
成膜装置及び成膜方法
【課題】同一の成膜材料を用いて繰り返し成膜を行った場合でも、各対象物における成膜速度を均一化することのできる成膜装置を提供する。
【解決手段】ターゲット101の表面に対向するように配置され、基板100を設置する基板ホルダ6と、基板100上の成膜環境を測定可能なセンサ部8とを備え、対象物ホルダ6は、ターゲット101に対して移動可能に構成されるとともに、基板ホルダ6の移動量及び移動方向と、センサ部8の移動量及び移動方向とが同一に設定されていることを特徴とする。
【解決手段】ターゲット101の表面に対向するように配置され、基板100を設置する基板ホルダ6と、基板100上の成膜環境を測定可能なセンサ部8とを備え、対象物ホルダ6は、ターゲット101に対して移動可能に構成されるとともに、基板ホルダ6の移動量及び移動方向と、センサ部8の移動量及び移動方向とが同一に設定されていることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、薄膜を成膜するための成膜装置及び成膜方法に関する。
【背景技術】
【0002】
デジタルカメラ、顕微鏡、内視鏡等の光学機器には、反射防止膜やダイクロイックフィルター等の光学薄膜が成膜された光学素子が用いられている。一般的に、これら光学薄膜を成膜する成膜装置としては、真空蒸着装置やマグネトロンスパッタリング装置が多く用いられている。成膜装置を用いて基板等の対象物の表面に成膜を行う場合、通常は、対象物を保持するホルダに多数の対象物を保持させて成膜を行う。このとき、ホルダの中心付近と周辺付近では成膜速度が同一でなくなることがあり、これを放置すると、ホルダの中心付近に保持された対象物と、周辺付近に保持された対象物とに成膜された薄膜の膜厚が不均一となり、品質のばらつきの原因となる。
【0003】
この問題を解決するための装置として、例えば特許文献1に記載の真空蒸着装置が提案されている。この装置においては、対象物である基板の周方向に複数個の膜厚モニターを設置して蒸着速度分布を把握し、その結果をフィードバックして蒸着源の電子銃を制御している。具体的には、電子銃において電子線の電流値、電子線の平均的位置、電子線のスキャン形状等を制御することにより、蒸着速度分布の均一化を行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−61810号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ホルダの中心付近と周辺付近との成膜速度差が小さい場合は、特許文献1の装置を用いても、ある程度成膜速度の均一化は可能である。
しかしながら、上述した特許文献1における方法では、同一の成膜材料を用いて何回も繰り返して成膜を行うと、成膜材料表面の高さが部分的に低くなるように形状が変化する。これによって材料の挙動が変化し、ホルダの中心付近と周辺付近との成膜速度差はより大きくなる。このような状況下では、特許文献1に記載の装置では蒸着源をフィードバック制御しても、成膜速度を均一化することが困難になるという不具合があった。
【0006】
本発明は上記事情に鑑みて成されたものであり、同一の成膜材料を用いて繰り返し成膜を行った場合でも、各対象物における成膜環境を均一化することのできる成膜装置及び成膜方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第一の態様は、成膜材料を用いて対象物の表面に成膜を行う成膜装置であって、前記成膜材料の表面に対向するように配置され、前記対象物を設置する対象物ホルダと、前記対象物上の成膜環境を測定可能な少なくとも2つのセンサ部と、を備え、前記対象物ホルダは、前記成膜材料と相対的に移動可能に構成されるとともに、前記対象物ホルダの移動量及び移動方向と、前記センサ部の移動量及び移動方向とが同一に設定されていることを特徴とする。
【0008】
また、本発明の成膜装置は、前記センサ部の測定結果に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる制御部を備え、前記制御部は、前記少なくとも2つのセンサ部で測定された前記成膜環境のうち、1つの前記センサ部で測定された前記成膜環境と、別の前記センサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させてもよい。
【0009】
前記制御部は、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを前記成膜材料の表面に平行な方向に移動させてもよいし、前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させてもよい。
【0010】
本発明の第二の態様は、同一の成膜材料を用いて、対象物ホルダに設置された対象物の表面に複数回連続して成膜を行う成膜方法であって、前記対象物の表面に成膜を行う成膜工程と、前記成膜工程中または前記成膜工程後に、前記対象物の成膜環境を測定可能に設けられた少なくとも2つのセンサ部により測定された成膜環境を示す指標を取得する指標取得工程と、前記指標取得工程で取得された指標に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる調節工程とを有し、前記調節工程では、前記対象物ホルダと前記成膜材料との位置関係の変化前後において、前記対象物ホルダと前記センサ部との相対位置が同一に保持されることを特徴とする。
【0011】
また、前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させてもよい。
【0012】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを前記成膜材料の表面に対して平行な方向に移動させてもよいし、前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させてもよい。
【発明の効果】
【0013】
本発明の成膜装置及び成膜方法によれば、同一の成膜材料を用いて繰り返し成膜を行った場合でも、各対象物における成膜速度を均一化することができる。
【図面の簡単な説明】
【0014】
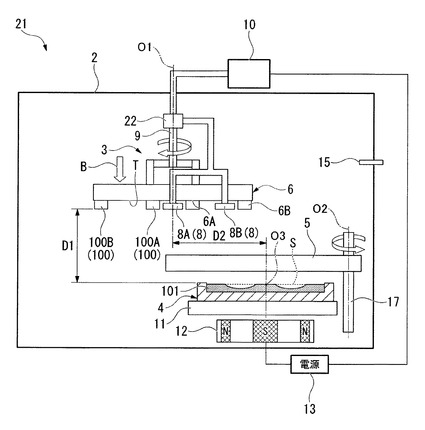
【図1】本発明の第1実施形態の成膜装置の構成を示す図である。
【図2】同成膜装置を用いて同一ターゲットで成膜を繰り返したときの基板ホルダ中央部及び周辺部の膜厚の推移を示すグラフである。
【図3】同成膜装置における基板保持部と材料保持部との偏心量と同基板ホルダ周辺部と中央部との膜厚比の関係を示すグラフである。
【図4】同成膜装置を用いた成膜方法の流れを示すフローチャートである。
【図5】同成膜装置の使用時の動作を示す図である。
【図6】本発明の第2実施形態の成膜装置の構成を示す図である。
【図7】同成膜装置における基板保持部と材料保持部との垂直距離と同基板ホルダ周辺部と中央部との膜厚比の関係を示すグラフである。
【図8】同成膜装置の使用時の動作を示す図である。
【発明を実施するための形態】
【0015】
(第1実施形態)
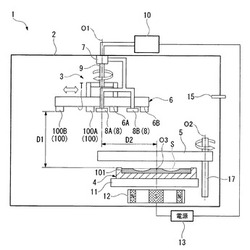
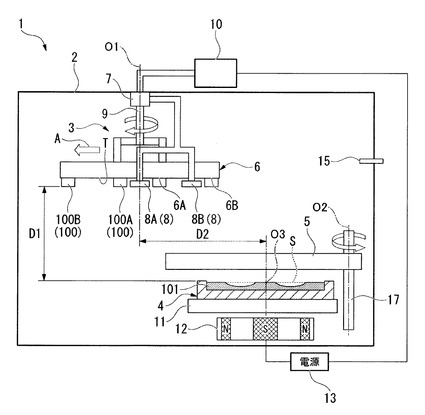
本発明の第1実施形態の成膜装置について、図1を参照して説明する。図1は、本実施形態の成膜装置1を示す概略図である。
図1に示すように、成膜装置1は、スパッタリングによる成膜を行う装置であって、真空槽2と、真空槽2の内部上方に設けられて成膜の対象物である基板100を保持する対象物支持部3と、真空槽2内部の下部に設けられた材料設置部4と、対象物支持部3と材料設置部4との間に設けられたシャッター5と対象物支持部3を駆動させるための駆動部7を備えて構成されている。
【0016】
真空槽2の側面には、導入ポート15が貫通して設けられており、真空槽2への不活性ガスの導入や酸素ガス、窒素ガス、フッ素系ガス等の反応性ガスの導入に使用される。
【0017】
対象物支持部3は、基板100が保持される略円盤状の基板ホルダ(対象物ホルダ)6と、基板100上に成膜された薄膜の成膜速度を測定するセンサ部8とを備えている。
【0018】
センサ部8は、駆動部7に支持されて基板ホルダ6の中心付近に配置された第1センサ部(1つのセンサ部)8Aと、駆動部7に支持されて基板ホルダ6の周縁付近に配置された第2センサ部(別のセンサ部)8Bとの2つの水晶センサを備えている。各センサ部8A、8Bは、それぞれ基板ホルダ6の中央部6A及び周辺部6B付近に取り付けられており、中央部6A及び周辺部6Bに保持された基板100の成膜速度を測定可能である。各センサ部8A、8Bは駆動部7の動きを制御するための制御部10に接続されている。
【0019】
基板ホルダ6は、回転軸9の軸心O1回りに回転可能に構成されており、基板ホルダ6の下側(材料設置部4に対向する側)の面に、成膜対象となる基板100が設置される。駆動部7は、モータ等の公知の構成からなり、対象物支持部3(基板ホルダ6及びセンサ部8)を回転軸9の軸心O1回りに回転させるとともに、対象物支持部3を回転軸9の軸心O1方向に直交する方向に移動させて、基板ホルダ6及びセンサ部8と材料設置部4との水平方向(図1に示す左右方向)における相対的な位置関係を変化させることが可能である。
【0020】
材料設置部4は、成膜材料が設置されるバッキングプレート11と、バッキングプレート11の下方に設けられたマグネットユニット12とを備えた公知の構成となっている。バッキングプレート11上には、適宜選択された材質のターゲット101が載置される。マグネットユニット12には電源13が接続されており、電源13からマグネットユニット12に電圧を印加することにより、基板100の表面にターゲット101の材質からなる薄膜を形成することができる。このとき、導入ポート15から酸素ガス等の反応性ガスを導入してターゲット101の材質と反応させて酸化物等の薄膜を基板100の表面に形成することも可能である。また、基板100への成膜中に制御部10から電源13の出力を調整することにより、成膜速度が一定になるように制御することができる。
【0021】
シャッター5は、真空槽2の下部に、その軸心O2回りに回動可能に設けられた回動軸17に支持固定されている。シャッター5は、スパッタリング環境が安定するまでターゲット101と基板100との間を遮蔽し、基板100への成膜が行われないよう制御する。
【0022】
以上が成膜装置1の構成に関する説明である。成膜装置1の使用時の動作については後述するが、成膜装置1を用いてターゲット101を交換せずに複数回継続して成膜工程を繰り返すと、平坦であったターゲット101の表面(対象物支持部3に対向する面)から分子が離脱することによって当該表面に凹凸が生じる。その結果、分子又は原子の飛び方が変化することによって、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度の差が大きくなり、中央部6Aと周辺部6Bとに保持された基板100上に同一時間で形成される膜厚が均一でなくなる。
【0023】
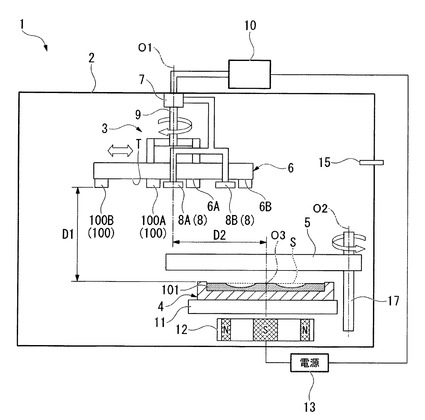
図2は、成膜装置1を用いてターゲット101を交換せずに成膜を複数回繰り返したときの各バッチにおいて、基板ホルダ6の中央部6Aと周辺部6Bとに保持された基板100上に同一時間に形成された薄膜の膜厚の推移を示すグラフである。
図2に示すように、成膜を繰り返した場合、基板ホルダ6の中央部6Aよりも周辺部6Bにおいて膜厚の低下の度合いが大きく、バッチを重ねるごとに両者の差が大きくなっていることがわかる。
【0024】
図2の検討においては、図1に示す基板ホルダ6の下面(T)とバッキングプレート11の上面(載置面)に載置されたターゲット101の当初の表面(S)との間の垂直距離であるT−S間距離D1と、基板ホルダ6の水平方向における中心(回転軸9の軸心O1と基板ホルダ6の下面Tとの交点)と、材料設置部4の水平方向における中心O3との水平方向の距離である偏心量D2とが一定であるために、ターゲット101の表面形状の変化に伴って成膜速度及び膜厚に変化が生じていることが考えられる。
【0025】
そこで、本実施形態の成膜装置1においては、制御部10が駆動部7を制御して、対象物支持部3(基板ホルダ6及びセンサ部8A,8B)を水平方向、すなわちバッキングプレート11の載置面の面方向と平行な方向(成膜材料の表面に平行な方向)に移動させる。これによって対象物支持部3と材料設置部4上のターゲット101との水平方向における位置関係が変化し、それに伴って中央部6A及び周辺部6Bにおける成膜速度及び膜厚が変化する。
【0026】
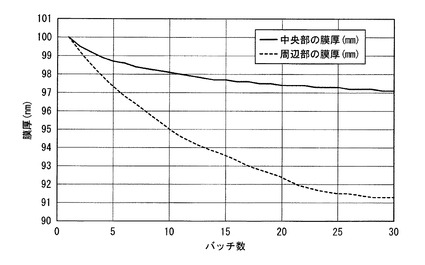
図3は、成膜装置1を用いて垂直距離D1を変えずに偏心量D2を様々な値に設定し、1バッチごとにターゲット101を新品と交換して成膜を行ったときの、基板ホルダ6の周辺部6Bに保持された基板100上の膜厚と、中央部6Aに保持された基板100上の膜厚との比を検討した結果を示すグラフである。
図3に示すように、偏心量D2を大きくするほど周辺部6Bの膜厚の中央部6Aの膜厚に対する比が大きくなることがわかる。
図2に示すように、成膜装置1においては、バッチを繰り返すごとに周辺部6Bの膜厚、および周辺部6Bの膜厚の中央部6Aの膜厚に対する比が低下するため、バッチを繰り返すごとに偏心量D2を増加させるように制御部10が駆動部7を制御すれば、基板ホルダ6の中央部6Aと周辺部6Bとにおける膜厚差を小さくして両者の成膜速度環境を均一に近づけることができる。
【0027】
(作用)
上記の構成を備えた成膜装置1の動作について、以下に説明する。
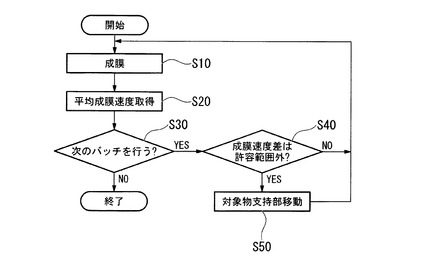
図4は、成膜装置1を用いた成膜方法の流れを示すフローチャートである。
図4に示すように、本成膜方法は、成膜を行う成膜工程S10と、基板ホルダ6の中央部6Aと周辺部6Bにおける成膜工程中の平均成膜速度を成膜環境を示す指標として取得する指標取得工程S20と、同一のターゲット101を用いて継続して成膜を行うかどうかを判断する継続判断工程S30と、成膜後に基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜環境を比較し、両者の環境における差が所定値以上であるかどうかを判断する工程S40と、両者の環境における差が所定値以上であるときに対象物支持部3(基板ホルダ6及びセンサ部8)を移動する工程(調節工程)S50と、を備えている。
【0028】
まずステップS10の成膜工程において、ユーザは基板ホルダ6上に基板100を設置し、ターゲット101をバッキングプレート11の載置面上に載置する。このとき、シャッター5は基板100とターゲット101との間に位置させる。そして、不図示の排気手段によって真空槽2の排気を行い、真空槽2内を真空にする。
【0029】
続いて、不活性ガスを導入ポート15から真空槽2内に導入し、電源13からマグネットユニット12に電力を印加して真空槽2内にプラズマを発生させる。発生したプラズマによって、ターゲット101に対して公知のプレスパッタリングが行われる。そして、必要に応じて酸素等の反応性ガスを導入ポート15から真空槽2内に導入し、スパッタリング環境が安定した後に回転軸9をその軸心O1回りに回転させ、対象物支持部3を回転させる。
【0030】
次に、回動軸17をその軸心O2回りに回動させてシャッター5を開き、基板100とターゲット101との間の遮蔽物をなくすと、基板100の表面にスパッタリングによって薄膜が形成される。図1に示す基板ホルダ6の中央部6Aに保持された基板100A及び周辺部6Bに保持された基板100B上の成膜速度の値は、それぞれセンサ部8の第1センサ部8A及び第2センサ部8Bによって計測され、この計測結果が制御部10に送られる。
成膜工程S10が終了すると、回動軸17が回転してシャッター5が再び基板100とターゲット101との間を遮蔽し、処理はステップS20に進む。
【0031】
続くステップS20では、成膜工程S10における第1センサ部8A及び第2センサ部8Bの計測した成膜速度値(指標)に基づいて、基板ホルダ6の中央部6Aと周辺部6Bにおける成膜工程中の平均成膜速度が各領域6A,6Bの成膜環境を示す指標として取得される。
【0032】
次に、ステップS30では、同一のターゲット101を用いて継続して成膜が行われるかどうかをユーザの制御部10への入力等に基づいて制御部10が判断する。継続した成膜が行われない場合は、制御部10による対象物支持部3の移動は必要ないため、処理は「NO」に進んで成膜作業を終了する。
一方、継続した成膜が行われる場合(ステップS30による判断結果が「YES」の場合)は、基板ホルダ6の位置修正の必要性を判断するため、処理はステップS40に進む。
【0033】
ステップS40において、制御部10は、ステップS20で取得された基板100A,100B上の平均成膜速度を比較し、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差が所定値以上であるかどうかを判断する。この所定値は、要求される膜厚の精度に応じて適宜決定され、予め制御部10に設定しておくことが好ましい。
基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差が所定値未満(成膜速度差が許容範囲内)である場合、制御部10による偏心量D2の調節は必要ないと判断され、処理は「NO」に進んで、成膜処理を一旦停止する。そして、不図示のロードロック式基板搬送機構を用いて、真空中で基板ホルダ6に保持された基板100を未成膜の基板100に交換した後、処理はステップS10に戻り、上述したフローと同様に次のバッチの成膜工程が行われる。
一方、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差が所定値以上(成膜速度差が許容範囲外)である場合は、制御部10による偏心量D2の調節が必要と判断され、処理は「YES」に進んでステップS50に移る。
【0034】
図5は、図1の成膜装置1の偏心量D2が大きくなるように、初期位置(図1の状態)から対象物支持部3が左側に移動したときの、対象物支持部3とターゲット101との位置関係を示す図である。
ステップS50では、制御部10が駆動部7を制御し、図5に示すように、偏心量D2が大きくなるように対象物支持部3が図5の左側に移動する(図5中矢印A参照)。
ここで、本実施形態では、基板ホルダ6とともにセンサ部8が駆動部7に支持されているため、対象物支持部移動工程においては基板ホルダ6とセンサ部8とが同期して移動することになる。すなわち、基板ホルダ6及びセンサ部8の移動時における移動量及び移動方向が同一に設定されており、基板ホルダ6の移動前後において、基板ホルダ6に対するセンサ部8の相対位置は変化しない。なお、対象物支持部3の水平方向への移動量は、常に所定の移動量、例えば3ミリメートル(mm)であってもよいし、是正すべき成膜速度差の大きさとそれに対応した偏心量D2の調整量を予めテーブル等として制御部10に入力しておき、制御部10が適宜当該テーブルを参照して移動量を決定するように構成させてもよい。
基板ホルダ6が水平方向に移動した後で成膜装置1は一旦停止し、不図示のロードロック式基板搬送機構を用いて、真空中で基板ホルダ6の基板を未成膜のものと交換した後、処理はステップS10に戻って、上述したフローと同様に次のバッチの成膜工程が行われる。
【0035】
本実施形態のスパッタリング装置1によれば、ターゲット101を交換せずに継続して成膜が行われる場合、バッチが終了するごとに、センサ部8の取得値に基づいてステップS20で得られた基板ホルダ6の中央部6A及び周辺部6Bの平均成膜速度がステップS40で比較される。これによって、中央部6Aと周辺部6Bとの成膜環境が比較され、両者の差が所定値以上である場合に、ステップS50の対象物支持部移動工程において制御部10が駆動部7を介して対象物支持部3を水平方向に移動させ、容易にフィードバック制御することが可能となる。その結果、基板ホルダ6と材料設置部4との偏心量D2が変化して中央部6Aと周辺部6Bとの成膜速度差が小さくなり、両者の成膜環境が均一化されて基板100A及び100B上に形成される薄膜の膜厚も均一化される。
したがって、同一ターゲット101を用いて繰り返し成膜を行う場合でも、基板100上に均一に成膜を行うことができ、成膜の再現性、精度を向上させることができる。すなわち、本実施形態では、成膜速度に応じてターゲット101と対象物支持部3との相対位置を変化させることで、従来のように成膜速度に基づいて電子銃等を制御する場合に比べて簡素な構成で基板ホルダ6上における成膜環境の均一化を図ることができる。そのため、製造効率及び製造コストの向上も図ることができる。
【0036】
特に、本実施形態では、基板ホルダ6の中央部6A及び周辺部6Bの成膜速度を測定するセンサ部8が駆動部7に支持されているため、対象物支持部移動工程において基板ホルダ6とセンサ部8とが同期して移動することになる。すなわち、基板ホルダ6及びセンサ部8の移動時における移動量及び移動方向が同一に設定されているため、基板ホルダ6の移動前後において、基板ホルダ6に対するセンサ部8の相対位置は変化しない。これにより、基板ホルダ6上の常に同位置の成膜速度を、センサ部8によって測定することができるため、信頼性が高く高精度な測定結果を得ることができる。
その結果、基板ホルダ6上における成膜環境の更なる均一化を図り、基板100上に形成される薄膜の均一化を図ることができる。なお、基板ホルダ6上における常に同位置の成膜速度を測定することで、過去の成膜時(例えば、前回成膜時)における基板100への成膜速度に基づいてフィードバック制御を行うこともできる。
【0037】
さらに、基板ホルダ6上の成膜速度を常時測定しながら成膜を行うことができるため、この測定結果に基づいてターゲット101と対象物支持部3との相対的な位置関係を速やかに変化させることができる。その結果、基板100上に形成される薄膜のさらなる均一化を図ることができる。
【0038】
なお、本実施形態においては、同一ターゲット101を用いて成膜を継続するか否かの判断が行われるステップS30の前に、当該判断に関わらず常に成膜工程S10における平均成膜速度がステップS20において取得される例を説明した。しかし、本実施形態の成膜装置1はこれには限定されず、例えばステップS10の途中にステップS20とステップS40を行い、許容範囲外の場合には対象物支持部3を移動させるステップS50を行い、成膜を継続する構成にしてもよい。
【0039】
(第2実施形態)
次に本発明の第2の実施形態について、図6〜図8を参照して説明する。
本実施形態の成膜装置21と、上述の第1実施形態の成膜装置1との異なるところは、駆動部による対象物支持部3の動作の態様である。なお、以下の説明において、成膜装置1と共通する構成については、同一の符号を付して重複する説明を省略する。
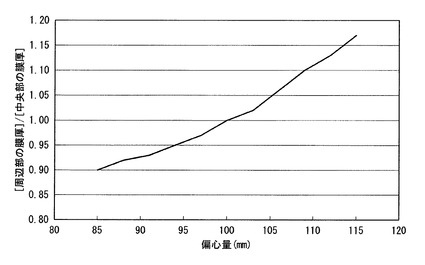
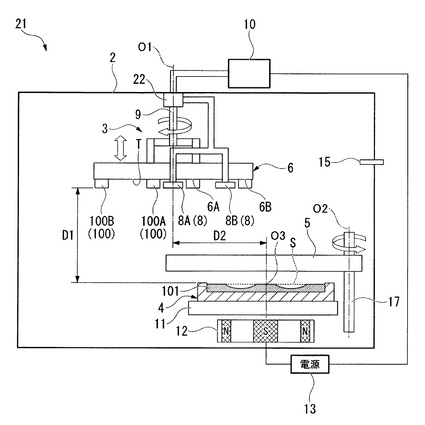
図6は成膜装置21を示す概略図である。
図6に示すように、成膜装置21の多くの構成は、上述した成膜装置1と共通しているが、対象物支持部3に取り付けられた駆動部22は、基板ホルダ6を回転軸9の軸心O1回りに回転可能とすると共に、対象物支持部3を回転軸9の軸心O1方向と平行な方向に移動させることが可能に構成されている。すなわち、成膜装置21においては、偏心量D2を変化させることはできない代わりに、対象物支持部3を材料設置部4の載置面と垂直な方向、つまり成膜材料の表面の法線方向(軸心O1方向)に対して平行に移動させて、基板ホルダ6の下面Tとバッキングプレート11の上面(載置面)に載置されたターゲット101の当初の表面Sとの間の垂直距離であるT−S間距離D1を変化させることができるようになっている。よって、基板ホルダ6、センサ部8及び基板100と、材料設置部4及び載置されたターゲット101との相対的な位置関係を変化させることができる。
【0040】
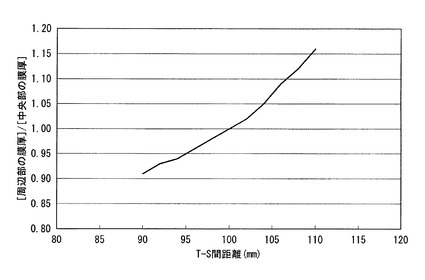
図7は、成膜装置21を用いて偏心量D2を変えずに、垂直距離D1を様々な値に設定し、1バッチごとにターゲット101を新品と交換して成膜を行い、基板ホルダ6の周辺部6Bに保持された基板100B上の膜厚と、中央部6Aに保持された基板100A上の膜厚との比を検討した結果を示すグラフである。
図7に示すように、T−S間距離D1を長くする、すなわち、基板ホルダ6を材料設置部4から遠ざけるほど、周辺部6Bの膜厚の中央部6Aの膜厚に対する比が大きくなることがわかる。
【0041】
(作用)
上記の構成を備えた成膜装置21の動作について、以下に説明する。
図8は、図6の成膜装置21のT−S間距離D1が小さくなるように、対象物支持部3が初期位置(図6の状態)から下側に移動したときの基板ホルダ6とターゲット101の位置関係を示す図である。
成膜装置21を用いた成膜手順においては、ステップS50の対象物支持部移動工程において、例えば周辺部6Bの基板100Bの成膜速度が所定値以上(成膜速度が許容範囲外)に上昇している場合は、図8に示すように、制御部10が駆動部22を介して対象物支持部3を成膜装置21の下側に移動させる(図8中矢印B参照)。これにより、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差を小さくして、成膜環境を均一化させることができる。
【0042】
本実施形態の成膜装置21においても、制御部10が対象物支持部3と材料設置部4との位置関係を変化させることによって、対象物支持部3に保持された複数の基板100間の成膜環境を均一に近づけることができ、容易にフィードバック制御することが可能となる。その結果、成膜の精度を向上させることができる。
また、駆動部22に対象物支持部3及びセンサ部8を水平方向に移動させるための機構を設ける必要がないため、駆動部22の構成がより簡素になり、より低コストで成膜装置を構成することができる。
【0043】
(実施例)
次に、本発明の実施例について、図6〜図8を参照して説明する。
本実施例の成膜装置21は上述の第2実施形態の成膜装置21と同一の構成であるため、以下の説明においては、成膜装置21の構成については、同一の符号を付して重複する説明を省略する。
図6に示すように、本実施形態に係る成膜装置21により、基板100上へMgF2の単層膜を100±5nmとなるように20回繰返し成膜した成膜方法について、以下、説明する。また、このMgF2の単層膜は、反射防止膜として用いられるものである。
MgF2の単層膜を成膜する前に、内径φ120mm、内径高さ0.35cmの石英製の皿からなる材料設置部4の中に粒径1〜2mmのMgF2のターゲット101を85gだけ配設する。次に、ターゲット101の表面を平坦化させた。さらに、対象物支持部3に基板100を搭載した基板ホルダ6を取り付けた。このときの偏心量D2は100mm、及びT−S間距離D1は100mmであり、さらに、回転軸9を中心に30rpmで基板100を公転させた。
【0044】
次に、不図示の真空ポンプを用いて、5×10−4Paまで真空槽2内を排気し、その後、導入ポート15から酸素ガスを4×10−1Paまで導入した。次に、電源13から不図示のマッチングボックスを介して、マグネットユニット12へ1400Wの高周波電力を供給し、プラズマを発生させた。この状態で、シャッター5を100秒間開け、基板100上にMgF2単層膜をセンサ部8で監視しながら100nm成膜した(ステップS10)。このとき、センサ部8Aで成膜速度が1nm/秒で一定となるように電源13を制御している。
【0045】
次に、成膜された基板100を保持した基板ホルダ6を、不図示のロードロック式基板搬送機構により真空槽2から移動させ、この基板ホルダ6を搬送している間に、平均成膜速度を取得し(ステップS20)、次のバッチを行うか判断する(ステップS30)。このとき、成膜を20回行ってない場合はステップS40へ進み、新規に成膜されていない基板100を保持した基板ホルダ6を真空槽2の上部へ配設する。
そして、図7に示すように、ステップS20で得られた平均成膜速度から膜厚比(成膜環境)を算出し、中央部6Aと周辺部6Bの膜厚比が1.05以下の場合はT−S間距離D1を変更せずに、次の成膜工程(ステップS10)へ進む。一方、膜厚比が1.05より大きい場合は、T−S間距離D1を小さくし、膜厚比が0.95より小さい場合はT−S間距離D1を大きくするように対象物支持部3を移動させる。なお、上述した第1,2実施形態のように、対象物支持部3の移動判断を平均成膜速度に基づいて行っても構わない。
【0046】
以上のようなスパッタリング成膜と、成膜された基板100を真空槽2から取出し新規の成膜されていない基板100を真空槽2へ配設する作業と、この対象物支持部3の搬送作業と同時に膜厚比が許容範囲外のときに基板ホルダ6を移動する作業とを繰返し行うことで、真空槽2を大気にさらすことなく、厚さ100nmのMgF2単層膜を20回連続的に成膜することができた。
本実施例により成膜したMgF2単層膜の反射率特性を、それぞれ(20回分)オリンパス製レンズ反射率測定器USPMで測定し、これらの反射率測定結果から物理膜厚を算出した。すると、これらMgF2単層膜の物理膜厚はすべて100±5nmであり、成膜毎に安定していた。
【0047】
この成膜装置及び成膜方法によれば、対象物支持部3とターゲット101の位置関係を制御しているので、基板100Aの膜厚が基板100Bの膜厚と略同一となり、同一時間で繰返し成膜した時の基板100上の物理膜厚を均一にすることができる。また、複数の基板100上の膜厚分布の再現性が良くなるので、生産効率を向上させることができる。
【0048】
以上、本発明の実施形態を説明したが、本発明の技術範囲は上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。
例えば、上述した各実施形態においては、スパッタリングによって成膜を行う成膜装置の例を挙げたが、これに限定されるのではなく、真空蒸着法、イオンプレーティング法、イオンアシスト蒸着法によって成膜を行う成膜装置であっても構わない。
また、上述した各実施形態においては、センサ部8が水晶センサで構成され、平均成膜速度差が制御ターゲットとされて成膜環境の比較及び調整が行われる例を説明したが、これに代えて、成膜速度を積分した膜厚値を制御ターゲットとしてもよい。さらに、膜厚値を制御ターゲットとする場合は、水晶センサに代えて光学式の膜厚センサが用いられてもよい。加えて、成膜速度が選択した成膜材料に鑑みて好適な所定の範囲内の値となるように、センサ部8のセンサの出力値に基づいて成膜速度値そのものが成膜速度差と併せて制御されてもよい。
さらに、上述した実施形態では、センサ部8を基板ホルダ6の中央部6Aと周辺部6Bに2つ用いた場合について説明したが、これに限らず3つ以上の複数用いる構成にしても構わない。これにより、基板ホルダ6上における各センサ部8毎の測定領域を縮小することができるため、基板ホルダ6上の成膜環境をより細かく測定することができる。したがって、より高精度な成膜環境の制御を行うことができるので、各基板100上に形成される薄膜の膜厚をより均一化することができる。
【0049】
また、成膜環境を調節する対象となる対象物の支持部位についても、上述の基板ホルダ6の中央部6A及び周辺部6Bに限定されず、装置の成膜特性によって適宜設定されてよい。
加えて、成膜環境を調節するための対象物支持部3の移動態様は、上述のような水平方向及び垂直方向のいずれか一方に限定されるものではない。したがって、これらを適宜組み合わせて2軸方向に移動可能に対象物支持部3を構成することによって、より好適に成膜環境の調節が可能になるとともに、装置の寸法等の設計パラメータが調節機能に制限を加える事態をおきにくくすることができる。
さらに、導入ガスは酸素の他に、アルゴンや窒素またはこれらの混合ガスでもよい。
【符号の説明】
【0050】
1、21 成膜装置
3 対象物支持部
4 材料設置部
6 基板ホルダ(対象物ホルダ)
8 センサ部
10 制御部
100、100A、100B 基板(対象物)
101 ターゲット(成膜材料)
【技術分野】
【0001】
本発明は、薄膜を成膜するための成膜装置及び成膜方法に関する。
【背景技術】
【0002】
デジタルカメラ、顕微鏡、内視鏡等の光学機器には、反射防止膜やダイクロイックフィルター等の光学薄膜が成膜された光学素子が用いられている。一般的に、これら光学薄膜を成膜する成膜装置としては、真空蒸着装置やマグネトロンスパッタリング装置が多く用いられている。成膜装置を用いて基板等の対象物の表面に成膜を行う場合、通常は、対象物を保持するホルダに多数の対象物を保持させて成膜を行う。このとき、ホルダの中心付近と周辺付近では成膜速度が同一でなくなることがあり、これを放置すると、ホルダの中心付近に保持された対象物と、周辺付近に保持された対象物とに成膜された薄膜の膜厚が不均一となり、品質のばらつきの原因となる。
【0003】
この問題を解決するための装置として、例えば特許文献1に記載の真空蒸着装置が提案されている。この装置においては、対象物である基板の周方向に複数個の膜厚モニターを設置して蒸着速度分布を把握し、その結果をフィードバックして蒸着源の電子銃を制御している。具体的には、電子銃において電子線の電流値、電子線の平均的位置、電子線のスキャン形状等を制御することにより、蒸着速度分布の均一化を行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−61810号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ホルダの中心付近と周辺付近との成膜速度差が小さい場合は、特許文献1の装置を用いても、ある程度成膜速度の均一化は可能である。
しかしながら、上述した特許文献1における方法では、同一の成膜材料を用いて何回も繰り返して成膜を行うと、成膜材料表面の高さが部分的に低くなるように形状が変化する。これによって材料の挙動が変化し、ホルダの中心付近と周辺付近との成膜速度差はより大きくなる。このような状況下では、特許文献1に記載の装置では蒸着源をフィードバック制御しても、成膜速度を均一化することが困難になるという不具合があった。
【0006】
本発明は上記事情に鑑みて成されたものであり、同一の成膜材料を用いて繰り返し成膜を行った場合でも、各対象物における成膜環境を均一化することのできる成膜装置及び成膜方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第一の態様は、成膜材料を用いて対象物の表面に成膜を行う成膜装置であって、前記成膜材料の表面に対向するように配置され、前記対象物を設置する対象物ホルダと、前記対象物上の成膜環境を測定可能な少なくとも2つのセンサ部と、を備え、前記対象物ホルダは、前記成膜材料と相対的に移動可能に構成されるとともに、前記対象物ホルダの移動量及び移動方向と、前記センサ部の移動量及び移動方向とが同一に設定されていることを特徴とする。
【0008】
また、本発明の成膜装置は、前記センサ部の測定結果に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる制御部を備え、前記制御部は、前記少なくとも2つのセンサ部で測定された前記成膜環境のうち、1つの前記センサ部で測定された前記成膜環境と、別の前記センサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させてもよい。
【0009】
前記制御部は、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを前記成膜材料の表面に平行な方向に移動させてもよいし、前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させてもよい。
【0010】
本発明の第二の態様は、同一の成膜材料を用いて、対象物ホルダに設置された対象物の表面に複数回連続して成膜を行う成膜方法であって、前記対象物の表面に成膜を行う成膜工程と、前記成膜工程中または前記成膜工程後に、前記対象物の成膜環境を測定可能に設けられた少なくとも2つのセンサ部により測定された成膜環境を示す指標を取得する指標取得工程と、前記指標取得工程で取得された指標に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる調節工程とを有し、前記調節工程では、前記対象物ホルダと前記成膜材料との位置関係の変化前後において、前記対象物ホルダと前記センサ部との相対位置が同一に保持されることを特徴とする。
【0011】
また、前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させてもよい。
【0012】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを前記成膜材料の表面に対して平行な方向に移動させてもよいし、前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させてもよい。
【発明の効果】
【0013】
本発明の成膜装置及び成膜方法によれば、同一の成膜材料を用いて繰り返し成膜を行った場合でも、各対象物における成膜速度を均一化することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態の成膜装置の構成を示す図である。
【図2】同成膜装置を用いて同一ターゲットで成膜を繰り返したときの基板ホルダ中央部及び周辺部の膜厚の推移を示すグラフである。
【図3】同成膜装置における基板保持部と材料保持部との偏心量と同基板ホルダ周辺部と中央部との膜厚比の関係を示すグラフである。
【図4】同成膜装置を用いた成膜方法の流れを示すフローチャートである。
【図5】同成膜装置の使用時の動作を示す図である。
【図6】本発明の第2実施形態の成膜装置の構成を示す図である。
【図7】同成膜装置における基板保持部と材料保持部との垂直距離と同基板ホルダ周辺部と中央部との膜厚比の関係を示すグラフである。
【図8】同成膜装置の使用時の動作を示す図である。
【発明を実施するための形態】
【0015】
(第1実施形態)
本発明の第1実施形態の成膜装置について、図1を参照して説明する。図1は、本実施形態の成膜装置1を示す概略図である。
図1に示すように、成膜装置1は、スパッタリングによる成膜を行う装置であって、真空槽2と、真空槽2の内部上方に設けられて成膜の対象物である基板100を保持する対象物支持部3と、真空槽2内部の下部に設けられた材料設置部4と、対象物支持部3と材料設置部4との間に設けられたシャッター5と対象物支持部3を駆動させるための駆動部7を備えて構成されている。
【0016】
真空槽2の側面には、導入ポート15が貫通して設けられており、真空槽2への不活性ガスの導入や酸素ガス、窒素ガス、フッ素系ガス等の反応性ガスの導入に使用される。
【0017】
対象物支持部3は、基板100が保持される略円盤状の基板ホルダ(対象物ホルダ)6と、基板100上に成膜された薄膜の成膜速度を測定するセンサ部8とを備えている。
【0018】
センサ部8は、駆動部7に支持されて基板ホルダ6の中心付近に配置された第1センサ部(1つのセンサ部)8Aと、駆動部7に支持されて基板ホルダ6の周縁付近に配置された第2センサ部(別のセンサ部)8Bとの2つの水晶センサを備えている。各センサ部8A、8Bは、それぞれ基板ホルダ6の中央部6A及び周辺部6B付近に取り付けられており、中央部6A及び周辺部6Bに保持された基板100の成膜速度を測定可能である。各センサ部8A、8Bは駆動部7の動きを制御するための制御部10に接続されている。
【0019】
基板ホルダ6は、回転軸9の軸心O1回りに回転可能に構成されており、基板ホルダ6の下側(材料設置部4に対向する側)の面に、成膜対象となる基板100が設置される。駆動部7は、モータ等の公知の構成からなり、対象物支持部3(基板ホルダ6及びセンサ部8)を回転軸9の軸心O1回りに回転させるとともに、対象物支持部3を回転軸9の軸心O1方向に直交する方向に移動させて、基板ホルダ6及びセンサ部8と材料設置部4との水平方向(図1に示す左右方向)における相対的な位置関係を変化させることが可能である。
【0020】
材料設置部4は、成膜材料が設置されるバッキングプレート11と、バッキングプレート11の下方に設けられたマグネットユニット12とを備えた公知の構成となっている。バッキングプレート11上には、適宜選択された材質のターゲット101が載置される。マグネットユニット12には電源13が接続されており、電源13からマグネットユニット12に電圧を印加することにより、基板100の表面にターゲット101の材質からなる薄膜を形成することができる。このとき、導入ポート15から酸素ガス等の反応性ガスを導入してターゲット101の材質と反応させて酸化物等の薄膜を基板100の表面に形成することも可能である。また、基板100への成膜中に制御部10から電源13の出力を調整することにより、成膜速度が一定になるように制御することができる。
【0021】
シャッター5は、真空槽2の下部に、その軸心O2回りに回動可能に設けられた回動軸17に支持固定されている。シャッター5は、スパッタリング環境が安定するまでターゲット101と基板100との間を遮蔽し、基板100への成膜が行われないよう制御する。
【0022】
以上が成膜装置1の構成に関する説明である。成膜装置1の使用時の動作については後述するが、成膜装置1を用いてターゲット101を交換せずに複数回継続して成膜工程を繰り返すと、平坦であったターゲット101の表面(対象物支持部3に対向する面)から分子が離脱することによって当該表面に凹凸が生じる。その結果、分子又は原子の飛び方が変化することによって、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度の差が大きくなり、中央部6Aと周辺部6Bとに保持された基板100上に同一時間で形成される膜厚が均一でなくなる。
【0023】
図2は、成膜装置1を用いてターゲット101を交換せずに成膜を複数回繰り返したときの各バッチにおいて、基板ホルダ6の中央部6Aと周辺部6Bとに保持された基板100上に同一時間に形成された薄膜の膜厚の推移を示すグラフである。
図2に示すように、成膜を繰り返した場合、基板ホルダ6の中央部6Aよりも周辺部6Bにおいて膜厚の低下の度合いが大きく、バッチを重ねるごとに両者の差が大きくなっていることがわかる。
【0024】
図2の検討においては、図1に示す基板ホルダ6の下面(T)とバッキングプレート11の上面(載置面)に載置されたターゲット101の当初の表面(S)との間の垂直距離であるT−S間距離D1と、基板ホルダ6の水平方向における中心(回転軸9の軸心O1と基板ホルダ6の下面Tとの交点)と、材料設置部4の水平方向における中心O3との水平方向の距離である偏心量D2とが一定であるために、ターゲット101の表面形状の変化に伴って成膜速度及び膜厚に変化が生じていることが考えられる。
【0025】
そこで、本実施形態の成膜装置1においては、制御部10が駆動部7を制御して、対象物支持部3(基板ホルダ6及びセンサ部8A,8B)を水平方向、すなわちバッキングプレート11の載置面の面方向と平行な方向(成膜材料の表面に平行な方向)に移動させる。これによって対象物支持部3と材料設置部4上のターゲット101との水平方向における位置関係が変化し、それに伴って中央部6A及び周辺部6Bにおける成膜速度及び膜厚が変化する。
【0026】
図3は、成膜装置1を用いて垂直距離D1を変えずに偏心量D2を様々な値に設定し、1バッチごとにターゲット101を新品と交換して成膜を行ったときの、基板ホルダ6の周辺部6Bに保持された基板100上の膜厚と、中央部6Aに保持された基板100上の膜厚との比を検討した結果を示すグラフである。
図3に示すように、偏心量D2を大きくするほど周辺部6Bの膜厚の中央部6Aの膜厚に対する比が大きくなることがわかる。
図2に示すように、成膜装置1においては、バッチを繰り返すごとに周辺部6Bの膜厚、および周辺部6Bの膜厚の中央部6Aの膜厚に対する比が低下するため、バッチを繰り返すごとに偏心量D2を増加させるように制御部10が駆動部7を制御すれば、基板ホルダ6の中央部6Aと周辺部6Bとにおける膜厚差を小さくして両者の成膜速度環境を均一に近づけることができる。
【0027】
(作用)
上記の構成を備えた成膜装置1の動作について、以下に説明する。
図4は、成膜装置1を用いた成膜方法の流れを示すフローチャートである。
図4に示すように、本成膜方法は、成膜を行う成膜工程S10と、基板ホルダ6の中央部6Aと周辺部6Bにおける成膜工程中の平均成膜速度を成膜環境を示す指標として取得する指標取得工程S20と、同一のターゲット101を用いて継続して成膜を行うかどうかを判断する継続判断工程S30と、成膜後に基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜環境を比較し、両者の環境における差が所定値以上であるかどうかを判断する工程S40と、両者の環境における差が所定値以上であるときに対象物支持部3(基板ホルダ6及びセンサ部8)を移動する工程(調節工程)S50と、を備えている。
【0028】
まずステップS10の成膜工程において、ユーザは基板ホルダ6上に基板100を設置し、ターゲット101をバッキングプレート11の載置面上に載置する。このとき、シャッター5は基板100とターゲット101との間に位置させる。そして、不図示の排気手段によって真空槽2の排気を行い、真空槽2内を真空にする。
【0029】
続いて、不活性ガスを導入ポート15から真空槽2内に導入し、電源13からマグネットユニット12に電力を印加して真空槽2内にプラズマを発生させる。発生したプラズマによって、ターゲット101に対して公知のプレスパッタリングが行われる。そして、必要に応じて酸素等の反応性ガスを導入ポート15から真空槽2内に導入し、スパッタリング環境が安定した後に回転軸9をその軸心O1回りに回転させ、対象物支持部3を回転させる。
【0030】
次に、回動軸17をその軸心O2回りに回動させてシャッター5を開き、基板100とターゲット101との間の遮蔽物をなくすと、基板100の表面にスパッタリングによって薄膜が形成される。図1に示す基板ホルダ6の中央部6Aに保持された基板100A及び周辺部6Bに保持された基板100B上の成膜速度の値は、それぞれセンサ部8の第1センサ部8A及び第2センサ部8Bによって計測され、この計測結果が制御部10に送られる。
成膜工程S10が終了すると、回動軸17が回転してシャッター5が再び基板100とターゲット101との間を遮蔽し、処理はステップS20に進む。
【0031】
続くステップS20では、成膜工程S10における第1センサ部8A及び第2センサ部8Bの計測した成膜速度値(指標)に基づいて、基板ホルダ6の中央部6Aと周辺部6Bにおける成膜工程中の平均成膜速度が各領域6A,6Bの成膜環境を示す指標として取得される。
【0032】
次に、ステップS30では、同一のターゲット101を用いて継続して成膜が行われるかどうかをユーザの制御部10への入力等に基づいて制御部10が判断する。継続した成膜が行われない場合は、制御部10による対象物支持部3の移動は必要ないため、処理は「NO」に進んで成膜作業を終了する。
一方、継続した成膜が行われる場合(ステップS30による判断結果が「YES」の場合)は、基板ホルダ6の位置修正の必要性を判断するため、処理はステップS40に進む。
【0033】
ステップS40において、制御部10は、ステップS20で取得された基板100A,100B上の平均成膜速度を比較し、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差が所定値以上であるかどうかを判断する。この所定値は、要求される膜厚の精度に応じて適宜決定され、予め制御部10に設定しておくことが好ましい。
基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差が所定値未満(成膜速度差が許容範囲内)である場合、制御部10による偏心量D2の調節は必要ないと判断され、処理は「NO」に進んで、成膜処理を一旦停止する。そして、不図示のロードロック式基板搬送機構を用いて、真空中で基板ホルダ6に保持された基板100を未成膜の基板100に交換した後、処理はステップS10に戻り、上述したフローと同様に次のバッチの成膜工程が行われる。
一方、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差が所定値以上(成膜速度差が許容範囲外)である場合は、制御部10による偏心量D2の調節が必要と判断され、処理は「YES」に進んでステップS50に移る。
【0034】
図5は、図1の成膜装置1の偏心量D2が大きくなるように、初期位置(図1の状態)から対象物支持部3が左側に移動したときの、対象物支持部3とターゲット101との位置関係を示す図である。
ステップS50では、制御部10が駆動部7を制御し、図5に示すように、偏心量D2が大きくなるように対象物支持部3が図5の左側に移動する(図5中矢印A参照)。
ここで、本実施形態では、基板ホルダ6とともにセンサ部8が駆動部7に支持されているため、対象物支持部移動工程においては基板ホルダ6とセンサ部8とが同期して移動することになる。すなわち、基板ホルダ6及びセンサ部8の移動時における移動量及び移動方向が同一に設定されており、基板ホルダ6の移動前後において、基板ホルダ6に対するセンサ部8の相対位置は変化しない。なお、対象物支持部3の水平方向への移動量は、常に所定の移動量、例えば3ミリメートル(mm)であってもよいし、是正すべき成膜速度差の大きさとそれに対応した偏心量D2の調整量を予めテーブル等として制御部10に入力しておき、制御部10が適宜当該テーブルを参照して移動量を決定するように構成させてもよい。
基板ホルダ6が水平方向に移動した後で成膜装置1は一旦停止し、不図示のロードロック式基板搬送機構を用いて、真空中で基板ホルダ6の基板を未成膜のものと交換した後、処理はステップS10に戻って、上述したフローと同様に次のバッチの成膜工程が行われる。
【0035】
本実施形態のスパッタリング装置1によれば、ターゲット101を交換せずに継続して成膜が行われる場合、バッチが終了するごとに、センサ部8の取得値に基づいてステップS20で得られた基板ホルダ6の中央部6A及び周辺部6Bの平均成膜速度がステップS40で比較される。これによって、中央部6Aと周辺部6Bとの成膜環境が比較され、両者の差が所定値以上である場合に、ステップS50の対象物支持部移動工程において制御部10が駆動部7を介して対象物支持部3を水平方向に移動させ、容易にフィードバック制御することが可能となる。その結果、基板ホルダ6と材料設置部4との偏心量D2が変化して中央部6Aと周辺部6Bとの成膜速度差が小さくなり、両者の成膜環境が均一化されて基板100A及び100B上に形成される薄膜の膜厚も均一化される。
したがって、同一ターゲット101を用いて繰り返し成膜を行う場合でも、基板100上に均一に成膜を行うことができ、成膜の再現性、精度を向上させることができる。すなわち、本実施形態では、成膜速度に応じてターゲット101と対象物支持部3との相対位置を変化させることで、従来のように成膜速度に基づいて電子銃等を制御する場合に比べて簡素な構成で基板ホルダ6上における成膜環境の均一化を図ることができる。そのため、製造効率及び製造コストの向上も図ることができる。
【0036】
特に、本実施形態では、基板ホルダ6の中央部6A及び周辺部6Bの成膜速度を測定するセンサ部8が駆動部7に支持されているため、対象物支持部移動工程において基板ホルダ6とセンサ部8とが同期して移動することになる。すなわち、基板ホルダ6及びセンサ部8の移動時における移動量及び移動方向が同一に設定されているため、基板ホルダ6の移動前後において、基板ホルダ6に対するセンサ部8の相対位置は変化しない。これにより、基板ホルダ6上の常に同位置の成膜速度を、センサ部8によって測定することができるため、信頼性が高く高精度な測定結果を得ることができる。
その結果、基板ホルダ6上における成膜環境の更なる均一化を図り、基板100上に形成される薄膜の均一化を図ることができる。なお、基板ホルダ6上における常に同位置の成膜速度を測定することで、過去の成膜時(例えば、前回成膜時)における基板100への成膜速度に基づいてフィードバック制御を行うこともできる。
【0037】
さらに、基板ホルダ6上の成膜速度を常時測定しながら成膜を行うことができるため、この測定結果に基づいてターゲット101と対象物支持部3との相対的な位置関係を速やかに変化させることができる。その結果、基板100上に形成される薄膜のさらなる均一化を図ることができる。
【0038】
なお、本実施形態においては、同一ターゲット101を用いて成膜を継続するか否かの判断が行われるステップS30の前に、当該判断に関わらず常に成膜工程S10における平均成膜速度がステップS20において取得される例を説明した。しかし、本実施形態の成膜装置1はこれには限定されず、例えばステップS10の途中にステップS20とステップS40を行い、許容範囲外の場合には対象物支持部3を移動させるステップS50を行い、成膜を継続する構成にしてもよい。
【0039】
(第2実施形態)
次に本発明の第2の実施形態について、図6〜図8を参照して説明する。
本実施形態の成膜装置21と、上述の第1実施形態の成膜装置1との異なるところは、駆動部による対象物支持部3の動作の態様である。なお、以下の説明において、成膜装置1と共通する構成については、同一の符号を付して重複する説明を省略する。
図6は成膜装置21を示す概略図である。
図6に示すように、成膜装置21の多くの構成は、上述した成膜装置1と共通しているが、対象物支持部3に取り付けられた駆動部22は、基板ホルダ6を回転軸9の軸心O1回りに回転可能とすると共に、対象物支持部3を回転軸9の軸心O1方向と平行な方向に移動させることが可能に構成されている。すなわち、成膜装置21においては、偏心量D2を変化させることはできない代わりに、対象物支持部3を材料設置部4の載置面と垂直な方向、つまり成膜材料の表面の法線方向(軸心O1方向)に対して平行に移動させて、基板ホルダ6の下面Tとバッキングプレート11の上面(載置面)に載置されたターゲット101の当初の表面Sとの間の垂直距離であるT−S間距離D1を変化させることができるようになっている。よって、基板ホルダ6、センサ部8及び基板100と、材料設置部4及び載置されたターゲット101との相対的な位置関係を変化させることができる。
【0040】
図7は、成膜装置21を用いて偏心量D2を変えずに、垂直距離D1を様々な値に設定し、1バッチごとにターゲット101を新品と交換して成膜を行い、基板ホルダ6の周辺部6Bに保持された基板100B上の膜厚と、中央部6Aに保持された基板100A上の膜厚との比を検討した結果を示すグラフである。
図7に示すように、T−S間距離D1を長くする、すなわち、基板ホルダ6を材料設置部4から遠ざけるほど、周辺部6Bの膜厚の中央部6Aの膜厚に対する比が大きくなることがわかる。
【0041】
(作用)
上記の構成を備えた成膜装置21の動作について、以下に説明する。
図8は、図6の成膜装置21のT−S間距離D1が小さくなるように、対象物支持部3が初期位置(図6の状態)から下側に移動したときの基板ホルダ6とターゲット101の位置関係を示す図である。
成膜装置21を用いた成膜手順においては、ステップS50の対象物支持部移動工程において、例えば周辺部6Bの基板100Bの成膜速度が所定値以上(成膜速度が許容範囲外)に上昇している場合は、図8に示すように、制御部10が駆動部22を介して対象物支持部3を成膜装置21の下側に移動させる(図8中矢印B参照)。これにより、基板ホルダ6の中央部6Aと周辺部6Bとにおける成膜速度差を小さくして、成膜環境を均一化させることができる。
【0042】
本実施形態の成膜装置21においても、制御部10が対象物支持部3と材料設置部4との位置関係を変化させることによって、対象物支持部3に保持された複数の基板100間の成膜環境を均一に近づけることができ、容易にフィードバック制御することが可能となる。その結果、成膜の精度を向上させることができる。
また、駆動部22に対象物支持部3及びセンサ部8を水平方向に移動させるための機構を設ける必要がないため、駆動部22の構成がより簡素になり、より低コストで成膜装置を構成することができる。
【0043】
(実施例)
次に、本発明の実施例について、図6〜図8を参照して説明する。
本実施例の成膜装置21は上述の第2実施形態の成膜装置21と同一の構成であるため、以下の説明においては、成膜装置21の構成については、同一の符号を付して重複する説明を省略する。
図6に示すように、本実施形態に係る成膜装置21により、基板100上へMgF2の単層膜を100±5nmとなるように20回繰返し成膜した成膜方法について、以下、説明する。また、このMgF2の単層膜は、反射防止膜として用いられるものである。
MgF2の単層膜を成膜する前に、内径φ120mm、内径高さ0.35cmの石英製の皿からなる材料設置部4の中に粒径1〜2mmのMgF2のターゲット101を85gだけ配設する。次に、ターゲット101の表面を平坦化させた。さらに、対象物支持部3に基板100を搭載した基板ホルダ6を取り付けた。このときの偏心量D2は100mm、及びT−S間距離D1は100mmであり、さらに、回転軸9を中心に30rpmで基板100を公転させた。
【0044】
次に、不図示の真空ポンプを用いて、5×10−4Paまで真空槽2内を排気し、その後、導入ポート15から酸素ガスを4×10−1Paまで導入した。次に、電源13から不図示のマッチングボックスを介して、マグネットユニット12へ1400Wの高周波電力を供給し、プラズマを発生させた。この状態で、シャッター5を100秒間開け、基板100上にMgF2単層膜をセンサ部8で監視しながら100nm成膜した(ステップS10)。このとき、センサ部8Aで成膜速度が1nm/秒で一定となるように電源13を制御している。
【0045】
次に、成膜された基板100を保持した基板ホルダ6を、不図示のロードロック式基板搬送機構により真空槽2から移動させ、この基板ホルダ6を搬送している間に、平均成膜速度を取得し(ステップS20)、次のバッチを行うか判断する(ステップS30)。このとき、成膜を20回行ってない場合はステップS40へ進み、新規に成膜されていない基板100を保持した基板ホルダ6を真空槽2の上部へ配設する。
そして、図7に示すように、ステップS20で得られた平均成膜速度から膜厚比(成膜環境)を算出し、中央部6Aと周辺部6Bの膜厚比が1.05以下の場合はT−S間距離D1を変更せずに、次の成膜工程(ステップS10)へ進む。一方、膜厚比が1.05より大きい場合は、T−S間距離D1を小さくし、膜厚比が0.95より小さい場合はT−S間距離D1を大きくするように対象物支持部3を移動させる。なお、上述した第1,2実施形態のように、対象物支持部3の移動判断を平均成膜速度に基づいて行っても構わない。
【0046】
以上のようなスパッタリング成膜と、成膜された基板100を真空槽2から取出し新規の成膜されていない基板100を真空槽2へ配設する作業と、この対象物支持部3の搬送作業と同時に膜厚比が許容範囲外のときに基板ホルダ6を移動する作業とを繰返し行うことで、真空槽2を大気にさらすことなく、厚さ100nmのMgF2単層膜を20回連続的に成膜することができた。
本実施例により成膜したMgF2単層膜の反射率特性を、それぞれ(20回分)オリンパス製レンズ反射率測定器USPMで測定し、これらの反射率測定結果から物理膜厚を算出した。すると、これらMgF2単層膜の物理膜厚はすべて100±5nmであり、成膜毎に安定していた。
【0047】
この成膜装置及び成膜方法によれば、対象物支持部3とターゲット101の位置関係を制御しているので、基板100Aの膜厚が基板100Bの膜厚と略同一となり、同一時間で繰返し成膜した時の基板100上の物理膜厚を均一にすることができる。また、複数の基板100上の膜厚分布の再現性が良くなるので、生産効率を向上させることができる。
【0048】
以上、本発明の実施形態を説明したが、本発明の技術範囲は上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。
例えば、上述した各実施形態においては、スパッタリングによって成膜を行う成膜装置の例を挙げたが、これに限定されるのではなく、真空蒸着法、イオンプレーティング法、イオンアシスト蒸着法によって成膜を行う成膜装置であっても構わない。
また、上述した各実施形態においては、センサ部8が水晶センサで構成され、平均成膜速度差が制御ターゲットとされて成膜環境の比較及び調整が行われる例を説明したが、これに代えて、成膜速度を積分した膜厚値を制御ターゲットとしてもよい。さらに、膜厚値を制御ターゲットとする場合は、水晶センサに代えて光学式の膜厚センサが用いられてもよい。加えて、成膜速度が選択した成膜材料に鑑みて好適な所定の範囲内の値となるように、センサ部8のセンサの出力値に基づいて成膜速度値そのものが成膜速度差と併せて制御されてもよい。
さらに、上述した実施形態では、センサ部8を基板ホルダ6の中央部6Aと周辺部6Bに2つ用いた場合について説明したが、これに限らず3つ以上の複数用いる構成にしても構わない。これにより、基板ホルダ6上における各センサ部8毎の測定領域を縮小することができるため、基板ホルダ6上の成膜環境をより細かく測定することができる。したがって、より高精度な成膜環境の制御を行うことができるので、各基板100上に形成される薄膜の膜厚をより均一化することができる。
【0049】
また、成膜環境を調節する対象となる対象物の支持部位についても、上述の基板ホルダ6の中央部6A及び周辺部6Bに限定されず、装置の成膜特性によって適宜設定されてよい。
加えて、成膜環境を調節するための対象物支持部3の移動態様は、上述のような水平方向及び垂直方向のいずれか一方に限定されるものではない。したがって、これらを適宜組み合わせて2軸方向に移動可能に対象物支持部3を構成することによって、より好適に成膜環境の調節が可能になるとともに、装置の寸法等の設計パラメータが調節機能に制限を加える事態をおきにくくすることができる。
さらに、導入ガスは酸素の他に、アルゴンや窒素またはこれらの混合ガスでもよい。
【符号の説明】
【0050】
1、21 成膜装置
3 対象物支持部
4 材料設置部
6 基板ホルダ(対象物ホルダ)
8 センサ部
10 制御部
100、100A、100B 基板(対象物)
101 ターゲット(成膜材料)
【特許請求の範囲】
【請求項1】
成膜材料を用いて対象物の表面に成膜を行う成膜装置であって、
前記成膜材料の表面に対向するように配置され、前記対象物を設置する対象物ホルダと
前記対象物上の成膜環境を測定可能な少なくとも2つのセンサ部と、を備え、
前記対象物ホルダは、前記成膜材料と相対的に移動可能に構成されるとともに、前記対象物ホルダの移動量及び移動方向と、前記センサ部の移動量及び移動方向とが同一に設定されていることを特徴とする成膜装置。
【請求項2】
前記センサ部の測定結果に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる制御部を備え、
前記制御部は、前記少なくとも2つのセンサ部で測定された前記成膜環境のうち、1つの前記センサ部で測定された前記成膜環境と、別の前記センサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させることを特徴とする請求項1に記載の成膜装置。
【請求項3】
前記制御部は、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面に平行な方向に移動させることを特徴とする請求項2に記載の成膜装置。
【請求項4】
前記制御部は、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させることを特徴とする請求項2に記載の成膜装置。
【請求項5】
同一の成膜材料を用いて、対象物ホルダに設置された対象物の表面に複数回連続して成膜を行う成膜方法であって、
前記対象物の表面に成膜を行う成膜工程と、
前記成膜工程中または前記成膜工程後に、前記対象物の成膜環境を測定可能に設けられた少なくとも2つのセンサ部により測定された成膜環境を示す指標を取得する指標取得工程と、
前記指標取得工程で取得された指標に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる調節工程とを有し、
前記調節工程では、前記対象物ホルダと前記成膜材料との位置関係の変化前後において、前記対象物ホルダと前記センサ部との相対位置が同一に保持されることを特徴とする成膜方法。
【請求項6】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させることを特徴とする請求項5に記載の成膜方法。
【請求項7】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面に対して平行な方向に移動させることを特徴とする請求項6に記載の成膜方法。
【請求項8】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させることを特徴とする請求項6に記載の成膜方法。
【請求項1】
成膜材料を用いて対象物の表面に成膜を行う成膜装置であって、
前記成膜材料の表面に対向するように配置され、前記対象物を設置する対象物ホルダと
前記対象物上の成膜環境を測定可能な少なくとも2つのセンサ部と、を備え、
前記対象物ホルダは、前記成膜材料と相対的に移動可能に構成されるとともに、前記対象物ホルダの移動量及び移動方向と、前記センサ部の移動量及び移動方向とが同一に設定されていることを特徴とする成膜装置。
【請求項2】
前記センサ部の測定結果に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる制御部を備え、
前記制御部は、前記少なくとも2つのセンサ部で測定された前記成膜環境のうち、1つの前記センサ部で測定された前記成膜環境と、別の前記センサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させることを特徴とする請求項1に記載の成膜装置。
【請求項3】
前記制御部は、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面に平行な方向に移動させることを特徴とする請求項2に記載の成膜装置。
【請求項4】
前記制御部は、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させることを特徴とする請求項2に記載の成膜装置。
【請求項5】
同一の成膜材料を用いて、対象物ホルダに設置された対象物の表面に複数回連続して成膜を行う成膜方法であって、
前記対象物の表面に成膜を行う成膜工程と、
前記成膜工程中または前記成膜工程後に、前記対象物の成膜環境を測定可能に設けられた少なくとも2つのセンサ部により測定された成膜環境を示す指標を取得する指標取得工程と、
前記指標取得工程で取得された指標に基づいて、前記対象物ホルダと前記成膜材料との相対的な位置関係を変化させる調節工程とを有し、
前記調節工程では、前記対象物ホルダと前記成膜材料との位置関係の変化前後において、前記対象物ホルダと前記センサ部との相対位置が同一に保持されることを特徴とする成膜方法。
【請求項6】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、前記対象物ホルダを移動させることを特徴とする請求項5に記載の成膜方法。
【請求項7】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面に対して平行な方向に移動させることを特徴とする請求項6に記載の成膜方法。
【請求項8】
前記調節工程では、前記指標取得工程で取得された前記成膜環境のうち、前記1つのセンサ部で測定された前記成膜環境と、前記別のセンサ部で測定された前記成膜環境との差が所定範囲以上であるときに、
前記対象物ホルダを前記成膜材料の表面の法線方向に対して平行に移動させることを特徴とする請求項6に記載の成膜方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−285647(P2010−285647A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−139583(P2009−139583)
【出願日】平成21年6月10日(2009.6.10)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月10日(2009.6.10)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]