を行う回数を決定してもよい。つまり、提供すべき情報の数から再帰的に移動先を予測する際の移動先の予測数、つまり移動先予測を行う回数を決定する機能を備える情報提供装置を、実施の形態13の変形例6における情報提供装置として実現してもよい。例えば、移動先予測数が2であった場合、移動先を予測した後、さらに予測した移動先を通過地として移動先予測を1回行う。
【0338】
これによって、提供する情報の数から再帰的に移動先を予測する際の移動先の予測数が決定され、提供する情報量の最適化が可能となる。
【0339】
なお、実施の形態13における各変形例をまとめると次にことが言える。つまり、移動先予測数決定部は、情報提供部が提供する提供情報の数、提供情報の内容、現在地取得部で特定される現在位置の周りに関する提供情報の数、移動先予測部で予測される移動先の周りに関する提供情報の数、現在位置から移動先への経路に関する提供情報の数、移動先予測部が予測する移動方向の数、および、移動先予測部が再帰的に移動先を予測する場合の予測回数の少なくとも一つに応じて、予測する移動先の数を決定してもよい。
【0340】
以上、本発明に係る情報提供装置について、実施の形態1〜13およびその変形例に基づいて説明したが、本発明は、これらの実施の形態および変形例に限定されるものではない。たとえば、各実施の形態および変形例における構成要素を任意に組み合わせて実現される実施の形態も本発明に含まれる。例として、移動体の移動先の方向だけを予測する実施の形態12と、実施の形態1の変形例3における向き算出部1204を組み合わせることで、推奨経路を用いた精度の高い移動方向だけの予測が可能となる。
【0341】
なお、特許請求の範囲における構成要素と実施の形態における構成要素との対応は、以下の通りである。
【0342】
つまり、特許請求の範囲における交通量検出地蓄積手段の一例が、実施の形態における交通量検出地蓄積部102、4502、5302であり、
同様に、現在地取得手段の一例が、現在地取得部101、1601であり、
向き算出手段の一例が、向き算出部104、1204、1604であり、
移動先予測手段の一例が、移動先予測部105、1005、1605、3105、3705、4005、4505、5305、9705、10405であり、
情報提供手段の一例が、情報提供部106、4006、4506、5706、6412、9006、9706、10606であり、
距離算出手段の一例が、距離算出部103、1003であり、
出発地取得手段の一例が、出発地取得部1007であり、
地図情報蓄積手段の一例が、地図情報蓄積部1207であり、
推奨経路算出手段の一例が、推奨経路算出部1208であり、
交通量検出地位置範囲算出手段の一例が、交通量検出地位置範囲算出部2108であり、
遠回り度算出手段の一例が、遠回り度算出部3109であり、
出発地取得手段の一例が、出発地取得部1007であり、
経路コスト算出手段の一例が、経路コスト算出部3103であり、
冗長度算出手段の一例が、冗長度算出部3709であり、
嗜好情報蓄積手段の一例が、嗜好情報蓄積部5307であり、
移動先提示手段の一例が、移動先提示部5707であり、
移動先選択手段の一例が、移動先選択検知部5709であり、
通過地提示手段の一例が、通過地提示部6407であり、
通過地選択手段の一例が、通過先選択検知部6408であり、
通過地選択検知手段の一例が、通過先選択検知部6408であり、
合成可否判定手段の一例が、合成可否判定部7508であり、
合成手段の一例が、合成部7509であり、
冗長度算出手段の一例が、冗長度算出部3709であり、
交通量検出地密度蓄積手段の一例が、交通量検出地密度蓄積部8007であり、
フィルタリング位置範囲算出手段の一例が、フィルタリング位置範囲算出部8008であり、
移動先候補フィルタリング手段の一例が、移動先候補フィルタリング部8009であり、
渋滞情報蓄積手段の一例が、渋滞情報蓄積部8307であり、
交通量推定手段の一例が、交通量推定部8308であり、
交通量検出地位置範囲算出手段の一例が、交通量検出地位置範囲算出部2108であり、交通量検出地位置変更手段の一例が、交通量検出地位置変更部2109であり、
リンク旅行時間蓄積手段の一例が、リンク旅行時間蓄積部8707であり、
交通量推定手段の一例が、交通量推定部8708であり、
移動先予測数決定手段の一例が、移動先予測数決定部9708、10108、10408、10608である。
【産業上の利用可能性】
【0343】
本発明は、移動体の移動先を予測し、予測した移動先に関する情報を移動体に提供する情報提供装置として、特に、交通量情報を用いて移動先を予測し、移動先に関連する情報を提供する装置として、例えば、カーナビゲーション装置や携帯電話等の移動体に情報を提供する装置として、有用である。
【図面の簡単な説明】
【0344】
【図1】本発明の実施の形態1における情報提供装置の構成を示すブロック図
【図2】交通量検出地蓄積部に蓄積された交通量検出地情報の例を示す図
【図3】移動先候補となる交通量検出地の例を示す図
【図4】移動先予測部が向きにより移動先候補をフィルタリングする例を示す図
【図5】交通量の向きによりフィルタリングされた移動先候補の例を示す図
【図6】移動先予測部が距離と交通量の大きさにより移動先を決定する例を示す図
【図7】情報提供部が予測した移動先に関連する情報を提供する例を示す図
【図8】本発明の実施の形態1における情報提供装置の動作の例を示すフローチャート
【図9】出発地からの距離が小さい場合の移動先の例を示す図
【図10】本発明の実施の形態1の変形例1における情報提供装置の構成を示すブロック図
【図11】本発明の実施の形態1の変形例1における情報提供装置の動作の例を示すフローチャート
【図12】本発明の実施の形態1の変形例3における情報提供装置の構成を示すブロック図
【図13】本発明の実施の形態1の変形例3における地図情報を用いた向き算出の例を示す図
【図14】本発明の実施の形態1の変形例3における情報提供装置の動作の例を示すフローチャート
【図15】移動先予測部が移動体の現在の向きにより移動先候補をフィルタリングする例を示す図
【図16】本発明の実施の形態1の変形例5における情報提供装置の構成を示すブロック図
【図17】本発明の実施の形態1の変形例5における理想現在位置向きの算出例を示す図
【図18】本発明の実施の形態1の変形例5における情報提供装置の構成を示すフローチャート
【図19】移動先予測部が最小経路コストにより移動先を決定する例を示す図
【図20】交通量検出地の位置の変更の例を示す図
【図21】本発明の実施の形態2における情報提供装置の構成を示すブロック図
【図22】交通量検出地位置範囲算出部が算出する交通量検出地変更可能位置範囲の例を示す図
【図23】交通量検出地位置変更部が交通量検出地の位置を変更する例を示す図
【図24】本発明の実施の形態2における情報提供装置の動作の例を示すフローチャート
【図25】交通量検出地の交通量の向きを変更する例を示す図
【図26】本発明の実施の形態2の変形例1における情報提供装置の構成を示すブロック図
【図27】交通量検出地位置範囲算出部によって算出された交通量検出変更可能位置範囲の例を示す図
【図28】交通量検出地向き変更部が交通量検出地の向きを変更する例を示す図
【図29】本発明の実施の形態2の変形例1における情報提供装置の動作の例を示すフローチャート
【図30】出発地から現在地までの移動の例を示す図
【図31】本発明の実施の形態3における情報提供装置の構成を示すブロック図
【図32】移動先候補までの経路コストの算出例を示す図
【図33】交通量の向きによりフィルタリングされた移動先候補の例を示す図
【図34】遠回り度による移動先候補のフィルタリング例を示す図
【図35】移動先予測部が経路コストと交通量の大きさにより移動先を決定する例を示す図
【図36】本発明の実施の形態3における情報提供装置の動作の例を示すフローチャート
【図37】本発明の実施の形態4における情報提供装置の構成を示すブロック図
【図38】冗長度算出部による冗長度の算出例を示す図
【図39】本発明の実施の形態4における情報提供装置の動作の例を示すフローチャート
【図40】本発明の実施の形態5における情報提供装置の構成を示すブロック図
【図41】移動先予測部による移動先予測結果の例を示す図
【図42】予測された移動先を現在地としてさらに移動先を予測する例を示す図
【図43】再帰的に予測された複数の移動先から算出した経路に関する情報を提供する例を示す図
【図44】本発明の実施の形態5における情報提供装置の動作の例を示すフローチャート
【図45】本発明の実施の形態6における情報提供装置の構成を示すブロック図
【図46】本発明の実施の形態6における交通量検出地蓄積部に蓄積された交通量検出地情報の例を示す図
【図47】本発明の実施の形態6における移動先候補となる交通量検出地の例を示す図
【図48】本発明の実施の形態6における交通量の向きによりフィルタリングされた移動先候補の例を示す図
【図49】本発明の実施の形態6における移動先予測部による移動先予測結果の例を示す図
【図50】本発明の実施の形態6における予測された移動先を現在地としてさらに移動先を予測する例を示す図
【図51】本発明の実施の形態6における再帰的に予測された複数の移動先から算出した経路に関する情報を提供する例を示す図
【図52】本発明の実施の形態6における情報提供装置の動作の例を示すフローチャート
【図53】本発明の実施の形態6の変形例1における情報提供装置の構成を示すブロック図
【図54】本発明の実施の形態6の変形例1における交通量検出地蓄積部に蓄積された交通量検出地情報の例を示す図
【図55】嗜好情報蓄積部に蓄積された嗜好情報の例を示す図
【図56】従来の目的地設定の例を示す図
【図57】本発明の実施の形態7における情報提供装置の構成を示すブロック図
【図58】移動先候補となる装置の画面内に存在する交通量検出地の例を示す図
【図59】本発明の実施の形態7における移動先予測部による移動先予測結果の例を示す図
【図60】移動先提示部による複数の移動先の提示例を示す図
【図61】選択された移動先を用いた予測移動先の提示と選択の例を示す図
【図62】選択・設定された目的地に関連する情報を提供する例を示す図
【図63】本発明の実施の形態7における情報提供装置の動作の例を示すフローチャート
【図64】本発明の実施の形態7の変形例1における情報提供装置の構成を示すブロック図
【図65】目的地候補蓄積部に蓄積された目的地候補情報の例を示す図
【図66】通過地予測部による通過地予測結果の例を示す図
【図67】通過地提示部による複数の通過地の提示の例を示す図
【図68】選択された通過地を用いた予測通過地の提示と選択の例を示す図
【図69】さらに選択された通過地を用いた予測通過地の提示と選択の例を示す図
【図70】目的地提示部による最終通過地を現在地とした目的地提示の例を示す図
【図71】選択された通過地および設定された目的地に関連する情報の提示の例を示す図
【図72】本発明の実施の形態7の変形例1における情報提供装置の動作の例を示すフローチャート
【図73】交通量検出地(交通量)の合成の例を示す図
【図74】交通量検出地(交通量)の合成の例を示す図
【図75】本発明の実施の形態8における情報提供装置の構成を示すブロック図
【図76】合成部による交通量検出地(交通量)の合成の例を示す図
【図77】本発明の実施の形態8における情報提供装置の動作の例を示すフローチャート
【図78】交通量検出地が合成不可である例を示す図
【図79】最小経路コストの差により交通量合成の可否を判定する例を示す図
【図80】本発明の実施の形態9における情報提供装置の構成を示すブロック図
【図81】交通量検出地密度蓄積部に蓄積された交通量検出地密度情報の例を示す図
【図82】本発明の実施の形態9における情報提供装置の動作の例を示すフローチャート
【図83】本発明の実施の形態10における情報提供装置の構成を示すブロック図
【図84】渋滞情報蓄積部に蓄積された渋滞情報の例を示す図
【図85】本発明の実施の形態10における情報提供装置の動作の例を示すフローチャート
【図86】交通量検出地位置範囲算出部が交通量検出地変更可能位置範囲を渋滞情報により算出する例を示す図
【図87】本発明の実施の形態11における情報提供装置の構成を示すブロック図
【図88】リンク旅行時間蓄積部に蓄積されたリンク旅行時間情報の例を示す図
【図89】本発明の実施の形態11における情報提供装置の動作の例を示すフローチャート
【図90】本発明の実施の形態12における情報提供装置の構成を示すブロック図
【図91】移動先の方向候補となる交通量検出地の例を示す図
【図92】移動先方向予測部が向きにより移動先の方向候補をフィルタリングする例を示す図
【図93】向きによりフィルタリングされた移動先の方向候補の例を示す図
【図94】移動先方向予測部が交通量の向きと大きさにより移動先の方向を決定する例を示す図
【図95】情報提供部が予測した移動先の方向に関連する情報を提供する例を示す図
【図96】本発明の実施の形態12における情報提供装置の動作の例を示すフローチャート
【図97】本発明の実施の形態13における情報提供装置の構成を示すブロック図
【図98】移動先予測部が距離と交通量の大きさと移動先予測数により移動先を決定する例を示す図
【図99】情報提供部が予測した複数の移動先に関連する情報を提供する例を示す図
【図100】本発明の実施の形態13における情報提供装置の動作の例を示すフローチャート
【図101】本発明の実施の形態13の変形例2における情報提供装置の構成を示すブロック図
【図102】提供情報取得部が取得する提供情報の例を示す図
【図103】本発明の実施の形態13の変形例2における情報提供装置の動作の例を示すフローチャート
【図104】本発明の実施の形態13の変形例3における情報提供装置の構成を示すブロック図
【図105】本発明の実施の形態13の変形例3における情報提供装置の動作の例を示すフローチャート
【図106】本発明の実施の形態13の変形例5における情報提供装置の構成を示すブロック図
【図107】本発明の実施の形態13の変形例5における情報提供装置の動作の例を示すフローチャート
【符号の説明】
【0345】
101、1601 現在地取得部
102、4502、5302 交通量検出地蓄積部
103、1003 距離算出部
104、1204、1604 向き算出部
105a、3705a、9005a 移動先候補決定部
105b、1005b、1605b、3105b、4505b、5305b、6405b、9005b、9705b、10405b、10605b フィルタリング部
106、4006、4506、5706、6412、9006、9706、10606 情報提供部
106a、4006a、4506a、6412a、9006a 提供情報蓄積部
1007 出発地取得部
1207 地図情報蓄積部
1208 推奨経路算出部
2108 交通量検出地位置範囲算出部
2109 交通量検出地位置変更部
2610 交通量検出地向き変変更部
3103 経路コスト算出部
3109 遠回り度算出部
3708 推奨経路計算部
3709 冗長度算出部
3710 冗長移動先除去部
4001 予測現在地取得部
4005c 繰り返し制御部
5307 嗜好情報蓄積部
5707 移動先提示部
5708 移動先選択検知部
5709 移動先選択部
6405 通過地予測部
6405a 通過地候補決定部
6407 通過地提示部
6408 通過先選択検知部
6409 目的地候補蓄積部
6410 目的地提示部
6411 目的地選択検知部
6413 通過地選択部
6414 目的地選択部
7508 合成可否判定部
7509 合成部
8007 交通量検出地密度蓄積部
8008 フィルタリング位置範囲算出部
8009 移動先候補フィルタリング部
8307 渋滞情報蓄積部
8308 交通量推定部
8707 リンク旅行時間蓄積部
8708 交通量推定部
9005、10605 移動先方向予測部
9707、10107 提供情報取得部
9708、10108、10408、10608 移動先予測数決定部
【特許請求の範囲】
【請求項1】
移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置であって、
交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段と、
移動体の現在位置を取得する現在地取得手段と、
前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出手段と、
前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出手段で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測手段と、
前記移動先予測手段によって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供手段と
を備えることを特徴とする情報提供装置。
【請求項2】
前記移動先予測手段は、前記交通量検出地蓄積手段に蓄積されている交通量検出地の中から、前記現在地取得手段で取得された現在位置から一定距離の範囲内にある交通量検出地を前記移動先候補として選択する
ことを特徴とする請求項1記載の情報提供装置。
【請求項3】
前記情報提供装置はさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの距離を算出する距離算出手段を備え、
前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量の大きさを蓄積し、
前記移動先予測手段は、前記方向差が予め定められた閾値の範囲内にある交通量検出地の中から、前記距離算出手段によって算出された距離が小さく、かつ、前記交通量検出地蓄積手段に蓄積されている交通量の大きさが大きい交通量検出地を選択し、選択した交通量検出地を前記移動体の移動先として予測する
ことを特徴とする請求項1記載の情報提供装置。
【請求項4】
前記情報提供装置はさらに、前記移動体の出発位置を取得する出発地取得手段を備え、
前記距離算出手段はさらに、前記出発地取得手段によって取得された出発位置から前記移動先候補位置までの距離を算出し、
前記移動先予測手段は、前記閾値として、前記距離算出手段によって算出された距離の大きさに対して単調減少する値を採用して前記方向差と前記閾値とを比較することにより、前記方向差が前記閾値の範囲内にある交通量検出地を特定する
ことを特徴とする請求項3記載の情報提供装置。
【請求項5】
前記情報提供装置はさらに、前記移動体の出発位置を取得する出発地取得手段を備え、
前記距離算出手段はさらに、前記出発地取得手段によって取得された出発位置から前記現在地取得手段で取得された現在位置までの距離、移動時間および右左折回数の少なくとも一つを算出し、
前記移動先予測手段は、前記閾値として、前記距離算出手段によって算出された距離、移動時間および右左折回数の少なくとも一つの大きさに対して単調減少する値を採用して前記方向差と前記閾値とを比較することにより、前記方向差が前記閾値の範囲内にある交通量検出地を特定する
ことを特徴とする請求項3記載の情報提供装置。
【請求項6】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段とを備え、
前記向き算出手段は、前記推奨経路算出手段で算出された推奨経路上の前記交通量検出地での移動体の向きを、前記現在位置から前記交通量検出地への向きとして算出する
ことを特徴とする請求項1記載の情報提供装置。
【請求項7】
前記現在地取得手段はさらに、前記移動体の現在の向きを取得し、
前記移動先予測手段はさらに、前記現在地取得手段で取得された向きと、前記交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値より大きい場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項8】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段とを備え、
前記現在地取得手段はさらに、前記移動体の現在の向きを取得し、
前記向き算出手段は、前記推奨経路算出手段で算出された推奨経路上の前記交通量検出地での移動体の向きを算出し、
前記移動先予測手段はさらに、前記現在地取得手段で取得された向きと、前記向き算出手段で算出された向きとが一致しない場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項9】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報と前記交通量検出地蓄積手段に蓄積されている交通量検出地を特定する情報とを用いて、前記交通量検出地の位置を変更し得る位置範囲を算出する交通量検出地位置範囲算出手段と、
前記交通量検出地位置範囲算出手段によって算出された位置範囲内で、かつ、前記現在地取得手段で取得された現在位置に最も近い位置に、前記交通量検出地の位置を変更する交通量検出地位置変更手段とを備え、
前記向き算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記向きを算出し、
前記距離算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記距離を算出する
ことを特徴とする請求項3記載の情報提供装置。
【請求項10】
前記交通量検出地位置範囲算出手段は、前記交通量検出地を含む道路において分岐が存在しない範囲を前記位置範囲として算出する
ことを特徴とする請求項9記載の情報提供装置。
【請求項11】
前記交通量検出地位置範囲算出手段は、前記交通量検出地を含む道路において、道路幅が所定の値以上の分岐が存在しない範囲を前記位置範囲として算出する
ことを特徴とする請求項9記載の情報提供装置。
【請求項12】
前記情報提供装置はさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への経路の遠回りの度合を示す遠回り度を算出する遠回り度算出手段を備え、
前記移動先予測手段はさらに、前記遠回り度算出手段で算出された前記交通量検出地への経路の遠回り度が予め定められた値より大きい場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項13】
前記情報提供装置はさらに、
前記移動体の出発位置を取得する出発地取得手段と、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記出発地取得手段によって取得された出発位置から前記現在地取得手段で取得された現在位置までの経路のコストである現在出発地間経路コストと、前記出発位置から前記交通量検出地までの経路のコストである出発候補地間経路コストと、前記現在位置から前記交通量検出地までの経路のコストである現在候補地間経路コストとを算出する経路コスト算出手段とを備え、
前記遠回り度算出手段は、前記経路コスト算出手段で算出された前記現在出発地間経路コストと前記現在候補地間経路コストの和と、前記出発候補地間経路コストとの差を、前記遠回り度として算出する
ことを特徴とする請求項12記載の情報提供装置。
【請求項14】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段と、
前記推奨経路算出手段で算出された推奨経路上に、当該推奨経路を算出した前記交通量検出地を除く他の交通量検出地が存在するか否かを判断することによって、冗長な交通量検出地が存在するか否かを示す冗長度を算出する冗長度算出手段と、
前記冗長度算出手段によって算出された冗長度によって冗長な交通量検出地が存在すると示された場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項15】
前記移動先予測手段は、移動先として予測した交通量検出地について、予測の確からしさを示す評価値を算出し、算出した評価値が予め定められた基準を満たす場合に、当該交通量検出地を前記移動体の現在位置として、前記移動先の予測を繰り返す
ことを特徴とする請求項3記載の情報提供装置。
【請求項16】
前記移動先予測手段は、移動先として予測した交通量検出地および他の交通量検出地について前記評価値を算出し、移動先として予測した交通量検出地の評価値が他のいずれの交通量検出地の評価値よりも一定幅を超えて高い場合に、前記予測を繰り返す
ことを特徴とする請求項15記載の情報提供装置。
【請求項17】
前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量検出地が道路であるか否かの情報を含む種別情報を蓄積し、
前記移動先予測手段は、前記交通量検出地蓄積手段に蓄積された種別情報を参照することで、前記交通量検出地が道路であるか否か判定し、道路であると判定した場合に、当該交通量検出地を前記移動体の現在位置として、前記予測を繰り返す
ことを特徴とする請求項3記載の情報提供装置。
【請求項18】
前記種別情報はさらに、前記交通量検出地がランドマークであるか否かを示し、
前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量検出地がランドマークである場合における前記ランドマークのカテゴリを示すカテゴリ情報を蓄積し、
前記情報提供装置はさらに、前記交通量検出地蓄積手段に蓄積されているカテゴリごとのユーザの評価を示す嗜好情報を蓄積する嗜好情報蓄積手段を備え、
前記移動先予測手段は、前記距離に対する前記交通量の大きさに対して、前記嗜好情報蓄積手段に蓄積されている前記交通量検出地のカテゴリに対応する評価で重みづけし、得られた値が大きい交通量検出地を、前記移動体の移動先として予測する
ことを特徴とする請求項17記載の情報提供装置。
【請求項19】
前記情報提供装置はさらに、
前記移動先予測手段で予測された移動先を提示する移動先提示手段と、
前記移動先提示手段で提示された移動先に対するユーザからの選択指示を受け付ける移動先選択手段とを備え、
情報提供手段は、前記移動先選択手段が受け付けた選択指示に対応する移動先に関する情報を取得して提示する
ことを特徴とする請求項1記載の情報提供装置。
【請求項20】
前記移動先予測手段は、前記移動先を前記移動体の通過地として予測し、
前記情報提供装置はさらに、
前記移動先予測手段で予測された通過地を提示する通過地提示手段と、
前記通過地提示手段で提示された通過地に対するユーザからの選択指示を受け付ける通過地選択手段と、
前記通過地選択手段が受け付けた選択指示が通過地の指定である場合に、当該通過地を前記移動体の現在位置とするように前記現在地取得手段に指示する通過地選択検知手段とを備える
ことを特徴とする請求項19記載の情報提供装置。
【請求項21】
前記情報提供装置はさらに、
前記複数の交通量検出地の位置と前記交通量検出地での交通量の向きの類似性に基づいて、前記複数の交通量検出地での交通量の大きさを合成できるか否かを判定する合成可否判定手段と、
前記合成可否判定手段が合成できると判定した場合に、前記複数の交通量検出地での交通量の大きさを合成することにより、前記交通量検出地での交通量の大きさを変更する合成手段とを備え、
前記移動先予測手段は、前記合成手段によって合成された交通量の大きさを用いて、前記交通量検出地を選択する
ことを特徴とする請求項3記載の情報提供装置。
【請求項22】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段と、
前記推奨経路算出手段で算出された推奨経路上に、当該推奨経路を算出した前記交通量検出地を除く他の交通量検出地が存在するか否かを判断することによって、冗長な交通量検出地が存在するか否かを示す冗長度を算出する冗長度算出手段とを備え、
前記合成手段は、前記冗長度算出手段によって算出された冗長度によって冗長な交通量検出地が存在すると示された場合に、当該交通量検出地を合成の対象から除外する
ことを特徴とする請求項21記載の情報提供装置。
【請求項23】
前記合成可否判定手段は、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への最小経路コストを算出し、前記複数の交通量検出地の位置の類似性については、前記最小経路コストの類似性を用いることで、前記可否を判定する
ことを特徴とする請求項21記載の情報提供装置。
【請求項24】
前記情報提供装置はさらに、
前記交通量検出地が存在する密度を地域別に蓄積する交通量検出地密度蓄積手段と、
前記現在地取得手段で取得された現在位置と前記交通量検出地密度蓄積手段に蓄積された現在位置を含む地域の前記密度とから、移動先候補とする交通量検出地の位置範囲を算出するフィルタリング位置範囲算出手段と、
前記フィルタリング位置範囲算出手段が算出した位置範囲に従って、前記交通量検出地蓄積手段に蓄積されている交通量検出地から移動先候補となるものをフィルタリングする移動先候補フィルタリング手段とを備え、
前記移動先予測手段は、前記移動先候補フィルタリング手段によるフィルタリングによって移動先候補とされた交通量検出地の一部または全部を、前記移動先候補として選択する
ことを特徴とする請求項1記載の情報提供装置。
【請求項25】
前記情報提供装置はさらに、
渋滞情報を蓄積する渋滞情報蓄積手段と、
前記渋滞情報蓄積手段に蓄積された渋滞情報から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、
前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積する
ことを特徴とする請求項3記載の情報提供装置。
【請求項26】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報と前記渋滞情報とを用いて、渋滞の始点と終点との間を、前記交通量検出地の位置を変更し得る位置範囲として算出する交通量検出地位置範囲算出手段と、
前記交通量検出地位置範囲算出手段によって算出された位置範囲内で、かつ、前記現在地取得手段で取得された現在位置に最も近い位置に、前記交通量検出地の位置を変更する交通量検出地位置変更手段とを備え、
前記向き算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記向きを算出し、
前記距離算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記距離を算出する
ことを特徴とする請求項25記載の情報提供装置。
【請求項27】
前記情報提供装置はさらに、
道路の所定の地点間を示すリンクについて、リンク旅行時間、リンク長、および、リンクの始点位置と終点位置を示す情報を蓄積するリンク旅行時間蓄積手段と、
前記リンク旅行時間蓄積手段に蓄積されたリンク旅行時間、リンク長、および、リンクの始点位置と終点位置から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、
前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積する
ことを特徴とする請求項3記載の情報提供装置。
【請求項28】
前記情報提供装置はさらに、予測する移動先の数を決定する移動先予測数決定手段を備え、
前記移動先予測手段は、前記移動先予測数決定手段で決定された数だけ移動先を予測する
ことを特徴とする請求項3記載の情報提供装置。
【請求項29】
前記移動先予測数決定手段は、前記情報提供手段が提供する提供情報の数、提供情報の内容、前記現在地取得手段で特定される現在位置の周りに関する提供情報の数、前記移動先予測手段で予測される移動先の周りに関する提供情報の数、前記現在位置から前記移動先への経路に関する提供情報の数、前記移動先予測手段が予測する移動方向の数、および、前記移動先予測手段が再帰的に移動先を予測する場合の予測回数の少なくとも一つに応じて、予測する移動先の数を決定する
ことを特徴とする請求項28記載の情報提供装置。
【請求項30】
交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段を参照することによって、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供方法であって、
移動体の現在位置を取得する現在地取得ステップと、
前記現在地取得ステップで取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出ステップと、
前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出ステップで算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測ステップと、
前記移動先予測ステップによって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供ステップと
を含むことを特徴とする情報提供方法。
【請求項31】
交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段を参照することによって、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置のためのプログラムであって、
請求項30記載の情報提供方法に含まれるステップをコンピュータに実行させる
ことを特徴とするプログラム。
【請求項1】
移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置であって、
交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段と、
移動体の現在位置を取得する現在地取得手段と、
前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出手段と、
前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出手段で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測手段と、
前記移動先予測手段によって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供手段と
を備えることを特徴とする情報提供装置。
【請求項2】
前記移動先予測手段は、前記交通量検出地蓄積手段に蓄積されている交通量検出地の中から、前記現在地取得手段で取得された現在位置から一定距離の範囲内にある交通量検出地を前記移動先候補として選択する
ことを特徴とする請求項1記載の情報提供装置。
【請求項3】
前記情報提供装置はさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの距離を算出する距離算出手段を備え、
前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量の大きさを蓄積し、
前記移動先予測手段は、前記方向差が予め定められた閾値の範囲内にある交通量検出地の中から、前記距離算出手段によって算出された距離が小さく、かつ、前記交通量検出地蓄積手段に蓄積されている交通量の大きさが大きい交通量検出地を選択し、選択した交通量検出地を前記移動体の移動先として予測する
ことを特徴とする請求項1記載の情報提供装置。
【請求項4】
前記情報提供装置はさらに、前記移動体の出発位置を取得する出発地取得手段を備え、
前記距離算出手段はさらに、前記出発地取得手段によって取得された出発位置から前記移動先候補位置までの距離を算出し、
前記移動先予測手段は、前記閾値として、前記距離算出手段によって算出された距離の大きさに対して単調減少する値を採用して前記方向差と前記閾値とを比較することにより、前記方向差が前記閾値の範囲内にある交通量検出地を特定する
ことを特徴とする請求項3記載の情報提供装置。
【請求項5】
前記情報提供装置はさらに、前記移動体の出発位置を取得する出発地取得手段を備え、
前記距離算出手段はさらに、前記出発地取得手段によって取得された出発位置から前記現在地取得手段で取得された現在位置までの距離、移動時間および右左折回数の少なくとも一つを算出し、
前記移動先予測手段は、前記閾値として、前記距離算出手段によって算出された距離、移動時間および右左折回数の少なくとも一つの大きさに対して単調減少する値を採用して前記方向差と前記閾値とを比較することにより、前記方向差が前記閾値の範囲内にある交通量検出地を特定する
ことを特徴とする請求項3記載の情報提供装置。
【請求項6】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段とを備え、
前記向き算出手段は、前記推奨経路算出手段で算出された推奨経路上の前記交通量検出地での移動体の向きを、前記現在位置から前記交通量検出地への向きとして算出する
ことを特徴とする請求項1記載の情報提供装置。
【請求項7】
前記現在地取得手段はさらに、前記移動体の現在の向きを取得し、
前記移動先予測手段はさらに、前記現在地取得手段で取得された向きと、前記交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値より大きい場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項8】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段とを備え、
前記現在地取得手段はさらに、前記移動体の現在の向きを取得し、
前記向き算出手段は、前記推奨経路算出手段で算出された推奨経路上の前記交通量検出地での移動体の向きを算出し、
前記移動先予測手段はさらに、前記現在地取得手段で取得された向きと、前記向き算出手段で算出された向きとが一致しない場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項9】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報と前記交通量検出地蓄積手段に蓄積されている交通量検出地を特定する情報とを用いて、前記交通量検出地の位置を変更し得る位置範囲を算出する交通量検出地位置範囲算出手段と、
前記交通量検出地位置範囲算出手段によって算出された位置範囲内で、かつ、前記現在地取得手段で取得された現在位置に最も近い位置に、前記交通量検出地の位置を変更する交通量検出地位置変更手段とを備え、
前記向き算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記向きを算出し、
前記距離算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記距離を算出する
ことを特徴とする請求項3記載の情報提供装置。
【請求項10】
前記交通量検出地位置範囲算出手段は、前記交通量検出地を含む道路において分岐が存在しない範囲を前記位置範囲として算出する
ことを特徴とする請求項9記載の情報提供装置。
【請求項11】
前記交通量検出地位置範囲算出手段は、前記交通量検出地を含む道路において、道路幅が所定の値以上の分岐が存在しない範囲を前記位置範囲として算出する
ことを特徴とする請求項9記載の情報提供装置。
【請求項12】
前記情報提供装置はさらに、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への経路の遠回りの度合を示す遠回り度を算出する遠回り度算出手段を備え、
前記移動先予測手段はさらに、前記遠回り度算出手段で算出された前記交通量検出地への経路の遠回り度が予め定められた値より大きい場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項13】
前記情報提供装置はさらに、
前記移動体の出発位置を取得する出発地取得手段と、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記出発地取得手段によって取得された出発位置から前記現在地取得手段で取得された現在位置までの経路のコストである現在出発地間経路コストと、前記出発位置から前記交通量検出地までの経路のコストである出発候補地間経路コストと、前記現在位置から前記交通量検出地までの経路のコストである現在候補地間経路コストとを算出する経路コスト算出手段とを備え、
前記遠回り度算出手段は、前記経路コスト算出手段で算出された前記現在出発地間経路コストと前記現在候補地間経路コストの和と、前記出発候補地間経路コストとの差を、前記遠回り度として算出する
ことを特徴とする請求項12記載の情報提供装置。
【請求項14】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段と、
前記推奨経路算出手段で算出された推奨経路上に、当該推奨経路を算出した前記交通量検出地を除く他の交通量検出地が存在するか否かを判断することによって、冗長な交通量検出地が存在するか否かを示す冗長度を算出する冗長度算出手段と、
前記冗長度算出手段によって算出された冗長度によって冗長な交通量検出地が存在すると示された場合に、当該交通量検出地を前記移動先候補から除外する
ことを特徴とする請求項1記載の情報提供装置。
【請求項15】
前記移動先予測手段は、移動先として予測した交通量検出地について、予測の確からしさを示す評価値を算出し、算出した評価値が予め定められた基準を満たす場合に、当該交通量検出地を前記移動体の現在位置として、前記移動先の予測を繰り返す
ことを特徴とする請求項3記載の情報提供装置。
【請求項16】
前記移動先予測手段は、移動先として予測した交通量検出地および他の交通量検出地について前記評価値を算出し、移動先として予測した交通量検出地の評価値が他のいずれの交通量検出地の評価値よりも一定幅を超えて高い場合に、前記予測を繰り返す
ことを特徴とする請求項15記載の情報提供装置。
【請求項17】
前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量検出地が道路であるか否かの情報を含む種別情報を蓄積し、
前記移動先予測手段は、前記交通量検出地蓄積手段に蓄積された種別情報を参照することで、前記交通量検出地が道路であるか否か判定し、道路であると判定した場合に、当該交通量検出地を前記移動体の現在位置として、前記予測を繰り返す
ことを特徴とする請求項3記載の情報提供装置。
【請求項18】
前記種別情報はさらに、前記交通量検出地がランドマークであるか否かを示し、
前記交通量検出地蓄積手段は、前記複数の交通量検出地について、さらに、交通量検出地がランドマークである場合における前記ランドマークのカテゴリを示すカテゴリ情報を蓄積し、
前記情報提供装置はさらに、前記交通量検出地蓄積手段に蓄積されているカテゴリごとのユーザの評価を示す嗜好情報を蓄積する嗜好情報蓄積手段を備え、
前記移動先予測手段は、前記距離に対する前記交通量の大きさに対して、前記嗜好情報蓄積手段に蓄積されている前記交通量検出地のカテゴリに対応する評価で重みづけし、得られた値が大きい交通量検出地を、前記移動体の移動先として予測する
ことを特徴とする請求項17記載の情報提供装置。
【請求項19】
前記情報提供装置はさらに、
前記移動先予測手段で予測された移動先を提示する移動先提示手段と、
前記移動先提示手段で提示された移動先に対するユーザからの選択指示を受け付ける移動先選択手段とを備え、
情報提供手段は、前記移動先選択手段が受け付けた選択指示に対応する移動先に関する情報を取得して提示する
ことを特徴とする請求項1記載の情報提供装置。
【請求項20】
前記移動先予測手段は、前記移動先を前記移動体の通過地として予測し、
前記情報提供装置はさらに、
前記移動先予測手段で予測された通過地を提示する通過地提示手段と、
前記通過地提示手段で提示された通過地に対するユーザからの選択指示を受け付ける通過地選択手段と、
前記通過地選択手段が受け付けた選択指示が通過地の指定である場合に、当該通過地を前記移動体の現在位置とするように前記現在地取得手段に指示する通過地選択検知手段とを備える
ことを特徴とする請求項19記載の情報提供装置。
【請求項21】
前記情報提供装置はさらに、
前記複数の交通量検出地の位置と前記交通量検出地での交通量の向きの類似性に基づいて、前記複数の交通量検出地での交通量の大きさを合成できるか否かを判定する合成可否判定手段と、
前記合成可否判定手段が合成できると判定した場合に、前記複数の交通量検出地での交通量の大きさを合成することにより、前記交通量検出地での交通量の大きさを変更する合成手段とを備え、
前記移動先予測手段は、前記合成手段によって合成された交通量の大きさを用いて、前記交通量検出地を選択する
ことを特徴とする請求項3記載の情報提供装置。
【請求項22】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報を用いて、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地までの推奨経路を算出する推奨経路算出手段と、
前記推奨経路算出手段で算出された推奨経路上に、当該推奨経路を算出した前記交通量検出地を除く他の交通量検出地が存在するか否かを判断することによって、冗長な交通量検出地が存在するか否かを示す冗長度を算出する冗長度算出手段とを備え、
前記合成手段は、前記冗長度算出手段によって算出された冗長度によって冗長な交通量検出地が存在すると示された場合に、当該交通量検出地を合成の対象から除外する
ことを特徴とする請求項21記載の情報提供装置。
【請求項23】
前記合成可否判定手段は、前記現在地取得手段で取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への最小経路コストを算出し、前記複数の交通量検出地の位置の類似性については、前記最小経路コストの類似性を用いることで、前記可否を判定する
ことを特徴とする請求項21記載の情報提供装置。
【請求項24】
前記情報提供装置はさらに、
前記交通量検出地が存在する密度を地域別に蓄積する交通量検出地密度蓄積手段と、
前記現在地取得手段で取得された現在位置と前記交通量検出地密度蓄積手段に蓄積された現在位置を含む地域の前記密度とから、移動先候補とする交通量検出地の位置範囲を算出するフィルタリング位置範囲算出手段と、
前記フィルタリング位置範囲算出手段が算出した位置範囲に従って、前記交通量検出地蓄積手段に蓄積されている交通量検出地から移動先候補となるものをフィルタリングする移動先候補フィルタリング手段とを備え、
前記移動先予測手段は、前記移動先候補フィルタリング手段によるフィルタリングによって移動先候補とされた交通量検出地の一部または全部を、前記移動先候補として選択する
ことを特徴とする請求項1記載の情報提供装置。
【請求項25】
前記情報提供装置はさらに、
渋滞情報を蓄積する渋滞情報蓄積手段と、
前記渋滞情報蓄積手段に蓄積された渋滞情報から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、
前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積する
ことを特徴とする請求項3記載の情報提供装置。
【請求項26】
前記情報提供装置はさらに、
地図情報を蓄積する地図情報蓄積手段と、
前記地図情報蓄積手段に蓄積された地図情報と前記渋滞情報とを用いて、渋滞の始点と終点との間を、前記交通量検出地の位置を変更し得る位置範囲として算出する交通量検出地位置範囲算出手段と、
前記交通量検出地位置範囲算出手段によって算出された位置範囲内で、かつ、前記現在地取得手段で取得された現在位置に最も近い位置に、前記交通量検出地の位置を変更する交通量検出地位置変更手段とを備え、
前記向き算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記向きを算出し、
前記距離算出手段は、前記交通量検出地位置変更手段によって変更された位置に基づいて、前記距離を算出する
ことを特徴とする請求項25記載の情報提供装置。
【請求項27】
前記情報提供装置はさらに、
道路の所定の地点間を示すリンクについて、リンク旅行時間、リンク長、および、リンクの始点位置と終点位置を示す情報を蓄積するリンク旅行時間蓄積手段と、
前記リンク旅行時間蓄積手段に蓄積されたリンク旅行時間、リンク長、および、リンクの始点位置と終点位置から、交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを推定する交通量推定手段とを備え、
前記交通量検出地蓄積手段は、前記交通量推定手段で推定された交通量検出地の位置、前記交通量検出地での交通量の向き、および、前記交通量検出地での交通量の大きさを示す情報を蓄積する
ことを特徴とする請求項3記載の情報提供装置。
【請求項28】
前記情報提供装置はさらに、予測する移動先の数を決定する移動先予測数決定手段を備え、
前記移動先予測手段は、前記移動先予測数決定手段で決定された数だけ移動先を予測する
ことを特徴とする請求項3記載の情報提供装置。
【請求項29】
前記移動先予測数決定手段は、前記情報提供手段が提供する提供情報の数、提供情報の内容、前記現在地取得手段で特定される現在位置の周りに関する提供情報の数、前記移動先予測手段で予測される移動先の周りに関する提供情報の数、前記現在位置から前記移動先への経路に関する提供情報の数、前記移動先予測手段が予測する移動方向の数、および、前記移動先予測手段が再帰的に移動先を予測する場合の予測回数の少なくとも一つに応じて、予測する移動先の数を決定する
ことを特徴とする請求項28記載の情報提供装置。
【請求項30】
交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段を参照することによって、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供方法であって、
移動体の現在位置を取得する現在地取得ステップと、
前記現在地取得ステップで取得された現在位置から前記交通量検出地蓄積手段に蓄積されている交通量検出地への向きを算出する向き算出ステップと、
前記交通量検出地蓄積手段に蓄積されている交通量検出地の一部または全部を移動先候補として選択し、選択した移動先候補の交通量検出地について、前記向き算出ステップで算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、算出した方向差が予め定められた閾値の範囲内にある交通量検出地を特定し、特定した交通量検出地を前記移動体の移動先または移動先の方向として予測する移動先予測ステップと、
前記移動先予測ステップによって予測された移動先または移動先の方向に関する情報を取得して提示する情報提供ステップと
を含むことを特徴とする情報提供方法。
【請求項31】
交通量を検出する地点である複数の交通量検出地における交通量の向きを、前記交通量検出地を特定する情報と対応づけて蓄積する交通量検出地蓄積手段を参照することによって、移動体の移動先を予測し、予測した移動先に関する情報を前記移動体に提供する情報提供装置のためのプログラムであって、
請求項30記載の情報提供方法に含まれるステップをコンピュータに実行させる
ことを特徴とするプログラム。
【図1】


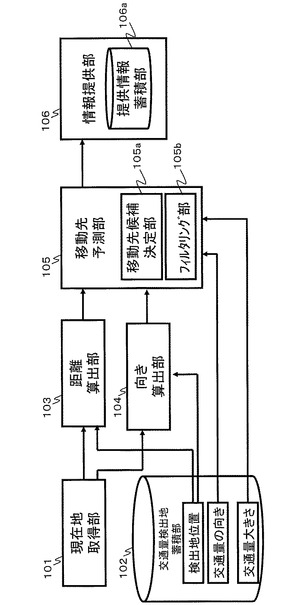
【図2】
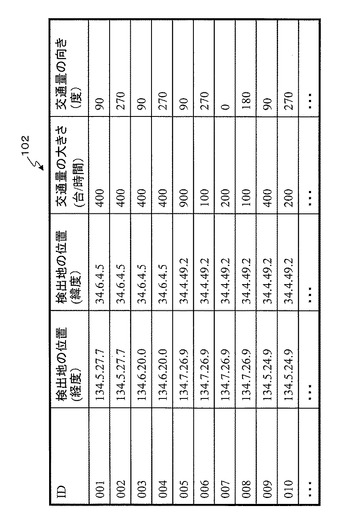
【図3】
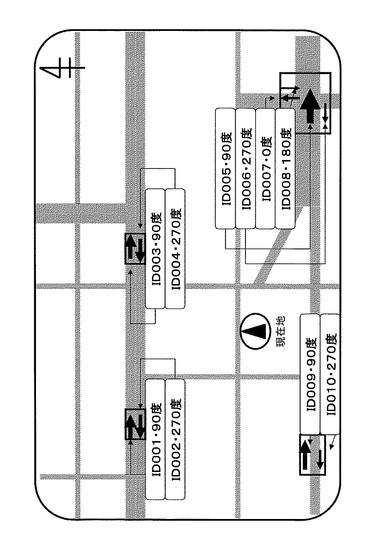
【図4】
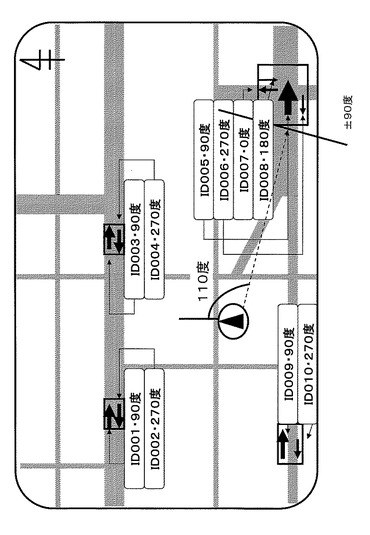
【図5】
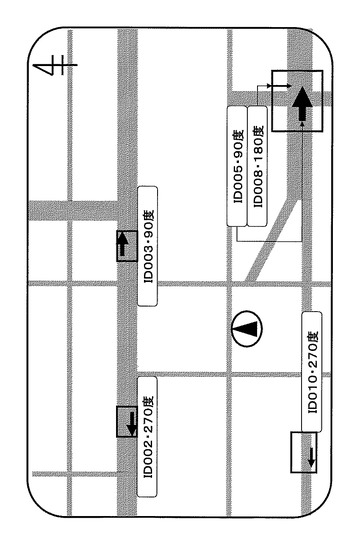
【図6】
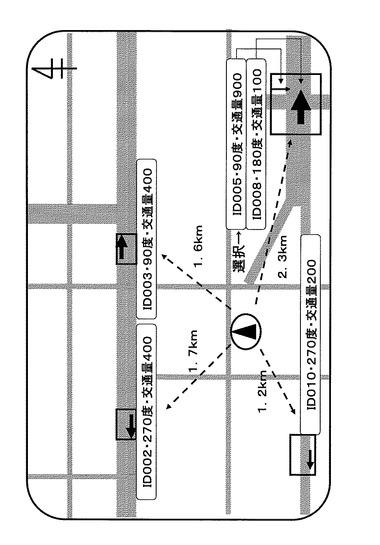
【図7】
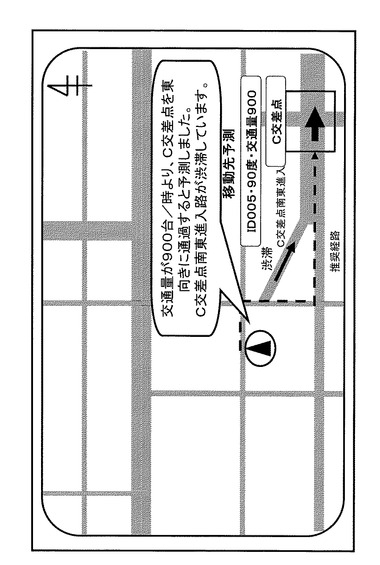
【図8】
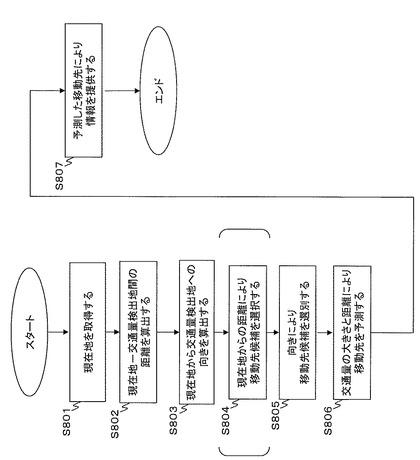
【図9】
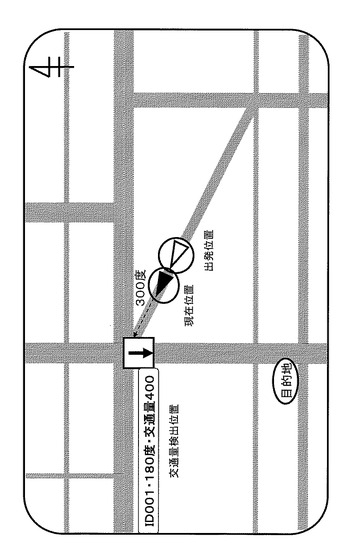
【図10】
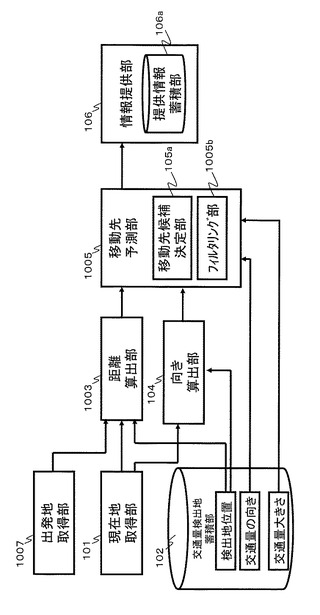
【図11】
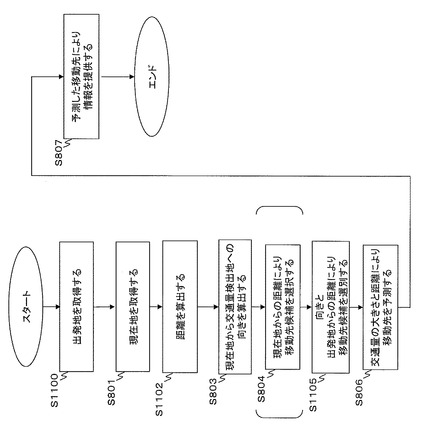
【図12】
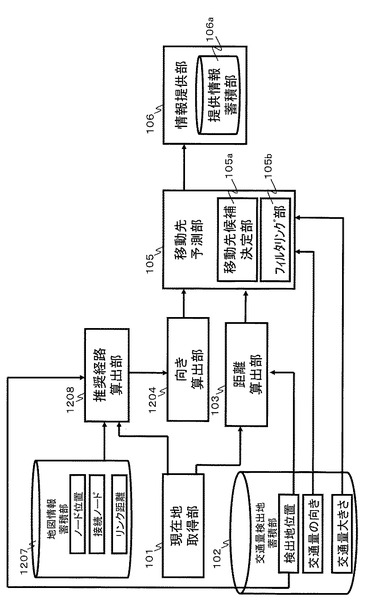
【図13】
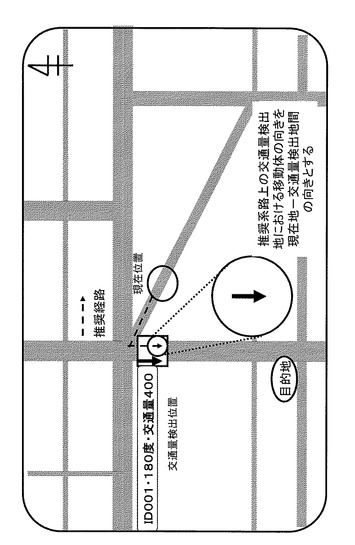
【図14】
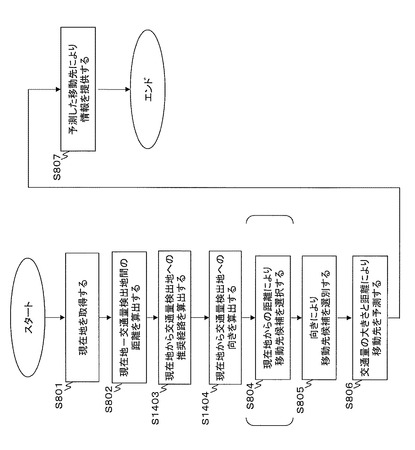
【図15】
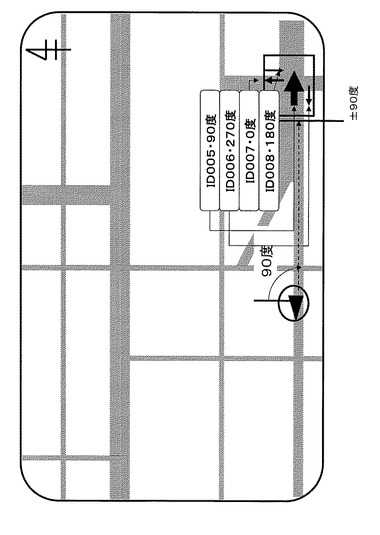
【図16】
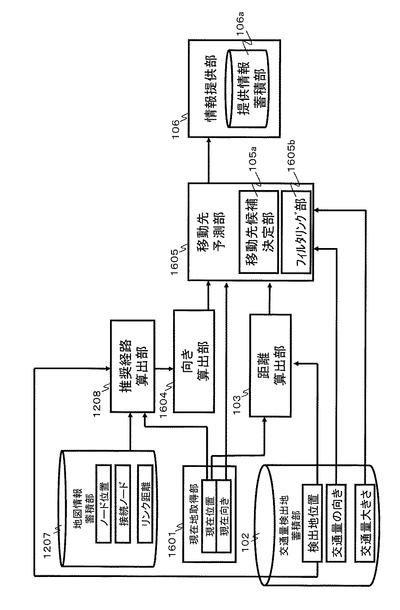
【図17】
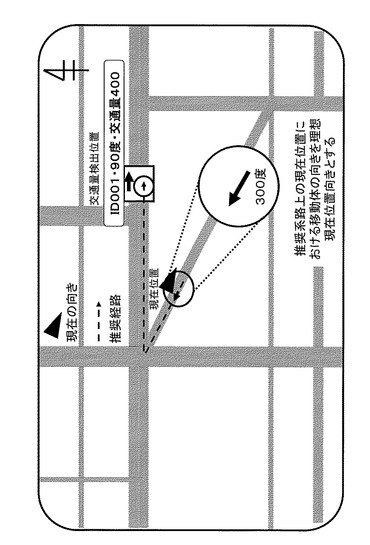
【図18】
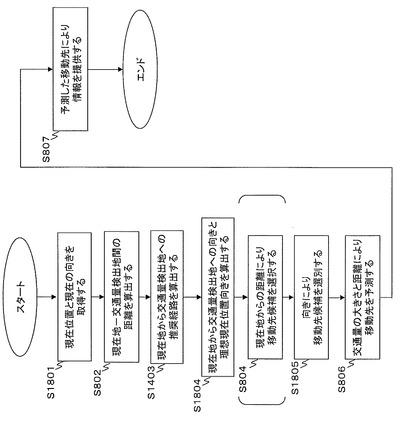
【図19】
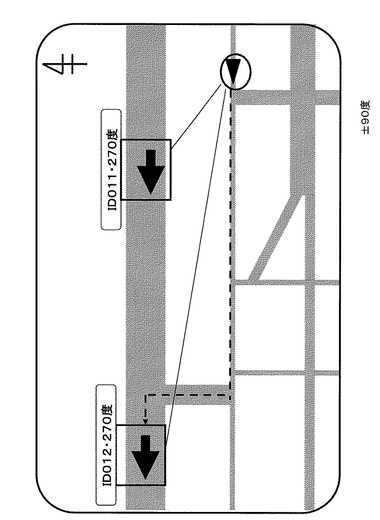
【図20】
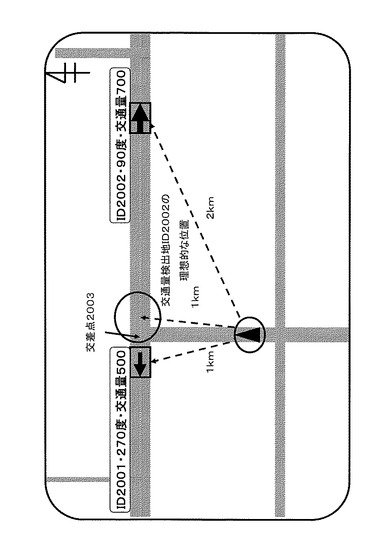
【図21】
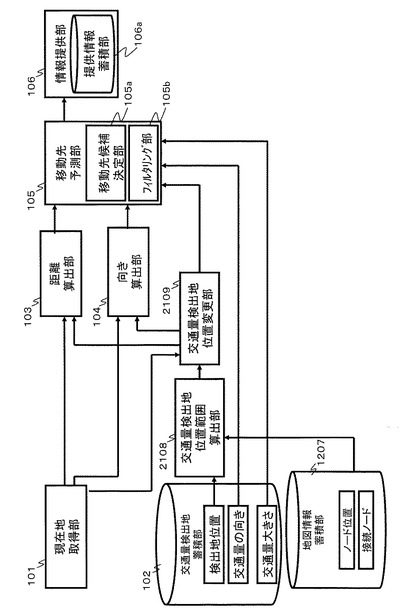
【図22】
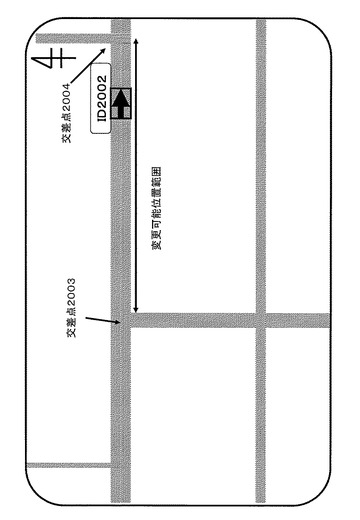
【図23】
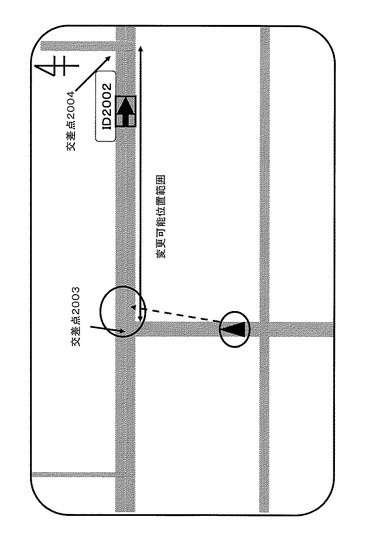
【図24】
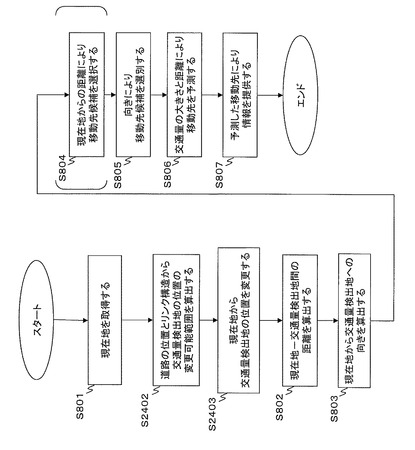
【図25】
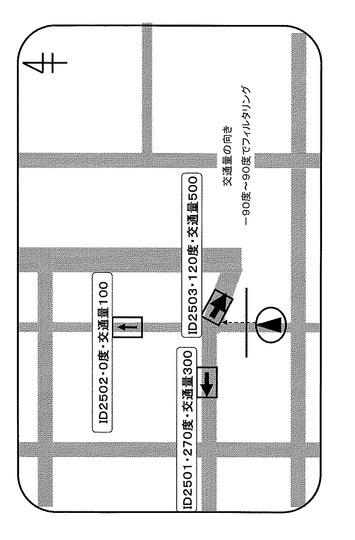
【図26】
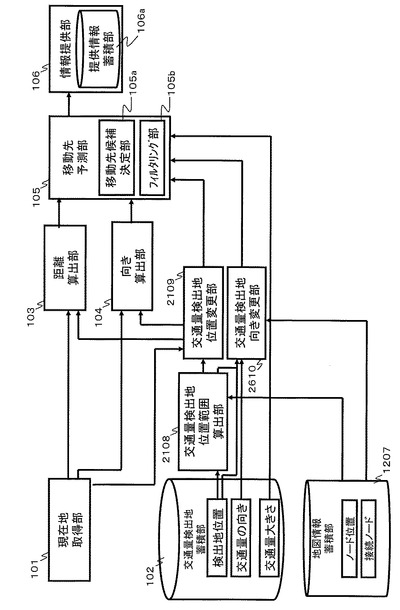
【図27】
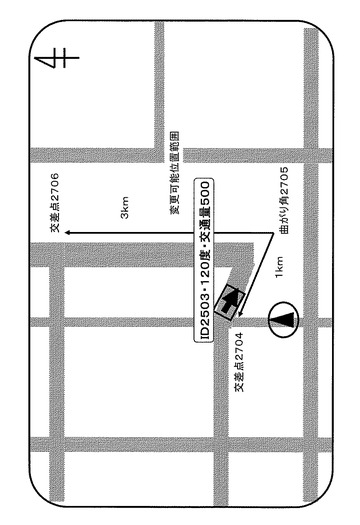
【図28】
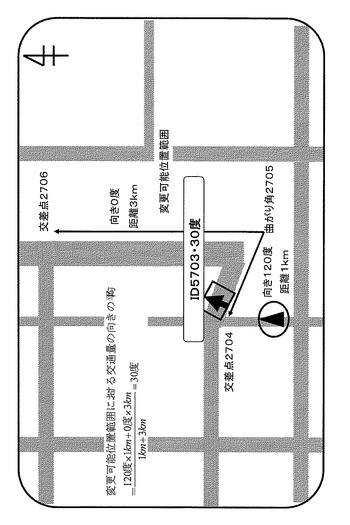
【図29】
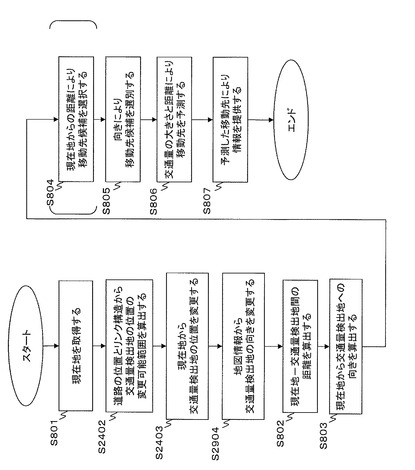
【図30】
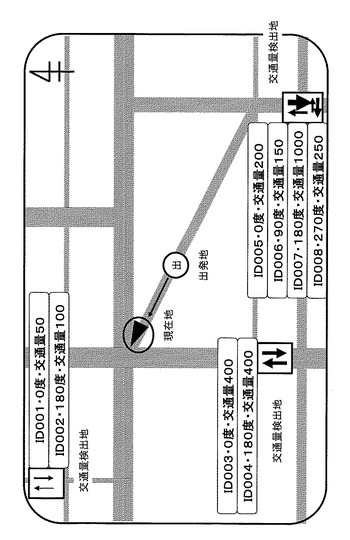
【図31】
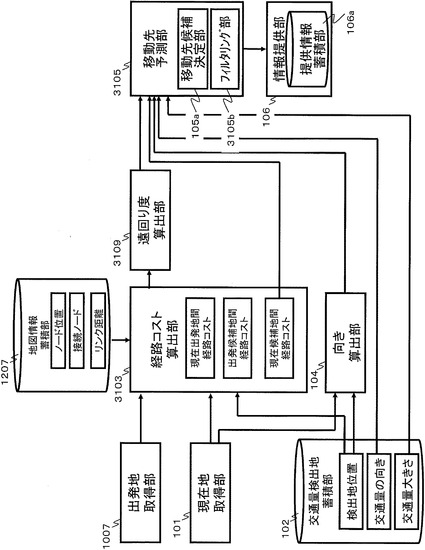
【図32】
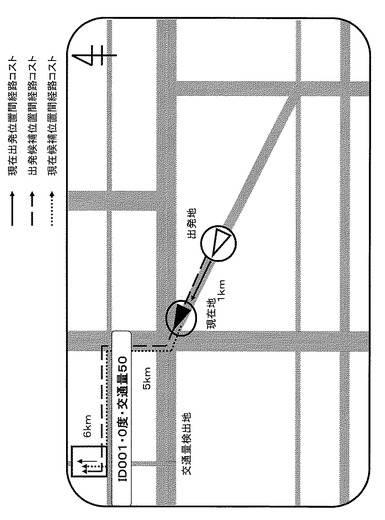
【図33】
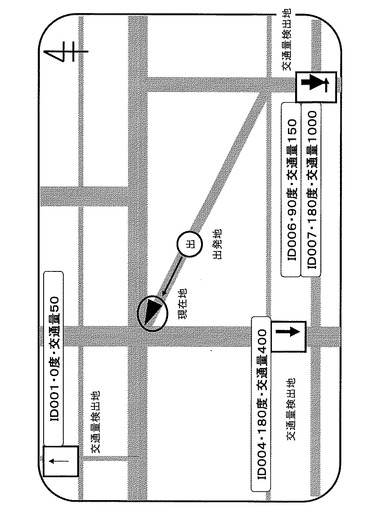
【図34】
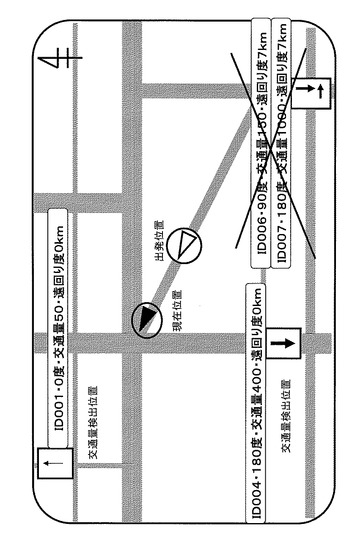
【図35】
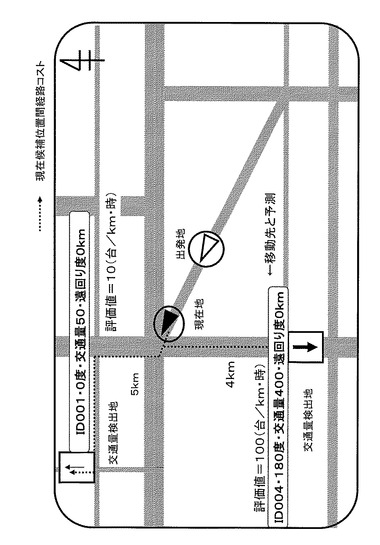
【図36】
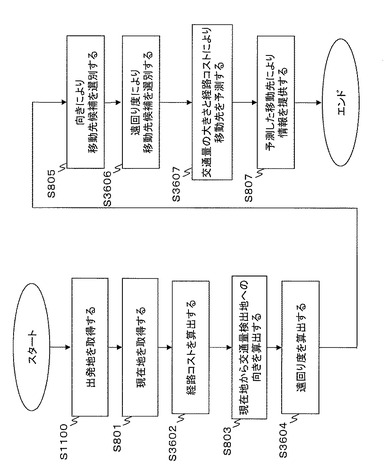
【図37】
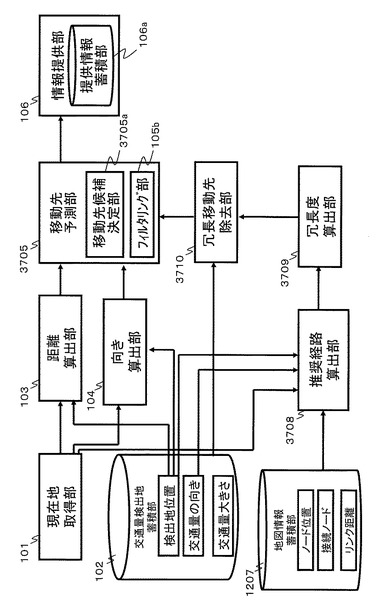
【図38】
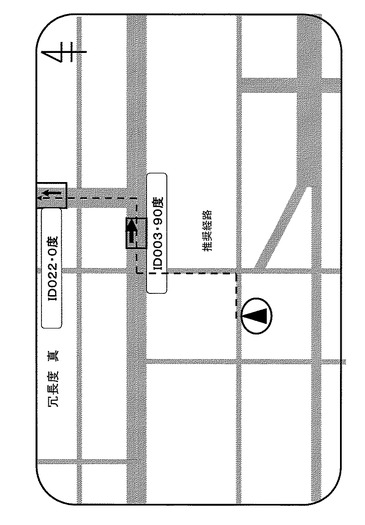
【図39】
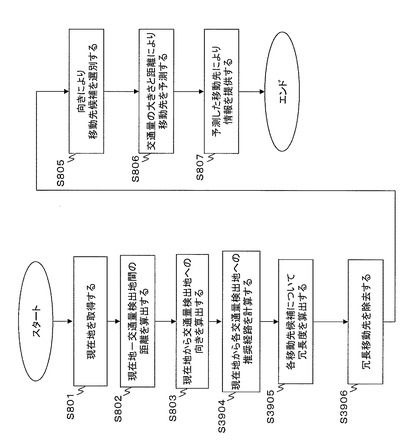
【図40】
【図41】
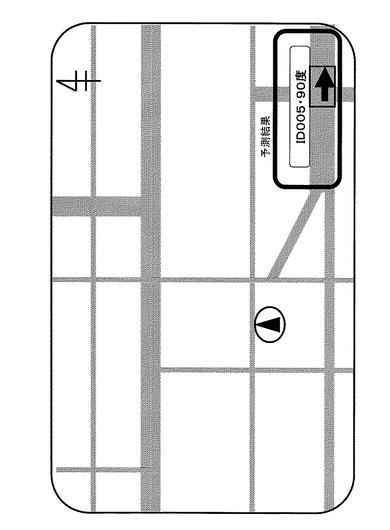
【図42】
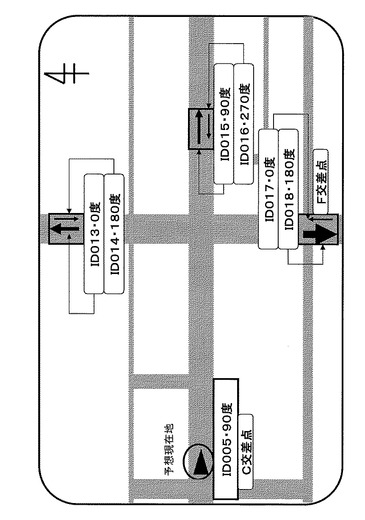
【図43】
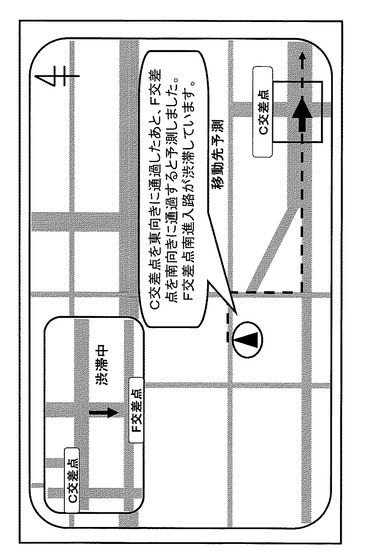
【図44】
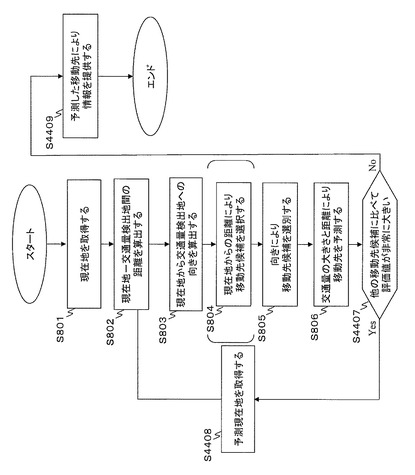
【図45】
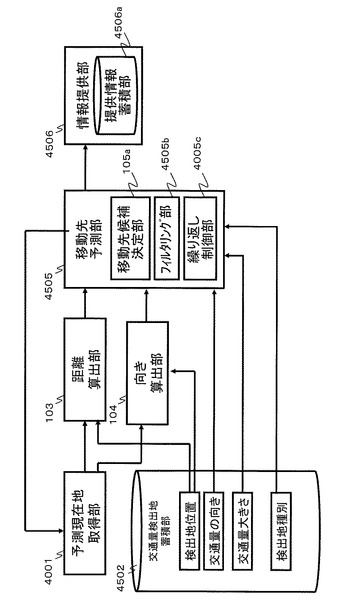
【図46】
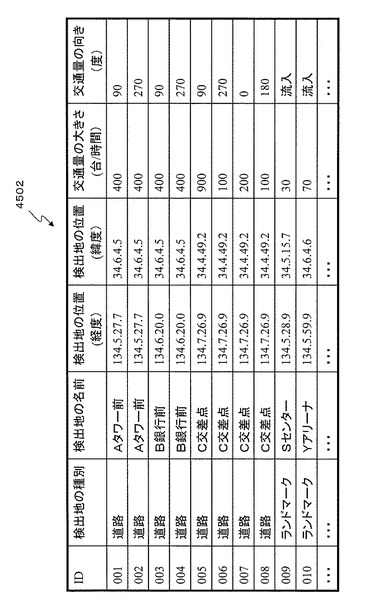
【図47】
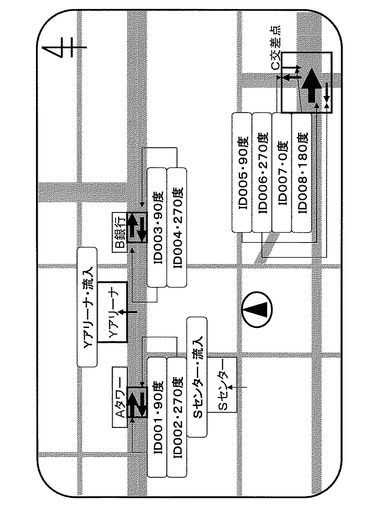
【図48】
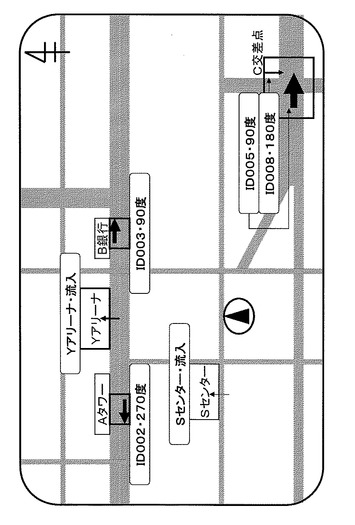
【図49】
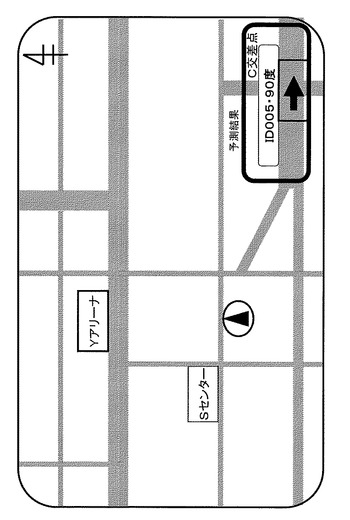
【図50】
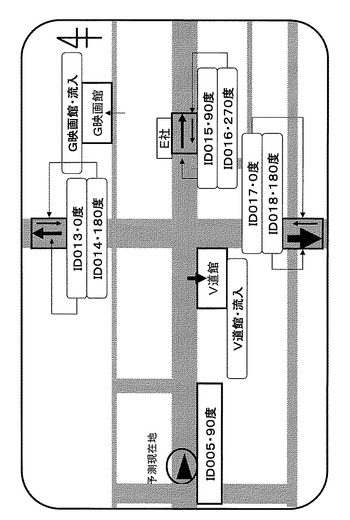
【図51】
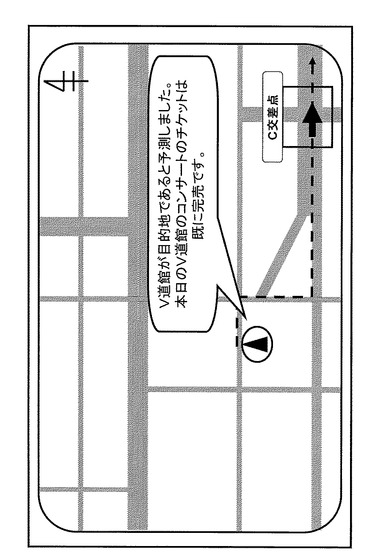
【図52】
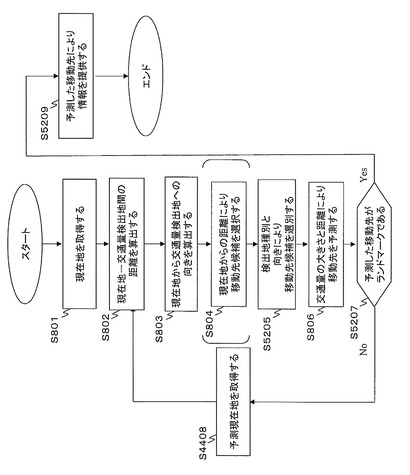
【図53】
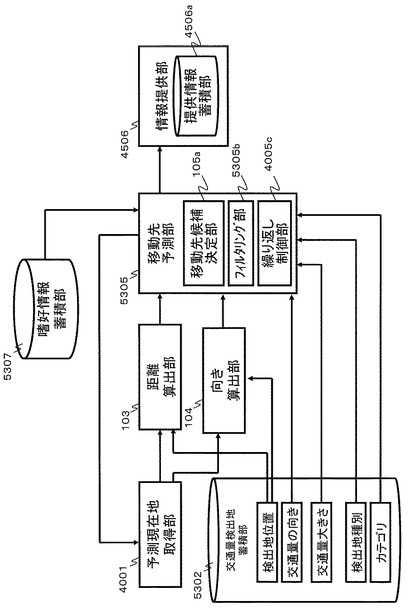
【図54】
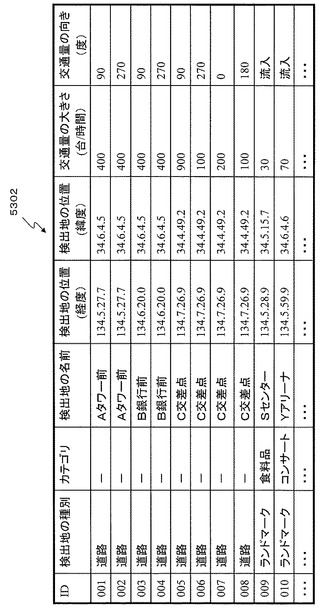
【図55】
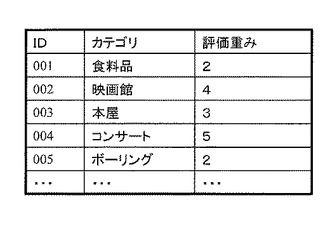
【図56】
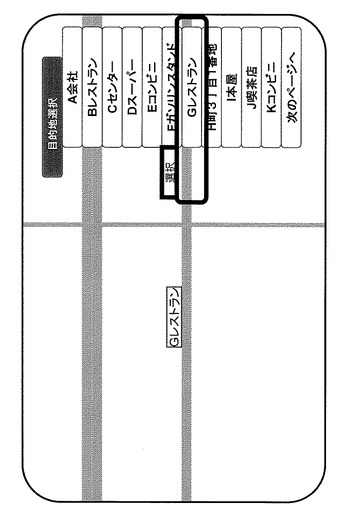
【図57】
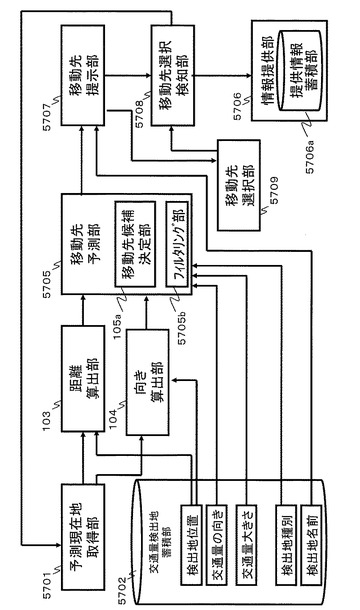
【図58】
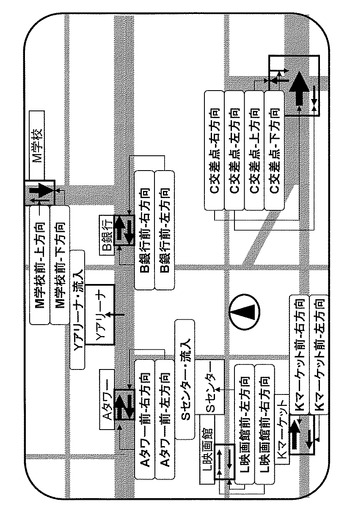
【図59】
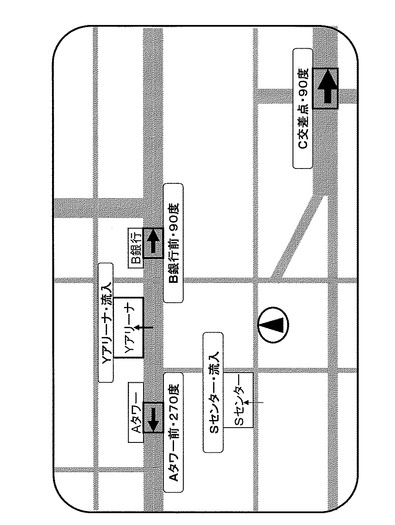
【図60】
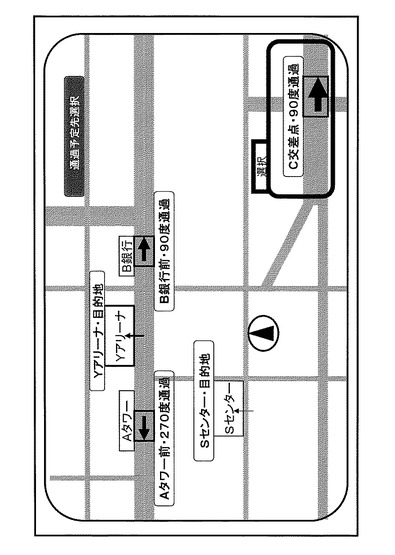
【図61】
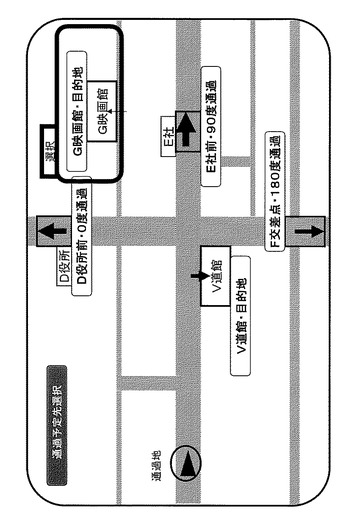
【図62】
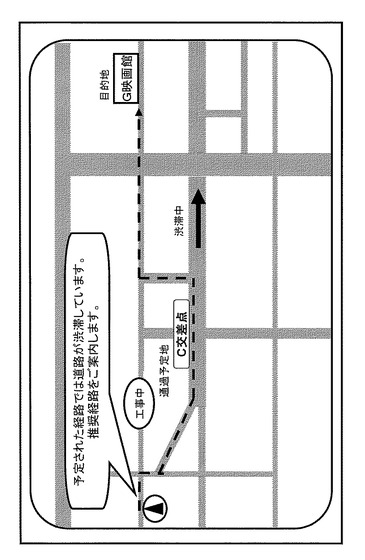
【図63】
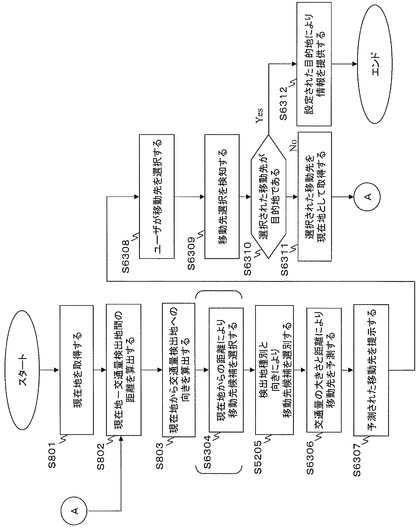
【図64】
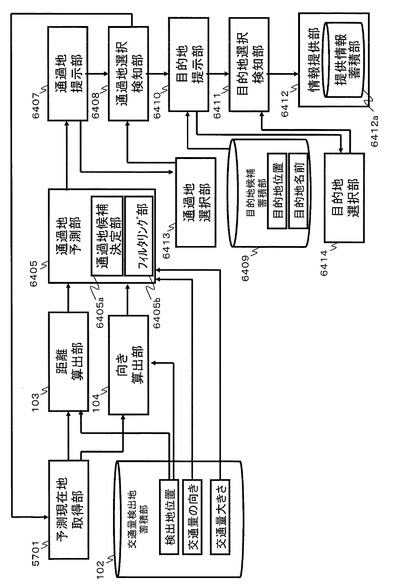
【図65】
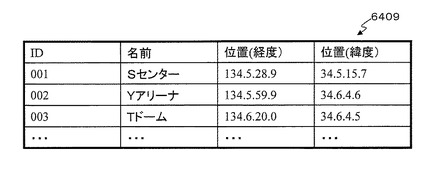
【図66】
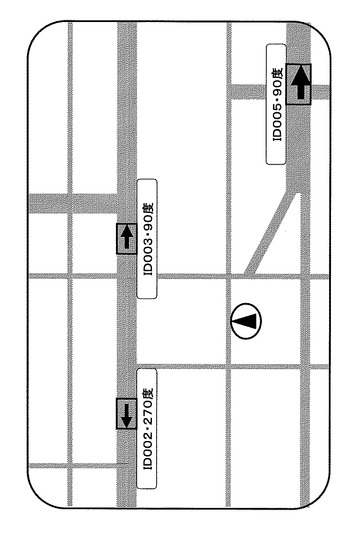
【図67】
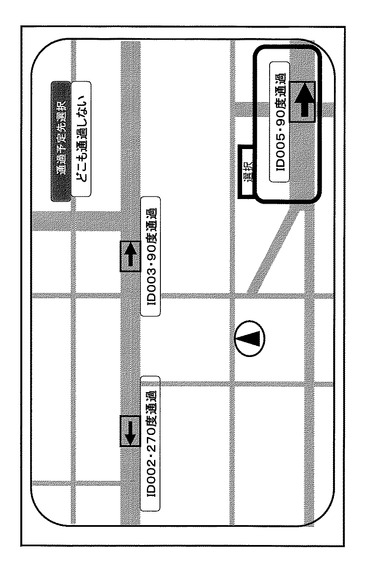
【図68】
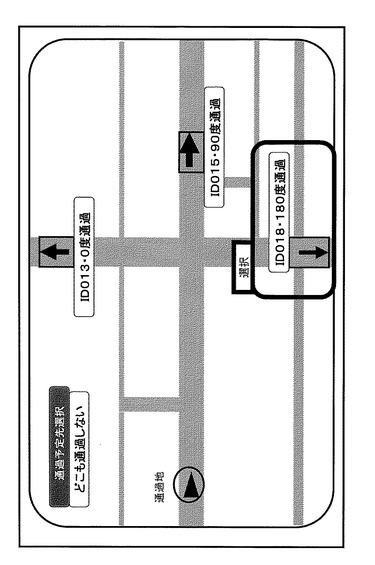
【図69】
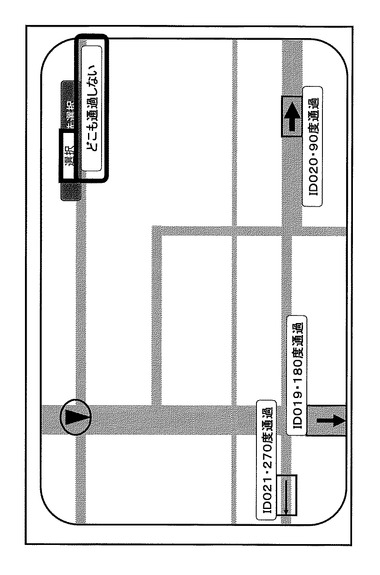
【図70】
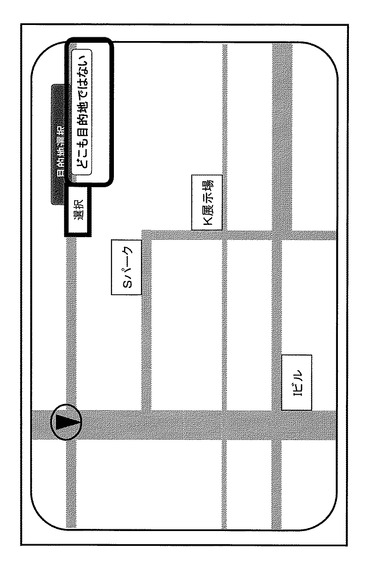
【図71】
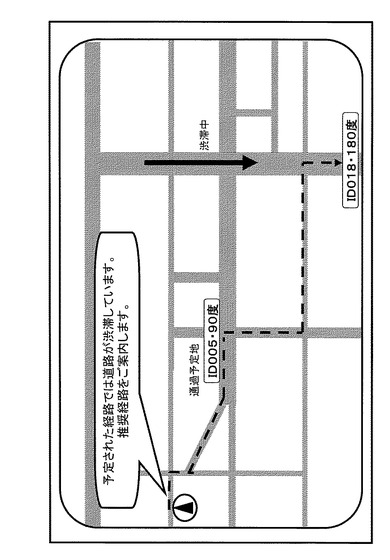
【図72】
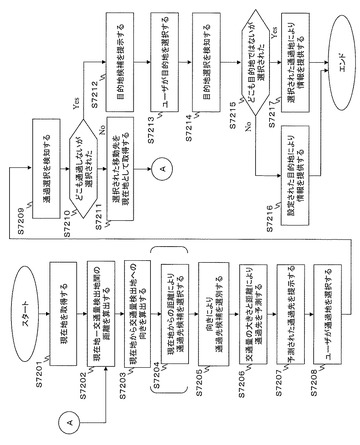
【図73】
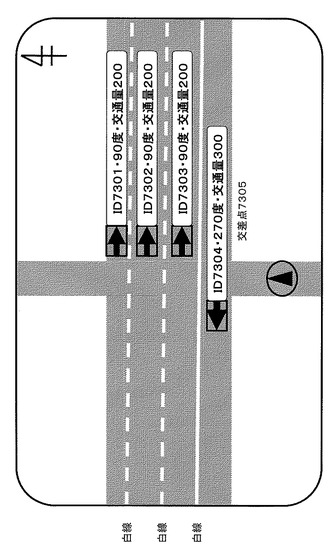
【図74】
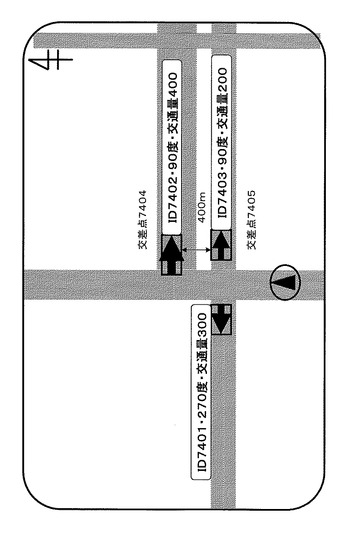
【図75】
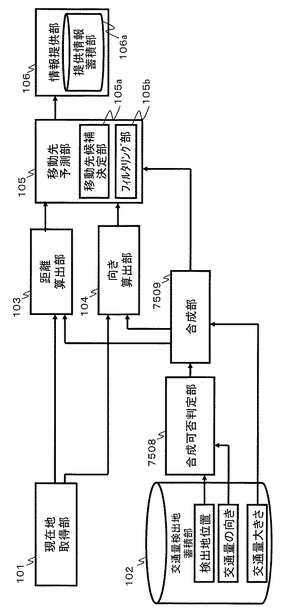
【図76】
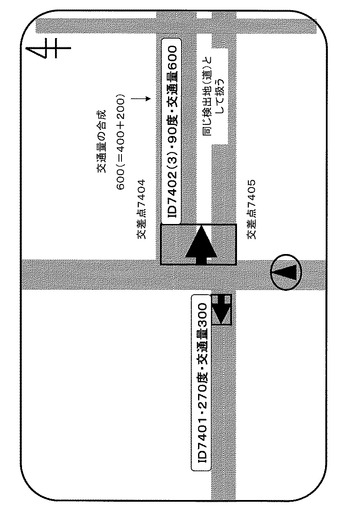
【図77】
【図78】
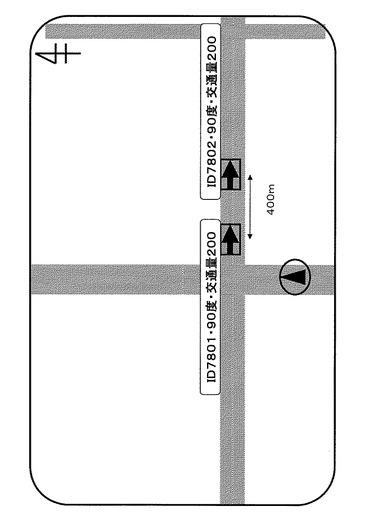
【図79】
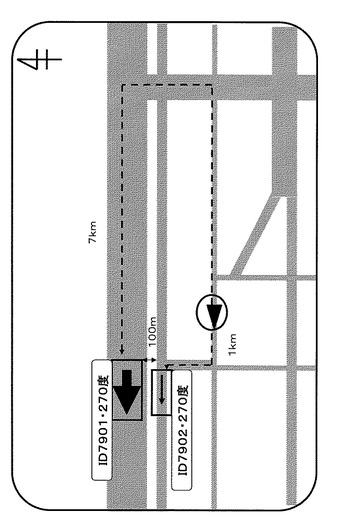
【図80】
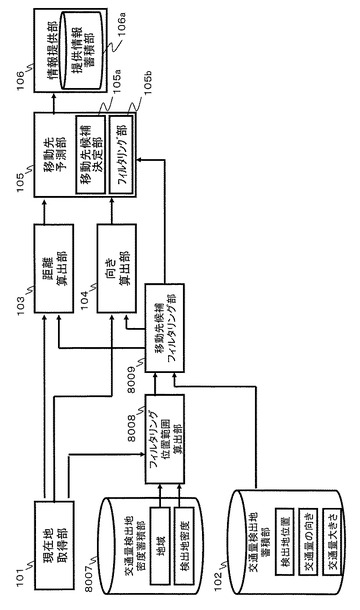
【図81】
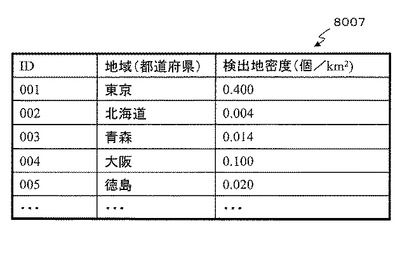
【図82】
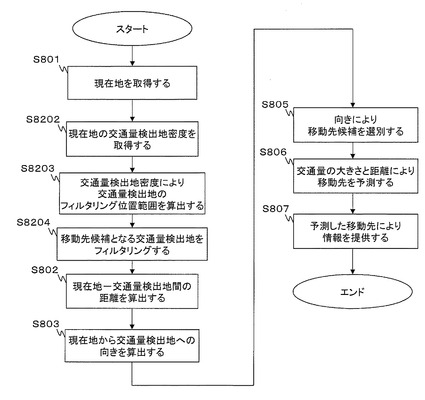
【図83】
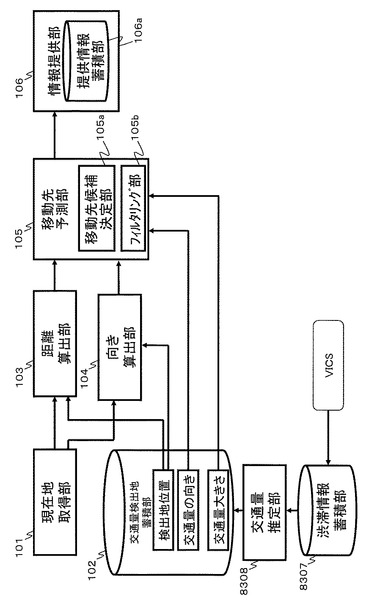
【図84】
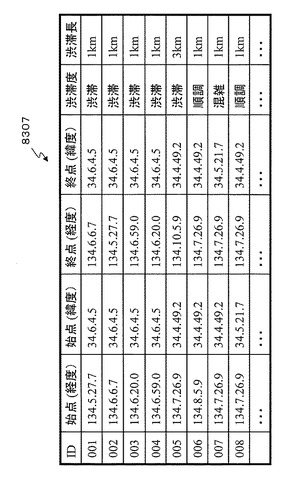
【図85】
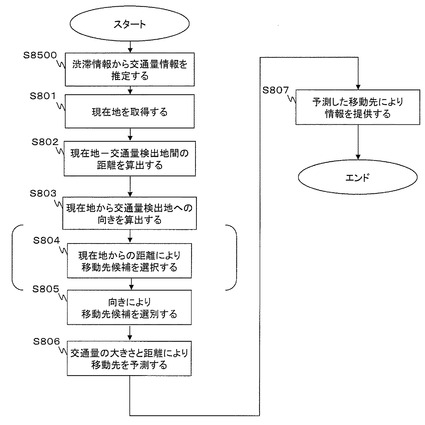
【図86】
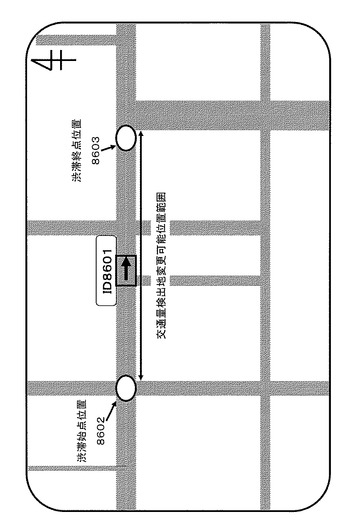
【図87】
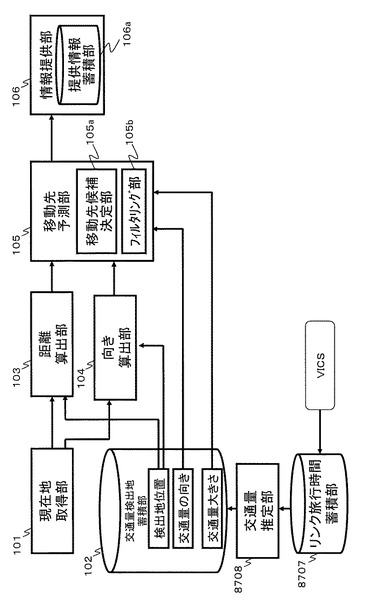
【図88】
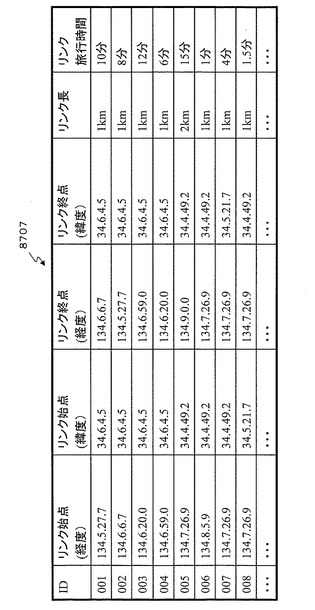
【図89】
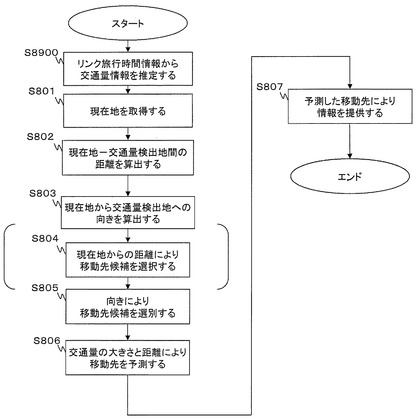
【図90】
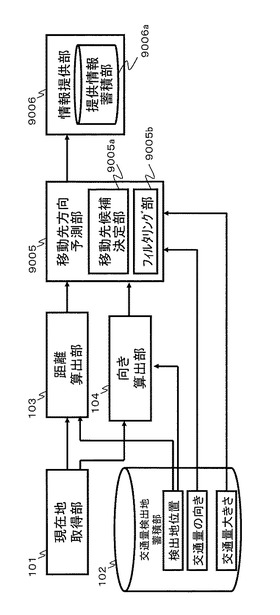
【図91】
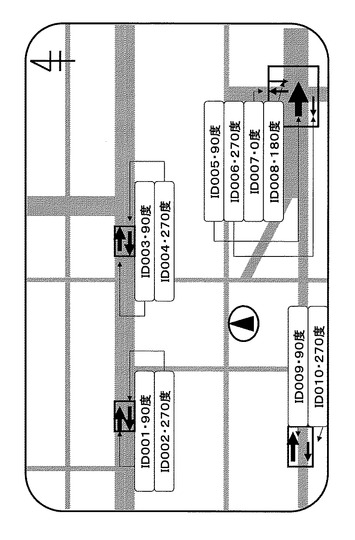
【図92】
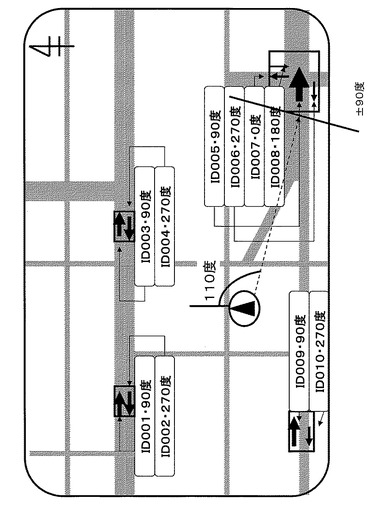
【図93】
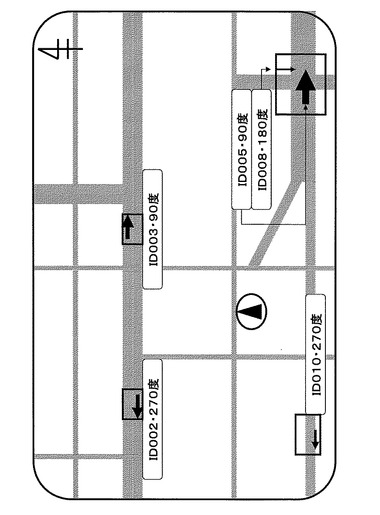
【図94】
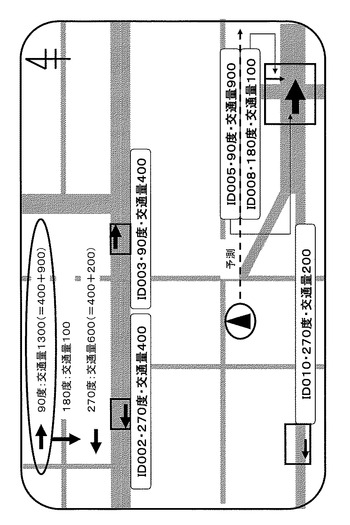
【図95】
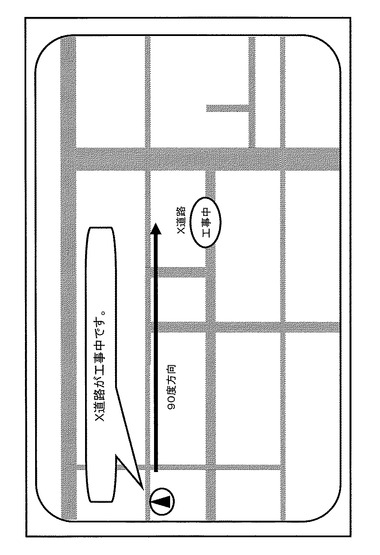
【図96】
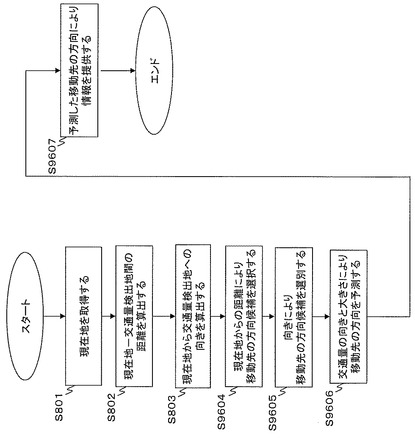
【図97】
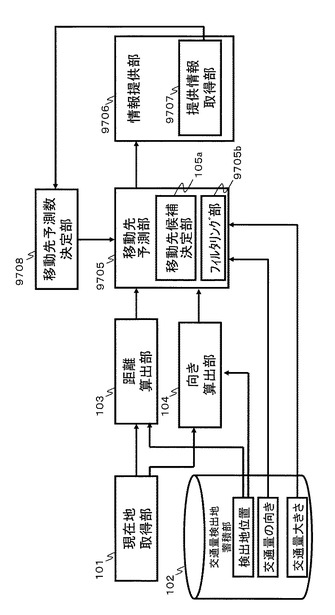
【図98】
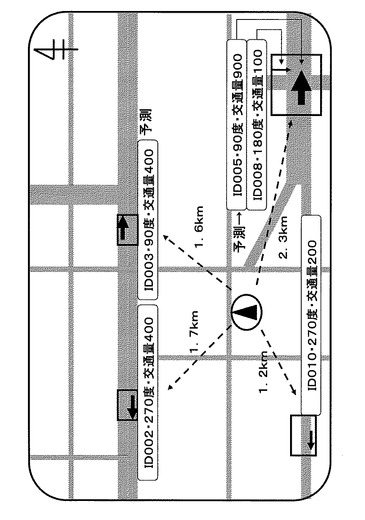
【図99】
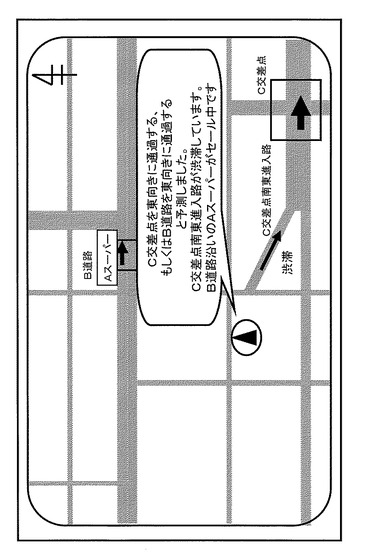
【図100】
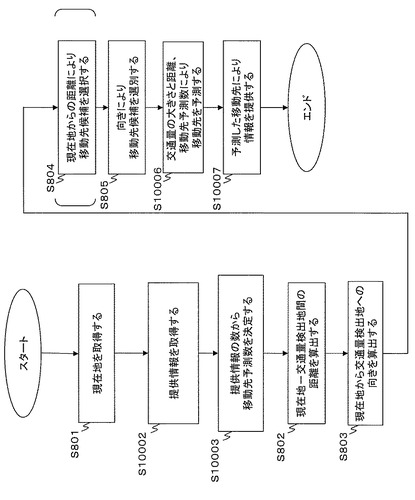
【図101】
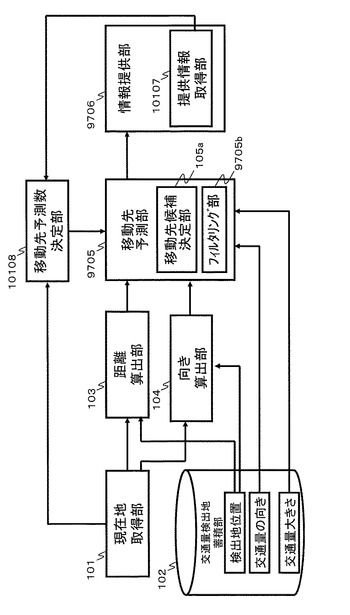
【図102】
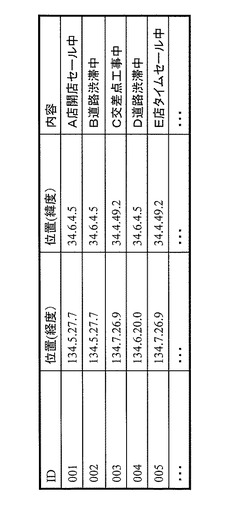
【図103】
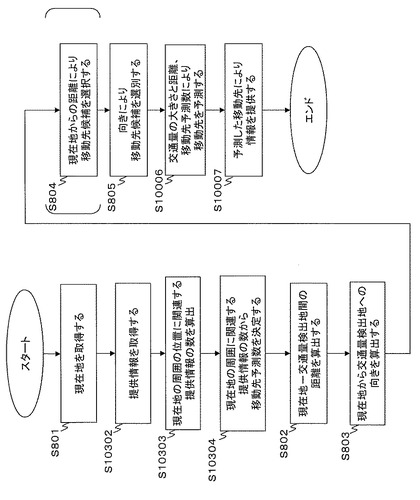
【図104】
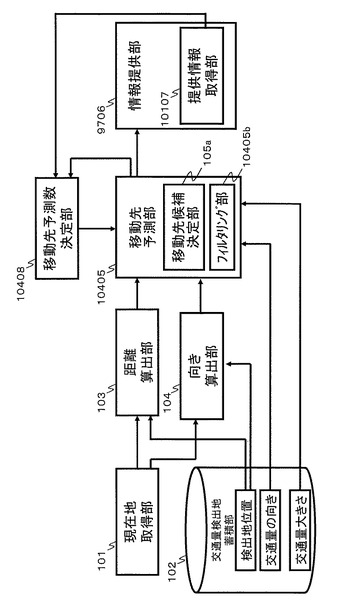
【図105】
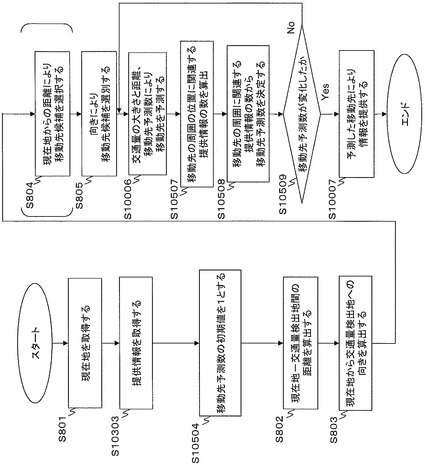
【図106】
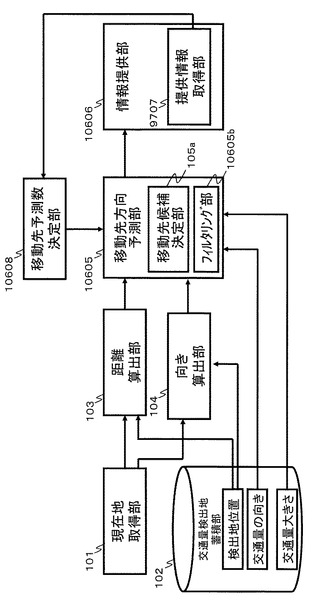
【図107】
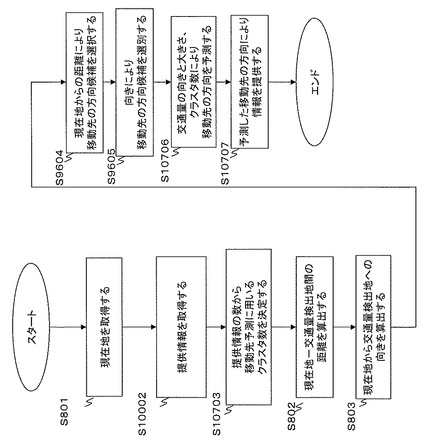
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図60】
【図61】
【図62】
【図63】
【図64】
【図65】
【図66】
【図67】
【図68】
【図69】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
【図81】
【図82】
【図83】
【図84】
【図85】
【図86】
【図87】
【図88】
【図89】
【図90】
【図91】
【図92】
【図93】
【図94】
【図95】
【図96】
【図97】
【図98】
【図99】
【図100】
【図101】
【図102】
【図103】
【図104】
【図105】
【図106】
【図107】
【公開番号】特開2007−178344(P2007−178344A)
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願番号】特願2005−378907(P2005−378907)
【出願日】平成17年12月28日(2005.12.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願日】平成17年12月28日(2005.12.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]