
把持型顎機構
【課題】異なる操作モードの間で迅速かつ容易に操作され得るツールアセンブリを有する、内視鏡外科手術用デバイスまたは腹腔鏡外科手術デバイスを提供する。
【解決手段】外科手術用デバイスは、静止ハンドル18および可動ハンドル20を有するハンドルアセンブリ13であって、この可動ハンドル20は、モード選択機構を有し、このモード選択機構は、その外科手術用デバイスを、操作の第一のモードと操作の第二のモードとの間で切り替えるように構成されている、ハンドルアセンブリ13;そのハンドル部分から遠位に延びる細長部材14であって、この細長部材14は、その細長部材14の長さに沿って延びる長手方向軸を規定する、細長部材14;ならびにその細長部材14の遠位端部分に設置されたツールアセンブリ27、を備える。
【解決手段】外科手術用デバイスは、静止ハンドル18および可動ハンドル20を有するハンドルアセンブリ13であって、この可動ハンドル20は、モード選択機構を有し、このモード選択機構は、その外科手術用デバイスを、操作の第一のモードと操作の第二のモードとの間で切り替えるように構成されている、ハンドルアセンブリ13;そのハンドル部分から遠位に延びる細長部材14であって、この細長部材14は、その細長部材14の長さに沿って延びる長手方向軸を規定する、細長部材14;ならびにその細長部材14の遠位端部分に設置されたツールアセンブリ27、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、外科手術用ステープル留めデバイスに関し、そしてより特定すると、クランプモードおよび/または発射モードとは独立して、ツールアセンブリを把持モードで作動させるように構成された、内視鏡外科手術用ステープル留めデバイスに関する。
【背景技術】
【0002】
組織がまず対向する顎構造体の間に把持またはクランプされ、次いで、外科手術用ファスナーによって接合される、外科手術用デバイスは、当該分野において周知である。これらのファスナーは、代表的に、外科手術用ステープルの形態であるが、2部品のポリマーファスナーもまた、利用され得る。
【0003】
この目的の器具は、2つの細長部材を有するツールアセンブリを備え得、これらの細長部材は、それぞれ、組織を捕捉またはクランプするために使用される。代表的に、これらの部材のうちの一方は、例えば2つの横に並んだ列に配置された複数のステープルを収容するステープルカートリッジを保有し、一方で、他方の部材は、ステープルがステープルカートリッジから駆動される際にステープルのレッグを変形させるための表面を規定するアンビルを有する。いくつかのステープラーにおいて、ステープル留め操作は、ステープルカートリッジを通って長手軸方向に移動するカム棒によって行われ、これらのカム棒は、ステープルをステープルカートリッジから連続的に排出させるために、ステープルプッシャーに作用する。ステープル留めされた組織をステープルの列の間で長手軸方向に切断するために、ナイフが、これらのステープルの列の間を移動し得る。このようなステープルは、特許文献1および特許文献2に開示されており、これらの各々は、現在、Tyco
Healthcare Group LPにより所有されており、そしてその全体が、本明細書中に参考として援用される。
【0004】
内視鏡手順または腹腔鏡手順において、外科手術は、小さい切開部を介してか、または皮膚の小さい入口創傷を通して挿入された小さい直径のカニューレを介して、実施される。器具の動きの程度が制限されるので、この器具が皮膚を介して位置決めされる場合に、外科医がこの器具のツールアセンブリを身体組織の回りで操作して、組織部位に接近させ、そして/またはこの組織部位をクランプすることは、非常に困難であり得る。回転可能な内視鏡本体部分および回転可能かつ/または関節運動可能なツールアセンブリを有する器具が、この問題を克服するために開発されており、そして市販されている。これらの器具は、内視鏡ツールの分野において、かなりの改善を提供するが、外科手術手順のために必要とされる時間を減少させ得、そして組織部位へのより容易な接近を可能にする、さらなる改善が、望ましい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6,250,532号明細書
【特許文献2】米国特許第6,241,139号明細書
【発明の概要】
【0006】
従って、異なる操作モードの間で迅速かつ容易に操作され得るツールアセンブリを有する、内視鏡外科手術用デバイスまたは腹腔鏡外科手術デバイスが、依然として必要とされている。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、以下を提供する:
(項目1)
外科手術用デバイスであって、
静止ハンドルおよび可動ハンドルを有するハンドルアセンブリであって、その可動ハンドルは、モード選択機構を有し、そのモード選択機構は、その外科手術用デバイスを、操作の第一のモードと操作の第二のモードとの間で切り替えるように構成されている、ハンドルアセンブリ;
そのハンドル部分から遠位に延びる細長部材であって、その細長部材は、その細長部材の長さに沿って延びる長手方向軸を規定する、細長部材;ならびに
その細長部材の遠位端部分に設置されたツールアセンブリ、
を備える、外科手術用デバイス。
(項目2)
上記ツールアセンブリは、カートリッジアセンブリおよびアンビルアセンブリを備え、そのカートリッジアセンブリは、そのカートリッジアセンブリ内に支持された複数のステープルを有し、そのアンビルアセンブリおよびそのカートリッジアセンブリのうちの少なくとも一方は、間隔を空けた位置と接近した位置との間で、互いに対して移動可能である、項目1に記載の外科手術用デバイス。
(項目3)
上記ハンドル部分は、回転制御部材を備え、その回転制御部材は、上記ハンドル部分に対する上記細長部材の回転を容易にするように構成されている、項目1に記載の外科手術用デバイス。
(項目4)
上記モード選択機構は、第一の位置と第二の位置との間で移動可能であるように構成されたスライドボタンである、項目1に記載の外科手術用デバイス。
(項目5)
上記ツールアセンブリは、上記操作の第一のモードにおいて組織を把持し、そして操作の第二のモードにおいて組織をクランプするように構成されている、項目1に記載の外科手術用デバイス。
(項目6)
上記ハンドル部分は、ツールアセンブリの関節運動を容易にするように構成された関節運動アクチュエータを備える、項目1に記載の外科手術用デバイス。
(項目7)
上記細長部材は、上記ハンドル部分に対して上記長手方向軸の周りで回転可能である、項目1に記載の外科手術用デバイス。
(項目8)
上記ハンドルアセンブリは、上記外科手術用デバイスをデフォルトモードに保持するように構成されている、項目1に記載の外科手術用デバイス。
(項目9)
上記操作の第一のモードは、操作の初期モードである、項目8に記載の外科手術用デバイス。
(項目10)
外科手術用デバイスであって、その外科手術用デバイスは、ハンドルアセンブリを備え、そのハンドルアセンブリは、静止ハンドルを規定するハウジング、可動ハンドル、作動シャフト、およびそのハウジング内に支持されたモード選択機構を備え、そのモード選択機構は、その作動シャフトと係合した第一の位置から、その作動シャフトから脱係合した第二の位置へと移動可能であり、その可動ハンドルは、その作動シャフトに作動可能に関連しており、その結果、その可動ハンドルの移動は、その作動シャフトの軸方向移動を引き起こし、そのモード選択機構がその第一の位置にある場合に、その起動シャフトは、第一の軸に沿って往復する、外科手術用デバイス。
(項目11)
上記モード選択機構が上記第二の位置にある場合に、作動シャフト前進機構が上記作動シャフトを遠位方向に前進させる、項目10に記載の外科手術用デバイス。
(項目12)
上記作動シャフトが、歯を有し、そして上記作動シャフト前進機構が、つめであり、そのつめは、交互の様式で、その歯と係合および脱係合する、項目11に記載の外科手術用デバイス。
(項目13)
上記つめが、上記可動ハンドルに取り付けられており、そしてその可動ハンドルが上記静止ハンドルの方へと移動すると、そのつめは上記歯と係合する、項目12に記載の外科手術用デバイス。
(項目14)
上記モード選択機構が、上記可動ハンドルに設置されたスライド可能なボタンを備える、項目10に記載の外科手術用デバイス。
(項目15)
上記モード選択機構が、把持つめを備え、その把持つめは、そのモード選択機構が上記第一の位置にある場合に、上記作動シャフトに規定された第一のスロットと係合する、項目11に記載の外科手術用デバイス。
(項目16)
上記作動シャフトが、上記第一のスロットの近位に配置された第二のスロットを有し、上記モード選択機構が上記第二の位置にある場合に、上記把持つめが、その第二のスロット内に配置される、項目15に記載の外科手術用デバイス。
(項目17)
上記モード選択機構が、スライド可能なボタンおよび旋回可能なヨークを備え、その旋回可能なヨークは、上記ハンドルアセンブリ内に配置され、そして上記可動ハンドルと係合するための第一のアーム、および上記スライド可能なボタンと係合するための第二のアームを有し、そのヨークは、その可動ハンドルがその静止ハンドルから離れて移動する場合に、そのスライド可能なボタンを上記第一の位置に維持する、項目10に記載の外科手術用デバイス。
(項目18)
外科手術用デバイスであって、その外科手術用デバイスは、ハンドルアセンブリを備え、そのハンドルアセンブリは、静止ハンドルを規定するハウジング、可動ハンドル、シャフト、およびそのハウジング内に支持されたモード選択機構を備え、そのモード選択機構は、その可動ハンドル上にスライド可能に支持された、少なくとも1つのスライドボタンと作動的に関連しており、その少なくとも1つのスライドボタンは、第一の位置から第二の位置へと移動可能であり、その第一の位置は、そのデバイスの操作の第一のモードに関連し、そしてその第二の一は、操作の第二のモードに関連し、そのシャフトは、その操作の第一のモードにおいて、そのモード選択機構により係合され、そしてその操作の第二のモードにおいて、そのモード選択機構により脱係合される、外科手術用デバイス。
(項目19)
外科手術用デバイスであって、
可動ハンドルを有するハンドルアセンブリであって、その可動ハンドルは、モード選択機構を有し、そのモード選択機構は、そのハンドルアセンブリのいずれの側からもスライドボタンにアクセス可能であるように、そのハンドルアセンブリ上にスライド可能に支持されたスライドボタンを備える、可動ハンドル;
そのハンドルアセンブリから遠位に延びる細長部材;および
その細長部材の遠位端部分に設置されたツールアセンブリ、
を備える、外科手術用デバイス。
(項目20)
外科手術用デバイスを作動させる方法であって、その方法は、
その外科手術用デバイスの作動シャフトが往復様式で移動するように、その外科手術用デバイスの作動ハンドルを操作する工程であって、その可動ハンドルは、その作動シャフトと係合した係合部材に取り付けられている、工程;
ボタンを作動させて、その係合部材をその作動シャフトから離れるように移動させる工程;および
前進部材がその作動シャフトに係合し、そしてその作動シャフトを遠位方向に前進させるように、その可動ハンドルを操作する工程、
を包含する、方法。
(項目21)
上記作動シャフトが、往復様式で移動して、上記外科手術用デバイスの1対の顎を開閉させる、項目20に記載の方法。
(項目22)
上記前進部材が、上記作動シャフトと係合および脱係合して、上記可動シャフトの1行程より大きくその作動シャフトを前進させる、項目21に記載の方法。
(項目23)
上記前進部材が、上記作動シャフトに係合して上記1対の顎を閉じ、引き続いて、その作動シャフトに係合して上記外科手術用デバイスの上記顎のうちの少なくとも一方からステープルを発射させる、項目22に記載の方法。
【0008】
外科手術用デバイスが開示され、この外科手術用デバイスは、ハンドルアセンブリ、細長部材、および使い捨て装填ユニットを備える。このハンドルアセンブリは、モード選択機構を備え、このモード選択機構は、操作の第一の把持モードと、操作の第二のクランプモードとの間で、外科手術用デバイスを切り替えるように構成される。このハンドルアセンブリは、回転制御部材および関節運動レバーを備える。この回転制御部材は、ハンドルアセンブリに対する細長部材の回転を容易にするように構成される。この関節運動レバーは、細長部材の長手方向軸に対して実質的に垂直な軸の周りでの、ツールアセンブリの関節運動を容易にするように構成される。1つの実施形態において、このツールアセンブリは、複数のステープルを有するカートリッジアセンブリ、およびアンビルアセンブリを備え、これらのカートリッジアセンブリおよびアンビルアセンブリは、このデバイスの操作の第二のクランプモードにおいて、組織をクランプし、そしてステープル留めするように構成される。
【0009】
本開示によれば、外科手術用ステープル留めデバイスが提供され、この外科手術用ステープル留めデバイスは、可動ハンドルを有するハンドルアセンブリ、細長部材、および使い捨て装填ユニット(「DLU」)を備える。このDLUは、遠位端に位置決めされるツールアセンブリを備え、このツールアセンブリは、アンビルアセンブリおよびカートリッジアセンブリを有する。この細長部材は、ハンドルアセンブリに回転可能に固定される。ツールアセンブリは、ステープル留めデバイスであり、そしてハンドルアセンブリは、把持つめを備え、この把持つめは、作動シャフトと係合するように移動可能であり、ツールアセンブリが把持モードで作動することを可能にする。より具体的には、把持つめは、ハンドルアセンブリの反対側にスライド可能に位置決めされた、1対のスライドボタンにより操作され、そして作動シャフトと係合するように選択的に移動可能であり、作動シャフトが、ある距離を移動することを可能にする。この作動シャフトの移動は、可動ハンドルの操作の際に、ツールアセンブリのカートリッジアセンブリとアンビルアセンブリとの接近を起こすが、ステープルの発射は起こさない。
【0010】
本開示の別の局面において、回転制御部材が、ハンドルアセンブリの前端に回転可能に設置されて、ハンドルアセンブリに対する細長部材の回転を容易にする。
【0011】
本開示のなお別の局面において、関節運動レバーが、回転制御部材の近くに設置されて、ツールアセンブリの関節運動を容易にする。
【0012】
本明細書中に開示される外科手術用ステープル留めデバイスの種々の実施形態が、図面を参照して本明細書中に開示される。
【発明の効果】
【0013】
異なる操作モードの間で迅速かつ容易に操作され得るツールアセンブリを有する、内視鏡外科手術用デバイスまたは腹腔鏡外科手術デバイスが、本発明によって提供される。
【図面の簡単な説明】
【0014】
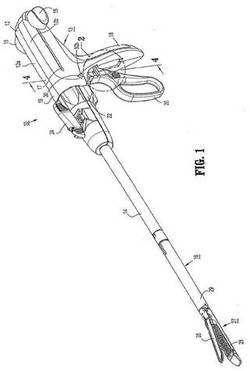
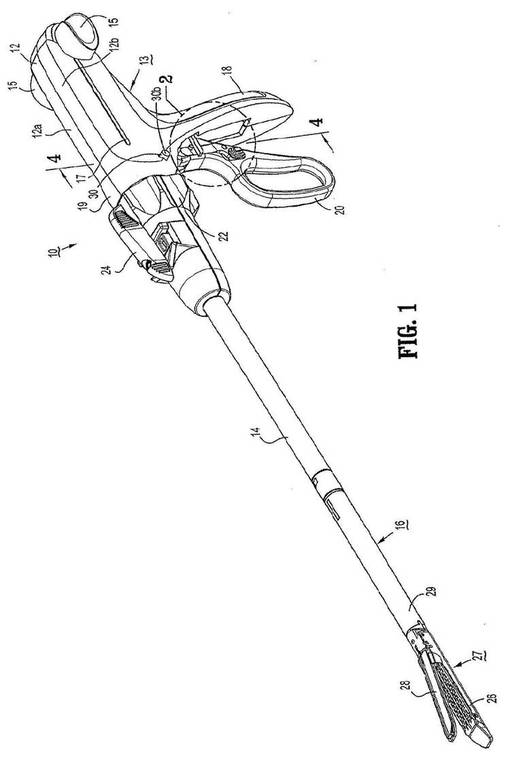
【図1】図1は、本明細書中に開示される外科手術用ステープル留めデバイスの側面斜視図である。
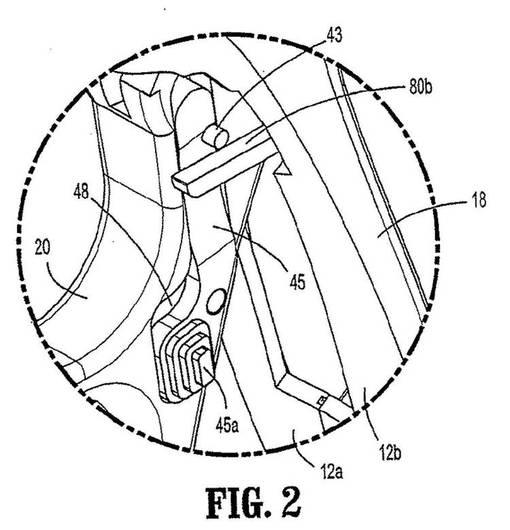
【図2】図2は、図1に示される指示された細部の領域の拡大図である。
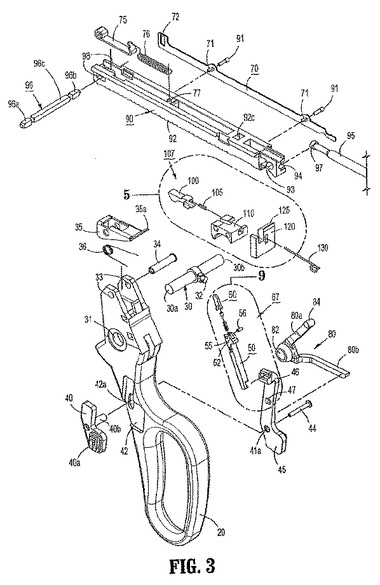
【図3】図3は、部品が分離された、図1に示される外科手術用ステープル留めデバイスの近位端の側面斜視図である。
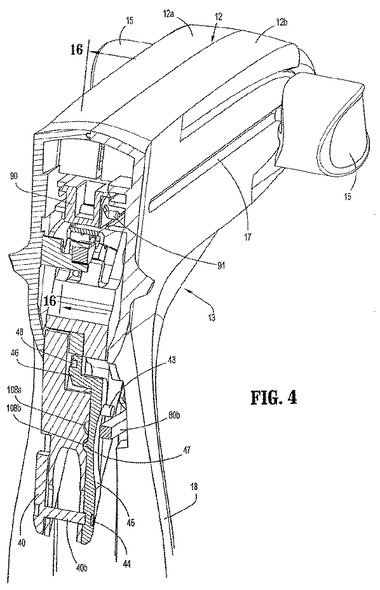
【図4】図4は、図1の断面線4−4に沿って見た、断面後方斜視図である。
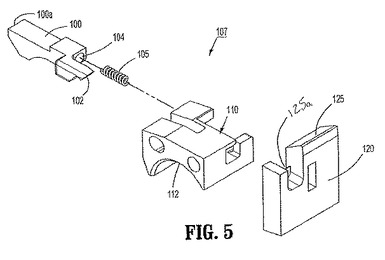
【図5】図5は、図3に示される指示された細部の領域の拡大図である。
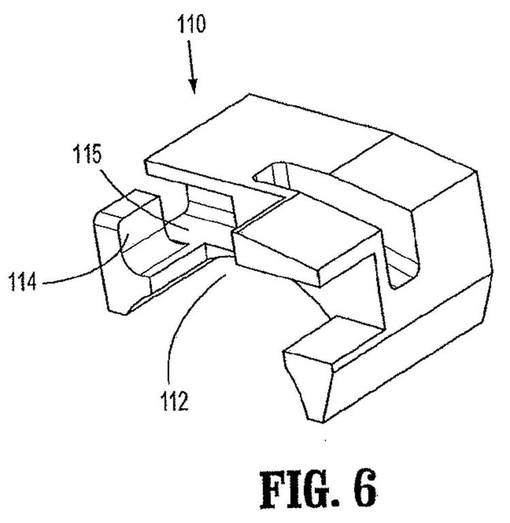
【図6】図6は、図5のばね支持体の斜視図である。
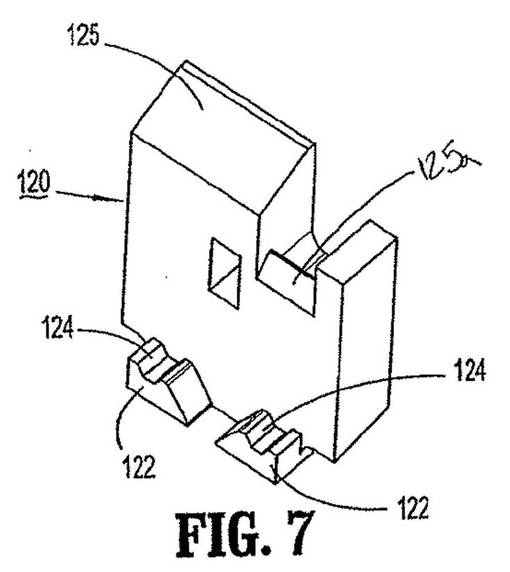
【図7】図7は、図5の垂直つめの斜視図である。
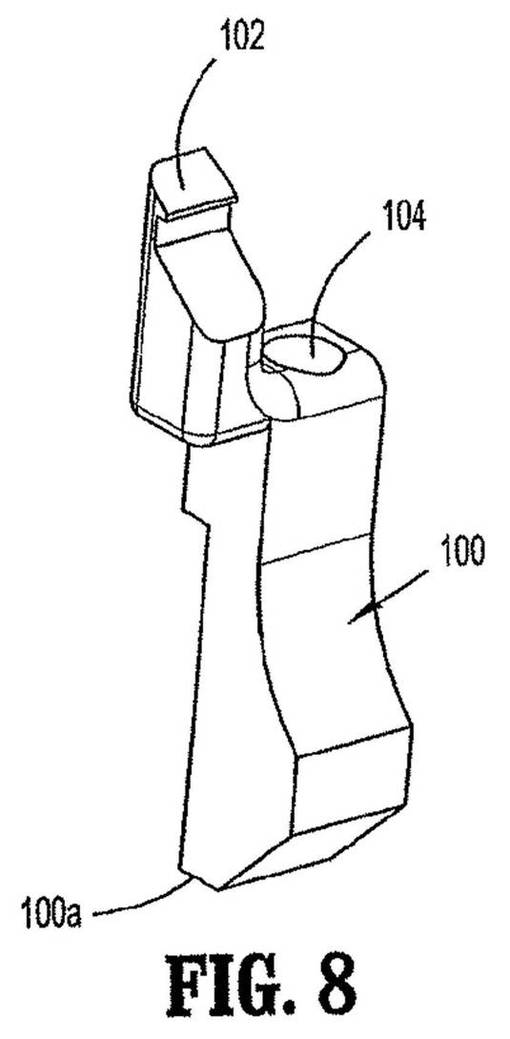
【図8】図8は、図5のロッキングカムの斜視図である。
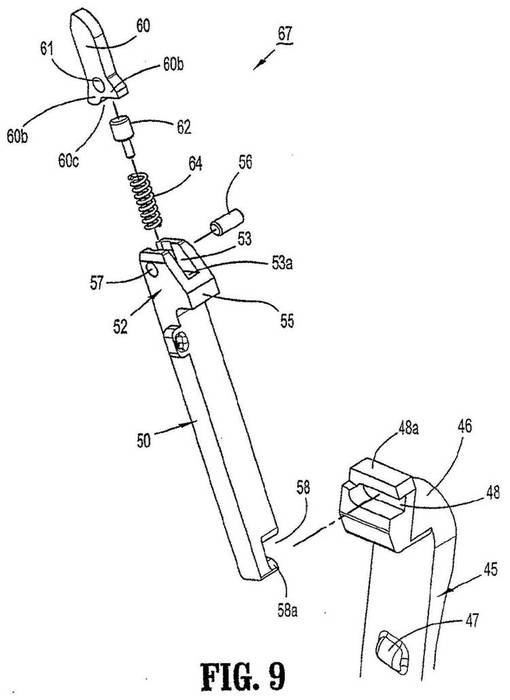
【図9】図9は、図3に示される指示された細部の領域の拡大図である。
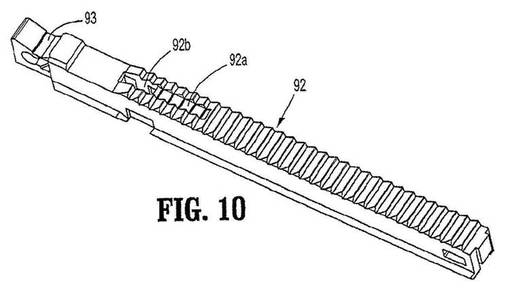
【図10】図10は、図3の歯付きラックの底面斜視図である。
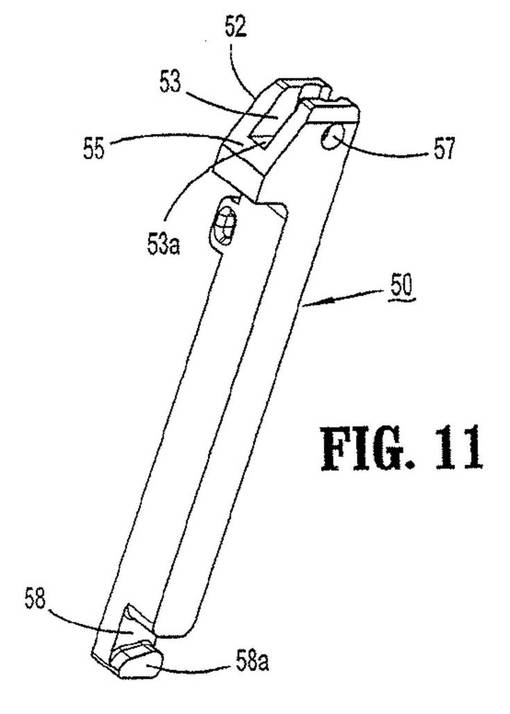
【図11】図11は、図9に示される図示から90°回転した、把持つめアームの側面斜視図である。
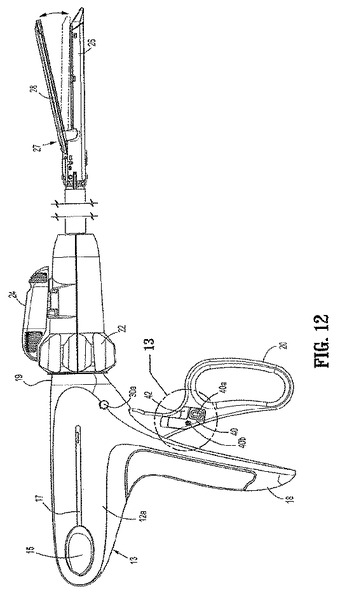
【図12】図12は、図1に示される外科手術用ステープル留めデバイスの側面図である。
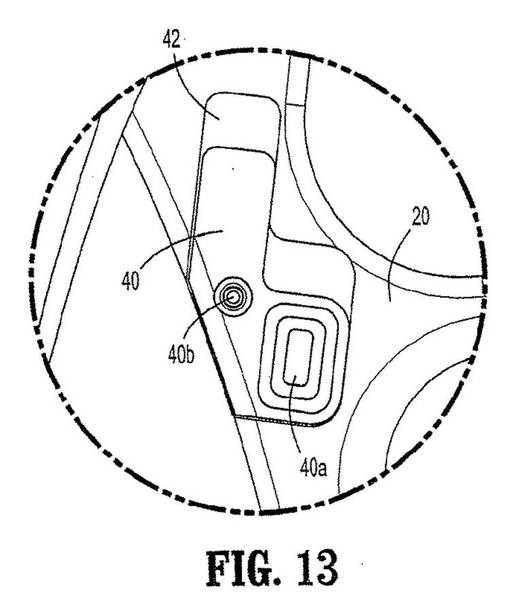
【図13】図13は、図12に示される指示された細部の領域の拡大図である。
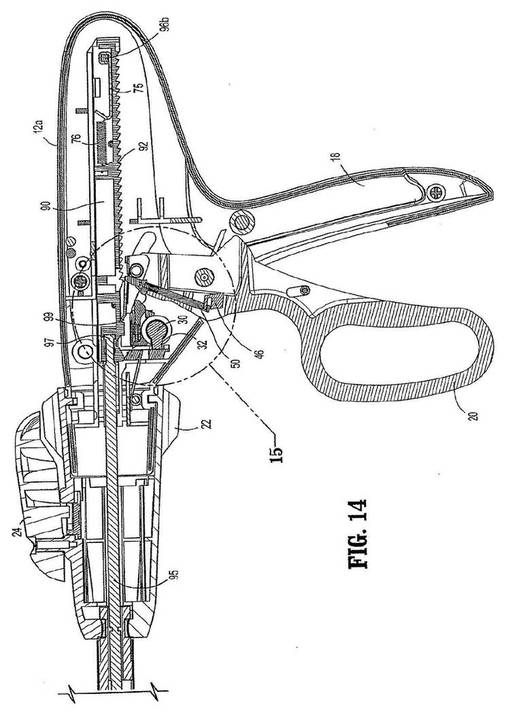
【図14】図14は、図1のハンドルアセンブリの側面断面図である。
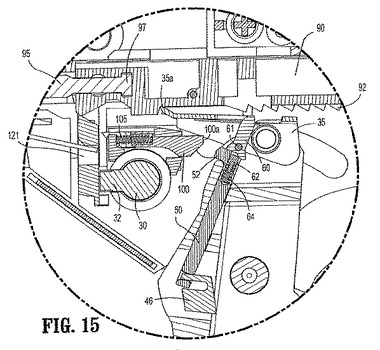
【図15】図15は、ハンドルアセンブリをクランプ/発射モードで図示している、図14に示される指示された細部の領域の拡大図である。
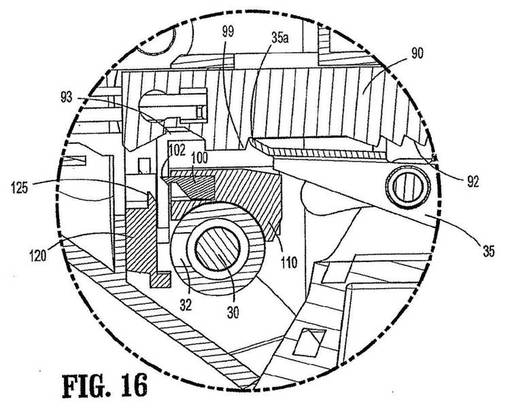
【図16】図16は、図4の断面線16−16に沿って見た側面断面図である。
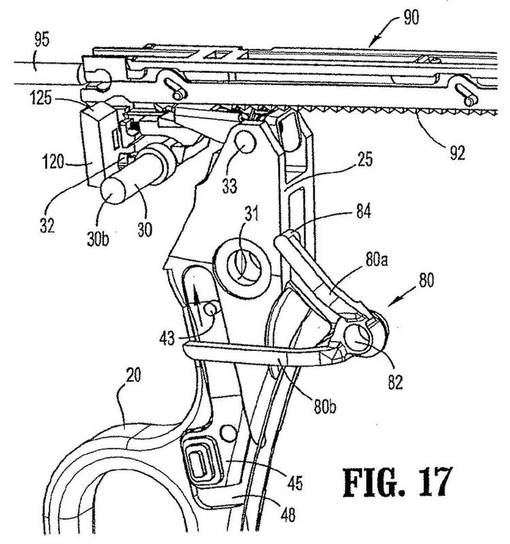
【図17】図17は、ハウジングが取り外された、図1に示される外科手術用ステープル留めデバイスのハンドルアセンブリの、部分的に切り取った側面斜視図である。
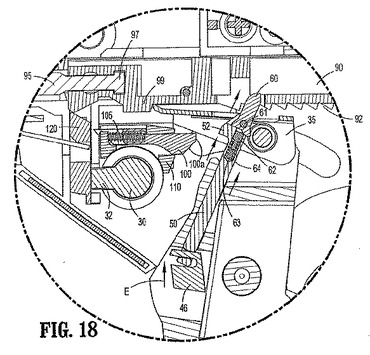
【図18】図18は、歯付きラックに係合する、図15の把持つめを図示する。
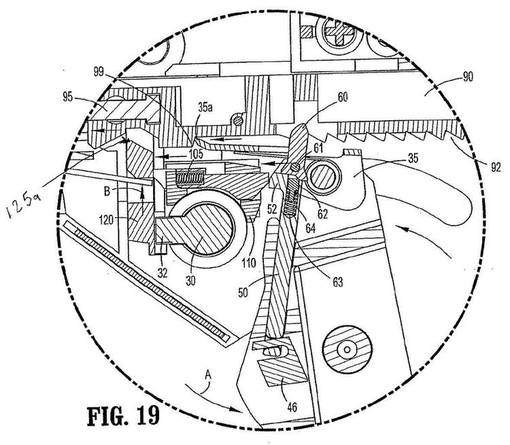
【図19】図19は、可動ハンドルが静止ハンドルの方へと旋回したところを図示する、側面断面図である。
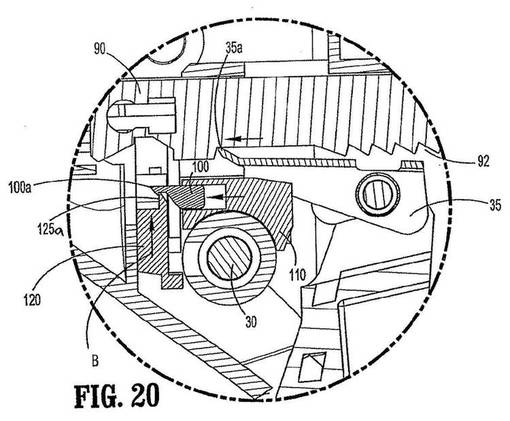
【図20】図20は、垂直つめがロッキングカムによって下位置に付勢されたところを図示する、側面断面図である。
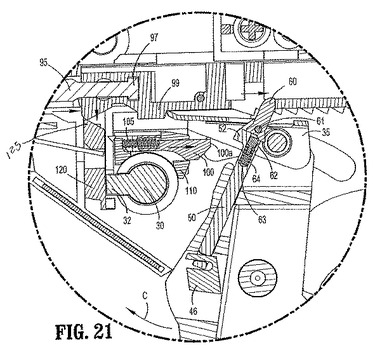
【図21】図21は、可動ハンドルが静止ハンドルから離れるように付勢されているところを図示する、側面断面図である。
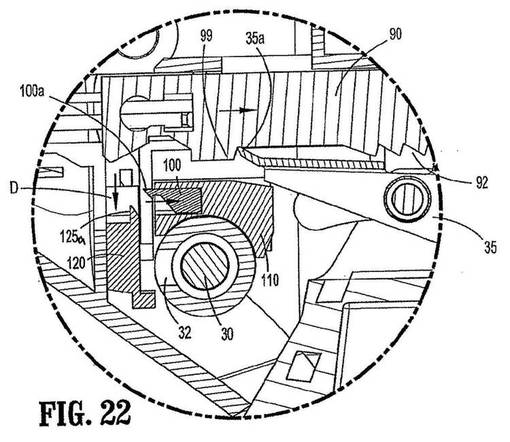
【図22】図22は、作動シャフトが引き込まれた位置にあるところを図示する、側面断面図である。
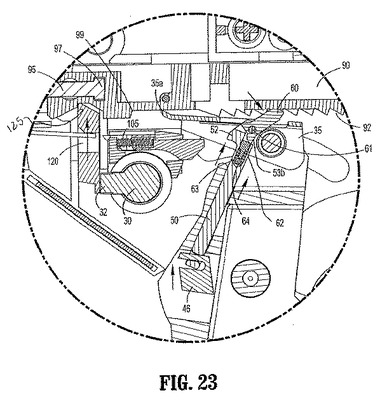
【図23】図23は、垂直つめが上位置にあり、そしてスライドボタンが上位置にあり、把持つめを歯付きラックに係合させているところを図示する、側面断面図である。
【発明を実施するための形態】
【0015】
(実施形態の詳細な説明)
本明細書中に開示される把持型顎機構の種々の実施形態が、ここで、図面を参照して詳細に記載される。図面において、同じ参照番号は、数枚の図の各々において、同一または対応する要素を表す。
【0016】
本明細書全体にわたって、用語「近位」とは、デバイスの、操作者に最も近い部分をいい、そして用語「遠位」とは、デバイスの、操作者から最も遠い部分をいう。
【0017】
図1は、一般的に10として示される、本明細書中に開示される外科手術用ステープル留めデバイスの1つの実施形態を図示する。外科手術用ステープル留めデバイス10は、ハンドルアセンブリ13、ハンドルアセンブリ13から遠位に延びる細長部材14、および細長部材14の遠位端に取り外し可能に固定された使い捨て装填ユニット(「DLU」)16を備える。DLU 16は、近位本体部分29(これは、細長部材14の延長部を形成する)、および遠位ツールアセンブリ27(これは、カートリッジアセンブリ26およびアンビルアセンブリ28を備える)を備える。カートリッジアセンブリ26およびアンビルアセンブリ28は、1対の顎をさらに規定する。ツールアセンブリ27は、細長部材14の長手方向軸に対して実質的に垂直な軸の周りで、本体部分29に旋回可能に接続される。カートリッジアセンブリ26は、複数のステープルを収容する。アンビルアセンブリ28は、カートリッジアセンブリ26に対して、カートリッジアセンブリ26から間隔を空けた開位置と、カートリッジアセンブリ26と併置して整列した接近位置またはクランプ位置との間で、移動可能である。あるいは、ツールアセンブリ27は、カートリッジアセンブリ26がアンビルアセンブリ28に対して移動可能であるように、配置され得る。DLU 16は、長さが約30mm〜約60mmである、ステープルの線状の列を適用するように構成される。他の長さ(例えば、45mm)のステープルの線形の列を有するDLUもまた、予測される。
【0018】
ハンドルアセンブリ13は、静止ハンドル18、可動ハンドル20、およびバレル部分19を備える。回転制御部材22が、バレル部分19の前端に回転可能に設置され、ハンドルアセンブリ13に対する細長部材14の回転を容易にする。回転制御部材22は、成形されたプラスチックの半セクション12aおよび12bから形成されるが、他の材料(例えば、金属)および他の製造方法が、予測される。関節運動レバー24もまた、バレル部分19の前端に、回転制御部材22に隣接して設置されて、ツールアセンブリ27の関節運動を容易にする。Millimanらに対する米国特許第5,865,361号(これは、Tyco Healthcare,LPにより所有されている)は、外科手術用ステープル留め装置のための回転制御アセンブリおよび関節運動アセンブリを記載しており、そしてその全体が、本明細書中に参考として援用される。
【0019】
1対の引き込みノブ15が、バレル部分19に沿って移動可能に位置決めされ、以下に詳細に記載されるように(図1を参照のこと)、デバイス10を、引き込まれた位置に戻す。可動ハンドル20の両側の横面の対向する1対の凹部42および48(図2を参照のこと)は、それぞれ、スライドボタン40および45をスライド可能に受容するための寸法にされる(図3を参照のこと)。スライドボタン40は、スライドボタン45と作動的に関連しており、その結果、一方の動きが、他方の動きを引き起こす。スライドボタン40および45は、デバイス10を、「把持」モードと「発射」またはクランプモードとの間で切り替えるように構成される。把持モードにおいて、ツールアセンブリ27は、把持型顎機構として作動するように構成される。すなわち、アンビルアセンブリ28は、カートリッジアセンブリ26との間に組織を把持するために、カートリッジアセンブリ26に対して、開位置と接近位置との間で前後に移動可能である。クランプモードにおいて、ツールアセンブリ27は、クランプ機構として作動するように構成される。すなわち、アンビルアセンブリ28は、カートリッジアセンブリ26との間に組織を把持するためにカートリッジアセンブリに対して移動可能であり、そしてステープルの線状の列を適用する。クランプモードにおいて、使用者は、引き込みノブ15を引き込んでツールアセンブリ27を開き、そして組織を解放し得る。スライドボタン40および45は、それぞれ上昇表面40aおよび45aを備える。上昇表面40aおよび45aは、スライドボタン40および45を、それぞれ凹部42および48の内部で移動させるために外科医の指によって係合されるように、構成される。理解されるように、スライドボタン40および45に対する代替物(例えば、ノブ、レバー、押下可能なボタン、トグル、トリガアセンブリなど)もまた、企図される。
【0020】
ハンドルアセンブリ13は、1対の成形された半セクション12aおよび12bから形成されたハウジング12を備え、このハウジングは、静止ハンドル18、およびハンドルアセンブリ13のバレル部分19を形成する。半セクション12aおよび12bは、熱可塑性材料(例えば、ポリカーボネート)から形成される。あるいは、必要とされる強度要件を有する他の材料(例えば、外科等級の金属)が、ハウジング12を形成するために使用され得る。ハウジング12の半セクション12aおよび12bは、公知の固定技術(例えば、接着剤、溶接、噛み合い構造体、ねじなど)を使用して、互いに固定される。あるいは、他の固定技術が使用され得る。
【0021】
図3を参照すると、可動ハンドル20は、ハウジング半セクション12aと12bとの間に、円柱形部材(図示せず)の回りで回転可能に支持される。この円柱形部材は、可動ハンドル20内の開口部31の中に受容される。付勢部材(図示せず;例えば、ねじりばね)が、可動ハンドル20を静止ハンドル18から離して非圧縮位置に推進するために、備えられ得る。可動ハンドル20は、旋回部材34を受容するような寸法にされた、1対の貫通穴33を備える。前進つめ35は、旋回部材34に回転可能に支持され、そしてばね36によって、作動シャフト90の方へと付勢される。
【0022】
作動シャフト90は、ハウジング12のバレル部分19の内部で、引き込まれた位置と前進位置との間でスライド可能に支持され、そして凹部94を規定する遠位端を備え、この凹部は、制御棒95の近位端97を回転可能に受容するように構成される。作動シャフト90は、歯付きラック92を備える。前進つめ35は、係合フィンガー35aを有し、この係合フィンガーは、ばね36によって、作動シャフト90の歯付きラック92の方へと付勢される。可動ハンドル20が作動されると、すなわち、ねじりばね(図示せず)の付勢に逆らって静止ハンドル18の方へと旋回すると、つめ35の係合フィンガー35aが作動シャフト90の歯付きラック92と係合して、作動シャフト90および制御棒95を遠位に前進させる。
【0023】
図3および図5〜図8を参照すると、垂直つめ120は、ハウジング半セクション12aと12bとの間に規定されたスロット121(図15を参照のこと)内に、スライド可能に位置決めされる。垂直つめ120は、延長位置または上位置(この位置において、垂直つめ120の先端125は、作動シャフト90の遠位端に形成された切抜き部93と係合する)から、引き込まれた位置または下位置(この位置において、垂直つめ120の先端125は、作動シャフト90から間隔を空けている)へと移動可能である。ハウジング半セクション12aと12bとの間に支持されたばね130は、垂直つめ120を延長位置に付勢するように位置決めされる。この延長位置において、垂直つめ120は、作動シャフト90の前進を防止して、デバイス10の発射を防止する。
【0024】
プランジャー30が、ハウジング半セクション12aおよび12b内に形成された、間隔を空けた円筒形チャネル(図示せず)の間に往復可能に支持される。プランジャー30は、カム部材32を備える。ばね(図示せず)が、間隔を空けた円筒形チャネル(図示せず)内で、プランジャー30の各端部に位置決めされ、プランジャー30を、垂直つめ120に形成された1対のカム表面122(図7を参照のこと)の間でカム部材32が中心に位置する位置へと推進し得る。各カム表面122には、プランジャー30のカム部材32を解放可能に受容するための凹部124が形成される。
【0025】
プランジャー30の各端部30aは、静止ハンドル18を通って延び、そしてばね(図示せず)の付勢に逆らって圧縮されて、カム部材32を、垂直つめ120のカム表面122のそれぞれ1つに、強制的に係合させ得る。カム部材32がカム表面122のうちの1つと係合するように移動すると、垂直つめ120は、延長位置から引き込まれた位置へと推進され、垂直つめ120の先端125を作動シャフト90の切抜き部93の外に移動させる(図19〜図23を参照のこと)。それぞれのカム表面122の凹部124内でのカム部材32の位置決めは、垂直つめ120を、引き込まれた位置に保持する。
【0026】
図3および図5を参照すると、ロッキングカムアセンブリ107は、ハウジング12(図1を参照のこと)のバレル部分19内の引き込まれた位置と前進位置との間で支持され、そしてばね支持体110およびカム部材100を備える。このカム部材は、先端102および近位表面100aを有する。プランジャー30は、ばね支持体110の底面に規定される環状凹部112内(図3および図5に示される)に受容され、ばね支持体110をハウジング半セクション12aと12bとの間に維持する。カム部材100は、ばね支持体110に規定されたスロット115内にスライド可能に受容される。カム部材100は、延長位置または遠位位置(この位置において、カム部材100の先端102が垂直つめ120の先端125と係合する)から、引き込まれた位置または近位位置(この位置において、カム部材100の先端102は、垂直つめ120から間隔を空けている)へと移動可能である。引き込まれた位置において、カム部材100の表面100aは、ばね支持体110から間隔を空けている。カム部材100は、ばね105によって近位に付勢され、このばねは、一端において、カム部材100の遠位端に規定された凹部104に固定され、そして他端において、ばね支持体110のスロット115により形成される延長部114と係合するように構成される。延長位置または遠位位置において、カム部材100の先端102は、垂直つめ120の先端125aと係合して、垂直つめ120を引き込まれた位置に保持する。
【0027】
図3、図9、および図11を参照すると、可動ハンドル20は、スライドボタン40および45と作動的に関連する把持つめアセンブリ67を備える。把持つめアセンブリ67は、スライドボタン40および45の操作に応答して、可動ハンドルに対して移動するために構成される。把持つめアセンブリ67は、つめアーム50および把持つめ60を備える。つめアーム50は、つめアーム50の頂端部の外向きに曲がった部分52に規定された傾斜表面55を有する。把持つめ60は、つめアーム50の外向きに曲がった部分52の内部で旋回可能に支持される。スライドボタン45の頂端部は、凹んだ溝48を規定する延長部48aを有する、内向きに曲がった部分46を備える。凹んだ溝48は、つめアーム50の底端部の凹んだ溝58によって規定される延長部58aをスライド可能に受容するような寸法および構成にされる。これに対応して、つめアーム50の凹んだ溝58は、スライドボタン45の延長部48aをスライド可能に受容するような寸法および構成にされる。スライドボタン45の底端部は、コネクタピン44を貫通して受容するように構成された開口部41aを備える。円筒形受部40bは、スライドボタン40の内側表面から外向きに延び、そして可動ハンドル20の凹部42に形成された長手軸方向スロット42a内で並進するような構成および寸法にされる。コネクタピン44は、受部40b内に受容されて、スライドボタン45をスライドボタン40に固定するような寸法にされる。突出部47は、スライドボタン45の横表面に配置され、以下でさらに議論されるように、可動ハンドル20に規定された1対の移動止め108aおよび108b(図4を参照のこと)内にスナップばめの様式で受容されるように構成される。
【0028】
つめアーム50の外向きに曲がった部分52は、凹んだ溝53を備え、この凹んだ溝は、旋回ピン56をスライド可能に受容するような寸法にされた1対の貫通穴57を有する。付勢ばね64は、一端において、旋回ピン62を内部に挿入して受容するために構成され、そして他端において、凹んだ溝53内に挿入されて受容されるように構成される。把持つめ60は、凹部60aを規定する、横方向に延びる1対の延長部60bおよび60cを備える。旋回ピン56は、把持つめ60の底端部の開口部61によって受容される。旋回ピン62は、凹部60aの内部に旋回可能に受容され、その結果、把持つめ60は、つめアーム50に対して、旋回ピン62の周りで近位方向に旋回する。凹んだ溝53は、まっすぐな位置(すなわち、つめアーム50の長手方向軸に沿った位置)と、近位位置または後方位置との間での、把持つめ60の旋回運動に適合するような寸法にされる。横方向の延長部60bは、凹んだ溝53の表面53aに接触し、その結果、把持つめ60の旋回運動が、つめアーム50に対してまっすぐな位置から近位に制限されるように、構成される。横方向の延長部60cは、外向きに曲がった部分52の溝53を通って旋回し、把持つめ60の、近位位置または後方位置への旋回運動を可能にするように、構成される。近位位置または後方位置において、横方向の延長部60cは、旋回ピン62、および従ってばね64を、外向きに曲がった部分52に規定された穴63内に押し込む(図23を参照のこと)。
【0029】
図17を参照すると、ハンドルアセンブリ13(図1を参照のこと)は、ヨーク80をさらに備え、このヨークは、デバイス10をデフォルトの把持モードに戻し、その結果、以下で詳細に議論されるように、スライドボタン40および45が上位置に戻って、把持つめ60を、歯付きラック92の遠位端部のスロットと係合させるように推進するように、構成される。ヨーク80は、円柱形部材(図示せず)の周りで、静止ハンドル18内に回転可能に支持され、この円柱形部材は、ヨーク80の開口部82内に受容される。1対のアーム80aおよび80bが、開口部82から横方向に延びる。矢印「A」により示される方向(図19を参照のこと)に可動ハンドル20を移動させると、すなわち、静止ハンドル18の方へと旋回させると、スライドボタン40および45は、上位置(この位置において、把持つめ60は、作動シャフト90の歯付きラック92のスロット92bと係合する)から下位置(この位置において、把持つめ60は、作動シャフト90の歯付きラック92から間隔を空けている)へと移動可能である。把持つめ60がスロット92b内に位置決めされると、可動ハンドル20の操作の際に、作動シャフト90の制限された前進および引き込みのみが起こり、デバイス10が、把持モードで作動することを可能にする。上位置において、スライドボタン45の突出部47は、移動止め108a内に位置決めされる。スライドボタン45の下向きへの移動は、図4に見られるように、突出部47の、移動止め108aから移動止め108bへの下向きの移動を引き起こす。移動止め108aおよび108b内への突出部47の受容は、外科医に、可聴および/または触覚的な応答を提供し、スライドボタン40および45の位置/モードの変化を示す。矢印「C」により示される方向(図21を参照のこと)での可動ハンドル20の移動の間、すなわち、静止ハンドル18から間隔を空けた初期位置への移動の間、アーム80aの遠位端に形成されたカム部材84は、可動ハンドル20の近位面に規定されたカム作用表面25とスライド可能に係合し、ヨーク80の時計回りの回転を引き起こし、その結果、ヨーク80のアーム80bは、スライドボタン45の頂端部に形成されたポスト43と係合して、スライドボタン40および45を図18の矢印「E」により示される方向に推進し、上位置にする。図23に示されるように、把持つめ60は、作動シャフト90の歯付きラック92のスロット92aによって、下向きに移動させられる。
【0030】
引き込みノブ15(図1を参照のこと)を備える引き込み機構が、結合棒96によって、作動シャフト90の近位端に接続される。結合棒96は、左係合部分96aおよび右係合部分96bを備え、これらの係合部分は、ハウジング半セクション12aおよび12bに形成された細長スロット17を通って延び、そして引き込みノブ15を受容するように構成される。結合棒96の中心部分96cは、作動シャフト90の近位端に隣接して形成された、対向する1対のスロット98内にスライド可能に受容されるような寸法および構成にされる。解放プレート70が、間隔を空けた1対のピン91(図3を参照のこと)によって、作動シャフト90の片側に支持される。ピン91は、作動シャフト90の横面から外向きに延び得、解放プレート70に形成された1対の角度の付いたカムスロット71と係合する。この様式で、解放プレート70は、作動シャフト90と作動的に関連し、そして引き込みノブ15の操作に応答して、この作動シャフトに対して移動するように設置される。
【0031】
使用において、引き込みノブ15が後方すなわち近位に引かれると、結合棒96は、最初、結合棒96が作動シャフト90のスロット98内でスライドするにつれて、解放プレート70を作動シャフト90に対して後方に移動させる。このことが起こると、解放プレート70は、ピン91によって、作動シャフト90に対して下方に移動させられ、これによって、歯付きラック92を覆い、前進つめ35の係合フィンガー35aを歯付きラック92から脱係合させる。一旦、結合棒96が、スロット98の近位端と係合する位置に掛け金をかけられると、引き込みノブ15のさらなる後方への移動は、作動シャフト90の引き込みを引き起こし、従って、制御棒95の後方への引き込みを引き起こす。作動シャフト90は、ばね76によって近位に付勢される。このばねは、一端において、コネクタ75を介して結合棒部分96cに固定され、そして他端において、作動シャフト90のポスト77に固定される。
【0032】
外科手術用ステープル留めデバイス10は、最初、把持モードである。図19を参照すると、可動ハンドル20は、カートリッジアセンブリ26およびアンビルアセンブリ28を、前後に往復する様式で、開いたり接近させたりするように操作され得る。可動ハンドル20は、把持行程を通して、矢印「A」により示される方向に移動される。この把持行程において、可動ハンドル20は、ねじりばね(図示せず)の付勢に逆らって、静止ハンドル18の方へと旋回し、前進つめ35の係合フィンガー35aを移動させて、作動シャフト90に形成された肩部99と係合させる。把持行程を通る可動ハンドル20の引き続く移動は、つめアーム50を、反時計回りに回転させる。つめアーム50の反時計回りの回転は、つめアーム50の外向きに曲がった部分52の傾斜表面55を、カム部材100の近位表面100aと係合させ、カム部材100を、延長位置または遠位位置に付勢する。延長位置または遠位位置において、カム部材100の先端102は、垂直つめ120の先端125aと係合して、垂直つめ120を引き込まれた位置に保持する(図20を参照のこと)。引き込まれた位置において、垂直つめ120は、作動シャフト90から間隔を空け、可動ハンドル20が矢印「C」により示される方向に引き続き移動する際に、作動シャフト90が引き込まれた位置に戻ることを可能にする。
【0033】
図21を参照すると、可動ハンドル20が使用者により解放された後に、付勢部材(図示せず)は、可動ハンドル20を、矢印「C」により示される方向で、その初期位置に戻す。可動ハンドル20がその初期位置に戻ると、ヨーク80のアーム80bは、スライドボタン40、45を上方にスライドさせ、その結果、デバイス10は、把持モードのままになる。スライドボタン40、45を下方にスライドさせると、デバイス10のモードがクランプモードに変わり、その結果、可動ハンドル20を方向「A」に引き続き移動させると、カートリッジアセンブリ26およびアンビルアセンブリ28が組織をクランプし、その結果、カートリッジアセンブリ26およびアンビルアセンブリ28は、可動ハンドル20が解放された後でさえも、接近したままになる。垂直つめ120は、作動シャフト90の切抜き部93と係合するように移動し、作動シャフト90を適所にロックする。プランジャー30が、ハウジング半セクション12aおよび12bの方へと内向きに押されると、プランジャー30のカム部材32は、垂直つめ120のカム表面122と係合し、その結果、カム部材32は、凹部124内に解放可能に受容されて、垂直つめ120を、図22の矢印「D」により示される方向に、その引き込まれた位置に推進する。引き込まれた位置において、垂直つめ120の先端125は、作動シャフト90の切抜き部93の外側にある。垂直つめ120は、プランジャー30のカム部材32と、垂直つめ120のカム表面122の凹部124との間の係合によって、引き込まれた位置に維持される。
【0034】
可動ハンドル20がその初期位置に戻ると、ヨーク80は、時計回りに回転するように推進される。ヨーク80の時計回りの回転は、ヨーク80のアーム80bを、スライドボタン45の係合ポスト43と強制的に係合させて、スライドボタン40および45を、上位置に推進する。上位置において、把持つめ60は、歯付きラック92のスロット92aによって(歯付きラック92が前進しているのでスロット92bではない(図23を参照のこと))、下向きに旋回するように付勢される。デバイス10は、ここで、発射の準備ができたモードである。可動ハンドル20は、可動ハンドルを方向「A」に移動させることにより作動され、作動シャフト90を前進させ、ステープルをカートリッジアセンブリ26から展開し得る。可動ハンドル20は、図19において矢印「A」により示される方向に、第二の発射行程を通して移動させられる。この発射工程の間、前進つめ35は、作動シャフト90の歯付きラック92と係合して、作動シャフト90および制御棒95を遠位に前進させる。図19を再度参照すると、作動シャフト90が遠位に移動すると、作動シャフト90に形成された肩部99が垂直つめ120と係合して、垂直つめ120を下方に移動させ、プランジャー30のカム部材32を、垂直つめ120のカム表面122から脱係合させ、そしてばね(図示せず)がプランジャー30をニュートラル位置(すなわち、圧縮されていない位置)に戻すことを可能にする。可動ハンドル20の、図21に矢印「C」により示される方向での引き続く移動は、歯付きラック92をさらに前進させる。引き込みノブ15は、作動シャフト90、および従って制御棒95を後方に引き込み、把持つめ60を歯付きラック92のスロット92b内で再度整列させるために使用される。デバイス10は、把持の準備ができたモードにある。なぜなら、ヨーク80がスライドボタン45を上位置に維持するからである。
【0035】
内視鏡手順において、しばしば、クランプおよびステープル留めが実施され得る前に、組織がわきへ操作されるかまたは引かれて、外科医が組織に接近し、そして/または組織を見ることを可能にしなければならない。本開示により理解される、選択可能な操作のモードは、ツールアセンブリ27が可動ハンドル20の作動により操作され得る把持モードでデバイス10を作動させて、組織を把持および操作し、その後、デバイス10を、ツールアセンブリ27が組織をクランプしてステープルを適用するように構成される、作動のクランプモードに容易に切り替える、という利点を外科医に与える。
【0036】
図14は、デバイス10の引き込み機構の作動を図示する。使用において、引き込みノブ15が外科医によって近位に引かれると、結合棒96は、最初、結合棒96が作動シャフト90のスロット98内でスライドするにつれて、解放プレート70を作動シャフト90に対して後方に移動させ、その結果、ピン91が解放プレート70にカム作用して解放プレート70を下向きに移動させ、作動シャフト90の歯付きラック92を覆う位置にし、そしてつめ120のフィンガー125を歯付きラック92から脱係合させる。結合棒96が後方に引かれ、結合棒がスロット98の後端に係合する位置まで移動すると、引き込みノブ15のさらなる後方への移動は、作動シャフト90および制御棒95の近位への移動を引き起こす。
【0037】
代替の実施形態において、把持モードを有するがプランジャー30を有さない、外科手術用ステープル留めデバイス10が、提供され得る。この実施形態において、垂直つめ120およびロッキングカムアセンブリ107は、取り除かれる。
【0038】
デバイス10は、図19および図20に従って、把持モードで開始する。可動ハンドル20は、把持つめ60がスロット92bに係合すると、前後に移動させられて、ツールアセンブリ27の顎を開閉させ得る。垂直つめ120およびロッキングカムアセンブリ107は、この実施形態において、取り除かれる。
【0039】
スライドボタン40および45を下方にスライドさせると、把持つめ60がスロット92bから離れるように移動する。可動ハンドル20が操作されて組織をクランプすると、把持つめ60は、スロット92a内に移動する。可動ハンドル20がさらに操作されると、前進つめ35が歯付きラック92を前進させて、ステープルを発射させる。可動ハンドル20の複数の行程が使用されて、歯付きラック92を前進させ、前進つめ35は、歯付きラック92と繰り返し係合および脱係合する。ヨーク80は、発射の間、スライドボタン40および45を上位置に維持する。引き込みノブ15が使用されて、歯付きラック92を引き込んだ後に、把持つめ60は、スロット92bと整列し、そしてデバイス10は、再度把持モードになる。
【0040】
種々の改変が、本明細書中に開示された実施形態に対してなされ得ることが理解される。例えば、開示された外科手術用ステープル留めデバイスは、他の外科手術用デバイス(例えば、クリップアプライア、デシケータ、電気外科密封デバイスなど)と関連して使用され得ることが、予測される。さらに、このデバイスはまた、ステープラーまたはファスナーを排出するデバイス以外のツールアセンブリ(例えば、密封デバイス(電気外科用のものおよび非電気外科用のもの)など)を備え得る。このデバイスの操作のモードを変化させるための、ボタンまたは他のアクチュエータが、ハンドルアセンブリの片側または両側に提供され得る。従って、上記説明は、限定と解釈されるべきではなく、単に、好ましい実施形態の例示とみなされるべきである。当業者は、添付の特許請求の範囲の精神および範囲内で、他の改変を予測する。
【符号の説明】
【0041】
10 外科手術用ステープル留めデバイス
13 ハンドルアセンブリ
14 細長部材
16 使い捨て装填ユニット(「DLU」)
17 細長スロット
18 静止ハンドル
20 可動ハンドル
22 回転制御部材
26 カートリッジアセンブリ
27 ツールアセンブリ
28 アンビルアセンブリ
35 前進つめ
40,45 スライドボタン
50 つめアーム
60 把持つめ
67 把持つめアセンブリ
80 ヨーク
90 作動シャフト
120 垂直つめ
130 ばね
【技術分野】
【0001】
本開示は、外科手術用ステープル留めデバイスに関し、そしてより特定すると、クランプモードおよび/または発射モードとは独立して、ツールアセンブリを把持モードで作動させるように構成された、内視鏡外科手術用ステープル留めデバイスに関する。
【背景技術】
【0002】
組織がまず対向する顎構造体の間に把持またはクランプされ、次いで、外科手術用ファスナーによって接合される、外科手術用デバイスは、当該分野において周知である。これらのファスナーは、代表的に、外科手術用ステープルの形態であるが、2部品のポリマーファスナーもまた、利用され得る。
【0003】
この目的の器具は、2つの細長部材を有するツールアセンブリを備え得、これらの細長部材は、それぞれ、組織を捕捉またはクランプするために使用される。代表的に、これらの部材のうちの一方は、例えば2つの横に並んだ列に配置された複数のステープルを収容するステープルカートリッジを保有し、一方で、他方の部材は、ステープルがステープルカートリッジから駆動される際にステープルのレッグを変形させるための表面を規定するアンビルを有する。いくつかのステープラーにおいて、ステープル留め操作は、ステープルカートリッジを通って長手軸方向に移動するカム棒によって行われ、これらのカム棒は、ステープルをステープルカートリッジから連続的に排出させるために、ステープルプッシャーに作用する。ステープル留めされた組織をステープルの列の間で長手軸方向に切断するために、ナイフが、これらのステープルの列の間を移動し得る。このようなステープルは、特許文献1および特許文献2に開示されており、これらの各々は、現在、Tyco
Healthcare Group LPにより所有されており、そしてその全体が、本明細書中に参考として援用される。
【0004】
内視鏡手順または腹腔鏡手順において、外科手術は、小さい切開部を介してか、または皮膚の小さい入口創傷を通して挿入された小さい直径のカニューレを介して、実施される。器具の動きの程度が制限されるので、この器具が皮膚を介して位置決めされる場合に、外科医がこの器具のツールアセンブリを身体組織の回りで操作して、組織部位に接近させ、そして/またはこの組織部位をクランプすることは、非常に困難であり得る。回転可能な内視鏡本体部分および回転可能かつ/または関節運動可能なツールアセンブリを有する器具が、この問題を克服するために開発されており、そして市販されている。これらの器具は、内視鏡ツールの分野において、かなりの改善を提供するが、外科手術手順のために必要とされる時間を減少させ得、そして組織部位へのより容易な接近を可能にする、さらなる改善が、望ましい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6,250,532号明細書
【特許文献2】米国特許第6,241,139号明細書
【発明の概要】
【0006】
従って、異なる操作モードの間で迅速かつ容易に操作され得るツールアセンブリを有する、内視鏡外科手術用デバイスまたは腹腔鏡外科手術デバイスが、依然として必要とされている。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、以下を提供する:
(項目1)
外科手術用デバイスであって、
静止ハンドルおよび可動ハンドルを有するハンドルアセンブリであって、その可動ハンドルは、モード選択機構を有し、そのモード選択機構は、その外科手術用デバイスを、操作の第一のモードと操作の第二のモードとの間で切り替えるように構成されている、ハンドルアセンブリ;
そのハンドル部分から遠位に延びる細長部材であって、その細長部材は、その細長部材の長さに沿って延びる長手方向軸を規定する、細長部材;ならびに
その細長部材の遠位端部分に設置されたツールアセンブリ、
を備える、外科手術用デバイス。
(項目2)
上記ツールアセンブリは、カートリッジアセンブリおよびアンビルアセンブリを備え、そのカートリッジアセンブリは、そのカートリッジアセンブリ内に支持された複数のステープルを有し、そのアンビルアセンブリおよびそのカートリッジアセンブリのうちの少なくとも一方は、間隔を空けた位置と接近した位置との間で、互いに対して移動可能である、項目1に記載の外科手術用デバイス。
(項目3)
上記ハンドル部分は、回転制御部材を備え、その回転制御部材は、上記ハンドル部分に対する上記細長部材の回転を容易にするように構成されている、項目1に記載の外科手術用デバイス。
(項目4)
上記モード選択機構は、第一の位置と第二の位置との間で移動可能であるように構成されたスライドボタンである、項目1に記載の外科手術用デバイス。
(項目5)
上記ツールアセンブリは、上記操作の第一のモードにおいて組織を把持し、そして操作の第二のモードにおいて組織をクランプするように構成されている、項目1に記載の外科手術用デバイス。
(項目6)
上記ハンドル部分は、ツールアセンブリの関節運動を容易にするように構成された関節運動アクチュエータを備える、項目1に記載の外科手術用デバイス。
(項目7)
上記細長部材は、上記ハンドル部分に対して上記長手方向軸の周りで回転可能である、項目1に記載の外科手術用デバイス。
(項目8)
上記ハンドルアセンブリは、上記外科手術用デバイスをデフォルトモードに保持するように構成されている、項目1に記載の外科手術用デバイス。
(項目9)
上記操作の第一のモードは、操作の初期モードである、項目8に記載の外科手術用デバイス。
(項目10)
外科手術用デバイスであって、その外科手術用デバイスは、ハンドルアセンブリを備え、そのハンドルアセンブリは、静止ハンドルを規定するハウジング、可動ハンドル、作動シャフト、およびそのハウジング内に支持されたモード選択機構を備え、そのモード選択機構は、その作動シャフトと係合した第一の位置から、その作動シャフトから脱係合した第二の位置へと移動可能であり、その可動ハンドルは、その作動シャフトに作動可能に関連しており、その結果、その可動ハンドルの移動は、その作動シャフトの軸方向移動を引き起こし、そのモード選択機構がその第一の位置にある場合に、その起動シャフトは、第一の軸に沿って往復する、外科手術用デバイス。
(項目11)
上記モード選択機構が上記第二の位置にある場合に、作動シャフト前進機構が上記作動シャフトを遠位方向に前進させる、項目10に記載の外科手術用デバイス。
(項目12)
上記作動シャフトが、歯を有し、そして上記作動シャフト前進機構が、つめであり、そのつめは、交互の様式で、その歯と係合および脱係合する、項目11に記載の外科手術用デバイス。
(項目13)
上記つめが、上記可動ハンドルに取り付けられており、そしてその可動ハンドルが上記静止ハンドルの方へと移動すると、そのつめは上記歯と係合する、項目12に記載の外科手術用デバイス。
(項目14)
上記モード選択機構が、上記可動ハンドルに設置されたスライド可能なボタンを備える、項目10に記載の外科手術用デバイス。
(項目15)
上記モード選択機構が、把持つめを備え、その把持つめは、そのモード選択機構が上記第一の位置にある場合に、上記作動シャフトに規定された第一のスロットと係合する、項目11に記載の外科手術用デバイス。
(項目16)
上記作動シャフトが、上記第一のスロットの近位に配置された第二のスロットを有し、上記モード選択機構が上記第二の位置にある場合に、上記把持つめが、その第二のスロット内に配置される、項目15に記載の外科手術用デバイス。
(項目17)
上記モード選択機構が、スライド可能なボタンおよび旋回可能なヨークを備え、その旋回可能なヨークは、上記ハンドルアセンブリ内に配置され、そして上記可動ハンドルと係合するための第一のアーム、および上記スライド可能なボタンと係合するための第二のアームを有し、そのヨークは、その可動ハンドルがその静止ハンドルから離れて移動する場合に、そのスライド可能なボタンを上記第一の位置に維持する、項目10に記載の外科手術用デバイス。
(項目18)
外科手術用デバイスであって、その外科手術用デバイスは、ハンドルアセンブリを備え、そのハンドルアセンブリは、静止ハンドルを規定するハウジング、可動ハンドル、シャフト、およびそのハウジング内に支持されたモード選択機構を備え、そのモード選択機構は、その可動ハンドル上にスライド可能に支持された、少なくとも1つのスライドボタンと作動的に関連しており、その少なくとも1つのスライドボタンは、第一の位置から第二の位置へと移動可能であり、その第一の位置は、そのデバイスの操作の第一のモードに関連し、そしてその第二の一は、操作の第二のモードに関連し、そのシャフトは、その操作の第一のモードにおいて、そのモード選択機構により係合され、そしてその操作の第二のモードにおいて、そのモード選択機構により脱係合される、外科手術用デバイス。
(項目19)
外科手術用デバイスであって、
可動ハンドルを有するハンドルアセンブリであって、その可動ハンドルは、モード選択機構を有し、そのモード選択機構は、そのハンドルアセンブリのいずれの側からもスライドボタンにアクセス可能であるように、そのハンドルアセンブリ上にスライド可能に支持されたスライドボタンを備える、可動ハンドル;
そのハンドルアセンブリから遠位に延びる細長部材;および
その細長部材の遠位端部分に設置されたツールアセンブリ、
を備える、外科手術用デバイス。
(項目20)
外科手術用デバイスを作動させる方法であって、その方法は、
その外科手術用デバイスの作動シャフトが往復様式で移動するように、その外科手術用デバイスの作動ハンドルを操作する工程であって、その可動ハンドルは、その作動シャフトと係合した係合部材に取り付けられている、工程;
ボタンを作動させて、その係合部材をその作動シャフトから離れるように移動させる工程;および
前進部材がその作動シャフトに係合し、そしてその作動シャフトを遠位方向に前進させるように、その可動ハンドルを操作する工程、
を包含する、方法。
(項目21)
上記作動シャフトが、往復様式で移動して、上記外科手術用デバイスの1対の顎を開閉させる、項目20に記載の方法。
(項目22)
上記前進部材が、上記作動シャフトと係合および脱係合して、上記可動シャフトの1行程より大きくその作動シャフトを前進させる、項目21に記載の方法。
(項目23)
上記前進部材が、上記作動シャフトに係合して上記1対の顎を閉じ、引き続いて、その作動シャフトに係合して上記外科手術用デバイスの上記顎のうちの少なくとも一方からステープルを発射させる、項目22に記載の方法。
【0008】
外科手術用デバイスが開示され、この外科手術用デバイスは、ハンドルアセンブリ、細長部材、および使い捨て装填ユニットを備える。このハンドルアセンブリは、モード選択機構を備え、このモード選択機構は、操作の第一の把持モードと、操作の第二のクランプモードとの間で、外科手術用デバイスを切り替えるように構成される。このハンドルアセンブリは、回転制御部材および関節運動レバーを備える。この回転制御部材は、ハンドルアセンブリに対する細長部材の回転を容易にするように構成される。この関節運動レバーは、細長部材の長手方向軸に対して実質的に垂直な軸の周りでの、ツールアセンブリの関節運動を容易にするように構成される。1つの実施形態において、このツールアセンブリは、複数のステープルを有するカートリッジアセンブリ、およびアンビルアセンブリを備え、これらのカートリッジアセンブリおよびアンビルアセンブリは、このデバイスの操作の第二のクランプモードにおいて、組織をクランプし、そしてステープル留めするように構成される。
【0009】
本開示によれば、外科手術用ステープル留めデバイスが提供され、この外科手術用ステープル留めデバイスは、可動ハンドルを有するハンドルアセンブリ、細長部材、および使い捨て装填ユニット(「DLU」)を備える。このDLUは、遠位端に位置決めされるツールアセンブリを備え、このツールアセンブリは、アンビルアセンブリおよびカートリッジアセンブリを有する。この細長部材は、ハンドルアセンブリに回転可能に固定される。ツールアセンブリは、ステープル留めデバイスであり、そしてハンドルアセンブリは、把持つめを備え、この把持つめは、作動シャフトと係合するように移動可能であり、ツールアセンブリが把持モードで作動することを可能にする。より具体的には、把持つめは、ハンドルアセンブリの反対側にスライド可能に位置決めされた、1対のスライドボタンにより操作され、そして作動シャフトと係合するように選択的に移動可能であり、作動シャフトが、ある距離を移動することを可能にする。この作動シャフトの移動は、可動ハンドルの操作の際に、ツールアセンブリのカートリッジアセンブリとアンビルアセンブリとの接近を起こすが、ステープルの発射は起こさない。
【0010】
本開示の別の局面において、回転制御部材が、ハンドルアセンブリの前端に回転可能に設置されて、ハンドルアセンブリに対する細長部材の回転を容易にする。
【0011】
本開示のなお別の局面において、関節運動レバーが、回転制御部材の近くに設置されて、ツールアセンブリの関節運動を容易にする。
【0012】
本明細書中に開示される外科手術用ステープル留めデバイスの種々の実施形態が、図面を参照して本明細書中に開示される。
【発明の効果】
【0013】
異なる操作モードの間で迅速かつ容易に操作され得るツールアセンブリを有する、内視鏡外科手術用デバイスまたは腹腔鏡外科手術デバイスが、本発明によって提供される。
【図面の簡単な説明】
【0014】
【図1】図1は、本明細書中に開示される外科手術用ステープル留めデバイスの側面斜視図である。
【図2】図2は、図1に示される指示された細部の領域の拡大図である。
【図3】図3は、部品が分離された、図1に示される外科手術用ステープル留めデバイスの近位端の側面斜視図である。
【図4】図4は、図1の断面線4−4に沿って見た、断面後方斜視図である。
【図5】図5は、図3に示される指示された細部の領域の拡大図である。
【図6】図6は、図5のばね支持体の斜視図である。
【図7】図7は、図5の垂直つめの斜視図である。
【図8】図8は、図5のロッキングカムの斜視図である。
【図9】図9は、図3に示される指示された細部の領域の拡大図である。
【図10】図10は、図3の歯付きラックの底面斜視図である。
【図11】図11は、図9に示される図示から90°回転した、把持つめアームの側面斜視図である。
【図12】図12は、図1に示される外科手術用ステープル留めデバイスの側面図である。
【図13】図13は、図12に示される指示された細部の領域の拡大図である。
【図14】図14は、図1のハンドルアセンブリの側面断面図である。
【図15】図15は、ハンドルアセンブリをクランプ/発射モードで図示している、図14に示される指示された細部の領域の拡大図である。
【図16】図16は、図4の断面線16−16に沿って見た側面断面図である。
【図17】図17は、ハウジングが取り外された、図1に示される外科手術用ステープル留めデバイスのハンドルアセンブリの、部分的に切り取った側面斜視図である。
【図18】図18は、歯付きラックに係合する、図15の把持つめを図示する。
【図19】図19は、可動ハンドルが静止ハンドルの方へと旋回したところを図示する、側面断面図である。
【図20】図20は、垂直つめがロッキングカムによって下位置に付勢されたところを図示する、側面断面図である。
【図21】図21は、可動ハンドルが静止ハンドルから離れるように付勢されているところを図示する、側面断面図である。
【図22】図22は、作動シャフトが引き込まれた位置にあるところを図示する、側面断面図である。
【図23】図23は、垂直つめが上位置にあり、そしてスライドボタンが上位置にあり、把持つめを歯付きラックに係合させているところを図示する、側面断面図である。
【発明を実施するための形態】
【0015】
(実施形態の詳細な説明)
本明細書中に開示される把持型顎機構の種々の実施形態が、ここで、図面を参照して詳細に記載される。図面において、同じ参照番号は、数枚の図の各々において、同一または対応する要素を表す。
【0016】
本明細書全体にわたって、用語「近位」とは、デバイスの、操作者に最も近い部分をいい、そして用語「遠位」とは、デバイスの、操作者から最も遠い部分をいう。
【0017】
図1は、一般的に10として示される、本明細書中に開示される外科手術用ステープル留めデバイスの1つの実施形態を図示する。外科手術用ステープル留めデバイス10は、ハンドルアセンブリ13、ハンドルアセンブリ13から遠位に延びる細長部材14、および細長部材14の遠位端に取り外し可能に固定された使い捨て装填ユニット(「DLU」)16を備える。DLU 16は、近位本体部分29(これは、細長部材14の延長部を形成する)、および遠位ツールアセンブリ27(これは、カートリッジアセンブリ26およびアンビルアセンブリ28を備える)を備える。カートリッジアセンブリ26およびアンビルアセンブリ28は、1対の顎をさらに規定する。ツールアセンブリ27は、細長部材14の長手方向軸に対して実質的に垂直な軸の周りで、本体部分29に旋回可能に接続される。カートリッジアセンブリ26は、複数のステープルを収容する。アンビルアセンブリ28は、カートリッジアセンブリ26に対して、カートリッジアセンブリ26から間隔を空けた開位置と、カートリッジアセンブリ26と併置して整列した接近位置またはクランプ位置との間で、移動可能である。あるいは、ツールアセンブリ27は、カートリッジアセンブリ26がアンビルアセンブリ28に対して移動可能であるように、配置され得る。DLU 16は、長さが約30mm〜約60mmである、ステープルの線状の列を適用するように構成される。他の長さ(例えば、45mm)のステープルの線形の列を有するDLUもまた、予測される。
【0018】
ハンドルアセンブリ13は、静止ハンドル18、可動ハンドル20、およびバレル部分19を備える。回転制御部材22が、バレル部分19の前端に回転可能に設置され、ハンドルアセンブリ13に対する細長部材14の回転を容易にする。回転制御部材22は、成形されたプラスチックの半セクション12aおよび12bから形成されるが、他の材料(例えば、金属)および他の製造方法が、予測される。関節運動レバー24もまた、バレル部分19の前端に、回転制御部材22に隣接して設置されて、ツールアセンブリ27の関節運動を容易にする。Millimanらに対する米国特許第5,865,361号(これは、Tyco Healthcare,LPにより所有されている)は、外科手術用ステープル留め装置のための回転制御アセンブリおよび関節運動アセンブリを記載しており、そしてその全体が、本明細書中に参考として援用される。
【0019】
1対の引き込みノブ15が、バレル部分19に沿って移動可能に位置決めされ、以下に詳細に記載されるように(図1を参照のこと)、デバイス10を、引き込まれた位置に戻す。可動ハンドル20の両側の横面の対向する1対の凹部42および48(図2を参照のこと)は、それぞれ、スライドボタン40および45をスライド可能に受容するための寸法にされる(図3を参照のこと)。スライドボタン40は、スライドボタン45と作動的に関連しており、その結果、一方の動きが、他方の動きを引き起こす。スライドボタン40および45は、デバイス10を、「把持」モードと「発射」またはクランプモードとの間で切り替えるように構成される。把持モードにおいて、ツールアセンブリ27は、把持型顎機構として作動するように構成される。すなわち、アンビルアセンブリ28は、カートリッジアセンブリ26との間に組織を把持するために、カートリッジアセンブリ26に対して、開位置と接近位置との間で前後に移動可能である。クランプモードにおいて、ツールアセンブリ27は、クランプ機構として作動するように構成される。すなわち、アンビルアセンブリ28は、カートリッジアセンブリ26との間に組織を把持するためにカートリッジアセンブリに対して移動可能であり、そしてステープルの線状の列を適用する。クランプモードにおいて、使用者は、引き込みノブ15を引き込んでツールアセンブリ27を開き、そして組織を解放し得る。スライドボタン40および45は、それぞれ上昇表面40aおよび45aを備える。上昇表面40aおよび45aは、スライドボタン40および45を、それぞれ凹部42および48の内部で移動させるために外科医の指によって係合されるように、構成される。理解されるように、スライドボタン40および45に対する代替物(例えば、ノブ、レバー、押下可能なボタン、トグル、トリガアセンブリなど)もまた、企図される。
【0020】
ハンドルアセンブリ13は、1対の成形された半セクション12aおよび12bから形成されたハウジング12を備え、このハウジングは、静止ハンドル18、およびハンドルアセンブリ13のバレル部分19を形成する。半セクション12aおよび12bは、熱可塑性材料(例えば、ポリカーボネート)から形成される。あるいは、必要とされる強度要件を有する他の材料(例えば、外科等級の金属)が、ハウジング12を形成するために使用され得る。ハウジング12の半セクション12aおよび12bは、公知の固定技術(例えば、接着剤、溶接、噛み合い構造体、ねじなど)を使用して、互いに固定される。あるいは、他の固定技術が使用され得る。
【0021】
図3を参照すると、可動ハンドル20は、ハウジング半セクション12aと12bとの間に、円柱形部材(図示せず)の回りで回転可能に支持される。この円柱形部材は、可動ハンドル20内の開口部31の中に受容される。付勢部材(図示せず;例えば、ねじりばね)が、可動ハンドル20を静止ハンドル18から離して非圧縮位置に推進するために、備えられ得る。可動ハンドル20は、旋回部材34を受容するような寸法にされた、1対の貫通穴33を備える。前進つめ35は、旋回部材34に回転可能に支持され、そしてばね36によって、作動シャフト90の方へと付勢される。
【0022】
作動シャフト90は、ハウジング12のバレル部分19の内部で、引き込まれた位置と前進位置との間でスライド可能に支持され、そして凹部94を規定する遠位端を備え、この凹部は、制御棒95の近位端97を回転可能に受容するように構成される。作動シャフト90は、歯付きラック92を備える。前進つめ35は、係合フィンガー35aを有し、この係合フィンガーは、ばね36によって、作動シャフト90の歯付きラック92の方へと付勢される。可動ハンドル20が作動されると、すなわち、ねじりばね(図示せず)の付勢に逆らって静止ハンドル18の方へと旋回すると、つめ35の係合フィンガー35aが作動シャフト90の歯付きラック92と係合して、作動シャフト90および制御棒95を遠位に前進させる。
【0023】
図3および図5〜図8を参照すると、垂直つめ120は、ハウジング半セクション12aと12bとの間に規定されたスロット121(図15を参照のこと)内に、スライド可能に位置決めされる。垂直つめ120は、延長位置または上位置(この位置において、垂直つめ120の先端125は、作動シャフト90の遠位端に形成された切抜き部93と係合する)から、引き込まれた位置または下位置(この位置において、垂直つめ120の先端125は、作動シャフト90から間隔を空けている)へと移動可能である。ハウジング半セクション12aと12bとの間に支持されたばね130は、垂直つめ120を延長位置に付勢するように位置決めされる。この延長位置において、垂直つめ120は、作動シャフト90の前進を防止して、デバイス10の発射を防止する。
【0024】
プランジャー30が、ハウジング半セクション12aおよび12b内に形成された、間隔を空けた円筒形チャネル(図示せず)の間に往復可能に支持される。プランジャー30は、カム部材32を備える。ばね(図示せず)が、間隔を空けた円筒形チャネル(図示せず)内で、プランジャー30の各端部に位置決めされ、プランジャー30を、垂直つめ120に形成された1対のカム表面122(図7を参照のこと)の間でカム部材32が中心に位置する位置へと推進し得る。各カム表面122には、プランジャー30のカム部材32を解放可能に受容するための凹部124が形成される。
【0025】
プランジャー30の各端部30aは、静止ハンドル18を通って延び、そしてばね(図示せず)の付勢に逆らって圧縮されて、カム部材32を、垂直つめ120のカム表面122のそれぞれ1つに、強制的に係合させ得る。カム部材32がカム表面122のうちの1つと係合するように移動すると、垂直つめ120は、延長位置から引き込まれた位置へと推進され、垂直つめ120の先端125を作動シャフト90の切抜き部93の外に移動させる(図19〜図23を参照のこと)。それぞれのカム表面122の凹部124内でのカム部材32の位置決めは、垂直つめ120を、引き込まれた位置に保持する。
【0026】
図3および図5を参照すると、ロッキングカムアセンブリ107は、ハウジング12(図1を参照のこと)のバレル部分19内の引き込まれた位置と前進位置との間で支持され、そしてばね支持体110およびカム部材100を備える。このカム部材は、先端102および近位表面100aを有する。プランジャー30は、ばね支持体110の底面に規定される環状凹部112内(図3および図5に示される)に受容され、ばね支持体110をハウジング半セクション12aと12bとの間に維持する。カム部材100は、ばね支持体110に規定されたスロット115内にスライド可能に受容される。カム部材100は、延長位置または遠位位置(この位置において、カム部材100の先端102が垂直つめ120の先端125と係合する)から、引き込まれた位置または近位位置(この位置において、カム部材100の先端102は、垂直つめ120から間隔を空けている)へと移動可能である。引き込まれた位置において、カム部材100の表面100aは、ばね支持体110から間隔を空けている。カム部材100は、ばね105によって近位に付勢され、このばねは、一端において、カム部材100の遠位端に規定された凹部104に固定され、そして他端において、ばね支持体110のスロット115により形成される延長部114と係合するように構成される。延長位置または遠位位置において、カム部材100の先端102は、垂直つめ120の先端125aと係合して、垂直つめ120を引き込まれた位置に保持する。
【0027】
図3、図9、および図11を参照すると、可動ハンドル20は、スライドボタン40および45と作動的に関連する把持つめアセンブリ67を備える。把持つめアセンブリ67は、スライドボタン40および45の操作に応答して、可動ハンドルに対して移動するために構成される。把持つめアセンブリ67は、つめアーム50および把持つめ60を備える。つめアーム50は、つめアーム50の頂端部の外向きに曲がった部分52に規定された傾斜表面55を有する。把持つめ60は、つめアーム50の外向きに曲がった部分52の内部で旋回可能に支持される。スライドボタン45の頂端部は、凹んだ溝48を規定する延長部48aを有する、内向きに曲がった部分46を備える。凹んだ溝48は、つめアーム50の底端部の凹んだ溝58によって規定される延長部58aをスライド可能に受容するような寸法および構成にされる。これに対応して、つめアーム50の凹んだ溝58は、スライドボタン45の延長部48aをスライド可能に受容するような寸法および構成にされる。スライドボタン45の底端部は、コネクタピン44を貫通して受容するように構成された開口部41aを備える。円筒形受部40bは、スライドボタン40の内側表面から外向きに延び、そして可動ハンドル20の凹部42に形成された長手軸方向スロット42a内で並進するような構成および寸法にされる。コネクタピン44は、受部40b内に受容されて、スライドボタン45をスライドボタン40に固定するような寸法にされる。突出部47は、スライドボタン45の横表面に配置され、以下でさらに議論されるように、可動ハンドル20に規定された1対の移動止め108aおよび108b(図4を参照のこと)内にスナップばめの様式で受容されるように構成される。
【0028】
つめアーム50の外向きに曲がった部分52は、凹んだ溝53を備え、この凹んだ溝は、旋回ピン56をスライド可能に受容するような寸法にされた1対の貫通穴57を有する。付勢ばね64は、一端において、旋回ピン62を内部に挿入して受容するために構成され、そして他端において、凹んだ溝53内に挿入されて受容されるように構成される。把持つめ60は、凹部60aを規定する、横方向に延びる1対の延長部60bおよび60cを備える。旋回ピン56は、把持つめ60の底端部の開口部61によって受容される。旋回ピン62は、凹部60aの内部に旋回可能に受容され、その結果、把持つめ60は、つめアーム50に対して、旋回ピン62の周りで近位方向に旋回する。凹んだ溝53は、まっすぐな位置(すなわち、つめアーム50の長手方向軸に沿った位置)と、近位位置または後方位置との間での、把持つめ60の旋回運動に適合するような寸法にされる。横方向の延長部60bは、凹んだ溝53の表面53aに接触し、その結果、把持つめ60の旋回運動が、つめアーム50に対してまっすぐな位置から近位に制限されるように、構成される。横方向の延長部60cは、外向きに曲がった部分52の溝53を通って旋回し、把持つめ60の、近位位置または後方位置への旋回運動を可能にするように、構成される。近位位置または後方位置において、横方向の延長部60cは、旋回ピン62、および従ってばね64を、外向きに曲がった部分52に規定された穴63内に押し込む(図23を参照のこと)。
【0029】
図17を参照すると、ハンドルアセンブリ13(図1を参照のこと)は、ヨーク80をさらに備え、このヨークは、デバイス10をデフォルトの把持モードに戻し、その結果、以下で詳細に議論されるように、スライドボタン40および45が上位置に戻って、把持つめ60を、歯付きラック92の遠位端部のスロットと係合させるように推進するように、構成される。ヨーク80は、円柱形部材(図示せず)の周りで、静止ハンドル18内に回転可能に支持され、この円柱形部材は、ヨーク80の開口部82内に受容される。1対のアーム80aおよび80bが、開口部82から横方向に延びる。矢印「A」により示される方向(図19を参照のこと)に可動ハンドル20を移動させると、すなわち、静止ハンドル18の方へと旋回させると、スライドボタン40および45は、上位置(この位置において、把持つめ60は、作動シャフト90の歯付きラック92のスロット92bと係合する)から下位置(この位置において、把持つめ60は、作動シャフト90の歯付きラック92から間隔を空けている)へと移動可能である。把持つめ60がスロット92b内に位置決めされると、可動ハンドル20の操作の際に、作動シャフト90の制限された前進および引き込みのみが起こり、デバイス10が、把持モードで作動することを可能にする。上位置において、スライドボタン45の突出部47は、移動止め108a内に位置決めされる。スライドボタン45の下向きへの移動は、図4に見られるように、突出部47の、移動止め108aから移動止め108bへの下向きの移動を引き起こす。移動止め108aおよび108b内への突出部47の受容は、外科医に、可聴および/または触覚的な応答を提供し、スライドボタン40および45の位置/モードの変化を示す。矢印「C」により示される方向(図21を参照のこと)での可動ハンドル20の移動の間、すなわち、静止ハンドル18から間隔を空けた初期位置への移動の間、アーム80aの遠位端に形成されたカム部材84は、可動ハンドル20の近位面に規定されたカム作用表面25とスライド可能に係合し、ヨーク80の時計回りの回転を引き起こし、その結果、ヨーク80のアーム80bは、スライドボタン45の頂端部に形成されたポスト43と係合して、スライドボタン40および45を図18の矢印「E」により示される方向に推進し、上位置にする。図23に示されるように、把持つめ60は、作動シャフト90の歯付きラック92のスロット92aによって、下向きに移動させられる。
【0030】
引き込みノブ15(図1を参照のこと)を備える引き込み機構が、結合棒96によって、作動シャフト90の近位端に接続される。結合棒96は、左係合部分96aおよび右係合部分96bを備え、これらの係合部分は、ハウジング半セクション12aおよび12bに形成された細長スロット17を通って延び、そして引き込みノブ15を受容するように構成される。結合棒96の中心部分96cは、作動シャフト90の近位端に隣接して形成された、対向する1対のスロット98内にスライド可能に受容されるような寸法および構成にされる。解放プレート70が、間隔を空けた1対のピン91(図3を参照のこと)によって、作動シャフト90の片側に支持される。ピン91は、作動シャフト90の横面から外向きに延び得、解放プレート70に形成された1対の角度の付いたカムスロット71と係合する。この様式で、解放プレート70は、作動シャフト90と作動的に関連し、そして引き込みノブ15の操作に応答して、この作動シャフトに対して移動するように設置される。
【0031】
使用において、引き込みノブ15が後方すなわち近位に引かれると、結合棒96は、最初、結合棒96が作動シャフト90のスロット98内でスライドするにつれて、解放プレート70を作動シャフト90に対して後方に移動させる。このことが起こると、解放プレート70は、ピン91によって、作動シャフト90に対して下方に移動させられ、これによって、歯付きラック92を覆い、前進つめ35の係合フィンガー35aを歯付きラック92から脱係合させる。一旦、結合棒96が、スロット98の近位端と係合する位置に掛け金をかけられると、引き込みノブ15のさらなる後方への移動は、作動シャフト90の引き込みを引き起こし、従って、制御棒95の後方への引き込みを引き起こす。作動シャフト90は、ばね76によって近位に付勢される。このばねは、一端において、コネクタ75を介して結合棒部分96cに固定され、そして他端において、作動シャフト90のポスト77に固定される。
【0032】
外科手術用ステープル留めデバイス10は、最初、把持モードである。図19を参照すると、可動ハンドル20は、カートリッジアセンブリ26およびアンビルアセンブリ28を、前後に往復する様式で、開いたり接近させたりするように操作され得る。可動ハンドル20は、把持行程を通して、矢印「A」により示される方向に移動される。この把持行程において、可動ハンドル20は、ねじりばね(図示せず)の付勢に逆らって、静止ハンドル18の方へと旋回し、前進つめ35の係合フィンガー35aを移動させて、作動シャフト90に形成された肩部99と係合させる。把持行程を通る可動ハンドル20の引き続く移動は、つめアーム50を、反時計回りに回転させる。つめアーム50の反時計回りの回転は、つめアーム50の外向きに曲がった部分52の傾斜表面55を、カム部材100の近位表面100aと係合させ、カム部材100を、延長位置または遠位位置に付勢する。延長位置または遠位位置において、カム部材100の先端102は、垂直つめ120の先端125aと係合して、垂直つめ120を引き込まれた位置に保持する(図20を参照のこと)。引き込まれた位置において、垂直つめ120は、作動シャフト90から間隔を空け、可動ハンドル20が矢印「C」により示される方向に引き続き移動する際に、作動シャフト90が引き込まれた位置に戻ることを可能にする。
【0033】
図21を参照すると、可動ハンドル20が使用者により解放された後に、付勢部材(図示せず)は、可動ハンドル20を、矢印「C」により示される方向で、その初期位置に戻す。可動ハンドル20がその初期位置に戻ると、ヨーク80のアーム80bは、スライドボタン40、45を上方にスライドさせ、その結果、デバイス10は、把持モードのままになる。スライドボタン40、45を下方にスライドさせると、デバイス10のモードがクランプモードに変わり、その結果、可動ハンドル20を方向「A」に引き続き移動させると、カートリッジアセンブリ26およびアンビルアセンブリ28が組織をクランプし、その結果、カートリッジアセンブリ26およびアンビルアセンブリ28は、可動ハンドル20が解放された後でさえも、接近したままになる。垂直つめ120は、作動シャフト90の切抜き部93と係合するように移動し、作動シャフト90を適所にロックする。プランジャー30が、ハウジング半セクション12aおよび12bの方へと内向きに押されると、プランジャー30のカム部材32は、垂直つめ120のカム表面122と係合し、その結果、カム部材32は、凹部124内に解放可能に受容されて、垂直つめ120を、図22の矢印「D」により示される方向に、その引き込まれた位置に推進する。引き込まれた位置において、垂直つめ120の先端125は、作動シャフト90の切抜き部93の外側にある。垂直つめ120は、プランジャー30のカム部材32と、垂直つめ120のカム表面122の凹部124との間の係合によって、引き込まれた位置に維持される。
【0034】
可動ハンドル20がその初期位置に戻ると、ヨーク80は、時計回りに回転するように推進される。ヨーク80の時計回りの回転は、ヨーク80のアーム80bを、スライドボタン45の係合ポスト43と強制的に係合させて、スライドボタン40および45を、上位置に推進する。上位置において、把持つめ60は、歯付きラック92のスロット92aによって(歯付きラック92が前進しているのでスロット92bではない(図23を参照のこと))、下向きに旋回するように付勢される。デバイス10は、ここで、発射の準備ができたモードである。可動ハンドル20は、可動ハンドルを方向「A」に移動させることにより作動され、作動シャフト90を前進させ、ステープルをカートリッジアセンブリ26から展開し得る。可動ハンドル20は、図19において矢印「A」により示される方向に、第二の発射行程を通して移動させられる。この発射工程の間、前進つめ35は、作動シャフト90の歯付きラック92と係合して、作動シャフト90および制御棒95を遠位に前進させる。図19を再度参照すると、作動シャフト90が遠位に移動すると、作動シャフト90に形成された肩部99が垂直つめ120と係合して、垂直つめ120を下方に移動させ、プランジャー30のカム部材32を、垂直つめ120のカム表面122から脱係合させ、そしてばね(図示せず)がプランジャー30をニュートラル位置(すなわち、圧縮されていない位置)に戻すことを可能にする。可動ハンドル20の、図21に矢印「C」により示される方向での引き続く移動は、歯付きラック92をさらに前進させる。引き込みノブ15は、作動シャフト90、および従って制御棒95を後方に引き込み、把持つめ60を歯付きラック92のスロット92b内で再度整列させるために使用される。デバイス10は、把持の準備ができたモードにある。なぜなら、ヨーク80がスライドボタン45を上位置に維持するからである。
【0035】
内視鏡手順において、しばしば、クランプおよびステープル留めが実施され得る前に、組織がわきへ操作されるかまたは引かれて、外科医が組織に接近し、そして/または組織を見ることを可能にしなければならない。本開示により理解される、選択可能な操作のモードは、ツールアセンブリ27が可動ハンドル20の作動により操作され得る把持モードでデバイス10を作動させて、組織を把持および操作し、その後、デバイス10を、ツールアセンブリ27が組織をクランプしてステープルを適用するように構成される、作動のクランプモードに容易に切り替える、という利点を外科医に与える。
【0036】
図14は、デバイス10の引き込み機構の作動を図示する。使用において、引き込みノブ15が外科医によって近位に引かれると、結合棒96は、最初、結合棒96が作動シャフト90のスロット98内でスライドするにつれて、解放プレート70を作動シャフト90に対して後方に移動させ、その結果、ピン91が解放プレート70にカム作用して解放プレート70を下向きに移動させ、作動シャフト90の歯付きラック92を覆う位置にし、そしてつめ120のフィンガー125を歯付きラック92から脱係合させる。結合棒96が後方に引かれ、結合棒がスロット98の後端に係合する位置まで移動すると、引き込みノブ15のさらなる後方への移動は、作動シャフト90および制御棒95の近位への移動を引き起こす。
【0037】
代替の実施形態において、把持モードを有するがプランジャー30を有さない、外科手術用ステープル留めデバイス10が、提供され得る。この実施形態において、垂直つめ120およびロッキングカムアセンブリ107は、取り除かれる。
【0038】
デバイス10は、図19および図20に従って、把持モードで開始する。可動ハンドル20は、把持つめ60がスロット92bに係合すると、前後に移動させられて、ツールアセンブリ27の顎を開閉させ得る。垂直つめ120およびロッキングカムアセンブリ107は、この実施形態において、取り除かれる。
【0039】
スライドボタン40および45を下方にスライドさせると、把持つめ60がスロット92bから離れるように移動する。可動ハンドル20が操作されて組織をクランプすると、把持つめ60は、スロット92a内に移動する。可動ハンドル20がさらに操作されると、前進つめ35が歯付きラック92を前進させて、ステープルを発射させる。可動ハンドル20の複数の行程が使用されて、歯付きラック92を前進させ、前進つめ35は、歯付きラック92と繰り返し係合および脱係合する。ヨーク80は、発射の間、スライドボタン40および45を上位置に維持する。引き込みノブ15が使用されて、歯付きラック92を引き込んだ後に、把持つめ60は、スロット92bと整列し、そしてデバイス10は、再度把持モードになる。
【0040】
種々の改変が、本明細書中に開示された実施形態に対してなされ得ることが理解される。例えば、開示された外科手術用ステープル留めデバイスは、他の外科手術用デバイス(例えば、クリップアプライア、デシケータ、電気外科密封デバイスなど)と関連して使用され得ることが、予測される。さらに、このデバイスはまた、ステープラーまたはファスナーを排出するデバイス以外のツールアセンブリ(例えば、密封デバイス(電気外科用のものおよび非電気外科用のもの)など)を備え得る。このデバイスの操作のモードを変化させるための、ボタンまたは他のアクチュエータが、ハンドルアセンブリの片側または両側に提供され得る。従って、上記説明は、限定と解釈されるべきではなく、単に、好ましい実施形態の例示とみなされるべきである。当業者は、添付の特許請求の範囲の精神および範囲内で、他の改変を予測する。
【符号の説明】
【0041】
10 外科手術用ステープル留めデバイス
13 ハンドルアセンブリ
14 細長部材
16 使い捨て装填ユニット(「DLU」)
17 細長スロット
18 静止ハンドル
20 可動ハンドル
22 回転制御部材
26 カートリッジアセンブリ
27 ツールアセンブリ
28 アンビルアセンブリ
35 前進つめ
40,45 スライドボタン
50 つめアーム
60 把持つめ
67 把持つめアセンブリ
80 ヨーク
90 作動シャフト
120 垂直つめ
130 ばね
【特許請求の範囲】
【請求項1】
明細書に記載の発明。
【請求項1】
明細書に記載の発明。
【図3】


【図4】
【図5】
【図12】
【図15】
【図18】
【図21】
【図23】
【図1】
【図2】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図16】
【図17】
【図19】
【図20】
【図22】
【図4】
【図5】
【図12】
【図15】
【図18】
【図21】
【図23】
【図1】
【図2】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図16】
【図17】
【図19】
【図20】
【図22】
【公開番号】特開2012−254323(P2012−254323A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2012−183481(P2012−183481)
【出願日】平成24年8月22日(2012.8.22)
【分割の表示】特願2007−234785(P2007−234785)の分割
【原出願日】平成19年9月10日(2007.9.10)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成24年8月22日(2012.8.22)
【分割の表示】特願2007−234785(P2007−234785)の分割
【原出願日】平成19年9月10日(2007.9.10)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]