
慣性航法システム
【課題】 簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速時計のドリフト・バイアス誤差を低減する慣性航法システムを提供する。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶、海中探査機、長距離トンネル掘削(シールド工法)等において、外界からの情報伝達が困難な移動体プラットフォームに固定設置し、長時間運動する移動体の位置及び方位検出として使用されるストラップダウン方式の慣性航法システムに関する。
【背景技術】
【0002】
慣性航法装置は、移動体が運動する際に生じる慣性力を検知し、物理計算及び幾何学計算を行うことにより、移動体の基準座標系における絶対位置(緯度と経度)を導出する装置である。そして、ジャイロスコープ及び加速度計が移動体に固定されて取り付けられている慣性航法装置の方式をストラップダウン方式慣性航法装置という。
【0003】
従来から、慣性航法装置ではジャイロスコープ及び加速度計がランダムな誤差(バイアス・ドリフト誤差)を持っており、該慣性航法装置が出力する位置情報系の精度が劣化するという問題点があり、このため長時間・長距離の慣性航法が困難となっていた。
【0004】
そこで、該問題点を解決するために、移動体の位置検出における慣性航法装置の性能改善として船舶においてはGPS、海中探査機においては支援母船又はトランスポンダ等の外部データを用いて内部演算ゲインを補正する手法がある。しかし、外部データを取得することが困難な海中、地中では前記の手法は適用不可能である。また、支援母船の随行やトランスポンダの事前設置は運航体制を大規模化にするため、運航経費の増大や監視体制の強化等の問題点がある。
【0005】
海中探査機においてはドップラ速度計等の他のセンサを用いたハイブリットにより慣性情報の精度を上げる手法が適用されている。この手法では、他の外界センサを必要とすることから、機構が複雑になると共に費用も増大し、また、ドップラ速度計の精度が劣化する場合、慣性測定ユニットとなるジャイロスコープや加速度計の姿勢系情報や位置系情報のみに依存しなければならない。しかし、これらセンサは、ドリフトやバイアス等のランダムな誤差を有しているため、長時間・長距離の移動、航行を余儀無くする船舶、海中探査機やシールド掘進機が要求するような精度が補償されない。
【0006】
また、慣性航法装置の性能は主要センサであるジャイロスコープ、加速度計の精度に強く依存するので、これらセンサの性能を個々に上げることが考えられるが、現在、これらセンサの開発は既に高い完成度をもっており、更なる性能改善をはかるには、この分野における技術革新的な展開と、多大なる時間及び費用が必要となる。
【0007】
そこで、慣性航法装置単体での性能改善の手法として、回転台を用いた手法を開示しているものがある(特許文献1)。特許文献1の第1実施形態の装置は、慣性測定ユニットを2つの回転軸において回転自在となるように支持した姿勢設定部によって、慣性測定ユニットの1つの検出軸が垂直状態に姿勢設定された時に検出された当該検出軸方向の加速度を予め記憶された重力加速度データと比較することにより当該検出軸方向の加速度を検出する加速度センサのバイアス誤差を検出すると共に、前記1つの検出軸が垂直状態に姿勢設定された時に検出された当該検出軸に直交する他の2軸周りの各角速度を予め記憶された前記角速度と地球の自転速度と航走体の緯度の各データから算出された前記他の2軸周りの各角速度と比較することにより当該2軸周りの各角速度を検出する各ジャイロのバイアス誤差を検出し、前記加速度センサのバイアス誤差及び各ジャイロのバイアス誤差によって位置系情報を補正するものである。また、特許文献1の第2実施形態の装置は、慣性測定ユニットを回転テーブル上に直接固定し、1秒間に数回転から数十回転の回転速度で常時一定回転させるものである。
【特許文献1】特開2001−141507号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1の第1実施形態の装置は、ジンバル機構を備えているため構造が複雑となる。また、上記特許文献1の第2実施形態の装置は、姿勢設定部が設けられておらず、X軸とY軸とが水平状態に設定されていないため、回転速度を船体の揺動周期よりも速い速度に設定する必要がある。したがって、回転軸に配置されるジャイロのスケールファクタ誤差により検出する方位角誤差が積算されてしまうことになる。さらに、加速度計の取付位置が回転台の回転中心と完全に一致しないと、高速回転する際に加速度計に大きな遠心加速度が入力され、別の誤差要因となる。
【0009】
本発明は、上記課題を解決するものであって、簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速度計のドリフト・バイアス誤差を低減する慣性航法システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
そのために本発明は、慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープと、前記慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計とを有する慣性測定部を備えた移動体の慣性航法システムにおいて、前記慣性測定部を上面に配置し、該上面と直交する慣性航法システム座標系の一軸周りに低速回転をする回転台と、前記回転台の回転角を検出する回転角検出手段とを有する回転台部と、前記慣性測定部と前記回転台部からの出力により前記移動体の姿勢情報及び位置情報を計算する演算部とを備えたことを特徴とする。
【0011】
また、前記演算部は、前記ジャイロスコープが出力する角速度信号から慣性航法システム座標系と基準座標系との姿勢関係を記述する第一座標変換行列を計算する第一座標変換行列計算手段と、前記回転角検出手段の出力する角度信号から慣性航法システム座標系と移動体座標系との姿勢関係を記述する第二座標変換行列を計算する第二座標変換行列計算手段と、前記第一座標変換行列計算手段の出力と前記第二座標変換行列計算手段の出力とから前記基準座標系において前記移動体の向いている方位・ロール・ピッチを出力するための姿勢角計算手段とを有することを特徴とする。
【0012】
また、前記演算部は、前記第一座標変換行列計算手段で計算された第一座標変換行列を入力し、前記回転台の基準座標系に対する角度及び角速度を出力する角度・角速度計算手段を有し、前記回転台部は、前記角度・角速度計算手段の出力から、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対しほぼ一定の回転速度となるように前記回転台を制御する回転台制御手段を有することを特徴とする。
【0013】
また、前記回転台は、アライメント中及び計測中に回転することを特徴とする。
【0014】
また、前記回転台は、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対し一回転するごとに回転方向を逆転することを特徴とする。
【発明の効果】
【0015】
それによって、本発明は、慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープと、前記慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計とを有する慣性測定部を備えた移動体の慣性航法システムにおいて、前記慣性測定部を上面に配置し、該上面と直交する慣性航法システム座標系の一軸周りに低速回転をする回転台と、前記回転台の回転角を検出する回転角検出手段とを有する回転台部と、前記慣性測定部と前記回転台部からの出力により前記移動体の姿勢情報及び位置情報を計算する演算部とを備えたので、従来の慣性航法装置が有していたジャイロスコープ、加速度計のドリフト・バイアス誤差が回転台から与えられる回転運動により平均化され、位置系情報の精度を向上させつつ、回転運動による遠心加速度的な誤差要因を補償し、移動体の位置情報だけでなく、姿勢系情報を算出することができる。また、従来の慣性航法装置に簡便な回転台部を付加することのみで性能向上をはかることができるため、新規開発と比較して開発費用が抑えられ、製造メーカ、機体種別に関係なく適用できる手法であるので、既存の装置を流用することが可能である。
【0016】
また、前記演算部は、前記ジャイロスコープが出力する角速度信号から慣性航法システム座標系と基準座標系との姿勢関係を記述する第一座標変換行列を計算する第一座標変換行列計算手段と、前記回転角検出手段の出力する角度信号から慣性航法システム座標系と移動体座標系との姿勢関係を記述する第二座標変換行列を計算する第二座標変換行列計算手段と、前記第一座標変換行列計算手段の出力と前記第二座標変換行列計算手段の出力とから前記基準座標系において前記移動体の向いている方位・ロール・ピッチを出力するための姿勢角計算手段とを有するので、方位・ロール・ピッチの姿勢系情報を正確に算出することができる。
【0017】
また、前記演算部は、前記第一座標変換行列計算手段で計算された第一座標変換行列を入力し、前記回転台の基準座標系に対する角度及び角速度を出力する角度・角速度計算手段を有し、前記回転台部は、前記角度・角速度計算手段の出力から、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対しほぼ一定の回転速度となるように前記回転台を制御する回転台制御手段を有するので、方位・ロール・ピッチの姿勢系情報をさらに正確に算出することができる。
【0018】
また、前記回転台は、アライメント中及び計測中に回転するので、アライメント時においてもセンサの検出値の誤差を軽減することができる。
【0019】
また、前記回転台は、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対し一回転するごとに回転方向を逆転するので、ジャイロスコープ及び加速度計がもつアシンメトリによるスケールファクタ誤差の蓄積を抑制することができる。
【発明を実施するための最良の形態】
【0020】
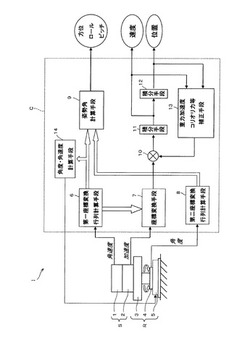
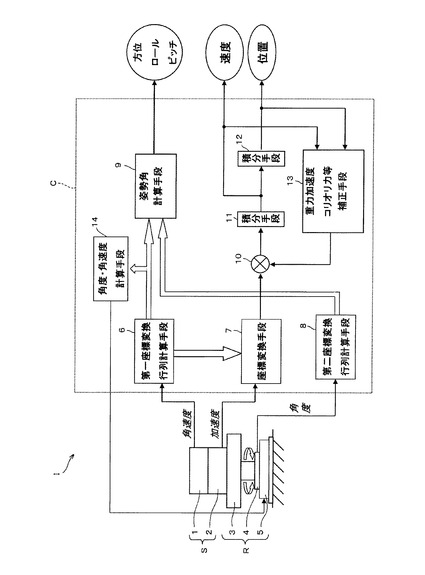
以下、本発明の実施の形態を図面に基づいて説明する。図1は本実施形態の慣性航法システムの概略図、を示す。図1において、Iは慣性航法システム、Sは慣性測定部、Rは回転台部、Cは演算部、1はジャイロスコープ、2は加速度計、3は回転台、4は回転角検出手段、5は回転台制御手段、6は第一座標変換行列計算手段、7は座標変換手段、8は第二座標変換行列計算手段、9は姿勢角計算手段、10は加算手段、11は第1積分手段、12は第2積分手段、13は補正手段、14は角度・角速度計算手段である。
【0021】
慣性航法システムIは、慣性測定部S、回転台部R及び演算部Cを備えており、姿勢がほぼ一定に安定している移動体Mに搭載され、移動体Mの位置情報、姿勢系情報を算出する。
【0022】
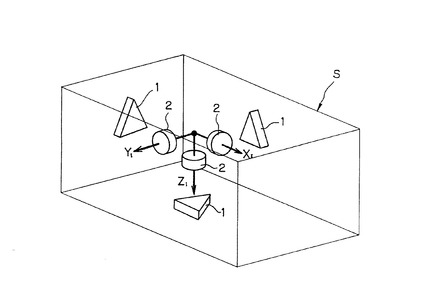
慣性測定部Sは、ジャイロスコープ1及び加速度計2を有し、ジャイロスコープ1及び加速度計2で測定された角速度及び加速度を慣性情報として演算部Cに出力する。ジャイロスコープ1は、慣性航法システム(INS)座標系(XI軸、YI軸、ZI軸)の三軸周りの角速度を検出するもので、慣性測定部Sの各軸に3個配置されている。加速度計2は、慣性航法システム座標系の三軸方向の加速度を検出するもので、慣性測定部Sの各軸に3個配置されている。なお、ジャイロスコープ1及び加速度計2はそれぞれ3個以上配置してもよい。図2は慣性測定部Sの概略図である。
【0023】
回転台部Rは回転台3、回転角検出手段4及び回転台制御手段5を有し、回転台制御手段5により回転台3を回転させ、回転角検出手段4で検出した回転台3の回転角を演算部Cに出力する。回転台3は、慣性測定部Sを台上に配置し、図示しない駆動部により慣性航法システム座標系の一軸(ZI軸)周りで駆動され、慣性測定部Sを回転させる台であり、移動体Mに支持されている。回転角検出手段4は、回転台3の回転角を検出し、演算部Cに出力する。回転台制御手段5は、ジャイロスコープ1が検出した角速度から演算部Cの第一座標変換行列計算手段6で第一座標変換行列を計算し、該第一座標変換行列から角度・角速度計算手段14で求めた基準座標系に対する回転台3の角度及び角速度の信号を入力することにより、慣性測定部Sの方位が常に基準座標系(XB軸、YB軸、ZB軸)に対しほぼ一定の回転速度となるよう回転台3を制御する。例えば、回転台3を基準座標系に対し定速=+1°/sで回転させることを考える場合、仮に移動体Mが基準座標系に対し+2°/sで旋回しているならば、回転台3を基準座標系に対し−1°/sで回転させることで、回転台3上の慣性計測部Sのジャイロスコープ1の出力が基準座標系に対し+1°/sとなるように制御し、仮に移動体Mが基準座標系に対し−2°/sで旋回しているならば、回転台3を基準座標系に対し+3°/sで回転させることで、回転台3上の慣性計測部Sのジャイロスコープ1の出力が基準座標系に対し+1°/sとなるように制御する。
【0024】
演算部Cは、高速動作する一種のコンピュータであり、第一座標変換行列計算手段6、座標変換手段7、第二座標変換行列計算手段8、姿勢角計算手段9、加算手段10,積分手段11及び12、補正手段13、角度・角速度計算手段14を有し、ジャイロスコープ1及び加速度計2で測定された角速度及び加速度並びに回転角検出器4で検出した回転台3の回転角を入力し、演算することで、基準座標系に対する移動体Mの方位・ロール・ピッチ情報、速度情報及び位置情報並びに基準座標系に対する回転台3の角度・角速度のそれぞれの情報を出力する。
【0025】
第一座標変換行列計算手段6は、ジャイロスコープ1が出力する角速度信号から慣性航法システム座標系(XI軸、YI軸、ZI軸)と基準座標系(XB軸、YB軸、ZB軸)との姿勢関係を記述する第一座標変換行列を計算する手段であり、該第一座標変換行列計算手段6で計算された第一座標変換行列は座標変換手段7、姿勢角計算手段9及び角度・角速度計算手段14に出力される。
【0026】
座標変換手段7は、加速度計2が出力する加速度信号を、第一座標変換行列計算手段6で計算された第一座標変換行列により基準座標系における加速度信号に変換する手段であり、該第一座標変換手段6で求められた基準座標系における加速度信号を加算手段10に出力する。
【0027】
第二座標変換行列計算手段8は、回転角検出手段4が出力する回転角度信号から慣性航法システム座標系(XI軸、YI軸、ZI軸)と移動体座標系(XM軸、YM軸、ZM軸)との姿勢関係を記述する第二座標変換行列を計算する手段であり、該第二座標変換行列計算手段8で計算された第二座標変換行列は姿勢角計算手段9に出力される。
【0028】
姿勢角計算手段9は、第一座標変換行列計算手段6で計算された第一座標変換行列と該第二座標変換行列計算手段8で計算された第二座標変換行列を入力し、基準座標系において移動体Mの向いている方位・ロール・ピッチを出力するための手段である。
【0029】
加算手段10は、座標変換手段7で座標変換した加速度信号と、後述する重力加速度及びコリオリ力の影響を補正する補正手段13の出力とを加算する手段で、第1積分手段11に出力するための手段である。
【0030】
第1積分手段11は、加速度信号と補正手段13の出力とを加算手段10で加算した信号を積分し、基準座標系における速度信号を出力するための手段であり、第2積分手段12は、速度信号をさらに積分し、基準座標系における位置信号を出力するための手段である。
【0031】
補正手段13は、第1積分手段11から出力された速度信号と、第2積分手段12から出力された位置信号とを、重力加速度及びコリオリ力等の影響を考慮して補正し、座標変換手段7の出力する加速度信号にフィードバックする手段である。
【0032】
角度・角速度計算手段14は、第一座標変換行列計算手段6で計算された第一座標変換行列を入力し、回転台制御手段5に出力するための手段である。
【0033】
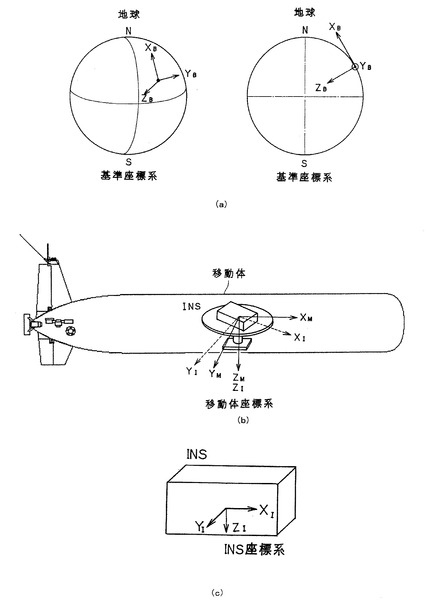
ここで、図3を参照して本システムの座標系について説明する。図3は基準座標系、慣性航法システム座標系及び移動体座標系を示す図である。図3(a)は基準座標系(XB,YB,ZB)、図3(b)は移動体座標系(XM,YM,ZM)、図3(c)は慣性航法システム座標系(XI,YI,ZI)、を示している。
【0034】
図3(a)で示した基準座標系(XB,YB,ZB)とは、地球表面からみて北極方向をXB、東方向をYB、中心方向をZBとした座標系である。図3(b)で示した移動体座標系(XM,YM,ZM)とは、移動体Mの前方向をXM、図3(b)においてXMに対して側方に向かう直角方向をYM、図3(b)においてXM及びYMに対して直交し下方に向かう方向をZMとした座標系である。図3(c)で示した慣性航法システム座標系(XI,YI,ZI)とは、慣性航法システムIの長手方向をXI、図3(c)においてXIに対して側面に向かう直角方向をYI、図3(c)においてXI及びYIに対して直交し下面に向かう方向をZIとした座標系である。
【0035】
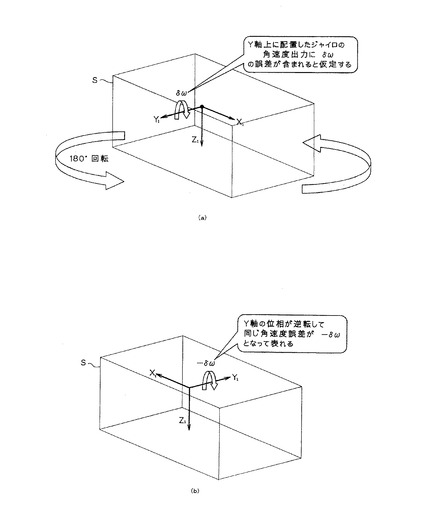
また、図4を用いて、回転によって慣性測定部Sの誤差を軽減する概念を説明する。ストラップダウン方式の慣性測定部Sにおいて、Y軸上に配置したジャイロスコープ1の角速度出力にδωのドリフト誤差がある場合(図4a)、ほぼ水平状態を保持する移動体Mにおいて、慣性測定部Sを回転台に設置し一定の角速度で180度回転を与えると、Y軸の位相が逆転して同じドリフト誤差が−δωとなって表れる(図4b)。したがって、一回転すると該ドリフト誤差は平均的に0に近づき、影響が軽減される。加速度計2の主要誤差であるバイアス誤差の影響も同様にして軽減される。このようにして、ジャイロスコープ1及び加速度計2に起因する速度誤差及び位置誤差の低減をはかることができる。
【0036】
次に、アライメントについて説明する。本発明のストラップダウン方式の慣性航法システムでは、3個の加速度計2の出力が0となる方向を見つけることにより、慣性航法システム座標系のX軸及びY軸における平面と水平面との関係が記述されるレベリング処理と、続いて水平面に射影されたジャイロスコープ1の出力が0となる方向を定めることにより水平面上での基準座標系のN軸を定める探北処理とを行い、基準座標系と慣性航法システム座標系との関係を計測し、座標変換行列を求める。このレベリング処理と探北処理とをアライメントという。
【0037】
次に、このように構成された慣性航法システムIによる移動体Mの方位・ロール・ピッチ、速度及び位置の計算について説明する。回転台3が回転動作を続けている間に、慣性航法システムIの慣性測定部Sに配置したジャイロスコープ1で計測された移動体Mの角速度を入力することにより第一座標変換行列計算手段6で計算された第一座標変換行列と、回転角検出手段4で計測された回転角を入力することにより第二座標変換行列計算手段8で計算された第二座標変換行列とから、姿勢角計算手段9で移動体Mの向いている方位・ロール・ピッチを計算する。
【0038】
また、回転台3が回転動作を続けている間に慣性航法システムIの慣性測定部Sに配置した加速度計2で計測された加速度を第一座標変換手段6で座標変換し、補正手段13からの信号を加算手段10で加算した後、第1積分手段11により積分して移動体Mの速度を計算し、さらに該速度を第2積分手段12により積分して移動体Mの位置を計算する。これにより、位置情報系の精度を向上し、全ての姿勢情報系を計算することができる。
【0039】
次に、このように構成された慣性航法システムIの回転台3の作動について説明する。まず、慣性航法システムIの慣性測定部Sを回転台部Rの回転台3の上に回転軸と慣性航法システム座標系(XI,YI,ZI)のZI軸を合わせて配置する。回転台3は、アライメント時及び位置等の計測時に一定の角速度で回転し、台上の慣性測定部Sに回転を与える。この際の回転速度は1秒間に0度より大きく10度以下の低速で、常時一定回転させるものである。続いて、移動体Mの旋回に関わらず基準座標系(XB,YB,ZB)において一回転(360度)した時点で、回転方向を逆向きに変更し、同様の角速度で回転させる。回転台3はアライメント時及び計測時にこの回転動作を続ける。
【0040】
なお、上記回転速度は一例として述べたのであって、回転速度は遠心加速度的な誤差要因の少ない範囲で1秒間に多少10度以上となっても良く、同様に上記回転方向は二回転や三回転した時点で回転方向を逆向きに変更しても良い。
【0041】
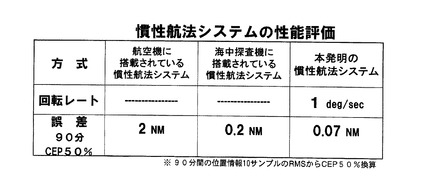
図5は、航空機に搭載されている慣性航法装置の一例と、海中探査機に搭載されている慣性航法装置の一例と、本発明の慣性航法システムIの性能評価の一例を比較した図である。
【0042】
航空機に搭載されている慣性航法装置の一例及び海中探査機に搭載されている慣性航法装置の一例の評価方法は、まず、アライメントを実施し、慣性航法モードで約90分間作動させる作業を10回繰り返すものである。
【0043】
次に、本発明の慣性航法システムIの評価方法を説明する。まず、慣性測定部Sを回転台3に載せ、アライメントを実施し、開始約10分後から1度/sの角速度で回転台3を回転させる。アライメントが終了した後、引き続き一定の角速度で回転台3を回転し、慣性航法モードで約90分間作動させる。この作業を10回繰り返す。
【0044】
それぞれで得られたデータから位置誤差のRMS(二乗平均値)を求める。ここで、RMSとは平均線から測定曲線までの偏差の二乗を平均した値の平方根である。さらに、位置誤差のRMSから50%CEP50%(Circular Error Probability)を次の式によりもとめる。
【0045】
(数1)
CEP50%(NM/H)=1.177/√2×RMS(m)/1.5(H)/1852(m/NM)
ここで、CEP50%とは、ある出力値において、その出力値の半数がある半径の円の中に収まる場合の円の半径を表す。また、単位(NM)はNautical Mileを示す。
【0046】
性能評価を比較した結果、航空機に搭載されている慣性航法装置の一例の誤差は2NM、海中探査機に搭載されている慣性航法装置の一例の誤差は0.2NMなのに対し、本発明の慣性航法システムIの誤差は0.07NMとなり、航法性能が向上しているのがわかる。
【0047】
したがって、本発明の慣性航法システムIを適用することにより、従来の慣性航法装置が有していたジャイロスコープ、加速度計のドリフト・バイアス誤差が回転台から与えられる回転運動により平均化され、位置系情報の精度を向上させることができる。
【0048】
また、アライメント時に回転台3を回転させることにより、アライメント時においても慣性測定部Sの検出値の誤差を軽減することができる。
【0049】
さらに、回転台3は、移動体Mの旋回に関わらず慣性測定部Sの方位が常に基準座標系に対して一定の回転速度となるように低速で回転させるので、ジャイロスコープ1及び加速度計2の誤差を軽減させつつ、回転運動による遠心加速度的な誤差要因を補償することができる。
【0050】
また、移動体Mの旋回に関わらず慣性測定部Sの方位が基準座標系に対し1回転又は数回転した時点で、回転方向を逆向きに変更し、同様に基準座標系に対し一定回転速度となるように回転させるので、ジャイロスコープ1のスケールファクタ誤差による方位角誤差の蓄積を抑制することができる。
【0051】
さらに、回転角検出手段4が回転台3の回転角度を検出することにより、移動体Mの位置情報だけでなく、姿勢系情報を算出することができる。
【0052】
また、従来の慣性航法装置に簡便な回転台部Rを付加することのみで性能向上をはかることができるため、新規開発と比較して開発費用が抑えられる。さらに、ストラップダウン方式の慣性航法装置ならば製造メーカ、機体種別に関係なく適用できる手法であるので、既存の装置を流用することが可能である。
【0053】
この慣性航法システムIを、海中探査機へ適用した場合には、ミッション中の支援母船の随行及びトランスポンダの設置をする必要がなくなり、船舶へ適用した場合には、GPS航行のバックアップができるとともに、精度の高い姿勢系情報も取得できる。他にも、GPS電波の届かない環境であるシールド工法によるトンネル掘削でもシールド掘進機を長時間・長距離に適用できる。
【図面の簡単な説明】
【0054】
【図1】本発明の慣性航法システムを示す図
【図2】本発明の慣性測定部を示す図
【図3】本発明の座標系を示す図
【図4】本発明の概念を示す図
【図5】本発明の性能評価を示す図
【符号の説明】
【0055】
I…慣性航法システム、S…慣性測定部、R…回転台部、C…演算部、1…ジャイロスコープ、2…加速度計、3…回転台、4…回転角検出手段、5…回転台制御手段、6…第一座標変換行列計算手段、7…座標変換手段、8…第二座標変換行列計算手段、9…姿勢角計算手段、10…加算手段、11…第1積分手段、12…第2積分手段、13…補正手段、14…角度・角速度計算手段
【技術分野】
【0001】
本発明は、船舶、海中探査機、長距離トンネル掘削(シールド工法)等において、外界からの情報伝達が困難な移動体プラットフォームに固定設置し、長時間運動する移動体の位置及び方位検出として使用されるストラップダウン方式の慣性航法システムに関する。
【背景技術】
【0002】
慣性航法装置は、移動体が運動する際に生じる慣性力を検知し、物理計算及び幾何学計算を行うことにより、移動体の基準座標系における絶対位置(緯度と経度)を導出する装置である。そして、ジャイロスコープ及び加速度計が移動体に固定されて取り付けられている慣性航法装置の方式をストラップダウン方式慣性航法装置という。
【0003】
従来から、慣性航法装置ではジャイロスコープ及び加速度計がランダムな誤差(バイアス・ドリフト誤差)を持っており、該慣性航法装置が出力する位置情報系の精度が劣化するという問題点があり、このため長時間・長距離の慣性航法が困難となっていた。
【0004】
そこで、該問題点を解決するために、移動体の位置検出における慣性航法装置の性能改善として船舶においてはGPS、海中探査機においては支援母船又はトランスポンダ等の外部データを用いて内部演算ゲインを補正する手法がある。しかし、外部データを取得することが困難な海中、地中では前記の手法は適用不可能である。また、支援母船の随行やトランスポンダの事前設置は運航体制を大規模化にするため、運航経費の増大や監視体制の強化等の問題点がある。
【0005】
海中探査機においてはドップラ速度計等の他のセンサを用いたハイブリットにより慣性情報の精度を上げる手法が適用されている。この手法では、他の外界センサを必要とすることから、機構が複雑になると共に費用も増大し、また、ドップラ速度計の精度が劣化する場合、慣性測定ユニットとなるジャイロスコープや加速度計の姿勢系情報や位置系情報のみに依存しなければならない。しかし、これらセンサは、ドリフトやバイアス等のランダムな誤差を有しているため、長時間・長距離の移動、航行を余儀無くする船舶、海中探査機やシールド掘進機が要求するような精度が補償されない。
【0006】
また、慣性航法装置の性能は主要センサであるジャイロスコープ、加速度計の精度に強く依存するので、これらセンサの性能を個々に上げることが考えられるが、現在、これらセンサの開発は既に高い完成度をもっており、更なる性能改善をはかるには、この分野における技術革新的な展開と、多大なる時間及び費用が必要となる。
【0007】
そこで、慣性航法装置単体での性能改善の手法として、回転台を用いた手法を開示しているものがある(特許文献1)。特許文献1の第1実施形態の装置は、慣性測定ユニットを2つの回転軸において回転自在となるように支持した姿勢設定部によって、慣性測定ユニットの1つの検出軸が垂直状態に姿勢設定された時に検出された当該検出軸方向の加速度を予め記憶された重力加速度データと比較することにより当該検出軸方向の加速度を検出する加速度センサのバイアス誤差を検出すると共に、前記1つの検出軸が垂直状態に姿勢設定された時に検出された当該検出軸に直交する他の2軸周りの各角速度を予め記憶された前記角速度と地球の自転速度と航走体の緯度の各データから算出された前記他の2軸周りの各角速度と比較することにより当該2軸周りの各角速度を検出する各ジャイロのバイアス誤差を検出し、前記加速度センサのバイアス誤差及び各ジャイロのバイアス誤差によって位置系情報を補正するものである。また、特許文献1の第2実施形態の装置は、慣性測定ユニットを回転テーブル上に直接固定し、1秒間に数回転から数十回転の回転速度で常時一定回転させるものである。
【特許文献1】特開2001−141507号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1の第1実施形態の装置は、ジンバル機構を備えているため構造が複雑となる。また、上記特許文献1の第2実施形態の装置は、姿勢設定部が設けられておらず、X軸とY軸とが水平状態に設定されていないため、回転速度を船体の揺動周期よりも速い速度に設定する必要がある。したがって、回転軸に配置されるジャイロのスケールファクタ誤差により検出する方位角誤差が積算されてしまうことになる。さらに、加速度計の取付位置が回転台の回転中心と完全に一致しないと、高速回転する際に加速度計に大きな遠心加速度が入力され、別の誤差要因となる。
【0009】
本発明は、上記課題を解決するものであって、簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速度計のドリフト・バイアス誤差を低減する慣性航法システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
そのために本発明は、慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープと、前記慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計とを有する慣性測定部を備えた移動体の慣性航法システムにおいて、前記慣性測定部を上面に配置し、該上面と直交する慣性航法システム座標系の一軸周りに低速回転をする回転台と、前記回転台の回転角を検出する回転角検出手段とを有する回転台部と、前記慣性測定部と前記回転台部からの出力により前記移動体の姿勢情報及び位置情報を計算する演算部とを備えたことを特徴とする。
【0011】
また、前記演算部は、前記ジャイロスコープが出力する角速度信号から慣性航法システム座標系と基準座標系との姿勢関係を記述する第一座標変換行列を計算する第一座標変換行列計算手段と、前記回転角検出手段の出力する角度信号から慣性航法システム座標系と移動体座標系との姿勢関係を記述する第二座標変換行列を計算する第二座標変換行列計算手段と、前記第一座標変換行列計算手段の出力と前記第二座標変換行列計算手段の出力とから前記基準座標系において前記移動体の向いている方位・ロール・ピッチを出力するための姿勢角計算手段とを有することを特徴とする。
【0012】
また、前記演算部は、前記第一座標変換行列計算手段で計算された第一座標変換行列を入力し、前記回転台の基準座標系に対する角度及び角速度を出力する角度・角速度計算手段を有し、前記回転台部は、前記角度・角速度計算手段の出力から、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対しほぼ一定の回転速度となるように前記回転台を制御する回転台制御手段を有することを特徴とする。
【0013】
また、前記回転台は、アライメント中及び計測中に回転することを特徴とする。
【0014】
また、前記回転台は、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対し一回転するごとに回転方向を逆転することを特徴とする。
【発明の効果】
【0015】
それによって、本発明は、慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープと、前記慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計とを有する慣性測定部を備えた移動体の慣性航法システムにおいて、前記慣性測定部を上面に配置し、該上面と直交する慣性航法システム座標系の一軸周りに低速回転をする回転台と、前記回転台の回転角を検出する回転角検出手段とを有する回転台部と、前記慣性測定部と前記回転台部からの出力により前記移動体の姿勢情報及び位置情報を計算する演算部とを備えたので、従来の慣性航法装置が有していたジャイロスコープ、加速度計のドリフト・バイアス誤差が回転台から与えられる回転運動により平均化され、位置系情報の精度を向上させつつ、回転運動による遠心加速度的な誤差要因を補償し、移動体の位置情報だけでなく、姿勢系情報を算出することができる。また、従来の慣性航法装置に簡便な回転台部を付加することのみで性能向上をはかることができるため、新規開発と比較して開発費用が抑えられ、製造メーカ、機体種別に関係なく適用できる手法であるので、既存の装置を流用することが可能である。
【0016】
また、前記演算部は、前記ジャイロスコープが出力する角速度信号から慣性航法システム座標系と基準座標系との姿勢関係を記述する第一座標変換行列を計算する第一座標変換行列計算手段と、前記回転角検出手段の出力する角度信号から慣性航法システム座標系と移動体座標系との姿勢関係を記述する第二座標変換行列を計算する第二座標変換行列計算手段と、前記第一座標変換行列計算手段の出力と前記第二座標変換行列計算手段の出力とから前記基準座標系において前記移動体の向いている方位・ロール・ピッチを出力するための姿勢角計算手段とを有するので、方位・ロール・ピッチの姿勢系情報を正確に算出することができる。
【0017】
また、前記演算部は、前記第一座標変換行列計算手段で計算された第一座標変換行列を入力し、前記回転台の基準座標系に対する角度及び角速度を出力する角度・角速度計算手段を有し、前記回転台部は、前記角度・角速度計算手段の出力から、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対しほぼ一定の回転速度となるように前記回転台を制御する回転台制御手段を有するので、方位・ロール・ピッチの姿勢系情報をさらに正確に算出することができる。
【0018】
また、前記回転台は、アライメント中及び計測中に回転するので、アライメント時においてもセンサの検出値の誤差を軽減することができる。
【0019】
また、前記回転台は、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対し一回転するごとに回転方向を逆転するので、ジャイロスコープ及び加速度計がもつアシンメトリによるスケールファクタ誤差の蓄積を抑制することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態を図面に基づいて説明する。図1は本実施形態の慣性航法システムの概略図、を示す。図1において、Iは慣性航法システム、Sは慣性測定部、Rは回転台部、Cは演算部、1はジャイロスコープ、2は加速度計、3は回転台、4は回転角検出手段、5は回転台制御手段、6は第一座標変換行列計算手段、7は座標変換手段、8は第二座標変換行列計算手段、9は姿勢角計算手段、10は加算手段、11は第1積分手段、12は第2積分手段、13は補正手段、14は角度・角速度計算手段である。
【0021】
慣性航法システムIは、慣性測定部S、回転台部R及び演算部Cを備えており、姿勢がほぼ一定に安定している移動体Mに搭載され、移動体Mの位置情報、姿勢系情報を算出する。
【0022】
慣性測定部Sは、ジャイロスコープ1及び加速度計2を有し、ジャイロスコープ1及び加速度計2で測定された角速度及び加速度を慣性情報として演算部Cに出力する。ジャイロスコープ1は、慣性航法システム(INS)座標系(XI軸、YI軸、ZI軸)の三軸周りの角速度を検出するもので、慣性測定部Sの各軸に3個配置されている。加速度計2は、慣性航法システム座標系の三軸方向の加速度を検出するもので、慣性測定部Sの各軸に3個配置されている。なお、ジャイロスコープ1及び加速度計2はそれぞれ3個以上配置してもよい。図2は慣性測定部Sの概略図である。
【0023】
回転台部Rは回転台3、回転角検出手段4及び回転台制御手段5を有し、回転台制御手段5により回転台3を回転させ、回転角検出手段4で検出した回転台3の回転角を演算部Cに出力する。回転台3は、慣性測定部Sを台上に配置し、図示しない駆動部により慣性航法システム座標系の一軸(ZI軸)周りで駆動され、慣性測定部Sを回転させる台であり、移動体Mに支持されている。回転角検出手段4は、回転台3の回転角を検出し、演算部Cに出力する。回転台制御手段5は、ジャイロスコープ1が検出した角速度から演算部Cの第一座標変換行列計算手段6で第一座標変換行列を計算し、該第一座標変換行列から角度・角速度計算手段14で求めた基準座標系に対する回転台3の角度及び角速度の信号を入力することにより、慣性測定部Sの方位が常に基準座標系(XB軸、YB軸、ZB軸)に対しほぼ一定の回転速度となるよう回転台3を制御する。例えば、回転台3を基準座標系に対し定速=+1°/sで回転させることを考える場合、仮に移動体Mが基準座標系に対し+2°/sで旋回しているならば、回転台3を基準座標系に対し−1°/sで回転させることで、回転台3上の慣性計測部Sのジャイロスコープ1の出力が基準座標系に対し+1°/sとなるように制御し、仮に移動体Mが基準座標系に対し−2°/sで旋回しているならば、回転台3を基準座標系に対し+3°/sで回転させることで、回転台3上の慣性計測部Sのジャイロスコープ1の出力が基準座標系に対し+1°/sとなるように制御する。
【0024】
演算部Cは、高速動作する一種のコンピュータであり、第一座標変換行列計算手段6、座標変換手段7、第二座標変換行列計算手段8、姿勢角計算手段9、加算手段10,積分手段11及び12、補正手段13、角度・角速度計算手段14を有し、ジャイロスコープ1及び加速度計2で測定された角速度及び加速度並びに回転角検出器4で検出した回転台3の回転角を入力し、演算することで、基準座標系に対する移動体Mの方位・ロール・ピッチ情報、速度情報及び位置情報並びに基準座標系に対する回転台3の角度・角速度のそれぞれの情報を出力する。
【0025】
第一座標変換行列計算手段6は、ジャイロスコープ1が出力する角速度信号から慣性航法システム座標系(XI軸、YI軸、ZI軸)と基準座標系(XB軸、YB軸、ZB軸)との姿勢関係を記述する第一座標変換行列を計算する手段であり、該第一座標変換行列計算手段6で計算された第一座標変換行列は座標変換手段7、姿勢角計算手段9及び角度・角速度計算手段14に出力される。
【0026】
座標変換手段7は、加速度計2が出力する加速度信号を、第一座標変換行列計算手段6で計算された第一座標変換行列により基準座標系における加速度信号に変換する手段であり、該第一座標変換手段6で求められた基準座標系における加速度信号を加算手段10に出力する。
【0027】
第二座標変換行列計算手段8は、回転角検出手段4が出力する回転角度信号から慣性航法システム座標系(XI軸、YI軸、ZI軸)と移動体座標系(XM軸、YM軸、ZM軸)との姿勢関係を記述する第二座標変換行列を計算する手段であり、該第二座標変換行列計算手段8で計算された第二座標変換行列は姿勢角計算手段9に出力される。
【0028】
姿勢角計算手段9は、第一座標変換行列計算手段6で計算された第一座標変換行列と該第二座標変換行列計算手段8で計算された第二座標変換行列を入力し、基準座標系において移動体Mの向いている方位・ロール・ピッチを出力するための手段である。
【0029】
加算手段10は、座標変換手段7で座標変換した加速度信号と、後述する重力加速度及びコリオリ力の影響を補正する補正手段13の出力とを加算する手段で、第1積分手段11に出力するための手段である。
【0030】
第1積分手段11は、加速度信号と補正手段13の出力とを加算手段10で加算した信号を積分し、基準座標系における速度信号を出力するための手段であり、第2積分手段12は、速度信号をさらに積分し、基準座標系における位置信号を出力するための手段である。
【0031】
補正手段13は、第1積分手段11から出力された速度信号と、第2積分手段12から出力された位置信号とを、重力加速度及びコリオリ力等の影響を考慮して補正し、座標変換手段7の出力する加速度信号にフィードバックする手段である。
【0032】
角度・角速度計算手段14は、第一座標変換行列計算手段6で計算された第一座標変換行列を入力し、回転台制御手段5に出力するための手段である。
【0033】
ここで、図3を参照して本システムの座標系について説明する。図3は基準座標系、慣性航法システム座標系及び移動体座標系を示す図である。図3(a)は基準座標系(XB,YB,ZB)、図3(b)は移動体座標系(XM,YM,ZM)、図3(c)は慣性航法システム座標系(XI,YI,ZI)、を示している。
【0034】
図3(a)で示した基準座標系(XB,YB,ZB)とは、地球表面からみて北極方向をXB、東方向をYB、中心方向をZBとした座標系である。図3(b)で示した移動体座標系(XM,YM,ZM)とは、移動体Mの前方向をXM、図3(b)においてXMに対して側方に向かう直角方向をYM、図3(b)においてXM及びYMに対して直交し下方に向かう方向をZMとした座標系である。図3(c)で示した慣性航法システム座標系(XI,YI,ZI)とは、慣性航法システムIの長手方向をXI、図3(c)においてXIに対して側面に向かう直角方向をYI、図3(c)においてXI及びYIに対して直交し下面に向かう方向をZIとした座標系である。
【0035】
また、図4を用いて、回転によって慣性測定部Sの誤差を軽減する概念を説明する。ストラップダウン方式の慣性測定部Sにおいて、Y軸上に配置したジャイロスコープ1の角速度出力にδωのドリフト誤差がある場合(図4a)、ほぼ水平状態を保持する移動体Mにおいて、慣性測定部Sを回転台に設置し一定の角速度で180度回転を与えると、Y軸の位相が逆転して同じドリフト誤差が−δωとなって表れる(図4b)。したがって、一回転すると該ドリフト誤差は平均的に0に近づき、影響が軽減される。加速度計2の主要誤差であるバイアス誤差の影響も同様にして軽減される。このようにして、ジャイロスコープ1及び加速度計2に起因する速度誤差及び位置誤差の低減をはかることができる。
【0036】
次に、アライメントについて説明する。本発明のストラップダウン方式の慣性航法システムでは、3個の加速度計2の出力が0となる方向を見つけることにより、慣性航法システム座標系のX軸及びY軸における平面と水平面との関係が記述されるレベリング処理と、続いて水平面に射影されたジャイロスコープ1の出力が0となる方向を定めることにより水平面上での基準座標系のN軸を定める探北処理とを行い、基準座標系と慣性航法システム座標系との関係を計測し、座標変換行列を求める。このレベリング処理と探北処理とをアライメントという。
【0037】
次に、このように構成された慣性航法システムIによる移動体Mの方位・ロール・ピッチ、速度及び位置の計算について説明する。回転台3が回転動作を続けている間に、慣性航法システムIの慣性測定部Sに配置したジャイロスコープ1で計測された移動体Mの角速度を入力することにより第一座標変換行列計算手段6で計算された第一座標変換行列と、回転角検出手段4で計測された回転角を入力することにより第二座標変換行列計算手段8で計算された第二座標変換行列とから、姿勢角計算手段9で移動体Mの向いている方位・ロール・ピッチを計算する。
【0038】
また、回転台3が回転動作を続けている間に慣性航法システムIの慣性測定部Sに配置した加速度計2で計測された加速度を第一座標変換手段6で座標変換し、補正手段13からの信号を加算手段10で加算した後、第1積分手段11により積分して移動体Mの速度を計算し、さらに該速度を第2積分手段12により積分して移動体Mの位置を計算する。これにより、位置情報系の精度を向上し、全ての姿勢情報系を計算することができる。
【0039】
次に、このように構成された慣性航法システムIの回転台3の作動について説明する。まず、慣性航法システムIの慣性測定部Sを回転台部Rの回転台3の上に回転軸と慣性航法システム座標系(XI,YI,ZI)のZI軸を合わせて配置する。回転台3は、アライメント時及び位置等の計測時に一定の角速度で回転し、台上の慣性測定部Sに回転を与える。この際の回転速度は1秒間に0度より大きく10度以下の低速で、常時一定回転させるものである。続いて、移動体Mの旋回に関わらず基準座標系(XB,YB,ZB)において一回転(360度)した時点で、回転方向を逆向きに変更し、同様の角速度で回転させる。回転台3はアライメント時及び計測時にこの回転動作を続ける。
【0040】
なお、上記回転速度は一例として述べたのであって、回転速度は遠心加速度的な誤差要因の少ない範囲で1秒間に多少10度以上となっても良く、同様に上記回転方向は二回転や三回転した時点で回転方向を逆向きに変更しても良い。
【0041】
図5は、航空機に搭載されている慣性航法装置の一例と、海中探査機に搭載されている慣性航法装置の一例と、本発明の慣性航法システムIの性能評価の一例を比較した図である。
【0042】
航空機に搭載されている慣性航法装置の一例及び海中探査機に搭載されている慣性航法装置の一例の評価方法は、まず、アライメントを実施し、慣性航法モードで約90分間作動させる作業を10回繰り返すものである。
【0043】
次に、本発明の慣性航法システムIの評価方法を説明する。まず、慣性測定部Sを回転台3に載せ、アライメントを実施し、開始約10分後から1度/sの角速度で回転台3を回転させる。アライメントが終了した後、引き続き一定の角速度で回転台3を回転し、慣性航法モードで約90分間作動させる。この作業を10回繰り返す。
【0044】
それぞれで得られたデータから位置誤差のRMS(二乗平均値)を求める。ここで、RMSとは平均線から測定曲線までの偏差の二乗を平均した値の平方根である。さらに、位置誤差のRMSから50%CEP50%(Circular Error Probability)を次の式によりもとめる。
【0045】
(数1)
CEP50%(NM/H)=1.177/√2×RMS(m)/1.5(H)/1852(m/NM)
ここで、CEP50%とは、ある出力値において、その出力値の半数がある半径の円の中に収まる場合の円の半径を表す。また、単位(NM)はNautical Mileを示す。
【0046】
性能評価を比較した結果、航空機に搭載されている慣性航法装置の一例の誤差は2NM、海中探査機に搭載されている慣性航法装置の一例の誤差は0.2NMなのに対し、本発明の慣性航法システムIの誤差は0.07NMとなり、航法性能が向上しているのがわかる。
【0047】
したがって、本発明の慣性航法システムIを適用することにより、従来の慣性航法装置が有していたジャイロスコープ、加速度計のドリフト・バイアス誤差が回転台から与えられる回転運動により平均化され、位置系情報の精度を向上させることができる。
【0048】
また、アライメント時に回転台3を回転させることにより、アライメント時においても慣性測定部Sの検出値の誤差を軽減することができる。
【0049】
さらに、回転台3は、移動体Mの旋回に関わらず慣性測定部Sの方位が常に基準座標系に対して一定の回転速度となるように低速で回転させるので、ジャイロスコープ1及び加速度計2の誤差を軽減させつつ、回転運動による遠心加速度的な誤差要因を補償することができる。
【0050】
また、移動体Mの旋回に関わらず慣性測定部Sの方位が基準座標系に対し1回転又は数回転した時点で、回転方向を逆向きに変更し、同様に基準座標系に対し一定回転速度となるように回転させるので、ジャイロスコープ1のスケールファクタ誤差による方位角誤差の蓄積を抑制することができる。
【0051】
さらに、回転角検出手段4が回転台3の回転角度を検出することにより、移動体Mの位置情報だけでなく、姿勢系情報を算出することができる。
【0052】
また、従来の慣性航法装置に簡便な回転台部Rを付加することのみで性能向上をはかることができるため、新規開発と比較して開発費用が抑えられる。さらに、ストラップダウン方式の慣性航法装置ならば製造メーカ、機体種別に関係なく適用できる手法であるので、既存の装置を流用することが可能である。
【0053】
この慣性航法システムIを、海中探査機へ適用した場合には、ミッション中の支援母船の随行及びトランスポンダの設置をする必要がなくなり、船舶へ適用した場合には、GPS航行のバックアップができるとともに、精度の高い姿勢系情報も取得できる。他にも、GPS電波の届かない環境であるシールド工法によるトンネル掘削でもシールド掘進機を長時間・長距離に適用できる。
【図面の簡単な説明】
【0054】
【図1】本発明の慣性航法システムを示す図
【図2】本発明の慣性測定部を示す図
【図3】本発明の座標系を示す図
【図4】本発明の概念を示す図
【図5】本発明の性能評価を示す図
【符号の説明】
【0055】
I…慣性航法システム、S…慣性測定部、R…回転台部、C…演算部、1…ジャイロスコープ、2…加速度計、3…回転台、4…回転角検出手段、5…回転台制御手段、6…第一座標変換行列計算手段、7…座標変換手段、8…第二座標変換行列計算手段、9…姿勢角計算手段、10…加算手段、11…第1積分手段、12…第2積分手段、13…補正手段、14…角度・角速度計算手段
【特許請求の範囲】
【請求項1】
慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープと、前記慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計とを有する慣性測定部を備えた移動体の慣性航法システムにおいて、前記慣性測定部を上面に配置し、該上面と直交する慣性航法システム座標系の一軸周りに低速回転をする回転台と、前記回転台の回転角を検出する回転角検出手段とを有する回転台部と、前記慣性測定部と前記回転台部からの出力により前記移動体の姿勢情報及び位置情報を計算する演算部とを備えたことを特徴とする慣性航法システム。
【請求項2】
前記演算部は、前記ジャイロスコープが出力する角速度信号から慣性航法システム座標系と基準座標系との姿勢関係を記述する第一座標変換行列を計算する第一座標変換行列計算手段と、前記回転角検出手段の出力する角度信号から慣性航法システム座標系と移動体座標系との姿勢関係を記述する第二座標変換行列を計算する第二座標変換行列計算手段と、前記第一座標変換行列計算手段の出力と前記第二座標変換行列計算手段の出力とから前記基準座標系において前記移動体の向いている方位・ロール・ピッチを出力するための姿勢角計算手段とを有することを特徴とする請求項1に記載の慣性航法システム。
【請求項3】
前記演算部は、前記第一座標変換行列計算手段で計算された第一座標変換行列を入力し、前記回転台の基準座標系に対する角度及び角速度を出力する角度・角速度計算手段を有し、前記回転台部は、前記角度・角速度計算手段の出力から、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対しほぼ一定の回転速度となるように前記回転台を制御する回転台制御手段を有することを特徴とする請求項2に記載の慣性航法システム。
【請求項4】
前記回転台は、アライメント中及び計測中に回転することを特徴とする請求項1乃至3のいずれかに記載の慣性航法システム。
【請求項5】
前記回転台は、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対し一回転するごとに回転方向を逆転することを特徴とする請求項1乃至4のいずれかに記載の慣性航法システム。
【請求項1】
慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープと、前記慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計とを有する慣性測定部を備えた移動体の慣性航法システムにおいて、前記慣性測定部を上面に配置し、該上面と直交する慣性航法システム座標系の一軸周りに低速回転をする回転台と、前記回転台の回転角を検出する回転角検出手段とを有する回転台部と、前記慣性測定部と前記回転台部からの出力により前記移動体の姿勢情報及び位置情報を計算する演算部とを備えたことを特徴とする慣性航法システム。
【請求項2】
前記演算部は、前記ジャイロスコープが出力する角速度信号から慣性航法システム座標系と基準座標系との姿勢関係を記述する第一座標変換行列を計算する第一座標変換行列計算手段と、前記回転角検出手段の出力する角度信号から慣性航法システム座標系と移動体座標系との姿勢関係を記述する第二座標変換行列を計算する第二座標変換行列計算手段と、前記第一座標変換行列計算手段の出力と前記第二座標変換行列計算手段の出力とから前記基準座標系において前記移動体の向いている方位・ロール・ピッチを出力するための姿勢角計算手段とを有することを特徴とする請求項1に記載の慣性航法システム。
【請求項3】
前記演算部は、前記第一座標変換行列計算手段で計算された第一座標変換行列を入力し、前記回転台の基準座標系に対する角度及び角速度を出力する角度・角速度計算手段を有し、前記回転台部は、前記角度・角速度計算手段の出力から、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対しほぼ一定の回転速度となるように前記回転台を制御する回転台制御手段を有することを特徴とする請求項2に記載の慣性航法システム。
【請求項4】
前記回転台は、アライメント中及び計測中に回転することを特徴とする請求項1乃至3のいずれかに記載の慣性航法システム。
【請求項5】
前記回転台は、前記移動体の旋回に関わらず前記慣性測定部の方位が常に基準座標系に対し一回転するごとに回転方向を逆転することを特徴とする請求項1乃至4のいずれかに記載の慣性航法システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−155584(P2007−155584A)
【公開日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願番号】特願2005−353316(P2005−353316)
【出願日】平成17年12月7日(2005.12.7)
【出願人】(504194878)独立行政法人海洋研究開発機構 (110)
【出願人】(000231073)日本航空電子工業株式会社 (1,081)
【Fターム(参考)】
【公開日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願日】平成17年12月7日(2005.12.7)
【出願人】(504194878)独立行政法人海洋研究開発機構 (110)
【出願人】(000231073)日本航空電子工業株式会社 (1,081)
【Fターム(参考)】
[ Back to top ]