
手術支援システム
【課題】 コンピュータ/ロボットシステムによる手術の場合、手術対象の生体組織の特性を考慮して切除工具の最適な送り速度を算出して手術器械に出力する。
【解決手段】 自動制御される手術器械のアームに取り付けられる手術用工具で生体組織を手術する手術支援システムにおいて、手術対象となる生体組織から得た医用画像データを蓄積してボクセル化する手段と、生体組織の形状から手術個所を設定する手段と、手術個所を手術するために工具が進む工具経路を計算する手段と、工具とボクセルとの干渉領域を判定する手段と、この干渉領域における生体組織の硬さを決定する手段と、この硬さに対応した工具の最適な送り速度を計算する手段と、当該計算で得た送り速度を手術器械に出力する手段とを備える。
【解決手段】 自動制御される手術器械のアームに取り付けられる手術用工具で生体組織を手術する手術支援システムにおいて、手術対象となる生体組織から得た医用画像データを蓄積してボクセル化する手段と、生体組織の形状から手術個所を設定する手段と、手術個所を手術するために工具が進む工具経路を計算する手段と、工具とボクセルとの干渉領域を判定する手段と、この干渉領域における生体組織の硬さを決定する手段と、この硬さに対応した工具の最適な送り速度を計算する手段と、当該計算で得た送り速度を手術器械に出力する手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人工関節の置換等に際して生体組織をコンピユータ/ロボットシステムによる手術器械で手術する場合に工具の送り速度を最適化し、低侵襲化や手術時間の短縮化を実現する手術支援システムに関するものである。
【背景技術】
【0002】
近年、人工関節等のインプラント構成部品及び生体組織の負荷低減による体内寿命の向上を目指した手術の高精度化、更には小さい傷(低侵襲)で済む手術によって患者の負担軽減と早期回復を目的として、コンピュータ/ロボットシステムによる手術器械、すなわち、手術ロボットが適用されている。例えば、人工関節置換術においては、人工関節を設置するための骨の手術(以下、切除)を正確に行うため、下記特許文献1に例示されるような手術器械のアームに手術用工具(以下、工具)が装着された装置を用い、この工具を自動制御して対象骨を人工関節の設置面形状に適合するように切除するといったことが行われている。
【0003】
生体組織を術前計画に基づいて正確に切除するには、通常の工作機械で加工される機械部品等の加工物と同様に工具と加工物の相対位置関係を維持することが重要である。一般的な金属材料では、材料剛性が高いために工作機械のテーブルに対して剛直な固定(クランプ)が可能である。しかし、生体組織は金属材料に比して材料剛性が極端に低いために剛直な固定が困難である。例えば、骨組織の場合、皮膚や筋組織より剛性は高いものの、通常、手術対象部位以外の骨周囲は軟組織に囲まれているため、骨を固定具で直接把持して固定できる状況は限られている。
【0004】
また、最近では、患者の肉体的負担軽減と術後の早期回復を目的とした低侵襲手術が行われているが、このような手術では、患部である骨を直接把持できる場合は更に狭まる。このため、下記特許文献2で見られるような軟組織上から骨を固定する固定具が提案されているが、これに依ったとしても、機械加工における加工物のように強固な固定力は得られない。
【0005】
さらに、患者の肉体的負担軽減のためには手術時間の短縮は重要であるが、これを実現するためには、骨の切除時間の短縮を目的として工具の切込み量を含めて送り速度を速くすることが考えられる。しかし、送り速度を早くすると、切除負荷が増加することから、工具と生体組織の相対位置関係を維持するために要求される患部固定力はより一層高くすることが要求される。しかし、生体組織における患部固定力には限界があるのは上記したとおりである。このように、正確な生体組織の切除と低侵襲化及び手術時間短縮化を満たすには、切除負荷を一定値以下に設定した上での切除が要求されることとなる。
【0006】
特に、骨組織では表面の硬い皮質骨と内部の海綿骨が傾斜的な構造を呈している関係で、切除中の切除負荷の変動が大きい。このため、切除負荷が大きな部位では、患部及び工具を把持する手術器械のアームに振動を引き起すとともに、生体組織の変位も生じさせる。このアームの振動及び生体組織の変位を抑制するため、切除中の工具に作用する切除反力を力センサで計測して力帰還による実時間での送り速度を制御する方法がある。しかし、力を検出してからの送り速度制御では固定力の確保が困難な生体組織の切除系では正確な制御が難しく、結果的に切除負荷による生体組織の変位を引き起こして手術精度の低下をもたらす。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−306500号公報
【特許文献2】特開2007−202950号公報
【特許文献3】特開2008−146457号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
そこで、本発明は、切除領域である生体組織の傾斜的材料特性を含む様々な特性を考慮し、切除負荷を規定値以下とするとともに、その場合の最適な送り速度を具現することで、正確な生体組織切除と低侵襲化及び手術時間短縮化を実現したものである。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明は、請求項1に記載した、自動制御される手術器械のアームに取り付けられる手術用工具で生体組織を手術する手術支援システムにおいて、手術対象となる生体組織から得た医用画像データを蓄積してボクセル化する手段と、生体組織の形状を含む特性から手術個所を設定する手段と、手術個所を手術するために工具が進む工具経路を計算する手段と、工具とボクセルとの干渉領域を判定する手段と、この干渉領域における生体組織の硬さを決定する手段と、この硬さに対応した工具の最適な送り速度を計算する手段と、当該計算で得た送り速度を手術器械に出力する手段とを備えることを特徴とする手術支援システムを提供したものである。
【0010】
また、本発明は、以上の手術支援システムにおいて、請求項2に記載した、医用画像における画像輝度値から硬さを推定するとともに、この推定した硬さを基に送り速度が計算される手段、請求項3に記載した、工具に作用する切除反力を実時間計測し、力帰還によって切除反力に対応した送り速度が計算される手段を提供する。
【発明の効果】
【0011】
請求項1の発明によると、生体組織の硬さを事前に予測して送り速度の制御を行うことになり、生体組織に一定値以上の切除負荷が作用しないため、切除中の振動及び生体組織変位の低減が可能となる。したがって、最適な送り速度で切除できることになり、正確な切除はもちろんのこと、手術の低侵襲化、短時間化が可能になる。請求項2の手段によると、骨の硬さを簡単な方法で予測できるし、請求項3の手段によると、付加的な力帰還情報による送り速度の制御が可能になり、工具経路と実空間での生体組織位置のずれの基になる過度な切除負荷の増加を抑制し、安全、かつ、正確な生体組織の切除を実現する。
【図面の簡単な説明】
【0012】
【図1】手術支援システムの説明図である。
【図2】手術支援システムのハードウエアの構成図である。
【図3】レジストレーションの概念図である。
【図4】工具の要素分割と干渉判定に関する概念図である。
【図5】工具進路及び工具姿勢情報の例示図である。
【図6】切除領域に対応する工具の有限要素を抽出を例示する説明図である。
【図7】手術支援システムのを実行するためのNCコードを例示した説明図である。
【発明を実施するための形態】
【0013】
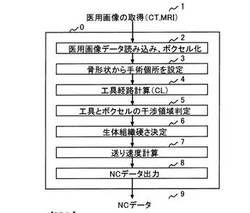
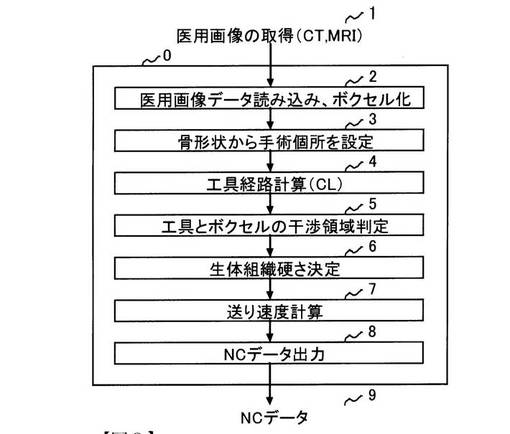
以下、本発明の実施の形態を、手術個所である生体組織として人工膝関節置換のための骨、すなわち、大腿骨及び脛骨の切除を例にとって説明する。図1は本発明を構成する各手段のブロック図であり、本発明では、膝周辺の生体組織(以下では骨という)から医用画像を取得する手段1と、取得した医用画像を蓄積してボクセル化する手段2と、骨の形状から手術個所を設定する手段3と、手術個所を切除するために工具が進む工具経路を計算する手段4と、工具とボクセルとの干渉領域を判定する手段5と、この干渉領域における生体組織の硬さを決定する手段6と、この硬さに対応した工具の最適な送り速度を計算する手段7と、当該計算で得た送り速度をNCデータ9として手術器械に出力する手段8とを有しており、これらで手術支援装置(以下、支援装置)10を構成している。
【0014】
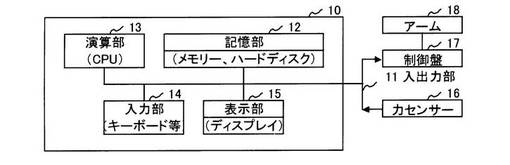
支援装置10の主体はコンピュータであり、外部からの情報取得及び外部への出力手段である入出力部11(一般的にはCD−ROMやDVDドライブ又はLAN等、実時間出力の場合にはLANを使用する)、外部からの取得情報や内部で計算される情報及び計算用のプログラムが格納される記憶部12[ROM(Read Only Memory) 、RAM(Random Access Memory) 、OS(Operation System) 又はOS相当のプログラムが格納されたハードディスク]及び内部計算情報とプログラムによって計算を行う演算部13(Central Processing Unit)、規定値等を設定する入力部14(キーボードやマウス等のデバイス)、情報を表示する表示部15(ディスプレー)で構成される。
【0015】
そして、情報の格納は記憶部12で行い(ROM又はRAMに格納される情報量が膨大な場合には、ハードディスクに格納される場合もある)、計算は記憶部12に格納されるプログラムにより演算部13で行い、骨の硬さ等による切除負荷の設定値(規定値)や種々の指令の入力は入力部14から行い、外部から取得される情報及び外部に出力される情報は入出力部11から行うものとして上記の各手段について説明する。
【0016】
まず、切除対象となる骨の医用画像データを蓄積してボクセル化する手段2について説明する。本例では、医用画像としてDICOM(Digital Imaging and Communication in Medicine)形式のCT(Computered Tomography) マルチスライスデータを使用するが、DICOMデータには画像スライス位置とピクセルサイズ及び画像厚さデータが格納されている。そこで、図3に示すようにDICOMデータ内で定義されるピクセルサイズdと画像厚さtを基準とする立体的なボクセルデータを作成する。ボクセルデータ内の各ボクセル要素に対してボクセル要素の中心位置と画像輝度値(本例では、後述するCT値を採用)が記憶部12に格納される。
【0017】
CT撮影による断層画像のスライス間隔とボクセルの厚みとの関係でスライス間に隙間ができる場合があるが、この場合は、この隙間の部分のボクセル要素を補間する。この補間には線形補間法があり、隣接するボクセル要素をスライス間に線形で挿入することで実際に即したボクセルデータが得られる。なお、スライス間補間は種々の原理に基づく非線形補間法でもよい。逆に、断層画像間がオーバーラップする場合には、隣接する各ボクセル要素をオーバーラップ分だけ減弱する。さらに、本例では、CT画像を使用しているが、MRI (Magnetic Resonance Imaging system)の断層画像データであっても差し支えない。医用画像の撮影領域は、工具による切除領域を十分に含んだものになっている。
【0018】
次に、骨の形状から切除面を設定する手段3について説明する。最初に、切除対象となる手術個所、つまり、骨の形状情報を取得する。本例では、人工膝関節置換術を対象としているため、骨(大腿骨と脛骨)形状をCT画像によるボクセルデータから抽出し、その形状データを参照して人工関節の設置位置を決定する。本例では、ボクセルデータの輝度値に基づいて特定の輝度値の範囲にあるボクセルデータ要素を骨組織として認識させ、マーチング・キューブ法により骨表面形状を構築する。この骨表面形状を参照して人工関節の設置位置を決定することで、骨表面形状データに対する人工関節の設置面位置(言い換えると、骨に対する切除位置)が確定、数値化される。
【0019】
なお、上記の骨表面形状は記憶部12に格納されるボクセルデータを使用して演算部13で構築され、表示部15に骨形状として表示される。また、人工関節の形状データも同様に記憶部12に格納されており、表示部15に骨表面形状とともに人工関節形状及び位置が表示される。人工関節位置は、入力部14による入力値により調整され、表示部15に表示される骨表面形状と人工関節形状を対比しながら医師の判断で人工関節位置を決定する。
【0020】
ここで、上記の骨表面形状の構築及び人工関節の位置等の指定は、汎用コンピュータを使用してDICOMビューア(例えば、Materialize 社のソフトウエアMimics) 等で行うことも可能である。この場合には、骨表面形状データ及び数値化された切除位置情報等は、入出力部11から転送され、記憶部12に格納される。また、取得される骨表面形状データ及び人工関節形状データの形式はSTL (STereo Lithograohy) が適しているが、IGES等による汎用CADデータの情報でも差し支えない。
【0021】
人工関節設置面を形成するための工具が進む工具経路を計算する手段4では、骨表面形状データと人工関節設置位置から確定される切除面情報20から工具経路(CL−Cutter Location )を計算する。さらに、この工具経路の他に工具姿勢も計算する(以下、工具情報30と総称する)。工具経路及び工具姿勢の計算に関して、第一過程として図3に示すようにCTマルチスライスデータから構築されたボクセルデータが表現されているボクセル座標系32(骨表面形状は本ボクセルデータから構築されているため、人工関節設置面(切除面)位置とともに同座標系で表現されている)から工具31が先端に装着され、実際に切除を行う手術器械のアーム21の手術器械座標系34に変換する。本例では、赤外線座標測定機(NDI 社製、商品名Polaris )を使用して座標変換を行っており、以下にその手順を説明する。
【0022】
図3において、まず、切除面情報20が表現されているボクセル座標系32から手術室空間内の骨(大腿骨23、脛骨24)が表現されている実空間座標系33に変換する。この場合、骨23、24には赤外線測定用のトラッカー(大腿骨用は25、脛骨用は26)が固定され、それを基準として実空間座標系33を設定している。そして、赤外線座標測定機のプローブ27によって骨23、24の形状を皮切部28からそれぞれ実空間座標系33に対して計測し、計測された骨23、24の形状情報と上記した骨の形状から切除面を設定する手段3で取得された骨表面形状情報間で誤差が最小となるように位置合わせを行い、切除面情報20が表現されているボクセル座標系32と手術室内の骨23、24が表現されている実空間座標系33との対応付け(位置合わせともいう)を行う。
【0023】
このような操作を行うのは、切除面情報20と実際の骨23、24との位置を合わせるためであり、これをレジストレーションという。このレジストレーションは、例えば、[齋藤季他:”骨表面形状からの点計測誤差分布推定を用いた点対応レジストレーションにおける特徴点の最適化”日本コンピュータ外科学会誌vol.10, no.3, pp.313-314 (2008) 、上記特許文献3]の方法で行えばよい。このレジストレーションにより、ボクセル座標系32は実空間座標系33に変換される。
【0024】
次に、骨23、24に取り付けられたトラッカー25、26及びアーム21に取り付けられたトラッカー29の位置の同時計測による相対位置関係から、実空間座標系33を手術器械座標系34に変換する。最終的に、骨の形状と切除面が表現されている切除面情報20はボクセル座標系32における座標値をアーム21の手術器械座標系34の座標値に以下の(1)式により変換される。

【0025】
この場合、
は手術器械座標系34での座標値、
はボクセル座標系32での座標値、
は実空間座標系33から手術器械座標系34への変換情報(レジストレーション情報)、
はボクセル座標系32から実空間座標系33へのレジストレーション情報である。このように、各座標系32、33、34への変換を行うのは、それぞれの座標軸の向きが違うこと及び皮切部28からのプローブ27による骨形状計測、骨切除時に骨周囲の組織とプローブ27及び工具31との干渉を回避するために骨23、24の位置及び角度を変更する場合があるためである。つまり、ボクセル座標系32から実空間座標系33に一度座標変換をしておけば、骨23、24の位置・姿勢が変更になった場合には実空間座標系33から手術器械座標系34への変換のみでボクセル座標系32から手術器械34への座標変換が済むため、レジストレーションを再度する必要がなく、手間が省けるからである。
【0026】
手術器械座標系34に変換された骨23、24における切除面情報20から工具経路及び工具姿勢を計算して工具情報30とするのは上記した。工具情報30の計算は、文献[N.Sugita et al, "Bone cutting robot with Soft tissue collision avoidance capability by a redundant axis for minimally invasive orthopaedic surgery", Proceedings of IEEE/CME International Conference on Comprex Medical Engineering(CME 2007)]に記載される方法等が考えられる。
【0027】
ここで、工具情報30の上記文献の計算方法について説明する。まず、皮切部28の形状を手術器械座標系34に対して計測する。これは、小さい傷(低侵襲)で人工関節設置のための切除面を形成するために、工具31と皮切部28及び骨周囲組織との干渉による骨周囲組織の損傷を回避するためである。
【0028】
次に、座標系34に変換された切除面情報20に含まれる骨表面形状データと切除面位置を利用して、骨23、24の切除領域を計算する。この骨23、24の切除領域は、骨表面形状データを切除面でトリム(切り取る)及び分割し、分割された骨表面形状データの工具31で切削される部分の骨表面形状データを骨23、24の切除領域とする。この操作は本実施例では手術器械座標系34に変換された大腿骨23及び脛骨24の骨表面形状データに対して行い、大腿骨23及び脛骨24の切除領域を決定する。
【0029】
切除領域確定後、規定の工具切り込み深さ及びオーバーラップ率から切除領域全体を工具が走査するように工具経路が計算される。さらに、計測された皮切部28の形状から、計算された工具経路に対して皮切部28と干渉しない工具姿勢が決定される。
【0030】
本例では、アーム18は並進3軸と回転3軸を有するため、任意の工具位置及び姿勢を定義することができる。なお、本例では、工具情報30は手術器械座標系34に対して記述される。このような工具情報30の計算方法により、骨周囲組織の損傷を回避しながら人工関節設置のための骨切除を実現する。
【0031】
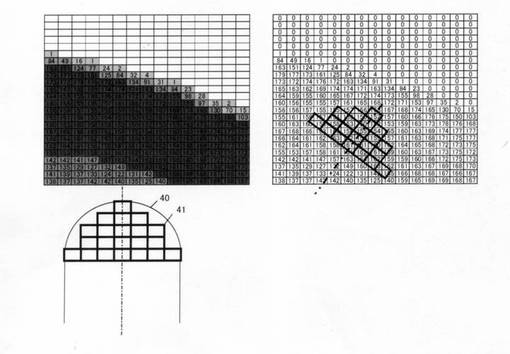
続いて、工具31とボクセルとの干渉領域を判定する手段5を実行する。この場合、送り速度の最適化のため、まず、骨23、24の硬さ計算を行うが、その場合、工具情報30による情報から算定した工具位置と、この工具位置においてCTマルチスライスデータ等の画像情報から生成されたボクセルと工具31との干渉、すなわち、ボクセル内の切除領域の該当箇所の判定を行う。本例では、図4に例示するように工具切刃領域形状40を有限要素41に分割した近似形状によってボクセルと工具31が干渉しているかどうかの判定を行う。以下に、その処理について説明する。
【0032】
本例では、工具31としてボールエンドミルを使用しているが、ボールエンドミルの切刃領域40を有限要素41に分割し、工具情報30による情報からアーム21の手術器械座標系34における有限要素41の位置及び姿勢に変換する。さらに、上記式(1)の逆変換によって、有限要素41を図3のアーム21の位置が表現されている手術器械座標系34からボクセルが表現されているボクセル座標系32に変換する。
【0033】
そして、ボクセル座標系32に変換された工具の切除に関与する領域の有限要素41と、CTマルチスライスデータ等の医用画像から構成されたボクセルとを同座標系に重ね合わせて対比することで干渉判定を行う。干渉判定は工具31の有限要素41とボクセルが同じボクセル座標系32で表現されていることから容易に可能である。本例では、干渉判定はAABB(Axis-Aligned Bounding Box)法で実施しているが、この他にOBB(Oriented Bounding Box) 法等でも差し支えない。
【0034】
すなわち、この工程で工具の工具の切除に関与する領域の有限要素41と干渉すると判定されたボクセル要素は、工具位置情報Nijにおける工具による骨切削領域を表現していることになる。
【0035】
ここで、ボクセル座標系32で表現されるボクセルをアーム21の位置が表現されている実空間座標系34に変換して、上記の工具情報30の計算時に工具情報30と対比することで干渉判定を行うことも可能である。しかし、工具31の有限要素41の数はボクセル要素数に比べて圧倒的に少ないことから、計算効率化のために前者の方法を採用している。
【0036】
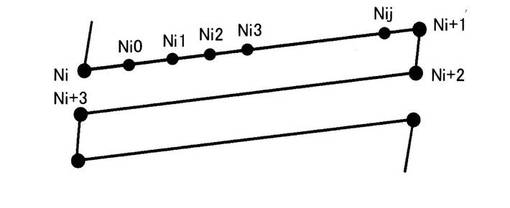
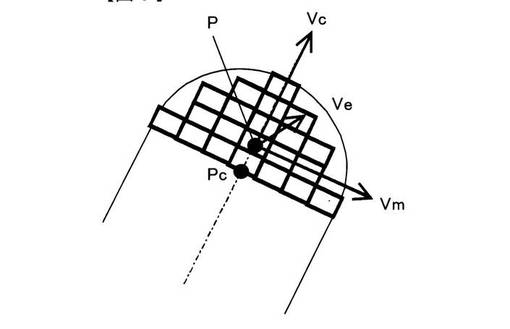
干渉判定は、図5に示すように連続する工具位置情報Ni (i=1,2,3,4,…m)に対してNi とNi+1 (i=1,2,3,4…m−1)間を規定距離で分割し、分割された上記情報Nij(j=1,2,3,4,…n)を生成し、分割された工具位置情報Nijそれぞれについて計算する。判定対象となる有限要素41は切除に関与する領域(本例ではボールエンドミルの切刃部分)のみとしていることから、実際の切除領域40を表現できる。切除に関与する工具31の有限要素41の抽出は、図6に例示するように点Pを通る切込み方向ベクトルVc 、工具移動方向ベクトルVm 及び工具の有限要素中心位置と点Pで表現されるベクトルVe の内積を計算し、以下の条件式双方を満たすものとする。
Vc・Ve
arccos (───── )<90(deg) ‥‥(2)
|Vc||Ve|
Vm・Ve
arccos (───── )<90(deg) ‥‥(3)
|Vm||Ve|
ここで、点Pの座標値はボールエンドミルの先端球形状の中心を基準として中心座標値Pc 、球半径をr、切込み深さをdとして以下の式にて計算している。
Vc
P=Pc+(r−d)────
|Vc| ‥‥(4)
【0037】
なお、切込み方向ベクトルVc 及び工具移動方向ベクトルVm は、図3に示すアーム21の位置が表現されている手術器械座標系34に対して表現されているものを上記(1)式の方法によってボクセルが表現されているボクセル座標系32に変換することで上記(2)及び(3)の計算を行う。このような操作・処理によって工具31の切除に関与する領域が定まる。
【0038】
骨23、24の硬さを決定する手段6では、上記の工具位置情報Nijにおける骨切除領域から干渉領域の骨23、24の硬さを決定する。本例では、DICOM形式のCT画像からボクセルを構築しているため、各ボクセル要素に画像の輝度値が格納されている。この輝度値はCT値に対応しているため、ここでは、輝度値をCT値とするが、このCT値を上記工具31とボクセルとの干渉領域を判定する手段5で工具位置情報Nijにおいて判定されたボクセル領域の各ボクセル要素に対して集積し、平均値を計算することで工具31による骨切削領域の硬さの指標とする。
【0039】
なお、本実施例ではCT値として8bitデータを例示しているが、16bitデータでも差し支えない。DICOM形式のCT画像では、画像輝度値であるCT値は16bitデータで格納されているが、本実施例では記憶部12に格納される情報量低減のため、骨組織全体のCT値を内包するように線形ウインドウ変換及びビット変換を行い、8bitデータを適用している。CT値への逆変換は、情報量低減により変換精度は低下するものの、本例のような骨組織ではCT値に十分な幅があるため硬さの決定に支障はない。
【0040】
また、骨組織と軟組織の複合状態での切除を行う場合には、CT値の分布幅が大きくなるので、その場合にはウインドウ変換時の中央値と幅を対象組織のCT値を内包するような設定を行えばよい。
【0041】
骨23、24を切除する際の工具31の最適な送り速度を計算する手段7では、骨23、24の硬さを決定する手段6で計算された平均CT値を硬さの指標として送り速度を決定する。一般的に、CT値は生体組織の密度に比例し、例えば、肝臓等の軟組織は0〜100、骨は50〜1000程度である。このように、軟組織と骨のような硬組織ではCT値に差異が生ずる性質を利用し、CT値が高い場合は高密度で硬く、低い場合には柔らかい組織であると推定して送り速度を決定する。
【0042】
本例の骨組織では、切除条件(切込み深さ、工具形状、工具回転数)とCT値及び送り速度をパラメータとする切除条件であって切除負荷に対応する切除反力の関係を実験的に予め求めて最適値を計算し、これを規定値として記憶部12に格納しておく。骨23、24の硬さを決定する手段6において分割された工具位置情報Nijに対する平均CT値から切除反力を計算し、切除反力が規定値以上となる場合には実行されている送り速度に対して減速を指令する。反対に、規定値以下となる場合は増速を指令する。
【0043】
最適な送り速度とともに、工具情報30にに基づく工具位置情報Ni を出力する手段8では、分割された工具位置情報Nijと、それに対応する送り速度増減速指令を基にアーム21の動作命令を出力する。本例では、アーム21の自由度は上述のように並進3軸(U、V、W)、回転3軸(A、B、C)であるため、慣例に従って工具情報動作命令は工作機械一般で使用されているNC(Numerical Control)指令によるものとして、手術器械座標系34に対して表現される機械座標系(直行UVW軸)によって定義されるローカルな座標系)に対して記述されることとして以下に説明する。
【0044】
工具位置情報NijはNC指令に変換される。例えば、稼動軸であるUVWABC軸に対応してG54G00U2V4W8A20F200のように表現される。工具位置情報Ni とNi+1 間で上記送り速度計算の手段で送り速度増減速指令がない場合には、Ni により生成されたNC指令の次にNi+1 のNC指令が出力される。
【0045】
一方で、工具位置情報Ni と工具位置情報Ni+1 間、例えば、Nijで送り速度増減速指令がある場合には、工具位置情報Nij-1に対応するNC指令の送り速度を増減速する。これは、切除反力の上昇をもたらす硬い部分や低下をもたらす軟らかい部分に工具が到達する前に送り速度を増減速することで切除負荷の上昇を抑制したり、低下を補完するためである。送り速度を増減速した場合、工具位置情報Nij+1で送り速度指令が発せられない場合、それ以後の指令によって送り速度を既定された送り速度に段階的に戻すNC指令を出力する。
【0046】
上記した過程を分割された工具位置情報Nij(i=1,2,3,4…. m、j=1,2,3,4….n)に対して行い、図7に例示するように送り速度が最適化された一連のNCコードを生成する。
【0047】
以上のような送り速度の最適化により、手術器械の振動や生体組織の変位を抑制してアーム21先端の工具31と切除対象の骨23、24との相対位置を維持することができるため、正確な骨23、24の切除が可能になる。さらに、骨23、24の硬さに応じて送り速度の増減を行うものであるから、切除反力を規定値以下に保ちながら加工時間の短縮にも繋がる。
【0048】
加えて、本発明では請求項3に示すように、切除反力の力帰還による送り速度の実時間制御手段を備える。工具31に作用する力を図2に例示する力センサ16で検出し、実時間計測による切除反力が規定値を超えた場合に、段階的に送り速度減速指令を直接アーム21の制御盤17に出力することで工具31と切除対象である骨23、24の相対位置変化を抑制する。反対に、規定値に満たない場合には送り速度増速指令を発する。
【0049】
一般的に、生体組織の切除では生体組織形状と加工位置情報が表現されている座標系(本実施例では図3に例示するボクセル座標系32)と手術室での実空間に座する生体組織が表現されている座標系(本実施例では実空間座標系33)の対応付けを行うため、レジストレーションを行う必要があるのは上記した。このレジストレーションでは1mm以下程度の誤差が生じるため、図1の工具経路を計算する手段4で計算される工具情報30にこの誤差が伝播される。このため、実空間の生体組織位置に対して工具位置がレジストレーション誤差分シフトする結果となり、その誤差が大きい場合にはNCによる送り速度増減速指令が加工対象の生体組織の硬さと対応せず、既定の送り速度によって硬い又は軟らかい組織に工具が遭遇する場合がある。
【0050】
このような場合に、力帰還による実時間送り速度制御による手段を付加することは、レジストレーション誤差が大きい場合に正確な生体組織の切除を担保する上で有効である。なお、以上は生体組織として骨を例にしたが、その他の組織及びその混合組織でも適用可能であることはいうまでもなく、その場合は上記した説明中の骨は特定の生体組織ということになる。
【符号の説明】
【0051】
1 医用画像の取得
2 医用画像データを蓄積しボクセル化する手段
3 生体組織形状と加工面情報を取得する手段
4 工具経路を計算する手段
5 工具とボクセルの干渉領域判定の手段
6 生体組織の硬さを決定する手段
7 送り速度計算の手段
8 工具位置と姿勢情報を出力する手段
9 手術器械へ出力するNCデータ
10 手術支援装置
11 入出力部
12 記憶部
13 演算部
14 入力部
15 表示部
16 力センサー
17 制御盤
20 生体組織の形状と加工面情報
21 アーム
22 赤外線座標測定器
23 大腿骨
24 脛骨
25 大腿骨用トラッカー
26 脛骨用トラッカー
27 プローブ
28 皮切部
29 手術器械のアーム用トラッカー
30 工具位置及び工具姿勢情報(工具情報)
31 工具
32 ボクセル座標系
33 実空間座標系
34 手術器械座標系
40 工具切刃領域
41 有限要素
【技術分野】
【0001】
本発明は、人工関節の置換等に際して生体組織をコンピユータ/ロボットシステムによる手術器械で手術する場合に工具の送り速度を最適化し、低侵襲化や手術時間の短縮化を実現する手術支援システムに関するものである。
【背景技術】
【0002】
近年、人工関節等のインプラント構成部品及び生体組織の負荷低減による体内寿命の向上を目指した手術の高精度化、更には小さい傷(低侵襲)で済む手術によって患者の負担軽減と早期回復を目的として、コンピュータ/ロボットシステムによる手術器械、すなわち、手術ロボットが適用されている。例えば、人工関節置換術においては、人工関節を設置するための骨の手術(以下、切除)を正確に行うため、下記特許文献1に例示されるような手術器械のアームに手術用工具(以下、工具)が装着された装置を用い、この工具を自動制御して対象骨を人工関節の設置面形状に適合するように切除するといったことが行われている。
【0003】
生体組織を術前計画に基づいて正確に切除するには、通常の工作機械で加工される機械部品等の加工物と同様に工具と加工物の相対位置関係を維持することが重要である。一般的な金属材料では、材料剛性が高いために工作機械のテーブルに対して剛直な固定(クランプ)が可能である。しかし、生体組織は金属材料に比して材料剛性が極端に低いために剛直な固定が困難である。例えば、骨組織の場合、皮膚や筋組織より剛性は高いものの、通常、手術対象部位以外の骨周囲は軟組織に囲まれているため、骨を固定具で直接把持して固定できる状況は限られている。
【0004】
また、最近では、患者の肉体的負担軽減と術後の早期回復を目的とした低侵襲手術が行われているが、このような手術では、患部である骨を直接把持できる場合は更に狭まる。このため、下記特許文献2で見られるような軟組織上から骨を固定する固定具が提案されているが、これに依ったとしても、機械加工における加工物のように強固な固定力は得られない。
【0005】
さらに、患者の肉体的負担軽減のためには手術時間の短縮は重要であるが、これを実現するためには、骨の切除時間の短縮を目的として工具の切込み量を含めて送り速度を速くすることが考えられる。しかし、送り速度を早くすると、切除負荷が増加することから、工具と生体組織の相対位置関係を維持するために要求される患部固定力はより一層高くすることが要求される。しかし、生体組織における患部固定力には限界があるのは上記したとおりである。このように、正確な生体組織の切除と低侵襲化及び手術時間短縮化を満たすには、切除負荷を一定値以下に設定した上での切除が要求されることとなる。
【0006】
特に、骨組織では表面の硬い皮質骨と内部の海綿骨が傾斜的な構造を呈している関係で、切除中の切除負荷の変動が大きい。このため、切除負荷が大きな部位では、患部及び工具を把持する手術器械のアームに振動を引き起すとともに、生体組織の変位も生じさせる。このアームの振動及び生体組織の変位を抑制するため、切除中の工具に作用する切除反力を力センサで計測して力帰還による実時間での送り速度を制御する方法がある。しかし、力を検出してからの送り速度制御では固定力の確保が困難な生体組織の切除系では正確な制御が難しく、結果的に切除負荷による生体組織の変位を引き起こして手術精度の低下をもたらす。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−306500号公報
【特許文献2】特開2007−202950号公報
【特許文献3】特開2008−146457号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
そこで、本発明は、切除領域である生体組織の傾斜的材料特性を含む様々な特性を考慮し、切除負荷を規定値以下とするとともに、その場合の最適な送り速度を具現することで、正確な生体組織切除と低侵襲化及び手術時間短縮化を実現したものである。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明は、請求項1に記載した、自動制御される手術器械のアームに取り付けられる手術用工具で生体組織を手術する手術支援システムにおいて、手術対象となる生体組織から得た医用画像データを蓄積してボクセル化する手段と、生体組織の形状を含む特性から手術個所を設定する手段と、手術個所を手術するために工具が進む工具経路を計算する手段と、工具とボクセルとの干渉領域を判定する手段と、この干渉領域における生体組織の硬さを決定する手段と、この硬さに対応した工具の最適な送り速度を計算する手段と、当該計算で得た送り速度を手術器械に出力する手段とを備えることを特徴とする手術支援システムを提供したものである。
【0010】
また、本発明は、以上の手術支援システムにおいて、請求項2に記載した、医用画像における画像輝度値から硬さを推定するとともに、この推定した硬さを基に送り速度が計算される手段、請求項3に記載した、工具に作用する切除反力を実時間計測し、力帰還によって切除反力に対応した送り速度が計算される手段を提供する。
【発明の効果】
【0011】
請求項1の発明によると、生体組織の硬さを事前に予測して送り速度の制御を行うことになり、生体組織に一定値以上の切除負荷が作用しないため、切除中の振動及び生体組織変位の低減が可能となる。したがって、最適な送り速度で切除できることになり、正確な切除はもちろんのこと、手術の低侵襲化、短時間化が可能になる。請求項2の手段によると、骨の硬さを簡単な方法で予測できるし、請求項3の手段によると、付加的な力帰還情報による送り速度の制御が可能になり、工具経路と実空間での生体組織位置のずれの基になる過度な切除負荷の増加を抑制し、安全、かつ、正確な生体組織の切除を実現する。
【図面の簡単な説明】
【0012】
【図1】手術支援システムの説明図である。
【図2】手術支援システムのハードウエアの構成図である。
【図3】レジストレーションの概念図である。
【図4】工具の要素分割と干渉判定に関する概念図である。
【図5】工具進路及び工具姿勢情報の例示図である。
【図6】切除領域に対応する工具の有限要素を抽出を例示する説明図である。
【図7】手術支援システムのを実行するためのNCコードを例示した説明図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を、手術個所である生体組織として人工膝関節置換のための骨、すなわち、大腿骨及び脛骨の切除を例にとって説明する。図1は本発明を構成する各手段のブロック図であり、本発明では、膝周辺の生体組織(以下では骨という)から医用画像を取得する手段1と、取得した医用画像を蓄積してボクセル化する手段2と、骨の形状から手術個所を設定する手段3と、手術個所を切除するために工具が進む工具経路を計算する手段4と、工具とボクセルとの干渉領域を判定する手段5と、この干渉領域における生体組織の硬さを決定する手段6と、この硬さに対応した工具の最適な送り速度を計算する手段7と、当該計算で得た送り速度をNCデータ9として手術器械に出力する手段8とを有しており、これらで手術支援装置(以下、支援装置)10を構成している。
【0014】
支援装置10の主体はコンピュータであり、外部からの情報取得及び外部への出力手段である入出力部11(一般的にはCD−ROMやDVDドライブ又はLAN等、実時間出力の場合にはLANを使用する)、外部からの取得情報や内部で計算される情報及び計算用のプログラムが格納される記憶部12[ROM(Read Only Memory) 、RAM(Random Access Memory) 、OS(Operation System) 又はOS相当のプログラムが格納されたハードディスク]及び内部計算情報とプログラムによって計算を行う演算部13(Central Processing Unit)、規定値等を設定する入力部14(キーボードやマウス等のデバイス)、情報を表示する表示部15(ディスプレー)で構成される。
【0015】
そして、情報の格納は記憶部12で行い(ROM又はRAMに格納される情報量が膨大な場合には、ハードディスクに格納される場合もある)、計算は記憶部12に格納されるプログラムにより演算部13で行い、骨の硬さ等による切除負荷の設定値(規定値)や種々の指令の入力は入力部14から行い、外部から取得される情報及び外部に出力される情報は入出力部11から行うものとして上記の各手段について説明する。
【0016】
まず、切除対象となる骨の医用画像データを蓄積してボクセル化する手段2について説明する。本例では、医用画像としてDICOM(Digital Imaging and Communication in Medicine)形式のCT(Computered Tomography) マルチスライスデータを使用するが、DICOMデータには画像スライス位置とピクセルサイズ及び画像厚さデータが格納されている。そこで、図3に示すようにDICOMデータ内で定義されるピクセルサイズdと画像厚さtを基準とする立体的なボクセルデータを作成する。ボクセルデータ内の各ボクセル要素に対してボクセル要素の中心位置と画像輝度値(本例では、後述するCT値を採用)が記憶部12に格納される。
【0017】
CT撮影による断層画像のスライス間隔とボクセルの厚みとの関係でスライス間に隙間ができる場合があるが、この場合は、この隙間の部分のボクセル要素を補間する。この補間には線形補間法があり、隣接するボクセル要素をスライス間に線形で挿入することで実際に即したボクセルデータが得られる。なお、スライス間補間は種々の原理に基づく非線形補間法でもよい。逆に、断層画像間がオーバーラップする場合には、隣接する各ボクセル要素をオーバーラップ分だけ減弱する。さらに、本例では、CT画像を使用しているが、MRI (Magnetic Resonance Imaging system)の断層画像データであっても差し支えない。医用画像の撮影領域は、工具による切除領域を十分に含んだものになっている。
【0018】
次に、骨の形状から切除面を設定する手段3について説明する。最初に、切除対象となる手術個所、つまり、骨の形状情報を取得する。本例では、人工膝関節置換術を対象としているため、骨(大腿骨と脛骨)形状をCT画像によるボクセルデータから抽出し、その形状データを参照して人工関節の設置位置を決定する。本例では、ボクセルデータの輝度値に基づいて特定の輝度値の範囲にあるボクセルデータ要素を骨組織として認識させ、マーチング・キューブ法により骨表面形状を構築する。この骨表面形状を参照して人工関節の設置位置を決定することで、骨表面形状データに対する人工関節の設置面位置(言い換えると、骨に対する切除位置)が確定、数値化される。
【0019】
なお、上記の骨表面形状は記憶部12に格納されるボクセルデータを使用して演算部13で構築され、表示部15に骨形状として表示される。また、人工関節の形状データも同様に記憶部12に格納されており、表示部15に骨表面形状とともに人工関節形状及び位置が表示される。人工関節位置は、入力部14による入力値により調整され、表示部15に表示される骨表面形状と人工関節形状を対比しながら医師の判断で人工関節位置を決定する。
【0020】
ここで、上記の骨表面形状の構築及び人工関節の位置等の指定は、汎用コンピュータを使用してDICOMビューア(例えば、Materialize 社のソフトウエアMimics) 等で行うことも可能である。この場合には、骨表面形状データ及び数値化された切除位置情報等は、入出力部11から転送され、記憶部12に格納される。また、取得される骨表面形状データ及び人工関節形状データの形式はSTL (STereo Lithograohy) が適しているが、IGES等による汎用CADデータの情報でも差し支えない。
【0021】
人工関節設置面を形成するための工具が進む工具経路を計算する手段4では、骨表面形状データと人工関節設置位置から確定される切除面情報20から工具経路(CL−Cutter Location )を計算する。さらに、この工具経路の他に工具姿勢も計算する(以下、工具情報30と総称する)。工具経路及び工具姿勢の計算に関して、第一過程として図3に示すようにCTマルチスライスデータから構築されたボクセルデータが表現されているボクセル座標系32(骨表面形状は本ボクセルデータから構築されているため、人工関節設置面(切除面)位置とともに同座標系で表現されている)から工具31が先端に装着され、実際に切除を行う手術器械のアーム21の手術器械座標系34に変換する。本例では、赤外線座標測定機(NDI 社製、商品名Polaris )を使用して座標変換を行っており、以下にその手順を説明する。
【0022】
図3において、まず、切除面情報20が表現されているボクセル座標系32から手術室空間内の骨(大腿骨23、脛骨24)が表現されている実空間座標系33に変換する。この場合、骨23、24には赤外線測定用のトラッカー(大腿骨用は25、脛骨用は26)が固定され、それを基準として実空間座標系33を設定している。そして、赤外線座標測定機のプローブ27によって骨23、24の形状を皮切部28からそれぞれ実空間座標系33に対して計測し、計測された骨23、24の形状情報と上記した骨の形状から切除面を設定する手段3で取得された骨表面形状情報間で誤差が最小となるように位置合わせを行い、切除面情報20が表現されているボクセル座標系32と手術室内の骨23、24が表現されている実空間座標系33との対応付け(位置合わせともいう)を行う。
【0023】
このような操作を行うのは、切除面情報20と実際の骨23、24との位置を合わせるためであり、これをレジストレーションという。このレジストレーションは、例えば、[齋藤季他:”骨表面形状からの点計測誤差分布推定を用いた点対応レジストレーションにおける特徴点の最適化”日本コンピュータ外科学会誌vol.10, no.3, pp.313-314 (2008) 、上記特許文献3]の方法で行えばよい。このレジストレーションにより、ボクセル座標系32は実空間座標系33に変換される。
【0024】
次に、骨23、24に取り付けられたトラッカー25、26及びアーム21に取り付けられたトラッカー29の位置の同時計測による相対位置関係から、実空間座標系33を手術器械座標系34に変換する。最終的に、骨の形状と切除面が表現されている切除面情報20はボクセル座標系32における座標値をアーム21の手術器械座標系34の座標値に以下の(1)式により変換される。
【0025】
この場合、
は手術器械座標系34での座標値、
はボクセル座標系32での座標値、
は実空間座標系33から手術器械座標系34への変換情報(レジストレーション情報)、
はボクセル座標系32から実空間座標系33へのレジストレーション情報である。このように、各座標系32、33、34への変換を行うのは、それぞれの座標軸の向きが違うこと及び皮切部28からのプローブ27による骨形状計測、骨切除時に骨周囲の組織とプローブ27及び工具31との干渉を回避するために骨23、24の位置及び角度を変更する場合があるためである。つまり、ボクセル座標系32から実空間座標系33に一度座標変換をしておけば、骨23、24の位置・姿勢が変更になった場合には実空間座標系33から手術器械座標系34への変換のみでボクセル座標系32から手術器械34への座標変換が済むため、レジストレーションを再度する必要がなく、手間が省けるからである。
【0026】
手術器械座標系34に変換された骨23、24における切除面情報20から工具経路及び工具姿勢を計算して工具情報30とするのは上記した。工具情報30の計算は、文献[N.Sugita et al, "Bone cutting robot with Soft tissue collision avoidance capability by a redundant axis for minimally invasive orthopaedic surgery", Proceedings of IEEE/CME International Conference on Comprex Medical Engineering(CME 2007)]に記載される方法等が考えられる。
【0027】
ここで、工具情報30の上記文献の計算方法について説明する。まず、皮切部28の形状を手術器械座標系34に対して計測する。これは、小さい傷(低侵襲)で人工関節設置のための切除面を形成するために、工具31と皮切部28及び骨周囲組織との干渉による骨周囲組織の損傷を回避するためである。
【0028】
次に、座標系34に変換された切除面情報20に含まれる骨表面形状データと切除面位置を利用して、骨23、24の切除領域を計算する。この骨23、24の切除領域は、骨表面形状データを切除面でトリム(切り取る)及び分割し、分割された骨表面形状データの工具31で切削される部分の骨表面形状データを骨23、24の切除領域とする。この操作は本実施例では手術器械座標系34に変換された大腿骨23及び脛骨24の骨表面形状データに対して行い、大腿骨23及び脛骨24の切除領域を決定する。
【0029】
切除領域確定後、規定の工具切り込み深さ及びオーバーラップ率から切除領域全体を工具が走査するように工具経路が計算される。さらに、計測された皮切部28の形状から、計算された工具経路に対して皮切部28と干渉しない工具姿勢が決定される。
【0030】
本例では、アーム18は並進3軸と回転3軸を有するため、任意の工具位置及び姿勢を定義することができる。なお、本例では、工具情報30は手術器械座標系34に対して記述される。このような工具情報30の計算方法により、骨周囲組織の損傷を回避しながら人工関節設置のための骨切除を実現する。
【0031】
続いて、工具31とボクセルとの干渉領域を判定する手段5を実行する。この場合、送り速度の最適化のため、まず、骨23、24の硬さ計算を行うが、その場合、工具情報30による情報から算定した工具位置と、この工具位置においてCTマルチスライスデータ等の画像情報から生成されたボクセルと工具31との干渉、すなわち、ボクセル内の切除領域の該当箇所の判定を行う。本例では、図4に例示するように工具切刃領域形状40を有限要素41に分割した近似形状によってボクセルと工具31が干渉しているかどうかの判定を行う。以下に、その処理について説明する。
【0032】
本例では、工具31としてボールエンドミルを使用しているが、ボールエンドミルの切刃領域40を有限要素41に分割し、工具情報30による情報からアーム21の手術器械座標系34における有限要素41の位置及び姿勢に変換する。さらに、上記式(1)の逆変換によって、有限要素41を図3のアーム21の位置が表現されている手術器械座標系34からボクセルが表現されているボクセル座標系32に変換する。
【0033】
そして、ボクセル座標系32に変換された工具の切除に関与する領域の有限要素41と、CTマルチスライスデータ等の医用画像から構成されたボクセルとを同座標系に重ね合わせて対比することで干渉判定を行う。干渉判定は工具31の有限要素41とボクセルが同じボクセル座標系32で表現されていることから容易に可能である。本例では、干渉判定はAABB(Axis-Aligned Bounding Box)法で実施しているが、この他にOBB(Oriented Bounding Box) 法等でも差し支えない。
【0034】
すなわち、この工程で工具の工具の切除に関与する領域の有限要素41と干渉すると判定されたボクセル要素は、工具位置情報Nijにおける工具による骨切削領域を表現していることになる。
【0035】
ここで、ボクセル座標系32で表現されるボクセルをアーム21の位置が表現されている実空間座標系34に変換して、上記の工具情報30の計算時に工具情報30と対比することで干渉判定を行うことも可能である。しかし、工具31の有限要素41の数はボクセル要素数に比べて圧倒的に少ないことから、計算効率化のために前者の方法を採用している。
【0036】
干渉判定は、図5に示すように連続する工具位置情報Ni (i=1,2,3,4,…m)に対してNi とNi+1 (i=1,2,3,4…m−1)間を規定距離で分割し、分割された上記情報Nij(j=1,2,3,4,…n)を生成し、分割された工具位置情報Nijそれぞれについて計算する。判定対象となる有限要素41は切除に関与する領域(本例ではボールエンドミルの切刃部分)のみとしていることから、実際の切除領域40を表現できる。切除に関与する工具31の有限要素41の抽出は、図6に例示するように点Pを通る切込み方向ベクトルVc 、工具移動方向ベクトルVm 及び工具の有限要素中心位置と点Pで表現されるベクトルVe の内積を計算し、以下の条件式双方を満たすものとする。
Vc・Ve
arccos (───── )<90(deg) ‥‥(2)
|Vc||Ve|
Vm・Ve
arccos (───── )<90(deg) ‥‥(3)
|Vm||Ve|
ここで、点Pの座標値はボールエンドミルの先端球形状の中心を基準として中心座標値Pc 、球半径をr、切込み深さをdとして以下の式にて計算している。
Vc
P=Pc+(r−d)────
|Vc| ‥‥(4)
【0037】
なお、切込み方向ベクトルVc 及び工具移動方向ベクトルVm は、図3に示すアーム21の位置が表現されている手術器械座標系34に対して表現されているものを上記(1)式の方法によってボクセルが表現されているボクセル座標系32に変換することで上記(2)及び(3)の計算を行う。このような操作・処理によって工具31の切除に関与する領域が定まる。
【0038】
骨23、24の硬さを決定する手段6では、上記の工具位置情報Nijにおける骨切除領域から干渉領域の骨23、24の硬さを決定する。本例では、DICOM形式のCT画像からボクセルを構築しているため、各ボクセル要素に画像の輝度値が格納されている。この輝度値はCT値に対応しているため、ここでは、輝度値をCT値とするが、このCT値を上記工具31とボクセルとの干渉領域を判定する手段5で工具位置情報Nijにおいて判定されたボクセル領域の各ボクセル要素に対して集積し、平均値を計算することで工具31による骨切削領域の硬さの指標とする。
【0039】
なお、本実施例ではCT値として8bitデータを例示しているが、16bitデータでも差し支えない。DICOM形式のCT画像では、画像輝度値であるCT値は16bitデータで格納されているが、本実施例では記憶部12に格納される情報量低減のため、骨組織全体のCT値を内包するように線形ウインドウ変換及びビット変換を行い、8bitデータを適用している。CT値への逆変換は、情報量低減により変換精度は低下するものの、本例のような骨組織ではCT値に十分な幅があるため硬さの決定に支障はない。
【0040】
また、骨組織と軟組織の複合状態での切除を行う場合には、CT値の分布幅が大きくなるので、その場合にはウインドウ変換時の中央値と幅を対象組織のCT値を内包するような設定を行えばよい。
【0041】
骨23、24を切除する際の工具31の最適な送り速度を計算する手段7では、骨23、24の硬さを決定する手段6で計算された平均CT値を硬さの指標として送り速度を決定する。一般的に、CT値は生体組織の密度に比例し、例えば、肝臓等の軟組織は0〜100、骨は50〜1000程度である。このように、軟組織と骨のような硬組織ではCT値に差異が生ずる性質を利用し、CT値が高い場合は高密度で硬く、低い場合には柔らかい組織であると推定して送り速度を決定する。
【0042】
本例の骨組織では、切除条件(切込み深さ、工具形状、工具回転数)とCT値及び送り速度をパラメータとする切除条件であって切除負荷に対応する切除反力の関係を実験的に予め求めて最適値を計算し、これを規定値として記憶部12に格納しておく。骨23、24の硬さを決定する手段6において分割された工具位置情報Nijに対する平均CT値から切除反力を計算し、切除反力が規定値以上となる場合には実行されている送り速度に対して減速を指令する。反対に、規定値以下となる場合は増速を指令する。
【0043】
最適な送り速度とともに、工具情報30にに基づく工具位置情報Ni を出力する手段8では、分割された工具位置情報Nijと、それに対応する送り速度増減速指令を基にアーム21の動作命令を出力する。本例では、アーム21の自由度は上述のように並進3軸(U、V、W)、回転3軸(A、B、C)であるため、慣例に従って工具情報動作命令は工作機械一般で使用されているNC(Numerical Control)指令によるものとして、手術器械座標系34に対して表現される機械座標系(直行UVW軸)によって定義されるローカルな座標系)に対して記述されることとして以下に説明する。
【0044】
工具位置情報NijはNC指令に変換される。例えば、稼動軸であるUVWABC軸に対応してG54G00U2V4W8A20F200のように表現される。工具位置情報Ni とNi+1 間で上記送り速度計算の手段で送り速度増減速指令がない場合には、Ni により生成されたNC指令の次にNi+1 のNC指令が出力される。
【0045】
一方で、工具位置情報Ni と工具位置情報Ni+1 間、例えば、Nijで送り速度増減速指令がある場合には、工具位置情報Nij-1に対応するNC指令の送り速度を増減速する。これは、切除反力の上昇をもたらす硬い部分や低下をもたらす軟らかい部分に工具が到達する前に送り速度を増減速することで切除負荷の上昇を抑制したり、低下を補完するためである。送り速度を増減速した場合、工具位置情報Nij+1で送り速度指令が発せられない場合、それ以後の指令によって送り速度を既定された送り速度に段階的に戻すNC指令を出力する。
【0046】
上記した過程を分割された工具位置情報Nij(i=1,2,3,4…. m、j=1,2,3,4….n)に対して行い、図7に例示するように送り速度が最適化された一連のNCコードを生成する。
【0047】
以上のような送り速度の最適化により、手術器械の振動や生体組織の変位を抑制してアーム21先端の工具31と切除対象の骨23、24との相対位置を維持することができるため、正確な骨23、24の切除が可能になる。さらに、骨23、24の硬さに応じて送り速度の増減を行うものであるから、切除反力を規定値以下に保ちながら加工時間の短縮にも繋がる。
【0048】
加えて、本発明では請求項3に示すように、切除反力の力帰還による送り速度の実時間制御手段を備える。工具31に作用する力を図2に例示する力センサ16で検出し、実時間計測による切除反力が規定値を超えた場合に、段階的に送り速度減速指令を直接アーム21の制御盤17に出力することで工具31と切除対象である骨23、24の相対位置変化を抑制する。反対に、規定値に満たない場合には送り速度増速指令を発する。
【0049】
一般的に、生体組織の切除では生体組織形状と加工位置情報が表現されている座標系(本実施例では図3に例示するボクセル座標系32)と手術室での実空間に座する生体組織が表現されている座標系(本実施例では実空間座標系33)の対応付けを行うため、レジストレーションを行う必要があるのは上記した。このレジストレーションでは1mm以下程度の誤差が生じるため、図1の工具経路を計算する手段4で計算される工具情報30にこの誤差が伝播される。このため、実空間の生体組織位置に対して工具位置がレジストレーション誤差分シフトする結果となり、その誤差が大きい場合にはNCによる送り速度増減速指令が加工対象の生体組織の硬さと対応せず、既定の送り速度によって硬い又は軟らかい組織に工具が遭遇する場合がある。
【0050】
このような場合に、力帰還による実時間送り速度制御による手段を付加することは、レジストレーション誤差が大きい場合に正確な生体組織の切除を担保する上で有効である。なお、以上は生体組織として骨を例にしたが、その他の組織及びその混合組織でも適用可能であることはいうまでもなく、その場合は上記した説明中の骨は特定の生体組織ということになる。
【符号の説明】
【0051】
1 医用画像の取得
2 医用画像データを蓄積しボクセル化する手段
3 生体組織形状と加工面情報を取得する手段
4 工具経路を計算する手段
5 工具とボクセルの干渉領域判定の手段
6 生体組織の硬さを決定する手段
7 送り速度計算の手段
8 工具位置と姿勢情報を出力する手段
9 手術器械へ出力するNCデータ
10 手術支援装置
11 入出力部
12 記憶部
13 演算部
14 入力部
15 表示部
16 力センサー
17 制御盤
20 生体組織の形状と加工面情報
21 アーム
22 赤外線座標測定器
23 大腿骨
24 脛骨
25 大腿骨用トラッカー
26 脛骨用トラッカー
27 プローブ
28 皮切部
29 手術器械のアーム用トラッカー
30 工具位置及び工具姿勢情報(工具情報)
31 工具
32 ボクセル座標系
33 実空間座標系
34 手術器械座標系
40 工具切刃領域
41 有限要素
【特許請求の範囲】
【請求項1】
自動制御される手術器械のアームに取り付けられる手術用工具で生体組織を手術する手術支援システムにおいて、手術対象となる生体組織から得た医用画像データを蓄積してボクセル化する手段と、生体組織の形状から手術個所を設定する手段と、手術個所を手術するために工具が進む工具経路を計算する手段と、工具とボクセルとの干渉領域を判定する手段と、この干渉領域における生体組織の硬さを決定する手段と、この硬さに対応した工具の最適な送り速度を計算する手段と、当該計算で得た送り速度を手術器械に出力する手段とを備えることを特徴とする手術支援システム。
【請求項2】
医用画像における画像輝度値から硬さを推定するとともに、この推定した硬さを基に送り速度が計算される請求項1の手術支援システム。
【請求項3】
工具に作用する切除反力を実時間計測し、力帰還によって切除反力に対応した送り速度が計算される請求項1又は2の手術支援システム。
【請求項1】
自動制御される手術器械のアームに取り付けられる手術用工具で生体組織を手術する手術支援システムにおいて、手術対象となる生体組織から得た医用画像データを蓄積してボクセル化する手段と、生体組織の形状から手術個所を設定する手段と、手術個所を手術するために工具が進む工具経路を計算する手段と、工具とボクセルとの干渉領域を判定する手段と、この干渉領域における生体組織の硬さを決定する手段と、この硬さに対応した工具の最適な送り速度を計算する手段と、当該計算で得た送り速度を手術器械に出力する手段とを備えることを特徴とする手術支援システム。
【請求項2】
医用画像における画像輝度値から硬さを推定するとともに、この推定した硬さを基に送り速度が計算される請求項1の手術支援システム。
【請求項3】
工具に作用する切除反力を実時間計測し、力帰還によって切除反力に対応した送り速度が計算される請求項1又は2の手術支援システム。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−254975(P2011−254975A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131646(P2010−131646)
【出願日】平成22年6月9日(2010.6.9)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 第22回バイオエンジニアリング講演会 2010年1月9日〜10日
【出願人】(508282465)ナカシマメディカル株式会社 (22)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月9日(2010.6.9)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 第22回バイオエンジニアリング講演会 2010年1月9日〜10日
【出願人】(508282465)ナカシマメディカル株式会社 (22)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
[ Back to top ]