
感覚フィードバック装置、感覚フィードバック方法
【課題】運動感覚麻痺の改善をしたり、熟練者の感覚を身につけたりすることができるフィードバック装置が存在しなかった。
【解決手段】圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサと、第二の人の感覚障害の生じていない箇所に貼付されるパッドと、圧力センサから、第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、圧力値取得部が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、刺激強度に対応する電気刺激をパッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置により、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。
【解決手段】圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサと、第二の人の感覚障害の生じていない箇所に貼付されるパッドと、圧力センサから、第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、圧力値取得部が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、刺激強度に対応する電気刺激をパッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置により、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人が物体に接した場合の圧力を、電気刺激に変えて、人の感覚のある箇所に伝える感覚フィードバック装置等に関するものである。
【背景技術】
【0002】
脳卒中後遺症や中枢性・末梢性神経障害などにより、感覚機能に障害が生じる事がある。従来、麻痺肢の筋収縮を促す用途で用いられる電気刺激装置があった。この装置は、感覚入力の代償として用いられる。
【0003】
さらに具体的には、下腿皮層上に装着するための薄さと柔軟性及び粘着性を有する2つの導子と、電源と、低周波パルス発生回路と、傾斜センサと、振動センサとを含み構成される本体と、前記本体と前記2つの導子を接続するリード線とから構成され、下腿皮層上からの電気刺激で足関節背屈筋を収縮させることとし、一定時間振動センサが作動せず、または下腿軸が水平に近く傾いた時に、自動的に出力がOFFとなることとする歩行補助具があった(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−6916号公報(第1頁、第1図等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の装置では、運動感覚麻痺の改善をしたり、熟練者の感覚を身につけたりすることができなかった。
【課題を解決するための手段】
【0006】
本第一の発明の感覚フィードバック装置は、1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、第一の人の1以上の箇所、または第一の人が接する物体の1以上の箇所に配置される1以上の圧力センサと、第二の人の感覚障害の生じていない1以上の箇所に貼付される1以上のパッドと、1以上の各圧力センサから、第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得部と、圧力値取得部が取得した1以上の圧力値から、圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得部と、1以上の刺激強度に対応する1以上の電気刺激を1以上の各パッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置である。
【0007】
かかる構成により、熟練者の感覚を身につけることができる。
【0008】
本第二の発明の感覚フィードバック装置は、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサと、第二の人の感覚障害の生じていない箇所に貼付されるパッドと、圧力センサから、第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、圧力値取得部が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、刺激強度に対応する電気刺激をパッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置である。
【0009】
かかる構成により、熟練者の感覚を身につけることができる。
【0010】
また、本第三の発明の感覚フィードバック装置は、第一または第二の発明に対して、第一の人と第二の人とは同一人であり、物体と接する第一の人の一の箇所は、感覚障害の生じた箇所である感覚フィードバック装置である。
【0011】
かかる構成により、運動感覚麻痺の改善をしたり、熟練者の感覚を身につけたりすることができる。
【0012】
また、本第四の発明の感覚フィードバック装置は、第一から第三いずれかの発明に対して、圧力刺激強度情報格納部は、ユーザを識別するユーザ識別子に対応付けて2以上の圧力刺激強度情報を格納しており、ユーザ識別子を受け付ける受付部をさらに具備し、刺激強度取得部は、圧力値取得部が取得した1以上の圧力値から、受付部が受け付けたユーザ識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する感覚フィードバック装置である。
【0013】
かかる構成により、運動感覚麻痺の改善を各個人に合わせて行うことができる、または、熟練者の感覚を各個人に合わせて身につけることができる。
【0014】
また、本第五の発明の感覚フィードバック装置は、第一から第三いずれかの発明に対して、圧力刺激強度情報格納部は、物体を識別する物体識別子に対応付けて2以上の圧力刺激強度情報を格納しており、物体識別子を受け付ける受付部をさらに具備し、刺激強度取得部は、圧力値取得部が取得した1以上の圧力値から、受付部が受け付けた物体識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する感覚フィードバック装置である。
【0015】
かかる構成により、運動感覚麻痺の改善を接触する物体に合わせて行うことができる、または、熟練者の感覚を接触する物体に合わせて身につけることができる。
【0016】
また、本第六の発明の感覚フィードバック装置は、第一から第五いずれかの発明に対して、圧力センサは2以上であり、圧力刺激強度情報は、2以上の圧力値と電気による刺激強度との対応を示す情報であり、圧力値取得部は、第一人の一の箇所と物体とが接したことにより発生する2以上の圧力センサから2以上の圧力値を取得し、刺激強度取得部は、圧力値取得部が取得した2以上の圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する感覚フィードバック装置である。
【0017】
かかる構成により、精度高く運動感覚麻痺の改善を行うことができる、または、精度高く熟練者の感覚を身につけることができる。
【0018】
また、本第七の発明の感覚フィードバック装置は、第一の発明に対して、圧力センサを2以上具備し、当該2以上の圧力センサは、第一の人の2以上の箇所、または第一の人が接する物体の2以上の箇所に配置され、パッドを2以上具備し、当該2以上のパッドは、第二の人の感覚障害の生じていない2以上の箇所に貼付され、圧力値取得部は、2以上の各圧力センサから、第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得し、刺激強度取得部は、圧力値取得部が取得した2以上の各圧力値から、圧力刺激強度情報を用いて、2以上の刺激強度を取得し、電気刺激発生部は、2以上の各刺激強度に対応する2以上の各電気刺激を2以上の各パッドに発生させる感覚フィードバック装置である。
【0019】
かかる構成により、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。
【0020】
また、本第八の発明の感覚フィードバック装置は、第六または第七の発明に対して、2以上の圧力センサのうちの2つの圧力センサの各々は、第一の人の感覚障害が生じている母指および示指に貼付される感覚フィードバック装置である。
【0021】
かかる構成により、運動感覚麻痺の改善を行うことができる。
【0022】
また、本第九の発明の感覚フィードバック装置は、第一から第八いずれかの発明に対して、圧力値取得部が取得した1以上の圧力値、または刺激強度取得部が取得した1以上の刺激強度を出力する出力部をさらに具備する感覚フィードバック装置である。
【0023】
かかる構成により、訓練中の状況が把握できる。
【0024】
また、本第十の発明の感覚フィードバック装置は、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、感覚障害の生じた箇所、または感覚障害の生じた箇所と接する物体の箇所に配置される圧力センサと、感覚障害の生じていない箇所に貼付されるパッドと、圧力センサから、感覚障害の生じた箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、圧力値取得部が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、刺激強度に対応する電気刺激をパッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置である。
【0025】
かかる構成により、運動感覚麻痺の改善を行うことができる。
【発明の効果】
【0026】
本発明による感覚フィードバック装置によれば、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。
【図面の簡単な説明】
【0027】
【図1】実施の形態1における感覚フィードバック装置のブロック図
【図2】同感覚フィードバック装置の概念図
【図3】同感覚フィードバック装置の概念図
【図4】同圧力値と刺激強度との対応表を示す図
【図5】同被験者が健常な腕で物体を握った際の圧力値を示す図
【図6】同圧力値を変換して取得された刺激強度を示す図
【図7】同被験者が麻痺のある腕で物体を握った際の圧力値を示す図
【図8】同圧力値を変換して取得された刺激強度を示す図
【図9】同簡易上肢機能検査を説明する図
【図10】同簡易上肢機能検査の結果を示す図
【図11】同被験者の機能評価の結果を示す図
【図12】同訓練前の麻痺側と非麻痺側の指先に貼付された圧力センサの電圧値を測定した結果を示す図
【図13】同被験者に貼付された圧力センサ、パッドを示す図
【図14】同トレーニングの1日目の結果を示す図
【図15】同トレーニングの63日目の結果を示す図
【図16】同St値の出力結果を示す図
【図17】実施の形態2における感覚フィードバック装置のブロック図
【図18】同評価方法を示す図
【図19】同コントロールにおける60分のトレーニング後のAPBの筋電位を示すグラフ
【図20】同コントロールにおける示指・母指に貼付された圧力センサの電圧値を示すグラフ
【図21】同介入3回目60分のトレーニング後のAPBの筋電位を示すグラフ
【図22】同介入3回目60分のトレーニング後の示指・母指に貼付された圧力センサの電圧値を示すグラフ
【図23】同非麻痺側のAPBの筋電位を示すグラフ
【図24】同出力部が出力したSt値のグラフ
【図25】同BBTを説明する図
【図26】同BBTの実験結果を示す図
【図27】実施の形態におけるコンピュータシステムの概観図
【図28】同コンピュータシステムのブロック図
【発明を実施するための形態】
【0028】
以下、感覚フィードバック装置等の実施形態について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
【0029】
(実施の形態1)
本実施の形態において、第一の人が物体に接した場合の圧力を、電気刺激に変えて、第二の人の感覚のある箇所に伝える感覚フィードバック装置について説明する。なお、第一の人と第二の人とは同一人でも良い。
【0030】
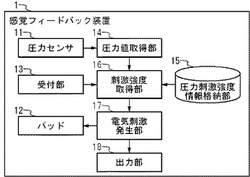
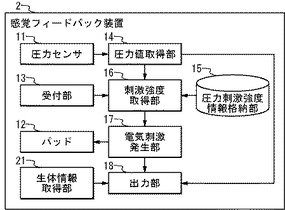
図1は、本実施の形態における感覚フィードバック装置1のブロック図である。感覚フィードバック装置1は、圧力センサ11、パッド12、受付部13、圧力値取得部14、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18を具備する。
【0031】
圧力センサ11は、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される。圧力センサ11は、感覚障害の生じた箇所、または感覚障害の生じた箇所と接する物体の箇所に配置されることは好適である。かかる場合、第一の人は、感覚障害のある人である。なお、一の箇所とは、少なくとも一の箇所、の意味である。つまり、圧力センサ11は、2以上の箇所に配置されても良い。圧力センサ11は、圧力を検知できれば良く、静電容量の変化を用いるもの、ひずみゲージを用いるもの等、その検知方法は問わない。
【0032】
パッド12は、第二の人の感覚障害の生じていない箇所に貼付される。第二の人は、第一の人と同じでも良い。なお、第一の人と第二の人とが同一人で、圧力センサ11が感覚障害の生じた箇所に配置され、パッド12が感覚障害の生じていない箇所に貼付される場合、感覚フィードバック装置1は、麻痺した箇所の訓練のための装置として用いられる。また、例えば、第一の人と第二の人とが異なり、第一の人が熟練者であり、第二の人が訓練者である場合、感覚フィードバック装置1は、訓練者が、熟練者の物体を握る等の感覚を覚えるための訓練装置として用いられる。パッド12は、電気信号を人に伝えるものである。パッド12は、例えば、低周波治療器に用いられるパッドと同一で良い。パッド12は、通常、人体の所望の各部に貼り付けることができるように、柔軟性を有している。そして、パッド12は、例えば、内部に設けられる導電層と、表面側に設けられる導電性を有する粘着層と、導電層に電気的に接続される電極ホックと、導電層における電極ホックが設けられている部分以外の裏面を覆う保護層とを備えている。なお、粘着層は、例えば、ゲル状の材料によって構成されている。また、人に貼付されるパッドは2以上でも良い。
【0033】
受付部13は、ユーザを識別するユーザ識別子や、物体を識別する物体識別子などを受け付ける。ここで、受け付けとは、キーボードやマウス、タッチパネルなどの入力デバイスから入力された情報の受け付け、有線もしくは無線の通信回線を介して送信された情報の受信、光ディスクや磁気ディスク、半導体メモリなどの記録媒体から読み出された情報の受け付けなどを含む概念である。ユーザ識別子等の入力手段は、キーボードやマウスやメニュー画面によるもの等、何でも良い。受付部13は、キーボード等の入力手段のデバイスドライバーや、メニュー画面の制御ソフトウェア等で実現され得る。
【0034】
圧力値取得部14は、圧力センサ11から、第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する。圧力値取得部14は、圧力センサ11から、感覚障害の生じた箇所と物体とが接したことにより発生する圧力値を取得することは好適である。また、圧力値取得部14は、第一人の一の箇所と物体とが接したことにより発生する2以上の圧力センサ11から2以上の圧力値を取得しても良い。なお、圧力値取得部14は、例えば、圧力センサ11からの信号をAD変換し、圧力値を取得する。また、「人の一の箇所と物体とが接した」とは、通常、人が物体を握ったことである。ただし、「人の一の箇所と物体とが接した」とは、人が物体を押したこと、人が物体にあたったこと等でも良い。
【0035】
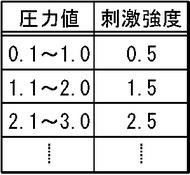
圧力刺激強度情報格納部15は、圧力刺激強度情報を格納し得る。圧力刺激強度情報とは、圧力値と電気による刺激強度との対応を示す情報である。圧力刺激強度情報は、例えば、圧力値と刺激強度との対応表である。また、圧力刺激強度情報は、例えば、圧力値をパラメータとし、刺激強度を出力する関数である。また、圧力刺激強度情報は、例えば、圧力値の軸とパラメータの軸とを有するグラフなどである。圧力刺激強度情報格納部15は、ユーザ識別子に対応付けて2以上の圧力刺激強度情報を格納していても良い。かかる場合、ユーザに応じて、同じ圧力値でも、出力する刺激強度が異なり得る。また、圧力刺激強度情報格納部15は、物体を識別する物体識別子に対応付けて2以上の圧力刺激強度情報を格納していても良い。かかる場合、人が接する物体に応じて、同じ圧力値でも、出力する刺激強度が異なり得る。
【0036】
圧力刺激強度情報格納部15は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。圧力刺激強度情報格納部15に圧力刺激強度情報が記憶される過程は問わない。例えば、記録媒体を介して圧力刺激強度情報が圧力刺激強度情報格納部15で記憶されるようになってもよく、通信回線等を介して送信された圧力刺激強度情報が圧力刺激強度情報格納部15で記憶されるようになってもよく、あるいは、入力デバイスを介して入力された圧力刺激強度情報が圧力刺激強度情報格納部15で記憶されるようになってもよい。
【0037】
刺激強度取得部16は、圧力値取得部14が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する。また、刺激強度取得部16は、圧力値取得部14が取得した圧力値から、受付部13が受け付けたユーザ識別子に対応付けられている圧力刺激強度情報を用いて、刺激強度を取得しても良い。また、刺激強度取得部16は、圧力値取得部14が取得した圧力値から、受付部13が受け付けた物体識別子に対応付けられている圧力刺激強度情報を用いて、刺激強度を取得しても良い。さらに、刺激強度取得部16は、圧力値取得部14が取得した2以上の圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する。
【0038】
刺激強度取得部16は、通常、MPUやメモリ等から実現され得る。刺激強度取得部16の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0039】
電気刺激発生部17は、刺激強度に対応する電気刺激をパッド12に発生させる。電気刺激発生部17は、例えば、刺激強度に比例した電流を発生する。ただし、発生する電流は、刺激強度に比例する必要はなく、刺激強度をパラメータとする関数により、発生する電流を決定しても良い。
【0040】
出力部18は、圧力値取得部14が取得した圧力値、または刺激強度取得部16が取得した刺激強度を出力する。出力部18は、通常、視覚的に圧力値または刺激強度を出力する。また、出力部18は、圧力の不安定さを示す指標を出力しても良い。圧力の不安定さを示す指標は、例えば、St値である。St値は、以下の数式1で示される。数式1において、v(n)は、数式2で示される。なお、圧力の不安定さを示す指標とは、圧力の安定さを示す指標と考えても良い。
【数1】

【数2】
【0041】
数式1、2において、pは圧力センサの電圧値、rはサンプリング周波数、v(n)はn番目のサンプルにおける変化率、Nは総サンプルデータ数である。
【0042】
なお、出力部18がSt値を出力する場合、出力部18は、上記の数式1、数式2の情報を保持しており、かかる数式にパラメータを代入し、St値を算出し、出力する。
【0043】
ここで、出力とは、通常、ディスプレイへの表示、プロジェクターを用いた投影であるが、プリンタへの印字、音出力、外部の装置への送信、記録媒体への蓄積、他の処理装置や他のプログラムなどへの処理結果の引渡しなどを含む概念である。
【0044】
出力部18は、ディスプレイ等の出力デバイスを含むと考えても含まないと考えても良い。出力部18は、出力デバイスのドライバーソフトまたは、出力デバイスのドライバーソフトと出力デバイス等で実現され得る。
【0045】
以下、本実施の形態における感覚フィードバック装置1の具体的な利用例について説明する。
【0046】
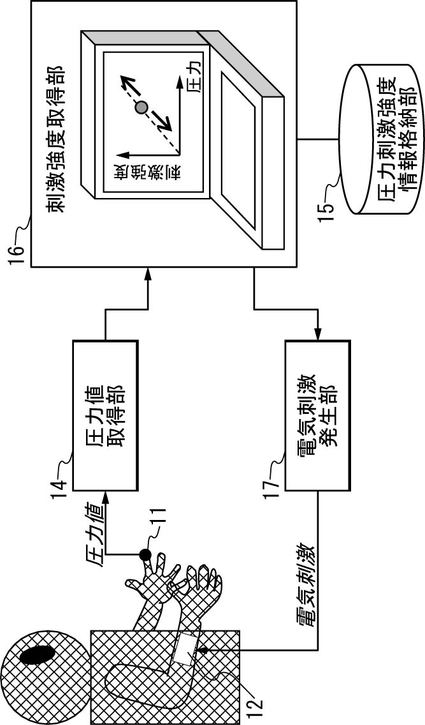
(具体例1)
具体例1において、感覚フィードバック装置1の概念図は、図2である。具体例1において、ユーザは、例えば、左手に麻痺を有する人である。また、ユーザの右手は、麻痺を有しない。そして、圧力センサ11は、麻痺のある左手の人差し指の指先に配置されている。また、パッド12は、麻痺のない右手の腕の一の箇所に配置されている。
【0047】
また、圧力刺激強度情報格納部15は、「刺激強度=f(圧力値)」で示される演算式の情報が格納されている。関数「f」は、圧力値に比例した刺激強度を出力する関数である、とする。
【0048】
かかる状況において、左手の運動感覚麻痺の改善のために、ユーザは、左手で物体(例えば、ペットボトル)を掴む、とする。
【0049】
次に、圧力値取得部14は、圧力センサ11から、物体を掴んだ際の圧力値(X1)を取得する。次に、刺激強度取得部16は、「Y=f(X1)」を実行し、刺激強度「Y1」を得る。
【0050】
次に、電気刺激発生部17は、刺激強度「Y1」に対応する電気刺激をパッド12に発生させる。
【0051】
そして、上記の圧力値取得部14の処理、刺激強度取得部16の処理、および電気刺激発生部17の処理が繰り返される。
【0052】
以上により、ユーザは、麻痺のある左手で物体を掴んだ際の力の強さ(圧力値)を、麻痺のない右手の腕の一の箇所で感じることができる。このような訓練を行うことにより、ユーザは、適切な力で物体を掴むことができるようになる。つまり、このような訓練を行うことにより、運動感覚麻痺の改善を行うことができる。
【0053】
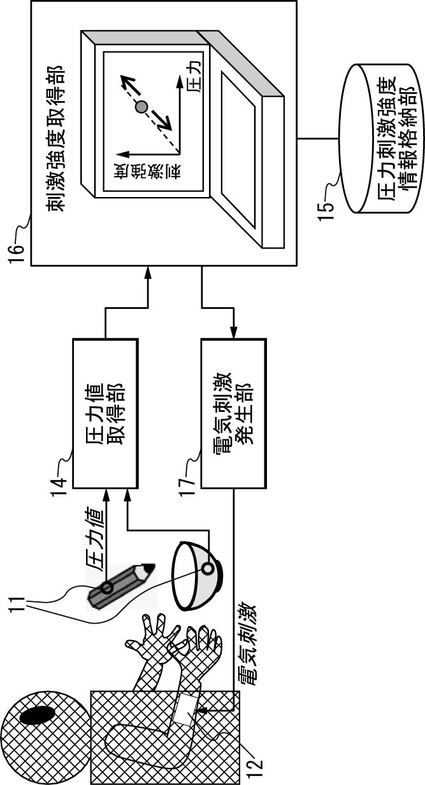
(具体例2)
具体例2において、感覚フィードバック装置1の概念図は、図3である。具体例2において、ユーザは、例えば、左手に麻痺を有する人である。また、ユーザの右手は、麻痺を有しない。そして、圧力センサ11は、ユーザが掴む物体(例えば、鉛筆、茶碗、ペットボトル、筆、竹刀など)の一の箇所であり、ユーザが掴む箇所に配置されている。また、パッド12は、麻痺のない右手の腕の一の箇所に配置されている。
【0054】
また、圧力刺激強度情報格納部15は、例えば、図4に示す圧力値と刺激強度との対応表を保持している、とする。
【0055】
かかる状況において、左手の運動感覚麻痺の改善のために、ユーザは、左手で物体の圧力センサ11を含む箇所を掴む、とする。
【0056】
次に、圧力値取得部14は、圧力センサ11から、物体を掴んだ際の圧力値(X2)を取得する。次に、刺激強度取得部16は、圧力値(X2)に対応する刺激強度「Y2」を、圧力値と刺激強度との対応表から読み出し、刺激強度「Y2」を得る、とする。
【0057】
次に、電気刺激発生部17は、刺激強度「Y2」に対応する電気刺激をパッド12に発生させる。
【0058】
そして、上記の圧力値取得部14の処理、刺激強度取得部16の処理、および電気刺激発生部17の処理が繰り返される。
【0059】
以上により、ユーザは、麻痺のある左手で物体を掴んだ際の力の強さ(圧力値)を、麻痺のない右手の腕の一の箇所で感じることができる。このような訓練を行うことにより、ユーザは、適切な力で物体を掴むことができるようになる。つまり、このような訓練を行うことにより、運動感覚麻痺の改善を行うことができる。
【0060】
(具体例3)
具体例3は、熟練者が物体に接触した際の圧力値から取得される電気刺激を、訓練者の麻痺のない体の一の箇所に与えることにより、訓練者に熟練者の感覚を身につけることができる感覚フィードバック装置1である。
【0061】
具体例3において、第一の人は、例えば、習字の熟練者である、とする。また、第二の人は、習字の訓練者である、とする。そして、第一の人の1以上の指、または筆の1以上の箇所に圧力センサ11が配置されている、とする。
【0062】
また、第二の人の腕等に、1以上のパッド12が貼付されている、とする。
【0063】
かかる状況において、熟練者は、筆を握って、筆で字を書いた、とする。
【0064】
次に、圧力値取得部14は、圧力センサ11から、熟練者が筆を掴んでいる間、圧力値(X3)を取得する。次に、刺激強度取得部16は、例えば、「Y=f(X3)」を実行し、刺激強度「Y3」を得る。
【0065】
次に、電気刺激発生部17は、刺激強度「Y3」に対応する電気刺激をパッド12に発生させる。そして、上記の圧力値取得部14の処理、刺激強度取得部16の処理、および電気刺激発生部17の処理が繰り返される。
【0066】
以上の処理により、訓練者は、熟練者がどの程度の強さで、筆を握りながら字を書いているかを体感できる。その結果、熟練者の筆使いを、体で学ぶことができる。
(実験結果1)
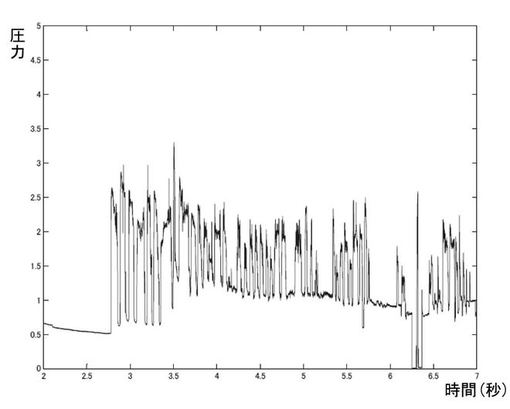
【0067】
以下、感覚フィードバック装置1の第一の実験結果について説明する。図5は、ある被験者が健常な腕(ここでは、右腕)で物体を握った際の、指と物体との間の圧力センサの圧力値である。図5の横軸は時間(秒)であり、縦軸は圧力に対応する数値である。
【0068】
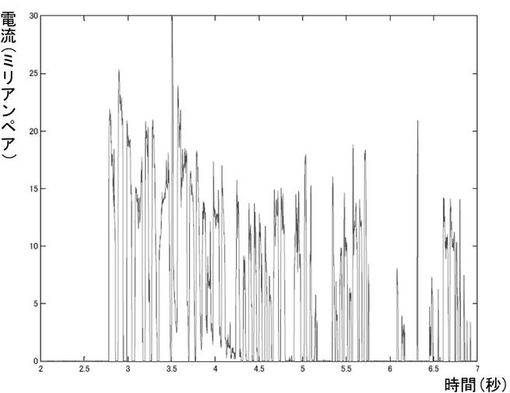
図6は、図5の圧力値を変換して取得された刺激強度である。図6の横軸は時間(秒)であり、縦軸は電流(ミリアンペア)である。
【0069】
図7は、ある被験者が麻痺のある腕(ここでは、左腕)で物体を握った際の、指と物体との間の圧力センサの圧力値である。図7の横軸は時間(秒)であり、縦軸は圧力に対応する数値である。
【0070】
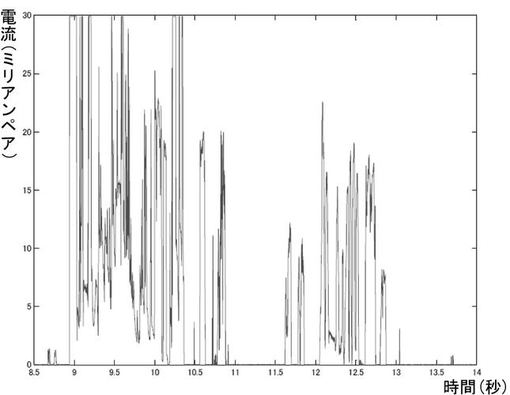
図8は、図7の圧力値を変換して取得された刺激強度である。図8の横軸は時間(秒)であり、縦軸は電流(ミリアンペア)である。
【0071】
図5から図8において、感覚の麻痺していない方の腕で物体を掴んだ場合は、安定した力で物体を掴んでいるが、麻痺している方の腕で物体を掴んだ場合は、力が比較的強く、変動が激しく、安定しない力で物体を掴んでいることが分かる。
【0072】
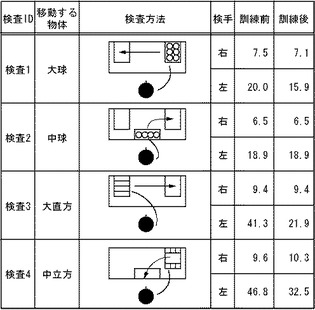
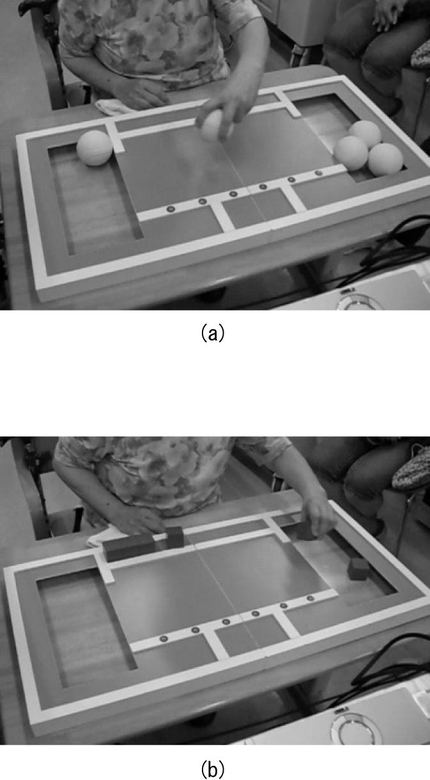
この被験者に、感覚フィードバック装置1を用いて、訓練を行ってもらった。そして、訓練を行う前、および行った後に、簡易上肢機能検査を行った。簡易上肢機能検査とは、図9(a)(b)に示すように、ボールや箱等の物体を、一の場所から他の場所に移す場合の時間を測定して、上肢の機能をチェックする検査である。
【0073】
簡易上肢機能検査の結果を図10に示す。図10において、訓練前と訓練後で、麻痺の無い右手の作業時間について、あまり変化がないが、麻痺のある左手の作業時間について、検査2を除いて、大幅に改善されていることが分かる。
(実験結果2)
【0074】
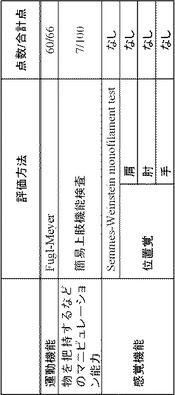
以下、感覚フィードバック装置1の第二の実験結果について説明する。本実験において、重度の感覚麻痺を有する脳卒中患者に対して、感覚フィードバック装置1を用いた訓練を実施した。被験者は、66歳女性で、27か月前に右視床出血を発症し、左片麻痺を有する。また、被験者は、麻痺側の手指を動かすことは可能であるのに、日常生活において麻痺手を使用できないことが不満である。かかる被験者の機能評価の結果を、図11に示す。図11において、Fugl-Meyerによる運動機能の評価結果(点数)は、60/66であり、物を把持するなどのマニピュレーション能力を図る簡易上肢機能検査では、7/100(点数)であった。また、図11において、感覚機能はなし、である。かかる図11に示す機能評価の結果から、日常生活において、被験者が麻痺側の手を使用できない要因は、感覚機能の欠如であると考えられる。
【0075】
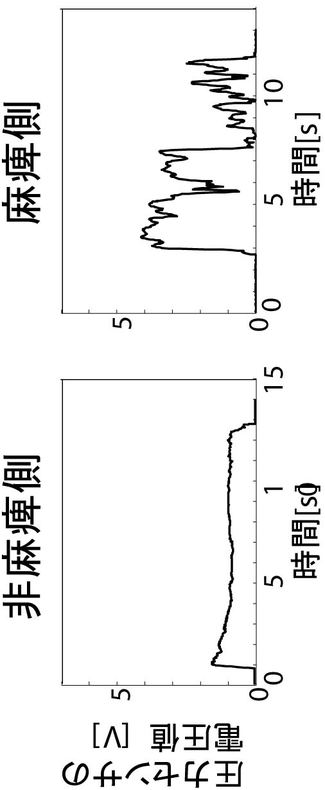
感覚フィードバック装置1を用いた訓練前の状態を把握するため、被験者は缶(重さ370g)を持ち上げ10秒保持するタスクを実施した。かかるタスクの実施中に、麻痺側(左側)と、非麻痺側(右側)の指先に貼付された圧力センサの電圧値を測定した。圧力センサの電圧値と指先圧力は比例関係があり、圧力センサの電圧値はどの程度安定した指先圧力で物体を把持しているかを示す。かかる測定した結果を図12に示す。図12によれば、非麻痺側は、タスク中、一定の指先圧力を維持できたが、麻痺側は、タスク中、一定の指先圧力を維持できなかったことが分かる。
【0076】
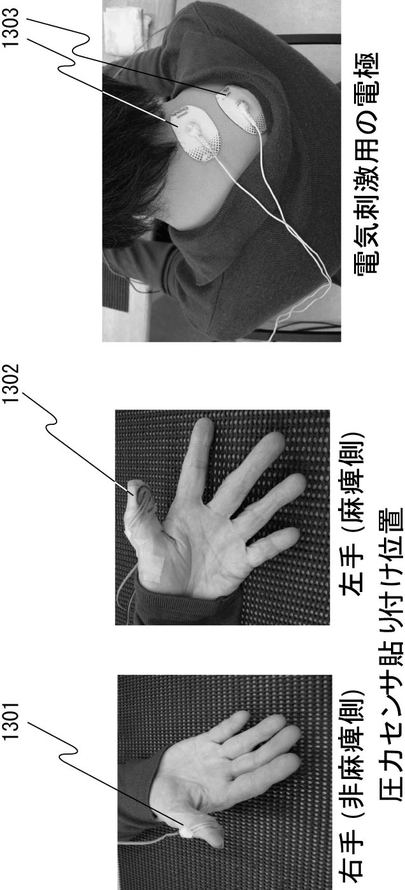
そして、この被験者は、感覚フィードバック装置1を用いて、以下のトレーニングを行った。図13に示すように、被験者の右手(非麻痺側)の母指(1301)、および左手(麻痺側)の母指(1302)に圧力センサ11を配置した。そして、電気刺激用の電極(パッド12)を、感覚障害の生じていない背中の2箇所(1303、1304)に貼付した。
【0077】
また、被験者は、非麻痺側で物体を把持し、その刺激強度などを学習する。その後、被験者は、麻痺側で非麻痺側と同じ物体を同様の刺激強度で物体を把持できるようトレーニングを行った。そして、トレーニングの頻度は、日に1時間、1ヶ月目は5日/週、2ヶ月目は3日/週であった。
【0078】
本実験において、缶把持タスク中の圧力センサの電圧値を計測し、どの程度安定した指先圧力で物体を把持できているかを検証した。
【0079】
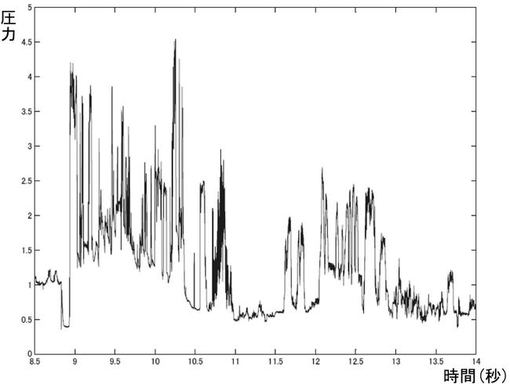
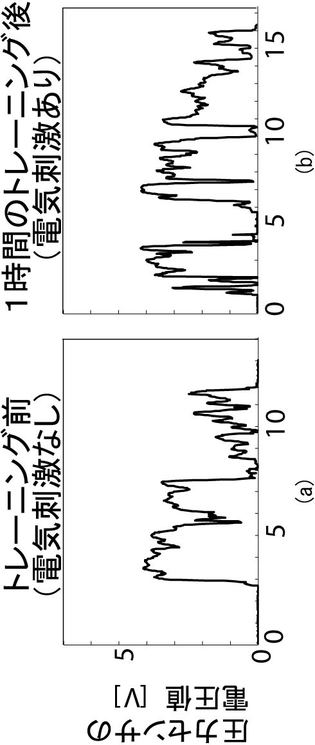
上記のトレーニングの結果は、以下である。つまり、トレーニングの1日目の結果を図14に示す。図14(a)は、トレーニング前の圧力センサの電圧値を示すグラフであり、圧力センサの電圧値は不安定であることが分かる。また、図14(b)は、1時間のトレーニング後の圧力センサの電圧値を示すグラフであり、1日目では、トレーニング後も、圧力センサの電圧値は不安定なままであることが分かる。つまり、1日目では、物体を把持している間の指先圧力の安定度合いはトレーニング前後で変化がないことが分かる。
【0080】
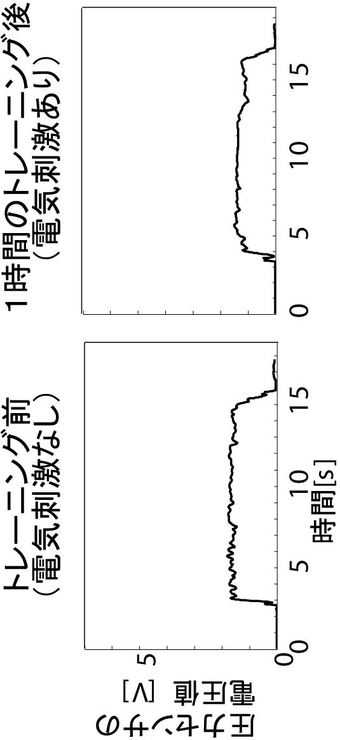
また、トレーニングの63日目の結果を図15に示す。図15(a)は、トレーニング前の圧力センサの電圧値を示すグラフであり、図15(b)は、1時間のトレーニング後の圧力センサの電圧値を示すグラフである。図15において、電圧値の不安定さは1日目と比較して大幅に改善されていることが分かる。
【0081】
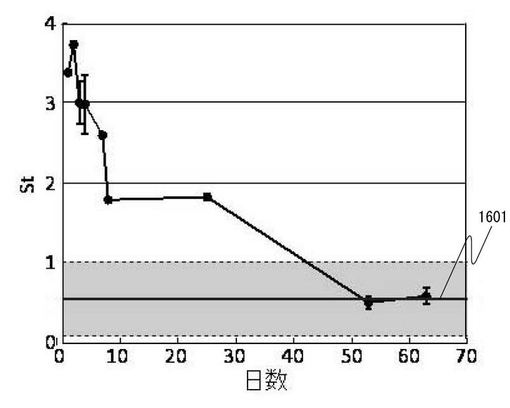
また、本実験において、出力部18は、St値を出力した。その結果を、図16に示す。図16において、線1601は、非麻痺側の平均値であり、グレーゾーンは「非麻痺側の平均値+−2×標準偏差」である。図16から、トレーニングが進むにつれSt値は減少し、被験者の圧力の安定性は向上したことが分かる。また、図16から、53日目、63日目におけるSt値は、非麻痺側で観測されるSt値と同程度となったことが分かる。
【0082】
以上、本実験により、トレーニングが進むにつれ安定性は徐々に向上した。また、63日目において、被験者は缶把持中に安定した指先圧力を維持することが可能であり、その安定度合いは非麻痺側と同程度となった。また、63日目において、被験者は、感覚フィードバック装置1を使用していない場合でも、安定した指先圧力を維持することが可能であった。
【0083】
以上、本実施の形態によれば、運動感覚麻痺の改善を行うことができる、または、本実施の形態によれば、熟練者の感覚を、訓練者に身につけさせることができる。
【0084】
また、本実施の形態によれば、感覚フィードバック装置1は、把持対象物または感覚障害の生じた実際の手指の先をはじめとした上肢下肢に圧力センサを装着することにより、圧力値に応じた電気刺激を感覚の残存する部位にフィードバックするものである。感覚フィードバック装置1の実際の用途としては、健常手で把持した圧力に応じた電気刺激と同等の電気刺激を生じさせるように麻痺手で把持する、などの訓練に用いる事ができる。この訓練により、運動感覚麻痺の改善が期待できる。また、感覚フィードバック装置1の対象は脳卒中片麻痺だけではなく、中枢性・末梢性の神経障害などの重度の障害患者にも対応可能である。
【0085】
なお、本実施の形態における受付部13、圧力値取得部14、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18等の処理は、ソフトウェアで実現しても良い。そして、このソフトウェアをソフトウェアダウンロード等により配布しても良い。また、このソフトウェアをCD−ROMなどの記録媒体に記録して流布しても良い。なお、このことは、本明細書における他の実施の形態においても該当する。なお、本実施の形態における感覚フィードバック装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、記録媒体に、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、コンピュータを、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサから、前記第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、前記圧力値取得部が取得した圧力値から、前記圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、前記刺激強度に対応する電気刺激を、第二の人の感覚障害の生じていない箇所に貼付されるパッドに発生させる電気刺激発生部として機能させるためのプログラム、である。
【0086】
(実施の形態2)
本実施の形態において、第一の人が物体に接した場合の2以上の圧力(ここでは、2つの圧力)を、電気刺激に変えて、第二の人の感覚のある箇所に伝える感覚フィードバック装置について説明する。なお、第一の人と第二の人とは同一人でも良い。
【0087】
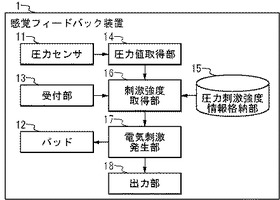
本実施の形態における感覚フィードバック装置2のブロック図を、図17に示す。感覚フィードバック装置2は、圧力センサ11、パッド12、受付部13、圧力値取得部14、生体情報取得部21、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18を具備する。
【0088】
生体情報取得部21は、生体情報を取得する。生体情報は、例えば、筋電位である。また、生体情報は、例えば、発汗量などでも良い。生体情報取得部21は、筋電計である。また、生体情報取得部21は、発汗量測定器などでも良い。
【0089】
また、感覚フィードバック装置2の圧力センサ11は、2以上である。そして、2以上の圧力センサ11は、第一の人の2以上の箇所、または第一の人が接する物体の2以上の箇所に配置される。
【0090】
また、感覚フィードバック装置2のパッド12も、2以上である。そして、2以上のパッドは、第二の人の感覚障害の生じていない2以上の箇所に貼付される。第二の人は、第一の人と同じでも良い。なお、本実施の形態では、第一の人と第二の人とが同一人で、圧力センサ11が感覚障害の生じた2箇所に配置され、2つのパッド12が感覚障害の生じていない2箇所に貼付される場合について説明する。そして、本実施の形態において、感覚フィードバック装置2は、麻痺した箇所の訓練のための装置として用いられる。ただし、実施の形態1で説明したように、感覚フィードバック装置2も、訓練者が、熟練者の物体を握る等の感覚を覚えるための訓練装置として用いられても良い。
【0091】
また、感覚フィードバック装置2の圧力値取得部14は、2以上の各圧力センサ11から、第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得する。
【0092】
また、感覚フィードバック装置2の刺激強度取得部16は、圧力値取得部14が取得した2以上の各圧力値から、圧力刺激強度情報を用いて、2以上の刺激強度を取得する。
【0093】
また、感覚フィードバック装置2の電気刺激発生部17は、2以上の各刺激強度に対応する2以上の各電気刺激を2以上の各パッド12に発生させる。
【0094】
さらに、感覚フィードバック装置2の出力部18は、生体情報取得部21が取得した生体情報や、圧力値取得部14が取得した圧力値を出力しても良い。
(実験結果3)
【0095】
実施の形態1で説明した実験結果2の被験者にとって、小さい物体をつまむことは難しかった。この被験者が小さい物体をつまもうとする際、特に、示指が被験者の意図に反して動いてしまう、という状況であった。また、被験者にとって、指先つまみ(tip pinch)が難しいため、つまみ方が横つまみ(lateral pinch)になってしまっていた。
【0096】
そこで、本第三の実験において、指先つまみを実現するため、被験者の麻痺側の母指と示指との両方の指先に、圧力センサ11を貼付し、電気刺激を別々にフィードバックする感覚フィードバック装置2を用いた。
【0097】
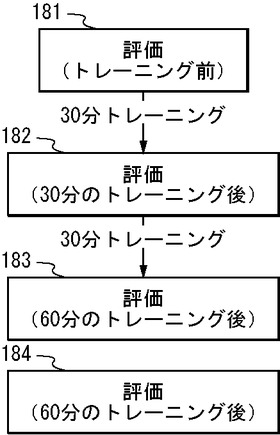
被験者は、図18に示す流れで、種々の物体を母指・示指で把持するトレーニングを行い、マニピュレーション機能を評価(第一、第二の評価)した。つまり、刺激なしで、トレーニング前に評価した(181)。次に、刺激ありで、30分のトレーニング後に評価した(182)。次に、刺激ありで、さらに30分(全部で60分)のトレーニング後に評価した(183)。そして、刺激なしで、60分のトレーニング後に評価した(184)。183と184の間には、トレーニングは行わなかった。なお、上記の図18の流れでのトレーニングと評価は計3回(トレーニング開始日を1日目とすると、10日後、12日後、15日後に実施)行った。これをそれぞれ介入1回目、2回目、3回目と呼称する。また、感覚フィードバック装置を用いたトレーニングの有効性を検証するための比較実験として、トレーニング開始日において、すべて、刺激なしで、トレーニング前に評価し、30分のトレーニング後に評価し、さらに30分(全部で60分)のトレーニング後に評価した。これをコントロールと呼称する。
【0098】
以下に、第一の評価と、第二の評価の詳細を示す。
(第一の評価)
【0099】
第一の評価は、ブロックつまみタスクである。ここでのブロックつまみタスクは、被験者が、母指と示指とのみを用いて、ブロックをつまんで持ち上げるタスクである。本タスクで用いたブロックの大きさは、「2.5cm×2.5cm×2.5cm」であった。そして、本タスクにおける計測項目は、(1)短母指外転筋(APB)の筋電位、(2)母指・示指に貼付した圧力センサの電圧値、(3)対象物体であるブロックに貼付した圧力センサの電圧値であった。つまり、本タスクにおいて、圧力センサ11は、被験者の母指、被験者の示指、ブロックに配置された。また、生体情報取得部21は、短母指外転筋(APB)の筋電位を取得するものであった。
【0100】
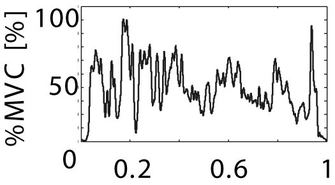
図19は、コントロールにおける、60分のトレーニング後のAPBの筋電位(%MVC)を示すグラフである。図19において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、筋電位(%MVC)である。
【0101】
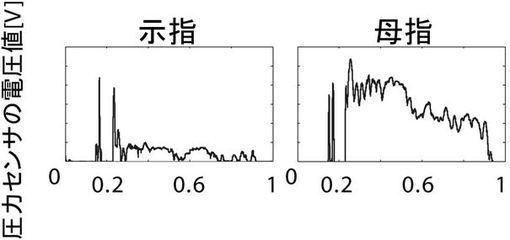
また、図20は、コントロールにおける、60分のトレーニング後の示指、および母指に貼付された圧力センサ11の電圧値[V]を示すグラフである。図20において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、圧力センサ11の電圧値[V]である。
【0102】
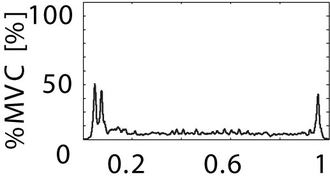
また、図21は、介入3回目における60分のトレーニング後のAPBの筋電位(%MVC)を示すグラフである。図21において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、筋電位(%MVC)である。
【0103】
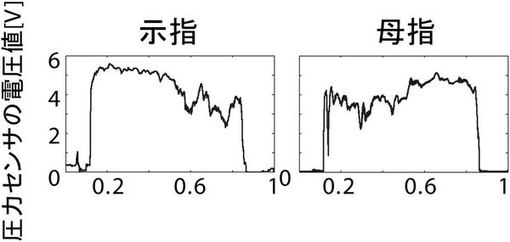
また、図22は、介入3回目における60分のトレーニング後の示指、および母指に貼付された圧力センサ11の電圧値[V]を示すグラフである。図22において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、圧力センサ11の電圧値[V]である。
【0104】
さらに、図23は、非麻痺側のAPBの筋電位(%MVC)を示すグラフである。図23において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、筋電位(%MVC)である。
【0105】
図19から図23の実験結果によれば、介入3回目の60分のトレーニング後において、APBの筋電位パターン(図21)は非麻痺側の筋電位パターン(図23)と類似していることが分かる。このことが、少なくとも3回目のトレーニング後には、麻痺側の母指および示指の指先が、ブロックの指先つまみを実現できたことを示している。
【0106】
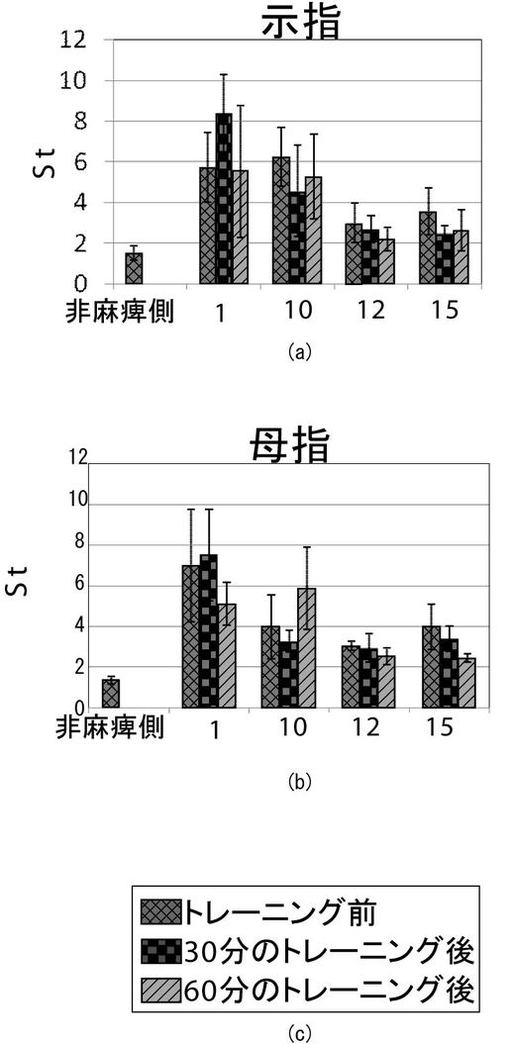
また、圧力値取得部14は、ブロックに貼付した圧力センサ11から圧力値を取得する。そして、出力部18は、圧力値取得部14が取得した圧力値を用いて、St値を算出し、出力した、とする。そして、出力部18が出力したSt値のグラフを、図24に示す。図24において、(a)は、示指の非麻痺側のSt値、コントロール(横軸の1)、介入1回目(横軸の10)、介入2回目(横軸の12)、介入3回目(横軸の15)のSt値を示している。また、St値は、トレーニング前、30分のトレーニング後、60分のトレーニング後の3回の評価結果を有する。
【0107】
図24において、介入2回目、3回目におけるSt値はコントロールにおけるSt値と比較して減少していることが分かる。しかし、麻痺側のSt値は非麻痺側と比較すると高いことが分かる。つまり、非麻痺側と比較すると、麻痺側の指先圧力が不安定であることが分かる。
【0108】
第一の評価において、感覚フィードバック装置2を使用してブロックをつまむと、APBの筋電位パターンが変化(非麻痺側の筋電位パターンと類似)した。また、示指の指先がブロックと接触(感覚フィードバック装置2を使用しない場合は接触しない)した。そのため、感覚フィードバック装置2がブロックつまみ動作の間の手の形状を矯正し、tip pinchが実現された。
(第二の評価)
【0109】
第二の評価は、Box and Block Test (BBT)と呼ばれているトレーニングである。BBTとは、巧緻性のテストであり、臨床検査で使用されているテストである。BBTにおいて、図25に示すように、被験者は、ブロックを一方の空間からパーティションを越えて、他方の空間に移動させるタスクを実施する。そして、被験者が1分間で移動できたブロック数がカウントされる。
【0110】
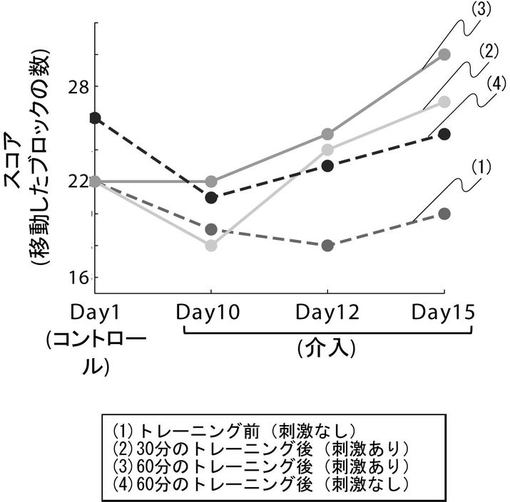
そして、BBTの実験結果を図26に示す。図26において、コントロール(横軸のDay1)、介入1回目(横軸のDay10)、介入2回目(横軸のDay12)、介入3回目(横軸のDay15)のスコアをグラフ化している。なお、スコアとは、移動できたブロック数である。
【0111】
図26において、介入1回目では、30分のトレーニング後のスコアがトレーニング前(刺激なし)のスコアよりも低かった。10日目は介入初日のため、被験者は、感覚フィードバック装置2に慣れておらず、スコアが減少したと考えられる。60分のトレーニング後の評価(刺激あり)ではトレーニング前よりスコアが上昇した。また、介入2回目、および3回目目では、刺激ありの場合のスコアが刺激なしのスコアより高い、また60分のトレーニング後のスコア(刺激あり)が30分のトレーニング後のスコア(刺激あり)より高い、60分のトレーニング後のスコア(刺激なし)がトレーニング前のスコア(刺激なし)より高いという結果が得られた。
【0112】
第二の評価において、感覚フィードバック装置2を使用した場合の方がBBTのスコアは高かった。また、被験者は、60分のトレーニング後に刺激をオンにしたまま(感覚フィードバック装置2を使用して)BBTを実施した際に最高スコアを記録した。このことは、感覚フィードバック装置2を用いたトレーニングは感覚麻痺を有する脳卒中患者の巧緻性(manipulation capability)の向上に寄与する可能性が十分あることを示す。
【0113】
以上、本実施の形態によれば、運動感覚麻痺の改善を行うことができる、または、本実施の形態によれば、熟練者の感覚を、訓練者に身につけさせることができる。
【0114】
また、本実施の形態によれば、特に、感覚麻痺を有する脳卒中患者のリハビリテーションに寄与する可能性が十分ある。
【0115】
なお、本実施の形態における受付部13、圧力値取得部14、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18等の処理は、ソフトウェアで実現しても良い。また、本実施の形態における感覚フィードバック装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、記録媒体に、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、コンピュータを、1以上の各圧力センサから、第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得部と、前記圧力値取得部が取得した1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得部と、前記1以上の刺激強度に対応する1以上の電気刺激を1以上の各パッドに発生させる電気刺激発生部として機能させるためのプログラム、である。
【0116】
また、上記プログラムにおいて、前記圧力値取得部は、2以上の各圧力センサから、前記第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得し、前記刺激強度取得部は、前記圧力値取得部が取得した2以上の各圧力値から、前記圧力刺激強度情報を用いて、2以上の刺激強度を取得し、前記電気刺激発生部は、前記2以上の各刺激強度に対応する2以上の各電気刺激を前記2以上の各パッドに発生させるものとして、コンピュータを機能させることは好適である。
【0117】
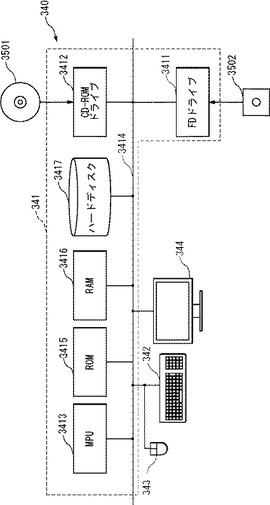
また、図27は、本明細書で述べたプログラムを実行して、上述した実施の形態の感覚フィードバック装置等を実現するコンピュータの外観を示す。上述の実施の形態は、コンピュータハードウェア及びその上で実行されるコンピュータプログラムで実現され得る。図27は、このコンピュータシステム340の概観図であり、図28は、コンピュータシステム340の内部構成を示す図である。
【0118】
図27において、コンピュータシステム340は、FDドライブ3411、CD−ROMドライブ3412を含むコンピュータ341と、キーボード342と、マウス343と、モニタ344とを含む。
【0119】
図28において、コンピュータ341は、FDドライブ3411、CD−ROMドライブ3412に加えて、MPU3413と、CD−ROMドライブ3412及びFDドライブ3411に接続されたバス3414と、ブートアッププログラム等のプログラムを記憶するためのROM3415とに接続され、アプリケーションプログラムの命令を一時的に記憶するとともに一時記憶空間を提供するためのRAM3416と、アプリケーションプログラム、システムプログラム、及びデータを記憶するためのハードディスク3417とを含む。ここでは、図示しないが、コンピュータ341は、さらに、LANへの接続を提供するネットワークカードを含んでも良い。
【0120】
コンピュータシステム340に、上述した実施の形態の感覚フィードバック装置等の機能を実行させるプログラムは、CD−ROM3501、またはFD3502に記憶されて、CD−ROMドライブ3412またはFDドライブ3411に挿入され、さらにハードディスク3417に転送されても良い。これに代えて、プログラムは、図示しないネットワークを介してコンピュータ341に送信され、ハードディスク3417に記憶されても良い。プログラムは実行の際にRAM3416にロードされる。プログラムは、CD−ROM3501、FD3502またはネットワークから直接、ロードされても良い。
【0121】
プログラムは、コンピュータ341に、上述した実施の形態の感覚フィードバック装置等の機能を実行させるオペレーティングシステム(OS)、またはサードパーティープログラム等は、必ずしも含まなくても良い。プログラムは、制御された態様で適切な機能(モジュール)を呼び出し、所望の結果が得られるようにする命令の部分のみを含んでいれば良い。コンピュータシステム340がどのように動作するかは周知であり、詳細な説明は省略する。
【0122】
また、上記プログラムを実行するコンピュータは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、あるいは分散処理を行ってもよい。
【0123】
また、上記各実施の形態において、各処理(各機能)は、単一の装置(システム)によって集中処理されることによって実現されてもよく、あるいは、複数の装置によって分散処理されることによって実現されてもよい。
【0124】
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【産業上の利用可能性】
【0125】
以上のように、本発明にかかる感覚フィードバック装置は、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。という効果を有し、訓練装置等として有用である。
【符号の説明】
【0126】
1 感覚フィードバック装置
11 圧力センサ
12 パッド
13 受付部
14 圧力値取得部
15 圧力刺激強度情報格納部
16 刺激強度取得部
17 電気刺激発生部
18 出力部
21 生体情報取得部
【技術分野】
【0001】
本発明は、人が物体に接した場合の圧力を、電気刺激に変えて、人の感覚のある箇所に伝える感覚フィードバック装置等に関するものである。
【背景技術】
【0002】
脳卒中後遺症や中枢性・末梢性神経障害などにより、感覚機能に障害が生じる事がある。従来、麻痺肢の筋収縮を促す用途で用いられる電気刺激装置があった。この装置は、感覚入力の代償として用いられる。
【0003】
さらに具体的には、下腿皮層上に装着するための薄さと柔軟性及び粘着性を有する2つの導子と、電源と、低周波パルス発生回路と、傾斜センサと、振動センサとを含み構成される本体と、前記本体と前記2つの導子を接続するリード線とから構成され、下腿皮層上からの電気刺激で足関節背屈筋を収縮させることとし、一定時間振動センサが作動せず、または下腿軸が水平に近く傾いた時に、自動的に出力がOFFとなることとする歩行補助具があった(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−6916号公報(第1頁、第1図等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の装置では、運動感覚麻痺の改善をしたり、熟練者の感覚を身につけたりすることができなかった。
【課題を解決するための手段】
【0006】
本第一の発明の感覚フィードバック装置は、1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、第一の人の1以上の箇所、または第一の人が接する物体の1以上の箇所に配置される1以上の圧力センサと、第二の人の感覚障害の生じていない1以上の箇所に貼付される1以上のパッドと、1以上の各圧力センサから、第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得部と、圧力値取得部が取得した1以上の圧力値から、圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得部と、1以上の刺激強度に対応する1以上の電気刺激を1以上の各パッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置である。
【0007】
かかる構成により、熟練者の感覚を身につけることができる。
【0008】
本第二の発明の感覚フィードバック装置は、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサと、第二の人の感覚障害の生じていない箇所に貼付されるパッドと、圧力センサから、第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、圧力値取得部が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、刺激強度に対応する電気刺激をパッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置である。
【0009】
かかる構成により、熟練者の感覚を身につけることができる。
【0010】
また、本第三の発明の感覚フィードバック装置は、第一または第二の発明に対して、第一の人と第二の人とは同一人であり、物体と接する第一の人の一の箇所は、感覚障害の生じた箇所である感覚フィードバック装置である。
【0011】
かかる構成により、運動感覚麻痺の改善をしたり、熟練者の感覚を身につけたりすることができる。
【0012】
また、本第四の発明の感覚フィードバック装置は、第一から第三いずれかの発明に対して、圧力刺激強度情報格納部は、ユーザを識別するユーザ識別子に対応付けて2以上の圧力刺激強度情報を格納しており、ユーザ識別子を受け付ける受付部をさらに具備し、刺激強度取得部は、圧力値取得部が取得した1以上の圧力値から、受付部が受け付けたユーザ識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する感覚フィードバック装置である。
【0013】
かかる構成により、運動感覚麻痺の改善を各個人に合わせて行うことができる、または、熟練者の感覚を各個人に合わせて身につけることができる。
【0014】
また、本第五の発明の感覚フィードバック装置は、第一から第三いずれかの発明に対して、圧力刺激強度情報格納部は、物体を識別する物体識別子に対応付けて2以上の圧力刺激強度情報を格納しており、物体識別子を受け付ける受付部をさらに具備し、刺激強度取得部は、圧力値取得部が取得した1以上の圧力値から、受付部が受け付けた物体識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する感覚フィードバック装置である。
【0015】
かかる構成により、運動感覚麻痺の改善を接触する物体に合わせて行うことができる、または、熟練者の感覚を接触する物体に合わせて身につけることができる。
【0016】
また、本第六の発明の感覚フィードバック装置は、第一から第五いずれかの発明に対して、圧力センサは2以上であり、圧力刺激強度情報は、2以上の圧力値と電気による刺激強度との対応を示す情報であり、圧力値取得部は、第一人の一の箇所と物体とが接したことにより発生する2以上の圧力センサから2以上の圧力値を取得し、刺激強度取得部は、圧力値取得部が取得した2以上の圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する感覚フィードバック装置である。
【0017】
かかる構成により、精度高く運動感覚麻痺の改善を行うことができる、または、精度高く熟練者の感覚を身につけることができる。
【0018】
また、本第七の発明の感覚フィードバック装置は、第一の発明に対して、圧力センサを2以上具備し、当該2以上の圧力センサは、第一の人の2以上の箇所、または第一の人が接する物体の2以上の箇所に配置され、パッドを2以上具備し、当該2以上のパッドは、第二の人の感覚障害の生じていない2以上の箇所に貼付され、圧力値取得部は、2以上の各圧力センサから、第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得し、刺激強度取得部は、圧力値取得部が取得した2以上の各圧力値から、圧力刺激強度情報を用いて、2以上の刺激強度を取得し、電気刺激発生部は、2以上の各刺激強度に対応する2以上の各電気刺激を2以上の各パッドに発生させる感覚フィードバック装置である。
【0019】
かかる構成により、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。
【0020】
また、本第八の発明の感覚フィードバック装置は、第六または第七の発明に対して、2以上の圧力センサのうちの2つの圧力センサの各々は、第一の人の感覚障害が生じている母指および示指に貼付される感覚フィードバック装置である。
【0021】
かかる構成により、運動感覚麻痺の改善を行うことができる。
【0022】
また、本第九の発明の感覚フィードバック装置は、第一から第八いずれかの発明に対して、圧力値取得部が取得した1以上の圧力値、または刺激強度取得部が取得した1以上の刺激強度を出力する出力部をさらに具備する感覚フィードバック装置である。
【0023】
かかる構成により、訓練中の状況が把握できる。
【0024】
また、本第十の発明の感覚フィードバック装置は、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、感覚障害の生じた箇所、または感覚障害の生じた箇所と接する物体の箇所に配置される圧力センサと、感覚障害の生じていない箇所に貼付されるパッドと、圧力センサから、感覚障害の生じた箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、圧力値取得部が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、刺激強度に対応する電気刺激をパッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置である。
【0025】
かかる構成により、運動感覚麻痺の改善を行うことができる。
【発明の効果】
【0026】
本発明による感覚フィードバック装置によれば、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。
【図面の簡単な説明】
【0027】
【図1】実施の形態1における感覚フィードバック装置のブロック図
【図2】同感覚フィードバック装置の概念図
【図3】同感覚フィードバック装置の概念図
【図4】同圧力値と刺激強度との対応表を示す図
【図5】同被験者が健常な腕で物体を握った際の圧力値を示す図
【図6】同圧力値を変換して取得された刺激強度を示す図
【図7】同被験者が麻痺のある腕で物体を握った際の圧力値を示す図
【図8】同圧力値を変換して取得された刺激強度を示す図
【図9】同簡易上肢機能検査を説明する図
【図10】同簡易上肢機能検査の結果を示す図
【図11】同被験者の機能評価の結果を示す図
【図12】同訓練前の麻痺側と非麻痺側の指先に貼付された圧力センサの電圧値を測定した結果を示す図
【図13】同被験者に貼付された圧力センサ、パッドを示す図
【図14】同トレーニングの1日目の結果を示す図
【図15】同トレーニングの63日目の結果を示す図
【図16】同St値の出力結果を示す図
【図17】実施の形態2における感覚フィードバック装置のブロック図
【図18】同評価方法を示す図
【図19】同コントロールにおける60分のトレーニング後のAPBの筋電位を示すグラフ
【図20】同コントロールにおける示指・母指に貼付された圧力センサの電圧値を示すグラフ
【図21】同介入3回目60分のトレーニング後のAPBの筋電位を示すグラフ
【図22】同介入3回目60分のトレーニング後の示指・母指に貼付された圧力センサの電圧値を示すグラフ
【図23】同非麻痺側のAPBの筋電位を示すグラフ
【図24】同出力部が出力したSt値のグラフ
【図25】同BBTを説明する図
【図26】同BBTの実験結果を示す図
【図27】実施の形態におけるコンピュータシステムの概観図
【図28】同コンピュータシステムのブロック図
【発明を実施するための形態】
【0028】
以下、感覚フィードバック装置等の実施形態について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
【0029】
(実施の形態1)
本実施の形態において、第一の人が物体に接した場合の圧力を、電気刺激に変えて、第二の人の感覚のある箇所に伝える感覚フィードバック装置について説明する。なお、第一の人と第二の人とは同一人でも良い。
【0030】
図1は、本実施の形態における感覚フィードバック装置1のブロック図である。感覚フィードバック装置1は、圧力センサ11、パッド12、受付部13、圧力値取得部14、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18を具備する。
【0031】
圧力センサ11は、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される。圧力センサ11は、感覚障害の生じた箇所、または感覚障害の生じた箇所と接する物体の箇所に配置されることは好適である。かかる場合、第一の人は、感覚障害のある人である。なお、一の箇所とは、少なくとも一の箇所、の意味である。つまり、圧力センサ11は、2以上の箇所に配置されても良い。圧力センサ11は、圧力を検知できれば良く、静電容量の変化を用いるもの、ひずみゲージを用いるもの等、その検知方法は問わない。
【0032】
パッド12は、第二の人の感覚障害の生じていない箇所に貼付される。第二の人は、第一の人と同じでも良い。なお、第一の人と第二の人とが同一人で、圧力センサ11が感覚障害の生じた箇所に配置され、パッド12が感覚障害の生じていない箇所に貼付される場合、感覚フィードバック装置1は、麻痺した箇所の訓練のための装置として用いられる。また、例えば、第一の人と第二の人とが異なり、第一の人が熟練者であり、第二の人が訓練者である場合、感覚フィードバック装置1は、訓練者が、熟練者の物体を握る等の感覚を覚えるための訓練装置として用いられる。パッド12は、電気信号を人に伝えるものである。パッド12は、例えば、低周波治療器に用いられるパッドと同一で良い。パッド12は、通常、人体の所望の各部に貼り付けることができるように、柔軟性を有している。そして、パッド12は、例えば、内部に設けられる導電層と、表面側に設けられる導電性を有する粘着層と、導電層に電気的に接続される電極ホックと、導電層における電極ホックが設けられている部分以外の裏面を覆う保護層とを備えている。なお、粘着層は、例えば、ゲル状の材料によって構成されている。また、人に貼付されるパッドは2以上でも良い。
【0033】
受付部13は、ユーザを識別するユーザ識別子や、物体を識別する物体識別子などを受け付ける。ここで、受け付けとは、キーボードやマウス、タッチパネルなどの入力デバイスから入力された情報の受け付け、有線もしくは無線の通信回線を介して送信された情報の受信、光ディスクや磁気ディスク、半導体メモリなどの記録媒体から読み出された情報の受け付けなどを含む概念である。ユーザ識別子等の入力手段は、キーボードやマウスやメニュー画面によるもの等、何でも良い。受付部13は、キーボード等の入力手段のデバイスドライバーや、メニュー画面の制御ソフトウェア等で実現され得る。
【0034】
圧力値取得部14は、圧力センサ11から、第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する。圧力値取得部14は、圧力センサ11から、感覚障害の生じた箇所と物体とが接したことにより発生する圧力値を取得することは好適である。また、圧力値取得部14は、第一人の一の箇所と物体とが接したことにより発生する2以上の圧力センサ11から2以上の圧力値を取得しても良い。なお、圧力値取得部14は、例えば、圧力センサ11からの信号をAD変換し、圧力値を取得する。また、「人の一の箇所と物体とが接した」とは、通常、人が物体を握ったことである。ただし、「人の一の箇所と物体とが接した」とは、人が物体を押したこと、人が物体にあたったこと等でも良い。
【0035】
圧力刺激強度情報格納部15は、圧力刺激強度情報を格納し得る。圧力刺激強度情報とは、圧力値と電気による刺激強度との対応を示す情報である。圧力刺激強度情報は、例えば、圧力値と刺激強度との対応表である。また、圧力刺激強度情報は、例えば、圧力値をパラメータとし、刺激強度を出力する関数である。また、圧力刺激強度情報は、例えば、圧力値の軸とパラメータの軸とを有するグラフなどである。圧力刺激強度情報格納部15は、ユーザ識別子に対応付けて2以上の圧力刺激強度情報を格納していても良い。かかる場合、ユーザに応じて、同じ圧力値でも、出力する刺激強度が異なり得る。また、圧力刺激強度情報格納部15は、物体を識別する物体識別子に対応付けて2以上の圧力刺激強度情報を格納していても良い。かかる場合、人が接する物体に応じて、同じ圧力値でも、出力する刺激強度が異なり得る。
【0036】
圧力刺激強度情報格納部15は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。圧力刺激強度情報格納部15に圧力刺激強度情報が記憶される過程は問わない。例えば、記録媒体を介して圧力刺激強度情報が圧力刺激強度情報格納部15で記憶されるようになってもよく、通信回線等を介して送信された圧力刺激強度情報が圧力刺激強度情報格納部15で記憶されるようになってもよく、あるいは、入力デバイスを介して入力された圧力刺激強度情報が圧力刺激強度情報格納部15で記憶されるようになってもよい。
【0037】
刺激強度取得部16は、圧力値取得部14が取得した圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する。また、刺激強度取得部16は、圧力値取得部14が取得した圧力値から、受付部13が受け付けたユーザ識別子に対応付けられている圧力刺激強度情報を用いて、刺激強度を取得しても良い。また、刺激強度取得部16は、圧力値取得部14が取得した圧力値から、受付部13が受け付けた物体識別子に対応付けられている圧力刺激強度情報を用いて、刺激強度を取得しても良い。さらに、刺激強度取得部16は、圧力値取得部14が取得した2以上の圧力値から、圧力刺激強度情報を用いて、刺激強度を取得する。
【0038】
刺激強度取得部16は、通常、MPUやメモリ等から実現され得る。刺激強度取得部16の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0039】
電気刺激発生部17は、刺激強度に対応する電気刺激をパッド12に発生させる。電気刺激発生部17は、例えば、刺激強度に比例した電流を発生する。ただし、発生する電流は、刺激強度に比例する必要はなく、刺激強度をパラメータとする関数により、発生する電流を決定しても良い。
【0040】
出力部18は、圧力値取得部14が取得した圧力値、または刺激強度取得部16が取得した刺激強度を出力する。出力部18は、通常、視覚的に圧力値または刺激強度を出力する。また、出力部18は、圧力の不安定さを示す指標を出力しても良い。圧力の不安定さを示す指標は、例えば、St値である。St値は、以下の数式1で示される。数式1において、v(n)は、数式2で示される。なお、圧力の不安定さを示す指標とは、圧力の安定さを示す指標と考えても良い。
【数1】
【数2】
【0041】
数式1、2において、pは圧力センサの電圧値、rはサンプリング周波数、v(n)はn番目のサンプルにおける変化率、Nは総サンプルデータ数である。
【0042】
なお、出力部18がSt値を出力する場合、出力部18は、上記の数式1、数式2の情報を保持しており、かかる数式にパラメータを代入し、St値を算出し、出力する。
【0043】
ここで、出力とは、通常、ディスプレイへの表示、プロジェクターを用いた投影であるが、プリンタへの印字、音出力、外部の装置への送信、記録媒体への蓄積、他の処理装置や他のプログラムなどへの処理結果の引渡しなどを含む概念である。
【0044】
出力部18は、ディスプレイ等の出力デバイスを含むと考えても含まないと考えても良い。出力部18は、出力デバイスのドライバーソフトまたは、出力デバイスのドライバーソフトと出力デバイス等で実現され得る。
【0045】
以下、本実施の形態における感覚フィードバック装置1の具体的な利用例について説明する。
【0046】
(具体例1)
具体例1において、感覚フィードバック装置1の概念図は、図2である。具体例1において、ユーザは、例えば、左手に麻痺を有する人である。また、ユーザの右手は、麻痺を有しない。そして、圧力センサ11は、麻痺のある左手の人差し指の指先に配置されている。また、パッド12は、麻痺のない右手の腕の一の箇所に配置されている。
【0047】
また、圧力刺激強度情報格納部15は、「刺激強度=f(圧力値)」で示される演算式の情報が格納されている。関数「f」は、圧力値に比例した刺激強度を出力する関数である、とする。
【0048】
かかる状況において、左手の運動感覚麻痺の改善のために、ユーザは、左手で物体(例えば、ペットボトル)を掴む、とする。
【0049】
次に、圧力値取得部14は、圧力センサ11から、物体を掴んだ際の圧力値(X1)を取得する。次に、刺激強度取得部16は、「Y=f(X1)」を実行し、刺激強度「Y1」を得る。
【0050】
次に、電気刺激発生部17は、刺激強度「Y1」に対応する電気刺激をパッド12に発生させる。
【0051】
そして、上記の圧力値取得部14の処理、刺激強度取得部16の処理、および電気刺激発生部17の処理が繰り返される。
【0052】
以上により、ユーザは、麻痺のある左手で物体を掴んだ際の力の強さ(圧力値)を、麻痺のない右手の腕の一の箇所で感じることができる。このような訓練を行うことにより、ユーザは、適切な力で物体を掴むことができるようになる。つまり、このような訓練を行うことにより、運動感覚麻痺の改善を行うことができる。
【0053】
(具体例2)
具体例2において、感覚フィードバック装置1の概念図は、図3である。具体例2において、ユーザは、例えば、左手に麻痺を有する人である。また、ユーザの右手は、麻痺を有しない。そして、圧力センサ11は、ユーザが掴む物体(例えば、鉛筆、茶碗、ペットボトル、筆、竹刀など)の一の箇所であり、ユーザが掴む箇所に配置されている。また、パッド12は、麻痺のない右手の腕の一の箇所に配置されている。
【0054】
また、圧力刺激強度情報格納部15は、例えば、図4に示す圧力値と刺激強度との対応表を保持している、とする。
【0055】
かかる状況において、左手の運動感覚麻痺の改善のために、ユーザは、左手で物体の圧力センサ11を含む箇所を掴む、とする。
【0056】
次に、圧力値取得部14は、圧力センサ11から、物体を掴んだ際の圧力値(X2)を取得する。次に、刺激強度取得部16は、圧力値(X2)に対応する刺激強度「Y2」を、圧力値と刺激強度との対応表から読み出し、刺激強度「Y2」を得る、とする。
【0057】
次に、電気刺激発生部17は、刺激強度「Y2」に対応する電気刺激をパッド12に発生させる。
【0058】
そして、上記の圧力値取得部14の処理、刺激強度取得部16の処理、および電気刺激発生部17の処理が繰り返される。
【0059】
以上により、ユーザは、麻痺のある左手で物体を掴んだ際の力の強さ(圧力値)を、麻痺のない右手の腕の一の箇所で感じることができる。このような訓練を行うことにより、ユーザは、適切な力で物体を掴むことができるようになる。つまり、このような訓練を行うことにより、運動感覚麻痺の改善を行うことができる。
【0060】
(具体例3)
具体例3は、熟練者が物体に接触した際の圧力値から取得される電気刺激を、訓練者の麻痺のない体の一の箇所に与えることにより、訓練者に熟練者の感覚を身につけることができる感覚フィードバック装置1である。
【0061】
具体例3において、第一の人は、例えば、習字の熟練者である、とする。また、第二の人は、習字の訓練者である、とする。そして、第一の人の1以上の指、または筆の1以上の箇所に圧力センサ11が配置されている、とする。
【0062】
また、第二の人の腕等に、1以上のパッド12が貼付されている、とする。
【0063】
かかる状況において、熟練者は、筆を握って、筆で字を書いた、とする。
【0064】
次に、圧力値取得部14は、圧力センサ11から、熟練者が筆を掴んでいる間、圧力値(X3)を取得する。次に、刺激強度取得部16は、例えば、「Y=f(X3)」を実行し、刺激強度「Y3」を得る。
【0065】
次に、電気刺激発生部17は、刺激強度「Y3」に対応する電気刺激をパッド12に発生させる。そして、上記の圧力値取得部14の処理、刺激強度取得部16の処理、および電気刺激発生部17の処理が繰り返される。
【0066】
以上の処理により、訓練者は、熟練者がどの程度の強さで、筆を握りながら字を書いているかを体感できる。その結果、熟練者の筆使いを、体で学ぶことができる。
(実験結果1)
【0067】
以下、感覚フィードバック装置1の第一の実験結果について説明する。図5は、ある被験者が健常な腕(ここでは、右腕)で物体を握った際の、指と物体との間の圧力センサの圧力値である。図5の横軸は時間(秒)であり、縦軸は圧力に対応する数値である。
【0068】
図6は、図5の圧力値を変換して取得された刺激強度である。図6の横軸は時間(秒)であり、縦軸は電流(ミリアンペア)である。
【0069】
図7は、ある被験者が麻痺のある腕(ここでは、左腕)で物体を握った際の、指と物体との間の圧力センサの圧力値である。図7の横軸は時間(秒)であり、縦軸は圧力に対応する数値である。
【0070】
図8は、図7の圧力値を変換して取得された刺激強度である。図8の横軸は時間(秒)であり、縦軸は電流(ミリアンペア)である。
【0071】
図5から図8において、感覚の麻痺していない方の腕で物体を掴んだ場合は、安定した力で物体を掴んでいるが、麻痺している方の腕で物体を掴んだ場合は、力が比較的強く、変動が激しく、安定しない力で物体を掴んでいることが分かる。
【0072】
この被験者に、感覚フィードバック装置1を用いて、訓練を行ってもらった。そして、訓練を行う前、および行った後に、簡易上肢機能検査を行った。簡易上肢機能検査とは、図9(a)(b)に示すように、ボールや箱等の物体を、一の場所から他の場所に移す場合の時間を測定して、上肢の機能をチェックする検査である。
【0073】
簡易上肢機能検査の結果を図10に示す。図10において、訓練前と訓練後で、麻痺の無い右手の作業時間について、あまり変化がないが、麻痺のある左手の作業時間について、検査2を除いて、大幅に改善されていることが分かる。
(実験結果2)
【0074】
以下、感覚フィードバック装置1の第二の実験結果について説明する。本実験において、重度の感覚麻痺を有する脳卒中患者に対して、感覚フィードバック装置1を用いた訓練を実施した。被験者は、66歳女性で、27か月前に右視床出血を発症し、左片麻痺を有する。また、被験者は、麻痺側の手指を動かすことは可能であるのに、日常生活において麻痺手を使用できないことが不満である。かかる被験者の機能評価の結果を、図11に示す。図11において、Fugl-Meyerによる運動機能の評価結果(点数)は、60/66であり、物を把持するなどのマニピュレーション能力を図る簡易上肢機能検査では、7/100(点数)であった。また、図11において、感覚機能はなし、である。かかる図11に示す機能評価の結果から、日常生活において、被験者が麻痺側の手を使用できない要因は、感覚機能の欠如であると考えられる。
【0075】
感覚フィードバック装置1を用いた訓練前の状態を把握するため、被験者は缶(重さ370g)を持ち上げ10秒保持するタスクを実施した。かかるタスクの実施中に、麻痺側(左側)と、非麻痺側(右側)の指先に貼付された圧力センサの電圧値を測定した。圧力センサの電圧値と指先圧力は比例関係があり、圧力センサの電圧値はどの程度安定した指先圧力で物体を把持しているかを示す。かかる測定した結果を図12に示す。図12によれば、非麻痺側は、タスク中、一定の指先圧力を維持できたが、麻痺側は、タスク中、一定の指先圧力を維持できなかったことが分かる。
【0076】
そして、この被験者は、感覚フィードバック装置1を用いて、以下のトレーニングを行った。図13に示すように、被験者の右手(非麻痺側)の母指(1301)、および左手(麻痺側)の母指(1302)に圧力センサ11を配置した。そして、電気刺激用の電極(パッド12)を、感覚障害の生じていない背中の2箇所(1303、1304)に貼付した。
【0077】
また、被験者は、非麻痺側で物体を把持し、その刺激強度などを学習する。その後、被験者は、麻痺側で非麻痺側と同じ物体を同様の刺激強度で物体を把持できるようトレーニングを行った。そして、トレーニングの頻度は、日に1時間、1ヶ月目は5日/週、2ヶ月目は3日/週であった。
【0078】
本実験において、缶把持タスク中の圧力センサの電圧値を計測し、どの程度安定した指先圧力で物体を把持できているかを検証した。
【0079】
上記のトレーニングの結果は、以下である。つまり、トレーニングの1日目の結果を図14に示す。図14(a)は、トレーニング前の圧力センサの電圧値を示すグラフであり、圧力センサの電圧値は不安定であることが分かる。また、図14(b)は、1時間のトレーニング後の圧力センサの電圧値を示すグラフであり、1日目では、トレーニング後も、圧力センサの電圧値は不安定なままであることが分かる。つまり、1日目では、物体を把持している間の指先圧力の安定度合いはトレーニング前後で変化がないことが分かる。
【0080】
また、トレーニングの63日目の結果を図15に示す。図15(a)は、トレーニング前の圧力センサの電圧値を示すグラフであり、図15(b)は、1時間のトレーニング後の圧力センサの電圧値を示すグラフである。図15において、電圧値の不安定さは1日目と比較して大幅に改善されていることが分かる。
【0081】
また、本実験において、出力部18は、St値を出力した。その結果を、図16に示す。図16において、線1601は、非麻痺側の平均値であり、グレーゾーンは「非麻痺側の平均値+−2×標準偏差」である。図16から、トレーニングが進むにつれSt値は減少し、被験者の圧力の安定性は向上したことが分かる。また、図16から、53日目、63日目におけるSt値は、非麻痺側で観測されるSt値と同程度となったことが分かる。
【0082】
以上、本実験により、トレーニングが進むにつれ安定性は徐々に向上した。また、63日目において、被験者は缶把持中に安定した指先圧力を維持することが可能であり、その安定度合いは非麻痺側と同程度となった。また、63日目において、被験者は、感覚フィードバック装置1を使用していない場合でも、安定した指先圧力を維持することが可能であった。
【0083】
以上、本実施の形態によれば、運動感覚麻痺の改善を行うことができる、または、本実施の形態によれば、熟練者の感覚を、訓練者に身につけさせることができる。
【0084】
また、本実施の形態によれば、感覚フィードバック装置1は、把持対象物または感覚障害の生じた実際の手指の先をはじめとした上肢下肢に圧力センサを装着することにより、圧力値に応じた電気刺激を感覚の残存する部位にフィードバックするものである。感覚フィードバック装置1の実際の用途としては、健常手で把持した圧力に応じた電気刺激と同等の電気刺激を生じさせるように麻痺手で把持する、などの訓練に用いる事ができる。この訓練により、運動感覚麻痺の改善が期待できる。また、感覚フィードバック装置1の対象は脳卒中片麻痺だけではなく、中枢性・末梢性の神経障害などの重度の障害患者にも対応可能である。
【0085】
なお、本実施の形態における受付部13、圧力値取得部14、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18等の処理は、ソフトウェアで実現しても良い。そして、このソフトウェアをソフトウェアダウンロード等により配布しても良い。また、このソフトウェアをCD−ROMなどの記録媒体に記録して流布しても良い。なお、このことは、本明細書における他の実施の形態においても該当する。なお、本実施の形態における感覚フィードバック装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、記録媒体に、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、コンピュータを、第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサから、前記第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、前記圧力値取得部が取得した圧力値から、前記圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、前記刺激強度に対応する電気刺激を、第二の人の感覚障害の生じていない箇所に貼付されるパッドに発生させる電気刺激発生部として機能させるためのプログラム、である。
【0086】
(実施の形態2)
本実施の形態において、第一の人が物体に接した場合の2以上の圧力(ここでは、2つの圧力)を、電気刺激に変えて、第二の人の感覚のある箇所に伝える感覚フィードバック装置について説明する。なお、第一の人と第二の人とは同一人でも良い。
【0087】
本実施の形態における感覚フィードバック装置2のブロック図を、図17に示す。感覚フィードバック装置2は、圧力センサ11、パッド12、受付部13、圧力値取得部14、生体情報取得部21、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18を具備する。
【0088】
生体情報取得部21は、生体情報を取得する。生体情報は、例えば、筋電位である。また、生体情報は、例えば、発汗量などでも良い。生体情報取得部21は、筋電計である。また、生体情報取得部21は、発汗量測定器などでも良い。
【0089】
また、感覚フィードバック装置2の圧力センサ11は、2以上である。そして、2以上の圧力センサ11は、第一の人の2以上の箇所、または第一の人が接する物体の2以上の箇所に配置される。
【0090】
また、感覚フィードバック装置2のパッド12も、2以上である。そして、2以上のパッドは、第二の人の感覚障害の生じていない2以上の箇所に貼付される。第二の人は、第一の人と同じでも良い。なお、本実施の形態では、第一の人と第二の人とが同一人で、圧力センサ11が感覚障害の生じた2箇所に配置され、2つのパッド12が感覚障害の生じていない2箇所に貼付される場合について説明する。そして、本実施の形態において、感覚フィードバック装置2は、麻痺した箇所の訓練のための装置として用いられる。ただし、実施の形態1で説明したように、感覚フィードバック装置2も、訓練者が、熟練者の物体を握る等の感覚を覚えるための訓練装置として用いられても良い。
【0091】
また、感覚フィードバック装置2の圧力値取得部14は、2以上の各圧力センサ11から、第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得する。
【0092】
また、感覚フィードバック装置2の刺激強度取得部16は、圧力値取得部14が取得した2以上の各圧力値から、圧力刺激強度情報を用いて、2以上の刺激強度を取得する。
【0093】
また、感覚フィードバック装置2の電気刺激発生部17は、2以上の各刺激強度に対応する2以上の各電気刺激を2以上の各パッド12に発生させる。
【0094】
さらに、感覚フィードバック装置2の出力部18は、生体情報取得部21が取得した生体情報や、圧力値取得部14が取得した圧力値を出力しても良い。
(実験結果3)
【0095】
実施の形態1で説明した実験結果2の被験者にとって、小さい物体をつまむことは難しかった。この被験者が小さい物体をつまもうとする際、特に、示指が被験者の意図に反して動いてしまう、という状況であった。また、被験者にとって、指先つまみ(tip pinch)が難しいため、つまみ方が横つまみ(lateral pinch)になってしまっていた。
【0096】
そこで、本第三の実験において、指先つまみを実現するため、被験者の麻痺側の母指と示指との両方の指先に、圧力センサ11を貼付し、電気刺激を別々にフィードバックする感覚フィードバック装置2を用いた。
【0097】
被験者は、図18に示す流れで、種々の物体を母指・示指で把持するトレーニングを行い、マニピュレーション機能を評価(第一、第二の評価)した。つまり、刺激なしで、トレーニング前に評価した(181)。次に、刺激ありで、30分のトレーニング後に評価した(182)。次に、刺激ありで、さらに30分(全部で60分)のトレーニング後に評価した(183)。そして、刺激なしで、60分のトレーニング後に評価した(184)。183と184の間には、トレーニングは行わなかった。なお、上記の図18の流れでのトレーニングと評価は計3回(トレーニング開始日を1日目とすると、10日後、12日後、15日後に実施)行った。これをそれぞれ介入1回目、2回目、3回目と呼称する。また、感覚フィードバック装置を用いたトレーニングの有効性を検証するための比較実験として、トレーニング開始日において、すべて、刺激なしで、トレーニング前に評価し、30分のトレーニング後に評価し、さらに30分(全部で60分)のトレーニング後に評価した。これをコントロールと呼称する。
【0098】
以下に、第一の評価と、第二の評価の詳細を示す。
(第一の評価)
【0099】
第一の評価は、ブロックつまみタスクである。ここでのブロックつまみタスクは、被験者が、母指と示指とのみを用いて、ブロックをつまんで持ち上げるタスクである。本タスクで用いたブロックの大きさは、「2.5cm×2.5cm×2.5cm」であった。そして、本タスクにおける計測項目は、(1)短母指外転筋(APB)の筋電位、(2)母指・示指に貼付した圧力センサの電圧値、(3)対象物体であるブロックに貼付した圧力センサの電圧値であった。つまり、本タスクにおいて、圧力センサ11は、被験者の母指、被験者の示指、ブロックに配置された。また、生体情報取得部21は、短母指外転筋(APB)の筋電位を取得するものであった。
【0100】
図19は、コントロールにおける、60分のトレーニング後のAPBの筋電位(%MVC)を示すグラフである。図19において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、筋電位(%MVC)である。
【0101】
また、図20は、コントロールにおける、60分のトレーニング後の示指、および母指に貼付された圧力センサ11の電圧値[V]を示すグラフである。図20において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、圧力センサ11の電圧値[V]である。
【0102】
また、図21は、介入3回目における60分のトレーニング後のAPBの筋電位(%MVC)を示すグラフである。図21において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、筋電位(%MVC)である。
【0103】
また、図22は、介入3回目における60分のトレーニング後の示指、および母指に貼付された圧力センサ11の電圧値[V]を示すグラフである。図22において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、圧力センサ11の電圧値[V]である。
【0104】
さらに、図23は、非麻痺側のAPBの筋電位(%MVC)を示すグラフである。図23において、横軸は、動作開始を(0)とし、動作終了を(1)としている。また、縦軸は、筋電位(%MVC)である。
【0105】
図19から図23の実験結果によれば、介入3回目の60分のトレーニング後において、APBの筋電位パターン(図21)は非麻痺側の筋電位パターン(図23)と類似していることが分かる。このことが、少なくとも3回目のトレーニング後には、麻痺側の母指および示指の指先が、ブロックの指先つまみを実現できたことを示している。
【0106】
また、圧力値取得部14は、ブロックに貼付した圧力センサ11から圧力値を取得する。そして、出力部18は、圧力値取得部14が取得した圧力値を用いて、St値を算出し、出力した、とする。そして、出力部18が出力したSt値のグラフを、図24に示す。図24において、(a)は、示指の非麻痺側のSt値、コントロール(横軸の1)、介入1回目(横軸の10)、介入2回目(横軸の12)、介入3回目(横軸の15)のSt値を示している。また、St値は、トレーニング前、30分のトレーニング後、60分のトレーニング後の3回の評価結果を有する。
【0107】
図24において、介入2回目、3回目におけるSt値はコントロールにおけるSt値と比較して減少していることが分かる。しかし、麻痺側のSt値は非麻痺側と比較すると高いことが分かる。つまり、非麻痺側と比較すると、麻痺側の指先圧力が不安定であることが分かる。
【0108】
第一の評価において、感覚フィードバック装置2を使用してブロックをつまむと、APBの筋電位パターンが変化(非麻痺側の筋電位パターンと類似)した。また、示指の指先がブロックと接触(感覚フィードバック装置2を使用しない場合は接触しない)した。そのため、感覚フィードバック装置2がブロックつまみ動作の間の手の形状を矯正し、tip pinchが実現された。
(第二の評価)
【0109】
第二の評価は、Box and Block Test (BBT)と呼ばれているトレーニングである。BBTとは、巧緻性のテストであり、臨床検査で使用されているテストである。BBTにおいて、図25に示すように、被験者は、ブロックを一方の空間からパーティションを越えて、他方の空間に移動させるタスクを実施する。そして、被験者が1分間で移動できたブロック数がカウントされる。
【0110】
そして、BBTの実験結果を図26に示す。図26において、コントロール(横軸のDay1)、介入1回目(横軸のDay10)、介入2回目(横軸のDay12)、介入3回目(横軸のDay15)のスコアをグラフ化している。なお、スコアとは、移動できたブロック数である。
【0111】
図26において、介入1回目では、30分のトレーニング後のスコアがトレーニング前(刺激なし)のスコアよりも低かった。10日目は介入初日のため、被験者は、感覚フィードバック装置2に慣れておらず、スコアが減少したと考えられる。60分のトレーニング後の評価(刺激あり)ではトレーニング前よりスコアが上昇した。また、介入2回目、および3回目目では、刺激ありの場合のスコアが刺激なしのスコアより高い、また60分のトレーニング後のスコア(刺激あり)が30分のトレーニング後のスコア(刺激あり)より高い、60分のトレーニング後のスコア(刺激なし)がトレーニング前のスコア(刺激なし)より高いという結果が得られた。
【0112】
第二の評価において、感覚フィードバック装置2を使用した場合の方がBBTのスコアは高かった。また、被験者は、60分のトレーニング後に刺激をオンにしたまま(感覚フィードバック装置2を使用して)BBTを実施した際に最高スコアを記録した。このことは、感覚フィードバック装置2を用いたトレーニングは感覚麻痺を有する脳卒中患者の巧緻性(manipulation capability)の向上に寄与する可能性が十分あることを示す。
【0113】
以上、本実施の形態によれば、運動感覚麻痺の改善を行うことができる、または、本実施の形態によれば、熟練者の感覚を、訓練者に身につけさせることができる。
【0114】
また、本実施の形態によれば、特に、感覚麻痺を有する脳卒中患者のリハビリテーションに寄与する可能性が十分ある。
【0115】
なお、本実施の形態における受付部13、圧力値取得部14、圧力刺激強度情報格納部15、刺激強度取得部16、電気刺激発生部17、および出力部18等の処理は、ソフトウェアで実現しても良い。また、本実施の形態における感覚フィードバック装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、記録媒体に、圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、コンピュータを、1以上の各圧力センサから、第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得部と、前記圧力値取得部が取得した1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得部と、前記1以上の刺激強度に対応する1以上の電気刺激を1以上の各パッドに発生させる電気刺激発生部として機能させるためのプログラム、である。
【0116】
また、上記プログラムにおいて、前記圧力値取得部は、2以上の各圧力センサから、前記第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得し、前記刺激強度取得部は、前記圧力値取得部が取得した2以上の各圧力値から、前記圧力刺激強度情報を用いて、2以上の刺激強度を取得し、前記電気刺激発生部は、前記2以上の各刺激強度に対応する2以上の各電気刺激を前記2以上の各パッドに発生させるものとして、コンピュータを機能させることは好適である。
【0117】
また、図27は、本明細書で述べたプログラムを実行して、上述した実施の形態の感覚フィードバック装置等を実現するコンピュータの外観を示す。上述の実施の形態は、コンピュータハードウェア及びその上で実行されるコンピュータプログラムで実現され得る。図27は、このコンピュータシステム340の概観図であり、図28は、コンピュータシステム340の内部構成を示す図である。
【0118】
図27において、コンピュータシステム340は、FDドライブ3411、CD−ROMドライブ3412を含むコンピュータ341と、キーボード342と、マウス343と、モニタ344とを含む。
【0119】
図28において、コンピュータ341は、FDドライブ3411、CD−ROMドライブ3412に加えて、MPU3413と、CD−ROMドライブ3412及びFDドライブ3411に接続されたバス3414と、ブートアッププログラム等のプログラムを記憶するためのROM3415とに接続され、アプリケーションプログラムの命令を一時的に記憶するとともに一時記憶空間を提供するためのRAM3416と、アプリケーションプログラム、システムプログラム、及びデータを記憶するためのハードディスク3417とを含む。ここでは、図示しないが、コンピュータ341は、さらに、LANへの接続を提供するネットワークカードを含んでも良い。
【0120】
コンピュータシステム340に、上述した実施の形態の感覚フィードバック装置等の機能を実行させるプログラムは、CD−ROM3501、またはFD3502に記憶されて、CD−ROMドライブ3412またはFDドライブ3411に挿入され、さらにハードディスク3417に転送されても良い。これに代えて、プログラムは、図示しないネットワークを介してコンピュータ341に送信され、ハードディスク3417に記憶されても良い。プログラムは実行の際にRAM3416にロードされる。プログラムは、CD−ROM3501、FD3502またはネットワークから直接、ロードされても良い。
【0121】
プログラムは、コンピュータ341に、上述した実施の形態の感覚フィードバック装置等の機能を実行させるオペレーティングシステム(OS)、またはサードパーティープログラム等は、必ずしも含まなくても良い。プログラムは、制御された態様で適切な機能(モジュール)を呼び出し、所望の結果が得られるようにする命令の部分のみを含んでいれば良い。コンピュータシステム340がどのように動作するかは周知であり、詳細な説明は省略する。
【0122】
また、上記プログラムを実行するコンピュータは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、あるいは分散処理を行ってもよい。
【0123】
また、上記各実施の形態において、各処理(各機能)は、単一の装置(システム)によって集中処理されることによって実現されてもよく、あるいは、複数の装置によって分散処理されることによって実現されてもよい。
【0124】
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【産業上の利用可能性】
【0125】
以上のように、本発明にかかる感覚フィードバック装置は、運動感覚麻痺の改善を行うことができる、または、熟練者の感覚を身につけることができる。という効果を有し、訓練装置等として有用である。
【符号の説明】
【0126】
1 感覚フィードバック装置
11 圧力センサ
12 パッド
13 受付部
14 圧力値取得部
15 圧力刺激強度情報格納部
16 刺激強度取得部
17 電気刺激発生部
18 出力部
21 生体情報取得部
【特許請求の範囲】
【請求項1】
1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、
第一の人の1以上の箇所、または第一の人が接する物体の1以上の箇所に配置される1以上の圧力センサと、
第二の人の感覚障害の生じていない1以上の箇所に貼付される1以上のパッドと、
前記1以上の各圧力センサから、前記第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得部と、
前記圧力値取得部が取得した1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得部と、
前記1以上の刺激強度に対応する1以上の電気刺激を前記1以上の各パッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置。
【請求項2】
圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、
第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサと、
第二の人の感覚障害の生じていない箇所に貼付されるパッドと、
前記圧力センサから、前記第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、
前記圧力値取得部が取得した圧力値から、前記圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、
前記刺激強度に対応する電気刺激を前記パッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置。
【請求項3】
前記第一の人と前記第二の人とは同一人であり、
前記物体と接する前記第一の人の一の箇所は、感覚障害の生じた箇所である請求項1または請求項2記載の感覚フィードバック装置。
【請求項4】
前記圧力刺激強度情報格納部は、
ユーザを識別するユーザ識別子に対応付けて2以上の圧力刺激強度情報を格納しており、
ユーザ識別子を受け付ける受付部をさらに具備し、
前記刺激強度取得部は、
前記圧力値取得部が取得した1以上の圧力値から、前記受付部が受け付けたユーザ識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する請求項1から請求項3いずれか記載の感覚フィードバック装置。
【請求項5】
前記圧力刺激強度情報格納部は、
物体を識別する物体識別子に対応付けて2以上の圧力刺激強度情報を格納しており、
物体識別子を受け付ける受付部をさらに具備し、
前記刺激強度取得部は、
前記圧力値取得部が取得した1以上の圧力値から、前記受付部が受け付けた物体識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する請求項1から請求項3いずれか記載の感覚フィードバック装置。
【請求項6】
前記圧力センサは2以上であり、
前記圧力刺激強度情報は、
2以上の圧力値と電気による刺激強度との対応を示す情報であり、
前記圧力値取得部は、
前記第一人の一の箇所と物体とが接したことにより発生する前記2以上の圧力センサから2以上の圧力値を取得し、
前記刺激強度取得部は、
前記圧力値取得部が取得した2以上の圧力値から、前記圧力刺激強度情報を用いて、刺激強度を取得する請求項1から請求項5いずれか記載の感覚フィードバック装置。
【請求項7】
前記圧力センサを2以上具備し、当該2以上の圧力センサは、第一の人の2以上の箇所、または第一の人が接する物体の2以上の箇所に配置され、
前記パッドを2以上具備し、当該2以上のパッドは、第二の人の感覚障害の生じていない2以上の箇所に貼付され、
前記圧力値取得部は、
前記2以上の各圧力センサから、前記第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得し、
前記刺激強度取得部は、
前記圧力値取得部が取得した2以上の各圧力値から、前記圧力刺激強度情報を用いて、2以上の刺激強度を取得し、
前記電気刺激発生部は、
前記2以上の各刺激強度に対応する2以上の各電気刺激を前記2以上の各パッドに発生させる請求項1記載の感覚フィードバック装置。
【請求項8】
前記2以上の圧力センサのうちの2つの圧力センサの各々は、
前記第一の人の感覚障害が生じている母指および示指に貼付される請求項6または請求項7記載の感覚フィードバック装置。
【請求項9】
前記圧力値取得部が取得した1以上の圧力値、または刺激強度取得部が取得した1以上の刺激強度を出力する出力部をさらに具備する請求項1から請求項8いずれか記載の感覚フィードバック装置。
【請求項10】
記憶媒体に、
1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、
圧力値取得部、刺激強度取得部、および電気刺激発生部により実現される感覚フィードバック方法であって、
前記圧力値取得部が、第一の人の1以上の箇所、または第一の人が接する物体の1以上の箇所に配置される1以上の圧力センサから、第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得ステップと、
前記刺激強度取得部が、前記圧力値取得ステップで取得された1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得ステップと、
前記電気刺激発生部が、前記1以上の刺激強度に対応する1以上の電気刺激を、第二の人の感覚障害の生じていない1以上の箇所に貼付される1以上の各パッドに発生させる電気刺激発生ステップとを具備する感覚フィードバック方法。
【請求項11】
記憶媒体に、
1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、
圧力値取得部、刺激強度取得部、および電気刺激発生部により実現される感覚フィードバック方法であって、
前記圧力値取得部が、感覚障害の生じた1以上の箇所、または感覚障害の生じた1以上の箇所と接する物体の1以上の箇所に配置された1以上の圧力センサから、前記感覚障害の生じた1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得ステップと、
前記刺激強度取得部が、前記圧力値取得ステップで取得された1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得ステップと、
前記電気刺激発生部が、前記1以上の刺激強度に対応する1以上の電気刺激を、感覚障害の生じていない箇所に貼付された1以上の各パッドに発生させる電気刺激発生ステップとを具備する感覚フィードバック方法。
【請求項1】
1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、
第一の人の1以上の箇所、または第一の人が接する物体の1以上の箇所に配置される1以上の圧力センサと、
第二の人の感覚障害の生じていない1以上の箇所に貼付される1以上のパッドと、
前記1以上の各圧力センサから、前記第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得部と、
前記圧力値取得部が取得した1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得部と、
前記1以上の刺激強度に対応する1以上の電気刺激を前記1以上の各パッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置。
【請求項2】
圧力値と電気による刺激強度との対応を示す情報である圧力刺激強度情報を格納し得る圧力刺激強度情報格納部と、
第一の人の一の箇所、または第一の人が接する物体の一の箇所に配置される圧力センサと、
第二の人の感覚障害の生じていない箇所に貼付されるパッドと、
前記圧力センサから、前記第一人の一の箇所と物体とが接したことにより発生する圧力値を取得する圧力値取得部と、
前記圧力値取得部が取得した圧力値から、前記圧力刺激強度情報を用いて、刺激強度を取得する刺激強度取得部と、
前記刺激強度に対応する電気刺激を前記パッドに発生させる電気刺激発生部とを具備する感覚フィードバック装置。
【請求項3】
前記第一の人と前記第二の人とは同一人であり、
前記物体と接する前記第一の人の一の箇所は、感覚障害の生じた箇所である請求項1または請求項2記載の感覚フィードバック装置。
【請求項4】
前記圧力刺激強度情報格納部は、
ユーザを識別するユーザ識別子に対応付けて2以上の圧力刺激強度情報を格納しており、
ユーザ識別子を受け付ける受付部をさらに具備し、
前記刺激強度取得部は、
前記圧力値取得部が取得した1以上の圧力値から、前記受付部が受け付けたユーザ識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する請求項1から請求項3いずれか記載の感覚フィードバック装置。
【請求項5】
前記圧力刺激強度情報格納部は、
物体を識別する物体識別子に対応付けて2以上の圧力刺激強度情報を格納しており、
物体識別子を受け付ける受付部をさらに具備し、
前記刺激強度取得部は、
前記圧力値取得部が取得した1以上の圧力値から、前記受付部が受け付けた物体識別子に対応付けられている圧力刺激強度情報を用いて、1以上の刺激強度を取得する請求項1から請求項3いずれか記載の感覚フィードバック装置。
【請求項6】
前記圧力センサは2以上であり、
前記圧力刺激強度情報は、
2以上の圧力値と電気による刺激強度との対応を示す情報であり、
前記圧力値取得部は、
前記第一人の一の箇所と物体とが接したことにより発生する前記2以上の圧力センサから2以上の圧力値を取得し、
前記刺激強度取得部は、
前記圧力値取得部が取得した2以上の圧力値から、前記圧力刺激強度情報を用いて、刺激強度を取得する請求項1から請求項5いずれか記載の感覚フィードバック装置。
【請求項7】
前記圧力センサを2以上具備し、当該2以上の圧力センサは、第一の人の2以上の箇所、または第一の人が接する物体の2以上の箇所に配置され、
前記パッドを2以上具備し、当該2以上のパッドは、第二の人の感覚障害の生じていない2以上の箇所に貼付され、
前記圧力値取得部は、
前記2以上の各圧力センサから、前記第一人の2以上の箇所と物体とが接したことにより発生する2以上の圧力値を取得し、
前記刺激強度取得部は、
前記圧力値取得部が取得した2以上の各圧力値から、前記圧力刺激強度情報を用いて、2以上の刺激強度を取得し、
前記電気刺激発生部は、
前記2以上の各刺激強度に対応する2以上の各電気刺激を前記2以上の各パッドに発生させる請求項1記載の感覚フィードバック装置。
【請求項8】
前記2以上の圧力センサのうちの2つの圧力センサの各々は、
前記第一の人の感覚障害が生じている母指および示指に貼付される請求項6または請求項7記載の感覚フィードバック装置。
【請求項9】
前記圧力値取得部が取得した1以上の圧力値、または刺激強度取得部が取得した1以上の刺激強度を出力する出力部をさらに具備する請求項1から請求項8いずれか記載の感覚フィードバック装置。
【請求項10】
記憶媒体に、
1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、
圧力値取得部、刺激強度取得部、および電気刺激発生部により実現される感覚フィードバック方法であって、
前記圧力値取得部が、第一の人の1以上の箇所、または第一の人が接する物体の1以上の箇所に配置される1以上の圧力センサから、第一人の1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得ステップと、
前記刺激強度取得部が、前記圧力値取得ステップで取得された1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得ステップと、
前記電気刺激発生部が、前記1以上の刺激強度に対応する1以上の電気刺激を、第二の人の感覚障害の生じていない1以上の箇所に貼付される1以上の各パッドに発生させる電気刺激発生ステップとを具備する感覚フィードバック方法。
【請求項11】
記憶媒体に、
1以上の圧力値と電気による1以上の刺激強度との対応を示す情報である圧力刺激強度情報を格納しており、
圧力値取得部、刺激強度取得部、および電気刺激発生部により実現される感覚フィードバック方法であって、
前記圧力値取得部が、感覚障害の生じた1以上の箇所、または感覚障害の生じた1以上の箇所と接する物体の1以上の箇所に配置された1以上の圧力センサから、前記感覚障害の生じた1以上の箇所と物体とが接したことにより発生する1以上の圧力値を取得する圧力値取得ステップと、
前記刺激強度取得部が、前記圧力値取得ステップで取得された1以上の圧力値から、前記圧力刺激強度情報を用いて、1以上の刺激強度を取得する刺激強度取得ステップと、
前記電気刺激発生部が、前記1以上の刺激強度に対応する1以上の電気刺激を、感覚障害の生じていない箇所に貼付された1以上の各パッドに発生させる電気刺激発生ステップとを具備する感覚フィードバック方法。
【図1】

【図4】
【図10】
【図11】
【図17】
【図18】
【図27】
【図28】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図13】
【図14】
【図15】
【図16】
【図19】
【図20】
【図21】

【図22】
【図23】
【図24】
【図25】

【図26】
【図4】
【図10】
【図11】
【図17】
【図18】
【図27】
【図28】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図13】
【図14】
【図15】
【図16】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2012−66067(P2012−66067A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2011−180083(P2011−180083)
【出願日】平成23年8月22日(2011.8.22)
【国等の委託研究の成果に係る記載事項】(出願人による申告)文部科学省、平成23年度科学技術試験研究委託事業「日本の特長を活かしたBMIの統合的研究開発」に係る委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【出願人】(899000079)学校法人慶應義塾 (742)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【国等の委託研究の成果に係る記載事項】(出願人による申告)文部科学省、平成23年度科学技術試験研究委託事業「日本の特長を活かしたBMIの統合的研究開発」に係る委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【出願人】(899000079)学校法人慶應義塾 (742)
[ Back to top ]