
技術的構造物の力学的耐荷能力および/または応力を制御する方法および装置
本発明は、技術的構造物の力学的耐荷能力および/または応力を制御するための方法および装置方法が記載されている。本発明は、以下の方法ステップ、すなわち構造物の応力と相互に関連する少なくとも一つの特性値を検出するステップ、検出された少なくとも一つの特性値に基づいて、構造物の応力状態を求めるステップ、構造物の応力状態を評価するステップ、および応力状態の評価と、構造物の寿命を最適化するために設定された少なくとも一つの目的関数とに基づいて、少なくとも一つの信号を生成するステップを特徴とする。この信号は、構造物内部に組み込まれまたは構造物に適用されている少なくとも一つのアクチュエータに、応力状態を制御するようそのアクチュエータをアクティブ化するために供給される。
【発明の詳細な説明】
【背景技術】
【0001】
例えばフレーム構造または類似の支持機能を行うユニットのような現代の力学的構造物は、少なくとも二つの矛盾する設計基準を考慮しなければならない。すなわち、一方ではできるだけ軽量に形成し、他方では動的および静的な負荷作用に対して高い耐荷能力をもたなければならない。これらの要件に対して、従来型の構造物、すなわち純粋に受動的に設計された構造物は、適切な材料選択ならびに対応する構造設計によって部分的にしか対応できない。したがって材料選択には材料工学的な耐荷能力限界が、そして構造的に規定可能な構造物設計には、静的および動的な耐荷能力限界があり、この限界を超えると不可逆的な構造物損傷が生じて、その力学的構造物の全体的寿命を著しく損なうことがあり得る。上記の耐荷能力の問題を緩和するために、力学的または機械工学的構造物を、構造上意識的にオーバーサイズに設計し、一時的な、すなわち短期的に生じる負荷ピークまたは応力ピークに、損傷なく耐えることができるようにする。しかしこの措置は、構造物重量上およびコスト上の負担をともなう。
【発明の開示】
【発明が解決しようとする課題】
【0002】
本発明の課題は、すでに存在する構造物を耐荷能力をそのままに保ちながらより軽量に形成するため、あるいは質量または重量をそのままに保ちながら構造物の耐荷能力を改善しまたは向上させるために、技術的構造物の力学的耐荷能力および/または応力を制御する装置および方法を示すことである。さらに、これに対応して、技術的構造物の力学的設計の最適化を達成し、すなわち、より軽量ながら、例えば従来設計の構造物と同様な寿命を有する構造物を実現すべきである。
【課題を解決するための手段】
【0003】
本発明の課題の解決策は、請求項1に記載されている。請求項12の対象は、この解決策による装置である。本発明の思想を有利に発展させた諸特徴は、従属請求項ならびに特に例示的実施形態を参照した説明の対象から読み取ることができる。
【0004】
技術的または力学的構造物または構造物システムの力学的耐荷能力を制御するこの解決策のコンセプトは、アダプトロニクスの基本原理に基づく。この基本原理によれば、まず第一のステップとして、その構造物のその時点における応力状態を検出するが、そのためには、その構造物の応力と相互に関連する少なくとも一つの特性値、好ましくはその構造物に静的および/または動的な負荷作用がかかると変化する機械的特性値を検出する。検出された少なくとも一つのこの特性値に基づいて、構造物の応力状態を求める。この場合、少なくとも一つの特性値によって特徴付けられる同様な構造物の応力状態が記憶されている、一つのデータベースないし知識ベースが利用される。これらの応力状態は、好ましくは校正された基準測定の過程で前もって得られたものであり、計測技術的に検出可能な少なくとも一つの特性値によって特徴付けられている。専門家の知識を利用することも考えられる。計測技術的に検出された特性値を分類することにより、このようにしてその構造物のその時点に存在する応力状態を推論することができる。
【0005】
次のステップでは、その構造物の検出された応力状態を、構造耐久性を用いる方法によって、特に臨界的であると評価すべき応力状態との関係において、評価することが妥当である。臨界的応力状態とは、許容される最大の負荷作用があるときにその構造物が取るはずの応力状態をいい、すなわちこの臨界的と評価すべき応力状態を超えると、不可逆的な構造物の損傷を生じる。これに関連して、好ましくはその構造物の、それに達しまたはそれを超えると構造物が局部的にまたは全体に不可逆的な損傷を生じる、いわゆる残存耐荷能力を記述する程度または数量を求める。
【0006】
評価された応力状態に基づき、かつ少なくとも構造物寿命の最大化のために設定された条件または判定基準を含む少なくとも一つの目的関数を前提として、少なくとも一つの信号が生成され、この信号が、その構造物内部に組み込まれまたはその構造物に適用されている少なくとも一つのアクチュエータにそれをアクティブ化するために供給され、それによりその構造物の応力状態が制御される。好ましくは構造物内部に組み込まれたアクチュエータを相応にアクティブ化することによる、この応力状態の制御は、構造物の寿命を延長するために行われ、その際、アクチュエータが構造物に及ぼす作用は、負荷を解除する作用、あるいは場合によっては負荷を印加荷する作用も及ぼすことができる。例えば外部からの負荷導入に対抗して、構造物の安定性およびそれに関連する支持特性を改善することが重要である場合、適切に選択されたアクチュエータは、それぞれ該当する構造物領域を強化または剛性化することができる。他方では、例えば外部から構造物に作用する高振動数の交番負荷によって生じる亀裂形成または脆性破壊現象を予防するために、構造物領域を目的に合わせて不安定化し、あるいは弾性状態にすることによって、この構造物の寿命延長を支援することもできよう。
【0007】
特に好ましい一変形方法においては、アクティブな調節の過程で、構造物と結合されているアクチュエータ、すなわち構造物に組み込まれまたは構造物に適用されているアクチュエータを、相応にアクティブ化することによって、応力状態に対する影響力行使または制御を行う。すなわち、構造物に対するアクチュエータの作用が、センサによってリアルタイムで検出され、構造物寿命を向上させる目的関数を用いて評価され、それによって最終的にアクチュエータの操作を目標通りに調節する。
【0008】
着目されるそれぞれの構造物の材料および構造形成に応じて、好ましくは、複数のアクチュエータを構造物に組み込み、または構造物に適用する。好ましくはこれを、外部からの負荷作用によって特に強い負荷を受ける構造物領域、すなわち特に強い材料応力およびそれにともなう疲労現象を受ける構造物領域で行う。構造物と結合された複数のアクチュエータを用いる際には、すべての個々のアクチュエータの制御されたアクティブ化を行うために、構造物の負荷状態を全体として評価し、かつすべてのアクチュエータと構造物全体との相互影響を考慮することが重要である。
【0009】
構造物と結合されたそれぞれのアクチュエータの、前記のようにアクティブに制御されたアクティブ化を行う代わりに、いわゆるセミアクティブな影響力行使を行っても、技術的構造物の力学的耐荷能力の制御が可能になる。この場合、そのアクチュエータ挙動がある特定のアクチュエータタスクを前提として作成されている、アクチュエータを利用する。アクティブな制御の場合は、アクチュエータは対応するエネルギー供給および制御信号によって駆動されるが、これとは異なって、セミアクティブに駆動されるアクチュエータは、外部からのエネルギー供給なしで駆動される。この場合、アクチュエータは、力学的負荷をアクティブに導入するアクチュエータとしてではなく、エネルギー変換器として働く。このエネルギー変換器は、構造物に作用して応力を生じる力学的エネルギーを、好ましくは電気エネルギーに変換し、その結果、接続されている電気回路で、この電気エネルギーを処理することができる。このようにして、例えば共振回路を作製し、あるいはエネルギー回収を実現することができる。
【0010】
典型的には、この種のアクチュエータシステムは、異なるエネルギー形態の間でエネルギーを変換できるエネルギー変換材料を含む。この種のエネルギー変換材料の好ましい代表例は、例えば圧電セラミックスや無鉛圧電セラミックスのような圧電材料、形状記憶合金(SMA材料)、ならびに電気粘性流体、または電気活性ポリマーである。したがって、この種のエネルギー変換材料の場合、材料剛性および減衰挙動を、外部からのエネルギー供給によって制御することが知られている。エネルギー変換材料のいかんに応じて、外部からのエネルギー供給を、電気的、熱的、または磁気的性質のものとすることができる。その逆に、この種のエネルギー変換材料では、変形によって例えば電気エネルギーが発生し、これは、センサによって、または上記の方法で、セミアクティブに変換することができる。
【0011】
したがってこの解決策による方法は、アダプトロニクスの基本原理に基づいており、このアダプトロニクスを技術的構造物の構造耐久性の視点と結びつけるものである。その際、技術的構造物の力学的応力状態が検出、評価され、この知識に基づいて、アクチュエータがそれぞれの構造物の応力状態に、アクティブまたはセミアクティブに介入する。この介入は、応力に相応に、その構造物の寿命向上措置を目的として行われる。当然のことながら、これに対応して、力学的設計という点での技術的構造物の最適化を達成することができる。例えば、より軽量ながら、従来設計の構造物に匹敵する寿命の構造物を実現することができる。
【0012】
このようにして、適切なセンサで検出された、累計された現在の応力特性値に基づいて、技術的構造物の稼働率および寿命消費を評価することができ、構造物と結合され、かつ/または構造物に組み込まれた、一つまたは複数のアクチュエータを用いて、負荷によって生じ技術的構造物内部に存在するエネルギー流に対して、寿命にとって好都合であるアクティブな影響力行使を行うことができる。構造物と結合され、かつ/または構造物に組み込まれた、少なくとも一つのアクチュエータのアクティブ化は、寿命を向上させる目的関数に基づいて行われる。この目的関数により、例えば構造物上および/または構造物内に分配して取り付けられた複数のアクチュエータを使用するとき、寿命をより多く消費した構造物領域では、構造物に静的または動的に作用する負荷導入が、例えば特定のアクチュエータのアクティブな制御によって、例えばエネルギー反射によって減少し、一方、寿命消費が少ない構造物領域では、エネルギー伝達のアクティブな制御によって、負荷導入が増加する。アクチュエータに割り当てられる力学的インピーダンスを適切に選択し操作することによって、弱化または損傷が大きい構造物領域を保護し、あまり利用されていない構造領域にはより大きな負荷をかけることができる。したがって、技術的構造物内部における負荷再配分をアクティブに制御して行うという本解決策のコンセプトは、システム寿命を向上させるという目的、または安全率を同じままに維持し、それどころか改善しながらインテリジェントな軽量構造を達成するという目的に向けて、システム信頼性および構造耐久性の点で、決定的な一歩を踏み出すものである。場合によっては短時間でむしろまれにしか生じない過大負荷の際に生じることがある材料の過応力を回避する目的で、構造物部品をオーバーサイズにする方法がこれまでに知られているが、本解決策による方法を用いてそれを回避することができる。むしろ本解決策によるアクティブな構造物制御により、好ましくは、負荷によって構造物に生じるすべてのエネルギー流の制御された監視を行うことが可能になり、その結果、構造物内部で使用負荷が作用する際の変化に対して、またはそれによって生じる応力状態の変化に対して、応力に相応に、最終的には寿命を延長する方向に反応することができる。
【0013】
技術的構造物の力学的耐荷能力を制御する上記の方法を実施するために、その方法に関連する、本解決策による装置は、少なくとも一つのセンサを備える。このセンサは、構造物内に組み込まれ、または構造物に適用され、応力と相互に関連するセンサ信号を生成する。このセンサ信号は、好ましくは、静的および/または動的な負荷作用があるとき、構造物が受ける変形によって変化する。好ましくはこれには、エネルギー変換材料からなる、またはエネルギー変換材料を含むセンサが適しており、このセンサは、センサのその時点の伸張状態から電気的信号を生成する。この少なくとも一つのセンサによって得られるセンサ信号は、そのセンサ信号に対応する特性値が、好ましくは力学的特性値が割り当てられている評価ユニットに導かれる。さらに、一つのデータベース、例えばそれ自体公知のメモリーユニットの形のデータベースが設けられ、このデータベースには、予め知られている、好ましくは基準測定によって検出され、かつ/または、数値的にかつ/または分析によって決定された、技術的構造物の応力状態が記憶され、このデータベースから、求められた特性値に応じて、すでに評価済みの一つの応力状態が選択される。上記に代わるものとして、または上記を補完するものとして、既存の専門家の知識を利用して、検出された特性値によって特徴付けられる応力状態を評価することもできる。最後に、一つのアクティブ化ユニットを設け、このユニットは、構造物中に組み込まれまたは構造物に適用されている少なくとも一つのアクチュエータを、その時点で評価された応力状態に応じて、その構造物が少なくとも一つの局部領域で負荷を印加されまたは解除されるようにアクティブ化する。
【0014】
特に好ましい一実施形態では、少なくとも一つのセンサと、少なくとも一つのアクチュエータとが、単一部品として実施され、前記のエネルギー変換材料を含み、あるいは全体がエネルギー変換材料で製作される。このエネルギー変換材料は、力学的エネルギーを電気エネルギーに、またその逆に変換することができる。好ましくはセンサとアクチュエータが、力学的応力を直接検出、制御するために、同一構造で、構造物の高負荷領域、高応力領域に組み込まれる。
【0015】
できるだけ自主的、自律的に動作する装置を得るために、好ましい一実施形態は、センサおよびアクチュエータだけでなく、評価ユニット、およびこの評価ユニットとデータ上結合しているデータベースまたはメモリーユニットをも、構造物内に組み込むようにする。それ自体公知のマイクロエレクトロニクス部品を使用することにより、上記の構成部品は、ミニチュア化して実施可能であり、構造物の力学的耐荷能力を弱めずに、技術的構造物に何らかの方法で適用することができる。
【0016】
さらに、評価ユニットならびに知識ベースを、技術的構造物と分離して設け、それぞれ構造物と結合された少なくとも一つのセンサとアクチュエータの間で必要な信号交換を、遠隔計測ユニットを用いて行うことができる。この遠隔計測ユニットは、一方では構造物と連結され、他方では評価ユニットがある箇所に設けられている。技術的構造物が静的なものである場合は、データ交換を有線で行うことも可能である。
【0017】
少なくとも一つのセンサを、構造物に組み込み、または構造物に適用する代わりに、外部からの負荷作用によって構造物に生じる構造物変形を、構造物とは分離して設けられたセンサシステム、例えばカメラユニットによって検出することも考えられる。しかし、技術的構造物の応力状態を制御するために、少なくとも一つのアクチュエータを、構造物内部に好ましくは同一構造として組み込み、あるいは構造物の対応する選択された表面領域に適用することはどうしても必要である。
【0018】
下記に、本発明の一般的思想を制限することなく、図面を参照しながら例示的実施形態に則して本発明を例によって説明する。
【発明を実施するための最良の形態】
【0019】
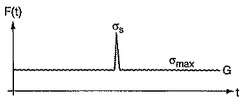
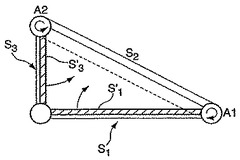
図1aは、自動車の三角アームの懸架点1、2、3を著しく模式的に示す。この三角アームの懸架点1は、自動車のホイールRに取り付けられ、懸架点2、3はボディ側に取り付けられている。結合ストラットS1、S2、S3に沿って、負荷によって生じた相応の引張り応力または圧縮応力σD、σZが働く。三角アームの構造設計には、車両重量、路面反力、および運転操作による短時間負荷を考慮しなければならない。これらを、構造物の寸法設計の際に基準として利用しなければならない。その際、特に、まれに生じる特殊負荷σSを評価して、これを考慮しなければならない(力-時間ダイヤグラムとして、図1bのF(t)/t-ダイヤグラムを参照)。この特殊負荷も、三角アームによって確実に捕捉しなければならない。この種の特殊負荷は最終的に、図示の三角アームの形の着目される構造物が、大部分の時間は完全にオーバーサイズに設計される原因となる。特殊負荷の作用を無視するなら、通常は、通常生じる最大負荷σmaxに応じて構造物を設計すれば十分であろう。図1bの力-時間ダイヤグラムはこのことを示す。しかし三角アームは安全部品なので、この種の部品または構造物の場合、相応の特殊負荷を考慮しなければならない。このことは最終的には、構造物設計で前記のオーバーサイズが行われる原因となる。
【0020】
ここで、例えば自動車が道路表面の穴を通過し、それにより鉛直上向きの力F1が、ホイールRを介してマウント1に作用すると想定しよう。その結果、この種の道路穴通過は、結合ストラットS2に沿って大きな圧縮応力σ0を生じるが、それに対して他の2本のストラットS1およびS3は、ほとんど応力がかからないままである。
【0021】
図1cは三角アームの例示的実施形態を概略的に示す。三角アームの結合ストラットS1およびS3が、それらの長さ方向に沿ってそれぞれ分割されて形成され、各結合ストラットのそれぞれ半分S1´、S3´が、アクチュエータ要素A1およびA2によって、回転可能または旋回可能に取り付けられており、結合ストラットS2を補強するために、このストラットと平行に走る旋回状態をとることができる。アクチュエータA1およびA2を相応にアクティブ化することにより、結合ストラットの半分S1’およびS3’を結合ストラットS2に沿ってあてがって、結合ストラットS2の力学的耐荷能力を短時間補強し、それにより、短時間生じる特殊負荷σSに、損傷なしに耐えることができる。
【0022】
アクチュエータ要素A1およびA2は、好ましくは、エネルギー変換システムとして形成され、力学的エネルギーを電気エネルギーに変換し、またはその逆に、電気的アクティブ化によって電気機械的仕事を行うことができる。相応のエネルギー変換によって、構造物から力学的エネルギーを取り出し、例えば接続された電気回路で熱エネルギーに変換することによってこれを消散させることも考えられる。アクチュエータ駆動のもう一つの変形は、相応の変換によって電気エネルギーを得、これによりそのシステムからエネルギーを取り出すことであろう。
【0023】
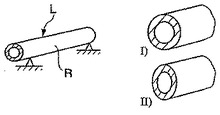
平面慣性特性を、したがって耐荷能力を向上させる目的で、アクチュエータが、技術的構造物の断面積を変化させることも考えられる。つまり、例えば図1dの管Rの形の、曲げ負荷のかかる構造物を、断面変化させて、断面を円形(I)から楕円形(II)に変化させることができる。この断面変化の目的は、楕円形断面の最大半軸を負荷Lの作用する方向に向けることによって、平面慣性モーメントを上げること、または楕円形断面の最大半軸を、負荷Lの作用を横切る方向に向けることによって、構造物の柔軟性を上げることである。これは、例えば構造物の内圧を制御することによって行うことができる。このために電気粘性流体または磁気粘性流体を用いる場合、さらに、アクティブに制御された減衰を得ることができる。
【0024】
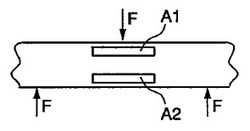
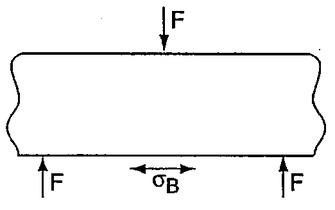
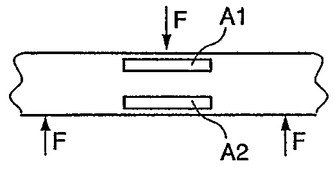
図2は、たわみ軸Bを著しく概略的に示し、このたわみ軸は、例えば印刷機または鉄道車輪で回転軸として用いられるものである。図2bのように負荷がかかる場合、図示の力Fが記載の負荷導入領域に働き、これらの力が、最終的にはたわみ軸Bを曲げ、たわみ軸B内部に引張り応力σBを誘起する。本解決策に従って、たわみ軸Bの内部に二つのアクチュエータA1およびA2、例えばいずれも圧電アクチュエータの種類を設ける場合、アクチュエータをアクティブ化することにより、追加的な力のモーメントをたわみ軸Bに導入することができる。外部の力または負荷の作用によって生じるたわみ軸Bの屈曲を、この力のモーメントによって補償することができ、したがってたわみ軸Bに負荷を印加する引張り応力σBは生じない。したがってアクティブ化可能なアクチュエータA1およびA2は、外部からたわみ軸Bに作用する負荷を、より臨界的でない領域に迂回させ、その結果、この場合、アクチュエータによって制御された負荷迂回ということができる。この種のアクチュエータ配置は、短時間生じる負荷衝撃の緩和に適しているものが好ましく、最終的に、従来は構造上必要だったたわみ軸オーバーサイズを省く助けとなる。
【0025】
図3が示すもう一つの例では、ギャップを設けられた構造領域SRの過応力を避けるために、プレート状に形成された構造物Pの内部で、的を絞りかつ制御された負荷迂回Lを行う。構造物Pは、この弱点箇所SRの領域に特定の応力がかかった場合、追加の措置を取らなければ疲労し、割れ始めると予想される。これを回避するため、構造物P内部の領域SRで局部的な変形を検出するために、センサSEを設け、アクティブな負荷迂回のために、4つの平面アクチュエータA1〜A4を設ける。これらの平面アクチュエータは、外部から構造物Pへの負荷作用Lを、対応する剛性化により、構造的弱点箇所SRを迂回して導くことができる。
【0026】
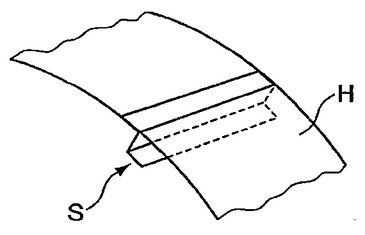
もう一つの例示的実施形態を図4aおよび4bに示す。この場合、例えば航空機の外壁パネルとして用いられるような大面積のスキンパネルH-を面的に剛性化することが妥当である。このために、いわゆるストリンガ要素Sが用いられ、この要素はその全長にわたって、スキンパネルHとここには図示しない下部構造との物体的結合を生じる。ここで本解決策の原理によって、それぞれ二つのストリンガ要素のピボット点SA1およびSA2の形のストリンガ要素Sを縮小して形成することができる。この二つのピボット点は、短時間相互に剛性化するために、アクチュエータAと結合されている。アクチュエータAがアクティブ化されるのは、過応力状態が検出される場合だけである。アクチュエータAはセンサ機能特性も同時に備えるものと、想定されたい。
【0027】
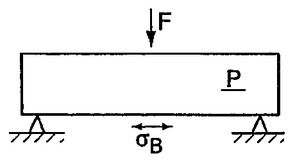
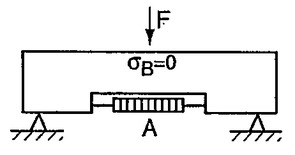
図5は、二つの支承点に載っているプレートPに、負荷がかかっている場合を示す。プレートPに対する力の作用Fによって、図2の場合と同様に曲げ応力σBが誘起され、この曲げ応力は、本解決策に従ってアクチュエータAを図4bの配置で使用することにより補償される。アクチュエータAは、プレートPにおいて、通常の場合なら最大に屈曲する領域に組み込まれる。このために、プレートPはそのための開口部を有し、その開口部に、形状記憶合金または圧電セラミックス製のアクチュエータAが組み込まれる。
【図面の簡単な説明】
【0028】
【図1a】図1aは本解決策による方法を理由付けするための概略図である。
【図1b】図1bは本解決策による方法を理由付けするための概略図である。
【図1c】図1cは本解決策による方法を理由付けするための概略図である。
【図1d】図1dは本解決策による方法を理由付けするための概略図である。
【図2a】図2aはたわみ軸における本解決策の原理を示す概略図である。
【図2b】図2bはたわみ軸における本解決策の原理を示す概略図である。
【図3】弱化された構造物領域を有するプレート型部品の概略図である。
【図4a】図4aは一体型部品の概略図である。
【図4b】図4bは一体型部品の概略図である。
【図5a】図5aは二つの固定マウントに載せられたプレートにおける本解決策による方法の概略図である。
【図5b】図5bは二つの固定マウントに載せられたプレートにおける本解決策による方法の概略図である。
【背景技術】
【0001】
例えばフレーム構造または類似の支持機能を行うユニットのような現代の力学的構造物は、少なくとも二つの矛盾する設計基準を考慮しなければならない。すなわち、一方ではできるだけ軽量に形成し、他方では動的および静的な負荷作用に対して高い耐荷能力をもたなければならない。これらの要件に対して、従来型の構造物、すなわち純粋に受動的に設計された構造物は、適切な材料選択ならびに対応する構造設計によって部分的にしか対応できない。したがって材料選択には材料工学的な耐荷能力限界が、そして構造的に規定可能な構造物設計には、静的および動的な耐荷能力限界があり、この限界を超えると不可逆的な構造物損傷が生じて、その力学的構造物の全体的寿命を著しく損なうことがあり得る。上記の耐荷能力の問題を緩和するために、力学的または機械工学的構造物を、構造上意識的にオーバーサイズに設計し、一時的な、すなわち短期的に生じる負荷ピークまたは応力ピークに、損傷なく耐えることができるようにする。しかしこの措置は、構造物重量上およびコスト上の負担をともなう。
【発明の開示】
【発明が解決しようとする課題】
【0002】
本発明の課題は、すでに存在する構造物を耐荷能力をそのままに保ちながらより軽量に形成するため、あるいは質量または重量をそのままに保ちながら構造物の耐荷能力を改善しまたは向上させるために、技術的構造物の力学的耐荷能力および/または応力を制御する装置および方法を示すことである。さらに、これに対応して、技術的構造物の力学的設計の最適化を達成し、すなわち、より軽量ながら、例えば従来設計の構造物と同様な寿命を有する構造物を実現すべきである。
【課題を解決するための手段】
【0003】
本発明の課題の解決策は、請求項1に記載されている。請求項12の対象は、この解決策による装置である。本発明の思想を有利に発展させた諸特徴は、従属請求項ならびに特に例示的実施形態を参照した説明の対象から読み取ることができる。
【0004】
技術的または力学的構造物または構造物システムの力学的耐荷能力を制御するこの解決策のコンセプトは、アダプトロニクスの基本原理に基づく。この基本原理によれば、まず第一のステップとして、その構造物のその時点における応力状態を検出するが、そのためには、その構造物の応力と相互に関連する少なくとも一つの特性値、好ましくはその構造物に静的および/または動的な負荷作用がかかると変化する機械的特性値を検出する。検出された少なくとも一つのこの特性値に基づいて、構造物の応力状態を求める。この場合、少なくとも一つの特性値によって特徴付けられる同様な構造物の応力状態が記憶されている、一つのデータベースないし知識ベースが利用される。これらの応力状態は、好ましくは校正された基準測定の過程で前もって得られたものであり、計測技術的に検出可能な少なくとも一つの特性値によって特徴付けられている。専門家の知識を利用することも考えられる。計測技術的に検出された特性値を分類することにより、このようにしてその構造物のその時点に存在する応力状態を推論することができる。
【0005】
次のステップでは、その構造物の検出された応力状態を、構造耐久性を用いる方法によって、特に臨界的であると評価すべき応力状態との関係において、評価することが妥当である。臨界的応力状態とは、許容される最大の負荷作用があるときにその構造物が取るはずの応力状態をいい、すなわちこの臨界的と評価すべき応力状態を超えると、不可逆的な構造物の損傷を生じる。これに関連して、好ましくはその構造物の、それに達しまたはそれを超えると構造物が局部的にまたは全体に不可逆的な損傷を生じる、いわゆる残存耐荷能力を記述する程度または数量を求める。
【0006】
評価された応力状態に基づき、かつ少なくとも構造物寿命の最大化のために設定された条件または判定基準を含む少なくとも一つの目的関数を前提として、少なくとも一つの信号が生成され、この信号が、その構造物内部に組み込まれまたはその構造物に適用されている少なくとも一つのアクチュエータにそれをアクティブ化するために供給され、それによりその構造物の応力状態が制御される。好ましくは構造物内部に組み込まれたアクチュエータを相応にアクティブ化することによる、この応力状態の制御は、構造物の寿命を延長するために行われ、その際、アクチュエータが構造物に及ぼす作用は、負荷を解除する作用、あるいは場合によっては負荷を印加荷する作用も及ぼすことができる。例えば外部からの負荷導入に対抗して、構造物の安定性およびそれに関連する支持特性を改善することが重要である場合、適切に選択されたアクチュエータは、それぞれ該当する構造物領域を強化または剛性化することができる。他方では、例えば外部から構造物に作用する高振動数の交番負荷によって生じる亀裂形成または脆性破壊現象を予防するために、構造物領域を目的に合わせて不安定化し、あるいは弾性状態にすることによって、この構造物の寿命延長を支援することもできよう。
【0007】
特に好ましい一変形方法においては、アクティブな調節の過程で、構造物と結合されているアクチュエータ、すなわち構造物に組み込まれまたは構造物に適用されているアクチュエータを、相応にアクティブ化することによって、応力状態に対する影響力行使または制御を行う。すなわち、構造物に対するアクチュエータの作用が、センサによってリアルタイムで検出され、構造物寿命を向上させる目的関数を用いて評価され、それによって最終的にアクチュエータの操作を目標通りに調節する。
【0008】
着目されるそれぞれの構造物の材料および構造形成に応じて、好ましくは、複数のアクチュエータを構造物に組み込み、または構造物に適用する。好ましくはこれを、外部からの負荷作用によって特に強い負荷を受ける構造物領域、すなわち特に強い材料応力およびそれにともなう疲労現象を受ける構造物領域で行う。構造物と結合された複数のアクチュエータを用いる際には、すべての個々のアクチュエータの制御されたアクティブ化を行うために、構造物の負荷状態を全体として評価し、かつすべてのアクチュエータと構造物全体との相互影響を考慮することが重要である。
【0009】
構造物と結合されたそれぞれのアクチュエータの、前記のようにアクティブに制御されたアクティブ化を行う代わりに、いわゆるセミアクティブな影響力行使を行っても、技術的構造物の力学的耐荷能力の制御が可能になる。この場合、そのアクチュエータ挙動がある特定のアクチュエータタスクを前提として作成されている、アクチュエータを利用する。アクティブな制御の場合は、アクチュエータは対応するエネルギー供給および制御信号によって駆動されるが、これとは異なって、セミアクティブに駆動されるアクチュエータは、外部からのエネルギー供給なしで駆動される。この場合、アクチュエータは、力学的負荷をアクティブに導入するアクチュエータとしてではなく、エネルギー変換器として働く。このエネルギー変換器は、構造物に作用して応力を生じる力学的エネルギーを、好ましくは電気エネルギーに変換し、その結果、接続されている電気回路で、この電気エネルギーを処理することができる。このようにして、例えば共振回路を作製し、あるいはエネルギー回収を実現することができる。
【0010】
典型的には、この種のアクチュエータシステムは、異なるエネルギー形態の間でエネルギーを変換できるエネルギー変換材料を含む。この種のエネルギー変換材料の好ましい代表例は、例えば圧電セラミックスや無鉛圧電セラミックスのような圧電材料、形状記憶合金(SMA材料)、ならびに電気粘性流体、または電気活性ポリマーである。したがって、この種のエネルギー変換材料の場合、材料剛性および減衰挙動を、外部からのエネルギー供給によって制御することが知られている。エネルギー変換材料のいかんに応じて、外部からのエネルギー供給を、電気的、熱的、または磁気的性質のものとすることができる。その逆に、この種のエネルギー変換材料では、変形によって例えば電気エネルギーが発生し、これは、センサによって、または上記の方法で、セミアクティブに変換することができる。
【0011】
したがってこの解決策による方法は、アダプトロニクスの基本原理に基づいており、このアダプトロニクスを技術的構造物の構造耐久性の視点と結びつけるものである。その際、技術的構造物の力学的応力状態が検出、評価され、この知識に基づいて、アクチュエータがそれぞれの構造物の応力状態に、アクティブまたはセミアクティブに介入する。この介入は、応力に相応に、その構造物の寿命向上措置を目的として行われる。当然のことながら、これに対応して、力学的設計という点での技術的構造物の最適化を達成することができる。例えば、より軽量ながら、従来設計の構造物に匹敵する寿命の構造物を実現することができる。
【0012】
このようにして、適切なセンサで検出された、累計された現在の応力特性値に基づいて、技術的構造物の稼働率および寿命消費を評価することができ、構造物と結合され、かつ/または構造物に組み込まれた、一つまたは複数のアクチュエータを用いて、負荷によって生じ技術的構造物内部に存在するエネルギー流に対して、寿命にとって好都合であるアクティブな影響力行使を行うことができる。構造物と結合され、かつ/または構造物に組み込まれた、少なくとも一つのアクチュエータのアクティブ化は、寿命を向上させる目的関数に基づいて行われる。この目的関数により、例えば構造物上および/または構造物内に分配して取り付けられた複数のアクチュエータを使用するとき、寿命をより多く消費した構造物領域では、構造物に静的または動的に作用する負荷導入が、例えば特定のアクチュエータのアクティブな制御によって、例えばエネルギー反射によって減少し、一方、寿命消費が少ない構造物領域では、エネルギー伝達のアクティブな制御によって、負荷導入が増加する。アクチュエータに割り当てられる力学的インピーダンスを適切に選択し操作することによって、弱化または損傷が大きい構造物領域を保護し、あまり利用されていない構造領域にはより大きな負荷をかけることができる。したがって、技術的構造物内部における負荷再配分をアクティブに制御して行うという本解決策のコンセプトは、システム寿命を向上させるという目的、または安全率を同じままに維持し、それどころか改善しながらインテリジェントな軽量構造を達成するという目的に向けて、システム信頼性および構造耐久性の点で、決定的な一歩を踏み出すものである。場合によっては短時間でむしろまれにしか生じない過大負荷の際に生じることがある材料の過応力を回避する目的で、構造物部品をオーバーサイズにする方法がこれまでに知られているが、本解決策による方法を用いてそれを回避することができる。むしろ本解決策によるアクティブな構造物制御により、好ましくは、負荷によって構造物に生じるすべてのエネルギー流の制御された監視を行うことが可能になり、その結果、構造物内部で使用負荷が作用する際の変化に対して、またはそれによって生じる応力状態の変化に対して、応力に相応に、最終的には寿命を延長する方向に反応することができる。
【0013】
技術的構造物の力学的耐荷能力を制御する上記の方法を実施するために、その方法に関連する、本解決策による装置は、少なくとも一つのセンサを備える。このセンサは、構造物内に組み込まれ、または構造物に適用され、応力と相互に関連するセンサ信号を生成する。このセンサ信号は、好ましくは、静的および/または動的な負荷作用があるとき、構造物が受ける変形によって変化する。好ましくはこれには、エネルギー変換材料からなる、またはエネルギー変換材料を含むセンサが適しており、このセンサは、センサのその時点の伸張状態から電気的信号を生成する。この少なくとも一つのセンサによって得られるセンサ信号は、そのセンサ信号に対応する特性値が、好ましくは力学的特性値が割り当てられている評価ユニットに導かれる。さらに、一つのデータベース、例えばそれ自体公知のメモリーユニットの形のデータベースが設けられ、このデータベースには、予め知られている、好ましくは基準測定によって検出され、かつ/または、数値的にかつ/または分析によって決定された、技術的構造物の応力状態が記憶され、このデータベースから、求められた特性値に応じて、すでに評価済みの一つの応力状態が選択される。上記に代わるものとして、または上記を補完するものとして、既存の専門家の知識を利用して、検出された特性値によって特徴付けられる応力状態を評価することもできる。最後に、一つのアクティブ化ユニットを設け、このユニットは、構造物中に組み込まれまたは構造物に適用されている少なくとも一つのアクチュエータを、その時点で評価された応力状態に応じて、その構造物が少なくとも一つの局部領域で負荷を印加されまたは解除されるようにアクティブ化する。
【0014】
特に好ましい一実施形態では、少なくとも一つのセンサと、少なくとも一つのアクチュエータとが、単一部品として実施され、前記のエネルギー変換材料を含み、あるいは全体がエネルギー変換材料で製作される。このエネルギー変換材料は、力学的エネルギーを電気エネルギーに、またその逆に変換することができる。好ましくはセンサとアクチュエータが、力学的応力を直接検出、制御するために、同一構造で、構造物の高負荷領域、高応力領域に組み込まれる。
【0015】
できるだけ自主的、自律的に動作する装置を得るために、好ましい一実施形態は、センサおよびアクチュエータだけでなく、評価ユニット、およびこの評価ユニットとデータ上結合しているデータベースまたはメモリーユニットをも、構造物内に組み込むようにする。それ自体公知のマイクロエレクトロニクス部品を使用することにより、上記の構成部品は、ミニチュア化して実施可能であり、構造物の力学的耐荷能力を弱めずに、技術的構造物に何らかの方法で適用することができる。
【0016】
さらに、評価ユニットならびに知識ベースを、技術的構造物と分離して設け、それぞれ構造物と結合された少なくとも一つのセンサとアクチュエータの間で必要な信号交換を、遠隔計測ユニットを用いて行うことができる。この遠隔計測ユニットは、一方では構造物と連結され、他方では評価ユニットがある箇所に設けられている。技術的構造物が静的なものである場合は、データ交換を有線で行うことも可能である。
【0017】
少なくとも一つのセンサを、構造物に組み込み、または構造物に適用する代わりに、外部からの負荷作用によって構造物に生じる構造物変形を、構造物とは分離して設けられたセンサシステム、例えばカメラユニットによって検出することも考えられる。しかし、技術的構造物の応力状態を制御するために、少なくとも一つのアクチュエータを、構造物内部に好ましくは同一構造として組み込み、あるいは構造物の対応する選択された表面領域に適用することはどうしても必要である。
【0018】
下記に、本発明の一般的思想を制限することなく、図面を参照しながら例示的実施形態に則して本発明を例によって説明する。
【発明を実施するための最良の形態】
【0019】
図1aは、自動車の三角アームの懸架点1、2、3を著しく模式的に示す。この三角アームの懸架点1は、自動車のホイールRに取り付けられ、懸架点2、3はボディ側に取り付けられている。結合ストラットS1、S2、S3に沿って、負荷によって生じた相応の引張り応力または圧縮応力σD、σZが働く。三角アームの構造設計には、車両重量、路面反力、および運転操作による短時間負荷を考慮しなければならない。これらを、構造物の寸法設計の際に基準として利用しなければならない。その際、特に、まれに生じる特殊負荷σSを評価して、これを考慮しなければならない(力-時間ダイヤグラムとして、図1bのF(t)/t-ダイヤグラムを参照)。この特殊負荷も、三角アームによって確実に捕捉しなければならない。この種の特殊負荷は最終的に、図示の三角アームの形の着目される構造物が、大部分の時間は完全にオーバーサイズに設計される原因となる。特殊負荷の作用を無視するなら、通常は、通常生じる最大負荷σmaxに応じて構造物を設計すれば十分であろう。図1bの力-時間ダイヤグラムはこのことを示す。しかし三角アームは安全部品なので、この種の部品または構造物の場合、相応の特殊負荷を考慮しなければならない。このことは最終的には、構造物設計で前記のオーバーサイズが行われる原因となる。
【0020】
ここで、例えば自動車が道路表面の穴を通過し、それにより鉛直上向きの力F1が、ホイールRを介してマウント1に作用すると想定しよう。その結果、この種の道路穴通過は、結合ストラットS2に沿って大きな圧縮応力σ0を生じるが、それに対して他の2本のストラットS1およびS3は、ほとんど応力がかからないままである。
【0021】
図1cは三角アームの例示的実施形態を概略的に示す。三角アームの結合ストラットS1およびS3が、それらの長さ方向に沿ってそれぞれ分割されて形成され、各結合ストラットのそれぞれ半分S1´、S3´が、アクチュエータ要素A1およびA2によって、回転可能または旋回可能に取り付けられており、結合ストラットS2を補強するために、このストラットと平行に走る旋回状態をとることができる。アクチュエータA1およびA2を相応にアクティブ化することにより、結合ストラットの半分S1’およびS3’を結合ストラットS2に沿ってあてがって、結合ストラットS2の力学的耐荷能力を短時間補強し、それにより、短時間生じる特殊負荷σSに、損傷なしに耐えることができる。
【0022】
アクチュエータ要素A1およびA2は、好ましくは、エネルギー変換システムとして形成され、力学的エネルギーを電気エネルギーに変換し、またはその逆に、電気的アクティブ化によって電気機械的仕事を行うことができる。相応のエネルギー変換によって、構造物から力学的エネルギーを取り出し、例えば接続された電気回路で熱エネルギーに変換することによってこれを消散させることも考えられる。アクチュエータ駆動のもう一つの変形は、相応の変換によって電気エネルギーを得、これによりそのシステムからエネルギーを取り出すことであろう。
【0023】
平面慣性特性を、したがって耐荷能力を向上させる目的で、アクチュエータが、技術的構造物の断面積を変化させることも考えられる。つまり、例えば図1dの管Rの形の、曲げ負荷のかかる構造物を、断面変化させて、断面を円形(I)から楕円形(II)に変化させることができる。この断面変化の目的は、楕円形断面の最大半軸を負荷Lの作用する方向に向けることによって、平面慣性モーメントを上げること、または楕円形断面の最大半軸を、負荷Lの作用を横切る方向に向けることによって、構造物の柔軟性を上げることである。これは、例えば構造物の内圧を制御することによって行うことができる。このために電気粘性流体または磁気粘性流体を用いる場合、さらに、アクティブに制御された減衰を得ることができる。
【0024】
図2は、たわみ軸Bを著しく概略的に示し、このたわみ軸は、例えば印刷機または鉄道車輪で回転軸として用いられるものである。図2bのように負荷がかかる場合、図示の力Fが記載の負荷導入領域に働き、これらの力が、最終的にはたわみ軸Bを曲げ、たわみ軸B内部に引張り応力σBを誘起する。本解決策に従って、たわみ軸Bの内部に二つのアクチュエータA1およびA2、例えばいずれも圧電アクチュエータの種類を設ける場合、アクチュエータをアクティブ化することにより、追加的な力のモーメントをたわみ軸Bに導入することができる。外部の力または負荷の作用によって生じるたわみ軸Bの屈曲を、この力のモーメントによって補償することができ、したがってたわみ軸Bに負荷を印加する引張り応力σBは生じない。したがってアクティブ化可能なアクチュエータA1およびA2は、外部からたわみ軸Bに作用する負荷を、より臨界的でない領域に迂回させ、その結果、この場合、アクチュエータによって制御された負荷迂回ということができる。この種のアクチュエータ配置は、短時間生じる負荷衝撃の緩和に適しているものが好ましく、最終的に、従来は構造上必要だったたわみ軸オーバーサイズを省く助けとなる。
【0025】
図3が示すもう一つの例では、ギャップを設けられた構造領域SRの過応力を避けるために、プレート状に形成された構造物Pの内部で、的を絞りかつ制御された負荷迂回Lを行う。構造物Pは、この弱点箇所SRの領域に特定の応力がかかった場合、追加の措置を取らなければ疲労し、割れ始めると予想される。これを回避するため、構造物P内部の領域SRで局部的な変形を検出するために、センサSEを設け、アクティブな負荷迂回のために、4つの平面アクチュエータA1〜A4を設ける。これらの平面アクチュエータは、外部から構造物Pへの負荷作用Lを、対応する剛性化により、構造的弱点箇所SRを迂回して導くことができる。
【0026】
もう一つの例示的実施形態を図4aおよび4bに示す。この場合、例えば航空機の外壁パネルとして用いられるような大面積のスキンパネルH-を面的に剛性化することが妥当である。このために、いわゆるストリンガ要素Sが用いられ、この要素はその全長にわたって、スキンパネルHとここには図示しない下部構造との物体的結合を生じる。ここで本解決策の原理によって、それぞれ二つのストリンガ要素のピボット点SA1およびSA2の形のストリンガ要素Sを縮小して形成することができる。この二つのピボット点は、短時間相互に剛性化するために、アクチュエータAと結合されている。アクチュエータAがアクティブ化されるのは、過応力状態が検出される場合だけである。アクチュエータAはセンサ機能特性も同時に備えるものと、想定されたい。
【0027】
図5は、二つの支承点に載っているプレートPに、負荷がかかっている場合を示す。プレートPに対する力の作用Fによって、図2の場合と同様に曲げ応力σBが誘起され、この曲げ応力は、本解決策に従ってアクチュエータAを図4bの配置で使用することにより補償される。アクチュエータAは、プレートPにおいて、通常の場合なら最大に屈曲する領域に組み込まれる。このために、プレートPはそのための開口部を有し、その開口部に、形状記憶合金または圧電セラミックス製のアクチュエータAが組み込まれる。
【図面の簡単な説明】
【0028】
【図1a】図1aは本解決策による方法を理由付けするための概略図である。
【図1b】図1bは本解決策による方法を理由付けするための概略図である。
【図1c】図1cは本解決策による方法を理由付けするための概略図である。
【図1d】図1dは本解決策による方法を理由付けするための概略図である。
【図2a】図2aはたわみ軸における本解決策の原理を示す概略図である。
【図2b】図2bはたわみ軸における本解決策の原理を示す概略図である。
【図3】弱化された構造物領域を有するプレート型部品の概略図である。
【図4a】図4aは一体型部品の概略図である。
【図4b】図4bは一体型部品の概略図である。
【図5a】図5aは二つの固定マウントに載せられたプレートにおける本解決策による方法の概略図である。
【図5b】図5bは二つの固定マウントに載せられたプレートにおける本解決策による方法の概略図である。
【特許請求の範囲】
【請求項1】
技術的構造物の力学的耐荷能力および/または応力を制御する方法であって、
構造物の応力と相互に関連する少なくとも一つの特性値を検出するステップと、
検出された前記少なくとも一つの特性値に基づいて、構造物の応力状態を求めるステップと、
構造物の応力状態を評価するステップと、
応力状態の評価と、少なくとも構造物の寿命を最適化するために設定された少なくとも一つの目的関数とに基づいて、少なくとも一つの信号を生成するステップであって、前記信号が、構造物内部に組み込まれまたは構造物に適用されている少なくとも一つのアクチュエータに、前記応力状態を制御するよう前記アクチュエータをアクティブ化するために供給されるステップとを特徴とする方法。
【請求項2】
前記少なくとも一つの特性値を検出するために、前記構造物に適用され、かつ/または構造物に組み込まれている、かつ/または構造物から分離して配置されている少なくとも一つのセンサを設けることを特徴とする、請求項1に記載の方法。
【請求項3】
応力と相互に関連する前記少なくとも一つの特性値が、前記構造物に静的および/または動的負荷が作用したときに変化することを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記センサが、前記構造物の力学的および/または熱的特性値を検出し、前記特性値が、負荷によって構造物が変形する際に変化することを特徴とする、請求項1から3のいずれかに記載の方法。
【請求項5】
前記構造物の応力状態が、一つのデータベースにアクセスすることによって求められ、前記データベースには、前記少なくとも一つの特性値に割り当て可能な前記構造物の参照される既知の応力状態が記憶されていることを特徴とする、請求項1から4のいずれかに記載の方法。
【請求項6】
前記構造物の応力状態の評価が、構造物の残存耐荷能力を記述する数量を求めることによって行われ、この残存耐荷能力とは、構造物への過大な負荷導入がその残存耐荷能力に達しまたはそれを上回った場合に構造物が局部的または全体的な不可逆的損傷を受けるものであることを特徴とする、請求項1から5のいずれかに記載の方法。
【請求項7】
前記少なくとも一つのアクチュエータをアクティブ化するための前記少なくとも一つの信号の生成が、構造物の残存耐荷能力を表す数量が目的関数に基づいて最適化されるように行われることを特徴とする、請求項6に記載の方法。
【請求項8】
前記少なくとも一つのアクチュエータのアクティブ化が、前記構造物が負荷の導入を受ける既知の少なくとも一つの領域において負荷の印加または解除、すなわち剛性の追加または弾性の増加を受けるように行われることを特徴とする、請求項1から7のいずれかに記載の方法。
【請求項9】
前記少なくとも一つのアクチュエータのアクティブ化が、セミアクティブな信号処理またはアクティブな制御の過程で行われることを特徴とする、請求項1から7のいずれかに記載の方法。
【請求項10】
前記特性値の検出、ならびに前記の応力状態のアクチュエータによる制御が、多機能的なエネルギー変換材料を用いて行われることを特徴とする、請求項1から9のいずれかに記載の方法。
【請求項11】
前記特性値として、負荷による構造物変形から導き出される力および/または膨張値が用いられることを特徴とする、請求項1から10のいずれかに記載の方法。
【請求項12】
技術的構造物の力学的耐荷能力を制御する装置であって、
応力と相互に関連するセンサ信号を生成する少なくとも一つのセンサが、構造物内に組み込まれ、構造物に適用され、かつ/または構造物から分離されて設けられていること、
一つの評価ユニットが設けられ、前記ユニットにおいて前記センサ信号が評価され、前記センサ信号に一つの特性値が割り当てられること、
一つのデータベースが設けられ、前記データベースに、技術的構造物の前もって知られている複数の応力状態が記憶され、前記評価ユニットが、前記データベースから、求められた特性値に応じて、一つの応力状態を選択し評価すること、ならびに
一つのアクティブ化ユニットが設けられ、前記アクティブ化ユニットが、構造物に組み込まれ、または構造物に適用されている、少なくとも一つのアクチュエータを、構造物が応力状態に応じて、その少なくとも一つの局部領域において負荷を印加または解除されるようにアクティブ化することを特徴とする装置。
【請求項13】
前記センサが、前記構造物が静的および/または動的負荷の作用時に受ける構造物の変形に応じたセンサ信号を生成することを特徴とする、請求項12に記載の装置。
【請求項14】
前記少なくとも一つのセンサおよび/または前記少なくとも一つのアクチュエータが、エネルギー変換材料を含むことを特徴とする、請求項12または13に記載の装置。
【請求項15】
前記エネルギー変換材料が、以下の材料クラス、すなわち圧電セラミックス、無鉛圧電セラミックス、圧電ポリマー、電歪セラミックス、電気粘性流体、ポリマーゲル、磁気粘性流体、形状記憶合金、形状記憶ポリマーのうちの少なくとも一つからなることを特徴とする、請求項14に記載の装置。
【請求項16】
前記評価ユニット、データベース、およびアクティブ化ユニットが、ミニチュア化されて、構造物内部に組み込まれ、あるいは構造物に適用されることを特徴とする、請求項12から15のいずれかに記載の装置。
【請求項17】
エネルギー源が、構造物内に組み込まれ、または構造物に適用されることを特徴とする、請求項12から16のいずれかに記載の装置。
【請求項18】
遠隔計測ユニットが、構造物内に組み込まれ、または構造物に適用され、前記遠隔計測ユニットが、構造物とは分離して設けられた評価ユニットに、センサ信号を伝送することを特徴とする、請求項12から15のいずれかに記載の装置。
【請求項1】
技術的構造物の力学的耐荷能力および/または応力を制御する方法であって、
構造物の応力と相互に関連する少なくとも一つの特性値を検出するステップと、
検出された前記少なくとも一つの特性値に基づいて、構造物の応力状態を求めるステップと、
構造物の応力状態を評価するステップと、
応力状態の評価と、少なくとも構造物の寿命を最適化するために設定された少なくとも一つの目的関数とに基づいて、少なくとも一つの信号を生成するステップであって、前記信号が、構造物内部に組み込まれまたは構造物に適用されている少なくとも一つのアクチュエータに、前記応力状態を制御するよう前記アクチュエータをアクティブ化するために供給されるステップとを特徴とする方法。
【請求項2】
前記少なくとも一つの特性値を検出するために、前記構造物に適用され、かつ/または構造物に組み込まれている、かつ/または構造物から分離して配置されている少なくとも一つのセンサを設けることを特徴とする、請求項1に記載の方法。
【請求項3】
応力と相互に関連する前記少なくとも一つの特性値が、前記構造物に静的および/または動的負荷が作用したときに変化することを特徴とする、請求項1または2に記載の方法。
【請求項4】
前記センサが、前記構造物の力学的および/または熱的特性値を検出し、前記特性値が、負荷によって構造物が変形する際に変化することを特徴とする、請求項1から3のいずれかに記載の方法。
【請求項5】
前記構造物の応力状態が、一つのデータベースにアクセスすることによって求められ、前記データベースには、前記少なくとも一つの特性値に割り当て可能な前記構造物の参照される既知の応力状態が記憶されていることを特徴とする、請求項1から4のいずれかに記載の方法。
【請求項6】
前記構造物の応力状態の評価が、構造物の残存耐荷能力を記述する数量を求めることによって行われ、この残存耐荷能力とは、構造物への過大な負荷導入がその残存耐荷能力に達しまたはそれを上回った場合に構造物が局部的または全体的な不可逆的損傷を受けるものであることを特徴とする、請求項1から5のいずれかに記載の方法。
【請求項7】
前記少なくとも一つのアクチュエータをアクティブ化するための前記少なくとも一つの信号の生成が、構造物の残存耐荷能力を表す数量が目的関数に基づいて最適化されるように行われることを特徴とする、請求項6に記載の方法。
【請求項8】
前記少なくとも一つのアクチュエータのアクティブ化が、前記構造物が負荷の導入を受ける既知の少なくとも一つの領域において負荷の印加または解除、すなわち剛性の追加または弾性の増加を受けるように行われることを特徴とする、請求項1から7のいずれかに記載の方法。
【請求項9】
前記少なくとも一つのアクチュエータのアクティブ化が、セミアクティブな信号処理またはアクティブな制御の過程で行われることを特徴とする、請求項1から7のいずれかに記載の方法。
【請求項10】
前記特性値の検出、ならびに前記の応力状態のアクチュエータによる制御が、多機能的なエネルギー変換材料を用いて行われることを特徴とする、請求項1から9のいずれかに記載の方法。
【請求項11】
前記特性値として、負荷による構造物変形から導き出される力および/または膨張値が用いられることを特徴とする、請求項1から10のいずれかに記載の方法。
【請求項12】
技術的構造物の力学的耐荷能力を制御する装置であって、
応力と相互に関連するセンサ信号を生成する少なくとも一つのセンサが、構造物内に組み込まれ、構造物に適用され、かつ/または構造物から分離されて設けられていること、
一つの評価ユニットが設けられ、前記ユニットにおいて前記センサ信号が評価され、前記センサ信号に一つの特性値が割り当てられること、
一つのデータベースが設けられ、前記データベースに、技術的構造物の前もって知られている複数の応力状態が記憶され、前記評価ユニットが、前記データベースから、求められた特性値に応じて、一つの応力状態を選択し評価すること、ならびに
一つのアクティブ化ユニットが設けられ、前記アクティブ化ユニットが、構造物に組み込まれ、または構造物に適用されている、少なくとも一つのアクチュエータを、構造物が応力状態に応じて、その少なくとも一つの局部領域において負荷を印加または解除されるようにアクティブ化することを特徴とする装置。
【請求項13】
前記センサが、前記構造物が静的および/または動的負荷の作用時に受ける構造物の変形に応じたセンサ信号を生成することを特徴とする、請求項12に記載の装置。
【請求項14】
前記少なくとも一つのセンサおよび/または前記少なくとも一つのアクチュエータが、エネルギー変換材料を含むことを特徴とする、請求項12または13に記載の装置。
【請求項15】
前記エネルギー変換材料が、以下の材料クラス、すなわち圧電セラミックス、無鉛圧電セラミックス、圧電ポリマー、電歪セラミックス、電気粘性流体、ポリマーゲル、磁気粘性流体、形状記憶合金、形状記憶ポリマーのうちの少なくとも一つからなることを特徴とする、請求項14に記載の装置。
【請求項16】
前記評価ユニット、データベース、およびアクティブ化ユニットが、ミニチュア化されて、構造物内部に組み込まれ、あるいは構造物に適用されることを特徴とする、請求項12から15のいずれかに記載の装置。
【請求項17】
エネルギー源が、構造物内に組み込まれ、または構造物に適用されることを特徴とする、請求項12から16のいずれかに記載の装置。
【請求項18】
遠隔計測ユニットが、構造物内に組み込まれ、または構造物に適用され、前記遠隔計測ユニットが、構造物とは分離して設けられた評価ユニットに、センサ信号を伝送することを特徴とする、請求項12から15のいずれかに記載の装置。
【図1a】



【図1b】
【図1c】
【図1d】
【図2a】
【図2b】
【図3】

【図4a】
【図4b】

【図5a】
【図5b】
【図1b】
【図1c】
【図1d】
【図2a】
【図2b】
【図3】
【図4a】
【図4b】
【図5a】
【図5b】
【公表番号】特表2008−541113(P2008−541113A)
【公表日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願番号】特願2008−511648(P2008−511648)
【出願日】平成18年5月18日(2006.5.18)
【国際出願番号】PCT/EP2006/004766
【国際公開番号】WO2006/122821
【国際公開日】平成18年11月23日(2006.11.23)
【出願人】(500242786)フラウンホファー ゲセルシャフトツール フェールデルンク ダー アンゲヴァンテン フォルシュンク エー.ファオ. (47)
【Fターム(参考)】
【公表日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願日】平成18年5月18日(2006.5.18)
【国際出願番号】PCT/EP2006/004766
【国際公開番号】WO2006/122821
【国際公開日】平成18年11月23日(2006.11.23)
【出願人】(500242786)フラウンホファー ゲセルシャフトツール フェールデルンク ダー アンゲヴァンテン フォルシュンク エー.ファオ. (47)
【Fターム(参考)】
[ Back to top ]