
手投げ式ロボット
【課題】突起物がなくても架台の回転を防止し、略ボール状に縮小を変形可能とした。
【解決手段】モータ4を内蔵した架台2と、架台の左右にギアボックス9を介してモータに連繋して回転可能で、内部中空の略半球状の1対の可動輪3と、ギアボックス9内において可動輪3の駆動軸12と同一軸線上に配置され、可動輪の回転方向に対して常時逆転方向に回転することにより、架台2を静止状態に保持する逆転機構とを備え、駆動軸12を可動輪3に設けた軸受部11に対して軸方向に移動可能に連結し、可動輪3同士を軸方向に沿って離接可能に連結した。
【解決手段】モータ4を内蔵した架台2と、架台の左右にギアボックス9を介してモータに連繋して回転可能で、内部中空の略半球状の1対の可動輪3と、ギアボックス9内において可動輪3の駆動軸12と同一軸線上に配置され、可動輪の回転方向に対して常時逆転方向に回転することにより、架台2を静止状態に保持する逆転機構とを備え、駆動軸12を可動輪3に設けた軸受部11に対して軸方向に移動可能に連結し、可動輪3同士を軸方向に沿って離接可能に連結した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高さが低い床下、人間が直接はいることができない危険な室内などを観察または偵察する場合などに用いる手投げ式小形ロボットに関するものである。
【背景技術】
【0002】
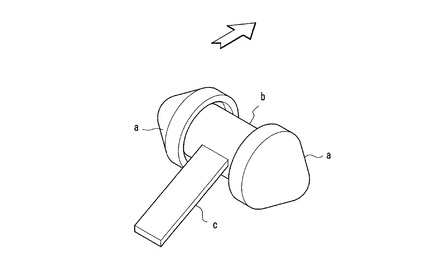
この種の小形ロボットの一例として、図6に示すように、左右一対の可動輪aと、可動輪a間に支持された架台bとを備えたものがある。この構造の自走式ロボットは、架台bに床面に接地する支持棒cを有し、移動時に可動輪aに取付けられた針状のばねが伸びて回転することにより(可動輪に内蔵した動力機構により)移動するようになっている。
【0003】
また、他のタイプの自走式小形ロボットは、前記支持棒cに替えて、後ろに突起式のスタビライザがついており、いずれの構造とも、移動時において可動輪により架台がつれ廻りすることを防止するとともに、停止時における架台の安定を確保するようになっている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、前記小形ロボットでは、長い支持棒または突起式のスタビライザが床面に接地しているために、摩耗したり、移動時の障害になったりすることもありうる。また、これらの支持棒またはスタビライザは、前記ロボットでは移動のために必要不可欠な部品であり、架台から長く突出させなければならず、小型化が困難となっていた。
【0005】
そこで、本発明は、上記課題を解決するものであり、その目的はこのような支持棒、またはスタビライザがなくても、可動輪の回転に伴う架台のつれ廻りによる回転を防止し、かつ略ボール状に縮小変形可能とすることによって、運搬および、観察ないし偵察現場に対する投擲を容易とするようにした手投げ式ロボットを提供するものである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の手投げ式ロボットは、モータ4を内蔵した架台2と、架台2の左右にギアボックス9を介して前記モータ4に連繋して回転可能とした内部中空の略半球状の1対の可動輪3と、ギアボックス9内において前記可動輪3の駆動軸12と同一軸線上に配置され、前記可動輪3の回転方向に対して常時逆転方向に回転することにより、前記架台2を静止状態に保持する逆転機構とを備え、前記駆動軸12を可動輪3内に設けた軸受部11に対して軸方向に移動可能に連結し、前記可動輪3同士を軸方向に沿って離接可能に連結したことを特徴としている。上記モータは、架台の左右に設けても良いが、一個のモータの駆動軸を連動機構を介して前記一対の可動輪に連動連結させるようにしても差し支えない。
【0007】
請求項2の発明は、請求項1において、前記可動輪同士の接合縁は、雌雄のねじによってねじ込み式に連結可能となっているとともに、前記ギアボックスと軸支部間において、駆動軸の外周に介在された圧縮コイルばねにより、互いに離間側に付勢されていることを特徴としている。
【0008】
請求項3の発明は、請求項1または2において、記架台内には前記モータとともに、CPU、無線通信手段、バッテリなどの作動手段を内蔵するとともに、架台上には撮像用のカメラおよびアンテナを突設し、無線通信手段により遠隔操縦手段からの制御により前記モータ制御を行うとともに、前記カメラで撮像された画像情報を前記無線通信手段を介して前記遠隔操縦手段に設けたモニタディスプレイに表示可能としたことを特徴としている。
【発明の効果】
【0009】
請求項1の発明では、逆転機構により、架台そのものに可動輪とは逆転方向の回転モーメントが生じ、可動輪の回転に伴う、架台のつれ廻りが相殺され、静止状態に安定して保たれる。また、必要に応じて縮小および展開でき、縮小した状態では略ボール状に小型化できる。
【0010】
請求項2の発明では、請求項1の作用・効果に加え、移動、投擲時には可動輪同士をねじ込み式に連結しておくことによりボール状に縮小し、接地した段階で、左右のモータねじ込み方とは逆側に逆転することにより、ねじが外れ、ばね力によって自動的に展開状態となるため、縮小・展開のための構造も簡単となる。
【0011】
請求項3の発明では、遠隔操縦によって、移動、方向転換を自在に行えるとともに、撮像された画像をリアルタイムで遠隔操縦手段のモニタディスプレイに表示できる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の最良の形態を添付図面を参照して説明する。
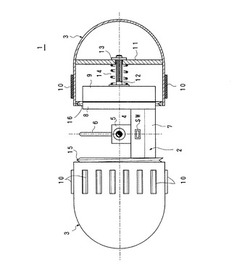
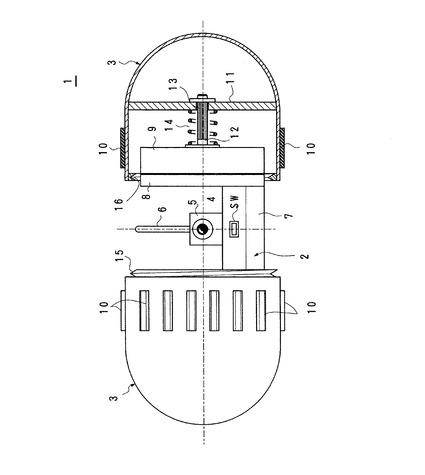
図1は本発明に係る手投げ式ロボットの展開状態における右半部を断面して示す正面図、図2は、同ギアボックス内における動力伝達機構を示す右半部の断面図である。
【0013】
図において、手投げ式ロボット1は、縮小時は、手投弾と同様、掌で握れる程度の大きさであり、架台2と、架台2の左右に展開配置された1対の可動輪3とからなっている。
【0014】
架台2は、左右一対のモータ4、および後述する各種電子部品を内蔵するとともに、上部中央に撮像用のカメラ5並びにアンテナ6を突設した格納部7と、格納部7の左右に立設された取付ベース8を介して固定されたギアボックス9、並びに格納部7の正面中央部に突出配置された起動用のスイッチSWを備えている。
【0015】
各可動輪3は、半球形の端部に筒部一体化した内部中空状のものであり、その筒状の外周部には、周方向に沿ってゴム製の多数の突起10が突設され、この突起10を接地面として回転可能となっている。
【0016】
また、可動輪3の内奥部には軸受部11が一体化され、この軸受部11における可動輪3の回転中心には前記ギアボックス9の端部より突出する駆動軸12を摺動可能に軸支している。なお、駆動軸12の軸受部11に対する回り止め手段としては、図示のスプライン溝13による係合のほか、キーとキー溝による係合手段などを採用できる。
【0017】
また、軸受部11と、ギアボックス9の間には、駆動軸11の外周には圧縮コイルばね14が介挿され、このばね14のばね圧により各可動輪3は常時架台2より離間する側に付勢されている。
【0018】
さらに、両可動輪3同士の接合端における開口縁の一方には、雄ネジ部15が突出し、他方の内周部に雌ねじ部16が形成され、図1に示すような架台2を解放した状態から、操作者の人手により、前記ばね14のばね圧に抗して両可動輪3を引寄せ、互いにねじることによって、両可動輪3間に前記架台2を格納した状態でカプセル状に閉じられるようになっている。
【0019】
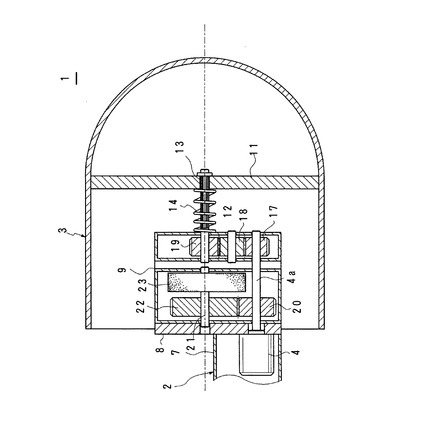
図2にしめすように、ギアボックス9内の前記軸受部11に近い位置には、モータ4の出力軸4aに入力ギア17、中間ギア18および出力ギア19を介して前記駆動軸12に連繋してモータ4の回転方向と同方向に回転し、その回転動力を軸受部11を介して可動輪3に伝達するようになっている。
【0020】
またギアボックス9内の取付ベース8に近い位置には、出力軸4aの根本側に軸装された入力ギア20に、前記駆動軸12と同軸上に配置された反転軸21に固定された反転用ギア22が噛合している。
【0021】
この反転軸21にはバランサー23が同軸に接合され、モータ4の回転方向とは常時逆の回転力が与えられることにより、バランサー23のフライホイール効果によって、可動輪3の回転方向とは逆の回転モーメントを生じさせることにより、架台2が可動輪3の回転方向につれ廻りすることを防止し静止状態に保持するようになっている。
【0022】
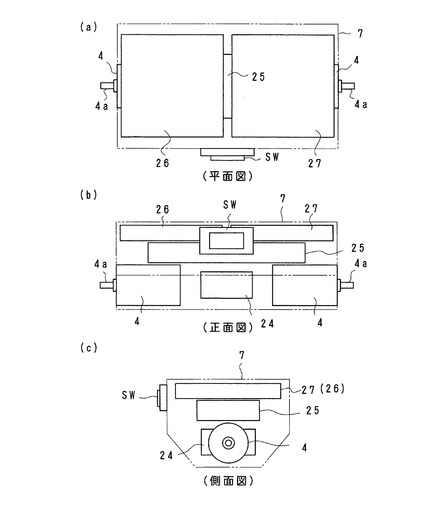
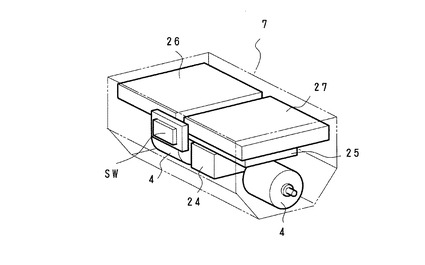
図3,4は前記格納部7内に格納された上述する電子部品の配置を示している。格納部7の底部側左右には上述する1対のモータ4が配置されているとともに、各モータ4間には加速度・方位センサ24が配置され、各モータ4の上部には各部の駆動電源となるバッテリ25が配置され、さらにその上部側の一方には、各部制御用のCPU26、他方には無線通信装置27が配置され、各部を図示しない配線により接続している。
この構造によれば重量の重いバッテリ25、モータ4が低位置に配置されることによって低重心に保たれ、可動輪3の停止状態でも、図1、2に示すごとく架台2は撮像用のカメラ5を上部に位置させた状態で定位置に安定して保持されるものとなる。
【0023】
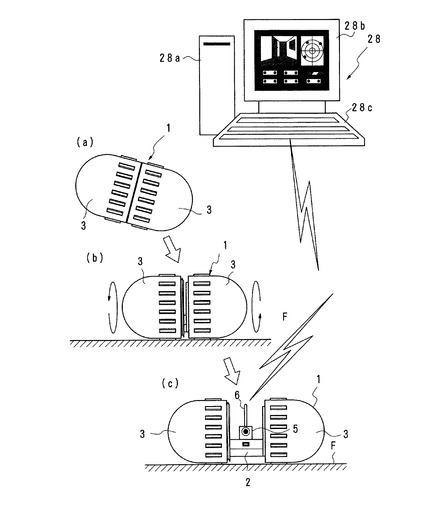
CPU26は、図5に示すように、遠隔操縦装置28からの指令を通信装置27を介して受け、遠隔操縦装置28からの指令に基づき左右のモータ4を動かして、指令方向に移動するとともに、撮像用のカメラ5で受像した画像信号を通信装置27を介して操縦装置28側に送出する動作を行う。
【0024】
図5は、以上のロボット1の投擲から展開動作までを示すものである。投擲前には、スイッチSWを入れた上で、(a)に示すように、可動輪3同士を接合し、その後に恰も手投弾と同様な投擲方法により、操作者が目的とする室内に投入れた後、操作者自身は安全な場所に待避することで、操作者の安全を確保できる。
【0025】
投入れ動作に伴い、加速度・方位センサ24は、この状態を検出するが、着地衝撃以後の検出しなくなった状態、すなわち、(b)に示すように、床面F上に静止した段階でCPU26は、両モータ4をねじ弛み方向に逆転させることにより、ねじの係合が外され、ばね14のばね圧により可動輪3が左右に自動的に展開することにより、(c)および図1に示すように、架台2が露出し、撮像用のカメラ5による室内の撮像が可能となり、アンテナ6を通じて操縦装置28に対する相互通信が可能となり、操縦装置28からの指令に応じて、以後はこの展開状態のまま室内を自走しつつその内部を観察または偵察することができる。操縦装置28からの指令によっても可動輪3を左右に展開することができる。
【0026】
操縦装置28は、通常のパソコンに類似するものであり、無線通信装置を内蔵したパソコン本体28aと、モニタディスプレイ28bおよびキーボード28cを備えるほか、図示しない操作用マウス、ジョイステックなどを有し、パソコン本体28a内に内蔵されたソフトにより、モニタディスプレイ28bには、図示のごとく、加速度・方位センサ24からの位置・方向情報及び撮像用のカメラ5により撮像された室内画像を表示させるとともに、撮像用のカメラ5のターゲット画像および、操縦者側のチェック入力などに応じてそのターゲット内における危険物、あるいは危険人物の存在を示すブリック点などが表示される。
【0027】
また、操縦装置28からの移動命令に応じてロボット1のモータ4を駆動することにより、ロボット1は室内を自走しつつその室内風景およびターゲット画像を映し出し、モニタディスプレイ28bに表示させる。方向転換する場合には、左右のモータ4を逆転させることにより、心地旋回により直ちに方向転換てきる。
【0028】
なお、図では遠隔操縦装置28として、ディスクトップ形パソコンを示しているが、実際の災害現場や事件現場などにおいては、可搬できるラップトップパソコンなどの携帯型パソコンに代替することが望ましい。また、図示しないが、災害現場、事件現場などにおいて、投擲動作など、ロボット1に対する蛮用に抗すべく、架台2内に内蔵される前記各電子部品を緩衝材などで保護し、耐衝撃性を付与しておくことも勿論である。
【図面の簡単な説明】
【0029】
【図1】本発明に係る手投げ式ロボットの展開状態における右半部を断面して示す正面図である。
【図2】同ギアボックス内における動力伝達機構を示す右半部の断面図である。
【図3】(a)〜(c)は格納部内の部品配置を示す平断面図、正断面図および側断面図である。
【図4】同格納部内の部品配置を示す斜視図である。
【図5】(a)〜(c)は同手投げ式ロボットの投擲から展開状態までの過程と、遠隔操縦装置との関係を示す説明図である。
【図6】従来の自走式小形ロボットの一例を示す斜視図である。
【符号の説明】
【0030】
1 手投げ式ロボット
2 架台
3 可動輪
4 モータ
4a 出力軸
5 撮像用のカメラ
6 アンテナ
7 格納部
8 取付ベース
9 ギアボックス
11 軸受部
12 駆動軸
14 圧縮コイルばね
15 雄ネジ部
16 雌ねじ部
17,20 入力ギア
18 中間ギア
19 出力ギア
21 反転軸
22 反転用ギア
23 バランサー
24 加速度・方位センサ
25 バッテリ
26 CPU
27 通信装置
28 遠隔操縦装置
28b モニタディスプレイ
【技術分野】
【0001】
本発明は、高さが低い床下、人間が直接はいることができない危険な室内などを観察または偵察する場合などに用いる手投げ式小形ロボットに関するものである。
【背景技術】
【0002】
この種の小形ロボットの一例として、図6に示すように、左右一対の可動輪aと、可動輪a間に支持された架台bとを備えたものがある。この構造の自走式ロボットは、架台bに床面に接地する支持棒cを有し、移動時に可動輪aに取付けられた針状のばねが伸びて回転することにより(可動輪に内蔵した動力機構により)移動するようになっている。
【0003】
また、他のタイプの自走式小形ロボットは、前記支持棒cに替えて、後ろに突起式のスタビライザがついており、いずれの構造とも、移動時において可動輪により架台がつれ廻りすることを防止するとともに、停止時における架台の安定を確保するようになっている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、前記小形ロボットでは、長い支持棒または突起式のスタビライザが床面に接地しているために、摩耗したり、移動時の障害になったりすることもありうる。また、これらの支持棒またはスタビライザは、前記ロボットでは移動のために必要不可欠な部品であり、架台から長く突出させなければならず、小型化が困難となっていた。
【0005】
そこで、本発明は、上記課題を解決するものであり、その目的はこのような支持棒、またはスタビライザがなくても、可動輪の回転に伴う架台のつれ廻りによる回転を防止し、かつ略ボール状に縮小変形可能とすることによって、運搬および、観察ないし偵察現場に対する投擲を容易とするようにした手投げ式ロボットを提供するものである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の手投げ式ロボットは、モータ4を内蔵した架台2と、架台2の左右にギアボックス9を介して前記モータ4に連繋して回転可能とした内部中空の略半球状の1対の可動輪3と、ギアボックス9内において前記可動輪3の駆動軸12と同一軸線上に配置され、前記可動輪3の回転方向に対して常時逆転方向に回転することにより、前記架台2を静止状態に保持する逆転機構とを備え、前記駆動軸12を可動輪3内に設けた軸受部11に対して軸方向に移動可能に連結し、前記可動輪3同士を軸方向に沿って離接可能に連結したことを特徴としている。上記モータは、架台の左右に設けても良いが、一個のモータの駆動軸を連動機構を介して前記一対の可動輪に連動連結させるようにしても差し支えない。
【0007】
請求項2の発明は、請求項1において、前記可動輪同士の接合縁は、雌雄のねじによってねじ込み式に連結可能となっているとともに、前記ギアボックスと軸支部間において、駆動軸の外周に介在された圧縮コイルばねにより、互いに離間側に付勢されていることを特徴としている。
【0008】
請求項3の発明は、請求項1または2において、記架台内には前記モータとともに、CPU、無線通信手段、バッテリなどの作動手段を内蔵するとともに、架台上には撮像用のカメラおよびアンテナを突設し、無線通信手段により遠隔操縦手段からの制御により前記モータ制御を行うとともに、前記カメラで撮像された画像情報を前記無線通信手段を介して前記遠隔操縦手段に設けたモニタディスプレイに表示可能としたことを特徴としている。
【発明の効果】
【0009】
請求項1の発明では、逆転機構により、架台そのものに可動輪とは逆転方向の回転モーメントが生じ、可動輪の回転に伴う、架台のつれ廻りが相殺され、静止状態に安定して保たれる。また、必要に応じて縮小および展開でき、縮小した状態では略ボール状に小型化できる。
【0010】
請求項2の発明では、請求項1の作用・効果に加え、移動、投擲時には可動輪同士をねじ込み式に連結しておくことによりボール状に縮小し、接地した段階で、左右のモータねじ込み方とは逆側に逆転することにより、ねじが外れ、ばね力によって自動的に展開状態となるため、縮小・展開のための構造も簡単となる。
【0011】
請求項3の発明では、遠隔操縦によって、移動、方向転換を自在に行えるとともに、撮像された画像をリアルタイムで遠隔操縦手段のモニタディスプレイに表示できる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の最良の形態を添付図面を参照して説明する。
図1は本発明に係る手投げ式ロボットの展開状態における右半部を断面して示す正面図、図2は、同ギアボックス内における動力伝達機構を示す右半部の断面図である。
【0013】
図において、手投げ式ロボット1は、縮小時は、手投弾と同様、掌で握れる程度の大きさであり、架台2と、架台2の左右に展開配置された1対の可動輪3とからなっている。
【0014】
架台2は、左右一対のモータ4、および後述する各種電子部品を内蔵するとともに、上部中央に撮像用のカメラ5並びにアンテナ6を突設した格納部7と、格納部7の左右に立設された取付ベース8を介して固定されたギアボックス9、並びに格納部7の正面中央部に突出配置された起動用のスイッチSWを備えている。
【0015】
各可動輪3は、半球形の端部に筒部一体化した内部中空状のものであり、その筒状の外周部には、周方向に沿ってゴム製の多数の突起10が突設され、この突起10を接地面として回転可能となっている。
【0016】
また、可動輪3の内奥部には軸受部11が一体化され、この軸受部11における可動輪3の回転中心には前記ギアボックス9の端部より突出する駆動軸12を摺動可能に軸支している。なお、駆動軸12の軸受部11に対する回り止め手段としては、図示のスプライン溝13による係合のほか、キーとキー溝による係合手段などを採用できる。
【0017】
また、軸受部11と、ギアボックス9の間には、駆動軸11の外周には圧縮コイルばね14が介挿され、このばね14のばね圧により各可動輪3は常時架台2より離間する側に付勢されている。
【0018】
さらに、両可動輪3同士の接合端における開口縁の一方には、雄ネジ部15が突出し、他方の内周部に雌ねじ部16が形成され、図1に示すような架台2を解放した状態から、操作者の人手により、前記ばね14のばね圧に抗して両可動輪3を引寄せ、互いにねじることによって、両可動輪3間に前記架台2を格納した状態でカプセル状に閉じられるようになっている。
【0019】
図2にしめすように、ギアボックス9内の前記軸受部11に近い位置には、モータ4の出力軸4aに入力ギア17、中間ギア18および出力ギア19を介して前記駆動軸12に連繋してモータ4の回転方向と同方向に回転し、その回転動力を軸受部11を介して可動輪3に伝達するようになっている。
【0020】
またギアボックス9内の取付ベース8に近い位置には、出力軸4aの根本側に軸装された入力ギア20に、前記駆動軸12と同軸上に配置された反転軸21に固定された反転用ギア22が噛合している。
【0021】
この反転軸21にはバランサー23が同軸に接合され、モータ4の回転方向とは常時逆の回転力が与えられることにより、バランサー23のフライホイール効果によって、可動輪3の回転方向とは逆の回転モーメントを生じさせることにより、架台2が可動輪3の回転方向につれ廻りすることを防止し静止状態に保持するようになっている。
【0022】
図3,4は前記格納部7内に格納された上述する電子部品の配置を示している。格納部7の底部側左右には上述する1対のモータ4が配置されているとともに、各モータ4間には加速度・方位センサ24が配置され、各モータ4の上部には各部の駆動電源となるバッテリ25が配置され、さらにその上部側の一方には、各部制御用のCPU26、他方には無線通信装置27が配置され、各部を図示しない配線により接続している。
この構造によれば重量の重いバッテリ25、モータ4が低位置に配置されることによって低重心に保たれ、可動輪3の停止状態でも、図1、2に示すごとく架台2は撮像用のカメラ5を上部に位置させた状態で定位置に安定して保持されるものとなる。
【0023】
CPU26は、図5に示すように、遠隔操縦装置28からの指令を通信装置27を介して受け、遠隔操縦装置28からの指令に基づき左右のモータ4を動かして、指令方向に移動するとともに、撮像用のカメラ5で受像した画像信号を通信装置27を介して操縦装置28側に送出する動作を行う。
【0024】
図5は、以上のロボット1の投擲から展開動作までを示すものである。投擲前には、スイッチSWを入れた上で、(a)に示すように、可動輪3同士を接合し、その後に恰も手投弾と同様な投擲方法により、操作者が目的とする室内に投入れた後、操作者自身は安全な場所に待避することで、操作者の安全を確保できる。
【0025】
投入れ動作に伴い、加速度・方位センサ24は、この状態を検出するが、着地衝撃以後の検出しなくなった状態、すなわち、(b)に示すように、床面F上に静止した段階でCPU26は、両モータ4をねじ弛み方向に逆転させることにより、ねじの係合が外され、ばね14のばね圧により可動輪3が左右に自動的に展開することにより、(c)および図1に示すように、架台2が露出し、撮像用のカメラ5による室内の撮像が可能となり、アンテナ6を通じて操縦装置28に対する相互通信が可能となり、操縦装置28からの指令に応じて、以後はこの展開状態のまま室内を自走しつつその内部を観察または偵察することができる。操縦装置28からの指令によっても可動輪3を左右に展開することができる。
【0026】
操縦装置28は、通常のパソコンに類似するものであり、無線通信装置を内蔵したパソコン本体28aと、モニタディスプレイ28bおよびキーボード28cを備えるほか、図示しない操作用マウス、ジョイステックなどを有し、パソコン本体28a内に内蔵されたソフトにより、モニタディスプレイ28bには、図示のごとく、加速度・方位センサ24からの位置・方向情報及び撮像用のカメラ5により撮像された室内画像を表示させるとともに、撮像用のカメラ5のターゲット画像および、操縦者側のチェック入力などに応じてそのターゲット内における危険物、あるいは危険人物の存在を示すブリック点などが表示される。
【0027】
また、操縦装置28からの移動命令に応じてロボット1のモータ4を駆動することにより、ロボット1は室内を自走しつつその室内風景およびターゲット画像を映し出し、モニタディスプレイ28bに表示させる。方向転換する場合には、左右のモータ4を逆転させることにより、心地旋回により直ちに方向転換てきる。
【0028】
なお、図では遠隔操縦装置28として、ディスクトップ形パソコンを示しているが、実際の災害現場や事件現場などにおいては、可搬できるラップトップパソコンなどの携帯型パソコンに代替することが望ましい。また、図示しないが、災害現場、事件現場などにおいて、投擲動作など、ロボット1に対する蛮用に抗すべく、架台2内に内蔵される前記各電子部品を緩衝材などで保護し、耐衝撃性を付与しておくことも勿論である。
【図面の簡単な説明】
【0029】
【図1】本発明に係る手投げ式ロボットの展開状態における右半部を断面して示す正面図である。
【図2】同ギアボックス内における動力伝達機構を示す右半部の断面図である。
【図3】(a)〜(c)は格納部内の部品配置を示す平断面図、正断面図および側断面図である。
【図4】同格納部内の部品配置を示す斜視図である。
【図5】(a)〜(c)は同手投げ式ロボットの投擲から展開状態までの過程と、遠隔操縦装置との関係を示す説明図である。
【図6】従来の自走式小形ロボットの一例を示す斜視図である。
【符号の説明】
【0030】
1 手投げ式ロボット
2 架台
3 可動輪
4 モータ
4a 出力軸
5 撮像用のカメラ
6 アンテナ
7 格納部
8 取付ベース
9 ギアボックス
11 軸受部
12 駆動軸
14 圧縮コイルばね
15 雄ネジ部
16 雌ねじ部
17,20 入力ギア
18 中間ギア
19 出力ギア
21 反転軸
22 反転用ギア
23 バランサー
24 加速度・方位センサ
25 バッテリ
26 CPU
27 通信装置
28 遠隔操縦装置
28b モニタディスプレイ
【特許請求の範囲】
【請求項1】
モータを内蔵した架台と、架台の左右にギアボックスを介して前記モータに連繋して回転可能で、内部中空とした略半球状の1対の可動輪と、ギアボックス内において前記可動輪の駆動軸と同一軸線上に配置され、前記可動輪の回転方向に対して常時逆転方向に回転することにより、前記架台を静止状態に保持する逆転機構とを備え、
前記駆動軸を可動輪内に設けた軸受部に対して軸方向に移動可能に連結し、前記可動輪同士を軸方向に沿って離接可能に連結したことを特徴とする手投げ式ロボット。
【請求項2】
前記可動輪同士の接合縁は、雌雄のねじによってねじ込み式に連結可能となっているとともに、前記ギアボックスと軸支部間において、駆動軸の外周に介在された圧縮コイルばねにより、互いに離間側に付勢されていることを特徴とする請求項1記載の手投げ式ロボット。
【請求項3】
前記架台内には前記モータとともに、CPU、無線通信手段、バッテリなどの作動手段を内蔵するとともに、架台上には撮像用のカメラおよびアンテナを突設し、無線通信手段により遠隔操縦手段からの制御により前記モータ制御を行うとともに、前記カメラで撮像された画像情報を前記無線通信手段を介して前記遠隔操縦手段に設けたモニタディスプレイに表示可能としたことを特徴とする請求項1または2記載の手投げ式ロボット。
【請求項1】
モータを内蔵した架台と、架台の左右にギアボックスを介して前記モータに連繋して回転可能で、内部中空とした略半球状の1対の可動輪と、ギアボックス内において前記可動輪の駆動軸と同一軸線上に配置され、前記可動輪の回転方向に対して常時逆転方向に回転することにより、前記架台を静止状態に保持する逆転機構とを備え、
前記駆動軸を可動輪内に設けた軸受部に対して軸方向に移動可能に連結し、前記可動輪同士を軸方向に沿って離接可能に連結したことを特徴とする手投げ式ロボット。
【請求項2】
前記可動輪同士の接合縁は、雌雄のねじによってねじ込み式に連結可能となっているとともに、前記ギアボックスと軸支部間において、駆動軸の外周に介在された圧縮コイルばねにより、互いに離間側に付勢されていることを特徴とする請求項1記載の手投げ式ロボット。
【請求項3】
前記架台内には前記モータとともに、CPU、無線通信手段、バッテリなどの作動手段を内蔵するとともに、架台上には撮像用のカメラおよびアンテナを突設し、無線通信手段により遠隔操縦手段からの制御により前記モータ制御を行うとともに、前記カメラで撮像された画像情報を前記無線通信手段を介して前記遠隔操縦手段に設けたモニタディスプレイに表示可能としたことを特徴とする請求項1または2記載の手投げ式ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−229813(P2008−229813A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2007−76443(P2007−76443)
【出願日】平成19年3月23日(2007.3.23)
【出願人】(390014306)防衛省技術研究本部長 (169)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成19年3月23日(2007.3.23)
【出願人】(390014306)防衛省技術研究本部長 (169)
【Fターム(参考)】
[ Back to top ]