
投球装置用チェンジアップコントローラ
【課題】回転式ホイールに結合され且つボールを競技者に向けて前方に投げるための回転速度で回転式ホイールを回転させるよう構成されるモータを含む投球装置を提供する。
【解決手段】速度制御モジュールはモータ108に結合され、且つ、モータ108を用いて、速球設定の際の第1の回転速度、及び、チェンジアップ設定の際の第2の回転速度で、回転式ホイール102を回転させるよう構成され得る。速度制御モジュールは、投球装置が速球設定及びチェンジアップ設定の場合に、投球装置が投げるボールが目的ゾーンに到達するように、第1の回転速度に基づいて第2の回転速度を決定し得る。いくつかの実施例群では、速度制御モジュールは、第1の回転速度から第2の回転速度に回転式ホイール102を移行させるために、抵抗制動を利用し得る。
【解決手段】速度制御モジュールはモータ108に結合され、且つ、モータ108を用いて、速球設定の際の第1の回転速度、及び、チェンジアップ設定の際の第2の回転速度で、回転式ホイール102を回転させるよう構成され得る。速度制御モジュールは、投球装置が速球設定及びチェンジアップ設定の場合に、投球装置が投げるボールが目的ゾーンに到達するように、第1の回転速度に基づいて第2の回転速度を決定し得る。いくつかの実施例群では、速度制御モジュールは、第1の回転速度から第2の回転速度に回転式ホイール102を移行させるために、抵抗制動を利用し得る。
【発明の詳細な説明】
【技術分野】
【0001】
本書の実施例群は投球装置の分野に関する。
【背景技術】
【0002】
投球装置は、野球のボール、ソフトボール、テニスボール等を投げるために用いられる。野球又はソフトボールに関し、投球装置は、打撃練習において、打者に対して、その打者が打とうとするボールを繰り返し投げるために使用され得る。いくつかの投球装置は、速球、チェンジアップ、及び/又はカーブ等の異なる球種を投げることができる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら、これらの投球装置は、球が打者のところで適切な位置(例えば、ストライクゾーンである。)に到達するように、球種を変えるために物理的な調節を必要とする。その調節は、投球間の長い中断、及び/又は、投球装置における1又は複数の構成要素の位置の変更を必要とする場合がある。打者は、投球間の長い遅延を認識し、且つ/或いは、装置の調節を視認し得る。このことは、異なる球種が来ることを打者に知らせ、それによって、打撃練習における意外性を無くしてしまう。
【課題を解決するための手段】
【0004】
個々の実施例群において、ピッチングマシンコントローラのための方法、装置、及びシステムが提供される。典型的な実施例群では、開示される装置及び/又はシステムにおける1又は複数の構成要素に演算装置が与えられていてもよく、また、本書で説明するように、1又は複数の方法を実行するために演算装置が採用されてもよい。
【0005】
本書の実施例群は、ピッチングマシンのための速度制御モジュールを提供する。ピッチングマシンは、1又は複数の回転式ホイール、及び、各回転式ホイールに関連付けられるモータを含み得る。それらのモータは、関連付けられた回転式ホイールを回転させ得る。ピッチングマシンはさらに、ボールを受けてそのボールを1又は複数の回転式ホイールの外周面に接触させるように構成される供給構造を含み得る。そのボールは、1又は複数の回転式ホイールの回転によって外側に投げられ得る。
【0006】
個々の実施例では、速度制御モジュールは、モータに結合され、且つ、そのモータを用いて、速球設定の際の第1の回転速度、及び、チェンジアップ設定の際の第2の回転速度で、回転式ホイールを回転させるように構成され得る。速度制御モジュールは、投球装置が速球設定及びチェンジアップ設定の場合に、投球装置が投げるボールが目的ゾーンに到達するように、第1の回転速度に基づいて第2の回転速度を決定し得る。いくつかの実施例では、速度制御モジュールは、回転式ホイールを第1の回転速度から第2の回転速度に移行させるために、抵抗制動を利用し得る。
【図面の簡単な説明】
【0007】
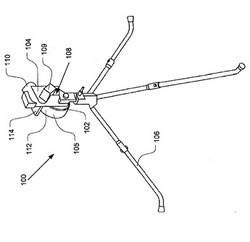
【図1】種々の実施例群にしたがう投球装置の側面図を示す。
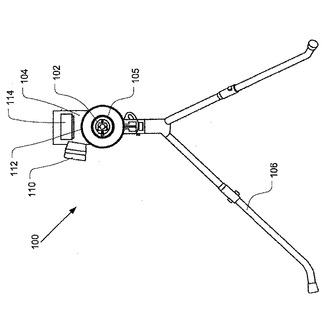
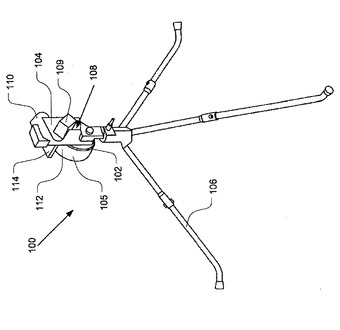
【図2】図1の投球装置の斜視図を示す。
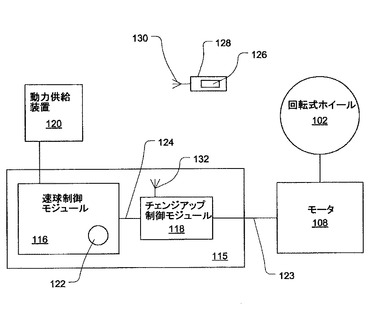
【図3】図1の投球装置の機能ブロック図を示す。
【図4】種々の実施例群にしたがう、野球ボール投球装置用チェンジアップアルゴリズムを示す。
【図5】種々の実施例群にしたがう、ソフトボール投球装置用チェンジアップアルゴリズムを示す。
【図6】種々の実施例群にしたがう、2つの回転式ホイールを有する投球装置の側面図を示す。
【図7】図6の投球装置の斜視図を示す。
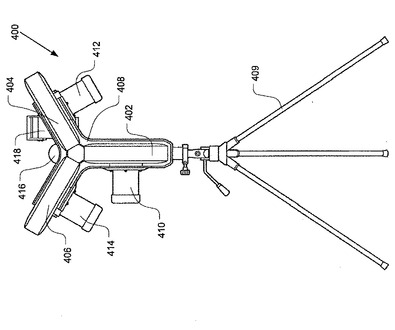
【図8】種々の実施例群にしたがう、3つの回転式ホイールを有する投球装置の正面図を示す。
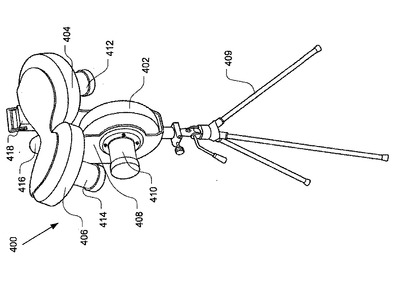
【図9】図8の投球装置の斜視図を示す。
【発明を実施するための形態】
【0008】
実施例群は、添付図面及び添付の特許請求の範囲と関連して、以下の詳細な説明により容易に理解されるであろう。実施例群は、例として示されるものであり、添付図面の図に限定されるものではない。
【0009】
以下の詳細な説明では、詳細な説明の一部を構成し、且つ、実施され得る実施例群を説明目的で示す添付図が参照される。当然ながら、他の実施例群が利用されてもよく、本発明の範囲を逸脱することなく構造的又は論理的な変更が行われてもよい。それ故に、以下の詳細な説明は、限定的な意味にとられてはならず、また、実施例群の範囲は、添付の請求項及びその均等物によって定められる。
【0010】
複数の個別の操作として種々の操作が、実施例群を理解するのに役立ち得る態様で、順に記載され得る。しかしながら、説明の順番は、それらの操作が順番に依存することを暗示するものと解釈されてはならない。
【0011】
説明では、上/下、前/後、頂/底のような観点基準の記載が用いられる場合がある。そのような記載は、単に議論を容易にするために用いられるものであり、開示される実施例群の適用を制限することを意図しない。
【0012】
用語“結合され”及び“接続され”が、それらの派生語と共に、用いられる場合がある。当然ながら、これらの用語は、互いの同義語となることを意図しない。むしろ、特定の実施例群では、“接続され”は、2以上の要素が互いに物理的に或いは電気的に直接接触することを示すために用いられ得る。“結合され”は、2以上の要素が物理的に或いは電気的に直接接触することを意味し得る。しかしながら、“結合され”は、2以上の要素が互いに直接接触しないが、それでもなお互いに協働し或いは相互作用することも意味し得る。
【0013】
説明のための、“A/B”の形式、又は、“A及び/又はB”の形式の表現は、(A)、(B)、又は、(A及びB)を意味する。説明のための、“A、B、及びCのうちの少なくとも1つ”の形式の表現は、(A)、(B)、(C)、(A及びB)、(A及びC)、(B及びC)、又は、(A、B、及びC)を意味する。説明のための、“(A)B”の形式の表現は、(B)又は(AB)を意味する。すなわち、Aがオプションの要素であることを意味する。
【0014】
説明では、用語“実施例”又は“実施例群”を用いる場合がある。それらはそれぞれ、1又は複数の同じ若しくは異なる実施例を参照する。さらに、用語“有する”、“含む”、“持つ”等は、実施例群に関して用いられるように、同義であり、また、一般的に、“オープンな”用語として意図されている(例えば、用語“含んでいる”は、“含んでいるが限定されない”として解釈され、用語“有する”は、“少なくとも有する”として解釈され、用語“含む”は、“含むが限定されない”として解釈される等である。)。
【0015】
本書における任意の複数形及び/又は単数形の用語に関して、当業者は、文脈及び/又は適用に適していれば、複数から単数へ、且つ/或いは、単数から複数へ翻訳し得る。本書では、種々の単数/複数の置換は、明確化のために、明示的に説明され得る。
【0016】
図1及び図2を参照すると、投球装置100は、ボディ部分104に結合され且つ支持構造106(例えば三脚である。)によって地面上に支持される回転式ホイール102を含み得る。いくつかの実施例群では、回転式ホイール102は、空気式タイヤ105を含み得る。モータ108は、回転式ホイール102に結合され、且つ、回転式ホイール102を回転駆動するよう構成され得る。投球装置100はさらに、支持構造に結合され、且つボール(図示せず。)を受け入れてそのボールを回転式ホイール102の外周面112に接触させるよう構成される供給構造110を含み得る。供給構造は、オペレータによるボールの手動供給のために構成されてもよく、且つ/或いは、周期的にボールを回転式ホイール102に自動供給するよう構成されてもよい。
【0017】
ピンチプレート114は、ボディ部分に結合され、且つ、ボールの直径より小さい距離だけ回転式ホイール102の外周面112から間隔を空けて配置され得る。ピンチプレート114は、回転式ホイール102に対してボールを挟み、そして、回転式ホイール102は、投球装置100から打者(図示せず。)に向けてボールを外側に投げ得る。
【0018】
制御ボックス109は、モータ108に結合され、且つ、回転式ホイール102の回転速度を制御するよう構成され得る。個々の実施例群において、投球装置100は、速球(比較的高速での投球)を投げるために、或いは、チェンジアップ(比較的低速での投球)を投げるために、それぞれ、速球設定及び/又はチェンジアップ設定に選択的にセットされ得る。モータ108は、速球設定の際に第1の回転速度(すなわち、速球回転速度)で回転し、また、チェンジアップ設定の際に第2の回転速度(すなわち、チェンジアップ回転速度)で回転し得る。第2の回転速度は、第1の回転速度よりも遅いものとなり得る。したがって、投球装置100は、チェンジアップ設定の場合よりも速球設定の場合により速い速度でボールを投げ得る。
【0019】
図3に示すように、投球装置100は、速度制御モジュール115を含み得る。速度制御モジュール115は、(図2に示すような)制御ボックス109内に配置され得る。速度制御モジュール115は、動力供給装置120に結合され得る。速球制御モジュール116は、動力供給装置120に結合され得る。動力供給装置120は、120ボルトの交流(AC)電源(例えば、壁コンセント)、バッテリ、及び/又は任意の他の適切な電源等の任意の適切な動力源であればよい。
【0020】
いくつかの実施例群では、速度制御モジュール115は、速球制御モジュール116(基準速度制御モジュール116とも称される。)及びチェンジアップ制御モジュール118を含み得る。さらに、速度制御モジュール115は、オペレータがある速度範囲の中から速球速度設定を特定できるように、速球制御モジュール116に結合される速度制御機構122を含み得る。いくつかの実施例群では、速度制御機構122は、回転ダイアルを持つポテンショメータを含み得る。代替的に或いは追加的に、速度制御機構122は、1又は複数のボタン、タッチスクリーン、及び/又はディスプレイを含み得る。投球装置100が速球設定の場合、モータ108の回転速度(すなわち、第1の回転速度)は、速球制御モジュール116によって制御され得る。モータ108の第1の回転速度は、速球制御モジュール116の速球速度設定によって決定され得る。
【0021】
いくつかの実施例群では、速球制御モジュール116及びチェンジアップ制御モジュール118は、(例えば、同じチップに配置される)同じ集積回路の一部であってもよい。別の実施例群では、チェンジアップ制御モジュール118は、速球制御モジュール116とは別の回路であってもよい。そのような実施例群では、チェンジアップ制御モジュール118は、既存の装置における従来の速球制御モジュール116に結合されるよう構成されてもよい。
【0022】
個々の実施例群では、チェンジアップ制御モジュール118は、(投球装置100が速球設定にあるときの)非係合状態と(投球装置100がチェンジアップ設定にあるときの)係合状態とを切換可能であってもよい。係合状態の場合、チェンジアップ制御モジュール118は、チェンジアップを投げるためにモータ108を第2の回転速度で回転させ得る。
【0023】
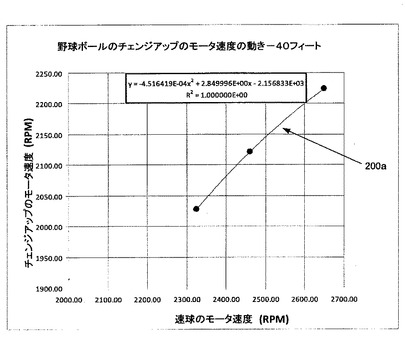
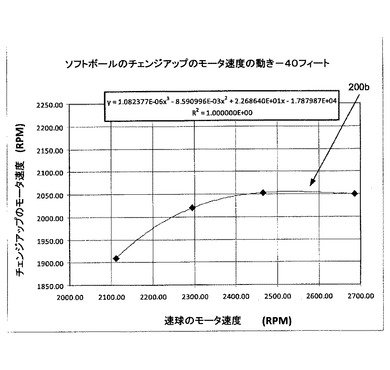
個々の実施例群では、第2の回転速度は、チェンジアップ制御モジュールによって利用される(図4及び図5のそれぞれに示すような)チェンジアップアルゴリズム200a、200bに基づいて決定され得る。チェンジアップアルゴリズム200aは、野球ボールを投げるための第2の回転速度を決定するよう構成され得る。一方で、チェンジアップアルゴリズム200bは、ソフトボールを投げるための第2の回転速度を決定するよう構成され得る。チェンジアップアルゴリズム200a、200bは、投球装置100が速球設定であるかチェンジアップ設定であるかにかかわらず、競技者(例えば、打者である。)のところで、目的ゾーン(例えば、ストライクゾーンである。)内にボールが到達するように構成され得る。チェンジアップアルゴリズム200a、200bは、少なくとも部分的には第1の回転速度に基づいて第2の回転速度を決定してもよい。第1の回転速度と第2の回転速度との差は、第1の回転速度の大きさに応じて変化し得る。このことは、打者のところで速球設定及びチェンジアップ設定での目的ゾーン内にボールが到達するのを促進し得る。目的ゾーン内にボールを到達させながら、比較的高速(例えば、毎時90マイルである。)の速球投球に関する第1の回転速度と第2の回転速度との間の速度差は、比較的低速(例えば、毎時50マイルである。)の速球投球に関する速度差より大きいものとなり得る。
【0024】
いくつかの実施例群では、図4及び図5に示すように、チェンジアップアルゴリズム200a、200bは、第1の回転速度に基づいて第2の回転速度を決定する方程式を含み得る。例えば、チェンジアップアルゴリズムは、多項式(例えば、二階多項式である。)、べき乗則方程式、指数方程式、及び/又は、対数方程式を含み得る。ただし、他のタイプの方程式も可能である。別の実施例群(図示せず。)では、チェンジアップアルゴリズム200a、200bは、第1の回転速度の割合に基づいて第2の回転速度を決定してもよい(例えば、一次線形方程式である。)。或いは、チェンジアップアルゴリズム200a、200bは、第1の回転速度を第2の回転速度に関連付けるための値の参照テーブルを含み得る。チェンジアップ制御モジュール118は、第1の回転速度に基づいて第2の回転速度を決定するためにその参照テーブルを用いてもよい。
【0025】
チェンジアップアルゴリズム200a、200bは、投球装置100の距離設定(すなわち、投球装置から打者までの距離である。)に応じて変化し得る。いくつかの実施例群では、距離設定は、(その距離設定がチェンジアップアルゴリズムでの定数となるように)製造業者によってセットされてもよい。別の実施例群では、距離設定は、オペレータによって選択的に制御されてもよい。
【0026】
いくつかの実施例群では、チェンジアップ制御モジュール118は、チェンジアップアルゴリズム200a、及び/又は200bが保存されるメモリ装置を含み得る。いくつかの実施例群では、チェンジアップ制御モジュールは、(図4に示すような)野球ボール用チェンジアップアルゴリズム200a、及び、(図5に示すような)ソフトボール用チェンジアップアルゴリズム200bの双方が保存されるメモリ装置を含み得る。チェンジアップ制御モジュール118は、野球ボール用チェンジアップアルゴリズム200a又はソフトボール用チェンジアップアルゴリズム200bを用いるべくチェンジアップ制御モジュールを選択的に設定するためのディップスイッチ等のスイッチを含み得る。適切なアルゴリズムは、投球装置100の配送に先立って、製造業者/小売業者によって設定されてもよく、且つ/或いは、投球装置100は、野球ボールの投球とソフトボールの投球とを変更するためにオペレータがアクセス可能なスイッチを含んでいてもよい。
【0027】
個々の実施例群では、チェンジアップアルゴリズム200a、200bは、ボールを目的ゾーンに到達させるために、回転式ホイール102、(ピンチプレート114を含む)供給構造110、及び/又は、(図1及び図2に示すような)投球装置100の他の構成要素の位置が速球投球とチェンジアップ投球との間で変更される必要がないように、構成され得る。したがって、投球装置100の外周面112からボールが飛び出すときのボールの軌跡は、速球設定の際とチェンジアップ設定の際とで同じとなり得る。その軌跡は、ピンチプレート114と回転式ホイール102との相対角度及び/又は相対位置によって決定され得る。このことは、構造を単純化し、また、打者に気付かれることなく投球装置100を速球設定からチェンジアップ設定に或いはその逆に変更するのを容易にする。
【0028】
速球制御モジュール116及びチェンジアップ制御モジュール118は、図3では、速度制御モジュール115内の別々の構成要素として示されたが、別の実施例群では、速球制御モジュール116及びチェンジアップ制御モジュール118は、同じ構成要素に統合されてもよい。例えば、速球制御モジュール116及びチェンジアップ制御モジュール118は、同じ集積回路の一部であってもよい。
【0029】
再び図3を参照すると、個々の実施例群では、速度制御モジュール115は、モータ108を第1の回転速度から第2の回転速度に移行させるために抵抗制動スキームを用いてもよい。抵抗制動スキームは、モータ108が比較的迅速に第1の回転速度から第2の回転速度に移行できるようにし、それによって、投球間の通常の時間遅延を増大させることなく、速球投球からチェンジアップ投球への変更を容易にし得る。このことは、チェンジアップ投球が行われることに打者が気付くのをさらに防止し得る。
【0030】
個々の実施例群では、モータ108は、電動モータ(例えば、直流(DC)モータ又は交流(AC)モータである。)であってもよい。モータ108は、1又は複数の入力端子123で入力信号を受けてもよい。モータ108の回転速度は、モータ108が受ける入力信号における1又は複数のパラメータに基づくものであってもよい。例えば、モータ108の回転速度は、入力信号の電圧レベルに基づくものであってもよい。これらの実施例群では、入力信号は、入力電圧と称される場合もある。いくつかの実施例では、より高い入力電圧が、モータ108のより高い回転速度をもたらし得る(そして、それ故に、回転式ホイール102のより高い回転速度をもたらし得る。)。別の実施例群では、入力信号の電流、周波数、及び/又は、デューティサイクル(例えば、パルス幅変調である。)といった入力信号の別のパラメータがモータの速度を制御するために用いられてもよい。
【0031】
個々の実施例群では、速球制御モジュール116は、1又は複数の出力端子124で第1の電圧(すなわち、速球電圧)を創出してもよい。第1の電圧は、速球速度設定に基づく電圧レベルを有する。チェンジアップ制御モジュール118が非係合状態にある場合、速球制御モジュール116の出力端子124は、モータ108の入力端子123に通信可能に結合されてもよく、また、第1の電圧は、入力電圧としてモータ108に伝えられる。第1の電圧は、モータ108を第1の回転速度で回転させ、それによって、回転式ホイール102が速球投球を行うようにする。
【0032】
チェンジアップ制御モジュール118が係合状態に切り換えられると、速度制御モジュール115は、入力電圧を第1の電圧から第2の電圧に移行させ得る。いくつかの実施例では、チェンジアップ制御モジュール118は、速球制御モジュール116の出力端子124とモータ108の入力端子123との間の通信可能な結合を中断し得る。そして、チェンジアップ制御モジュール118は、入力端子123を負荷抵抗(図示せず。)に結合し得る。負荷抵抗は、モータ108を発電機に変換させ、その負荷抵抗への入力電圧を供給し得る。この工程は、抵抗制動及び/又は回生制動とも称される。抵抗制動は、入力電圧の電圧レベルを迅速に減少させ得る。チェンジアップ制御モジュール118は、入力電圧が第2の電圧(すなわち、チェンジアップ電圧)に達するまで、入力端子123を負荷抵抗に結合し得る。入力電圧が第2の電圧に達すると、入力端子123は、フォロワ回路(図示せず。)に結合され得る。フォロワ回路は、入力電圧が第2の電圧で保持されるように、第2の電圧を創出してもよい。第2の電圧は、モータ108を第2の回転速度で回転させ、それによって、回転式ホイール102がチェンジアップ投球を行うようにする。
【0033】
チェンジアップ制御モジュール118によって用いられる抵抗制動スキームは、モータ108の回転速度が、(速球投球に対応する)第1の回転速度から(チェンジアップ投球に対応する)第2の回転速度に比較的迅速に移行できるようにし得る。例えば、モータ108は、約2〜3秒で約2500rpmから約2100rpmに移行し得る。それ故に、投球装置100は、投球間の遅延時間を増大させることなく、速球投球からチェンジアップ投球へ移行し得る。
【0034】
いくつかの実施例群では、負荷抵抗は、1又は複数の抵抗器を含み得る。電源がバッテリであるいくつかの実施例群では、負荷抵抗は、バッテリを含み得る。これらの実施例群では、モータ108は、第1の電圧から第2の電圧への移行の際にバッテリを再充電し得る。
【0035】
チェンジアップ制御モジュール118が非係合状態に戻されると、モータ108の入力端子123は再び、速球制御モジュール116の出力端子124に通信可能に結合される。速球制御モジュール116は再び、第1の電圧を入力電圧としてモータ108に供給する。回転式ホイール102の回転速度は、第2の回転速度から第1の回転速度に再び上昇し得る。いくつかの実施例群では、回転式ホイール102は、対数関数にしたがって第1の回転速度まで上昇し得る。回転式ホイール102の回転速度は、次の投球に先立って、第1の回転速度と実質的に等しいもの(すなわち、第1の回転速度の少なくとも95%である。)となり得る。
【0036】
個々の実施例群では、投球装置100は、チェンジアップ制御モジュール118を係合状態と非係合状態との間で切り換えるためのチェンジアップスイッチ126を含み得る。いくつかの実施例群では、チェンジアップスイッチは、チェンジアップ制御モジュール118に通信可能に結合される携帯用コントローラ128上に配置され得る。いくつかの実施例群では、図3に示すように、携帯用コントローラ128は、チェンジアップ制御モジュール118とワイヤレスで通信し得る。携帯用コントローラ128は、無線周波数(RF)信号を介して、並びに/又は、Bluetooth、ワイヤレスブロードバンドネットワーク(例えば、Wi−Fi、WiMaxである。)、及び/若しくは、セルラーネットワーク等の任意の適切なワイヤレス通信プロトコルを介して、チェンジアップ制御モジュールと通信し得る。携帯用コントローラ128は、信号をチェンジアップ制御モジュール118に向けて発信するために(且つ/或いは信号をチェンジアップ制御モジュール118から受信するために)、アンテナ130を含み得る。また、チェンジアップ制御モジュール118は、携帯用コントローラ128からの信号を受信するために(且つ/或いは、携帯用コントローラ128に向けて信号を発信するために)、アンテナ132を含み得る。チェンジアップスイッチ126は、1又は複数のボタン、トグル、スライダ、タッチスクリーン、及び/又は、チェンジアップ制御モジュール118にその状態を変えるよう(例えば、非係合状態から係合状態に、且つ/或いは、係合状態から非係合状態に変えるよう)伝えるためにチェンジアップ制御モジュール118に信号を送信するよう携帯用コントローラ128に伝えるように作動させられ得る他の適切なアクチュエータを含み得る。いくつかの実施例群では、携帯用コントローラ128は、携帯情報端末(PDA)、携帯電話、パーソナルコンピュータ(PC)、タブレットコンピュータ、及び/又はMP3プレーヤ等の家庭用電化製品であってもよい。
【0037】
別の実施例群では、携帯用コントローラ128は、有線接続を介してチェンジアップ制御モジュール118と通信し得る。さらに別の実施例群では、チェンジアップスイッチ126は、ボディ部分104及び/又は制御ボックス109に結合されてもよい。
【0038】
いくつかの実施例群では、チェンジアップ制御モジュール118は、(例えば、携帯用コントローラ128によって)非係合状態から係合状態、及び、係合状態から非係合状態に選択的に切り換えられてもよい。代替的に或いは追加的に、チェンジアップ制御モジュール118は、係合状態でのある期間の後、係合状態から非係合状態に戻るように自動的に切り換わってもよい。その期間の長さは、投球装置100が1又は複数のチェンジアップ投球を行うのに十分な時間を許容するように設定され得る。
【0039】
いくつかの実施例群では、投球装置100は周期的にチェンジアップを自動的に投球するように構成され得る。したがって、チェンジアップ制御モジュール118は、所定の間隔及び/又はランダムな間隔で係合状態から非係合状態に自動的に切り換わるように構成され得る。このことは、自動供給機に特に適しており、投球装置100を制御するオペレータの存在なしに、競技者が速球及び/又はチェンジアップを打つ練習を行えるようにする。
【0040】
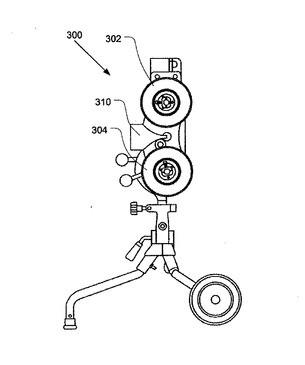
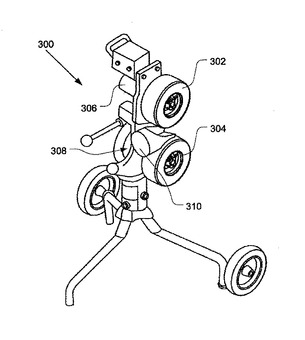
別の実施例群では、投球装置は、1つ、2つ、3つ、或いはそれ以上の回転式ホイールといった、1又は複数の任意の数の回転式ホイールを含み得る。いくつかの実施例群では、回転式ホイールのそれぞれは、関連するモータに結合され得る。図6及び図7に示すように、投球装置300は、第1回転式ホイール302及び第2回転式ホイール304を含む。第1回転式ホイール302は、第1モータ306に結合され、第2回転式ホイール304は、第2モータ308に結合され得る。供給構造310は、ボール(図示せず。)を受けてそのボールを第1回転式ホイール302の外周面と第2回転式ホイール304の外周面との間に向けるように構成され得る。そのボールは、第1回転式ホイール302の外周面と第2回転式ホイール304の外周面との間に挟まれ得る。そして、それら2つの回転式ホイールの回転は、そのボールを前方に投げ得る。したがって、投球装置300は、ピンチプレートを含んでいなくてもよい。
【0041】
第1回転式ホイール302及び第2回転式ホイール304は、(図6及び図7に示すように)垂直に、水平に、且つ/或いは、垂直と水平との間の角度に配置され得る。いくつかの実施例群では、第1回転式ホイール302及び/又は第2回転式ホイール304の配置は、垂直配置及び/又は水平配置との間で調整可能であってもよい。
【0042】
いくつかの実施例群では、第1モータ306及び第2モータ308は、第1回転式ホイール302及び/又は第2回転式ホイール304の回転速度を独立して制御するように独立して制御され得る。各モータは、上述のように、速度制御モジュールに結合され得る。別の実施例群では、第1モータ306及び第2モータ308の双方が、同じ速度制御モジュールによって制御されてもよい。複数の回転式ホイールは、速球、チェンジアップ、カーブ、シンカー、ライザー、及び/又はスライダを含む様々な球種を投げるのに使用され得る。したがって、速度制御モジュール及び/又はチェンジアップアルゴリズムは、目的ゾーン内に任意の数の適切な球種を投げるために、1又は複数の回転式ホイールの回転速度を制御するよう構成され得る。
【0043】
図8及び図9に示すように、投球装置400は、第1回転式ホイール402、第2回転式ホイール404、及び、第3回転式ホイール406を含み、それぞれがボディ部分408に結合されている。投球装置400は、支持構造409(例えば、三脚である。)によって支持され得る。第1モータ410は、第1回転式ホイール402に結合され、第2モータ412は、第2回転式ホイール404に結合され、第3モータ414は、第3回転式ホイール406に結合され得る。供給構造416は、ボール(図示せず。)を受けてそのボールを第1回転式ホイール402、第2回転式ホイール404、及び第3回転式ホイール406のそれぞれの外周面の間に向けるように構成され得る。そのボールは、それら外周面の間に挟まれ得る。そして、それら回転式ホイールの回転は、そのボールを前方へ投げ得る。したがって、投球装置400は、ピンチプレートを含まなくてもよい。
【0044】
第1回転式ホイール402、第2回転式ホイール404、及び第3回転式ホイール406は、互いに対して任意の適切な配置で配置され得る。いくつかの実施例群では、1又は複数の回転式ホイールの配置は、調整可能であってもよい。
【0045】
いくつかの実施例群では、第1モータ410、第2モータ412、及び/又は第3モータ414は、各回転式ホイールの回転速度を独立して制御するように独立して制御され得る。各モータは、制御ボックス418に結合され得る。制御ボックス418は、上述のように、第1モータ410、第2モータ412、及び/又は第3モータ414の回転速度を制御するための速度制御モジュールを含み得る。いくつかの実施例群では、各モータは、個別の速度制御モジュールによって制御され得る。別の実施例群では、第1モータ410、第2モータ412、及び/又は第3モータ414のうちの2つ以上が同じ速度制御モジュールによって制御され得る。複数の回転式ホイールは、速球、チェンジアップ、カーブ、シンカー、ライザー、及び/又はスライダを含む様々な球種を投げるのに使用され得る。したがって、速度制御モジュール及び/又はチェンジアップアルゴリズムは、目的ゾーン内に任意の数の適切な球種を投げるために、1又は複数の回転式ホイールの回転速度を制御するよう構成され得る。
【0046】
打者に投球するために用いられるものとしての投球装置が本書で説明されたが、投球装置は、キャッチング、(例えば、ゴロ及び/若しくはフライの)フィールディング、並びに/又は他の目的の練習等の他の目的のためにボールを投げるのに用いられてもよい。さらに、野球ボール及び/又はソフトボールを投げることを参照して投球装置が本書で説明されたが、投球装置は、テニスボール及び/又はフットボール等の任意の適切なボール又は他の物体を投げるために用いられてもよい。チェンジアップ及び速球という用語は、野球及び/又はソフトボールに限定されることを意味するものではなく、異なる相対速度で任意の物体を投げることを記述するために使用され得る。
【0047】
本書において特定の実施例群が図示され且つ説明されたが、当業者は、広範囲に亘る代替の且つ/或いは均等の実施例群、又は、同じ目的を達成するよう作られた実行例群が、本発明の範囲を逸脱することなく、図示され且つ説明された実施例群の代わりに使用され得ることを理解するであろう。当業者は、実施例群が極めて広範な方法で実行され得ることを容易に理解するであろう。本願は、本書で検討された実施例の任意の適応例及び変更例をカバーすることを意図する。それ故に、実施例が請求項及びその均等物のみによって限定されることを明白に意図する。
【符号の説明】
【0048】
100・・・投球装置 102・・・回転式ホイール 104・・・ボディ部分 105・・・空気式タイヤ 106・・・支持構造 108・・・モータ 109・・・制御ボックス 110・・・供給構造 112・・・外周面 114・・・ピンチプレート 115・・・速度制御モジュール 116・・・速球制御モジュール 118・・・チェンジアップ制御モジュール 120・・・動力供給装置 122・・・速度制御機構 123・・・入力端子 124・・・出力端子 126・・・チェンジアップスイッチ 128・・・携帯用コントローラ 130、132・・・アンテナ 300・・・投球装置 302・・・第1回転式ホイール 304・・・第2回転式ホイール 306・・・第1モータ 308・・・第2モータ 310・・・供給構造 400・・・投球装置 402・・・第1回転式ホイール 404・・・第2回転式ホイール 406・・・第3回転式ホイール 408・・・ボディ部分 409・・・支持構造 410・・・第1モータ 412・・・第2モータ 414・・・第3モータ 416・・・供給構造 418・・・制御ボックス
【技術分野】
【0001】
本書の実施例群は投球装置の分野に関する。
【背景技術】
【0002】
投球装置は、野球のボール、ソフトボール、テニスボール等を投げるために用いられる。野球又はソフトボールに関し、投球装置は、打撃練習において、打者に対して、その打者が打とうとするボールを繰り返し投げるために使用され得る。いくつかの投球装置は、速球、チェンジアップ、及び/又はカーブ等の異なる球種を投げることができる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら、これらの投球装置は、球が打者のところで適切な位置(例えば、ストライクゾーンである。)に到達するように、球種を変えるために物理的な調節を必要とする。その調節は、投球間の長い中断、及び/又は、投球装置における1又は複数の構成要素の位置の変更を必要とする場合がある。打者は、投球間の長い遅延を認識し、且つ/或いは、装置の調節を視認し得る。このことは、異なる球種が来ることを打者に知らせ、それによって、打撃練習における意外性を無くしてしまう。
【課題を解決するための手段】
【0004】
個々の実施例群において、ピッチングマシンコントローラのための方法、装置、及びシステムが提供される。典型的な実施例群では、開示される装置及び/又はシステムにおける1又は複数の構成要素に演算装置が与えられていてもよく、また、本書で説明するように、1又は複数の方法を実行するために演算装置が採用されてもよい。
【0005】
本書の実施例群は、ピッチングマシンのための速度制御モジュールを提供する。ピッチングマシンは、1又は複数の回転式ホイール、及び、各回転式ホイールに関連付けられるモータを含み得る。それらのモータは、関連付けられた回転式ホイールを回転させ得る。ピッチングマシンはさらに、ボールを受けてそのボールを1又は複数の回転式ホイールの外周面に接触させるように構成される供給構造を含み得る。そのボールは、1又は複数の回転式ホイールの回転によって外側に投げられ得る。
【0006】
個々の実施例では、速度制御モジュールは、モータに結合され、且つ、そのモータを用いて、速球設定の際の第1の回転速度、及び、チェンジアップ設定の際の第2の回転速度で、回転式ホイールを回転させるように構成され得る。速度制御モジュールは、投球装置が速球設定及びチェンジアップ設定の場合に、投球装置が投げるボールが目的ゾーンに到達するように、第1の回転速度に基づいて第2の回転速度を決定し得る。いくつかの実施例では、速度制御モジュールは、回転式ホイールを第1の回転速度から第2の回転速度に移行させるために、抵抗制動を利用し得る。
【図面の簡単な説明】
【0007】
【図1】種々の実施例群にしたがう投球装置の側面図を示す。
【図2】図1の投球装置の斜視図を示す。
【図3】図1の投球装置の機能ブロック図を示す。
【図4】種々の実施例群にしたがう、野球ボール投球装置用チェンジアップアルゴリズムを示す。
【図5】種々の実施例群にしたがう、ソフトボール投球装置用チェンジアップアルゴリズムを示す。
【図6】種々の実施例群にしたがう、2つの回転式ホイールを有する投球装置の側面図を示す。
【図7】図6の投球装置の斜視図を示す。
【図8】種々の実施例群にしたがう、3つの回転式ホイールを有する投球装置の正面図を示す。
【図9】図8の投球装置の斜視図を示す。
【発明を実施するための形態】
【0008】
実施例群は、添付図面及び添付の特許請求の範囲と関連して、以下の詳細な説明により容易に理解されるであろう。実施例群は、例として示されるものであり、添付図面の図に限定されるものではない。
【0009】
以下の詳細な説明では、詳細な説明の一部を構成し、且つ、実施され得る実施例群を説明目的で示す添付図が参照される。当然ながら、他の実施例群が利用されてもよく、本発明の範囲を逸脱することなく構造的又は論理的な変更が行われてもよい。それ故に、以下の詳細な説明は、限定的な意味にとられてはならず、また、実施例群の範囲は、添付の請求項及びその均等物によって定められる。
【0010】
複数の個別の操作として種々の操作が、実施例群を理解するのに役立ち得る態様で、順に記載され得る。しかしながら、説明の順番は、それらの操作が順番に依存することを暗示するものと解釈されてはならない。
【0011】
説明では、上/下、前/後、頂/底のような観点基準の記載が用いられる場合がある。そのような記載は、単に議論を容易にするために用いられるものであり、開示される実施例群の適用を制限することを意図しない。
【0012】
用語“結合され”及び“接続され”が、それらの派生語と共に、用いられる場合がある。当然ながら、これらの用語は、互いの同義語となることを意図しない。むしろ、特定の実施例群では、“接続され”は、2以上の要素が互いに物理的に或いは電気的に直接接触することを示すために用いられ得る。“結合され”は、2以上の要素が物理的に或いは電気的に直接接触することを意味し得る。しかしながら、“結合され”は、2以上の要素が互いに直接接触しないが、それでもなお互いに協働し或いは相互作用することも意味し得る。
【0013】
説明のための、“A/B”の形式、又は、“A及び/又はB”の形式の表現は、(A)、(B)、又は、(A及びB)を意味する。説明のための、“A、B、及びCのうちの少なくとも1つ”の形式の表現は、(A)、(B)、(C)、(A及びB)、(A及びC)、(B及びC)、又は、(A、B、及びC)を意味する。説明のための、“(A)B”の形式の表現は、(B)又は(AB)を意味する。すなわち、Aがオプションの要素であることを意味する。
【0014】
説明では、用語“実施例”又は“実施例群”を用いる場合がある。それらはそれぞれ、1又は複数の同じ若しくは異なる実施例を参照する。さらに、用語“有する”、“含む”、“持つ”等は、実施例群に関して用いられるように、同義であり、また、一般的に、“オープンな”用語として意図されている(例えば、用語“含んでいる”は、“含んでいるが限定されない”として解釈され、用語“有する”は、“少なくとも有する”として解釈され、用語“含む”は、“含むが限定されない”として解釈される等である。)。
【0015】
本書における任意の複数形及び/又は単数形の用語に関して、当業者は、文脈及び/又は適用に適していれば、複数から単数へ、且つ/或いは、単数から複数へ翻訳し得る。本書では、種々の単数/複数の置換は、明確化のために、明示的に説明され得る。
【0016】
図1及び図2を参照すると、投球装置100は、ボディ部分104に結合され且つ支持構造106(例えば三脚である。)によって地面上に支持される回転式ホイール102を含み得る。いくつかの実施例群では、回転式ホイール102は、空気式タイヤ105を含み得る。モータ108は、回転式ホイール102に結合され、且つ、回転式ホイール102を回転駆動するよう構成され得る。投球装置100はさらに、支持構造に結合され、且つボール(図示せず。)を受け入れてそのボールを回転式ホイール102の外周面112に接触させるよう構成される供給構造110を含み得る。供給構造は、オペレータによるボールの手動供給のために構成されてもよく、且つ/或いは、周期的にボールを回転式ホイール102に自動供給するよう構成されてもよい。
【0017】
ピンチプレート114は、ボディ部分に結合され、且つ、ボールの直径より小さい距離だけ回転式ホイール102の外周面112から間隔を空けて配置され得る。ピンチプレート114は、回転式ホイール102に対してボールを挟み、そして、回転式ホイール102は、投球装置100から打者(図示せず。)に向けてボールを外側に投げ得る。
【0018】
制御ボックス109は、モータ108に結合され、且つ、回転式ホイール102の回転速度を制御するよう構成され得る。個々の実施例群において、投球装置100は、速球(比較的高速での投球)を投げるために、或いは、チェンジアップ(比較的低速での投球)を投げるために、それぞれ、速球設定及び/又はチェンジアップ設定に選択的にセットされ得る。モータ108は、速球設定の際に第1の回転速度(すなわち、速球回転速度)で回転し、また、チェンジアップ設定の際に第2の回転速度(すなわち、チェンジアップ回転速度)で回転し得る。第2の回転速度は、第1の回転速度よりも遅いものとなり得る。したがって、投球装置100は、チェンジアップ設定の場合よりも速球設定の場合により速い速度でボールを投げ得る。
【0019】
図3に示すように、投球装置100は、速度制御モジュール115を含み得る。速度制御モジュール115は、(図2に示すような)制御ボックス109内に配置され得る。速度制御モジュール115は、動力供給装置120に結合され得る。速球制御モジュール116は、動力供給装置120に結合され得る。動力供給装置120は、120ボルトの交流(AC)電源(例えば、壁コンセント)、バッテリ、及び/又は任意の他の適切な電源等の任意の適切な動力源であればよい。
【0020】
いくつかの実施例群では、速度制御モジュール115は、速球制御モジュール116(基準速度制御モジュール116とも称される。)及びチェンジアップ制御モジュール118を含み得る。さらに、速度制御モジュール115は、オペレータがある速度範囲の中から速球速度設定を特定できるように、速球制御モジュール116に結合される速度制御機構122を含み得る。いくつかの実施例群では、速度制御機構122は、回転ダイアルを持つポテンショメータを含み得る。代替的に或いは追加的に、速度制御機構122は、1又は複数のボタン、タッチスクリーン、及び/又はディスプレイを含み得る。投球装置100が速球設定の場合、モータ108の回転速度(すなわち、第1の回転速度)は、速球制御モジュール116によって制御され得る。モータ108の第1の回転速度は、速球制御モジュール116の速球速度設定によって決定され得る。
【0021】
いくつかの実施例群では、速球制御モジュール116及びチェンジアップ制御モジュール118は、(例えば、同じチップに配置される)同じ集積回路の一部であってもよい。別の実施例群では、チェンジアップ制御モジュール118は、速球制御モジュール116とは別の回路であってもよい。そのような実施例群では、チェンジアップ制御モジュール118は、既存の装置における従来の速球制御モジュール116に結合されるよう構成されてもよい。
【0022】
個々の実施例群では、チェンジアップ制御モジュール118は、(投球装置100が速球設定にあるときの)非係合状態と(投球装置100がチェンジアップ設定にあるときの)係合状態とを切換可能であってもよい。係合状態の場合、チェンジアップ制御モジュール118は、チェンジアップを投げるためにモータ108を第2の回転速度で回転させ得る。
【0023】
個々の実施例群では、第2の回転速度は、チェンジアップ制御モジュールによって利用される(図4及び図5のそれぞれに示すような)チェンジアップアルゴリズム200a、200bに基づいて決定され得る。チェンジアップアルゴリズム200aは、野球ボールを投げるための第2の回転速度を決定するよう構成され得る。一方で、チェンジアップアルゴリズム200bは、ソフトボールを投げるための第2の回転速度を決定するよう構成され得る。チェンジアップアルゴリズム200a、200bは、投球装置100が速球設定であるかチェンジアップ設定であるかにかかわらず、競技者(例えば、打者である。)のところで、目的ゾーン(例えば、ストライクゾーンである。)内にボールが到達するように構成され得る。チェンジアップアルゴリズム200a、200bは、少なくとも部分的には第1の回転速度に基づいて第2の回転速度を決定してもよい。第1の回転速度と第2の回転速度との差は、第1の回転速度の大きさに応じて変化し得る。このことは、打者のところで速球設定及びチェンジアップ設定での目的ゾーン内にボールが到達するのを促進し得る。目的ゾーン内にボールを到達させながら、比較的高速(例えば、毎時90マイルである。)の速球投球に関する第1の回転速度と第2の回転速度との間の速度差は、比較的低速(例えば、毎時50マイルである。)の速球投球に関する速度差より大きいものとなり得る。
【0024】
いくつかの実施例群では、図4及び図5に示すように、チェンジアップアルゴリズム200a、200bは、第1の回転速度に基づいて第2の回転速度を決定する方程式を含み得る。例えば、チェンジアップアルゴリズムは、多項式(例えば、二階多項式である。)、べき乗則方程式、指数方程式、及び/又は、対数方程式を含み得る。ただし、他のタイプの方程式も可能である。別の実施例群(図示せず。)では、チェンジアップアルゴリズム200a、200bは、第1の回転速度の割合に基づいて第2の回転速度を決定してもよい(例えば、一次線形方程式である。)。或いは、チェンジアップアルゴリズム200a、200bは、第1の回転速度を第2の回転速度に関連付けるための値の参照テーブルを含み得る。チェンジアップ制御モジュール118は、第1の回転速度に基づいて第2の回転速度を決定するためにその参照テーブルを用いてもよい。
【0025】
チェンジアップアルゴリズム200a、200bは、投球装置100の距離設定(すなわち、投球装置から打者までの距離である。)に応じて変化し得る。いくつかの実施例群では、距離設定は、(その距離設定がチェンジアップアルゴリズムでの定数となるように)製造業者によってセットされてもよい。別の実施例群では、距離設定は、オペレータによって選択的に制御されてもよい。
【0026】
いくつかの実施例群では、チェンジアップ制御モジュール118は、チェンジアップアルゴリズム200a、及び/又は200bが保存されるメモリ装置を含み得る。いくつかの実施例群では、チェンジアップ制御モジュールは、(図4に示すような)野球ボール用チェンジアップアルゴリズム200a、及び、(図5に示すような)ソフトボール用チェンジアップアルゴリズム200bの双方が保存されるメモリ装置を含み得る。チェンジアップ制御モジュール118は、野球ボール用チェンジアップアルゴリズム200a又はソフトボール用チェンジアップアルゴリズム200bを用いるべくチェンジアップ制御モジュールを選択的に設定するためのディップスイッチ等のスイッチを含み得る。適切なアルゴリズムは、投球装置100の配送に先立って、製造業者/小売業者によって設定されてもよく、且つ/或いは、投球装置100は、野球ボールの投球とソフトボールの投球とを変更するためにオペレータがアクセス可能なスイッチを含んでいてもよい。
【0027】
個々の実施例群では、チェンジアップアルゴリズム200a、200bは、ボールを目的ゾーンに到達させるために、回転式ホイール102、(ピンチプレート114を含む)供給構造110、及び/又は、(図1及び図2に示すような)投球装置100の他の構成要素の位置が速球投球とチェンジアップ投球との間で変更される必要がないように、構成され得る。したがって、投球装置100の外周面112からボールが飛び出すときのボールの軌跡は、速球設定の際とチェンジアップ設定の際とで同じとなり得る。その軌跡は、ピンチプレート114と回転式ホイール102との相対角度及び/又は相対位置によって決定され得る。このことは、構造を単純化し、また、打者に気付かれることなく投球装置100を速球設定からチェンジアップ設定に或いはその逆に変更するのを容易にする。
【0028】
速球制御モジュール116及びチェンジアップ制御モジュール118は、図3では、速度制御モジュール115内の別々の構成要素として示されたが、別の実施例群では、速球制御モジュール116及びチェンジアップ制御モジュール118は、同じ構成要素に統合されてもよい。例えば、速球制御モジュール116及びチェンジアップ制御モジュール118は、同じ集積回路の一部であってもよい。
【0029】
再び図3を参照すると、個々の実施例群では、速度制御モジュール115は、モータ108を第1の回転速度から第2の回転速度に移行させるために抵抗制動スキームを用いてもよい。抵抗制動スキームは、モータ108が比較的迅速に第1の回転速度から第2の回転速度に移行できるようにし、それによって、投球間の通常の時間遅延を増大させることなく、速球投球からチェンジアップ投球への変更を容易にし得る。このことは、チェンジアップ投球が行われることに打者が気付くのをさらに防止し得る。
【0030】
個々の実施例群では、モータ108は、電動モータ(例えば、直流(DC)モータ又は交流(AC)モータである。)であってもよい。モータ108は、1又は複数の入力端子123で入力信号を受けてもよい。モータ108の回転速度は、モータ108が受ける入力信号における1又は複数のパラメータに基づくものであってもよい。例えば、モータ108の回転速度は、入力信号の電圧レベルに基づくものであってもよい。これらの実施例群では、入力信号は、入力電圧と称される場合もある。いくつかの実施例では、より高い入力電圧が、モータ108のより高い回転速度をもたらし得る(そして、それ故に、回転式ホイール102のより高い回転速度をもたらし得る。)。別の実施例群では、入力信号の電流、周波数、及び/又は、デューティサイクル(例えば、パルス幅変調である。)といった入力信号の別のパラメータがモータの速度を制御するために用いられてもよい。
【0031】
個々の実施例群では、速球制御モジュール116は、1又は複数の出力端子124で第1の電圧(すなわち、速球電圧)を創出してもよい。第1の電圧は、速球速度設定に基づく電圧レベルを有する。チェンジアップ制御モジュール118が非係合状態にある場合、速球制御モジュール116の出力端子124は、モータ108の入力端子123に通信可能に結合されてもよく、また、第1の電圧は、入力電圧としてモータ108に伝えられる。第1の電圧は、モータ108を第1の回転速度で回転させ、それによって、回転式ホイール102が速球投球を行うようにする。
【0032】
チェンジアップ制御モジュール118が係合状態に切り換えられると、速度制御モジュール115は、入力電圧を第1の電圧から第2の電圧に移行させ得る。いくつかの実施例では、チェンジアップ制御モジュール118は、速球制御モジュール116の出力端子124とモータ108の入力端子123との間の通信可能な結合を中断し得る。そして、チェンジアップ制御モジュール118は、入力端子123を負荷抵抗(図示せず。)に結合し得る。負荷抵抗は、モータ108を発電機に変換させ、その負荷抵抗への入力電圧を供給し得る。この工程は、抵抗制動及び/又は回生制動とも称される。抵抗制動は、入力電圧の電圧レベルを迅速に減少させ得る。チェンジアップ制御モジュール118は、入力電圧が第2の電圧(すなわち、チェンジアップ電圧)に達するまで、入力端子123を負荷抵抗に結合し得る。入力電圧が第2の電圧に達すると、入力端子123は、フォロワ回路(図示せず。)に結合され得る。フォロワ回路は、入力電圧が第2の電圧で保持されるように、第2の電圧を創出してもよい。第2の電圧は、モータ108を第2の回転速度で回転させ、それによって、回転式ホイール102がチェンジアップ投球を行うようにする。
【0033】
チェンジアップ制御モジュール118によって用いられる抵抗制動スキームは、モータ108の回転速度が、(速球投球に対応する)第1の回転速度から(チェンジアップ投球に対応する)第2の回転速度に比較的迅速に移行できるようにし得る。例えば、モータ108は、約2〜3秒で約2500rpmから約2100rpmに移行し得る。それ故に、投球装置100は、投球間の遅延時間を増大させることなく、速球投球からチェンジアップ投球へ移行し得る。
【0034】
いくつかの実施例群では、負荷抵抗は、1又は複数の抵抗器を含み得る。電源がバッテリであるいくつかの実施例群では、負荷抵抗は、バッテリを含み得る。これらの実施例群では、モータ108は、第1の電圧から第2の電圧への移行の際にバッテリを再充電し得る。
【0035】
チェンジアップ制御モジュール118が非係合状態に戻されると、モータ108の入力端子123は再び、速球制御モジュール116の出力端子124に通信可能に結合される。速球制御モジュール116は再び、第1の電圧を入力電圧としてモータ108に供給する。回転式ホイール102の回転速度は、第2の回転速度から第1の回転速度に再び上昇し得る。いくつかの実施例群では、回転式ホイール102は、対数関数にしたがって第1の回転速度まで上昇し得る。回転式ホイール102の回転速度は、次の投球に先立って、第1の回転速度と実質的に等しいもの(すなわち、第1の回転速度の少なくとも95%である。)となり得る。
【0036】
個々の実施例群では、投球装置100は、チェンジアップ制御モジュール118を係合状態と非係合状態との間で切り換えるためのチェンジアップスイッチ126を含み得る。いくつかの実施例群では、チェンジアップスイッチは、チェンジアップ制御モジュール118に通信可能に結合される携帯用コントローラ128上に配置され得る。いくつかの実施例群では、図3に示すように、携帯用コントローラ128は、チェンジアップ制御モジュール118とワイヤレスで通信し得る。携帯用コントローラ128は、無線周波数(RF)信号を介して、並びに/又は、Bluetooth、ワイヤレスブロードバンドネットワーク(例えば、Wi−Fi、WiMaxである。)、及び/若しくは、セルラーネットワーク等の任意の適切なワイヤレス通信プロトコルを介して、チェンジアップ制御モジュールと通信し得る。携帯用コントローラ128は、信号をチェンジアップ制御モジュール118に向けて発信するために(且つ/或いは信号をチェンジアップ制御モジュール118から受信するために)、アンテナ130を含み得る。また、チェンジアップ制御モジュール118は、携帯用コントローラ128からの信号を受信するために(且つ/或いは、携帯用コントローラ128に向けて信号を発信するために)、アンテナ132を含み得る。チェンジアップスイッチ126は、1又は複数のボタン、トグル、スライダ、タッチスクリーン、及び/又は、チェンジアップ制御モジュール118にその状態を変えるよう(例えば、非係合状態から係合状態に、且つ/或いは、係合状態から非係合状態に変えるよう)伝えるためにチェンジアップ制御モジュール118に信号を送信するよう携帯用コントローラ128に伝えるように作動させられ得る他の適切なアクチュエータを含み得る。いくつかの実施例群では、携帯用コントローラ128は、携帯情報端末(PDA)、携帯電話、パーソナルコンピュータ(PC)、タブレットコンピュータ、及び/又はMP3プレーヤ等の家庭用電化製品であってもよい。
【0037】
別の実施例群では、携帯用コントローラ128は、有線接続を介してチェンジアップ制御モジュール118と通信し得る。さらに別の実施例群では、チェンジアップスイッチ126は、ボディ部分104及び/又は制御ボックス109に結合されてもよい。
【0038】
いくつかの実施例群では、チェンジアップ制御モジュール118は、(例えば、携帯用コントローラ128によって)非係合状態から係合状態、及び、係合状態から非係合状態に選択的に切り換えられてもよい。代替的に或いは追加的に、チェンジアップ制御モジュール118は、係合状態でのある期間の後、係合状態から非係合状態に戻るように自動的に切り換わってもよい。その期間の長さは、投球装置100が1又は複数のチェンジアップ投球を行うのに十分な時間を許容するように設定され得る。
【0039】
いくつかの実施例群では、投球装置100は周期的にチェンジアップを自動的に投球するように構成され得る。したがって、チェンジアップ制御モジュール118は、所定の間隔及び/又はランダムな間隔で係合状態から非係合状態に自動的に切り換わるように構成され得る。このことは、自動供給機に特に適しており、投球装置100を制御するオペレータの存在なしに、競技者が速球及び/又はチェンジアップを打つ練習を行えるようにする。
【0040】
別の実施例群では、投球装置は、1つ、2つ、3つ、或いはそれ以上の回転式ホイールといった、1又は複数の任意の数の回転式ホイールを含み得る。いくつかの実施例群では、回転式ホイールのそれぞれは、関連するモータに結合され得る。図6及び図7に示すように、投球装置300は、第1回転式ホイール302及び第2回転式ホイール304を含む。第1回転式ホイール302は、第1モータ306に結合され、第2回転式ホイール304は、第2モータ308に結合され得る。供給構造310は、ボール(図示せず。)を受けてそのボールを第1回転式ホイール302の外周面と第2回転式ホイール304の外周面との間に向けるように構成され得る。そのボールは、第1回転式ホイール302の外周面と第2回転式ホイール304の外周面との間に挟まれ得る。そして、それら2つの回転式ホイールの回転は、そのボールを前方に投げ得る。したがって、投球装置300は、ピンチプレートを含んでいなくてもよい。
【0041】
第1回転式ホイール302及び第2回転式ホイール304は、(図6及び図7に示すように)垂直に、水平に、且つ/或いは、垂直と水平との間の角度に配置され得る。いくつかの実施例群では、第1回転式ホイール302及び/又は第2回転式ホイール304の配置は、垂直配置及び/又は水平配置との間で調整可能であってもよい。
【0042】
いくつかの実施例群では、第1モータ306及び第2モータ308は、第1回転式ホイール302及び/又は第2回転式ホイール304の回転速度を独立して制御するように独立して制御され得る。各モータは、上述のように、速度制御モジュールに結合され得る。別の実施例群では、第1モータ306及び第2モータ308の双方が、同じ速度制御モジュールによって制御されてもよい。複数の回転式ホイールは、速球、チェンジアップ、カーブ、シンカー、ライザー、及び/又はスライダを含む様々な球種を投げるのに使用され得る。したがって、速度制御モジュール及び/又はチェンジアップアルゴリズムは、目的ゾーン内に任意の数の適切な球種を投げるために、1又は複数の回転式ホイールの回転速度を制御するよう構成され得る。
【0043】
図8及び図9に示すように、投球装置400は、第1回転式ホイール402、第2回転式ホイール404、及び、第3回転式ホイール406を含み、それぞれがボディ部分408に結合されている。投球装置400は、支持構造409(例えば、三脚である。)によって支持され得る。第1モータ410は、第1回転式ホイール402に結合され、第2モータ412は、第2回転式ホイール404に結合され、第3モータ414は、第3回転式ホイール406に結合され得る。供給構造416は、ボール(図示せず。)を受けてそのボールを第1回転式ホイール402、第2回転式ホイール404、及び第3回転式ホイール406のそれぞれの外周面の間に向けるように構成され得る。そのボールは、それら外周面の間に挟まれ得る。そして、それら回転式ホイールの回転は、そのボールを前方へ投げ得る。したがって、投球装置400は、ピンチプレートを含まなくてもよい。
【0044】
第1回転式ホイール402、第2回転式ホイール404、及び第3回転式ホイール406は、互いに対して任意の適切な配置で配置され得る。いくつかの実施例群では、1又は複数の回転式ホイールの配置は、調整可能であってもよい。
【0045】
いくつかの実施例群では、第1モータ410、第2モータ412、及び/又は第3モータ414は、各回転式ホイールの回転速度を独立して制御するように独立して制御され得る。各モータは、制御ボックス418に結合され得る。制御ボックス418は、上述のように、第1モータ410、第2モータ412、及び/又は第3モータ414の回転速度を制御するための速度制御モジュールを含み得る。いくつかの実施例群では、各モータは、個別の速度制御モジュールによって制御され得る。別の実施例群では、第1モータ410、第2モータ412、及び/又は第3モータ414のうちの2つ以上が同じ速度制御モジュールによって制御され得る。複数の回転式ホイールは、速球、チェンジアップ、カーブ、シンカー、ライザー、及び/又はスライダを含む様々な球種を投げるのに使用され得る。したがって、速度制御モジュール及び/又はチェンジアップアルゴリズムは、目的ゾーン内に任意の数の適切な球種を投げるために、1又は複数の回転式ホイールの回転速度を制御するよう構成され得る。
【0046】
打者に投球するために用いられるものとしての投球装置が本書で説明されたが、投球装置は、キャッチング、(例えば、ゴロ及び/若しくはフライの)フィールディング、並びに/又は他の目的の練習等の他の目的のためにボールを投げるのに用いられてもよい。さらに、野球ボール及び/又はソフトボールを投げることを参照して投球装置が本書で説明されたが、投球装置は、テニスボール及び/又はフットボール等の任意の適切なボール又は他の物体を投げるために用いられてもよい。チェンジアップ及び速球という用語は、野球及び/又はソフトボールに限定されることを意味するものではなく、異なる相対速度で任意の物体を投げることを記述するために使用され得る。
【0047】
本書において特定の実施例群が図示され且つ説明されたが、当業者は、広範囲に亘る代替の且つ/或いは均等の実施例群、又は、同じ目的を達成するよう作られた実行例群が、本発明の範囲を逸脱することなく、図示され且つ説明された実施例群の代わりに使用され得ることを理解するであろう。当業者は、実施例群が極めて広範な方法で実行され得ることを容易に理解するであろう。本願は、本書で検討された実施例の任意の適応例及び変更例をカバーすることを意図する。それ故に、実施例が請求項及びその均等物のみによって限定されることを明白に意図する。
【符号の説明】
【0048】
100・・・投球装置 102・・・回転式ホイール 104・・・ボディ部分 105・・・空気式タイヤ 106・・・支持構造 108・・・モータ 109・・・制御ボックス 110・・・供給構造 112・・・外周面 114・・・ピンチプレート 115・・・速度制御モジュール 116・・・速球制御モジュール 118・・・チェンジアップ制御モジュール 120・・・動力供給装置 122・・・速度制御機構 123・・・入力端子 124・・・出力端子 126・・・チェンジアップスイッチ 128・・・携帯用コントローラ 130、132・・・アンテナ 300・・・投球装置 302・・・第1回転式ホイール 304・・・第2回転式ホイール 306・・・第1モータ 308・・・第2モータ 310・・・供給構造 400・・・投球装置 402・・・第1回転式ホイール 404・・・第2回転式ホイール 406・・・第3回転式ホイール 408・・・ボディ部分 409・・・支持構造 410・・・第1モータ 412・・・第2モータ 414・・・第3モータ 416・・・供給構造 418・・・制御ボックス
【特許請求の範囲】
【請求項1】
投球装置であって:
ボディ部分に結合される1又は複数の回転式ホイールであり、各回転式ホイールが関連するモータに結合され、前記モータが前記回転式ホイールをある回転速度で回転させるよう構成され、前記回転速度が、少なくとも部分的に、前記モータが受ける入力信号のパラメータに基づくところの1又は複数の回転式ホイール;
前記ボディ部分に結合され且つボールを受けて前記ボールを前記1又は複数の回転式ホイールのうちの少なくとも1つの外周面に向けるよう構成される供給構造であり、前記回転式ホイールが前記ボールを当該投球装置から競技者に向けて外側に投げるよう構成されるところの供給構造;
前記モータのうちの少なくとも1つに結合される速度制御モジュールであり、速球設定とチェンジアップ設定との間で選択的に切換可能であり、前記速球設定の際に前記回転式ホイールを第1の回転速度で回転させるために第1の入力信号を前記モータに供給し、且つ、前記チェンジアップ設定の際に前記回転式ホイールを第2の回転速度で回転させるために第2の入力信号を前記モータに供給するように構成されるところの速度制御モジュール;を有し、
前記速度制御モジュールは、前記速球設定の際及び前記チェンジアップ設定の際に、前記回転式ホイール又は前記供給構造の位置を調整することなく、前記ボールが前記競技者のところで目的ゾーンに到達するように、少なくとも部分的には前記第1の入力信号のパラメータに基づいて前記第2の入力信号を決定するよう構成される、
投球装置。
【請求項2】
前記1又は複数の回転式ホイールは、第1の回転式ホイールを含み、
前記供給構造は、前記ボールの直径より小さい距離だけ前記第1の回転式ホイールの外周面から間隔を空けて配置されるピンチプレートを含む、
請求項1に記載の投球装置。
【請求項3】
前記入力信号は、入力電圧を含み、
前記第1の入力信号は、第1の電圧を含み、
前記第2の入力信号は、第2の電圧を含み、
前記第1の電圧は、前記速度制御モジュールの速球速度設定に基づく値を有し、
前記第2の電圧は、少なくとも部分的には、前記第1の電圧の値に基づく値を有する、
請求項1に記載の投球装置。
【請求項4】
前記速球速度設定は、ポテンショメータによって制御され、
前記ポテンショメータは、当該投球装置のオペレータによる制御が可能である、
請求項3に記載の投球装置。
【請求項5】
前記速度制御モジュールは、速球制御モジュール及びチェンジアップ制御モジュールを含み、
前記速球制御モジュールは、前記第1の電圧を創出するよう構成され、且つ、前記速球設定の際に前記第1の電圧を前記モータに渡すために前記モータの入力端子に通信可能に結合され、
前記チェンジアップ制御モジュールは、前記速球制御モジュールに結合され、且つ、
前記チェンジアップ設定の際に前記入力電圧を前記第1の電圧から前記第2の電圧に移行させるために前記速球制御モジュールと前記モータの入力端子との間の通信可能な結合を中断するよう構成される、
請求項3に記載の投球装置。
【請求項6】
前記チェンジアップ制御モジュールはさらに、前記入力電圧を前記第1の電圧から前記第2の電圧に移行させるために、前記モータの前記入力端子を負荷抵抗に結合するよう構成される、
請求項5に記載の投球装置。
【請求項7】
前記チェンジアップ制御モジュールはさらに、前記入力電圧が前記第2の電圧に達すると、前記第2の電圧を提供するよう構成されるフォロワ回路に前記モータの前記入力端子を結合するよう構成される、
請求項6に記載の投球装置。
【請求項8】
前記速度制御モジュールを前記速球設定及び/又は前記チェンジアップ設定に選択的にセットするために前記速度制御モジュールとワイヤレスで通信するよう構成される携帯用コントローラをさらに有する、
請求項1に記載の投球装置。
【請求項9】
前記速度制御モジュールは、前記チェンジアップ設定でしばらくした後、前記チェンジアップ設定から前記速球設定に自動的に切り換わるよう構成される、
請求項1に記載の投球装置。
【請求項10】
前記第2の回転速度は、チェンジアップアルゴリズムを用いて決定され、
前記チェンジアップアルゴリズムは、多項式関数を含む、
請求項1に記載の投球装置。
【請求項11】
前記モータは、1又は複数の回転式ホイールのうちの第1回転式ホイールに結合される第1モータを含み、
当該投球装置はさらに、第2回転式ホイールに結合される第2モータを含み、
前記第2モータは、少なくとも部分的には前記第2モータが受ける第2の入力信号の値に基づく第2の回転速度で前記第2回転式ホイールを回転させるよう構成され、
前記第2回転式ホイールは、前記ボディ部分に結合され、且つ、前記第1回転式ホイールと協働してボールを投げるために、前記第1回転式ホイールの外周面から間隔を空けて配置される外周面を有する、
請求項1に記載の投球装置。
【請求項12】
第3回転式ホイールに結合される第3モータをさらに有し、
前記第3モータは、少なくとも部分的には前記第3モータが受ける第3の入力信号の値に基づく第3の回転速度で前記第3回転式ホイールを回転させるよう構成され、
前記第3回転式ホイールは、前記ボディ部分に結合され、且つ、前記第1回転式ホイール及び前記第2回転式ホイールと協働してボールを投げるために、前記第1回転式ホイール及び前記第2回転式ホイールの外周面から間隔を空けて配置される外周面を有する、
請求項11に記載の投球装置。
【請求項13】
投球装置であって:
回転式ホイール;
前記回転式ホイールに結合され、且つ、ボールを受けて前記ボールを前記回転式ホイールの外周面に向けるよう構成される供給構造;
前記回転式ホイールに結合され、且つ、ある回転速度で回転するよう構成され、それによって、前記回転式ホイールを回転させるモータであり、前記回転速度は、前記モータが受ける入力電圧に基づくところのモータ;
第1の電圧を創出するよう構成される速球制御モジュールであり、前記第1の電圧は、当該投球装置の基準速度設定に依存する値を有するところの速球制御モジュール;及び
前記速球制御モジュール及び前記モータに結合されるチェンジアップ制御モジュールであり、係合状態と非係合状態との間で選択的に切換可能であるチェンジアップ制御モジュール;を有し、
前記チェンジアップ制御モジュールが前記非係合状態にある場合、前記第1の電圧が前記入力電圧として前記モータに提供され、
前記チェンジアップ制御モジュールが前記係合状態にある場合、前記チェンジアップ制御モジュールは、前記モータの入力端子を前記速球制御モジュールから切り離し、且つ、前記入力端子を負荷抵抗に結合することによって、前記第1の電圧から第2の電圧に前記入力電圧を移行させる、
投球装置。
【請求項14】
前記チェンジアップ制御モジュールはさらに、前記入力電圧が前記第2の電圧に達すると、前記モータの前記入力端子をフォロワ回路に結合し、
前記フォロワ回路は、前記第2の電圧を前記入力電圧として前記モータに提供するよう構成される、
請求項13に記載の投球装置。
【請求項15】
前記フォロワ回路は、前記速球制御モジュールから前記第1の電圧を受け、且つ、少なくとも部分的には前記第1の電圧の値に基づいて前記第2の電圧を創出するよう構成される、
請求項14に記載の投球装置。
【請求項16】
前記回転式ホイールから前記ボールが投げられたときの軌跡は、前記チェンジアップ制御モジュールが前記係合状態及び前記非係合状態にある場合、実質的に一定のままであり、
チェンジアップアルゴリズムは、前記ボールが目的ゾーンに投げられるよう、構成される、
請求項15に記載の投球装置。
【請求項17】
前記供給構造は、前記ボールの直径より小さい距離だけ前記回転式ホイールから間隔を空けて配置されるピンチプレートを含み、
前記ピンチプレートの位置、及び、前記回転式ホイールの位置は、前記チェンジアップ制御モジュールが前記係合状態及び前記非係合状態にある場合、実質的に一定である、
請求項15に記載の投球装置。
【請求項18】
前記回転式ホイールは、第1回転式ホイールを含み、
前記モータは、第1モータを含み、
前記入力電圧は、第1の入力電圧を含み、
当該投球装置はさらに、前記供給構造に結合され、且つ、当該投球装置から外側に前記ボールを投げるために前記ボールの直径より小さい距離だけ前記第1回転式ホイールの外周面から間隔を空けて配置される外周面を有する第2回転式ホイールを有し、
前記第2回転式ホイールは、第2の入力電圧を前記第2回転式ホイールの回転速度に変換するために前記第2の入力電圧を受けるよう構成される第2モータに結合される、
請求項13に記載の投球装置。
【請求項19】
前記供給構造に結合され、且つ、当該投球装置から外側に前記ボールを投げるために前記第1回転式ホイール及び前記第2回転式ホイールのそれぞれの外周面から間隔を空けて配置される外周面を有する第3回転式ホイールをさらに有し、
前記第3回転式ホイールは、第3モータに結合される、
請求項18に記載の投球装置。
【請求項20】
速度制御モジュールによって、第1モードの際に、前記速度制御モジュールの基準速度設定に基づいて第1の電圧を創出するステップ;
前記速度制御モジュールによって、前記第1モードの際に、前記第1の電圧を入力電圧としてモータに供給するステップであり、前記モータが、前記第1の電圧の値に基づく第1の回転速度で投球装置の回転式ホイールを回転させるために、前記回転式ホイールに動作可能に結合され、前記回転式ホイールが目的ゾーン内にボールを投げるようにするところのステップ;
前記速度制御モジュールによって、前記速度制御モジュールの前記基準速度設定に基づいて第2の電圧を決定するステップであり、前記第2の電圧が、前記第2の電圧が前記入力電圧として前記モータに供給されたときに、前記モータが前記第1の回転速度より遅い第2の回転速度で前記回転式ホイールを回転させるように設定され、且つ、前記回転式ホイールが前記目的ゾーン内にボールを投げるように設定される値を有するところのステップ;及び
前記速度制御モジュールによって、前記速度制御モジュールが第1モードから第2モードに切り換えられたときに、前記モータの前記入力電圧を前記第1の電圧から前記第2の電圧に移行させるステップ;
を有する方法。
【請求項21】
前記移行させるステップは、前記モータの入力端子を負荷抵抗に結合するステップをさらに有する、
請求項20に記載の方法。
【請求項22】
前記入力電圧が前記第2の電圧に達したときに、前記入力端子を前記負荷抵抗から切り離し、且つ、前記第2の電圧を前記入力端子に提供するよう構成されるフォロワ回路に前記入力端子を結合するステップをさらに有する、
請求項21に記載の方法。
【請求項23】
前記速度制御モジュールが前記第2モードから前記第1モードに切り換えられたときに、前記第1の電圧を前記入力電圧として前記モータに提供するステップをさらに有する、
請求項20に記載の方法。
【請求項1】
投球装置であって:
ボディ部分に結合される1又は複数の回転式ホイールであり、各回転式ホイールが関連するモータに結合され、前記モータが前記回転式ホイールをある回転速度で回転させるよう構成され、前記回転速度が、少なくとも部分的に、前記モータが受ける入力信号のパラメータに基づくところの1又は複数の回転式ホイール;
前記ボディ部分に結合され且つボールを受けて前記ボールを前記1又は複数の回転式ホイールのうちの少なくとも1つの外周面に向けるよう構成される供給構造であり、前記回転式ホイールが前記ボールを当該投球装置から競技者に向けて外側に投げるよう構成されるところの供給構造;
前記モータのうちの少なくとも1つに結合される速度制御モジュールであり、速球設定とチェンジアップ設定との間で選択的に切換可能であり、前記速球設定の際に前記回転式ホイールを第1の回転速度で回転させるために第1の入力信号を前記モータに供給し、且つ、前記チェンジアップ設定の際に前記回転式ホイールを第2の回転速度で回転させるために第2の入力信号を前記モータに供給するように構成されるところの速度制御モジュール;を有し、
前記速度制御モジュールは、前記速球設定の際及び前記チェンジアップ設定の際に、前記回転式ホイール又は前記供給構造の位置を調整することなく、前記ボールが前記競技者のところで目的ゾーンに到達するように、少なくとも部分的には前記第1の入力信号のパラメータに基づいて前記第2の入力信号を決定するよう構成される、
投球装置。
【請求項2】
前記1又は複数の回転式ホイールは、第1の回転式ホイールを含み、
前記供給構造は、前記ボールの直径より小さい距離だけ前記第1の回転式ホイールの外周面から間隔を空けて配置されるピンチプレートを含む、
請求項1に記載の投球装置。
【請求項3】
前記入力信号は、入力電圧を含み、
前記第1の入力信号は、第1の電圧を含み、
前記第2の入力信号は、第2の電圧を含み、
前記第1の電圧は、前記速度制御モジュールの速球速度設定に基づく値を有し、
前記第2の電圧は、少なくとも部分的には、前記第1の電圧の値に基づく値を有する、
請求項1に記載の投球装置。
【請求項4】
前記速球速度設定は、ポテンショメータによって制御され、
前記ポテンショメータは、当該投球装置のオペレータによる制御が可能である、
請求項3に記載の投球装置。
【請求項5】
前記速度制御モジュールは、速球制御モジュール及びチェンジアップ制御モジュールを含み、
前記速球制御モジュールは、前記第1の電圧を創出するよう構成され、且つ、前記速球設定の際に前記第1の電圧を前記モータに渡すために前記モータの入力端子に通信可能に結合され、
前記チェンジアップ制御モジュールは、前記速球制御モジュールに結合され、且つ、
前記チェンジアップ設定の際に前記入力電圧を前記第1の電圧から前記第2の電圧に移行させるために前記速球制御モジュールと前記モータの入力端子との間の通信可能な結合を中断するよう構成される、
請求項3に記載の投球装置。
【請求項6】
前記チェンジアップ制御モジュールはさらに、前記入力電圧を前記第1の電圧から前記第2の電圧に移行させるために、前記モータの前記入力端子を負荷抵抗に結合するよう構成される、
請求項5に記載の投球装置。
【請求項7】
前記チェンジアップ制御モジュールはさらに、前記入力電圧が前記第2の電圧に達すると、前記第2の電圧を提供するよう構成されるフォロワ回路に前記モータの前記入力端子を結合するよう構成される、
請求項6に記載の投球装置。
【請求項8】
前記速度制御モジュールを前記速球設定及び/又は前記チェンジアップ設定に選択的にセットするために前記速度制御モジュールとワイヤレスで通信するよう構成される携帯用コントローラをさらに有する、
請求項1に記載の投球装置。
【請求項9】
前記速度制御モジュールは、前記チェンジアップ設定でしばらくした後、前記チェンジアップ設定から前記速球設定に自動的に切り換わるよう構成される、
請求項1に記載の投球装置。
【請求項10】
前記第2の回転速度は、チェンジアップアルゴリズムを用いて決定され、
前記チェンジアップアルゴリズムは、多項式関数を含む、
請求項1に記載の投球装置。
【請求項11】
前記モータは、1又は複数の回転式ホイールのうちの第1回転式ホイールに結合される第1モータを含み、
当該投球装置はさらに、第2回転式ホイールに結合される第2モータを含み、
前記第2モータは、少なくとも部分的には前記第2モータが受ける第2の入力信号の値に基づく第2の回転速度で前記第2回転式ホイールを回転させるよう構成され、
前記第2回転式ホイールは、前記ボディ部分に結合され、且つ、前記第1回転式ホイールと協働してボールを投げるために、前記第1回転式ホイールの外周面から間隔を空けて配置される外周面を有する、
請求項1に記載の投球装置。
【請求項12】
第3回転式ホイールに結合される第3モータをさらに有し、
前記第3モータは、少なくとも部分的には前記第3モータが受ける第3の入力信号の値に基づく第3の回転速度で前記第3回転式ホイールを回転させるよう構成され、
前記第3回転式ホイールは、前記ボディ部分に結合され、且つ、前記第1回転式ホイール及び前記第2回転式ホイールと協働してボールを投げるために、前記第1回転式ホイール及び前記第2回転式ホイールの外周面から間隔を空けて配置される外周面を有する、
請求項11に記載の投球装置。
【請求項13】
投球装置であって:
回転式ホイール;
前記回転式ホイールに結合され、且つ、ボールを受けて前記ボールを前記回転式ホイールの外周面に向けるよう構成される供給構造;
前記回転式ホイールに結合され、且つ、ある回転速度で回転するよう構成され、それによって、前記回転式ホイールを回転させるモータであり、前記回転速度は、前記モータが受ける入力電圧に基づくところのモータ;
第1の電圧を創出するよう構成される速球制御モジュールであり、前記第1の電圧は、当該投球装置の基準速度設定に依存する値を有するところの速球制御モジュール;及び
前記速球制御モジュール及び前記モータに結合されるチェンジアップ制御モジュールであり、係合状態と非係合状態との間で選択的に切換可能であるチェンジアップ制御モジュール;を有し、
前記チェンジアップ制御モジュールが前記非係合状態にある場合、前記第1の電圧が前記入力電圧として前記モータに提供され、
前記チェンジアップ制御モジュールが前記係合状態にある場合、前記チェンジアップ制御モジュールは、前記モータの入力端子を前記速球制御モジュールから切り離し、且つ、前記入力端子を負荷抵抗に結合することによって、前記第1の電圧から第2の電圧に前記入力電圧を移行させる、
投球装置。
【請求項14】
前記チェンジアップ制御モジュールはさらに、前記入力電圧が前記第2の電圧に達すると、前記モータの前記入力端子をフォロワ回路に結合し、
前記フォロワ回路は、前記第2の電圧を前記入力電圧として前記モータに提供するよう構成される、
請求項13に記載の投球装置。
【請求項15】
前記フォロワ回路は、前記速球制御モジュールから前記第1の電圧を受け、且つ、少なくとも部分的には前記第1の電圧の値に基づいて前記第2の電圧を創出するよう構成される、
請求項14に記載の投球装置。
【請求項16】
前記回転式ホイールから前記ボールが投げられたときの軌跡は、前記チェンジアップ制御モジュールが前記係合状態及び前記非係合状態にある場合、実質的に一定のままであり、
チェンジアップアルゴリズムは、前記ボールが目的ゾーンに投げられるよう、構成される、
請求項15に記載の投球装置。
【請求項17】
前記供給構造は、前記ボールの直径より小さい距離だけ前記回転式ホイールから間隔を空けて配置されるピンチプレートを含み、
前記ピンチプレートの位置、及び、前記回転式ホイールの位置は、前記チェンジアップ制御モジュールが前記係合状態及び前記非係合状態にある場合、実質的に一定である、
請求項15に記載の投球装置。
【請求項18】
前記回転式ホイールは、第1回転式ホイールを含み、
前記モータは、第1モータを含み、
前記入力電圧は、第1の入力電圧を含み、
当該投球装置はさらに、前記供給構造に結合され、且つ、当該投球装置から外側に前記ボールを投げるために前記ボールの直径より小さい距離だけ前記第1回転式ホイールの外周面から間隔を空けて配置される外周面を有する第2回転式ホイールを有し、
前記第2回転式ホイールは、第2の入力電圧を前記第2回転式ホイールの回転速度に変換するために前記第2の入力電圧を受けるよう構成される第2モータに結合される、
請求項13に記載の投球装置。
【請求項19】
前記供給構造に結合され、且つ、当該投球装置から外側に前記ボールを投げるために前記第1回転式ホイール及び前記第2回転式ホイールのそれぞれの外周面から間隔を空けて配置される外周面を有する第3回転式ホイールをさらに有し、
前記第3回転式ホイールは、第3モータに結合される、
請求項18に記載の投球装置。
【請求項20】
速度制御モジュールによって、第1モードの際に、前記速度制御モジュールの基準速度設定に基づいて第1の電圧を創出するステップ;
前記速度制御モジュールによって、前記第1モードの際に、前記第1の電圧を入力電圧としてモータに供給するステップであり、前記モータが、前記第1の電圧の値に基づく第1の回転速度で投球装置の回転式ホイールを回転させるために、前記回転式ホイールに動作可能に結合され、前記回転式ホイールが目的ゾーン内にボールを投げるようにするところのステップ;
前記速度制御モジュールによって、前記速度制御モジュールの前記基準速度設定に基づいて第2の電圧を決定するステップであり、前記第2の電圧が、前記第2の電圧が前記入力電圧として前記モータに供給されたときに、前記モータが前記第1の回転速度より遅い第2の回転速度で前記回転式ホイールを回転させるように設定され、且つ、前記回転式ホイールが前記目的ゾーン内にボールを投げるように設定される値を有するところのステップ;及び
前記速度制御モジュールによって、前記速度制御モジュールが第1モードから第2モードに切り換えられたときに、前記モータの前記入力電圧を前記第1の電圧から前記第2の電圧に移行させるステップ;
を有する方法。
【請求項21】
前記移行させるステップは、前記モータの入力端子を負荷抵抗に結合するステップをさらに有する、
請求項20に記載の方法。
【請求項22】
前記入力電圧が前記第2の電圧に達したときに、前記入力端子を前記負荷抵抗から切り離し、且つ、前記第2の電圧を前記入力端子に提供するよう構成されるフォロワ回路に前記入力端子を結合するステップをさらに有する、
請求項21に記載の方法。
【請求項23】
前記速度制御モジュールが前記第2モードから前記第1モードに切り換えられたときに、前記第1の電圧を前記入力電圧として前記モータに提供するステップをさらに有する、
請求項20に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−81774(P2013−81774A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−223107(P2012−223107)
【出願日】平成24年10月5日(2012.10.5)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.BLUETOOTH
【出願人】(512050818)ジャグス スポーツ,インコーポレイテッド (2)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年10月5日(2012.10.5)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.BLUETOOTH
【出願人】(512050818)ジャグス スポーツ,インコーポレイテッド (2)
[ Back to top ]