
情報提示システム及び情報提示方法
【課題】 情報提示システムが提示した情報に対して、ドライバの認知負荷を悪化させることなく、ドライバから情報提示システムへの応答を可能にする情報提示システムを提供する。
【解決手段】 本発明の情報提示システム1は、移動体に備えられてドライバに情報を提示する情報提示システムであって、提示情報を提示する音声出力部33と、ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部103と、運転行動情報取得部103にて取得した運転行動の情報に基づいて、情報提示部33にて提示された提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部104を備えている。
【解決手段】 本発明の情報提示システム1は、移動体に備えられてドライバに情報を提示する情報提示システムであって、提示情報を提示する音声出力部33と、ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部103と、運転行動情報取得部103にて取得した運転行動の情報に基づいて、情報提示部33にて提示された提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部104を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体を運転するユーザに情報を提示した後に、当該提示情報に対するユーザの応答を受け付ける対話型の情報提示システム及び情報提示方法に関するものである。
【背景技術】
【0002】
車両等の移動体に搭載される対話型の情報提示システムでは、情報提示システムからユーザに情報を提示したとき、または何らかの行動の提案を行ったときには、ユーザは自身の意思を情報提示システムに伝達する必要がある(例えば、特許文献1参照)。通常、ユーザは、情報提示システムにおける各種スイッチ、タッチパネルによるGUIインタフェース、音声認識による操作手法を利用して情報提示システムを操作することによって、自身の意思を情報提示システムに伝達する。特に、音声認識の技術を用いてユーザの意思を情報提示システムに伝達すれば、移動体を運転しているユーザの認知負荷を軽減でき、交通安全上好ましい。
【0003】
音声認識技術を取り入れた対話型の情報提示システムの先行技術として、特許文献2及び特許文献3がある。特許文献2では、ユーザとの対話を通してユーザの嗜好を推定し、ユーザに適合した情報を提供する車両対話システムが開示されている。また、特許文献3では、車両位置や時間に基づいて、エージェントが自立的に起動して、ユーザと対話を行う車載用エージェントシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−141497号公報
【特許文献2】特開2009−064186号公報
【特許文献3】特開2004−054883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、移動体に搭載される対話型の情報提示システムにおいて、移動体を運転しているユーザが情報提示システムへ意思伝達を行う行為はいずれも、ユーザの認知負荷を運転以外に割り当てることを意味しており、ユーザを危険な状態に陥れる可能性があるという問題があった。音声認識の技術を利用してユーザが発声することで自己の意思を伝達する場合には、ユーザの認知負荷はある程度は軽減されるが、依然として、発声という意思伝達のための行為を強いるものであり、ユーザの認知負荷の軽減には不十分である。また、音声認識技術では、ユーザが正確な発音をしなければ情報提示システムが音声を正しく認識できないため、ユーザは正確な発音をすることに注意力を奪われることになる。
【0006】
本発明は、従来の問題を解決するためになされたもので、情報提示システムが提示した情報に対して、移動体を運転しているユーザの認知負荷を軽減して、ユーザから情報提示システムへの応答を可能にする情報提示システム及び情報提示方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、移動体を運転しているユーザ(以下、「ドライバ」という)による運転行動を、情報提示システムに対するドライバの応答行為として認識することによって、ドライバと情報提示システムとの間におけるドライバの認知負荷の低いインタラクションを実現するものである。
【0008】
本発明の情報提示システムは、移動体に備えられてドライバに情報を提示する情報提示システムであって、提示情報を提示する情報提示部と、ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記情報提示部にて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部とを備えた構成を有している。
【0009】
この構成により、ドライバに対して運転以外の操作を要求することなく、提示情報に対するドライバの意思を推定することで、ドライバと情報提示システムとのインタラクションが可能となる。また、情報提示システムのとのインタラクションにおけるドライバの認知負荷を抑えることができる。さらに、リアルタイムでドライバの意思を情報提示システムに伝達できる。
【0010】
また、上記の情報提示システムは、情報を取得する情報取得部をさらに備え、前記情報提示部は、前記情報取得部が取得した情報に基づく提示情報を提示する。この構成により、取得した情報を提示するとともに、その提示情報に対するドライバの応答を推定できる。
【0011】
また、上記の情報提示システムにおいて、前記情報取得部は、無線通信により外部のネットワークから情報を取得し、前記情報提示システムは、さらに前記情報取得部が取得した情報に基づいて、前記提示情報を生成する提示情報生成部を備え、前記情報提示部は、前記提示情報生成部が生成した提示情報を提示する。
【0012】
この構成により、例えばインターネット等の外部のネットワークから移動体周辺の情報を取得して、その情報をドライバに提示するのにふさわしい提示情報に加工したうえで、ドライバに提示するので、例えば外部のネットワークから文字情報を取得して、その文字情報を音声情報に変換して提示する等が可能となる。
【0013】
また、上記の情報提示システムにおいて、前記情報提示部は、前記提示情報として提案目的地の情報を提示し、前記ドライバ意思推定部は、ドライバが前記提案目的地に行く意思を有するか否かを推定して、推定結果を前記情報提示部に出力し、前記情報提示部は、前記ドライバ意思推定部から、ドライバが前記提案目的地に行く意思を有するとの推定結果を受けたときに、当該提案目的地に関する更なる情報を提示する。
【0014】
この構成により、情報提示部が移動体付近の目的地を提案し、ドライバ意思推定部が、ドライバがその提案に従ったか否かを推定し、ドライバが提案に従って目的地に向かうとその目的地のさらに詳細な情報等を提示することができるので、ドライバが提案に従った場合に詳細な情報を提示して、ドライバが提案に従わなかった場合には詳細な情報は提示しないという情報提示が可能になる。情報提示は映像出力部での映像(文字情報を含む)表示や音声出力部からの音声出力によるので、ドライバに提示できる情報の量は限られている。そこで、先に目的地の提案のみを提示して、ドライバによるその目的地に行く意思が推定されたときにさらに詳細な情報を提示し、ドライバが目的地の提案に対して関心を持たない場合は詳細な情報を提供しないこととすれば、限られた提示できる情報の量を有効に利用して、ドライバにとって有用な情報を提示できる。
【0015】
上記の情報提示システムにおいて、前記ドライバ意思推定部は、通常運転状態でのドライバによる移動体の運転行動の情報と、前記運転行動情報取得部にて取得した運転行動の情報との差分に基づいて、ドライバの意思を推定する。
【0016】
この構成により、ドライバが提示情報に対して通常状態の運転行動とは異なる運転行動をしたか否かで、ドライバの意思を推定できる。
【0017】
上記の情報提示システムにおいて、前記ドライバ意思推定部は、ドライバの過去の走行履歴と、前記運転行動情報取得部にて取得した運転行動の情報とに基づいて、ドライバの意思を推定する。
【0018】
この構成により、ドライバが普段走行している経路から外れるなどの運転行動をとったときに、それに基づいてドライバの意思を推定でき、推定の精度が向上する。
【0019】
また、上記の情報提示システムは、経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、前記ドライバ意思推定部は、前記運転行動の情報に基づいて、ドライバが前記経路案内部による経路案内の最中に前記経路案内目的地への経路を外れて前記提案目的地に向かう運転行動を行ったときに、ドライバが前記提案目的地に行く意思を有していると推定する。
【0020】
この構成により、例えばナビゲーション装置で経路案内をしているときに、その経路から外れたことに基づいて、提案された提案目的地に行く意思があると推定できる。
【0021】
また、上記の情報提示システムにおいて、前記ドライバ意思推定部は、移動体と前記提案目的地とが所定の距離以上であるときは、前記運転行動の情報に基づくドライバの意思の推定をしない。
【0022】
移動体と提案目的地とが所定の距離以上離れている場合には、ドライバの運転行動は必ずしも提案目的地に行くための運転行動とはいえないことがある。そこで、この構成により、提案目的地へ行くか否かとは関係のない運転行動に基づいてドライバの意思を推定することを回避できる。
【0023】
また、上記の情報提示システムは、移動体の実際の走行結果と前記推定結果とを比較することで、該推定結果が正しかったか否かを判断する推定正否判断部と、前記推定正否判断部による前記推定結果の正否判断の事例を記憶する意思推定事例記憶部とをさらに備え、前記ドライバ意思推定部は、前記意思推定事例記憶部に記憶された事例を参照して、ドライバの意思を推定する。
【0024】
この構成により、ドライバ意思推定部による推定結果の正否を学習することができ、特定のドライバがこの情報提示システムを多く利用することで、当該特定のドライバの癖を考慮した意思の推定が可能になり、推定の精度を向上できる。
【0025】
また、上記の情報提示システムは、経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、前記経路案内部は、前記ドライバ意思推定部にて、ドライバが前記提案目的地に行く意思を有すると推定されたときに、前記経路案内目的地を前記提案目的地として経路を案内する。
【0026】
この構成により、ドライバが情報提示システムの提案に従って提案目的地に行くことを意思決定した場合に、経路案内の目的地を変更する操作をする必要がなく、ドライバの認知負荷を軽減できる。
【0027】
また、上記の情報提示システムおいて、前記情報提示部は、前記提示情報の提示とともに、前記ドライバ意思推定部がドライバの意思を推定する際に用いる、前記提示情報に対する応答と移動体の操作との関係を示す情報を提示する。
【0028】
この構成により、どのような運転行動をすれば提示情報に従ったと推定されるかをドライバに案内するので、ドライバ意思推定部が誤ってドライバの意思を推定することを軽減でき、推定の精度を向上できる。
【0029】
また、上記の情報提示システムにおいて、前記移動体の運転行動の情報は、ステアリング、アクセル、ブレーキ、及び/又はクラッチの操作の情報である。この構成により、ドライバは、提示情報に対する応答を、移動体を運転するための通常の操作によって表現することができる。
【0030】
また、上記の情報提示システムにおいて、前記情報提示部は、音声で情報を提示する。この構成により、ドライバは、自身の応答を伝達する場合のみならず、提示された情報を受けるに際しても、運転以外の認知負荷を軽減できる。
【0031】
本発明の情報提示装置は、移動体に備えられてドライバに情報を提示する情報提示装置であって、情報を取得する情報取得部と、前記情報取得部が取得した情報に基づいて、提示情報を生成する提示情報生成部と、ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記提示情報生成部にて生成された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部とを備えた構成を有している。
【0032】
本発明の情報提示方法は、移動体のドライバに情報を提示する情報提示方法であって、提示情報を提示する情報提示ステップと、ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップとを含む。
【0033】
本発明のコンピュータプログラムは、移動体のドライバに対する情報提示方法を実行するためのコンピュータプログラムであって、コンピュータに、提示情報を提示する情報提示ステップと、ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップとを実行させる。
【発明の効果】
【0034】
本発明によれば、提示情報に対するドライバの運転行動からドライバの意思を推定するので、ドライバと情報提示システムとの間におけるドライバの認知負荷を低減できるという優れた効果を有する。
【図面の簡単な説明】
【0035】
【図1】本発明の第1の実施の形態における情報提示システムの構成を示すブロック図
【図2】本発明の第1の実施の形態における情報提示システムの第1の動作例を説明するための図
【図3】本発明の第1の実施の形態における情報提示システムの第2の動作例を説明するための図
【図4】本発明の第1の実施の形態におけるドライバの意思の推定の第2の例のアクセル操作及びブレーキ操作の例を示す図
【図5】本発明の第1の実施の形態における情報提示システムの第3の動作例を説明するための図
【図6】本発明の第1の実施の形態における情報提示システムの第4の動作例を説明するための図
【図7】本発明の第1の実施の形態における情報提示システムの動作を示すフロー図
【図8】本発明の第2の実施の形態における情報提示システムの構成を示すブロック図
【図9】本発明の第2の実施の形態における情報提示システムの動作例を説明するための図
【図10】本発明の第2の実施の形態における情報提示システムの動作を示すフロー図
【図11】本発明の第3の実施の形態における情報提示システムの構成を示すブロック図
【図12】本発明の第3の実施の形態における情報提示システムの動作例を説明するための図
【図13】本発明の第3の実施の形態における情報提示システムの動作を示すフロー図
【図14】本発明の第4の実施の形態における情報提示システムの構成を示すブロック図
【図15】本発明の第4の実施の形態における情報提示システムの動作を示すフロー図
【発明を実施するための形態】
【0036】
以下、本発明の実施の形態の情報提示システムについて、図面を参照しながら説明する。
(第1の実施の形態)
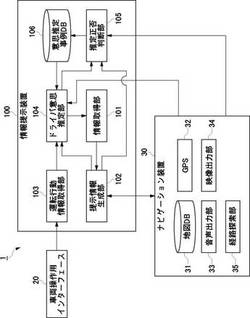
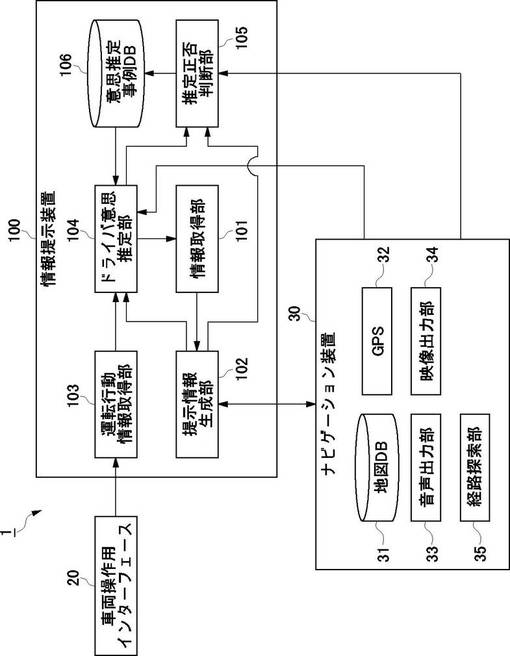
図1は、第1の実施の形態の情報提示システムの構成を示すブロック図である。まず、情報提示システム1の概略構成を説明する。情報提示システム1は、情報提示装置100、車両操作用インターフェース20、及びナビゲーション装置30を備えている。情報提示装置100は、ドライバによる運転行動を情報提示システム1に対するドライバの応答行為として認識することによって、ドライバと情報提示システム1との間におけるドライバの認知負荷の低いインタラクションを実現する。このために、情報提示装置100は、無線通信によって外部のネットワークから情報を取得する情報取得部101と、情報取得部101で取得した情報に基づいて、ドライバに提示する提示情報を生成する提示情報生成部102と、ドライバによる車両の運転行動の情報を取得する運転行動情報取得部103と、運転行動情報取得部103で取得した運転行動の情報に基づいて、提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部104と、車両の実際の走行結果とドライバ意思推定部104での推定結果とを比較することで、推定結果が正しかったか否かを判断する推定正否判断部105と、推定正否判断部105による推定結果の正否判断の事例を記憶する意思推定事例データベース106とを備えている。
【0037】
ナビゲーション装置30は、周知の構成を有しており、地図情報を記憶する地図情報ベース31と、車両の現在位置情報を取得するGPS32と、スピーカ等からなる音声出力部33と、表示パネル等からなる映像出力部34と、地図情報と現在位置情報に基づいて、目的地までの経路を探索する経路探索部35とを備えている。このナビゲーション装置30は、情報提示装置100の提示情報生成部102に接続されており、提示情報生成部102が生成した提示情報を受け取って、当該提示情報を音声出力部33及び映像出力部34から出力することでドライバに提示する。また、ナビゲーション装置30は、提示情報生成部102、ドライバ意思推定部104及び推定正否判断部105とそれぞれ接続されており、これらに車両の現在位置情報や地図情報を提供する。
【0038】
車両操作用インターフェース20は、車両の運転をするためにドライバが操作をする部材であって、車両の走行を直接的に制御する部材であり、ステアリング、アクセル、ブレーキ、及びクラッチを含む。車両操作用インターフェース20は、情報提示装置100の運転行動情報取得部101に接続されており、これらの部材の操作に関する情報を運転行動情報として運転行動情報取得部101に伝達する。運転行動情報は、ステアリングの角度、アクセルの開度(踏み込み量)、ブレーキの強度(踏み込み量)、クラッチの段数を含む。
【0039】
次に、情報提示システム1にてドライバに提示情報を提示して、その提示情報に対するドライバの応答を推定し、更なる情報提示を行う構成について詳細に説明する。情報取得部101は、無線通信インターフェースを備えており、無線でインターネットに接続して、インターネット上の特定のサイトから情報を取得する。このサイトでは該サイトのユーザが互いに雑談をしており、情報取得部101は、該サイトのユーザによる雑談情報をテキスト形式で取得する。提示情報生成部102は、ナビゲーション装置30から車両の現在位置情報を取得して、情報取得部101が取得した雑談情報から車両の現在位置の近辺の情報を抽出する。提示情報生成部102は、例えば、情報取得部101が雑談情報から車両の現在地近辺の喫茶店Gの情報を抽出したときに、提示情報として、「この先の交差点を左折して200m先に、秋季限定のケーキが食べられる喫茶店Gがあります。」といった音声情報と、これに対応する映像情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30では、音声出力部33がこの音声情報を出力し、映像出力部34がこの映像情報を出力する。これによりドライバに情報を提示する。
【0040】
運転行動情報取得部103は、車両操作用インターフェース20から運転行動情報を取得する。この運転行動情報には、上述の通り、ステアリングの角度、アクセルの開度(踏み込み量)、ブレーキの強度(踏み込み量)、クラッチの段数が含まれる。運転行動情報取得部103は、これらの運転行動情報をドライバ意思推定部104に出力する。
【0041】
ドライバ意思推定部104は、ナビゲーション装置30から取得した車両の現在位置情報と地図情報、提示情報生成部102から取得した提示情報、及び運転行動情報取得部103から取得した運転行動情報に基づいて、ドライバが提示情報で提案された目的地に行く意思を有するか否かを推定し、推定結果を情報取得部101及び推定正否判断部105に出力する。ドライバ意思推定部104は、推定の際に、さらに意思推定事例データベース106に記憶された過去の推定事例を参照して、ドライバが提示情報で提案された目的地に行く意思があるか否かの結論を出す。
【0042】
情報取得部101は、推定結果を受け取って、推定結果が、ドライバが提示情報で提案された目的地に行く意思を有することを示しているときは、当該目的地についての更に詳細な情報を取得して、提示情報生成部102に出力する。提示情報生成部102は、この詳細な情報に基づいて、音声及び映像の詳細な提示情報を生成し、ナビゲーション装置30に出力する。ナビゲーション装置30では、音声出力部33が詳細な提示情報を音声出力し、映像出力部34が詳細な提示情報を映像出力する。
【0043】
一方、推定正否判断部105は、ドライバ意思推定部104から取得した推定結果及びナビゲーション装置30から取得した車両の実際の走行結果に基づいて、ドライバ意思推定部104によるドライバの意思の推定が正しかったか否かを判断する。推定結果が、ドライバが提示情報によって提案された目的地(以下、「提案目的地」という)に行く意思があることを示しており、実際の走行結果もドライバが提案目的地まで移動したことを示している場合には、この推定結果を正例として、この推定に用いた条件(車両の現在位置情報、地図情報、提示情報、及び運転行動情報等)とともに意思推定事例データベース106に記憶する。また、推定結果が、ドライバが提案目的地に行く意思がないことを示しており、実際の走行結果もドライバが提案目的地に移動しなかったことを示している場合には、この推定結果を正例として、意思推定事例データベース106に記憶する。一方、推定結果が、ドライバが提示情報によって提案された提案目的地に行く意思があることを示しているが、実際の走行結果はドライバが提案目的地に移動しなかったことを示している場合には、この推定結果を誤例として、意思推定事例データベース106に記憶する。また、推定結果が、ドライバが提示情報によって提案された提案目的地に行く意思がないことを示しているが、実際の走行結果はドライバが提案目的地まで移動したことを示している場合にも、この推定結果を誤例として、意思推定事例データベース106に記憶する。
【0044】
ドライバ意思推定部104は、ナビゲーション装置30から取得した車両の現在位置情報と地図情報、提示情報生成部102から取得した提示情報、及び運転行動情報取得部103から取得した運転行動情報に基づいて、ドライバが提示情報で提案された目的地に行く意思を有するか否かを判断するが、これら車両の現在位置情報、地図情報、提示情報及び運転行動情報の条件を意思推定事例データベース106に記憶されている各推定事例の条件と比較して、意思の有無の推定に用いる条件と近い条件の推定事例が意思推定データベース106に記憶されている場合は、この推定事例を参照する。条件の近い推定事例が正例であれば、ドライバが提示情報に従った推定し、条件の近い推定事例が誤例であれば、その条件によってはドライバが提示情報に従ったとは推定しない。
【0045】
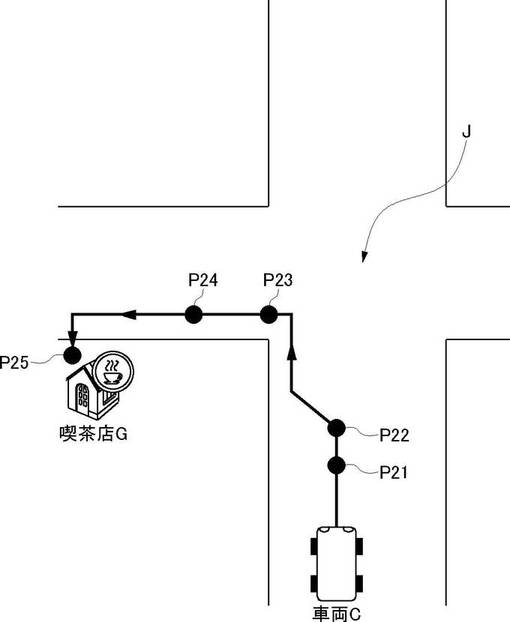
以下、情報提示システムの動作について、例を挙げて説明する。なお、以下の動作例の説明では、説明を簡潔にするため、過去の推定事例に基づいて推定をする点については説明を省略する。図2は、情報提示システム1の第1の動作例を示す図である。この例では、ドライバのステアリング操作に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P21で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために位置P22でステアリングを若干左に切って、車両Cを道路の左側に寄せて走行し、位置P23で交差点Jを左折する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度に基づいて車両Cが左折したことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、その左折した位置が交差点Jであることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その交差点Jでの左折のためにステアリングを左に切った運転行動が、喫茶店Gへ向かう運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、ドライバが提示情報に従って喫茶店Gに行くと意思決定したことを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0046】
情報取得部101は、この推定結果を受けて喫茶店Gに関する更なる詳細情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P24で喫茶店Gに関する詳細な情報を提示する。
【0047】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32による車両の現在位置情報に基づいて、位置P25で車両が喫茶店Gに到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0048】
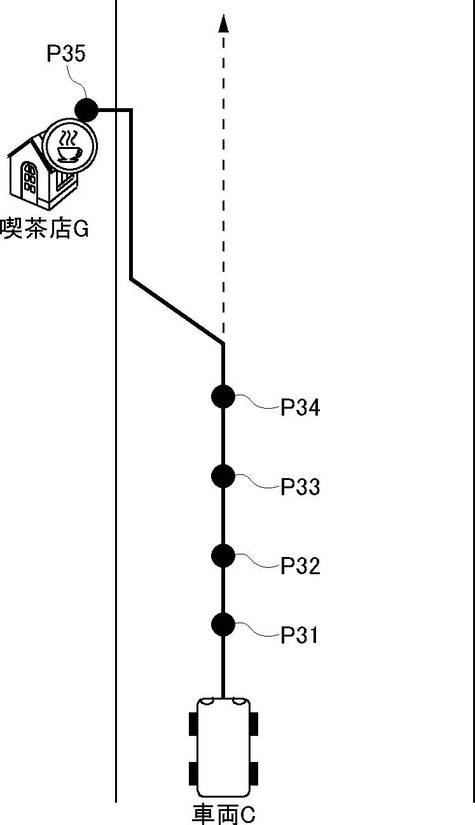
図3は、情報処理システム1の第2の動作例を示す図である。この例では、ドライバのアクセル及びブレーキの操作に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P31で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、喫茶店Gで停車するために位置P32でアクセルを緩めてブレーキをかけ始める。そうすると、位置P33でドライバ意思推定部104は、運転行動情報取得部103から取得したアクセルの開度及びブレーキの強度に基づいて車両Cが減速されたことを認識する。
【0049】
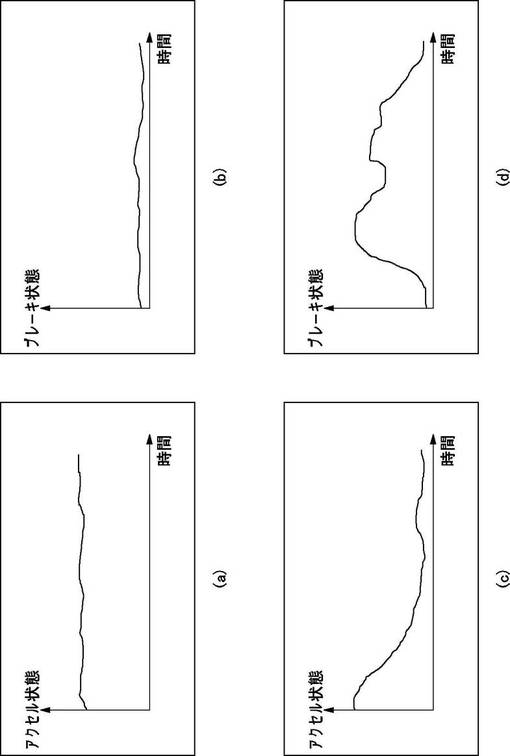
図4は、ドラバイ意思推定部104がドライバの意思の推定する際のアクセル操作及びブレーキ操作の例を示す図である。図4(a)は、通常運転状態でのアクセル操作を示すグラフであり、横軸は時間であり、縦軸はアクセルの開度である。図4(b)は、通常運転状態でのブレーキ操作を示すグラフであり、横軸は時間であり、縦軸はブレーキの強度である。図4(c)は、図4(a)に対応するグラフであり、提案目的地に行く場合のアクセル操作の例を示している。図4(d)は、図4(b)に対応するグラフであり、提案目的地に行く場合のブレーキ操作の例を示している。
【0050】
まず、アクセル操作について説明する。図4(a)のグラフは予めドライバ意思推定部104に記憶されており、ドライバ意思推定部104ではこの図4(a)のアクセル操作と、運転行動情報取得部103が取得したアクセル開度の情報とを比較する。運転行動情報取得部103が取得したアクセル開度の情報が、図4(c)のように時間とともに減少すると、図4(a)のアクセル操作との差分が所定の閾値以上となり、ドライバ意思推定部104はアクセルが緩められたと判断する。
【0051】
ブレーキ操作についても同様である。図4(b)のグラフは予めドライバ意思推定部104に記憶されており、ドライバ意思推定部104ではこの図4(b)のブレーキ操作と、運転行動情報取得部103が取得したブレーキ強度の情報とを比較する。運転行動情報取得部103が取得したブレーキ強度の情報が、図4(d)のように時間とともに増大すると、図4(b)のブレーキ操作との差分が所定の閾値以上となり、ドライバ意思推定部104はブレーキがかけられたと判断する。このようにして、ドライバ意思推定部104は、車両Cが減速されたことを認識する。
【0052】
また、ドライバ意思推定部104は、ナビゲーション装置30から取得した車両の現在位置情報と地図情報及び提示情報生成部102から取得した提示情報に基づいて、その減速した位置が喫茶店Gの直前であることを認識し、位置P32でのアクセル及びブレーキの操作が喫茶店Gへ行くための運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、ドライバが提示情報に従って喫茶店Gに行く意思があることを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0053】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P34で喫茶店Gに関する詳細な情報を提示する。
【0054】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32による車両の現在位置情報に基づいて、位置P35で車両が喫茶店Gの到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0055】
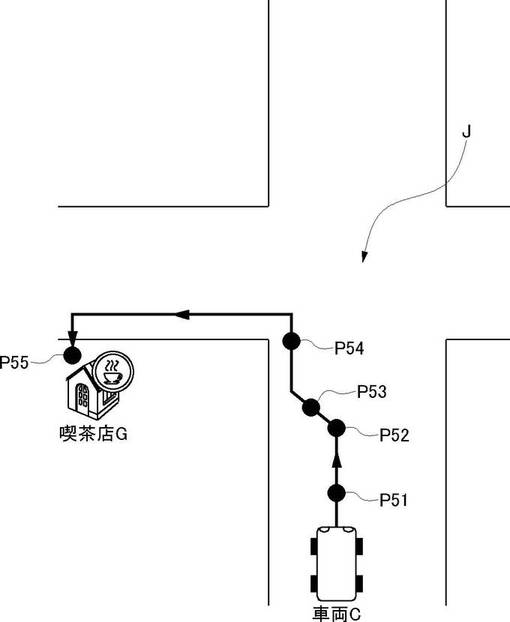
図5は、情報提示システム1の第3の動作例を示す図である。この例では、ドライバのステアリング操作、アクセル開度及びブレーキ強度に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P51で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために位置P52で速度を落としながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度とアクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、減速しながら道路左側に寄った位置が交差点Jの手前であることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その交差点Jの手前での減速しながら道路左側に寄るためのステアリング、アクセル及びブレーキの操作が喫茶店Gへ向かう運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、位置P53でドライバが提示情報に従って喫茶店Gに行くと意思決定したことを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0056】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P54で喫茶店Gに関する詳細な情報を提示する。
【0057】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32が取得した車両の現在位置情報に基づいて、位置P55で車両が喫茶店Gに到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0058】
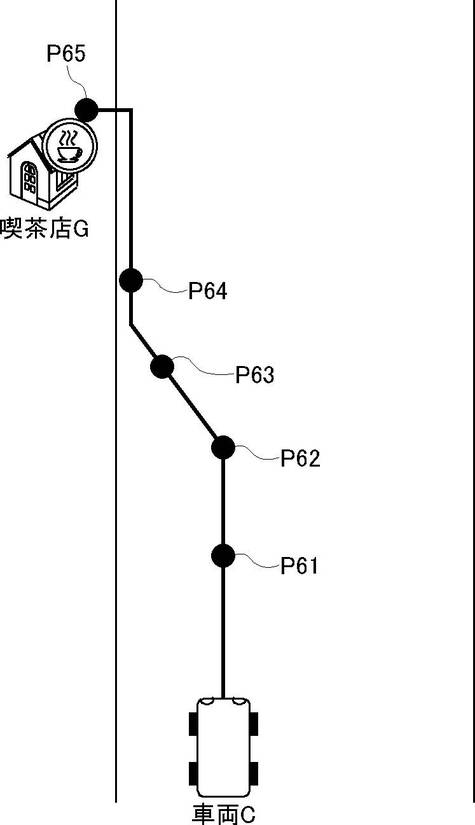
図6は、情報提示システム1の第4の動作例を示す図である。この例でも、ドライバのステアリング操作とアクセル開度及びブレーキ強度に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P61で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、喫茶店Gで停車するために位置P62で速度を落としながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度とアクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、減速しながら道路左側に寄った位置が喫茶店Gの手前であることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その喫茶店Gの手前での減速しながら道路左側に寄るためのステアリング、アクセル及びブレーキの操作が喫茶店Gへ向かうための運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、位置P63でドライバが提示情報に従って喫茶店Gに行くと意思決定したことを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0059】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P64で喫茶店Gに関する詳細な情報を提示する。
【0060】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32による車両の現在位置情報に基づいて、位置P65で車両が喫茶店Gに到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0061】
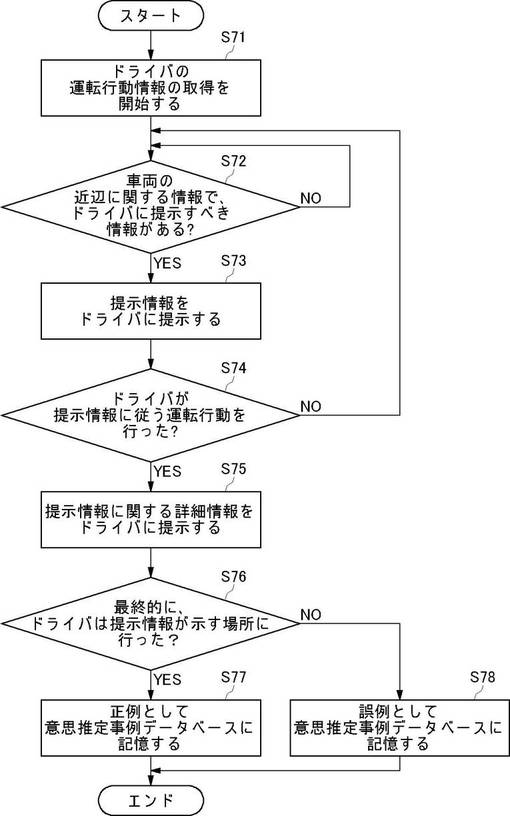
図7は、本実施の形態における情報提示システム1の動作を示すフロー図である。まず、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS71)。次に、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS72)。ドライバに提示すべき情報があれば(ステップS72でYES)、提示情報生成部102にて音声及び映像の提示情報を生成して、ナビゲーション装置30の音声出力部33や映像出力部34を用いて提示情報をドライバに提示する(ステップS73)。ドライバに提示すべき情報がなければ(ステップS72でNO)、そのような情報があるまでステップS72を繰り返す。
【0062】
次に、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報、提示情報生成部102が生成した提示情報、ナビゲーション装置30から送られてきた車両の現在位置情報と地図情報、及び推定事例データベース106が記憶している過去の推定事例に基づいて、ドライバが提示情報に従う運転行動を行ったか否かを判断することにより、ドライバの意思を推定する(ステップS74)。ドライバが提示情報に従う運転行動を行ったと判断したときは(ステップS74でYES)、ドライバ意思推定部104は、その推定結果を情報取得部101に渡し、情報取得部101は詳細な情報を取得して提示情報生成部102に出力し、提示情報生成部102はその詳細な情報の音声及び映像の提示情報を生成し、ナビゲーション装置30がこれを出力することで、提示情報に関する詳細情報をドライバに提示する(ステップS75)。ドライバ意思推定部104が、ドライバが提示情報に従う運転行動を行わなかったと判断した場合は(ステップS74でNO)、ステップS72に戻って、ドライバに提示すべき他の情報がないかを判断する。
【0063】
ステップS74で、ドライバが提示情報に従う運転行動を行ったと判断して、ステップS75で、ドライバに提示情報の詳細情報を提示した後に、推定正否判断部105は、ナビゲーション装置30からの車両の現在位置情報等の情報を用いて、ドライバが最終的に提示情報に従って実際に提案目的地に行ったか否かを判断する(ステップS76)。ドライバが、提案目的地に行った場合には(ステップS76でYES)、推定正否判断部105は、直前のステップS74での推定を正例として、意思推定事例データベース106に記録する(ステップS77)。一方、ドライバが、提案目的地に行かなかった場合には(ステップS76でNO)、直前のステップS74での推定を誤例として、意思推定事例データベース106に記録する(ステップS78)。
【0064】
以上、本発明の第1の実施の形態を説明したが、この実施の形態の情報提示システムによれば、提案目的地の情報を提示した上で、ドライバの運転行動がその提示情報に従って提案目的地に行くための運転行動であるか否かによってドライバがその提案目的地に行く意思を有するか否かを推定するので、ドライバに運転以外の操作を要求することなく、ドライバの意思を認識でき、ドライバと情報提示装置との間のインタラクションにおいてドライバの認知負荷を抑えることができる。また、ドライバの運転行動から、ドライバの意思を推定するので、リアルタイムでドライバの意図を情報提示装置に伝達できる。
【0065】
(第2の実施の形態)
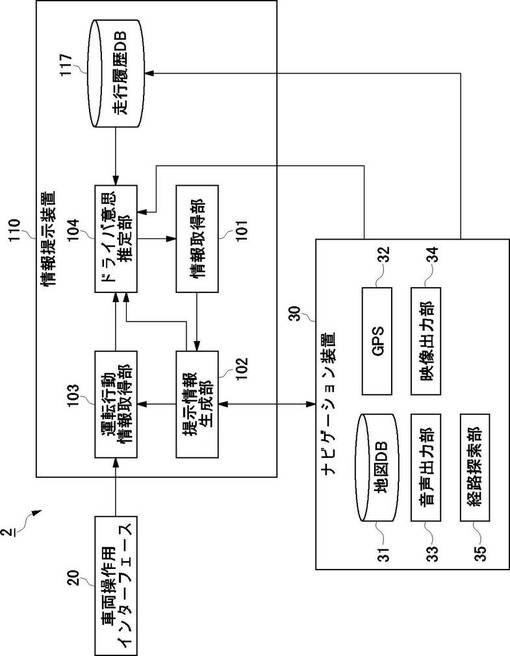
図8は、本発明の第2の実施の形態の情報提示システムの構成を示すブロック図である。本実施の形態の情報提示システム2において、第1の実施の形態の情報提示システム1と同一の構成については、同一の符号を付して、その詳細な説明は省略する。本実施の形態の情報提示システム2の情報提示装置110は、走行履歴データベース117を備えている。本実施の形態のナビゲーション装置30は、車両の走行履歴を出力する機能を有しており、走行履歴データベース117は、ナビゲーション装置30から出力された走行履歴を記憶する。
【0066】
本実施の形態のドライバ意思推定部104は、ドライバの意思を推定する際に、走行履歴データベース117に記憶された過去の走行履歴を参照する。走行履歴データベース117には、過去の走行履歴が記憶されているので、ドライバ意思推定部104はこれを参照することで、ドライバが日常的に走行している経路やドライバがよく行く目的地を判断する。そして、ドライバ意思推定部104は、ドライバの運転行動に基づいて、提示情報によって提案された目的地に行く意思を有すると判断する場合には、その運転行動が、日常的に走行している経路を走行するための運転行動ではなく、かつ、その運転行動が、ドライバがよく行く目的地に向かうための運転行動ではないということを条件とする。即ち、その運転行動が、ドライバが日常的に走行している経路を走行するための運転行動であるか、又はその運転行動が、ドライバがよく行く目的地に向かうための運転行動であるときは、ドライバが提示情報に従って提案目的地に行く意思を有すると判断するのを待ち、日常的に走行している経路を外れるような運転行動をとったとき、又はよく行く目的地への経路を外れる運転行動をとったときに、はじめてそのドライバが提案目的地に行く意思を有すると判断する。
【0067】
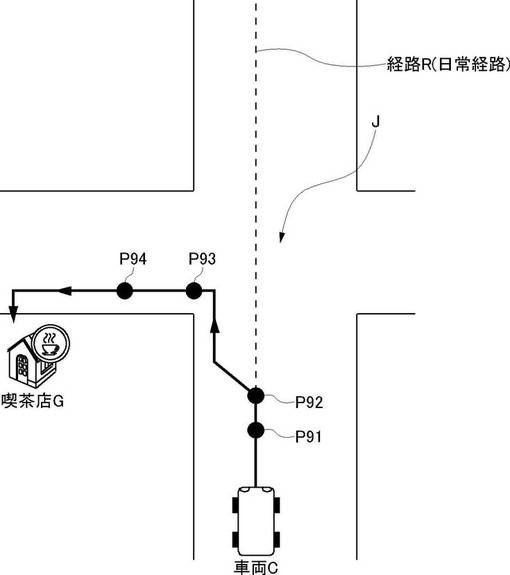
図9は、情報提示システム2の動作例を示す図である。この例では、走行履歴データベース117には、交差点Jを直進する経路が日常的な経路Rとして記録されている。車両Cが縦方向の道路を直進しているときに、位置P91で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために、位置P92で速度を緩めながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度、アクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、その道路左側に寄る運転行動を行った位置が交差点Jの直前であることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その道路左側に寄る運転行動が、喫茶店Gへ向かう運転行動であることを認識する。そして、位置P93でステアリングを左に切って交差点Jを左折すると、このステアリングを左に切った運転行動が日常的な経路Rから外れる運転行動であると判断して、これによりドライバが喫茶店Gに行く意思決定したことを推定し、その推定結果を情報取得部101に出力する。
【0068】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P94で喫茶店Gに関する詳細な情報を提示する。
【0069】
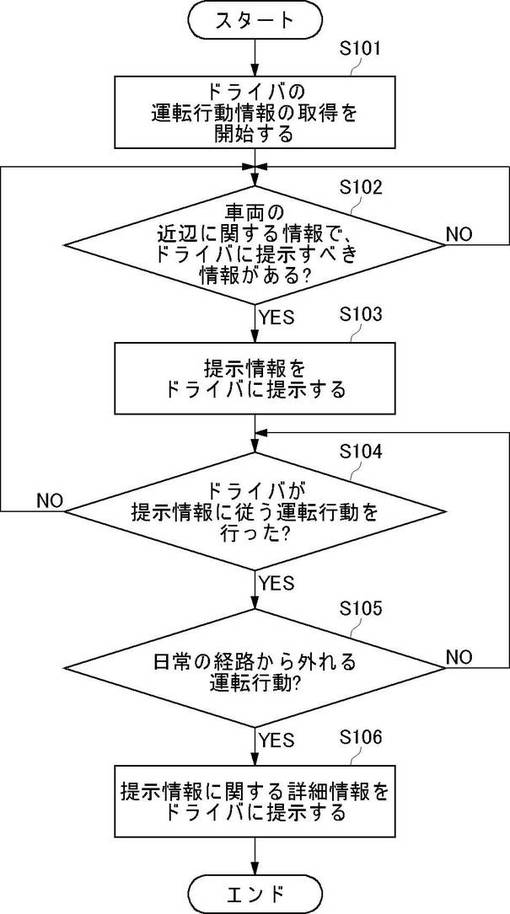
図10は、本発明の第2の実施の形態における情報提示システムの動作を示すフロー図である。まず、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS101)。次に、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS102)。ドライバに提示すべき情報があれば(ステップS102でYES)、提示情報生成部102にて音声及び映像の提示情報を生成して、ナビゲーション装置30の音声出力部33や映像出力部34を用いて提示情報をドライバに提示する(ステップS103)。ドライバに提示すべき情報がなければ(ステップS102でNO)、そのような情報があるまでステップS102を繰り返す。
【0070】
次に、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から送られてきた車両の現在位置情報と地図情報に基づいて、第1の実施の形態と同様にしてドライバが提示情報に従う運転行動を行ったか否かを判断する(ステップS104)。ドライバ意思推定部104が、ドライバが提示情報に従う運転行動を行わなかったと判断した場合は(ステップS104でNO)、ステップS102に戻って、ドライバに提示すべき他の情報がないかを判断する。ドライバが提示情報に従う運転行動を行ったと判断したときは(ステップS104でYES)、ドライバ意思推定部104は、走行履歴データベース117から読み出した過去の走行履歴を参照することで、ドライバが日常的に走行している経路やドライバがよく行く目的地を認識し、ナビゲーション装置30から車両の現在位置情報を取得して、ドライバの運転行動が、日常的に走行している経路を外れるような運転行動、又はよく行く目的地への経路を外れる運転行動であるかを判断することにより、ドライバの意思を推定する(ステップS105)。
【0071】
ステップS105で、日常の経路やよく行く目的地への経路から外れる運転行動ではないと判断した場合には(ステップS105でNO)、ステップS104に戻って、ドライバが提示情報に従う新たな運転行動を行ったか否かを判断する。ステップS105で、日常の経路やよく行く目的地への経路から外れる運転行動であると判断した場合には(ステップS105でYES)、ドライバ意思推定部104は、ドライバは提示情報で提案された目的地に行く意思を有するとの推定結果を情報取得部101に渡し、情報取得部101はさらに提示した情報のさらに詳細な情報を取得して提示情報生成部102に出力し、提示情報生成部102はその詳細な情報の音声及び映像の提示情報を生成し、ナビゲーション装置30がこれを出力することで、提示情報に関する詳細情報をドライバに提示する(ステップS106)。
【0072】
以上のように、本実施の形態の情報提示システムによれば、ドライバが日常の走行履歴から外れるような運転行動を行ったときにのみ、その運転行動を提案目的に行くための運転行動と判断してドライバの意思を推定するので、ドライバの意思をより正確に推定できる。また、ドライバが、提案目的地に行くための運転行動をとった場合にも、その運転行動が日常的に利用する経路を走行するための運転行動でもあるときは、ドライバが提示情報に従って提案された目的地に行くとは判断しないので、提案目的地が単に本来行こうとしていた目的地の経路途中にあって、ドライバは単に本来の目的地に向かっているだけであるという場合に、情報提示システムが、ドライバが提案目的地に行こうとしていると誤って推定することがない。
【0073】
なお、上記の第2の実施の形態では、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、その運転行動が日常的に利用する経路やよく行く目的地への経路から外れる運転行動であるか否かを判断することでドライバの意思の推定精度を向上させたが、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、ナビゲーション装置30のGPS32を用いて車両の現在位置を確認して、車両が日常的に利用する経路やよく行く目的地への経路から外れたか否かを判断することで、ドライバの意思の推定の精度を向上させてもよい。
【0074】
(第3の実施の形態)
図11は、本発明の第3の実施の形態の情報提示システムの構成を示すブロック図である。本実施の形態の情報提示システム3において、第1の実施の形態の情報提示システム1と同一の構成については、同一の符号を付して、その詳細な説明は省略する。
【0075】
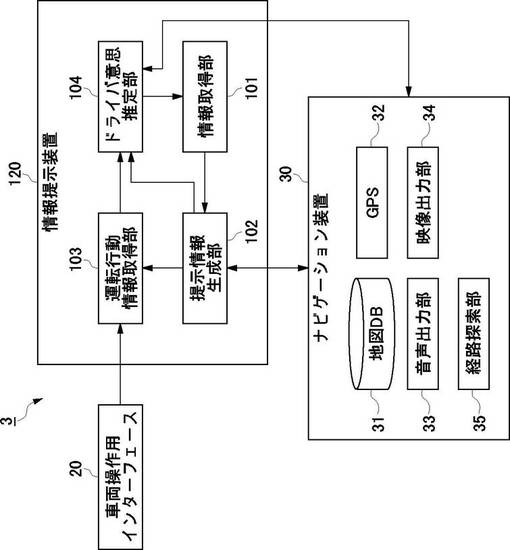
本実施の形態のドライバ意思推定部104は、ドライバの意思を推定する際に、ナビゲーション装置30にて設定された経路を参照する。ナビゲーション装置30の経路探索部35は、ドライバにより指定された目的地までの経路を探索して、車両の現在位置に応じて目的地までの走行経路を案内する機能を有している。情報提示装置120は、第1又は第2の実施の形態と同様にして、情報取得部101で情報を取得して、提示情報生成部102で提示情報を取得する。この提示情報は、ナビゲーション装置30の音声出力部33及び映像出力部34によってドライバに提示される。
【0076】
ドライバ意思推定部104は、運転行動情報取得部103から取得したドライバの運転行動の情報、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から取得した、車両の現在位置情報及び地図情報に基づいて、ドライバが提案目的地に行くための運転行動を行ったか否かを判断する。ドライバ意思推定部104は、さらに、この運転行動が、ナビゲーション装置30から取得した、ドライバにより指定された目的地までの経路から外れる運転行動であるか否かに基づいて、ドライバが提案目的地に行く意思を有するか否かを推定する。
【0077】
また、本実施の形態のドライバ意思推定部104は、提案目的地と車両の現在位置との距離が所定の閾値以下になってからドライバの意思の推定を開始する。これは、車両の位置と提案目的地との距離があまりに遠い場合には、たとえドライバにより指定された目的地までの経路から外れる運転行動が行われたとしても、そのような運転行動を一概に提案目的地に行くための運転行動であると判断するのは適切でないからである。ドライバの意思の推定を開始するための提案目的地と車両の現在位置との距離は、例えば500mとする。
【0078】
また、本実施の形態の情報提示システム120は、ドライバの意思の推定に基づいて、ナビゲーション装置30によるナビゲーションの目的地を自動的に変更する。このために、ドライバ意思推定部104は、ドライバが提案目的地に行く意思を有すると推定した場合に、情報取得部101に推定結果を渡すとともに、ナビゲーション装置30に対しても推定結果を渡す。ナビゲーション装置30は、ドライバが提案目的地に行く意思を有するとの推定結果を受け取ると、現在行っているドライバが指定した目的地への経路案内を中止して、提案目的地に行くための経路を探索して経路案内を開始する。また、ナビゲーション装置30は、ドライバが提案目的地に行く意思を有するとの推定結果を受け取った場合において、ドライバが指定した目的地への経路案内を行っていないときは、提案目的地を目的地としてそこまでの経路を探索して経路案内を開始する。
【0079】
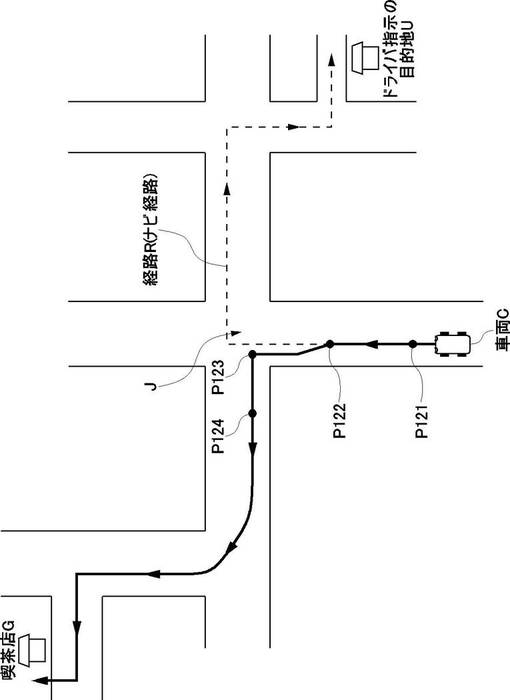
図12は、本実施の形態の情報提示システム3の動作例を示す図である。この例では、ナビゲーション装置30は、ドライバが指定した目的地Uに行くための経路(ナビ経路)Rを探索して、ドライバに経路案内をしている。車両Cが縦方向の道路を直進しているときに、位置P121で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために、位置P122で速度を緩めながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度、アクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、この運転行動が喫茶店Gに行くための運転行動であると判断する。しかし、この時点ではまだこのドライバが喫茶店Gに行くと意思決定したという推定結論は出さない。
【0080】
その後ドライバがステアリングを左に切って、位置P123で左折をすると、ナビゲーション装置30から取得した車両Cの現在位置情報と地図情報に基づいて、その左折した位置が交差点Jであることを認識し、かつ、提示情報生成部102から取得した提示情報に基づいて、その交差点Jでの左折のためにステアリングを左に切った運転行動がナビ経路Rから外れて反対側に向かう運転行動であると認識する。ドライバ意思推定部104は、これらの認識に基づいて、ドライバによる上記の運転行動が、提示情報に従って喫茶店Gに行くための運転行動であると判断する。これによりドライバが喫茶店Gに行く意思決定したことを推定し、その推定結果を情報取得部101に出力する。
【0081】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。また、ナビゲーション装置30は、経路案内の目的地をドライバが指定した目的地Uから喫茶店Gに変更して、喫茶店Gまでの経路を探索する。ナビゲーション装置30は、位置P124で喫茶店Gに関する詳細な情報を提示するとともに、喫茶店Gまでの経路案内を開始する。
【0082】
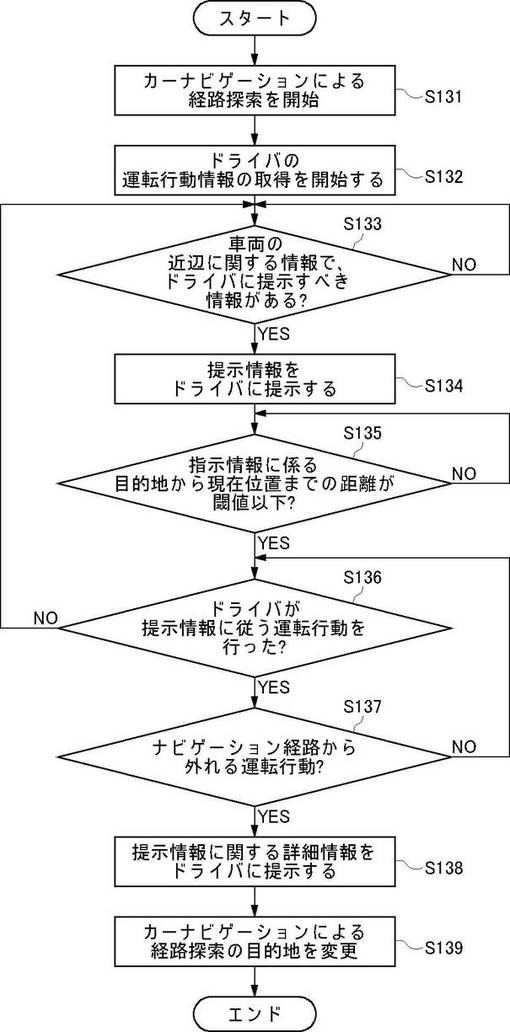
図13は、本発明の第3の実施の形態における情報提示システムの動作を示すフロー図である。まず、ナビゲーション装置30は、ドライバから目的地の指定を受けて、当該目的地への経路を探索し、ナビゲーションを開始する(ステップS131)。次に、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS132)。その後、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS133)。ドライバに提示すべき情報があれば(ステップS133でYES)、提示情報生成部102にて音声及び映像の提示情報を生成して、ナビゲーション装置30の音声出力部33や映像出力部34を用いて提示情報を出力してドライバに提示する(ステップS134)。ドライバに提示すべき情報がなければ(ステップS133でNO)、そのような情報があるまでステップS133を繰り返す。
【0083】
次に、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報とナビゲーション装置30から取得した車両の現在位置情報及び地図情報を参照して、提示情報に係る目的地から現在位置までの距離が閾値以下であるか否かを判断する(ステップS135)。この距離が閾値以下となるまで待って、閾値以下となった場合は(ステップS135でYES)、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報と、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から送られてきた車両の現在位置情報と地図情報に基づいて、第1の実施の形態と同様にして、ドライバが提示情報に従う運転行動を行ったか否かを判断する(ステップS136)。
【0084】
ドライバ意思推定部104が、ドライバが提示情報に従う運転行動を行わなかったと判断した場合は(ステップS136でNO)、ステップS132に戻って、ドライバに提示すべき他の情報がないかを判断する。ドライバが提示情報に従う運転行動を行ったと判断したときは(ステップS136でYES)、ドライバ意思推定部104は、ナビゲーション装置30から取得した、ナビ経路及び車両の現在位置を参照することで、ドライバの運転行動がナビ経路を外れるような運転行動であるかを判断することにより、ドライバの意思を推定する(ステップS137)。
【0085】
ステップS137で、ナビ経路から外れる運転行動ではないと判断した場合には(ステップS137でNO)、ステップS136に戻って、ドライバが提示情報に従う新たな運転行動を行ったか否かを判断する。ステップS137で、ナビ経路から外れる運転行動であると判断した場合には(ステップS137でYES)、ドライバ意思推定部104は、ドライバは提示情報で提案された目的地に行く意思を有するとの推定結果を情報取得部101に渡し、情報取得部101はさらに提示した情報のさらに詳細な情報を取得して提示情報生成部102に出力し、提示情報生成部102はその詳細な情報の音声及び映像の提示情報を生成し、ナビゲーション装置30がこれを出力することで、提示情報に関する詳細情報をドライバに提示する(ステップS138)。
【0086】
ナビゲーション装置30は、さらに、経路案内において、ドライバより指定された目的地を提示情報で提案された目的地に変更して、新たな経路を探索し、経路案内を開始する(ステップS139)。
【0087】
以上のように、本実施の形態の情報提示システム3によれば、ナビ経路から外れるような運転行動を行ったときに、それを提案目的地に向かうための運転行動と判断してドライバの意思を推定するので、ドライバの意思をより正確に推定できる。また、ドライバが、提案された目的地に行くための運転行動を行った場合にも、その運転行動が、ナビゲーション装置30の経路案内に従って走行するための運転行動である限り、ドライバが提示情報に従って提案された目的地に行く意思を有するとは判断しないので、提案された目的地が単に本来行こうとしていた目的地の経路途中にあって、ドライバは単に本来の目的地に向かっているだけであるという場合に、ドライバが情報提示システムによって提案された目的地に行こうとしていると誤って判断することがない。
【0088】
また、本実施の形態の情報提示システム3によれば、ドライバが情報提示システム3の提示情報に従ったと推定した場合に、ナビゲーション装置30にて目的地をその提示情報の提案する目的地に変更して経路を探索し、経路案内を開始するので、ドライバは提示情報にて提案された目的地に行こうと思ったときに、容易にその目的地に到達できる。
【0089】
なお、上記の第3の実施の形態では、まずステップS135にて提示情報に係る目的地と車両の現在位置との距離が所定の閾値以下であることを判断して、この距離が閾値以下になった後に、ステップS136にてドライバが提示情報に従う運転行動を行ったかを判断し、ステップS137にてその運転行動がナビ経路から外れる運転行動であるかを判断したが、提示情報に係る目的地と車両の現在位置との距離が所定の閾値以下であるかの判断は、ステップS136の後又はステップS137の後に行ってもよい。
【0090】
また、上記の第3の実施の形態では、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、その運転行動がナビ経路から外れる運転行動であるか否かを判断することでドライバの意思の推定精度を向上させたが、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、ナビゲーション装置30のGPS32を用いて車両の現在位置を確認して、車両がドライバにより指定された目的地までの経路から外れたか否かを判断することで、ドライバの意思の推定の精度を向上させてもよい。
【0091】
(第4の実施の形態)
図14は、本発明の第4の実施の形態の情報提示システムの構成を示すブロック図である。本実施の形態の情報提示システム4において、第1の実施の形態の情報提示システム1と同一の構成については、同一の符号を付して、その詳細な説明は省略する。
【0092】
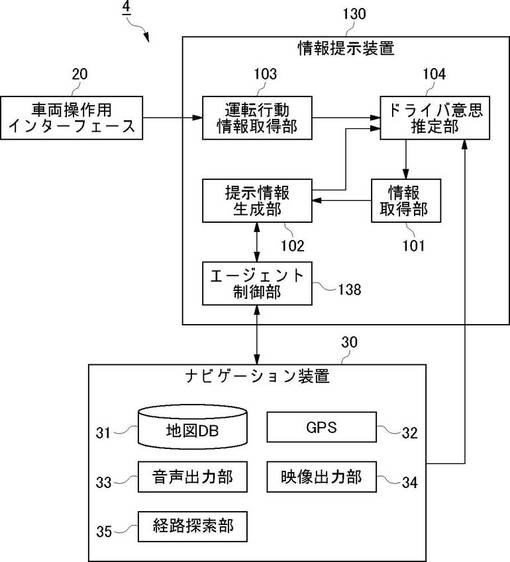
本実施の形態の情報提示システム4の情報提示装置130は、エージェント制御部138を備えている。エージェント制御部138は、提示情報生成部102で生成された提示情報に基づいて複数のエージェント(仮想的な話者)の会話を生成する。エージェント制御部138は、生成した会話をナビゲーション装置30の音声出力部33及び映像出力部34に出力する。音声出力部33及び映像出力部34は、エージェントが会話をする形式でドライバに情報を提示する。
【0093】
ドライバが音声出力部33及び映像出力部34より出力されるエージェントの会話に参与しなくても、エージェント同士の会話は進行する。従って、ドライバの応答を強制せずに、インタラクションを連続して持続させることが可能である。ドライバがエージェント間で構成される会話に介入することを望む場合には、上記の実施の形態と同様に、運転行動でエージェント間の会話に参加することが可能である。
【0094】
ドライバがエージェント間の会話に対応した運転行動をすると、運転行動情報取得部103がその運転行動の情報を取得し、ドライバ意思推定部104に出力する。ドライバ意思推定部104は、提示情報生成部102から取得した提示情報及びナビゲーション装置30から取得した車両の現在位置情報及び地図情報に基づいて、運転行動情報取得部103から取得した運転行動情報がエージェント間の会話に対応した運転行動であると判断することでドライバの意思を推定する。
【0095】
ドライバ意思推定部104は、推定結果を情報取得部101に出力すると、情報取得部101はドライバの意思に従った新たな情報を取得して、提示情報生成部102に出力する。提示情報生成部102は新たな情報をもとに提示情報を生成する。エージェント制御部138は、提示情報生成部102にて新たに生成された提示情報に基づいて、エージェントの会話を生成し、ナビゲーション装置30に出力する。ナビゲーション装置30の音声出力部33及び映像出力部34は、音声及び映像を用いて会話形式で提示情報を提示する。
【0096】
以下、情報提示システム4の動作の具体例を説明する。提示情報生成部102が生成した提示情報に基づいて、エージェント制御部138が、例えば、エージェントA、Bによる次のような会話を生成する。
エージェントA:「この先のカーブは、交通事故が多発しているらしいよ。」
エージェントB:「そうらしいね。最近もスリップ事故でけが人が出たらしいね。」
【0097】
この会話に対するドライバの応答として、ドライバがブレーキを踏んで減速をすると、運転行動情報取得部103がその運転行動の情報を取得して、ドライバ意思推定部104に出力し、ドライバ意思推定部104では、ナビゲーション装置30から車両の現在位置情報と地図情報を取得して、当該ブレーキを踏む運転行動がその先のカーブに進入する前の減速であることを認識し、提示情報生成部102から取得した提示情報に基づいて、この運転行動がエージェントA、Bの会話への応答であると推定する。
【0098】
ドライバ意思推定部104は情報取得部101にこの推定結果を出力する。情報取得部10は、推定結果を受けて、当該推定結果に基づいてさらに情報を取得して提示情報生成部102に出力する。提示情報生成部102は、提示情報を生成してエージェント制御部138に出力する。エージェント制御部138は、例えば次のようなドライバの運転行動に対する会話を生成する。
エージェントA:「そうそう、やっぱり安全運転が一番だよ。」
エージェントB:「交通事故の原因の多くはスピードの出しすぎだって言うしね。」
【0099】
図15は、本発明の第4の実施の形態における情報提示システムの動作を示すフロー図である。まず、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS151)。その後、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS152)。ドライバに提示すべき情報があれば(ステップS152でYES)、提示情報生成部102が提示情報を生成して、エージェント制御部138が提示情報に基づいて音声及び映像の会話を生成する(ステップS153)。ナビゲーション装置30は音声出力部33や映像出力部34を用いて会話形式で提示情報をドライバに提示する(ステップS154)。ドライバに提示すべき情報がなければ(ステップS152でNO)、そのような情報があるまでステップS152を繰り返す。
【0100】
次に、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報と、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から送られてきた車両の現在位置情報と地図情報に基づいて、ドライバの運転行動がエージェントの会話に対する応答であるか否かを判断する(ステップS155)。ドライバ意思推定部104が、ドライバの運転行動がエージェントの会話に対する応答ではないと判断した場合は(ステップS155でNO)、ステップS152に戻って、ドライバに提示すべき他の情報がないかを判断する。ドライバの運転行動がエージェントの会話に対する応答であると判断したときは(ステップS155でYES)、エージェントの会話内容をドライバの運転行動に応じて変化させて、ドライバの運転行動に対応した会話を出力する(ステップS156)。
【0101】
以上のように、本実施の形態の情報提示システム4によれば、複数のエージェントによる会話形式の情報提示がされ、この会話にドライバが参与しなくてもエージェント間の会話は進行するため、ドライバの応答を強制することがなく、ドライバの認知負荷を抑えることができる。また、本実施の形態の情報提示システム4によれば、複数のエージェントによる会話形式の情報提示に対して、ドライバの運転行動からドライバが提示情報に従う意思があるか否かを推定するので、ドライバによる言語を用いないインタラクションが可能であり、ドライバと情報提示装置との間のインタラクションにおいてドライバの認知負荷を抑えることができる。
【0102】
(変形例)
上記の情報提示システム対して、種々の変更が可能である。以下、いくつかの変形例を説明する。上記の実施の形態では、提示情報生成部102は、情報取得部101が取得した情報に基づいて提示情報を生成したが、提示情報生成部102は、さらに車両の運転操作方法に関するアドバイス情報を生成して、提示情報とともにナビゲーション装置30に出力してもよい。このアドバイス情報とは、第1の実施の形態で説明した、運転行動とドライバ意思の推定との関係を説明する情報である。例えば、アクセルを緩めてブレーキ強度を増加させる運転行動を提示情報に従った運転行動であると判断する場合には、その旨を音声等で案内することで、ドライバはどのような運転行動を行えば提示情報に従った運転行動と認識されるかを知ることができる。このように、情報提示システムがドライバに自身の意思を表現するための所定の運転行動を指定したとしても、そのような車両操作はあくまでも提示情報で提案された目的地に行くための運転行動であり、情報提示システムに応答をするに際してドライバの認知負荷が増えることはない。
【0103】
上記の第2〜第4の実施の形態の情報提示システムは、推定正否判断部及び意思推定事例データベースを有しない構成であったが、これらの実施の形態の情報提示システムがさらに推定正否判断部及び意思推定事例データベースを備えて、過去の推定事例も考慮してドライバの意思を推定してもよい。
【0104】
また、上記の実施の形態の情報提示システムでは、ナビゲーション装置の音声出力部及び映像出力部を利用して提示情報をドライバに提示していたが、情報提示システム専用の音声出力部及び映像出力部を利用して提示情報を提示するようにしてもよい。さらに、提示情報は、音声出力部又は映像出力部のいずれか一方を利用して出力されてもよい。特に、音声による情報提示は映像の場合と比較してドライバの認知負荷をより抑えることができるので有効である。
【0105】
また、上記の実施の形態の情報提示システムでは、情報取得装部101は、無線通信によって外部から情報を取得したが、情報取得装部101は情報提示装置が記憶している情報の中から車両近辺の情報を取得してもよい。さらに、上記の実施の形態の情報提示システムでは、情報取得部101にて情報を取得して、提示情報生成部102で提示情報を生成したが、提示すべき情報を情報取得部101にて直接取得することにより提示情報生成部102の構成を省略してよい。
【0106】
また、上記の実施の形態では車両に搭載される情報提示システムを紹介したが、情報提示システムは、ユーザが操作することによって運転される、車両以外の他の移動体に搭載されてもよい。
【産業上の利用可能性】
【0107】
本発明は、提示情報に対するドライバの運転行動からドライバの意思を推定するので、ドライバと情報提示システムとの間におけるドライバの認知負荷を低減できるという効果を有し、移動体を運転するユーザに情報を提示した後に当該提示情報に対するユーザの応答を受け付ける対話型の情報提示システム等として有用である。
【符号の説明】
【0108】
1、2、3 情報提示システム
20 車両操作用インターフェース
30 ナビゲーション装置
33 音声出力部
34 映像出力部
100、110、120 情報提示装置
101 情報取得部
102 提示情報生成部
103 運転行動情報取得部
104 ドライバ意思推定部
105 推定正否判断部
106 意思推定事例データベース
117 走行履歴データベース
138 エージェント制御部
【技術分野】
【0001】
本発明は、移動体を運転するユーザに情報を提示した後に、当該提示情報に対するユーザの応答を受け付ける対話型の情報提示システム及び情報提示方法に関するものである。
【背景技術】
【0002】
車両等の移動体に搭載される対話型の情報提示システムでは、情報提示システムからユーザに情報を提示したとき、または何らかの行動の提案を行ったときには、ユーザは自身の意思を情報提示システムに伝達する必要がある(例えば、特許文献1参照)。通常、ユーザは、情報提示システムにおける各種スイッチ、タッチパネルによるGUIインタフェース、音声認識による操作手法を利用して情報提示システムを操作することによって、自身の意思を情報提示システムに伝達する。特に、音声認識の技術を用いてユーザの意思を情報提示システムに伝達すれば、移動体を運転しているユーザの認知負荷を軽減でき、交通安全上好ましい。
【0003】
音声認識技術を取り入れた対話型の情報提示システムの先行技術として、特許文献2及び特許文献3がある。特許文献2では、ユーザとの対話を通してユーザの嗜好を推定し、ユーザに適合した情報を提供する車両対話システムが開示されている。また、特許文献3では、車両位置や時間に基づいて、エージェントが自立的に起動して、ユーザと対話を行う車載用エージェントシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−141497号公報
【特許文献2】特開2009−064186号公報
【特許文献3】特開2004−054883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、移動体に搭載される対話型の情報提示システムにおいて、移動体を運転しているユーザが情報提示システムへ意思伝達を行う行為はいずれも、ユーザの認知負荷を運転以外に割り当てることを意味しており、ユーザを危険な状態に陥れる可能性があるという問題があった。音声認識の技術を利用してユーザが発声することで自己の意思を伝達する場合には、ユーザの認知負荷はある程度は軽減されるが、依然として、発声という意思伝達のための行為を強いるものであり、ユーザの認知負荷の軽減には不十分である。また、音声認識技術では、ユーザが正確な発音をしなければ情報提示システムが音声を正しく認識できないため、ユーザは正確な発音をすることに注意力を奪われることになる。
【0006】
本発明は、従来の問題を解決するためになされたもので、情報提示システムが提示した情報に対して、移動体を運転しているユーザの認知負荷を軽減して、ユーザから情報提示システムへの応答を可能にする情報提示システム及び情報提示方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、移動体を運転しているユーザ(以下、「ドライバ」という)による運転行動を、情報提示システムに対するドライバの応答行為として認識することによって、ドライバと情報提示システムとの間におけるドライバの認知負荷の低いインタラクションを実現するものである。
【0008】
本発明の情報提示システムは、移動体に備えられてドライバに情報を提示する情報提示システムであって、提示情報を提示する情報提示部と、ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記情報提示部にて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部とを備えた構成を有している。
【0009】
この構成により、ドライバに対して運転以外の操作を要求することなく、提示情報に対するドライバの意思を推定することで、ドライバと情報提示システムとのインタラクションが可能となる。また、情報提示システムのとのインタラクションにおけるドライバの認知負荷を抑えることができる。さらに、リアルタイムでドライバの意思を情報提示システムに伝達できる。
【0010】
また、上記の情報提示システムは、情報を取得する情報取得部をさらに備え、前記情報提示部は、前記情報取得部が取得した情報に基づく提示情報を提示する。この構成により、取得した情報を提示するとともに、その提示情報に対するドライバの応答を推定できる。
【0011】
また、上記の情報提示システムにおいて、前記情報取得部は、無線通信により外部のネットワークから情報を取得し、前記情報提示システムは、さらに前記情報取得部が取得した情報に基づいて、前記提示情報を生成する提示情報生成部を備え、前記情報提示部は、前記提示情報生成部が生成した提示情報を提示する。
【0012】
この構成により、例えばインターネット等の外部のネットワークから移動体周辺の情報を取得して、その情報をドライバに提示するのにふさわしい提示情報に加工したうえで、ドライバに提示するので、例えば外部のネットワークから文字情報を取得して、その文字情報を音声情報に変換して提示する等が可能となる。
【0013】
また、上記の情報提示システムにおいて、前記情報提示部は、前記提示情報として提案目的地の情報を提示し、前記ドライバ意思推定部は、ドライバが前記提案目的地に行く意思を有するか否かを推定して、推定結果を前記情報提示部に出力し、前記情報提示部は、前記ドライバ意思推定部から、ドライバが前記提案目的地に行く意思を有するとの推定結果を受けたときに、当該提案目的地に関する更なる情報を提示する。
【0014】
この構成により、情報提示部が移動体付近の目的地を提案し、ドライバ意思推定部が、ドライバがその提案に従ったか否かを推定し、ドライバが提案に従って目的地に向かうとその目的地のさらに詳細な情報等を提示することができるので、ドライバが提案に従った場合に詳細な情報を提示して、ドライバが提案に従わなかった場合には詳細な情報は提示しないという情報提示が可能になる。情報提示は映像出力部での映像(文字情報を含む)表示や音声出力部からの音声出力によるので、ドライバに提示できる情報の量は限られている。そこで、先に目的地の提案のみを提示して、ドライバによるその目的地に行く意思が推定されたときにさらに詳細な情報を提示し、ドライバが目的地の提案に対して関心を持たない場合は詳細な情報を提供しないこととすれば、限られた提示できる情報の量を有効に利用して、ドライバにとって有用な情報を提示できる。
【0015】
上記の情報提示システムにおいて、前記ドライバ意思推定部は、通常運転状態でのドライバによる移動体の運転行動の情報と、前記運転行動情報取得部にて取得した運転行動の情報との差分に基づいて、ドライバの意思を推定する。
【0016】
この構成により、ドライバが提示情報に対して通常状態の運転行動とは異なる運転行動をしたか否かで、ドライバの意思を推定できる。
【0017】
上記の情報提示システムにおいて、前記ドライバ意思推定部は、ドライバの過去の走行履歴と、前記運転行動情報取得部にて取得した運転行動の情報とに基づいて、ドライバの意思を推定する。
【0018】
この構成により、ドライバが普段走行している経路から外れるなどの運転行動をとったときに、それに基づいてドライバの意思を推定でき、推定の精度が向上する。
【0019】
また、上記の情報提示システムは、経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、前記ドライバ意思推定部は、前記運転行動の情報に基づいて、ドライバが前記経路案内部による経路案内の最中に前記経路案内目的地への経路を外れて前記提案目的地に向かう運転行動を行ったときに、ドライバが前記提案目的地に行く意思を有していると推定する。
【0020】
この構成により、例えばナビゲーション装置で経路案内をしているときに、その経路から外れたことに基づいて、提案された提案目的地に行く意思があると推定できる。
【0021】
また、上記の情報提示システムにおいて、前記ドライバ意思推定部は、移動体と前記提案目的地とが所定の距離以上であるときは、前記運転行動の情報に基づくドライバの意思の推定をしない。
【0022】
移動体と提案目的地とが所定の距離以上離れている場合には、ドライバの運転行動は必ずしも提案目的地に行くための運転行動とはいえないことがある。そこで、この構成により、提案目的地へ行くか否かとは関係のない運転行動に基づいてドライバの意思を推定することを回避できる。
【0023】
また、上記の情報提示システムは、移動体の実際の走行結果と前記推定結果とを比較することで、該推定結果が正しかったか否かを判断する推定正否判断部と、前記推定正否判断部による前記推定結果の正否判断の事例を記憶する意思推定事例記憶部とをさらに備え、前記ドライバ意思推定部は、前記意思推定事例記憶部に記憶された事例を参照して、ドライバの意思を推定する。
【0024】
この構成により、ドライバ意思推定部による推定結果の正否を学習することができ、特定のドライバがこの情報提示システムを多く利用することで、当該特定のドライバの癖を考慮した意思の推定が可能になり、推定の精度を向上できる。
【0025】
また、上記の情報提示システムは、経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、前記経路案内部は、前記ドライバ意思推定部にて、ドライバが前記提案目的地に行く意思を有すると推定されたときに、前記経路案内目的地を前記提案目的地として経路を案内する。
【0026】
この構成により、ドライバが情報提示システムの提案に従って提案目的地に行くことを意思決定した場合に、経路案内の目的地を変更する操作をする必要がなく、ドライバの認知負荷を軽減できる。
【0027】
また、上記の情報提示システムおいて、前記情報提示部は、前記提示情報の提示とともに、前記ドライバ意思推定部がドライバの意思を推定する際に用いる、前記提示情報に対する応答と移動体の操作との関係を示す情報を提示する。
【0028】
この構成により、どのような運転行動をすれば提示情報に従ったと推定されるかをドライバに案内するので、ドライバ意思推定部が誤ってドライバの意思を推定することを軽減でき、推定の精度を向上できる。
【0029】
また、上記の情報提示システムにおいて、前記移動体の運転行動の情報は、ステアリング、アクセル、ブレーキ、及び/又はクラッチの操作の情報である。この構成により、ドライバは、提示情報に対する応答を、移動体を運転するための通常の操作によって表現することができる。
【0030】
また、上記の情報提示システムにおいて、前記情報提示部は、音声で情報を提示する。この構成により、ドライバは、自身の応答を伝達する場合のみならず、提示された情報を受けるに際しても、運転以外の認知負荷を軽減できる。
【0031】
本発明の情報提示装置は、移動体に備えられてドライバに情報を提示する情報提示装置であって、情報を取得する情報取得部と、前記情報取得部が取得した情報に基づいて、提示情報を生成する提示情報生成部と、ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記提示情報生成部にて生成された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部とを備えた構成を有している。
【0032】
本発明の情報提示方法は、移動体のドライバに情報を提示する情報提示方法であって、提示情報を提示する情報提示ステップと、ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップとを含む。
【0033】
本発明のコンピュータプログラムは、移動体のドライバに対する情報提示方法を実行するためのコンピュータプログラムであって、コンピュータに、提示情報を提示する情報提示ステップと、ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップとを実行させる。
【発明の効果】
【0034】
本発明によれば、提示情報に対するドライバの運転行動からドライバの意思を推定するので、ドライバと情報提示システムとの間におけるドライバの認知負荷を低減できるという優れた効果を有する。
【図面の簡単な説明】
【0035】
【図1】本発明の第1の実施の形態における情報提示システムの構成を示すブロック図
【図2】本発明の第1の実施の形態における情報提示システムの第1の動作例を説明するための図
【図3】本発明の第1の実施の形態における情報提示システムの第2の動作例を説明するための図
【図4】本発明の第1の実施の形態におけるドライバの意思の推定の第2の例のアクセル操作及びブレーキ操作の例を示す図
【図5】本発明の第1の実施の形態における情報提示システムの第3の動作例を説明するための図
【図6】本発明の第1の実施の形態における情報提示システムの第4の動作例を説明するための図
【図7】本発明の第1の実施の形態における情報提示システムの動作を示すフロー図
【図8】本発明の第2の実施の形態における情報提示システムの構成を示すブロック図
【図9】本発明の第2の実施の形態における情報提示システムの動作例を説明するための図
【図10】本発明の第2の実施の形態における情報提示システムの動作を示すフロー図
【図11】本発明の第3の実施の形態における情報提示システムの構成を示すブロック図
【図12】本発明の第3の実施の形態における情報提示システムの動作例を説明するための図
【図13】本発明の第3の実施の形態における情報提示システムの動作を示すフロー図
【図14】本発明の第4の実施の形態における情報提示システムの構成を示すブロック図
【図15】本発明の第4の実施の形態における情報提示システムの動作を示すフロー図
【発明を実施するための形態】
【0036】
以下、本発明の実施の形態の情報提示システムについて、図面を参照しながら説明する。
(第1の実施の形態)
図1は、第1の実施の形態の情報提示システムの構成を示すブロック図である。まず、情報提示システム1の概略構成を説明する。情報提示システム1は、情報提示装置100、車両操作用インターフェース20、及びナビゲーション装置30を備えている。情報提示装置100は、ドライバによる運転行動を情報提示システム1に対するドライバの応答行為として認識することによって、ドライバと情報提示システム1との間におけるドライバの認知負荷の低いインタラクションを実現する。このために、情報提示装置100は、無線通信によって外部のネットワークから情報を取得する情報取得部101と、情報取得部101で取得した情報に基づいて、ドライバに提示する提示情報を生成する提示情報生成部102と、ドライバによる車両の運転行動の情報を取得する運転行動情報取得部103と、運転行動情報取得部103で取得した運転行動の情報に基づいて、提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部104と、車両の実際の走行結果とドライバ意思推定部104での推定結果とを比較することで、推定結果が正しかったか否かを判断する推定正否判断部105と、推定正否判断部105による推定結果の正否判断の事例を記憶する意思推定事例データベース106とを備えている。
【0037】
ナビゲーション装置30は、周知の構成を有しており、地図情報を記憶する地図情報ベース31と、車両の現在位置情報を取得するGPS32と、スピーカ等からなる音声出力部33と、表示パネル等からなる映像出力部34と、地図情報と現在位置情報に基づいて、目的地までの経路を探索する経路探索部35とを備えている。このナビゲーション装置30は、情報提示装置100の提示情報生成部102に接続されており、提示情報生成部102が生成した提示情報を受け取って、当該提示情報を音声出力部33及び映像出力部34から出力することでドライバに提示する。また、ナビゲーション装置30は、提示情報生成部102、ドライバ意思推定部104及び推定正否判断部105とそれぞれ接続されており、これらに車両の現在位置情報や地図情報を提供する。
【0038】
車両操作用インターフェース20は、車両の運転をするためにドライバが操作をする部材であって、車両の走行を直接的に制御する部材であり、ステアリング、アクセル、ブレーキ、及びクラッチを含む。車両操作用インターフェース20は、情報提示装置100の運転行動情報取得部101に接続されており、これらの部材の操作に関する情報を運転行動情報として運転行動情報取得部101に伝達する。運転行動情報は、ステアリングの角度、アクセルの開度(踏み込み量)、ブレーキの強度(踏み込み量)、クラッチの段数を含む。
【0039】
次に、情報提示システム1にてドライバに提示情報を提示して、その提示情報に対するドライバの応答を推定し、更なる情報提示を行う構成について詳細に説明する。情報取得部101は、無線通信インターフェースを備えており、無線でインターネットに接続して、インターネット上の特定のサイトから情報を取得する。このサイトでは該サイトのユーザが互いに雑談をしており、情報取得部101は、該サイトのユーザによる雑談情報をテキスト形式で取得する。提示情報生成部102は、ナビゲーション装置30から車両の現在位置情報を取得して、情報取得部101が取得した雑談情報から車両の現在位置の近辺の情報を抽出する。提示情報生成部102は、例えば、情報取得部101が雑談情報から車両の現在地近辺の喫茶店Gの情報を抽出したときに、提示情報として、「この先の交差点を左折して200m先に、秋季限定のケーキが食べられる喫茶店Gがあります。」といった音声情報と、これに対応する映像情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30では、音声出力部33がこの音声情報を出力し、映像出力部34がこの映像情報を出力する。これによりドライバに情報を提示する。
【0040】
運転行動情報取得部103は、車両操作用インターフェース20から運転行動情報を取得する。この運転行動情報には、上述の通り、ステアリングの角度、アクセルの開度(踏み込み量)、ブレーキの強度(踏み込み量)、クラッチの段数が含まれる。運転行動情報取得部103は、これらの運転行動情報をドライバ意思推定部104に出力する。
【0041】
ドライバ意思推定部104は、ナビゲーション装置30から取得した車両の現在位置情報と地図情報、提示情報生成部102から取得した提示情報、及び運転行動情報取得部103から取得した運転行動情報に基づいて、ドライバが提示情報で提案された目的地に行く意思を有するか否かを推定し、推定結果を情報取得部101及び推定正否判断部105に出力する。ドライバ意思推定部104は、推定の際に、さらに意思推定事例データベース106に記憶された過去の推定事例を参照して、ドライバが提示情報で提案された目的地に行く意思があるか否かの結論を出す。
【0042】
情報取得部101は、推定結果を受け取って、推定結果が、ドライバが提示情報で提案された目的地に行く意思を有することを示しているときは、当該目的地についての更に詳細な情報を取得して、提示情報生成部102に出力する。提示情報生成部102は、この詳細な情報に基づいて、音声及び映像の詳細な提示情報を生成し、ナビゲーション装置30に出力する。ナビゲーション装置30では、音声出力部33が詳細な提示情報を音声出力し、映像出力部34が詳細な提示情報を映像出力する。
【0043】
一方、推定正否判断部105は、ドライバ意思推定部104から取得した推定結果及びナビゲーション装置30から取得した車両の実際の走行結果に基づいて、ドライバ意思推定部104によるドライバの意思の推定が正しかったか否かを判断する。推定結果が、ドライバが提示情報によって提案された目的地(以下、「提案目的地」という)に行く意思があることを示しており、実際の走行結果もドライバが提案目的地まで移動したことを示している場合には、この推定結果を正例として、この推定に用いた条件(車両の現在位置情報、地図情報、提示情報、及び運転行動情報等)とともに意思推定事例データベース106に記憶する。また、推定結果が、ドライバが提案目的地に行く意思がないことを示しており、実際の走行結果もドライバが提案目的地に移動しなかったことを示している場合には、この推定結果を正例として、意思推定事例データベース106に記憶する。一方、推定結果が、ドライバが提示情報によって提案された提案目的地に行く意思があることを示しているが、実際の走行結果はドライバが提案目的地に移動しなかったことを示している場合には、この推定結果を誤例として、意思推定事例データベース106に記憶する。また、推定結果が、ドライバが提示情報によって提案された提案目的地に行く意思がないことを示しているが、実際の走行結果はドライバが提案目的地まで移動したことを示している場合にも、この推定結果を誤例として、意思推定事例データベース106に記憶する。
【0044】
ドライバ意思推定部104は、ナビゲーション装置30から取得した車両の現在位置情報と地図情報、提示情報生成部102から取得した提示情報、及び運転行動情報取得部103から取得した運転行動情報に基づいて、ドライバが提示情報で提案された目的地に行く意思を有するか否かを判断するが、これら車両の現在位置情報、地図情報、提示情報及び運転行動情報の条件を意思推定事例データベース106に記憶されている各推定事例の条件と比較して、意思の有無の推定に用いる条件と近い条件の推定事例が意思推定データベース106に記憶されている場合は、この推定事例を参照する。条件の近い推定事例が正例であれば、ドライバが提示情報に従った推定し、条件の近い推定事例が誤例であれば、その条件によってはドライバが提示情報に従ったとは推定しない。
【0045】
以下、情報提示システムの動作について、例を挙げて説明する。なお、以下の動作例の説明では、説明を簡潔にするため、過去の推定事例に基づいて推定をする点については説明を省略する。図2は、情報提示システム1の第1の動作例を示す図である。この例では、ドライバのステアリング操作に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P21で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために位置P22でステアリングを若干左に切って、車両Cを道路の左側に寄せて走行し、位置P23で交差点Jを左折する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度に基づいて車両Cが左折したことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、その左折した位置が交差点Jであることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その交差点Jでの左折のためにステアリングを左に切った運転行動が、喫茶店Gへ向かう運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、ドライバが提示情報に従って喫茶店Gに行くと意思決定したことを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0046】
情報取得部101は、この推定結果を受けて喫茶店Gに関する更なる詳細情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P24で喫茶店Gに関する詳細な情報を提示する。
【0047】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32による車両の現在位置情報に基づいて、位置P25で車両が喫茶店Gに到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0048】
図3は、情報処理システム1の第2の動作例を示す図である。この例では、ドライバのアクセル及びブレーキの操作に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P31で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、喫茶店Gで停車するために位置P32でアクセルを緩めてブレーキをかけ始める。そうすると、位置P33でドライバ意思推定部104は、運転行動情報取得部103から取得したアクセルの開度及びブレーキの強度に基づいて車両Cが減速されたことを認識する。
【0049】
図4は、ドラバイ意思推定部104がドライバの意思の推定する際のアクセル操作及びブレーキ操作の例を示す図である。図4(a)は、通常運転状態でのアクセル操作を示すグラフであり、横軸は時間であり、縦軸はアクセルの開度である。図4(b)は、通常運転状態でのブレーキ操作を示すグラフであり、横軸は時間であり、縦軸はブレーキの強度である。図4(c)は、図4(a)に対応するグラフであり、提案目的地に行く場合のアクセル操作の例を示している。図4(d)は、図4(b)に対応するグラフであり、提案目的地に行く場合のブレーキ操作の例を示している。
【0050】
まず、アクセル操作について説明する。図4(a)のグラフは予めドライバ意思推定部104に記憶されており、ドライバ意思推定部104ではこの図4(a)のアクセル操作と、運転行動情報取得部103が取得したアクセル開度の情報とを比較する。運転行動情報取得部103が取得したアクセル開度の情報が、図4(c)のように時間とともに減少すると、図4(a)のアクセル操作との差分が所定の閾値以上となり、ドライバ意思推定部104はアクセルが緩められたと判断する。
【0051】
ブレーキ操作についても同様である。図4(b)のグラフは予めドライバ意思推定部104に記憶されており、ドライバ意思推定部104ではこの図4(b)のブレーキ操作と、運転行動情報取得部103が取得したブレーキ強度の情報とを比較する。運転行動情報取得部103が取得したブレーキ強度の情報が、図4(d)のように時間とともに増大すると、図4(b)のブレーキ操作との差分が所定の閾値以上となり、ドライバ意思推定部104はブレーキがかけられたと判断する。このようにして、ドライバ意思推定部104は、車両Cが減速されたことを認識する。
【0052】
また、ドライバ意思推定部104は、ナビゲーション装置30から取得した車両の現在位置情報と地図情報及び提示情報生成部102から取得した提示情報に基づいて、その減速した位置が喫茶店Gの直前であることを認識し、位置P32でのアクセル及びブレーキの操作が喫茶店Gへ行くための運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、ドライバが提示情報に従って喫茶店Gに行く意思があることを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0053】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P34で喫茶店Gに関する詳細な情報を提示する。
【0054】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32による車両の現在位置情報に基づいて、位置P35で車両が喫茶店Gの到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0055】
図5は、情報提示システム1の第3の動作例を示す図である。この例では、ドライバのステアリング操作、アクセル開度及びブレーキ強度に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P51で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために位置P52で速度を落としながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度とアクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、減速しながら道路左側に寄った位置が交差点Jの手前であることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その交差点Jの手前での減速しながら道路左側に寄るためのステアリング、アクセル及びブレーキの操作が喫茶店Gへ向かう運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、位置P53でドライバが提示情報に従って喫茶店Gに行くと意思決定したことを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0056】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P54で喫茶店Gに関する詳細な情報を提示する。
【0057】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32が取得した車両の現在位置情報に基づいて、位置P55で車両が喫茶店Gに到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0058】
図6は、情報提示システム1の第4の動作例を示す図である。この例でも、ドライバのステアリング操作とアクセル開度及びブレーキ強度に基づいてドライバの意思を推定する。まず、車両Cが縦方向の道路を直進しているときに、位置P61で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、喫茶店Gで停車するために位置P62で速度を落としながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度とアクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、減速しながら道路左側に寄った位置が喫茶店Gの手前であることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その喫茶店Gの手前での減速しながら道路左側に寄るためのステアリング、アクセル及びブレーキの操作が喫茶店Gへ向かうための運転行動であることを認識する。ドライバ意思推定部104は、これらの認識に基づいて、位置P63でドライバが提示情報に従って喫茶店Gに行くと意思決定したことを推定し、その推定結果を情報取得部101及び推定正否判断部105に出力する。
【0059】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P64で喫茶店Gに関する詳細な情報を提示する。
【0060】
ナビゲーション装置30は、地図データベース31の地図情報、GPS32による車両の現在位置情報に基づいて、位置P65で車両が喫茶店Gに到着したことを確認して、推定正否判断部105にその走行結果を送信する。推定正否判断部105は、ドライバが喫茶店Gに行く意思があると推定した推定結果と、車両が喫茶店Gに到着したという走行結果から、この推定結果は正しいと判断して、この推定結果を正例として意思推定事例データベース106に記憶する。
【0061】
図7は、本実施の形態における情報提示システム1の動作を示すフロー図である。まず、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS71)。次に、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS72)。ドライバに提示すべき情報があれば(ステップS72でYES)、提示情報生成部102にて音声及び映像の提示情報を生成して、ナビゲーション装置30の音声出力部33や映像出力部34を用いて提示情報をドライバに提示する(ステップS73)。ドライバに提示すべき情報がなければ(ステップS72でNO)、そのような情報があるまでステップS72を繰り返す。
【0062】
次に、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報、提示情報生成部102が生成した提示情報、ナビゲーション装置30から送られてきた車両の現在位置情報と地図情報、及び推定事例データベース106が記憶している過去の推定事例に基づいて、ドライバが提示情報に従う運転行動を行ったか否かを判断することにより、ドライバの意思を推定する(ステップS74)。ドライバが提示情報に従う運転行動を行ったと判断したときは(ステップS74でYES)、ドライバ意思推定部104は、その推定結果を情報取得部101に渡し、情報取得部101は詳細な情報を取得して提示情報生成部102に出力し、提示情報生成部102はその詳細な情報の音声及び映像の提示情報を生成し、ナビゲーション装置30がこれを出力することで、提示情報に関する詳細情報をドライバに提示する(ステップS75)。ドライバ意思推定部104が、ドライバが提示情報に従う運転行動を行わなかったと判断した場合は(ステップS74でNO)、ステップS72に戻って、ドライバに提示すべき他の情報がないかを判断する。
【0063】
ステップS74で、ドライバが提示情報に従う運転行動を行ったと判断して、ステップS75で、ドライバに提示情報の詳細情報を提示した後に、推定正否判断部105は、ナビゲーション装置30からの車両の現在位置情報等の情報を用いて、ドライバが最終的に提示情報に従って実際に提案目的地に行ったか否かを判断する(ステップS76)。ドライバが、提案目的地に行った場合には(ステップS76でYES)、推定正否判断部105は、直前のステップS74での推定を正例として、意思推定事例データベース106に記録する(ステップS77)。一方、ドライバが、提案目的地に行かなかった場合には(ステップS76でNO)、直前のステップS74での推定を誤例として、意思推定事例データベース106に記録する(ステップS78)。
【0064】
以上、本発明の第1の実施の形態を説明したが、この実施の形態の情報提示システムによれば、提案目的地の情報を提示した上で、ドライバの運転行動がその提示情報に従って提案目的地に行くための運転行動であるか否かによってドライバがその提案目的地に行く意思を有するか否かを推定するので、ドライバに運転以外の操作を要求することなく、ドライバの意思を認識でき、ドライバと情報提示装置との間のインタラクションにおいてドライバの認知負荷を抑えることができる。また、ドライバの運転行動から、ドライバの意思を推定するので、リアルタイムでドライバの意図を情報提示装置に伝達できる。
【0065】
(第2の実施の形態)
図8は、本発明の第2の実施の形態の情報提示システムの構成を示すブロック図である。本実施の形態の情報提示システム2において、第1の実施の形態の情報提示システム1と同一の構成については、同一の符号を付して、その詳細な説明は省略する。本実施の形態の情報提示システム2の情報提示装置110は、走行履歴データベース117を備えている。本実施の形態のナビゲーション装置30は、車両の走行履歴を出力する機能を有しており、走行履歴データベース117は、ナビゲーション装置30から出力された走行履歴を記憶する。
【0066】
本実施の形態のドライバ意思推定部104は、ドライバの意思を推定する際に、走行履歴データベース117に記憶された過去の走行履歴を参照する。走行履歴データベース117には、過去の走行履歴が記憶されているので、ドライバ意思推定部104はこれを参照することで、ドライバが日常的に走行している経路やドライバがよく行く目的地を判断する。そして、ドライバ意思推定部104は、ドライバの運転行動に基づいて、提示情報によって提案された目的地に行く意思を有すると判断する場合には、その運転行動が、日常的に走行している経路を走行するための運転行動ではなく、かつ、その運転行動が、ドライバがよく行く目的地に向かうための運転行動ではないということを条件とする。即ち、その運転行動が、ドライバが日常的に走行している経路を走行するための運転行動であるか、又はその運転行動が、ドライバがよく行く目的地に向かうための運転行動であるときは、ドライバが提示情報に従って提案目的地に行く意思を有すると判断するのを待ち、日常的に走行している経路を外れるような運転行動をとったとき、又はよく行く目的地への経路を外れる運転行動をとったときに、はじめてそのドライバが提案目的地に行く意思を有すると判断する。
【0067】
図9は、情報提示システム2の動作例を示す図である。この例では、走行履歴データベース117には、交差点Jを直進する経路が日常的な経路Rとして記録されている。車両Cが縦方向の道路を直進しているときに、位置P91で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために、位置P92で速度を緩めながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度、アクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、ナビゲーション装置30から取得した車両の現在位置情報と地図情報に基づいて、その道路左側に寄る運転行動を行った位置が交差点Jの直前であることを認識する。そして、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報に基づいて、その道路左側に寄る運転行動が、喫茶店Gへ向かう運転行動であることを認識する。そして、位置P93でステアリングを左に切って交差点Jを左折すると、このステアリングを左に切った運転行動が日常的な経路Rから外れる運転行動であると判断して、これによりドライバが喫茶店Gに行く意思決定したことを推定し、その推定結果を情報取得部101に出力する。
【0068】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。ナビゲーション装置30は、位置P94で喫茶店Gに関する詳細な情報を提示する。
【0069】
図10は、本発明の第2の実施の形態における情報提示システムの動作を示すフロー図である。まず、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS101)。次に、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS102)。ドライバに提示すべき情報があれば(ステップS102でYES)、提示情報生成部102にて音声及び映像の提示情報を生成して、ナビゲーション装置30の音声出力部33や映像出力部34を用いて提示情報をドライバに提示する(ステップS103)。ドライバに提示すべき情報がなければ(ステップS102でNO)、そのような情報があるまでステップS102を繰り返す。
【0070】
次に、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から送られてきた車両の現在位置情報と地図情報に基づいて、第1の実施の形態と同様にしてドライバが提示情報に従う運転行動を行ったか否かを判断する(ステップS104)。ドライバ意思推定部104が、ドライバが提示情報に従う運転行動を行わなかったと判断した場合は(ステップS104でNO)、ステップS102に戻って、ドライバに提示すべき他の情報がないかを判断する。ドライバが提示情報に従う運転行動を行ったと判断したときは(ステップS104でYES)、ドライバ意思推定部104は、走行履歴データベース117から読み出した過去の走行履歴を参照することで、ドライバが日常的に走行している経路やドライバがよく行く目的地を認識し、ナビゲーション装置30から車両の現在位置情報を取得して、ドライバの運転行動が、日常的に走行している経路を外れるような運転行動、又はよく行く目的地への経路を外れる運転行動であるかを判断することにより、ドライバの意思を推定する(ステップS105)。
【0071】
ステップS105で、日常の経路やよく行く目的地への経路から外れる運転行動ではないと判断した場合には(ステップS105でNO)、ステップS104に戻って、ドライバが提示情報に従う新たな運転行動を行ったか否かを判断する。ステップS105で、日常の経路やよく行く目的地への経路から外れる運転行動であると判断した場合には(ステップS105でYES)、ドライバ意思推定部104は、ドライバは提示情報で提案された目的地に行く意思を有するとの推定結果を情報取得部101に渡し、情報取得部101はさらに提示した情報のさらに詳細な情報を取得して提示情報生成部102に出力し、提示情報生成部102はその詳細な情報の音声及び映像の提示情報を生成し、ナビゲーション装置30がこれを出力することで、提示情報に関する詳細情報をドライバに提示する(ステップS106)。
【0072】
以上のように、本実施の形態の情報提示システムによれば、ドライバが日常の走行履歴から外れるような運転行動を行ったときにのみ、その運転行動を提案目的に行くための運転行動と判断してドライバの意思を推定するので、ドライバの意思をより正確に推定できる。また、ドライバが、提案目的地に行くための運転行動をとった場合にも、その運転行動が日常的に利用する経路を走行するための運転行動でもあるときは、ドライバが提示情報に従って提案された目的地に行くとは判断しないので、提案目的地が単に本来行こうとしていた目的地の経路途中にあって、ドライバは単に本来の目的地に向かっているだけであるという場合に、情報提示システムが、ドライバが提案目的地に行こうとしていると誤って推定することがない。
【0073】
なお、上記の第2の実施の形態では、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、その運転行動が日常的に利用する経路やよく行く目的地への経路から外れる運転行動であるか否かを判断することでドライバの意思の推定精度を向上させたが、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、ナビゲーション装置30のGPS32を用いて車両の現在位置を確認して、車両が日常的に利用する経路やよく行く目的地への経路から外れたか否かを判断することで、ドライバの意思の推定の精度を向上させてもよい。
【0074】
(第3の実施の形態)
図11は、本発明の第3の実施の形態の情報提示システムの構成を示すブロック図である。本実施の形態の情報提示システム3において、第1の実施の形態の情報提示システム1と同一の構成については、同一の符号を付して、その詳細な説明は省略する。
【0075】
本実施の形態のドライバ意思推定部104は、ドライバの意思を推定する際に、ナビゲーション装置30にて設定された経路を参照する。ナビゲーション装置30の経路探索部35は、ドライバにより指定された目的地までの経路を探索して、車両の現在位置に応じて目的地までの走行経路を案内する機能を有している。情報提示装置120は、第1又は第2の実施の形態と同様にして、情報取得部101で情報を取得して、提示情報生成部102で提示情報を取得する。この提示情報は、ナビゲーション装置30の音声出力部33及び映像出力部34によってドライバに提示される。
【0076】
ドライバ意思推定部104は、運転行動情報取得部103から取得したドライバの運転行動の情報、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から取得した、車両の現在位置情報及び地図情報に基づいて、ドライバが提案目的地に行くための運転行動を行ったか否かを判断する。ドライバ意思推定部104は、さらに、この運転行動が、ナビゲーション装置30から取得した、ドライバにより指定された目的地までの経路から外れる運転行動であるか否かに基づいて、ドライバが提案目的地に行く意思を有するか否かを推定する。
【0077】
また、本実施の形態のドライバ意思推定部104は、提案目的地と車両の現在位置との距離が所定の閾値以下になってからドライバの意思の推定を開始する。これは、車両の位置と提案目的地との距離があまりに遠い場合には、たとえドライバにより指定された目的地までの経路から外れる運転行動が行われたとしても、そのような運転行動を一概に提案目的地に行くための運転行動であると判断するのは適切でないからである。ドライバの意思の推定を開始するための提案目的地と車両の現在位置との距離は、例えば500mとする。
【0078】
また、本実施の形態の情報提示システム120は、ドライバの意思の推定に基づいて、ナビゲーション装置30によるナビゲーションの目的地を自動的に変更する。このために、ドライバ意思推定部104は、ドライバが提案目的地に行く意思を有すると推定した場合に、情報取得部101に推定結果を渡すとともに、ナビゲーション装置30に対しても推定結果を渡す。ナビゲーション装置30は、ドライバが提案目的地に行く意思を有するとの推定結果を受け取ると、現在行っているドライバが指定した目的地への経路案内を中止して、提案目的地に行くための経路を探索して経路案内を開始する。また、ナビゲーション装置30は、ドライバが提案目的地に行く意思を有するとの推定結果を受け取った場合において、ドライバが指定した目的地への経路案内を行っていないときは、提案目的地を目的地としてそこまでの経路を探索して経路案内を開始する。
【0079】
図12は、本実施の形態の情報提示システム3の動作例を示す図である。この例では、ナビゲーション装置30は、ドライバが指定した目的地Uに行くための経路(ナビ経路)Rを探索して、ドライバに経路案内をしている。車両Cが縦方向の道路を直進しているときに、位置P121で、喫茶店Gに関する情報が提示される。ドライバはこの提示情報に従って喫茶店Gに行くことを意思決定し、その先の交差点Jを左折するために、位置P122で速度を緩めながらステアリングを若干左に切って、車両Cを道路の左側に寄せて走行する。そうすると、ドライバ意思推定部104は、運転行動情報取得部103から取得したステアリング角度、アクセル開度及びブレーキ強度に基づいて車両Cが減速しながら道路左側に寄ったことを認識し、この運転行動が喫茶店Gに行くための運転行動であると判断する。しかし、この時点ではまだこのドライバが喫茶店Gに行くと意思決定したという推定結論は出さない。
【0080】
その後ドライバがステアリングを左に切って、位置P123で左折をすると、ナビゲーション装置30から取得した車両Cの現在位置情報と地図情報に基づいて、その左折した位置が交差点Jであることを認識し、かつ、提示情報生成部102から取得した提示情報に基づいて、その交差点Jでの左折のためにステアリングを左に切った運転行動がナビ経路Rから外れて反対側に向かう運転行動であると認識する。ドライバ意思推定部104は、これらの認識に基づいて、ドライバによる上記の運転行動が、提示情報に従って喫茶店Gに行くための運転行動であると判断する。これによりドライバが喫茶店Gに行く意思決定したことを推定し、その推定結果を情報取得部101に出力する。
【0081】
情報取得部101は、この推定結果を受けて喫茶店Gに関する詳細な情報を取得し、これを提示情報生成部102に出力する。提示情報生成部102は、この詳細情報に基づいて音声及び映像の詳細な提示情報を生成してナビゲーション装置30に出力する。また、ナビゲーション装置30は、経路案内の目的地をドライバが指定した目的地Uから喫茶店Gに変更して、喫茶店Gまでの経路を探索する。ナビゲーション装置30は、位置P124で喫茶店Gに関する詳細な情報を提示するとともに、喫茶店Gまでの経路案内を開始する。
【0082】
図13は、本発明の第3の実施の形態における情報提示システムの動作を示すフロー図である。まず、ナビゲーション装置30は、ドライバから目的地の指定を受けて、当該目的地への経路を探索し、ナビゲーションを開始する(ステップS131)。次に、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS132)。その後、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS133)。ドライバに提示すべき情報があれば(ステップS133でYES)、提示情報生成部102にて音声及び映像の提示情報を生成して、ナビゲーション装置30の音声出力部33や映像出力部34を用いて提示情報を出力してドライバに提示する(ステップS134)。ドライバに提示すべき情報がなければ(ステップS133でNO)、そのような情報があるまでステップS133を繰り返す。
【0083】
次に、ドライバ意思推定部104は、提示情報生成部102から取得した提示情報とナビゲーション装置30から取得した車両の現在位置情報及び地図情報を参照して、提示情報に係る目的地から現在位置までの距離が閾値以下であるか否かを判断する(ステップS135)。この距離が閾値以下となるまで待って、閾値以下となった場合は(ステップS135でYES)、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報と、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から送られてきた車両の現在位置情報と地図情報に基づいて、第1の実施の形態と同様にして、ドライバが提示情報に従う運転行動を行ったか否かを判断する(ステップS136)。
【0084】
ドライバ意思推定部104が、ドライバが提示情報に従う運転行動を行わなかったと判断した場合は(ステップS136でNO)、ステップS132に戻って、ドライバに提示すべき他の情報がないかを判断する。ドライバが提示情報に従う運転行動を行ったと判断したときは(ステップS136でYES)、ドライバ意思推定部104は、ナビゲーション装置30から取得した、ナビ経路及び車両の現在位置を参照することで、ドライバの運転行動がナビ経路を外れるような運転行動であるかを判断することにより、ドライバの意思を推定する(ステップS137)。
【0085】
ステップS137で、ナビ経路から外れる運転行動ではないと判断した場合には(ステップS137でNO)、ステップS136に戻って、ドライバが提示情報に従う新たな運転行動を行ったか否かを判断する。ステップS137で、ナビ経路から外れる運転行動であると判断した場合には(ステップS137でYES)、ドライバ意思推定部104は、ドライバは提示情報で提案された目的地に行く意思を有するとの推定結果を情報取得部101に渡し、情報取得部101はさらに提示した情報のさらに詳細な情報を取得して提示情報生成部102に出力し、提示情報生成部102はその詳細な情報の音声及び映像の提示情報を生成し、ナビゲーション装置30がこれを出力することで、提示情報に関する詳細情報をドライバに提示する(ステップS138)。
【0086】
ナビゲーション装置30は、さらに、経路案内において、ドライバより指定された目的地を提示情報で提案された目的地に変更して、新たな経路を探索し、経路案内を開始する(ステップS139)。
【0087】
以上のように、本実施の形態の情報提示システム3によれば、ナビ経路から外れるような運転行動を行ったときに、それを提案目的地に向かうための運転行動と判断してドライバの意思を推定するので、ドライバの意思をより正確に推定できる。また、ドライバが、提案された目的地に行くための運転行動を行った場合にも、その運転行動が、ナビゲーション装置30の経路案内に従って走行するための運転行動である限り、ドライバが提示情報に従って提案された目的地に行く意思を有するとは判断しないので、提案された目的地が単に本来行こうとしていた目的地の経路途中にあって、ドライバは単に本来の目的地に向かっているだけであるという場合に、ドライバが情報提示システムによって提案された目的地に行こうとしていると誤って判断することがない。
【0088】
また、本実施の形態の情報提示システム3によれば、ドライバが情報提示システム3の提示情報に従ったと推定した場合に、ナビゲーション装置30にて目的地をその提示情報の提案する目的地に変更して経路を探索し、経路案内を開始するので、ドライバは提示情報にて提案された目的地に行こうと思ったときに、容易にその目的地に到達できる。
【0089】
なお、上記の第3の実施の形態では、まずステップS135にて提示情報に係る目的地と車両の現在位置との距離が所定の閾値以下であることを判断して、この距離が閾値以下になった後に、ステップS136にてドライバが提示情報に従う運転行動を行ったかを判断し、ステップS137にてその運転行動がナビ経路から外れる運転行動であるかを判断したが、提示情報に係る目的地と車両の現在位置との距離が所定の閾値以下であるかの判断は、ステップS136の後又はステップS137の後に行ってもよい。
【0090】
また、上記の第3の実施の形態では、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、その運転行動がナビ経路から外れる運転行動であるか否かを判断することでドライバの意思の推定精度を向上させたが、ドライバの運転行動が提案目的地に行くための運転行動であるかを判断するとともに、ナビゲーション装置30のGPS32を用いて車両の現在位置を確認して、車両がドライバにより指定された目的地までの経路から外れたか否かを判断することで、ドライバの意思の推定の精度を向上させてもよい。
【0091】
(第4の実施の形態)
図14は、本発明の第4の実施の形態の情報提示システムの構成を示すブロック図である。本実施の形態の情報提示システム4において、第1の実施の形態の情報提示システム1と同一の構成については、同一の符号を付して、その詳細な説明は省略する。
【0092】
本実施の形態の情報提示システム4の情報提示装置130は、エージェント制御部138を備えている。エージェント制御部138は、提示情報生成部102で生成された提示情報に基づいて複数のエージェント(仮想的な話者)の会話を生成する。エージェント制御部138は、生成した会話をナビゲーション装置30の音声出力部33及び映像出力部34に出力する。音声出力部33及び映像出力部34は、エージェントが会話をする形式でドライバに情報を提示する。
【0093】
ドライバが音声出力部33及び映像出力部34より出力されるエージェントの会話に参与しなくても、エージェント同士の会話は進行する。従って、ドライバの応答を強制せずに、インタラクションを連続して持続させることが可能である。ドライバがエージェント間で構成される会話に介入することを望む場合には、上記の実施の形態と同様に、運転行動でエージェント間の会話に参加することが可能である。
【0094】
ドライバがエージェント間の会話に対応した運転行動をすると、運転行動情報取得部103がその運転行動の情報を取得し、ドライバ意思推定部104に出力する。ドライバ意思推定部104は、提示情報生成部102から取得した提示情報及びナビゲーション装置30から取得した車両の現在位置情報及び地図情報に基づいて、運転行動情報取得部103から取得した運転行動情報がエージェント間の会話に対応した運転行動であると判断することでドライバの意思を推定する。
【0095】
ドライバ意思推定部104は、推定結果を情報取得部101に出力すると、情報取得部101はドライバの意思に従った新たな情報を取得して、提示情報生成部102に出力する。提示情報生成部102は新たな情報をもとに提示情報を生成する。エージェント制御部138は、提示情報生成部102にて新たに生成された提示情報に基づいて、エージェントの会話を生成し、ナビゲーション装置30に出力する。ナビゲーション装置30の音声出力部33及び映像出力部34は、音声及び映像を用いて会話形式で提示情報を提示する。
【0096】
以下、情報提示システム4の動作の具体例を説明する。提示情報生成部102が生成した提示情報に基づいて、エージェント制御部138が、例えば、エージェントA、Bによる次のような会話を生成する。
エージェントA:「この先のカーブは、交通事故が多発しているらしいよ。」
エージェントB:「そうらしいね。最近もスリップ事故でけが人が出たらしいね。」
【0097】
この会話に対するドライバの応答として、ドライバがブレーキを踏んで減速をすると、運転行動情報取得部103がその運転行動の情報を取得して、ドライバ意思推定部104に出力し、ドライバ意思推定部104では、ナビゲーション装置30から車両の現在位置情報と地図情報を取得して、当該ブレーキを踏む運転行動がその先のカーブに進入する前の減速であることを認識し、提示情報生成部102から取得した提示情報に基づいて、この運転行動がエージェントA、Bの会話への応答であると推定する。
【0098】
ドライバ意思推定部104は情報取得部101にこの推定結果を出力する。情報取得部10は、推定結果を受けて、当該推定結果に基づいてさらに情報を取得して提示情報生成部102に出力する。提示情報生成部102は、提示情報を生成してエージェント制御部138に出力する。エージェント制御部138は、例えば次のようなドライバの運転行動に対する会話を生成する。
エージェントA:「そうそう、やっぱり安全運転が一番だよ。」
エージェントB:「交通事故の原因の多くはスピードの出しすぎだって言うしね。」
【0099】
図15は、本発明の第4の実施の形態における情報提示システムの動作を示すフロー図である。まず、運転行動情報取得部103は、車両操作用インターフェース20からのドライバの運転行動情報の取得を開始する(ステップS151)。その後、情報取得部101は、取得した情報の中から、車両の近辺に関する情報で、ドライバに提示すべき情報があるか否かを判断する(ステップS152)。ドライバに提示すべき情報があれば(ステップS152でYES)、提示情報生成部102が提示情報を生成して、エージェント制御部138が提示情報に基づいて音声及び映像の会話を生成する(ステップS153)。ナビゲーション装置30は音声出力部33や映像出力部34を用いて会話形式で提示情報をドライバに提示する(ステップS154)。ドライバに提示すべき情報がなければ(ステップS152でNO)、そのような情報があるまでステップS152を繰り返す。
【0100】
次に、ドライバ意思推定部104は、運転行動情報取得部103が取得した運転行動情報と、提示情報生成部102が生成した提示情報、及びナビゲーション装置30から送られてきた車両の現在位置情報と地図情報に基づいて、ドライバの運転行動がエージェントの会話に対する応答であるか否かを判断する(ステップS155)。ドライバ意思推定部104が、ドライバの運転行動がエージェントの会話に対する応答ではないと判断した場合は(ステップS155でNO)、ステップS152に戻って、ドライバに提示すべき他の情報がないかを判断する。ドライバの運転行動がエージェントの会話に対する応答であると判断したときは(ステップS155でYES)、エージェントの会話内容をドライバの運転行動に応じて変化させて、ドライバの運転行動に対応した会話を出力する(ステップS156)。
【0101】
以上のように、本実施の形態の情報提示システム4によれば、複数のエージェントによる会話形式の情報提示がされ、この会話にドライバが参与しなくてもエージェント間の会話は進行するため、ドライバの応答を強制することがなく、ドライバの認知負荷を抑えることができる。また、本実施の形態の情報提示システム4によれば、複数のエージェントによる会話形式の情報提示に対して、ドライバの運転行動からドライバが提示情報に従う意思があるか否かを推定するので、ドライバによる言語を用いないインタラクションが可能であり、ドライバと情報提示装置との間のインタラクションにおいてドライバの認知負荷を抑えることができる。
【0102】
(変形例)
上記の情報提示システム対して、種々の変更が可能である。以下、いくつかの変形例を説明する。上記の実施の形態では、提示情報生成部102は、情報取得部101が取得した情報に基づいて提示情報を生成したが、提示情報生成部102は、さらに車両の運転操作方法に関するアドバイス情報を生成して、提示情報とともにナビゲーション装置30に出力してもよい。このアドバイス情報とは、第1の実施の形態で説明した、運転行動とドライバ意思の推定との関係を説明する情報である。例えば、アクセルを緩めてブレーキ強度を増加させる運転行動を提示情報に従った運転行動であると判断する場合には、その旨を音声等で案内することで、ドライバはどのような運転行動を行えば提示情報に従った運転行動と認識されるかを知ることができる。このように、情報提示システムがドライバに自身の意思を表現するための所定の運転行動を指定したとしても、そのような車両操作はあくまでも提示情報で提案された目的地に行くための運転行動であり、情報提示システムに応答をするに際してドライバの認知負荷が増えることはない。
【0103】
上記の第2〜第4の実施の形態の情報提示システムは、推定正否判断部及び意思推定事例データベースを有しない構成であったが、これらの実施の形態の情報提示システムがさらに推定正否判断部及び意思推定事例データベースを備えて、過去の推定事例も考慮してドライバの意思を推定してもよい。
【0104】
また、上記の実施の形態の情報提示システムでは、ナビゲーション装置の音声出力部及び映像出力部を利用して提示情報をドライバに提示していたが、情報提示システム専用の音声出力部及び映像出力部を利用して提示情報を提示するようにしてもよい。さらに、提示情報は、音声出力部又は映像出力部のいずれか一方を利用して出力されてもよい。特に、音声による情報提示は映像の場合と比較してドライバの認知負荷をより抑えることができるので有効である。
【0105】
また、上記の実施の形態の情報提示システムでは、情報取得装部101は、無線通信によって外部から情報を取得したが、情報取得装部101は情報提示装置が記憶している情報の中から車両近辺の情報を取得してもよい。さらに、上記の実施の形態の情報提示システムでは、情報取得部101にて情報を取得して、提示情報生成部102で提示情報を生成したが、提示すべき情報を情報取得部101にて直接取得することにより提示情報生成部102の構成を省略してよい。
【0106】
また、上記の実施の形態では車両に搭載される情報提示システムを紹介したが、情報提示システムは、ユーザが操作することによって運転される、車両以外の他の移動体に搭載されてもよい。
【産業上の利用可能性】
【0107】
本発明は、提示情報に対するドライバの運転行動からドライバの意思を推定するので、ドライバと情報提示システムとの間におけるドライバの認知負荷を低減できるという効果を有し、移動体を運転するユーザに情報を提示した後に当該提示情報に対するユーザの応答を受け付ける対話型の情報提示システム等として有用である。
【符号の説明】
【0108】
1、2、3 情報提示システム
20 車両操作用インターフェース
30 ナビゲーション装置
33 音声出力部
34 映像出力部
100、110、120 情報提示装置
101 情報取得部
102 提示情報生成部
103 運転行動情報取得部
104 ドライバ意思推定部
105 推定正否判断部
106 意思推定事例データベース
117 走行履歴データベース
138 エージェント制御部
【特許請求の範囲】
【請求項1】
移動体に備えられてドライバに情報を提示する情報提示システムであって、
提示情報を提示する情報提示部と、
ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、
前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記情報提示部にて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部と、
を備えたことを特徴とする情報提示システム。
【請求項2】
情報を取得する情報取得部をさらに備え、
前記情報提示部は、前記情報取得部が取得した情報に基づく提示情報を提示することを特徴とする請求項1に記載の情報提示システム。
【請求項3】
前記情報取得部は、無線通信により外部のネットワークから情報を取得し、
前記情報提示システムは、さらに前記情報取得部が取得した情報に基づいて、前記提示情報を生成する提示情報生成部を備え、
前記情報提示部は、前記提示情報生成部が生成した提示情報を提示することを特徴とする請求項2に記載の情報提示システム。
【請求項4】
前記情報提示部は、前記提示情報として提案目的地の情報を提示し、
前記ドライバ意思推定部は、ドライバが前記提案目的地に行く意思を有するか否かを推定して、推定結果を前記情報提示部に出力し、
前記情報提示部は、前記ドライバ意思推定部から、ドライバが前記提案目的地に行く意思を有するとの推定結果を受けたときに、当該提案目的地に関する更なる情報を提示することを特徴とする請求項1ないし請求項3のいずれかに記載の情報提示システム。
【請求項5】
前記ドライバ意思推定部は、通常運転状態でのドライバによる移動体の運転行動の情報と、前記運転行動情報取得部にて取得した運転行動の情報との差分に基づいて、ドライバの意思を推定することを特徴とする請求項1ないし請求項4のいずれかに記載の情報提示システム。
【請求項6】
前記ドライバ意思推定部は、ドライバの過去の走行履歴と、前記運転行動情報取得部にて取得した運転行動の情報とに基づいて、ドライバの意思を推定することを特徴とする請求項1ないし請求項4のいずれかに記載の情報提示システム。
【請求項7】
経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、
前記ドライバ意思推定部は、前記運転行動の情報に基づいて、ドライバが前記経路案内部による経路案内の最中に前記経路案内目的地への経路を外れて前記提案目的地に向かう運転行動を行ったときに、ドライバが前記提案目的地に行く意思を有していると推定することを特徴とする請求項4に記載の情報提示システム。
【請求項8】
前記ドライバ意思推定部は、移動体と前記提案目的地とが所定の距離以上であるときは、前記運転行動の情報に基づくドライバの意思の推定をしないことを特徴とする請求項4ないし請求項7のいずれかに記載の情報提示システム。
【請求項9】
移動体の実際の走行結果と前記推定結果とを比較することで、該推定結果が正しかったか否かを判断する推定正否判断部と、
前記推定正否判断部による前記推定結果の正否判断の事例を記憶する意思推定事例記憶部とをさらに備え、
前記ドライバ意思推定部は、前記意思推定事例記憶部に記憶された事例を参照して、ドライバの意思を推定することを特徴とする請求項1ないし請求項8のいずれかに記載の情報提示システム。
【請求項10】
経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、
前記経路案内部は、前記ドライバ意思推定部にて、ドライバが前記提案目的地に行く意思を有すると推定されたときに、前記経路案内目的地を前記提案目的地として経路を案内することを特徴とする請求項4又は7に記載の情報提示システム。
【請求項11】
前記情報提示部は、前記提示情報の提示とともに、前記ドライバ意思推定部がドライバの意思を推定する際に用いる、前記提示情報に対する応答と移動体の操作との関係を示す情報を提示することを特徴とする請求項1ないし請求項10のいずれかに記載の情報提示システム。
【請求項12】
前記移動体の運転行動の情報は、ステアリング、アクセル、ブレーキ、及び/又はクラッチの操作の情報であることを特徴とする請求項1ないし請求項11のいずれかに記載の情報提示システム。
【請求項13】
前記情報提示部は、音声で情報を提示することを特徴とする請求項1ないし請求項12のいずれかに記載の情報提示システム。
【請求項14】
移動体に備えられてドライバに情報を提示する情報提示装置であって、
情報を取得する情報取得部と、
前記情報取得部が取得した情報に基づいて、提示情報を生成する提示情報生成部と、
ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、
前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記提示情報生成部にて生成された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部と、
を備えたことを特徴とする情報提示装置。
【請求項15】
移動体のドライバに情報を提示する情報提示方法であって、
提示情報を提示する情報提示ステップと、
ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、
前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップと、
を含むことを特徴とする情報提示方法。
【請求項16】
移動体のドライバに対する情報提示方法を実行するためのコンピュータプログラムであって、コンピュータに、
提示情報を提示する情報提示ステップと、
ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、
前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップと、
を実行させることを特徴とするコンピュータプログラム。
【請求項1】
移動体に備えられてドライバに情報を提示する情報提示システムであって、
提示情報を提示する情報提示部と、
ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、
前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記情報提示部にて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部と、
を備えたことを特徴とする情報提示システム。
【請求項2】
情報を取得する情報取得部をさらに備え、
前記情報提示部は、前記情報取得部が取得した情報に基づく提示情報を提示することを特徴とする請求項1に記載の情報提示システム。
【請求項3】
前記情報取得部は、無線通信により外部のネットワークから情報を取得し、
前記情報提示システムは、さらに前記情報取得部が取得した情報に基づいて、前記提示情報を生成する提示情報生成部を備え、
前記情報提示部は、前記提示情報生成部が生成した提示情報を提示することを特徴とする請求項2に記載の情報提示システム。
【請求項4】
前記情報提示部は、前記提示情報として提案目的地の情報を提示し、
前記ドライバ意思推定部は、ドライバが前記提案目的地に行く意思を有するか否かを推定して、推定結果を前記情報提示部に出力し、
前記情報提示部は、前記ドライバ意思推定部から、ドライバが前記提案目的地に行く意思を有するとの推定結果を受けたときに、当該提案目的地に関する更なる情報を提示することを特徴とする請求項1ないし請求項3のいずれかに記載の情報提示システム。
【請求項5】
前記ドライバ意思推定部は、通常運転状態でのドライバによる移動体の運転行動の情報と、前記運転行動情報取得部にて取得した運転行動の情報との差分に基づいて、ドライバの意思を推定することを特徴とする請求項1ないし請求項4のいずれかに記載の情報提示システム。
【請求項6】
前記ドライバ意思推定部は、ドライバの過去の走行履歴と、前記運転行動情報取得部にて取得した運転行動の情報とに基づいて、ドライバの意思を推定することを特徴とする請求項1ないし請求項4のいずれかに記載の情報提示システム。
【請求項7】
経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、
前記ドライバ意思推定部は、前記運転行動の情報に基づいて、ドライバが前記経路案内部による経路案内の最中に前記経路案内目的地への経路を外れて前記提案目的地に向かう運転行動を行ったときに、ドライバが前記提案目的地に行く意思を有していると推定することを特徴とする請求項4に記載の情報提示システム。
【請求項8】
前記ドライバ意思推定部は、移動体と前記提案目的地とが所定の距離以上であるときは、前記運転行動の情報に基づくドライバの意思の推定をしないことを特徴とする請求項4ないし請求項7のいずれかに記載の情報提示システム。
【請求項9】
移動体の実際の走行結果と前記推定結果とを比較することで、該推定結果が正しかったか否かを判断する推定正否判断部と、
前記推定正否判断部による前記推定結果の正否判断の事例を記憶する意思推定事例記憶部とをさらに備え、
前記ドライバ意思推定部は、前記意思推定事例記憶部に記憶された事例を参照して、ドライバの意思を推定することを特徴とする請求項1ないし請求項8のいずれかに記載の情報提示システム。
【請求項10】
経路案内目的地までの経路を探索して経路案内をする経路案内部をさらに備え、
前記経路案内部は、前記ドライバ意思推定部にて、ドライバが前記提案目的地に行く意思を有すると推定されたときに、前記経路案内目的地を前記提案目的地として経路を案内することを特徴とする請求項4又は7に記載の情報提示システム。
【請求項11】
前記情報提示部は、前記提示情報の提示とともに、前記ドライバ意思推定部がドライバの意思を推定する際に用いる、前記提示情報に対する応答と移動体の操作との関係を示す情報を提示することを特徴とする請求項1ないし請求項10のいずれかに記載の情報提示システム。
【請求項12】
前記移動体の運転行動の情報は、ステアリング、アクセル、ブレーキ、及び/又はクラッチの操作の情報であることを特徴とする請求項1ないし請求項11のいずれかに記載の情報提示システム。
【請求項13】
前記情報提示部は、音声で情報を提示することを特徴とする請求項1ないし請求項12のいずれかに記載の情報提示システム。
【請求項14】
移動体に備えられてドライバに情報を提示する情報提示装置であって、
情報を取得する情報取得部と、
前記情報取得部が取得した情報に基づいて、提示情報を生成する提示情報生成部と、
ドライバによる移動体の運転行動の情報を取得する運転行動情報取得部と、
前記運転行動情報取得部にて取得した前記運転行動の情報に基づいて、前記提示情報生成部にて生成された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定部と、
を備えたことを特徴とする情報提示装置。
【請求項15】
移動体のドライバに情報を提示する情報提示方法であって、
提示情報を提示する情報提示ステップと、
ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、
前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップと、
を含むことを特徴とする情報提示方法。
【請求項16】
移動体のドライバに対する情報提示方法を実行するためのコンピュータプログラムであって、コンピュータに、
提示情報を提示する情報提示ステップと、
ドライバによる移動体の運転行動の情報を取得する運転行動の情報取得ステップと、
前記運転行動の情報取得ステップにて取得した前記運転行動の情報に基づいて、前記情報提示ステップにて提示された前記提示情報に対するドライバの意思を推定して、推定結果を出力するドライバ意思推定ステップと、
を実行させることを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−99747(P2011−99747A)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願番号】特願2009−254158(P2009−254158)
【出願日】平成21年11月5日(2009.11.5)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(304027349)国立大学法人豊橋技術科学大学 (391)
【Fターム(参考)】
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願日】平成21年11月5日(2009.11.5)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(304027349)国立大学法人豊橋技術科学大学 (391)
【Fターム(参考)】
[ Back to top ]