
感度および質量分解能が増強された四重極型質量分析計
新規の方法および質量分析計装置が導入され、多極機器の1つまたは複数のイオンの出口パターンのイメージを時空間的に決定する。特に、本発明の方法および構造は、配列された検出器によって、時間および四重極質量フィルタのビーム断面における空間変位の関数として、イオン電流を測定する。検出された四重極のイオン電流の線形性は、その再生成可能な時空間構造と組み合わせて、感度と質量分解能の両方が不可欠である複雑な混合物内の個別のイオン種からの寄与信号のデコンボリューションを可能にする。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、質量分析の分野に関する。より具体的には、本発明は、四重極機器の出口開口部で収集される時空間特性のデコンボリューションによって向上された高質量分解能(MRP)および高感度を実現する質量分析計システムおよび方法に関する。
【背景技術】
【0002】
四重極は、従来、低分解能機器として記載されている。従来の四重極型質量分析計の理論および動作については、多数の著書(例えば、Dawson P.H.(1976),Quadrupole Mass Spectrometry and Its Applications,Elsevier,Amsterdam)および多数の特許文献、例えば、1954年12月21日に出願され1960年6月7日に発行された、Paul et al.,「Apparatus For Separating Charged Particles Of Different Specific Charges」と称する米国特許第2,939,952号明細書に記載されている。
【0003】
質量フィルタとして、そのような機器は、特定の範囲の質量電荷比を有するイオンがデバイス全体を通じて安定した軌道を有するように、時間の関数としてランプすることができる印加RFおよびDC電位によって安定限界を設定することにより動作する。特に、当業者に知られている方式で、固定および/またはランプACおよびDC電圧を、円筒状構成の電極だが大抵は双曲線電極のロッド対に印加することによって、所望の電場を設定し、xおよびy次元において既定のイオンの運動を安定させる。その結果、x軸方向に印加された電場は、重い方のイオンの軌道を安定させるが、軽い方のイオンは不安定な軌道を描く。対照的に、y軸方向の電場は、軽い方のイオンの軌道を安定させるが、重い方のイオンは不安定な軌道を描く。四重極において安定な軌道を描き、したがって、四重極ロッドセットの出口断面に配置された検出器に到達する質量範囲は、質量の安定限界によって定義される。
【0004】
通常、四重極型質量分析システムは、単一の検出器を使用して、時間の関数として四重極ロッドセットの出口断面へのイオンの到達を記録する。質量の安定限界を時間に単調に変化させることによって、検出器へのイオンの到達時間からイオンの質量電荷比を(近似的に)決定することができる。従来の四重極型質量分析計では、その到達時間からイオンの質量電荷比を概算する際の不確実性は、質量の安定限界間の幅に相当する。この不確実性は、質量の安定限界の範囲を狭くすることによって、すなわち、狭帯域フィルタとして四重極を動作することによって低減することができる。このモードでは、四重極の質量分解能が増強されるが、その理由は、「安定した」質量の狭帯域外のイオンが、通過して検出器に到達するよりもむしろ、ロッドに衝突するためである。しかし、質量分解能の向上には感度の犠牲が伴う。特に、安定限界の範囲が狭い場合、たとえ「安定した」質量であってもそれはほんのわずか安定しているだけであり、したがって、これらのほんの一部しか検出器に到達できない。
【0005】
配列されたソースによって提供される空間特性を分析するための数学的デコンボリューションプロセスを利用したシステムおよび方法に関する背景情報については、2008年3月4日に発行されたScheidemann et al.,「ANALYTICAL INSTRUMENTS USING A PSEUDORANDOM ARRAY OF SOURCES,SUCH AS A MICRO−MACHINED MASS SPECTROMETER OR MONOCHROMATOR」と称する米国特許第7,339,521号明細書に記載され、請求されている。同特許文献は、次の記載事項「疑似ランダム系列を使用して疑似ランダムソースアレイにおいて複数のソースを空間的に配置する新規の方法および構造が本明細書に開示される。疑似ランダムソースアレイは、サンプルまたはソースによって放出されるプローブ粒子/波の空間的離間距離に依存する分析機器内の単一のソースを置き換えることができる。この疑似ランダムソースアレイ内の大多数のソースは、位置敏感型検出器上の信号を増強する。数学的デコンボリューションプロセスは、検出器の信号から信号対雑音比が向上されたスペクトルを取り出す。」を含む。
【0006】
光電子放出素子によってイオンの空間的検出を実現する質量分析計システムに対する背景情報については、1989年3月7日に発行されたBateman et al.,「MASS SPECTROMETER FOR POSITIVE AND NEGATIVE IONS」と称する米国特許第4,810,882号明細書に記載され、請求されている。同特許文献は、次の記載事項「本発明は、正イオンと負イオンの両方とも検出することができる質量分析計を提供する。質量分析器から現れる正イオンは、コンバージョン電極に衝突して二次電子を放出し、環状電極を通過して蛍光体に衝突し、光子を放出する。負イオンは、環状電極の表面に衝突して二次電子を放出し、これもまた蛍光体に衝突し、光子を放出する。光子は従来の光電子増培管で検出される。電極は、正イオンと負イオンの両方とも、それらに印加される電位を変化することなく検出できるようにバイアスして配置する。」を含む。
【0007】
イオン収集用に配列された検出器を使用するシステムに対する背景情報については、Bonner DentonによってPittconで2009年3月8日に提示された「From the Infrared to X−ray:Advanced Detectors Set to Revolutionize Spectroscopy」に記載されている。同著書は、次の記載事項「全く新しい世代の非常に有望なイオンおよび電子検出器は、元々可視CCDおよび赤外マルチプレクサアレイ用に開発された技術の組合せに適応させて変更することによって実装されている。この新しい世代のイオンおよび電子検出器は、四重極および飛行時間型イオン移動度計に適した単一の要素からイオンサイクロイドおよびセクター型質量分析計用のリニアアレイに至るまでの構成において実装されている。これらの新しい技法を使用してマイクロファラデーカップおよび指電極のアレイを読み取った最新の結果を提示する。この手法は、高感度ファラデータイプのクーロン検出器であるため、同位体比質量分析計および従来の質量分析計内の高密度アレイならびにイオン移動度分析計用の超高感度検出器の実装に適する。」を含む。同提示に記載される検出器はイオンの出口位置についての情報を提供するが、記載されている研究ではこの情報を利用していない。むしろ、アレイは、捕捉するイオンの総数を増加させるために使用し、感度が増強された単一の検出器と機能的に同等である。
【発明の概要】
【発明が解決しようとする課題】
【0008】
図1Aは、四重極デバイスで現在利用可能な質量分解能の能力を示す、従来の三連四重極型(TSQ)質量分析器からの例示的なデータを示す。図1Aに示されるように、例示的な検出されたm/z508.208のイオンから得られる質量分解能は約44,170であり、これは、フーリエ変換質量分析(FTMS)などの「高分解能」プラットホームで通常達成されるものと同様である。そのような質量分解能を得るため、機器は、低速で走査され、既定の質量の安定領域の境界内で動作される。データによって示される質量分解能(すなわち、固有の質量分解能)は比較的高いが、この機器に対する感度は、図示されていないが、非常に低い。
【0009】
図1B(差し込み図を参照)は、狭い安定透過窓(Aで示されるデータ)および広い安定透過窓(A’で示されるデータ)で動作されるTSQ四重極からの例示的なm/z182、508および997イオンのQ3強度を示す。図1Bのデータを利用して、透過安定窓を開放することによって質量選択性四重極に対する感度を大幅に増加することができることを示す。しかし、図に明示されていないが、そのような広帯域モードで動作される四重極機器に対する固有の質量分解能は、望ましくない場合が多い。
【0010】
図1Aおよび1Bによっておさえるべき重要な点は、従来、四重極質量フィルタの動作は、比較的高い質量分解能または質量分解能を犠牲にした上での高い感度のいずれかを実現するが、両方同時に実現するわけではなく、すべてのケースにおいて、走査速度は比較的低速である。しかし、本発明は、高走査速度での高質量分解能と増加された感度の両方を同時に実現するシステムおよび動作方法を提供し、これは、四重極型質量分析器の現在の能力を超える。
【0011】
それに応じて、質量分析分野において、信号対雑音比(すなわち、感度)の損失なく、そのようなシステムの質量分解能を向上する必要がある。本発明は、本明細書に開示されるように、時間とビーム断面における空間変位の両方の関数としてイオン電流を測定し、次いで、個別のイオン種からの寄与信号をデコンボリュートすることによってこの必要性に取り組む。
【課題を解決するための手段】
【0012】
本発明は、両方とも同時に安定しているときでさえ、印加RFおよびDC電場の関数として、イオンが位置敏感型検出器のどこに衝突するかを記録することによってイオン種の中で識別する、新規の四重極質量フィルタ方法およびシステムを対象とする。到達時間および位置をビン化すると、データを一連のイオンイメージとして考えることができる。観測された各イオンイメージは、本質的には、成分イメージの重ね合わせであり、所定の瞬間に四重極を抜け出るイオンに対し異なるm/z値ごとに1つずつ割り当てられる。本発明はm/zおよび印加電場の関数として任意のイオンイメージの予測を実現するため、個々の成分は、本明細書で論じられる数学的デコンボリューションプロセスによって、観測された一連のイオンイメージから抽出することができる。各種の質量電荷比および存在度は、必然的にデコンボリューションから直接得られる。
【0013】
本発明の第1の態様は、無名数のマシューパラメータ(a,q)によって特徴付けられる、印加RFおよびDC電場によって画定される安定境界内で豊富な1つまたは複数のイオン種を通過させるよう構成された多極と、多極の断面エリアでの豊富なイオンの時空間特性を記録するよう構成された検出器と、印加RFおよび/またはDC電場の関数として前記豊富な1つまたは複数のイオン種の前記記録された時空間特性のデコンボリューションを行い、前記1つまたは複数のイオン種の質量識別を提供するよう構成された処理手段とを含む、高質量分解能・高感度の質量分析計機器を対象とする。
【0014】
本発明の別の態様は、最初に基準信号を取得または合成によって生成することにより、質量分析器および検出器から取得したイメージのデコンボリューションプロセスを実現する。基準信号は一連のイメージであり、各イメージは、四重極に印加された特定の状態の電場によって生成された単一の(標準的な)種のイオンが抜け出る際の空間分布を表す。その後、プロセスは、前記多極の出口チャネルからの豊富な1つまたは複数のイオン種に関する時空間の生データを取得するよう設計される。次いで、プロセスは、基準信号からシフトされた自己相関ベクトルを生成し、取得データを適切なチャンクに分割し、そのようなデータにゼロを挿入する。次いで、複数のデータチャンクの1つと基準信号の各々とのドット積を生成する。次いで、デコンボリューション問題を行列形式(大抵の場合、テプリッツ形式)に変換し、解答し、こうして、前記豊富な1つまたは複数のイオン種の質量識別を提供する。これには、異なるイオン種の数と、各種に対するその相対存在度および質量電荷比の正確な概算とが含まれる。
【発明の効果】
【0015】
それに応じて、本発明は、印加電場の関数としてだけでなく四重極の出口での空間的な断面における位置の関数としてもイオン密度の分布を計算することによって、時間分解能が約1RFサイクルの包括的な質量データをユーザが取得することを可能にする装置および動作方法を実現する。適用例としては、これらに厳密には限定されないが、上文では四重極システムで直接の情報が得られなかった石油分析、薬剤分析、ホスホペプチド分析、DNA配列およびタンパク質配列などが含まれる。副効用として、本明細書に開示されるそのような構成および方法は、製造上の公差に対する要件の緩和を可能にし、それにより、ロバスト性を向上する一方で全体的なコストが削減される。
【図面の簡単な説明】
【0016】
【図1A】有益な市販のTSQからの例示的な四重極質量データを示す。
【図1B】0.7FWHMのAMU安定透過窓での動作を10.0FWHMのAMU安定透過窓での動作と比較したTSQ四重極からの追加のQ3データを示す。
【図2A】より狭い質量の安定限界の範囲を表す走査線と、より広い質量の安定限界の範囲を実現するようDC/RF比が低減されている「低減された」走査線とが描かれたマシュー安定線図を示す。
【図2B】特定の瞬間に四重極の出口開口部で収集された際の、複数の異なるイオン種のシミュレートされた記録イメージを示す。
【図3】本発明の方法を用いて動作することができる三連質量分析計システムの有益な例示的な構成を示す。
【図4】読み出しアノードのリニアアレイを用いて構成された、時間・位置測定型イオン検出器システムの例示的な実施形態を示す。
【図5】遅延線システムを実装する、例示的な時間・位置測定型イオン検出器システムを示す。
【図6】光検出器技術を組み込む、例示的な時間・位置測定型イオン検出器システムを示す。
【図7】本発明のデコンボリューションプロセスの例示的なシミュレート結果を示す。
【図8】質量分解能をFWHMで測定したデコンボリューションプロセスの例示的なシミュレート結果を示す。
【発明を実施するための形態】
【0017】
本明細書の本発明の説明では、黙示的または明示的に理解されないまたは記述されない限り、単数形で表現される語はその相対物の複数形を包括し、複数形で表現される語はその相対物の単数形を包括することが理解される。その上、黙示的または明示的に理解されないまたは記述されない限り、本明細書に記載される任意の所定のコンポーネントまたは実施形態に対し、そのコンポーネント用に記載されるいかなる可能な候補形態または代替形態も、一般に、個別に使用されるかまたは互いに組み合わせて使用できることが理解される。さらに、本明細書に示される図面は必ずしも原寸に比例するとは限らず、いくつかの要素は本発明を明確にするためだけに描かれている場合があることを理解されたい。また、参照番号は、さまざまな図面間で繰り返され、対応する要素または類似した要素を示すことができる。それに加えて、黙示的または明示的に理解されないまたは記述されない限り、そのような候補形態または代替形態のいかなるリストも、単なる例示であって、制限するものではないことが理解されよう。それに加えて、他に指定のない限り、本明細書および特許請求の範囲で使用される成分、構成物質、反応条件などの量を表す数値は、用語「約(about)」によって修正されているものとして理解されたい。
【0018】
それに応じて、それに反して指定のない限り、本明細書および添付の特許請求の範囲に記載される数値パラメータは、近似値であり、本明細書に提示される対象物によって得ようとする所望の特性に応じて変化し得る。最低限でも、均等物の原則の適用を請求項の範囲に制限しようと試みるのではなく、少なくとも、報告された有効桁数を踏まえた上で、通常の四捨五入技法を適用することによって、各数値パラメータを解釈されたい。本明細書に提示される対象物の幅広い範囲を記載する数値範囲およびパラメータは近似値であるにもかかわらず、具体的な例において記載される数値はできる限り正確に報告される。しかし、いかなる数値も、それぞれのテスト測定値において見出される標準偏差から必然的に生じるある種の誤差を本質的に含む。
【0019】
概要
通常、多極質量フィルタ(例えば、四重極質量フィルタ)は連続イオンビーム上で動作するが、パルスイオンビームも使用することができ、走査機能およびデータ取得アルゴリズムに適切な修正を施してそのような不連続信号を適正に統合する。長軸に対して4回対称性を有するよう配置された平行ロッド構成上に電位を動的に印加することによって、機器内に四重極電場を生成する。対称軸とはz軸を指す。慣例により、4本のロッドは、一対のxロッドおよび一対のyロッドとして記載される。いかなる瞬間にも、2本のxロッドは互いに同じ電位を有し、2本のyロッドも同様である。yロッド上の電位は、xロッドとは逆にする。z軸での一定の電位に対して、ロッドのそれぞれのセットの電位は、一定のDCオフセットに、素早く振動する(約1MHzの典型的な周波数で)RF成分を加えたものとして表現することができる。
【0020】
xロッド上のDCオフセットは正であり、その結果、正イオンは、z軸付近に保持される傾向がある復元力を感じ取る。x方向の電位はウェルに似ている。逆に、yロッド上のDCオフセットは負であり、その結果、正イオンは、z軸からさらに遠ざけるよう作用する斥力を感じ取る。y方向の電位はサドルに似ている。
【0021】
振動性のRF成分は、ロッドの両方の対に印加される。xロッド上のRF位相は、yロッド上の位相と同じであり、180度異なる。イオンは、z軸に沿って、四重極の入口から、大抵の場合四重極の出口に配置される検出器まで慣性で移動する。四重極の内部では、イオンは、x方向およびy方向に分離可能な軌道を描く。x方向では、印加RF電場は、最小の質量電荷比を有するイオンを電位ウェルの外へ運び出し、ロッド内へ運び込む。十分に高い質量電荷比を有するイオンは、ウェル内で捕捉されたまま、x方向に安定した軌道を描く。x方向に印加された電場は、高域質量フィルタとして機能する。逆に、y方向では、最も軽いイオンのみが印加RF電場によって安定し、これは、印加DCが最も軽いイオンをロッドに引き寄せる傾向に打ち勝つ。したがって、y方向に印加された電場は、低域質量フィルタとして機能する。x方向とy方向の両方において安定した成分の軌道を描くイオンは、四重極を通過して検出器に到達する。DCオフセットおよびRF振幅は、所望の範囲のm/z値を有するイオンのみを測定するよう選択することができる。RFおよびDC電圧が固定されている場合は、イオンは、入口から出口まで四重極を横断し、含まれるRF位相の周期関数である出口パターンを示す。イオンがどこで抜け出るかは分離可能な運動に基づくが、観測されるイオン振動は、RFに完全に固定される。例えば、質量フィルタモードで四重極を動作した結果として、ランプRFおよびDC電圧を提供することによるデバイスの走査は、機器の出口開口部で観測されるように、経時的に空間特性を自然に変化させる。
【0022】
本発明は、イオンが本質的に同時に四重極を抜け出るにもかかわらず、空間的に分散された異なるm/zを有するイオンを収集することによって、そのように変化する特性を利用する。例えば、図2Bで例示されるように、所定の瞬間に、質量Aのイオンと質量Bのイオンは、機器の出口断面の2つの異なるクラスタに位置することができる。本発明は、約10RFサイクル、大抵の場合、1RFサイクル(例えば、典型的なRFサイクル1MHzは、約1マイクロ秒の時間枠に相当する)まで低減される時間分解能を有するか、または、それぞれのRFおよび/または印加DC電圧におけるRF位相の関数としての1つまたは複数の収集イメージの形態でデータを提供するサブRFサイクル特異度を有する、分散された抜け出るイオンを取得する。一旦収集すれば、本発明は、イオンの出口パターンをデコンボリュートする構築されたモデルによって、捕獲されたイメージ内の全質量スペクトル成分を抽出することができ、したがって、干渉信号の近くにある間も所望のイオン信号強度を提供することができる。
【0023】
構成において、本発明の四重極型質量分析計は従来の四重極型質量分析計と異なるが、その違いは、本発明は、イオンが四重極を抜け出る際にイオンを観測するための高速で位置敏感型検出器を含むが、後者は、イオンの相対位置を記録することなくイオンを計数するだけである。特に、本発明は、以下の2つの重要な点、すなわち、1)イオンイメージの時系列を質量スペクトルに変換する数学的変換、および、2)広い安定限界の範囲で動作し、高感度を生成するよう構成された四重極において従来の機器とは異なる。従来の四重極機器とは違って、本明細書で利用する場合のより広い安定限界の範囲は、質量分解能の低減をもたらすことはない。実際、本発明は、さまざまな動作条件、四重極型質量分析計とは通常関連しない特性の下、非常に高い質量分解能を生成する。
【0024】
それに応じて、本明細書に開示される新規のデータ取得およびデータ分析装置ならびに方法は、本発明の基礎を形成し、従来のシステムで可能な速度より高い走査速度で、より高い感度および質量分解能(MRP)を同時に達成することを可能にする。イオンイメージの時系列は、印加DCオフセットおよびRF振幅をランプしながら、高い経時的なサンプリングレートで取得される。デコンボリューションアルゴリズムは、検出器に到達するイオンの質量電荷比の値の分布を再構築し、「質量スペクトル」、実際には質量電荷比スペクトルを提供する。本発明の高データ速度および計算要件を考慮して、グラフィックスプロセッシングユニット(GPU)を使用してリアルタイムでデータストリームを質量スペクトルに変換する場合が多い。
【0025】
具体的な説明
理想的な四重極内のイオンの軌道は、マシュー方程式によってモデル化される。マシュー方程式は、ロッドが有限長および有限離間距離を有する実際の状況とは違って、半径方向と軸方向の両方に無限に広がる電場について説明する。マシュー方程式の解は、当業者に知られている通り、有界と非有界に分類することができる。有界解は、有限半径のシリンダの外に決して出ないような軌道に相当し、この場合、半径はイオンの初期条件に依存する。通常、有界解は、四重極を通してイオンを検出器まで運ぶ軌道と同じと考えられる。有限ロッドの場合、有界軌道を有する一部のイオンは、通過して検出器に到達するよりもむしろロッドに衝突する、すなわち、限界半径は四重極オリフィスの半径を超える。逆に、わずかに非有界軌道を有する一部のイオンは、四重極を通過して検出器に到達する、すなわち、イオンは半径方向に無限に広がる機会を得る前に検出器に到達する。これらの欠点にもかかわらず、マシュー方程式は、本発明に使用されるものなどの有限四重極におけるイオンの挙動の理解において依然として非常に有用である。
【0026】
マシュー方程式は、2つの無名数のパラメータaおよびqで表すことができる。マシュー方程式の一般解、すなわち、イオンが安定した軌道を有するかどうかを問わない解は、これらの2つのパラメータのみに依存する。また、特定のイオンに対する軌道は、一連の初期条件、すなわち、イオンが四重極に入る際のイオンの位置および速度ならびにその瞬間の四重極のRF位相にも依存する。m/zがイオンの質量電荷比を示し、UがDCオフセットを示し、VがRF振幅を示す場合、aはU/(m/z)に比例し、qはV/(m/z)に比例する。(q,a)値の平面は、有界解および非有界解に相当する連続領域に区切ることができる。q−a平面における有界および非有界領域の描写は安定線図と呼ばれ、図2Aと関連して以下で詳細に論じられる。マシュー方程式の有界解を含む領域は、安定領域と呼ばれる。安定領域は、2つの領域が交差することによって形成され、軌道のx成分およびy成分それぞれが安定している領域に相当する。複数の安定領域が存在するが、従来の機器は、主要な安定領域に関与する。主要な安定領域はq−a平面の原点に頂点を有する。その境界は、およその座標(0.706,0.237)ポイントの最高点まで単調に上昇し、単調に降下してa軸上のqがおよそ0.908のポイントに第3の頂点を形成する。慣例により、q−a平面の正象限のみが考慮される。この象限では、安定領域は三角形に似ている。
【0027】
図2Aは、特定の質量/電荷比のイオンに対するそのような例示的なマシュー四重極安定線図を示す。イオンを通過させるには、X次元とY次元の両方において同時に安定していなければならない。図2Aに示されるY等ベータ線(βy)は安定線図の先端でほぼゼロに近く、X等ベータ線(βx)はほぼ1.0に近い。質量フィルタリングのための四重極の一般的な動作の間は、対応する固定RFおよびDC値に対するqおよびaパラメータは、「パークされた(parked)」図の最高点(mで示される)とよく対応するよう望ましく選択することができ、その結果、実質的にm個のイオンのみを透過および検出することができる。他のU/V比の値の場合、異なるm/z値を有するイオンは、原点と第2のポイント(q*,a*)(参照文字2で示される)を通過する安定線図の線上にマップされる。図2Aに示される参照文字1によって示される、動作線と呼ばれる値の集合は、{(kq*,ka*):k>0)で示すことができ、kはm/zに反比例する。線の傾斜はU/V比によって指定される。qおよびa、したがって、四重極に印加される比例するRFおよびDC電圧が一定の割合で増加すると、走査線1は、イオンに対する所定の安定領域を通過するよう構成される。
【0028】
したがって、機器は、安定線図をガイドとして使用して、「パークされ」得る、すなわち、特定の対象イオンを標的とするために固定UおよびVを用いて動作され得るか(例えば、mで示される図2Aの最高点で)または「走査され」得、UとV振幅の両方を単調に増加させ、低m/zから高m/zまで、連続した時間区間で、m/z値の全範囲を安定領域にもたらす。特別なケースは、UとVそれぞれが時間に線形にランプされる場合である。このケースでは、すべてのイオンは安定線図全体を通して同じ固定動作線を進行し、イオンは線に沿ってm/zに反比例する速度で移動する。例えば、質量電荷比Mのイオンが時間tに(q*,a*)2を通過する場合、質量電荷比2Mを有するイオンは、時間2tに同じポイントを通過する。(q*,a*)2が図2Aの安定線図の先端のすぐ下に位置し、その結果、時間tに質量電荷比Mが標的とされる場合、質量電荷比2Mは、時間2tに標的とされる。したがって、時間スケールとm/zスケールは線形的に関連する。その結果、時間の関数として検出器に衝突するイオンの流束は、ビーム内のイオンの質量分布にほぼ比例する。すなわち、検出される信号は「質量スペクトル」である。
【0029】
検出器に到達するイオンの存在度を増加することによって増加された感度を実現するため、図2Aに示される走査線1’は、領域6と8によって制限される低減された傾斜を用いて再構成することができる。RFおよびDC電圧が時間に線形にランプされる(上記の通り「走査される」)と、あらゆるm/z値はマシュー安定線図においてイオンと同じ経路(すなわち、q、a経路)をたどり、上記と同様に、線に沿ってm/zに反比例する速度で移動する。
【0030】
マシュー安定線図に対するイオンの移動をさらに理解するため、イオンは、安定領域に入る前はy方向において不安定であるが、イオンが安定線図の第1の境界2に入ると(βy=0を有する)、イオンは非常に安定するようになり、y方向における高振幅および低周波数の比較的大きな振動を伴うが、この振動は経時的に減少する傾向があることが知られている。境界領域4によって示されるように、イオンが安定線図を抜け出ると、イオンはx方向において不安定となり(βx=1)、したがって、x方向における振動は経時的に増加する傾向があり、抜け出る直前にx方向における比較的大きな振動を伴う。走査線がy不安定領域またはx不安定領域のいずれかで動作される場合、安定線図内に制限されないイオンは、電極に対して放出され、検出されない。一般に、2つのイオンが同時に安定している場合、重い方のイオン(後に安定線図に入る)はより大きなy方向振動を有し、軽い方のイオンはより大きなx方向振動を有する。
【0031】
イオンが図2Aの安定領域を移動するにつれて変化するイオン運動の他の態様は、x方向およびy方向における振動の周波数(マシューパラメータ、ベータ(β)によって特徴付けられる)である。イオンが安定線図に入ると、y方向におけるその(基本)振動の周波数は、本質的にはゼロであり、ある出口における値まで上昇する。y方向におけるイオンの基本周波数は、「チャープ」のように増加する、すなわち、当技術分野で周知の通り、ベータがa:qランプに伴い非線形に増加するにつれて、周波数は時間に非線形にわずかに増加する。同様に、x方向における基本振動の周波数(ω)もまた、RF/2または(ω/2)をわずかに下回るある初期の値から、出口におけるω/2(β=1)ちょうどまで増加する。x方向におけるイオンの運動は、主要周波数(ω/2)をわずかに上回るおよび下回る周波数を有する2つの異なる振動の和によって支配されることを理解されたい。ω/2(すなわち、基本)をわずかに下回る周波数は、ω/2をわずかに上回る周波数のミラーイメージである。イオンが抜け出ると同時に交わる2つの周波数は、イオンが抜け出る直前に非常に低い周波数ビート現象をもたらすものだが、イオンが安定領域に入る際の低周波数y方向振動に類似する。
【0032】
したがって、2つのイオンが同時に安定している場合、重い方のイオン(安定線図を通してそれほど遠くない)はXとYの両方において低速振動を有し(Xではわずかだが、Yではかなりの程度)、軽い方のイオンは高速振動を有し、出口付近であればX方向における低周波数ビートを有する。また、ミクロ運動の周波数および振幅もまた、関連した方法で変化する(簡潔に要約することは容易ではない)が、質量識別の提供にも役に立つ。この運動の複雑なパターンは、よく似た質量を有する2つのイオンを判別するために本発明によって新規の方法で利用される。
【0033】
上記説明の一般的言明として、四重極によって操作されたイオンは、安定領域を通過する際に、検出器の断面上で振動運動「イオンダンス」を行うよう誘導される。あらゆるイオンが、同じ「a」および「q」値だが、ただ異なる時間において異なるRFおよびDC電圧で、全く同じダンスを行う。イオン運動(すなわち、同じm/zだが、さまざまな初期変位および速度を有するイオン雲に対する)は、時間の関数として四重極を抜け出るイオン雲の位置および形状に影響を及ぼすことによって、aおよびqにより完全に特徴付けられる。2つの質量がほぼ同一の場合、それらのそれぞれのダンスの速度は、本質的に同じであり、タイムシフトによって近似的に関連付けることができる。
【0034】
図2Bは、そのような「イオンダンス」の特定の瞬間における特定のパターンのシミュレートされた記録イメージを示す。例示的なイメージは、本明細書で論じられるように、高速検出器(すなわち、10RFサイクル、大抵の場合、1RFサイクルまで低減される時間分解能が可能な、または、サブRFサイクル特異度を有する検出器)によって収集することができ、この検出器は、どこでおよびいつイオンが抜け出るかについて取得するよう配置され、細かな詳細を判別するためかなりの質量分解能を有する。上述の通り、走査中にイオンがその(q,a)位置で安定領域に入ると、その軌道のy成分は「不安定」から「安定」へと変化する。時間の経過に伴って進行する出口断面に形成されるイオンイメージを観察すると、イオン雲は、引き延ばされ、収集イメージの上下部を超えるほどの激しい垂直振動が起こる。徐々に、出口における雲は、縮小され、y成分振動の振幅は減少する。四重極に入る際に雲が十分コンパクトであれば、イオンが十分に安全領域内にある際の完全な振動サイクル中、雲全体はイメージ内にとどまる、すなわち、100%の透過率である。
【0035】
イオンが安定領域の出口に近づくと、同様の結果が起こるが、逆であり、y成分よりむしろx成分に関与する。雲は、水平方向に徐々に引き延ばされ、この方向の振動は、雲がイメージの左右の境界間を渡りきるまで、その大きさを増大させる。最終的には、雲の振動と長さの両方とも、透過がゼロに減少するまで増加する。
【0036】
図2Bは、そのような結果を図示する。具体的には、図2Bは、四重極全体を通して安定した軌道を有する5つの質量(2つが楕円内にハイライトで図示される)を示す。しかし、同じRFおよびDC電圧では、各々が、異なるaおよびqひいては「ベータ」を含み、したがって、あらゆる瞬間に異なる出口パターンを含む。図で提供される楕円12および14は、例示的な走査線(例えば、図2Aの走査線1’)に対する安定領域6および8の端部で制限された質量に相当する。
【0037】
特に、図2Bに示される楕円6によって図で開示される垂直方向のイオン雲は、上記で説明されるように、安定線図に入る重い方のイオンに相当し、それに応じて、示されるY四重極の近くにそのような重いイオンをもたらすような振幅で振動する。図2Bに示される楕円8によって図で開示されるイオンのクラスタもまた、上記で説明されるように、安定線図を抜け出る軽い方のイオンに相当し、したがって、そのようなイオンを、示されるX四重極の近くにそのような軽い方のイオンをもたらすような振幅で振動させる。イメージ内には、同じ時間枠で収集されたが、aおよびqひいては「ベータ」パラメータの違いのため異なる出口パターンを有する、追加のイオンのクラスタ(図2Bに示されるが、明確にハイライトされていない)が位置する。
【0038】
したがって、出口におけるあらゆるイオン雲は同じ「ダンス」を行い、安定領域に入ってイメージに現れる際にy方向で激しく振動し、振動を鎮め、安定領域を抜け出てイメージから消える際にx方向で激しく振動する。すべてのイオンが同じダンスをするが、そのタイミングおよびテンポは異なる。それぞれのイオンがそのダンスを始める時間、すなわち、安定領域に入る時間およびダンスの速度は、(m/z)-1でスケーリングされる。
【0039】
それに応じて、任意のm/zを有するイオンに対してイオンイメージの時系列を構築することが可能であるため、本明細書に詳述される数学的デコンボリューションプロセスによって、図2Bに示されるものと同様の観測されたイオンイメージの系列から個々の成分を抽出することも可能である。各種の質量電荷比および存在度は、デコンボリューションから直接得られる。四重極の軸に沿って対称的に注入されたイオンは、四重極デバイスの出口開口部で描像されるように区別を実現するが、出口におけるイオン雲はさらに大きな振動を伴うため、出口開口部で収集する際に、さらに良好な区別を実現するため、中心から外してイオンを注入することが好ましいことに留意されたい。図2Bは、そのような中心から外した状態での注入の実施形態を示す。
【0040】
重要なポイントは、単に有界であるか非有界であるかに応じてイオンの軌道を分類するだけでは、同様の質量電荷比を有するイオンの判別において四重極の最大の可能性は活用されない。より細かな区別は、印加電場の関数としてイオンが検出器上に落下する場所を記録するイオンイメージを収集することによって、有界軌道を有するイオンの間で行うことができる。観測された各イオンイメージは、本質的には、成分イメージの重ね合わせであり、所定の瞬間に四重極を抜け出るイオンに対し異なるm/z値ごとに1つずつ割り当てられる。本発明は、イオンが検出器に衝突する時間および位置を記録することによって、四重極内で同時に安定しているイオンのm/z値を判別する能力を実証する。この能力を活用して、本発明は、四重極型質量分析計の感度に強い影響を与える。有界軌道を有するイオンのみが測定されるため、必然的に、実際に検出器に到達するイオンの数とともに、いかなるイオン種の信号対雑音特性も向上するということになる。
【0041】
本発明の四重極に対する安定透過窓は、こうして既定の方式(すなわち、図2Aに示されるように、走査線1’の傾斜を低減することによって)で構成することができ、それにより、比較的広い範囲のイオンが機器を通過することが可能となり、その結果、所定の種に対して記録されるイオンの数が増加するため、信号対雑音が増加する。それに応じて、イオンの数が増加することによって、感度における利得が有益に提供されるが、その理由は、所定の瞬間に、所定のイオン種のより大きな部分が単に四重極を通過できるだけでなく、はるかに長い走査時間の間四重極を通過できるためである。感度における潜在的利得は、必然的にこれらの因子が増倍された結果生じる。
【0042】
しかし、イオン数の増加は必要だが、感度の増加に必要であり得るある種のトレードオフがある。一例としては、イオン統計が改良された質量フィルタとして、すなわち、透過安定窓を開放することによって四重極が動作されると、感度における利得は質量分解能の損失によって打ち消される場合があるが、その理由は、同じ時間枠で四重極を抜け出る高い方の存在度の種によって、窓内の低い存在度の種が目立たなくなり得るためである。そのような影響を緩和するため、本発明の質量分解能は潜在的にかなり大きいが(すなわち、RF専用モードで動作することによって)、本発明のシステムは、最大約10AMU幅の質量分解能窓で動作される場合が多く、いくつかの適用例では、選択されたm/z透過窓内での有用な信号対雑音比の実現に必要な走査速度と組み合わせて最大約20AMU幅の質量分解能窓で動作されることを理解されたい。
【0043】
分離の基礎としてイオンイメージを使用することにより、本発明の方法および機器は、高感度(すなわち、従来の四重極フィルタより10〜200倍優れた増加された感度)を実現するばかりでなく、同時に質量区別の精度を100ppm(10,000の質量分解能)から約10ppm(100,000の質量分解能)まで低減することができる。予想外に、本発明は、本明細書で開示されるデバイスが理想の条件下(すべての電子機器の最小限のドリフト)で動作されれば、1ppm(すなわち、100万の質量分解能)の史上に例を見ない質量区別の精度までも実現することができる。
【0044】
図面に戻ると、図3は、三連質量分析計システム(例えば、市販のTSQ)の有益な例示的な構成を示し、概して参照番号300で指定される。質量分析計システム300は非限定的な有益な一例として提示され、したがって、本発明は、本明細書で示されるものとは異なるアーキテクチャおよび構成を有する他の質量分析計システムと関連して実施することもできることを理解されたい。
【0045】
質量分析計300の動作の制御は可能であり、データは、公知のタイプのさまざまな回路の制御およびデータシステム(示さず)によって取得することができ、このシステムは、汎用もしくは専用プロセッサ(デジタル信号プロセッサ(DSP))、ファームウェア、質量分析計および/もしくは関連機器に対する機器制御およびデータ分析を提供するソフトウェア、本発明の既定のデータ分析および制御ルーチンを実施する一連の命令を実行するよう構成されたハードウェア回路のいずれか1つまたは組合せとして実装することができる。また、そのようなデータ処理は、平均化、走査分類、本明細書に開示されるようなデコンボリューション、ライブラリ検索、データ格納およびデータ報告も含み得る。
【0046】
本明細書に開示されるように既定の低速または高速走査、対応する走査からの生ファイル内の一連のm/z値の識別、データのマージ、ユーザへの結果のエクスポート/表示/出力などを開始する命令は、質量分析計300の上述の命令および制御機能を実行するためのハードウェアおよびソフトウェア論理を含むデータ処理ベースシステム(例えば、コントローラ、コンピュータ、パーソナルコンピュータなど)によって実行できることも理解されたい。
【0047】
さらに、上記で説明されるそのような命令および制御機能は、機械可読媒体(例えば、コンピュータ可読媒体)によって提供されるため、図3に示される質量分析計システム300によっても実施することができる。本発明の態様によれば、コンピュータ可読媒体は、当業者に知られているおよび理解されている媒体を指し、機械/コンピュータが読み取る(すなわち、走査する/検知する)ことができ、機械/コンピュータのハードウェアおよび/またはソフトウェアで解釈できる形態で提供される符号化された情報を有する。
【0048】
したがって、所定のスペクトルの質量スペクトルデータが、本明細書に開示される有益な質量分析計300システムによって受取されると、本発明のコンピュータプログラムに組み込まれた情報を利用して、例えば、質量スペクトルデータからデータを抽出することができ、このデータは、選択された一連の質量電荷比に相当する。さらに、本発明のコンピュータプログラムに組み込まれた情報を利用して、当業者に理解されているおよび所望されている方式で、正規化するための方法、データをシフトするための方法または生ファイルから不要なデータを抽出するための方法を実施することができる。
【0049】
図3の例示的な質量分析計300システムに戻ると、1つまたは複数の対象の分析物を含有するサンプルは、無線周波数(RF)専用モードまたはRF/DCモードのいずれかで本発明を動作することができるところでまたはその近くで動作するイオンソース352によってイオン化することができる。特定の印加RFおよびDC電位に応じて、選択された質量電荷比を有するイオンのみがそのような構造体を通過することができ、残りのイオンは、不安定な軌道をたどり、印加多極電場から逃れるよう促される。RF電圧のみが既定の電極(例えば、球、双曲線、平面電極対など)間に印加されると、装置が動作し、広く開いた状態で、ある閾値質量を上回るイオンを透過させる。RFおよびDC電圧の組合せが既定のロッド対間に印加されると、上方カットオフ質量と下方カットオフ質量の両方が存在する。DC対RF電圧の比率が増加すると、当業者に知られているおよび理解されているように、質量フィルタ動作を実現するようイオン質量の透過帯域が狭くなる。
【0050】
それに応じて、図3(例えば、Q3)で示される本発明の多極デバイスの既定の相対する電極に印加されるRFおよびDC電圧は、大量のイオン透過が機器を通して方向付けられ、出口開口部で収集され、質量特性を決定するよう処理され得るように設計された既定の安定透過窓を実現するように印加することができる。
【0051】
したがって、例示的な多極(例えば、図3のQ3)は、システム300の協働コンポーネントとともに、典型的な四重極走査技法を利用する場合とは対照的に、その最大約200倍の感度の量的増加を伴う潜在的に最大約100万の質量分解能を実現するよう構成することができる。特に、そのようなデバイスのRFおよびDC電圧を経時的に走査し、既定のm/z値(例えば、20AMU)を超える安定透過窓について直接の情報を得ることができる。その後、安定した軌道を有するイオンは、約10RFサイクルの時間分解能または気圧が可能な、または、システム要件で定義される圧力で可能な検出器366に到達する。それに応じて、イオンソース352は、これらに厳密には限定されないが、電子イオン化(EI)ソース、化学イオン化(CI)ソース、マトリックス支援レーザ脱離イオン化(MALDI)ソース、エレクトロスプレーイオン化(ESI)ソース、大気圧化学イオン化(APCI)ソース、ナノエレクトロスプレーイオン化(NanoESI)ソース、大気圧イオン化(API)などを含み得る。
【0052】
結果として生じたイオンは、チューブレンズ、スキマー、ならびに、無線周波数RF四重極および八重極イオンガイドなどから選択される多極、例えば、参照番号353および354が含まれ得る場合が多い既定のイオン光学機器によって方向付けられ、そのようなイオンを動作上において案内して集束して良好な透過率を提供する、圧力が徐々に低減される一連のチャンバを通して促される。さまざまなチャンバは、一連のポンプ(図示せず)に結合された対応するポート380(図では矢印で表される)と連通し、所望の値で圧力を維持する。
【0053】
図3の例示的な質量分析計300は、当業者に知られているような高次多極電場(例えば、八極電場)の存在下でも動作することができる四重極イオンガイドとして実行するように、それぞれの電源(図示せず)に電気的に結合されたQ1、Q2およびQ3とラベル付けされたセクションを有する三連構成364を含むように示される。本発明のそのような極構造は、大抵の場合、1RFサイクルまで低減されるか、または、サブRFサイクル特異度を有し、特異度は、所望の質量区別(PPM)を提供するため、走査速度に対する適切な分解能を実現するよう選択されることに留意されたい。そのような検出器は、豊富な質量スペクトル368にデコンボリュートすることができるデータを提供するように、四重極(例えば、図3のQ3)のチャネル出口に有益に配置される。そのような動作から生じた結果として生じた時間依存データは、記録されたイオンの到達時間および位置の収集値を一連のm/z値および相対存在度に変換する、本明細書に記載されるデコンボリューション方法を適用することによって、質量スペクトルに変換される。
【0054】
そのような経時的に変化する特性を観測するための容易な構成は、四重極(Q3)の出口開口部と、許容されたイオン情報を記録するよう設計されたそれぞれの検出器366との間に平面に沿って空間的に構成された狭小手段(例えば、ピンホール)の形態であり得る。そのような構成を用いて、狭小開口部を通過している時間依存イオン電流は、ランプ電圧の関数としてビーム断面の所定の位置におけるエンベロープのサンプルを実現する。重要なことに、所定のm/z値およびランプ電圧に対するエンベロープは、わずかに異なるm/z値およびシフトされたランプ電圧に対するエンベロープとほぼ同じであるため、わずかに異なるm/z値を有する2つのイオンに対するそのような例示的な狭小開口部を通過している時間依存イオン電流もまた、タイムシフトで関連付けられ、RFおよびDC電圧におけるシフトに相当する。RFおよびDC電場が時間に依存するため、四重極の出口断面におけるイオンの出現は時間に依存する。特に、RFおよびDC電場はユーザによって制御され、したがって公知のため、イオンイメージの時系列は、任意のm/zのイオンに対する周知のマシュー方程式の解を使用して、有益にモデル化することができる。
【0055】
しかし、四重極デバイスの出口における既定の空間的な位置での狭小開口部の利用は基本的な見解を示すものであるが、時間と相関する四重極の出口開口部における既定の空間的な平面には複数の狭小開口部位置が事実上存在し、各々が異なる詳細および信号強度を有する。そのような情報を有益に記録するため、本発明の空間/時間検出器366構成は、事実上、組み込まれた質量成分を有するイメージとして個別のシフトパターンを空間的に記録するために、複数の分解能チャネルを本質的に提供する、ちょっとした複数のピンホールアレイである。印加DC電圧およびRF振幅は、RF位相に同調させて、任意の電場条件に対するイオンイメージの測定値を提供することができる。印加電場は、予測可能なおよび決定的な方法で、任意のイオンに対するイメージの外観を決定する(そのm/z値に依存する)。印加電場を変更することによって、本発明は、サンプルの全質量範囲についての情報を入手することができる。
【0056】
ちなみに、四重極の開口構成での断面における位置の関数としての初期のイオン密度、および、放置されていればイオンの初期速度を妨害し得る電場成分が存在する。例えば、機器の入り口(例えば、Q3の)における電界終端は、イオン注入に依存する軸方向の電場成分を含む場合が多い。イオンが入ると、イオンが入ったRF位相は、入口の位相空間またはイオンの初期条件の初期置換をもたらす。イオンの運動エネルギーおよび質量は、速度ひいてはイオンが四重極内に存在する時間を決定するため、結果として生じた時間は、イオンの初期のRF位相と出口におけるRF位相との間のシフトを決定する。したがって、エネルギーの小さな変化は、この関係ひいては全RF位相の関数としての出口におけるイメージを変更する。その上、イメージを撹乱することもできる出口における電場に対する軸方向の成分が存在する。放置されていれば多少有害ではあるが、本発明は、例えば、多極(例えば図3に示される衝突セルQ2)内のイオンを冷却し、軸上にイオンを注入するか、または、好ましくはデバイス内でイオンの位相を変調することによってわずかに中心から外してイオンを注入することによって、そのような成分を緩和するよう構成することができる。マシュー方程式の直接解よりむしろ、基準信号の直接観測、すなわちイメージの時系列により、電場におけるさまざまな非理想性について説明することができる。マシュー方程式を使用して、公知のm/z値に対する基準信号をさまざまなm/z値に対する基準信号群に変換することができる。この技法は、印加電場におけるさまざまな非理想性に対する耐性を有する方法を提供する。
【0057】
ランプ速度の効果
上記で論じられるように、RFおよびDC振幅が時間に線形にランプされると、各イオンのa、q値は各々、上記図2Aに示されるように、時間に線形に増加する。具体的には、四重極長を横断する際、イオンは、この条件が変化する間にいくつものRFサイクルを経験し、結果として、そのようなイオンは印加電圧のランプの間、ベータの変化を経験する。それに応じて、一定の期間後のイオンの出口位置は、他の上述の因子に加えて、ランプ速度の関数として変化する。その上、従来の選択的な質量フィルタの動作では、ユニット質量分解能でのフィルタ窓はかなり収縮し、高質量カットオフと低質量カットオフは不鮮明になるため、ピーク形状はランプ速度によって悪影響を受ける。特定の所望の質量の選択的な走査を提供することを希望する際(例えば、ユニット質量分解能)、従来の四重極システムのユーザは、彼または彼女のシステムを選択されたa:qパラメータを用いて構成し、次いで、既定の離散速度で走査して(例えば、約500(AMU/秒)の走査速度)信号を検出する場合が多い。
【0058】
しかし、本明細書では、そのような走査速度やさらに低速の走査速度を利用して所望の信号対雑音比を増加することもできるが、本発明は、安定透過窓はより広く、したがって、広い範囲のイオンは感度の量的増加が可能であるため、任意選択で、上限値として、最大約10,000AMU/秒やさらに最大約100,000AMU/秒まで走査速度を増加することができる。走査速度の増加の利益としては、測定時間枠の減少および調査走査と協調した本発明の動作が含まれ、a:qポイントは、全動作速度も増加させるように信号が存在するこれらの領域のみから追加の情報を抽出するよう(すなわち、対象走査)選択することができる。
【0059】
検出器
図4は、時間・位置測定型イオン検出器システムの基本的で非限定的な有益な例示的な実施形態を示し、概して参照番号400で指定され、本発明の方法を用いて使用することができる。図4に示されるように、例えば、少なくとも約1mmのビーム直径を有する入射イオンI(付随の矢印を用いて方向で示される)は、マイクロチャネルプレート(MCP)402のアセンブリによって受取される。そのようなアセンブリ(例えば、パルス計数に対して(通常、当業者に知られているような5ナノ秒未満のパルス)は、互いに隣接するMCP(シェブロン型またはV−積層型)または三重(Z−積層型)MCPの対を含み得、個々のプレートは、最大約107またはそれ以上の電子を生成するプレートの組合せを用いて、適切な帯域幅要件(例えば、約1MHzから最大約100MHzまでで)での動作を可能にするための十分な利得および分解能を有する。
【0060】
例示として実施可能性を示すため、図4に示されるように、シェブロン型またはZ−積層型(MCP)402の第1の表面を10kV、すなわち、負イオン用に構成される場合は+10kVに、正イオンを受取するよう構成される場合は−10kVにフロートさせ、第2の表面をそれぞれ+12kVおよび−8kVにフロートさせることができる。そのようなプレートバイアスは、2kVの電圧勾配を実現し、大地に対し結果として生じた相対出力8〜12kVの利得を提供する。すべての高電圧部分は、例えばアルゴンなどの不活性ガスが充填された約1e−5mBar〜1e−6mBarの真空下にある。
【0061】
したがって、図4の例示的なバイアス配置は、上記で論じられるように、衝突イオンIが、例えば、四重極の出口から受取される際に、MCP402の前表面に電子を誘導し、その後、電子は、印加電圧によって加速されるにつれて、MCP402の個別のチャネルに沿って移動するよう方向付けられることを可能にする。当業者に知られているように、MCPのチャネルはそれぞれ独立した電子増倍管として機能するため、流入イオンIは、チャネル壁上で受取される際に二次電子(e-で示される)を生成する。このプロセスは、MCP積層402の両端間において電位勾配によって数百回繰り返され、大多数の電子がこのようにしてMCP積層202の出力端部から放出され、MCPの前表面における粒子衝突のパターン(イメージ)の保存を実質的に可能にする。
【0062】
図4に戻ると、バイアス配置は、MCP積層402の後方に構成された光学コンポーネント、例えば、蛍光体被覆光ファイバープレート406に衝突させるため、MCP積層402によって増倍された電子のさらなる加速も実現する。そのような構成は、信号電子を、受取された電子の量に比例する、結果として生じた複数の光子(pで示される)に変換する。あるいは、MCP402積層から結果として生じた電子雲が、高電圧によって、ギャップを横断して、電子の運動エネルギーが光として放出される蛍光体スクリーンに引き寄せられるように、例えば、アルミニウム加工の蛍光体スクリーンなどの光学コンポーネントをバイアス配置で提供することができる(図示せず)。いかなる構成においても、感光性チャネルプレート410アセンブリ(アノード出力は大地に対してバイアスされた状態で示される)などの後続プレートは、結果として生じたそれぞれの入射光子pを光電子に変換し直すことができる。それぞれの光電子は、感光性チャネルプレート410の後方で二次電子の雲411を生成し、二次電子の雲411は拡散して、一構成として、これらに限定されないが、抵抗構造の二次元アレイ、二次元遅延線ウェッジおよびストリップ設計ならびに市販またはカスタムの遅延線アノード読み出しなどの検出アノード412のアレイに衝突する。設計の一部として、感光性チャネルプレート410およびアノード412は、密閉された真空エンクロージャ413(破線の縦型長方形で示される)内にある。
【0063】
本明細書の設計に適合させるための二次元アノード構造体の説明例として、四重極の出口から受取されたほぼすべてのイオンの軌道は原点を通過し、したがって、大抵の信号を含むため、そのようなアレイは、アノード構造体が中心から離れたものより小さくなるように本明細書で多くの場合最適に構成される線形X−Y格子として構成され得る。説明構成として、Arria FPGAが利用される場合、半径方向に10個のセクターおよび半径方向に8つの分割線を有するクモの巣構成の対象格子が望ましい。そのような例示的な構成から、アノード412の出力は、物理的に接合された4つの対称象限として構成され得る。キャパシタンス効果が信号の帯域幅を低下させる場合は、図4のアノードそれぞれを、当技術分野で知られている独立した増幅器414および追加のアナログデジタル変換回路(ADC)418に結合することができる。例えば、そのような独立した増幅は、差動トランスインピーダンス増幅器を用いて増幅することができ、約500MHz未満、大抵の場合、約100MHzまで低減され、大抵の場合、少なくとも約40MHzで変換する8進数ADCによって提供されるADC418を用いて雑音を抑制することができる。四重極によって提供されるイオン入口が対称でない場合は、軸外入口オリフィスによって、または、上記で簡潔に論じられるような図3に示される三連四重極364構成Q2などの冷却セルの使用によって、追加の識別を提供することができ、入力位相を変化させてシステム400動作を増強することができる。このケースでは、反対側のセクターを接合することは望ましくない。
【0064】
図4に示されるそのようなアノード構造体412は有益な一実施形態であるが、上述の通り、異なる設計の遅延線アノード(例えば、クロス配線(cross−wired)遅延線アノード、螺旋格子など)を、図4に示される構成において実装することができること、または、示される追加のコンポーネントなしでMCP402積層に続いて隣接して結合されるよう同様に構成し、本発明の範囲内で動作するようにもできることも理解されたい。そのようなデバイスの仕組みを可能にするため、構造体自体は、アノード構成に適合する適切な追加のタイミングおよび増幅回路(例えば、トランスインピーダンス増幅器)に結合される場合が多いが、その理由は、到達時間における信号差の測定値をイメージによる位置情報へ変換する支援を行うためである。本発明のシステムとともに利用できる特定の有益なクロス配線遅延線アノードについては、2003年12月9日に発行された、Jagutzki et al.,「DEVICE AND METHOD FOR TWO−DIMENSIONAL DETECTION OF PARTICLES OR ELECTROMAGNETIC RADIATION」と称する米国特許第6,661,013号明細書で見られ、その開示全体は参照により本明細書に組み込まれる。
【0065】
図4の基本的なアノード構造体に戻ると、増幅器414およびアナログデジタル変換回路(ADC)418および/または電荷積分器(図示せず)から生じた信号は、本発明のデータ速度に対する低消費電力および高雑音排除性のために設計されたコンポーネントである、例えば、シリアルLVDS(低圧差動信号伝送)高速デジタルインターフェース420を介して、最終的には、フィールドプログラム可能ゲートアレイ(FPGA)422に方向付けることができる。FPGA 422は、図4に示されるようなコンピュータ処理手段426に対して、構成可能なコプロセッサである能力のために有益であり、本発明の計算集約型タスクに対する特定用途向けハードウェアアクセラレータとしての動作を可能にする。そのような例示的で非限定的な一構成として、84の入力と85の出力のLVDS I/Oチャネルと、少なくともPCI Express x4チャネル取得システムを有する統合されたPCI Expressハードウェア424(4つの双方向の矢印で示される)とを有し、標準データ処理手段426(例えば、コンピュータ、PCなど)に供給する市販のArria FPGAを、計算統一デバイスアーキテクチャ(CUDA)で並列処理を行うグラフィックスプロセッシングユニット(GPU)サブシステムとともに利用することができる。
【0066】
図5は、別の有益な時間・位置測定型イオン検出器システムを示し、ここでは概して参照番号500で指定され、図4に対して上記で論じられた構成の遅延線アノードの変更を実施する。一般に、時間・位置測定型イオン検出器システム500は、前端部マイクロチャネルプレート(MCP)積層502、光学導管508、遅延線検出システム518および高圧電源514を含み、必要なバイアス電圧を提供する。イオンから光子への変換プロセスの一部として、所望のビーム直径を有する所望の入射イオンI(付随の矢印を用いて方向で示される)は、マイクロチャネルプレート(MCP)502(例えば、シェブロン型またはV−積層型または三重(Z−積層型))の前端部アセンブリによって受取される。この構成では、そのようなマイクロチャネルプレート(MCP)502は、バイアス配置(負イオン用に構成される場合は+10kV〜約+15kVに、正イオンを受取するよう構成される場合は−10kV〜約−15kV、第2の表面を例えば+12kVおよび−8kVにフロートさせる)で構成され、個々のプレートが本発明の要件に対して十分な利得を有することがここでもまた可能になる。
【0067】
時間および位置検出に光子を提供するため、これに限定されないが、蛍光体被覆光ファイバープレート504などの光学コンポーネントがMCP積層502の後方に構成され、信号電子を、MCP積層502から受取された電子の量に比例する複数の光子に変換する。その後、大抵の場合テーパー型光ファイバーバンドルである光学導管508は蛍光体被覆光ファイバープレート504に結合され、少なくともX−Y次元の一方においてイメージサイズを最大約80mm(例えば、40mm)まで拡大し、四重極デバイスによって制限されない分解能を実現する。大抵の場合テーパー型光学導管である光学導管は、円形、正方形および六角形の形式から構成することができ、ほとんどすべての規則的に形成される多角形の形式で製作することができる。
【0068】
図5に示される構成では、方向付けされた光子は、次いで、市販またはカスタムメードの遅延線システム518によって受取される。本明細書の構成を限定することなく示すための例示的な一構成として、遅延線システム518は、シールド管筺体内に封入された市販のRoentDek遅延線三次元感光性検出器であり得る。そのようなシステムは、光学導管508から受取された光子を比例する電子に変換するよう設計された光ファイバー窓(図示せず)に結合された低雑音フォトカソード(これも図示せず)を用いて構成される場合が多い。その後、シェブロン型またはZ−積層型マイクロチャネルプレート(MCP)502’は、変換された電子を受取して増幅し、結果として生じた電子雲を直交遅延線アノード(概して512で示される)に方向付ける。したがって、アノード512のリード線は、密閉環境の外部に位置する回路基板(図示せず)に結合され、回路基板は、5つの定比率弁別器(CFD)(図示せず)と、時間デジタル変換器(TDC)(これも図示せず)とを含み得、上記で論じられるように、最終的にPCIインターフェースおよびデータ処理手段(図示せず)に提供されるため、すべてのイオン事象に対する最大約5つの正確なタイムスタンプを登録するよう設計される。図5に示される構成のため、到達速度が計数システムに対する典型的なパルスパイルアップ限界を超えない限り、イオン事象Iはこうして、ありとあらゆるイオンに対するXおよびY座標ならびに到達時間の三次元表示に容易に変換される。
【0069】
上記で同様に論じられるように、異なる遅延線アノード設計(例えば、クロス配線遅延線アノード、螺旋格子など)は、例えば、参照により組み込まれる米国特許第6,661,013号明細書に見られる構造体を置き換えることによって、図5に示されるアノード構造体512の代用とすることもできる。その上、Roentekで進化してきたMCPに対する読み出し概念の一部として、本発明は、密閉環境の外部に装着される遅延線読み出しアノードを用いて構成することもできる。そのような構成では、ゲルマニウムからなる抵抗層が増強管の出力窓(ガラスまたはセラミック)上に直接堆積され、従来のイメージ増強管の蛍光体スクリーンを置き換える。位置情報は、専用ピックアップ遅延線電極(アノード)および密閉の外部に装着されて窓と密接に接触する結合された読み出し基板によって入手することができる。管内部で移動する電荷雲と外部の離間された読み出し電極との間の間隔は、読み出し基板上の含まれる信号の幾何学的拡大を引き起こす。これは、むしろ粗い読み出し構造、例えば、遅延線読み出しに対して数ミリメートルのピッチを有するストリップの使用が可能になるため有益である。
【0070】
図6は、別の所望の時間・位置測定型イオン検出器システムを示し、ここでは概して参照番号600で指定される。この構成では、時間・位置測定型イオン検出器システム600は、前端部マイクロチャネルプレート(MCP)積層602、光学導管608、取得電子機器618、例えば、これに限定されないが、上記で論じられた構成と同様のCPUおよびGPUプロセッサ、ならびに、この新規の構成では、光検出器612、例えば、これに限定されないが、本発明の構成に組み込むことができる電荷注入デバイス(CID)検出器などの任意の数の二次元画素検出器も含む。特定のCIDに関し、そのような検出器は、これに限定されないが、画素数が2のべき乗の正方形アレイ(例えば、64×64)として構成することができる。例示的な動作モードでは、各列のすべての64画素を、各読み取りが少なくとも約1.0MHzのRFサイクルごとに最低1回の割合、または、サブRFサイクル特異度を増加させるために望ましくはより高い割合で行われる単一の読み出しとして読み取ることができる。別の動作モードでは、各列の各画素を個別に読み取ることができる。例えば、1行目のすべての画素を1回目のRFサイクルで読み取る一方で、追加の信号積分を他の63の行上に蓄積させることができる。64のRFサイクルの完了後は、各々が1回読み取られているが、必ずしも同時である必要はない。読み取りは、64のインターリーブRFサイクルに対する蓄積信号の積分である。さらに別の例示的な動作モードでは、複数の行を読み取ることができる(例えば、2行ごとに32のRFサイクルで全体の読み取りを行う)。
【0071】
図5と関連して上記で同様に論じられるように、こうして、所望の入射イオンI(付随の矢印を用いて方向で示される)は、マイクロチャネルプレート(MCP)602の前端部アセンブリによって受取される。時間および位置検出に光子を提供するため、これに限定されないが、蛍光体被覆光ファイバープレート604などの光学コンポーネントがここでもまたMCP積層602の数ミリメートル後方に構成され、信号電子を、MCP積層602から受取された電子の量に比例する複数の光子に変換する。その後、これに限定されないが、テーパー型光ファイバーバンドルなどの光学導管608は蛍光体被覆光ファイバープレート604に結合され、生成イメージを拡大および/または縮小し、光検出器612、例えば、CIDの寸法に適合させる。上記と同様の光学導管は、円形、正方形および六角形の形式から構成することができ、ほとんどすべての規則的に形成される多角形の形式で製作することができる。
【0072】
質量分解能の増加が望まれるそれらの例示的な状況では、システムは、管理しやすいように検出された情報を提供するよう構成することができる。例えば、デコンボリューションの間、以下で詳述するアルゴリズムのドット積の部分をパイプライン化することができる。観測された信号と基準信号群との間のドット積は、画素を読み出す際に各画素値からのドット積への寄与物を蓄積することによって、オンザフライで計算することができる。画素のドット積への寄与物が記録された後は画素値を記憶する必要はなく、大きなメモリバッファの必要性を低減する。図4のFPGAを一例として使用すると、64×64アレイは、64の行として読み出すことができ、したがって、64の列は、4096画素アレイにおいてユニークな情報の大部分を表すため全体として単に128の読み取りを有する。取得レートも低減する場合は、複数のRFサイクルを平均して、実質的に質量分解能を犠牲にすることなく計算上の負担を低減することができる。別の代替形態として、マルチチャネル分析器は、各画素を用いて四重極デバイスのRFサイクルをいくつかのサブサイクルビンに分割するよう構成することができ、RFは、一例として図4のFPGAもしくは図6の光検出器によって追跡されるか、または、それによって生成される。各サブサイクルビンは、所望の期間の間信号を積分して、読み出すことができる。したがって、全データ速度は、すべての時間においてすべての成分が能動的である連続した変換プロセスである。
【0073】
図4および図5の構成においても提供される獲得電子618内のコンピュータ処理手段(図示せず)は、グラフィックスプロセッシングユニット(GPU)を含むことが多く、これは、当業者に知られているように、かつてスーパーコンピュータのみの領域であった超並列計算のレベルを実現できる処理手段である。構成の一部として、本明細書で利用されるグラフィックスプロセッシングユニット(GPU)は、プロセッサ、回路、特定用途向け集積回路、デジタル信号プロセッサ、ビデオカードの形式もしくはそれらの組合せ、または、他の今日知られているもしくは後に開発されたグラフィックスプロセッシング用のデバイスなどのさまざまな形式で提供することができる。一例として、GPUは、OpenCLおよびCUDAのアプリケーションプログラミングインターフェース(API)または他の今日知られているもしくは後に開発されたAPIを使用して、ATI、MatroxまたはnVIDIAによって提供されるグラフィックスプロセッサまたはビデオカードを含み得る。本明細書で利用されるそのようなGPUは、1つまたは複数の頂点プロセッサ、および、1つまたは複数のフラグメントプロセッサも含み得る。ラスタライゼーションおよび補間回路などの他のアナログまたはデジタルデバイスも含み得る。1つまたは複数のフレームバッファもディスプレイにデータを出力するために提供され得る。
【0074】
こうして、上記で説明された構成に結合されるGPUを有益に利用して、1つまたは複数の形式で関連する空間関係を伴うさまざまなオブジェクトを表すデータを受取する。その後、GPUは、テクスチャマッピングまたは他の二次元または三次元のレンダリングを実行することによって、データに基づいて二次元または三次元のイメージを順に生成する。GPUは、データの相対位置決め方式を決定し、特定の観測方向から見ることができるデータを表すフラグメントを生成するよう動作可能でもある。本明細書で利用されるGPUアーキテクチャの一部として、そのような組み込まれたGPUユニットは、これに限定されないが、図4に示されるFPGA 422などの上流のデバイスから受取する際に、所望の量、すなわち、64、128、256または他のキロバイト数の情報を記憶するよう構成された、例えば、ランダムアクセスメモリなどのビデオメモリも含む。したがって、動作の際、GPUは、パーソナルコンピュータ(PC)などのデータ処理手段を用いて構成されたアプリケーションプログラミングインターフェース(API)に基づくグラフィックスプロセッシングに対するビデオメモリから情報にアクセスする。
【0075】
デコンボリューション手順に関する論考
デコンボリューションプロセスは、特定の質量分析器(例えば、四重極)および検出器から取得されたイメージデータの数値変換である。すべての質量分析方法は、質量およびそれらの質量の強度のリストを送達する。方法を判別するのは、それが達成される方法および生成された質量強度リストの特性である。具体的には、質量間で識別する分析器は、質量分解能において常に制限され、その質量分解能は、報告された質量と強度の両方における特異度および正確度を確立する。存在度感受性(すなわち、量的感受性)という用語は、干渉種近くの強度を測定する分析器の能力を説明するために本明細書で使用される。したがって、本発明は、デコンボリューションプロセスを利用して、そのような干渉信号近くの信号強度を本質的に抽出する。
【0076】
モノ同位体種に対する機器応答は、積層された一連の二次元イメージとして説明され得、これらのイメージは、本明細書でボクセルとして説明される三次元データパケットに分類され得るセットの形で現れる。実際に、各データポイントは短いイメージシリーズである。ボクセル内でのデータの画素間近接を使用する可能性があるが、本明細書のデータは二次元として取り扱われ、一方の次元は質量軸であり、他方の次元は特定の質量での機器応答について説明する平坦化されたイメージシリーズから構築されたベクトルである。この機器応答は、有限範囲を有し、他ではゼロである。この範囲は、ピーク幅として知られており、原子質量単位(AMU)で表される。典型的な四重極型質量分析計では、原子質量単位は1に設定され、機器応答自体は、質量分析計の質量分解能および特異度の定義として使用される。しかし、機器応答内には追加情報があり、弱いイオン信号の取得に固有の統計的分散の量に関連する追加の制約付きではあるが、実際の質量分解能限界ははるかに高い。
【0077】
機器応答は、システムの全質量範囲にわたって完全には一様ではないが、あらゆるローカル区域内では一定である。したがって、全質量範囲にわたるシステムの応答について説明することができる1つまたは複数のモデル機器応答ベクトルが存在する。取得データは、コンボリュートされた機器応答を含む。したがって、本発明の数学的プロセスは、取得データ(すなわち、イメージ)をデコンボリュートし、観測された質量位置および強度の正確なリストを生成する。
【0078】
それに応じて、本発明のデコンボリューションプロセスは、当業者に知られているように、低いイオン密度を有する四重極デバイスを備える場合が多い質量分析器から取得されたデータに有益に適用される。イオン密度が低いため、結果として生じたイオン間相互作用はデバイスにおいて無視できるほど小さいものであり、各イオンの軌道を本質的に独立したものにすることが効果的に可能である。その上、動作している四重極内のイオン電流は線形であるため、四重極を通過するイオンの混合物から生じる信号は、上記で説明されるように、例えば、検出器アレイ上で受取する際に四重極を通過する各イオンによって生成された信号の重複合計(N)と本質的に等しい。
【0079】
本発明は、以下の連続段階に細分できる既知の信号の線形結合として検出データのモデルによって上記で説明された重複効果を利用する。
1)質量スペクトルを生成するための、N個の信号をユニットタイムシフト(例えば、テプリッツシステム)によって重ね合わせるという制約下における強度推定段階、および
2)質量リストを生成するための、ゼロから実質的に判別可能な強度を有する上記信号のサブセットの選択段階および後続の信号強度の向上段階。
【0080】
それに応じて、以下は、例えば、結合されたコンピュータによって実行された、四重極構成から生じた1つまたは複数の捕獲イメージのデコンボリューションプロセスに関する論考である。そこで最初に、J個の観測された収集値をデータベクトルX=(X1、X2、…XJ)と示すものとする。測定値Xjに対応する独立変数の値のベクトルをyjと示すものとする。例えば、この適用例における独立変数は、出口断面における位置および時間であり、したがって、yjは、Xjを測定できる条件について説明する3つの値からなるベクトルである。
【0081】
N個の既知信号をスケーリングする最適強度の理論的計算
N個の既知信号の線形重ね合わせをデコンボリュートするための一般的なケースでは、N個の既知信号U1、U2、…UNを有し、各信号はJ成分からなるベクトルであると仮定する。データベクトルのJ成分と各信号ベクトルのJ成分との間には一対一対応が存在する。例えば、n番目の信号ベクトルUn=(Un1、Un2、…UNJ)を考慮すると、Unjは、yjで「測定」された場合のn番目の信号の値を表す。
【0082】
方程式1で示されるように、強度の集合I1、I2、…INを選択し、各信号ベクトルU1、U2、…UNをスケーリングし、それらを加えることによってモデルベクトルSを形成することができる。
【数1】
各信号ベクトルU1、U2、…UNと同様に、モデルベクトルSはJ成分を有し、データベクトルXの成分と一対一対応である。
【0083】
SによるXの近似値における「誤差」をeと示すものとし、次いで、eを最小化する収集値I1、I2、…INを見出す。eの選択は幾分任意である。本明細書で開示される通り、方程式2で示されるように、eを、データベクトルXの成分とモデルベクトルSの成分との差を二乗したものの和として定義する。
【数2】
表記法は、モデルの依存性およびN個の選択された強度値に対するモデルにおける誤差を明示的に示す。
【0084】
強度ベクトルI(方程式3)を定義し、差分ベクトルΔ(方程式4)を定義し、内積演算子(方程式5)を使用することによって方程式2を簡素化する。
【数3】
【数4】
【数5】
方程式5では、aとbはともに、J成分からなるベクトルであると想定する。
【0085】
方程式3〜5を使用して、方程式6に示されるように、方程式2を書き直すことができる。
【数6】
Iの最適値をI*、すなわち、eを最小化する強度ベクトルI*=(I1*、I2*、…IN*)と示すものとする。方程式7で示されるように、I*で求められたIに対するeの一次導関数はゼロである。
【数7】
方程式7は、N個の方程式の省略表現であり、強度I1、I2、…INごとに1つずつ割り当てられる。
【0086】
連鎖法則を使用して方程式6の右辺の値を求める。誤差eは差分ベクトルΔの関数であり、ΔはモデルベクトルSの関数であり、Sは強度ベクトルIの関数であり、Iは強度I1、I2、…INを含む。
【0087】
I*(未知の)で求められたImの1つに対するeの導関数を考慮する。mは[1..N]の形式の任意の添字である。
【数8】
【数9】
【数10】
ここで、方程式9、10を使用して、方程式8の右辺内の
∂Δ/∂Im(I*)
を置き換える。
【数11】
次いで、方程式4を使用して、方程式11の右辺内のΔ(I*)を置き換える。
【数12】
方程式7に記載される最適化基準によって指定されるように、方程式12の右辺をゼロに設定すると、方程式13が得られる。
【数13】
ここで、方程式1を使用して、方程式13の左辺内のS(I*)を置き換える。
【数14】
方程式14は未知の強度{In*}を既知のデータベクトルXおよび既知の信号{Un}と関連付けることに留意されたい。残されたすべてのものは、{In*}の値に対する式へと導く代数的再構成である。
【0088】
内積の線形性を使用して、方程式14の左辺に表示される和の内積を、内積の和として書き直す。
【数15】
方程式15の左辺は、方程式16で示されるように、行ベクトルと列ベクトルの積として記載することができる。
【数16】
行ベクトルAm(方程式17)およびスカラーam(方程式18)を定義する。両数量は添字mに依存する。
【数17】
【数18】
方程式16〜18を使用して、方程式15をコンパクトに書き直すことができる。
【数19】
方程式19は、各mを[1..N]の形式に保つ。すべてのN個の方程式(方程式15の形式)は、N成分からなる列の形式で記載することができる。
【数20】
【0089】
方程式20の左辺の列ベクトルはN個の行ベクトルを含み、各々のサイズはNである。複数の行からなるこの列は、N×N行列を表し、Aで示す。方程式17のmに1を代入し、方程式20の左辺の列ベクトルの1行目のA1を置き換えることによって行列Aを形成する。このプロセスを、添字2…Nに対して繰り返し、それにより、N×N行列を構築する。その要素は、方程式21によって得られる。
【数21】
方程式21によって示されるように、行列Aの行mと列nにおける行列要素は、m番目の信号とn番目の信号の内積である。方程式20の右辺の列ベクトルをaで示す。
【0090】
要約すると、N個の方程式は、単一の行列方程式としてまとめることができる。
【数22】
ここでは、方程式22の右辺に表示されるベクトルaの成分は、方程式18によって定義される。
【0091】
いずれの信号も重複しない自明なケース、すなわち、m≠nの場合は常にAmn=0であるケースでは、Aは対角行列である。このケースでは、最適強度の解は、In*=an/Annによって得られ、各nは[1..N]の形式である。別の特別のケースは、mおよびnが異なるクラスタに属する場合は常にAmn=0であるように、信号をK個のクラスタに区切る場合である。そのケースでは、Aはブロック対角行列である。結果として生じた行列方程式は、K個の(部分)行列方程式に区切ることができ、クラスタ(または部分行列のブロック)ごとに1つずつ割り当てられる。ブロック対角のケースは、依然としてO(N3)であるが、一般的なケースより少ない計算が伴われる。
【0092】
一般に、方程式22の形式の方程式を解くにあたって、O(N3)の複雑性を有する。すなわち、N個の未知の強度の決定に必要な計算数は、未知の強度の数の三乗に相当する。
【0093】
1)特別なケース:N個の信号はユニットタイムシフトによって重ね合わせ可能である
このセクションでは、(方程式22)の一般的なケースを解決する複雑性における劇的な低減を提供するように、いくつかの追加の制約が問題に課される。
制約1:いかなる信号対UmおよびUnも、タイムシフトによって重ね合わせることができる。
制約2:隣接する信号UnとUn+1との間のタイムシフトは、[1..N−1]の形式のすべてのnに対して同じである。
【0094】
制約(1)と同等な言明は、すべての信号は標準信号Uのタイムシフトによって表すことができるということである。この制約は、高質量分解能四重極問題に適用可能である。第2の制約は、信号間の深刻な重複にもかかわらす、信号検出およびそれらの位置の初期推定の提供のための解の決定を容易にする。これらの2つの制約は、本明細書の以下で開示されるように、方程式22の解を、O(N3)問題からO(N2)問題に低減する。
【0095】
上記の制約(1)は、方程式23によって象徴的に表すことができる。
【数23】
式中、vは時間を除くすべての独立変数(すなわち、このケースでは、出口断面における位置および初期のRF位相)の値を表す添字の集合であり、qは時間の添字である。信号はタイムシフトに関連するため、観測に影響を及ぼす時間と他の独立変数とを判別する必要がある。
【0096】
方程式23を明確に定義するため、任意の時間ポイントmにおいて測定された収集値は、任意の他の時間ポイントnにおいて測定されたものと同じvの収集値を含まなければならない。この特性を考慮に入れて、内積の定義(方程式5)は、時間値および他の独立変数の形式で書き直される。
【数24】
式中、測定値の総数J=QVであり、qは時間の添字であり、vは残りの値に対する添字である(すなわち、他の独立変数の値の組合せの有限数は、一次元の添字vによって列挙される)。
【0097】
さらに、UnとUmの両方とも全区間[1..N]において定義されなければならないため、両信号は、[1..N]外でも定義されなければならない。区間[1..N]または任意の他の有限区間のタイムシフトは、同じ区間内には含まれない。したがって、すべての信号は、すべての整数時間ポイントに対して定義されなければならない。恐らくは、有限範囲の一部の支持領域外では、信号値はゼロになるように定義される。
【0098】
制約によって課される特別な特性は、行列要素A(m+k)(n+k)を考慮することによって明らかとなる。以下の短い導出は、A(m+k)(n+k)をAmnの形式で記載できることを示し、それに加え、多くの場合、その項は無視できるほど小さい。
【数25】
【0099】
上記の方程式25では、最初の等号の右側の式は、行列要素の定義(方程式22)から得られ、次の式は、他の独立変数から時間が判別される新しい内積の定義(方程式24)から得られ、次の式は、それぞれをUmおよびUnの形式で記載するために、タイムシフト方程式(方程式23)を各因数に適用することによって得られる。方程式25の2列目の式は、総和Σの添字qをq+kに置き換えることを伴う。方程式25の3列目の式は、時間の添字にわたって総和を3つの部分(q値が1未満の部分、q値が1からQまでの部分、次いでQ−k+1からQまでの余分な項を減ずる部分)に分割した結果である。これらの3項の和の2番目はAmnであり、この量は、最後の式において再ラベルされ前方に引き出される。
【0100】
任意の値kに対して要素A(m+k)(n+k)をAmnと同等と見なすには、方程式25の最後の式の括弧内に表示される項を誤差項と見なす。誤差項は、「左側」と「右側」と呼ばれる2つの項を含む。「左側」の項は、データが収集されてきた時間窓の左端に達する前に、Um+kまたはUn+kのいずれかの信号がゼロまで減少するとゼロとなる。同様に、「右側」の項は、データ窓の右端に達する前に、いずれかの信号がゼロまで減少するとゼロとなる。
【0101】
方程式25の「誤差」項がゼロにより近似されると、形式A(m+k)(n+k)の各要素をAmnで近似することができる。定義上、この特性を満たす行列Aは、テプリッツ形式であり、その意義については本明細書の以下で説明される。
【0102】
行列Aがテプリッツ形式であると仮定する。すると、行列の対角帯に沿った要素は同等な値である。例えば、A12=A23=A34…。一般に、行列内の任意の要素(例えばAmn)は、行添字と列添字の差m−nのみに依存する。したがって、N×N行列は、唯一、2N−1個の異なる値を含み、それは、−NからNまでの範囲のm−n値に相当する。
【0103】
行列Aは、2N−1個の異なる値を指定し、逆の順番で(すなわち、下から上へ)行列の1列目に最初のN個の値を入れ、次いで、左から右へ1行目の残りのN−1要素を埋めることによって構築することができる。行列の残りは、行列の左端または上端から右下向きに、行列の下端または左端それぞれに達するまで値をコピーすることによって、主対角に平行な2N−1帯のそれぞれを埋めることによって埋められる。Aがテプリッツ行列である場合は、唯一O(N2)計算を必要とするレビンソン再帰法(例えば、Numerical Recipes in Cを参照)によって方程式22の解を求めることができる。テプリッツ特性により、N個の強度値の初期推定値の計算は比較的迅速に行われる。
【0104】
テプリッツ近似法によって誘発された誤差(A(m+k)(n+k)〜Amn)は、特別なケースを考慮する際に最も容易に理解することができる。最初に、対角行列Aについて考慮する。信号U1は、データが観測される時間区間[1..Q]内に完全に位置する(すなわち、切り捨てしない)と仮定する。ここで、U1の右方へ(n−1)時間ユニットだけシフトされる信号Unについて考慮する。信号Unは時間Qを超えて拡張し、したがって、信号の右尾部はデータ窓によって切り捨てられると仮定する。すると、Unとそれ自身の内積、すなわち、行列要素Annは、切り捨ての結果、A11より小さくなる。しかし、テプリッツ近似法では、AnnをA11と同等と見なす。結果として生じたAnnの過大推定により、対応する強度In*は過小推定される。同様に、ブロック対角のケースでは、窓の端部によって切り捨てられるブロック内の信号の強度もまた、過小推定される。ブロック内において、切り捨てによりすべての項が同様のスケール係数で低減されれば、その結果、すべての強度は同じ係数の逆数でスケーリングされる。
【0105】
一定の時間区間におけるN個の収集推定値(または同等にm/z){In*}は、観測されたデータベクトルXから再構築された質量スペクトルとして解釈することができる。
【0106】
2)存在する信号の数およびそれらの位置の推定
最終的に、テプリッツシステムを解いた結果生じる初期推定値を使用する方法について考慮する。データが実際には等しく離間されたN個の信号を実現したものであるとは予想しない。むしろ、データは、任意の値の時間に位置する比較的小さい数の信号(例えば、k<<N)を実現したものであると予想する。このような関係において、N個の強度の大部分がゼロとなると予想する。ゼロとは異なる推定値は、信号の存在を示し得るが、データの雑音、存在する信号の位置における誤差、信号モデルにおける誤差および切り捨ての影響から生じたものでもあり得る。
【0107】
強度値には閾値が適用され、k個の信号のみを保持し、閾値を超える異なるイオン種に対応し、残りの強度をゼロに設定する。閾値モデルは、k個の信号の重ね合わせとしてデータを近似する。本発明の適用目的に対する有益な結果として、テプリッツシステムの解は、存在する信号の数(k)およびこれらのk個の信号のおよその位置を特定する強度値の集合を生成する。
【0108】
データ処理に関する一般論考
したがって、本発明は、観測された信号を基準信号の混合物の線形結合として表現するよう設計される。このケースでは、観測された「信号」は、四重極を抜け出るイオンの取得イメージの時系列である。基準信号は、異なるm/z値を有するイオンから観測された信号への寄与物である。線形結合における係数は、質量スペクトルに相当する。
【0109】
基準信号:本発明に対する質量スペクトルを構築するには、各m/z値に対して信号、すなわち、そのm/z値を有する単一のイオン種によって生成することができるイオンイメージの時系列を指定することが有益である。本明細書の手法は、テストサンプルを観測することによって、キャリブレーション工程としてはオフラインである標準的な基準信号を構築し、次いで、m/z値によってインデックスが付された基準信号群を標準的な基準信号の形式で表示することである。
【0110】
所定の時間において、観測された出口における雲のイメージは、3つのパラメータ、すなわち、aおよびq、さらにイオンが四重極に入る際のイオンのRF位相に依存する。出口における雲は、イオンの速度および半径方向の変位の分布にも依存し、この分布は、強度スケーリングの場合を除いて、時間に不変であると想定される。
【0111】
本発明に対する基準信号群の構築には課題が提示される。信号を決定する3つのパラメータのうち2つaおよびqはt/(m/z)比に依存するが、第3のパラメータはtのみに依存し、m/zには依存しない。したがって、イオン対からの時系列と任意の異なるm/z値とを正確に関連付ける簡単な方法は全くない。
【0112】
幸いなことに、計数可能な基準信号群(連続的なものよりむしろ)は、RFサイクルの整数倍数であるタイムシフトによって標準的な基準信号から構築することができる。これらの信号は、特に、標準信号とのm/z差が小さい場合に、さまざまなイオン種に対する予想信号の優れた近似値である。
【0113】
タイムシフト近似法がうまく機能する理由を理解するため、および、その限界を調べるため、t1およびt2のそれぞれに中心を置き、d1およびd2のそれぞれの幅を有する2つのパルス(t2=kt1、d2=kt2およびt1>>d1)のケースについて考慮する。さらに、kはおよそ1であると想定する。第2のパルスは、まさに係数kによる時間軸の拡張によって第1のパルスから生成することができる。しかし、第1のパルスへのt2−t1のタイムシフトの適用は、d1の幅を有するt2に中心を置くパルスを生成し、それは、kがおよそ1の場合はd2にほぼ等しくなる。低度から中程度の安定限界(例えば、10Da以下)の場合、イオン信号は上記のパルス信号のようなものであり、時間ゼロから狭くて多数のピーク幅に中心を置く。
【0114】
イオンイメージは固定RFサイクルによって変調されるため、標準的な基準信号は、タイムシフトによって任意のm/z値からの信号と関連付けることができない。むしろ、標準的な基準信号は、タイムシフトによってRF周期の整数倍数である信号と関連付けることができるだけである。すなわち、RF位相は、RF周期の整数倍数でのみ整合される。
【0115】
離散的なタイムシフトを考慮できるのみであるという制限は、本発明において重大な制限ではない。基準信号群が周波数連続体上で有効であるフーリエ変換質量分析(FTMS)でさえ、観測された信号は、周波数が1/T(Tは観測された信号の期間)の整数倍数である計数可能な正弦波数の形式で実際に表示される。FTMSと本発明の両方において、基準信号が定義される整数倍数上に必ずしも位置しない信号の表示は、構築された質量スペクトルにおける小さな誤差をもたらす。しかし、これらの誤差は、一般に、許容できるほど小さい。FTMSと本発明の両方において、基準信号のm/z離間は、走査速度を低減することによって低減することができる。FTMSとは異なり、本発明において低減された走査速度は、必ずしもより長い走査を意味せず、むしろ、より低速な走査速度で精査するために質量範囲の小領域を素早く標的とすることができる。
【0116】
上述のデコンボリューション問題に戻ると、観測された信号は基準信号の線形結合であると想定され、RF周期の整数倍数で1つの基準信号が存在し、規則的に離間されたm/zの間隔に対応するとも想定される。RFサイクルに相当するm/z離間は、走査速度によって決定される。
【0117】
行列方程式:本発明を通じた質量スペクトルの構築は、FTMSと概念的に同じである。FTMSと本明細書で利用されるものの両方において、質量スペクトルのサンプル値は、上記で詳細に論じられるように、線形行列方程式Ax=bを解くベクトルの成分である。行列Aは、基準信号対間の重複合計の集合によって形成される。ベクトルbは、各基準信号と観測された信号との間の重複合計の集合によって形成される。ベクトルxは、(概算の)相対存在度の集合を含む。
【0118】
行列方程式の解:FTMSでは、行列Aは恒等行列であり、x=bであり、bは信号のフーリエ変換である。フーリエ変換は、単に、変動周波数の正弦波を有する重複合計の収集値である。本発明では、行列Aは、上記で論じられるように、テプリッツ形式である場合が多く、これは、主対角に平行な任意の帯内のすべての要素が同じであることを意味する。テプリッツ形式は、拡張している基準信号が互いのシフトされたバージョンである場合は常に生じる。
【0119】
計算の複雑性:取得中の時間サンプルまたはRFサイクルの数をNと示すものとする。一般に、Ax=bの解はO(N3)の複雑性を有し、Aの計算はO(N3)であり、bの計算はO(N2)である。したがって、一般的なデコンボリューション問題に対するxの計算はO(N3)である。FTMSでは、Aは一定であり、bの計算は高速フーリエ変換を使用してO(NlogN)である。Ax=bは自明の解を有するため、計算はO(NlogN)である。本発明では、Aがテプリッツ形式である場合、2N−1個のユニークな値のみを計算する必要があるため、Aの計算はO(N2)であり、Bの計算はO(N2)であり、Ax=bの解はO(N2)である。したがって、x(質量スペクトル)の計算はO(N2)である。
【0120】
O(N3)からO(N2)への低減された複雑性は、リアルタイムでの質量スペクトルの構築に有益である。計算は、高度な「並列処理が可能」であり、組み込まれたGPU上で実施することができる。計算上の負担を低減する別の方法は、取得をより小さな時間区間または「チャンク」に分割することである。サイズN/kのk個のチャンクの解は、O(N2)問題においてk倍の加速をもたらす。「チャンク化」は、基準信号を指定するためのタイムシフト近似法は標準的な基準信号とかなり異なるm/z値に対して有効でない場合があるという問題も取り扱う。
【0121】
さらなる性能分析に関する論考
質量分析計の性能を評価するための主要な指標は、感度、質量分解能および走査速度である。前述のように、感度は、干渉種近くのイオン種を検出することができる最も低い存在度を指す。MRPは、M/DM比として定義され、Mは、分析されたm/z値であり、DMは、通常m/z単位のピークの全幅として定義され、最大値の半値で測定される(すなわち、FWHM)。DMの代替の定義は、2つのイオンを異なるものとして特定することができるm/z単位の最小離間距離である。この代替の定義は、エンドユーザに最も有用であるが、決定が難しい場合が多い。
【0122】
本発明では、ユーザは、走査速度およびDC/RF振幅比を制御することができる。これらの2つのパラメータを変化させることによって、ユーザは、以下で説明されるように、走査速度、感度およびMRPをトレードオフすることができる。本発明の性能は、入口のビームを集束する場合にも増強され、より優れた識別を提供する。前述のように、イオンが四重極に入る際に集束ビームをわずかに中心から外して移動させることによってさらなる向上を達成することができる。イオンが中心から外れて入ると、出口におけるイオン雲はより大きな振動を伴い、密接に関係した信号の識別をより良好に行う。しかし、ビームが中心から外れ過ぎる場合は、検出器に到達するイオンはより少なくなり、感度の損失をもたらすことに留意されたい。
【0123】
走査速度:走査速度は、通常、ユニット時間あたりの質量の形式で表示されるが、これは単に近似的に正しい。上記の図2Aに示されるように、UおよびVがランプされると、増加するm/z値は、動作線上に位置するポイント(q*,a*)を通過する。UおよびVが時間に線形にランプされると、ポイント(q*,a*)で見られるm/z値は時間に線形に変化し、したがって、一定の変化率は、Da/秒単位の走査速度として示され得る。しかし、動作線上のポイントごとに走査速度は異なる。質量の安定限界の範囲が比較的狭い場合は、m/z値は、大体同じ速度で動作線のすべての安定したポイントを通過する。
【0124】
感度:基本的に、四重極型質量分析計の感度は、検出器に到達するイオンの数によって決定される。四重極を走査する際、検出器に到達する所定の種のイオンの数は、そのイオン種のソースの輝度、平均透過率、透過期間の積によって決定される。上記で論じられるように、感度は、安定線図の先端から遠方にDC/RF線を減少させることによって向上することができる。平均透過率は、透過率が低い端部から離れた安定領域の内部でイオンがより多くの時間過ごせるため、DC/RF比の場合に増加する。質量の安定限界の範囲が広いため、各イオンが安定領域を通過するのにより長い時間を要し、収集のためにイオンが通過して検出器に到達するまでの時間は増加する。
【0125】
負荷サイクル:任意の瞬間で全スペクトルを取得する際、ソースで作成されたイオンのごく一部だけが検出器に到達し、残りはロッドに衝突する。所定のm/z値に対して透過されたイオンの割合は負荷サイクルと呼ばれる。負荷サイクルは、制限されたソース輝度を捕獲する際の質量分析計の効率の尺度である。負荷サイクルを改良すると、より短い時間で同じレベルの感度を達成することができ(すなわち、より高速の走査速度)、それにより、サンプルスループットを向上する。従来のシステムおよび本発明では、負荷サイクルは、サンプル内に存在する全質量範囲に対する質量安定範囲の割合である。
【0126】
本明細書の方法の使用によって改良された負荷サイクルを示す非限定的な例示として、本発明のユーザは、1Da(従来のシステムの典型である)の代わりに、負荷サイクルを10倍改良するため、10Da(本明細書で提供されるように)の安定限界(すなわち、安定透過窓)を選択することができる。また、109/秒のソースの輝度も、解説の目的で、0から1000まで大体一様な質量分布で構成され、その結果、10Daの窓はイオンの1%を表す。したがって、負荷サイクルは、0.1%から1%に改良される。平均イオン透過率が25%からおよそ100%に向上されれば、全走査にわたって平均化されたイオン強度は、109/秒×10-3×0.25=2.5×105から109/秒×10-2×1=107/秒へと40倍増加する。
【0127】
したがって、本発明のユーザが全走査モードで10個のイオンの分析物を記録することを希望すると仮定し、分析物は、サンプル内で1ppmの存在度を有し、分析物は、例えば、クロマトグラフィー(例えば、50分勾配において30秒幅の溶出プロフィール)を使用して100倍に濃縮される。上記の数値を使用した従来のシステムにおける分析物イオンの強度は、2.5×105×10-6×102=250/秒である。したがって、この例における必要な取得時間は、約40ミリ秒である。本発明では、例示的な10Da透過窓を使用すると、イオン強度は約40倍大きく、したがって、本明細書に記載されるシステムにおける必要な取得時間は、約1ミリ秒の優れた走査速度でのものである。
【0128】
それに応じて、従来のシステムと対照的に本発明の有益な感度利得は、上記全体にわたって論じられるように、動作線を安定領域の先端から遠方に押し下げ、したがって、安定限界の範囲を広げることによってもたらされることを理解されたい。実際には、動作線は、ユーザが依然として1RFサイクルのタイムシフトを決定できる範囲までできる限り下がるよう構成することができる。このケースでは、質量分解能の損失は全くなく、量子限界に達する。
【0129】
上記で説明されるように、本発明は、動作線に沿って最も近いRFサイクルまでのタイムシフトを決定することができる。このRFサイクル限界は、走査速度とMRPとの間でトレードオフを確立するが、MRPおよび質量精度上に絶対限界を課さない。走査速度は、動作線に沿った1RFサイクルのタイムシフトが任意の小さな質量差に相当するように減少することができる。
【0130】
例えば、RF周波数は約1MHzであると仮定する。すると、1RF周期は1マイクロ秒である。10kDa/秒の走査速度の場合、10mDaのm/z範囲は動作線上のポイントを通過する。10mDaの質量差を決定する能力は、m/z1000での100kのMRPに相当する。1000Daの質量範囲の場合、10kDa/秒での走査は100ミリ秒で質量スペクトルを生成し、これは、10Hzの反復率に相当し、走査間のオーバーヘッドを除外する。同様に、本発明は、走査速度におけるx倍とMRPにおけるx倍とをトレードオフすることができる。それに応じて、本発明は、10Hzの反復率で100kのMRPにおいて、1Hzの反復率で1MのMRPにおける「低速」走査で、または、100Hzの反復率で10kのMRPにおける「高速」走査で動作するよう構成することができる。実際には、達成可能な走査速度の範囲は、感度または電子安定性などの他の検討事項によって制限され得る。
【0131】
例示的な動作モード
一実施形態として、本発明は、例えば、質量範囲が1000Da以上の質量スペクトル全体が取得されるMS1「全走査」モードで動作することができる。そのような構成では、走査速度を低減して感度および質量分解能(MRP)を増強するか、または、走査速度を増加してスループットを向上することができる。本発明は、比較的高速な走査速度で高MRPを実現するため、従来の方法および機器に勝る本発明によって提供される負荷サイクルの改良にもかかわらず、十分なイオンの収集に要する時間で走査速度を制限することが可能である。
【0132】
別の実施形態として、本発明は、分析のために1つまたは複数の選択されたイオンが標的とされる「選択されたイオンモード」(SIM)ででも動作することができる。従来、SIMモードは、前述のように、四重極をパークする、すなわち、UおよびVを固定して保持することによって実行される。対照的に、本発明は、狭い質量範囲にわたって素早くUおよびVを走査し、透過が約100%となるように十分に広い安定限界の範囲を使用する。選択されたイオンモードでは、感度要件が走査の長さを決定する場合が多い。そのようなケースでは、小さなm/z範囲にわたって非常に低速な走査速度を選択してMRPを最大にすることができる。あるいは、より大きなm/z範囲にわたって、すなわち、ある安定境界から別の安定境界までイオンを走査し、選択されたイオンの位置のロバスト推定を提供することができる。
【0133】
また、前述のように、質量スペクトル全体にわたる検出のための調査走査の後に、対象の特徴に焦点を合わせるための複数の標的走査が続く、MS1動作のハイブリッドモードを実施することができる。標的走査を使用して、干渉種の探索および/または選択された種の定量化の改良を行うことができる。標的走査の別の可能な用途は、元素組成の決定である。例えば、本発明の四重極は、モノ同位体イオン種のおよそ1ダルトン上の「A1」領域を標的とし、同位体分布を特徴付けることができる。例えば、m/z1000での160kのMRPを用いると、6.3mDaだけ離間するC−13およびN−15ピークを決定することができる。これらのイオンの存在度は、種内の炭素および窒素の数を推定する。同様に、A2同位体種を精査して、C−132、S−34およびO−18種に焦点を置くことができる。
【0134】
三連四重極構成では、本発明で使用される位置敏感型検出器は、上記で説明されるように、Q3の出口に配置することができる。他の2つの四重極Q1およびQ2は、従来の方式で、すなわち、それぞれ先行質量フィルタおよび衝突セルとして動作される。MS1スペクトルを収集するため、Q1およびQ2は、質量フィルタリングも衝突もなしにイオンを通過させる。生成物イオンを収集して分析するため、Q1は狭い範囲の先行イオン(すなわち、1Da幅の質量範囲)を選択するよう構成し、Q2はイオンをフラグメント化するよう構成し、Q3は生成物イオンを分析するよう構成することができる。
【0135】
また、Q3を全走査モードで使用して、m/z1000での10kのMRPで100Hzにおける(全)MS/MSスペクトルを収集することもでき、ソースの輝度は、1ミリ秒の取得に対する受け入れ可能な感度の達成に十分であると想定する。あるいは、Q3をSIMモードで使用して、1つまたは複数の選択された生成物イオンを分析することができる(すなわち、単一反応モニタリング(SRM)または多重反応モニタリング(MRM))。感度は、質量範囲全体を取り扱うよりもむしろ、選択されたイオンに四重極を集中させることによって向上することができる。
【0136】
シミュレート結果
図7は、本明細書に記載される実施形態を使用して記録されたイメージ(例えば、図2B)を提供する際の、上記で詳述されるデコンボリューションプロセスの例示的なシミュレート結果を示す。本発明は、最初に基準信号702を取得または合成によって生成する。その後、プロセスは、記録されたデータによって提供されるような所望の分析物イオンのコンボリュートされた生データ704を取得するよう設計される。そのようなプロセスに対するデータは、三次元パケットまたはボクセル(すなわち、体積画素)で取得され、この場合、2つの次元は、上記の配置された検出器によって収集されたイオンの出口パターンに相当するイメージXおよびYである。第3の次元は、対応する時間であり、含まれるRFの位相と同調される。次いで、プロセスは、基準信号702からシフトされた自己相関ベクトル706を生成し、取得データを適切なチャンクに分割し(量が多過ぎる場合は、データを部分的に切り取る)、そのようなデータにゼロを挿入する。デコンボリューションプロセスの方程式22によって実施される方法の重要な部分は、上記で示されるように、基準信号702とチャンク化された取得生データ704との間のシフトされた相互相関を含み、716で示される相互相関トレースを提供する。その後、いくつかの強度ピーク720がテプリッツ行列の解(例えば、In*=an/Ann)から抽出され、これは、存在するピークの数、正確な相対強度およびそれらが位置するおよその場所を示す。この例では、所望の強度ピーク720は、相対強度1、1/4、1/16および1/64で、ppm単位で定義される質量間隔で等しく離間されたものとして示される。そして、補間されシフトされたクロス積および自己相関ドット積を伴う4×4のバージョンの問題が生成される。その後、強度推定値は、制約付きの形式の問題に精密化され、反復的に精密化され、必要に応じてデータフィルタリング(例えば、ベッセルフィルタリングを使用して)が含まれる。その後、大量のデータセットから生じたいかなるチャンク化データも、再結合させて、元々記録された全スペクトルを提供することができる。
【0137】
図8は、結果として生じたデータが4つのピーク820のクラスタに対するものであることを示し、最も高いピークの中心と2番目に高いピークの中心は、10ppmに相当する7つのピーク幅分だけ離間し、7×1e6/10=700kもの驚くほどの質量分解能をもたらす。
【0138】
本明細書のさまざまな実施形態に関連して説明される特徴は、本発明の精神および範囲から逸脱することなく、任意の組合せで混合し適合させることができることを理解されたい。さまざまな選択された実施形態が示され詳細に説明されているが、それらは例示的なものであり、本発明の精神および範囲から逸脱することなく、さまざまな代替形態および改変形態が可能であることを理解されたい。
【技術分野】
【0001】
本発明は、質量分析の分野に関する。より具体的には、本発明は、四重極機器の出口開口部で収集される時空間特性のデコンボリューションによって向上された高質量分解能(MRP)および高感度を実現する質量分析計システムおよび方法に関する。
【背景技術】
【0002】
四重極は、従来、低分解能機器として記載されている。従来の四重極型質量分析計の理論および動作については、多数の著書(例えば、Dawson P.H.(1976),Quadrupole Mass Spectrometry and Its Applications,Elsevier,Amsterdam)および多数の特許文献、例えば、1954年12月21日に出願され1960年6月7日に発行された、Paul et al.,「Apparatus For Separating Charged Particles Of Different Specific Charges」と称する米国特許第2,939,952号明細書に記載されている。
【0003】
質量フィルタとして、そのような機器は、特定の範囲の質量電荷比を有するイオンがデバイス全体を通じて安定した軌道を有するように、時間の関数としてランプすることができる印加RFおよびDC電位によって安定限界を設定することにより動作する。特に、当業者に知られている方式で、固定および/またはランプACおよびDC電圧を、円筒状構成の電極だが大抵は双曲線電極のロッド対に印加することによって、所望の電場を設定し、xおよびy次元において既定のイオンの運動を安定させる。その結果、x軸方向に印加された電場は、重い方のイオンの軌道を安定させるが、軽い方のイオンは不安定な軌道を描く。対照的に、y軸方向の電場は、軽い方のイオンの軌道を安定させるが、重い方のイオンは不安定な軌道を描く。四重極において安定な軌道を描き、したがって、四重極ロッドセットの出口断面に配置された検出器に到達する質量範囲は、質量の安定限界によって定義される。
【0004】
通常、四重極型質量分析システムは、単一の検出器を使用して、時間の関数として四重極ロッドセットの出口断面へのイオンの到達を記録する。質量の安定限界を時間に単調に変化させることによって、検出器へのイオンの到達時間からイオンの質量電荷比を(近似的に)決定することができる。従来の四重極型質量分析計では、その到達時間からイオンの質量電荷比を概算する際の不確実性は、質量の安定限界間の幅に相当する。この不確実性は、質量の安定限界の範囲を狭くすることによって、すなわち、狭帯域フィルタとして四重極を動作することによって低減することができる。このモードでは、四重極の質量分解能が増強されるが、その理由は、「安定した」質量の狭帯域外のイオンが、通過して検出器に到達するよりもむしろ、ロッドに衝突するためである。しかし、質量分解能の向上には感度の犠牲が伴う。特に、安定限界の範囲が狭い場合、たとえ「安定した」質量であってもそれはほんのわずか安定しているだけであり、したがって、これらのほんの一部しか検出器に到達できない。
【0005】
配列されたソースによって提供される空間特性を分析するための数学的デコンボリューションプロセスを利用したシステムおよび方法に関する背景情報については、2008年3月4日に発行されたScheidemann et al.,「ANALYTICAL INSTRUMENTS USING A PSEUDORANDOM ARRAY OF SOURCES,SUCH AS A MICRO−MACHINED MASS SPECTROMETER OR MONOCHROMATOR」と称する米国特許第7,339,521号明細書に記載され、請求されている。同特許文献は、次の記載事項「疑似ランダム系列を使用して疑似ランダムソースアレイにおいて複数のソースを空間的に配置する新規の方法および構造が本明細書に開示される。疑似ランダムソースアレイは、サンプルまたはソースによって放出されるプローブ粒子/波の空間的離間距離に依存する分析機器内の単一のソースを置き換えることができる。この疑似ランダムソースアレイ内の大多数のソースは、位置敏感型検出器上の信号を増強する。数学的デコンボリューションプロセスは、検出器の信号から信号対雑音比が向上されたスペクトルを取り出す。」を含む。
【0006】
光電子放出素子によってイオンの空間的検出を実現する質量分析計システムに対する背景情報については、1989年3月7日に発行されたBateman et al.,「MASS SPECTROMETER FOR POSITIVE AND NEGATIVE IONS」と称する米国特許第4,810,882号明細書に記載され、請求されている。同特許文献は、次の記載事項「本発明は、正イオンと負イオンの両方とも検出することができる質量分析計を提供する。質量分析器から現れる正イオンは、コンバージョン電極に衝突して二次電子を放出し、環状電極を通過して蛍光体に衝突し、光子を放出する。負イオンは、環状電極の表面に衝突して二次電子を放出し、これもまた蛍光体に衝突し、光子を放出する。光子は従来の光電子増培管で検出される。電極は、正イオンと負イオンの両方とも、それらに印加される電位を変化することなく検出できるようにバイアスして配置する。」を含む。
【0007】
イオン収集用に配列された検出器を使用するシステムに対する背景情報については、Bonner DentonによってPittconで2009年3月8日に提示された「From the Infrared to X−ray:Advanced Detectors Set to Revolutionize Spectroscopy」に記載されている。同著書は、次の記載事項「全く新しい世代の非常に有望なイオンおよび電子検出器は、元々可視CCDおよび赤外マルチプレクサアレイ用に開発された技術の組合せに適応させて変更することによって実装されている。この新しい世代のイオンおよび電子検出器は、四重極および飛行時間型イオン移動度計に適した単一の要素からイオンサイクロイドおよびセクター型質量分析計用のリニアアレイに至るまでの構成において実装されている。これらの新しい技法を使用してマイクロファラデーカップおよび指電極のアレイを読み取った最新の結果を提示する。この手法は、高感度ファラデータイプのクーロン検出器であるため、同位体比質量分析計および従来の質量分析計内の高密度アレイならびにイオン移動度分析計用の超高感度検出器の実装に適する。」を含む。同提示に記載される検出器はイオンの出口位置についての情報を提供するが、記載されている研究ではこの情報を利用していない。むしろ、アレイは、捕捉するイオンの総数を増加させるために使用し、感度が増強された単一の検出器と機能的に同等である。
【発明の概要】
【発明が解決しようとする課題】
【0008】
図1Aは、四重極デバイスで現在利用可能な質量分解能の能力を示す、従来の三連四重極型(TSQ)質量分析器からの例示的なデータを示す。図1Aに示されるように、例示的な検出されたm/z508.208のイオンから得られる質量分解能は約44,170であり、これは、フーリエ変換質量分析(FTMS)などの「高分解能」プラットホームで通常達成されるものと同様である。そのような質量分解能を得るため、機器は、低速で走査され、既定の質量の安定領域の境界内で動作される。データによって示される質量分解能(すなわち、固有の質量分解能)は比較的高いが、この機器に対する感度は、図示されていないが、非常に低い。
【0009】
図1B(差し込み図を参照)は、狭い安定透過窓(Aで示されるデータ)および広い安定透過窓(A’で示されるデータ)で動作されるTSQ四重極からの例示的なm/z182、508および997イオンのQ3強度を示す。図1Bのデータを利用して、透過安定窓を開放することによって質量選択性四重極に対する感度を大幅に増加することができることを示す。しかし、図に明示されていないが、そのような広帯域モードで動作される四重極機器に対する固有の質量分解能は、望ましくない場合が多い。
【0010】
図1Aおよび1Bによっておさえるべき重要な点は、従来、四重極質量フィルタの動作は、比較的高い質量分解能または質量分解能を犠牲にした上での高い感度のいずれかを実現するが、両方同時に実現するわけではなく、すべてのケースにおいて、走査速度は比較的低速である。しかし、本発明は、高走査速度での高質量分解能と増加された感度の両方を同時に実現するシステムおよび動作方法を提供し、これは、四重極型質量分析器の現在の能力を超える。
【0011】
それに応じて、質量分析分野において、信号対雑音比(すなわち、感度)の損失なく、そのようなシステムの質量分解能を向上する必要がある。本発明は、本明細書に開示されるように、時間とビーム断面における空間変位の両方の関数としてイオン電流を測定し、次いで、個別のイオン種からの寄与信号をデコンボリュートすることによってこの必要性に取り組む。
【課題を解決するための手段】
【0012】
本発明は、両方とも同時に安定しているときでさえ、印加RFおよびDC電場の関数として、イオンが位置敏感型検出器のどこに衝突するかを記録することによってイオン種の中で識別する、新規の四重極質量フィルタ方法およびシステムを対象とする。到達時間および位置をビン化すると、データを一連のイオンイメージとして考えることができる。観測された各イオンイメージは、本質的には、成分イメージの重ね合わせであり、所定の瞬間に四重極を抜け出るイオンに対し異なるm/z値ごとに1つずつ割り当てられる。本発明はm/zおよび印加電場の関数として任意のイオンイメージの予測を実現するため、個々の成分は、本明細書で論じられる数学的デコンボリューションプロセスによって、観測された一連のイオンイメージから抽出することができる。各種の質量電荷比および存在度は、必然的にデコンボリューションから直接得られる。
【0013】
本発明の第1の態様は、無名数のマシューパラメータ(a,q)によって特徴付けられる、印加RFおよびDC電場によって画定される安定境界内で豊富な1つまたは複数のイオン種を通過させるよう構成された多極と、多極の断面エリアでの豊富なイオンの時空間特性を記録するよう構成された検出器と、印加RFおよび/またはDC電場の関数として前記豊富な1つまたは複数のイオン種の前記記録された時空間特性のデコンボリューションを行い、前記1つまたは複数のイオン種の質量識別を提供するよう構成された処理手段とを含む、高質量分解能・高感度の質量分析計機器を対象とする。
【0014】
本発明の別の態様は、最初に基準信号を取得または合成によって生成することにより、質量分析器および検出器から取得したイメージのデコンボリューションプロセスを実現する。基準信号は一連のイメージであり、各イメージは、四重極に印加された特定の状態の電場によって生成された単一の(標準的な)種のイオンが抜け出る際の空間分布を表す。その後、プロセスは、前記多極の出口チャネルからの豊富な1つまたは複数のイオン種に関する時空間の生データを取得するよう設計される。次いで、プロセスは、基準信号からシフトされた自己相関ベクトルを生成し、取得データを適切なチャンクに分割し、そのようなデータにゼロを挿入する。次いで、複数のデータチャンクの1つと基準信号の各々とのドット積を生成する。次いで、デコンボリューション問題を行列形式(大抵の場合、テプリッツ形式)に変換し、解答し、こうして、前記豊富な1つまたは複数のイオン種の質量識別を提供する。これには、異なるイオン種の数と、各種に対するその相対存在度および質量電荷比の正確な概算とが含まれる。
【発明の効果】
【0015】
それに応じて、本発明は、印加電場の関数としてだけでなく四重極の出口での空間的な断面における位置の関数としてもイオン密度の分布を計算することによって、時間分解能が約1RFサイクルの包括的な質量データをユーザが取得することを可能にする装置および動作方法を実現する。適用例としては、これらに厳密には限定されないが、上文では四重極システムで直接の情報が得られなかった石油分析、薬剤分析、ホスホペプチド分析、DNA配列およびタンパク質配列などが含まれる。副効用として、本明細書に開示されるそのような構成および方法は、製造上の公差に対する要件の緩和を可能にし、それにより、ロバスト性を向上する一方で全体的なコストが削減される。
【図面の簡単な説明】
【0016】
【図1A】有益な市販のTSQからの例示的な四重極質量データを示す。
【図1B】0.7FWHMのAMU安定透過窓での動作を10.0FWHMのAMU安定透過窓での動作と比較したTSQ四重極からの追加のQ3データを示す。
【図2A】より狭い質量の安定限界の範囲を表す走査線と、より広い質量の安定限界の範囲を実現するようDC/RF比が低減されている「低減された」走査線とが描かれたマシュー安定線図を示す。
【図2B】特定の瞬間に四重極の出口開口部で収集された際の、複数の異なるイオン種のシミュレートされた記録イメージを示す。
【図3】本発明の方法を用いて動作することができる三連質量分析計システムの有益な例示的な構成を示す。
【図4】読み出しアノードのリニアアレイを用いて構成された、時間・位置測定型イオン検出器システムの例示的な実施形態を示す。
【図5】遅延線システムを実装する、例示的な時間・位置測定型イオン検出器システムを示す。
【図6】光検出器技術を組み込む、例示的な時間・位置測定型イオン検出器システムを示す。
【図7】本発明のデコンボリューションプロセスの例示的なシミュレート結果を示す。
【図8】質量分解能をFWHMで測定したデコンボリューションプロセスの例示的なシミュレート結果を示す。
【発明を実施するための形態】
【0017】
本明細書の本発明の説明では、黙示的または明示的に理解されないまたは記述されない限り、単数形で表現される語はその相対物の複数形を包括し、複数形で表現される語はその相対物の単数形を包括することが理解される。その上、黙示的または明示的に理解されないまたは記述されない限り、本明細書に記載される任意の所定のコンポーネントまたは実施形態に対し、そのコンポーネント用に記載されるいかなる可能な候補形態または代替形態も、一般に、個別に使用されるかまたは互いに組み合わせて使用できることが理解される。さらに、本明細書に示される図面は必ずしも原寸に比例するとは限らず、いくつかの要素は本発明を明確にするためだけに描かれている場合があることを理解されたい。また、参照番号は、さまざまな図面間で繰り返され、対応する要素または類似した要素を示すことができる。それに加えて、黙示的または明示的に理解されないまたは記述されない限り、そのような候補形態または代替形態のいかなるリストも、単なる例示であって、制限するものではないことが理解されよう。それに加えて、他に指定のない限り、本明細書および特許請求の範囲で使用される成分、構成物質、反応条件などの量を表す数値は、用語「約(about)」によって修正されているものとして理解されたい。
【0018】
それに応じて、それに反して指定のない限り、本明細書および添付の特許請求の範囲に記載される数値パラメータは、近似値であり、本明細書に提示される対象物によって得ようとする所望の特性に応じて変化し得る。最低限でも、均等物の原則の適用を請求項の範囲に制限しようと試みるのではなく、少なくとも、報告された有効桁数を踏まえた上で、通常の四捨五入技法を適用することによって、各数値パラメータを解釈されたい。本明細書に提示される対象物の幅広い範囲を記載する数値範囲およびパラメータは近似値であるにもかかわらず、具体的な例において記載される数値はできる限り正確に報告される。しかし、いかなる数値も、それぞれのテスト測定値において見出される標準偏差から必然的に生じるある種の誤差を本質的に含む。
【0019】
概要
通常、多極質量フィルタ(例えば、四重極質量フィルタ)は連続イオンビーム上で動作するが、パルスイオンビームも使用することができ、走査機能およびデータ取得アルゴリズムに適切な修正を施してそのような不連続信号を適正に統合する。長軸に対して4回対称性を有するよう配置された平行ロッド構成上に電位を動的に印加することによって、機器内に四重極電場を生成する。対称軸とはz軸を指す。慣例により、4本のロッドは、一対のxロッドおよび一対のyロッドとして記載される。いかなる瞬間にも、2本のxロッドは互いに同じ電位を有し、2本のyロッドも同様である。yロッド上の電位は、xロッドとは逆にする。z軸での一定の電位に対して、ロッドのそれぞれのセットの電位は、一定のDCオフセットに、素早く振動する(約1MHzの典型的な周波数で)RF成分を加えたものとして表現することができる。
【0020】
xロッド上のDCオフセットは正であり、その結果、正イオンは、z軸付近に保持される傾向がある復元力を感じ取る。x方向の電位はウェルに似ている。逆に、yロッド上のDCオフセットは負であり、その結果、正イオンは、z軸からさらに遠ざけるよう作用する斥力を感じ取る。y方向の電位はサドルに似ている。
【0021】
振動性のRF成分は、ロッドの両方の対に印加される。xロッド上のRF位相は、yロッド上の位相と同じであり、180度異なる。イオンは、z軸に沿って、四重極の入口から、大抵の場合四重極の出口に配置される検出器まで慣性で移動する。四重極の内部では、イオンは、x方向およびy方向に分離可能な軌道を描く。x方向では、印加RF電場は、最小の質量電荷比を有するイオンを電位ウェルの外へ運び出し、ロッド内へ運び込む。十分に高い質量電荷比を有するイオンは、ウェル内で捕捉されたまま、x方向に安定した軌道を描く。x方向に印加された電場は、高域質量フィルタとして機能する。逆に、y方向では、最も軽いイオンのみが印加RF電場によって安定し、これは、印加DCが最も軽いイオンをロッドに引き寄せる傾向に打ち勝つ。したがって、y方向に印加された電場は、低域質量フィルタとして機能する。x方向とy方向の両方において安定した成分の軌道を描くイオンは、四重極を通過して検出器に到達する。DCオフセットおよびRF振幅は、所望の範囲のm/z値を有するイオンのみを測定するよう選択することができる。RFおよびDC電圧が固定されている場合は、イオンは、入口から出口まで四重極を横断し、含まれるRF位相の周期関数である出口パターンを示す。イオンがどこで抜け出るかは分離可能な運動に基づくが、観測されるイオン振動は、RFに完全に固定される。例えば、質量フィルタモードで四重極を動作した結果として、ランプRFおよびDC電圧を提供することによるデバイスの走査は、機器の出口開口部で観測されるように、経時的に空間特性を自然に変化させる。
【0022】
本発明は、イオンが本質的に同時に四重極を抜け出るにもかかわらず、空間的に分散された異なるm/zを有するイオンを収集することによって、そのように変化する特性を利用する。例えば、図2Bで例示されるように、所定の瞬間に、質量Aのイオンと質量Bのイオンは、機器の出口断面の2つの異なるクラスタに位置することができる。本発明は、約10RFサイクル、大抵の場合、1RFサイクル(例えば、典型的なRFサイクル1MHzは、約1マイクロ秒の時間枠に相当する)まで低減される時間分解能を有するか、または、それぞれのRFおよび/または印加DC電圧におけるRF位相の関数としての1つまたは複数の収集イメージの形態でデータを提供するサブRFサイクル特異度を有する、分散された抜け出るイオンを取得する。一旦収集すれば、本発明は、イオンの出口パターンをデコンボリュートする構築されたモデルによって、捕獲されたイメージ内の全質量スペクトル成分を抽出することができ、したがって、干渉信号の近くにある間も所望のイオン信号強度を提供することができる。
【0023】
構成において、本発明の四重極型質量分析計は従来の四重極型質量分析計と異なるが、その違いは、本発明は、イオンが四重極を抜け出る際にイオンを観測するための高速で位置敏感型検出器を含むが、後者は、イオンの相対位置を記録することなくイオンを計数するだけである。特に、本発明は、以下の2つの重要な点、すなわち、1)イオンイメージの時系列を質量スペクトルに変換する数学的変換、および、2)広い安定限界の範囲で動作し、高感度を生成するよう構成された四重極において従来の機器とは異なる。従来の四重極機器とは違って、本明細書で利用する場合のより広い安定限界の範囲は、質量分解能の低減をもたらすことはない。実際、本発明は、さまざまな動作条件、四重極型質量分析計とは通常関連しない特性の下、非常に高い質量分解能を生成する。
【0024】
それに応じて、本明細書に開示される新規のデータ取得およびデータ分析装置ならびに方法は、本発明の基礎を形成し、従来のシステムで可能な速度より高い走査速度で、より高い感度および質量分解能(MRP)を同時に達成することを可能にする。イオンイメージの時系列は、印加DCオフセットおよびRF振幅をランプしながら、高い経時的なサンプリングレートで取得される。デコンボリューションアルゴリズムは、検出器に到達するイオンの質量電荷比の値の分布を再構築し、「質量スペクトル」、実際には質量電荷比スペクトルを提供する。本発明の高データ速度および計算要件を考慮して、グラフィックスプロセッシングユニット(GPU)を使用してリアルタイムでデータストリームを質量スペクトルに変換する場合が多い。
【0025】
具体的な説明
理想的な四重極内のイオンの軌道は、マシュー方程式によってモデル化される。マシュー方程式は、ロッドが有限長および有限離間距離を有する実際の状況とは違って、半径方向と軸方向の両方に無限に広がる電場について説明する。マシュー方程式の解は、当業者に知られている通り、有界と非有界に分類することができる。有界解は、有限半径のシリンダの外に決して出ないような軌道に相当し、この場合、半径はイオンの初期条件に依存する。通常、有界解は、四重極を通してイオンを検出器まで運ぶ軌道と同じと考えられる。有限ロッドの場合、有界軌道を有する一部のイオンは、通過して検出器に到達するよりもむしろロッドに衝突する、すなわち、限界半径は四重極オリフィスの半径を超える。逆に、わずかに非有界軌道を有する一部のイオンは、四重極を通過して検出器に到達する、すなわち、イオンは半径方向に無限に広がる機会を得る前に検出器に到達する。これらの欠点にもかかわらず、マシュー方程式は、本発明に使用されるものなどの有限四重極におけるイオンの挙動の理解において依然として非常に有用である。
【0026】
マシュー方程式は、2つの無名数のパラメータaおよびqで表すことができる。マシュー方程式の一般解、すなわち、イオンが安定した軌道を有するかどうかを問わない解は、これらの2つのパラメータのみに依存する。また、特定のイオンに対する軌道は、一連の初期条件、すなわち、イオンが四重極に入る際のイオンの位置および速度ならびにその瞬間の四重極のRF位相にも依存する。m/zがイオンの質量電荷比を示し、UがDCオフセットを示し、VがRF振幅を示す場合、aはU/(m/z)に比例し、qはV/(m/z)に比例する。(q,a)値の平面は、有界解および非有界解に相当する連続領域に区切ることができる。q−a平面における有界および非有界領域の描写は安定線図と呼ばれ、図2Aと関連して以下で詳細に論じられる。マシュー方程式の有界解を含む領域は、安定領域と呼ばれる。安定領域は、2つの領域が交差することによって形成され、軌道のx成分およびy成分それぞれが安定している領域に相当する。複数の安定領域が存在するが、従来の機器は、主要な安定領域に関与する。主要な安定領域はq−a平面の原点に頂点を有する。その境界は、およその座標(0.706,0.237)ポイントの最高点まで単調に上昇し、単調に降下してa軸上のqがおよそ0.908のポイントに第3の頂点を形成する。慣例により、q−a平面の正象限のみが考慮される。この象限では、安定領域は三角形に似ている。
【0027】
図2Aは、特定の質量/電荷比のイオンに対するそのような例示的なマシュー四重極安定線図を示す。イオンを通過させるには、X次元とY次元の両方において同時に安定していなければならない。図2Aに示されるY等ベータ線(βy)は安定線図の先端でほぼゼロに近く、X等ベータ線(βx)はほぼ1.0に近い。質量フィルタリングのための四重極の一般的な動作の間は、対応する固定RFおよびDC値に対するqおよびaパラメータは、「パークされた(parked)」図の最高点(mで示される)とよく対応するよう望ましく選択することができ、その結果、実質的にm個のイオンのみを透過および検出することができる。他のU/V比の値の場合、異なるm/z値を有するイオンは、原点と第2のポイント(q*,a*)(参照文字2で示される)を通過する安定線図の線上にマップされる。図2Aに示される参照文字1によって示される、動作線と呼ばれる値の集合は、{(kq*,ka*):k>0)で示すことができ、kはm/zに反比例する。線の傾斜はU/V比によって指定される。qおよびa、したがって、四重極に印加される比例するRFおよびDC電圧が一定の割合で増加すると、走査線1は、イオンに対する所定の安定領域を通過するよう構成される。
【0028】
したがって、機器は、安定線図をガイドとして使用して、「パークされ」得る、すなわち、特定の対象イオンを標的とするために固定UおよびVを用いて動作され得るか(例えば、mで示される図2Aの最高点で)または「走査され」得、UとV振幅の両方を単調に増加させ、低m/zから高m/zまで、連続した時間区間で、m/z値の全範囲を安定領域にもたらす。特別なケースは、UとVそれぞれが時間に線形にランプされる場合である。このケースでは、すべてのイオンは安定線図全体を通して同じ固定動作線を進行し、イオンは線に沿ってm/zに反比例する速度で移動する。例えば、質量電荷比Mのイオンが時間tに(q*,a*)2を通過する場合、質量電荷比2Mを有するイオンは、時間2tに同じポイントを通過する。(q*,a*)2が図2Aの安定線図の先端のすぐ下に位置し、その結果、時間tに質量電荷比Mが標的とされる場合、質量電荷比2Mは、時間2tに標的とされる。したがって、時間スケールとm/zスケールは線形的に関連する。その結果、時間の関数として検出器に衝突するイオンの流束は、ビーム内のイオンの質量分布にほぼ比例する。すなわち、検出される信号は「質量スペクトル」である。
【0029】
検出器に到達するイオンの存在度を増加することによって増加された感度を実現するため、図2Aに示される走査線1’は、領域6と8によって制限される低減された傾斜を用いて再構成することができる。RFおよびDC電圧が時間に線形にランプされる(上記の通り「走査される」)と、あらゆるm/z値はマシュー安定線図においてイオンと同じ経路(すなわち、q、a経路)をたどり、上記と同様に、線に沿ってm/zに反比例する速度で移動する。
【0030】
マシュー安定線図に対するイオンの移動をさらに理解するため、イオンは、安定領域に入る前はy方向において不安定であるが、イオンが安定線図の第1の境界2に入ると(βy=0を有する)、イオンは非常に安定するようになり、y方向における高振幅および低周波数の比較的大きな振動を伴うが、この振動は経時的に減少する傾向があることが知られている。境界領域4によって示されるように、イオンが安定線図を抜け出ると、イオンはx方向において不安定となり(βx=1)、したがって、x方向における振動は経時的に増加する傾向があり、抜け出る直前にx方向における比較的大きな振動を伴う。走査線がy不安定領域またはx不安定領域のいずれかで動作される場合、安定線図内に制限されないイオンは、電極に対して放出され、検出されない。一般に、2つのイオンが同時に安定している場合、重い方のイオン(後に安定線図に入る)はより大きなy方向振動を有し、軽い方のイオンはより大きなx方向振動を有する。
【0031】
イオンが図2Aの安定領域を移動するにつれて変化するイオン運動の他の態様は、x方向およびy方向における振動の周波数(マシューパラメータ、ベータ(β)によって特徴付けられる)である。イオンが安定線図に入ると、y方向におけるその(基本)振動の周波数は、本質的にはゼロであり、ある出口における値まで上昇する。y方向におけるイオンの基本周波数は、「チャープ」のように増加する、すなわち、当技術分野で周知の通り、ベータがa:qランプに伴い非線形に増加するにつれて、周波数は時間に非線形にわずかに増加する。同様に、x方向における基本振動の周波数(ω)もまた、RF/2または(ω/2)をわずかに下回るある初期の値から、出口におけるω/2(β=1)ちょうどまで増加する。x方向におけるイオンの運動は、主要周波数(ω/2)をわずかに上回るおよび下回る周波数を有する2つの異なる振動の和によって支配されることを理解されたい。ω/2(すなわち、基本)をわずかに下回る周波数は、ω/2をわずかに上回る周波数のミラーイメージである。イオンが抜け出ると同時に交わる2つの周波数は、イオンが抜け出る直前に非常に低い周波数ビート現象をもたらすものだが、イオンが安定領域に入る際の低周波数y方向振動に類似する。
【0032】
したがって、2つのイオンが同時に安定している場合、重い方のイオン(安定線図を通してそれほど遠くない)はXとYの両方において低速振動を有し(Xではわずかだが、Yではかなりの程度)、軽い方のイオンは高速振動を有し、出口付近であればX方向における低周波数ビートを有する。また、ミクロ運動の周波数および振幅もまた、関連した方法で変化する(簡潔に要約することは容易ではない)が、質量識別の提供にも役に立つ。この運動の複雑なパターンは、よく似た質量を有する2つのイオンを判別するために本発明によって新規の方法で利用される。
【0033】
上記説明の一般的言明として、四重極によって操作されたイオンは、安定領域を通過する際に、検出器の断面上で振動運動「イオンダンス」を行うよう誘導される。あらゆるイオンが、同じ「a」および「q」値だが、ただ異なる時間において異なるRFおよびDC電圧で、全く同じダンスを行う。イオン運動(すなわち、同じm/zだが、さまざまな初期変位および速度を有するイオン雲に対する)は、時間の関数として四重極を抜け出るイオン雲の位置および形状に影響を及ぼすことによって、aおよびqにより完全に特徴付けられる。2つの質量がほぼ同一の場合、それらのそれぞれのダンスの速度は、本質的に同じであり、タイムシフトによって近似的に関連付けることができる。
【0034】
図2Bは、そのような「イオンダンス」の特定の瞬間における特定のパターンのシミュレートされた記録イメージを示す。例示的なイメージは、本明細書で論じられるように、高速検出器(すなわち、10RFサイクル、大抵の場合、1RFサイクルまで低減される時間分解能が可能な、または、サブRFサイクル特異度を有する検出器)によって収集することができ、この検出器は、どこでおよびいつイオンが抜け出るかについて取得するよう配置され、細かな詳細を判別するためかなりの質量分解能を有する。上述の通り、走査中にイオンがその(q,a)位置で安定領域に入ると、その軌道のy成分は「不安定」から「安定」へと変化する。時間の経過に伴って進行する出口断面に形成されるイオンイメージを観察すると、イオン雲は、引き延ばされ、収集イメージの上下部を超えるほどの激しい垂直振動が起こる。徐々に、出口における雲は、縮小され、y成分振動の振幅は減少する。四重極に入る際に雲が十分コンパクトであれば、イオンが十分に安全領域内にある際の完全な振動サイクル中、雲全体はイメージ内にとどまる、すなわち、100%の透過率である。
【0035】
イオンが安定領域の出口に近づくと、同様の結果が起こるが、逆であり、y成分よりむしろx成分に関与する。雲は、水平方向に徐々に引き延ばされ、この方向の振動は、雲がイメージの左右の境界間を渡りきるまで、その大きさを増大させる。最終的には、雲の振動と長さの両方とも、透過がゼロに減少するまで増加する。
【0036】
図2Bは、そのような結果を図示する。具体的には、図2Bは、四重極全体を通して安定した軌道を有する5つの質量(2つが楕円内にハイライトで図示される)を示す。しかし、同じRFおよびDC電圧では、各々が、異なるaおよびqひいては「ベータ」を含み、したがって、あらゆる瞬間に異なる出口パターンを含む。図で提供される楕円12および14は、例示的な走査線(例えば、図2Aの走査線1’)に対する安定領域6および8の端部で制限された質量に相当する。
【0037】
特に、図2Bに示される楕円6によって図で開示される垂直方向のイオン雲は、上記で説明されるように、安定線図に入る重い方のイオンに相当し、それに応じて、示されるY四重極の近くにそのような重いイオンをもたらすような振幅で振動する。図2Bに示される楕円8によって図で開示されるイオンのクラスタもまた、上記で説明されるように、安定線図を抜け出る軽い方のイオンに相当し、したがって、そのようなイオンを、示されるX四重極の近くにそのような軽い方のイオンをもたらすような振幅で振動させる。イメージ内には、同じ時間枠で収集されたが、aおよびqひいては「ベータ」パラメータの違いのため異なる出口パターンを有する、追加のイオンのクラスタ(図2Bに示されるが、明確にハイライトされていない)が位置する。
【0038】
したがって、出口におけるあらゆるイオン雲は同じ「ダンス」を行い、安定領域に入ってイメージに現れる際にy方向で激しく振動し、振動を鎮め、安定領域を抜け出てイメージから消える際にx方向で激しく振動する。すべてのイオンが同じダンスをするが、そのタイミングおよびテンポは異なる。それぞれのイオンがそのダンスを始める時間、すなわち、安定領域に入る時間およびダンスの速度は、(m/z)-1でスケーリングされる。
【0039】
それに応じて、任意のm/zを有するイオンに対してイオンイメージの時系列を構築することが可能であるため、本明細書に詳述される数学的デコンボリューションプロセスによって、図2Bに示されるものと同様の観測されたイオンイメージの系列から個々の成分を抽出することも可能である。各種の質量電荷比および存在度は、デコンボリューションから直接得られる。四重極の軸に沿って対称的に注入されたイオンは、四重極デバイスの出口開口部で描像されるように区別を実現するが、出口におけるイオン雲はさらに大きな振動を伴うため、出口開口部で収集する際に、さらに良好な区別を実現するため、中心から外してイオンを注入することが好ましいことに留意されたい。図2Bは、そのような中心から外した状態での注入の実施形態を示す。
【0040】
重要なポイントは、単に有界であるか非有界であるかに応じてイオンの軌道を分類するだけでは、同様の質量電荷比を有するイオンの判別において四重極の最大の可能性は活用されない。より細かな区別は、印加電場の関数としてイオンが検出器上に落下する場所を記録するイオンイメージを収集することによって、有界軌道を有するイオンの間で行うことができる。観測された各イオンイメージは、本質的には、成分イメージの重ね合わせであり、所定の瞬間に四重極を抜け出るイオンに対し異なるm/z値ごとに1つずつ割り当てられる。本発明は、イオンが検出器に衝突する時間および位置を記録することによって、四重極内で同時に安定しているイオンのm/z値を判別する能力を実証する。この能力を活用して、本発明は、四重極型質量分析計の感度に強い影響を与える。有界軌道を有するイオンのみが測定されるため、必然的に、実際に検出器に到達するイオンの数とともに、いかなるイオン種の信号対雑音特性も向上するということになる。
【0041】
本発明の四重極に対する安定透過窓は、こうして既定の方式(すなわち、図2Aに示されるように、走査線1’の傾斜を低減することによって)で構成することができ、それにより、比較的広い範囲のイオンが機器を通過することが可能となり、その結果、所定の種に対して記録されるイオンの数が増加するため、信号対雑音が増加する。それに応じて、イオンの数が増加することによって、感度における利得が有益に提供されるが、その理由は、所定の瞬間に、所定のイオン種のより大きな部分が単に四重極を通過できるだけでなく、はるかに長い走査時間の間四重極を通過できるためである。感度における潜在的利得は、必然的にこれらの因子が増倍された結果生じる。
【0042】
しかし、イオン数の増加は必要だが、感度の増加に必要であり得るある種のトレードオフがある。一例としては、イオン統計が改良された質量フィルタとして、すなわち、透過安定窓を開放することによって四重極が動作されると、感度における利得は質量分解能の損失によって打ち消される場合があるが、その理由は、同じ時間枠で四重極を抜け出る高い方の存在度の種によって、窓内の低い存在度の種が目立たなくなり得るためである。そのような影響を緩和するため、本発明の質量分解能は潜在的にかなり大きいが(すなわち、RF専用モードで動作することによって)、本発明のシステムは、最大約10AMU幅の質量分解能窓で動作される場合が多く、いくつかの適用例では、選択されたm/z透過窓内での有用な信号対雑音比の実現に必要な走査速度と組み合わせて最大約20AMU幅の質量分解能窓で動作されることを理解されたい。
【0043】
分離の基礎としてイオンイメージを使用することにより、本発明の方法および機器は、高感度(すなわち、従来の四重極フィルタより10〜200倍優れた増加された感度)を実現するばかりでなく、同時に質量区別の精度を100ppm(10,000の質量分解能)から約10ppm(100,000の質量分解能)まで低減することができる。予想外に、本発明は、本明細書で開示されるデバイスが理想の条件下(すべての電子機器の最小限のドリフト)で動作されれば、1ppm(すなわち、100万の質量分解能)の史上に例を見ない質量区別の精度までも実現することができる。
【0044】
図面に戻ると、図3は、三連質量分析計システム(例えば、市販のTSQ)の有益な例示的な構成を示し、概して参照番号300で指定される。質量分析計システム300は非限定的な有益な一例として提示され、したがって、本発明は、本明細書で示されるものとは異なるアーキテクチャおよび構成を有する他の質量分析計システムと関連して実施することもできることを理解されたい。
【0045】
質量分析計300の動作の制御は可能であり、データは、公知のタイプのさまざまな回路の制御およびデータシステム(示さず)によって取得することができ、このシステムは、汎用もしくは専用プロセッサ(デジタル信号プロセッサ(DSP))、ファームウェア、質量分析計および/もしくは関連機器に対する機器制御およびデータ分析を提供するソフトウェア、本発明の既定のデータ分析および制御ルーチンを実施する一連の命令を実行するよう構成されたハードウェア回路のいずれか1つまたは組合せとして実装することができる。また、そのようなデータ処理は、平均化、走査分類、本明細書に開示されるようなデコンボリューション、ライブラリ検索、データ格納およびデータ報告も含み得る。
【0046】
本明細書に開示されるように既定の低速または高速走査、対応する走査からの生ファイル内の一連のm/z値の識別、データのマージ、ユーザへの結果のエクスポート/表示/出力などを開始する命令は、質量分析計300の上述の命令および制御機能を実行するためのハードウェアおよびソフトウェア論理を含むデータ処理ベースシステム(例えば、コントローラ、コンピュータ、パーソナルコンピュータなど)によって実行できることも理解されたい。
【0047】
さらに、上記で説明されるそのような命令および制御機能は、機械可読媒体(例えば、コンピュータ可読媒体)によって提供されるため、図3に示される質量分析計システム300によっても実施することができる。本発明の態様によれば、コンピュータ可読媒体は、当業者に知られているおよび理解されている媒体を指し、機械/コンピュータが読み取る(すなわち、走査する/検知する)ことができ、機械/コンピュータのハードウェアおよび/またはソフトウェアで解釈できる形態で提供される符号化された情報を有する。
【0048】
したがって、所定のスペクトルの質量スペクトルデータが、本明細書に開示される有益な質量分析計300システムによって受取されると、本発明のコンピュータプログラムに組み込まれた情報を利用して、例えば、質量スペクトルデータからデータを抽出することができ、このデータは、選択された一連の質量電荷比に相当する。さらに、本発明のコンピュータプログラムに組み込まれた情報を利用して、当業者に理解されているおよび所望されている方式で、正規化するための方法、データをシフトするための方法または生ファイルから不要なデータを抽出するための方法を実施することができる。
【0049】
図3の例示的な質量分析計300システムに戻ると、1つまたは複数の対象の分析物を含有するサンプルは、無線周波数(RF)専用モードまたはRF/DCモードのいずれかで本発明を動作することができるところでまたはその近くで動作するイオンソース352によってイオン化することができる。特定の印加RFおよびDC電位に応じて、選択された質量電荷比を有するイオンのみがそのような構造体を通過することができ、残りのイオンは、不安定な軌道をたどり、印加多極電場から逃れるよう促される。RF電圧のみが既定の電極(例えば、球、双曲線、平面電極対など)間に印加されると、装置が動作し、広く開いた状態で、ある閾値質量を上回るイオンを透過させる。RFおよびDC電圧の組合せが既定のロッド対間に印加されると、上方カットオフ質量と下方カットオフ質量の両方が存在する。DC対RF電圧の比率が増加すると、当業者に知られているおよび理解されているように、質量フィルタ動作を実現するようイオン質量の透過帯域が狭くなる。
【0050】
それに応じて、図3(例えば、Q3)で示される本発明の多極デバイスの既定の相対する電極に印加されるRFおよびDC電圧は、大量のイオン透過が機器を通して方向付けられ、出口開口部で収集され、質量特性を決定するよう処理され得るように設計された既定の安定透過窓を実現するように印加することができる。
【0051】
したがって、例示的な多極(例えば、図3のQ3)は、システム300の協働コンポーネントとともに、典型的な四重極走査技法を利用する場合とは対照的に、その最大約200倍の感度の量的増加を伴う潜在的に最大約100万の質量分解能を実現するよう構成することができる。特に、そのようなデバイスのRFおよびDC電圧を経時的に走査し、既定のm/z値(例えば、20AMU)を超える安定透過窓について直接の情報を得ることができる。その後、安定した軌道を有するイオンは、約10RFサイクルの時間分解能または気圧が可能な、または、システム要件で定義される圧力で可能な検出器366に到達する。それに応じて、イオンソース352は、これらに厳密には限定されないが、電子イオン化(EI)ソース、化学イオン化(CI)ソース、マトリックス支援レーザ脱離イオン化(MALDI)ソース、エレクトロスプレーイオン化(ESI)ソース、大気圧化学イオン化(APCI)ソース、ナノエレクトロスプレーイオン化(NanoESI)ソース、大気圧イオン化(API)などを含み得る。
【0052】
結果として生じたイオンは、チューブレンズ、スキマー、ならびに、無線周波数RF四重極および八重極イオンガイドなどから選択される多極、例えば、参照番号353および354が含まれ得る場合が多い既定のイオン光学機器によって方向付けられ、そのようなイオンを動作上において案内して集束して良好な透過率を提供する、圧力が徐々に低減される一連のチャンバを通して促される。さまざまなチャンバは、一連のポンプ(図示せず)に結合された対応するポート380(図では矢印で表される)と連通し、所望の値で圧力を維持する。
【0053】
図3の例示的な質量分析計300は、当業者に知られているような高次多極電場(例えば、八極電場)の存在下でも動作することができる四重極イオンガイドとして実行するように、それぞれの電源(図示せず)に電気的に結合されたQ1、Q2およびQ3とラベル付けされたセクションを有する三連構成364を含むように示される。本発明のそのような極構造は、大抵の場合、1RFサイクルまで低減されるか、または、サブRFサイクル特異度を有し、特異度は、所望の質量区別(PPM)を提供するため、走査速度に対する適切な分解能を実現するよう選択されることに留意されたい。そのような検出器は、豊富な質量スペクトル368にデコンボリュートすることができるデータを提供するように、四重極(例えば、図3のQ3)のチャネル出口に有益に配置される。そのような動作から生じた結果として生じた時間依存データは、記録されたイオンの到達時間および位置の収集値を一連のm/z値および相対存在度に変換する、本明細書に記載されるデコンボリューション方法を適用することによって、質量スペクトルに変換される。
【0054】
そのような経時的に変化する特性を観測するための容易な構成は、四重極(Q3)の出口開口部と、許容されたイオン情報を記録するよう設計されたそれぞれの検出器366との間に平面に沿って空間的に構成された狭小手段(例えば、ピンホール)の形態であり得る。そのような構成を用いて、狭小開口部を通過している時間依存イオン電流は、ランプ電圧の関数としてビーム断面の所定の位置におけるエンベロープのサンプルを実現する。重要なことに、所定のm/z値およびランプ電圧に対するエンベロープは、わずかに異なるm/z値およびシフトされたランプ電圧に対するエンベロープとほぼ同じであるため、わずかに異なるm/z値を有する2つのイオンに対するそのような例示的な狭小開口部を通過している時間依存イオン電流もまた、タイムシフトで関連付けられ、RFおよびDC電圧におけるシフトに相当する。RFおよびDC電場が時間に依存するため、四重極の出口断面におけるイオンの出現は時間に依存する。特に、RFおよびDC電場はユーザによって制御され、したがって公知のため、イオンイメージの時系列は、任意のm/zのイオンに対する周知のマシュー方程式の解を使用して、有益にモデル化することができる。
【0055】
しかし、四重極デバイスの出口における既定の空間的な位置での狭小開口部の利用は基本的な見解を示すものであるが、時間と相関する四重極の出口開口部における既定の空間的な平面には複数の狭小開口部位置が事実上存在し、各々が異なる詳細および信号強度を有する。そのような情報を有益に記録するため、本発明の空間/時間検出器366構成は、事実上、組み込まれた質量成分を有するイメージとして個別のシフトパターンを空間的に記録するために、複数の分解能チャネルを本質的に提供する、ちょっとした複数のピンホールアレイである。印加DC電圧およびRF振幅は、RF位相に同調させて、任意の電場条件に対するイオンイメージの測定値を提供することができる。印加電場は、予測可能なおよび決定的な方法で、任意のイオンに対するイメージの外観を決定する(そのm/z値に依存する)。印加電場を変更することによって、本発明は、サンプルの全質量範囲についての情報を入手することができる。
【0056】
ちなみに、四重極の開口構成での断面における位置の関数としての初期のイオン密度、および、放置されていればイオンの初期速度を妨害し得る電場成分が存在する。例えば、機器の入り口(例えば、Q3の)における電界終端は、イオン注入に依存する軸方向の電場成分を含む場合が多い。イオンが入ると、イオンが入ったRF位相は、入口の位相空間またはイオンの初期条件の初期置換をもたらす。イオンの運動エネルギーおよび質量は、速度ひいてはイオンが四重極内に存在する時間を決定するため、結果として生じた時間は、イオンの初期のRF位相と出口におけるRF位相との間のシフトを決定する。したがって、エネルギーの小さな変化は、この関係ひいては全RF位相の関数としての出口におけるイメージを変更する。その上、イメージを撹乱することもできる出口における電場に対する軸方向の成分が存在する。放置されていれば多少有害ではあるが、本発明は、例えば、多極(例えば図3に示される衝突セルQ2)内のイオンを冷却し、軸上にイオンを注入するか、または、好ましくはデバイス内でイオンの位相を変調することによってわずかに中心から外してイオンを注入することによって、そのような成分を緩和するよう構成することができる。マシュー方程式の直接解よりむしろ、基準信号の直接観測、すなわちイメージの時系列により、電場におけるさまざまな非理想性について説明することができる。マシュー方程式を使用して、公知のm/z値に対する基準信号をさまざまなm/z値に対する基準信号群に変換することができる。この技法は、印加電場におけるさまざまな非理想性に対する耐性を有する方法を提供する。
【0057】
ランプ速度の効果
上記で論じられるように、RFおよびDC振幅が時間に線形にランプされると、各イオンのa、q値は各々、上記図2Aに示されるように、時間に線形に増加する。具体的には、四重極長を横断する際、イオンは、この条件が変化する間にいくつものRFサイクルを経験し、結果として、そのようなイオンは印加電圧のランプの間、ベータの変化を経験する。それに応じて、一定の期間後のイオンの出口位置は、他の上述の因子に加えて、ランプ速度の関数として変化する。その上、従来の選択的な質量フィルタの動作では、ユニット質量分解能でのフィルタ窓はかなり収縮し、高質量カットオフと低質量カットオフは不鮮明になるため、ピーク形状はランプ速度によって悪影響を受ける。特定の所望の質量の選択的な走査を提供することを希望する際(例えば、ユニット質量分解能)、従来の四重極システムのユーザは、彼または彼女のシステムを選択されたa:qパラメータを用いて構成し、次いで、既定の離散速度で走査して(例えば、約500(AMU/秒)の走査速度)信号を検出する場合が多い。
【0058】
しかし、本明細書では、そのような走査速度やさらに低速の走査速度を利用して所望の信号対雑音比を増加することもできるが、本発明は、安定透過窓はより広く、したがって、広い範囲のイオンは感度の量的増加が可能であるため、任意選択で、上限値として、最大約10,000AMU/秒やさらに最大約100,000AMU/秒まで走査速度を増加することができる。走査速度の増加の利益としては、測定時間枠の減少および調査走査と協調した本発明の動作が含まれ、a:qポイントは、全動作速度も増加させるように信号が存在するこれらの領域のみから追加の情報を抽出するよう(すなわち、対象走査)選択することができる。
【0059】
検出器
図4は、時間・位置測定型イオン検出器システムの基本的で非限定的な有益な例示的な実施形態を示し、概して参照番号400で指定され、本発明の方法を用いて使用することができる。図4に示されるように、例えば、少なくとも約1mmのビーム直径を有する入射イオンI(付随の矢印を用いて方向で示される)は、マイクロチャネルプレート(MCP)402のアセンブリによって受取される。そのようなアセンブリ(例えば、パルス計数に対して(通常、当業者に知られているような5ナノ秒未満のパルス)は、互いに隣接するMCP(シェブロン型またはV−積層型)または三重(Z−積層型)MCPの対を含み得、個々のプレートは、最大約107またはそれ以上の電子を生成するプレートの組合せを用いて、適切な帯域幅要件(例えば、約1MHzから最大約100MHzまでで)での動作を可能にするための十分な利得および分解能を有する。
【0060】
例示として実施可能性を示すため、図4に示されるように、シェブロン型またはZ−積層型(MCP)402の第1の表面を10kV、すなわち、負イオン用に構成される場合は+10kVに、正イオンを受取するよう構成される場合は−10kVにフロートさせ、第2の表面をそれぞれ+12kVおよび−8kVにフロートさせることができる。そのようなプレートバイアスは、2kVの電圧勾配を実現し、大地に対し結果として生じた相対出力8〜12kVの利得を提供する。すべての高電圧部分は、例えばアルゴンなどの不活性ガスが充填された約1e−5mBar〜1e−6mBarの真空下にある。
【0061】
したがって、図4の例示的なバイアス配置は、上記で論じられるように、衝突イオンIが、例えば、四重極の出口から受取される際に、MCP402の前表面に電子を誘導し、その後、電子は、印加電圧によって加速されるにつれて、MCP402の個別のチャネルに沿って移動するよう方向付けられることを可能にする。当業者に知られているように、MCPのチャネルはそれぞれ独立した電子増倍管として機能するため、流入イオンIは、チャネル壁上で受取される際に二次電子(e-で示される)を生成する。このプロセスは、MCP積層402の両端間において電位勾配によって数百回繰り返され、大多数の電子がこのようにしてMCP積層202の出力端部から放出され、MCPの前表面における粒子衝突のパターン(イメージ)の保存を実質的に可能にする。
【0062】
図4に戻ると、バイアス配置は、MCP積層402の後方に構成された光学コンポーネント、例えば、蛍光体被覆光ファイバープレート406に衝突させるため、MCP積層402によって増倍された電子のさらなる加速も実現する。そのような構成は、信号電子を、受取された電子の量に比例する、結果として生じた複数の光子(pで示される)に変換する。あるいは、MCP402積層から結果として生じた電子雲が、高電圧によって、ギャップを横断して、電子の運動エネルギーが光として放出される蛍光体スクリーンに引き寄せられるように、例えば、アルミニウム加工の蛍光体スクリーンなどの光学コンポーネントをバイアス配置で提供することができる(図示せず)。いかなる構成においても、感光性チャネルプレート410アセンブリ(アノード出力は大地に対してバイアスされた状態で示される)などの後続プレートは、結果として生じたそれぞれの入射光子pを光電子に変換し直すことができる。それぞれの光電子は、感光性チャネルプレート410の後方で二次電子の雲411を生成し、二次電子の雲411は拡散して、一構成として、これらに限定されないが、抵抗構造の二次元アレイ、二次元遅延線ウェッジおよびストリップ設計ならびに市販またはカスタムの遅延線アノード読み出しなどの検出アノード412のアレイに衝突する。設計の一部として、感光性チャネルプレート410およびアノード412は、密閉された真空エンクロージャ413(破線の縦型長方形で示される)内にある。
【0063】
本明細書の設計に適合させるための二次元アノード構造体の説明例として、四重極の出口から受取されたほぼすべてのイオンの軌道は原点を通過し、したがって、大抵の信号を含むため、そのようなアレイは、アノード構造体が中心から離れたものより小さくなるように本明細書で多くの場合最適に構成される線形X−Y格子として構成され得る。説明構成として、Arria FPGAが利用される場合、半径方向に10個のセクターおよび半径方向に8つの分割線を有するクモの巣構成の対象格子が望ましい。そのような例示的な構成から、アノード412の出力は、物理的に接合された4つの対称象限として構成され得る。キャパシタンス効果が信号の帯域幅を低下させる場合は、図4のアノードそれぞれを、当技術分野で知られている独立した増幅器414および追加のアナログデジタル変換回路(ADC)418に結合することができる。例えば、そのような独立した増幅は、差動トランスインピーダンス増幅器を用いて増幅することができ、約500MHz未満、大抵の場合、約100MHzまで低減され、大抵の場合、少なくとも約40MHzで変換する8進数ADCによって提供されるADC418を用いて雑音を抑制することができる。四重極によって提供されるイオン入口が対称でない場合は、軸外入口オリフィスによって、または、上記で簡潔に論じられるような図3に示される三連四重極364構成Q2などの冷却セルの使用によって、追加の識別を提供することができ、入力位相を変化させてシステム400動作を増強することができる。このケースでは、反対側のセクターを接合することは望ましくない。
【0064】
図4に示されるそのようなアノード構造体412は有益な一実施形態であるが、上述の通り、異なる設計の遅延線アノード(例えば、クロス配線(cross−wired)遅延線アノード、螺旋格子など)を、図4に示される構成において実装することができること、または、示される追加のコンポーネントなしでMCP402積層に続いて隣接して結合されるよう同様に構成し、本発明の範囲内で動作するようにもできることも理解されたい。そのようなデバイスの仕組みを可能にするため、構造体自体は、アノード構成に適合する適切な追加のタイミングおよび増幅回路(例えば、トランスインピーダンス増幅器)に結合される場合が多いが、その理由は、到達時間における信号差の測定値をイメージによる位置情報へ変換する支援を行うためである。本発明のシステムとともに利用できる特定の有益なクロス配線遅延線アノードについては、2003年12月9日に発行された、Jagutzki et al.,「DEVICE AND METHOD FOR TWO−DIMENSIONAL DETECTION OF PARTICLES OR ELECTROMAGNETIC RADIATION」と称する米国特許第6,661,013号明細書で見られ、その開示全体は参照により本明細書に組み込まれる。
【0065】
図4の基本的なアノード構造体に戻ると、増幅器414およびアナログデジタル変換回路(ADC)418および/または電荷積分器(図示せず)から生じた信号は、本発明のデータ速度に対する低消費電力および高雑音排除性のために設計されたコンポーネントである、例えば、シリアルLVDS(低圧差動信号伝送)高速デジタルインターフェース420を介して、最終的には、フィールドプログラム可能ゲートアレイ(FPGA)422に方向付けることができる。FPGA 422は、図4に示されるようなコンピュータ処理手段426に対して、構成可能なコプロセッサである能力のために有益であり、本発明の計算集約型タスクに対する特定用途向けハードウェアアクセラレータとしての動作を可能にする。そのような例示的で非限定的な一構成として、84の入力と85の出力のLVDS I/Oチャネルと、少なくともPCI Express x4チャネル取得システムを有する統合されたPCI Expressハードウェア424(4つの双方向の矢印で示される)とを有し、標準データ処理手段426(例えば、コンピュータ、PCなど)に供給する市販のArria FPGAを、計算統一デバイスアーキテクチャ(CUDA)で並列処理を行うグラフィックスプロセッシングユニット(GPU)サブシステムとともに利用することができる。
【0066】
図5は、別の有益な時間・位置測定型イオン検出器システムを示し、ここでは概して参照番号500で指定され、図4に対して上記で論じられた構成の遅延線アノードの変更を実施する。一般に、時間・位置測定型イオン検出器システム500は、前端部マイクロチャネルプレート(MCP)積層502、光学導管508、遅延線検出システム518および高圧電源514を含み、必要なバイアス電圧を提供する。イオンから光子への変換プロセスの一部として、所望のビーム直径を有する所望の入射イオンI(付随の矢印を用いて方向で示される)は、マイクロチャネルプレート(MCP)502(例えば、シェブロン型またはV−積層型または三重(Z−積層型))の前端部アセンブリによって受取される。この構成では、そのようなマイクロチャネルプレート(MCP)502は、バイアス配置(負イオン用に構成される場合は+10kV〜約+15kVに、正イオンを受取するよう構成される場合は−10kV〜約−15kV、第2の表面を例えば+12kVおよび−8kVにフロートさせる)で構成され、個々のプレートが本発明の要件に対して十分な利得を有することがここでもまた可能になる。
【0067】
時間および位置検出に光子を提供するため、これに限定されないが、蛍光体被覆光ファイバープレート504などの光学コンポーネントがMCP積層502の後方に構成され、信号電子を、MCP積層502から受取された電子の量に比例する複数の光子に変換する。その後、大抵の場合テーパー型光ファイバーバンドルである光学導管508は蛍光体被覆光ファイバープレート504に結合され、少なくともX−Y次元の一方においてイメージサイズを最大約80mm(例えば、40mm)まで拡大し、四重極デバイスによって制限されない分解能を実現する。大抵の場合テーパー型光学導管である光学導管は、円形、正方形および六角形の形式から構成することができ、ほとんどすべての規則的に形成される多角形の形式で製作することができる。
【0068】
図5に示される構成では、方向付けされた光子は、次いで、市販またはカスタムメードの遅延線システム518によって受取される。本明細書の構成を限定することなく示すための例示的な一構成として、遅延線システム518は、シールド管筺体内に封入された市販のRoentDek遅延線三次元感光性検出器であり得る。そのようなシステムは、光学導管508から受取された光子を比例する電子に変換するよう設計された光ファイバー窓(図示せず)に結合された低雑音フォトカソード(これも図示せず)を用いて構成される場合が多い。その後、シェブロン型またはZ−積層型マイクロチャネルプレート(MCP)502’は、変換された電子を受取して増幅し、結果として生じた電子雲を直交遅延線アノード(概して512で示される)に方向付ける。したがって、アノード512のリード線は、密閉環境の外部に位置する回路基板(図示せず)に結合され、回路基板は、5つの定比率弁別器(CFD)(図示せず)と、時間デジタル変換器(TDC)(これも図示せず)とを含み得、上記で論じられるように、最終的にPCIインターフェースおよびデータ処理手段(図示せず)に提供されるため、すべてのイオン事象に対する最大約5つの正確なタイムスタンプを登録するよう設計される。図5に示される構成のため、到達速度が計数システムに対する典型的なパルスパイルアップ限界を超えない限り、イオン事象Iはこうして、ありとあらゆるイオンに対するXおよびY座標ならびに到達時間の三次元表示に容易に変換される。
【0069】
上記で同様に論じられるように、異なる遅延線アノード設計(例えば、クロス配線遅延線アノード、螺旋格子など)は、例えば、参照により組み込まれる米国特許第6,661,013号明細書に見られる構造体を置き換えることによって、図5に示されるアノード構造体512の代用とすることもできる。その上、Roentekで進化してきたMCPに対する読み出し概念の一部として、本発明は、密閉環境の外部に装着される遅延線読み出しアノードを用いて構成することもできる。そのような構成では、ゲルマニウムからなる抵抗層が増強管の出力窓(ガラスまたはセラミック)上に直接堆積され、従来のイメージ増強管の蛍光体スクリーンを置き換える。位置情報は、専用ピックアップ遅延線電極(アノード)および密閉の外部に装着されて窓と密接に接触する結合された読み出し基板によって入手することができる。管内部で移動する電荷雲と外部の離間された読み出し電極との間の間隔は、読み出し基板上の含まれる信号の幾何学的拡大を引き起こす。これは、むしろ粗い読み出し構造、例えば、遅延線読み出しに対して数ミリメートルのピッチを有するストリップの使用が可能になるため有益である。
【0070】
図6は、別の所望の時間・位置測定型イオン検出器システムを示し、ここでは概して参照番号600で指定される。この構成では、時間・位置測定型イオン検出器システム600は、前端部マイクロチャネルプレート(MCP)積層602、光学導管608、取得電子機器618、例えば、これに限定されないが、上記で論じられた構成と同様のCPUおよびGPUプロセッサ、ならびに、この新規の構成では、光検出器612、例えば、これに限定されないが、本発明の構成に組み込むことができる電荷注入デバイス(CID)検出器などの任意の数の二次元画素検出器も含む。特定のCIDに関し、そのような検出器は、これに限定されないが、画素数が2のべき乗の正方形アレイ(例えば、64×64)として構成することができる。例示的な動作モードでは、各列のすべての64画素を、各読み取りが少なくとも約1.0MHzのRFサイクルごとに最低1回の割合、または、サブRFサイクル特異度を増加させるために望ましくはより高い割合で行われる単一の読み出しとして読み取ることができる。別の動作モードでは、各列の各画素を個別に読み取ることができる。例えば、1行目のすべての画素を1回目のRFサイクルで読み取る一方で、追加の信号積分を他の63の行上に蓄積させることができる。64のRFサイクルの完了後は、各々が1回読み取られているが、必ずしも同時である必要はない。読み取りは、64のインターリーブRFサイクルに対する蓄積信号の積分である。さらに別の例示的な動作モードでは、複数の行を読み取ることができる(例えば、2行ごとに32のRFサイクルで全体の読み取りを行う)。
【0071】
図5と関連して上記で同様に論じられるように、こうして、所望の入射イオンI(付随の矢印を用いて方向で示される)は、マイクロチャネルプレート(MCP)602の前端部アセンブリによって受取される。時間および位置検出に光子を提供するため、これに限定されないが、蛍光体被覆光ファイバープレート604などの光学コンポーネントがここでもまたMCP積層602の数ミリメートル後方に構成され、信号電子を、MCP積層602から受取された電子の量に比例する複数の光子に変換する。その後、これに限定されないが、テーパー型光ファイバーバンドルなどの光学導管608は蛍光体被覆光ファイバープレート604に結合され、生成イメージを拡大および/または縮小し、光検出器612、例えば、CIDの寸法に適合させる。上記と同様の光学導管は、円形、正方形および六角形の形式から構成することができ、ほとんどすべての規則的に形成される多角形の形式で製作することができる。
【0072】
質量分解能の増加が望まれるそれらの例示的な状況では、システムは、管理しやすいように検出された情報を提供するよう構成することができる。例えば、デコンボリューションの間、以下で詳述するアルゴリズムのドット積の部分をパイプライン化することができる。観測された信号と基準信号群との間のドット積は、画素を読み出す際に各画素値からのドット積への寄与物を蓄積することによって、オンザフライで計算することができる。画素のドット積への寄与物が記録された後は画素値を記憶する必要はなく、大きなメモリバッファの必要性を低減する。図4のFPGAを一例として使用すると、64×64アレイは、64の行として読み出すことができ、したがって、64の列は、4096画素アレイにおいてユニークな情報の大部分を表すため全体として単に128の読み取りを有する。取得レートも低減する場合は、複数のRFサイクルを平均して、実質的に質量分解能を犠牲にすることなく計算上の負担を低減することができる。別の代替形態として、マルチチャネル分析器は、各画素を用いて四重極デバイスのRFサイクルをいくつかのサブサイクルビンに分割するよう構成することができ、RFは、一例として図4のFPGAもしくは図6の光検出器によって追跡されるか、または、それによって生成される。各サブサイクルビンは、所望の期間の間信号を積分して、読み出すことができる。したがって、全データ速度は、すべての時間においてすべての成分が能動的である連続した変換プロセスである。
【0073】
図4および図5の構成においても提供される獲得電子618内のコンピュータ処理手段(図示せず)は、グラフィックスプロセッシングユニット(GPU)を含むことが多く、これは、当業者に知られているように、かつてスーパーコンピュータのみの領域であった超並列計算のレベルを実現できる処理手段である。構成の一部として、本明細書で利用されるグラフィックスプロセッシングユニット(GPU)は、プロセッサ、回路、特定用途向け集積回路、デジタル信号プロセッサ、ビデオカードの形式もしくはそれらの組合せ、または、他の今日知られているもしくは後に開発されたグラフィックスプロセッシング用のデバイスなどのさまざまな形式で提供することができる。一例として、GPUは、OpenCLおよびCUDAのアプリケーションプログラミングインターフェース(API)または他の今日知られているもしくは後に開発されたAPIを使用して、ATI、MatroxまたはnVIDIAによって提供されるグラフィックスプロセッサまたはビデオカードを含み得る。本明細書で利用されるそのようなGPUは、1つまたは複数の頂点プロセッサ、および、1つまたは複数のフラグメントプロセッサも含み得る。ラスタライゼーションおよび補間回路などの他のアナログまたはデジタルデバイスも含み得る。1つまたは複数のフレームバッファもディスプレイにデータを出力するために提供され得る。
【0074】
こうして、上記で説明された構成に結合されるGPUを有益に利用して、1つまたは複数の形式で関連する空間関係を伴うさまざまなオブジェクトを表すデータを受取する。その後、GPUは、テクスチャマッピングまたは他の二次元または三次元のレンダリングを実行することによって、データに基づいて二次元または三次元のイメージを順に生成する。GPUは、データの相対位置決め方式を決定し、特定の観測方向から見ることができるデータを表すフラグメントを生成するよう動作可能でもある。本明細書で利用されるGPUアーキテクチャの一部として、そのような組み込まれたGPUユニットは、これに限定されないが、図4に示されるFPGA 422などの上流のデバイスから受取する際に、所望の量、すなわち、64、128、256または他のキロバイト数の情報を記憶するよう構成された、例えば、ランダムアクセスメモリなどのビデオメモリも含む。したがって、動作の際、GPUは、パーソナルコンピュータ(PC)などのデータ処理手段を用いて構成されたアプリケーションプログラミングインターフェース(API)に基づくグラフィックスプロセッシングに対するビデオメモリから情報にアクセスする。
【0075】
デコンボリューション手順に関する論考
デコンボリューションプロセスは、特定の質量分析器(例えば、四重極)および検出器から取得されたイメージデータの数値変換である。すべての質量分析方法は、質量およびそれらの質量の強度のリストを送達する。方法を判別するのは、それが達成される方法および生成された質量強度リストの特性である。具体的には、質量間で識別する分析器は、質量分解能において常に制限され、その質量分解能は、報告された質量と強度の両方における特異度および正確度を確立する。存在度感受性(すなわち、量的感受性)という用語は、干渉種近くの強度を測定する分析器の能力を説明するために本明細書で使用される。したがって、本発明は、デコンボリューションプロセスを利用して、そのような干渉信号近くの信号強度を本質的に抽出する。
【0076】
モノ同位体種に対する機器応答は、積層された一連の二次元イメージとして説明され得、これらのイメージは、本明細書でボクセルとして説明される三次元データパケットに分類され得るセットの形で現れる。実際に、各データポイントは短いイメージシリーズである。ボクセル内でのデータの画素間近接を使用する可能性があるが、本明細書のデータは二次元として取り扱われ、一方の次元は質量軸であり、他方の次元は特定の質量での機器応答について説明する平坦化されたイメージシリーズから構築されたベクトルである。この機器応答は、有限範囲を有し、他ではゼロである。この範囲は、ピーク幅として知られており、原子質量単位(AMU)で表される。典型的な四重極型質量分析計では、原子質量単位は1に設定され、機器応答自体は、質量分析計の質量分解能および特異度の定義として使用される。しかし、機器応答内には追加情報があり、弱いイオン信号の取得に固有の統計的分散の量に関連する追加の制約付きではあるが、実際の質量分解能限界ははるかに高い。
【0077】
機器応答は、システムの全質量範囲にわたって完全には一様ではないが、あらゆるローカル区域内では一定である。したがって、全質量範囲にわたるシステムの応答について説明することができる1つまたは複数のモデル機器応答ベクトルが存在する。取得データは、コンボリュートされた機器応答を含む。したがって、本発明の数学的プロセスは、取得データ(すなわち、イメージ)をデコンボリュートし、観測された質量位置および強度の正確なリストを生成する。
【0078】
それに応じて、本発明のデコンボリューションプロセスは、当業者に知られているように、低いイオン密度を有する四重極デバイスを備える場合が多い質量分析器から取得されたデータに有益に適用される。イオン密度が低いため、結果として生じたイオン間相互作用はデバイスにおいて無視できるほど小さいものであり、各イオンの軌道を本質的に独立したものにすることが効果的に可能である。その上、動作している四重極内のイオン電流は線形であるため、四重極を通過するイオンの混合物から生じる信号は、上記で説明されるように、例えば、検出器アレイ上で受取する際に四重極を通過する各イオンによって生成された信号の重複合計(N)と本質的に等しい。
【0079】
本発明は、以下の連続段階に細分できる既知の信号の線形結合として検出データのモデルによって上記で説明された重複効果を利用する。
1)質量スペクトルを生成するための、N個の信号をユニットタイムシフト(例えば、テプリッツシステム)によって重ね合わせるという制約下における強度推定段階、および
2)質量リストを生成するための、ゼロから実質的に判別可能な強度を有する上記信号のサブセットの選択段階および後続の信号強度の向上段階。
【0080】
それに応じて、以下は、例えば、結合されたコンピュータによって実行された、四重極構成から生じた1つまたは複数の捕獲イメージのデコンボリューションプロセスに関する論考である。そこで最初に、J個の観測された収集値をデータベクトルX=(X1、X2、…XJ)と示すものとする。測定値Xjに対応する独立変数の値のベクトルをyjと示すものとする。例えば、この適用例における独立変数は、出口断面における位置および時間であり、したがって、yjは、Xjを測定できる条件について説明する3つの値からなるベクトルである。
【0081】
N個の既知信号をスケーリングする最適強度の理論的計算
N個の既知信号の線形重ね合わせをデコンボリュートするための一般的なケースでは、N個の既知信号U1、U2、…UNを有し、各信号はJ成分からなるベクトルであると仮定する。データベクトルのJ成分と各信号ベクトルのJ成分との間には一対一対応が存在する。例えば、n番目の信号ベクトルUn=(Un1、Un2、…UNJ)を考慮すると、Unjは、yjで「測定」された場合のn番目の信号の値を表す。
【0082】
方程式1で示されるように、強度の集合I1、I2、…INを選択し、各信号ベクトルU1、U2、…UNをスケーリングし、それらを加えることによってモデルベクトルSを形成することができる。
【数1】
各信号ベクトルU1、U2、…UNと同様に、モデルベクトルSはJ成分を有し、データベクトルXの成分と一対一対応である。
【0083】
SによるXの近似値における「誤差」をeと示すものとし、次いで、eを最小化する収集値I1、I2、…INを見出す。eの選択は幾分任意である。本明細書で開示される通り、方程式2で示されるように、eを、データベクトルXの成分とモデルベクトルSの成分との差を二乗したものの和として定義する。
【数2】
表記法は、モデルの依存性およびN個の選択された強度値に対するモデルにおける誤差を明示的に示す。
【0084】
強度ベクトルI(方程式3)を定義し、差分ベクトルΔ(方程式4)を定義し、内積演算子(方程式5)を使用することによって方程式2を簡素化する。
【数3】
【数4】
【数5】
方程式5では、aとbはともに、J成分からなるベクトルであると想定する。
【0085】
方程式3〜5を使用して、方程式6に示されるように、方程式2を書き直すことができる。
【数6】
Iの最適値をI*、すなわち、eを最小化する強度ベクトルI*=(I1*、I2*、…IN*)と示すものとする。方程式7で示されるように、I*で求められたIに対するeの一次導関数はゼロである。
【数7】
方程式7は、N個の方程式の省略表現であり、強度I1、I2、…INごとに1つずつ割り当てられる。
【0086】
連鎖法則を使用して方程式6の右辺の値を求める。誤差eは差分ベクトルΔの関数であり、ΔはモデルベクトルSの関数であり、Sは強度ベクトルIの関数であり、Iは強度I1、I2、…INを含む。
【0087】
I*(未知の)で求められたImの1つに対するeの導関数を考慮する。mは[1..N]の形式の任意の添字である。
【数8】
【数9】
【数10】
ここで、方程式9、10を使用して、方程式8の右辺内の
∂Δ/∂Im(I*)
を置き換える。
【数11】
次いで、方程式4を使用して、方程式11の右辺内のΔ(I*)を置き換える。
【数12】
方程式7に記載される最適化基準によって指定されるように、方程式12の右辺をゼロに設定すると、方程式13が得られる。
【数13】
ここで、方程式1を使用して、方程式13の左辺内のS(I*)を置き換える。
【数14】
方程式14は未知の強度{In*}を既知のデータベクトルXおよび既知の信号{Un}と関連付けることに留意されたい。残されたすべてのものは、{In*}の値に対する式へと導く代数的再構成である。
【0088】
内積の線形性を使用して、方程式14の左辺に表示される和の内積を、内積の和として書き直す。
【数15】
方程式15の左辺は、方程式16で示されるように、行ベクトルと列ベクトルの積として記載することができる。
【数16】
行ベクトルAm(方程式17)およびスカラーam(方程式18)を定義する。両数量は添字mに依存する。
【数17】
【数18】
方程式16〜18を使用して、方程式15をコンパクトに書き直すことができる。
【数19】
方程式19は、各mを[1..N]の形式に保つ。すべてのN個の方程式(方程式15の形式)は、N成分からなる列の形式で記載することができる。
【数20】
【0089】
方程式20の左辺の列ベクトルはN個の行ベクトルを含み、各々のサイズはNである。複数の行からなるこの列は、N×N行列を表し、Aで示す。方程式17のmに1を代入し、方程式20の左辺の列ベクトルの1行目のA1を置き換えることによって行列Aを形成する。このプロセスを、添字2…Nに対して繰り返し、それにより、N×N行列を構築する。その要素は、方程式21によって得られる。
【数21】
方程式21によって示されるように、行列Aの行mと列nにおける行列要素は、m番目の信号とn番目の信号の内積である。方程式20の右辺の列ベクトルをaで示す。
【0090】
要約すると、N個の方程式は、単一の行列方程式としてまとめることができる。
【数22】
ここでは、方程式22の右辺に表示されるベクトルaの成分は、方程式18によって定義される。
【0091】
いずれの信号も重複しない自明なケース、すなわち、m≠nの場合は常にAmn=0であるケースでは、Aは対角行列である。このケースでは、最適強度の解は、In*=an/Annによって得られ、各nは[1..N]の形式である。別の特別のケースは、mおよびnが異なるクラスタに属する場合は常にAmn=0であるように、信号をK個のクラスタに区切る場合である。そのケースでは、Aはブロック対角行列である。結果として生じた行列方程式は、K個の(部分)行列方程式に区切ることができ、クラスタ(または部分行列のブロック)ごとに1つずつ割り当てられる。ブロック対角のケースは、依然としてO(N3)であるが、一般的なケースより少ない計算が伴われる。
【0092】
一般に、方程式22の形式の方程式を解くにあたって、O(N3)の複雑性を有する。すなわち、N個の未知の強度の決定に必要な計算数は、未知の強度の数の三乗に相当する。
【0093】
1)特別なケース:N個の信号はユニットタイムシフトによって重ね合わせ可能である
このセクションでは、(方程式22)の一般的なケースを解決する複雑性における劇的な低減を提供するように、いくつかの追加の制約が問題に課される。
制約1:いかなる信号対UmおよびUnも、タイムシフトによって重ね合わせることができる。
制約2:隣接する信号UnとUn+1との間のタイムシフトは、[1..N−1]の形式のすべてのnに対して同じである。
【0094】
制約(1)と同等な言明は、すべての信号は標準信号Uのタイムシフトによって表すことができるということである。この制約は、高質量分解能四重極問題に適用可能である。第2の制約は、信号間の深刻な重複にもかかわらす、信号検出およびそれらの位置の初期推定の提供のための解の決定を容易にする。これらの2つの制約は、本明細書の以下で開示されるように、方程式22の解を、O(N3)問題からO(N2)問題に低減する。
【0095】
上記の制約(1)は、方程式23によって象徴的に表すことができる。
【数23】
式中、vは時間を除くすべての独立変数(すなわち、このケースでは、出口断面における位置および初期のRF位相)の値を表す添字の集合であり、qは時間の添字である。信号はタイムシフトに関連するため、観測に影響を及ぼす時間と他の独立変数とを判別する必要がある。
【0096】
方程式23を明確に定義するため、任意の時間ポイントmにおいて測定された収集値は、任意の他の時間ポイントnにおいて測定されたものと同じvの収集値を含まなければならない。この特性を考慮に入れて、内積の定義(方程式5)は、時間値および他の独立変数の形式で書き直される。
【数24】
式中、測定値の総数J=QVであり、qは時間の添字であり、vは残りの値に対する添字である(すなわち、他の独立変数の値の組合せの有限数は、一次元の添字vによって列挙される)。
【0097】
さらに、UnとUmの両方とも全区間[1..N]において定義されなければならないため、両信号は、[1..N]外でも定義されなければならない。区間[1..N]または任意の他の有限区間のタイムシフトは、同じ区間内には含まれない。したがって、すべての信号は、すべての整数時間ポイントに対して定義されなければならない。恐らくは、有限範囲の一部の支持領域外では、信号値はゼロになるように定義される。
【0098】
制約によって課される特別な特性は、行列要素A(m+k)(n+k)を考慮することによって明らかとなる。以下の短い導出は、A(m+k)(n+k)をAmnの形式で記載できることを示し、それに加え、多くの場合、その項は無視できるほど小さい。
【数25】
【0099】
上記の方程式25では、最初の等号の右側の式は、行列要素の定義(方程式22)から得られ、次の式は、他の独立変数から時間が判別される新しい内積の定義(方程式24)から得られ、次の式は、それぞれをUmおよびUnの形式で記載するために、タイムシフト方程式(方程式23)を各因数に適用することによって得られる。方程式25の2列目の式は、総和Σの添字qをq+kに置き換えることを伴う。方程式25の3列目の式は、時間の添字にわたって総和を3つの部分(q値が1未満の部分、q値が1からQまでの部分、次いでQ−k+1からQまでの余分な項を減ずる部分)に分割した結果である。これらの3項の和の2番目はAmnであり、この量は、最後の式において再ラベルされ前方に引き出される。
【0100】
任意の値kに対して要素A(m+k)(n+k)をAmnと同等と見なすには、方程式25の最後の式の括弧内に表示される項を誤差項と見なす。誤差項は、「左側」と「右側」と呼ばれる2つの項を含む。「左側」の項は、データが収集されてきた時間窓の左端に達する前に、Um+kまたはUn+kのいずれかの信号がゼロまで減少するとゼロとなる。同様に、「右側」の項は、データ窓の右端に達する前に、いずれかの信号がゼロまで減少するとゼロとなる。
【0101】
方程式25の「誤差」項がゼロにより近似されると、形式A(m+k)(n+k)の各要素をAmnで近似することができる。定義上、この特性を満たす行列Aは、テプリッツ形式であり、その意義については本明細書の以下で説明される。
【0102】
行列Aがテプリッツ形式であると仮定する。すると、行列の対角帯に沿った要素は同等な値である。例えば、A12=A23=A34…。一般に、行列内の任意の要素(例えばAmn)は、行添字と列添字の差m−nのみに依存する。したがって、N×N行列は、唯一、2N−1個の異なる値を含み、それは、−NからNまでの範囲のm−n値に相当する。
【0103】
行列Aは、2N−1個の異なる値を指定し、逆の順番で(すなわち、下から上へ)行列の1列目に最初のN個の値を入れ、次いで、左から右へ1行目の残りのN−1要素を埋めることによって構築することができる。行列の残りは、行列の左端または上端から右下向きに、行列の下端または左端それぞれに達するまで値をコピーすることによって、主対角に平行な2N−1帯のそれぞれを埋めることによって埋められる。Aがテプリッツ行列である場合は、唯一O(N2)計算を必要とするレビンソン再帰法(例えば、Numerical Recipes in Cを参照)によって方程式22の解を求めることができる。テプリッツ特性により、N個の強度値の初期推定値の計算は比較的迅速に行われる。
【0104】
テプリッツ近似法によって誘発された誤差(A(m+k)(n+k)〜Amn)は、特別なケースを考慮する際に最も容易に理解することができる。最初に、対角行列Aについて考慮する。信号U1は、データが観測される時間区間[1..Q]内に完全に位置する(すなわち、切り捨てしない)と仮定する。ここで、U1の右方へ(n−1)時間ユニットだけシフトされる信号Unについて考慮する。信号Unは時間Qを超えて拡張し、したがって、信号の右尾部はデータ窓によって切り捨てられると仮定する。すると、Unとそれ自身の内積、すなわち、行列要素Annは、切り捨ての結果、A11より小さくなる。しかし、テプリッツ近似法では、AnnをA11と同等と見なす。結果として生じたAnnの過大推定により、対応する強度In*は過小推定される。同様に、ブロック対角のケースでは、窓の端部によって切り捨てられるブロック内の信号の強度もまた、過小推定される。ブロック内において、切り捨てによりすべての項が同様のスケール係数で低減されれば、その結果、すべての強度は同じ係数の逆数でスケーリングされる。
【0105】
一定の時間区間におけるN個の収集推定値(または同等にm/z){In*}は、観測されたデータベクトルXから再構築された質量スペクトルとして解釈することができる。
【0106】
2)存在する信号の数およびそれらの位置の推定
最終的に、テプリッツシステムを解いた結果生じる初期推定値を使用する方法について考慮する。データが実際には等しく離間されたN個の信号を実現したものであるとは予想しない。むしろ、データは、任意の値の時間に位置する比較的小さい数の信号(例えば、k<<N)を実現したものであると予想する。このような関係において、N個の強度の大部分がゼロとなると予想する。ゼロとは異なる推定値は、信号の存在を示し得るが、データの雑音、存在する信号の位置における誤差、信号モデルにおける誤差および切り捨ての影響から生じたものでもあり得る。
【0107】
強度値には閾値が適用され、k個の信号のみを保持し、閾値を超える異なるイオン種に対応し、残りの強度をゼロに設定する。閾値モデルは、k個の信号の重ね合わせとしてデータを近似する。本発明の適用目的に対する有益な結果として、テプリッツシステムの解は、存在する信号の数(k)およびこれらのk個の信号のおよその位置を特定する強度値の集合を生成する。
【0108】
データ処理に関する一般論考
したがって、本発明は、観測された信号を基準信号の混合物の線形結合として表現するよう設計される。このケースでは、観測された「信号」は、四重極を抜け出るイオンの取得イメージの時系列である。基準信号は、異なるm/z値を有するイオンから観測された信号への寄与物である。線形結合における係数は、質量スペクトルに相当する。
【0109】
基準信号:本発明に対する質量スペクトルを構築するには、各m/z値に対して信号、すなわち、そのm/z値を有する単一のイオン種によって生成することができるイオンイメージの時系列を指定することが有益である。本明細書の手法は、テストサンプルを観測することによって、キャリブレーション工程としてはオフラインである標準的な基準信号を構築し、次いで、m/z値によってインデックスが付された基準信号群を標準的な基準信号の形式で表示することである。
【0110】
所定の時間において、観測された出口における雲のイメージは、3つのパラメータ、すなわち、aおよびq、さらにイオンが四重極に入る際のイオンのRF位相に依存する。出口における雲は、イオンの速度および半径方向の変位の分布にも依存し、この分布は、強度スケーリングの場合を除いて、時間に不変であると想定される。
【0111】
本発明に対する基準信号群の構築には課題が提示される。信号を決定する3つのパラメータのうち2つaおよびqはt/(m/z)比に依存するが、第3のパラメータはtのみに依存し、m/zには依存しない。したがって、イオン対からの時系列と任意の異なるm/z値とを正確に関連付ける簡単な方法は全くない。
【0112】
幸いなことに、計数可能な基準信号群(連続的なものよりむしろ)は、RFサイクルの整数倍数であるタイムシフトによって標準的な基準信号から構築することができる。これらの信号は、特に、標準信号とのm/z差が小さい場合に、さまざまなイオン種に対する予想信号の優れた近似値である。
【0113】
タイムシフト近似法がうまく機能する理由を理解するため、および、その限界を調べるため、t1およびt2のそれぞれに中心を置き、d1およびd2のそれぞれの幅を有する2つのパルス(t2=kt1、d2=kt2およびt1>>d1)のケースについて考慮する。さらに、kはおよそ1であると想定する。第2のパルスは、まさに係数kによる時間軸の拡張によって第1のパルスから生成することができる。しかし、第1のパルスへのt2−t1のタイムシフトの適用は、d1の幅を有するt2に中心を置くパルスを生成し、それは、kがおよそ1の場合はd2にほぼ等しくなる。低度から中程度の安定限界(例えば、10Da以下)の場合、イオン信号は上記のパルス信号のようなものであり、時間ゼロから狭くて多数のピーク幅に中心を置く。
【0114】
イオンイメージは固定RFサイクルによって変調されるため、標準的な基準信号は、タイムシフトによって任意のm/z値からの信号と関連付けることができない。むしろ、標準的な基準信号は、タイムシフトによってRF周期の整数倍数である信号と関連付けることができるだけである。すなわち、RF位相は、RF周期の整数倍数でのみ整合される。
【0115】
離散的なタイムシフトを考慮できるのみであるという制限は、本発明において重大な制限ではない。基準信号群が周波数連続体上で有効であるフーリエ変換質量分析(FTMS)でさえ、観測された信号は、周波数が1/T(Tは観測された信号の期間)の整数倍数である計数可能な正弦波数の形式で実際に表示される。FTMSと本発明の両方において、基準信号が定義される整数倍数上に必ずしも位置しない信号の表示は、構築された質量スペクトルにおける小さな誤差をもたらす。しかし、これらの誤差は、一般に、許容できるほど小さい。FTMSと本発明の両方において、基準信号のm/z離間は、走査速度を低減することによって低減することができる。FTMSとは異なり、本発明において低減された走査速度は、必ずしもより長い走査を意味せず、むしろ、より低速な走査速度で精査するために質量範囲の小領域を素早く標的とすることができる。
【0116】
上述のデコンボリューション問題に戻ると、観測された信号は基準信号の線形結合であると想定され、RF周期の整数倍数で1つの基準信号が存在し、規則的に離間されたm/zの間隔に対応するとも想定される。RFサイクルに相当するm/z離間は、走査速度によって決定される。
【0117】
行列方程式:本発明を通じた質量スペクトルの構築は、FTMSと概念的に同じである。FTMSと本明細書で利用されるものの両方において、質量スペクトルのサンプル値は、上記で詳細に論じられるように、線形行列方程式Ax=bを解くベクトルの成分である。行列Aは、基準信号対間の重複合計の集合によって形成される。ベクトルbは、各基準信号と観測された信号との間の重複合計の集合によって形成される。ベクトルxは、(概算の)相対存在度の集合を含む。
【0118】
行列方程式の解:FTMSでは、行列Aは恒等行列であり、x=bであり、bは信号のフーリエ変換である。フーリエ変換は、単に、変動周波数の正弦波を有する重複合計の収集値である。本発明では、行列Aは、上記で論じられるように、テプリッツ形式である場合が多く、これは、主対角に平行な任意の帯内のすべての要素が同じであることを意味する。テプリッツ形式は、拡張している基準信号が互いのシフトされたバージョンである場合は常に生じる。
【0119】
計算の複雑性:取得中の時間サンプルまたはRFサイクルの数をNと示すものとする。一般に、Ax=bの解はO(N3)の複雑性を有し、Aの計算はO(N3)であり、bの計算はO(N2)である。したがって、一般的なデコンボリューション問題に対するxの計算はO(N3)である。FTMSでは、Aは一定であり、bの計算は高速フーリエ変換を使用してO(NlogN)である。Ax=bは自明の解を有するため、計算はO(NlogN)である。本発明では、Aがテプリッツ形式である場合、2N−1個のユニークな値のみを計算する必要があるため、Aの計算はO(N2)であり、Bの計算はO(N2)であり、Ax=bの解はO(N2)である。したがって、x(質量スペクトル)の計算はO(N2)である。
【0120】
O(N3)からO(N2)への低減された複雑性は、リアルタイムでの質量スペクトルの構築に有益である。計算は、高度な「並列処理が可能」であり、組み込まれたGPU上で実施することができる。計算上の負担を低減する別の方法は、取得をより小さな時間区間または「チャンク」に分割することである。サイズN/kのk個のチャンクの解は、O(N2)問題においてk倍の加速をもたらす。「チャンク化」は、基準信号を指定するためのタイムシフト近似法は標準的な基準信号とかなり異なるm/z値に対して有効でない場合があるという問題も取り扱う。
【0121】
さらなる性能分析に関する論考
質量分析計の性能を評価するための主要な指標は、感度、質量分解能および走査速度である。前述のように、感度は、干渉種近くのイオン種を検出することができる最も低い存在度を指す。MRPは、M/DM比として定義され、Mは、分析されたm/z値であり、DMは、通常m/z単位のピークの全幅として定義され、最大値の半値で測定される(すなわち、FWHM)。DMの代替の定義は、2つのイオンを異なるものとして特定することができるm/z単位の最小離間距離である。この代替の定義は、エンドユーザに最も有用であるが、決定が難しい場合が多い。
【0122】
本発明では、ユーザは、走査速度およびDC/RF振幅比を制御することができる。これらの2つのパラメータを変化させることによって、ユーザは、以下で説明されるように、走査速度、感度およびMRPをトレードオフすることができる。本発明の性能は、入口のビームを集束する場合にも増強され、より優れた識別を提供する。前述のように、イオンが四重極に入る際に集束ビームをわずかに中心から外して移動させることによってさらなる向上を達成することができる。イオンが中心から外れて入ると、出口におけるイオン雲はより大きな振動を伴い、密接に関係した信号の識別をより良好に行う。しかし、ビームが中心から外れ過ぎる場合は、検出器に到達するイオンはより少なくなり、感度の損失をもたらすことに留意されたい。
【0123】
走査速度:走査速度は、通常、ユニット時間あたりの質量の形式で表示されるが、これは単に近似的に正しい。上記の図2Aに示されるように、UおよびVがランプされると、増加するm/z値は、動作線上に位置するポイント(q*,a*)を通過する。UおよびVが時間に線形にランプされると、ポイント(q*,a*)で見られるm/z値は時間に線形に変化し、したがって、一定の変化率は、Da/秒単位の走査速度として示され得る。しかし、動作線上のポイントごとに走査速度は異なる。質量の安定限界の範囲が比較的狭い場合は、m/z値は、大体同じ速度で動作線のすべての安定したポイントを通過する。
【0124】
感度:基本的に、四重極型質量分析計の感度は、検出器に到達するイオンの数によって決定される。四重極を走査する際、検出器に到達する所定の種のイオンの数は、そのイオン種のソースの輝度、平均透過率、透過期間の積によって決定される。上記で論じられるように、感度は、安定線図の先端から遠方にDC/RF線を減少させることによって向上することができる。平均透過率は、透過率が低い端部から離れた安定領域の内部でイオンがより多くの時間過ごせるため、DC/RF比の場合に増加する。質量の安定限界の範囲が広いため、各イオンが安定領域を通過するのにより長い時間を要し、収集のためにイオンが通過して検出器に到達するまでの時間は増加する。
【0125】
負荷サイクル:任意の瞬間で全スペクトルを取得する際、ソースで作成されたイオンのごく一部だけが検出器に到達し、残りはロッドに衝突する。所定のm/z値に対して透過されたイオンの割合は負荷サイクルと呼ばれる。負荷サイクルは、制限されたソース輝度を捕獲する際の質量分析計の効率の尺度である。負荷サイクルを改良すると、より短い時間で同じレベルの感度を達成することができ(すなわち、より高速の走査速度)、それにより、サンプルスループットを向上する。従来のシステムおよび本発明では、負荷サイクルは、サンプル内に存在する全質量範囲に対する質量安定範囲の割合である。
【0126】
本明細書の方法の使用によって改良された負荷サイクルを示す非限定的な例示として、本発明のユーザは、1Da(従来のシステムの典型である)の代わりに、負荷サイクルを10倍改良するため、10Da(本明細書で提供されるように)の安定限界(すなわち、安定透過窓)を選択することができる。また、109/秒のソースの輝度も、解説の目的で、0から1000まで大体一様な質量分布で構成され、その結果、10Daの窓はイオンの1%を表す。したがって、負荷サイクルは、0.1%から1%に改良される。平均イオン透過率が25%からおよそ100%に向上されれば、全走査にわたって平均化されたイオン強度は、109/秒×10-3×0.25=2.5×105から109/秒×10-2×1=107/秒へと40倍増加する。
【0127】
したがって、本発明のユーザが全走査モードで10個のイオンの分析物を記録することを希望すると仮定し、分析物は、サンプル内で1ppmの存在度を有し、分析物は、例えば、クロマトグラフィー(例えば、50分勾配において30秒幅の溶出プロフィール)を使用して100倍に濃縮される。上記の数値を使用した従来のシステムにおける分析物イオンの強度は、2.5×105×10-6×102=250/秒である。したがって、この例における必要な取得時間は、約40ミリ秒である。本発明では、例示的な10Da透過窓を使用すると、イオン強度は約40倍大きく、したがって、本明細書に記載されるシステムにおける必要な取得時間は、約1ミリ秒の優れた走査速度でのものである。
【0128】
それに応じて、従来のシステムと対照的に本発明の有益な感度利得は、上記全体にわたって論じられるように、動作線を安定領域の先端から遠方に押し下げ、したがって、安定限界の範囲を広げることによってもたらされることを理解されたい。実際には、動作線は、ユーザが依然として1RFサイクルのタイムシフトを決定できる範囲までできる限り下がるよう構成することができる。このケースでは、質量分解能の損失は全くなく、量子限界に達する。
【0129】
上記で説明されるように、本発明は、動作線に沿って最も近いRFサイクルまでのタイムシフトを決定することができる。このRFサイクル限界は、走査速度とMRPとの間でトレードオフを確立するが、MRPおよび質量精度上に絶対限界を課さない。走査速度は、動作線に沿った1RFサイクルのタイムシフトが任意の小さな質量差に相当するように減少することができる。
【0130】
例えば、RF周波数は約1MHzであると仮定する。すると、1RF周期は1マイクロ秒である。10kDa/秒の走査速度の場合、10mDaのm/z範囲は動作線上のポイントを通過する。10mDaの質量差を決定する能力は、m/z1000での100kのMRPに相当する。1000Daの質量範囲の場合、10kDa/秒での走査は100ミリ秒で質量スペクトルを生成し、これは、10Hzの反復率に相当し、走査間のオーバーヘッドを除外する。同様に、本発明は、走査速度におけるx倍とMRPにおけるx倍とをトレードオフすることができる。それに応じて、本発明は、10Hzの反復率で100kのMRPにおいて、1Hzの反復率で1MのMRPにおける「低速」走査で、または、100Hzの反復率で10kのMRPにおける「高速」走査で動作するよう構成することができる。実際には、達成可能な走査速度の範囲は、感度または電子安定性などの他の検討事項によって制限され得る。
【0131】
例示的な動作モード
一実施形態として、本発明は、例えば、質量範囲が1000Da以上の質量スペクトル全体が取得されるMS1「全走査」モードで動作することができる。そのような構成では、走査速度を低減して感度および質量分解能(MRP)を増強するか、または、走査速度を増加してスループットを向上することができる。本発明は、比較的高速な走査速度で高MRPを実現するため、従来の方法および機器に勝る本発明によって提供される負荷サイクルの改良にもかかわらず、十分なイオンの収集に要する時間で走査速度を制限することが可能である。
【0132】
別の実施形態として、本発明は、分析のために1つまたは複数の選択されたイオンが標的とされる「選択されたイオンモード」(SIM)ででも動作することができる。従来、SIMモードは、前述のように、四重極をパークする、すなわち、UおよびVを固定して保持することによって実行される。対照的に、本発明は、狭い質量範囲にわたって素早くUおよびVを走査し、透過が約100%となるように十分に広い安定限界の範囲を使用する。選択されたイオンモードでは、感度要件が走査の長さを決定する場合が多い。そのようなケースでは、小さなm/z範囲にわたって非常に低速な走査速度を選択してMRPを最大にすることができる。あるいは、より大きなm/z範囲にわたって、すなわち、ある安定境界から別の安定境界までイオンを走査し、選択されたイオンの位置のロバスト推定を提供することができる。
【0133】
また、前述のように、質量スペクトル全体にわたる検出のための調査走査の後に、対象の特徴に焦点を合わせるための複数の標的走査が続く、MS1動作のハイブリッドモードを実施することができる。標的走査を使用して、干渉種の探索および/または選択された種の定量化の改良を行うことができる。標的走査の別の可能な用途は、元素組成の決定である。例えば、本発明の四重極は、モノ同位体イオン種のおよそ1ダルトン上の「A1」領域を標的とし、同位体分布を特徴付けることができる。例えば、m/z1000での160kのMRPを用いると、6.3mDaだけ離間するC−13およびN−15ピークを決定することができる。これらのイオンの存在度は、種内の炭素および窒素の数を推定する。同様に、A2同位体種を精査して、C−132、S−34およびO−18種に焦点を置くことができる。
【0134】
三連四重極構成では、本発明で使用される位置敏感型検出器は、上記で説明されるように、Q3の出口に配置することができる。他の2つの四重極Q1およびQ2は、従来の方式で、すなわち、それぞれ先行質量フィルタおよび衝突セルとして動作される。MS1スペクトルを収集するため、Q1およびQ2は、質量フィルタリングも衝突もなしにイオンを通過させる。生成物イオンを収集して分析するため、Q1は狭い範囲の先行イオン(すなわち、1Da幅の質量範囲)を選択するよう構成し、Q2はイオンをフラグメント化するよう構成し、Q3は生成物イオンを分析するよう構成することができる。
【0135】
また、Q3を全走査モードで使用して、m/z1000での10kのMRPで100Hzにおける(全)MS/MSスペクトルを収集することもでき、ソースの輝度は、1ミリ秒の取得に対する受け入れ可能な感度の達成に十分であると想定する。あるいは、Q3をSIMモードで使用して、1つまたは複数の選択された生成物イオンを分析することができる(すなわち、単一反応モニタリング(SRM)または多重反応モニタリング(MRM))。感度は、質量範囲全体を取り扱うよりもむしろ、選択されたイオンに四重極を集中させることによって向上することができる。
【0136】
シミュレート結果
図7は、本明細書に記載される実施形態を使用して記録されたイメージ(例えば、図2B)を提供する際の、上記で詳述されるデコンボリューションプロセスの例示的なシミュレート結果を示す。本発明は、最初に基準信号702を取得または合成によって生成する。その後、プロセスは、記録されたデータによって提供されるような所望の分析物イオンのコンボリュートされた生データ704を取得するよう設計される。そのようなプロセスに対するデータは、三次元パケットまたはボクセル(すなわち、体積画素)で取得され、この場合、2つの次元は、上記の配置された検出器によって収集されたイオンの出口パターンに相当するイメージXおよびYである。第3の次元は、対応する時間であり、含まれるRFの位相と同調される。次いで、プロセスは、基準信号702からシフトされた自己相関ベクトル706を生成し、取得データを適切なチャンクに分割し(量が多過ぎる場合は、データを部分的に切り取る)、そのようなデータにゼロを挿入する。デコンボリューションプロセスの方程式22によって実施される方法の重要な部分は、上記で示されるように、基準信号702とチャンク化された取得生データ704との間のシフトされた相互相関を含み、716で示される相互相関トレースを提供する。その後、いくつかの強度ピーク720がテプリッツ行列の解(例えば、In*=an/Ann)から抽出され、これは、存在するピークの数、正確な相対強度およびそれらが位置するおよその場所を示す。この例では、所望の強度ピーク720は、相対強度1、1/4、1/16および1/64で、ppm単位で定義される質量間隔で等しく離間されたものとして示される。そして、補間されシフトされたクロス積および自己相関ドット積を伴う4×4のバージョンの問題が生成される。その後、強度推定値は、制約付きの形式の問題に精密化され、反復的に精密化され、必要に応じてデータフィルタリング(例えば、ベッセルフィルタリングを使用して)が含まれる。その後、大量のデータセットから生じたいかなるチャンク化データも、再結合させて、元々記録された全スペクトルを提供することができる。
【0137】
図8は、結果として生じたデータが4つのピーク820のクラスタに対するものであることを示し、最も高いピークの中心と2番目に高いピークの中心は、10ppmに相当する7つのピーク幅分だけ離間し、7×1e6/10=700kもの驚くほどの質量分解能をもたらす。
【0138】
本明細書のさまざまな実施形態に関連して説明される特徴は、本発明の精神および範囲から逸脱することなく、任意の組合せで混合し適合させることができることを理解されたい。さまざまな選択された実施形態が示され詳細に説明されているが、それらは例示的なものであり、本発明の精神および範囲から逸脱することなく、さまざまな代替形態および改変形態が可能であることを理解されたい。
【特許請求の範囲】
【請求項1】
(a,q)値によって画定される安定境界内で豊富な1つまたは複数のイオン種を通過させるよう構成された多極と、
前記多極の断面エリアでの前記豊富なイオンの時空間特性を記録するよう構成された検出器と、
印加RFおよび/またはDC電場の関数として前記豊富な1つまたは複数のイオン種の記録された前記時空間特性のデコンボリューションを行い、前記1つまたは複数のイオン種の質量識別を提供するよう構成された処理手段と
を備える高質量分解能・高感度の質量分析計。
【請求項2】
前記処理手段は、複数の平均化されたRFサイクルの関数として前記豊富な1つまたは複数のイオン種の記録された前記時空間特性のデコンボリューションを行い、前記1つまたは複数のイオン種の質量識別を提供するよう構成された、請求項1に記載の質量分析計。
【請求項3】
前記多極は、四重極をさらに含む、請求項1または2に記載の質量分析計。
【請求項4】
前記多極は、高次多極電場の存在下で動作する四重極を含む、請求項1に記載の質量分析計。
【請求項5】
前記断面エリアは、前記多極の出口チャネルを備える、請求項1に記載の質量分析計。
【請求項6】
前記(a,q)値によって画定される安定境界は、RF専用モードによって提供される安定透過窓を含む、請求項1または2に記載の質量分析計。
【請求項7】
前記(a,q)値によって画定される安定境界は、約10の原子質量単位(AMU)から最大約20AMUまでの安定透過窓を含む、請求項1または2に記載の質量分析計。
【請求項8】
前記検出器は、少なくとも約10RFサイクルから約1RFサイクルまで低減される時間分解能を提供する、請求項1または2に記載の質量分析計。
【請求項9】
前記検出器は、サブRFサイクル程度の時間分解能を提供する、請求項1または2に記載の質量分析計。
【請求項10】
前記検出器は、少なくとも1つまたは複数のマイクロチャネルプレートの構成で電子増倍管を備える、請求項1に記載の質量分析計。
【請求項11】
前記検出器は、検出アノードの二次元アレイを含む、請求項1に記載の質量分析計。
【請求項12】
前記検出アノードの二次元アレイは、遅延線アノード読み出しの形式で構成されたアレイを含む、請求項11に記載の質量分析計。
【請求項13】
前記遅延線アノード読み出しは、クロス配線遅延線アノード構造体を含む、請求項12に記載の質量分析計。
【請求項14】
前記検出器は、前記多極から収集された1つまたは複数のイメージを拡大および/または縮小するための光ファイバーバンドルを備える、請求項1に記載の質量分析計。
【請求項15】
前記検出器は、配列された光検出器を備える、請求項1に記載の質量分析計。
【請求項16】
前記配列された光検出器は、電荷注入デバイス(CID)を備える、請求項15に記載の質量分析計。
【請求項17】
前記多極に印加されるRFおよびDC電圧は時間に線形にランプされ、あらゆる所望のイオンが、そのm/z値に反比例する速度で前記安定境界を横断し、イオンが既定の(a,q)ポイントに到達する時間とm/zとの間で線形関係を作成することが可能になる、請求項1または2に記載の質量分析計。
【請求項18】
前記多極に印加される前記RFおよびDC電圧は、約500AMU/秒から最大約100,000AMU/秒までの速度でランプされる、請求項1または2に記載の質量分析計。
【請求項19】
マシュー(a,q)値によって画定される前記安定境界を開放することによって、10倍から最大約200倍までの感度の増加を実現する、請求項1または2に記載の質量分析計。
【請求項20】
前記質量識別は、約1ppmまで低減される質量精度を含む、請求項1または2に記載の質量分析計。
【請求項21】
前記質量識別は、100ppmから約10ppmまで低減される質量精度を含む、請求項1または2に記載の質量分析計。
【請求項22】
前記豊富な1つまたは複数のイオン種は、前記多極の軸に沿って対称的に注入される、請求項1または2に記載の質量分析計。
【請求項23】
前記豊富な1つまたは複数のイオン種は、前記多極の中心から外して注入される、請求項1または2に記載の質量分析計。
【請求項24】
全走査モードで動作するよう構成された、請求項1に記載の質量分析計。
【請求項25】
質量スペクトル全体にわたる検出のための調査走査、それに続く対象の特徴について直接の情報を得るための複数の標的走査を伴って動作するよう構成された、請求項1に記載の質量分析計。
【請求項26】
前記標的走査は、元素組成の決定を実現する、請求項25に記載の質量分析計。
【請求項27】
基準信号を提供する工程と、
前記多極の出口チャネルから豊富な1つまたは複数のイオン種の時空間の生データを取得する工程と、
前記取得データを1つまたは複数のチャンクに分割する工程と、
複数のデータチャンクの1つと前記基準信号の各々とのドット積を計算する工程と、
前記観測された生データおよび前記基準信号を使用して、質量電荷比の一定の区間におけるイオン存在度の推定値を提供することによって、質量スペクトルを再構築する工程と、
前記観測された生データおよび前記基準信号を使用して、異なるm/z値および推定強度のリストを再構築する工程と
を含む高質量分解能・高感度の多極質量分析計法。
【請求項28】
前記解答工程は、基準信号の収集値からテプリッツ形式を構築する工程をさらに含む、請求項27に記載の質量分析計。
【請求項29】
前記基準信号から、シフトされた自己相関ベクトルを生成する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項30】
前記1つまたは複数のチャンク化データを再結合させて全スペクトルを提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項31】
マシュー(a,q)値によって画定される安定境界を開放することによって、約10倍から最大約200倍までの感度の増加を提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項32】
約1ppmまで低減される質量識別を実現する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項33】
100ppmから約10ppmまで低減される質量識別の精度識別を実現する工程をさらに含む、請求項32に記載の質量分析計法。
【請求項34】
前記多極の出口チャネルから時空間の生データを取得する前記工程は、約10の原子質量単位(AMU)から最大約20AMUまでの安定透過窓を提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項35】
前記多極の出口チャネルから時空間の生データを取得する前記工程は、RF専用モードによって可能となる安定透過窓を提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項36】
前記多極の出口チャネルから時空間の生データを取得する前記工程は、多極に印加されるRFおよびDC電圧を時間に線形にランプし、あらゆる所望のイオンが、そのm/z値に反比例する速度で前記安定境界を横断し、イオンが既定の(a,q)ポイントに到達する時間とm/zとの間で線形関係を作成することが可能になる工程をさらに含む、請求項27に記載の質量分析計法。
【請求項1】
(a,q)値によって画定される安定境界内で豊富な1つまたは複数のイオン種を通過させるよう構成された多極と、
前記多極の断面エリアでの前記豊富なイオンの時空間特性を記録するよう構成された検出器と、
印加RFおよび/またはDC電場の関数として前記豊富な1つまたは複数のイオン種の記録された前記時空間特性のデコンボリューションを行い、前記1つまたは複数のイオン種の質量識別を提供するよう構成された処理手段と
を備える高質量分解能・高感度の質量分析計。
【請求項2】
前記処理手段は、複数の平均化されたRFサイクルの関数として前記豊富な1つまたは複数のイオン種の記録された前記時空間特性のデコンボリューションを行い、前記1つまたは複数のイオン種の質量識別を提供するよう構成された、請求項1に記載の質量分析計。
【請求項3】
前記多極は、四重極をさらに含む、請求項1または2に記載の質量分析計。
【請求項4】
前記多極は、高次多極電場の存在下で動作する四重極を含む、請求項1に記載の質量分析計。
【請求項5】
前記断面エリアは、前記多極の出口チャネルを備える、請求項1に記載の質量分析計。
【請求項6】
前記(a,q)値によって画定される安定境界は、RF専用モードによって提供される安定透過窓を含む、請求項1または2に記載の質量分析計。
【請求項7】
前記(a,q)値によって画定される安定境界は、約10の原子質量単位(AMU)から最大約20AMUまでの安定透過窓を含む、請求項1または2に記載の質量分析計。
【請求項8】
前記検出器は、少なくとも約10RFサイクルから約1RFサイクルまで低減される時間分解能を提供する、請求項1または2に記載の質量分析計。
【請求項9】
前記検出器は、サブRFサイクル程度の時間分解能を提供する、請求項1または2に記載の質量分析計。
【請求項10】
前記検出器は、少なくとも1つまたは複数のマイクロチャネルプレートの構成で電子増倍管を備える、請求項1に記載の質量分析計。
【請求項11】
前記検出器は、検出アノードの二次元アレイを含む、請求項1に記載の質量分析計。
【請求項12】
前記検出アノードの二次元アレイは、遅延線アノード読み出しの形式で構成されたアレイを含む、請求項11に記載の質量分析計。
【請求項13】
前記遅延線アノード読み出しは、クロス配線遅延線アノード構造体を含む、請求項12に記載の質量分析計。
【請求項14】
前記検出器は、前記多極から収集された1つまたは複数のイメージを拡大および/または縮小するための光ファイバーバンドルを備える、請求項1に記載の質量分析計。
【請求項15】
前記検出器は、配列された光検出器を備える、請求項1に記載の質量分析計。
【請求項16】
前記配列された光検出器は、電荷注入デバイス(CID)を備える、請求項15に記載の質量分析計。
【請求項17】
前記多極に印加されるRFおよびDC電圧は時間に線形にランプされ、あらゆる所望のイオンが、そのm/z値に反比例する速度で前記安定境界を横断し、イオンが既定の(a,q)ポイントに到達する時間とm/zとの間で線形関係を作成することが可能になる、請求項1または2に記載の質量分析計。
【請求項18】
前記多極に印加される前記RFおよびDC電圧は、約500AMU/秒から最大約100,000AMU/秒までの速度でランプされる、請求項1または2に記載の質量分析計。
【請求項19】
マシュー(a,q)値によって画定される前記安定境界を開放することによって、10倍から最大約200倍までの感度の増加を実現する、請求項1または2に記載の質量分析計。
【請求項20】
前記質量識別は、約1ppmまで低減される質量精度を含む、請求項1または2に記載の質量分析計。
【請求項21】
前記質量識別は、100ppmから約10ppmまで低減される質量精度を含む、請求項1または2に記載の質量分析計。
【請求項22】
前記豊富な1つまたは複数のイオン種は、前記多極の軸に沿って対称的に注入される、請求項1または2に記載の質量分析計。
【請求項23】
前記豊富な1つまたは複数のイオン種は、前記多極の中心から外して注入される、請求項1または2に記載の質量分析計。
【請求項24】
全走査モードで動作するよう構成された、請求項1に記載の質量分析計。
【請求項25】
質量スペクトル全体にわたる検出のための調査走査、それに続く対象の特徴について直接の情報を得るための複数の標的走査を伴って動作するよう構成された、請求項1に記載の質量分析計。
【請求項26】
前記標的走査は、元素組成の決定を実現する、請求項25に記載の質量分析計。
【請求項27】
基準信号を提供する工程と、
前記多極の出口チャネルから豊富な1つまたは複数のイオン種の時空間の生データを取得する工程と、
前記取得データを1つまたは複数のチャンクに分割する工程と、
複数のデータチャンクの1つと前記基準信号の各々とのドット積を計算する工程と、
前記観測された生データおよび前記基準信号を使用して、質量電荷比の一定の区間におけるイオン存在度の推定値を提供することによって、質量スペクトルを再構築する工程と、
前記観測された生データおよび前記基準信号を使用して、異なるm/z値および推定強度のリストを再構築する工程と
を含む高質量分解能・高感度の多極質量分析計法。
【請求項28】
前記解答工程は、基準信号の収集値からテプリッツ形式を構築する工程をさらに含む、請求項27に記載の質量分析計。
【請求項29】
前記基準信号から、シフトされた自己相関ベクトルを生成する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項30】
前記1つまたは複数のチャンク化データを再結合させて全スペクトルを提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項31】
マシュー(a,q)値によって画定される安定境界を開放することによって、約10倍から最大約200倍までの感度の増加を提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項32】
約1ppmまで低減される質量識別を実現する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項33】
100ppmから約10ppmまで低減される質量識別の精度識別を実現する工程をさらに含む、請求項32に記載の質量分析計法。
【請求項34】
前記多極の出口チャネルから時空間の生データを取得する前記工程は、約10の原子質量単位(AMU)から最大約20AMUまでの安定透過窓を提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項35】
前記多極の出口チャネルから時空間の生データを取得する前記工程は、RF専用モードによって可能となる安定透過窓を提供する工程をさらに含む、請求項27に記載の質量分析計法。
【請求項36】
前記多極の出口チャネルから時空間の生データを取得する前記工程は、多極に印加されるRFおよびDC電圧を時間に線形にランプし、あらゆる所望のイオンが、そのm/z値に反比例する速度で前記安定境界を横断し、イオンが既定の(a,q)ポイントに到達する時間とm/zとの間で線形関係を作成することが可能になる工程をさらに含む、請求項27に記載の質量分析計法。
【図1A】

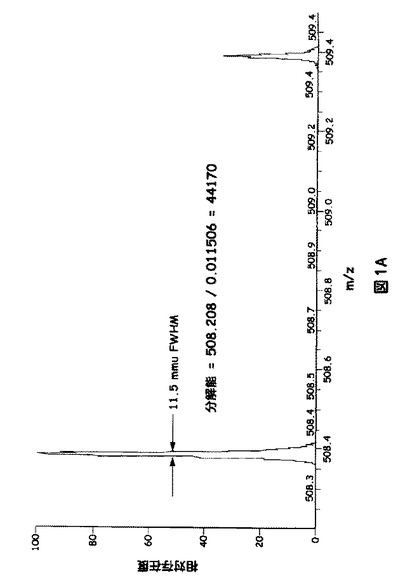
【図1B】
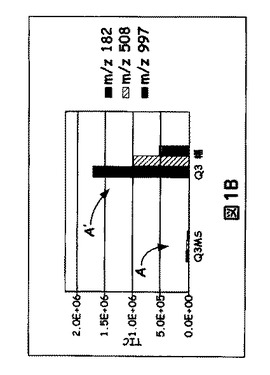
【図2A】
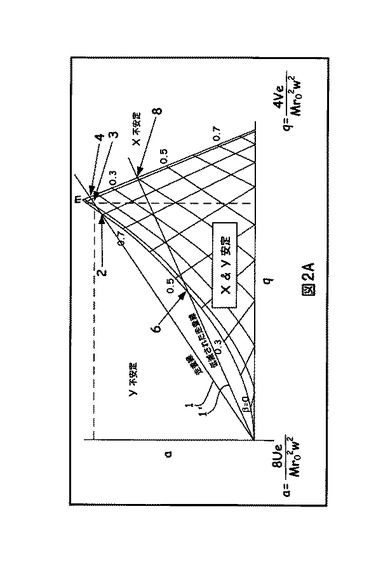
【図2B】
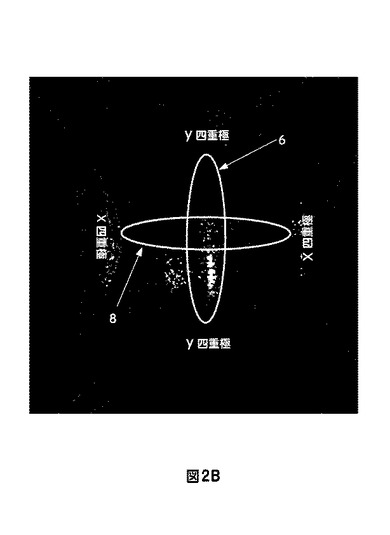
【図3】
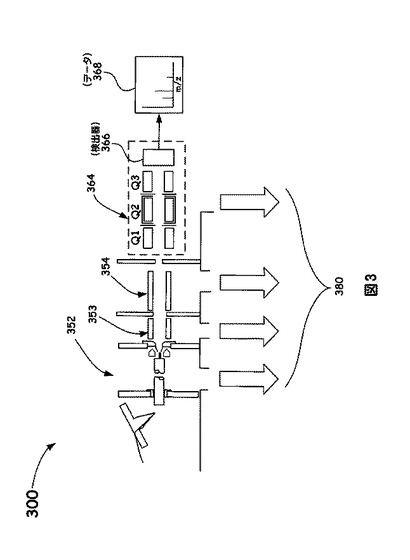
【図4】
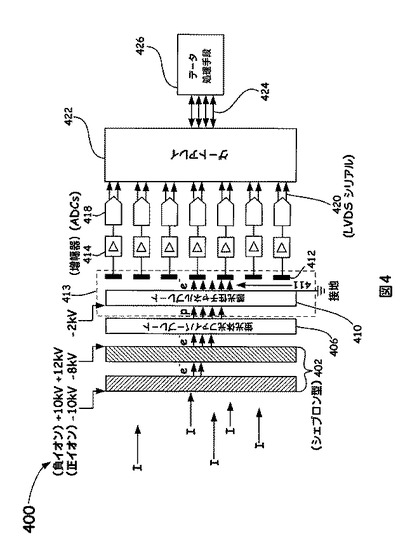
【図5】
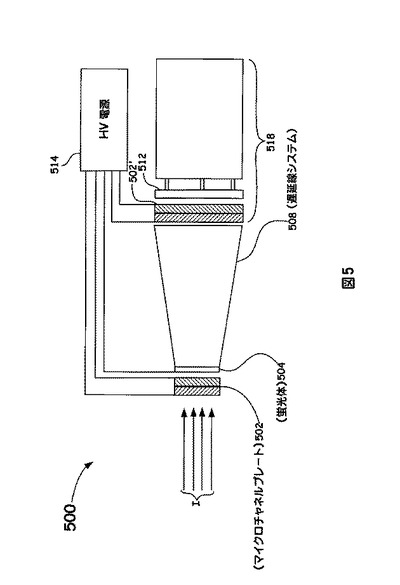
【図6】
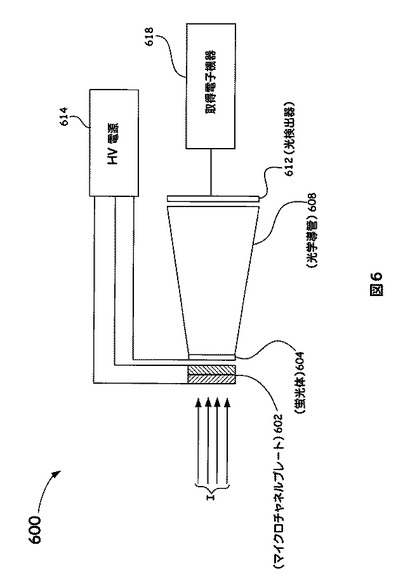
【図7】
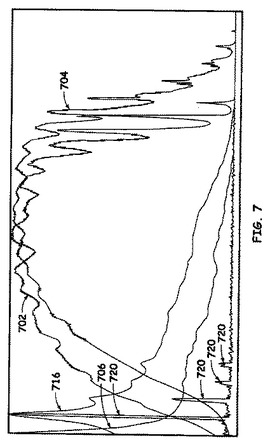
【図8】
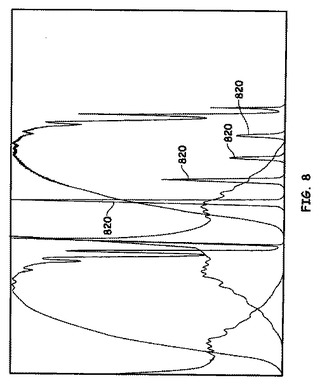
【図1B】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2013−521619(P2013−521619A)
【公表日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2012−556144(P2012−556144)
【出願日】平成23年2月28日(2011.2.28)
【国際出願番号】PCT/US2011/026543
【国際公開番号】WO2011/109311
【国際公開日】平成23年9月9日(2011.9.9)
【出願人】(501192059)サーモ フィニガン リミテッド ライアビリティ カンパニー (42)
【Fターム(参考)】
【公表日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【国際出願番号】PCT/US2011/026543
【国際公開番号】WO2011/109311
【国際公開日】平成23年9月9日(2011.9.9)
【出願人】(501192059)サーモ フィニガン リミテッド ライアビリティ カンパニー (42)
【Fターム(参考)】
[ Back to top ]