
情報機器
【課題】位置情報が別の情報と一体となって記録されている場合であっても、位置情報の公開レベルをコントロールすることが可能な情報機器を提供すること。
【解決手段】入力部12を介して情報機器10に入力された位置情報は、第1情報として記憶部14に記憶される。位置情報の出力要求がなされた場合に、情報生成部16は、第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する。出力部18は、第1情報を出力する代わりに、第2情報を出力要求元に出力する。
【解決手段】入力部12を介して情報機器10に入力された位置情報は、第1情報として記憶部14に記憶される。位置情報の出力要求がなされた場合に、情報生成部16は、第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する。出力部18は、第1情報を出力する代わりに、第2情報を出力要求元に出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報を画像に関連付けて記録することが可能な情報機器に関する。
【背景技術】
【0002】
近年、デジタルカメラ等の情報機器に、GPS(Global Positioning System)等の位置検出装置を持たせたものが知られている。このような位置検出装置を持つ情報機器では、情報機器の現在位置を特定することが可能である。これにより、例えば、デジタルカメラでは、撮影画像をその撮影位置と関連付けて記録することが可能となる。
【0003】
GPS等によって検出される位置情報は、ユーザにとって便利な情報となり得る。ただし、プライバシーの保護の観点からは、位置情報を安易に公開するべきではない。これに対し、特許文献1では、位置情報の公開レベルを設定できるようにしておき、設定された公開レベルの範囲で位置情報を公開するようにしている。また、特許文献2では、IDとパスワードとが一致した場合に位置情報の送信を許可するシステムにおいて、位置情報の送信を要求した端末のIDが、位置情報の送信を許可しない端末のIDとして登録されている場合には、仮にIDとパスワードとが一致した場合であっても位置情報を送信しないようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−296673号公報
【特許文献2】特許第3545354号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、デジタルカメラのような情報機器では、撮影画像と撮影位置情報とが1つの画像ファイルとして記録される。この場合、画像ファイルのヘッダに記録された撮影位置情報は、所定のソフトウェアを用いて読み取ることが可能である。このような情報機器に対し、特許文献1や特許文献2の技術を用いてプライバシーの保護を図ろうとしても、撮影位置情報の公開を禁止するためには、画像ファイル自体の送信を禁止する必要が生じる。逆に、画像ファイルの送信を許可してしまうと、撮影位置情報が公開されてしまう。このため、例えば、画像については公開を許可して位置情報については公開を制限する(公開しない、部分的に公開する)といったような位置情報の公開レベルのコントロールは困難である。
【0006】
本発明は、上記の事情に鑑みてなされたもので、位置情報が別の情報と一体となって記録されている場合であっても、位置情報の公開レベルをコントロールすることが可能な情報機器を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明の第1の態様の情報機器は、位置情報を第1情報として記憶する記憶部と、上記第1情報に基づいて、上記第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する情報生成部と、上記第1情報に対する出力要求に応じて、上記第1情報の代わりに上記第2情報を出力する出力部と、を具備することを特徴とする。
【発明の効果】
【0008】
本発明によれば、位置情報が別の情報と一体となって記録されている場合であっても、位置情報の公開レベルをコントロールすることが可能な情報機器を提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施形態に係る情報機器の構成を示すブロック図である。
【図2】情報機器10の動作を示すフローチャートである。
【図3】第1情報としての位置情報の構成の例を示す図である。
【図4】第2情報としての位置情報の構成の例を示す図である。
【図5】本発明の第1の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。
【図6】情報機器20の動作を示すフローチャートである。
【図7】本発明の第1の実施形態の第2の変形例に係る情報機器の一例としてのデジタルカメラの本体を正面から見た外観図である。
【図8】本発明の第1の実施形態の第2の変形例に係る情報機器の一例としてのデジタルカメラの本体を背面から見た外観図である。
【図9】本発明の第1の実施形態の第2の変形例に係るデジタルカメラの内部の電気回路構成について示すブロック図である。
【図10】本発明の第1の実施形態の第2の変形例に係るボディCPU265mによるカメラ本体200のパワーオンリセットの動作を示すフローチャートである。
【図11】本発明の第1の実施形態の第2の変形例に係る撮影動作のサブルーチンを示すフローチャートである。
【図12】再生動作のサブルーチンについて示すフローチャートである。
【図13】液晶モニタ再生のサブルーチンについて示すフローチャートである。
【図14】外部再生のサブルーチンについて示すフローチャートである。
【図15】本発明の第1の実施形態の第2の変形例に係る外部機器接続動作のサブルーチンについて示すフローチャートである。
【図16】本発明の第2の実施形態に係る情報機器の構成を示すブロック図である。
【図17】情報機器10aの動作を示すフローチャートである。
【図18】暗号化済みの第1情報としての位置情報の構成の例を示す図である。
【図19】本発明の第2の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。
【図20】情報機器20aの動作を示すフローチャートである。
【図21】本発明の第2の実施形態の第2の変形例に係る撮影動作のサブルーチンを示すフローチャートである。
【図22】本発明の第2の実施形態の第2の変形例に係る外部機器接続動作のサブルーチンについて示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。
[第1の実施形態]
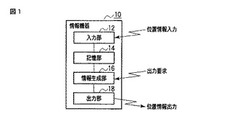
図1は、本発明の第1の実施形態に係る情報機器の構成を示すブロック図である。図1に示す情報機器10は、入力部12と、記憶部14と、情報生成部16と、出力部18と、を有している。
【0011】
入力部12は、情報機器10の外部からの位置情報を第1情報として記憶部14に入力する。記憶部14は、入力部12から入力された位置情報を記憶する。
情報生成部16は、外部からの位置情報の出力要求に応じて、記憶部14に記憶されている第1情報としての位置情報を用いて第2情報としての位置情報を生成する。
出力部18は、情報生成部16で生成された第2情報としての位置情報を、情報機器10の外部に出力する。
【0012】
図2は、情報機器10の動作を示すフローチャートである。図2において、記憶部14は、情報機器10の外部から入力部12を介して位置情報が入力されたか否かを判定している(S1)。S1の判定において、外部から位置情報が入力された場合に、記憶部14は、入力された位置情報を第1情報として記憶する(S2)。
図3は、第1情報としての位置情報の構成の例を示す図である。図3に示す例の位置情報は、緯度情報と経度情報とを有し、緯度情報と経度情報のそれぞれで「度」・「分」・「秒」までの位置情報が記録される。例えば、図3は、北緯35度48分8秒、東経139度34分55秒の場合に記録される位置情報を示している。
ここで、第1情報としての位置情報は、必ずしも「秒」までの情報を記録する必要はない。また、必ずしも「度」・「分」・「秒」の形式で記録する必要もない。
【0013】
位置情報の入力がない場合又は第1情報が記憶部14に記憶された後、情報生成部16は、所定の出力要求元から位置情報の出力要求がなされたか否かを判定する(S3)。S3の判定において、位置情報の出力要求がなされたと判定した場合に、情報生成部16は、記憶部14から第1情報を取り出す(S4)。そして、情報生成部16は、取り出した第1情報から第2情報を生成する(S5)。
【0014】
第2情報としての位置情報は、第1情報としての位置情報よりも位置の精度を劣化させた情報である。例えば、第1情報に記録されている情報の一部をマスクすることで位置の精度を劣化させる。図4は、第2情報としての位置情報の構成の例を示す図である。図4(a)は、図3に示す第1情報における「秒」の情報をNull情報(位置情報なしを示す情報)でマスクしたものである。この場合、第2情報は、「分」の情報までが有効な情報となるように位置の精度が劣化する。このため、図4(a)に示す位置情報を見ても、ユーザは、「分」の情報までしか知ることができない。ここで、Null情報は、例えば、通常の第1情報がとり得ない値を設定する。例えば、「度」の情報は、0〜180までの値をとり得るものであるので、Null情報としてはそれ以外の値を設定する。同様に、「分」・「秒」の情報は、0〜60までの値をとり得るものであるので、Null情報としてはそれ以外の値を設定する。
【0015】
また、図4(b)は、図3に示す第1情報における「分」・「秒」の情報をNull情報でマスクしたものである。この場合、第2情報は、「度」の情報までが有効な情報となるように位置の精度が劣化する。このため、図4(b)に示す位置情報を見ても、ユーザは、「度」の情報までしか知ることができない。また、図4(c)は、図3に示す第1情報における「度」・「分」・「秒」の全ての情報をNull情報でマスクしたものである。この場合、ユーザは、第2情報を見ても位置を知ることができなくなる。
【0016】
ここで、第1情報から、図4(a)〜図4(c)に示す何れの第2情報を生成するのかは、例えば出力要求元のID(ユーザID、端末ID等)によって特定する。この場合、情報生成部16には、出力要求元のIDと、そのIDに対してどの精度の第2情報を公開するのかを示す情報と、を対応付けた情報を記憶させておく。このような構成により、ユーザ毎に位置情報の公開レベルを設定することが可能である。
【0017】
第2情報を生成した後、情報生成部16は、生成した第2情報を出力部18に入力する。出力部18は、情報生成部16から入力された第2情報を、出力要求元に対して出力する(S6)。
第2情報の出力後又はS3の判定において出力要求がなされていないと情報生成部16が判定した場合には、図2の処理が一旦終了する。
【0018】
以上説明したように、本実施形態によれば、位置情報の出力要求がなされた場合に、実際に記憶している第1情報の代わりに、第1情報よりも位置の精度を劣化させた第2情報を出力要求元に出力するようにしている。これにより、位置情報の公開レベルをコントロールすることが可能である。また、位置情報自体の精度を劣化させることにより、仮に位置情報が別の情報と一体に記録されている場合であっても位置情報の公開レベルをコントロールすることができる。
【0019】
ここで、図2の例では、位置情報の出力要求がなされてから第2情報を生成するようにしている。これに対し、第1情報としての位置情報が入力されてきた時点で第2情報を生成するようにしても良い。
[第1の実施形態の第1の変形例]
次に、第1の実施形態の変形例について説明する。第1の実施形態の第1の変形例は、位置情報と画像とを1つの画像ファイルとして記憶可能な情報機器への第1の実施形態の適用例である。
【0020】
図5は、本発明の第1の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。図5に示す情報機器20は、位置情報入力部22と、位置情報バッファ24と、画像入力部26と、記憶部28と、情報生成部30と、出力部32と、を有している。
【0021】
位置情報入力部22は、所定時間毎に、情報機器20の位置情報を第1情報として位置情報バッファ24に入力する。位置情報入力部22は、情報機器20の位置情報を例えばGPSによって特定する。このために、位置情報入力部22は、GPS衛星34からのGPS信号を受信するための受信回路を有している。位置情報バッファ24は、位置情報入力部22から所定時間毎に入力される位置情報を保持する。
【0022】
画像入力部26は、情報機器20の外部から入力された画像(画像データ)を記憶部28に入力する。画像入力部26に撮像機能を持たせることにより、画像入力部26自体が画像を取得できるようにしても良い。
記憶部28は、位置情報バッファ24から取得した位置情報と画像入力部26から入力された画像とを関連付けて1つの画像ファイルとして記憶する。
【0023】
情報生成部30は、外部からの画像ファイルの出力要求に応じて、記憶部28に記憶されている画像ファイル中の第1情報としての位置情報を用いて第2情報としての位置情報を生成する。また、情報生成部30は、生成した第2情報を記憶部28に記憶されている画像ファイル中の画像と関連付けして別の画像ファイルを生成する。
出力部32は、情報生成部30で生成された第2情報が関連付けられた画像ファイルを情報機器20の外部に出力する。
【0024】
図6は、情報機器20の動作を示すフローチャートである。図6において、位置情報入力部22は、所定時間が経過したか否かを判定している(S11)。この所定時間は、位置情報の取得間隔に対応しており、適宜設定できる時間である。S11の判定において、所定時間が経過したと判定した場合に、位置情報入力部22は、GPS衛星34からのGPS信号を受信して情報機器20の位置情報を取得する(S12)。その後、位置情報入力部22は、取得した位置情報を第1情報として位置情報バッファ24に入力して位置情報バッファ24の内容を更新する(S13)。第1情報としての位置情報は、第1の実施形態で説明したものと同様として良い。
【0025】
また、記憶部28は、情報機器20の外部から画像入力部26を介して画像が入力されてきたか否かを判定している(S14)。S14の判定において、画像が入力されてきたと判定した場合に、記憶部28は、入力された画像を取得する(S15)。続いて、記憶部28は、位置情報バッファ24から位置情報を取り込む(S16)。その後、記憶部28は、画像と位置情報(第1情報)とを1つの画像ファイルとして記憶する(S17)。
【0026】
画像の入力がない場合又は画像ファイルが記憶部28に記憶された後、情報生成部30は、所定の出力要求元から画像ファイルの出力要求がなされたか否かを判定する(S18)。S18の判定において、画像ファイルの出力要求がなされたと判定した場合に、情報生成部30は、記憶部28に記憶されている画像ファイルから第1情報を取り出す(S19)。そして、情報生成部30は、取り出した第1情報から第2情報を生成する(S20)。第2情報としての位置情報は、第1の実施形態で説明したものと同様として良く、第1情報から第2情報を生成する手法も第1の実施形態と同様として良い。
【0027】
第2情報を生成した後、情報生成部30は、生成した第2情報を記憶部28に記憶されている画像と関連付けて別の画像ファイルを生成する。その後、情報生成部30は、新たに生成した画像ファイルを出力部32に入力する。出力部32は、情報生成部30から入力された画像ファイルを、出力要求元に対して出力する(S21)。
画像ファイルの出力後又はS18の判定において出力要求がなされていないと情報生成部30が判定した場合には、図6の処理が一旦終了する。
【0028】
以上説明した第1の変形例においては、送信される画像ファイルに関連付けされる位置情報は、位置の精度が劣化している。このため、画像ファイルを受け取ったユーザは、専用のソフトウェアを用いて位置情報を知ろうとしても、正確な位置情報については知ることができない。
【0029】
ここで、第1の変形例においては、画像と位置情報とが1つの画像ファイルと記憶される例を示している。これに対し、画像と位置情報とが別のファイルとなっている場合でも、第1の実施形態の技術は適用可能である。この場合には、例えば画像の出力要求がなされた場合には、記憶部28に記憶されている画像ファイルをそのまま出力要求元に出力し、位置情報の出力要求がなされた場合には、記憶部28に記憶されている位置情報ファイルの位置情報を劣化させてから(第2情報に対応した位置情報ファイルを新たに生成してから)出力要求元に出力する。
【0030】
[第1の実施形態の第2の変形例]
次に、第1の実施形態の第2の変形例について説明する。第2の変形例は、第1の変形例の具体例である。より詳しくは、第2の変形例は、第1の実施形態の第1の変形例の技術を、情報機器の一例としてのデジタルカメラに対して適用したものである。
【0031】
図7は、本発明の第1の実施形態の第2の変形例に係る情報機器の一例としてのデジタルカメラの本体を正面から見た外観図であり、図8は、このデジタルカメラの本体を背面から見た外観図である。
図7に示すように、カメラ本体200の前面の略中央には、交換レンズからの被写体光束をカメラ本体200内部に入射させるための開口が設けられている。そして、この開口の周囲には、交換レンズを装着するためのボディマウント200aが設けられている。また、開口内には、通信接点200cが配置されている。交換レンズがカメラ本体200に装着された際には、カメラ本体200と交換レンズとが通信接点200cを介して通信自在に接続される。また、開口内にはミラーボックスが形成されており、ミラーボックス内には、可動ミラー201等が配置されている。
【0032】
また、カメラ本体200の例えば正面左側にはグリップ部が形成されている。そして、グリップ部の上部には、レリーズ釦267aが配置されている。レリーズ釦267aは、第1レリーズスイッチ(以下、1Rスイッチという)と、第2レリーズスイッチ(以下、2Rスイッチという)と、を有している。1Rスイッチは、撮影者がレリーズ釦267aを半押しするとオンするスイッチである。1Rスイッチがオンすることにより、焦点制御(AF)動作や露出制御(AE)といった撮影準備動作が行われる。また、2Rスイッチは、撮影者がレリーズ釦267aを全押しするとオンするスイッチである。2Rスイッチがオンすることにより、本撮影用の露出動作が行われる。
【0033】
さらに、カメラ本体200のグリップ部には、前ダイアル275aが配置されている。前ダイアル275aは、時計方向及び反時計方向に回転自在に構成されている。前ダイアル275aの回転方向と回転量とは、カメラ本体200内で検出される。
カメラ本体200の上部には、ポップアップ式の内蔵フラッシュ291が収納されている。内蔵フラッシュ291は、ポップアップ状態となると発光部が被写体に向くように構成されている。このような内蔵フラッシュ291は、被写体を照明するための補助光を照射する。
【0034】
カメラ本体200の上面には、コントロールパネル289が配置されている。コントロールパネル289は、液晶表示装置等の表示装置である。このコントロールパネル289には、絞り値やシャッタ速度値等の撮影情報が表示される。
また、図8に示すように、カメラ本体200の背面の右上には、後ダイアル275bが配置されている。後ダイアル275bも、前ダイアル275aと同様、時計方向及び反時計方向に回転自在に構成されている。そして、後ダイアル275bの回転方向と回転量とは、カメラ本体200内で検出される。
【0035】
後ダイアル275bの下側には、ライブビュー表示釦(以下、LV表示釦という)267bが配置されている。ここで、ライブビュー表示とは、撮像素子を介して取得した画像データに基づいて、被写体像観察用の被写体像を、液晶モニタ等の表示装置に表示する動作のことをいう。LV表示釦267bが操作されることにより、ライブビュー表示モードが設定されてライブビュー表示が行われる。ライブビュー表示中にLV表示釦267bが操作されることにより、ライブビュー表示モードが解除されてライブビュー表示が終了される。
【0036】
LV表示釦267bの下側には、十字釦267cが配置されている。十字釦267cは、上側十字釦、下側十字釦、右側十字釦、左側十字釦の4つの釦を有している。液晶モニタ(以下、LCDという)283にカーソルが表示されている場合には、カーソルを移動させる等するための釦として十字釦267cを用いる。十字釦267cを構成する4つの釦のほぼ中心には、OK釦267dが配置されている。OK釦267dは、例えば十字釦267cによって選択された項目の決定を行うために用いられる。
【0037】
十字釦267cの下側には、パワースイッチ267eが配置されている。パワースイッチ267eは、カメラ本体200の動作を制御するために用いられる。カメラ本体200は、パワースイッチ267eがオン状態の場合に動作を開始し、オフ状態の場合に動作を停止する。
【0038】
カメラ本体200の背面の略中央上部には、接眼部200bが設けられている。また、接眼部200bの中に接眼レンズ213が配置されている。接眼レンズ213は、後述の観察光学系より出射された被写体光束をユーザの目に被写体像として結像させるために設けられている。
【0039】
接眼部200bの下側には、LCD283が配置されている。LCD283は、ライブビュー画像、記録済みの被写体像、撮影情報やメニューといった各種の画像を表示するための表示装置である。カメラ本体200に設ける表示装置としては、これらの表示を行うことができるものであれば液晶モニタに限らない。また、図8の例では、LCD283をカメラ本体200の背面に配置しているが、ユーザが観察できる位置であれば、必ずしもLCD283をカメラ本体200の背面に配置する必要はない。
【0040】
LCD283の下側であって、パワースイッチ267eの左側には、メニュー釦267fが配置されている。メニュー釦267fは、カメラ本体200のモードをメニューモードに設定する、及びカメラ本体200に設定されたメニューモードを解除するために用いられる。メニューモードは、カメラ本体200の種々のモードやその他の設定を行うためのモードである。カメラ本体200のモードがメニューモードに設定されると、LCD283にメニュー画面が表示される。ユーザは、メニュー画面の中から好みのモード等を、十字釦267cを用いて選択し、OK釦267dによって確定する。
【0041】
メニュー釦267fの左側には、再生釦267gが配置されている。再生釦267gは、カメラ本体200のモードを再生モードに設定するために用いられる。カメラ本体200のモードが再生モードに設定されると、記録媒体等に記録された画像データが読み出され、この画像データに基づいた画像がLCD283に再生される。
【0042】
再生釦267gの左側には、縦横釦267hが配置されている。縦横釦267hは、画像の記録時において、縦長画像と横長画像の何れを記録するかを選択するために用いられる。
図9は、本変形例に係るデジタルカメラの内部の電気回路構成について示すブロック図である。上述したように、本変形例に係るカメラ本体200には、交換レンズ100が装着される。そして、交換レンズ100がカメラ本体200に装着された際に、カメラ本体200と交換レンズ100とは、通信接点200cを介して通信自在に接続される。
【0043】
撮影光学系101は、フォーカスレンズやズームレンズ等の複数のレンズを有している。撮影光学系101は、フォーカスレンズやズームレンズをその光軸(図示一点鎖線方向)に沿って駆動することにより、焦点位置及び焦点距離を変えることが可能に構成されている。このような撮影光学系101は、被写体からの光束を集光して被写体像を結像させる。
【0044】
絞り103は、撮影光学系101の光路中に配置されている。絞り103は、開閉することによってその開口量(絞り値)を変えることが可能に構成されている。このような絞り103は、撮影光学系101を介してカメラ本体200に入射する光束の光量を調節する。
【0045】
焦点位置検出機構105は、例えばエンコーダであって、撮影光学系101を構成するフォーカスレンズのレンズ位置、即ち撮影光学系101の焦点位置を検出する。ズーム位置検出機構107は、撮影光学系101を構成するズームレンズのレンズ位置、即ち撮影光学系101の焦点距離を検出する。
【0046】
光学系駆動機構109は、レンズCPU113の制御に従って、フォーカスレンズやズームレンズをその光軸方向に沿って駆動する。絞り駆動機構111は、レンズCPU113の制御に従って、絞り103を開閉駆動する。
撮影光学系101は光学系駆動機構109によって駆動され、絞り103は絞り駆動機構111によって駆動される。光学系駆動機構109によって駆動された撮影光学系101の焦点位置(ピント位置)は、焦点位置検出機構105によって検出され、また撮影光学系101の焦点距離は、ズーム位置検出機構107によって検出される。
【0047】
レンズCPU113は、交換レンズ100内の制御を行う。レンズCPU113には、焦点位置検出機構105、ズーム位置検出機構107、光学系駆動機構109、絞り駆動機構111が接続されており、また、レンズCPU113は、通信接点200cを介してカメラ本体200に接続されている。このようなレンズCPU113は、交換レンズ100内の制御として、例えば、光学系駆動機構109を制御することによって撮影光学系101の焦点位置を制御したり、撮影光学系101のズーム駆動を行ったりする。また、レンズCPU113は、焦点位置検出機構105によって検出された焦点位置の情報やズーム位置検出機構107によって検出された焦点距離の情報をカメラ本体200に送信することも行う。さらに、レンズCPU113は、絞り駆動機構111を制御することによって絞り値を制御することも行う。
【0048】
レンズROM115及びレンズRAM117は、レンズCPU113に接続されている。レンズROM115は、例えば電気的に書き換え可能な不揮発性メモリであり、レンズCPU113による交換レンズ100内の制御を実行させるためのプログラムや、交換レンズ100の固有情報等を記憶している。レンズRAM117は、例えば電気的に書き換え可能な揮発性メモリであり、上述のプログラムを実行するための一時的な記憶領域として使用される。
【0049】
可動ミラー201は、下降位置(被写体像観察位置)と上昇位置(退避位置)との間で回動自在に構成されている。下降位置は、図9において実線で示した位置であって、交換レンズ100がカメラ本体200に装着された際に、撮影光学系101の光軸に対して可動ミラー201が45度傾いた状態となる位置である。可動ミラー201が下降位置にある場合には、撮影光学系101からの被写体像が、観察光学系に向けて反射される。また、上昇位置は、図9において破線で示した位置であって、交換レンズ100がカメラ本体200に装着された際に、撮影光学系101の光軸から可動ミラー201が退避した状態となる位置である。可動ミラー201が上昇位置にある場合には、撮影光学系101からの被写体像が、撮像素子233cの方向に導かれる。
【0050】
観察光学系は、可動ミラー201の上方に設けられ、フォーカシングスクリーン203と、全面液晶板(以下、全面LCDという)205と、ペンタプリズム207と、ファインダ内表示部209と、接眼レンズ213と、を有している。
フォーカシングスクリーン203は、可動ミラー201で反射された被写体像が結像される。全面LCD205は、フォーカシングスクリーン203の上方に配置されている。この全面LCD205は、部分的に光の透過と遮光とを制御自在に構成されており、フォーカシングスクリーン203上に結像した被写体像の任意の部分を、ペンタプリズム207に導く。ペンタプリズム207は、全面LCD205の上方に配置されている。このペンタプリズム207は、全面LCD205によって導かれた被写体像を内部で反射させることによって、被写体像の左右を反転させる。
【0051】
ファインダ内表示部209は、ペンタプリズム207の前面側(交換レンズ100に近い側とする)の反射面に沿って配置されている。ファインダ内表示部209は、液晶表示装置等から構成されており、全面LCD205によって導かれた被写体像に対して、視野表示や撮影情報表示等を重畳させる。ファインダ内表示駆動回路211は、ファインダ内表示部209に接続されており、ボディCPU265mの制御に従ってファインダ内表示部209を駆動する。
【0052】
接眼レンズ213は、ペンタプリズム207の出射側(図では交換レンズ100に対して遠い側)に配置されている。接眼レンズ213は、ペンタプリズム207から出射された被写体像(及びファインダ内表示部209によって重畳された表示)を、接眼部200bを覗き込んでいるユーザの目に結像させる。測光センサ215は、接眼レンズ213の近傍であって、接眼レンズ213を介した被写体像の観察の邪魔にならない位置に配置されている。この測光センサ215は、ペンタプリズム207から被写体像として出射される光束の一部を受光し、受光した光束を電気信号に変換する。測光処理回路217は、測光センサ215に接続されており、測光センサ215の出力に対して増幅処理やアナログ−デジタル変換処理等を施す。
【0053】
サブミラー219は、可動ミラー201の中央付近に構成されたハーフミラー部の背面に設けられている。サブミラー219は、可動ミラー201のハーフミラー部を透過した被写体光束を、位相差AFセンサ223の方向に反射させる。ここで、サブミラー219は、可動ミラー201に対して回動自在に構成されている。可動ミラー201が上昇位置にあるときには、サブミラー219は、ハーフミラー部を覆う位置に回動する。一方、可動ミラー201が下降位置にあるときには、サブミラー219は、可動ミラー201に対して略90度をなす位置まで回動する。
ミラー駆動機構221は、入出力回路265gを介したボディCPU265mの制御に従って、可動ミラー201を上昇位置又は下降位置に駆動する。
【0054】
位相差AFセンサ223は、サブミラー219の下方に配置されている。位相差AFセンサ223は、サブミラー219で反射された被写体光束に対応した像を受光して電気信号に変換するセンサ対である。また、位相差AFセンサ223は、サブミラー219で反射された被写体光束を複数の光束に分離するための公知の位相差AF光学系も有している。位相差AF処理回路225は、位相差AFセンサ223に接続されている。この位相差AF処理回路225は、位相差AFセンサ223を構成するセンサ対でそれぞれ得られた電気信号を取り込み、取り込んだ電気信号を用いて、撮影光学系101によって結像される被写体像の焦点ズレ量(デフォーカス量)及び焦点ズレ方向を算出する。ここで、位相差AFセンサ223のセンサ対の構成によっては、撮影画面内の複数ポイントの焦点ズレ量を検出可能である。
【0055】
シャッタ227は、フォーカルプレーンタイプのシャッタであって、撮像素子233cの撮像面を露出状態又は遮光状態とするように構成されている。シャッタ227のシャッタ速度値を制御することにより、撮像素子233cの露出時間が制御される。シャッタ駆動機構229は、入出力回路265gを介したボディCPU265mの制御に従って、シャッタ227を開閉駆動する。発光許可信号回路231は、シャッタ227の近傍に設けられている。発光許可信号回路231は、シャッタ227の先幕の走行位置に応じて順次オンとなるスイッチX1、X2、X3、X4を有している。スイッチX1は、撮影画面が16:9の縦長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。スイッチX2は、撮影画面が4:3縦長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。スイッチX3は、撮影画面が4:3横長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。スイッチX4は、撮影画面が16:9横長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。これらのスイッチとしては、機械的なオンオフスイッチや、光電スイッチ等、シャッタ227の先幕の走行位置を検知できるスイッチであれば良い。
【0056】
撮像ユニット233は、シャッタ227の後方に配置されており、防塵フィルタ233aが形成されたパッケージ内に、赤外カットフィルタ・ローパスフィルタ233bと、撮像素子233cとを封入するように構成されている。
防塵フィルタ233aは、撮像ユニット233のパッケージ内への塵埃の侵入を防止するものである。また、防塵フィルタ233aの周囲には、圧電素子が固定されている。防塵フィルタ駆動回路235は、圧電素子に接続されており、入出力回路265gを介したボディCPU265mの制御に従って、圧電素子を超音波振動させる。防塵フィルタ233aに付着した塵埃は、圧電素子を介して防塵フィルタ233aの表面に発生した振動波によって除去される。
赤外カットフィルタ・ローパスフィルタ233bは、被写体光束から赤外光成分と、高周波成分を除去するための光学フィルタである。
【0057】
撮像素子233cは、シャッタ227との間に、防塵フィルタ233a、赤外カットフィルタ・ローパスフィルタ233bを介するように配置されている。この撮像素子233cは、撮影光学系101によって結像される被写体像を電気信号に変換する。ここで、撮像素子233cは、CCD(Charge Coupled Device)方式及びCMOS(Complementary Metal Oxide Semiconductor)方式等の種々の2次元固体撮像素子を使用できる。
【0058】
撮像素子駆動回路237は、撮像素子233cに接続されており、撮像素子233cで得られた電気信号(画像信号)を読み出す等する。前処理回路239は、撮像素子駆動回路237に接続されており、撮像素子駆動回路237から読み出された画像信号に対して、増幅処理、アナログ−デジタル変換処理、ライブビュー表示のための間引き処理、拡大表示のための切り出し処理等の、画像処理のための前処理を行うことにより、画像データを生成する。
【0059】
シフト機構241は、撮像ユニット233を、撮像素子233cの撮像面と平行な方向であるX軸方向とY軸方向に沿って移動させる。
手ブレセンサ243は、カメラ本体200に加えられた手ブレ等によるカメラ本体200の振動を検出する。手ブレセンサ243は、例えば角加速度センサにより構成される。手ブレ補正回路245は、手ブレセンサ243に接続され、手ブレセンサ243によって検出された振動を除去するために必要な手ブレ補正量を示す手ブレ補正信号を生成する。
【0060】
シフト機構駆動回路247は、手ブレ補正回路245に接続され、手ブレ補正信号に基づいてシフト機構241を駆動する。シフト機構241によってカメラ本体200に加えられた手ブレ等の振動を打ち消すように撮像ユニット233を移動させることによって、防振(手ブレ補正)を行う。
【0061】
傾きセンサ249は、3軸周りの角加速度を検出するセンサである。この傾きセンサ249により、カメラ本体200の傾きを検出する。傾き検知回路251は、傾きセンサ249に接続されており、傾きセンサ249の出力値と定常状態の値との差からカメラ本体200の傾き状態を検知し、また傾きセンサ249の変化量からカメラ本体200に発生した加速度を検知する。
【0062】
光源センサ253は、被写体の環境光となる光源を検出するためのセンサである。光源処理回路255は、光源センサ253に接続され、光源センサ253からの出力に応じて、光源の種類に応じた光源データを出力する。照度センサ257は、カメラ本体200上での照度を測定するためのセンサである。照度処理回路259は、照度センサ257に接続され、照度に応じた照度データを出力する。
【0063】
リモコン受信センサ261は、リモコン(リモートコントロール)装置(不図示)からの赤外線等によるリモコン指令を受信するための赤外線センサである。リモコン受信処理回路263は、リモコン受信センサ261に接続され、リモコン受信センサ261からの信号を処理してリモコン信号を出力する。
【0064】
カメラ用IC265は、カメラ本体200の制御に適するように構成されたASIC(Application Specific Integrated Circuit:特定用途向け集積回路)である。カメラ用IC265は、コントラストAF回路265aと、AE回路265bと、画像処理回路265cと、圧縮伸張回路265dと、ビデオ信号出力回路265eと、スイッチ検知回路265fと、入出力回路265gと、通信回路265hと、フラッシュメモリ制御回路265iと、SDRAM制御回路265jと、記録媒体制御回路265kと、ダイアル検知回路265lと、ボディCPU265mと、を有している。このうち、AE回路265bと、画像処理回路265cと、圧縮伸張回路265dと、ビデオ信号出力回路265eと、スイッチ検知回路265fと、入出力回路265gと、通信回路265hと、フラッシュメモリ制御回路265iと、SDRAM制御回路265jと、記録媒体制御回路265kと、ダイアル検知回路265lと、ボディCPU265mとは、データバス265nに接続されている。
【0065】
コントラストAF回路265aは、前処理回路239に接続されており、前処理回路239からの画像データに基づいて高周波成分を抽出し、この高周波成分に基づくコントラスト情報をボディCPU265mに出力する。ここで、コントラストAF回路265aは、撮影画面内の全領域から高周波成分を抽出可能である。AE回路265bは、前処理回路239に接続されており、前処理回路239からの画像データに基づいて被写体輝度を算出し、算出した被写体輝度に応じた測光情報をボディCPU265mに出力する。
【0066】
画像処理回路265cは、前処理回路239からデータバス265nを介して入力された画像データに対して、増幅(デジタルゲイン調整処理)、色補正、ガンマ(γ)補正、コントラスト補正、ライブビュー表示用画像の生成等の各種の画像処理を施す。圧縮伸張回路265dは、画像データをJPEG方式やTIFF方式等の圧縮方式により圧縮したり、また圧縮された画像データを表示等のために伸張したりする。ここで、圧縮方式は、JPEG方式やTIFF方式に限るものではない。
【0067】
ビデオ信号出力回路265eは、LCD駆動回路281に接続されており、また、通信接点200gを介して外部表示装置500に接続される。ビデオ信号出力回路265eは、SDRAM271、記録媒体273a、記録媒体273bに記憶された画像データを、LCD283等に表示するためのビデオ信号に変換する。
【0068】
スイッチ検知回路265fは、図7及び図8で示した各種の操作部材(レリーズ釦267a、パワースイッチ267e等)の操作に応答して動作する各種スイッチ267からの信号を、データバス265nを介してボディCPU265mに入力する。
入出力回路265gは、防塵フィルタ駆動回路235、シャッタ駆動機構229、位相差AF処理回路225、ミラー駆動機構221、光源処理回路255、照度処理回路259、リモコン受信処理回路263、傾き検知回路251、シフト機構駆動回路247、発光許可信号回路231、測光処理回路217、LCD向き検知回路285、充電回路291a、フラッシュ発光回路291b、GPS受信回路293に接続されている。この入出力回路265gは、ボディCPU265m等のカメラ用IC265の内部の回路と、カメラ用IC265の外部の回路との間のデータの入出力を、データバス265nを介して仲介する。
【0069】
通信回路265hは、交換レンズ100がカメラ本体200に装着された際に、通信接点200cを介してレンズCPU113と通信自在に接続される。この通信回路265hは、ボディCPU265m等のカメラ用IC265内部の回路とレンズCPU113との間のデータや制御命令の通信を仲介する。
【0070】
フラッシュメモリ制御回路265iは、データバス265n及びフラッシュメモリ(Flash Memory)269に接続されており、フラッシュメモリ269に対するデータの読み書きを制御する。フラッシュメモリ269は、例えば電気的に書き換え可能な不揮発性メモリとして構成されており、カメラ本体200の動作を制御するためのプログラムを記憶している。
【0071】
SDRAM制御回路265jは、データバス265n及びSDRAM(Synchronous DRAM)271に接続されており、SDRAM271に対するデータの読み書きを制御する。SDRAM271は、画像処理回路265cによる画像処理によって得られた画像データ及び圧縮伸張回路265dによる圧縮によって得られた圧縮画像データを一時的に記憶するためのバッファメモリである。
【0072】
記録媒体制御回路265kは、記録媒体273a、273bに対するデータの読み書きを制御する。記録媒体273a、273bは、xDピクチャーカード(登録商標)、コンパクトフラッシュ(登録商標)、SDメモリカード(登録商標)、メモリスティック(登録商標)等の記録媒体である。記録媒体273a、273bは、カメラ本体200に対して着脱自在に構成して良い。その他、記録媒体273a、273bは、通信接点を介して接続可能なハードディスク等であっても良い。なお、記録媒体273aと記録媒体273bとの組み合わせ方は、同じ種類の記録媒体であって記録容量が異なる組み合わせや、異なる種類の記録媒体の組み合わせ等の、自由な組み合わせ方を採用できる。
【0073】
ダイアル検知回路265lは、前述の前ダイアル275aと後ダイアル275bにそれぞれ接続されており、それぞれのダイアルの回転方向及び回転量を検知し、検知した回転方向及び回転量に応じた信号を、データバス265nを介してボディCPU265mに入力する。
【0074】
ボディCPU265mは、交換レンズ100の制御を含む、カメラ本体200の全体の動作を制御する。ボディCPU265mは、フラッシュメモリ269に記憶されたプログラムに従ってカメラ本体200の制御を行う。また、本実施形態におけるボディCPU265mは、情報生成部30としての機能も有している。
【0075】
電源供給回路277は、内蔵のバッテリ279aに接続されており、バッテリ279aから供給される電力を、カメラ本体200の各回路や各機構の動作に必要な電力に変換して供給する。ここで、電源供給回路277は、外部電源279bにも接続され、外部電源279bからの電力もカメラ本体200の各回路や各機構に供給する。
【0076】
LCD駆動回路281は、ビデオ信号出力回路265eで得られたビデオ信号に従ってLCD283を駆動して、LCD283に画像を表示させる。LCD向き検知回路285は、LCD283の向きを検知する。本実施形態におけるLCD283は、その向きを縦位置や横位置に変更することができる。LCD向き検知回路285は、LCD283の向きを検知し、検知したLCD283の向きを示す信号を、入出力回路265gを介してボディCPU265mに伝達する。
コントロールパネル駆動回路287は、コントロールパネル289とボディCPU265mとに接続されている。コントロールパネル駆動回路287は、ボディCPU265mの制御に従って、コントロールパネル289に撮影情報等を表示する。
【0077】
内蔵フラッシュ291は、充電回路291a、フラッシュ発光回路291b、発光管291c等を有している。充電回路291aは、バッテリ279a又は外部電源279bを電源とし、これらの電源からの電圧を昇圧し、この昇圧した電圧を用いて、不図示のフラッシュ発光用のコンデンサを充電する。フラッシュ発光回路291bは、発光許可信号を受信して、充電回路291aに充電された電圧を発光管291cに印加する等の発光制御を行う。発光管291cは、例えばキセノン管と反射傘を備えており、フラッシュ発光回路291bから印加された電圧に従って発光する。
【0078】
GPS受信回路293は、GPSアンテナ295を介してGPS衛星からのGPS信号を受信し、受信したGPS信号を保持する。
暗号化回路297は、第1情報としての位置情報の暗号化を行う。この暗号化回路297については第2の実施形態において詳述する。
【0079】
外部フラッシュ300は、カメラ本体200に対して着脱自在に構成されたフラッシュ装置である。この外部フラッシュ300は、カメラ本体200に装着された際に通信接点200d、200eを介して、カメラ本体200と通信自在に接続される。外部フラッシュ300は、フラッシュCPU301、充電回路303、フラッシュ発光回路305、発光管307、ズーム駆動回路309を有している。
【0080】
フラッシュCPU301は、外部フラッシュ300の制御を行い、また、通信接点200dと通信回路265hとを介してボディCPU265mと通信を行う。充電回路303は、外部フラッシュ300に装填された不図示の電源電池の電圧を昇圧し、昇圧した電圧を用いて、不図示のフラッシュ発光用のコンデンサを充電する。フラッシュ発光回路305は、ボディCPU265mから受信した発光許可信号に応じて充電回路303に充電された電圧を発光管307に印加する。発光管307は、例えばキセノン管と反射傘を備えており、フラッシュ発光回路305から印加された電圧に従って発光する。ズーム駆動回路309は、撮影光学系101の焦点距離に応じて、発光管307のキセノン管と反射笠との間隔を制御する。これにより、キセノン管と反射傘との間隔が、撮影光学系101の焦点距離等に応じた照射角となるようにする。
【0081】
外部機器400は、パーソナルコンピュータ(PC)等の機器であって機器CPU401を有している。機器CPU401は、外部機器400の動作を制御するものであって、通信接点200f及び通信回路265hを介して、ボディCPU265mと通信自在に接続される。
【0082】
外部表示装置500は、テレビジョン受像機(以下、テレビという)等の表示機器であって、表示駆動回路501と、表示装置503とを有している。表示駆動回路501は、通信接点200gを通じて、ビデオ信号出力回路265eに接続されており、ビデオ信号出力回路265eからのビデオ信号に基づき、外部表示装置500に画像を表示させる。
【0083】
次に、本変形例のデジタルカメラの動作を説明する。図10は、カメラ本体200のボディCPU265mによるカメラ本体200のパワーオンリセットの動作を示すフローチャートである。カメラ本体200にバッテリ279aが装填されるか又は外部電源279bが接続されると、図10に示すフローチャートの動作がスタートする。このとき、ボディCPU265mは、スイッチ検知回路265fの状態から、パワースイッチ267eがオンであるかを判定する(S101)。S101の判定において、パワースイッチ267eがオフであると判定した場合に、ボディCPU265mは、カメラ本体200の状態を、低消費電力の状態であるスリープ状態とする(S102)。スリープ状態において、ボディCPU265mは、パワースイッチ267eがオンであるかを判定しており、パワースイッチ267eがオンとなった場合にS103以下の処理を行う。パワースイッチ267eがオンとなるまでは、ボディCPU265mは、パワースイッチ割り込み処理以外の動作を停止させることによって低消費電力化を図る。
【0084】
S101の判定においてパワースイッチ267eがオンであると判定した場合又はS102のスリープ状態を脱した場合に、ボディCPU265mは、電源供給回路277を介した電源供給を開始する(S103)。次に、ボディCPU265mは、塵埃除去動作を行う(S104)。塵埃除去動作に際し、ボディCPU265mは、入出力回路265gを介して防塵フィルタ駆動回路235を動作させることによって、防塵フィルタ233aに固着された圧電素子を超音波振動させ、この超音波振動によって防塵フィルタ233aの表面に付着した塵埃等を除去する。
【0085】
次に、ボディCPU265mは、撮影モードや、ISO感度、マニュアル設定されたシャッタ速度や絞り値等、ユーザによって設定された情報があれば、それらの撮影モードや撮影条件の読み込みを行う(S105)。このときに、ボディCPU265mは、レンズCPU113から通信回路265hを介して交換レンズ100の開放絞り値や焦点距離情報等も読み込む。
【0086】
撮影モード等の読み込みを行うと、ボディCPU265mは、現在、ライブビュー表示モードであるかを判定する(S106)。前述したように、LV表示釦267bが一度操作されるとライブビュー表示モードが設定され、再度操作されるとライブビュー表示モードが解除される。
【0087】
S106の判定において、ライブビュー表示モードでないと判定した場合、即ち光学ファインダ表示モードである場合に、ボディCPU265mは、ファインダ測光(F測光)及び露出量演算を行う(S107)。光学ファインダ表示モードの場合には、観察光学系による被写体像の観察を可能とするため、可動ミラー201が下降状態にある。この場合、撮影光学系101を通過した被写体光束は、測光センサ215に入射する。この被写体光束を用いて測光を行うことができる。ボディCPU265mは、ファインダ測光の結果、測光処理回路217によって得られた被写体輝度に基づいて適正露出を得るための絞り値やシャッタ速度値等を演算する。ここで、絞り値やシャッタ速度値の演算にあたっては、S105において読み込まれた撮影モードや撮影条件を用いる。
【0088】
露出量の演算後、ボディCPU265mは、ファインダ内表示部209への重畳表示を行う(S108)。ボディCPU265mは、ファインダ内表示駆動回路211を制御して、撮影範囲、絞り値、シャッタ速度値等の撮影条件を被写体像に重畳させる。ここで、絞り値やシャッタ速度値は、コントロールパネル289にも表示させる。
【0089】
続いて、ボディCPU265mは、ライブビュー表示を消灯する(S109)。ライブビュー表示モードから光学ファインダ表示モードに切り替わった際には、S109においてライブビュー表示を消灯する。なお、ライブビュー表示が既に消灯されている場合には、ボディCPU265mは、S109においては特に処理を行わない。
【0090】
また、S106における判定の結果、ライブビュー表示モードであると判定した場合、ボディCPU265mは、入出力回路265gを介したミラー駆動機構221の制御により、可動ミラー201を上昇位置に退避させる(S110)。その後、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227を開放する(S111)。ライブビュー表示モードでは、撮像素子233cを介して取得される画像データに基づいて、被写体像をLCD283に表示させる。このために、撮像素子233c上に被写体像が形成されるように、可動ミラー201を退避させ、シャッタ227を開放する。なお、可動ミラー201が既に退避しており、また、シャッタ227が既に解放されている場合には、ボディCPU265mは、S110及びS111においては特に処理を行わない。
【0091】
続いて、ボディCPU265mは、イメージャー測光(I測光)及び露出量演算を行う(S112)。ライブビュー表示モードでは、可動ミラー201を撮影光学系101の光路から退避させているので、測光センサ215には被写体光束が入射しない。そこで、撮像素子233cを介して得られた画像データを用いて、AE回路265bによって被写体輝度を算出する。この算出された被写体輝度に基づいて、ボディCPU265mは、適正露出を得るための絞り値やシャッタ速度値等を演算する。ここで、絞り値やシャッタ速度値の演算にあたっては、S107と同様、S105において読み込まれた撮影モードや撮影条件を用いる。ここで、絞り値やシャッタ速度値は、LCD283やコントロールパネル289に表示させる。
【0092】
続いて、ボディCPU265mは、ライブビュー表示を行う(S113)。この際、ボディCPU265mは、前処理回路239を介して得られる画像データを画像処理回路265cに入力して、画素数を間引く等の画像処理を施す。そして、ボディCPU265mは、ビデオ信号出力回路265eを介してLCD駆動回路281を制御して、画像処理回路265cによって処理された画像データに対応した画像を、設定されている向きやアスペクト比でLCD283に表示させる。このような動作を、撮像素子233cの撮像動作のたびに行う。
【0093】
ライブビュー表示の後、ボディCPU265mは、ファインダ内表示部209への重畳表示を消灯する(S114)。光学ファインダ表示モードからライブビュー表示モードに切り替わった際には、S114においてファインダ表示を消灯する。なお、ファインダ表示が既に消灯されている場合には、ボディCPU265mは、S114においては特に処理を行わない。
【0094】
S109においてライブビュー表示を消灯した後又はS114においてファインダ表示を消灯した後、ボディCPU265mは、スイッチ検知回路265fの状態から、レリーズ釦267aが半押しされたか、即ち1Rスイッチがオンかを判定する(S115)。
【0095】
S115の判定において、1Rスイッチがオンであると判定した場合、ボディCPU265mは、撮影動作のサブルーチンを実行する(S116)。このサブルーチンの詳細は図11を用いて後述する。
S115の判定において1Rスイッチがオンでないと判定した場合又はS116の撮影動作のサブルーチンを実行した場合には、ボディCPU265mは、スイッチ検知回路265fの状態から、設定スイッチがオンかを判定する(S117)。設定スイッチは、メニュー釦267fの操作によってオンするスイッチである。
【0096】
S117の判定において、設定スイッチがオンであると判定した場合、ボディCPU265mは、設定変更を行う(S118)。S118においては、メニュー画面上での操作に従ってカメラ本体の各種の設定を変更する。
S117の判定において設定スイッチがオンでないと判定した場合又はS118の設定変更の後、ボディCPU265mは、再生スイッチがオンかを判定する(S119)。再生スイッチは、再生釦267gの操作によってオンするスイッチである。S119の判定において、再生スイッチがオンであると判定した場合、ボディCPU265mは、再生動作のサブルーチンを実行する(S120)。この再生動作のサブルーチンの詳細については、図12〜図14を用いて後述する。
【0097】
S119の判定において再生スイッチがオンでないと判定した場合又はS120の再生動作のサブルーチンを実行した場合には、ボディCPU265mは、外部機器400が接続されているかを判定する(S121)。S121の判定において、外部機器400が接続されていると判定した場合、ボディCPU265mは、外部機器接続動作のサブルーチンを実行する(S122)。この外部機器接続動作のサブルーチンの詳細については、図15を用いて後述する。
【0098】
S121の判定において外部機器400が接続されていないと判定した場合又はS122の外部機器接続動作のサブルーチンを実行した場合には、ボディCPU265mは、スイッチ検知回路265fの状態から、パワースイッチ267eがオンか判定する(S123)。S123の判定において、パワースイッチ267eがオンであると判定した場合、ボディCPU265mは、処理をS106に戻して前述の動作を実行する。一方、S123の判定において、パワースイッチ267eがオンではないと判定した場合に、ボディCPU265mは、電源供給回路277を介しての電源供給を停止させる(S124)。その後、ボディCPU265mは、カメラ本体200をスリープ状態とする。
【0099】
次に、S116における撮影動作のサブルーチンについて、図11のフローチャートを用いて説明する。撮影動作のサブルーチンに入ると、ボディCPU265mは、S106と同様にライブビュー表示モードかを判定する(S201)。S201の判定において、ライブビュー表示モードでないと判定した場合に、ボディCPU265mは、位相差AFを実行する(S202)。位相差AFの場合、ボディCPU265mは、位相差AF処理回路225を用いて、撮影光学系101の周辺を通過した対をなす光束から、公知の位相差法を用いて撮影光学系101の焦点ズレ方向及び焦点ズレ量を検出する。そして、ボディCPU265mは、検出された焦点ズレ方向及び焦点ズレ量に従って撮影光学系101のフォーカスレンズの駆動量を算出し、算出した駆動量をレンズCPU113に通信する。レンズCPU113は、通信された駆動量に従って光学系駆動機構109を駆動させることにより、フォーカスレンズを合焦位置に駆動する。
【0100】
位相差AFの後、ボディCPU265mは、S107と同様のファインダ測光及び露出量演算を行う(S203)。S203において演算された絞り値やシャッタ速度値は、ファインダ内表示部209やコントロールパネル289に表示させる。
また、S201の判定において、ライブビュー表示モードであると判定した場合に、ボディCPU265mは、イメージャーAFを実行する(S204)。ライブビュー表示モードでは、可動ミラー201が撮影光学系101の光路から退避しており、位相差AFを行うことができない。そこで、撮像素子233cを介して得られる画像データを用いたイメージャーAFを行う。イメージャーAFの場合、ボディCPU265mは、コントラストAF回路265aから出力された画像データの高周波成分がピーク値となるように、レンズCPU113を介して撮影光学系101のフォーカスレンズの駆動制御を行う。
イメージャーAFの後、ボディCPU265mは、S112と同様のイメージャー測光及び露出量演算を行う(S205)。S205において演算された絞り値やシャッタ速度値は、LCD283やコントロールパネル289に表示させる。
【0101】
S203におけるファインダ測光及び露出量演算又はS205におけるイメージャー測光及び露出量演算の後、ボディCPU265mは、レリーズ釦267aが全押しされたか、即ち2Rスイッチがオンかを判定する(S206)。
S206の判定において、2Rスイッチがオンでないと判定した場合に、ボディCPU265mは、1Rスイッチがオンかを判定する(S207)。1Rスイッチがオンでない場合、レリーズ釦267aからユーザの指が離れたことを示している。したがって、ボディCPU265mは、撮影動作のサブルーチンを終了する。一方、S207の判定において、1Rスイッチがオンである場合に、少なくともユーザの指がレリーズ釦267aにかかっていることを示している。この場合に、ボディCPU265mは、処理をS206に戻す。
【0102】
また、S206の判定において、2Rスイッチがオンであると判定した場合、ボディCPU265mは、露出動作を実行する。このために、ボディCPU265mは、S106及びS201と同様にしてライブビュー表示モードか判定する(S208)。S208の判定において、ライブビュー表示モードでないと判定した場合に、ボディCPU265mは、入出力回路265gを介したミラー駆動機構221の制御により、可動ミラー201を上昇位置に退避させる(S209)。ライブビュー表示モードでない場合、即ち光学ファインダ表示モードの場合には、可動ミラー201が下降位置にある。したがって、撮像素子233cに被写体光束に導くために、可動ミラー201を退避させる。
【0103】
一方、S208の判定において、ライブビュー表示モードであると判定した場合に、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227を閉じる(S210)。ライブビュー表示モードの場合には、可動ミラー201は下降位置にあり、シャッタ227は開放のままである。露出動作を実行するにあたって、シャッタ227をチャージする必要があることから、一旦、シャッタ227を閉じる。
【0104】
S209の可動ミラー201の退避後又はS210においてシャッタ227を閉じた後、ボディCPU265mは、レンズCPU113を介して絞り103を絞り込む(S211)。S211において、ボディCPU265mは、S203又はS205の露出量演算において求められた絞り値又は手動設定された絞り値となるように、レンズCPU113に対して絞り103の絞り込みの指示を行う。
【0105】
続いて、ボディCPU265mは、露出動作を行う(S212)。S212において、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227の先幕を走行させるとともに、撮像素子233cによる撮像(電荷蓄積)を開始させる。また、S203又はS205の測光の結果、内蔵フラッシュ291又は外部フラッシュ300によってフラッシュを発光させる必要がある場合には、発光許可信号回路231又はボディCPU265mは、シャッタ227の先幕が全開となった時点でフラッシュの発光を実行させる。シャッタの227の先幕が全開となった後、シャッタ速度値に応じて定まる所定時間が経過すると、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227の後幕を走行させるとともに、撮像素子233cにおける撮像(電荷蓄積)を終了させる。
【0106】
露出動作が終了すると、ボディCPU265mは、GPS受信回路293及び入出力回路265gを介してGPS衛星からのGPS信号を取り込む(S213)。ここで、第1の変形例と同様に、GPS受信回路293は、所定時間毎にGPS信号を受信するようにしても良い。この場合、GPS受信回路293は、最新のGPS信号を保持しておくようにしても良いし、過去の所定時間までのGPS信号を保持しておくようにしても良い。
【0107】
GPS信号を取り込んだ後、ボディCPU265mは、レンズCPU113を介して絞り103を開放する(S214)。S214において、ボディCPU265mは、絞り103の開放量が開放絞り値となるようにレンズCPU113に対して絞り103の駆動指示を行う。
【0108】
絞り103を開放にした後、ボディCPU265mは、S106、S201、S208と同様にして、ライブビュー表示モードかを判定する(S215)。S215の判定において、ライブビュー表示モードでないと判定した場合に、ボディCPU265mは、入出力回路265gを介したミラー駆動機構221の制御により、可動ミラー201を下降位置に復帰させる(S216)。S209において可動ミラー201は、撮影光学系101の光路から退避しているので、観察光学系による被写体像の観察が可能なように、可動ミラー201を光路中に復帰させる。
【0109】
一方、S215の判定において、ライブビュー表示モードであると判定した場合に、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227を開放する(S217)。これは、ライブビュー表示を再開するためである。
【0110】
S216における可動ミラー201の復帰後又はS217におけるシャッタ227の開放後、ボディCPU265mは、撮像素子駆動回路237を制御して、画像信号の読み出しを行う(S218)。続いて、ボディCPU265mは、画像処理回路265c及び圧縮伸張回路265dを用いて、前処理回路239から出力された画像データに対して画像処理を施す(S219)。
【0111】
画像処理の後、ボディCPU265mは、GPS受信回路293から取得したGPS信号を処理してカメラ本体200の位置情報を生成する(S220)。この位置情報が、前述の第1情報に対応する。第1情報としての位置情報を生成した後、ボディCPU265mは、画像処理回路265c及び圧縮伸張回路265dによる画像処理の結果として得られる圧縮画像データに所定のヘッダ情報を付加して画像ファイルを生成する。このヘッダ情報には、露出動作時の条件(絞り値やシャッタ速度値等)や第1情報としての位置情報を記録する。画像ファイルの生成後、ボディCPU265mは、生成した画像ファイルを、記録媒体制御回路265kを用いて記録媒体273a又は273bに記録する(S221)。画像ファイルの記録後、ボディCPU265mは、撮影動作を終了させる。
このように、本変形例においては、撮影動作時に第1情報としての位置情報が生成され、生成された第1情報が画像データと関連付けて記録される。
【0112】
次に、S120における再生動作のサブルーチンについて、図12に示すフローチャートを用いて説明する。再生動作のサブルーチンに入ると、再生画像が指定される(S301)。S301において、ボディCPU265mは、ビデオ信号出力回路265eを介してLCD駆動回路281を制御して、LCD283に記録媒体273a又は記録媒体273bに記録されている画像ファイルの一覧をサムネイル表示させる。ユーザは、サムネイル表示された画像ファイルの中から所望の画像ファイルを、十字釦267cを用いて指定する。ボディCPU265mは、スイッチ検知回路265fの状態から、ユーザによって指定された画像ファイルを認識する。
【0113】
ユーザによる再生画像の指定が行われると、ボディCPU265mは、外部表示装置500が接続されているかを判定する(S302)。S302の判定において、外部表示装置500が接続されていないと判定した場合に、ボディCPU265mは、液晶モニタ再生を行う(S303)。S303においては、記録媒体から読み出された画像ファイルに対応した画像をLCD283に表示させる。液晶モニタ再生のサブルーチンは、図13を用いて後述する。
【0114】
また、S302の判定において、外部表示装置500が接続されていると判定した場合に、ボディCPU265mは、外部再生を行う(S304)。S304においては、記録媒体から読み出された画像ファイルに対応した画像を外部表示装置500に表示させる。外部再生のサブルーチンは、図14を用いて後述する。
【0115】
S303の液晶モニタ再生又はS304の外部再生の後、ボディCPU265mは、再生終了か判定する(S305)。本変形例においては、例えば、一旦、再生釦267gが操作されることにより再生動作が開始され、再度、再生釦267gが操作されることにより再生動作が終了される。したがって、S305において、ボディCPU265mは、再度、再生釦267gが操作されたかを判定する。
【0116】
S305の判定において、再生終了でない場合に、ボディCPU265mは、処理をS302に戻して前述の動作を実行する。一方、S305の判定において、再生終了である場合には、ボディCPU265mは、再生動作を終了させる。
次に、S303における液晶モニタ再生のサブルーチンについて、図13に示すフローチャートを用いて説明する。液晶モニタ再生のサブルーチンに入ると、ボディCPU265mは、ユーザによって指定された画像ファイルを記録媒体から読み込む(S401)。続いて、ボディCPU265mは、読み込んだ画像ファイル中の圧縮画像データを圧縮伸張回路265dによって伸張した後、画像処理回路265cにより画像データ中の余白部分の黒塗りを行う(S402)。本変形例のカメラ本体200で得られる画像データは、縦横位置やアスペクト比が異なっている。このため、読み出した画像データの縦横位置やアスペクト比に従って余白部分を黒塗りとする。
【0117】
余白部分の黒塗りを行った後、ボディCPU265mは、モニタ再生表示を開始する(S403)。S403において、ボディCPU265mは、黒塗り後の画像データをビデオ信号出力回路265eに入力してLCD283に画像を再生する。この際、必要に応じて、絞り値やシャッタ速度値を示す情報や、撮影位置を示す情報を重畳表示させる。ここで、表示させる撮影位置は、第1情報に対応した位置情報である。
【0118】
モニタ再生表示を開始した後、ボディCPU265mは、画像選択操作がなされたかを判定する(S404)。本変形例においては、左右の十字釦267cが操作されることにより、再生する画像を別の画像に変更することができる。また、サムネイル表示を再度行って、この中から再生する画像を選択することもできる。したがって、S404において、ボディCPU265mは、十字釦267cが操作されたかや再度のサムネイル表示が指示されたかを画像選択操作として判定する。
【0119】
S404の判定において、画像選択操作がなされたと判定した場合に、ボディCPU265mは、再生する画像ファイルを変更する(S405)。この後、ボディCPU265mは、処理をS401に戻して変更された画像ファイルを読み込んで再生する。
一方、S404の判定において、画像選択がなされていないと判定した場合に、ボディCPU265mは、再生終了かを判定する(S406)。S406においてはS305と同様に、ボディCPU265mは、再度、再生釦267gが操作されたかを判定する。S406の判定において、再生終了でないと判定した場合に、ボディCPU265mは、処理をS404に戻して前述の動作を実行する。一方、S406の判定において、再生終了であると判定した場合に、ボディCPU265mは、液晶モニタ再生のサブルーチンを終了させる。
【0120】
次に、S304における外部再生のサブルーチンについて、図14に示すフローチャートを用いて説明する。外部再生のサブルーチンに入ると、ボディCPU265mは、ユーザによって指定された画像ファイルを記録媒体から読み込む(S501)。続いて、ボディCPU265mは、読み込んだ画像ファイル中の圧縮画像データを圧縮伸張回路265dによって伸張した後、伸張した画像データをビデオ信号出力回路265eに出力する。ビデオ信号出力回路265eは、入力された画像データを映像信号に変換し、この変換した映像信号を、通信接点200gを介して外部表示装置500に出力する(S502)。これにより、外部表示装置500による画像の表示が開始される。この際、必要に応じて、絞り値やシャッタ速度値を示す情報や、撮影位置を示す情報を重畳表示させる。ここで、表示させる撮影位置は、第1情報に対応した位置情報である。なお、外部再生動作の際には、撮影位置を示す情報を表示させないようにしても良い。これは、プライバシーの保護のためである。
【0121】
外部再生表示を開始した後、ボディCPU265mは、画像選択操作がなされたかを判定する(S503)。S404と同様に、ボディCPU265mは、十字釦267cが操作されたかや再度のサムネイル表示が指示されたかを画像選択操作として判定する。
【0122】
S503の判定において、画像選択操作がなされた場合に、ボディCPU265mは、再生する画像ファイルを変更する(S504)。この後、ボディCPU265mは、処理をS501に戻して変更された画像ファイルを読み込んで再生する。
一方、S504の判定において、画像選択がなされていない場合に、ボディCPU265mは、再生終了かを判定する(S505)。S505においてはS305と同様に、ボディCPU265mは、再度、再生釦267gが操作されたかを判定する。S505の判定において、再生終了でないと判定した場合に、ボディCPU265mは、処理をS503に戻して前述の動作を実行する。一方、S505の判定において、再生終了であると判定した場合に、ボディCPU265mは、外部再生のサブルーチンを終了させる。
【0123】
次に、S122における外部機器接続動作のサブルーチンについて、図15のフローチャートを用いて説明する。外部機器接続動作のサブルーチンに入ると、ボディCPU265mは、カメラ本体200から外部機器400に画像ファイルを転送するかを判定する(S601)。S601において、ボディCPU265mは、例えば外部機器400に対して未転送の画像ファイルがあるか又は指定した画像ファイルを外部機器400に転送するようにユーザ操作によって指示されたかを判定する。
【0124】
S601の判定において、カメラ本体200から外部機器400に画像ファイルを転送すると判定した場合に、ボディCPU265mは、未転送の画像ファイル又はユーザによって指定された画像ファイルのヘッダ情報に記録されている第1情報としての位置情報を取り出す(S602)。そして、ボディCPU265mは、取り出した第1情報から第2情報を生成する(S603)。第2情報としての位置情報の生成の仕方は、前述した通りである。
【0125】
第2情報を生成した後、ボディCPU265mは、生成した第2情報をこれから転送しようとしている画像ファイルの画像データと関連付けて別の画像ファイルを生成する(S604)。その後、ボディCPU265mは、新たに生成した画像ファイルを外部機器400に出力(転送)する(S605)。
【0126】
このように、本変形例では、外部機器400に画像ファイルを転送する際には、位置情報の精度を劣化させてから転送を行うようにしている。これにより、転送された画像ファイルからは、カメラの所有者が許可した公開レベルまでの位置情報しか知ることができない。このため、カメラの所有者のプライバシーの保護を図ることが可能である。
【0127】
S601の判定において外部機器400に画像ファイルを転送しないと判定した場合又はS605において画像ファイルを出力した後、ボディCPU265mは、外部機器400からカメラ本体200に画像ファイルを転送するかを判定する(S606)。S606において、ボディCPU265mは、例えばカメラ本体200に記録されていない画像ファイルがあるか又は指定した画像ファイルをカメラ本体200に転送するようにユーザ操作によって指示されたかを判定する。
【0128】
S606の判定において、外部機器400からカメラ本体200に画像ファイルを転送すると判定した場合に、ボディCPU265mは、外部機器400から画像ファイルを受信する(S607)。そして、ボディCPU265mは、受信した画像ファイルを記録媒体273a又は273bに記録する(S608)。
【0129】
S606の判定において外部機器400から画像ファイルを転送しないと判定した場合又はS608において画像ファイルを記録した後、ボディCPU265mは、現在、カメラ本体200に外部機器400が接続中であるかを判定する(S609)。S609の判定において、外部機器400が接続中であると判定した場合、ボディCPU265mは、処理をS601に戻して前述の動作を実行する。また、S609の判定において、外部機器400が接続中でないと判定した場合、ボディCPU265mは、外部機器接続動作のサブルーチンを終了させる。
【0130】
以上説明したように、本変形例によれば、第1の実施形態の第1の変形例の技術を、デジタルカメラに対して適用可能である。ここで、本変形例では、情報機器の例としてデジタルカメラを示したが、第1の実施形態の技術は、位置情報を取得可能な各種の情報機器に対して適用可能である。
[第2の実施形態]
次に、本発明の第2の実施形態について説明する。図16は、本発明の第2の実施形態に係る情報機器の構成を示すブロック図である。図16に示す情報機器10aは、入力部12と、記憶部14と、情報生成部16と、暗号化部17と、出力部18と、を有している。ここで、図1と同一の参照符号を付した構成は、図1と同様のものである。したがって説明を省略する。
【0131】
暗号化部17は、外部からの位置情報の出力要求に応じて情報生成部16からなされた暗号化要求に応じて、記憶部14に記憶されている第1情報としての位置情報を暗号化する。暗号化の方式は、公開鍵暗号化方式等の種々の方式を用いることが可能である。
【0132】
図17は、情報機器10aの動作を示すフローチャートである。図17において、図2と同様の動作であるS1〜S5については説明を省略する。第2の実施形態においては、S5において第2情報を生成するのと並行して、情報生成部16は、暗号化部17に対して第1情報の暗号化を指示する。これを受けて暗号化部17は、第1情報を暗号化する(S7)。「秒」の情報を暗号化した第1情報の例を図18(a)に示し、「秒」と「分」の情報を暗号化した第1情報の例を図18(b)に示す。なお、暗号化部17は、外部からの位置情報の出力要求に応じて暗号化を行うようにしても良い。
【0133】
第2情報の生成と第1情報の暗号化とが完了した後、出力部18は、情報生成部16及び暗号化部17から入力された第2情報及び暗号化済みの第1情報を、出力要求元に対して出力する(S8)。
第2情報及び暗号化済みの第1情報の出力後又はS3の判定において出力要求がなされていないと情報生成部16が判定した場合には、図17の処理が一旦終了する。
【0134】
以上説明したように、本実施形態によれば、位置情報の出力要求がなされた場合に、実際に記憶している第1情報よりも位置の精度を劣化させた第2情報と第1情報を暗号化した情報とを出力要求元に出力するようにしている。第2情報により、位置情報の公開レベルをコントロールすることが可能であるが、第2情報を送られたユーザは、第2情報から第1情報を復元することはできない。これに対し、暗号化済みの第1情報は、復号キーを有していないユーザにとっては理解できない情報である。しかしながら、復号キーがあれば第1情報を復元することができる。これにより、出力要求元に位置情報を送信した後であっても、その出力要求元のユーザに対する位置情報の公開を許可することが可能となる。
【0135】
[第2の実施形態の第1の変形例]
次に、第2の実施形態の変形例について説明する。第2の実施形態の第1の変形例は、位置情報と画像とを1つの画像ファイルとして記憶可能な情報機器への第2の実施形態の適用例である。
図19は、本発明の第2の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。図19に示す情報機器20aは、位置情報入力部22と、位置情報バッファ24と、画像入力部26と、記憶部28と、情報生成部30と、暗号化部31と、出力部32と、を有している。ここで、図5と同一の参照符号を付した構成は、図5と同様のものである。したがって説明を省略する。また、暗号化部31は、暗号化部17と同一の動作をするものであるので詳細な説明については省略する。
【0136】
図20は、情報機器20aの動作を示すフローチャートである。図20において、図6と同様の動作であるS1〜S20については説明を省略する。第2の実施形態においては、S20において第2情報を生成するのと並行して、情報生成部30は、暗号化部31に対して第1情報の暗号化を指示する。これを受けて暗号化部31は、第1情報を暗号化する(S22)。なお、暗号化部31は、外部からの位置情報の出力要求に応じて暗号化を行うようにしても良い。
【0137】
第2情報の生成と第1情報の暗号化とが完了した後、情報生成部30は、生成した第2情報と暗号化部31において生成された暗号化済みの第1情報とを記憶部28に記憶されている画像と関連付け直して別の画像ファイルを生成する。その後、情報生成部30は、新たに生成した画像ファイルを出力部32に入力する。出力部32は、情報生成部16から入力された画像ファイルを、出力要求元に対して出力する(S23)。
画像ファイルの出力後又はS18の判定において出力要求がなされていないと情報生成部30が判定した場合には、図20の処理が一旦終了する。
【0138】
以上説明した第1の変形例においては、送信される画像ファイルに関連付けされる第2情報は、位置の精度が劣化している。このため、画像ファイルを受け取ったユーザは、所定のソフトウェアを用いて位置情報を知ろうとしても、正確な位置情報については知ることができない。また、暗号化済みの第1情報は、復号キーを有していないユーザにとっては理解できない情報である。しかしながら、復号キーがあれば第1情報を復元することができる。これにより、出力要求元に位置情報を送信した後であっても、その出力要求元のユーザに対する位置情報の公開を許可することが可能となる。
【0139】
ここで、第1の変形例においては、画像と位置情報とが1つの画像ファイルと記憶される例を示している。これに対し、画像と位置情報とが別のファイルとなっている場合でも、第2の実施形態の技術は適用可能である。この場合には、例えば画像の出力要求がなされた場合には、記憶部28に記憶されている画像ファイルをそのまま出力要求元に出力し、位置情報の出力要求がなされた場合には、記憶部28に記憶されている位置情報ファイルの位置情報を劣化させたファイル(第2情報に対応した位置情報ファイル)と記憶部28に記憶されている位置情報ファイルの位置情報を暗号化したファイル(暗号化済みの第1情報に対応した位置情報ファイル)とを出力要求元に出力する。
【0140】
[第2の実施形態の第2の変形例]
次に、第2の実施形態の第2の変形例について説明する。第2の変形例は、第1の変形例の具体例である。より詳しくは、第2の変形例は、第2の実施形態の第1の変形例の技術を、情報機器の一例としてのデジタルカメラに対して適用したものである。ここで、デジタルカメラの構成は、図7〜図9で示した構成を適用できる。したがって、ここでは説明を省略する。
【0141】
次に、本変形例のデジタルカメラの動作を説明する。図21は、カメラ本体200のボディCPU265mによる撮影動作を示すフローチャートである。なお、パワーオンリセット時の動作と再生動作は、図10、図12〜14と同様であるので説明を省略する。また、図21において、図11と同様の動作であるS201〜S220については説明を省略する。
【0142】
第1情報としての位置情報を生成した後、ボディCPU265mは、生成した第1情報を用いて第2情報としての位置情報を生成する(S222)。続いて、ボディCPU265mは、暗号化回路297により、第1情報を暗号化する(S223)。第2情報と暗号化済みの第1情報とを生成した後、ボディCPU265mは、画像処理回路265c及び圧縮伸張回路265dによる画像処理の結果として得られる圧縮画像データに所定のヘッダ情報を付加して画像ファイルを生成する。このヘッダ情報には、露出動作時の条件(絞り値やシャッタ速度値等)に加えて、第2情報と暗号化済みの第1情報とを記録する。画像ファイルの生成後、ボディCPU265mは、生成した画像ファイルを、記録媒体制御回路265kを用いて記録媒体273a又は273bに記録する(S224)。画像ファイルの記録後、ボディCPU265mは、撮影動作を終了させる。
このように、本変形例においては、撮影動作時に第2情報と暗号化済み第1情報とが生成され、生成された第2情報と暗号化済み第1情報とが画像データと関連付けて記録される。
【0143】
次に、本変形例における外部機器接続動作のサブルーチンについて、図22のフローチャートを用いて説明する。ここで、図22において、図15と同様の動作であるS601、S606〜S609については説明を省略する。
S601の判定において、カメラ本体200から外部機器400に画像ファイルを転送すると判定した場合に、ボディCPU265mは、未転送の画像ファイル又はユーザによって指定された画像ファイルを記録媒体から取り出す(S610)。そして、ボディCPU265mは、取り出した画像ファイルを外部機器400に出力(転送)する(S611)。
【0144】
このように本変形例では、撮影動作時に第2情報と暗号化済みの第1情報とが生成されるので、外部機器接続動作時には第2情報の生成処理や第1情報の暗号化処理が行われることなく、画像ファイルが転送(出力)される。なお、第1の実施形態の第2の変形例と同様に、第2情報の生成処理と第1情報の暗号化処理とを外部機器接続動作時に行うようにしても良い。
以上説明したように、本変形例によれば、第2の実施形態の第1の変形例の技術を、デジタルカメラに対して適用可能である。ここで、本変形例では、情報機器の例としてデジタルカメラを示したが、第2の実施形態の技術は、位置情報を取得可能な各種の情報機器に対して適用可能である。
【0145】
以上実施形態に基づいて本発明を説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形や応用が可能なことは勿論である。また、図面中の各動作フローチャートの説明において、便宜上、「まず」、「次に」等を用いて動作を説明しているが、この順で動作を実施することが必須であることを意味するものではない。
【0146】
さらに、上記した実施形態には種々の段階の発明が含まれており、開示される複数の構成要件の適当な組合せにより種々の発明が抽出され得る。例えば、実施形態に示される全構成要件からいくつかの構成要件が削除されても、上述したような課題を解決でき、上述したような効果が得られる場合には、この構成要件が削除された構成も発明として抽出され得る。
【符号の説明】
【0147】
10,10a,20,20a…情報機器、12…入力部、14,28…記憶部、16,30…情報生成部、17,31…暗号化部、18,32…出力部、22…位置情報入力部、24…位置情報バッファ、26…画像入力部、100…交換レンズ、101…撮影光学系、103…絞り、105…焦点位置検出機構、107…ズーム位置検出機構、109…光学系駆動機構、111…絞り駆動機構、113…レンズCPU、115…レンズROM、117…レンズRAM、200…カメラ本体、201…可動ミラー、203…フォーカシングスクリーン、205…全面液晶板(全面LCD)、207…ペンタプリズム、209…ファインダ内表示部、211…ファインダ内表示駆動回路、213…接眼レンズ、215…測光センサ、217…測光処理回路、219…サブミラー、221…ミラー駆動機構、223…AFセンサ、225…AF処理回路、227…シャッタ、229…シャッタ駆動機構、231…発光許可信号回路、233…撮像ユニット、235…防塵フィルタ駆動回路、237…撮像素子駆動回路、239…前処理回路、241…シフト機構、243…手ブレセンサ、245…手ブレ補正回路、247…シフト機構駆動回路、249…傾きセンサ、251…傾き検知回路、253…光源センサ、255…光源処理回路、257…照度センサ、259…照度処理回路、261…リモコン受信センサ、263…リモコン受信処理回路、265m…ボディCPU、265…カメラ用IC、267…各種スイッチ、269…フラッシュメモリ、271…SDRAM、273a,273b…記録媒体、275a…前ダイアル、275b…後ダイアル、277…電源供給回路、279a…バッテリ、279b…外部電源、281…LCD駆動回路、283…液晶モニタ(LCD)、285…LCD向き検知回路、287…コントロールパネル駆動回路、289…コントロールパネル、291…内蔵フラッシュ、293…GPS受信回路、295…GPSアンテナ、297…暗号化回路、300…外部フラッシュ、400…外部機器、500…外部表示装置
【技術分野】
【0001】
本発明は、位置情報を画像に関連付けて記録することが可能な情報機器に関する。
【背景技術】
【0002】
近年、デジタルカメラ等の情報機器に、GPS(Global Positioning System)等の位置検出装置を持たせたものが知られている。このような位置検出装置を持つ情報機器では、情報機器の現在位置を特定することが可能である。これにより、例えば、デジタルカメラでは、撮影画像をその撮影位置と関連付けて記録することが可能となる。
【0003】
GPS等によって検出される位置情報は、ユーザにとって便利な情報となり得る。ただし、プライバシーの保護の観点からは、位置情報を安易に公開するべきではない。これに対し、特許文献1では、位置情報の公開レベルを設定できるようにしておき、設定された公開レベルの範囲で位置情報を公開するようにしている。また、特許文献2では、IDとパスワードとが一致した場合に位置情報の送信を許可するシステムにおいて、位置情報の送信を要求した端末のIDが、位置情報の送信を許可しない端末のIDとして登録されている場合には、仮にIDとパスワードとが一致した場合であっても位置情報を送信しないようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−296673号公報
【特許文献2】特許第3545354号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、デジタルカメラのような情報機器では、撮影画像と撮影位置情報とが1つの画像ファイルとして記録される。この場合、画像ファイルのヘッダに記録された撮影位置情報は、所定のソフトウェアを用いて読み取ることが可能である。このような情報機器に対し、特許文献1や特許文献2の技術を用いてプライバシーの保護を図ろうとしても、撮影位置情報の公開を禁止するためには、画像ファイル自体の送信を禁止する必要が生じる。逆に、画像ファイルの送信を許可してしまうと、撮影位置情報が公開されてしまう。このため、例えば、画像については公開を許可して位置情報については公開を制限する(公開しない、部分的に公開する)といったような位置情報の公開レベルのコントロールは困難である。
【0006】
本発明は、上記の事情に鑑みてなされたもので、位置情報が別の情報と一体となって記録されている場合であっても、位置情報の公開レベルをコントロールすることが可能な情報機器を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明の第1の態様の情報機器は、位置情報を第1情報として記憶する記憶部と、上記第1情報に基づいて、上記第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する情報生成部と、上記第1情報に対する出力要求に応じて、上記第1情報の代わりに上記第2情報を出力する出力部と、を具備することを特徴とする。
【発明の効果】
【0008】
本発明によれば、位置情報が別の情報と一体となって記録されている場合であっても、位置情報の公開レベルをコントロールすることが可能な情報機器を提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施形態に係る情報機器の構成を示すブロック図である。
【図2】情報機器10の動作を示すフローチャートである。
【図3】第1情報としての位置情報の構成の例を示す図である。
【図4】第2情報としての位置情報の構成の例を示す図である。
【図5】本発明の第1の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。
【図6】情報機器20の動作を示すフローチャートである。
【図7】本発明の第1の実施形態の第2の変形例に係る情報機器の一例としてのデジタルカメラの本体を正面から見た外観図である。
【図8】本発明の第1の実施形態の第2の変形例に係る情報機器の一例としてのデジタルカメラの本体を背面から見た外観図である。
【図9】本発明の第1の実施形態の第2の変形例に係るデジタルカメラの内部の電気回路構成について示すブロック図である。
【図10】本発明の第1の実施形態の第2の変形例に係るボディCPU265mによるカメラ本体200のパワーオンリセットの動作を示すフローチャートである。
【図11】本発明の第1の実施形態の第2の変形例に係る撮影動作のサブルーチンを示すフローチャートである。
【図12】再生動作のサブルーチンについて示すフローチャートである。
【図13】液晶モニタ再生のサブルーチンについて示すフローチャートである。
【図14】外部再生のサブルーチンについて示すフローチャートである。
【図15】本発明の第1の実施形態の第2の変形例に係る外部機器接続動作のサブルーチンについて示すフローチャートである。
【図16】本発明の第2の実施形態に係る情報機器の構成を示すブロック図である。
【図17】情報機器10aの動作を示すフローチャートである。
【図18】暗号化済みの第1情報としての位置情報の構成の例を示す図である。
【図19】本発明の第2の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。
【図20】情報機器20aの動作を示すフローチャートである。
【図21】本発明の第2の実施形態の第2の変形例に係る撮影動作のサブルーチンを示すフローチャートである。
【図22】本発明の第2の実施形態の第2の変形例に係る外部機器接続動作のサブルーチンについて示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。
[第1の実施形態]
図1は、本発明の第1の実施形態に係る情報機器の構成を示すブロック図である。図1に示す情報機器10は、入力部12と、記憶部14と、情報生成部16と、出力部18と、を有している。
【0011】
入力部12は、情報機器10の外部からの位置情報を第1情報として記憶部14に入力する。記憶部14は、入力部12から入力された位置情報を記憶する。
情報生成部16は、外部からの位置情報の出力要求に応じて、記憶部14に記憶されている第1情報としての位置情報を用いて第2情報としての位置情報を生成する。
出力部18は、情報生成部16で生成された第2情報としての位置情報を、情報機器10の外部に出力する。
【0012】
図2は、情報機器10の動作を示すフローチャートである。図2において、記憶部14は、情報機器10の外部から入力部12を介して位置情報が入力されたか否かを判定している(S1)。S1の判定において、外部から位置情報が入力された場合に、記憶部14は、入力された位置情報を第1情報として記憶する(S2)。
図3は、第1情報としての位置情報の構成の例を示す図である。図3に示す例の位置情報は、緯度情報と経度情報とを有し、緯度情報と経度情報のそれぞれで「度」・「分」・「秒」までの位置情報が記録される。例えば、図3は、北緯35度48分8秒、東経139度34分55秒の場合に記録される位置情報を示している。
ここで、第1情報としての位置情報は、必ずしも「秒」までの情報を記録する必要はない。また、必ずしも「度」・「分」・「秒」の形式で記録する必要もない。
【0013】
位置情報の入力がない場合又は第1情報が記憶部14に記憶された後、情報生成部16は、所定の出力要求元から位置情報の出力要求がなされたか否かを判定する(S3)。S3の判定において、位置情報の出力要求がなされたと判定した場合に、情報生成部16は、記憶部14から第1情報を取り出す(S4)。そして、情報生成部16は、取り出した第1情報から第2情報を生成する(S5)。
【0014】
第2情報としての位置情報は、第1情報としての位置情報よりも位置の精度を劣化させた情報である。例えば、第1情報に記録されている情報の一部をマスクすることで位置の精度を劣化させる。図4は、第2情報としての位置情報の構成の例を示す図である。図4(a)は、図3に示す第1情報における「秒」の情報をNull情報(位置情報なしを示す情報)でマスクしたものである。この場合、第2情報は、「分」の情報までが有効な情報となるように位置の精度が劣化する。このため、図4(a)に示す位置情報を見ても、ユーザは、「分」の情報までしか知ることができない。ここで、Null情報は、例えば、通常の第1情報がとり得ない値を設定する。例えば、「度」の情報は、0〜180までの値をとり得るものであるので、Null情報としてはそれ以外の値を設定する。同様に、「分」・「秒」の情報は、0〜60までの値をとり得るものであるので、Null情報としてはそれ以外の値を設定する。
【0015】
また、図4(b)は、図3に示す第1情報における「分」・「秒」の情報をNull情報でマスクしたものである。この場合、第2情報は、「度」の情報までが有効な情報となるように位置の精度が劣化する。このため、図4(b)に示す位置情報を見ても、ユーザは、「度」の情報までしか知ることができない。また、図4(c)は、図3に示す第1情報における「度」・「分」・「秒」の全ての情報をNull情報でマスクしたものである。この場合、ユーザは、第2情報を見ても位置を知ることができなくなる。
【0016】
ここで、第1情報から、図4(a)〜図4(c)に示す何れの第2情報を生成するのかは、例えば出力要求元のID(ユーザID、端末ID等)によって特定する。この場合、情報生成部16には、出力要求元のIDと、そのIDに対してどの精度の第2情報を公開するのかを示す情報と、を対応付けた情報を記憶させておく。このような構成により、ユーザ毎に位置情報の公開レベルを設定することが可能である。
【0017】
第2情報を生成した後、情報生成部16は、生成した第2情報を出力部18に入力する。出力部18は、情報生成部16から入力された第2情報を、出力要求元に対して出力する(S6)。
第2情報の出力後又はS3の判定において出力要求がなされていないと情報生成部16が判定した場合には、図2の処理が一旦終了する。
【0018】
以上説明したように、本実施形態によれば、位置情報の出力要求がなされた場合に、実際に記憶している第1情報の代わりに、第1情報よりも位置の精度を劣化させた第2情報を出力要求元に出力するようにしている。これにより、位置情報の公開レベルをコントロールすることが可能である。また、位置情報自体の精度を劣化させることにより、仮に位置情報が別の情報と一体に記録されている場合であっても位置情報の公開レベルをコントロールすることができる。
【0019】
ここで、図2の例では、位置情報の出力要求がなされてから第2情報を生成するようにしている。これに対し、第1情報としての位置情報が入力されてきた時点で第2情報を生成するようにしても良い。
[第1の実施形態の第1の変形例]
次に、第1の実施形態の変形例について説明する。第1の実施形態の第1の変形例は、位置情報と画像とを1つの画像ファイルとして記憶可能な情報機器への第1の実施形態の適用例である。
【0020】
図5は、本発明の第1の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。図5に示す情報機器20は、位置情報入力部22と、位置情報バッファ24と、画像入力部26と、記憶部28と、情報生成部30と、出力部32と、を有している。
【0021】
位置情報入力部22は、所定時間毎に、情報機器20の位置情報を第1情報として位置情報バッファ24に入力する。位置情報入力部22は、情報機器20の位置情報を例えばGPSによって特定する。このために、位置情報入力部22は、GPS衛星34からのGPS信号を受信するための受信回路を有している。位置情報バッファ24は、位置情報入力部22から所定時間毎に入力される位置情報を保持する。
【0022】
画像入力部26は、情報機器20の外部から入力された画像(画像データ)を記憶部28に入力する。画像入力部26に撮像機能を持たせることにより、画像入力部26自体が画像を取得できるようにしても良い。
記憶部28は、位置情報バッファ24から取得した位置情報と画像入力部26から入力された画像とを関連付けて1つの画像ファイルとして記憶する。
【0023】
情報生成部30は、外部からの画像ファイルの出力要求に応じて、記憶部28に記憶されている画像ファイル中の第1情報としての位置情報を用いて第2情報としての位置情報を生成する。また、情報生成部30は、生成した第2情報を記憶部28に記憶されている画像ファイル中の画像と関連付けして別の画像ファイルを生成する。
出力部32は、情報生成部30で生成された第2情報が関連付けられた画像ファイルを情報機器20の外部に出力する。
【0024】
図6は、情報機器20の動作を示すフローチャートである。図6において、位置情報入力部22は、所定時間が経過したか否かを判定している(S11)。この所定時間は、位置情報の取得間隔に対応しており、適宜設定できる時間である。S11の判定において、所定時間が経過したと判定した場合に、位置情報入力部22は、GPS衛星34からのGPS信号を受信して情報機器20の位置情報を取得する(S12)。その後、位置情報入力部22は、取得した位置情報を第1情報として位置情報バッファ24に入力して位置情報バッファ24の内容を更新する(S13)。第1情報としての位置情報は、第1の実施形態で説明したものと同様として良い。
【0025】
また、記憶部28は、情報機器20の外部から画像入力部26を介して画像が入力されてきたか否かを判定している(S14)。S14の判定において、画像が入力されてきたと判定した場合に、記憶部28は、入力された画像を取得する(S15)。続いて、記憶部28は、位置情報バッファ24から位置情報を取り込む(S16)。その後、記憶部28は、画像と位置情報(第1情報)とを1つの画像ファイルとして記憶する(S17)。
【0026】
画像の入力がない場合又は画像ファイルが記憶部28に記憶された後、情報生成部30は、所定の出力要求元から画像ファイルの出力要求がなされたか否かを判定する(S18)。S18の判定において、画像ファイルの出力要求がなされたと判定した場合に、情報生成部30は、記憶部28に記憶されている画像ファイルから第1情報を取り出す(S19)。そして、情報生成部30は、取り出した第1情報から第2情報を生成する(S20)。第2情報としての位置情報は、第1の実施形態で説明したものと同様として良く、第1情報から第2情報を生成する手法も第1の実施形態と同様として良い。
【0027】
第2情報を生成した後、情報生成部30は、生成した第2情報を記憶部28に記憶されている画像と関連付けて別の画像ファイルを生成する。その後、情報生成部30は、新たに生成した画像ファイルを出力部32に入力する。出力部32は、情報生成部30から入力された画像ファイルを、出力要求元に対して出力する(S21)。
画像ファイルの出力後又はS18の判定において出力要求がなされていないと情報生成部30が判定した場合には、図6の処理が一旦終了する。
【0028】
以上説明した第1の変形例においては、送信される画像ファイルに関連付けされる位置情報は、位置の精度が劣化している。このため、画像ファイルを受け取ったユーザは、専用のソフトウェアを用いて位置情報を知ろうとしても、正確な位置情報については知ることができない。
【0029】
ここで、第1の変形例においては、画像と位置情報とが1つの画像ファイルと記憶される例を示している。これに対し、画像と位置情報とが別のファイルとなっている場合でも、第1の実施形態の技術は適用可能である。この場合には、例えば画像の出力要求がなされた場合には、記憶部28に記憶されている画像ファイルをそのまま出力要求元に出力し、位置情報の出力要求がなされた場合には、記憶部28に記憶されている位置情報ファイルの位置情報を劣化させてから(第2情報に対応した位置情報ファイルを新たに生成してから)出力要求元に出力する。
【0030】
[第1の実施形態の第2の変形例]
次に、第1の実施形態の第2の変形例について説明する。第2の変形例は、第1の変形例の具体例である。より詳しくは、第2の変形例は、第1の実施形態の第1の変形例の技術を、情報機器の一例としてのデジタルカメラに対して適用したものである。
【0031】
図7は、本発明の第1の実施形態の第2の変形例に係る情報機器の一例としてのデジタルカメラの本体を正面から見た外観図であり、図8は、このデジタルカメラの本体を背面から見た外観図である。
図7に示すように、カメラ本体200の前面の略中央には、交換レンズからの被写体光束をカメラ本体200内部に入射させるための開口が設けられている。そして、この開口の周囲には、交換レンズを装着するためのボディマウント200aが設けられている。また、開口内には、通信接点200cが配置されている。交換レンズがカメラ本体200に装着された際には、カメラ本体200と交換レンズとが通信接点200cを介して通信自在に接続される。また、開口内にはミラーボックスが形成されており、ミラーボックス内には、可動ミラー201等が配置されている。
【0032】
また、カメラ本体200の例えば正面左側にはグリップ部が形成されている。そして、グリップ部の上部には、レリーズ釦267aが配置されている。レリーズ釦267aは、第1レリーズスイッチ(以下、1Rスイッチという)と、第2レリーズスイッチ(以下、2Rスイッチという)と、を有している。1Rスイッチは、撮影者がレリーズ釦267aを半押しするとオンするスイッチである。1Rスイッチがオンすることにより、焦点制御(AF)動作や露出制御(AE)といった撮影準備動作が行われる。また、2Rスイッチは、撮影者がレリーズ釦267aを全押しするとオンするスイッチである。2Rスイッチがオンすることにより、本撮影用の露出動作が行われる。
【0033】
さらに、カメラ本体200のグリップ部には、前ダイアル275aが配置されている。前ダイアル275aは、時計方向及び反時計方向に回転自在に構成されている。前ダイアル275aの回転方向と回転量とは、カメラ本体200内で検出される。
カメラ本体200の上部には、ポップアップ式の内蔵フラッシュ291が収納されている。内蔵フラッシュ291は、ポップアップ状態となると発光部が被写体に向くように構成されている。このような内蔵フラッシュ291は、被写体を照明するための補助光を照射する。
【0034】
カメラ本体200の上面には、コントロールパネル289が配置されている。コントロールパネル289は、液晶表示装置等の表示装置である。このコントロールパネル289には、絞り値やシャッタ速度値等の撮影情報が表示される。
また、図8に示すように、カメラ本体200の背面の右上には、後ダイアル275bが配置されている。後ダイアル275bも、前ダイアル275aと同様、時計方向及び反時計方向に回転自在に構成されている。そして、後ダイアル275bの回転方向と回転量とは、カメラ本体200内で検出される。
【0035】
後ダイアル275bの下側には、ライブビュー表示釦(以下、LV表示釦という)267bが配置されている。ここで、ライブビュー表示とは、撮像素子を介して取得した画像データに基づいて、被写体像観察用の被写体像を、液晶モニタ等の表示装置に表示する動作のことをいう。LV表示釦267bが操作されることにより、ライブビュー表示モードが設定されてライブビュー表示が行われる。ライブビュー表示中にLV表示釦267bが操作されることにより、ライブビュー表示モードが解除されてライブビュー表示が終了される。
【0036】
LV表示釦267bの下側には、十字釦267cが配置されている。十字釦267cは、上側十字釦、下側十字釦、右側十字釦、左側十字釦の4つの釦を有している。液晶モニタ(以下、LCDという)283にカーソルが表示されている場合には、カーソルを移動させる等するための釦として十字釦267cを用いる。十字釦267cを構成する4つの釦のほぼ中心には、OK釦267dが配置されている。OK釦267dは、例えば十字釦267cによって選択された項目の決定を行うために用いられる。
【0037】
十字釦267cの下側には、パワースイッチ267eが配置されている。パワースイッチ267eは、カメラ本体200の動作を制御するために用いられる。カメラ本体200は、パワースイッチ267eがオン状態の場合に動作を開始し、オフ状態の場合に動作を停止する。
【0038】
カメラ本体200の背面の略中央上部には、接眼部200bが設けられている。また、接眼部200bの中に接眼レンズ213が配置されている。接眼レンズ213は、後述の観察光学系より出射された被写体光束をユーザの目に被写体像として結像させるために設けられている。
【0039】
接眼部200bの下側には、LCD283が配置されている。LCD283は、ライブビュー画像、記録済みの被写体像、撮影情報やメニューといった各種の画像を表示するための表示装置である。カメラ本体200に設ける表示装置としては、これらの表示を行うことができるものであれば液晶モニタに限らない。また、図8の例では、LCD283をカメラ本体200の背面に配置しているが、ユーザが観察できる位置であれば、必ずしもLCD283をカメラ本体200の背面に配置する必要はない。
【0040】
LCD283の下側であって、パワースイッチ267eの左側には、メニュー釦267fが配置されている。メニュー釦267fは、カメラ本体200のモードをメニューモードに設定する、及びカメラ本体200に設定されたメニューモードを解除するために用いられる。メニューモードは、カメラ本体200の種々のモードやその他の設定を行うためのモードである。カメラ本体200のモードがメニューモードに設定されると、LCD283にメニュー画面が表示される。ユーザは、メニュー画面の中から好みのモード等を、十字釦267cを用いて選択し、OK釦267dによって確定する。
【0041】
メニュー釦267fの左側には、再生釦267gが配置されている。再生釦267gは、カメラ本体200のモードを再生モードに設定するために用いられる。カメラ本体200のモードが再生モードに設定されると、記録媒体等に記録された画像データが読み出され、この画像データに基づいた画像がLCD283に再生される。
【0042】
再生釦267gの左側には、縦横釦267hが配置されている。縦横釦267hは、画像の記録時において、縦長画像と横長画像の何れを記録するかを選択するために用いられる。
図9は、本変形例に係るデジタルカメラの内部の電気回路構成について示すブロック図である。上述したように、本変形例に係るカメラ本体200には、交換レンズ100が装着される。そして、交換レンズ100がカメラ本体200に装着された際に、カメラ本体200と交換レンズ100とは、通信接点200cを介して通信自在に接続される。
【0043】
撮影光学系101は、フォーカスレンズやズームレンズ等の複数のレンズを有している。撮影光学系101は、フォーカスレンズやズームレンズをその光軸(図示一点鎖線方向)に沿って駆動することにより、焦点位置及び焦点距離を変えることが可能に構成されている。このような撮影光学系101は、被写体からの光束を集光して被写体像を結像させる。
【0044】
絞り103は、撮影光学系101の光路中に配置されている。絞り103は、開閉することによってその開口量(絞り値)を変えることが可能に構成されている。このような絞り103は、撮影光学系101を介してカメラ本体200に入射する光束の光量を調節する。
【0045】
焦点位置検出機構105は、例えばエンコーダであって、撮影光学系101を構成するフォーカスレンズのレンズ位置、即ち撮影光学系101の焦点位置を検出する。ズーム位置検出機構107は、撮影光学系101を構成するズームレンズのレンズ位置、即ち撮影光学系101の焦点距離を検出する。
【0046】
光学系駆動機構109は、レンズCPU113の制御に従って、フォーカスレンズやズームレンズをその光軸方向に沿って駆動する。絞り駆動機構111は、レンズCPU113の制御に従って、絞り103を開閉駆動する。
撮影光学系101は光学系駆動機構109によって駆動され、絞り103は絞り駆動機構111によって駆動される。光学系駆動機構109によって駆動された撮影光学系101の焦点位置(ピント位置)は、焦点位置検出機構105によって検出され、また撮影光学系101の焦点距離は、ズーム位置検出機構107によって検出される。
【0047】
レンズCPU113は、交換レンズ100内の制御を行う。レンズCPU113には、焦点位置検出機構105、ズーム位置検出機構107、光学系駆動機構109、絞り駆動機構111が接続されており、また、レンズCPU113は、通信接点200cを介してカメラ本体200に接続されている。このようなレンズCPU113は、交換レンズ100内の制御として、例えば、光学系駆動機構109を制御することによって撮影光学系101の焦点位置を制御したり、撮影光学系101のズーム駆動を行ったりする。また、レンズCPU113は、焦点位置検出機構105によって検出された焦点位置の情報やズーム位置検出機構107によって検出された焦点距離の情報をカメラ本体200に送信することも行う。さらに、レンズCPU113は、絞り駆動機構111を制御することによって絞り値を制御することも行う。
【0048】
レンズROM115及びレンズRAM117は、レンズCPU113に接続されている。レンズROM115は、例えば電気的に書き換え可能な不揮発性メモリであり、レンズCPU113による交換レンズ100内の制御を実行させるためのプログラムや、交換レンズ100の固有情報等を記憶している。レンズRAM117は、例えば電気的に書き換え可能な揮発性メモリであり、上述のプログラムを実行するための一時的な記憶領域として使用される。
【0049】
可動ミラー201は、下降位置(被写体像観察位置)と上昇位置(退避位置)との間で回動自在に構成されている。下降位置は、図9において実線で示した位置であって、交換レンズ100がカメラ本体200に装着された際に、撮影光学系101の光軸に対して可動ミラー201が45度傾いた状態となる位置である。可動ミラー201が下降位置にある場合には、撮影光学系101からの被写体像が、観察光学系に向けて反射される。また、上昇位置は、図9において破線で示した位置であって、交換レンズ100がカメラ本体200に装着された際に、撮影光学系101の光軸から可動ミラー201が退避した状態となる位置である。可動ミラー201が上昇位置にある場合には、撮影光学系101からの被写体像が、撮像素子233cの方向に導かれる。
【0050】
観察光学系は、可動ミラー201の上方に設けられ、フォーカシングスクリーン203と、全面液晶板(以下、全面LCDという)205と、ペンタプリズム207と、ファインダ内表示部209と、接眼レンズ213と、を有している。
フォーカシングスクリーン203は、可動ミラー201で反射された被写体像が結像される。全面LCD205は、フォーカシングスクリーン203の上方に配置されている。この全面LCD205は、部分的に光の透過と遮光とを制御自在に構成されており、フォーカシングスクリーン203上に結像した被写体像の任意の部分を、ペンタプリズム207に導く。ペンタプリズム207は、全面LCD205の上方に配置されている。このペンタプリズム207は、全面LCD205によって導かれた被写体像を内部で反射させることによって、被写体像の左右を反転させる。
【0051】
ファインダ内表示部209は、ペンタプリズム207の前面側(交換レンズ100に近い側とする)の反射面に沿って配置されている。ファインダ内表示部209は、液晶表示装置等から構成されており、全面LCD205によって導かれた被写体像に対して、視野表示や撮影情報表示等を重畳させる。ファインダ内表示駆動回路211は、ファインダ内表示部209に接続されており、ボディCPU265mの制御に従ってファインダ内表示部209を駆動する。
【0052】
接眼レンズ213は、ペンタプリズム207の出射側(図では交換レンズ100に対して遠い側)に配置されている。接眼レンズ213は、ペンタプリズム207から出射された被写体像(及びファインダ内表示部209によって重畳された表示)を、接眼部200bを覗き込んでいるユーザの目に結像させる。測光センサ215は、接眼レンズ213の近傍であって、接眼レンズ213を介した被写体像の観察の邪魔にならない位置に配置されている。この測光センサ215は、ペンタプリズム207から被写体像として出射される光束の一部を受光し、受光した光束を電気信号に変換する。測光処理回路217は、測光センサ215に接続されており、測光センサ215の出力に対して増幅処理やアナログ−デジタル変換処理等を施す。
【0053】
サブミラー219は、可動ミラー201の中央付近に構成されたハーフミラー部の背面に設けられている。サブミラー219は、可動ミラー201のハーフミラー部を透過した被写体光束を、位相差AFセンサ223の方向に反射させる。ここで、サブミラー219は、可動ミラー201に対して回動自在に構成されている。可動ミラー201が上昇位置にあるときには、サブミラー219は、ハーフミラー部を覆う位置に回動する。一方、可動ミラー201が下降位置にあるときには、サブミラー219は、可動ミラー201に対して略90度をなす位置まで回動する。
ミラー駆動機構221は、入出力回路265gを介したボディCPU265mの制御に従って、可動ミラー201を上昇位置又は下降位置に駆動する。
【0054】
位相差AFセンサ223は、サブミラー219の下方に配置されている。位相差AFセンサ223は、サブミラー219で反射された被写体光束に対応した像を受光して電気信号に変換するセンサ対である。また、位相差AFセンサ223は、サブミラー219で反射された被写体光束を複数の光束に分離するための公知の位相差AF光学系も有している。位相差AF処理回路225は、位相差AFセンサ223に接続されている。この位相差AF処理回路225は、位相差AFセンサ223を構成するセンサ対でそれぞれ得られた電気信号を取り込み、取り込んだ電気信号を用いて、撮影光学系101によって結像される被写体像の焦点ズレ量(デフォーカス量)及び焦点ズレ方向を算出する。ここで、位相差AFセンサ223のセンサ対の構成によっては、撮影画面内の複数ポイントの焦点ズレ量を検出可能である。
【0055】
シャッタ227は、フォーカルプレーンタイプのシャッタであって、撮像素子233cの撮像面を露出状態又は遮光状態とするように構成されている。シャッタ227のシャッタ速度値を制御することにより、撮像素子233cの露出時間が制御される。シャッタ駆動機構229は、入出力回路265gを介したボディCPU265mの制御に従って、シャッタ227を開閉駆動する。発光許可信号回路231は、シャッタ227の近傍に設けられている。発光許可信号回路231は、シャッタ227の先幕の走行位置に応じて順次オンとなるスイッチX1、X2、X3、X4を有している。スイッチX1は、撮影画面が16:9の縦長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。スイッチX2は、撮影画面が4:3縦長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。スイッチX3は、撮影画面が4:3横長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。スイッチX4は、撮影画面が16:9横長画面の場合の最適なフラッシュの発光タイミングにおいてオン状態となるシンクロスイッチである。これらのスイッチとしては、機械的なオンオフスイッチや、光電スイッチ等、シャッタ227の先幕の走行位置を検知できるスイッチであれば良い。
【0056】
撮像ユニット233は、シャッタ227の後方に配置されており、防塵フィルタ233aが形成されたパッケージ内に、赤外カットフィルタ・ローパスフィルタ233bと、撮像素子233cとを封入するように構成されている。
防塵フィルタ233aは、撮像ユニット233のパッケージ内への塵埃の侵入を防止するものである。また、防塵フィルタ233aの周囲には、圧電素子が固定されている。防塵フィルタ駆動回路235は、圧電素子に接続されており、入出力回路265gを介したボディCPU265mの制御に従って、圧電素子を超音波振動させる。防塵フィルタ233aに付着した塵埃は、圧電素子を介して防塵フィルタ233aの表面に発生した振動波によって除去される。
赤外カットフィルタ・ローパスフィルタ233bは、被写体光束から赤外光成分と、高周波成分を除去するための光学フィルタである。
【0057】
撮像素子233cは、シャッタ227との間に、防塵フィルタ233a、赤外カットフィルタ・ローパスフィルタ233bを介するように配置されている。この撮像素子233cは、撮影光学系101によって結像される被写体像を電気信号に変換する。ここで、撮像素子233cは、CCD(Charge Coupled Device)方式及びCMOS(Complementary Metal Oxide Semiconductor)方式等の種々の2次元固体撮像素子を使用できる。
【0058】
撮像素子駆動回路237は、撮像素子233cに接続されており、撮像素子233cで得られた電気信号(画像信号)を読み出す等する。前処理回路239は、撮像素子駆動回路237に接続されており、撮像素子駆動回路237から読み出された画像信号に対して、増幅処理、アナログ−デジタル変換処理、ライブビュー表示のための間引き処理、拡大表示のための切り出し処理等の、画像処理のための前処理を行うことにより、画像データを生成する。
【0059】
シフト機構241は、撮像ユニット233を、撮像素子233cの撮像面と平行な方向であるX軸方向とY軸方向に沿って移動させる。
手ブレセンサ243は、カメラ本体200に加えられた手ブレ等によるカメラ本体200の振動を検出する。手ブレセンサ243は、例えば角加速度センサにより構成される。手ブレ補正回路245は、手ブレセンサ243に接続され、手ブレセンサ243によって検出された振動を除去するために必要な手ブレ補正量を示す手ブレ補正信号を生成する。
【0060】
シフト機構駆動回路247は、手ブレ補正回路245に接続され、手ブレ補正信号に基づいてシフト機構241を駆動する。シフト機構241によってカメラ本体200に加えられた手ブレ等の振動を打ち消すように撮像ユニット233を移動させることによって、防振(手ブレ補正)を行う。
【0061】
傾きセンサ249は、3軸周りの角加速度を検出するセンサである。この傾きセンサ249により、カメラ本体200の傾きを検出する。傾き検知回路251は、傾きセンサ249に接続されており、傾きセンサ249の出力値と定常状態の値との差からカメラ本体200の傾き状態を検知し、また傾きセンサ249の変化量からカメラ本体200に発生した加速度を検知する。
【0062】
光源センサ253は、被写体の環境光となる光源を検出するためのセンサである。光源処理回路255は、光源センサ253に接続され、光源センサ253からの出力に応じて、光源の種類に応じた光源データを出力する。照度センサ257は、カメラ本体200上での照度を測定するためのセンサである。照度処理回路259は、照度センサ257に接続され、照度に応じた照度データを出力する。
【0063】
リモコン受信センサ261は、リモコン(リモートコントロール)装置(不図示)からの赤外線等によるリモコン指令を受信するための赤外線センサである。リモコン受信処理回路263は、リモコン受信センサ261に接続され、リモコン受信センサ261からの信号を処理してリモコン信号を出力する。
【0064】
カメラ用IC265は、カメラ本体200の制御に適するように構成されたASIC(Application Specific Integrated Circuit:特定用途向け集積回路)である。カメラ用IC265は、コントラストAF回路265aと、AE回路265bと、画像処理回路265cと、圧縮伸張回路265dと、ビデオ信号出力回路265eと、スイッチ検知回路265fと、入出力回路265gと、通信回路265hと、フラッシュメモリ制御回路265iと、SDRAM制御回路265jと、記録媒体制御回路265kと、ダイアル検知回路265lと、ボディCPU265mと、を有している。このうち、AE回路265bと、画像処理回路265cと、圧縮伸張回路265dと、ビデオ信号出力回路265eと、スイッチ検知回路265fと、入出力回路265gと、通信回路265hと、フラッシュメモリ制御回路265iと、SDRAM制御回路265jと、記録媒体制御回路265kと、ダイアル検知回路265lと、ボディCPU265mとは、データバス265nに接続されている。
【0065】
コントラストAF回路265aは、前処理回路239に接続されており、前処理回路239からの画像データに基づいて高周波成分を抽出し、この高周波成分に基づくコントラスト情報をボディCPU265mに出力する。ここで、コントラストAF回路265aは、撮影画面内の全領域から高周波成分を抽出可能である。AE回路265bは、前処理回路239に接続されており、前処理回路239からの画像データに基づいて被写体輝度を算出し、算出した被写体輝度に応じた測光情報をボディCPU265mに出力する。
【0066】
画像処理回路265cは、前処理回路239からデータバス265nを介して入力された画像データに対して、増幅(デジタルゲイン調整処理)、色補正、ガンマ(γ)補正、コントラスト補正、ライブビュー表示用画像の生成等の各種の画像処理を施す。圧縮伸張回路265dは、画像データをJPEG方式やTIFF方式等の圧縮方式により圧縮したり、また圧縮された画像データを表示等のために伸張したりする。ここで、圧縮方式は、JPEG方式やTIFF方式に限るものではない。
【0067】
ビデオ信号出力回路265eは、LCD駆動回路281に接続されており、また、通信接点200gを介して外部表示装置500に接続される。ビデオ信号出力回路265eは、SDRAM271、記録媒体273a、記録媒体273bに記憶された画像データを、LCD283等に表示するためのビデオ信号に変換する。
【0068】
スイッチ検知回路265fは、図7及び図8で示した各種の操作部材(レリーズ釦267a、パワースイッチ267e等)の操作に応答して動作する各種スイッチ267からの信号を、データバス265nを介してボディCPU265mに入力する。
入出力回路265gは、防塵フィルタ駆動回路235、シャッタ駆動機構229、位相差AF処理回路225、ミラー駆動機構221、光源処理回路255、照度処理回路259、リモコン受信処理回路263、傾き検知回路251、シフト機構駆動回路247、発光許可信号回路231、測光処理回路217、LCD向き検知回路285、充電回路291a、フラッシュ発光回路291b、GPS受信回路293に接続されている。この入出力回路265gは、ボディCPU265m等のカメラ用IC265の内部の回路と、カメラ用IC265の外部の回路との間のデータの入出力を、データバス265nを介して仲介する。
【0069】
通信回路265hは、交換レンズ100がカメラ本体200に装着された際に、通信接点200cを介してレンズCPU113と通信自在に接続される。この通信回路265hは、ボディCPU265m等のカメラ用IC265内部の回路とレンズCPU113との間のデータや制御命令の通信を仲介する。
【0070】
フラッシュメモリ制御回路265iは、データバス265n及びフラッシュメモリ(Flash Memory)269に接続されており、フラッシュメモリ269に対するデータの読み書きを制御する。フラッシュメモリ269は、例えば電気的に書き換え可能な不揮発性メモリとして構成されており、カメラ本体200の動作を制御するためのプログラムを記憶している。
【0071】
SDRAM制御回路265jは、データバス265n及びSDRAM(Synchronous DRAM)271に接続されており、SDRAM271に対するデータの読み書きを制御する。SDRAM271は、画像処理回路265cによる画像処理によって得られた画像データ及び圧縮伸張回路265dによる圧縮によって得られた圧縮画像データを一時的に記憶するためのバッファメモリである。
【0072】
記録媒体制御回路265kは、記録媒体273a、273bに対するデータの読み書きを制御する。記録媒体273a、273bは、xDピクチャーカード(登録商標)、コンパクトフラッシュ(登録商標)、SDメモリカード(登録商標)、メモリスティック(登録商標)等の記録媒体である。記録媒体273a、273bは、カメラ本体200に対して着脱自在に構成して良い。その他、記録媒体273a、273bは、通信接点を介して接続可能なハードディスク等であっても良い。なお、記録媒体273aと記録媒体273bとの組み合わせ方は、同じ種類の記録媒体であって記録容量が異なる組み合わせや、異なる種類の記録媒体の組み合わせ等の、自由な組み合わせ方を採用できる。
【0073】
ダイアル検知回路265lは、前述の前ダイアル275aと後ダイアル275bにそれぞれ接続されており、それぞれのダイアルの回転方向及び回転量を検知し、検知した回転方向及び回転量に応じた信号を、データバス265nを介してボディCPU265mに入力する。
【0074】
ボディCPU265mは、交換レンズ100の制御を含む、カメラ本体200の全体の動作を制御する。ボディCPU265mは、フラッシュメモリ269に記憶されたプログラムに従ってカメラ本体200の制御を行う。また、本実施形態におけるボディCPU265mは、情報生成部30としての機能も有している。
【0075】
電源供給回路277は、内蔵のバッテリ279aに接続されており、バッテリ279aから供給される電力を、カメラ本体200の各回路や各機構の動作に必要な電力に変換して供給する。ここで、電源供給回路277は、外部電源279bにも接続され、外部電源279bからの電力もカメラ本体200の各回路や各機構に供給する。
【0076】
LCD駆動回路281は、ビデオ信号出力回路265eで得られたビデオ信号に従ってLCD283を駆動して、LCD283に画像を表示させる。LCD向き検知回路285は、LCD283の向きを検知する。本実施形態におけるLCD283は、その向きを縦位置や横位置に変更することができる。LCD向き検知回路285は、LCD283の向きを検知し、検知したLCD283の向きを示す信号を、入出力回路265gを介してボディCPU265mに伝達する。
コントロールパネル駆動回路287は、コントロールパネル289とボディCPU265mとに接続されている。コントロールパネル駆動回路287は、ボディCPU265mの制御に従って、コントロールパネル289に撮影情報等を表示する。
【0077】
内蔵フラッシュ291は、充電回路291a、フラッシュ発光回路291b、発光管291c等を有している。充電回路291aは、バッテリ279a又は外部電源279bを電源とし、これらの電源からの電圧を昇圧し、この昇圧した電圧を用いて、不図示のフラッシュ発光用のコンデンサを充電する。フラッシュ発光回路291bは、発光許可信号を受信して、充電回路291aに充電された電圧を発光管291cに印加する等の発光制御を行う。発光管291cは、例えばキセノン管と反射傘を備えており、フラッシュ発光回路291bから印加された電圧に従って発光する。
【0078】
GPS受信回路293は、GPSアンテナ295を介してGPS衛星からのGPS信号を受信し、受信したGPS信号を保持する。
暗号化回路297は、第1情報としての位置情報の暗号化を行う。この暗号化回路297については第2の実施形態において詳述する。
【0079】
外部フラッシュ300は、カメラ本体200に対して着脱自在に構成されたフラッシュ装置である。この外部フラッシュ300は、カメラ本体200に装着された際に通信接点200d、200eを介して、カメラ本体200と通信自在に接続される。外部フラッシュ300は、フラッシュCPU301、充電回路303、フラッシュ発光回路305、発光管307、ズーム駆動回路309を有している。
【0080】
フラッシュCPU301は、外部フラッシュ300の制御を行い、また、通信接点200dと通信回路265hとを介してボディCPU265mと通信を行う。充電回路303は、外部フラッシュ300に装填された不図示の電源電池の電圧を昇圧し、昇圧した電圧を用いて、不図示のフラッシュ発光用のコンデンサを充電する。フラッシュ発光回路305は、ボディCPU265mから受信した発光許可信号に応じて充電回路303に充電された電圧を発光管307に印加する。発光管307は、例えばキセノン管と反射傘を備えており、フラッシュ発光回路305から印加された電圧に従って発光する。ズーム駆動回路309は、撮影光学系101の焦点距離に応じて、発光管307のキセノン管と反射笠との間隔を制御する。これにより、キセノン管と反射傘との間隔が、撮影光学系101の焦点距離等に応じた照射角となるようにする。
【0081】
外部機器400は、パーソナルコンピュータ(PC)等の機器であって機器CPU401を有している。機器CPU401は、外部機器400の動作を制御するものであって、通信接点200f及び通信回路265hを介して、ボディCPU265mと通信自在に接続される。
【0082】
外部表示装置500は、テレビジョン受像機(以下、テレビという)等の表示機器であって、表示駆動回路501と、表示装置503とを有している。表示駆動回路501は、通信接点200gを通じて、ビデオ信号出力回路265eに接続されており、ビデオ信号出力回路265eからのビデオ信号に基づき、外部表示装置500に画像を表示させる。
【0083】
次に、本変形例のデジタルカメラの動作を説明する。図10は、カメラ本体200のボディCPU265mによるカメラ本体200のパワーオンリセットの動作を示すフローチャートである。カメラ本体200にバッテリ279aが装填されるか又は外部電源279bが接続されると、図10に示すフローチャートの動作がスタートする。このとき、ボディCPU265mは、スイッチ検知回路265fの状態から、パワースイッチ267eがオンであるかを判定する(S101)。S101の判定において、パワースイッチ267eがオフであると判定した場合に、ボディCPU265mは、カメラ本体200の状態を、低消費電力の状態であるスリープ状態とする(S102)。スリープ状態において、ボディCPU265mは、パワースイッチ267eがオンであるかを判定しており、パワースイッチ267eがオンとなった場合にS103以下の処理を行う。パワースイッチ267eがオンとなるまでは、ボディCPU265mは、パワースイッチ割り込み処理以外の動作を停止させることによって低消費電力化を図る。
【0084】
S101の判定においてパワースイッチ267eがオンであると判定した場合又はS102のスリープ状態を脱した場合に、ボディCPU265mは、電源供給回路277を介した電源供給を開始する(S103)。次に、ボディCPU265mは、塵埃除去動作を行う(S104)。塵埃除去動作に際し、ボディCPU265mは、入出力回路265gを介して防塵フィルタ駆動回路235を動作させることによって、防塵フィルタ233aに固着された圧電素子を超音波振動させ、この超音波振動によって防塵フィルタ233aの表面に付着した塵埃等を除去する。
【0085】
次に、ボディCPU265mは、撮影モードや、ISO感度、マニュアル設定されたシャッタ速度や絞り値等、ユーザによって設定された情報があれば、それらの撮影モードや撮影条件の読み込みを行う(S105)。このときに、ボディCPU265mは、レンズCPU113から通信回路265hを介して交換レンズ100の開放絞り値や焦点距離情報等も読み込む。
【0086】
撮影モード等の読み込みを行うと、ボディCPU265mは、現在、ライブビュー表示モードであるかを判定する(S106)。前述したように、LV表示釦267bが一度操作されるとライブビュー表示モードが設定され、再度操作されるとライブビュー表示モードが解除される。
【0087】
S106の判定において、ライブビュー表示モードでないと判定した場合、即ち光学ファインダ表示モードである場合に、ボディCPU265mは、ファインダ測光(F測光)及び露出量演算を行う(S107)。光学ファインダ表示モードの場合には、観察光学系による被写体像の観察を可能とするため、可動ミラー201が下降状態にある。この場合、撮影光学系101を通過した被写体光束は、測光センサ215に入射する。この被写体光束を用いて測光を行うことができる。ボディCPU265mは、ファインダ測光の結果、測光処理回路217によって得られた被写体輝度に基づいて適正露出を得るための絞り値やシャッタ速度値等を演算する。ここで、絞り値やシャッタ速度値の演算にあたっては、S105において読み込まれた撮影モードや撮影条件を用いる。
【0088】
露出量の演算後、ボディCPU265mは、ファインダ内表示部209への重畳表示を行う(S108)。ボディCPU265mは、ファインダ内表示駆動回路211を制御して、撮影範囲、絞り値、シャッタ速度値等の撮影条件を被写体像に重畳させる。ここで、絞り値やシャッタ速度値は、コントロールパネル289にも表示させる。
【0089】
続いて、ボディCPU265mは、ライブビュー表示を消灯する(S109)。ライブビュー表示モードから光学ファインダ表示モードに切り替わった際には、S109においてライブビュー表示を消灯する。なお、ライブビュー表示が既に消灯されている場合には、ボディCPU265mは、S109においては特に処理を行わない。
【0090】
また、S106における判定の結果、ライブビュー表示モードであると判定した場合、ボディCPU265mは、入出力回路265gを介したミラー駆動機構221の制御により、可動ミラー201を上昇位置に退避させる(S110)。その後、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227を開放する(S111)。ライブビュー表示モードでは、撮像素子233cを介して取得される画像データに基づいて、被写体像をLCD283に表示させる。このために、撮像素子233c上に被写体像が形成されるように、可動ミラー201を退避させ、シャッタ227を開放する。なお、可動ミラー201が既に退避しており、また、シャッタ227が既に解放されている場合には、ボディCPU265mは、S110及びS111においては特に処理を行わない。
【0091】
続いて、ボディCPU265mは、イメージャー測光(I測光)及び露出量演算を行う(S112)。ライブビュー表示モードでは、可動ミラー201を撮影光学系101の光路から退避させているので、測光センサ215には被写体光束が入射しない。そこで、撮像素子233cを介して得られた画像データを用いて、AE回路265bによって被写体輝度を算出する。この算出された被写体輝度に基づいて、ボディCPU265mは、適正露出を得るための絞り値やシャッタ速度値等を演算する。ここで、絞り値やシャッタ速度値の演算にあたっては、S107と同様、S105において読み込まれた撮影モードや撮影条件を用いる。ここで、絞り値やシャッタ速度値は、LCD283やコントロールパネル289に表示させる。
【0092】
続いて、ボディCPU265mは、ライブビュー表示を行う(S113)。この際、ボディCPU265mは、前処理回路239を介して得られる画像データを画像処理回路265cに入力して、画素数を間引く等の画像処理を施す。そして、ボディCPU265mは、ビデオ信号出力回路265eを介してLCD駆動回路281を制御して、画像処理回路265cによって処理された画像データに対応した画像を、設定されている向きやアスペクト比でLCD283に表示させる。このような動作を、撮像素子233cの撮像動作のたびに行う。
【0093】
ライブビュー表示の後、ボディCPU265mは、ファインダ内表示部209への重畳表示を消灯する(S114)。光学ファインダ表示モードからライブビュー表示モードに切り替わった際には、S114においてファインダ表示を消灯する。なお、ファインダ表示が既に消灯されている場合には、ボディCPU265mは、S114においては特に処理を行わない。
【0094】
S109においてライブビュー表示を消灯した後又はS114においてファインダ表示を消灯した後、ボディCPU265mは、スイッチ検知回路265fの状態から、レリーズ釦267aが半押しされたか、即ち1Rスイッチがオンかを判定する(S115)。
【0095】
S115の判定において、1Rスイッチがオンであると判定した場合、ボディCPU265mは、撮影動作のサブルーチンを実行する(S116)。このサブルーチンの詳細は図11を用いて後述する。
S115の判定において1Rスイッチがオンでないと判定した場合又はS116の撮影動作のサブルーチンを実行した場合には、ボディCPU265mは、スイッチ検知回路265fの状態から、設定スイッチがオンかを判定する(S117)。設定スイッチは、メニュー釦267fの操作によってオンするスイッチである。
【0096】
S117の判定において、設定スイッチがオンであると判定した場合、ボディCPU265mは、設定変更を行う(S118)。S118においては、メニュー画面上での操作に従ってカメラ本体の各種の設定を変更する。
S117の判定において設定スイッチがオンでないと判定した場合又はS118の設定変更の後、ボディCPU265mは、再生スイッチがオンかを判定する(S119)。再生スイッチは、再生釦267gの操作によってオンするスイッチである。S119の判定において、再生スイッチがオンであると判定した場合、ボディCPU265mは、再生動作のサブルーチンを実行する(S120)。この再生動作のサブルーチンの詳細については、図12〜図14を用いて後述する。
【0097】
S119の判定において再生スイッチがオンでないと判定した場合又はS120の再生動作のサブルーチンを実行した場合には、ボディCPU265mは、外部機器400が接続されているかを判定する(S121)。S121の判定において、外部機器400が接続されていると判定した場合、ボディCPU265mは、外部機器接続動作のサブルーチンを実行する(S122)。この外部機器接続動作のサブルーチンの詳細については、図15を用いて後述する。
【0098】
S121の判定において外部機器400が接続されていないと判定した場合又はS122の外部機器接続動作のサブルーチンを実行した場合には、ボディCPU265mは、スイッチ検知回路265fの状態から、パワースイッチ267eがオンか判定する(S123)。S123の判定において、パワースイッチ267eがオンであると判定した場合、ボディCPU265mは、処理をS106に戻して前述の動作を実行する。一方、S123の判定において、パワースイッチ267eがオンではないと判定した場合に、ボディCPU265mは、電源供給回路277を介しての電源供給を停止させる(S124)。その後、ボディCPU265mは、カメラ本体200をスリープ状態とする。
【0099】
次に、S116における撮影動作のサブルーチンについて、図11のフローチャートを用いて説明する。撮影動作のサブルーチンに入ると、ボディCPU265mは、S106と同様にライブビュー表示モードかを判定する(S201)。S201の判定において、ライブビュー表示モードでないと判定した場合に、ボディCPU265mは、位相差AFを実行する(S202)。位相差AFの場合、ボディCPU265mは、位相差AF処理回路225を用いて、撮影光学系101の周辺を通過した対をなす光束から、公知の位相差法を用いて撮影光学系101の焦点ズレ方向及び焦点ズレ量を検出する。そして、ボディCPU265mは、検出された焦点ズレ方向及び焦点ズレ量に従って撮影光学系101のフォーカスレンズの駆動量を算出し、算出した駆動量をレンズCPU113に通信する。レンズCPU113は、通信された駆動量に従って光学系駆動機構109を駆動させることにより、フォーカスレンズを合焦位置に駆動する。
【0100】
位相差AFの後、ボディCPU265mは、S107と同様のファインダ測光及び露出量演算を行う(S203)。S203において演算された絞り値やシャッタ速度値は、ファインダ内表示部209やコントロールパネル289に表示させる。
また、S201の判定において、ライブビュー表示モードであると判定した場合に、ボディCPU265mは、イメージャーAFを実行する(S204)。ライブビュー表示モードでは、可動ミラー201が撮影光学系101の光路から退避しており、位相差AFを行うことができない。そこで、撮像素子233cを介して得られる画像データを用いたイメージャーAFを行う。イメージャーAFの場合、ボディCPU265mは、コントラストAF回路265aから出力された画像データの高周波成分がピーク値となるように、レンズCPU113を介して撮影光学系101のフォーカスレンズの駆動制御を行う。
イメージャーAFの後、ボディCPU265mは、S112と同様のイメージャー測光及び露出量演算を行う(S205)。S205において演算された絞り値やシャッタ速度値は、LCD283やコントロールパネル289に表示させる。
【0101】
S203におけるファインダ測光及び露出量演算又はS205におけるイメージャー測光及び露出量演算の後、ボディCPU265mは、レリーズ釦267aが全押しされたか、即ち2Rスイッチがオンかを判定する(S206)。
S206の判定において、2Rスイッチがオンでないと判定した場合に、ボディCPU265mは、1Rスイッチがオンかを判定する(S207)。1Rスイッチがオンでない場合、レリーズ釦267aからユーザの指が離れたことを示している。したがって、ボディCPU265mは、撮影動作のサブルーチンを終了する。一方、S207の判定において、1Rスイッチがオンである場合に、少なくともユーザの指がレリーズ釦267aにかかっていることを示している。この場合に、ボディCPU265mは、処理をS206に戻す。
【0102】
また、S206の判定において、2Rスイッチがオンであると判定した場合、ボディCPU265mは、露出動作を実行する。このために、ボディCPU265mは、S106及びS201と同様にしてライブビュー表示モードか判定する(S208)。S208の判定において、ライブビュー表示モードでないと判定した場合に、ボディCPU265mは、入出力回路265gを介したミラー駆動機構221の制御により、可動ミラー201を上昇位置に退避させる(S209)。ライブビュー表示モードでない場合、即ち光学ファインダ表示モードの場合には、可動ミラー201が下降位置にある。したがって、撮像素子233cに被写体光束に導くために、可動ミラー201を退避させる。
【0103】
一方、S208の判定において、ライブビュー表示モードであると判定した場合に、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227を閉じる(S210)。ライブビュー表示モードの場合には、可動ミラー201は下降位置にあり、シャッタ227は開放のままである。露出動作を実行するにあたって、シャッタ227をチャージする必要があることから、一旦、シャッタ227を閉じる。
【0104】
S209の可動ミラー201の退避後又はS210においてシャッタ227を閉じた後、ボディCPU265mは、レンズCPU113を介して絞り103を絞り込む(S211)。S211において、ボディCPU265mは、S203又はS205の露出量演算において求められた絞り値又は手動設定された絞り値となるように、レンズCPU113に対して絞り103の絞り込みの指示を行う。
【0105】
続いて、ボディCPU265mは、露出動作を行う(S212)。S212において、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227の先幕を走行させるとともに、撮像素子233cによる撮像(電荷蓄積)を開始させる。また、S203又はS205の測光の結果、内蔵フラッシュ291又は外部フラッシュ300によってフラッシュを発光させる必要がある場合には、発光許可信号回路231又はボディCPU265mは、シャッタ227の先幕が全開となった時点でフラッシュの発光を実行させる。シャッタの227の先幕が全開となった後、シャッタ速度値に応じて定まる所定時間が経過すると、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227の後幕を走行させるとともに、撮像素子233cにおける撮像(電荷蓄積)を終了させる。
【0106】
露出動作が終了すると、ボディCPU265mは、GPS受信回路293及び入出力回路265gを介してGPS衛星からのGPS信号を取り込む(S213)。ここで、第1の変形例と同様に、GPS受信回路293は、所定時間毎にGPS信号を受信するようにしても良い。この場合、GPS受信回路293は、最新のGPS信号を保持しておくようにしても良いし、過去の所定時間までのGPS信号を保持しておくようにしても良い。
【0107】
GPS信号を取り込んだ後、ボディCPU265mは、レンズCPU113を介して絞り103を開放する(S214)。S214において、ボディCPU265mは、絞り103の開放量が開放絞り値となるようにレンズCPU113に対して絞り103の駆動指示を行う。
【0108】
絞り103を開放にした後、ボディCPU265mは、S106、S201、S208と同様にして、ライブビュー表示モードかを判定する(S215)。S215の判定において、ライブビュー表示モードでないと判定した場合に、ボディCPU265mは、入出力回路265gを介したミラー駆動機構221の制御により、可動ミラー201を下降位置に復帰させる(S216)。S209において可動ミラー201は、撮影光学系101の光路から退避しているので、観察光学系による被写体像の観察が可能なように、可動ミラー201を光路中に復帰させる。
【0109】
一方、S215の判定において、ライブビュー表示モードであると判定した場合に、ボディCPU265mは、入出力回路265gを介したシャッタ駆動機構229の制御により、シャッタ227を開放する(S217)。これは、ライブビュー表示を再開するためである。
【0110】
S216における可動ミラー201の復帰後又はS217におけるシャッタ227の開放後、ボディCPU265mは、撮像素子駆動回路237を制御して、画像信号の読み出しを行う(S218)。続いて、ボディCPU265mは、画像処理回路265c及び圧縮伸張回路265dを用いて、前処理回路239から出力された画像データに対して画像処理を施す(S219)。
【0111】
画像処理の後、ボディCPU265mは、GPS受信回路293から取得したGPS信号を処理してカメラ本体200の位置情報を生成する(S220)。この位置情報が、前述の第1情報に対応する。第1情報としての位置情報を生成した後、ボディCPU265mは、画像処理回路265c及び圧縮伸張回路265dによる画像処理の結果として得られる圧縮画像データに所定のヘッダ情報を付加して画像ファイルを生成する。このヘッダ情報には、露出動作時の条件(絞り値やシャッタ速度値等)や第1情報としての位置情報を記録する。画像ファイルの生成後、ボディCPU265mは、生成した画像ファイルを、記録媒体制御回路265kを用いて記録媒体273a又は273bに記録する(S221)。画像ファイルの記録後、ボディCPU265mは、撮影動作を終了させる。
このように、本変形例においては、撮影動作時に第1情報としての位置情報が生成され、生成された第1情報が画像データと関連付けて記録される。
【0112】
次に、S120における再生動作のサブルーチンについて、図12に示すフローチャートを用いて説明する。再生動作のサブルーチンに入ると、再生画像が指定される(S301)。S301において、ボディCPU265mは、ビデオ信号出力回路265eを介してLCD駆動回路281を制御して、LCD283に記録媒体273a又は記録媒体273bに記録されている画像ファイルの一覧をサムネイル表示させる。ユーザは、サムネイル表示された画像ファイルの中から所望の画像ファイルを、十字釦267cを用いて指定する。ボディCPU265mは、スイッチ検知回路265fの状態から、ユーザによって指定された画像ファイルを認識する。
【0113】
ユーザによる再生画像の指定が行われると、ボディCPU265mは、外部表示装置500が接続されているかを判定する(S302)。S302の判定において、外部表示装置500が接続されていないと判定した場合に、ボディCPU265mは、液晶モニタ再生を行う(S303)。S303においては、記録媒体から読み出された画像ファイルに対応した画像をLCD283に表示させる。液晶モニタ再生のサブルーチンは、図13を用いて後述する。
【0114】
また、S302の判定において、外部表示装置500が接続されていると判定した場合に、ボディCPU265mは、外部再生を行う(S304)。S304においては、記録媒体から読み出された画像ファイルに対応した画像を外部表示装置500に表示させる。外部再生のサブルーチンは、図14を用いて後述する。
【0115】
S303の液晶モニタ再生又はS304の外部再生の後、ボディCPU265mは、再生終了か判定する(S305)。本変形例においては、例えば、一旦、再生釦267gが操作されることにより再生動作が開始され、再度、再生釦267gが操作されることにより再生動作が終了される。したがって、S305において、ボディCPU265mは、再度、再生釦267gが操作されたかを判定する。
【0116】
S305の判定において、再生終了でない場合に、ボディCPU265mは、処理をS302に戻して前述の動作を実行する。一方、S305の判定において、再生終了である場合には、ボディCPU265mは、再生動作を終了させる。
次に、S303における液晶モニタ再生のサブルーチンについて、図13に示すフローチャートを用いて説明する。液晶モニタ再生のサブルーチンに入ると、ボディCPU265mは、ユーザによって指定された画像ファイルを記録媒体から読み込む(S401)。続いて、ボディCPU265mは、読み込んだ画像ファイル中の圧縮画像データを圧縮伸張回路265dによって伸張した後、画像処理回路265cにより画像データ中の余白部分の黒塗りを行う(S402)。本変形例のカメラ本体200で得られる画像データは、縦横位置やアスペクト比が異なっている。このため、読み出した画像データの縦横位置やアスペクト比に従って余白部分を黒塗りとする。
【0117】
余白部分の黒塗りを行った後、ボディCPU265mは、モニタ再生表示を開始する(S403)。S403において、ボディCPU265mは、黒塗り後の画像データをビデオ信号出力回路265eに入力してLCD283に画像を再生する。この際、必要に応じて、絞り値やシャッタ速度値を示す情報や、撮影位置を示す情報を重畳表示させる。ここで、表示させる撮影位置は、第1情報に対応した位置情報である。
【0118】
モニタ再生表示を開始した後、ボディCPU265mは、画像選択操作がなされたかを判定する(S404)。本変形例においては、左右の十字釦267cが操作されることにより、再生する画像を別の画像に変更することができる。また、サムネイル表示を再度行って、この中から再生する画像を選択することもできる。したがって、S404において、ボディCPU265mは、十字釦267cが操作されたかや再度のサムネイル表示が指示されたかを画像選択操作として判定する。
【0119】
S404の判定において、画像選択操作がなされたと判定した場合に、ボディCPU265mは、再生する画像ファイルを変更する(S405)。この後、ボディCPU265mは、処理をS401に戻して変更された画像ファイルを読み込んで再生する。
一方、S404の判定において、画像選択がなされていないと判定した場合に、ボディCPU265mは、再生終了かを判定する(S406)。S406においてはS305と同様に、ボディCPU265mは、再度、再生釦267gが操作されたかを判定する。S406の判定において、再生終了でないと判定した場合に、ボディCPU265mは、処理をS404に戻して前述の動作を実行する。一方、S406の判定において、再生終了であると判定した場合に、ボディCPU265mは、液晶モニタ再生のサブルーチンを終了させる。
【0120】
次に、S304における外部再生のサブルーチンについて、図14に示すフローチャートを用いて説明する。外部再生のサブルーチンに入ると、ボディCPU265mは、ユーザによって指定された画像ファイルを記録媒体から読み込む(S501)。続いて、ボディCPU265mは、読み込んだ画像ファイル中の圧縮画像データを圧縮伸張回路265dによって伸張した後、伸張した画像データをビデオ信号出力回路265eに出力する。ビデオ信号出力回路265eは、入力された画像データを映像信号に変換し、この変換した映像信号を、通信接点200gを介して外部表示装置500に出力する(S502)。これにより、外部表示装置500による画像の表示が開始される。この際、必要に応じて、絞り値やシャッタ速度値を示す情報や、撮影位置を示す情報を重畳表示させる。ここで、表示させる撮影位置は、第1情報に対応した位置情報である。なお、外部再生動作の際には、撮影位置を示す情報を表示させないようにしても良い。これは、プライバシーの保護のためである。
【0121】
外部再生表示を開始した後、ボディCPU265mは、画像選択操作がなされたかを判定する(S503)。S404と同様に、ボディCPU265mは、十字釦267cが操作されたかや再度のサムネイル表示が指示されたかを画像選択操作として判定する。
【0122】
S503の判定において、画像選択操作がなされた場合に、ボディCPU265mは、再生する画像ファイルを変更する(S504)。この後、ボディCPU265mは、処理をS501に戻して変更された画像ファイルを読み込んで再生する。
一方、S504の判定において、画像選択がなされていない場合に、ボディCPU265mは、再生終了かを判定する(S505)。S505においてはS305と同様に、ボディCPU265mは、再度、再生釦267gが操作されたかを判定する。S505の判定において、再生終了でないと判定した場合に、ボディCPU265mは、処理をS503に戻して前述の動作を実行する。一方、S505の判定において、再生終了であると判定した場合に、ボディCPU265mは、外部再生のサブルーチンを終了させる。
【0123】
次に、S122における外部機器接続動作のサブルーチンについて、図15のフローチャートを用いて説明する。外部機器接続動作のサブルーチンに入ると、ボディCPU265mは、カメラ本体200から外部機器400に画像ファイルを転送するかを判定する(S601)。S601において、ボディCPU265mは、例えば外部機器400に対して未転送の画像ファイルがあるか又は指定した画像ファイルを外部機器400に転送するようにユーザ操作によって指示されたかを判定する。
【0124】
S601の判定において、カメラ本体200から外部機器400に画像ファイルを転送すると判定した場合に、ボディCPU265mは、未転送の画像ファイル又はユーザによって指定された画像ファイルのヘッダ情報に記録されている第1情報としての位置情報を取り出す(S602)。そして、ボディCPU265mは、取り出した第1情報から第2情報を生成する(S603)。第2情報としての位置情報の生成の仕方は、前述した通りである。
【0125】
第2情報を生成した後、ボディCPU265mは、生成した第2情報をこれから転送しようとしている画像ファイルの画像データと関連付けて別の画像ファイルを生成する(S604)。その後、ボディCPU265mは、新たに生成した画像ファイルを外部機器400に出力(転送)する(S605)。
【0126】
このように、本変形例では、外部機器400に画像ファイルを転送する際には、位置情報の精度を劣化させてから転送を行うようにしている。これにより、転送された画像ファイルからは、カメラの所有者が許可した公開レベルまでの位置情報しか知ることができない。このため、カメラの所有者のプライバシーの保護を図ることが可能である。
【0127】
S601の判定において外部機器400に画像ファイルを転送しないと判定した場合又はS605において画像ファイルを出力した後、ボディCPU265mは、外部機器400からカメラ本体200に画像ファイルを転送するかを判定する(S606)。S606において、ボディCPU265mは、例えばカメラ本体200に記録されていない画像ファイルがあるか又は指定した画像ファイルをカメラ本体200に転送するようにユーザ操作によって指示されたかを判定する。
【0128】
S606の判定において、外部機器400からカメラ本体200に画像ファイルを転送すると判定した場合に、ボディCPU265mは、外部機器400から画像ファイルを受信する(S607)。そして、ボディCPU265mは、受信した画像ファイルを記録媒体273a又は273bに記録する(S608)。
【0129】
S606の判定において外部機器400から画像ファイルを転送しないと判定した場合又はS608において画像ファイルを記録した後、ボディCPU265mは、現在、カメラ本体200に外部機器400が接続中であるかを判定する(S609)。S609の判定において、外部機器400が接続中であると判定した場合、ボディCPU265mは、処理をS601に戻して前述の動作を実行する。また、S609の判定において、外部機器400が接続中でないと判定した場合、ボディCPU265mは、外部機器接続動作のサブルーチンを終了させる。
【0130】
以上説明したように、本変形例によれば、第1の実施形態の第1の変形例の技術を、デジタルカメラに対して適用可能である。ここで、本変形例では、情報機器の例としてデジタルカメラを示したが、第1の実施形態の技術は、位置情報を取得可能な各種の情報機器に対して適用可能である。
[第2の実施形態]
次に、本発明の第2の実施形態について説明する。図16は、本発明の第2の実施形態に係る情報機器の構成を示すブロック図である。図16に示す情報機器10aは、入力部12と、記憶部14と、情報生成部16と、暗号化部17と、出力部18と、を有している。ここで、図1と同一の参照符号を付した構成は、図1と同様のものである。したがって説明を省略する。
【0131】
暗号化部17は、外部からの位置情報の出力要求に応じて情報生成部16からなされた暗号化要求に応じて、記憶部14に記憶されている第1情報としての位置情報を暗号化する。暗号化の方式は、公開鍵暗号化方式等の種々の方式を用いることが可能である。
【0132】
図17は、情報機器10aの動作を示すフローチャートである。図17において、図2と同様の動作であるS1〜S5については説明を省略する。第2の実施形態においては、S5において第2情報を生成するのと並行して、情報生成部16は、暗号化部17に対して第1情報の暗号化を指示する。これを受けて暗号化部17は、第1情報を暗号化する(S7)。「秒」の情報を暗号化した第1情報の例を図18(a)に示し、「秒」と「分」の情報を暗号化した第1情報の例を図18(b)に示す。なお、暗号化部17は、外部からの位置情報の出力要求に応じて暗号化を行うようにしても良い。
【0133】
第2情報の生成と第1情報の暗号化とが完了した後、出力部18は、情報生成部16及び暗号化部17から入力された第2情報及び暗号化済みの第1情報を、出力要求元に対して出力する(S8)。
第2情報及び暗号化済みの第1情報の出力後又はS3の判定において出力要求がなされていないと情報生成部16が判定した場合には、図17の処理が一旦終了する。
【0134】
以上説明したように、本実施形態によれば、位置情報の出力要求がなされた場合に、実際に記憶している第1情報よりも位置の精度を劣化させた第2情報と第1情報を暗号化した情報とを出力要求元に出力するようにしている。第2情報により、位置情報の公開レベルをコントロールすることが可能であるが、第2情報を送られたユーザは、第2情報から第1情報を復元することはできない。これに対し、暗号化済みの第1情報は、復号キーを有していないユーザにとっては理解できない情報である。しかしながら、復号キーがあれば第1情報を復元することができる。これにより、出力要求元に位置情報を送信した後であっても、その出力要求元のユーザに対する位置情報の公開を許可することが可能となる。
【0135】
[第2の実施形態の第1の変形例]
次に、第2の実施形態の変形例について説明する。第2の実施形態の第1の変形例は、位置情報と画像とを1つの画像ファイルとして記憶可能な情報機器への第2の実施形態の適用例である。
図19は、本発明の第2の実施形態の第1の変形例に係る情報機器の構成を示すブロック図である。図19に示す情報機器20aは、位置情報入力部22と、位置情報バッファ24と、画像入力部26と、記憶部28と、情報生成部30と、暗号化部31と、出力部32と、を有している。ここで、図5と同一の参照符号を付した構成は、図5と同様のものである。したがって説明を省略する。また、暗号化部31は、暗号化部17と同一の動作をするものであるので詳細な説明については省略する。
【0136】
図20は、情報機器20aの動作を示すフローチャートである。図20において、図6と同様の動作であるS1〜S20については説明を省略する。第2の実施形態においては、S20において第2情報を生成するのと並行して、情報生成部30は、暗号化部31に対して第1情報の暗号化を指示する。これを受けて暗号化部31は、第1情報を暗号化する(S22)。なお、暗号化部31は、外部からの位置情報の出力要求に応じて暗号化を行うようにしても良い。
【0137】
第2情報の生成と第1情報の暗号化とが完了した後、情報生成部30は、生成した第2情報と暗号化部31において生成された暗号化済みの第1情報とを記憶部28に記憶されている画像と関連付け直して別の画像ファイルを生成する。その後、情報生成部30は、新たに生成した画像ファイルを出力部32に入力する。出力部32は、情報生成部16から入力された画像ファイルを、出力要求元に対して出力する(S23)。
画像ファイルの出力後又はS18の判定において出力要求がなされていないと情報生成部30が判定した場合には、図20の処理が一旦終了する。
【0138】
以上説明した第1の変形例においては、送信される画像ファイルに関連付けされる第2情報は、位置の精度が劣化している。このため、画像ファイルを受け取ったユーザは、所定のソフトウェアを用いて位置情報を知ろうとしても、正確な位置情報については知ることができない。また、暗号化済みの第1情報は、復号キーを有していないユーザにとっては理解できない情報である。しかしながら、復号キーがあれば第1情報を復元することができる。これにより、出力要求元に位置情報を送信した後であっても、その出力要求元のユーザに対する位置情報の公開を許可することが可能となる。
【0139】
ここで、第1の変形例においては、画像と位置情報とが1つの画像ファイルと記憶される例を示している。これに対し、画像と位置情報とが別のファイルとなっている場合でも、第2の実施形態の技術は適用可能である。この場合には、例えば画像の出力要求がなされた場合には、記憶部28に記憶されている画像ファイルをそのまま出力要求元に出力し、位置情報の出力要求がなされた場合には、記憶部28に記憶されている位置情報ファイルの位置情報を劣化させたファイル(第2情報に対応した位置情報ファイル)と記憶部28に記憶されている位置情報ファイルの位置情報を暗号化したファイル(暗号化済みの第1情報に対応した位置情報ファイル)とを出力要求元に出力する。
【0140】
[第2の実施形態の第2の変形例]
次に、第2の実施形態の第2の変形例について説明する。第2の変形例は、第1の変形例の具体例である。より詳しくは、第2の変形例は、第2の実施形態の第1の変形例の技術を、情報機器の一例としてのデジタルカメラに対して適用したものである。ここで、デジタルカメラの構成は、図7〜図9で示した構成を適用できる。したがって、ここでは説明を省略する。
【0141】
次に、本変形例のデジタルカメラの動作を説明する。図21は、カメラ本体200のボディCPU265mによる撮影動作を示すフローチャートである。なお、パワーオンリセット時の動作と再生動作は、図10、図12〜14と同様であるので説明を省略する。また、図21において、図11と同様の動作であるS201〜S220については説明を省略する。
【0142】
第1情報としての位置情報を生成した後、ボディCPU265mは、生成した第1情報を用いて第2情報としての位置情報を生成する(S222)。続いて、ボディCPU265mは、暗号化回路297により、第1情報を暗号化する(S223)。第2情報と暗号化済みの第1情報とを生成した後、ボディCPU265mは、画像処理回路265c及び圧縮伸張回路265dによる画像処理の結果として得られる圧縮画像データに所定のヘッダ情報を付加して画像ファイルを生成する。このヘッダ情報には、露出動作時の条件(絞り値やシャッタ速度値等)に加えて、第2情報と暗号化済みの第1情報とを記録する。画像ファイルの生成後、ボディCPU265mは、生成した画像ファイルを、記録媒体制御回路265kを用いて記録媒体273a又は273bに記録する(S224)。画像ファイルの記録後、ボディCPU265mは、撮影動作を終了させる。
このように、本変形例においては、撮影動作時に第2情報と暗号化済み第1情報とが生成され、生成された第2情報と暗号化済み第1情報とが画像データと関連付けて記録される。
【0143】
次に、本変形例における外部機器接続動作のサブルーチンについて、図22のフローチャートを用いて説明する。ここで、図22において、図15と同様の動作であるS601、S606〜S609については説明を省略する。
S601の判定において、カメラ本体200から外部機器400に画像ファイルを転送すると判定した場合に、ボディCPU265mは、未転送の画像ファイル又はユーザによって指定された画像ファイルを記録媒体から取り出す(S610)。そして、ボディCPU265mは、取り出した画像ファイルを外部機器400に出力(転送)する(S611)。
【0144】
このように本変形例では、撮影動作時に第2情報と暗号化済みの第1情報とが生成されるので、外部機器接続動作時には第2情報の生成処理や第1情報の暗号化処理が行われることなく、画像ファイルが転送(出力)される。なお、第1の実施形態の第2の変形例と同様に、第2情報の生成処理と第1情報の暗号化処理とを外部機器接続動作時に行うようにしても良い。
以上説明したように、本変形例によれば、第2の実施形態の第1の変形例の技術を、デジタルカメラに対して適用可能である。ここで、本変形例では、情報機器の例としてデジタルカメラを示したが、第2の実施形態の技術は、位置情報を取得可能な各種の情報機器に対して適用可能である。
【0145】
以上実施形態に基づいて本発明を説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形や応用が可能なことは勿論である。また、図面中の各動作フローチャートの説明において、便宜上、「まず」、「次に」等を用いて動作を説明しているが、この順で動作を実施することが必須であることを意味するものではない。
【0146】
さらに、上記した実施形態には種々の段階の発明が含まれており、開示される複数の構成要件の適当な組合せにより種々の発明が抽出され得る。例えば、実施形態に示される全構成要件からいくつかの構成要件が削除されても、上述したような課題を解決でき、上述したような効果が得られる場合には、この構成要件が削除された構成も発明として抽出され得る。
【符号の説明】
【0147】
10,10a,20,20a…情報機器、12…入力部、14,28…記憶部、16,30…情報生成部、17,31…暗号化部、18,32…出力部、22…位置情報入力部、24…位置情報バッファ、26…画像入力部、100…交換レンズ、101…撮影光学系、103…絞り、105…焦点位置検出機構、107…ズーム位置検出機構、109…光学系駆動機構、111…絞り駆動機構、113…レンズCPU、115…レンズROM、117…レンズRAM、200…カメラ本体、201…可動ミラー、203…フォーカシングスクリーン、205…全面液晶板(全面LCD)、207…ペンタプリズム、209…ファインダ内表示部、211…ファインダ内表示駆動回路、213…接眼レンズ、215…測光センサ、217…測光処理回路、219…サブミラー、221…ミラー駆動機構、223…AFセンサ、225…AF処理回路、227…シャッタ、229…シャッタ駆動機構、231…発光許可信号回路、233…撮像ユニット、235…防塵フィルタ駆動回路、237…撮像素子駆動回路、239…前処理回路、241…シフト機構、243…手ブレセンサ、245…手ブレ補正回路、247…シフト機構駆動回路、249…傾きセンサ、251…傾き検知回路、253…光源センサ、255…光源処理回路、257…照度センサ、259…照度処理回路、261…リモコン受信センサ、263…リモコン受信処理回路、265m…ボディCPU、265…カメラ用IC、267…各種スイッチ、269…フラッシュメモリ、271…SDRAM、273a,273b…記録媒体、275a…前ダイアル、275b…後ダイアル、277…電源供給回路、279a…バッテリ、279b…外部電源、281…LCD駆動回路、283…液晶モニタ(LCD)、285…LCD向き検知回路、287…コントロールパネル駆動回路、289…コントロールパネル、291…内蔵フラッシュ、293…GPS受信回路、295…GPSアンテナ、297…暗号化回路、300…外部フラッシュ、400…外部機器、500…外部表示装置
【特許請求の範囲】
【請求項1】
位置情報を第1情報として記憶する記憶部と、
上記第1情報に基づいて、上記第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する情報生成部と、
上記第1情報に対する出力要求に応じて、上記第1情報の代わりに上記第2情報を出力する出力部と、
を具備することを特徴とする情報機器。
【請求項2】
上記位置情報は、所定時間毎に入力されることを特徴とする請求項1に記載の情報機器。
【請求項3】
上記第1情報は、画像に関連付けられた位置情報であることを特徴とする請求項1又は2に記載の情報機器。
【請求項4】
上記第1情報を入力するための位置情報入力部と、
上記画像を入力するための画像入力部と、
をさらに具備し、
上記記憶部は、上記入力された第1情報と上記入力された画像とを関連付けて記憶することを特徴とする請求項3に記載の情報機器。
【請求項5】
上記第1情報を暗号化する暗号化部をさらに具備することを特徴とする請求項1又は2に記載の情報機器。
【請求項6】
上記情報生成部は、上記第2情報を、上記暗号化された上記第1情報とともに画像に関連付けることを特徴とする請求項5に記載の情報機器。
【請求項1】
位置情報を第1情報として記憶する記憶部と、
上記第1情報に基づいて、上記第1情報よりも位置情報の精度を劣化させた情報である第2情報を生成する情報生成部と、
上記第1情報に対する出力要求に応じて、上記第1情報の代わりに上記第2情報を出力する出力部と、
を具備することを特徴とする情報機器。
【請求項2】
上記位置情報は、所定時間毎に入力されることを特徴とする請求項1に記載の情報機器。
【請求項3】
上記第1情報は、画像に関連付けられた位置情報であることを特徴とする請求項1又は2に記載の情報機器。
【請求項4】
上記第1情報を入力するための位置情報入力部と、
上記画像を入力するための画像入力部と、
をさらに具備し、
上記記憶部は、上記入力された第1情報と上記入力された画像とを関連付けて記憶することを特徴とする請求項3に記載の情報機器。
【請求項5】
上記第1情報を暗号化する暗号化部をさらに具備することを特徴とする請求項1又は2に記載の情報機器。
【請求項6】
上記情報生成部は、上記第2情報を、上記暗号化された上記第1情報とともに画像に関連付けることを特徴とする請求項5に記載の情報機器。
【図1】


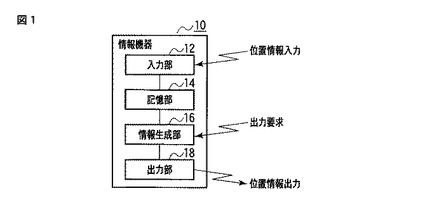
【図2】
【図3】

【図4】
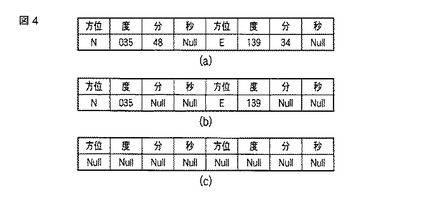
【図5】
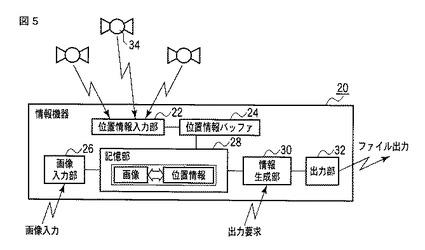
【図6】
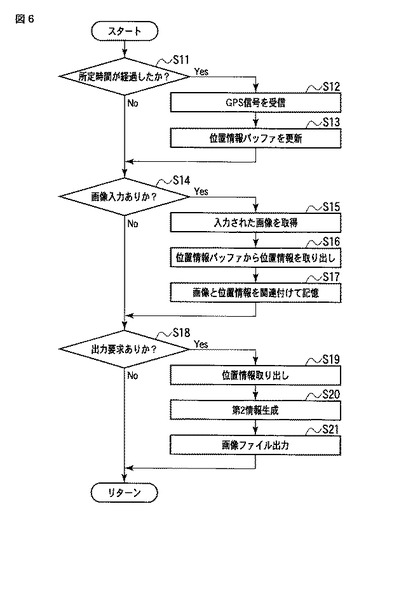
【図7】
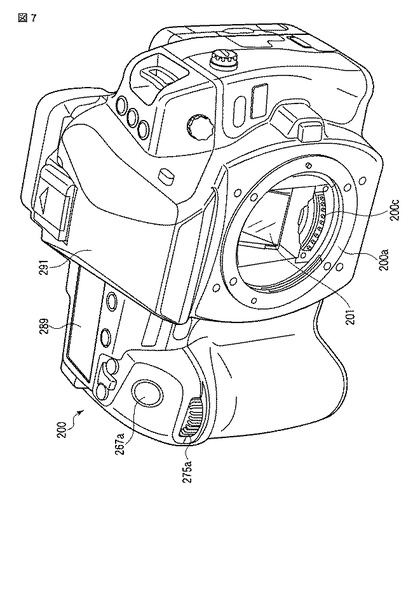
【図8】
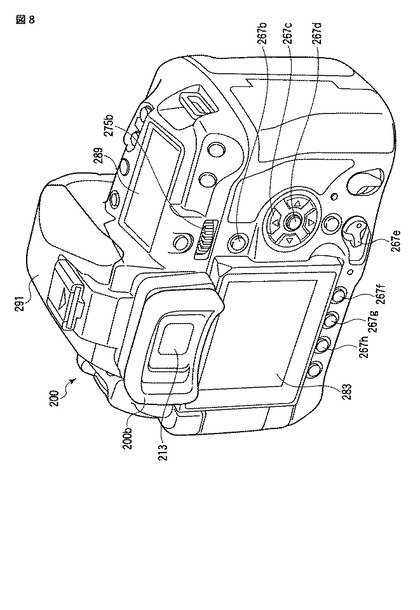
【図9】
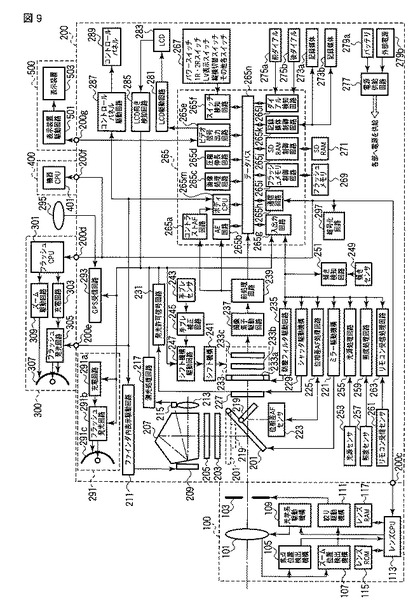
【図10】
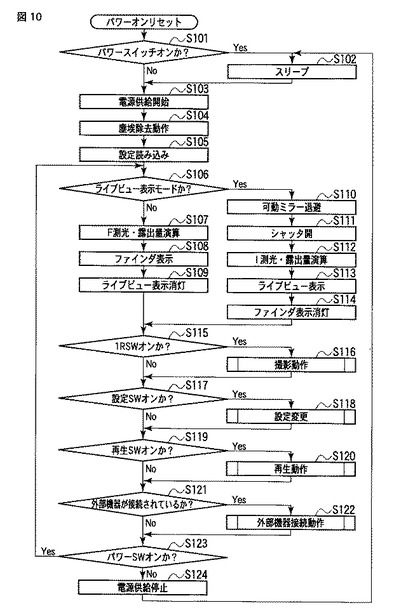
【図11】
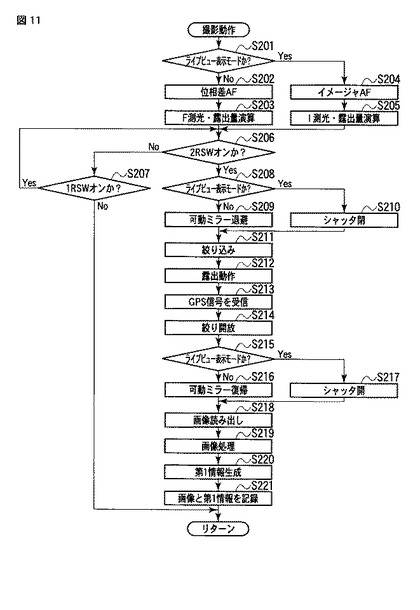
【図12】
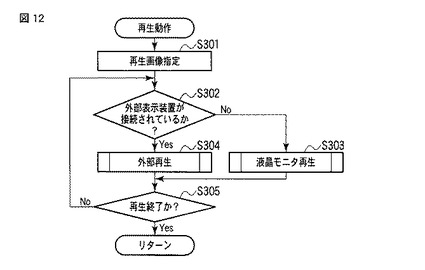
【図13】
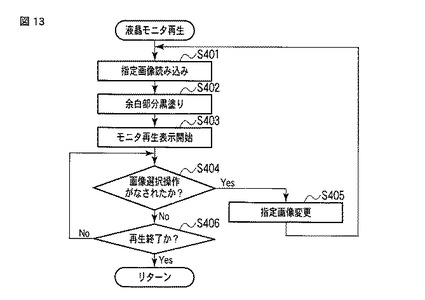
【図14】
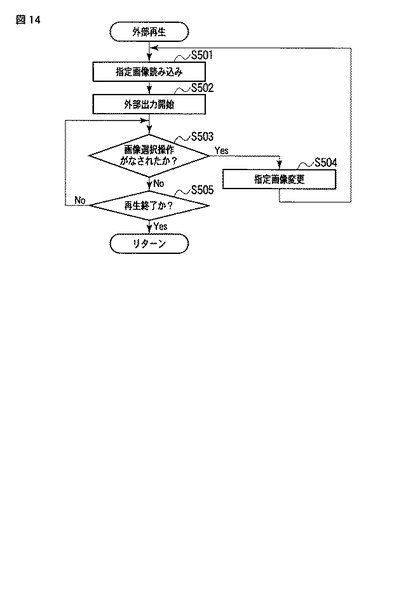
【図15】
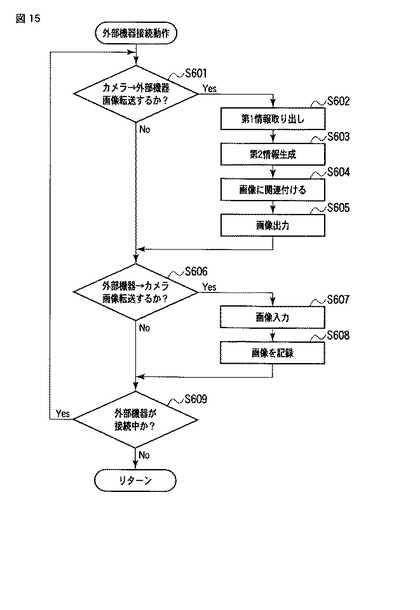
【図16】

【図17】
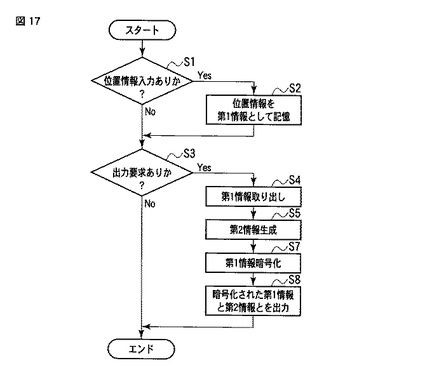
【図18】
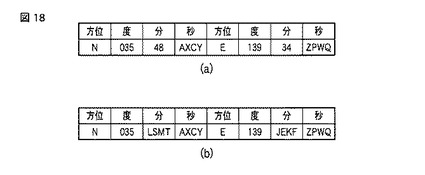
【図19】
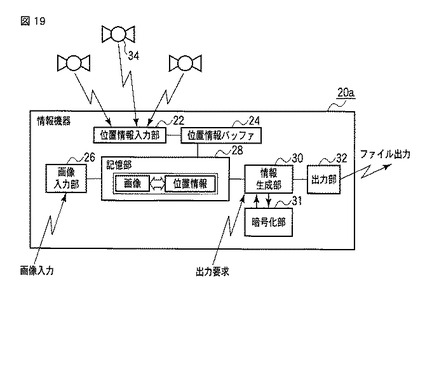
【図20】

【図21】

【図22】
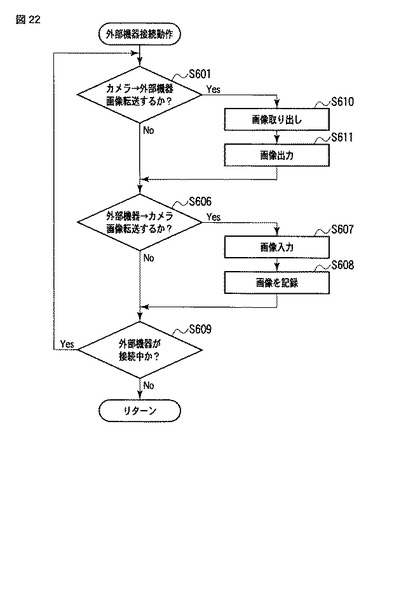
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−256170(P2012−256170A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−128343(P2011−128343)
【出願日】平成23年6月8日(2011.6.8)
【出願人】(504371974)オリンパスイメージング株式会社 (2,647)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月8日(2011.6.8)
【出願人】(504371974)オリンパスイメージング株式会社 (2,647)
【Fターム(参考)】
[ Back to top ]