
慣性航法装置、飛翔体及び航法データ算出方法
【課題】飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛翔体の飛行に用いる航法データを算出する慣性航法装置、該慣性航法装置を備える飛翔体及び上記航法データの算出方法に関する。
【背景技術】
【0002】
従来から飛翔体として、翼により揚力を得つつエンジン等の動力源から発生される推進力によって飛行する飛行機や、自らの質量の一部を後方に射出しその反作用で生じる推進力によって飛行するロケット等が用いられている。これらの飛翔体においては、目標経路に沿って飛行するための誘導が一般的に行われている。
ここで、非特許文献1には、積み荷いわゆるペイロードを所定の高度まで運び、地球の周回軌道に投入するロケット及びその誘導システムについて開示されている。
【0003】
非特許文献1に開示されたロケットは、その現在位置や速度といった航法データを算出する航法装置と、誘導に用いられる指令値を算出する誘導計算機と、ロケットの推進装置等を制御する飛行制御部とを有している。誘導計算機は、航法データと目標経路とを比較し、ロケットの姿勢を補正するための指令値を算出し、指令値を飛行制御部に出力する。飛行制御部は、誘導計算機からの指令値に基づきロケットの姿勢を補正することで、ロケットを目標経路に沿って飛行させることができる。
【0004】
ロケットの航法データを算出する航法装置としては、ロケットの外部に設置された送信機がロケットの飛行に関する情報を送信し、ロケットに設けられた受信機が受信した上記情報から航法データを算出する電波航法装置や衛星航法装置、又は、ロケットに加速度計等のセンサ(慣性計測器)を設置し、センサの計測結果を積分することで必要な航法データを算出する慣性航法装置等が用いられている。
【0005】
なお、近年のロケットでは、天候の影響や送受信機の故障等により航法データの算出ができなくなり誘導不能となることを避ける必要があることから、自律飛行を行うための慣性航法装置を備えることが必須の条件となっている。
また、上記慣性航法装置で航法データを算出した後、GPS衛星から送信される情報を用いて上記航法データを補正する方法も用いられている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3354353号公報
【非特許文献】
【0007】
【非特許文献1】日本航空宇宙学会編、「航空宇宙工学便覧」、丸善株式会社、2005年11月、p.855−859
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、慣性航法装置を有するロケットでは、地上からの打ち上げ時におけるロケットの方位情報を取得する必要がある。これは、慣性航法装置は上記方位情報から航法データの初期値を算出するためである。そこで、ロケットの打ち上げ前にアライメントと呼ばれる処理を行い、ロケットに働く真の重力方向やロケットからの真北方向等を算出している。
このアライメントには一般的に1時間程度の時間が掛かり、アライメントの存在がロケットの運用面における手間やコストを増加させていた。
【0009】
また、前述の通り慣性航法装置は、慣性計測器からの計測結果を積分することで航法データを算出する。ところが、算出には積分を用いているために、航法データに含まれる誤差量は次第に大きくなり発散する傾向があることから、慣性計測器には計測結果に含まれる誤差量が少なく精度の高い計測機を用いる必要がある。
しかし、このような高精度の慣性計測器は高価であり、高価な慣性計測器を使用することでロケットのコストを増加させていた。
【0010】
さらに、特許文献1に開示された方法を用いて、航法データの補正処理を例えばロケットの動力飛行中に行った場合、ロケットの質量は時間と共に大きく減少するために、その補正のための計算量が膨大になり、高性能の演算装置を備える必要や正しく補正することが難しくなる等の課題があった。
【0011】
本発明は、このような事情に鑑みてなされたものであり、飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器や演算装置等を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明の慣性航法装置は、慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部と、を有するという構成を採用する。
このような構成を採用する本発明では、受信機が飛翔体の飛行に関する情報を受信して比較用航法データを算出し、誤差推定部が受信した比較用航法データを参照して航法データの誤差量を推定し、飛翔体の慣性飛行中に航法演算部が誤差量を用いて航法データを補正する。そのため、本発明では、誤差の少ない航法データを得ることが可能となる。
また、本発明では、慣性飛行中は飛翔体の推進用燃料が消費されず飛翔体の質量が一定であることから、質量に関するパラメータも一定となり、誤差推定の結果得られる誤差量の精度が向上する。
【0013】
また、本発明の慣性航法装置は、飛翔体の慣性飛行中に所定の推進力が生じたときに、航法データの誤差を補正するという構成を採用する。
このような構成を採用する本発明では、飛翔体に所定の推進力が生じ、慣性計測器がこの推進力を計測するため、慣性計測器の計測結果におけるSN比(信号対雑音比)が向上する。
【0014】
また、本発明の飛翔体は、上記の慣性航法装置を有するという構成を採用する。
このような構成を採用する本発明では、飛翔体は、誤差の少ない航法データを用いて飛行することが可能となる。
【0015】
また、本発明は、慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する航法データ算出方法であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信工程と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定工程と、誤差量を用いて航法データを補正する補正工程と、を備えるという方法を採用する。
このような方法を採用する本発明では、誤差の少ない航法データを得ることが可能となる。
【0016】
また、本発明は、飛翔体の慣性飛行中に、受信工程、誤差推定工程及び補正工程が行われるという方法を採用する。
このような方法を採用する本発明では、慣性飛行中は飛翔体の推進用燃料が消費されず飛翔体の質量が一定であることから、質量に関するパラメータも一定となり、誤差推定の結果得られる誤差量の精度が向上する。
【0017】
また、本発明は、飛翔体の慣性飛行中に所定の推進力が生じたときに、受信工程、誤差推定工程及び補正工程が行われるという方法を採用する。
このような方法を採用する本発明では、飛翔体に所定の推進力が生じ、慣性計測器がこの推進力を計測するため、慣性計測器の計測結果におけるSN比(信号対雑音比)が向上する。
【発明の効果】
【0018】
本発明によれば、以下の効果を得ることができる。
本発明によれば、いわゆる海上発射や空中発射等のアライメントを実施しても飛翔体の方位情報に誤差が残るような打ち上げ方法や、計測結果に比較的大きな誤差が含まれる一方で低廉な慣性計測器を用いた場合であっても、誤差の少ない航法データを得ることができる。そのため、本発明によれば、海上発射や空中発射等の打ち上げ方法を用いた場合であっても、精度の高い誘導を行うことができるという効果がある。また、本発明によれば、飛翔体の打ち上げ時における方位情報を取得するためのアライメントを省略もしくは短縮でき、低廉な慣性計測器や演算装置等を使用できるという効果がある。
【図面の簡単な説明】
【0019】
【図1】本実施形態に係る慣性航法装置Aが設けられたロケットXの全体構成を示す概略図である。
【図2】本実施形態における機器搭載部6の構成を示す概略図である。
【図3】本実施形態に係る慣性航法装置Aの航法データの算出及び補正の方法を示す概略図である。
【発明を実施するための形態】
【0020】
以下、図面を参照して本発明の実施形態について説明する。
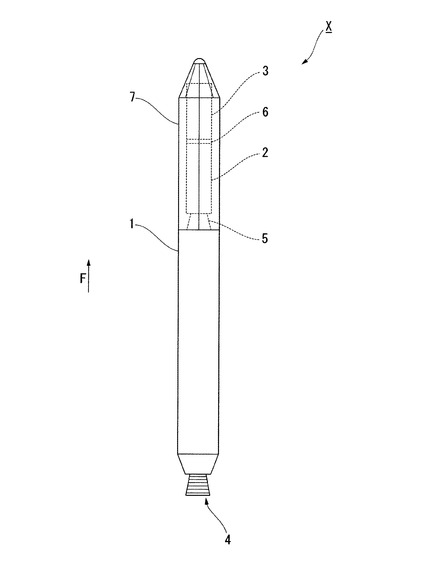
まず、本実施形態に係る慣性航法装置Aが設けられたロケット(飛翔体)Xの全体構成を、図1を参照して説明する。
図1は、本実施形態に係る慣性航法装置Aが設けられたロケットXの全体構成を示す概略図である。
【0021】
本実施形態に係るロケットXは、多段式固体ロケット又は多段式液体ロケットであり、積み荷であるペイロード3を所定の高度まで運び、必要な速度で地球の周回軌道又は亜軌道にペイロード3を投入するためのロケットである。また、ロケットXにおいては、予め設定された目標経路に沿って飛行するという、いわゆる誘導が行われている。
図1に代表例を示すように、ロケットXは主要な要素として、第1段ロケット1と、第2段ロケット2と、積み荷であるペイロード3とを有している。なお、図1における矢印Fは、ロケットXの推進方向を示す。
【0022】
第1段ロケット1は、ロケットXの地上からの打ち上げ時に使用される主要な推進装置である。第1段ロケット1は、第1段ロケット1の−F方向側に設けられ推進力を発生する第1段エンジン部4と、第1段エンジン部4に供給されるロケット燃料を蓄える不図示の燃料タンクとを有している。第1段エンジン部4は、エンジンの噴射方向を変化させる不図示のジンバル部を有している。
【0023】
第2段ロケット2は、第1段ロケット1の+F方向側に設けられ、第1段ロケット1が切り離された後にペイロード3を運ぶための推進装置である。第2段ロケット2は、第2段ロケット2の−F方向側に設けられ推進力を発生する第2段エンジン部5と、ロケットX全体の飛行制御を行う制御機器等が設置される機器搭載部6と、第2段エンジン部5に供給される酸素及び水素を蓄える不図示の液体酸素タンク及び液体水素タンクと、所定の推進力を発生する不図示のガスジェットを有している。第2段エンジン部5は、エンジンの噴射方向を変化させる不図示のジンバル部を有している。なお、機器搭載部6に設置される制御機器等の説明は後述する。
【0024】
第2段ロケット2の+F方向側には、ペイロード3が設置されている。第2段ロケット2及びペイロード3の外側には、ロケットXの先端部外殻を形成するフェアリング7が設けられている。フェアリング7は、ロケットXの大気圏通過中におけるペイロード3の保護用カバーである。
【0025】
次に、本実施形態における機器搭載部6の構成を、図2を参照して説明する。
図2は、本実施形態における機器搭載部6の構成を示す概略図である。
【0026】
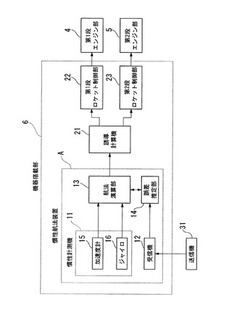
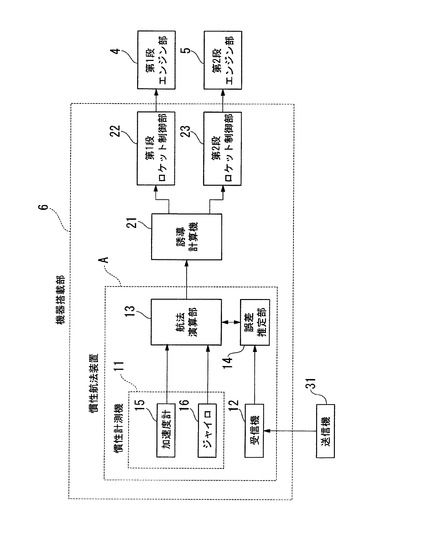
図2に示すように、機器搭載部6は、ロケットXの現在位置や速度等の航法データを算出する慣性航法装置Aと、誘導に用いられる指令値を算出する誘導計算機21と、上記指令値に従い第1段エンジン部4を制御する第1段ロケット制御部22と、上記指令値に従い第2段エンジン部5を制御する第2段ロケット制御部23とを有している。
【0027】
慣性航法装置Aは、ロケットXの加速度や角速度等を計測するセンサである慣性計測器11と、ロケットXの飛行に関する情報を受信して航法データとの比較に用いられる比較用航法データを算出する受信機12と、慣性計測器11の計測結果から航法データを算出し後述する誤差推定部14が推定した誤差量を用いて上記航法データを補正する航法演算部13と、航法データと比較用航法データとを比較しつつ航法データに含まれる誤差量を推定する誤差推定部14とを有している。
【0028】
慣性計測器11は、ロケットXにおける互いに直交する所定の3軸に関する加速度を計測する加速度計15と、ロケットXにおける互いに直交する所定の3軸周りの角速度を計測するジャイロ16とを有している。加速度計15及びジャイロ16は、計測結果である加速度及び角速度、さらに加速度及び角速度の積算値である速度増分積算値及び角度増分積算値を航法演算部13に出力する。
【0029】
受信機12は、ロケットXの外部に設けられた複数の送信機31から送信されるロケットXの飛行に関する情報を受信して、ロケットXの現在位置及び速度を算出する受信機である。なお、受信機12が算出する位置及び速度の情報は、航法データとの比較に用いられる比較用航法データとなる。
本実施形態における送信機31はGPS衛星であり、受信機12はGPS受信機である。もっとも、送信機31及び受信機12はGPS機器に限定されず、例えば超短波の電波を用いた無線標識施設(VOR)等であってもよい。
【0030】
航法演算部13は、慣性計測器11の計測結果から航法データを算出し、後述する誤差推定部14が推定した誤差量を用いて航法データを補正する演算部である。そして、航法演算部13は、補正後の航法データを誘導計算機21に出力する。
【0031】
誤差推定部14は、航法演算部13から入力された航法データと受信機12から入力された比較用航法データとを比較し、航法データに含まれる誤差量を推定する推定部である。誤差推定部14は、カルマンフィルタによって構成されている。
【0032】
続いて、代表例として本実施形態に係るロケットXが地上から打ち上げられ、ペイロード3を地球の周回軌道に投入する動作を説明する。
【0033】
まず、ロケットXが、地上に設けられた打ち上げ設備に設置される。ここで、航法データ(座標変換行列等)の初期値を算出するための、設置時におけるロケットXの方位情報を慣性航法装置Aに導入させる。この方位情報は、ロケットXからの真の重力方向や真北方向等の情報である。方位情報の導入方法は、ロケットXの方位を所定の値として入力してもよいし、簡易的なアライメントを短時間で行うことで算出してもよい。
【0034】
次に、第1段ロケット1点火し、これらの推進装置の推進力によりロケットXを地上から打ち上げる。ロケットXには慣性力が働き、慣性計測器11は、ロケットXの加速度及び角速度を計測する。航法演算部13は、慣性計測器11の計測結果より航法データを算出し、該航法データを誘導計算機21に出力する。誘導計算機21は、入力された航法データと予め設定された目標経路とを比較し、ロケットXを目標経路に沿って誘導するために必要な指令値を算出し、該指令値を第1段ロケット制御部22に出力する。第1段ロケット制御部22は、入力された指令値に基づき、ロケットXが目標経路に沿って飛行するように第1段エンジン部4及びそのジンバル部等を制御する。
【0035】
ロケットXが第1段ロケット1の推進力により飛行している間、すなわちロケットXの動力飛行中には、航法演算部13による誤差補正は行わない。航法演算部13は、慣性計測器11の計測結果を元に算出した航法データを補正せずに誘導計算機21に出力する。
【0036】
次に、第1段ロケット1の燃料が尽きたところで、第1段ロケット1を第2段ロケット2から切り離す。その後、ペイロード3は、第2段ロケット2によって投入位置まで運ばれる。
誘導計算機21は、航法データと目標経路とを比較し、第2段ロケット2を目標経路に沿って誘導するために必要な指令値を算出し、該指令値を第2段ロケット制御部23に出力する。第2段ロケット制御部23は、入力された指令値に従い、第2段ロケット2が目標経路に沿って飛行するように第2段エンジン部5を制御する。なお、第2段エンジン部5の作動中も、航法データの誤差補正は実施しない。
【0037】
次に、第2段ロケット2が地球の重力圏を脱したところで、誘導計算機21及び第2段ロケット制御部23が第2段エンジン部5を停止させ、第2段ロケット2は慣性飛行に入る。また、誘導計算機21は、慣性飛行に入ったことを示す信号を慣性航法装置Aに出力する。この信号の入力により慣性航法装置Aは、航法データの誤差補正を開始する。この誤差補正の方法については後述する。
【0038】
航法データの誤差補正を行うことにより、例えば、ロケットXの打ち上げ時における方位情報や慣性計測器11の計測結果に大きな誤差が含まれている場合であっても、誤差の少ない航法データを得ることができる。
また、本実施形態では航法データの誤差補正は、第2段ロケット2の慣性飛行中に実施される。そのため、慣性飛行中は第2段ロケット2の推進用酸素及び水素が消費されず、第2段ロケット2の質量が一定であることから、誤差推定部14の推定により得られる誤差量の精度を向上させることができる。
【0039】
さらに、航法データの誤差補正時に、第2段ロケット2に設けられ所定の推進力を発生できるガスジェットを作動させ、所定の推進力を発生させてもよい。
上記ガスジェットの作動時には、慣性計測器11が上記ガスジェットの作動により発生する慣性力等を計測するため、慣性計測器11の計測結果におけるSN比(信号対雑音比)が向上し、航法データの推定をガスジェットによる推進力を加えない場合に比べ、迅速に行うことができる。なお、上記所定の推進力を発生させる場合は、後述する誤差推定部において、時間更新を示す状態方程式に制御入力項を追加する場合がある。
【0040】
次に、慣性航法装置Aが、補正後の航法データを誘導計算機21に出力する。誘導計算機21は、第2段ロケット2を目標経路に沿って誘導するための指令値を算出し、該指令値を第2段ロケット制御部23に出力する。第2段ロケット制御部23は、入力された指令値に基づき、第2段ロケット2が目標経路に沿って飛行するように第2段エンジン部5を制御する。したがって、第2段ロケット2を精度よく目標経路に沿わせて飛行させることができる。
【0041】
最後に、第2段ロケット2に設けられたペイロード3を、地球の周回軌道に投入する。
第2段ロケット2が、ペイロード3の投入位置に到達したところで、第2段ロケット2からペイロード3を切り離し、地球の周回軌道に投入する。ペイロード3は、地球を周回するに十分な速度で投入されるため、地球の周回軌道を周回することができる。
以上で、ロケットXが地上から打ち上げられ、ペイロード3を地球の周回軌道に投入する動作が終了する。
【0042】
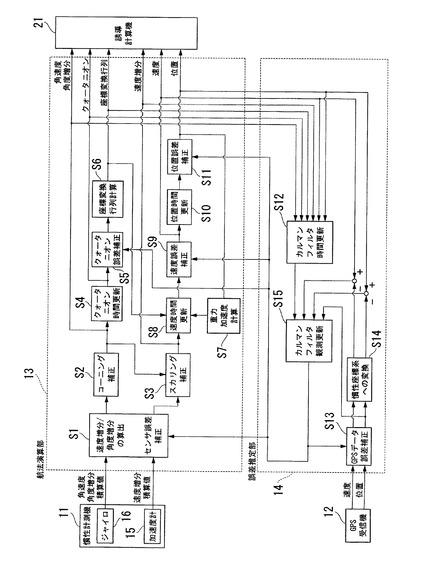
続いて、慣性航法装置Aにおける航法データの算出及び補正について、図3を参照して説明する。
図3は、本実施形態に係る慣性航法装置Aの航法データの算出及び補正の方法を示す概略図である。なお、図3において、ステップS1からS11までは航法演算部13における処理ステップを示し、ステップS12からS15までは誤差推定部14における処理ステップを示している。
【0043】
ステップS1では、第2段ロケット2の速度増分、角度増分及び角速度を算出し、上記各々の値に含まれる誤差を補正する。
まず、加速度計15及びジャイロ16のそれぞれの出力である速度増分積算値及び角度増分積算値より、サンプリング周期間での速度増分及び角度増分を算出する。これは、現サイクルにおける速度増分積算値及び角度増分積算値から、前サイクルにおける速度増分積算値及び角度増分積算値を引くことにより算出する。
次に、得られた速度増分及び角度増分の各々に、後述する誤差推定部14によって推定した誤差量を加えることで、補正後の速度増分及び角度増分を算出する。また、ジャイロ16の出力である角速度計測値に対しても、誤差推定部14によって推定した誤差量を加え、補正後の角速度を算出する。なお、速度増分の補正に用いる誤差量は、バイアス誤差、スケールファクタ誤差及びミスアライメント誤差の3種である。一方、角度増分及び角速度の補正に用いる誤差量も、バイアス誤差、スケールファクタ誤差及びミスアライメント誤差の3種である。
【0044】
ステップS2ではコーニング補正を、ステップS3ではスカリング補正を行う。
ステップS1で算出した補正後速度増分及び補正後角度増分は、第2段ロケット2の機体の回転運動の影響から正しい速度変化及び角度変化を計測できていない。よって、ステップS1で算出した補正後角度増分及び補正後速度増分に対してコーニング補正及びスカリング補正を行う。
コーニング補正では、ステップS1で算出した補正後角度増分から、機体座標系の回転によって発生する機体座標系の各軸周りにおける見かけ上の角速度の影響を補正し、慣性座標系から見た機体座標系の単位時間当たりの角度増分を求める。スカリング補正では、回転している機体座標系の各軸方向の速度増分となっているステップS1で算出した補正後速度増分に対し、コーニング補正後の角度増分を用い、単位時間の間、一定の機体座標系において計測した速度増分となるように補正する。
【0045】
ステップS4では、クォータニオンの時間更新を行う。
クォータニオンとは、慣性計測器11が設置された機体座標系であるプラットフォーム座標系から、慣性座標系への変換を表す四元数をいう。ステップS2で算出したコーニング補正後の角度増分を用いて、クォータニオンを時間更新して算出する。
【0046】
ステップS5では、クォータニオンの誤差補正を行う。
後述する誤差推定部14によって推定されるクォータニオンの誤差量を用いて、ステップS4で算出した時間更新後のクォータニオンを補正する。その後、時間更新に用いられる数式における近似の精度により発生するスケール誤差を補正するため、正規化処理を実施する。
本実施形態では、クォータニオンの誤差を補正しているために、第2段ロケット2の姿勢情報を精度よく算出することができる。
【0047】
ステップS6では、座標変換行列を算出する。
ステップS5で算出された誤差補正後のクォータニオンを用いて、プラットフォーム座標系から慣性座標系への座標変換行列を算出する。
【0048】
ステップS7では、第2段ロケット2に働く重力加速度を算出する。
第2段ロケット2に働く重力加速度は第2段ロケット2の位置によって変化するため、後述するステップS11にて算出される第2段ロケット2の位置情報から、第2段ロケット2に働く重力加速度を算出する。
【0049】
ステップS8では、慣性座標系における第2段ロケット2の速度を時間更新する。
慣性座標系における前サイクルでの第2段ロケット2の速度に、ステップS3で算出したスカリング補正後の速度増分をステップS6で算出した座標変換行列により変換した値と、ステップS7で算出した重力加速度による速度の増分とを加えることにより、慣性座標系における現サイクルでの第2段ロケット2の速度を算出する。なお、重力加速度による速度の増加分は、台形近似にて算出しており、前サイクルにおける重力加速度と現サイクルにおける重力加速度との平均値にサンプリング周期を掛けることで算出する。
【0050】
ステップS9では、慣性座標系における第2段ロケット2の速度の誤差を補正する。
誤差推定部14によって推定される速度の誤差量を用いて、ステップS8で算出した時間更新後の速度を補正する。
【0051】
ステップS10では、慣性座標系における第2段ロケット2の位置を更新する。
慣性座標系における前サイクルでの第2段ロケット2の位置に、ステップS9で算出した補正後の速度による位置の変位分を加えることにより、慣性座標系における現サイクルでの第2段ロケット2の位置を算出する。なお、速度による位置の変位分は、台形近似にて算出しており、前サイクルにおける速度と現サイクルにおける速度との平均値にサンプリング周期を掛けることで算出する。
【0052】
ステップS11では、慣性座標系における第2段ロケット2の位置の誤差を補正する。
誤差推定部14によって推定される位置の誤差量を用いて、ステップS10で算出した時間更新後の位置を補正する。
以上で、航法演算部13による航法データの算出及び補正、すなわち、第2段ロケット2の角速度、角度増分、クォータニオン、座標変換行列、速度増分、速度及び位置の算出及び誤差補正が終了する。なお、上記航法データは、航法演算部13から誘導計算機21に出力される。
【0053】
次に、誤差推定部14による、航法演算部13における誤差補正に用いるための誤差量を推定について説明する。誤差推定部14はステップS12及びS15の処理により、カルマンフィルタを構成している。
【0054】
ステップS12では、カルマンフィルタにおける状態変数の時間更新を行う。
時間更新では、前サイクルでの状態変数の値から、現サイクルでの状態変数の値を推定する。なお、本実施形態において、状態変数として推定するものは、航法演算部13によって算出された第2段ロケット2の位置誤差、同じく速度誤差、加速度計15のバイアス誤差、同じくスケールファクタ誤差、同じくミスアライメント誤差、クォータニオン誤差、ジャイロ16のバイアス誤差、同じくスケールファクタ誤差、同じくミスアライメント誤差、受信機12により算出された第2段ロケット2の位置誤差及び速度誤差である。
【0055】
ステップS13では、受信機12が算出した第2段ロケット2の位置情報及び速度情報を誤差補正する。
受信機12は、送信機31から送信される第2段ロケット2の飛行に関する情報を取得し、第2段ロケット2の位置及び速度を算出する。なお、これらの位置情報及び速度情報は、航法演算部13が算出する航法データに対する比較に用いられる比較用航法データである。受信機12が算出する比較用航法データにも誤差は含まれているが、この誤差は航法データにおける誤差の性質、すなわち発散する性質を有しておらず、所定の範囲で分散した誤差量である。
また、ステップS12では、誤差推定部14が受信機12が算出する第2段ロケット2の位置情報及び速度情報に含まれる誤差量も推定している。そこで、この推定量を用いて、受信機12が算出した第2段ロケット2の位置情報及び速度情報を補正する。この補正により、比較用航法データを、航法データの誤差補正に使用できる信頼性の高いデータとすることができる。
【0056】
ステップS14では、ステップS13で補正された第2段ロケット2の位置情報及び速度情報を慣性座標系における位置情報及び速度情報に変換する。
受信機12が算出する第2段ロケット2の位置情報及び速度情報は、地球中心・地球固定座標系での位置情報及び速度情報であるため、各々の情報を慣性座標系での位置情報及び速度情報に変換する。
【0057】
ステップS15では、カルマンフィルタにおける状態変数の観測更新を行う。
カルマンフィルタの観測値は、ステップS14で算出された第2段ロケット2の位置情報及び速度情報と、ステップS11及びS9で算出された第2段ロケット2の位置情報及び速度情報との差分である。次に、上記観測値を参照することで、ステップS12で算出された時間更新後の状態変数を更に信頼性の高い状態変数に変換する。状態変数は、前述の通り複数の誤差量で構成されているため、ステップS12及びS15のカルマンフィルタを用いることで、信頼性の高い誤差量を推定することができる。
以上で、誤差推定部14による誤差量の推定が終了する。
【0058】
前述した航法演算部13及び誤差推定部14による処理を繰り返すことで、得られた信頼性の高い誤差量は、航法演算部13におけるステップS1等で算出された航法データに加えられ、信頼性の高い航法データを得ることができる。
以上で、慣性航法装置Aにおける航法データの算出及び補正が終了する。
【0059】
したがって、本実施形態によれば、以下の効果を得ることができる。
本実施形態によれば、打ち上げ時におけるロケットXの方位情報に誤差が含まれている場合や、計測結果に比較的大きな誤差が含まれる一方で低廉な慣性計測器11を用いた場合であっても、誤差の少ない航法データを得ることができる。そのため、本実施形態によれば、ロケットXの打ち上げ時における方位情報を取得するためのアライメントを省略もしくは短縮でき、低廉な慣性計測器11や航法演算部13を使用できるという効果がある。
【0060】
なお、前述した実施の形態において示した動作手順、あるいは各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲においてプロセス条件や設計要求等に基づき種々変更可能である。
【0061】
例えば、上記実施形態では、飛翔体としてロケットXが用いられているが、本発明はこのような構成に限定されるものではなく、ロケットXと同様に自らの質量の一部を後方に射出することで飛行するミサイルや、翼を備える飛行機等であってもよい。
【0062】
また、上記実施形態では、ロケットXは地上から打ち上げられているが、海上の船舶等から打ち上げられる海上発射、又は、他の飛翔体の飛行中に該他の飛翔体から打ち上げられる空中発射を用いて打ち上げられてもよい。
【0063】
また、上記実施形態では、2段式のロケットXが用いられているが、3段以上の段数を備えるロケットを用いてもよい。
【符号の説明】
【0064】
A…慣性航法装置、X…ロケット、11…慣性計測器、12…受信機、13…航法演算部、14…誤差推定部
【技術分野】
【0001】
本発明は、飛翔体の飛行に用いる航法データを算出する慣性航法装置、該慣性航法装置を備える飛翔体及び上記航法データの算出方法に関する。
【背景技術】
【0002】
従来から飛翔体として、翼により揚力を得つつエンジン等の動力源から発生される推進力によって飛行する飛行機や、自らの質量の一部を後方に射出しその反作用で生じる推進力によって飛行するロケット等が用いられている。これらの飛翔体においては、目標経路に沿って飛行するための誘導が一般的に行われている。
ここで、非特許文献1には、積み荷いわゆるペイロードを所定の高度まで運び、地球の周回軌道に投入するロケット及びその誘導システムについて開示されている。
【0003】
非特許文献1に開示されたロケットは、その現在位置や速度といった航法データを算出する航法装置と、誘導に用いられる指令値を算出する誘導計算機と、ロケットの推進装置等を制御する飛行制御部とを有している。誘導計算機は、航法データと目標経路とを比較し、ロケットの姿勢を補正するための指令値を算出し、指令値を飛行制御部に出力する。飛行制御部は、誘導計算機からの指令値に基づきロケットの姿勢を補正することで、ロケットを目標経路に沿って飛行させることができる。
【0004】
ロケットの航法データを算出する航法装置としては、ロケットの外部に設置された送信機がロケットの飛行に関する情報を送信し、ロケットに設けられた受信機が受信した上記情報から航法データを算出する電波航法装置や衛星航法装置、又は、ロケットに加速度計等のセンサ(慣性計測器)を設置し、センサの計測結果を積分することで必要な航法データを算出する慣性航法装置等が用いられている。
【0005】
なお、近年のロケットでは、天候の影響や送受信機の故障等により航法データの算出ができなくなり誘導不能となることを避ける必要があることから、自律飛行を行うための慣性航法装置を備えることが必須の条件となっている。
また、上記慣性航法装置で航法データを算出した後、GPS衛星から送信される情報を用いて上記航法データを補正する方法も用いられている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3354353号公報
【非特許文献】
【0007】
【非特許文献1】日本航空宇宙学会編、「航空宇宙工学便覧」、丸善株式会社、2005年11月、p.855−859
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、慣性航法装置を有するロケットでは、地上からの打ち上げ時におけるロケットの方位情報を取得する必要がある。これは、慣性航法装置は上記方位情報から航法データの初期値を算出するためである。そこで、ロケットの打ち上げ前にアライメントと呼ばれる処理を行い、ロケットに働く真の重力方向やロケットからの真北方向等を算出している。
このアライメントには一般的に1時間程度の時間が掛かり、アライメントの存在がロケットの運用面における手間やコストを増加させていた。
【0009】
また、前述の通り慣性航法装置は、慣性計測器からの計測結果を積分することで航法データを算出する。ところが、算出には積分を用いているために、航法データに含まれる誤差量は次第に大きくなり発散する傾向があることから、慣性計測器には計測結果に含まれる誤差量が少なく精度の高い計測機を用いる必要がある。
しかし、このような高精度の慣性計測器は高価であり、高価な慣性計測器を使用することでロケットのコストを増加させていた。
【0010】
さらに、特許文献1に開示された方法を用いて、航法データの補正処理を例えばロケットの動力飛行中に行った場合、ロケットの質量は時間と共に大きく減少するために、その補正のための計算量が膨大になり、高性能の演算装置を備える必要や正しく補正することが難しくなる等の課題があった。
【0011】
本発明は、このような事情に鑑みてなされたものであり、飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器や演算装置等を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明の慣性航法装置は、慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部と、を有するという構成を採用する。
このような構成を採用する本発明では、受信機が飛翔体の飛行に関する情報を受信して比較用航法データを算出し、誤差推定部が受信した比較用航法データを参照して航法データの誤差量を推定し、飛翔体の慣性飛行中に航法演算部が誤差量を用いて航法データを補正する。そのため、本発明では、誤差の少ない航法データを得ることが可能となる。
また、本発明では、慣性飛行中は飛翔体の推進用燃料が消費されず飛翔体の質量が一定であることから、質量に関するパラメータも一定となり、誤差推定の結果得られる誤差量の精度が向上する。
【0013】
また、本発明の慣性航法装置は、飛翔体の慣性飛行中に所定の推進力が生じたときに、航法データの誤差を補正するという構成を採用する。
このような構成を採用する本発明では、飛翔体に所定の推進力が生じ、慣性計測器がこの推進力を計測するため、慣性計測器の計測結果におけるSN比(信号対雑音比)が向上する。
【0014】
また、本発明の飛翔体は、上記の慣性航法装置を有するという構成を採用する。
このような構成を採用する本発明では、飛翔体は、誤差の少ない航法データを用いて飛行することが可能となる。
【0015】
また、本発明は、慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する航法データ算出方法であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信工程と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定工程と、誤差量を用いて航法データを補正する補正工程と、を備えるという方法を採用する。
このような方法を採用する本発明では、誤差の少ない航法データを得ることが可能となる。
【0016】
また、本発明は、飛翔体の慣性飛行中に、受信工程、誤差推定工程及び補正工程が行われるという方法を採用する。
このような方法を採用する本発明では、慣性飛行中は飛翔体の推進用燃料が消費されず飛翔体の質量が一定であることから、質量に関するパラメータも一定となり、誤差推定の結果得られる誤差量の精度が向上する。
【0017】
また、本発明は、飛翔体の慣性飛行中に所定の推進力が生じたときに、受信工程、誤差推定工程及び補正工程が行われるという方法を採用する。
このような方法を採用する本発明では、飛翔体に所定の推進力が生じ、慣性計測器がこの推進力を計測するため、慣性計測器の計測結果におけるSN比(信号対雑音比)が向上する。
【発明の効果】
【0018】
本発明によれば、以下の効果を得ることができる。
本発明によれば、いわゆる海上発射や空中発射等のアライメントを実施しても飛翔体の方位情報に誤差が残るような打ち上げ方法や、計測結果に比較的大きな誤差が含まれる一方で低廉な慣性計測器を用いた場合であっても、誤差の少ない航法データを得ることができる。そのため、本発明によれば、海上発射や空中発射等の打ち上げ方法を用いた場合であっても、精度の高い誘導を行うことができるという効果がある。また、本発明によれば、飛翔体の打ち上げ時における方位情報を取得するためのアライメントを省略もしくは短縮でき、低廉な慣性計測器や演算装置等を使用できるという効果がある。
【図面の簡単な説明】
【0019】
【図1】本実施形態に係る慣性航法装置Aが設けられたロケットXの全体構成を示す概略図である。
【図2】本実施形態における機器搭載部6の構成を示す概略図である。
【図3】本実施形態に係る慣性航法装置Aの航法データの算出及び補正の方法を示す概略図である。
【発明を実施するための形態】
【0020】
以下、図面を参照して本発明の実施形態について説明する。
まず、本実施形態に係る慣性航法装置Aが設けられたロケット(飛翔体)Xの全体構成を、図1を参照して説明する。
図1は、本実施形態に係る慣性航法装置Aが設けられたロケットXの全体構成を示す概略図である。
【0021】
本実施形態に係るロケットXは、多段式固体ロケット又は多段式液体ロケットであり、積み荷であるペイロード3を所定の高度まで運び、必要な速度で地球の周回軌道又は亜軌道にペイロード3を投入するためのロケットである。また、ロケットXにおいては、予め設定された目標経路に沿って飛行するという、いわゆる誘導が行われている。
図1に代表例を示すように、ロケットXは主要な要素として、第1段ロケット1と、第2段ロケット2と、積み荷であるペイロード3とを有している。なお、図1における矢印Fは、ロケットXの推進方向を示す。
【0022】
第1段ロケット1は、ロケットXの地上からの打ち上げ時に使用される主要な推進装置である。第1段ロケット1は、第1段ロケット1の−F方向側に設けられ推進力を発生する第1段エンジン部4と、第1段エンジン部4に供給されるロケット燃料を蓄える不図示の燃料タンクとを有している。第1段エンジン部4は、エンジンの噴射方向を変化させる不図示のジンバル部を有している。
【0023】
第2段ロケット2は、第1段ロケット1の+F方向側に設けられ、第1段ロケット1が切り離された後にペイロード3を運ぶための推進装置である。第2段ロケット2は、第2段ロケット2の−F方向側に設けられ推進力を発生する第2段エンジン部5と、ロケットX全体の飛行制御を行う制御機器等が設置される機器搭載部6と、第2段エンジン部5に供給される酸素及び水素を蓄える不図示の液体酸素タンク及び液体水素タンクと、所定の推進力を発生する不図示のガスジェットを有している。第2段エンジン部5は、エンジンの噴射方向を変化させる不図示のジンバル部を有している。なお、機器搭載部6に設置される制御機器等の説明は後述する。
【0024】
第2段ロケット2の+F方向側には、ペイロード3が設置されている。第2段ロケット2及びペイロード3の外側には、ロケットXの先端部外殻を形成するフェアリング7が設けられている。フェアリング7は、ロケットXの大気圏通過中におけるペイロード3の保護用カバーである。
【0025】
次に、本実施形態における機器搭載部6の構成を、図2を参照して説明する。
図2は、本実施形態における機器搭載部6の構成を示す概略図である。
【0026】
図2に示すように、機器搭載部6は、ロケットXの現在位置や速度等の航法データを算出する慣性航法装置Aと、誘導に用いられる指令値を算出する誘導計算機21と、上記指令値に従い第1段エンジン部4を制御する第1段ロケット制御部22と、上記指令値に従い第2段エンジン部5を制御する第2段ロケット制御部23とを有している。
【0027】
慣性航法装置Aは、ロケットXの加速度や角速度等を計測するセンサである慣性計測器11と、ロケットXの飛行に関する情報を受信して航法データとの比較に用いられる比較用航法データを算出する受信機12と、慣性計測器11の計測結果から航法データを算出し後述する誤差推定部14が推定した誤差量を用いて上記航法データを補正する航法演算部13と、航法データと比較用航法データとを比較しつつ航法データに含まれる誤差量を推定する誤差推定部14とを有している。
【0028】
慣性計測器11は、ロケットXにおける互いに直交する所定の3軸に関する加速度を計測する加速度計15と、ロケットXにおける互いに直交する所定の3軸周りの角速度を計測するジャイロ16とを有している。加速度計15及びジャイロ16は、計測結果である加速度及び角速度、さらに加速度及び角速度の積算値である速度増分積算値及び角度増分積算値を航法演算部13に出力する。
【0029】
受信機12は、ロケットXの外部に設けられた複数の送信機31から送信されるロケットXの飛行に関する情報を受信して、ロケットXの現在位置及び速度を算出する受信機である。なお、受信機12が算出する位置及び速度の情報は、航法データとの比較に用いられる比較用航法データとなる。
本実施形態における送信機31はGPS衛星であり、受信機12はGPS受信機である。もっとも、送信機31及び受信機12はGPS機器に限定されず、例えば超短波の電波を用いた無線標識施設(VOR)等であってもよい。
【0030】
航法演算部13は、慣性計測器11の計測結果から航法データを算出し、後述する誤差推定部14が推定した誤差量を用いて航法データを補正する演算部である。そして、航法演算部13は、補正後の航法データを誘導計算機21に出力する。
【0031】
誤差推定部14は、航法演算部13から入力された航法データと受信機12から入力された比較用航法データとを比較し、航法データに含まれる誤差量を推定する推定部である。誤差推定部14は、カルマンフィルタによって構成されている。
【0032】
続いて、代表例として本実施形態に係るロケットXが地上から打ち上げられ、ペイロード3を地球の周回軌道に投入する動作を説明する。
【0033】
まず、ロケットXが、地上に設けられた打ち上げ設備に設置される。ここで、航法データ(座標変換行列等)の初期値を算出するための、設置時におけるロケットXの方位情報を慣性航法装置Aに導入させる。この方位情報は、ロケットXからの真の重力方向や真北方向等の情報である。方位情報の導入方法は、ロケットXの方位を所定の値として入力してもよいし、簡易的なアライメントを短時間で行うことで算出してもよい。
【0034】
次に、第1段ロケット1点火し、これらの推進装置の推進力によりロケットXを地上から打ち上げる。ロケットXには慣性力が働き、慣性計測器11は、ロケットXの加速度及び角速度を計測する。航法演算部13は、慣性計測器11の計測結果より航法データを算出し、該航法データを誘導計算機21に出力する。誘導計算機21は、入力された航法データと予め設定された目標経路とを比較し、ロケットXを目標経路に沿って誘導するために必要な指令値を算出し、該指令値を第1段ロケット制御部22に出力する。第1段ロケット制御部22は、入力された指令値に基づき、ロケットXが目標経路に沿って飛行するように第1段エンジン部4及びそのジンバル部等を制御する。
【0035】
ロケットXが第1段ロケット1の推進力により飛行している間、すなわちロケットXの動力飛行中には、航法演算部13による誤差補正は行わない。航法演算部13は、慣性計測器11の計測結果を元に算出した航法データを補正せずに誘導計算機21に出力する。
【0036】
次に、第1段ロケット1の燃料が尽きたところで、第1段ロケット1を第2段ロケット2から切り離す。その後、ペイロード3は、第2段ロケット2によって投入位置まで運ばれる。
誘導計算機21は、航法データと目標経路とを比較し、第2段ロケット2を目標経路に沿って誘導するために必要な指令値を算出し、該指令値を第2段ロケット制御部23に出力する。第2段ロケット制御部23は、入力された指令値に従い、第2段ロケット2が目標経路に沿って飛行するように第2段エンジン部5を制御する。なお、第2段エンジン部5の作動中も、航法データの誤差補正は実施しない。
【0037】
次に、第2段ロケット2が地球の重力圏を脱したところで、誘導計算機21及び第2段ロケット制御部23が第2段エンジン部5を停止させ、第2段ロケット2は慣性飛行に入る。また、誘導計算機21は、慣性飛行に入ったことを示す信号を慣性航法装置Aに出力する。この信号の入力により慣性航法装置Aは、航法データの誤差補正を開始する。この誤差補正の方法については後述する。
【0038】
航法データの誤差補正を行うことにより、例えば、ロケットXの打ち上げ時における方位情報や慣性計測器11の計測結果に大きな誤差が含まれている場合であっても、誤差の少ない航法データを得ることができる。
また、本実施形態では航法データの誤差補正は、第2段ロケット2の慣性飛行中に実施される。そのため、慣性飛行中は第2段ロケット2の推進用酸素及び水素が消費されず、第2段ロケット2の質量が一定であることから、誤差推定部14の推定により得られる誤差量の精度を向上させることができる。
【0039】
さらに、航法データの誤差補正時に、第2段ロケット2に設けられ所定の推進力を発生できるガスジェットを作動させ、所定の推進力を発生させてもよい。
上記ガスジェットの作動時には、慣性計測器11が上記ガスジェットの作動により発生する慣性力等を計測するため、慣性計測器11の計測結果におけるSN比(信号対雑音比)が向上し、航法データの推定をガスジェットによる推進力を加えない場合に比べ、迅速に行うことができる。なお、上記所定の推進力を発生させる場合は、後述する誤差推定部において、時間更新を示す状態方程式に制御入力項を追加する場合がある。
【0040】
次に、慣性航法装置Aが、補正後の航法データを誘導計算機21に出力する。誘導計算機21は、第2段ロケット2を目標経路に沿って誘導するための指令値を算出し、該指令値を第2段ロケット制御部23に出力する。第2段ロケット制御部23は、入力された指令値に基づき、第2段ロケット2が目標経路に沿って飛行するように第2段エンジン部5を制御する。したがって、第2段ロケット2を精度よく目標経路に沿わせて飛行させることができる。
【0041】
最後に、第2段ロケット2に設けられたペイロード3を、地球の周回軌道に投入する。
第2段ロケット2が、ペイロード3の投入位置に到達したところで、第2段ロケット2からペイロード3を切り離し、地球の周回軌道に投入する。ペイロード3は、地球を周回するに十分な速度で投入されるため、地球の周回軌道を周回することができる。
以上で、ロケットXが地上から打ち上げられ、ペイロード3を地球の周回軌道に投入する動作が終了する。
【0042】
続いて、慣性航法装置Aにおける航法データの算出及び補正について、図3を参照して説明する。
図3は、本実施形態に係る慣性航法装置Aの航法データの算出及び補正の方法を示す概略図である。なお、図3において、ステップS1からS11までは航法演算部13における処理ステップを示し、ステップS12からS15までは誤差推定部14における処理ステップを示している。
【0043】
ステップS1では、第2段ロケット2の速度増分、角度増分及び角速度を算出し、上記各々の値に含まれる誤差を補正する。
まず、加速度計15及びジャイロ16のそれぞれの出力である速度増分積算値及び角度増分積算値より、サンプリング周期間での速度増分及び角度増分を算出する。これは、現サイクルにおける速度増分積算値及び角度増分積算値から、前サイクルにおける速度増分積算値及び角度増分積算値を引くことにより算出する。
次に、得られた速度増分及び角度増分の各々に、後述する誤差推定部14によって推定した誤差量を加えることで、補正後の速度増分及び角度増分を算出する。また、ジャイロ16の出力である角速度計測値に対しても、誤差推定部14によって推定した誤差量を加え、補正後の角速度を算出する。なお、速度増分の補正に用いる誤差量は、バイアス誤差、スケールファクタ誤差及びミスアライメント誤差の3種である。一方、角度増分及び角速度の補正に用いる誤差量も、バイアス誤差、スケールファクタ誤差及びミスアライメント誤差の3種である。
【0044】
ステップS2ではコーニング補正を、ステップS3ではスカリング補正を行う。
ステップS1で算出した補正後速度増分及び補正後角度増分は、第2段ロケット2の機体の回転運動の影響から正しい速度変化及び角度変化を計測できていない。よって、ステップS1で算出した補正後角度増分及び補正後速度増分に対してコーニング補正及びスカリング補正を行う。
コーニング補正では、ステップS1で算出した補正後角度増分から、機体座標系の回転によって発生する機体座標系の各軸周りにおける見かけ上の角速度の影響を補正し、慣性座標系から見た機体座標系の単位時間当たりの角度増分を求める。スカリング補正では、回転している機体座標系の各軸方向の速度増分となっているステップS1で算出した補正後速度増分に対し、コーニング補正後の角度増分を用い、単位時間の間、一定の機体座標系において計測した速度増分となるように補正する。
【0045】
ステップS4では、クォータニオンの時間更新を行う。
クォータニオンとは、慣性計測器11が設置された機体座標系であるプラットフォーム座標系から、慣性座標系への変換を表す四元数をいう。ステップS2で算出したコーニング補正後の角度増分を用いて、クォータニオンを時間更新して算出する。
【0046】
ステップS5では、クォータニオンの誤差補正を行う。
後述する誤差推定部14によって推定されるクォータニオンの誤差量を用いて、ステップS4で算出した時間更新後のクォータニオンを補正する。その後、時間更新に用いられる数式における近似の精度により発生するスケール誤差を補正するため、正規化処理を実施する。
本実施形態では、クォータニオンの誤差を補正しているために、第2段ロケット2の姿勢情報を精度よく算出することができる。
【0047】
ステップS6では、座標変換行列を算出する。
ステップS5で算出された誤差補正後のクォータニオンを用いて、プラットフォーム座標系から慣性座標系への座標変換行列を算出する。
【0048】
ステップS7では、第2段ロケット2に働く重力加速度を算出する。
第2段ロケット2に働く重力加速度は第2段ロケット2の位置によって変化するため、後述するステップS11にて算出される第2段ロケット2の位置情報から、第2段ロケット2に働く重力加速度を算出する。
【0049】
ステップS8では、慣性座標系における第2段ロケット2の速度を時間更新する。
慣性座標系における前サイクルでの第2段ロケット2の速度に、ステップS3で算出したスカリング補正後の速度増分をステップS6で算出した座標変換行列により変換した値と、ステップS7で算出した重力加速度による速度の増分とを加えることにより、慣性座標系における現サイクルでの第2段ロケット2の速度を算出する。なお、重力加速度による速度の増加分は、台形近似にて算出しており、前サイクルにおける重力加速度と現サイクルにおける重力加速度との平均値にサンプリング周期を掛けることで算出する。
【0050】
ステップS9では、慣性座標系における第2段ロケット2の速度の誤差を補正する。
誤差推定部14によって推定される速度の誤差量を用いて、ステップS8で算出した時間更新後の速度を補正する。
【0051】
ステップS10では、慣性座標系における第2段ロケット2の位置を更新する。
慣性座標系における前サイクルでの第2段ロケット2の位置に、ステップS9で算出した補正後の速度による位置の変位分を加えることにより、慣性座標系における現サイクルでの第2段ロケット2の位置を算出する。なお、速度による位置の変位分は、台形近似にて算出しており、前サイクルにおける速度と現サイクルにおける速度との平均値にサンプリング周期を掛けることで算出する。
【0052】
ステップS11では、慣性座標系における第2段ロケット2の位置の誤差を補正する。
誤差推定部14によって推定される位置の誤差量を用いて、ステップS10で算出した時間更新後の位置を補正する。
以上で、航法演算部13による航法データの算出及び補正、すなわち、第2段ロケット2の角速度、角度増分、クォータニオン、座標変換行列、速度増分、速度及び位置の算出及び誤差補正が終了する。なお、上記航法データは、航法演算部13から誘導計算機21に出力される。
【0053】
次に、誤差推定部14による、航法演算部13における誤差補正に用いるための誤差量を推定について説明する。誤差推定部14はステップS12及びS15の処理により、カルマンフィルタを構成している。
【0054】
ステップS12では、カルマンフィルタにおける状態変数の時間更新を行う。
時間更新では、前サイクルでの状態変数の値から、現サイクルでの状態変数の値を推定する。なお、本実施形態において、状態変数として推定するものは、航法演算部13によって算出された第2段ロケット2の位置誤差、同じく速度誤差、加速度計15のバイアス誤差、同じくスケールファクタ誤差、同じくミスアライメント誤差、クォータニオン誤差、ジャイロ16のバイアス誤差、同じくスケールファクタ誤差、同じくミスアライメント誤差、受信機12により算出された第2段ロケット2の位置誤差及び速度誤差である。
【0055】
ステップS13では、受信機12が算出した第2段ロケット2の位置情報及び速度情報を誤差補正する。
受信機12は、送信機31から送信される第2段ロケット2の飛行に関する情報を取得し、第2段ロケット2の位置及び速度を算出する。なお、これらの位置情報及び速度情報は、航法演算部13が算出する航法データに対する比較に用いられる比較用航法データである。受信機12が算出する比較用航法データにも誤差は含まれているが、この誤差は航法データにおける誤差の性質、すなわち発散する性質を有しておらず、所定の範囲で分散した誤差量である。
また、ステップS12では、誤差推定部14が受信機12が算出する第2段ロケット2の位置情報及び速度情報に含まれる誤差量も推定している。そこで、この推定量を用いて、受信機12が算出した第2段ロケット2の位置情報及び速度情報を補正する。この補正により、比較用航法データを、航法データの誤差補正に使用できる信頼性の高いデータとすることができる。
【0056】
ステップS14では、ステップS13で補正された第2段ロケット2の位置情報及び速度情報を慣性座標系における位置情報及び速度情報に変換する。
受信機12が算出する第2段ロケット2の位置情報及び速度情報は、地球中心・地球固定座標系での位置情報及び速度情報であるため、各々の情報を慣性座標系での位置情報及び速度情報に変換する。
【0057】
ステップS15では、カルマンフィルタにおける状態変数の観測更新を行う。
カルマンフィルタの観測値は、ステップS14で算出された第2段ロケット2の位置情報及び速度情報と、ステップS11及びS9で算出された第2段ロケット2の位置情報及び速度情報との差分である。次に、上記観測値を参照することで、ステップS12で算出された時間更新後の状態変数を更に信頼性の高い状態変数に変換する。状態変数は、前述の通り複数の誤差量で構成されているため、ステップS12及びS15のカルマンフィルタを用いることで、信頼性の高い誤差量を推定することができる。
以上で、誤差推定部14による誤差量の推定が終了する。
【0058】
前述した航法演算部13及び誤差推定部14による処理を繰り返すことで、得られた信頼性の高い誤差量は、航法演算部13におけるステップS1等で算出された航法データに加えられ、信頼性の高い航法データを得ることができる。
以上で、慣性航法装置Aにおける航法データの算出及び補正が終了する。
【0059】
したがって、本実施形態によれば、以下の効果を得ることができる。
本実施形態によれば、打ち上げ時におけるロケットXの方位情報に誤差が含まれている場合や、計測結果に比較的大きな誤差が含まれる一方で低廉な慣性計測器11を用いた場合であっても、誤差の少ない航法データを得ることができる。そのため、本実施形態によれば、ロケットXの打ち上げ時における方位情報を取得するためのアライメントを省略もしくは短縮でき、低廉な慣性計測器11や航法演算部13を使用できるという効果がある。
【0060】
なお、前述した実施の形態において示した動作手順、あるいは各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲においてプロセス条件や設計要求等に基づき種々変更可能である。
【0061】
例えば、上記実施形態では、飛翔体としてロケットXが用いられているが、本発明はこのような構成に限定されるものではなく、ロケットXと同様に自らの質量の一部を後方に射出することで飛行するミサイルや、翼を備える飛行機等であってもよい。
【0062】
また、上記実施形態では、ロケットXは地上から打ち上げられているが、海上の船舶等から打ち上げられる海上発射、又は、他の飛翔体の飛行中に該他の飛翔体から打ち上げられる空中発射を用いて打ち上げられてもよい。
【0063】
また、上記実施形態では、2段式のロケットXが用いられているが、3段以上の段数を備えるロケットを用いてもよい。
【符号の説明】
【0064】
A…慣性航法装置、X…ロケット、11…慣性計測器、12…受信機、13…航法演算部、14…誤差推定部
【特許請求の範囲】
【請求項1】
慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、
前記飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機と、
受信した前記比較用航法データを参照して、前記航法データの誤差量を推定する誤差推定部と、
前記飛翔体の慣性飛行中に前記誤差量を用いて前記航法データを補正する航法演算部と、を有することを特徴とする慣性航法装置。
【請求項2】
前記飛翔体の慣性飛行中に所定の推進力が生じたときに、前記航法データの誤差を補正することを特徴とする請求項1に記載の慣性航法装置。
【請求項3】
請求項1又は2に記載の慣性航法装置を有することを特徴とする飛翔体。
【請求項4】
慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する航法データ算出方法であって、
前記飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信工程と、
受信した前記比較用航法データを参照して、前記航法データの誤差量を推定する誤差推定工程と、
前記誤差量を用いて前記航法データを補正する補正工程と、を備えることを特徴とする航法データ算出方法。
【請求項5】
前記飛翔体の慣性飛行中に、前記受信工程、前記誤差推定工程及び前記補正工程が行われることを特徴とする請求項4に記載の航法データ算出方法。
【請求項6】
前記飛翔体の慣性飛行中に所定の推進力が生じたときに、前記受信工程、前記誤差推定工程及び前記補正工程が行われることを特徴とする請求項5に記載の航法データ算出方法。
【請求項1】
慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、
前記飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機と、
受信した前記比較用航法データを参照して、前記航法データの誤差量を推定する誤差推定部と、
前記飛翔体の慣性飛行中に前記誤差量を用いて前記航法データを補正する航法演算部と、を有することを特徴とする慣性航法装置。
【請求項2】
前記飛翔体の慣性飛行中に所定の推進力が生じたときに、前記航法データの誤差を補正することを特徴とする請求項1に記載の慣性航法装置。
【請求項3】
請求項1又は2に記載の慣性航法装置を有することを特徴とする飛翔体。
【請求項4】
慣性計測器の計測結果から飛翔体の飛行に用いる航法データを算出する航法データ算出方法であって、
前記飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信工程と、
受信した前記比較用航法データを参照して、前記航法データの誤差量を推定する誤差推定工程と、
前記誤差量を用いて前記航法データを補正する補正工程と、を備えることを特徴とする航法データ算出方法。
【請求項5】
前記飛翔体の慣性飛行中に、前記受信工程、前記誤差推定工程及び前記補正工程が行われることを特徴とする請求項4に記載の航法データ算出方法。
【請求項6】
前記飛翔体の慣性飛行中に所定の推進力が生じたときに、前記受信工程、前記誤差推定工程及び前記補正工程が行われることを特徴とする請求項5に記載の航法データ算出方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−261842(P2010−261842A)
【公開日】平成22年11月18日(2010.11.18)
【国際特許分類】
【出願番号】特願2009−113533(P2009−113533)
【出願日】平成21年5月8日(2009.5.8)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年11月18日(2010.11.18)
【国際特許分類】
【出願日】平成21年5月8日(2009.5.8)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]