
打楽器演奏マニピュレータ及び打楽器演奏ロボット
【課題】打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させる。
【解決手段】本発明の一態様に係る打楽器演奏マニピュレータ10は、スティック31を動作させるための掌部23fと、スティック31の先端が打楽器30の打面30aに向かう回転力を掌部23fに付与する電動機13とを備え、電動機13は、打面30aとの衝突で跳ね返されたスティック31の打面30aと反対方向へ向かう回転力を電力として回収し、スティック31を制動する。
【解決手段】本発明の一態様に係る打楽器演奏マニピュレータ10は、スティック31を動作させるための掌部23fと、スティック31の先端が打楽器30の打面30aに向かう回転力を掌部23fに付与する電動機13とを備え、電動機13は、打面30aとの衝突で跳ね返されたスティック31の打面30aと反対方向へ向かう回転力を電力として回収し、スティック31を制動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、打楽器を演奏するためのマニピュレータ及びそのマニピュレータを備えたロボットに関する。
【背景技術】
【0002】
従来から、テーマパークのアトラクション等で、打楽器を演奏するロボットが活躍している。このロボットは、スティックを持ったマニピュレータを備えており、演奏する曲にあわせてマニピュレータを動作させることによって、スティックの先端を打楽器の打面に打ち下ろして演奏する。このような実際の打楽器をロボットに演奏させる技術として、例えば、特許文献1又は特許文献2がある。
【0003】
特許文献1に記載の打楽器演奏ロボットは、掌部に回転軸を支点として回転可能に連結されているスティックを有している。スティックと掌部の間にはバネが圧縮状態で挿入されており、このバネの復元力を利用して、スティックを動かすことにより演奏を行うことができる。また、掌部にはストッパが設けられており、スティックがストッパと衝突することにより回転の勢いが減殺され回転が停止する。
【0004】
特許文献2に記載の打楽器演奏ロボットでは、スティックがDCモータの回転軸に連結されている。DCモータの回転により、スティックをドラムの打面に打ち下ろすことにより演奏を行う。また、振動周波数制御装置によりスティックを上下方向から挟持して、スティックの振動を制御している。
【0005】
なお、特許文献3には、モータ駆動のハンマで弦楽器を叩く電子ピアノが記載されている。ハンマを止め具に衝突させることにより、ハンマの動きを止めることができる。また、電動機の回生エネルギーを利用する技術として特許文献4又は特許文献5がある。
【特許文献1】特開2006−159295号公報
【特許文献2】特開2002−258836号公報
【特許文献3】特表平9−500455号公報
【特許文献4】特開2005−53693号公報
【特許文献5】特開平9−137683号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の打楽器演奏ロボットでは、依然として改善すべき点が残されている。従来の打楽器演奏ロボットでは、スティックは、演奏時に常に固定された状態でロボットの掌で保持されている。スティックで打楽器の打面を叩いたときのスティック先端にかかる力は、10〜30Nである。この力を受けてもスティック保持を維持しつつ、ドラム演奏に支障をきたすようなスティックずれを押さえるために、スティックで打楽器の打面を叩いたときの衝撃を掌で緩和し、ロボットハンド・アームの全体でスティックを押さえている。このため、ロボットのハンド及びアームには、打面を叩いたときの衝撃による負荷がかかる。また、従来技術ではスティックで打面を叩いたときの力による反力を利用することができなかった。
【0007】
本発明は、このような事情を背景としてなされたものであり、本発明の目的は、打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させることが可能な打楽器演奏マニピュレータ及びこれを備える打楽器演奏ロボットを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の第1の態様に係る打楽器演奏マニピュレータは、スティックを動作させるための動作部と、前記スティックの先端が打楽器の打面に向かう回転力を前記動作部に付与する電動機とを備え、前記電動機は、前記打面との衝突で跳ね返された前記スティックの前記打面と反対方向へ向かう回転力を電力として回収し、前記スティックを制動するものである。これにより、演奏時にスティックで打面を叩いたときの衝撃(反力)を発電用動力とすることで衝撃を緩和し、アーム等への負荷を減少させることができる。
【0009】
本発明の第2の態様に係る打楽器演奏マニピュレータは、上記の打楽器演奏マニピュレータにおいて、前記電力を蓄電する蓄電器を備えるものである。これにより、演奏時にスティックで打面を叩いたときの衝撃(反力)を発電用動力として電気エネルギーを得て、ロボットのエネルギー効率を向上させることができる。
【0010】
本発明の第3の態様に係る打楽器演奏ロボットは、上記いずれかの打楽器演奏マニピュレータと、前記電動機を駆動する駆動部とを備えるものである。これにより、演奏時にスティックで打面を叩いたときの衝撃(反力)を発電用動力とすることで、衝撃を緩和し、アーム等への負荷を減少させることができる。
【0011】
本発明の第4の態様に係る打楽器演奏ロボットは、上記の打楽器演奏ロボットにおいて、前記動作部は、掌部又は足部であることを特徴とするものである。本発明は、このような場合に有効である。
【発明の効果】
【0012】
本発明によれば、打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させることが可能な打楽器演奏マニピュレータ及びこれを備える打楽器演奏ロボットを提供することができる。
【発明を実施するための最良の形態】
【0013】
以下に、本発明を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。各図面において、同一要素には同一の符号が付されており、説明の明確化のため、必要に応じて重複説明は省略する。
【0014】
実施の形態1.
本発明の実施の形態1に係る打楽器演奏ロボットの構成について、図1及び図2を参照して説明する。図1は、本実施の形態に係る打楽器演奏マニピュレータを備えた打楽器演奏ロボット20の構成を示す図である。図2は、掌部23fによるスティック31の支持状態を説明するための図である。
【0015】
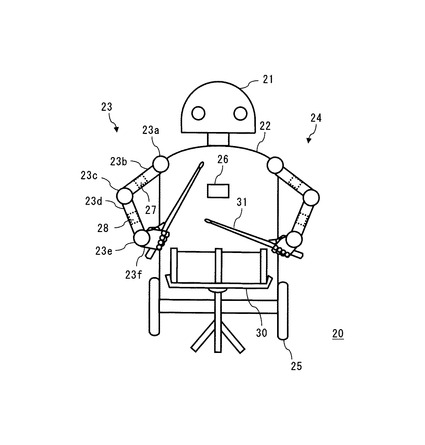
まず、図1を参照して、本実施の形態に係る打楽器演奏ロボット20の構成について説明する。打楽器演奏ロボット20は、ヒトを模して作成されたヒューマノイド・ロボットである。ここでは、打楽器演奏ロボット20は、打楽器の一例であるドラム30を演奏する場合について説明する。図1に示すように、打楽器演奏ロボット20は、頭部21、胴体部22、右腕部23、左腕部24、車輪25、制御部26等を備えている。
【0016】
胴体部22は、略直方体形状を有している。胴体部22には、打楽器演奏ロボット20の動作を統括的に制御する制御部26が収納されている。胴体部22には、右腕部23、左腕部24が接続されている。右腕部23は、肩関節23a、上腕部23b、肘関節23c、前腕部23d、手首関節23e、掌部23fを有している。左腕部24は、右腕と同様に、肩関節、上腕部、肘関節、前腕部、手首関節、掌部を有している。なお、右腕部23と、左腕部24とは略同一の構成を有しているため、左腕部24については説明を省略し、以下、右腕部23の構成のみについて詳細に説明する。
【0017】
胴体部22には、上腕部23bの一端が、肩関節23aを介して揺動自在に取り付けられている。上腕部23bの他端には、肘関節23cを介して、前腕部23dの一端が接続されている。前腕部23dは肘関節23cを支点として揺動可能である。また、上腕部23bの内部には前腕部23dを揺動させるアクチュエータ27が設けられている。アクチュエータ27としては、例えば、ソレノイドやモータ等を用いることができる。このアクチュエータ27は、制御部26から出力される制御信号により駆動される。
【0018】
前腕部23dの他端には、手首関節23eを介して動作部である掌部23fが連結されている。掌部23fは、手首関節23eを支点として揺動可能である。前腕部23dの内部には、掌部23を揺動させるアクチュエータ28が設けられている。アクチュエータ28としては、ソレノイドやモータ等を用いることができる。このアクチュエータ28もまた、制御部26から出力される制御信号により駆動される。掌部23fには、ドラム30を演奏する(叩く)ためのスティック31が支持されている。従って、掌部23fがスティック31を支持する支持部である。掌部23fによるスティックの支持については、後に詳述する。
【0019】
また、胴体部22の下側には、車輪25が接続されている。打楽器演奏ロボット20は、車輪25を回転させることによって、前進/後退をする。本実施の形態に係る打楽器演奏ロボット20は、ヒトがドラム30を叩きながら行進するように、車輪25を回転させて移動しながらドラム30の演奏を行う。
【0020】
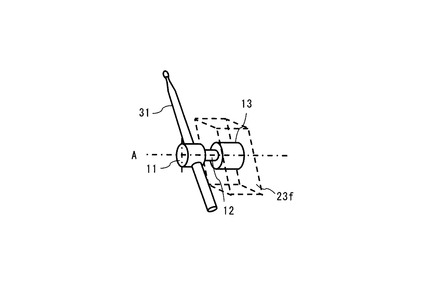
ここで、図2を参照して、掌部23fによるスティック31の支持の様子について説明する。図2に示すように、スティック31は、スティック固定部11に貫入されている。スティック固定部11は、シャフト12に固定されている。また、シャフト12は、掌部23f内に設けられた電動機13の回転軸に連結されている。すなわち、電動機13は、スティック31の回転軸Aと同軸上に設けられている。従って、スティック31は、回転軸Aを中心として回転自在に支持されている。
【0021】
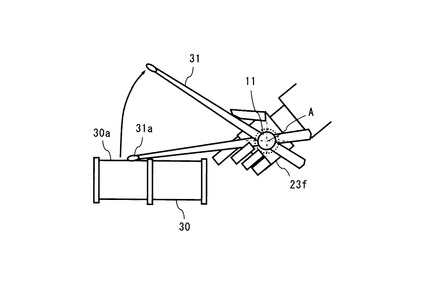
本実施の形態で用いられる電動機13は、電動機と発電機とが可逆であり兼用されるものである。通常ドラム30の演奏を行う際には、電動機13は電力を回転力に変換する。電動機13の回転軸を回転させることにより、シャフト12が回転する。これにより、スティック固定部11に貫入されたスティック31が回転軸Aを中心として回転する。従って、図3に示すように、先端31aをドラム30の打面30aに向かって振り下ろし、演奏を行うことができる。
【0022】
一方、ドラム30の打面30aにスティック31の先端31aが衝突すると、打面30aからの反力により、図3中矢印で示すように、スティック31の先端31aが打面30aから遠ざかる方向に跳ね返される。これにより、スティック31は、回転軸Aを中心として、演奏を行うときと逆回りに回転する。このとき、電動機13を発電機として作動させ、回転力を電力に変換して回収する。また、発電時の回転抵抗を制動力として利用して、スティック31の回転を制動することができる。すなわち、電動機13は、回生ブレーキとして機能する。
【0023】
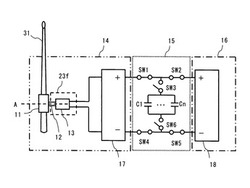
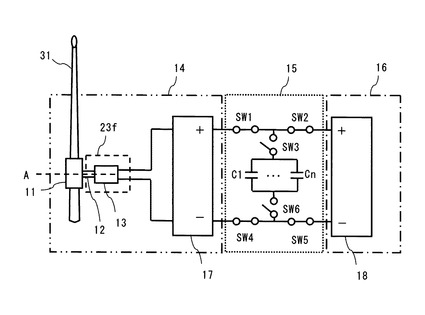
ここで、図4を参照して、本実施の形態に係る打楽器演奏マニピュレータについて説明する。図4に示すように、打楽器演奏マニピュレータは、上述の掌部23fを有する可動発電部14、蓄電部15、電源部16を備えている。ここでは、電動機13として、サーボアンプ17を備えるサーボモータを用いる例について説明する。
【0024】
可動発電部14は、スティック31で打面30aを叩いたときの反力を電動機13に伝えて発電し、かつ、発電によるブレーキ効果で反力による衝撃を緩和する。なお、可動発電部14の構成としては、この例に限定されるものではなく、電動機13として使用するモータごとに構成が多少異なる。
【0025】
蓄電部15は、スイッチ素子SW1・・・SW6、コンデンサC1、・・・、Cnを有する。サーボアンプ17の(+)端子とバッテリー回路18の(+)端子とは、スイッチ素子SW1及びSW2を介して接続されている。また、サーボアンプ17の電源端子(−)とバッテリー回路18の(−)端子とは、スイッチ素子SW4及びSW5を介して接続されている。スイッチ素子SW1とSW2との接続点には、コンデンサC1、・・・、Cnの一端が、スイッチ素子SW3を介して接続されている。また、スイッチ素子SW4とSW5との接続点には、コンデンサC1、・・・、Cnの他端が、スイッチ素子SW6を介して接続されている。
【0026】
スイッチ素子SW1、・・・、SW6を切替えることにより、バッテリー回路18とコンデンサC1、・・・、Cnの接続/遮断を実現することができる。コンデンサC1、・・・、Cnは、回生電力の蓄電・放電をする。なお、電動機13で発電した電力を電源部16のバッテリー回路18に返す場合、電源部16以上の電圧が必要となる。電動機13で発電した電力の電圧が電源電圧以下の場合、回生失効となるからである。蓄電部15は、電動機13で発電した電力をコンデンサC1、・・・、Cnに蓄電し、電源電圧以上になった後にバッテリー回路18への放電、充電を行う。なお、使用するモータ、電源によっては、アンプやバッテリー回路に組み込まれている場合もある。
【0027】
電源部16は、打楽器演奏ロボット20にロボット用電源を供給する。電源部16は、バッテリー回路18、電源電圧安定化回路(不図示)等で構成される。電源部16は、打楽器演奏ロボット20に安定した電圧で電流を供給する。また、電源部16は、電圧異常やバッテリー異常を感知して回路遮断できる。上述したように、電動機13で発電した電力でバッテリー回路18を充電することにより、次に電動機13を駆動させる際に、充電した電力を用いてロボットを駆動することができる。このように、本発明によれば、打面30aを叩いたときの衝撃によるアーム等への負荷を減少させることができ、また、ロボットの消費電力を低減させることが可能となるスティック31を回転させて演奏を行う際に再利用することができる。
【0028】
実施の形態2.
本発明の実施の形態2に係る打楽器演奏ロボット20'の構成について、図5及び図6を参照して説明する。図5は、本実施の形態に係る打楽器演奏ロボット20A'の構成を示す図である。図6は、本実施の形態に係る打楽器演奏マニピュレータの構成を示す図である。図5、6において、図4を同一の構成要素には同一の符号を付し、説明を適宜省略する。
【0029】
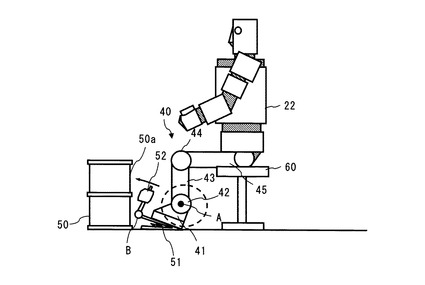
図5に示すように、本実施の形態に係る打楽器演奏ロボット20'は、実施の形態1の車輪25の代わりに脚部40を備えている。脚部40は、足部41、足首関節42、下腿部43、膝関節44、大腿部45等を備えている。胴体部22には、大腿部の一端が揺動自在に取り付けられている。大腿部45の他端には、膝関節44を介して下腿部43の一端が接続されている。下腿部43は、膝関節44を支点として搖動可能である。なお、ここでは図示していないが、下腿部43を駆動するためのモータ等からなるアクチュエータが、例えば大腿部45の内部に設けられている。
【0030】
下腿部43の他端には、足首関節42を介して足部41が連結されている。足部41は、足首関節42を支点として搖動可能である。なお、例えば、下腿部43の内部には、足部41を駆動するためのモータ等からなるアクチュエータが設けられている。本実施の形態においては、打楽器演奏ロボット20'は、椅子60に腰掛けた状態で、足部41を足首関節42の回転軸Aを中心として回転させ、ドラムセットのバスドラム50を演奏する際に使用するバスドラムペダル51を踏む。これにより、バスドラムペダル51に設けられたバスドラム用スティック52が回転軸Bを中心に回転して、バスドラム50の打面50aに振り下ろされ、演奏が行われる。すなわち、バスドラム用スティック52は、足部41を回転させることにより、回転軸Bを中心として回転する。
【0031】
バスドラム50の打面50aにバスドラム用スティック52の先端が衝突すると、打面50aからの反力により、バスドラム用スティック52の先端が打面50aから遠ざかる方向に跳ね返される。これにより、バスドラム用スティック52は、回転軸Bを中心として、演奏を行うときと逆回りに回転する。これに起因して、打楽器演奏ロボット20'の足部41が回転軸Aを中心として、逆周りに回転する。このとき、電動機13を発電機として作動させ、回転力を電力に変換して回収する。また、発電時の回転抵抗を制動力として利用して、スティック31の回転を制動することができる。すなわち、電動機13は、回生ブレーキとして機能する。
【0032】
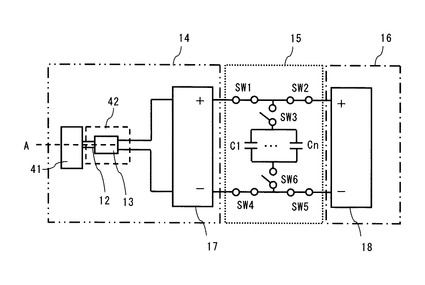
ここで、図6を参照して、本実施の形態に係る打楽器演奏マニピュレータについて説明する。図6に示すように、打楽器演奏マニピュレータは、上述の足部41を有する可動発電部14、蓄電部15、電源部16を備えている。なお、本実施の形態に用いられる打楽器演奏マニピュレータとしては、実施の形態1で用いたものと略同一の構成を有するものを使用することができる。図6に示すように、足部41は、シャフト12に固定されている。また、シャフト12は、足部41内に設けられた電動機13の回転軸に連結されている。すなわち、電動機13は、足部41の回転軸Aと同軸上に設けられている。
【0033】
可動発電部14は、バスドラム用スティック52で打面50aを叩いたときの反力を電動機13に伝えて発電し、かつ、発電によるブレーキ効果で反力による衝撃を緩和する。蓄電部15は、スイッチ素子SW1・・・SW6、コンデンサC1、・・・、Cnを有する。蓄電部13の構成としては、実施の形態1と同様のものを用いることができる。スイッチ素子SW1、・・・、SW6を切替えることにより、バッテリー回路18とコンデンサC1、・・・、Cnの接続/遮断を実現することができる。コンデンサC1、・・・、Cnは、回生電力の蓄電・放電をする。
【0034】
電源部16は、打楽器演奏ロボット20'にロボット用電源を供給する。上述したように、電動機13で発電した電力でバッテリー回路18を充電することにより、次に電動機13を駆動させる際に、充電した電力を用いてロボットを駆動することができる。このように、本発明によれば、打面30aを叩いたときの衝撃によるアーム等への負荷を減少させることができ、また、ロボットの消費電力を低減させることが可能となるスティック31を回転させて演奏を行う際に再利用することができる。
【0035】
このように、バスドラム等を、脚部40を用いて演奏をする打楽器演奏ロボット20'においても衝撃による反力が発生するので、電動機13により発電させることで衝撃力緩和と発電によるエネルギー効率向上が期待できる。さらに、脚部40を用いて演奏を行う打楽器演奏ロボット20'については、衝撃力、反力共に腕部でスティック31を用いて演奏を行う場合よりも大きい力が作用するため、より大きな効果が望める。
【0036】
なお、上述の実施の形態では、打楽器の一例としてドラム30を用いた例について説明したが、これに限定されるものではない。これ以外にも、例えば、バスドラム、メロディックタム、フロアタム、ティンパニ、和太鼓といった膜鳴打楽器、シンバル、トライアングル、ゴング、釣鐘、木魚等の体鳴打楽器でもよい。さらに、シロフォン、マリンバを含む木琴や、グラッケンシュピール、ヴィブラフォンを含む鉄琴といった鍵盤打楽器でもよい。さらに、膜面の振動をセンサによって検知し、膜面の振動を信号によって送信し、他の音源で音を生成する電子ドラムであってもよい。
【図面の簡単な説明】
【0037】
【図1】実施の形態1に係る打楽器演奏ロボットの構成を説明する図である。
【図2】実施の形態1に係る打楽器演奏ロボットの掌部によるスティックの支持状態を説明するための図である。打楽器演奏マニピュレータの構成を示す図である。
【図3】打楽器を演奏する際のマニピュレータの動作を説明する図である。
【図4】実施の形態1に係る打楽器演奏マニピュレータの構成を示す図である。
【図5】本実施の形態2に係る打楽器演奏ロボットの構成を説明する図である。
【図6】実施の形態1に係る打楽器演奏マニピュレータの構成を示す図である。
【符号の説明】
【0038】
10 打楽器演奏マニピュレータ
11 スティック固定部
12 シャフト
13 電動機
14 可動発電部
15 蓄電部
16 電源部
17 サーボアンプ
18 バッテリー回路
20、20' 打楽器演奏ロボット
21 頭部
22 胴体部
23 右腕部
24 左腕部
23a 肩関節
23b 上腕部
23c 肘関節
23d 前腕部
23e 手首関節
23f 掌部
25 車輪
26 制御部
27、28 アクチュエータ
30 ドラム
30a、50a 打面
31 スティック
31a スティックの先端
40 脚部
41 足部
42 足首関節
43 下腿部
44 膝関節
45 大腿部
50 バスドラム
51 バスドラムペダル
52 バスドラム用スティック
A 回転軸
B バスドラム用スティックの回転軸
SW1、・・・、SW6 スイッチ素子
C1、・・・、Cn コンデンサ
【技術分野】
【0001】
本発明は、打楽器を演奏するためのマニピュレータ及びそのマニピュレータを備えたロボットに関する。
【背景技術】
【0002】
従来から、テーマパークのアトラクション等で、打楽器を演奏するロボットが活躍している。このロボットは、スティックを持ったマニピュレータを備えており、演奏する曲にあわせてマニピュレータを動作させることによって、スティックの先端を打楽器の打面に打ち下ろして演奏する。このような実際の打楽器をロボットに演奏させる技術として、例えば、特許文献1又は特許文献2がある。
【0003】
特許文献1に記載の打楽器演奏ロボットは、掌部に回転軸を支点として回転可能に連結されているスティックを有している。スティックと掌部の間にはバネが圧縮状態で挿入されており、このバネの復元力を利用して、スティックを動かすことにより演奏を行うことができる。また、掌部にはストッパが設けられており、スティックがストッパと衝突することにより回転の勢いが減殺され回転が停止する。
【0004】
特許文献2に記載の打楽器演奏ロボットでは、スティックがDCモータの回転軸に連結されている。DCモータの回転により、スティックをドラムの打面に打ち下ろすことにより演奏を行う。また、振動周波数制御装置によりスティックを上下方向から挟持して、スティックの振動を制御している。
【0005】
なお、特許文献3には、モータ駆動のハンマで弦楽器を叩く電子ピアノが記載されている。ハンマを止め具に衝突させることにより、ハンマの動きを止めることができる。また、電動機の回生エネルギーを利用する技術として特許文献4又は特許文献5がある。
【特許文献1】特開2006−159295号公報
【特許文献2】特開2002−258836号公報
【特許文献3】特表平9−500455号公報
【特許文献4】特開2005−53693号公報
【特許文献5】特開平9−137683号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の打楽器演奏ロボットでは、依然として改善すべき点が残されている。従来の打楽器演奏ロボットでは、スティックは、演奏時に常に固定された状態でロボットの掌で保持されている。スティックで打楽器の打面を叩いたときのスティック先端にかかる力は、10〜30Nである。この力を受けてもスティック保持を維持しつつ、ドラム演奏に支障をきたすようなスティックずれを押さえるために、スティックで打楽器の打面を叩いたときの衝撃を掌で緩和し、ロボットハンド・アームの全体でスティックを押さえている。このため、ロボットのハンド及びアームには、打面を叩いたときの衝撃による負荷がかかる。また、従来技術ではスティックで打面を叩いたときの力による反力を利用することができなかった。
【0007】
本発明は、このような事情を背景としてなされたものであり、本発明の目的は、打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させることが可能な打楽器演奏マニピュレータ及びこれを備える打楽器演奏ロボットを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の第1の態様に係る打楽器演奏マニピュレータは、スティックを動作させるための動作部と、前記スティックの先端が打楽器の打面に向かう回転力を前記動作部に付与する電動機とを備え、前記電動機は、前記打面との衝突で跳ね返された前記スティックの前記打面と反対方向へ向かう回転力を電力として回収し、前記スティックを制動するものである。これにより、演奏時にスティックで打面を叩いたときの衝撃(反力)を発電用動力とすることで衝撃を緩和し、アーム等への負荷を減少させることができる。
【0009】
本発明の第2の態様に係る打楽器演奏マニピュレータは、上記の打楽器演奏マニピュレータにおいて、前記電力を蓄電する蓄電器を備えるものである。これにより、演奏時にスティックで打面を叩いたときの衝撃(反力)を発電用動力として電気エネルギーを得て、ロボットのエネルギー効率を向上させることができる。
【0010】
本発明の第3の態様に係る打楽器演奏ロボットは、上記いずれかの打楽器演奏マニピュレータと、前記電動機を駆動する駆動部とを備えるものである。これにより、演奏時にスティックで打面を叩いたときの衝撃(反力)を発電用動力とすることで、衝撃を緩和し、アーム等への負荷を減少させることができる。
【0011】
本発明の第4の態様に係る打楽器演奏ロボットは、上記の打楽器演奏ロボットにおいて、前記動作部は、掌部又は足部であることを特徴とするものである。本発明は、このような場合に有効である。
【発明の効果】
【0012】
本発明によれば、打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させることが可能な打楽器演奏マニピュレータ及びこれを備える打楽器演奏ロボットを提供することができる。
【発明を実施するための最良の形態】
【0013】
以下に、本発明を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。各図面において、同一要素には同一の符号が付されており、説明の明確化のため、必要に応じて重複説明は省略する。
【0014】
実施の形態1.
本発明の実施の形態1に係る打楽器演奏ロボットの構成について、図1及び図2を参照して説明する。図1は、本実施の形態に係る打楽器演奏マニピュレータを備えた打楽器演奏ロボット20の構成を示す図である。図2は、掌部23fによるスティック31の支持状態を説明するための図である。
【0015】
まず、図1を参照して、本実施の形態に係る打楽器演奏ロボット20の構成について説明する。打楽器演奏ロボット20は、ヒトを模して作成されたヒューマノイド・ロボットである。ここでは、打楽器演奏ロボット20は、打楽器の一例であるドラム30を演奏する場合について説明する。図1に示すように、打楽器演奏ロボット20は、頭部21、胴体部22、右腕部23、左腕部24、車輪25、制御部26等を備えている。
【0016】
胴体部22は、略直方体形状を有している。胴体部22には、打楽器演奏ロボット20の動作を統括的に制御する制御部26が収納されている。胴体部22には、右腕部23、左腕部24が接続されている。右腕部23は、肩関節23a、上腕部23b、肘関節23c、前腕部23d、手首関節23e、掌部23fを有している。左腕部24は、右腕と同様に、肩関節、上腕部、肘関節、前腕部、手首関節、掌部を有している。なお、右腕部23と、左腕部24とは略同一の構成を有しているため、左腕部24については説明を省略し、以下、右腕部23の構成のみについて詳細に説明する。
【0017】
胴体部22には、上腕部23bの一端が、肩関節23aを介して揺動自在に取り付けられている。上腕部23bの他端には、肘関節23cを介して、前腕部23dの一端が接続されている。前腕部23dは肘関節23cを支点として揺動可能である。また、上腕部23bの内部には前腕部23dを揺動させるアクチュエータ27が設けられている。アクチュエータ27としては、例えば、ソレノイドやモータ等を用いることができる。このアクチュエータ27は、制御部26から出力される制御信号により駆動される。
【0018】
前腕部23dの他端には、手首関節23eを介して動作部である掌部23fが連結されている。掌部23fは、手首関節23eを支点として揺動可能である。前腕部23dの内部には、掌部23を揺動させるアクチュエータ28が設けられている。アクチュエータ28としては、ソレノイドやモータ等を用いることができる。このアクチュエータ28もまた、制御部26から出力される制御信号により駆動される。掌部23fには、ドラム30を演奏する(叩く)ためのスティック31が支持されている。従って、掌部23fがスティック31を支持する支持部である。掌部23fによるスティックの支持については、後に詳述する。
【0019】
また、胴体部22の下側には、車輪25が接続されている。打楽器演奏ロボット20は、車輪25を回転させることによって、前進/後退をする。本実施の形態に係る打楽器演奏ロボット20は、ヒトがドラム30を叩きながら行進するように、車輪25を回転させて移動しながらドラム30の演奏を行う。
【0020】
ここで、図2を参照して、掌部23fによるスティック31の支持の様子について説明する。図2に示すように、スティック31は、スティック固定部11に貫入されている。スティック固定部11は、シャフト12に固定されている。また、シャフト12は、掌部23f内に設けられた電動機13の回転軸に連結されている。すなわち、電動機13は、スティック31の回転軸Aと同軸上に設けられている。従って、スティック31は、回転軸Aを中心として回転自在に支持されている。
【0021】
本実施の形態で用いられる電動機13は、電動機と発電機とが可逆であり兼用されるものである。通常ドラム30の演奏を行う際には、電動機13は電力を回転力に変換する。電動機13の回転軸を回転させることにより、シャフト12が回転する。これにより、スティック固定部11に貫入されたスティック31が回転軸Aを中心として回転する。従って、図3に示すように、先端31aをドラム30の打面30aに向かって振り下ろし、演奏を行うことができる。
【0022】
一方、ドラム30の打面30aにスティック31の先端31aが衝突すると、打面30aからの反力により、図3中矢印で示すように、スティック31の先端31aが打面30aから遠ざかる方向に跳ね返される。これにより、スティック31は、回転軸Aを中心として、演奏を行うときと逆回りに回転する。このとき、電動機13を発電機として作動させ、回転力を電力に変換して回収する。また、発電時の回転抵抗を制動力として利用して、スティック31の回転を制動することができる。すなわち、電動機13は、回生ブレーキとして機能する。
【0023】
ここで、図4を参照して、本実施の形態に係る打楽器演奏マニピュレータについて説明する。図4に示すように、打楽器演奏マニピュレータは、上述の掌部23fを有する可動発電部14、蓄電部15、電源部16を備えている。ここでは、電動機13として、サーボアンプ17を備えるサーボモータを用いる例について説明する。
【0024】
可動発電部14は、スティック31で打面30aを叩いたときの反力を電動機13に伝えて発電し、かつ、発電によるブレーキ効果で反力による衝撃を緩和する。なお、可動発電部14の構成としては、この例に限定されるものではなく、電動機13として使用するモータごとに構成が多少異なる。
【0025】
蓄電部15は、スイッチ素子SW1・・・SW6、コンデンサC1、・・・、Cnを有する。サーボアンプ17の(+)端子とバッテリー回路18の(+)端子とは、スイッチ素子SW1及びSW2を介して接続されている。また、サーボアンプ17の電源端子(−)とバッテリー回路18の(−)端子とは、スイッチ素子SW4及びSW5を介して接続されている。スイッチ素子SW1とSW2との接続点には、コンデンサC1、・・・、Cnの一端が、スイッチ素子SW3を介して接続されている。また、スイッチ素子SW4とSW5との接続点には、コンデンサC1、・・・、Cnの他端が、スイッチ素子SW6を介して接続されている。
【0026】
スイッチ素子SW1、・・・、SW6を切替えることにより、バッテリー回路18とコンデンサC1、・・・、Cnの接続/遮断を実現することができる。コンデンサC1、・・・、Cnは、回生電力の蓄電・放電をする。なお、電動機13で発電した電力を電源部16のバッテリー回路18に返す場合、電源部16以上の電圧が必要となる。電動機13で発電した電力の電圧が電源電圧以下の場合、回生失効となるからである。蓄電部15は、電動機13で発電した電力をコンデンサC1、・・・、Cnに蓄電し、電源電圧以上になった後にバッテリー回路18への放電、充電を行う。なお、使用するモータ、電源によっては、アンプやバッテリー回路に組み込まれている場合もある。
【0027】
電源部16は、打楽器演奏ロボット20にロボット用電源を供給する。電源部16は、バッテリー回路18、電源電圧安定化回路(不図示)等で構成される。電源部16は、打楽器演奏ロボット20に安定した電圧で電流を供給する。また、電源部16は、電圧異常やバッテリー異常を感知して回路遮断できる。上述したように、電動機13で発電した電力でバッテリー回路18を充電することにより、次に電動機13を駆動させる際に、充電した電力を用いてロボットを駆動することができる。このように、本発明によれば、打面30aを叩いたときの衝撃によるアーム等への負荷を減少させることができ、また、ロボットの消費電力を低減させることが可能となるスティック31を回転させて演奏を行う際に再利用することができる。
【0028】
実施の形態2.
本発明の実施の形態2に係る打楽器演奏ロボット20'の構成について、図5及び図6を参照して説明する。図5は、本実施の形態に係る打楽器演奏ロボット20A'の構成を示す図である。図6は、本実施の形態に係る打楽器演奏マニピュレータの構成を示す図である。図5、6において、図4を同一の構成要素には同一の符号を付し、説明を適宜省略する。
【0029】
図5に示すように、本実施の形態に係る打楽器演奏ロボット20'は、実施の形態1の車輪25の代わりに脚部40を備えている。脚部40は、足部41、足首関節42、下腿部43、膝関節44、大腿部45等を備えている。胴体部22には、大腿部の一端が揺動自在に取り付けられている。大腿部45の他端には、膝関節44を介して下腿部43の一端が接続されている。下腿部43は、膝関節44を支点として搖動可能である。なお、ここでは図示していないが、下腿部43を駆動するためのモータ等からなるアクチュエータが、例えば大腿部45の内部に設けられている。
【0030】
下腿部43の他端には、足首関節42を介して足部41が連結されている。足部41は、足首関節42を支点として搖動可能である。なお、例えば、下腿部43の内部には、足部41を駆動するためのモータ等からなるアクチュエータが設けられている。本実施の形態においては、打楽器演奏ロボット20'は、椅子60に腰掛けた状態で、足部41を足首関節42の回転軸Aを中心として回転させ、ドラムセットのバスドラム50を演奏する際に使用するバスドラムペダル51を踏む。これにより、バスドラムペダル51に設けられたバスドラム用スティック52が回転軸Bを中心に回転して、バスドラム50の打面50aに振り下ろされ、演奏が行われる。すなわち、バスドラム用スティック52は、足部41を回転させることにより、回転軸Bを中心として回転する。
【0031】
バスドラム50の打面50aにバスドラム用スティック52の先端が衝突すると、打面50aからの反力により、バスドラム用スティック52の先端が打面50aから遠ざかる方向に跳ね返される。これにより、バスドラム用スティック52は、回転軸Bを中心として、演奏を行うときと逆回りに回転する。これに起因して、打楽器演奏ロボット20'の足部41が回転軸Aを中心として、逆周りに回転する。このとき、電動機13を発電機として作動させ、回転力を電力に変換して回収する。また、発電時の回転抵抗を制動力として利用して、スティック31の回転を制動することができる。すなわち、電動機13は、回生ブレーキとして機能する。
【0032】
ここで、図6を参照して、本実施の形態に係る打楽器演奏マニピュレータについて説明する。図6に示すように、打楽器演奏マニピュレータは、上述の足部41を有する可動発電部14、蓄電部15、電源部16を備えている。なお、本実施の形態に用いられる打楽器演奏マニピュレータとしては、実施の形態1で用いたものと略同一の構成を有するものを使用することができる。図6に示すように、足部41は、シャフト12に固定されている。また、シャフト12は、足部41内に設けられた電動機13の回転軸に連結されている。すなわち、電動機13は、足部41の回転軸Aと同軸上に設けられている。
【0033】
可動発電部14は、バスドラム用スティック52で打面50aを叩いたときの反力を電動機13に伝えて発電し、かつ、発電によるブレーキ効果で反力による衝撃を緩和する。蓄電部15は、スイッチ素子SW1・・・SW6、コンデンサC1、・・・、Cnを有する。蓄電部13の構成としては、実施の形態1と同様のものを用いることができる。スイッチ素子SW1、・・・、SW6を切替えることにより、バッテリー回路18とコンデンサC1、・・・、Cnの接続/遮断を実現することができる。コンデンサC1、・・・、Cnは、回生電力の蓄電・放電をする。
【0034】
電源部16は、打楽器演奏ロボット20'にロボット用電源を供給する。上述したように、電動機13で発電した電力でバッテリー回路18を充電することにより、次に電動機13を駆動させる際に、充電した電力を用いてロボットを駆動することができる。このように、本発明によれば、打面30aを叩いたときの衝撃によるアーム等への負荷を減少させることができ、また、ロボットの消費電力を低減させることが可能となるスティック31を回転させて演奏を行う際に再利用することができる。
【0035】
このように、バスドラム等を、脚部40を用いて演奏をする打楽器演奏ロボット20'においても衝撃による反力が発生するので、電動機13により発電させることで衝撃力緩和と発電によるエネルギー効率向上が期待できる。さらに、脚部40を用いて演奏を行う打楽器演奏ロボット20'については、衝撃力、反力共に腕部でスティック31を用いて演奏を行う場合よりも大きい力が作用するため、より大きな効果が望める。
【0036】
なお、上述の実施の形態では、打楽器の一例としてドラム30を用いた例について説明したが、これに限定されるものではない。これ以外にも、例えば、バスドラム、メロディックタム、フロアタム、ティンパニ、和太鼓といった膜鳴打楽器、シンバル、トライアングル、ゴング、釣鐘、木魚等の体鳴打楽器でもよい。さらに、シロフォン、マリンバを含む木琴や、グラッケンシュピール、ヴィブラフォンを含む鉄琴といった鍵盤打楽器でもよい。さらに、膜面の振動をセンサによって検知し、膜面の振動を信号によって送信し、他の音源で音を生成する電子ドラムであってもよい。
【図面の簡単な説明】
【0037】
【図1】実施の形態1に係る打楽器演奏ロボットの構成を説明する図である。
【図2】実施の形態1に係る打楽器演奏ロボットの掌部によるスティックの支持状態を説明するための図である。打楽器演奏マニピュレータの構成を示す図である。
【図3】打楽器を演奏する際のマニピュレータの動作を説明する図である。
【図4】実施の形態1に係る打楽器演奏マニピュレータの構成を示す図である。
【図5】本実施の形態2に係る打楽器演奏ロボットの構成を説明する図である。
【図6】実施の形態1に係る打楽器演奏マニピュレータの構成を示す図である。
【符号の説明】
【0038】
10 打楽器演奏マニピュレータ
11 スティック固定部
12 シャフト
13 電動機
14 可動発電部
15 蓄電部
16 電源部
17 サーボアンプ
18 バッテリー回路
20、20' 打楽器演奏ロボット
21 頭部
22 胴体部
23 右腕部
24 左腕部
23a 肩関節
23b 上腕部
23c 肘関節
23d 前腕部
23e 手首関節
23f 掌部
25 車輪
26 制御部
27、28 アクチュエータ
30 ドラム
30a、50a 打面
31 スティック
31a スティックの先端
40 脚部
41 足部
42 足首関節
43 下腿部
44 膝関節
45 大腿部
50 バスドラム
51 バスドラムペダル
52 バスドラム用スティック
A 回転軸
B バスドラム用スティックの回転軸
SW1、・・・、SW6 スイッチ素子
C1、・・・、Cn コンデンサ
【特許請求の範囲】
【請求項1】
スティックを動作させるための動作部と、
前記スティックの先端が打楽器の打面に向かう回転力を前記動作部に付与する電動機、
とを備え、
前記電動機は、前記打面との衝突で跳ね返された前記スティックの前記打面と反対方向へ向かう回転力を電力として回収し、前記スティックを制動する打楽器演奏マニピュレータ。
【請求項2】
前記電力を蓄電する蓄電部を備える請求項1に記載の打楽器演奏マニピュレータ。
【請求項3】
請求項1又は2に記載の打楽器演奏マニピュレータと、
前記電動機を駆動する駆動部とを備える打楽器演奏ロボット。
【請求項4】
前記動作部は、掌部又は足部であることを特徴とする請求項3に記載の打楽器演奏ロボット。
【請求項1】
スティックを動作させるための動作部と、
前記スティックの先端が打楽器の打面に向かう回転力を前記動作部に付与する電動機、
とを備え、
前記電動機は、前記打面との衝突で跳ね返された前記スティックの前記打面と反対方向へ向かう回転力を電力として回収し、前記スティックを制動する打楽器演奏マニピュレータ。
【請求項2】
前記電力を蓄電する蓄電部を備える請求項1に記載の打楽器演奏マニピュレータ。
【請求項3】
請求項1又は2に記載の打楽器演奏マニピュレータと、
前記電動機を駆動する駆動部とを備える打楽器演奏ロボット。
【請求項4】
前記動作部は、掌部又は足部であることを特徴とする請求項3に記載の打楽器演奏ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−279726(P2009−279726A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2008−136332(P2008−136332)
【出願日】平成20年5月26日(2008.5.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願日】平成20年5月26日(2008.5.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]