
情報記録装置および情報記録方法
【課題】瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定すること。
【解決手段】情報記録装置は、トラックを有する磁気記録媒体、検出手段、および記録制御手段を具備する。検出手段は、トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出する。記録制御手段は、少なくとも両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する。
【解決手段】情報記録装置は、トラックを有する磁気記録媒体、検出手段、および記録制御手段を具備する。検出手段は、トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出する。記録制御手段は、少なくとも両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、記録媒体に情報を記録する情報記録装置および情報記録方法に関する。
【背景技術】
【0002】
近年、情報記録装置の一例である磁気ディスク装置(以下、HDDとも称する)の高記録容量化を実現するための様々な技術が開発されている。この技術の一つに“瓦記録”と称される記録技術がある。瓦記録は、磁気ディスク上のトラックへの情報の記録に際して、当該トラックに隣接するトラックの一部に対して重ねて記録する記録方式である。一方で、従来からHDDで適用されている一般的な記録方式では、隣接するトラックは互いに所定の隙間を隔てて配置されるために、TPI(Track Per Inch)を向上させることが困難であった。つまり、瓦記録の採用により、TPI(Track Per Inch)をより向上することが可能となっている。
【0003】
HDDでは、トラックへの記録時に、ヘッドの記録磁界や磁化遷移が隣接トラックに漏洩するフリンジングが発生することがある。フリンジングの発生により、磁気的に記憶された情報が破壊されることがある。また、TPIが大きくなるほど、フリンジングの影響が無視できなくなる。そこで従来から、フリンジングの影響を考慮してトラックピッチを決定することが行われてきた。例えば、あるトラックに対して、トラック方向の両側から徐々に離間または接近するように記録して、隣接トラックから当該トラックへのフリンジングの影響を評価することで、トラックピッチを決定する手法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−339601号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが従来は、あるトラックに対して両側から記録される可能性があったため、あるトラックに対するトラック方向の両側からのフリンジングの影響の評価結果に基づいて、トラックピッチが決定されていた。両側からのフリンジングの影響は片側からのフリンジングの影響より大きいので、磁気的に情報を記録する情報記録装置において、トラックピッチをより狭く設定することは困難であった。
【0006】
そこで、本発明が解決しようとする課題は、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することができる情報記録装置および情報記録方法を提供することである。
【課題を解決するための手段】
【0007】
実施形態の情報記録装置は、トラックを有する磁気記録媒体、検出手段、および記録制御手段を具備する。検出手段は、トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出する。記録制御手段は、少なくとも両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する。
【図面の簡単な説明】
【0008】
【図1】本実施形態に係る情報記録装置としての磁気ディスク装置(HDD)を備える電子機器の構成を示すブロック図。
【図2】本実施形態に係るHDDで実行される、記録時に発生するフリンジングの影響に基づいてトラックピッチを決定するトラックピッチ決定処理の動作を説明するためのフローチャート。
【図3】本実施形態にかかるトラックピッチ決定処理にて決定されたトラックピッチおよび記録方向が適用される瓦記録処理の態様を説明するための概念図。
【図4】本実施形態にかかる磁気ディスクの記録面で発生するフリンジングの影響の態様を説明するための模式図。
【図5】本実施形態にかかる磁気ディスクの記録面の任意の位置において実行される瓦記録処理の具体例の態様を示す模式図。
【図6】本実施形態にかかる磁気ディスクの記録面の任意の位置において実行される瓦記録処理の他の具体例の態様を示す模式図。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を用いて説明する。
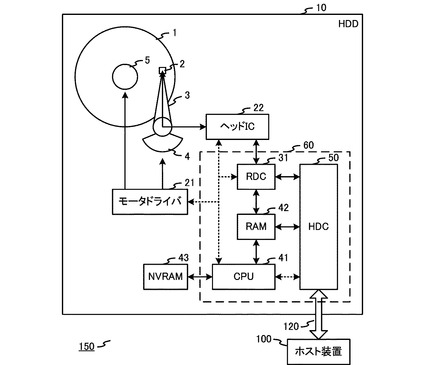
図1は、本実施形態に係る情報記録装置としての磁気ディスク装置(以下、HDDとも称する)10を備える電子機器150の構成を示すブロック図である。また電子機器150はホスト装置100を備えている。HDD10は、通信媒体(ホストI/F)120を介してホスト装置100と接続され、ホスト装置100の記憶モジュールとして機能する。ホストI/F120は、ホスト装置100とHDD10とを接続し、ホスト装置100とHDD10との間のデータ及びコマンドの送受に係る通信に利用される。例えば、電子機器150は、パーソナルコンピュータであり、ホスト装置100は、パーソナルコンピュータに備えられるチップセットICである。
【0010】
本実施形態に係るHDD10は、磁気ディスク1、スライダ2、アーム3、VCM(ボイスコイルモータ)4、及びSPM(スピンドルモータ)5などの機構部を有する。またHDD10は、モータドライバ21、ヘッドIC22、NVRAM43、及びコントローラ60などの回路系ブロックを備える。コントローラ60は、リードライトチャネルIC(以下、RDCとも称する)31、CPU41、RAM42、及びHDC(Hard Disc Controller)50を含む。
【0011】
本実施形態に係るHDD10では、スライダ2に備えられたライトヘッド(不図示)により、磁気ディスク1の記録面に情報が記録される。磁気ディスク1の記録面への情報の記録には、瓦記録と称される記録方式が適用される。瓦記録は、磁気ディスク1で定義されるトラックについて、隣接するトラックの一部を重ねて記録する(一部を上書きする)記録方式である。あるトラックのトラック方向の中心と、当該トラックに重ねて記録される隣接トラックのトラック方向の中心との距離であるトラックピッチは、記録時に発生するフリンジングの影響に基づいて決定される。
【0012】
磁気ディスク1は、SPM5に固定され、SPM5が回転駆動することで回転する。磁気ディスク1の少なくとも一面は磁気的に情報が記録される記録面である。つまり、磁気ディスク1は磁気記録媒体である。記録面には例えば同心円の複数のトラックが定義され、各トラックはサーボ領域とデータ領域とを有する。サーボ領域には、磁気ディスク1の記録面上での物理的なアドレス情報が記録されている。また、HDD10に記録されるべき情報はデータ領域に記録される。本実施形態では、磁気ディスク1のデータ領域に対する情報の記録方式として瓦記録が適用される。
【0013】
スライダ2は、磁気ディスク1の記録面に対応するようにアーム3の一端に備えられる。スライダ2は、リードヘッド(不図示)及びライトヘッド(不図示)を備えている。リードヘッド(不図示)は、磁気ディスク1の記録面に磁気記録された信号を読み取る。読み取られた信号は、アーム3上の導体パターンを介してヘッドIC22へ出力される。ライトヘッド(不図示)は、ヘッドIC22からアーム3上の導体パターンを介して入力されるライト信号(ライト電流)に応じて、磁気ディスク1の記録面に磁気記録する。
【0014】
アーム3は、一端にスライダ2、他端に軸受部3aを備えている。アーム3は、VCM4への駆動電流の供給に応じて、軸受部3aを回転中心として回転し、磁気ディスク1の記録面上でスライダ2を半径方向に移動させる。
【0015】
VCM4は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、アーム3を回転させる。
SPM5は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、磁気ディスク1を回転させる。
モータドライバ21は、コントローラ60(さらに具体的にはCPU41)からの制御信号に基づいて、VCM4を駆動するための駆動信号(電流)をVCM4へ、SPM5を駆動するための駆動信号(電流)をSPM5へ供給する。
【0016】
ヘッドIC22は、スライダ2に備えられたリードヘッド(不図示)からアーム3上の導体パターンを介して入力された信号を増幅し、増幅した信号をリード情報としてコントローラ60(さらに具体的にはRDC31)に出力する。またヘッドIC22は、コントローラ60(RDC31)から入力された記録情報に応じたライト信号(ライト電流)を、スライダ2に備えられたライトヘッド(不図示)へ、アーム3上の導体パターンを介して出力する。
【0017】
コントローラ60は、RDC31、CPU41、RAM42、及びHDC50等を含むSoC(System On
Chip)として構成される。コントローラ60がRAM42を含まず、コントローラ60の外部にRAM42が接続される構成であってもよい。コントローラ60は、磁気ディスク1の記録面に定義される複数のバンド及び境界トラックに対して情報を記録する情報記録処理を行う。
【0018】
RDC31は、ヘッドIC22から入力されたリード情報に所定の処理を施して復号化し、復号化した情報をHDC50へ出力する。またRDC31は、HDC50から入力された記録対象の情報に所定の処理を施して符号化し、この符号化した情報を記録情報としてヘッドIC22へ出力する。RDC31は、リード情報からサーボ領域を示すサーボ区間を検出し、検出したサーボ区間での信号から位置情報を抽出する。抽出された位置情報はCPU41へ出力される。RDC31は、これらの処理のためにRAM42をワークメモリとして利用する。
【0019】
CPU41は、NVRAM43に記憶されたプログラムを実行することでHDD10に備えられた各ブロックを制御するプロセッサである。例えばCPU41は、VCM4及びSPM5の回転制御処理、及び磁気ディスク1に対する情報記録処理の動作を制御する。CPU41は、コントローラ60がサーボコントローラ、又はリードライトコントローラとして動作するためのプログラムを実行する。CPU41は、このようなプログラムの実行においてRAM42をワークメモリとして利用する。本実施形態では、コントローラ60は、磁気ディスク1に記録された情報を読み出して、例えばエラーレート測定によるデータ品質評価処理の動作を制御する。またコントローラ60がリードライトコントローラとして動作する場合、瓦記録にて磁気ディスク1へ情報が記録される。さらにコントローラ60は、隣接するトラック間のトラック方向の中心同士の間隔(トラックピッチ)を、記録時に発生するフリンジングの影響に基づいて決定するトラックピッチ決定処理の動作を制御する。
【0020】
RAM42は、RDC31、CPU41及びHDC50のワークメモリである。RAM42には揮発性メモリであるDRAMが適用される。
NVRAM43は、CPU41が実行するプログラムを記憶する不揮発性メモリである。NVRAM43に記憶されるプログラムは更新可能である。またNVRAM43は、CPU41で実行される処理で利用されるパラメータ値を記憶する。
【0021】
HDC50は、ホスト装置100との間で情報を送信及び受信する通信処理を実行する。HDC50は、RDC31から入力された復号化した情報に所定の処理を施して符号化し、符号化した情報を送信情報としてホスト装置100へ送信する。またHDC50は、ホスト装置100から受信した受信情報に所定の処理を施して復号化し、復号化した情報を記録対象の情報としてRDC31へ出力する。例えばHDC50は、ホスト装置100との間でSATA(Serial Advanced Technology Attachment)規格に準拠した通信処理を実行する。HDC50は、ホスト装置100から、データの記録を開始する論理アドレス及び記録データ長の情報を含むライトコマンドを受信した場合、受信したライトコマンドから論理アドレス及び記録データ長の情報を抽出する。抽出された論理アドレス及び記録データ長の情報はCPU41へ出力される。
【0022】
このような構成により、本実施形態に係るHDD10に備えられた複数のブロックによって、複数のトラックに対して、所定のトラックピッチで瓦記録方式により情報が記録される。このトラックピッチは、トラックピッチ決定処理によって、記録時に発生するフリンジングの影響に基づいて、より狭くなるように決定される。すなわち、本実施形態に係るHDD10は、瓦記録方式による情報の記録に際して、トラックピッチをより狭く設定することができる
【0023】
次に、図2を用いて、本実施形態に係るHDD10で実行される、記録時に発生するフリンジングの影響に基づいてトラックピッチを決定するトラックピッチ決定処理の動作を説明する。
【0024】
図2は、本実施形態に係るHDD10で実行される、記録時に発生するフリンジングの影響に基づいてトラックピッチを決定するトラックピッチ決定処理の動作を説明するためのフローチャートである。
【0025】
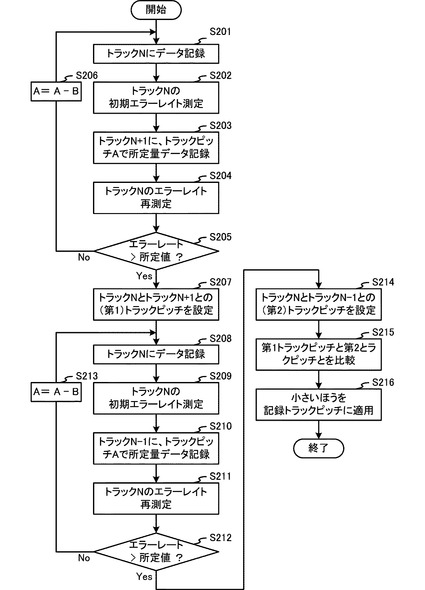
トラックピッチ決定処理は、リードライトコントローラとして動作するCPU41により制御される。このトラックピッチ決定処理では、トラックピッチだけでなく瓦記録処理のおける記録方向も決定される。まず、リードライトコントローラは、トラックNに対してデータを記録する(S201)。このデータはエラーレートが測定できるデータであればよい。リードライトコントローラは、データが記録されたトラックNのセクタごとのエラーレートを測定する(S202)。測定されたエラーレートは、セクタごとの初期エラーレートERdefとして、RAM42などのメモリ(記憶部)に記憶される。
【0026】
次に、リードライトコントローラは、トラックNに対してトラックピッチAで、トラックNの隣接トラックであるトラックN+1に所定量のデータを記録する(S203)。この時点でのトラックピッチAは、所定の測定開始値Astartである。また所定量のデータは、例えば数セクタといったエラーレートが測定できるデータ量であればよい。所定量のデータの記録が完了すると、リードライトコントローラは、トラックN+1のデータを記録したセクタに隣接するトラックNのセクタのエラーレートを再測定する(S204)。また、リードライトコントローラは、測定したエラーレートが初期エラーレートERdefに対して所定値より悪化しているか否かを判定する(S205)。
【0027】
測定したエラーレートが所定値よりも悪化していない場合(S205のNo)、現在のトラックピッチAから減算値Bを引いた値(A=A−B)でトラックピッチAが更新される(S206)。そしてリードライトコントローラは、再び、トラックNに対してデータを記録し(S201)、記録したトラックNの初期エラーレートを測定し(S202)、更新されたトラックピッチAで、トラックN+1に対して所定量のデータを記録し(S203)、トラックNのエラーレートを再測定する(S204)、という一連の処理を実行する。
【0028】
一方、測定したエラーレートが所定値より悪化している場合(S205のYes)、リードライトコントローラは、継続する記録を停止して、一巡前のトラックピッチA(更新される直前のトラックピッチA)を、トラックN+1からトラックNに向かう側の第1トラックピッチとしてメモリに記憶する(S207)。換言すると、トラックN+1へのデータの記録に際してトラックN+1からトラックNに向かう方向に発生するフリンジングが影響する幅が特定される。
【0029】
次に、リードライトコントローラは、トラックNと、トラックNの隣接トラックであってトラックN+1と反対側の隣接トラックであるトラックN−1とのトラックピッチを測定する処理を行う。この処理はトラックNとトラックN+1とのトラックピッチを測定する処理と同等である。リードライトコントローラは、トラックNに対してデータを再び記録し(N208)、データが記録されたトラックNのセクタごとのエラーレートを測定する(S209)。測定されたエラーレートは、セクタごとの初期エラーレートERdefとしてメモリ(記憶部)に記憶される。
【0030】
次に、リードライトコントローラは、トラックNに対してトラックピッチAで、トラックN−1に所定量のデータを記録する(S210)。この時点でのトラックピッチAは、所定の測定開始値Astartである。所定量のデータの記録が完了すると、リードライトコントローラは、トラックN−1のデータを記録したセクタに隣接するトラックNのセクタのエラーレートを再測定する(S211)。また、リードライトコントローラは、測定したエラーレートが初期エラーレートERdefに対して所定値より悪化しているか否かを判定する(S212)。
【0031】
測定したエラーレートが所定値よりも悪化していない場合(S212のNo)、現在のトラックピッチAから減算値Bを引いた値(A=A−B)でトラックピッチAが更新される(S213)。そしてリードライトコントローラは、再び、トラックNに対してデータを記録し(S208)、記録したトラックNの初期エラーレートを測定し(S209)、更新されたトラックピッチAで、トラックN−1に対して所定量のデータを記録し(S210)、トラックNのエラーレートを再測定する(S211)、という一連の処理を実行する。
【0032】
一方、測定したエラーレートが所定値より悪化している場合(S212のYes)、リードライトコントローラは、継続する記録を停止して、一巡前のトラックピッチA(更新される直前のトラックピッチA)を、トラックN−1からトラックNに向かう側の第2トラックピッチとしてメモリに記憶する(S214)。換言すると、トラックN−1へのデータの記録に際してトラックN−1からトラックNに向かう方向に発生するフリンジングが影響する幅が特定される。
【0033】
リードライトコントローラは、第1トラックピッチと第2トラックピッチとを比較し(S215)、値が小さいほうを記録トラックピッチに適用することを決定する(S216)。またリードライトコントローラは、逆の値の大きいほうの方向を瓦記録処理における記録方向として決定する。すなわち、トラックピッチ決定処理により記録トラックピッチが決定された後は、値の大きいトラックピッチ側にトラックを重ねる瓦記録が実行されることになる。換言すると、記録トラックピッチの決定後は、フリンジングが影響する幅の広いトラック方向にトラックが上書きされる瓦記録が実行されることになる。
【0034】
なお、トラックピッチ決定処理によって決定された記録トラックピッチおよび記録方向は、磁気ディスク1の全ての記録面で適用されなくてもよい。例えば、磁気ディスク1の記録面を半径方向に複数の領域に区分けし、区分けられた複数の領域それぞれに対応する記録トラックピッチおよび記録方向が決定されてもよい。決定された記録トラックピッチおよび記録方向は、対応する領域それぞれで実行される瓦記録処理に適用される。
【0035】
また、このトラックピッチ決定処理はあくまでも一例であって、他の手法によりトラックピッチが決定されてもよい。例えば、エラーレートでなくVMM(Viterbi Metric Margin)や再生信号のレベルに基づいてデータの信頼性が評価されてもよい。
【0036】
このような手順で、本実施形態に係るHDD10によるトラックピッチ決定処理が実行される。この処理では、あるトラックに対して両方のトラック方向から発生するフリンジングが影響する幅に基づいて、トラックピッチおよび瓦記録処理における記録方向が決定される。すなわち、本実施形態に係るHDD10は、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することが可能となる。
【0037】
次に、図3を用いて、本実施形態にかかるトラックピッチ決定処理にて決定されたトラックピッチおよび記録方向が適用される瓦記録処理の態様を説明する。
図3は、本実施形態にかかるトラックピッチ決定処理にて決定されたトラックピッチおよび記録方向が適用される瓦記録処理の態様を説明するための概念図である。
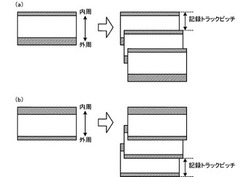
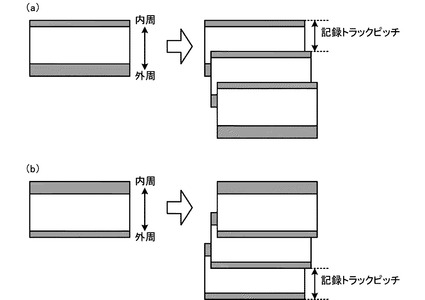
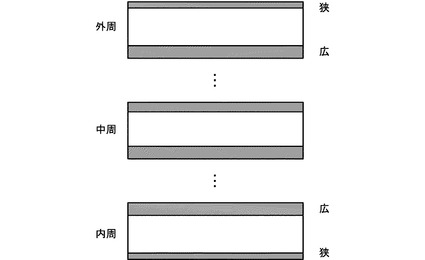
図3(a)に示す概念図は、あるトラックへの記録により発生するフリンジングが影響するトラック方向の幅が、内周側が狭く外周側が広い態様を示している。この態様では、隣接するトラック間のトラックピッチは、少なくともトラックからデータを読み出すためのデータリード幅と幅の狭い内周側のフリンジング幅とに基づいて設定される。また、外周方向にトラックが上書きされる瓦記録処理が実行される。
【0038】
図3(b)に示す概念図は、フリンジングが影響するトラック方向の幅が、内周側が広く外周側が狭い態様を示している。この態様では、隣接するトラック間のトラックピッチは、少なくともトラックからデータを読み出すためのデータリード幅と幅の狭い外周側のフリンジング幅とに基づいて設定される。また、内周方向にトラックが上書きされる瓦記録処理が実行される。
【0039】
このようにして、本実施形態にかかるトラックピッチ決定処理によれば、あるトラックに対する両方向からのフリンジング幅に基づいて、トラックピッチおよび瓦記録処理における記録方向が決定される。例えば、本実施形態にかかるHDD10に備えられる磁気ディスク1の記録面の任意の位置でトラックピッチ決定処理が実行されれば、この任意の位置に適合するトラックピッチおよび記録方向の瓦記録処理を実行することが可能となる。
【0040】
次に、磁気ディスク1の記録面の任意の位置に適合するトラックピッチおよび記録方向が適用される瓦記録処理の具体例を、図4,5を用いて説明する。
図4は、本実施形態にかかる磁気ディスク1の記録面で発生するフリンジングの影響の態様を説明するための模式図である。図5は、本実施形態にかかる磁気ディスク1の記録面の任意の位置において実行される瓦記録処理の具体例の態様を示す模式図である。
【0041】
本実施形態にかかるHDD10では、磁気ディスク1の記録面上に定義されるトラックと、スライダ2に備えられるリードヘッドまたはライトヘッドとがなす角度であるスキュー角が、記録面の位置に応じて変化する。例えば、スキュー角が記録面の中周付近で0度となり内周側および外周側では所定の角度をなすことがある。スキュー角に応じて、フリンジングの影響が発生する量(トラック方向の幅)が変化する。
【0042】
具体的には、図4に示す模式図のように、磁気ディスク1の記録面の中周付近のトラックでは、両方のトラック方向に対して発生するフリンジングが影響する幅は略等しい。一方で、記録面の外周側のトラックでは、フリンジングが影響するトラック方向の幅は内周側が広く外周側が狭い。また、記録面の内周側のトラックでは、フリンジングが影響するトラック方向の幅は内周側が狭く外周側が広い。このような傾向は、図4に示した3つのトラックの近傍で、本実施形態にかかるトラックピッチ決定処理を実行することで把握することが可能である。図4に示した態様でフリンジングが発生するのであれば、図5に示す模式図のように、中周よりも内周側の領域では、内周から中周に向かう方向の瓦記録処理を実行することが決定される。また中周よりも外周側の領域では、外周から中周に向かう方向の瓦記録処理を実行することが決定される。
【0043】
このようにして、本実施形態にかかるHDD10に備えられる磁気ディスク1の記録面の複数の位置でトラックピッチ決定処理を実行することで、記録面の位置ごとに適合するトラックピッチおよび記録方向の瓦記録処理を実行することが可能となる。
【0044】
次に、図6を用いて、磁気ディスク1の記録面の任意の位置に適合するトラックピッチおよび記録方向が適用される瓦記録処理の他の具体例を説明する。
図6は、本実施形態にかかる磁気ディスク1の記録面の任意の位置において実行される瓦記録処理の他の具体例の態様を示す模式図である。
本実施形態では、磁気ディスク1の記録面はトラック方向に複数の領域に区切られ、区切られた領域それぞれで独立して瓦記録処理が実行される。これら複数の領域のうち隣り合う領域で実行される瓦記録処理は、記録方向が同じであることも異なることもある。何れの場合においても、隣り合うトラックそれぞれから発生するフリンジング幅に応じたギャップを隔てて、隣の領域のトラックと接合される。具体的には、図6に示す模式図のように、これら隣り合う領域の境界で隣接するトラック同士は、これらのトラックのうち何れかのトラックへの記録で発生するフリンジング幅のうち広く発生するフリンジング幅のギャップを隔てて接合される。これは、隣り合う領域で実行される瓦記録処理が同じ記録方向または異なる記録方向の何れでも同様である。これらのトラック同士のギャップは、図6に示す模式図のように広く発生するフリンジング幅とすることが好ましいが、このフリンジング幅の距離以上であればよい。
【0045】
このようにして、本実施形態にかかるトラックピッチ決定処理によれば、瓦記録処理が実行される領域内のトラックピッチだけでなく、これらの領域のうち隣接する領域の接合部における最小トラックピッチを決定することも可能となる。すなわち、本実施形態に係るHDD10によれば、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することが可能となる。
【0046】
以上説明したように本実施形態によれば、磁気ディスク1の記録面をトラック方向に区切った複数の領域それぞれで独立して瓦記録処理が実行される。また、この瓦記録処理における、複数の領域内でのトラックピッチおよび記録方向、およびこれらの領域のうち隣接する領域の接合部における最小トラックピッチを決定するトラックピッチ決定処理が実行される。このトラックピッチ決定処理では、トラックへの記録で発生するフリンジングの影響に基づいて、トラックピッチがより狭くなるように決定される。従って本実施形態に係るHDD10によれば、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することができる。
【0047】
なお、少なくとも一つの実施形態を説明したが、説明した実施形態は一例として提示したものであり、発明の範囲はこの実施形態に限定されない。また、説明した実施形態は、本発明の要旨を変えない範囲において、種々の変更、改変等が可能である。さらに、前述した実施形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよく、さらに、異なる実施形態に係る構成要素を適宜組み合わせても良い。これらの実施形態やその変形は、発明の範囲や要旨に含まれ、特許請求の範囲に記載された発明と、その均等の範囲に含まれるものである。
【符号の説明】
【0048】
1…磁気ディスク、2…スライダ、3…アーム、4…VCM(ボイスコイルモータ)、5…SPM(スピンドルモータ)、10…磁気ディスク装置(HDD)、21…モータドライバ、22…ヘッドIC、31…リードライトチャネルIC(RDC)、41…CPU、42…RAM、43…NVRAM、50…HDC(Hard Disc Controller)、100…ホスト装置、120…通信媒体(ホストI/F)、150…電子機器。
【技術分野】
【0001】
本発明の実施形態は、記録媒体に情報を記録する情報記録装置および情報記録方法に関する。
【背景技術】
【0002】
近年、情報記録装置の一例である磁気ディスク装置(以下、HDDとも称する)の高記録容量化を実現するための様々な技術が開発されている。この技術の一つに“瓦記録”と称される記録技術がある。瓦記録は、磁気ディスク上のトラックへの情報の記録に際して、当該トラックに隣接するトラックの一部に対して重ねて記録する記録方式である。一方で、従来からHDDで適用されている一般的な記録方式では、隣接するトラックは互いに所定の隙間を隔てて配置されるために、TPI(Track Per Inch)を向上させることが困難であった。つまり、瓦記録の採用により、TPI(Track Per Inch)をより向上することが可能となっている。
【0003】
HDDでは、トラックへの記録時に、ヘッドの記録磁界や磁化遷移が隣接トラックに漏洩するフリンジングが発生することがある。フリンジングの発生により、磁気的に記憶された情報が破壊されることがある。また、TPIが大きくなるほど、フリンジングの影響が無視できなくなる。そこで従来から、フリンジングの影響を考慮してトラックピッチを決定することが行われてきた。例えば、あるトラックに対して、トラック方向の両側から徐々に離間または接近するように記録して、隣接トラックから当該トラックへのフリンジングの影響を評価することで、トラックピッチを決定する手法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−339601号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが従来は、あるトラックに対して両側から記録される可能性があったため、あるトラックに対するトラック方向の両側からのフリンジングの影響の評価結果に基づいて、トラックピッチが決定されていた。両側からのフリンジングの影響は片側からのフリンジングの影響より大きいので、磁気的に情報を記録する情報記録装置において、トラックピッチをより狭く設定することは困難であった。
【0006】
そこで、本発明が解決しようとする課題は、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することができる情報記録装置および情報記録方法を提供することである。
【課題を解決するための手段】
【0007】
実施形態の情報記録装置は、トラックを有する磁気記録媒体、検出手段、および記録制御手段を具備する。検出手段は、トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出する。記録制御手段は、少なくとも両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する。
【図面の簡単な説明】
【0008】
【図1】本実施形態に係る情報記録装置としての磁気ディスク装置(HDD)を備える電子機器の構成を示すブロック図。
【図2】本実施形態に係るHDDで実行される、記録時に発生するフリンジングの影響に基づいてトラックピッチを決定するトラックピッチ決定処理の動作を説明するためのフローチャート。
【図3】本実施形態にかかるトラックピッチ決定処理にて決定されたトラックピッチおよび記録方向が適用される瓦記録処理の態様を説明するための概念図。
【図4】本実施形態にかかる磁気ディスクの記録面で発生するフリンジングの影響の態様を説明するための模式図。
【図5】本実施形態にかかる磁気ディスクの記録面の任意の位置において実行される瓦記録処理の具体例の態様を示す模式図。
【図6】本実施形態にかかる磁気ディスクの記録面の任意の位置において実行される瓦記録処理の他の具体例の態様を示す模式図。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を用いて説明する。
図1は、本実施形態に係る情報記録装置としての磁気ディスク装置(以下、HDDとも称する)10を備える電子機器150の構成を示すブロック図である。また電子機器150はホスト装置100を備えている。HDD10は、通信媒体(ホストI/F)120を介してホスト装置100と接続され、ホスト装置100の記憶モジュールとして機能する。ホストI/F120は、ホスト装置100とHDD10とを接続し、ホスト装置100とHDD10との間のデータ及びコマンドの送受に係る通信に利用される。例えば、電子機器150は、パーソナルコンピュータであり、ホスト装置100は、パーソナルコンピュータに備えられるチップセットICである。
【0010】
本実施形態に係るHDD10は、磁気ディスク1、スライダ2、アーム3、VCM(ボイスコイルモータ)4、及びSPM(スピンドルモータ)5などの機構部を有する。またHDD10は、モータドライバ21、ヘッドIC22、NVRAM43、及びコントローラ60などの回路系ブロックを備える。コントローラ60は、リードライトチャネルIC(以下、RDCとも称する)31、CPU41、RAM42、及びHDC(Hard Disc Controller)50を含む。
【0011】
本実施形態に係るHDD10では、スライダ2に備えられたライトヘッド(不図示)により、磁気ディスク1の記録面に情報が記録される。磁気ディスク1の記録面への情報の記録には、瓦記録と称される記録方式が適用される。瓦記録は、磁気ディスク1で定義されるトラックについて、隣接するトラックの一部を重ねて記録する(一部を上書きする)記録方式である。あるトラックのトラック方向の中心と、当該トラックに重ねて記録される隣接トラックのトラック方向の中心との距離であるトラックピッチは、記録時に発生するフリンジングの影響に基づいて決定される。
【0012】
磁気ディスク1は、SPM5に固定され、SPM5が回転駆動することで回転する。磁気ディスク1の少なくとも一面は磁気的に情報が記録される記録面である。つまり、磁気ディスク1は磁気記録媒体である。記録面には例えば同心円の複数のトラックが定義され、各トラックはサーボ領域とデータ領域とを有する。サーボ領域には、磁気ディスク1の記録面上での物理的なアドレス情報が記録されている。また、HDD10に記録されるべき情報はデータ領域に記録される。本実施形態では、磁気ディスク1のデータ領域に対する情報の記録方式として瓦記録が適用される。
【0013】
スライダ2は、磁気ディスク1の記録面に対応するようにアーム3の一端に備えられる。スライダ2は、リードヘッド(不図示)及びライトヘッド(不図示)を備えている。リードヘッド(不図示)は、磁気ディスク1の記録面に磁気記録された信号を読み取る。読み取られた信号は、アーム3上の導体パターンを介してヘッドIC22へ出力される。ライトヘッド(不図示)は、ヘッドIC22からアーム3上の導体パターンを介して入力されるライト信号(ライト電流)に応じて、磁気ディスク1の記録面に磁気記録する。
【0014】
アーム3は、一端にスライダ2、他端に軸受部3aを備えている。アーム3は、VCM4への駆動電流の供給に応じて、軸受部3aを回転中心として回転し、磁気ディスク1の記録面上でスライダ2を半径方向に移動させる。
【0015】
VCM4は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、アーム3を回転させる。
SPM5は、モータドライバ21から供給される駆動信号(電流)に応じて駆動し、磁気ディスク1を回転させる。
モータドライバ21は、コントローラ60(さらに具体的にはCPU41)からの制御信号に基づいて、VCM4を駆動するための駆動信号(電流)をVCM4へ、SPM5を駆動するための駆動信号(電流)をSPM5へ供給する。
【0016】
ヘッドIC22は、スライダ2に備えられたリードヘッド(不図示)からアーム3上の導体パターンを介して入力された信号を増幅し、増幅した信号をリード情報としてコントローラ60(さらに具体的にはRDC31)に出力する。またヘッドIC22は、コントローラ60(RDC31)から入力された記録情報に応じたライト信号(ライト電流)を、スライダ2に備えられたライトヘッド(不図示)へ、アーム3上の導体パターンを介して出力する。
【0017】
コントローラ60は、RDC31、CPU41、RAM42、及びHDC50等を含むSoC(System On
Chip)として構成される。コントローラ60がRAM42を含まず、コントローラ60の外部にRAM42が接続される構成であってもよい。コントローラ60は、磁気ディスク1の記録面に定義される複数のバンド及び境界トラックに対して情報を記録する情報記録処理を行う。
【0018】
RDC31は、ヘッドIC22から入力されたリード情報に所定の処理を施して復号化し、復号化した情報をHDC50へ出力する。またRDC31は、HDC50から入力された記録対象の情報に所定の処理を施して符号化し、この符号化した情報を記録情報としてヘッドIC22へ出力する。RDC31は、リード情報からサーボ領域を示すサーボ区間を検出し、検出したサーボ区間での信号から位置情報を抽出する。抽出された位置情報はCPU41へ出力される。RDC31は、これらの処理のためにRAM42をワークメモリとして利用する。
【0019】
CPU41は、NVRAM43に記憶されたプログラムを実行することでHDD10に備えられた各ブロックを制御するプロセッサである。例えばCPU41は、VCM4及びSPM5の回転制御処理、及び磁気ディスク1に対する情報記録処理の動作を制御する。CPU41は、コントローラ60がサーボコントローラ、又はリードライトコントローラとして動作するためのプログラムを実行する。CPU41は、このようなプログラムの実行においてRAM42をワークメモリとして利用する。本実施形態では、コントローラ60は、磁気ディスク1に記録された情報を読み出して、例えばエラーレート測定によるデータ品質評価処理の動作を制御する。またコントローラ60がリードライトコントローラとして動作する場合、瓦記録にて磁気ディスク1へ情報が記録される。さらにコントローラ60は、隣接するトラック間のトラック方向の中心同士の間隔(トラックピッチ)を、記録時に発生するフリンジングの影響に基づいて決定するトラックピッチ決定処理の動作を制御する。
【0020】
RAM42は、RDC31、CPU41及びHDC50のワークメモリである。RAM42には揮発性メモリであるDRAMが適用される。
NVRAM43は、CPU41が実行するプログラムを記憶する不揮発性メモリである。NVRAM43に記憶されるプログラムは更新可能である。またNVRAM43は、CPU41で実行される処理で利用されるパラメータ値を記憶する。
【0021】
HDC50は、ホスト装置100との間で情報を送信及び受信する通信処理を実行する。HDC50は、RDC31から入力された復号化した情報に所定の処理を施して符号化し、符号化した情報を送信情報としてホスト装置100へ送信する。またHDC50は、ホスト装置100から受信した受信情報に所定の処理を施して復号化し、復号化した情報を記録対象の情報としてRDC31へ出力する。例えばHDC50は、ホスト装置100との間でSATA(Serial Advanced Technology Attachment)規格に準拠した通信処理を実行する。HDC50は、ホスト装置100から、データの記録を開始する論理アドレス及び記録データ長の情報を含むライトコマンドを受信した場合、受信したライトコマンドから論理アドレス及び記録データ長の情報を抽出する。抽出された論理アドレス及び記録データ長の情報はCPU41へ出力される。
【0022】
このような構成により、本実施形態に係るHDD10に備えられた複数のブロックによって、複数のトラックに対して、所定のトラックピッチで瓦記録方式により情報が記録される。このトラックピッチは、トラックピッチ決定処理によって、記録時に発生するフリンジングの影響に基づいて、より狭くなるように決定される。すなわち、本実施形態に係るHDD10は、瓦記録方式による情報の記録に際して、トラックピッチをより狭く設定することができる
【0023】
次に、図2を用いて、本実施形態に係るHDD10で実行される、記録時に発生するフリンジングの影響に基づいてトラックピッチを決定するトラックピッチ決定処理の動作を説明する。
【0024】
図2は、本実施形態に係るHDD10で実行される、記録時に発生するフリンジングの影響に基づいてトラックピッチを決定するトラックピッチ決定処理の動作を説明するためのフローチャートである。
【0025】
トラックピッチ決定処理は、リードライトコントローラとして動作するCPU41により制御される。このトラックピッチ決定処理では、トラックピッチだけでなく瓦記録処理のおける記録方向も決定される。まず、リードライトコントローラは、トラックNに対してデータを記録する(S201)。このデータはエラーレートが測定できるデータであればよい。リードライトコントローラは、データが記録されたトラックNのセクタごとのエラーレートを測定する(S202)。測定されたエラーレートは、セクタごとの初期エラーレートERdefとして、RAM42などのメモリ(記憶部)に記憶される。
【0026】
次に、リードライトコントローラは、トラックNに対してトラックピッチAで、トラックNの隣接トラックであるトラックN+1に所定量のデータを記録する(S203)。この時点でのトラックピッチAは、所定の測定開始値Astartである。また所定量のデータは、例えば数セクタといったエラーレートが測定できるデータ量であればよい。所定量のデータの記録が完了すると、リードライトコントローラは、トラックN+1のデータを記録したセクタに隣接するトラックNのセクタのエラーレートを再測定する(S204)。また、リードライトコントローラは、測定したエラーレートが初期エラーレートERdefに対して所定値より悪化しているか否かを判定する(S205)。
【0027】
測定したエラーレートが所定値よりも悪化していない場合(S205のNo)、現在のトラックピッチAから減算値Bを引いた値(A=A−B)でトラックピッチAが更新される(S206)。そしてリードライトコントローラは、再び、トラックNに対してデータを記録し(S201)、記録したトラックNの初期エラーレートを測定し(S202)、更新されたトラックピッチAで、トラックN+1に対して所定量のデータを記録し(S203)、トラックNのエラーレートを再測定する(S204)、という一連の処理を実行する。
【0028】
一方、測定したエラーレートが所定値より悪化している場合(S205のYes)、リードライトコントローラは、継続する記録を停止して、一巡前のトラックピッチA(更新される直前のトラックピッチA)を、トラックN+1からトラックNに向かう側の第1トラックピッチとしてメモリに記憶する(S207)。換言すると、トラックN+1へのデータの記録に際してトラックN+1からトラックNに向かう方向に発生するフリンジングが影響する幅が特定される。
【0029】
次に、リードライトコントローラは、トラックNと、トラックNの隣接トラックであってトラックN+1と反対側の隣接トラックであるトラックN−1とのトラックピッチを測定する処理を行う。この処理はトラックNとトラックN+1とのトラックピッチを測定する処理と同等である。リードライトコントローラは、トラックNに対してデータを再び記録し(N208)、データが記録されたトラックNのセクタごとのエラーレートを測定する(S209)。測定されたエラーレートは、セクタごとの初期エラーレートERdefとしてメモリ(記憶部)に記憶される。
【0030】
次に、リードライトコントローラは、トラックNに対してトラックピッチAで、トラックN−1に所定量のデータを記録する(S210)。この時点でのトラックピッチAは、所定の測定開始値Astartである。所定量のデータの記録が完了すると、リードライトコントローラは、トラックN−1のデータを記録したセクタに隣接するトラックNのセクタのエラーレートを再測定する(S211)。また、リードライトコントローラは、測定したエラーレートが初期エラーレートERdefに対して所定値より悪化しているか否かを判定する(S212)。
【0031】
測定したエラーレートが所定値よりも悪化していない場合(S212のNo)、現在のトラックピッチAから減算値Bを引いた値(A=A−B)でトラックピッチAが更新される(S213)。そしてリードライトコントローラは、再び、トラックNに対してデータを記録し(S208)、記録したトラックNの初期エラーレートを測定し(S209)、更新されたトラックピッチAで、トラックN−1に対して所定量のデータを記録し(S210)、トラックNのエラーレートを再測定する(S211)、という一連の処理を実行する。
【0032】
一方、測定したエラーレートが所定値より悪化している場合(S212のYes)、リードライトコントローラは、継続する記録を停止して、一巡前のトラックピッチA(更新される直前のトラックピッチA)を、トラックN−1からトラックNに向かう側の第2トラックピッチとしてメモリに記憶する(S214)。換言すると、トラックN−1へのデータの記録に際してトラックN−1からトラックNに向かう方向に発生するフリンジングが影響する幅が特定される。
【0033】
リードライトコントローラは、第1トラックピッチと第2トラックピッチとを比較し(S215)、値が小さいほうを記録トラックピッチに適用することを決定する(S216)。またリードライトコントローラは、逆の値の大きいほうの方向を瓦記録処理における記録方向として決定する。すなわち、トラックピッチ決定処理により記録トラックピッチが決定された後は、値の大きいトラックピッチ側にトラックを重ねる瓦記録が実行されることになる。換言すると、記録トラックピッチの決定後は、フリンジングが影響する幅の広いトラック方向にトラックが上書きされる瓦記録が実行されることになる。
【0034】
なお、トラックピッチ決定処理によって決定された記録トラックピッチおよび記録方向は、磁気ディスク1の全ての記録面で適用されなくてもよい。例えば、磁気ディスク1の記録面を半径方向に複数の領域に区分けし、区分けられた複数の領域それぞれに対応する記録トラックピッチおよび記録方向が決定されてもよい。決定された記録トラックピッチおよび記録方向は、対応する領域それぞれで実行される瓦記録処理に適用される。
【0035】
また、このトラックピッチ決定処理はあくまでも一例であって、他の手法によりトラックピッチが決定されてもよい。例えば、エラーレートでなくVMM(Viterbi Metric Margin)や再生信号のレベルに基づいてデータの信頼性が評価されてもよい。
【0036】
このような手順で、本実施形態に係るHDD10によるトラックピッチ決定処理が実行される。この処理では、あるトラックに対して両方のトラック方向から発生するフリンジングが影響する幅に基づいて、トラックピッチおよび瓦記録処理における記録方向が決定される。すなわち、本実施形態に係るHDD10は、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することが可能となる。
【0037】
次に、図3を用いて、本実施形態にかかるトラックピッチ決定処理にて決定されたトラックピッチおよび記録方向が適用される瓦記録処理の態様を説明する。
図3は、本実施形態にかかるトラックピッチ決定処理にて決定されたトラックピッチおよび記録方向が適用される瓦記録処理の態様を説明するための概念図である。
図3(a)に示す概念図は、あるトラックへの記録により発生するフリンジングが影響するトラック方向の幅が、内周側が狭く外周側が広い態様を示している。この態様では、隣接するトラック間のトラックピッチは、少なくともトラックからデータを読み出すためのデータリード幅と幅の狭い内周側のフリンジング幅とに基づいて設定される。また、外周方向にトラックが上書きされる瓦記録処理が実行される。
【0038】
図3(b)に示す概念図は、フリンジングが影響するトラック方向の幅が、内周側が広く外周側が狭い態様を示している。この態様では、隣接するトラック間のトラックピッチは、少なくともトラックからデータを読み出すためのデータリード幅と幅の狭い外周側のフリンジング幅とに基づいて設定される。また、内周方向にトラックが上書きされる瓦記録処理が実行される。
【0039】
このようにして、本実施形態にかかるトラックピッチ決定処理によれば、あるトラックに対する両方向からのフリンジング幅に基づいて、トラックピッチおよび瓦記録処理における記録方向が決定される。例えば、本実施形態にかかるHDD10に備えられる磁気ディスク1の記録面の任意の位置でトラックピッチ決定処理が実行されれば、この任意の位置に適合するトラックピッチおよび記録方向の瓦記録処理を実行することが可能となる。
【0040】
次に、磁気ディスク1の記録面の任意の位置に適合するトラックピッチおよび記録方向が適用される瓦記録処理の具体例を、図4,5を用いて説明する。
図4は、本実施形態にかかる磁気ディスク1の記録面で発生するフリンジングの影響の態様を説明するための模式図である。図5は、本実施形態にかかる磁気ディスク1の記録面の任意の位置において実行される瓦記録処理の具体例の態様を示す模式図である。
【0041】
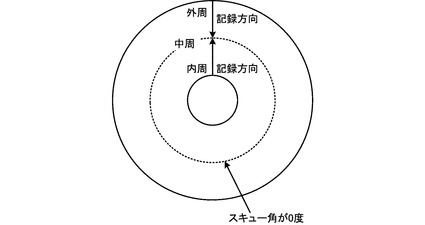
本実施形態にかかるHDD10では、磁気ディスク1の記録面上に定義されるトラックと、スライダ2に備えられるリードヘッドまたはライトヘッドとがなす角度であるスキュー角が、記録面の位置に応じて変化する。例えば、スキュー角が記録面の中周付近で0度となり内周側および外周側では所定の角度をなすことがある。スキュー角に応じて、フリンジングの影響が発生する量(トラック方向の幅)が変化する。
【0042】
具体的には、図4に示す模式図のように、磁気ディスク1の記録面の中周付近のトラックでは、両方のトラック方向に対して発生するフリンジングが影響する幅は略等しい。一方で、記録面の外周側のトラックでは、フリンジングが影響するトラック方向の幅は内周側が広く外周側が狭い。また、記録面の内周側のトラックでは、フリンジングが影響するトラック方向の幅は内周側が狭く外周側が広い。このような傾向は、図4に示した3つのトラックの近傍で、本実施形態にかかるトラックピッチ決定処理を実行することで把握することが可能である。図4に示した態様でフリンジングが発生するのであれば、図5に示す模式図のように、中周よりも内周側の領域では、内周から中周に向かう方向の瓦記録処理を実行することが決定される。また中周よりも外周側の領域では、外周から中周に向かう方向の瓦記録処理を実行することが決定される。
【0043】
このようにして、本実施形態にかかるHDD10に備えられる磁気ディスク1の記録面の複数の位置でトラックピッチ決定処理を実行することで、記録面の位置ごとに適合するトラックピッチおよび記録方向の瓦記録処理を実行することが可能となる。
【0044】
次に、図6を用いて、磁気ディスク1の記録面の任意の位置に適合するトラックピッチおよび記録方向が適用される瓦記録処理の他の具体例を説明する。
図6は、本実施形態にかかる磁気ディスク1の記録面の任意の位置において実行される瓦記録処理の他の具体例の態様を示す模式図である。
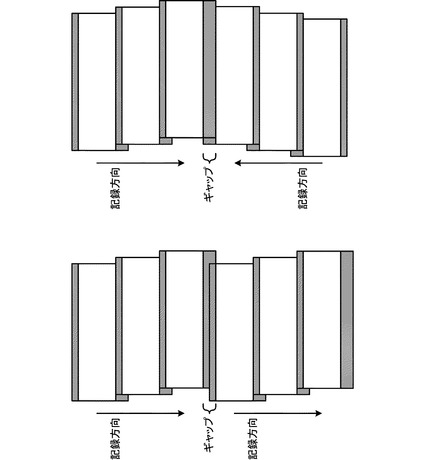
本実施形態では、磁気ディスク1の記録面はトラック方向に複数の領域に区切られ、区切られた領域それぞれで独立して瓦記録処理が実行される。これら複数の領域のうち隣り合う領域で実行される瓦記録処理は、記録方向が同じであることも異なることもある。何れの場合においても、隣り合うトラックそれぞれから発生するフリンジング幅に応じたギャップを隔てて、隣の領域のトラックと接合される。具体的には、図6に示す模式図のように、これら隣り合う領域の境界で隣接するトラック同士は、これらのトラックのうち何れかのトラックへの記録で発生するフリンジング幅のうち広く発生するフリンジング幅のギャップを隔てて接合される。これは、隣り合う領域で実行される瓦記録処理が同じ記録方向または異なる記録方向の何れでも同様である。これらのトラック同士のギャップは、図6に示す模式図のように広く発生するフリンジング幅とすることが好ましいが、このフリンジング幅の距離以上であればよい。
【0045】
このようにして、本実施形態にかかるトラックピッチ決定処理によれば、瓦記録処理が実行される領域内のトラックピッチだけでなく、これらの領域のうち隣接する領域の接合部における最小トラックピッチを決定することも可能となる。すなわち、本実施形態に係るHDD10によれば、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することが可能となる。
【0046】
以上説明したように本実施形態によれば、磁気ディスク1の記録面をトラック方向に区切った複数の領域それぞれで独立して瓦記録処理が実行される。また、この瓦記録処理における、複数の領域内でのトラックピッチおよび記録方向、およびこれらの領域のうち隣接する領域の接合部における最小トラックピッチを決定するトラックピッチ決定処理が実行される。このトラックピッチ決定処理では、トラックへの記録で発生するフリンジングの影響に基づいて、トラックピッチがより狭くなるように決定される。従って本実施形態に係るHDD10によれば、瓦記録方式による情報の記録に際して、片側からのフリンジングの影響のみを考慮することによりトラックピッチをより狭く設定することができる。
【0047】
なお、少なくとも一つの実施形態を説明したが、説明した実施形態は一例として提示したものであり、発明の範囲はこの実施形態に限定されない。また、説明した実施形態は、本発明の要旨を変えない範囲において、種々の変更、改変等が可能である。さらに、前述した実施形態に開示されている複数の構成要素を適宜に組み合わせることにより、種々の発明を形成することができる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよく、さらに、異なる実施形態に係る構成要素を適宜組み合わせても良い。これらの実施形態やその変形は、発明の範囲や要旨に含まれ、特許請求の範囲に記載された発明と、その均等の範囲に含まれるものである。
【符号の説明】
【0048】
1…磁気ディスク、2…スライダ、3…アーム、4…VCM(ボイスコイルモータ)、5…SPM(スピンドルモータ)、10…磁気ディスク装置(HDD)、21…モータドライバ、22…ヘッドIC、31…リードライトチャネルIC(RDC)、41…CPU、42…RAM、43…NVRAM、50…HDC(Hard Disc Controller)、100…ホスト装置、120…通信媒体(ホストI/F)、150…電子機器。
【特許請求の範囲】
【請求項1】
トラックを有する磁気記録媒体と、
前記トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出する検出手段と、
少なくとも前記両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する記録制御手段と、
を具備する情報記録装置。
【請求項2】
前記記録制御手段は、前記両側に発生するフリンジングの幅のうち幅が広く発生する方向に向かって前記隣接するトラック同士の一部を重ねて記録するように制御する請求項1に記載の情報記録装置。
【請求項3】
前記制御手段は、前記磁気ディスクの記録領域のうち内周側の領域では内周から中周に向かう方向に、前記磁気ディスクの記録領域のうち外周側の領域では外周から中周に向かう方向に向かって前記隣接するトラック同士の一部を重ねて記録するように制御する請求項1または2のいずれか1項に記載の情報記録装置。
【請求項4】
前記制御手段は、隣接する複数の前記トラックからなるトラック群を複数定義し、当該複数のトラック郡のうち隣り合うトラック郡の境界で隣接するトラック同士は、当該隣接するトラックのうち何れかのトラックへの記録で発生するフリンジング幅のうち広く発生するフリンジング幅の距離を隔てて接合される請求項1ないし3のいずれか1項に記載の情報記録装置。
【請求項5】
トラックを有する磁気記録媒体を具備する情報記録装置の譲歩記録方法であって、
前記トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出し、
少なくとも前記両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する情報記録方法。
【請求項6】
さらに、前記両側に発生するフリンジングの幅のうち幅が広く発生する方向に向かって前記隣接するトラック同士の一部を重ねて記録するように制御する請求項5に記載の情報記録方法。
【請求項1】
トラックを有する磁気記録媒体と、
前記トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出する検出手段と、
少なくとも前記両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する記録制御手段と、
を具備する情報記録装置。
【請求項2】
前記記録制御手段は、前記両側に発生するフリンジングの幅のうち幅が広く発生する方向に向かって前記隣接するトラック同士の一部を重ねて記録するように制御する請求項1に記載の情報記録装置。
【請求項3】
前記制御手段は、前記磁気ディスクの記録領域のうち内周側の領域では内周から中周に向かう方向に、前記磁気ディスクの記録領域のうち外周側の領域では外周から中周に向かう方向に向かって前記隣接するトラック同士の一部を重ねて記録するように制御する請求項1または2のいずれか1項に記載の情報記録装置。
【請求項4】
前記制御手段は、隣接する複数の前記トラックからなるトラック群を複数定義し、当該複数のトラック郡のうち隣り合うトラック郡の境界で隣接するトラック同士は、当該隣接するトラックのうち何れかのトラックへの記録で発生するフリンジング幅のうち広く発生するフリンジング幅の距離を隔てて接合される請求項1ないし3のいずれか1項に記載の情報記録装置。
【請求項5】
トラックを有する磁気記録媒体を具備する情報記録装置の譲歩記録方法であって、
前記トラックへの記録に伴い当該トラックに対してトラック方向の両側に発生するフリンジングの幅を検出し、
少なくとも前記両側に発生するフリンジングの幅のうち狭いフリンジング幅と前記トラックからデータを読み出すためのデータリード幅とをトラックピッチとして、隣接するトラック同士の一部を重ねて記録するように制御する情報記録方法。
【請求項6】
さらに、前記両側に発生するフリンジングの幅のうち幅が広く発生する方向に向かって前記隣接するトラック同士の一部を重ねて記録するように制御する請求項5に記載の情報記録方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−212488(P2012−212488A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−76447(P2011−76447)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]