
抱き可能形態の呼吸誘導体

【課題】本発明は、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有する抱き可能形態の呼吸誘導体を実現し提供する。
【解決手段】本発明に係る抱き可能形態の呼吸誘導体1は、抱き可能なぬいぐるみ形態の本体2と、本体2に配置され、本体2を抱く人Mの呼吸数を検出する呼吸センサー3と、本体2に内蔵され、本体2における抱く人Mとの接触側を膨縮させる膨縮機構部4と、呼吸センサー3の検出信号を基に、当初本体2における前記抱く人Mとの接触側である腹部2bの膨縮回数が抱く人Mの呼吸数を模倣するように膨縮機構部4を駆動制御し、徐々に腹部2bの膨縮回数がゆっくりしたものとなるように膨縮機構部4を駆動制御して、本体2を抱く人Mの呼吸数が本体2の腹部2b側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部5と、を有するものである。
【解決手段】本発明に係る抱き可能形態の呼吸誘導体1は、抱き可能なぬいぐるみ形態の本体2と、本体2に配置され、本体2を抱く人Mの呼吸数を検出する呼吸センサー3と、本体2に内蔵され、本体2における抱く人Mとの接触側を膨縮させる膨縮機構部4と、呼吸センサー3の検出信号を基に、当初本体2における前記抱く人Mとの接触側である腹部2bの膨縮回数が抱く人Mの呼吸数を模倣するように膨縮機構部4を駆動制御し、徐々に腹部2bの膨縮回数がゆっくりしたものとなるように膨縮機構部4を駆動制御して、本体2を抱く人Mの呼吸数が本体2の腹部2b側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部5と、を有するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、抱き可能形態の呼吸誘導体に関し、詳しくは、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有する抱き可能形態の呼吸誘導体に関するものである。
【背景技術】
【0002】
従来から、動物形状の縫いぐるみの本体の腹部を押出したり元に戻したりして動物や人の呼吸に類似する動きを表現するようにした玩具が提案されている。
【0003】
例えば、従来、特許文献1には、動物形状の縫いぐるみの内部に、太鼓91と、駆動源13と、駆動源13からの動力によって規則的に太鼓91を打つばち部材93と、駆動源13からの動力によって規則的に回動する回動部材79、85とを収納し、太鼓91はばち部材93に打たれて動物の心臓の鼓動音に類似する音を発生し、回動部材79、85は塊状先端部81、87を有し、塊状先端部81、87は動物の腹部を押出したり元に戻したりして、動物の呼吸に類似する動きを表現するように構成した縫いぐるみ玩具が提案されている。
しかし、この特許文献1の場合、縫いぐるみ玩具の腹部を押出したり元に戻したりして、動物の呼吸に類似する動きを表現するものの、その腹部の膨縮は予め定められた一定の周期によるものと推定され、縫いぐるみ玩具を抱く人の呼吸を誘導するというような工夫はされていない。
【0004】
また、特許文献2には、呼吸センサ5により検出した利用者の呼吸が、映像提示装置2に提示される誘導図形の形状の変化として利用者に提示されるとともに、誘導制御部10により呼気期間の目標時間を設定し、誘導図形が特定の形状になることを目標の達成として映像提示装置2に提示し、利用者は呼吸センサ5により検出された自己の呼吸の状態変化を誘導図形の変化により確認し、誘導図形が特定の形状になるように呼気期間を整えるように意識するだけで、当該利用者の呼吸を定められた呼吸状態に誘導するように構成した呼吸誘導システムが提案されている。
【0005】
しかし、この特許文献2の場合は、利用者の呼吸の状態を誘導図形の形状の変化として提示する映像提示装置2を採用した構成であり、複雑で大掛かりな装置構成を必要としている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】実開平5−39593号公報
【特許文献2】特開2010−104455号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする問題点は、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有するような抱き可能形態の呼吸誘導体が存在しない点である。
【課題を解決するための手段】
【0008】
本発明に係る抱き可能形態の呼吸誘導体は、抱き可能形態の本体と、前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、を有することを最も主要な特徴とする。
【発明の効果】
【0009】
請求項1記載の発明によれば、抱く人が抱き可能形態の本体を抱き込むことにより、本体の腹部の膨縮回数の変化が抱く人に伝達され情動呼吸が誘発されて、抱く人の呼吸リズムを安定させると同時に、心を安らげ癒すことができる効果を発揮する抱き可能形態の呼吸誘導体を実現し提供することができる。
【0010】
請求項2記載の発明によれば、本体をぬいぐるみ形態とした構成の基に、請求項1記載の発明と同様、本体の腹部における膨縮回数の変化が抱く人に伝達され情動呼吸が誘発されて、抱く人の呼吸リズムを安定させると同時に、心を安らげ癒すことができる効果を発揮する抱き可能形態の呼吸誘導体を実現し提供することができる。
【0011】
請求項3記載の発明によれば、本体を人形形状、動物形状、擬似動物形状のうちのいずれかの形状としたぬいぐるみ形態の構成の基に、請求項1記載の発明と同様、本体の腹部の膨縮回数の変化が抱く人に伝達され情動呼吸が誘発されて、抱く人の呼吸リズムを安定させると同時に、心を安らげ癒すことができる効果を発揮する抱き可能形態の呼吸誘導体を実現し提供することができる。
【図面の簡単な説明】
【0012】
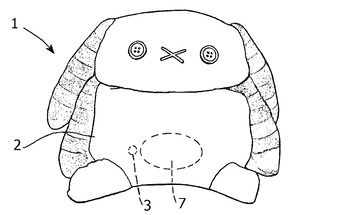
【図1】図1は本発明の実施例に係る抱き可能形態の呼吸誘導体を示す正面図である。
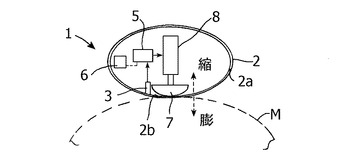
【図2】図2は本実施例に係る抱き可能形態の呼吸誘導体による抱く人の呼吸誘導動作を示す説明図である。
【図3】図3は本実施例に係る抱き可能形態の呼吸誘導体の制御系を示すブロック図である。
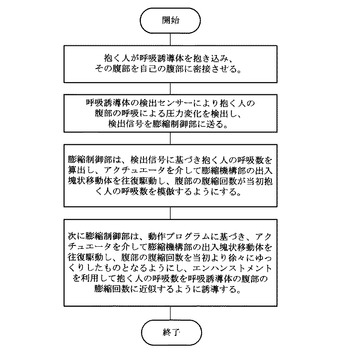
【図4】図4は本実施例に係る抱き可能形態の呼吸誘導体による抱く人の呼吸誘導動作を示すフローチャートである。
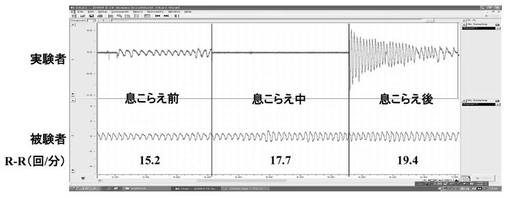
【図5】図5は息こらえ実験における実験者及び被検者の息こらえ前、息こらえ中、息こらえ後における呼吸変化を示す波形図である。
【図6】図6は息こらえ実験における7人の被検者の息こらえ前、息こらえ中、息こらえ後における呼吸数を示す表である。
【図7】図7は息こらえ実験における7人の被検者の息こらえ前、息こらえ中、息こらえ後における呼吸数を示すグラフである。
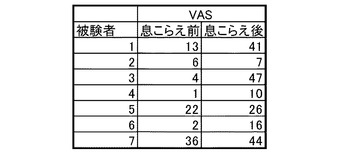
【図8】図8は息こらえ実験における7人の被検者の息こらえ前、息こらえ後におけるVASの変化を示す表である。
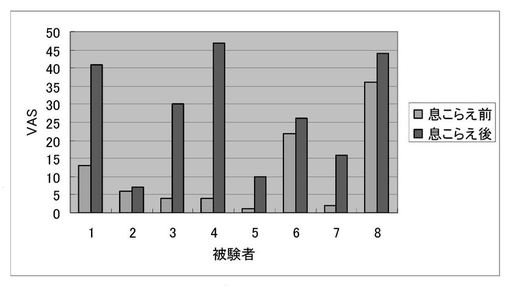
【図9】図9は息こらえ実験における7人の被検者の息こらえ前、息こらえ後におけるVASの変化を示すグラフである。
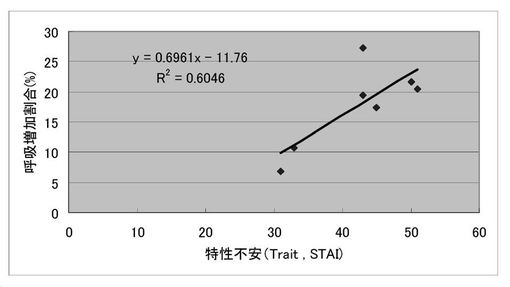
【図10】図10は息こらえ実験における被検者の呼吸増加割合と特性不安の関係を示すグラフである。
【図11】図11は息こらえ実験における被検者のEEG、その実効値、双極子電圧の変化と、被検者の脳内に生じる側頭極、扁桃体の状態の一例を示す説明図である。
【図12】図12は息こらえ実験における被検者のEEG、その実効値、双極子電位の変化と、被検者の脳内に生じる側頭極、扁桃体の状態の他例を示す説明図である。
【発明を実施するための形態】
【0013】
本発明は、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有する抱き可能形態の呼吸誘導体を実現し提供するという目的を、抱き可能なぬいぐるみ形態の本体と、前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、を有する構成により実現した。
【実施例】
【0014】
以下、本発明の実施例に係る抱き可能形態の呼吸誘導体について図面を参照して詳細に説明する。
【0015】
最初に、本実施例に係る抱き可能形態の呼吸誘導体に関する前提概念について先ず説明する。
【0016】
一般に、乳児に限らず、幼児や大人でも、不安やいらつきなど感情の変化があると呼吸数が変化する。
【0017】
このような情動呼吸の元は呼吸リズムであり、呼吸が感情を変えるもので、感情が呼吸を変えるものではないと考えられている。
幼児や大人の不安と呼吸との関係について考察すると、不安感情が起ると、脳における大脳辺縁系の情動の中枢とされる扁桃体に活動が生じ、その活動が大きいと不安が増幅される。
【0018】
一般的には、その活動が視床下部に伝搬し、自律神経活動を高め、心拍と呼吸数が上がると考えられがちであるが、心拍に関しては自律神経支配であることからその通りであるものの、呼吸のリズムは自律神経支配ではない。
【0019】
注目すべきは、不安感情が生じたときの扁桃体の活動が呼吸に伴って出てくることであり、呼吸のリズムと共に扁桃体の活動が高まり、呼吸が速くなればそれだけ扁桃体の活動量も増加していく。すなわち、呼吸リズムが情動を作っているとも言える。
一方、不安やいらつきのある人が強制的に深呼吸をすると気持ちが和らぐのは、呼吸リズムを遅くし、扁桃体の活動量が下がるからである。
【0020】
次に、人から人への情動の伝播について本願発明者が実施した実験について以下説明する。
現在までに様々な情動により呼吸が変化することが報告されており、特に恐怖や不安などの負の感情は呼吸数を上昇させることが知られている。
【0021】
いわゆるこの情動性呼吸は、主に延髄を起源とする代謝性呼吸とは異なり、脳幹部より上位脳、すなわち、扁桃体や側頭極などの辺縁系が関与していることが明らかにされてきた(Masaoka & Homma I., 1997)。
【0022】
また、情動による呼吸の変化は無意識下であり、その変化は個々の不安尺度に依存することも明らかにされてきた(Masaoka & Homma I., 2001)。
【0023】
言い換えれば、呼吸の変化を観察すればその人のもつ情動や感情の指標となり得るのである。
【0024】
本願発明者は、これまでの呼吸と情動の研究を基に、呼吸と最も密接に関連した情動である「息苦しさ」について、新たな視点を考慮して実験を試みたものである。
【0025】
近年、ミラーニューロン(mirror neuron)に関する脳研究が盛んに行われている。これは情動に関するものでは悲しみの表情、またストレス刺激を投与されている人を観察するだけで、観察者の脳も同部位が活動するというものである。
【0026】
情動の伝播は日常でも多く観察され、この機構を理解することは社会性、適応力を理解する上で重要である。
【0027】
本願発明者は、「息苦しさ」を感じる人を別の人が観察することで、その人が「息苦しさ」を感じるのかを、つまり「息苦しさ」が伝わるかどうかを、またそれがどういうことかを、呼吸、心理、脳内活動部位(脳波双極子追跡法による脳内電源推定)の面から検討し実験を試みた。以下に、この実験内容について具体的に説明する。
【0028】
[対象]
健常成人男性7例(平均34.6歳)を対象に実施した。性差の影響を除くため男性のみで施行した。
【0029】
[実験概要]
いわゆる「息苦しさ」を伝える方法として、身近であることやその簡便性から「息こらえ」を選択した。
【0030】
[呼吸]
実験者を「息こらえ」をする人、被験者を「息こらえ」を観察する人と定義し、実験者の「息こらえ」を、被験者が観察し、両者の呼吸を呼気ガス分析器(実験者:AE 300S,MINATO)、及び、呼気ガス分析器(被験者:CPEX-1,ARCO
SYSTEM)を用いて流量をアナログアウトし、Power Lab(ADInstruments)を介して実験者、被験者双方の呼吸を記録した。
【0031】
[脳波]
被験者の脳波を同時記録した。すなわち、脳波計(Neurofax EEG-1100,Nihon
Koden)を用い、不関電極を被験者の左耳に装着し、国際10〜20法に従い電極を装着した。
【0032】
[心理]
実験開始直前、STAI(Spielberger's State Trait Anxiety Inventory):状態−特性不安検査を施行し、被験者の不安尺度を測定した。
【0033】
[数値化]
そして、VAS(Visual Analogue Scale)にて、実験者の「息こらえ」を観察しているときの被験者の「息苦しさ」を数値化した。
【0034】
実験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸波形の一例、及び、実験者を観察する被験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸波形の一例を図5に示す。
【0035】
また、7人の被験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸数(回/分)を図6に、同様に7人の被験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸数(回/分)を表したグラフを図7に示す。
【0036】
更に、息こらえ前、息こらえ後での7人の被験者のVAS(Visual Analogue
Scale)変化を図8に表として、図9にグラフとして各々示す。
【0037】
図8、図9においては、全く息苦しさを感じないを「0」として示し、最大の息苦しさを「100」として示している。
【0038】
更に、息こらえ前と比べた息こらえ後の呼吸増加割合(%)と、特性不安(Trait STAI)との関係を図10に示す。
【0039】
図11、図12は、例として二人の被検者(観察者)に関する脳波(EEG)、その実効値(RMS)、双極子電位(Diporality)の変化と、被検者の脳内に生じる側頭極、扁桃体の状態を各々示すものである。
【0040】
なお、図11、図12の各図においては、被検者の側頭極(Temporal pole)T、扁桃体(Amygdala)Aを、その頭部の冠状断面、横断面を撮像した状態の基に示している。
【0041】
図11、図12の各図に示すように、被検者の脳波で吸息開始後300〜500msecに、呼吸に同期して呼吸関連不安電位(RAP:Respiratory-related Anxiety Potential)が出現し、その電源は不安と関連の強い側頭極Tや扁桃体Aに認められた。
【0042】
以上の実験結果を検証すると、以下A〜Dの通りである。
A.被験者が「息こらえ」を観察したとき、「息こらえ前」と比べて、「息こらえ中」、「息こらえ後」に被験者の呼吸数は増加した(図6、図7)。
B.被験者7例中、全例で「息こらえ前」よりも「息こらえ後」で呼吸数の増加が認められた(図6、図7)。
C.被験者7例中、全例で「息こらえ前」よりも「息こらえ後」の方が、「息苦しい」と感じた(図8、図9)。ただし、VASの変化と呼吸数の増加割合に関連性は認められなかった。
D.特性不安の高い被験者ほど、「息こらえ後」の呼吸数の増加割合が、「息こらえ前」の呼吸数と比べて大きかった(図10)。
【0043】
以上の結果から他人の「息こらえ」を観察した被検者は、全員が「息苦しい」と感じたが、「息苦しい」という感覚は、無意識下で呼吸数の増加という現象を伴うことが分かった。
【0044】
しかし、個々の被検者が感じる「息苦しさ」の程度と「呼吸数」には関連性はなく、むしろ「不安感」の大小が「呼吸数」と強く関連していた。つまり、不安を感じやすい人ほど、呼吸数が増加する傾向にあった。
【0045】
このことから「息苦しさ」という感覚は、人の不安感と密接に関係した感覚であることが言える。
【0046】
厳密には、「息苦しさ」が伝わるということは、被験者(観察者)が持つ不安感が無意識の内に「息苦しさ」という一つの主観を作り出したと言い換えることができる。
【0047】
次に、上記前提概念及び息こらえの実験を踏まえた本発明の実施例に係る抱き可能形態の呼吸誘導体について、図1乃至図4を参照して説明する。
【0048】
本実施例に係る抱き可能形態の呼吸誘導体1は、図1乃至図3に示すように、外周部に例えば布材からなる外被2aを具備するぬいぐるみ形態で、かつ、抱き可能な擬似動物形状に形成した本体2と、前記本体2に配置され、本体2を抱く人Mの例えば腹部に近接してその呼吸数を検出する呼吸センサー3と、前記本体2に内蔵され、本体2における前記抱く人Mと接触する腹部2b側を膨縮させる膨縮機構部4と、前記呼吸センサー3の検出信号を基に、当初本体2における前記腹部2bの膨縮回数が抱く人Mの呼吸数を模倣するように前記膨縮機構部4を駆動制御し、徐々に前記腹部2bの膨縮回数がゆっくりしたものとなるように前記膨縮機構部4を駆動制御して、前記本体2を抱く人Mの呼吸数が前記本体2の腹部2b側のゆっくりした膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部5と、前記呼吸誘導体1の動作に必要な電力供給を行う電源部(例えば電池)6と、を有している。
【0049】
ここに、エントレインメントとは、心理学用語であり、主に乳児の発達段階における母子相互の働きかけを指すものである。この時期の母子相互の最も基本的なやり取りであり、このような情緒的共生の段階を経て、乳児は自己の情動的核(エムディ)を形成し、自律的自己に移行していくものである。
【0050】
乳児の様々な欲求は、情動浸透的に母親に伝わり、母親は、乳児の情動表出に対して調子を合わせるという情動調律(スターン)により、適切な応答を示すことになる。
【0051】
本実施例に係る抱き可能形態の呼吸誘導体1は、上述したようなエントレインメントを利用するものである。
【0052】
前記本体2の形状としては、小さな子どもを始め、どんな人にも親しみ犬、猫等の動物形状、これらを模した擬似動物形状、人形形状等の例を挙ることができるが、特に限定するものではない。更には、これらに類似したロボット形態のものでもよい。
【0053】
前記呼吸センサー3としては、例えば抱く人Mの呼吸に伴う腹部の膨縮による圧力変化を利用して抱く人Mの呼吸数を検出する圧力式呼吸センサー等を使用することができるが、これに限定するものではない。
【0054】
前記膨縮機構部4は、例えば前記本体2の腹部2bに臨ませた出入塊状移動体7と、この出入塊状移動体7の押し出し、戻し駆動を行うアクチュエータ8とにより構成する。この他、空気袋とエアーポンプとの組み合わせにより構成することもできる。
【0055】
前記膨縮制御部5は、例えば全体の制御を行う制御部であるCPU10、予め呼吸誘導体1の動作プログラムを格納したメモリ9、前記アクチュエータ8用の駆動回路11により構成する。
【0056】
次に、図4を参照して本実施例に係る抱き可能形態の呼吸誘導体1による抱く人Mの呼吸誘導動作を説明する。
【0057】
前記呼吸誘導体1を抱く人Mが抱き込み、呼吸誘導体1の腹部2bを自己の腹部に密接させると、呼吸誘導体1の呼吸センサー3は、抱く人Mの呼吸に伴う腹部の膨縮による圧力変化を連続的に検出し、検出信号を膨縮制御部5に送る。
【0058】
前記膨縮制御部5は、呼吸センサー3からの検出信号を入力し、動作プログラムに基づいて抱く人Mの呼吸数を算出して駆動回路11からアクチュエータ8に駆動信号を出力し、当初本体2における前記膨縮機構部4のアクチュエータ8を駆動し、出入塊状移動体7を抱く人Mの腹部側に押し出したり、元に戻したりの往復駆動を行い、前記腹部2bの膨縮回数が抱く人Mの呼吸数を模倣する状態となる状態とする。
【0059】
この後、前記膨縮制御部5は、動作プログラムに基づいて駆動回路11からアクチュエータ8に駆動信号を出力し、前記膨縮機構部4のアクチュエータ8を駆動して、出入塊状移動体7の押し出し、戻しの周期を徐々にゆるやかにし、前記腹部2bの膨縮回数が徐々にゆっくりしたものとなるようにして、これにより、前記本体2を抱く人Mの呼吸数が前記本体2の腹部2b側のゆっくりした膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う。
【0060】
例えば、抱く人Mの呼吸数が当初25回/分であるような場合には、その呼吸数を正常値とされる18〜20回/分となるように誘導する。
【0061】
この結果、抱く人Mは、呼吸誘導体1を抱き込んでいるだけで、自己の呼吸数が当初の状態から本体2の腹部2bのゆっくりした膨縮回数に近似するように誘導されることになり、呼吸リズムが安定すると同時に、心を安らげ癒すことができる(リラックスする)ことができる。
【産業上の利用可能性】
【0062】
本発明は、家庭や学校における児童のメンタルヘルスケア、感情が不安定になりがちな人のストレス・マネジメント、寝つきが悪い、睡眠が不足している人の就寝サポート、感情障害、精神障害をもつ人に対する呼吸補助・情動サポート、呼吸器系の症状をもつ人の治療サポート等の用途に広範に適用可能である。
【符号の説明】
【0063】
1 呼吸誘導体
2 本体
2a 外被
2b 腹部
3 呼吸センサー
4 膨縮機構部
5 膨縮制御部
6 電源部
7 出入塊状移動体
8 アクチュエータ
9 メモリ
10 CPU
11 駆動回路
A 扁桃体
T 側頭極
M 抱く人
【技術分野】
【0001】
本発明は、抱き可能形態の呼吸誘導体に関し、詳しくは、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有する抱き可能形態の呼吸誘導体に関するものである。
【背景技術】
【0002】
従来から、動物形状の縫いぐるみの本体の腹部を押出したり元に戻したりして動物や人の呼吸に類似する動きを表現するようにした玩具が提案されている。
【0003】
例えば、従来、特許文献1には、動物形状の縫いぐるみの内部に、太鼓91と、駆動源13と、駆動源13からの動力によって規則的に太鼓91を打つばち部材93と、駆動源13からの動力によって規則的に回動する回動部材79、85とを収納し、太鼓91はばち部材93に打たれて動物の心臓の鼓動音に類似する音を発生し、回動部材79、85は塊状先端部81、87を有し、塊状先端部81、87は動物の腹部を押出したり元に戻したりして、動物の呼吸に類似する動きを表現するように構成した縫いぐるみ玩具が提案されている。
しかし、この特許文献1の場合、縫いぐるみ玩具の腹部を押出したり元に戻したりして、動物の呼吸に類似する動きを表現するものの、その腹部の膨縮は予め定められた一定の周期によるものと推定され、縫いぐるみ玩具を抱く人の呼吸を誘導するというような工夫はされていない。
【0004】
また、特許文献2には、呼吸センサ5により検出した利用者の呼吸が、映像提示装置2に提示される誘導図形の形状の変化として利用者に提示されるとともに、誘導制御部10により呼気期間の目標時間を設定し、誘導図形が特定の形状になることを目標の達成として映像提示装置2に提示し、利用者は呼吸センサ5により検出された自己の呼吸の状態変化を誘導図形の変化により確認し、誘導図形が特定の形状になるように呼気期間を整えるように意識するだけで、当該利用者の呼吸を定められた呼吸状態に誘導するように構成した呼吸誘導システムが提案されている。
【0005】
しかし、この特許文献2の場合は、利用者の呼吸の状態を誘導図形の形状の変化として提示する映像提示装置2を採用した構成であり、複雑で大掛かりな装置構成を必要としている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】実開平5−39593号公報
【特許文献2】特開2010−104455号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする問題点は、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有するような抱き可能形態の呼吸誘導体が存在しない点である。
【課題を解決するための手段】
【0008】
本発明に係る抱き可能形態の呼吸誘導体は、抱き可能形態の本体と、前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、を有することを最も主要な特徴とする。
【発明の効果】
【0009】
請求項1記載の発明によれば、抱く人が抱き可能形態の本体を抱き込むことにより、本体の腹部の膨縮回数の変化が抱く人に伝達され情動呼吸が誘発されて、抱く人の呼吸リズムを安定させると同時に、心を安らげ癒すことができる効果を発揮する抱き可能形態の呼吸誘導体を実現し提供することができる。
【0010】
請求項2記載の発明によれば、本体をぬいぐるみ形態とした構成の基に、請求項1記載の発明と同様、本体の腹部における膨縮回数の変化が抱く人に伝達され情動呼吸が誘発されて、抱く人の呼吸リズムを安定させると同時に、心を安らげ癒すことができる効果を発揮する抱き可能形態の呼吸誘導体を実現し提供することができる。
【0011】
請求項3記載の発明によれば、本体を人形形状、動物形状、擬似動物形状のうちのいずれかの形状としたぬいぐるみ形態の構成の基に、請求項1記載の発明と同様、本体の腹部の膨縮回数の変化が抱く人に伝達され情動呼吸が誘発されて、抱く人の呼吸リズムを安定させると同時に、心を安らげ癒すことができる効果を発揮する抱き可能形態の呼吸誘導体を実現し提供することができる。
【図面の簡単な説明】
【0012】
【図1】図1は本発明の実施例に係る抱き可能形態の呼吸誘導体を示す正面図である。
【図2】図2は本実施例に係る抱き可能形態の呼吸誘導体による抱く人の呼吸誘導動作を示す説明図である。
【図3】図3は本実施例に係る抱き可能形態の呼吸誘導体の制御系を示すブロック図である。
【図4】図4は本実施例に係る抱き可能形態の呼吸誘導体による抱く人の呼吸誘導動作を示すフローチャートである。
【図5】図5は息こらえ実験における実験者及び被検者の息こらえ前、息こらえ中、息こらえ後における呼吸変化を示す波形図である。
【図6】図6は息こらえ実験における7人の被検者の息こらえ前、息こらえ中、息こらえ後における呼吸数を示す表である。
【図7】図7は息こらえ実験における7人の被検者の息こらえ前、息こらえ中、息こらえ後における呼吸数を示すグラフである。
【図8】図8は息こらえ実験における7人の被検者の息こらえ前、息こらえ後におけるVASの変化を示す表である。
【図9】図9は息こらえ実験における7人の被検者の息こらえ前、息こらえ後におけるVASの変化を示すグラフである。
【図10】図10は息こらえ実験における被検者の呼吸増加割合と特性不安の関係を示すグラフである。
【図11】図11は息こらえ実験における被検者のEEG、その実効値、双極子電圧の変化と、被検者の脳内に生じる側頭極、扁桃体の状態の一例を示す説明図である。
【図12】図12は息こらえ実験における被検者のEEG、その実効値、双極子電位の変化と、被検者の脳内に生じる側頭極、扁桃体の状態の他例を示す説明図である。
【発明を実施するための形態】
【0013】
本発明は、抱く人の呼吸を誘導し呼吸リズムを安定させると同時に、心を安らげ癒すことができる機能を有する抱き可能形態の呼吸誘導体を実現し提供するという目的を、抱き可能なぬいぐるみ形態の本体と、前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、を有する構成により実現した。
【実施例】
【0014】
以下、本発明の実施例に係る抱き可能形態の呼吸誘導体について図面を参照して詳細に説明する。
【0015】
最初に、本実施例に係る抱き可能形態の呼吸誘導体に関する前提概念について先ず説明する。
【0016】
一般に、乳児に限らず、幼児や大人でも、不安やいらつきなど感情の変化があると呼吸数が変化する。
【0017】
このような情動呼吸の元は呼吸リズムであり、呼吸が感情を変えるもので、感情が呼吸を変えるものではないと考えられている。
幼児や大人の不安と呼吸との関係について考察すると、不安感情が起ると、脳における大脳辺縁系の情動の中枢とされる扁桃体に活動が生じ、その活動が大きいと不安が増幅される。
【0018】
一般的には、その活動が視床下部に伝搬し、自律神経活動を高め、心拍と呼吸数が上がると考えられがちであるが、心拍に関しては自律神経支配であることからその通りであるものの、呼吸のリズムは自律神経支配ではない。
【0019】
注目すべきは、不安感情が生じたときの扁桃体の活動が呼吸に伴って出てくることであり、呼吸のリズムと共に扁桃体の活動が高まり、呼吸が速くなればそれだけ扁桃体の活動量も増加していく。すなわち、呼吸リズムが情動を作っているとも言える。
一方、不安やいらつきのある人が強制的に深呼吸をすると気持ちが和らぐのは、呼吸リズムを遅くし、扁桃体の活動量が下がるからである。
【0020】
次に、人から人への情動の伝播について本願発明者が実施した実験について以下説明する。
現在までに様々な情動により呼吸が変化することが報告されており、特に恐怖や不安などの負の感情は呼吸数を上昇させることが知られている。
【0021】
いわゆるこの情動性呼吸は、主に延髄を起源とする代謝性呼吸とは異なり、脳幹部より上位脳、すなわち、扁桃体や側頭極などの辺縁系が関与していることが明らかにされてきた(Masaoka & Homma I., 1997)。
【0022】
また、情動による呼吸の変化は無意識下であり、その変化は個々の不安尺度に依存することも明らかにされてきた(Masaoka & Homma I., 2001)。
【0023】
言い換えれば、呼吸の変化を観察すればその人のもつ情動や感情の指標となり得るのである。
【0024】
本願発明者は、これまでの呼吸と情動の研究を基に、呼吸と最も密接に関連した情動である「息苦しさ」について、新たな視点を考慮して実験を試みたものである。
【0025】
近年、ミラーニューロン(mirror neuron)に関する脳研究が盛んに行われている。これは情動に関するものでは悲しみの表情、またストレス刺激を投与されている人を観察するだけで、観察者の脳も同部位が活動するというものである。
【0026】
情動の伝播は日常でも多く観察され、この機構を理解することは社会性、適応力を理解する上で重要である。
【0027】
本願発明者は、「息苦しさ」を感じる人を別の人が観察することで、その人が「息苦しさ」を感じるのかを、つまり「息苦しさ」が伝わるかどうかを、またそれがどういうことかを、呼吸、心理、脳内活動部位(脳波双極子追跡法による脳内電源推定)の面から検討し実験を試みた。以下に、この実験内容について具体的に説明する。
【0028】
[対象]
健常成人男性7例(平均34.6歳)を対象に実施した。性差の影響を除くため男性のみで施行した。
【0029】
[実験概要]
いわゆる「息苦しさ」を伝える方法として、身近であることやその簡便性から「息こらえ」を選択した。
【0030】
[呼吸]
実験者を「息こらえ」をする人、被験者を「息こらえ」を観察する人と定義し、実験者の「息こらえ」を、被験者が観察し、両者の呼吸を呼気ガス分析器(実験者:AE 300S,MINATO)、及び、呼気ガス分析器(被験者:CPEX-1,ARCO
SYSTEM)を用いて流量をアナログアウトし、Power Lab(ADInstruments)を介して実験者、被験者双方の呼吸を記録した。
【0031】
[脳波]
被験者の脳波を同時記録した。すなわち、脳波計(Neurofax EEG-1100,Nihon
Koden)を用い、不関電極を被験者の左耳に装着し、国際10〜20法に従い電極を装着した。
【0032】
[心理]
実験開始直前、STAI(Spielberger's State Trait Anxiety Inventory):状態−特性不安検査を施行し、被験者の不安尺度を測定した。
【0033】
[数値化]
そして、VAS(Visual Analogue Scale)にて、実験者の「息こらえ」を観察しているときの被験者の「息苦しさ」を数値化した。
【0034】
実験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸波形の一例、及び、実験者を観察する被験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸波形の一例を図5に示す。
【0035】
また、7人の被験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸数(回/分)を図6に、同様に7人の被験者の「息こらえ」前、「息こらえ」中、「息こらえ」後の各呼吸数(回/分)を表したグラフを図7に示す。
【0036】
更に、息こらえ前、息こらえ後での7人の被験者のVAS(Visual Analogue
Scale)変化を図8に表として、図9にグラフとして各々示す。
【0037】
図8、図9においては、全く息苦しさを感じないを「0」として示し、最大の息苦しさを「100」として示している。
【0038】
更に、息こらえ前と比べた息こらえ後の呼吸増加割合(%)と、特性不安(Trait STAI)との関係を図10に示す。
【0039】
図11、図12は、例として二人の被検者(観察者)に関する脳波(EEG)、その実効値(RMS)、双極子電位(Diporality)の変化と、被検者の脳内に生じる側頭極、扁桃体の状態を各々示すものである。
【0040】
なお、図11、図12の各図においては、被検者の側頭極(Temporal pole)T、扁桃体(Amygdala)Aを、その頭部の冠状断面、横断面を撮像した状態の基に示している。
【0041】
図11、図12の各図に示すように、被検者の脳波で吸息開始後300〜500msecに、呼吸に同期して呼吸関連不安電位(RAP:Respiratory-related Anxiety Potential)が出現し、その電源は不安と関連の強い側頭極Tや扁桃体Aに認められた。
【0042】
以上の実験結果を検証すると、以下A〜Dの通りである。
A.被験者が「息こらえ」を観察したとき、「息こらえ前」と比べて、「息こらえ中」、「息こらえ後」に被験者の呼吸数は増加した(図6、図7)。
B.被験者7例中、全例で「息こらえ前」よりも「息こらえ後」で呼吸数の増加が認められた(図6、図7)。
C.被験者7例中、全例で「息こらえ前」よりも「息こらえ後」の方が、「息苦しい」と感じた(図8、図9)。ただし、VASの変化と呼吸数の増加割合に関連性は認められなかった。
D.特性不安の高い被験者ほど、「息こらえ後」の呼吸数の増加割合が、「息こらえ前」の呼吸数と比べて大きかった(図10)。
【0043】
以上の結果から他人の「息こらえ」を観察した被検者は、全員が「息苦しい」と感じたが、「息苦しい」という感覚は、無意識下で呼吸数の増加という現象を伴うことが分かった。
【0044】
しかし、個々の被検者が感じる「息苦しさ」の程度と「呼吸数」には関連性はなく、むしろ「不安感」の大小が「呼吸数」と強く関連していた。つまり、不安を感じやすい人ほど、呼吸数が増加する傾向にあった。
【0045】
このことから「息苦しさ」という感覚は、人の不安感と密接に関係した感覚であることが言える。
【0046】
厳密には、「息苦しさ」が伝わるということは、被験者(観察者)が持つ不安感が無意識の内に「息苦しさ」という一つの主観を作り出したと言い換えることができる。
【0047】
次に、上記前提概念及び息こらえの実験を踏まえた本発明の実施例に係る抱き可能形態の呼吸誘導体について、図1乃至図4を参照して説明する。
【0048】
本実施例に係る抱き可能形態の呼吸誘導体1は、図1乃至図3に示すように、外周部に例えば布材からなる外被2aを具備するぬいぐるみ形態で、かつ、抱き可能な擬似動物形状に形成した本体2と、前記本体2に配置され、本体2を抱く人Mの例えば腹部に近接してその呼吸数を検出する呼吸センサー3と、前記本体2に内蔵され、本体2における前記抱く人Mと接触する腹部2b側を膨縮させる膨縮機構部4と、前記呼吸センサー3の検出信号を基に、当初本体2における前記腹部2bの膨縮回数が抱く人Mの呼吸数を模倣するように前記膨縮機構部4を駆動制御し、徐々に前記腹部2bの膨縮回数がゆっくりしたものとなるように前記膨縮機構部4を駆動制御して、前記本体2を抱く人Mの呼吸数が前記本体2の腹部2b側のゆっくりした膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部5と、前記呼吸誘導体1の動作に必要な電力供給を行う電源部(例えば電池)6と、を有している。
【0049】
ここに、エントレインメントとは、心理学用語であり、主に乳児の発達段階における母子相互の働きかけを指すものである。この時期の母子相互の最も基本的なやり取りであり、このような情緒的共生の段階を経て、乳児は自己の情動的核(エムディ)を形成し、自律的自己に移行していくものである。
【0050】
乳児の様々な欲求は、情動浸透的に母親に伝わり、母親は、乳児の情動表出に対して調子を合わせるという情動調律(スターン)により、適切な応答を示すことになる。
【0051】
本実施例に係る抱き可能形態の呼吸誘導体1は、上述したようなエントレインメントを利用するものである。
【0052】
前記本体2の形状としては、小さな子どもを始め、どんな人にも親しみ犬、猫等の動物形状、これらを模した擬似動物形状、人形形状等の例を挙ることができるが、特に限定するものではない。更には、これらに類似したロボット形態のものでもよい。
【0053】
前記呼吸センサー3としては、例えば抱く人Mの呼吸に伴う腹部の膨縮による圧力変化を利用して抱く人Mの呼吸数を検出する圧力式呼吸センサー等を使用することができるが、これに限定するものではない。
【0054】
前記膨縮機構部4は、例えば前記本体2の腹部2bに臨ませた出入塊状移動体7と、この出入塊状移動体7の押し出し、戻し駆動を行うアクチュエータ8とにより構成する。この他、空気袋とエアーポンプとの組み合わせにより構成することもできる。
【0055】
前記膨縮制御部5は、例えば全体の制御を行う制御部であるCPU10、予め呼吸誘導体1の動作プログラムを格納したメモリ9、前記アクチュエータ8用の駆動回路11により構成する。
【0056】
次に、図4を参照して本実施例に係る抱き可能形態の呼吸誘導体1による抱く人Mの呼吸誘導動作を説明する。
【0057】
前記呼吸誘導体1を抱く人Mが抱き込み、呼吸誘導体1の腹部2bを自己の腹部に密接させると、呼吸誘導体1の呼吸センサー3は、抱く人Mの呼吸に伴う腹部の膨縮による圧力変化を連続的に検出し、検出信号を膨縮制御部5に送る。
【0058】
前記膨縮制御部5は、呼吸センサー3からの検出信号を入力し、動作プログラムに基づいて抱く人Mの呼吸数を算出して駆動回路11からアクチュエータ8に駆動信号を出力し、当初本体2における前記膨縮機構部4のアクチュエータ8を駆動し、出入塊状移動体7を抱く人Mの腹部側に押し出したり、元に戻したりの往復駆動を行い、前記腹部2bの膨縮回数が抱く人Mの呼吸数を模倣する状態となる状態とする。
【0059】
この後、前記膨縮制御部5は、動作プログラムに基づいて駆動回路11からアクチュエータ8に駆動信号を出力し、前記膨縮機構部4のアクチュエータ8を駆動して、出入塊状移動体7の押し出し、戻しの周期を徐々にゆるやかにし、前記腹部2bの膨縮回数が徐々にゆっくりしたものとなるようにして、これにより、前記本体2を抱く人Mの呼吸数が前記本体2の腹部2b側のゆっくりした膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う。
【0060】
例えば、抱く人Mの呼吸数が当初25回/分であるような場合には、その呼吸数を正常値とされる18〜20回/分となるように誘導する。
【0061】
この結果、抱く人Mは、呼吸誘導体1を抱き込んでいるだけで、自己の呼吸数が当初の状態から本体2の腹部2bのゆっくりした膨縮回数に近似するように誘導されることになり、呼吸リズムが安定すると同時に、心を安らげ癒すことができる(リラックスする)ことができる。
【産業上の利用可能性】
【0062】
本発明は、家庭や学校における児童のメンタルヘルスケア、感情が不安定になりがちな人のストレス・マネジメント、寝つきが悪い、睡眠が不足している人の就寝サポート、感情障害、精神障害をもつ人に対する呼吸補助・情動サポート、呼吸器系の症状をもつ人の治療サポート等の用途に広範に適用可能である。
【符号の説明】
【0063】
1 呼吸誘導体
2 本体
2a 外被
2b 腹部
3 呼吸センサー
4 膨縮機構部
5 膨縮制御部
6 電源部
7 出入塊状移動体
8 アクチュエータ
9 メモリ
10 CPU
11 駆動回路
A 扁桃体
T 側頭極
M 抱く人
【特許請求の範囲】
【請求項1】
抱き可能形態の本体と、
前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、
前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、
前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、
を有することを特徴とする抱き可能形態の呼吸誘導体。
【請求項2】
抱き可能なぬいぐるみ形態の本体と、
前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、
前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、
前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、
を有することを特徴とする抱き可能形態の呼吸誘導体。
【請求項3】
抱き可能なぬいぐるみ形態で、人形形状、動物形状、擬似動物形状のうちのいずれかの形状とした本体と、
前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、
前記本体に内蔵され、本体における前記抱く人と接触する腹部側を膨縮させる膨縮機構部と、
前記呼吸センサーの検出信号を基に、当初本体における前記腹部の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記腹部の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の腹部側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、
を有することを特徴とする抱き可能形態の呼吸誘導体。
【請求項1】
抱き可能形態の本体と、
前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、
前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、
前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、
を有することを特徴とする抱き可能形態の呼吸誘導体。
【請求項2】
抱き可能なぬいぐるみ形態の本体と、
前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、
前記本体に内蔵され、本体における前記抱く人との接触側を膨縮させる膨縮機構部と、
前記呼吸センサーの検出信号を基に、当初本体における前記抱く人との接触側の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記接触側の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の接触側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、
を有することを特徴とする抱き可能形態の呼吸誘導体。
【請求項3】
抱き可能なぬいぐるみ形態で、人形形状、動物形状、擬似動物形状のうちのいずれかの形状とした本体と、
前記本体に配置され、本体を抱く人の呼吸数を検出する呼吸センサーと、
前記本体に内蔵され、本体における前記抱く人と接触する腹部側を膨縮させる膨縮機構部と、
前記呼吸センサーの検出信号を基に、当初本体における前記腹部の膨縮回数が抱く人の呼吸数を模倣するように前記膨縮機構部を駆動制御し、徐々に前記腹部の膨縮回数がゆっくりしたものとなるように前記膨縮機構部を駆動制御して、前記本体を抱く人の呼吸数が前記本体の腹部側の膨縮回数に近似するようにエントレインメントを利用した呼吸誘導を行う膨縮制御部と、
を有することを特徴とする抱き可能形態の呼吸誘導体。
【図1】


【図2】
【図3】

【図4】
【図6】

【図8】
【図5】
【図7】

【図9】
【図10】
【図11】

【図12】

【図2】
【図3】
【図4】
【図6】
【図8】
【図5】
【図7】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−22302(P2013−22302A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−160904(P2011−160904)
【出願日】平成23年7月22日(2011.7.22)
【出願人】(501212221)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月22日(2011.7.22)
【出願人】(501212221)
【Fターム(参考)】
[ Back to top ]