
押圧力検知装置

【課題】 薄型で外部の押圧力を電気的出力として高感度に検知できる押圧力検知装置を提供する。
【解決手段】 弾性板2に左側受力部3と右側受力部4が固定されており、左側受力部3の第1の当接部6aと右側受力部4の第1の当接部6bが第1の押圧部材21に当接し、左側受力部3の第2の当接部7aと右側受力部4の第2の当接部7bが第2の押圧部材22に当接している。第1の押圧部材21と第2の押圧部材22とが互いに接近する方向へ加圧されると、弾性板2の第1の撓み部5aと第2の撓み部5bが互いに逆向きに湾曲する。弾性板2の一方の側に設けられた直列の抵抗体層9a,9bで湾曲変形の撓みを検知できる。
【解決手段】 弾性板2に左側受力部3と右側受力部4が固定されており、左側受力部3の第1の当接部6aと右側受力部4の第1の当接部6bが第1の押圧部材21に当接し、左側受力部3の第2の当接部7aと右側受力部4の第2の当接部7bが第2の押圧部材22に当接している。第1の押圧部材21と第2の押圧部材22とが互いに接近する方向へ加圧されると、弾性板2の第1の撓み部5aと第2の撓み部5bが互いに逆向きに湾曲する。弾性板2の一方の側に設けられた直列の抵抗体層9a,9bで湾曲変形の撓みを検知できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歪検知素子を使用して外部からの加圧力に対応した電気的出力を高感度で得ることが可能な押圧力検知装置に関する。
【背景技術】
【0002】
外部から作用する加圧力に対応した電気的出力を得る検知装置は各種分野で使用されている。
【0003】
以下の特許文献1に記載の多方向入力装置は、スティック・ポインタまたはポインティング・スティックなどと称されるものである。この多方向入力装置は、弾性基板にスティック状の操作体が固定され、弾性基板には、溝部で分離された撓み部が前記操作体を挟む両側に設けられている。それぞれの撓み部の表面には抵抗体層が設けられている。操作体を挟む位置に配置された対を成す抵抗体層は直列に接続されており、直列に接続された両抵抗体層に電圧が印加される。
【0004】
前記操作体に対し、一方の撓み部が設けられている側に向けて倒す力を与えると、操作体を挟む位置にある一方の側の撓み部の表面に伸び歪みが生じて抵抗体層の抵抗値が増大し、他方の側の撓み部に圧縮歪みが生じて抵抗体層の抵抗値が低下する。その結果、直列に接続された抵抗体層の中間から、操作体に作用する力の大小に対応した電位の変化を検知することができる。
【0005】
特許文献1に記載された多方向入力装置は、弾性基板に固定されたスティック状の操作体に対して倒す向きの力を与えたときに電位の変化を取り出すことができるが、前記操作体を弾性基板に対して垂直な方向へ押圧したときには、電位の変化を得ることはできない。その理由は、操作体を垂直に押したときは、操作体を挟んで両側に位置する撓み部の表面が共に伸び歪みを生じ、それぞれの撓み部に設けられた抵抗体層の抵抗値が共に増大する。そのため、直列に接続された抵抗体層の中点の電位を変化させることができないからである。
【0006】
特許文献2には、四角形のタッチパネルの四隅が操作スイッチで支持されて、タッチパネルを機械的スイッチ感覚で使用できるようにした入力装置が開示されている。また、特許文献3には、四角形のタッチパネルの四隅が圧力センサで支持され、それぞれの圧力センサの出力値を演算処理することで加圧位置を検出するタッチセンサパネルが開示されている。
【0007】
しかし、特許文献2のようにタッチパネルの四隅を操作スイッチで支持する構造は、薄型の操作装置として構成することが難しく、またタッチパネルを深い位置まで押し込まないと操作スイッチがONにならないため、誤操作が生じやすい欠点がある。特許文献3にはどのような圧力センサを使用するのかが記載されていないが、特許文献1に記載の構造は作用できないため、結果として複雑な構造の圧力センサを使用しなくてはならない。
【0008】
特許文献4に記載されたロードセルは、ベースに固定された固定柱部と測定皿に固定された可動柱部とが、互いに平行な2つの梁部で連結されており、それぞれの梁部とそれぞれの固定柱部との連結境界部およびそれぞれの梁部と可動柱部との連結境界部の4箇所に歪みゲージが貼着されている。このロードセルは、測定皿に載せられた測定物の質量で可動柱部が下がったときに、2つの歪みゲージで伸び歪みを検知でき、他の2つの歪みゲージで圧縮歪みを検知できるため、ホイートストンブリッジを構成することで比較的高感度の検知出力を期待できる。
【0009】
しかしながら、2つの梁が平行に配置された構造であるため、薄型化が困難である。また、固定柱部が固定側で可動柱部が可動側の片持ち構造であるため、例えば2つのパネルの間に挟んで使用しようとしてもその支持構造が複雑になる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平10−49293号公報
【特許文献2】実用新案登録第3064385号公報
【特許文献3】実願昭62−158403号(実開平1−64737号)のマイクロフィルム
【特許文献4】特開2004−198294号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は上記従来の課題を解決するものであり、1つの弾性部材の撓み変形によって弾性部材の同じ側に伸び歪みと圧縮歪みを形成でき、それぞれの撓み部に設けられた歪検知素子の中間電位を検知することで、外部からの押圧力を高感度で検知できる押圧力検知装置を提供することを目的としている。
【0012】
また本発明は、静電容量式などの座標検知装置と併用でき、または表示画面に対向させて透過表示式としても使用できる押圧力検知装置を提供することを目的としている。
【課題を解決するための手段】
【0013】
本発明は、弾性的に撓むことができる弾性体と、前記弾性体上で距離を開けて配置された一対の受力部とを有し、それぞれの受力部に、前記弾性体の第1の側に突出する第1の当接部と、前記弾性体の前記第1の側と反対側の第2の側に突出する第2の当接部が設けられ、それぞれの前記受力部では、前記第1の当接部が前記第2の当接部に対して前記弾性体に沿う同じ方向に距離を開けて位置しており、
それぞれの前記第1の当接部とそれぞれの前記第2の当接部に対して、前記弾性部材に向く押圧力が作用したときに、それぞれの前記受力部が同じ向きに回動して、前記受力部と前記受力部との間の前記弾性体に、互いに逆向きに撓む撓み部が形成可能とされており、
互いに逆向きに撓むそれぞれの前記撓み部に歪検知素子が設けられていることを特徴とするものである。
【0014】
本発明の押圧力検知装置は、弾性体の第1の側と第2の側から第1の当接部と第2の当接部を加圧すると、弾性体の同じ面に伸び歪みと圧縮歪みの両方を発生させることができる。そのため、2つの歪検知素子の中点電位の変化を求めることで、加圧力の大小に対応した高感度の電気的出力を得ることができる。
【0015】
本発明は、前記弾性体が撓んでいないときに、前記第1の側では、それぞれの前記第1の当接部が他の部分よりも前記弾性体から最も離れた位置に突出し、前記第2の側では、それぞれの前記第2の当接部が他の部分よりも前記弾性体から最も離れた位置に突出しているものとして構成できる。
【0016】
または、本発明は、前記弾性体が撓んでいないときに、前記第1の側と前記第2の側の双方おいて、それぞれの前記第1の当接部の前記弾性体からの突出寸法と、それぞれの前記第2の当接部の前記弾性体からの突出寸法とが同じであるものとして構成することも可能である。
【0017】
本発明は、それぞれの受力部で、前記第1の当接部と前記第2の当接部とが一体に形成されているものであってもよいし、それぞれの受力部で、前記第1の当接部と前記第2の当接部とが別体に形成されているものであってもよい。
【0018】
本発明は、前記受力部と前記受力部との間の前記弾性体の互いに逆向きに撓むそれぞれの前記撓み部において、前記歪検知素子が、前記弾性体の同じ側に設けられているものである。
【0019】
本発明の押圧力検知装置は、それぞれの撓み部において、歪検知素子を、弾性体の同じ側に取り付けた構成であっても、外部の押圧力によって歪検知素子から互いに逆極性の出力を得ることができる。
【0020】
本発明は、前記歪検知素子が抵抗体層であり、互いに逆向きに撓むそれぞれの前記撓み部において前記抵抗体層が同じ膜厚で同じ幅寸法で形成されている構成とすることが可能である。弾性体の同じ側の面に抵抗体層を同じ厚さで同じ幅で形成することにより、異なる歪み部に設けられた歪検知素子の特性を一致させることが可能である。
【0021】
本発明は、互いに逆向きに撓むそれぞれの前記撓み部に設けられた前記抵抗体層が直列に接続されて、前記抵抗体層と前記抵抗体層との中点の電位を検出する検出回路が設けられており、前記中点電位は、前記第1の当接部と前記第2の当接部とに作用する力の変化に対して一次関数的に変化するものである。
【0022】
また、本発明は、前記弾性体の前記第1の側に第1の押圧部材が対向し、前記弾性体の前記第2の側に第2の押圧部材が対向しており、
前記第1の押圧部材と前記第2の押圧部材が互いに接近するときに、前記第1の押圧部材がそれぞれの前記第1の当接部を押圧し、前記第2の押圧部材がそれぞれの前記第2の当接部を押圧するものとして構成できる。
【0023】
上記のように、パネルなどの2つの押圧部材の間に弾性体を介在させるだけで押圧力検知装置を構成できる。また、押圧力検知装置を薄型に構成することが可能になる。
【0024】
例えば、本発明は、前記第1の押圧部材と前記第2の押圧部材は板材であり、前記第1の押圧部材と前記第2の押圧部材とに一定の面積の操作領域が形成されて、前記第1の押圧部材と前記第2の押圧部材は、前記操作領域を囲む周囲領域において、互いに接近できるように連結されている構造が可能である。
【0025】
この場合に、本発明は、前記周囲領域の内側で、前記第1の押圧部材と前記第2の押圧部材との間に複数の前記弾性体が互いに独立して設けられており、それぞれの前記弾性体に設けられた前記歪検知素子に接続される配線が前記周囲領域に設けられていることが好ましい。
【0026】
操作領域を囲む周囲領域を、2つの押圧部材を連結する連結部として使用するとともに、この周囲領域を配線領域として使用することで、操作領域内などに多くの配線が露出するのを防止でき、操作領域を種々の用途に使用することが可能となる。
【0027】
例えば、前記第1の押圧部材の表側に操作面が設けられ、少なくとも前記操作領域に、前記操作面に対する操作位置を検知する座標検知装置が設けられているものとして構成できる。
【0028】
または、前記第1の押圧部材と前記第2の押圧部材は、少なくとも前記操作領域が透明であり、前記第2の押圧部材の外側に表示画面が設けられ、前記操作領域では、前記第1の押圧部材の外側から前記表示画面を目視可能であるものとして構成できる。
【発明の効果】
【0029】
本発明の押圧力検知装置は、薄型に構成でき、しかも外部からの押圧力を高感度で電気的出力に変換することが可能である。
【0030】
また、静電容量式の座標検知装置との併用が可能であり、また表示画面を透過させる透過パネルへの搭載も可能である。
【図面の簡単な説明】
【0031】
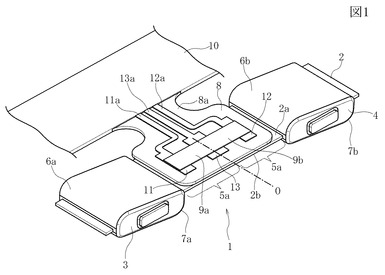
【図1】本発明の実施の形態の押圧力検知装置を示す斜視図、
【図2】図1に示す押圧力検知装置の平面図、
【図3】図1に示す押圧力検知装置の動作を説明する端面図であり、(A)は加圧前の状態を示し、(B)は加圧後の状態を示す、
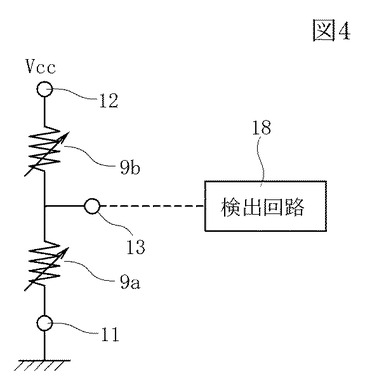
【図4】歪検知素子の回路図、
【図5】荷重に対する検知出力の変化を示す線図、
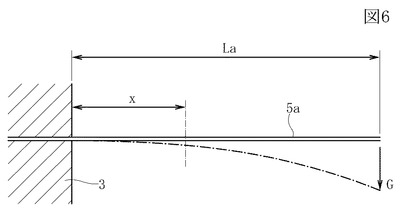
【図6】撓み部での弾性板の変形状態をモデル化して示す説明図、
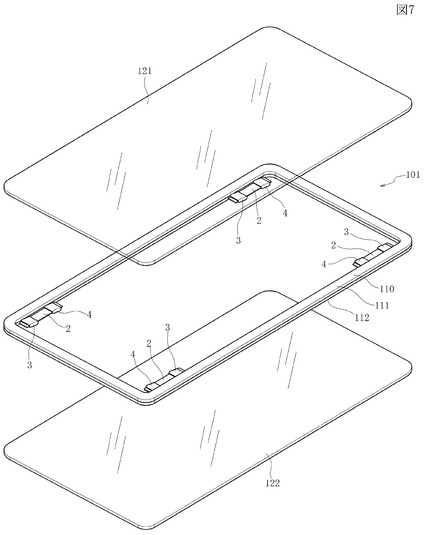
【図7】操作領域または表示領域を備えた押圧力検知装置の分解斜視図、
【図8】図7に示す押圧力検知装置の部分断面図、
【図9】他の実施の形態の押圧力検知装置を示す端面図、
【図10】さらに他の実施の形態の押圧力検知装置を示す端面図、
【発明を実施するための形態】
【0032】
図1ないし図3に示す押圧力検知装置1に使用されている弾性体は弾性板2である。弾性板2はステンレススチールなどの弾性撓み可能な金属材料で形成されている。本明細書での「弾性撓み」とは、図3(B)に示すように、外力を与えたときに板厚方向に曲げ撓みを発生させることができ、且つ外力を除去したときに平坦な状態に復帰する機能を意味している。
【0033】
図2に示すように、弾性板2は、幅寸法がW0で長さ寸法がL0である。図2では、長さ寸法L0を左右に二分する中心線をOで示している。中心線Oは、弾性板2の長手方向に直交して幅方向に延びる仮想線である。
【0034】
前記弾性板2には、左側受力部3と右側受力部4が固定されている。左側受力部3と右側受力部4は合成樹脂材料で形成されている。この合成樹脂材料としては、摩擦係数の低いポリアセタール樹脂などを使用することが好ましい。図1と図2に示すように、弾性板2は、左側受力部3と右側受力部4のそれぞれの内部に埋設されて固定されている。左側受力部3と右側受力部4は、例えば弾性板2が成型金型のキャビティの内部に保持された状態で、前記キャビティ内に溶融樹脂を射出して硬化させるいわゆるインサート成型工程で形成される。
【0035】
図2に示すように、左側受力部3の対向縁部3aと右側受力部4の対向縁部4aは、前記中心線Oから左右に同じ距離だけ離れている。弾性板2は、前記対向縁部3aと前記対向縁部4aとで挟まれた長さL1の部分が変形領域であり、この変形領域では、長さL1の全長にわたって、弾性板2の幅寸法と厚さ寸法が一定であり、すなわち断面係数が一定である。
【0036】
長さL1の変形領域では、中心線Oと対向縁部3aとで挟まれた領域が第1の撓み部5aであり、中心線Oと対向縁部4aとで挟まれた領域が第2の撓み部5bである。図3(B)に示すように、左側受力部3と右側受力部4とが押圧されると、第1の撓み部5aと第2の撓み部5bが、互いに上下逆向きの曲げ歪みを生じる。
【0037】
図3においては、弾性板2よりも上側15が第1の側であり、弾性板2よりも下側が第2の側である。また、撓んでおらず平坦な状態の弾性板2の長手方向に沿い且つ弾性板2の表面と平行な向きがX1−X2方向である。左側受力部3は中心線OよりもX1側に位置し、右側受力部4は中心線OよりもX2側に位置している。
【0038】
左側受力部3には、弾性板2の上面2aよりも上側15に突出している第1の当接部6aと、弾性板2の下面2bよりも下側16に突出している第2の当接部7aが形成されている。右側受力部4には、弾性板2の上面2aよりも上側15に突出している第1の当接部6bと、弾性板2の下面2bよりも下側16に突出している第2の当接部7bが形成されている。
【0039】
図3(A)に示すように、押圧力検知装置1では、弾性板2が撓んでいないときに、左側受力部3の第1の当接部6aと右側受力部4の第1の当接部6bが、それ以外の部分に比べて、弾性板2の上面2aから上側15に向けて最も突出している。同じく、弾性板2が撓んでいないときに、左右側受力部3の第2の当接部7aと右側受力部4の第2の当接部7bが、それ以外の部分に比べて、弾性板2の下面2bから下側16に向けて最も突出している。
【0040】
弾性板2の板厚の中心を通る中立軸から左側受力部3の第1の当接部6aまでの突出高さ寸法と、中立軸から右側受力部4の第1の当接部6bまでの突出高さ寸法は同じであり、共に突出高さ寸法がH1である。中立軸から左側受力部4の第2の当接部7aまでの突出高さ寸法と、中立軸から右側受力部4の第2の当接部7bまでの突出高さ寸法は同じであり、共に突出高さ寸法がH2である。そして、中立軸から第1の当接部6a,6bまでの突出高さ寸法H1と、中立軸から第2の当接部7a,7bまでの突出高さ寸法H2とが同じ寸法である。
【0041】
図3(A)に示すように、左側受力部3では、第1の当接部6aが第2の当接部7aよりもX1側に離れて位置している。左側受力部3での第1の当接部6aと第2の当接部7aの、弾性板2の長手方向に沿う方向(X1−X2方向)での間隔寸法はS1である。右側受力部4においても、第1の当接部6bが第2の当接部7bよりもX1側に離れて位置している。右側受力部4での第1の当接部6bと第2の当接部7bの、X1−X2方向での間隔寸法はS2である。前記間隔寸法S1と前記間隔寸法S2は等しい。すなわち、左側受力部3と右側受力部4は、形状と寸法が同じである。
【0042】
図1と図2および図3(A)に示すように、長さL1の変形領域では、弾性板2の上面2aにポリイミドシートなどの可撓性の合成樹脂シートで形成された絶縁層8が固定されており、第1の撓み部5aと第2の撓み部5bの双方において、絶縁層8の上に歪検知素子が設けられている。なお、図3(B)は、主に変形領域での弾性板2の変形状態を説明するために、絶縁層8と歪み検知素子の図示を省略している。
【0043】
図1と図2に示すように、絶縁層8の表面には第1の電極層11と第2の電極層12および、中間電極層13が設けられている。これら電極層11,12,13は、銀ペーストなどをスクリーン印刷して形成されている。中間電極層13のX1−X2方向の幅寸法の中心は前記中心線Oに一致している。第1の電極層11と第2の電極層12は、X1−X2方向の幅寸法が互いに一致している。また、中心線Oから第1の電極層11までのX1方向の距離と、中心線Oから第2の電極層12までのX2方向の距離が一致している。
【0044】
第1の撓み部5aでは、前記中間電極層13と第1の電極層11との間に、第1の歪検知素子である第1の抵抗体層9aが形成され、第2の撓み部5bでは、中間電極層13と第2の電極層12との間に、第2の歪検知素子である第2の抵抗体層9bが形成されている。図1と図2に示す実施の形態では、第1の抵抗体層9aと第2の抵抗体層9bが連続して同じ幅寸法で同じ厚さ寸法で形成されている。ただし、第1の抵抗体層9aと第2の抵抗体層9bとが、互いに分離して形成されているものであってもよい。
【0045】
第1の抵抗体層9aと第2の抵抗体層9bは連続したものであっても、また分離されているものであっても、絶縁層8の同じ表面に同じ工程で同時に形成できる。そのため、第1の抵抗体層9aと第2の抵抗体層9bを同じ抵抗値に揃えて形成しやすい。第1の抵抗体層9aと第2の抵抗体層9bは、バインダ樹脂にカーボンブラックやカーボンナノチューブなどが含まれたものであり、スクリーン印刷工程で、第1の電極層11と第2の電極層12と中間電極層13および絶縁層8の表面に形成される。第1の抵抗体層9aと第2の抵抗体層9bは、第1の撓み部5aと第2の撓み部5bの撓み変形に追従して延び変形し、または圧縮変形する。伸び変形したときに抵抗値が高くなり、圧縮変形すると抵抗値が低下する。
【0046】
図1と図2に示すように、前記合成樹脂シートによって、前記絶縁層8に連続する延出部8aと、さらに延出部8aに連続する支持基板10とが一体に形成されている。第1の電極層11から一体に延びるリード層11aと、第2の電極層12から一体に延びるリード層12a、および中間電極層13から一体に延びるリード層13aは、共に前記延出部8aの表面を経て前記支持基板10の表面に引き出されている。支持基板10では、それぞれのリード層11a,12a,13aの表面がポリイミド樹脂などの有機絶縁層で覆われている。
【0047】
次に、前記押圧力検知装置1の動作について説明する。
図3に示すように、押圧力検知装置1は、第1の押圧部材21と第2の押圧部材22との間に挟まれて使用される。第1の押圧部材21と第2の押圧部材22は、例えば板材であり、通常は、第2の押圧部材22が固定部材であり、第1の押圧部材21が前記第2の押圧部材22に接近し離反できるように支持された可動部材である。
【0048】
押圧力検知装置1が携帯用機器などの操作装置に使用される場合には、第2の押圧部材22が機器本体に固定された支持パネルであり、第1の押圧部材21が、操作側に設けられた操作パネルである。また、押圧力検知装置1が荷重センサまたは差圧力センサとして使用される場合は、第2の押圧部材22が固定部となり、第1の押圧部材21が外力や外圧力を受ける測定可動部となる。
【0049】
前記押圧検知装置1は、弾性板2と左側受力部3および右側受力部4が一体化されたものを、第1の押圧部材21と第2の押圧部材22の間に設置するだけで押圧力や圧力の検知が可能となる。左側受力部3や右側受力部4を、第1の加圧部材21や第2の加圧部材22に固定するなどの必要がないため、組み立てがきわめて容易である。また、左側受力部3と右側受力部4はX1−X2方向に並んで配置されているため、第1の押圧部材21と第2の押圧部材22の狭い隙間の内部に配置でき、押圧力検知装置1の全体を薄型に構成できる。
【0050】
図4は、第1の抵抗体層9aと第2の抵抗体層9bの接続状態を示す回路図である。図1と図2に示すように、第1の抵抗体層9aと第2の抵抗体層9bは、中間電極層13を介して直列に接続されている。第1の電極層11は接地電位に設定され、第2の電極層12に例えば5ボルトのDC電圧が与えられる。第1の抵抗体層9aと第2の抵抗体層9bの抵抗値の変化に伴って中間電極層13の中点電位が変化し、この電位の変化が検出回路18で検出される。
【0051】
第1の抵抗体層9aと第2の抵抗体層9bは、同じ工程で形成され、幅寸法と膜厚が同じであるため、図3(A)に示すように、弾性板2が撓んでいないときに、第1の抵抗体層9aの抵抗値と第2の抵抗体層9bの抵抗値がほぼ一致している。よって、図4に示す中間電極層13の中点電位はほぼVcc/2であり、Vccが5ボルトの場合に中点電位がほぼ2.5ボルトである。
【0052】
第1の押圧部材21と第2の押圧部材22とが互いに接近するように押圧されると、第1の押圧部材21と第2の押圧部材22との間の隙間が狭められ、第1の押圧部材21で第1の当接部6a,6bが弾性板2に向けて押圧され、第2の押圧部材22で第2の当接部7a,7bが弾性板2に向けて押圧される。
【0053】
その結果、図3(B)に示すように、左側受力部3と右側受力部4が共に同じ方向(図3(A)(B)では反時計方向)へ回動させられる。左側受力部3と右側受力部4は、ポリアセタール樹脂などの摩擦抵抗の小さい材料で形成され、第1の当接部6a,6bと第2の当接部7a,7bがX1−X2方向に向けて曲率を有する凸曲面であるため、第1の当接部6a,6bが第1の押圧部材21の内面と最小の抵抗力で摺動し、第2の当接部7a,7bが第2の押圧部材22の内面と最小の抵抗力で摺動する。
【0054】
図3(B)に示すように、第1の撓み部5aでは、凸側が上側15に向く曲げ変形となって、弾性板2の上面2aに伸び歪みが発生する。第2の撓み部5bでは、凸側が下側16に向く曲げ変形となって、弾性板2の上面2aに圧縮歪みが発生する。第1の撓み部5aで弾性板2の上面2aに伸び歪が発生すると、第1の抵抗体層9aがこれに追従して伸び歪みを発生し抵抗値が増大する。このとき、第1の抵抗体層9aのX1−X2方向の伸び率に対して、抵抗値の変化率が一次関数的に変化する。第2の撓み部5bで弾性板2の上面2aに圧縮歪みが発生すると、第2の抵抗体層9bの抵抗値が低下する。第2の抵抗体層9bの抵抗値の変化率は、第2の抵抗体層9bのX1−X2方向の圧縮率に対して一次関数的に変化する。
【0055】
図2に示すように、左側受力部3と右側受力部4が中心線Oから左右に同じ距離だけ離れており、図3(A)に示すように、左側受力部3と右側受力部4の形状と寸法が同じであり、特にH1=H2で且つS1=S2である。そのため、第1の押圧部材21と第2の押圧部材22とが平行を維持して接近したときに、左側受力部3と右側受力部4の回動角度は同じである。そのため、第1の撓み部5aに作用する曲げモーメントと第2の撓み部5bに作用する曲げモーメントは、上下逆向きであるが、その絶対値は同じである。また、第1の撓み部5aでの弾性板2の上面2aの伸び歪み率と、第2の撓み部5bでの弾性板2の上面2aの圧縮歪み率は、その絶対値が同じである。
【0056】
さらに、第1の抵抗体層9aと第2の抵抗体層9bは、中心線Oから左右に対称に形成されている。そのため、第1の押圧部材21と第2の押圧部材22を平行を維持させて接近させたときに、第1の抵抗体層9aの抵抗値の変化率と、第2の抵抗体層9bの抵抗値の変化率は、極性が逆ではあるが、その絶対値がほぼ同じである。
【0057】
図5のグラフは、横軸に、第1の押圧部材21と第2の押圧部材22を互いに接近させる荷重の変化を示し、縦軸に、中間電極層13で得られる電位のVcc/2からの増加量を示している。第1の押圧部材21と第2の押圧部材22が接近すると、第1の抵抗体層9aの抵抗値が増大し、第2の抵抗体層9bの抵抗値が低下するため、中間電極層13で検出される中間電位は上昇し、図5に示すように、前記荷重が大きくなるにしたがって、中間電位のVcc/2からの増加量が増大していく。
【0058】
第1の押圧部材21と第2の押圧部材22を加圧したときに、抵抗値が増大する第1の抵抗体層9aと抵抗値が低下する第2の抵抗体層9bとの中点電位を検出しているために、検出回路で前記中点電位の変化を広いレンジで高感度に検出することができる。
【0059】
また、押圧力検知装置1は、第1の撓み部5aと第2の撓み部5bの曲げ歪みによって押圧力を検知しているために、図5に示すように、荷重の増加率に対して、中点電位の増加量が比例し、荷重の増加に対して中点電位が一次関数的に増大する。その理由は以下の通りである。
【0060】
図3(B)に示すように、第1の撓み部5aの変形は、左側受力部3で固定された片持ち梁に対して中心線Oの部分に集中荷重が作用したのと同じであり、第2の撓み部5bの変形は、右側受力部4で固定された片持ち梁に対して中心線Oの部分に集中荷重が作用したのと同じである。
【0061】
図6は、左側受力部3で固定された第1の撓み部5aを片持ち梁としてモデル化した説明図である。この片持ち梁の自由長はLaであり、自由端に集中荷重Gが作用したときに、片持ち梁は鎖線で示すように撓み変形する。撓み変形したときの、左側受力部3からxだけ離れた位置での曲げモーメントMxは、時計方向のモーメントをプラスとしたときに、Mx=G(La−x)である。左側受力部3からxだけ離れた位置での梁の表面応力ρxは、梁の断面係数をZとしたときに、ρx=Mx/Z=G・(La−x)/Zである。
【0062】
第1の撓み部5aと第2の撓み部5bは、それぞれLaが定数で、断面係数Zも一定である。そのため、左側受力部3からxだけ離れた位置での梁の表面応力ρxは、荷重Gを変数としたときに、荷重Gの一次関数として変化する。弾性板2の表面の歪みは表面応力ρxに比例する。したがって、第1の撓み部5aと第2の撓み部5bのそれぞれの位置での表面歪みの変化は、荷重Gを変数としたときに、荷重Gの一次関数として変化する。
【0063】
以上から、図5に示すように、第1の押圧部材21と第2の押圧部材22とを接近させる荷重の変化に対して、中間電極層13からの中点電位の出力を一次関数的に変化させることができる。この押圧力検知装置1は、与えられる荷重の変化に対して検知出力のリニアリティを確保できる。
【0064】
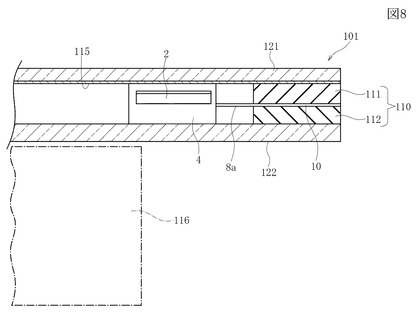
図7は、携帯用機器の操作装置などに使用可能な押圧力検知装置101の構造を示す分解斜視図であり、図8は、押圧力検知装置101が組み立てられた状態を示す部分断面図である。
【0065】
この押圧力検知装置101は、第1の押圧部材121と第2の押圧部材122が透明パネルである。透明パネルは、例えば、透明なアクリル板のような合成樹脂板またはガラス板である。第1の押圧部材121と第2の押圧部材122との間には、枠形状の連結部材110が介在している。連結部材110は、第1の押圧部材121と第2の押圧部材122の周縁部に沿って設けられている。
【0066】
図8に示すように、連結部材110は、上側弾性体枠111と下側弾性体枠112とが重ねられて構成されている。第1の押圧部材121である透明パネルの周縁部が、上側弾性体枠111の表面に接着固定され、第2の押圧部材122である透明パネルの周縁部が、下側弾性体枠112の表面に接着固定されている。上側弾性体枠111と下側弾性体枠112は合成ゴムシート、発泡樹脂シート、発泡ゴムシートなどであり、上下の圧縮力に対して厚さ寸法の変化が比例する弾性体である。連結部材110で連結された第1の押圧部材121と第2の押圧部材122は、互いに接近させることが可能である。
【0067】
第1の押圧部材121と第2の押圧部材122とが連結部材110を介して重ねられた状態で、前記連結部材110が設けられた領域が周囲領域であり、連結部材110で囲まれた内側の領域は、透明な第1の押圧部材121と透明な押圧部材122とを介して上下に透視可能な操作領域または表示領域である。
【0068】
前記操作領域または表示領域では、前記周囲領域の内側の4箇所に、図1と図2に示すように、弾性板2と左側受力部3と右側受力部4とが一体化されて、弾性板2の変形領域に絶縁層8と歪検知装置とが設けられた検知ユニットが配置されている。4箇所に設けられた検知ユニットからそれぞれ延びる合成樹脂シートの4つの延出部8aは、全て同じ支持基板10と一体化されている。合成樹脂シートで形成された支持基板10は、前記連結部材110とほぼ同じ枠形状である。図8に示すように、枠形状の支持基板10は、連結部材110を構成する上側弾性体枠111と下側弾性体枠112との間に挟まれて、上側弾性体枠111と支持基板10の双方に接着固定されている。
【0069】
図8に示すように、それぞれの左側受力部3と右側受力部4は、第1の押圧部材121と第2の押圧部材122との隙間内に位置しており、第1の押圧部材121と第2の押圧部材122とを接近させる荷重が作用していないときに、第1の当接部6a,6bが第1の押圧部材121の下面に最小の隙間で対向し、第2の当接部7a,7bが第2の押圧部材122の上面に最小の隙間で対向し、それぞれの弾性板2に曲げモーメントが作用しておらず、第1の撓み部5aと第2の撓み部5bの双方が撓んでいない。
【0070】
4箇所に設けられたそれぞれの検知ユニットでは、弾性板2と枠状の連結部材110との間が、可撓性の合成樹脂シートで形成された延出部8aのみを介して連結されている。よって、弾性板2が連結部材110に拘束されず、延出部8aの変形によって比較的自由に動くことができる。そのため、第1の押圧部材121と第2の押圧部材122とを接近させる押圧力が作用したときに、左側受力部3と右側受力部4が、第1の押圧部材121と第2の押圧部材122とから均等な押圧力を受けるようになる。
【0071】
また、それぞれの弾性板2の表面に設けられた歪検知素子の配線であるリード線11a,12a,13aは、全て枠形状の支持基板10に導かれ、連結部材110の内部で配線が引き回されている。そのため、連結部材110で囲まれた操作領域または表示領域に、押圧力検知装置101の配線が延びることがなく、前記配線が操作領域または表示領域の機能の障害になるのを防止できる。
【0072】
図8に示すように、第1の押圧部材121は操作パネルとして使用されており、少なくとも連結部材110で囲まれた領域内において、第1の押圧部材121の裏面に座標検知装置115が設けられている。座標検知装置115は静電容量の変化を検知するものであり、透明な絶縁層を挟んで一方の側に複数のX電極が他方の側に複数のY電極が設けられている。X電極とY電極は共に透明電極である。前記X電極とY電極はマトリクス状に多数の箇所で絶縁層を介して交差している。第1の押圧部材121の表面のいずれかの箇所に人体の指が触れると、指の接触位置に最も近い位置にあるX電極とY電極との交差部での静電容量が変化する。例えば複数のX電極と複数のY電極に順番にパルス状の電圧を印加し、静電容量の変化に応じた両電極間に流れる電流の変化を検知することで、どの位置に指が触れたかを検知することができる。
【0073】
前記静電容量式の座標検知装置115は、第1の押圧部材121の上面に積層されて設けられていてもよい。
【0074】
また、座標検知装置として、第1の押圧部材121の上面に透明な押圧式のタッチパッドが設けられていてもよい。このタッチパッドは、透明な樹脂シートが隙間を介して対向しており、それぞれの樹脂シートの対向面に透明な抵抗体層が形成されている。一方の樹脂シートの抵抗体層にはX方向に勾配を持つ電圧が印加され、他方の樹脂シートの抵抗体層にはY方向に勾配を持つ電圧が印加され、X方向の電圧とY方向の電圧が異なる時間帯に印加される。タッチパッドのいずれかの場所を押圧すると、対向する抵抗体層どうしが接触し、その接触位置でのX方向の電圧とY方向の電圧を検知することで、操作位置を座標上で特定することができる。
【0075】
図8に示すように、第2の押圧部材122は固定パネルとして電子機器の本体部に固定される。そして、第2の押圧部材122の下側に液晶表示パネルなどの表示装置116が配置され、その表示画面が連結部材110で囲まれている操作ならびに表示領域に対向している。
【0076】
図7と図8に示す押圧力検知装置101は、表示装置116の表示画面の表示内容を、第1の押圧部材121と第2の押圧部材122を透視して目視することができる。表示画面の表示内容を見ながら、第1の押圧部材121の上面のいずれかの箇所を操作すると、その位置が座標検知装置115で検知され、図示しない制御部において第1の押圧部材121の上面での操作箇所が特定される。そして、その操作箇所において指で第1の押圧部材121を押圧すると、図3(B)に示すように弾性板2が変形し、図5に示すように、中間電極層13から押圧力に対応した電圧変化を得ることができる。
【0077】
例えば、4箇所の検知ユニットのそれぞれの中間電極層13から検出された電圧変化の平均値が所定のしきい値を超えたときに、制御部は指による操作箇所が押圧されたと認識する。これにより、制御部は、座標検知装置115で特定された操作箇所への操作入力が確定されたと判断する。または、4箇所の検知ユニットの中間電極層13から出力される検知電圧のいずれかが一定のしきい値を超えたと判断したときに、操作箇所への操作入力が確定されたと判断してもよい。
【0078】
図5に示すように、押圧力検知装置では、第1の押圧部材121に与えられる押圧力の変化に対して、検知出力が一次関数的に変化する。したがって、4箇所の検知出力の平均値の変化を段階的に設定されたしきい値と比較し、第1の押圧部材121に与えられる押圧力の大きさを段階的に判断し、それぞれの押圧力の大きさに応じて、異なる入力操作として判別してもよい。
【0079】
なお、4箇所の検知素子のそれぞれの検知出力の大小を比較するなどの演算を行うことで、座標検知装置115を設けなくても、第1の押圧部材121が押圧された操作箇所を特定することもできる。
【0080】
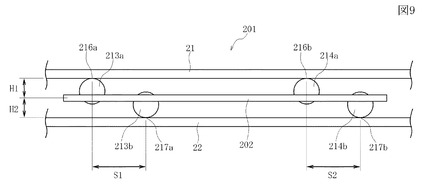
図9と図10は本発明の他の実施の形態の押圧力検知装置を示している。
図9に示す押圧力検知装置201は、弾性板202に、ポリアセタール樹脂などで形成された左側受力部213a,213bが固定され、また右側受力部214a,214bが固定されている。左側受力部213aと左側受力部213bは別体のものであり、一方の左側受力部213aに第1の当接部216aが設けられ、他方の左側受力部213bに第2の当接部217aが設けられている。右側受力部214aと右側受力部214bも別体に形成されており、一方の右側受力部214aに第1の当接部216bが設けられ、他方の右側受力部214bに第2の当接部217bが設けられている。
【0081】
第1の当接部216a,216bは、図3に示す第1の当接部6a,6bに対応し、第2の当接部217a,217bは図3に示した第2の当接部7a,7bに対応している。また、第1の当接部216a,216bと第2の当接部217a,217bに関する寸法H1,H2およびS1,S2は、図3に示す実施の形態と同じである。
【0082】
図9に示す押圧力検知装置201は、第1の押圧部材21と第2の押圧部材22を接近させるときに、弾性板202の変形領域が図3(B)に示す弾性板2と同様に歪み変形する。よって変形領域の第1の撓み部と第2の撓み部に歪検知素子を設置しておくことで、図5に示したのと同じ検知出力を得ることができる。
【0083】
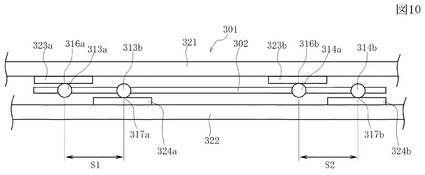
図10に示す押圧力検知装置301は、弾性板302に2つに分離された左側受力部313a,313bと右側受力部314a,314bが固定されている。左側受力部313aに第1の当接部316aが設けられ、左側受力部313bに第2の当接部317aが設けられている。右側受力部314aに第1の当接部316aが設けられ、右側受力部314bに第2の当接部317bが設けられている。
【0084】
第1の当接部316aと第2の当接部317aとの間隔寸法S1および第1の当接部316bと第2の当接部317bとの間隔寸法S1は、図3に示した実施の形態と同じである。
【0085】
図10に示す押圧力検知装置201では、第1の押圧部材321に、弾性板302が撓んでいない状態で、第1の当接部316a,316bに当たる第1の押圧部323a,323bが下向きに突出形成されている。第2の押圧部材322には、弾性板302が撓んでいない状態で、第2の当接部317a,317bに当接する第2の押圧部324a,324bが上向きに突出形成されている。また、弾性板302が撓んでいない状態で、第1の押圧部323a,323bは、左側受力部313bと右側受力部314bに当たっておらず、第2の押圧部324a,324bは左側受力部313aと右側受力部314aに当たっていない。
【0086】
図10に示す押圧力検知装置301は、第1の押圧部材321と第2の押圧部材322を接近させるときに、弾性板302の変形領域が図3(B)に示す弾性板2と同様に歪み変形する。弾性板302の変形領域の第1の撓み部と第2の撓み部に歪検知素子を設置しておくことで、図5に示したのと同じ検知出力を得ることができる。
【0087】
なお、前記実施の形態では、弾性体として弾性板2,202,302が使用されている。この弾性板は幅寸法W0に対して板厚寸法が十分に小さく、板厚方向へ変形するものである。ただし、本発明の弾性体は、弾性板に限られず、断面が正方形の角柱などであってもよい。ただし、長さL1の変形領域において断面係数が均一であることが好ましい。
【符号の説明】
【0088】
1 押圧力検知装置
2 弾性板
2a 弾性板の上面
2b 弾性板の下面
3 左側受力部
4 右側受力部
6a,6b 第1の当接部
7a,7b 第2の当接部
8 絶縁層
8a 延長部
9a 第1の抵抗体層
9b 第2の抵抗体層
10 支持基板
11 第1の電極層
12 第2の電極層
13 中間電極層
15 第1の側である上側
16 第2の側である下側
21 第1の押圧部材
22 第2の押圧部材
101 押圧力検知装置
110 連結部材
121 第1の押圧部材
122 第2の押圧部材
201 押圧力検知装置
202 弾性板
213a,213b 左側受力部
214a,214b 右側受力部
216a,216b 第1の当接部
217a,217b 第2の当接部
301 押圧力検知装置
302 弾性板
313a,313b 左側受力部
314a,314b 右側受力部
316a,316b 第1の当接部
317a,317b 第2の当接部
321 第1の押圧部材
322 第2の押圧部材
323a,323b 第1の押圧部
324a,324b 第2の押圧部
【技術分野】
【0001】
本発明は、歪検知素子を使用して外部からの加圧力に対応した電気的出力を高感度で得ることが可能な押圧力検知装置に関する。
【背景技術】
【0002】
外部から作用する加圧力に対応した電気的出力を得る検知装置は各種分野で使用されている。
【0003】
以下の特許文献1に記載の多方向入力装置は、スティック・ポインタまたはポインティング・スティックなどと称されるものである。この多方向入力装置は、弾性基板にスティック状の操作体が固定され、弾性基板には、溝部で分離された撓み部が前記操作体を挟む両側に設けられている。それぞれの撓み部の表面には抵抗体層が設けられている。操作体を挟む位置に配置された対を成す抵抗体層は直列に接続されており、直列に接続された両抵抗体層に電圧が印加される。
【0004】
前記操作体に対し、一方の撓み部が設けられている側に向けて倒す力を与えると、操作体を挟む位置にある一方の側の撓み部の表面に伸び歪みが生じて抵抗体層の抵抗値が増大し、他方の側の撓み部に圧縮歪みが生じて抵抗体層の抵抗値が低下する。その結果、直列に接続された抵抗体層の中間から、操作体に作用する力の大小に対応した電位の変化を検知することができる。
【0005】
特許文献1に記載された多方向入力装置は、弾性基板に固定されたスティック状の操作体に対して倒す向きの力を与えたときに電位の変化を取り出すことができるが、前記操作体を弾性基板に対して垂直な方向へ押圧したときには、電位の変化を得ることはできない。その理由は、操作体を垂直に押したときは、操作体を挟んで両側に位置する撓み部の表面が共に伸び歪みを生じ、それぞれの撓み部に設けられた抵抗体層の抵抗値が共に増大する。そのため、直列に接続された抵抗体層の中点の電位を変化させることができないからである。
【0006】
特許文献2には、四角形のタッチパネルの四隅が操作スイッチで支持されて、タッチパネルを機械的スイッチ感覚で使用できるようにした入力装置が開示されている。また、特許文献3には、四角形のタッチパネルの四隅が圧力センサで支持され、それぞれの圧力センサの出力値を演算処理することで加圧位置を検出するタッチセンサパネルが開示されている。
【0007】
しかし、特許文献2のようにタッチパネルの四隅を操作スイッチで支持する構造は、薄型の操作装置として構成することが難しく、またタッチパネルを深い位置まで押し込まないと操作スイッチがONにならないため、誤操作が生じやすい欠点がある。特許文献3にはどのような圧力センサを使用するのかが記載されていないが、特許文献1に記載の構造は作用できないため、結果として複雑な構造の圧力センサを使用しなくてはならない。
【0008】
特許文献4に記載されたロードセルは、ベースに固定された固定柱部と測定皿に固定された可動柱部とが、互いに平行な2つの梁部で連結されており、それぞれの梁部とそれぞれの固定柱部との連結境界部およびそれぞれの梁部と可動柱部との連結境界部の4箇所に歪みゲージが貼着されている。このロードセルは、測定皿に載せられた測定物の質量で可動柱部が下がったときに、2つの歪みゲージで伸び歪みを検知でき、他の2つの歪みゲージで圧縮歪みを検知できるため、ホイートストンブリッジを構成することで比較的高感度の検知出力を期待できる。
【0009】
しかしながら、2つの梁が平行に配置された構造であるため、薄型化が困難である。また、固定柱部が固定側で可動柱部が可動側の片持ち構造であるため、例えば2つのパネルの間に挟んで使用しようとしてもその支持構造が複雑になる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平10−49293号公報
【特許文献2】実用新案登録第3064385号公報
【特許文献3】実願昭62−158403号(実開平1−64737号)のマイクロフィルム
【特許文献4】特開2004−198294号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は上記従来の課題を解決するものであり、1つの弾性部材の撓み変形によって弾性部材の同じ側に伸び歪みと圧縮歪みを形成でき、それぞれの撓み部に設けられた歪検知素子の中間電位を検知することで、外部からの押圧力を高感度で検知できる押圧力検知装置を提供することを目的としている。
【0012】
また本発明は、静電容量式などの座標検知装置と併用でき、または表示画面に対向させて透過表示式としても使用できる押圧力検知装置を提供することを目的としている。
【課題を解決するための手段】
【0013】
本発明は、弾性的に撓むことができる弾性体と、前記弾性体上で距離を開けて配置された一対の受力部とを有し、それぞれの受力部に、前記弾性体の第1の側に突出する第1の当接部と、前記弾性体の前記第1の側と反対側の第2の側に突出する第2の当接部が設けられ、それぞれの前記受力部では、前記第1の当接部が前記第2の当接部に対して前記弾性体に沿う同じ方向に距離を開けて位置しており、
それぞれの前記第1の当接部とそれぞれの前記第2の当接部に対して、前記弾性部材に向く押圧力が作用したときに、それぞれの前記受力部が同じ向きに回動して、前記受力部と前記受力部との間の前記弾性体に、互いに逆向きに撓む撓み部が形成可能とされており、
互いに逆向きに撓むそれぞれの前記撓み部に歪検知素子が設けられていることを特徴とするものである。
【0014】
本発明の押圧力検知装置は、弾性体の第1の側と第2の側から第1の当接部と第2の当接部を加圧すると、弾性体の同じ面に伸び歪みと圧縮歪みの両方を発生させることができる。そのため、2つの歪検知素子の中点電位の変化を求めることで、加圧力の大小に対応した高感度の電気的出力を得ることができる。
【0015】
本発明は、前記弾性体が撓んでいないときに、前記第1の側では、それぞれの前記第1の当接部が他の部分よりも前記弾性体から最も離れた位置に突出し、前記第2の側では、それぞれの前記第2の当接部が他の部分よりも前記弾性体から最も離れた位置に突出しているものとして構成できる。
【0016】
または、本発明は、前記弾性体が撓んでいないときに、前記第1の側と前記第2の側の双方おいて、それぞれの前記第1の当接部の前記弾性体からの突出寸法と、それぞれの前記第2の当接部の前記弾性体からの突出寸法とが同じであるものとして構成することも可能である。
【0017】
本発明は、それぞれの受力部で、前記第1の当接部と前記第2の当接部とが一体に形成されているものであってもよいし、それぞれの受力部で、前記第1の当接部と前記第2の当接部とが別体に形成されているものであってもよい。
【0018】
本発明は、前記受力部と前記受力部との間の前記弾性体の互いに逆向きに撓むそれぞれの前記撓み部において、前記歪検知素子が、前記弾性体の同じ側に設けられているものである。
【0019】
本発明の押圧力検知装置は、それぞれの撓み部において、歪検知素子を、弾性体の同じ側に取り付けた構成であっても、外部の押圧力によって歪検知素子から互いに逆極性の出力を得ることができる。
【0020】
本発明は、前記歪検知素子が抵抗体層であり、互いに逆向きに撓むそれぞれの前記撓み部において前記抵抗体層が同じ膜厚で同じ幅寸法で形成されている構成とすることが可能である。弾性体の同じ側の面に抵抗体層を同じ厚さで同じ幅で形成することにより、異なる歪み部に設けられた歪検知素子の特性を一致させることが可能である。
【0021】
本発明は、互いに逆向きに撓むそれぞれの前記撓み部に設けられた前記抵抗体層が直列に接続されて、前記抵抗体層と前記抵抗体層との中点の電位を検出する検出回路が設けられており、前記中点電位は、前記第1の当接部と前記第2の当接部とに作用する力の変化に対して一次関数的に変化するものである。
【0022】
また、本発明は、前記弾性体の前記第1の側に第1の押圧部材が対向し、前記弾性体の前記第2の側に第2の押圧部材が対向しており、
前記第1の押圧部材と前記第2の押圧部材が互いに接近するときに、前記第1の押圧部材がそれぞれの前記第1の当接部を押圧し、前記第2の押圧部材がそれぞれの前記第2の当接部を押圧するものとして構成できる。
【0023】
上記のように、パネルなどの2つの押圧部材の間に弾性体を介在させるだけで押圧力検知装置を構成できる。また、押圧力検知装置を薄型に構成することが可能になる。
【0024】
例えば、本発明は、前記第1の押圧部材と前記第2の押圧部材は板材であり、前記第1の押圧部材と前記第2の押圧部材とに一定の面積の操作領域が形成されて、前記第1の押圧部材と前記第2の押圧部材は、前記操作領域を囲む周囲領域において、互いに接近できるように連結されている構造が可能である。
【0025】
この場合に、本発明は、前記周囲領域の内側で、前記第1の押圧部材と前記第2の押圧部材との間に複数の前記弾性体が互いに独立して設けられており、それぞれの前記弾性体に設けられた前記歪検知素子に接続される配線が前記周囲領域に設けられていることが好ましい。
【0026】
操作領域を囲む周囲領域を、2つの押圧部材を連結する連結部として使用するとともに、この周囲領域を配線領域として使用することで、操作領域内などに多くの配線が露出するのを防止でき、操作領域を種々の用途に使用することが可能となる。
【0027】
例えば、前記第1の押圧部材の表側に操作面が設けられ、少なくとも前記操作領域に、前記操作面に対する操作位置を検知する座標検知装置が設けられているものとして構成できる。
【0028】
または、前記第1の押圧部材と前記第2の押圧部材は、少なくとも前記操作領域が透明であり、前記第2の押圧部材の外側に表示画面が設けられ、前記操作領域では、前記第1の押圧部材の外側から前記表示画面を目視可能であるものとして構成できる。
【発明の効果】
【0029】
本発明の押圧力検知装置は、薄型に構成でき、しかも外部からの押圧力を高感度で電気的出力に変換することが可能である。
【0030】
また、静電容量式の座標検知装置との併用が可能であり、また表示画面を透過させる透過パネルへの搭載も可能である。
【図面の簡単な説明】
【0031】
【図1】本発明の実施の形態の押圧力検知装置を示す斜視図、
【図2】図1に示す押圧力検知装置の平面図、
【図3】図1に示す押圧力検知装置の動作を説明する端面図であり、(A)は加圧前の状態を示し、(B)は加圧後の状態を示す、
【図4】歪検知素子の回路図、
【図5】荷重に対する検知出力の変化を示す線図、
【図6】撓み部での弾性板の変形状態をモデル化して示す説明図、
【図7】操作領域または表示領域を備えた押圧力検知装置の分解斜視図、
【図8】図7に示す押圧力検知装置の部分断面図、
【図9】他の実施の形態の押圧力検知装置を示す端面図、
【図10】さらに他の実施の形態の押圧力検知装置を示す端面図、
【発明を実施するための形態】
【0032】
図1ないし図3に示す押圧力検知装置1に使用されている弾性体は弾性板2である。弾性板2はステンレススチールなどの弾性撓み可能な金属材料で形成されている。本明細書での「弾性撓み」とは、図3(B)に示すように、外力を与えたときに板厚方向に曲げ撓みを発生させることができ、且つ外力を除去したときに平坦な状態に復帰する機能を意味している。
【0033】
図2に示すように、弾性板2は、幅寸法がW0で長さ寸法がL0である。図2では、長さ寸法L0を左右に二分する中心線をOで示している。中心線Oは、弾性板2の長手方向に直交して幅方向に延びる仮想線である。
【0034】
前記弾性板2には、左側受力部3と右側受力部4が固定されている。左側受力部3と右側受力部4は合成樹脂材料で形成されている。この合成樹脂材料としては、摩擦係数の低いポリアセタール樹脂などを使用することが好ましい。図1と図2に示すように、弾性板2は、左側受力部3と右側受力部4のそれぞれの内部に埋設されて固定されている。左側受力部3と右側受力部4は、例えば弾性板2が成型金型のキャビティの内部に保持された状態で、前記キャビティ内に溶融樹脂を射出して硬化させるいわゆるインサート成型工程で形成される。
【0035】
図2に示すように、左側受力部3の対向縁部3aと右側受力部4の対向縁部4aは、前記中心線Oから左右に同じ距離だけ離れている。弾性板2は、前記対向縁部3aと前記対向縁部4aとで挟まれた長さL1の部分が変形領域であり、この変形領域では、長さL1の全長にわたって、弾性板2の幅寸法と厚さ寸法が一定であり、すなわち断面係数が一定である。
【0036】
長さL1の変形領域では、中心線Oと対向縁部3aとで挟まれた領域が第1の撓み部5aであり、中心線Oと対向縁部4aとで挟まれた領域が第2の撓み部5bである。図3(B)に示すように、左側受力部3と右側受力部4とが押圧されると、第1の撓み部5aと第2の撓み部5bが、互いに上下逆向きの曲げ歪みを生じる。
【0037】
図3においては、弾性板2よりも上側15が第1の側であり、弾性板2よりも下側が第2の側である。また、撓んでおらず平坦な状態の弾性板2の長手方向に沿い且つ弾性板2の表面と平行な向きがX1−X2方向である。左側受力部3は中心線OよりもX1側に位置し、右側受力部4は中心線OよりもX2側に位置している。
【0038】
左側受力部3には、弾性板2の上面2aよりも上側15に突出している第1の当接部6aと、弾性板2の下面2bよりも下側16に突出している第2の当接部7aが形成されている。右側受力部4には、弾性板2の上面2aよりも上側15に突出している第1の当接部6bと、弾性板2の下面2bよりも下側16に突出している第2の当接部7bが形成されている。
【0039】
図3(A)に示すように、押圧力検知装置1では、弾性板2が撓んでいないときに、左側受力部3の第1の当接部6aと右側受力部4の第1の当接部6bが、それ以外の部分に比べて、弾性板2の上面2aから上側15に向けて最も突出している。同じく、弾性板2が撓んでいないときに、左右側受力部3の第2の当接部7aと右側受力部4の第2の当接部7bが、それ以外の部分に比べて、弾性板2の下面2bから下側16に向けて最も突出している。
【0040】
弾性板2の板厚の中心を通る中立軸から左側受力部3の第1の当接部6aまでの突出高さ寸法と、中立軸から右側受力部4の第1の当接部6bまでの突出高さ寸法は同じであり、共に突出高さ寸法がH1である。中立軸から左側受力部4の第2の当接部7aまでの突出高さ寸法と、中立軸から右側受力部4の第2の当接部7bまでの突出高さ寸法は同じであり、共に突出高さ寸法がH2である。そして、中立軸から第1の当接部6a,6bまでの突出高さ寸法H1と、中立軸から第2の当接部7a,7bまでの突出高さ寸法H2とが同じ寸法である。
【0041】
図3(A)に示すように、左側受力部3では、第1の当接部6aが第2の当接部7aよりもX1側に離れて位置している。左側受力部3での第1の当接部6aと第2の当接部7aの、弾性板2の長手方向に沿う方向(X1−X2方向)での間隔寸法はS1である。右側受力部4においても、第1の当接部6bが第2の当接部7bよりもX1側に離れて位置している。右側受力部4での第1の当接部6bと第2の当接部7bの、X1−X2方向での間隔寸法はS2である。前記間隔寸法S1と前記間隔寸法S2は等しい。すなわち、左側受力部3と右側受力部4は、形状と寸法が同じである。
【0042】
図1と図2および図3(A)に示すように、長さL1の変形領域では、弾性板2の上面2aにポリイミドシートなどの可撓性の合成樹脂シートで形成された絶縁層8が固定されており、第1の撓み部5aと第2の撓み部5bの双方において、絶縁層8の上に歪検知素子が設けられている。なお、図3(B)は、主に変形領域での弾性板2の変形状態を説明するために、絶縁層8と歪み検知素子の図示を省略している。
【0043】
図1と図2に示すように、絶縁層8の表面には第1の電極層11と第2の電極層12および、中間電極層13が設けられている。これら電極層11,12,13は、銀ペーストなどをスクリーン印刷して形成されている。中間電極層13のX1−X2方向の幅寸法の中心は前記中心線Oに一致している。第1の電極層11と第2の電極層12は、X1−X2方向の幅寸法が互いに一致している。また、中心線Oから第1の電極層11までのX1方向の距離と、中心線Oから第2の電極層12までのX2方向の距離が一致している。
【0044】
第1の撓み部5aでは、前記中間電極層13と第1の電極層11との間に、第1の歪検知素子である第1の抵抗体層9aが形成され、第2の撓み部5bでは、中間電極層13と第2の電極層12との間に、第2の歪検知素子である第2の抵抗体層9bが形成されている。図1と図2に示す実施の形態では、第1の抵抗体層9aと第2の抵抗体層9bが連続して同じ幅寸法で同じ厚さ寸法で形成されている。ただし、第1の抵抗体層9aと第2の抵抗体層9bとが、互いに分離して形成されているものであってもよい。
【0045】
第1の抵抗体層9aと第2の抵抗体層9bは連続したものであっても、また分離されているものであっても、絶縁層8の同じ表面に同じ工程で同時に形成できる。そのため、第1の抵抗体層9aと第2の抵抗体層9bを同じ抵抗値に揃えて形成しやすい。第1の抵抗体層9aと第2の抵抗体層9bは、バインダ樹脂にカーボンブラックやカーボンナノチューブなどが含まれたものであり、スクリーン印刷工程で、第1の電極層11と第2の電極層12と中間電極層13および絶縁層8の表面に形成される。第1の抵抗体層9aと第2の抵抗体層9bは、第1の撓み部5aと第2の撓み部5bの撓み変形に追従して延び変形し、または圧縮変形する。伸び変形したときに抵抗値が高くなり、圧縮変形すると抵抗値が低下する。
【0046】
図1と図2に示すように、前記合成樹脂シートによって、前記絶縁層8に連続する延出部8aと、さらに延出部8aに連続する支持基板10とが一体に形成されている。第1の電極層11から一体に延びるリード層11aと、第2の電極層12から一体に延びるリード層12a、および中間電極層13から一体に延びるリード層13aは、共に前記延出部8aの表面を経て前記支持基板10の表面に引き出されている。支持基板10では、それぞれのリード層11a,12a,13aの表面がポリイミド樹脂などの有機絶縁層で覆われている。
【0047】
次に、前記押圧力検知装置1の動作について説明する。
図3に示すように、押圧力検知装置1は、第1の押圧部材21と第2の押圧部材22との間に挟まれて使用される。第1の押圧部材21と第2の押圧部材22は、例えば板材であり、通常は、第2の押圧部材22が固定部材であり、第1の押圧部材21が前記第2の押圧部材22に接近し離反できるように支持された可動部材である。
【0048】
押圧力検知装置1が携帯用機器などの操作装置に使用される場合には、第2の押圧部材22が機器本体に固定された支持パネルであり、第1の押圧部材21が、操作側に設けられた操作パネルである。また、押圧力検知装置1が荷重センサまたは差圧力センサとして使用される場合は、第2の押圧部材22が固定部となり、第1の押圧部材21が外力や外圧力を受ける測定可動部となる。
【0049】
前記押圧検知装置1は、弾性板2と左側受力部3および右側受力部4が一体化されたものを、第1の押圧部材21と第2の押圧部材22の間に設置するだけで押圧力や圧力の検知が可能となる。左側受力部3や右側受力部4を、第1の加圧部材21や第2の加圧部材22に固定するなどの必要がないため、組み立てがきわめて容易である。また、左側受力部3と右側受力部4はX1−X2方向に並んで配置されているため、第1の押圧部材21と第2の押圧部材22の狭い隙間の内部に配置でき、押圧力検知装置1の全体を薄型に構成できる。
【0050】
図4は、第1の抵抗体層9aと第2の抵抗体層9bの接続状態を示す回路図である。図1と図2に示すように、第1の抵抗体層9aと第2の抵抗体層9bは、中間電極層13を介して直列に接続されている。第1の電極層11は接地電位に設定され、第2の電極層12に例えば5ボルトのDC電圧が与えられる。第1の抵抗体層9aと第2の抵抗体層9bの抵抗値の変化に伴って中間電極層13の中点電位が変化し、この電位の変化が検出回路18で検出される。
【0051】
第1の抵抗体層9aと第2の抵抗体層9bは、同じ工程で形成され、幅寸法と膜厚が同じであるため、図3(A)に示すように、弾性板2が撓んでいないときに、第1の抵抗体層9aの抵抗値と第2の抵抗体層9bの抵抗値がほぼ一致している。よって、図4に示す中間電極層13の中点電位はほぼVcc/2であり、Vccが5ボルトの場合に中点電位がほぼ2.5ボルトである。
【0052】
第1の押圧部材21と第2の押圧部材22とが互いに接近するように押圧されると、第1の押圧部材21と第2の押圧部材22との間の隙間が狭められ、第1の押圧部材21で第1の当接部6a,6bが弾性板2に向けて押圧され、第2の押圧部材22で第2の当接部7a,7bが弾性板2に向けて押圧される。
【0053】
その結果、図3(B)に示すように、左側受力部3と右側受力部4が共に同じ方向(図3(A)(B)では反時計方向)へ回動させられる。左側受力部3と右側受力部4は、ポリアセタール樹脂などの摩擦抵抗の小さい材料で形成され、第1の当接部6a,6bと第2の当接部7a,7bがX1−X2方向に向けて曲率を有する凸曲面であるため、第1の当接部6a,6bが第1の押圧部材21の内面と最小の抵抗力で摺動し、第2の当接部7a,7bが第2の押圧部材22の内面と最小の抵抗力で摺動する。
【0054】
図3(B)に示すように、第1の撓み部5aでは、凸側が上側15に向く曲げ変形となって、弾性板2の上面2aに伸び歪みが発生する。第2の撓み部5bでは、凸側が下側16に向く曲げ変形となって、弾性板2の上面2aに圧縮歪みが発生する。第1の撓み部5aで弾性板2の上面2aに伸び歪が発生すると、第1の抵抗体層9aがこれに追従して伸び歪みを発生し抵抗値が増大する。このとき、第1の抵抗体層9aのX1−X2方向の伸び率に対して、抵抗値の変化率が一次関数的に変化する。第2の撓み部5bで弾性板2の上面2aに圧縮歪みが発生すると、第2の抵抗体層9bの抵抗値が低下する。第2の抵抗体層9bの抵抗値の変化率は、第2の抵抗体層9bのX1−X2方向の圧縮率に対して一次関数的に変化する。
【0055】
図2に示すように、左側受力部3と右側受力部4が中心線Oから左右に同じ距離だけ離れており、図3(A)に示すように、左側受力部3と右側受力部4の形状と寸法が同じであり、特にH1=H2で且つS1=S2である。そのため、第1の押圧部材21と第2の押圧部材22とが平行を維持して接近したときに、左側受力部3と右側受力部4の回動角度は同じである。そのため、第1の撓み部5aに作用する曲げモーメントと第2の撓み部5bに作用する曲げモーメントは、上下逆向きであるが、その絶対値は同じである。また、第1の撓み部5aでの弾性板2の上面2aの伸び歪み率と、第2の撓み部5bでの弾性板2の上面2aの圧縮歪み率は、その絶対値が同じである。
【0056】
さらに、第1の抵抗体層9aと第2の抵抗体層9bは、中心線Oから左右に対称に形成されている。そのため、第1の押圧部材21と第2の押圧部材22を平行を維持させて接近させたときに、第1の抵抗体層9aの抵抗値の変化率と、第2の抵抗体層9bの抵抗値の変化率は、極性が逆ではあるが、その絶対値がほぼ同じである。
【0057】
図5のグラフは、横軸に、第1の押圧部材21と第2の押圧部材22を互いに接近させる荷重の変化を示し、縦軸に、中間電極層13で得られる電位のVcc/2からの増加量を示している。第1の押圧部材21と第2の押圧部材22が接近すると、第1の抵抗体層9aの抵抗値が増大し、第2の抵抗体層9bの抵抗値が低下するため、中間電極層13で検出される中間電位は上昇し、図5に示すように、前記荷重が大きくなるにしたがって、中間電位のVcc/2からの増加量が増大していく。
【0058】
第1の押圧部材21と第2の押圧部材22を加圧したときに、抵抗値が増大する第1の抵抗体層9aと抵抗値が低下する第2の抵抗体層9bとの中点電位を検出しているために、検出回路で前記中点電位の変化を広いレンジで高感度に検出することができる。
【0059】
また、押圧力検知装置1は、第1の撓み部5aと第2の撓み部5bの曲げ歪みによって押圧力を検知しているために、図5に示すように、荷重の増加率に対して、中点電位の増加量が比例し、荷重の増加に対して中点電位が一次関数的に増大する。その理由は以下の通りである。
【0060】
図3(B)に示すように、第1の撓み部5aの変形は、左側受力部3で固定された片持ち梁に対して中心線Oの部分に集中荷重が作用したのと同じであり、第2の撓み部5bの変形は、右側受力部4で固定された片持ち梁に対して中心線Oの部分に集中荷重が作用したのと同じである。
【0061】
図6は、左側受力部3で固定された第1の撓み部5aを片持ち梁としてモデル化した説明図である。この片持ち梁の自由長はLaであり、自由端に集中荷重Gが作用したときに、片持ち梁は鎖線で示すように撓み変形する。撓み変形したときの、左側受力部3からxだけ離れた位置での曲げモーメントMxは、時計方向のモーメントをプラスとしたときに、Mx=G(La−x)である。左側受力部3からxだけ離れた位置での梁の表面応力ρxは、梁の断面係数をZとしたときに、ρx=Mx/Z=G・(La−x)/Zである。
【0062】
第1の撓み部5aと第2の撓み部5bは、それぞれLaが定数で、断面係数Zも一定である。そのため、左側受力部3からxだけ離れた位置での梁の表面応力ρxは、荷重Gを変数としたときに、荷重Gの一次関数として変化する。弾性板2の表面の歪みは表面応力ρxに比例する。したがって、第1の撓み部5aと第2の撓み部5bのそれぞれの位置での表面歪みの変化は、荷重Gを変数としたときに、荷重Gの一次関数として変化する。
【0063】
以上から、図5に示すように、第1の押圧部材21と第2の押圧部材22とを接近させる荷重の変化に対して、中間電極層13からの中点電位の出力を一次関数的に変化させることができる。この押圧力検知装置1は、与えられる荷重の変化に対して検知出力のリニアリティを確保できる。
【0064】
図7は、携帯用機器の操作装置などに使用可能な押圧力検知装置101の構造を示す分解斜視図であり、図8は、押圧力検知装置101が組み立てられた状態を示す部分断面図である。
【0065】
この押圧力検知装置101は、第1の押圧部材121と第2の押圧部材122が透明パネルである。透明パネルは、例えば、透明なアクリル板のような合成樹脂板またはガラス板である。第1の押圧部材121と第2の押圧部材122との間には、枠形状の連結部材110が介在している。連結部材110は、第1の押圧部材121と第2の押圧部材122の周縁部に沿って設けられている。
【0066】
図8に示すように、連結部材110は、上側弾性体枠111と下側弾性体枠112とが重ねられて構成されている。第1の押圧部材121である透明パネルの周縁部が、上側弾性体枠111の表面に接着固定され、第2の押圧部材122である透明パネルの周縁部が、下側弾性体枠112の表面に接着固定されている。上側弾性体枠111と下側弾性体枠112は合成ゴムシート、発泡樹脂シート、発泡ゴムシートなどであり、上下の圧縮力に対して厚さ寸法の変化が比例する弾性体である。連結部材110で連結された第1の押圧部材121と第2の押圧部材122は、互いに接近させることが可能である。
【0067】
第1の押圧部材121と第2の押圧部材122とが連結部材110を介して重ねられた状態で、前記連結部材110が設けられた領域が周囲領域であり、連結部材110で囲まれた内側の領域は、透明な第1の押圧部材121と透明な押圧部材122とを介して上下に透視可能な操作領域または表示領域である。
【0068】
前記操作領域または表示領域では、前記周囲領域の内側の4箇所に、図1と図2に示すように、弾性板2と左側受力部3と右側受力部4とが一体化されて、弾性板2の変形領域に絶縁層8と歪検知装置とが設けられた検知ユニットが配置されている。4箇所に設けられた検知ユニットからそれぞれ延びる合成樹脂シートの4つの延出部8aは、全て同じ支持基板10と一体化されている。合成樹脂シートで形成された支持基板10は、前記連結部材110とほぼ同じ枠形状である。図8に示すように、枠形状の支持基板10は、連結部材110を構成する上側弾性体枠111と下側弾性体枠112との間に挟まれて、上側弾性体枠111と支持基板10の双方に接着固定されている。
【0069】
図8に示すように、それぞれの左側受力部3と右側受力部4は、第1の押圧部材121と第2の押圧部材122との隙間内に位置しており、第1の押圧部材121と第2の押圧部材122とを接近させる荷重が作用していないときに、第1の当接部6a,6bが第1の押圧部材121の下面に最小の隙間で対向し、第2の当接部7a,7bが第2の押圧部材122の上面に最小の隙間で対向し、それぞれの弾性板2に曲げモーメントが作用しておらず、第1の撓み部5aと第2の撓み部5bの双方が撓んでいない。
【0070】
4箇所に設けられたそれぞれの検知ユニットでは、弾性板2と枠状の連結部材110との間が、可撓性の合成樹脂シートで形成された延出部8aのみを介して連結されている。よって、弾性板2が連結部材110に拘束されず、延出部8aの変形によって比較的自由に動くことができる。そのため、第1の押圧部材121と第2の押圧部材122とを接近させる押圧力が作用したときに、左側受力部3と右側受力部4が、第1の押圧部材121と第2の押圧部材122とから均等な押圧力を受けるようになる。
【0071】
また、それぞれの弾性板2の表面に設けられた歪検知素子の配線であるリード線11a,12a,13aは、全て枠形状の支持基板10に導かれ、連結部材110の内部で配線が引き回されている。そのため、連結部材110で囲まれた操作領域または表示領域に、押圧力検知装置101の配線が延びることがなく、前記配線が操作領域または表示領域の機能の障害になるのを防止できる。
【0072】
図8に示すように、第1の押圧部材121は操作パネルとして使用されており、少なくとも連結部材110で囲まれた領域内において、第1の押圧部材121の裏面に座標検知装置115が設けられている。座標検知装置115は静電容量の変化を検知するものであり、透明な絶縁層を挟んで一方の側に複数のX電極が他方の側に複数のY電極が設けられている。X電極とY電極は共に透明電極である。前記X電極とY電極はマトリクス状に多数の箇所で絶縁層を介して交差している。第1の押圧部材121の表面のいずれかの箇所に人体の指が触れると、指の接触位置に最も近い位置にあるX電極とY電極との交差部での静電容量が変化する。例えば複数のX電極と複数のY電極に順番にパルス状の電圧を印加し、静電容量の変化に応じた両電極間に流れる電流の変化を検知することで、どの位置に指が触れたかを検知することができる。
【0073】
前記静電容量式の座標検知装置115は、第1の押圧部材121の上面に積層されて設けられていてもよい。
【0074】
また、座標検知装置として、第1の押圧部材121の上面に透明な押圧式のタッチパッドが設けられていてもよい。このタッチパッドは、透明な樹脂シートが隙間を介して対向しており、それぞれの樹脂シートの対向面に透明な抵抗体層が形成されている。一方の樹脂シートの抵抗体層にはX方向に勾配を持つ電圧が印加され、他方の樹脂シートの抵抗体層にはY方向に勾配を持つ電圧が印加され、X方向の電圧とY方向の電圧が異なる時間帯に印加される。タッチパッドのいずれかの場所を押圧すると、対向する抵抗体層どうしが接触し、その接触位置でのX方向の電圧とY方向の電圧を検知することで、操作位置を座標上で特定することができる。
【0075】
図8に示すように、第2の押圧部材122は固定パネルとして電子機器の本体部に固定される。そして、第2の押圧部材122の下側に液晶表示パネルなどの表示装置116が配置され、その表示画面が連結部材110で囲まれている操作ならびに表示領域に対向している。
【0076】
図7と図8に示す押圧力検知装置101は、表示装置116の表示画面の表示内容を、第1の押圧部材121と第2の押圧部材122を透視して目視することができる。表示画面の表示内容を見ながら、第1の押圧部材121の上面のいずれかの箇所を操作すると、その位置が座標検知装置115で検知され、図示しない制御部において第1の押圧部材121の上面での操作箇所が特定される。そして、その操作箇所において指で第1の押圧部材121を押圧すると、図3(B)に示すように弾性板2が変形し、図5に示すように、中間電極層13から押圧力に対応した電圧変化を得ることができる。
【0077】
例えば、4箇所の検知ユニットのそれぞれの中間電極層13から検出された電圧変化の平均値が所定のしきい値を超えたときに、制御部は指による操作箇所が押圧されたと認識する。これにより、制御部は、座標検知装置115で特定された操作箇所への操作入力が確定されたと判断する。または、4箇所の検知ユニットの中間電極層13から出力される検知電圧のいずれかが一定のしきい値を超えたと判断したときに、操作箇所への操作入力が確定されたと判断してもよい。
【0078】
図5に示すように、押圧力検知装置では、第1の押圧部材121に与えられる押圧力の変化に対して、検知出力が一次関数的に変化する。したがって、4箇所の検知出力の平均値の変化を段階的に設定されたしきい値と比較し、第1の押圧部材121に与えられる押圧力の大きさを段階的に判断し、それぞれの押圧力の大きさに応じて、異なる入力操作として判別してもよい。
【0079】
なお、4箇所の検知素子のそれぞれの検知出力の大小を比較するなどの演算を行うことで、座標検知装置115を設けなくても、第1の押圧部材121が押圧された操作箇所を特定することもできる。
【0080】
図9と図10は本発明の他の実施の形態の押圧力検知装置を示している。
図9に示す押圧力検知装置201は、弾性板202に、ポリアセタール樹脂などで形成された左側受力部213a,213bが固定され、また右側受力部214a,214bが固定されている。左側受力部213aと左側受力部213bは別体のものであり、一方の左側受力部213aに第1の当接部216aが設けられ、他方の左側受力部213bに第2の当接部217aが設けられている。右側受力部214aと右側受力部214bも別体に形成されており、一方の右側受力部214aに第1の当接部216bが設けられ、他方の右側受力部214bに第2の当接部217bが設けられている。
【0081】
第1の当接部216a,216bは、図3に示す第1の当接部6a,6bに対応し、第2の当接部217a,217bは図3に示した第2の当接部7a,7bに対応している。また、第1の当接部216a,216bと第2の当接部217a,217bに関する寸法H1,H2およびS1,S2は、図3に示す実施の形態と同じである。
【0082】
図9に示す押圧力検知装置201は、第1の押圧部材21と第2の押圧部材22を接近させるときに、弾性板202の変形領域が図3(B)に示す弾性板2と同様に歪み変形する。よって変形領域の第1の撓み部と第2の撓み部に歪検知素子を設置しておくことで、図5に示したのと同じ検知出力を得ることができる。
【0083】
図10に示す押圧力検知装置301は、弾性板302に2つに分離された左側受力部313a,313bと右側受力部314a,314bが固定されている。左側受力部313aに第1の当接部316aが設けられ、左側受力部313bに第2の当接部317aが設けられている。右側受力部314aに第1の当接部316aが設けられ、右側受力部314bに第2の当接部317bが設けられている。
【0084】
第1の当接部316aと第2の当接部317aとの間隔寸法S1および第1の当接部316bと第2の当接部317bとの間隔寸法S1は、図3に示した実施の形態と同じである。
【0085】
図10に示す押圧力検知装置201では、第1の押圧部材321に、弾性板302が撓んでいない状態で、第1の当接部316a,316bに当たる第1の押圧部323a,323bが下向きに突出形成されている。第2の押圧部材322には、弾性板302が撓んでいない状態で、第2の当接部317a,317bに当接する第2の押圧部324a,324bが上向きに突出形成されている。また、弾性板302が撓んでいない状態で、第1の押圧部323a,323bは、左側受力部313bと右側受力部314bに当たっておらず、第2の押圧部324a,324bは左側受力部313aと右側受力部314aに当たっていない。
【0086】
図10に示す押圧力検知装置301は、第1の押圧部材321と第2の押圧部材322を接近させるときに、弾性板302の変形領域が図3(B)に示す弾性板2と同様に歪み変形する。弾性板302の変形領域の第1の撓み部と第2の撓み部に歪検知素子を設置しておくことで、図5に示したのと同じ検知出力を得ることができる。
【0087】
なお、前記実施の形態では、弾性体として弾性板2,202,302が使用されている。この弾性板は幅寸法W0に対して板厚寸法が十分に小さく、板厚方向へ変形するものである。ただし、本発明の弾性体は、弾性板に限られず、断面が正方形の角柱などであってもよい。ただし、長さL1の変形領域において断面係数が均一であることが好ましい。
【符号の説明】
【0088】
1 押圧力検知装置
2 弾性板
2a 弾性板の上面
2b 弾性板の下面
3 左側受力部
4 右側受力部
6a,6b 第1の当接部
7a,7b 第2の当接部
8 絶縁層
8a 延長部
9a 第1の抵抗体層
9b 第2の抵抗体層
10 支持基板
11 第1の電極層
12 第2の電極層
13 中間電極層
15 第1の側である上側
16 第2の側である下側
21 第1の押圧部材
22 第2の押圧部材
101 押圧力検知装置
110 連結部材
121 第1の押圧部材
122 第2の押圧部材
201 押圧力検知装置
202 弾性板
213a,213b 左側受力部
214a,214b 右側受力部
216a,216b 第1の当接部
217a,217b 第2の当接部
301 押圧力検知装置
302 弾性板
313a,313b 左側受力部
314a,314b 右側受力部
316a,316b 第1の当接部
317a,317b 第2の当接部
321 第1の押圧部材
322 第2の押圧部材
323a,323b 第1の押圧部
324a,324b 第2の押圧部
【特許請求の範囲】
【請求項1】
弾性的に撓むことができる弾性体と、前記弾性体上で距離を開けて配置された一対の受力部とを有し、それぞれの受力部に、前記弾性体の第1の側に突出する第1の当接部と、前記弾性体の前記第1の側と反対側の第2の側に突出する第2の当接部が設けられ、それぞれの前記受力部では、前記第1の当接部が前記第2の当接部に対して前記弾性体に沿う同じ方向に距離を開けて位置しており、
それぞれの前記第1の当接部とそれぞれの前記第2の当接部に対して、前記弾性部材に向く押圧力が作用したときに、それぞれの前記受力部が同じ向きに回動して、前記受力部と前記受力部との間の前記弾性体に、互いに逆向きに撓む撓み部が形成可能とされており、
互いに逆向きに撓むそれぞれの前記撓み部に歪検知素子が設けられていることを特徴とする押圧力検知装置。
【請求項2】
前記弾性体が撓んでいないときに、前記第1の側では、それぞれの前記第1の当接部が他の部分よりも前記弾性体から最も離れた位置に突出し、前記第2の側では、それぞれの前記第2の当接部が他の部分よりも前記弾性体から最も離れた位置に突出している請求項1記載の押圧力検知装置。
【請求項3】
前記弾性体が撓んでいないときに、前記第1の側と前記第2の側の双方おいて、それぞれの前記第1の当接部の前記弾性体からの突出寸法と、それぞれの前記第2の当接部の前記弾性体からの突出寸法とが同じである請求項1記載の押圧力検知装置。
【請求項4】
それぞれの受力部では、前記第1の当接部と前記第2の当接部とが一体に形成されている請求項1ないし3のいずれかに記載の押圧力検知装置。
【請求項5】
それぞれの受力部では、前記第1の当接部と前記第2の当接部とが別体のものとして形成されている請求項1ないし3のいずれかに記載の押圧力検知装置。
【請求項6】
前記受力部と前記受力部との間の前記弾性体では、互いに逆向きに撓むそれぞれの前記撓み部において、前記歪検知素子が、前記弾性体の同じ側に設けられている請求項1ないし5のいずれかに記載の押圧力検知装置。
【請求項7】
前記歪検知素子は、抵抗体層であり、互いに逆向きに撓むそれぞれの前記撓み部において前記抵抗体層が同じ膜厚で同じ幅寸法で形成されている請求項6記載の押圧力検知装置。
【請求項8】
互いに逆向きに撓むそれぞれの前記撓み部に設けられた前記抵抗体層が直列に接続されて、前記抵抗体層と前記抵抗体層との中点の電位を検出する検出回路が設けられており、前記中点電位は、前記第1の当接部と前記第2の当接部とに作用する力の変化に対して一次関数的に変化する請求項7記載の押圧力検知装置。
【請求項9】
前記弾性体の前記第1の側に第1の押圧部材が対向し、前記弾性体の前記第2の側に第2の押圧部材が対向しており、
前記第1の押圧部材と前記第2の押圧部材が互いに接近するときに、前記第1の押圧部材がそれぞれの前記第1の当接部を押圧し、前記第2の押圧部材がそれぞれの前記第2の当接部を押圧する請求項1ないし8のいずれかに記載の押圧力検知装置。
【請求項10】
前記第1の押圧部材と前記第2の押圧部材は板材であり、前記第1の押圧部材と前記第2の押圧部材とに一定の面積の操作領域が形成されて、前記第1の押圧部材と前記第2の押圧部材は、前記操作領域を囲む周囲領域において、互いに接近できるように連結されている請求項9記載の押圧力検知装置。
【請求項11】
前記周囲領域の内側で、前記第1の押圧部材と前記第2の押圧部材との間に複数の前記弾性体が互いに独立して設けられており、それぞれの前記弾性体に設けられた前記歪検知素子に接続される配線が前記周囲領域に設けられている請求項10記載の押圧力検知装置。
【請求項12】
前記第1の押圧部材の表側に操作面が設けられ、少なくとも前記操作領域に、前記操作面に対する操作位置を検知する座標検知装置が設けられている請求項10または11記載の押圧力検知装置。
【請求項13】
前記第1の押圧部材と前記第2の押圧部材は、少なくとも前記操作領域が透明であり、前記第2の押圧部材の外側に表示画面が設けられ、前記操作領域では、前記第1の押圧部材の外側から前記表示画面を目視可能である請求項10ないし12のいずれかに記載の押圧力検知装置。
【請求項1】
弾性的に撓むことができる弾性体と、前記弾性体上で距離を開けて配置された一対の受力部とを有し、それぞれの受力部に、前記弾性体の第1の側に突出する第1の当接部と、前記弾性体の前記第1の側と反対側の第2の側に突出する第2の当接部が設けられ、それぞれの前記受力部では、前記第1の当接部が前記第2の当接部に対して前記弾性体に沿う同じ方向に距離を開けて位置しており、
それぞれの前記第1の当接部とそれぞれの前記第2の当接部に対して、前記弾性部材に向く押圧力が作用したときに、それぞれの前記受力部が同じ向きに回動して、前記受力部と前記受力部との間の前記弾性体に、互いに逆向きに撓む撓み部が形成可能とされており、
互いに逆向きに撓むそれぞれの前記撓み部に歪検知素子が設けられていることを特徴とする押圧力検知装置。
【請求項2】
前記弾性体が撓んでいないときに、前記第1の側では、それぞれの前記第1の当接部が他の部分よりも前記弾性体から最も離れた位置に突出し、前記第2の側では、それぞれの前記第2の当接部が他の部分よりも前記弾性体から最も離れた位置に突出している請求項1記載の押圧力検知装置。
【請求項3】
前記弾性体が撓んでいないときに、前記第1の側と前記第2の側の双方おいて、それぞれの前記第1の当接部の前記弾性体からの突出寸法と、それぞれの前記第2の当接部の前記弾性体からの突出寸法とが同じである請求項1記載の押圧力検知装置。
【請求項4】
それぞれの受力部では、前記第1の当接部と前記第2の当接部とが一体に形成されている請求項1ないし3のいずれかに記載の押圧力検知装置。
【請求項5】
それぞれの受力部では、前記第1の当接部と前記第2の当接部とが別体のものとして形成されている請求項1ないし3のいずれかに記載の押圧力検知装置。
【請求項6】
前記受力部と前記受力部との間の前記弾性体では、互いに逆向きに撓むそれぞれの前記撓み部において、前記歪検知素子が、前記弾性体の同じ側に設けられている請求項1ないし5のいずれかに記載の押圧力検知装置。
【請求項7】
前記歪検知素子は、抵抗体層であり、互いに逆向きに撓むそれぞれの前記撓み部において前記抵抗体層が同じ膜厚で同じ幅寸法で形成されている請求項6記載の押圧力検知装置。
【請求項8】
互いに逆向きに撓むそれぞれの前記撓み部に設けられた前記抵抗体層が直列に接続されて、前記抵抗体層と前記抵抗体層との中点の電位を検出する検出回路が設けられており、前記中点電位は、前記第1の当接部と前記第2の当接部とに作用する力の変化に対して一次関数的に変化する請求項7記載の押圧力検知装置。
【請求項9】
前記弾性体の前記第1の側に第1の押圧部材が対向し、前記弾性体の前記第2の側に第2の押圧部材が対向しており、
前記第1の押圧部材と前記第2の押圧部材が互いに接近するときに、前記第1の押圧部材がそれぞれの前記第1の当接部を押圧し、前記第2の押圧部材がそれぞれの前記第2の当接部を押圧する請求項1ないし8のいずれかに記載の押圧力検知装置。
【請求項10】
前記第1の押圧部材と前記第2の押圧部材は板材であり、前記第1の押圧部材と前記第2の押圧部材とに一定の面積の操作領域が形成されて、前記第1の押圧部材と前記第2の押圧部材は、前記操作領域を囲む周囲領域において、互いに接近できるように連結されている請求項9記載の押圧力検知装置。
【請求項11】
前記周囲領域の内側で、前記第1の押圧部材と前記第2の押圧部材との間に複数の前記弾性体が互いに独立して設けられており、それぞれの前記弾性体に設けられた前記歪検知素子に接続される配線が前記周囲領域に設けられている請求項10記載の押圧力検知装置。
【請求項12】
前記第1の押圧部材の表側に操作面が設けられ、少なくとも前記操作領域に、前記操作面に対する操作位置を検知する座標検知装置が設けられている請求項10または11記載の押圧力検知装置。
【請求項13】
前記第1の押圧部材と前記第2の押圧部材は、少なくとも前記操作領域が透明であり、前記第2の押圧部材の外側に表示画面が設けられ、前記操作領域では、前記第1の押圧部材の外側から前記表示画面を目視可能である請求項10ないし12のいずれかに記載の押圧力検知装置。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−169411(P2010−169411A)
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願番号】特願2009−9753(P2009−9753)
【出願日】平成21年1月20日(2009.1.20)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願日】平成21年1月20日(2009.1.20)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]