
把持連結機構及び移動装置群
【課題】把持機構と連結機構を備えていても小型化かつ低コストで構成でき、また、両機構の相互干渉を防止することができる把持連結機構及びこの把持連結機構を有する移動装置と被連結部材を有する移動装置を備えた移動装置群を提供することにある。
【解決手段】外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構20、把持機構に搭載され、外部の被連結部材40に対し連結及び連結解除可能な連結機構30、把持機構に搭載され、把持機構の把持及び把持開放並びに格納を動作させると共に、連結機構の連結及び連結解除を動作させる1つの駆動機構50を備える。これにより、把持機構の専用の駆動機構と連結機構の専用の駆動機構を別々に搭載する必要が無いと共に、連結機構と駆動機構を把持機構に集約しているので、小型化かつ低コストな把持連結機構として構成することができる。
【解決手段】外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構20、把持機構に搭載され、外部の被連結部材40に対し連結及び連結解除可能な連結機構30、把持機構に搭載され、把持機構の把持及び把持開放並びに格納を動作させると共に、連結機構の連結及び連結解除を動作させる1つの駆動機構50を備える。これにより、把持機構の専用の駆動機構と連結機構の専用の駆動機構を別々に搭載する必要が無いと共に、連結機構と駆動機構を把持機構に集約しているので、小型化かつ低コストな把持連結機構として構成することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外部の物体を把持等可能な把持機構と、被連結部材に対し連結等可能な連結機構と、把持機構を動作させると共に連結機構を動作させる1つの駆動機構とを備えた把持連結機構及びこの把持連結機構を有する移動装置と被連結部材を有する移動装置を備えた移動装置群に関する。
【背景技術】
【0002】
従来より傾斜面、凹凸面、段差等がある比較的不整地な場所や階段等をスムーズに移動可能な移動装置として、無限軌道を備えた装置、即ち複数のプーリとプーリ間に掛け渡されたベルトにより移動可能なクローラが多用されている。そして、例えば被災地や月面等における探査機として利用可能とするために、グリッパを有するアームを搭載したクローラで成る移動装置が開発されている。ところが、このグリッパを有するアームは通常はクローラの上部に取り付けられるため、移動装置の重心は比較的上方に位置することになる。このため、傾斜面の傾斜角、凹凸面の凹凸高さ、段差や階段の高さが大きいときは、移動装置が当該傾斜面等を乗り越える際に転倒するおそれがある。そこで、複数台の移動装置を連結アームにより連結した移動装置が提案されている。このような移動装置によれば、1台の移動装置が上記傾斜面等を乗り越える際には、他の移動装置は平坦面に静止して移動中の移動装置を支えて転倒を防止することができる(非特許文献1参照)。
【0003】
【非特許文献1】"Helios VII a new vehicle for disaster response (Mechanical design and basic experiments)", M. Guarnieri, P. Debenest, T. Inoh, E. Fukushima and S. Hirose1, Journal of Advanced Robotics. Special Issue on Rescue Robotics. p.901-927, Vol.19, n.18, 2005
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述した複数台の移動装置は、連結アームにより連結されているため、比較的大型の装置となり、狭小の場所へ潜入させることが困難な場合がある。そこで、連結アームを駆動機構により連結・連結解除可能な構造とすれば良いが、グリッパを有するアームの駆動機構と連結アームの駆動機構を別々に搭載する必要があるため、移動装置が大型化すると共にコスト高になるおそれがある。更に、グリッパを有するアームを駆動するときは連結アームが干渉するおそれがあり、一方、連結アームを駆動するときはグリッパを有するアームが干渉するおそれがある。
【0005】
本発明は、上記のような課題に鑑みなされたものであり、その目的は、把持機構と連結機構を備えていても小型化かつ低コストで構成でき、また、両機構の相互干渉を防止することができる把持連結機構及びこの把持連結機構を有する移動装置と被連結部材を有する移動装置を備えた移動装置群を提供することにある。
【課題を解決するための手段】
【0006】
上記目的達成のため、本発明の把持連結機構では、外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構と、当該把持機構に搭載され、外部の被連結部材に対し連結及び連結解除可能な連結機構と、前記把持機構に搭載され、前記把持機構の把持及び把持開放並びに格納を動作させると共に、前記連結機構の連結及び連結解除を動作させる1つの駆動機構とを備えたことを特徴としている。これにより、把持機構の専用の駆動機構と連結機構の専用の駆動機構を別々に搭載する必要が無いと共に、連結機構と駆動機構を把持機構に集約しているので、小型化かつ低コストな機構群として構成することができる。
【0007】
また、前記駆動機構は、前記連結機構を前記被連結部材に対し連結状態としたときは、前記把持機構を格納状態とし、前記連結機構を前記被連結部材に対し連結解除状態としたときは、前記把持機構を把持及び把持開放可能状態とすることを特徴としている。これにより、把持機構と連結機構を1つに集約して連動、即ち把持機構を把持動作させるときは連結機構を連結解除動作させ、連結機構を連結動作させるときは把持機構を格納動作させるので、両機構の相互干渉を防止することができる。
【0008】
また、前記把持機構は、前記物体を把持及び把持開放するグリッパと、当該グリッパが把持及び把持開放動作自在に取り付けられたアームとを備え、前記連結機構は、前記アームに内蔵された、前記被連結部材を挟持及び挟持開放する連結爪と、当該連結爪の挟持状態をロック及びロック解除する連結爪ロックとを備え、前記駆動機構は、前記グリッパを前記アームに沿って格納するときに、前記連結爪を前記連結爪ロックによりロックすることを特徴としている。これにより、グリッパはアームの外側で動作し、連結爪と連結爪ロックはアームの内側で動作することになるので、両機構は相互に干渉することは無い。また、前記グリッパは、多関節構造であることを特徴としている。これにより、把持及び把持開放並びに格納の動作の柔軟性を高めることができる。また、前記グリッパを前記アームに沿って格納する際に案内するグリッパガイドが、前記アームに設けられていることを特徴としている。これにより、グリッパを所定の格納位置に確実に格納することができる。
【0009】
また、前記駆動機構は、前記グリッパに係止されたワイヤと、当該ワイヤが巻回されたプーリと、当該プーリを移動させるボールネジと、当該ボールネジを回転させるモータとを備え、前記モータを駆動させて前記ボールネジを回転させ、前記プーリを移動させて前記ワイヤを引張・弛緩させることにより前記グリッパを動作させることを特徴としている。これにより、駆動機構を簡易な構成とすることができる。また、前記連結爪ロックは前記プーリと一体化されており、前記モータを駆動させて前記ボールネジを回転させ、前記連結爪ロックを移動させることにより前記連結爪の挟持状態をロック及びロック解除することを特徴としている。これにより、把持機構と連結機構を容易に連動させることができる。
【0010】
また、前記被連結部材は、球状の連結爪開閉部と、当該連結爪開閉部の径よりも小径の円筒状であって、当該円筒一端面が前記連結爪開閉部と一体化された連結爪把持部と、当該連結爪把持部の円筒他端面が固定された台座部とを備え、前記連結爪開閉部の頂部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を挿入し、前記連結爪把持部を前記連結爪により把持させて連結させ、また前記連結爪開閉部の底部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を抜き取って連結解除することを特徴としている。これにより、連結爪自体は駆動部分を持たなくても被連結部材と自動的に連結及び連結解除することができる。
【0011】
上記目的達成のため、本発明の移動装置群では、少なくとも第1の移動装置と第2の移動装置を備えた移動装置群であって、上記各把持機構、上記各連結機構及び上記各駆動機構は、前記第1の移動装置に搭載され、上記各被連結部材は、前記第2の移動装置に搭載されていることを特徴としている。これにより、上記各作用効果を奏する移動装置群を提供することができる。また、前記第1及び第2の移動装置は、クローラを備えていることを特徴としている。これにより、比較的不整地な場所においても容易に移動することができる。
【発明を実施するための最良の形態】
【0012】
本発明の実施形態について、図面を参照して説明する。尚、以下に説明する実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0013】
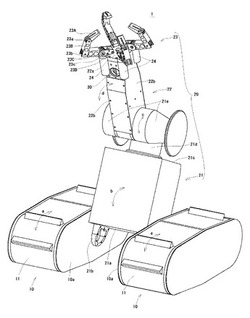
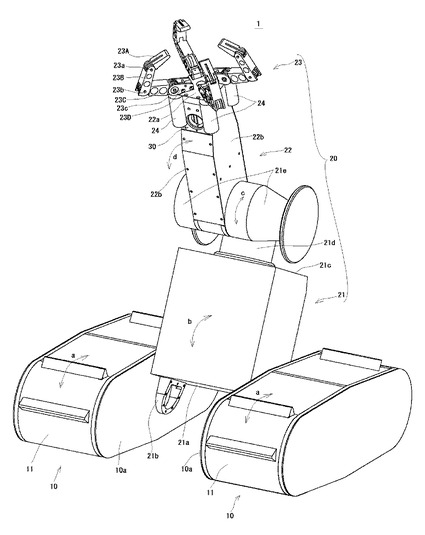
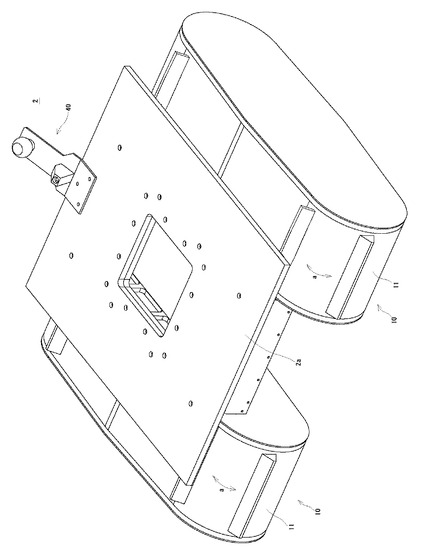
図1は、本発明の一実施の形態に係る把持連結機構を備えた主移動装置を示す斜視図、図2は、本発明の一実施の形態に係る被連結部材を備えた副移動装置を示す斜視図である。図1に示す主移動装置(第1の移動装置)1は、平行に配置された一対のクローラ10の上部に把持機構20及び連結機構30が搭載された構成となっている。また、図2に示す副移動装置(第2の移動装置)2は、主移動装置1と同様の平行に配置された一対のクローラ10を連結する本体2aの上部に被連結部材40が搭載された構成となっている。
【0014】
クローラ10は、前後に配置された図示しない一対のプーリの間にベルト11が掛け渡され、プーリ間に図示しないモータとギア機構等が配置されている。そして、クローラ10は、モータの駆動力がギア機構等を介してプーリに伝達されることにより、ベルト11が図示矢印a方向に回転駆動されて前後移動及び旋回する。このように主移動装置1と副移動装置2は、クローラ10を備えているので、傾斜面、凹凸面、段差等がある比較的不整地な場所や階段等においても容易に移動することができる。
【0015】
把持機構20は、図1に示すように、本体21とアーム22とグリッパ23を備えている。本体21は、略立方体の箱状に形成されて一対のクローラ10の間に配置され、本体底面21aの両側に設けられた本体支持部21b(図では片方のみを示す)が一対のクローラ10の対向する側面10aに取り付けられている。そして、本体21は、クローラ10に内蔵されている図示しないモータとギア機構等により、本体支持部21bを中心に図示矢印b方向(ベルト11の回転駆動方向aと同一)に旋回する。
【0016】
更に、本体21の上面21cには、円筒状のアーム支持部21dが突設され、アーム支持部21dの周面両側には、アーム状の一対の回転部21eが取り付けられている。即ち、一対の回転部21eは、後端側がアーム支持部21dの周面両側に回転可能に取り付けられており、先端側にはアーム22の後端が回転可能に取り付けられている。そして、一対の回転部21eは、アーム支持部21dに内蔵されている図示しないモータとギア機構等により、本体21の回転軸に対し平行な軸を中心に図示矢印c方向(ベルト11の回転駆動方向aと同一)に旋回する。
【0017】
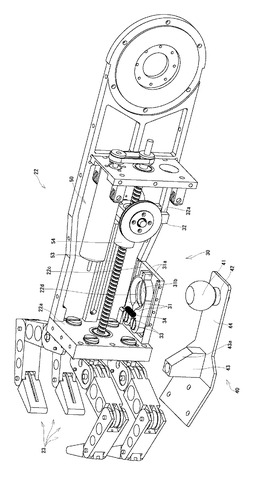
アーム22は、図1に示すように、略直方体の箱状に形成されて後端が一対の回転部21eの先端の間に回転可能に取り付けられている。そして、アーム22は、回転部21eに内蔵されている図示しないモータとギア機構等により、回転部21eの回転軸に対し平行な軸を中心に図示矢印d方向(ベルト11の回転駆動方向aと同一)に旋回する。更に、アーム22は、先端面22aにグリッパ23が取り付けられ、先端面22a側の4つの角部にはグリッパ23を格納する際の案内となる略円柱状のグリッパガイド24(図では3つのみを示す)が取り付けられ、連結機構30と、把持機構20及び連結機構30を駆動する図3に示す駆動機構50が内蔵されている。尚、連結機構30と駆動機構50の詳細は後述する。
【0018】
グリッパ23は、図1に示すように、アーム22の先端面22aに十字形に4本取り付けられており、それぞれが3つの関節を備えている。グリッパ23の先端から見て第1関節23aよりも先の部分(以下、第1グリップ部23Aという)及び第1関節23aと第2関節23bの間の部分(以下、第2グリップ部23Bという)は、内側に略90°折り曲げ可能に構成されている。また、第2関節23bと第3関節23cの間の部分(以下、第3グリップ部23Cという)は、内側から外側にかけて略180°折り曲げ可能に構成されている。そして、第3関節23cを支持する部分(以下、第4グリップ部23Dという)は、アーム22の先端面22aに沿って略45°回転可能に構成されている。
【0019】
4本のグリッパ23は、図1に示すようにアーム22の先端面22aにて第1〜第3グリップ部23A〜23Cが窄み若しくは拡がることにより、外部の物体を把持若しくは把持開放することができると共に、第1〜第3グリップ部23A〜23Cが直線状に伸び、第3の関節23cにて外側に折れ曲がってアーム22の両側面22bに当接することにより、アーム22の両側面22bに沿わせた格納位置に格納することができる。尚、このグリッパ23の格納動作の詳細については後述する。
【0020】
以上のような構成の把持機構20を備えた主移動装置1によれば、前後移動及び旋回可能な一対のクローラ10と前後に旋回可能な本体21、回転部21e、アーム22を備えていると共に、多関節のグリッパ23を備えているので、把持対象の物体がどのような形状であっても、また、どのような位置にあっても、グリッパ23を当該位置に移動させてグリッパ23により当該物体を容易かつ確実に把持させることができる。
【0021】
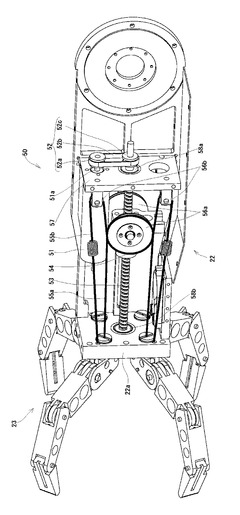
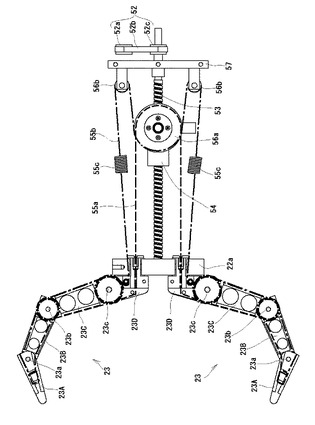
図3は、駆動機構50の詳細を示す斜視図である。駆動機構50は、駆動モータ51、モータ用プーリ機構52、ボールネジ53、ボールネジナット54、2本の第1ワイヤ55a、2本の第2ワイヤ55b、2つの第1プーリ56a、4つの第2プーリ56bを備えている。アーム22の内部には、先端面22aに対し所定距離を開けて平行に配置された駆動機構取付板57が固定されている。この駆動機構取付板57には、駆動モータ51の駆動軸51aがアーム22の後方に向かって貫通するように取り付けられていると共に、ボールネジ53の一端がアーム22の後方に向かって貫通するようにベアリング58aを介して取り付けられている。尚、ボールネジ53の他端はアーム22の先端面22aにベアリング58bを介して取り付けられている。
【0022】
更に、アーム22の先端面22aに対向する駆動機構取付板57の面の4つの角部には、4つの第2プーリ56b(図では便宜上手前の2つのみを示す)が回転自在となるようにそれぞれ取り付けられている。モータ用プーリ機構52は、駆動モータ51の駆動軸51aに嵌入されたプーリ52aとボールネジ53の一端に嵌入されたプーリ52cとこれらのプーリ52a、52cを連結するベルト52bを備えており、駆動モータ51の駆動力をボールネジ53に伝達する。2つの第1プーリ56aは、ボールネジナット54の両側にそれぞれ固定されている。従って、ボールネジナット54がボールネジ53の回転によりボールネジ53に沿って移動するときは、2つの第1プーリ56aも移動することになる。
【0023】
第1ワイヤ55aは、グリッパ23と第1プーリ56aを連結するように掛け回されている。第2ワイヤ55bは、グリッパ23と第2プーリ56bを連結するように掛け回されている。即ち、1本の第1ワイヤ55aは、図示手前の2本のグリッパ23と図示手前の第1プーリ56aを連結するように掛け回され、他の1本の第1ワイヤ55a(図では便宜上示さず)は、図示奥側の2本のグリッパ23と図示奥側の第1プーリ56aを連結するように掛け回されている。
【0024】
また、1本の第2ワイヤ55bは、図示手前の2本のグリッパ23と図示手前の2つの第2プーリ56bを連結するように掛け回され、他の1本の第2ワイヤ55b(図では便宜上示さず)は、図示奥側の2本のグリッパ23と図示奥側の2つの第2プーリ56bを連結するように掛け回されている。このように、2本の第1ワイヤ55aと2本の第2ワイヤ55bは、対称的に配置されているため、4本のグリッパ23を同時に動作させることができる。次に、第1ワイヤ55aと第2ワイヤ55bの詳細な掛け回し状態とその動作例を図4及び図5を参照して説明する。尚、上述したように2本の第1ワイヤ55aと2本の第2ワイヤ55bは対称配置されているので、図4では便宜上、1本の第1ワイヤ55aと1本の第2ワイヤ55bのみを示す。
【0025】
図4は、第1ワイヤ55aと第2ワイヤ55bの詳細な掛け回し状態を示す平面図、図5は、その動作例を示す斜視図である。図4の破線で示す第1ワイヤ55aは、一端が図示上部のグリッパ23の第1グリップ部23Aの外側に係止された後、第1グリップ部23Aの内側から第2グリップ部23Bの内側を通されて第2関節23bに巻回される。更に、第3グリップ部23Cの内側を通されて第3関節23cに巻回され、アーム22の先端面22aの図示上部に貫通して取り付けられているグリッパ23の第4グリップ部23D内を通されて第1プーリ56aに巻回される。
【0026】
そして、アーム22の先端面22aの図示下部に貫通して取り付けられているグリッパ23の第4グリップ部23D内を通されて第3関節23cに巻回され、第3グリップ部23Cの内側を通されて第2関節23bに巻回される。更に、第2グリップ部23Bの内側から第1グリップ部23Aの内側を通され、最終的に当該第1ワイヤ55aの他端が第1グリップ部23Aの外側に係止される。
【0027】
図4の一点鎖線で示す第2ワイヤ55bは、一端が図示上部のグリッパ23の第1グリップ部23Aの内側に係止された後、第1グリップ部23Aの外側から第2グリップ部23Bの外側を通されて第2関節23bに巻回される。更に、第3グリップ部23Cの外側を通されて第3関節23cに巻回され、アーム22の先端面22aの図示上部に貫通されて当該第2ワイヤ55bの他端が図示上部の引張コイルバネ55cの一端に係止される。更に、新たな第2ワイヤ55bの一端が図示上部の引張コイルバネ55cの他端に係止された後、図示上部の第2プーリ56bに巻回され、第1プーリ56aに巻回される。
【0028】
そして、図示下部の第2プーリ56bに巻回され、当該第2ワイヤ55bの他端が図示下部の引張コイルバネ55cの一端に係止される。更に、新たな第2ワイヤ55bの一端が図示下部の引張コイルバネ55cの他端に係止された後、アーム22の先端面22aの図示下部に貫通されて図示下部のグリッパ23の第3関節23cに巻回される。そして、第3グリップ部23Cの外側を通されて第2関節23bに巻回され、第2グリップ部23Bの外側から第1グリップ部23Aの外側を通され、最終的に当該第2ワイヤ55bの他端が第1グリップ部23Aの内側に係止される。
【0029】
このような構成によれば、図5(A)に示すように、第1プーリ56aがアーム22の先端面22aに最も近接しているときは、第2ワイヤ55bが引張コイルバネ55cと共に引張られて第1ワイヤ55aが緩む。従って、グリッパ23の第1グリップ部23A及び第2グリップ部23Bは直線状に伸び(図ではグリッパ23の第1グリップ部23A及び第2グリップ部23Bは便宜上省略されている)、第3グリップ部23Cは第3関節23cで外側に最大限折れ曲がるので、グリッパ23はアーム22の側面22bに沿うことになる。
【0030】
次に、図5(B)に示すように、第1プーリ56aがアーム22の先端面22aから離間する方向へ移動したときは、第1ワイヤ55aが引張られて第2ワイヤ55bが緩む。従って、グリッパ23の第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、第1関節23a、第2関節23b及び第3関節23cでそれぞれ内側に折れ曲がるので、グリッパ23は外部にある物体(図示せず)の把持を開始することになる。尚、このときの第2ワイヤ55bの弛み分は引張コイルバネ55cの収縮に吸収される。
【0031】
更に、図5(C)に示すように、第1プーリ56aがアーム22の先端面22aから最も離間する方向へ移動したときは、第1ワイヤ55aが更に引張られて第2ワイヤ55bが緩む。従って、グリッパ23の第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、第1関節23a、第2関節23b及び第3関節23cでそれぞれ更に内側に折れ曲がるので、グリッパ23は外部にある物体(図示せず)を把持することになる。尚、このときの第2ワイヤ55bの弛み分も引張コイルバネ55cの収縮に吸収される。
【0032】
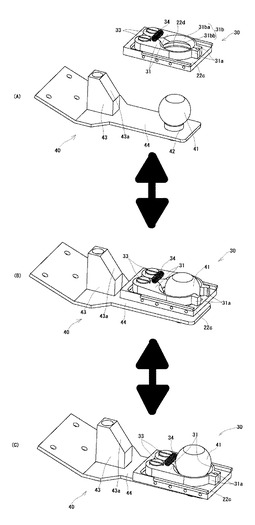
図6は、連結機構30と被連結部材40の詳細を示す斜視図、図7は、その動作例を示す斜視図である。連結機構30は、一対の連結爪31と連結爪ロック32を備えている。連結爪31は、先端側が半円の円弧状(一対の連結爪31は左右対称の円弧状)に形成され、更に先端には直方体状の凸部31aが突設されており、後端側がピン33によりアーム22の底面22c上に旋回自在に取り付けられている。そして、一対の連結爪31は、並設されて後端側が引張コイルバネ34に係止されており、先端側には後述する被連結部材40を構成する連結爪開閉部41の径よりも小さく、連結爪把持部42の径よりも若干大きい径の円形の穴31bが形成され、更に先端には2つ分の直方体状の凸部31aが形成される。連結爪ロック32は、矩形板状に形成されており、一端側には当接している一対の連結爪31の凸部31aを挟み込むことが可能な凹部32aが設けられている。そして、連結爪ロック32は、凹部32aが連結爪31の凸部31aと相対するように、駆動機構50を構成するボールネジナット54に固定されている。
【0033】
被連結部材40は、連結爪開閉部41と連結爪把持部42と連結爪案内部43と台座部44を備えている。連結爪開閉部41は球状に形成され、連結爪把持部42は連結爪開閉部41の径よりも小径の円筒状に形成されている。そして、連結爪把持部42の一端面が連結爪開閉部41と一体化され、連結爪把持部42の他端面が台座部44の一端上に固定されている。連結機構30の一対の連結爪31は、連結爪開閉部41の頂部に押圧されることにより連結爪開閉部41の球面に沿って開いた後に閉じ、最終的に連結爪把持部42を把持する。
【0034】
連結爪案内部43は、楔状に形成されており、連結爪開閉部41の固定部位から所定間隔あけた台座部44の他端上に固定されている。即ち、アーム22の先端面22aの下部が連結爪案内部43の楔状部分43aに当接してアーム22が案内されたときに、連結爪開閉部41がアーム22の底面22cに開けられた連結爪開閉部41の径よりも若干大きい径の穴22dに位置決めされて挿入されるように、連結爪案内部43は台座部44の他端上に固定されている。台座部44は、略矩形状に形成されており、図2に示すように一端側が副移動装置2の本体2aから突出するように他端側が本体2a上に固定されている。
【0035】
このような構成において、アーム22を被連結部材40の上方から下方に移動させて、図7(A)に示すように、アーム22の底面22cに穿孔されている穴22dを被連結部材40の連結爪開閉部41の上方に位置決めする。そして、アーム22を降下させて穴22dの中に連結爪開閉部41を挿入するが、このとき穴22dと連結爪開閉部41の位置が多少ずれていても、アーム22の先端面22aの下部が連結爪案内部43の楔状部分43aに当接して沿うので、穴22dの中に連結爪開閉部41を確実に挿入することができる。
【0036】
そして、図7(B)に示すように、連結爪開閉部41が穴22dの中に挿入されると更に連結爪31の穴31bの中に挿入され、一対の連結爪31に当接して一対の連結爪31を両側に徐徐に押し広げる。続いて、一対の連結爪31は、引張コイルバネ34の収縮力により連結爪開閉部41の球面に沿って徐徐に狭まり、最終的には、図7(C)に示すように、連結爪把持部42の部分で完全に閉じて連結爪把持部42を把持する。
【0037】
一方、図7(C)に示す状態からアーム22を上昇させると、図7(B)に示すように、一対の連結爪31は、連結爪開閉部41の球面に沿って徐徐に広がり、最終的には、図7(A)に示すように、連結爪開閉部41は、一対の連結爪31の穴31b及びアーム22の穴22dから抜ける。このとき、一対の連結爪31は、引張コイルバネ34の収縮力により自動的に閉じる。尚、一対の連結爪31の穴31bの内面には、連結爪開閉部41の挿抜が容易となるように、逆向きの面取り31ba、31bbが施されている。
【0038】
以上のような構成の把持機構20、連結機構30及び駆動機構50が搭載された主移動装置1は、通常は単独で移動して外部にある物体を把持する。これにより、比較的狭小の場所であっても容易に潜入することができる。そして、別の場所に移動するときは、被連結部材40が搭載された副移動装置2と連結して移動する。これにより、例えば主移動装置1が傾斜面、凹凸面、段差等がある比較的不整地な場所や階段等を乗り越える際には、副移動装置2は平坦面に静止して移動中の主移動装置1を支えることにより、主移動装置1の転倒を防止することができる。ここで、本実施形態の把持連結機構は、1つの駆動機構50が把持機構20と連結機構30を駆動するが、解決課題でも述べたような把持機構20と連結機構30の相互干渉が生じないように構成されており、以下に図面を参照して説明する。
【0039】
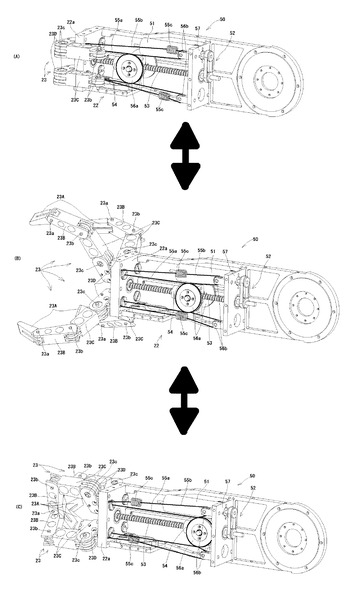
図8は、駆動機構50による把持機構20と連結機構30の駆動状態を示す斜視図、図9は、そのときの把持機構20の状態を正面から見た図である。主移動装置1が副移動装置2と連結する際は、図8(A)に示すように、アーム22を被連結部材40の上方に移動させる。このとき、グリッパ23は、第1グリップ部23A及び第2グリップ部23Bが第1関節23a及び第2関節23bでそれぞれ内側に折れ曲がって物体を把持可能な状態にあり、ボールネジナット54に固定されている第1プーリ56aは駆動機構取付板57に近接して位置している。
【0040】
そして、アーム22を降下させて、図8(B)に示すように、アーム22の底面22cに穿孔されている穴22d及び連結爪31の穴31bの中に被連結部材40の連結爪開閉部41を挿入すると共に、駆動モータ51を駆動してモータ用プーリ機構52を介してボールネジ53を回転させ、ボールネジナット54をアーム22の先端面22a方向に移動させる。すると、ボールネジナット54に固定されている第1プーリ56aは、第2ワイヤ55bを引張ると同時に第1ワイヤ55aを緩めるので(図では第1ワイヤ55aと第2ワイヤ55bは便宜上省略されている)、グリッパ23は、徐徐に開いて第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは直線状に伸びる。
【0041】
更に、図8(C)に示すように、被連結部材40の連結爪開閉部41を挿入させて、連結爪把持部42を連結爪31で把持させると共に、駆動モータ51を駆動してモータ用プーリ機構52を介してボールネジ53を回転させ、ボールネジナット54をアーム22の先端面22aに近接させる。すると、ボールネジナット54に固定されている第1プーリ56aは、第2ワイヤ55bを引張ると同時に第1ワイヤ55aを緩めるので(図では手前の第1プーリ56aと第1ワイヤ55a及び第2ワイヤ55bは便宜上省略されている)、グリッパ23は、第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cが直線状に伸びたままで第3関節23cで外側に最大限折れ曲がる。
【0042】
このとき、図9(A)及び(B)に示すように、第1グリップ部23A、第2グリップ部23B(図では第1グリップ部23A及び第2グリップ部23Bは便宜上省略されている)及び第3グリップ部23Cは、円柱状のグリッパガイド24の周面に当接して案内される。即ち、直線状に伸びた第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、第3関節23cで外側に折れ曲がるときにグリッパガイド24の周面に沿うと共に、第4グリップ部23Dがアーム22の先端面22a上で図示矢印a方向に旋回する。従って、直線状に伸びた第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、最終的にはアーム22の側面22bに沿って当接することになり、把持機構20は格納されることになる。
【0043】
そして、このグリッパ23の格納動作と同時に、図8(C)に示すように、ボールネジナット54に固定されている連結爪ロック32の凹部32aが一対の連結爪31の凸部31aに嵌り込んで挟み込むので、一対の連結爪31は連結爪把持部42を把持した状態で開かないようにロックされることになる。従って、連結爪開閉部41は連結爪31の穴31aから抜けなくなり、連結機構20と被連結部材40は連結されることになる。
【0044】
以上のように、本実施形態の把持連結機構によれば、外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構20と、当該把持機構20に搭載され、外部の被連結部材40に対し連結及び連結解除可能な連結機構30と、把持機構20に搭載され、把持機構20の把持及び把持開放並びに格納を動作させると共に、連結機構30の連結及び連結解除を動作させる1つの駆動機構50とを備えているので、把持機構20の専用の駆動機構と連結機構30の専用の駆動機構を別々に搭載する必要が無いと共に、連結機構30と駆動機構50を把持機構20に集約しており、小型化かつ低コストな把持連結機構として構成することができる。
【0045】
また、駆動機構50は、連結機構30を被連結部材40に対し連結状態としたときは、把持機構20を格納状態とし、連結機構30を被連結部材40に対し連結解除状態としたときは、把持機構20を把持及び把持開放可能状態とするので、把持機構20と連結機構30を1つに集約して連動、即ち把持機構20を把持動作させるときは連結機構30を連結解除動作させ、連結機構30を連結動作させるときは把持機構20を格納動作させて、両機構20、30の相互干渉を防止することができる。
【0046】
尚、上述した実施形態で使用されるギア機構の代わりにベルト・プーリ機構を用いても良い。また、グリッパ23は、3つの関節23a、23b、23cを備えた構成としたが、2つ若しくは4つ以上の多関節としても良い。また、把持機構20、連結機構30及び駆動機構50と被連結部材40を搭載した1台の移動装置とすれば、当該移動装置を複数台用意することにより相互に連結させることができる。また、連結機構30の機構を利用して特定の対象物を強力に把持した状態を保持する保持機構としても良い。
【図面の簡単な説明】
【0047】
【図1】本発明の一実施の形態に係る把持連結機構を備えた主移動装置を示す斜視図である。
【図2】本発明の一実施の形態に係る被連結部材を備えた副移動装置を示す斜視図である。
【図3】図1の把持連結機構を駆動する駆動機構の詳細を示す斜視図である。
【図4】図3の駆動機構の第1ワイヤと第2ワイヤの詳細な掛け回し状態を示す平面図である。
【図5】図1の把持機構の動作例を示す斜視図である。
【図6】図1の連結機構と図2の被連結部材の詳細を示す斜視図である。
【図7】図6の連結機構と被連結部材の動作例を示す斜視図である。
【図8】図3の駆動機構による把持機構と連結機構の駆動状態を示す斜視図である。
【図9】図8の把持機構の状態を正面から見た図である。
【符号の説明】
【0048】
1 主移動装置、2 副移動装置、10 クローラ、11 ベルト、20 把持機構、21 本体、22 アーム、23 グリッパ、24 グリッパガイド、30 連結機構、31 連結爪、32 連結爪ロック、40 被連結部材、41 連結爪開閉部、42 連結爪把持部、43 連結爪案内部、44 台座部、50 駆動機構、51 駆動モータ、52 モータ用プーリ、53 ボールネジ、54 ボールネジナット、55a 第1ワイヤ、55b 第2ワイヤ、56a 第1プーリ、56b 第2プーリ、57 駆動機構取付板
【技術分野】
【0001】
本発明は、外部の物体を把持等可能な把持機構と、被連結部材に対し連結等可能な連結機構と、把持機構を動作させると共に連結機構を動作させる1つの駆動機構とを備えた把持連結機構及びこの把持連結機構を有する移動装置と被連結部材を有する移動装置を備えた移動装置群に関する。
【背景技術】
【0002】
従来より傾斜面、凹凸面、段差等がある比較的不整地な場所や階段等をスムーズに移動可能な移動装置として、無限軌道を備えた装置、即ち複数のプーリとプーリ間に掛け渡されたベルトにより移動可能なクローラが多用されている。そして、例えば被災地や月面等における探査機として利用可能とするために、グリッパを有するアームを搭載したクローラで成る移動装置が開発されている。ところが、このグリッパを有するアームは通常はクローラの上部に取り付けられるため、移動装置の重心は比較的上方に位置することになる。このため、傾斜面の傾斜角、凹凸面の凹凸高さ、段差や階段の高さが大きいときは、移動装置が当該傾斜面等を乗り越える際に転倒するおそれがある。そこで、複数台の移動装置を連結アームにより連結した移動装置が提案されている。このような移動装置によれば、1台の移動装置が上記傾斜面等を乗り越える際には、他の移動装置は平坦面に静止して移動中の移動装置を支えて転倒を防止することができる(非特許文献1参照)。
【0003】
【非特許文献1】"Helios VII a new vehicle for disaster response (Mechanical design and basic experiments)", M. Guarnieri, P. Debenest, T. Inoh, E. Fukushima and S. Hirose1, Journal of Advanced Robotics. Special Issue on Rescue Robotics. p.901-927, Vol.19, n.18, 2005
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述した複数台の移動装置は、連結アームにより連結されているため、比較的大型の装置となり、狭小の場所へ潜入させることが困難な場合がある。そこで、連結アームを駆動機構により連結・連結解除可能な構造とすれば良いが、グリッパを有するアームの駆動機構と連結アームの駆動機構を別々に搭載する必要があるため、移動装置が大型化すると共にコスト高になるおそれがある。更に、グリッパを有するアームを駆動するときは連結アームが干渉するおそれがあり、一方、連結アームを駆動するときはグリッパを有するアームが干渉するおそれがある。
【0005】
本発明は、上記のような課題に鑑みなされたものであり、その目的は、把持機構と連結機構を備えていても小型化かつ低コストで構成でき、また、両機構の相互干渉を防止することができる把持連結機構及びこの把持連結機構を有する移動装置と被連結部材を有する移動装置を備えた移動装置群を提供することにある。
【課題を解決するための手段】
【0006】
上記目的達成のため、本発明の把持連結機構では、外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構と、当該把持機構に搭載され、外部の被連結部材に対し連結及び連結解除可能な連結機構と、前記把持機構に搭載され、前記把持機構の把持及び把持開放並びに格納を動作させると共に、前記連結機構の連結及び連結解除を動作させる1つの駆動機構とを備えたことを特徴としている。これにより、把持機構の専用の駆動機構と連結機構の専用の駆動機構を別々に搭載する必要が無いと共に、連結機構と駆動機構を把持機構に集約しているので、小型化かつ低コストな機構群として構成することができる。
【0007】
また、前記駆動機構は、前記連結機構を前記被連結部材に対し連結状態としたときは、前記把持機構を格納状態とし、前記連結機構を前記被連結部材に対し連結解除状態としたときは、前記把持機構を把持及び把持開放可能状態とすることを特徴としている。これにより、把持機構と連結機構を1つに集約して連動、即ち把持機構を把持動作させるときは連結機構を連結解除動作させ、連結機構を連結動作させるときは把持機構を格納動作させるので、両機構の相互干渉を防止することができる。
【0008】
また、前記把持機構は、前記物体を把持及び把持開放するグリッパと、当該グリッパが把持及び把持開放動作自在に取り付けられたアームとを備え、前記連結機構は、前記アームに内蔵された、前記被連結部材を挟持及び挟持開放する連結爪と、当該連結爪の挟持状態をロック及びロック解除する連結爪ロックとを備え、前記駆動機構は、前記グリッパを前記アームに沿って格納するときに、前記連結爪を前記連結爪ロックによりロックすることを特徴としている。これにより、グリッパはアームの外側で動作し、連結爪と連結爪ロックはアームの内側で動作することになるので、両機構は相互に干渉することは無い。また、前記グリッパは、多関節構造であることを特徴としている。これにより、把持及び把持開放並びに格納の動作の柔軟性を高めることができる。また、前記グリッパを前記アームに沿って格納する際に案内するグリッパガイドが、前記アームに設けられていることを特徴としている。これにより、グリッパを所定の格納位置に確実に格納することができる。
【0009】
また、前記駆動機構は、前記グリッパに係止されたワイヤと、当該ワイヤが巻回されたプーリと、当該プーリを移動させるボールネジと、当該ボールネジを回転させるモータとを備え、前記モータを駆動させて前記ボールネジを回転させ、前記プーリを移動させて前記ワイヤを引張・弛緩させることにより前記グリッパを動作させることを特徴としている。これにより、駆動機構を簡易な構成とすることができる。また、前記連結爪ロックは前記プーリと一体化されており、前記モータを駆動させて前記ボールネジを回転させ、前記連結爪ロックを移動させることにより前記連結爪の挟持状態をロック及びロック解除することを特徴としている。これにより、把持機構と連結機構を容易に連動させることができる。
【0010】
また、前記被連結部材は、球状の連結爪開閉部と、当該連結爪開閉部の径よりも小径の円筒状であって、当該円筒一端面が前記連結爪開閉部と一体化された連結爪把持部と、当該連結爪把持部の円筒他端面が固定された台座部とを備え、前記連結爪開閉部の頂部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を挿入し、前記連結爪把持部を前記連結爪により把持させて連結させ、また前記連結爪開閉部の底部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を抜き取って連結解除することを特徴としている。これにより、連結爪自体は駆動部分を持たなくても被連結部材と自動的に連結及び連結解除することができる。
【0011】
上記目的達成のため、本発明の移動装置群では、少なくとも第1の移動装置と第2の移動装置を備えた移動装置群であって、上記各把持機構、上記各連結機構及び上記各駆動機構は、前記第1の移動装置に搭載され、上記各被連結部材は、前記第2の移動装置に搭載されていることを特徴としている。これにより、上記各作用効果を奏する移動装置群を提供することができる。また、前記第1及び第2の移動装置は、クローラを備えていることを特徴としている。これにより、比較的不整地な場所においても容易に移動することができる。
【発明を実施するための最良の形態】
【0012】
本発明の実施形態について、図面を参照して説明する。尚、以下に説明する実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0013】
図1は、本発明の一実施の形態に係る把持連結機構を備えた主移動装置を示す斜視図、図2は、本発明の一実施の形態に係る被連結部材を備えた副移動装置を示す斜視図である。図1に示す主移動装置(第1の移動装置)1は、平行に配置された一対のクローラ10の上部に把持機構20及び連結機構30が搭載された構成となっている。また、図2に示す副移動装置(第2の移動装置)2は、主移動装置1と同様の平行に配置された一対のクローラ10を連結する本体2aの上部に被連結部材40が搭載された構成となっている。
【0014】
クローラ10は、前後に配置された図示しない一対のプーリの間にベルト11が掛け渡され、プーリ間に図示しないモータとギア機構等が配置されている。そして、クローラ10は、モータの駆動力がギア機構等を介してプーリに伝達されることにより、ベルト11が図示矢印a方向に回転駆動されて前後移動及び旋回する。このように主移動装置1と副移動装置2は、クローラ10を備えているので、傾斜面、凹凸面、段差等がある比較的不整地な場所や階段等においても容易に移動することができる。
【0015】
把持機構20は、図1に示すように、本体21とアーム22とグリッパ23を備えている。本体21は、略立方体の箱状に形成されて一対のクローラ10の間に配置され、本体底面21aの両側に設けられた本体支持部21b(図では片方のみを示す)が一対のクローラ10の対向する側面10aに取り付けられている。そして、本体21は、クローラ10に内蔵されている図示しないモータとギア機構等により、本体支持部21bを中心に図示矢印b方向(ベルト11の回転駆動方向aと同一)に旋回する。
【0016】
更に、本体21の上面21cには、円筒状のアーム支持部21dが突設され、アーム支持部21dの周面両側には、アーム状の一対の回転部21eが取り付けられている。即ち、一対の回転部21eは、後端側がアーム支持部21dの周面両側に回転可能に取り付けられており、先端側にはアーム22の後端が回転可能に取り付けられている。そして、一対の回転部21eは、アーム支持部21dに内蔵されている図示しないモータとギア機構等により、本体21の回転軸に対し平行な軸を中心に図示矢印c方向(ベルト11の回転駆動方向aと同一)に旋回する。
【0017】
アーム22は、図1に示すように、略直方体の箱状に形成されて後端が一対の回転部21eの先端の間に回転可能に取り付けられている。そして、アーム22は、回転部21eに内蔵されている図示しないモータとギア機構等により、回転部21eの回転軸に対し平行な軸を中心に図示矢印d方向(ベルト11の回転駆動方向aと同一)に旋回する。更に、アーム22は、先端面22aにグリッパ23が取り付けられ、先端面22a側の4つの角部にはグリッパ23を格納する際の案内となる略円柱状のグリッパガイド24(図では3つのみを示す)が取り付けられ、連結機構30と、把持機構20及び連結機構30を駆動する図3に示す駆動機構50が内蔵されている。尚、連結機構30と駆動機構50の詳細は後述する。
【0018】
グリッパ23は、図1に示すように、アーム22の先端面22aに十字形に4本取り付けられており、それぞれが3つの関節を備えている。グリッパ23の先端から見て第1関節23aよりも先の部分(以下、第1グリップ部23Aという)及び第1関節23aと第2関節23bの間の部分(以下、第2グリップ部23Bという)は、内側に略90°折り曲げ可能に構成されている。また、第2関節23bと第3関節23cの間の部分(以下、第3グリップ部23Cという)は、内側から外側にかけて略180°折り曲げ可能に構成されている。そして、第3関節23cを支持する部分(以下、第4グリップ部23Dという)は、アーム22の先端面22aに沿って略45°回転可能に構成されている。
【0019】
4本のグリッパ23は、図1に示すようにアーム22の先端面22aにて第1〜第3グリップ部23A〜23Cが窄み若しくは拡がることにより、外部の物体を把持若しくは把持開放することができると共に、第1〜第3グリップ部23A〜23Cが直線状に伸び、第3の関節23cにて外側に折れ曲がってアーム22の両側面22bに当接することにより、アーム22の両側面22bに沿わせた格納位置に格納することができる。尚、このグリッパ23の格納動作の詳細については後述する。
【0020】
以上のような構成の把持機構20を備えた主移動装置1によれば、前後移動及び旋回可能な一対のクローラ10と前後に旋回可能な本体21、回転部21e、アーム22を備えていると共に、多関節のグリッパ23を備えているので、把持対象の物体がどのような形状であっても、また、どのような位置にあっても、グリッパ23を当該位置に移動させてグリッパ23により当該物体を容易かつ確実に把持させることができる。
【0021】
図3は、駆動機構50の詳細を示す斜視図である。駆動機構50は、駆動モータ51、モータ用プーリ機構52、ボールネジ53、ボールネジナット54、2本の第1ワイヤ55a、2本の第2ワイヤ55b、2つの第1プーリ56a、4つの第2プーリ56bを備えている。アーム22の内部には、先端面22aに対し所定距離を開けて平行に配置された駆動機構取付板57が固定されている。この駆動機構取付板57には、駆動モータ51の駆動軸51aがアーム22の後方に向かって貫通するように取り付けられていると共に、ボールネジ53の一端がアーム22の後方に向かって貫通するようにベアリング58aを介して取り付けられている。尚、ボールネジ53の他端はアーム22の先端面22aにベアリング58bを介して取り付けられている。
【0022】
更に、アーム22の先端面22aに対向する駆動機構取付板57の面の4つの角部には、4つの第2プーリ56b(図では便宜上手前の2つのみを示す)が回転自在となるようにそれぞれ取り付けられている。モータ用プーリ機構52は、駆動モータ51の駆動軸51aに嵌入されたプーリ52aとボールネジ53の一端に嵌入されたプーリ52cとこれらのプーリ52a、52cを連結するベルト52bを備えており、駆動モータ51の駆動力をボールネジ53に伝達する。2つの第1プーリ56aは、ボールネジナット54の両側にそれぞれ固定されている。従って、ボールネジナット54がボールネジ53の回転によりボールネジ53に沿って移動するときは、2つの第1プーリ56aも移動することになる。
【0023】
第1ワイヤ55aは、グリッパ23と第1プーリ56aを連結するように掛け回されている。第2ワイヤ55bは、グリッパ23と第2プーリ56bを連結するように掛け回されている。即ち、1本の第1ワイヤ55aは、図示手前の2本のグリッパ23と図示手前の第1プーリ56aを連結するように掛け回され、他の1本の第1ワイヤ55a(図では便宜上示さず)は、図示奥側の2本のグリッパ23と図示奥側の第1プーリ56aを連結するように掛け回されている。
【0024】
また、1本の第2ワイヤ55bは、図示手前の2本のグリッパ23と図示手前の2つの第2プーリ56bを連結するように掛け回され、他の1本の第2ワイヤ55b(図では便宜上示さず)は、図示奥側の2本のグリッパ23と図示奥側の2つの第2プーリ56bを連結するように掛け回されている。このように、2本の第1ワイヤ55aと2本の第2ワイヤ55bは、対称的に配置されているため、4本のグリッパ23を同時に動作させることができる。次に、第1ワイヤ55aと第2ワイヤ55bの詳細な掛け回し状態とその動作例を図4及び図5を参照して説明する。尚、上述したように2本の第1ワイヤ55aと2本の第2ワイヤ55bは対称配置されているので、図4では便宜上、1本の第1ワイヤ55aと1本の第2ワイヤ55bのみを示す。
【0025】
図4は、第1ワイヤ55aと第2ワイヤ55bの詳細な掛け回し状態を示す平面図、図5は、その動作例を示す斜視図である。図4の破線で示す第1ワイヤ55aは、一端が図示上部のグリッパ23の第1グリップ部23Aの外側に係止された後、第1グリップ部23Aの内側から第2グリップ部23Bの内側を通されて第2関節23bに巻回される。更に、第3グリップ部23Cの内側を通されて第3関節23cに巻回され、アーム22の先端面22aの図示上部に貫通して取り付けられているグリッパ23の第4グリップ部23D内を通されて第1プーリ56aに巻回される。
【0026】
そして、アーム22の先端面22aの図示下部に貫通して取り付けられているグリッパ23の第4グリップ部23D内を通されて第3関節23cに巻回され、第3グリップ部23Cの内側を通されて第2関節23bに巻回される。更に、第2グリップ部23Bの内側から第1グリップ部23Aの内側を通され、最終的に当該第1ワイヤ55aの他端が第1グリップ部23Aの外側に係止される。
【0027】
図4の一点鎖線で示す第2ワイヤ55bは、一端が図示上部のグリッパ23の第1グリップ部23Aの内側に係止された後、第1グリップ部23Aの外側から第2グリップ部23Bの外側を通されて第2関節23bに巻回される。更に、第3グリップ部23Cの外側を通されて第3関節23cに巻回され、アーム22の先端面22aの図示上部に貫通されて当該第2ワイヤ55bの他端が図示上部の引張コイルバネ55cの一端に係止される。更に、新たな第2ワイヤ55bの一端が図示上部の引張コイルバネ55cの他端に係止された後、図示上部の第2プーリ56bに巻回され、第1プーリ56aに巻回される。
【0028】
そして、図示下部の第2プーリ56bに巻回され、当該第2ワイヤ55bの他端が図示下部の引張コイルバネ55cの一端に係止される。更に、新たな第2ワイヤ55bの一端が図示下部の引張コイルバネ55cの他端に係止された後、アーム22の先端面22aの図示下部に貫通されて図示下部のグリッパ23の第3関節23cに巻回される。そして、第3グリップ部23Cの外側を通されて第2関節23bに巻回され、第2グリップ部23Bの外側から第1グリップ部23Aの外側を通され、最終的に当該第2ワイヤ55bの他端が第1グリップ部23Aの内側に係止される。
【0029】
このような構成によれば、図5(A)に示すように、第1プーリ56aがアーム22の先端面22aに最も近接しているときは、第2ワイヤ55bが引張コイルバネ55cと共に引張られて第1ワイヤ55aが緩む。従って、グリッパ23の第1グリップ部23A及び第2グリップ部23Bは直線状に伸び(図ではグリッパ23の第1グリップ部23A及び第2グリップ部23Bは便宜上省略されている)、第3グリップ部23Cは第3関節23cで外側に最大限折れ曲がるので、グリッパ23はアーム22の側面22bに沿うことになる。
【0030】
次に、図5(B)に示すように、第1プーリ56aがアーム22の先端面22aから離間する方向へ移動したときは、第1ワイヤ55aが引張られて第2ワイヤ55bが緩む。従って、グリッパ23の第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、第1関節23a、第2関節23b及び第3関節23cでそれぞれ内側に折れ曲がるので、グリッパ23は外部にある物体(図示せず)の把持を開始することになる。尚、このときの第2ワイヤ55bの弛み分は引張コイルバネ55cの収縮に吸収される。
【0031】
更に、図5(C)に示すように、第1プーリ56aがアーム22の先端面22aから最も離間する方向へ移動したときは、第1ワイヤ55aが更に引張られて第2ワイヤ55bが緩む。従って、グリッパ23の第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、第1関節23a、第2関節23b及び第3関節23cでそれぞれ更に内側に折れ曲がるので、グリッパ23は外部にある物体(図示せず)を把持することになる。尚、このときの第2ワイヤ55bの弛み分も引張コイルバネ55cの収縮に吸収される。
【0032】
図6は、連結機構30と被連結部材40の詳細を示す斜視図、図7は、その動作例を示す斜視図である。連結機構30は、一対の連結爪31と連結爪ロック32を備えている。連結爪31は、先端側が半円の円弧状(一対の連結爪31は左右対称の円弧状)に形成され、更に先端には直方体状の凸部31aが突設されており、後端側がピン33によりアーム22の底面22c上に旋回自在に取り付けられている。そして、一対の連結爪31は、並設されて後端側が引張コイルバネ34に係止されており、先端側には後述する被連結部材40を構成する連結爪開閉部41の径よりも小さく、連結爪把持部42の径よりも若干大きい径の円形の穴31bが形成され、更に先端には2つ分の直方体状の凸部31aが形成される。連結爪ロック32は、矩形板状に形成されており、一端側には当接している一対の連結爪31の凸部31aを挟み込むことが可能な凹部32aが設けられている。そして、連結爪ロック32は、凹部32aが連結爪31の凸部31aと相対するように、駆動機構50を構成するボールネジナット54に固定されている。
【0033】
被連結部材40は、連結爪開閉部41と連結爪把持部42と連結爪案内部43と台座部44を備えている。連結爪開閉部41は球状に形成され、連結爪把持部42は連結爪開閉部41の径よりも小径の円筒状に形成されている。そして、連結爪把持部42の一端面が連結爪開閉部41と一体化され、連結爪把持部42の他端面が台座部44の一端上に固定されている。連結機構30の一対の連結爪31は、連結爪開閉部41の頂部に押圧されることにより連結爪開閉部41の球面に沿って開いた後に閉じ、最終的に連結爪把持部42を把持する。
【0034】
連結爪案内部43は、楔状に形成されており、連結爪開閉部41の固定部位から所定間隔あけた台座部44の他端上に固定されている。即ち、アーム22の先端面22aの下部が連結爪案内部43の楔状部分43aに当接してアーム22が案内されたときに、連結爪開閉部41がアーム22の底面22cに開けられた連結爪開閉部41の径よりも若干大きい径の穴22dに位置決めされて挿入されるように、連結爪案内部43は台座部44の他端上に固定されている。台座部44は、略矩形状に形成されており、図2に示すように一端側が副移動装置2の本体2aから突出するように他端側が本体2a上に固定されている。
【0035】
このような構成において、アーム22を被連結部材40の上方から下方に移動させて、図7(A)に示すように、アーム22の底面22cに穿孔されている穴22dを被連結部材40の連結爪開閉部41の上方に位置決めする。そして、アーム22を降下させて穴22dの中に連結爪開閉部41を挿入するが、このとき穴22dと連結爪開閉部41の位置が多少ずれていても、アーム22の先端面22aの下部が連結爪案内部43の楔状部分43aに当接して沿うので、穴22dの中に連結爪開閉部41を確実に挿入することができる。
【0036】
そして、図7(B)に示すように、連結爪開閉部41が穴22dの中に挿入されると更に連結爪31の穴31bの中に挿入され、一対の連結爪31に当接して一対の連結爪31を両側に徐徐に押し広げる。続いて、一対の連結爪31は、引張コイルバネ34の収縮力により連結爪開閉部41の球面に沿って徐徐に狭まり、最終的には、図7(C)に示すように、連結爪把持部42の部分で完全に閉じて連結爪把持部42を把持する。
【0037】
一方、図7(C)に示す状態からアーム22を上昇させると、図7(B)に示すように、一対の連結爪31は、連結爪開閉部41の球面に沿って徐徐に広がり、最終的には、図7(A)に示すように、連結爪開閉部41は、一対の連結爪31の穴31b及びアーム22の穴22dから抜ける。このとき、一対の連結爪31は、引張コイルバネ34の収縮力により自動的に閉じる。尚、一対の連結爪31の穴31bの内面には、連結爪開閉部41の挿抜が容易となるように、逆向きの面取り31ba、31bbが施されている。
【0038】
以上のような構成の把持機構20、連結機構30及び駆動機構50が搭載された主移動装置1は、通常は単独で移動して外部にある物体を把持する。これにより、比較的狭小の場所であっても容易に潜入することができる。そして、別の場所に移動するときは、被連結部材40が搭載された副移動装置2と連結して移動する。これにより、例えば主移動装置1が傾斜面、凹凸面、段差等がある比較的不整地な場所や階段等を乗り越える際には、副移動装置2は平坦面に静止して移動中の主移動装置1を支えることにより、主移動装置1の転倒を防止することができる。ここで、本実施形態の把持連結機構は、1つの駆動機構50が把持機構20と連結機構30を駆動するが、解決課題でも述べたような把持機構20と連結機構30の相互干渉が生じないように構成されており、以下に図面を参照して説明する。
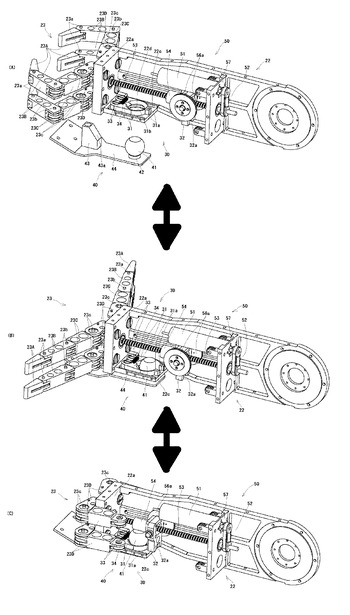
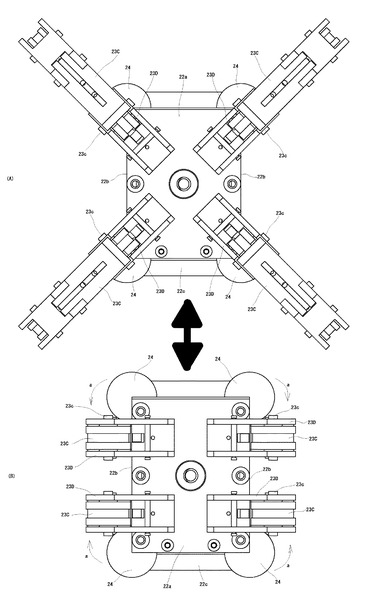
【0039】
図8は、駆動機構50による把持機構20と連結機構30の駆動状態を示す斜視図、図9は、そのときの把持機構20の状態を正面から見た図である。主移動装置1が副移動装置2と連結する際は、図8(A)に示すように、アーム22を被連結部材40の上方に移動させる。このとき、グリッパ23は、第1グリップ部23A及び第2グリップ部23Bが第1関節23a及び第2関節23bでそれぞれ内側に折れ曲がって物体を把持可能な状態にあり、ボールネジナット54に固定されている第1プーリ56aは駆動機構取付板57に近接して位置している。
【0040】
そして、アーム22を降下させて、図8(B)に示すように、アーム22の底面22cに穿孔されている穴22d及び連結爪31の穴31bの中に被連結部材40の連結爪開閉部41を挿入すると共に、駆動モータ51を駆動してモータ用プーリ機構52を介してボールネジ53を回転させ、ボールネジナット54をアーム22の先端面22a方向に移動させる。すると、ボールネジナット54に固定されている第1プーリ56aは、第2ワイヤ55bを引張ると同時に第1ワイヤ55aを緩めるので(図では第1ワイヤ55aと第2ワイヤ55bは便宜上省略されている)、グリッパ23は、徐徐に開いて第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは直線状に伸びる。
【0041】
更に、図8(C)に示すように、被連結部材40の連結爪開閉部41を挿入させて、連結爪把持部42を連結爪31で把持させると共に、駆動モータ51を駆動してモータ用プーリ機構52を介してボールネジ53を回転させ、ボールネジナット54をアーム22の先端面22aに近接させる。すると、ボールネジナット54に固定されている第1プーリ56aは、第2ワイヤ55bを引張ると同時に第1ワイヤ55aを緩めるので(図では手前の第1プーリ56aと第1ワイヤ55a及び第2ワイヤ55bは便宜上省略されている)、グリッパ23は、第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cが直線状に伸びたままで第3関節23cで外側に最大限折れ曲がる。
【0042】
このとき、図9(A)及び(B)に示すように、第1グリップ部23A、第2グリップ部23B(図では第1グリップ部23A及び第2グリップ部23Bは便宜上省略されている)及び第3グリップ部23Cは、円柱状のグリッパガイド24の周面に当接して案内される。即ち、直線状に伸びた第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、第3関節23cで外側に折れ曲がるときにグリッパガイド24の周面に沿うと共に、第4グリップ部23Dがアーム22の先端面22a上で図示矢印a方向に旋回する。従って、直線状に伸びた第1グリップ部23A、第2グリップ部23B及び第3グリップ部23Cは、最終的にはアーム22の側面22bに沿って当接することになり、把持機構20は格納されることになる。
【0043】
そして、このグリッパ23の格納動作と同時に、図8(C)に示すように、ボールネジナット54に固定されている連結爪ロック32の凹部32aが一対の連結爪31の凸部31aに嵌り込んで挟み込むので、一対の連結爪31は連結爪把持部42を把持した状態で開かないようにロックされることになる。従って、連結爪開閉部41は連結爪31の穴31aから抜けなくなり、連結機構20と被連結部材40は連結されることになる。
【0044】
以上のように、本実施形態の把持連結機構によれば、外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構20と、当該把持機構20に搭載され、外部の被連結部材40に対し連結及び連結解除可能な連結機構30と、把持機構20に搭載され、把持機構20の把持及び把持開放並びに格納を動作させると共に、連結機構30の連結及び連結解除を動作させる1つの駆動機構50とを備えているので、把持機構20の専用の駆動機構と連結機構30の専用の駆動機構を別々に搭載する必要が無いと共に、連結機構30と駆動機構50を把持機構20に集約しており、小型化かつ低コストな把持連結機構として構成することができる。
【0045】
また、駆動機構50は、連結機構30を被連結部材40に対し連結状態としたときは、把持機構20を格納状態とし、連結機構30を被連結部材40に対し連結解除状態としたときは、把持機構20を把持及び把持開放可能状態とするので、把持機構20と連結機構30を1つに集約して連動、即ち把持機構20を把持動作させるときは連結機構30を連結解除動作させ、連結機構30を連結動作させるときは把持機構20を格納動作させて、両機構20、30の相互干渉を防止することができる。
【0046】
尚、上述した実施形態で使用されるギア機構の代わりにベルト・プーリ機構を用いても良い。また、グリッパ23は、3つの関節23a、23b、23cを備えた構成としたが、2つ若しくは4つ以上の多関節としても良い。また、把持機構20、連結機構30及び駆動機構50と被連結部材40を搭載した1台の移動装置とすれば、当該移動装置を複数台用意することにより相互に連結させることができる。また、連結機構30の機構を利用して特定の対象物を強力に把持した状態を保持する保持機構としても良い。
【図面の簡単な説明】
【0047】
【図1】本発明の一実施の形態に係る把持連結機構を備えた主移動装置を示す斜視図である。
【図2】本発明の一実施の形態に係る被連結部材を備えた副移動装置を示す斜視図である。
【図3】図1の把持連結機構を駆動する駆動機構の詳細を示す斜視図である。
【図4】図3の駆動機構の第1ワイヤと第2ワイヤの詳細な掛け回し状態を示す平面図である。
【図5】図1の把持機構の動作例を示す斜視図である。
【図6】図1の連結機構と図2の被連結部材の詳細を示す斜視図である。
【図7】図6の連結機構と被連結部材の動作例を示す斜視図である。
【図8】図3の駆動機構による把持機構と連結機構の駆動状態を示す斜視図である。
【図9】図8の把持機構の状態を正面から見た図である。
【符号の説明】
【0048】
1 主移動装置、2 副移動装置、10 クローラ、11 ベルト、20 把持機構、21 本体、22 アーム、23 グリッパ、24 グリッパガイド、30 連結機構、31 連結爪、32 連結爪ロック、40 被連結部材、41 連結爪開閉部、42 連結爪把持部、43 連結爪案内部、44 台座部、50 駆動機構、51 駆動モータ、52 モータ用プーリ、53 ボールネジ、54 ボールネジナット、55a 第1ワイヤ、55b 第2ワイヤ、56a 第1プーリ、56b 第2プーリ、57 駆動機構取付板
【特許請求の範囲】
【請求項1】
外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構と、
当該把持機構に搭載され、外部の被連結部材に対し連結及び連結解除可能な連結機構と、
前記把持機構に搭載され、前記把持機構の把持及び把持開放並びに格納を動作させると共に、前記連結機構の連結及び連結解除を動作させる1つの駆動機構とを備えたことを特徴とする把持連結機構。
【請求項2】
前記駆動機構は、前記連結機構を前記被連結部材に対し連結状態としたときは、前記把持機構を格納状態とし、前記連結機構を前記被連結部材に対し連結解除状態としたときは、前記把持機構を把持及び把持開放可能状態とすることを特徴とする請求項1に記載の把持連結機構。
【請求項3】
前記把持機構は、前記物体を把持及び把持開放するグリッパと、当該グリッパが把持及び把持開放動作自在に取り付けられたアームとを備え、
前記連結機構は、前記アームに内蔵された、前記被連結部材を挟持及び挟持開放する連結爪と、当該連結爪の挟持状態をロック及びロック解除する連結爪ロックとを備え、
前記駆動機構は、前記グリッパを前記アームに沿って格納するときに、前記連結爪を前記連結爪ロックによりロックすることを特徴とする請求項1又は2に記載の把持連結機構。
【請求項4】
前記グリッパは、多関節構造であることを特徴とする請求項3に記載の把持連結機構。
【請求項5】
前記グリッパを前記アームに沿って格納する際に案内するグリッパガイドが、前記アームに設けられていることを特徴とする請求項3又は4に記載の把持連結機構。
【請求項6】
前記駆動機構は、前記グリッパに係止されたワイヤと、当該ワイヤが巻回されたプーリと、当該プーリを移動させるボールネジと、当該ボールネジを回転させるモータとを備え、前記モータを駆動させて前記ボールネジを回転させ、前記プーリを移動させて前記ワイヤを引張・弛緩させることにより前記グリッパを動作させることを特徴とする請求項3〜5の何れか一項に記載の把持連結機構。
【請求項7】
前記連結爪ロックは前記プーリと一体化されており、前記モータを駆動させて前記ボールネジを回転させ、前記連結爪ロックを移動させることにより前記連結爪の挟持状態をロック及びロック解除することを特徴とする請求項6に記載の把持連結機構。
【請求項8】
前記被連結部材は、球状の連結爪開閉部と、当該連結爪開閉部の径よりも小径の円筒状であって、当該円筒一端面が前記連結爪開閉部と一体化された連結爪把持部と、当該連結爪把持部の円筒他端面が固定された台座部とを備え、前記連結爪開閉部の頂部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を挿入し、前記連結爪把持部を前記連結爪により把持させて連結させ、また前記連結爪開閉部の底部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を抜き取って連結解除することを特徴とする請求項3〜7の何れか一項に記載の把持連結機構。
【請求項9】
少なくとも第1の移動装置と第2の移動装置を備えた移動装置群であって、
請求項1〜8の何れか一項に記載の把持機構、連結機構及び駆動機構は、前記第1の移動装置に搭載され、請求項1又は8に記載の被連結部材は、前記第2の移動装置に搭載されていることを特徴とする移動装置群。
【請求項10】
前記第1及び第2の移動装置は、クローラを備えていることを特徴とする請求項9に記載の移動装置群。
【請求項1】
外部の物体を把持及び把持開放可能であり、当該把持動作以外のときは格納位置に格納可能な把持機構と、
当該把持機構に搭載され、外部の被連結部材に対し連結及び連結解除可能な連結機構と、
前記把持機構に搭載され、前記把持機構の把持及び把持開放並びに格納を動作させると共に、前記連結機構の連結及び連結解除を動作させる1つの駆動機構とを備えたことを特徴とする把持連結機構。
【請求項2】
前記駆動機構は、前記連結機構を前記被連結部材に対し連結状態としたときは、前記把持機構を格納状態とし、前記連結機構を前記被連結部材に対し連結解除状態としたときは、前記把持機構を把持及び把持開放可能状態とすることを特徴とする請求項1に記載の把持連結機構。
【請求項3】
前記把持機構は、前記物体を把持及び把持開放するグリッパと、当該グリッパが把持及び把持開放動作自在に取り付けられたアームとを備え、
前記連結機構は、前記アームに内蔵された、前記被連結部材を挟持及び挟持開放する連結爪と、当該連結爪の挟持状態をロック及びロック解除する連結爪ロックとを備え、
前記駆動機構は、前記グリッパを前記アームに沿って格納するときに、前記連結爪を前記連結爪ロックによりロックすることを特徴とする請求項1又は2に記載の把持連結機構。
【請求項4】
前記グリッパは、多関節構造であることを特徴とする請求項3に記載の把持連結機構。
【請求項5】
前記グリッパを前記アームに沿って格納する際に案内するグリッパガイドが、前記アームに設けられていることを特徴とする請求項3又は4に記載の把持連結機構。
【請求項6】
前記駆動機構は、前記グリッパに係止されたワイヤと、当該ワイヤが巻回されたプーリと、当該プーリを移動させるボールネジと、当該ボールネジを回転させるモータとを備え、前記モータを駆動させて前記ボールネジを回転させ、前記プーリを移動させて前記ワイヤを引張・弛緩させることにより前記グリッパを動作させることを特徴とする請求項3〜5の何れか一項に記載の把持連結機構。
【請求項7】
前記連結爪ロックは前記プーリと一体化されており、前記モータを駆動させて前記ボールネジを回転させ、前記連結爪ロックを移動させることにより前記連結爪の挟持状態をロック及びロック解除することを特徴とする請求項6に記載の把持連結機構。
【請求項8】
前記被連結部材は、球状の連結爪開閉部と、当該連結爪開閉部の径よりも小径の円筒状であって、当該円筒一端面が前記連結爪開閉部と一体化された連結爪把持部と、当該連結爪把持部の円筒他端面が固定された台座部とを備え、前記連結爪開閉部の頂部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を挿入し、前記連結爪把持部を前記連結爪により把持させて連結させ、また前記連結爪開閉部の底部を前記連結爪に押圧することにより当該連結爪を開いて当該連結爪開閉部を抜き取って連結解除することを特徴とする請求項3〜7の何れか一項に記載の把持連結機構。
【請求項9】
少なくとも第1の移動装置と第2の移動装置を備えた移動装置群であって、
請求項1〜8の何れか一項に記載の把持機構、連結機構及び駆動機構は、前記第1の移動装置に搭載され、請求項1又は8に記載の被連結部材は、前記第2の移動装置に搭載されていることを特徴とする移動装置群。
【請求項10】
前記第1及び第2の移動装置は、クローラを備えていることを特徴とする請求項9に記載の移動装置群。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−126870(P2008−126870A)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願番号】特願2006−314914(P2006−314914)
【出願日】平成18年11月22日(2006.11.22)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願日】平成18年11月22日(2006.11.22)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
[ Back to top ]