
技能習得支援システム及び技能習得支援方法
【課題】模範者の動作に対する利用者の動作の差異を検出する技能習得支援システムにおいて、利用者の動作の評価を適正に行う。
【解決手段】模範者及び利用者の動作に係るデータを検出するセンサ5と、前記動作に係るデータを取得する動作データ取得手段7,10と、前記動作に係るデータを記録する記憶手段17と、前記模範者の動作に係る第1のグラフL1を形成すると共に、利用者の動作に係る第2のグラフL2を形成するグラフ化手段10と、前記第1、第2のグラフにおける所定の作業ポイントが時間軸上で一致するよう調整する作業ポイント一致手段10と、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲Rを時系列に形成する許容範囲形成手段10と、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段10とを備える。
【解決手段】模範者及び利用者の動作に係るデータを検出するセンサ5と、前記動作に係るデータを取得する動作データ取得手段7,10と、前記動作に係るデータを記録する記憶手段17と、前記模範者の動作に係る第1のグラフL1を形成すると共に、利用者の動作に係る第2のグラフL2を形成するグラフ化手段10と、前記第1、第2のグラフにおける所定の作業ポイントが時間軸上で一致するよう調整する作業ポイント一致手段10と、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲Rを時系列に形成する許容範囲形成手段10と、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段10とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、技能習得支援システム及び技能習得支援方法に関し、特に基準となる動作を効率よく習得することのできる技能習得支援システム及び技能習得支援方法に関する。
【背景技術】
【0002】
例えば、自動車の製造工程において車両ボディに塗装を施す工程は、ロボットによる塗装作業、或いはスプレーガンを用いた人手による塗装作業が行われている。
前記人手による作業の場合、高習熟者であれば、ワークに対し常に一定の動作でスプレーガンを操作し、仕上がりのよい塗装作業を行うことができる。
しかしながら、技能が完全に身に付いていない低習熟者の場合、塗装作業の動作がワーク毎に一定ではなく、塗装の仕上がり状態がばらつくという課題がある。
【0003】
前記課題の解決に応用できるものとして、特許文献1には、利用者が所定の基準動作(指導者の動作)に対する動作のずれや誤りを把握でき、それにより正確な動作を行えるようにするための運動支援システムについて開示されている。
【0004】
この運動支援システムにおいては、先ず、所定の運動を行う指導者の動作を撮影した運動画像データと、利用者の動作を撮影した運動画像データとがコンピュータの記憶装置に記録される。
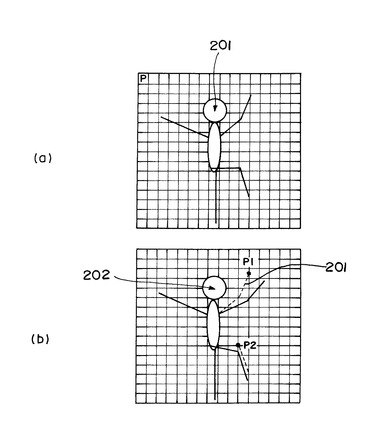
次いで、図8(a)に示すように指導者201の運動画像データが監視対象部位(例えば首、手、足)について2次元軸のメッシュ状に座標化され、図8(b)に示すように利用者202のデータも同様に座標化される。ここで、図8(b)に示すように利用者202の座標系に指導者201の座標値を重ねることにより、座標P1、P2において大きな差分(動作の違い)が生じていることが検出できる。
【0005】
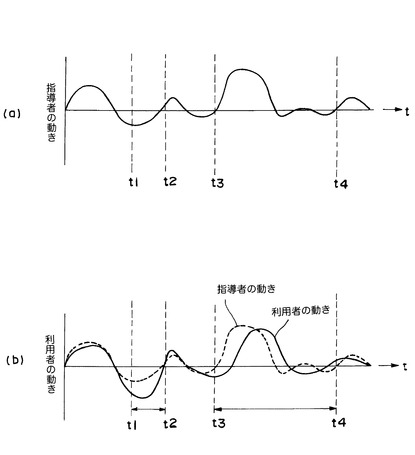
更に、図9(a)に示すように指導者の動作が時系列にグラフ化され、図9(b)に示すように利用者の動作も同様にグラフ化される。ここで、図9(b)に示すように利用者のグラフに指導者のグラフ(破線)を重ねることにより、時刻t1とt2の間、及び時刻t3とt4の間に動作速度のずれが生じていることが検出できる。
このように、特許文献1に開示された運動支援システムによれば、利用者自身が各部位の動作位置や動作速度のずれを把握し、動作の矯正に活用することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−302122号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に開示された運動支援システムにあっては、例えば時刻t3とt4との間のように時間的ずれが生じると、その影響により、最終的に一連の動作を適正に評価できないという課題があった。
具体的には、複数種類の単一動作で構成される一連動作の作業において、そのうち数種の単一動作の動作時間がそれぞれ極端にずれると、その影響により、残る数種の単一動作がそれぞれ許容範囲内であっても、それを正しく評価出来なくなる虞があった。
また、複数種類の単一動作がそれぞれ許容範囲内であっても(例えば、結果的に仕上がりのよい塗装が得られても)、各単一動作の微少な時間的ずれが累積され、最終的に累積された時間的ずれが大きくなり、一連の作業の評価結果が悪いものとなる虞があった。
【0008】
本発明は、前記した点に着目してなされたものであり、模範者の動作に対する利用者の動作の差異を検出する技能習得支援システム及び技能習得支援方法であって、利用者の動作の評価適正に行うことができる技能習得支援システム及び技能習得支援方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記した課題を解決するために、本発明に係る技能習得支援システムは、模範者の動作に対する利用者の動作の差異を検出する技能習得支援システムであって、模範者及び利用者の身体において、所定の監視部位に取り付けられ、前記模範者及び利用者のそれぞれの動作に係るデータを検出するセンサと、前記センサが検出した動作に係るデータを取得する動作データ取得手段と、前記動作データ取得手段が取得した動作に係るデータを記録する記憶手段と、前記記憶手段に記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するグラフ化手段と、前記グラフ化手段が形成した第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整する作業ポイント一致手段と、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成する許容範囲形成手段と、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段とを備えることに特徴を有する。
尚、前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことが望ましい。
また、前記模範者及び利用者の動作を動画として撮影するカメラと、前記カメラから出力される画像データを取得し、前記記憶手段に記録する画像データ取得手段と、前記記憶手段に記録された動作に係るデータと画像データとを時系列に紐付けする紐付け手段とを備えることが望ましい。
【0010】
このような構成によれば、模範者と利用者との動作速度にずれが生じても、その時間的ずれが累積されることがなく、動作の評価を適正に行うことができる。
また、利用者は、矯正すべき箇所をグラフ及び画像から容易に知ることができるため、繰り返し訓練することにより、技能的な作業動作を効率よく習得することができる。
【0011】
また、前記した課題を解決するために、本発明に係る技能習得支援方法は、模範者の動作に対する利用者の動作の差異を検出する技能習得支援方法であって、模範者及び利用者の身体において、所定の監視部位に取り付けられたセンサにより、前記模範者及び利用者のそれぞれの動作に係るデータを検出するステップと、前記センサが検出した動作に係るデータを取得するステップと、前記取得した動作に係るデータを記録するステップと、前記記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するステップと、前記第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整するステップと、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成するステップと、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出するステップとを含むことに特徴を有する。
尚、前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことが望ましい。
また、前記模範者及び利用者の身体の監視部位に取り付けられたセンサにより、模範者及び利用者のそれぞれの動作に係るデータを検出するステップにおいて、前記模範者及び利用者の動作を動画として撮影するステップと、前記撮影により出力される画像データを取得し、記録するステップとを実行し、前記記録された動作に係るデータと画像データとを時系列に紐付けすることが望ましい。
【0012】
このようなステップを実施することにより、模範者と利用者との動作速度にずれが生じても、その時間的ずれが累積されることがなく、動作の評価を適正に行うことができる。
また、利用者は、矯正すべき箇所をグラフ及び画像から容易に知ることができるため、繰り返し訓練することにより、技能的な作業動作を効率よく習得することができる。
【発明の効果】
【0013】
本発明によれば、基準となる模範者の動作に対する利用者の動作の差異を検出する技能習得支援システム及び技能習得支援方法であって、利用者の動作の評価を適正に行うことができる技能習得支援システム及び技能習得支援方法を得ることができる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明に係る技能習得支援システムの一実施形態を示す概念図である。
【図2】図2は、図1の技能習得支援システムの全体構成を示すブロック図である。
【図3】図3は、図1の技能習得支援システムにおける一連の動作の流れを示すフローである。
【図4】図4は、低習熟者及び高習熟者の動作の加速度の変化を時系列に示すグラフである。
【図5】図5は、図4のグラフにおいて、所定の作業ポイントの経過時間を低習熟者及び高習熟者について示したグラフである。
【図6】図6は、図5のグラフに示した作業ポイントの時間軸を低習熟者と高習熟者との間で一致させたグラフである。
【図7】図7は、図6の高習熟者のグラフにおいて、低習熟者に対するデータ許容範囲を示すと共に、低習熟者のグラフが前記データ許容範囲を外れた箇所を示すグラフである。
【図8】図8は、従来の運動支援システムにおいて、利用者と指導者の運動画像データを2次元軸のメッシュ状に座標化した結果を示す模式図である。
【図9】図9は、従来の運動支援システムにおいて、利用者と指導者の運動画像データを時系列に示したグラフである。
【発明を実施するための形態】
【0015】
以下、本発明にかかる技能習得支援システム及び技能習得支援方法の実施の形態につき、図面に基づいて説明する。尚、本実施の形態においては、本発明に係る技能習得支援システムを、自動車の車両ボディにスプレーガンにより塗装処理を施す技能(模範者の動作)を低習熟者(利用者)が習得する場合に適用して説明する。
【0016】
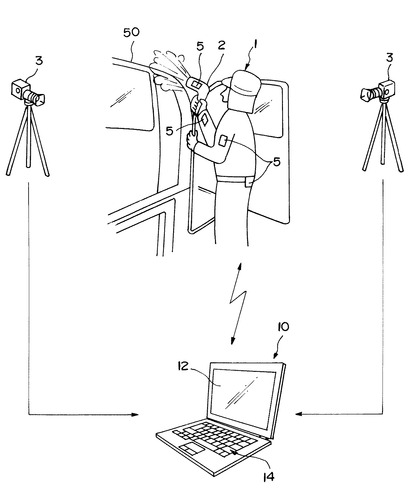
図1は、本発明に係る技能習得支援システムの一実施形態を示す概念図である。図1に示すように、作業者1は車両ボディ50に対しスプレーガン2により塗布処理を施す。
作業者1の周りには、複数の角度からこの作業者1の動作を撮影するための複数のカメラ3が設置される。
これらのカメラ3により撮影された動画からなる画像データは、コンピュータ10に出力され、コンピュータ10においてデジタルデータとして記録されるようになっている。
【0017】
また、スプレーガン2、作業者1の手首、腕、腰などの監視部位には、それぞれセンサ5が取り付けられている。このセンサ5は、3軸加速度センサと3軸ジャイロセンサと3軸地磁気センサとを有し、加速度センサにより監視部位の動作の加速度を検出し、ジャイロセンサにより監視部位の角度及び角速度を検出し、3軸地磁気センサにより監視部位の方位角を検出するようになっている。また、各センサ5とコンピュータ10とは、無線通信によりデータの送受信が可能となされ、本実施形態では、ブルートゥースを用いた無線通信によりセンサ5の検出データがコンピュータ10に入力されるようになされている。
【0018】
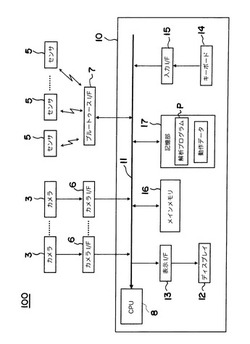
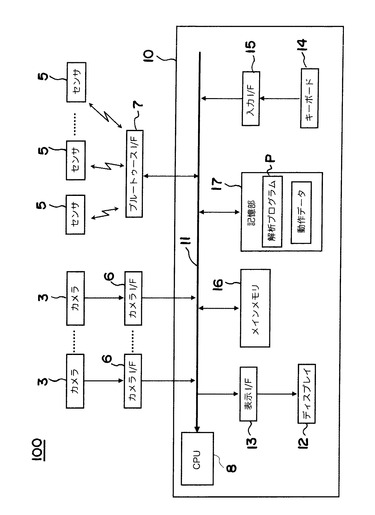
続いて、図2を用いて、図1に示した技能習得支援システムの全体構成について、より具体的に説明する。図2は、技能習得支援システム100の全体構成を示すブロック図である。
前記のように作業者1を撮影するための複数のカメラ3は、それぞれカメラインターフェイス6を介してコンピュータ10に接続される(カメラインターフェイス6とコンピュータ10とにより画像データ取得手段が構成される)。
また、作業者1及びスプレーガン2に取り付けられる複数のセンサ5は、ブルートゥースインターフェイス7を介してコンピュータ10と無線接続される(ブルートゥースインターフェイス7とコンピュータ10とにより動作データ取得手段が構成される)。
【0019】
コンピュータ10は、コンピュータプログラムに従い、各種命令、演算を行うためのCPU8を有し、このCPU8には、バスライン11を介して複数のユニットが接続されている。具体的には、センサ5による検出結果など、様々な情報を表示するためのディスプレイ12が表示インターフェイス13を介して接続され、コンピュータ10の操作のためのコマンドを外部から入力するための入力手段であるキーボード14等が入力インターフェイス15を介して接続される。さらにCPU8には、実行されるプログラムやデータを一時的に記憶するメインメモリ16が接続され、センサ5から検出データを取得し、解析するための解析プログラムPや取得した動作データを記録する記憶部17(記憶手段)が接続されている。
【0020】
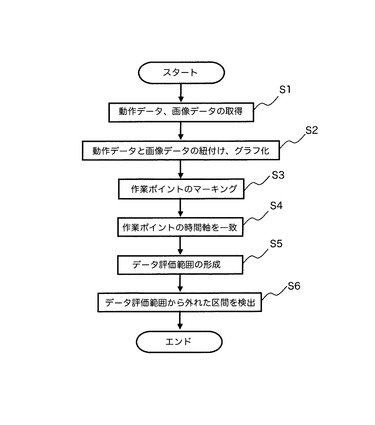
続いて、前記のように構成された技能習得支援システム100における一連の動作について図3のフローに沿って説明する。尚、以下においては、高習熟者の動作を低習熟者が習得する目的で実施されるものとする。
先ず、高習熟者と低習熟者とがそれぞれ作業者1として、その監視部位(手首、腕、腰、スプレーガン2等)にセンサ5が取り付けられ、車両ボディ50への塗布作業が行われる。
また、このとき、複数のカメラ3により作業者1の動作が撮影され、作業開始時刻から完了時刻までの作業期間の動画の画像データがコンピュータ10の記憶部17に記録される。
【0021】
また、コンピュータ10では、キーボード14の操作により解析プログラムPが実行され、CPU8は、このプログラムPに従い命令を実行する。具体的には前記作業期間において所定の時間間隔(例えば1sec毎)で各センサ5から無線通信により各監視部位の加速度、角度、角速度などのデータ(纏めて動作データと呼ぶ)を取得し、記憶部17に記録する(図3のステップS1)。
【0022】
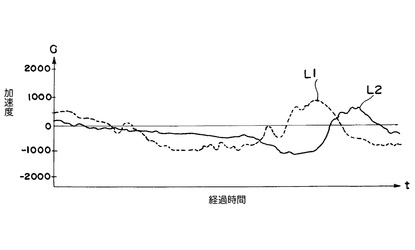
前記作業期間が終わり、高習熟者及び低習熟者の画像データと動作データとがそれぞれ記憶部17に記録されると、コンピュータ10では画像データと動作データとを時系列に紐付けし、また、図4に示すように監視部位毎に動作データをグラフ化し、ディスプレイ12に表示する(図3のステップS2)。尚、図4においては手首に取り付けられたセンサ5から取得した動作データに基づき、高習熟者(破線)のグラフL1、低習熟者(実線)のグラフL2について示している。また、このグラフの縦軸は、加速度Gであり、横軸は経過時間tである。また、このステップS2において、コンピュータ10は紐付け手段、及びグラフ化手段として機能する。
【0023】
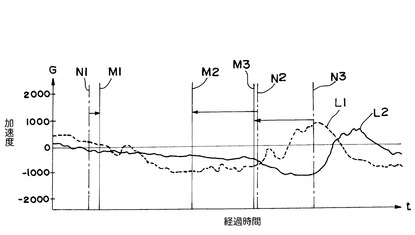
次いで、コンピュータ10では、一連の塗布作業において、要所となる複数の作業ポイント(例えば、ピラーに対するスプレーガン2からの吹き付け完了時など)における経過時間を、図5に示すようにグラフL1,L2についてそれぞれマーキングする(図3のステップS3)。尚、マーキングされたライン(マークラインと呼ぶ)は、図5において、高習熟者のグラフL1はマークラインM1〜M3(実線)で示し、低習熟者のグラフL2はマークラインN1〜N3(一点鎖線)で示している。
【0024】
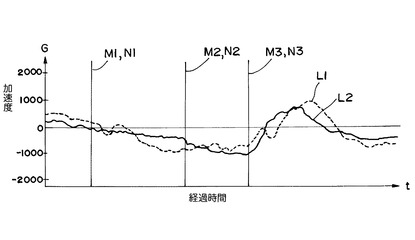
次に、コンピュータ10では、図5に矢印で示すように、高習熟者のマークラインM1〜M3に対し低習熟者のマークラインN1〜N3が時間軸上で一致するよう調整がなされる。ここで、低習熟者のグラフL2は、図6に示すように、高習熟者の複数のマークラインM1〜M3により区切られる各区間において、均等な時間間隔で伸縮される(図3のステップS4)。尚、このステップS3,S4において、コンピュータ10は作業ポイント一致手段として機能する。
【0025】
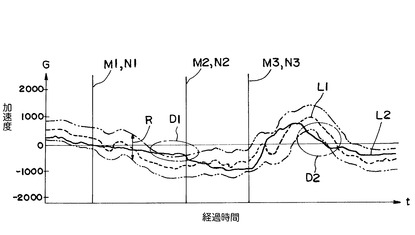
こうして高習熟者のグラフL1と低習熟者のグラフL2とについて、各要所となる作業ポイントが時間軸上で一致するよう調整されると、(コンピュータ10は許容範囲形成手段として機能し、)図7に示すように高習熟者のグラフL1に、低習熟者の能力レベルに合ったデータ評価範囲(データ許容範囲)Rを表示する(図3のステップS5)。
ここで、解析プログラムPが実行されるコンピュータ10においては、低習熟者のグラフL2が前記データ評価範囲Rから外れた区間D1,D2を検出し、その箇所は低習熟者と高習熟者の動作が異なると判断し、その旨ディスプレイ12に表示する(図3のステップS6)。また、このようにステップS6においては、コンピュータ10は相違箇所検出手段として機能する。
【0026】
尚、センサ5により取得された他の監視部位、及び、加速度データ以外の角度、角速度データについても上記ステップと同様にグラフ化され、高習熟者と低習熟者の動作の差異が判断される。
【0027】
低習熟者は、図7に示したグラフの結果により、高習熟者と動作の異なる箇所を知ることができ、また、経過時間に紐付けられた画像データをディスプレイ12に表示させることにより、所定の動作を容易に矯正し、訓練することができる。
【0028】
以上のように本発明に係る技能習得支援システム100によれば、高習熟者と低習熟者のそれぞれの動作データ(加速度、角速度、角度など)を取得してグラフ化し、高習熟者のグラフL1と低習熟者のグラフL2とにおいて要所となる各作業ポイントが時間軸上で一致するよう調整される。また、高習熟者のグラフL1に対し、低習熟者の能力レベルに合わせたデータ評価範囲Rが形成され、低習熟者のグラフL2において前記データ評価範囲Rを外れた区間が検出され、その外れた区間の動作が矯正すべき箇所で有ると判断される。
これにより、低習熟者と高習熟者の動作速度にずれが生じても、その時間的ずれが累積されることがなく、動作の評価を適正に行うことができる。
また、低習熟者は、矯正すべき箇所を容易に知ることができるため、繰り返し訓練することにより、技能的な作業動作を効率よく習得することができる。
【0029】
尚、前記実施の形態においては、作業者が自動車の車両ボディにスプレーガンにより塗装処理を施す技能(基準となる動作)を低習熟者(利用者)が習得する場合を例にして説明したが、本発明にあっては、その形態に限定されるものではなく、その他、あらゆる技能の習得のために好適に用いることができる。
【符号の説明】
【0030】
1 作業者(低習熟者(利用者)、高習熟者(模範者))
2 スプレーガン
3 カメラ
5 センサ
6 カメラインターフェイス(画像データ取得手段)
7 ブルートゥースインターフェイス(動作データ取得手段)
8 CPU
10 コンピュータ(画像データ取得手段、動作データ取得手段、紐付け手段、グラフ化手段、作業ポイント一致手段、許容範囲形成手段、相違箇所検出手段)
12 ディスプレイ
13 表示インターフェイス
14 キーボード
15 入力インターフェイス
16 メインメモリ
17 記憶部(記憶手段)
L1 高習熟者のグラフ
L2 低習熟者のグラフ
P 解析プログラム
R データ評価範囲(データ許容範囲)
【技術分野】
【0001】
本発明は、技能習得支援システム及び技能習得支援方法に関し、特に基準となる動作を効率よく習得することのできる技能習得支援システム及び技能習得支援方法に関する。
【背景技術】
【0002】
例えば、自動車の製造工程において車両ボディに塗装を施す工程は、ロボットによる塗装作業、或いはスプレーガンを用いた人手による塗装作業が行われている。
前記人手による作業の場合、高習熟者であれば、ワークに対し常に一定の動作でスプレーガンを操作し、仕上がりのよい塗装作業を行うことができる。
しかしながら、技能が完全に身に付いていない低習熟者の場合、塗装作業の動作がワーク毎に一定ではなく、塗装の仕上がり状態がばらつくという課題がある。
【0003】
前記課題の解決に応用できるものとして、特許文献1には、利用者が所定の基準動作(指導者の動作)に対する動作のずれや誤りを把握でき、それにより正確な動作を行えるようにするための運動支援システムについて開示されている。
【0004】
この運動支援システムにおいては、先ず、所定の運動を行う指導者の動作を撮影した運動画像データと、利用者の動作を撮影した運動画像データとがコンピュータの記憶装置に記録される。
次いで、図8(a)に示すように指導者201の運動画像データが監視対象部位(例えば首、手、足)について2次元軸のメッシュ状に座標化され、図8(b)に示すように利用者202のデータも同様に座標化される。ここで、図8(b)に示すように利用者202の座標系に指導者201の座標値を重ねることにより、座標P1、P2において大きな差分(動作の違い)が生じていることが検出できる。
【0005】
更に、図9(a)に示すように指導者の動作が時系列にグラフ化され、図9(b)に示すように利用者の動作も同様にグラフ化される。ここで、図9(b)に示すように利用者のグラフに指導者のグラフ(破線)を重ねることにより、時刻t1とt2の間、及び時刻t3とt4の間に動作速度のずれが生じていることが検出できる。
このように、特許文献1に開示された運動支援システムによれば、利用者自身が各部位の動作位置や動作速度のずれを把握し、動作の矯正に活用することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−302122号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に開示された運動支援システムにあっては、例えば時刻t3とt4との間のように時間的ずれが生じると、その影響により、最終的に一連の動作を適正に評価できないという課題があった。
具体的には、複数種類の単一動作で構成される一連動作の作業において、そのうち数種の単一動作の動作時間がそれぞれ極端にずれると、その影響により、残る数種の単一動作がそれぞれ許容範囲内であっても、それを正しく評価出来なくなる虞があった。
また、複数種類の単一動作がそれぞれ許容範囲内であっても(例えば、結果的に仕上がりのよい塗装が得られても)、各単一動作の微少な時間的ずれが累積され、最終的に累積された時間的ずれが大きくなり、一連の作業の評価結果が悪いものとなる虞があった。
【0008】
本発明は、前記した点に着目してなされたものであり、模範者の動作に対する利用者の動作の差異を検出する技能習得支援システム及び技能習得支援方法であって、利用者の動作の評価適正に行うことができる技能習得支援システム及び技能習得支援方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記した課題を解決するために、本発明に係る技能習得支援システムは、模範者の動作に対する利用者の動作の差異を検出する技能習得支援システムであって、模範者及び利用者の身体において、所定の監視部位に取り付けられ、前記模範者及び利用者のそれぞれの動作に係るデータを検出するセンサと、前記センサが検出した動作に係るデータを取得する動作データ取得手段と、前記動作データ取得手段が取得した動作に係るデータを記録する記憶手段と、前記記憶手段に記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するグラフ化手段と、前記グラフ化手段が形成した第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整する作業ポイント一致手段と、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成する許容範囲形成手段と、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段とを備えることに特徴を有する。
尚、前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことが望ましい。
また、前記模範者及び利用者の動作を動画として撮影するカメラと、前記カメラから出力される画像データを取得し、前記記憶手段に記録する画像データ取得手段と、前記記憶手段に記録された動作に係るデータと画像データとを時系列に紐付けする紐付け手段とを備えることが望ましい。
【0010】
このような構成によれば、模範者と利用者との動作速度にずれが生じても、その時間的ずれが累積されることがなく、動作の評価を適正に行うことができる。
また、利用者は、矯正すべき箇所をグラフ及び画像から容易に知ることができるため、繰り返し訓練することにより、技能的な作業動作を効率よく習得することができる。
【0011】
また、前記した課題を解決するために、本発明に係る技能習得支援方法は、模範者の動作に対する利用者の動作の差異を検出する技能習得支援方法であって、模範者及び利用者の身体において、所定の監視部位に取り付けられたセンサにより、前記模範者及び利用者のそれぞれの動作に係るデータを検出するステップと、前記センサが検出した動作に係るデータを取得するステップと、前記取得した動作に係るデータを記録するステップと、前記記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するステップと、前記第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整するステップと、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成するステップと、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出するステップとを含むことに特徴を有する。
尚、前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことが望ましい。
また、前記模範者及び利用者の身体の監視部位に取り付けられたセンサにより、模範者及び利用者のそれぞれの動作に係るデータを検出するステップにおいて、前記模範者及び利用者の動作を動画として撮影するステップと、前記撮影により出力される画像データを取得し、記録するステップとを実行し、前記記録された動作に係るデータと画像データとを時系列に紐付けすることが望ましい。
【0012】
このようなステップを実施することにより、模範者と利用者との動作速度にずれが生じても、その時間的ずれが累積されることがなく、動作の評価を適正に行うことができる。
また、利用者は、矯正すべき箇所をグラフ及び画像から容易に知ることができるため、繰り返し訓練することにより、技能的な作業動作を効率よく習得することができる。
【発明の効果】
【0013】
本発明によれば、基準となる模範者の動作に対する利用者の動作の差異を検出する技能習得支援システム及び技能習得支援方法であって、利用者の動作の評価を適正に行うことができる技能習得支援システム及び技能習得支援方法を得ることができる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明に係る技能習得支援システムの一実施形態を示す概念図である。
【図2】図2は、図1の技能習得支援システムの全体構成を示すブロック図である。
【図3】図3は、図1の技能習得支援システムにおける一連の動作の流れを示すフローである。
【図4】図4は、低習熟者及び高習熟者の動作の加速度の変化を時系列に示すグラフである。
【図5】図5は、図4のグラフにおいて、所定の作業ポイントの経過時間を低習熟者及び高習熟者について示したグラフである。
【図6】図6は、図5のグラフに示した作業ポイントの時間軸を低習熟者と高習熟者との間で一致させたグラフである。
【図7】図7は、図6の高習熟者のグラフにおいて、低習熟者に対するデータ許容範囲を示すと共に、低習熟者のグラフが前記データ許容範囲を外れた箇所を示すグラフである。
【図8】図8は、従来の運動支援システムにおいて、利用者と指導者の運動画像データを2次元軸のメッシュ状に座標化した結果を示す模式図である。
【図9】図9は、従来の運動支援システムにおいて、利用者と指導者の運動画像データを時系列に示したグラフである。
【発明を実施するための形態】
【0015】
以下、本発明にかかる技能習得支援システム及び技能習得支援方法の実施の形態につき、図面に基づいて説明する。尚、本実施の形態においては、本発明に係る技能習得支援システムを、自動車の車両ボディにスプレーガンにより塗装処理を施す技能(模範者の動作)を低習熟者(利用者)が習得する場合に適用して説明する。
【0016】
図1は、本発明に係る技能習得支援システムの一実施形態を示す概念図である。図1に示すように、作業者1は車両ボディ50に対しスプレーガン2により塗布処理を施す。
作業者1の周りには、複数の角度からこの作業者1の動作を撮影するための複数のカメラ3が設置される。
これらのカメラ3により撮影された動画からなる画像データは、コンピュータ10に出力され、コンピュータ10においてデジタルデータとして記録されるようになっている。
【0017】
また、スプレーガン2、作業者1の手首、腕、腰などの監視部位には、それぞれセンサ5が取り付けられている。このセンサ5は、3軸加速度センサと3軸ジャイロセンサと3軸地磁気センサとを有し、加速度センサにより監視部位の動作の加速度を検出し、ジャイロセンサにより監視部位の角度及び角速度を検出し、3軸地磁気センサにより監視部位の方位角を検出するようになっている。また、各センサ5とコンピュータ10とは、無線通信によりデータの送受信が可能となされ、本実施形態では、ブルートゥースを用いた無線通信によりセンサ5の検出データがコンピュータ10に入力されるようになされている。
【0018】
続いて、図2を用いて、図1に示した技能習得支援システムの全体構成について、より具体的に説明する。図2は、技能習得支援システム100の全体構成を示すブロック図である。
前記のように作業者1を撮影するための複数のカメラ3は、それぞれカメラインターフェイス6を介してコンピュータ10に接続される(カメラインターフェイス6とコンピュータ10とにより画像データ取得手段が構成される)。
また、作業者1及びスプレーガン2に取り付けられる複数のセンサ5は、ブルートゥースインターフェイス7を介してコンピュータ10と無線接続される(ブルートゥースインターフェイス7とコンピュータ10とにより動作データ取得手段が構成される)。
【0019】
コンピュータ10は、コンピュータプログラムに従い、各種命令、演算を行うためのCPU8を有し、このCPU8には、バスライン11を介して複数のユニットが接続されている。具体的には、センサ5による検出結果など、様々な情報を表示するためのディスプレイ12が表示インターフェイス13を介して接続され、コンピュータ10の操作のためのコマンドを外部から入力するための入力手段であるキーボード14等が入力インターフェイス15を介して接続される。さらにCPU8には、実行されるプログラムやデータを一時的に記憶するメインメモリ16が接続され、センサ5から検出データを取得し、解析するための解析プログラムPや取得した動作データを記録する記憶部17(記憶手段)が接続されている。
【0020】
続いて、前記のように構成された技能習得支援システム100における一連の動作について図3のフローに沿って説明する。尚、以下においては、高習熟者の動作を低習熟者が習得する目的で実施されるものとする。
先ず、高習熟者と低習熟者とがそれぞれ作業者1として、その監視部位(手首、腕、腰、スプレーガン2等)にセンサ5が取り付けられ、車両ボディ50への塗布作業が行われる。
また、このとき、複数のカメラ3により作業者1の動作が撮影され、作業開始時刻から完了時刻までの作業期間の動画の画像データがコンピュータ10の記憶部17に記録される。
【0021】
また、コンピュータ10では、キーボード14の操作により解析プログラムPが実行され、CPU8は、このプログラムPに従い命令を実行する。具体的には前記作業期間において所定の時間間隔(例えば1sec毎)で各センサ5から無線通信により各監視部位の加速度、角度、角速度などのデータ(纏めて動作データと呼ぶ)を取得し、記憶部17に記録する(図3のステップS1)。
【0022】
前記作業期間が終わり、高習熟者及び低習熟者の画像データと動作データとがそれぞれ記憶部17に記録されると、コンピュータ10では画像データと動作データとを時系列に紐付けし、また、図4に示すように監視部位毎に動作データをグラフ化し、ディスプレイ12に表示する(図3のステップS2)。尚、図4においては手首に取り付けられたセンサ5から取得した動作データに基づき、高習熟者(破線)のグラフL1、低習熟者(実線)のグラフL2について示している。また、このグラフの縦軸は、加速度Gであり、横軸は経過時間tである。また、このステップS2において、コンピュータ10は紐付け手段、及びグラフ化手段として機能する。
【0023】
次いで、コンピュータ10では、一連の塗布作業において、要所となる複数の作業ポイント(例えば、ピラーに対するスプレーガン2からの吹き付け完了時など)における経過時間を、図5に示すようにグラフL1,L2についてそれぞれマーキングする(図3のステップS3)。尚、マーキングされたライン(マークラインと呼ぶ)は、図5において、高習熟者のグラフL1はマークラインM1〜M3(実線)で示し、低習熟者のグラフL2はマークラインN1〜N3(一点鎖線)で示している。
【0024】
次に、コンピュータ10では、図5に矢印で示すように、高習熟者のマークラインM1〜M3に対し低習熟者のマークラインN1〜N3が時間軸上で一致するよう調整がなされる。ここで、低習熟者のグラフL2は、図6に示すように、高習熟者の複数のマークラインM1〜M3により区切られる各区間において、均等な時間間隔で伸縮される(図3のステップS4)。尚、このステップS3,S4において、コンピュータ10は作業ポイント一致手段として機能する。
【0025】
こうして高習熟者のグラフL1と低習熟者のグラフL2とについて、各要所となる作業ポイントが時間軸上で一致するよう調整されると、(コンピュータ10は許容範囲形成手段として機能し、)図7に示すように高習熟者のグラフL1に、低習熟者の能力レベルに合ったデータ評価範囲(データ許容範囲)Rを表示する(図3のステップS5)。
ここで、解析プログラムPが実行されるコンピュータ10においては、低習熟者のグラフL2が前記データ評価範囲Rから外れた区間D1,D2を検出し、その箇所は低習熟者と高習熟者の動作が異なると判断し、その旨ディスプレイ12に表示する(図3のステップS6)。また、このようにステップS6においては、コンピュータ10は相違箇所検出手段として機能する。
【0026】
尚、センサ5により取得された他の監視部位、及び、加速度データ以外の角度、角速度データについても上記ステップと同様にグラフ化され、高習熟者と低習熟者の動作の差異が判断される。
【0027】
低習熟者は、図7に示したグラフの結果により、高習熟者と動作の異なる箇所を知ることができ、また、経過時間に紐付けられた画像データをディスプレイ12に表示させることにより、所定の動作を容易に矯正し、訓練することができる。
【0028】
以上のように本発明に係る技能習得支援システム100によれば、高習熟者と低習熟者のそれぞれの動作データ(加速度、角速度、角度など)を取得してグラフ化し、高習熟者のグラフL1と低習熟者のグラフL2とにおいて要所となる各作業ポイントが時間軸上で一致するよう調整される。また、高習熟者のグラフL1に対し、低習熟者の能力レベルに合わせたデータ評価範囲Rが形成され、低習熟者のグラフL2において前記データ評価範囲Rを外れた区間が検出され、その外れた区間の動作が矯正すべき箇所で有ると判断される。
これにより、低習熟者と高習熟者の動作速度にずれが生じても、その時間的ずれが累積されることがなく、動作の評価を適正に行うことができる。
また、低習熟者は、矯正すべき箇所を容易に知ることができるため、繰り返し訓練することにより、技能的な作業動作を効率よく習得することができる。
【0029】
尚、前記実施の形態においては、作業者が自動車の車両ボディにスプレーガンにより塗装処理を施す技能(基準となる動作)を低習熟者(利用者)が習得する場合を例にして説明したが、本発明にあっては、その形態に限定されるものではなく、その他、あらゆる技能の習得のために好適に用いることができる。
【符号の説明】
【0030】
1 作業者(低習熟者(利用者)、高習熟者(模範者))
2 スプレーガン
3 カメラ
5 センサ
6 カメラインターフェイス(画像データ取得手段)
7 ブルートゥースインターフェイス(動作データ取得手段)
8 CPU
10 コンピュータ(画像データ取得手段、動作データ取得手段、紐付け手段、グラフ化手段、作業ポイント一致手段、許容範囲形成手段、相違箇所検出手段)
12 ディスプレイ
13 表示インターフェイス
14 キーボード
15 入力インターフェイス
16 メインメモリ
17 記憶部(記憶手段)
L1 高習熟者のグラフ
L2 低習熟者のグラフ
P 解析プログラム
R データ評価範囲(データ許容範囲)
【特許請求の範囲】
【請求項1】
模範者の動作に対する利用者の動作の差異を検出する技能習得支援システムであって、
模範者及び利用者の身体において、所定の監視部位に取り付けられ、前記模範者及び利用者のそれぞれの動作に係るデータを検出するセンサと、
前記センサが検出した動作に係るデータを取得する動作データ取得手段と、
前記動作データ取得手段が取得した動作に係るデータを記録する記憶手段と、
前記記憶手段に記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するグラフ化手段と、
前記グラフ化手段が形成した第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整する作業ポイント一致手段と、
前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成する許容範囲形成手段と、
前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段とを備えることを特徴とする技能習得支援システム。
【請求項2】
前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことを特徴とする請求項1に記載された技能習得支援システム。
【請求項3】
前記模範者及び利用者の動作を動画として撮影するカメラと、
前記カメラから出力される画像データを取得し、前記記憶手段に記録する画像データ取得手段と、
前記記憶手段に記録された動作に係るデータと画像データとを時系列に紐付けする紐付け手段とを備えることを特徴とする請求項1または請求項2に記載された技能習得支援システム。
【請求項4】
模範者の動作に対する利用者の動作の差異を検出する技能習得支援方法であって、
模範者及び利用者の身体において、所定の監視部位に取り付けられたセンサにより、前記模範者及び利用者のそれぞれの動作に係るデータを検出するステップと、
前記センサが検出した動作に係るデータを取得するステップと、
前記取得した動作に係るデータを記録するステップと、
前記記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するステップと、
前記第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整するステップと、
前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成するステップと、
前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出するステップとを含むことを特徴とする技能習得支援方法。
【請求項5】
前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことを特徴とする請求項4に記載された技能習得支援方法。
【請求項6】
前記模範者及び利用者の身体の監視部位に取り付けられたセンサにより、模範者及び利用者のそれぞれの動作に係るデータを検出するステップにおいて、
前記模範者及び利用者の動作を動画として撮影するステップと、
前記撮影により出力される画像データを取得し、記録するステップとを実行し、
前記記録された動作に係るデータと画像データとを時系列に紐付けすることを特徴とする請求項4または請求項5に記載された技能習得支援方法。
【請求項1】
模範者の動作に対する利用者の動作の差異を検出する技能習得支援システムであって、
模範者及び利用者の身体において、所定の監視部位に取り付けられ、前記模範者及び利用者のそれぞれの動作に係るデータを検出するセンサと、
前記センサが検出した動作に係るデータを取得する動作データ取得手段と、
前記動作データ取得手段が取得した動作に係るデータを記録する記憶手段と、
前記記憶手段に記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するグラフ化手段と、
前記グラフ化手段が形成した第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整する作業ポイント一致手段と、
前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成する許容範囲形成手段と、
前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段とを備えることを特徴とする技能習得支援システム。
【請求項2】
前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことを特徴とする請求項1に記載された技能習得支援システム。
【請求項3】
前記模範者及び利用者の動作を動画として撮影するカメラと、
前記カメラから出力される画像データを取得し、前記記憶手段に記録する画像データ取得手段と、
前記記憶手段に記録された動作に係るデータと画像データとを時系列に紐付けする紐付け手段とを備えることを特徴とする請求項1または請求項2に記載された技能習得支援システム。
【請求項4】
模範者の動作に対する利用者の動作の差異を検出する技能習得支援方法であって、
模範者及び利用者の身体において、所定の監視部位に取り付けられたセンサにより、前記模範者及び利用者のそれぞれの動作に係るデータを検出するステップと、
前記センサが検出した動作に係るデータを取得するステップと、
前記取得した動作に係るデータを記録するステップと、
前記記録された模範者の動作に係るデータを時系列にグラフ化し、第1のグラフを形成して表示すると共に、利用者の動作に係るデータを時系列にグラフ化し、第2のグラフを形成して表示するステップと、
前記第1のグラフと第2のグラフとにおいて、前記第1のグラフにおける所定の作業ポイントと前記第2のグラフにおける前記所定の作業ポイントとが時間軸上で一致するよう調整するステップと、
前記第1のグラフにおいて、前記利用者に対するデータ許容範囲を時系列に形成するステップと、
前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出するステップとを含むことを特徴とする技能習得支援方法。
【請求項5】
前記センサが検出する動作に係るデータは、少なくとも加速度データと角速度データと角度データのいずれかを含むことを特徴とする請求項4に記載された技能習得支援方法。
【請求項6】
前記模範者及び利用者の身体の監視部位に取り付けられたセンサにより、模範者及び利用者のそれぞれの動作に係るデータを検出するステップにおいて、
前記模範者及び利用者の動作を動画として撮影するステップと、
前記撮影により出力される画像データを取得し、記録するステップとを実行し、
前記記録された動作に係るデータと画像データとを時系列に紐付けすることを特徴とする請求項4または請求項5に記載された技能習得支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−88730(P2013−88730A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−231249(P2011−231249)
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000157083)トヨタ自動車東日本株式会社 (1,164)
【出願人】(507234427)公立大学法人岩手県立大学 (22)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000157083)トヨタ自動車東日本株式会社 (1,164)
【出願人】(507234427)公立大学法人岩手県立大学 (22)
【Fターム(参考)】
[ Back to top ]