
手ぶれ補正機能付き撮像装置
【課題】本体ケースに設けられた演算処理装置およびX−Y平面に沿って移動される撮像素子を電気的に接続しても、適切に手ぶれ補正を行うことができる手ぶれ補正機能付き撮像装置を提供する。
【解決手段】本発明の手ぶれ補正機能付き撮像装置は、手ぶれに応じて撮影光軸をZ軸方向としたX−Y平面で撮像素子101を移動させて追従させる手ぶれ補正機構および演算処理装置を両延在端で電気的に接続するフレキシブル基板20を備える。フレキシブル基板20は、塑性変形されて屈曲されることによりZ軸方向に延在する第2延在部分210と第4延在部分212とを有し、第2延在部分210を含む平面とX−Y平面との交線および第4延在部分212を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差している。
【解決手段】本発明の手ぶれ補正機能付き撮像装置は、手ぶれに応じて撮影光軸をZ軸方向としたX−Y平面で撮像素子101を移動させて追従させる手ぶれ補正機構および演算処理装置を両延在端で電気的に接続するフレキシブル基板20を備える。フレキシブル基板20は、塑性変形されて屈曲されることによりZ軸方向に延在する第2延在部分210と第4延在部分212とを有し、第2延在部分210を含む平面とX−Y平面との交線および第4延在部分212を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像データを生成する撮像素子に被写体像を結像させて被写体の画像を撮影する撮像装置に関し、特に、手ぶれによる被写体像の移動に撮像素子を追従させることにより、手ぶれが補正された被写体の画像を撮影することができる手ぶれ補正機能が設けられた手ぶれ補正機能付き撮像装置に関する。
【背景技術】
【0002】
従来から、撮像装置としてのデジタルカメラには、手ぶれ補正機構を備えるものが知られている。この撮像装置には、撮像素子としてのCCDが、撮影光軸上でレンズ鏡筒を収容し本体ケースに取り付けられた固定筒の一端に設けられた載置ステージに搭載されている。載置ステージは、撮影光軸をZ軸方向としてこれに垂直なX−Y平面に沿って移動可能に案内ステージに保持されている。案内ステージは、本体ケース内で撮影光軸に対して固定され、載置ステージは、案内ステージ上で永久磁石およびこれに対向するコイルが形成する磁力により可動される構造とされている(例えば、特許文献1参照。)。この従来のカメラでは、本体ケースに設けられた演算処理装置が、本体ケースに生じたX方向とY方向との傾きを検出し、この検出出力に基づいて、コイルへの通電電流を変化させることにより、手ぶれによる被写体の像の移動にCCDを追従移動させる制御を行っている。このデジタルカメラでは、CCDと演算処理装置とが電気的に接続されており、演算処理装置がCCDから出力された画像信号に基づいて画像形成処理および画像表示処理等を行うことにより、被写体の撮影およびモニタ上での撮影前の被写体の状態の確認等が可能とされている。
【特許文献1】特開2004−274242号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記した手ぶれ補正機能付きカメラでは、手ぶれ補正が行われる際、CCDがX−Y平面内で移動されることに対し、演算処理装置が本体ケースに設けられていることから、CCDと演算処理装置との相対的な間隔が変化することとなる。このため、CCDと演算処理装置との電気的な接続にフレキシブル基板を用いることが考えられている。ところが、手ぶれ補正のためのCCDの移動は、永久磁石とこれに対向するコイルが形成する磁力を利用して微量な位置調整を行うものであるから、CCDと演算処理装置との相対的な間隔の変化に応じてフレキシブル基板に生じる撓み力がCCDの適切な移動の妨げとなり、適切に手ぶれ補正を行うことができなくなる虞がある。
【0004】
本発明は、上記の問題に鑑みて為されたもので、本体ケースに設けられた演算処理装置およびX−Y平面に沿って移動される撮像素子を電気的に接続しても、適切に手ぶれ補正を行うことができる手ぶれ補正機能付き撮像装置を提供することを課題としている。
【課題を解決するための手段】
【0005】
上記課題を解決するため、請求項1に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部とを有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0006】
請求項2に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部とを有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0007】
請求項3に係る発明は、請求項1または請求項2に記載の手ぶれ補正機能付き撮像装置であって、前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする。
【0008】
請求項4に係る発明は、請求項3に記載の手ぶれ補正機能付き撮像装置であって、前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする。
【0009】
請求項5に係る発明は、請求項1ないし請求項4のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする。
【0010】
請求項6に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0011】
請求項7に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0012】
請求項8に係る発明は、請求項6または請求項7に記載の手ぶれ補正機能付き撮像装置であって、前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする。
【0013】
請求項9に係る発明は、請求項8に記載の手ぶれ補正機能付き撮像装置であって、前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする。
【0014】
請求項10に係る発明は、請求項6ないし請求項9のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする。
【0015】
請求項11に係る発明は、請求項6ないし請求項10のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記固定部材は、撮影光軸上でレンズ鏡筒を収容する固定筒であり、前記撮像素子は、前記固定筒の端部に配置され、前記フレキシブル基板の前記撮像素子接続部は、前記撮像素子の撮像面とは反対側の面に接続され、前記フレキシブル基板の前記連結延在部は、前記固定筒の外周に沿って配置されていることを特徴とする。
【0016】
請求項12に係る発明は、請求項1ないし請求項11のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記手ぶれ補正機構は、前記撮像素子を搭載する載置ステージを有し、該載置ステージをX−Y平面に沿って移動させることにより前記撮像素子をX−Y平面内で移動させて追従させることを特徴とする。
【発明の効果】
【0017】
請求項1および請求項2に記載の発明によれば、撓み変形することによりその厚さ方向への力を吸収することができるフレキシブル基板において、その第2延在部および第4延在部が撓むことによりX軸方向成分の力およびY軸方向成分の力を吸収できる構成とされている。これにより、X−Y平面内で移動される撮像素子に接続される一端と演算処理装置に接続される他端との相対的な間隔が変化しても、フレキシブル基板では一端と他端との間で力を作用させることはなく、撮像素子のX−Y平面内で移動を妨げることはない。このため、適切に手ぶれ補正を行うことができる。
【0018】
請求項3および請求項4に記載の発明によれば、第2延在部がY−Z平面と平行であることからX軸方向の力を吸収し、かつ第4延在部がX−Z平面と平行であることからY軸方向の力を吸収するので、一端と他端との間に生じる力をより効果的に吸収することができる。
【0019】
請求項5に記載の発明によれば、連結延在部が、2つに分岐された第1の連結延在部と第2の連結延在部とが重ねられて構成されているので、幅寸法を増加させることなく送電路を増加させることができる。
【0020】
請求項6および請求項7に記載の発明によれば、撓み変形することによりその厚さ方向への力を吸収することができるフレキシブル基板において、その第2延在部および第4延在部が撓むことによりX軸方向成分の力およびY軸方向成分の力を吸収できる構成とされている。これにより、X−Y平面内で移動される撮像素子に接続される撮像素子接続部と演算処理装置に接続される演算処理接続部との相対的な間隔が変化しても、フレキシブル基板では、撮像素子接続部と演算処理接続部との間で力を作用させることはなく、撮像素子のX−Y平面内で移動を妨げることはない。このため、適切に手ぶれ補正を行うことができる。
【0021】
請求項8および請求項9に記載の発明によれば、第2延在部がY−Z平面と平行であることからX軸方向の力を吸収し、かつ第4延在部がX−Z平面と平行であることからY軸方向の力を吸収するので、撮像素子接続部と演算処理接続部との間に生じる力をより効果的に吸収することができる。
【0022】
請求項10に記載の発明によれば、連結延在部が、2つに分岐された第1の連結延在部と第2の連結延在部とが重ねられて構成されているので、幅寸法を増加させることなく送電路を増加させることができる。
【0023】
請求項11に記載の発明によれば、連結延在部が、固定筒の外周に沿って配置されているので、円形で構成されるレンズ鏡筒の周りの空間を有効に利用することができる。
【0024】
請求項12に記載の発明によれば、載置ステージがX−Y平面に沿って移動されるので、フレキシブル基板の一端側または撮像素子接続部側に、載置ステージを駆動させる駆動機構への接続端子を設けることができる。
【発明を実施するための最良の形態】
【0025】
以下に、本発明に係わる手ぶれ補正機能を有するカメラを図面を参照しつつ説明する。
【実施例】
【0026】
(デジタルカメラの一般的構成)
図1は本発明に係わる撮像装置としてのデジタルスチルカメラ(以下、カメラともいう)の一例を示す正面図、図2はその背面図、図3はその上面図、図4はそのデジタルカメラの内部のシステム構成の概要を示すブロック回路図である。
【0027】
図1において、カメラ本体(本体ケース)の上面には、レリーズスイッチ(レリーズシャッター)SW1、モードダイアルSW2、図3に示すサブ液晶ディスプレイ(サブLCDともいう)1が配設されている。
【0028】
カメラ本体の正面には、撮影レンズを含む鏡胴ユニット7、光学ファインダ4、ストロボ発光部3、測距ユニット5、リモートコントロール受光部6が設けられている。
【0029】
カメラの背面には、図2に示すように電源スイッチSW13、LCDモニタ10、AFLED8、ストロボLED9、光学ファインダ4、広角方向ズームスイッチSW3、望遠方向ズームスイッチSW4、セルフタイマの設定・削除スイッチSW5、メニュースイッチSW6、上移動・ストロボセットスイッチSW7、右移動スイッチSW8、ディスプレイスイッチSW9、下移動・マクロスイッチSW10、左移動・画像確認スイッチSW11、OKスイッチSW12、手ぶれ補正スイッチSW14が設けられている。カメラ本体の側面にはメモリカード/電池装填室の蓋2が設けられている。
【0030】
これらの各部材の機能及び作用は公知であるので、その説明は省略することにし、次にカメラの内部のシステム構成を説明する。
【0031】
その図4において、104はデジタルスチルカメラプロセッサ(以下、プロセッサともいう)である。
【0032】
プロセッサ104は、A/D変換器10411、CCD1信号処理ブロック1041、CCD2信号処理ブロック1042、CPUブロック1043、ローカルSRAM1044、USBブロック1045、シリアルブロック1046、JPEG・CODECブロック(JPEG圧縮・伸長を行うブロック)1047、RESIZEブロック(画像データのサイズを補間処理により拡大・縮小するブロック)1048、TV信号表示ブロック(画像データを液晶モニタ・TVなどの外部表示機器に表示させるためのビデオ信号に変換するブロック)1049、メモリカードコントローラブロック(撮影画像データを記録するメモリカードの制御を行うブロック)10410を有している。これらの各ブロックは相互にバスラインで接続されている。
【0033】
プロセッサ104の外部にはRAW−RGB画像データ(ホワイトバランス設定、γ設定が行われた状態の画像データ)、YUV画像データ(輝度データ、色差データ変換が行われた状態の画像データ)、JPEG画像データ(JPEG圧縮された状態の画像データ)を保存するSDRAM103が配置され、このSDRAM103はプロセッサ104にメモリコントローラ(図示を略す)、バスラインを介して接続されている。
【0034】
プロセッサ104の外部には、更に、RAM107、内蔵メモリ(メモリカードスロットルにメモリカードが装着されていない場合でも撮影画像データを記憶するためのメモリ)120、制御プログラム、パラメータなどが格納されたROM108が設けられ、これらもバスラインによってプロセッサ104に接続されている。
【0035】
その制御プログラムは、カメラの電源スイッチSW13をオンすると、プロセッサ104のメインメモリ(図示を略す)にロードされ、プロセッサ104はその制御プログラムに従って各部の動作制御を行うと共に、制御データ、パラメータ等をRAM107等に一時的に保存させる。
【0036】
鏡胴ユニット7は、ズームレンズ71aを有するズーム光学系71、フォーカスレンズ72aを有するフォーカス光学系72、絞り73aを有する絞りユニット73、メカニカルシャッター74aを有するメカニカルシャッターユニット74からなるレンズ鏡筒を備えている。
【0037】
ズーム光学系71、フォーカス光学系72、絞りユニット73、メカニカルシャッターユニット74は、ズームモータ71b、フォーカスモータ72b、絞りモータ73b、メカニカルシャッターモータ74bによってそれぞれ駆動されるようになっている。
【0038】
これらの各モータはモータドライバ75によって駆動され、このモータドライバ75はプロセッサ104のCPUブロック1043によって制御される。
【0039】
鏡胴ユニット7の各レンズ系によりCCD101に被写体像が結像され、CCD101は被写体像を画像信号に変換してF/E−IC102に画像信号を出力する。F/E−IC102は画像ノイズ除去用のため相関二重サンプリングを行うCDS1021、利得調整用のAGC1022、アナログデジタル変換を行うA/D変換部1023から構成されている。すなわち、F/E−IC102はその画像信号に所定の処理を施し、アナログ画像信号をデジタル信号に変換してプロセッサ104のCCD1信号処理ブロック1041に向けてこのデジタル信号を出力する。
【0040】
これらの信号制御処理は、プロセッサ104のCCD1信号処理ブロック1041から出力される垂直同期信号VD・水平同期信号HDによりTG1024を介して行われる。そのTG1024はその垂直同期信号VD・水平同期信号HDに基づき駆動タイミング信号を生成する。
【0041】
プロセッサ104のCPUブロック1043は、音声記録回路1151による音声記録動作を制御するようになっている。音声記録回路1151はマイクロフォンで1153で変換された音声記録信号のマイクロフォンアンプリファイア1152による増幅信号を指令に応じて記録する。CPUブロック1043は、音声再生回路1161の動作も制御する。音声再生回路1161は、指令により適宜メモリに記憶されている音声信号を再生してオーディオアンプリファイア1162に出力し、スピーカ1163から音声を出力させるように構成されている。
【0042】
CPUブロック1043は、更に、ストロボ回路114を制御することによってストロボ発光部3から照明光を発光させる。これに加えて、CPUブロック1043は、測距ユニット5も制御する。
【0043】
CPUブロック1043は、プロセッサ104のサブCPU109に接続され、サブCPU109はLCDドライバ111を介してサブLCD1による表示制御を行う。サブCPU109は、更に、AFLED8、ストロボLED9、リモートコントロール受光部6、操作スイッチSW1〜SW14からなる操作キーユニット、ブザー113に接続されている。
【0044】
USBブロック1045はUSBコネクタ122に接続され、シリアルブロック1046はシリアルドライバ回路1231を介してRS−232Cコネクタ1232に接続されている。TV信号表示ブロック1049は、LCDドライバ117を介してLCDモニタ10に接続されると共に、ビデオアンプリファイア(TV信号表示ブロック1049から出力されたビデオ信号を75Ωインピーダンスに変換するためのアンプリファイア)118を介してビデオジャック(カメラをTVなどの外部表示機器に接続するためのジャック)119に接続されている。メモリカードコントローラブロック10410はメモリカードスロット121のカード接点との接点に接続されている。
【0045】
LCDドライバ117はLCDモニタ10を駆動すると共に、TV信号表示ブロック1049から出力されたビデオ信号をLCDモニタ10に表示させる信号に変換する役割を果たす。LCDモニタ10は撮影前の被写体の状態監視、撮影画像の確認、およびメモリカード又は内蔵メモリ120に記録された画像データを表示するために用いられる。
【0046】
デジタルカメラの本体には、鏡胴ユニット7の一部を構成する固定筒(後述する)が設けられている。この固定筒にはCCDステージ1251がX−Y方向に移動可能に設けられている。CCD101は手ぶれ補正機構の一部を構成するCCDステージ1251に搭載され、そのCCDステージ1251の詳細なメカニカルな構造については後述する。
【0047】
そのCCDステージ1251はアクチュエータ1255によって駆動され、アクチュエータ1255はドライバー1254によって駆動制御される。そのドライバー1254はコイルドライブMD1とコイルドライブMD2とから構成されている。そのドライバー1254はアナログデジタル変換器IC1に接続され、そのアナログデジタル変換器IC1はROM108に接続され、このアナログデジタル変換器IC1にはROM108から制御データが入力される。
【0048】
固定筒には手ぶれ補正スイッチSW14がオフ、電源スイッチSW13がオフのときにCCDステージ1251を中央位置に保持する原点位置強制保持機構1263が設けられている。この原点位置強制保持機構1263はアクチュエータとしてのステッピングモータSTM1により制御され、そのステッピングモータSTM1はドライバー1261によって駆動される。このドライバー1261にはROM108から制御データが入力される。
【0049】
CCDステージ1251には位置検出素子1252が取り付けられている。この位置検出素子1252の検出出力はアンプリファイア1253に入力され、増幅されてA/D変換器10411に入力される。カメラ本体にはジャイロセンサ1241がX方向とY方向との回転を検出可能に設けられ、ジャイロセンサ1241の検出出力はローパスフィルタ兼用のアンプリファイア1242を介してA/D変換器10411に入力される。
【0050】
次に、本発明に係わるカメラの一般的な動作概要を説明する。
【0051】
モードダイアルSW2を撮影モードに設定すると、カメラが撮影モードで起動される。また、モードダイアルSW2を再生モードに設定すると、カメラが再生モードで起動される。プロセッサ104はモードダイアルSW2のスイッチの状態が撮影モードであるか、再生モードであるかを判断する(図5のS.1)。
【0052】
また、プロセッサ104はモータドライバ75を制御し、鏡胴ユニット7のレンズ鏡筒を撮影可能な位置に移動させる。更に、プロセッサ104はCCD101、F/E−IC102、LCDモニタ10等の各回路に電源を投入して動作を開始させる。各回路の電源が投入されると、ファインダーモードの動作が開始される。
【0053】
ファインダーモードでは、各レンズ系を通して撮像素子(CCD101)に入射した光が光電変換されて、R、G、Bのアナログ信号としてCDS回路1021、A/D変換器1023に送信される。A/D変換器1023はそのアナログ信号をデジタル変換し、そのデジタル信号はデジタル信号処理IC(SDRAM103)内のYUV変換部でYUVデータに変換され、図示を略すメモリコントローラによってフレームメモリに書き込まれる。
【0054】
このYUV信号はメモリコントローラによって読み出され、TV信号表示ブロック1049を介してTV(図示を略す)やLCDモニタ10へ送信され、これにより撮影画像の表示が行われる。この処理は1/30秒間隔で行われ、1/30秒ごとに更新されるファインダーモードの表示となる。すなわち、モニタリング処理が実行される(図5のS.2)。ついで、モードダイアルSW2の設定変更が行われたか否かを判断する(図5のS.3)。モードダイアルSW2の設定がそのままの場合には、レリーズスイッチSW1を操作することにより撮影処理が実行される(図5のS.4)。
【0055】
再生モードでは、プロセッサ104は撮影済み画像をLCDモニタ10に表示させる(図5のS.5)。ついで、プロセッサ104はモードダイアルSW2の設定が変更されたか否かを判断し(図5のS.6)、プロセッサ104はモードダイアルSW2の設定が変更された場合にはS.1へ移行し、そのままの場合にはS.5を繰り返す。
【0056】
このように、プロセッサ104およびF/E−IC102は、CCD101からの信号を処理する演算処理装置として機能する。また、この演算処理装置は、後述するように、手ぶれ補正を行う際、手ぶれ補正機構を駆動する機能も有する。
(手ぶれ補正の原理)
図6は手ぶれ補正の原理を説明するための説明図であって、(a)はデジタルカメラが実線で示す手ぶれのない状態から破線で示すように傾いた状態を示し、(b)はそのカメラ本体の撮影レンズとCCD101の撮像面との関係を示す部分拡大図である。
【0057】
カメラの手ぶれがない状態のとき、CCD101の撮像面が位置P1、すなわち、中央位置にあるとき、被写体の像が原点Oに投影されていたとする。ここで、手ぶれによりカメラがθ(θx、θy)方向に傾いたとする。すると、撮像面はP2の位置に移動し、被写体の像はO’に移動する。そこで、撮像面の位置がP1となるように、X方向にdx、Y方向にdyだけ撮像面を平行移動させることにより、被写体の像は元の原点位置Oに戻ることになる。
(手ぶれ補正機構のメカニカルな構成)
図7は固定筒の正面図、図8は固定筒の縦断面図、図9は固定筒の背面図である。その図7〜図9において、10は固定筒である。固定筒10は箱形形状を呈し、その内側がレンズ鏡筒受入用の収納空間とされている。固定筒10は、本体ケース(カメラ本体)内に設けられており、撮影光軸との位置関係が一定とされている。固定筒10の背面には全体的に略矩形状を呈する板状のベース部材11が取り付けられている。その固定筒10の内周壁には、ここではレンズ鏡筒を繰り出し・繰り入れるためのヘリコイド12が形成されている。固定筒10は少なくとも2つの角部が切り欠かれ、一方の角部10aは後述するステッピングモータSTMの取り付け部とされ、他方の角部10bは後述するフレキシブルプリント基板20の折り曲げ箇所とされている。
【0058】
CCDステージ1251はそのベース部材11に設けられている。このCCDステージ1251は図10に分解して示すように環枠形状のX方向ステージ13と、矩形状のY方向ステージ14と、載置ステージ15とから大略構成されている。
【0059】
X方向ステージ13はベース部材11に固定されている。このX方向ステージ13にはX方向に延びる一対のガイド軸13a、13bがY方向に間隔を開けて設けられている。X方向ステージ13には直方体形状の4個の永久磁石16a〜16dが配置されている。この4個の永久磁石16a〜16dは二個一対とされ、一対の永久磁石16a、16bはX−Y平面内でY方向に間隔を開けて平行に配置されている。この実施例では、一対のガイド軸13a、13bが一対の永久磁石16a、16bを貫通する構成とされているが、これに限るものではなく一対のガイド軸13a、13bに併設して設けられていても良い。一対の永久磁石16c、16dはX−Y平面内でX方向に間隔を開けて配置されている。
【0060】
Y方向ステージ14はY方向に延びる一対のガイド軸14a、14bがX方向に間隔を開けて設けられている。そのY方向ステージ14にはX方向に間隔を開けて対向する二個一対の被支承部17a、17a’、17b、17b’がY方向に間隔を開けて形成されている。各一対の被支承部(17a、17a’)、(17b、17b’)はX方向ステージ13の一対のガイド軸13a、13bにそれぞれ可動可能に支承され、これによりY方向ステージ14がX方向に可動可能とされている。
【0061】
CCD101は載置ステージ15に固定されている。載置ステージ15はX方向に張り出した一対のコイル取り付け板部15a、15bとY方向に張り出した一対のコイル取付板部15c、15dとを有する。CCD101はその載置ステージ15の中央に固定されている。載置ステージ15にはCCD101の撮像面と同じ側にY方向に間隔を開けて対向する二個一対の被支承部(符号を略す)がX方向に間隔を開けて形成され、各一対の被支承部はY方向ステージ14の一対のガイド軸14a、14bに可動可能に支承され、これにより載置ステージ15は全体としてX−Y方向に可動可能とされている。
【0062】
CCD101には撮像面と反対側の面に保護板19が貼り付けられている。保護板19にはその中央にテーパ形状の凹所19aが形成されている。この凹所19aの機能については後述する。
【0063】
一対のコイル取り付け板部15a、15bにはそれぞれ偏平かつ渦巻き状のコイル体COL1、COL1’が貼り付けられている。コイル体COL1、COL1’は直列接続されている。一対の取付板部15c、15dにはそれぞれ偏平かつ渦巻き状のコイル体COL2、COL2’が貼り付けられている。コイル体COL2、COL2’も同様に直列接続されている。
【0064】
各コイル体COL1、COL1’はそれぞれ各永久磁石16c、16dに臨まされている。各コイル体COL2、COL2’はそれぞれ永久磁石16a、16bに臨まされている。一対のコイル体COL1、COL1’は、X方向にCCD101を可動させるのに用いられ、一対のコイル体COL2、COL2’はY方向にCCD101を可動させるのに用いられる。
【0065】
コイル体COL1、COL1’には、図9に示すように、各コイル体COL1、COL1’をX方向に横断する方向に磁性材料からなる吸着棒35が設けられている。
【0066】
ここでは、位置検出素子1252にはホール素子が用いられ、一対のコイル取付板部15a、15bの一方のコイル取付板部15bには位置検出素子1252としてのホール素子1252aが設けられ、同様に一対のコイル取付板部15c、15dの一方のコイル取付板部15dにはホール素子1252bが設けられている。
【0067】
そのCCD101はフレキシブルプリント基板20を介してF/EIC102に電気的に接続され(図11参照)、そのホール素子1252a、1252bはフレキシブルプリント基板20を介してオペレーショナルアンプリファイア1253に電気的に接続され、各コイル体COL1、COL1’、COL2、COL2’はコイルドライバ1254に電気的に接続されている。
【0068】
原点位置強制保持機構1263は、図11、図12に拡大して示すように、ステッピングモータSTM1を有する。このステッピングモータSTM1の駆動制御については後述することにし、原点位置強制保持機構1263のメカニカルな構成を先に詳細に説明する。
【0069】
ステッピングモータSTM1は図7および図11に示すように固定筒10の角部10aに設けられている。そのステッピングモータSTM1の出力軸20には出力ギヤ21が設けられている。固定筒10の角部10aには回転運動を直線運動に変換する変換機構22が設けられている。
【0070】
この変換機構22は回転伝達ギヤ23と往復動シャフト24と付勢コイルスプリング25と強制押さえ板26とバネ受け部材27とから大略構成されている。固定筒10の角部10aにはZ軸方向に間隔を開けて一対の支承部28、29が形成されている。支承部28はモータ取付板から構成されている。往復動シャフト24はその支承部29とモータ取付板28との間に掛け渡されて支承されている。その回転伝達ギヤ23は一対の支承部28、29の間に位置して、往復動シャフト24に回転可能に支承されると共に、出力ギヤ21に噛合されている。
【0071】
その往復動シャフト24の一端側の部分は支承部29を貫通してベース部材11の背面側に臨んでいる。付勢コイルスプリング25はバネ受け部材27と支承部29との間に設けられ、往復動シャフト24はその付勢コイルスプリング25により支承部28に向けて付勢されている。往復動シャフト24には回転伝達ギヤ23の軸穴端面と係合する段差部24aを有する。
【0072】
その回転伝達ギヤ23にはその一方の端面部に図13(a)〜図13(e)に示すようにカム溝31が形成されている。このカム溝31は回転伝達ギヤ23の周回り方向に延び、谷底平坦部31aと頂上平坦部31bとその谷底平坦部31aから頂上平坦部31bに向かって連続的に傾斜する傾斜面部31cとから構成されている。その谷底平坦部31aと頂上平坦部31bとの間は後述するカムピンが回転方向から衝合する衝合壁としての絶壁31dとなっている。
【0073】
その支承部28にはカムピン32が固定され、そのカムピン32の先端はカム溝31に摺接されている。その絶壁31dから傾斜面部31cの傾斜開始位置31eまでの谷底平坦部31aの回転方向の長さはステッピングモータSTM1の回転制御信号に換算して2パルス分に相当する。
【0074】
その傾斜面部の傾斜開始位置31eから頂上平坦部31bに通じる傾斜終端位置31fまでの傾斜面部31cの回転方向長さはステッピングモータSTM1の回転制御信号に換算して30パルス分に相当する。
【0075】
その傾斜終端位置31fから絶壁31dまでの間の頂上平坦部31bの回転方向長さはステッピングモータSTM1の回転制御信号に換算して3パルス分に相当し、ステッピングモータSTM1の35パルス分が回転伝達ギヤ23の1回転に対応し、回転伝達ギヤ23の一回転により往復動シャフト24がZ軸方向に一往復される。
【0076】
強制押さえ板26はベース部材11の背面側に設けられている。その強制押さえ板26は図9に示すようにCCD101の中心に向かって長く延びる構成とされ、その強制押さえ板26の基端部26aは往復動シャフト24の一端部に固定されている。その強制押さえ板26の自由端部26bにはテーパ形状の押さえピン33が固定されている。その強制押さえ板26の延びる方向途中にはガイド軸26cが突出形成されている。
【0077】
ベース部材11には位置決め突起11a、11bとコイル取り付け突起11cと係合突起11dとが形成されている。コイル取り付け突起11cにはネジリコイルバネ34の巻回部34aが取り付けられ、ネジリコイルバネ34の一端部34bは係合突起11dに係合され、ネジリコイルバネ34の他端部34cはガイド軸26cに係合されている。ベース部材11にはガイド軸26cをガイドするガイド穴(図示を略す)が形成されている。
【0078】
強制押さえ板26はそのネジリコイルバネ34によって位置決め突起11aに当接されつつ往復動シャフト24の往復動に伴ってベース部材11に対して離反接近する方向(Z軸方向)に往復動される。そのガイド軸26cはその強制押さえ板26の往復動を安定した姿勢で行わせる役割を果たす。
【0079】
押さえピン(嵌合突起)33は凹所(嵌合穴)19aと嵌合することにより載置ステージ15を機械的に原点位置に保持させる役割を果たし、図14(a)に拡大して示すように押さえピン33の周壁33aと保護板19の凹所周壁19bとが密接に嵌合した状態がカムピン32のホールド待機位置に相当し、図14(b)に拡大して示すように押さえピン33の周壁33aと保護板19の凹所周壁19bとが最大離間した状態がカムピン33のリリース待機位置に対応し、カムピン32のホールド待機位置は載置ステージ15の強制原点位置でもある。
(プリント基板の折り曲げ方)
フレキシブルプリント基板20(以下プリント基板20ともいう)は、CCD接続部201と、コイル接続部202と、位置検出素子接続部203と、ブロック回路接続部204と、連結延在部205とを有する。図15は、CCD接続部201の表側からみたプリント基板20の展開図であり、図16は、裏側から見たプリント基板20の展開図であり、CCDステージ1251上に取り付けられた状態を示している。
【0080】
CCD接続部201は、図15に示すように、CCD101の接続ピンに対応する接続パターン部分201aと、保護板19の凹所19aに対応する貫通孔201bとを有する。また、図示は略すが、コイル接続部202には、各コイル体COL1、COL1´COL2、COL2´(以下各コイル体COLともいう)と電気的に接続可能な接続パターン部分が、位置検出素子接続部203には、位置検出素子1252と電気的に接続可能な接続パターン部分がそれぞれ設けられている。このため、本実施例では、CCD接続部201が撮像素子としてのCCD101に接続される一端、すなわち撮像素子接続部として機能する。ブロック回路接続部204は、F/E−IC102、オペレーショナルアンプリファイア1253およびコイルドライバ1254に電気的に接続される接続パターン部分204aを有し、これにより、システムブロック回路は、連結延在部205を介して、CCD接続部201、コイル接続部202および位置検出素子接続部203と電気的に接続されている。このため、本実施例では、ブロック回路接続部204が演算処理装置としてのプロセッサ104およびF/E−IC102に接続される他端、すなわち演算処理接続部として機能する。
【0081】
連結延在部205は、本実施例では、第1連結延在部206と、第2連結延在部207との二股に分かれて構成されている。第2連結延在部207は、直線aおよび直線bに沿って折り曲げると第1連結延在部206に重なる形状とされている。第2連結延在部207は、裏表を逆にすると第1連結延在部206と同様の構成であるので、その詳細な説明は省略する。
【0082】
第1連結延在部206は、第1直線部分208と、第1湾曲部分209と、第2直線部分210と、第2湾曲部分211と、第3直線部分212とを有する。第1直線部分208は、組み付け時にCCD101の裏面に配置されるCCD接続部201から、Y軸方向およびX軸方向に対して略45度の傾斜を為す方向(角部10bへ向かう方向)に延びている(図16参照。)。第1湾曲部分209は、全体に扇状を呈し、頂角が略45度とされており、幅寸法を変えることなく第1直線部分208と第2直線部分210とを繋いでいる。第2直線部分210は、X軸方向に沿って延びている。第2湾曲部分211は、全体に扇状を呈し、頂角が略90度とされており、幅寸法を変更することなく第2直線部分210と第3直線部分212とを繋いでいる。第3直線部分212は、長さ寸法が第2直線部分210と等しく形成されており、第2直線部分210と直交する方向に、すなわちY軸方向に沿って延びている。
【0083】
次にプリント基板20の取り付け方について説明する。
【0084】
図16に示すように、CCD接続部201の接続パターン部分201aをCCD101の接続ピンに一致させ、かつ貫通孔201bを凹所19aに一致させた位置で、プリント基板20を保護板19側からCCDステージ1251に取り付ける。
【0085】
プリント基板20の上にFPC補助板213を取り付ける。FPC補助板213は、板部材であり、CCD接続部201の一部と、第1連結延在部206の第1直線部分208および第1湾曲部分209との形状に適合している。FPC補助板213は、プリント基板20の折り曲げを補助するため、直線aに沿う第1辺部213aと、第1湾曲部分209と第2直線部分210との境界線に沿う第2辺部213bと、後述する線分dに沿う第3辺部213cとが設けられている。
【0086】
直線aおよび直線bを折目とし、FPC補助板213が間に挟まるように、第2連結延在部207を第1連結延在部206上に折り重ねる(図17参照。)。
【0087】
直線cを折目とし、位置検出素子接続部203をCCD接続部201上に折り重ね、位置検出素子接続部203を位置検出素子1252と電気的に接続する(図17参照。)。
【0088】
直線dを折目とし、コイル接続部202をCCD接続部201上に折り重ね、コイル接続部202を各コイル体COLと電気的に接続する(図17参照。)。ここまでの工程により、図17に示すように、プリント基板20は、CCDステージ1251に取り付けられ、ベース部材11上のX−Y平面内に位置される。
【0089】
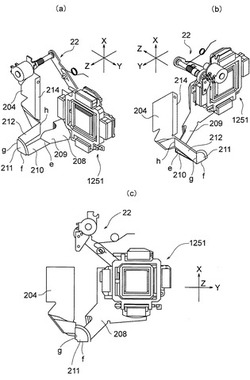
ついで、図9(b)、図11、図18(a)および図18(b)に示すように、第2直線部分210が固定筒10の角部10bでY−Z平面に沿って延在するように、直線eに沿って略直角に塑性変形されて折り曲げられる。
【0090】
さらに、第2湾曲部分211がベース部材11からZ軸方向のレンズ鏡筒側に変位したX−Y平面内で、かつ第2直線部分210よりも固定筒10側で延在するように、直線fに沿って略直角に塑性変形されて折り曲げられる。
【0091】
ついで、第3直線部分212が固定筒10の角部10bでX−Z平面に沿って延在するように、直線gに沿って略直角に塑性変形されて折り曲げられる。
【0092】
ブロック回路接続部204が固定筒10の外方でX−Y平面に沿って延在するように、直線hに沿って略直角に塑性変形されて折り曲げられる。直線hに沿う折り曲げにより形成されX−Z平面に沿って延在する折返個所214を介して、ブロック回路接続部204がベース部材11に取り付けられる(図7および図9(b)参照。)。ブロック回路接続部204は、固定筒10のベース部材11に取り付けられていることから、本体ケース内で撮影光軸に対して固定されている。
【0093】
このため、第1直線部分208および第1湾曲部分209がX−Y平面に沿って延在する第1延在部分となり、第2湾曲部分211がCCD101(撮像素子)から見て被写体へ向かう方向に延在する第2延在部分となり、第2湾曲部分211がX−Y平面に沿って延在する第3延在部分となり、第3直線部分212がCCD101(撮像素子)から見て被写体とは逆へ向かう方向に延在する第4延在部分となる。
【0094】
手ぶれ補正が行われる際、載置ステージ15がベース部材11上でX−Y平面内を移動されるので、プリント基板20では、載置ステージ15に固定された載置ステージ接続側とベース部材11に固定されたブロック回路接続側との相対的な間隔が変化することとなる。この間隔の変化により互いの間に生じる力が載置ステージ15の移動を阻害することを防止するために、プリント基板20では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされている。プリント基板20では、その厚さ方向へ容易に変形することから、第2直線部分210の撓み変形によりX軸方向の力を吸収し、かつ第3直線部分212の撓み変形によりY軸方向の力を吸収するので、X−Y平面内で生じる間隔の変化が生み出す力を吸収することができる。
【0095】
また、第2湾曲部分211が第2直線部分210と第3直線部分212と固定筒10とに囲まれたX−Y平面内に存在していることから、載置ステージ15の移動により載置ステージ接続側と第2直線部分210との折り曲げ部分(直線e)に力が加わると、第2直線部分210が一方向へのみ膨らむC字状の撓み変形となり歪応力を緩和できるので、反発力が小さくなり載置ステージ15の移動による力を効果的に吸収することができる。これに対して、第2湾曲部分211が第2直線部分210と第3直線部分212と固定筒10とに囲まれた空間の外方でX−Y平面内に存在するとした場合、第2直線部分210が折り曲げ部分(直線e)に加えられた力により相反する二方向へ膨らむS字状の撓み変形となり歪応力が相対的に大きくなるので、反発力が大きくなり載置ステージ15の移動による力の吸収量が小さくなる。このことは、Y軸方向の力を吸収する第3直線部分212でも同様である。よって、プリント基板20は、手ぶれ補正の際、載置ステージ15のX−Y平面内での移動を妨げることはない。
【0096】
プリント基板20では、その折り曲げ個所が固定筒10の角部10bでZ軸方向に沿って形成されているので、一般に円形で構成されるレンズ鏡筒の周囲の空間、すなわち固定筒10の角部10bを有効に利用することができ、折り曲げ個所を設けることによるカメラの大型化を防止することができる。
【0097】
プリント基板20では、連結延在部205が折り重ねの可能な第1連結延在部206と第2連結延在部207とに分かれて構成されているので、連結延在部205の幅寸法を増加させることなく送電路を増加することができ、固定筒10の角部10bの制限された空間内で折り曲げ個所を構成することができる。このため、送電路の本数が少ない場合には、第2連結延在部207を設けなくてもよい。
【0098】
プリント基板20では、FPC補助板213が取り付けられているので、プリント基板20のCCD接続部201から第1直線部分208を経て第1湾曲部分209に至る個所に撓み変形が生じさせることなく、載置ステージ15の移動により生じた力を第3直線部分212に作用させることができ、確実に折り曲げ個所で力を吸収させることができる。
(手ぶれ補正機構の保持制御回路)
ステッピングモータSTM1は図19に示す保持制御回路によって制御される。そのステッピングモータSTM1は、二相制御構成とされ、第1コイルSTMC’の各端末は出力線40a、40a’を介してモータドライバMD3に接続されている。第2コイルSTMC”の各端末は出力線40b、40b’を介してモータドライバMD3に接続されている。出力線40aには電流制限用抵抗R18が介在され、出力線40bには電流制限用抵抗R19が介在されている。その出力線40aと出力線40a’との間にはコンデンサC7が介在され、出力線40bと出力線40b’との間にはコンデンサC8が介在されている。
【0099】
そのモータドライバMD3にはプロセッサ104のポートIN1、IN2から保持制御信号が入力されると共に、プロセッサ104のポートENAにはイネーブル信号が入力され、モータドライブMD3はこの保持制御信号、イネーブル信号に基づいてステッピングモータSTM1への通電制御を行っている。
【0100】
図20はその保持制御回路の動作を説明するためのフローチャートであり、リセット処理と、リリース処理と、保持処理との三段階の処理動作からなっている。
【0101】
デジタルカメラの電源スイッチSW13をオンすると、プロセッサ104の制御により、リセット処理がまず最初に実行される(S.1)。このリセット処理では、プロセッサ104の制御により、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が反時計方向に2パルス分回転駆動される。ついで、1000pps(パルスパーセカント)の早い速度でステッピングモータSTM1が反時計方向に33パルス分回転駆動される。そして、最後に、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が時計方向に2パルス分回転駆動される。
【0102】
カムピン32がカム溝31の回転方向いずれの位置にあっても、反時計方向に35パルス分ほどステッピングモータSTM1を回転させることによりカムピン32がカム溝31の絶壁31dに物理的に当接する。
【0103】
この当接位置から時計方向にステッピングモータSTM1を2パルス分駆動させると、カムピン32がカム溝31の傾斜開始位置31eにセットされる(図13(e)参照)。このカムピン32がカム溝31の傾斜開始位置31eにセットされた状態がリセット位置であり、CCD101が原点位置Oに強制保持されている状態に対応している。この原点位置Oは載置ステージ15の可動範囲の中央位置でもある。この電源オンからリセット完了までの所要時間は約53msec(ミリセカント)である。
【0104】
この手ぶれ補正機構では、ここでは、手ぶれ補正スイッチSW14をオンすることにより手ぶれ補正を実行し、手ぶれ補正スイッチSW14をオフ又は撮影が完了すると同時に手ぶれ補正実行を解除する構成となっている。
【0105】
手ぶれ補正スイッチSW14がオンされると、プロセッサ104の制御によりリリース処理が実行される(S.2)。このリリース処理では、まず、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が時計方向に2パルス分回転駆動され、ついで、1000pps(パルスパーセカント)の早い回転速度で時計方向に28パルス分回転駆動され、その後、ステッピングモータSTM1への通電が5msec(ミリセカント)保持される。ついで、モータドライブMD1によりステッピングモータSTM1への通電が停止される。
【0106】
このリリース処理により、カムピン32はカム溝31の傾斜終端位置31fに位置される(図13(d)参照)。この傾斜開始位置31eから傾斜終端位置31fまでへの所要時間は約43msec(ミリセカント)である。すなわち、カムピン32がホールド待機位置からリリース待機位置に移動するのに要する所要時間は約43msec(ミリセカント)である。このリリース待機位置で、手ぶれ制御が実行される。
【0107】
ついで、手ぶれ補正スイッチSW14がオフ又は撮影が実行されると、プロセッサ104は保持処理を実行する(S.3)。この保持処理では、プロセッサ104の制御により、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が時計方向に2パルス分回転駆動され、その後、1000pps(パルスパーセカント)の早い速度で時計方向に3パルス分回転駆動される。これにより、カムピン32はカム溝31の頂上平坦部31bを通過して谷底平坦部31aに降下し、谷底平坦部31aに当接する。その後、ステッピングモータSTM1への通電が5msec(ミリセカント)保持される。
【0108】
ついで、モータドライブMD1によりステッピングモータSTM1への通電が停止される。これにより、カムピン32はカム溝31の傾斜開始位置31eにセットされ、CCD101の中央位置が保持される。電源オン中は、いったんリセット処理が実行された場合、このリリース処理と保持待機処理とが実行される。なお、このリリース待機位置から保持待機位置へ移動するのに要する時間は、約18msec(ミリセカント)である。
【0109】
この手ぶれ補正機構によれば、強制押さえ板26に形成した押圧ピン33により強制的にCCD101の載置ステージ15を中央位置に保持する構成であるので、載置ステージ15の原点位置への保持を持続させるための通電制御が不要となり、手ぶれ補正機構を動作させた場合でもその電力消耗の低減を図ることができる。
(手ぶれ検出回路の回路構成)
図21は手ぶれ検出回路の回路構成を示す図である。この手ぶれ検出回路はX方向の回転を検出するX方向回転検出部と、Y方向の回転を検出するY方向回転検出部とから構成されている。
【0110】
X方向回転検出部は、例えば圧電振動ジャイロセンサS1Bを有し、圧電振動ジャイロセンサS1Bの第1端子はコンデンサC13を介してアースされている。圧電振動ジャイロセンサS1Bの第2端子は接続線42の途中に設けられたコンデンサC10を介してオペレーショナルアンプリファイアOP3の+端子に接続されている。圧電振動ジャイロセンサS1Bの第3端子は接続線43の途中に設けられた抵抗R23を介してオペレーショナルアンプリファイアOP3の−端子に接続されている。
【0111】
圧電振動ジャイロセンサS1Bの第4端子は、アースに接続されると共にコンデンサC11を介して接続線43に接続されている。オペレーショナルアンプリファイアOP3の+端子は抵抗R20を介して接続線43に接続されている。接続線42と接続線43との間には抵抗R20と並列に抵抗R21と切り替えスイッチASW1とからなる直列体が接続されている。
【0112】
オペレーショナルアンプリファイアOP3の出力端子はコンデンサC12を介してオペレーショナルアンプリファイアOP3の−端子に接続されている。そのコンデンサC12にはこれと並列に抵抗R22が接続されている。そのコンデンサC10と抵抗R20とはハイパスフィルターHPF1を構成し、そのコンデンサC12と抵抗R22とはローパスフィルターLPF1を構成している。オペレーショナルアンプリファイアOP3は圧電振動ジャイロセンサS1Bの出力を増幅して、オペレーショナルアンプリファイアOP3の出力端子からX方向検出信号OUT1を出力する。
【0113】
Y方向回転検出部は、圧電振動ジャイロセンサS2Aを有し、圧電振動ジャイロセンサS2Aの第1端子はコンデンサC17を介してアースされている。圧電振動ジャイロセンサS2Aの第2端子は接続線44の途中に設けられたコンデンサC14を介してオペレーショナルアンプリファイアOP4の+端子に接続されている。圧電振動ジャイロセンサS2Aの第3端子は接続線45の途中に設けられた抵抗R26を介してオペレーショナルアンプリファイアOP4の−端子に接続されている。圧電振動ジャイロセンサS2Aの第4端子はアースに接続されると共にコンデンサC15を介して接続線45に接続されている。
【0114】
オペレーショナルアンプリファイアOP4の+端子は抵抗R24を介して接続線45に接続されている。接続線44と接続線45との間には抵抗R24と並列に抵抗R25と切り替えスイッチASW2とからなる直列体が接続されている。オペレーショナルアンプリファイアOP4の出力端子はコンデンサC16を介してオペレーショナルアンプリファイアOP4の−端子に接続されている。そのコンデンサC16にはこれと並列に抵抗R27が接続されている。そのコンデンサC14と抵抗R24とはハイパスフィルターHPF2を構成し、そのコンデンサC16と抵抗R27とはローパスフィルターLPF2を構成している。オペレーショナルアンプリファイアOP4は圧電振動ジャイロセンサS2Aの出力を増幅して、オペレーショナルアンプリファイアOP4の出力端子からX方向検出信号OUT2を出力する。
【0115】
切り替えスイッチASW1、ASW2には信号線46を介して切り替え制御信号SWC1が入力される。この切り替えスイッチASW1、ASW2はハイパスフィルターHPF1、HPF2の応答速度を早くするためにコンデンサーC11、C15の充電を早める機能を有し、プロセッサ104は電源オン後一定時間切り替え制御信号SWC1を切り替えスイッチASW1、ASW2に出力し、これにより、切り替えスイッチASW1、ASW2が一定時間オンされる。ジャイロセンサS1B、S2Aの検出出力OUT1、OUT2はT秒ごとにA/D変換器10411に読み込まれる。ここで、
ωyaw(t)…YAW方向の瞬間角速度
ωpitch(t)…PITCH方向の瞬間角速度
θyaw(t)…YAW方向の変化角度
θpitch(t)…PITCH方向の変化角度
Dyaw(t)…YAW方向の回転に対応して像がX方向に移動する量
Dpitch(t)…PITCH方向の回転に対応して像がY方向に移動する量
とすると、
θyaw(t)=Σωyaw(i)・T
θpitch(t)=Σωpitch(i)・T
の関係式により、θyaw(t)、θpitch(t)が求まる。
【0116】
また、ズームポイントzp、フォーカスポイントfpとから焦点距離fが決定され、YAW方向の回転に対応して像が移動する量Dyaw(t)、PITCH方向の回転に対応して像が移動する量Dpitch(t)とYAW方向の変化角度θyaw(t)、PITCH方向の変化角度θpitch(t)との間には、
Dyaw(t)=f*tan(θyaw(t)) …(i)
Dpitch(t)=f*tan(θpitch(t))…(ii)
すなわち、YAW方向の回転に対応して像がX方向に移動する量Dyaw(t)、PITCH方向の回転に対応して像がY方向に移動する量Dpitch(t)がCCD101をX−Y方向に移動させるべき量に対応する。
【0117】
手ぶれによりYAW方向の回転変位とPITCH方向の回転変位とがあるときには、CCDの目標位置を上記(i)、(ii)式によって算出し、位置検出素子1252により検出された実際のCCD101のX−Y方向の位置と目標値との差がなくなるように、載置ステージ15を駆動する。この制御はT秒間隔で行われる。
【0118】
なお、ジャイロセンサS1B、S2Aの検出出力が「0」のときは、カメラ本体の並進運動変位Xdに追従してCCD101が並進変位されるように、載置ステージ15が制御される。
(手ぶれ補正制御回路)
図22は手ぶれ補正制御回路の一例を示すブロック図である。この手ぶれ補正制御回路は、フィードバック回路50と位置対応電圧設定回路51とから概略構成されている。
【0119】
ホール素子H1、H2は位置対応電圧設定回路51の一部を構成している。そのホール素子(1252a)H1には一定の電圧Vh1−が印加されている。ホール素子H1の一端子は抵抗R2を介してオペレーショナルアンプリファイアOP1の−端子に接続されている。ホール素子H1の他端子は抵抗R3を介してオペレーショナルアンプリファイアOP1の+端子に接続されている。
【0120】
オペレーショナルアンプリファイアOP1の出力端子は抵抗R5を介してプロセッサ104の入力ポートL1に接続されている。オペレーショナルアンプリファイアOP1の出力端子は抵抗R1を介してオペレーショナルアンプリファイアOP1の−端子に接続されている。また、抵抗R5と入力ポートL1との接続点はコンデンサC1を介してアースされている。
【0121】
ホール素子(1252b)H2には一定の電圧Vh2−が印加されている。ホール素子H2の一端子は抵抗R7を介してオペレーショナルアンプリファイアOP2の−端子に接続されている。ホール素子H2の他端子は抵抗R8を介してオペレーショナルアンプリファイアOP2の+端子に接続されている。
【0122】
オペレーショナルアンプリファイアOP2の出力端子は抵抗R9を介してプロセッサ104の入力ポートL2に接続されている。オペレーショナルアンプリファイアOP2の出力端子は抵抗R6を介してオペレーショナルアンプリファイアOP2の−端子に接続されている。また、抵抗R9と入力ポートL2との接続点はコンデンサC2を介してアースされている。
【0123】
プロセッサ104の出力ポートL3は位置対応電圧設定回路51の一部を構成するD/A変換回路IC2に接続され、プロセッサ104の出力ポートL4、L6はD/A変換回路IC2とD/A変換回路IC1とに接続されている。プロセッサ104の出力ポートL5はD/A変換回路IC1に接続されている。
【0124】
そのD/A変換回路IC2には2本の出力線61、62が接続され、一方の出力線61は抵抗R4を介してオペレーショナルアンプリファイアOP1の+端子に入力されている。他方の出力線62は抵抗R10を介してオペレーショナルアンプリファイアOP2の+端子に入力されている。
【0125】
そのD/A変換回路IC2には出力ポートL3からのチップセレクタ信号DI、出力ポートL4からクロック信号SCLK、出力ポートL6から補正用デジタルデータDINが入力され、D/A変換回路IC2は補正用デジタルデータをデジタルアナログ変換する機能を有する。
【0126】
D/A変換回路IC1はフィードバック回路50の一部を構成している。そのD/A変換回路IC1には1本の共通線63と2本の出力線64、65とが接続されている。共通線63はコイルドライブ回路MD1とコイルドライブ回路MD2とに接続されている。出力線64は抵抗R14を介してコイルドライブ回路MD1の入力端子L7に接続されている。出力線65は抵抗R15を介してコイルドライブ回路MD2の入力端子L8に接続されている。
【0127】
抵抗R14と入力端子L7との接続点はコンデンサC3を介してコイルドライブ回路MD1のアース端子ER1に接続されている。抵抗R15と入力端子L8との接続点はコンデンサC4を介してコイルドライブ回路MD2のアース端子ER2に接続されている。共通線63は、抵抗R12および抵抗R11を介して電源Vccに接続され、この接続点は、抵抗R13を介してアースされている。
【0128】
そのコイルドライブ回路MD1、MD2には、プロセッサ104からのコントロール信号CONT1が共に入力される。そのコイルドライブ回路MD1の出力端子には抵抗R16を介してコイルCOL1”(コイル体COL1とコイル体COL1’との直列接続体をいう)が接続され、その抵抗R16とコイルCOL1”との直列体に平行にコンデンサC5が接続されている。そのコイルドライブ回路MD2の出力端子には抵抗R17を介してコイルCOL2”(コイル体COL2とコイル体COL2’との直列接続体をいう)が接続され、その抵抗R17とコイルCOL2”との直列体に平行にコンデンサC6が接続されている。そのコイルCOL1”は載置ステージ15をX方向に可動させ、そのコイルCOL2”は載置ステージ15をY方向に駆動させるのに用いられる。
【0129】
ここで、各ホール素子H1、H2に所定電圧Vh1−、Vh2−を印加し、ジャイロセンサS1B、S2Aの検出出力が0でかつCCD101が可動範囲の中心位置(原点)に存在するときのホール素子H1、H2の検出出力電圧値をVh1、Vh2とする。その際のプロセッサ104の各入力ポートL1、L2のアナログ出力電圧値をV1ADin、V2ADinとする。この出力電圧値V1ADin、V2ADinを実際に測定する。
【0130】
この出力電圧値(実測値)V1ADin、V2ADinは、マグネット(永久磁石)16a〜16dとホール素子H1、H2とのメカニカルな位置関係に関する組み立て誤差要因、載置ステージ15に対するホール素子H1、H2の取り付け位置とコイルCOL1”、COL2”の取り付け位置との組み立て誤差要因等に基づいてばらついている。また、ホール素子H1、H2それ自体の特性によってもばらついている。
【0131】
従って、何らの補正も行わないものとすると、ホール素子H1、H2の原点位置に対応する検出値が各カメラ毎にばらつくことになり、精確な手ぶれ補正を行うことができないことになる。
【0132】
そこで、補正前の出力電圧値V1ADin、V2ADinが一定電圧値(設定基準電圧値)となるようにアナログデジタル変換器IC2から各オペレーショナルアンプリファイアOP1、OP2に入力される補正電圧Vr1’、Vr2’を設定する。すなわち、CCD101が原点位置に存在し、CCD101の非制御時(コイルCOL1”、COL2”への非通電時)の出力電圧値(検出値)V1ADin、V2ADinのばらつきを補正するために、補正電圧Vr1’、Vr2’を設定する。
【0133】
ここでは、オペレーショナルアンプリファイアOP1、OP2の動作可能範囲電圧の略中心の値、例えば1.7ボルトが設定基準電圧値になるように設定するために、プロセッサ104は以下に説明する演算を行う。
【0134】
ここでは、説明の便宜のため、R2=R3=R7=R8、R1=R4=R10=R6と仮定するが、これに限るものではない。
【0135】
各抵抗をR2=R3=R7=R8、R1=R4=R10=R6と仮定した条件のもとでは、
V1ADin=R1/R2*((Vh1+)−(Vh1−))+Vr1’
V2ADin=R1/R2*((Vh2+)−(Vh2−))+Vr2’
の関係式が成立する。
【0136】
プロセッサ104は、この関係式に基づいて、補正電圧Vr1’、Vr2’を演算により求める。これにより、CCD101の原点位置におけるホール素子H1、H2の検出値がマグネット(永久磁石)16a〜16dとホール素子H1、H2とのメカニカルな位置関係に関する組み立て誤差要因、載置ステージ15に対するホール素子H1、H2の取り付け位置とコイルCOL1”、COL2”の取り付け位置との組み立て誤差要因等に基づいてばらついても一定となる。
【0137】
プロセッサ104は、そのD/A変換回路IC2と共に、ホール素子H1、H2の検出値のばらつきいかんにかかわらず検出値を設定基準電圧値に設定するための補正値を出力するばらつき補正回路の一部を構成し、更には、設定基準電圧値を演算により求める補正値演算手段として機能する。
【0138】
この初期設定は、図23のフローチャートに示すように、カメラの組み立て工場における最終検査である出荷時に設定する(S.1〜S.3参照)。
【0139】
実際の制御は、図24のフローチャートに示すように、プロセッサ104が手ぶれ検出回路の検出出力OUT1、OUT2に基づき演算により得られた制御目標値を読み込み(S.11)、ついで、ホール素子H1、H2により得られた実際の位置対応電圧値V1ADin、V2ADinをプロセッサ104が読み込み(S.12)、これらによりプロセッサ104が制御目標値と位置対応電圧値V1ADin、V2ADinとの差を演算する(S.13)。
【0140】
プロセッサ104はこの差分出力に基づいてデジタルアナログ変換回路IC1へ制御データを出力する。デジタルアナログ変換回路IC1はその制御データに対応する制御電圧Vdac1、Vdac2を出力する(S.14)。この制御電圧Vdac1、Vdac2はコイルドライブ回路MD1、MD2に入力される。コイルドライブ回路MD1、MD2は各コイルcol1”、col2”にそれぞれ駆動電圧Vout1、Vout2を出力する。
【0141】
その駆動電圧Vout1、Vout2は、分圧電圧をVrとして、
Vout1=(Vdac1−Vr)*K
Vout2=(Vdac2−Vr)*K
により設定される。
【0142】
ここで、符号Kは分圧電圧Vrに基づく比例定数である。
【0143】
CCD101はマグネット16a〜16dとコイルCOL1”、COL2”との磁界により吸引反発されて可動され、駆動電圧Vout1、Vout2が「正電圧」か「負電圧」であるか否かによって、その可動方向が制御される。これにより、そのホール素子H1、H2の検出値が変化する。この検出値の変化に対応して位置対応電圧値V1ADin、V2ADinが変化し、この位置対応電圧値がプロセッサ104にフィードバックされるため、手ぶれ検出回路の検出出力値により制御目標値が変化した場合でも、CCD101を迅速に目標位置に追従移動させることができる(S.15)。そして、撮影が完了すると制御が終了する(S.16)。
(変形例)
図25はフィードバック回路50の変形例を示す回路図であって、ここでは、プロセッサ104がコイルドライバMD4をPWM制御によって駆動制御することにより、コイルCOL1”、COL2”への通電制御が行われるようになっている。
【0144】
すなわち、そのコイルドライバMD4には、正方向信号CON1と逆方向信号CON2とが入力されると共に、パルス電圧Vin1とパルス電圧Vin2とが入力され、パルス信号のハイレベルの持続時間が長くなるほどコイルCOL1”、COL2”への通電電圧が高くなる。
(手ぶれ補正機構オンによる撮影の詳細)
図26に示すように、手ぶれ補正スイッチSW14をオンすると(S.1)、ジャイロセンサS1B、S2Aの電源がオンされる(S.2)。レリーズスイッチSW1を押下して第1段押し下げが完了すると(S.3)、オートフォーカス動作(合焦動作)が開始される(S.4)。と同時に、載置ステージ15のメカニカルな強制固定が解除され、コイルCOL1”、COL2”への通電によるCCD中央保持制御が開始される(S.4)。
【0145】
次に、カメラ振動によるモニターリング処理が開始される(S.5)。プロセッサ104はレリーズスイッチSW1の第1段押し下げが続行されているか否かを判断し(S.6)、レリーズスイッチSW1の第1段押し下げが継続されている場合には、レリーズスイッチSW1の第2段押し下げが実行されたか否かを判断する(S.7)。レリーズスイッチSW1の第1段押し下げが解除された場合には、ステップS.3に戻り、レリーズスイッチSW1の第2段押し下げがされていない場合にはステップS.6に戻る。
【0146】
レリーズスイッチSW1の第2段押し下げが完了した場合には、CCD101が像の移動方向に追従を開始し(S.8)、ついで露光が行われ(S.9)、露光の終了(S.10)と共にCCD101の追従が停止され(S.11)、載置ステージ15がコイルCOL1”、COL2”への通電制御により原点位置に復帰され(S.11)、載置ステージ15が原点位置に復帰したか否かが判断され(S.12)、CCDメカニカルに原点位置に強制固定される(S.13)。
【0147】
このレリーズスイッチSW1の操作タイミングには二つの態様が考えられる。
【0148】
図27はレリーズスイッチSW1の二段押しの場合の手ぶれ補正処理のタイミングチャートである。ここで、二段押しとはレリーズスイッチSW1の第1段の押し下げ操作から第2段の押し下げ操作までの間に不連続性を有するレリーズ操作を言う。例えば、第1段の押し下げ後、シャッターチャンスをうかがって第2段の露光開始動作に移行する撮影動作を言う。
【0149】
レリーズスイッチSW1の第1段を押し下げると、デジタルカメラの合焦動作が開始される。原点位置強制保持機構1263は、この状態ではまだ載置ステージ15の強制保持を解除していない。コイルCOL1”、COL2”は非通電状態にある。また、載置ステージ15はメカニカルに中央位置に固定保持されている状態にある。LCDモニタ10には被写体画像が表示されている状態にある。
【0150】
合焦動作が完了すると、プロセッサ104は原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな強制保持解除が実行される。と同時に、コイルCOL1”、COL2”への通電が開始され、コイルCOL1”、COL2”への通電制御により、レリーズスイッチSW1の第1段押し動作中(レリーズ1)の手ぶれ補正処理が実行される。レリーズスイッチSW2の第2段押し(レリーズ2)が行われると、載置ステージ15がコイルCOL1”、COL2”への通電制御によりいったん中央位置に戻された後、間をあけてLCDモニタ10が消灯され、被写体画像を表示しない状態となる。
【0151】
ついで、静止画露光が開始されると共に、載置ステージ15が手ぶれに基づく像の移動に追従制御される。静止画露光の終了と共に載置ステージ15がコイルCOL1”、COL2”への通電制御に基づき中央位置に復帰され、ついで、プロセッサ104は、原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな強制固定が実行される。ついで、コイルCOL1”、COL2”への通電が停止される。
【0152】
このように、レリーズ1中は、ユーザーはカメラがぶれたとしても、LCDモニタ10を視認することにより、ぶれのない状態の被写体画像をモニタリングできる。
【0153】
また、レリーズ2中に、載置ステージ15を中央位置にいったん戻すと、レリーズ1中の被写体画像の構図に対してレリーズ2中の構図がずれることになるが、この発明の実施の形態によれば、載置ステージ15をいったん中央位置に戻した状態で、撮影直前の被写体画像を確認できるため、撮影直前(露光直前)の被写体画像の構図を確認できる。
【0154】
レリーズスイッチSW1の第1段を押して第2段を押さずにレリーズスイッチSW1の押し下げを解除した場合には、図28に示すように、第1段の押し下げと同時に合焦動作が開始され、合焦完了と共にプロセッサ104は原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな強制保持解除が実行される。と同時に、コイルCOL1”、COL2”への通電が開始され、コイルCOL1”、COL2”への通電制御により、レリーズスイッチSW1(レリーズ1)の第1段押し動作中の手ぶれ補正処理が実行される。
【0155】
このレリーズスイッチSW1の第1段押し動作中にレリーズスイッチSW1の第1段押し動作を解除すると、載置ステージ15がコイルCOL1”、COL2”への通電制御に基づき中央位置に復帰され、ついで、プロセッサ104は、原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな固定保持が実行される。ついで、コイルCOL1”、COL2”への通電が停止される。
【0156】
図29はレリーズスイッチSW1の一気押しの場合の手ぶれ補正処理のタイミングチャートである。ここで、一気押しとはレリーズスイッチSW1の第1段の押し下げ操作(レリーズ1)から第2段の押し下げ操作(レリーズ2)までが連続性を有するレリーズ操作を言う。例えば、第1段の押し下げ後、直ちに第2段の露光開始動作に移行する撮影動作を言う。
【0157】
レリーズスイッチSW1の第1段を押し下げると、デジタルカメラの合焦動作が開始される。LCDモニタ10には被写体画像が表示されている状態にある。また、レリーズスイッチSW2の第1段の押し下げ後、直ちにレリーズスイッチSW1の第2段の押し下げ動作が実行される。同時に、LCDモニタ10が消灯され、被写体画像を表示しない状態となる。
【0158】
合焦動作が完了すると、プロセッサ104は原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな保持解除が実行される。と同時に、コイルCOL1”、COL2”への通電が開始され、コイルCOL1”、COL2”への通電制御により、載置ステージ15の中央位置への保持が行われる。これにより、手ぶれ補正処理が実行される。
【0159】
載置ステージ15はコイルCOL1”、COL2”への通電により中央位置保持が実行され、静止画露光が開始されると共に、載置ステージ15が手ぶれに基づく像の移動に追従制御される。静止画露光の終了と共に載置ステージ15がコイルCOL1”、COL2”への通電制御に基づき中央位置に復帰され、ついで、プロセッサ104は、原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな固定保持が実行される。ついで、コイルCOL1”、COL2”への通電が停止される。
【0160】
このように一気押しの場合、構図の確認はレリーズ1の操作中に完了していると考えられ、レリーズ2中の構図の確認は不要であるため、レリーズ2中にいったん載置ステージ15を中央位置に戻したとしても構図の再確認を行わせる必要はないと考えられるから、手ぶれ補正制御処理の簡略化を図ることができる。
【0161】
また、合焦動作中にLCDモニタ10を消灯するため、電池の無駄な消耗を回避できる。
【0162】
更に、載置ステージ15が機械的に原点位置に強制押圧された状態のとき、吸着棒35(図9(a)参照。)がマグネット16b、16dに吸着保持されるので、載置ステージ15のZ軸方向のガタが抑制される。また、載置ステージ15は、原点位置にない場合であっても、吸着棒35がマグネット16b、16dに吸着保持され、Z軸方向のガタが抑制される。
【0163】
本発明に係る手ぶれ補正機能付き撮像装置であるデジタルカメラでは、手ぶれ補正が行われる際にベース部材11上で載置ステージ15がX−Y平面内で移動されることに伴って、載置ステージ15に固定された載置ステージ接続側とベース部材11に固定されたブロック回路接続側との相対的な間隔の変化によりプリント基板20に生じる力を吸収することができる。これは、次のことによる。プリント基板20では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされている。プリント基板20では、その厚さ方向へ容易に変形することから、第2直線部分210の撓み変形によりX軸方向の力を吸収し、かつ第3直線部分212の撓み変形によりY軸方向の力を吸収するので、X−Y平面内で生じる間隔の変化が生み出す力を吸収することができることによる。よって、載置ステージ接続側(撮像素子接続部)とブロック回路接続側(演算処理接続部)との間隔の変化により、プリント基板20に生じる力が載置ステージ15の移動を阻害することを防止することができる。
【0164】
また、第2湾曲部分211が第2直線部分210と第3直線部分212と固定筒10とに囲まれたX−Y平面内に存在していることから、載置ステージ15の移動により載置ステージ接続側と第2直線部分210との折り曲げ部分(直線e)に力が加わると、第2直線部分210が一方向へのみ膨らむC字状の撓み変形となり歪応力を緩和できるので、反発力が小さくなり載置ステージ15の移動による力を効果的に吸収することができる。
【0165】
プリント基板20では、その折り曲げ個所が固定筒10の角部10bでZ軸方向に沿って形成されているので、一般に円形で構成されるレンズ鏡筒の周囲の空間、すなわち固定筒10の角部10bを有効に利用することができ、折り曲げ個所を設けることによるカメラの大型化を防止することができる。
【0166】
プリント基板20では、連結延在部205が折り重ねの可能な第1連結延在部206と第2連結延在部207とに分かれて構成されているので、連結延在部205の幅寸法を増加させることなく送電路を増加することができ、固定筒10の角部10bの制限された空間内で折り曲げ個所を構成することができる。このため、送電路の本数が少ない場合には、第2連結延在部207を設けなくてもよい。
【0167】
プリント基板20では、FPC補助板213が取り付けられているので、プリント基板20のCCD接続部201から第1直線部分208を経て第1湾曲部分209に至る個所に撓み変形が生じさせることなく、載置ステージ15の移動により生じた力を第3直線部分212に作用させることができ、確実に折り曲げ個所で力を吸収させることができる。
【0168】
なお、上記した実施例では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされていたが、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在し、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、一方がX軸方向と交差し、かつ他方がY軸方向と交差していれば、載置ステージ15がX−Y平面内で移動することによりプリント基板20に生じる力を吸収することができ、上記した実施例に限定されるものではない。これは、次のことによる。
【0169】
上記したようにプリント基板20では、厚さ方向に撓むことにより、厚さ方向の力すなわち面に対する垂線方向の力を吸収することができる。Z軸方向に延在する第2直線部分210および第3直線部分212が、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、一方がX軸方向と交差し、かつ他方がY軸方向と交差するように設定されると、第2直線部分210および第3直線部分212が撓むことにより吸収できる力には、X軸方向成分とY軸方向成分とが必ず含まれることとなるので、載置ステージ15のX−Y平面内での移動によりプリント基板20に生じる力を吸収することができることによる。
【0170】
上記した実施例では、第2直線部分210、第2湾曲部分211および第3直線部分212が、Z軸方向(撮影光軸方向)で見て、CCD101から被写体側に延在されていたが、CCD101から強制押え板26へ向けて(CCD101から被写体とは逆へ向かう方向)延在されていても載置ステージ15がX−Y平面内で移動することによりプリント基板20に生じる力を吸収することができ、上記した実施例に限定されるものではない。
【0171】
上記した実施例では、撮像素子(CCD101)と演算処理装置(プロセッサ104およびF/E−IC102)との電気的な接続にフレキシブルプリント基板20が用いられていたが、電気的に接続することができかつ厚さ方向に容易に曲げ変形するフレキシブル基板であればよく、上記した実施例に限定されるものではない。
【0172】
上記した実施例では、第1湾曲部分209と第2直線部分210との境界線(直線e)、第2直線部分210と第2湾曲部分211との境界線(直線f)、第2湾曲部分211と第3直線部分212との境界線(直線g)および第3直線部分212とブロック回路接続部204(演算処理接続部)との境界線(直線h)が、略直角に塑性変形されて折り曲げられていたが、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在され、互いの延在方向が交差し、かつ互いの交線がX軸方向およびY軸方向に平行でなければよいことから、適宜折り曲げ角度を選択して塑性変形させればよく、上記した実施例に限定されるものではない。
【0173】
上記した実施例では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされていたが、載置ステージ15がX−Y平面内で移動することによりプリント基板20に生じる力を吸収することができればよいことから、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在し、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、互いに交差するように設定してもよく、上記した実施例に限定されるものではない。これは、次のことによる。
【0174】
上記したようにプリント基板20では、厚さ方向に撓むことにより、厚さ方向の力すなわち面に対する垂線方向の力を吸収することができるが、面の延在方向すなわち幅方向の力を吸収することが困難である。Z軸方向に延在する第2直線部分210および第3直線部分212が、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、互いに交差するように設定されると、第2直線部分210および第3直線部分212の幅方向が互いに異なるので、互いに吸収が困難な方向を補うことができる。さらに、第2直線部分210および第3直線部分212が撓むことにより吸収できる力には、X軸方向成分とY軸方向成分とが必ず含まれることとなるので、載置ステージ15のX−Y平面内での移動によりプリント基板20に生じる力を吸収することができる。このことから、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在され、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、互いに交差するように設定してもよい。
【0175】
上記した実施例では、第2湾曲部分211が略90度の頂角の扇状とされていたが、X−Y平面上に延在し、かつ第2直線部分210と第3直線部分212とを繋ぐものであればよく、上記した実施例に限定されるものではない。第2湾曲部分211は、例えば、第2直線部分210がY−Z平面内に存在されかつ第3直線部分212がX−Z平面内に存在される場合には、略270度の頂角の扇状であってもよく、第2直線部分210がY−Z平面内に存在されかつ第3直線部分212がX−Z平面内に存在されない場合には、互いの延在面に合わせた扇状であってもよく、第2直線部分210と第3直線部分212との延在方向に合わせたクランク形状であってもよい。
【0176】
上記した実施例では、プリント基板20の他端側となる演算処理接続部、すなわちブロック回路接続部204は、固定筒10のベース部材11に取り付けられていたが、本体ケース内で撮影光軸に対して固定されていればよく、上記した実施例に限定されるものではない。
【0177】
上記した実施例では、ジャイロセンサ1241がX方向とY方向との回転を検出することによりカメラ本体(本体ケース)に生じた手ぶれを検出していたが、例えば、モニタリング画像を画像処理することにより手ぶれを検出してもよく、上記した実施例に限定されるものではない。
【図面の簡単な説明】
【0178】
【図1】本発明に係わるデジタルカメラの正面図である。
【図2】本発明に係わるデジタルカメラの背面図である。
【図3】本発明に係わるデジタルカメラの上面図である。
【図4】本発明に係わるデジタルカメラの内部のシステム構成の概要を示すブロック回路図である。
【図5】本発明に係わるデジタルカメラの一般的動作概要を説明するためのフローチャートである。
【図6】本発明に係わるデジタルカメラの手ぶれ補正の原理を説明するための図であって、(a)はデジタルカメラの傾きを示し、(b)はそのデジタルカメラの撮影レンズとCCDの撮像面との関係を示す部分拡大図である。
【図7】本発明に係わるデジタルカメラのレンズ鏡胴の固定筒を示す正面図である。
【図8】図7に示す固定筒の縦断面図である。
【図9】図7に示す固定筒の背面図であって、(a)はフレキシブルプリント基板を取り付けてない状態を示す図であり、(b)はフレキシブルプリント基板を取り付けた状態を示す図である。
【図10】本発明に係わるCCDステージの分解斜視図である。
【図11】図9(b)のII−II線に沿う部分拡大断面図である。
【図12】本発明に係わる原点位置強制保持機構の要部を示す説明図であって、(a)はCCDステージとステッピングモータと変換機構との連結関係を示す斜視図、(b)はその変換機構の部分を拡大して示す斜視図である。
【図13】回転伝達ギヤのカム溝を示す模式図であって、(a)は回転伝達ギヤの底面図であり、(b)は(a)に記載の環状の一点鎖線Vに沿って得られた断面を示した図であり、(c)はカムピンがカム溝の傾斜面部を摺動して回転伝達ギヤがベース部材に向かって押し上げられた状態を示し、(d)はカムピンがカム溝の頂上平坦部に当接して回転伝達ギヤが最も押し上げられた状態を示し、(e)はカムピンが絶壁を通過して谷底平坦部に当接して回転伝達ギヤが最も押し下げられた状態を示している。
【図14】図12(a)に示す押さえピンと凹所との嵌合状態を説明するための説明図であって、(a)は押さえピンと凹所周壁との密接状態を示す部分拡大断面図であり、(b)は押さえピンと凹所周壁との離間状態を示す部分拡大断面図である。
【図15】折り曲げ前のフレキシブルプリント基板を示し、表側から見た図である。
【図16】折り曲げ前のフレキシブルプリント基板のCCDステージへの取り付け状態を示す図である。
【図17】プリント基板の連結延在部の重ね合わせ状態を示す図である。
【図18】CCDステージとフレキシブルプリント基板との配置関係を模式的に示す斜視図であり、(a)、(b)、(c)はこれらを異なる方向から見た図である。
【図19】本発明に係わる原点位置強制保持制御回路のブロック回路図である。
【図20】本発明に係わる手ぶれ補正機構の原点位置強制保持機構の制御処理の一例を示すフローチャートである。
【図21】本発明に係わる手ぶれ検出回路の一例を示す回路図である。
【図22】本発明に係わる手ぶれ補正制御回路のブロック回路図である。
【図23】本発明に係わるばらつき補正設定処理の一例を示すフローチャートである。
【図24】本発明に係わる手ぶれ補正制御回路の処理の一例を示すフローチャートである。
【図25】図22に示すフィードバック回路の変形例を示すブロック回路図である。
【図26】本発明に係わる撮像装置の手ぶれ補正処理の一連の流れを示すフローチャートである。
【図27】本発明に係わる撮像装置の二段押しの場合の手ぶれ補正処理の一例を示すタイミングチャートである。
【図28】本発明に係わる撮像装置の手ぶれ補正処理の解除処理の一例を示すタイミングチャートである。
【図29】本発明に係わる撮像装置の一気押しの場合の手ぶれ補正処理の一例を示すタイミングチャートである。
【符号の説明】
【0179】
101 (撮像素子としての)CCD
1241 手ぶれ検出センサ
1263 原点位置強制保持機構
【技術分野】
【0001】
本発明は、画像データを生成する撮像素子に被写体像を結像させて被写体の画像を撮影する撮像装置に関し、特に、手ぶれによる被写体像の移動に撮像素子を追従させることにより、手ぶれが補正された被写体の画像を撮影することができる手ぶれ補正機能が設けられた手ぶれ補正機能付き撮像装置に関する。
【背景技術】
【0002】
従来から、撮像装置としてのデジタルカメラには、手ぶれ補正機構を備えるものが知られている。この撮像装置には、撮像素子としてのCCDが、撮影光軸上でレンズ鏡筒を収容し本体ケースに取り付けられた固定筒の一端に設けられた載置ステージに搭載されている。載置ステージは、撮影光軸をZ軸方向としてこれに垂直なX−Y平面に沿って移動可能に案内ステージに保持されている。案内ステージは、本体ケース内で撮影光軸に対して固定され、載置ステージは、案内ステージ上で永久磁石およびこれに対向するコイルが形成する磁力により可動される構造とされている(例えば、特許文献1参照。)。この従来のカメラでは、本体ケースに設けられた演算処理装置が、本体ケースに生じたX方向とY方向との傾きを検出し、この検出出力に基づいて、コイルへの通電電流を変化させることにより、手ぶれによる被写体の像の移動にCCDを追従移動させる制御を行っている。このデジタルカメラでは、CCDと演算処理装置とが電気的に接続されており、演算処理装置がCCDから出力された画像信号に基づいて画像形成処理および画像表示処理等を行うことにより、被写体の撮影およびモニタ上での撮影前の被写体の状態の確認等が可能とされている。
【特許文献1】特開2004−274242号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記した手ぶれ補正機能付きカメラでは、手ぶれ補正が行われる際、CCDがX−Y平面内で移動されることに対し、演算処理装置が本体ケースに設けられていることから、CCDと演算処理装置との相対的な間隔が変化することとなる。このため、CCDと演算処理装置との電気的な接続にフレキシブル基板を用いることが考えられている。ところが、手ぶれ補正のためのCCDの移動は、永久磁石とこれに対向するコイルが形成する磁力を利用して微量な位置調整を行うものであるから、CCDと演算処理装置との相対的な間隔の変化に応じてフレキシブル基板に生じる撓み力がCCDの適切な移動の妨げとなり、適切に手ぶれ補正を行うことができなくなる虞がある。
【0004】
本発明は、上記の問題に鑑みて為されたもので、本体ケースに設けられた演算処理装置およびX−Y平面に沿って移動される撮像素子を電気的に接続しても、適切に手ぶれ補正を行うことができる手ぶれ補正機能付き撮像装置を提供することを課題としている。
【課題を解決するための手段】
【0005】
上記課題を解決するため、請求項1に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部とを有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0006】
請求項2に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部とを有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0007】
請求項3に係る発明は、請求項1または請求項2に記載の手ぶれ補正機能付き撮像装置であって、前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする。
【0008】
請求項4に係る発明は、請求項3に記載の手ぶれ補正機能付き撮像装置であって、前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする。
【0009】
請求項5に係る発明は、請求項1ないし請求項4のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする。
【0010】
請求項6に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0011】
請求項7に係る手ぶれ補正機能付き撮像装置は、撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする。
【0012】
請求項8に係る発明は、請求項6または請求項7に記載の手ぶれ補正機能付き撮像装置であって、前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする。
【0013】
請求項9に係る発明は、請求項8に記載の手ぶれ補正機能付き撮像装置であって、前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする。
【0014】
請求項10に係る発明は、請求項6ないし請求項9のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする。
【0015】
請求項11に係る発明は、請求項6ないし請求項10のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記固定部材は、撮影光軸上でレンズ鏡筒を収容する固定筒であり、前記撮像素子は、前記固定筒の端部に配置され、前記フレキシブル基板の前記撮像素子接続部は、前記撮像素子の撮像面とは反対側の面に接続され、前記フレキシブル基板の前記連結延在部は、前記固定筒の外周に沿って配置されていることを特徴とする。
【0016】
請求項12に係る発明は、請求項1ないし請求項11のいずれか1項に記載の手ぶれ補正機能付き撮像装置であって、前記手ぶれ補正機構は、前記撮像素子を搭載する載置ステージを有し、該載置ステージをX−Y平面に沿って移動させることにより前記撮像素子をX−Y平面内で移動させて追従させることを特徴とする。
【発明の効果】
【0017】
請求項1および請求項2に記載の発明によれば、撓み変形することによりその厚さ方向への力を吸収することができるフレキシブル基板において、その第2延在部および第4延在部が撓むことによりX軸方向成分の力およびY軸方向成分の力を吸収できる構成とされている。これにより、X−Y平面内で移動される撮像素子に接続される一端と演算処理装置に接続される他端との相対的な間隔が変化しても、フレキシブル基板では一端と他端との間で力を作用させることはなく、撮像素子のX−Y平面内で移動を妨げることはない。このため、適切に手ぶれ補正を行うことができる。
【0018】
請求項3および請求項4に記載の発明によれば、第2延在部がY−Z平面と平行であることからX軸方向の力を吸収し、かつ第4延在部がX−Z平面と平行であることからY軸方向の力を吸収するので、一端と他端との間に生じる力をより効果的に吸収することができる。
【0019】
請求項5に記載の発明によれば、連結延在部が、2つに分岐された第1の連結延在部と第2の連結延在部とが重ねられて構成されているので、幅寸法を増加させることなく送電路を増加させることができる。
【0020】
請求項6および請求項7に記載の発明によれば、撓み変形することによりその厚さ方向への力を吸収することができるフレキシブル基板において、その第2延在部および第4延在部が撓むことによりX軸方向成分の力およびY軸方向成分の力を吸収できる構成とされている。これにより、X−Y平面内で移動される撮像素子に接続される撮像素子接続部と演算処理装置に接続される演算処理接続部との相対的な間隔が変化しても、フレキシブル基板では、撮像素子接続部と演算処理接続部との間で力を作用させることはなく、撮像素子のX−Y平面内で移動を妨げることはない。このため、適切に手ぶれ補正を行うことができる。
【0021】
請求項8および請求項9に記載の発明によれば、第2延在部がY−Z平面と平行であることからX軸方向の力を吸収し、かつ第4延在部がX−Z平面と平行であることからY軸方向の力を吸収するので、撮像素子接続部と演算処理接続部との間に生じる力をより効果的に吸収することができる。
【0022】
請求項10に記載の発明によれば、連結延在部が、2つに分岐された第1の連結延在部と第2の連結延在部とが重ねられて構成されているので、幅寸法を増加させることなく送電路を増加させることができる。
【0023】
請求項11に記載の発明によれば、連結延在部が、固定筒の外周に沿って配置されているので、円形で構成されるレンズ鏡筒の周りの空間を有効に利用することができる。
【0024】
請求項12に記載の発明によれば、載置ステージがX−Y平面に沿って移動されるので、フレキシブル基板の一端側または撮像素子接続部側に、載置ステージを駆動させる駆動機構への接続端子を設けることができる。
【発明を実施するための最良の形態】
【0025】
以下に、本発明に係わる手ぶれ補正機能を有するカメラを図面を参照しつつ説明する。
【実施例】
【0026】
(デジタルカメラの一般的構成)
図1は本発明に係わる撮像装置としてのデジタルスチルカメラ(以下、カメラともいう)の一例を示す正面図、図2はその背面図、図3はその上面図、図4はそのデジタルカメラの内部のシステム構成の概要を示すブロック回路図である。
【0027】
図1において、カメラ本体(本体ケース)の上面には、レリーズスイッチ(レリーズシャッター)SW1、モードダイアルSW2、図3に示すサブ液晶ディスプレイ(サブLCDともいう)1が配設されている。
【0028】
カメラ本体の正面には、撮影レンズを含む鏡胴ユニット7、光学ファインダ4、ストロボ発光部3、測距ユニット5、リモートコントロール受光部6が設けられている。
【0029】
カメラの背面には、図2に示すように電源スイッチSW13、LCDモニタ10、AFLED8、ストロボLED9、光学ファインダ4、広角方向ズームスイッチSW3、望遠方向ズームスイッチSW4、セルフタイマの設定・削除スイッチSW5、メニュースイッチSW6、上移動・ストロボセットスイッチSW7、右移動スイッチSW8、ディスプレイスイッチSW9、下移動・マクロスイッチSW10、左移動・画像確認スイッチSW11、OKスイッチSW12、手ぶれ補正スイッチSW14が設けられている。カメラ本体の側面にはメモリカード/電池装填室の蓋2が設けられている。
【0030】
これらの各部材の機能及び作用は公知であるので、その説明は省略することにし、次にカメラの内部のシステム構成を説明する。
【0031】
その図4において、104はデジタルスチルカメラプロセッサ(以下、プロセッサともいう)である。
【0032】
プロセッサ104は、A/D変換器10411、CCD1信号処理ブロック1041、CCD2信号処理ブロック1042、CPUブロック1043、ローカルSRAM1044、USBブロック1045、シリアルブロック1046、JPEG・CODECブロック(JPEG圧縮・伸長を行うブロック)1047、RESIZEブロック(画像データのサイズを補間処理により拡大・縮小するブロック)1048、TV信号表示ブロック(画像データを液晶モニタ・TVなどの外部表示機器に表示させるためのビデオ信号に変換するブロック)1049、メモリカードコントローラブロック(撮影画像データを記録するメモリカードの制御を行うブロック)10410を有している。これらの各ブロックは相互にバスラインで接続されている。
【0033】
プロセッサ104の外部にはRAW−RGB画像データ(ホワイトバランス設定、γ設定が行われた状態の画像データ)、YUV画像データ(輝度データ、色差データ変換が行われた状態の画像データ)、JPEG画像データ(JPEG圧縮された状態の画像データ)を保存するSDRAM103が配置され、このSDRAM103はプロセッサ104にメモリコントローラ(図示を略す)、バスラインを介して接続されている。
【0034】
プロセッサ104の外部には、更に、RAM107、内蔵メモリ(メモリカードスロットルにメモリカードが装着されていない場合でも撮影画像データを記憶するためのメモリ)120、制御プログラム、パラメータなどが格納されたROM108が設けられ、これらもバスラインによってプロセッサ104に接続されている。
【0035】
その制御プログラムは、カメラの電源スイッチSW13をオンすると、プロセッサ104のメインメモリ(図示を略す)にロードされ、プロセッサ104はその制御プログラムに従って各部の動作制御を行うと共に、制御データ、パラメータ等をRAM107等に一時的に保存させる。
【0036】
鏡胴ユニット7は、ズームレンズ71aを有するズーム光学系71、フォーカスレンズ72aを有するフォーカス光学系72、絞り73aを有する絞りユニット73、メカニカルシャッター74aを有するメカニカルシャッターユニット74からなるレンズ鏡筒を備えている。
【0037】
ズーム光学系71、フォーカス光学系72、絞りユニット73、メカニカルシャッターユニット74は、ズームモータ71b、フォーカスモータ72b、絞りモータ73b、メカニカルシャッターモータ74bによってそれぞれ駆動されるようになっている。
【0038】
これらの各モータはモータドライバ75によって駆動され、このモータドライバ75はプロセッサ104のCPUブロック1043によって制御される。
【0039】
鏡胴ユニット7の各レンズ系によりCCD101に被写体像が結像され、CCD101は被写体像を画像信号に変換してF/E−IC102に画像信号を出力する。F/E−IC102は画像ノイズ除去用のため相関二重サンプリングを行うCDS1021、利得調整用のAGC1022、アナログデジタル変換を行うA/D変換部1023から構成されている。すなわち、F/E−IC102はその画像信号に所定の処理を施し、アナログ画像信号をデジタル信号に変換してプロセッサ104のCCD1信号処理ブロック1041に向けてこのデジタル信号を出力する。
【0040】
これらの信号制御処理は、プロセッサ104のCCD1信号処理ブロック1041から出力される垂直同期信号VD・水平同期信号HDによりTG1024を介して行われる。そのTG1024はその垂直同期信号VD・水平同期信号HDに基づき駆動タイミング信号を生成する。
【0041】
プロセッサ104のCPUブロック1043は、音声記録回路1151による音声記録動作を制御するようになっている。音声記録回路1151はマイクロフォンで1153で変換された音声記録信号のマイクロフォンアンプリファイア1152による増幅信号を指令に応じて記録する。CPUブロック1043は、音声再生回路1161の動作も制御する。音声再生回路1161は、指令により適宜メモリに記憶されている音声信号を再生してオーディオアンプリファイア1162に出力し、スピーカ1163から音声を出力させるように構成されている。
【0042】
CPUブロック1043は、更に、ストロボ回路114を制御することによってストロボ発光部3から照明光を発光させる。これに加えて、CPUブロック1043は、測距ユニット5も制御する。
【0043】
CPUブロック1043は、プロセッサ104のサブCPU109に接続され、サブCPU109はLCDドライバ111を介してサブLCD1による表示制御を行う。サブCPU109は、更に、AFLED8、ストロボLED9、リモートコントロール受光部6、操作スイッチSW1〜SW14からなる操作キーユニット、ブザー113に接続されている。
【0044】
USBブロック1045はUSBコネクタ122に接続され、シリアルブロック1046はシリアルドライバ回路1231を介してRS−232Cコネクタ1232に接続されている。TV信号表示ブロック1049は、LCDドライバ117を介してLCDモニタ10に接続されると共に、ビデオアンプリファイア(TV信号表示ブロック1049から出力されたビデオ信号を75Ωインピーダンスに変換するためのアンプリファイア)118を介してビデオジャック(カメラをTVなどの外部表示機器に接続するためのジャック)119に接続されている。メモリカードコントローラブロック10410はメモリカードスロット121のカード接点との接点に接続されている。
【0045】
LCDドライバ117はLCDモニタ10を駆動すると共に、TV信号表示ブロック1049から出力されたビデオ信号をLCDモニタ10に表示させる信号に変換する役割を果たす。LCDモニタ10は撮影前の被写体の状態監視、撮影画像の確認、およびメモリカード又は内蔵メモリ120に記録された画像データを表示するために用いられる。
【0046】
デジタルカメラの本体には、鏡胴ユニット7の一部を構成する固定筒(後述する)が設けられている。この固定筒にはCCDステージ1251がX−Y方向に移動可能に設けられている。CCD101は手ぶれ補正機構の一部を構成するCCDステージ1251に搭載され、そのCCDステージ1251の詳細なメカニカルな構造については後述する。
【0047】
そのCCDステージ1251はアクチュエータ1255によって駆動され、アクチュエータ1255はドライバー1254によって駆動制御される。そのドライバー1254はコイルドライブMD1とコイルドライブMD2とから構成されている。そのドライバー1254はアナログデジタル変換器IC1に接続され、そのアナログデジタル変換器IC1はROM108に接続され、このアナログデジタル変換器IC1にはROM108から制御データが入力される。
【0048】
固定筒には手ぶれ補正スイッチSW14がオフ、電源スイッチSW13がオフのときにCCDステージ1251を中央位置に保持する原点位置強制保持機構1263が設けられている。この原点位置強制保持機構1263はアクチュエータとしてのステッピングモータSTM1により制御され、そのステッピングモータSTM1はドライバー1261によって駆動される。このドライバー1261にはROM108から制御データが入力される。
【0049】
CCDステージ1251には位置検出素子1252が取り付けられている。この位置検出素子1252の検出出力はアンプリファイア1253に入力され、増幅されてA/D変換器10411に入力される。カメラ本体にはジャイロセンサ1241がX方向とY方向との回転を検出可能に設けられ、ジャイロセンサ1241の検出出力はローパスフィルタ兼用のアンプリファイア1242を介してA/D変換器10411に入力される。
【0050】
次に、本発明に係わるカメラの一般的な動作概要を説明する。
【0051】
モードダイアルSW2を撮影モードに設定すると、カメラが撮影モードで起動される。また、モードダイアルSW2を再生モードに設定すると、カメラが再生モードで起動される。プロセッサ104はモードダイアルSW2のスイッチの状態が撮影モードであるか、再生モードであるかを判断する(図5のS.1)。
【0052】
また、プロセッサ104はモータドライバ75を制御し、鏡胴ユニット7のレンズ鏡筒を撮影可能な位置に移動させる。更に、プロセッサ104はCCD101、F/E−IC102、LCDモニタ10等の各回路に電源を投入して動作を開始させる。各回路の電源が投入されると、ファインダーモードの動作が開始される。
【0053】
ファインダーモードでは、各レンズ系を通して撮像素子(CCD101)に入射した光が光電変換されて、R、G、Bのアナログ信号としてCDS回路1021、A/D変換器1023に送信される。A/D変換器1023はそのアナログ信号をデジタル変換し、そのデジタル信号はデジタル信号処理IC(SDRAM103)内のYUV変換部でYUVデータに変換され、図示を略すメモリコントローラによってフレームメモリに書き込まれる。
【0054】
このYUV信号はメモリコントローラによって読み出され、TV信号表示ブロック1049を介してTV(図示を略す)やLCDモニタ10へ送信され、これにより撮影画像の表示が行われる。この処理は1/30秒間隔で行われ、1/30秒ごとに更新されるファインダーモードの表示となる。すなわち、モニタリング処理が実行される(図5のS.2)。ついで、モードダイアルSW2の設定変更が行われたか否かを判断する(図5のS.3)。モードダイアルSW2の設定がそのままの場合には、レリーズスイッチSW1を操作することにより撮影処理が実行される(図5のS.4)。
【0055】
再生モードでは、プロセッサ104は撮影済み画像をLCDモニタ10に表示させる(図5のS.5)。ついで、プロセッサ104はモードダイアルSW2の設定が変更されたか否かを判断し(図5のS.6)、プロセッサ104はモードダイアルSW2の設定が変更された場合にはS.1へ移行し、そのままの場合にはS.5を繰り返す。
【0056】
このように、プロセッサ104およびF/E−IC102は、CCD101からの信号を処理する演算処理装置として機能する。また、この演算処理装置は、後述するように、手ぶれ補正を行う際、手ぶれ補正機構を駆動する機能も有する。
(手ぶれ補正の原理)
図6は手ぶれ補正の原理を説明するための説明図であって、(a)はデジタルカメラが実線で示す手ぶれのない状態から破線で示すように傾いた状態を示し、(b)はそのカメラ本体の撮影レンズとCCD101の撮像面との関係を示す部分拡大図である。
【0057】
カメラの手ぶれがない状態のとき、CCD101の撮像面が位置P1、すなわち、中央位置にあるとき、被写体の像が原点Oに投影されていたとする。ここで、手ぶれによりカメラがθ(θx、θy)方向に傾いたとする。すると、撮像面はP2の位置に移動し、被写体の像はO’に移動する。そこで、撮像面の位置がP1となるように、X方向にdx、Y方向にdyだけ撮像面を平行移動させることにより、被写体の像は元の原点位置Oに戻ることになる。
(手ぶれ補正機構のメカニカルな構成)
図7は固定筒の正面図、図8は固定筒の縦断面図、図9は固定筒の背面図である。その図7〜図9において、10は固定筒である。固定筒10は箱形形状を呈し、その内側がレンズ鏡筒受入用の収納空間とされている。固定筒10は、本体ケース(カメラ本体)内に設けられており、撮影光軸との位置関係が一定とされている。固定筒10の背面には全体的に略矩形状を呈する板状のベース部材11が取り付けられている。その固定筒10の内周壁には、ここではレンズ鏡筒を繰り出し・繰り入れるためのヘリコイド12が形成されている。固定筒10は少なくとも2つの角部が切り欠かれ、一方の角部10aは後述するステッピングモータSTMの取り付け部とされ、他方の角部10bは後述するフレキシブルプリント基板20の折り曲げ箇所とされている。
【0058】
CCDステージ1251はそのベース部材11に設けられている。このCCDステージ1251は図10に分解して示すように環枠形状のX方向ステージ13と、矩形状のY方向ステージ14と、載置ステージ15とから大略構成されている。
【0059】
X方向ステージ13はベース部材11に固定されている。このX方向ステージ13にはX方向に延びる一対のガイド軸13a、13bがY方向に間隔を開けて設けられている。X方向ステージ13には直方体形状の4個の永久磁石16a〜16dが配置されている。この4個の永久磁石16a〜16dは二個一対とされ、一対の永久磁石16a、16bはX−Y平面内でY方向に間隔を開けて平行に配置されている。この実施例では、一対のガイド軸13a、13bが一対の永久磁石16a、16bを貫通する構成とされているが、これに限るものではなく一対のガイド軸13a、13bに併設して設けられていても良い。一対の永久磁石16c、16dはX−Y平面内でX方向に間隔を開けて配置されている。
【0060】
Y方向ステージ14はY方向に延びる一対のガイド軸14a、14bがX方向に間隔を開けて設けられている。そのY方向ステージ14にはX方向に間隔を開けて対向する二個一対の被支承部17a、17a’、17b、17b’がY方向に間隔を開けて形成されている。各一対の被支承部(17a、17a’)、(17b、17b’)はX方向ステージ13の一対のガイド軸13a、13bにそれぞれ可動可能に支承され、これによりY方向ステージ14がX方向に可動可能とされている。
【0061】
CCD101は載置ステージ15に固定されている。載置ステージ15はX方向に張り出した一対のコイル取り付け板部15a、15bとY方向に張り出した一対のコイル取付板部15c、15dとを有する。CCD101はその載置ステージ15の中央に固定されている。載置ステージ15にはCCD101の撮像面と同じ側にY方向に間隔を開けて対向する二個一対の被支承部(符号を略す)がX方向に間隔を開けて形成され、各一対の被支承部はY方向ステージ14の一対のガイド軸14a、14bに可動可能に支承され、これにより載置ステージ15は全体としてX−Y方向に可動可能とされている。
【0062】
CCD101には撮像面と反対側の面に保護板19が貼り付けられている。保護板19にはその中央にテーパ形状の凹所19aが形成されている。この凹所19aの機能については後述する。
【0063】
一対のコイル取り付け板部15a、15bにはそれぞれ偏平かつ渦巻き状のコイル体COL1、COL1’が貼り付けられている。コイル体COL1、COL1’は直列接続されている。一対の取付板部15c、15dにはそれぞれ偏平かつ渦巻き状のコイル体COL2、COL2’が貼り付けられている。コイル体COL2、COL2’も同様に直列接続されている。
【0064】
各コイル体COL1、COL1’はそれぞれ各永久磁石16c、16dに臨まされている。各コイル体COL2、COL2’はそれぞれ永久磁石16a、16bに臨まされている。一対のコイル体COL1、COL1’は、X方向にCCD101を可動させるのに用いられ、一対のコイル体COL2、COL2’はY方向にCCD101を可動させるのに用いられる。
【0065】
コイル体COL1、COL1’には、図9に示すように、各コイル体COL1、COL1’をX方向に横断する方向に磁性材料からなる吸着棒35が設けられている。
【0066】
ここでは、位置検出素子1252にはホール素子が用いられ、一対のコイル取付板部15a、15bの一方のコイル取付板部15bには位置検出素子1252としてのホール素子1252aが設けられ、同様に一対のコイル取付板部15c、15dの一方のコイル取付板部15dにはホール素子1252bが設けられている。
【0067】
そのCCD101はフレキシブルプリント基板20を介してF/EIC102に電気的に接続され(図11参照)、そのホール素子1252a、1252bはフレキシブルプリント基板20を介してオペレーショナルアンプリファイア1253に電気的に接続され、各コイル体COL1、COL1’、COL2、COL2’はコイルドライバ1254に電気的に接続されている。
【0068】
原点位置強制保持機構1263は、図11、図12に拡大して示すように、ステッピングモータSTM1を有する。このステッピングモータSTM1の駆動制御については後述することにし、原点位置強制保持機構1263のメカニカルな構成を先に詳細に説明する。
【0069】
ステッピングモータSTM1は図7および図11に示すように固定筒10の角部10aに設けられている。そのステッピングモータSTM1の出力軸20には出力ギヤ21が設けられている。固定筒10の角部10aには回転運動を直線運動に変換する変換機構22が設けられている。
【0070】
この変換機構22は回転伝達ギヤ23と往復動シャフト24と付勢コイルスプリング25と強制押さえ板26とバネ受け部材27とから大略構成されている。固定筒10の角部10aにはZ軸方向に間隔を開けて一対の支承部28、29が形成されている。支承部28はモータ取付板から構成されている。往復動シャフト24はその支承部29とモータ取付板28との間に掛け渡されて支承されている。その回転伝達ギヤ23は一対の支承部28、29の間に位置して、往復動シャフト24に回転可能に支承されると共に、出力ギヤ21に噛合されている。
【0071】
その往復動シャフト24の一端側の部分は支承部29を貫通してベース部材11の背面側に臨んでいる。付勢コイルスプリング25はバネ受け部材27と支承部29との間に設けられ、往復動シャフト24はその付勢コイルスプリング25により支承部28に向けて付勢されている。往復動シャフト24には回転伝達ギヤ23の軸穴端面と係合する段差部24aを有する。
【0072】
その回転伝達ギヤ23にはその一方の端面部に図13(a)〜図13(e)に示すようにカム溝31が形成されている。このカム溝31は回転伝達ギヤ23の周回り方向に延び、谷底平坦部31aと頂上平坦部31bとその谷底平坦部31aから頂上平坦部31bに向かって連続的に傾斜する傾斜面部31cとから構成されている。その谷底平坦部31aと頂上平坦部31bとの間は後述するカムピンが回転方向から衝合する衝合壁としての絶壁31dとなっている。
【0073】
その支承部28にはカムピン32が固定され、そのカムピン32の先端はカム溝31に摺接されている。その絶壁31dから傾斜面部31cの傾斜開始位置31eまでの谷底平坦部31aの回転方向の長さはステッピングモータSTM1の回転制御信号に換算して2パルス分に相当する。
【0074】
その傾斜面部の傾斜開始位置31eから頂上平坦部31bに通じる傾斜終端位置31fまでの傾斜面部31cの回転方向長さはステッピングモータSTM1の回転制御信号に換算して30パルス分に相当する。
【0075】
その傾斜終端位置31fから絶壁31dまでの間の頂上平坦部31bの回転方向長さはステッピングモータSTM1の回転制御信号に換算して3パルス分に相当し、ステッピングモータSTM1の35パルス分が回転伝達ギヤ23の1回転に対応し、回転伝達ギヤ23の一回転により往復動シャフト24がZ軸方向に一往復される。
【0076】
強制押さえ板26はベース部材11の背面側に設けられている。その強制押さえ板26は図9に示すようにCCD101の中心に向かって長く延びる構成とされ、その強制押さえ板26の基端部26aは往復動シャフト24の一端部に固定されている。その強制押さえ板26の自由端部26bにはテーパ形状の押さえピン33が固定されている。その強制押さえ板26の延びる方向途中にはガイド軸26cが突出形成されている。
【0077】
ベース部材11には位置決め突起11a、11bとコイル取り付け突起11cと係合突起11dとが形成されている。コイル取り付け突起11cにはネジリコイルバネ34の巻回部34aが取り付けられ、ネジリコイルバネ34の一端部34bは係合突起11dに係合され、ネジリコイルバネ34の他端部34cはガイド軸26cに係合されている。ベース部材11にはガイド軸26cをガイドするガイド穴(図示を略す)が形成されている。
【0078】
強制押さえ板26はそのネジリコイルバネ34によって位置決め突起11aに当接されつつ往復動シャフト24の往復動に伴ってベース部材11に対して離反接近する方向(Z軸方向)に往復動される。そのガイド軸26cはその強制押さえ板26の往復動を安定した姿勢で行わせる役割を果たす。
【0079】
押さえピン(嵌合突起)33は凹所(嵌合穴)19aと嵌合することにより載置ステージ15を機械的に原点位置に保持させる役割を果たし、図14(a)に拡大して示すように押さえピン33の周壁33aと保護板19の凹所周壁19bとが密接に嵌合した状態がカムピン32のホールド待機位置に相当し、図14(b)に拡大して示すように押さえピン33の周壁33aと保護板19の凹所周壁19bとが最大離間した状態がカムピン33のリリース待機位置に対応し、カムピン32のホールド待機位置は載置ステージ15の強制原点位置でもある。
(プリント基板の折り曲げ方)
フレキシブルプリント基板20(以下プリント基板20ともいう)は、CCD接続部201と、コイル接続部202と、位置検出素子接続部203と、ブロック回路接続部204と、連結延在部205とを有する。図15は、CCD接続部201の表側からみたプリント基板20の展開図であり、図16は、裏側から見たプリント基板20の展開図であり、CCDステージ1251上に取り付けられた状態を示している。
【0080】
CCD接続部201は、図15に示すように、CCD101の接続ピンに対応する接続パターン部分201aと、保護板19の凹所19aに対応する貫通孔201bとを有する。また、図示は略すが、コイル接続部202には、各コイル体COL1、COL1´COL2、COL2´(以下各コイル体COLともいう)と電気的に接続可能な接続パターン部分が、位置検出素子接続部203には、位置検出素子1252と電気的に接続可能な接続パターン部分がそれぞれ設けられている。このため、本実施例では、CCD接続部201が撮像素子としてのCCD101に接続される一端、すなわち撮像素子接続部として機能する。ブロック回路接続部204は、F/E−IC102、オペレーショナルアンプリファイア1253およびコイルドライバ1254に電気的に接続される接続パターン部分204aを有し、これにより、システムブロック回路は、連結延在部205を介して、CCD接続部201、コイル接続部202および位置検出素子接続部203と電気的に接続されている。このため、本実施例では、ブロック回路接続部204が演算処理装置としてのプロセッサ104およびF/E−IC102に接続される他端、すなわち演算処理接続部として機能する。
【0081】
連結延在部205は、本実施例では、第1連結延在部206と、第2連結延在部207との二股に分かれて構成されている。第2連結延在部207は、直線aおよび直線bに沿って折り曲げると第1連結延在部206に重なる形状とされている。第2連結延在部207は、裏表を逆にすると第1連結延在部206と同様の構成であるので、その詳細な説明は省略する。
【0082】
第1連結延在部206は、第1直線部分208と、第1湾曲部分209と、第2直線部分210と、第2湾曲部分211と、第3直線部分212とを有する。第1直線部分208は、組み付け時にCCD101の裏面に配置されるCCD接続部201から、Y軸方向およびX軸方向に対して略45度の傾斜を為す方向(角部10bへ向かう方向)に延びている(図16参照。)。第1湾曲部分209は、全体に扇状を呈し、頂角が略45度とされており、幅寸法を変えることなく第1直線部分208と第2直線部分210とを繋いでいる。第2直線部分210は、X軸方向に沿って延びている。第2湾曲部分211は、全体に扇状を呈し、頂角が略90度とされており、幅寸法を変更することなく第2直線部分210と第3直線部分212とを繋いでいる。第3直線部分212は、長さ寸法が第2直線部分210と等しく形成されており、第2直線部分210と直交する方向に、すなわちY軸方向に沿って延びている。
【0083】
次にプリント基板20の取り付け方について説明する。
【0084】
図16に示すように、CCD接続部201の接続パターン部分201aをCCD101の接続ピンに一致させ、かつ貫通孔201bを凹所19aに一致させた位置で、プリント基板20を保護板19側からCCDステージ1251に取り付ける。
【0085】
プリント基板20の上にFPC補助板213を取り付ける。FPC補助板213は、板部材であり、CCD接続部201の一部と、第1連結延在部206の第1直線部分208および第1湾曲部分209との形状に適合している。FPC補助板213は、プリント基板20の折り曲げを補助するため、直線aに沿う第1辺部213aと、第1湾曲部分209と第2直線部分210との境界線に沿う第2辺部213bと、後述する線分dに沿う第3辺部213cとが設けられている。
【0086】
直線aおよび直線bを折目とし、FPC補助板213が間に挟まるように、第2連結延在部207を第1連結延在部206上に折り重ねる(図17参照。)。
【0087】
直線cを折目とし、位置検出素子接続部203をCCD接続部201上に折り重ね、位置検出素子接続部203を位置検出素子1252と電気的に接続する(図17参照。)。
【0088】
直線dを折目とし、コイル接続部202をCCD接続部201上に折り重ね、コイル接続部202を各コイル体COLと電気的に接続する(図17参照。)。ここまでの工程により、図17に示すように、プリント基板20は、CCDステージ1251に取り付けられ、ベース部材11上のX−Y平面内に位置される。
【0089】
ついで、図9(b)、図11、図18(a)および図18(b)に示すように、第2直線部分210が固定筒10の角部10bでY−Z平面に沿って延在するように、直線eに沿って略直角に塑性変形されて折り曲げられる。
【0090】
さらに、第2湾曲部分211がベース部材11からZ軸方向のレンズ鏡筒側に変位したX−Y平面内で、かつ第2直線部分210よりも固定筒10側で延在するように、直線fに沿って略直角に塑性変形されて折り曲げられる。
【0091】
ついで、第3直線部分212が固定筒10の角部10bでX−Z平面に沿って延在するように、直線gに沿って略直角に塑性変形されて折り曲げられる。
【0092】
ブロック回路接続部204が固定筒10の外方でX−Y平面に沿って延在するように、直線hに沿って略直角に塑性変形されて折り曲げられる。直線hに沿う折り曲げにより形成されX−Z平面に沿って延在する折返個所214を介して、ブロック回路接続部204がベース部材11に取り付けられる(図7および図9(b)参照。)。ブロック回路接続部204は、固定筒10のベース部材11に取り付けられていることから、本体ケース内で撮影光軸に対して固定されている。
【0093】
このため、第1直線部分208および第1湾曲部分209がX−Y平面に沿って延在する第1延在部分となり、第2湾曲部分211がCCD101(撮像素子)から見て被写体へ向かう方向に延在する第2延在部分となり、第2湾曲部分211がX−Y平面に沿って延在する第3延在部分となり、第3直線部分212がCCD101(撮像素子)から見て被写体とは逆へ向かう方向に延在する第4延在部分となる。
【0094】
手ぶれ補正が行われる際、載置ステージ15がベース部材11上でX−Y平面内を移動されるので、プリント基板20では、載置ステージ15に固定された載置ステージ接続側とベース部材11に固定されたブロック回路接続側との相対的な間隔が変化することとなる。この間隔の変化により互いの間に生じる力が載置ステージ15の移動を阻害することを防止するために、プリント基板20では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされている。プリント基板20では、その厚さ方向へ容易に変形することから、第2直線部分210の撓み変形によりX軸方向の力を吸収し、かつ第3直線部分212の撓み変形によりY軸方向の力を吸収するので、X−Y平面内で生じる間隔の変化が生み出す力を吸収することができる。
【0095】
また、第2湾曲部分211が第2直線部分210と第3直線部分212と固定筒10とに囲まれたX−Y平面内に存在していることから、載置ステージ15の移動により載置ステージ接続側と第2直線部分210との折り曲げ部分(直線e)に力が加わると、第2直線部分210が一方向へのみ膨らむC字状の撓み変形となり歪応力を緩和できるので、反発力が小さくなり載置ステージ15の移動による力を効果的に吸収することができる。これに対して、第2湾曲部分211が第2直線部分210と第3直線部分212と固定筒10とに囲まれた空間の外方でX−Y平面内に存在するとした場合、第2直線部分210が折り曲げ部分(直線e)に加えられた力により相反する二方向へ膨らむS字状の撓み変形となり歪応力が相対的に大きくなるので、反発力が大きくなり載置ステージ15の移動による力の吸収量が小さくなる。このことは、Y軸方向の力を吸収する第3直線部分212でも同様である。よって、プリント基板20は、手ぶれ補正の際、載置ステージ15のX−Y平面内での移動を妨げることはない。
【0096】
プリント基板20では、その折り曲げ個所が固定筒10の角部10bでZ軸方向に沿って形成されているので、一般に円形で構成されるレンズ鏡筒の周囲の空間、すなわち固定筒10の角部10bを有効に利用することができ、折り曲げ個所を設けることによるカメラの大型化を防止することができる。
【0097】
プリント基板20では、連結延在部205が折り重ねの可能な第1連結延在部206と第2連結延在部207とに分かれて構成されているので、連結延在部205の幅寸法を増加させることなく送電路を増加することができ、固定筒10の角部10bの制限された空間内で折り曲げ個所を構成することができる。このため、送電路の本数が少ない場合には、第2連結延在部207を設けなくてもよい。
【0098】
プリント基板20では、FPC補助板213が取り付けられているので、プリント基板20のCCD接続部201から第1直線部分208を経て第1湾曲部分209に至る個所に撓み変形が生じさせることなく、載置ステージ15の移動により生じた力を第3直線部分212に作用させることができ、確実に折り曲げ個所で力を吸収させることができる。
(手ぶれ補正機構の保持制御回路)
ステッピングモータSTM1は図19に示す保持制御回路によって制御される。そのステッピングモータSTM1は、二相制御構成とされ、第1コイルSTMC’の各端末は出力線40a、40a’を介してモータドライバMD3に接続されている。第2コイルSTMC”の各端末は出力線40b、40b’を介してモータドライバMD3に接続されている。出力線40aには電流制限用抵抗R18が介在され、出力線40bには電流制限用抵抗R19が介在されている。その出力線40aと出力線40a’との間にはコンデンサC7が介在され、出力線40bと出力線40b’との間にはコンデンサC8が介在されている。
【0099】
そのモータドライバMD3にはプロセッサ104のポートIN1、IN2から保持制御信号が入力されると共に、プロセッサ104のポートENAにはイネーブル信号が入力され、モータドライブMD3はこの保持制御信号、イネーブル信号に基づいてステッピングモータSTM1への通電制御を行っている。
【0100】
図20はその保持制御回路の動作を説明するためのフローチャートであり、リセット処理と、リリース処理と、保持処理との三段階の処理動作からなっている。
【0101】
デジタルカメラの電源スイッチSW13をオンすると、プロセッサ104の制御により、リセット処理がまず最初に実行される(S.1)。このリセット処理では、プロセッサ104の制御により、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が反時計方向に2パルス分回転駆動される。ついで、1000pps(パルスパーセカント)の早い速度でステッピングモータSTM1が反時計方向に33パルス分回転駆動される。そして、最後に、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が時計方向に2パルス分回転駆動される。
【0102】
カムピン32がカム溝31の回転方向いずれの位置にあっても、反時計方向に35パルス分ほどステッピングモータSTM1を回転させることによりカムピン32がカム溝31の絶壁31dに物理的に当接する。
【0103】
この当接位置から時計方向にステッピングモータSTM1を2パルス分駆動させると、カムピン32がカム溝31の傾斜開始位置31eにセットされる(図13(e)参照)。このカムピン32がカム溝31の傾斜開始位置31eにセットされた状態がリセット位置であり、CCD101が原点位置Oに強制保持されている状態に対応している。この原点位置Oは載置ステージ15の可動範囲の中央位置でもある。この電源オンからリセット完了までの所要時間は約53msec(ミリセカント)である。
【0104】
この手ぶれ補正機構では、ここでは、手ぶれ補正スイッチSW14をオンすることにより手ぶれ補正を実行し、手ぶれ補正スイッチSW14をオフ又は撮影が完了すると同時に手ぶれ補正実行を解除する構成となっている。
【0105】
手ぶれ補正スイッチSW14がオンされると、プロセッサ104の制御によりリリース処理が実行される(S.2)。このリリース処理では、まず、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が時計方向に2パルス分回転駆動され、ついで、1000pps(パルスパーセカント)の早い回転速度で時計方向に28パルス分回転駆動され、その後、ステッピングモータSTM1への通電が5msec(ミリセカント)保持される。ついで、モータドライブMD1によりステッピングモータSTM1への通電が停止される。
【0106】
このリリース処理により、カムピン32はカム溝31の傾斜終端位置31fに位置される(図13(d)参照)。この傾斜開始位置31eから傾斜終端位置31fまでへの所要時間は約43msec(ミリセカント)である。すなわち、カムピン32がホールド待機位置からリリース待機位置に移動するのに要する所要時間は約43msec(ミリセカント)である。このリリース待機位置で、手ぶれ制御が実行される。
【0107】
ついで、手ぶれ補正スイッチSW14がオフ又は撮影が実行されると、プロセッサ104は保持処理を実行する(S.3)。この保持処理では、プロセッサ104の制御により、200pps(パルスパーセカント)の緩やかな速度でステッピングモータSTM1が時計方向に2パルス分回転駆動され、その後、1000pps(パルスパーセカント)の早い速度で時計方向に3パルス分回転駆動される。これにより、カムピン32はカム溝31の頂上平坦部31bを通過して谷底平坦部31aに降下し、谷底平坦部31aに当接する。その後、ステッピングモータSTM1への通電が5msec(ミリセカント)保持される。
【0108】
ついで、モータドライブMD1によりステッピングモータSTM1への通電が停止される。これにより、カムピン32はカム溝31の傾斜開始位置31eにセットされ、CCD101の中央位置が保持される。電源オン中は、いったんリセット処理が実行された場合、このリリース処理と保持待機処理とが実行される。なお、このリリース待機位置から保持待機位置へ移動するのに要する時間は、約18msec(ミリセカント)である。
【0109】
この手ぶれ補正機構によれば、強制押さえ板26に形成した押圧ピン33により強制的にCCD101の載置ステージ15を中央位置に保持する構成であるので、載置ステージ15の原点位置への保持を持続させるための通電制御が不要となり、手ぶれ補正機構を動作させた場合でもその電力消耗の低減を図ることができる。
(手ぶれ検出回路の回路構成)
図21は手ぶれ検出回路の回路構成を示す図である。この手ぶれ検出回路はX方向の回転を検出するX方向回転検出部と、Y方向の回転を検出するY方向回転検出部とから構成されている。
【0110】
X方向回転検出部は、例えば圧電振動ジャイロセンサS1Bを有し、圧電振動ジャイロセンサS1Bの第1端子はコンデンサC13を介してアースされている。圧電振動ジャイロセンサS1Bの第2端子は接続線42の途中に設けられたコンデンサC10を介してオペレーショナルアンプリファイアOP3の+端子に接続されている。圧電振動ジャイロセンサS1Bの第3端子は接続線43の途中に設けられた抵抗R23を介してオペレーショナルアンプリファイアOP3の−端子に接続されている。
【0111】
圧電振動ジャイロセンサS1Bの第4端子は、アースに接続されると共にコンデンサC11を介して接続線43に接続されている。オペレーショナルアンプリファイアOP3の+端子は抵抗R20を介して接続線43に接続されている。接続線42と接続線43との間には抵抗R20と並列に抵抗R21と切り替えスイッチASW1とからなる直列体が接続されている。
【0112】
オペレーショナルアンプリファイアOP3の出力端子はコンデンサC12を介してオペレーショナルアンプリファイアOP3の−端子に接続されている。そのコンデンサC12にはこれと並列に抵抗R22が接続されている。そのコンデンサC10と抵抗R20とはハイパスフィルターHPF1を構成し、そのコンデンサC12と抵抗R22とはローパスフィルターLPF1を構成している。オペレーショナルアンプリファイアOP3は圧電振動ジャイロセンサS1Bの出力を増幅して、オペレーショナルアンプリファイアOP3の出力端子からX方向検出信号OUT1を出力する。
【0113】
Y方向回転検出部は、圧電振動ジャイロセンサS2Aを有し、圧電振動ジャイロセンサS2Aの第1端子はコンデンサC17を介してアースされている。圧電振動ジャイロセンサS2Aの第2端子は接続線44の途中に設けられたコンデンサC14を介してオペレーショナルアンプリファイアOP4の+端子に接続されている。圧電振動ジャイロセンサS2Aの第3端子は接続線45の途中に設けられた抵抗R26を介してオペレーショナルアンプリファイアOP4の−端子に接続されている。圧電振動ジャイロセンサS2Aの第4端子はアースに接続されると共にコンデンサC15を介して接続線45に接続されている。
【0114】
オペレーショナルアンプリファイアOP4の+端子は抵抗R24を介して接続線45に接続されている。接続線44と接続線45との間には抵抗R24と並列に抵抗R25と切り替えスイッチASW2とからなる直列体が接続されている。オペレーショナルアンプリファイアOP4の出力端子はコンデンサC16を介してオペレーショナルアンプリファイアOP4の−端子に接続されている。そのコンデンサC16にはこれと並列に抵抗R27が接続されている。そのコンデンサC14と抵抗R24とはハイパスフィルターHPF2を構成し、そのコンデンサC16と抵抗R27とはローパスフィルターLPF2を構成している。オペレーショナルアンプリファイアOP4は圧電振動ジャイロセンサS2Aの出力を増幅して、オペレーショナルアンプリファイアOP4の出力端子からX方向検出信号OUT2を出力する。
【0115】
切り替えスイッチASW1、ASW2には信号線46を介して切り替え制御信号SWC1が入力される。この切り替えスイッチASW1、ASW2はハイパスフィルターHPF1、HPF2の応答速度を早くするためにコンデンサーC11、C15の充電を早める機能を有し、プロセッサ104は電源オン後一定時間切り替え制御信号SWC1を切り替えスイッチASW1、ASW2に出力し、これにより、切り替えスイッチASW1、ASW2が一定時間オンされる。ジャイロセンサS1B、S2Aの検出出力OUT1、OUT2はT秒ごとにA/D変換器10411に読み込まれる。ここで、
ωyaw(t)…YAW方向の瞬間角速度
ωpitch(t)…PITCH方向の瞬間角速度
θyaw(t)…YAW方向の変化角度
θpitch(t)…PITCH方向の変化角度
Dyaw(t)…YAW方向の回転に対応して像がX方向に移動する量
Dpitch(t)…PITCH方向の回転に対応して像がY方向に移動する量
とすると、
θyaw(t)=Σωyaw(i)・T
θpitch(t)=Σωpitch(i)・T
の関係式により、θyaw(t)、θpitch(t)が求まる。
【0116】
また、ズームポイントzp、フォーカスポイントfpとから焦点距離fが決定され、YAW方向の回転に対応して像が移動する量Dyaw(t)、PITCH方向の回転に対応して像が移動する量Dpitch(t)とYAW方向の変化角度θyaw(t)、PITCH方向の変化角度θpitch(t)との間には、
Dyaw(t)=f*tan(θyaw(t)) …(i)
Dpitch(t)=f*tan(θpitch(t))…(ii)
すなわち、YAW方向の回転に対応して像がX方向に移動する量Dyaw(t)、PITCH方向の回転に対応して像がY方向に移動する量Dpitch(t)がCCD101をX−Y方向に移動させるべき量に対応する。
【0117】
手ぶれによりYAW方向の回転変位とPITCH方向の回転変位とがあるときには、CCDの目標位置を上記(i)、(ii)式によって算出し、位置検出素子1252により検出された実際のCCD101のX−Y方向の位置と目標値との差がなくなるように、載置ステージ15を駆動する。この制御はT秒間隔で行われる。
【0118】
なお、ジャイロセンサS1B、S2Aの検出出力が「0」のときは、カメラ本体の並進運動変位Xdに追従してCCD101が並進変位されるように、載置ステージ15が制御される。
(手ぶれ補正制御回路)
図22は手ぶれ補正制御回路の一例を示すブロック図である。この手ぶれ補正制御回路は、フィードバック回路50と位置対応電圧設定回路51とから概略構成されている。
【0119】
ホール素子H1、H2は位置対応電圧設定回路51の一部を構成している。そのホール素子(1252a)H1には一定の電圧Vh1−が印加されている。ホール素子H1の一端子は抵抗R2を介してオペレーショナルアンプリファイアOP1の−端子に接続されている。ホール素子H1の他端子は抵抗R3を介してオペレーショナルアンプリファイアOP1の+端子に接続されている。
【0120】
オペレーショナルアンプリファイアOP1の出力端子は抵抗R5を介してプロセッサ104の入力ポートL1に接続されている。オペレーショナルアンプリファイアOP1の出力端子は抵抗R1を介してオペレーショナルアンプリファイアOP1の−端子に接続されている。また、抵抗R5と入力ポートL1との接続点はコンデンサC1を介してアースされている。
【0121】
ホール素子(1252b)H2には一定の電圧Vh2−が印加されている。ホール素子H2の一端子は抵抗R7を介してオペレーショナルアンプリファイアOP2の−端子に接続されている。ホール素子H2の他端子は抵抗R8を介してオペレーショナルアンプリファイアOP2の+端子に接続されている。
【0122】
オペレーショナルアンプリファイアOP2の出力端子は抵抗R9を介してプロセッサ104の入力ポートL2に接続されている。オペレーショナルアンプリファイアOP2の出力端子は抵抗R6を介してオペレーショナルアンプリファイアOP2の−端子に接続されている。また、抵抗R9と入力ポートL2との接続点はコンデンサC2を介してアースされている。
【0123】
プロセッサ104の出力ポートL3は位置対応電圧設定回路51の一部を構成するD/A変換回路IC2に接続され、プロセッサ104の出力ポートL4、L6はD/A変換回路IC2とD/A変換回路IC1とに接続されている。プロセッサ104の出力ポートL5はD/A変換回路IC1に接続されている。
【0124】
そのD/A変換回路IC2には2本の出力線61、62が接続され、一方の出力線61は抵抗R4を介してオペレーショナルアンプリファイアOP1の+端子に入力されている。他方の出力線62は抵抗R10を介してオペレーショナルアンプリファイアOP2の+端子に入力されている。
【0125】
そのD/A変換回路IC2には出力ポートL3からのチップセレクタ信号DI、出力ポートL4からクロック信号SCLK、出力ポートL6から補正用デジタルデータDINが入力され、D/A変換回路IC2は補正用デジタルデータをデジタルアナログ変換する機能を有する。
【0126】
D/A変換回路IC1はフィードバック回路50の一部を構成している。そのD/A変換回路IC1には1本の共通線63と2本の出力線64、65とが接続されている。共通線63はコイルドライブ回路MD1とコイルドライブ回路MD2とに接続されている。出力線64は抵抗R14を介してコイルドライブ回路MD1の入力端子L7に接続されている。出力線65は抵抗R15を介してコイルドライブ回路MD2の入力端子L8に接続されている。
【0127】
抵抗R14と入力端子L7との接続点はコンデンサC3を介してコイルドライブ回路MD1のアース端子ER1に接続されている。抵抗R15と入力端子L8との接続点はコンデンサC4を介してコイルドライブ回路MD2のアース端子ER2に接続されている。共通線63は、抵抗R12および抵抗R11を介して電源Vccに接続され、この接続点は、抵抗R13を介してアースされている。
【0128】
そのコイルドライブ回路MD1、MD2には、プロセッサ104からのコントロール信号CONT1が共に入力される。そのコイルドライブ回路MD1の出力端子には抵抗R16を介してコイルCOL1”(コイル体COL1とコイル体COL1’との直列接続体をいう)が接続され、その抵抗R16とコイルCOL1”との直列体に平行にコンデンサC5が接続されている。そのコイルドライブ回路MD2の出力端子には抵抗R17を介してコイルCOL2”(コイル体COL2とコイル体COL2’との直列接続体をいう)が接続され、その抵抗R17とコイルCOL2”との直列体に平行にコンデンサC6が接続されている。そのコイルCOL1”は載置ステージ15をX方向に可動させ、そのコイルCOL2”は載置ステージ15をY方向に駆動させるのに用いられる。
【0129】
ここで、各ホール素子H1、H2に所定電圧Vh1−、Vh2−を印加し、ジャイロセンサS1B、S2Aの検出出力が0でかつCCD101が可動範囲の中心位置(原点)に存在するときのホール素子H1、H2の検出出力電圧値をVh1、Vh2とする。その際のプロセッサ104の各入力ポートL1、L2のアナログ出力電圧値をV1ADin、V2ADinとする。この出力電圧値V1ADin、V2ADinを実際に測定する。
【0130】
この出力電圧値(実測値)V1ADin、V2ADinは、マグネット(永久磁石)16a〜16dとホール素子H1、H2とのメカニカルな位置関係に関する組み立て誤差要因、載置ステージ15に対するホール素子H1、H2の取り付け位置とコイルCOL1”、COL2”の取り付け位置との組み立て誤差要因等に基づいてばらついている。また、ホール素子H1、H2それ自体の特性によってもばらついている。
【0131】
従って、何らの補正も行わないものとすると、ホール素子H1、H2の原点位置に対応する検出値が各カメラ毎にばらつくことになり、精確な手ぶれ補正を行うことができないことになる。
【0132】
そこで、補正前の出力電圧値V1ADin、V2ADinが一定電圧値(設定基準電圧値)となるようにアナログデジタル変換器IC2から各オペレーショナルアンプリファイアOP1、OP2に入力される補正電圧Vr1’、Vr2’を設定する。すなわち、CCD101が原点位置に存在し、CCD101の非制御時(コイルCOL1”、COL2”への非通電時)の出力電圧値(検出値)V1ADin、V2ADinのばらつきを補正するために、補正電圧Vr1’、Vr2’を設定する。
【0133】
ここでは、オペレーショナルアンプリファイアOP1、OP2の動作可能範囲電圧の略中心の値、例えば1.7ボルトが設定基準電圧値になるように設定するために、プロセッサ104は以下に説明する演算を行う。
【0134】
ここでは、説明の便宜のため、R2=R3=R7=R8、R1=R4=R10=R6と仮定するが、これに限るものではない。
【0135】
各抵抗をR2=R3=R7=R8、R1=R4=R10=R6と仮定した条件のもとでは、
V1ADin=R1/R2*((Vh1+)−(Vh1−))+Vr1’
V2ADin=R1/R2*((Vh2+)−(Vh2−))+Vr2’
の関係式が成立する。
【0136】
プロセッサ104は、この関係式に基づいて、補正電圧Vr1’、Vr2’を演算により求める。これにより、CCD101の原点位置におけるホール素子H1、H2の検出値がマグネット(永久磁石)16a〜16dとホール素子H1、H2とのメカニカルな位置関係に関する組み立て誤差要因、載置ステージ15に対するホール素子H1、H2の取り付け位置とコイルCOL1”、COL2”の取り付け位置との組み立て誤差要因等に基づいてばらついても一定となる。
【0137】
プロセッサ104は、そのD/A変換回路IC2と共に、ホール素子H1、H2の検出値のばらつきいかんにかかわらず検出値を設定基準電圧値に設定するための補正値を出力するばらつき補正回路の一部を構成し、更には、設定基準電圧値を演算により求める補正値演算手段として機能する。
【0138】
この初期設定は、図23のフローチャートに示すように、カメラの組み立て工場における最終検査である出荷時に設定する(S.1〜S.3参照)。
【0139】
実際の制御は、図24のフローチャートに示すように、プロセッサ104が手ぶれ検出回路の検出出力OUT1、OUT2に基づき演算により得られた制御目標値を読み込み(S.11)、ついで、ホール素子H1、H2により得られた実際の位置対応電圧値V1ADin、V2ADinをプロセッサ104が読み込み(S.12)、これらによりプロセッサ104が制御目標値と位置対応電圧値V1ADin、V2ADinとの差を演算する(S.13)。
【0140】
プロセッサ104はこの差分出力に基づいてデジタルアナログ変換回路IC1へ制御データを出力する。デジタルアナログ変換回路IC1はその制御データに対応する制御電圧Vdac1、Vdac2を出力する(S.14)。この制御電圧Vdac1、Vdac2はコイルドライブ回路MD1、MD2に入力される。コイルドライブ回路MD1、MD2は各コイルcol1”、col2”にそれぞれ駆動電圧Vout1、Vout2を出力する。
【0141】
その駆動電圧Vout1、Vout2は、分圧電圧をVrとして、
Vout1=(Vdac1−Vr)*K
Vout2=(Vdac2−Vr)*K
により設定される。
【0142】
ここで、符号Kは分圧電圧Vrに基づく比例定数である。
【0143】
CCD101はマグネット16a〜16dとコイルCOL1”、COL2”との磁界により吸引反発されて可動され、駆動電圧Vout1、Vout2が「正電圧」か「負電圧」であるか否かによって、その可動方向が制御される。これにより、そのホール素子H1、H2の検出値が変化する。この検出値の変化に対応して位置対応電圧値V1ADin、V2ADinが変化し、この位置対応電圧値がプロセッサ104にフィードバックされるため、手ぶれ検出回路の検出出力値により制御目標値が変化した場合でも、CCD101を迅速に目標位置に追従移動させることができる(S.15)。そして、撮影が完了すると制御が終了する(S.16)。
(変形例)
図25はフィードバック回路50の変形例を示す回路図であって、ここでは、プロセッサ104がコイルドライバMD4をPWM制御によって駆動制御することにより、コイルCOL1”、COL2”への通電制御が行われるようになっている。
【0144】
すなわち、そのコイルドライバMD4には、正方向信号CON1と逆方向信号CON2とが入力されると共に、パルス電圧Vin1とパルス電圧Vin2とが入力され、パルス信号のハイレベルの持続時間が長くなるほどコイルCOL1”、COL2”への通電電圧が高くなる。
(手ぶれ補正機構オンによる撮影の詳細)
図26に示すように、手ぶれ補正スイッチSW14をオンすると(S.1)、ジャイロセンサS1B、S2Aの電源がオンされる(S.2)。レリーズスイッチSW1を押下して第1段押し下げが完了すると(S.3)、オートフォーカス動作(合焦動作)が開始される(S.4)。と同時に、載置ステージ15のメカニカルな強制固定が解除され、コイルCOL1”、COL2”への通電によるCCD中央保持制御が開始される(S.4)。
【0145】
次に、カメラ振動によるモニターリング処理が開始される(S.5)。プロセッサ104はレリーズスイッチSW1の第1段押し下げが続行されているか否かを判断し(S.6)、レリーズスイッチSW1の第1段押し下げが継続されている場合には、レリーズスイッチSW1の第2段押し下げが実行されたか否かを判断する(S.7)。レリーズスイッチSW1の第1段押し下げが解除された場合には、ステップS.3に戻り、レリーズスイッチSW1の第2段押し下げがされていない場合にはステップS.6に戻る。
【0146】
レリーズスイッチSW1の第2段押し下げが完了した場合には、CCD101が像の移動方向に追従を開始し(S.8)、ついで露光が行われ(S.9)、露光の終了(S.10)と共にCCD101の追従が停止され(S.11)、載置ステージ15がコイルCOL1”、COL2”への通電制御により原点位置に復帰され(S.11)、載置ステージ15が原点位置に復帰したか否かが判断され(S.12)、CCDメカニカルに原点位置に強制固定される(S.13)。
【0147】
このレリーズスイッチSW1の操作タイミングには二つの態様が考えられる。
【0148】
図27はレリーズスイッチSW1の二段押しの場合の手ぶれ補正処理のタイミングチャートである。ここで、二段押しとはレリーズスイッチSW1の第1段の押し下げ操作から第2段の押し下げ操作までの間に不連続性を有するレリーズ操作を言う。例えば、第1段の押し下げ後、シャッターチャンスをうかがって第2段の露光開始動作に移行する撮影動作を言う。
【0149】
レリーズスイッチSW1の第1段を押し下げると、デジタルカメラの合焦動作が開始される。原点位置強制保持機構1263は、この状態ではまだ載置ステージ15の強制保持を解除していない。コイルCOL1”、COL2”は非通電状態にある。また、載置ステージ15はメカニカルに中央位置に固定保持されている状態にある。LCDモニタ10には被写体画像が表示されている状態にある。
【0150】
合焦動作が完了すると、プロセッサ104は原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな強制保持解除が実行される。と同時に、コイルCOL1”、COL2”への通電が開始され、コイルCOL1”、COL2”への通電制御により、レリーズスイッチSW1の第1段押し動作中(レリーズ1)の手ぶれ補正処理が実行される。レリーズスイッチSW2の第2段押し(レリーズ2)が行われると、載置ステージ15がコイルCOL1”、COL2”への通電制御によりいったん中央位置に戻された後、間をあけてLCDモニタ10が消灯され、被写体画像を表示しない状態となる。
【0151】
ついで、静止画露光が開始されると共に、載置ステージ15が手ぶれに基づく像の移動に追従制御される。静止画露光の終了と共に載置ステージ15がコイルCOL1”、COL2”への通電制御に基づき中央位置に復帰され、ついで、プロセッサ104は、原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな強制固定が実行される。ついで、コイルCOL1”、COL2”への通電が停止される。
【0152】
このように、レリーズ1中は、ユーザーはカメラがぶれたとしても、LCDモニタ10を視認することにより、ぶれのない状態の被写体画像をモニタリングできる。
【0153】
また、レリーズ2中に、載置ステージ15を中央位置にいったん戻すと、レリーズ1中の被写体画像の構図に対してレリーズ2中の構図がずれることになるが、この発明の実施の形態によれば、載置ステージ15をいったん中央位置に戻した状態で、撮影直前の被写体画像を確認できるため、撮影直前(露光直前)の被写体画像の構図を確認できる。
【0154】
レリーズスイッチSW1の第1段を押して第2段を押さずにレリーズスイッチSW1の押し下げを解除した場合には、図28に示すように、第1段の押し下げと同時に合焦動作が開始され、合焦完了と共にプロセッサ104は原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな強制保持解除が実行される。と同時に、コイルCOL1”、COL2”への通電が開始され、コイルCOL1”、COL2”への通電制御により、レリーズスイッチSW1(レリーズ1)の第1段押し動作中の手ぶれ補正処理が実行される。
【0155】
このレリーズスイッチSW1の第1段押し動作中にレリーズスイッチSW1の第1段押し動作を解除すると、載置ステージ15がコイルCOL1”、COL2”への通電制御に基づき中央位置に復帰され、ついで、プロセッサ104は、原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな固定保持が実行される。ついで、コイルCOL1”、COL2”への通電が停止される。
【0156】
図29はレリーズスイッチSW1の一気押しの場合の手ぶれ補正処理のタイミングチャートである。ここで、一気押しとはレリーズスイッチSW1の第1段の押し下げ操作(レリーズ1)から第2段の押し下げ操作(レリーズ2)までが連続性を有するレリーズ操作を言う。例えば、第1段の押し下げ後、直ちに第2段の露光開始動作に移行する撮影動作を言う。
【0157】
レリーズスイッチSW1の第1段を押し下げると、デジタルカメラの合焦動作が開始される。LCDモニタ10には被写体画像が表示されている状態にある。また、レリーズスイッチSW2の第1段の押し下げ後、直ちにレリーズスイッチSW1の第2段の押し下げ動作が実行される。同時に、LCDモニタ10が消灯され、被写体画像を表示しない状態となる。
【0158】
合焦動作が完了すると、プロセッサ104は原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな保持解除が実行される。と同時に、コイルCOL1”、COL2”への通電が開始され、コイルCOL1”、COL2”への通電制御により、載置ステージ15の中央位置への保持が行われる。これにより、手ぶれ補正処理が実行される。
【0159】
載置ステージ15はコイルCOL1”、COL2”への通電により中央位置保持が実行され、静止画露光が開始されると共に、載置ステージ15が手ぶれに基づく像の移動に追従制御される。静止画露光の終了と共に載置ステージ15がコイルCOL1”、COL2”への通電制御に基づき中央位置に復帰され、ついで、プロセッサ104は、原点位置強制保持機構1263のステッピングモータSTM1への通電を開始し、これにより載置ステージ15のメカニカルな固定保持が実行される。ついで、コイルCOL1”、COL2”への通電が停止される。
【0160】
このように一気押しの場合、構図の確認はレリーズ1の操作中に完了していると考えられ、レリーズ2中の構図の確認は不要であるため、レリーズ2中にいったん載置ステージ15を中央位置に戻したとしても構図の再確認を行わせる必要はないと考えられるから、手ぶれ補正制御処理の簡略化を図ることができる。
【0161】
また、合焦動作中にLCDモニタ10を消灯するため、電池の無駄な消耗を回避できる。
【0162】
更に、載置ステージ15が機械的に原点位置に強制押圧された状態のとき、吸着棒35(図9(a)参照。)がマグネット16b、16dに吸着保持されるので、載置ステージ15のZ軸方向のガタが抑制される。また、載置ステージ15は、原点位置にない場合であっても、吸着棒35がマグネット16b、16dに吸着保持され、Z軸方向のガタが抑制される。
【0163】
本発明に係る手ぶれ補正機能付き撮像装置であるデジタルカメラでは、手ぶれ補正が行われる際にベース部材11上で載置ステージ15がX−Y平面内で移動されることに伴って、載置ステージ15に固定された載置ステージ接続側とベース部材11に固定されたブロック回路接続側との相対的な間隔の変化によりプリント基板20に生じる力を吸収することができる。これは、次のことによる。プリント基板20では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされている。プリント基板20では、その厚さ方向へ容易に変形することから、第2直線部分210の撓み変形によりX軸方向の力を吸収し、かつ第3直線部分212の撓み変形によりY軸方向の力を吸収するので、X−Y平面内で生じる間隔の変化が生み出す力を吸収することができることによる。よって、載置ステージ接続側(撮像素子接続部)とブロック回路接続側(演算処理接続部)との間隔の変化により、プリント基板20に生じる力が載置ステージ15の移動を阻害することを防止することができる。
【0164】
また、第2湾曲部分211が第2直線部分210と第3直線部分212と固定筒10とに囲まれたX−Y平面内に存在していることから、載置ステージ15の移動により載置ステージ接続側と第2直線部分210との折り曲げ部分(直線e)に力が加わると、第2直線部分210が一方向へのみ膨らむC字状の撓み変形となり歪応力を緩和できるので、反発力が小さくなり載置ステージ15の移動による力を効果的に吸収することができる。
【0165】
プリント基板20では、その折り曲げ個所が固定筒10の角部10bでZ軸方向に沿って形成されているので、一般に円形で構成されるレンズ鏡筒の周囲の空間、すなわち固定筒10の角部10bを有効に利用することができ、折り曲げ個所を設けることによるカメラの大型化を防止することができる。
【0166】
プリント基板20では、連結延在部205が折り重ねの可能な第1連結延在部206と第2連結延在部207とに分かれて構成されているので、連結延在部205の幅寸法を増加させることなく送電路を増加することができ、固定筒10の角部10bの制限された空間内で折り曲げ個所を構成することができる。このため、送電路の本数が少ない場合には、第2連結延在部207を設けなくてもよい。
【0167】
プリント基板20では、FPC補助板213が取り付けられているので、プリント基板20のCCD接続部201から第1直線部分208を経て第1湾曲部分209に至る個所に撓み変形が生じさせることなく、載置ステージ15の移動により生じた力を第3直線部分212に作用させることができ、確実に折り曲げ個所で力を吸収させることができる。
【0168】
なお、上記した実施例では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされていたが、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在し、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、一方がX軸方向と交差し、かつ他方がY軸方向と交差していれば、載置ステージ15がX−Y平面内で移動することによりプリント基板20に生じる力を吸収することができ、上記した実施例に限定されるものではない。これは、次のことによる。
【0169】
上記したようにプリント基板20では、厚さ方向に撓むことにより、厚さ方向の力すなわち面に対する垂線方向の力を吸収することができる。Z軸方向に延在する第2直線部分210および第3直線部分212が、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、一方がX軸方向と交差し、かつ他方がY軸方向と交差するように設定されると、第2直線部分210および第3直線部分212が撓むことにより吸収できる力には、X軸方向成分とY軸方向成分とが必ず含まれることとなるので、載置ステージ15のX−Y平面内での移動によりプリント基板20に生じる力を吸収することができることによる。
【0170】
上記した実施例では、第2直線部分210、第2湾曲部分211および第3直線部分212が、Z軸方向(撮影光軸方向)で見て、CCD101から被写体側に延在されていたが、CCD101から強制押え板26へ向けて(CCD101から被写体とは逆へ向かう方向)延在されていても載置ステージ15がX−Y平面内で移動することによりプリント基板20に生じる力を吸収することができ、上記した実施例に限定されるものではない。
【0171】
上記した実施例では、撮像素子(CCD101)と演算処理装置(プロセッサ104およびF/E−IC102)との電気的な接続にフレキシブルプリント基板20が用いられていたが、電気的に接続することができかつ厚さ方向に容易に曲げ変形するフレキシブル基板であればよく、上記した実施例に限定されるものではない。
【0172】
上記した実施例では、第1湾曲部分209と第2直線部分210との境界線(直線e)、第2直線部分210と第2湾曲部分211との境界線(直線f)、第2湾曲部分211と第3直線部分212との境界線(直線g)および第3直線部分212とブロック回路接続部204(演算処理接続部)との境界線(直線h)が、略直角に塑性変形されて折り曲げられていたが、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在され、互いの延在方向が交差し、かつ互いの交線がX軸方向およびY軸方向に平行でなければよいことから、適宜折り曲げ角度を選択して塑性変形させればよく、上記した実施例に限定されるものではない。
【0173】
上記した実施例では、第2直線部分210がY−Z平面内に存在され、第3直線部分212がX−Z平面内に存在され、互いに直交する位置関係とされていたが、載置ステージ15がX−Y平面内で移動することによりプリント基板20に生じる力を吸収することができればよいことから、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在し、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、互いに交差するように設定してもよく、上記した実施例に限定されるものではない。これは、次のことによる。
【0174】
上記したようにプリント基板20では、厚さ方向に撓むことにより、厚さ方向の力すなわち面に対する垂線方向の力を吸収することができるが、面の延在方向すなわち幅方向の力を吸収することが困難である。Z軸方向に延在する第2直線部分210および第3直線部分212が、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、互いに交差するように設定されると、第2直線部分210および第3直線部分212の幅方向が互いに異なるので、互いに吸収が困難な方向を補うことができる。さらに、第2直線部分210および第3直線部分212が撓むことにより吸収できる力には、X軸方向成分とY軸方向成分とが必ず含まれることとなるので、載置ステージ15のX−Y平面内での移動によりプリント基板20に生じる力を吸収することができる。このことから、第2湾曲部分211がX−Y平面に沿って延在し、第2直線部分210および第3直線部分212がZ軸方向(撮影光軸方向)に延在され、第2直線部分210を含む平面とX−Y平面との交線および第3直線部分212を含む平面とX−Y平面との交線が、互いに交差するように設定してもよい。
【0175】
上記した実施例では、第2湾曲部分211が略90度の頂角の扇状とされていたが、X−Y平面上に延在し、かつ第2直線部分210と第3直線部分212とを繋ぐものであればよく、上記した実施例に限定されるものではない。第2湾曲部分211は、例えば、第2直線部分210がY−Z平面内に存在されかつ第3直線部分212がX−Z平面内に存在される場合には、略270度の頂角の扇状であってもよく、第2直線部分210がY−Z平面内に存在されかつ第3直線部分212がX−Z平面内に存在されない場合には、互いの延在面に合わせた扇状であってもよく、第2直線部分210と第3直線部分212との延在方向に合わせたクランク形状であってもよい。
【0176】
上記した実施例では、プリント基板20の他端側となる演算処理接続部、すなわちブロック回路接続部204は、固定筒10のベース部材11に取り付けられていたが、本体ケース内で撮影光軸に対して固定されていればよく、上記した実施例に限定されるものではない。
【0177】
上記した実施例では、ジャイロセンサ1241がX方向とY方向との回転を検出することによりカメラ本体(本体ケース)に生じた手ぶれを検出していたが、例えば、モニタリング画像を画像処理することにより手ぶれを検出してもよく、上記した実施例に限定されるものではない。
【図面の簡単な説明】
【0178】
【図1】本発明に係わるデジタルカメラの正面図である。
【図2】本発明に係わるデジタルカメラの背面図である。
【図3】本発明に係わるデジタルカメラの上面図である。
【図4】本発明に係わるデジタルカメラの内部のシステム構成の概要を示すブロック回路図である。
【図5】本発明に係わるデジタルカメラの一般的動作概要を説明するためのフローチャートである。
【図6】本発明に係わるデジタルカメラの手ぶれ補正の原理を説明するための図であって、(a)はデジタルカメラの傾きを示し、(b)はそのデジタルカメラの撮影レンズとCCDの撮像面との関係を示す部分拡大図である。
【図7】本発明に係わるデジタルカメラのレンズ鏡胴の固定筒を示す正面図である。
【図8】図7に示す固定筒の縦断面図である。
【図9】図7に示す固定筒の背面図であって、(a)はフレキシブルプリント基板を取り付けてない状態を示す図であり、(b)はフレキシブルプリント基板を取り付けた状態を示す図である。
【図10】本発明に係わるCCDステージの分解斜視図である。
【図11】図9(b)のII−II線に沿う部分拡大断面図である。
【図12】本発明に係わる原点位置強制保持機構の要部を示す説明図であって、(a)はCCDステージとステッピングモータと変換機構との連結関係を示す斜視図、(b)はその変換機構の部分を拡大して示す斜視図である。
【図13】回転伝達ギヤのカム溝を示す模式図であって、(a)は回転伝達ギヤの底面図であり、(b)は(a)に記載の環状の一点鎖線Vに沿って得られた断面を示した図であり、(c)はカムピンがカム溝の傾斜面部を摺動して回転伝達ギヤがベース部材に向かって押し上げられた状態を示し、(d)はカムピンがカム溝の頂上平坦部に当接して回転伝達ギヤが最も押し上げられた状態を示し、(e)はカムピンが絶壁を通過して谷底平坦部に当接して回転伝達ギヤが最も押し下げられた状態を示している。
【図14】図12(a)に示す押さえピンと凹所との嵌合状態を説明するための説明図であって、(a)は押さえピンと凹所周壁との密接状態を示す部分拡大断面図であり、(b)は押さえピンと凹所周壁との離間状態を示す部分拡大断面図である。
【図15】折り曲げ前のフレキシブルプリント基板を示し、表側から見た図である。
【図16】折り曲げ前のフレキシブルプリント基板のCCDステージへの取り付け状態を示す図である。
【図17】プリント基板の連結延在部の重ね合わせ状態を示す図である。
【図18】CCDステージとフレキシブルプリント基板との配置関係を模式的に示す斜視図であり、(a)、(b)、(c)はこれらを異なる方向から見た図である。
【図19】本発明に係わる原点位置強制保持制御回路のブロック回路図である。
【図20】本発明に係わる手ぶれ補正機構の原点位置強制保持機構の制御処理の一例を示すフローチャートである。
【図21】本発明に係わる手ぶれ検出回路の一例を示す回路図である。
【図22】本発明に係わる手ぶれ補正制御回路のブロック回路図である。
【図23】本発明に係わるばらつき補正設定処理の一例を示すフローチャートである。
【図24】本発明に係わる手ぶれ補正制御回路の処理の一例を示すフローチャートである。
【図25】図22に示すフィードバック回路の変形例を示すブロック回路図である。
【図26】本発明に係わる撮像装置の手ぶれ補正処理の一連の流れを示すフローチャートである。
【図27】本発明に係わる撮像装置の二段押しの場合の手ぶれ補正処理の一例を示すタイミングチャートである。
【図28】本発明に係わる撮像装置の手ぶれ補正処理の解除処理の一例を示すタイミングチャートである。
【図29】本発明に係わる撮像装置の一気押しの場合の手ぶれ補正処理の一例を示すタイミングチャートである。
【符号の説明】
【0179】
101 (撮像素子としての)CCD
1241 手ぶれ検出センサ
1263 原点位置強制保持機構
【特許請求の範囲】
【請求項1】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、
該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部を有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項2】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、
該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部を有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項3】
前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする請求項1または請求項2に記載の手ぶれ補正機能付き撮像装置。
【請求項4】
前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする請求項3に記載の手ぶれ補正機能付き撮像装置。
【請求項5】
前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする請求項1ないし請求項4のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項6】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、
該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、
該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項7】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、
該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、
該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項8】
前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする請求項6または請求項7に記載の手ぶれ補正機能付き撮像装置。
【請求項9】
前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする請求項8に記載の手ぶれ補正機能付き撮像装置。
【請求項10】
前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする請求項6ないし請求項9のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項11】
前記固定部材は、撮影光軸上でレンズ鏡筒を収容する固定筒であり、前記撮像素子は、前記固定筒の端部に配置され、前記フレキシブル基板の前記撮像素子接続部は、前記撮像素子の撮像面とは反対側の面に接続され、前記フレキシブル基板の前記連結延在部は、前記固定筒の外周に沿って配置されていることを特徴とする請求項6ないし請求項10のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項12】
前記手ぶれ補正機構は、前記撮像素子を搭載する載置ステージを有し、該載置ステージをX−Y平面に沿って移動させることにより前記撮像素子をX−Y平面内で移動させて追従させることを特徴とする請求項1ないし請求項11のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項1】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、
該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部を有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項2】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、一端が前記撮像素子に接続されかつ他端が前記演算処理装置への接続のために前記本体ケース内で撮影光軸に対して固定されるフレキシブル基板とを備え、
該フレキシブル基板は、前記一端と前記他端とを連結する連結延在部を有し、該連結延在部は、前記一端からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記他端に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記他端との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項3】
前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする請求項1または請求項2に記載の手ぶれ補正機能付き撮像装置。
【請求項4】
前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする請求項3に記載の手ぶれ補正機能付き撮像装置。
【請求項5】
前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする請求項1ないし請求項4のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項6】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、
該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、
該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項7】
撮影光軸をZ軸方向としてこれに直交するX−Y平面とZ軸との交点を原点とし、本体ケースに生じた手ぶれを検出することにより像の前記原点からの移動量を目標値として算出し、該目標値に基づいて手ぶれによる被写体の像の移動に被写体画像が結像される撮像素子をX−Y平面内で移動させて追従させる手ぶれ補正機構と、該手ぶれ補正機構を前記本体ケースに固定する固定部材と、前記手ぶれ補正機構を駆動しかつ前記撮像素子からの信号を処理し前記本体ケースに設けられた演算処理装置と、該演算処理装置および前記撮像素子を電気的に接続するフレキシブル基板とを備え、
該フレキシブル基板は、前記撮像素子に接続された撮像素子接続部と、X−Y平面に沿って延在するように前記固定部材に取り付けられ前記演算処理装置に接続される演算処理接続部と、該演算処理接続部および前記撮像素子接続部を連結する連結延在部とを有し、
該連結延在部は、前記撮像素子接続部からX−Y平面に沿って延在する第1延在部分と、該第1延在部分に連続し前記撮像素子から見て前記被写体とは逆へ向かう方向に延在する第2延在部分と、該第2延在部分に連続しX−Y平面と平行に延在する第3延在部分と、該第3延在部分に連続し前記撮像素子から見て前記被写体へ向かう方向に延在し延在端で前記演算処理接続部に連続する第4延在部分とを有し、
前記第1延在部分と前記第2延在部分との境界線、該第2延在部分と前記第3延在部分との境界線、該第3延在部分と前記第4延在部分との境界線および該第4延在部分と前記演算処理接続部との境界線は、塑性変形されて屈曲され、前記第2延在部分を含む平面とX−Y平面との交線および前記第4延在部分を含む平面とX−Y平面との交線は、一方がX軸方向と交差し、かつ他方がY軸方向と交差することを特徴とする手ぶれ補正機能付き撮像装置。
【請求項8】
前記第2延在部分は、Y−Z平面と平行とされ、前記第4延在部分は、X−Z平面と平行とされていることを特徴とする請求項6または請求項7に記載の手ぶれ補正機能付き撮像装置。
【請求項9】
前記第3延在部分は、頂角が略90度とされた扇状であることを特徴とする請求項8に記載の手ぶれ補正機能付き撮像装置。
【請求項10】
前記連結延在部は、2つに分岐する第1連結延在部と第2連結延在部とからなり、前記第1連結延在部と前記第2連結延在部とは、折り重ねると略一致する形状とされ、前記連結延在部は、前記第1連結延在部と前記第2連結延在部とが重ねられた状態で、前記第1延在部分と前記第2延在部分と前記第3延在部分と前記第4延在部分とを構成していることを特徴とする請求項6ないし請求項9のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項11】
前記固定部材は、撮影光軸上でレンズ鏡筒を収容する固定筒であり、前記撮像素子は、前記固定筒の端部に配置され、前記フレキシブル基板の前記撮像素子接続部は、前記撮像素子の撮像面とは反対側の面に接続され、前記フレキシブル基板の前記連結延在部は、前記固定筒の外周に沿って配置されていることを特徴とする請求項6ないし請求項10のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【請求項12】
前記手ぶれ補正機構は、前記撮像素子を搭載する載置ステージを有し、該載置ステージをX−Y平面に沿って移動させることにより前記撮像素子をX−Y平面内で移動させて追従させることを特徴とする請求項1ないし請求項11のいずれか1項に記載の手ぶれ補正機能付き撮像装置。
【図1】


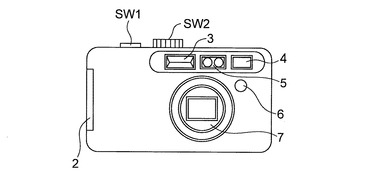
【図2】
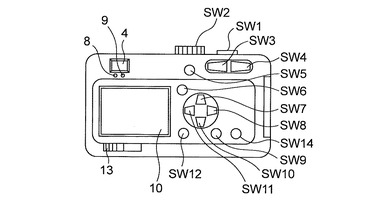
【図3】
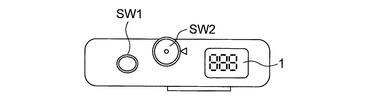
【図4】
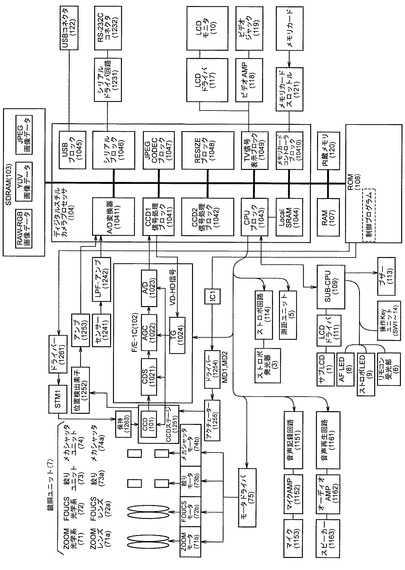
【図5】
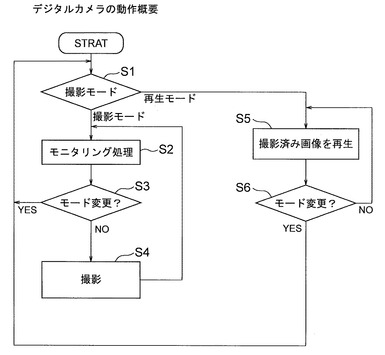
【図6】
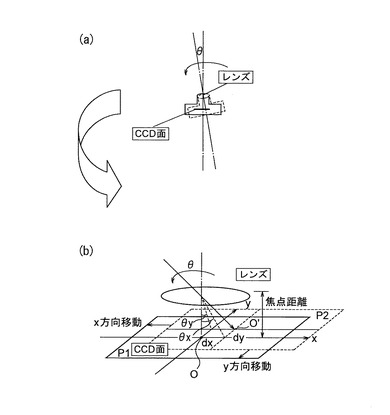
【図7】
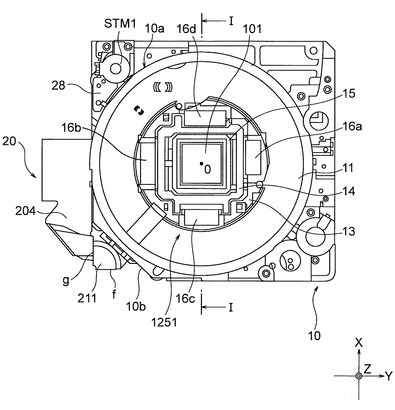
【図8】
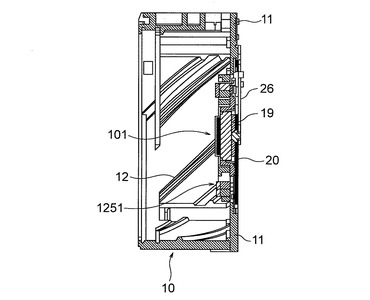
【図9】
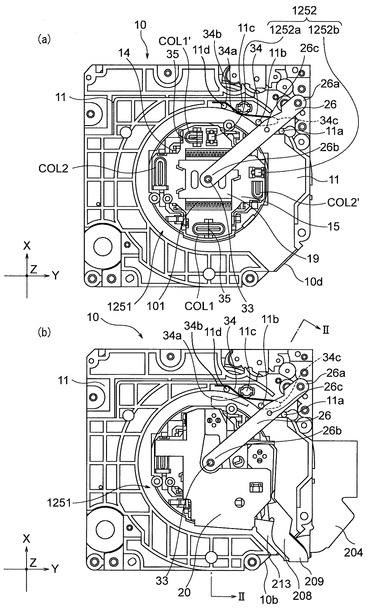
【図10】
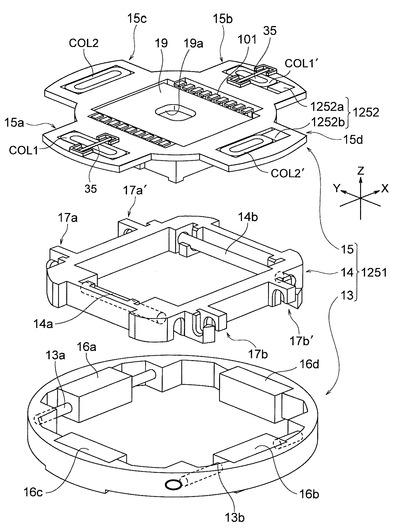
【図11】
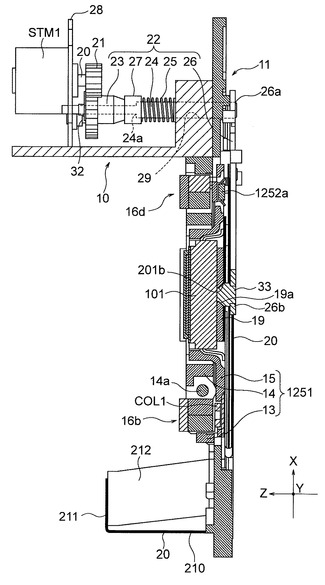
【図12】
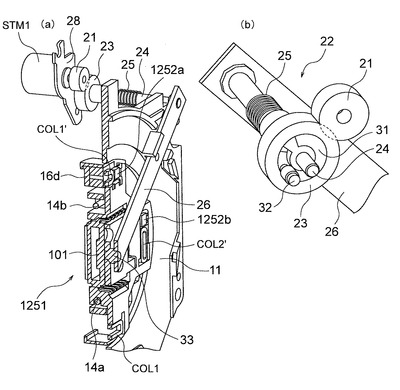
【図13】
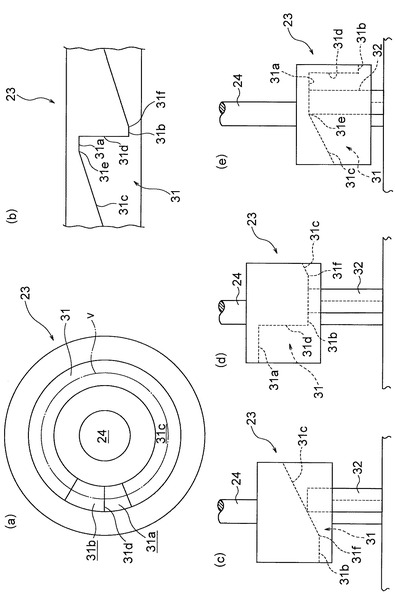
【図14】
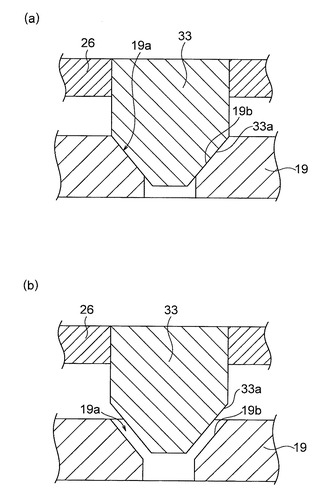
【図15】
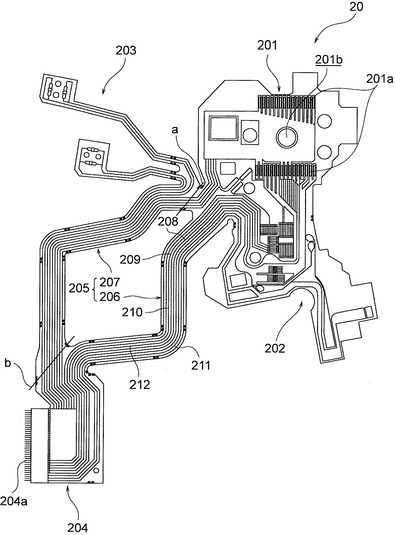
【図16】
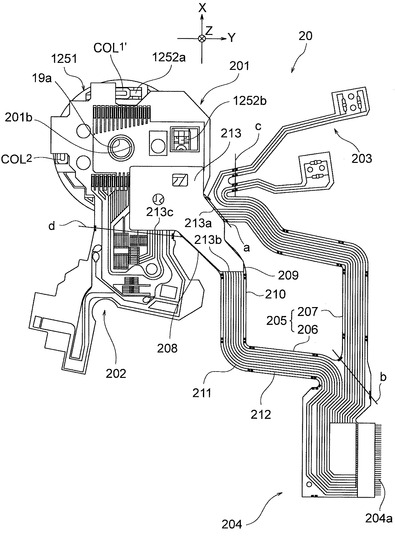
【図17】
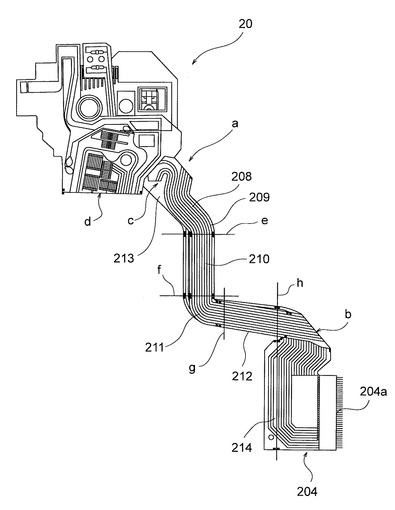
【図18】
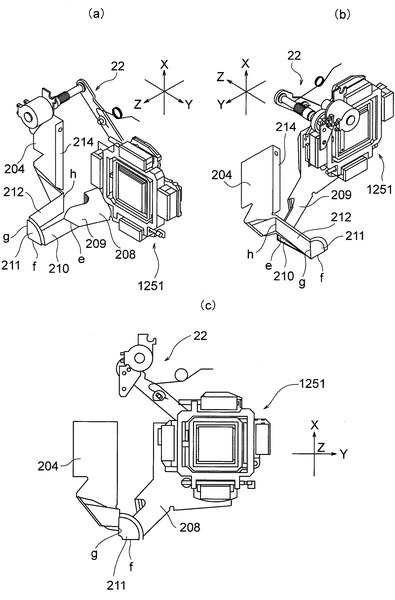
【図19】
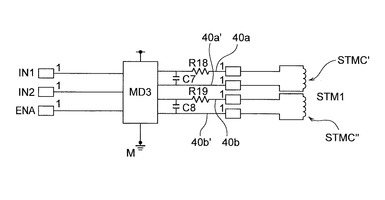
【図20】
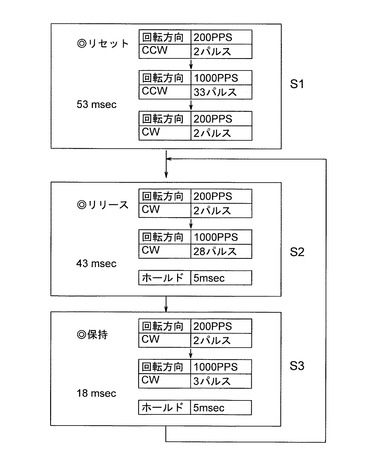
【図21】
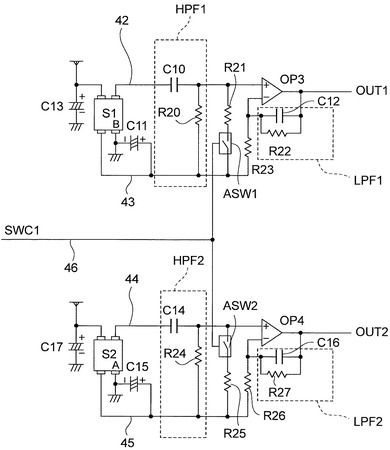
【図22】
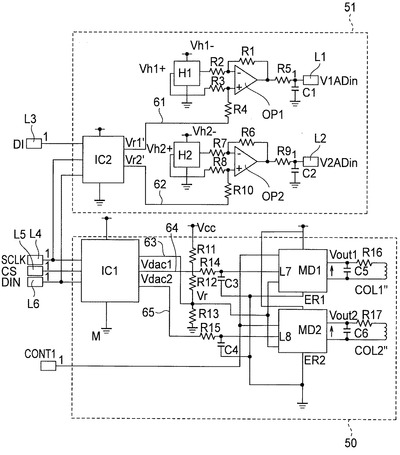
【図23】
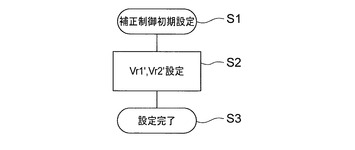
【図24】
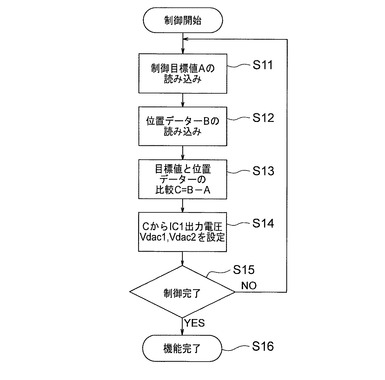
【図25】
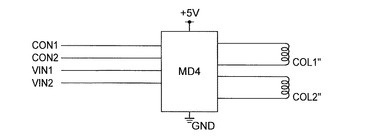
【図26】
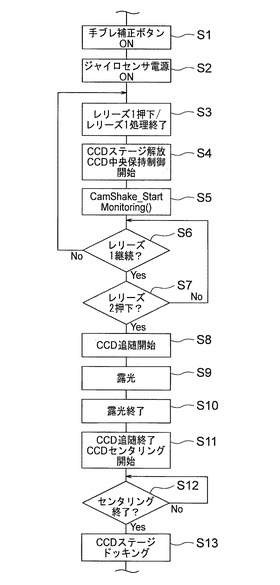
【図27】
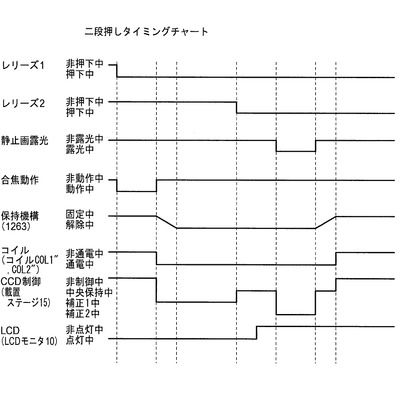
【図28】
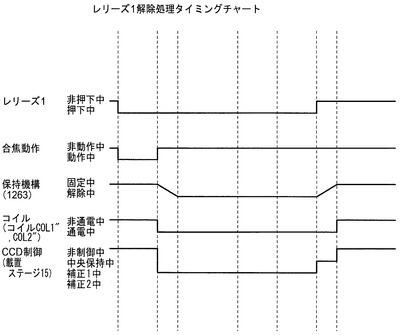
【図29】
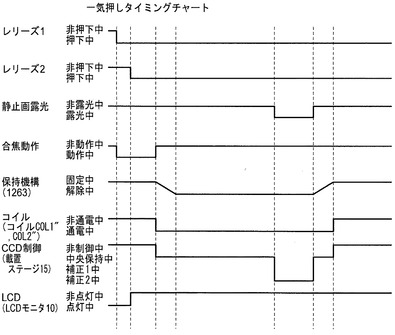
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2007−114485(P2007−114485A)
【公開日】平成19年5月10日(2007.5.10)
【国際特許分類】
【出願番号】特願2005−305840(P2005−305840)
【出願日】平成17年10月20日(2005.10.20)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成19年5月10日(2007.5.10)
【国際特許分類】
【出願日】平成17年10月20日(2005.10.20)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]