
投射型表示装置
【課題】 投射型表示装置の姿勢を検出し、映像中の電子ズームすべき対象範囲を検出し、移動制御を行うことを特徴とした投射型表示装置を提供する。
【解決手段】 本発明の投射型表示装置は、投射型表示装置の画角情報を取得する画角情報取得部と、前記投射型表示装置本体の姿勢情報を検出する姿勢変化検出部と、入力される映像信号に対して電子ズーム信号処理を行なう映像信号ズーム制御部と、電子ズーム信号の対象位置を算出する電子ズーム位置算出部と、映像信号を取得する映像信号取得部と、映像信号を表示する映像表示部を備え、前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報に基づいて、前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、映像信号上の電子ズーム位置を移動制御することを特徴とした投射型表示装置。
【解決手段】 本発明の投射型表示装置は、投射型表示装置の画角情報を取得する画角情報取得部と、前記投射型表示装置本体の姿勢情報を検出する姿勢変化検出部と、入力される映像信号に対して電子ズーム信号処理を行なう映像信号ズーム制御部と、電子ズーム信号の対象位置を算出する電子ズーム位置算出部と、映像信号を取得する映像信号取得部と、映像信号を表示する映像表示部を備え、前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報に基づいて、前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、映像信号上の電子ズーム位置を移動制御することを特徴とした投射型表示装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、投射型表示装置に関し、特に電子ズーム制御に関するものである。
【背景技術】
【0002】
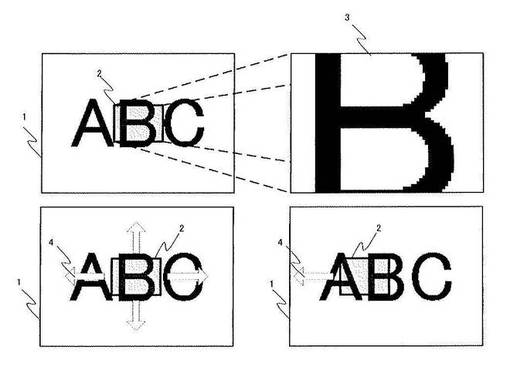
従来、電子ズーム制御を行う最には投射型表示装置本体に備えられた釦や、リモコン等による釦操作によって拡大する位置を指定し、電子ズーム制御をしていた。図12を用いて説明すると、映像領域1内の電子ズーム領域2を指定し、電子ズーム映像3を表示することが出来る従来の機能がある。さらに映像領域1内の電子ズーム領域2を移動方向4のように移動させ、電子ズーム映像3に映像領域1上の任意の領域を拡大して表示することが出来る。
【0003】
例えば、特許文献1では投射型表示装置に備えられた釦や、リモコンの操作によって電子ズームの中心位置を設定する手法が開示されている。
【0004】
特許文献2ではスクリーンなどの被投射面との相対位置を算出し、表示する映像の移動制御を行う手法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−163360号公報
【特許文献2】特開2008−209469号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の特許文献1に開示された従来技術では、投射型表示装置に備えられた釦や、リモコン等による操作によって電子ズーム位置を移動制御するため、ユーザーにとっては操作の負荷が生じてしまう。また、特許文献2に開示された従来技術では、被投射面と投射型表示装置との相対位置を算出し、投射映像をスクロールするシステムを紹介しているが、投射型表示装置とは分離している相対位置を算出する装置を被投射面側に用意しなければならず、投射型表示装置のみでの実現は難しい。
【0007】
投射型表示装置内の構成で投射型表示装置の姿勢を検出し、映像信号中の電子ズームすべき対象範囲を検出し、移動制御を行うことを特徴とした投射型表示装置を提供する。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の投射型表示装置は、投射型表示装置の画角情報を取得する画角情報取得部と、前記投射型表示装置本体の姿勢情報を検出する姿勢変化検出部と、入力される映像信号に対して電子ズーム信号処理を行なう映像信号ズーム制御部と、電子ズーム信号の対象位置を算出する電子ズーム位置算出部と、映像信号を取得する映像信号取得部と、映像信号を表示する映像表示部を備え、前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報に基づいて、前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、映像信号上の電子ズーム位置を移動制御することを特徴とする。
【発明の効果】
【0009】
本発明によれば、投射型表示装置のみを用意し、ユーザーが被投射面に対する投射型表示装置の向きを変えるだけで、投射映像中の電子ズーム位置を移動制御することが出来る。
【図面の簡単な説明】
【0010】
【図1】実施例1における投射型表示装置の機能ブロック図
【図2】実施例1における投射型表示装置の電子ズーム制御フローチャート
【図3】実施例2における投射型表示装置の機能ブロック図
【図4】実施例2における投射型表示装置の電子ズーム制御フローチャート
【図5】実施例1、2における電子ズーム制御の実行するケースを表現するイメージ図
【図6】実施例1、2における電子ズーム制御を実行するケースを表現するイメージ図
【図7】実施例3における投射型表示装置の機能ブロック図
【図8】実施例3における投射型表示装置の電子ズーム制御フローチャート
【図9】実施例3における電子ズーム制御を実行するケースを表現するイメージ図
【図10】実施例1、2、3における投射型表示装置内の機能の詳細を示すブロック図
【図11】実施例1、2、3における投射型表示装置内の機能の詳細を示すブロック図
【図12】従来技術の電子ズームを表現するイメージ図
【発明を実施するための形態】
【0011】
以下に、本発明の好ましい実施の形態を、添付の図面に基づいて詳細に説明する。
【0012】
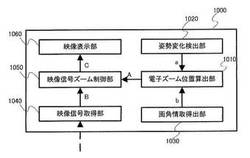
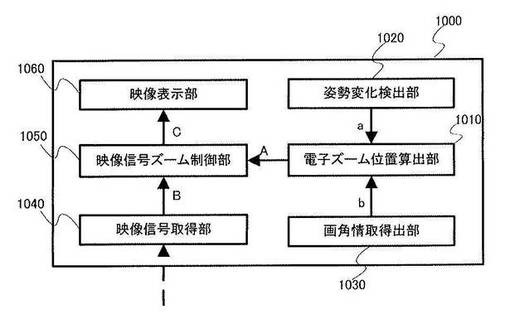
図1は、本発明の実施形態にかかわる投射型表示装置の構成例を示すブロック図である。
【0013】
[実施例1]
以下図1を参照して、本発明の第1の実施例による投射型表示装置の構成を示す機能ブロックについて説明する。
【0014】
1000投射型表示装置本体である。
【0015】
1010は電子ズーム位置算出部であり、映像領域における電子ズーム制御対象の領域を示す電子ズーム位置情報Aを算出する。
【0016】
1020は姿勢変化検出部であり、現在の投射型表示装置の姿勢状態の変化を検出し、姿勢情報aを算出する。
【0017】
1030は画角情報取得部であり、現在の投射型表示装置の画角情報bを取得する。
【0018】
1040は映像信号取得部であり、外部機器から映像信号が入力される。映像信号取得部1040は、図1に図示しない投射型表示装置1000に装着された記録デバイスから映像信号を取得する構成としても良い。
【0019】
1050は映像信号ズーム制御部であり、電子ズーム位置情報Aに基づいて映像信号Bの電子ズーム制御を行う。
【0020】
1060は映像表示部であり、ズーム映像信号Cの表示を行なう。
【0021】
本実施例における電子ズーム位置算出部1010、画角情報取得部1030、映像信号取得部1040、映像信号ズーム制御部1050は、図1に図示しないCPU、ROM、RAMを有する1つ以上のコンピュータから構成される。
【0022】
本実施例における姿勢変化検出部1020は、ジャイロセンサや加速度センサから構成される。
【0023】
本実施例における映像表示部1060は、LCOSパネルなどから構成される。
【0024】
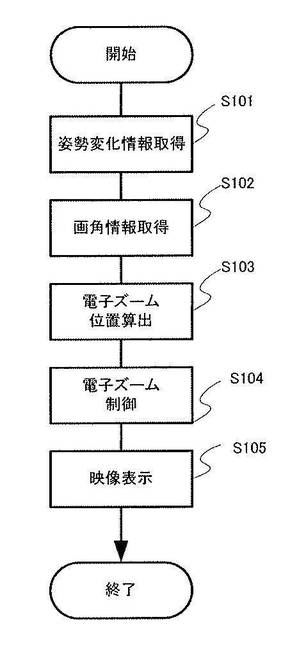
図2は本実施形態に係る、電子ズームを制御するフローの一例であり、図1の構成を用いて説明する。
【0025】
投射型表示装置1000の本体に図1に図示しない操作手段を備え、ユーザーによる操作を検出し一連の処理が実行されることとする。なお、操作手段の操作によって、従来の電子ズーム制御と、本件における電子ズーム位置移動制御との切替え制御が行えるとしても良い。
【0026】
ステップS101は投射型表示装置1000の姿勢情報を取得するステップである。ユーザーによる電子ズーム制御開始操作により、電子ズーム位置算出部1010は投射型表示装置1000の姿勢情報を検出する姿勢情報検出部1020から姿勢情報a取得する。
【0027】
ステップS102は投射型表示装置1000の持つ図1に図示しない映像を投射する光学系の画角情報を取得するステップである。電子ズーム位置算出部1010は画角情報取得部1030から画角情報bを取得する。
【0028】
ステップS103は電子ズーム位置を算出するステップである。電子ズーム位置算出部1010はS101で取得した姿勢情報aとS102で取得した画角情報bを用いて電子ズーム位置情報Aを算出する。
【0029】
ステップS104は映像信号を電子ズーム制御するステップである。映像信号ズーム制御部1050は映像信号取得部1040へ入力された映像信号Bに対して、S103により求められた電子ズーム位置情報Aに基づいて電子ズーム処理を行い、ズーム映像信号Cを作成する。
【0030】
ステップS105は電子ズーム映像を表示するステップである。S104によって電子ズーム処理されたズーム映像信号Cを映像表示部1060によって表示する。
【0031】
以上の処理は電子ズーム移動制御操作が継続されている限り繰り返し行なわれる。
【0032】
[実施例2]
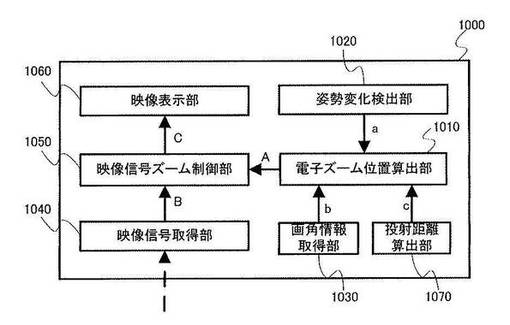
以下図3を参照して、本発明の第2の実施例による投射型表示装置の構成を示す機能ブロックについて説明する。なお、既述の実施例で説明した同一名の機能ブロックについて、本実施例においても同一の働きをするものについては説明は省略する。
【0033】
本実施例における投射型表示装置1000は、実施例1の図1に示す投射型表示装置1000の構成に投射距離算出部1070が追加された構成となる。
【0034】
1070は投射距離算出部であり、被投射面のスクリーンと投射型表示装置1000との距離を示す投射距離情報cを取得する。
【0035】
本実施例における電子ズーム位置算出部1010、画角情報取得部1030、映像信号取得部1040、映像信号ズーム制御部1050は、図3に図示しないCPU、ROM、RAMを有する1つ以上のコンピュータから構成される。
【0036】
本実施例における姿勢変化検出部1020は、ジャイロセンサや加速度センサから構成される。
【0037】
本実施例における映像表示部1060は、LCOSパネルなどから構成される。
【0038】
本実施例における投射距離算出部1070は、距離測定センサから構成される。
【0039】
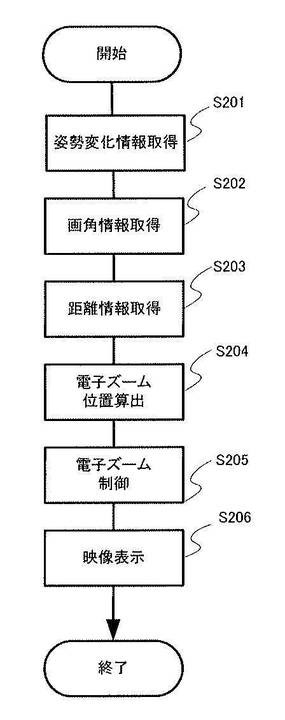
図4は本実施形態に係る、電子ズームを制御するフローの一例であり、図3の構成を用いて説明する。
【0040】
投射型表示装置1000の本体に図3に図示しない操作手段を備え、ユーザーによる操作を検出し一連の処理が実行されることとする。なお、操作手段の操作によって、従来の電子ズーム制御と、本件における電子ズーム位置移動制御との切替え制御が行えるとしても良い。
【0041】
ステップS201は投射型表示装置1000の姿勢情報を取得するステップである。ユーザーによる電子ズーム制御開始操作により、電子ズーム位置算出部1010は投射型表示装置1000の姿勢情報を検出する姿勢情報検出部1020から姿勢情報a取得する。
【0042】
ステップS202は投射型表示装置1000の持つ図3に図示しない映像を投射する光学系の画角情報を取得するステップである。電子ズーム位置算出部1010は画角情報取得部1030から画角情報bを取得する。
【0043】
ステップS203は被投射面のスクリーンと投射型表示装置1000との距離を算出するステップである。電子ズーム位置算出部1010は投射距離算出部1070から投射距離情報cを取得する。
【0044】
ステップS204は電子ズーム位置を算出するステップである。電子ズーム位置算出部1010はS201で取得した姿勢情報aと、S202で取得した画角情報bと、S203で取得した投射距離情報cを用いて電子ズーム位置情報Aを算出する。
【0045】
ステップS205は映像信号を電子ズーム制御するステップである。映像信号ズーム制御部1050は映像信号取得部1040へ入力された映像信号Bを、S204により求められた電子ズーム位置情報Aに基づいて電子ズーム処理を行い、ズーム映像信号Cを作成する。
【0046】
ステップS206は電子ズーム映像を表示するステップである。S205によって電子ズーム処理されたズーム映像信号Cを映像表示部1060によって表示する。
【0047】
以上の処理はズーム移動制御操作が継続されている限り繰り返し行なわれる。
【0048】
実施例1、2によれば、投射型表示装置1000の姿勢を変化させることで、映像信号中の電子ズーム領域を移動制御し、姿勢の変化に合せて移動する電子ズーム映像を表示することが出来る。また画角や投射距離の変化に応じて拡大、縮小する投射映像の比率に合せて映像信号上の電子ズーム領域の移動量を制御することができる。
【0049】
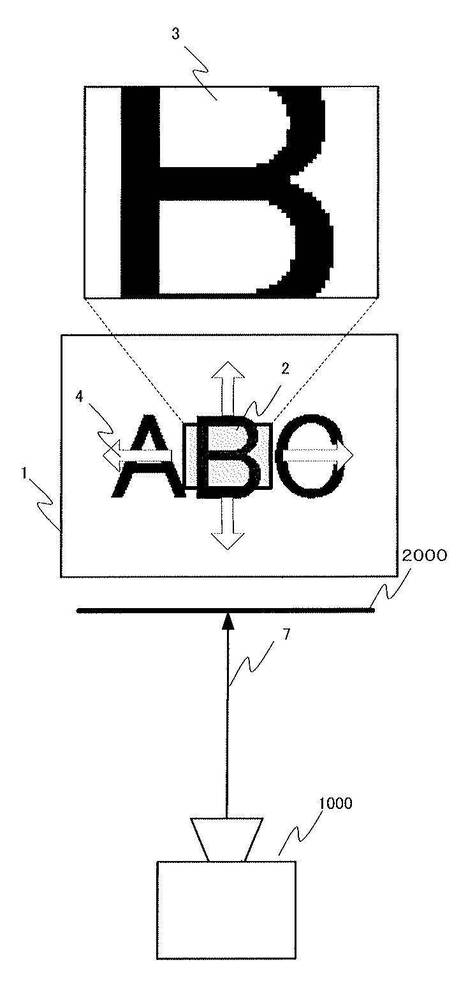
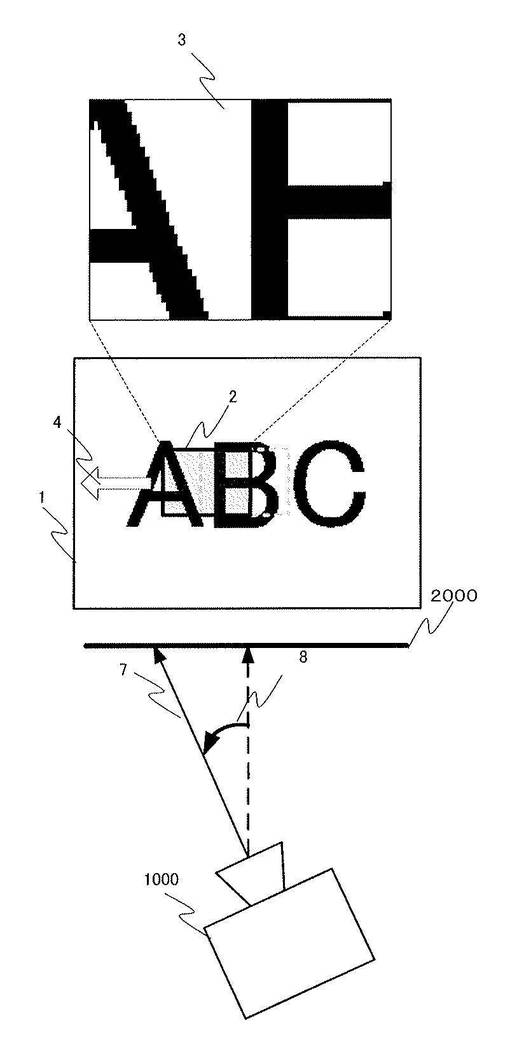
図5、図6は、実施例1、2における投射型表示装置1000の姿勢を変化させた場合の投射型表示装置1000の姿勢と、投射型表示装置1000の姿勢変化に合せて入力された映像信号の領域上を移動する電子ズーム領域の動きと、電子ズーム映像を示すイメージ図である。
【0050】
図5はスクリーン2000に対して投射方向7が垂直に交わる場合を示す。
【0051】
投射型表示装置1000はスクリーン2000に対して映像領域1内で指定された電子ズーム領域2は電子ズーム映像3として投射される。
【0052】
図6のように、投射型表示装置1000の姿勢を姿勢変化方向8の方向へ変化させる。姿勢変化方向8への姿勢変化によって投射方向7と交わるスクリーン2000上を移動する投射映像に合せて、映像領域1内の電子ズーム領域2を電子ズーム移動方向4へ移動する。これにより、電子ズーム映像3の内容も変化する。
【0053】
なお、図5、6に図示しない三脚などの固定用治具に装着し、ブレの無い安定した状態で投射型表示装置1000姿勢を変化させるものとしても良い。
【0054】
[実施例3]
以下図7を参照して、本発明の第3の実施例による投射型表示装置の構成を示す機能ブロックについて説明する。なお、既述の実施例で説明した同一名の機能ブロックについて、本実施例においても同一の働きをするものについては説明は省略する。
【0055】
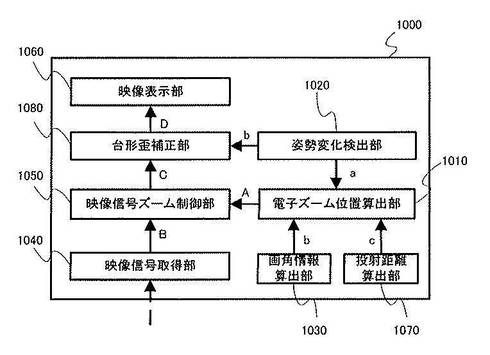
本実施例における投射型表示装置1000は、実施例2の図3に示す投射型表示装置1000の構成に台形歪補正部1080が追加された構成となる。
【0056】
1080は台形歪補正部であり、姿勢検出部1020から取得した姿勢情報aに基づいて、投射映像信号となるズーム映像信号Cに対して台形歪補正処理を行う。台形歪補正されたズーム映像信号Cは、補正ズーム映像信号Dとして映像表示部1060へ伝送される。
【0057】
本実施例における電子ズーム位置算出部1010、画角情報取得部1030、映像信号取得部1040、映像信号ズーム制御部1050、台形歪補正部1080は、図7に図示しないCPU、ROM、RAMを有する1つ以上のコンピュータから構成される。
【0058】
本実施例における姿勢変化検出部1020は、ジャイロセンサや加速度センサから構成される。
【0059】
本実施例における映像表示部1060は、LCOSパネルなどから構成される。
【0060】
本実施例における投射距離算出部1070は、距離測定センサから構成される。
【0061】
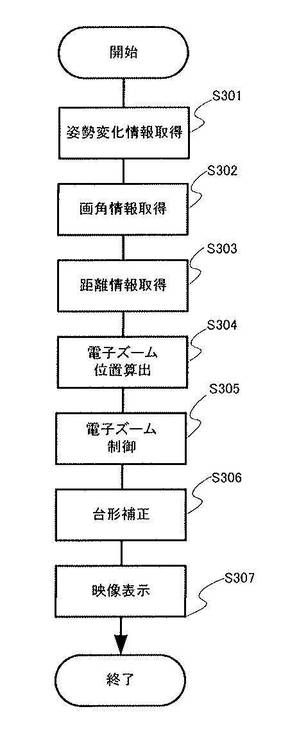
図8は本実施形態に係る、シフトガイドを表示する処理フローの一例を示す。図7の構成を用いて説明する。投射型表示装置1000の本体に図7に図示しない操作手段を備え、ユーザーによる操作を検出し一連の処理が実行されることとする。なお、操作手段の操作によって、従来の電子ズーム制御と、本件における電子ズーム位置移動制御との切替え制御が行えるとしても良い。
【0062】
ステップS301は投射型表示装置1000の姿勢情報を取得するステップである。ユーザーによる電子ズーム制御開始操作により、電子ズーム位置算出部1010は投射型表示装置1000の姿勢情報を検出する姿勢情報検出部1020から姿勢情報a取得する。ステップS302は投射型表示装置1000の持つ図7に図示しない映像を投射する光学系の画角情報を取得するステップである。電子ズーム位置算出部1010は画角情報取得部1030から画角情報bを取得する。
【0063】
ステップS303は被投射面のスクリーンと投射型表示装置1000との距離を算出するステップである。電子ズーム位置算出部1010は投射距離算出部1070から投射距離情報cを取得する。
【0064】
ステップS304は電子ズーム位置を算出するステップである。電子ズーム位置算出部1010はS301で取得した姿勢情報aとS302で取得した画角情報bとS303で取得した投射距離情報cを用いて電子ズーム位置情報Aを算出する。
【0065】
ステップS305は映像信号を電子ズーム制御するステップである。映像信号ズーム制御部1050は映像信号取得部1040へ入力された映像信号Bに対して、S304により求められた電子ズーム位置情報Aに基づいて電子ズーム処理を行い、ズーム映像信号Cを作成する。
【0066】
ステップS306はS305から取得した姿勢情報aに基づいて、台形補正制御部1080が台形歪補正を行なうステップである。
【0067】
ステップS307は電子ズーム映像を表示するステップである。S305によって電子ズーム処理され、S306によって台形歪補正された補正ズーム映像信号Dを映像表示部1060によって表示する。
【0068】
以上の処理は電子ズーム移動制御操作が継続されている限り繰り返し行なわれる。
【0069】
実施例3によれば、投射型表示装置1000の姿勢を変化させることで、スクリーンに対してあおりを行って映像を投射する状況となった場合に発生する台形歪を補正しつつ、映像信号中の電子ズーム領域を移動制御し、姿勢の変化に合せて移動する電子ズーム映像を表示することが出来る。
【0070】
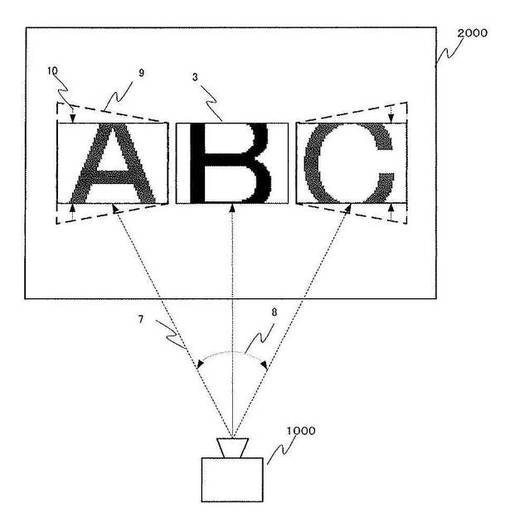
図9は実施例3における投射型表示装置1000の姿勢を変化させた場合の投射型表示装置の姿勢と、入力映像領域上を移動する電子ズーム領域の動きと、電子ズーム映像を示したイメージ図である。
【0071】
投射型表示装置1000の姿勢を姿勢変化方向8のように変化させる。姿勢変化方向8によって投射方向7と交わるスクリーン2000上の投射映像が移動するのに合せて、電子ズーム映像3に表示される映像信号上の電子ズーム位置が移動する。さらに、投射方向7がスクリーン2000に対して直交しない、あおりを行なって映像を投射させる際に、発生する台形歪9を投射型表示装置1000の姿勢方向8の変化量に基づいて補正10のように補正することが可能である。これによって、投射型表示装置1000の姿勢を変化をした際にも台形歪のない電子ズーム映像3を投射することが可能である。
【0072】
なお、図9に図示しない三脚などの固定用治具に装着し、ブレの無い安定した状態で投射型表示装置1000の姿勢を変化させるものとしても良い。
【0073】
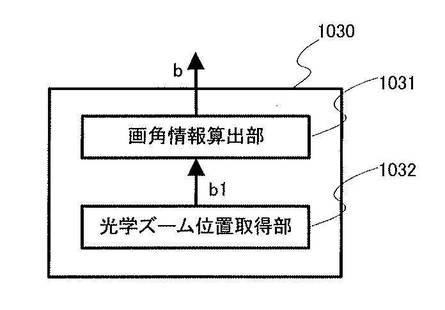
図10は既述の実施例における画角情報取得部1030の詳細の構成を示す第1の図である。
【0074】
1032は光学ズーム位置取得部であり、図示しない映像を投射する光学系の光学ズーム位置情b1を取得する。
【0075】
1031は画角情報算出部であり、光学ズーム位置取得部1032によって取得された光学ズーム位置情報b1を用いて、投射型表示装置1000から投射される映像の画角情報bを算出する。
【0076】
画角情報算出部1031は図10に図示しないCPU、ROM、RAMを有するコンピュータから構成される。
【0077】
光学ズーム位置取得部1032は、エンコーダから構成される。
【0078】
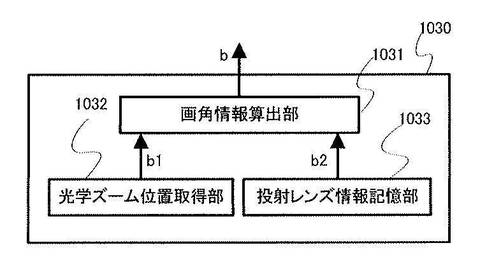
図11は既述の実施例における画角情報取得部1030の詳細の構成を示す第2の図である。
【0079】
1032は光学ズーム位置取得部であり、図11に図示しない映像を投射する投射レンズの光学ズーム位置情b1を取得する。
【0080】
1033は投射レンズ情報記憶部であり、図11に図示しない映像を投射する投射レンズの種類毎に用意される投射レンズ情報b2を保持する。
【0081】
1031は画角情報算出部であり、光学ズーム位置取得部1032によって取得された光学ズーム位置情報b1と、投射レンズ情報記憶部1033から取得した投射レンズ情報b2を用いて、投射型表示装置1000から投射される映像の画角情報bを算出する。
【0082】
画角情報算出部1031は図11に図示しないCPU、ROM、RAMを有するコンピュータから構成される。
【0083】
光学ズーム位置取得部1032は、エンコーダから構成される。
【0084】
投射レンズ情報記憶部1033は、ROMなどの記録媒体から構成される。
【0085】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0086】
1000 投射型表示装置
1010 電子ズーム位置算出部
1020 姿勢変化検出部
1030 画角情報取得部
1040 映像信号取得部
1050 映像信号ズーム制御部
1060 映像表示部
A 電子ズーム位置情報
B 映像信号
C ズーム映像信号
a 姿勢情報
b 画角情報
【技術分野】
【0001】
本発明は、投射型表示装置に関し、特に電子ズーム制御に関するものである。
【背景技術】
【0002】
従来、電子ズーム制御を行う最には投射型表示装置本体に備えられた釦や、リモコン等による釦操作によって拡大する位置を指定し、電子ズーム制御をしていた。図12を用いて説明すると、映像領域1内の電子ズーム領域2を指定し、電子ズーム映像3を表示することが出来る従来の機能がある。さらに映像領域1内の電子ズーム領域2を移動方向4のように移動させ、電子ズーム映像3に映像領域1上の任意の領域を拡大して表示することが出来る。
【0003】
例えば、特許文献1では投射型表示装置に備えられた釦や、リモコンの操作によって電子ズームの中心位置を設定する手法が開示されている。
【0004】
特許文献2ではスクリーンなどの被投射面との相対位置を算出し、表示する映像の移動制御を行う手法が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−163360号公報
【特許文献2】特開2008−209469号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の特許文献1に開示された従来技術では、投射型表示装置に備えられた釦や、リモコン等による操作によって電子ズーム位置を移動制御するため、ユーザーにとっては操作の負荷が生じてしまう。また、特許文献2に開示された従来技術では、被投射面と投射型表示装置との相対位置を算出し、投射映像をスクロールするシステムを紹介しているが、投射型表示装置とは分離している相対位置を算出する装置を被投射面側に用意しなければならず、投射型表示装置のみでの実現は難しい。
【0007】
投射型表示装置内の構成で投射型表示装置の姿勢を検出し、映像信号中の電子ズームすべき対象範囲を検出し、移動制御を行うことを特徴とした投射型表示装置を提供する。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の投射型表示装置は、投射型表示装置の画角情報を取得する画角情報取得部と、前記投射型表示装置本体の姿勢情報を検出する姿勢変化検出部と、入力される映像信号に対して電子ズーム信号処理を行なう映像信号ズーム制御部と、電子ズーム信号の対象位置を算出する電子ズーム位置算出部と、映像信号を取得する映像信号取得部と、映像信号を表示する映像表示部を備え、前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報に基づいて、前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、映像信号上の電子ズーム位置を移動制御することを特徴とする。
【発明の効果】
【0009】
本発明によれば、投射型表示装置のみを用意し、ユーザーが被投射面に対する投射型表示装置の向きを変えるだけで、投射映像中の電子ズーム位置を移動制御することが出来る。
【図面の簡単な説明】
【0010】
【図1】実施例1における投射型表示装置の機能ブロック図
【図2】実施例1における投射型表示装置の電子ズーム制御フローチャート
【図3】実施例2における投射型表示装置の機能ブロック図
【図4】実施例2における投射型表示装置の電子ズーム制御フローチャート
【図5】実施例1、2における電子ズーム制御の実行するケースを表現するイメージ図
【図6】実施例1、2における電子ズーム制御を実行するケースを表現するイメージ図
【図7】実施例3における投射型表示装置の機能ブロック図
【図8】実施例3における投射型表示装置の電子ズーム制御フローチャート
【図9】実施例3における電子ズーム制御を実行するケースを表現するイメージ図
【図10】実施例1、2、3における投射型表示装置内の機能の詳細を示すブロック図
【図11】実施例1、2、3における投射型表示装置内の機能の詳細を示すブロック図
【図12】従来技術の電子ズームを表現するイメージ図
【発明を実施するための形態】
【0011】
以下に、本発明の好ましい実施の形態を、添付の図面に基づいて詳細に説明する。
【0012】
図1は、本発明の実施形態にかかわる投射型表示装置の構成例を示すブロック図である。
【0013】
[実施例1]
以下図1を参照して、本発明の第1の実施例による投射型表示装置の構成を示す機能ブロックについて説明する。
【0014】
1000投射型表示装置本体である。
【0015】
1010は電子ズーム位置算出部であり、映像領域における電子ズーム制御対象の領域を示す電子ズーム位置情報Aを算出する。
【0016】
1020は姿勢変化検出部であり、現在の投射型表示装置の姿勢状態の変化を検出し、姿勢情報aを算出する。
【0017】
1030は画角情報取得部であり、現在の投射型表示装置の画角情報bを取得する。
【0018】
1040は映像信号取得部であり、外部機器から映像信号が入力される。映像信号取得部1040は、図1に図示しない投射型表示装置1000に装着された記録デバイスから映像信号を取得する構成としても良い。
【0019】
1050は映像信号ズーム制御部であり、電子ズーム位置情報Aに基づいて映像信号Bの電子ズーム制御を行う。
【0020】
1060は映像表示部であり、ズーム映像信号Cの表示を行なう。
【0021】
本実施例における電子ズーム位置算出部1010、画角情報取得部1030、映像信号取得部1040、映像信号ズーム制御部1050は、図1に図示しないCPU、ROM、RAMを有する1つ以上のコンピュータから構成される。
【0022】
本実施例における姿勢変化検出部1020は、ジャイロセンサや加速度センサから構成される。
【0023】
本実施例における映像表示部1060は、LCOSパネルなどから構成される。
【0024】
図2は本実施形態に係る、電子ズームを制御するフローの一例であり、図1の構成を用いて説明する。
【0025】
投射型表示装置1000の本体に図1に図示しない操作手段を備え、ユーザーによる操作を検出し一連の処理が実行されることとする。なお、操作手段の操作によって、従来の電子ズーム制御と、本件における電子ズーム位置移動制御との切替え制御が行えるとしても良い。
【0026】
ステップS101は投射型表示装置1000の姿勢情報を取得するステップである。ユーザーによる電子ズーム制御開始操作により、電子ズーム位置算出部1010は投射型表示装置1000の姿勢情報を検出する姿勢情報検出部1020から姿勢情報a取得する。
【0027】
ステップS102は投射型表示装置1000の持つ図1に図示しない映像を投射する光学系の画角情報を取得するステップである。電子ズーム位置算出部1010は画角情報取得部1030から画角情報bを取得する。
【0028】
ステップS103は電子ズーム位置を算出するステップである。電子ズーム位置算出部1010はS101で取得した姿勢情報aとS102で取得した画角情報bを用いて電子ズーム位置情報Aを算出する。
【0029】
ステップS104は映像信号を電子ズーム制御するステップである。映像信号ズーム制御部1050は映像信号取得部1040へ入力された映像信号Bに対して、S103により求められた電子ズーム位置情報Aに基づいて電子ズーム処理を行い、ズーム映像信号Cを作成する。
【0030】
ステップS105は電子ズーム映像を表示するステップである。S104によって電子ズーム処理されたズーム映像信号Cを映像表示部1060によって表示する。
【0031】
以上の処理は電子ズーム移動制御操作が継続されている限り繰り返し行なわれる。
【0032】
[実施例2]
以下図3を参照して、本発明の第2の実施例による投射型表示装置の構成を示す機能ブロックについて説明する。なお、既述の実施例で説明した同一名の機能ブロックについて、本実施例においても同一の働きをするものについては説明は省略する。
【0033】
本実施例における投射型表示装置1000は、実施例1の図1に示す投射型表示装置1000の構成に投射距離算出部1070が追加された構成となる。
【0034】
1070は投射距離算出部であり、被投射面のスクリーンと投射型表示装置1000との距離を示す投射距離情報cを取得する。
【0035】
本実施例における電子ズーム位置算出部1010、画角情報取得部1030、映像信号取得部1040、映像信号ズーム制御部1050は、図3に図示しないCPU、ROM、RAMを有する1つ以上のコンピュータから構成される。
【0036】
本実施例における姿勢変化検出部1020は、ジャイロセンサや加速度センサから構成される。
【0037】
本実施例における映像表示部1060は、LCOSパネルなどから構成される。
【0038】
本実施例における投射距離算出部1070は、距離測定センサから構成される。
【0039】
図4は本実施形態に係る、電子ズームを制御するフローの一例であり、図3の構成を用いて説明する。
【0040】
投射型表示装置1000の本体に図3に図示しない操作手段を備え、ユーザーによる操作を検出し一連の処理が実行されることとする。なお、操作手段の操作によって、従来の電子ズーム制御と、本件における電子ズーム位置移動制御との切替え制御が行えるとしても良い。
【0041】
ステップS201は投射型表示装置1000の姿勢情報を取得するステップである。ユーザーによる電子ズーム制御開始操作により、電子ズーム位置算出部1010は投射型表示装置1000の姿勢情報を検出する姿勢情報検出部1020から姿勢情報a取得する。
【0042】
ステップS202は投射型表示装置1000の持つ図3に図示しない映像を投射する光学系の画角情報を取得するステップである。電子ズーム位置算出部1010は画角情報取得部1030から画角情報bを取得する。
【0043】
ステップS203は被投射面のスクリーンと投射型表示装置1000との距離を算出するステップである。電子ズーム位置算出部1010は投射距離算出部1070から投射距離情報cを取得する。
【0044】
ステップS204は電子ズーム位置を算出するステップである。電子ズーム位置算出部1010はS201で取得した姿勢情報aと、S202で取得した画角情報bと、S203で取得した投射距離情報cを用いて電子ズーム位置情報Aを算出する。
【0045】
ステップS205は映像信号を電子ズーム制御するステップである。映像信号ズーム制御部1050は映像信号取得部1040へ入力された映像信号Bを、S204により求められた電子ズーム位置情報Aに基づいて電子ズーム処理を行い、ズーム映像信号Cを作成する。
【0046】
ステップS206は電子ズーム映像を表示するステップである。S205によって電子ズーム処理されたズーム映像信号Cを映像表示部1060によって表示する。
【0047】
以上の処理はズーム移動制御操作が継続されている限り繰り返し行なわれる。
【0048】
実施例1、2によれば、投射型表示装置1000の姿勢を変化させることで、映像信号中の電子ズーム領域を移動制御し、姿勢の変化に合せて移動する電子ズーム映像を表示することが出来る。また画角や投射距離の変化に応じて拡大、縮小する投射映像の比率に合せて映像信号上の電子ズーム領域の移動量を制御することができる。
【0049】
図5、図6は、実施例1、2における投射型表示装置1000の姿勢を変化させた場合の投射型表示装置1000の姿勢と、投射型表示装置1000の姿勢変化に合せて入力された映像信号の領域上を移動する電子ズーム領域の動きと、電子ズーム映像を示すイメージ図である。
【0050】
図5はスクリーン2000に対して投射方向7が垂直に交わる場合を示す。
【0051】
投射型表示装置1000はスクリーン2000に対して映像領域1内で指定された電子ズーム領域2は電子ズーム映像3として投射される。
【0052】
図6のように、投射型表示装置1000の姿勢を姿勢変化方向8の方向へ変化させる。姿勢変化方向8への姿勢変化によって投射方向7と交わるスクリーン2000上を移動する投射映像に合せて、映像領域1内の電子ズーム領域2を電子ズーム移動方向4へ移動する。これにより、電子ズーム映像3の内容も変化する。
【0053】
なお、図5、6に図示しない三脚などの固定用治具に装着し、ブレの無い安定した状態で投射型表示装置1000姿勢を変化させるものとしても良い。
【0054】
[実施例3]
以下図7を参照して、本発明の第3の実施例による投射型表示装置の構成を示す機能ブロックについて説明する。なお、既述の実施例で説明した同一名の機能ブロックについて、本実施例においても同一の働きをするものについては説明は省略する。
【0055】
本実施例における投射型表示装置1000は、実施例2の図3に示す投射型表示装置1000の構成に台形歪補正部1080が追加された構成となる。
【0056】
1080は台形歪補正部であり、姿勢検出部1020から取得した姿勢情報aに基づいて、投射映像信号となるズーム映像信号Cに対して台形歪補正処理を行う。台形歪補正されたズーム映像信号Cは、補正ズーム映像信号Dとして映像表示部1060へ伝送される。
【0057】
本実施例における電子ズーム位置算出部1010、画角情報取得部1030、映像信号取得部1040、映像信号ズーム制御部1050、台形歪補正部1080は、図7に図示しないCPU、ROM、RAMを有する1つ以上のコンピュータから構成される。
【0058】
本実施例における姿勢変化検出部1020は、ジャイロセンサや加速度センサから構成される。
【0059】
本実施例における映像表示部1060は、LCOSパネルなどから構成される。
【0060】
本実施例における投射距離算出部1070は、距離測定センサから構成される。
【0061】
図8は本実施形態に係る、シフトガイドを表示する処理フローの一例を示す。図7の構成を用いて説明する。投射型表示装置1000の本体に図7に図示しない操作手段を備え、ユーザーによる操作を検出し一連の処理が実行されることとする。なお、操作手段の操作によって、従来の電子ズーム制御と、本件における電子ズーム位置移動制御との切替え制御が行えるとしても良い。
【0062】
ステップS301は投射型表示装置1000の姿勢情報を取得するステップである。ユーザーによる電子ズーム制御開始操作により、電子ズーム位置算出部1010は投射型表示装置1000の姿勢情報を検出する姿勢情報検出部1020から姿勢情報a取得する。ステップS302は投射型表示装置1000の持つ図7に図示しない映像を投射する光学系の画角情報を取得するステップである。電子ズーム位置算出部1010は画角情報取得部1030から画角情報bを取得する。
【0063】
ステップS303は被投射面のスクリーンと投射型表示装置1000との距離を算出するステップである。電子ズーム位置算出部1010は投射距離算出部1070から投射距離情報cを取得する。
【0064】
ステップS304は電子ズーム位置を算出するステップである。電子ズーム位置算出部1010はS301で取得した姿勢情報aとS302で取得した画角情報bとS303で取得した投射距離情報cを用いて電子ズーム位置情報Aを算出する。
【0065】
ステップS305は映像信号を電子ズーム制御するステップである。映像信号ズーム制御部1050は映像信号取得部1040へ入力された映像信号Bに対して、S304により求められた電子ズーム位置情報Aに基づいて電子ズーム処理を行い、ズーム映像信号Cを作成する。
【0066】
ステップS306はS305から取得した姿勢情報aに基づいて、台形補正制御部1080が台形歪補正を行なうステップである。
【0067】
ステップS307は電子ズーム映像を表示するステップである。S305によって電子ズーム処理され、S306によって台形歪補正された補正ズーム映像信号Dを映像表示部1060によって表示する。
【0068】
以上の処理は電子ズーム移動制御操作が継続されている限り繰り返し行なわれる。
【0069】
実施例3によれば、投射型表示装置1000の姿勢を変化させることで、スクリーンに対してあおりを行って映像を投射する状況となった場合に発生する台形歪を補正しつつ、映像信号中の電子ズーム領域を移動制御し、姿勢の変化に合せて移動する電子ズーム映像を表示することが出来る。
【0070】
図9は実施例3における投射型表示装置1000の姿勢を変化させた場合の投射型表示装置の姿勢と、入力映像領域上を移動する電子ズーム領域の動きと、電子ズーム映像を示したイメージ図である。
【0071】
投射型表示装置1000の姿勢を姿勢変化方向8のように変化させる。姿勢変化方向8によって投射方向7と交わるスクリーン2000上の投射映像が移動するのに合せて、電子ズーム映像3に表示される映像信号上の電子ズーム位置が移動する。さらに、投射方向7がスクリーン2000に対して直交しない、あおりを行なって映像を投射させる際に、発生する台形歪9を投射型表示装置1000の姿勢方向8の変化量に基づいて補正10のように補正することが可能である。これによって、投射型表示装置1000の姿勢を変化をした際にも台形歪のない電子ズーム映像3を投射することが可能である。
【0072】
なお、図9に図示しない三脚などの固定用治具に装着し、ブレの無い安定した状態で投射型表示装置1000の姿勢を変化させるものとしても良い。
【0073】
図10は既述の実施例における画角情報取得部1030の詳細の構成を示す第1の図である。
【0074】
1032は光学ズーム位置取得部であり、図示しない映像を投射する光学系の光学ズーム位置情b1を取得する。
【0075】
1031は画角情報算出部であり、光学ズーム位置取得部1032によって取得された光学ズーム位置情報b1を用いて、投射型表示装置1000から投射される映像の画角情報bを算出する。
【0076】
画角情報算出部1031は図10に図示しないCPU、ROM、RAMを有するコンピュータから構成される。
【0077】
光学ズーム位置取得部1032は、エンコーダから構成される。
【0078】
図11は既述の実施例における画角情報取得部1030の詳細の構成を示す第2の図である。
【0079】
1032は光学ズーム位置取得部であり、図11に図示しない映像を投射する投射レンズの光学ズーム位置情b1を取得する。
【0080】
1033は投射レンズ情報記憶部であり、図11に図示しない映像を投射する投射レンズの種類毎に用意される投射レンズ情報b2を保持する。
【0081】
1031は画角情報算出部であり、光学ズーム位置取得部1032によって取得された光学ズーム位置情報b1と、投射レンズ情報記憶部1033から取得した投射レンズ情報b2を用いて、投射型表示装置1000から投射される映像の画角情報bを算出する。
【0082】
画角情報算出部1031は図11に図示しないCPU、ROM、RAMを有するコンピュータから構成される。
【0083】
光学ズーム位置取得部1032は、エンコーダから構成される。
【0084】
投射レンズ情報記憶部1033は、ROMなどの記録媒体から構成される。
【0085】
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0086】
1000 投射型表示装置
1010 電子ズーム位置算出部
1020 姿勢変化検出部
1030 画角情報取得部
1040 映像信号取得部
1050 映像信号ズーム制御部
1060 映像表示部
A 電子ズーム位置情報
B 映像信号
C ズーム映像信号
a 姿勢情報
b 画角情報
【特許請求の範囲】
【請求項1】
投射型表示装置の画角情報を取得する画角情報取得部と、
前記投射型表示装置本体の姿勢情報を検出する姿勢変化検出部と、
入力される映像信号に対して電子ズーム信号処理を行なう映像信号ズーム制御部と、
電子ズーム信号の対象位置を算出する電子ズーム位置算出部と、
映像信号を取得する映像信号取得部と、映像信号を表示する映像表示部を備え、
前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報に基づいて、
前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、
前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、
映像信号上の電子ズーム位置を移動制御することを特徴とした投射型表示装置。
【請求項2】
映像と投射するスクリーンと前記投射型表示装置との距離を取得する投射距離算出部を備え、
前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報と前期投射距離算出部から取得した投射距離情報に基づいて、
前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、
前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、
映像信号上の電子ズーム位置を移動制御することを特徴とした請求項1に記載の投射型表示装置。
【請求項3】
スクリーンに投射する映像の台形歪を補正する台形歪補正部を備え、
前記姿勢変化検出部から取得した姿勢情報に基づいて、
前記映像信号ズーム制御部から取得した電子ズーム映像信号に対して台型歪補正処理を行なうことを特徴とした請求項1または請求項2に記載の投射型表示装置。
【請求項4】
前記画角情報取得部は、
光学ズーム位置情報を取得する光学ズーム位置取得部と、
前記光学ズーム位置取得部から取得した光学ズーム位置情報に基づいて、
画角情報を算出する画角情報算出部から構成されていることを特徴とする請求項1乃至請求項3の何れか1項に記載の投射型表示装置。
【請求項5】
前記画角情報取得部は、
投射レンズ情報を保持する投射レンズ情報記憶部と、
光学ズーム位置情報を取得する光学ズーム位置取得部と、
前記投射レンズ情報記憶部から取得した投射レンズ情報と、
前記光学ズーム位置取得部から取得した光学ズーム位置情報に基づいて、
画角情報を算出する画角情報算出部から構成されていることを特徴とする請求項1乃至請求項3の何れか1項に記載の投射型表示装置。
【請求項1】
投射型表示装置の画角情報を取得する画角情報取得部と、
前記投射型表示装置本体の姿勢情報を検出する姿勢変化検出部と、
入力される映像信号に対して電子ズーム信号処理を行なう映像信号ズーム制御部と、
電子ズーム信号の対象位置を算出する電子ズーム位置算出部と、
映像信号を取得する映像信号取得部と、映像信号を表示する映像表示部を備え、
前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報に基づいて、
前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、
前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、
映像信号上の電子ズーム位置を移動制御することを特徴とした投射型表示装置。
【請求項2】
映像と投射するスクリーンと前記投射型表示装置との距離を取得する投射距離算出部を備え、
前記画角情報取得部から取得した画角情報と前記姿勢変化検出部から取得した姿勢情報と前期投射距離算出部から取得した投射距離情報に基づいて、
前記電子ズーム位置算出部は映像信号上の電子ズーム制御対象とする位置を算出し、
前記映像信号ズーム制御部は前記電子ズーム位置算出部から取得した電子ズーム位置情報に基づいて、
映像信号上の電子ズーム位置を移動制御することを特徴とした請求項1に記載の投射型表示装置。
【請求項3】
スクリーンに投射する映像の台形歪を補正する台形歪補正部を備え、
前記姿勢変化検出部から取得した姿勢情報に基づいて、
前記映像信号ズーム制御部から取得した電子ズーム映像信号に対して台型歪補正処理を行なうことを特徴とした請求項1または請求項2に記載の投射型表示装置。
【請求項4】
前記画角情報取得部は、
光学ズーム位置情報を取得する光学ズーム位置取得部と、
前記光学ズーム位置取得部から取得した光学ズーム位置情報に基づいて、
画角情報を算出する画角情報算出部から構成されていることを特徴とする請求項1乃至請求項3の何れか1項に記載の投射型表示装置。
【請求項5】
前記画角情報取得部は、
投射レンズ情報を保持する投射レンズ情報記憶部と、
光学ズーム位置情報を取得する光学ズーム位置取得部と、
前記投射レンズ情報記憶部から取得した投射レンズ情報と、
前記光学ズーム位置取得部から取得した光学ズーム位置情報に基づいて、
画角情報を算出する画角情報算出部から構成されていることを特徴とする請求項1乃至請求項3の何れか1項に記載の投射型表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−109184(P2013−109184A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254593(P2011−254593)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]