
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法に関するものである。
【背景技術】
【0002】
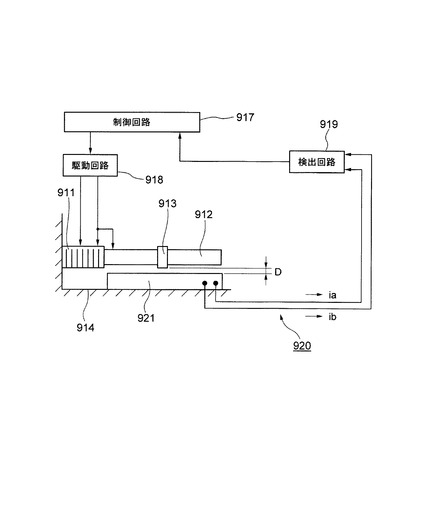
図20は、従来のアクチュエータ920の構成を示す側面図である。図20に示すように、アクチュエータ920は、電気機械変換素子の1つである圧電素子911、駆動軸912、駆動軸912に摩擦結合した移動体913、及び、アクチエータ920のフレーム914を備える。圧電素子911の一端はフレーム914に固定され、圧電素子911の他端には駆動軸912が固定されている。
【0003】
また、検出部材921は、移動体913の位置を静電容量に基づいて検出するための固定電極を構成するもので、移動体913の移動方向に沿って平行に、非接触の状態で配置され、フレーム914に固定されている。駆動軸912、移動体913、及び検出部材(固定電極)921は、導電性の材料で構成されている。検出部材921は、移動体913に対向する面に、電極921を構成しており、電極921と移動体913とは間隔Dを隔てて対向して静電容量Cのコンデンサを形成している。
【0004】
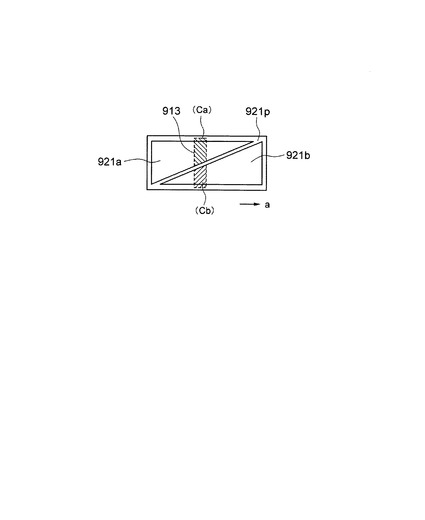
図21は、検出部材921の構成及び移動体913との関係を示す平面図である。図21に示すように、検出部材921は、絶縁体921pの上に、直角三角形の第1電極921aと第2電極921bとが、斜辺を対向させて形成されている。駆動回路918(図20)から出力された駆動波形は、圧電素子911に印加されると共に、駆動軸912を経て移動体913にも供給される。
【0005】
図21に示す状態例のように、移動体913と第1電極921aとが互いに対向するとともに、移動体913と第2電極921bとが互いに対向しており、それぞれ静電容量結合している。このため、移動体913に印加される駆動波形は、第1電極921a及び第2電極921bに向けてそれぞれ流れる。第1電極921a及び第2電極921bに向けて流れる電流iは検出回路919で検出され、制御回路917に入力される。
【0006】
ここで、一例として、移動体913が、第1電極921a側から第2電極921b側に向けて矢印a方向(図21)に移動する場合について説明する。移動体913の移動により、移動体913と第1電極921aとの間の対向電極面積は次第に減少して両者間の静電容量Caは次第に減少する一方、移動体913と第2電極921bとの間の対向電極面積は次第に増加して両者間の静電容量Cbは次第に増加する。従って、移動体913の移動にともなって、移動体913から第1電極921aに流れる電流iaは次第に減少し、移動体913から第2電極921bに流れる電流ibは次第に増加する。
【0007】
これに対して、移動体913が第2電極921b側から第1電極921a側に向けて、矢印aと反対方向に移動する場合は、移動体913と第1電極921aとの間の対向電極面積は次第に増加して両者間の静電容量Caは次第に増加するとともに、移動体913と第2電極921bとの間の対向電極面積は次第に減少して両者間の静電容量Cbは次第に減少する。したがって、移動体913から第1電極921aに流れる電流iaは次第に増大し、移動体913から第2電極921bに流れる電流ibは次第に減少する。
【0008】
以上のように、移動体913の移動にともなって増減する、電流iaの大きさと電流ibの大きさとを互いに比較することで、移動体913の検出部材921に対する位置を求めることができるほか、電流ia及び電流ibの大きさが変化する方向により移動体913の移動方向を求めることができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2003−185406号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上述のアクチュエータ920では、湿度、温度、重力、経年変化などの影響により、静電容量の検出値が、アクチュエータ920を組み立てたときの初期検出値と異なってしまう。このため、実際の静電容量(電流)の検出値に対して、組み立て時に設定した静電容量と位置情報の関係を適用すると、検出部材921に対する移動体913の位置を正確に検出することができなくなる。
【0011】
本発明は、上記に鑑みてなされたものであって、移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータに関する技術について提供することを目的とする。
【課題を解決するための手段】
【0012】
上述した課題を解決し、目的を達成するために、本発明に係る慣性駆動アクチュエータのキャリブレーション方法は、移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、移動体に設けられた移動体電極と、振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、を備え、比率算出ステップで算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出可能としたことを特徴としている。
【0013】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係であることが好ましい。
【0014】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、静電容量記憶ステップにおいて記憶された静電容量を比較する静電容量比較ステップを有することが好ましい。
【0015】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、移動体が駆動信号を入力せず、停止しているにも関わらず、静電容量が変化した際に、位置情報と静電容量の関係に誤差が発生したことを検知し、再度キャリブレーションを促すことが好ましい。
【0016】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、一方の移動限界位置から他方の移動限界位置への方向の1駆動波形あたりの移動量と、他方の移動限界位置から一方の移動限界位置への方向の1駆動波形あたりの移動量と、をそれぞれ測定、計算し、各1駆動波形あたりの移動量を一方または個別に記憶することが好ましい。
【0017】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、1駆動波形あたりの移動量を計算する際に、少なくとも1度、一方の移動限界位置から他方の移動限界位置までの移動範囲の中心側へ移動することが好ましい。
【0018】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、振動基板電極が複数あり、それぞれの振動基板電極と移動体電極との静電容量を比較、演算することにより、移動体の位置情報を算出することが好ましい。
【0019】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、振動基板電極が、駆動用電極及び位置検出用電極の一方または両方を持つことが好ましい。
【0020】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、キャリブレーションの結果を確認するための確認ステップを有することが好ましい。
【0021】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、確認ステップにおいて、正しくキャリブレーションが行われていないことが確認された場合には、再度キャリブレーションを行うことが好ましい。
【0022】
本発明の慣性駆動アクチュエータ装置は、移動手段により往復移動される振動基板と、移動手段に駆動信号を印加する駆動回路と、振動基板に対して慣性により移動する移動体と、移動体の移動限界距離を規制する突き当て部と、移動体に設けられた移動体電極と振動基板に設けられた振動基板電極とが対向する部分の静電容量を検出する静電容量検出回路と、静電容量検出回路が検出した静電容量を記憶する静電容量記憶部と、静電容量記憶部に記憶された静電容量と移動限界距離との比率を算出する比率演算部と、
静電容量検出回路によって検出された静電容量と比率記憶部に記憶された比率とに基づいて、移動体の絶対位置を計算する絶対位置演算部と、を備えることを特徴としている。
【0023】
本発明の慣性駆動アクチュエータ装置においては、移動体が導電材料を含むことが好ましい。
【0024】
本発明の慣性駆動アクチュエータ装置においては、振動基板の移動体とは反対側に永久磁石が配置されるとともに、移動体が磁性材料を含むことが好ましい。
【0025】
また、本発明の位置算出方法は、移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、
前記移動体に設けられた移動体電極と、前記振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、
前記静電容量検出ステップにおいて検出された、前記一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、
前記静電容量記憶ステップにおいて記憶された前記一方及び他方の前記移動限界位置での静電容量と、前記一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、
前記比率算出ステップで算出した前記比率を用いて、前記一方及び他方の移動限界位置間における前記移動体の絶対位置を算出する絶対位置算出ステップと、を備えることを特徴としている。
【発明の効果】
【0026】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置は、移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することができるという効果を奏する。
【図面の簡単な説明】
【0027】
【図1】本発明の第1実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図2】本発明の第1実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図3】本発明の第1実施形態に係る制御回路の構成を示すブロック図である。
【図4】本発明の第1実施形態に係る慣性駆動アクチュエータのキャリブレーションの流れの概要を示すフローチャートである。
【図5】本発明の第1実施形態に係る慣性駆動アクチュエータのキャリブレーションの流れを示すフローチャートである。
【図6】本発明の第1実施形態の第1変形例に係るキャリブレーションの流れを示すフローチャートである。
【図7】本発明の第1実施形態の第2変形例に係るキャリブレーションの流れを示すフローチャートである。
【図8】本発明の第1実施形態の第3変形例に係るキャリブレーションの流れを示すフローチャートである。
【図9】本発明の第1実施形態の第4変形例に係るキャリブレーションの流れを示すフローチャートである。
【図10】本発明の第2実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図11】本発明の第2実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図12】本発明の第3実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図13】本発明の第3実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図14】本発明の第4実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図15】本発明の第4実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図16】本発明の第5実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図17】本発明の第5実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図18】本発明の第6実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図19】本発明の第6実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図20】従来のアクチュエータ920の構成を示す側面図である。
【図21】従来の検出部材の構成及び移動体との関係を示す平面図である。
【発明を実施するための形態】
【0028】
以下に、本発明に係る慣性駆動アクチュエータ及び慣性駆動アクチュエータ装置の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態によりこの発明が限定されるものではない。
【0029】
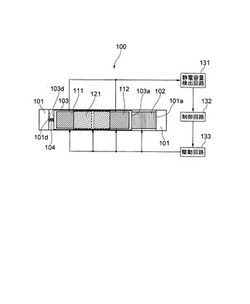
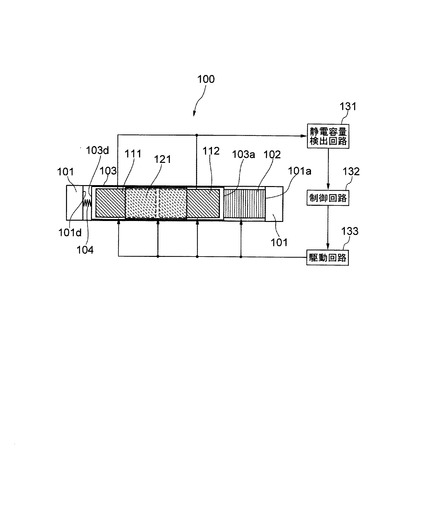
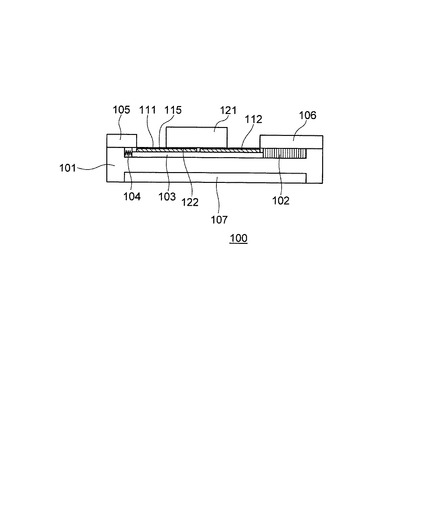
まず、図1、図2を参照しつつ、第1実施形態に係る慣性駆動アクチュエータ100の構成について説明する。図1は、本発明の第1実施形態に係る慣性駆動アクチュエータ100を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図2は、慣性駆動アクチュエータ100の構成を示す側面図である。なお、図1においては、突き当て部105、106の図示を省略している。以下の説明では、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ100と、慣性駆動アクチュエータ100に接続された静電容量検出回路131及び駆動回路133と、制御回路132と、を備える。
【0030】
慣性駆動アクチュエータ100は、固定部材101と、圧電素子102と、固定部材101上に変位可能に載置された振動基板103と、バネ104と、固定部材101上に形成された突き当て部105、106と、振動基板103上に配置された振動基板電極111、112と、移動体121と、を備える。また、固定部材101の下側には永久磁石107が配置されている。
【0031】
固定部材101の内側面101aには、圧電素子102の一端が隣接している。この圧電素子102の他端は、振動基板103の右側面103aに隣接している。
【0032】
振動基板103を介して圧電素子102と対向するように、バネ104が配置されている。すなわち、バネ104は、一端が固定部材101の内側面101dに隣接するとともに、他端が振動基板103の左側面103dに隣接している。
【0033】
慣性駆動アクチュエータ100においては、圧電素子102が伸張して振動基板103が変位したときにバネ104が振動基板103を支持し、圧電素子102が収縮すると、振動基板103はバネ104の弾性力によってもとの位置へ変位する。すなわち、バネ104は、圧電素子102の伸縮を振動基板103へ伝達する補助を行っている。なお、圧電素子102の両端及びバネ104の両端は、固定部材101及び/又は振動基板103に固定されていてもよい。
【0034】
振動基板103の上面には振動基板電極111、112が形成され、振動基板電極111、112の上面には絶縁層115が形成されている。振動基板電極111、112上には、絶縁層115を介して、移動体121が載置されている。移動体121の下面、すなわち振動基板電極111、112に対向する面には、移動体電極122が形成されている。
【0035】
移動体121は、振動基板103の変位にともなって、長板状の振動基板103の長手方向(図1、図2の左右方向)において、絶縁層115と摺動しつつ移動可能である。なお、移動体121は、磁性材料又は導電材料で形成することが好ましい。
【0036】
圧電素子102、振動基板電極111、112、移動体121の移動体電極122には、これらを駆動させるための駆動電圧を印加するための駆動回路133が接続されている。さらに、振動基板電極111、112には、移動体121の移動体電極122と振動基板電極111、112との間の静電容量を検出する静電容量検出回路131が接続されている。静電容量検出回路131からの出力信号は、制御回路132に入力される。
【0037】
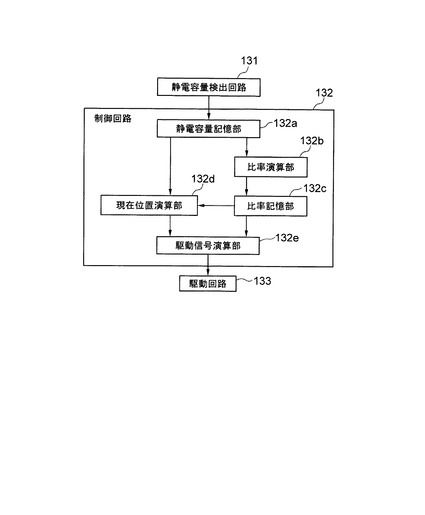
図3を参照しつつ、制御回路132における処理の概要について説明する。ここで図3は、制御回路132の構成を示すブロック図である。制御回路132は、静電容量記憶部132a、比率演算部132b、比率記憶部132c、現在位置演算部132d、及び駆動信号演算部132eを備える。
【0038】
まず、静電容量検出回路131から入力された検出結果としての静電容量は、静電容量記憶部132aに記憶される。記憶される静電容量は、移動体121の移動体電極122と振動基板電極111との間の静電容量、及び、移動体電極122と振動基板電極112との間の静電容量であって、比率演算部132bにおいて、これら検出された静電容量に基づく移動体の移動距離と静電容量との比率が算出され、この演算結果は比率記憶部132cに記憶される。
【0039】
比率演算部132bによる演算結果は現在位置演算部132dへ出力され、現在位置演算部132dにおいて、振動基板103上における移動体121の絶対位置(現在位置)が算出される。さらに、駆動信号演算部132eにおいて、比率演算部132bによる演算結果及び現在位置演算部132dによる演算結果に基づいて、振動基板電極111、112、及び圧電素子102を駆動させるための駆動信号が生成される。
【0040】
生成された駆動信号は、駆動回路133に出力される。駆動回路133は、制御回路132から入力された駆動信号によって振動基板電極111、112、移動体電極122、及び圧電素子102を駆動する。
【0041】
固定部材101のバネ104側の端部上面には、バネ104、及び、絶縁層115のバネ104側の端部を上から覆うように突き当て部105が形成されている。また、固定部材101の圧電素子102側の端部上面には、圧電素子102、及び、絶縁層115の圧電素子102側の端部を上から覆うように突き当て部106が形成されている。
【0042】
突き当て部105、106により、移動体121の移動範囲が規制される。すなわち、移動体121が突き当て部105、106とそれぞれ接触する位置が両端の移動限界位置であり、これらの移動限界位置間の距離が移動体121の移動できる最大距離(移動限界距離)となる。
【0043】
(位置検出原理)
ここで、移動体121の検出方式について説明する。移動体121の位置検出も慣性駆動アクチュエータ100の駆動と同様に移動体121に設けられた移動体電極122と振動基板103に設けられた振動基板電極111、112を用いて行う。移動体電極122と振動基板電極111、112とのそれぞれが対向する部分はそれぞれコンデンサとしてみることができる。
移動体電極122と振動基板電極111との対向する部分の面積に相当する静電容量と、移動体電極122と振動基板電極112との対向する部分の面積に相当する静電容量と、を比較または差分を検出することによって、移動体121の振動基板103に対する相対的な位置を検出することができる。
例えば、移動体121を図1又は図2において、紙面右側に移動させると移動体電極122と振動基板電極111との対向面積が大きくなるため、振動基板電極111と移動体電極122との間の静電容量は大きくなる。一方で、移動体電極122と振動基板電極112との対向面積は次第に小さくなるため、振動基板電極112と移動体電極122との間の静電容量も小さくなる。これら静電容量の差分を取れば、静電容量の大小関係から移動体の位置を高精度に把握することが可能である。
【0044】
本実施例では移動体121が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体121と振動基板電極電極との間の静電容量が増加するように構成されている。さらに、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係にあることが好ましい。
【0045】
なお、移動限界位置は、突き当て部105、106のいずれを一方の移動限界位置に設定することもできる。また、移動体の位置と静電容量との関係は、位置の変化に伴って静電容量が変化すれば比例関係でなくてもよい。
【0046】
以上の構成により、振動基板電極111、112、及び圧電素子102に駆動電圧を印加すると、振動基板103は、圧電素子102の変位の方向に変位する。このように振動基板103が変位すると、振動基板103上の移動体121は、突き当て部105、106によって定まる移動限界位置間の移動範囲内において、慣性により移動可能で、振動基板103に対する相対的な位置を検出することが可能である。
【0047】
ここで、移動体121が右方向(突き当て部106側へ向かう方向)に移動する場合を例にとって、慣性駆動アクチュエータ100の駆動原理をより具体的に説明する。
まず、駆動回路133から急峻な立ち上がりの電圧を圧電素子102へ印加すると、圧電素子102は、急激に膨張して左方向(バネ104側へ向かう方向)へ変位する。圧電素子102のこの動きに伴って、振動基板103も急激に左方向へ変位する。
【0048】
このとき、振動基板103に形成された振動基板電極111、112の電圧と、移動体121の移動体電極122の電圧と、を同電位にしてあると、振動基板電極111、112と移動体電極122との間に静電吸着力が発生しないため、移動体121の慣性により、移動体121はその位置に留まる。
【0049】
次に、圧電素子102への印加電圧を急峻に立ち下げると、圧電素子102は急激に縮む。その際、圧電素子102と振動基板103とを押圧するバネ104の弾性力により、圧電素子102が急激に右方向へ変位する。圧電素子102のこの動きに伴い、振動基板103も急激に右方向へ変位する。このとき、振動基板103の振動基板電極111、112の電圧と、移動体121の移動体電極122の電圧と、の間に電位差を与えて静電吸着力を発生させると、振動基板電極111、112と移動体121の移動体電極122との間の摩擦力が増大する。従って、振動基板103の変位とともに移動体121も右方向へ移動する。
【0050】
以上の操作を繰り返すことにより、移動体121を振動基板103に対して右方向へ移動させることができる。
【0051】
つづいて、図4から図9を参照して、慣性駆動アクチュエータ100のキャリブレーション方法について説明する。
【0052】
まず、図4を参照しつつ、キャリブレーションの概要について説明する。図4は、本発明の第1実施形態に係る慣性駆動アクチュエータ100のキャリブレーションの流れの概要を示すフローチャートである。以下の説明において、一方の移動限界位置は、移動体121が慣性駆動アクチュエータ100の一方の突き当て部105に接した位置であり、他方の移動限界位置は、移動体121が慣性駆動アクチュエータ100の他方の突き当て部106に接した位置としており、移動体121の移動体電極122と振動基板電極111、112との間の静電容量は、移動体121が突き当て部105側から突き当て部106側へ移動するほど大きくなる。
【0053】
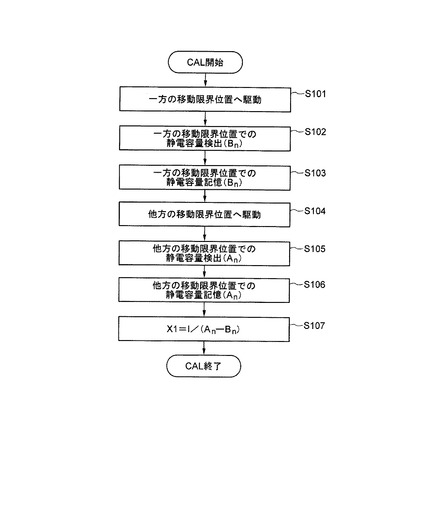
キャリブレーション開始後、まず、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を一方の移動限界位置へ移動させる(ステップS101)。
【0054】
次に、一方の移動限界位置における、静電容量Bnを検出する(静電容量検出ステップ、ステップS102)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS103)。
【0055】
つづいて、振動基板電極111、112、移動体電極122及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ移動させ(ステップS104)、他方の移動限界位置における、静電容量Anを検出する(静電容量検出ステップ、ステップS105)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS106)。
【0056】
静電容量記憶部132aに記憶された静電容量An、Bnを次式(I)に適用して、一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離lと、の比率X1を算出する(比率算出ステップ、ステップS107)。
X1=l/(An−Bn) ・・・(I)
このX1は、現在(キャリブレーション時)の静電容量と組み立て時に設定された移動限界距離(l)を関連付けた比率値となる。算出された比率X1は比率記憶部132cに記憶され、以上でキャリブレーションが終了する。なお、距離lは、慣性駆動アクチュエータ100の組み立て時に規定されているものでも良く、また突き当て部105,106に規定されるものでも良い。
【0057】
このようなキャリブレーションを行うことによって、比率算出ステップで算出した比率X1を用いて、一方及び他方の移動限界位置間における現在の移動体121の絶対位置(現在位置)が算出可能となる。絶対位置の算出は、次式(II)によって行う。
絶対位置=移動体121の現在位置での静電容量×X1 …(II)
【0058】
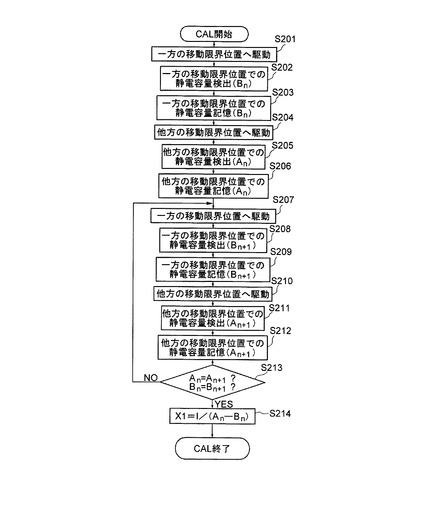
つづいて、図5を参照しつつ、キャリブレーションについてより具体的に説明する。図5は、本発明の第1実施形態に係る慣性駆動アクチュエータ100のキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図5のステップS201からステップS206は、図4のステップS101からステップS106にそれぞれ対応するため、その説明は省略する。
【0059】
一方の移動限界位置での静電容量Bn、及び、他方の移動限界位置での静電容量Anを、静電容量記憶部132aにそれぞれ記憶(ステップS203、206)した後に、確認ステップ(ステップS207からS213)を行う。確認ステップ終了後は、図4のステップS107と同様の比率算出ステップ(ステップS214)を行う。
【0060】
確認ステップでは、静電容量検出の信頼性を向上させるために、再度、一方の移動限界位置での静電容量(Bn+1)、及び、他方の移動限界位置での静電容量(An+1)を測定する。
【0061】
具体的には、まず、振動基板電極111、112、移動体電極122及び圧電素子102に電圧を印加して、移動体121を一方の移動限界位置へ移動させる(ステップS207)。次に、一方の移動限界位置における静電容量Bn+1を検出する(静電容量検出ステップ、ステップS208)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS209)。
【0062】
つづいて、振動基板電極111、112、移動体電極122及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ移動させ(ステップS210)、他方の移動限界位置における静電容量An+1を検出する(静電容量検出ステップ、ステップS211)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS212)。
【0063】
次に、記憶された静電容量An、An+1、Bn、Bn+1を互いにを比較する(静電容量比較ステップ、ステップS213)。具体的には、An=An+1、及び、Bn=Bn+1、の2式をそれぞれ満足しているかどうかを比較する。これらの2式の両方を満足している場合は、比率算出ステップ(ステップS214)を実行する。一方、これらの2式の一方又は両方を満足しない場合は、両式を満足するまで確認ステップを繰り返す。
【0064】
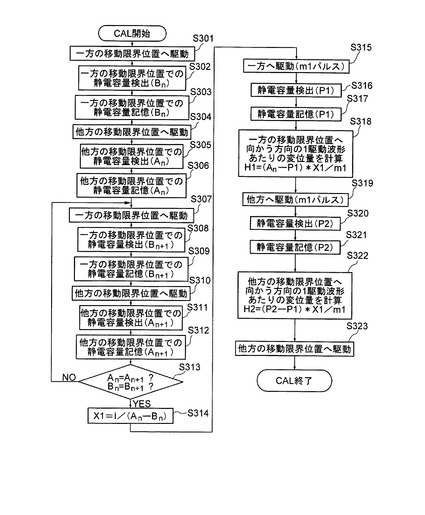
つづいて、図6を参照しつつ、キャリブレーションについてさらに説明する。図6は、本発明の第1実施形態の第1変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図6のステップS301からステップS314は、図5のステップS201からステップS214にそれぞれ対応するため、その説明は省略する。
【0065】
図6に示すキャリブレーションでは、比率算出(ステップS314)につづいて、1駆動波形あたりの移動量を計算する(ステップS315からステップS322)。
【0066】
まず、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加、移動体121を一方の移動限界位置へ向かう方向に移動させる(ステップS315)。この移動では、圧電素子102に印加する駆動波形の数をm1としている。次に、移動を終了した位置における静電容量P1を検出する(ステップS316)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS317)。
【0067】
つづいて、静電容量記憶部132aに記憶されている、静電容量An、静電容量P1、波形数m1、及び比率X1を用いて、一方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H1を算出する(ステップS318)。算出は次式(III)を用いて行う。
H1=(An−P1)×X1/m1 ・・・(III)
算出された変位量H1は比率記憶部132cや、例えばCPUに記憶される。
【0068】
次に、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ向かう方向に移動させる(ステップS319)。この移動においても、圧電素子102に印加する駆動波形の数をm1としている。移動終了後、その位置における静電容量P2を検出する(ステップS320)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS321)。
【0069】
さらに、静電容量記憶部132aに記憶されている、静電容量P1、P2、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップS322)。算出は次式(IV)を用いて行う。
H2=(P2−P1)×X1/m1 ・・・(IV)
算出された変位量H2は比率記憶部132cや、例えばCPUに記憶される。
【0070】
以上のように1駆動波形あたりの変位量H1、H2の測定を終えた後に、移動体121を他方の移動限界位置へ移動させる(ステップS323)。
【0071】
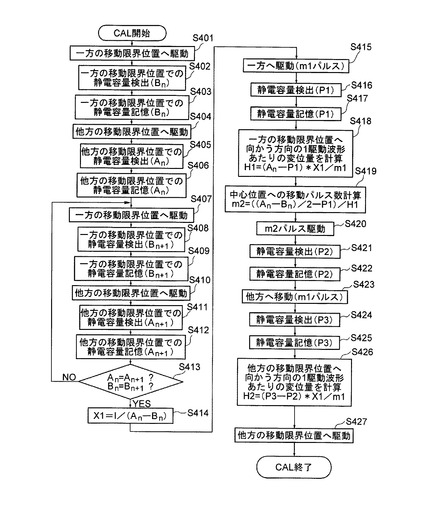
つづいて、図7を参照しつつ、キャリブレーションについてさらに説明する。図7は、本発明の第1実施形態の第2変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図7のステップS401からステップS418は、図6のステップS301からステップS318にそれぞれ対応するため、その説明は省略する。
【0072】
図7に示すキャリブレーションでは、一方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H1の算出の後に、中心位置への移動波形数を算出(ステップS419)し、移動体121を中心位置に移動して静電容量を検出した後に、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量を算出する(ステップS420からS426)。それぞれの工程について、以下に詳細に説明する。
【0073】
中心位置への移動波形数m2の算出(ステップS419)は、次式(V)によって行う。
m2=((An−Bn)/2−P1)/H1 ・・・(V)
ここで、中心位置とは、慣性駆動アクチュエータ100の組み立て時に測定した、一方の移動限界位置と他方の移動限界位置との中間の位置である。
また、算出された波形数m2は静電容量記憶部132aに記憶される。
【0074】
ここで、波形数m2は、中心位置への移動波形数ではなく、中心側へ向かう移動波形数であってもよい。波形数m2の算出は、他方の移動限界位置へ向かう方向の1駆動波形あたりの移動量の算出にあたって、波形数をm1としたときに、移動体121が突き当て部106に突きあたり、正しく1駆動波形あたりの移動量が計算できないことを避けるために、いったん中心側へ移動体121を移動させる量を定めるものである。
【0075】
慣性駆動アクチュエータは、動作方向によっては重力の影響を受けることがある。特に垂直方向へ動作させる場合には影響が大きくなる。このような場合に対応するために、一方の移動限界位置への方向、他方の移動限界位置への方向への1駆動波形の移動量が異なることを考慮し、中心側へ移動させることとし、一方から他方、また他方から一方へ駆動する際の1駆動波形あたりの変位量を算出、記憶することとしている。
【0076】
また、一方の移動限界位置と他方の移動限界位置との移動範囲内において、一方の移動限界位置からの距離と静電容量とは、比例関係が成り立っているので、静電容量Anと静電容量Bnの中間値が中心位置での静電容量とわかる。
【0077】
また、「中心付近」と記載しているのは、ステップS419では、一方の移動限界位置へ向かう方向への1駆動波形あたりの移動量は算出されているが、他方の移動限界位置へ向かう方向への1駆動波形あたりの移動量は算出されていないため、中心位置より一方の移動限界位置へ向かう方向に移動体121があった場合、他方の移動限界位置へ向かう方向へ移動させるが、一方の移動限界位置へ向かう方向への1駆動波形あたりの移動量(変位量H1)を使用するためである。
【0078】
つづいて、式(V)で算出した波形数m2だけ圧電素子102を駆動して、移動体121を中心位置へ移動させ(ステップS420)、中心位置での静電容量を検出する(ステップS421)。検出された静電容量は静電容量記憶部132aに記憶される(ステップS422)。
【0079】
次に、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ向かう方向に移動させる(ステップS423)。この移動では、圧電素子102に印加する駆動波形の数をm1としている。移動終了後、その位置における静電容量P3を検出する(ステップS424)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS425)。
【0080】
さらに、静電容量記憶部132aに記憶されている、静電容量P2、P3、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップS426)。算出は次式(VI)を用いて行う。
H2=(P2−P1)×X1/m1 ・・・(VI)
算出された変位量H2は比率記憶部132cに記憶される。
【0081】
以上のように1駆動波形あたりの変位量H1、H2の測定を終えた後に、移動体121を他方の移動限界位置へ移動させる(ステップS427)。
【0082】
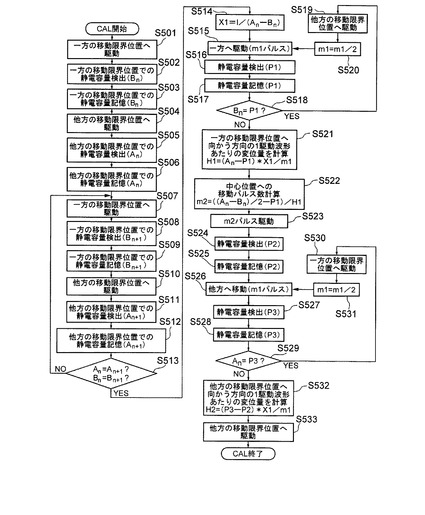
次に、図8を参照しつつ、キャリブレーションについてさらに説明する。図8は、本発明の第1実施形態の第3変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図8のステップS501からステップS517、ステップS521からステップS528、ステップS532、及びステップS533は、図7のステップS401からステップS417、ステップS418からステップS425、ステップS426、及びステップS427にそれぞれ対応するため、その説明は省略する。
【0083】
図8に示すキャリブレーションでは、比率算出ステップ(ステップS514)終了後、一方の移動限界位置へ向かう方向にm1パルス分移動して静電容量P1を検出、記憶(ステップS515からS517)した後に、検出した静電容量P1と、一方の移動限界位置における静電容量Bnと、を比較する(比較ステップ、ステップS518)。
【0084】
これら二つの静電容量Bn、P1が互いに同一であった場合(ステップS518でYES)、m1の駆動波形数以内に、移動体121が突き当て部105まで達したこととなる。この場合、比率X1を正しく測定できていない可能性があるため、再度他方限界位置へ移動(ステップS519)した後に、駆動波形数m1を、いままでの値の半分に値に置き換え(m1=m1/2)(ステップS520)、このm1の波形数だけ駆動電圧を出力して、移動体121を一方の移動限界位置へ向かう方向へ駆動させる(ステップS515)。その後、再び静電容量P1を検出し、静電容量P1を上書き記憶する(ステップS516、S517)。
【0085】
その後、記憶された静電容量P1、Bnを互いに比較し(ステップS518)、これらの静電容量が互いに同一ではなくなるまで、他方限界位置への移動(ステップS519)、駆動波形数m1の置き換え(m1=m1/2)(ステップS520)、移動体121の一方の移動限界位置へ向かう方向への駆動(ステップS515)、及び、静電容量P1の検出・記憶(ステップS516、517)を繰り返す。
【0086】
一方、静電容量Bn、P1が互いに同一ではなかった場合(ステップS518でNO)、静電容量An、静電容量P1、波形数m1、及び比率X1を用いて、一方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H1を算出する(ステップS521)。算出は次式(III)を用いて行う。
H1=(An−P1)×X1/m1 ・・・(III)
【0087】
変位量H1の算出後は、図7に示すキャリブレーションと同様に、中心位置への移動波形数m2の算出(ステップS522)、
波形数m2分駆動した後の静電容量P2の検出、記憶(ステップS523からS525)、及び、他方の移動限界位置へ向かう方向へ波形数m1だけ移動した後の静電容量P3の検出、記憶(ステップS526からS528)を行う。
【0088】
その後、検出した静電容量P3と、他方の移動限界位置における静電容量Anと、を互いに比較する(比較ステップ、ステップS529)。
【0089】
これら二つの静電容量An、P3が互いに同一であった場合(ステップS529でYES)、m1の駆動波形数以内に、移動体121が突き当て部106まで達したこととなる。この場合、比率X1を正しく測定できていない可能性があるため、再度一方限界位置へ移動(ステップS530)した後に、駆動波形数m1を、いままでの値の半分に値に置き換え(m1=m1/2)(ステップS531)、このm1の波形数だけ駆動電圧を出力して、移動体121を他方の移動限界位置へ向かう方向へ駆動させる(ステップS526)。その後、再び静電容量P3を検出し、静電容量P3を上書き記憶する(ステップS527、S528)。
【0090】
その後、記憶された静電容量P3、Anを互いに比較し(ステップS529)、これらの静電容量が互いに同一ではなくなるまで、一方限界位置への移動(ステップS530)、駆動波形数m1の置き換え(m1=m1/2)(ステップS531)、移動体121の他方の移動限界位置へ向かう方向への駆動(ステップS5526)、及び、静電容量P3の検出・記憶(ステップS527、528)を繰り返す。
【0091】
一方、静電容量An、P3が互いに同一ではなかった場合(ステップS529でNO)、静電容量P2、P3、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップS532)。算出は次式(VII)を用いて行う。
H2=(P3−P2)×X1/m1 ・・・(VII)
【0092】
以上のように1駆動波形あたりの変位量H1、H2の測定を終えた後に、移動体121を他方の移動限界位置へ移動させる(ステップS533)。
【0093】
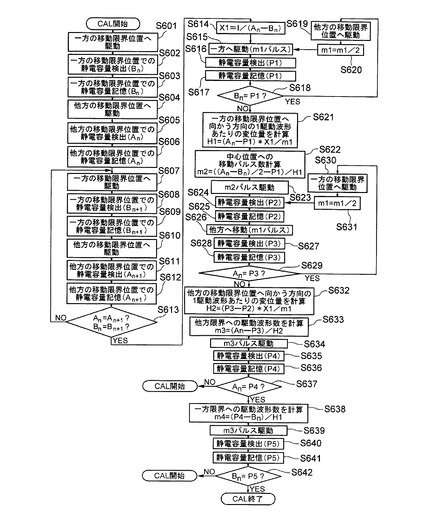
つづいて、図9を参照しつつ、キャリブレーションについて、さらに具体的に説明する。図9は、本発明の第1実施形態の第4変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図9のステップS601からステップS632は、図8のステップS501からステップS532にそれぞれ対応するため、その説明は省略する。
【0094】
図9に示すキャリブレーションでは、他方の移動限界位置に向けて移動したときの静電容量P3(ステップS627)と、他方の移動限界位置における静電容量An(ステップS605)と、を比較して、これらが同一でない場合(ステップS629でNO)、静電容量P2、P3、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップ632)。算出は次式(VII)を用いて行う。
H2=(P3−P2)×X1/m1 ・・・(VII)
【0095】
次に、静電容量An、P3、及び1駆動波形あたりの変位量H2を用いて、次式(VIII)により、他方の移動限界位置へ移動させるための駆動波形数m3を算出する(ステップS633)。
m3=((An−P3)/H2 ・・・(VIII)
【0096】
つづいて、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ向かう方向に移動させる(ステップS634)。この移動では、圧電素子102に印加する駆動波形の数をm3としている。移動終了後、その位置における静電容量P4を検出する(ステップS635)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS636)。
【0097】
次に、検出した静電容量P4と、他方の移動限界位置における静電容量Anと、を互いに比較する(比較ステップ、ステップS637)。静電容量P4と静電容量Anとが異なった場合(ステップS637でNO)は、キャリブレーションをステップS601から再度行う。
【0098】
これに対して、静電容量P4と静電容量Anとが同一であった場合(ステップS637でYES)は、静電容量Bn、P4、及び1駆動波形あたりの変位量H1を用いて、次式(IX)により、一方の移動限界位置へ移動させるための駆動波形数m4を算出する(ステップS638)。
【0099】
m4=(P4−Bn)/H1 ・・・(IX)
【0100】
つづいて、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を一方の移動限界位置へ向かう方向に移動させる(ステップS639)。この移動では、圧電素子102に印加する駆動波形の数をm4としている。移動終了後、その位置における静電容量P5を検出する(ステップS640)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS641)。
【0101】
次に、検出した静電容量P5と、一方の移動限界位置における静電容量Bnと、を互いに比較する(比較ステップ、ステップS642)。静電容量P5と静電容量Bnとが異なった場合(ステップS642でNO)は、キャリブレーションをステップS601から再度行う。一方、静電容量P5と静電容量Bnとが同一であった場合(ステップS642でYES)は、キャリブレーションを終了する。
【0102】
図9に示すキャリブレーションでは、移動体121が駆動信号を入力せず、停止しているにも関わらず、静電容量が変化した際に、位置情報と静電容量の関係に誤差が発生したことを検知し、再度キャリブレーションを促すことができる(ステップS637、642)。
【0103】
一般に、静電容量は、湿度、温度、重力その他の環境の変化により変動しやすい。静電容量は、次式(X)で表すことができる。
C=ε0εs・S/d ・・・(X)
ここで、Cは静電容量、ε0は真空の誘電率、εsは電極間の絶縁層の比誘電率、Sは電極面積、dは電極間隔である。
【0104】
例えば、湿度が変化することにより、比誘電率εsが変化し、電極の吸水を伴うと、電極面積S及び電極間隔dも変化する。また、温度が変化した場合には、絶縁層の比誘電率εsが変化し、構成部材の熱膨張を伴うと、電極面積S及び電極間隔dが変化する。さらにまた、アクチュエータの向き(姿勢)を変化させた場合、移動体への重力が変化することから、電極間隔dが変化する。
【0105】
アクチュエータの環境は、その実使用中に変化する可能性があり、これにより移動体電極と振動基板電極との間の静電容量が変化しやすい。第1実施形態に係るアクチュエータ装置では、このような静電容量の変化を判定するために一定時間、移動体121を動作させていない場合にて、静電容量を検出、確認し、最終移動後の静電容量と一定時間後の静電容量に差が発生した場合は、使用者に対して再度キャリブレーションを行うこと促す。
【0106】
促す方法としては、例えば、ランプの点灯や、表示ディスプレーへの表示があるが、これらに限定されない。また、図9に示すキャリブレーションのように、使用者に対してキャリブレーションを促さずに、自動的にキャリブレーションを行うこともできる。
【0107】
(第2実施形態)
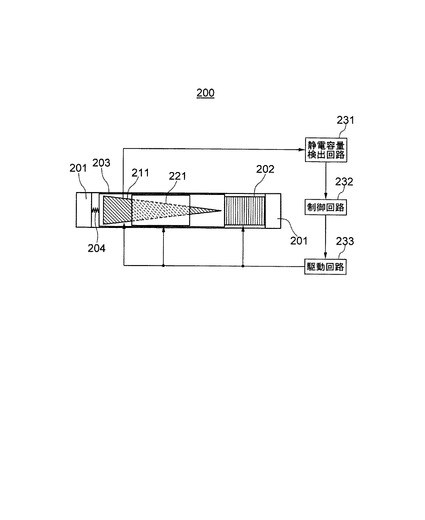
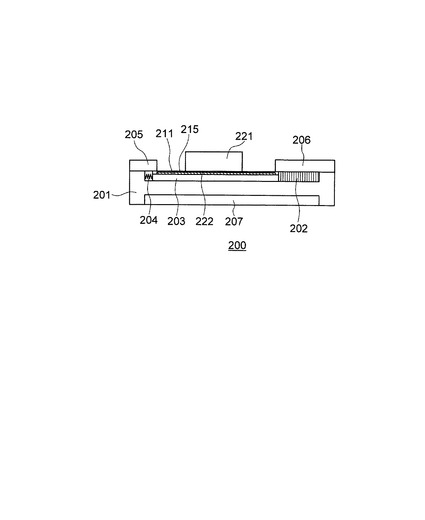
次に、図10、図11を参照しつつ、第2実施形態に係る慣性駆動アクチュエータ200の構成について説明する。図10は、本発明の第2実施形態に係る慣性駆動アクチュエータ200を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図11は、慣性駆動アクチュエータ200の構成を示す側面図である。なお、図10においては、突き当て部205、206の図示を省略している。
【0108】
第2実施形態に係る慣性駆動アクチュエータ200においては、振動基板電極が1つのみであって、振動基板203の長手方向において、バネ204側から圧電素子202側へ向かうにつれて振動基板電極211の幅が狭くなっている点が第1実施形態に係る慣性駆動アクチュエータ100と異なる。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0109】
振動基板203の長手方向において振動基板電極211の幅が変化することにより、移動体221が一方の移動限界位置(突き当て部206に突き当たった位置)から他方の移動限界位置(突き当て部205に突き当たった位置)に移動するにつれて、移動体221の移動体電極222との間の静電容量が変化する。また、振動基板電極211の平面形状を三角形状としているため、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係となる。
【0110】
慣性駆動アクチュエータ200の固定部材201、圧電素子202、バネ204、突き当て部205、206、永久磁石207、及び移動体221は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0111】
振動基板電極211は、振動基板203の上面に形成され、振動基板電極211の上面には絶縁層215が形成されている。振動基板電極211上には、絶縁層215を介して、移動体221が載置されている。移動体221の下面、すなわち振動基板電極211に対向する面には、移動体電極222が形成されている。移動体221は、振動基板203の変位にともなって、長板状の振動基板203の長手方向(図10、図11の左右方向)において、絶縁層215と摺動しつつ移動可能である。なお、移動体221は、磁性材料又は導電材料で形成することが好ましい。
【0112】
圧電素子202、振動基板電極211、移動体221の移動体電極222には、これらを駆動させるための駆動電圧を印加するための駆動回路233が接続されている。さらに、振動基板電極211には、移動体221の移動体電極222と振動基板電極211との間の静電容量を検出する静電容量検出回路231が接続されている。静電容量検出回路231からの出力信号は、制御回路232に入力される。
【0113】
制御回路232の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ200と、慣性駆動アクチュエータ200に接続された静電容量検出回路231及び駆動回路233と、制御回路232と、を備える。
【0114】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体221と振動基板電極211との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体221の絶対位置を確実かつ正確に算出することができる。
【0115】
(第3実施形態)
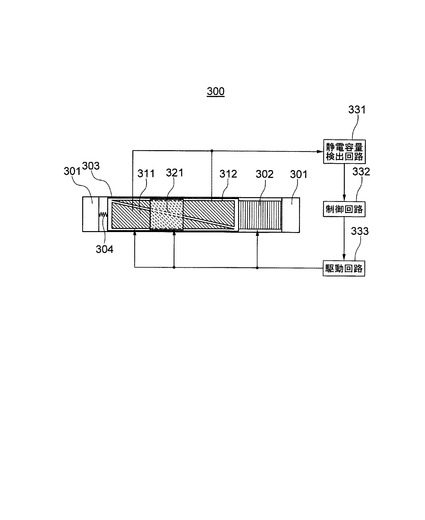
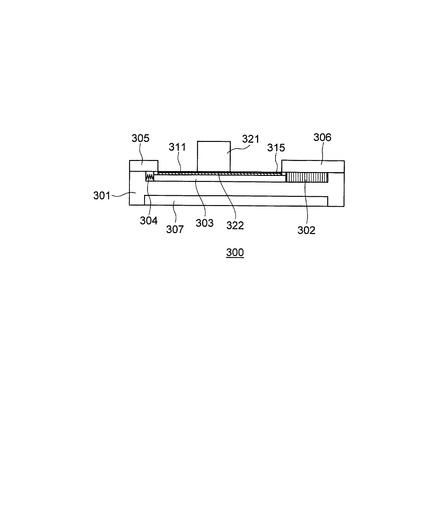
次に、図12、図13を参照しつつ、第3実施形態に係る慣性駆動アクチュエータ300の構成について説明する。図12は、本発明の第3実施形態に係る慣性駆動アクチュエータ300を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図13は、慣性駆動アクチュエータ300の構成を示す側面図である。なお、図12においては、突き当て部305、306の図示を省略している。
【0116】
第3実施形態に係る慣性駆動アクチュエータ300は、2つの振動基板電極311、312を備え、この振動基板電極311、312は、斜辺が互いに対向する直角三角形の平面形状を有している点が第1実施形態に係る慣性駆動アクチュエータ100と異なる。すなわち、振動基板電極311は、振動基板303の長手方向において、バネ304側から圧電素子302側へ向かうにつれて幅が狭くなり、振動基板電極312は、圧電素子302側からバネ304側へ向かうにつれて幅が狭くなっている。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0117】
振動基板電極311、312は、その平面形状により、移動体321が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体321の移動体電極322との間の静電容量が移動量に比例してそれぞれ変化するように構成されている。
【0118】
慣性駆動アクチュエータ300の固定部材301、圧電素子302、バネ304、突き当て部305、306、永久磁石307、及び移動体321は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0119】
振動基板電極311、312は、振動基板303の上面に形成され、振動基板電極311、312の上面には絶縁層315が形成されている。振動基板電極311、312上には、絶縁層315を介して、移動体321が載置されている。移動体321の下面、すなわち振動基板電極311、312に対向する面には、移動体電極322が形成されている。
【0120】
移動体321は、振動基板303の変位にともなって、長板状の振動基板303の長手方向(図12、図13の左右方向)において、絶縁層315と摺動しつつ移動可能である。なお、移動体321は、磁性材料又は導電材料で形成することが好ましい。
【0121】
圧電素子302、振動基板電極311、移動体321の移動体電極322には、これらを駆動させるための駆動電圧を印加するための駆動回路333が接続されている。さらに、振動基板電極311、312には、移動体321の移動体電極322と振動基板電極311、312との間の静電容量をそれぞれ検出する静電容量検出回路331が接続されている。
【0122】
静電容量検出回路331からの出力信号は、制御回路332に入力される。制御回路332の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ300と、慣性駆動アクチュエータ300に接続された静電容量検出回路331及び駆動回路333と、制御回路332と、を備える。
【0123】
静電容量検出回路331では、振動基板電極311と移動体電極322との間の静電容量と、振動基板電極312と移動体電極322との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体321が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。移動体321の位置検出の観点からは、振動基板電極311、312の一方のみでもよい。
【0124】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体321と振動基板電極311、312との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体321の絶対位置を確実かつ正確に算出することができる。
【0125】
(第4実施形態)
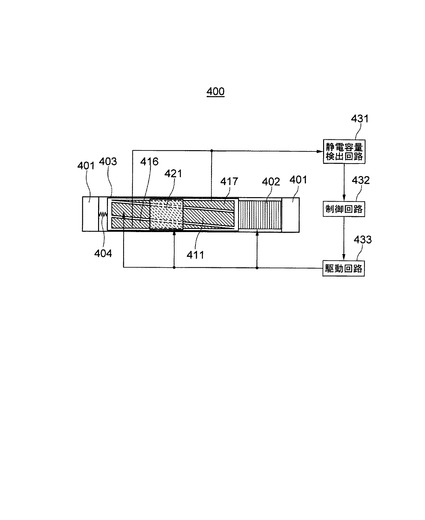
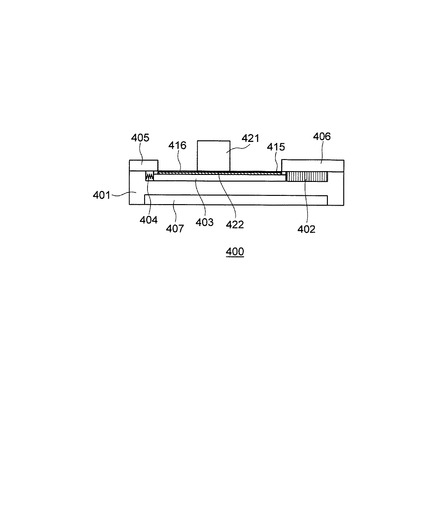
つづいて、図14、図15を参照しつつ、第4実施形態に係る慣性駆動アクチュエータ400の構成について説明する。ここで、図14は、本発明の第4実施形態に係る慣性駆動アクチュエータ400を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図15は、慣性駆動アクチュエータ400の構成を示す側面図である。なお、図14においては、突き当て部405、406の図示を省略している。
【0126】
第4実施形態に係る慣性駆動アクチュエータ400においては、振動基板電極111、112に代えて、2つの振動基板位置検出電極416、417と、これら振動基板位置検出電極416、417の間に配置された振動基板駆動電極411と、を振動基板403に形成した点が第1実施形態の慣性駆動アクチュエータ100と異なる。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0127】
具体的には、2つの振動基板位置検出電極416、417は、直角三角形の平面形状を有し、斜辺が互いに対向するように配置されている。また、振動基板駆動電極411は、平行四辺形の平面形状を有し、二つの側辺が振動基板位置検出電極416、417の斜辺とそれぞれ対向するように配置されている。
【0128】
振動基板位置検出電極416、417は、その平面形状により、移動体421が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体421の移動体電極422との間の静電容量が移動量に比例してそれぞれ変化するように構成されている。
【0129】
慣性駆動アクチュエータ400の固定部材401、圧電素子402、バネ404、突き当て部405、406、永久磁石407、及び移動体421は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0130】
振動基板駆動電極411、振動基板位置検出電極416、417は、振動基板403の上面に形成され、振動基板駆動電極411の上面には絶縁層415が形成されている。振動基板駆動電極411、振動基板位置検出電極416、417上には、絶縁層415を介して、移動体421が載置されている。移動体421の下面、すなわち振動基板駆動電極411、振動基板位置検出電極416、417に対向する面には、移動体電極422が形成されている。移動体421は、振動基板403の変位にともなって、長板状の振動基板403の長手方向(図14、図15の左右方向)において、絶縁層415と摺動しつつ移動可能である。なお、移動体421は、磁性材料又は導電材料で形成することが好ましい。
【0131】
圧電素子402、振動基板駆動電極411、移動体421の移動体電極422には、これらを駆動させるための駆動電圧を印加するための駆動回路433が接続されている。さらに、振動基板位置検出電極416、417には、移動体421の移動体電極422と振動基板位置検出電極416、416との間の静電容量をそれぞれ検出する静電容量検出回路431が接続されている。
【0132】
静電容量検出回路431からの出力信号は、制御回路432に入力される。制御回路432の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ400と、慣性駆動アクチュエータ400に接続された静電容量検出回路431及び駆動回路433と、制御回路432と、を備える。
【0133】
静電容量検出回路431では、振動基板位置検出電極416と移動体電極422との間の静電容量と、417と移動体電極422との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体421が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。移動体421の位置検出は、振動基板位置検出電極416、417の一方のみでも良い。
【0134】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体421と振動基板駆動電極411との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体421の絶対位置を確実かつ正確に算出することができる。
【0135】
(第5実施形態)
【0136】
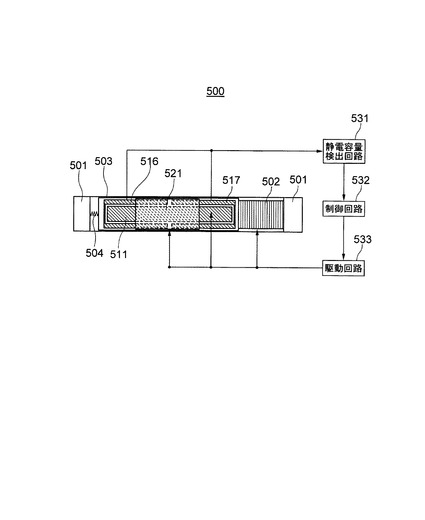
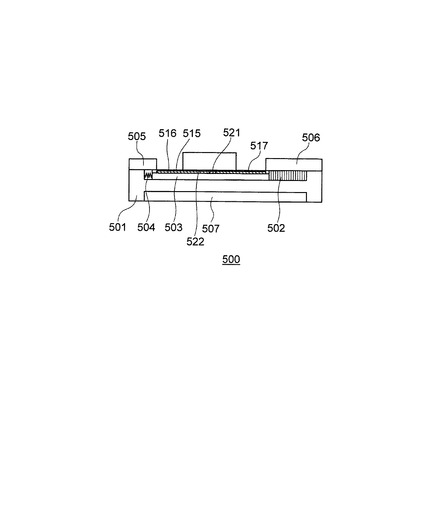
つづいて、図16、図17を参照しつつ、第5実施形態に係る慣性駆動アクチュエータ500の構成について説明する。ここで、図16は、本発明の第5実施形態に係る慣性駆動アクチュエータ500を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図17は、慣性駆動アクチュエータ500の構成を示す側面図である。なお、図16においては、突き当て部505、506の図示を省略している。
【0137】
第5実施形態に係る慣性駆動アクチュエータ500においては、振動基板電極111、112に代えて、2つの振動基板位置検出電極516、517と、これら振動基板位置検出電極516、517の間に配置された振動基板駆動電極511と、を振動基板503に形成した点が第1実施形態の慣性駆動アクチュエータ100と異なる。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0138】
具体的には、2つの振動基板位置検出電極516、517は、コの字状の平面形状を有し、先端が互いに対向するように配置されている。また、振動基板駆動電極511は、長方形の平面形状を有し、振動基板位置検出電極516と振動基板位置検出電極517で囲まれて形成される領域に、振動基板位置検出電極516、517とそれぞれ離間して配置されている。
【0139】
また、一方の移動限界位置と他方の移動限界位置との中間位置において、振動基板位置検出電極516と振動基板位置検出電極517とを互いに離間させていることにより、この離間部分では静電容量の値が大きくかわるため、一方の移動限界位置と他方の移動限界位置との中間位置を容易に検出することができる。
【0140】
ここで、振動基板位置検出電極516、517は、移動体521が一方の移動限界位置から他方の移動限界位置へ向かう方向に移動するにつれて、移動体521の移動体電極522との間の静電容量が変化するように構成されることが好ましい。さらに、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係にあることが好ましい。このためには、例えば、一方の移動限界位置から他方の移動限界位置に向かう方向に移動するにつれて、移動体521と振動基板位置検出電極516、517との距離が小さくなるように、振動基板位置検出電極516、517の厚さに傾斜を持たせることができる。
【0141】
慣性駆動アクチュエータ500の固定部材501、圧電素子502、バネ504、突き当て部505、506、永久磁石507、及び移動体521は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0142】
振動基板駆動電極511、振動基板位置検出電極516、517は、振動基板503の上面に形成され、振動基板駆動電極511の上面には絶縁層515が形成されている。振動基板駆動電極511、振動基板位置検出電極516、517上には、絶縁層515を介して、移動体521が載置されている。
【0143】
移動体521の下面、すなわち振動基板駆動電極511、振動基板位置検出電極516、517に対向する面には、移動体電極522が形成されている。移動体521は、振動基板503の変位にともなって、長板状の振動基板503の長手方向(図16、図17の左右方向)において、絶縁層515と摺動しつつ移動可能である。なお、移動体521は、磁性材料又は導電材料で形成することが好ましい。
【0144】
圧電素子502、振動基板駆動電極511、移動体521の移動体電極522には、これらを駆動させるための駆動電圧を印加するための駆動回路533が接続されている。さらに、振動基板位置検出電極516、517には、移動体521の移動体電極522と振動基板位置検出電極516、517との間の静電容量をそれぞれ検出する静電容量検出回路531が接続されている。
【0145】
静電容量検出回路531からの出力信号は、制御回路532に入力される。制御回路532の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ500と、慣性駆動アクチュエータ500に接続された静電容量検出回路531及び駆動回路533と、制御回路532と、を備える。
【0146】
静電容量検出回路531では、振動基板位置検出電極516と移動体電極522との間の静電容量と、振動基板位置検出電極517と移動体電極522との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体521が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。移動体521の位置検出は、振動基板位置検出電極516、517の一方のみでも良い。
【0147】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体521と振動基板駆動電極511との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体521の絶対位置を確実かつ正確に算出することができる。
【0148】
(第6実施形態)
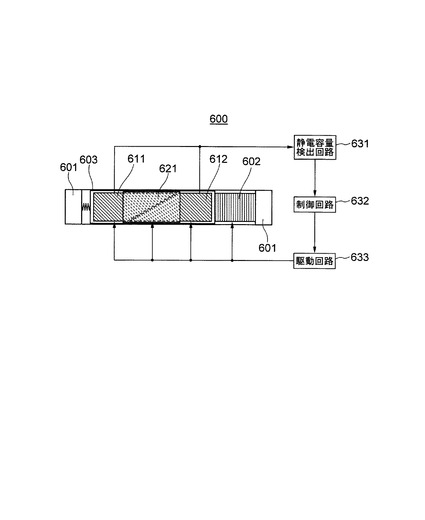
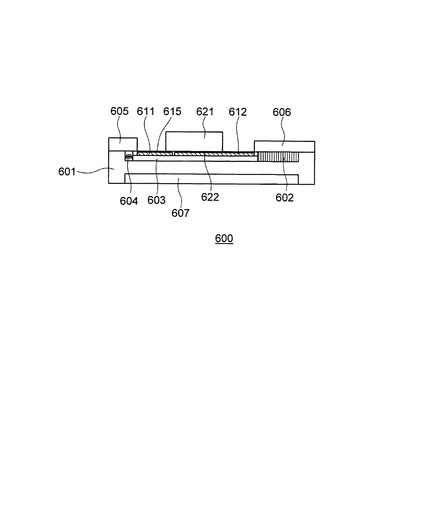
次に、図18、図19を参照しつつ、第6実施形態に係る慣性駆動アクチュエータ600の構成について説明する。図18は、本発明の第6実施形態に係る慣性駆動アクチュエータ600を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図19は、慣性駆動アクチュエータ600の構成を示す側面図である。なお、図18においては、突き当て部605、606の図示を省略している。
【0149】
第6実施形態に係る慣性駆動アクチュエータ600は、2つの振動基板電極611、612を備え、この振動基板電極611、612は、斜辺が互いに対向する台形の平面形状を有している点が第1実施形態に係る慣性駆動アクチュエータ100と異なる。すなわち、振動基板電極611は、振動基板電極612側の部分において、バネ604側から圧電素子602側へ向かうにつれて幅が狭くなり、振動基板電極612は、振動基板電極611側の部分において、圧電素子602側からバネ604側へ向かうにつれて幅が狭くなっている。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0150】
振動基板電極611、612は、移動体621が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体621の移動体電極622との間の静電容量が増加するように構成されている。さらに、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係にあることが好ましい。このためには、振動基板電極611、612の平面形状に加えて、例えば、一方の移動限界位置から他方の移動限界位置に向かうにつれて、移動体621と振動基板電極611、612との距離が小さくなるように、振動基板電極611、612の厚さに傾斜を持たせることができる。
【0151】
慣性駆動アクチュエータ600の固定部材601、圧電素子602、バネ604、突き当て部605、606、永久磁石607、及び移動体621は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0152】
振動基板電極611、612は、振動基板603の上面に形成され、振動基板電極611、612の上面には絶縁層615が形成されている。振動基板電極611、612上には、絶縁層615を介して、移動体621が載置されている。移動体621の下面、すなわち振動基板電極611、612に対向する面には、移動体電極622が形成されている。
【0153】
移動体621は、振動基板603の変位にともなって、長板状の振動基板603の長手方向(図18、図19の左右方向)において、絶縁層615と摺動しつつ移動可能である。なお、移動体621は、磁性材料又は導電材料で形成することが好ましい。
【0154】
圧電素子602、振動基板電極611、612、移動体621の移動体電極622には、これらを駆動させるための駆動電圧を印加するための駆動回路633が接続されている。さらに、振動基板電極611、612には、移動体621の移動体電極622と振動基板電極611、612との間の静電容量をそれぞれ検出する静電容量検出回路631が接続されている。
【0155】
静電容量検出回路631からの出力信号は、制御回路632に入力される。制御回路632の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ600と、慣性駆動アクチュエータ600に接続された静電容量検出回路631及び駆動回路633と、制御回路632と、を備える。
【0156】
静電容量検出回路631では、振動基板電極611と移動体電極622との間の静電容量と、振動基板電極612と移動体電極622との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体621が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。
【0157】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体621と振動基板電極611、612との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体621の絶対位置を確実かつ正確に算出することができる。
【産業上の利用可能性】
【0158】
以上のように、本発明に係る慣性駆動アクチュエータは、移動体を微小に変位させることが必要な小型機器に有用である。
【符号の説明】
【0159】
100 慣性駆動アクチュエータ
101 固定部材
102 圧電素子
103 振動基板
104 バネ
105、106 突き当て部
107 永久磁石
111、112 振動基板電極
115 絶縁層
121 移動体
122 移動体電極
131 静電容量検出回路
132 制御回路
133 駆動回路
200 慣性駆動アクチュエータ
201 固定部材
202 圧電素子
203 振動基板
204 バネ
205、206 突き当て部
207 永久磁石
211 振動基板電極
215 絶縁層
221 移動体
222 移動体電極
231 静電容量検出回路
232 制御回路
233 駆動回路
300 慣性駆動アクチュエータ
301 固定部材
302 圧電素子
303 振動基板
304 バネ
305、306 突き当て部
307 永久磁石
311、312 振動基板電極
315 絶縁層
321 移動体
322 移動体電極
331 静電容量検出回路
332 制御回路
333 駆動回路
400 慣性駆動アクチュエータ
401 固定部材
402 圧電素子
403 振動基板
404 バネ
405、406 突き当て部
407 永久磁石
411 振動基板駆動電極
415 絶縁層
416、417 振動基板位置検出電極
421 移動体
422 移動体電極
431 静電容量検出回路
432 制御回路
433 駆動回路
500 慣性駆動アクチュエータ
501 固定部材
502 圧電素子
503 振動基板
504 バネ
505、506 突き当て部
507 永久磁石
511 振動基板駆動電極
515 絶縁層
516、517 振動基板位置検出電極
521 移動体
522 移動体電極
531 静電容量検出回路
532 制御回路
533 駆動回路
600 慣性駆動アクチュエータ
601 固定部材
602 圧電素子
603 振動基板
604 バネ
605、606 突き当て部
607 永久磁石
611、612 振動基板電極
615 絶縁層
621 移動体
622 移動体電極
631 静電容量検出回路
632 制御回路
633 駆動回路
【技術分野】
【0001】
本発明は、慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法に関するものである。
【背景技術】
【0002】
図20は、従来のアクチュエータ920の構成を示す側面図である。図20に示すように、アクチュエータ920は、電気機械変換素子の1つである圧電素子911、駆動軸912、駆動軸912に摩擦結合した移動体913、及び、アクチエータ920のフレーム914を備える。圧電素子911の一端はフレーム914に固定され、圧電素子911の他端には駆動軸912が固定されている。
【0003】
また、検出部材921は、移動体913の位置を静電容量に基づいて検出するための固定電極を構成するもので、移動体913の移動方向に沿って平行に、非接触の状態で配置され、フレーム914に固定されている。駆動軸912、移動体913、及び検出部材(固定電極)921は、導電性の材料で構成されている。検出部材921は、移動体913に対向する面に、電極921を構成しており、電極921と移動体913とは間隔Dを隔てて対向して静電容量Cのコンデンサを形成している。
【0004】
図21は、検出部材921の構成及び移動体913との関係を示す平面図である。図21に示すように、検出部材921は、絶縁体921pの上に、直角三角形の第1電極921aと第2電極921bとが、斜辺を対向させて形成されている。駆動回路918(図20)から出力された駆動波形は、圧電素子911に印加されると共に、駆動軸912を経て移動体913にも供給される。
【0005】
図21に示す状態例のように、移動体913と第1電極921aとが互いに対向するとともに、移動体913と第2電極921bとが互いに対向しており、それぞれ静電容量結合している。このため、移動体913に印加される駆動波形は、第1電極921a及び第2電極921bに向けてそれぞれ流れる。第1電極921a及び第2電極921bに向けて流れる電流iは検出回路919で検出され、制御回路917に入力される。
【0006】
ここで、一例として、移動体913が、第1電極921a側から第2電極921b側に向けて矢印a方向(図21)に移動する場合について説明する。移動体913の移動により、移動体913と第1電極921aとの間の対向電極面積は次第に減少して両者間の静電容量Caは次第に減少する一方、移動体913と第2電極921bとの間の対向電極面積は次第に増加して両者間の静電容量Cbは次第に増加する。従って、移動体913の移動にともなって、移動体913から第1電極921aに流れる電流iaは次第に減少し、移動体913から第2電極921bに流れる電流ibは次第に増加する。
【0007】
これに対して、移動体913が第2電極921b側から第1電極921a側に向けて、矢印aと反対方向に移動する場合は、移動体913と第1電極921aとの間の対向電極面積は次第に増加して両者間の静電容量Caは次第に増加するとともに、移動体913と第2電極921bとの間の対向電極面積は次第に減少して両者間の静電容量Cbは次第に減少する。したがって、移動体913から第1電極921aに流れる電流iaは次第に増大し、移動体913から第2電極921bに流れる電流ibは次第に減少する。
【0008】
以上のように、移動体913の移動にともなって増減する、電流iaの大きさと電流ibの大きさとを互いに比較することで、移動体913の検出部材921に対する位置を求めることができるほか、電流ia及び電流ibの大きさが変化する方向により移動体913の移動方向を求めることができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2003−185406号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上述のアクチュエータ920では、湿度、温度、重力、経年変化などの影響により、静電容量の検出値が、アクチュエータ920を組み立てたときの初期検出値と異なってしまう。このため、実際の静電容量(電流)の検出値に対して、組み立て時に設定した静電容量と位置情報の関係を適用すると、検出部材921に対する移動体913の位置を正確に検出することができなくなる。
【0011】
本発明は、上記に鑑みてなされたものであって、移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータに関する技術について提供することを目的とする。
【課題を解決するための手段】
【0012】
上述した課題を解決し、目的を達成するために、本発明に係る慣性駆動アクチュエータのキャリブレーション方法は、移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、移動体に設けられた移動体電極と、振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、を備え、比率算出ステップで算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出可能としたことを特徴としている。
【0013】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係であることが好ましい。
【0014】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、静電容量記憶ステップにおいて記憶された静電容量を比較する静電容量比較ステップを有することが好ましい。
【0015】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、移動体が駆動信号を入力せず、停止しているにも関わらず、静電容量が変化した際に、位置情報と静電容量の関係に誤差が発生したことを検知し、再度キャリブレーションを促すことが好ましい。
【0016】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、一方の移動限界位置から他方の移動限界位置への方向の1駆動波形あたりの移動量と、他方の移動限界位置から一方の移動限界位置への方向の1駆動波形あたりの移動量と、をそれぞれ測定、計算し、各1駆動波形あたりの移動量を一方または個別に記憶することが好ましい。
【0017】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、1駆動波形あたりの移動量を計算する際に、少なくとも1度、一方の移動限界位置から他方の移動限界位置までの移動範囲の中心側へ移動することが好ましい。
【0018】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、振動基板電極が複数あり、それぞれの振動基板電極と移動体電極との静電容量を比較、演算することにより、移動体の位置情報を算出することが好ましい。
【0019】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、振動基板電極が、駆動用電極及び位置検出用電極の一方または両方を持つことが好ましい。
【0020】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、キャリブレーションの結果を確認するための確認ステップを有することが好ましい。
【0021】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法では、確認ステップにおいて、正しくキャリブレーションが行われていないことが確認された場合には、再度キャリブレーションを行うことが好ましい。
【0022】
本発明の慣性駆動アクチュエータ装置は、移動手段により往復移動される振動基板と、移動手段に駆動信号を印加する駆動回路と、振動基板に対して慣性により移動する移動体と、移動体の移動限界距離を規制する突き当て部と、移動体に設けられた移動体電極と振動基板に設けられた振動基板電極とが対向する部分の静電容量を検出する静電容量検出回路と、静電容量検出回路が検出した静電容量を記憶する静電容量記憶部と、静電容量記憶部に記憶された静電容量と移動限界距離との比率を算出する比率演算部と、
静電容量検出回路によって検出された静電容量と比率記憶部に記憶された比率とに基づいて、移動体の絶対位置を計算する絶対位置演算部と、を備えることを特徴としている。
【0023】
本発明の慣性駆動アクチュエータ装置においては、移動体が導電材料を含むことが好ましい。
【0024】
本発明の慣性駆動アクチュエータ装置においては、振動基板の移動体とは反対側に永久磁石が配置されるとともに、移動体が磁性材料を含むことが好ましい。
【0025】
また、本発明の位置算出方法は、移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、
前記移動体に設けられた移動体電極と、前記振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、
前記静電容量検出ステップにおいて検出された、前記一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、
前記静電容量記憶ステップにおいて記憶された前記一方及び他方の前記移動限界位置での静電容量と、前記一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、
前記比率算出ステップで算出した前記比率を用いて、前記一方及び他方の移動限界位置間における前記移動体の絶対位置を算出する絶対位置算出ステップと、を備えることを特徴としている。
【発明の効果】
【0026】
本発明に係る慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置は、移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することができるという効果を奏する。
【図面の簡単な説明】
【0027】
【図1】本発明の第1実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図2】本発明の第1実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図3】本発明の第1実施形態に係る制御回路の構成を示すブロック図である。
【図4】本発明の第1実施形態に係る慣性駆動アクチュエータのキャリブレーションの流れの概要を示すフローチャートである。
【図5】本発明の第1実施形態に係る慣性駆動アクチュエータのキャリブレーションの流れを示すフローチャートである。
【図6】本発明の第1実施形態の第1変形例に係るキャリブレーションの流れを示すフローチャートである。
【図7】本発明の第1実施形態の第2変形例に係るキャリブレーションの流れを示すフローチャートである。
【図8】本発明の第1実施形態の第3変形例に係るキャリブレーションの流れを示すフローチャートである。
【図9】本発明の第1実施形態の第4変形例に係るキャリブレーションの流れを示すフローチャートである。
【図10】本発明の第2実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図11】本発明の第2実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図12】本発明の第3実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図13】本発明の第3実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図14】本発明の第4実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図15】本発明の第4実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図16】本発明の第5実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図17】本発明の第5実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図18】本発明の第6実施形態に係る慣性駆動アクチュエータを含む慣性駆動アクチュエータ装置の構成を示す平面図である。
【図19】本発明の第6実施形態に係る慣性駆動アクチュエータの構成を示す側面図である。
【図20】従来のアクチュエータ920の構成を示す側面図である。
【図21】従来の検出部材の構成及び移動体との関係を示す平面図である。
【発明を実施するための形態】
【0028】
以下に、本発明に係る慣性駆動アクチュエータ及び慣性駆動アクチュエータ装置の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態によりこの発明が限定されるものではない。
【0029】
まず、図1、図2を参照しつつ、第1実施形態に係る慣性駆動アクチュエータ100の構成について説明する。図1は、本発明の第1実施形態に係る慣性駆動アクチュエータ100を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図2は、慣性駆動アクチュエータ100の構成を示す側面図である。なお、図1においては、突き当て部105、106の図示を省略している。以下の説明では、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ100と、慣性駆動アクチュエータ100に接続された静電容量検出回路131及び駆動回路133と、制御回路132と、を備える。
【0030】
慣性駆動アクチュエータ100は、固定部材101と、圧電素子102と、固定部材101上に変位可能に載置された振動基板103と、バネ104と、固定部材101上に形成された突き当て部105、106と、振動基板103上に配置された振動基板電極111、112と、移動体121と、を備える。また、固定部材101の下側には永久磁石107が配置されている。
【0031】
固定部材101の内側面101aには、圧電素子102の一端が隣接している。この圧電素子102の他端は、振動基板103の右側面103aに隣接している。
【0032】
振動基板103を介して圧電素子102と対向するように、バネ104が配置されている。すなわち、バネ104は、一端が固定部材101の内側面101dに隣接するとともに、他端が振動基板103の左側面103dに隣接している。
【0033】
慣性駆動アクチュエータ100においては、圧電素子102が伸張して振動基板103が変位したときにバネ104が振動基板103を支持し、圧電素子102が収縮すると、振動基板103はバネ104の弾性力によってもとの位置へ変位する。すなわち、バネ104は、圧電素子102の伸縮を振動基板103へ伝達する補助を行っている。なお、圧電素子102の両端及びバネ104の両端は、固定部材101及び/又は振動基板103に固定されていてもよい。
【0034】
振動基板103の上面には振動基板電極111、112が形成され、振動基板電極111、112の上面には絶縁層115が形成されている。振動基板電極111、112上には、絶縁層115を介して、移動体121が載置されている。移動体121の下面、すなわち振動基板電極111、112に対向する面には、移動体電極122が形成されている。
【0035】
移動体121は、振動基板103の変位にともなって、長板状の振動基板103の長手方向(図1、図2の左右方向)において、絶縁層115と摺動しつつ移動可能である。なお、移動体121は、磁性材料又は導電材料で形成することが好ましい。
【0036】
圧電素子102、振動基板電極111、112、移動体121の移動体電極122には、これらを駆動させるための駆動電圧を印加するための駆動回路133が接続されている。さらに、振動基板電極111、112には、移動体121の移動体電極122と振動基板電極111、112との間の静電容量を検出する静電容量検出回路131が接続されている。静電容量検出回路131からの出力信号は、制御回路132に入力される。
【0037】
図3を参照しつつ、制御回路132における処理の概要について説明する。ここで図3は、制御回路132の構成を示すブロック図である。制御回路132は、静電容量記憶部132a、比率演算部132b、比率記憶部132c、現在位置演算部132d、及び駆動信号演算部132eを備える。
【0038】
まず、静電容量検出回路131から入力された検出結果としての静電容量は、静電容量記憶部132aに記憶される。記憶される静電容量は、移動体121の移動体電極122と振動基板電極111との間の静電容量、及び、移動体電極122と振動基板電極112との間の静電容量であって、比率演算部132bにおいて、これら検出された静電容量に基づく移動体の移動距離と静電容量との比率が算出され、この演算結果は比率記憶部132cに記憶される。
【0039】
比率演算部132bによる演算結果は現在位置演算部132dへ出力され、現在位置演算部132dにおいて、振動基板103上における移動体121の絶対位置(現在位置)が算出される。さらに、駆動信号演算部132eにおいて、比率演算部132bによる演算結果及び現在位置演算部132dによる演算結果に基づいて、振動基板電極111、112、及び圧電素子102を駆動させるための駆動信号が生成される。
【0040】
生成された駆動信号は、駆動回路133に出力される。駆動回路133は、制御回路132から入力された駆動信号によって振動基板電極111、112、移動体電極122、及び圧電素子102を駆動する。
【0041】
固定部材101のバネ104側の端部上面には、バネ104、及び、絶縁層115のバネ104側の端部を上から覆うように突き当て部105が形成されている。また、固定部材101の圧電素子102側の端部上面には、圧電素子102、及び、絶縁層115の圧電素子102側の端部を上から覆うように突き当て部106が形成されている。
【0042】
突き当て部105、106により、移動体121の移動範囲が規制される。すなわち、移動体121が突き当て部105、106とそれぞれ接触する位置が両端の移動限界位置であり、これらの移動限界位置間の距離が移動体121の移動できる最大距離(移動限界距離)となる。
【0043】
(位置検出原理)
ここで、移動体121の検出方式について説明する。移動体121の位置検出も慣性駆動アクチュエータ100の駆動と同様に移動体121に設けられた移動体電極122と振動基板103に設けられた振動基板電極111、112を用いて行う。移動体電極122と振動基板電極111、112とのそれぞれが対向する部分はそれぞれコンデンサとしてみることができる。
移動体電極122と振動基板電極111との対向する部分の面積に相当する静電容量と、移動体電極122と振動基板電極112との対向する部分の面積に相当する静電容量と、を比較または差分を検出することによって、移動体121の振動基板103に対する相対的な位置を検出することができる。
例えば、移動体121を図1又は図2において、紙面右側に移動させると移動体電極122と振動基板電極111との対向面積が大きくなるため、振動基板電極111と移動体電極122との間の静電容量は大きくなる。一方で、移動体電極122と振動基板電極112との対向面積は次第に小さくなるため、振動基板電極112と移動体電極122との間の静電容量も小さくなる。これら静電容量の差分を取れば、静電容量の大小関係から移動体の位置を高精度に把握することが可能である。
【0044】
本実施例では移動体121が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体121と振動基板電極電極との間の静電容量が増加するように構成されている。さらに、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係にあることが好ましい。
【0045】
なお、移動限界位置は、突き当て部105、106のいずれを一方の移動限界位置に設定することもできる。また、移動体の位置と静電容量との関係は、位置の変化に伴って静電容量が変化すれば比例関係でなくてもよい。
【0046】
以上の構成により、振動基板電極111、112、及び圧電素子102に駆動電圧を印加すると、振動基板103は、圧電素子102の変位の方向に変位する。このように振動基板103が変位すると、振動基板103上の移動体121は、突き当て部105、106によって定まる移動限界位置間の移動範囲内において、慣性により移動可能で、振動基板103に対する相対的な位置を検出することが可能である。
【0047】
ここで、移動体121が右方向(突き当て部106側へ向かう方向)に移動する場合を例にとって、慣性駆動アクチュエータ100の駆動原理をより具体的に説明する。
まず、駆動回路133から急峻な立ち上がりの電圧を圧電素子102へ印加すると、圧電素子102は、急激に膨張して左方向(バネ104側へ向かう方向)へ変位する。圧電素子102のこの動きに伴って、振動基板103も急激に左方向へ変位する。
【0048】
このとき、振動基板103に形成された振動基板電極111、112の電圧と、移動体121の移動体電極122の電圧と、を同電位にしてあると、振動基板電極111、112と移動体電極122との間に静電吸着力が発生しないため、移動体121の慣性により、移動体121はその位置に留まる。
【0049】
次に、圧電素子102への印加電圧を急峻に立ち下げると、圧電素子102は急激に縮む。その際、圧電素子102と振動基板103とを押圧するバネ104の弾性力により、圧電素子102が急激に右方向へ変位する。圧電素子102のこの動きに伴い、振動基板103も急激に右方向へ変位する。このとき、振動基板103の振動基板電極111、112の電圧と、移動体121の移動体電極122の電圧と、の間に電位差を与えて静電吸着力を発生させると、振動基板電極111、112と移動体121の移動体電極122との間の摩擦力が増大する。従って、振動基板103の変位とともに移動体121も右方向へ移動する。
【0050】
以上の操作を繰り返すことにより、移動体121を振動基板103に対して右方向へ移動させることができる。
【0051】
つづいて、図4から図9を参照して、慣性駆動アクチュエータ100のキャリブレーション方法について説明する。
【0052】
まず、図4を参照しつつ、キャリブレーションの概要について説明する。図4は、本発明の第1実施形態に係る慣性駆動アクチュエータ100のキャリブレーションの流れの概要を示すフローチャートである。以下の説明において、一方の移動限界位置は、移動体121が慣性駆動アクチュエータ100の一方の突き当て部105に接した位置であり、他方の移動限界位置は、移動体121が慣性駆動アクチュエータ100の他方の突き当て部106に接した位置としており、移動体121の移動体電極122と振動基板電極111、112との間の静電容量は、移動体121が突き当て部105側から突き当て部106側へ移動するほど大きくなる。
【0053】
キャリブレーション開始後、まず、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を一方の移動限界位置へ移動させる(ステップS101)。
【0054】
次に、一方の移動限界位置における、静電容量Bnを検出する(静電容量検出ステップ、ステップS102)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS103)。
【0055】
つづいて、振動基板電極111、112、移動体電極122及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ移動させ(ステップS104)、他方の移動限界位置における、静電容量Anを検出する(静電容量検出ステップ、ステップS105)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS106)。
【0056】
静電容量記憶部132aに記憶された静電容量An、Bnを次式(I)に適用して、一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離lと、の比率X1を算出する(比率算出ステップ、ステップS107)。
X1=l/(An−Bn) ・・・(I)
このX1は、現在(キャリブレーション時)の静電容量と組み立て時に設定された移動限界距離(l)を関連付けた比率値となる。算出された比率X1は比率記憶部132cに記憶され、以上でキャリブレーションが終了する。なお、距離lは、慣性駆動アクチュエータ100の組み立て時に規定されているものでも良く、また突き当て部105,106に規定されるものでも良い。
【0057】
このようなキャリブレーションを行うことによって、比率算出ステップで算出した比率X1を用いて、一方及び他方の移動限界位置間における現在の移動体121の絶対位置(現在位置)が算出可能となる。絶対位置の算出は、次式(II)によって行う。
絶対位置=移動体121の現在位置での静電容量×X1 …(II)
【0058】
つづいて、図5を参照しつつ、キャリブレーションについてより具体的に説明する。図5は、本発明の第1実施形態に係る慣性駆動アクチュエータ100のキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図5のステップS201からステップS206は、図4のステップS101からステップS106にそれぞれ対応するため、その説明は省略する。
【0059】
一方の移動限界位置での静電容量Bn、及び、他方の移動限界位置での静電容量Anを、静電容量記憶部132aにそれぞれ記憶(ステップS203、206)した後に、確認ステップ(ステップS207からS213)を行う。確認ステップ終了後は、図4のステップS107と同様の比率算出ステップ(ステップS214)を行う。
【0060】
確認ステップでは、静電容量検出の信頼性を向上させるために、再度、一方の移動限界位置での静電容量(Bn+1)、及び、他方の移動限界位置での静電容量(An+1)を測定する。
【0061】
具体的には、まず、振動基板電極111、112、移動体電極122及び圧電素子102に電圧を印加して、移動体121を一方の移動限界位置へ移動させる(ステップS207)。次に、一方の移動限界位置における静電容量Bn+1を検出する(静電容量検出ステップ、ステップS208)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS209)。
【0062】
つづいて、振動基板電極111、112、移動体電極122及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ移動させ(ステップS210)、他方の移動限界位置における静電容量An+1を検出する(静電容量検出ステップ、ステップS211)。検出した静電容量は静電容量記憶部132aに記憶される(静電容量記憶ステップ、ステップS212)。
【0063】
次に、記憶された静電容量An、An+1、Bn、Bn+1を互いにを比較する(静電容量比較ステップ、ステップS213)。具体的には、An=An+1、及び、Bn=Bn+1、の2式をそれぞれ満足しているかどうかを比較する。これらの2式の両方を満足している場合は、比率算出ステップ(ステップS214)を実行する。一方、これらの2式の一方又は両方を満足しない場合は、両式を満足するまで確認ステップを繰り返す。
【0064】
つづいて、図6を参照しつつ、キャリブレーションについてさらに説明する。図6は、本発明の第1実施形態の第1変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図6のステップS301からステップS314は、図5のステップS201からステップS214にそれぞれ対応するため、その説明は省略する。
【0065】
図6に示すキャリブレーションでは、比率算出(ステップS314)につづいて、1駆動波形あたりの移動量を計算する(ステップS315からステップS322)。
【0066】
まず、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加、移動体121を一方の移動限界位置へ向かう方向に移動させる(ステップS315)。この移動では、圧電素子102に印加する駆動波形の数をm1としている。次に、移動を終了した位置における静電容量P1を検出する(ステップS316)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS317)。
【0067】
つづいて、静電容量記憶部132aに記憶されている、静電容量An、静電容量P1、波形数m1、及び比率X1を用いて、一方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H1を算出する(ステップS318)。算出は次式(III)を用いて行う。
H1=(An−P1)×X1/m1 ・・・(III)
算出された変位量H1は比率記憶部132cや、例えばCPUに記憶される。
【0068】
次に、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ向かう方向に移動させる(ステップS319)。この移動においても、圧電素子102に印加する駆動波形の数をm1としている。移動終了後、その位置における静電容量P2を検出する(ステップS320)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS321)。
【0069】
さらに、静電容量記憶部132aに記憶されている、静電容量P1、P2、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップS322)。算出は次式(IV)を用いて行う。
H2=(P2−P1)×X1/m1 ・・・(IV)
算出された変位量H2は比率記憶部132cや、例えばCPUに記憶される。
【0070】
以上のように1駆動波形あたりの変位量H1、H2の測定を終えた後に、移動体121を他方の移動限界位置へ移動させる(ステップS323)。
【0071】
つづいて、図7を参照しつつ、キャリブレーションについてさらに説明する。図7は、本発明の第1実施形態の第2変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図7のステップS401からステップS418は、図6のステップS301からステップS318にそれぞれ対応するため、その説明は省略する。
【0072】
図7に示すキャリブレーションでは、一方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H1の算出の後に、中心位置への移動波形数を算出(ステップS419)し、移動体121を中心位置に移動して静電容量を検出した後に、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量を算出する(ステップS420からS426)。それぞれの工程について、以下に詳細に説明する。
【0073】
中心位置への移動波形数m2の算出(ステップS419)は、次式(V)によって行う。
m2=((An−Bn)/2−P1)/H1 ・・・(V)
ここで、中心位置とは、慣性駆動アクチュエータ100の組み立て時に測定した、一方の移動限界位置と他方の移動限界位置との中間の位置である。
また、算出された波形数m2は静電容量記憶部132aに記憶される。
【0074】
ここで、波形数m2は、中心位置への移動波形数ではなく、中心側へ向かう移動波形数であってもよい。波形数m2の算出は、他方の移動限界位置へ向かう方向の1駆動波形あたりの移動量の算出にあたって、波形数をm1としたときに、移動体121が突き当て部106に突きあたり、正しく1駆動波形あたりの移動量が計算できないことを避けるために、いったん中心側へ移動体121を移動させる量を定めるものである。
【0075】
慣性駆動アクチュエータは、動作方向によっては重力の影響を受けることがある。特に垂直方向へ動作させる場合には影響が大きくなる。このような場合に対応するために、一方の移動限界位置への方向、他方の移動限界位置への方向への1駆動波形の移動量が異なることを考慮し、中心側へ移動させることとし、一方から他方、また他方から一方へ駆動する際の1駆動波形あたりの変位量を算出、記憶することとしている。
【0076】
また、一方の移動限界位置と他方の移動限界位置との移動範囲内において、一方の移動限界位置からの距離と静電容量とは、比例関係が成り立っているので、静電容量Anと静電容量Bnの中間値が中心位置での静電容量とわかる。
【0077】
また、「中心付近」と記載しているのは、ステップS419では、一方の移動限界位置へ向かう方向への1駆動波形あたりの移動量は算出されているが、他方の移動限界位置へ向かう方向への1駆動波形あたりの移動量は算出されていないため、中心位置より一方の移動限界位置へ向かう方向に移動体121があった場合、他方の移動限界位置へ向かう方向へ移動させるが、一方の移動限界位置へ向かう方向への1駆動波形あたりの移動量(変位量H1)を使用するためである。
【0078】
つづいて、式(V)で算出した波形数m2だけ圧電素子102を駆動して、移動体121を中心位置へ移動させ(ステップS420)、中心位置での静電容量を検出する(ステップS421)。検出された静電容量は静電容量記憶部132aに記憶される(ステップS422)。
【0079】
次に、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ向かう方向に移動させる(ステップS423)。この移動では、圧電素子102に印加する駆動波形の数をm1としている。移動終了後、その位置における静電容量P3を検出する(ステップS424)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS425)。
【0080】
さらに、静電容量記憶部132aに記憶されている、静電容量P2、P3、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップS426)。算出は次式(VI)を用いて行う。
H2=(P2−P1)×X1/m1 ・・・(VI)
算出された変位量H2は比率記憶部132cに記憶される。
【0081】
以上のように1駆動波形あたりの変位量H1、H2の測定を終えた後に、移動体121を他方の移動限界位置へ移動させる(ステップS427)。
【0082】
次に、図8を参照しつつ、キャリブレーションについてさらに説明する。図8は、本発明の第1実施形態の第3変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図8のステップS501からステップS517、ステップS521からステップS528、ステップS532、及びステップS533は、図7のステップS401からステップS417、ステップS418からステップS425、ステップS426、及びステップS427にそれぞれ対応するため、その説明は省略する。
【0083】
図8に示すキャリブレーションでは、比率算出ステップ(ステップS514)終了後、一方の移動限界位置へ向かう方向にm1パルス分移動して静電容量P1を検出、記憶(ステップS515からS517)した後に、検出した静電容量P1と、一方の移動限界位置における静電容量Bnと、を比較する(比較ステップ、ステップS518)。
【0084】
これら二つの静電容量Bn、P1が互いに同一であった場合(ステップS518でYES)、m1の駆動波形数以内に、移動体121が突き当て部105まで達したこととなる。この場合、比率X1を正しく測定できていない可能性があるため、再度他方限界位置へ移動(ステップS519)した後に、駆動波形数m1を、いままでの値の半分に値に置き換え(m1=m1/2)(ステップS520)、このm1の波形数だけ駆動電圧を出力して、移動体121を一方の移動限界位置へ向かう方向へ駆動させる(ステップS515)。その後、再び静電容量P1を検出し、静電容量P1を上書き記憶する(ステップS516、S517)。
【0085】
その後、記憶された静電容量P1、Bnを互いに比較し(ステップS518)、これらの静電容量が互いに同一ではなくなるまで、他方限界位置への移動(ステップS519)、駆動波形数m1の置き換え(m1=m1/2)(ステップS520)、移動体121の一方の移動限界位置へ向かう方向への駆動(ステップS515)、及び、静電容量P1の検出・記憶(ステップS516、517)を繰り返す。
【0086】
一方、静電容量Bn、P1が互いに同一ではなかった場合(ステップS518でNO)、静電容量An、静電容量P1、波形数m1、及び比率X1を用いて、一方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H1を算出する(ステップS521)。算出は次式(III)を用いて行う。
H1=(An−P1)×X1/m1 ・・・(III)
【0087】
変位量H1の算出後は、図7に示すキャリブレーションと同様に、中心位置への移動波形数m2の算出(ステップS522)、
波形数m2分駆動した後の静電容量P2の検出、記憶(ステップS523からS525)、及び、他方の移動限界位置へ向かう方向へ波形数m1だけ移動した後の静電容量P3の検出、記憶(ステップS526からS528)を行う。
【0088】
その後、検出した静電容量P3と、他方の移動限界位置における静電容量Anと、を互いに比較する(比較ステップ、ステップS529)。
【0089】
これら二つの静電容量An、P3が互いに同一であった場合(ステップS529でYES)、m1の駆動波形数以内に、移動体121が突き当て部106まで達したこととなる。この場合、比率X1を正しく測定できていない可能性があるため、再度一方限界位置へ移動(ステップS530)した後に、駆動波形数m1を、いままでの値の半分に値に置き換え(m1=m1/2)(ステップS531)、このm1の波形数だけ駆動電圧を出力して、移動体121を他方の移動限界位置へ向かう方向へ駆動させる(ステップS526)。その後、再び静電容量P3を検出し、静電容量P3を上書き記憶する(ステップS527、S528)。
【0090】
その後、記憶された静電容量P3、Anを互いに比較し(ステップS529)、これらの静電容量が互いに同一ではなくなるまで、一方限界位置への移動(ステップS530)、駆動波形数m1の置き換え(m1=m1/2)(ステップS531)、移動体121の他方の移動限界位置へ向かう方向への駆動(ステップS5526)、及び、静電容量P3の検出・記憶(ステップS527、528)を繰り返す。
【0091】
一方、静電容量An、P3が互いに同一ではなかった場合(ステップS529でNO)、静電容量P2、P3、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップS532)。算出は次式(VII)を用いて行う。
H2=(P3−P2)×X1/m1 ・・・(VII)
【0092】
以上のように1駆動波形あたりの変位量H1、H2の測定を終えた後に、移動体121を他方の移動限界位置へ移動させる(ステップS533)。
【0093】
つづいて、図9を参照しつつ、キャリブレーションについて、さらに具体的に説明する。図9は、本発明の第1実施形態の第4変形例に係るキャリブレーションの流れを示すフローチャートである。なお、一方の移動限界位置及び他方の移動限界位置は、図4に示す場合と同様であり、移動体121の移動体電極122と振動基板電極111、112との間の静電容量も図4の場合と同様である。また、図9のステップS601からステップS632は、図8のステップS501からステップS532にそれぞれ対応するため、その説明は省略する。
【0094】
図9に示すキャリブレーションでは、他方の移動限界位置に向けて移動したときの静電容量P3(ステップS627)と、他方の移動限界位置における静電容量An(ステップS605)と、を比較して、これらが同一でない場合(ステップS629でNO)、静電容量P2、P3、波形数m1、及び比率X1を用いて、他方の移動限界位置へ向かう方向における1駆動波形あたりの変位量H2を算出する(ステップ632)。算出は次式(VII)を用いて行う。
H2=(P3−P2)×X1/m1 ・・・(VII)
【0095】
次に、静電容量An、P3、及び1駆動波形あたりの変位量H2を用いて、次式(VIII)により、他方の移動限界位置へ移動させるための駆動波形数m3を算出する(ステップS633)。
m3=((An−P3)/H2 ・・・(VIII)
【0096】
つづいて、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を他方の移動限界位置へ向かう方向に移動させる(ステップS634)。この移動では、圧電素子102に印加する駆動波形の数をm3としている。移動終了後、その位置における静電容量P4を検出する(ステップS635)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS636)。
【0097】
次に、検出した静電容量P4と、他方の移動限界位置における静電容量Anと、を互いに比較する(比較ステップ、ステップS637)。静電容量P4と静電容量Anとが異なった場合(ステップS637でNO)は、キャリブレーションをステップS601から再度行う。
【0098】
これに対して、静電容量P4と静電容量Anとが同一であった場合(ステップS637でYES)は、静電容量Bn、P4、及び1駆動波形あたりの変位量H1を用いて、次式(IX)により、一方の移動限界位置へ移動させるための駆動波形数m4を算出する(ステップS638)。
【0099】
m4=(P4−Bn)/H1 ・・・(IX)
【0100】
つづいて、振動基板電極111、112、移動体電極122、及び圧電素子102に電圧を印加して、移動体121を一方の移動限界位置へ向かう方向に移動させる(ステップS639)。この移動では、圧電素子102に印加する駆動波形の数をm4としている。移動終了後、その位置における静電容量P5を検出する(ステップS640)。検出した静電容量は静電容量記憶部132aに記憶される(ステップS641)。
【0101】
次に、検出した静電容量P5と、一方の移動限界位置における静電容量Bnと、を互いに比較する(比較ステップ、ステップS642)。静電容量P5と静電容量Bnとが異なった場合(ステップS642でNO)は、キャリブレーションをステップS601から再度行う。一方、静電容量P5と静電容量Bnとが同一であった場合(ステップS642でYES)は、キャリブレーションを終了する。
【0102】
図9に示すキャリブレーションでは、移動体121が駆動信号を入力せず、停止しているにも関わらず、静電容量が変化した際に、位置情報と静電容量の関係に誤差が発生したことを検知し、再度キャリブレーションを促すことができる(ステップS637、642)。
【0103】
一般に、静電容量は、湿度、温度、重力その他の環境の変化により変動しやすい。静電容量は、次式(X)で表すことができる。
C=ε0εs・S/d ・・・(X)
ここで、Cは静電容量、ε0は真空の誘電率、εsは電極間の絶縁層の比誘電率、Sは電極面積、dは電極間隔である。
【0104】
例えば、湿度が変化することにより、比誘電率εsが変化し、電極の吸水を伴うと、電極面積S及び電極間隔dも変化する。また、温度が変化した場合には、絶縁層の比誘電率εsが変化し、構成部材の熱膨張を伴うと、電極面積S及び電極間隔dが変化する。さらにまた、アクチュエータの向き(姿勢)を変化させた場合、移動体への重力が変化することから、電極間隔dが変化する。
【0105】
アクチュエータの環境は、その実使用中に変化する可能性があり、これにより移動体電極と振動基板電極との間の静電容量が変化しやすい。第1実施形態に係るアクチュエータ装置では、このような静電容量の変化を判定するために一定時間、移動体121を動作させていない場合にて、静電容量を検出、確認し、最終移動後の静電容量と一定時間後の静電容量に差が発生した場合は、使用者に対して再度キャリブレーションを行うこと促す。
【0106】
促す方法としては、例えば、ランプの点灯や、表示ディスプレーへの表示があるが、これらに限定されない。また、図9に示すキャリブレーションのように、使用者に対してキャリブレーションを促さずに、自動的にキャリブレーションを行うこともできる。
【0107】
(第2実施形態)
次に、図10、図11を参照しつつ、第2実施形態に係る慣性駆動アクチュエータ200の構成について説明する。図10は、本発明の第2実施形態に係る慣性駆動アクチュエータ200を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図11は、慣性駆動アクチュエータ200の構成を示す側面図である。なお、図10においては、突き当て部205、206の図示を省略している。
【0108】
第2実施形態に係る慣性駆動アクチュエータ200においては、振動基板電極が1つのみであって、振動基板203の長手方向において、バネ204側から圧電素子202側へ向かうにつれて振動基板電極211の幅が狭くなっている点が第1実施形態に係る慣性駆動アクチュエータ100と異なる。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0109】
振動基板203の長手方向において振動基板電極211の幅が変化することにより、移動体221が一方の移動限界位置(突き当て部206に突き当たった位置)から他方の移動限界位置(突き当て部205に突き当たった位置)に移動するにつれて、移動体221の移動体電極222との間の静電容量が変化する。また、振動基板電極211の平面形状を三角形状としているため、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係となる。
【0110】
慣性駆動アクチュエータ200の固定部材201、圧電素子202、バネ204、突き当て部205、206、永久磁石207、及び移動体221は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0111】
振動基板電極211は、振動基板203の上面に形成され、振動基板電極211の上面には絶縁層215が形成されている。振動基板電極211上には、絶縁層215を介して、移動体221が載置されている。移動体221の下面、すなわち振動基板電極211に対向する面には、移動体電極222が形成されている。移動体221は、振動基板203の変位にともなって、長板状の振動基板203の長手方向(図10、図11の左右方向)において、絶縁層215と摺動しつつ移動可能である。なお、移動体221は、磁性材料又は導電材料で形成することが好ましい。
【0112】
圧電素子202、振動基板電極211、移動体221の移動体電極222には、これらを駆動させるための駆動電圧を印加するための駆動回路233が接続されている。さらに、振動基板電極211には、移動体221の移動体電極222と振動基板電極211との間の静電容量を検出する静電容量検出回路231が接続されている。静電容量検出回路231からの出力信号は、制御回路232に入力される。
【0113】
制御回路232の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ200と、慣性駆動アクチュエータ200に接続された静電容量検出回路231及び駆動回路233と、制御回路232と、を備える。
【0114】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体221と振動基板電極211との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体221の絶対位置を確実かつ正確に算出することができる。
【0115】
(第3実施形態)
次に、図12、図13を参照しつつ、第3実施形態に係る慣性駆動アクチュエータ300の構成について説明する。図12は、本発明の第3実施形態に係る慣性駆動アクチュエータ300を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図13は、慣性駆動アクチュエータ300の構成を示す側面図である。なお、図12においては、突き当て部305、306の図示を省略している。
【0116】
第3実施形態に係る慣性駆動アクチュエータ300は、2つの振動基板電極311、312を備え、この振動基板電極311、312は、斜辺が互いに対向する直角三角形の平面形状を有している点が第1実施形態に係る慣性駆動アクチュエータ100と異なる。すなわち、振動基板電極311は、振動基板303の長手方向において、バネ304側から圧電素子302側へ向かうにつれて幅が狭くなり、振動基板電極312は、圧電素子302側からバネ304側へ向かうにつれて幅が狭くなっている。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0117】
振動基板電極311、312は、その平面形状により、移動体321が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体321の移動体電極322との間の静電容量が移動量に比例してそれぞれ変化するように構成されている。
【0118】
慣性駆動アクチュエータ300の固定部材301、圧電素子302、バネ304、突き当て部305、306、永久磁石307、及び移動体321は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0119】
振動基板電極311、312は、振動基板303の上面に形成され、振動基板電極311、312の上面には絶縁層315が形成されている。振動基板電極311、312上には、絶縁層315を介して、移動体321が載置されている。移動体321の下面、すなわち振動基板電極311、312に対向する面には、移動体電極322が形成されている。
【0120】
移動体321は、振動基板303の変位にともなって、長板状の振動基板303の長手方向(図12、図13の左右方向)において、絶縁層315と摺動しつつ移動可能である。なお、移動体321は、磁性材料又は導電材料で形成することが好ましい。
【0121】
圧電素子302、振動基板電極311、移動体321の移動体電極322には、これらを駆動させるための駆動電圧を印加するための駆動回路333が接続されている。さらに、振動基板電極311、312には、移動体321の移動体電極322と振動基板電極311、312との間の静電容量をそれぞれ検出する静電容量検出回路331が接続されている。
【0122】
静電容量検出回路331からの出力信号は、制御回路332に入力される。制御回路332の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ300と、慣性駆動アクチュエータ300に接続された静電容量検出回路331及び駆動回路333と、制御回路332と、を備える。
【0123】
静電容量検出回路331では、振動基板電極311と移動体電極322との間の静電容量と、振動基板電極312と移動体電極322との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体321が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。移動体321の位置検出の観点からは、振動基板電極311、312の一方のみでもよい。
【0124】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体321と振動基板電極311、312との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体321の絶対位置を確実かつ正確に算出することができる。
【0125】
(第4実施形態)
つづいて、図14、図15を参照しつつ、第4実施形態に係る慣性駆動アクチュエータ400の構成について説明する。ここで、図14は、本発明の第4実施形態に係る慣性駆動アクチュエータ400を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図15は、慣性駆動アクチュエータ400の構成を示す側面図である。なお、図14においては、突き当て部405、406の図示を省略している。
【0126】
第4実施形態に係る慣性駆動アクチュエータ400においては、振動基板電極111、112に代えて、2つの振動基板位置検出電極416、417と、これら振動基板位置検出電極416、417の間に配置された振動基板駆動電極411と、を振動基板403に形成した点が第1実施形態の慣性駆動アクチュエータ100と異なる。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0127】
具体的には、2つの振動基板位置検出電極416、417は、直角三角形の平面形状を有し、斜辺が互いに対向するように配置されている。また、振動基板駆動電極411は、平行四辺形の平面形状を有し、二つの側辺が振動基板位置検出電極416、417の斜辺とそれぞれ対向するように配置されている。
【0128】
振動基板位置検出電極416、417は、その平面形状により、移動体421が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体421の移動体電極422との間の静電容量が移動量に比例してそれぞれ変化するように構成されている。
【0129】
慣性駆動アクチュエータ400の固定部材401、圧電素子402、バネ404、突き当て部405、406、永久磁石407、及び移動体421は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0130】
振動基板駆動電極411、振動基板位置検出電極416、417は、振動基板403の上面に形成され、振動基板駆動電極411の上面には絶縁層415が形成されている。振動基板駆動電極411、振動基板位置検出電極416、417上には、絶縁層415を介して、移動体421が載置されている。移動体421の下面、すなわち振動基板駆動電極411、振動基板位置検出電極416、417に対向する面には、移動体電極422が形成されている。移動体421は、振動基板403の変位にともなって、長板状の振動基板403の長手方向(図14、図15の左右方向)において、絶縁層415と摺動しつつ移動可能である。なお、移動体421は、磁性材料又は導電材料で形成することが好ましい。
【0131】
圧電素子402、振動基板駆動電極411、移動体421の移動体電極422には、これらを駆動させるための駆動電圧を印加するための駆動回路433が接続されている。さらに、振動基板位置検出電極416、417には、移動体421の移動体電極422と振動基板位置検出電極416、416との間の静電容量をそれぞれ検出する静電容量検出回路431が接続されている。
【0132】
静電容量検出回路431からの出力信号は、制御回路432に入力される。制御回路432の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ400と、慣性駆動アクチュエータ400に接続された静電容量検出回路431及び駆動回路433と、制御回路432と、を備える。
【0133】
静電容量検出回路431では、振動基板位置検出電極416と移動体電極422との間の静電容量と、417と移動体電極422との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体421が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。移動体421の位置検出は、振動基板位置検出電極416、417の一方のみでも良い。
【0134】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体421と振動基板駆動電極411との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体421の絶対位置を確実かつ正確に算出することができる。
【0135】
(第5実施形態)
【0136】
つづいて、図16、図17を参照しつつ、第5実施形態に係る慣性駆動アクチュエータ500の構成について説明する。ここで、図16は、本発明の第5実施形態に係る慣性駆動アクチュエータ500を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図17は、慣性駆動アクチュエータ500の構成を示す側面図である。なお、図16においては、突き当て部505、506の図示を省略している。
【0137】
第5実施形態に係る慣性駆動アクチュエータ500においては、振動基板電極111、112に代えて、2つの振動基板位置検出電極516、517と、これら振動基板位置検出電極516、517の間に配置された振動基板駆動電極511と、を振動基板503に形成した点が第1実施形態の慣性駆動アクチュエータ100と異なる。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0138】
具体的には、2つの振動基板位置検出電極516、517は、コの字状の平面形状を有し、先端が互いに対向するように配置されている。また、振動基板駆動電極511は、長方形の平面形状を有し、振動基板位置検出電極516と振動基板位置検出電極517で囲まれて形成される領域に、振動基板位置検出電極516、517とそれぞれ離間して配置されている。
【0139】
また、一方の移動限界位置と他方の移動限界位置との中間位置において、振動基板位置検出電極516と振動基板位置検出電極517とを互いに離間させていることにより、この離間部分では静電容量の値が大きくかわるため、一方の移動限界位置と他方の移動限界位置との中間位置を容易に検出することができる。
【0140】
ここで、振動基板位置検出電極516、517は、移動体521が一方の移動限界位置から他方の移動限界位置へ向かう方向に移動するにつれて、移動体521の移動体電極522との間の静電容量が変化するように構成されることが好ましい。さらに、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係にあることが好ましい。このためには、例えば、一方の移動限界位置から他方の移動限界位置に向かう方向に移動するにつれて、移動体521と振動基板位置検出電極516、517との距離が小さくなるように、振動基板位置検出電極516、517の厚さに傾斜を持たせることができる。
【0141】
慣性駆動アクチュエータ500の固定部材501、圧電素子502、バネ504、突き当て部505、506、永久磁石507、及び移動体521は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0142】
振動基板駆動電極511、振動基板位置検出電極516、517は、振動基板503の上面に形成され、振動基板駆動電極511の上面には絶縁層515が形成されている。振動基板駆動電極511、振動基板位置検出電極516、517上には、絶縁層515を介して、移動体521が載置されている。
【0143】
移動体521の下面、すなわち振動基板駆動電極511、振動基板位置検出電極516、517に対向する面には、移動体電極522が形成されている。移動体521は、振動基板503の変位にともなって、長板状の振動基板503の長手方向(図16、図17の左右方向)において、絶縁層515と摺動しつつ移動可能である。なお、移動体521は、磁性材料又は導電材料で形成することが好ましい。
【0144】
圧電素子502、振動基板駆動電極511、移動体521の移動体電極522には、これらを駆動させるための駆動電圧を印加するための駆動回路533が接続されている。さらに、振動基板位置検出電極516、517には、移動体521の移動体電極522と振動基板位置検出電極516、517との間の静電容量をそれぞれ検出する静電容量検出回路531が接続されている。
【0145】
静電容量検出回路531からの出力信号は、制御回路532に入力される。制御回路532の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ500と、慣性駆動アクチュエータ500に接続された静電容量検出回路531及び駆動回路533と、制御回路532と、を備える。
【0146】
静電容量検出回路531では、振動基板位置検出電極516と移動体電極522との間の静電容量と、振動基板位置検出電極517と移動体電極522との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体521が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。移動体521の位置検出は、振動基板位置検出電極516、517の一方のみでも良い。
【0147】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体521と振動基板駆動電極511との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体521の絶対位置を確実かつ正確に算出することができる。
【0148】
(第6実施形態)
次に、図18、図19を参照しつつ、第6実施形態に係る慣性駆動アクチュエータ600の構成について説明する。図18は、本発明の第6実施形態に係る慣性駆動アクチュエータ600を含む慣性駆動アクチュエータ装置の構成を示す平面図である。図19は、慣性駆動アクチュエータ600の構成を示す側面図である。なお、図18においては、突き当て部605、606の図示を省略している。
【0149】
第6実施形態に係る慣性駆動アクチュエータ600は、2つの振動基板電極611、612を備え、この振動基板電極611、612は、斜辺が互いに対向する台形の平面形状を有している点が第1実施形態に係る慣性駆動アクチュエータ100と異なる。すなわち、振動基板電極611は、振動基板電極612側の部分において、バネ604側から圧電素子602側へ向かうにつれて幅が狭くなり、振動基板電極612は、振動基板電極611側の部分において、圧電素子602側からバネ604側へ向かうにつれて幅が狭くなっている。その他の構成は第1実施形態に係る慣性駆動アクチュエータ100と同様である。
【0150】
振動基板電極611、612は、移動体621が一方の移動限界位置から他方の移動限界位置に移動するにつれて、移動体621の移動体電極622との間の静電容量が増加するように構成されている。さらに、一方の移動限界位置から他方の移動限界位置までの移動範囲内において、移動体の位置と静電容量とが比例関係にあることが好ましい。このためには、振動基板電極611、612の平面形状に加えて、例えば、一方の移動限界位置から他方の移動限界位置に向かうにつれて、移動体621と振動基板電極611、612との距離が小さくなるように、振動基板電極611、612の厚さに傾斜を持たせることができる。
【0151】
慣性駆動アクチュエータ600の固定部材601、圧電素子602、バネ604、突き当て部605、606、永久磁石607、及び移動体621は、第1実施形態に係る慣性駆動アクチュエータ100の固定部材101、圧電素子102、バネ104、突き当て部105、106、永久磁石107、及び移動体121と、それぞれ同様であるため、詳細な説明は省略する。
【0152】
振動基板電極611、612は、振動基板603の上面に形成され、振動基板電極611、612の上面には絶縁層615が形成されている。振動基板電極611、612上には、絶縁層615を介して、移動体621が載置されている。移動体621の下面、すなわち振動基板電極611、612に対向する面には、移動体電極622が形成されている。
【0153】
移動体621は、振動基板603の変位にともなって、長板状の振動基板603の長手方向(図18、図19の左右方向)において、絶縁層615と摺動しつつ移動可能である。なお、移動体621は、磁性材料又は導電材料で形成することが好ましい。
【0154】
圧電素子602、振動基板電極611、612、移動体621の移動体電極622には、これらを駆動させるための駆動電圧を印加するための駆動回路633が接続されている。さらに、振動基板電極611、612には、移動体621の移動体電極622と振動基板電極611、612との間の静電容量をそれぞれ検出する静電容量検出回路631が接続されている。
【0155】
静電容量検出回路631からの出力信号は、制御回路632に入力される。制御回路632の構成は、慣性駆動アクチュエータ100の制御回路132と同様であるため詳細な説明は省略する。ここで、慣性駆動アクチュエータ装置は、慣性駆動アクチュエータ600と、慣性駆動アクチュエータ600に接続された静電容量検出回路631及び駆動回路633と、制御回路632と、を備える。
【0156】
静電容量検出回路631では、振動基板電極611と移動体電極622との間の静電容量と、振動基板電極612と移動体電極622との間の静電容量と、をそれぞれ検出する。これらの静電容量は、移動体621が一方の移動限界位置から他方の移動限界位置に移動するにつれて、それぞれ値が変化する。
【0157】
以上の構成により、慣性駆動アクチュエータ100と同様のキャリブレーションを実行することができることから、移動体621と振動基板電極611、612との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体621の絶対位置を確実かつ正確に算出することができる。
【産業上の利用可能性】
【0158】
以上のように、本発明に係る慣性駆動アクチュエータは、移動体を微小に変位させることが必要な小型機器に有用である。
【符号の説明】
【0159】
100 慣性駆動アクチュエータ
101 固定部材
102 圧電素子
103 振動基板
104 バネ
105、106 突き当て部
107 永久磁石
111、112 振動基板電極
115 絶縁層
121 移動体
122 移動体電極
131 静電容量検出回路
132 制御回路
133 駆動回路
200 慣性駆動アクチュエータ
201 固定部材
202 圧電素子
203 振動基板
204 バネ
205、206 突き当て部
207 永久磁石
211 振動基板電極
215 絶縁層
221 移動体
222 移動体電極
231 静電容量検出回路
232 制御回路
233 駆動回路
300 慣性駆動アクチュエータ
301 固定部材
302 圧電素子
303 振動基板
304 バネ
305、306 突き当て部
307 永久磁石
311、312 振動基板電極
315 絶縁層
321 移動体
322 移動体電極
331 静電容量検出回路
332 制御回路
333 駆動回路
400 慣性駆動アクチュエータ
401 固定部材
402 圧電素子
403 振動基板
404 バネ
405、406 突き当て部
407 永久磁石
411 振動基板駆動電極
415 絶縁層
416、417 振動基板位置検出電極
421 移動体
422 移動体電極
431 静電容量検出回路
432 制御回路
433 駆動回路
500 慣性駆動アクチュエータ
501 固定部材
502 圧電素子
503 振動基板
504 バネ
505、506 突き当て部
507 永久磁石
511 振動基板駆動電極
515 絶縁層
516、517 振動基板位置検出電極
521 移動体
522 移動体電極
531 静電容量検出回路
532 制御回路
533 駆動回路
600 慣性駆動アクチュエータ
601 固定部材
602 圧電素子
603 振動基板
604 バネ
605、606 突き当て部
607 永久磁石
611、612 振動基板電極
615 絶縁層
621 移動体
622 移動体電極
631 静電容量検出回路
632 制御回路
633 駆動回路
【特許請求の範囲】
【請求項1】
移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、
前記移動体に設けられた移動体電極と、前記振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、
前記静電容量検出ステップにおいて検出された、前記一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、
前記静電容量記憶ステップにおいて記憶された前記一方及び他方の前記移動限界位置での静電容量と、前記一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、
を備え、
前記比率算出ステップで算出した前記比率を用いて、前記一方及び他方の移動限界位置間における前記移動体の絶対位置を算出可能としたことを特徴とする慣性駆動アクチュエータのキャリブレーション方法。
【請求項2】
前記一方の移動限界位置から前記他方の移動限界位置までの移動範囲内において、前記移動体の位置と前記静電容量とが比例関係であることを特徴とする請求項1に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項3】
前記静電容量記憶ステップにおいて記憶された静電容量を比較する静電容量比較ステップを有することを特徴とする請求項1又は請求項2に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項4】
前記移動体が駆動信号を入力せず、停止しているにも関わらず、静電容量が変化した際に、位置情報と静電容量の関係に誤差が発生したことを検知し、再度キャリブレーションを促すことを特徴とする請求項1から請求項3のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項5】
前記一方の移動限界位置から前記他方の移動限界位置への方向の1駆動波形あたりの移動量と、前記他方の移動限界位置から前記一方の移動限界位置への方向の1駆動波形あたりの移動量と、をそれぞれ測定、計算し、各1駆動波形あたりの移動量を一方または個別に記憶することを特徴とする請求項1から請求項4のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項6】
前記1駆動波形あたりの移動量を計算する際に、少なくとも1度、前記一方の移動限界位置から前記他方の移動限界位置までの移動範囲の中心側へ移動することを特徴とする請求項5に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項7】
前記振動基板電極が複数あり、それぞれの振動基板電極と前記移動体電極との静電容量を比較、演算することにより、前記移動体の位置情報を算出することを特徴とする請求項1から請求項6のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項8】
前記振動基板電極が、駆動用電極及び位置検出用電極の一方または両方を持つことを特徴とする請求項1から請求項7のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項9】
キャリブレーションの結果を確認するための確認ステップを有することを特徴とする請求項1から請求項8のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項10】
前記確認ステップにおいて、正しくキャリブレーションが行われていないことが確認された場合には、再度キャリブレーションを行うことを特徴とする請求項9に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項11】
移動手段により往復移動される振動基板と、
前記移動手段に駆動信号を印加する駆動回路と、
前記振動基板に対して慣性により移動する移動体と、
前記移動体の移動限界距離を規制する突き当て部と、
前記移動体に設けられた移動体電極と前記振動基板に設けられた振動基板電極とが対向する部分の静電容量を検出する静電容量検出回路と、
前記静電容量検出回路が検出した静電容量を記憶する静電容量記憶部と、
前記静電容量記憶部に記憶された静電容量と前記移動限界距離との比率を算出する比率演算部と、
前記静電容量検出回路によって検出された静電容量と前記比率記憶部に記憶された比率とに基づいて、前記移動体の絶対位置を計算する絶対位置演算部と、
を備えることを特徴とする慣性駆動アクチュエータ装置。
【請求項12】
前記移動体は導電材料を含むことを特徴とする請求項11に記載の慣性駆動アクチュエータ装置。
【請求項13】
前記振動基板の前記移動体とは反対側に永久磁石が配置されるとともに、前記移動体が磁性材料を含むことを特徴とする請求項11又は請求項12に記載の慣性駆動アクチュエータ装置。
【請求項14】
移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、
前記移動体に設けられた移動体電極と、前記振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、
前記静電容量検出ステップにおいて検出された、前記一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、
前記静電容量記憶ステップにおいて記憶された前記一方及び他方の前記移動限界位置での静電容量と、前記一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、
前記比率算出ステップで算出した前記比率を用いて、前記一方及び他方の移動限界位置間における前記移動体の絶対位置を算出する絶対位置算出ステップと、
を備えることを特徴とする移動体の位置算出方法。
【請求項1】
移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、
前記移動体に設けられた移動体電極と、前記振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、
前記静電容量検出ステップにおいて検出された、前記一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、
前記静電容量記憶ステップにおいて記憶された前記一方及び他方の前記移動限界位置での静電容量と、前記一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、
を備え、
前記比率算出ステップで算出した前記比率を用いて、前記一方及び他方の移動限界位置間における前記移動体の絶対位置を算出可能としたことを特徴とする慣性駆動アクチュエータのキャリブレーション方法。
【請求項2】
前記一方の移動限界位置から前記他方の移動限界位置までの移動範囲内において、前記移動体の位置と前記静電容量とが比例関係であることを特徴とする請求項1に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項3】
前記静電容量記憶ステップにおいて記憶された静電容量を比較する静電容量比較ステップを有することを特徴とする請求項1又は請求項2に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項4】
前記移動体が駆動信号を入力せず、停止しているにも関わらず、静電容量が変化した際に、位置情報と静電容量の関係に誤差が発生したことを検知し、再度キャリブレーションを促すことを特徴とする請求項1から請求項3のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項5】
前記一方の移動限界位置から前記他方の移動限界位置への方向の1駆動波形あたりの移動量と、前記他方の移動限界位置から前記一方の移動限界位置への方向の1駆動波形あたりの移動量と、をそれぞれ測定、計算し、各1駆動波形あたりの移動量を一方または個別に記憶することを特徴とする請求項1から請求項4のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項6】
前記1駆動波形あたりの移動量を計算する際に、少なくとも1度、前記一方の移動限界位置から前記他方の移動限界位置までの移動範囲の中心側へ移動することを特徴とする請求項5に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項7】
前記振動基板電極が複数あり、それぞれの振動基板電極と前記移動体電極との静電容量を比較、演算することにより、前記移動体の位置情報を算出することを特徴とする請求項1から請求項6のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項8】
前記振動基板電極が、駆動用電極及び位置検出用電極の一方または両方を持つことを特徴とする請求項1から請求項7のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項9】
キャリブレーションの結果を確認するための確認ステップを有することを特徴とする請求項1から請求項8のいずれか1項に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項10】
前記確認ステップにおいて、正しくキャリブレーションが行われていないことが確認された場合には、再度キャリブレーションを行うことを特徴とする請求項9に記載の慣性駆動アクチュエータのキャリブレーション方法。
【請求項11】
移動手段により往復移動される振動基板と、
前記移動手段に駆動信号を印加する駆動回路と、
前記振動基板に対して慣性により移動する移動体と、
前記移動体の移動限界距離を規制する突き当て部と、
前記移動体に設けられた移動体電極と前記振動基板に設けられた振動基板電極とが対向する部分の静電容量を検出する静電容量検出回路と、
前記静電容量検出回路が検出した静電容量を記憶する静電容量記憶部と、
前記静電容量記憶部に記憶された静電容量と前記移動限界距離との比率を算出する比率演算部と、
前記静電容量検出回路によって検出された静電容量と前記比率記憶部に記憶された比率とに基づいて、前記移動体の絶対位置を計算する絶対位置演算部と、
を備えることを特徴とする慣性駆動アクチュエータ装置。
【請求項12】
前記移動体は導電材料を含むことを特徴とする請求項11に記載の慣性駆動アクチュエータ装置。
【請求項13】
前記振動基板の前記移動体とは反対側に永久磁石が配置されるとともに、前記移動体が磁性材料を含むことを特徴とする請求項11又は請求項12に記載の慣性駆動アクチュエータ装置。
【請求項14】
移動手段により往復移動される振動基板に対して、慣性により一方及び他方の移動限界位置間を移動する移動体の駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、
前記移動体に設けられた移動体電極と、前記振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、
前記静電容量検出ステップにおいて検出された、前記一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、
前記静電容量記憶ステップにおいて記憶された前記一方及び他方の前記移動限界位置での静電容量と、前記一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、
前記比率算出ステップで算出した前記比率を用いて、前記一方及び他方の移動限界位置間における前記移動体の絶対位置を算出する絶対位置算出ステップと、
を備えることを特徴とする移動体の位置算出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2010−216986(P2010−216986A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−63996(P2009−63996)
【出願日】平成21年3月17日(2009.3.17)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月17日(2009.3.17)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]