
慣性駆動アクチュエータ
【課題】磨耗等の影響が少なく、効率よく移動体を移動あるいは駆動でき、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動を行うことができる慣性駆動アクチュエータを提供すること。
【解決手段】変位手段と、振動基板と、磁界を発生する第1の磁界発生手段と、振動基板の平面上に配置され、第1の磁界発生手段が発生するN極とS極の磁束を所定の位置に集中させる第1のヨークを有する移動子と、振動基板の移動子に対向した向きと反対側に第2のヨークと、を有し、振動基板よりも外側で第1のヨークと、第2のヨークの端部が対向することで、移動子の駆動方向に垂直な方向の動きを機械的に規制し、
第1の磁界発生手段から発生する磁界を制御することによって、移動子と振動基板の間に働く摩擦力を制御し、移動子を駆動することを特徴とする。
【解決手段】変位手段と、振動基板と、磁界を発生する第1の磁界発生手段と、振動基板の平面上に配置され、第1の磁界発生手段が発生するN極とS極の磁束を所定の位置に集中させる第1のヨークを有する移動子と、振動基板の移動子に対向した向きと反対側に第2のヨークと、を有し、振動基板よりも外側で第1のヨークと、第2のヨークの端部が対向することで、移動子の駆動方向に垂直な方向の動きを機械的に規制し、
第1の磁界発生手段から発生する磁界を制御することによって、移動子と振動基板の間に働く摩擦力を制御し、移動子を駆動することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動子を所定方向に移動させる慣性駆動アクチュエータに関するものである。
【背景技術】
【0002】
駆動軸に結合された電気機械変換素子に鋸歯状波駆動パルスを供給して駆動軸を軸方向に変位させ、この駆動軸に摩擦結合させた移動部材を軸方向に移動させるアクチュエータが知られている(以下、このようなアクチュエータを「インパクト駆動アクチュエータ」或いは「慣性駆動アクチュエータ」と称する)。
【0003】
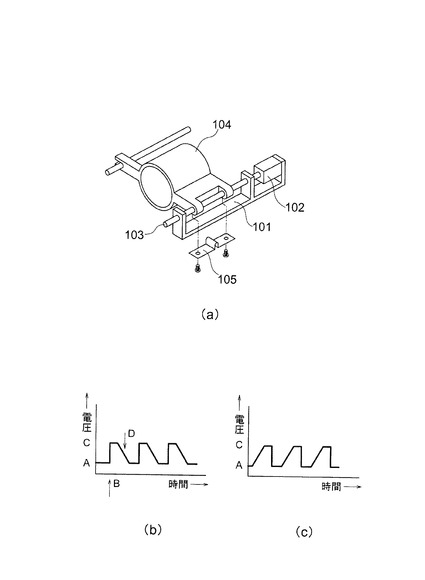
このようなインパクト駆動アクチュエータが、特許文献1に開示されている。図10(a)は、その構成を示す図である。振動部材103は支持部材101の立ち上がり部にあけられた穴に挿入され、振動部材103の軸方向に移動可能に配置されている。振動部材103の一端は圧電素子102の一端と固定され、圧電素子102の他端は支持部材101に固定されている。
このため、圧電素子102の振動に伴い振動部材103が軸方向に振動する。移動体104にも2つの穴が設けられており、振動部材103がその穴に挿入されている。更に移動体104には下方から板ばね105が取り付けられており、板ばね105に設けられている突起部が振動部材103に押付けられている。このように板ばね105による押圧によって、移動体104と振動部材103は互いに摩擦結合されている。
【0004】
図10(b)、(c)に、インパクト駆動アクチュエータを駆動するための駆動波形を示す。図10(b)は移動体104を右に移動させるための駆動波形で、図10(c)は移動体104を左に移動させるための駆動波形である。これらの駆動波形を用いて、インパクト駆動アクチュエータの動作原理を説明する。なお、以下の説明では、圧電素子102が伸びる方向を左、縮む方向を右とする。
【0005】
移動体104を右に動かす場合には、図10(b)に示す駆動波形を用いる。駆動波形は、急峻に立ち上がる部分と緩やかに立ち下がる部分を有している。駆動波形が急峻に立ち上がる部分では、圧電素子102が急激に伸びる。ここで、振動部材103は圧電素子102に固定されているため、振動部材103は、圧電素子102の急激な伸びに応じて急速に左に移動する。このとき、移動体104の慣性は振動部材103との間の摩擦結合力(板ばね105で押圧されている移動体104と振動部材103との間の摩擦力)に打ち勝つことから、移動体104は左には移動せず、その位置にとどまる。
【0006】
次に、駆動波形が緩やかに立ち下がる部分では、圧電素子102が緩やかに縮む。振動部材103は、圧電素子102の緩やかな縮みに応じてゆっくりと右に移動する。この場合、移動体104の慣性は振動部材103との間の摩擦結合力に打ち勝つことができない。そのため、移動体104は振動部材103の移動と共に右に移動する。
【0007】
一方、移動体104を左に動かす場合には、図10(c)に示す駆動波形を用いる。駆動波形は、緩やかに立ち上がる部分と急峻に立ち下がる部分を有している。駆動波形が緩やかに立ち上がる部分では、圧電素子102が緩やかに伸びる。この場合、振動部材103は、圧電素子102の緩やかな伸びに応じてゆっくりと左に移動する。この場合、移動体104の慣性は振動部材103との間の摩擦結合力に打ち勝つことができない。そのため、移動体104は振動部材103の移動と共に左に移動する。
【0008】
次に、駆動波形が急峻に立ち上がる部分では、図10(b)で説明したように、移動体104の慣性は振動部材103との間の摩擦結合力に打ち勝つことから、移動体104は右には移動せず、その位置にとどまる。
【0009】
なお、板ばね105が常に振動部材103に押し付けられていることにより、移動体104は振動部材103に摩擦で支持されている。よって、移動体104が停止している際にも、その位置は保持されている。
【0010】
上記のように、インパクト駆動アクチュエータは、板ばね105による移動体104と振動部材103との摩擦結合と慣性を利用したアクチュエータであって、図10(b)、(c)に示す駆動波形を用いることで、移動体104を移動させることができるアクチュエータである。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−288828号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
特許文献1に記載されているインパクト駆動アクチュエータは、板ばねにより振動部材103と移動体104に摩擦力を与えている。しかしながら、板ばねは常に振動部材と接触しているため、摩耗などの影響で所望の摩擦力が得られなくなる。そのため、特許文献1に記載されているインパクト駆動アクチュエータは、長期に亘って、安定した動作ができなくなるおそれがある。
【0013】
本発明は、上記実情に鑑みなされたもので、磨耗等の影響が少なく、効率よく移動体を移動あるいは駆動でき、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動を行うことができる慣性駆動アクチュエータを提供することを目的とする。
【課題を解決するための手段】
【0014】
上述した課題を解決し、目的を達成するために、本発明の慣性駆動アクチュエータは、
第1の方向と第1の方向とは逆の第2の方向に微小変位を発生する変位手段と、
変位手段の微小変位によって往復運動する振動基板と、
磁界を発生する第1の磁界発生手段と、
振動基板の平面上に配置され、第1の磁界発生手段が発生するN極とS極の磁束を所定の位置に集中させる第1のヨークを有する移動子と、
振動基板の移動子に対向した向きと反対側に第2のヨークと、を有し、
振動基板よりも外側で第1のヨークと、第2のヨークの端部が対向することで、移動子の駆動方向に垂直な方向の動きを機械的に規制し、
第1の磁界発生手段から発生する磁界を制御することによって、移動子と振動基板の間に働く摩擦力を制御し、移動子を駆動することを特徴とする。
【0015】
また、本発明の好ましい態様によれば、第1の磁界発生手段から発生する磁界とは別に、移動子が振動基板に対向した方向に磁気吸引力または磁気反発力が働くように磁界を発生する第2の磁界発生手段をさらに有することが望ましい。
【0016】
また、本発明の好ましい態様によれば、第1の磁界発生手段が電磁コイルであることが望ましい。
【0017】
また、本発明の好ましい態様によれば、第2の磁界発生手段が永久磁石であることが望ましい。
【0018】
また、本発明の好ましい態様によれば、変位手段が圧電素子であることが望ましい。
【0019】
また、本発明の好ましい態様によれば、振動基板が非磁性体であることが望ましい。
【0020】
また、本発明の好ましい態様によれば、振動基板が非磁性部と磁性部を有することが望ましい。
【0021】
また、本発明の好ましい態様によれば、振動基板は、少なくとも一部が第1の磁界発生手段を有することが望ましい。
【0022】
また、本発明の好ましい態様によれば、振動基板は、少なくとも一部が第2の磁界発生手段を有することが望ましい。
【0023】
また、本発明の好ましい態様によれば、振動基板は、第2のヨークの機能を兼用することが望ましい。
【0024】
また、本発明の好ましい態様によれば、移動子が永久磁石を有することが望ましい。
【発明の効果】
【0025】
本発明によれば、磁気力を用いることで摩耗等の影響を少なくすることができ、さらにヨークを用いることから効率よく移動体(移動子)を移動あるいは駆動でき、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動を行うことができる慣性駆動アクチュエータを提供することができる。
【図面の簡単な説明】
【0026】
【図1】第1実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は上面図、(b)は側面図、(c)は断面図である。(d)は変形例の断面図である。
【図2】(a)は第2実施形態の慣性駆動アクチュエータの断面図、(b)は第3実施形態の慣性駆動アクチュエータの断面図である。
【図3】第4実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は側面図、(b)は断面図である。
【図4】第5実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は側面図、(b)は断面図である。
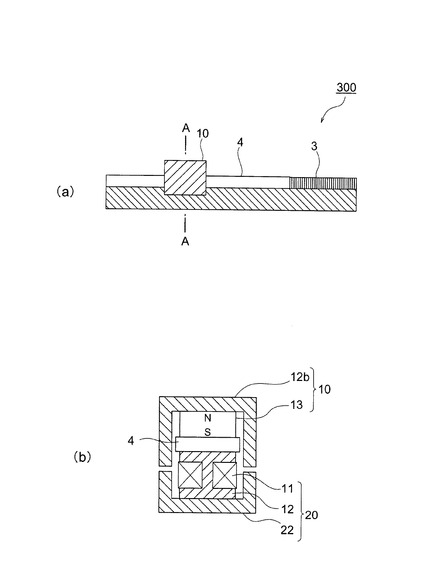
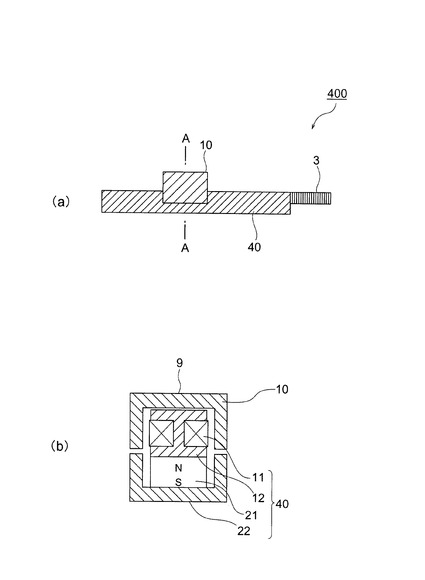
【図5】第6実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は側面図、(b)は断面図である。
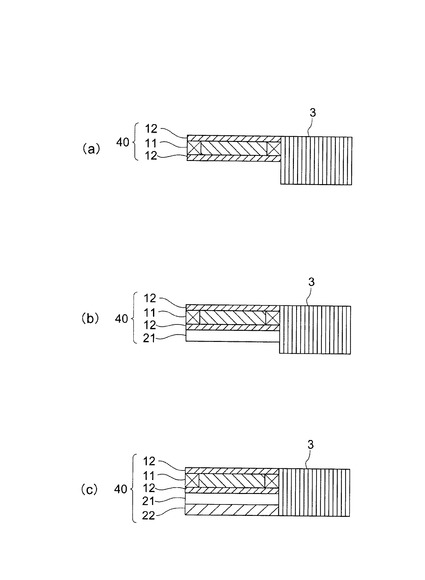
【図6】(a)、(b)、(c)は、それぞれ振動子との連結構成例を示す図である。
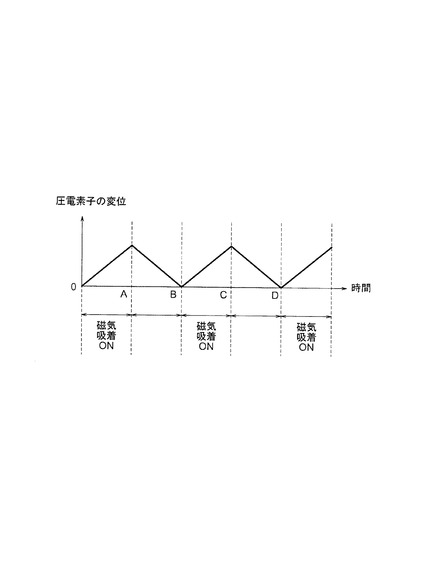
【図7】第1実施形態の慣性駆動アクチュエータ100を駆動するときの駆動方法を示す図である。
【図8】第7実施形態の慣性駆動アクチュエータの(a)は側面図、(b)は上面図、(c)は断面図である。
【図9】第7実施形態の慣性駆動アクチュエータを駆動するときの駆動方法を示す図である。
【図10】従来のインパクト駆動アクチュエータを示す図であって、(a)構成を示す図、(b)移動体を右に移動させるための駆動波形を示す図、(c)移動体を左に移動させるための駆動波形を示す図である。
【発明を実施するための形態】
【0027】
本実施形態の慣性駆動アクチュエータの構成による作用効果を説明する。なお、この実施形態によって本発明は限定されるものではない。すなわち、実施形態の説明に当たって、例示のために特定の詳細な内容が多く含まれるが、これらの詳細な内容に色々なバリエーションや変更を加えても、本発明の範囲を超えない。従って、以下で説明する本発明の例示的な実施形態は、権利請求された発明に対して、一般性を失わせることなく、また、何ら限定をすることもなく、述べられたものである。
【0028】
(第1実施形態)
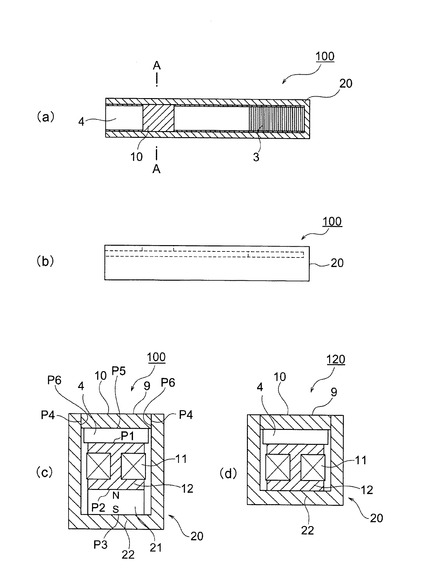
第1実施形態に係る慣性駆動アクチュエータを図1に示す。図1(a)は慣性駆動アクチュエータの上面図、図1(b)は側面図、図1(c)は図1(a)におけるA−Aで示す位置における断面図である。
【0029】
第1実施形態の慣性駆動アクチュエータ100は、圧電素子(変位手段)3と、振動基板4と、移動子10と固定子20で構成されている。固定子20の上部に圧電素子3と振動基板4が位置し、振動基板4の上部に移動子10が位置する。移動子10は、第1のヨーク9の機能を有している。
【0030】
圧電素子3と振動基板4は、共に板状の部材である。ここで、振動基板4には非磁性体の材料が用いられている。圧電素子3の一端と振動基板4の一端は機械的に連結されている。なお、機械的に連結する構成に限られず、接着でも良い。圧電素子3と振動基板4は、固定子20の上部に載置される。圧電素子3は微小変位を発生させ、振動基板4は微小変位によって往復運動する。
【0031】
上記構成により、圧電素子3(変位手段)は、第1の方向と第1の方向とは逆の第2の方向に微小変位を発生する。圧電素子3の微小変位によって、振動基板4は往復運動する。移動子10は、振動基板4の平面上に配置されている。
移動子10は、振動基板4の平面上に配置され、コイル11(第1の磁界発生手段)が発生するN極とS極の磁束を所定の位置に集中させる第1のヨーク9の機能を有する。
【0032】
図1(c)に示す断面図において、振動基板4の移動子10に対向した向きに、固定子20側に磁気吸引力又は磁気反発力が働くように磁界を発生するコイル11(第1の磁界発生手段)が設けられている。コイル11は、例えばコイル芯を巻いた電磁コイルである。
また、コイル11の周囲には、コイル11が発生する磁束がN極、S極ともに集中するように、コイル11が発生する磁束を誘導する第2のヨーク12、22(磁束誘導部材)が形成されている。ここで、コイル11を巻きつけるための部材は、第2のヨーク12の機能を兼用している。
【0033】
第2のヨーク12、22は、コイル11が発生する磁束が、固定子20側の面(所定の位置)にN極、S極、ともに集中するように、コイル11から発生する磁界を制御することによって、移動子10と振動基板4の間に働く摩擦力を制御し、移動子10を駆動する。
【0034】
ここで、振動基板4よりも外側において、第1のヨーク9、すなわち移動子10と、第2のヨーク22の端部が対向する。これにより、移動子10の駆動方向に垂直な方向の動きを機械的に規制することができる。
【0035】
このような構成によれば、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0036】
コイル11(第1の磁界発生手段)とは別に、移動子10が振動基板4に対向した方向に磁気吸引力または磁気反発力が働くように磁界を発生する永久磁石21(第2の磁界発生手段)をさらに設ける構成とすることができる。
【0037】
第2のヨーク22は、コイル11(第1の磁界発生手段)とともに永久磁石21(第2の磁界発生手段)が発生する磁束も、固定子20側の面(所定の位置)にN極、S極、ともに集中するように、永久磁石21(第2の磁界発生手段)が発生する磁束を誘導するために、永久磁石21(第2の磁界発生手段)に対して配置されている。
そして、コイル11(第1の磁界発生手段)と永久磁石21(第2の磁界発生手段)のうち少なくとも1つの発生手段から発生する磁界を制御することによって、移動子10と振動基板4の間に働く摩擦力を制御し、移動子10を駆動する。
【0038】
さらに、具体的に説明する。図1(c)に示すように、固定子20は、コイル11、第2のヨーク(磁束誘導部材)12、22と、さらに、永久磁石21(第2の磁界発生手段)で構成されている。永久磁石21は直方体の部材で、一方の面側(上側面)がN極、他方の面側(下側面)がS極となっている。また、本実施例では、コイル11は、その長手方向の長さが、永久磁石21の長手方向の長さとほぼ同じである。第2のヨーク22は箱状の部材である。永久磁石21は、第2のヨーク22の底面部に固定されている。これにより、磁束の外部への漏れ防止の効果を奏することができる。
【0039】
なお、コイル11は永久磁石21(あるいは第2のヨーク22)に対して常時固定されている。そのため、コイル11は移動子10の移動に伴って移動することはない。したがって、コイル11へ接続されている配線が動くことがない。
【0040】
このように、永久磁石21を設けることにより、コイル11に電流を流していないときも移動子10に常に保持力が作用する。このため、慣性駆動アクチュエータの系全体が傾いても安定した駆動ができる。
【0041】
(第1実施形態の変形例)
また、図1(c)に示した構成に対して、図1(d)に示すような断面構成とすることもできる。図1(d)に示す慣性駆動アクチュエータ150は、永久磁石21を有していない。このため、簡易な構成となり、移動子10は、振動基板4に対して、重力により載置される状態となる。
【0042】
次に、慣性駆動アクチュエータ100の動作について説明する。なお、駆動原理(駆動方法)については図7で説明する。
【0043】
上記のような構成において、例えば、紙面上方向にN極が発生するように、コイル11に電流を流す。すると、第2のヨーク12の中央上部P1にはN極が集中し、中央下部P2にはS極が集中する。
ここで、コイル11の両側には第2のヨーク22が配置されている。そのため、コイル11で発生した磁束の外部への漏れを、第2のヨーク22によって抑えることができる。
第2のヨーク22の中央下部P3にはN極が集中する。第2のヨーク22の2つの上端部P4にはS極が集中する。
それに対向し、移動子10では、第1のヨーク9の中央部P5には逆極性であるS極が誘起される。また、移動子10の2つの両端部P6にはN極が集中する。
その結果、移動子10に対して紙面下側に向かって、強い磁気吸着力が発生する。
【0044】
ここで、コイル11と、永久磁石21は、第1のヨーク9と第2のヨーク22で囲まれている状態になる。そのため、コイル11と永久磁石21で発生した磁束の外部への漏れを、第1のヨーク9と第2のヨーク22によって抑えることができる。
【0045】
一方、上述した磁束の関係とは反対に、第2のヨーク12の中央上部P1にS極が集中するように、コイル11に電流を流した場合は、磁気吸着力が減少する。また、コイル11に流す電流を変えることによって、移動子10の振動基板4に対する垂直抗力の強さを変えることができる。このようにすることで、移動子10と振動基板4の摩擦力を制御することが可能となる。
【0046】
以上述べたように、本実施形態の慣性駆動アクチュエータ100では、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、本実施形態の慣性駆動アクチュエータ100は、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10の移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。
更に、本実施形態の慣性駆動アクチュエータ100では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0047】
このように、本実施形態の慣性駆動アクチュエータ100では、移動子10と固定子20の各々で磁束の外部への漏れを抑制し、これによりS極やN極を所定の領域に集中させることができる。よって、移動子10と固定子20の間に、紙面下側に向かって効率的に磁気吸着力を発生させることができる。
【0048】
以上述べたように、本実施形態の慣性駆動アクチュエータ100では、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、本実施形態の慣性駆動アクチュエータ100は、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10の移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。更に、本実施形態の慣性駆動アクチュエータ100では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができる。このため、簡単かつ低コストな構成でありながら、移動子10を効率良く移動あるいは駆動できる。
【0049】
また、固定子20の両端は、固定部材B(不図示)に固定されている。なお、固定子20を固定部材Bに固定するにあたっては、永久磁石21と第2のヨーク22を、別々に固定部材Bに対して固定しても良い。あるいは、永久磁石21と第2のヨーク22を先に固定(連結)しておき、少なくともどちらか一方を固定部材Bに対して固定しても良い。また、固定部材Bとして固定部材Aを利用して良いし、固定部材Bと固定部材Aは別々であっても良い。なお、固定部材Aは、例えば、圧電素子3の一端に設けられた部材である。
【0050】
また、図1(c)に示すように、振動基板4の長手方向と直交する方向(図1(c)の紙面左右方向)では、振動基板4よりも外側に、第2のヨーク22の側面端部が位置している。そして、第1のヨーク9の端部は、第2のヨーク22と近接している。そのため、振動基板4の長手方向と直交する方向(図1(c)の紙面左右方向)については、移動子10の動きが規制されることになる。
【0051】
このように、本実施形態の慣性駆動アクチュエータ100では、第1のヨーク9、第2のヨーク12、22は、磁束漏れを抑制する機能を持つだけでなく、移動子10の所定の方向に対する動きを規制するガイド機能も兼ねる。そのため、より部品数の削減、省サイズ化が可能となる。尚、本実施形態では、第2のヨーク22と振動基板4によって振動子10の動きを規制しているが、図示を省略した固定部材と第2のヨーク22を使って、振動子10の動きを規制することも当然可能である。
【0052】
さらに加えて、上述したように、移動子10に配線が存在しないため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0053】
(変形例)
また、図1(c)に示した構成に対して、図1(d)に示すような断面構成とすることもできる。図1(d)に示す慣性駆動アクチュエータ150は、永久磁石21を有していない点が上述の第1実施形態と異なる。このため、移動子10は、振動基板4に対して、重力により載置される状態となる。
【0054】
(第2実施形態)
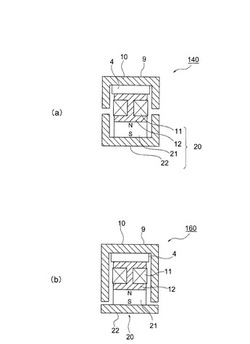
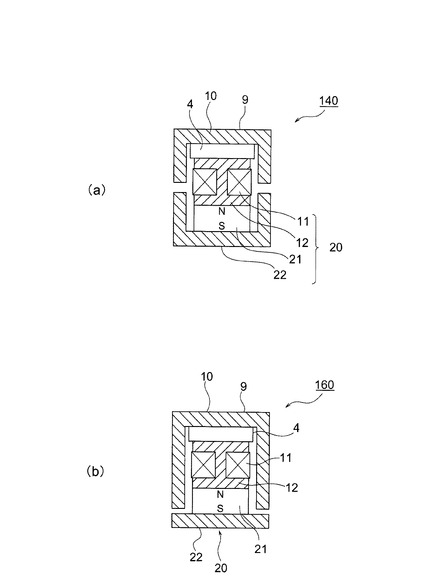
次に、第2実施形態に係る慣性駆動アクチュエータ140について説明する。
図2(a)は、慣性駆動アクチュエータ140の断面図である。第1実施形態の慣性駆動アクチュエータ100と同じ構成については同一の番号を付し、重複する説明は省略する。
【0055】
第2実施形態の慣性駆動アクチュエータ140は、圧電素子3と、移動子10と、振動基板4と固定子20で構成されている。振動基板4の上部に振動基板4の上部に移動子10が位置する。そして、圧電素子3の一端と振動基板4の一端は機械的に連結されている。
【0056】
本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0057】
さらに、第1実施形態の慣性駆動アクチュエータ100との相違点は、次のとおりである。第1のヨーク9については、振動基板4を覆う形状を有し、第1のヨーク9の側面部分の先端は、コイル11の半ばまで形成されている。
また、第2のヨーク22については、底部に配置されている永久磁石21を覆う形状を有している。第2のヨーク22の側面部分は、矩形形状の永久磁石21の上端部まで形成されている。
【0058】
上記のような相違点はあるものの、コイル11と永久磁石21は、第1のヨーク9と第2のヨーク22とによって覆われている。また、第1のヨーク9と第2のヨーク22は、各々の端部が近接するように配置されている。これらの点では、第1実施形態の慣性駆動アクチュエータ100と同じである。
【0059】
よって、第1実施形態と同様に、本実施形態の慣性駆動アクチュエータ140では、移動子10を移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。
【0060】
更に、本実施形態の慣性駆動アクチュエータ140では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0061】
上述したように、本実施形態の慣性駆動アクチュエータ140では、第1のヨーク9の側面が、振動基板4の両端外側に位置している。そのため、振動基板4の長手方向と直交する方向について、移動子10の動きが規制されることになる。
【0062】
また、第1実施形態の構成においては、移動子10の横方向の端部における吸着力は横方向に働いてしまう。これに対して、第2実施形態の構成においては、第1実施形態の構成に比較して、移動子10の端部に働く吸着力が全て紙面下方向に働いている。これより、第2実施形態の構成のほうが、より一層吸着力を効率的に利用できる。
【0063】
(第3実施形態)
次に、第3実施形態に係る慣性駆動アクチュエータ160について説明する。
図2(b)は慣性駆動アクチュエータ160の断面図である。第1実施形態の慣性駆動アクチュエータ100と同じ構成については同一の番号を付し、重複する説明は省略する。
【0064】
第3実施形態の慣性駆動アクチュエータ160は、圧電素子3と、移動子10と、振動基板4と固定子20で構成されている。振動基板4の上部に振動基板4の上部に移動子10が位置する。そして、圧電素子3の一端と振動基板4の一端は機械的に連結されている。
【0065】
本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0066】
さらに、第1実施形態の慣性駆動アクチュエータ100との相違点は、次のとおりである。第1のヨーク9については、振動基板4、コイル11、永久磁石21を覆う形状を有している。
また、第2のヨーク22については、永久磁石21の底部に設けられている板状部材である。
【0067】
上述したように、振動基板4とコイル11と永久磁石21は、第1のヨーク9と第2のヨーク22によって覆われている。また、第1のヨーク9と第2のヨーク22は、各々の端部が近接するように配置されている。これらの点では、第1実施形態の慣性駆動アクチュエータ100と同じである。
【0068】
よって、第1実施形態と同様に、本実施形態の慣性駆動アクチュエータ160では、移動子10を移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。
更に、本実施形態の慣性駆動アクチュエータ160では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0069】
また、本実施形態の慣性駆動アクチュエータ160では、第1のヨーク9の側面が、振動基板4の外側に、近接して位置している。さらに、第1のヨーク9の側面は、コイル11とも近接している。そのため、振動基板4の長手方向と直交する方向について、移動子10の動きが規制されることになる。
【0070】
なお、コイル11と第1のヨーク9が接触してもコイル11が破損しないように、コイル11に保護部材または保護膜を設けておくのが望ましい。また、コイル11を小さくし、その代わりにコイル11を巻きつけている部材の先端(振動基板4と接触している部分)の大きさを振動基板4と略同じ大きさにしても良い。このようにすることで、振動基板4の長手方向と直交する方向について、移動子10の動きを規制することができる。
【0071】
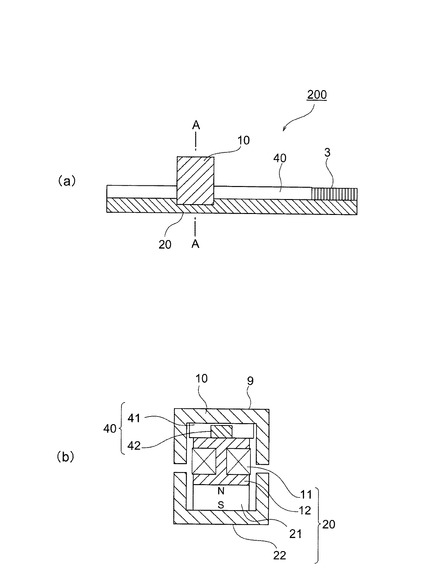
(第4実施形態)
第4実施形態の慣性駆動アクチュエータを図3(a)、(b)に示す。図3(a)は慣性駆動アクチュエータ200の側面図、図3(b)は図3(a)におけるA−Aで示す位置における断面図である。
本実施形態の基本的な構成は、上述した第2実施形態(図2(a))と同じである。第2実施形態の慣性駆動アクチュエータと同じ構成については同一の番号を付し、重複する説明は省略する。
【0072】
第4実施形態の慣性駆動アクチュエータ200では、振動基板40の構成が、第2実施形態の慣性駆動アクチュエータ100と異なる。よって、振動基板40について説明をする。
【0073】
第4実施形態の慣性駆動アクチュエータ200では、振動基板40は、非磁性部41と磁性部42を有する。磁性部42はヨーク部であって、この磁性部42の両側に非磁性部41が位置している。なお、磁性部42を取り囲むように非磁性部41を設け、磁性部42が振動基板40の内部に位置するようにしても良い。
【0074】
このような構成をとることにより、第4実施形態の慣性駆動アクチュエータ200では、第1のヨーク9の中央部とコイル11との間を磁束が流れる際に、磁束漏れをより抑制することができる。その結果、効率良く磁気吸着力、もしくは反発力を移動子10に作用させることが可能となる。
【0075】
また、本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0076】
(第5実施形態)
第5実施形態の慣性駆動アクチュエータを図4に(a)、(b)に示す。図4(a)は慣性駆動アクチュエータ300の側面図、図4(b)は図4(a)におけるA−Aで示す位置における断面図である。第1実施形態の慣性駆動アクチュエータと同じ構成については同一の番号を付し、その説明は省略する。なお、配線の図示は省略している。
【0077】
第5実施形態の慣性駆動アクチュエータ300は、圧電素子3と、振動基板4と、移動子10と固定子20で構成されている。固定子20の上部に圧電素子3と振動基板4が位置し、振動基板4の上部に移動子10が位置する。
【0078】
移動子10は、第1のヨーク12bと永久磁石13とを有している。永久磁石13は、N極が第1のヨーク12b側に位置するように配置されている。第1のヨーク12bは、側面が永久磁石13と、振動基板4とコイル11の一部を覆うように形成されている。
【0079】
一方、固定子20は、コイル11、第2のヨーク12、22を有している。本実施形態は、第1実施形態に比較して、永久磁石21(第2の磁界発生手段)が移動子10側に設けられている点が異なる。
【0080】
上記のような構成において、例えば、紙面上方向にN極、下方向にS極が発生するように、コイル11に電流を流す。すると、第2のヨーク22には、逆極性が誘起される。このため、第2のヨーク22の中央下部にはN極が集中し、第2のヨーク22の両端上部にはS極が集中する。
【0081】
永久磁石13は、上部にN極、下部にS極となるように配置されている。移動子10では、第1のヨーク12bには逆極性が誘起される。すなわち、第1のヨーク12bの中央部にはS極が誘起され、両端部にはN極が誘起される。その結果、移動子10に対して紙面下側に向かって、コイル11に電流を流さないときと比べて強い磁気吸着力が発生する。
【0082】
一方、紙面上方向にS極が集中するように、コイル11に電流を流した場合は、コイル11に電流を流さないときと比べて弱い磁気吸着力が発生する。また、コイル11に流す電流を変えることによって、移動子10の振動基板4に対する垂直抗力の強さを変えることができる。このようにすることで、移動子10と振動基板4の摩擦力を制御することが可能となる。
【0083】
以上述べたように、本実施形態の慣性駆動アクチュエータ300では、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、本実施形態の慣性駆動アクチュエータ300は、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10の移動あるいは駆動させても磨耗が生じない。
【0084】
その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。更に、本実施形態の慣性駆動アクチュエータ300では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0085】
さらに、本実施形態の慣性駆動アクチュエータ300では、第1のヨーク12bの両端は、振動基板4の両端を囲うようにして第2のヨーク22に向かって伸びている。そのため、第1のヨーク12bの両端と振動基板4によって、図4(b)の紙面左右方向について、移動子10の動きが規制される。なお、本実施形態の慣性駆動アクチュエータ300では、第1のヨーク12bの両端がコイル11の近傍に位置している。そこで、振動基板4の代わりにコイル11を使って、移動子10の動きを規制することも可能である。なお、その際、移動子10と接触しても破損しないように、コイル11には十分な保護対策がなされている。
【0086】
このように、本実施形態の慣性駆動アクチュエータ300では、第1のヨーク12aは磁束漏れを抑制する機能を持つだけでなく、移動子10の所定の方向に対する動きを規制するガイド機能も兼ねる(第1のヨーク12bが複数の役割を担っている)。
【0087】
また、本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0088】
(第6実施形態)
次に、第6実施形態に係る慣性駆動アクチュエータ400について説明する。
図5(a)は慣性駆動アクチュエータ400の側面図、図5(b)は図5(a)におけるA−Aで示す位置における断面図である。第1実施形態の慣性駆動アクチュエータ100と同じ構成については同一の番号を付し、その説明は省略する。
【0089】
第6実施形態の慣性駆動アクチュエータ400は、圧電素子3と、移動子10と、振動基板40で構成されている。振動基板40の上部に移動子10が位置する。そして、圧電素子3の一端と振動基板40の一端は機械的に連結されている。
なお、圧電素子3と、振動基板40とを連結する構成例の詳細に関しては、後述する。
【0090】
移動子10は、第1のヨーク9の機能を有している。なお、移動子10の構造は第2実施形態の移動子10(図2(a))と同じなので、説明を省略する。本実施形態の移動子10も、第1実施形態の移動子10と同様の役割をする。
ただし、本実施形態においては、第2実施形態の振動基板4を有していない点が上述した第2実施形態と異なる。代わりに、振動基板40は、コイル11、永久磁石21と第2のヨーク12、22で構成されている。振動基板40は、第2実施形態の固定子20と同様の役割をし、振動基板4の役割も果たす。
【0091】
本実施形態においても、コイル11が振動基板(固定子)20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0092】
このように、本実施形態の慣性駆動アクチュエータ400は、第1実施形態の慣性駆動アクチュエータ100と同じ作用を行う部材を備えているので、第1実施形態の慣性駆動アクチュエータ100と同様の効果を奏する。
【0093】
次に、圧電素子3と、振動基板40とを連結する構成例を説明する。図6(a)、6(b)、6(c)は、圧電素子3と、振動基板40とを連結する3つの異なる構成を示している。
【0094】
図6(a)は、コイル11のみが圧電素子3と連結し振動する構成である。つまり、振動基板40は、少なくとも一部がコイル11(第1の磁界発生手段)を有する構成である。これによれば、振動基板40がコイル11であるため、簡易な構成とすることができる。
【0095】
図6(b)は、コイル11と永久磁石21とが圧電素子3と連結し振動する構成である。ここで、圧電素子3と永久磁石21のみが連結して振動する構成でもよい。これにより、移動子10を常に一定の磁気吸引力で保持することができる。
【0096】
図6(c)は、コイル11と永久磁石21とヨーク22とが圧電素子3と連結し振動する構成である。これにより、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができる。また、部品点数を低減できる。このため、簡単かつ低コストな構成でありながら、移動子10を効率よく移動あるいは駆動できる。
図6(c)の構成のさらなる効果として、振動する際に上述の図6(a)、図6(b)の構成と比べて、振動方向に対して垂直に働く磁石の吸着力がないため、圧電素子3は小さい力でコイル11と永久磁石21とヨーク22を振動させることが出来る。
【0097】
ここで、圧電素子3とヨーク22のみと連結する構成、または圧電素子3とヨーク22とコイル22のみとを接続する構成、または圧電素子3とヨーク22と磁石21のみが連結し振動する構成でもよい。
【0098】
図6(a)〜(c)に示した構成例において、振動基板40の上面側に移動子10を載置することで、移動子10を移動させることができる。これらの構成例においても、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、これらの構成例の慣性駆動アクチュエータは、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10を移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。更に、これらの構成例の慣性駆動アクチュエータでは、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができる。このため、簡単かつ低コストな構成でありながら、移動子10を効率よく移動あるいは駆動できる。
【0099】
さらに加えて、上述したように、移動子10に配線が存在しないため、配線の耐久性が向上し、断線することが抑制され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0100】
次に、上述した慣性駆動アクチュエータ100の駆動方法を説明する。
図7は、例えば、第1実施形態の慣性駆動アクチュエータ100を駆動するときの駆動方法を示している。図7において、横軸は時間を示し、縦軸は圧電素子3の変位を示している。図1(b)において、圧電素子3が紙面左方向に伸びた場合を正としている。
【0101】
時刻0からAまでの間、圧電素子3は延伸している。この間は、コイル11に、紙面上方向にN極が発生するように電流を流す。すると、移動子10に対して振動基板4側に働く磁気吸着力が増加する。そのため、移動子10と振動基板4との間の摩擦は増加する。その結果、圧電素子3の延伸とともに振動基板4は紙面左方向に移動し、それとともに移動子10も紙面左方向に移動する。
【0102】
次に、時刻Aから時刻Bまでの間、圧電素子3は収縮している。この間、コイル11に電流を流すのを止める。すると、移動子10に対してコイル11により発生する磁気吸着力が働かなくなる。そのため、移動子10と振動基板4との間の摩擦力は減少する。これは、振動基板4の動きに対して移動子10のすべる量が増加したことを意味する。その結果、圧電素子3の収縮とともに振動基板4が紙面右方向に移動しても、見かけ上、移動子10は移動した位置で静止した状態となる。このように、圧電素子3の収縮とともに、紙面右方向に移動する振動基板4に対して移動子10は左方向に滑るため、時刻0から時刻Bまでの間で、移動子10は紙面左方向に移動することとなる。同様のことを、時刻Bから時刻C、時刻Cから時刻Dというように繰り返すことにより、移動子10を紙面左方向に移動させていくことができる。
【0103】
なお、移動子10を紙面右方向への移動は、コイル11に電流を流すタイミングを、図7と逆にすることにより可能である。すなわち、時刻0から時刻Aまでの間(振動基板4は延伸中)は、コイル11に電流を流さず、時刻Aから時刻Bまでの間(振動基板4は収縮中)に、コイル11に紙面上方向にN極が発生するように電流を流す。このようにすることで、移動子10を紙面右方向へ移動させことができる。
【0104】
尚、上記の左移動の例では、時刻Aから時刻Bまでの間は、コイル11に電流を流すのを止めている。これに代わり、移動子10に対して振動基板4側に磁気反発力が働くように(あるいは、磁気吸着力が減少するように)、コイル11に電流を流してもよい。このようにすることで、移動子10の紙面左方向への移動子10の移動が可能である。
【0105】
上述のように、コイル11に電流を流さない場合、移動子10と振動基板4との間の摩擦力は減少し、その結果、振動基板4が紙面右方向に移動しても、見かけ上、移動子10は移動した位置で静止した状態となる、とした。しかしながら、移動子10(第1のヨーク9)、コイル11、第2のヨーク12、永久磁石13のスペック(材質、重さ、長さ等)を適宜選択すれば、コイルに電流を流さない場合であっても、移動子10と振動基板4との間の摩擦力をある程度維持することができる。
【0106】
そこで、時刻0からAまでの間、コイル11に電流を流さないようにすると、圧電素子3の延伸とともに振動基板4を紙面左方向に移動させることができる。そして、時刻Aから時刻Bまでの間は、移動子10に対して振動基板4側に磁気反発力が働くように、コイル11に電流を流すようにする。このようにしても、移動子10を紙面左方向に移動させていくことができる。
【0107】
また、例えば、第1実施形態の変形例の慣性駆動アクチュエータ150を駆動する場合は、次のようになる。時刻0からAまでの間、コイル11に、紙面上方向にN極が発生するように電流を流す。すると、移動子10と振動基板4との間の摩擦は増加する。その結果、圧電素子3の延伸とともに振動基板4は紙面左方向に移動し、それとともに移動子10も紙面左方向に移動する。
【0108】
次に、時刻Aから時刻Bまでの間、コイル11に電流を流すのを止める。すると、移動子10と振動基板4との間の摩擦は減少する。その結果、圧電素子3の収縮とともに振動基板4が紙面右方向に移動しても、見かけ上、移動子10は移動した位置で静止した状態となる。このようにすることで、移動子10を紙面左方向へ移動させことができる。
【0109】
なお、上述のようにコイル11に電流を流すタイミングを変えることで、移動子10を紙面右方向へ移動させことができることはいうまでもない。また、コイル11に流す電流の向きを逆にしても移動子10を移動させることはできる。
【0110】
(第7実施形態)
次に、第7実施形態に係る慣性駆動アクチュエータ500について説明する。
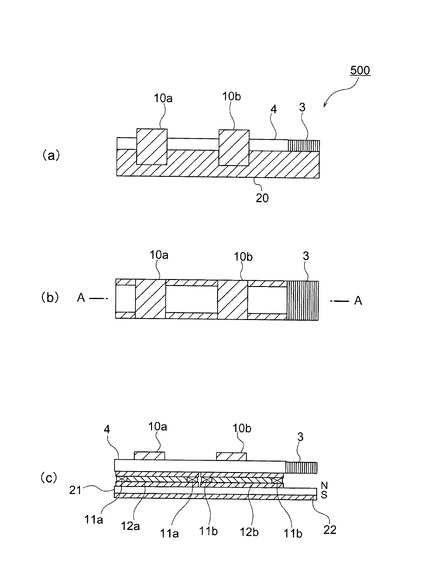
図8(a)は、慣性駆動アクチュエータ500の側面図、図8(b)は上面図、(c)は断面図である。また、図8(a)、(b)、(c)は、第5実施形態の慣性駆動アクチュエータ500を駆動するときの駆動方法を示している。
【0111】
第7実施形態の慣性駆動アクチュエータ500は、第1実施形態の慣性駆動アクチュエータ100における移動子10を2つ備えている。すなわち、第7実施形態の慣性駆動アクチュエータ500は、圧電素子3と、振動基板4と、移動子10aと、移動子10bと固定子20で構成されている。固定子20の上部に圧電素子3と振動基板4が位置し、振動基板4の上部に移動子10aと、移動子10bが位置する。
【0112】
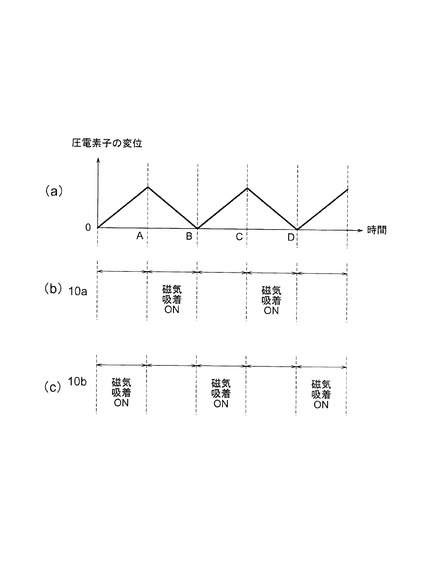
慣性駆動アクチュエータ500の駆動方法について説明する。図9(a)、(b)、(c)において、横軸は時間を示し、縦軸は圧電素子3の変位を示している。図8(a)、(b)、(c)において、圧電素子3が紙面左方向に伸びた場合を正としている。
【0113】
図8(c)の断面図に示すように、本実施形態においては、移動子10aが移動する範囲において、コイル11aを固定子20側に設けている。同様に、移動子10bが移動する範囲において、コイル11bを固定子20側に設けている。即ち各移動子に対応したコイルが必要となる。
移動子10aの吸引力を変化させるときはコイル11aを使用する。移動子10bの吸引力を変化させるときはコイル11bを使用する。
【0114】
時刻0から時刻Aまでの間、圧電素子3は延伸している。この間、移動子10aのコイル11aに電流を流さないでおく。この場合、移動子10aに対して磁気吸着力が働かなくなる。そのため、移動子10aは、その位置を変えずに静止したままである。一方、移動子10bのコイル11bに、紙面上方向にN極が発生するように電流を流す。この場合、図6で説明したように、移動子10bに対して振動基板4側に磁気吸着力が働く。そのため、移動子10bは紙面左方向に移動する。
【0115】
次に、時刻Aから時刻Bまでの間、圧電素子3は収縮している。この間、移動子10aのコイル11aに、紙面上方向にN極が発生するように電流を流す。この場合、図1(c)で説明したように、移動子10aに対して振動基板4側に磁気吸着力が働く。そのため、移動子10aは紙面右方向に移動する。一方、移動子10bのコイル11bに電流を流さないでおく。この場合、移動子10bに対して磁気吸着力が働かなくなる。そのため、移動子10bは、その位置を変えずに静止したままである。
【0116】
以上のように、時刻0から時刻Aの間、移動子10aは静止し、移動子10bは紙面左方向、すなわち移動子10aに向かって移動する。一方、時刻Aから時刻Bまでの間、移動子10aは紙面右方向、すなわち移動子10bに向かって移動し、移動子10bは静止している。その結果、移動子10aと移動子10bを近づけることができる。また、時刻0から時刻Bまでの間の駆動方法を繰り返すことで、移動子10aと移動子10bを更に近づけることができる。また、駆動方法を変えれば、移動子10aと移動子10bを同一方向に移動させることや、移動子10aと移動子10bを離すようにすることもできる。
【0117】
なお、図8および図9では、説明のために2個の移動子の構成とその駆動方法を例示したが、原理的には2個以上の移動子においても、同一の振動基板上で、それぞれを独立に駆動することが可能である。
【0118】
また、本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0119】
なお、本発明は、その趣旨を逸脱しない範囲で様々な変形例をとることができる。
【産業上の利用可能性】
【0120】
以上のように、本発明は、長期に亘って、安定した動作、例えば、移動子を所望の位置に移動させることや、所望の位置で移動子を静止させることや、静止した状態を維持することができる慣性駆動アクチュエータに適している。
【符号の説明】
【0121】
3 圧電素子
4、40 振動基板
9 ヨーク
10、10a、10b 移動子
11、11a、11b コイル
12、12a、12b 第1のヨーク
20 固定子
21 永久磁石
22 ヨーク
40 振動基板
41 非磁性部
42 磁性部
100、120、140、200、300、400、500 慣性駆動アクチュエータ
101 支持部材
102 圧電素子
103 振動部材
104 移動体
105 板ばね
【技術分野】
【0001】
本発明は、移動子を所定方向に移動させる慣性駆動アクチュエータに関するものである。
【背景技術】
【0002】
駆動軸に結合された電気機械変換素子に鋸歯状波駆動パルスを供給して駆動軸を軸方向に変位させ、この駆動軸に摩擦結合させた移動部材を軸方向に移動させるアクチュエータが知られている(以下、このようなアクチュエータを「インパクト駆動アクチュエータ」或いは「慣性駆動アクチュエータ」と称する)。
【0003】
このようなインパクト駆動アクチュエータが、特許文献1に開示されている。図10(a)は、その構成を示す図である。振動部材103は支持部材101の立ち上がり部にあけられた穴に挿入され、振動部材103の軸方向に移動可能に配置されている。振動部材103の一端は圧電素子102の一端と固定され、圧電素子102の他端は支持部材101に固定されている。
このため、圧電素子102の振動に伴い振動部材103が軸方向に振動する。移動体104にも2つの穴が設けられており、振動部材103がその穴に挿入されている。更に移動体104には下方から板ばね105が取り付けられており、板ばね105に設けられている突起部が振動部材103に押付けられている。このように板ばね105による押圧によって、移動体104と振動部材103は互いに摩擦結合されている。
【0004】
図10(b)、(c)に、インパクト駆動アクチュエータを駆動するための駆動波形を示す。図10(b)は移動体104を右に移動させるための駆動波形で、図10(c)は移動体104を左に移動させるための駆動波形である。これらの駆動波形を用いて、インパクト駆動アクチュエータの動作原理を説明する。なお、以下の説明では、圧電素子102が伸びる方向を左、縮む方向を右とする。
【0005】
移動体104を右に動かす場合には、図10(b)に示す駆動波形を用いる。駆動波形は、急峻に立ち上がる部分と緩やかに立ち下がる部分を有している。駆動波形が急峻に立ち上がる部分では、圧電素子102が急激に伸びる。ここで、振動部材103は圧電素子102に固定されているため、振動部材103は、圧電素子102の急激な伸びに応じて急速に左に移動する。このとき、移動体104の慣性は振動部材103との間の摩擦結合力(板ばね105で押圧されている移動体104と振動部材103との間の摩擦力)に打ち勝つことから、移動体104は左には移動せず、その位置にとどまる。
【0006】
次に、駆動波形が緩やかに立ち下がる部分では、圧電素子102が緩やかに縮む。振動部材103は、圧電素子102の緩やかな縮みに応じてゆっくりと右に移動する。この場合、移動体104の慣性は振動部材103との間の摩擦結合力に打ち勝つことができない。そのため、移動体104は振動部材103の移動と共に右に移動する。
【0007】
一方、移動体104を左に動かす場合には、図10(c)に示す駆動波形を用いる。駆動波形は、緩やかに立ち上がる部分と急峻に立ち下がる部分を有している。駆動波形が緩やかに立ち上がる部分では、圧電素子102が緩やかに伸びる。この場合、振動部材103は、圧電素子102の緩やかな伸びに応じてゆっくりと左に移動する。この場合、移動体104の慣性は振動部材103との間の摩擦結合力に打ち勝つことができない。そのため、移動体104は振動部材103の移動と共に左に移動する。
【0008】
次に、駆動波形が急峻に立ち上がる部分では、図10(b)で説明したように、移動体104の慣性は振動部材103との間の摩擦結合力に打ち勝つことから、移動体104は右には移動せず、その位置にとどまる。
【0009】
なお、板ばね105が常に振動部材103に押し付けられていることにより、移動体104は振動部材103に摩擦で支持されている。よって、移動体104が停止している際にも、その位置は保持されている。
【0010】
上記のように、インパクト駆動アクチュエータは、板ばね105による移動体104と振動部材103との摩擦結合と慣性を利用したアクチュエータであって、図10(b)、(c)に示す駆動波形を用いることで、移動体104を移動させることができるアクチュエータである。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−288828号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
特許文献1に記載されているインパクト駆動アクチュエータは、板ばねにより振動部材103と移動体104に摩擦力を与えている。しかしながら、板ばねは常に振動部材と接触しているため、摩耗などの影響で所望の摩擦力が得られなくなる。そのため、特許文献1に記載されているインパクト駆動アクチュエータは、長期に亘って、安定した動作ができなくなるおそれがある。
【0013】
本発明は、上記実情に鑑みなされたもので、磨耗等の影響が少なく、効率よく移動体を移動あるいは駆動でき、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動を行うことができる慣性駆動アクチュエータを提供することを目的とする。
【課題を解決するための手段】
【0014】
上述した課題を解決し、目的を達成するために、本発明の慣性駆動アクチュエータは、
第1の方向と第1の方向とは逆の第2の方向に微小変位を発生する変位手段と、
変位手段の微小変位によって往復運動する振動基板と、
磁界を発生する第1の磁界発生手段と、
振動基板の平面上に配置され、第1の磁界発生手段が発生するN極とS極の磁束を所定の位置に集中させる第1のヨークを有する移動子と、
振動基板の移動子に対向した向きと反対側に第2のヨークと、を有し、
振動基板よりも外側で第1のヨークと、第2のヨークの端部が対向することで、移動子の駆動方向に垂直な方向の動きを機械的に規制し、
第1の磁界発生手段から発生する磁界を制御することによって、移動子と振動基板の間に働く摩擦力を制御し、移動子を駆動することを特徴とする。
【0015】
また、本発明の好ましい態様によれば、第1の磁界発生手段から発生する磁界とは別に、移動子が振動基板に対向した方向に磁気吸引力または磁気反発力が働くように磁界を発生する第2の磁界発生手段をさらに有することが望ましい。
【0016】
また、本発明の好ましい態様によれば、第1の磁界発生手段が電磁コイルであることが望ましい。
【0017】
また、本発明の好ましい態様によれば、第2の磁界発生手段が永久磁石であることが望ましい。
【0018】
また、本発明の好ましい態様によれば、変位手段が圧電素子であることが望ましい。
【0019】
また、本発明の好ましい態様によれば、振動基板が非磁性体であることが望ましい。
【0020】
また、本発明の好ましい態様によれば、振動基板が非磁性部と磁性部を有することが望ましい。
【0021】
また、本発明の好ましい態様によれば、振動基板は、少なくとも一部が第1の磁界発生手段を有することが望ましい。
【0022】
また、本発明の好ましい態様によれば、振動基板は、少なくとも一部が第2の磁界発生手段を有することが望ましい。
【0023】
また、本発明の好ましい態様によれば、振動基板は、第2のヨークの機能を兼用することが望ましい。
【0024】
また、本発明の好ましい態様によれば、移動子が永久磁石を有することが望ましい。
【発明の効果】
【0025】
本発明によれば、磁気力を用いることで摩耗等の影響を少なくすることができ、さらにヨークを用いることから効率よく移動体(移動子)を移動あるいは駆動でき、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動を行うことができる慣性駆動アクチュエータを提供することができる。
【図面の簡単な説明】
【0026】
【図1】第1実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は上面図、(b)は側面図、(c)は断面図である。(d)は変形例の断面図である。
【図2】(a)は第2実施形態の慣性駆動アクチュエータの断面図、(b)は第3実施形態の慣性駆動アクチュエータの断面図である。
【図3】第4実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は側面図、(b)は断面図である。
【図4】第5実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は側面図、(b)は断面図である。
【図5】第6実施形態の慣性駆動アクチュエータの構造を示す図であって、(a)は側面図、(b)は断面図である。
【図6】(a)、(b)、(c)は、それぞれ振動子との連結構成例を示す図である。
【図7】第1実施形態の慣性駆動アクチュエータ100を駆動するときの駆動方法を示す図である。
【図8】第7実施形態の慣性駆動アクチュエータの(a)は側面図、(b)は上面図、(c)は断面図である。
【図9】第7実施形態の慣性駆動アクチュエータを駆動するときの駆動方法を示す図である。
【図10】従来のインパクト駆動アクチュエータを示す図であって、(a)構成を示す図、(b)移動体を右に移動させるための駆動波形を示す図、(c)移動体を左に移動させるための駆動波形を示す図である。
【発明を実施するための形態】
【0027】
本実施形態の慣性駆動アクチュエータの構成による作用効果を説明する。なお、この実施形態によって本発明は限定されるものではない。すなわち、実施形態の説明に当たって、例示のために特定の詳細な内容が多く含まれるが、これらの詳細な内容に色々なバリエーションや変更を加えても、本発明の範囲を超えない。従って、以下で説明する本発明の例示的な実施形態は、権利請求された発明に対して、一般性を失わせることなく、また、何ら限定をすることもなく、述べられたものである。
【0028】
(第1実施形態)
第1実施形態に係る慣性駆動アクチュエータを図1に示す。図1(a)は慣性駆動アクチュエータの上面図、図1(b)は側面図、図1(c)は図1(a)におけるA−Aで示す位置における断面図である。
【0029】
第1実施形態の慣性駆動アクチュエータ100は、圧電素子(変位手段)3と、振動基板4と、移動子10と固定子20で構成されている。固定子20の上部に圧電素子3と振動基板4が位置し、振動基板4の上部に移動子10が位置する。移動子10は、第1のヨーク9の機能を有している。
【0030】
圧電素子3と振動基板4は、共に板状の部材である。ここで、振動基板4には非磁性体の材料が用いられている。圧電素子3の一端と振動基板4の一端は機械的に連結されている。なお、機械的に連結する構成に限られず、接着でも良い。圧電素子3と振動基板4は、固定子20の上部に載置される。圧電素子3は微小変位を発生させ、振動基板4は微小変位によって往復運動する。
【0031】
上記構成により、圧電素子3(変位手段)は、第1の方向と第1の方向とは逆の第2の方向に微小変位を発生する。圧電素子3の微小変位によって、振動基板4は往復運動する。移動子10は、振動基板4の平面上に配置されている。
移動子10は、振動基板4の平面上に配置され、コイル11(第1の磁界発生手段)が発生するN極とS極の磁束を所定の位置に集中させる第1のヨーク9の機能を有する。
【0032】
図1(c)に示す断面図において、振動基板4の移動子10に対向した向きに、固定子20側に磁気吸引力又は磁気反発力が働くように磁界を発生するコイル11(第1の磁界発生手段)が設けられている。コイル11は、例えばコイル芯を巻いた電磁コイルである。
また、コイル11の周囲には、コイル11が発生する磁束がN極、S極ともに集中するように、コイル11が発生する磁束を誘導する第2のヨーク12、22(磁束誘導部材)が形成されている。ここで、コイル11を巻きつけるための部材は、第2のヨーク12の機能を兼用している。
【0033】
第2のヨーク12、22は、コイル11が発生する磁束が、固定子20側の面(所定の位置)にN極、S極、ともに集中するように、コイル11から発生する磁界を制御することによって、移動子10と振動基板4の間に働く摩擦力を制御し、移動子10を駆動する。
【0034】
ここで、振動基板4よりも外側において、第1のヨーク9、すなわち移動子10と、第2のヨーク22の端部が対向する。これにより、移動子10の駆動方向に垂直な方向の動きを機械的に規制することができる。
【0035】
このような構成によれば、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0036】
コイル11(第1の磁界発生手段)とは別に、移動子10が振動基板4に対向した方向に磁気吸引力または磁気反発力が働くように磁界を発生する永久磁石21(第2の磁界発生手段)をさらに設ける構成とすることができる。
【0037】
第2のヨーク22は、コイル11(第1の磁界発生手段)とともに永久磁石21(第2の磁界発生手段)が発生する磁束も、固定子20側の面(所定の位置)にN極、S極、ともに集中するように、永久磁石21(第2の磁界発生手段)が発生する磁束を誘導するために、永久磁石21(第2の磁界発生手段)に対して配置されている。
そして、コイル11(第1の磁界発生手段)と永久磁石21(第2の磁界発生手段)のうち少なくとも1つの発生手段から発生する磁界を制御することによって、移動子10と振動基板4の間に働く摩擦力を制御し、移動子10を駆動する。
【0038】
さらに、具体的に説明する。図1(c)に示すように、固定子20は、コイル11、第2のヨーク(磁束誘導部材)12、22と、さらに、永久磁石21(第2の磁界発生手段)で構成されている。永久磁石21は直方体の部材で、一方の面側(上側面)がN極、他方の面側(下側面)がS極となっている。また、本実施例では、コイル11は、その長手方向の長さが、永久磁石21の長手方向の長さとほぼ同じである。第2のヨーク22は箱状の部材である。永久磁石21は、第2のヨーク22の底面部に固定されている。これにより、磁束の外部への漏れ防止の効果を奏することができる。
【0039】
なお、コイル11は永久磁石21(あるいは第2のヨーク22)に対して常時固定されている。そのため、コイル11は移動子10の移動に伴って移動することはない。したがって、コイル11へ接続されている配線が動くことがない。
【0040】
このように、永久磁石21を設けることにより、コイル11に電流を流していないときも移動子10に常に保持力が作用する。このため、慣性駆動アクチュエータの系全体が傾いても安定した駆動ができる。
【0041】
(第1実施形態の変形例)
また、図1(c)に示した構成に対して、図1(d)に示すような断面構成とすることもできる。図1(d)に示す慣性駆動アクチュエータ150は、永久磁石21を有していない。このため、簡易な構成となり、移動子10は、振動基板4に対して、重力により載置される状態となる。
【0042】
次に、慣性駆動アクチュエータ100の動作について説明する。なお、駆動原理(駆動方法)については図7で説明する。
【0043】
上記のような構成において、例えば、紙面上方向にN極が発生するように、コイル11に電流を流す。すると、第2のヨーク12の中央上部P1にはN極が集中し、中央下部P2にはS極が集中する。
ここで、コイル11の両側には第2のヨーク22が配置されている。そのため、コイル11で発生した磁束の外部への漏れを、第2のヨーク22によって抑えることができる。
第2のヨーク22の中央下部P3にはN極が集中する。第2のヨーク22の2つの上端部P4にはS極が集中する。
それに対向し、移動子10では、第1のヨーク9の中央部P5には逆極性であるS極が誘起される。また、移動子10の2つの両端部P6にはN極が集中する。
その結果、移動子10に対して紙面下側に向かって、強い磁気吸着力が発生する。
【0044】
ここで、コイル11と、永久磁石21は、第1のヨーク9と第2のヨーク22で囲まれている状態になる。そのため、コイル11と永久磁石21で発生した磁束の外部への漏れを、第1のヨーク9と第2のヨーク22によって抑えることができる。
【0045】
一方、上述した磁束の関係とは反対に、第2のヨーク12の中央上部P1にS極が集中するように、コイル11に電流を流した場合は、磁気吸着力が減少する。また、コイル11に流す電流を変えることによって、移動子10の振動基板4に対する垂直抗力の強さを変えることができる。このようにすることで、移動子10と振動基板4の摩擦力を制御することが可能となる。
【0046】
以上述べたように、本実施形態の慣性駆動アクチュエータ100では、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、本実施形態の慣性駆動アクチュエータ100は、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10の移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。
更に、本実施形態の慣性駆動アクチュエータ100では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0047】
このように、本実施形態の慣性駆動アクチュエータ100では、移動子10と固定子20の各々で磁束の外部への漏れを抑制し、これによりS極やN極を所定の領域に集中させることができる。よって、移動子10と固定子20の間に、紙面下側に向かって効率的に磁気吸着力を発生させることができる。
【0048】
以上述べたように、本実施形態の慣性駆動アクチュエータ100では、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、本実施形態の慣性駆動アクチュエータ100は、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10の移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。更に、本実施形態の慣性駆動アクチュエータ100では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができる。このため、簡単かつ低コストな構成でありながら、移動子10を効率良く移動あるいは駆動できる。
【0049】
また、固定子20の両端は、固定部材B(不図示)に固定されている。なお、固定子20を固定部材Bに固定するにあたっては、永久磁石21と第2のヨーク22を、別々に固定部材Bに対して固定しても良い。あるいは、永久磁石21と第2のヨーク22を先に固定(連結)しておき、少なくともどちらか一方を固定部材Bに対して固定しても良い。また、固定部材Bとして固定部材Aを利用して良いし、固定部材Bと固定部材Aは別々であっても良い。なお、固定部材Aは、例えば、圧電素子3の一端に設けられた部材である。
【0050】
また、図1(c)に示すように、振動基板4の長手方向と直交する方向(図1(c)の紙面左右方向)では、振動基板4よりも外側に、第2のヨーク22の側面端部が位置している。そして、第1のヨーク9の端部は、第2のヨーク22と近接している。そのため、振動基板4の長手方向と直交する方向(図1(c)の紙面左右方向)については、移動子10の動きが規制されることになる。
【0051】
このように、本実施形態の慣性駆動アクチュエータ100では、第1のヨーク9、第2のヨーク12、22は、磁束漏れを抑制する機能を持つだけでなく、移動子10の所定の方向に対する動きを規制するガイド機能も兼ねる。そのため、より部品数の削減、省サイズ化が可能となる。尚、本実施形態では、第2のヨーク22と振動基板4によって振動子10の動きを規制しているが、図示を省略した固定部材と第2のヨーク22を使って、振動子10の動きを規制することも当然可能である。
【0052】
さらに加えて、上述したように、移動子10に配線が存在しないため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0053】
(変形例)
また、図1(c)に示した構成に対して、図1(d)に示すような断面構成とすることもできる。図1(d)に示す慣性駆動アクチュエータ150は、永久磁石21を有していない点が上述の第1実施形態と異なる。このため、移動子10は、振動基板4に対して、重力により載置される状態となる。
【0054】
(第2実施形態)
次に、第2実施形態に係る慣性駆動アクチュエータ140について説明する。
図2(a)は、慣性駆動アクチュエータ140の断面図である。第1実施形態の慣性駆動アクチュエータ100と同じ構成については同一の番号を付し、重複する説明は省略する。
【0055】
第2実施形態の慣性駆動アクチュエータ140は、圧電素子3と、移動子10と、振動基板4と固定子20で構成されている。振動基板4の上部に振動基板4の上部に移動子10が位置する。そして、圧電素子3の一端と振動基板4の一端は機械的に連結されている。
【0056】
本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0057】
さらに、第1実施形態の慣性駆動アクチュエータ100との相違点は、次のとおりである。第1のヨーク9については、振動基板4を覆う形状を有し、第1のヨーク9の側面部分の先端は、コイル11の半ばまで形成されている。
また、第2のヨーク22については、底部に配置されている永久磁石21を覆う形状を有している。第2のヨーク22の側面部分は、矩形形状の永久磁石21の上端部まで形成されている。
【0058】
上記のような相違点はあるものの、コイル11と永久磁石21は、第1のヨーク9と第2のヨーク22とによって覆われている。また、第1のヨーク9と第2のヨーク22は、各々の端部が近接するように配置されている。これらの点では、第1実施形態の慣性駆動アクチュエータ100と同じである。
【0059】
よって、第1実施形態と同様に、本実施形態の慣性駆動アクチュエータ140では、移動子10を移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。
【0060】
更に、本実施形態の慣性駆動アクチュエータ140では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0061】
上述したように、本実施形態の慣性駆動アクチュエータ140では、第1のヨーク9の側面が、振動基板4の両端外側に位置している。そのため、振動基板4の長手方向と直交する方向について、移動子10の動きが規制されることになる。
【0062】
また、第1実施形態の構成においては、移動子10の横方向の端部における吸着力は横方向に働いてしまう。これに対して、第2実施形態の構成においては、第1実施形態の構成に比較して、移動子10の端部に働く吸着力が全て紙面下方向に働いている。これより、第2実施形態の構成のほうが、より一層吸着力を効率的に利用できる。
【0063】
(第3実施形態)
次に、第3実施形態に係る慣性駆動アクチュエータ160について説明する。
図2(b)は慣性駆動アクチュエータ160の断面図である。第1実施形態の慣性駆動アクチュエータ100と同じ構成については同一の番号を付し、重複する説明は省略する。
【0064】
第3実施形態の慣性駆動アクチュエータ160は、圧電素子3と、移動子10と、振動基板4と固定子20で構成されている。振動基板4の上部に振動基板4の上部に移動子10が位置する。そして、圧電素子3の一端と振動基板4の一端は機械的に連結されている。
【0065】
本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0066】
さらに、第1実施形態の慣性駆動アクチュエータ100との相違点は、次のとおりである。第1のヨーク9については、振動基板4、コイル11、永久磁石21を覆う形状を有している。
また、第2のヨーク22については、永久磁石21の底部に設けられている板状部材である。
【0067】
上述したように、振動基板4とコイル11と永久磁石21は、第1のヨーク9と第2のヨーク22によって覆われている。また、第1のヨーク9と第2のヨーク22は、各々の端部が近接するように配置されている。これらの点では、第1実施形態の慣性駆動アクチュエータ100と同じである。
【0068】
よって、第1実施形態と同様に、本実施形態の慣性駆動アクチュエータ160では、移動子10を移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。
更に、本実施形態の慣性駆動アクチュエータ160では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0069】
また、本実施形態の慣性駆動アクチュエータ160では、第1のヨーク9の側面が、振動基板4の外側に、近接して位置している。さらに、第1のヨーク9の側面は、コイル11とも近接している。そのため、振動基板4の長手方向と直交する方向について、移動子10の動きが規制されることになる。
【0070】
なお、コイル11と第1のヨーク9が接触してもコイル11が破損しないように、コイル11に保護部材または保護膜を設けておくのが望ましい。また、コイル11を小さくし、その代わりにコイル11を巻きつけている部材の先端(振動基板4と接触している部分)の大きさを振動基板4と略同じ大きさにしても良い。このようにすることで、振動基板4の長手方向と直交する方向について、移動子10の動きを規制することができる。
【0071】
(第4実施形態)
第4実施形態の慣性駆動アクチュエータを図3(a)、(b)に示す。図3(a)は慣性駆動アクチュエータ200の側面図、図3(b)は図3(a)におけるA−Aで示す位置における断面図である。
本実施形態の基本的な構成は、上述した第2実施形態(図2(a))と同じである。第2実施形態の慣性駆動アクチュエータと同じ構成については同一の番号を付し、重複する説明は省略する。
【0072】
第4実施形態の慣性駆動アクチュエータ200では、振動基板40の構成が、第2実施形態の慣性駆動アクチュエータ100と異なる。よって、振動基板40について説明をする。
【0073】
第4実施形態の慣性駆動アクチュエータ200では、振動基板40は、非磁性部41と磁性部42を有する。磁性部42はヨーク部であって、この磁性部42の両側に非磁性部41が位置している。なお、磁性部42を取り囲むように非磁性部41を設け、磁性部42が振動基板40の内部に位置するようにしても良い。
【0074】
このような構成をとることにより、第4実施形態の慣性駆動アクチュエータ200では、第1のヨーク9の中央部とコイル11との間を磁束が流れる際に、磁束漏れをより抑制することができる。その結果、効率良く磁気吸着力、もしくは反発力を移動子10に作用させることが可能となる。
【0075】
また、本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0076】
(第5実施形態)
第5実施形態の慣性駆動アクチュエータを図4に(a)、(b)に示す。図4(a)は慣性駆動アクチュエータ300の側面図、図4(b)は図4(a)におけるA−Aで示す位置における断面図である。第1実施形態の慣性駆動アクチュエータと同じ構成については同一の番号を付し、その説明は省略する。なお、配線の図示は省略している。
【0077】
第5実施形態の慣性駆動アクチュエータ300は、圧電素子3と、振動基板4と、移動子10と固定子20で構成されている。固定子20の上部に圧電素子3と振動基板4が位置し、振動基板4の上部に移動子10が位置する。
【0078】
移動子10は、第1のヨーク12bと永久磁石13とを有している。永久磁石13は、N極が第1のヨーク12b側に位置するように配置されている。第1のヨーク12bは、側面が永久磁石13と、振動基板4とコイル11の一部を覆うように形成されている。
【0079】
一方、固定子20は、コイル11、第2のヨーク12、22を有している。本実施形態は、第1実施形態に比較して、永久磁石21(第2の磁界発生手段)が移動子10側に設けられている点が異なる。
【0080】
上記のような構成において、例えば、紙面上方向にN極、下方向にS極が発生するように、コイル11に電流を流す。すると、第2のヨーク22には、逆極性が誘起される。このため、第2のヨーク22の中央下部にはN極が集中し、第2のヨーク22の両端上部にはS極が集中する。
【0081】
永久磁石13は、上部にN極、下部にS極となるように配置されている。移動子10では、第1のヨーク12bには逆極性が誘起される。すなわち、第1のヨーク12bの中央部にはS極が誘起され、両端部にはN極が誘起される。その結果、移動子10に対して紙面下側に向かって、コイル11に電流を流さないときと比べて強い磁気吸着力が発生する。
【0082】
一方、紙面上方向にS極が集中するように、コイル11に電流を流した場合は、コイル11に電流を流さないときと比べて弱い磁気吸着力が発生する。また、コイル11に流す電流を変えることによって、移動子10の振動基板4に対する垂直抗力の強さを変えることができる。このようにすることで、移動子10と振動基板4の摩擦力を制御することが可能となる。
【0083】
以上述べたように、本実施形態の慣性駆動アクチュエータ300では、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、本実施形態の慣性駆動アクチュエータ300は、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10の移動あるいは駆動させても磨耗が生じない。
【0084】
その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。更に、本実施形態の慣性駆動アクチュエータ300では、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができるため、移動子10を効率よく移動あるいは駆動できる。
【0085】
さらに、本実施形態の慣性駆動アクチュエータ300では、第1のヨーク12bの両端は、振動基板4の両端を囲うようにして第2のヨーク22に向かって伸びている。そのため、第1のヨーク12bの両端と振動基板4によって、図4(b)の紙面左右方向について、移動子10の動きが規制される。なお、本実施形態の慣性駆動アクチュエータ300では、第1のヨーク12bの両端がコイル11の近傍に位置している。そこで、振動基板4の代わりにコイル11を使って、移動子10の動きを規制することも可能である。なお、その際、移動子10と接触しても破損しないように、コイル11には十分な保護対策がなされている。
【0086】
このように、本実施形態の慣性駆動アクチュエータ300では、第1のヨーク12aは磁束漏れを抑制する機能を持つだけでなく、移動子10の所定の方向に対する動きを規制するガイド機能も兼ねる(第1のヨーク12bが複数の役割を担っている)。
【0087】
また、本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0088】
(第6実施形態)
次に、第6実施形態に係る慣性駆動アクチュエータ400について説明する。
図5(a)は慣性駆動アクチュエータ400の側面図、図5(b)は図5(a)におけるA−Aで示す位置における断面図である。第1実施形態の慣性駆動アクチュエータ100と同じ構成については同一の番号を付し、その説明は省略する。
【0089】
第6実施形態の慣性駆動アクチュエータ400は、圧電素子3と、移動子10と、振動基板40で構成されている。振動基板40の上部に移動子10が位置する。そして、圧電素子3の一端と振動基板40の一端は機械的に連結されている。
なお、圧電素子3と、振動基板40とを連結する構成例の詳細に関しては、後述する。
【0090】
移動子10は、第1のヨーク9の機能を有している。なお、移動子10の構造は第2実施形態の移動子10(図2(a))と同じなので、説明を省略する。本実施形態の移動子10も、第1実施形態の移動子10と同様の役割をする。
ただし、本実施形態においては、第2実施形態の振動基板4を有していない点が上述した第2実施形態と異なる。代わりに、振動基板40は、コイル11、永久磁石21と第2のヨーク12、22で構成されている。振動基板40は、第2実施形態の固定子20と同様の役割をし、振動基板4の役割も果たす。
【0091】
本実施形態においても、コイル11が振動基板(固定子)20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0092】
このように、本実施形態の慣性駆動アクチュエータ400は、第1実施形態の慣性駆動アクチュエータ100と同じ作用を行う部材を備えているので、第1実施形態の慣性駆動アクチュエータ100と同様の効果を奏する。
【0093】
次に、圧電素子3と、振動基板40とを連結する構成例を説明する。図6(a)、6(b)、6(c)は、圧電素子3と、振動基板40とを連結する3つの異なる構成を示している。
【0094】
図6(a)は、コイル11のみが圧電素子3と連結し振動する構成である。つまり、振動基板40は、少なくとも一部がコイル11(第1の磁界発生手段)を有する構成である。これによれば、振動基板40がコイル11であるため、簡易な構成とすることができる。
【0095】
図6(b)は、コイル11と永久磁石21とが圧電素子3と連結し振動する構成である。ここで、圧電素子3と永久磁石21のみが連結して振動する構成でもよい。これにより、移動子10を常に一定の磁気吸引力で保持することができる。
【0096】
図6(c)は、コイル11と永久磁石21とヨーク22とが圧電素子3と連結し振動する構成である。これにより、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができる。また、部品点数を低減できる。このため、簡単かつ低コストな構成でありながら、移動子10を効率よく移動あるいは駆動できる。
図6(c)の構成のさらなる効果として、振動する際に上述の図6(a)、図6(b)の構成と比べて、振動方向に対して垂直に働く磁石の吸着力がないため、圧電素子3は小さい力でコイル11と永久磁石21とヨーク22を振動させることが出来る。
【0097】
ここで、圧電素子3とヨーク22のみと連結する構成、または圧電素子3とヨーク22とコイル22のみとを接続する構成、または圧電素子3とヨーク22と磁石21のみが連結し振動する構成でもよい。
【0098】
図6(a)〜(c)に示した構成例において、振動基板40の上面側に移動子10を載置することで、移動子10を移動させることができる。これらの構成例においても、移動子10の移動あるいは駆動に磁気力を用いている。すなわち、これらの構成例の慣性駆動アクチュエータは、駆動したときに磨耗が生じる弾性体のような部材を使っていない。そのため、移動子10を移動あるいは駆動させても磨耗が生じない。その結果、長期間にわたって、安定して移動子10を移動あるいは駆動する(所望の位置に移動させることや、所望の位置で保持する)ことができる。更に、これらの構成例の慣性駆動アクチュエータでは、ヨークを用いていることから、外部への磁束漏れを抑制できる。これにより、磁気吸着力や磁気反発力を効率よく発生させることができる。このため、簡単かつ低コストな構成でありながら、移動子10を効率よく移動あるいは駆動できる。
【0099】
さらに加えて、上述したように、移動子10に配線が存在しないため、配線の耐久性が向上し、断線することが抑制され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0100】
次に、上述した慣性駆動アクチュエータ100の駆動方法を説明する。
図7は、例えば、第1実施形態の慣性駆動アクチュエータ100を駆動するときの駆動方法を示している。図7において、横軸は時間を示し、縦軸は圧電素子3の変位を示している。図1(b)において、圧電素子3が紙面左方向に伸びた場合を正としている。
【0101】
時刻0からAまでの間、圧電素子3は延伸している。この間は、コイル11に、紙面上方向にN極が発生するように電流を流す。すると、移動子10に対して振動基板4側に働く磁気吸着力が増加する。そのため、移動子10と振動基板4との間の摩擦は増加する。その結果、圧電素子3の延伸とともに振動基板4は紙面左方向に移動し、それとともに移動子10も紙面左方向に移動する。
【0102】
次に、時刻Aから時刻Bまでの間、圧電素子3は収縮している。この間、コイル11に電流を流すのを止める。すると、移動子10に対してコイル11により発生する磁気吸着力が働かなくなる。そのため、移動子10と振動基板4との間の摩擦力は減少する。これは、振動基板4の動きに対して移動子10のすべる量が増加したことを意味する。その結果、圧電素子3の収縮とともに振動基板4が紙面右方向に移動しても、見かけ上、移動子10は移動した位置で静止した状態となる。このように、圧電素子3の収縮とともに、紙面右方向に移動する振動基板4に対して移動子10は左方向に滑るため、時刻0から時刻Bまでの間で、移動子10は紙面左方向に移動することとなる。同様のことを、時刻Bから時刻C、時刻Cから時刻Dというように繰り返すことにより、移動子10を紙面左方向に移動させていくことができる。
【0103】
なお、移動子10を紙面右方向への移動は、コイル11に電流を流すタイミングを、図7と逆にすることにより可能である。すなわち、時刻0から時刻Aまでの間(振動基板4は延伸中)は、コイル11に電流を流さず、時刻Aから時刻Bまでの間(振動基板4は収縮中)に、コイル11に紙面上方向にN極が発生するように電流を流す。このようにすることで、移動子10を紙面右方向へ移動させことができる。
【0104】
尚、上記の左移動の例では、時刻Aから時刻Bまでの間は、コイル11に電流を流すのを止めている。これに代わり、移動子10に対して振動基板4側に磁気反発力が働くように(あるいは、磁気吸着力が減少するように)、コイル11に電流を流してもよい。このようにすることで、移動子10の紙面左方向への移動子10の移動が可能である。
【0105】
上述のように、コイル11に電流を流さない場合、移動子10と振動基板4との間の摩擦力は減少し、その結果、振動基板4が紙面右方向に移動しても、見かけ上、移動子10は移動した位置で静止した状態となる、とした。しかしながら、移動子10(第1のヨーク9)、コイル11、第2のヨーク12、永久磁石13のスペック(材質、重さ、長さ等)を適宜選択すれば、コイルに電流を流さない場合であっても、移動子10と振動基板4との間の摩擦力をある程度維持することができる。
【0106】
そこで、時刻0からAまでの間、コイル11に電流を流さないようにすると、圧電素子3の延伸とともに振動基板4を紙面左方向に移動させることができる。そして、時刻Aから時刻Bまでの間は、移動子10に対して振動基板4側に磁気反発力が働くように、コイル11に電流を流すようにする。このようにしても、移動子10を紙面左方向に移動させていくことができる。
【0107】
また、例えば、第1実施形態の変形例の慣性駆動アクチュエータ150を駆動する場合は、次のようになる。時刻0からAまでの間、コイル11に、紙面上方向にN極が発生するように電流を流す。すると、移動子10と振動基板4との間の摩擦は増加する。その結果、圧電素子3の延伸とともに振動基板4は紙面左方向に移動し、それとともに移動子10も紙面左方向に移動する。
【0108】
次に、時刻Aから時刻Bまでの間、コイル11に電流を流すのを止める。すると、移動子10と振動基板4との間の摩擦は減少する。その結果、圧電素子3の収縮とともに振動基板4が紙面右方向に移動しても、見かけ上、移動子10は移動した位置で静止した状態となる。このようにすることで、移動子10を紙面左方向へ移動させことができる。
【0109】
なお、上述のようにコイル11に電流を流すタイミングを変えることで、移動子10を紙面右方向へ移動させことができることはいうまでもない。また、コイル11に流す電流の向きを逆にしても移動子10を移動させることはできる。
【0110】
(第7実施形態)
次に、第7実施形態に係る慣性駆動アクチュエータ500について説明する。
図8(a)は、慣性駆動アクチュエータ500の側面図、図8(b)は上面図、(c)は断面図である。また、図8(a)、(b)、(c)は、第5実施形態の慣性駆動アクチュエータ500を駆動するときの駆動方法を示している。
【0111】
第7実施形態の慣性駆動アクチュエータ500は、第1実施形態の慣性駆動アクチュエータ100における移動子10を2つ備えている。すなわち、第7実施形態の慣性駆動アクチュエータ500は、圧電素子3と、振動基板4と、移動子10aと、移動子10bと固定子20で構成されている。固定子20の上部に圧電素子3と振動基板4が位置し、振動基板4の上部に移動子10aと、移動子10bが位置する。
【0112】
慣性駆動アクチュエータ500の駆動方法について説明する。図9(a)、(b)、(c)において、横軸は時間を示し、縦軸は圧電素子3の変位を示している。図8(a)、(b)、(c)において、圧電素子3が紙面左方向に伸びた場合を正としている。
【0113】
図8(c)の断面図に示すように、本実施形態においては、移動子10aが移動する範囲において、コイル11aを固定子20側に設けている。同様に、移動子10bが移動する範囲において、コイル11bを固定子20側に設けている。即ち各移動子に対応したコイルが必要となる。
移動子10aの吸引力を変化させるときはコイル11aを使用する。移動子10bの吸引力を変化させるときはコイル11bを使用する。
【0114】
時刻0から時刻Aまでの間、圧電素子3は延伸している。この間、移動子10aのコイル11aに電流を流さないでおく。この場合、移動子10aに対して磁気吸着力が働かなくなる。そのため、移動子10aは、その位置を変えずに静止したままである。一方、移動子10bのコイル11bに、紙面上方向にN極が発生するように電流を流す。この場合、図6で説明したように、移動子10bに対して振動基板4側に磁気吸着力が働く。そのため、移動子10bは紙面左方向に移動する。
【0115】
次に、時刻Aから時刻Bまでの間、圧電素子3は収縮している。この間、移動子10aのコイル11aに、紙面上方向にN極が発生するように電流を流す。この場合、図1(c)で説明したように、移動子10aに対して振動基板4側に磁気吸着力が働く。そのため、移動子10aは紙面右方向に移動する。一方、移動子10bのコイル11bに電流を流さないでおく。この場合、移動子10bに対して磁気吸着力が働かなくなる。そのため、移動子10bは、その位置を変えずに静止したままである。
【0116】
以上のように、時刻0から時刻Aの間、移動子10aは静止し、移動子10bは紙面左方向、すなわち移動子10aに向かって移動する。一方、時刻Aから時刻Bまでの間、移動子10aは紙面右方向、すなわち移動子10bに向かって移動し、移動子10bは静止している。その結果、移動子10aと移動子10bを近づけることができる。また、時刻0から時刻Bまでの間の駆動方法を繰り返すことで、移動子10aと移動子10bを更に近づけることができる。また、駆動方法を変えれば、移動子10aと移動子10bを同一方向に移動させることや、移動子10aと移動子10bを離すようにすることもできる。
【0117】
なお、図8および図9では、説明のために2個の移動子の構成とその駆動方法を例示したが、原理的には2個以上の移動子においても、同一の振動基板上で、それぞれを独立に駆動することが可能である。
【0118】
また、本実施形態においても、コイル11が固定子20側に設けられているため、移動子10に配線が存在しない。このため、配線の耐久性が向上し、断線することが防止され長期間にわたり安定した駆動ができる。また、配線が存在していないので、負担が発生せず安定した駆動を行うことができるので望ましい。
【0119】
なお、本発明は、その趣旨を逸脱しない範囲で様々な変形例をとることができる。
【産業上の利用可能性】
【0120】
以上のように、本発明は、長期に亘って、安定した動作、例えば、移動子を所望の位置に移動させることや、所望の位置で移動子を静止させることや、静止した状態を維持することができる慣性駆動アクチュエータに適している。
【符号の説明】
【0121】
3 圧電素子
4、40 振動基板
9 ヨーク
10、10a、10b 移動子
11、11a、11b コイル
12、12a、12b 第1のヨーク
20 固定子
21 永久磁石
22 ヨーク
40 振動基板
41 非磁性部
42 磁性部
100、120、140、200、300、400、500 慣性駆動アクチュエータ
101 支持部材
102 圧電素子
103 振動部材
104 移動体
105 板ばね
【特許請求の範囲】
【請求項1】
第1の方向と前記第1の方向とは逆の第2の方向に微小変位を発生する変位手段と、
前記変位手段の前記微小変位によって往復運動する振動基板と、
磁界を発生する第1の磁界発生手段と、
前記振動基板の平面上に配置され、前記第1の磁界発生手段が発生するN極とS極の磁束を所定の位置に集中させる第1のヨークを有する移動子と、
前記振動基板の前記移動子に対向した向きと反対側に第2のヨークと、を有し、
前記振動基板よりも外側で前記第1のヨークと、前記第2のヨークの端部が対向することで、前記移動子の駆動方向に垂直な方向の動きを機械的に規制し、
第1の磁界発生手段から発生する磁界を制御することによって、前記移動子と前記振動基板の間に働く摩擦力を制御し、前記移動子を駆動することを特徴とする慣性駆動アクチュエータ。
【請求項2】
前記第1の磁界発生手段から発生する磁界とは別に、前記移動子が前記振動基板に対向した方向に磁気吸引力または磁気反発力が働くように磁界を発生する第2の磁界発生手段をさらに有することを特徴とする請求項1に記載の慣性駆動アクチュエータ。
【請求項3】
前記第1の磁界発生手段が電磁コイルであることを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項4】
前記第2の磁界発生手段が永久磁石であることを特徴とする請求項2に記載の慣性駆動アクチュエータ。
【請求項5】
前記変位手段が圧電素子であることを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項6】
前記振動基板が非磁性体であることを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項7】
前記振動基板が非磁性部と磁性部を有することを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項8】
前記振動基板は、少なくとも一部が前記第1の磁界発生手段を有することを特徴とする請求項1または請求項2に記載の慣性駆動アクチュエータ。
【請求項9】
前記振動基板は、少なくとも一部が前記第2の磁界発生手段を有することを特徴とする請求項2に記載の慣性駆動アクチュエータ。
【請求項10】
前記振動基板は、前記第2のヨークの機能を兼用することを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項11】
前記移動子が永久磁石を有することを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項1】
第1の方向と前記第1の方向とは逆の第2の方向に微小変位を発生する変位手段と、
前記変位手段の前記微小変位によって往復運動する振動基板と、
磁界を発生する第1の磁界発生手段と、
前記振動基板の平面上に配置され、前記第1の磁界発生手段が発生するN極とS極の磁束を所定の位置に集中させる第1のヨークを有する移動子と、
前記振動基板の前記移動子に対向した向きと反対側に第2のヨークと、を有し、
前記振動基板よりも外側で前記第1のヨークと、前記第2のヨークの端部が対向することで、前記移動子の駆動方向に垂直な方向の動きを機械的に規制し、
第1の磁界発生手段から発生する磁界を制御することによって、前記移動子と前記振動基板の間に働く摩擦力を制御し、前記移動子を駆動することを特徴とする慣性駆動アクチュエータ。
【請求項2】
前記第1の磁界発生手段から発生する磁界とは別に、前記移動子が前記振動基板に対向した方向に磁気吸引力または磁気反発力が働くように磁界を発生する第2の磁界発生手段をさらに有することを特徴とする請求項1に記載の慣性駆動アクチュエータ。
【請求項3】
前記第1の磁界発生手段が電磁コイルであることを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項4】
前記第2の磁界発生手段が永久磁石であることを特徴とする請求項2に記載の慣性駆動アクチュエータ。
【請求項5】
前記変位手段が圧電素子であることを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項6】
前記振動基板が非磁性体であることを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項7】
前記振動基板が非磁性部と磁性部を有することを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項8】
前記振動基板は、少なくとも一部が前記第1の磁界発生手段を有することを特徴とする請求項1または請求項2に記載の慣性駆動アクチュエータ。
【請求項9】
前記振動基板は、少なくとも一部が前記第2の磁界発生手段を有することを特徴とする請求項2に記載の慣性駆動アクチュエータ。
【請求項10】
前記振動基板は、前記第2のヨークの機能を兼用することを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【請求項11】
前記移動子が永久磁石を有することを特徴とする請求項1または2に記載の慣性駆動アクチュエータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−106396(P2013−106396A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−247337(P2011−247337)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]