
情報提供装置
【課題】ドライバに対しより確実に情報を伝えることができる車載用の情報提供装置を提供する。
【解決手段】ナビゲーション装置の制御部は、年齢,運転歴や、運転操作に基づき、ドライバの運転技量を判定すると共に、運転技量と、自車両の運転操作や自車両周辺の静的環境,動的環境に基づき、該ドライバにとっての運転負荷を推定する。そして、運転負荷が低い場合には、生成した各種メッセージを通知する(S1225)と共に、運転負荷が高い場合には、メッセージの提供を保留し(S1230)、運転負荷が低くなったときに、保留しているメッセージを提供する(S1245)。
【解決手段】ナビゲーション装置の制御部は、年齢,運転歴や、運転操作に基づき、ドライバの運転技量を判定すると共に、運転技量と、自車両の運転操作や自車両周辺の静的環境,動的環境に基づき、該ドライバにとっての運転負荷を推定する。そして、運転負荷が低い場合には、生成した各種メッセージを通知する(S1225)と共に、運転負荷が高い場合には、メッセージの提供を保留し(S1230)、運転負荷が低くなったときに、保留しているメッセージを提供する(S1245)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用の情報提供装置に関する。
【背景技術】
【0002】
経路案内情報や交通情報を提供するナビゲーション装置や、自車両周辺の歩行者や他の車両についての情報を提供し、安全運転を支援する運転支援装置等が知られている。また、これら以外にも、ニュース,天気予報,観光情報,各種施設に関する情報等、利便性や娯楽性を高めるための情報を提供する車載装置が知られており、このような装置を用いることで、より安全で快適な運転を行うことや、ドライブをより楽しむことが可能となる。
【0003】
しかしながら、混雑している道路を走行している時や交差点を通過している時等、運転負荷が上昇している時に情報が提供されても、ドライバは提供された情報を理解できず、情報が十分に伝わらないというおそれがある。
【0004】
そこで、特許文献1には、自車両の挙動や運転操作等に基づきドライバの運転負荷を判別し、運転負荷が低下した時期に情報を提供することで、ドライバに対して確実に情報を伝える車両用情報提供装置について記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−87111号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、例えば、初心者とベテランのドライバでは、同じ条件の下で車両を運転する場合であっても各自にとっての運転の難易度は大きく異なっており、個々のドライバの運転負荷は運転技量に応じて大きく異なるものとなる。これに対し、特許文献1に記載の情報提供装置では、個々のドライバの運転技量を考慮することなく、車両の挙動等に基づき運転負荷が一律に判別されているため、運転負荷を判別する精度が悪く、ドライバに十分に情報が伝わらない場合があった。
【0007】
本願発明は上記課題に鑑みてなされたものであり、ドライバに対しより確実に情報を伝えることができる車載用の情報提供装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題に鑑みてなされた請求項1に記載の情報提供装置は、ドライバの運転技量を記憶している運転技量記憶手段と、ドライバが運転する自車両の運転操作に関する情報と、自車両の走行環境に関する情報とのうちの少なくとも一つを運転情報として検出する運転情報検出手段と、を備えることを特徴とする。また、これらに加え、運転技量記憶手段に記憶されている運転技量と、運転情報検出手段により検出された運転情報とに基づき、ドライバにとっての運転の難易度を示す現在の運転負荷を推定する負荷推定手段と、負荷推定手段により推定された現在の運転負荷が低い時期に各種メッセージを提供する提供手段と、を備えることを特徴とする。
【0009】
なお、運転技量とは、自車両を運転する個々のドライバに関するものであるため、個々のドライバを識別する情報と該ドライバの運転技量とを対応付けた状態で運転技量記憶手段に記憶させておき、負荷推定手段は、現在のドライバについての運転技量を運転技量記憶手段から読み出し、該ドライバの運転負荷を推定しても良い。
【0010】
このような構成によれば、個々のドライバの運転技量を考慮して運転負荷が推定されるため、運転負荷を精度良く推定することができ、運転負荷が確実に低下した時期に各種メッセージを提供することができる。したがって、ドライバに対しより確実に情報を伝えることができるのである。
【0011】
なお、情報提供装置は、次のようにしてドライバの運転技量を判別しても良い。
すなわち、請求項2に記載されているように、情報提供装置は、ドライバの年齢、或いは、運転経験の長さのうちの少なくとも一方に基づき該ドライバの運転技量を判別し、該運転技量を運転技量記憶手段に記憶する運転技量判別手段をさらに備えていても良い。
【0012】
こうすることにより、簡易かつ確実にドライバの運転技量を判別することができる。
また、請求項3に記載されているように、情報提供装置は、ドライバによる自車両の運転操作に基づき該ドライバの運転技量を判別し、該運転技量を運転技量記憶手段に記憶する運転技量判別手段をさらに備えていても良い。
【0013】
こうすることにより、より正確にドライバの運転技量を判別することができる。
また、自車両の故障に関する情報等といった緊急度の高い情報については、運転負荷に関らずドライバに通知したほうが良いと考えられる。
【0014】
そこで、請求項4に記載の情報提供装置では、提供手段は、メッセージのうち緊急度の高いものについては、現在の運転負荷に関らず提供する。
こうすることにより、ドライバは、自車両の故障等への対処を迅速に行うことが可能となる。
【0015】
ところで、例えば、ナビゲーション装置における経路案内では、交差点等の分岐点の手前で、「次の交差点を左折します」等といった自車両の進行方向を告げるメッセージが提供される場合があるが、交差点の50m手前で該メッセージを提供するといった具合に、このようなメッセージは提供時期が予め定められている。そして、このようなメッセージの提供が予定されている時期においてドライバの運転負荷が高くなる場合も想定される。
【0016】
そこで、請求項5に記載の情報提供装置では、予め定められた提供時期に提供されることが予定されているメッセージを提供時期設定メッセージとし、地図データに登録されている経路の中から自車両の走行予定経路を予測する経路予測手段と、自車両が走行予定経路を走行する際にドライバに生じる運転負荷である将来の運転負荷を予測する負荷予測手段と、を備える。また、負荷予測手段により予測された将来の運転負荷に基づき、提供時期設定メッセージに係る提供時期にドライバに生じる運転負荷がどの程度であるかを判定し、該運転負荷が高い場合には該提供時期を変更する変更手段と、を備え、提供手段は、提供時期設定メッセージに係る提供時期が到来した後、現在の運転負荷が低い時期に、該提供時期設定メッセージを提供する。
【0017】
こうすることにより、ドライバの運転負荷に応じて柔軟にメッセージの提供が予定されている時期を変更することができ、利便性を損なうことなく、ドライバに対しより確実に情報を伝えることができる。
【0018】
ここで、将来の運転負荷の予測方法としては、次のようなものが考えられる。
すなわち、請求項6に記載されているように、情報提供装置は、負荷推定手段により推定された現在の運転負荷に基づき、地図データに登録されている経路を走行する際に生じたドライバの運転負荷の履歴情報を生成する履歴情報生成手段をさらに備え、負荷予測手段は、履歴情報生成手段により生成された、走行予定経路に対応する履歴情報に基づき、該走行予定経路を走行する際の将来の運転負荷を予測しても良い。
【0019】
なお、履歴情報とは、自車両を運転する個々のドライバに関するものであるため、個々のドライバを識別する情報と該ドライバの履歴情報とを対応付けておき、負荷予測手段は、現在のドライバに対応する履歴情報に基づき将来の運転負荷を予測しても良い。
【0020】
こうすることにより、正確に将来の運転負荷を予測することができる。
また、ドライバが自車両を運転した期間が短い場合等には、該ドライバが運転する自車両が走行した経路の数が少なく、走行予定経路に対応する該ドライバの履歴情報が生成されていないという可能性が高い。
【0021】
そこで、請求項7に記載の情報提供装置は、地図データに登録されている経路を構成する各道路について、車両が該道路を安全に走行した際に運転技量の異なるそれぞれのドライバに生じる運転負荷を示す運転負荷データを取得する運転負荷データ取得手段をさらに備え、負荷予測手段は、運転技量判別手段により判別されたドライバの運転技量と運転負荷データとに基づき、該ドライバが運転する自車両が走行予定経路を走行する際の将来の運転負荷を予測する。
【0022】
こうすることにより、走行予定経路に対応する履歴情報が生成されていない場合であっても、該走行予定経路を走行する際の将来の運転負荷を予測することが可能となる。
また、ドライバが疲労している場合等には、認知や判断を行う能力が低下するため、運転の難易度が向上し、同じ条件下の運転であっても、正常な場合と比べて運転負荷が増加すると考えられる。
【0023】
そこで、請求項8に記載の情報提供装置は、ドライバの生体情報を検出する生体情報検出手段をさらに備え、負荷推定手段は、生体情報検出手段により検出されたドライバの生体情報をさらに加味して、該ドライバの現在の運転負荷を推定する。
【0024】
こうすることにより、運転負荷を推定する精度を向上させることができ、ドライバに対しより確実に情報を伝えることが可能となる。
ところで、既に述べたように、情報提供装置は運転負荷が低い時期にメッセージを提供するため、運転負荷が高い場合にメッセージとして提供する情報の検出や取得等がなされた場合には、該情報に基づくメッセージの提供を保留し、運転負荷が低くなった時に保留されているメッセージを提供することが考えられる。
【0025】
また、情報提供装置から提供されるメッセージとして、例えば、経路案内において、分岐点の手前で自車両の進行方向を告げるメッセージや、渋滞情報や事故情報等といった特定の道路に関するメッセージ等が考えられる。そして、このようなメッセージに関しては、保留中に自車両がメッセージに係る分岐点を通過した場合や、走行する道路が変わった場合等には、メッセージの内容が自車両の運転に適合しないものとなってしまう。
【0026】
そこで、請求項9に記載の情報提供装置では、メッセージには有効期限が設定されており、メッセージに設定された有効期限が経過したか否かを判別する有効期限判別手段をさらに備え、提供手段は、有効期限判別手段により有効期限が経過していないと判別されたメッセージを提供する。
【0027】
こうすることにより、自車両の運転に適合しないメッセージが提供されることを防ぐことができる。
【図面の簡単な説明】
【0028】
【図1】車載システムの構成を示すブロック図と、ナビゲーション装置の構成を示すブロック図である。
【図2】ナビゲーション装置を制御する制御プログラムの構成を示すブロック図である。
【図3】情報提供処理のフローチャートである。
【図4】経路データと履歴情報についての説明図である。
【図5】運転技量判定処理と個人情報判定処理のフローチャートである。
【図6】運転操作判定処理のフローチャートである。
【図7】加減速操作評価処理とハンドル操作評価処理のフローチャートである。
【図8】運転負荷推定処理のフローチャートである。
【図9】ドライバ状態判定処理のフローチャートである。
【図10】運転操作負荷判定処理のフローチャートである。
【図11】静的環境負荷判定処理のフローチャートである。
【図12】メッセージ報知処理のフローチャートである。
【図13】運転負荷予測処理のフローチャートと、運転負荷データについての説明図である。
【図14】案内メッセージ生成処理のフローチャートである。
【図15】案内メッセージ報知処理のフローチャートである。
【発明を実施するための形態】
【0029】
以下、本発明の実施形態について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0030】
[構成の説明]
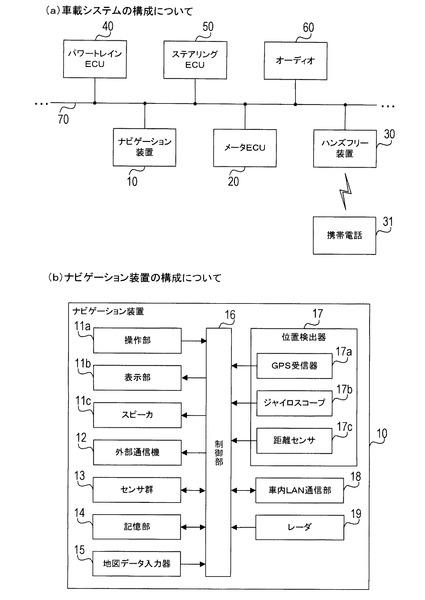
図1(a)は、CAN等の車内LAN70を介して接続されたナビゲーション装置10,メータECU20等から構成される本実施形態の車載システムの構成を示すブロック図である。車載システムは、経路案内を行うと共に、自車両のドライバの運転負荷が低い時期に各種情報を提供するよう構成されたナビゲーション装置10と、メータを制御するメータECU20等を有している。また、車載システムは、携帯電話31と無線通信を行い、スピーカやマイクを利用してハンズフリー通話を実現するハンズフリー装置30と、自車両のエンジンや変速機を制御するパワートレインECU40と、ドライバのハンドル操作に応じて自車両の舵角を制御するステアリングECU50と、テレビ放送やラジオ放送の受信が可能なオーディオ60等を有している。
【0031】
次に、車載システムを構成するナビゲーション装置10の構成について、図1(b)を用いて説明する。ナビゲーション装置10は、操作部11a,表示部11b,スピーカ11c,外部通信機12,センサ群13,記憶部14,地図データ入力器15,制御部16,位置検出器17,車内LAN通信部18,レーダ19等から構成されている。
【0032】
操作部11aは、ユーザからの各種指示を受け付ける部位であり、具体的にはメカニカルなキースイッチや、タッチスイッチ等から構成される。
また、表示部11bは、各種表示を行う部位であり、具体的にはLCDや有機EL等から構成される。
【0033】
また、スピーカ11cは、制御部16から入力された信号に基づき音声を出力する部位である。
また、外部通信機12は、路側に設置された光ビーコンや電波ビーコン等を介してVICSの情報センタから交通情報(事故情報や渋滞情報等)を取得する。また、FM多重放送によって送信される交通情報も取得する。
【0034】
また、センサ群13は、ドライバの生体情報を検出するための部位であり、ハンドルにおける把握位置に取り付けられた血圧センサや、該把握位置に取り付けられ、ハンドルを握るドライバの手の状態を検出する感圧センサや、ドライバの顔を撮影するカメラや、ドライバの体温を検出する赤外線センサ等から構成されている。
【0035】
また、記憶部14は、記憶保持動作が不要なデバイス(例えば、HDD)から構成され、各種情報を記憶することができる。
また、地図データ入力器15は、経路案内等を行う際に使用する地図データや、所定の施設を検索する際に用いる施設検索情報等の各種データを入力するための装置である。これらのデータの記憶媒体としては、そのデータ量が膨大であるため、DVD−ROMやHDDを用いるのが一般的である。
【0036】
また、制御部16は、CPU、ROM、RAM、I/O及びこれらを接続するバスライン等からなる周知のマイクロコンピュータを中心に構成される。制御部16は、ROMに記憶されているプログラムや、RAMにロードされたプログラムに従いナビゲーション装置10の各部位を制御する。
【0037】
また、位置検出器17は、GPS(Global Positioning System)用の人工衛星からの信号を、図示しないGPSアンテナを介して受信して車両の位置、方位、速度等を検出するGPS受信器17aと、車両に加えられる回転運動の大きさを検出するジャイロスコープ17bと、車両の前後方向の加速度等から走行した距離を検出する距離センサ17cとを備えている。そして、これらは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0038】
また、車内LAN通信部18は、車内LAN70を介して種々の情報の送受信を行う部位である。
また、レーダ19は、車両や歩行者等といった自車両周辺の障害物を検出する部位である。
【0039】
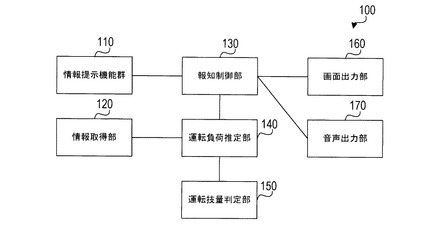
次に、ナビゲーション装置10を制御する制御プログラム100の構成について、図2に記載のブロック図を用いて説明する。
制御プログラム100は、ドライバに提供するメッセージを生成する情報提示機能群110と、ドライバや自車両の状態や走行環境に関する情報を取得する情報取得部120と、ドライバの運転技量を判定する運転技量判定部150と、運転技量に応じてドライバの運転負荷を算出する運転負荷推定部140とを有する。また、運転負荷が低下した際にドライバにメッセージを報知する報知制御部130と、表示部11bに各種画像を表示することでメッセージを出力する画面出力部160と、スピーカ11cを介して音声によりメッセージを出力する音声出力部170とを有する。
【0040】
なお、情報提示機能群110は、地図データや自車両の現在地等に基づき経路案内に関するメッセージを生成すると共に、VICSの交通情報に基づくメッセージを生成するよう構成されている。また、車内LAN70を介して他の装置と通信を行い、車両の故障情報,交通情報,ニュース,携帯電話31への着呼やメールの着信等の各種情報を取得し、これらの情報に基づくメッセージを生成するよう構成されている。
【0041】
また、情報取得部120は、例えば、操作部11aを介して受け付けた操作や、キーレスエントリシステムを構成する携帯機(図示なし)から取得した情報に基づき、ドライバの年齢,運転歴等、ドライバに関する情報を特定するよう構成されている。また、車内LAN70を介して他の装置と通信を行い、運転操作に関する情報や、自車両の状態に関する情報や、車両の走行環境に関する情報を取得するよう構成されている。また、センサ群13により、ドライバの生体情報を検出するよう構成されている。
【0042】
[動作の説明]
次に、本実施形態のナビゲーション装置10の動作について説明する。ナビゲーション装置10は、自車両を運転する各ドライバの運転技量を判定すると共に、該運転技量と、自車両の運転操作,自車両の状態,走行環境に基づき、各ドライバにとっての運転の難易度である運転負荷を個別に推定する。そして、推定された運転負荷が低い時期に、経路案内に関するメッセージや、他の装置から取得した各種情報に基づくメッセージを提供するよう構成されている。以下では、該ナビゲーション装置10の動作について、フローチャートを用いて詳細に説明する。
【0043】
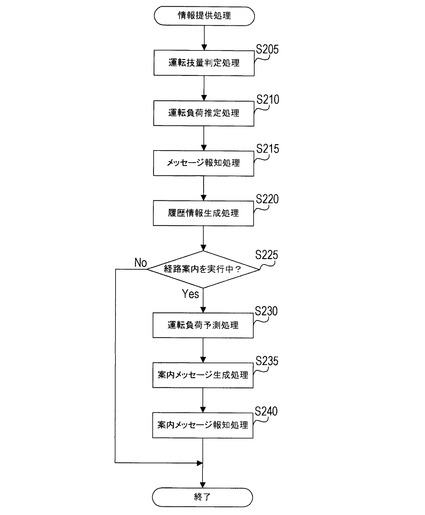
(1)情報提供処理について
まず、自車両を運転する個々のドライバの運転負荷を推定すると共に、運転負荷が低い時期に各種メッセージを提供するよう、メッセージの提供タイミングの遅延や繰り上げを行う情報提供処理について、図3に記載のフローチャートを用いて説明する。なお、本処理は、自車両の運転中に定期的に実行される処理である。
【0044】
S205では、ナビゲーション装置10の制御部16は、自車両のドライバの運転技量を判定する運転技量判定処理を行い、S210に処理を移行する。
S210では、制御部16は、ドライバの運転技量や、自車両の運転操作,自車両の状態,走行環境に基づき、該ドライバの運転負荷を、大,中,小の三段階で推定する運転負荷推定処理を行い、S215に処理を移行する。
【0045】
S215では、制御部16は、運転負荷に応じたタイミングでドライバに対し各種メッセージを提供するメッセージ報知処理を行い、S220に処理を移行する。
S220では、制御部16は、地図データに登録されている経路を自車両が走行する際に生じたドライバの運転負荷の履歴情報を更新する。
【0046】
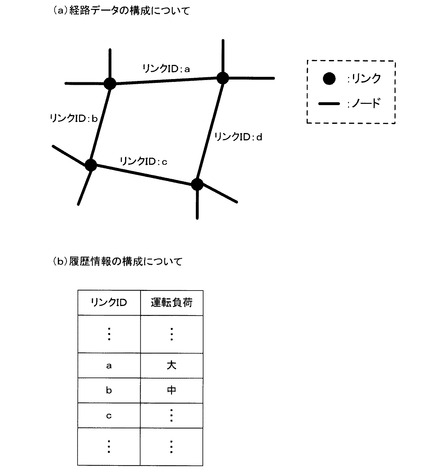
ここで、履歴情報について、図4を用いて説明する。ナビゲーション装置10で用いられる地図データは、複数のノードとノード間を結ぶリンクとにより経路を表す経路データを有しており、各リンクには固有のIDが付されている(図4(a)参照)。そして、履歴情報は、自車両を運転するドライバ毎に設けられており、リンクIDと、該リンクIDが示す経路を走行した際に推定されたドライバの運転負荷とから構成されている。なお、図4(b)には、特定のドライバについての履歴情報の一例を示す表が記載されている。
【0047】
そして、自車両が各リンクに対応する経路の走行を完了すると、制御部16は、該経路の走行中に推定された運転負荷を平均化したものを特定する。具体的には、大,中,小の運転負荷の各段階を数値化すると共に、該経路を走行中に推定された運転負荷の数値の平均値を算出し、該平均値に基づき、該経路を走行中の運転負荷を大,中,小のいずれかに判定しても良い。また、大,中,小の各段階のうち、該経路を走行中に推定された時間が最も長い段階を、該経路を走行中の運転負荷としても良い。そして、現在のドライバに対応する履歴情報に対し、走行を完了した経路のリンクIDに対応付けて特定した運転負荷を設定することで、履歴情報を更新する。
【0048】
続くS225では、制御部16は、経路案内を実行中であるか否かを判定し、肯定判定が得られた場合には(S225:Yes)、S230に処理を移行し、否定判定が得られた場合には(S225:No)、本処理を終了する。なお、ナビゲーション装置10は、ドライバ等により行われた操作に応じて目的地までの経路案内を行っても良いし、自車両が予め登録された通勤経路等を走行中であると判定した際に、自発的に該経路に沿って走行するための経路案内を行っても良い。
【0049】
S230では、制御部16は、これから先にドライバに生じる運転負荷を予測する運転負荷予測処理を行い、S235に処理を移行する。
S235では、制御部16は、予め定められたタイミングで自車両の進路等を通知する案内メッセージを生成する案内メッセージ生成処理を行い、S240に処理を移行する。
【0050】
S240では、制御部16は、予め定められたタイミングで案内メッセージを通知する案内メッセージ報知処理を行い、本処理を終了する。
(2)運転技量判定処理について
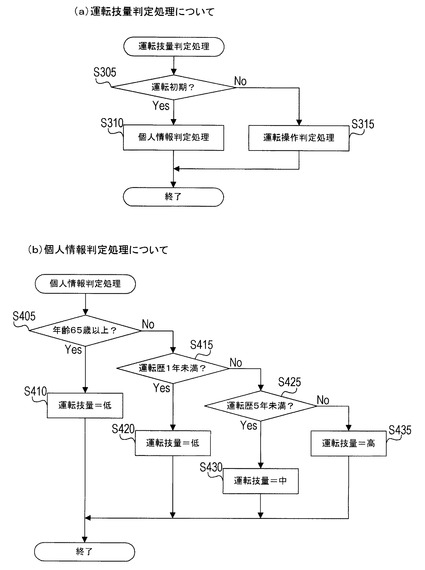
次に、ドライバの運転技量を、高,中,低の三段階で判定する運転技量判定処理について、図5(a)に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0051】
S305では、制御部16は、現在のドライバが初めて自車両を運転する場合等、該ドライバの運転技量が未判定の状態であるか否かを判定し、肯定判定が得られた場合には(S305:Yes)、S310に処理を移行すると共に、否定判定が得られた場合には(S305:No)、S315に処理を移行する。
【0052】
S310では、制御部16は、ドライバの個人情報に基づき該ドライバの運転技量を判定する個人情報判定処理を行い、本処理を終了する。
一方、S315では、制御部16は、運転操作に基づきドライバの運転技量を判定する運転操作判定処理を行い、本処理を終了する。
【0053】
(3)個人情報判定処理について
次に、個人情報に基づきドライバの運転技量を、高,中,低の三段階で判定する個人情報判定処理について、図5(b)に記載のフローチャートを用いて説明する。なお、本処理は、運転技量判定処理からコールされるサブルーチンとして構成されている。
【0054】
S405では、制御部16は、ドライバの個人情報に基づき、該ドライバの年齢が65歳以上か否かを判定し、肯定判定が得られた場合には(S405:Yes)、S410に処理を移行し、否定判定が得られた場合には(S405:No)、S415に処理を移行する。
【0055】
S410では、制御部16は、運転技量を“低”と判定し、本処理を終了する。
S415では、制御部16は、ドライバの個人情報に基づき、該ドライバの運転経験年数(運転歴と記載)が1年未満か否かを判定する。そして、肯定判定が得られた場合には(S415:Yes)、S420に処理を移行し、否定判定が得られた場合には(S415:No)、S425に処理を移行する。
【0056】
S420では、制御部16は、運転技量を“低”と判定して判定結果をRAMに記憶し、本処理を終了する。
S425では、制御部16は、ドライバの個人情報に基づき、該ドライバの運転歴が5年未満か否かを判定する。そして、肯定判定が得られた場合には(S425:Yes)、S430に処理を移行し、否定判定が得られた場合には(S425:No)、S435に処理を移行する。
【0057】
S430では、制御部16は、運転技量を“中”と判定して判定結果をRAMに記憶し、本処理を終了する。
一方、S435では、制御部16は、運転技量を“高”と判定して判定結果をRAMに記憶し、本処理を終了する。
【0058】
(4)運転操作判定処理について
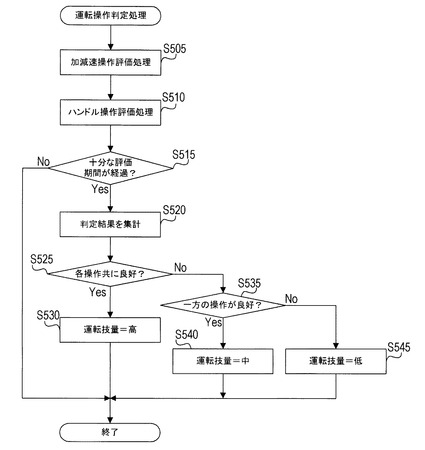
次に、運転操作に基づきドライバの運転技量を、高,中,低の三段階で判定する運転操作判定処理について、図6に記載のフローチャートを用いて説明する。なお、本処理は、運転技量判定処理からコールされるサブルーチンとして構成されている。
【0059】
S505では、制御部16は、自車両を加減速させる操作について評価する加減速操作評価処理を行い、S510に処理を移行する。
S510では、制御部16は、自車両のハンドル操作について評価するハンドル操作評価処理を行い、S515に処理を移行する。
【0060】
S515では、制御部16は、現在のドライバの運転操作についての評価期間が十分であるか否かを判定する。具体的には、現在のドライバが自車両を運転した期間が所定の閾値(例えば5時間)を超えるか否かを判定し、肯定判定が得られた場合には(S515:Yes)、S520に処理を移行し、否定判定が得られた場合には(S515:No)、本処理を終了する。
【0061】
S520では、制御部16は、自車両を加減速させる操作についての評価結果と、ハンドル操作についての評価結果を集計する。具体的には、各操作について定期的なタイミングで○,×の二段階で評価がなされるが(詳細は後述する)、○,×の数を集計しても良いし、各段階を数値化し、評価結果の平均値を算出しても良い。そして、S525に処理を移行する。
【0062】
S525では、制御部16は、集計結果に基づき、各操作についての評価結果が共に良好であるか否かを判定する。具体的には、○,×の数を集計した場合であれば、○の数が所定値を超える場合には、評価結果が良好であると判定しても良いし、各段階の評価を数値化したものの平均値を算出した場合であれば、該平均値が所定値を超える場合には、評価結果が良好であると判定しても良い。そして、肯定判定が得られた場合には(S525:Yes)、S530に処理を移行し、否定判定が得られた場合には(S525:No)、S535に処理を移行する。
【0063】
S530では、制御部16は、ドライバの運転技量を“高”と判定して判定結果をRAMに記憶し、本処理を終了する。
S535では、制御部16は、同様にして、一方の操作についての評価結果が良好であるか否かを判定し、肯定判定が得られた場合には(S535:Yes)、S540に処理を移行し、否定判定が得られた場合には(S535:No)、S545に処理を移行する。
【0064】
S540では、制御部16は、ドライバの運転技量を“中”と判定して判定結果をRAMに記憶し、本処理を終了する。
一方、S545では、制御部16は、ドライバの運転技量を“低”と判定して判定結果をRAMに記憶し、本処理を終了する。
【0065】
(5)加減速操作評価処理について
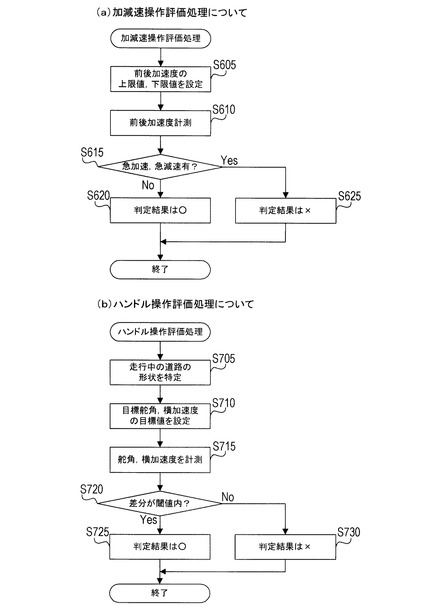
次に、自車両を加減速させる操作について、“○”,“×”の二段階で評価する加減速操作評価処理について、図7(a)に記載のフローチャートを用いて説明する。なお、本処理は、運転操作判定処理からコールされるサブルーチンとして構成されている。
【0066】
S605では、制御部16は、自車両周辺の静的環境や動的環境に基づき、安全運転を行う上で要求される加速度の上限値,下限値を設定する。
ここで、静的環境とは、例えば、走行中の道路の種別(高速道路か一般道路か),車線の数,道幅,道路の形状や、交差点,繁華街等といった走行中の場所等、頻繁に変化しない走行環境のことであり、制御部16は、地図データに基づき、このような静的環境を判別しても良い。
【0067】
また、動的環境とは、例えば、自車両周辺の混雑度合いや天候等、時間帯等によって動的に変化する走行環境のことであり、制御部16は、レーダ19を用いて車両や歩行者等の障害物を検出することや、外部から取得した交通情報や天候情報に基づき、動的環境について判別しても良い。
【0068】
なお、例えば、道路の道幅が狭い場合や、繁華街を走行中である場合や、渋滞中の道路を走行している場合や、悪天候の場合等、静的環境や動的環境に基づき運転の難易度が高いと判定された場合には、安全運転を行う上で要求される加速度の上限値がより低く、下限値がより高く設定されることは言うまでも無い。また、このような加速度の上限値,下限値を示すデータ(教師データ)は、記憶部14に記憶されている。
【0069】
続くS610では、制御部16は、車内LAN70を介してメータECU20から取得した自車両の車速に基づき前後方向の加速度を計測し、S615に処理を移行する。
S615では、制御部16は、計測された加速度と、加速度の上限値,下限値に基づき、急加速や急減速がなされたか否かを判定する。なお、計測された加速度が上限値を超える場合には、急加速とみなされ、該加速度が下限値を下回る場合には、急減速とみなされる。そして、肯定判定が得られた場合には(S615:Yes)、S625に処理を移行し、否定判定が得られた場合には(S615:No)、S620に処理を移行する。
【0070】
S620では、制御部16は、判定結果を“○”とし、本処理を終了する。
一方、S625では、制御部16は、判定結果を“×”とし、本処理を終了する。
(6)ハンドル操作評価処理について
次に、ハンドル操作について“○”,“×”の二段階で評価するハンドル操作評価処理について、図7(b)に記載のフローチャートを用いて説明する。なお、本処理は、運転操作判定処理からコールされるサブルーチンとして構成されている。
【0071】
S705では、制御部16は、地図データに基づき、自車両が現在走行中の道路の形状を特定し、S710に処理を移行する。
S710では、制御部16は、特定した道路の形状に基づき、安全運転を行う上で要求される舵角の目標値と横方向の加速度の目標値を設定し、S715に処理を移行する。なお、このような舵角や加速度の目標値を示すデータ(教師データ)は、記憶部14に記憶されている。
【0072】
S715では、制御部16は、車内LAN70を介してステアリングECU50から現在の舵角を取得すると共に、該舵角と、車内LAN70を介して取得した現在の車速とに基づき、自車両の横方向の加速度を計測し、S720に処理を移行する。なお、制御部16は、図示しない加速度センサにより、横方向の加速度を計測しても良い。
【0073】
S720では、制御部16は、自車両の舵角と横方向の加速度に関して、それぞれ、目標値と現在の値との差分を算出し、該差分が、予め定められた閾値以下であるか否かを判定する。そして、肯定判定が得られた場合には(S720:Yes)、S725に処理を移行し、否定判定が得られた場合には(S720:No)、S730に処理を移行する。
【0074】
S725では、制御部16は、判定結果を“○”とし、本処理を終了する。
一方、S730では、制御部16は、判定結果を“×”とし、本処理を終了する。
(7)運転負荷推定処理について
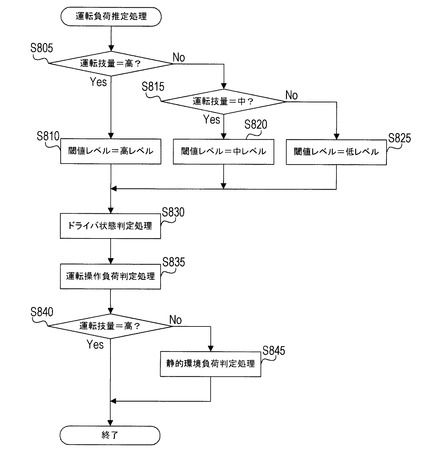
次に、ドライバの運転技量や、自車両の運転操作や、自車両の状態や、走行環境に基づき、該ドライバの運転負荷を、大,中,小の三段階で推定する運転負荷推定処理について、図8に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0075】
S805では、制御部16は、ドライバの運転技量が“高”であるか否かを判定し、肯定判定が得られた場合には(S805:Yes)、S810に処理を移行し、否定判定が得られた場合には(S805:No)、S815に処理を移行する。
【0076】
S810では、制御部16は、運転負荷の判定に用いられる各種閾値を設定するための閾値レベルを高レベルに設定し、S830に処理を移行する。
S815では、制御部16は、ドライバの運転技量が“中”であるか否かを判定し、肯定判定が得られた場合には(S815:Yes)、S820に処理を移行し、否定判定が得られた場合には(S815:No)、S825に処理を移行する。
【0077】
S820では、制御部16は、閾値レベルを中レベルに設定し、S830に処理を移行する。
一方、S825では、制御部16は、閾値レベルを低レベルに設定し、S830に処理を移行する。
【0078】
S830では、制御部16は、ドライバの生体情報に基づきドライバの疲労度や異常を検出し、検出結果に応じて閾値レベルを再設定するドライバ状態判定処理を行い、S835に処理を移行する。
【0079】
S835では、制御部16は、ドライバの運転技量と運転操作等に基づき該ドライバの運転負荷を判定する運転操作負荷判定処理を行い、S840に処理を移行する。
S840では、制御部16は、ドライバの運転技量が“高”であるか否かを判定し、肯定判定が得られた場合には(S840:Yes)、本処理を終了し、否定判定が得られた場合には(S840:No)、S845に処理を移行する。
【0080】
S845では、制御部16は、上述した静的環境に基づきドライバの運転負荷を判定する静的環境負荷判定処理を行い、本処理を終了する。
なお、静的環境に加えて、上述した動的環境に基づきドライバの運転負荷を判定しても良く、具体的には、例えば、レーダ19を用いて自車両周辺の混雑度合いを検出すると共に、該混雑度合いと運転技量の各段階に対応する閾値とを比較し、ドライバの運転技量に応じた運転負荷を推定しても良い。また、例えば、車内LAN70を介して天候情報を取得し、悪天候である場合には運転負荷を“大”と推定しても良い。
【0081】
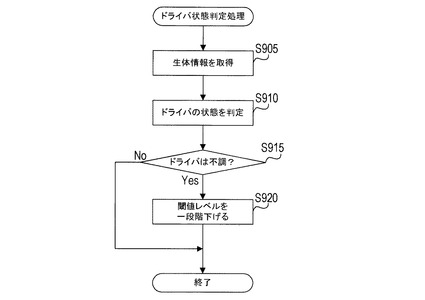
(8)ドライバ状態判定処理について
次に、ドライバの生体情報に基づきドライバの疲労度や異常を検出し、検出結果に応じて閾値レベルを再設定するドライバ状態判定処理について、図9に記載のフローチャートを用いて説明する。なお、本処理は、運転負荷推定処理からコールされるサブルーチンとして構成されている。
【0082】
S905では、制御部16は、センサ群13を介して、ドライバの顔の画像や、ドライバの体温,血圧や、ハンドルを握るドライバの手の状態を検出し、S910に処理を移行する。
【0083】
S910では、制御部16は、センサ群13による検出結果に基づき、ドライバの体調や精神状態を判定する。
具体的には、撮影されたドライバの顔の画像と、予め用意されている該ドライバの顔の画像とを比較することで、現在のドライバの体調や精神状態を判別しても良い。また、ドライバの体温,血圧の変動に基づき、現在のドライバの体調等を判別しても良いし、ハンドルを握るドライバの手の動きから現在のドライバの体調等を判別しても良い。また、これらの判別結果から、総合的にドライバの体調や精神状態を判別しても良い。
【0084】
続くS915では、制御部16は、ドライバの体調や精神状態が不調であるか否かを判定し、肯定判定が得られた場合には(S915:Yes)、S920に処理を移行すると共に、否定判定が得られた場合には(S915:No)、本処理を終了する。
【0085】
S920では、制御部16は、閾値レベルを一段階下げ、本処理を終了する。
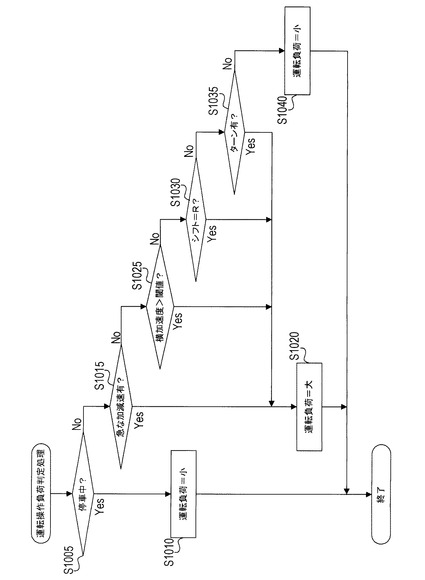
(9)運転操作負荷判定処理について
次に、ドライバの運転技量と、運転操作や自車両の状態に基づき、該ドライバの運転負荷を推定する運転操作負荷判定処理について、図10に記載のフローチャートを用いて説明する。なお、本処理は、運転負荷推定処理からコールされるサブルーチンとして構成されている。
【0086】
S1005では、制御部16は、車内LAN70を介して取得した自車両の車速に基づき、自車両が停車中であるか否かを判定する。そして、肯定判定が得られた場合には(S1005:Yes)、S1010に処理を移行し、否定判定が得られた場合には(S1005:No)、S1015に処理を移行する。
【0087】
S1010では、制御部16は、運転負荷を“小”と推定し、本処理を終了する。
S1015では、制御部16は、車内LAN70を介して取得した自車両の車速に基づき、自車両の前後方向の加速度を算出し、急激な加速或いは減速がなされたか否か(前後方向の加速度が、予め定められた上限値を超えるか、或いは下限値を下回るか否か)が判定される。
【0088】
なお、加速度の上限値,下限値としては、閾値レベルに対応する三種類の値が設けられており、閾値レベルが高レベルであるときは、三種類のうち、上限値に最大値が、下限値に最小値が用いられ、閾値レベルが下がるにつれ、上限値として用いられる値が低くなると共に、下限値として用いられる値が高くなる。
【0089】
そして、肯定判定が得られた場合には(S1015:Yes)、S1020に処理を移行し、否定判定が獲られた場合には(S1015:No)、S1025に処理を移行する。
【0090】
S1020では、制御部16は、運転負荷を“大”と推定し、本処理を終了する。
S1025では、制御部16は、車内LAN70を介して取得した車速や舵角に基づき自車両の横方向の加速度を計測し、該横方向の加速度が予め定められた閾値を超えるか否かを判定する。
【0091】
なお、横方向の加速度の閾値としては、閾値レベルに対応する三種類の値が設けられており、閾値レベルが高レベルであるときは、三種類のうちの最大値が用いられ、閾値レベルが下がるにつれ、用いられる値が小さくなる。
【0092】
そして、肯定判定が得られた場合には(S1025:Yes)、S1020に処理を移行し、否定判定が得られた場合には(S1025:No)、S1030に処理を移行する。
【0093】
S1030では、制御部16は、車内LAN70を介してパワートレインECU40からシフトレバーの位置情報を取得し、シフトレバーの位置がリバースに設定されているか否かを判定する。そして、肯定判定が得られた場合には(S1030:Yes)、S1020に処理を移行し、否定判定が得られた場合には(S1030:No)、S1035に処理を移行する。
【0094】
S1035では、制御部16は、車内LAN70を介して取得した舵角に基づき、自車両をUターンさせる操作がなされているか否かを判定する。そして、肯定判定が得られた場合には(S1035:Yes)、S1020に処理を移行し、否定判定が得られた場合には(S1035:No)、S1040に処理を移行する。
【0095】
S1040では、制御部16は、運転負荷を“小”と推定し、本処理を終了する。
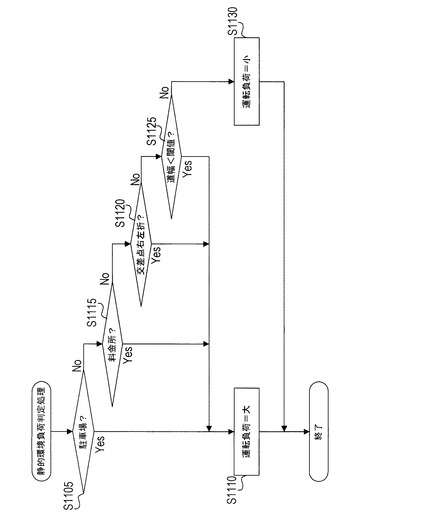
(10)静的環境負荷判定処理について
次に、静的環境に基づきドライバの運転負荷を推定する静的環境負荷判定処理について、図11に記載のフローチャートを用いて説明する。なお、本処理は、運転負荷推定処理からコールされるサブルーチンとして構成されている。
【0096】
S1105では、制御部16は、地図データと現在地とに基づき、自車両が駐車場を走行中であるか否かを判定し、肯定判定が得られた場合には(S1105:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1105:No)、S1115に処理を移行する。
【0097】
S1110では、制御部16は、運転負荷を“大”と推定し、本処理を終了する。
S1115では、制御部16は、地図データと現在地とに基づき、自車両が有料道路の料金所付近であるか否かを判定し、肯定判定が得られた場合には(S1115:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1115:No)、S1120に処理を移行する。
【0098】
S1120では、制御部16は、地図データ,現在地と、車内LAN70を介して取得した舵角や、ウインカの操作状態等に基づき、自車両が交差点を右左折している最中か否かを判定する。そして、肯定判定が得られた場合には(S1120:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1120:No)、S1125に処理を移行する。
【0099】
S1125では、制御部16は、地図データに基づき、自車両が走行している道路の道幅が予め定められた閾値を下回るか否かを判定する。
なお、道幅の閾値としては、閾値レベルに対応する三種類の値が設けられており、閾値レベルが高レベルであるときは、三種類のうちの最小値が用いられ、閾値レベルが下がるにつれ、用いられる値が大きくなる。
【0100】
そして、肯定判定が得られた場合には(S1125:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1125:No)、S1130に処理を移行する。
【0101】
S1130では、制御部16は、運転負荷を“小”と推定し、本処理を終了する。
(11)メッセージ報知処理について
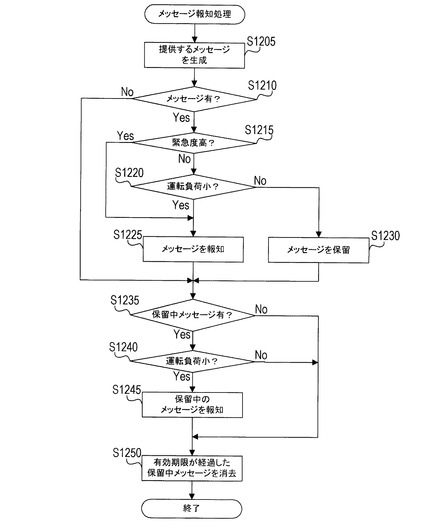
次に、運転負荷に応じたタイミングでドライバに対し各種メッセージを報知するメッセージ報知処理について、図12に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0102】
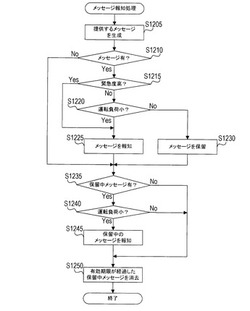
S1205では、制御部16は、ドライバに報知する各種メッセージを生成する。
具体的には、制御部16は、例えば、地図データに基づき自車両を目的地に誘導するための案内メッセージを生成しても良いし、外部通信機12を介して取得した情報に基づき、渋滞情報や事故情報等、特定の道路区間についての交通情報に関するメッセージを生成しても良い。また、制御部16は、例えば、地図データから走行中の道路や場所等の静的環境に関する情報を取得し、これに基づきドライバの注意を喚起する警告メッセージを生成しても良いし、レーダ19を介して自車両周辺の車両,歩行者等の動的環境を検出し、検出結果に基づき、事故の危険性について警告する警告メッセージを生成しても良い。
【0103】
また、制御部16は、例えば、車内LAN70を介して、自車両の故障情報,燃料の残量や、車速,ステアリング操作,シートベルト着用の有無,ドアの開閉状態等を示す情報を取得し、運転操作や自車両の状態に関する警告メッセージを生成しても良い。
【0104】
また、制御部16は、例えば、地図データ入力器15から入力された施設検索情報に基づき、各種施設に関するメッセージを生成しても良い。また、制御部16は、例えば、車内LAN70を介して、オーディオ60が受信したニュース,天気予報や、携帯電話31が受信した観光情報,各種施設に関する情報や、携帯電話31への着呼やメール着信を通知する情報等を取得し、これらに基づくメッセージを生成しても良い。
【0105】
なお、これらのメッセージのうち、例えば、自車両の故障や、事故の危険性等についての警告メッセージは緊急度の高いメッセージとなっていても良い。また、例えば、特定の道路区間に関する交通情報に基づくメッセージや、静的環境や動的環境に関するメッセージには有効期限が設定されており、該メッセージに係る情報を取得した時点や、該メッセージを生成した時点を起点として所定時間(例えば3分)が経過した際には、該メッセージの有効期限が経過したものとみなされる。
【0106】
続くS1210では、制御部16は、S1205にて生成されたメッセージの有無を判定し、肯定判定が得られた場合には(S1210:Yes)、S1215に処理を移行し、否定判定が得られた場合には(S1210:No)、S1235に処理を移行する。
【0107】
S1215では、制御部16は、生成されたメッセージが緊急度の高いメッセージかどうかを判定し、肯定判定が得られた場合には(S1215:Yes)、S1225に処理を移行し、否定判定が得られた場合には(S1215:No)、S1220に処理を移行する。
【0108】
S1220では、制御部16は、推定された現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1220:Yes)、S1225に処理を移行し、否定判定が得られた場合には(S1220:No)、S1230に処理を移行する。
【0109】
S1225では、制御部16は、表示部11bやスピーカ11cを介して生成されたメッセージを報知し、S1235に処理を移行する。
S1230では、制御部16は、生成されたメッセージの報知を保留し、S1235に処理を移行する。
【0110】
S1235では、制御部16は、保留中のメッセージの有無を判定し、肯定判定が得られた場合には(S1235:Yes)、S1240に処理を移行し、否定判定が得られた場合には(S1235:No)、S1250に処理を移行する。
【0111】
S1240では、制御部16は、推定された現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1240:Yes)、S1245に処理を移行し、否定判定が得られた場合には(S1240:No)、S1250に処理を移行する。
【0112】
S1245では、制御部16は、表示部11bやスピーカ11cを介して保留中のメッセージを報知し、S1250に処理を移行する。
S1250では、制御部16は、保留中のメッセージのうち、有効期限が経過したメッセージを消去し、本処理を終了する。
【0113】
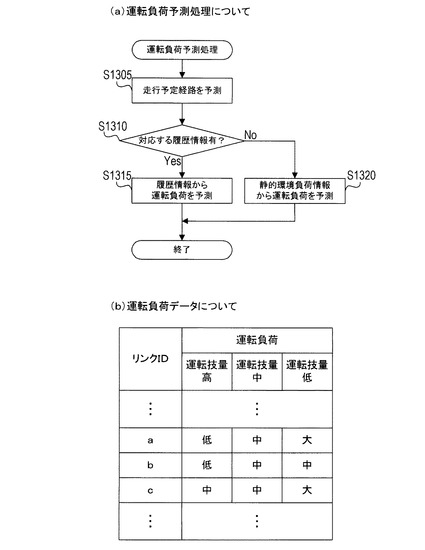
(12)運転負荷予測処理について
次に、ドライバに生じる運転負荷を予測する運転負荷予測処理について、図13(a)に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0114】
S1305では、制御部16は、走行予定経路を予測する。具体的には、ドライバ等により設定された目的地までの経路案内が行われている場合であれば、経路案内に係る経路を走行予定経路として予測しても良い。また、予め登録された通勤経路等を走行中であると判定された場合には、該経路を走行予定経路として予測しても良い。そして、制御部16は、S1310に処理を移行する。
【0115】
S1310では、制御部16は、現在のドライバの履歴情報において、走行予定経路を構成する全てのリンクに対応する運転負荷が設定されているか否かを判定し、肯定判定が得られた場合には(S1310:Yes)、S1315に処理を移行し、否定判定が得られた場合には(S1310:No)、S1320に処理を移行する。
【0116】
S1315では、制御部16は、現在のドライバの履歴情報において、走行予定経路を構成する各リンクに対応する運転負荷(“大”,“中”,“小”の三段階)を、該リンクに対応する道路を走行する際に生じる該ドライバの運転負荷として予測し、本処理を終了する。
【0117】
一方、S1320では、制御部16は、地図データに含まれている運転負荷データに基づき、走行予定経路を走行する際に生じる運転負荷を予測する。
ここで、運転負荷データについて説明する。運転負荷データとは、地図データに登録されている経路を走行する際に生じる運転負荷を予め推定した推定結果を示すものである。
【0118】
既に述べたように、地図データは、複数のノードとノード間を結ぶリンクとにより経路を表す経路データを有しており、各リンクには固有のIDが付されている(図4(a)参照)。また、各リンクに対応する道路の形状,道幅,種別(高速道路か一般道路か等)や、該道路がどのような場所に設けられているか等の静的環境に基づき、該道路を安全に走行する際に生じる運転負荷(換言すれば、該道路を走行する際に規範となる運転操作が行われた場合の運転負荷)を、運転技量に応じて推定することができる。そして、運転負荷データでは、地図データに登録されている各リンクに対応する道路について、運転技量毎に、上述の如く推定された運転負荷(“大”,“中”,“小”の三段階)が設定されている(図13(b)参照)。
【0119】
そして、制御部16は、走行予定経路に対応するリンクIDを特定すると共に、ドライバの運転技量と運転負荷データとに基づき、各リンクに対応する運転負荷を特定し、特定した運転負荷を、現在のドライバが走行予定経路を走行する際に生じる運転負荷とするのである。
【0120】
運転負荷を予測した後、制御部16は、本処理を終了する。
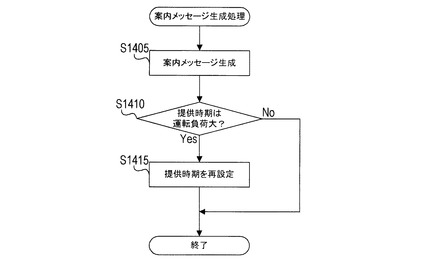
(13)案内メッセージ生成処理について
次に、予め定められたタイミングで自車両の進路等を通知する案内メッセージを生成する案内メッセージ生成処理について、図14に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0121】
S1405では、制御部16は、予め定められたタイミングで自車両の進路等を通知する案内メッセージを生成する。なお、ここでの案内メッセージとは、例えば、「次の交差点を左折する」ことや、「次の側道を走行して高速道路から出る」こと等を音声や画像で通知する情報であり、このような案内メッセージは、例えば、上記交差点や上記側道への入口から100m手前に到達した時点等、予め定められた提供時期に報知されることが予定されている。
【0122】
また、これらの案内メッセージには有効期限が設定されており、該メッセージを生成した時点を起点として所定時間(例えば3分)が経過した際や、自車両が該案内情報に係る交差点等の分岐点に到達した際には、有効期限が経過したものとみなされる。
【0123】
続くS1410では、制御部16は、運転負荷予測処理による運転負荷の予測結果に基づき、生成した案内メッセージの提供時期において、運転負荷が“大”と予測されているか否かを判定する。そして、肯定判定が得られた場合には(S1410:Yes)、S1415に処理を移行し、否定判定が得られた場合には(S1410:No)、本処理を終了する。
【0124】
S1415では、制御部16は、運転負荷予測処理による運転負荷の予測結果に基づき、提供時期が到来する前の時期であって、運転負荷が“小”と予測されている運転負荷低下時期をサーチし、生成した案内メッセージの提供時期を運転負荷低下時期に変更する。なお、提供時期が到来する前の時期に運転負荷低下時期が存在しない場合には、該提供時期を、提供時期の到来後における運転負荷低下時期に変更してもよい。そして、制御部16は、本処理を終了する。
【0125】
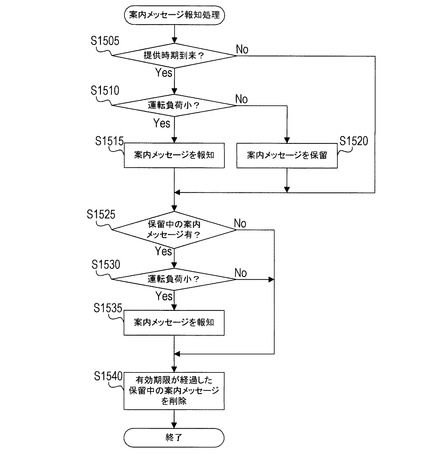
(14)案内メッセージ報知処理について
次に、予め定められたタイミングで案内メッセージを報知する案内メッセージ報知処理について、図15に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0126】
S1505では、制御部16は、生成した案内メッセージについての提供時期が到来したか否かを判定し、肯定判定が得られた場合には(S1505:Yes)、S1510に処理を移行し、否定判定が得られた場合には(S1505:No)、S1525に処理を移行する。
【0127】
S1510では、制御部16は、現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1510:Yes)、S1515に処理を移行し、否定判定が得られた場合には(S1510:No)、S1520に処理を移行する。
【0128】
S1515では、制御部16は、表示部11b,スピーカ11cを用いて提供時期が到来した案内メッセージを報知し、S1525に処理を移行する。
一方、S1520では、制御部16は、案内メッセージの報知を保留し、S1525に処理を移行する。
【0129】
S1525では、制御部16は、保留中の案内メッセージの有無を判定し、肯定判定が得られた場合には(S1525:Yes)、S1530に処理を移行し、否定判定が得られた場合には(S1525:No)、S1540に処理を移行する。
【0130】
S1530では、制御部16は、現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1530:Yes)、S1535に処理を移行し、否定判定が得られた場合には(S1530:No)、S1540に処理を移行する。
【0131】
S1535では、制御部16は、表示部11b,スピーカ11cを用いて保留中の案内メッセージを報知し、S1540に処理を移行する。
S1540では、制御部16は、保留中の案内メッセージのうち、有効期限が経過した案内メッセージを消去し、本処理を終了する。
【0132】
[効果]
本実施形態のナビゲーション装置10によれば、個人情報や運転操作に基づき、個々のドライバの運転技量が推定され、運転技量と、該ドライバの運転操作,自車両の状態,走行環境等に基づき、個々のドライバにとっての運転負荷が推定される。このため、ドライバの運転負荷を精度良く判定することができ、運転負荷が確実に低下した時期に各種メッセージを提供することができるため、ドライバに対しより確実に情報を伝えることができる。
【0133】
[他の実施形態]
(1)本実施形態のナビゲーション装置10では、年齢,運転歴や、運転操作からドライバの運転技量を判定しているが、運転技量の判定方法は、これに限定されることは無く、例えば、車内LAN70に接続された記憶装置から第三者により判定された運転技量を取得し、該運転技量に基づき運転負荷を推定しても良い。このような場合であっても、同様の効果を得ることができる。
【0134】
(2)また、本実施形態のナビゲーション装置10では、運転技量と、車速,舵角,前後方向或いは横方向の加速度等といった運転操作や自車両の状態と、静的環境や動的環境とに基づき、運転負荷を推定している。しかしながら、これに限定されることは無く、運転技量と、運転操作,自車両の状態,静的環境,動的環境のうちの少なくとも一つとに基づき運転負荷を推定しても良く、このような場合であっても、同様の効果を得ることができる。
【0135】
(3)また、本実施形態では、ナビゲーション装置10を例に挙げて本発明に係る情報提供装置について説明したが、これに限定されることは無く、該情報提供装置は、例えば、メータとして構成されていても良いし、ヘッドアップディスプレイの制御装置等として構成されていても良い。このような場合であっても、同様の効果を得ることができる。
【0136】
(4)また、本実施形態では、運転負荷データが地図データに含まれており、ナビゲーション装置10では、地図データ入力器15を介して運転負荷データが取得される。しかしながら、これに限定されることは無く、例えば、外部通信機12や、ハンズフリー装置30に接続された携帯電話31を介して外部サーバと通信を行い、該外部サーバから運転負荷データを取得しても良い。一方、該外部サーバでは、様々な運転手についての履歴情報を随時収集し、収集した履歴情報に基づき、より高い精度で運転負荷を推定した運転負荷データを生成しても良い。このような運転付加データを取得することにより、ナビゲーション装置10は、より高い精度で運転負荷を予測することができる。
【0137】
[特許請求の範囲との対応]
上記実施形態の説明で用いた用語と、特許請求の範囲の記載に用いた用語との対応を示す。
【0138】
ナビゲーション装置10が情報提供装置に相当する。
また、ナビゲーション装置10の制御部16のRAMが運転技量記憶手段に、地図データ入力器15が運転負荷データ取得手段に、センサ群13が生体情報検出手段に相当する。
【0139】
また、自車両の車速,舵角,シフトレバーの位置や、自車両の前後方向の加速度,横方向の加速度等が運転操作に関する情報に相当する。
また、道路の種別(高速道路か一般道路か),車線の数,道幅,道路の形状や、交差点,繁華街等といった走行中の場所等といった静的環境と、自車両周辺の混雑度合い,天候等の動的環境が走行環境に相当する。
【0140】
また、運転操作負荷判定処理のS1005,S1015,S1025,S1030,S1035や、静的環境負荷判定処理のS1105,S1115,S1120,S1125が運転情報検出手段に相当する。
【0141】
また、運転操作負荷判定処理のS1010,S1020,S1040や、静的環境負荷判定処理のS1110,S1130が負荷推定手段に相当する。
また、メッセージ報知処理のS1225,S1245や、案内メッセージ報知処理のS1515,S1535が提供手段に相当する。
【0142】
また、個人情報判別処理のS410,S420,S430が、請求項2における運転技量判別手段に相当する。
また、運転操作判別処理のS530,S540,S545が、請求項3における運転技量判別手段に相当する。
【0143】
また、案内メッセージが提供時期設定メッセージに相当し、運転負荷予測処理のS1305が経路予測手段に、運転負荷予測処理のS1315,S1320が負荷予測手段に、案内メッセージ生成処理のS1410,S1415が変更手段に、情報提供処理のS220が履歴情報生成手段に相当する。
【0144】
また、メッセージ放置処理のS1250や案内メッセージ報知処理のS1540が、有効期限判別手段に相当する。
【符号の説明】
【0145】
10…ナビゲーション装置、11a…操作部、11b…表示部、11c…スピーカ、12…外部通信機、13…センサ群、14…記憶部、15…地図データ入力器、16…制御部、17…位置検出器、17a…GPS受信器、17b…ジャイロスコープ、17c…距離センサ、18…車内LAN通信部、19…レーダ、20…メータECU、30…ハンズフリー装置、31…携帯電話、40…パワートレインECU、50…ステアリングECU、60…オーディオ、70…車内LAN、100…制御プログラム、110…情報提示機能群、120…情報取得部、130…報知制御部、140…運転負荷推定部、150…運転技量判定部、160…画面出力部、170…音声出力部。
【技術分野】
【0001】
本発明は、車載用の情報提供装置に関する。
【背景技術】
【0002】
経路案内情報や交通情報を提供するナビゲーション装置や、自車両周辺の歩行者や他の車両についての情報を提供し、安全運転を支援する運転支援装置等が知られている。また、これら以外にも、ニュース,天気予報,観光情報,各種施設に関する情報等、利便性や娯楽性を高めるための情報を提供する車載装置が知られており、このような装置を用いることで、より安全で快適な運転を行うことや、ドライブをより楽しむことが可能となる。
【0003】
しかしながら、混雑している道路を走行している時や交差点を通過している時等、運転負荷が上昇している時に情報が提供されても、ドライバは提供された情報を理解できず、情報が十分に伝わらないというおそれがある。
【0004】
そこで、特許文献1には、自車両の挙動や運転操作等に基づきドライバの運転負荷を判別し、運転負荷が低下した時期に情報を提供することで、ドライバに対して確実に情報を伝える車両用情報提供装置について記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−87111号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、例えば、初心者とベテランのドライバでは、同じ条件の下で車両を運転する場合であっても各自にとっての運転の難易度は大きく異なっており、個々のドライバの運転負荷は運転技量に応じて大きく異なるものとなる。これに対し、特許文献1に記載の情報提供装置では、個々のドライバの運転技量を考慮することなく、車両の挙動等に基づき運転負荷が一律に判別されているため、運転負荷を判別する精度が悪く、ドライバに十分に情報が伝わらない場合があった。
【0007】
本願発明は上記課題に鑑みてなされたものであり、ドライバに対しより確実に情報を伝えることができる車載用の情報提供装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題に鑑みてなされた請求項1に記載の情報提供装置は、ドライバの運転技量を記憶している運転技量記憶手段と、ドライバが運転する自車両の運転操作に関する情報と、自車両の走行環境に関する情報とのうちの少なくとも一つを運転情報として検出する運転情報検出手段と、を備えることを特徴とする。また、これらに加え、運転技量記憶手段に記憶されている運転技量と、運転情報検出手段により検出された運転情報とに基づき、ドライバにとっての運転の難易度を示す現在の運転負荷を推定する負荷推定手段と、負荷推定手段により推定された現在の運転負荷が低い時期に各種メッセージを提供する提供手段と、を備えることを特徴とする。
【0009】
なお、運転技量とは、自車両を運転する個々のドライバに関するものであるため、個々のドライバを識別する情報と該ドライバの運転技量とを対応付けた状態で運転技量記憶手段に記憶させておき、負荷推定手段は、現在のドライバについての運転技量を運転技量記憶手段から読み出し、該ドライバの運転負荷を推定しても良い。
【0010】
このような構成によれば、個々のドライバの運転技量を考慮して運転負荷が推定されるため、運転負荷を精度良く推定することができ、運転負荷が確実に低下した時期に各種メッセージを提供することができる。したがって、ドライバに対しより確実に情報を伝えることができるのである。
【0011】
なお、情報提供装置は、次のようにしてドライバの運転技量を判別しても良い。
すなわち、請求項2に記載されているように、情報提供装置は、ドライバの年齢、或いは、運転経験の長さのうちの少なくとも一方に基づき該ドライバの運転技量を判別し、該運転技量を運転技量記憶手段に記憶する運転技量判別手段をさらに備えていても良い。
【0012】
こうすることにより、簡易かつ確実にドライバの運転技量を判別することができる。
また、請求項3に記載されているように、情報提供装置は、ドライバによる自車両の運転操作に基づき該ドライバの運転技量を判別し、該運転技量を運転技量記憶手段に記憶する運転技量判別手段をさらに備えていても良い。
【0013】
こうすることにより、より正確にドライバの運転技量を判別することができる。
また、自車両の故障に関する情報等といった緊急度の高い情報については、運転負荷に関らずドライバに通知したほうが良いと考えられる。
【0014】
そこで、請求項4に記載の情報提供装置では、提供手段は、メッセージのうち緊急度の高いものについては、現在の運転負荷に関らず提供する。
こうすることにより、ドライバは、自車両の故障等への対処を迅速に行うことが可能となる。
【0015】
ところで、例えば、ナビゲーション装置における経路案内では、交差点等の分岐点の手前で、「次の交差点を左折します」等といった自車両の進行方向を告げるメッセージが提供される場合があるが、交差点の50m手前で該メッセージを提供するといった具合に、このようなメッセージは提供時期が予め定められている。そして、このようなメッセージの提供が予定されている時期においてドライバの運転負荷が高くなる場合も想定される。
【0016】
そこで、請求項5に記載の情報提供装置では、予め定められた提供時期に提供されることが予定されているメッセージを提供時期設定メッセージとし、地図データに登録されている経路の中から自車両の走行予定経路を予測する経路予測手段と、自車両が走行予定経路を走行する際にドライバに生じる運転負荷である将来の運転負荷を予測する負荷予測手段と、を備える。また、負荷予測手段により予測された将来の運転負荷に基づき、提供時期設定メッセージに係る提供時期にドライバに生じる運転負荷がどの程度であるかを判定し、該運転負荷が高い場合には該提供時期を変更する変更手段と、を備え、提供手段は、提供時期設定メッセージに係る提供時期が到来した後、現在の運転負荷が低い時期に、該提供時期設定メッセージを提供する。
【0017】
こうすることにより、ドライバの運転負荷に応じて柔軟にメッセージの提供が予定されている時期を変更することができ、利便性を損なうことなく、ドライバに対しより確実に情報を伝えることができる。
【0018】
ここで、将来の運転負荷の予測方法としては、次のようなものが考えられる。
すなわち、請求項6に記載されているように、情報提供装置は、負荷推定手段により推定された現在の運転負荷に基づき、地図データに登録されている経路を走行する際に生じたドライバの運転負荷の履歴情報を生成する履歴情報生成手段をさらに備え、負荷予測手段は、履歴情報生成手段により生成された、走行予定経路に対応する履歴情報に基づき、該走行予定経路を走行する際の将来の運転負荷を予測しても良い。
【0019】
なお、履歴情報とは、自車両を運転する個々のドライバに関するものであるため、個々のドライバを識別する情報と該ドライバの履歴情報とを対応付けておき、負荷予測手段は、現在のドライバに対応する履歴情報に基づき将来の運転負荷を予測しても良い。
【0020】
こうすることにより、正確に将来の運転負荷を予測することができる。
また、ドライバが自車両を運転した期間が短い場合等には、該ドライバが運転する自車両が走行した経路の数が少なく、走行予定経路に対応する該ドライバの履歴情報が生成されていないという可能性が高い。
【0021】
そこで、請求項7に記載の情報提供装置は、地図データに登録されている経路を構成する各道路について、車両が該道路を安全に走行した際に運転技量の異なるそれぞれのドライバに生じる運転負荷を示す運転負荷データを取得する運転負荷データ取得手段をさらに備え、負荷予測手段は、運転技量判別手段により判別されたドライバの運転技量と運転負荷データとに基づき、該ドライバが運転する自車両が走行予定経路を走行する際の将来の運転負荷を予測する。
【0022】
こうすることにより、走行予定経路に対応する履歴情報が生成されていない場合であっても、該走行予定経路を走行する際の将来の運転負荷を予測することが可能となる。
また、ドライバが疲労している場合等には、認知や判断を行う能力が低下するため、運転の難易度が向上し、同じ条件下の運転であっても、正常な場合と比べて運転負荷が増加すると考えられる。
【0023】
そこで、請求項8に記載の情報提供装置は、ドライバの生体情報を検出する生体情報検出手段をさらに備え、負荷推定手段は、生体情報検出手段により検出されたドライバの生体情報をさらに加味して、該ドライバの現在の運転負荷を推定する。
【0024】
こうすることにより、運転負荷を推定する精度を向上させることができ、ドライバに対しより確実に情報を伝えることが可能となる。
ところで、既に述べたように、情報提供装置は運転負荷が低い時期にメッセージを提供するため、運転負荷が高い場合にメッセージとして提供する情報の検出や取得等がなされた場合には、該情報に基づくメッセージの提供を保留し、運転負荷が低くなった時に保留されているメッセージを提供することが考えられる。
【0025】
また、情報提供装置から提供されるメッセージとして、例えば、経路案内において、分岐点の手前で自車両の進行方向を告げるメッセージや、渋滞情報や事故情報等といった特定の道路に関するメッセージ等が考えられる。そして、このようなメッセージに関しては、保留中に自車両がメッセージに係る分岐点を通過した場合や、走行する道路が変わった場合等には、メッセージの内容が自車両の運転に適合しないものとなってしまう。
【0026】
そこで、請求項9に記載の情報提供装置では、メッセージには有効期限が設定されており、メッセージに設定された有効期限が経過したか否かを判別する有効期限判別手段をさらに備え、提供手段は、有効期限判別手段により有効期限が経過していないと判別されたメッセージを提供する。
【0027】
こうすることにより、自車両の運転に適合しないメッセージが提供されることを防ぐことができる。
【図面の簡単な説明】
【0028】
【図1】車載システムの構成を示すブロック図と、ナビゲーション装置の構成を示すブロック図である。
【図2】ナビゲーション装置を制御する制御プログラムの構成を示すブロック図である。
【図3】情報提供処理のフローチャートである。
【図4】経路データと履歴情報についての説明図である。
【図5】運転技量判定処理と個人情報判定処理のフローチャートである。
【図6】運転操作判定処理のフローチャートである。
【図7】加減速操作評価処理とハンドル操作評価処理のフローチャートである。
【図8】運転負荷推定処理のフローチャートである。
【図9】ドライバ状態判定処理のフローチャートである。
【図10】運転操作負荷判定処理のフローチャートである。
【図11】静的環境負荷判定処理のフローチャートである。
【図12】メッセージ報知処理のフローチャートである。
【図13】運転負荷予測処理のフローチャートと、運転負荷データについての説明図である。
【図14】案内メッセージ生成処理のフローチャートである。
【図15】案内メッセージ報知処理のフローチャートである。
【発明を実施するための形態】
【0029】
以下、本発明の実施形態について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0030】
[構成の説明]
図1(a)は、CAN等の車内LAN70を介して接続されたナビゲーション装置10,メータECU20等から構成される本実施形態の車載システムの構成を示すブロック図である。車載システムは、経路案内を行うと共に、自車両のドライバの運転負荷が低い時期に各種情報を提供するよう構成されたナビゲーション装置10と、メータを制御するメータECU20等を有している。また、車載システムは、携帯電話31と無線通信を行い、スピーカやマイクを利用してハンズフリー通話を実現するハンズフリー装置30と、自車両のエンジンや変速機を制御するパワートレインECU40と、ドライバのハンドル操作に応じて自車両の舵角を制御するステアリングECU50と、テレビ放送やラジオ放送の受信が可能なオーディオ60等を有している。
【0031】
次に、車載システムを構成するナビゲーション装置10の構成について、図1(b)を用いて説明する。ナビゲーション装置10は、操作部11a,表示部11b,スピーカ11c,外部通信機12,センサ群13,記憶部14,地図データ入力器15,制御部16,位置検出器17,車内LAN通信部18,レーダ19等から構成されている。
【0032】
操作部11aは、ユーザからの各種指示を受け付ける部位であり、具体的にはメカニカルなキースイッチや、タッチスイッチ等から構成される。
また、表示部11bは、各種表示を行う部位であり、具体的にはLCDや有機EL等から構成される。
【0033】
また、スピーカ11cは、制御部16から入力された信号に基づき音声を出力する部位である。
また、外部通信機12は、路側に設置された光ビーコンや電波ビーコン等を介してVICSの情報センタから交通情報(事故情報や渋滞情報等)を取得する。また、FM多重放送によって送信される交通情報も取得する。
【0034】
また、センサ群13は、ドライバの生体情報を検出するための部位であり、ハンドルにおける把握位置に取り付けられた血圧センサや、該把握位置に取り付けられ、ハンドルを握るドライバの手の状態を検出する感圧センサや、ドライバの顔を撮影するカメラや、ドライバの体温を検出する赤外線センサ等から構成されている。
【0035】
また、記憶部14は、記憶保持動作が不要なデバイス(例えば、HDD)から構成され、各種情報を記憶することができる。
また、地図データ入力器15は、経路案内等を行う際に使用する地図データや、所定の施設を検索する際に用いる施設検索情報等の各種データを入力するための装置である。これらのデータの記憶媒体としては、そのデータ量が膨大であるため、DVD−ROMやHDDを用いるのが一般的である。
【0036】
また、制御部16は、CPU、ROM、RAM、I/O及びこれらを接続するバスライン等からなる周知のマイクロコンピュータを中心に構成される。制御部16は、ROMに記憶されているプログラムや、RAMにロードされたプログラムに従いナビゲーション装置10の各部位を制御する。
【0037】
また、位置検出器17は、GPS(Global Positioning System)用の人工衛星からの信号を、図示しないGPSアンテナを介して受信して車両の位置、方位、速度等を検出するGPS受信器17aと、車両に加えられる回転運動の大きさを検出するジャイロスコープ17bと、車両の前後方向の加速度等から走行した距離を検出する距離センサ17cとを備えている。そして、これらは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0038】
また、車内LAN通信部18は、車内LAN70を介して種々の情報の送受信を行う部位である。
また、レーダ19は、車両や歩行者等といった自車両周辺の障害物を検出する部位である。
【0039】
次に、ナビゲーション装置10を制御する制御プログラム100の構成について、図2に記載のブロック図を用いて説明する。
制御プログラム100は、ドライバに提供するメッセージを生成する情報提示機能群110と、ドライバや自車両の状態や走行環境に関する情報を取得する情報取得部120と、ドライバの運転技量を判定する運転技量判定部150と、運転技量に応じてドライバの運転負荷を算出する運転負荷推定部140とを有する。また、運転負荷が低下した際にドライバにメッセージを報知する報知制御部130と、表示部11bに各種画像を表示することでメッセージを出力する画面出力部160と、スピーカ11cを介して音声によりメッセージを出力する音声出力部170とを有する。
【0040】
なお、情報提示機能群110は、地図データや自車両の現在地等に基づき経路案内に関するメッセージを生成すると共に、VICSの交通情報に基づくメッセージを生成するよう構成されている。また、車内LAN70を介して他の装置と通信を行い、車両の故障情報,交通情報,ニュース,携帯電話31への着呼やメールの着信等の各種情報を取得し、これらの情報に基づくメッセージを生成するよう構成されている。
【0041】
また、情報取得部120は、例えば、操作部11aを介して受け付けた操作や、キーレスエントリシステムを構成する携帯機(図示なし)から取得した情報に基づき、ドライバの年齢,運転歴等、ドライバに関する情報を特定するよう構成されている。また、車内LAN70を介して他の装置と通信を行い、運転操作に関する情報や、自車両の状態に関する情報や、車両の走行環境に関する情報を取得するよう構成されている。また、センサ群13により、ドライバの生体情報を検出するよう構成されている。
【0042】
[動作の説明]
次に、本実施形態のナビゲーション装置10の動作について説明する。ナビゲーション装置10は、自車両を運転する各ドライバの運転技量を判定すると共に、該運転技量と、自車両の運転操作,自車両の状態,走行環境に基づき、各ドライバにとっての運転の難易度である運転負荷を個別に推定する。そして、推定された運転負荷が低い時期に、経路案内に関するメッセージや、他の装置から取得した各種情報に基づくメッセージを提供するよう構成されている。以下では、該ナビゲーション装置10の動作について、フローチャートを用いて詳細に説明する。
【0043】
(1)情報提供処理について
まず、自車両を運転する個々のドライバの運転負荷を推定すると共に、運転負荷が低い時期に各種メッセージを提供するよう、メッセージの提供タイミングの遅延や繰り上げを行う情報提供処理について、図3に記載のフローチャートを用いて説明する。なお、本処理は、自車両の運転中に定期的に実行される処理である。
【0044】
S205では、ナビゲーション装置10の制御部16は、自車両のドライバの運転技量を判定する運転技量判定処理を行い、S210に処理を移行する。
S210では、制御部16は、ドライバの運転技量や、自車両の運転操作,自車両の状態,走行環境に基づき、該ドライバの運転負荷を、大,中,小の三段階で推定する運転負荷推定処理を行い、S215に処理を移行する。
【0045】
S215では、制御部16は、運転負荷に応じたタイミングでドライバに対し各種メッセージを提供するメッセージ報知処理を行い、S220に処理を移行する。
S220では、制御部16は、地図データに登録されている経路を自車両が走行する際に生じたドライバの運転負荷の履歴情報を更新する。
【0046】
ここで、履歴情報について、図4を用いて説明する。ナビゲーション装置10で用いられる地図データは、複数のノードとノード間を結ぶリンクとにより経路を表す経路データを有しており、各リンクには固有のIDが付されている(図4(a)参照)。そして、履歴情報は、自車両を運転するドライバ毎に設けられており、リンクIDと、該リンクIDが示す経路を走行した際に推定されたドライバの運転負荷とから構成されている。なお、図4(b)には、特定のドライバについての履歴情報の一例を示す表が記載されている。
【0047】
そして、自車両が各リンクに対応する経路の走行を完了すると、制御部16は、該経路の走行中に推定された運転負荷を平均化したものを特定する。具体的には、大,中,小の運転負荷の各段階を数値化すると共に、該経路を走行中に推定された運転負荷の数値の平均値を算出し、該平均値に基づき、該経路を走行中の運転負荷を大,中,小のいずれかに判定しても良い。また、大,中,小の各段階のうち、該経路を走行中に推定された時間が最も長い段階を、該経路を走行中の運転負荷としても良い。そして、現在のドライバに対応する履歴情報に対し、走行を完了した経路のリンクIDに対応付けて特定した運転負荷を設定することで、履歴情報を更新する。
【0048】
続くS225では、制御部16は、経路案内を実行中であるか否かを判定し、肯定判定が得られた場合には(S225:Yes)、S230に処理を移行し、否定判定が得られた場合には(S225:No)、本処理を終了する。なお、ナビゲーション装置10は、ドライバ等により行われた操作に応じて目的地までの経路案内を行っても良いし、自車両が予め登録された通勤経路等を走行中であると判定した際に、自発的に該経路に沿って走行するための経路案内を行っても良い。
【0049】
S230では、制御部16は、これから先にドライバに生じる運転負荷を予測する運転負荷予測処理を行い、S235に処理を移行する。
S235では、制御部16は、予め定められたタイミングで自車両の進路等を通知する案内メッセージを生成する案内メッセージ生成処理を行い、S240に処理を移行する。
【0050】
S240では、制御部16は、予め定められたタイミングで案内メッセージを通知する案内メッセージ報知処理を行い、本処理を終了する。
(2)運転技量判定処理について
次に、ドライバの運転技量を、高,中,低の三段階で判定する運転技量判定処理について、図5(a)に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0051】
S305では、制御部16は、現在のドライバが初めて自車両を運転する場合等、該ドライバの運転技量が未判定の状態であるか否かを判定し、肯定判定が得られた場合には(S305:Yes)、S310に処理を移行すると共に、否定判定が得られた場合には(S305:No)、S315に処理を移行する。
【0052】
S310では、制御部16は、ドライバの個人情報に基づき該ドライバの運転技量を判定する個人情報判定処理を行い、本処理を終了する。
一方、S315では、制御部16は、運転操作に基づきドライバの運転技量を判定する運転操作判定処理を行い、本処理を終了する。
【0053】
(3)個人情報判定処理について
次に、個人情報に基づきドライバの運転技量を、高,中,低の三段階で判定する個人情報判定処理について、図5(b)に記載のフローチャートを用いて説明する。なお、本処理は、運転技量判定処理からコールされるサブルーチンとして構成されている。
【0054】
S405では、制御部16は、ドライバの個人情報に基づき、該ドライバの年齢が65歳以上か否かを判定し、肯定判定が得られた場合には(S405:Yes)、S410に処理を移行し、否定判定が得られた場合には(S405:No)、S415に処理を移行する。
【0055】
S410では、制御部16は、運転技量を“低”と判定し、本処理を終了する。
S415では、制御部16は、ドライバの個人情報に基づき、該ドライバの運転経験年数(運転歴と記載)が1年未満か否かを判定する。そして、肯定判定が得られた場合には(S415:Yes)、S420に処理を移行し、否定判定が得られた場合には(S415:No)、S425に処理を移行する。
【0056】
S420では、制御部16は、運転技量を“低”と判定して判定結果をRAMに記憶し、本処理を終了する。
S425では、制御部16は、ドライバの個人情報に基づき、該ドライバの運転歴が5年未満か否かを判定する。そして、肯定判定が得られた場合には(S425:Yes)、S430に処理を移行し、否定判定が得られた場合には(S425:No)、S435に処理を移行する。
【0057】
S430では、制御部16は、運転技量を“中”と判定して判定結果をRAMに記憶し、本処理を終了する。
一方、S435では、制御部16は、運転技量を“高”と判定して判定結果をRAMに記憶し、本処理を終了する。
【0058】
(4)運転操作判定処理について
次に、運転操作に基づきドライバの運転技量を、高,中,低の三段階で判定する運転操作判定処理について、図6に記載のフローチャートを用いて説明する。なお、本処理は、運転技量判定処理からコールされるサブルーチンとして構成されている。
【0059】
S505では、制御部16は、自車両を加減速させる操作について評価する加減速操作評価処理を行い、S510に処理を移行する。
S510では、制御部16は、自車両のハンドル操作について評価するハンドル操作評価処理を行い、S515に処理を移行する。
【0060】
S515では、制御部16は、現在のドライバの運転操作についての評価期間が十分であるか否かを判定する。具体的には、現在のドライバが自車両を運転した期間が所定の閾値(例えば5時間)を超えるか否かを判定し、肯定判定が得られた場合には(S515:Yes)、S520に処理を移行し、否定判定が得られた場合には(S515:No)、本処理を終了する。
【0061】
S520では、制御部16は、自車両を加減速させる操作についての評価結果と、ハンドル操作についての評価結果を集計する。具体的には、各操作について定期的なタイミングで○,×の二段階で評価がなされるが(詳細は後述する)、○,×の数を集計しても良いし、各段階を数値化し、評価結果の平均値を算出しても良い。そして、S525に処理を移行する。
【0062】
S525では、制御部16は、集計結果に基づき、各操作についての評価結果が共に良好であるか否かを判定する。具体的には、○,×の数を集計した場合であれば、○の数が所定値を超える場合には、評価結果が良好であると判定しても良いし、各段階の評価を数値化したものの平均値を算出した場合であれば、該平均値が所定値を超える場合には、評価結果が良好であると判定しても良い。そして、肯定判定が得られた場合には(S525:Yes)、S530に処理を移行し、否定判定が得られた場合には(S525:No)、S535に処理を移行する。
【0063】
S530では、制御部16は、ドライバの運転技量を“高”と判定して判定結果をRAMに記憶し、本処理を終了する。
S535では、制御部16は、同様にして、一方の操作についての評価結果が良好であるか否かを判定し、肯定判定が得られた場合には(S535:Yes)、S540に処理を移行し、否定判定が得られた場合には(S535:No)、S545に処理を移行する。
【0064】
S540では、制御部16は、ドライバの運転技量を“中”と判定して判定結果をRAMに記憶し、本処理を終了する。
一方、S545では、制御部16は、ドライバの運転技量を“低”と判定して判定結果をRAMに記憶し、本処理を終了する。
【0065】
(5)加減速操作評価処理について
次に、自車両を加減速させる操作について、“○”,“×”の二段階で評価する加減速操作評価処理について、図7(a)に記載のフローチャートを用いて説明する。なお、本処理は、運転操作判定処理からコールされるサブルーチンとして構成されている。
【0066】
S605では、制御部16は、自車両周辺の静的環境や動的環境に基づき、安全運転を行う上で要求される加速度の上限値,下限値を設定する。
ここで、静的環境とは、例えば、走行中の道路の種別(高速道路か一般道路か),車線の数,道幅,道路の形状や、交差点,繁華街等といった走行中の場所等、頻繁に変化しない走行環境のことであり、制御部16は、地図データに基づき、このような静的環境を判別しても良い。
【0067】
また、動的環境とは、例えば、自車両周辺の混雑度合いや天候等、時間帯等によって動的に変化する走行環境のことであり、制御部16は、レーダ19を用いて車両や歩行者等の障害物を検出することや、外部から取得した交通情報や天候情報に基づき、動的環境について判別しても良い。
【0068】
なお、例えば、道路の道幅が狭い場合や、繁華街を走行中である場合や、渋滞中の道路を走行している場合や、悪天候の場合等、静的環境や動的環境に基づき運転の難易度が高いと判定された場合には、安全運転を行う上で要求される加速度の上限値がより低く、下限値がより高く設定されることは言うまでも無い。また、このような加速度の上限値,下限値を示すデータ(教師データ)は、記憶部14に記憶されている。
【0069】
続くS610では、制御部16は、車内LAN70を介してメータECU20から取得した自車両の車速に基づき前後方向の加速度を計測し、S615に処理を移行する。
S615では、制御部16は、計測された加速度と、加速度の上限値,下限値に基づき、急加速や急減速がなされたか否かを判定する。なお、計測された加速度が上限値を超える場合には、急加速とみなされ、該加速度が下限値を下回る場合には、急減速とみなされる。そして、肯定判定が得られた場合には(S615:Yes)、S625に処理を移行し、否定判定が得られた場合には(S615:No)、S620に処理を移行する。
【0070】
S620では、制御部16は、判定結果を“○”とし、本処理を終了する。
一方、S625では、制御部16は、判定結果を“×”とし、本処理を終了する。
(6)ハンドル操作評価処理について
次に、ハンドル操作について“○”,“×”の二段階で評価するハンドル操作評価処理について、図7(b)に記載のフローチャートを用いて説明する。なお、本処理は、運転操作判定処理からコールされるサブルーチンとして構成されている。
【0071】
S705では、制御部16は、地図データに基づき、自車両が現在走行中の道路の形状を特定し、S710に処理を移行する。
S710では、制御部16は、特定した道路の形状に基づき、安全運転を行う上で要求される舵角の目標値と横方向の加速度の目標値を設定し、S715に処理を移行する。なお、このような舵角や加速度の目標値を示すデータ(教師データ)は、記憶部14に記憶されている。
【0072】
S715では、制御部16は、車内LAN70を介してステアリングECU50から現在の舵角を取得すると共に、該舵角と、車内LAN70を介して取得した現在の車速とに基づき、自車両の横方向の加速度を計測し、S720に処理を移行する。なお、制御部16は、図示しない加速度センサにより、横方向の加速度を計測しても良い。
【0073】
S720では、制御部16は、自車両の舵角と横方向の加速度に関して、それぞれ、目標値と現在の値との差分を算出し、該差分が、予め定められた閾値以下であるか否かを判定する。そして、肯定判定が得られた場合には(S720:Yes)、S725に処理を移行し、否定判定が得られた場合には(S720:No)、S730に処理を移行する。
【0074】
S725では、制御部16は、判定結果を“○”とし、本処理を終了する。
一方、S730では、制御部16は、判定結果を“×”とし、本処理を終了する。
(7)運転負荷推定処理について
次に、ドライバの運転技量や、自車両の運転操作や、自車両の状態や、走行環境に基づき、該ドライバの運転負荷を、大,中,小の三段階で推定する運転負荷推定処理について、図8に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0075】
S805では、制御部16は、ドライバの運転技量が“高”であるか否かを判定し、肯定判定が得られた場合には(S805:Yes)、S810に処理を移行し、否定判定が得られた場合には(S805:No)、S815に処理を移行する。
【0076】
S810では、制御部16は、運転負荷の判定に用いられる各種閾値を設定するための閾値レベルを高レベルに設定し、S830に処理を移行する。
S815では、制御部16は、ドライバの運転技量が“中”であるか否かを判定し、肯定判定が得られた場合には(S815:Yes)、S820に処理を移行し、否定判定が得られた場合には(S815:No)、S825に処理を移行する。
【0077】
S820では、制御部16は、閾値レベルを中レベルに設定し、S830に処理を移行する。
一方、S825では、制御部16は、閾値レベルを低レベルに設定し、S830に処理を移行する。
【0078】
S830では、制御部16は、ドライバの生体情報に基づきドライバの疲労度や異常を検出し、検出結果に応じて閾値レベルを再設定するドライバ状態判定処理を行い、S835に処理を移行する。
【0079】
S835では、制御部16は、ドライバの運転技量と運転操作等に基づき該ドライバの運転負荷を判定する運転操作負荷判定処理を行い、S840に処理を移行する。
S840では、制御部16は、ドライバの運転技量が“高”であるか否かを判定し、肯定判定が得られた場合には(S840:Yes)、本処理を終了し、否定判定が得られた場合には(S840:No)、S845に処理を移行する。
【0080】
S845では、制御部16は、上述した静的環境に基づきドライバの運転負荷を判定する静的環境負荷判定処理を行い、本処理を終了する。
なお、静的環境に加えて、上述した動的環境に基づきドライバの運転負荷を判定しても良く、具体的には、例えば、レーダ19を用いて自車両周辺の混雑度合いを検出すると共に、該混雑度合いと運転技量の各段階に対応する閾値とを比較し、ドライバの運転技量に応じた運転負荷を推定しても良い。また、例えば、車内LAN70を介して天候情報を取得し、悪天候である場合には運転負荷を“大”と推定しても良い。
【0081】
(8)ドライバ状態判定処理について
次に、ドライバの生体情報に基づきドライバの疲労度や異常を検出し、検出結果に応じて閾値レベルを再設定するドライバ状態判定処理について、図9に記載のフローチャートを用いて説明する。なお、本処理は、運転負荷推定処理からコールされるサブルーチンとして構成されている。
【0082】
S905では、制御部16は、センサ群13を介して、ドライバの顔の画像や、ドライバの体温,血圧や、ハンドルを握るドライバの手の状態を検出し、S910に処理を移行する。
【0083】
S910では、制御部16は、センサ群13による検出結果に基づき、ドライバの体調や精神状態を判定する。
具体的には、撮影されたドライバの顔の画像と、予め用意されている該ドライバの顔の画像とを比較することで、現在のドライバの体調や精神状態を判別しても良い。また、ドライバの体温,血圧の変動に基づき、現在のドライバの体調等を判別しても良いし、ハンドルを握るドライバの手の動きから現在のドライバの体調等を判別しても良い。また、これらの判別結果から、総合的にドライバの体調や精神状態を判別しても良い。
【0084】
続くS915では、制御部16は、ドライバの体調や精神状態が不調であるか否かを判定し、肯定判定が得られた場合には(S915:Yes)、S920に処理を移行すると共に、否定判定が得られた場合には(S915:No)、本処理を終了する。
【0085】
S920では、制御部16は、閾値レベルを一段階下げ、本処理を終了する。
(9)運転操作負荷判定処理について
次に、ドライバの運転技量と、運転操作や自車両の状態に基づき、該ドライバの運転負荷を推定する運転操作負荷判定処理について、図10に記載のフローチャートを用いて説明する。なお、本処理は、運転負荷推定処理からコールされるサブルーチンとして構成されている。
【0086】
S1005では、制御部16は、車内LAN70を介して取得した自車両の車速に基づき、自車両が停車中であるか否かを判定する。そして、肯定判定が得られた場合には(S1005:Yes)、S1010に処理を移行し、否定判定が得られた場合には(S1005:No)、S1015に処理を移行する。
【0087】
S1010では、制御部16は、運転負荷を“小”と推定し、本処理を終了する。
S1015では、制御部16は、車内LAN70を介して取得した自車両の車速に基づき、自車両の前後方向の加速度を算出し、急激な加速或いは減速がなされたか否か(前後方向の加速度が、予め定められた上限値を超えるか、或いは下限値を下回るか否か)が判定される。
【0088】
なお、加速度の上限値,下限値としては、閾値レベルに対応する三種類の値が設けられており、閾値レベルが高レベルであるときは、三種類のうち、上限値に最大値が、下限値に最小値が用いられ、閾値レベルが下がるにつれ、上限値として用いられる値が低くなると共に、下限値として用いられる値が高くなる。
【0089】
そして、肯定判定が得られた場合には(S1015:Yes)、S1020に処理を移行し、否定判定が獲られた場合には(S1015:No)、S1025に処理を移行する。
【0090】
S1020では、制御部16は、運転負荷を“大”と推定し、本処理を終了する。
S1025では、制御部16は、車内LAN70を介して取得した車速や舵角に基づき自車両の横方向の加速度を計測し、該横方向の加速度が予め定められた閾値を超えるか否かを判定する。
【0091】
なお、横方向の加速度の閾値としては、閾値レベルに対応する三種類の値が設けられており、閾値レベルが高レベルであるときは、三種類のうちの最大値が用いられ、閾値レベルが下がるにつれ、用いられる値が小さくなる。
【0092】
そして、肯定判定が得られた場合には(S1025:Yes)、S1020に処理を移行し、否定判定が得られた場合には(S1025:No)、S1030に処理を移行する。
【0093】
S1030では、制御部16は、車内LAN70を介してパワートレインECU40からシフトレバーの位置情報を取得し、シフトレバーの位置がリバースに設定されているか否かを判定する。そして、肯定判定が得られた場合には(S1030:Yes)、S1020に処理を移行し、否定判定が得られた場合には(S1030:No)、S1035に処理を移行する。
【0094】
S1035では、制御部16は、車内LAN70を介して取得した舵角に基づき、自車両をUターンさせる操作がなされているか否かを判定する。そして、肯定判定が得られた場合には(S1035:Yes)、S1020に処理を移行し、否定判定が得られた場合には(S1035:No)、S1040に処理を移行する。
【0095】
S1040では、制御部16は、運転負荷を“小”と推定し、本処理を終了する。
(10)静的環境負荷判定処理について
次に、静的環境に基づきドライバの運転負荷を推定する静的環境負荷判定処理について、図11に記載のフローチャートを用いて説明する。なお、本処理は、運転負荷推定処理からコールされるサブルーチンとして構成されている。
【0096】
S1105では、制御部16は、地図データと現在地とに基づき、自車両が駐車場を走行中であるか否かを判定し、肯定判定が得られた場合には(S1105:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1105:No)、S1115に処理を移行する。
【0097】
S1110では、制御部16は、運転負荷を“大”と推定し、本処理を終了する。
S1115では、制御部16は、地図データと現在地とに基づき、自車両が有料道路の料金所付近であるか否かを判定し、肯定判定が得られた場合には(S1115:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1115:No)、S1120に処理を移行する。
【0098】
S1120では、制御部16は、地図データ,現在地と、車内LAN70を介して取得した舵角や、ウインカの操作状態等に基づき、自車両が交差点を右左折している最中か否かを判定する。そして、肯定判定が得られた場合には(S1120:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1120:No)、S1125に処理を移行する。
【0099】
S1125では、制御部16は、地図データに基づき、自車両が走行している道路の道幅が予め定められた閾値を下回るか否かを判定する。
なお、道幅の閾値としては、閾値レベルに対応する三種類の値が設けられており、閾値レベルが高レベルであるときは、三種類のうちの最小値が用いられ、閾値レベルが下がるにつれ、用いられる値が大きくなる。
【0100】
そして、肯定判定が得られた場合には(S1125:Yes)、S1110に処理を移行し、否定判定が得られた場合には(S1125:No)、S1130に処理を移行する。
【0101】
S1130では、制御部16は、運転負荷を“小”と推定し、本処理を終了する。
(11)メッセージ報知処理について
次に、運転負荷に応じたタイミングでドライバに対し各種メッセージを報知するメッセージ報知処理について、図12に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0102】
S1205では、制御部16は、ドライバに報知する各種メッセージを生成する。
具体的には、制御部16は、例えば、地図データに基づき自車両を目的地に誘導するための案内メッセージを生成しても良いし、外部通信機12を介して取得した情報に基づき、渋滞情報や事故情報等、特定の道路区間についての交通情報に関するメッセージを生成しても良い。また、制御部16は、例えば、地図データから走行中の道路や場所等の静的環境に関する情報を取得し、これに基づきドライバの注意を喚起する警告メッセージを生成しても良いし、レーダ19を介して自車両周辺の車両,歩行者等の動的環境を検出し、検出結果に基づき、事故の危険性について警告する警告メッセージを生成しても良い。
【0103】
また、制御部16は、例えば、車内LAN70を介して、自車両の故障情報,燃料の残量や、車速,ステアリング操作,シートベルト着用の有無,ドアの開閉状態等を示す情報を取得し、運転操作や自車両の状態に関する警告メッセージを生成しても良い。
【0104】
また、制御部16は、例えば、地図データ入力器15から入力された施設検索情報に基づき、各種施設に関するメッセージを生成しても良い。また、制御部16は、例えば、車内LAN70を介して、オーディオ60が受信したニュース,天気予報や、携帯電話31が受信した観光情報,各種施設に関する情報や、携帯電話31への着呼やメール着信を通知する情報等を取得し、これらに基づくメッセージを生成しても良い。
【0105】
なお、これらのメッセージのうち、例えば、自車両の故障や、事故の危険性等についての警告メッセージは緊急度の高いメッセージとなっていても良い。また、例えば、特定の道路区間に関する交通情報に基づくメッセージや、静的環境や動的環境に関するメッセージには有効期限が設定されており、該メッセージに係る情報を取得した時点や、該メッセージを生成した時点を起点として所定時間(例えば3分)が経過した際には、該メッセージの有効期限が経過したものとみなされる。
【0106】
続くS1210では、制御部16は、S1205にて生成されたメッセージの有無を判定し、肯定判定が得られた場合には(S1210:Yes)、S1215に処理を移行し、否定判定が得られた場合には(S1210:No)、S1235に処理を移行する。
【0107】
S1215では、制御部16は、生成されたメッセージが緊急度の高いメッセージかどうかを判定し、肯定判定が得られた場合には(S1215:Yes)、S1225に処理を移行し、否定判定が得られた場合には(S1215:No)、S1220に処理を移行する。
【0108】
S1220では、制御部16は、推定された現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1220:Yes)、S1225に処理を移行し、否定判定が得られた場合には(S1220:No)、S1230に処理を移行する。
【0109】
S1225では、制御部16は、表示部11bやスピーカ11cを介して生成されたメッセージを報知し、S1235に処理を移行する。
S1230では、制御部16は、生成されたメッセージの報知を保留し、S1235に処理を移行する。
【0110】
S1235では、制御部16は、保留中のメッセージの有無を判定し、肯定判定が得られた場合には(S1235:Yes)、S1240に処理を移行し、否定判定が得られた場合には(S1235:No)、S1250に処理を移行する。
【0111】
S1240では、制御部16は、推定された現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1240:Yes)、S1245に処理を移行し、否定判定が得られた場合には(S1240:No)、S1250に処理を移行する。
【0112】
S1245では、制御部16は、表示部11bやスピーカ11cを介して保留中のメッセージを報知し、S1250に処理を移行する。
S1250では、制御部16は、保留中のメッセージのうち、有効期限が経過したメッセージを消去し、本処理を終了する。
【0113】
(12)運転負荷予測処理について
次に、ドライバに生じる運転負荷を予測する運転負荷予測処理について、図13(a)に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0114】
S1305では、制御部16は、走行予定経路を予測する。具体的には、ドライバ等により設定された目的地までの経路案内が行われている場合であれば、経路案内に係る経路を走行予定経路として予測しても良い。また、予め登録された通勤経路等を走行中であると判定された場合には、該経路を走行予定経路として予測しても良い。そして、制御部16は、S1310に処理を移行する。
【0115】
S1310では、制御部16は、現在のドライバの履歴情報において、走行予定経路を構成する全てのリンクに対応する運転負荷が設定されているか否かを判定し、肯定判定が得られた場合には(S1310:Yes)、S1315に処理を移行し、否定判定が得られた場合には(S1310:No)、S1320に処理を移行する。
【0116】
S1315では、制御部16は、現在のドライバの履歴情報において、走行予定経路を構成する各リンクに対応する運転負荷(“大”,“中”,“小”の三段階)を、該リンクに対応する道路を走行する際に生じる該ドライバの運転負荷として予測し、本処理を終了する。
【0117】
一方、S1320では、制御部16は、地図データに含まれている運転負荷データに基づき、走行予定経路を走行する際に生じる運転負荷を予測する。
ここで、運転負荷データについて説明する。運転負荷データとは、地図データに登録されている経路を走行する際に生じる運転負荷を予め推定した推定結果を示すものである。
【0118】
既に述べたように、地図データは、複数のノードとノード間を結ぶリンクとにより経路を表す経路データを有しており、各リンクには固有のIDが付されている(図4(a)参照)。また、各リンクに対応する道路の形状,道幅,種別(高速道路か一般道路か等)や、該道路がどのような場所に設けられているか等の静的環境に基づき、該道路を安全に走行する際に生じる運転負荷(換言すれば、該道路を走行する際に規範となる運転操作が行われた場合の運転負荷)を、運転技量に応じて推定することができる。そして、運転負荷データでは、地図データに登録されている各リンクに対応する道路について、運転技量毎に、上述の如く推定された運転負荷(“大”,“中”,“小”の三段階)が設定されている(図13(b)参照)。
【0119】
そして、制御部16は、走行予定経路に対応するリンクIDを特定すると共に、ドライバの運転技量と運転負荷データとに基づき、各リンクに対応する運転負荷を特定し、特定した運転負荷を、現在のドライバが走行予定経路を走行する際に生じる運転負荷とするのである。
【0120】
運転負荷を予測した後、制御部16は、本処理を終了する。
(13)案内メッセージ生成処理について
次に、予め定められたタイミングで自車両の進路等を通知する案内メッセージを生成する案内メッセージ生成処理について、図14に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0121】
S1405では、制御部16は、予め定められたタイミングで自車両の進路等を通知する案内メッセージを生成する。なお、ここでの案内メッセージとは、例えば、「次の交差点を左折する」ことや、「次の側道を走行して高速道路から出る」こと等を音声や画像で通知する情報であり、このような案内メッセージは、例えば、上記交差点や上記側道への入口から100m手前に到達した時点等、予め定められた提供時期に報知されることが予定されている。
【0122】
また、これらの案内メッセージには有効期限が設定されており、該メッセージを生成した時点を起点として所定時間(例えば3分)が経過した際や、自車両が該案内情報に係る交差点等の分岐点に到達した際には、有効期限が経過したものとみなされる。
【0123】
続くS1410では、制御部16は、運転負荷予測処理による運転負荷の予測結果に基づき、生成した案内メッセージの提供時期において、運転負荷が“大”と予測されているか否かを判定する。そして、肯定判定が得られた場合には(S1410:Yes)、S1415に処理を移行し、否定判定が得られた場合には(S1410:No)、本処理を終了する。
【0124】
S1415では、制御部16は、運転負荷予測処理による運転負荷の予測結果に基づき、提供時期が到来する前の時期であって、運転負荷が“小”と予測されている運転負荷低下時期をサーチし、生成した案内メッセージの提供時期を運転負荷低下時期に変更する。なお、提供時期が到来する前の時期に運転負荷低下時期が存在しない場合には、該提供時期を、提供時期の到来後における運転負荷低下時期に変更してもよい。そして、制御部16は、本処理を終了する。
【0125】
(14)案内メッセージ報知処理について
次に、予め定められたタイミングで案内メッセージを報知する案内メッセージ報知処理について、図15に記載のフローチャートを用いて説明する。なお、本処理は、情報提供処理から起動される。
【0126】
S1505では、制御部16は、生成した案内メッセージについての提供時期が到来したか否かを判定し、肯定判定が得られた場合には(S1505:Yes)、S1510に処理を移行し、否定判定が得られた場合には(S1505:No)、S1525に処理を移行する。
【0127】
S1510では、制御部16は、現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1510:Yes)、S1515に処理を移行し、否定判定が得られた場合には(S1510:No)、S1520に処理を移行する。
【0128】
S1515では、制御部16は、表示部11b,スピーカ11cを用いて提供時期が到来した案内メッセージを報知し、S1525に処理を移行する。
一方、S1520では、制御部16は、案内メッセージの報知を保留し、S1525に処理を移行する。
【0129】
S1525では、制御部16は、保留中の案内メッセージの有無を判定し、肯定判定が得られた場合には(S1525:Yes)、S1530に処理を移行し、否定判定が得られた場合には(S1525:No)、S1540に処理を移行する。
【0130】
S1530では、制御部16は、現在の運転負荷が“小”であるか否かを判定し、肯定判定が得られた場合には(S1530:Yes)、S1535に処理を移行し、否定判定が得られた場合には(S1530:No)、S1540に処理を移行する。
【0131】
S1535では、制御部16は、表示部11b,スピーカ11cを用いて保留中の案内メッセージを報知し、S1540に処理を移行する。
S1540では、制御部16は、保留中の案内メッセージのうち、有効期限が経過した案内メッセージを消去し、本処理を終了する。
【0132】
[効果]
本実施形態のナビゲーション装置10によれば、個人情報や運転操作に基づき、個々のドライバの運転技量が推定され、運転技量と、該ドライバの運転操作,自車両の状態,走行環境等に基づき、個々のドライバにとっての運転負荷が推定される。このため、ドライバの運転負荷を精度良く判定することができ、運転負荷が確実に低下した時期に各種メッセージを提供することができるため、ドライバに対しより確実に情報を伝えることができる。
【0133】
[他の実施形態]
(1)本実施形態のナビゲーション装置10では、年齢,運転歴や、運転操作からドライバの運転技量を判定しているが、運転技量の判定方法は、これに限定されることは無く、例えば、車内LAN70に接続された記憶装置から第三者により判定された運転技量を取得し、該運転技量に基づき運転負荷を推定しても良い。このような場合であっても、同様の効果を得ることができる。
【0134】
(2)また、本実施形態のナビゲーション装置10では、運転技量と、車速,舵角,前後方向或いは横方向の加速度等といった運転操作や自車両の状態と、静的環境や動的環境とに基づき、運転負荷を推定している。しかしながら、これに限定されることは無く、運転技量と、運転操作,自車両の状態,静的環境,動的環境のうちの少なくとも一つとに基づき運転負荷を推定しても良く、このような場合であっても、同様の効果を得ることができる。
【0135】
(3)また、本実施形態では、ナビゲーション装置10を例に挙げて本発明に係る情報提供装置について説明したが、これに限定されることは無く、該情報提供装置は、例えば、メータとして構成されていても良いし、ヘッドアップディスプレイの制御装置等として構成されていても良い。このような場合であっても、同様の効果を得ることができる。
【0136】
(4)また、本実施形態では、運転負荷データが地図データに含まれており、ナビゲーション装置10では、地図データ入力器15を介して運転負荷データが取得される。しかしながら、これに限定されることは無く、例えば、外部通信機12や、ハンズフリー装置30に接続された携帯電話31を介して外部サーバと通信を行い、該外部サーバから運転負荷データを取得しても良い。一方、該外部サーバでは、様々な運転手についての履歴情報を随時収集し、収集した履歴情報に基づき、より高い精度で運転負荷を推定した運転負荷データを生成しても良い。このような運転付加データを取得することにより、ナビゲーション装置10は、より高い精度で運転負荷を予測することができる。
【0137】
[特許請求の範囲との対応]
上記実施形態の説明で用いた用語と、特許請求の範囲の記載に用いた用語との対応を示す。
【0138】
ナビゲーション装置10が情報提供装置に相当する。
また、ナビゲーション装置10の制御部16のRAMが運転技量記憶手段に、地図データ入力器15が運転負荷データ取得手段に、センサ群13が生体情報検出手段に相当する。
【0139】
また、自車両の車速,舵角,シフトレバーの位置や、自車両の前後方向の加速度,横方向の加速度等が運転操作に関する情報に相当する。
また、道路の種別(高速道路か一般道路か),車線の数,道幅,道路の形状や、交差点,繁華街等といった走行中の場所等といった静的環境と、自車両周辺の混雑度合い,天候等の動的環境が走行環境に相当する。
【0140】
また、運転操作負荷判定処理のS1005,S1015,S1025,S1030,S1035や、静的環境負荷判定処理のS1105,S1115,S1120,S1125が運転情報検出手段に相当する。
【0141】
また、運転操作負荷判定処理のS1010,S1020,S1040や、静的環境負荷判定処理のS1110,S1130が負荷推定手段に相当する。
また、メッセージ報知処理のS1225,S1245や、案内メッセージ報知処理のS1515,S1535が提供手段に相当する。
【0142】
また、個人情報判別処理のS410,S420,S430が、請求項2における運転技量判別手段に相当する。
また、運転操作判別処理のS530,S540,S545が、請求項3における運転技量判別手段に相当する。
【0143】
また、案内メッセージが提供時期設定メッセージに相当し、運転負荷予測処理のS1305が経路予測手段に、運転負荷予測処理のS1315,S1320が負荷予測手段に、案内メッセージ生成処理のS1410,S1415が変更手段に、情報提供処理のS220が履歴情報生成手段に相当する。
【0144】
また、メッセージ放置処理のS1250や案内メッセージ報知処理のS1540が、有効期限判別手段に相当する。
【符号の説明】
【0145】
10…ナビゲーション装置、11a…操作部、11b…表示部、11c…スピーカ、12…外部通信機、13…センサ群、14…記憶部、15…地図データ入力器、16…制御部、17…位置検出器、17a…GPS受信器、17b…ジャイロスコープ、17c…距離センサ、18…車内LAN通信部、19…レーダ、20…メータECU、30…ハンズフリー装置、31…携帯電話、40…パワートレインECU、50…ステアリングECU、60…オーディオ、70…車内LAN、100…制御プログラム、110…情報提示機能群、120…情報取得部、130…報知制御部、140…運転負荷推定部、150…運転技量判定部、160…画面出力部、170…音声出力部。
【特許請求の範囲】
【請求項1】
ドライバの運転技量を記憶している運転技量記憶手段と、
前記ドライバが運転する自車両の運転操作に関する情報と、自車両の走行環境に関する情報とのうちの少なくとも一つを運転情報として検出する運転情報検出手段と、
前記運転技量記憶手段に記憶されている前記運転技量と、前記運転情報検出手段により検出された前記運転情報とに基づき、前記ドライバにとっての運転の難易度を示す現在の運転負荷を推定する負荷推定手段と、
前記負荷推定手段により推定された前記現在の運転負荷が低い時期に各種メッセージを提供する提供手段と、
を備えることを特徴とする情報提供装置。
【請求項2】
請求項1に記載の情報提供装置において、
前記ドライバの年齢、或いは、運転経験の長さのうちの少なくとも一方に基づき該ドライバの前記運転技量を判別し、該運転技量を前記運転技量記憶手段に記憶する運転技量判別手段をさらに備えること、
を特徴とする情報提供装置。
【請求項3】
請求項1に記載の情報提供装置において、
前記ドライバによる自車両の運転操作に基づき該ドライバの前記運転技量を判別し、該運転技量を前記運転技量記憶手段に記憶する運転技量判別手段をさらに備えること、
を特徴とする情報提供装置。
【請求項4】
請求項1から請求項3のうちのいずれか1項に記載の情報提供装置において、
前記提供手段は、前記メッセージのうち緊急度の高いものについては、前記現在の運転負荷に関らず提供すること、
を特徴とする情報提供装置。
【請求項5】
請求項1から請求項4のうちのいずれか1項に記載の情報提供装置において、
予め定められた提供時期に提供されることが予定されている前記メッセージを提供時期設定メッセージとし、
地図データに登録されている経路の中から自車両の走行予定経路を予測する経路予測手段と、
自車両が前記走行予定経路を走行する際に前記ドライバに生じる運転負荷である将来の運転負荷を予測する負荷予測手段と、
前記負荷予測手段により予測された前記将来の運転負荷に基づき、前記提供時期設定メッセージに係る前記提供時期に前記ドライバに生じる運転負荷がどの程度であるかを判定し、該運転負荷が高い場合には該提供時期を変更する変更手段と、
を備え、
前記提供手段は、前記提供時期設定メッセージに係る前記提供時期が到来した後、前記現在の運転負荷が低い時期に、該提供時期設定メッセージを提供すること、
を特徴とする情報提供装置。
【請求項6】
請求項5に記載の情報提供装置において、
前記負荷推定手段により推定された前記現在の運転負荷に基づき、前記地図データに登録されている前記経路を走行する際に生じた前記ドライバの運転負荷の履歴情報を生成する履歴情報生成手段をさらに備え、
前記負荷予測手段は、前記履歴情報生成手段により生成された、前記走行予定経路に対応する前記履歴情報に基づき、該走行予定経路を走行する際の前記将来の運転負荷を予測すること、
を特徴とする情報提供装置。
【請求項7】
請求項5に記載の情報提供装置において、
前記地図データに登録されている前記経路を構成する各道路について、車両が該道路を安全に走行した際に前記運転技量の異なるそれぞれの前記ドライバに生じる運転負荷を示す運転負荷データを取得する運転負荷データ取得手段をさらに備え、
前記負荷予測手段は、前記運転技量判別手段により判別された前記ドライバの前記運転技量と前記運転負荷データとに基づき、該ドライバが運転する自車両が前記走行予定経路を走行する際の前記将来の運転負荷を予測すること、
を特徴とする情報提供装置。
【請求項8】
請求項1から請求項7のうちのいずれか1項に記載の情報提供装置において、
前記ドライバの生体情報を検出する生体情報検出手段をさらに備え、
前記負荷推定手段は、前記生体情報検出手段により検出された前記ドライバの前記生体情報をさらに加味して、該ドライバの前記現在の運転負荷を推定すること、
を特徴とする情報提供装置。
【請求項9】
請求項1から請求項8のうちのいずれか1項に記載の情報提供装置において、
前記メッセージには有効期限が設定されており、
前記メッセージに設定された前記有効期限が経過したか否かを判別する有効期限判別手段をさらに備え、
前記提供手段は、前記有効期限判別手段により前記有効期限が経過していないと判別された前記メッセージを提供すること、
を特徴とする情報提供装置。
【請求項1】
ドライバの運転技量を記憶している運転技量記憶手段と、
前記ドライバが運転する自車両の運転操作に関する情報と、自車両の走行環境に関する情報とのうちの少なくとも一つを運転情報として検出する運転情報検出手段と、
前記運転技量記憶手段に記憶されている前記運転技量と、前記運転情報検出手段により検出された前記運転情報とに基づき、前記ドライバにとっての運転の難易度を示す現在の運転負荷を推定する負荷推定手段と、
前記負荷推定手段により推定された前記現在の運転負荷が低い時期に各種メッセージを提供する提供手段と、
を備えることを特徴とする情報提供装置。
【請求項2】
請求項1に記載の情報提供装置において、
前記ドライバの年齢、或いは、運転経験の長さのうちの少なくとも一方に基づき該ドライバの前記運転技量を判別し、該運転技量を前記運転技量記憶手段に記憶する運転技量判別手段をさらに備えること、
を特徴とする情報提供装置。
【請求項3】
請求項1に記載の情報提供装置において、
前記ドライバによる自車両の運転操作に基づき該ドライバの前記運転技量を判別し、該運転技量を前記運転技量記憶手段に記憶する運転技量判別手段をさらに備えること、
を特徴とする情報提供装置。
【請求項4】
請求項1から請求項3のうちのいずれか1項に記載の情報提供装置において、
前記提供手段は、前記メッセージのうち緊急度の高いものについては、前記現在の運転負荷に関らず提供すること、
を特徴とする情報提供装置。
【請求項5】
請求項1から請求項4のうちのいずれか1項に記載の情報提供装置において、
予め定められた提供時期に提供されることが予定されている前記メッセージを提供時期設定メッセージとし、
地図データに登録されている経路の中から自車両の走行予定経路を予測する経路予測手段と、
自車両が前記走行予定経路を走行する際に前記ドライバに生じる運転負荷である将来の運転負荷を予測する負荷予測手段と、
前記負荷予測手段により予測された前記将来の運転負荷に基づき、前記提供時期設定メッセージに係る前記提供時期に前記ドライバに生じる運転負荷がどの程度であるかを判定し、該運転負荷が高い場合には該提供時期を変更する変更手段と、
を備え、
前記提供手段は、前記提供時期設定メッセージに係る前記提供時期が到来した後、前記現在の運転負荷が低い時期に、該提供時期設定メッセージを提供すること、
を特徴とする情報提供装置。
【請求項6】
請求項5に記載の情報提供装置において、
前記負荷推定手段により推定された前記現在の運転負荷に基づき、前記地図データに登録されている前記経路を走行する際に生じた前記ドライバの運転負荷の履歴情報を生成する履歴情報生成手段をさらに備え、
前記負荷予測手段は、前記履歴情報生成手段により生成された、前記走行予定経路に対応する前記履歴情報に基づき、該走行予定経路を走行する際の前記将来の運転負荷を予測すること、
を特徴とする情報提供装置。
【請求項7】
請求項5に記載の情報提供装置において、
前記地図データに登録されている前記経路を構成する各道路について、車両が該道路を安全に走行した際に前記運転技量の異なるそれぞれの前記ドライバに生じる運転負荷を示す運転負荷データを取得する運転負荷データ取得手段をさらに備え、
前記負荷予測手段は、前記運転技量判別手段により判別された前記ドライバの前記運転技量と前記運転負荷データとに基づき、該ドライバが運転する自車両が前記走行予定経路を走行する際の前記将来の運転負荷を予測すること、
を特徴とする情報提供装置。
【請求項8】
請求項1から請求項7のうちのいずれか1項に記載の情報提供装置において、
前記ドライバの生体情報を検出する生体情報検出手段をさらに備え、
前記負荷推定手段は、前記生体情報検出手段により検出された前記ドライバの前記生体情報をさらに加味して、該ドライバの前記現在の運転負荷を推定すること、
を特徴とする情報提供装置。
【請求項9】
請求項1から請求項8のうちのいずれか1項に記載の情報提供装置において、
前記メッセージには有効期限が設定されており、
前記メッセージに設定された前記有効期限が経過したか否かを判別する有効期限判別手段をさらに備え、
前記提供手段は、前記有効期限判別手段により前記有効期限が経過していないと判別された前記メッセージを提供すること、
を特徴とする情報提供装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−194060(P2012−194060A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−58288(P2011−58288)
【出願日】平成23年3月16日(2011.3.16)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月16日(2011.3.16)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]