
感圧センサ体
【課題】感圧導電性部材が繰返し印加される圧力から受けるストレスを軽減し、印加圧力を多方向あるいは局部的に受けても、これに起因する接触面積のばらつきを抑えることで、安定して感圧特性を得ることができる感圧センサ体を提供する。
【解決手段】基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体。
【解決手段】基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無加圧状態では高い電気抵抗値を示し、圧力の増加に伴う圧縮変形に従って電気抵抗値が減少し導電性を示す感圧導電性部材を利用した、感圧センサ体に関する。
【背景技術】
【0002】
従来、部材に作用する圧力の大きさ、分布状態を測定する手段として、チタン酸ジルコン酸鉛等の圧電セラミックスを用いた方式や、歪みゲージを用いる方式が使用されている。しかしながら、圧電セラミックスを用いた方式は、一般に剛性の高い材料が使用されるため、感圧センサの形状の自由度に制限があり、また、歪みゲージを用いる方式も同様に、感圧センサの形状設計の自由度が低いという問題を有している。
【0003】
これらの問題に対して、ゴム、エラストマー、樹脂材料などの高分子材料を基材とし、この基材中に導電性粒子を分散させた導電性部材を用いることで、形状の自由度が高い感圧センサが得られることが知られている。
【0004】
上記導電性部材による感圧特性は、以下の2つのタイプに大別される。その一つは、無加圧時は高い電気抵抗値を示すが、圧力の増加に伴う圧縮変形により、基材中の導電性粒子同士の粒子間距離が狭まり、導電性粒子による導電パスが形成されることによって電気抵抗値が減少する、抵抗値変化型である。なお、この抵抗値変化は基材中における導電性粒子の分散状態が大きく影響する為、繰り返しの圧縮変形による電気抵抗値変化の再現性が課題となっている。特に、押圧を繰り返すうちに、疲労により導電性部材が永久変形を起こし、導電性粒子同士が接触したままとなり圧力を検出し難くなる問題を有している。
【0005】
もう一方のタイプは、上記導電性部材を用いて導電性塗膜を形成し、導電性塗膜同士、あるいは、導電性塗膜と例えば櫛型電極を、対向配置させるタイプである。このタイプの感圧センサ体の場合、圧力の増加に伴い、導電性塗膜同士の接触面積、あるいは導電性塗膜と櫛型電極間の接触面積が変化することで導通状態が変化する。従って、圧力の変化を電気抵抗値変化として検出することが可能であり、接触面積変化型といえる。
【0006】
このような感圧センサ体は、少なくとも、感圧性を得るための導電性部材とその抵抗値変化の出力経路となる電極基板から構成される。さらに、実装使用時に安定した感圧性能が維持できるよう、感圧導電性部材と電極基板を固定したり、あるいは電極基板への感圧導電性部材の押付け状態を規定している。
【0007】
たとえば、短冊状の感圧導電性ゴムの短辺を電極基板に接着固定して、長辺の少なくとも一部を接着固定しないことを特徴とする感圧センサで、さらにその上に柔軟な保護フィルムが弛みを持たせて配置されている感圧センサが提案されている(特許文献1)。また、感圧導電性ゴムの細片を、柔軟な電極基板上に間隔をおいて設けた一対の電極間に配置し、粘着テープで固定することを特徴とする圧力センサが提案されている(特許文献2)。更に、くし状電極上に感圧導電性弾性体を設けた感圧導電センサにおいて、感圧導電性弾性体に圧力を有して薄皮(フィルムなど)が被覆されていることを特徴とする感圧導電センサが提案されている(特許文献3)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−351653号公報
【特許文献2】特開平4−38432号公報
【特許文献3】特開2001−195945号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の感圧センサ体は、感圧導電性ゴムと電極基板の間に接着剤層を設けて固定することで、それぞれの相対位置関係がずれることなく、安定した感圧特性を得ることができる。しかし接着剤層の介在は、感圧導電性ゴムと電極基板の間の固定だけでなく、スペーサーとして感圧特性に影響を及ぼすので、接着剤層の厚み精度が感圧特性のばらつきを生じる要因となる場合がある。この影響は、上述の接触面積変化型の感圧センサ体に適用する場合に特に顕著に現れ、使用できる感圧導電性部材が制約を受けざるを得なくなる。また、保護フィルムは弛ませて設けられているので、たとえばセンサ面に局部的に繰返して圧力が加わったり、多方向から圧力が加わった場合には、フィルム材が延伸等して寸法が変化することで、皺の発生や偏りが生じて感圧導電性部材に正確に圧力が伝わらなくなり、感圧センサとしての機能を損なう場合がある。
【0010】
特許文献2の感圧センサ体において使用されるポリエチレン製の粘着テープは剛性が低いため、繰返し使用によりテープ材の変形や劣化による不具合が懸念される。
【0011】
また特許文献3の感圧センサ体は、くし状電極上に感圧導電性弾性体を設け、感圧導電性弾性体に常時圧力がかかるように電極ごと薄皮で被覆されている。この感圧センサ体は、押し子により圧力を印加した後に解放するとき、感圧導電性弾性体の形状回復性に加え、薄皮自身の形状回復性が作用するので、圧力の増減に精度よく追従する構造であり、圧力増減時の感圧特性のばらつきが小さくなるとしている。しかし、感圧導電性弾性体に常時圧力を加えると、それだけで電気抵抗値が低下するため、その状態から圧力を加えても電気抵抗値の変化幅が小さくなる。つまり感圧センサとしての感度や感知できる圧力幅が狭くなるので、センサとして使用できる範囲が大きく損なわれ、用途が限定されることが懸念される。
【0012】
以上を踏まえ、本発明者らは、上記課題を解決するため、接触面積変化型の感圧導電性部材において、圧力印加面にしかるべき剛性と厚みを有する絶縁層を設けることで、繰り返し使用に対する耐久性と感圧安定性が得られることを見出した。本発明の目的は、接触面積変化型の感圧導電性部材が繰返し印加される圧力から受けるストレスを軽減し、印加圧力を多方向あるいは局部的に受けても、これに起因する接触面積のばらつきを抑えることで、安定して感圧特性を得ることができる感圧センサ体を提供することにある。
【課題を解決するための手段】
【0013】
本発明は、基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体である。
【発明の効果】
【0014】
本発明の感圧センサ体は、接触面積変化型の感圧導電性部材が繰返し印加される圧力から受けるストレスを軽減し、印加圧力を多方向あるいは局部的に受けても、これに起因する接触面積のばらつきを抑えることができ、安定した感圧特性を得ることができる。
【図面の簡単な説明】
【0015】
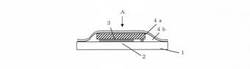
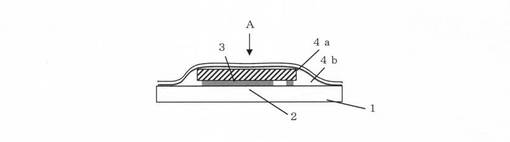
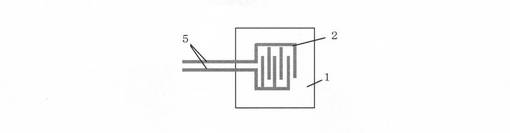
【図1】本発明に係る感圧センサ体の一実施形態を示す図である。
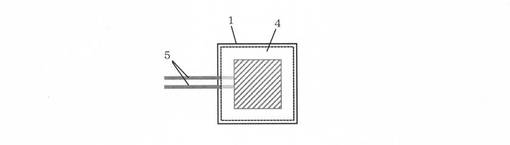
【図2】図1に示す感圧センサ体をA方向から見た透視図である。
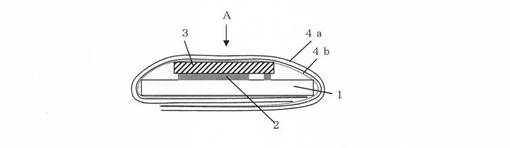
【図3】本発明に係る感圧センサ体の他の実施形態を示す図である。
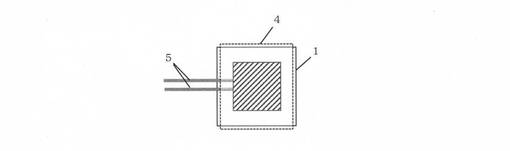
【図4】図3に示す感圧センサ体をA方向から見た透視図である。
【図5】実施例における櫛歯状電極の模式図である。
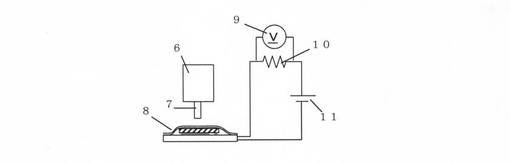
【図6】荷重による感圧センサ体の電気抵抗値変化の測定方法を示す図である。
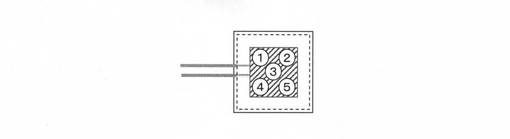
【図7】実施例における感圧センサ体への荷重箇所を示す図である。
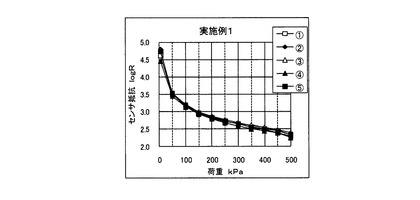
【図8】実施例1の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
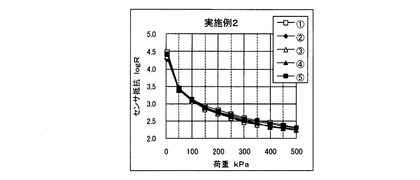
【図9】実施例2の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
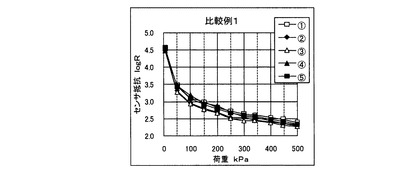
【図10】比較例1の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
【図11】比較例2の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
【発明を実施するための形態】
【0016】
本発明は、基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体である。
【0017】
<絶縁性被覆部材>
本発明に係る感圧センサ体は、少なくとも感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材を有している。絶縁性被覆部材を設ける第1の目的は、様々な圧力の形態による感圧特性のばらつきを抑制し、安定化させることである。感圧センサ体に外部より圧力を加えたとき、前記可撓性フィルムを介して、感圧導電性部材に圧力が伝わる。接触面積変化型の感圧導電性部材を使用する場合、安定した感圧特性を得るためには、感圧導電性部材がある一定圧力を受けたときの感圧導電性部材と電極基板との接触状態が一定となるようにすることが重要である。本発明のように一定の剛性を有する絶縁性被覆部材とともに圧力を伝えることで、様々な圧力の形態、すなわち押し子の形状や加える圧力の角度等が用途に応じて変化しても、感圧導電性部材の全面に圧力を分散させて安定した接触面積が確保できるので、圧力の形態に左右されない安定した感圧特性を得ることができる。
【0018】
絶縁性被覆部材を設ける第2の目的は、感圧導電性部材の保護である。感圧センサ体を小型化や柔軟化するとき、感圧導電性部材としてゴムやエラストマーに導電材を混合したものがしばしば選ばれる。絶縁性被覆部材は、繰返し圧力や応力集中等からこれらの材料の変形や劣化を防止するものである。
【0019】
〔可撓性フィルム〕
絶縁性被覆部材は、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有している。ヤング率が3.0GPa以上4.0GPa以下であると本発明の効果をより好ましく得ることができる。ヤング率が1.7GPaに満たない場合、圧力を印加したとき、感圧導電性部材全体への圧力分散が不十分となって、感圧特性のばらつきが生じ、保護に対する耐久性も低下する。一方、ヤング率が6.5GPaを超えた場合、その剛性により、貼り付け時の撓んだ形状が維持できずに元の略平板状に戻ろうとする。そのため、使用時に絶縁性被覆部材が電極基板から剥離するおそれがある。あるいは剥離しなくても、感圧導電性部材を電極基板面に常時押付けるように力が働くので、無荷重時での接触面積が大きくなり、感圧センサ体の感度を示す電気抵抗値の変化幅を大きく損ねてしまう。
【0020】
また、上記可撓性フィルムの厚みは、10μm以上100μm以下である。厚みが25μm以上75μm以下であると本発明の効果をより好ましく得ることができる。10μmに満たない場合、ヤング率が上記範囲にあっても印加圧力を感圧導電性部材の全体に均一に伝える効果や保護効果が不十分となる。また、100μmを超える場合、その厚みにより、貼り付け時の撓んだ形状が維持できずに元の略平板状に戻ろうとする。そのため、使用時に絶縁性被覆部材が電極基板から剥離するおそれがある。あるいは剥離しなくても、感圧導電性部材を電極基板面に常時押付けるように力が働くので、無荷重時での接触面積が大きくなり、感圧センサ体の感度を示す電気抵抗値の変化幅を大きく損ねてしまう。
【0021】
可撓性フィルムの材質としては、絶縁性でかつ上記ヤング率と厚みを満たすものであれば、特に制限されず、たとえば、二軸延伸ナイロンフィルム、ポリイミドフィルム、ポリエチレンテレフタレートフィルム、ポリスルフェンサルファイドフィルム、ポリスチレンフィルム等から選ばれる。
【0022】
〔粘着剤層〕
絶縁性被覆部材は、粘着剤層と、可撓性フィルムとを少なくとも有している。粘着剤層は、例えば可撓性フィルムの少なくとも片面に設けられる。絶縁性被覆部材は、粘着剤層を有することから、上述の効果に加えて、電極基板上に感圧導電性部材を固定する粘着テープとしても機能する。本発明で使用される感圧導電性部材は電極との接触面積の変化により感圧特性を発現するものであるので、電極上への感圧導電性部材の固定は必須である。電極基板と感圧導電性部材の相対位置関係がずれなければ、どのような貼付け方でもよい。但し、本発明の目的である、様々な圧力の形態による感圧特性のばらつき抑制や感圧導電性部材の保護を達成するためには、少なくとも感圧導電性部材の圧力印加面が絶縁性被覆部材で被覆されている必要がある。
【0023】
絶縁性被覆部材による被覆の実施形態の一例として、図1および2並びに図3および4に示す感圧センサ体が挙げられる。図1および2では、基板1および電極2からなる電極基板上に感圧導電性部材3を配置し、その上から面積が十分大きい絶縁性被覆部材4を被せて、絶縁性被覆部材の外周近傍を電極基板面に貼付けることによって、感圧導電性部材が粘着剤層4bを介して電極基板上に固定されている。また、図3および4のように、感圧導電性部材を配置した基板電極の外周面を1周以上、絶縁性被覆部材で巻きつける方法もある。
【0024】
粘着剤層は、例えば、可撓性フィルムの少なくとも一方の表面に粘着剤を塗布することによって形成することができる。可撓性フィルムの表面に塗布される粘着剤としては、アクリル系粘着剤が好ましく使用できる。他にも粘着剤としてゴム系やシリコーンゴム系等の粘着剤があり、これらを使用することもできる。しかし、ゴム系粘着剤では、粘着性を得るために、粘着付与剤等が配合されている。このため、特定の使用環境や長期間使用では粘着付与剤が染み出して、電気的な接点障害を引き起こす要因となったり、使用するゴムの種類によっては、硬化、劣化等により、粘着性自体が失われることが懸念される。また、シリコーンゴム系粘着剤では、含有する低分子シロキサン成分の染み出しによる電気的な接点障害の要因となる場合がある。一方、アクリル系粘着剤では主成分であるアクリル酸エステル共重合体自身が粘着性を有し、ゴム系やシリコーン系の粘着剤と比較して、粘着力も高いためより好適である。粘着剤層の厚みとしては、特に制限されるものではないが、一般に10〜50μmの範囲で使用される。
【0025】
<感圧導電性部材>
感圧導電性部材としては、絶縁性エラストマーシートに導電材を含有する導電塗膜層が積層されたものを使用することができる。例えば、絶縁性エラストマーシートとしてゴム弾性体を用い、その表面に導電塗料を塗布して使用される。塗布層は電気抵抗値の調整や表面性状等、所望の特性に合わせるために、1層であっても2層以上であってもよい。厚みとしては、絶縁性エラストマーシート100〜1000μmに対し、塗布層10〜50μmで塗布される。塗布層が10μm以上であれば、絶縁性エラストマーシートからの染み出しをブロックすることができ、当接部材である電極部の汚染を防止することができる。導電塗料の樹脂成分としては、フッ素樹脂、ポリアミド樹脂、アクリル樹脂、ポリウレタン樹脂、シリコーン樹脂、ブチラール樹脂、スチレン−エチレン−ブチレン−オレフィン共重合体(SEBC)及びオレフィン−エチレン・ブチレン・オレフィン共重合体(CEBC)等を挙げることができる。これらの樹脂は1種または2種以上を組み合わせて用いてもよい。また、絶縁性エラストマーシートの基材樹脂は架橋系のものでもよく、このための硬化剤としては、例えば、イソシアネート化合物、アミン化合物を適宜配合することができる。
【0026】
また、感圧導電性部材としては、感圧センサ体の柔軟性を損なわないように、ゴムや樹脂等のエラストマーに導電材を分散混合した導電性エラストマーを用いることができる。エラストマー種としては、前記可撓性フィルムよりもヤング率が小さいものであれば、特に制限されないが、圧力印加や解放による形状変化の追従性に優れるもの、すなわち反発弾性に優れるゴム弾性体が好適である。一般にゴム弾性体のヤング率は0.01〜0.1GPaであることから、従来公知のものが使用可能であるが、特に反発弾性に優れるブタジエンゴムが好ましい。また、所望の特性を得るために、各種ゴムをブレンドしても差し支えない。その場合、天然ゴムあるいはイソプレンゴムとのブレンドであれば、ブタジエンゴムの持つ反発弾性を損ねることなく、好適である。
【0027】
〔導電材〕
感圧導電性部材に配合される導電材としては、特に制限されることなく、従来公知のものが使用できる。例えば、導電性カーボン、グラファイト、黒鉛粒子、銅、アルミニウム、ニッケル、鉄粉及び金属酸化物である導電性酸化錫や導電性酸化チタン等が使用できる。これらは1種または2種以上を組み合わせて用いてもよい。配合量としては、ベースとなるゴムあるいは樹脂100質量部に対し、2〜200質量部、好ましくは5〜100質量部の範囲である。また、ゴムあるいは樹脂と導電材の他に、その他成分を配合することも可能であり、例えば、有機弾性フィラー、無機酸化物フィラーなどが挙げられる。有機弾性フィラーとしては、シリコーン系、ウレタン系などのエラストマーやアクリル系、スチレン系、ポリアミド系など樹脂からなる球状粒子が挙げられる。無機酸化物フィラーとしては、シリカ、アルミナ、酸化チタン、酸化亜鉛、酸化マグネシウム、などが挙げられる。
【0028】
本発明で使用される感圧導電性部材は、圧力を印加したときに、電極基板との接触面積変化を電気抵抗値の変化として検出するものである。この接触面積を制御するために当接面に適宜凹凸形状を設けたり、粗し処理を行うことができる。表面凹凸形状を設ける方法としては、例えばキャビティ内に所望の凹凸を設けたり、あるいはブラスト処理等を行った金型に、未硬化のゴム材料を充填して硬化することで転写する方法等が挙げられる。また塗布層を有する感圧導電性部材の場合は、前記のように凹凸を転写した絶縁性エラストマーシートに導電塗料を塗布する方法や、導電塗料中に粗し粒子として、アクリル系、スチレン系、ポリアミド系など樹脂からなる球状粒子を添加する方法等が挙げられる。
【0029】
<電極基板>
電極基板としては公知の電極基板が使用できる。例えばガラスエポキシ基板等の絶縁性基板に銅箔等をプリントしてパターンを形成したものでも良いし、フレキシブルプリント基板のようにポリアミド等の絶縁性フィルムを銅箔等の導体を組み合わせたものでも良い。また、感圧センサの小型化や柔軟化のために、ポリアミドやポリエチレンテレフタレート(PET)絶縁性フィルム上に銀やカーボンブラックを含む導電性ペーストを任意のパターンでスクリーン印刷したものを使用しても良い。
【0030】
<配線部>
配線部としては公知の配線形式のものが使用できる。例えば上記のように導電部分のパターンをプリントした基板において、所望の箇所からリード線を引き出す方法がある。また、基板として絶縁性フィルムを用いる場合では、電極部のパターンを設ける際に、配線部となる導電経路も同時にプリントしたものを使用することもできる。
【実施例】
【0031】
以下に、実施例及び比較例により本発明をより具体的に説明する。
【0032】
[実施例1]
<1.感圧導電性部材の作成>
表1に示す材料を準備した。3L加圧型ニーダー(D3−10:株式会社モリヤマ製)を用い、まずローター回転数30rpmで、原料ゴムのみを1分間素練りし、次いで酸化亜鉛、ステアリン酸亜鉛、カーボンブラックを投入して10分間混練りした。ニーダー容量に対する材料の充填量は65体積%とした。得られたゴム組成物を室温(25℃)で1時間冷ました後、更に、オープンロール機(12インチテスト用ロール機:関西ロール(株)製)を用い、TETD、MBTSおよび硫黄を添加して混練した。フロントロール15rpm、バックロール18rpmで、適宜切返しながら15分間混練した後、ロール間隙0.6mmにて薄通した後、縦10mm、横10mmのサイズに裁断することにより基材となるゴム組成物の未加硫物を得た。次に、この未加硫物を予め170℃に加熱した縦10mm、横10mm、深さ0.5mmの金型内に充填し、170℃、100kgfにて15分間プレス加硫を行い、ゴム弾性体を得た。
【0033】
【表1】

【0034】
一方、ミキサーを用いて表2に示す材料を撹拌し、混合溶液1を作製した。次いでこの混合溶液を、平均粒径が0.8mmのガラスビーズをメディアとして、容器の容積に対して80%の充填率で充填したビーズミル分散機(アイメックス社製、ウルトラビスコミル)を用いて、ディスク周速10m/s、処理速度200ml/minで6時間、循環運転を行い、分散処理をして一次分散液を調製した。
【0035】
【表2】
【0036】
次いでこの一次分散液452質量部を含む表3に示す材料を、ミキサーを用いて撹拌し、混合溶液2を作製した。次いでこの混合溶液を、平均粒径が0.8mmのガラスビーズをメディアとして容器の容積に対して80%の充填率で充填したビーズミル分散機(アイメックス社製、ウルトラビスコミル)を用いて、ディスク周速6m/s、処理速度600ml/minで2時間、循環運転を行い、分散処理をして二次分散液を調製した。
【0037】
【表3】
【0038】
この二次分散溶液をディッピング法にて上記ゴム弾性体(縦10mm、横10mm、厚み0.5mm)に塗布し、160℃で60分間、加熱することによって硬化させ、膜厚が15μmの導電性塗膜を形成して、感圧導電性部材を得た。
【0039】
<2.絶縁性被覆部材の作成>
可撓性フィルムとして、ポリイミドフィルム(東レ・デュポン株式会社製、カプトン100H/V、ヤング率3.4GPa、厚み25μm)を使用した。このフィルムの片面にアクリル系粘着剤(東洋インキ化学社製、オリバインBPS−5127)をグラビアロール方式で塗布して塗膜を形成し、これを乾燥して、厚み15μmの粘着剤層を有する絶縁性被覆部材を得た。
【0040】
<3.感圧センサ体の作成>
上記感圧導電性部材(縦10mm、横10mm)を図5で示す櫛歯状の試験用電極(外寸:縦15mm、横15mm、電極部サイズ:縦10mm、横10mm)上に配置した。次いで上記絶縁性被覆部材を縦15mm、横15mmのサイズに裁断し、図1および図2に示すように電極に貼り付けることによって、感圧導電性部材が電極上に固定された感圧センサ体を得た。
【0041】
<4.評価方法>
得られた感圧センサ体は、23℃、60%RHの環境に24時間以上放置した後に評価を行なった。測定は図6に示す感圧特性評価装置を用い、固定された感圧センサ体の上部から直径3mmの円柱状押し圧子で荷重をかけた。その際に感圧センサ体に5Vの電圧を印加し、感圧センサ体に直列につないだ内部抵抗1kΩにかかる電圧から感圧センサ体の電気抵抗値を算出した。
【0042】
〔4−1.ばらつき評価〕
図7に示す1〜5の箇所に上記感圧特性評価装置を用いてそれぞれ100kPaの荷重をかけ、そのときの感圧センサ体の電気抵抗値のばらつきから評価した。各測定箇所1、2、3、4、及び5における感圧センサ体の電気抵抗値をR1、R2、R3、R4、及びR5、それぞれの対数値をlogR1、logR2、logR3、logR4、及びlogR5として、以下の基準にしたがってランク付けした。
【0043】
【数1】
【0044】
〔4−1.センサ感度評価〕
上記の感圧特性評価装置を用いて、図7に示す1〜5の箇所に対して0kPa〜500kPaの範囲で荷重をかけ、0kPa時に示された感圧センサ体の抵抗値の平均値と500kPa時に示された感圧センサ体の抵抗値の平均値の差をセンサ感度とし、以下の基準にしたがってランク付けした。
【0045】
【数2】
【0046】
総合評価として、ばらつき評価およびセンサ感度評価が、共にAであったものをAランクとし、AとBあるいは共にBであったものをBランクとし、少なくとも一方がCであったものをCランクとした。評価結果を表5に示す。
【0047】
[実施例2〜7及び比較例1〜4]
可撓性フィルムとして表4に示すフィルムを用いて実施例1と同様にして粘着剤層を設けた絶縁性被覆部材を作製したこと以外は、実施例1と同様にして感圧センサ体を作製し評価した。評価結果を表5に示す。
【0048】
【表4】
【0049】
【表5】
【0050】
実施例1および2並びに比較例1および2における、荷重に対する感圧センサ体の電気抵抗値の変化を図8〜図11に示す。これらの実施例と比較例は、厚みが同じでヤング率が異なるフィルムを用いた例である。実施例1および2に対し、比較例1では絶縁性被覆部材のヤング率(剛性)が小さすぎるために、荷重を局部的に加えた場合、荷重の偏りや場所によるわずかな有効接触面積の違いが、ばらつきとして電気抵抗値に現れることが分かる。このように絶縁性被覆部材のヤング率が小さくなると、感圧センサ体の電気抵抗値がばらつきやすくなる傾向になるといえる。また、比較例2ではヤング率が大きすぎるために、感圧導電性部材の全面を覆うように貼り付けると、絶縁性被覆部材により感圧導電性部材に常時荷重がかかった状態となるため、0kPa時でも電気抵抗値が低下し、500kPaの荷重をかけたときの電気抵抗値との差が小さくなる。つまりヤング率が大きいほどセンサとしての感度が小さくなる傾向にあるといえる。以上の結果と実施例3および4から、本発明の感圧センサ体に使用される絶縁性被覆部材の適切なヤング率は、1.7GPa以上6.5GPa以下であり、より好ましくは3.0GPa以上4.0GPa以下である。
【0051】
実施例2、5、6、7並びに比較例3、4は、同じヤング率のフィルムにおいてその厚みを変えたものである。比較例3のように厚みが小さいほど感圧センサ体の電気抵抗値がばらつきやすくなり、厚みが大きいほど感圧センサ体としての感度が小さくなるうえに、貼り付け固定すること自体が困難となることがわかる。比較例4の場合は、フィルム厚みが大きすぎるために絶縁性被覆部材を電極基板上に貼付けることができなかった。以上の結果より本発明の感圧センサ体に使用される絶縁性被覆部材の適切なフィルム厚みは、10μm以上100μm以下であり、より好ましくは25μm以上75μm以下である。
【符号の説明】
【0052】
1 基板
2 電極
3 感圧導電性部材
4 絶縁性被覆部材
4a 可撓性フィルム
4b 粘着剤層
5 配線部
6 荷重測定器
7 円柱状押し圧子
8 感圧センサ体
9 電圧測定器
10 1kΩ内部抵抗体
11 電圧印加装置
【技術分野】
【0001】
本発明は、無加圧状態では高い電気抵抗値を示し、圧力の増加に伴う圧縮変形に従って電気抵抗値が減少し導電性を示す感圧導電性部材を利用した、感圧センサ体に関する。
【背景技術】
【0002】
従来、部材に作用する圧力の大きさ、分布状態を測定する手段として、チタン酸ジルコン酸鉛等の圧電セラミックスを用いた方式や、歪みゲージを用いる方式が使用されている。しかしながら、圧電セラミックスを用いた方式は、一般に剛性の高い材料が使用されるため、感圧センサの形状の自由度に制限があり、また、歪みゲージを用いる方式も同様に、感圧センサの形状設計の自由度が低いという問題を有している。
【0003】
これらの問題に対して、ゴム、エラストマー、樹脂材料などの高分子材料を基材とし、この基材中に導電性粒子を分散させた導電性部材を用いることで、形状の自由度が高い感圧センサが得られることが知られている。
【0004】
上記導電性部材による感圧特性は、以下の2つのタイプに大別される。その一つは、無加圧時は高い電気抵抗値を示すが、圧力の増加に伴う圧縮変形により、基材中の導電性粒子同士の粒子間距離が狭まり、導電性粒子による導電パスが形成されることによって電気抵抗値が減少する、抵抗値変化型である。なお、この抵抗値変化は基材中における導電性粒子の分散状態が大きく影響する為、繰り返しの圧縮変形による電気抵抗値変化の再現性が課題となっている。特に、押圧を繰り返すうちに、疲労により導電性部材が永久変形を起こし、導電性粒子同士が接触したままとなり圧力を検出し難くなる問題を有している。
【0005】
もう一方のタイプは、上記導電性部材を用いて導電性塗膜を形成し、導電性塗膜同士、あるいは、導電性塗膜と例えば櫛型電極を、対向配置させるタイプである。このタイプの感圧センサ体の場合、圧力の増加に伴い、導電性塗膜同士の接触面積、あるいは導電性塗膜と櫛型電極間の接触面積が変化することで導通状態が変化する。従って、圧力の変化を電気抵抗値変化として検出することが可能であり、接触面積変化型といえる。
【0006】
このような感圧センサ体は、少なくとも、感圧性を得るための導電性部材とその抵抗値変化の出力経路となる電極基板から構成される。さらに、実装使用時に安定した感圧性能が維持できるよう、感圧導電性部材と電極基板を固定したり、あるいは電極基板への感圧導電性部材の押付け状態を規定している。
【0007】
たとえば、短冊状の感圧導電性ゴムの短辺を電極基板に接着固定して、長辺の少なくとも一部を接着固定しないことを特徴とする感圧センサで、さらにその上に柔軟な保護フィルムが弛みを持たせて配置されている感圧センサが提案されている(特許文献1)。また、感圧導電性ゴムの細片を、柔軟な電極基板上に間隔をおいて設けた一対の電極間に配置し、粘着テープで固定することを特徴とする圧力センサが提案されている(特許文献2)。更に、くし状電極上に感圧導電性弾性体を設けた感圧導電センサにおいて、感圧導電性弾性体に圧力を有して薄皮(フィルムなど)が被覆されていることを特徴とする感圧導電センサが提案されている(特許文献3)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−351653号公報
【特許文献2】特開平4−38432号公報
【特許文献3】特開2001−195945号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の感圧センサ体は、感圧導電性ゴムと電極基板の間に接着剤層を設けて固定することで、それぞれの相対位置関係がずれることなく、安定した感圧特性を得ることができる。しかし接着剤層の介在は、感圧導電性ゴムと電極基板の間の固定だけでなく、スペーサーとして感圧特性に影響を及ぼすので、接着剤層の厚み精度が感圧特性のばらつきを生じる要因となる場合がある。この影響は、上述の接触面積変化型の感圧センサ体に適用する場合に特に顕著に現れ、使用できる感圧導電性部材が制約を受けざるを得なくなる。また、保護フィルムは弛ませて設けられているので、たとえばセンサ面に局部的に繰返して圧力が加わったり、多方向から圧力が加わった場合には、フィルム材が延伸等して寸法が変化することで、皺の発生や偏りが生じて感圧導電性部材に正確に圧力が伝わらなくなり、感圧センサとしての機能を損なう場合がある。
【0010】
特許文献2の感圧センサ体において使用されるポリエチレン製の粘着テープは剛性が低いため、繰返し使用によりテープ材の変形や劣化による不具合が懸念される。
【0011】
また特許文献3の感圧センサ体は、くし状電極上に感圧導電性弾性体を設け、感圧導電性弾性体に常時圧力がかかるように電極ごと薄皮で被覆されている。この感圧センサ体は、押し子により圧力を印加した後に解放するとき、感圧導電性弾性体の形状回復性に加え、薄皮自身の形状回復性が作用するので、圧力の増減に精度よく追従する構造であり、圧力増減時の感圧特性のばらつきが小さくなるとしている。しかし、感圧導電性弾性体に常時圧力を加えると、それだけで電気抵抗値が低下するため、その状態から圧力を加えても電気抵抗値の変化幅が小さくなる。つまり感圧センサとしての感度や感知できる圧力幅が狭くなるので、センサとして使用できる範囲が大きく損なわれ、用途が限定されることが懸念される。
【0012】
以上を踏まえ、本発明者らは、上記課題を解決するため、接触面積変化型の感圧導電性部材において、圧力印加面にしかるべき剛性と厚みを有する絶縁層を設けることで、繰り返し使用に対する耐久性と感圧安定性が得られることを見出した。本発明の目的は、接触面積変化型の感圧導電性部材が繰返し印加される圧力から受けるストレスを軽減し、印加圧力を多方向あるいは局部的に受けても、これに起因する接触面積のばらつきを抑えることで、安定して感圧特性を得ることができる感圧センサ体を提供することにある。
【課題を解決するための手段】
【0013】
本発明は、基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体である。
【発明の効果】
【0014】
本発明の感圧センサ体は、接触面積変化型の感圧導電性部材が繰返し印加される圧力から受けるストレスを軽減し、印加圧力を多方向あるいは局部的に受けても、これに起因する接触面積のばらつきを抑えることができ、安定した感圧特性を得ることができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る感圧センサ体の一実施形態を示す図である。
【図2】図1に示す感圧センサ体をA方向から見た透視図である。
【図3】本発明に係る感圧センサ体の他の実施形態を示す図である。
【図4】図3に示す感圧センサ体をA方向から見た透視図である。
【図5】実施例における櫛歯状電極の模式図である。
【図6】荷重による感圧センサ体の電気抵抗値変化の測定方法を示す図である。
【図7】実施例における感圧センサ体への荷重箇所を示す図である。
【図8】実施例1の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
【図9】実施例2の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
【図10】比較例1の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
【図11】比較例2の感圧センサ体における荷重と電気抵抗値の関係を示す図である。
【発明を実施するための形態】
【0016】
本発明は、基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体である。
【0017】
<絶縁性被覆部材>
本発明に係る感圧センサ体は、少なくとも感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材を有している。絶縁性被覆部材を設ける第1の目的は、様々な圧力の形態による感圧特性のばらつきを抑制し、安定化させることである。感圧センサ体に外部より圧力を加えたとき、前記可撓性フィルムを介して、感圧導電性部材に圧力が伝わる。接触面積変化型の感圧導電性部材を使用する場合、安定した感圧特性を得るためには、感圧導電性部材がある一定圧力を受けたときの感圧導電性部材と電極基板との接触状態が一定となるようにすることが重要である。本発明のように一定の剛性を有する絶縁性被覆部材とともに圧力を伝えることで、様々な圧力の形態、すなわち押し子の形状や加える圧力の角度等が用途に応じて変化しても、感圧導電性部材の全面に圧力を分散させて安定した接触面積が確保できるので、圧力の形態に左右されない安定した感圧特性を得ることができる。
【0018】
絶縁性被覆部材を設ける第2の目的は、感圧導電性部材の保護である。感圧センサ体を小型化や柔軟化するとき、感圧導電性部材としてゴムやエラストマーに導電材を混合したものがしばしば選ばれる。絶縁性被覆部材は、繰返し圧力や応力集中等からこれらの材料の変形や劣化を防止するものである。
【0019】
〔可撓性フィルム〕
絶縁性被覆部材は、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有している。ヤング率が3.0GPa以上4.0GPa以下であると本発明の効果をより好ましく得ることができる。ヤング率が1.7GPaに満たない場合、圧力を印加したとき、感圧導電性部材全体への圧力分散が不十分となって、感圧特性のばらつきが生じ、保護に対する耐久性も低下する。一方、ヤング率が6.5GPaを超えた場合、その剛性により、貼り付け時の撓んだ形状が維持できずに元の略平板状に戻ろうとする。そのため、使用時に絶縁性被覆部材が電極基板から剥離するおそれがある。あるいは剥離しなくても、感圧導電性部材を電極基板面に常時押付けるように力が働くので、無荷重時での接触面積が大きくなり、感圧センサ体の感度を示す電気抵抗値の変化幅を大きく損ねてしまう。
【0020】
また、上記可撓性フィルムの厚みは、10μm以上100μm以下である。厚みが25μm以上75μm以下であると本発明の効果をより好ましく得ることができる。10μmに満たない場合、ヤング率が上記範囲にあっても印加圧力を感圧導電性部材の全体に均一に伝える効果や保護効果が不十分となる。また、100μmを超える場合、その厚みにより、貼り付け時の撓んだ形状が維持できずに元の略平板状に戻ろうとする。そのため、使用時に絶縁性被覆部材が電極基板から剥離するおそれがある。あるいは剥離しなくても、感圧導電性部材を電極基板面に常時押付けるように力が働くので、無荷重時での接触面積が大きくなり、感圧センサ体の感度を示す電気抵抗値の変化幅を大きく損ねてしまう。
【0021】
可撓性フィルムの材質としては、絶縁性でかつ上記ヤング率と厚みを満たすものであれば、特に制限されず、たとえば、二軸延伸ナイロンフィルム、ポリイミドフィルム、ポリエチレンテレフタレートフィルム、ポリスルフェンサルファイドフィルム、ポリスチレンフィルム等から選ばれる。
【0022】
〔粘着剤層〕
絶縁性被覆部材は、粘着剤層と、可撓性フィルムとを少なくとも有している。粘着剤層は、例えば可撓性フィルムの少なくとも片面に設けられる。絶縁性被覆部材は、粘着剤層を有することから、上述の効果に加えて、電極基板上に感圧導電性部材を固定する粘着テープとしても機能する。本発明で使用される感圧導電性部材は電極との接触面積の変化により感圧特性を発現するものであるので、電極上への感圧導電性部材の固定は必須である。電極基板と感圧導電性部材の相対位置関係がずれなければ、どのような貼付け方でもよい。但し、本発明の目的である、様々な圧力の形態による感圧特性のばらつき抑制や感圧導電性部材の保護を達成するためには、少なくとも感圧導電性部材の圧力印加面が絶縁性被覆部材で被覆されている必要がある。
【0023】
絶縁性被覆部材による被覆の実施形態の一例として、図1および2並びに図3および4に示す感圧センサ体が挙げられる。図1および2では、基板1および電極2からなる電極基板上に感圧導電性部材3を配置し、その上から面積が十分大きい絶縁性被覆部材4を被せて、絶縁性被覆部材の外周近傍を電極基板面に貼付けることによって、感圧導電性部材が粘着剤層4bを介して電極基板上に固定されている。また、図3および4のように、感圧導電性部材を配置した基板電極の外周面を1周以上、絶縁性被覆部材で巻きつける方法もある。
【0024】
粘着剤層は、例えば、可撓性フィルムの少なくとも一方の表面に粘着剤を塗布することによって形成することができる。可撓性フィルムの表面に塗布される粘着剤としては、アクリル系粘着剤が好ましく使用できる。他にも粘着剤としてゴム系やシリコーンゴム系等の粘着剤があり、これらを使用することもできる。しかし、ゴム系粘着剤では、粘着性を得るために、粘着付与剤等が配合されている。このため、特定の使用環境や長期間使用では粘着付与剤が染み出して、電気的な接点障害を引き起こす要因となったり、使用するゴムの種類によっては、硬化、劣化等により、粘着性自体が失われることが懸念される。また、シリコーンゴム系粘着剤では、含有する低分子シロキサン成分の染み出しによる電気的な接点障害の要因となる場合がある。一方、アクリル系粘着剤では主成分であるアクリル酸エステル共重合体自身が粘着性を有し、ゴム系やシリコーン系の粘着剤と比較して、粘着力も高いためより好適である。粘着剤層の厚みとしては、特に制限されるものではないが、一般に10〜50μmの範囲で使用される。
【0025】
<感圧導電性部材>
感圧導電性部材としては、絶縁性エラストマーシートに導電材を含有する導電塗膜層が積層されたものを使用することができる。例えば、絶縁性エラストマーシートとしてゴム弾性体を用い、その表面に導電塗料を塗布して使用される。塗布層は電気抵抗値の調整や表面性状等、所望の特性に合わせるために、1層であっても2層以上であってもよい。厚みとしては、絶縁性エラストマーシート100〜1000μmに対し、塗布層10〜50μmで塗布される。塗布層が10μm以上であれば、絶縁性エラストマーシートからの染み出しをブロックすることができ、当接部材である電極部の汚染を防止することができる。導電塗料の樹脂成分としては、フッ素樹脂、ポリアミド樹脂、アクリル樹脂、ポリウレタン樹脂、シリコーン樹脂、ブチラール樹脂、スチレン−エチレン−ブチレン−オレフィン共重合体(SEBC)及びオレフィン−エチレン・ブチレン・オレフィン共重合体(CEBC)等を挙げることができる。これらの樹脂は1種または2種以上を組み合わせて用いてもよい。また、絶縁性エラストマーシートの基材樹脂は架橋系のものでもよく、このための硬化剤としては、例えば、イソシアネート化合物、アミン化合物を適宜配合することができる。
【0026】
また、感圧導電性部材としては、感圧センサ体の柔軟性を損なわないように、ゴムや樹脂等のエラストマーに導電材を分散混合した導電性エラストマーを用いることができる。エラストマー種としては、前記可撓性フィルムよりもヤング率が小さいものであれば、特に制限されないが、圧力印加や解放による形状変化の追従性に優れるもの、すなわち反発弾性に優れるゴム弾性体が好適である。一般にゴム弾性体のヤング率は0.01〜0.1GPaであることから、従来公知のものが使用可能であるが、特に反発弾性に優れるブタジエンゴムが好ましい。また、所望の特性を得るために、各種ゴムをブレンドしても差し支えない。その場合、天然ゴムあるいはイソプレンゴムとのブレンドであれば、ブタジエンゴムの持つ反発弾性を損ねることなく、好適である。
【0027】
〔導電材〕
感圧導電性部材に配合される導電材としては、特に制限されることなく、従来公知のものが使用できる。例えば、導電性カーボン、グラファイト、黒鉛粒子、銅、アルミニウム、ニッケル、鉄粉及び金属酸化物である導電性酸化錫や導電性酸化チタン等が使用できる。これらは1種または2種以上を組み合わせて用いてもよい。配合量としては、ベースとなるゴムあるいは樹脂100質量部に対し、2〜200質量部、好ましくは5〜100質量部の範囲である。また、ゴムあるいは樹脂と導電材の他に、その他成分を配合することも可能であり、例えば、有機弾性フィラー、無機酸化物フィラーなどが挙げられる。有機弾性フィラーとしては、シリコーン系、ウレタン系などのエラストマーやアクリル系、スチレン系、ポリアミド系など樹脂からなる球状粒子が挙げられる。無機酸化物フィラーとしては、シリカ、アルミナ、酸化チタン、酸化亜鉛、酸化マグネシウム、などが挙げられる。
【0028】
本発明で使用される感圧導電性部材は、圧力を印加したときに、電極基板との接触面積変化を電気抵抗値の変化として検出するものである。この接触面積を制御するために当接面に適宜凹凸形状を設けたり、粗し処理を行うことができる。表面凹凸形状を設ける方法としては、例えばキャビティ内に所望の凹凸を設けたり、あるいはブラスト処理等を行った金型に、未硬化のゴム材料を充填して硬化することで転写する方法等が挙げられる。また塗布層を有する感圧導電性部材の場合は、前記のように凹凸を転写した絶縁性エラストマーシートに導電塗料を塗布する方法や、導電塗料中に粗し粒子として、アクリル系、スチレン系、ポリアミド系など樹脂からなる球状粒子を添加する方法等が挙げられる。
【0029】
<電極基板>
電極基板としては公知の電極基板が使用できる。例えばガラスエポキシ基板等の絶縁性基板に銅箔等をプリントしてパターンを形成したものでも良いし、フレキシブルプリント基板のようにポリアミド等の絶縁性フィルムを銅箔等の導体を組み合わせたものでも良い。また、感圧センサの小型化や柔軟化のために、ポリアミドやポリエチレンテレフタレート(PET)絶縁性フィルム上に銀やカーボンブラックを含む導電性ペーストを任意のパターンでスクリーン印刷したものを使用しても良い。
【0030】
<配線部>
配線部としては公知の配線形式のものが使用できる。例えば上記のように導電部分のパターンをプリントした基板において、所望の箇所からリード線を引き出す方法がある。また、基板として絶縁性フィルムを用いる場合では、電極部のパターンを設ける際に、配線部となる導電経路も同時にプリントしたものを使用することもできる。
【実施例】
【0031】
以下に、実施例及び比較例により本発明をより具体的に説明する。
【0032】
[実施例1]
<1.感圧導電性部材の作成>
表1に示す材料を準備した。3L加圧型ニーダー(D3−10:株式会社モリヤマ製)を用い、まずローター回転数30rpmで、原料ゴムのみを1分間素練りし、次いで酸化亜鉛、ステアリン酸亜鉛、カーボンブラックを投入して10分間混練りした。ニーダー容量に対する材料の充填量は65体積%とした。得られたゴム組成物を室温(25℃)で1時間冷ました後、更に、オープンロール機(12インチテスト用ロール機:関西ロール(株)製)を用い、TETD、MBTSおよび硫黄を添加して混練した。フロントロール15rpm、バックロール18rpmで、適宜切返しながら15分間混練した後、ロール間隙0.6mmにて薄通した後、縦10mm、横10mmのサイズに裁断することにより基材となるゴム組成物の未加硫物を得た。次に、この未加硫物を予め170℃に加熱した縦10mm、横10mm、深さ0.5mmの金型内に充填し、170℃、100kgfにて15分間プレス加硫を行い、ゴム弾性体を得た。
【0033】
【表1】
【0034】
一方、ミキサーを用いて表2に示す材料を撹拌し、混合溶液1を作製した。次いでこの混合溶液を、平均粒径が0.8mmのガラスビーズをメディアとして、容器の容積に対して80%の充填率で充填したビーズミル分散機(アイメックス社製、ウルトラビスコミル)を用いて、ディスク周速10m/s、処理速度200ml/minで6時間、循環運転を行い、分散処理をして一次分散液を調製した。
【0035】
【表2】
【0036】
次いでこの一次分散液452質量部を含む表3に示す材料を、ミキサーを用いて撹拌し、混合溶液2を作製した。次いでこの混合溶液を、平均粒径が0.8mmのガラスビーズをメディアとして容器の容積に対して80%の充填率で充填したビーズミル分散機(アイメックス社製、ウルトラビスコミル)を用いて、ディスク周速6m/s、処理速度600ml/minで2時間、循環運転を行い、分散処理をして二次分散液を調製した。
【0037】
【表3】
【0038】
この二次分散溶液をディッピング法にて上記ゴム弾性体(縦10mm、横10mm、厚み0.5mm)に塗布し、160℃で60分間、加熱することによって硬化させ、膜厚が15μmの導電性塗膜を形成して、感圧導電性部材を得た。
【0039】
<2.絶縁性被覆部材の作成>
可撓性フィルムとして、ポリイミドフィルム(東レ・デュポン株式会社製、カプトン100H/V、ヤング率3.4GPa、厚み25μm)を使用した。このフィルムの片面にアクリル系粘着剤(東洋インキ化学社製、オリバインBPS−5127)をグラビアロール方式で塗布して塗膜を形成し、これを乾燥して、厚み15μmの粘着剤層を有する絶縁性被覆部材を得た。
【0040】
<3.感圧センサ体の作成>
上記感圧導電性部材(縦10mm、横10mm)を図5で示す櫛歯状の試験用電極(外寸:縦15mm、横15mm、電極部サイズ:縦10mm、横10mm)上に配置した。次いで上記絶縁性被覆部材を縦15mm、横15mmのサイズに裁断し、図1および図2に示すように電極に貼り付けることによって、感圧導電性部材が電極上に固定された感圧センサ体を得た。
【0041】
<4.評価方法>
得られた感圧センサ体は、23℃、60%RHの環境に24時間以上放置した後に評価を行なった。測定は図6に示す感圧特性評価装置を用い、固定された感圧センサ体の上部から直径3mmの円柱状押し圧子で荷重をかけた。その際に感圧センサ体に5Vの電圧を印加し、感圧センサ体に直列につないだ内部抵抗1kΩにかかる電圧から感圧センサ体の電気抵抗値を算出した。
【0042】
〔4−1.ばらつき評価〕
図7に示す1〜5の箇所に上記感圧特性評価装置を用いてそれぞれ100kPaの荷重をかけ、そのときの感圧センサ体の電気抵抗値のばらつきから評価した。各測定箇所1、2、3、4、及び5における感圧センサ体の電気抵抗値をR1、R2、R3、R4、及びR5、それぞれの対数値をlogR1、logR2、logR3、logR4、及びlogR5として、以下の基準にしたがってランク付けした。
【0043】
【数1】
【0044】
〔4−1.センサ感度評価〕
上記の感圧特性評価装置を用いて、図7に示す1〜5の箇所に対して0kPa〜500kPaの範囲で荷重をかけ、0kPa時に示された感圧センサ体の抵抗値の平均値と500kPa時に示された感圧センサ体の抵抗値の平均値の差をセンサ感度とし、以下の基準にしたがってランク付けした。
【0045】
【数2】
【0046】
総合評価として、ばらつき評価およびセンサ感度評価が、共にAであったものをAランクとし、AとBあるいは共にBであったものをBランクとし、少なくとも一方がCであったものをCランクとした。評価結果を表5に示す。
【0047】
[実施例2〜7及び比較例1〜4]
可撓性フィルムとして表4に示すフィルムを用いて実施例1と同様にして粘着剤層を設けた絶縁性被覆部材を作製したこと以外は、実施例1と同様にして感圧センサ体を作製し評価した。評価結果を表5に示す。
【0048】
【表4】
【0049】
【表5】
【0050】
実施例1および2並びに比較例1および2における、荷重に対する感圧センサ体の電気抵抗値の変化を図8〜図11に示す。これらの実施例と比較例は、厚みが同じでヤング率が異なるフィルムを用いた例である。実施例1および2に対し、比較例1では絶縁性被覆部材のヤング率(剛性)が小さすぎるために、荷重を局部的に加えた場合、荷重の偏りや場所によるわずかな有効接触面積の違いが、ばらつきとして電気抵抗値に現れることが分かる。このように絶縁性被覆部材のヤング率が小さくなると、感圧センサ体の電気抵抗値がばらつきやすくなる傾向になるといえる。また、比較例2ではヤング率が大きすぎるために、感圧導電性部材の全面を覆うように貼り付けると、絶縁性被覆部材により感圧導電性部材に常時荷重がかかった状態となるため、0kPa時でも電気抵抗値が低下し、500kPaの荷重をかけたときの電気抵抗値との差が小さくなる。つまりヤング率が大きいほどセンサとしての感度が小さくなる傾向にあるといえる。以上の結果と実施例3および4から、本発明の感圧センサ体に使用される絶縁性被覆部材の適切なヤング率は、1.7GPa以上6.5GPa以下であり、より好ましくは3.0GPa以上4.0GPa以下である。
【0051】
実施例2、5、6、7並びに比較例3、4は、同じヤング率のフィルムにおいてその厚みを変えたものである。比較例3のように厚みが小さいほど感圧センサ体の電気抵抗値がばらつきやすくなり、厚みが大きいほど感圧センサ体としての感度が小さくなるうえに、貼り付け固定すること自体が困難となることがわかる。比較例4の場合は、フィルム厚みが大きすぎるために絶縁性被覆部材を電極基板上に貼付けることができなかった。以上の結果より本発明の感圧センサ体に使用される絶縁性被覆部材の適切なフィルム厚みは、10μm以上100μm以下であり、より好ましくは25μm以上75μm以下である。
【符号の説明】
【0052】
1 基板
2 電極
3 感圧導電性部材
4 絶縁性被覆部材
4a 可撓性フィルム
4b 粘着剤層
5 配線部
6 荷重測定器
7 円柱状押し圧子
8 感圧センサ体
9 電圧測定器
10 1kΩ内部抵抗体
11 電圧印加装置
【特許請求の範囲】
【請求項1】
基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体。
【請求項2】
前記可撓性フィルムは、ヤング率が3.0GPa以上4.0GPa以下、かつ厚みが25μm以上75μm以下であることを特徴とする請求項1に記載の感圧センサ体。
【請求項3】
前記粘着剤層の粘着剤がアクリル系粘着剤であることを特徴とする請求項1または2に記載の感圧センサ体。
【請求項4】
前記感圧導電性部材が、絶縁性エラストマーシートに導電材を含有する導電塗膜層が積層されたものであることを特徴とする請求項1〜3のいずれかの一項に記載の感圧センサ体。
【請求項5】
前記感圧導電性部材が導電材を含有する導電性エラストマーであることを特徴とする請求項1〜3のいずれかの一項に記載の感圧センサ体。
【請求項1】
基板上に少なくとも一対の電極を設けた電極基板と、圧力を受けたときの電極基板との接触面積の変化により電気抵抗値が変化する感圧導電性部材と、少なくとも前記感圧導電性部材の圧力印加面を被覆する絶縁性被覆部材と、前記電極にそれぞれ導通している配線部とを、少なくとも有する感圧センサ体において、前記絶縁性被覆部材が、粘着剤層と、ヤング率1.7GPa以上6.5GPa以下、かつ厚み10μm以上100μm以下の可撓性フィルムとを少なくとも有し、前記粘着剤層が前記電極基板に貼付けられることによって前記感圧導電性部材が前記電極基板上に固定されていることを特徴とする感圧センサ体。
【請求項2】
前記可撓性フィルムは、ヤング率が3.0GPa以上4.0GPa以下、かつ厚みが25μm以上75μm以下であることを特徴とする請求項1に記載の感圧センサ体。
【請求項3】
前記粘着剤層の粘着剤がアクリル系粘着剤であることを特徴とする請求項1または2に記載の感圧センサ体。
【請求項4】
前記感圧導電性部材が、絶縁性エラストマーシートに導電材を含有する導電塗膜層が積層されたものであることを特徴とする請求項1〜3のいずれかの一項に記載の感圧センサ体。
【請求項5】
前記感圧導電性部材が導電材を含有する導電性エラストマーであることを特徴とする請求項1〜3のいずれかの一項に記載の感圧センサ体。
【図8】

【図9】
【図10】
【図11】

【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図11】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−159463(P2012−159463A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−20880(P2011−20880)
【出願日】平成23年2月2日(2011.2.2)
【出願人】(393002634)キヤノン化成株式会社 (640)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年2月2日(2011.2.2)
【出願人】(393002634)キヤノン化成株式会社 (640)
[ Back to top ]