
手振り表示灯
【課題】手振り折り返し位置に達したことを確実に検出できる手振り表示灯を実現する。
【解決手段】該手振り表示灯10は、手振り折り返し位置Aの検出のために、筒体21と、その内部空間22に収容された可動部材23と、筒体21の一端側21aまたは他端21b側に配設されて可動部材23を検出する検出手段と、筒体21の他端側21bに配設された磁石26とを有し、磁石26は、その磁力で可動部材23を他端側21bに保持することができ、筒体21の他端側21bに保持された可動部材23に、筒体21の一端側21aに向けた所定の加速度が作用したときには、可動部材23が一端側21aに向かって移動して、可動部材23が一端側21aに移動してきたこと、または可動部材23が他端側21bから離脱したことを検出して、手振り表示灯10が折り返し位置Aに位置づけられたことを検出できる。
【解決手段】該手振り表示灯10は、手振り折り返し位置Aの検出のために、筒体21と、その内部空間22に収容された可動部材23と、筒体21の一端側21aまたは他端21b側に配設されて可動部材23を検出する検出手段と、筒体21の他端側21bに配設された磁石26とを有し、磁石26は、その磁力で可動部材23を他端側21bに保持することができ、筒体21の他端側21bに保持された可動部材23に、筒体21の一端側21aに向けた所定の加速度が作用したときには、可動部材23が一端側21aに向かって移動して、可動部材23が一端側21aに移動してきたこと、または可動部材23が他端側21bから離脱したことを検出して、手振り表示灯10が折り返し位置Aに位置づけられたことを検出できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、文字情報等を簡便に表示することができる手振り表示灯に関するものである。
【背景技術】
【0002】
道路工事現場等で、夜間における車両の交通整理等を行うために手振り表示灯が使用されている。手振り表示灯は、棒形状をなし、その表示部に発光ダイオード(以下、単に「LED」と表記することがある)等を配列したものであり、例えばICチップ等のメモリー手段にメモリーされた、LEDの点滅パターン情報に従って、LEDを所定の順序に点滅させることで、手振り周期と同期して、表示部の手振り領域(略扇形状の領域であり、以下、単に「表示領域」と表記することがある)に文字情報や図形情報等を表示するものである(特許文献1)。こうした手振り表示灯が、文字情報や図形情報等を表示するためには、その手振り周期、および始点を定めなければ、表示領域に文字情報や図形情報等を正確に表示することができない。
【0003】
そこで、手振り表示灯を振ったときに、手振り表示灯の軸方向に生じる遠心力の変化を加速度センサーで検出することで、手振り周期を算出するとともに、手振り方向の加速度(上記遠心力と直交する方向の加速度)を検出する手振り加速度センサーを使用して、手振り方向の反転を検出することで、手振り周期の始点を定める技術が提案された(特許文献2)。
【0004】
ここで手振り加速度センサーは、遠心力の変化を検出する加速度センサーと同様な加速度センサーであり、例えば、特許文献2に例示された加速度センサーは、発振回路を構成する鉄心コイルと、スプリングに連結された磁性体との間隔が、加速度の大小および方向によって変化して、発振周波数が変化することに着目して、加速度の変化を検出するものである。加速度センサーには、他の加速度検出原理を有するものもあるが、何れも構成が複雑であることを否めず、スプリング等の構成要素が加速度の検出結果にハンティング等を生じることもある。
【0005】
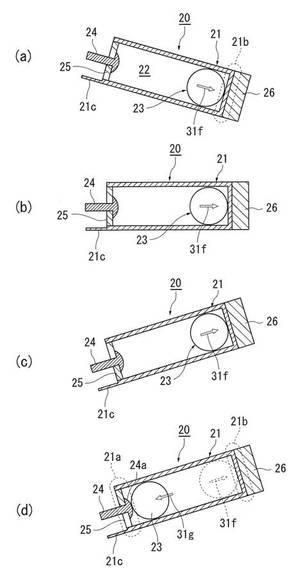
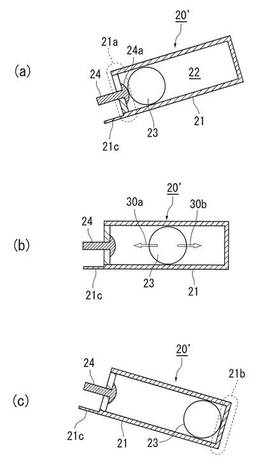
そこで、図4に示す傾斜センサー20’を用いて、手振り方向の反転を検出する手振り表示灯10が考えられる。傾斜センサー20’は、導電性を有する有底の筒体(例えば円筒形状の筒体)21と、その内部空間22に収容された球体23(磁性体で形成され且つ導電性を有した、例えば鋼鉄の球体等)と、筒体21の一端側21a(筒体21の底部端側21bと相対する開口端側)に配設された電極24を有するものである。電極24は、その一端側が接触電極24aを形成し、絶縁部材25に挿通されて、筒体21と同軸に位置づけられ、接触電極24aは、筒体21の一端側21aにおいて、筒体21の内部空間22側に位置づけられる。このように傾斜センサー20’は、加速度センサーに比べると構成が簡易で、従って安価である。
【0006】
かかる傾斜センサー20’は、筒体21を手振り表示灯10の軸と直交するようにして、図5に示すように、手振り表示灯10の先端部10bの内部に取り付けられる(ここで筒体21の一端側21aは、図5中で左側に位置づけられるとする。)。手振り表示灯10は、複数のLED(図示せず)を配列した表示部11を有しており、先端部10bと相対する端部である底端部10aと表示部11との間に把持部12が設けられている。
【0007】
手振り表示灯10は、その操作者によって手振りされ、表示領域15を形成する(図5)。ここで、手振り周期の始点は、図5中の位置Aで示す位置であり、手振り周期は、手振り表示灯10が、位置A、位置B、位置Cと振られ、そして位置C、位置B、位置Aへと振り戻されるのに要する時間である。
【0008】
図6は、傾斜センサー20’における球体23の移動の様子を説明するための図であり、球体23は、筒体21の傾斜によって作用する重力、および手振り表示灯10の手振りによって作用する加速度(図6(b)中、矢印30aまたは30b)によって、筒体21の内部を回転して移動する。
【0009】
手振り表示灯10が位置Aにあるときには、傾斜センサー20’の球体23は、筒体21の一端側21aにあって接触電極24aに当接し、その結果、電極24と筒体21の筒体電極21cの間が電気的に導通状態になる(図6(a))。
【0010】
手振り表示灯10が位置Bにあるときには、傾斜センサー20’の球体23は、電極24から離れて、例えば筒体21の略中央部近傍に位置する(図6(b))。手振り表示灯10が位置Bにあるときには、傾斜センサー20’の球体23は、底部端側21bに位置する(図6(c))。いずれの場合にも、電極24と筒体21の筒体電極21cの間は電気的に非導通状態になる。
【0011】
従って、手振り表示灯10が有する制御回路(図示せず)は、傾斜センサー20’が電極24と筒体21の筒体電極21cの間が非導通状態から導通状態に変化したことを検知すると、手振り表示灯10が位置Aの位置に到達したと判断することができる。
【0012】
しかし、球体23に作用する加速度(重力、および手振りによる加速度30a、30b)は、手振り表示灯10が位置Aに到達する前であっても、球体23に作用して、球体23を電極24に当接させることがある。そうすると、手振り表示灯10は、位置Aに到達したことを正確に検出できなくなってしまう。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開2005−230397号公報
【特許文献2】特開平06−060295号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
上記課題を解決するため本発明にかかる手振り表示灯は、簡単な構成で且つ安価に、手振り方向の反転を正確に検出することを課題としたものである。
【課題を解決するための手段】
【0015】
上記課題を解決するめ本発明にかかる手振り表示灯は、手振りによって、手振り表示灯が有する表示部が略扇形状の表示領域を移動することで形成される表示領域における手振りの折り返し点を正確に検出するための折り返し位置検出センサーを有している。
【0016】
この折り返し位置検出センサーは、筒体(例えば円筒形状の有底筒体)と、筒体の内部空間に移動可能に収容された、磁性体で形成された可動部材と、筒体の一端側または他端側に配設されて可動部材を検出する検出手段と、筒体の他端側に配設された磁石とを有している。従って、可動部材が筒体の一端側に向けて移動すると、検出手段は、可動部材が筒体の一端側に移動したこと、または可動部材が他端側を離脱したことを検出することができる。
【0017】
ところで磁石は、その磁力で可動部材を筒体の他端側に保持することができるから、こうして保持された可動部材に、筒体の一端側に向けた加速度によって、磁石の磁力よりも強い力が作用したときには、可動部材は、筒体の他端側を離脱し一端側に向けて移動する。上記加速度が、手振り表示灯の手振り方向が方向転換された時に発生する加速度であり、この加速度によって、筒体の他端側において磁力で保持されていた可動部材が、他端側から離脱して筒体の一端側に到達すれば、手振り表示灯が表示領域における折り返し点に到達したと判断することができる。
【0018】
ここで検出手段としては、例えば、光検出器がある。光検出器は、筒体の一端側または他端側において、筒体の直径方向に光路を設定したもので、発光ダイオードの光を照射して、これをフォトダイオード等の受光素子で受光するものである。筒体の一端側または他端側に可動部材が存在していれば、光路が遮られるから可動部材が筒体の一端側または他端側にあることを検出することができる。
【0019】
検出手段は、電気的接点等で構成することもできる。例えば、筒体はその全体または一部が導電性を有しており、可動部材は、少なくともその表面が導電性を有しており、検出手段は、筒体の一端側に配設され、筒体と電気的に絶縁されるとともに、筒体の内部空間に電気的接点を有して、筒体の一端側に移動してきた可動部材に電気的に接触可能な電極とを有するものである。このような検出手段は、可動部材が筒体の一端側に向かって移動して電極に当接して、筒体と電極との間が通電状態となることで、折り返し位置検出センサーが、該手振り表示灯が表示領域における折り返し点に位置づけられたことを検出することができる。
【0020】
電気的接点等で構成された検出手段は、筒体の他端側に配設されるものでもよい。この場合には、可動部材が他端側を離脱したことで、折り返し位置検出センサーが、該手振り表示灯が表示領域における折り返し点に位置づけられたことを検出することができる。
【0021】
ところで磁石は、その磁力で可動部材を筒体の他端側に保持することができるから、こうして保持された可動部材に、筒体の一端側に向けた加速度によって、磁石の磁力よりも強い力が作用したときには、可動部材は、筒体の他端側を離脱し一端側に向けて移動する。
【0022】
上記加速度が、手振り表示灯の手振り方向が方向転換された時に発生する加速度であり、この加速度によって、筒体の他端側において磁力で保持されていた可動部材が、他端側から離脱して筒体の一端側に到達すれば、手振り表示灯が表示領域における折り返し点に到達したと判断することができる。
【0023】
または、上記加速度が、手振り表示灯の手振り方向が方向転換される直前に発生する加速度であり、この加速度によって、筒体の他端側において磁力で保持されていた可動部材が、他端側から離脱すれば、または筒体の一端側に到達すれば、手振り表示灯が表示領域における折り返し点に到達すると判断することができる。
【発明の効果】
【0024】
このように本発明にかかる手振り表示灯によれば、簡単な構成の加速度センサーを用いて、安価、且つ正確に手振り方向の反転を検出することができる。
【図面の簡単な説明】
【0025】
【図1】本発明にかかる手振り表示灯の手振りを説明するための図であり(a)、また本発明にかかる手振り表示灯の概略外形斜視図である(b)。
【図2】図1に示す手振り表示灯が有する折り返し位置検出センサーの一例の断面概略構成を示す図である。
【図3】図2に示す折り返し位置検出センサーによる、折り返し位置検出を説明するための図である。
【図4】従来の手振り表示灯が有する傾斜センサーの断面概略構成を示す図である。
【図5】従来の手振り表示灯の手振りを説明するための図である。
【図6】図4に示す従来の傾斜センサーによる折り返し位置の検出を説明するための図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して、本発明にかかる手振り表示灯について説明する。なお背景技術において説明した傾斜センサー20’および手振り表示灯10と、同様の機能を有する構成要素については、同一の符号を付してそれらの説明を省略する。
【実施例】
【0027】
<手振り表示灯>
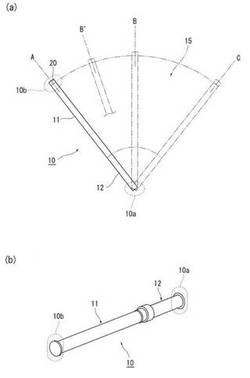
図1(a)は本発明にかかる手振り表示灯10の手振りを説明するための図であり、図1(b)は手振り表示灯10の概略外形斜視図である。手振り表示灯10は、表示部11、手振り周期に同期して発光素子の点滅を制御等するための制御部(図示せず)、把持部12、および手振りによって、表示部11が略扇形状の表示領域を移動することで形成される、表示領域15における手振りの折り返し位置Aを検出するための折り返し位置検出センサー20を有している。
【0028】
この折り返し位置検出センサー20は、手振り表示灯10の先端部10bの内部に取り付けられている。手振り表示灯10は、その底端部(一端側)10aを中心側(要側)とする略扇形状の表示領域15を手振りによって形成することができる。
【0029】
ここで折り返し位置検出センサー20は、手振り表示灯10の先端部10bに取り付けられることで、手振りで生じる加速度を最も検出しやすくなる。ただし手振りで生じる加速度を検出できればよいのであって、その取り付け位置は、手振り表示灯10の先端部10bに限定されるものではない。
【0030】
<折り返し位置検出センサー>
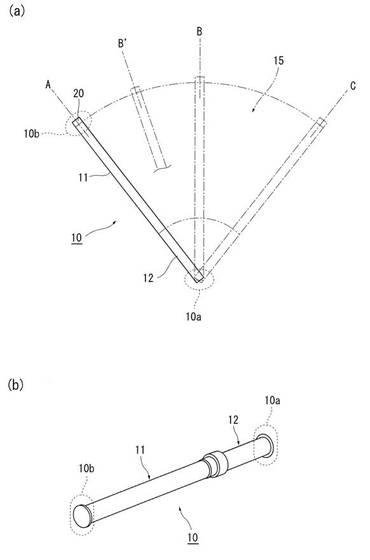
図2に概略断面構成を示す折り返し位置検出センサー20は、背景技術において説明した傾斜センサー20’に対し、筒体21の底部端側21bの軸方向外側に、さらに磁石26を固着等した点で相違する。筒体21の底部端側21bに当接した球体23には、磁石26の磁力、球体(可動部材)23の透磁率、形状等、および磁石26と球体23と間隔等で決まる力31fが作用する。
【0031】
ここで筒体21は典型的には円筒の有底筒体であり、可動部材としては、球体23が筒体21の内部を回転して移動するようになっているが、球体以外の形状を有する可動部材であってもよい。筒体21も、その内部空間22を可動部材が移動できるものであればよい。
【0032】
球体23は、その全体が導電性を有していてもよく、あるいは表面領域だけが導電性を有していてもよい。筒体21と接触電極24aに接触するのは、球体23の表面だからである。
【0033】
折り返し点検出センサー20の筒体21は、その全体が導電性を有していてもよく、または一端側21a近傍だけが導電性を有してもよい。筒体21の一端側21aに配設された電極24に当接した球体23は、筒体21の一端側21aの近傍と接触電極24aとの間介在して、両者の間を電気的に導通させるからである。もちろん筒体電極21cは筒体21の導電性を有する領域と電気的に接続されていなければならない。
【0034】
磁石26の配設位置は、筒体21の底部端側21b側であれば、筒体21の軸方向外側に限定されない。磁石26が筒体21の底部端側21bに当接した球体23を所定の力31fで保持できればよいのである。
【0035】
<手振りの折り返し点検出>
手振り表示灯10が位置A、位置B、位置Cへと振られたのちに、位置C、位置B、位置B’、位置Aへと振り戻されたとき(図1(a)参照)を例として、折り返し点の検出について説明する。
【0036】
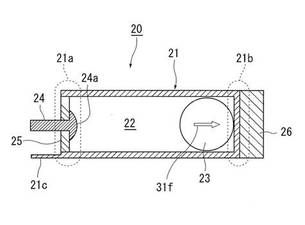
手振り表示灯10が位置Cにあるときには、折り返し位置検出センサー20の底部端側21bが一端側21aより低位にあって、球体23は、重力で底部端側21b側に回転して移動することに加えて、磁石26の力31fで底部端側21b側に保持されている(図3(a))。
【0037】
手振り表示灯10が位置Cから位置Bに移動すると、筒体21が略水平に位置づけられる。このときも、球体23は磁石による力31fで底部端側21b側に保持され続けている(図3(b))。
【0038】
手振り表示灯10が位置Bから位置B’に移動すると、折り返し位置検出センサー20では、一端側21aが底部端側21bより低位になる。このとき、球体23には、重力が作用して筒体21の一端側21aに向かう力が作用するが、磁石26による力31fがこれに勝って、球体23は底部端側21b側に保持され続ける(図3(c))。手振り表示灯10が位置Bから位置Aに向けて移動しているときも、同様にして球体23は底部端側21b側に保持され続ける。
【0039】
手振り表示灯10が位置Bから位置Aに移動したのち、位置Bへと手振り方向を転換した瞬間、手振り方向の転換による大きな加速度が球体23に作用する。この加速度によって球体23に作用する力31gが、磁石26によって球体23に作用する力31fに勝っていれば、球体23は、筒体21の底部端側21b側から離脱して、一端側21aに向かって移動して、接触電極24aに当接する(図3(d))。すると、折り返し位置検出センサー20の電極24と、筒体21の電極21cとの間が、電気的非導通状態から導通状態に変化するから、手振り表示灯10の手振り方向が転換されたことを瞬時に検出することができる。
【0040】
筒体21の一端側21aに当接した球体23は、一端側21aに向けた加速度が作用しているうちは、一端側21a側に留まり続ける(電極24と筒体21の電極21cの間の導通が維持される。)。
【0041】
筒体21の一端側21aに当接した球体23は、概ね、位置Bを位置Cに向けて通過するころに、筒体21の底部端側21b側へと回転して移動し始め、底部端側21b側に達すると、磁石26によって底部端側21b側に保持されることになる。かくして、折り返し位置検出センサー20は、簡単な構成で且つ安価に、手振り方向の反転を正確に検出することができる。
【0042】
<変形例1>
上述した折り返し位置検出センサー20は、手振り表示灯10が手振り方向を転換した瞬間に球体23に作用する大きな加速度に着目して、この加速度によって球体23に作用する力31gが、磁石26によって球体23に作用する力31fに勝るように、磁石26の磁力、球体(可動部材)23の透磁率、形状等、および磁石26と球体23と間隔等を定めたものである。
【0043】
ところで、手振り表示灯10は、方向転換する前に手振りが大きく減速して停止する。この減速時に作用する加速度で球体23に作用する力31gが、磁石26で球体23に作用する力31fに勝るように、磁石26の磁力、球体23の透磁率、形状等、および磁石26と球体23と間隔等を定めてもよい。こうすることで、折り返し位置検出センサー20は、手振りの方向転換の直前に手振りの方向転換を検出することができる。
【0044】
<変形例2>
上述した折り返し位置検出センサー20は、筒体21と、筒体21の一端側21aに配設された電極24とが、両者の間に介在する球体23によって電気的の接続されることで、折り返し位置を検出するものである。ここで電極24を筒体21の他端側21bに配設してもよい。この様な折り返し位置検出センサーでは、球体23が筒体21bの他端側21bを離脱したときに(筒体21と電極24との間が電気的に非導通となったときに)、手振り表示灯10が表示領域15における折り返し点Aに位置づけられたと判断することができる。ただし折り返し位置検出センサーは、電気的接続の有無によって可動部材の移動を検出するものに限定されない。
【0045】
例えば、筒体の一端側または他端側において、筒体の直径方向に発光ダイオードの光を照射して、これをフォトダイオード等の受光素子で受光するものであってもよい。この様な光検出器であれば、筒体の一端側または他端側に可動部材が存在していれば、光路が遮られるから可動部材が筒体の一端側にあること、または可動部材が他端側から離脱したことを検出することができる。
【0046】
可動部材が筒体の一端側に当接したときに発生する音を検出するものであってもよい。さらに、筒体の一端側または他端側にホール素子を配設したものであってもよい。この様な検出器であれば、筒体の一端側または他端側に磁性体の可動部材が存在しているか否かによって生じる磁界の変化を検出することで、可動部材が筒体の一端側にあること、または可動部材が他端側から離脱したことを検出することができる。
【0047】
このように、折り返し位置検出センサーは、可動部材が筒体の一端側または他端側の存在または離脱したことを検出することができるものであればよいのである。
【0048】
なお本発明にかかる手振り表示灯は、上記実施例に限定されるものではなく、その趣旨を変更することなく、適宜変形して実施することができる。
【産業上の利用可能性】
【0049】
本発明にかかる手振り信号灯は、工業的に製造できるから、また商業的に販売等できるから、本発明は経済的価値を有して産業上利用することができる発明である。
【符号の説明】
【0050】
10 手振り表示灯
11 表示部
15 扇形状の表示領域
20 折り返し位置検出センサー
21 筒体
21a 筒体の一端側
21b 筒体の他端側(底部端側)
22 筒体の内部空間
23 球体(可動部材)
24 電極
26 磁石
31g 力(筒体の一端側に向けた所定の加速度で可動部材に作用する力)
【技術分野】
【0001】
本発明は、文字情報等を簡便に表示することができる手振り表示灯に関するものである。
【背景技術】
【0002】
道路工事現場等で、夜間における車両の交通整理等を行うために手振り表示灯が使用されている。手振り表示灯は、棒形状をなし、その表示部に発光ダイオード(以下、単に「LED」と表記することがある)等を配列したものであり、例えばICチップ等のメモリー手段にメモリーされた、LEDの点滅パターン情報に従って、LEDを所定の順序に点滅させることで、手振り周期と同期して、表示部の手振り領域(略扇形状の領域であり、以下、単に「表示領域」と表記することがある)に文字情報や図形情報等を表示するものである(特許文献1)。こうした手振り表示灯が、文字情報や図形情報等を表示するためには、その手振り周期、および始点を定めなければ、表示領域に文字情報や図形情報等を正確に表示することができない。
【0003】
そこで、手振り表示灯を振ったときに、手振り表示灯の軸方向に生じる遠心力の変化を加速度センサーで検出することで、手振り周期を算出するとともに、手振り方向の加速度(上記遠心力と直交する方向の加速度)を検出する手振り加速度センサーを使用して、手振り方向の反転を検出することで、手振り周期の始点を定める技術が提案された(特許文献2)。
【0004】
ここで手振り加速度センサーは、遠心力の変化を検出する加速度センサーと同様な加速度センサーであり、例えば、特許文献2に例示された加速度センサーは、発振回路を構成する鉄心コイルと、スプリングに連結された磁性体との間隔が、加速度の大小および方向によって変化して、発振周波数が変化することに着目して、加速度の変化を検出するものである。加速度センサーには、他の加速度検出原理を有するものもあるが、何れも構成が複雑であることを否めず、スプリング等の構成要素が加速度の検出結果にハンティング等を生じることもある。
【0005】
そこで、図4に示す傾斜センサー20’を用いて、手振り方向の反転を検出する手振り表示灯10が考えられる。傾斜センサー20’は、導電性を有する有底の筒体(例えば円筒形状の筒体)21と、その内部空間22に収容された球体23(磁性体で形成され且つ導電性を有した、例えば鋼鉄の球体等)と、筒体21の一端側21a(筒体21の底部端側21bと相対する開口端側)に配設された電極24を有するものである。電極24は、その一端側が接触電極24aを形成し、絶縁部材25に挿通されて、筒体21と同軸に位置づけられ、接触電極24aは、筒体21の一端側21aにおいて、筒体21の内部空間22側に位置づけられる。このように傾斜センサー20’は、加速度センサーに比べると構成が簡易で、従って安価である。
【0006】
かかる傾斜センサー20’は、筒体21を手振り表示灯10の軸と直交するようにして、図5に示すように、手振り表示灯10の先端部10bの内部に取り付けられる(ここで筒体21の一端側21aは、図5中で左側に位置づけられるとする。)。手振り表示灯10は、複数のLED(図示せず)を配列した表示部11を有しており、先端部10bと相対する端部である底端部10aと表示部11との間に把持部12が設けられている。
【0007】
手振り表示灯10は、その操作者によって手振りされ、表示領域15を形成する(図5)。ここで、手振り周期の始点は、図5中の位置Aで示す位置であり、手振り周期は、手振り表示灯10が、位置A、位置B、位置Cと振られ、そして位置C、位置B、位置Aへと振り戻されるのに要する時間である。
【0008】
図6は、傾斜センサー20’における球体23の移動の様子を説明するための図であり、球体23は、筒体21の傾斜によって作用する重力、および手振り表示灯10の手振りによって作用する加速度(図6(b)中、矢印30aまたは30b)によって、筒体21の内部を回転して移動する。
【0009】
手振り表示灯10が位置Aにあるときには、傾斜センサー20’の球体23は、筒体21の一端側21aにあって接触電極24aに当接し、その結果、電極24と筒体21の筒体電極21cの間が電気的に導通状態になる(図6(a))。
【0010】
手振り表示灯10が位置Bにあるときには、傾斜センサー20’の球体23は、電極24から離れて、例えば筒体21の略中央部近傍に位置する(図6(b))。手振り表示灯10が位置Bにあるときには、傾斜センサー20’の球体23は、底部端側21bに位置する(図6(c))。いずれの場合にも、電極24と筒体21の筒体電極21cの間は電気的に非導通状態になる。
【0011】
従って、手振り表示灯10が有する制御回路(図示せず)は、傾斜センサー20’が電極24と筒体21の筒体電極21cの間が非導通状態から導通状態に変化したことを検知すると、手振り表示灯10が位置Aの位置に到達したと判断することができる。
【0012】
しかし、球体23に作用する加速度(重力、および手振りによる加速度30a、30b)は、手振り表示灯10が位置Aに到達する前であっても、球体23に作用して、球体23を電極24に当接させることがある。そうすると、手振り表示灯10は、位置Aに到達したことを正確に検出できなくなってしまう。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開2005−230397号公報
【特許文献2】特開平06−060295号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
上記課題を解決するため本発明にかかる手振り表示灯は、簡単な構成で且つ安価に、手振り方向の反転を正確に検出することを課題としたものである。
【課題を解決するための手段】
【0015】
上記課題を解決するめ本発明にかかる手振り表示灯は、手振りによって、手振り表示灯が有する表示部が略扇形状の表示領域を移動することで形成される表示領域における手振りの折り返し点を正確に検出するための折り返し位置検出センサーを有している。
【0016】
この折り返し位置検出センサーは、筒体(例えば円筒形状の有底筒体)と、筒体の内部空間に移動可能に収容された、磁性体で形成された可動部材と、筒体の一端側または他端側に配設されて可動部材を検出する検出手段と、筒体の他端側に配設された磁石とを有している。従って、可動部材が筒体の一端側に向けて移動すると、検出手段は、可動部材が筒体の一端側に移動したこと、または可動部材が他端側を離脱したことを検出することができる。
【0017】
ところで磁石は、その磁力で可動部材を筒体の他端側に保持することができるから、こうして保持された可動部材に、筒体の一端側に向けた加速度によって、磁石の磁力よりも強い力が作用したときには、可動部材は、筒体の他端側を離脱し一端側に向けて移動する。上記加速度が、手振り表示灯の手振り方向が方向転換された時に発生する加速度であり、この加速度によって、筒体の他端側において磁力で保持されていた可動部材が、他端側から離脱して筒体の一端側に到達すれば、手振り表示灯が表示領域における折り返し点に到達したと判断することができる。
【0018】
ここで検出手段としては、例えば、光検出器がある。光検出器は、筒体の一端側または他端側において、筒体の直径方向に光路を設定したもので、発光ダイオードの光を照射して、これをフォトダイオード等の受光素子で受光するものである。筒体の一端側または他端側に可動部材が存在していれば、光路が遮られるから可動部材が筒体の一端側または他端側にあることを検出することができる。
【0019】
検出手段は、電気的接点等で構成することもできる。例えば、筒体はその全体または一部が導電性を有しており、可動部材は、少なくともその表面が導電性を有しており、検出手段は、筒体の一端側に配設され、筒体と電気的に絶縁されるとともに、筒体の内部空間に電気的接点を有して、筒体の一端側に移動してきた可動部材に電気的に接触可能な電極とを有するものである。このような検出手段は、可動部材が筒体の一端側に向かって移動して電極に当接して、筒体と電極との間が通電状態となることで、折り返し位置検出センサーが、該手振り表示灯が表示領域における折り返し点に位置づけられたことを検出することができる。
【0020】
電気的接点等で構成された検出手段は、筒体の他端側に配設されるものでもよい。この場合には、可動部材が他端側を離脱したことで、折り返し位置検出センサーが、該手振り表示灯が表示領域における折り返し点に位置づけられたことを検出することができる。
【0021】
ところで磁石は、その磁力で可動部材を筒体の他端側に保持することができるから、こうして保持された可動部材に、筒体の一端側に向けた加速度によって、磁石の磁力よりも強い力が作用したときには、可動部材は、筒体の他端側を離脱し一端側に向けて移動する。
【0022】
上記加速度が、手振り表示灯の手振り方向が方向転換された時に発生する加速度であり、この加速度によって、筒体の他端側において磁力で保持されていた可動部材が、他端側から離脱して筒体の一端側に到達すれば、手振り表示灯が表示領域における折り返し点に到達したと判断することができる。
【0023】
または、上記加速度が、手振り表示灯の手振り方向が方向転換される直前に発生する加速度であり、この加速度によって、筒体の他端側において磁力で保持されていた可動部材が、他端側から離脱すれば、または筒体の一端側に到達すれば、手振り表示灯が表示領域における折り返し点に到達すると判断することができる。
【発明の効果】
【0024】
このように本発明にかかる手振り表示灯によれば、簡単な構成の加速度センサーを用いて、安価、且つ正確に手振り方向の反転を検出することができる。
【図面の簡単な説明】
【0025】
【図1】本発明にかかる手振り表示灯の手振りを説明するための図であり(a)、また本発明にかかる手振り表示灯の概略外形斜視図である(b)。
【図2】図1に示す手振り表示灯が有する折り返し位置検出センサーの一例の断面概略構成を示す図である。
【図3】図2に示す折り返し位置検出センサーによる、折り返し位置検出を説明するための図である。
【図4】従来の手振り表示灯が有する傾斜センサーの断面概略構成を示す図である。
【図5】従来の手振り表示灯の手振りを説明するための図である。
【図6】図4に示す従来の傾斜センサーによる折り返し位置の検出を説明するための図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して、本発明にかかる手振り表示灯について説明する。なお背景技術において説明した傾斜センサー20’および手振り表示灯10と、同様の機能を有する構成要素については、同一の符号を付してそれらの説明を省略する。
【実施例】
【0027】
<手振り表示灯>
図1(a)は本発明にかかる手振り表示灯10の手振りを説明するための図であり、図1(b)は手振り表示灯10の概略外形斜視図である。手振り表示灯10は、表示部11、手振り周期に同期して発光素子の点滅を制御等するための制御部(図示せず)、把持部12、および手振りによって、表示部11が略扇形状の表示領域を移動することで形成される、表示領域15における手振りの折り返し位置Aを検出するための折り返し位置検出センサー20を有している。
【0028】
この折り返し位置検出センサー20は、手振り表示灯10の先端部10bの内部に取り付けられている。手振り表示灯10は、その底端部(一端側)10aを中心側(要側)とする略扇形状の表示領域15を手振りによって形成することができる。
【0029】
ここで折り返し位置検出センサー20は、手振り表示灯10の先端部10bに取り付けられることで、手振りで生じる加速度を最も検出しやすくなる。ただし手振りで生じる加速度を検出できればよいのであって、その取り付け位置は、手振り表示灯10の先端部10bに限定されるものではない。
【0030】
<折り返し位置検出センサー>
図2に概略断面構成を示す折り返し位置検出センサー20は、背景技術において説明した傾斜センサー20’に対し、筒体21の底部端側21bの軸方向外側に、さらに磁石26を固着等した点で相違する。筒体21の底部端側21bに当接した球体23には、磁石26の磁力、球体(可動部材)23の透磁率、形状等、および磁石26と球体23と間隔等で決まる力31fが作用する。
【0031】
ここで筒体21は典型的には円筒の有底筒体であり、可動部材としては、球体23が筒体21の内部を回転して移動するようになっているが、球体以外の形状を有する可動部材であってもよい。筒体21も、その内部空間22を可動部材が移動できるものであればよい。
【0032】
球体23は、その全体が導電性を有していてもよく、あるいは表面領域だけが導電性を有していてもよい。筒体21と接触電極24aに接触するのは、球体23の表面だからである。
【0033】
折り返し点検出センサー20の筒体21は、その全体が導電性を有していてもよく、または一端側21a近傍だけが導電性を有してもよい。筒体21の一端側21aに配設された電極24に当接した球体23は、筒体21の一端側21aの近傍と接触電極24aとの間介在して、両者の間を電気的に導通させるからである。もちろん筒体電極21cは筒体21の導電性を有する領域と電気的に接続されていなければならない。
【0034】
磁石26の配設位置は、筒体21の底部端側21b側であれば、筒体21の軸方向外側に限定されない。磁石26が筒体21の底部端側21bに当接した球体23を所定の力31fで保持できればよいのである。
【0035】
<手振りの折り返し点検出>
手振り表示灯10が位置A、位置B、位置Cへと振られたのちに、位置C、位置B、位置B’、位置Aへと振り戻されたとき(図1(a)参照)を例として、折り返し点の検出について説明する。
【0036】
手振り表示灯10が位置Cにあるときには、折り返し位置検出センサー20の底部端側21bが一端側21aより低位にあって、球体23は、重力で底部端側21b側に回転して移動することに加えて、磁石26の力31fで底部端側21b側に保持されている(図3(a))。
【0037】
手振り表示灯10が位置Cから位置Bに移動すると、筒体21が略水平に位置づけられる。このときも、球体23は磁石による力31fで底部端側21b側に保持され続けている(図3(b))。
【0038】
手振り表示灯10が位置Bから位置B’に移動すると、折り返し位置検出センサー20では、一端側21aが底部端側21bより低位になる。このとき、球体23には、重力が作用して筒体21の一端側21aに向かう力が作用するが、磁石26による力31fがこれに勝って、球体23は底部端側21b側に保持され続ける(図3(c))。手振り表示灯10が位置Bから位置Aに向けて移動しているときも、同様にして球体23は底部端側21b側に保持され続ける。
【0039】
手振り表示灯10が位置Bから位置Aに移動したのち、位置Bへと手振り方向を転換した瞬間、手振り方向の転換による大きな加速度が球体23に作用する。この加速度によって球体23に作用する力31gが、磁石26によって球体23に作用する力31fに勝っていれば、球体23は、筒体21の底部端側21b側から離脱して、一端側21aに向かって移動して、接触電極24aに当接する(図3(d))。すると、折り返し位置検出センサー20の電極24と、筒体21の電極21cとの間が、電気的非導通状態から導通状態に変化するから、手振り表示灯10の手振り方向が転換されたことを瞬時に検出することができる。
【0040】
筒体21の一端側21aに当接した球体23は、一端側21aに向けた加速度が作用しているうちは、一端側21a側に留まり続ける(電極24と筒体21の電極21cの間の導通が維持される。)。
【0041】
筒体21の一端側21aに当接した球体23は、概ね、位置Bを位置Cに向けて通過するころに、筒体21の底部端側21b側へと回転して移動し始め、底部端側21b側に達すると、磁石26によって底部端側21b側に保持されることになる。かくして、折り返し位置検出センサー20は、簡単な構成で且つ安価に、手振り方向の反転を正確に検出することができる。
【0042】
<変形例1>
上述した折り返し位置検出センサー20は、手振り表示灯10が手振り方向を転換した瞬間に球体23に作用する大きな加速度に着目して、この加速度によって球体23に作用する力31gが、磁石26によって球体23に作用する力31fに勝るように、磁石26の磁力、球体(可動部材)23の透磁率、形状等、および磁石26と球体23と間隔等を定めたものである。
【0043】
ところで、手振り表示灯10は、方向転換する前に手振りが大きく減速して停止する。この減速時に作用する加速度で球体23に作用する力31gが、磁石26で球体23に作用する力31fに勝るように、磁石26の磁力、球体23の透磁率、形状等、および磁石26と球体23と間隔等を定めてもよい。こうすることで、折り返し位置検出センサー20は、手振りの方向転換の直前に手振りの方向転換を検出することができる。
【0044】
<変形例2>
上述した折り返し位置検出センサー20は、筒体21と、筒体21の一端側21aに配設された電極24とが、両者の間に介在する球体23によって電気的の接続されることで、折り返し位置を検出するものである。ここで電極24を筒体21の他端側21bに配設してもよい。この様な折り返し位置検出センサーでは、球体23が筒体21bの他端側21bを離脱したときに(筒体21と電極24との間が電気的に非導通となったときに)、手振り表示灯10が表示領域15における折り返し点Aに位置づけられたと判断することができる。ただし折り返し位置検出センサーは、電気的接続の有無によって可動部材の移動を検出するものに限定されない。
【0045】
例えば、筒体の一端側または他端側において、筒体の直径方向に発光ダイオードの光を照射して、これをフォトダイオード等の受光素子で受光するものであってもよい。この様な光検出器であれば、筒体の一端側または他端側に可動部材が存在していれば、光路が遮られるから可動部材が筒体の一端側にあること、または可動部材が他端側から離脱したことを検出することができる。
【0046】
可動部材が筒体の一端側に当接したときに発生する音を検出するものであってもよい。さらに、筒体の一端側または他端側にホール素子を配設したものであってもよい。この様な検出器であれば、筒体の一端側または他端側に磁性体の可動部材が存在しているか否かによって生じる磁界の変化を検出することで、可動部材が筒体の一端側にあること、または可動部材が他端側から離脱したことを検出することができる。
【0047】
このように、折り返し位置検出センサーは、可動部材が筒体の一端側または他端側の存在または離脱したことを検出することができるものであればよいのである。
【0048】
なお本発明にかかる手振り表示灯は、上記実施例に限定されるものではなく、その趣旨を変更することなく、適宜変形して実施することができる。
【産業上の利用可能性】
【0049】
本発明にかかる手振り信号灯は、工業的に製造できるから、また商業的に販売等できるから、本発明は経済的価値を有して産業上利用することができる発明である。
【符号の説明】
【0050】
10 手振り表示灯
11 表示部
15 扇形状の表示領域
20 折り返し位置検出センサー
21 筒体
21a 筒体の一端側
21b 筒体の他端側(底部端側)
22 筒体の内部空間
23 球体(可動部材)
24 電極
26 磁石
31g 力(筒体の一端側に向けた所定の加速度で可動部材に作用する力)
【特許請求の範囲】
【請求項1】
棒形状をなし、前記棒形状の一端側を中心側とする略扇形状の表示領域を手振りによって形成することができ、前記表示領域に、人間の視覚によって認識できる2次元情報を表示することができる手振り表示灯であって、
該手振り表示灯は、その軸方向に複数の発光素子が配列された前記表示部と、手振り周期に同期して発光素子の点滅を制御する制御部と、前記表示領域における手振りの折り返し点を検出するための折り返し位置検出センサーとを有しており、
前記折り返し位置検出センサーは、筒体と、前記筒体の内部空間に移動可能に収容された、磁性体で形成された可動部材と、前記筒体の一端側または他端側に配設されて前記可動部材を検出する検出手段と、前記筒体の他端側に配設された磁石とを有し、
前記磁石は、その磁力で前記可動部材を前記筒体の他端側に保持することができ、前記筒体の他端側に保持された前記可動部材に、前記筒体の一端側に向けた所定の加速度が作用したときには、前記可動部材が前記筒体の一端側に向かって移動して、
前記検出手段が、前記可動部材が前記筒体の一端側に移動してきたこと、または前記可動部材が前記筒体の他端側から離脱したことを検出することで、
前記折り返し位置検出センサーが、該手振り表示灯が前記表示領域における折り返し点に位置づけられたことを検出できることを特徴とする手振り表示灯。
【請求項2】
前記筒体は、その全体または一部が導電性を有しており、
前記可動部材は、少なくともその表面が導電性を有しており、
前記検出手段は、前記筒体の一端側または他端側に配設され、前記筒体と電気的に絶縁されるとともに、前記筒体の内部空間に電気的接点を有して、前記筒体の一端側または他端側に移動してきた前記可動部材に電気的に接触可能な電極とを有し、
前記可動部材が前記筒体の一端側に向かって移動して前記電極に当接して、前記筒体と前記電極との間が通電状態となることで、
または前記可動部材が前記筒体の他端側から離脱して、前記筒体と前記電極との間が非通電状態となることで、
前記折り返し位置検出センサーが、該手振り表示灯が前記表示領域における折り返し点に位置づけられたことを検出できることを特徴とする請求項1に記載の手振り表示灯。
【請求項3】
前記所定の加速度は、該手振り表示灯の手振り方向が方向転換された時、または該手振り表示灯の手振り方向が方向転換される直前に発生する加速度であることを特徴とする請求項1または2に記載の手振り表示灯。
【請求項1】
棒形状をなし、前記棒形状の一端側を中心側とする略扇形状の表示領域を手振りによって形成することができ、前記表示領域に、人間の視覚によって認識できる2次元情報を表示することができる手振り表示灯であって、
該手振り表示灯は、その軸方向に複数の発光素子が配列された前記表示部と、手振り周期に同期して発光素子の点滅を制御する制御部と、前記表示領域における手振りの折り返し点を検出するための折り返し位置検出センサーとを有しており、
前記折り返し位置検出センサーは、筒体と、前記筒体の内部空間に移動可能に収容された、磁性体で形成された可動部材と、前記筒体の一端側または他端側に配設されて前記可動部材を検出する検出手段と、前記筒体の他端側に配設された磁石とを有し、
前記磁石は、その磁力で前記可動部材を前記筒体の他端側に保持することができ、前記筒体の他端側に保持された前記可動部材に、前記筒体の一端側に向けた所定の加速度が作用したときには、前記可動部材が前記筒体の一端側に向かって移動して、
前記検出手段が、前記可動部材が前記筒体の一端側に移動してきたこと、または前記可動部材が前記筒体の他端側から離脱したことを検出することで、
前記折り返し位置検出センサーが、該手振り表示灯が前記表示領域における折り返し点に位置づけられたことを検出できることを特徴とする手振り表示灯。
【請求項2】
前記筒体は、その全体または一部が導電性を有しており、
前記可動部材は、少なくともその表面が導電性を有しており、
前記検出手段は、前記筒体の一端側または他端側に配設され、前記筒体と電気的に絶縁されるとともに、前記筒体の内部空間に電気的接点を有して、前記筒体の一端側または他端側に移動してきた前記可動部材に電気的に接触可能な電極とを有し、
前記可動部材が前記筒体の一端側に向かって移動して前記電極に当接して、前記筒体と前記電極との間が通電状態となることで、
または前記可動部材が前記筒体の他端側から離脱して、前記筒体と前記電極との間が非通電状態となることで、
前記折り返し位置検出センサーが、該手振り表示灯が前記表示領域における折り返し点に位置づけられたことを検出できることを特徴とする請求項1に記載の手振り表示灯。
【請求項3】
前記所定の加速度は、該手振り表示灯の手振り方向が方向転換された時、または該手振り表示灯の手振り方向が方向転換される直前に発生する加速度であることを特徴とする請求項1または2に記載の手振り表示灯。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−12367(P2013−12367A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143719(P2011−143719)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(594032540)株式会社市川精機 (3)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(594032540)株式会社市川精機 (3)
【Fターム(参考)】
[ Back to top ]