
情報表示装置

【課題】地図や文字等の画像を可動機構の作動状態に応じた適切な状態で表示部に表示させることができる情報表示装置を提供する。
【解決手段】方位検出部158における方位検出の基準方向が、可動機構103を介して連結された第1の筐体101および第2の筐体102のうち、表示部104が保持された第2の筐体102上に設定される。操作スタイルの変更により2つの筐体の位置関係が変化して、使用者に対する表示画面104の方向が変化すると、開閉検出部153において検出される可動機構103の作動状態に応じて、方位検出部158の検出結果が補正され、この補正に応じて、表示画面104上の地図の向きが補正される。更に、地図の向きに関する上記補正後の表示画像に対し、開閉検出部153の検出結果に応じた所定の回転処理が施され、表示画面104上の画像が操作スタイルに応じた適切な向きに制御される。
【解決手段】方位検出部158における方位検出の基準方向が、可動機構103を介して連結された第1の筐体101および第2の筐体102のうち、表示部104が保持された第2の筐体102上に設定される。操作スタイルの変更により2つの筐体の位置関係が変化して、使用者に対する表示画面104の方向が変化すると、開閉検出部153において検出される可動機構103の作動状態に応じて、方位検出部158の検出結果が補正され、この補正に応じて、表示画面104上の地図の向きが補正される。更に、地図の向きに関する上記補正後の表示画像に対し、開閉検出部153の検出結果に応じた所定の回転処理が施され、表示画面104上の画像が操作スタイルに応じた適切な向きに制御される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報表示装置に関するものである。
【背景技術】
【0002】
近年、プロセッサの処理能力の向上や低消費電力技術の進展に伴って、携帯電話やPDAなどの携帯型の電子機器がますます高機能化している。例えば、車載用として広く普及しているGPS(global positioning system)を利用したナビゲーション機能が、携帯電話に搭載されつつある。
【0003】
ナビゲーション機能を有する携帯電話に関しては、例えば特許文献1に記載される従来技術が存在する。
【0004】
特許文献1に記載される技術は、地図上に端末の位置を順次にプロットすることにより、端末の移動の軌跡を地図上に表示させるものであるが、端末において方位の検出をおこなうことができれば、その検出結果を用いて地図の方位を実際の方位に合わせて表示することが可能になり、より実用的なナビゲーション機能を実現することができる。
【0005】
方位の検出は、一般に、地磁気センサを用いて行われる。例えば、地平面に対して水平な面の上に基準となる2次元の座標系が設定され、その各座標軸方向における地磁気の強さが地磁気センサによって測定される。方位角は、この測定によって得られた2次元の地磁気ベクトルと座標軸とのなす角度から求められる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−124581号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、近年の携帯電話は、表示部とキー操作部とがそれぞれ別の筐体に配置されたものが多い。この種の携帯電話は、一般に、2つの筐体が折り畳まれてキー操作部が内側に隠れる状態(クローズ状態)か、または、キー操作部および表示部が共に露出する状態(オープン状態)で使用される。
このように、2つの筐体の位置関係が操作スタイルに応じて変化する構造の携帯電話の場合、地磁気センサが配置される位置によっては、操作スタイルの変更に伴って地磁気センサの測定方向が変化し、方位の検出結果が変わってしまう。
【0008】
また、上述した2筐体型の構造には、クローズ状態において表示部が内側に隠れるタイプと外側に露出したままのタイプとがある。前者のタイプには、例えば、表示部の面とキー操作部の面とが向き合った状態で内側に折り畳まれるタイプがある。後者のタイプには、例えば、表示部の面とキー操作部の面とがほぼ平行な状態で回転し、クローズ状態において、表示部の筐体の下にキー操作部の面が隠れるタイプがある。
後者のタイプの場合、オープン状態およびクローズ状態の何れにおいても表示部が使用可能であるため、操作スタイルの変更によって使用者に対する表示画面の方向が変わる場合には、それに応じて絵や文字の画像も回転させて表示を見やすくすることが好ましい。
ところが、上述のように操作スタイルの変更に伴って方位の検出結果も変化してしまうと、表示部に表示される地図の画像もこの方位に合わせて回転させるため、単に表示画面の方向だけを考慮して画像を回転させたのでは、地図を正しい方位に向けて表示させることはできない。
【0009】
本発明はかかる事情に鑑みてなされたものであり、その目的は、地図や文字等の画像を適切な状態で表示部に表示させることができる情報表示装置を提供することにある。
【課題を解決するための手段】
【0010】
第1の手段は、地図を利用して、現在地の位置と方位の情報を表示する情報表示装置であって、第1の筐体と、少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、上記可動機構の作動状態を判定する作動状態判定手段と、上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、上記作動状態判定手段の判定結果に基づいて上記方位検出手段の検出結果を補正し、当該補正した検出結果に応じて、上記表示手段の表示画面上における上記地図の向きを制御する第1の表示制御手段と、上記作動状態判定手段の判定結果に基づいて、上記第1の表示制御手段における制御結果の上記地図を含む表示画像に所定の回転処理を施す第2の表示制御手段とを有する。
【0011】
第2の手段は、地図を利用して、現在地の位置と方位の情報および付加情報を表示する情報表示装置であって、第1の筐体と、少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、上記可動機構の作動状態を検出する作動状態判定手段と、上記方位検出手段の検出結果に応じて、上記表示手段の表示画面上における上記地図の向き制御する第1の表示制御手段と、上記作動状態判定手段の判定結果に応じて、上記地図の画像とともに表示される上記付加情報の配置を変更する第2の表示制御手段とを有する。
【0012】
上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度が互いに等しい角度となる複数の作動状態を有し、
上記方位検出手段は、上記複数の作動状態において上記基準方向と上記地平面とが所定の角度を有するものとして上記地理的方位を検出してもよい。
この場合、上記方位検出手段は、上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、上記地磁気検出手段において検出される上記複数方向の地磁気と、上記所定の角度に関連する情報とに基づいて、上記複数の作動状態における上記地平面上の方位角を算出する方位角算出手段とを含んでもよい。
【0013】
または、上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度がそれぞれ異なる角度となる複数の作動状態を有し、上記方位検出手段は、上記基準方向と上記地平面とのなす角度が、上記作動状態判定手段の判定結果に対応する所定の角度であるものとして上記地理的方位を検出してもよい。
この場合、上記方位検出手段は、上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、上記地磁気検出手段において検出される上記複数方向の地磁気と、上記作動状態判定手段の判定結果に対応する上記所定の角度の情報とに基づいて、地平面上の方位角を算出する方位角算出手段とを含んでもよい。
【0014】
あるいは、上記方位検出手段は、上記基準方向と地平面とのなす角度を検出する角度検出手段を含み、当該角度検出手段の検出角度に応じた上記地理的方位を検出してもよい。
この場合、上記方位検出手段は、上記基準方向と地平面とのなす角度を検出する角度検出手段と、上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、上記地磁気検出手段において検出される上記複数方向の地磁気と、上記角度検出手段の検出角度とに応じて、上記地平面上の方位角を算出する方位角算出手段とを含んでもよい。
【0015】
更に、上記第1の手段および上記第2の手段は、上記第2の筐体の対向する端部にそれぞれ配置され、磁石を利用して電気信号から音声への変換もしくは音声から電気信号への変換を行う複数の音声変換手段を有し、上記地磁気検出手段は、それぞれの上記声変換手段の間に配置されてもよい。
【発明の効果】
【0016】
本発明によれば、地図や文字等の画像を適切な状態で表示部に表示させることができる。
【図面の簡単な説明】
【0017】
【図1】第1の実施形態に係る携帯電話において地理的位置および地図の情報を取得するためのシステムの構成例を示すブロック図である。
【図2】携帯電話のオープン状態における外観の一例を図解した図である。
【図3】携帯電話のクローズ状態における外観の一例を図解した図である。
【図4】第1の実施形態に係る携帯電話の構成例を示すブロック図である。
【図5】方位検出部の構成例を示すブロック図である。
【図6】地磁気検出部の配置例を図解した図である。
【図7】方位角の算出方法を説明するための図である。
【図8】第1の実施形態に係る携帯電話における、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。
【図9】方位検出の基準方向と表示画面上の基準方向との関係の一例を図解した第1の図である。
【図10】位置情報および地図情報の取得に関する処理の流れを図解したフローチャートである。
【図11】第1の実施形態に係る第1の表示制御部における処理の流れを図解したフローチャートである。
【図12】第1の実施形態に係る第2の表示制御部における処理の流れを図解したフローチャートである。
【図13】第2の実施形態に係る携帯電話における、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。
【図14】方位検出の基準方向と表示画面上の基準方向との関係の一例を図解した第2の図である。
【図15】第2の実施形態に係る第1の表示制御部における処理の流れを図解したフローチャートである。
【図16】第2の実施形態に係る第2の表示制御部における処理の流れを図解したフローチャートである。
【図17】方位検出部の他の構成例を示すブロック図である。
【発明を実施するための形態】
【0018】
以下、ナビゲーション機能や撮像機能を有する多機能型の携帯電話の2つの実施形態について、図面を参照しながら述べる。
【0019】
<第1の実施形態>
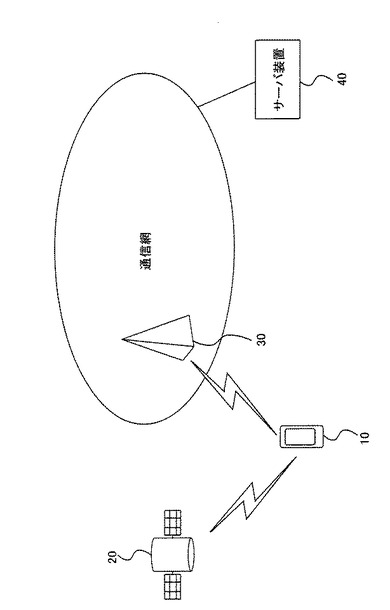
図1は、第1の実施形態に係る携帯電話10において地理的位置および地図の情報を取得するためのシステムの構成例を示すブロック図である。
【0020】
携帯電話10は、既知の軌道を周回する3つまたはそれ以上のGPS衛星20から送信される信号を受信し、その受信信号に関する情報を、基地局30から通信網を経由してサーバ装置40に送信する。
サーバ装置40は、携帯電話10から送られてきた情報に基づいて、携帯電話10の地理的な位置を算出する。更に、算出した位置に基づいて、携帯電話10周辺の地図の情報をデータベースから検索する。そして、算出した位置情報および検索した地図情報を、通信網から基地局30を経由して携帯電話10に送信する。
【0021】
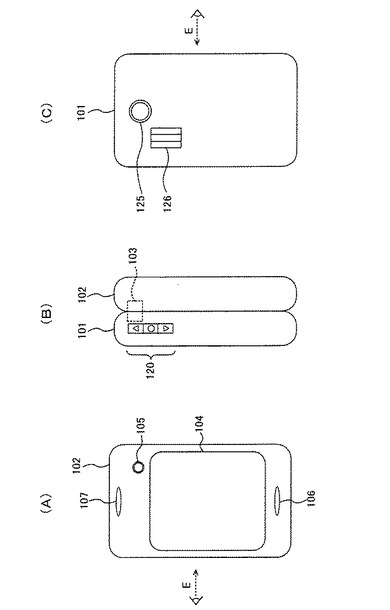
図2および図3は、携帯電話10のオープン状態およびクローズ状態における外観の一例を図解した図である。図2(A),(B),(C)は、オープン状態における携帯電話10の表側、側面、裏側の外観をそれぞれ示す。図3(A),(B),(C)は、クローズ状態における携帯電話10の表側、側面、裏側の外観をそれぞれ示す。
【0022】
図に示すように、携帯電話10は、2つの筐体(第1の筐体101、第2の筐体102)を有しており、これらの筐体が可動機構103を介して連結される。第1の筐体101および第2の筐体102は、何れも角に丸みを帯びた長方形に近い板状の形を有しており、互いのサイズが近似している。これら2つの筐体は、上記した長方形の面上における片側の短辺の中央に近い部分において、長方形の面を互いに向けた状態で、可動機構103により連結される。可動機構103は、互いの長方形の面を貫く方向に伸びる回転軸を中心に、2つの筐体を相対的に回転させる。
【0023】
オープン状態では、図2(A)および図2(C)に示すように、正面もしくは裏面から見ると2つの筐体の長辺が平行な状態になる。連結部に対して離れた側にあるそれぞれの筐体の短辺は、上述の回転軸を間に挟んで平行に向き合う配置となり、最も離れた状態になる。また、図2(B)に示すように、第2の筐体102は、横から見ると第1の筐体101に対し傾いた状態となる。
【0024】
一方、クローズ状態においても、図3(A)および図3(C)に示すように、2つの筐体の長辺は平行な状態になるが、連結部に対して離れた側にあるそれぞれの筐体の短辺は、上述の回転軸を間に挟まないで平行に向き合う配置となり、最も近づいた状態になる。また、図3(B)に示すように、第1の筐体101および第2の筐体102の長方形の面は横から見てほぼ平行になり、2つの筐体は互いに重ね合わされた状態となる。
【0025】
第2の筐体102に接している側の第1の筐体101の面上には、図2(A)に示すように、操作キー110が配置される。操作キー110は、数字・記号等を入力するためのキーや、各種の機能を選択・実行するためのキーなどを含んでおり、主としてオープン状態において使用される。クローズ状態においては、図3に示すように、第2の筐体102によって覆われた状態となり、使用不能になる。この操作キー110は、後述するキー入力部154に含まれる。
【0026】
また、連結部を上側にして操作キー110の面を見た場合における第1の筐体101の左側面(矢印Eの方向から見た第1の筐体101の側面)には、連結部に近い側に、操作キー120が配置される。操作キー120は、各種の機能を選択・実行するためのキーを含んでおり、主としてクローズ状態において使用される。操作キー120も、操作キー110と同様に、キー入力部154に含まれる。
【0027】
更に、連結部を上側にして操作キー110の面を見た場合における第1の筐体101の下側の側面には、そのほぼ中央に、マイク用の穴109が設けられる。
【0028】
また、第1の筐体101に接していない側の第2の筐体102の面上には、図2(A)および図3(A)に示すように、矩形の表示画面104が配置される。表示画面104は、例えばLCD(liquid crystal display)パネルや有機EL(electroluminescent)パネルなどの表示デバイスによって構成され、後述の表示部155に含まれる。
【0029】
この表示画面104と同一の面上には、両端の短辺にそれぞれ近い位置に、表示画面104を挟んでスピーカ用の穴106および107が設けらる。穴107は連結部側の短辺の近くに配置され、穴106はその反対側の短辺の近くに配置される。
さらに、この面上には、連結部を下にして見た場合の左下隅に、カメラレンズ105が配置されている。カメラレンズ105は、後述の撮像部157に含まれる。
【0030】
また、図2(C)および図3(C)に示すように、第2の筐体102に接していない側の第1の筐体101の面には、カメラレンズ125およびフラッシュランプ126が配置されている。カメラレンズ125は、この面上の連結部側の短辺に近い位置に配置されており、フラッシュランプ126は、連結部を上にして見た場合におけるカメラレンズ125の左下側の位置に配置されている。カメラレンズ125およびフラッシュランプ126は、撮像部157に含まれる。
【0031】
図4は、第1の実施形態に係る携帯電話10の構成例を示すブロック図である。図4に例示する携帯電話10は、通信処理部150と、GPS受信部151と、記憶部152と、開閉判定部153と、キー入力部154と、表示部155と、音声入出力部156と、撮像部157と、方位検出部158と、制御部159とを有する。開閉判定部153は、作動状態判定手段の一実施形態である。方位検出部158は、方位検出手段の一実施形態である。
【0032】
通信処理部150は、基地局30との間の無線通信に関する処理を行う。例えば、制御部159から出力される送信データに所定の変調処理を施して無線信号に変換し、アンテナから送出する。また、アンテナにおいて受信された無線信号に所定の復調処理を施して受信データを再生し、制御部159に出力する。
【0033】
GPS受信部151は、GPS衛星20から送出される信号を受信して増幅、ノイズ除去、変調等の信号処理を施し、サーバ装置40において位置情報を算出するために必要な情報を取得する。
【0034】
記憶部152は、制御部159において実行されるプログラムや、制御部159の処理で用いられる定数データ、一時的に記憶が必要な変数データ、撮像画像データなどを記憶する。
【0035】
開閉判定部153は、可動機構103による第1の筐体101および第2の筐体102の回転の状態が、上述したオープン状態またはクローズ状態の何れであるかを判定する。
【0036】
キー入力部154は、上述した操作キー110、120に対してキーを押下する等の入力操作が行なわれた場合、これに応じた信号を発生して制御部159に出力する。
【0037】
表示部155は、制御部159において生成される画像データに応じた画像を表示画面104に表示させる。
【0038】
音声処理部156は、入力される音声をマイクにおいて電気的な音声信号に変換して増幅、アナログ−デジタル変換、符号化等の信号処理を施し、その処理結果の音声データを制御部159へ出力する。また、制御部159から入力される音声データに復号化、デジタル−アナログ変換、増幅等の信号処理を施して音声信号を生成し、これをスピーカにおいて音声に変換する。
【0039】
撮像部157は、上述したカメラレンズ105や125において入射した像を撮像して静止画や動画の画像データを生成し、制御部159に出力する。また、制御部159の制御に従って、撮像時にフラッシュランプ126を点灯させる。
【0040】
方位検出部158は、第2の筐体102上に予め設定された基準方向Zの地理的方位を検出する。基準方向Zは、例えば、第2の筐体102における連結部側の短辺から連結部より離れた側の短辺へ向かう方向(図9参照)へ、表示画面104と平行に設定される。
【0041】
また方位検出部158は、方位の検出にあたって、地平面に対する基準方向Zの傾斜角も加味する。通常の使用状態において、使用者は第1の筐体101を把持しながら第2の筐体102を回転させるものとすると、地平面に対する基準方向Zの傾斜角は、オープン状態およびクローズ状態において等しくなる。したがって、方位検出部158は、オープン状態およびクローズ状態における基準方向Zの地理的方位として、この傾斜角がオープン状態およびクローズ状態において共通な所定の角度を有するものとした場合の方位を検出する。
【0042】
ここで、方位検出部158のより詳細な構成について、図5〜図7を参照して説明する。
【0043】
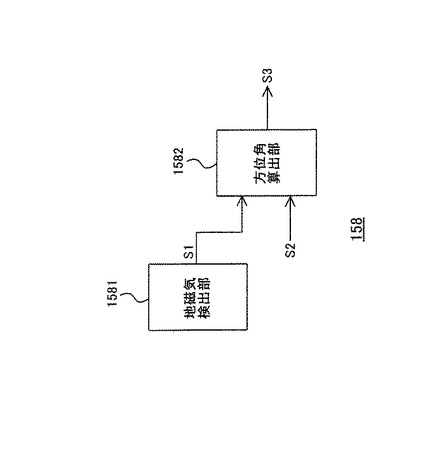
図5は、方位検出部158の構成例を示すブロック図である。
図5に例示する方位検出部158は、地磁気検出部1581および方位角算出部1582を有する。
地磁気検出部1581は、地磁気検出手段の一実施形態である。
方位角算出部1582は、方位角算出手段の一実施形態である。
【0044】
地磁気検出部1581は、第1の筐体101に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する。例えば、第1の筐体101に設定される3次元の直角座標系の各座標軸方向における3軸の地磁気成分S1を検出する。地磁気の検出には、コイルの励磁を利用する方法や、ホール効果を利用する方法、磁気抵抗素子を利用する方法など、種々の方法を用いることができる。
【0045】
なお、地磁気検出部1581は、地磁気以外の磁気の影響によって検出結果に誤差を生じるため、第1の筐体101に含まれる磁気発生源からなるべく離間して配置されることが好ましい。
【0046】
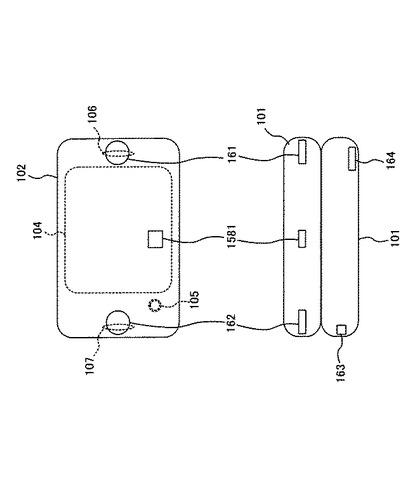
図6は、地磁気検出部1581の配置例を図解した図である。図6の例によると、スピーカ用の穴106および107(図2(A))に近い第2の筐体102の端部には、スピーカ161および162がそれぞれ配置される。スピーカ161はオープン状態における電話機の音声出力に使用され、スピーカ162はクローズ状態における電話機の音声出力に使用される。また、マイク用の穴109(図2(A))に近い第1の筐体101の端部にはマイク163が配置されており、当該端部に対向する他方の端部には着信通知用のスピーカ164が配置される。これらのマイクやスピーカは、何れも磁石を利用して音声から電気信号への変換もしくは電気信号から音声への変換を行うため、この磁石によって発生する磁気が地磁気検出部1581の検出誤差の原因となり得る。
【0047】
そこで、図6の例では、地磁気検出部1581は、スピーカ161が配置される端部とスピーカ162が配置される端部とからそれぞれ離間した、第2の筐体102の中央の領域に配置される。これにより、スピーカ161および162からの距離が長くなり、これらの磁気の影響が緩和される。また、クローズ状態においては第1の筐体101のマイク163およびスピーカ164からの距離も長くなり、これらの磁気の影響も緩和される。
【0048】
方位角算出部1582は、地磁気検出部1581において検出される各方向の地磁気成分S1と、オープン状態およびクローズ状態において共通な上述の傾斜角度の情報S2とに応じて、地平面上における方位角を算出する。
【0049】
なお、この傾斜角度の情報S2は、例えば記憶部152に定数データとして記憶されており、制御部159によって記憶部152から読み出されて方位角算出部1582に供給される。これにより、傾斜角の設定値を容易に変更することが可能となる。
【0050】
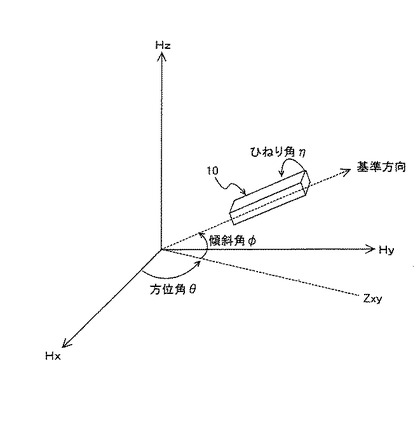
図7は、方位角の算出方法を説明するための図である。図7において、座標軸Hx、Hy、Hzを有する直角座標系は、地平面上に設定される基準の座標系である。すなわち、座標軸HxおよびHyは地平面に平行な座標軸であり、それぞれ所定の方位を向く。また、座標軸Hzは地平面に垂直な方向を向く座標軸である。
方位角θは、基準方向Zのベクトルを地平面に正射影した像Zxyと座標軸Hxとのなす角度である。傾斜角φは、この像Zxyと基準方向Zのベクトルとのなす角度である。また、ひねり角ηは、基準方向Zのベクトルを回転軸として携帯電話10を回転させた角度である。方位角θ、傾斜角φ、ひねり角ηが何れもゼロの場合、第1の筐体101に設定される地磁気検出の座標系は、図7に示す座標軸Hx、Hy、Hzの座標系と一致する。
【0051】
ここで、座標軸Hxに対応する地磁気の検出値をα、座標軸Hyに対応する地磁気の検出値をβ、座標軸Hzに対応する地磁気の検出値をγとすると、図7に示す方位角θの正接tanθは次式で表される。
【0052】
〔数1〕
tanθ=β/(γ・sinφ−α・cosφ)
…
(1)
【0053】
ただし、式(1)において、ひねり角ηはゼロとしている。
方位角算出部1582は、例えば式(1)に示すような関係を用いて、3軸の地磁気の検出値から方位角を算出する。
以上が、方位検出部158の説明である。
【0054】
図4の説明に戻る。制御部159は、記憶部152に格納されるプログラムに基づいて処理を実行するコンピュータを有しており、携帯電話10の全体的な動作に関わる種々の処理を行う。例えば、電話機の機能に関連する処理として、キー入力部154におけるキー入力操作に応じて通信処理部150の発呼、着信のシーケンスを制御する処理や、音声処理部156において入出力される音声データを通信処理部150において送受信させる処理を行う。
撮像機能に関連する処理としては、キー入力部154におけるキー入力操作に応じて撮像部157に静止画や動画の撮像処理を実行させる処理や、当該撮像処理によって生成される画像データに圧縮符号化等の画像処理を施して記憶部152に格納する処理を行う。静止画の撮影時には、適切なタイミングでフラッシュランプ126を点灯させる処理も行う。
【0055】
また、制御部159は、ナビゲーション機能に関連する処理として、地理的位置と地図の情報をサーバ装置40から取得する処理や、方位検出部158の検出結果に応じて表示部155の表示画面104上における地図の向きを制御する処理、開閉判定部153の検出結果に応じて表示画面104の画像に回転処理を施す処理を行う。
【0056】
図8は、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。図8に例示するプログラムは、地図情報取得部1591と、記号画像生成部1592と、第1の表示制御部1593と、第2の表示制御部1594とを有する。第1の表示制御部1593は、第1の表示制御手段の一実施形態である。第2の表示制御部1594は、第2の表示制御手段の一実施形態である。
【0057】
地図情報取得部1591は、地理的位置と地図の情報をサーバ装置40から取得するための処理を実行する。すなわち、GPS受信部151においてGPS衛星20の信号を受信させて、その受信信号に関する情報を通信処理部150からサーバ装置40に宛てて送信させることにより、サーバ装置40から返送される地理的位置と地図の情報を取得する。
【0058】
記号画像生成部1592は、地図とともに表示画面104に表示させる文字やマーク、シンボルなどの記号(地図記号など)の画像に関する情報を生成する。
【0059】
第1の表示制御部1593は、開閉判定部153において判定される可動機構103の作動状態(オープン状態、クローズ状態)に応じて方位検出部158の検出結果を補正し、当該補正した検出結果に応じて表示部155の表示画面104上における地図の向きを制御する。
【0060】
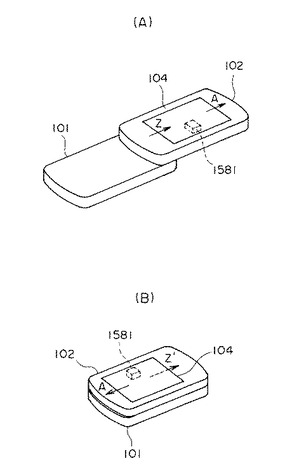
図9は、方位検出の基準方向Zと表示画面104上の基準方向Aとの関係の一例を図解した図である。図9の例において、方位検出の基準方向Zは、第2の筐体102における連結部より近い側の短辺から連結部より離れた側の短辺へ向かう方向に設定される。また、表示画面104上の基準方向Aは、第2の筐体102の連結部に近い側の短辺から連結部より離れた側の短辺へ向かう向きに設定される。
例えばこのように方位検出の基準方向Zおよび表示画面の基準方向Aが設定されるものとすると、第1の表示制御部1593は、開閉判定部153においてオープン状態が判定された場合、方位検出部158において検出される基準方向Zの方位と、表示画面104の基準方向Aにおける地図の方位とが等しくなるように、表示画面104上の地図の向きを制御する。この場合、方位検出の基準方向Zと表示画面上の方位とが一致するため、表示画面104には正しい方向を向いた地図が表示される。
【0061】
一方、開閉判定部153においてクローズ状態が判定された場合、第1の表示制御部1593は、方位検出部158において検出される基準方向Zの方位を180°反転させる補正を行い、この補正後の方位と表示画面104の基準方向Aにおける地図の方位とが等しくなるように、表示画面104上の地図の向きを制御する。この場合の方位の検出結果は、方位検出の基準方向Zを180°反転させた場合の検出結果(すなわち基準方向Z'における方位の検出結果)と等価になるため、方位検出の基準方向Z'と表示画面上の方位とが180°反転した状態となり、表示画面104には逆方向を向いた地図が表示される。
【0062】
また、上述した地図に加えて、第1の表示制御部1592は、地図情報取得部1591において取得された現在地の地理的位置を示すマークを地図上に表示させるとともに、方向Aを表示画面104の上方向として記号画像生成部1592の記号画像を表示させる。
【0063】
第2の表示制御部1594は、開閉判定部153の判定結果S4に応じて、第1の表示制御部1593における制御結果の表示画像に所定の回転処理を施す。
すなわち、開閉判定部153においてオープン状態が判定された場合、第1の表示制御部1593における制御結果の表示画像をそのまま表示画面104に表示させる。また、開閉判定部153においてクローズ状態が判定された場合、第1の表示制御部1593における制御結果の表示画像を表示画面104上において180°回転させて表示させる。
【0064】
次に、上述した構成を有する携帯電話10の動作について、ナビゲーション機能を中心に説明する。
【0065】
図10は、地図情報取得部1591における位置情報および地図情報の取得に関する処理の流れを図解したフローチャートである。
ステップST101〜ST103は地図情報取得部1591の処理を示し、ステップST201〜ST203はサーバ装置40の処理を示す。
【0066】
先ず、地図情報取得部1591は、GPS受信部151においてGPS衛星20の信号を受信させて、その受信信号に関する情報を取得する(ステップST101)。次いで、取得した情報を通信処理部150からサーバ装置40に宛てて送信させる(ステップST102)。
【0067】
通信処理部150から送信された情報は、基地局30に受信され、通信網を介してサーバ装置40に伝送される。
サーバ装置は、この情報を携帯電話10からの処理要求として受信し(ステップST201)、受信した情報に基づいて、携帯電話10の地理的な位置を算出する。更に、この算出した位置に基づいて、携帯電話10周辺の地図の情報をデータベースから検索する(ステップST202)。そして、算出した位置情報および検索した地図情報を、処理要求に応答した処理結果として、通信網から基地局30を経由して携帯電話10に返信する(ステップST203)。
【0068】
地図情報取得部1591は、ステップST101において送信した情報に応答するサーバ装置40からの返信を待ち、通信処理部150においてこの返信が受信されると、これに含まれる位置情報および地図情報を取得する(ステップST103)。
【0069】
図11は、第1の表示制御部1593における処理の流れを図解したフローチャートである。
【0070】
第1の表示制御部1593は、開閉判定部153の判定結果S4に基づいて、可動機構103がオープン状態またはクローズ状態の何れにあるかを判定する(ステップST301)。
【0071】
オープン状態であると判定した場合、第1の表示制御部1593は、地図情報取得部1591において取得される地図情報および位置情報と、記号画像生成部1592において生成される記号画像の情報と、方位検出部158において検出される方位の情報S3とに応じて、表示部155の表示画面104に表示させる画像データを生成する(ステップST303)。
すなわち、第1の表示制御部1593は、方位検出部158において検出される基準方向Zの方位と表示画面104の基準方向Aにおける地図の方位とが等しくなるように表示画面104上での向きが制御された地図と、この地図上における現在地の位置を示すマークと、基準方向Aを表示画面104の上方向として配置された文字等の記号画像とを、表示画面104に表示させる画像データを生成する。
【0072】
一方、クローズ状態であると判定した場合、第1の表示制御部1593は、方位検出部158における方位の検出結果を180°反転させ(ステップST302)、この補正した方位の情報を用いて、上述したステップST303の画像データ生成を行う。
これにより、オープン状態およびクローズ状態における表示画面104の画像を比較すると、表示画面104の基準方向Aに対する地図および記号の向きは、両状態において同じになる。すなわち、クローズ状態において第1の表示制御部1593により生成される画像データを表示画面104に表示させた場合、使用者から見た表示画像の向きは、地図および記号を含めて、第2の筐体102の回転に伴い180°反転するが、基準方向Aに対する地図および記号の向きはオープン状態と変わらない。
その後、上述したナビゲーション用の地図を表示する処理モードの終了または続行の判定を行い(ステップST304)、続行が指示された場合には、ステップST301〜ST303の処理を繰り返す。
【0073】
図12は、第2の表示制御部1594における処理の流れを図解したフローチャートである。
【0074】
第2の表示制御部1594は、開閉判定部153の判定結果S4に基づいて、可動機構103がオープン状態またはクローズ状態の何れにあるかを判定する(ステップST401)。
オープン状態であると判定した場合、第1の表示制御部1593において生成された画像データを表示部155に出力してその画像を表示画面104に表示させる(ステップST403)。クローズ状態の場合は、オープン状態における表示画像が表示画面104上において180°回転するように、第1の表示制御部1593において生成された画像データを変換して(ステップST402)表示部155に出力する(ステップST403)。
その後、上述したナビゲーション用の地図を表示する処理モードの終了または続行の判定を行い(ステップST404)、続行が指示された場合には、ステップST401〜ST403の処理を繰り返す。
【0075】
以上説明したように、第1の実施形態によれば、方位検出部158における方位検出の基準方向が、可動機構103を介して連結された第1の筐体101および第2の筐体102のうち、表示部104が保持された第2の筐体102上に設定される。操作スタイルの変更により、第1の筐体101および第2の筐体102の位置関係が変化して、使用者に対する表示画面104の方向が変化すると、開閉判定部153において判定される可動機構103の作動状態(オープン状態またはクローズ状態)に応じて、方位検出部158における方位の検出結果が補正され、この補正に応じて、表示画面104上における地図の向きが補正される。更に、地図の向きに関する上記の補正後の表示画像に対して、開閉判定部153の判定結果に応じた所定の回転処理が施され、表示画面104上の画像が操作スタイルに応じた適切な方向を向くように制御される。
すなわち、本実施形態の構造では、操作スタイルの変更により表示画面104の方向が変化すると、これに連動して方位検出の基準方向の地理的な方位が変化するため、方位の検出結果の変化に応じて表示画面104上における地図の向きが変化する。そのため、操作スタイルの変更による地図の方向の変化には、使用者に対する表示画面104の方向変化とともに、表示画面104上における地図の方向変化が含まれる。これに対し、操作スタイルの変更による記号画像の方向変化には、使用者に対する表示画面104の方向変化のみである。したがって、上述のように方位の検出結果に補正を行うことによって地図の方向を補正し、次いで、地図と記号画像とを含む表示画像の全体に回転処理を施すことにより、地図と記号画像とにそれぞれ異なる角度の回転を与えることが可能になり、両者を操作スタイルに応じた適切な方向に向けることが可能になる。
【0076】
また、可動機構103の作動状態に基づいて方位の検出結果を補正し、この補正された方位に応じて地図の向きを制御することにより地図を回転させるため、検出方位に応じて地図の向きを制御する通常の処理の他に、可動機構103の作動状態に応じて地図の向きを制御する特別な処理を設ける必要がなく、処理を複雑化させることがない。
【0077】
更に、可動機構の作動状態に応じて表示画像に回転処理を施す第2の表示制御部1594のプログラムについては、本実施形態と同様な2筐体の構造を有するとともに地図によるナビゲーション機能を有さない他の機器の同様なプログラムを容易に転用することが可能である。これにより、設計作業の負担を軽減できるとともに、ソフトウェアのバグの発生を減らすことができる。
【0078】
また、本実施形態によれば、可動機構103における2つの作動状態(オープン状態およびクローズ状態)において、表示部155の表示画面104と地平面とのなす角度を一定に保った場合に、方位検出の基準方向Zと地平面とのなす角度は、この2つの作動状態において互いに等しい角度となる。方位検出部158は、この2つの作動状態における基準方向Zの地理的方位として、基準方向Zと地平面とが所定の角度(例えば45°)を有するものとした場合の方位を検出する。
通常、使用者は表示画面104に対する視線の方向を一定に保とうとするため、方位検出の基準方向Zと地平面とのなす傾斜角は可動機構103の作動状態に依らずほぼ一定になる。したがって、この2つの作動状態において共通の傾斜角を加味した方位角を算出することが可能になるため、作動状態ごとに傾斜角が異なる場合に比べて処理を簡略化することができる。
【0079】
また、第2の筐体102の対向する端部には、スピーカ106、107といった磁気発生源がそれぞれ配置されている。磁気検出部1581は、この磁気発生源による磁界形成領域であっても地磁気を検出し得る磁界強度を有した領域として、第2の筐体102の端部に配置されるこれらの磁気発生源から離れた第2の筐体102の中央付近の領域に配置されている。
したがって、磁気検出部1581に対するこれらの磁気発生源からの磁気の影響が緩和され、地磁気の正常な検出が可能になる。
【0080】
<第2の実施形態>
次に、第2の実施形態について述べる。第2の実施形態は、ナビゲーション時の表示制御に関連する処理として、上述した第1の実施形態とは異なる処理を行う。
【0081】
図13は、第2の実施形態に係る携帯電話において、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。図13に例示するプログラムは、地図情報取得部1591と、記号画像生成部1592と、第1の表示制御部1593Aと、第2の表示制御部1594とを有する。ただし、図8と図13の同一符号は同一の構成要素を示す。第1の表示制御部1593Aは、第1の表示制御手段の一実施形態である。第2の表示制御部1594Aは、第2の表示制御手段の一実施形態である。
【0082】
第2の表示制御部1594Aは、記号画像生成部1592において生成される記号画像の表示画面104上における配置を、開閉判定部153の判定結果に応じて変更する。すなわち、開閉判定部153においてオープン状態が判定された場合は、表示画面の基準方向Aが上方向となるように記号画像の配置を設定し、クローズ状態が判定された場合は、この基準方向Aが下方向となるように記号画像の配置を設定する。
【0083】
第1の表示制御部1593Aは、方位検出部158の検出結果に応じて表示部155の表示画面104上における地図の向きを制御する。
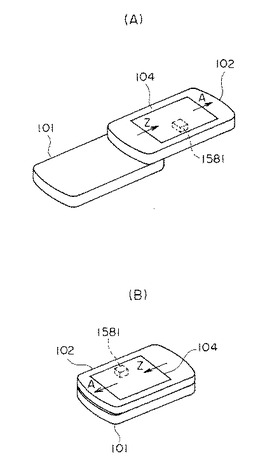
すなわち、第1の表示制御部1593Aは、図14(A)および(B)に示すように、オープン状態およびクローズ状態の何れにおいても、方位検出部158において検出される基準方向Zの方位と、表示画面104の基準方向Aにおける地図の方位とが等しくなるように、表示画面104上の地図の向きを制御する。
これにより、方位検出の基準方向Zと表示画面上の方位とが一致するため、表示画面104には何れの作動状態においても正しい方向を向いた地図が表示される。
【0084】
また、上述した地図に加えて、第1の表示制御部1592Aは、地図情報取得部1591において取得された現在地の地理的位置を示すマークを地図上に表示させるとともに、第2の表示制御部1594Aにおいて配置が設定された記号画像を表示させる。
【0085】
上述した構成を有する第2の実施形態に係る携帯電話について、第1の実施形態と異なる表示制御に関連する部分を中心に説明する。
【0086】
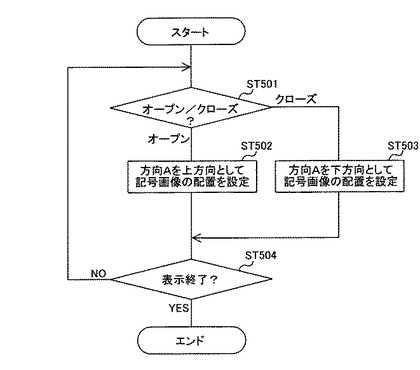
図15は、第2の表示制御部1594Aにおける処理の流れを図解したフローチャートである。
【0087】
第2の表示制御部1594は、開閉判定部153の判定結果S4に基づいて、可動機構103がオープン状態またはクローズ状態の何れにあるかを判定する(ステップST501)。オープン状態であると判定した場合は、表示画面の基準方向Aを上方向として記号画像の配置を設定し(ステップST502)、クローズ状態であると判定した場合は、この基準方向Aを下方向として記号画像の配置を設定する(ステップST503)。
その後、上述したナビゲーション用の地図を表示する処理モードの終了または続行の判定を行い(ステップST504)、続行が指示された場合には、ステップST301〜ST303の処理を繰り返す。
【0088】
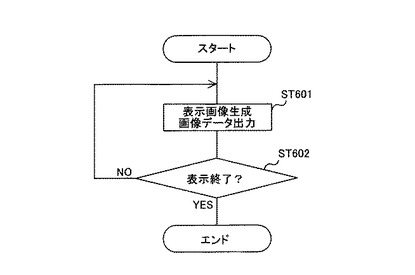
図16は、第1の表示制御部1593Aにおける処理の流れを図解したフローチャートである。
第1の表示制御部1593Aは、地図情報取得部1591において取得される地図情報および位置情報と、第2の表示制御部1594Aにおいて表示画面104上の配置が設定された記号画像の情報と、方位検出部158において検出される方位の情報S3とに応じて、表示部155の表示画面104に表示させる画像データを生成する(ステップST601)。
すなわち、第1の表示制御部1593Aは、方位検出部158において検出される基準方向Zの方位と表示画面104の基準方向Aにおける地図の方位とが等しくなるように表示画面104上での向きが制御された地図と、この地図上における現在地の位置を示すマークと、第2の表示制御部1594Aにおいて基準方向Aが表示画面104の上方向または下方向となるように配置が設定された文字等の記号画像とを、表示画面104に表示させる画像データを生成する。
【0089】
以上説明したように、第2の実施形態によれば、可動機構103の作動状態に応じて記号画像の配置(向きや位置など)を適切な状態に変更しつつ、表示画面104上における地図の向きの制御方法については可動機構103の作動状態に依らず同一とすることにより、使用者に表示される地図および記号の向きを操作スタイルに応じた適切な状態に設定することができる。
その他、可動機構の作動状態ごとに傾斜角が異なる場合に比べて処理を簡略化することができる点や、磁気検出部1581に対する第2の筐体102の磁気発生源からの磁気の影響が緩和される点は、上述した第1の実施形態と同様である。
【0090】
なお、本発明は上述した実施形態に限定されず、種々の改変が可能である。
【0091】
例えば、上述した実施形態では、傾斜角に関する情報として、可動機構103の作動状態に対応して予め設定された傾斜角のデータが方位角の算出に用いられているが、例えば図17に示すように、重力加速度の方向等に基づいて傾斜角を検出する傾斜角検出部1583(角度検出手段に対応する)を設けて、その結果を方位角の検出に用いる構成としてもよい。すなわち、方位角算出部1582が、地磁気検出部1581で検出される地磁気と傾斜角度検出部1583で検出される傾斜角とに応じて方位角を算出する構成としてもよい。
これにより、より正確な傾斜角が得られるため、方位の検出精度を高めることが可能である。また、傾斜角検出部1583において2次元の傾斜角を検出するものとすれば、傾斜角に加えてひねり角の情報も方位角の算出に用いることが可能になるため、更に正確な方位を検出することが可能になる。
【0092】
上述した実施形態では、可動機構103における2つの作動状態(オープン状態およびクローズ状態)において、表示部155の表示画面104と地平面とのなす角度を一定に保った場合に、方位検出の基準方向Zと地平面とのなす角度は、この2つの作動状態において互いに等しい角度となる例が示されているが、本発明はこれに限定されない。
【0093】
例えば、第1の筐体101に対する第2の筐体102の傾きがオープン状態およびクローズ状態の中間の位置となるような作動状態では、基準方向Aと地平面とがほぼ平行、すなわち傾斜角がゼロになる。この作動状態は、オープン状態およびクローズ状態とは傾斜角が異なるため、これらと同一の傾斜角で方位角を算出してしまうと誤差を生じる。
【0094】
このように、表示画面と地平面とのなす角度を一定に保った場合に、方位検出の基準方向と地平面とのなす傾斜角度がそれぞれ異なる角度となる複数の作動状態を可動機構が持つ場合にも、本発明は適用可能である。
例えば、方位検出部158は、地平面に対する基準方向Zの傾斜角が、開閉判定部153の判定結果に対応する所定の角度であるものとして、地理的方位の検出を行う。この場合の傾斜角の情報は、例えば、データ・テーブルとして記憶部152に予め格納される。方位の検出が行われる場合、制御部159は、開閉判定部153の判定結果に関連付けられた傾斜角の情報をこのデータ・テーブルから読み出して方位検出部158に渡し、方位検出部158は、制御部159から取得したこの傾斜角の情報に基づいて方位の検出を行う。
このような構成により、可動機構103の作動状態に応じた適切な傾斜角の情報に基づいて方位を検出することが可能になり、方位の検出精度を高めることができる。
【0095】
上述した実施形態では、地磁気検出の基準の座標系として直交座標系を用いているが、これに限らず、例えば座標軸が斜交した座標系を当該基準の座標系としても、方位角の算出は可能である。
【0096】
また、上述した実施形態では、制御部159の処理がコンピュータによってプログラムに基づいて処理される例を示したが、これらの処理の少なくとも一部をハードウェアによって実行させることも可能である。
逆に、制御部159以外の他のユニットにおける少なくとも一部の処理を、制御部159のコンピュータにおいて実行させてもよい。例えば、方位検出部158における方位角算出部1582の処理は、制御部159のコンピュータにおいて実行させてもよい。
【符号の説明】
【0097】
10…携帯電話、20…GPS衛星、30…基地局、40…サーバ装置、102…第1の筐体、102…第2の筐体、103…可動機構、104…表示画面、105,125…カメラレンズ、106,107…スピーカ用の穴、109…マイク用の穴、110,120…操作キー、126…フラッシュランプ、150…通信処理部、151…GPS受信部、152…記憶部、153…開閉判定部、154…キー入力部、155…表示部、156…音声処理部、157…撮像部、158…方位検出部、159…制御部、161,162,164…スピーカ、163…マイク、1581…地磁気検出部、1582…方位角算出部、1583…傾斜角検出部、1591…地図情報取得部、1592…記号画像生成部、1593,1593A…第1の表示制御部、1594,1594A…第2の表示制御部__
【技術分野】
【0001】
本発明は、情報表示装置に関するものである。
【背景技術】
【0002】
近年、プロセッサの処理能力の向上や低消費電力技術の進展に伴って、携帯電話やPDAなどの携帯型の電子機器がますます高機能化している。例えば、車載用として広く普及しているGPS(global positioning system)を利用したナビゲーション機能が、携帯電話に搭載されつつある。
【0003】
ナビゲーション機能を有する携帯電話に関しては、例えば特許文献1に記載される従来技術が存在する。
【0004】
特許文献1に記載される技術は、地図上に端末の位置を順次にプロットすることにより、端末の移動の軌跡を地図上に表示させるものであるが、端末において方位の検出をおこなうことができれば、その検出結果を用いて地図の方位を実際の方位に合わせて表示することが可能になり、より実用的なナビゲーション機能を実現することができる。
【0005】
方位の検出は、一般に、地磁気センサを用いて行われる。例えば、地平面に対して水平な面の上に基準となる2次元の座標系が設定され、その各座標軸方向における地磁気の強さが地磁気センサによって測定される。方位角は、この測定によって得られた2次元の地磁気ベクトルと座標軸とのなす角度から求められる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−124581号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、近年の携帯電話は、表示部とキー操作部とがそれぞれ別の筐体に配置されたものが多い。この種の携帯電話は、一般に、2つの筐体が折り畳まれてキー操作部が内側に隠れる状態(クローズ状態)か、または、キー操作部および表示部が共に露出する状態(オープン状態)で使用される。
このように、2つの筐体の位置関係が操作スタイルに応じて変化する構造の携帯電話の場合、地磁気センサが配置される位置によっては、操作スタイルの変更に伴って地磁気センサの測定方向が変化し、方位の検出結果が変わってしまう。
【0008】
また、上述した2筐体型の構造には、クローズ状態において表示部が内側に隠れるタイプと外側に露出したままのタイプとがある。前者のタイプには、例えば、表示部の面とキー操作部の面とが向き合った状態で内側に折り畳まれるタイプがある。後者のタイプには、例えば、表示部の面とキー操作部の面とがほぼ平行な状態で回転し、クローズ状態において、表示部の筐体の下にキー操作部の面が隠れるタイプがある。
後者のタイプの場合、オープン状態およびクローズ状態の何れにおいても表示部が使用可能であるため、操作スタイルの変更によって使用者に対する表示画面の方向が変わる場合には、それに応じて絵や文字の画像も回転させて表示を見やすくすることが好ましい。
ところが、上述のように操作スタイルの変更に伴って方位の検出結果も変化してしまうと、表示部に表示される地図の画像もこの方位に合わせて回転させるため、単に表示画面の方向だけを考慮して画像を回転させたのでは、地図を正しい方位に向けて表示させることはできない。
【0009】
本発明はかかる事情に鑑みてなされたものであり、その目的は、地図や文字等の画像を適切な状態で表示部に表示させることができる情報表示装置を提供することにある。
【課題を解決するための手段】
【0010】
第1の手段は、地図を利用して、現在地の位置と方位の情報を表示する情報表示装置であって、第1の筐体と、少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、上記可動機構の作動状態を判定する作動状態判定手段と、上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、上記作動状態判定手段の判定結果に基づいて上記方位検出手段の検出結果を補正し、当該補正した検出結果に応じて、上記表示手段の表示画面上における上記地図の向きを制御する第1の表示制御手段と、上記作動状態判定手段の判定結果に基づいて、上記第1の表示制御手段における制御結果の上記地図を含む表示画像に所定の回転処理を施す第2の表示制御手段とを有する。
【0011】
第2の手段は、地図を利用して、現在地の位置と方位の情報および付加情報を表示する情報表示装置であって、第1の筐体と、少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、上記可動機構の作動状態を検出する作動状態判定手段と、上記方位検出手段の検出結果に応じて、上記表示手段の表示画面上における上記地図の向き制御する第1の表示制御手段と、上記作動状態判定手段の判定結果に応じて、上記地図の画像とともに表示される上記付加情報の配置を変更する第2の表示制御手段とを有する。
【0012】
上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度が互いに等しい角度となる複数の作動状態を有し、
上記方位検出手段は、上記複数の作動状態において上記基準方向と上記地平面とが所定の角度を有するものとして上記地理的方位を検出してもよい。
この場合、上記方位検出手段は、上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、上記地磁気検出手段において検出される上記複数方向の地磁気と、上記所定の角度に関連する情報とに基づいて、上記複数の作動状態における上記地平面上の方位角を算出する方位角算出手段とを含んでもよい。
【0013】
または、上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度がそれぞれ異なる角度となる複数の作動状態を有し、上記方位検出手段は、上記基準方向と上記地平面とのなす角度が、上記作動状態判定手段の判定結果に対応する所定の角度であるものとして上記地理的方位を検出してもよい。
この場合、上記方位検出手段は、上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、上記地磁気検出手段において検出される上記複数方向の地磁気と、上記作動状態判定手段の判定結果に対応する上記所定の角度の情報とに基づいて、地平面上の方位角を算出する方位角算出手段とを含んでもよい。
【0014】
あるいは、上記方位検出手段は、上記基準方向と地平面とのなす角度を検出する角度検出手段を含み、当該角度検出手段の検出角度に応じた上記地理的方位を検出してもよい。
この場合、上記方位検出手段は、上記基準方向と地平面とのなす角度を検出する角度検出手段と、上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、上記地磁気検出手段において検出される上記複数方向の地磁気と、上記角度検出手段の検出角度とに応じて、上記地平面上の方位角を算出する方位角算出手段とを含んでもよい。
【0015】
更に、上記第1の手段および上記第2の手段は、上記第2の筐体の対向する端部にそれぞれ配置され、磁石を利用して電気信号から音声への変換もしくは音声から電気信号への変換を行う複数の音声変換手段を有し、上記地磁気検出手段は、それぞれの上記声変換手段の間に配置されてもよい。
【発明の効果】
【0016】
本発明によれば、地図や文字等の画像を適切な状態で表示部に表示させることができる。
【図面の簡単な説明】
【0017】
【図1】第1の実施形態に係る携帯電話において地理的位置および地図の情報を取得するためのシステムの構成例を示すブロック図である。
【図2】携帯電話のオープン状態における外観の一例を図解した図である。
【図3】携帯電話のクローズ状態における外観の一例を図解した図である。
【図4】第1の実施形態に係る携帯電話の構成例を示すブロック図である。
【図5】方位検出部の構成例を示すブロック図である。
【図6】地磁気検出部の配置例を図解した図である。
【図7】方位角の算出方法を説明するための図である。
【図8】第1の実施形態に係る携帯電話における、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。
【図9】方位検出の基準方向と表示画面上の基準方向との関係の一例を図解した第1の図である。
【図10】位置情報および地図情報の取得に関する処理の流れを図解したフローチャートである。
【図11】第1の実施形態に係る第1の表示制御部における処理の流れを図解したフローチャートである。
【図12】第1の実施形態に係る第2の表示制御部における処理の流れを図解したフローチャートである。
【図13】第2の実施形態に係る携帯電話における、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。
【図14】方位検出の基準方向と表示画面上の基準方向との関係の一例を図解した第2の図である。
【図15】第2の実施形態に係る第1の表示制御部における処理の流れを図解したフローチャートである。
【図16】第2の実施形態に係る第2の表示制御部における処理の流れを図解したフローチャートである。
【図17】方位検出部の他の構成例を示すブロック図である。
【発明を実施するための形態】
【0018】
以下、ナビゲーション機能や撮像機能を有する多機能型の携帯電話の2つの実施形態について、図面を参照しながら述べる。
【0019】
<第1の実施形態>
図1は、第1の実施形態に係る携帯電話10において地理的位置および地図の情報を取得するためのシステムの構成例を示すブロック図である。
【0020】
携帯電話10は、既知の軌道を周回する3つまたはそれ以上のGPS衛星20から送信される信号を受信し、その受信信号に関する情報を、基地局30から通信網を経由してサーバ装置40に送信する。
サーバ装置40は、携帯電話10から送られてきた情報に基づいて、携帯電話10の地理的な位置を算出する。更に、算出した位置に基づいて、携帯電話10周辺の地図の情報をデータベースから検索する。そして、算出した位置情報および検索した地図情報を、通信網から基地局30を経由して携帯電話10に送信する。
【0021】
図2および図3は、携帯電話10のオープン状態およびクローズ状態における外観の一例を図解した図である。図2(A),(B),(C)は、オープン状態における携帯電話10の表側、側面、裏側の外観をそれぞれ示す。図3(A),(B),(C)は、クローズ状態における携帯電話10の表側、側面、裏側の外観をそれぞれ示す。
【0022】
図に示すように、携帯電話10は、2つの筐体(第1の筐体101、第2の筐体102)を有しており、これらの筐体が可動機構103を介して連結される。第1の筐体101および第2の筐体102は、何れも角に丸みを帯びた長方形に近い板状の形を有しており、互いのサイズが近似している。これら2つの筐体は、上記した長方形の面上における片側の短辺の中央に近い部分において、長方形の面を互いに向けた状態で、可動機構103により連結される。可動機構103は、互いの長方形の面を貫く方向に伸びる回転軸を中心に、2つの筐体を相対的に回転させる。
【0023】
オープン状態では、図2(A)および図2(C)に示すように、正面もしくは裏面から見ると2つの筐体の長辺が平行な状態になる。連結部に対して離れた側にあるそれぞれの筐体の短辺は、上述の回転軸を間に挟んで平行に向き合う配置となり、最も離れた状態になる。また、図2(B)に示すように、第2の筐体102は、横から見ると第1の筐体101に対し傾いた状態となる。
【0024】
一方、クローズ状態においても、図3(A)および図3(C)に示すように、2つの筐体の長辺は平行な状態になるが、連結部に対して離れた側にあるそれぞれの筐体の短辺は、上述の回転軸を間に挟まないで平行に向き合う配置となり、最も近づいた状態になる。また、図3(B)に示すように、第1の筐体101および第2の筐体102の長方形の面は横から見てほぼ平行になり、2つの筐体は互いに重ね合わされた状態となる。
【0025】
第2の筐体102に接している側の第1の筐体101の面上には、図2(A)に示すように、操作キー110が配置される。操作キー110は、数字・記号等を入力するためのキーや、各種の機能を選択・実行するためのキーなどを含んでおり、主としてオープン状態において使用される。クローズ状態においては、図3に示すように、第2の筐体102によって覆われた状態となり、使用不能になる。この操作キー110は、後述するキー入力部154に含まれる。
【0026】
また、連結部を上側にして操作キー110の面を見た場合における第1の筐体101の左側面(矢印Eの方向から見た第1の筐体101の側面)には、連結部に近い側に、操作キー120が配置される。操作キー120は、各種の機能を選択・実行するためのキーを含んでおり、主としてクローズ状態において使用される。操作キー120も、操作キー110と同様に、キー入力部154に含まれる。
【0027】
更に、連結部を上側にして操作キー110の面を見た場合における第1の筐体101の下側の側面には、そのほぼ中央に、マイク用の穴109が設けられる。
【0028】
また、第1の筐体101に接していない側の第2の筐体102の面上には、図2(A)および図3(A)に示すように、矩形の表示画面104が配置される。表示画面104は、例えばLCD(liquid crystal display)パネルや有機EL(electroluminescent)パネルなどの表示デバイスによって構成され、後述の表示部155に含まれる。
【0029】
この表示画面104と同一の面上には、両端の短辺にそれぞれ近い位置に、表示画面104を挟んでスピーカ用の穴106および107が設けらる。穴107は連結部側の短辺の近くに配置され、穴106はその反対側の短辺の近くに配置される。
さらに、この面上には、連結部を下にして見た場合の左下隅に、カメラレンズ105が配置されている。カメラレンズ105は、後述の撮像部157に含まれる。
【0030】
また、図2(C)および図3(C)に示すように、第2の筐体102に接していない側の第1の筐体101の面には、カメラレンズ125およびフラッシュランプ126が配置されている。カメラレンズ125は、この面上の連結部側の短辺に近い位置に配置されており、フラッシュランプ126は、連結部を上にして見た場合におけるカメラレンズ125の左下側の位置に配置されている。カメラレンズ125およびフラッシュランプ126は、撮像部157に含まれる。
【0031】
図4は、第1の実施形態に係る携帯電話10の構成例を示すブロック図である。図4に例示する携帯電話10は、通信処理部150と、GPS受信部151と、記憶部152と、開閉判定部153と、キー入力部154と、表示部155と、音声入出力部156と、撮像部157と、方位検出部158と、制御部159とを有する。開閉判定部153は、作動状態判定手段の一実施形態である。方位検出部158は、方位検出手段の一実施形態である。
【0032】
通信処理部150は、基地局30との間の無線通信に関する処理を行う。例えば、制御部159から出力される送信データに所定の変調処理を施して無線信号に変換し、アンテナから送出する。また、アンテナにおいて受信された無線信号に所定の復調処理を施して受信データを再生し、制御部159に出力する。
【0033】
GPS受信部151は、GPS衛星20から送出される信号を受信して増幅、ノイズ除去、変調等の信号処理を施し、サーバ装置40において位置情報を算出するために必要な情報を取得する。
【0034】
記憶部152は、制御部159において実行されるプログラムや、制御部159の処理で用いられる定数データ、一時的に記憶が必要な変数データ、撮像画像データなどを記憶する。
【0035】
開閉判定部153は、可動機構103による第1の筐体101および第2の筐体102の回転の状態が、上述したオープン状態またはクローズ状態の何れであるかを判定する。
【0036】
キー入力部154は、上述した操作キー110、120に対してキーを押下する等の入力操作が行なわれた場合、これに応じた信号を発生して制御部159に出力する。
【0037】
表示部155は、制御部159において生成される画像データに応じた画像を表示画面104に表示させる。
【0038】
音声処理部156は、入力される音声をマイクにおいて電気的な音声信号に変換して増幅、アナログ−デジタル変換、符号化等の信号処理を施し、その処理結果の音声データを制御部159へ出力する。また、制御部159から入力される音声データに復号化、デジタル−アナログ変換、増幅等の信号処理を施して音声信号を生成し、これをスピーカにおいて音声に変換する。
【0039】
撮像部157は、上述したカメラレンズ105や125において入射した像を撮像して静止画や動画の画像データを生成し、制御部159に出力する。また、制御部159の制御に従って、撮像時にフラッシュランプ126を点灯させる。
【0040】
方位検出部158は、第2の筐体102上に予め設定された基準方向Zの地理的方位を検出する。基準方向Zは、例えば、第2の筐体102における連結部側の短辺から連結部より離れた側の短辺へ向かう方向(図9参照)へ、表示画面104と平行に設定される。
【0041】
また方位検出部158は、方位の検出にあたって、地平面に対する基準方向Zの傾斜角も加味する。通常の使用状態において、使用者は第1の筐体101を把持しながら第2の筐体102を回転させるものとすると、地平面に対する基準方向Zの傾斜角は、オープン状態およびクローズ状態において等しくなる。したがって、方位検出部158は、オープン状態およびクローズ状態における基準方向Zの地理的方位として、この傾斜角がオープン状態およびクローズ状態において共通な所定の角度を有するものとした場合の方位を検出する。
【0042】
ここで、方位検出部158のより詳細な構成について、図5〜図7を参照して説明する。
【0043】
図5は、方位検出部158の構成例を示すブロック図である。
図5に例示する方位検出部158は、地磁気検出部1581および方位角算出部1582を有する。
地磁気検出部1581は、地磁気検出手段の一実施形態である。
方位角算出部1582は、方位角算出手段の一実施形態である。
【0044】
地磁気検出部1581は、第1の筐体101に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する。例えば、第1の筐体101に設定される3次元の直角座標系の各座標軸方向における3軸の地磁気成分S1を検出する。地磁気の検出には、コイルの励磁を利用する方法や、ホール効果を利用する方法、磁気抵抗素子を利用する方法など、種々の方法を用いることができる。
【0045】
なお、地磁気検出部1581は、地磁気以外の磁気の影響によって検出結果に誤差を生じるため、第1の筐体101に含まれる磁気発生源からなるべく離間して配置されることが好ましい。
【0046】
図6は、地磁気検出部1581の配置例を図解した図である。図6の例によると、スピーカ用の穴106および107(図2(A))に近い第2の筐体102の端部には、スピーカ161および162がそれぞれ配置される。スピーカ161はオープン状態における電話機の音声出力に使用され、スピーカ162はクローズ状態における電話機の音声出力に使用される。また、マイク用の穴109(図2(A))に近い第1の筐体101の端部にはマイク163が配置されており、当該端部に対向する他方の端部には着信通知用のスピーカ164が配置される。これらのマイクやスピーカは、何れも磁石を利用して音声から電気信号への変換もしくは電気信号から音声への変換を行うため、この磁石によって発生する磁気が地磁気検出部1581の検出誤差の原因となり得る。
【0047】
そこで、図6の例では、地磁気検出部1581は、スピーカ161が配置される端部とスピーカ162が配置される端部とからそれぞれ離間した、第2の筐体102の中央の領域に配置される。これにより、スピーカ161および162からの距離が長くなり、これらの磁気の影響が緩和される。また、クローズ状態においては第1の筐体101のマイク163およびスピーカ164からの距離も長くなり、これらの磁気の影響も緩和される。
【0048】
方位角算出部1582は、地磁気検出部1581において検出される各方向の地磁気成分S1と、オープン状態およびクローズ状態において共通な上述の傾斜角度の情報S2とに応じて、地平面上における方位角を算出する。
【0049】
なお、この傾斜角度の情報S2は、例えば記憶部152に定数データとして記憶されており、制御部159によって記憶部152から読み出されて方位角算出部1582に供給される。これにより、傾斜角の設定値を容易に変更することが可能となる。
【0050】
図7は、方位角の算出方法を説明するための図である。図7において、座標軸Hx、Hy、Hzを有する直角座標系は、地平面上に設定される基準の座標系である。すなわち、座標軸HxおよびHyは地平面に平行な座標軸であり、それぞれ所定の方位を向く。また、座標軸Hzは地平面に垂直な方向を向く座標軸である。
方位角θは、基準方向Zのベクトルを地平面に正射影した像Zxyと座標軸Hxとのなす角度である。傾斜角φは、この像Zxyと基準方向Zのベクトルとのなす角度である。また、ひねり角ηは、基準方向Zのベクトルを回転軸として携帯電話10を回転させた角度である。方位角θ、傾斜角φ、ひねり角ηが何れもゼロの場合、第1の筐体101に設定される地磁気検出の座標系は、図7に示す座標軸Hx、Hy、Hzの座標系と一致する。
【0051】
ここで、座標軸Hxに対応する地磁気の検出値をα、座標軸Hyに対応する地磁気の検出値をβ、座標軸Hzに対応する地磁気の検出値をγとすると、図7に示す方位角θの正接tanθは次式で表される。
【0052】
〔数1〕
tanθ=β/(γ・sinφ−α・cosφ)
…
(1)
【0053】
ただし、式(1)において、ひねり角ηはゼロとしている。
方位角算出部1582は、例えば式(1)に示すような関係を用いて、3軸の地磁気の検出値から方位角を算出する。
以上が、方位検出部158の説明である。
【0054】
図4の説明に戻る。制御部159は、記憶部152に格納されるプログラムに基づいて処理を実行するコンピュータを有しており、携帯電話10の全体的な動作に関わる種々の処理を行う。例えば、電話機の機能に関連する処理として、キー入力部154におけるキー入力操作に応じて通信処理部150の発呼、着信のシーケンスを制御する処理や、音声処理部156において入出力される音声データを通信処理部150において送受信させる処理を行う。
撮像機能に関連する処理としては、キー入力部154におけるキー入力操作に応じて撮像部157に静止画や動画の撮像処理を実行させる処理や、当該撮像処理によって生成される画像データに圧縮符号化等の画像処理を施して記憶部152に格納する処理を行う。静止画の撮影時には、適切なタイミングでフラッシュランプ126を点灯させる処理も行う。
【0055】
また、制御部159は、ナビゲーション機能に関連する処理として、地理的位置と地図の情報をサーバ装置40から取得する処理や、方位検出部158の検出結果に応じて表示部155の表示画面104上における地図の向きを制御する処理、開閉判定部153の検出結果に応じて表示画面104の画像に回転処理を施す処理を行う。
【0056】
図8は、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。図8に例示するプログラムは、地図情報取得部1591と、記号画像生成部1592と、第1の表示制御部1593と、第2の表示制御部1594とを有する。第1の表示制御部1593は、第1の表示制御手段の一実施形態である。第2の表示制御部1594は、第2の表示制御手段の一実施形態である。
【0057】
地図情報取得部1591は、地理的位置と地図の情報をサーバ装置40から取得するための処理を実行する。すなわち、GPS受信部151においてGPS衛星20の信号を受信させて、その受信信号に関する情報を通信処理部150からサーバ装置40に宛てて送信させることにより、サーバ装置40から返送される地理的位置と地図の情報を取得する。
【0058】
記号画像生成部1592は、地図とともに表示画面104に表示させる文字やマーク、シンボルなどの記号(地図記号など)の画像に関する情報を生成する。
【0059】
第1の表示制御部1593は、開閉判定部153において判定される可動機構103の作動状態(オープン状態、クローズ状態)に応じて方位検出部158の検出結果を補正し、当該補正した検出結果に応じて表示部155の表示画面104上における地図の向きを制御する。
【0060】
図9は、方位検出の基準方向Zと表示画面104上の基準方向Aとの関係の一例を図解した図である。図9の例において、方位検出の基準方向Zは、第2の筐体102における連結部より近い側の短辺から連結部より離れた側の短辺へ向かう方向に設定される。また、表示画面104上の基準方向Aは、第2の筐体102の連結部に近い側の短辺から連結部より離れた側の短辺へ向かう向きに設定される。
例えばこのように方位検出の基準方向Zおよび表示画面の基準方向Aが設定されるものとすると、第1の表示制御部1593は、開閉判定部153においてオープン状態が判定された場合、方位検出部158において検出される基準方向Zの方位と、表示画面104の基準方向Aにおける地図の方位とが等しくなるように、表示画面104上の地図の向きを制御する。この場合、方位検出の基準方向Zと表示画面上の方位とが一致するため、表示画面104には正しい方向を向いた地図が表示される。
【0061】
一方、開閉判定部153においてクローズ状態が判定された場合、第1の表示制御部1593は、方位検出部158において検出される基準方向Zの方位を180°反転させる補正を行い、この補正後の方位と表示画面104の基準方向Aにおける地図の方位とが等しくなるように、表示画面104上の地図の向きを制御する。この場合の方位の検出結果は、方位検出の基準方向Zを180°反転させた場合の検出結果(すなわち基準方向Z'における方位の検出結果)と等価になるため、方位検出の基準方向Z'と表示画面上の方位とが180°反転した状態となり、表示画面104には逆方向を向いた地図が表示される。
【0062】
また、上述した地図に加えて、第1の表示制御部1592は、地図情報取得部1591において取得された現在地の地理的位置を示すマークを地図上に表示させるとともに、方向Aを表示画面104の上方向として記号画像生成部1592の記号画像を表示させる。
【0063】
第2の表示制御部1594は、開閉判定部153の判定結果S4に応じて、第1の表示制御部1593における制御結果の表示画像に所定の回転処理を施す。
すなわち、開閉判定部153においてオープン状態が判定された場合、第1の表示制御部1593における制御結果の表示画像をそのまま表示画面104に表示させる。また、開閉判定部153においてクローズ状態が判定された場合、第1の表示制御部1593における制御結果の表示画像を表示画面104上において180°回転させて表示させる。
【0064】
次に、上述した構成を有する携帯電話10の動作について、ナビゲーション機能を中心に説明する。
【0065】
図10は、地図情報取得部1591における位置情報および地図情報の取得に関する処理の流れを図解したフローチャートである。
ステップST101〜ST103は地図情報取得部1591の処理を示し、ステップST201〜ST203はサーバ装置40の処理を示す。
【0066】
先ず、地図情報取得部1591は、GPS受信部151においてGPS衛星20の信号を受信させて、その受信信号に関する情報を取得する(ステップST101)。次いで、取得した情報を通信処理部150からサーバ装置40に宛てて送信させる(ステップST102)。
【0067】
通信処理部150から送信された情報は、基地局30に受信され、通信網を介してサーバ装置40に伝送される。
サーバ装置は、この情報を携帯電話10からの処理要求として受信し(ステップST201)、受信した情報に基づいて、携帯電話10の地理的な位置を算出する。更に、この算出した位置に基づいて、携帯電話10周辺の地図の情報をデータベースから検索する(ステップST202)。そして、算出した位置情報および検索した地図情報を、処理要求に応答した処理結果として、通信網から基地局30を経由して携帯電話10に返信する(ステップST203)。
【0068】
地図情報取得部1591は、ステップST101において送信した情報に応答するサーバ装置40からの返信を待ち、通信処理部150においてこの返信が受信されると、これに含まれる位置情報および地図情報を取得する(ステップST103)。
【0069】
図11は、第1の表示制御部1593における処理の流れを図解したフローチャートである。
【0070】
第1の表示制御部1593は、開閉判定部153の判定結果S4に基づいて、可動機構103がオープン状態またはクローズ状態の何れにあるかを判定する(ステップST301)。
【0071】
オープン状態であると判定した場合、第1の表示制御部1593は、地図情報取得部1591において取得される地図情報および位置情報と、記号画像生成部1592において生成される記号画像の情報と、方位検出部158において検出される方位の情報S3とに応じて、表示部155の表示画面104に表示させる画像データを生成する(ステップST303)。
すなわち、第1の表示制御部1593は、方位検出部158において検出される基準方向Zの方位と表示画面104の基準方向Aにおける地図の方位とが等しくなるように表示画面104上での向きが制御された地図と、この地図上における現在地の位置を示すマークと、基準方向Aを表示画面104の上方向として配置された文字等の記号画像とを、表示画面104に表示させる画像データを生成する。
【0072】
一方、クローズ状態であると判定した場合、第1の表示制御部1593は、方位検出部158における方位の検出結果を180°反転させ(ステップST302)、この補正した方位の情報を用いて、上述したステップST303の画像データ生成を行う。
これにより、オープン状態およびクローズ状態における表示画面104の画像を比較すると、表示画面104の基準方向Aに対する地図および記号の向きは、両状態において同じになる。すなわち、クローズ状態において第1の表示制御部1593により生成される画像データを表示画面104に表示させた場合、使用者から見た表示画像の向きは、地図および記号を含めて、第2の筐体102の回転に伴い180°反転するが、基準方向Aに対する地図および記号の向きはオープン状態と変わらない。
その後、上述したナビゲーション用の地図を表示する処理モードの終了または続行の判定を行い(ステップST304)、続行が指示された場合には、ステップST301〜ST303の処理を繰り返す。
【0073】
図12は、第2の表示制御部1594における処理の流れを図解したフローチャートである。
【0074】
第2の表示制御部1594は、開閉判定部153の判定結果S4に基づいて、可動機構103がオープン状態またはクローズ状態の何れにあるかを判定する(ステップST401)。
オープン状態であると判定した場合、第1の表示制御部1593において生成された画像データを表示部155に出力してその画像を表示画面104に表示させる(ステップST403)。クローズ状態の場合は、オープン状態における表示画像が表示画面104上において180°回転するように、第1の表示制御部1593において生成された画像データを変換して(ステップST402)表示部155に出力する(ステップST403)。
その後、上述したナビゲーション用の地図を表示する処理モードの終了または続行の判定を行い(ステップST404)、続行が指示された場合には、ステップST401〜ST403の処理を繰り返す。
【0075】
以上説明したように、第1の実施形態によれば、方位検出部158における方位検出の基準方向が、可動機構103を介して連結された第1の筐体101および第2の筐体102のうち、表示部104が保持された第2の筐体102上に設定される。操作スタイルの変更により、第1の筐体101および第2の筐体102の位置関係が変化して、使用者に対する表示画面104の方向が変化すると、開閉判定部153において判定される可動機構103の作動状態(オープン状態またはクローズ状態)に応じて、方位検出部158における方位の検出結果が補正され、この補正に応じて、表示画面104上における地図の向きが補正される。更に、地図の向きに関する上記の補正後の表示画像に対して、開閉判定部153の判定結果に応じた所定の回転処理が施され、表示画面104上の画像が操作スタイルに応じた適切な方向を向くように制御される。
すなわち、本実施形態の構造では、操作スタイルの変更により表示画面104の方向が変化すると、これに連動して方位検出の基準方向の地理的な方位が変化するため、方位の検出結果の変化に応じて表示画面104上における地図の向きが変化する。そのため、操作スタイルの変更による地図の方向の変化には、使用者に対する表示画面104の方向変化とともに、表示画面104上における地図の方向変化が含まれる。これに対し、操作スタイルの変更による記号画像の方向変化には、使用者に対する表示画面104の方向変化のみである。したがって、上述のように方位の検出結果に補正を行うことによって地図の方向を補正し、次いで、地図と記号画像とを含む表示画像の全体に回転処理を施すことにより、地図と記号画像とにそれぞれ異なる角度の回転を与えることが可能になり、両者を操作スタイルに応じた適切な方向に向けることが可能になる。
【0076】
また、可動機構103の作動状態に基づいて方位の検出結果を補正し、この補正された方位に応じて地図の向きを制御することにより地図を回転させるため、検出方位に応じて地図の向きを制御する通常の処理の他に、可動機構103の作動状態に応じて地図の向きを制御する特別な処理を設ける必要がなく、処理を複雑化させることがない。
【0077】
更に、可動機構の作動状態に応じて表示画像に回転処理を施す第2の表示制御部1594のプログラムについては、本実施形態と同様な2筐体の構造を有するとともに地図によるナビゲーション機能を有さない他の機器の同様なプログラムを容易に転用することが可能である。これにより、設計作業の負担を軽減できるとともに、ソフトウェアのバグの発生を減らすことができる。
【0078】
また、本実施形態によれば、可動機構103における2つの作動状態(オープン状態およびクローズ状態)において、表示部155の表示画面104と地平面とのなす角度を一定に保った場合に、方位検出の基準方向Zと地平面とのなす角度は、この2つの作動状態において互いに等しい角度となる。方位検出部158は、この2つの作動状態における基準方向Zの地理的方位として、基準方向Zと地平面とが所定の角度(例えば45°)を有するものとした場合の方位を検出する。
通常、使用者は表示画面104に対する視線の方向を一定に保とうとするため、方位検出の基準方向Zと地平面とのなす傾斜角は可動機構103の作動状態に依らずほぼ一定になる。したがって、この2つの作動状態において共通の傾斜角を加味した方位角を算出することが可能になるため、作動状態ごとに傾斜角が異なる場合に比べて処理を簡略化することができる。
【0079】
また、第2の筐体102の対向する端部には、スピーカ106、107といった磁気発生源がそれぞれ配置されている。磁気検出部1581は、この磁気発生源による磁界形成領域であっても地磁気を検出し得る磁界強度を有した領域として、第2の筐体102の端部に配置されるこれらの磁気発生源から離れた第2の筐体102の中央付近の領域に配置されている。
したがって、磁気検出部1581に対するこれらの磁気発生源からの磁気の影響が緩和され、地磁気の正常な検出が可能になる。
【0080】
<第2の実施形態>
次に、第2の実施形態について述べる。第2の実施形態は、ナビゲーション時の表示制御に関連する処理として、上述した第1の実施形態とは異なる処理を行う。
【0081】
図13は、第2の実施形態に係る携帯電話において、ナビゲーション時の表示制御に関連する部分のプログラムの機能的な構成の一例を示すブロック図である。図13に例示するプログラムは、地図情報取得部1591と、記号画像生成部1592と、第1の表示制御部1593Aと、第2の表示制御部1594とを有する。ただし、図8と図13の同一符号は同一の構成要素を示す。第1の表示制御部1593Aは、第1の表示制御手段の一実施形態である。第2の表示制御部1594Aは、第2の表示制御手段の一実施形態である。
【0082】
第2の表示制御部1594Aは、記号画像生成部1592において生成される記号画像の表示画面104上における配置を、開閉判定部153の判定結果に応じて変更する。すなわち、開閉判定部153においてオープン状態が判定された場合は、表示画面の基準方向Aが上方向となるように記号画像の配置を設定し、クローズ状態が判定された場合は、この基準方向Aが下方向となるように記号画像の配置を設定する。
【0083】
第1の表示制御部1593Aは、方位検出部158の検出結果に応じて表示部155の表示画面104上における地図の向きを制御する。
すなわち、第1の表示制御部1593Aは、図14(A)および(B)に示すように、オープン状態およびクローズ状態の何れにおいても、方位検出部158において検出される基準方向Zの方位と、表示画面104の基準方向Aにおける地図の方位とが等しくなるように、表示画面104上の地図の向きを制御する。
これにより、方位検出の基準方向Zと表示画面上の方位とが一致するため、表示画面104には何れの作動状態においても正しい方向を向いた地図が表示される。
【0084】
また、上述した地図に加えて、第1の表示制御部1592Aは、地図情報取得部1591において取得された現在地の地理的位置を示すマークを地図上に表示させるとともに、第2の表示制御部1594Aにおいて配置が設定された記号画像を表示させる。
【0085】
上述した構成を有する第2の実施形態に係る携帯電話について、第1の実施形態と異なる表示制御に関連する部分を中心に説明する。
【0086】
図15は、第2の表示制御部1594Aにおける処理の流れを図解したフローチャートである。
【0087】
第2の表示制御部1594は、開閉判定部153の判定結果S4に基づいて、可動機構103がオープン状態またはクローズ状態の何れにあるかを判定する(ステップST501)。オープン状態であると判定した場合は、表示画面の基準方向Aを上方向として記号画像の配置を設定し(ステップST502)、クローズ状態であると判定した場合は、この基準方向Aを下方向として記号画像の配置を設定する(ステップST503)。
その後、上述したナビゲーション用の地図を表示する処理モードの終了または続行の判定を行い(ステップST504)、続行が指示された場合には、ステップST301〜ST303の処理を繰り返す。
【0088】
図16は、第1の表示制御部1593Aにおける処理の流れを図解したフローチャートである。
第1の表示制御部1593Aは、地図情報取得部1591において取得される地図情報および位置情報と、第2の表示制御部1594Aにおいて表示画面104上の配置が設定された記号画像の情報と、方位検出部158において検出される方位の情報S3とに応じて、表示部155の表示画面104に表示させる画像データを生成する(ステップST601)。
すなわち、第1の表示制御部1593Aは、方位検出部158において検出される基準方向Zの方位と表示画面104の基準方向Aにおける地図の方位とが等しくなるように表示画面104上での向きが制御された地図と、この地図上における現在地の位置を示すマークと、第2の表示制御部1594Aにおいて基準方向Aが表示画面104の上方向または下方向となるように配置が設定された文字等の記号画像とを、表示画面104に表示させる画像データを生成する。
【0089】
以上説明したように、第2の実施形態によれば、可動機構103の作動状態に応じて記号画像の配置(向きや位置など)を適切な状態に変更しつつ、表示画面104上における地図の向きの制御方法については可動機構103の作動状態に依らず同一とすることにより、使用者に表示される地図および記号の向きを操作スタイルに応じた適切な状態に設定することができる。
その他、可動機構の作動状態ごとに傾斜角が異なる場合に比べて処理を簡略化することができる点や、磁気検出部1581に対する第2の筐体102の磁気発生源からの磁気の影響が緩和される点は、上述した第1の実施形態と同様である。
【0090】
なお、本発明は上述した実施形態に限定されず、種々の改変が可能である。
【0091】
例えば、上述した実施形態では、傾斜角に関する情報として、可動機構103の作動状態に対応して予め設定された傾斜角のデータが方位角の算出に用いられているが、例えば図17に示すように、重力加速度の方向等に基づいて傾斜角を検出する傾斜角検出部1583(角度検出手段に対応する)を設けて、その結果を方位角の検出に用いる構成としてもよい。すなわち、方位角算出部1582が、地磁気検出部1581で検出される地磁気と傾斜角度検出部1583で検出される傾斜角とに応じて方位角を算出する構成としてもよい。
これにより、より正確な傾斜角が得られるため、方位の検出精度を高めることが可能である。また、傾斜角検出部1583において2次元の傾斜角を検出するものとすれば、傾斜角に加えてひねり角の情報も方位角の算出に用いることが可能になるため、更に正確な方位を検出することが可能になる。
【0092】
上述した実施形態では、可動機構103における2つの作動状態(オープン状態およびクローズ状態)において、表示部155の表示画面104と地平面とのなす角度を一定に保った場合に、方位検出の基準方向Zと地平面とのなす角度は、この2つの作動状態において互いに等しい角度となる例が示されているが、本発明はこれに限定されない。
【0093】
例えば、第1の筐体101に対する第2の筐体102の傾きがオープン状態およびクローズ状態の中間の位置となるような作動状態では、基準方向Aと地平面とがほぼ平行、すなわち傾斜角がゼロになる。この作動状態は、オープン状態およびクローズ状態とは傾斜角が異なるため、これらと同一の傾斜角で方位角を算出してしまうと誤差を生じる。
【0094】
このように、表示画面と地平面とのなす角度を一定に保った場合に、方位検出の基準方向と地平面とのなす傾斜角度がそれぞれ異なる角度となる複数の作動状態を可動機構が持つ場合にも、本発明は適用可能である。
例えば、方位検出部158は、地平面に対する基準方向Zの傾斜角が、開閉判定部153の判定結果に対応する所定の角度であるものとして、地理的方位の検出を行う。この場合の傾斜角の情報は、例えば、データ・テーブルとして記憶部152に予め格納される。方位の検出が行われる場合、制御部159は、開閉判定部153の判定結果に関連付けられた傾斜角の情報をこのデータ・テーブルから読み出して方位検出部158に渡し、方位検出部158は、制御部159から取得したこの傾斜角の情報に基づいて方位の検出を行う。
このような構成により、可動機構103の作動状態に応じた適切な傾斜角の情報に基づいて方位を検出することが可能になり、方位の検出精度を高めることができる。
【0095】
上述した実施形態では、地磁気検出の基準の座標系として直交座標系を用いているが、これに限らず、例えば座標軸が斜交した座標系を当該基準の座標系としても、方位角の算出は可能である。
【0096】
また、上述した実施形態では、制御部159の処理がコンピュータによってプログラムに基づいて処理される例を示したが、これらの処理の少なくとも一部をハードウェアによって実行させることも可能である。
逆に、制御部159以外の他のユニットにおける少なくとも一部の処理を、制御部159のコンピュータにおいて実行させてもよい。例えば、方位検出部158における方位角算出部1582の処理は、制御部159のコンピュータにおいて実行させてもよい。
【符号の説明】
【0097】
10…携帯電話、20…GPS衛星、30…基地局、40…サーバ装置、102…第1の筐体、102…第2の筐体、103…可動機構、104…表示画面、105,125…カメラレンズ、106,107…スピーカ用の穴、109…マイク用の穴、110,120…操作キー、126…フラッシュランプ、150…通信処理部、151…GPS受信部、152…記憶部、153…開閉判定部、154…キー入力部、155…表示部、156…音声処理部、157…撮像部、158…方位検出部、159…制御部、161,162,164…スピーカ、163…マイク、1581…地磁気検出部、1582…方位角算出部、1583…傾斜角検出部、1591…地図情報取得部、1592…記号画像生成部、1593,1593A…第1の表示制御部、1594,1594A…第2の表示制御部__
【特許請求の範囲】
【請求項1】
地図を利用して、現在地の位置と方位の情報を表示する情報表示装置であって、
第1の筐体と、
少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、
上記可動機構の作動状態を判定する作動状態判定手段と、
上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、
上記作動状態判定手段の判定結果に基づいて上記方位検出手段の検出結果を補正し、当該補正した検出結果に応じて、上記表示手段の表示画面上における上記地図の向きを制御する第1の表示制御手段と、
上記作動状態判定手段の判定結果に基づいて、上記第1の表示制御手段における制御結果の上記地図を含む表示画像に所定の回転処理を施す第2の表示制御手段と、
を有することを特徴とする情報表示装置。
【請求項2】
地図を利用して、現在地の位置と方位の情報および付加情報を表示する情報表示装置であって、
第1の筐体と、
少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、
上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、
上記可動機構の作動状態を検出する作動状態判定手段と、
上記方位検出手段の検出結果に応じて、上記表示手段の表示画面上における上記地図の向き制御する第1の表示制御手段と、
上記作動状態判定手段の判定結果に応じて、上記地図の画像とともに表示される上記付加情報の配置を変更する第2の表示制御手段と、
を有することを特徴とする情報表示装置。
【請求項3】
上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度が互いに等しい角度となる複数の作動状態を有し、
上記方位検出手段は、上記複数の作動状態において上記基準方向と上記地平面とが所定の角度を有するものとして上記地理的方位を検出する、
請求項1または2に記載の情報表示装置。
【請求項4】
上記方位検出手段は、
上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、
上記地磁気検出手段において検出される上記複数方向の地磁気と、上記所定の角度に関連する情報とに基づいて、上記複数の作動状態における上記地平面上の方位角を算出する方位角算出手段と、を含む、
請求項3に記載の情報表示装置。
【請求項5】
上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度がそれぞれ異なる角度となる複数の作動状態を有し、
上記方位検出手段は、上記基準方向と上記地平面とのなす角度が、上記作動状態判定手段の判定結果に対応する所定の角度であるものとして上記地理的方位を検出する、
請求項1または2に記載の情報表示装置。
【請求項6】
上記方位検出手段は、
上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、
上記地磁気検出手段において検出される上記複数方向の地磁気と、上記作動状態判定手段の判定結果に対応する上記所定の角度の情報とに基づいて、地平面上の方位角を算出する方位角算出手段と、を含む、
請求項5に記載の情報表示装置。
【請求項7】
上記方位検出手段は、上記基準方向と地平面とのなす角度を検出する角度検出手段を含み、当該角度検出手段の検出角度に応じた上記地理的方位を検出する、
請求項1または2に記載の情報表示装置。
【請求項8】
上記方位検出手段は、
上記基準方向と地平面とのなす角度を検出する角度検出手段と、
上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、
上記地磁気検出手段において検出される上記複数方向の地磁気と、上記角度検出手段の検出角度とに応じて、上記地平面上の方位角を算出する方位角算出手段と、を含む、
請求項7に記載の情報表示装置。
【請求項9】
上記第2の筐体の対向する端部にそれぞれ配置され、磁石を利用して電気信号から音声への変換もしくは音声から電気信号への変換を行う複数の音声変換手段を有し、
上記地磁気検出手段は、それぞれの上記声変換手段の間に配置される、
請求項4、6、または8の何れか一に記載の情報表示装置。
【請求項1】
地図を利用して、現在地の位置と方位の情報を表示する情報表示装置であって、
第1の筐体と、
少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、
上記可動機構の作動状態を判定する作動状態判定手段と、
上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、
上記作動状態判定手段の判定結果に基づいて上記方位検出手段の検出結果を補正し、当該補正した検出結果に応じて、上記表示手段の表示画面上における上記地図の向きを制御する第1の表示制御手段と、
上記作動状態判定手段の判定結果に基づいて、上記第1の表示制御手段における制御結果の上記地図を含む表示画像に所定の回転処理を施す第2の表示制御手段と、
を有することを特徴とする情報表示装置。
【請求項2】
地図を利用して、現在地の位置と方位の情報および付加情報を表示する情報表示装置であって、
第1の筐体と、
少なくとも上記地図を表示する表示手段を備え、可動機構を介して上記第1の筐体と連結される第2の筐体と、
上記第2の筐体上に設定された基準方向の地理的方位を検出する方位検出手段と、
上記可動機構の作動状態を検出する作動状態判定手段と、
上記方位検出手段の検出結果に応じて、上記表示手段の表示画面上における上記地図の向き制御する第1の表示制御手段と、
上記作動状態判定手段の判定結果に応じて、上記地図の画像とともに表示される上記付加情報の配置を変更する第2の表示制御手段と、
を有することを特徴とする情報表示装置。
【請求項3】
上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度が互いに等しい角度となる複数の作動状態を有し、
上記方位検出手段は、上記複数の作動状態において上記基準方向と上記地平面とが所定の角度を有するものとして上記地理的方位を検出する、
請求項1または2に記載の情報表示装置。
【請求項4】
上記方位検出手段は、
上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、
上記地磁気検出手段において検出される上記複数方向の地磁気と、上記所定の角度に関連する情報とに基づいて、上記複数の作動状態における上記地平面上の方位角を算出する方位角算出手段と、を含む、
請求項3に記載の情報表示装置。
【請求項5】
上記可動機構は、上記表示手段の表示画面と地平面とのなす角度を一定に保った場合に、上記基準方向と上記地平面とのなす角度がそれぞれ異なる角度となる複数の作動状態を有し、
上記方位検出手段は、上記基準方向と上記地平面とのなす角度が、上記作動状態判定手段の判定結果に対応する所定の角度であるものとして上記地理的方位を検出する、
請求項1または2に記載の情報表示装置。
【請求項6】
上記方位検出手段は、
上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、
上記地磁気検出手段において検出される上記複数方向の地磁気と、上記作動状態判定手段の判定結果に対応する上記所定の角度の情報とに基づいて、地平面上の方位角を算出する方位角算出手段と、を含む、
請求項5に記載の情報表示装置。
【請求項7】
上記方位検出手段は、上記基準方向と地平面とのなす角度を検出する角度検出手段を含み、当該角度検出手段の検出角度に応じた上記地理的方位を検出する、
請求項1または2に記載の情報表示装置。
【請求項8】
上記方位検出手段は、
上記基準方向と地平面とのなす角度を検出する角度検出手段と、
上記第2の筐体上に設定される座標系の各座標軸に平行な所定の複数の方向における地磁気を検出する地磁気検出手段と、
上記地磁気検出手段において検出される上記複数方向の地磁気と、上記角度検出手段の検出角度とに応じて、上記地平面上の方位角を算出する方位角算出手段と、を含む、
請求項7に記載の情報表示装置。
【請求項9】
上記第2の筐体の対向する端部にそれぞれ配置され、磁石を利用して電気信号から音声への変換もしくは音声から電気信号への変換を行う複数の音声変換手段を有し、
上記地磁気検出手段は、それぞれの上記声変換手段の間に配置される、
請求項4、6、または8の何れか一に記載の情報表示装置。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】

【図12】

【図13】

【図14】
【図15】
【図16】
【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−29856(P2013−29856A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2012−221654(P2012−221654)
【出願日】平成24年10月3日(2012.10.3)
【分割の表示】特願2008−237236(P2008−237236)の分割
【原出願日】平成15年9月30日(2003.9.30)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成24年10月3日(2012.10.3)
【分割の表示】特願2008−237236(P2008−237236)の分割
【原出願日】平成15年9月30日(2003.9.30)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
[ Back to top ]