
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。

【発明の詳細な説明】
【背景技術】
【0001】
「関連出願への相互参照」
本出願は、米国仮特許出願第60/500,804号の利益を請求するものである。この仮特許出願は、「INERTIAL GPS NAVIGATON SYSTEM USING INJECTED ALIGNMENT DATA FOR THE INERTIAL SYSTEM」と題し、Thomas John Ford他によって2003年9月5日に出願されたものであり、参照により本明細書に組み込むものとする。
【0002】
[発明の背景]
「発明の分野」
本発明は、一般にGPS受信機、より具体的には、慣性システムを組み込んでいるGPS受信機に関する。
【0003】
「背景情報」
衛星航法システム(GPS。全地球測位システムともいう)受信機は、それ自体の位置を正確に計算するために複数のGPS衛星からの信号を要求する。GPS受信機は、種々の衛星からのキャリア(搬送波)、擬似ランダムコード、及び被変調データからなる信号を取得し、追跡する。受信機は、局所的に発生されたコードとそれぞれの衛星から受信したコードとを互いに関連付けて(または、相関をとり)、コードチップの局所発生に対する受信機時間を、対応するコードチップの伝送時刻における衛星時間に関連付けるタイミング情報を得る。受信機時間と、種々の衛星における種々の信号の伝送時間との間のタイミング関係を、種々の衛星からの被変調データと共に用いて、衛星と共有する基準フレーム(たとえば、地心軸(ECEF)フレーム)に関する受信機の位置を生成することができる。
【0004】
少なくとも4つの衛星がGPS位置を求めるために必要とされる。固定位置(これは、「基地局」受信機において生成される)に関する擬似ランダム測定値の補正を用いて、基地局の位置に対する局所受信機の相対位置を得ることができる。基地局及び局所受信機で取得されたキャリア測定値の関連する初期の曖昧さを解消することを可能にするために即座にまたはある時間にわたって十分な信号が利用可能である場合には、そのキャリア測定値を既知のやり方で混合して、正確な相対位置測定値を生成することができる。具体的には、その曖昧さを現在のキャリア測定値と共に使用して、局所受信機、基地局受信機、及び、種々の衛星(その時点において、これらの衛星の信号はそれら2つの受信機によって追跡されている)との間の幾何学的距離の差を生成することができる。
【0005】
曖昧さを解消する処理に要する時間は、典型的には、30秒〜1分の間である。処理に要する時間は、追跡される衛星の数に依存し、比較的少数の衛星を追跡している場合でも長い時間を要する。
【0006】
任意の所与の時間において、GPS受信機が、最小数の衛星からの信号を受信しない場合には、GPS受信機は位置情報を計算できない。その後、再び衛星信号がGPS受信機に利用可能になる、すなわち、衛星が受信機に「見える」ようになると、受信機は、受信機がその位置計算を再開できるようになる前に、信号を再取得できなければならない。信号の再取得には、信号を再度追跡するために、局所発生されたコードを受信信号内のコードに再同期化することが含まれる。信号再取得処理の後に、受信機は、正確な差動モードで動作しているときには、正確な位置が利用可能になる前にキャリアの曖昧さを再び解消しなければならない。
【0007】
上記の再取得動作中、ユーザにはナビゲーション情報が提供されず、上記の解消処理中、ユーザには正確な位置情報が提供されない。したがって、受信機が信号を再取得し、キャリアの曖昧さを解消する速さは、ユーザにとては最も重要な事項である。
【0008】
GPS衛星は、たとえば、都市環境中のさまざまな時間にわたってGPS受信機に利用不能となる場合がある。それは、GPS受信機が、橋の下を通るとき、トンネルを通るとき、あるいは、文字通り「都市の谷間」と呼ばれる場所を通るときであるが、そのような場合、ビルによって、信号がブロックされたり、衛星信号を位置計算に使用するのに好ましくないものにする過度に大きなマルチパス信号が生成される。さらに、特別観覧席や高いフェンスがあるレース場などの他の環境では、同様に信号がブロックされたり、大きなマルチパス信号が生成される場合がある。したがって、GPS受信機が、自然界の峡谷を通過し、及び/または、レース場や衛星の有効範囲がまばらにしか存在しない他のエリアなどを通っているときにGPS受信機を動作させると、受信機は同様に十分な数の衛星を追跡できなくなる場合がある。したがって、いくつかの環境では、ナビゲーション情報を散発的にし利用できず、また、GPSベースのナビゲーションシステム(航法システム)が、ナビゲーションツールとして使用するのに適さない場合がある。
【0009】
ナビゲーション情報(航法情報)が遮断されるという問題に対する1つの対処法は、GPS受信機が十分な数の衛星を観察することができないときは常に代理として動作する慣性システムを使用することである。慣性システムは、ある時間にわたって慣性位置情報にドリフトを導入する傾向がある、初期システム(位置、速度及び姿勢)誤差ならびに、IMUセンサ誤差の導出などの周知の問題を有している。したがって、慣性システムにおける位置計算に対するドリフト誤差の悪影響を制限するためにGPS位置情報を使用するシステムが開発されている。さらに、そのようなシステムは、慣性位置及び速度情報をGPSシステムに提供して、信号の再取得や曖昧さを解消するための処理を支援する。そのようなシステムは、米国特許第6,721,657に記載されており、参照によってその開示内容全体を本明細書に組み込むものとする。
【0010】
特許されているGPSとINS(慣性航法システム)の組合せシステムは、GPSと慣性サブシステムからの情報をリアルタイムで結合して、信号の再取得と関連するキャリアの曖昧さの解消を支援する。したがって、INS/GPS受信機は、十分な数のGPS衛星が視野内に常時存在するわけではない環境でも、正確で中断しないナビゲーション情報を提供する。この組合せシステムは、INSカルマンフィルタが、以前の時間と現在の時間とに及ぶGPS及び/または他の観察可能物、すなわち、測定値を含むように変更することによって改良されている。INSカルマンフィルタは、観測可能物を利用して、以前の位置と現在の位置に関する位置情報を更新し、現在の位置、速度及び姿勢に関する情報を伝達する。したがって、INS/GPS受信機は、十分な数のGPS衛星が視野内に常時存在するわけではない環境における慣性位置及び速度のさらに正確な予測値を生成する。改良されたシステムは、2004年1月15日に提出された、「INERTIAL GPS NAVIGATON SYSTEM WITH MODIFIED KALMAN FILTER」と題する同時係属中の特許出願第10/758,363に記載されている。
【0011】
上記のINS/GPSシステムは、受信機が静止しているときにINSシステムの位置合わせを確立することができる環境では良好に機能する。INSシステムの位置合わせは、INSシステムによって測定されて重力ベクトルと比較される加速度と、INSシステムによって測定されて地球自転速度と比較される角速度の組合せからしばしば得られる。この計算では、INSシステムが重力以外の特定の力を受けないことと、地球の自転以外には物理的に回転していないことが必要とされる。さらに、この計算では、ユニット内のジャイロバイアス(またはジャイロの偏り)が地球自転速度に比べて小さいことが必要とされる。
【0012】
受信機が始動時に静止していない環境、たとえば、ガレージ(GPSはない)から出てレース場に行くレースカー内では、INSシステムの位置合わせは、受信機が比較的速い速度で移動し、コーナーをまわるときに達成されなければならない。そのような環境では、INSシステムは、垂直方向ではない特定の大きな力と運動によって誘発された回転を検知する。したがって、これらの環境のもとでは、位置合わせのための標準的な方法は、45°以上のロール及びピッチ誤差を生じやすい。このタイプの初期誤差は、カルマンフィルタ予測値(または予測器)において非線形誤差をもたらし、これによって、そのフィルタは、システムを有効にするための十分なシステム誤差を予測するのに極めて長い時間を要することになる。
【0013】
[発明の概要]
本発明は、慣性(「INS」)/GPS受信機であり、また、入力された位置合わせデータ(アライメントデータ。整列データともいう)を使用して、受信機が始動時に動いているときに、INSサブシステムの位置合わせを決定する受信機の動作方法である。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、慣性測定ユニット(「IMU」)のボディフレーム(または、本体フレーム)と受信機が搭載されている乗物との間の既知または既定の角度関係から決定される。
【0014】
パラメータ化された表面情報は、たとえば、乗物が移動する表面、すなわち、道路または例示として後述するレース場(この上で乗物を運転する)の配向である場合がある。パラメータ化された表面情報は、道路またはレース場の表面に垂直な方向において制約をもたらす。この例で使用されるレース場の表面モデルは、それぞれの連続する平坦なセクション(部分)が直交する3組の軸(z軸は表面に垂直である)に基づく割り当てられた平坦なセクションフレームである。それぞれの平坦なセクションの幾何学的形状を用いて、平坦な表面のフレームをy軸が北を向く右回りのフレームである地理的なフレーム(すなわち、局所レベルのフレーム)に回転させるための関連する回転行列Rlpを決定する。局所レベルのフレームをECEFフレームに回転させる回転行列は既知である。
【0015】
受信機は、初期(または最初)のGPS位置を使用して、パラメータ化された表面上の乗物の位置、すなわち、乗物がどの平坦なセクションに「配置されている」かを決定する。受信機はまた、局所レベルのフレームに関して規定されている関連するGPS速度ベクトルを使用して乗物の配向を決定する。これを行うために、INSサブシステムは、回転行列Rpl(これは、表面モデルによって平坦なセクションに関連付けられたRlp行列の転置である)を使用して、GPS速度ベクトルを適用可能な平坦なセクションフレームにおける速度ベクトルVpに変換する。
【0016】
次に、変換された速度ベクトルのz成分がゼロに設定される。なぜなら、乗物は平坦なセクションの表面上を移動するように制約されているからである。その後、システムは、平坦なセクションフレーム内の乗物について「ピッチ(pitch)」と「ロール(roll)」ベクトルを決定し、それらのベクトルを関連する回転行列Rlpを使用して、局所レベルのフレームにおける対応するベクトルに変換する。局所レベルのフレームにおいてパラメータ化されたピッチ及びロールベクトルは、乗物のフレーム軸を表しており、システムは、この軸を使用して、乗物のフレームを局所レベルのフレームに関連付けるオイラー角(Euler angle)を決定する。これらのオイラー角を使用して、システムは、さらに、ベクトルを乗物のフレームから局所レベルのフレームに変換するための回転行列Rlvを計算する。
【0017】
システムはまた、システムが既に位置合わせされ、かつ、乗物が既知の配向状態にあったある時間にわたって収集されたデータ、または、ユーザによって提供されたデータを使用して、ベクトルを乗物のフレームからIMUボディフレームに変換するために、回転行列Rbvを計算済みである。次に、システムは、種々の計算された回転行列及び既知の回転行列、及び/または、対応する転置行列(すなわち、ベクトルをIMUボディフレームから乗物のフレームに、乗物のフレームから局所レベルのフレームに、局所レベルのフレームからECEFフレームに変換することに関連する行列)を使用して、ベクトルをIMUボディフレームからECEFフレームに変換するための回転行列を計算する。その後、システムは、IMU測定値とGPS測定値(これらはすべて、ECEFフレームに変換される)を使用して、既知のやり方でナビゲーション情報を決定する。
【特許文献1】米国特許第6,721,657号明細書
【特許文献2】米国特許出願第10/758,363号明細書
【発明の開示】
【0018】
【実施例】
【0019】
[例示的な実施形態の詳細な説明]
以下、添付図面を参照して本発明を説明する。図1を参照すると、GPS/INS受信機10は、プロセッサ16の制御下で、GPS位置、INS位置、速度及び姿勢情報を計算するように動作するINSサブシステム12とGPSサブシステム14を備える。GPSサブシステムは、アンテナ18を介して受信した衛星信号を処理する。INSサブシステムは、直交配置された加速度計22とジャイロスコープ24からのデータを読み取る慣性測定ユニット(「IMU」)20からの測定値を受信する。IMUからのデータは、クロック28によって保全(維持)された時間を使用して時間のタグが付され、これにより、2つのサブシステムは、時間的に同期している位置関連情報を確実に交換することができる。好ましくは、クロック28はGPS時間を維持する。2つのサブシステムは協働して、プロセッサ16内のソフトウェア統合を介して、所定の時間に及び/または特定のイベントに応答して、サブシステム間の位置関連情報を提供する。さらに、GPSサブシステムは、適切な時間に、デルタ位相(delta phase)測定値などのGPS観測可能物をINSサブシステムに提供することができる。処理の後、受信機は、位置、速度及び/または姿勢などのナビゲーション情報を、たとえば、表示装置(不図示)に送信することによってユーザに提供する。
【0020】
理解をしやすくするために、プロセッサ16を特に参照せずに2つのサブシステムの処理動作を説明する。システムは、プロセッサ16の代わりに後述する種々のGPS及びINS計算処理を実行するのに要求される情報を交換するために適切な時間に互いに通信する専用のGPS及びINSサブプロセッサを備えることができる。たとえば、IMUデータにGPS時間をタグ付けする(すなわち、GPS時間の標識を付す)ためにIMUデータがINSサブプロセッサに提供されるときに、INSサブプロセッサはGPSサブプロセッサと通信する。さらに、GPSサブプロセッサは、適宜にGPS観測可能物を提供するため、及び、各測定間隔の開始時にGPS位置情報を提供するためなどにINSサブプロセッサと通信する。
【0021】
始動時、GPSサブシステム14は、既知のやり方で動作して、少なくとも最小数のGPS衛星からの信号を取得し、それぞれの衛星に対する擬似距離(pseudorange)及び関連するドップラー速度(Doppler rate:ドップラー周波数変化率ともいう)を計算する。擬似距離に基づいて、GPSサブシステムは、衛星に対する自身の位置を決定する。GPSサブシステムは、また、基地局で生成されたディファレンシャル補正(微分補正)測定値を使用して、または、関連するキャリアサイクルの曖昧さを解消した後に、固定位置にある基地局受信機(不図示)に対する自身の位置を決定することもできる。
【0022】
同時に、INSサブシステム12は、IMUデータ、すなわち、種々の加速度計22及びジャイロスコープ24からの測定値を処理して、受信機の初期の姿勢及び速度を決定する。図2及び図4を参照して後述するように、INSサブシステムの位置合わせは、受信機が、始動処理中に、静止している(すなわち、一定の位置にある)か動いているかに依存して、IMUデータまたは入力された位置合わせデータを使用して決定される。また、更に詳細に後述するように、入力された位置合わせデータは、表面モデル21に関連するパラメータ化された表面情報を使用してINSサブシステムによって計算される。INSサブシステムはさらに、IMUデータ、GPS位置、関連する共分散情報、適用可能なGPS観測可能物を処理して、INSカルマンフィルタ(不図示)用の種々の行列を設定する。INSサブシステムは、各測定間隔の開始時に、GPS測定値または他の関連する測定値でINSカルマンフィルタを更新し、更新された誤差状態を機械化処理部(mechanization process)に提供する。機械化処理部は、その更新された情報及びIMUデータを使用して、測定間隔にわたって、現在の慣性位置、姿勢、及び速度に関連する情報を伝達する。関連する慣性位置及び速度誤差は、カルマン更新処理を介して、各測定間隔でGPS観測可能物及び他の観測可能物によって制御される。
【0023】
A.静止しているINSサブシステムの位置合わせ
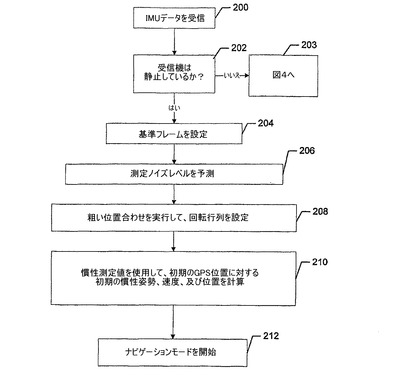
図2を参照すると、受信機10が始動中(ステップ200、202)に静止している場合は、INSサブシステム12は、IMUデータを使用して、加速度計及びジャイロスコープの測定用の測定基準フレーム、または、ボディフレームの配向を決定する(ステップ204)。こうして、INSサブシステムは、ボディフレームをECEFフレームに関連付けるオイラー角として表される初期の姿勢を計算する。システムは、ボディフレームのy軸が局所レベルのフレームのz軸(すなわち、重力ベクトル)と位置合わせされた状態に近付かないようにボディフレームのy軸の配向を設定しなければならない。そうでなければ、ボディフレームを局所レベルのフレームに関連付ける関連する回転行列を正しく満たすことができない。なぜなら、有意なピッチ、ロール及び方位(機首方位)値を決定することができないからである。
【0024】
y軸が重力ベクトルと位置合わせされないように基準フレームの配向を設定するために、INSサブシステム12は、名目上x、y及びz軸に割り当てられた種々の加速度計からの測定値を比較して、どの測定値が最も大きいかを決定する。次に、INSサブシステムは、x、y及びz軸を加速度計及びジャイロスコープ間に再割り当て、または、マッピングし、これによって、z軸が、最大の正の加速度の大きさを有する、すなわち、z軸が上を向くようにする。この場合、INSサブシステムは、受信機がどのよに配向しているかに関係なく初期の姿勢を正しく予測するだろう。
【0025】
IMU20は、プロセッサ16のポート(不図示)にプラグイン(すなわち、接続)し、そのポートを介して、加速度計及びジャイロスコープ測定データをプロセッサに供給する。INSサブシステムは、使用中の特定のIMUに対応する適用可能な初期の不確実性値とスケールファクタを、INSシステムの要素と生のIMU測定値に、それぞれ割り当てる。
【0026】
INSサブシステムは、測定された加速度計信号の標準偏差に基づいてIMU測定値におけるノイズレベルを予測する(ステップ206)。ノイズレベルの予測が完了する前に受信機が移動すると、処理は、IMUメーカによって指定された公称のノイズレベル値を予測値として使用する。
【0027】
ステップ204と206は基本的に同時に行われる。基準フレームとノイズレベルが決定されると、INSサブシステム12は、粗い位置合わせ処理を開始する(ステップ208)。粗い位置合わせ処理によって、計算上のフレーム(この例では、地心軸(すなわち、ECEF)フレームである)に測定データを変換するために使用される種々の回転行列が設定される。粗い位置合わせ処理は、GPSサブシステム14によって提供される初期のGPS位置である、受信機の想定された「局所」位置に基づいている。INSサブシステムは、その局所位置に関連付けられた3つの直交ベクトル、すなわち、重力ベクトル、地球の角速度ベクトル、それら2つのベクトルの外積(またはベクトル積)を規定する。次に、INSサブシステムは、加速度計22及びジャイロスコープ24の測定値に基づいて、基準フレーム、または、ボディーフレームに変換されたそれらのベクトル及びそれらのベクトルの外積を決定する。3つのベクトルのうちの2つの組は、その変換によって関連付けられた以下の2つの行列Sl及びSbを形成する。
【0028】
【数1】
【0029】
ここで、Rlbは、局所レベルから、基準フレーム、または、ボディフレームにベクトルを変換するために使用される回転行列であり、Rblは、以下に示すように回転行列の転置行列である。
【0030】
【数2】
【0031】
Rblが計算されると、INSサブシステムは、ボディフレームの測定値を計算上の(ECEF)フレームに回転するために使用される回転行列Rbeを以下のように計算する。
【0032】
Rbe=RleRbl
システムはまた、行列Rblの特定の要素を使用して、以下のように、ロール(横揺れや回転など)、ピッチ(縦揺れなど)及び方位の状態要素を生成する。
【0033】
【数3】
【0034】
ここで、ArcSin、ArcTanは、それぞれ、逆サイン、逆タンジェント関数を表す。また、fx、fy、fzは、IMUによってボディフレームにおいて測定された特定の力である。ωx、ωy、ωzは、IMUによってボディフレームにおいて測定された角速度であり、Wは地球の回転(自転)速度、gは標準重力の大きさ、ψは緯度である。
【0035】
時間の経過にわたる位置合わせの正確さは、ジャイロスコープ測定値に対するノイズ、特に、ωxが東を向くように基準フレームが位置合わせされたときのωxにおけるノイズに依存する。したがって、INSサブシステム12は、初期の姿勢及び速度を計算する際にステップ206で決定された予測ノイズレベルを使用する。初期のGPS位置は、INSサブシステムの位置要素を初期化する(ステップ210)ために使用される。
【0036】
静止している受信機に対する粗い位置合わせ処理は、初期のGPS位置の計算後一定時間が経過した時間と、システムが動き始めた時間(または、動き初めてから上記一定時間が経過した時間)とのいずれか早い時間の経過後に終了する。粗い位置合わせの一部として、姿勢の正確さとINS測定ノイズレベルが計算される。粗い位置合わせの後、INSサブシステムは、ナビゲーションモードで動作し(ステップ212)、カルマンフィルタ処理と機械化処理を既知のやり方で使用して、現在の位置、速度、姿勢及びバイアス(または偏向)の予測値といった慣性システムパラメータを伝達する。
【0037】
B.動いているINSサブシステムの位置合わせ
受信機が始動中(ステップ200、202、203)に動いている場合は、INSサブシステム12は、入力された位置合わせデータを使用してIMUボディフレームの位置合わせを決定する。サブシステムは、パラメータ化された表面情報、測定されたGPS速度、及び、IMUボディフレームと受信機が設置されている乗物との間の既定の角度関係に基づいて位置合わせデータを決定する。IMUボディフレームと乗物との間の角度関係は、ユーザが提供する情報に基づくものであってもよく、または、システムが既に(または以前に)位置合わせされ、かつ、乗物が既知の配向状態にあったときのある時間にわたって収集されたデータに基づくものであってもよい。始動処理については図4を参照してより詳細に後述し、図5を参照して、IMUボディフレームと乗物との間の角度関係がある時間にわたって収集されたデータからどのようにして決定されるかについて説明する。
【0038】
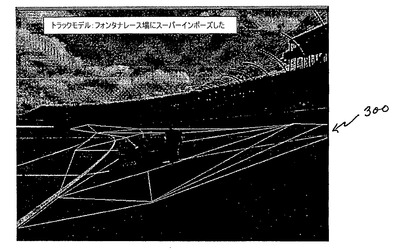
パラメータ化された表面情報を提供するために使用される表面モデルの1例が図3に示されている。レース場の一部のモデル300は、各々が既知の配向を有する連続(または隣接)した平坦なセクション(または平面部)302を含む。この例では、平坦なセクションは三角形の形状をしているが、それらのセクションは種々の形状を有していてもよい。平坦なセクションの配向及びレイアウトは、この場合、航空写真測量技術を使用して決定されるが、それらの幾何学的形状を決定するために他の方法を使用することもできる。
【0039】
位置決めの計算では、それぞれの三角形の各々が、それらの三角形の表面部に垂直な方向において制約をもたらす。具体的には、GPS受信機アンテナが所与の三角形の「内部」にある間、アンテナの位置はその表面部に垂直な方向において不変である。アンテナの高さは乗物(ここでは、レースカー)に対して固定されており、したがって、平坦部の制約を、三角形すなわち平坦なセクション302に関して規定することができる。
【0040】
各々の平坦なセクション302には、平坦なセクションのフレームを形成する3組の直交する軸が割り当てられる。所与の三角形の幾何学的形状を使用して、平坦なセクションのフレームを地理的なフレームすなわち局所レベルのフレーム(これは、y軸が北を向いている右回りのフレームである)に回転させる回転行列Rplを決定することができる。システムは、それぞれの平坦なセクションについて回転行列Rplを予め計算し、また、局所レベルのフレームをそれぞれの平坦なセクションのフレームに回転させる転置行列Rlpを予め計算する。さらに、システムは、局所レベルのフレームを基準ECEFフレームに回転させる回転行列Rleを記憶している。
【0041】
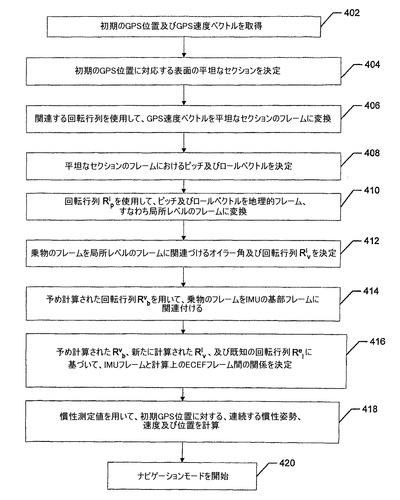
図4を参照すると、受信機10が始動時に動いているときは、GPSサブシステム14は、地理的なフレーム、すなわち、局所レベルのフレームにおいてパラメータ化された初期のGPS位置及びGPS速度ベクトルVlを提供する(ステップ402)。初期のGPS位置に基づいて、INSサブシステムは、適用可能な平坦なセクション302を決定する(ステップ404)。その平坦なセクションについて計算された回転行列Rlpを使用して、サブシステムは、以下のように、速度ベクトルVlを平坦なセクションのフレームに変換する(ステップ406)。
【0042】
【数4】
【0043】
乗物がレース場を移動している、すなわち、平坦な表面に平行に移動しているという想定の下では、以下のように速度ベクトルVpのz成分をゼロに設定できる。
【0044】
【数5】
【0045】
ベクトルVpは乗物のフレームのy軸に平行である。この乗物のフレームは、y軸が前方を向き、z軸が上を向き、x軸が運転手の右を向いた3つの直交する軸によって規定される。局所レベルのフレームにおける速度ベクトルの傾きが乗物のピッチ角であり、したがって、平坦なセクションのフレーム内の対応するベクトルは「ピッチ」ベクトルである(ステップ408)。速度ベクトルが平坦なセクションのフレームにおいてz軸のまわりに−90°回転すると、乗物のフレームのx軸に平行なベクトルとなり、局所フレームにおけるこの回転されたベクトルの傾きは、乗物のロール角に等しい。したがって、平坦なセクションのフレームにおける「ロール」ベクトル(ステップ408)は、以下のようになる。
【0046】
【数6】
【0047】
ここで、R3は、z軸のまわりの回転に関連する回転行列である。回転行列Rlpは既知であるので、平坦なセクションのフレームにおけるピッチ及びロールベクトルを、以下のように、局所レベルのフレームにおけるピッチ及びロールベクトルに容易に変換することができる(ステップ410)。
【0048】
【数7】
【0049】
局所レベルのフレームにおけるピッチ及びロールベクトルは、乗物のフレーム軸を表す。このフレーム軸から、乗物のフレームを局所レベルのフレームに関連付けるオイラー角を導出することができる(ステップ412)。
【0050】
以下のロールベクトルが与えられた場合、
【0051】
【数8】
【0052】
ロール及び方位(たとえば、乗物の向き)を以下のように生成することができる。
【0053】
【数9】
【0054】
ピッチは、局所レベルのピッチベクトルから次のように計算できる。
【0055】
【数10】
【0056】
計算されたオイラー角αβyを使用して、乗物のフレームから局所レベルのフレームにベクトルを変換するための回転行列Rvlを既知のやり方で計算することができる。
【0057】
上記したように、ベクトルを局所レベルのフレームからECEFフレームに変換するための回転行列Rleは既知である。さらに、IMUボディフレームから乗物のフレームにベクトルを変換するための回転行列Rbvは既知である。すなわち、この行列は、ユーザによって提供されたデータ、またはシステムの動作中に収集されたデータを使用して予め計算される。これらの既知の行列、及び、新たに計算された回転行列Rvlを用いて、サブシステムは、IMUボディフレームとECEFフレームを関連付ける回転行列Rbeを以下のように計算する。
【0058】
【数11】
【0059】
次に、サブシステムは、計算された回転行列Rbeに基づいて、これら2つのフレームを既知のやり方で関連付けるオイラー角または回転四元数(rotation quaternion)の成分を決定する。
【0060】
受信機が動いている場合は、INSサブシステムは、IMUメーカによって指定された公称ノイズレベル値を、IMU測定値用の予測ノイズレベルとして使用する。位置合わせ、GPS速度及びGPS位置を用いて、INSサブシステムは、慣性測定値からそれ自体の連続する姿勢、速度及び位置を計算し、ナビゲーションモードでの動作を開始する(ステップ420)。
【0061】
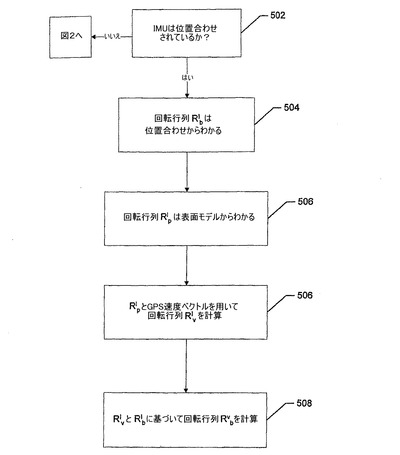
図5を参照して、ある時間にわたって収集されたデータを使用して回転行列Rbvをどのように計算するかを説明する。INSサブシステムが位置合わせされ(ステップ502)、乗物が、表面モデル300(図3)の平坦なセクション302に対応する表面などの、既知の配向を有する表面上を移動するとき、IMUボディフレームから局所レベルのフレームへの回転行列Rblと平坦なセクションのフレームから局所レベルのフレームへの回転行列Rplの両方が既知である(ステップ504、506)。この場合、INSサブシステムは、回転行列RplとGPS速度ベクトルを使用し、及び、(i)速度ベクトルと、乗物の前方を向いている乗物のフレームのy軸とが平行であり、(ii)乗物のフレームのx軸とy軸が、平坦なセクションの表面部に平行である(ステップ508)、という想定に基づいて、乗物のフレームと局所レベルのフレームを関連付ける回転行列Rvlを計算できる。システムは、また、IMUボディフレームを乗物のフレームに関連付ける回転行列Rbvを、
【0062】
【数12】
【0063】
に基づいて計算できる(ステップ510)。
【0064】
サブシステムは、次に、計算された回転行列Rbvに基づいてIMUボディフレームを乗物のフレームに結合するオイラー角αβyを決定する。ある時間にわたって、サブシステムは、同じ計算を実行して、種々の平坦なセクションに関連する回転行列に基づいてオイラー角を決定する。次に、サブシステムは、アウトライアー(外れ値)を無視してそれらの値を平均することにより、角度関係をより強力に規定する。次に、システムは、後で使用するために、「オンザフライ」の位置合わせ処理、すなわち、受信機が動いているときに行われる位置合わせ処理とともにこれらの値をメモリ(不図示)に記憶する。
【0065】
以上の説明は、本発明の特定の実施形態に限定したものである。しかしながら、本発明のいくつかまたは全ての利点を達成しつつ本発明に対して変形及び変更をなすことができることは明らかであろう。したがって、本発明の真の思想及び範囲内に入る、そのような全ての変形及び変更をカバーすることが添付の特許請求の範囲の目的である。本発明には、他のタイプのパラメータ化された表面情報を使用することも含まれるが、その場合、INSサブシステムは、その表面情報から乗物が移動している表面の配向を計算することができる。さらに、受信機は、他のフレームを使用すること、及び/または、計算に際してそれぞれのステップにおいてあるフレームから別のフレームへとベクトルまたは測定データを変換すること、などができる。
【図面の簡単な説明】
【0066】
【図1】本発明にしたがって構成されたGPS/INS受信機の機能ブロック図である。
【図2】静止している受信機用のINSサブシステム始動処理のフローチャートである。
【図3】パラメータ化された表面情報を提供する際に使用するための表面モデルを示す。
【図4】動いている受信機用のINSサブシステム始動処理のフローチャートである。
【図5】後で使用する位置合わせデータを決定するためのINSサブシステムの動作のフローチャートである。
【背景技術】
【0001】
「関連出願への相互参照」
本出願は、米国仮特許出願第60/500,804号の利益を請求するものである。この仮特許出願は、「INERTIAL GPS NAVIGATON SYSTEM USING INJECTED ALIGNMENT DATA FOR THE INERTIAL SYSTEM」と題し、Thomas John Ford他によって2003年9月5日に出願されたものであり、参照により本明細書に組み込むものとする。
【0002】
[発明の背景]
「発明の分野」
本発明は、一般にGPS受信機、より具体的には、慣性システムを組み込んでいるGPS受信機に関する。
【0003】
「背景情報」
衛星航法システム(GPS。全地球測位システムともいう)受信機は、それ自体の位置を正確に計算するために複数のGPS衛星からの信号を要求する。GPS受信機は、種々の衛星からのキャリア(搬送波)、擬似ランダムコード、及び被変調データからなる信号を取得し、追跡する。受信機は、局所的に発生されたコードとそれぞれの衛星から受信したコードとを互いに関連付けて(または、相関をとり)、コードチップの局所発生に対する受信機時間を、対応するコードチップの伝送時刻における衛星時間に関連付けるタイミング情報を得る。受信機時間と、種々の衛星における種々の信号の伝送時間との間のタイミング関係を、種々の衛星からの被変調データと共に用いて、衛星と共有する基準フレーム(たとえば、地心軸(ECEF)フレーム)に関する受信機の位置を生成することができる。
【0004】
少なくとも4つの衛星がGPS位置を求めるために必要とされる。固定位置(これは、「基地局」受信機において生成される)に関する擬似ランダム測定値の補正を用いて、基地局の位置に対する局所受信機の相対位置を得ることができる。基地局及び局所受信機で取得されたキャリア測定値の関連する初期の曖昧さを解消することを可能にするために即座にまたはある時間にわたって十分な信号が利用可能である場合には、そのキャリア測定値を既知のやり方で混合して、正確な相対位置測定値を生成することができる。具体的には、その曖昧さを現在のキャリア測定値と共に使用して、局所受信機、基地局受信機、及び、種々の衛星(その時点において、これらの衛星の信号はそれら2つの受信機によって追跡されている)との間の幾何学的距離の差を生成することができる。
【0005】
曖昧さを解消する処理に要する時間は、典型的には、30秒〜1分の間である。処理に要する時間は、追跡される衛星の数に依存し、比較的少数の衛星を追跡している場合でも長い時間を要する。
【0006】
任意の所与の時間において、GPS受信機が、最小数の衛星からの信号を受信しない場合には、GPS受信機は位置情報を計算できない。その後、再び衛星信号がGPS受信機に利用可能になる、すなわち、衛星が受信機に「見える」ようになると、受信機は、受信機がその位置計算を再開できるようになる前に、信号を再取得できなければならない。信号の再取得には、信号を再度追跡するために、局所発生されたコードを受信信号内のコードに再同期化することが含まれる。信号再取得処理の後に、受信機は、正確な差動モードで動作しているときには、正確な位置が利用可能になる前にキャリアの曖昧さを再び解消しなければならない。
【0007】
上記の再取得動作中、ユーザにはナビゲーション情報が提供されず、上記の解消処理中、ユーザには正確な位置情報が提供されない。したがって、受信機が信号を再取得し、キャリアの曖昧さを解消する速さは、ユーザにとては最も重要な事項である。
【0008】
GPS衛星は、たとえば、都市環境中のさまざまな時間にわたってGPS受信機に利用不能となる場合がある。それは、GPS受信機が、橋の下を通るとき、トンネルを通るとき、あるいは、文字通り「都市の谷間」と呼ばれる場所を通るときであるが、そのような場合、ビルによって、信号がブロックされたり、衛星信号を位置計算に使用するのに好ましくないものにする過度に大きなマルチパス信号が生成される。さらに、特別観覧席や高いフェンスがあるレース場などの他の環境では、同様に信号がブロックされたり、大きなマルチパス信号が生成される場合がある。したがって、GPS受信機が、自然界の峡谷を通過し、及び/または、レース場や衛星の有効範囲がまばらにしか存在しない他のエリアなどを通っているときにGPS受信機を動作させると、受信機は同様に十分な数の衛星を追跡できなくなる場合がある。したがって、いくつかの環境では、ナビゲーション情報を散発的にし利用できず、また、GPSベースのナビゲーションシステム(航法システム)が、ナビゲーションツールとして使用するのに適さない場合がある。
【0009】
ナビゲーション情報(航法情報)が遮断されるという問題に対する1つの対処法は、GPS受信機が十分な数の衛星を観察することができないときは常に代理として動作する慣性システムを使用することである。慣性システムは、ある時間にわたって慣性位置情報にドリフトを導入する傾向がある、初期システム(位置、速度及び姿勢)誤差ならびに、IMUセンサ誤差の導出などの周知の問題を有している。したがって、慣性システムにおける位置計算に対するドリフト誤差の悪影響を制限するためにGPS位置情報を使用するシステムが開発されている。さらに、そのようなシステムは、慣性位置及び速度情報をGPSシステムに提供して、信号の再取得や曖昧さを解消するための処理を支援する。そのようなシステムは、米国特許第6,721,657に記載されており、参照によってその開示内容全体を本明細書に組み込むものとする。
【0010】
特許されているGPSとINS(慣性航法システム)の組合せシステムは、GPSと慣性サブシステムからの情報をリアルタイムで結合して、信号の再取得と関連するキャリアの曖昧さの解消を支援する。したがって、INS/GPS受信機は、十分な数のGPS衛星が視野内に常時存在するわけではない環境でも、正確で中断しないナビゲーション情報を提供する。この組合せシステムは、INSカルマンフィルタが、以前の時間と現在の時間とに及ぶGPS及び/または他の観察可能物、すなわち、測定値を含むように変更することによって改良されている。INSカルマンフィルタは、観測可能物を利用して、以前の位置と現在の位置に関する位置情報を更新し、現在の位置、速度及び姿勢に関する情報を伝達する。したがって、INS/GPS受信機は、十分な数のGPS衛星が視野内に常時存在するわけではない環境における慣性位置及び速度のさらに正確な予測値を生成する。改良されたシステムは、2004年1月15日に提出された、「INERTIAL GPS NAVIGATON SYSTEM WITH MODIFIED KALMAN FILTER」と題する同時係属中の特許出願第10/758,363に記載されている。
【0011】
上記のINS/GPSシステムは、受信機が静止しているときにINSシステムの位置合わせを確立することができる環境では良好に機能する。INSシステムの位置合わせは、INSシステムによって測定されて重力ベクトルと比較される加速度と、INSシステムによって測定されて地球自転速度と比較される角速度の組合せからしばしば得られる。この計算では、INSシステムが重力以外の特定の力を受けないことと、地球の自転以外には物理的に回転していないことが必要とされる。さらに、この計算では、ユニット内のジャイロバイアス(またはジャイロの偏り)が地球自転速度に比べて小さいことが必要とされる。
【0012】
受信機が始動時に静止していない環境、たとえば、ガレージ(GPSはない)から出てレース場に行くレースカー内では、INSシステムの位置合わせは、受信機が比較的速い速度で移動し、コーナーをまわるときに達成されなければならない。そのような環境では、INSシステムは、垂直方向ではない特定の大きな力と運動によって誘発された回転を検知する。したがって、これらの環境のもとでは、位置合わせのための標準的な方法は、45°以上のロール及びピッチ誤差を生じやすい。このタイプの初期誤差は、カルマンフィルタ予測値(または予測器)において非線形誤差をもたらし、これによって、そのフィルタは、システムを有効にするための十分なシステム誤差を予測するのに極めて長い時間を要することになる。
【0013】
[発明の概要]
本発明は、慣性(「INS」)/GPS受信機であり、また、入力された位置合わせデータ(アライメントデータ。整列データともいう)を使用して、受信機が始動時に動いているときに、INSサブシステムの位置合わせを決定する受信機の動作方法である。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、慣性測定ユニット(「IMU」)のボディフレーム(または、本体フレーム)と受信機が搭載されている乗物との間の既知または既定の角度関係から決定される。
【0014】
パラメータ化された表面情報は、たとえば、乗物が移動する表面、すなわち、道路または例示として後述するレース場(この上で乗物を運転する)の配向である場合がある。パラメータ化された表面情報は、道路またはレース場の表面に垂直な方向において制約をもたらす。この例で使用されるレース場の表面モデルは、それぞれの連続する平坦なセクション(部分)が直交する3組の軸(z軸は表面に垂直である)に基づく割り当てられた平坦なセクションフレームである。それぞれの平坦なセクションの幾何学的形状を用いて、平坦な表面のフレームをy軸が北を向く右回りのフレームである地理的なフレーム(すなわち、局所レベルのフレーム)に回転させるための関連する回転行列Rlpを決定する。局所レベルのフレームをECEFフレームに回転させる回転行列は既知である。
【0015】
受信機は、初期(または最初)のGPS位置を使用して、パラメータ化された表面上の乗物の位置、すなわち、乗物がどの平坦なセクションに「配置されている」かを決定する。受信機はまた、局所レベルのフレームに関して規定されている関連するGPS速度ベクトルを使用して乗物の配向を決定する。これを行うために、INSサブシステムは、回転行列Rpl(これは、表面モデルによって平坦なセクションに関連付けられたRlp行列の転置である)を使用して、GPS速度ベクトルを適用可能な平坦なセクションフレームにおける速度ベクトルVpに変換する。
【0016】
次に、変換された速度ベクトルのz成分がゼロに設定される。なぜなら、乗物は平坦なセクションの表面上を移動するように制約されているからである。その後、システムは、平坦なセクションフレーム内の乗物について「ピッチ(pitch)」と「ロール(roll)」ベクトルを決定し、それらのベクトルを関連する回転行列Rlpを使用して、局所レベルのフレームにおける対応するベクトルに変換する。局所レベルのフレームにおいてパラメータ化されたピッチ及びロールベクトルは、乗物のフレーム軸を表しており、システムは、この軸を使用して、乗物のフレームを局所レベルのフレームに関連付けるオイラー角(Euler angle)を決定する。これらのオイラー角を使用して、システムは、さらに、ベクトルを乗物のフレームから局所レベルのフレームに変換するための回転行列Rlvを計算する。
【0017】
システムはまた、システムが既に位置合わせされ、かつ、乗物が既知の配向状態にあったある時間にわたって収集されたデータ、または、ユーザによって提供されたデータを使用して、ベクトルを乗物のフレームからIMUボディフレームに変換するために、回転行列Rbvを計算済みである。次に、システムは、種々の計算された回転行列及び既知の回転行列、及び/または、対応する転置行列(すなわち、ベクトルをIMUボディフレームから乗物のフレームに、乗物のフレームから局所レベルのフレームに、局所レベルのフレームからECEFフレームに変換することに関連する行列)を使用して、ベクトルをIMUボディフレームからECEFフレームに変換するための回転行列を計算する。その後、システムは、IMU測定値とGPS測定値(これらはすべて、ECEFフレームに変換される)を使用して、既知のやり方でナビゲーション情報を決定する。
【特許文献1】米国特許第6,721,657号明細書
【特許文献2】米国特許出願第10/758,363号明細書
【発明の開示】
【0018】
【実施例】
【0019】
[例示的な実施形態の詳細な説明]
以下、添付図面を参照して本発明を説明する。図1を参照すると、GPS/INS受信機10は、プロセッサ16の制御下で、GPS位置、INS位置、速度及び姿勢情報を計算するように動作するINSサブシステム12とGPSサブシステム14を備える。GPSサブシステムは、アンテナ18を介して受信した衛星信号を処理する。INSサブシステムは、直交配置された加速度計22とジャイロスコープ24からのデータを読み取る慣性測定ユニット(「IMU」)20からの測定値を受信する。IMUからのデータは、クロック28によって保全(維持)された時間を使用して時間のタグが付され、これにより、2つのサブシステムは、時間的に同期している位置関連情報を確実に交換することができる。好ましくは、クロック28はGPS時間を維持する。2つのサブシステムは協働して、プロセッサ16内のソフトウェア統合を介して、所定の時間に及び/または特定のイベントに応答して、サブシステム間の位置関連情報を提供する。さらに、GPSサブシステムは、適切な時間に、デルタ位相(delta phase)測定値などのGPS観測可能物をINSサブシステムに提供することができる。処理の後、受信機は、位置、速度及び/または姿勢などのナビゲーション情報を、たとえば、表示装置(不図示)に送信することによってユーザに提供する。
【0020】
理解をしやすくするために、プロセッサ16を特に参照せずに2つのサブシステムの処理動作を説明する。システムは、プロセッサ16の代わりに後述する種々のGPS及びINS計算処理を実行するのに要求される情報を交換するために適切な時間に互いに通信する専用のGPS及びINSサブプロセッサを備えることができる。たとえば、IMUデータにGPS時間をタグ付けする(すなわち、GPS時間の標識を付す)ためにIMUデータがINSサブプロセッサに提供されるときに、INSサブプロセッサはGPSサブプロセッサと通信する。さらに、GPSサブプロセッサは、適宜にGPS観測可能物を提供するため、及び、各測定間隔の開始時にGPS位置情報を提供するためなどにINSサブプロセッサと通信する。
【0021】
始動時、GPSサブシステム14は、既知のやり方で動作して、少なくとも最小数のGPS衛星からの信号を取得し、それぞれの衛星に対する擬似距離(pseudorange)及び関連するドップラー速度(Doppler rate:ドップラー周波数変化率ともいう)を計算する。擬似距離に基づいて、GPSサブシステムは、衛星に対する自身の位置を決定する。GPSサブシステムは、また、基地局で生成されたディファレンシャル補正(微分補正)測定値を使用して、または、関連するキャリアサイクルの曖昧さを解消した後に、固定位置にある基地局受信機(不図示)に対する自身の位置を決定することもできる。
【0022】
同時に、INSサブシステム12は、IMUデータ、すなわち、種々の加速度計22及びジャイロスコープ24からの測定値を処理して、受信機の初期の姿勢及び速度を決定する。図2及び図4を参照して後述するように、INSサブシステムの位置合わせは、受信機が、始動処理中に、静止している(すなわち、一定の位置にある)か動いているかに依存して、IMUデータまたは入力された位置合わせデータを使用して決定される。また、更に詳細に後述するように、入力された位置合わせデータは、表面モデル21に関連するパラメータ化された表面情報を使用してINSサブシステムによって計算される。INSサブシステムはさらに、IMUデータ、GPS位置、関連する共分散情報、適用可能なGPS観測可能物を処理して、INSカルマンフィルタ(不図示)用の種々の行列を設定する。INSサブシステムは、各測定間隔の開始時に、GPS測定値または他の関連する測定値でINSカルマンフィルタを更新し、更新された誤差状態を機械化処理部(mechanization process)に提供する。機械化処理部は、その更新された情報及びIMUデータを使用して、測定間隔にわたって、現在の慣性位置、姿勢、及び速度に関連する情報を伝達する。関連する慣性位置及び速度誤差は、カルマン更新処理を介して、各測定間隔でGPS観測可能物及び他の観測可能物によって制御される。
【0023】
A.静止しているINSサブシステムの位置合わせ
図2を参照すると、受信機10が始動中(ステップ200、202)に静止している場合は、INSサブシステム12は、IMUデータを使用して、加速度計及びジャイロスコープの測定用の測定基準フレーム、または、ボディフレームの配向を決定する(ステップ204)。こうして、INSサブシステムは、ボディフレームをECEFフレームに関連付けるオイラー角として表される初期の姿勢を計算する。システムは、ボディフレームのy軸が局所レベルのフレームのz軸(すなわち、重力ベクトル)と位置合わせされた状態に近付かないようにボディフレームのy軸の配向を設定しなければならない。そうでなければ、ボディフレームを局所レベルのフレームに関連付ける関連する回転行列を正しく満たすことができない。なぜなら、有意なピッチ、ロール及び方位(機首方位)値を決定することができないからである。
【0024】
y軸が重力ベクトルと位置合わせされないように基準フレームの配向を設定するために、INSサブシステム12は、名目上x、y及びz軸に割り当てられた種々の加速度計からの測定値を比較して、どの測定値が最も大きいかを決定する。次に、INSサブシステムは、x、y及びz軸を加速度計及びジャイロスコープ間に再割り当て、または、マッピングし、これによって、z軸が、最大の正の加速度の大きさを有する、すなわち、z軸が上を向くようにする。この場合、INSサブシステムは、受信機がどのよに配向しているかに関係なく初期の姿勢を正しく予測するだろう。
【0025】
IMU20は、プロセッサ16のポート(不図示)にプラグイン(すなわち、接続)し、そのポートを介して、加速度計及びジャイロスコープ測定データをプロセッサに供給する。INSサブシステムは、使用中の特定のIMUに対応する適用可能な初期の不確実性値とスケールファクタを、INSシステムの要素と生のIMU測定値に、それぞれ割り当てる。
【0026】
INSサブシステムは、測定された加速度計信号の標準偏差に基づいてIMU測定値におけるノイズレベルを予測する(ステップ206)。ノイズレベルの予測が完了する前に受信機が移動すると、処理は、IMUメーカによって指定された公称のノイズレベル値を予測値として使用する。
【0027】
ステップ204と206は基本的に同時に行われる。基準フレームとノイズレベルが決定されると、INSサブシステム12は、粗い位置合わせ処理を開始する(ステップ208)。粗い位置合わせ処理によって、計算上のフレーム(この例では、地心軸(すなわち、ECEF)フレームである)に測定データを変換するために使用される種々の回転行列が設定される。粗い位置合わせ処理は、GPSサブシステム14によって提供される初期のGPS位置である、受信機の想定された「局所」位置に基づいている。INSサブシステムは、その局所位置に関連付けられた3つの直交ベクトル、すなわち、重力ベクトル、地球の角速度ベクトル、それら2つのベクトルの外積(またはベクトル積)を規定する。次に、INSサブシステムは、加速度計22及びジャイロスコープ24の測定値に基づいて、基準フレーム、または、ボディーフレームに変換されたそれらのベクトル及びそれらのベクトルの外積を決定する。3つのベクトルのうちの2つの組は、その変換によって関連付けられた以下の2つの行列Sl及びSbを形成する。
【0028】
【数1】
【0029】
ここで、Rlbは、局所レベルから、基準フレーム、または、ボディフレームにベクトルを変換するために使用される回転行列であり、Rblは、以下に示すように回転行列の転置行列である。
【0030】
【数2】
【0031】
Rblが計算されると、INSサブシステムは、ボディフレームの測定値を計算上の(ECEF)フレームに回転するために使用される回転行列Rbeを以下のように計算する。
【0032】
Rbe=RleRbl
システムはまた、行列Rblの特定の要素を使用して、以下のように、ロール(横揺れや回転など)、ピッチ(縦揺れなど)及び方位の状態要素を生成する。
【0033】
【数3】
【0034】
ここで、ArcSin、ArcTanは、それぞれ、逆サイン、逆タンジェント関数を表す。また、fx、fy、fzは、IMUによってボディフレームにおいて測定された特定の力である。ωx、ωy、ωzは、IMUによってボディフレームにおいて測定された角速度であり、Wは地球の回転(自転)速度、gは標準重力の大きさ、ψは緯度である。
【0035】
時間の経過にわたる位置合わせの正確さは、ジャイロスコープ測定値に対するノイズ、特に、ωxが東を向くように基準フレームが位置合わせされたときのωxにおけるノイズに依存する。したがって、INSサブシステム12は、初期の姿勢及び速度を計算する際にステップ206で決定された予測ノイズレベルを使用する。初期のGPS位置は、INSサブシステムの位置要素を初期化する(ステップ210)ために使用される。
【0036】
静止している受信機に対する粗い位置合わせ処理は、初期のGPS位置の計算後一定時間が経過した時間と、システムが動き始めた時間(または、動き初めてから上記一定時間が経過した時間)とのいずれか早い時間の経過後に終了する。粗い位置合わせの一部として、姿勢の正確さとINS測定ノイズレベルが計算される。粗い位置合わせの後、INSサブシステムは、ナビゲーションモードで動作し(ステップ212)、カルマンフィルタ処理と機械化処理を既知のやり方で使用して、現在の位置、速度、姿勢及びバイアス(または偏向)の予測値といった慣性システムパラメータを伝達する。
【0037】
B.動いているINSサブシステムの位置合わせ
受信機が始動中(ステップ200、202、203)に動いている場合は、INSサブシステム12は、入力された位置合わせデータを使用してIMUボディフレームの位置合わせを決定する。サブシステムは、パラメータ化された表面情報、測定されたGPS速度、及び、IMUボディフレームと受信機が設置されている乗物との間の既定の角度関係に基づいて位置合わせデータを決定する。IMUボディフレームと乗物との間の角度関係は、ユーザが提供する情報に基づくものであってもよく、または、システムが既に(または以前に)位置合わせされ、かつ、乗物が既知の配向状態にあったときのある時間にわたって収集されたデータに基づくものであってもよい。始動処理については図4を参照してより詳細に後述し、図5を参照して、IMUボディフレームと乗物との間の角度関係がある時間にわたって収集されたデータからどのようにして決定されるかについて説明する。
【0038】
パラメータ化された表面情報を提供するために使用される表面モデルの1例が図3に示されている。レース場の一部のモデル300は、各々が既知の配向を有する連続(または隣接)した平坦なセクション(または平面部)302を含む。この例では、平坦なセクションは三角形の形状をしているが、それらのセクションは種々の形状を有していてもよい。平坦なセクションの配向及びレイアウトは、この場合、航空写真測量技術を使用して決定されるが、それらの幾何学的形状を決定するために他の方法を使用することもできる。
【0039】
位置決めの計算では、それぞれの三角形の各々が、それらの三角形の表面部に垂直な方向において制約をもたらす。具体的には、GPS受信機アンテナが所与の三角形の「内部」にある間、アンテナの位置はその表面部に垂直な方向において不変である。アンテナの高さは乗物(ここでは、レースカー)に対して固定されており、したがって、平坦部の制約を、三角形すなわち平坦なセクション302に関して規定することができる。
【0040】
各々の平坦なセクション302には、平坦なセクションのフレームを形成する3組の直交する軸が割り当てられる。所与の三角形の幾何学的形状を使用して、平坦なセクションのフレームを地理的なフレームすなわち局所レベルのフレーム(これは、y軸が北を向いている右回りのフレームである)に回転させる回転行列Rplを決定することができる。システムは、それぞれの平坦なセクションについて回転行列Rplを予め計算し、また、局所レベルのフレームをそれぞれの平坦なセクションのフレームに回転させる転置行列Rlpを予め計算する。さらに、システムは、局所レベルのフレームを基準ECEFフレームに回転させる回転行列Rleを記憶している。
【0041】
図4を参照すると、受信機10が始動時に動いているときは、GPSサブシステム14は、地理的なフレーム、すなわち、局所レベルのフレームにおいてパラメータ化された初期のGPS位置及びGPS速度ベクトルVlを提供する(ステップ402)。初期のGPS位置に基づいて、INSサブシステムは、適用可能な平坦なセクション302を決定する(ステップ404)。その平坦なセクションについて計算された回転行列Rlpを使用して、サブシステムは、以下のように、速度ベクトルVlを平坦なセクションのフレームに変換する(ステップ406)。
【0042】
【数4】
【0043】
乗物がレース場を移動している、すなわち、平坦な表面に平行に移動しているという想定の下では、以下のように速度ベクトルVpのz成分をゼロに設定できる。
【0044】
【数5】
【0045】
ベクトルVpは乗物のフレームのy軸に平行である。この乗物のフレームは、y軸が前方を向き、z軸が上を向き、x軸が運転手の右を向いた3つの直交する軸によって規定される。局所レベルのフレームにおける速度ベクトルの傾きが乗物のピッチ角であり、したがって、平坦なセクションのフレーム内の対応するベクトルは「ピッチ」ベクトルである(ステップ408)。速度ベクトルが平坦なセクションのフレームにおいてz軸のまわりに−90°回転すると、乗物のフレームのx軸に平行なベクトルとなり、局所フレームにおけるこの回転されたベクトルの傾きは、乗物のロール角に等しい。したがって、平坦なセクションのフレームにおける「ロール」ベクトル(ステップ408)は、以下のようになる。
【0046】
【数6】
【0047】
ここで、R3は、z軸のまわりの回転に関連する回転行列である。回転行列Rlpは既知であるので、平坦なセクションのフレームにおけるピッチ及びロールベクトルを、以下のように、局所レベルのフレームにおけるピッチ及びロールベクトルに容易に変換することができる(ステップ410)。
【0048】
【数7】
【0049】
局所レベルのフレームにおけるピッチ及びロールベクトルは、乗物のフレーム軸を表す。このフレーム軸から、乗物のフレームを局所レベルのフレームに関連付けるオイラー角を導出することができる(ステップ412)。
【0050】
以下のロールベクトルが与えられた場合、
【0051】
【数8】
【0052】
ロール及び方位(たとえば、乗物の向き)を以下のように生成することができる。
【0053】
【数9】
【0054】
ピッチは、局所レベルのピッチベクトルから次のように計算できる。
【0055】
【数10】
【0056】
計算されたオイラー角αβyを使用して、乗物のフレームから局所レベルのフレームにベクトルを変換するための回転行列Rvlを既知のやり方で計算することができる。
【0057】
上記したように、ベクトルを局所レベルのフレームからECEFフレームに変換するための回転行列Rleは既知である。さらに、IMUボディフレームから乗物のフレームにベクトルを変換するための回転行列Rbvは既知である。すなわち、この行列は、ユーザによって提供されたデータ、またはシステムの動作中に収集されたデータを使用して予め計算される。これらの既知の行列、及び、新たに計算された回転行列Rvlを用いて、サブシステムは、IMUボディフレームとECEFフレームを関連付ける回転行列Rbeを以下のように計算する。
【0058】
【数11】
【0059】
次に、サブシステムは、計算された回転行列Rbeに基づいて、これら2つのフレームを既知のやり方で関連付けるオイラー角または回転四元数(rotation quaternion)の成分を決定する。
【0060】
受信機が動いている場合は、INSサブシステムは、IMUメーカによって指定された公称ノイズレベル値を、IMU測定値用の予測ノイズレベルとして使用する。位置合わせ、GPS速度及びGPS位置を用いて、INSサブシステムは、慣性測定値からそれ自体の連続する姿勢、速度及び位置を計算し、ナビゲーションモードでの動作を開始する(ステップ420)。
【0061】
図5を参照して、ある時間にわたって収集されたデータを使用して回転行列Rbvをどのように計算するかを説明する。INSサブシステムが位置合わせされ(ステップ502)、乗物が、表面モデル300(図3)の平坦なセクション302に対応する表面などの、既知の配向を有する表面上を移動するとき、IMUボディフレームから局所レベルのフレームへの回転行列Rblと平坦なセクションのフレームから局所レベルのフレームへの回転行列Rplの両方が既知である(ステップ504、506)。この場合、INSサブシステムは、回転行列RplとGPS速度ベクトルを使用し、及び、(i)速度ベクトルと、乗物の前方を向いている乗物のフレームのy軸とが平行であり、(ii)乗物のフレームのx軸とy軸が、平坦なセクションの表面部に平行である(ステップ508)、という想定に基づいて、乗物のフレームと局所レベルのフレームを関連付ける回転行列Rvlを計算できる。システムは、また、IMUボディフレームを乗物のフレームに関連付ける回転行列Rbvを、
【0062】
【数12】
【0063】
に基づいて計算できる(ステップ510)。
【0064】
サブシステムは、次に、計算された回転行列Rbvに基づいてIMUボディフレームを乗物のフレームに結合するオイラー角αβyを決定する。ある時間にわたって、サブシステムは、同じ計算を実行して、種々の平坦なセクションに関連する回転行列に基づいてオイラー角を決定する。次に、サブシステムは、アウトライアー(外れ値)を無視してそれらの値を平均することにより、角度関係をより強力に規定する。次に、システムは、後で使用するために、「オンザフライ」の位置合わせ処理、すなわち、受信機が動いているときに行われる位置合わせ処理とともにこれらの値をメモリ(不図示)に記憶する。
【0065】
以上の説明は、本発明の特定の実施形態に限定したものである。しかしながら、本発明のいくつかまたは全ての利点を達成しつつ本発明に対して変形及び変更をなすことができることは明らかであろう。したがって、本発明の真の思想及び範囲内に入る、そのような全ての変形及び変更をカバーすることが添付の特許請求の範囲の目的である。本発明には、他のタイプのパラメータ化された表面情報を使用することも含まれるが、その場合、INSサブシステムは、その表面情報から乗物が移動している表面の配向を計算することができる。さらに、受信機は、他のフレームを使用すること、及び/または、計算に際してそれぞれのステップにおいてあるフレームから別のフレームへとベクトルまたは測定データを変換すること、などができる。
【図面の簡単な説明】
【0066】
【図1】本発明にしたがって構成されたGPS/INS受信機の機能ブロック図である。
【図2】静止している受信機用のINSサブシステム始動処理のフローチャートである。
【図3】パラメータ化された表面情報を提供する際に使用するための表面モデルを示す。
【図4】動いている受信機用のINSサブシステム始動処理のフローチャートである。
【図5】後で使用する位置合わせデータを決定するためのINSサブシステムの動作のフローチャートである。
【特許請求の範囲】
【請求項1】
慣性/衛星航法システム(GPS)受信機であって、
A.複数のGPS衛星から受信した信号に関連する相関測定値を提供するためのGPSサブシステムと、
B.複数の加速度計及びジャイロスコープからの慣性測定値を提供するための慣性測定ユニットを有する慣性サブシステムと、
C.前記相関測定値に基づいてGPS位置を計算し、前記慣性測定値に基づいて前記GPS位置に対する慣性位置、速度及び姿勢を計算するプロセッサであって、前記受信機が動いているときに、パラメータ化された表面情報に関連するGPS位置、対応するGPS速度ベクトル及び位置合わせデータを使用して、前記慣性測定ユニットを位置合わせするプロセッサ
を備える受信機。
【請求項2】
前記プロセッサは、前記GPS位置に対応する平坦な表面の相対的な配向を前記パラメータ化された表面情報として使用する、請求項1の慣性/衛星航法システム受信機。
【請求項3】
前記プロセッサは、
平坦な表面の配向情報とともに前記GPS速度ベクトルを使用して、前記受信機が搭載された乗物のピッチ、ロール及び方位を決定し、及び、
前記乗物と慣性測定ユニットのボディフレームとの間の角度関係に基づいて、前記慣性測定ユニットのボディフレームと、前記受信機によって使用される計算上のフレームまたは基準フレームとの間の角度関係を決定し、
前記慣性測定ユニットのボディフレームは、前記加速度計とジャイロスコープとの相対的な配向に関連することからなる、請求項2の慣性/衛星航法システム受信機。
【請求項4】
前記プロセッサは、
前記GPS速度ベクトルを前記平坦な表面に関連する平坦なセクションのフレームにおけるベクトルに変換し、かつ、ピッチ及びロールベクトルを決定し、
前記ピッチ及びロールベクトルを地理的フレームまたは局所レベルのフレームにおける対応するベクトルに変換し、
前記局所レベルのフレームにおけるパラメータ化されたピッチ及びロールベクトルの成分を操作して、前記ピッチ、ロール及び方位値を生成する
ことにより、前記乗物のピッチ、ロール及び方位を決定する、請求項3の慣性/衛星航法システム受信機。
【請求項5】
前記平坦なセクションのフレームは、z軸が前記表面に垂直である3組の直交軸を有し、
前記平坦なセクションのフレームにおけるパラメータ化された前記GPS速度ベクトルのz成分は、前記ピッチベクトルを決定するためにゼロに設定される、請求項4の慣性/衛星航法システム受信機。
【請求項6】
前記平坦なフレームのセクションにおけるパラメータ化されたロールベクトルは、前記z軸まわりのピッチベクトルを回転させることによって決定される、請求項5の慣性/衛星航法システム受信機。
【請求項7】
前記プロセッサは、前記慣性測定ユニットのボディフレームと前記基準フレームとの間の角度関係を、
前記ピッチ、ロール及び方位値に基づいて、乗物のフレームと前記局所レベルのフレームを関連付ける回転行列Rlvを計算し、
前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係に基づいて前記慣性測定ユニットのボディフレームと前記乗物のフレームとを関連付ける回転行列Rvbを計算し、及び、
前記計算された行列Rlv及びRvb、及び、前記局所レベルのフレームを前記基準フレームに関連付ける既知の回転行列Relに基づいて、前記慣性測定ユニットのボディフレームと前記基準フレームを関連付ける回転行列Rebを計算する
ことによって決定する、請求項4の慣性/衛星航法システム受信機。
【請求項8】
前記乗物のフレームは、y軸が前記乗物の前方を向き、z軸が上を向き、x軸が運転手の右側を向いた軸を有する、請求項7の慣性/衛星航法システム受信機。
【請求項9】
前記プロセッサは、ユーザによって提供されるデータに基づいて、前記乗物のフレームと、前記慣性測定ユニットのボディフレームとの間の角度関係を決定する、請求項7の慣性/衛星航法システム受信機。
【請求項10】
前記プロセッサは、前記慣性サブシステムが既に位置合わせされ、かつ、前記乗物が既知の配向を有する表面上にあったときに収集されたデータに基づいて、前記乗物のフレームと前記慣性測定ユニットのボディフレームとの間の角度関係を決定する、請求項7の慣性/衛星航法システム受信機。
【請求項11】
前記プロセッサは、前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係を、
前記GPS速度ベクトルに基づいて回転行列Rlvを計算し、及び、
Rvb=RvlRlbを計算すること
によって決定し、
前記乗物のフレームのy軸は、前記GPS速度ベクトルに平行であり、前記乗物のフレームのx軸及びy軸は、前記平坦なセクションの表面部に平行であり、RvlはRlvの転置であり、Rlbは前記位置合わせから既知である、請求項7の慣性/衛星航法システム。
【請求項12】
前記プロセッサは、さらに、前記慣性測定ユニットによってなされた測定(または、前記慣性測定ユニットによって生成された測定値)に基づいて、前記受信機が静止しているときに前記慣性測定ユニットの位置合わせを決定する、請求項1の慣性/衛星航法システム受信機。
【請求項13】
始動時に動いている慣性/GPS受信機の慣性測定ユニットの位置合わせを決定する方法であって、
A.複数のGPS衛星からの信号を受信するステップと、
B.前記衛星信号内のキャリア及びコードを取得し、追跡するステップと、
C.GPS位置及び関連するGPS速度ベクトルを決定するステップと、
D.前記GPS位置に対応する表面モデル上の位置を識別し、対応する表面部の相対的な配向を決定するステップと、
E.前記表面部の配向と前記GPS速度ベクトルを使用して、前記受信機が搭載されている乗物のピッチ、ロール及び方位を決定するステップと、
F.前記ピッチ、ロール、方位情報、及び、前記乗物と、前記慣性測定ユニットに関連する測定フレームまたはボディフレームとの間の角度関係に関する情報を使用して、前記慣性測定ユニットのボディフレームと計算上のフレームまたは基準フレームとの間の角度関係を決定するステップ
を含む、方法。
【請求項14】
ピッチ、ロール及び方位を決定する前記ステップが、さらに、
前記GPS速度ベクトルを、前記表面部に関連する平坦なセクションのフレームにおけるベクトルに変換し、前記平坦なセクションのフレームにおけるピッチ及びロールベクトルを決定するステップと、
前記ピッチ及びロールベクトルを、前記平坦なセクションのフレームから地理的なフレームまたは局所レベルのフレームに変換するステップと、
前記局所フレームにおけるパラメータ化されたピッチ及びロールベクトルの成分を使用して、前記ピッチ、ロール及び方位値を計算するステップ
を含むことからなる、請求項13の方法。
【請求項15】
前記平坦なセクションのフレームが、z軸が前記表面部に垂直である3組の直交軸を有し、前記GPS速度ベクトルを変換する前記ステップが、さらに、前記ピッチベクトルを決定するために、前記平坦なセクションのフレームにおけるパラメータ化されたGPS速度ベクトルのz成分をゼロに設定するステップを含むことからなる、請求項14の方法。
【請求項16】
前記ピッチベクトルを前記平坦なフレームのz軸のまわりに回転させることによって、前記平坦なフレームのセクションにおけるパラメータ化されたロールベクトルを決定するステップを含む、請求項15の方法。
【請求項17】
前記慣性測定ユニットのボディフレームと前記基準フレームとの間の角度関係を決定する前記ステップが、
前記ピッチ、ロール及び方位値に基づいて、乗物のフレームと局所レベルのフレームを関連付ける回転行列Rlvを計算するステップと、
前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係に基づいて、前記慣性測定ユニットのボディフレームと前記乗物のフレームを関連付ける回転行列Rvbを計算するステップと、
前記計算された行列Rlv及びRvbと、前記局所レベルのフレームと前記基準フレームを関連付ける既知の回転行列Relとに基づいて、前記慣性測定ユニットのボディフレームと前記基準フレームを関連付ける回転行列Rebを計算するステップ
を含むことからなる、請求項13の方法。
【請求項18】
前記慣性測定ユニットのボディフレームと前記基準フレームとの間の角度関係を決定する前記ステップにおいて使用される、前記乗物のフレームと前記慣性測定ユニットのボディフレームとの間の関係に関する情報が、前記慣性測定ユニットが既に位置合わせされ、かつ、前記乗物が既知の配向を有する表面上にあったときに収集されたデータに基づくことからなる、請求項13の方法。
【請求項19】
前記慣性測定ユニットのボディフレームと前記基準フレームとの間の関係を決定する前記ステップにおいて使用される、前記乗物のフレームと前記慣性測定ユニットのボディフレームとの間の関係に関する情報が、ユーザによって提供される情報に基づくことからなる、請求項13の方法。
【請求項20】
前記受信機が、静止状態で再始動するときに、前記慣性測定ユニットによって生成された測定値を用いて前記慣性測定ユニットのボディフレームと前記基準フレームとの間の関係を決定するステップをさらに含む、請求項13の方法。
【請求項21】
前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係を決定する前記ステップが、
前記GPS速度ベクトルに基づいて回転行列Rlvを計算するステップと、
Rvb=RvlRlbを計算するステップ
をさらに含み、
前記乗物のフレームのy軸は前記GPS速度ベクトルに平行であり、前記乗物のフレームのx軸及びy軸は、前記表面部に平行であり、RvlはRlvの転置であり、Rlbは前記位置合わせから既知である、請求項17の方法。
【請求項1】
慣性/衛星航法システム(GPS)受信機であって、
A.複数のGPS衛星から受信した信号に関連する相関測定値を提供するためのGPSサブシステムと、
B.複数の加速度計及びジャイロスコープからの慣性測定値を提供するための慣性測定ユニットを有する慣性サブシステムと、
C.前記相関測定値に基づいてGPS位置を計算し、前記慣性測定値に基づいて前記GPS位置に対する慣性位置、速度及び姿勢を計算するプロセッサであって、前記受信機が動いているときに、パラメータ化された表面情報に関連するGPS位置、対応するGPS速度ベクトル及び位置合わせデータを使用して、前記慣性測定ユニットを位置合わせするプロセッサ
を備える受信機。
【請求項2】
前記プロセッサは、前記GPS位置に対応する平坦な表面の相対的な配向を前記パラメータ化された表面情報として使用する、請求項1の慣性/衛星航法システム受信機。
【請求項3】
前記プロセッサは、
平坦な表面の配向情報とともに前記GPS速度ベクトルを使用して、前記受信機が搭載された乗物のピッチ、ロール及び方位を決定し、及び、
前記乗物と慣性測定ユニットのボディフレームとの間の角度関係に基づいて、前記慣性測定ユニットのボディフレームと、前記受信機によって使用される計算上のフレームまたは基準フレームとの間の角度関係を決定し、
前記慣性測定ユニットのボディフレームは、前記加速度計とジャイロスコープとの相対的な配向に関連することからなる、請求項2の慣性/衛星航法システム受信機。
【請求項4】
前記プロセッサは、
前記GPS速度ベクトルを前記平坦な表面に関連する平坦なセクションのフレームにおけるベクトルに変換し、かつ、ピッチ及びロールベクトルを決定し、
前記ピッチ及びロールベクトルを地理的フレームまたは局所レベルのフレームにおける対応するベクトルに変換し、
前記局所レベルのフレームにおけるパラメータ化されたピッチ及びロールベクトルの成分を操作して、前記ピッチ、ロール及び方位値を生成する
ことにより、前記乗物のピッチ、ロール及び方位を決定する、請求項3の慣性/衛星航法システム受信機。
【請求項5】
前記平坦なセクションのフレームは、z軸が前記表面に垂直である3組の直交軸を有し、
前記平坦なセクションのフレームにおけるパラメータ化された前記GPS速度ベクトルのz成分は、前記ピッチベクトルを決定するためにゼロに設定される、請求項4の慣性/衛星航法システム受信機。
【請求項6】
前記平坦なフレームのセクションにおけるパラメータ化されたロールベクトルは、前記z軸まわりのピッチベクトルを回転させることによって決定される、請求項5の慣性/衛星航法システム受信機。
【請求項7】
前記プロセッサは、前記慣性測定ユニットのボディフレームと前記基準フレームとの間の角度関係を、
前記ピッチ、ロール及び方位値に基づいて、乗物のフレームと前記局所レベルのフレームを関連付ける回転行列Rlvを計算し、
前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係に基づいて前記慣性測定ユニットのボディフレームと前記乗物のフレームとを関連付ける回転行列Rvbを計算し、及び、
前記計算された行列Rlv及びRvb、及び、前記局所レベルのフレームを前記基準フレームに関連付ける既知の回転行列Relに基づいて、前記慣性測定ユニットのボディフレームと前記基準フレームを関連付ける回転行列Rebを計算する
ことによって決定する、請求項4の慣性/衛星航法システム受信機。
【請求項8】
前記乗物のフレームは、y軸が前記乗物の前方を向き、z軸が上を向き、x軸が運転手の右側を向いた軸を有する、請求項7の慣性/衛星航法システム受信機。
【請求項9】
前記プロセッサは、ユーザによって提供されるデータに基づいて、前記乗物のフレームと、前記慣性測定ユニットのボディフレームとの間の角度関係を決定する、請求項7の慣性/衛星航法システム受信機。
【請求項10】
前記プロセッサは、前記慣性サブシステムが既に位置合わせされ、かつ、前記乗物が既知の配向を有する表面上にあったときに収集されたデータに基づいて、前記乗物のフレームと前記慣性測定ユニットのボディフレームとの間の角度関係を決定する、請求項7の慣性/衛星航法システム受信機。
【請求項11】
前記プロセッサは、前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係を、
前記GPS速度ベクトルに基づいて回転行列Rlvを計算し、及び、
Rvb=RvlRlbを計算すること
によって決定し、
前記乗物のフレームのy軸は、前記GPS速度ベクトルに平行であり、前記乗物のフレームのx軸及びy軸は、前記平坦なセクションの表面部に平行であり、RvlはRlvの転置であり、Rlbは前記位置合わせから既知である、請求項7の慣性/衛星航法システム。
【請求項12】
前記プロセッサは、さらに、前記慣性測定ユニットによってなされた測定(または、前記慣性測定ユニットによって生成された測定値)に基づいて、前記受信機が静止しているときに前記慣性測定ユニットの位置合わせを決定する、請求項1の慣性/衛星航法システム受信機。
【請求項13】
始動時に動いている慣性/GPS受信機の慣性測定ユニットの位置合わせを決定する方法であって、
A.複数のGPS衛星からの信号を受信するステップと、
B.前記衛星信号内のキャリア及びコードを取得し、追跡するステップと、
C.GPS位置及び関連するGPS速度ベクトルを決定するステップと、
D.前記GPS位置に対応する表面モデル上の位置を識別し、対応する表面部の相対的な配向を決定するステップと、
E.前記表面部の配向と前記GPS速度ベクトルを使用して、前記受信機が搭載されている乗物のピッチ、ロール及び方位を決定するステップと、
F.前記ピッチ、ロール、方位情報、及び、前記乗物と、前記慣性測定ユニットに関連する測定フレームまたはボディフレームとの間の角度関係に関する情報を使用して、前記慣性測定ユニットのボディフレームと計算上のフレームまたは基準フレームとの間の角度関係を決定するステップ
を含む、方法。
【請求項14】
ピッチ、ロール及び方位を決定する前記ステップが、さらに、
前記GPS速度ベクトルを、前記表面部に関連する平坦なセクションのフレームにおけるベクトルに変換し、前記平坦なセクションのフレームにおけるピッチ及びロールベクトルを決定するステップと、
前記ピッチ及びロールベクトルを、前記平坦なセクションのフレームから地理的なフレームまたは局所レベルのフレームに変換するステップと、
前記局所フレームにおけるパラメータ化されたピッチ及びロールベクトルの成分を使用して、前記ピッチ、ロール及び方位値を計算するステップ
を含むことからなる、請求項13の方法。
【請求項15】
前記平坦なセクションのフレームが、z軸が前記表面部に垂直である3組の直交軸を有し、前記GPS速度ベクトルを変換する前記ステップが、さらに、前記ピッチベクトルを決定するために、前記平坦なセクションのフレームにおけるパラメータ化されたGPS速度ベクトルのz成分をゼロに設定するステップを含むことからなる、請求項14の方法。
【請求項16】
前記ピッチベクトルを前記平坦なフレームのz軸のまわりに回転させることによって、前記平坦なフレームのセクションにおけるパラメータ化されたロールベクトルを決定するステップを含む、請求項15の方法。
【請求項17】
前記慣性測定ユニットのボディフレームと前記基準フレームとの間の角度関係を決定する前記ステップが、
前記ピッチ、ロール及び方位値に基づいて、乗物のフレームと局所レベルのフレームを関連付ける回転行列Rlvを計算するステップと、
前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係に基づいて、前記慣性測定ユニットのボディフレームと前記乗物のフレームを関連付ける回転行列Rvbを計算するステップと、
前記計算された行列Rlv及びRvbと、前記局所レベルのフレームと前記基準フレームを関連付ける既知の回転行列Relとに基づいて、前記慣性測定ユニットのボディフレームと前記基準フレームを関連付ける回転行列Rebを計算するステップ
を含むことからなる、請求項13の方法。
【請求項18】
前記慣性測定ユニットのボディフレームと前記基準フレームとの間の角度関係を決定する前記ステップにおいて使用される、前記乗物のフレームと前記慣性測定ユニットのボディフレームとの間の関係に関する情報が、前記慣性測定ユニットが既に位置合わせされ、かつ、前記乗物が既知の配向を有する表面上にあったときに収集されたデータに基づくことからなる、請求項13の方法。
【請求項19】
前記慣性測定ユニットのボディフレームと前記基準フレームとの間の関係を決定する前記ステップにおいて使用される、前記乗物のフレームと前記慣性測定ユニットのボディフレームとの間の関係に関する情報が、ユーザによって提供される情報に基づくことからなる、請求項13の方法。
【請求項20】
前記受信機が、静止状態で再始動するときに、前記慣性測定ユニットによって生成された測定値を用いて前記慣性測定ユニットのボディフレームと前記基準フレームとの間の関係を決定するステップをさらに含む、請求項13の方法。
【請求項21】
前記乗物と前記慣性測定ユニットのボディフレームとの間の角度関係を決定する前記ステップが、
前記GPS速度ベクトルに基づいて回転行列Rlvを計算するステップと、
Rvb=RvlRlbを計算するステップ
をさらに含み、
前記乗物のフレームのy軸は前記GPS速度ベクトルに平行であり、前記乗物のフレームのx軸及びy軸は、前記表面部に平行であり、RvlはRlvの転置であり、Rlbは前記位置合わせから既知である、請求項17の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2007−504448(P2007−504448A)
【公表日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願番号】特願2006−525015(P2006−525015)
【出願日】平成16年9月3日(2004.9.3)
【国際出願番号】PCT/CA2004/001627
【国際公開番号】WO2005/024457
【国際公開日】平成17年3月17日(2005.3.17)
【出願人】(598093381)ノヴァテル・インコーポレイテッド (7)
【Fターム(参考)】
【公表日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願日】平成16年9月3日(2004.9.3)
【国際出願番号】PCT/CA2004/001627
【国際公開番号】WO2005/024457
【国際公開日】平成17年3月17日(2005.3.17)
【出願人】(598093381)ノヴァテル・インコーポレイテッド (7)
【Fターム(参考)】
[ Back to top ]