
情報記録媒体の提供装置
【課題】紙幣やチケット等の情報記録媒体を顧客に提供するセルフサービス端末における情報記録媒体の提供装置の構成を自動的に検知する。
【解決手段】第1のパージ位置、スタック位置、及び提供位置の間の直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置について記載する。情報記録媒体の提供装置は、誘導型センサと、誘導型センサと協働して誘導型センサに対するターゲットの位置情報を提供する可動式キャリッジ上に装着された共振ターゲットと、可動式キャリッジ上の提供装置トラックの近傍に装着された光センサとを備える検知システムを含む。検知システムは、第1の光学特性を有し、提供装置トラック上の第1のパージ位置の近傍に装着された第1のパージターゲットと、第2の光学特性を有し、提供装置トラック上の提供位置の近傍に装着された提供ターゲットと、をさらに備える。
【解決手段】第1のパージ位置、スタック位置、及び提供位置の間の直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置について記載する。情報記録媒体の提供装置は、誘導型センサと、誘導型センサと協働して誘導型センサに対するターゲットの位置情報を提供する可動式キャリッジ上に装着された共振ターゲットと、可動式キャリッジ上の提供装置トラックの近傍に装着された光センサとを備える検知システムを含む。検知システムは、第1の光学特性を有し、提供装置トラック上の第1のパージ位置の近傍に装着された第1のパージターゲットと、第2の光学特性を有し、提供装置トラック上の提供位置の近傍に装着された提供ターゲットと、をさらに備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紙幣やチケット等の情報記録媒体を顧客に提供するセルフサービス端末における情報記録媒体の提供装置に関し、特に、当該情報記録媒体の構成を自動的に検知する技術に関する。
【背景技術】
【0002】
情報記録媒体の提供装置は、情報記録媒体ディスペンサの一部として使用される。情報記録媒体の提供装置は、情報記録媒体アイテム(例えば、紙幣など)を顧客に提供するディスペンサの一部である。一般的なタイプの情報記録媒体ディスペンサとしてシート形態の情報記録媒体アイテム(例えば、紙幣、チケット、クーポンなど)の束(又はスタック)をディスペンスするシート束情報記録媒体ディスペンサがある。
【0003】
束の情報記録媒体の提供装置は、通常、1つ又は複数の情報記録媒体ピックユニットに結合されている。各情報記録媒体ピックユニットは、内蔵の情報記録媒体カセット(又はホッパ)から個々の情報記録媒体アイテムを取得し、取得した情報記録媒体アイテムを情報記録媒体の提供装置へ搬送し、情報記録媒体アイテムを束に揃え(例えば、バリスティックスタッカ又はスタッキングホイールを用いて)、次に情報記録媒体アイテムの束を顧客に提供する。顧客が提供された束を取り出さない場合、提供装置は束を引っ込めてパージビンへ搬送する。
【0004】
幾つかの情報記録媒体ディスペンサは前面アクセス型である。これは、情報記録媒体アイテムが顧客にディスペンスされるのと同じ情報記録媒体ディスペンサの側に情報記録媒体カセットが挿入されるということを意味する。また、背面アクセス型の情報記録媒体ディスペンサもある。これは、情報記録媒体アイテムが顧客にディスペンスされるのと逆の情報記録媒体ディスペンサの側に情報記録媒体カセットが挿入されるということを意味する。
【発明の概要】
【発明が解決しようとする課題】
【0005】
改良型の情報記録媒体アイテムの提供装置を提供することが望ましい。また、様々なサイズのセルフサービス端末に適合する様々な長さの提供装置と併用できる情報記録媒体アイテムの提供装置を提供することが望ましい。そのようなシステムが確実に動作することを可能にするために、情報記録媒体アイテムの提供装置構成を自動的に検出する検知システムを有することが望ましい。
【課題を解決するための手段】
【0006】
したがって、本発明は、一般に、情報記録媒体の提供装置の構成を検知する情報記録媒体の提供装置のための方法、システム、装置、及びソフトウェアを提供する。
【0007】
上記の「発明の概要」と下記の「発明を実施するための形態」で開示する主題に加えて、この項の以下の各節では、必要に応じて、本出願の手続中に使用することがある代替の請求項表現をさらに基礎固めすることが意図されている。本出願が認可された場合、幾つかの態様は本出願の手続中に追加された請求項に関連する可能性があり、別の態様は本出願の手続中に削除された請求項に関連する可能性があり、また別の態様は請求項に記載しなかった主題に関連する可能性がある。さらに、以下に詳細に説明する様々な態様は、他に別段の記載がない限り、互いに独立している。1つの態様に対応するいかなる請求項も、請求項に明記しない限り、残りの態様のいかなる要素又は特徴も組み込んでいると解釈すべきではない。
【0008】
第1の態様によれば、第1のパージ位置、スタック位置、及び提供位置の間の直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置のための検知システムであって、中央トラック部分上に装着され、順方向又は逆方向のいずれかからスタック位置に接近する際に可動式キャリッジの位置を確認できるようにスタック位置の両側に延在する誘導型センサと、誘導型センサと協働して誘導型センサに対するターゲットの位置情報を提供する可動式キャリッジ上に装着された共振ターゲットと、可動式キャリッジ上の提供装置トラックの近傍に装着された光センサと、第1の光学特性を有し、光センサがパージターゲットを検出すると可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムをパージビンの入り口に搬送するように提供装置トラック上の第1のパージ位置の近傍に装着された第1のパージターゲットと、第2の光学特性を有し、光センサが提供ターゲットを検出すると可動式キャリッジが正確に整列して顧客に情報記録媒体アイテムを提供するように提供装置トラック上の提供位置の近傍に装着された提供ターゲットとを備える検知システムが提供される。
【0009】
検知システムは、第3の光学特性を有し、光センサが第2のパージターゲットを検出すると可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムをパージビンの別の入口に搬送するように提供装置トラック上の第2のパージ位置の近傍に装着された第2のパージターゲットをさらに備えてもよい。
【0010】
第1のパージ位置は、顧客に提供されたが顧客によって取り出されなかった(又は完全には取り出されなかった)情報記録媒体アイテム用に使用できる。
【0011】
第2のパージ位置は、顧客に提供されなかった情報記録媒体アイテム用に使用できる。これは、情報記録媒体アイテムの束を作成する際に異常があった場合、又は必要な束を作成するのに情報記録媒体アイテムが不足している場合、又は単一動作で偶然に複数の情報記録媒体アイテムを取得した場合に発生することがある。
【0012】
第1、第2、及び第3の光学特性は、パージターゲットと提供ターゲットの異なる透過値に関連していてもよい。例えば、第1の光学特性はほぼ1%の透過を含み、第2の光学特性はほぼ5%の透過を含み、第3の光学特性はほぼ20%の透過を含んでもよい。任意の便利な透過パーセンテージを使用できる。
【0013】
直線の提供装置トラックは、情報記録媒体の提供装置の顧客引渡し端から情報記録媒体の提供装置のディスペンサ端へ延在してもよい。
【0014】
直線の提供装置トラックは、中央のトラック部と、中央のトラック部から顧客引渡し端まで延在する着脱可能なノーズ部と、中央のトラック部からディスペンサ端まで延在する着脱可能な端部とを有してもよい。
【0015】
直線の提供装置トラックは、着脱可能なノーズ部と着脱可能な端部とを交換し、それにより前面アクセス型提供装置と背面アクセス型提供装置とを切り替えることで再構成できる。
【0016】
各々が異なる長さを有して直線の提供装置トラックを様々なサイズのセルフサービス端末に適合するように構成させる複数の異なる着脱可能なノーズ部を提供できる。例えば、ディスペンサと情報記録媒体アイテムがディスペンスされるフェーシアとの間の距離は、セルフサービス端末によって異なっていてもよい。
【0017】
ターゲットは、提供装置トラックから横方向に延在するタブ部を含んでもよい。タブ部は、直線の提供装置トラックに沿って画定された一連のスロットに挿抜可能な個別のタブを備えてもよい。これによって、例えば、提供タブを着脱可能なノーズ部の適切な位置に装着することができる。あるいは、タブ部は、全長に沿って様々な光学特性を定義する単一の連続するタブを備えてもよい。タブ部は、各々がその全長の大半で(スタック位置などのプリセット位置を画定する小領域を除いて)均一な光学特性を有する様々な長さの部分を含んでもよい。
【0018】
可動式キャリッジ上に装着された光センサは、光センサ内の送信機と光センサ内の検出器との間に提供装置トラックを横切る方向を向いたスロットを画定していてもよく、光センサはキャリッジの移動に伴ってタブ部がスロットを通過するように装着される。
【0019】
可動式キャリッジは、情報記録媒体アイテムをキャリッジ板上に配置できる開位置と、キャリッジ板とキャリッジ本体との間に情報記録媒体アイテムをクランプする閉位置との間でキャリッジ板が移動可能なキャリッジ本体とキャリッジ板とを含んでもよい。
【0020】
情報記録媒体の提供装置は、接続ケーブルに結合するコネクタを有する制御盤を含んでもよい。接続ケーブルは、キャリッジ接続端に2つのコネクタ(前面アクセスコネクタと背面アクセスコネクタ)を有していてもよい。
【0021】
可動式キャリッジは、前面アクセス入力部と、前面アクセス入力部とは異なるように構成された背面アクセス入力部とを含んでもよく、前面アクセス入力部は前面アクセスコネクタへの相補コネクタを提供し、背面アクセス入力部は背面アクセスコネクタへの相補コネクタを提供する。これによって、前面アクセスコネクタだけを用いて前面アクセス入力部に接続できる。同様に、背面アクセスコネクタだけを用いて背面アクセス入力部に接続できる。
【0022】
前面アクセスコネクタは、制御盤からのインジケータ信号を接地できる。背面アクセスコネクタは、制御盤からのインジケータ信号を接地できない(その代わりに抵抗によってHighにプルできる)。これによって、キャリッジタイプを表示するインジケータ信号が提供される(低電圧は前面アクセスを表示し、高電圧は背面アクセスを表示する)。あるいは、前面アクセスはインジケータ信号を接地できず、背面アクセスはインジケータ信号を接地でき、この場合に低電圧は背面アクセスを表示する。これによって、インジケータ信号の状態に基づいて前面アクセス構成が存在するか、又は背面アクセス構成が存在するかを検出できる。
【0023】
第2の態様によれば、情報記録媒体の提供装置の構成を検知する方法であって、情報記録媒体の提供装置が直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含み、該方法が、キャリッジ上の前面アクセスコネクタ又はキャリッジ上の背面アクセスコネクタに結合されたケーブルからの信号を制御盤上で検出するステップと、情報記録媒体の提供装置にアクセスの向きを割り当てるステップであって、ケーブルが前面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが前面アクセスであり、又はケーブルが背面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが背面アクセスであるステップと、直線の提供装置トラック上で位置マーカが検出されるまでキャリッジを移動させるステップと、割り当てられたアクセスの向きに関連する格納された構成情報にアクセスして位置マーカ情報を取り出すステップと、その特性に基づいて位置マーカを識別し、アクセスされた構成情報を用いるステップと、検出された位置マーカがスタック位置マーカでない場合、アクセスされた構成情報を用いてキャリッジをスタック位置マーカへ移動させてキャリッジを移動させる方向を確認するステップと、キャリッジが横断する距離を測定しながらキャリッジをスタック位置から提供位置へ移動させるステップと、構成情報を更新して提供位置とスタック位置との間の距離を含ませるステップと、を含む方法が提供される。
【0024】
位置マーカは、直線の提供装置トラック上に装着された誘導型センサと、直線の提供装置トラックから横方向に延在する複数のタブ部とを備えてもよい。
【0025】
誘導型センサは、可動式キャリッジが順方向又は逆方向のいずれかからスタック位置に接近する際に可動式キャリッジの位置を確認できるようにスタック位置の両側に延在していてもよい。
【0026】
キャリッジは、誘導型センサと協働して誘導型センサに対するターゲットの位置情報を提供する共振ターゲットを含んでもよい。
【0027】
位置マーカは、可動式キャリッジ上の提供装置トラックの近傍に装着された光センサによって検出できる。
【0028】
位置マーカは、第1のパージターゲットと、第2のパージターゲットと、提供ターゲットとを含んでもよい。これら3つのターゲットは、異なる透過係数などの異なる光学特性を有してもよい。
【0029】
第3の態様によれば、直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置の構成を検知する方法であって、キャリッジ上に装着されたセンサを用いてキャリッジが情報記録媒体アイテムを排出する位置を検出するステップと、直線の提供装置トラック上に装着されたセンサを用いてキャリッジに情報記録媒体アイテムが装着される位置を検出するステップと、を含む方法が提供される。
【0030】
第4の態様によれば、第1の態様の検知システムを含む情報記録媒体ディスペンサが提供される。
【0031】
第5の態様によれば、第4の態様の情報記録媒体ディスペンサを含むセルフサービス端末が提供される。
【0032】
第6の態様によれば、第2の態様を実施するプログラム命令を含むコンピュータプログラムが提供される。
【0033】
第7の態様によれば、第3の態様を実施するプログラム命令を含むコンピュータプログラムが提供される。
【0034】
これらのコンピュータプログラムは情報記録媒体(コンピュータメモリなど)上に実施でき、又は電気搬送装置上で搬送できる。
【0035】
第8の態様によれば、情報記録媒体の提供装置を構成する方法であって、提供装置トラックに沿ってセンサを含むキャリッジを移動させるステップと、提供装置トラック上に装着された複数のターゲットを検出するステップと、ターゲットに関連付けられた特性に基づいて検出された複数のターゲットの各々を識別するステップと、識別されたターゲットの場所に基づいて情報記録媒体の提供装置を構成するステップとを含む方法が提供される。
【0036】
この方法は、2つの識別されたターゲット間の距離を測定する別のステップを含んでもよい。これら2つの識別されたターゲットは、スタック位置ターゲットと、提供位置ターゲットとを含んでもよい。
【0037】
識別されたターゲットの場所に基づいて情報記録媒体の提供装置を構成するステップは、2つの識別されたターゲット間の測定された距離で構成情報を更新するステップを含んでもよい。
【0038】
説明を分かりやすく簡潔にするために、上記の態様で提供された要素はそのすべての組合せを明示しているわけではない。それにもかかわらず、技術的に不可能でない限り、又はその逆の内容が明示されていない限り、1つの態様を指すコンシストリクローズ(consistory clause)は、それらのコンシストリクローズが関連する可能性があるすべての他の態様のオプションの特徴として準用されることを当業者であれば直接かつ明確に認識することができるであろう。
【0039】
上記及びその他の態様は、添付の図面を参照しながら以下の具体的な説明を読むことで明らかになるだろう。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態による検知システムを含む背面アクセス情報記録媒体アイテムの提供装置の簡単な概略図である。
【図2】図1の提供装置の各部(直線の提供装置トラック、位置マーカ、及び線形誘導型センサ)をより詳細に示す簡単な概略図である。
【図3】直線の提供装置トラックに係合する提供装置の可動式キャリッジの一部を示す図1の情報記録媒体アイテムの提供装置の一部の簡単な側面図である。
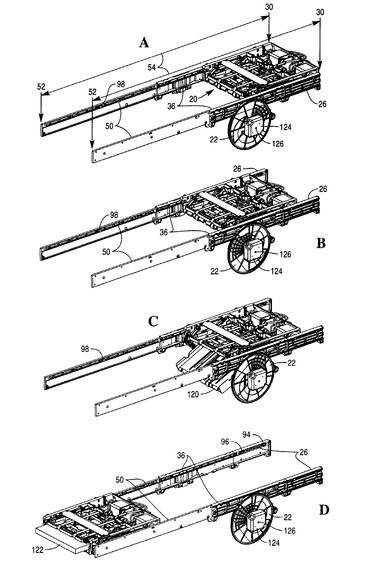
【図4】図2の提供装置トラックと、可動式キャリッジが4つの異なる位置にある図1の情報記録媒体アイテムの提供装置のその他の部分(カムブロック、及び可動式キャリッジ)を示す図である。
【図5A】図3のキャリッジの位置の特定に使用される工程を示すフローチャート(図を見やすくするために3つのチャートA、B、及びCに分割されている)である。
【図5B】図3のキャリッジの位置の特定に使用される工程を示すフローチャート(図を見やすくするために3つのチャートA、B、及びCに分割されている)である。
【図5C】図3のキャリッジの位置の特定に使用される工程を示すフローチャート(図を見やすくするために3つのチャートA、B、及びCに分割されている)である。
【図6】本発明の別の実施形態による検知システムを含む前面アクセス情報記録媒体アイテムの提供装置の簡単な概略図である。
【図7】図6の提供装置の各部(直線の提供装置トラック、位置マーカ、及び線形誘導型センサ)をより詳細に示す簡単な概略図である。
【図8】本発明の第3の実施形態による背面アクセス提供装置の光学ターゲットの3つの長い部分の不透明度(透過度の逆)を示す図である。
【図9】本発明の第4の実施形態による前面アクセス提供装置の光学ターゲットの3つの長い部分の不透明度を示す図である。
【0041】
提供された図面の幾つかは実際の物理的実施形態を生成できるコンピュータレンダリングに基づいていることに留意されたい。したがって、これらの図面の幾つかは、これらの実施形態の理解には必須でないが当業者に有用な情報を伝える複雑な詳細を含んでいる。したがって、図面に示すすべての部分について具体的に言及はしない。さらに、図を見やすくし、多数の引出し線によって図面を煩雑にすることを回避するため、一部の図面では参照番号を一部割愛している。さらに、幾つかの図面では特徴の一部を取り除いてさらに見やすさを高めている。
【発明を実施するための形態】
【0042】
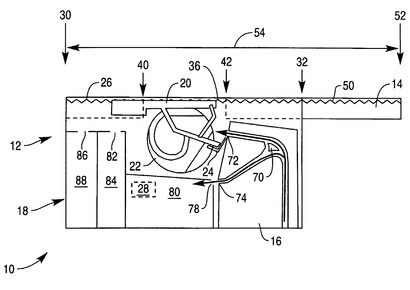
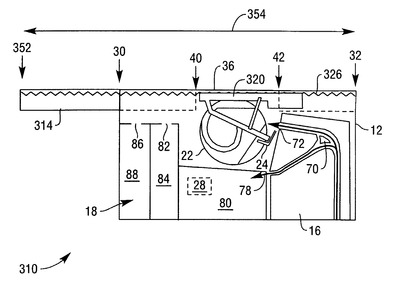
まず図1について説明する。図1は、本発明の一実施形態による検知システムを含む反転可能な情報記録媒体アイテムの提供装置10(紙幣提供装置の形態)の簡単な概略図である。
【0043】
紙幣提供装置10は、シャーシ12と、着脱可能なノーズ14と、ディスペンサ(図示せず)のピックユニット(図示せず)に結合する紙幣搬送ユニット16と、多区画パージビン18と、キャリッジ20(図1のスタック位置に示す)と、キャリッジ20上のカムフォロワ(図示せず)に係合することでキャリッジ20を開閉するカムブロック22と、紙幣を紙幣搬送ユニット16から整頓されたスタックとしてキャリッジ20内に吹き付けた状態に維持する位置合わせデバイス24と、着脱可能なトラック26と、紙幣提供装置10を制御する制御盤(点線28で示す)とを備える。図には示していないが、制御盤28はキャリッジの接続端に2つのコネクタ(前面アクセスコネクタと背面アクセスコネクタ)を有する接続ケーブルに結合するコネクタを有する。前面アクセスコネクタは、制御盤28からのインジケータ信号を接地する。背面アクセスコネクタは、制御盤28からのインジケータ信号を接地しない(インジケータ信号はその代わりに抵抗によってHighにプルされる)。したがって、制御盤28は、インジケータ信号に基づいて紙幣提供装置10が前面アクセス用と背面アクセス用のどちらに構成されているかを検出することができる。
【0044】
シャーシ12は板金から形成される。シャーシ12はハンドル端30から取得端32へ延在し、全体として直方体の形状を有する。
【0045】
シャーシ12は、その上部領域に位置する1対の中央トラック36を含む。中央トラック36の各々は、中央ハンドル端40から中央取得端42へ延在する直線の歯付きラックを画定する。
【0046】
着脱可能なノーズ14も全体として直方体の形状を有し、各々がノーズ14の中央取得端42から提供端52へ延在し、各々が対応する中央トラック36に整列してシャーシ12の各側に連続するトラックを提供する相互に対向する2つのノーズトラック50を含む。
【0047】
着脱可能なトラック26は、シャーシ12のハンドル端30に位置する。ハンドル端30と中央ハンドル端40との間の距離は、取得端32と中央取得端42との間の距離にほぼ等しい。これによって、着脱可能なトラック26をシャーシ12の両端に配置することができる。
【0048】
着脱可能なトラック26と、中央トラック36と、ノーズトラック50はすべて、組み合わさってシャーシ12のハンドル端30からノーズ14の提供端52へ延在する提供装置トラック(矢印54で示す)を提供するように、直線の歯付きラックである。
【0049】
キャリッジ20は、その両側にあり、シャフトの両側に装着された1対の歯付き駆動歯(図1に示さず)を含む。歯付き駆動歯はシャーシ12の両側の提供装置トラック54と噛み合い、キャリッジ20が提供装置トラック54の全長にわたって直線的に移動することを可能にする。提供装置トラック54は1つしか示していないが、シャーシ12は各々がシャーシ12の両側にある2つの平行な提供装置トラック54を含む。キャリッジ20は、両方の提供装置トラック54と同時に係合し(キャリッジ20の2つの対向する側の各々は提供装置トラック54の異なる一方と係合する)。しかし、図を見やすくするため、図1では提供装置トラック54を1つしか示していない。
【0050】
紙幣搬送ユニット16は、紙幣をキャリッジ積載出口72(紙幣をキャリッジ20上に積載するための)又はパージビン出口74(紙幣をパージビン18内に積載するための)へ経路指示するダイバータ70を含む。
【0051】
多区画パージビン18は3つの入口を有する。第1の入口78は、紙幣搬送ユニット16から紙幣を受け取ってプリバンチ方向転換区画80内に収容する。第2の入口82は、キャリッジ20から紙幣を受け取って提供後退区画84内に収容する。これは、顧客に提供されたが顧客が束(又はその全部)を取り出さなかったために後退した紙幣束を収容するためのものである。第3の入口86は、キャリッジ20から紙幣束を受け取ってプリ提供後退区画88内に収容する。これは、顧客に提供する前にパージされた紙幣束を収容するためのものである。
【0052】
紙幣の束をキャリッジ外に搬送して第2の入口82へ移送できるように(提供後退区画84へ送達するために)キャリッジ20が整列すると、これは提供パージ位置(又は提供後退(RFP)位置)と呼ばれる。
【0053】
紙幣の束をキャリッジ外に搬送して第3の入口86内に収容できるように(プリ提供後退区画88へ送達するために)キャリッジ20が整列すると、これはプリ提供パージ位置(又は拒絶位置)と呼ばれる。
【0054】
顧客に紙幣の束を送達するためにキャリッジ20が整列すると、これは提供位置と呼ばれる。
【0055】
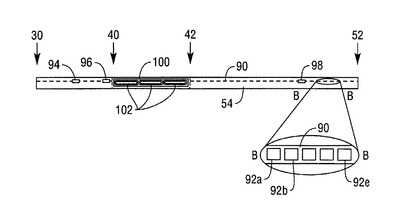
装着された構成要素を示す提供装置トラック54の簡単な概略図である図2について説明する。
【0056】
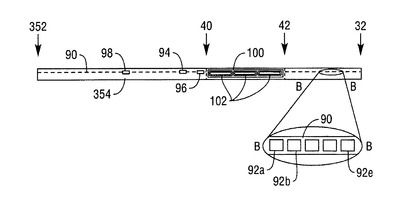
提供装置トラック54は、提供装置トラック54の実質的に全長にわたって延在するターゲットマウント90を備える。ターゲットマウント90は、直線状に並んだ一連の開口92a、b、...を画定する(図2の拡大部分B−Bに最もよく示されている)。以下に説明するように、3つの光学ターゲット94、96、98はマウント90内に着脱可能に配置されている。3つの光学ターゲット94、96、98は、開口92を有する締り嵌めを提供する寸法の挿入端(図示せず)を有するタブの形態である。
【0057】
提供装置トラック54上には誘導型センサ100も装着されている。誘導型センサ100は、誘導型センサ100上の複数のスパイラルとして配置された導電トラック102を含む。
【0058】
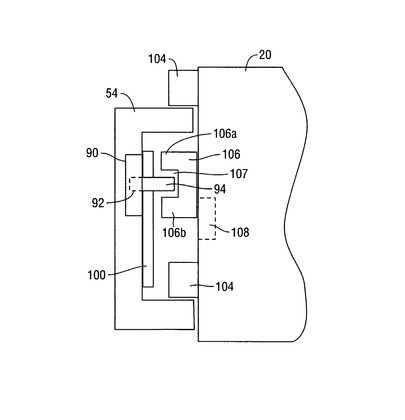
また、提供装置トラック54に係合する可動式キャリッジ20の一部の簡単な側面図である図3について説明する。
【0059】
可動式キャリッジ20は、直線の提供装置トラック54によって画定された歯付きラックと係合する2つの歯付き駆動歯車104を含む。可動式キャリッジ20は、またキャリッジ20の側面に装着された光センサ106を含む。光センサ106は、光センサ106内の送信機アーム106aと検出器アーム106bとの間にスロット107を画定する。アーム106a、bは、提供装置トラック54の長手方向を横切る方向を向き、光センサ106は、キャリッジ20が直線の提供装置トラック54に沿って移動する時に光学ターゲット94、96、98がスロット107を通過するように装着される。
【0060】
キャリッジ20上には共振ターゲット108(フェライトブロックを含む共振器の形態の)も装着されている。共振ターゲット108は、共振ターゲット108が通過する際に誘導型センサ100によって検出される。
【0061】
この実施形態では、誘導型センサ100及びターゲット108は、Cambridge Integrated Circuits Ltd,21 Sedley Taylor Road,Cambridge,CB2 8PW,UK製の線形共振誘導型位置センサのラインアップから選択される。
【0062】
再度図2を参照すると、図示の上記3つの光学ターゲット94、96、98は特に透過特性などの光学特性を別にして同一である。
【0063】
第1の光学ターゲット(又はタブ)94はプリ提供パージタブと呼ばれる。これはプリ提供パージ位置にある。このタブ94は約1%の透過率を有し、入射光のわずか1%しかそこを透過しない。
【0064】
第2の光学ターゲット(又はタブ)96は提供パージタブと呼ばれる。これは提供パージ位置にある。このタブ96は約5%の透過率を有し、入射光の5%がそこを透過する。
【0065】
第3の光学ターゲット(又はタブ)98は提供タブと呼ばれる。これは提供位置にある。このタブ98は約20%の透過率を有し、入射光の20%がそこを透過する。
【0066】
光センサ106は制御盤28に結合され、制御盤28はどの光学ターゲットがどの位置に対応するかを(光センサ106によって検出される透過率に基づいて)示す光学ターゲット(タブ)情報を格納する。この格納された情報を他の情報(提供装置の向きなど)と共に本明細書では格納された構成情報と呼ぶ。制御盤28は、光学ターゲット94、96、98の透過率の変化に適応するソフトウェア(図示せず)を含み、このソフトウェアは、塵埃が光学ターゲット94、96、98上に堆積すると共に光学ターゲット94、96、98の格納された透過値を更新する。
【0067】
次に図4A〜図4Dについて説明する。図4A〜図4Dは、提供装置トラック54、カムブロック22、及びキャリッジ20を示し、キャリッジは4つの異なる位置に示されている。4つの位置とは、提供パージ位置(図4A)、スタック位置、キャリッジ閉(図4B)、スタック位置(キャリッジ閉(図4C)、及び提供位置(図4D)である。非提供パージ位置は図4には示されていない。
【0068】
図4Aは、紙幣の束をパージビン18に搬送するための提供パージ位置にあるキャリッジ20を示す。以下に詳述するように、この位置で紙幣の束が顧客に提供されたが顧客によって取り出されなかった。
【0069】
図4Bは、キャリッジ20が閉位置にあるスタック位置のキャリッジ20を示す。スタック位置で、キャリッジ20内のキャリッジ板120(図4C)が開くまでカムブロック22をカムブロックモータ(図示せず)によって回転させることができる。
【0070】
図4Cは、キャリッジ20が開位置にあるスタック位置のキャリッジ20を示す。すなわち、キャリッジ板120は下降している。
【0071】
図4Dは、提供位置にあるキャリッジ20と、顧客が取り出せるようにキャリッジ20から排出された紙幣の束122とを示す。
【0072】
カムブロック位置センサ124はカムブロック22上に装着され、カムブロック22が装着されたシャフト126上に装着された別の共振ターゲット(図示せず)と協働する。これによって、カムブロック位置センサ124はシャフト126の回転位置を検知でき、それによってカムブロック22の回転位置を推定することができる。これは、キャリッジ20が提供装置トラック54の当該部分に沿って移動するためにカムブロック22が画定された位置になければならない実施形態で必要になる。以下の説明では、カムブロック22は画定された位置にある必要がないか、又はすでに画定された位置にある。
【0073】
この実施形態では、カムブロック位置センサ124及び共振ターゲットは、Cambridge Integrated Circuits Ltd,21 Sedley Taylor Road,Cambridge,CB2 8PW,UK製の回転共振誘導型位置センサのラインアップから選択される。
【0074】
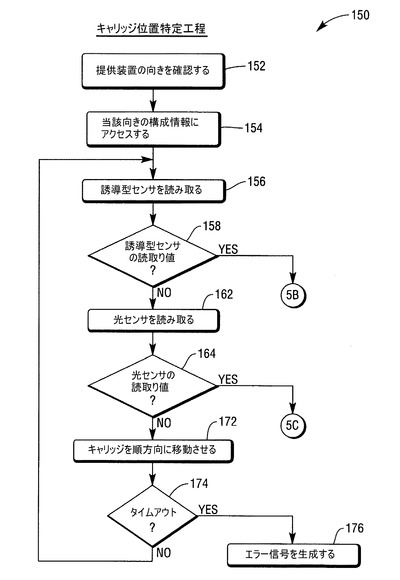
紙幣提供装置10が最初に電源投入されると、制御盤28はまずキャリッジ20の位置を確認しなければならない。これは、キャリッジ位置特定工程150を示すフローチャートである図5を参照して記載する工程を用いて実施される。
【0075】
最初に、制御盤28は紙幣提供装置10の向き(すなわち、前面アクセスと背面アクセスのどちらであるか)を確認する(ステップ152)。これは、制御盤28上のインジケータ信号の状態を検知することで実施される。
【0076】
次に、制御盤28はその向きの構成情報(制御盤28上のメモリ(図示せず)に格納された)にアクセスする(ステップ154)。構成情報は、紙幣提供装置10に装着されたターゲットに関する情報(例えば、ターゲットの数、提供装置10上のターゲットの順序、各ターゲットの透過特性など)、シャーシ12上に装着された着脱可能なノーズ14の長さに関する情報などを含む。
【0077】
次に、制御盤28は誘導型センサ100の読取りを試みる(ステップ156)。
【0078】
誘導型センサ100が読取り値(共振ターゲット108が誘導型センサ100付近に位置することを示す)を提供する(ステップ158)と、工程は図5Bに示す提供装置長較正サブ工程160へ進む。
【0079】
誘導型センサ100が読取り値を提供しない(ステップ158)と、制御盤28は光センサ106からの出力を検出する(ステップ162)。
【0080】
光学ターゲット94、96、98が光センサ106のアーム106a、bの間に位置することを光センサ106が示す(ステップ164)と、工程は図5Cに示す光学ターゲット識別サブ工程170へ進む。
【0081】
光学ターゲット94、96、98が存在しないことを光センサ106が示す(ステップ164)と、制御盤28は超低速でキャリッジ20を順方向に移動させる(ステップ172)。
【0082】
次に、制御盤28はタイムアウト状態が発生したことを確認する(ステップ174)。言い換えれば、紙幣提供装置10上で使用可能な最長の着脱可能なノーズ14の端部に達するのに必要な程度より長時間(又は先まで)キャリッジ20が駆動されると、エラーが発生する。次に、制御盤28はエラー信号を生成する(ステップ176)。このエラー信号は、紙幣提供装置10が設置されているATMへ送信される。
【0083】
タイムアウト状態が発生しなかった場合(ステップ174)、フローはステップ156に戻り、そこで誘導型センサ100が再度読み取られる。この時までに、キャリッジ20はわずかに移動しているので、光センサ106は光学ターゲット94、96、98のいずれかに到達した可能性がある。
【0084】
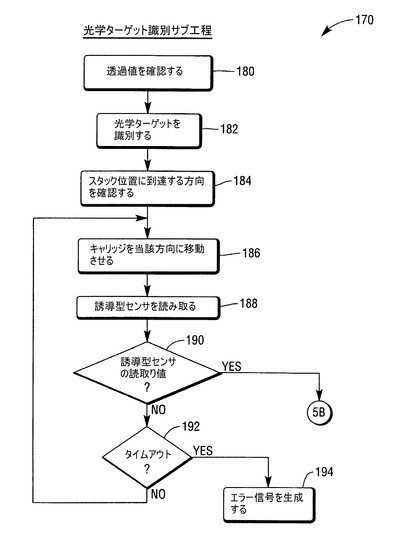
図5Cに示す光学ターゲット識別サブ工程170について説明する。
【0085】
最初に、制御盤28は、光センサ106によって読み取られた透過値を確認する(ステップ180)。
【0086】
透過値は、構成情報の一部として制御盤メモリ(図示せず)に格納された(また上記ステップ154でアクセスされた)様々な透過値と比較され、読み取られた光学ターゲット94、96、98が識別される(ステップ182)。
【0087】
光学ターゲット94、96、98が識別されると、制御盤28はスタック位置に到達するためにどの方向(順方向又は逆方向)にキャリッジ20を移動させるかを確認できる(ステップ184)。次に、制御盤28はキャリッジ20を当該方向に移動させる(ステップ186)。
【0088】
次に、制御盤28は誘導型センサ100の読取りを試みる(ステップ188)。
【0089】
誘導型センサ100が読取り値(共振ターゲット108が誘導型センサ100付近に位置することを示す)を提供する(ステップ190)と、工程は図5Bに示す提供装置長較正サブ工程160へ進む。
【0090】
誘導型センサ100が読取り値を提供しない(ステップ190)と、制御盤28はタイムアウト状態が発生したか否かを確認する(ステップ192)。次に、制御盤28はエラー信号を生成する(ステップ194)。このエラー信号は、紙幣提供装置10が設置されているATMへ送信される。
【0091】
タイムアウト状態が発生しなかった場合(ステップ192)、制御盤28はステップ186に戻り、そこで制御盤28は、スタック位置へ向けてキャリッジ20を移動させ続ける。
【0092】
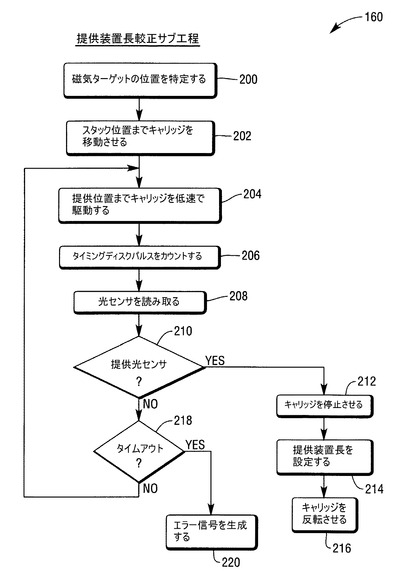
図5Bに示す提供装置長較正サブ工程160について説明する。
【0093】
最初に、制御盤28は誘導型センサ100を用いて共振ターゲット108の正確な位置を特定する(ステップ200)。次に、キャリッジ20がスタック位置にまだない場合、制御盤28はキャリッジ20をスタック位置へ移動させる(ステップ202)。
【0094】
次に、制御盤28は提供位置へ向けてキャリッジ20を低速で駆動する(ステップ204)。
【0095】
制御盤28は、タイミングディスクによって生成されたパルスの数を記録する(ステップ206)。タイミングディスクパルスは、キャリッジ20を移動させるステッパモータ(図示せず)を駆動させるパルスである。タイミングディスクパルスをカウントすることで、制御盤28はキャリッジ20が移動する距離を測定できる。
【0096】
次に、制御盤28は誘導型センサ106の読取りを試みる(ステップ208)。
【0097】
提供光学ターゲット98が光センサ106のアーム106a、bの間に位置することを光センサ106が示す(ステップ210)と、制御盤28はキャリッジ20を停止させ(ステップ212)、カウントされたタイミングディスクパルスに基づいて構成情報を更新して提供装置長を設定する(ステップ214)。次に、制御盤28はキャリッジ20を反転させてスタック位置に戻す(ステップ216)。
【0098】
光学ターゲットが存在しないか、又は提供ターゲット98とは別の光学ターゲット(例えば、提供パージターゲット96又はプリ提供パージターゲット94)が存在することを光センサ106が示す(ステップ210)と、制御盤28はタイムアウト状態が発生したか否かを確認する(ステップ218)。次に、制御盤28はエラー信号を生成する(ステップ220)。このエラー信号は、紙幣提供装置10が設置されているATMへ送信される。
【0099】
タイムアウト状態が発生しなかった場合(ステップ218)、制御盤28はステップ204に戻り、そこでキャリッジ20は提供位置へ向けて移動し続ける。
【0100】
キャリッジ位置特定工程150が完了すると、制御盤28は提供装置の向き、光学ターゲット94、96、98の各々の位置、及び着脱可能な提供装置ノーズ14の長さを認識し、これによって紙幣提供装置10を正確に動作させることができる。
【0101】
キャリッジ位置特定工程150は、紙幣提供装置10に電源を投入する毎に繰り返すことができる。これは、停電後、又はディスペンサの稼働後にも実行できる。その結果、別の着脱可能な提供装置ノーズ14を追加した場合、又は光学ターゲット94、96、98が移動した場合に、制御盤28は人力による入力に頼らずに上記変化についての情報を自動的に入手できる。
【0102】
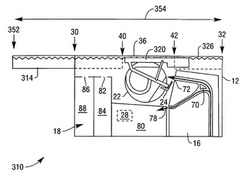
本発明の別の実施形態による検知システムを含む前面アクセス情報記録媒体アイテムの提供装置(紙幣提供装置の形態)310の簡単な概略図である図6について説明する。紙幣提供装置310は紙幣提供装置10の再構成バージョンであり、同一の部分は同じ参照番号で示されている。
【0103】
紙幣提供装置10と紙幣提供装置310との間の相違点は以下の通りである。紙幣提供装置310は、着脱可能なノーズ314と、再構成キャリッジ320(図6のスタック位置に示す)と、着脱可能なトラック326と、新しい提供端352と、シャーシ12の取得端32からノーズ314の新しい提供端352へ延在する新しい提供装置トラック(矢印354で示す)とを含む。
【0104】
着脱可能なノーズ314及び着脱可能なトラック326は、実際は着脱可能なノーズ14及び着脱可能なトラック26と同一であるが、その位置は切り替えられて提供装置を背面アクセス型から前面アクセス型へ変換している。
【0105】
図7は、光学ターゲット94、96、98を背面アクセス型提供装置10における位置から取り外して前面アクセス型提供装置310の新しい位置に挿入した様子を示す図6の提供装置の簡単な概略図である。
【0106】
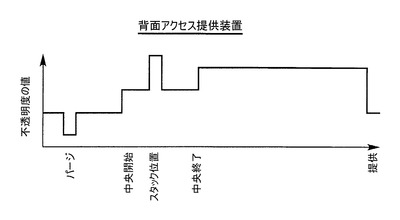
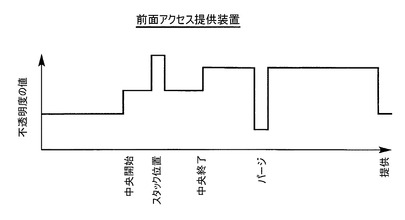
本発明の第3及び第4の実施形態について説明する。これらの実施形態では、ターゲットマウント90上の任意の所望の位置での挿抜が可能な3つの小さい光学ターゲットを使用せずに、光学ターゲットの3つの長い部分が連続長として装着されている。3つの長い部分の各々は異なる透過特性を有する。第1の長さは着脱可能なトラック26、326の全長にわたって延在し、第2の長さは中央トラック36の全長にわたって延在し、第3の長さは提供装置ノーズ14、314の全長にわたって延在する。
【0107】
背面アクセス型提供装置10(図8)及び前面アクセス型提供装置310(図9)の光学ターゲットの3つの長い部分の不透明度(透過度の逆)を示すグラフである図8及び図9について説明する。
【0108】
グラフから明らかなように、中央トラック部はスタック位置の低透過度(高不透明度)地点を含む。
【0109】
背面アクセス型提供装置10は、着脱可能なトラック26に装着された長い部分のパージ位置(1つのパージ位置だけを図示している)の高透過度(低不透明度)地点と、着脱可能な提供装置ノーズ14に装着された長い部分の提供位置の中間透過度(中間不透明度)地点とを含む。
【0110】
同様に、前面アクセス型提供装置310は、着脱可能な提供装置ノーズ314に装着された長い部分のパージ位置(1つのパージ位置だけを図示している)の高透過度(低不透明度)地点と、着脱可能な提供装置ノーズ314に装着された長い部分の提供位置の中間透過度(中間不透明度)地点とを含む。
【0111】
制御盤28は常時これらの長い部分の透過度(不透明度)を読み取っているため、紙幣提供装置10、310のどの部分にキャリッジ20が位置するかを推定できる。
【0112】
精度を上げる必要がある場合、上記の第1及び第2の実施形態と同様、スタック位置の近傍の誘導型センサを使用できる
【0113】
本発明の範囲内で上記の実施形態を様々に変更できる。例えば、別の実施形態では、上記とは別の誘導型センサを使用してもよい。
【0114】
別の実施形態では、上記とは別の透過値を使用してもよい。
【0115】
別の実施形態では、透過値とは別の光学特性を使用してもよく、又は非光学特性を使用してもよい。
【0116】
画定された位置になければならないカムブロック(カムブロック22など)が使用される別の実施形態では、カムブロック22の位置を検知でき、キャリッジ20がカムブロック位置にない場合、キャリッジ20を移動させる前にカムブロックを画定された位置へ移動させてもよい。
【0117】
本明細書に記載する方法ステップは、適宜任意の適切な順序で、又は同時に実行することができる。本明細書に記載する方法は有形の情報記録媒体上の機械可読形態のソフトウェア又は伝搬信号として実行することができる。
【0118】
本明細書では、「備える」、「含む」、「組み込む」及び「有する」という用語は、限定されたリストではなく、1つ又は複数の要素又はステップの拡張可能なリストを記載するために使用される。そのような用語が使用される時には、リスト内に記載した要素又はステップはリストに追加できる他の要素又はステップを除外するものではない。
【0119】
文脈によって別の意味になる場合を除き、「ある」という用語はそれに続く少なくとも1つの要素、整数、ステップ、特徴、動作、又は構成要素を示すために使用されるが、追加の要素、整数、ステップ、特徴、動作、又は構成要素を除外するものではない。
【0120】
「1つ又は複数の」、「少なくとも」、「が、これに限定されない」又は幾つかの例のその他の同様の語句のような広義の用語及び語句の存在は、そのような広義の語句が使用されない例では狭義のケースが意図又は必要とされることを意味しないし、またそれを意味すると解釈されるべきではない。
【技術分野】
【0001】
本発明は、紙幣やチケット等の情報記録媒体を顧客に提供するセルフサービス端末における情報記録媒体の提供装置に関し、特に、当該情報記録媒体の構成を自動的に検知する技術に関する。
【背景技術】
【0002】
情報記録媒体の提供装置は、情報記録媒体ディスペンサの一部として使用される。情報記録媒体の提供装置は、情報記録媒体アイテム(例えば、紙幣など)を顧客に提供するディスペンサの一部である。一般的なタイプの情報記録媒体ディスペンサとしてシート形態の情報記録媒体アイテム(例えば、紙幣、チケット、クーポンなど)の束(又はスタック)をディスペンスするシート束情報記録媒体ディスペンサがある。
【0003】
束の情報記録媒体の提供装置は、通常、1つ又は複数の情報記録媒体ピックユニットに結合されている。各情報記録媒体ピックユニットは、内蔵の情報記録媒体カセット(又はホッパ)から個々の情報記録媒体アイテムを取得し、取得した情報記録媒体アイテムを情報記録媒体の提供装置へ搬送し、情報記録媒体アイテムを束に揃え(例えば、バリスティックスタッカ又はスタッキングホイールを用いて)、次に情報記録媒体アイテムの束を顧客に提供する。顧客が提供された束を取り出さない場合、提供装置は束を引っ込めてパージビンへ搬送する。
【0004】
幾つかの情報記録媒体ディスペンサは前面アクセス型である。これは、情報記録媒体アイテムが顧客にディスペンスされるのと同じ情報記録媒体ディスペンサの側に情報記録媒体カセットが挿入されるということを意味する。また、背面アクセス型の情報記録媒体ディスペンサもある。これは、情報記録媒体アイテムが顧客にディスペンスされるのと逆の情報記録媒体ディスペンサの側に情報記録媒体カセットが挿入されるということを意味する。
【発明の概要】
【発明が解決しようとする課題】
【0005】
改良型の情報記録媒体アイテムの提供装置を提供することが望ましい。また、様々なサイズのセルフサービス端末に適合する様々な長さの提供装置と併用できる情報記録媒体アイテムの提供装置を提供することが望ましい。そのようなシステムが確実に動作することを可能にするために、情報記録媒体アイテムの提供装置構成を自動的に検出する検知システムを有することが望ましい。
【課題を解決するための手段】
【0006】
したがって、本発明は、一般に、情報記録媒体の提供装置の構成を検知する情報記録媒体の提供装置のための方法、システム、装置、及びソフトウェアを提供する。
【0007】
上記の「発明の概要」と下記の「発明を実施するための形態」で開示する主題に加えて、この項の以下の各節では、必要に応じて、本出願の手続中に使用することがある代替の請求項表現をさらに基礎固めすることが意図されている。本出願が認可された場合、幾つかの態様は本出願の手続中に追加された請求項に関連する可能性があり、別の態様は本出願の手続中に削除された請求項に関連する可能性があり、また別の態様は請求項に記載しなかった主題に関連する可能性がある。さらに、以下に詳細に説明する様々な態様は、他に別段の記載がない限り、互いに独立している。1つの態様に対応するいかなる請求項も、請求項に明記しない限り、残りの態様のいかなる要素又は特徴も組み込んでいると解釈すべきではない。
【0008】
第1の態様によれば、第1のパージ位置、スタック位置、及び提供位置の間の直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置のための検知システムであって、中央トラック部分上に装着され、順方向又は逆方向のいずれかからスタック位置に接近する際に可動式キャリッジの位置を確認できるようにスタック位置の両側に延在する誘導型センサと、誘導型センサと協働して誘導型センサに対するターゲットの位置情報を提供する可動式キャリッジ上に装着された共振ターゲットと、可動式キャリッジ上の提供装置トラックの近傍に装着された光センサと、第1の光学特性を有し、光センサがパージターゲットを検出すると可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムをパージビンの入り口に搬送するように提供装置トラック上の第1のパージ位置の近傍に装着された第1のパージターゲットと、第2の光学特性を有し、光センサが提供ターゲットを検出すると可動式キャリッジが正確に整列して顧客に情報記録媒体アイテムを提供するように提供装置トラック上の提供位置の近傍に装着された提供ターゲットとを備える検知システムが提供される。
【0009】
検知システムは、第3の光学特性を有し、光センサが第2のパージターゲットを検出すると可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムをパージビンの別の入口に搬送するように提供装置トラック上の第2のパージ位置の近傍に装着された第2のパージターゲットをさらに備えてもよい。
【0010】
第1のパージ位置は、顧客に提供されたが顧客によって取り出されなかった(又は完全には取り出されなかった)情報記録媒体アイテム用に使用できる。
【0011】
第2のパージ位置は、顧客に提供されなかった情報記録媒体アイテム用に使用できる。これは、情報記録媒体アイテムの束を作成する際に異常があった場合、又は必要な束を作成するのに情報記録媒体アイテムが不足している場合、又は単一動作で偶然に複数の情報記録媒体アイテムを取得した場合に発生することがある。
【0012】
第1、第2、及び第3の光学特性は、パージターゲットと提供ターゲットの異なる透過値に関連していてもよい。例えば、第1の光学特性はほぼ1%の透過を含み、第2の光学特性はほぼ5%の透過を含み、第3の光学特性はほぼ20%の透過を含んでもよい。任意の便利な透過パーセンテージを使用できる。
【0013】
直線の提供装置トラックは、情報記録媒体の提供装置の顧客引渡し端から情報記録媒体の提供装置のディスペンサ端へ延在してもよい。
【0014】
直線の提供装置トラックは、中央のトラック部と、中央のトラック部から顧客引渡し端まで延在する着脱可能なノーズ部と、中央のトラック部からディスペンサ端まで延在する着脱可能な端部とを有してもよい。
【0015】
直線の提供装置トラックは、着脱可能なノーズ部と着脱可能な端部とを交換し、それにより前面アクセス型提供装置と背面アクセス型提供装置とを切り替えることで再構成できる。
【0016】
各々が異なる長さを有して直線の提供装置トラックを様々なサイズのセルフサービス端末に適合するように構成させる複数の異なる着脱可能なノーズ部を提供できる。例えば、ディスペンサと情報記録媒体アイテムがディスペンスされるフェーシアとの間の距離は、セルフサービス端末によって異なっていてもよい。
【0017】
ターゲットは、提供装置トラックから横方向に延在するタブ部を含んでもよい。タブ部は、直線の提供装置トラックに沿って画定された一連のスロットに挿抜可能な個別のタブを備えてもよい。これによって、例えば、提供タブを着脱可能なノーズ部の適切な位置に装着することができる。あるいは、タブ部は、全長に沿って様々な光学特性を定義する単一の連続するタブを備えてもよい。タブ部は、各々がその全長の大半で(スタック位置などのプリセット位置を画定する小領域を除いて)均一な光学特性を有する様々な長さの部分を含んでもよい。
【0018】
可動式キャリッジ上に装着された光センサは、光センサ内の送信機と光センサ内の検出器との間に提供装置トラックを横切る方向を向いたスロットを画定していてもよく、光センサはキャリッジの移動に伴ってタブ部がスロットを通過するように装着される。
【0019】
可動式キャリッジは、情報記録媒体アイテムをキャリッジ板上に配置できる開位置と、キャリッジ板とキャリッジ本体との間に情報記録媒体アイテムをクランプする閉位置との間でキャリッジ板が移動可能なキャリッジ本体とキャリッジ板とを含んでもよい。
【0020】
情報記録媒体の提供装置は、接続ケーブルに結合するコネクタを有する制御盤を含んでもよい。接続ケーブルは、キャリッジ接続端に2つのコネクタ(前面アクセスコネクタと背面アクセスコネクタ)を有していてもよい。
【0021】
可動式キャリッジは、前面アクセス入力部と、前面アクセス入力部とは異なるように構成された背面アクセス入力部とを含んでもよく、前面アクセス入力部は前面アクセスコネクタへの相補コネクタを提供し、背面アクセス入力部は背面アクセスコネクタへの相補コネクタを提供する。これによって、前面アクセスコネクタだけを用いて前面アクセス入力部に接続できる。同様に、背面アクセスコネクタだけを用いて背面アクセス入力部に接続できる。
【0022】
前面アクセスコネクタは、制御盤からのインジケータ信号を接地できる。背面アクセスコネクタは、制御盤からのインジケータ信号を接地できない(その代わりに抵抗によってHighにプルできる)。これによって、キャリッジタイプを表示するインジケータ信号が提供される(低電圧は前面アクセスを表示し、高電圧は背面アクセスを表示する)。あるいは、前面アクセスはインジケータ信号を接地できず、背面アクセスはインジケータ信号を接地でき、この場合に低電圧は背面アクセスを表示する。これによって、インジケータ信号の状態に基づいて前面アクセス構成が存在するか、又は背面アクセス構成が存在するかを検出できる。
【0023】
第2の態様によれば、情報記録媒体の提供装置の構成を検知する方法であって、情報記録媒体の提供装置が直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含み、該方法が、キャリッジ上の前面アクセスコネクタ又はキャリッジ上の背面アクセスコネクタに結合されたケーブルからの信号を制御盤上で検出するステップと、情報記録媒体の提供装置にアクセスの向きを割り当てるステップであって、ケーブルが前面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが前面アクセスであり、又はケーブルが背面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが背面アクセスであるステップと、直線の提供装置トラック上で位置マーカが検出されるまでキャリッジを移動させるステップと、割り当てられたアクセスの向きに関連する格納された構成情報にアクセスして位置マーカ情報を取り出すステップと、その特性に基づいて位置マーカを識別し、アクセスされた構成情報を用いるステップと、検出された位置マーカがスタック位置マーカでない場合、アクセスされた構成情報を用いてキャリッジをスタック位置マーカへ移動させてキャリッジを移動させる方向を確認するステップと、キャリッジが横断する距離を測定しながらキャリッジをスタック位置から提供位置へ移動させるステップと、構成情報を更新して提供位置とスタック位置との間の距離を含ませるステップと、を含む方法が提供される。
【0024】
位置マーカは、直線の提供装置トラック上に装着された誘導型センサと、直線の提供装置トラックから横方向に延在する複数のタブ部とを備えてもよい。
【0025】
誘導型センサは、可動式キャリッジが順方向又は逆方向のいずれかからスタック位置に接近する際に可動式キャリッジの位置を確認できるようにスタック位置の両側に延在していてもよい。
【0026】
キャリッジは、誘導型センサと協働して誘導型センサに対するターゲットの位置情報を提供する共振ターゲットを含んでもよい。
【0027】
位置マーカは、可動式キャリッジ上の提供装置トラックの近傍に装着された光センサによって検出できる。
【0028】
位置マーカは、第1のパージターゲットと、第2のパージターゲットと、提供ターゲットとを含んでもよい。これら3つのターゲットは、異なる透過係数などの異なる光学特性を有してもよい。
【0029】
第3の態様によれば、直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置の構成を検知する方法であって、キャリッジ上に装着されたセンサを用いてキャリッジが情報記録媒体アイテムを排出する位置を検出するステップと、直線の提供装置トラック上に装着されたセンサを用いてキャリッジに情報記録媒体アイテムが装着される位置を検出するステップと、を含む方法が提供される。
【0030】
第4の態様によれば、第1の態様の検知システムを含む情報記録媒体ディスペンサが提供される。
【0031】
第5の態様によれば、第4の態様の情報記録媒体ディスペンサを含むセルフサービス端末が提供される。
【0032】
第6の態様によれば、第2の態様を実施するプログラム命令を含むコンピュータプログラムが提供される。
【0033】
第7の態様によれば、第3の態様を実施するプログラム命令を含むコンピュータプログラムが提供される。
【0034】
これらのコンピュータプログラムは情報記録媒体(コンピュータメモリなど)上に実施でき、又は電気搬送装置上で搬送できる。
【0035】
第8の態様によれば、情報記録媒体の提供装置を構成する方法であって、提供装置トラックに沿ってセンサを含むキャリッジを移動させるステップと、提供装置トラック上に装着された複数のターゲットを検出するステップと、ターゲットに関連付けられた特性に基づいて検出された複数のターゲットの各々を識別するステップと、識別されたターゲットの場所に基づいて情報記録媒体の提供装置を構成するステップとを含む方法が提供される。
【0036】
この方法は、2つの識別されたターゲット間の距離を測定する別のステップを含んでもよい。これら2つの識別されたターゲットは、スタック位置ターゲットと、提供位置ターゲットとを含んでもよい。
【0037】
識別されたターゲットの場所に基づいて情報記録媒体の提供装置を構成するステップは、2つの識別されたターゲット間の測定された距離で構成情報を更新するステップを含んでもよい。
【0038】
説明を分かりやすく簡潔にするために、上記の態様で提供された要素はそのすべての組合せを明示しているわけではない。それにもかかわらず、技術的に不可能でない限り、又はその逆の内容が明示されていない限り、1つの態様を指すコンシストリクローズ(consistory clause)は、それらのコンシストリクローズが関連する可能性があるすべての他の態様のオプションの特徴として準用されることを当業者であれば直接かつ明確に認識することができるであろう。
【0039】
上記及びその他の態様は、添付の図面を参照しながら以下の具体的な説明を読むことで明らかになるだろう。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態による検知システムを含む背面アクセス情報記録媒体アイテムの提供装置の簡単な概略図である。
【図2】図1の提供装置の各部(直線の提供装置トラック、位置マーカ、及び線形誘導型センサ)をより詳細に示す簡単な概略図である。
【図3】直線の提供装置トラックに係合する提供装置の可動式キャリッジの一部を示す図1の情報記録媒体アイテムの提供装置の一部の簡単な側面図である。
【図4】図2の提供装置トラックと、可動式キャリッジが4つの異なる位置にある図1の情報記録媒体アイテムの提供装置のその他の部分(カムブロック、及び可動式キャリッジ)を示す図である。
【図5A】図3のキャリッジの位置の特定に使用される工程を示すフローチャート(図を見やすくするために3つのチャートA、B、及びCに分割されている)である。
【図5B】図3のキャリッジの位置の特定に使用される工程を示すフローチャート(図を見やすくするために3つのチャートA、B、及びCに分割されている)である。
【図5C】図3のキャリッジの位置の特定に使用される工程を示すフローチャート(図を見やすくするために3つのチャートA、B、及びCに分割されている)である。
【図6】本発明の別の実施形態による検知システムを含む前面アクセス情報記録媒体アイテムの提供装置の簡単な概略図である。
【図7】図6の提供装置の各部(直線の提供装置トラック、位置マーカ、及び線形誘導型センサ)をより詳細に示す簡単な概略図である。
【図8】本発明の第3の実施形態による背面アクセス提供装置の光学ターゲットの3つの長い部分の不透明度(透過度の逆)を示す図である。
【図9】本発明の第4の実施形態による前面アクセス提供装置の光学ターゲットの3つの長い部分の不透明度を示す図である。
【0041】
提供された図面の幾つかは実際の物理的実施形態を生成できるコンピュータレンダリングに基づいていることに留意されたい。したがって、これらの図面の幾つかは、これらの実施形態の理解には必須でないが当業者に有用な情報を伝える複雑な詳細を含んでいる。したがって、図面に示すすべての部分について具体的に言及はしない。さらに、図を見やすくし、多数の引出し線によって図面を煩雑にすることを回避するため、一部の図面では参照番号を一部割愛している。さらに、幾つかの図面では特徴の一部を取り除いてさらに見やすさを高めている。
【発明を実施するための形態】
【0042】
まず図1について説明する。図1は、本発明の一実施形態による検知システムを含む反転可能な情報記録媒体アイテムの提供装置10(紙幣提供装置の形態)の簡単な概略図である。
【0043】
紙幣提供装置10は、シャーシ12と、着脱可能なノーズ14と、ディスペンサ(図示せず)のピックユニット(図示せず)に結合する紙幣搬送ユニット16と、多区画パージビン18と、キャリッジ20(図1のスタック位置に示す)と、キャリッジ20上のカムフォロワ(図示せず)に係合することでキャリッジ20を開閉するカムブロック22と、紙幣を紙幣搬送ユニット16から整頓されたスタックとしてキャリッジ20内に吹き付けた状態に維持する位置合わせデバイス24と、着脱可能なトラック26と、紙幣提供装置10を制御する制御盤(点線28で示す)とを備える。図には示していないが、制御盤28はキャリッジの接続端に2つのコネクタ(前面アクセスコネクタと背面アクセスコネクタ)を有する接続ケーブルに結合するコネクタを有する。前面アクセスコネクタは、制御盤28からのインジケータ信号を接地する。背面アクセスコネクタは、制御盤28からのインジケータ信号を接地しない(インジケータ信号はその代わりに抵抗によってHighにプルされる)。したがって、制御盤28は、インジケータ信号に基づいて紙幣提供装置10が前面アクセス用と背面アクセス用のどちらに構成されているかを検出することができる。
【0044】
シャーシ12は板金から形成される。シャーシ12はハンドル端30から取得端32へ延在し、全体として直方体の形状を有する。
【0045】
シャーシ12は、その上部領域に位置する1対の中央トラック36を含む。中央トラック36の各々は、中央ハンドル端40から中央取得端42へ延在する直線の歯付きラックを画定する。
【0046】
着脱可能なノーズ14も全体として直方体の形状を有し、各々がノーズ14の中央取得端42から提供端52へ延在し、各々が対応する中央トラック36に整列してシャーシ12の各側に連続するトラックを提供する相互に対向する2つのノーズトラック50を含む。
【0047】
着脱可能なトラック26は、シャーシ12のハンドル端30に位置する。ハンドル端30と中央ハンドル端40との間の距離は、取得端32と中央取得端42との間の距離にほぼ等しい。これによって、着脱可能なトラック26をシャーシ12の両端に配置することができる。
【0048】
着脱可能なトラック26と、中央トラック36と、ノーズトラック50はすべて、組み合わさってシャーシ12のハンドル端30からノーズ14の提供端52へ延在する提供装置トラック(矢印54で示す)を提供するように、直線の歯付きラックである。
【0049】
キャリッジ20は、その両側にあり、シャフトの両側に装着された1対の歯付き駆動歯(図1に示さず)を含む。歯付き駆動歯はシャーシ12の両側の提供装置トラック54と噛み合い、キャリッジ20が提供装置トラック54の全長にわたって直線的に移動することを可能にする。提供装置トラック54は1つしか示していないが、シャーシ12は各々がシャーシ12の両側にある2つの平行な提供装置トラック54を含む。キャリッジ20は、両方の提供装置トラック54と同時に係合し(キャリッジ20の2つの対向する側の各々は提供装置トラック54の異なる一方と係合する)。しかし、図を見やすくするため、図1では提供装置トラック54を1つしか示していない。
【0050】
紙幣搬送ユニット16は、紙幣をキャリッジ積載出口72(紙幣をキャリッジ20上に積載するための)又はパージビン出口74(紙幣をパージビン18内に積載するための)へ経路指示するダイバータ70を含む。
【0051】
多区画パージビン18は3つの入口を有する。第1の入口78は、紙幣搬送ユニット16から紙幣を受け取ってプリバンチ方向転換区画80内に収容する。第2の入口82は、キャリッジ20から紙幣を受け取って提供後退区画84内に収容する。これは、顧客に提供されたが顧客が束(又はその全部)を取り出さなかったために後退した紙幣束を収容するためのものである。第3の入口86は、キャリッジ20から紙幣束を受け取ってプリ提供後退区画88内に収容する。これは、顧客に提供する前にパージされた紙幣束を収容するためのものである。
【0052】
紙幣の束をキャリッジ外に搬送して第2の入口82へ移送できるように(提供後退区画84へ送達するために)キャリッジ20が整列すると、これは提供パージ位置(又は提供後退(RFP)位置)と呼ばれる。
【0053】
紙幣の束をキャリッジ外に搬送して第3の入口86内に収容できるように(プリ提供後退区画88へ送達するために)キャリッジ20が整列すると、これはプリ提供パージ位置(又は拒絶位置)と呼ばれる。
【0054】
顧客に紙幣の束を送達するためにキャリッジ20が整列すると、これは提供位置と呼ばれる。
【0055】
装着された構成要素を示す提供装置トラック54の簡単な概略図である図2について説明する。
【0056】
提供装置トラック54は、提供装置トラック54の実質的に全長にわたって延在するターゲットマウント90を備える。ターゲットマウント90は、直線状に並んだ一連の開口92a、b、...を画定する(図2の拡大部分B−Bに最もよく示されている)。以下に説明するように、3つの光学ターゲット94、96、98はマウント90内に着脱可能に配置されている。3つの光学ターゲット94、96、98は、開口92を有する締り嵌めを提供する寸法の挿入端(図示せず)を有するタブの形態である。
【0057】
提供装置トラック54上には誘導型センサ100も装着されている。誘導型センサ100は、誘導型センサ100上の複数のスパイラルとして配置された導電トラック102を含む。
【0058】
また、提供装置トラック54に係合する可動式キャリッジ20の一部の簡単な側面図である図3について説明する。
【0059】
可動式キャリッジ20は、直線の提供装置トラック54によって画定された歯付きラックと係合する2つの歯付き駆動歯車104を含む。可動式キャリッジ20は、またキャリッジ20の側面に装着された光センサ106を含む。光センサ106は、光センサ106内の送信機アーム106aと検出器アーム106bとの間にスロット107を画定する。アーム106a、bは、提供装置トラック54の長手方向を横切る方向を向き、光センサ106は、キャリッジ20が直線の提供装置トラック54に沿って移動する時に光学ターゲット94、96、98がスロット107を通過するように装着される。
【0060】
キャリッジ20上には共振ターゲット108(フェライトブロックを含む共振器の形態の)も装着されている。共振ターゲット108は、共振ターゲット108が通過する際に誘導型センサ100によって検出される。
【0061】
この実施形態では、誘導型センサ100及びターゲット108は、Cambridge Integrated Circuits Ltd,21 Sedley Taylor Road,Cambridge,CB2 8PW,UK製の線形共振誘導型位置センサのラインアップから選択される。
【0062】
再度図2を参照すると、図示の上記3つの光学ターゲット94、96、98は特に透過特性などの光学特性を別にして同一である。
【0063】
第1の光学ターゲット(又はタブ)94はプリ提供パージタブと呼ばれる。これはプリ提供パージ位置にある。このタブ94は約1%の透過率を有し、入射光のわずか1%しかそこを透過しない。
【0064】
第2の光学ターゲット(又はタブ)96は提供パージタブと呼ばれる。これは提供パージ位置にある。このタブ96は約5%の透過率を有し、入射光の5%がそこを透過する。
【0065】
第3の光学ターゲット(又はタブ)98は提供タブと呼ばれる。これは提供位置にある。このタブ98は約20%の透過率を有し、入射光の20%がそこを透過する。
【0066】
光センサ106は制御盤28に結合され、制御盤28はどの光学ターゲットがどの位置に対応するかを(光センサ106によって検出される透過率に基づいて)示す光学ターゲット(タブ)情報を格納する。この格納された情報を他の情報(提供装置の向きなど)と共に本明細書では格納された構成情報と呼ぶ。制御盤28は、光学ターゲット94、96、98の透過率の変化に適応するソフトウェア(図示せず)を含み、このソフトウェアは、塵埃が光学ターゲット94、96、98上に堆積すると共に光学ターゲット94、96、98の格納された透過値を更新する。
【0067】
次に図4A〜図4Dについて説明する。図4A〜図4Dは、提供装置トラック54、カムブロック22、及びキャリッジ20を示し、キャリッジは4つの異なる位置に示されている。4つの位置とは、提供パージ位置(図4A)、スタック位置、キャリッジ閉(図4B)、スタック位置(キャリッジ閉(図4C)、及び提供位置(図4D)である。非提供パージ位置は図4には示されていない。
【0068】
図4Aは、紙幣の束をパージビン18に搬送するための提供パージ位置にあるキャリッジ20を示す。以下に詳述するように、この位置で紙幣の束が顧客に提供されたが顧客によって取り出されなかった。
【0069】
図4Bは、キャリッジ20が閉位置にあるスタック位置のキャリッジ20を示す。スタック位置で、キャリッジ20内のキャリッジ板120(図4C)が開くまでカムブロック22をカムブロックモータ(図示せず)によって回転させることができる。
【0070】
図4Cは、キャリッジ20が開位置にあるスタック位置のキャリッジ20を示す。すなわち、キャリッジ板120は下降している。
【0071】
図4Dは、提供位置にあるキャリッジ20と、顧客が取り出せるようにキャリッジ20から排出された紙幣の束122とを示す。
【0072】
カムブロック位置センサ124はカムブロック22上に装着され、カムブロック22が装着されたシャフト126上に装着された別の共振ターゲット(図示せず)と協働する。これによって、カムブロック位置センサ124はシャフト126の回転位置を検知でき、それによってカムブロック22の回転位置を推定することができる。これは、キャリッジ20が提供装置トラック54の当該部分に沿って移動するためにカムブロック22が画定された位置になければならない実施形態で必要になる。以下の説明では、カムブロック22は画定された位置にある必要がないか、又はすでに画定された位置にある。
【0073】
この実施形態では、カムブロック位置センサ124及び共振ターゲットは、Cambridge Integrated Circuits Ltd,21 Sedley Taylor Road,Cambridge,CB2 8PW,UK製の回転共振誘導型位置センサのラインアップから選択される。
【0074】
紙幣提供装置10が最初に電源投入されると、制御盤28はまずキャリッジ20の位置を確認しなければならない。これは、キャリッジ位置特定工程150を示すフローチャートである図5を参照して記載する工程を用いて実施される。
【0075】
最初に、制御盤28は紙幣提供装置10の向き(すなわち、前面アクセスと背面アクセスのどちらであるか)を確認する(ステップ152)。これは、制御盤28上のインジケータ信号の状態を検知することで実施される。
【0076】
次に、制御盤28はその向きの構成情報(制御盤28上のメモリ(図示せず)に格納された)にアクセスする(ステップ154)。構成情報は、紙幣提供装置10に装着されたターゲットに関する情報(例えば、ターゲットの数、提供装置10上のターゲットの順序、各ターゲットの透過特性など)、シャーシ12上に装着された着脱可能なノーズ14の長さに関する情報などを含む。
【0077】
次に、制御盤28は誘導型センサ100の読取りを試みる(ステップ156)。
【0078】
誘導型センサ100が読取り値(共振ターゲット108が誘導型センサ100付近に位置することを示す)を提供する(ステップ158)と、工程は図5Bに示す提供装置長較正サブ工程160へ進む。
【0079】
誘導型センサ100が読取り値を提供しない(ステップ158)と、制御盤28は光センサ106からの出力を検出する(ステップ162)。
【0080】
光学ターゲット94、96、98が光センサ106のアーム106a、bの間に位置することを光センサ106が示す(ステップ164)と、工程は図5Cに示す光学ターゲット識別サブ工程170へ進む。
【0081】
光学ターゲット94、96、98が存在しないことを光センサ106が示す(ステップ164)と、制御盤28は超低速でキャリッジ20を順方向に移動させる(ステップ172)。
【0082】
次に、制御盤28はタイムアウト状態が発生したことを確認する(ステップ174)。言い換えれば、紙幣提供装置10上で使用可能な最長の着脱可能なノーズ14の端部に達するのに必要な程度より長時間(又は先まで)キャリッジ20が駆動されると、エラーが発生する。次に、制御盤28はエラー信号を生成する(ステップ176)。このエラー信号は、紙幣提供装置10が設置されているATMへ送信される。
【0083】
タイムアウト状態が発生しなかった場合(ステップ174)、フローはステップ156に戻り、そこで誘導型センサ100が再度読み取られる。この時までに、キャリッジ20はわずかに移動しているので、光センサ106は光学ターゲット94、96、98のいずれかに到達した可能性がある。
【0084】
図5Cに示す光学ターゲット識別サブ工程170について説明する。
【0085】
最初に、制御盤28は、光センサ106によって読み取られた透過値を確認する(ステップ180)。
【0086】
透過値は、構成情報の一部として制御盤メモリ(図示せず)に格納された(また上記ステップ154でアクセスされた)様々な透過値と比較され、読み取られた光学ターゲット94、96、98が識別される(ステップ182)。
【0087】
光学ターゲット94、96、98が識別されると、制御盤28はスタック位置に到達するためにどの方向(順方向又は逆方向)にキャリッジ20を移動させるかを確認できる(ステップ184)。次に、制御盤28はキャリッジ20を当該方向に移動させる(ステップ186)。
【0088】
次に、制御盤28は誘導型センサ100の読取りを試みる(ステップ188)。
【0089】
誘導型センサ100が読取り値(共振ターゲット108が誘導型センサ100付近に位置することを示す)を提供する(ステップ190)と、工程は図5Bに示す提供装置長較正サブ工程160へ進む。
【0090】
誘導型センサ100が読取り値を提供しない(ステップ190)と、制御盤28はタイムアウト状態が発生したか否かを確認する(ステップ192)。次に、制御盤28はエラー信号を生成する(ステップ194)。このエラー信号は、紙幣提供装置10が設置されているATMへ送信される。
【0091】
タイムアウト状態が発生しなかった場合(ステップ192)、制御盤28はステップ186に戻り、そこで制御盤28は、スタック位置へ向けてキャリッジ20を移動させ続ける。
【0092】
図5Bに示す提供装置長較正サブ工程160について説明する。
【0093】
最初に、制御盤28は誘導型センサ100を用いて共振ターゲット108の正確な位置を特定する(ステップ200)。次に、キャリッジ20がスタック位置にまだない場合、制御盤28はキャリッジ20をスタック位置へ移動させる(ステップ202)。
【0094】
次に、制御盤28は提供位置へ向けてキャリッジ20を低速で駆動する(ステップ204)。
【0095】
制御盤28は、タイミングディスクによって生成されたパルスの数を記録する(ステップ206)。タイミングディスクパルスは、キャリッジ20を移動させるステッパモータ(図示せず)を駆動させるパルスである。タイミングディスクパルスをカウントすることで、制御盤28はキャリッジ20が移動する距離を測定できる。
【0096】
次に、制御盤28は誘導型センサ106の読取りを試みる(ステップ208)。
【0097】
提供光学ターゲット98が光センサ106のアーム106a、bの間に位置することを光センサ106が示す(ステップ210)と、制御盤28はキャリッジ20を停止させ(ステップ212)、カウントされたタイミングディスクパルスに基づいて構成情報を更新して提供装置長を設定する(ステップ214)。次に、制御盤28はキャリッジ20を反転させてスタック位置に戻す(ステップ216)。
【0098】
光学ターゲットが存在しないか、又は提供ターゲット98とは別の光学ターゲット(例えば、提供パージターゲット96又はプリ提供パージターゲット94)が存在することを光センサ106が示す(ステップ210)と、制御盤28はタイムアウト状態が発生したか否かを確認する(ステップ218)。次に、制御盤28はエラー信号を生成する(ステップ220)。このエラー信号は、紙幣提供装置10が設置されているATMへ送信される。
【0099】
タイムアウト状態が発生しなかった場合(ステップ218)、制御盤28はステップ204に戻り、そこでキャリッジ20は提供位置へ向けて移動し続ける。
【0100】
キャリッジ位置特定工程150が完了すると、制御盤28は提供装置の向き、光学ターゲット94、96、98の各々の位置、及び着脱可能な提供装置ノーズ14の長さを認識し、これによって紙幣提供装置10を正確に動作させることができる。
【0101】
キャリッジ位置特定工程150は、紙幣提供装置10に電源を投入する毎に繰り返すことができる。これは、停電後、又はディスペンサの稼働後にも実行できる。その結果、別の着脱可能な提供装置ノーズ14を追加した場合、又は光学ターゲット94、96、98が移動した場合に、制御盤28は人力による入力に頼らずに上記変化についての情報を自動的に入手できる。
【0102】
本発明の別の実施形態による検知システムを含む前面アクセス情報記録媒体アイテムの提供装置(紙幣提供装置の形態)310の簡単な概略図である図6について説明する。紙幣提供装置310は紙幣提供装置10の再構成バージョンであり、同一の部分は同じ参照番号で示されている。
【0103】
紙幣提供装置10と紙幣提供装置310との間の相違点は以下の通りである。紙幣提供装置310は、着脱可能なノーズ314と、再構成キャリッジ320(図6のスタック位置に示す)と、着脱可能なトラック326と、新しい提供端352と、シャーシ12の取得端32からノーズ314の新しい提供端352へ延在する新しい提供装置トラック(矢印354で示す)とを含む。
【0104】
着脱可能なノーズ314及び着脱可能なトラック326は、実際は着脱可能なノーズ14及び着脱可能なトラック26と同一であるが、その位置は切り替えられて提供装置を背面アクセス型から前面アクセス型へ変換している。
【0105】
図7は、光学ターゲット94、96、98を背面アクセス型提供装置10における位置から取り外して前面アクセス型提供装置310の新しい位置に挿入した様子を示す図6の提供装置の簡単な概略図である。
【0106】
本発明の第3及び第4の実施形態について説明する。これらの実施形態では、ターゲットマウント90上の任意の所望の位置での挿抜が可能な3つの小さい光学ターゲットを使用せずに、光学ターゲットの3つの長い部分が連続長として装着されている。3つの長い部分の各々は異なる透過特性を有する。第1の長さは着脱可能なトラック26、326の全長にわたって延在し、第2の長さは中央トラック36の全長にわたって延在し、第3の長さは提供装置ノーズ14、314の全長にわたって延在する。
【0107】
背面アクセス型提供装置10(図8)及び前面アクセス型提供装置310(図9)の光学ターゲットの3つの長い部分の不透明度(透過度の逆)を示すグラフである図8及び図9について説明する。
【0108】
グラフから明らかなように、中央トラック部はスタック位置の低透過度(高不透明度)地点を含む。
【0109】
背面アクセス型提供装置10は、着脱可能なトラック26に装着された長い部分のパージ位置(1つのパージ位置だけを図示している)の高透過度(低不透明度)地点と、着脱可能な提供装置ノーズ14に装着された長い部分の提供位置の中間透過度(中間不透明度)地点とを含む。
【0110】
同様に、前面アクセス型提供装置310は、着脱可能な提供装置ノーズ314に装着された長い部分のパージ位置(1つのパージ位置だけを図示している)の高透過度(低不透明度)地点と、着脱可能な提供装置ノーズ314に装着された長い部分の提供位置の中間透過度(中間不透明度)地点とを含む。
【0111】
制御盤28は常時これらの長い部分の透過度(不透明度)を読み取っているため、紙幣提供装置10、310のどの部分にキャリッジ20が位置するかを推定できる。
【0112】
精度を上げる必要がある場合、上記の第1及び第2の実施形態と同様、スタック位置の近傍の誘導型センサを使用できる
【0113】
本発明の範囲内で上記の実施形態を様々に変更できる。例えば、別の実施形態では、上記とは別の誘導型センサを使用してもよい。
【0114】
別の実施形態では、上記とは別の透過値を使用してもよい。
【0115】
別の実施形態では、透過値とは別の光学特性を使用してもよく、又は非光学特性を使用してもよい。
【0116】
画定された位置になければならないカムブロック(カムブロック22など)が使用される別の実施形態では、カムブロック22の位置を検知でき、キャリッジ20がカムブロック位置にない場合、キャリッジ20を移動させる前にカムブロックを画定された位置へ移動させてもよい。
【0117】
本明細書に記載する方法ステップは、適宜任意の適切な順序で、又は同時に実行することができる。本明細書に記載する方法は有形の情報記録媒体上の機械可読形態のソフトウェア又は伝搬信号として実行することができる。
【0118】
本明細書では、「備える」、「含む」、「組み込む」及び「有する」という用語は、限定されたリストではなく、1つ又は複数の要素又はステップの拡張可能なリストを記載するために使用される。そのような用語が使用される時には、リスト内に記載した要素又はステップはリストに追加できる他の要素又はステップを除外するものではない。
【0119】
文脈によって別の意味になる場合を除き、「ある」という用語はそれに続く少なくとも1つの要素、整数、ステップ、特徴、動作、又は構成要素を示すために使用されるが、追加の要素、整数、ステップ、特徴、動作、又は構成要素を除外するものではない。
【0120】
「1つ又は複数の」、「少なくとも」、「が、これに限定されない」又は幾つかの例のその他の同様の語句のような広義の用語及び語句の存在は、そのような広義の語句が使用されない例では狭義のケースが意図又は必要とされることを意味しないし、またそれを意味すると解釈されるべきではない。
【特許請求の範囲】
【請求項1】
第1のパージ位置、スタック位置及び提供位置の間の直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置のための検知システムであって、
中央トラック部分上に装着され、前記順方向又は逆方向のいずれかから前記スタック位置に接近する際に前記可動式キャリッジの位置を確認できるようにスタック位置の両側に延在する誘導型センサと、
前記誘導型センサと協働して前記誘導型センサに対する前記ターゲットの位置情報を提供する前記可動式キャリッジ上に装着された共振ターゲットと、
前記可動式キャリッジ上の前記提供装置トラックの近傍に装着された光センサと、
第1の光学特性を有し、前記光センサが前記パージターゲットを検出すると前記可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムをパージビンの入り口に搬送するように前記提供装置トラック上の前記第1のパージ位置の近傍に装着された第1のパージターゲットと、
第2の光学特性を有し、前記光センサが前記提供ターゲットを検出すると前記可動式キャリッジが正確に整列して顧客に情報記録媒体アイテムを提供するように前記提供装置トラック上の前記提供位置の近傍に装着された提供ターゲットと
を備える検知システム。
【請求項2】
前記検知システムが、第3の光学特性を有し、前記光センサが前記第2のパージターゲットを検出すると前記可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムを前記パージビンの第2の入口に搬送するように前記提供装置トラック上の第2のパージ位置の近傍に装着された第2のパージターゲットをさらに備える、請求項1に記載の検知システム。
【請求項3】
前記第1のパージ位置が、顧客に提供されたが前記顧客によって取り出されなかった情報記録媒体アイテム用に使用される、請求項1に記載の検知システム。
【請求項4】
前記第2のパージ位置が、顧客に提供されなかった情報記録媒体アイテム用に使用される、請求項2に記載の検知システム。
【請求項5】
前記第1、第2、及び第3の光学特性が、前記パージターゲットと前記提供ターゲットの異なる透過値に関連する、請求項2に記載の検知システム。
【請求項6】
前記直線の提供装置トラックが、前記情報記録媒体の提供装置の顧客引渡し端から前記情報記録媒体の提供装置のディスペンサ端へ延在し、前記直線の提供装置トラックが、中央のトラック部と、前記中央のトラック部から前記顧客引渡し端まで延在する着脱可能なノーズ部と、前記中央のトラック部から前記ディスペンサ端まで延在する着脱可能な端部とを備える、請求項2に記載の検知システム。
【請求項7】
前記直線の提供装置トラックが、前記着脱可能なノーズ部と前記着脱可能な端部とを交換して前面アクセス型提供装置と背面アクセス型提供装置とを切り替えることで再構成できる、請求項6に記載の検知システム。
【請求項8】
前記可動式キャリッジ上に装着された前記光センサが、前記光センサ内の送信機と検出器との間にスロットを画定し、前記スロットが提供装置トラックを横断する方向に向き、前記キャリッジが移動する際に前記第1のパージターゲットと前記提供ターゲットが前記スロットを通過するように前記光センサが装着される、請求項6に記載の検知システム。
【請求項9】
前記情報記録媒体の提供装置が、キャリッジ接続端に前面アクセスコネクタと背面アクセスコネクタとを有する接続ケーブルに結合するコネクタを有する制御盤を含む、請求項6に記載の検知システム。
【請求項10】
請求項1に記載の検知システムを含む情報記録媒体の提供装置。
【請求項11】
情報記録媒体の提供装置の構成を検知する方法であって、前記情報記録媒体の提供装置が直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含み、前記方法が、
前記キャリッジ上の前面アクセスコネクタ又は前記キャリッジ上の背面アクセスコネクタに結合されたケーブルからの信号を制御盤上で検出するステップと、
前記情報記録媒体の提供装置にアクセスの向きを割り当てるステップであって、前記ケーブルが前記前面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが前面アクセスであり、又は前記ケーブルが前記背面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが背面アクセスであるステップと、
前記直線の提供装置トラック上で位置マーカが検出されるまで前記キャリッジを移動させるステップと、
前記割り当てられたアクセスの向きに関連する格納された構成情報にアクセスして位置マーカ情報を取り出すステップと、
前記アクセスされた構成情報を用いてその特性に基づいて前記位置マーカを識別するステップと、
前記検出された位置マーカがスタック位置マーカでない場合、前記アクセスされた構成情報を用いて前記キャリッジを前記スタック位置マーカへ移動させて前記キャリッジを移動させる方向を確認するステップと、
前記キャリッジが横断する距離を測定しながら前記キャリッジを前記スタック位置から提供位置へ移動させるステップと、
前記構成情報を更新して前記提供位置と前記スタック位置との間の距離を含ませるステップと、
を含む検知方法。
【請求項12】
前記位置マーカが、前記直線の提供装置トラック上に装着された誘導型センサと、前記直線の提供装置トラックから横方向に延在する複数のタブ部とを備える、請求項11に記載の情報記録媒体の提供装置の構成を検知する検知方法。
【請求項13】
提供装置トラックに沿ってセンサを含むキャリッジを移動させるステップと、
前記提供装置トラック上に装着された複数のターゲットを検出するステップと、
前記ターゲットに関連付けられた特性に基づいて前記検出された複数のターゲットの各々を識別するステップと、
前記識別されたターゲットの場所に基づいて前記情報記録媒体の提供装置を構成するステップと、
を含む情報記録媒体提供装置の構成方法。
【請求項14】
前記情報記録媒体の提供装置を構成する前に2つの識別されたターゲットの間の距離を測定する別のステップを含む、請求項13に記載の構成方法。
【請求項15】
前記識別されたターゲットの場所に基づいて情報記録媒体の提供装置を構成するステップが前記2つの識別されたターゲットの間の測定された距離で構成情報を更新するステップを含む、請求項14に記載の情報記録媒体提供装置の構成方法。
【請求項1】
第1のパージ位置、スタック位置及び提供位置の間の直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含む情報記録媒体の提供装置のための検知システムであって、
中央トラック部分上に装着され、前記順方向又は逆方向のいずれかから前記スタック位置に接近する際に前記可動式キャリッジの位置を確認できるようにスタック位置の両側に延在する誘導型センサと、
前記誘導型センサと協働して前記誘導型センサに対する前記ターゲットの位置情報を提供する前記可動式キャリッジ上に装着された共振ターゲットと、
前記可動式キャリッジ上の前記提供装置トラックの近傍に装着された光センサと、
第1の光学特性を有し、前記光センサが前記パージターゲットを検出すると前記可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムをパージビンの入り口に搬送するように前記提供装置トラック上の前記第1のパージ位置の近傍に装着された第1のパージターゲットと、
第2の光学特性を有し、前記光センサが前記提供ターゲットを検出すると前記可動式キャリッジが正確に整列して顧客に情報記録媒体アイテムを提供するように前記提供装置トラック上の前記提供位置の近傍に装着された提供ターゲットと
を備える検知システム。
【請求項2】
前記検知システムが、第3の光学特性を有し、前記光センサが前記第2のパージターゲットを検出すると前記可動式キャリッジが正確に整列してそれによって担持する情報記録媒体アイテムを前記パージビンの第2の入口に搬送するように前記提供装置トラック上の第2のパージ位置の近傍に装着された第2のパージターゲットをさらに備える、請求項1に記載の検知システム。
【請求項3】
前記第1のパージ位置が、顧客に提供されたが前記顧客によって取り出されなかった情報記録媒体アイテム用に使用される、請求項1に記載の検知システム。
【請求項4】
前記第2のパージ位置が、顧客に提供されなかった情報記録媒体アイテム用に使用される、請求項2に記載の検知システム。
【請求項5】
前記第1、第2、及び第3の光学特性が、前記パージターゲットと前記提供ターゲットの異なる透過値に関連する、請求項2に記載の検知システム。
【請求項6】
前記直線の提供装置トラックが、前記情報記録媒体の提供装置の顧客引渡し端から前記情報記録媒体の提供装置のディスペンサ端へ延在し、前記直線の提供装置トラックが、中央のトラック部と、前記中央のトラック部から前記顧客引渡し端まで延在する着脱可能なノーズ部と、前記中央のトラック部から前記ディスペンサ端まで延在する着脱可能な端部とを備える、請求項2に記載の検知システム。
【請求項7】
前記直線の提供装置トラックが、前記着脱可能なノーズ部と前記着脱可能な端部とを交換して前面アクセス型提供装置と背面アクセス型提供装置とを切り替えることで再構成できる、請求項6に記載の検知システム。
【請求項8】
前記可動式キャリッジ上に装着された前記光センサが、前記光センサ内の送信機と検出器との間にスロットを画定し、前記スロットが提供装置トラックを横断する方向に向き、前記キャリッジが移動する際に前記第1のパージターゲットと前記提供ターゲットが前記スロットを通過するように前記光センサが装着される、請求項6に記載の検知システム。
【請求項9】
前記情報記録媒体の提供装置が、キャリッジ接続端に前面アクセスコネクタと背面アクセスコネクタとを有する接続ケーブルに結合するコネクタを有する制御盤を含む、請求項6に記載の検知システム。
【請求項10】
請求項1に記載の検知システムを含む情報記録媒体の提供装置。
【請求項11】
情報記録媒体の提供装置の構成を検知する方法であって、前記情報記録媒体の提供装置が直線の提供装置トラックに沿って順方向及び逆方向に移動可能なキャリッジを含み、前記方法が、
前記キャリッジ上の前面アクセスコネクタ又は前記キャリッジ上の背面アクセスコネクタに結合されたケーブルからの信号を制御盤上で検出するステップと、
前記情報記録媒体の提供装置にアクセスの向きを割り当てるステップであって、前記ケーブルが前記前面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが前面アクセスであり、又は前記ケーブルが前記背面アクセスコネクタに結合していることを検出された信号が示す場合はアクセスの向きが背面アクセスであるステップと、
前記直線の提供装置トラック上で位置マーカが検出されるまで前記キャリッジを移動させるステップと、
前記割り当てられたアクセスの向きに関連する格納された構成情報にアクセスして位置マーカ情報を取り出すステップと、
前記アクセスされた構成情報を用いてその特性に基づいて前記位置マーカを識別するステップと、
前記検出された位置マーカがスタック位置マーカでない場合、前記アクセスされた構成情報を用いて前記キャリッジを前記スタック位置マーカへ移動させて前記キャリッジを移動させる方向を確認するステップと、
前記キャリッジが横断する距離を測定しながら前記キャリッジを前記スタック位置から提供位置へ移動させるステップと、
前記構成情報を更新して前記提供位置と前記スタック位置との間の距離を含ませるステップと、
を含む検知方法。
【請求項12】
前記位置マーカが、前記直線の提供装置トラック上に装着された誘導型センサと、前記直線の提供装置トラックから横方向に延在する複数のタブ部とを備える、請求項11に記載の情報記録媒体の提供装置の構成を検知する検知方法。
【請求項13】
提供装置トラックに沿ってセンサを含むキャリッジを移動させるステップと、
前記提供装置トラック上に装着された複数のターゲットを検出するステップと、
前記ターゲットに関連付けられた特性に基づいて前記検出された複数のターゲットの各々を識別するステップと、
前記識別されたターゲットの場所に基づいて前記情報記録媒体の提供装置を構成するステップと、
を含む情報記録媒体提供装置の構成方法。
【請求項14】
前記情報記録媒体の提供装置を構成する前に2つの識別されたターゲットの間の距離を測定する別のステップを含む、請求項13に記載の構成方法。
【請求項15】
前記識別されたターゲットの場所に基づいて情報記録媒体の提供装置を構成するステップが前記2つの識別されたターゲットの間の測定された距離で構成情報を更新するステップを含む、請求項14に記載の情報記録媒体提供装置の構成方法。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−131641(P2012−131641A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2011−270765(P2011−270765)
【出願日】平成23年12月12日(2011.12.12)
【出願人】(391007161)エヌ・シー・アール・コーポレイション (85)
【氏名又は名称原語表記】NCR CORPORATION
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成23年12月12日(2011.12.12)
【出願人】(391007161)エヌ・シー・アール・コーポレイション (85)
【氏名又は名称原語表記】NCR CORPORATION
【Fターム(参考)】
[ Back to top ]