
情報提供装置
【課題】ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うための技術を提供する。
【解決手段】
本発明に係る情報提供装置は、車両に搭載され、ドライバーに情報を提供する情報提供装置であって、最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、を有することを特徴とする。
【解決手段】
本発明に係る情報提供装置は、車両に搭載され、ドライバーに情報を提供する情報提供装置であって、最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、ドライバーに情報を提供する情報提供装置に関する。
【背景技術】
【0002】
従来、車両に搭載され、ドライバーに情報を提供する情報提供装置がある。提供される情報としては、例えば、自車両近辺のマップを表すマップ情報、マップ上で目印になる建物(お店)等を表す建物情報、目的地までのルートを表すルート情報、渋滞などにより目的地までのルートが変更された際に提供されるルート変更情報、お店や観光スポットなどが近くあることを表す広告情報、メールなどがある。
【0003】
しかしながら、車両が走行中(ドライバーが運転中)にそのような情報を提供すると、ドライバーは情報を容易に確認することができなかったり、ドライバーに対して安全運転の妨げとなる虞がある。
【0004】
そのような問題に鑑みた従来技術は、例えば、特許文献1に開示されている。具体的には、特許文献1には、自車両が走行している場合に、提供する情報に制限を加える情報提供装置(車両用地図表示装置)が開示されている。
【0005】
【特許文献1】特開2004−317418号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されている情報提供装置においても、自車両(ドライバー)の状態に限らず即座に情報が提供されるため、上記問題を完全に解決することができなかった。
【0007】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うための技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は以下の構成を採用する。
【0009】
本発明に係る情報提供装置は、
車両に搭載され、ドライバーに情報を提供する情報提供装置であって、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、
を有することを特徴とする。
【0010】
本発明に係る情報提供装置では、最終的に情報を提供すべき地点と、現時点での自車両
の位置との間に事前設定条件に適合することが予想される予想区間があるか否かを判断する。そして、予想区間内で自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する。即ち、受信した後に予想区間中または予想区間後まで情報の提供を遅らせる。更に、予想区間内で自車両の状態が事前設定条件に適合した場合には、そのタイミングで情報を提供する。それにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことが可能となるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。なお、予想区間は、ドライバーが余裕をもって情報を確認できる状態(情報確認可能状態)となることが予想される区間であることが好ましい。
【0011】
自車両の状態が前記予想区間内で事前設定条件に適合しなかった場合に、前記情報提供手段は、前記自車両が前記予想区間を通過後、前記最終提供地点に到達するまでに前記情報を提供することが好ましい。このような構成にすることにより、自車両の状態が予想区間内で事前設定条件に適合しなかった場合であっても、情報を提供すべき区間内で情報の提供を行うことが可能となる。
【0012】
前記予想区間がないと判断された場合に、前記情報提供手段は、前記自車両が前記最終提供地点に到達するまでに前記情報を提供することが好ましい。このような構成にすることにより、予想区間がないと判断された場合であっても、情報を提供すべき区間内で情報の提供を行うことが可能となる。
【0013】
前記事前設定条件は、前記自車両の速度が所定の速度未満であることであることが好ましい。また、前記事前設定条件は、前記自車両が停止していることであることが好ましい。自車両の速度が所定の速度(例えば10km/h)未満の場合には、当該所定の速度以上の速度で走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。自車両が停止していれば、ドライバーはより確実に情報を確認することができる。そのため、上述したように事前設定条件を定義することにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことが可能となるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。
【0014】
前記予想区間は、前記最終提供地点と現時点での自車両の位置との間の渋滞を表す情報、信号機の設置位置を表す情報、立ち寄り地点の位置を表す情報の少なくともいずれかの情報に基づいて定められる区間であることが好ましい。最終提供地点と現時点での自車両の位置との間に、渋滞、信号機、立ち寄り地点などがある場合には、自車両は速度を低下するまたは停車することが予想される。そのため、予想区間を、渋滞を表す情報(渋滞情報)、信号機の設置位置を表す情報(信号機の設置位置情報)、立ち寄り地点の位置を表す情報(立ち寄り地点の位置情報)などに基づいて定めることにより、予想区間を容易に定義することが可能となる。
【0015】
前記事前設定条件は、前記自車両が走行しやすい道路を走行していることであることが好ましい。幅の狭い道路、入り組んだ道(急カーブの多い道)、歩道の無い道路などに比べ、幅の広い道路、直線の道路、歩道がある道路などの道路のほうが自車両は走行しやすい。そして、そのような走行しやすい道路を走行している場合には、走行しにくい道路を走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。そのため、上述したように事前設定条件を定義することにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことが可能となるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。
【0016】
前記予想区間は、前記走行しやすい道路の区間であることが好ましい。上述したように、走行しやすい道路を走行している状態では、走行しにくい道路を走行している状態に比
べ、ドライバーは余裕をもって情報を確認できる。そのため、走行しやすい道路の区間を予想区間とすることにより、予想区間を容易に定義することが可能となる。
【0017】
また、本発明は、上記手段の少なくとも一部を有する情報提供装置として捉えてもよいし、上記処理の少なくとも一部を含む情報提供方法、または、かかる方法を実現するための情報提供プログラムやそのプログラムを記憶した記憶媒体として捉えることもできる。また、本発明は、上記手段の少なくとも一部を有する車両として捉えてもよい。なお、上記手段及び処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0018】
本発明によれば、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うための技術を提供することができる。
【発明を実施するための最良の形態】
【0019】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。本実施形態に係る情報提供装置は、車両に搭載され、ドライバーに情報を提供する。
【0020】
<装置構成>
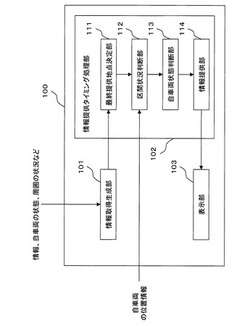
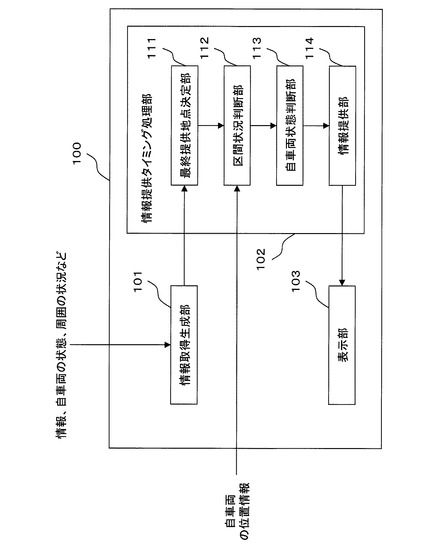
まず、本実施形態に係る情報提供装置の構成について、図1を用いて説明する。図1は、本実施形態に係る情報提供装置の機能・構成を示すブロック図である。図1に示すように、本実施形態に係る情報提供装置100は、情報取得生成部101、情報提供タイミング処理部102、表示部103などを備える。
【0021】
情報取得生成部101は、情報の取得や生成を行う。例えば、情報取得生成部101は、外部(路側機など)から情報(メール、お店や観光スポットなどが近くにあることを表す広告情報など)を取得する。また、情報取得生成部101は、自車両の状態や周囲の状況などに応じて情報を生成する。具体的には、外部から渋滞や通行止めなどの交通状況を表す情報を取得し、目的地までの走行ルート(以後、単にルートと記載する)が変更された場合に、ルートが変更されたことを表すルート変更情報を生成する。また、自車両の燃料が所定の量より少なくなった際に、燃料が少なくなったことを表す給油警告情報を生成する。その他に、取得される情報や生成される情報として、自車両近辺のマップを表すマップ情報、マップ上で目印になる建物(お店)等を表す建物情報、目的地までのルートを表すルート情報などがある。
【0022】
情報提供タイミング処理部102は、情報取得生成部101で取得、生成された情報を、所定のタイミングで提供する(表示部103に出力する)。情報提供タイミング処理部102は、図1に示すように、最終提供地点決定部111、区間状況判断部112、自車両状態判断部113、情報提供部114などを備える。
【0023】
最終提供地点決定部111は、例えば、情報取得生成部101で情報が取得または生成された場合に、最終的に当該情報を提供すべき地点である最終提供地点を、当該情報の内容に応じて決定する。最終提供地点の具体例については、後で詳しく説明する。
【0024】
区間状況判断部112は、最終提供地点決定部111で決定された最終提供地点と現時点での自車両の位置との間に、自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する。なお、予想区間は、ドライバーが余裕をもって情報を確認できる状態(情報確認可能状態)となることが予想される区間であることが好ましい。自車両の位置(位置情報)は、例えば、不図示の受信機で受信されたGPS信号に基づいて算出すればよい。事前設定条件及び予想区間の具体例については、後で詳しく説明する。
【0025】
自車両状態判断部113は、自車両の状態が事前設定条件に適合しているか否かを判断する。具体的には、自車両状態判断部113は、区間状況判断部112で予想区間があると判断された場合に、自車両の状態が事前設定条件に適合するか否かを判断する。
【0026】
情報提供部114は、区間状況判断部112の判断結果や自車両状態判断部113の判断結果に応じたタイミングで情報を提供する(表示部103に出力する)。具体的には、予想区間内で自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する。本実施形態では、自車両状態判断部113で自車両の状態が事前設定条件に適合していると判断されたタイミングで情報を提供し、自車両の状態が予想区間内で事前設定条件に適合しなかった場合には、自車両が予想区間の最終地点(最終提供地点に最も近い予想区間端部)を通過したタイミングで情報を提供する。また、区間状況判断部112で予想区間がないと判断された場合には、情報取得生成部101で情報が取得、生成された直後に(即ち、従来のタイミングと同様のタイミングで)、情報を提供する。
【0027】
表示部103は、情報提供タイミング処理部102(情報提供部114)から送られた情報を表示する。それにより、ドライバーに対し情報が提供(提示)される。表示部103は、液晶ディスプレイ、プラズマディスプレイ、有機ELディスプレイなどの既存の表示装置を適用すればよい。
【0028】
<情報提供処理>
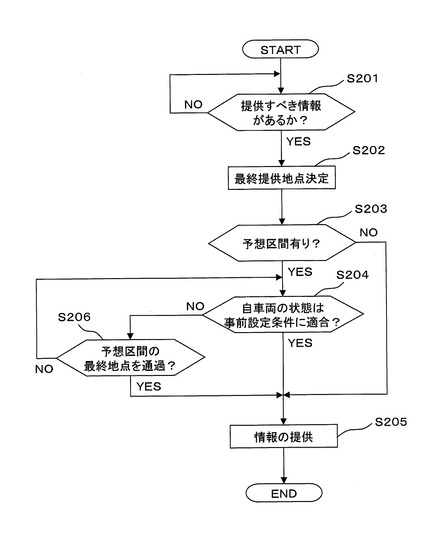
次に、本実施形態に係る情報提供装置100において情報が提供されるまでの処理の流れを、図2を用いて説明する。図2は、本実施形態に係る情報提供装置100において情報が提供されるまでの処理の流れを示すフローチャートである。
【0029】
まず、情報取得生成部101が情報を取得または生成した場合に、即ち、提供すべき情報がある場合に(ステップS201:YES)、最終提供地点決定部111が、当該情報の内容に応じて、最終提供地点を決定する(ステップS202)。
【0030】
次に、区間状況判断部112が、最終提供地点と現時点での自車両の位置との間に、自車両の状態が事前設定条件に適合することが予想される予想区間があるか否かを判断する(ステップS203)。予想区間があると判断された場合には(ステップS203:YES)、ステップS204へ進み、予想区間がないと判断された場合には(ステップS203:NO)、ステップS205へ進む。
【0031】
ステップS204では、自車両状態判断部113が、自車両の状態が事前設定条件に適合しているか否かを判断する。自車両の状態が事前設定条件に適合している場合には(ステップS204:YES)、ステップS205へ進み、自車両の状態が事前設定条件に適合していない場合には(ステップS204:NO)、ステップS206へ進む。
【0032】
ステップS205では、ステップS201で取得または生成された情報の提供が行われる。具体的には、情報提供部114が、ステップS201で取得または生成された情報を表示部103に出力することにより、表示部103に当該情報が表示される。それにより、ステップS201で取得または生成された情報がドライバーに提供される。
【0033】
ステップS206では、自車両状態判断部113が、自車両が予想区間の最終地点を通過したか否かを判断する。自車両が予想区間の最終地点を通過した場合には(ステップS206:YES)、ステップS205へ進み、自車両が予想区間の最終地点を通過していない場合には(ステップS206:NO)、ステップS204へ戻る。なお、自車両が予想区間の最終地点を通過したか否かは、例えば、予想区間と自車両の位置情報から判断す
ればよい。ステップS206の処理は、自車両状態判断部113以外の機能が行ってもよい。情報提供装置が、ステップS206の処理を行うための他の機能を更に備えていてもよい。
【0034】
<最終提供地点、事前設定条件、及び、予想区間の具体例>
以下、最終提供地点、事前設定条件、及び、予想区間の具体例について詳しく説明する。
【0035】
(最終提供地点の例)
最終提供地点は、情報の種類によって区分することができる。以下、情報が、目的地までのルートが変更されたことを表すルート変更情報であった場合、お店や観光スポットなどが近くにあることを表す広告情報であった場合、自車両の燃料が少なくなったことを表す給油警告情報であった場合、及び、メールであった場合の最終提供地点の一例についてそれぞれ説明する。
【0036】
・情報がルート変更情報であった場合
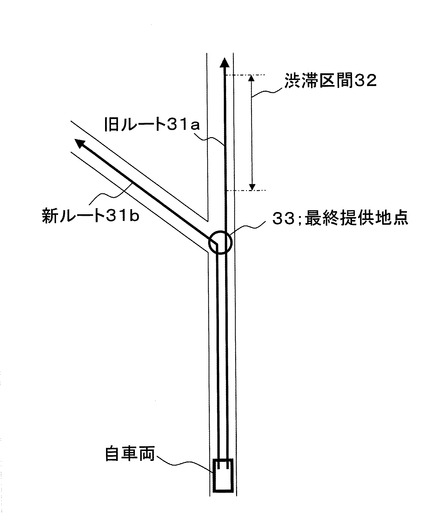
情報がルート変更情報であった場合には、変更前のルートと変更後のルートとの差が生じる地点よりも前に最終提供地点を設定すればよい。
【0037】
例えば、図3に示すように目的地までのルート(旧ルート31a)中の区間32で渋滞が発生していたとする。その場合には、目的地までのルートは、区間32より手前で迂回するようなルート(新ルート31b)に変更される。図3の例では、旧ルート31aと新ルート31bは、区間32の手前の交差点33より後で異なるルートとなる。ドライバーに対して少なくとも交差点33までにルート変更情報を提供すれば、当該情報を確認することにより、ドライバーは渋滞を避けることができる(交差点33よりも後にルート変更情報を提供したとしても意味をなさない)。そこで、図3の例では、交差点33の位置を最終提供地点とする。
【0038】
なお、ドライバーがルート変更情報を確認してから実際の動作(変更後のルートで進行するためのハンドル操作)に移るまでには若干の時間を要するため、変更前のルートと変更後のルートとの差が生じる地点(分岐点)よりもある程度前の地点(例えば、分岐点の50m前の地点、分岐点に到達する予定時刻の30秒前に到達することが予想される地点など)を最終提供地点とすることが好ましい。
【0039】
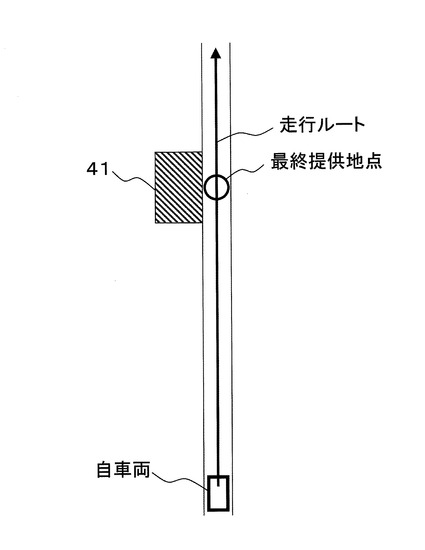
・情報が広告情報であった場合
情報が広告情報であった場合には、お店や観光スポットの位置よりも前に最終提供地点を設定すればよい。
【0040】
例えば、図4に示すように自車両が、観光スポット41を通過するルート(または観光スポット41までのルート)を走行していたとする。その場合には、観光スポット41までに広告情報を提供すれば、当該情報を確認することにより、ドライバーは観光スポット41の存在を把握し、観光スポット41に容易に立ち寄ることができる(観光スポット41よりも後に広告情報を提供した場合には、観光スポット41に立ち寄り難くなってしまう)。そこで、図4の例では、観光スポット41の位置を最終提供地点とする。
【0041】
なお、ドライバーが広告情報を確認してから実際の動作(お店に入るためのハンドル操作)に移るまでには若干の時間を要するため、お店や観光スポットの位置よりもある程度前の地点(例えば、50m前の地点や30秒前の地点など)を最終提供地点とすることが好ましい。
【0042】
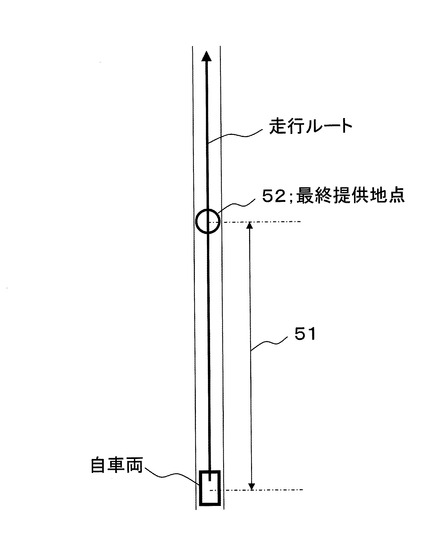
・情報が給油警告情報であった場合
情報が給油警告情報であった場合には、図5に示すように、燃料が所定の量(例えば、3リットル未満)より少なくなった地点から所定の距離51だけ先の地点52(例えば、10km先の地点や10分先の地点)を最終提供地点とすればよい。勿論、最終提供地点は、残りの燃料で走行できる範囲内の地点である。
【0043】
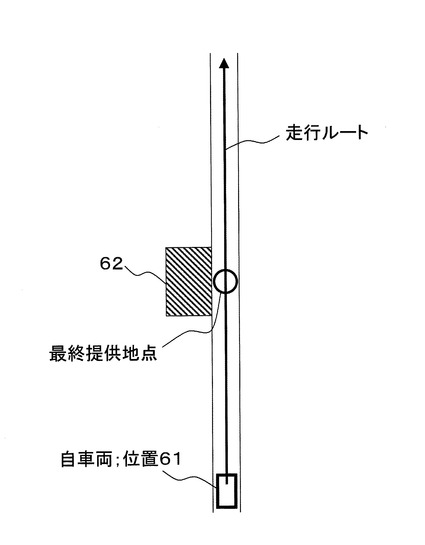
しかしながら、情報が給油警告情報であった場合に上述したような地点を最終提供地点とすると、最終提供地点付近に給油場所(ガソリンスタンドなど)が無い場合がある。そこで、自車両が通過するルートにおいて燃料が所定の量より少なくなった地点の先に存在する給油場所の位置を最終提供地点としてもよい。
【0044】
例えば、図6に示すように自車両の燃料が位置61で残りわずかになったとする。その場合には、自車両が走行するルートにおいて位置61の先に存在する給油場所62までに給油警告情報を提供すれば、当該情報を確認することにより、ドライバーは給油場所62の存在を把握し、給油場所62に立ち寄ることができる。それにより、燃料切れになることなく、給油することができる。そこで、図6の例では、給油場所62の位置を最終地点とする。
【0045】
なお、そのように最終提供地点を定義した場合には、ドライバーが給油警告情報を確認してから実際の動作(給油場所に入るためのハンドル操作)に移るまでには若干の時間を要するため、給油場所よりもある程度前の地点(例えば、50m前の地点や30秒前の地点など)を最終提供地点とすることが好ましい。
【0046】
・情報がメールであった場合
情報がメールであった場合には、メールを受信した地点から所定の距離だけ先の地点(例えば、15km先の地点や15分先の地点)を最終提供地点とすればよい。なお、メールの重要度に応じて最終提供地点を異ならせてもよい。例えば、重要度の高いメールを受信した場合には2km先の地点を最終提供地点とし、重要度の低いメールを受信した場合には30km先の地点を最終提供地点とすればよい。
【0047】
(事前設定条件の例)
事前設定条件は、例えば、自車両の速度や自車両の走行している道路の走りやすさに基づいて定義することができる。
【0048】
具体的には、自車両の速度が所定の速度未満の場合には、当該所定の速度以上の速度で走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。そこで、自車両の速度が所定の速度(例えば、15km/h)未満であることを事前設定条件とすることにより、ドライバーが余裕をもって情報を確認できるタイミングで情報を提示することができる(そのようなタイミングでステップS204からステップS205へ進む(ステップS204:YES))。そのため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提示を行うことができる。
【0049】
自車両が停止していれば、ドライバーはより確実に情報を確認することができる。そこで、自車両が停止していることを事前設定条件とすることにより、ドライバーがより確実に余裕をもって情報を確認できるタイミングで情報を提供することができる。即ち、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供をより確実に行うことができる。
【0050】
また、幅の狭い道路、入り組んだ道(急カーブの多い道)、歩道の無い道路などに比べ、幅の広い道路、直線の道路、歩道がある道路などの道路のほうが車両は走行しやすい。
そして、そのような走行しやすい道路を走行している場合には、走行しにくい道路を走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。そこで、走行しやすい道路を走行していることを事前設定条件とすることにより、ドライバーが余裕をもって情報を確認できるタイミングで情報を提供することができる。そのため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる
【0051】
(予想区間の例)
予想区間は、例えば、最終提供地点と現時点での自車両の位置との間の渋滞を表す情報(渋滞情報)、信号機の設置位置を表す情報(信号機の設置位置情報)、立ち寄り地点の位置を表す情報(立ち寄り地点の位置情報)の少なくともいずれかの情報に基づいて定義することができる。立ち寄り地点とは、最終提供地点と現時点との間でドライバーが立ち寄る地点(お店などの位置)のことである。
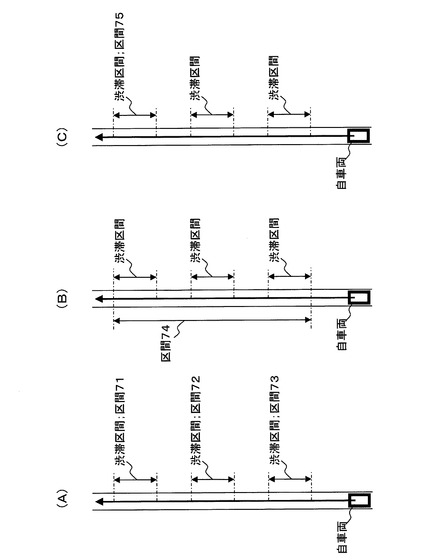
【0052】
具体的には、図7A〜図7Cに示すように、最終提供地点と現時点での自車両の位置との間に、渋滞がある場合には、自車両は当該渋滞により速度を低下するまたは停車することが予想される。そのため、予想区間は渋滞情報に基づいて定めることができる。例えば、最終提供地点と現時点での自車両の位置との間で渋滞が発生している区間(渋滞区間)を予想区間とすればよい。なお、最終提供地点と現時点での自車両の位置との間に渋滞区間が複数ある場合には、図7Aに示すように渋滞区間のそれぞれを予想区間(区間71〜73)とすればよい。図7Bに示すように複数の渋滞区間に対して1つ(最終提供地点と現時点での自車両の位置との間で1つ)の予想区間(区間74)を定めてもよい。図7Cに示すように複数の渋滞区間の内、特定の渋滞区間を予想区間(区間75)としてもよい。特定の渋滞区間は、最終提供地点に最も近い渋滞区間であってもよいし、最終提供地点から最も遠い渋滞区間であってもよい。特定の渋滞区間は複数であってもよい。予想区間は、最終提供地点と現時点での自車両の位置との間の渋滞情報に基づいていればどのように定義してもよい。
【0053】
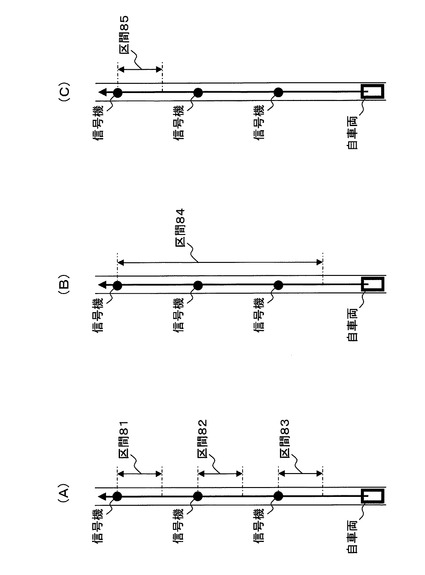
また、図8A〜図8Cに示すように、最終提供地点と現時点での自車両の位置との間に信号機がある場合には、自車両は当該信号機(赤信号など)により速度を低下するまたは停車することが予想される。そのため、予想区間は信号機の設置位置情報に基づいて定めることができる。例えば、信号機の設置位置から所定の距離(例えば、100m)だけ手前までの区間(信号機の設置位置を含む)を予想区間とすればよい。なお、最終提供地点と現時点での自車両の位置との間に複数の信号機がある場合には、図8Aに示すように信号機毎に予想区間(区間81〜83)を定めればよい。図8Bに示すように複数の信号機に対して1つ(最終提供地点と現時点での自車両の位置との間で1つ)の予想区間(区間84)を定めてもよい。図8Cに示すように複数の信号機の内、特定の信号機に対して予想区間(区間85)を定めてもよい。特定の信号機は、最終提供地点に最も近い信号機であってもよいし、最終提供地点から最も遠い信号機であってもよい。信号機の切り換えタイミングと自車両の走行速度などに基づいて、自車両の停止の原因となる信号機を検出し、当該検出された信号機を特定の信号機としてもよい。特定の信号機は複数であってもよい。予想区間は、最終提供地点と現時点での自車両の位置との間の信号機の設置位置情報に基づいていればどのように定義してもよい。
【0054】
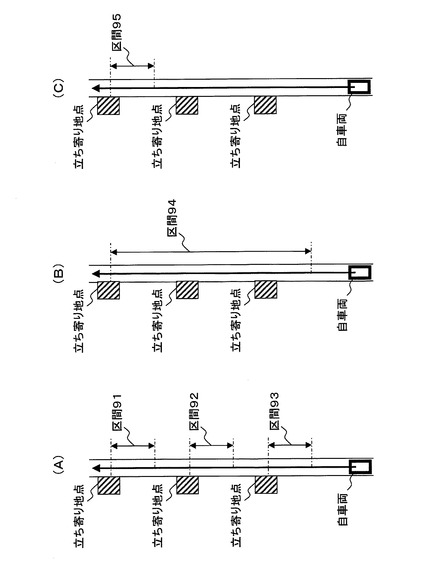
また、図9A〜図9Cに示すように、最終提供地点と現時点での自車両の位置との間に立ち寄り地点がある場合には、自車両は当該立ち寄り地点に立ち寄ることにより速度を低下するまたは停車することが予想される。そのため、予想区間は立ち寄り地点の位置情報に基づいて定めることができる。例えば、立ち寄り地点の位置から所定の距離(例えば、200m)だけ手前までの区間(立ち寄り地点の位置を含む)を予想区間とすればよい。なお、最終提供地点と現時点での自車両の位置との間に複数の立ち寄り地点がある場合には、図9Aに示すように立ち寄り地点毎に予想区間(区間91〜93)を定めればよい。
図9Bに示すように複数の立ち寄り地点に対して1つ(最終提供地点と現時点での自車両の位置との間で1つ)の予想区間(区間94)を定めてもよい。図9Cに示すように複数の立ち寄り地点の内、特定の立ち寄り地点に対して予想区間(区間95)を定めてもよい。特定の立ち寄り地点は、最終提供地点に最も近い立ち寄り地点であってもよいし、最終提供地点から最も遠い立ち寄り地点であってもよい。特定の立ち寄り地点は複数であってもよい。予想区間は、最終提供地点と現時点での自車両の位置との間の立ち寄り地点の位置情報に基づいていればどのように定義してもよい。
【0055】
また、上述したように、走りやすい道路を走行している状態では、走行しにくい道路を走行している状態に比べ、ドライバーは余裕をもって情報を確認できる。そのため、走行しやすい道路の区間を予想区間としてもよい。
【0056】
上記例示のように予想区間を定義すれば、予想区間を容易に定義することができる。
【0057】
以上述べたように、本実施形態に係る情報提供装置は、最終的に情報を提供すべき地点と、現時点での自車両の位置との間に事前設定条件に適合することが予想される区間があるか否かを判断する。そして、予想区間内で自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する。即ち、受信した後に予想区間中または予想区間後まで情報の提供を遅らせる。更に、予想区間内で自車両の状態が事前設定条件に適合した場合には、そのタイミングで情報を提供する。それにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことができるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。
【0058】
なお、本実施形態では、自車両の状態が予想区間内で事前設定条件に適合しなかった場合や、区間状況判断部112で予想区間がないと判断された場合において情報を提供する構成としたが、そのような場合にはドライバーが余裕を持って情報を確認することができない可能性が高いため、情報を提供しなくてもよい。
【0059】
なお、本実施形態では、自車両の状態が予想区間内で事前設定条件に適合しなかった場合に、自車両が予想区間の最終地点を通過したタイミングで情報を提供するものとしたが、そのような場合における情報の提供のタイミングは、それに限らない。自車両の状態が予想区間内で事前設定条件に適合しなかった場合には、自車両が予想区間を通過後、最終提供地点に到達するまでに情報を提供すれば、情報を提供すべき区間内で情報の提供を行うことができる。
【0060】
なお、本実施形態では、区間状況判断部112で予想区間がないと判断された場合に、情報取得生成部101で情報が取得、生成された直後に情報を提供するものとしたが、そのような場合における情報の提供のタイミングは、それに限らない。自車両が最終提供地点に到達するまでに情報を提供すれば、情報を提供すべき区間内で情報の提供を行うことができる。
【0061】
なお、情報が重要度の極めて高いメールや緊急のメール(読み期限付きメールなど)であった場合には、図2のような処理を行わず、受信後直ちに提供してもよい。
【0062】
なお、自車両は、道路毎に走りやすさが対応付けられた情報(テーブルやマップ)を外部から受信するか、または、記憶していることが好ましい。それにより、自車両が走行している道路が走りやすい道路か否かを容易に判断することができる。また、自車両は自身の位置情報を外部(道路の走りやすさを管理する管理センターなど)に送信し、管理センターから自車両の走行している道路の走りやすさを取得してもよい。そのような構成においても、自車両が走行している道路が走りやすい道路か否かを容易に判断することができ
る。
【0063】
なお、道路の走りやすさは、メーカの基準で定められていてもよいし、地域の基準で定められていてもよい。国土交通省の走りやすさマップに基づいて定められていてもよい。例えば、国土交通省の走りやすさマップにおいて、走りやすさランクB以上の道路を走行しやすい道路とすればよい。
【0064】
なお、上述した各種所定値は、発明の効果を奏する範囲であればどのような値であってもよく、ユーザやメーカの好みに応じて適宜設定すればよい。
【0065】
なお、本実施形態では、情報が表示部に表示されることによりドライバーに提供(提示)される構成としたが、情報は音声や光、またはそれら(映像、音声、光)の組み合わせによりドライバーに提供されるものであってもよい。光で情報を提供する場合には、例えば、表示部の代わりに発光ダイオードなどを適用すればよいし、音や音声で情報を提供する場合には、例えば、表示部の代わりにスピーカーなどを適用すればよい。
【図面の簡単な説明】
【0066】
【図1】図1は、本実施形態に係る情報提供装置の機能・構成を示すブロック図である。
【図2】図2は、本実施形態に係る情報提供装置において情報が提供されるまでの処理の流れを示すフローチャートである。
【図3】図3は、最終提供地点の一例を示す図である。
【図4】図4は、最終提供地点の一例を示す図である。
【図5】図5は、最終提供地点の一例を示す図である。
【図6】図6は、最終提供地点の一例を示す図である。
【図7】図7は、予想区間の一例を示す図である。
【図8】図8は、予想区間の一例を示す図である。
【図9】図9は、予想区間の一例を示す図である。
【符号の説明】
【0067】
100 情報提供装置
101 情報取得生成部
102 情報提供タイミング処理部
103 表示部
111 最終提供地点決定部
112 区間状況判断部
113 自車両状態判断部
114 情報提供部
【技術分野】
【0001】
本発明は、車両に搭載され、ドライバーに情報を提供する情報提供装置に関する。
【背景技術】
【0002】
従来、車両に搭載され、ドライバーに情報を提供する情報提供装置がある。提供される情報としては、例えば、自車両近辺のマップを表すマップ情報、マップ上で目印になる建物(お店)等を表す建物情報、目的地までのルートを表すルート情報、渋滞などにより目的地までのルートが変更された際に提供されるルート変更情報、お店や観光スポットなどが近くあることを表す広告情報、メールなどがある。
【0003】
しかしながら、車両が走行中(ドライバーが運転中)にそのような情報を提供すると、ドライバーは情報を容易に確認することができなかったり、ドライバーに対して安全運転の妨げとなる虞がある。
【0004】
そのような問題に鑑みた従来技術は、例えば、特許文献1に開示されている。具体的には、特許文献1には、自車両が走行している場合に、提供する情報に制限を加える情報提供装置(車両用地図表示装置)が開示されている。
【0005】
【特許文献1】特開2004−317418号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されている情報提供装置においても、自車両(ドライバー)の状態に限らず即座に情報が提供されるため、上記問題を完全に解決することができなかった。
【0007】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うための技術を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は以下の構成を採用する。
【0009】
本発明に係る情報提供装置は、
車両に搭載され、ドライバーに情報を提供する情報提供装置であって、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、
を有することを特徴とする。
【0010】
本発明に係る情報提供装置では、最終的に情報を提供すべき地点と、現時点での自車両
の位置との間に事前設定条件に適合することが予想される予想区間があるか否かを判断する。そして、予想区間内で自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する。即ち、受信した後に予想区間中または予想区間後まで情報の提供を遅らせる。更に、予想区間内で自車両の状態が事前設定条件に適合した場合には、そのタイミングで情報を提供する。それにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことが可能となるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。なお、予想区間は、ドライバーが余裕をもって情報を確認できる状態(情報確認可能状態)となることが予想される区間であることが好ましい。
【0011】
自車両の状態が前記予想区間内で事前設定条件に適合しなかった場合に、前記情報提供手段は、前記自車両が前記予想区間を通過後、前記最終提供地点に到達するまでに前記情報を提供することが好ましい。このような構成にすることにより、自車両の状態が予想区間内で事前設定条件に適合しなかった場合であっても、情報を提供すべき区間内で情報の提供を行うことが可能となる。
【0012】
前記予想区間がないと判断された場合に、前記情報提供手段は、前記自車両が前記最終提供地点に到達するまでに前記情報を提供することが好ましい。このような構成にすることにより、予想区間がないと判断された場合であっても、情報を提供すべき区間内で情報の提供を行うことが可能となる。
【0013】
前記事前設定条件は、前記自車両の速度が所定の速度未満であることであることが好ましい。また、前記事前設定条件は、前記自車両が停止していることであることが好ましい。自車両の速度が所定の速度(例えば10km/h)未満の場合には、当該所定の速度以上の速度で走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。自車両が停止していれば、ドライバーはより確実に情報を確認することができる。そのため、上述したように事前設定条件を定義することにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことが可能となるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。
【0014】
前記予想区間は、前記最終提供地点と現時点での自車両の位置との間の渋滞を表す情報、信号機の設置位置を表す情報、立ち寄り地点の位置を表す情報の少なくともいずれかの情報に基づいて定められる区間であることが好ましい。最終提供地点と現時点での自車両の位置との間に、渋滞、信号機、立ち寄り地点などがある場合には、自車両は速度を低下するまたは停車することが予想される。そのため、予想区間を、渋滞を表す情報(渋滞情報)、信号機の設置位置を表す情報(信号機の設置位置情報)、立ち寄り地点の位置を表す情報(立ち寄り地点の位置情報)などに基づいて定めることにより、予想区間を容易に定義することが可能となる。
【0015】
前記事前設定条件は、前記自車両が走行しやすい道路を走行していることであることが好ましい。幅の狭い道路、入り組んだ道(急カーブの多い道)、歩道の無い道路などに比べ、幅の広い道路、直線の道路、歩道がある道路などの道路のほうが自車両は走行しやすい。そして、そのような走行しやすい道路を走行している場合には、走行しにくい道路を走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。そのため、上述したように事前設定条件を定義することにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことが可能となるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。
【0016】
前記予想区間は、前記走行しやすい道路の区間であることが好ましい。上述したように、走行しやすい道路を走行している状態では、走行しにくい道路を走行している状態に比
べ、ドライバーは余裕をもって情報を確認できる。そのため、走行しやすい道路の区間を予想区間とすることにより、予想区間を容易に定義することが可能となる。
【0017】
また、本発明は、上記手段の少なくとも一部を有する情報提供装置として捉えてもよいし、上記処理の少なくとも一部を含む情報提供方法、または、かかる方法を実現するための情報提供プログラムやそのプログラムを記憶した記憶媒体として捉えることもできる。また、本発明は、上記手段の少なくとも一部を有する車両として捉えてもよい。なお、上記手段及び処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0018】
本発明によれば、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うための技術を提供することができる。
【発明を実施するための最良の形態】
【0019】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。本実施形態に係る情報提供装置は、車両に搭載され、ドライバーに情報を提供する。
【0020】
<装置構成>
まず、本実施形態に係る情報提供装置の構成について、図1を用いて説明する。図1は、本実施形態に係る情報提供装置の機能・構成を示すブロック図である。図1に示すように、本実施形態に係る情報提供装置100は、情報取得生成部101、情報提供タイミング処理部102、表示部103などを備える。
【0021】
情報取得生成部101は、情報の取得や生成を行う。例えば、情報取得生成部101は、外部(路側機など)から情報(メール、お店や観光スポットなどが近くにあることを表す広告情報など)を取得する。また、情報取得生成部101は、自車両の状態や周囲の状況などに応じて情報を生成する。具体的には、外部から渋滞や通行止めなどの交通状況を表す情報を取得し、目的地までの走行ルート(以後、単にルートと記載する)が変更された場合に、ルートが変更されたことを表すルート変更情報を生成する。また、自車両の燃料が所定の量より少なくなった際に、燃料が少なくなったことを表す給油警告情報を生成する。その他に、取得される情報や生成される情報として、自車両近辺のマップを表すマップ情報、マップ上で目印になる建物(お店)等を表す建物情報、目的地までのルートを表すルート情報などがある。
【0022】
情報提供タイミング処理部102は、情報取得生成部101で取得、生成された情報を、所定のタイミングで提供する(表示部103に出力する)。情報提供タイミング処理部102は、図1に示すように、最終提供地点決定部111、区間状況判断部112、自車両状態判断部113、情報提供部114などを備える。
【0023】
最終提供地点決定部111は、例えば、情報取得生成部101で情報が取得または生成された場合に、最終的に当該情報を提供すべき地点である最終提供地点を、当該情報の内容に応じて決定する。最終提供地点の具体例については、後で詳しく説明する。
【0024】
区間状況判断部112は、最終提供地点決定部111で決定された最終提供地点と現時点での自車両の位置との間に、自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する。なお、予想区間は、ドライバーが余裕をもって情報を確認できる状態(情報確認可能状態)となることが予想される区間であることが好ましい。自車両の位置(位置情報)は、例えば、不図示の受信機で受信されたGPS信号に基づいて算出すればよい。事前設定条件及び予想区間の具体例については、後で詳しく説明する。
【0025】
自車両状態判断部113は、自車両の状態が事前設定条件に適合しているか否かを判断する。具体的には、自車両状態判断部113は、区間状況判断部112で予想区間があると判断された場合に、自車両の状態が事前設定条件に適合するか否かを判断する。
【0026】
情報提供部114は、区間状況判断部112の判断結果や自車両状態判断部113の判断結果に応じたタイミングで情報を提供する(表示部103に出力する)。具体的には、予想区間内で自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する。本実施形態では、自車両状態判断部113で自車両の状態が事前設定条件に適合していると判断されたタイミングで情報を提供し、自車両の状態が予想区間内で事前設定条件に適合しなかった場合には、自車両が予想区間の最終地点(最終提供地点に最も近い予想区間端部)を通過したタイミングで情報を提供する。また、区間状況判断部112で予想区間がないと判断された場合には、情報取得生成部101で情報が取得、生成された直後に(即ち、従来のタイミングと同様のタイミングで)、情報を提供する。
【0027】
表示部103は、情報提供タイミング処理部102(情報提供部114)から送られた情報を表示する。それにより、ドライバーに対し情報が提供(提示)される。表示部103は、液晶ディスプレイ、プラズマディスプレイ、有機ELディスプレイなどの既存の表示装置を適用すればよい。
【0028】
<情報提供処理>
次に、本実施形態に係る情報提供装置100において情報が提供されるまでの処理の流れを、図2を用いて説明する。図2は、本実施形態に係る情報提供装置100において情報が提供されるまでの処理の流れを示すフローチャートである。
【0029】
まず、情報取得生成部101が情報を取得または生成した場合に、即ち、提供すべき情報がある場合に(ステップS201:YES)、最終提供地点決定部111が、当該情報の内容に応じて、最終提供地点を決定する(ステップS202)。
【0030】
次に、区間状況判断部112が、最終提供地点と現時点での自車両の位置との間に、自車両の状態が事前設定条件に適合することが予想される予想区間があるか否かを判断する(ステップS203)。予想区間があると判断された場合には(ステップS203:YES)、ステップS204へ進み、予想区間がないと判断された場合には(ステップS203:NO)、ステップS205へ進む。
【0031】
ステップS204では、自車両状態判断部113が、自車両の状態が事前設定条件に適合しているか否かを判断する。自車両の状態が事前設定条件に適合している場合には(ステップS204:YES)、ステップS205へ進み、自車両の状態が事前設定条件に適合していない場合には(ステップS204:NO)、ステップS206へ進む。
【0032】
ステップS205では、ステップS201で取得または生成された情報の提供が行われる。具体的には、情報提供部114が、ステップS201で取得または生成された情報を表示部103に出力することにより、表示部103に当該情報が表示される。それにより、ステップS201で取得または生成された情報がドライバーに提供される。
【0033】
ステップS206では、自車両状態判断部113が、自車両が予想区間の最終地点を通過したか否かを判断する。自車両が予想区間の最終地点を通過した場合には(ステップS206:YES)、ステップS205へ進み、自車両が予想区間の最終地点を通過していない場合には(ステップS206:NO)、ステップS204へ戻る。なお、自車両が予想区間の最終地点を通過したか否かは、例えば、予想区間と自車両の位置情報から判断す
ればよい。ステップS206の処理は、自車両状態判断部113以外の機能が行ってもよい。情報提供装置が、ステップS206の処理を行うための他の機能を更に備えていてもよい。
【0034】
<最終提供地点、事前設定条件、及び、予想区間の具体例>
以下、最終提供地点、事前設定条件、及び、予想区間の具体例について詳しく説明する。
【0035】
(最終提供地点の例)
最終提供地点は、情報の種類によって区分することができる。以下、情報が、目的地までのルートが変更されたことを表すルート変更情報であった場合、お店や観光スポットなどが近くにあることを表す広告情報であった場合、自車両の燃料が少なくなったことを表す給油警告情報であった場合、及び、メールであった場合の最終提供地点の一例についてそれぞれ説明する。
【0036】
・情報がルート変更情報であった場合
情報がルート変更情報であった場合には、変更前のルートと変更後のルートとの差が生じる地点よりも前に最終提供地点を設定すればよい。
【0037】
例えば、図3に示すように目的地までのルート(旧ルート31a)中の区間32で渋滞が発生していたとする。その場合には、目的地までのルートは、区間32より手前で迂回するようなルート(新ルート31b)に変更される。図3の例では、旧ルート31aと新ルート31bは、区間32の手前の交差点33より後で異なるルートとなる。ドライバーに対して少なくとも交差点33までにルート変更情報を提供すれば、当該情報を確認することにより、ドライバーは渋滞を避けることができる(交差点33よりも後にルート変更情報を提供したとしても意味をなさない)。そこで、図3の例では、交差点33の位置を最終提供地点とする。
【0038】
なお、ドライバーがルート変更情報を確認してから実際の動作(変更後のルートで進行するためのハンドル操作)に移るまでには若干の時間を要するため、変更前のルートと変更後のルートとの差が生じる地点(分岐点)よりもある程度前の地点(例えば、分岐点の50m前の地点、分岐点に到達する予定時刻の30秒前に到達することが予想される地点など)を最終提供地点とすることが好ましい。
【0039】
・情報が広告情報であった場合
情報が広告情報であった場合には、お店や観光スポットの位置よりも前に最終提供地点を設定すればよい。
【0040】
例えば、図4に示すように自車両が、観光スポット41を通過するルート(または観光スポット41までのルート)を走行していたとする。その場合には、観光スポット41までに広告情報を提供すれば、当該情報を確認することにより、ドライバーは観光スポット41の存在を把握し、観光スポット41に容易に立ち寄ることができる(観光スポット41よりも後に広告情報を提供した場合には、観光スポット41に立ち寄り難くなってしまう)。そこで、図4の例では、観光スポット41の位置を最終提供地点とする。
【0041】
なお、ドライバーが広告情報を確認してから実際の動作(お店に入るためのハンドル操作)に移るまでには若干の時間を要するため、お店や観光スポットの位置よりもある程度前の地点(例えば、50m前の地点や30秒前の地点など)を最終提供地点とすることが好ましい。
【0042】
・情報が給油警告情報であった場合
情報が給油警告情報であった場合には、図5に示すように、燃料が所定の量(例えば、3リットル未満)より少なくなった地点から所定の距離51だけ先の地点52(例えば、10km先の地点や10分先の地点)を最終提供地点とすればよい。勿論、最終提供地点は、残りの燃料で走行できる範囲内の地点である。
【0043】
しかしながら、情報が給油警告情報であった場合に上述したような地点を最終提供地点とすると、最終提供地点付近に給油場所(ガソリンスタンドなど)が無い場合がある。そこで、自車両が通過するルートにおいて燃料が所定の量より少なくなった地点の先に存在する給油場所の位置を最終提供地点としてもよい。
【0044】
例えば、図6に示すように自車両の燃料が位置61で残りわずかになったとする。その場合には、自車両が走行するルートにおいて位置61の先に存在する給油場所62までに給油警告情報を提供すれば、当該情報を確認することにより、ドライバーは給油場所62の存在を把握し、給油場所62に立ち寄ることができる。それにより、燃料切れになることなく、給油することができる。そこで、図6の例では、給油場所62の位置を最終地点とする。
【0045】
なお、そのように最終提供地点を定義した場合には、ドライバーが給油警告情報を確認してから実際の動作(給油場所に入るためのハンドル操作)に移るまでには若干の時間を要するため、給油場所よりもある程度前の地点(例えば、50m前の地点や30秒前の地点など)を最終提供地点とすることが好ましい。
【0046】
・情報がメールであった場合
情報がメールであった場合には、メールを受信した地点から所定の距離だけ先の地点(例えば、15km先の地点や15分先の地点)を最終提供地点とすればよい。なお、メールの重要度に応じて最終提供地点を異ならせてもよい。例えば、重要度の高いメールを受信した場合には2km先の地点を最終提供地点とし、重要度の低いメールを受信した場合には30km先の地点を最終提供地点とすればよい。
【0047】
(事前設定条件の例)
事前設定条件は、例えば、自車両の速度や自車両の走行している道路の走りやすさに基づいて定義することができる。
【0048】
具体的には、自車両の速度が所定の速度未満の場合には、当該所定の速度以上の速度で走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。そこで、自車両の速度が所定の速度(例えば、15km/h)未満であることを事前設定条件とすることにより、ドライバーが余裕をもって情報を確認できるタイミングで情報を提示することができる(そのようなタイミングでステップS204からステップS205へ進む(ステップS204:YES))。そのため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提示を行うことができる。
【0049】
自車両が停止していれば、ドライバーはより確実に情報を確認することができる。そこで、自車両が停止していることを事前設定条件とすることにより、ドライバーがより確実に余裕をもって情報を確認できるタイミングで情報を提供することができる。即ち、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供をより確実に行うことができる。
【0050】
また、幅の狭い道路、入り組んだ道(急カーブの多い道)、歩道の無い道路などに比べ、幅の広い道路、直線の道路、歩道がある道路などの道路のほうが車両は走行しやすい。
そして、そのような走行しやすい道路を走行している場合には、走行しにくい道路を走行している場合に比べ、ドライバーは余裕をもって情報を確認できる。そこで、走行しやすい道路を走行していることを事前設定条件とすることにより、ドライバーが余裕をもって情報を確認できるタイミングで情報を提供することができる。そのため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる
【0051】
(予想区間の例)
予想区間は、例えば、最終提供地点と現時点での自車両の位置との間の渋滞を表す情報(渋滞情報)、信号機の設置位置を表す情報(信号機の設置位置情報)、立ち寄り地点の位置を表す情報(立ち寄り地点の位置情報)の少なくともいずれかの情報に基づいて定義することができる。立ち寄り地点とは、最終提供地点と現時点との間でドライバーが立ち寄る地点(お店などの位置)のことである。
【0052】
具体的には、図7A〜図7Cに示すように、最終提供地点と現時点での自車両の位置との間に、渋滞がある場合には、自車両は当該渋滞により速度を低下するまたは停車することが予想される。そのため、予想区間は渋滞情報に基づいて定めることができる。例えば、最終提供地点と現時点での自車両の位置との間で渋滞が発生している区間(渋滞区間)を予想区間とすればよい。なお、最終提供地点と現時点での自車両の位置との間に渋滞区間が複数ある場合には、図7Aに示すように渋滞区間のそれぞれを予想区間(区間71〜73)とすればよい。図7Bに示すように複数の渋滞区間に対して1つ(最終提供地点と現時点での自車両の位置との間で1つ)の予想区間(区間74)を定めてもよい。図7Cに示すように複数の渋滞区間の内、特定の渋滞区間を予想区間(区間75)としてもよい。特定の渋滞区間は、最終提供地点に最も近い渋滞区間であってもよいし、最終提供地点から最も遠い渋滞区間であってもよい。特定の渋滞区間は複数であってもよい。予想区間は、最終提供地点と現時点での自車両の位置との間の渋滞情報に基づいていればどのように定義してもよい。
【0053】
また、図8A〜図8Cに示すように、最終提供地点と現時点での自車両の位置との間に信号機がある場合には、自車両は当該信号機(赤信号など)により速度を低下するまたは停車することが予想される。そのため、予想区間は信号機の設置位置情報に基づいて定めることができる。例えば、信号機の設置位置から所定の距離(例えば、100m)だけ手前までの区間(信号機の設置位置を含む)を予想区間とすればよい。なお、最終提供地点と現時点での自車両の位置との間に複数の信号機がある場合には、図8Aに示すように信号機毎に予想区間(区間81〜83)を定めればよい。図8Bに示すように複数の信号機に対して1つ(最終提供地点と現時点での自車両の位置との間で1つ)の予想区間(区間84)を定めてもよい。図8Cに示すように複数の信号機の内、特定の信号機に対して予想区間(区間85)を定めてもよい。特定の信号機は、最終提供地点に最も近い信号機であってもよいし、最終提供地点から最も遠い信号機であってもよい。信号機の切り換えタイミングと自車両の走行速度などに基づいて、自車両の停止の原因となる信号機を検出し、当該検出された信号機を特定の信号機としてもよい。特定の信号機は複数であってもよい。予想区間は、最終提供地点と現時点での自車両の位置との間の信号機の設置位置情報に基づいていればどのように定義してもよい。
【0054】
また、図9A〜図9Cに示すように、最終提供地点と現時点での自車両の位置との間に立ち寄り地点がある場合には、自車両は当該立ち寄り地点に立ち寄ることにより速度を低下するまたは停車することが予想される。そのため、予想区間は立ち寄り地点の位置情報に基づいて定めることができる。例えば、立ち寄り地点の位置から所定の距離(例えば、200m)だけ手前までの区間(立ち寄り地点の位置を含む)を予想区間とすればよい。なお、最終提供地点と現時点での自車両の位置との間に複数の立ち寄り地点がある場合には、図9Aに示すように立ち寄り地点毎に予想区間(区間91〜93)を定めればよい。
図9Bに示すように複数の立ち寄り地点に対して1つ(最終提供地点と現時点での自車両の位置との間で1つ)の予想区間(区間94)を定めてもよい。図9Cに示すように複数の立ち寄り地点の内、特定の立ち寄り地点に対して予想区間(区間95)を定めてもよい。特定の立ち寄り地点は、最終提供地点に最も近い立ち寄り地点であってもよいし、最終提供地点から最も遠い立ち寄り地点であってもよい。特定の立ち寄り地点は複数であってもよい。予想区間は、最終提供地点と現時点での自車両の位置との間の立ち寄り地点の位置情報に基づいていればどのように定義してもよい。
【0055】
また、上述したように、走りやすい道路を走行している状態では、走行しにくい道路を走行している状態に比べ、ドライバーは余裕をもって情報を確認できる。そのため、走行しやすい道路の区間を予想区間としてもよい。
【0056】
上記例示のように予想区間を定義すれば、予想区間を容易に定義することができる。
【0057】
以上述べたように、本実施形態に係る情報提供装置は、最終的に情報を提供すべき地点と、現時点での自車両の位置との間に事前設定条件に適合することが予想される区間があるか否かを判断する。そして、予想区間内で自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する。即ち、受信した後に予想区間中または予想区間後まで情報の提供を遅らせる。更に、予想区間内で自車両の状態が事前設定条件に適合した場合には、そのタイミングで情報を提供する。それにより、ドライバーが余裕をもって情報を確認できるタイミングで情報の提供を行うことができるため、ドライバーに対し安全運転の妨げとならず且つ理解しやすい情報提供を行うことができる。
【0058】
なお、本実施形態では、自車両の状態が予想区間内で事前設定条件に適合しなかった場合や、区間状況判断部112で予想区間がないと判断された場合において情報を提供する構成としたが、そのような場合にはドライバーが余裕を持って情報を確認することができない可能性が高いため、情報を提供しなくてもよい。
【0059】
なお、本実施形態では、自車両の状態が予想区間内で事前設定条件に適合しなかった場合に、自車両が予想区間の最終地点を通過したタイミングで情報を提供するものとしたが、そのような場合における情報の提供のタイミングは、それに限らない。自車両の状態が予想区間内で事前設定条件に適合しなかった場合には、自車両が予想区間を通過後、最終提供地点に到達するまでに情報を提供すれば、情報を提供すべき区間内で情報の提供を行うことができる。
【0060】
なお、本実施形態では、区間状況判断部112で予想区間がないと判断された場合に、情報取得生成部101で情報が取得、生成された直後に情報を提供するものとしたが、そのような場合における情報の提供のタイミングは、それに限らない。自車両が最終提供地点に到達するまでに情報を提供すれば、情報を提供すべき区間内で情報の提供を行うことができる。
【0061】
なお、情報が重要度の極めて高いメールや緊急のメール(読み期限付きメールなど)であった場合には、図2のような処理を行わず、受信後直ちに提供してもよい。
【0062】
なお、自車両は、道路毎に走りやすさが対応付けられた情報(テーブルやマップ)を外部から受信するか、または、記憶していることが好ましい。それにより、自車両が走行している道路が走りやすい道路か否かを容易に判断することができる。また、自車両は自身の位置情報を外部(道路の走りやすさを管理する管理センターなど)に送信し、管理センターから自車両の走行している道路の走りやすさを取得してもよい。そのような構成においても、自車両が走行している道路が走りやすい道路か否かを容易に判断することができ
る。
【0063】
なお、道路の走りやすさは、メーカの基準で定められていてもよいし、地域の基準で定められていてもよい。国土交通省の走りやすさマップに基づいて定められていてもよい。例えば、国土交通省の走りやすさマップにおいて、走りやすさランクB以上の道路を走行しやすい道路とすればよい。
【0064】
なお、上述した各種所定値は、発明の効果を奏する範囲であればどのような値であってもよく、ユーザやメーカの好みに応じて適宜設定すればよい。
【0065】
なお、本実施形態では、情報が表示部に表示されることによりドライバーに提供(提示)される構成としたが、情報は音声や光、またはそれら(映像、音声、光)の組み合わせによりドライバーに提供されるものであってもよい。光で情報を提供する場合には、例えば、表示部の代わりに発光ダイオードなどを適用すればよいし、音や音声で情報を提供する場合には、例えば、表示部の代わりにスピーカーなどを適用すればよい。
【図面の簡単な説明】
【0066】
【図1】図1は、本実施形態に係る情報提供装置の機能・構成を示すブロック図である。
【図2】図2は、本実施形態に係る情報提供装置において情報が提供されるまでの処理の流れを示すフローチャートである。
【図3】図3は、最終提供地点の一例を示す図である。
【図4】図4は、最終提供地点の一例を示す図である。
【図5】図5は、最終提供地点の一例を示す図である。
【図6】図6は、最終提供地点の一例を示す図である。
【図7】図7は、予想区間の一例を示す図である。
【図8】図8は、予想区間の一例を示す図である。
【図9】図9は、予想区間の一例を示す図である。
【符号の説明】
【0067】
100 情報提供装置
101 情報取得生成部
102 情報提供タイミング処理部
103 表示部
111 最終提供地点決定部
112 区間状況判断部
113 自車両状態判断部
114 情報提供部
【特許請求の範囲】
【請求項1】
車両に搭載され、ドライバーに情報を提供する情報提供装置であって、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、
を有することを特徴とする情報提供装置。
【請求項2】
自車両の状態が前記予想区間内で事前設定条件に適合しなかった場合に、前記情報提供手段は、前記自車両が前記予想区間を通過後、前記最終提供地点に到達するまでに前記情報を提供する
ことを特徴とする請求項1に記載の情報提供装置。
【請求項3】
前記予想区間がないと判断された場合に、前記情報提供手段は、前記自車両が前記最終提供地点に到達するまでに前記情報を提供する
ことを特徴とする請求項1または2に記載の情報提供装置。
【請求項4】
前記事前設定条件は、前記自車両の速度が所定の速度未満であることである
ことを特徴とする請求項1〜3のいずれか1項に記載の情報提供装置。
【請求項5】
前記事前設定条件は、前記自車両が停止していることである
ことを特徴とする請求項4に記載の情報提供装置。
【請求項6】
前記予想区間は、前記最終提供地点と現時点での自車両の位置との間の渋滞を表す情報、信号機の設置位置を表す情報、立ち寄り地点の位置を表す情報の少なくともいずれかの情報に基づいて定められる区間である
ことを特徴とする請求項4または5に記載の情報提供装置。
【請求項7】
前記事前設定条件は、前記自車両が走行しやすい道路を走行していることである
ことを特徴とする請求項1〜3のいずれか1項に記載の情報提供装置。
【請求項8】
前記予想区間は、前記走行しやすい道路の区間である
ことを特徴とする請求項7に記載の情報提供装置。
【請求項9】
車両に搭載され、ドライバーに情報を提供する情報提供装置の情報提供方法であって、
コンピュータが、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定するステップと、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断するステップと、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断するステップと、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情
報を提供するステップと、
を実行する情報提供方法。
【請求項10】
車両に搭載され、ドライバーに情報を提供する情報提供装置の情報提供プログラムであって、
コンピュータに、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定するステップと、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断するステップと、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断するステップと、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供するステップと、
を実行させるための情報提供プログラム。
【請求項11】
ドライバーに情報を提供する車両であって、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、
を有することを特徴とする車両。
【請求項1】
車両に搭載され、ドライバーに情報を提供する情報提供装置であって、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、
を有することを特徴とする情報提供装置。
【請求項2】
自車両の状態が前記予想区間内で事前設定条件に適合しなかった場合に、前記情報提供手段は、前記自車両が前記予想区間を通過後、前記最終提供地点に到達するまでに前記情報を提供する
ことを特徴とする請求項1に記載の情報提供装置。
【請求項3】
前記予想区間がないと判断された場合に、前記情報提供手段は、前記自車両が前記最終提供地点に到達するまでに前記情報を提供する
ことを特徴とする請求項1または2に記載の情報提供装置。
【請求項4】
前記事前設定条件は、前記自車両の速度が所定の速度未満であることである
ことを特徴とする請求項1〜3のいずれか1項に記載の情報提供装置。
【請求項5】
前記事前設定条件は、前記自車両が停止していることである
ことを特徴とする請求項4に記載の情報提供装置。
【請求項6】
前記予想区間は、前記最終提供地点と現時点での自車両の位置との間の渋滞を表す情報、信号機の設置位置を表す情報、立ち寄り地点の位置を表す情報の少なくともいずれかの情報に基づいて定められる区間である
ことを特徴とする請求項4または5に記載の情報提供装置。
【請求項7】
前記事前設定条件は、前記自車両が走行しやすい道路を走行していることである
ことを特徴とする請求項1〜3のいずれか1項に記載の情報提供装置。
【請求項8】
前記予想区間は、前記走行しやすい道路の区間である
ことを特徴とする請求項7に記載の情報提供装置。
【請求項9】
車両に搭載され、ドライバーに情報を提供する情報提供装置の情報提供方法であって、
コンピュータが、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定するステップと、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断するステップと、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断するステップと、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情
報を提供するステップと、
を実行する情報提供方法。
【請求項10】
車両に搭載され、ドライバーに情報を提供する情報提供装置の情報提供プログラムであって、
コンピュータに、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定するステップと、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断するステップと、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断するステップと、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供するステップと、
を実行させるための情報提供プログラム。
【請求項11】
ドライバーに情報を提供する車両であって、
最終的に情報を提供すべき地点である最終提供地点を、情報の内容に応じて決定する最終提供地点決定手段と、
前記最終提供地点と現時点での自車両の位置との間に、前記自車両の状態が、事前に定めた事前設定条件に適合することが予想される予想区間があるか否かを判断する区間状況判断手段と、
前記予想区間があると判断された場合に、自車両の状態が事前設定条件に適合しているか否かを判断する自車両状態判断手段と、
予想区間内で前記自車両の状態が事前設定条件に適合した際、または、予想区間後に情報を提供する情報提供手段と、
を有することを特徴とする車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−151625(P2010−151625A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2008−330281(P2008−330281)
【出願日】平成20年12月25日(2008.12.25)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年12月25日(2008.12.25)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]