
把持動作設定方法、装置、およびプログラム
【課題】ロボットハンドの把持部に把持される対象物の把持位置と把持方向を3次元的に認識して設定できる手段を提供する。
【解決手段】表示装置の画面15aにおいて、対象物の形状21と、把持位置と把持方向を示すための移動表示部23とを3次元的に表示させ、操作装置の位置変更操作および向き変更操作に応じて、移動表示部23の位置と向きを変更し、操作装置の設定操作がされると、この時に、対象物の形状21において移動表示部23が示している位置と、移動表示部23が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する。
【解決手段】表示装置の画面15aにおいて、対象物の形状21と、把持位置と把持方向を示すための移動表示部23とを3次元的に表示させ、操作装置の位置変更操作および向き変更操作に応じて、移動表示部23の位置と向きを変更し、操作装置の設定操作がされると、この時に、対象物の形状21において移動表示部23が示している位置と、移動表示部23が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボットハンドにより対象物を把持する把持位置と把持方向を設定する把持動作設定方法、装置、およびプログラムに関する。
【背景技術】
【0002】
従来において、ロボットハンドに対象物を把持させるために、対象物における把持位置を予め設定することが行われている。この場合、設定した把持位置に基づいて、ロボットハンドがこの把持位置で対象物を把持するように、ロボットハンドの動作が制御される。
【0003】
把持位置や把持方向の設定方法は、例えば、下記の特許文献1〜3に記載されている。
【0004】
特許文献1では、次のように、ティーチングにより把持位置を含む動作データを設定している。人が、ロボットハンドに対して動作指令を入力する入力装置(ティーチングペンダント)を用いて、ロボットハンドを動作させる。これにより、ロボットハンドにより対象物を把持させることができる。このようなロボットハンドの動作中におけるロボットハンドの各位置と各姿勢を計測し、計測した各位置と各姿勢に基づいて、ロボットハンドの移動経路や、ロボットハンドによる把持位置や把持方向などを動作データとして設定する。
【0005】
特許文献2では、対象物の形状データに基づいて、対象物の各表面部分について、法線ベクトルを求める。これらの法線ベクトルのうち、内積がしきい値(例えば−0.9)以下となる2つの法線ベクトルを特定する。特定した2つの法線ベクトルをそれぞれ有する表面部分は、互いに反対側を向いているため、これらの表面部分を把持位置として設定する。従って、例えば、ロボットハンドの1対の爪が、特定した表面部分に接して対象物を挟持ことができる。
【0006】
特許文献3では、対象物の画像を表示装置に表示し、この画像において把持位置を指定し、指定した把持位置を計測し、この計測値を把持位置として設定する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−346792号公報
【特許文献2】特開2008−272886号公報
【特許文献3】特開平11−58279号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、特許文献1の場合には、ティーチングを行うのに手間がかかる。
特許文献2の場合には、各法線ベクトルを求める演算と、法線ベクトル同士の内積の演算と、互いに反対側を向いている法線ベクトルを特定する演算とを行う。従って、演算負荷が大きくなる。
特許文献3の場合には、人が、画面に表示された対象物を画像を見ながら、把持位置を指定すると、把持位置に基づいて、把持方向がコンピュータにより自動的に演算される。しかし、人は、把持方向を視覚的に認識しにくい。
【0009】
そこで、本発明の目的は、ティーチングを行わなくても、把持位置と把持方向を3次元的に認識して設定できる把持動作設定方法、装置、およびプログラムを提供することにある。
【課題を解決するための手段】
【0010】
上述した目的を達成するため、本発明によると、ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定方法であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を用意し、
前記画面において、
(A)コンピュータにより、対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、コンピュータにより、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、コンピュータにより把持位置と把持方向に設定する、ことを特徴とする把持動作設定方法が提供される。
【0011】
本発明の好ましい実施形態によると、ロボットハンドは、互いに対して回転可能に連結された複数のリンクにより構成されており、
複数のリンクのうち最先端のリンクに前記把持部が取り付けられており、
前記(A)において、コンピュータにより、移動表示部の向きに対して一定の方向を向く最先端リンク方向表示部を3次元的に表示させ、
前記(B)において、移動表示部の3次元的な向きの変更に伴って、移動表示部の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部の3次元的な向きも変更され、
移動表示部の向きに対する3次元的な前記一定の方向は、把持部が対象物を把持する時に、把持部が対象物を把持する把持方向に対して最先端のリンクが実際に向いている一定方向と同じである。
【0012】
本発明の実施形態によると、位置変更操作は、画面に表示された対象物の形状における外面、エッジまたは穴を選択する操作であり、この選択により、選択した外面、エッジまたは穴の中心を移動表示部が示すように、移動表示部の位置が変更される。
【0013】
本発明の好ましい実施形態によると、移動表示部は、前記画面において、3次元的に表示される矢印である。
【0014】
本発明の別の実施形態によると、移動表示部は、前記ロボットハンドと前記把持部の3次元的な形状である。
【0015】
上述した目的を達成するため、本発明によると、ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定装置であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を備え、
コンピュータは、前記画面において、
(A)対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する、ことを特徴とする把持動作設定装置が提供される。
【0016】
また、上述した目的を達成するため、本発明によると、ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部に把持される位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定プログラムであって、
表示装置の画面において、
(A)対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させる処理と、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の3次元的な位置と向きを変更する処理と、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する処理と、をコンピュータに実行させる、ことを特徴とする把持動作設定プログラムが提供される。
【発明の効果】
【0017】
上述した本発明によると、コンピュータにより、画面において、対象物の3次元的な形状と移動表示部とを表示させ、この移動表示部の位置と向きを変更させる位置変更操作と向き変更操作が操作装置にされると、この操作に応じて、前記画面において移動表示部の位置と向きが変更され、操作装置に設定操作がされると、この時に、前記画面上の対象物の3次元的な形状において移動表示部が示している位置と、移動表示部が向いている方向とを、それぞれ、把持位置と把持方向に設定する。
すなわち、人は、画面を見ながら、位置変更操作および向き変更操作を操作装置にすることにより、移動表示部の位置と向きを、対象物の3次元的な形状に対して定めることができる。次いで、人は、設定操作を操作装置にすることにより、定めた移動表示部の位置と向きを、把持位置と把持方向に設定できる。
従って、人は、3次元的に表示される移動表示部が示す位置により、把持位置を認識でき、3次元的に表示される移動表示部の向きにより、把持方向を認識できる。このように、人が、把持位置と把持方向を3次元的に認識して設定することができる。
よって、人は、ティーチングを行わなくても、把持位置と把持方向を3次元的に認識して設定できる。
【図面の簡単な説明】
【0018】
【図1】ロボットハンドとその制御装置を示す。
【図2】ロボットハンドの把持部による把持位置と把持方向を示す。
【図3】本発明の実施形態による把持動作設定装置の構成図である。
【図4】表示装置の画面を示す。
【図5】本発明の実施形態による把持動作設定方法を示すフローチャートである。
【図6】図2の場合と異なる構成を有する把持部による把持位置と把持方向を示す。
【図7】表示装置における画面の別の例を示す。
【発明を実施するための形態】
【0019】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0020】
本発明の実施形態による把持動作設定方法では、ロボットハンド3の把持部5により対象物1を把持する場合に、対象物1において把持部5に把持される位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する。なお、把持方向は、対象物1に固定された仮想の3次元座標系において3次元的に定められる。
【0021】
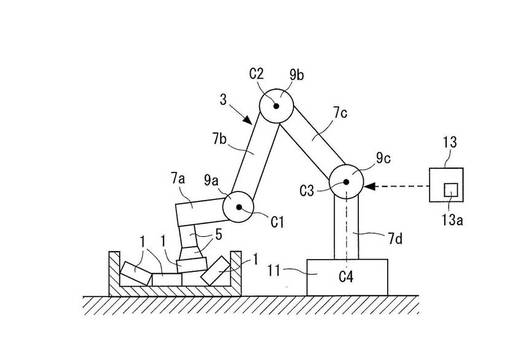
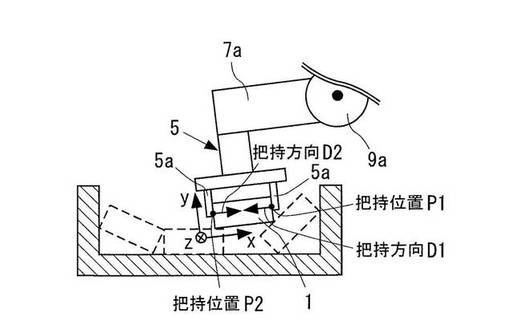
図1は、ロボットハンド3の構成例を示す。図1において、ロボットハンド3は、互いに対して回転可能に連結された複数のリンク7a〜7dにより構成されている。複数の7a〜7dのうち最先端にある第1のリンク7aの先端部に把持部5が固定されている。第1のリンク7aは、第1の関節9aを介して第2のリンク7bに連結されているとともに、第1の関節9aの回転軸C1回りに第2のリンク7bに対して回転可能である。第2のリンク7bは、第2の関節9bを介して第3のリンク7cに連結されているとともに、第2の関節9bの回転軸C2回りに第3のリンク7cに対して回転可能である。第3のリンク7cは、第3の関節9cを介して第4のリンク7dに連結されているとともに、第3の関節9cの回転軸C3回りに第4のリンク7dに対して回転可能である。第4のリンク7dは、自身の中心軸である回転軸C4の回りに回転可能に設置台11に支持されている。
【0022】
この構成で、第1〜第4のリンク7a〜7dが、それぞれ、図示しない複数の駆動装置(例えば、サーボモータ)により対応する回転軸C1〜C4回りに回転駆動される。これらの回転駆動が制御装置13によって制御されることにより、ロボットハンド3は動作する。
【0023】
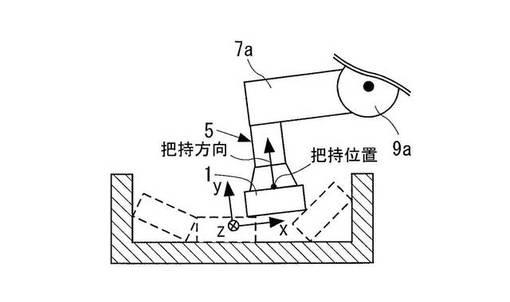
図2に基づいて、把持位置と把持方向を説明する。図2は、図1の部分拡大図である。把持位置と把持方向は、対象物1に対して固定された3次元座標系における位置と方向として表される。この3次元座標系は、図2に示す例では、互いに直交するx軸とy軸とz軸を有する。図2の例では、把持部5は、対象物1を吸引することにより対象物1を吸着して把持する吸引装置である。図2の例では、把持位置は、吸引装置5が対象物1を吸着する位置であり、把持方向は、吸引装置5が対象物1を吸引(吸着)する方向である。このような把持位置と把持方向は、本発明の実施形態による方法で設定され、制御装置13の記憶部13aに記憶されている。
【0024】
制御装置13は、把持位置および把持方向に基づいて、ロボットハンド3を制御する。これにより、ロボットハンド3は、対象物1における把持位置にて把持方向に対象物1を把持する。図2の例では、制御装置13は、吸引装置5が把持方向を向くように、吸引装置5を把持位置に位置決めし、この状態で、吸引装置5を作動させることにより、吸引装置5により対象物1を吸引して把持する。このような制御は、記憶部13aに記憶されている把持位置および把持方向と、記憶部13aに記憶されている対象物1の3次元形状と、把持する対象物1の位置および向きとに基づいて行われる。把持する対象物1の位置および向きは、例えば、レーザ距離計を用いて認識される。この場合には、レーザ距離計は、レーザ射出点から、各計測方向にレーザ光を発することにより、各計測方向において、レーザ射出点から、計測範囲内に存在する物体上の各被計測点までの距離を計測する。制御装置13は、各計測方向について計測した距離に基づいて、レーザ距離計による計測範囲に存在する物体の形状を認識する。制御装置13は、このように認識した形状と、記憶部13aに記憶されている対象物1の3次元形状とを比べることにより、対象物1の位置と対象物1の向きを認識する。
【0025】
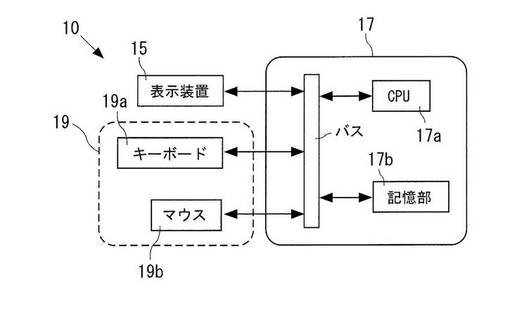
図3は、本発明の実施形態による把持動作設定方法に用いられる把持動作設定装置10を示す。把持動作設定装置10は、表示装置15と、コンピュータ17と、操作装置19とを備える。
【0026】
表示装置15は、対象物1の形状21を3次元的に表示するための2次元の画面15aを有する。
【0027】
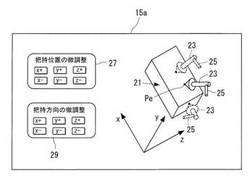
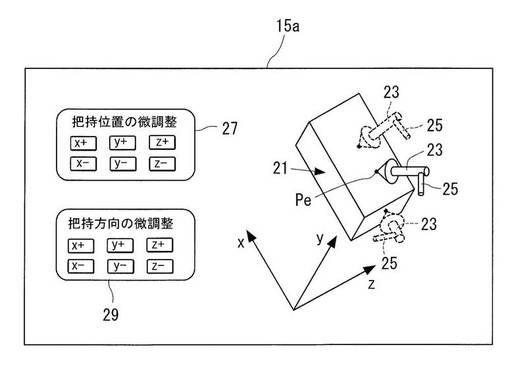
コンピュータ17は、図4に示すように、表示装置15の画面15a上に、対象物1の形状21と、当該形状21において把持位置と把持方向を指定するための移動表示部23とを3次元的に表示させる。本実施形態では、移動表示部23は、画面15aにおいて、3次元的に表示される矢印である。なお、移動表示部23は、対象物1の3次元的な形状21よりも手前に表示される。
【0028】
本実施形態によると、表示装置15の画面15aにおいて、コンピュータ17により、移動表示部23の向きに対して3次元的に一定の方向を向く指標である最先端リンク方向表示部25を3次元的に表示させる。表示装置15の画面15aにおいて、移動表示部23の向きに対する3次元的な前記一定の方向は、把持部5が対象物1を把持する時に把持部5が対象物1を把持する把持方向に対して最先端のリンク7a(リンク7aの軸)が実際に向く一定の方向と同じである。なお、ロボットハンド3において、把持部5による把持方向に対する最先端のリンク7aの向きは、ロボットハンド3の動作にかかわらず一定である。
【0029】
最先端リンク方向表示部25は、図4の例では、移動表示部23の向きに対して3次元的に前記一定の方向を向く中心軸を有する棒状部である。ただし、最先端リンク方向表示部25は、図4の例では、その向きを人が認識できるものであれば棒状部でなくてもよい。例えば、最先端リンク方向表示部25は、矢印であってもよい。
【0030】
操作装置19は、人に操作される。操作装置19は、例えば、キーボード19aとマウス19bとを有していてよい。
【0031】
把持位置と把持方向を設定するために、操作装置19にされる操作には、位置変更操作と向き変更操作と設定操作とがある。
【0032】
位置変更操作が操作装置19にされると、コンピュータ17により、表示装置15の画面15aにおいて移動表示部23の位置が変更される。
【0033】
向き変更操作が操作装置19にされると、コンピュータ17により、表示装置15の画面15aにおいて移動表示部23の向きが変更される。
【0034】
設定操作が操作装置19にされると、コンピュータ17により、この時に、対象物1の形状21において移動表示部23が示している位置と、移動表示部23が3次元的に向いている方向とが、それぞれ、把持位置と把持方向に設定される。
【0035】
詳しくは次の通りである。
【0036】
位置変更操作と向き変更操作は、画面15aにおいて、移動表示部23が示している位置と、移動表示部23が向いている方向を調節するために行われる。操作装置19に位置変更操作と向き変更操作がされることにより、移動表示部23の位置と向きが、画面15a内の3次元座標系において変更される。この3次元座標系は、画面15aに表示される3次元空間において対象物1の形状21に固定されている。この3次元座標系は、図4に示すように、互いに直交するx軸とy軸とz軸を有する。以下において、x軸、y軸、z軸は、それぞれ、画面15aにおいて対象物1の形状21に対して固定されている当該3次元座標系のx軸とy軸とz軸を意味する。
【0037】
このように移動表示部23の位置と向きを調節した後に、設定操作により、画面15aにおいて、移動表示部23が示している位置を把持位置として設定でき、移動表示部23が向いている方向を把持方向として設定できる。把持部5が、上述のように吸引装置である場合には、図4において、このように設定された把持位置は、吸引装置が対象物1を吸着する位置であり、このように設定された把持方向は、吸引装置が対象物1を吸引(吸着)する方向である。
【0038】
なお、位置変更操作と向き変更操作が操作装置19にされても、対象物1の形状21の向きと位置は変わらない。
【0039】
本実施形態では、位置変更操作と向き変更操作には、後述するステップS2における位置変更操作と向き変更操作と、後述するステップS5における微調整用の位置変更操作と向き変更操作とがある。
【0040】
本実施形態によると、操作装置19にされる操作には、さらに、回転操作、拡大操作、および縮小操作がある。
【0041】
回転操作は、画面15aに表示される対象物1の形状21を回転させる回転操作である。この時の回転軸は、対象物1の形状21を貫通する軸であり、その向きは、操作装置19により任意に定めることができる。また、回転操作において、対象物1の形状21を回転させる量も、操作装置19により任意に定めることができる。
拡大操作は、画面15aに表示される対象物1の形状21を拡大する操作である。その拡大率は、操作装置19により任意に定めることができる。
縮小操作は、画面15aに表示される対象物1の形状21を縮小する操作である。その縮小率は、操作装置19により任意に定めることができる。
【0042】
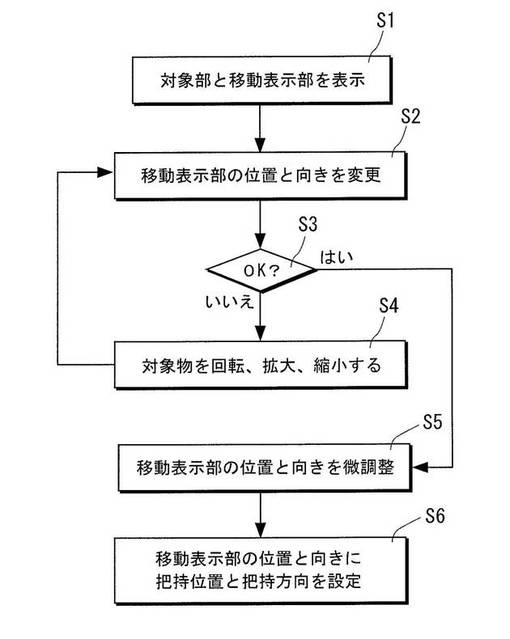
図5は、本発明の実施形態による把持動作設定方法を示すフローチャートである。この方法は、ステップS1〜S6を有する。
【0043】
ステップS1において、コンピュータ17の中央演算装置(CPU)17aにより、対象物1の形状21と移動表示部23とを、表示装置15の画面15aに3次元的に表示させる。なお、CPU17aは、コンピュータ17の記憶部17bに記憶されている対象物1の3次元形状のデータに基づいて、画面15aにおいて対象物1の形状21を3次元的に表示させる。
また、ステップS1では、コンピュータ17のCPU17aにより、画面15aにおいて、移動表示部23の向きに対して一定の方向を向く最先端リンク方向表示部25を3次元的に表示させる。なお、好ましくは、最先端リンク方向表示部25は、図4のように、移動表示部23に接続されている。
【0044】
ステップS2において、人が、表示装置15の画面15aを見ながら、位置変更操作および向き変更操作を操作装置19にする。このように操作装置19にされた位置変更操作および向き変更操作に応じて、コンピュータ17のCPU17aにより、表示装置15の画面15aにおいて移動表示部23の位置と3次元的な向きを変更する。
また、ステップS2では、このような移動表示部23の向きの変更に伴って、移動表示部23の向きに対して3次元的に一定の方向を向くように、最先端リンク方向表示部25の3次元的な向きも、コンピュータ17のCPU17aにより変更される。
なお、本実施形態では、ステップS2において、画面15aにおいて、位置変更操により移動表示部23が移動すると、最先端リンク方向表示部25は移動表示部23と一体的に移動する。
【0045】
なお、ステップS2は、次のように行われてよい。
ステップS2の位置変更操作は、人が、台や机の面におかれたマウス19bを前後左右に動かす操作であってよい。例えば、マウス19bを前後に動かすことにより、マウス19bの移動量と移動方向に応じて、移動表示部23が、図4の紙面に沿って画面15aの上下方向に移動する。マウス19bを左右に動かすことにより、マウス19bの移動量と移動方向に応じて、移動表示部23が、図4の紙面に沿って画面15aの左右方向に移動する。これにより、移動表示部23が、画面15aにおける対象物1の形状21において示している(指している)位置を変更する。なお、移動表示部23が、画面15aにおける対象物1の形状21において示している位置とは、2次元の画面15a(図4の紙面)と垂直な方向において、移動表示部23の指示位置(図4では、先端)Peを、3次元的に表示されている対象物1の形状(表面)21に投影した位置である。
ステップS2の向き変更操作は、例えば、キーボード19aの1つまたは複数のボタンを押す操作であってよい。このように押されたボタンの種類や回数に応じて、移動表示部23の向きが、画面15a内の前記3次元座標系において変更される。
【0046】
例えば、ステップS2の位置変更操作と向き変更操作により、図4において、実線で描かれている移動表示部23の位置と向きが、図4において破線で描かれているいずれかの移動表示部23の位置と向きに変更される。
【0047】
ステップS3において、移動表示部23の位置と向きが、現在の位置と向きでよいかどうかを判断する。ステップS3の判断は人が行う。この判断が「いいえ」の場合には、ステップS4へ進み、この判断が「はい」の場合には、ステップS5へ進む。
【0048】
ステップS4において、人が、表示装置15の画面15aを見ながら、回転操作、拡大操作、および縮小操作のいずれかまたは複数を行う。
回転操作がされた場合には、次の処理が行われる。すなわち、操作装置19により、回転軸の向きと回転量が定められ、回転操作が操作装置19にされた場合には、定められた回転軸の向きと回転量に従って、コンピュータ17のCPU17aにより、画面15aに表示される対象物1の形状21を回転させる。
拡大操作または縮小操作がされた場合には、次の処理が行われる。すなわち、操作装置19により、拡大率または縮小率が定められ、拡大操作または縮小操作が操作装置19にされた場合には、定められた拡大率または縮小率に従って、コンピュータ17のCPU17aにより、画面15aに表示される対象物1の形状21を拡大または縮小する。
【0049】
ステップS5において、人が、表示装置15の画面15aを見ながら、微調整用の位置変更操作および向き変更操作の一方または両方を操作装置19にする。操作装置19にされた微調整用の位置変更操作に応じて、コンピュータ17のCPU17aにより、画面15aにおいて移動表示部23の位置が微調整され、操作装置19にされた微調整用の向き変更操作に応じて、コンピュータ17のCPU17aにより、画面15aにおいて移動表示部23の向きが微調整される。なお、ステップS5は省略されてもよい。この場合には、ステップS3の判断が「はい」となった場合には、ステップS5を省略してステップS6へ進む。
【0050】
ステップS5は、次のように行われてよい。
【0051】
微調整用の位置変更操作は、図4に示すように画面15aに表示された位置微調整パネル27上の表示部「x+」「y+」「z+」「x−」「y−」「z−」を用いて行われる。キーボード19aにおける特定のボタンを押すことにより、マウス19bを動かすと、移動表示部23ではなく、別のカーソルが画面15a上を移動するようになる(ただし、移動表示部23は画面15aに表示されたままである)。このカーソルを、画面15aに表示された位置微調整パネル27における表示部「x+」に合わせて、マウス19bを1回クリックすると、移動表示部23がx軸の正方向に微小量だけ移動する。同様に、カーソルを、表示部「x−」に合わせて、マウス19bを1回クリックすると、移動表示部23がx軸の負方向に微小量だけ移動し、カーソルを、表示部「y+」に合わせて、マウス19bを1回クリックすると、移動表示部23がy軸の正方向に微小量だけ移動し、カーソルを、表示部「y−」に合わせて、マウス19bを1回クリックすると、移動表示部23がy軸の負方向に微小量だけ移動し、カーソルを、表示部「z+」に合わせて、マウス19bを1回クリックすると、移動表示部23がz軸の正方向に微小量だけ移動し、カーソルを、表示部「z−」に合わせて、マウス19bを1回クリックすると、移動表示部23がz軸の負方向に微小量だけ移動する。このように、微調整したい表示部にカーソルを合わせて、1回または複数回クリックして、移動表示部23の位置を微調整する。
【0052】
微調整用の向き変更操作は、図4に示すように画面15aに表示された向き微調整パネル29上の表示部「x+」「y+」「z+」「x−」「y−」「z−」を用いて行われる。上述のカーソルを、画面15aに表示された向き微調整パネル29における表示部「x+」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りx軸と平行な回転軸回りに、移動表示部23が、正の回転方向に微小量だけ回転する。なお、回転方向の正と負は、それぞれ、その回転軸と平行なx軸、y軸またはz軸の正方向の側から見て時計回りと反時計まわりの方向を意味する。同様に、カーソルを、表示部「x−」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りx軸と平行な回転軸回りに、移動表示部23が、負の回転方向に微小量だけ回転し、カーソルを、表示部「y+」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りy軸と平行な回転軸回りに、移動表示部23が、正の回転方向に微小量だけ回転し、カーソルを、表示部「y−」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りy軸と平行な回転軸回りに、移動表示部23が、負の回転方向に微小量だけ回転し、カーソルを、表示部「z+」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りz軸と平行な回転軸回りに、移動表示部23が、正の回転方向に微小量だけ回転し、カーソルを、表示部「z−」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りz軸と平行な回転軸回りに、移動表示部23が、負の回転方向に微小量だけ回転する。このように、微調整したい表示部にカーソルを合わせて、1回または複数回クリックして、移動表示部23の向きを微調整する。
【0053】
ステップS5では、移動表示部23の向きの微調整に伴って、移動表示部23の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部25の3次元的な向きも微調整される。なお、本実施形態では、ステップS5において、位置変更操作により移動表示部23が微小量だけ移動すると、最先端リンク方向表示部25は移動表示部23と一体的に微小量だけ移動する。
【0054】
ステップS6において、人が、表示装置15の画面15aを見て、設定操作を操作装置19にする。このように操作装置19に設定操作がされると、コンピュータ17のCPU17aにより、この時に、対象物1の形状21において移動表示部23が示している位置と、移動表示部23が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する。
この時、コンピュータ17のCPU17aは、2次元の画面15aと垂直な方向において、移動表示部23の指示位置Peを、画面15aに3次元的に表示されている対象物1の表面に投影し、投影した指示位置Peを、画面15a内の前記3次元座標系で表わす。このように表わされた指示位置Peが、把持位置として設定される。画面15a内の3次元座標系が、上述のように、x軸とy軸とz軸を有する場合には、コンピュータ17のCPU17aは、上述のように投影した指示位置Peを、x軸座標値、y軸座標値、およびz軸座標値により、把持位置として表わす。
【0055】
本発明の実施形態による把持動作設定プログラムは、上述したステップS1、S2、S4、S5、S6の各処理をコンピュータ17のCPU17aに実行させる。この把持動作設定プログラムは、コンピュータ17の記憶部17bに記憶されている。
【0056】
上述した本発明の実施形態によると、以下の効果が得られる。
【0057】
コンピュータ17のCPU17aにより、画面15aにおいて、対象物1の形状21と移動表示部23とを3次元的に表示させ、操作装置19の位置変更操作および向き変更操作に応じて、画面15aにおいて移動表示部23の位置と向きが変更され、操作装置19に設定操作がされると、この時に、画面15a上の形状21において移動表示部23が示している位置と、移動表示部23が向いている方向とを、それぞれ、把持位置と把持方向に設定する。
すなわち、人は、画面15aを見ながら、位置変更操作および向き変更操作を操作装置19にすることにより、移動表示部23の位置と向きを、対象物1の形状21に対して調節することができる。次いで、人は、設定操作を操作装置19にすることにより、調節した移動表示部23の位置と向きを、把持位置と把持方向に設定できる。
従って、人は、3次元的に表示される移動表示部23が示す位置により、把持位置を認識でき、3次元的に表示される移動表示部23の向きにより、把持方向を認識できる。このように、人は、把持位置と把持方向を3次元的に認識して設定することができる。
【0058】
また、移動表示部23の向きの変更に伴って、移動表示部23の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部25の3次元的な向きも変更される。従って、人は、画面15a内の最先端リンク方向表示部25により、最先端のリンク7aの向きを視覚的に確認できる。よって、最先端のリンク7aが対象物1に近づく動作も視覚的に把握できる。
【0059】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下の変更例1〜3のいずれかを採用してもよいし、変更例1〜3のうちの2つまたは3つを組み合わせて採用してもよい。この場合、以下で説明しない点は、上述と同じであってよい。
【0060】
(変更例1)
上述では、把持部5は吸引装置であったが、把持部5は、開閉する1対の爪5aを有していてもよい。この場合、把持部5は、図6に示すように、1対の爪5aを閉じることにより、1対の爪5aで対象物1を把持する。
【0061】
この場合、一方の爪5aについて、上述と同様に、上述のステップS1〜S6を行うことにより、当該爪5aによる把持位置と把持方向を設定する。これにより、一方の爪5aに対する他方の爪5aの位置関係と動作方向に基づいて、他方の爪5aについて、把持位置と把持方向が自動的に設定されてよい。図6の例では、他方の爪5aによる把持位置P2は、対象物1の3次元的な形状(表面)21において、一方の爪5aによる把持位置P1と正反対の位置であってよい。すなわち、形状21において、一方の爪5aによる把持位置P1がある部分(例えば、面またはエッジ)と反対側の部分(例えば、面またはエッジ)と、一方の爪5aによる把持位置P1を通り一方の爪5aによる把持方向D1と平行な直線との交点を、他方の爪5aによる把持位置P2に設定する。なお、他方の爪5aによる把持方向D2は、一方の爪5aによる把持方向D1と反対の方向である。
【0062】
(変更例2)
対象物1の形状21が、エッジにより区画される外面、エッジまたは穴を有する場合に、ステップS2の位置変更操作は、画面15aに表示された対象物1の形状21における外面、エッジまたは穴を選択する操作であってもよい。この選択により、選択した外面、エッジまたは穴の中心を移動表示部23が示すように、移動表示部23の位置が自動的に変更される。
【0063】
変更例2では、ステップS2の向き変更操作は、上述と同じである。この場合、ステップS2において、位置変更操作を行った後に、向き変更操作を行うのがよい。例えば、把持部5が吸引装置である場合には、位置変更操作により選択した外面の中心に移動表示部23を位置させたときには、この外面に垂直な方向を移動表示部23が向くように、向き変更操作により移動表示部23の向きを調整するのがよい。
【0064】
対象物1の形状21における外面、エッジまたは穴を選択する操作は、例えば、次のように行われてよい。
キーボード19aにおける特定のボタンを押すと、マウス19bの移動により、移動表示部23の代わりにカーソルが画面15a上を移動するようになる。このカーソルを、対象物1の形状21における外面、エッジまたは穴に合わせて、マウス19bをクリックする。これにより、カーソルが合わせられている外面、エッジまたは穴が選択される。ここで、カーソルが、外面、エッジまたは穴に合わせられているとは、2次元の画面15aと垂直な方向において、カーソルを、3次元的に表示されている対象物1の形状(表面)21に投影した位置に、当該外面、エッジまたは穴が存在していることを意味する。
または、移動表示部23が示す位置を、対象物1の形状21における外面、エッジまたは穴に合わせて、マウス19bをクリックする。これにより移動表示部23が示す外面、エッジまたは穴が選択される。ここで、移動表示部23が示す位置が、外面、エッジまたは穴に合わせられているとは、2次元の画面15aと垂直な方向において、移動表示部23の指示位置(先端)Peを、3次元的に表示されている対象物1の形状(表面)21に投影した位置に、当該外面、エッジまたは穴が存在していることを意味する。
なお、選択された外面が円柱または円錐の側面である場合には、この側面の中心は、この側面において、円柱または円錐の母線の方向における中心位置である。この中心位置は、1つに定まらないが任意の1点に定められてよい。
【0065】
以下、対象物1の形状21において選択される外面、エッジまたは穴について、順に説明する。
【0066】
対象物1の形状21における外面を選択することは、形状21における複数の外面のうちいずれかを選択することを意味する。
【0067】
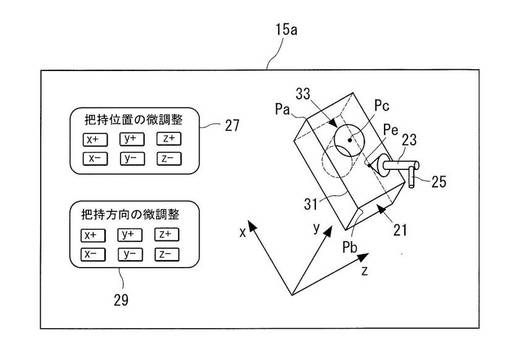
エッジとは、形状21において、隣接する2つの外面同士の境界線である。例えば、図7に示す頂点Pa,Pbが両端である線分がエッジ31として選択された場合には、この線分の中心を移動表示部23が示すように、移動表示部23の位置が変更される。なお、エッジ31を把持位置として選択することは、例えば、把持部5が、上述の変更例1のように1対の爪5aを有する場合に行われる。このとき、エッジ31の中心が、一方の爪5aによる把持位置に設定され、一方の爪5aによる把持方向も設定されたら、他方の爪5aによる把持位置と把持方向は、変更例1と同様に、次のように自動的に設定されてよい。
他方の爪5aによる把持位置は、対象物1の3次元的な形状(表面)21において、一方の爪5aによる把持位置と正反対の位置であってよい。すなわち、3次元的な形状21において、一方の爪5aによる把持位置と反対側の部分(例えば、面またはエッジ)と、一方の爪5aによる把持位置を通り一方の爪5aによる把持方向と平行な直線との交点を、他方の爪5aによる把持位置に設定する。なお、他方の爪5aによる把持方向は、一方の爪5aによる把持方向と反対の方向である。
【0068】
穴とは、図7に示すように、形状21に形成されている穴33である。穴33の中心とは、穴33の開口における中心位置Pcであってよい。穴33の中心Pcが把持位置に設定された場合には、例えば、図6のように、開閉する1対の爪5aを有する把持部5で、次のように、穴33の内面を把持する。1対の爪5aが穴33に挿入された状態で、1対の爪5aが互いに離間する方向に駆動され、1対の爪5aが互いに逆側(反対方向)に穴33の内面に押し付けられる。これにより、1対の爪5aで対象物1を把持する。
【0069】
(変更例3)
上述では、移動表示部23は、画面に15aにおいて位置と向きが変更可能な矢印であったが、移動表示部23は、ロボットハンド3の3次元的な形状と、ロボットハンド3に取り付けられた把持部5の3次元的な形状とであってもよい。この場合、移動表示部23が示す位置は、把持部5の3次元的な形状において、対象物1を把持する位置であり、移動表示部23の向きは、把持部5の3次元的な形状において、対象物1を把持する方向である。このような移動表示部23が示す位置と向きは、人が、画面15aにおいて、ロボットハンド3および把持部5の3次元的な形状を見ることによって認識することができる。
【0070】
この場合、画面に15aにおいて、ロボットハンド3および把持部5の3次元的な形状と、対象物1の3次元的な形状21とが重なっても、形状21の全体が見えるように、ロボットハンド3および把持部5の3次元的な形状に対して、形状21を透視して画面15aに表示するのがよい。
なお、画面15aに表示されるロボットハンド3の3次元的な形状は、最先端のリンク7aの3次元的な形状を含む。従って、最先端リンク方向表示部25は省略されてよい。
【0071】
なお、把持部5が、変更例2のように1対の爪5aを有する場合には、画面15aに表示される把持部5の3次元的な形状において、1対の爪5aは、互いに、次のような相対位置にあってよい。すなわち、この相対位置は、対象物1を実際に把持した時の1対の爪5a同士の相対位置と同じである。
【符号の説明】
【0072】
1 対象物、3 ロボットハンド、5 把持部(吸引装置)、5a 爪、7a〜7d リンク、9a〜9c 関節、10 把持動作設定装置、11 設置台、13 制御装置、13a 記憶部、15 表示装置、15a 画面、17 コンピュータ、17a CPU、17b 記憶部、19 操作装置、19a キーボード、19b マウス、21 対象物の形状、23 移動表示部、25 最先端リンク方向表示部、27 位置微調整パネル、29 向き微調整パネル、31 エッジ、33 穴
【技術分野】
【0001】
本発明は、ロボットハンドにより対象物を把持する把持位置と把持方向を設定する把持動作設定方法、装置、およびプログラムに関する。
【背景技術】
【0002】
従来において、ロボットハンドに対象物を把持させるために、対象物における把持位置を予め設定することが行われている。この場合、設定した把持位置に基づいて、ロボットハンドがこの把持位置で対象物を把持するように、ロボットハンドの動作が制御される。
【0003】
把持位置や把持方向の設定方法は、例えば、下記の特許文献1〜3に記載されている。
【0004】
特許文献1では、次のように、ティーチングにより把持位置を含む動作データを設定している。人が、ロボットハンドに対して動作指令を入力する入力装置(ティーチングペンダント)を用いて、ロボットハンドを動作させる。これにより、ロボットハンドにより対象物を把持させることができる。このようなロボットハンドの動作中におけるロボットハンドの各位置と各姿勢を計測し、計測した各位置と各姿勢に基づいて、ロボットハンドの移動経路や、ロボットハンドによる把持位置や把持方向などを動作データとして設定する。
【0005】
特許文献2では、対象物の形状データに基づいて、対象物の各表面部分について、法線ベクトルを求める。これらの法線ベクトルのうち、内積がしきい値(例えば−0.9)以下となる2つの法線ベクトルを特定する。特定した2つの法線ベクトルをそれぞれ有する表面部分は、互いに反対側を向いているため、これらの表面部分を把持位置として設定する。従って、例えば、ロボットハンドの1対の爪が、特定した表面部分に接して対象物を挟持ことができる。
【0006】
特許文献3では、対象物の画像を表示装置に表示し、この画像において把持位置を指定し、指定した把持位置を計測し、この計測値を把持位置として設定する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−346792号公報
【特許文献2】特開2008−272886号公報
【特許文献3】特開平11−58279号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、特許文献1の場合には、ティーチングを行うのに手間がかかる。
特許文献2の場合には、各法線ベクトルを求める演算と、法線ベクトル同士の内積の演算と、互いに反対側を向いている法線ベクトルを特定する演算とを行う。従って、演算負荷が大きくなる。
特許文献3の場合には、人が、画面に表示された対象物を画像を見ながら、把持位置を指定すると、把持位置に基づいて、把持方向がコンピュータにより自動的に演算される。しかし、人は、把持方向を視覚的に認識しにくい。
【0009】
そこで、本発明の目的は、ティーチングを行わなくても、把持位置と把持方向を3次元的に認識して設定できる把持動作設定方法、装置、およびプログラムを提供することにある。
【課題を解決するための手段】
【0010】
上述した目的を達成するため、本発明によると、ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定方法であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を用意し、
前記画面において、
(A)コンピュータにより、対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、コンピュータにより、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、コンピュータにより把持位置と把持方向に設定する、ことを特徴とする把持動作設定方法が提供される。
【0011】
本発明の好ましい実施形態によると、ロボットハンドは、互いに対して回転可能に連結された複数のリンクにより構成されており、
複数のリンクのうち最先端のリンクに前記把持部が取り付けられており、
前記(A)において、コンピュータにより、移動表示部の向きに対して一定の方向を向く最先端リンク方向表示部を3次元的に表示させ、
前記(B)において、移動表示部の3次元的な向きの変更に伴って、移動表示部の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部の3次元的な向きも変更され、
移動表示部の向きに対する3次元的な前記一定の方向は、把持部が対象物を把持する時に、把持部が対象物を把持する把持方向に対して最先端のリンクが実際に向いている一定方向と同じである。
【0012】
本発明の実施形態によると、位置変更操作は、画面に表示された対象物の形状における外面、エッジまたは穴を選択する操作であり、この選択により、選択した外面、エッジまたは穴の中心を移動表示部が示すように、移動表示部の位置が変更される。
【0013】
本発明の好ましい実施形態によると、移動表示部は、前記画面において、3次元的に表示される矢印である。
【0014】
本発明の別の実施形態によると、移動表示部は、前記ロボットハンドと前記把持部の3次元的な形状である。
【0015】
上述した目的を達成するため、本発明によると、ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定装置であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を備え、
コンピュータは、前記画面において、
(A)対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する、ことを特徴とする把持動作設定装置が提供される。
【0016】
また、上述した目的を達成するため、本発明によると、ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部に把持される位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定プログラムであって、
表示装置の画面において、
(A)対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させる処理と、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の3次元的な位置と向きを変更する処理と、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する処理と、をコンピュータに実行させる、ことを特徴とする把持動作設定プログラムが提供される。
【発明の効果】
【0017】
上述した本発明によると、コンピュータにより、画面において、対象物の3次元的な形状と移動表示部とを表示させ、この移動表示部の位置と向きを変更させる位置変更操作と向き変更操作が操作装置にされると、この操作に応じて、前記画面において移動表示部の位置と向きが変更され、操作装置に設定操作がされると、この時に、前記画面上の対象物の3次元的な形状において移動表示部が示している位置と、移動表示部が向いている方向とを、それぞれ、把持位置と把持方向に設定する。
すなわち、人は、画面を見ながら、位置変更操作および向き変更操作を操作装置にすることにより、移動表示部の位置と向きを、対象物の3次元的な形状に対して定めることができる。次いで、人は、設定操作を操作装置にすることにより、定めた移動表示部の位置と向きを、把持位置と把持方向に設定できる。
従って、人は、3次元的に表示される移動表示部が示す位置により、把持位置を認識でき、3次元的に表示される移動表示部の向きにより、把持方向を認識できる。このように、人が、把持位置と把持方向を3次元的に認識して設定することができる。
よって、人は、ティーチングを行わなくても、把持位置と把持方向を3次元的に認識して設定できる。
【図面の簡単な説明】
【0018】
【図1】ロボットハンドとその制御装置を示す。
【図2】ロボットハンドの把持部による把持位置と把持方向を示す。
【図3】本発明の実施形態による把持動作設定装置の構成図である。
【図4】表示装置の画面を示す。
【図5】本発明の実施形態による把持動作設定方法を示すフローチャートである。
【図6】図2の場合と異なる構成を有する把持部による把持位置と把持方向を示す。
【図7】表示装置における画面の別の例を示す。
【発明を実施するための形態】
【0019】
本発明の好ましい実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0020】
本発明の実施形態による把持動作設定方法では、ロボットハンド3の把持部5により対象物1を把持する場合に、対象物1において把持部5に把持される位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する。なお、把持方向は、対象物1に固定された仮想の3次元座標系において3次元的に定められる。
【0021】
図1は、ロボットハンド3の構成例を示す。図1において、ロボットハンド3は、互いに対して回転可能に連結された複数のリンク7a〜7dにより構成されている。複数の7a〜7dのうち最先端にある第1のリンク7aの先端部に把持部5が固定されている。第1のリンク7aは、第1の関節9aを介して第2のリンク7bに連結されているとともに、第1の関節9aの回転軸C1回りに第2のリンク7bに対して回転可能である。第2のリンク7bは、第2の関節9bを介して第3のリンク7cに連結されているとともに、第2の関節9bの回転軸C2回りに第3のリンク7cに対して回転可能である。第3のリンク7cは、第3の関節9cを介して第4のリンク7dに連結されているとともに、第3の関節9cの回転軸C3回りに第4のリンク7dに対して回転可能である。第4のリンク7dは、自身の中心軸である回転軸C4の回りに回転可能に設置台11に支持されている。
【0022】
この構成で、第1〜第4のリンク7a〜7dが、それぞれ、図示しない複数の駆動装置(例えば、サーボモータ)により対応する回転軸C1〜C4回りに回転駆動される。これらの回転駆動が制御装置13によって制御されることにより、ロボットハンド3は動作する。
【0023】
図2に基づいて、把持位置と把持方向を説明する。図2は、図1の部分拡大図である。把持位置と把持方向は、対象物1に対して固定された3次元座標系における位置と方向として表される。この3次元座標系は、図2に示す例では、互いに直交するx軸とy軸とz軸を有する。図2の例では、把持部5は、対象物1を吸引することにより対象物1を吸着して把持する吸引装置である。図2の例では、把持位置は、吸引装置5が対象物1を吸着する位置であり、把持方向は、吸引装置5が対象物1を吸引(吸着)する方向である。このような把持位置と把持方向は、本発明の実施形態による方法で設定され、制御装置13の記憶部13aに記憶されている。
【0024】
制御装置13は、把持位置および把持方向に基づいて、ロボットハンド3を制御する。これにより、ロボットハンド3は、対象物1における把持位置にて把持方向に対象物1を把持する。図2の例では、制御装置13は、吸引装置5が把持方向を向くように、吸引装置5を把持位置に位置決めし、この状態で、吸引装置5を作動させることにより、吸引装置5により対象物1を吸引して把持する。このような制御は、記憶部13aに記憶されている把持位置および把持方向と、記憶部13aに記憶されている対象物1の3次元形状と、把持する対象物1の位置および向きとに基づいて行われる。把持する対象物1の位置および向きは、例えば、レーザ距離計を用いて認識される。この場合には、レーザ距離計は、レーザ射出点から、各計測方向にレーザ光を発することにより、各計測方向において、レーザ射出点から、計測範囲内に存在する物体上の各被計測点までの距離を計測する。制御装置13は、各計測方向について計測した距離に基づいて、レーザ距離計による計測範囲に存在する物体の形状を認識する。制御装置13は、このように認識した形状と、記憶部13aに記憶されている対象物1の3次元形状とを比べることにより、対象物1の位置と対象物1の向きを認識する。
【0025】
図3は、本発明の実施形態による把持動作設定方法に用いられる把持動作設定装置10を示す。把持動作設定装置10は、表示装置15と、コンピュータ17と、操作装置19とを備える。
【0026】
表示装置15は、対象物1の形状21を3次元的に表示するための2次元の画面15aを有する。
【0027】
コンピュータ17は、図4に示すように、表示装置15の画面15a上に、対象物1の形状21と、当該形状21において把持位置と把持方向を指定するための移動表示部23とを3次元的に表示させる。本実施形態では、移動表示部23は、画面15aにおいて、3次元的に表示される矢印である。なお、移動表示部23は、対象物1の3次元的な形状21よりも手前に表示される。
【0028】
本実施形態によると、表示装置15の画面15aにおいて、コンピュータ17により、移動表示部23の向きに対して3次元的に一定の方向を向く指標である最先端リンク方向表示部25を3次元的に表示させる。表示装置15の画面15aにおいて、移動表示部23の向きに対する3次元的な前記一定の方向は、把持部5が対象物1を把持する時に把持部5が対象物1を把持する把持方向に対して最先端のリンク7a(リンク7aの軸)が実際に向く一定の方向と同じである。なお、ロボットハンド3において、把持部5による把持方向に対する最先端のリンク7aの向きは、ロボットハンド3の動作にかかわらず一定である。
【0029】
最先端リンク方向表示部25は、図4の例では、移動表示部23の向きに対して3次元的に前記一定の方向を向く中心軸を有する棒状部である。ただし、最先端リンク方向表示部25は、図4の例では、その向きを人が認識できるものであれば棒状部でなくてもよい。例えば、最先端リンク方向表示部25は、矢印であってもよい。
【0030】
操作装置19は、人に操作される。操作装置19は、例えば、キーボード19aとマウス19bとを有していてよい。
【0031】
把持位置と把持方向を設定するために、操作装置19にされる操作には、位置変更操作と向き変更操作と設定操作とがある。
【0032】
位置変更操作が操作装置19にされると、コンピュータ17により、表示装置15の画面15aにおいて移動表示部23の位置が変更される。
【0033】
向き変更操作が操作装置19にされると、コンピュータ17により、表示装置15の画面15aにおいて移動表示部23の向きが変更される。
【0034】
設定操作が操作装置19にされると、コンピュータ17により、この時に、対象物1の形状21において移動表示部23が示している位置と、移動表示部23が3次元的に向いている方向とが、それぞれ、把持位置と把持方向に設定される。
【0035】
詳しくは次の通りである。
【0036】
位置変更操作と向き変更操作は、画面15aにおいて、移動表示部23が示している位置と、移動表示部23が向いている方向を調節するために行われる。操作装置19に位置変更操作と向き変更操作がされることにより、移動表示部23の位置と向きが、画面15a内の3次元座標系において変更される。この3次元座標系は、画面15aに表示される3次元空間において対象物1の形状21に固定されている。この3次元座標系は、図4に示すように、互いに直交するx軸とy軸とz軸を有する。以下において、x軸、y軸、z軸は、それぞれ、画面15aにおいて対象物1の形状21に対して固定されている当該3次元座標系のx軸とy軸とz軸を意味する。
【0037】
このように移動表示部23の位置と向きを調節した後に、設定操作により、画面15aにおいて、移動表示部23が示している位置を把持位置として設定でき、移動表示部23が向いている方向を把持方向として設定できる。把持部5が、上述のように吸引装置である場合には、図4において、このように設定された把持位置は、吸引装置が対象物1を吸着する位置であり、このように設定された把持方向は、吸引装置が対象物1を吸引(吸着)する方向である。
【0038】
なお、位置変更操作と向き変更操作が操作装置19にされても、対象物1の形状21の向きと位置は変わらない。
【0039】
本実施形態では、位置変更操作と向き変更操作には、後述するステップS2における位置変更操作と向き変更操作と、後述するステップS5における微調整用の位置変更操作と向き変更操作とがある。
【0040】
本実施形態によると、操作装置19にされる操作には、さらに、回転操作、拡大操作、および縮小操作がある。
【0041】
回転操作は、画面15aに表示される対象物1の形状21を回転させる回転操作である。この時の回転軸は、対象物1の形状21を貫通する軸であり、その向きは、操作装置19により任意に定めることができる。また、回転操作において、対象物1の形状21を回転させる量も、操作装置19により任意に定めることができる。
拡大操作は、画面15aに表示される対象物1の形状21を拡大する操作である。その拡大率は、操作装置19により任意に定めることができる。
縮小操作は、画面15aに表示される対象物1の形状21を縮小する操作である。その縮小率は、操作装置19により任意に定めることができる。
【0042】
図5は、本発明の実施形態による把持動作設定方法を示すフローチャートである。この方法は、ステップS1〜S6を有する。
【0043】
ステップS1において、コンピュータ17の中央演算装置(CPU)17aにより、対象物1の形状21と移動表示部23とを、表示装置15の画面15aに3次元的に表示させる。なお、CPU17aは、コンピュータ17の記憶部17bに記憶されている対象物1の3次元形状のデータに基づいて、画面15aにおいて対象物1の形状21を3次元的に表示させる。
また、ステップS1では、コンピュータ17のCPU17aにより、画面15aにおいて、移動表示部23の向きに対して一定の方向を向く最先端リンク方向表示部25を3次元的に表示させる。なお、好ましくは、最先端リンク方向表示部25は、図4のように、移動表示部23に接続されている。
【0044】
ステップS2において、人が、表示装置15の画面15aを見ながら、位置変更操作および向き変更操作を操作装置19にする。このように操作装置19にされた位置変更操作および向き変更操作に応じて、コンピュータ17のCPU17aにより、表示装置15の画面15aにおいて移動表示部23の位置と3次元的な向きを変更する。
また、ステップS2では、このような移動表示部23の向きの変更に伴って、移動表示部23の向きに対して3次元的に一定の方向を向くように、最先端リンク方向表示部25の3次元的な向きも、コンピュータ17のCPU17aにより変更される。
なお、本実施形態では、ステップS2において、画面15aにおいて、位置変更操により移動表示部23が移動すると、最先端リンク方向表示部25は移動表示部23と一体的に移動する。
【0045】
なお、ステップS2は、次のように行われてよい。
ステップS2の位置変更操作は、人が、台や机の面におかれたマウス19bを前後左右に動かす操作であってよい。例えば、マウス19bを前後に動かすことにより、マウス19bの移動量と移動方向に応じて、移動表示部23が、図4の紙面に沿って画面15aの上下方向に移動する。マウス19bを左右に動かすことにより、マウス19bの移動量と移動方向に応じて、移動表示部23が、図4の紙面に沿って画面15aの左右方向に移動する。これにより、移動表示部23が、画面15aにおける対象物1の形状21において示している(指している)位置を変更する。なお、移動表示部23が、画面15aにおける対象物1の形状21において示している位置とは、2次元の画面15a(図4の紙面)と垂直な方向において、移動表示部23の指示位置(図4では、先端)Peを、3次元的に表示されている対象物1の形状(表面)21に投影した位置である。
ステップS2の向き変更操作は、例えば、キーボード19aの1つまたは複数のボタンを押す操作であってよい。このように押されたボタンの種類や回数に応じて、移動表示部23の向きが、画面15a内の前記3次元座標系において変更される。
【0046】
例えば、ステップS2の位置変更操作と向き変更操作により、図4において、実線で描かれている移動表示部23の位置と向きが、図4において破線で描かれているいずれかの移動表示部23の位置と向きに変更される。
【0047】
ステップS3において、移動表示部23の位置と向きが、現在の位置と向きでよいかどうかを判断する。ステップS3の判断は人が行う。この判断が「いいえ」の場合には、ステップS4へ進み、この判断が「はい」の場合には、ステップS5へ進む。
【0048】
ステップS4において、人が、表示装置15の画面15aを見ながら、回転操作、拡大操作、および縮小操作のいずれかまたは複数を行う。
回転操作がされた場合には、次の処理が行われる。すなわち、操作装置19により、回転軸の向きと回転量が定められ、回転操作が操作装置19にされた場合には、定められた回転軸の向きと回転量に従って、コンピュータ17のCPU17aにより、画面15aに表示される対象物1の形状21を回転させる。
拡大操作または縮小操作がされた場合には、次の処理が行われる。すなわち、操作装置19により、拡大率または縮小率が定められ、拡大操作または縮小操作が操作装置19にされた場合には、定められた拡大率または縮小率に従って、コンピュータ17のCPU17aにより、画面15aに表示される対象物1の形状21を拡大または縮小する。
【0049】
ステップS5において、人が、表示装置15の画面15aを見ながら、微調整用の位置変更操作および向き変更操作の一方または両方を操作装置19にする。操作装置19にされた微調整用の位置変更操作に応じて、コンピュータ17のCPU17aにより、画面15aにおいて移動表示部23の位置が微調整され、操作装置19にされた微調整用の向き変更操作に応じて、コンピュータ17のCPU17aにより、画面15aにおいて移動表示部23の向きが微調整される。なお、ステップS5は省略されてもよい。この場合には、ステップS3の判断が「はい」となった場合には、ステップS5を省略してステップS6へ進む。
【0050】
ステップS5は、次のように行われてよい。
【0051】
微調整用の位置変更操作は、図4に示すように画面15aに表示された位置微調整パネル27上の表示部「x+」「y+」「z+」「x−」「y−」「z−」を用いて行われる。キーボード19aにおける特定のボタンを押すことにより、マウス19bを動かすと、移動表示部23ではなく、別のカーソルが画面15a上を移動するようになる(ただし、移動表示部23は画面15aに表示されたままである)。このカーソルを、画面15aに表示された位置微調整パネル27における表示部「x+」に合わせて、マウス19bを1回クリックすると、移動表示部23がx軸の正方向に微小量だけ移動する。同様に、カーソルを、表示部「x−」に合わせて、マウス19bを1回クリックすると、移動表示部23がx軸の負方向に微小量だけ移動し、カーソルを、表示部「y+」に合わせて、マウス19bを1回クリックすると、移動表示部23がy軸の正方向に微小量だけ移動し、カーソルを、表示部「y−」に合わせて、マウス19bを1回クリックすると、移動表示部23がy軸の負方向に微小量だけ移動し、カーソルを、表示部「z+」に合わせて、マウス19bを1回クリックすると、移動表示部23がz軸の正方向に微小量だけ移動し、カーソルを、表示部「z−」に合わせて、マウス19bを1回クリックすると、移動表示部23がz軸の負方向に微小量だけ移動する。このように、微調整したい表示部にカーソルを合わせて、1回または複数回クリックして、移動表示部23の位置を微調整する。
【0052】
微調整用の向き変更操作は、図4に示すように画面15aに表示された向き微調整パネル29上の表示部「x+」「y+」「z+」「x−」「y−」「z−」を用いて行われる。上述のカーソルを、画面15aに表示された向き微調整パネル29における表示部「x+」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りx軸と平行な回転軸回りに、移動表示部23が、正の回転方向に微小量だけ回転する。なお、回転方向の正と負は、それぞれ、その回転軸と平行なx軸、y軸またはz軸の正方向の側から見て時計回りと反時計まわりの方向を意味する。同様に、カーソルを、表示部「x−」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りx軸と平行な回転軸回りに、移動表示部23が、負の回転方向に微小量だけ回転し、カーソルを、表示部「y+」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りy軸と平行な回転軸回りに、移動表示部23が、正の回転方向に微小量だけ回転し、カーソルを、表示部「y−」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りy軸と平行な回転軸回りに、移動表示部23が、負の回転方向に微小量だけ回転し、カーソルを、表示部「z+」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りz軸と平行な回転軸回りに、移動表示部23が、正の回転方向に微小量だけ回転し、カーソルを、表示部「z−」に合わせて、マウス19bを1回クリックすると、移動表示部23を通りz軸と平行な回転軸回りに、移動表示部23が、負の回転方向に微小量だけ回転する。このように、微調整したい表示部にカーソルを合わせて、1回または複数回クリックして、移動表示部23の向きを微調整する。
【0053】
ステップS5では、移動表示部23の向きの微調整に伴って、移動表示部23の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部25の3次元的な向きも微調整される。なお、本実施形態では、ステップS5において、位置変更操作により移動表示部23が微小量だけ移動すると、最先端リンク方向表示部25は移動表示部23と一体的に微小量だけ移動する。
【0054】
ステップS6において、人が、表示装置15の画面15aを見て、設定操作を操作装置19にする。このように操作装置19に設定操作がされると、コンピュータ17のCPU17aにより、この時に、対象物1の形状21において移動表示部23が示している位置と、移動表示部23が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する。
この時、コンピュータ17のCPU17aは、2次元の画面15aと垂直な方向において、移動表示部23の指示位置Peを、画面15aに3次元的に表示されている対象物1の表面に投影し、投影した指示位置Peを、画面15a内の前記3次元座標系で表わす。このように表わされた指示位置Peが、把持位置として設定される。画面15a内の3次元座標系が、上述のように、x軸とy軸とz軸を有する場合には、コンピュータ17のCPU17aは、上述のように投影した指示位置Peを、x軸座標値、y軸座標値、およびz軸座標値により、把持位置として表わす。
【0055】
本発明の実施形態による把持動作設定プログラムは、上述したステップS1、S2、S4、S5、S6の各処理をコンピュータ17のCPU17aに実行させる。この把持動作設定プログラムは、コンピュータ17の記憶部17bに記憶されている。
【0056】
上述した本発明の実施形態によると、以下の効果が得られる。
【0057】
コンピュータ17のCPU17aにより、画面15aにおいて、対象物1の形状21と移動表示部23とを3次元的に表示させ、操作装置19の位置変更操作および向き変更操作に応じて、画面15aにおいて移動表示部23の位置と向きが変更され、操作装置19に設定操作がされると、この時に、画面15a上の形状21において移動表示部23が示している位置と、移動表示部23が向いている方向とを、それぞれ、把持位置と把持方向に設定する。
すなわち、人は、画面15aを見ながら、位置変更操作および向き変更操作を操作装置19にすることにより、移動表示部23の位置と向きを、対象物1の形状21に対して調節することができる。次いで、人は、設定操作を操作装置19にすることにより、調節した移動表示部23の位置と向きを、把持位置と把持方向に設定できる。
従って、人は、3次元的に表示される移動表示部23が示す位置により、把持位置を認識でき、3次元的に表示される移動表示部23の向きにより、把持方向を認識できる。このように、人は、把持位置と把持方向を3次元的に認識して設定することができる。
【0058】
また、移動表示部23の向きの変更に伴って、移動表示部23の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部25の3次元的な向きも変更される。従って、人は、画面15a内の最先端リンク方向表示部25により、最先端のリンク7aの向きを視覚的に確認できる。よって、最先端のリンク7aが対象物1に近づく動作も視覚的に把握できる。
【0059】
本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。例えば、以下の変更例1〜3のいずれかを採用してもよいし、変更例1〜3のうちの2つまたは3つを組み合わせて採用してもよい。この場合、以下で説明しない点は、上述と同じであってよい。
【0060】
(変更例1)
上述では、把持部5は吸引装置であったが、把持部5は、開閉する1対の爪5aを有していてもよい。この場合、把持部5は、図6に示すように、1対の爪5aを閉じることにより、1対の爪5aで対象物1を把持する。
【0061】
この場合、一方の爪5aについて、上述と同様に、上述のステップS1〜S6を行うことにより、当該爪5aによる把持位置と把持方向を設定する。これにより、一方の爪5aに対する他方の爪5aの位置関係と動作方向に基づいて、他方の爪5aについて、把持位置と把持方向が自動的に設定されてよい。図6の例では、他方の爪5aによる把持位置P2は、対象物1の3次元的な形状(表面)21において、一方の爪5aによる把持位置P1と正反対の位置であってよい。すなわち、形状21において、一方の爪5aによる把持位置P1がある部分(例えば、面またはエッジ)と反対側の部分(例えば、面またはエッジ)と、一方の爪5aによる把持位置P1を通り一方の爪5aによる把持方向D1と平行な直線との交点を、他方の爪5aによる把持位置P2に設定する。なお、他方の爪5aによる把持方向D2は、一方の爪5aによる把持方向D1と反対の方向である。
【0062】
(変更例2)
対象物1の形状21が、エッジにより区画される外面、エッジまたは穴を有する場合に、ステップS2の位置変更操作は、画面15aに表示された対象物1の形状21における外面、エッジまたは穴を選択する操作であってもよい。この選択により、選択した外面、エッジまたは穴の中心を移動表示部23が示すように、移動表示部23の位置が自動的に変更される。
【0063】
変更例2では、ステップS2の向き変更操作は、上述と同じである。この場合、ステップS2において、位置変更操作を行った後に、向き変更操作を行うのがよい。例えば、把持部5が吸引装置である場合には、位置変更操作により選択した外面の中心に移動表示部23を位置させたときには、この外面に垂直な方向を移動表示部23が向くように、向き変更操作により移動表示部23の向きを調整するのがよい。
【0064】
対象物1の形状21における外面、エッジまたは穴を選択する操作は、例えば、次のように行われてよい。
キーボード19aにおける特定のボタンを押すと、マウス19bの移動により、移動表示部23の代わりにカーソルが画面15a上を移動するようになる。このカーソルを、対象物1の形状21における外面、エッジまたは穴に合わせて、マウス19bをクリックする。これにより、カーソルが合わせられている外面、エッジまたは穴が選択される。ここで、カーソルが、外面、エッジまたは穴に合わせられているとは、2次元の画面15aと垂直な方向において、カーソルを、3次元的に表示されている対象物1の形状(表面)21に投影した位置に、当該外面、エッジまたは穴が存在していることを意味する。
または、移動表示部23が示す位置を、対象物1の形状21における外面、エッジまたは穴に合わせて、マウス19bをクリックする。これにより移動表示部23が示す外面、エッジまたは穴が選択される。ここで、移動表示部23が示す位置が、外面、エッジまたは穴に合わせられているとは、2次元の画面15aと垂直な方向において、移動表示部23の指示位置(先端)Peを、3次元的に表示されている対象物1の形状(表面)21に投影した位置に、当該外面、エッジまたは穴が存在していることを意味する。
なお、選択された外面が円柱または円錐の側面である場合には、この側面の中心は、この側面において、円柱または円錐の母線の方向における中心位置である。この中心位置は、1つに定まらないが任意の1点に定められてよい。
【0065】
以下、対象物1の形状21において選択される外面、エッジまたは穴について、順に説明する。
【0066】
対象物1の形状21における外面を選択することは、形状21における複数の外面のうちいずれかを選択することを意味する。
【0067】
エッジとは、形状21において、隣接する2つの外面同士の境界線である。例えば、図7に示す頂点Pa,Pbが両端である線分がエッジ31として選択された場合には、この線分の中心を移動表示部23が示すように、移動表示部23の位置が変更される。なお、エッジ31を把持位置として選択することは、例えば、把持部5が、上述の変更例1のように1対の爪5aを有する場合に行われる。このとき、エッジ31の中心が、一方の爪5aによる把持位置に設定され、一方の爪5aによる把持方向も設定されたら、他方の爪5aによる把持位置と把持方向は、変更例1と同様に、次のように自動的に設定されてよい。
他方の爪5aによる把持位置は、対象物1の3次元的な形状(表面)21において、一方の爪5aによる把持位置と正反対の位置であってよい。すなわち、3次元的な形状21において、一方の爪5aによる把持位置と反対側の部分(例えば、面またはエッジ)と、一方の爪5aによる把持位置を通り一方の爪5aによる把持方向と平行な直線との交点を、他方の爪5aによる把持位置に設定する。なお、他方の爪5aによる把持方向は、一方の爪5aによる把持方向と反対の方向である。
【0068】
穴とは、図7に示すように、形状21に形成されている穴33である。穴33の中心とは、穴33の開口における中心位置Pcであってよい。穴33の中心Pcが把持位置に設定された場合には、例えば、図6のように、開閉する1対の爪5aを有する把持部5で、次のように、穴33の内面を把持する。1対の爪5aが穴33に挿入された状態で、1対の爪5aが互いに離間する方向に駆動され、1対の爪5aが互いに逆側(反対方向)に穴33の内面に押し付けられる。これにより、1対の爪5aで対象物1を把持する。
【0069】
(変更例3)
上述では、移動表示部23は、画面に15aにおいて位置と向きが変更可能な矢印であったが、移動表示部23は、ロボットハンド3の3次元的な形状と、ロボットハンド3に取り付けられた把持部5の3次元的な形状とであってもよい。この場合、移動表示部23が示す位置は、把持部5の3次元的な形状において、対象物1を把持する位置であり、移動表示部23の向きは、把持部5の3次元的な形状において、対象物1を把持する方向である。このような移動表示部23が示す位置と向きは、人が、画面15aにおいて、ロボットハンド3および把持部5の3次元的な形状を見ることによって認識することができる。
【0070】
この場合、画面に15aにおいて、ロボットハンド3および把持部5の3次元的な形状と、対象物1の3次元的な形状21とが重なっても、形状21の全体が見えるように、ロボットハンド3および把持部5の3次元的な形状に対して、形状21を透視して画面15aに表示するのがよい。
なお、画面15aに表示されるロボットハンド3の3次元的な形状は、最先端のリンク7aの3次元的な形状を含む。従って、最先端リンク方向表示部25は省略されてよい。
【0071】
なお、把持部5が、変更例2のように1対の爪5aを有する場合には、画面15aに表示される把持部5の3次元的な形状において、1対の爪5aは、互いに、次のような相対位置にあってよい。すなわち、この相対位置は、対象物1を実際に把持した時の1対の爪5a同士の相対位置と同じである。
【符号の説明】
【0072】
1 対象物、3 ロボットハンド、5 把持部(吸引装置)、5a 爪、7a〜7d リンク、9a〜9c 関節、10 把持動作設定装置、11 設置台、13 制御装置、13a 記憶部、15 表示装置、15a 画面、17 コンピュータ、17a CPU、17b 記憶部、19 操作装置、19a キーボード、19b マウス、21 対象物の形状、23 移動表示部、25 最先端リンク方向表示部、27 位置微調整パネル、29 向き微調整パネル、31 エッジ、33 穴
【特許請求の範囲】
【請求項1】
ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定方法であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を用意し、
前記画面において、
(A)コンピュータにより、対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、コンピュータにより、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、コンピュータにより把持位置と把持方向に設定する、ことを特徴とする把持動作設定方法。
【請求項2】
ロボットハンドは、互いに対して回転可能に連結された複数のリンクにより構成されており、
複数のリンクのうち最先端のリンクに前記把持部が取り付けられており、
前記(A)において、コンピュータにより、移動表示部の向きに対して一定の方向を向く最先端リンク方向表示部を3次元的に表示させ、
前記(B)において、移動表示部の3次元的な向きの変更に伴って、移動表示部の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部の3次元的な向きも変更され、
移動表示部の向きに対する3次元的な前記一定の方向は、把持部が対象物を把持する時に、把持部が対象物を把持する把持方向に対して最先端のリンクが実際に向いている一定方向と同じである、ことを特徴とする請求項1に記載の把持動作設定方法。
【請求項3】
位置変更操作は、画面に表示された対象物の形状における外面、エッジまたは穴を選択する操作であり、この選択により、選択した外面、エッジまたは穴の中心を移動表示部が示すように、移動表示部の位置が変更される、ことを特徴とする請求項1または2に記載の把持動作設定方法。
【請求項4】
移動表示部は、前記画面において、3次元的に表示される矢印である、ことを特徴とする請求項1、2または3に記載の把持動作設定方法。
【請求項5】
移動表示部は、前記ロボットハンドと前記把持部の3次元的な形状である、ことを特徴とする請求項1または3に記載の把持動作設定方法。
【請求項6】
ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定装置であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を備え、
コンピュータは、前記画面において、
(A)対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する、ことを特徴とする把持動作設定装置。
【請求項7】
ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部に把持される位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定プログラムであって、
表示装置の画面において、
(A)対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させる処理と、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の3次元的な位置と向きを変更する処理と、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する処理と、をコンピュータに実行させる、ことを特徴とする把持動作設定プログラム。
【請求項1】
ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定方法であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を用意し、
前記画面において、
(A)コンピュータにより、対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、コンピュータにより、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、コンピュータにより把持位置と把持方向に設定する、ことを特徴とする把持動作設定方法。
【請求項2】
ロボットハンドは、互いに対して回転可能に連結された複数のリンクにより構成されており、
複数のリンクのうち最先端のリンクに前記把持部が取り付けられており、
前記(A)において、コンピュータにより、移動表示部の向きに対して一定の方向を向く最先端リンク方向表示部を3次元的に表示させ、
前記(B)において、移動表示部の3次元的な向きの変更に伴って、移動表示部の向きに対して3次元的に前記一定の方向を向くように、最先端リンク方向表示部の3次元的な向きも変更され、
移動表示部の向きに対する3次元的な前記一定の方向は、把持部が対象物を把持する時に、把持部が対象物を把持する把持方向に対して最先端のリンクが実際に向いている一定方向と同じである、ことを特徴とする請求項1に記載の把持動作設定方法。
【請求項3】
位置変更操作は、画面に表示された対象物の形状における外面、エッジまたは穴を選択する操作であり、この選択により、選択した外面、エッジまたは穴の中心を移動表示部が示すように、移動表示部の位置が変更される、ことを特徴とする請求項1または2に記載の把持動作設定方法。
【請求項4】
移動表示部は、前記画面において、3次元的に表示される矢印である、ことを特徴とする請求項1、2または3に記載の把持動作設定方法。
【請求項5】
移動表示部は、前記ロボットハンドと前記把持部の3次元的な形状である、ことを特徴とする請求項1または3に記載の把持動作設定方法。
【請求項6】
ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部が把持する位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定装置であって、
対象物の形状を3次元的に表示するための2次元の画面を有する表示装置と、
前記画面において、対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させるコンピュータと、
前記画面において移動表示部の位置および向きを変更する位置変更操作および向き変更操作と、把持位置および把持方向を決定する設定操作とが可能な操作装置と、を備え、
コンピュータは、前記画面において、
(A)対象物の形状と移動表示部とを3次元的に表示させ、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の位置と向きを変更し、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する、ことを特徴とする把持動作設定装置。
【請求項7】
ロボットハンドの把持部により対象物を把持する場合に、対象物において把持部に把持される位置と方向をそれぞれ把持位置と把持方向として、把持位置と把持方向を設定する把持動作設定プログラムであって、
表示装置の画面において、
(A)対象物の形状と、把持位置と把持方向を示すための移動表示部とを3次元的に表示させる処理と、
(B)操作装置にされた位置変更操作および向き変更操作に応じて、移動表示部の3次元的な位置と向きを変更する処理と、
(C)操作装置に設定操作がされると、この時に、対象物の前記形状において移動表示部が示している位置と、移動表示部が3次元的に向いている方向とを、それぞれ、把持位置と把持方向に設定する処理と、をコンピュータに実行させる、ことを特徴とする把持動作設定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−111728(P2013−111728A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262248(P2011−262248)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]