
投球装置

【課題】ボールの投球コースを精度良くコントロールできる投球装置を提供する。
【解決手段】本発明における投球装置1は、所定の距離離れた所定のエリアにボール2を投球する投球装置において、ボール2を把持するボール把持手段30と、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸31の回りに回転可能に取り付けられ、アーム回転軸31を中心として回転する所定の長さの投球アーム32と、投球アーム32をアーム回転軸31の回りに回転させ、回転角速度を調整する回転駆動調整手段33と、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置に投球アーム32が来た時に、ボール2をボール把持手段30から放出させるボール放出手段35とを備え、ボール把持手段30は、投球アーム32の回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持する。
【解決手段】本発明における投球装置1は、所定の距離離れた所定のエリアにボール2を投球する投球装置において、ボール2を把持するボール把持手段30と、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸31の回りに回転可能に取り付けられ、アーム回転軸31を中心として回転する所定の長さの投球アーム32と、投球アーム32をアーム回転軸31の回りに回転させ、回転角速度を調整する回転駆動調整手段33と、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置に投球アーム32が来た時に、ボール2をボール把持手段30から放出させるボール放出手段35とを備え、ボール把持手段30は、投球アーム32の回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は投球装置に関する。詳しくはボールの投球コースを精度良くコントロールできる投球装置に関する。
【背景技術】
【0002】
従来の投球装置は、例えば投球アームの先端のボール受け部に球を載せて、投球アームを高速回転させ、遠心力により球を目標位置に向けて投球するように構成されていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−252387号公報(段落0003、図7)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の装置では、ボールの投球コースのばらつきが大きく、投球コースを精度良くコントロールすることは困難であった。
【0005】
本発明は、ボールの投球コースを精度良くコントロールできる投球装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の第1の態様における投球装置1は、例えば図2及び図3に示すように、所定の距離離れた所定のエリアにボール2を投球する投球装置において、ボール2を把持するボール把持手段30と、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸31の回りに回転可能に取り付けられ、アーム回転軸31を中心として回転する所定の長さの投球アーム32と、投球アーム32をアーム回転軸31の回りに回転させ、回転角速度を調整する回転駆動調整手段33と、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置に投球アーム32が来た時に、ボール2をボール把持手段30から放出させるボール放出手段35とを備え、ボール把持手段30は、投球アーム32の回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持する。
【0007】
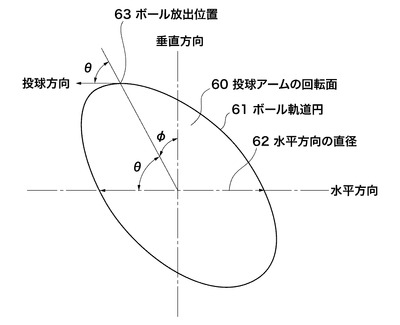
ここにおいて、投球装置は典型的には硬式野球に使用されるが、軟式野球、ソフトボールに使用しても良い。また、所定の距離とは、投球マウンドからホームベースまでの距離をいい、プロ野球等の場合、18.44mに設定されるが、少年野球や練習場など周囲環境に応じて変更可能である。また、所定のエリアとはストライクゾーンとその周囲をいい、縦横ともストライクゾーンの2〜3倍位が適当である。また、投球マウンドやホームベースとして、練習場やバッティングセンター等でのこれらに相当するものとしても良い。また、アーム支持手段34は、投球アーム32の回転中に回転中心が動かないように支持するものであれば、支柱状のものでも良く、アーム状のものでも良い。また、投球アーム32の回転面60は垂直方向を通る面から傾斜している場合でも、必ず水平面と交わり水平方向の直径62を有する。投球方向はこの水平方向の直径62とほぼ同じ方向になる(投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整することがある)ので、回転面60の水平方向の直径62と所定の角度θをなす位置とは、投球方向とほぼ所定の角度をなす位置と同じ意味である。この所定の角度θをなす位置がボール放出位置63である。
【0008】
本態様のように構成すると、ボール把持手段30は、投球アーム32が回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持し、かつ、ボール放出手段35は、投球アーム32がボール放出位置63に来た時にボール2をボール把持手段30から放出させるので、ボール放出の位置及びタイミングが一定になり、投球コースが安定し、再現性が良くなる。したがって、ボール2の投球コースを精度良くコントロールできる投球装置を提供できる。
【0009】
また、本発明の第2の態様に係る投球装置は、第1の態様において、例えば図4に示すように、所定の長さは20〜25cmである。
このように構成すると、所定の長さを20〜25cmとしたので、投手が投じるボールと良く似た球速、球種(直球、ドロップ、シュート、スライダー)を安定的に実現できる。
【0010】
また、本発明の第3の態様に係る投球装置は、第1又は第2の態様において、例えば図5に示すように、ボール把持手段30は、ボール2の把持をロックするロック機構351を有し、ボール放出手段35は、投球アーム32が所定の角度θをなす位置に来た時にロックを機械的に解除するロック解除機構352〜355を有する。
【0011】
ここにおいて、ロック機構として、例えばボール把持手段30のボールを把持する部分をボール2を把持するように機械的に押し付ける構成とし、ロック解除機構として、例えばソレノイド352の可動芯355をロック機構に連なる部分を有し、その部分に機械的に当ててロックを解除する構成にしてもよい。本態様のように構成すると、ロック解除機構352〜355でボール2の放出タイミングを機械的にコントロールするので、高精度(例えば1/20msecの精度)でコントロールでき、投球コースのばらつきを大いに減少できる。また、ソレノイド352はボール2の放出タイミングの直前近傍で可動芯355を突出してロック機構に連なる部分に機械的に当てるようにできるので好適である。なお、直前近傍とは、投球アーム32がアーム回転軸31の回りに1回転するより短い時間をいう。また、ロック機構とロック解除機構は機械的に高速解除できれば他のものでも良い。
【0012】
また、本発明の第4の態様に係る投球装置は、第1ないし第3のいずれかの態様において、例えば図2及び図3に示すように、所定の角度θはほぼ90度である。
ここにおいて、ほぼ90度とするのは、投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整することがあるからである。本態様のように構成すると、ボールはホームベースの方向に放出されるので、好適である。
【0013】
また、本発明の第5の態様に係る投球装置は、第1ないし第4のいずれかの態様において、例えば図2及び図3に示すように、投球アーム32の回転面60の垂直方向に対する角度φを調整する回転面調整手段40を備える。
このように構成すると、投球アーム32の回転面60の垂直方向に対する角度φを変えることにより、直球、ドロップ、シュート、スライダーなどの球種を投球でき、上手投げの他に、下手投げ、横手投げも演出できる。
【発明の効果】
【0014】
本発明によれば、ボールの投球コースを精度良くコントロールできる投球装置を提供できる。
【図面の簡単な説明】
【0015】
【図1】実施例1における投球装置の構成例を示す図である。
【図2】実施例1における投球装置の例を示す斜視図である。
【図3】投球アームの回転面を説明するための図である。
【図4】ボールの球速と回転数との関係を示す図である。
【図5】ボール把持のロックとその解除を説明するための図である。
【図6】実施例1における投球装置の動作フロー例を示す図である。
【発明を実施するための形態】
【0016】
以下、図面を参照して、本発明の実施の形態について説明する。なお、各図において、互いに同一または相当する部位については、同一又は類似の符号を付して、重複する説明を省略する。
【実施例1】
【0017】
[装置構成]
図1に本発明に係る実施例1における投球装置1の構成例を示す。
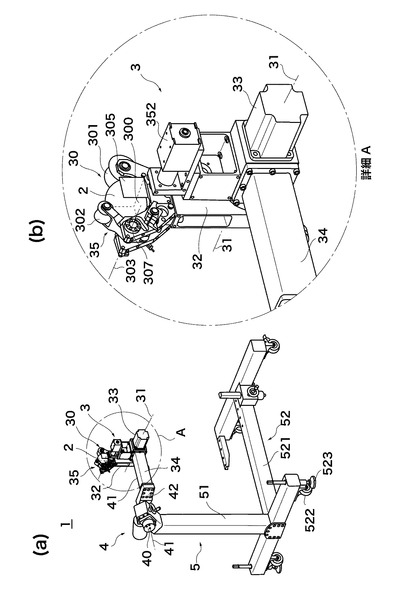
図2に当該投球装置1の斜視図を示す。図2(a)に投球装置全体の斜視図を、図2(b)に投球部3の拡大斜視図を示す。実施例1では、硬式野球の例で、投球アーム32の回転面60の垂直方向に対する角度φ(図3参照)を調整可能な例を説明する。
【0018】
投球装置1は、所定の距離離れた所定のエリアにボール2を投球する装置であり、野球の打撃練習用に使用される。典型的には硬式野球に使用されるが、軟式野球やソフトボールに使用しても良い。投球装置1は、投球マウンドからホームベースまでの距離に設置され、プロ野球等では18.44mの距離に設置されが、少年野球や練習場など周囲環境に応じて変更可能である。また、ホームベースのストライクゾーン及びその周囲に向けてボール2を投球する。このエリア(所定のエリア)も変更可能であるが、縦横ともストライクゾーンの2〜3倍位が適当である。
【0019】
投球装置1は、ボール2を把持・投球する投球部3と、投球アーム32の回転面の傾斜を調整するアーム回転面調整部4と、投球部3及びアーム回転面調整部4を支持する支持部5と、投球装置1及びその各部を制御して、投球装置1としての機能を実現させる制御部6とを備える。
【0020】
投球部3は、ボール2を把持するボール把持手段30と、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸としての第1の回転軸31の回りに回転可能に取り付けられ、第1の回転軸31を中心として回転する所定の長さの投球アーム32と、投球アーム32を回転軸31回りに回転させ、回転角速度を調整する回転駆動調整手段としての第1の回転モータ33と、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置であるボール放出位置63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させるボール放出手段35と、投球アーム32の回転面60の垂直方向に対する角度φを調整する回転面調整手段40と、投球アーム32を支持するアーム支持手段の一部としての支持アーム34とを備える。なお、アーム支持手段は支持部5を主要部とし、支持アーム34を含んで構成される。
【0021】
図3に投球アーム32の回転面60(以下、単に回転面ということもある)を示す。回転面60の円周はボール把持手段30に把持されたボール2が移動する軌道(以下、ボール軌道円61という)である。回転面60は水平方向の直径62を有する。ボール放出手段35は、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置(ボール放出位置)63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させる。所定の角度θはほぼ90度である。ほぼ90度とするのは、投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整することがあるからである。また、アーム回転面調整部4は、回転面調整手段40としての第3の回転モータにより投球アーム32の回転面60の垂直方向に対する角度φを調整する。角度φは任意に調整可能である。
【0022】
ボール把持手段30は、投球アーム32の回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持する。このため、ボール搭載面300と、第1のホルダ301と、第2のホルダ(ボールストッパ)302とで3点保持する。これらの3点は投球アーム32の回転面60内に配置され、ボール2を安定に保持するため、3点を結ぶ三角形は鋭角三角形となっている。ここで、ボール搭載面300と第1のホルダ301は投球アーム32に対して相対的に固定されている。第2のホルダ302は第2の回転軸303の回りに回動可能に取り付けられ、第2の回転軸303は投球アーム32に対して相対的に固定されている。第1のホルダ301及び第1のホルダ302はボール把持時にはボール2と接触する部分に回転面60内で回転可能なローラが使用され、回転面60内におけるボール2に対する歪の発生を防止する。
【0023】
ホルダ開閉部304は第2のホルダ302を第2の回転軸303の回りに回転してホルダの開閉する。すなわち、第1のホルダ301に対する第2のホルダ302の間隔と角度を制御する。ホルダ開閉部304は、例えば第2のホルダ302を第2の回転軸303の回りに回転させる第2の回転モータ307を有しても良く、また、第2のホルダ302がボール2を把持する方向に第2の回転軸303の回りに回転させるように第2のホルダ302を押し付けるロック機構としてのロックレバー351を有しても良い。本実施例ではこれらの両者を有するものとする。投球装置1がボール2の把持をロックする時(ボール2を把持してから、ボール軌道61上を回転し、放出するまで)にはロック機構を動作させ、ロック解除時(ボール2を放出してから把持するまで)には第2の回転モータ307を動作させるのが好適だからである。
【0024】
ボール供給時には、第2のホルダ302をボール搭載面300と反対側に回転して、ホルダを開いてボール搭載面300でボール2を受け、次いで第2のホルダ302をボール搭載面300側に回転して、ホルダを閉じてボール2を把持する。ボール2の把持を維持するために、第2のホルダ302をボール搭載面300の側にしてホルダを閉じた状態に保ちボール2を把持し続ける。ただし、ボール2と接触する第1のホルダの先端と第2のホルダの先端には回転面60内で回転可能なローラが使用され、回転面60内におけるボール2に対する歪の発生を防止する。また、第2のホルダ302の位置をロックする(把持をロックする)ロックレバー351が使用される。ボール放出時には、ロックレバー351によるロックが解除され、ホルダ開閉部304は第2のホルダ302をボール搭載面300と反対側に回転し、ホルダを開いてボール2を放出する。また、ボール搭載面300のアーム回転面60を挟んだ両側に押さえ板35が取り付けられ、ボール2のアーム回転面60と垂直方向の移動を抑止している。
【0025】
投球アーム32は、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸としての第1の回転軸31の回りに回転可能に取り付けられ、回転駆動調整手段としての第1の回転モータ33により、第1の回転軸31の回りに360度回転駆動される。投球アーム32が回転する面を投球アームの回転面60(単に回転面ということもある)という。ボール把持手段30に把持されたボール2はボール把持手段30と共に、第1の回転軸31の回りに投球アーム32長を半径とする円(回転面60内にある)の円周(以下、ボール軌道円61という)に沿って回転する。投球アーム32のかかる回転を通して、ボール2に投球速度(球速)と回転角速度(又は回転数)とが付与される。また、回転角速度(又は回転数)は、例えば回転面60の中心とボール放出位置63を結ぶ任意の位置を挟んで光源と光センサを配置して光センサで検出できる。
【0026】
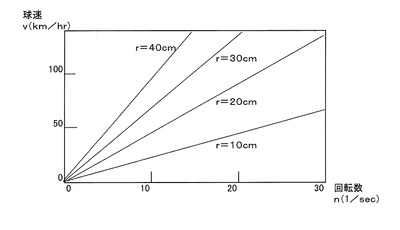
投球アーム32のアーム長をr、投球アーム32の回転数をn、球速をv、ボール2に付与される回転角速度をωとすると、
v=2πnr(m/sec)、ω=2πn(rad/sec)となる。
【0027】
図4にボールの球速vと回転数nとの関係を示す。球速vは回転数nに比例し、例えばr=20cm,n=20/sec(1200rpm)のときv=90.5km、r=30cm,n=20/sec(1200rpm)のときv=135.7kmとなる。これより、r=15〜30cmのとき、人が投げるような球速が得られる。r=20〜25cmのとき、打撃練習に好適な球速が得られる。例えば、r=23cm、n=27/sec(1620rpm)のときv=140.5kmとなる。投球アーム32の回転数nと回転面60の傾きφ(図3参照)により、直球、ドロップ、シュート、スライダーを投じることができる。投球アーム32の回転中はボール把持手段30がボール2を投球アーム32に対して移動及び回転しないよう固定的に把持するので、ボール2に付与される球速vと回転角速度ωは安定になり(ばらつきがなくなり)、再現性が良くなる。
【0028】
回転駆動調整手段としての第1の回転モータ33は、投球アーム32を第1の回転軸31回りに回転させ、回転角速度を調整する。第1の回転軸31は投球アーム32と支持アーム34との接続点を通り、投球アーム32は当該接続点を中心として第1の回転軸31の回りに360度回転する。また、投球アーム32の回転数を制御して、ボール2に目標の回転数と球速を付与する。回転駆動調整手段33として、例えば回転モータを使用可能である。
【0029】
ボール放出手段35は、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置(ボール放出位置)63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させる。本実施例では、投球アーム32を支持する支持アーム34は、水平面内、かつ投球方向に平行に設置される、すなわち、投球アーム32の回転面60の水平方向の直径62と同じ方向に設置されるので、投球アーム32が、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置は、支持アーム34と所定の角度をなす位置と同じである。投球方向が投球マウンドからホームベースの方向、すなわち支持アーム34と同じ方向となるのは、投球アーム32が支持アーム34と垂直になった時であり、所定の角度θが90度のときである。言い換えれば、投球アーム32が、回転面60の水平方向の直径62に垂直な位置に到達したときである。
【0030】
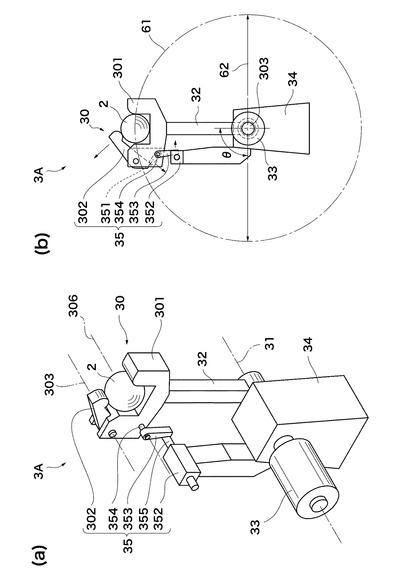
図5を参照して、投球部3におけるボール把持のロックとその解除を説明する。図5(a)にはロック機構及びロック解除機構を有する投球部3の斜視図を、図5(b)にその側面図を示す。図5の投球部3Aは図2の投球部3の変形例で、図2に明示されていないロック機構とロック解除機構を明示している。また、図2の第1のホルダ301及び第2のホルダのローラを省略し、図2の水平方向に長い支持アームを垂直方向に長く表示してある。その他、細部に差異はあるが、ボール把持のロックとその解除を説明する上で実質的な差異はない。第2のホルダ(ボールストッパ)302は第2の回転軸303の回りに回動可能に取り付けられている。また、第4の回転軸306に位置するピン354にロックレバー351とカンチレバー353とが一体的に取り付けられ、ピン354とロックレバー351とカンチレバー353は第4の回転軸306の回りに一体的に回転するようになっている。ロックレバー351は第2のホルダ302に接触して、第2のホルダ302を第2の回転軸303の回りにボール搭載面300の方向に回転するように押し付ける。これにより、ボール把持手段30はボール2を固定的、安定的に把持し、ロックレバー351が第2のホルダ302を押し付け続ける限り、ボール2はボール把持手段30に把持され続ける。この状態で投球アーム32はボール把持手段30にボール2を把持したまま、第1の回転軸31の回りに回転し続け、所定の角速度に到達する。
【0031】
ボール放出手段35はソレノイド352を有する。ソレノイド352は支持アーム34に固定的に取り付けられ、電流駆動すると、可動芯355が投球アーム32の回転面60の方向に突出し、電流駆動を停止すると元に戻るように動作する。ソレノイド352が電流駆動されない状態では、投球アーム32はソレノイド352に影響を受けずに回転面60内で回転するが、ソレノイド352が電流駆動されると、カンチレバー353が可動芯355に当るようになる。カンチレバー353が可動芯355に当ると、カンチレバー353とロックレバー351が第4の回転軸306の回りに一体的に回転し、第2のホルダ302を押し付けていたロックレバー351が第2のホルダ302から離れて、第2のホルダ302はボール2を把持する力を失い第2の回転軸303の回りに投球アーム32の回転と同じ方向に回転し、ボール把持手段30からボール2が放出されるようになる。
【0032】
ボール放出手段35は、投球アーム32が支持アーム34と所定の角度θをなす時に、すなわち投球アーム32がボール放出位置63に到達した時に、ボール把持手段30にボール2を放出させる。上記到達時点で、ボール把持手段30の把持をロックするロックレバー351が第2のホルダから離れてロックが解除され、第2のホルダ302が第2の回転軸303の回りにボール搭載面300と反対側に回転され、ボール2が把持状態から開放される。これにより、ボール2は投球装置1からホームベースに向かって放出、投球される。ボール放出前は、ボール2とボール把持手段30は共にボール軌道円61上を回転する。ボール放出後は、ボール2は水平方向に飛び、ボール把持手段30はボール軌道円61上を回転する。ボール放出直後のボール2の直進する速度とボール把持手段30の回転する速度は方向は異なるが大きさは同じなので、ボール把持手段30の第2のホルダ302の付け根となる第2の回転軸303が高い位置にあっても、ボール2はこの付け根にさえぎられることなく水平方向に直進する。
【0033】
もし、支持アーム34が回転面60の水平方向の直径62と角度αをなす場合には、投球方向が投球マウンドからホームベースの方向、すなわち水平方向となるのは、投球アーム32が支持アーム34と90度−αになった時、すなわち所定の角度が90度−αの時である。
【0034】
投球アーム32がボール放出位置63に到達した時に、時間的ばらつきがなく確実に、ボール2をボール把持手段30から放出させるために、ホルダ開閉部304は、把持をロックするロック機構としてのロックレバー351を有し、ボール放出手段35は、投球アーム32がボール放出位置63に来た時にロックを解除するロック解除機構を有する。ロック解除機構は、可動芯355を含むソレノイド352、ピン354に一体的に取り付けられたロックレバー351とカンチレバー353を有する。ロックレバー351はロック機構とロック解除機構に共有される。ソレノイド352が電流駆動されると、カンチレバー353が可動芯355に当るようになり、ロックレバー351によるロックを解除するように動作する。すなわち、第2のホルダ302を押し付けていたロックレバー351が第2のホルダ302から離れて、第2のホルダ302はボール2を把持する力を失い第2の回転軸303の回りに投球アーム32の回転と同じ方向に回転し、ボール把持手段30からボール2が放出されるようになる。
【0035】
例えば投球アーム32の回転20/secで0.36度(ミット位置で約2cm)の精度を出すには、1/20msecの制御が要求される。電気信号を用いる場合は1/20msecの制御が困難なので、ソレノイド352とピン354に一体的に取り付けられたロックレバー351とカンチレバー353を使用し、機械的にロックレバー351によるロックを解除し、ボール2を放出するようにした。ボール放出後も投球アーム32は慣性により回転を続け、停止後ボール供給位置に移動される。
【0036】
ソレノイド352を電流駆動して可動芯355を突出させるタイミングは、投球アーム32が設定された角速度に達した後で、可動芯355が突出時にカンチレバー353に追突しないようにすれば良い。このため、許容される時間は投球アーム32がボール放出位置63を通過してから、次にボール放出位置63に到達するまでの期間(1回転より少ない期間)であるが、投球アーム32がボール放出位置63を通過した後、できるだけ早く電流駆動するのがマージンをとれるので好ましい。また、カンチレバー353が可動芯355に当った後にソレノイド352の電流駆動を停止し、可動芯355を突出した位置から元に戻す。この許容される時間も投球アーム32がボール放出位置63を通過してから、次にボール放出位置63に到達するまでの期間(1回転より少ない期間)であるが、当った後できるだけ早く電流駆動を停止するのがマージンをとれるので好ましい。また、投球アーム32がボール放出位置63を通過する時間は、例えば回転面60の中心とボール放出位置63を結ぶ任意の位置を挟んで光源と光センサを配置して光センサで検出できる。このように機械的にボール2の把持をロック解除するのでボールの放出タイミングを高精度(例えば1/20msecの精度)でコントロールできる。
【0037】
投球アーム32は支持アーム34を介して支持部5に支持される。すなわち、支持アーム34はアーム支持手段の一部として機能する。本実施例では支持アーム34は水平面内、かつ投球方向に平行に設置される。回転面調整手段40の調整により、支持アーム34は、投球アーム32の回転面60の水平方向の直径62の回りに、水平状態を維持しつつ回転する。しかし、投球アーム32の回転面60の中心及び水平方向の直径62の位置は不変であり、支持アーム34に支持される投球アーム32は、この位置不変の中心の回りに回転可能である。また、投球方向は支持アーム34の長手方向と一致する。
【0038】
アーム回転面調整部4は、回転面調整手段40により投球アーム32の回転面60の垂直方向に対する角度φを調整する。回転面調整手段40は支持部5の支柱51の上端に、投球アーム32が連結された支持アーム34を第3の回転軸41の回りに回転可能に連結する。回転面調整手段40として第3の回転モータを使用できる。回転面調整手段40は、支持アーム34を水平に保持しつつ第3の回転軸41の回りに回転することにより、支持アーム34に連結された投球アーム32の回転面60の垂直方向に対する角度φを調整する。投球アーム32の回転面60が第3の回転軸41を含み、投球アーム32の回転面60の水平方向の直径62が第3の回転軸41と一致するように、支持アーム34は第3の回転軸41から、投球アーム32の長手方向中心線と支持アーム34の長手方向中心線の距離だけ離して設置される。このため、アーム回転面調整部4と支持アーム34の間に、アーム回転面調整部4と支持アーム34を連結する連結部材42が設けられている。回転面調整手段40として、例えば回転モータを使用可能である。
【0039】
図2に示すように、ホームベース側から見た支柱51に対して支持アーム34が右側に位置する時には、投球アーム32の回転面60は垂直面内にあり、投球アーム32の一端に取り付けられたボール把持手段30は、ボール軌道円61の遠端(支柱51から最も遠い位置)で供給されたボール2を把持し、投球アーム32は第1の回転モータ31により第1の回転モータ31側から見て左回りに回転駆動されて、ボール把持手段30はボール軌道円61の上端に来た時にボール2を放出する。この投球は投手の上手投げに対応する。
【0040】
回転面調整手段としての第3の回転モータ40で支持アーム34を第3の回転軸41の回りに回転すると、投球アーム32の回転面60も第3の回転軸41の回りに回転する。支柱51に対して支持アーム34が上側に位置する時には、投球アーム32の回転面60は水平面内になる。ボール把持手段30は、ボール軌道円61の遠端で供給されたボール2を把持し、投球アーム32は第1の回転モータ31により回転駆動されて、ボール把持手段30はボール軌道円61の左端に来た時にボール2を放出する。この投球は右腕投手の横手投げに対応する。支柱51に対して支持アーム34が下側に位置する時には、投球アーム32の回転面60は垂直面内になる。ボール把持手段30は、ボール軌道円61の遠端で供給されたボール2を把持し、投球アーム32は第1の回転駆動モータ31により回転駆動されて、ボール把持手段30はボール軌道円61の下端に来た時にボール2を放出する。この投球は投手の下手投げに対応する。支柱51に対して支持アーム34が下側に位置する時には、投球アーム32の回転面60は垂直面内になる。ボール把持手段30は、ボール軌道円61の遠端で供給されたボール2を把持し、投球アーム32は第1の回転駆動モータ31により回転駆動されて、ボール把持手段30はボール軌道円61の右端に来た時にボール2を放出する。この投球は左腕投手の横手投げに対応する。このように、回転面調整手段40は、投球アーム32の回転面60の垂直方向に対する角度φを調整する。これにより、投球装置1は、直球、ドロップ、シュート、スライダーを投球できる。
【0041】
支持部5は、投球部3及びアーム回転面調整部4を支持する。支持部5はアーム支持手段の主要部である。支持部5は、投球部3及びアーム回転面調整部4を上端で支持する支柱51と、支柱51の下端を固定し、移動可能な移動台52を有する。支柱51は剛性のアングルで構成され、投球部3及びアーム回転面調整部4を安定に支持する。移動台52は剛性のアングルからなる枠組521に、投球装置1を移動可能にするキャスター522と移動しないように位置を固定させるストッパ532が取り付けられて構成される。設置位置に着いたときは、ストッパ523を用いてグランド又は床面に固定的に設置される。設置位置では、支柱51が地面(水平面とみなしたとき)に対して垂直に、支持アーム34が地面(同上)に対して水平になるように設置される。ただし、設定時の計測誤差や設定のばらつき以内で水平であれば良い。また、投球アーム32が取り付けられ、投球アーム32の回転中に回転中心が動かないように支持するアーム支持手段は、支持部5と投球部3の支持アーム34とで構成される。
【0042】
制御部6は、投球装置1及びその各部を制御して、投球装置1としての機能を実現させる。具体的には、第1の第1の回転モータ31の回転速度と回転のタイミング、ホルダ開閉部304の開閉のタイミング、第3の回転モータ304による回転面60の傾斜角度、ソレノイド352の電流駆動と停止のタイミング、ボールの供給タイミング等を制御する。
【0043】
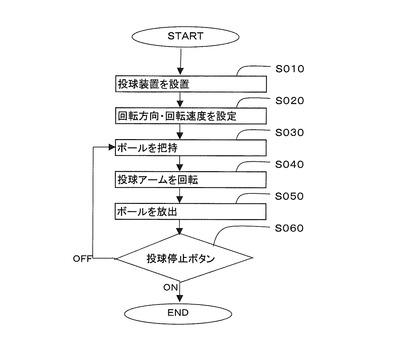
[動作フロー]
図6に本実例における投球装置の動作フロー例を示す。まず、投球装置1を投球マウンドに移動し、ホームベースの方向に投球するように設置する(装置設置工程:S010)。この時、支柱51を垂直、支持アーム34を水平になるように設置する。次に、投球アーム32の回転面60の傾斜と回転角速度(回転数)を設定する(投球設定工程:S020)。回転面の傾斜の設定は、アーム回転面調整部4の回転面調整手段(第3の回転モータ)40により、投球アーム32の回転面60の垂直方向からの傾斜角を調整して行なう。投球アーム32の回転角速度の設定は、投球部3の第1の回転モータ33の回転数を設定して行なう。
【0044】
次に、ボール把持手段30にボール2を供給し、ボール把持手段30は、供給されたボール2を把持する(ボール把持工程:S030)。ボール2の把持は、例えば投球アーム32が水平になる位置、すなわち、ボール把持手段30が支柱51から最も遠くなる位置で行なわれる。ボール把持手段30は、ホルダ開閉部304にて第2の回転モータ307により第2のホルダ302をボール搭載面300と反対側に動かし、ボール搭載面300で供給されたボール2を受ける。ボール2を受けたら、第2の回転モータ307により第2のホルダ302をボール搭載面300側に動かし、ボール2を把持する。また、ボール把持手段30は、ボール搭載面300と第1のホルダ301と第2のホルダ302でボール2を3点で把持し、ボール2が投球アーム32に対して相対的に移動又は回転しないようにしっかりと把持する。更に、把持はロック機構(ロックレバー)351によりロックされる。ロックレバー351は第2のホルダ302をボール搭載面300の方向に回転するように押し付ける。次に、投球アーム32を回転する(S040)。投球設定工程(S020)で設定された回転角速度(回転数)に達するまで第1の回転モータ33を駆動し、投球アーム32を第1の回転軸の回りに回転する。
【0045】
次に、ボール放出手段35は、投球アーム32が回転して、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置(ボール放出位置)63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させる(ボール放出工程:S050)。所定の角度θは、投球方向が投球マウンドからホームベースの方向となる時、すなわち、投球アーム32が回転面60の水平方向の直径62及び支持アーム34と垂直になった時に、これらとなす角度であり、90度に設定される。投球アーム32が支持アーム34に対して垂直になる位置(ボール放出位置)63に来た時、ボール放出手段35は、ロック解除機構によりロックを解除する。ソレノイド352とピン354に一体的に取り付けられたロックレバー351とカンチレバー353を使用し、機械的にロックレバー351による第2のホルダ302への押し付けを解除する。これにより、第2のホルダ302を第2の回転軸303の回りにボール搭載面300と反対側に回転するように動かし、ボール2を放出する。ボール2は支持アーム34の長手方向に、すなわち、ホームベースに向かって放出される。ボール放出手段35は、このように機械的にボール2の把持をロック解除するのでボールの放出タイミングを高精度(例えば1/20msecの精度)でコントロールできる。
【0046】
次に、投球を継続するか停止するかを判断する(S060)。停止する場合は投球停止ボタン(図示しない)をONにし、継続する場合はOFFに保つ。OFFの場合はボール把持工程(S030)に戻り、次のボールを把持し、以下同様な処理が繰り返され、ONの場合は処理を終了する。
【0047】
本実施例によれば、(1)ボール把持手段30は投球アーム32が回転中にボール2を投球アーム32に対して相対的に回転しないように固定するので、ボール放出時の安定性、再現性がある、(2)投球アーム32の長さを所定の長さにしたので、投手が投じるボールと良く似た球速、球種(直球、ドロップ、シュート、スライダー)を安定的に実現できる、(3)機械的にボールの放出タイミングをコントロールするので、高い精度でコントロールでき、ボール2のばらつきを大いに減少できる、という顕著な効果が得られた。すなわち、ボールの投球コースを精度良くコントロールできる投球装置を提供できる。
【実施例2】
【0048】
実施例1では、投球アームの回転面60の垂直方向に対する角度φを調整可能な例を説明したが、本実施例では、投球アーム32の回転面60が垂直方向を通る面に固定される例を説明する。主として実施例1との差異点を説明し、重複する説明を省略する。
【0049】
実施例1では、投球アーム32は支持アーム34を介して支持部5に支持されたが、本実施例では、例えば、地面に固定された円錐状の土台の上に音叉状に分岐した突起部を有するアーム支持手段を備え、投球アーム32が音叉状突起部の上端に回転モータにより回転可能に設置されている。したがって、支持アームは無く、支持部5のみでアーム支持手段を構成する。また、投球アームの回転面60の垂直方向に対する角度φを調整する回転面調整手段はない。したがって、投球アーム32の回転面60が垂直方向を通る面に固定されるが、実施例1と同様なボール把持手段30及び回転駆動調整手段33を有するので、投球アーム32の回転面60の傾斜の調整を除いて実施例1と同様な処理が可能である。したがって、実施例1と同様に、ボール放出の位置及びタイミングが一定になり、投球コースが安定し、再現性が良くなり、ボール2の投球コースを精度良くコントロールできる投球装置を提供できる。
【0050】
以上、本発明の実施の形態について説明したが、本発明は上記の実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で実施例に種々変更を加えられることは明白である。
【0051】
例えば、以上の実施例では、硬式野球について説明したが、本発明は、軟式野球やソフトボールにも適用可能である。ただし、それぞれに適切なアーム長が存在し得る。また、実施例1では、支持アームが水平かつ投球方向に平行に設置される例を説明したが、水平面と角度αに設置し、所定の角度を90度−αに設定しても良い。また、投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整しても良い。微調整は例えば、ソレノイドの位置を投球方向に対して微調整できるようにし、連結部材の位置を長手方向に対して微調整できるようにすれば良い。また、ロック機構とロック解除機構は機械的に高速解除できればロックレバー、カンチレバーとソレノイドとの組み合わせに限られず、他の組み合わせでも良い。また、図6の処理フローにおいて、ボール把持工程(S030)に戻る代わりに投球設定工程(S020)に戻り、回転面60の傾斜と回転角速度(回転数)を設定し直して、処理を繰り返すようにしても良い。また、把持用のホルダ等の数やポジション、回転モータの特性、投球アームのアーム長や形状、支持部の形状等を適宜変更可能である。
【産業上の利用可能性】
【0052】
本発明は、野球等の打撃練習用の投球装置に利用可能である。
【符号の説明】
【0053】
1 投球装置
2 ボール
3,3A 投球部
4 アーム回転面調整部
5 支持部(アーム支持手段の主要部)
6 制御部
30 ボール把持手段
31 第1の回転軸(アーム回転軸)
32 投球アーム
33 第1の回転モータ(回転駆動調整手段)
34 支持アーム(アーム支持手段の一部)
35 ボール放出手段
300 ボール搭載面
301 第1のホルダ
302 第2のホルダ
303 第2の回転軸
304 ホルダ開閉部
305 押さえ板
306 第4の回転軸
307 第2の回転モータ
351 ロックレバー
352 ソレノイド
353 カンチレバー
354 ピン
355 可動芯
40 第3の回転モータ(回転面調整手段)
41 第3の回転軸
42 連結部材
51 支柱
52 移動台
521 枠組
522 キャスター
523 ストッパ
60 投球アームの回転面
61 ボール軌道円
62 回転面の水平方向の直径
63 ボール放出位置
θ 所定の角度
φ 投球アームの回転面の垂直方向に対する角度
【技術分野】
【0001】
本発明は投球装置に関する。詳しくはボールの投球コースを精度良くコントロールできる投球装置に関する。
【背景技術】
【0002】
従来の投球装置は、例えば投球アームの先端のボール受け部に球を載せて、投球アームを高速回転させ、遠心力により球を目標位置に向けて投球するように構成されていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−252387号公報(段落0003、図7)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の装置では、ボールの投球コースのばらつきが大きく、投球コースを精度良くコントロールすることは困難であった。
【0005】
本発明は、ボールの投球コースを精度良くコントロールできる投球装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の第1の態様における投球装置1は、例えば図2及び図3に示すように、所定の距離離れた所定のエリアにボール2を投球する投球装置において、ボール2を把持するボール把持手段30と、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸31の回りに回転可能に取り付けられ、アーム回転軸31を中心として回転する所定の長さの投球アーム32と、投球アーム32をアーム回転軸31の回りに回転させ、回転角速度を調整する回転駆動調整手段33と、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置に投球アーム32が来た時に、ボール2をボール把持手段30から放出させるボール放出手段35とを備え、ボール把持手段30は、投球アーム32の回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持する。
【0007】
ここにおいて、投球装置は典型的には硬式野球に使用されるが、軟式野球、ソフトボールに使用しても良い。また、所定の距離とは、投球マウンドからホームベースまでの距離をいい、プロ野球等の場合、18.44mに設定されるが、少年野球や練習場など周囲環境に応じて変更可能である。また、所定のエリアとはストライクゾーンとその周囲をいい、縦横ともストライクゾーンの2〜3倍位が適当である。また、投球マウンドやホームベースとして、練習場やバッティングセンター等でのこれらに相当するものとしても良い。また、アーム支持手段34は、投球アーム32の回転中に回転中心が動かないように支持するものであれば、支柱状のものでも良く、アーム状のものでも良い。また、投球アーム32の回転面60は垂直方向を通る面から傾斜している場合でも、必ず水平面と交わり水平方向の直径62を有する。投球方向はこの水平方向の直径62とほぼ同じ方向になる(投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整することがある)ので、回転面60の水平方向の直径62と所定の角度θをなす位置とは、投球方向とほぼ所定の角度をなす位置と同じ意味である。この所定の角度θをなす位置がボール放出位置63である。
【0008】
本態様のように構成すると、ボール把持手段30は、投球アーム32が回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持し、かつ、ボール放出手段35は、投球アーム32がボール放出位置63に来た時にボール2をボール把持手段30から放出させるので、ボール放出の位置及びタイミングが一定になり、投球コースが安定し、再現性が良くなる。したがって、ボール2の投球コースを精度良くコントロールできる投球装置を提供できる。
【0009】
また、本発明の第2の態様に係る投球装置は、第1の態様において、例えば図4に示すように、所定の長さは20〜25cmである。
このように構成すると、所定の長さを20〜25cmとしたので、投手が投じるボールと良く似た球速、球種(直球、ドロップ、シュート、スライダー)を安定的に実現できる。
【0010】
また、本発明の第3の態様に係る投球装置は、第1又は第2の態様において、例えば図5に示すように、ボール把持手段30は、ボール2の把持をロックするロック機構351を有し、ボール放出手段35は、投球アーム32が所定の角度θをなす位置に来た時にロックを機械的に解除するロック解除機構352〜355を有する。
【0011】
ここにおいて、ロック機構として、例えばボール把持手段30のボールを把持する部分をボール2を把持するように機械的に押し付ける構成とし、ロック解除機構として、例えばソレノイド352の可動芯355をロック機構に連なる部分を有し、その部分に機械的に当ててロックを解除する構成にしてもよい。本態様のように構成すると、ロック解除機構352〜355でボール2の放出タイミングを機械的にコントロールするので、高精度(例えば1/20msecの精度)でコントロールでき、投球コースのばらつきを大いに減少できる。また、ソレノイド352はボール2の放出タイミングの直前近傍で可動芯355を突出してロック機構に連なる部分に機械的に当てるようにできるので好適である。なお、直前近傍とは、投球アーム32がアーム回転軸31の回りに1回転するより短い時間をいう。また、ロック機構とロック解除機構は機械的に高速解除できれば他のものでも良い。
【0012】
また、本発明の第4の態様に係る投球装置は、第1ないし第3のいずれかの態様において、例えば図2及び図3に示すように、所定の角度θはほぼ90度である。
ここにおいて、ほぼ90度とするのは、投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整することがあるからである。本態様のように構成すると、ボールはホームベースの方向に放出されるので、好適である。
【0013】
また、本発明の第5の態様に係る投球装置は、第1ないし第4のいずれかの態様において、例えば図2及び図3に示すように、投球アーム32の回転面60の垂直方向に対する角度φを調整する回転面調整手段40を備える。
このように構成すると、投球アーム32の回転面60の垂直方向に対する角度φを変えることにより、直球、ドロップ、シュート、スライダーなどの球種を投球でき、上手投げの他に、下手投げ、横手投げも演出できる。
【発明の効果】
【0014】
本発明によれば、ボールの投球コースを精度良くコントロールできる投球装置を提供できる。
【図面の簡単な説明】
【0015】
【図1】実施例1における投球装置の構成例を示す図である。
【図2】実施例1における投球装置の例を示す斜視図である。
【図3】投球アームの回転面を説明するための図である。
【図4】ボールの球速と回転数との関係を示す図である。
【図5】ボール把持のロックとその解除を説明するための図である。
【図6】実施例1における投球装置の動作フロー例を示す図である。
【発明を実施するための形態】
【0016】
以下、図面を参照して、本発明の実施の形態について説明する。なお、各図において、互いに同一または相当する部位については、同一又は類似の符号を付して、重複する説明を省略する。
【実施例1】
【0017】
[装置構成]
図1に本発明に係る実施例1における投球装置1の構成例を示す。
図2に当該投球装置1の斜視図を示す。図2(a)に投球装置全体の斜視図を、図2(b)に投球部3の拡大斜視図を示す。実施例1では、硬式野球の例で、投球アーム32の回転面60の垂直方向に対する角度φ(図3参照)を調整可能な例を説明する。
【0018】
投球装置1は、所定の距離離れた所定のエリアにボール2を投球する装置であり、野球の打撃練習用に使用される。典型的には硬式野球に使用されるが、軟式野球やソフトボールに使用しても良い。投球装置1は、投球マウンドからホームベースまでの距離に設置され、プロ野球等では18.44mの距離に設置されが、少年野球や練習場など周囲環境に応じて変更可能である。また、ホームベースのストライクゾーン及びその周囲に向けてボール2を投球する。このエリア(所定のエリア)も変更可能であるが、縦横ともストライクゾーンの2〜3倍位が適当である。
【0019】
投球装置1は、ボール2を把持・投球する投球部3と、投球アーム32の回転面の傾斜を調整するアーム回転面調整部4と、投球部3及びアーム回転面調整部4を支持する支持部5と、投球装置1及びその各部を制御して、投球装置1としての機能を実現させる制御部6とを備える。
【0020】
投球部3は、ボール2を把持するボール把持手段30と、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸としての第1の回転軸31の回りに回転可能に取り付けられ、第1の回転軸31を中心として回転する所定の長さの投球アーム32と、投球アーム32を回転軸31回りに回転させ、回転角速度を調整する回転駆動調整手段としての第1の回転モータ33と、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置であるボール放出位置63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させるボール放出手段35と、投球アーム32の回転面60の垂直方向に対する角度φを調整する回転面調整手段40と、投球アーム32を支持するアーム支持手段の一部としての支持アーム34とを備える。なお、アーム支持手段は支持部5を主要部とし、支持アーム34を含んで構成される。
【0021】
図3に投球アーム32の回転面60(以下、単に回転面ということもある)を示す。回転面60の円周はボール把持手段30に把持されたボール2が移動する軌道(以下、ボール軌道円61という)である。回転面60は水平方向の直径62を有する。ボール放出手段35は、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置(ボール放出位置)63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させる。所定の角度θはほぼ90度である。ほぼ90度とするのは、投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整することがあるからである。また、アーム回転面調整部4は、回転面調整手段40としての第3の回転モータにより投球アーム32の回転面60の垂直方向に対する角度φを調整する。角度φは任意に調整可能である。
【0022】
ボール把持手段30は、投球アーム32の回転中にボール2を投球アーム32に対して相対的に移動又は回転しないように把持する。このため、ボール搭載面300と、第1のホルダ301と、第2のホルダ(ボールストッパ)302とで3点保持する。これらの3点は投球アーム32の回転面60内に配置され、ボール2を安定に保持するため、3点を結ぶ三角形は鋭角三角形となっている。ここで、ボール搭載面300と第1のホルダ301は投球アーム32に対して相対的に固定されている。第2のホルダ302は第2の回転軸303の回りに回動可能に取り付けられ、第2の回転軸303は投球アーム32に対して相対的に固定されている。第1のホルダ301及び第1のホルダ302はボール把持時にはボール2と接触する部分に回転面60内で回転可能なローラが使用され、回転面60内におけるボール2に対する歪の発生を防止する。
【0023】
ホルダ開閉部304は第2のホルダ302を第2の回転軸303の回りに回転してホルダの開閉する。すなわち、第1のホルダ301に対する第2のホルダ302の間隔と角度を制御する。ホルダ開閉部304は、例えば第2のホルダ302を第2の回転軸303の回りに回転させる第2の回転モータ307を有しても良く、また、第2のホルダ302がボール2を把持する方向に第2の回転軸303の回りに回転させるように第2のホルダ302を押し付けるロック機構としてのロックレバー351を有しても良い。本実施例ではこれらの両者を有するものとする。投球装置1がボール2の把持をロックする時(ボール2を把持してから、ボール軌道61上を回転し、放出するまで)にはロック機構を動作させ、ロック解除時(ボール2を放出してから把持するまで)には第2の回転モータ307を動作させるのが好適だからである。
【0024】
ボール供給時には、第2のホルダ302をボール搭載面300と反対側に回転して、ホルダを開いてボール搭載面300でボール2を受け、次いで第2のホルダ302をボール搭載面300側に回転して、ホルダを閉じてボール2を把持する。ボール2の把持を維持するために、第2のホルダ302をボール搭載面300の側にしてホルダを閉じた状態に保ちボール2を把持し続ける。ただし、ボール2と接触する第1のホルダの先端と第2のホルダの先端には回転面60内で回転可能なローラが使用され、回転面60内におけるボール2に対する歪の発生を防止する。また、第2のホルダ302の位置をロックする(把持をロックする)ロックレバー351が使用される。ボール放出時には、ロックレバー351によるロックが解除され、ホルダ開閉部304は第2のホルダ302をボール搭載面300と反対側に回転し、ホルダを開いてボール2を放出する。また、ボール搭載面300のアーム回転面60を挟んだ両側に押さえ板35が取り付けられ、ボール2のアーム回転面60と垂直方向の移動を抑止している。
【0025】
投球アーム32は、一端にボール把持手段30が取り付けられ、他端がアーム支持手段34にアーム回転軸としての第1の回転軸31の回りに回転可能に取り付けられ、回転駆動調整手段としての第1の回転モータ33により、第1の回転軸31の回りに360度回転駆動される。投球アーム32が回転する面を投球アームの回転面60(単に回転面ということもある)という。ボール把持手段30に把持されたボール2はボール把持手段30と共に、第1の回転軸31の回りに投球アーム32長を半径とする円(回転面60内にある)の円周(以下、ボール軌道円61という)に沿って回転する。投球アーム32のかかる回転を通して、ボール2に投球速度(球速)と回転角速度(又は回転数)とが付与される。また、回転角速度(又は回転数)は、例えば回転面60の中心とボール放出位置63を結ぶ任意の位置を挟んで光源と光センサを配置して光センサで検出できる。
【0026】
投球アーム32のアーム長をr、投球アーム32の回転数をn、球速をv、ボール2に付与される回転角速度をωとすると、
v=2πnr(m/sec)、ω=2πn(rad/sec)となる。
【0027】
図4にボールの球速vと回転数nとの関係を示す。球速vは回転数nに比例し、例えばr=20cm,n=20/sec(1200rpm)のときv=90.5km、r=30cm,n=20/sec(1200rpm)のときv=135.7kmとなる。これより、r=15〜30cmのとき、人が投げるような球速が得られる。r=20〜25cmのとき、打撃練習に好適な球速が得られる。例えば、r=23cm、n=27/sec(1620rpm)のときv=140.5kmとなる。投球アーム32の回転数nと回転面60の傾きφ(図3参照)により、直球、ドロップ、シュート、スライダーを投じることができる。投球アーム32の回転中はボール把持手段30がボール2を投球アーム32に対して移動及び回転しないよう固定的に把持するので、ボール2に付与される球速vと回転角速度ωは安定になり(ばらつきがなくなり)、再現性が良くなる。
【0028】
回転駆動調整手段としての第1の回転モータ33は、投球アーム32を第1の回転軸31回りに回転させ、回転角速度を調整する。第1の回転軸31は投球アーム32と支持アーム34との接続点を通り、投球アーム32は当該接続点を中心として第1の回転軸31の回りに360度回転する。また、投球アーム32の回転数を制御して、ボール2に目標の回転数と球速を付与する。回転駆動調整手段33として、例えば回転モータを使用可能である。
【0029】
ボール放出手段35は、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置(ボール放出位置)63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させる。本実施例では、投球アーム32を支持する支持アーム34は、水平面内、かつ投球方向に平行に設置される、すなわち、投球アーム32の回転面60の水平方向の直径62と同じ方向に設置されるので、投球アーム32が、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置は、支持アーム34と所定の角度をなす位置と同じである。投球方向が投球マウンドからホームベースの方向、すなわち支持アーム34と同じ方向となるのは、投球アーム32が支持アーム34と垂直になった時であり、所定の角度θが90度のときである。言い換えれば、投球アーム32が、回転面60の水平方向の直径62に垂直な位置に到達したときである。
【0030】
図5を参照して、投球部3におけるボール把持のロックとその解除を説明する。図5(a)にはロック機構及びロック解除機構を有する投球部3の斜視図を、図5(b)にその側面図を示す。図5の投球部3Aは図2の投球部3の変形例で、図2に明示されていないロック機構とロック解除機構を明示している。また、図2の第1のホルダ301及び第2のホルダのローラを省略し、図2の水平方向に長い支持アームを垂直方向に長く表示してある。その他、細部に差異はあるが、ボール把持のロックとその解除を説明する上で実質的な差異はない。第2のホルダ(ボールストッパ)302は第2の回転軸303の回りに回動可能に取り付けられている。また、第4の回転軸306に位置するピン354にロックレバー351とカンチレバー353とが一体的に取り付けられ、ピン354とロックレバー351とカンチレバー353は第4の回転軸306の回りに一体的に回転するようになっている。ロックレバー351は第2のホルダ302に接触して、第2のホルダ302を第2の回転軸303の回りにボール搭載面300の方向に回転するように押し付ける。これにより、ボール把持手段30はボール2を固定的、安定的に把持し、ロックレバー351が第2のホルダ302を押し付け続ける限り、ボール2はボール把持手段30に把持され続ける。この状態で投球アーム32はボール把持手段30にボール2を把持したまま、第1の回転軸31の回りに回転し続け、所定の角速度に到達する。
【0031】
ボール放出手段35はソレノイド352を有する。ソレノイド352は支持アーム34に固定的に取り付けられ、電流駆動すると、可動芯355が投球アーム32の回転面60の方向に突出し、電流駆動を停止すると元に戻るように動作する。ソレノイド352が電流駆動されない状態では、投球アーム32はソレノイド352に影響を受けずに回転面60内で回転するが、ソレノイド352が電流駆動されると、カンチレバー353が可動芯355に当るようになる。カンチレバー353が可動芯355に当ると、カンチレバー353とロックレバー351が第4の回転軸306の回りに一体的に回転し、第2のホルダ302を押し付けていたロックレバー351が第2のホルダ302から離れて、第2のホルダ302はボール2を把持する力を失い第2の回転軸303の回りに投球アーム32の回転と同じ方向に回転し、ボール把持手段30からボール2が放出されるようになる。
【0032】
ボール放出手段35は、投球アーム32が支持アーム34と所定の角度θをなす時に、すなわち投球アーム32がボール放出位置63に到達した時に、ボール把持手段30にボール2を放出させる。上記到達時点で、ボール把持手段30の把持をロックするロックレバー351が第2のホルダから離れてロックが解除され、第2のホルダ302が第2の回転軸303の回りにボール搭載面300と反対側に回転され、ボール2が把持状態から開放される。これにより、ボール2は投球装置1からホームベースに向かって放出、投球される。ボール放出前は、ボール2とボール把持手段30は共にボール軌道円61上を回転する。ボール放出後は、ボール2は水平方向に飛び、ボール把持手段30はボール軌道円61上を回転する。ボール放出直後のボール2の直進する速度とボール把持手段30の回転する速度は方向は異なるが大きさは同じなので、ボール把持手段30の第2のホルダ302の付け根となる第2の回転軸303が高い位置にあっても、ボール2はこの付け根にさえぎられることなく水平方向に直進する。
【0033】
もし、支持アーム34が回転面60の水平方向の直径62と角度αをなす場合には、投球方向が投球マウンドからホームベースの方向、すなわち水平方向となるのは、投球アーム32が支持アーム34と90度−αになった時、すなわち所定の角度が90度−αの時である。
【0034】
投球アーム32がボール放出位置63に到達した時に、時間的ばらつきがなく確実に、ボール2をボール把持手段30から放出させるために、ホルダ開閉部304は、把持をロックするロック機構としてのロックレバー351を有し、ボール放出手段35は、投球アーム32がボール放出位置63に来た時にロックを解除するロック解除機構を有する。ロック解除機構は、可動芯355を含むソレノイド352、ピン354に一体的に取り付けられたロックレバー351とカンチレバー353を有する。ロックレバー351はロック機構とロック解除機構に共有される。ソレノイド352が電流駆動されると、カンチレバー353が可動芯355に当るようになり、ロックレバー351によるロックを解除するように動作する。すなわち、第2のホルダ302を押し付けていたロックレバー351が第2のホルダ302から離れて、第2のホルダ302はボール2を把持する力を失い第2の回転軸303の回りに投球アーム32の回転と同じ方向に回転し、ボール把持手段30からボール2が放出されるようになる。
【0035】
例えば投球アーム32の回転20/secで0.36度(ミット位置で約2cm)の精度を出すには、1/20msecの制御が要求される。電気信号を用いる場合は1/20msecの制御が困難なので、ソレノイド352とピン354に一体的に取り付けられたロックレバー351とカンチレバー353を使用し、機械的にロックレバー351によるロックを解除し、ボール2を放出するようにした。ボール放出後も投球アーム32は慣性により回転を続け、停止後ボール供給位置に移動される。
【0036】
ソレノイド352を電流駆動して可動芯355を突出させるタイミングは、投球アーム32が設定された角速度に達した後で、可動芯355が突出時にカンチレバー353に追突しないようにすれば良い。このため、許容される時間は投球アーム32がボール放出位置63を通過してから、次にボール放出位置63に到達するまでの期間(1回転より少ない期間)であるが、投球アーム32がボール放出位置63を通過した後、できるだけ早く電流駆動するのがマージンをとれるので好ましい。また、カンチレバー353が可動芯355に当った後にソレノイド352の電流駆動を停止し、可動芯355を突出した位置から元に戻す。この許容される時間も投球アーム32がボール放出位置63を通過してから、次にボール放出位置63に到達するまでの期間(1回転より少ない期間)であるが、当った後できるだけ早く電流駆動を停止するのがマージンをとれるので好ましい。また、投球アーム32がボール放出位置63を通過する時間は、例えば回転面60の中心とボール放出位置63を結ぶ任意の位置を挟んで光源と光センサを配置して光センサで検出できる。このように機械的にボール2の把持をロック解除するのでボールの放出タイミングを高精度(例えば1/20msecの精度)でコントロールできる。
【0037】
投球アーム32は支持アーム34を介して支持部5に支持される。すなわち、支持アーム34はアーム支持手段の一部として機能する。本実施例では支持アーム34は水平面内、かつ投球方向に平行に設置される。回転面調整手段40の調整により、支持アーム34は、投球アーム32の回転面60の水平方向の直径62の回りに、水平状態を維持しつつ回転する。しかし、投球アーム32の回転面60の中心及び水平方向の直径62の位置は不変であり、支持アーム34に支持される投球アーム32は、この位置不変の中心の回りに回転可能である。また、投球方向は支持アーム34の長手方向と一致する。
【0038】
アーム回転面調整部4は、回転面調整手段40により投球アーム32の回転面60の垂直方向に対する角度φを調整する。回転面調整手段40は支持部5の支柱51の上端に、投球アーム32が連結された支持アーム34を第3の回転軸41の回りに回転可能に連結する。回転面調整手段40として第3の回転モータを使用できる。回転面調整手段40は、支持アーム34を水平に保持しつつ第3の回転軸41の回りに回転することにより、支持アーム34に連結された投球アーム32の回転面60の垂直方向に対する角度φを調整する。投球アーム32の回転面60が第3の回転軸41を含み、投球アーム32の回転面60の水平方向の直径62が第3の回転軸41と一致するように、支持アーム34は第3の回転軸41から、投球アーム32の長手方向中心線と支持アーム34の長手方向中心線の距離だけ離して設置される。このため、アーム回転面調整部4と支持アーム34の間に、アーム回転面調整部4と支持アーム34を連結する連結部材42が設けられている。回転面調整手段40として、例えば回転モータを使用可能である。
【0039】
図2に示すように、ホームベース側から見た支柱51に対して支持アーム34が右側に位置する時には、投球アーム32の回転面60は垂直面内にあり、投球アーム32の一端に取り付けられたボール把持手段30は、ボール軌道円61の遠端(支柱51から最も遠い位置)で供給されたボール2を把持し、投球アーム32は第1の回転モータ31により第1の回転モータ31側から見て左回りに回転駆動されて、ボール把持手段30はボール軌道円61の上端に来た時にボール2を放出する。この投球は投手の上手投げに対応する。
【0040】
回転面調整手段としての第3の回転モータ40で支持アーム34を第3の回転軸41の回りに回転すると、投球アーム32の回転面60も第3の回転軸41の回りに回転する。支柱51に対して支持アーム34が上側に位置する時には、投球アーム32の回転面60は水平面内になる。ボール把持手段30は、ボール軌道円61の遠端で供給されたボール2を把持し、投球アーム32は第1の回転モータ31により回転駆動されて、ボール把持手段30はボール軌道円61の左端に来た時にボール2を放出する。この投球は右腕投手の横手投げに対応する。支柱51に対して支持アーム34が下側に位置する時には、投球アーム32の回転面60は垂直面内になる。ボール把持手段30は、ボール軌道円61の遠端で供給されたボール2を把持し、投球アーム32は第1の回転駆動モータ31により回転駆動されて、ボール把持手段30はボール軌道円61の下端に来た時にボール2を放出する。この投球は投手の下手投げに対応する。支柱51に対して支持アーム34が下側に位置する時には、投球アーム32の回転面60は垂直面内になる。ボール把持手段30は、ボール軌道円61の遠端で供給されたボール2を把持し、投球アーム32は第1の回転駆動モータ31により回転駆動されて、ボール把持手段30はボール軌道円61の右端に来た時にボール2を放出する。この投球は左腕投手の横手投げに対応する。このように、回転面調整手段40は、投球アーム32の回転面60の垂直方向に対する角度φを調整する。これにより、投球装置1は、直球、ドロップ、シュート、スライダーを投球できる。
【0041】
支持部5は、投球部3及びアーム回転面調整部4を支持する。支持部5はアーム支持手段の主要部である。支持部5は、投球部3及びアーム回転面調整部4を上端で支持する支柱51と、支柱51の下端を固定し、移動可能な移動台52を有する。支柱51は剛性のアングルで構成され、投球部3及びアーム回転面調整部4を安定に支持する。移動台52は剛性のアングルからなる枠組521に、投球装置1を移動可能にするキャスター522と移動しないように位置を固定させるストッパ532が取り付けられて構成される。設置位置に着いたときは、ストッパ523を用いてグランド又は床面に固定的に設置される。設置位置では、支柱51が地面(水平面とみなしたとき)に対して垂直に、支持アーム34が地面(同上)に対して水平になるように設置される。ただし、設定時の計測誤差や設定のばらつき以内で水平であれば良い。また、投球アーム32が取り付けられ、投球アーム32の回転中に回転中心が動かないように支持するアーム支持手段は、支持部5と投球部3の支持アーム34とで構成される。
【0042】
制御部6は、投球装置1及びその各部を制御して、投球装置1としての機能を実現させる。具体的には、第1の第1の回転モータ31の回転速度と回転のタイミング、ホルダ開閉部304の開閉のタイミング、第3の回転モータ304による回転面60の傾斜角度、ソレノイド352の電流駆動と停止のタイミング、ボールの供給タイミング等を制御する。
【0043】
[動作フロー]
図6に本実例における投球装置の動作フロー例を示す。まず、投球装置1を投球マウンドに移動し、ホームベースの方向に投球するように設置する(装置設置工程:S010)。この時、支柱51を垂直、支持アーム34を水平になるように設置する。次に、投球アーム32の回転面60の傾斜と回転角速度(回転数)を設定する(投球設定工程:S020)。回転面の傾斜の設定は、アーム回転面調整部4の回転面調整手段(第3の回転モータ)40により、投球アーム32の回転面60の垂直方向からの傾斜角を調整して行なう。投球アーム32の回転角速度の設定は、投球部3の第1の回転モータ33の回転数を設定して行なう。
【0044】
次に、ボール把持手段30にボール2を供給し、ボール把持手段30は、供給されたボール2を把持する(ボール把持工程:S030)。ボール2の把持は、例えば投球アーム32が水平になる位置、すなわち、ボール把持手段30が支柱51から最も遠くなる位置で行なわれる。ボール把持手段30は、ホルダ開閉部304にて第2の回転モータ307により第2のホルダ302をボール搭載面300と反対側に動かし、ボール搭載面300で供給されたボール2を受ける。ボール2を受けたら、第2の回転モータ307により第2のホルダ302をボール搭載面300側に動かし、ボール2を把持する。また、ボール把持手段30は、ボール搭載面300と第1のホルダ301と第2のホルダ302でボール2を3点で把持し、ボール2が投球アーム32に対して相対的に移動又は回転しないようにしっかりと把持する。更に、把持はロック機構(ロックレバー)351によりロックされる。ロックレバー351は第2のホルダ302をボール搭載面300の方向に回転するように押し付ける。次に、投球アーム32を回転する(S040)。投球設定工程(S020)で設定された回転角速度(回転数)に達するまで第1の回転モータ33を駆動し、投球アーム32を第1の回転軸の回りに回転する。
【0045】
次に、ボール放出手段35は、投球アーム32が回転して、投球アーム32の回転面60の水平方向の直径62と所定の角度θをなす位置(ボール放出位置)63に投球アーム32が来た時に、ボール2をボール把持手段30から放出させる(ボール放出工程:S050)。所定の角度θは、投球方向が投球マウンドからホームベースの方向となる時、すなわち、投球アーム32が回転面60の水平方向の直径62及び支持アーム34と垂直になった時に、これらとなす角度であり、90度に設定される。投球アーム32が支持アーム34に対して垂直になる位置(ボール放出位置)63に来た時、ボール放出手段35は、ロック解除機構によりロックを解除する。ソレノイド352とピン354に一体的に取り付けられたロックレバー351とカンチレバー353を使用し、機械的にロックレバー351による第2のホルダ302への押し付けを解除する。これにより、第2のホルダ302を第2の回転軸303の回りにボール搭載面300と反対側に回転するように動かし、ボール2を放出する。ボール2は支持アーム34の長手方向に、すなわち、ホームベースに向かって放出される。ボール放出手段35は、このように機械的にボール2の把持をロック解除するのでボールの放出タイミングを高精度(例えば1/20msecの精度)でコントロールできる。
【0046】
次に、投球を継続するか停止するかを判断する(S060)。停止する場合は投球停止ボタン(図示しない)をONにし、継続する場合はOFFに保つ。OFFの場合はボール把持工程(S030)に戻り、次のボールを把持し、以下同様な処理が繰り返され、ONの場合は処理を終了する。
【0047】
本実施例によれば、(1)ボール把持手段30は投球アーム32が回転中にボール2を投球アーム32に対して相対的に回転しないように固定するので、ボール放出時の安定性、再現性がある、(2)投球アーム32の長さを所定の長さにしたので、投手が投じるボールと良く似た球速、球種(直球、ドロップ、シュート、スライダー)を安定的に実現できる、(3)機械的にボールの放出タイミングをコントロールするので、高い精度でコントロールでき、ボール2のばらつきを大いに減少できる、という顕著な効果が得られた。すなわち、ボールの投球コースを精度良くコントロールできる投球装置を提供できる。
【実施例2】
【0048】
実施例1では、投球アームの回転面60の垂直方向に対する角度φを調整可能な例を説明したが、本実施例では、投球アーム32の回転面60が垂直方向を通る面に固定される例を説明する。主として実施例1との差異点を説明し、重複する説明を省略する。
【0049】
実施例1では、投球アーム32は支持アーム34を介して支持部5に支持されたが、本実施例では、例えば、地面に固定された円錐状の土台の上に音叉状に分岐した突起部を有するアーム支持手段を備え、投球アーム32が音叉状突起部の上端に回転モータにより回転可能に設置されている。したがって、支持アームは無く、支持部5のみでアーム支持手段を構成する。また、投球アームの回転面60の垂直方向に対する角度φを調整する回転面調整手段はない。したがって、投球アーム32の回転面60が垂直方向を通る面に固定されるが、実施例1と同様なボール把持手段30及び回転駆動調整手段33を有するので、投球アーム32の回転面60の傾斜の調整を除いて実施例1と同様な処理が可能である。したがって、実施例1と同様に、ボール放出の位置及びタイミングが一定になり、投球コースが安定し、再現性が良くなり、ボール2の投球コースを精度良くコントロールできる投球装置を提供できる。
【0050】
以上、本発明の実施の形態について説明したが、本発明は上記の実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で実施例に種々変更を加えられることは明白である。
【0051】
例えば、以上の実施例では、硬式野球について説明したが、本発明は、軟式野球やソフトボールにも適用可能である。ただし、それぞれに適切なアーム長が存在し得る。また、実施例1では、支持アームが水平かつ投球方向に平行に設置される例を説明したが、水平面と角度αに設置し、所定の角度を90度−αに設定しても良い。また、投球コースのホームベース位置での上下左右方向の位置をコントロールするために微調整しても良い。微調整は例えば、ソレノイドの位置を投球方向に対して微調整できるようにし、連結部材の位置を長手方向に対して微調整できるようにすれば良い。また、ロック機構とロック解除機構は機械的に高速解除できればロックレバー、カンチレバーとソレノイドとの組み合わせに限られず、他の組み合わせでも良い。また、図6の処理フローにおいて、ボール把持工程(S030)に戻る代わりに投球設定工程(S020)に戻り、回転面60の傾斜と回転角速度(回転数)を設定し直して、処理を繰り返すようにしても良い。また、把持用のホルダ等の数やポジション、回転モータの特性、投球アームのアーム長や形状、支持部の形状等を適宜変更可能である。
【産業上の利用可能性】
【0052】
本発明は、野球等の打撃練習用の投球装置に利用可能である。
【符号の説明】
【0053】
1 投球装置
2 ボール
3,3A 投球部
4 アーム回転面調整部
5 支持部(アーム支持手段の主要部)
6 制御部
30 ボール把持手段
31 第1の回転軸(アーム回転軸)
32 投球アーム
33 第1の回転モータ(回転駆動調整手段)
34 支持アーム(アーム支持手段の一部)
35 ボール放出手段
300 ボール搭載面
301 第1のホルダ
302 第2のホルダ
303 第2の回転軸
304 ホルダ開閉部
305 押さえ板
306 第4の回転軸
307 第2の回転モータ
351 ロックレバー
352 ソレノイド
353 カンチレバー
354 ピン
355 可動芯
40 第3の回転モータ(回転面調整手段)
41 第3の回転軸
42 連結部材
51 支柱
52 移動台
521 枠組
522 キャスター
523 ストッパ
60 投球アームの回転面
61 ボール軌道円
62 回転面の水平方向の直径
63 ボール放出位置
θ 所定の角度
φ 投球アームの回転面の垂直方向に対する角度
【特許請求の範囲】
【請求項1】
所定の距離離れた所定のエリアにボールを投球する投球装置において;
前記ボールを把持するボール把持手段と;
一端に前記ボール把持手段が取り付けられ、他端がアーム支持手段にアーム回転軸の回りに回転可能に取り付けられ、前記アーム回転軸を中心として回転する所定の長さの投球アームと;
前記投球アームを前記アーム回転軸の回りに回転させ、回転角速度を調整する回転駆動調整手段と;
前記投球アームの回転面の水平方向の直径と所定の角度をなす位置に前記投球アームが来た時に、前記ボールを前記ボール把持手段から放出させるボール放出手段とを備え;
前記ボール把持手段は、前記投球アームの回転中に前記ボールを前記投球アームに対して相対的に移動又は回転しないように把持する;
投球装置。
【請求項2】
前記所定の長さは20〜25cmである;
請求項1に記載の投球装置。
【請求項3】
前記ボール把持手段は、前記ボールの把持をロックするロック機構を有し;
前記ボール放出手段は、前記投球アームが前記所定の角度をなす位置に来た時に前記ロックを機械的に解除するロック解除機構を有する;
請求項1又は請求項2に記載の投球装置。
【請求項4】
前記所定の角度はほぼ90度である;
請求項1ないし請求項3のいずれか1項に記載の投球装置。
【請求項5】
前記投球アームの回転面の垂直方向に対する角度を調整する回転面調整手段を備える;
請求項1ないし請求項4のいずれか1項に記載の投球装置。
【請求項1】
所定の距離離れた所定のエリアにボールを投球する投球装置において;
前記ボールを把持するボール把持手段と;
一端に前記ボール把持手段が取り付けられ、他端がアーム支持手段にアーム回転軸の回りに回転可能に取り付けられ、前記アーム回転軸を中心として回転する所定の長さの投球アームと;
前記投球アームを前記アーム回転軸の回りに回転させ、回転角速度を調整する回転駆動調整手段と;
前記投球アームの回転面の水平方向の直径と所定の角度をなす位置に前記投球アームが来た時に、前記ボールを前記ボール把持手段から放出させるボール放出手段とを備え;
前記ボール把持手段は、前記投球アームの回転中に前記ボールを前記投球アームに対して相対的に移動又は回転しないように把持する;
投球装置。
【請求項2】
前記所定の長さは20〜25cmである;
請求項1に記載の投球装置。
【請求項3】
前記ボール把持手段は、前記ボールの把持をロックするロック機構を有し;
前記ボール放出手段は、前記投球アームが前記所定の角度をなす位置に来た時に前記ロックを機械的に解除するロック解除機構を有する;
請求項1又は請求項2に記載の投球装置。
【請求項4】
前記所定の角度はほぼ90度である;
請求項1ないし請求項3のいずれか1項に記載の投球装置。
【請求項5】
前記投球アームの回転面の垂直方向に対する角度を調整する回転面調整手段を備える;
請求項1ないし請求項4のいずれか1項に記載の投球装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−115389(P2012−115389A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−266497(P2010−266497)
【出願日】平成22年11月30日(2010.11.30)
【出願人】(506221701)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年11月30日(2010.11.30)
【出願人】(506221701)
[ Back to top ]