
手持ち式測定装置
本発明は、手持ち式測定装置(10)であって、測定物(16)における少なくとも1つの対象物(14)の位置を測定するために設けられた少なくとも1つの位置測定センサ(12)と、少なくとも1つの対象物特性値(22)を検出するために設けられた少なくとも1つの対象物センサ(20)を備えた保護回路(18)とを有しており、前記対象物特性値(22)は少なくとも、測定物(16)に対する位置測定センサ(12)のアライメントに依存している形式のものに関する。保護回路(18)が少なくとも1つの操作者センサ(24,26)を有しており、該操作者センサは、操作者(28)に依存した少なくとも1つの操作者特性値(30)を検出するために設けられていることが提案されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の形式の手持ち式測定装置に関する。
【0002】
手持ち式測定装置であって、測定物における対象物の位置を測定するために設けられた位置測定センサと、対象物特性値を検出するために設けられた対象物センサを備えた保護回路とを有しており、前記対象物特性値は、測定物に対する位置測定センサのアライメントに依存している形式のものが既に提案されている。保護回路の対象物センサにより、手持ち式測定装置の測定物への当接が検出される。
【0003】
発明の開示
本発明は、手持ち式測定装置であって、測定物における少なくとも1つの対象物の位置を測定するために設けられた少なくとも1つの位置測定センサと、少なくとも1つの対象物特性値を検出するために設けられた少なくとも1つの対象物センサを備えた保護回路とを有しており、前記対象物特性値は少なくとも、測定物に対する位置測定センサのアライメントに依存している形式のものに関する。
【0004】
保護回路が少なくとも1つの操作者センサを有しており、該操作者センサは、操作者に依存した少なくとも1つの操作者特性値を検出するために設けられていることが提案される。「手持ち式測定装置」とは特に、操作者によって保持及び/又はガイドされて、少なくとも1つの測定を実行するために設けられた装置であると理解されたい。有利には手持ち式測定装置は、一緒に動くディスプレイに測定結果を表示する。特に「位置測定センサ」の概念は、容量型センサ、誘導型センサ、レーダーセンサ、X線センサ、当業者に有利であるとみなされるその他のセンサ及び/又は有利にはUWBセンサであると理解されたい。「UWBセンサ」とは特に、測定時に少なくとも1つの広帯域の無線信号を発信し、無線信号の反射を受信するセンサであると理解されたい。「UWB」とは「Ultra Wide Band」の略である。「広帯域の無線信号」とは特に、0.3GHzより大きな、有利には1GHzよりも大きな3db帯域幅を有した無線信号であると理解されたい。有利には、無線信号は、当業者には有利とされる180MHz〜10.5GHzの、特に有利には600MHz〜3GHzの中心周波数を有している。
【0005】
位置測定センサの送信出力は、0.5mWよりも小さく、及び/又は−41.3dBm/MHzよりも小さく、特に有利には−63dBm/MHzよりも小さい。特に、「測定物における対象物の位置を測定する」という表現は、位置測定センサが運転中、測定物内に隠れて位置している対象物を検出することができることを意味している。有利には、位置測定センサは、運転中、特に対象物が、位置測定センサの位置測定領域内に配置されている場合に、隠れて位置している対象物と位置測定センサとの間の距離を検出する。有利には位置測定センサは、壁、天井、及び/又は床内に位置している対象物の位置を測定するために設けられている。対象物とは例えば、鉄筋、プラスチック管、電気ケーブル、及び/又は特に壁を形成する別の物質、例えばコンクリート、レンガ、石材等であり得る。
【0006】
「保護回路」とは特に、少なくとも1つの運転状態で、無線信号の送信を阻止する回路であると理解されたい。即ち特に、第3の機器、例えばGPS、W−LAN、UMTS、航空無線、及び/又は電波天文学を、無線信号によるノイズから保護するためのものである。
【0007】
「対象物センサ」とは特に、UWBセンサ、インピーダンス測定センサ、光学センサ、識別センサ、誘導型センサ、音響センサ、触覚センサ、当業者に有利とされるその他のセンサ、及び/又は有利には容量型センサであると理解されたい。「UWBセンサ」は有利には、測定物の表面と対象物センサとの間の距離を、測定物の表面から反射される広帯域の無線信号によって測定する。「インピーダンス測定センサ」は、有利にはアンテナの造波抵抗、アンテナのマッチングエラー、アンテナのジャンプ及び/又はパルス応答、及び/又は、当業者が有利と判断するその他のアンテナの特性値を測定する。有利にはインピーダンス測定センサは、位置測定センサのアンテナのインピーダンスを測定する。「光学センサ」は特に、反射光バリア、フォトリフレクタ及び/又は当業者が有利と判断するその他の光学センサであると理解されたい。「識別センサ」とは特に、測定物上に設けられたマーキング、例えばバーコード又はRFIDチップを、少なくとも1つの運転状態で検出するセンサであると理解されたい。「音響センサ」とは特に、超音波センサ、又は当業者が有利と判断するその他のセンサであると理解されたい。「容量型センサ」とは特に、少なくとも測定物への位置測定センサのアライメント、及び特に測定物と位置測定センサとの距離に依存した容量を測定するセンサであると理解されたい。
【0008】
「設けられている」とは特に、特別に構成されている、設計されている及び/又はプログラミングされているものと理解されたい。
【0009】
「対象物特性値」とは特に、アナログ式に及び/又はデジタル式にコード化して、測定物に対して相対的な位置測定センサのアライメントに関する情報を準備する及び/又は移送する特性値であると理解されたい。有利にはこの情報から少なくとも、位置測定センサが測定物に整列されているかどうかを推測することができる。
【0010】
「操作者センサ」とは特に、触覚センサ、抵抗センサ、運動センサ、加速度センサ、RFIDセンサ、赤外線センサ、当業者が有利と判断するその他のセンサ及び/又は有利には容量型センサであると理解されたい。「触覚センサ」は例えば、ハンドグリップ及び/又は少なくとも1つの車輪の少なくとも1つの車軸に配置されている、操作者によって操作可能なスイッチとして形成することができる。「運動センサ」は例えば、測定物に対して相対的な手持ち式測定装置の運動を、懸架装置の軸に配置されたインクリメンタル送信器によって検出することができる。「RFIDセンサ」は例えば、操作者に連行されるRFIDチップの存在を検出することができる。これは同時に、盗難防止装置として働くことができる。
【0011】
特に「操作者特性値」とは、使用者と手持ち式測定装置との相互作用に関する情報を、アナログ式及び/又はデジタル式にコード化して準備する及び/又は移送する特性値であると理解されたい。有利には操作者特性値は、操作者が手持ち式工具を把持しているかどうか、加速させるかどうか、測定物に置いたかどうか、及び/又は動かしたかどうかを表している。
【0012】
手持ち式測定装置の本発明による構成によれば、特に僅かな構成部品及び僅かな構造的な手間で、測定準備のできた運転状態を特に有利かつ確実に認識することができる。これにより特に、別の運転状態では位置測定センサをオフにすることができ、これにより電磁的なノイズが回避される。
【0013】
別の構成では、保護回路が少なくとも1つの評価ユニットを有しており、該評価ユニットは、少なくとも1つの運転状態で、少なくとも対象物特性値と操作者特性値とに依存した制御特性値をアウトプットすることが提案される。「評価ユニット」とは、特に、対象物特性値のためのインプットと、操作特性値のためのインプットと、制御特性値のためのアウトプットとを有するユニットと理解されたい。選択的には、評価ユニットは、対象物測定値と操作特性値のための唯1つのインプットを有することもできる。選択的又は付加的には、評価ユニットは操作特性値と対象物測定値を特に論理的に互いに結合することができる。「制御特性値」とは、特に、位置測定センサの無線信号の出力に影響を与える、特に無線信号を遮断するために設けられている特性値であると理解されたい。評価ユニットによって、構造的に簡単に、測定準備のできた運転状態を特に確実に検出することができる。
【0014】
さらに、対象物センサが、位置測定センサから測定物への距離に依存して対象物特性値を算出するために設けられていることが提案され、これにより測定装置が、測定物に対して相対的に測定準備のできた位置に配置されている場合には、特に確実に検知することができる。「距離に依存した」という表現は、特に、対象物特性値が、距離を示す少なくとも1つの情報を有していることと理解されたい。有利にはこの情報から、手持ち式測定装置の車輪が測定物に当て付けられているかどうかが検出可能である。
【0015】
さらに、位置測定センサが少なくとも1つの運転状態で、広帯域の無線信号を発信することが提案されており、これにより構造的に簡単で特に有利かつ正確な位置測定が可能である。
【0016】
さらに、保護回路が少なくとも1つの運転状態で、広帯域の無線信号の発信に干渉することが提案されており、これにより有利には、測定されるべきではない運転状態では無線信号を減じるおよび又は有利には遮断することができる。特に、「発信に干渉する」という表現は、広帯域の無線信号の保護回路が特に、無線信号の送信出力を変更する、及び/又は有利にはスイッチオン及び/又はオフすることと理解されたい。選択的には発信は、外乱となる周波数範囲でのみ抑制されることができる。
【0017】
さらに、位置測定センサと対象物センサとが少なくとも部分的に一体に形成されていることが提案されていて、これにより特に有利には、構成部品および構造的な手間を減じることができる。「少なくとも部分的に一体に形成されている」という表現は、特に、位置測定センサと対象物センサとが少なくとも1つの共通の機能グループを有しており、この機能グループは有利には測定値を、特別な電気的な特性値に変換する。有利には、位置測定センサと対象物センサとは、1つの共通の測定検出器を有している。有利には、対象物センサと位置測定センサとは、同じ機能原理、例えばUWB信号により、選択的には異なる機能原理、例えばUWB信号および容量的な信号により、少なくとも1つの特性値を検出する。
【0018】
本発明の有利な構成では、対象物センサ及び/又は操作者センサが、容量式に測定するために設けられていて、これにより特に確実かつ堅牢な測定が構造的に簡単に行える。「容量式に測定」という表現は特に、対象物センサ及び/又は操作者センサが少なくとも1つの容量を測定することを意味している。有利には、対象物センサは、対象物センサの測定検出器と測定物との間の少なくとも1つの容量を測定する。有利には操作者センサは、操作者センサの測定検出器と操作者との間の容量を測定する。
【0019】
さらに、対象物センサと操作者センサとが、少なくとも部分的に一体に形成された測定手段を有していることが提案されていて、これにより有利には、構成部品と構成スペースとを省くことができる。「測定手段」とは、特に、測定検出器から来るエネルギを特性値に変換する、即ち特に、翻訳及び/又は直線化する手段と理解されたい。有利には、1つ又は2つの測定手段が、対象物特性値及び/又は操作者特性値を発信する。
【0020】
さらに対象物センサと操作者センサとが少なくとも部分的に直列に接続されていることが提案されていて、これにより特に、構成部品を省きかつ構造的に簡単にセンサの特性値を結合することができる。有利には、対象物センサと操作者センサの測定検出器が、有利には測定物と操作者とを介して直列に接続されている。「直列に接続」の表現は、特に、測定のために使用されるエネルギが、これらの測定検出器を相前後して通ることであると理解されたい。「測定検出器」とは、特に、測定するために使用されるエネルギを発信する及び/又は有利には受け取り、この場合、特に変換する手段であると理解されたい。
【0021】
さらに操作者センサが、少なくとも1つの加速度を検出するために設けられていることが提案され、これにより特に有利には、操作者と手持ち式測定装置との相互作用を検出することができる。「加速度」とは、特に、測定物に対して相対的な操作者センサの測定手段の加速度であると理解されたい。選択的又は付加的に、操作者センサは、特に積分により、測定物に対して相対的な操作者センサの測定手段の速度を検出する。
【0022】
さらに、操作者センサが、少なくとも1つの回転速度(「Gyro」)を検出するために設けられていることが提案されていて、これにより特に有利には、操作者と手持ち式測定装置との相互作用を検出することができる。このようにして特に、ディテクタが例えば壁から持ち上げられたことを検知することができる。
【0023】
図面
さらなる利点は以下の図面の説明により明らかである。図面には本発明の実施例が示されている。図面、詳細な説明、請求項は、組み合わされた多数の特徴を有している。当業者はこれらの特徴を目的に応じて個々に利用することもでき、又は有利にはさらに組み合わせることもできる。
【図面の簡単な説明】
【0024】
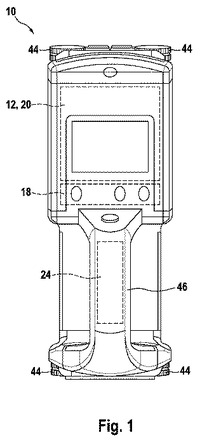
【図1】位置測定センサと、対象物センサ及び操作者センサを備えた保護回路とを有した本発明による手持ち式測定装置を示した図である。
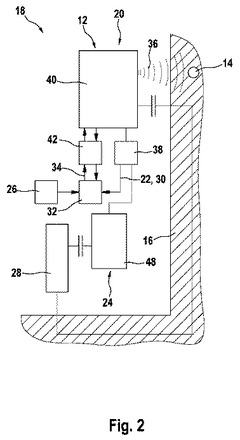
【図2】図1に示した手持ち式測定装置の保護回路の構成を示したブロック図である。
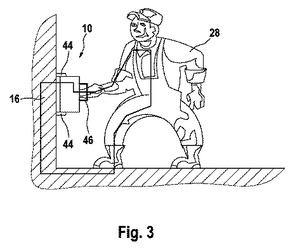
【図3】図1に示した手持ち式測定装置の保護回路を概略的に示した図である。
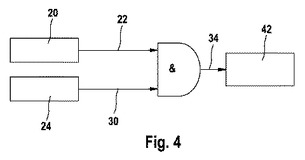
【図4】図1に示した手持ち式測定装置の評価の機能形式を示した図である。
【0025】
実施例の説明
図1には、本発明による手持ち式測定装置10が示されていて、この手持ち式測定装置10は位置測定センサ12を備えている。位置測定センサ12は測定運転中、測定物16内における対象物14の位置を測定する。測定物16は壁として形成されている。この場合、対象物14は、測定物16の表面の下側に隠れて配置されていても良い。位置を測定するために位置測定センサ12は測定検出器40と位置測定電子機器42とを有している。位置測定センサ12は測定運転中、広帯域の無線信号36を送信する。無線信号36の帯域幅は1〜3GHzである。測定検出器40は、個別に詳しく示していないが複数のアンテナを有している。位置測定電子機器42と測定検出器40とは共に、SAR位置測定システム(Synthetic Aperture Rader)を形成している。無線信号36は対象物14から反射される。反射の継続時間と強さが、位置測定センサ12により測定される。広帯域の無線信号36の深度分解能はこの場合、以下の式で計算できる。
【0026】
【数1】
【0027】
Δz:深度分解能(m)
Co:光速度(m/s)
εγ:測定物の誘電率
B :無線信号の帯域幅
【0028】
測定運転中、操作者28は手持ち式測定装置10を測定物16の表面に沿って動かす。このために手持ち式測定装置10は、複数の車輪44を備えた走行機構を有している。この走行機構は複数の車軸(詳しくは図示せず)を有しており、この車軸に車輪44が回転可能に取り付けられている。車軸は、測定物16に対して相対的な手持ち式測定装置10の運動を検出する運動センサ(詳しくは図示せず)に結合されている。これにより手持ち式測定装置10の計算ユニット(詳しくは図示せず)が、測定物16の二次元断面を算出する。計算ユニットはマイクロコントローラとして構成されている。
【0029】
図2には、手持ち式測定装置10が、対象物センサ20を備えた保護回路18を有していることが示されている。対象物センサ20は運転中に対象物特性値22を検出する。対象物特性値22は、測定物16への位置測定センサ12のアライメントに依存しており、即ち、対象物特性値22は、位置測定センサ12が測定物16に対して整列しているかどうかを表す少なくとも1つの情報を有している。このために対象物センサ20は測定手段38と測定検出器40とを有している。位置測定センサ12の測定検出器40は対象物センサ20の測定検出器40と一体的に形成されている。従って、位置測定センサ12と対象物センサ20とは部分的に一体に形成されている。選択的に、位置測定センサ12の測定検出器と、対象物センサ20の測定検出器40とを別個に形成することもでき、これは例えば車輪44又は摺動接点を介して、特に容量的に測定物16に接続することができる。
【0030】
対象物センサ20は容量式センサとして形成されている。即ち、測定手段38は2つの入力端の間の容量を測定するためのものである。従って、対象物センサ20は対象物特性値22を容量的に測定する。測定手段38は測定検出器40を介して容量的に測定物16に接続されている。これにより対象物センサ20は対象物特性値22を、位置測定センサ12から測定物16への距離に依存して検出する。選択的に又は付加的に、対象物センサを、車輪44に結合された運動センサとして、又は、運転中に表面に対する車輪44の圧力を検出するセンサとして形成することもできる。
【0031】
さらに保護回路18は、第1の操作者センサ24と第2の操作者センサ26とを有している。操作者センサ24,26は測定運転中に、操作者28に依存した操作者特性値30を検出する。操作者特性値30は、操作者28の相互作用を表す情報を有しており、この情報により測定意思、即ち、操作者28が測定しようとしているのかどうかがわかる。例えば操作者特性値30は、手持ち式測定装置10が加速されているかどうか、操作者28が手持ち式測定装置10の近くにとどまっているか、及び/又は操作者28が手持ち式測定装置10のハンドグリップ46を把持しているかどうかを示すことができる。
【0032】
この実施例では、第1の操作者センサ24が測定手段38と測定検出器48とを有している。操作者センサ24の測定手段38は対象物センサ20の測定手段38と一体的に形成されている。測定検出器48は電極として形成されている。さらに、測定検出器48は手持ち式測定装置10のハンドグリップ46内に配置されている。測定手段38は測定検出器48を介して容量的に操作者28に接続されている。操作者センサ24は操作者特性値30を容量式に測定する。
【0033】
図2及び図3には、対象物センサ20の測定検出器40と操作者センサ24の測定検出器48とが直列に接続されていることが示されている。測定検出器40,48の一方のゲートはそれぞれ、測定手段38の入力端に接続されている。測定検出器40,48の他方のゲートは測定物16と操作者28とを介して容量的に互いに接続されている。操作者28がハンドグリップ46を把持し、手持ち式測定装置10が上述したように測定物16に当接させられると、この直列回路は閉じられる。操作者28は足又はその他の体の一部を介して測定物16につながっている。
【0034】
保護回路18は評価ユニット32を有しており、この評価ユニット32は部分的に計算ユニットと一体的に形成されている。評価ユニット32は計算ルーチンを含んでいる。この計算ルーチンは計算ユニットのプロセッサで実行されている。さらに評価ユニット32は対象物特性値22と操作者特性値30とを有する信号のための入力端を有している。さらに、評価ユニット32は制御特性値34のための出力端を有している。
【0035】
評価ユニット32は運転中、対象物特性値22と操作者特性値30とに応じて制御特性値34をアウトプットする。制御特性値34は、位置測定電子機器42の入力信号である。前記の直列回路が開かれると、保護回路18は位置測定電子機器42を介して、広帯域の無線信号36の発信を中断する。従って、前記直列回路は、対象物特性値22と操作者特性値30のAND結合を形成している(図4)。これにより、広帯域の無線信号36は、測定物内にのみ、そして測定に必要な場合にだけ送られることが保証されている。
【0036】
第2の操作者センサ26は運転中に、手持ち式測定装置10の加速度を検出する。測定された加速度は、評価され、即ち重み付けされ、フィルタリングされ、測定時に手持ち式測定装置10が動かされる方向に方向付けられる。評価された加速度が閾値を超過すると、評価ユニット32は、操作者に起因する測定運動に基づいて、位置測定電子機器42を介して広帯域の無線信号36をスイッチオンする。第2の操作者センサ26の操作者特性値と対象物特性値22との間のAND結合はこの場合、評価ユニット32によって行われる。
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の形式の手持ち式測定装置に関する。
【0002】
手持ち式測定装置であって、測定物における対象物の位置を測定するために設けられた位置測定センサと、対象物特性値を検出するために設けられた対象物センサを備えた保護回路とを有しており、前記対象物特性値は、測定物に対する位置測定センサのアライメントに依存している形式のものが既に提案されている。保護回路の対象物センサにより、手持ち式測定装置の測定物への当接が検出される。
【0003】
発明の開示
本発明は、手持ち式測定装置であって、測定物における少なくとも1つの対象物の位置を測定するために設けられた少なくとも1つの位置測定センサと、少なくとも1つの対象物特性値を検出するために設けられた少なくとも1つの対象物センサを備えた保護回路とを有しており、前記対象物特性値は少なくとも、測定物に対する位置測定センサのアライメントに依存している形式のものに関する。
【0004】
保護回路が少なくとも1つの操作者センサを有しており、該操作者センサは、操作者に依存した少なくとも1つの操作者特性値を検出するために設けられていることが提案される。「手持ち式測定装置」とは特に、操作者によって保持及び/又はガイドされて、少なくとも1つの測定を実行するために設けられた装置であると理解されたい。有利には手持ち式測定装置は、一緒に動くディスプレイに測定結果を表示する。特に「位置測定センサ」の概念は、容量型センサ、誘導型センサ、レーダーセンサ、X線センサ、当業者に有利であるとみなされるその他のセンサ及び/又は有利にはUWBセンサであると理解されたい。「UWBセンサ」とは特に、測定時に少なくとも1つの広帯域の無線信号を発信し、無線信号の反射を受信するセンサであると理解されたい。「UWB」とは「Ultra Wide Band」の略である。「広帯域の無線信号」とは特に、0.3GHzより大きな、有利には1GHzよりも大きな3db帯域幅を有した無線信号であると理解されたい。有利には、無線信号は、当業者には有利とされる180MHz〜10.5GHzの、特に有利には600MHz〜3GHzの中心周波数を有している。
【0005】
位置測定センサの送信出力は、0.5mWよりも小さく、及び/又は−41.3dBm/MHzよりも小さく、特に有利には−63dBm/MHzよりも小さい。特に、「測定物における対象物の位置を測定する」という表現は、位置測定センサが運転中、測定物内に隠れて位置している対象物を検出することができることを意味している。有利には、位置測定センサは、運転中、特に対象物が、位置測定センサの位置測定領域内に配置されている場合に、隠れて位置している対象物と位置測定センサとの間の距離を検出する。有利には位置測定センサは、壁、天井、及び/又は床内に位置している対象物の位置を測定するために設けられている。対象物とは例えば、鉄筋、プラスチック管、電気ケーブル、及び/又は特に壁を形成する別の物質、例えばコンクリート、レンガ、石材等であり得る。
【0006】
「保護回路」とは特に、少なくとも1つの運転状態で、無線信号の送信を阻止する回路であると理解されたい。即ち特に、第3の機器、例えばGPS、W−LAN、UMTS、航空無線、及び/又は電波天文学を、無線信号によるノイズから保護するためのものである。
【0007】
「対象物センサ」とは特に、UWBセンサ、インピーダンス測定センサ、光学センサ、識別センサ、誘導型センサ、音響センサ、触覚センサ、当業者に有利とされるその他のセンサ、及び/又は有利には容量型センサであると理解されたい。「UWBセンサ」は有利には、測定物の表面と対象物センサとの間の距離を、測定物の表面から反射される広帯域の無線信号によって測定する。「インピーダンス測定センサ」は、有利にはアンテナの造波抵抗、アンテナのマッチングエラー、アンテナのジャンプ及び/又はパルス応答、及び/又は、当業者が有利と判断するその他のアンテナの特性値を測定する。有利にはインピーダンス測定センサは、位置測定センサのアンテナのインピーダンスを測定する。「光学センサ」は特に、反射光バリア、フォトリフレクタ及び/又は当業者が有利と判断するその他の光学センサであると理解されたい。「識別センサ」とは特に、測定物上に設けられたマーキング、例えばバーコード又はRFIDチップを、少なくとも1つの運転状態で検出するセンサであると理解されたい。「音響センサ」とは特に、超音波センサ、又は当業者が有利と判断するその他のセンサであると理解されたい。「容量型センサ」とは特に、少なくとも測定物への位置測定センサのアライメント、及び特に測定物と位置測定センサとの距離に依存した容量を測定するセンサであると理解されたい。
【0008】
「設けられている」とは特に、特別に構成されている、設計されている及び/又はプログラミングされているものと理解されたい。
【0009】
「対象物特性値」とは特に、アナログ式に及び/又はデジタル式にコード化して、測定物に対して相対的な位置測定センサのアライメントに関する情報を準備する及び/又は移送する特性値であると理解されたい。有利にはこの情報から少なくとも、位置測定センサが測定物に整列されているかどうかを推測することができる。
【0010】
「操作者センサ」とは特に、触覚センサ、抵抗センサ、運動センサ、加速度センサ、RFIDセンサ、赤外線センサ、当業者が有利と判断するその他のセンサ及び/又は有利には容量型センサであると理解されたい。「触覚センサ」は例えば、ハンドグリップ及び/又は少なくとも1つの車輪の少なくとも1つの車軸に配置されている、操作者によって操作可能なスイッチとして形成することができる。「運動センサ」は例えば、測定物に対して相対的な手持ち式測定装置の運動を、懸架装置の軸に配置されたインクリメンタル送信器によって検出することができる。「RFIDセンサ」は例えば、操作者に連行されるRFIDチップの存在を検出することができる。これは同時に、盗難防止装置として働くことができる。
【0011】
特に「操作者特性値」とは、使用者と手持ち式測定装置との相互作用に関する情報を、アナログ式及び/又はデジタル式にコード化して準備する及び/又は移送する特性値であると理解されたい。有利には操作者特性値は、操作者が手持ち式工具を把持しているかどうか、加速させるかどうか、測定物に置いたかどうか、及び/又は動かしたかどうかを表している。
【0012】
手持ち式測定装置の本発明による構成によれば、特に僅かな構成部品及び僅かな構造的な手間で、測定準備のできた運転状態を特に有利かつ確実に認識することができる。これにより特に、別の運転状態では位置測定センサをオフにすることができ、これにより電磁的なノイズが回避される。
【0013】
別の構成では、保護回路が少なくとも1つの評価ユニットを有しており、該評価ユニットは、少なくとも1つの運転状態で、少なくとも対象物特性値と操作者特性値とに依存した制御特性値をアウトプットすることが提案される。「評価ユニット」とは、特に、対象物特性値のためのインプットと、操作特性値のためのインプットと、制御特性値のためのアウトプットとを有するユニットと理解されたい。選択的には、評価ユニットは、対象物測定値と操作特性値のための唯1つのインプットを有することもできる。選択的又は付加的には、評価ユニットは操作特性値と対象物測定値を特に論理的に互いに結合することができる。「制御特性値」とは、特に、位置測定センサの無線信号の出力に影響を与える、特に無線信号を遮断するために設けられている特性値であると理解されたい。評価ユニットによって、構造的に簡単に、測定準備のできた運転状態を特に確実に検出することができる。
【0014】
さらに、対象物センサが、位置測定センサから測定物への距離に依存して対象物特性値を算出するために設けられていることが提案され、これにより測定装置が、測定物に対して相対的に測定準備のできた位置に配置されている場合には、特に確実に検知することができる。「距離に依存した」という表現は、特に、対象物特性値が、距離を示す少なくとも1つの情報を有していることと理解されたい。有利にはこの情報から、手持ち式測定装置の車輪が測定物に当て付けられているかどうかが検出可能である。
【0015】
さらに、位置測定センサが少なくとも1つの運転状態で、広帯域の無線信号を発信することが提案されており、これにより構造的に簡単で特に有利かつ正確な位置測定が可能である。
【0016】
さらに、保護回路が少なくとも1つの運転状態で、広帯域の無線信号の発信に干渉することが提案されており、これにより有利には、測定されるべきではない運転状態では無線信号を減じるおよび又は有利には遮断することができる。特に、「発信に干渉する」という表現は、広帯域の無線信号の保護回路が特に、無線信号の送信出力を変更する、及び/又は有利にはスイッチオン及び/又はオフすることと理解されたい。選択的には発信は、外乱となる周波数範囲でのみ抑制されることができる。
【0017】
さらに、位置測定センサと対象物センサとが少なくとも部分的に一体に形成されていることが提案されていて、これにより特に有利には、構成部品および構造的な手間を減じることができる。「少なくとも部分的に一体に形成されている」という表現は、特に、位置測定センサと対象物センサとが少なくとも1つの共通の機能グループを有しており、この機能グループは有利には測定値を、特別な電気的な特性値に変換する。有利には、位置測定センサと対象物センサとは、1つの共通の測定検出器を有している。有利には、対象物センサと位置測定センサとは、同じ機能原理、例えばUWB信号により、選択的には異なる機能原理、例えばUWB信号および容量的な信号により、少なくとも1つの特性値を検出する。
【0018】
本発明の有利な構成では、対象物センサ及び/又は操作者センサが、容量式に測定するために設けられていて、これにより特に確実かつ堅牢な測定が構造的に簡単に行える。「容量式に測定」という表現は特に、対象物センサ及び/又は操作者センサが少なくとも1つの容量を測定することを意味している。有利には、対象物センサは、対象物センサの測定検出器と測定物との間の少なくとも1つの容量を測定する。有利には操作者センサは、操作者センサの測定検出器と操作者との間の容量を測定する。
【0019】
さらに、対象物センサと操作者センサとが、少なくとも部分的に一体に形成された測定手段を有していることが提案されていて、これにより有利には、構成部品と構成スペースとを省くことができる。「測定手段」とは、特に、測定検出器から来るエネルギを特性値に変換する、即ち特に、翻訳及び/又は直線化する手段と理解されたい。有利には、1つ又は2つの測定手段が、対象物特性値及び/又は操作者特性値を発信する。
【0020】
さらに対象物センサと操作者センサとが少なくとも部分的に直列に接続されていることが提案されていて、これにより特に、構成部品を省きかつ構造的に簡単にセンサの特性値を結合することができる。有利には、対象物センサと操作者センサの測定検出器が、有利には測定物と操作者とを介して直列に接続されている。「直列に接続」の表現は、特に、測定のために使用されるエネルギが、これらの測定検出器を相前後して通ることであると理解されたい。「測定検出器」とは、特に、測定するために使用されるエネルギを発信する及び/又は有利には受け取り、この場合、特に変換する手段であると理解されたい。
【0021】
さらに操作者センサが、少なくとも1つの加速度を検出するために設けられていることが提案され、これにより特に有利には、操作者と手持ち式測定装置との相互作用を検出することができる。「加速度」とは、特に、測定物に対して相対的な操作者センサの測定手段の加速度であると理解されたい。選択的又は付加的に、操作者センサは、特に積分により、測定物に対して相対的な操作者センサの測定手段の速度を検出する。
【0022】
さらに、操作者センサが、少なくとも1つの回転速度(「Gyro」)を検出するために設けられていることが提案されていて、これにより特に有利には、操作者と手持ち式測定装置との相互作用を検出することができる。このようにして特に、ディテクタが例えば壁から持ち上げられたことを検知することができる。
【0023】
図面
さらなる利点は以下の図面の説明により明らかである。図面には本発明の実施例が示されている。図面、詳細な説明、請求項は、組み合わされた多数の特徴を有している。当業者はこれらの特徴を目的に応じて個々に利用することもでき、又は有利にはさらに組み合わせることもできる。
【図面の簡単な説明】
【0024】
【図1】位置測定センサと、対象物センサ及び操作者センサを備えた保護回路とを有した本発明による手持ち式測定装置を示した図である。
【図2】図1に示した手持ち式測定装置の保護回路の構成を示したブロック図である。
【図3】図1に示した手持ち式測定装置の保護回路を概略的に示した図である。
【図4】図1に示した手持ち式測定装置の評価の機能形式を示した図である。
【0025】
実施例の説明
図1には、本発明による手持ち式測定装置10が示されていて、この手持ち式測定装置10は位置測定センサ12を備えている。位置測定センサ12は測定運転中、測定物16内における対象物14の位置を測定する。測定物16は壁として形成されている。この場合、対象物14は、測定物16の表面の下側に隠れて配置されていても良い。位置を測定するために位置測定センサ12は測定検出器40と位置測定電子機器42とを有している。位置測定センサ12は測定運転中、広帯域の無線信号36を送信する。無線信号36の帯域幅は1〜3GHzである。測定検出器40は、個別に詳しく示していないが複数のアンテナを有している。位置測定電子機器42と測定検出器40とは共に、SAR位置測定システム(Synthetic Aperture Rader)を形成している。無線信号36は対象物14から反射される。反射の継続時間と強さが、位置測定センサ12により測定される。広帯域の無線信号36の深度分解能はこの場合、以下の式で計算できる。
【0026】
【数1】
【0027】
Δz:深度分解能(m)
Co:光速度(m/s)
εγ:測定物の誘電率
B :無線信号の帯域幅
【0028】
測定運転中、操作者28は手持ち式測定装置10を測定物16の表面に沿って動かす。このために手持ち式測定装置10は、複数の車輪44を備えた走行機構を有している。この走行機構は複数の車軸(詳しくは図示せず)を有しており、この車軸に車輪44が回転可能に取り付けられている。車軸は、測定物16に対して相対的な手持ち式測定装置10の運動を検出する運動センサ(詳しくは図示せず)に結合されている。これにより手持ち式測定装置10の計算ユニット(詳しくは図示せず)が、測定物16の二次元断面を算出する。計算ユニットはマイクロコントローラとして構成されている。
【0029】
図2には、手持ち式測定装置10が、対象物センサ20を備えた保護回路18を有していることが示されている。対象物センサ20は運転中に対象物特性値22を検出する。対象物特性値22は、測定物16への位置測定センサ12のアライメントに依存しており、即ち、対象物特性値22は、位置測定センサ12が測定物16に対して整列しているかどうかを表す少なくとも1つの情報を有している。このために対象物センサ20は測定手段38と測定検出器40とを有している。位置測定センサ12の測定検出器40は対象物センサ20の測定検出器40と一体的に形成されている。従って、位置測定センサ12と対象物センサ20とは部分的に一体に形成されている。選択的に、位置測定センサ12の測定検出器と、対象物センサ20の測定検出器40とを別個に形成することもでき、これは例えば車輪44又は摺動接点を介して、特に容量的に測定物16に接続することができる。
【0030】
対象物センサ20は容量式センサとして形成されている。即ち、測定手段38は2つの入力端の間の容量を測定するためのものである。従って、対象物センサ20は対象物特性値22を容量的に測定する。測定手段38は測定検出器40を介して容量的に測定物16に接続されている。これにより対象物センサ20は対象物特性値22を、位置測定センサ12から測定物16への距離に依存して検出する。選択的に又は付加的に、対象物センサを、車輪44に結合された運動センサとして、又は、運転中に表面に対する車輪44の圧力を検出するセンサとして形成することもできる。
【0031】
さらに保護回路18は、第1の操作者センサ24と第2の操作者センサ26とを有している。操作者センサ24,26は測定運転中に、操作者28に依存した操作者特性値30を検出する。操作者特性値30は、操作者28の相互作用を表す情報を有しており、この情報により測定意思、即ち、操作者28が測定しようとしているのかどうかがわかる。例えば操作者特性値30は、手持ち式測定装置10が加速されているかどうか、操作者28が手持ち式測定装置10の近くにとどまっているか、及び/又は操作者28が手持ち式測定装置10のハンドグリップ46を把持しているかどうかを示すことができる。
【0032】
この実施例では、第1の操作者センサ24が測定手段38と測定検出器48とを有している。操作者センサ24の測定手段38は対象物センサ20の測定手段38と一体的に形成されている。測定検出器48は電極として形成されている。さらに、測定検出器48は手持ち式測定装置10のハンドグリップ46内に配置されている。測定手段38は測定検出器48を介して容量的に操作者28に接続されている。操作者センサ24は操作者特性値30を容量式に測定する。
【0033】
図2及び図3には、対象物センサ20の測定検出器40と操作者センサ24の測定検出器48とが直列に接続されていることが示されている。測定検出器40,48の一方のゲートはそれぞれ、測定手段38の入力端に接続されている。測定検出器40,48の他方のゲートは測定物16と操作者28とを介して容量的に互いに接続されている。操作者28がハンドグリップ46を把持し、手持ち式測定装置10が上述したように測定物16に当接させられると、この直列回路は閉じられる。操作者28は足又はその他の体の一部を介して測定物16につながっている。
【0034】
保護回路18は評価ユニット32を有しており、この評価ユニット32は部分的に計算ユニットと一体的に形成されている。評価ユニット32は計算ルーチンを含んでいる。この計算ルーチンは計算ユニットのプロセッサで実行されている。さらに評価ユニット32は対象物特性値22と操作者特性値30とを有する信号のための入力端を有している。さらに、評価ユニット32は制御特性値34のための出力端を有している。
【0035】
評価ユニット32は運転中、対象物特性値22と操作者特性値30とに応じて制御特性値34をアウトプットする。制御特性値34は、位置測定電子機器42の入力信号である。前記の直列回路が開かれると、保護回路18は位置測定電子機器42を介して、広帯域の無線信号36の発信を中断する。従って、前記直列回路は、対象物特性値22と操作者特性値30のAND結合を形成している(図4)。これにより、広帯域の無線信号36は、測定物内にのみ、そして測定に必要な場合にだけ送られることが保証されている。
【0036】
第2の操作者センサ26は運転中に、手持ち式測定装置10の加速度を検出する。測定された加速度は、評価され、即ち重み付けされ、フィルタリングされ、測定時に手持ち式測定装置10が動かされる方向に方向付けられる。評価された加速度が閾値を超過すると、評価ユニット32は、操作者に起因する測定運動に基づいて、位置測定電子機器42を介して広帯域の無線信号36をスイッチオンする。第2の操作者センサ26の操作者特性値と対象物特性値22との間のAND結合はこの場合、評価ユニット32によって行われる。
【特許請求の範囲】
【請求項1】
手持ち式測定装置(10)であって、測定物(16)における少なくとも1つの対象物(14)の位置を測定するために設けられた少なくとも1つの位置測定センサ(12)と、少なくとも1つの対象物特性値(22)を検出するために設けられた少なくとも1つの対象物センサ(20)を備えた保護回路(18)とを有しており、前記対象物特性値(22)は少なくとも、測定物(16)に対する位置測定センサ(12)のアライメントに依存している形式のものにおいて、
保護回路(18)が少なくとも1つの操作者センサ(24,26)を有しており、該操作者センサは、操作者(28)に依存した少なくとも1つの操作者特性値(30)を検出するために設けられていることを特徴とする、手持ち式測定装置。
【請求項2】
保護回路(18)が少なくとも1つの評価ユニット(32)を有しており、該評価ユニットは、少なくとも1つの運転状態で、少なくとも対象物特性値(22)と操作者特性値(30)とに依存した制御特性値(34)をアウトプットする、請求項1記載の手持ち式測定装置。
【請求項3】
対象物センサ(20)が、位置測定センサ(12)から測定物(16)への距離に依存して対象物特性値(22)を検出するために設けられている、請求項1又は2記載の手持ち式測定装置。
【請求項4】
位置測定センサ(12)が少なくとも1つの運転状態で、広帯域の無線信号(36)を発信する、請求項1から3までのいずれか1項記載の手持ち式測定装置。
【請求項5】
保護回路(18)が少なくとも1つの運転状態で、広帯域の無線信号(36)の発信に干渉する、請求項4記載の手持ち式測定装置。
【請求項6】
位置測定センサ(12)と対象物センサ(20)とが少なくとも部分的に一体に形成されている、請求項1から5までのいずれか1項記載の手持ち式測定装置。
【請求項7】
対象物センサ(20)及び/又は操作者センサ(24)が、容量式に測定するために設けられている、請求項1から6までのいずれか1項記載の手持ち式測定装置。
【請求項8】
対象物センサ(20)と操作者センサ(24)とが、少なくとも部分的に一体に形成された測定手段(38)を有している、請求項1から7までのいずれか1項記載の手持ち式測定装置。
【請求項9】
対象物センサ(20)と操作者センサ(24)とが少なくとも部分的に直列に接続されている、請求項1から8までのいずれか1項記載の手持ち式測定装置。
【請求項10】
操作者センサ(26)が、少なくとも1つの加速度を検出するために設けられている、請求項1から9までのいずれか1項記載の手持ち式測定装置。
【請求項11】
操作者センサ(26)が、少なくとも1つの速度、特に回転速度を検出するために設けられている、請求項1から10までのいずれか1項記載の手持ち式測定装置。
【請求項1】
手持ち式測定装置(10)であって、測定物(16)における少なくとも1つの対象物(14)の位置を測定するために設けられた少なくとも1つの位置測定センサ(12)と、少なくとも1つの対象物特性値(22)を検出するために設けられた少なくとも1つの対象物センサ(20)を備えた保護回路(18)とを有しており、前記対象物特性値(22)は少なくとも、測定物(16)に対する位置測定センサ(12)のアライメントに依存している形式のものにおいて、
保護回路(18)が少なくとも1つの操作者センサ(24,26)を有しており、該操作者センサは、操作者(28)に依存した少なくとも1つの操作者特性値(30)を検出するために設けられていることを特徴とする、手持ち式測定装置。
【請求項2】
保護回路(18)が少なくとも1つの評価ユニット(32)を有しており、該評価ユニットは、少なくとも1つの運転状態で、少なくとも対象物特性値(22)と操作者特性値(30)とに依存した制御特性値(34)をアウトプットする、請求項1記載の手持ち式測定装置。
【請求項3】
対象物センサ(20)が、位置測定センサ(12)から測定物(16)への距離に依存して対象物特性値(22)を検出するために設けられている、請求項1又は2記載の手持ち式測定装置。
【請求項4】
位置測定センサ(12)が少なくとも1つの運転状態で、広帯域の無線信号(36)を発信する、請求項1から3までのいずれか1項記載の手持ち式測定装置。
【請求項5】
保護回路(18)が少なくとも1つの運転状態で、広帯域の無線信号(36)の発信に干渉する、請求項4記載の手持ち式測定装置。
【請求項6】
位置測定センサ(12)と対象物センサ(20)とが少なくとも部分的に一体に形成されている、請求項1から5までのいずれか1項記載の手持ち式測定装置。
【請求項7】
対象物センサ(20)及び/又は操作者センサ(24)が、容量式に測定するために設けられている、請求項1から6までのいずれか1項記載の手持ち式測定装置。
【請求項8】
対象物センサ(20)と操作者センサ(24)とが、少なくとも部分的に一体に形成された測定手段(38)を有している、請求項1から7までのいずれか1項記載の手持ち式測定装置。
【請求項9】
対象物センサ(20)と操作者センサ(24)とが少なくとも部分的に直列に接続されている、請求項1から8までのいずれか1項記載の手持ち式測定装置。
【請求項10】
操作者センサ(26)が、少なくとも1つの加速度を検出するために設けられている、請求項1から9までのいずれか1項記載の手持ち式測定装置。
【請求項11】
操作者センサ(26)が、少なくとも1つの速度、特に回転速度を検出するために設けられている、請求項1から10までのいずれか1項記載の手持ち式測定装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2013−514525(P2013−514525A)
【公表日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2012−543547(P2012−543547)
【出願日】平成22年10月26日(2010.10.26)
【国際出願番号】PCT/EP2010/066101
【国際公開番号】WO2011/072929
【国際公開日】平成23年6月23日(2011.6.23)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
【公表日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成22年10月26日(2010.10.26)
【国際出願番号】PCT/EP2010/066101
【国際公開番号】WO2011/072929
【国際公開日】平成23年6月23日(2011.6.23)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]