
技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォーム
【課題】技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォームであって、少なくとも、駆動手段と、検査手段と、位置データを求めるための手段と、通信手段とを備えているものを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供する。
【解決手段】ロボット用プラットフォーム10,20は、モジュール方式に形成されており、通信手段12,13,14は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
【解決手段】ロボット用プラットフォーム10,20は、モジュール方式に形成されており、通信手段12,13,14は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、たとえばガスタービン、蒸気タービン、ボイラまたはタンク等の大きな技術設備の自動化された検査の分野に関する。
【0002】
具体的には、本発明は、特に発電所における技術設備を遠隔操作式および/または自律式に検査するために設けられたロボット用プラットフォームであって、少なくとも、ロボット用プラットフォームを移動するための駆動手段と、技術設備を検査するための検査手段と、ロボット用プラットフォームの位置データを求めるための手段と、測定データおよび制御データを交換するためならびに評価ユニットに測定データおよび位置データを伝達するための通信手段とを備えているものに関する。
【背景技術】
【0003】
外側からアプローチが困難な場所で作業を実施する必要がある場合、たとえば発電所のような大きな技術設備で様々な検査作業および保守作業を行うのに、特別にその都度の用途に応じて極めて制限された範囲で構造化しかつ製造する必要がある多種多様なロボットが要求される。したがってそのようなロボットを完全に特定の用途のために開発しかつ製造するには、大きな費用および時間が掛かる。そのようなロボットを外側から操作する場合、そのために、ロボットを対応する外側ステーションと接続する厚くて重い給電ケーブルが必要である。給電ケーブルは、制御信号および電流をロボットに提供して、ロボットの位置通知を外側ステーションに伝達する(たとえば米国特許第6104970号明細書または米国特許出願公開第2008148876号明細書参照)。
【0004】
プラットフォームに組み付けられた様々な用途のための種々のセンサを備えることができる検査システムが流通している(たとえばPhoenix Inspection Systems Ltd.のスキャナ「Magman」またはZetec Inc.のロボットシステムZR−1)が、使用範囲は、柔軟に使用可能なシステムの場合に限定されている。さらにこのシステムでは、実際の評価ユニットと外部の制御兼評価ユニットとの間でデータ、制御信号およびエネルギを伝達するために、種々の多数のケーブル接続が必要である。これには特にユニットおよびセンサによる位置決めから様々なセンサデータを個別に伝達することが含まれる。個別の伝達はトラブルが生じやすく、付属のケーブルに起因してユニットの運動自由度が大幅に制限される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6104970号明細書
【特許文献2】米国特許出願公開第2008148876号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって本発明の課題は、冒頭で述べたようなロボット用プラットフォームを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面(状況)に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供することである。
【課題を解決するための手段】
【0007】
この課題を解決するために本発明の構成では、特に発電所における技術設備を遠隔操作式および/または自律式に検査するために設けられたロボット用プラットフォームであって、少なくとも、ロボット用プラットフォームを移動するための駆動手段と、技術設備を検査するための検査手段と、ロボット用プラットフォームの位置データを求めるための手段と、測定データおよび制御データを交換するためならびに評価ユニットに測定データおよび位置データを伝達するための通信手段とを備えているものにおいて、ロボット用プラットフォームは、モジュール方式に形成されており、通信手段は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
【0008】
本発明によるロボット用プラットフォームの1つの態様によれば、ロボット用プラットフォームは、個々のモジュールから形成されており、該個々のモジュールは、構造的に機械式の結合手段により、かつ/またはデータ交換のために統一規格に従って作動するデジタルの通信接続部により相互に接続されている。
【0009】
別の1つの態様によれば、デジタルの通信接続部は、イーサネット規格に従って作動する。
【0010】
本発明によるロボット用プラットフォームの別の1つの態様によれば、デジタルの通信接続部は、追加的に、モジュールに給電するための手段を備えている。
【0011】
別の1つの態様によれば、個々のモジュールは、単数または複数のサブモジュールを備えている。
【0012】
特に、サブモジュールの1つは、モジュール間のデータ交換および給電接続用のインタフェースである。
【0013】
別の1つの態様によれば、個々のモジュールは、電気駆動モータと、モジュールに組み込まれた、該電気駆動モータ用の制御ユニットとを備えており、該制御ユニットは、サブモジュールとして、出力サブモジュールとマイクロコントローラモジュールとを備えている。
【0014】
別の1つの態様によれば、モジュールの少なくとも1つは、ロボット用プラットフォームを移動するための駆動モジュールである。
【0015】
別の1つの態様によれば、駆動モジュールは、電気駆動モータ、特に直流モータを備えていて、かつ、サブモジュールとして、検査されるべき技術設備の磁化可能な表面に沿って転動するためおよび該表面に付着するための少なくとも1つのマグネットホイールと、駆動モータの給電用の出力サブモジュールと、電気駆動モータを制御するためのマイクロコントローラサブモジュールとを備えている。
【0016】
本発明による別の1つの態様によれば、モジュールの1つは、配置された検査手段を直線移動するための直動モジュールとして形成されている。
【0017】
本発明による更に別の1つの態様によれば、モジュールの1つは、ベースステーションであり、該ベースステーションは、残りのモジュールおよび検査信号の評価ユニットとのデータ交換を制御するために設けられている。
【0018】
別の1つの態様によれば、ベースステーションは、ロボット用プラットフォームに対する評価ユニットの簡単な接続を形成するために、エンコーダ信号をエミュレートする。
【0019】
別の態様によれば、評価ユニットの手前に、位置データを座標変換するための手段が設けられており、評価ユニットは、検査目的用にアレンジされた、自由に選択可能な座標系で作動する。
【0020】
本発明による別の1つの態様によれば、モジュールの少なくとも1つは、ロボット用プラットフォームの位置を特定するために形成されている。
【0021】
別の1つの態様によれば、位置を特定するために、位置発信器サブモジュールが設けられており、該位置発信器サブモジュールは、位置発信器ホイールとエンコーダユニットとを備えている。
【図面の簡単な説明】
【0022】
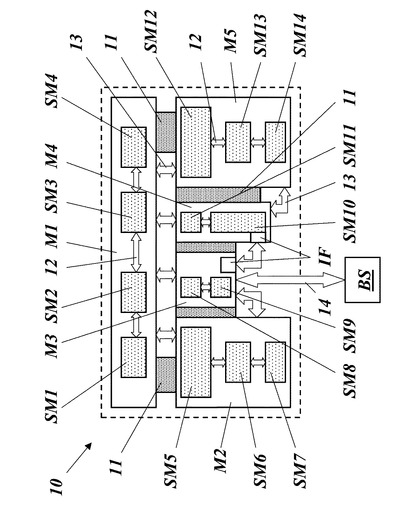
【図1】本発明の1つの実施の形態による、モジュール方式のロボット用プラットフォームの構造を示すブロック図である。
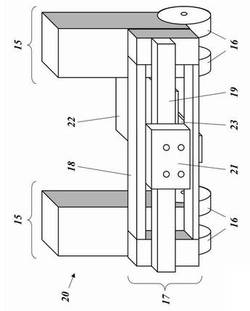
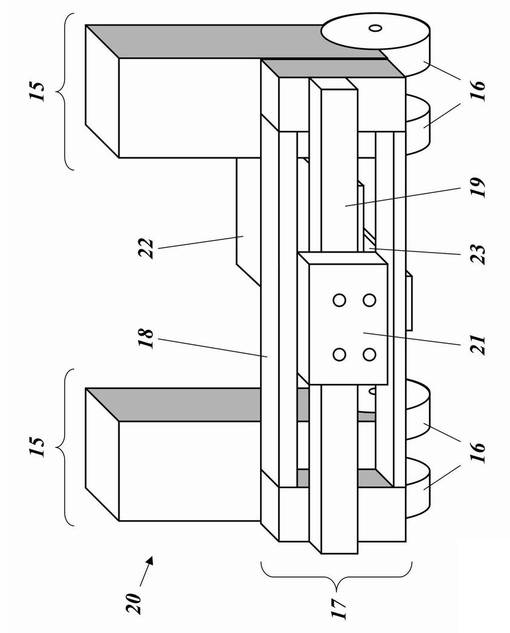
【図2】本発明の別の1つの実施の形態による、2つの駆動モジュールと1つの直動モジュールとを備えたロボット用プラットフォームの斜視図である。
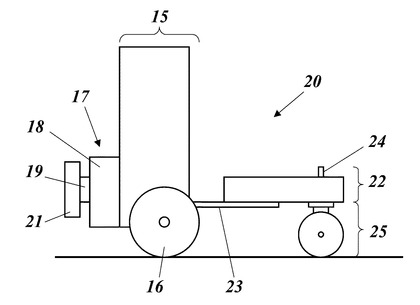
【図3】図2に示すロボット用プラットフォームの側面図である。
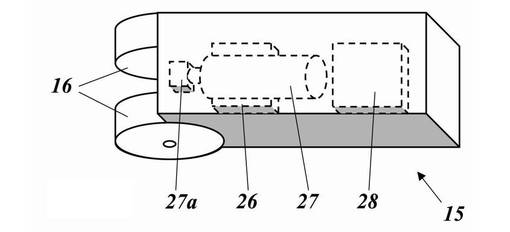
【図4】直流モータ、マイクロコントローラサブモジュールおよび直流モータに給電するための出力サブモジュールが組み込まれた、図2に示すロボット用プラットフォームの駆動モジュールの構造を示す図である。
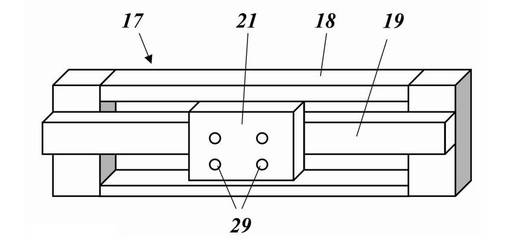
【図5】図2に示す直動モジュールを単独で示す図である。
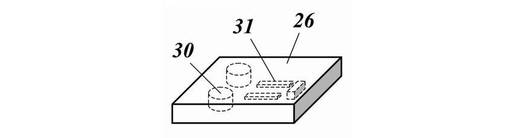
【図6】図4に示す出力サブモジュールを単独で示す図である。
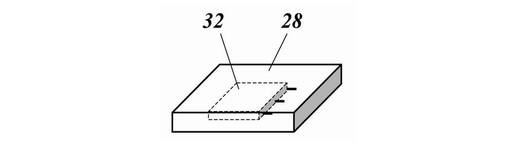
【図7】図4に示すマイクロコントローラサブモジュールを単独で示す図である。
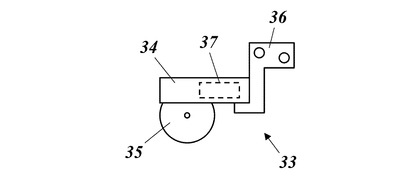
【図8】ロボット用プラットフォームの位置を特定するための位置発信器サブモジュールの側面図である。
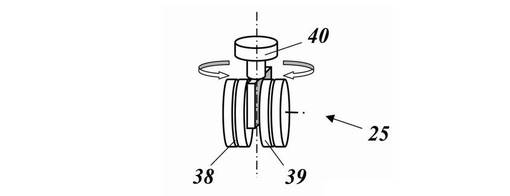
【図9】ロボット用プラットフォームの移動をサポートするための、鉛直方向の回転軸線を中心に回動可能なステアリングローラの斜視図である。
【発明を実施するための形態】
【0023】
以下に、本発明を実施するための形態を、図面を用いて具体的に説明する。
【0024】
本発明により、モジュールシステムとして設計されていて、したがって個々のモジュールの選択や組み合わせに応じて様々な用途に適合させることができるロボット用プラットフォームが提供される。モジュールシステムは、以下の性質および利点を特徴としている。
・システムは、制限数の基本的なモジュールから形成されていて、用途に固有の構成要素、たとえばセンサにより補足される。
・基本的なモジュールには、必要な場合、制御ユニットが組み込まれており、制御ユニットは、モジュールを運転するために、必要なローカルインテリジェンスを提供する。
・各モジュールは、別のモジュールもしくは検査箇所の外側に位置する操作に必要なベースユニットと接続するための標準的なインタフェースを備えている。
・各モジュールは、必要な場合、給電用の接続部を備えている。
・モジュール間のデータ交換は、好適にはイーサネット規格に従って行われる。
・ロボット用プラットフォームは、位置決め手段を備えており、その際、位置データは、実時間でイーサネットを介して伝達され、評価される。
・検査に必要なセンサは、より多くの自律性、頑強性および融通性を得るために、同様にモジュールとして設計されている。
・モジュール化は、複数の階層に配置されたシステムレベルにみられ、つまり、1つのモジュール内に複数のサブモジュールが存在し、サブモジュールは、その特別な構成によりモジュールの性質を決定する。
【0025】
図1には、本発明の1つの実施の形態による、モジュール方式のロボット用プラットフォームの構成をブロック図で示す。図1において破線で示すロボット用プラットフォーム10は、基本的な複数のモジュールM1−M5を備えており、基本的なモジュールM1−M5は、ロボット用プラットフォーム10を形成するために、図1において網掛けして示す、詳説しない構造的な結合手段11(たとえばねじ結合)により相互に接続されている。各モジュールM1−M5は、複数のサブモジュールSM1−SM14を備えており、サブモジュールSM1−SM14は、各モジュールの構造および機能に関しする特徴を有している。
【0026】
モジュールM1−M5は、規格化された通信接続部13(これは好適にはイーサネット規格に従って作動する)を介して相互に直にデータを交換する。データ交換を実現するために、モジュールM1−M5に相応のインタフェースIFが設けられている。必要な場合、個々のモジュールM1−M5におけるサブモジュールSM1−SM14もまた相応の通信接続部12を介してデータを交換する。さらにロボット用プラットフォーム10とベースステーションBSとの間に通信接続部14が形成されており、通信接続部14を介して、ロボット用プラットフォーム10に命令が送信され、ロボット用プラットフォーム10により位置データが受信される。
【0027】
ロボット用プラットフォーム10のモジュール方式の構造と、モジュールとサブモジュールとの間のイーサネットを介する通信性とにより、ロボット用プラットフォーム10自体に十分なインテリジェンスが存在する。これにより開ループ制御過程、閉ループ制御過程および測定過程を自律式に内部で行うことができ、その際、障害に敏感な、ベースステーションBSとのデータ交換を処理する必要はない。
【0028】
このような原理に従って形成された具体的なロボット用プラットフォームの1つの実施の形態を図2に示す。図2に示すロボット用プラットフォーム20は、相互間隔を有して配置された同一構造の2つの駆動モジュール15を備えており、駆動モジュール15は、ロボット用プラットフォーム20の運動を制御するために用いられる。図4には、個々の駆動モジュール15を示す。
【0029】
駆動モジュール15は、略直方体の幾何学形状を有する縦長のモジュールとして形成されていて、一方の端部に、マグネットホイール16の対偶を有しており、マグネットホイール16は、中央から外側に配置されており、駆動モジュール15は、鉛直位置のみならず水平位置でも、駆動のためにロボット用プラットフォームに装着することができる。マグネットホイール16は、ロボット用プラットフォームが走行面(下に位置する面、床、壁、支台等)上で移動する場合、一方では、走行面上で転動する。他方では、駆動モジュール15におけるマグネットホイール16は、走行面が強磁性である場合、ロボット用プラットフォームが走行面に付着するように働く。このようにしてロボット用プラットフォームは、たとえばタービンのロータ軸の周りを移動することができ、その際に落下または滑落することはない。
【0030】
駆動モジュール15の内側に直流モータ27が配置されており、直流モータ27は、伝動装置27aを介してマグネットホイール16を駆動する。直流モータ27に給電するために、出力サブモジュール26が設けられており(図6参照)、出力サブモジュール26は、たとえばPCB(プリント基板)として形成されていて、モータを駆動するのに必要な電子素子(出力半導体、コンデンサ、抵抗等)を備えている。出力サブモジュール26の他に、マイクロコントローラ32を備えたマイクロコントローラサブモジュール28が駆動モジュール15に取り付けられている。このサブモジュールは、ロボット用プラットフォーム20の測定された実際位置と所望の目標位置とに応じて直流モータ27の運転を制御する。最も簡単な場合、マグネットホイール16自体に相応のエンコーダを取り付けることができ、エンコーダは、ホイールの回転数を測定し、対応するデータをマイクロコントローラ32に提供する。さらにマイクロコントローラサブモジュール28は、たとえばスイッチまたはセンサデータを読み取るか、もしくは表示要素を操作するために、別のデータ入口および出口を備えている。そのような付加機能は、容易に、マイクロコントローラ32において進行する制御プログラムを介して達成することができる。
【0031】
位置決めに際してスリップに関連するエラーを回避しようとする場合、図8に示すように、ロボット用プラットフォーム20は、自律性の位置発信器サブモジュール33を装着することができ、位置発信器サブモジュール33は、特別な位置発信器ホイール35で、進行した距離をほぼスリップなく記録して、シャシ34に取り付けられたエンコーダユニット37を介して、位置データとして提供し、位置発信器サブモジュール33は、一般的な取付要素36により、ロボット用プラットフォームの適切な任意の箇所に取り付けることができる。マイクロコントローラ32は、大きな手間を掛けずに追加的な信号を読み取り、簡単に処理できるように設計されている。位置決めエラーの大幅な減少の他に、スリップ監視を実行することができ、上位のプログラムまたは作業員に相応に警告することができる。
【0032】
相互間隔を有する2つの駆動モジュール15は、図2もしくは図3に示すロボット用プラットフォーム20では、直動モジュール17により相互に固く結合されている。図5に個別に示す直動モジュール17は、縦長のフレームを有しており、フレームは、正面に、長手方向に延在するリニアガイド19を備えている。リニアガイド19に、キャリッジ21が、長手方向移動可能に配置されている。キャリッジ21は、センサユニットを取り付けるように設計されていて、適当な取付孔(図5の符号29)を備えている。キャリッジ21は、直動モジュール17に取り付けられた、図2には示していないモータにより移動可能であるので、キャリッジに取り付けられたセンサと共に、走行方向に対して横向きの移動が実現されている。このような構成でも、モジュールに、モータを運転するための適切なサブモジュール26,28が取り付けられている。
【0033】
図3から看取されるように、ロボット用プラットフォーム20は、別のモジュールとして電子ボックス22を備えており、電子ボックス22内に、ロボット用プラットフォームを運転するために必要な電子回路が取り付けられている。電子ボックス22は、別のモジュールと同様に、接続ブシュ24を備えており、接続ブシュ24に、データ伝達用の相応のケーブルが接続可能である。
【0034】
図示の実施の形態では、電子ボックス22の下面に、別のモジュールとして(受動的な)ステアリングローラ25が取り付けらており、ステアリングローラ25は、ロボット用プラットフォーム20を、突出する電子ボックス22の範囲で移動可能に支持する。図9に示すように、ステアリングローラ25は、平行に配置された2つのホイール38,39を備えており、ホイール38,39は、回動支承部40により、鉛直軸線を中心に回動可能に支承されている。そのようなローラは、好適には、相応のサーボモジュールと組み合わせると、ロボット用プラットフォーム20を操縦する、つまり移動方向を設定するために使用することもできる。移動方向の設定を行う別の構成は、両方の駆動モジュール15の様々な操作により得られる。
【0035】
通信接続部12〜14は、ライン接続されている。また、特にスペースまたは運動性の理由から好適である場合、特定の通信接続部をワイヤレスに構成することも考えられる。
【0036】
総じて、本発明による技術設備の検査および保守のためのモジュール方式のロボット用プラットフォームは以下の特徴を有している。
・ロボット用プラットフォームは、制御電子装置が組み込まれた少なくとも1つの駆動ユニットを備えている。
・ロボット用プラットフォームは、ロボット用プラットフォームを位置決めするための手段を備えている。
・個々のモジュールは、相互変調のデータ交換のための規格化されたデジタルのインタフェースを備えている。
・モータ駆動装置の制御ループの外側で使用するためのユニットの位置決めデータは、デジタルのインタフェースを介して外側へ伝達され、別の目的に提供される。
【符号の説明】
【0037】
10,20 ロボット用プラットフォーム(モジュラ)、 11 結合手段、 12〜14 通信接続部(イーサネット)、 15 駆動モジュール、 16 マグネットホイール、 17 直動モジュール、 18 フレーム、 19 リニアガイド、 21 キャリッジ、 22 電子ボックス、 24 接続ブシュ、 25 ステアリングローラ、 26 出力サブモジュール、 27 電動モータ(直流モータ)、 27a 伝動装置、 28 マイクロコントローラサブモジュール、 29 取付孔、 30,31 構成要素(電子)、 32 マイクロコントローラ、 33 位置発信器サブモジュール、 34 シャシ、 35 位置発信器ホイール、 36 取付要素、 37 エンコーダユニット、 38,39 ホイール、 40 回動支承部、 BS ベースステーション、 IF インタフェース(たとえばイーサネット)、 M1〜M5 モジュール、 SM1〜SM14 サブモジュール
【技術分野】
【0001】
本発明は、たとえばガスタービン、蒸気タービン、ボイラまたはタンク等の大きな技術設備の自動化された検査の分野に関する。
【0002】
具体的には、本発明は、特に発電所における技術設備を遠隔操作式および/または自律式に検査するために設けられたロボット用プラットフォームであって、少なくとも、ロボット用プラットフォームを移動するための駆動手段と、技術設備を検査するための検査手段と、ロボット用プラットフォームの位置データを求めるための手段と、測定データおよび制御データを交換するためならびに評価ユニットに測定データおよび位置データを伝達するための通信手段とを備えているものに関する。
【背景技術】
【0003】
外側からアプローチが困難な場所で作業を実施する必要がある場合、たとえば発電所のような大きな技術設備で様々な検査作業および保守作業を行うのに、特別にその都度の用途に応じて極めて制限された範囲で構造化しかつ製造する必要がある多種多様なロボットが要求される。したがってそのようなロボットを完全に特定の用途のために開発しかつ製造するには、大きな費用および時間が掛かる。そのようなロボットを外側から操作する場合、そのために、ロボットを対応する外側ステーションと接続する厚くて重い給電ケーブルが必要である。給電ケーブルは、制御信号および電流をロボットに提供して、ロボットの位置通知を外側ステーションに伝達する(たとえば米国特許第6104970号明細書または米国特許出願公開第2008148876号明細書参照)。
【0004】
プラットフォームに組み付けられた様々な用途のための種々のセンサを備えることができる検査システムが流通している(たとえばPhoenix Inspection Systems Ltd.のスキャナ「Magman」またはZetec Inc.のロボットシステムZR−1)が、使用範囲は、柔軟に使用可能なシステムの場合に限定されている。さらにこのシステムでは、実際の評価ユニットと外部の制御兼評価ユニットとの間でデータ、制御信号およびエネルギを伝達するために、種々の多数のケーブル接続が必要である。これには特にユニットおよびセンサによる位置決めから様々なセンサデータを個別に伝達することが含まれる。個別の伝達はトラブルが生じやすく、付属のケーブルに起因してユニットの運動自由度が大幅に制限される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6104970号明細書
【特許文献2】米国特許出願公開第2008148876号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって本発明の課題は、冒頭で述べたようなロボット用プラットフォームを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面(状況)に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供することである。
【課題を解決するための手段】
【0007】
この課題を解決するために本発明の構成では、特に発電所における技術設備を遠隔操作式および/または自律式に検査するために設けられたロボット用プラットフォームであって、少なくとも、ロボット用プラットフォームを移動するための駆動手段と、技術設備を検査するための検査手段と、ロボット用プラットフォームの位置データを求めるための手段と、測定データおよび制御データを交換するためならびに評価ユニットに測定データおよび位置データを伝達するための通信手段とを備えているものにおいて、ロボット用プラットフォームは、モジュール方式に形成されており、通信手段は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
【0008】
本発明によるロボット用プラットフォームの1つの態様によれば、ロボット用プラットフォームは、個々のモジュールから形成されており、該個々のモジュールは、構造的に機械式の結合手段により、かつ/またはデータ交換のために統一規格に従って作動するデジタルの通信接続部により相互に接続されている。
【0009】
別の1つの態様によれば、デジタルの通信接続部は、イーサネット規格に従って作動する。
【0010】
本発明によるロボット用プラットフォームの別の1つの態様によれば、デジタルの通信接続部は、追加的に、モジュールに給電するための手段を備えている。
【0011】
別の1つの態様によれば、個々のモジュールは、単数または複数のサブモジュールを備えている。
【0012】
特に、サブモジュールの1つは、モジュール間のデータ交換および給電接続用のインタフェースである。
【0013】
別の1つの態様によれば、個々のモジュールは、電気駆動モータと、モジュールに組み込まれた、該電気駆動モータ用の制御ユニットとを備えており、該制御ユニットは、サブモジュールとして、出力サブモジュールとマイクロコントローラモジュールとを備えている。
【0014】
別の1つの態様によれば、モジュールの少なくとも1つは、ロボット用プラットフォームを移動するための駆動モジュールである。
【0015】
別の1つの態様によれば、駆動モジュールは、電気駆動モータ、特に直流モータを備えていて、かつ、サブモジュールとして、検査されるべき技術設備の磁化可能な表面に沿って転動するためおよび該表面に付着するための少なくとも1つのマグネットホイールと、駆動モータの給電用の出力サブモジュールと、電気駆動モータを制御するためのマイクロコントローラサブモジュールとを備えている。
【0016】
本発明による別の1つの態様によれば、モジュールの1つは、配置された検査手段を直線移動するための直動モジュールとして形成されている。
【0017】
本発明による更に別の1つの態様によれば、モジュールの1つは、ベースステーションであり、該ベースステーションは、残りのモジュールおよび検査信号の評価ユニットとのデータ交換を制御するために設けられている。
【0018】
別の1つの態様によれば、ベースステーションは、ロボット用プラットフォームに対する評価ユニットの簡単な接続を形成するために、エンコーダ信号をエミュレートする。
【0019】
別の態様によれば、評価ユニットの手前に、位置データを座標変換するための手段が設けられており、評価ユニットは、検査目的用にアレンジされた、自由に選択可能な座標系で作動する。
【0020】
本発明による別の1つの態様によれば、モジュールの少なくとも1つは、ロボット用プラットフォームの位置を特定するために形成されている。
【0021】
別の1つの態様によれば、位置を特定するために、位置発信器サブモジュールが設けられており、該位置発信器サブモジュールは、位置発信器ホイールとエンコーダユニットとを備えている。
【図面の簡単な説明】
【0022】
【図1】本発明の1つの実施の形態による、モジュール方式のロボット用プラットフォームの構造を示すブロック図である。
【図2】本発明の別の1つの実施の形態による、2つの駆動モジュールと1つの直動モジュールとを備えたロボット用プラットフォームの斜視図である。
【図3】図2に示すロボット用プラットフォームの側面図である。
【図4】直流モータ、マイクロコントローラサブモジュールおよび直流モータに給電するための出力サブモジュールが組み込まれた、図2に示すロボット用プラットフォームの駆動モジュールの構造を示す図である。
【図5】図2に示す直動モジュールを単独で示す図である。
【図6】図4に示す出力サブモジュールを単独で示す図である。
【図7】図4に示すマイクロコントローラサブモジュールを単独で示す図である。
【図8】ロボット用プラットフォームの位置を特定するための位置発信器サブモジュールの側面図である。
【図9】ロボット用プラットフォームの移動をサポートするための、鉛直方向の回転軸線を中心に回動可能なステアリングローラの斜視図である。
【発明を実施するための形態】
【0023】
以下に、本発明を実施するための形態を、図面を用いて具体的に説明する。
【0024】
本発明により、モジュールシステムとして設計されていて、したがって個々のモジュールの選択や組み合わせに応じて様々な用途に適合させることができるロボット用プラットフォームが提供される。モジュールシステムは、以下の性質および利点を特徴としている。
・システムは、制限数の基本的なモジュールから形成されていて、用途に固有の構成要素、たとえばセンサにより補足される。
・基本的なモジュールには、必要な場合、制御ユニットが組み込まれており、制御ユニットは、モジュールを運転するために、必要なローカルインテリジェンスを提供する。
・各モジュールは、別のモジュールもしくは検査箇所の外側に位置する操作に必要なベースユニットと接続するための標準的なインタフェースを備えている。
・各モジュールは、必要な場合、給電用の接続部を備えている。
・モジュール間のデータ交換は、好適にはイーサネット規格に従って行われる。
・ロボット用プラットフォームは、位置決め手段を備えており、その際、位置データは、実時間でイーサネットを介して伝達され、評価される。
・検査に必要なセンサは、より多くの自律性、頑強性および融通性を得るために、同様にモジュールとして設計されている。
・モジュール化は、複数の階層に配置されたシステムレベルにみられ、つまり、1つのモジュール内に複数のサブモジュールが存在し、サブモジュールは、その特別な構成によりモジュールの性質を決定する。
【0025】
図1には、本発明の1つの実施の形態による、モジュール方式のロボット用プラットフォームの構成をブロック図で示す。図1において破線で示すロボット用プラットフォーム10は、基本的な複数のモジュールM1−M5を備えており、基本的なモジュールM1−M5は、ロボット用プラットフォーム10を形成するために、図1において網掛けして示す、詳説しない構造的な結合手段11(たとえばねじ結合)により相互に接続されている。各モジュールM1−M5は、複数のサブモジュールSM1−SM14を備えており、サブモジュールSM1−SM14は、各モジュールの構造および機能に関しする特徴を有している。
【0026】
モジュールM1−M5は、規格化された通信接続部13(これは好適にはイーサネット規格に従って作動する)を介して相互に直にデータを交換する。データ交換を実現するために、モジュールM1−M5に相応のインタフェースIFが設けられている。必要な場合、個々のモジュールM1−M5におけるサブモジュールSM1−SM14もまた相応の通信接続部12を介してデータを交換する。さらにロボット用プラットフォーム10とベースステーションBSとの間に通信接続部14が形成されており、通信接続部14を介して、ロボット用プラットフォーム10に命令が送信され、ロボット用プラットフォーム10により位置データが受信される。
【0027】
ロボット用プラットフォーム10のモジュール方式の構造と、モジュールとサブモジュールとの間のイーサネットを介する通信性とにより、ロボット用プラットフォーム10自体に十分なインテリジェンスが存在する。これにより開ループ制御過程、閉ループ制御過程および測定過程を自律式に内部で行うことができ、その際、障害に敏感な、ベースステーションBSとのデータ交換を処理する必要はない。
【0028】
このような原理に従って形成された具体的なロボット用プラットフォームの1つの実施の形態を図2に示す。図2に示すロボット用プラットフォーム20は、相互間隔を有して配置された同一構造の2つの駆動モジュール15を備えており、駆動モジュール15は、ロボット用プラットフォーム20の運動を制御するために用いられる。図4には、個々の駆動モジュール15を示す。
【0029】
駆動モジュール15は、略直方体の幾何学形状を有する縦長のモジュールとして形成されていて、一方の端部に、マグネットホイール16の対偶を有しており、マグネットホイール16は、中央から外側に配置されており、駆動モジュール15は、鉛直位置のみならず水平位置でも、駆動のためにロボット用プラットフォームに装着することができる。マグネットホイール16は、ロボット用プラットフォームが走行面(下に位置する面、床、壁、支台等)上で移動する場合、一方では、走行面上で転動する。他方では、駆動モジュール15におけるマグネットホイール16は、走行面が強磁性である場合、ロボット用プラットフォームが走行面に付着するように働く。このようにしてロボット用プラットフォームは、たとえばタービンのロータ軸の周りを移動することができ、その際に落下または滑落することはない。
【0030】
駆動モジュール15の内側に直流モータ27が配置されており、直流モータ27は、伝動装置27aを介してマグネットホイール16を駆動する。直流モータ27に給電するために、出力サブモジュール26が設けられており(図6参照)、出力サブモジュール26は、たとえばPCB(プリント基板)として形成されていて、モータを駆動するのに必要な電子素子(出力半導体、コンデンサ、抵抗等)を備えている。出力サブモジュール26の他に、マイクロコントローラ32を備えたマイクロコントローラサブモジュール28が駆動モジュール15に取り付けられている。このサブモジュールは、ロボット用プラットフォーム20の測定された実際位置と所望の目標位置とに応じて直流モータ27の運転を制御する。最も簡単な場合、マグネットホイール16自体に相応のエンコーダを取り付けることができ、エンコーダは、ホイールの回転数を測定し、対応するデータをマイクロコントローラ32に提供する。さらにマイクロコントローラサブモジュール28は、たとえばスイッチまたはセンサデータを読み取るか、もしくは表示要素を操作するために、別のデータ入口および出口を備えている。そのような付加機能は、容易に、マイクロコントローラ32において進行する制御プログラムを介して達成することができる。
【0031】
位置決めに際してスリップに関連するエラーを回避しようとする場合、図8に示すように、ロボット用プラットフォーム20は、自律性の位置発信器サブモジュール33を装着することができ、位置発信器サブモジュール33は、特別な位置発信器ホイール35で、進行した距離をほぼスリップなく記録して、シャシ34に取り付けられたエンコーダユニット37を介して、位置データとして提供し、位置発信器サブモジュール33は、一般的な取付要素36により、ロボット用プラットフォームの適切な任意の箇所に取り付けることができる。マイクロコントローラ32は、大きな手間を掛けずに追加的な信号を読み取り、簡単に処理できるように設計されている。位置決めエラーの大幅な減少の他に、スリップ監視を実行することができ、上位のプログラムまたは作業員に相応に警告することができる。
【0032】
相互間隔を有する2つの駆動モジュール15は、図2もしくは図3に示すロボット用プラットフォーム20では、直動モジュール17により相互に固く結合されている。図5に個別に示す直動モジュール17は、縦長のフレームを有しており、フレームは、正面に、長手方向に延在するリニアガイド19を備えている。リニアガイド19に、キャリッジ21が、長手方向移動可能に配置されている。キャリッジ21は、センサユニットを取り付けるように設計されていて、適当な取付孔(図5の符号29)を備えている。キャリッジ21は、直動モジュール17に取り付けられた、図2には示していないモータにより移動可能であるので、キャリッジに取り付けられたセンサと共に、走行方向に対して横向きの移動が実現されている。このような構成でも、モジュールに、モータを運転するための適切なサブモジュール26,28が取り付けられている。
【0033】
図3から看取されるように、ロボット用プラットフォーム20は、別のモジュールとして電子ボックス22を備えており、電子ボックス22内に、ロボット用プラットフォームを運転するために必要な電子回路が取り付けられている。電子ボックス22は、別のモジュールと同様に、接続ブシュ24を備えており、接続ブシュ24に、データ伝達用の相応のケーブルが接続可能である。
【0034】
図示の実施の形態では、電子ボックス22の下面に、別のモジュールとして(受動的な)ステアリングローラ25が取り付けらており、ステアリングローラ25は、ロボット用プラットフォーム20を、突出する電子ボックス22の範囲で移動可能に支持する。図9に示すように、ステアリングローラ25は、平行に配置された2つのホイール38,39を備えており、ホイール38,39は、回動支承部40により、鉛直軸線を中心に回動可能に支承されている。そのようなローラは、好適には、相応のサーボモジュールと組み合わせると、ロボット用プラットフォーム20を操縦する、つまり移動方向を設定するために使用することもできる。移動方向の設定を行う別の構成は、両方の駆動モジュール15の様々な操作により得られる。
【0035】
通信接続部12〜14は、ライン接続されている。また、特にスペースまたは運動性の理由から好適である場合、特定の通信接続部をワイヤレスに構成することも考えられる。
【0036】
総じて、本発明による技術設備の検査および保守のためのモジュール方式のロボット用プラットフォームは以下の特徴を有している。
・ロボット用プラットフォームは、制御電子装置が組み込まれた少なくとも1つの駆動ユニットを備えている。
・ロボット用プラットフォームは、ロボット用プラットフォームを位置決めするための手段を備えている。
・個々のモジュールは、相互変調のデータ交換のための規格化されたデジタルのインタフェースを備えている。
・モータ駆動装置の制御ループの外側で使用するためのユニットの位置決めデータは、デジタルのインタフェースを介して外側へ伝達され、別の目的に提供される。
【符号の説明】
【0037】
10,20 ロボット用プラットフォーム(モジュラ)、 11 結合手段、 12〜14 通信接続部(イーサネット)、 15 駆動モジュール、 16 マグネットホイール、 17 直動モジュール、 18 フレーム、 19 リニアガイド、 21 キャリッジ、 22 電子ボックス、 24 接続ブシュ、 25 ステアリングローラ、 26 出力サブモジュール、 27 電動モータ(直流モータ)、 27a 伝動装置、 28 マイクロコントローラサブモジュール、 29 取付孔、 30,31 構成要素(電子)、 32 マイクロコントローラ、 33 位置発信器サブモジュール、 34 シャシ、 35 位置発信器ホイール、 36 取付要素、 37 エンコーダユニット、 38,39 ホイール、 40 回動支承部、 BS ベースステーション、 IF インタフェース(たとえばイーサネット)、 M1〜M5 モジュール、 SM1〜SM14 サブモジュール
【特許請求の範囲】
【請求項1】
特に発電所における技術設備を遠隔操作式および/または自律式に検査するために設けられたロボット用プラットフォーム(10,20)であって、
少なくとも、ロボット用プラットフォーム(10,20)を移動するための駆動手段(15)と、技術設備を検査するための検査手段(17,33)と、ロボット用プラットフォーム(10,20)の位置データを求めるための手段(33)と、測定データおよび制御データを交換するためならびに評価ユニットに測定データおよび位置データを伝達するための通信手段(12,13,14,IF)とを備えているものにおいて、
ロボット用プラットフォーム(10,20)は、モジュール方式に形成されており、通信手段(12,13,14)は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達されることを特徴とする、ロボット用プラットフォーム。
【請求項2】
ロボット用プラットフォーム(10,20)は、個々のモジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)から形成されており、該個々のモジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)は、構造的に機械式の結合手段(11)により、かつ/またはデータ交換のために統一規格に従って作動するデジタルの通信接続部(12,13,14)により相互に接続されている、請求項1記載のロボット用プラットフォーム。
【請求項3】
デジタルの通信接続部(12,13,14)は、イーサネット規格に従って作動する、請求項2記載のロボット用プラットフォーム。
【請求項4】
デジタルの通信接続部(12,13,14)は、追加的に、モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)に給電するための手段を備えている、請求項2または3記載のロボット用プラットフォーム。
【請求項5】
個々のモジュール(M1,M2,M3,M4,M5;15,17,25,33)は、単数または複数のサブモジュール(SM1,SM2,SM3,SM4,SM5,SM6,SM7,SM8,SM9,SM10,SM11,SM12,SM13,SM14;16,26,28,37,IF)を備えている、請求項2から4までのいずれか1項記載のロボット用プラットフォーム。
【請求項6】
サブモジュール(SM1,SM2,SM3,SM4,SM5,SM6,SM7,SM8,SM9,SM10,SM11,SM12,SM13,SM14;16,26,28,37,IF)の1つは、モジュール間のデータ交換および給電接続用のインタフェース(IF)である、請求項5記載のロボット用プラットフォーム。
【請求項7】
個々のモジュールは、電気駆動モータ(27)と、モジュールに組み込まれた、該電気駆動モータ(27)用の制御ユニットとを備えており、該制御ユニットは、サブモジュールとして、出力サブモジュール(26)とマイクロコントローラモジュール(28)とを備えている、請求項5または6記載のロボット用プラットフォーム。
【請求項8】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の少なくとも1つは、ロボット用プラットフォーム(10,20)を移動するための駆動モジュール(15)である、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項9】
駆動モジュール(15)は、電気駆動モータ、特に直流モータ(27)を備えていて、かつ、サブモジュールとして、検査されるべき技術設備の磁化可能な表面に沿って転動するためおよび該表面に付着するための少なくとも1つのマグネットホイール(16)と、駆動モータ(27)の給電用の出力サブモジュール(26)と、電気駆動モータ(27)を制御するためのマイクロコントローラサブモジュール(32)とを備えている、請求項8記載のロボット用プラットフォーム。
【請求項10】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の1つは、配置された検査手段を直線移動するための直動モジュール(17)として形成されている、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項11】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の1つは、ベースステーション(BS)であり、該ベースステーション(BS)は、残りのモジュールと検査信号の評価ユニットとのデータ交換を制御するために設けられている、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項12】
ベースステーション(BS)は、ロボット用プラットフォーム(10,20)に対する評価ユニットの簡単な接続を形成するために、エンコーダ信号をエミュレートする、請求項11記載のロボット用プラットフォーム。
【請求項13】
評価ユニットの手前に、位置データを座標変換するための手段が設けられており、評価ユニットは、検査目的用にアレンジされた、自由に選択可能な座標系で作動する、請求項11または12記載のロボット用プラットフォーム。
【請求項14】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の少なくとも1つは、ロボット用プラットフォーム(10,20)の位置を特定するために形成されている、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項15】
位置を特定するために、位置発信器サブモジュール(33)が設けられており、該位置発信器サブモジュール(33)は、位置発信器ホイール(35)とエンコーダユニット(37)とを備えている、請求項14記載のロボット用プラットフォーム。
【請求項1】
特に発電所における技術設備を遠隔操作式および/または自律式に検査するために設けられたロボット用プラットフォーム(10,20)であって、
少なくとも、ロボット用プラットフォーム(10,20)を移動するための駆動手段(15)と、技術設備を検査するための検査手段(17,33)と、ロボット用プラットフォーム(10,20)の位置データを求めるための手段(33)と、測定データおよび制御データを交換するためならびに評価ユニットに測定データおよび位置データを伝達するための通信手段(12,13,14,IF)とを備えているものにおいて、
ロボット用プラットフォーム(10,20)は、モジュール方式に形成されており、通信手段(12,13,14)は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達されることを特徴とする、ロボット用プラットフォーム。
【請求項2】
ロボット用プラットフォーム(10,20)は、個々のモジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)から形成されており、該個々のモジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)は、構造的に機械式の結合手段(11)により、かつ/またはデータ交換のために統一規格に従って作動するデジタルの通信接続部(12,13,14)により相互に接続されている、請求項1記載のロボット用プラットフォーム。
【請求項3】
デジタルの通信接続部(12,13,14)は、イーサネット規格に従って作動する、請求項2記載のロボット用プラットフォーム。
【請求項4】
デジタルの通信接続部(12,13,14)は、追加的に、モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)に給電するための手段を備えている、請求項2または3記載のロボット用プラットフォーム。
【請求項5】
個々のモジュール(M1,M2,M3,M4,M5;15,17,25,33)は、単数または複数のサブモジュール(SM1,SM2,SM3,SM4,SM5,SM6,SM7,SM8,SM9,SM10,SM11,SM12,SM13,SM14;16,26,28,37,IF)を備えている、請求項2から4までのいずれか1項記載のロボット用プラットフォーム。
【請求項6】
サブモジュール(SM1,SM2,SM3,SM4,SM5,SM6,SM7,SM8,SM9,SM10,SM11,SM12,SM13,SM14;16,26,28,37,IF)の1つは、モジュール間のデータ交換および給電接続用のインタフェース(IF)である、請求項5記載のロボット用プラットフォーム。
【請求項7】
個々のモジュールは、電気駆動モータ(27)と、モジュールに組み込まれた、該電気駆動モータ(27)用の制御ユニットとを備えており、該制御ユニットは、サブモジュールとして、出力サブモジュール(26)とマイクロコントローラモジュール(28)とを備えている、請求項5または6記載のロボット用プラットフォーム。
【請求項8】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の少なくとも1つは、ロボット用プラットフォーム(10,20)を移動するための駆動モジュール(15)である、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項9】
駆動モジュール(15)は、電気駆動モータ、特に直流モータ(27)を備えていて、かつ、サブモジュールとして、検査されるべき技術設備の磁化可能な表面に沿って転動するためおよび該表面に付着するための少なくとも1つのマグネットホイール(16)と、駆動モータ(27)の給電用の出力サブモジュール(26)と、電気駆動モータ(27)を制御するためのマイクロコントローラサブモジュール(32)とを備えている、請求項8記載のロボット用プラットフォーム。
【請求項10】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の1つは、配置された検査手段を直線移動するための直動モジュール(17)として形成されている、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項11】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の1つは、ベースステーション(BS)であり、該ベースステーション(BS)は、残りのモジュールと検査信号の評価ユニットとのデータ交換を制御するために設けられている、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項12】
ベースステーション(BS)は、ロボット用プラットフォーム(10,20)に対する評価ユニットの簡単な接続を形成するために、エンコーダ信号をエミュレートする、請求項11記載のロボット用プラットフォーム。
【請求項13】
評価ユニットの手前に、位置データを座標変換するための手段が設けられており、評価ユニットは、検査目的用にアレンジされた、自由に選択可能な座標系で作動する、請求項11または12記載のロボット用プラットフォーム。
【請求項14】
モジュール(M1,M2,M3,M4,M5;15,17,25,33;BS)の少なくとも1つは、ロボット用プラットフォーム(10,20)の位置を特定するために形成されている、請求項2から7までのいずれか1項記載のロボット用プラットフォーム。
【請求項15】
位置を特定するために、位置発信器サブモジュール(33)が設けられており、該位置発信器サブモジュール(33)は、位置発信器ホイール(35)とエンコーダユニット(37)とを備えている、請求項14記載のロボット用プラットフォーム。
【図1】


【図3】
【図8】
【図2】
【図4】
【図5】
【図6】
【図7】
【図9】
【図3】
【図8】
【図2】
【図4】
【図5】
【図6】
【図7】
【図9】
【公開番号】特開2012−64218(P2012−64218A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2011−203516(P2011−203516)
【出願日】平成23年9月16日(2011.9.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
[ Back to top ]