
手ぶれ検出装置および撮影装置
【課題】 消費電力を抑えながら、撮影状況では手ぶれ補正を常に精度よく実行する。
【解決手段】 スリープモード機能を備えるジャイロセンサ20A、20B、ハイパスフィルタ22A、22Bを、カメラに設ける。ストロボ撮影が設定されると、ジャイロセンサ20A、20BをスリープモードONに設定する。そして、ストロボ充電が完了すると、ジャイロセンサ20A、20BをスリープモードOFFに設定する。
【解決手段】 スリープモード機能を備えるジャイロセンサ20A、20B、ハイパスフィルタ22A、22Bを、カメラに設ける。ストロボ撮影が設定されると、ジャイロセンサ20A、20BをスリープモードONに設定する。そして、ストロボ充電が完了すると、ジャイロセンサ20A、20BをスリープモードOFFに設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カメラなどの撮影装置に備えられた手ぶれ補正機構に関し、特に、手ぶれ検出処理に関する。
【背景技術】
【0002】
手ぶれ補正機能付きのカメラでは、ジャイロセンサなどの手ぶれ検出器が設けられており、カメラ操作時の手ぶれによってカメラ本体がヨーイング、あるいはピッチングすると、ジャイロセンサはカメラの姿勢変化により生じる角速度を検出する。そして、像ブレを防ぐため、手ぶれによるカメラの動きを相殺するように光学系、あるいは撮像素子がシフトする。ジャイロセンサを使用する場合、ドリフトによるDC成分をカットするため、ジャイロセンサからの出力電圧はハイパスフィルタに入力される(例えば、特許文献1、2参照)。
【0003】
電気により照明光を発光するストロボなどの発光装置を備えたカメラでは、発光のために、コンデンサの充電動作(以下、単にストロボ充電という)が行なわれる。このストロボ充電動作のとき、電源電圧が大きく変動し、低下する。撮影時に電源電圧が十分でなければ、シャッタ開閉など撮影動作に影響を及ぼし、システム的にダウンする。そのため、ストロボ充電の間、電力消費となる手ぶれ補正機構の動作を停止させ、動作タイミングをずらす(特許文献3参照)。また、露光が終了して最も電源電圧が低下したときにバッテリチェックを行い、電圧が低下している場合には手ぶれ補正機構の動作を停止させる(特許文献4参照)。
【特許文献1】特開平9−247520号公報
【特許文献2】特開2003−57706号公報
【特許文献3】特開平8−87044号公報
【特許文献4】特開平9−80529号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ストロボ充電の間、ジャイロセンサへ電源電圧が供給されるため、消費電力が無駄になっている。しかしながら、ジャイロセンサへの電源供給を停止すると、撮影可能状態に切り替えられた場合、上記ジャイロセンサの特性によって手ぶれを迅速に検出することができず、手ぶれ補正が精度よく働かない。また、ストロボ充電の影響でジャイロセンサからの出力電圧が変動し、ストロボ充電後も出力電圧が安定化せず、正確に手ぶれを検出することができない。
【課題を解決するための手段】
【0005】
本発明の撮影装置は、撮影光学系と、撮影光学系により形成される被写体像を記録する記録手段を備えたデジタルカメラ、ムービーカメラ、あるいは撮影機能を備えた携帯端末/携帯電話などの撮影装置である。また、撮影装置は、撮影時において電気により照明光を発光する発光手段を備える。例えば、発行手段は、放電によるストロボによって構成され、あるいは白色LEDなどによって構成される。
【0006】
一方、撮影装置は、手ぶれ補正可能であり、手ぶれによる角速度に応じた角速度信号を出力する角速度センサと、角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、制御手段と、手ぶれによる変位量に基づいて、撮影光学系による結像エリアを像ぶれが生じないように調整する手ぶれ補正手段とを備える。角速度センサは例えば電圧信号を出力するとともに、角速度センサからの角速度信号に対してDC成分を除去するハイパスフィルタを設けた場合、DC成分の除去された電圧信号がハイパスフィルタから検出される。角速度センサは例えばジャイロセンサであり、精度よく手ぶれを検出するため、水晶の結晶による振動ジャイロセンサを適用するのがよい。角速度が検出されると、角速度信号の電圧値と基準電圧とに基づいてカメラなどの撮影装置の姿勢変動による変動角速度が手ぶれとして検出される。基準電圧は角速度信号の電圧値の基準となる値であり、ジャイロセンサでは角速度センサから出力されている。ハイパスフィルタ後段には、例えばアンプを接続すればよい。手ぶれ補正手段は、イメージサークルに応じた結像エリアを手ぶれに合わせて位置調整すればよく、光学系あるいは撮像素子を光軸垂直方向に沿ってシフトさせる構成にすればよい。手ぶれ補正機構による制御系は、手ぶれ量の値「0」が続くと自動的に撮像素子の位置が中心位置へ戻るように、応答特性を定めればよい。
【0007】
本発明の角速度センサは、動作状態から動作停止状態へ切替可能なセンサであり、角速度センサが動作停止状態になると、角速度信号の電圧値が、基準電圧の値と同じになる。ここで動作停止状態とは、角速度を測定する機能を発揮できない状態を示し、その機能を再び実現させるため必要な電力は角速度センサに供給される。上記特性をもつ角速度センサとしては、例えばスリープモード実行可能な角速度センサを適用すればよい。スリープモードを設定した場合、センサ素子、アンプなど角速度センサの一部のモジュールへの電源供給を遮断し、基準電圧による角速度信号が出力される。
【0008】
このような角速度センサに対し、制御手段は、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する。そして、制御手段は、発光手段の充電の間、角速度センサを動作停止状態にし、発光手段の充電が完了すると、角速度センサを動作させる。
【0009】
手ぶれ検出の構成要素へ電源供給されている間、角速度センサから常時信号が出力されるが、角速度センサを動作停止状態にすることにより、基準電圧と電圧値が一致する角速度信号が角速度センサから出力される。スリープモードを設定可能な角速度センサの場合、センサ素子、アンプなど角速度センサの一部のモジュールへの電源供給を遮断することで基準電圧値による信号出力が維持される。ストロボ充電の間、角速度信号は一定であり、角速度センサでは必要最小限の要素しか電源供給されず、撮影動作実行までの消費電力が抑えられる。また、ストロボ充電が完了すると、角速度センサあるいはハイパスフィルタからの出力信号が安定化しているため、動画像を像ぶれのない状態で確認することができる。また、すぐに撮影動作を実行しても、精度よく手ぶれ補正を行うことができる。
【0010】
本発明の手ぶれ検出装置は、手ぶれによる角速度に応じた角速度信号を出力し、動作停止状態に切替可能な角速度センサと、角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを備え、角速度信号の電圧値が、角速度センサの動作停止状態において、基準電圧の値と同じになり、制御手段が、発光手段の充電の間、角速度センサを動作停止状態にし、充電が完了すると、角速度センサを動作させることを特徴とする。
【0011】
本発明の手ぶれ検出方法は、動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出し、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する方法であって、角速度信号の電圧値が、角速度センサの動作停止状態において、基準電圧値と同じになり、発光手段の充電の間、角速度センサを動作停止状態にし、発光手段の充電が完了すると、角速度センサを動作させることを特徴とする。
【0012】
本発明のプログラムは、動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを機能させるプログラムであって、角速度信号の電圧値が、角速度センサの動作停止状態において、基準電圧値と同じになり、ストロボ充電の間、角速度センサを動作停止状態にし、ストロボ充電が完了すると、角速度センサを動作させるように、制御手段を機能させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、消費電力を抑えながら、撮影状況では手ぶれ補正を常に精度よく実行することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して本発明の実施形態について説明する。
【0015】
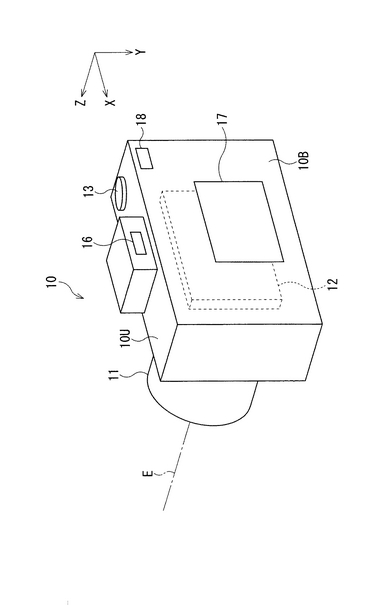
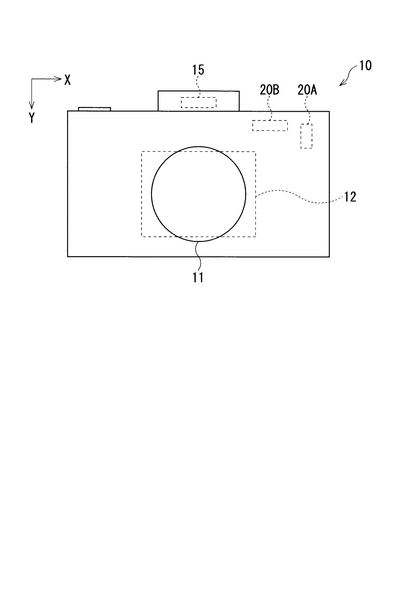
図1は、第1の実施形態であるカメラの概略的斜視図である。図2は、カメラの正面図である。
【0016】
カメラ10は、手ぶれ補正機能を備えたデジタルカメラであり、カメラ本体内部には、手ぶれ補正機構12がレンズ鏡筒11の後方に設けられている。カメラ上面10U側には、レリーズボタン13、手ぶれ補正ボタン16が設けられ、カメラ背面10Bには、LCD17、メイン電源ボタン18が設けられている。また、カメラ10の正面側には、ストロボ15が設けられている。カメラ上面に設けられたストロボボタン(図示せず)が操作されると、ストロボ撮影が実行される。
【0017】
カメラ本体内部には、手ぶれを検出するための角速度センサとしてのジャイロセンサ20A、20Bが設けられており、ジャイロセンサ20A、20Bは、それぞれカメラ10がヨーイング、ピッチングするときの角速度を検出する。ただし、レンズ鏡筒11内の撮影光学系(図示せず)の光軸Eの横方向の動き、すなわちX方向に対する角度をヨーイングとし、光軸Eの垂直でカメラ10の縦方向の動き、すなわちY方向に対する角度をピッチングとする。なお、X−Y平面は光軸Eに垂直であり、Z方向は光軸方向に対応する。また、X、Y方向は、それぞれカメラ10の横方向、縦方向に対応する。カメラ10が水平姿勢状態の場合、X方向は水平面、Y方向は鉛直方向に沿った方向になる。
【0018】
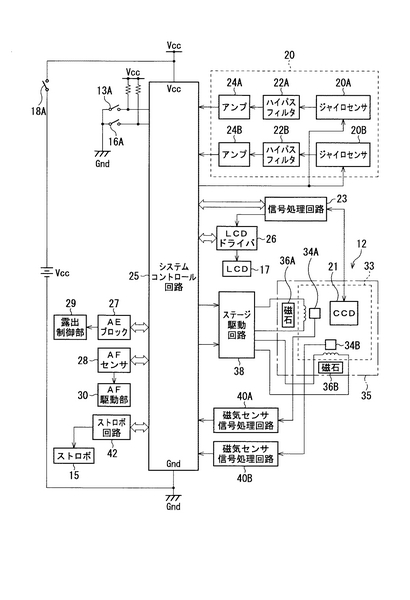
図3は、カメラ10のブロック図である。
【0019】
CPUを含むシステムコントロール回路25はカメラ10を制御し、カメラ全体の処理動作を実行するプログラムがROM(図示せず)に格納されている。レリーズスイッチ13A、手ぶれ補正スイッチ16A、メイン電源スイッチ18A、レリーズ半押しスイッチ(図示せず)、ストロボスイッチ(図示せず)などがシステムコントロール回路25に接続され、メイン電源ボタン18に対する操作によってメイン電源スイッチ18AがONに切り替わると、各回路へ電源が供給される。
【0020】
撮影モードが設定されている場合、動画像を表示するための処理動作が実行される。撮影光学系を通った光はレンズシャッタ(図示せず)を介してCCD21に到達し、被写体像がCCD21に受光面に形成される。CCD21では、光電変換により被写体像に応じたアナログ画像信号が発生し、CCD駆動回路(図示せず)によってCCD21から画像信号が所定時間間隔で順次読み出される。CCD21から読み出されたアナログ画像信号は、増幅処理されて信号処理回路23へ送られる。
【0021】
信号処理回路23では、アナログ画像信号がデジタル信号に変換されるとともに、ホワイトバランス調整処理、ガンマ補正処理など様々な処理がデジタル画像信号に対して施される。処理された画像信号は一時的にフレームメモリ(図示せず)に格納され、LCDドライバ26へ送られる。LCDドライバ26は、画像信号に基づいてLCD17を駆動する。その結果、カメラ背面に設けられたLCD17に被写体像が動画像として表示される。
【0022】
AEブロック27では、CCD21から読み出される画像信号に基づいて被写体の明るさが検出され、信号処理回路23ではそれに基づき動画像の明るさ調整が行われる。また、AEブロック27では、ユーザによる露出、画質に関する設定操作に従い、シャッタスピード及び絞り値の露出値が演算される。レリーズボタン13が半押しされると、被写体との距離がAFセンサ28において検出される。そして焦点調整のため、撮影光学系内のフォーカシングレンズ(図示せず)がAF駆動部30によって駆動される。被写体の明るさが十分でない場合、ストロボ回路42のコンデンサが充電され、ストロボ充電が行われる。
【0023】
レリーズボタン13が全押しされると、撮影動作が実行される。すなわち、前述の演算された露出値に基づいて、絞りが所定の開口径となるように駆動制御されるとともに、シャッタが所定の開度で所定期間だけ開き、被写体像に応じた画像信号がCCD21から読み出される。読み出された画像信号は、信号処理回路23において処理され、システムコントロール回路25を介しメモリカード(図示せず)に記憶される。シャッタ動作および絞り駆動制御は、露出制御部29によって制御されている。ストロボボタンが操作されるとストロボスイッチからの信号によってストロボ撮影が検出され、ストロボ充電が実行される。そしてレリーズボタン13が全押しされると、撮影動作に合わせてストロボが発光する。
【0024】
手ぶれ補正ボタン16が押下されると手ぶれ補正スイッチ16AがON状態となり、手ぶれ補正を実行させる操作信号がシステムコントロール回路25において検出される。手ぶれ検出部20は、ジャイロセンサ20A、20B、ハイパスフィルタ22A、22B、アンプ24A、24Bとを備え、手ぶれによるカメラの姿勢変動時の角速度が電圧として検出される。
【0025】
手ぶれ補正機構12は、CCD21が中央付近に取付けられた矩形状の移動ステージ33と、移動ステージ33に近接した状態で対向する矩形状の固定ステージ35とを備え、移動ステージ33および固定ステージ35とを支持する支持体(図示せず)が設けられている。固定ステージ35には、レンズ鏡筒11内部を通った光を通す開口部が形成されており、開口部のサイズはCCD21の移動範囲に従って定められている。
【0026】
移動ステージ33は、コイル(図示せず)の駆動によってX方向、Y方向に沿って独立して移動可能であり、システムコントロール回路25は、検出された角速度に基づいてカメラ10の変位角を演算し、ステージ駆動回路38を介して手ぶれ補正機構12を制御する。
【0027】
詳述すると、ユーザの手ぶれによってカメラ10の姿勢が変動(ヨーイング、ピッチングの動き)をすると、ジャイロセンサ20A、20Bからヨーイング、ピッチングの角速度に応じた電圧信号(角速度信号)が出力される。出力された電圧信号は、それぞれハイパスフィルタ22A、22BにおいてDC成分が除去され、アンプ24A、24Bにおいて増幅される。増幅された電圧信号がシステムコントロール回路25へ入力されると、カメラ10の変動量に応じた変位角度が検出される。そして、手ぶれによる像ブレを相殺するように、システムコントロール回路25からステージ駆動回路38へ制御信号が出力され、移動ステージ33がX方向、Y方向へ移動する。その結果、撮影光学系による像がCCD21の受光面上に沿って相対的にシフトした位置で結像し、像ぶれのない画像がCCD21に形成される。
【0028】
移動ステージ33のCCD21周りには、X方向、Y方向に沿ってホール素子などの磁気センサ34A、34Bが配置されている。一方、固定ステージ35には、磁気センサ34A、34Bに対向するように磁石36A、36BがX方向、Y方向に沿って配置されている。手ぶれが検知されて移動ステージ33が移動すると、磁気センサ34A、34Bは、磁石36A、36Bに対する相対的位置の変化に応じて磁界変化を検知し、磁気センサ信号処理回路40A、40Bは、それぞれ移動ステージ33のX方向、Y方向の移動量を検出する。システムコントロール回路25は、移動ステージ33の現在の相対的位置と設定された位置との差に基づき、移動ステージ33をフィードバック制御する。
【0029】
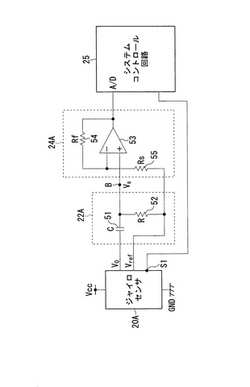
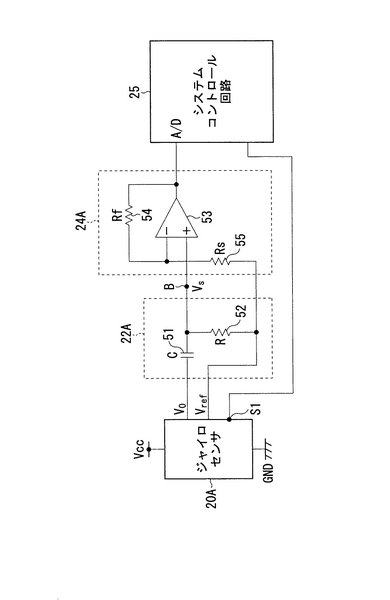
図4は、手ぶれ検出部20の等価回路を示した図である。なお、ジャイロセンサ20B、ハイパスフィルタ22B、アンプ24Bも同様の構成である。
【0030】
ハイパスフィルタ22Aは、容量Cのコンデンサ51と抵抗値Rの抵抗52とを備え、コンデンサ51の一端と抵抗52の一端がジャイロセンサ20Aに接続されている。カメラ10の角速度に応じた電圧V0はコンデンサ51側へ出力され、基準電圧Vrefは抵抗52側へ出力される。アンプ24Aは、オペアンプ53と、抵抗値Rf、Rsをそれぞれもつ抵抗54、55とを備える。ハイパスフィルタ22Aの時定数τ(=CR)は、低周波数の手ぶれを検知できるように、比較的大きな値に定められている。
【0031】
ジャイロセンサ20Aは、水晶の結晶による振動ジャイロセンサであり、スリープモードが実行可能なように構成されている。スリープモードをON/OFFに設定する制御信号は、システムコントロール回路25からジャイロセンサ20Aの端子S1へ送信される。スリープモードがONに設定されると、ジャイロセンサ20A内のセンサ素子、増幅器(いずれも図示せず)等、角速度を検出するのに不可欠な要素へ電源が供給されない一方、スリープモードをOFF設定へ切り替えるのに必要な要素に対して電源供給される。スリープモードがONに設定されている間、コンデンサ51へ出力される電圧V0は基準電圧Vrefと一致する。
【0032】
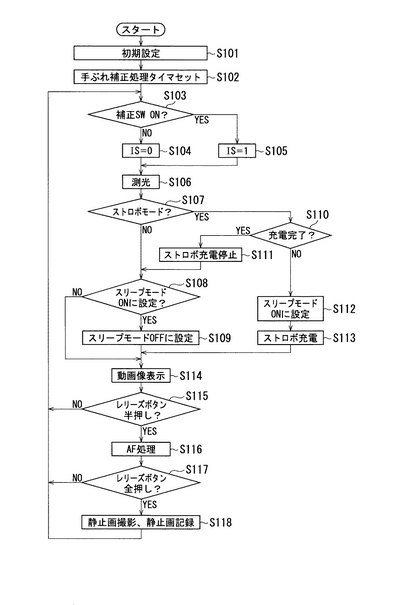
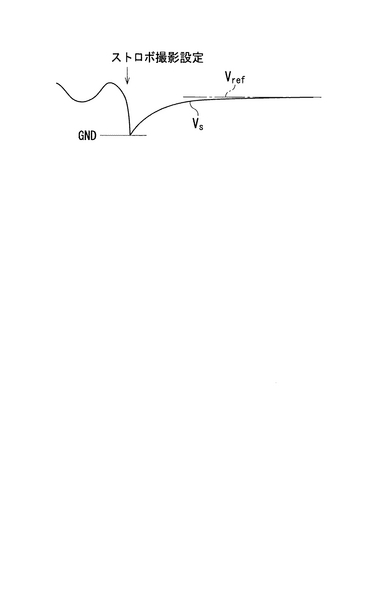
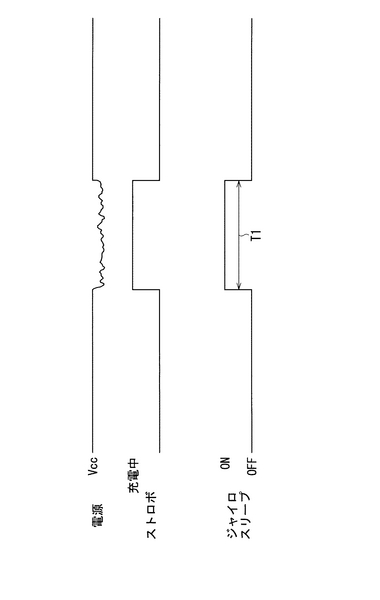
図5は、カメラ10の撮影動作処理を示したフローチャートである。図6は、ハイパスフィルタ22Aから出力される電圧の変動過程(状態遷移)を示した図である。図7は、撮影動作処理のタイミングチャートである。
【0033】
ステップS101では、CCD21、撮影光学系などが初期設定される。ステップS102では、手ぶれ補正処理を実行する割り込み処理がタイマーセットされる。
【0034】
ステップS103では、手ぶれ補正スイッチ16AがON状態であるか否かが判断される。手ぶれ補正スイッチ16AがON状態であると判断されると、ステップS105へ進み、手ぶれ補正変数ISが「1」に設定される。一方、手ぶれ補正スイッチ16AがON状態でないと判断されると、ステップS104へ進み、手ぶれ補正変数ISが「0」に設定される。手ぶれ補正変数ISは、手ぶれ補正モードの設定、非設定を示す変数であり、手ぶれ補正スイッチ16AがONに設定された場合にはIS=1に設定され、手ぶれ補正スイッチ16AがON設定されていない場合にはIS=0に設定される。
【0035】
ステップS106では、AEブロック27において測光され、被写体の明るさ調整処理が実行される。そしてステップS107では、ストロボボタンが操作され、ストロボ撮影が設定されたか否かが判断される。
【0036】
ステップS107において、ストロボ撮影が設定されていないと判断されると、ステップS108へ進む。ステップS108では、ジャイロセンサ20A、20BのスリープモードがONに設定されているか否かが判断される。スリープモードがONに設定されていないと判断されるとステップS114へ移る。一方、スリープモードがONに設定されていると判断された場合、ステップS109へ進み、ジャイロセンサ20A、20BのスリープモードがOFFに設定される。ステップS109が実行されると、ステップS114へ進む。なお、手ぶれ補正機構に対しては、メイン電源がON状態の間、常に電源が供給されている。
【0037】
一方、ステップS107において、ストロボ撮影が設定されていないと判断されると、ステップS110へ進み、ストロボ充電が完了しているか否かが判断される。ストロボ充電が完了したと判断されると、ステップS111へ進み、充電処理が終了する。ステップS111が実行されると、ステップS108、S109へ移り、スリープモードがOFFに設定される。
【0038】
一方、ステップS110において、ストロボ充電が完了していないと判断されると、ステップS112へ進み、ジャイロセンサ20A、20BのスリープモードがONに設定される。そして、ステップS113では、ストロボ充電処理が施される。ステップS113が実行されると、ステップS114へ進む。
【0039】
図6では、ストロボ撮影が設定された直後のハイパスフィルタ22Aから出力される電圧Vs(図4のB点における電圧)を時間と経過とともに示している(ハイパスフィルタ22Bについても同じである)。スリープモードがONに設定された場合、ジャイロセンサ20Aからの出力電圧V0は、上述したように基準電圧Vrefと一致する。したがって、スリープモードがONに設定された時点から、ハイパスフィルタ22Aの時定数τに従う出力電圧安定化までの過度状態が開始される。そして、所定時間が経過すると、実質的に出力電圧は安定化し、DC成分は除去される。
【0040】
ステップS114では、動画像表示処理が実行される。ステップS115では、レリーズボタン13が半押しされてレリーズ半押しスイッチがON状態であるか否かが判断される。レリーズボタン13が半押しされていないと判断されると、ステップS103へ戻る。一方、レリーズボタン13が半押しされたと判断されると、ステップS116へ進み、焦点調整処理、露出値演算が実行される。
【0041】
ステップS117では、レリーズボタン13が全押しされてレリーズスイッチ13AがON状態であるか否かが判断される。レリーズスイッチ13AがON状態ではないと判断されると、ステップS103へ戻る。一方、レリーズスイッチ13AがON状態であると判断された場合、ステップS118に進み、静止画撮影動作が行なわれる。すなわち演算された露出値に基づいて絞り及びシャッタが駆動されてCCD21の受光面上の露出制御が行なわれた後、CCD21から信号電荷が読み出され、所定の処理を施して静止画像データが生成される。また、ステップS118では、記録処理が実行される。
【0042】
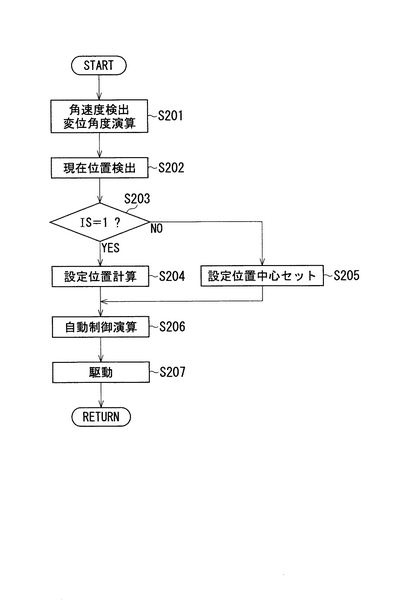
図8は、手ぶれ補正処理を示した割り込みルーチンである。手ぶれ補正処理は、図5の撮影動作処理に対して1ミリ秒[mS]間隔で割り込んで処理される。
【0043】
ステップS201では、カメラ10のピッチングに対する角速度がジャイロセンサ20Aからの出力電圧に基づいて検出されるステップS202では、磁気センサ34Aから送られてくる検出信号に基づき、CCD21の中心位置からのX方向に沿った相対的位置が検出される。ただし、ここではCCD21の中心が光軸Eにあるときの位置を中心位置と定める。
【0044】
ステップS203では、手ぶれ補正変数IS=1であるか、すなわち手ぶれ補正モードが設定されているか否かが判断される。手ぶれ補正変数IS=0である、すなわち手ぶれ補正モードが設定されていないと判断されると、ステップS205へ進み、CCD21の位置が中心位置に定められる。一方、手ぶれ補正変数IS=1であると判断された場合、ステップS204へ進む。ステップS204では、カメラ10の手ぶれによる変位角度が算出される。検出された角速度に基づいてカメラ10の姿勢変位角度が算出される。そして、カメラ10の姿勢変位角度に基づき、焦点距離等の特性に従う変換係数を利用して移動させるべきCCD21の位置(設定位置)が演算される。
【0045】
なお、手ぶれ補正機構による制御系は、手ぶれ量の値「0」が続くと自動的にCCD21の位置が中心位置へ戻るように、応答特性が定められている。従来知られているように、PID制御ブロックとカメラ10の手ぶれによる変動量(角度)算出ブロックとの間に所定の時定数によるループを入れ、安定化を図っている。
【0046】
ステップS206では、演算されたCCD21の設定位置と磁気センサ34Aにより検出される今現在のCCD21の位置とに基づき、移動ステージ33の操作量が演算される。そして、ステップS207では、演算された操作量に基づき、移動ステージ33がステージ駆動回路38からの駆動信号によって所定距離だけ移動する。ここではPID制御がフィードバック制御として実行される。
【0047】
なお、図8ではヨーイングに対する手ぶれ補正処理ルーチンを示すが、同様の手ぶれ補正処理がピッチングに対しても実行される。
【0048】
図7には、ストロボ充電している間のタイミングチャートが示されている。ジャイロセンサ20A、20BがスリープモードONに設定されている間、上述したように、ハイパスフィルタ22A、22BからのDC成分は除去されている。したがって、ストロボ充電が終了するときには、上述した特性によってCCD21の位置は中央位置へすでに回復し、その直後に検出される角速度信号は手ぶれによる角速度を示し、検出された角速度信号に基づいて手ぶれ補正が実行される。また、スリープモードがON状態の期間T1においては、ジャイロセンサ20A、20Bに対する消費電力が低減されている。さらに、ストロボ充電期間中の電源電圧の変動にジャイロセンサ20A、20Bの出力信号が影響されず、手ぶれと関係ない手ぶれ補正機構の動作が生じない。
【0049】
以上のように本実施形態によれば、ジャイロセンサ20A、20B、ハイパスフィルタ24A、24Bがカメラ10に設けられており、ジャイロセンサ20A、20Bはスリープモード機能を備える。ストロボ撮影が設定されると、ジャイロセンサ20A、20BはスリープモードONに設定される。その結果、基準電圧Vrefと同じ電圧V0がハイパスフィルタ22A、22Bへジャイロセンサ20A、20Bから出力され、出力電圧のDC成分が除去される。そして、ストロボ充電が完了すると、ジャイロセンサ20A、20BがスリープモードOFFに設定される。
【0050】
ジャイロセンサ20A、20Bは、圧電型振動体のジャイロセンサなどの角速度センサであってもよい。本実施形態においては、発光手段として、キセノン管を放電発光させる一般的なストロボ装置を前提としたが、白色LEDを用いたストロボ装置としてもよい。ハイパスフィルタを用いない構成にしてもよい。
【図面の簡単な説明】
【0051】
【図1】第1の実施形態であるカメラの概略的斜視図である。
【図2】カメラの正面図である。
【図3】カメラのブロック図である。
【図4】手ぶれ検出部(ジャイロセンサ、ハイパスフィルタ、アンプ)の等価回路を示した図である。
【図5】カメラの撮影動作処理を示したフローチャートである。
【図6】ハイパスフィルタから出力される電圧の変動過程(状態遷移)を示した図である。
【図7】ストロボ充電中のタイミングチャートである。
【図8】手ぶれ補正処理を示した割り込みルーチンである。
【符号の説明】
【0052】
10 カメラ
15 ストロボ
20 手ぶれ検出部
20A、20B ジャイロセンサ(角速度センサ)
21 CCD
22A、22B ハイパスフィルタ
25 システムコントロール回路
33 移動ステージ
42 ストロボ回路
V0 出力電圧
Vref 基準電圧
【技術分野】
【0001】
本発明は、カメラなどの撮影装置に備えられた手ぶれ補正機構に関し、特に、手ぶれ検出処理に関する。
【背景技術】
【0002】
手ぶれ補正機能付きのカメラでは、ジャイロセンサなどの手ぶれ検出器が設けられており、カメラ操作時の手ぶれによってカメラ本体がヨーイング、あるいはピッチングすると、ジャイロセンサはカメラの姿勢変化により生じる角速度を検出する。そして、像ブレを防ぐため、手ぶれによるカメラの動きを相殺するように光学系、あるいは撮像素子がシフトする。ジャイロセンサを使用する場合、ドリフトによるDC成分をカットするため、ジャイロセンサからの出力電圧はハイパスフィルタに入力される(例えば、特許文献1、2参照)。
【0003】
電気により照明光を発光するストロボなどの発光装置を備えたカメラでは、発光のために、コンデンサの充電動作(以下、単にストロボ充電という)が行なわれる。このストロボ充電動作のとき、電源電圧が大きく変動し、低下する。撮影時に電源電圧が十分でなければ、シャッタ開閉など撮影動作に影響を及ぼし、システム的にダウンする。そのため、ストロボ充電の間、電力消費となる手ぶれ補正機構の動作を停止させ、動作タイミングをずらす(特許文献3参照)。また、露光が終了して最も電源電圧が低下したときにバッテリチェックを行い、電圧が低下している場合には手ぶれ補正機構の動作を停止させる(特許文献4参照)。
【特許文献1】特開平9−247520号公報
【特許文献2】特開2003−57706号公報
【特許文献3】特開平8−87044号公報
【特許文献4】特開平9−80529号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ストロボ充電の間、ジャイロセンサへ電源電圧が供給されるため、消費電力が無駄になっている。しかしながら、ジャイロセンサへの電源供給を停止すると、撮影可能状態に切り替えられた場合、上記ジャイロセンサの特性によって手ぶれを迅速に検出することができず、手ぶれ補正が精度よく働かない。また、ストロボ充電の影響でジャイロセンサからの出力電圧が変動し、ストロボ充電後も出力電圧が安定化せず、正確に手ぶれを検出することができない。
【課題を解決するための手段】
【0005】
本発明の撮影装置は、撮影光学系と、撮影光学系により形成される被写体像を記録する記録手段を備えたデジタルカメラ、ムービーカメラ、あるいは撮影機能を備えた携帯端末/携帯電話などの撮影装置である。また、撮影装置は、撮影時において電気により照明光を発光する発光手段を備える。例えば、発行手段は、放電によるストロボによって構成され、あるいは白色LEDなどによって構成される。
【0006】
一方、撮影装置は、手ぶれ補正可能であり、手ぶれによる角速度に応じた角速度信号を出力する角速度センサと、角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、制御手段と、手ぶれによる変位量に基づいて、撮影光学系による結像エリアを像ぶれが生じないように調整する手ぶれ補正手段とを備える。角速度センサは例えば電圧信号を出力するとともに、角速度センサからの角速度信号に対してDC成分を除去するハイパスフィルタを設けた場合、DC成分の除去された電圧信号がハイパスフィルタから検出される。角速度センサは例えばジャイロセンサであり、精度よく手ぶれを検出するため、水晶の結晶による振動ジャイロセンサを適用するのがよい。角速度が検出されると、角速度信号の電圧値と基準電圧とに基づいてカメラなどの撮影装置の姿勢変動による変動角速度が手ぶれとして検出される。基準電圧は角速度信号の電圧値の基準となる値であり、ジャイロセンサでは角速度センサから出力されている。ハイパスフィルタ後段には、例えばアンプを接続すればよい。手ぶれ補正手段は、イメージサークルに応じた結像エリアを手ぶれに合わせて位置調整すればよく、光学系あるいは撮像素子を光軸垂直方向に沿ってシフトさせる構成にすればよい。手ぶれ補正機構による制御系は、手ぶれ量の値「0」が続くと自動的に撮像素子の位置が中心位置へ戻るように、応答特性を定めればよい。
【0007】
本発明の角速度センサは、動作状態から動作停止状態へ切替可能なセンサであり、角速度センサが動作停止状態になると、角速度信号の電圧値が、基準電圧の値と同じになる。ここで動作停止状態とは、角速度を測定する機能を発揮できない状態を示し、その機能を再び実現させるため必要な電力は角速度センサに供給される。上記特性をもつ角速度センサとしては、例えばスリープモード実行可能な角速度センサを適用すればよい。スリープモードを設定した場合、センサ素子、アンプなど角速度センサの一部のモジュールへの電源供給を遮断し、基準電圧による角速度信号が出力される。
【0008】
このような角速度センサに対し、制御手段は、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する。そして、制御手段は、発光手段の充電の間、角速度センサを動作停止状態にし、発光手段の充電が完了すると、角速度センサを動作させる。
【0009】
手ぶれ検出の構成要素へ電源供給されている間、角速度センサから常時信号が出力されるが、角速度センサを動作停止状態にすることにより、基準電圧と電圧値が一致する角速度信号が角速度センサから出力される。スリープモードを設定可能な角速度センサの場合、センサ素子、アンプなど角速度センサの一部のモジュールへの電源供給を遮断することで基準電圧値による信号出力が維持される。ストロボ充電の間、角速度信号は一定であり、角速度センサでは必要最小限の要素しか電源供給されず、撮影動作実行までの消費電力が抑えられる。また、ストロボ充電が完了すると、角速度センサあるいはハイパスフィルタからの出力信号が安定化しているため、動画像を像ぶれのない状態で確認することができる。また、すぐに撮影動作を実行しても、精度よく手ぶれ補正を行うことができる。
【0010】
本発明の手ぶれ検出装置は、手ぶれによる角速度に応じた角速度信号を出力し、動作停止状態に切替可能な角速度センサと、角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを備え、角速度信号の電圧値が、角速度センサの動作停止状態において、基準電圧の値と同じになり、制御手段が、発光手段の充電の間、角速度センサを動作停止状態にし、充電が完了すると、角速度センサを動作させることを特徴とする。
【0011】
本発明の手ぶれ検出方法は、動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出し、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する方法であって、角速度信号の電圧値が、角速度センサの動作停止状態において、基準電圧値と同じになり、発光手段の充電の間、角速度センサを動作停止状態にし、発光手段の充電が完了すると、角速度センサを動作させることを特徴とする。
【0012】
本発明のプログラムは、動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを機能させるプログラムであって、角速度信号の電圧値が、角速度センサの動作停止状態において、基準電圧値と同じになり、ストロボ充電の間、角速度センサを動作停止状態にし、ストロボ充電が完了すると、角速度センサを動作させるように、制御手段を機能させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、消費電力を抑えながら、撮影状況では手ぶれ補正を常に精度よく実行することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して本発明の実施形態について説明する。
【0015】
図1は、第1の実施形態であるカメラの概略的斜視図である。図2は、カメラの正面図である。
【0016】
カメラ10は、手ぶれ補正機能を備えたデジタルカメラであり、カメラ本体内部には、手ぶれ補正機構12がレンズ鏡筒11の後方に設けられている。カメラ上面10U側には、レリーズボタン13、手ぶれ補正ボタン16が設けられ、カメラ背面10Bには、LCD17、メイン電源ボタン18が設けられている。また、カメラ10の正面側には、ストロボ15が設けられている。カメラ上面に設けられたストロボボタン(図示せず)が操作されると、ストロボ撮影が実行される。
【0017】
カメラ本体内部には、手ぶれを検出するための角速度センサとしてのジャイロセンサ20A、20Bが設けられており、ジャイロセンサ20A、20Bは、それぞれカメラ10がヨーイング、ピッチングするときの角速度を検出する。ただし、レンズ鏡筒11内の撮影光学系(図示せず)の光軸Eの横方向の動き、すなわちX方向に対する角度をヨーイングとし、光軸Eの垂直でカメラ10の縦方向の動き、すなわちY方向に対する角度をピッチングとする。なお、X−Y平面は光軸Eに垂直であり、Z方向は光軸方向に対応する。また、X、Y方向は、それぞれカメラ10の横方向、縦方向に対応する。カメラ10が水平姿勢状態の場合、X方向は水平面、Y方向は鉛直方向に沿った方向になる。
【0018】
図3は、カメラ10のブロック図である。
【0019】
CPUを含むシステムコントロール回路25はカメラ10を制御し、カメラ全体の処理動作を実行するプログラムがROM(図示せず)に格納されている。レリーズスイッチ13A、手ぶれ補正スイッチ16A、メイン電源スイッチ18A、レリーズ半押しスイッチ(図示せず)、ストロボスイッチ(図示せず)などがシステムコントロール回路25に接続され、メイン電源ボタン18に対する操作によってメイン電源スイッチ18AがONに切り替わると、各回路へ電源が供給される。
【0020】
撮影モードが設定されている場合、動画像を表示するための処理動作が実行される。撮影光学系を通った光はレンズシャッタ(図示せず)を介してCCD21に到達し、被写体像がCCD21に受光面に形成される。CCD21では、光電変換により被写体像に応じたアナログ画像信号が発生し、CCD駆動回路(図示せず)によってCCD21から画像信号が所定時間間隔で順次読み出される。CCD21から読み出されたアナログ画像信号は、増幅処理されて信号処理回路23へ送られる。
【0021】
信号処理回路23では、アナログ画像信号がデジタル信号に変換されるとともに、ホワイトバランス調整処理、ガンマ補正処理など様々な処理がデジタル画像信号に対して施される。処理された画像信号は一時的にフレームメモリ(図示せず)に格納され、LCDドライバ26へ送られる。LCDドライバ26は、画像信号に基づいてLCD17を駆動する。その結果、カメラ背面に設けられたLCD17に被写体像が動画像として表示される。
【0022】
AEブロック27では、CCD21から読み出される画像信号に基づいて被写体の明るさが検出され、信号処理回路23ではそれに基づき動画像の明るさ調整が行われる。また、AEブロック27では、ユーザによる露出、画質に関する設定操作に従い、シャッタスピード及び絞り値の露出値が演算される。レリーズボタン13が半押しされると、被写体との距離がAFセンサ28において検出される。そして焦点調整のため、撮影光学系内のフォーカシングレンズ(図示せず)がAF駆動部30によって駆動される。被写体の明るさが十分でない場合、ストロボ回路42のコンデンサが充電され、ストロボ充電が行われる。
【0023】
レリーズボタン13が全押しされると、撮影動作が実行される。すなわち、前述の演算された露出値に基づいて、絞りが所定の開口径となるように駆動制御されるとともに、シャッタが所定の開度で所定期間だけ開き、被写体像に応じた画像信号がCCD21から読み出される。読み出された画像信号は、信号処理回路23において処理され、システムコントロール回路25を介しメモリカード(図示せず)に記憶される。シャッタ動作および絞り駆動制御は、露出制御部29によって制御されている。ストロボボタンが操作されるとストロボスイッチからの信号によってストロボ撮影が検出され、ストロボ充電が実行される。そしてレリーズボタン13が全押しされると、撮影動作に合わせてストロボが発光する。
【0024】
手ぶれ補正ボタン16が押下されると手ぶれ補正スイッチ16AがON状態となり、手ぶれ補正を実行させる操作信号がシステムコントロール回路25において検出される。手ぶれ検出部20は、ジャイロセンサ20A、20B、ハイパスフィルタ22A、22B、アンプ24A、24Bとを備え、手ぶれによるカメラの姿勢変動時の角速度が電圧として検出される。
【0025】
手ぶれ補正機構12は、CCD21が中央付近に取付けられた矩形状の移動ステージ33と、移動ステージ33に近接した状態で対向する矩形状の固定ステージ35とを備え、移動ステージ33および固定ステージ35とを支持する支持体(図示せず)が設けられている。固定ステージ35には、レンズ鏡筒11内部を通った光を通す開口部が形成されており、開口部のサイズはCCD21の移動範囲に従って定められている。
【0026】
移動ステージ33は、コイル(図示せず)の駆動によってX方向、Y方向に沿って独立して移動可能であり、システムコントロール回路25は、検出された角速度に基づいてカメラ10の変位角を演算し、ステージ駆動回路38を介して手ぶれ補正機構12を制御する。
【0027】
詳述すると、ユーザの手ぶれによってカメラ10の姿勢が変動(ヨーイング、ピッチングの動き)をすると、ジャイロセンサ20A、20Bからヨーイング、ピッチングの角速度に応じた電圧信号(角速度信号)が出力される。出力された電圧信号は、それぞれハイパスフィルタ22A、22BにおいてDC成分が除去され、アンプ24A、24Bにおいて増幅される。増幅された電圧信号がシステムコントロール回路25へ入力されると、カメラ10の変動量に応じた変位角度が検出される。そして、手ぶれによる像ブレを相殺するように、システムコントロール回路25からステージ駆動回路38へ制御信号が出力され、移動ステージ33がX方向、Y方向へ移動する。その結果、撮影光学系による像がCCD21の受光面上に沿って相対的にシフトした位置で結像し、像ぶれのない画像がCCD21に形成される。
【0028】
移動ステージ33のCCD21周りには、X方向、Y方向に沿ってホール素子などの磁気センサ34A、34Bが配置されている。一方、固定ステージ35には、磁気センサ34A、34Bに対向するように磁石36A、36BがX方向、Y方向に沿って配置されている。手ぶれが検知されて移動ステージ33が移動すると、磁気センサ34A、34Bは、磁石36A、36Bに対する相対的位置の変化に応じて磁界変化を検知し、磁気センサ信号処理回路40A、40Bは、それぞれ移動ステージ33のX方向、Y方向の移動量を検出する。システムコントロール回路25は、移動ステージ33の現在の相対的位置と設定された位置との差に基づき、移動ステージ33をフィードバック制御する。
【0029】
図4は、手ぶれ検出部20の等価回路を示した図である。なお、ジャイロセンサ20B、ハイパスフィルタ22B、アンプ24Bも同様の構成である。
【0030】
ハイパスフィルタ22Aは、容量Cのコンデンサ51と抵抗値Rの抵抗52とを備え、コンデンサ51の一端と抵抗52の一端がジャイロセンサ20Aに接続されている。カメラ10の角速度に応じた電圧V0はコンデンサ51側へ出力され、基準電圧Vrefは抵抗52側へ出力される。アンプ24Aは、オペアンプ53と、抵抗値Rf、Rsをそれぞれもつ抵抗54、55とを備える。ハイパスフィルタ22Aの時定数τ(=CR)は、低周波数の手ぶれを検知できるように、比較的大きな値に定められている。
【0031】
ジャイロセンサ20Aは、水晶の結晶による振動ジャイロセンサであり、スリープモードが実行可能なように構成されている。スリープモードをON/OFFに設定する制御信号は、システムコントロール回路25からジャイロセンサ20Aの端子S1へ送信される。スリープモードがONに設定されると、ジャイロセンサ20A内のセンサ素子、増幅器(いずれも図示せず)等、角速度を検出するのに不可欠な要素へ電源が供給されない一方、スリープモードをOFF設定へ切り替えるのに必要な要素に対して電源供給される。スリープモードがONに設定されている間、コンデンサ51へ出力される電圧V0は基準電圧Vrefと一致する。
【0032】
図5は、カメラ10の撮影動作処理を示したフローチャートである。図6は、ハイパスフィルタ22Aから出力される電圧の変動過程(状態遷移)を示した図である。図7は、撮影動作処理のタイミングチャートである。
【0033】
ステップS101では、CCD21、撮影光学系などが初期設定される。ステップS102では、手ぶれ補正処理を実行する割り込み処理がタイマーセットされる。
【0034】
ステップS103では、手ぶれ補正スイッチ16AがON状態であるか否かが判断される。手ぶれ補正スイッチ16AがON状態であると判断されると、ステップS105へ進み、手ぶれ補正変数ISが「1」に設定される。一方、手ぶれ補正スイッチ16AがON状態でないと判断されると、ステップS104へ進み、手ぶれ補正変数ISが「0」に設定される。手ぶれ補正変数ISは、手ぶれ補正モードの設定、非設定を示す変数であり、手ぶれ補正スイッチ16AがONに設定された場合にはIS=1に設定され、手ぶれ補正スイッチ16AがON設定されていない場合にはIS=0に設定される。
【0035】
ステップS106では、AEブロック27において測光され、被写体の明るさ調整処理が実行される。そしてステップS107では、ストロボボタンが操作され、ストロボ撮影が設定されたか否かが判断される。
【0036】
ステップS107において、ストロボ撮影が設定されていないと判断されると、ステップS108へ進む。ステップS108では、ジャイロセンサ20A、20BのスリープモードがONに設定されているか否かが判断される。スリープモードがONに設定されていないと判断されるとステップS114へ移る。一方、スリープモードがONに設定されていると判断された場合、ステップS109へ進み、ジャイロセンサ20A、20BのスリープモードがOFFに設定される。ステップS109が実行されると、ステップS114へ進む。なお、手ぶれ補正機構に対しては、メイン電源がON状態の間、常に電源が供給されている。
【0037】
一方、ステップS107において、ストロボ撮影が設定されていないと判断されると、ステップS110へ進み、ストロボ充電が完了しているか否かが判断される。ストロボ充電が完了したと判断されると、ステップS111へ進み、充電処理が終了する。ステップS111が実行されると、ステップS108、S109へ移り、スリープモードがOFFに設定される。
【0038】
一方、ステップS110において、ストロボ充電が完了していないと判断されると、ステップS112へ進み、ジャイロセンサ20A、20BのスリープモードがONに設定される。そして、ステップS113では、ストロボ充電処理が施される。ステップS113が実行されると、ステップS114へ進む。
【0039】
図6では、ストロボ撮影が設定された直後のハイパスフィルタ22Aから出力される電圧Vs(図4のB点における電圧)を時間と経過とともに示している(ハイパスフィルタ22Bについても同じである)。スリープモードがONに設定された場合、ジャイロセンサ20Aからの出力電圧V0は、上述したように基準電圧Vrefと一致する。したがって、スリープモードがONに設定された時点から、ハイパスフィルタ22Aの時定数τに従う出力電圧安定化までの過度状態が開始される。そして、所定時間が経過すると、実質的に出力電圧は安定化し、DC成分は除去される。
【0040】
ステップS114では、動画像表示処理が実行される。ステップS115では、レリーズボタン13が半押しされてレリーズ半押しスイッチがON状態であるか否かが判断される。レリーズボタン13が半押しされていないと判断されると、ステップS103へ戻る。一方、レリーズボタン13が半押しされたと判断されると、ステップS116へ進み、焦点調整処理、露出値演算が実行される。
【0041】
ステップS117では、レリーズボタン13が全押しされてレリーズスイッチ13AがON状態であるか否かが判断される。レリーズスイッチ13AがON状態ではないと判断されると、ステップS103へ戻る。一方、レリーズスイッチ13AがON状態であると判断された場合、ステップS118に進み、静止画撮影動作が行なわれる。すなわち演算された露出値に基づいて絞り及びシャッタが駆動されてCCD21の受光面上の露出制御が行なわれた後、CCD21から信号電荷が読み出され、所定の処理を施して静止画像データが生成される。また、ステップS118では、記録処理が実行される。
【0042】
図8は、手ぶれ補正処理を示した割り込みルーチンである。手ぶれ補正処理は、図5の撮影動作処理に対して1ミリ秒[mS]間隔で割り込んで処理される。
【0043】
ステップS201では、カメラ10のピッチングに対する角速度がジャイロセンサ20Aからの出力電圧に基づいて検出されるステップS202では、磁気センサ34Aから送られてくる検出信号に基づき、CCD21の中心位置からのX方向に沿った相対的位置が検出される。ただし、ここではCCD21の中心が光軸Eにあるときの位置を中心位置と定める。
【0044】
ステップS203では、手ぶれ補正変数IS=1であるか、すなわち手ぶれ補正モードが設定されているか否かが判断される。手ぶれ補正変数IS=0である、すなわち手ぶれ補正モードが設定されていないと判断されると、ステップS205へ進み、CCD21の位置が中心位置に定められる。一方、手ぶれ補正変数IS=1であると判断された場合、ステップS204へ進む。ステップS204では、カメラ10の手ぶれによる変位角度が算出される。検出された角速度に基づいてカメラ10の姿勢変位角度が算出される。そして、カメラ10の姿勢変位角度に基づき、焦点距離等の特性に従う変換係数を利用して移動させるべきCCD21の位置(設定位置)が演算される。
【0045】
なお、手ぶれ補正機構による制御系は、手ぶれ量の値「0」が続くと自動的にCCD21の位置が中心位置へ戻るように、応答特性が定められている。従来知られているように、PID制御ブロックとカメラ10の手ぶれによる変動量(角度)算出ブロックとの間に所定の時定数によるループを入れ、安定化を図っている。
【0046】
ステップS206では、演算されたCCD21の設定位置と磁気センサ34Aにより検出される今現在のCCD21の位置とに基づき、移動ステージ33の操作量が演算される。そして、ステップS207では、演算された操作量に基づき、移動ステージ33がステージ駆動回路38からの駆動信号によって所定距離だけ移動する。ここではPID制御がフィードバック制御として実行される。
【0047】
なお、図8ではヨーイングに対する手ぶれ補正処理ルーチンを示すが、同様の手ぶれ補正処理がピッチングに対しても実行される。
【0048】
図7には、ストロボ充電している間のタイミングチャートが示されている。ジャイロセンサ20A、20BがスリープモードONに設定されている間、上述したように、ハイパスフィルタ22A、22BからのDC成分は除去されている。したがって、ストロボ充電が終了するときには、上述した特性によってCCD21の位置は中央位置へすでに回復し、その直後に検出される角速度信号は手ぶれによる角速度を示し、検出された角速度信号に基づいて手ぶれ補正が実行される。また、スリープモードがON状態の期間T1においては、ジャイロセンサ20A、20Bに対する消費電力が低減されている。さらに、ストロボ充電期間中の電源電圧の変動にジャイロセンサ20A、20Bの出力信号が影響されず、手ぶれと関係ない手ぶれ補正機構の動作が生じない。
【0049】
以上のように本実施形態によれば、ジャイロセンサ20A、20B、ハイパスフィルタ24A、24Bがカメラ10に設けられており、ジャイロセンサ20A、20Bはスリープモード機能を備える。ストロボ撮影が設定されると、ジャイロセンサ20A、20BはスリープモードONに設定される。その結果、基準電圧Vrefと同じ電圧V0がハイパスフィルタ22A、22Bへジャイロセンサ20A、20Bから出力され、出力電圧のDC成分が除去される。そして、ストロボ充電が完了すると、ジャイロセンサ20A、20BがスリープモードOFFに設定される。
【0050】
ジャイロセンサ20A、20Bは、圧電型振動体のジャイロセンサなどの角速度センサであってもよい。本実施形態においては、発光手段として、キセノン管を放電発光させる一般的なストロボ装置を前提としたが、白色LEDを用いたストロボ装置としてもよい。ハイパスフィルタを用いない構成にしてもよい。
【図面の簡単な説明】
【0051】
【図1】第1の実施形態であるカメラの概略的斜視図である。
【図2】カメラの正面図である。
【図3】カメラのブロック図である。
【図4】手ぶれ検出部(ジャイロセンサ、ハイパスフィルタ、アンプ)の等価回路を示した図である。
【図5】カメラの撮影動作処理を示したフローチャートである。
【図6】ハイパスフィルタから出力される電圧の変動過程(状態遷移)を示した図である。
【図7】ストロボ充電中のタイミングチャートである。
【図8】手ぶれ補正処理を示した割り込みルーチンである。
【符号の説明】
【0052】
10 カメラ
15 ストロボ
20 手ぶれ検出部
20A、20B ジャイロセンサ(角速度センサ)
21 CCD
22A、22B ハイパスフィルタ
25 システムコントロール回路
33 移動ステージ
42 ストロボ回路
V0 出力電圧
Vref 基準電圧
【特許請求の範囲】
【請求項1】
撮影光学系と、
前記撮影光学系により形成される被写体像を記録する記録手段と、
撮影時において電気による照明光を発光する発光手段と、
手ぶれによる角速度に応じた角速度信号を出力し、動作停止状態に切替可能な角速度センサと、
角速度信号の電圧値と基準電圧値とに基づいて手ぶれによる変位量を検出する検出手段と、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段と、
前記手ぶれによる変位量に基づいて、前記撮影光学系による結像エリアを像ぶれが生じないように調整する手ぶれ補正手段とを備え、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧値と同じになり、
前記制御手段が、前記発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させることを特徴とする撮影装置。
【請求項2】
前記角速度センサが、スリープモードを実行可能なように構成されていることを特徴とする請求項1に記載の撮影装置。
【請求項3】
前記角速度センサが、水晶の結晶による振動ジャイロセンサであることを特徴とする請求項1に記載の撮影装置。
【請求項4】
手ぶれによる角速度に応じた角速度信号を出力し、動作停止状態に切替可能な角速度センサと、
角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを備え、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧の値と同じになり、
前記制御手段が、電気による照明光を発光する発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させることを特徴とする手ぶれ検出装置。
【請求項5】
動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出し、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する方法であって、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧値と同じになり、
電気による照明光を発光する発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させることを特徴とする手ぶれ検出方法。
【請求項6】
動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを機能させるプログラムであって、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧値と同じになり、
電気による照明光を発光する発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させるように、前記制御手段を機能させることを特徴とするプログラム。
【請求項1】
撮影光学系と、
前記撮影光学系により形成される被写体像を記録する記録手段と、
撮影時において電気による照明光を発光する発光手段と、
手ぶれによる角速度に応じた角速度信号を出力し、動作停止状態に切替可能な角速度センサと、
角速度信号の電圧値と基準電圧値とに基づいて手ぶれによる変位量を検出する検出手段と、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段と、
前記手ぶれによる変位量に基づいて、前記撮影光学系による結像エリアを像ぶれが生じないように調整する手ぶれ補正手段とを備え、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧値と同じになり、
前記制御手段が、前記発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させることを特徴とする撮影装置。
【請求項2】
前記角速度センサが、スリープモードを実行可能なように構成されていることを特徴とする請求項1に記載の撮影装置。
【請求項3】
前記角速度センサが、水晶の結晶による振動ジャイロセンサであることを特徴とする請求項1に記載の撮影装置。
【請求項4】
手ぶれによる角速度に応じた角速度信号を出力し、動作停止状態に切替可能な角速度センサと、
角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを備え、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧の値と同じになり、
前記制御手段が、電気による照明光を発光する発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させることを特徴とする手ぶれ検出装置。
【請求項5】
動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出し、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する方法であって、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧値と同じになり、
電気による照明光を発光する発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させることを特徴とする手ぶれ検出方法。
【請求項6】
動作停止状態に切替可能な角速度センサから出力される、手ぶれによる角速度に応じた角速度信号の電圧値と基準電圧値とに基づいて手ぶれを検出する検出手段と、
前記角速度センサを動作させる動作信号および動作停止状態にさせる動作停止信号を選択的に出力する制御手段とを機能させるプログラムであって、
前記角速度信号の電圧値が、前記角速度センサの動作停止状態において、基準電圧値と同じになり、
電気による照明光を発光する発光手段の充電の間、前記角速度センサを動作停止状態にし、前記発光手段の充電が完了すると、前記角速度センサを動作させるように、前記制御手段を機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−323264(P2006−323264A)
【公開日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願番号】特願2005−148001(P2005−148001)
【出願日】平成17年5月20日(2005.5.20)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
【公開日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願日】平成17年5月20日(2005.5.20)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
[ Back to top ]