
拡大観察装置
【課題】ステージが回転された場合でも観察対象物を所望の方向に容易に移動させることが可能でかつステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止可能な拡大観察装置を提供する。
【解決手段】ステージ21の載置面21a上に観察対象物Sが載置される。撮像装置10によって観察対象物Sが撮像されることにより撮像領域の画像データが取得される。撮像装置10により取得される画像データに基づいて観察対象物Sの画像が観察画像として表示部により表示される。ステージ21は、xt軸およびyt軸に沿って撮像装置10に関して相対的に移動される。この場合、回転角度検出部により検出される回転角度に基づいてxt軸およびyt軸に沿った移動量が制御される。
【解決手段】ステージ21の載置面21a上に観察対象物Sが載置される。撮像装置10によって観察対象物Sが撮像されることにより撮像領域の画像データが取得される。撮像装置10により取得される画像データに基づいて観察対象物Sの画像が観察画像として表示部により表示される。ステージ21は、xt軸およびyt軸に沿って撮像装置10に関して相対的に移動される。この場合、回転角度検出部により検出される回転角度に基づいてxt軸およびyt軸に沿った移動量が制御される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、拡大観察装置に関する。
【背景技術】
【0002】
従来より、観察対象物を観察するために、顕微鏡を備えた拡大観察装置が用いられる。顕微鏡は、観察対象物を撮像するための撮像装置を含む。撮像装置により撮像された観察対象物の画像が、表示部により表示される。ユーザは、表示部により表示される画像に基づいて、観察対象物の詳細な情報を取得することができる。
【0003】
特許文献1に記載される顕微鏡は、観察対象物を測定するためのカメラおよび観察対象物が載置されるステージを有する。カメラは、Z軸方向(鉛直方向)に沿うようにカメラ取付部に取り付けられる。カメラの下方において、回転可能にステージが設けられる。ステージは、X軸方向およびY軸方向に移動可能なX−Yステージからなる。ステージがX軸方向およびY軸方向に沿って移動されることにより、カメラの撮像領域に対する観察対象物の位置合わせが行われる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−337470号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の顕微鏡においては、ステージの回転軸が固定され、ステージの回転に伴いステージのX軸およびY軸が回転する。この場合、ステージのX軸およびY軸が回転することにより、ステージの移動方向の制御が困難であり、観察対象物を所望の方向に移動させることができない。
【0006】
一方、ステージのX軸およびY軸が固定され、ステージのX軸方向およびY軸方向への移動に伴いステージの回転軸が移動する構成も考えられる。しかしながら、カメラの撮像領域からステージの回転軸が外れると、ステージの回転により、撮像領域に対する観察対象物の移動量が大きくなる。それにより、観察対象物の所望の領域が撮像領域から外れやすくなる。
【0007】
本発明の目的は、ステージが回転された場合でも観察対象物を所望の方向に容易に移動させることが可能でかつステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止可能な拡大観察装置を提供することである。
【課題を解決するための手段】
【0008】
(1)本発明に係る拡大観察装置は、観察対象物を撮像することにより撮像領域の画像データを取得する撮像部と、撮像部により取得される画像データに基づいて観察対象物の画像を観察画像として表示する表示部と、観察対象物が載置される載置面を有し、載置面に対して略垂直な回転軸の周りで撮像部に関して相対的に回転可能でかつ載置面に略平行な面内で互いに交差する第1および第2の軸に沿って移動可能に設けられたステージと、ステージの回転角度を検出する回転角度検出部と、第1および第2の軸に沿ってステージを撮像部に関して相対的に移動させるステージ駆動部と、ステージの移動方向の指示を受け付ける指示受付部と、ステージ駆動部に第1および第2の軸に沿ったステージの移動量を与えることによりステージの移動を制御する制御部とを備え、ステージの第1および第2の軸は、ステージと一体的に回転軸の周りで回転し、制御部は、回転角度検出部により検出された回転角度に基づいて、撮像部の撮像領域における観察対象物の移動方向が指示受付部により受け付けられた方向に一致するようにステージ駆動部に与える第1および第2の軸に沿った移動量を制御するように構成されたものである。
【0009】
その拡大観察装置においては、載置面に対して略垂直な回転軸の周りで撮像部に関して相対的に回転可能でかつ載置面に略平行な面内で互いに交差する第1および第2の軸に沿って移動可能にステージが設けられる。ステージの載置面上に観察対象物が載置される。撮像部によって観察対象物が撮像されることにより撮像領域の画像データが取得される。撮像部により取得される画像データに基づいて観察対象物の画像が観察画像として表示部により表示される。
【0010】
ステージの移動方向の指示が指示受付部により受け付けられることにより、制御部からステージ駆動部に第1および第2の軸に沿ったステージの移動量が与えられる。与えられる移動量に基づいて、ステージ駆動部により第1および第2の軸に沿って撮像部に関して相対的にステージが移動される。それにより、撮像領域に対して相対的に観察対象物が移動する。
【0011】
ステージの第1および第2の軸は、ステージと一体的に回転軸の周りで回転する。この場合、撮像部に関してステージの回転軸を移動させることなくステージを移動させることができる。そのため、ステージの回転軸上に撮像領域を配置することにより、ステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止することができる。それにより、撮像対象物の所望の領域を撮像しつつ観察対象物の向きを変更することができる。
【0012】
ステージが回転された場合には、回転角度検出部により検出される回転角度に基づいて撮像部の撮像領域における観察対象物の移動方向が指示受付部により受け付けられた方向と一致するようにステージ駆動部に与えられる第1および第2の軸に沿った移動量が制御される。これにより、ステージが回転された場合でも、撮像領域において観察対象物を所望の方向に容易に移動させることができる。
【0013】
(2)撮像部の撮像領域には、互いに交差する第3および第4の軸が設定され、制御部は、所定の校正時に、ステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を検出し、通常時に、検出された角度差に基づいてステージ駆動部に与えるステージの第1および第2の軸に沿った移動量を補正するように構成されてもよい。
【0014】
この場合、撮像領域の第3および第4の軸が予め定められた状態からずれても、撮像領域の第3および第4の軸を基準に観察対象物を移動させることができる。それにより、ユーザは、撮像部の向きを認識することなく表示部に表示される観察対象物を見ながら撮像領域において観察対象物を容易に移動させることができる。
【0015】
(3)制御部は、ステージ駆動部によりステージが移動された場合の観察画像の移動方向に基づいてステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を検出するように構成されてもよい。
【0016】
この場合、ステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を容易に検出することができ、検出された角度差を用いてステージの第1および第2の軸に沿った移動量を補正することができる。
【0017】
(4)ステージに第1および第2の軸の方向を特定するための方向特定部が設けられ、制御部は、観察画像に含まれる方向特定部の画像に基づいてステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を検出するように構成されてもよい。
【0018】
この場合、ステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を容易に検出することができ、検出された角度差を用いてステージの第1および第2の軸に沿った移動量を補正することができる。
【0019】
(5)表示部は、ステージにおける撮像領域の位置を示す位置特定画像を表示してもよい。
【0020】
この場合、ユーザがステージにおける撮像領域の位置を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0021】
(6)位置特定画像は、ステージにおける撮像領域よりも広い領域を表す第1の画像および撮像領域に対応する第2の画像とを含み、制御部は、回転角度検出部により検出された回転角度に基づいて第1の画像を第2の画像に対して相対的に回転させてもよい。
【0022】
この場合、ユーザがステージと撮像領域との位置関係および撮像領域に対するステージの回転角度を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0023】
(7)撮像部は、撮像領域よりも広い領域を撮像可能に構成され、表示部は、撮像部により広い範囲の撮像時に得られる画像データに基づいて第1の画像を表示してもよい。
【0024】
この場合、ユーザがステージ上の観察対象物と撮像領域との位置関係を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0025】
(8)第1の画像は、ステージにおける撮像領域よりも広い領域を特定するための図形を示してもよい。
【0026】
この場合、制御部の処理負担を増大させることなく容易に第1の画像を表示部に表示させることができる。
【0027】
(9)第1の画像は、ステージにおける撮像領域の相対的な移動可能範囲に対応してもよい。
【0028】
この場合、ユーザがステージにおける撮像領域の相対的な移動可能範囲を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0029】
(10)指示受付部は、位置特定画像における任意の位置の指定を受け付け可能に構成され、制御部は、ステージにおいて指示受付部により指定された位置に対応する位置に撮像領域が移動するようにステージ駆動部によるステージの移動を制御してもよい。
【0030】
この場合、ユーザが位置特定画像上で所望の位置を指定することにより、その位置に対応するステージ上の位置が撮像領域となるようにステージが移動する。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0031】
(11)制御部は、ステージが移動された場合の観察画像の移動量を検出し、検出された移動量に基づいて観察画像の移動量とステージの移動量との関係を算出し、算出された関係に基づいてステージ駆動部に与える移動量を補正するように構成されてもよい。
【0032】
この場合、観察画像の移動量とステージの移動量との関係に誤差が生じることが防止される。それにより、観察画像に基づいてステージの移動を正確に制御することができる。
【発明の効果】
【0033】
本発明によれば、ステージが回転された場合でも、観察対象物を所望の方向に容易に移動させることが可能になるとともに、ステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止することが可能になる。
【図面の簡単な説明】
【0034】
【図1】本発明の一実施の形態に係る拡大観察装置の構成を示すブロック図である。
【図2】本発明の一実施の形態に係る拡大観察装置の顕微鏡を示す斜視図である。
【図3】顕微鏡の撮像装置がZ軸と平行に固定されている状態を示す模式図である。
【図4】顕微鏡の撮像装置がZ軸から所望の角度まで傾斜された状態を示す模式図である。
【図5】xt移動量およびyt移動量の算出方法の一例を示す模式図である。
【図6】CPUによるステージ駆動処理のフローチャートである。
【図7】ステージの載置面に載置される観察対象物の一例を示す平面図である。
【図8】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図9】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図10】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図11】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図12】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図13】ステージの移動方向の補正について説明するための図である。
【図14】ステージの移動方向の補正について説明するための図である。
【図15】CPUによる傾斜角度取得処理のフローチャートである。
【図16】位置特定画像の一例を示す図である。
【図17】表示部による位置特定画像の表示例を示す図である。
【図18】表示部による位置特定画像の表示例を示す図である。
【図19】表示部による位置特定画像の表示例を示す図である。
【発明を実施するための形態】
【0035】
以下、本発明の一実施の形態に係る拡大観察装置について図面を参照しながら説明する。
【0036】
(1)拡大観察装置の構成
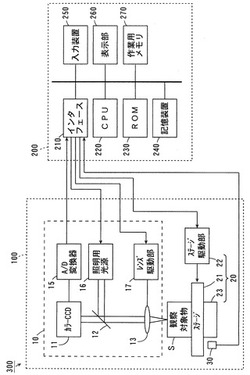
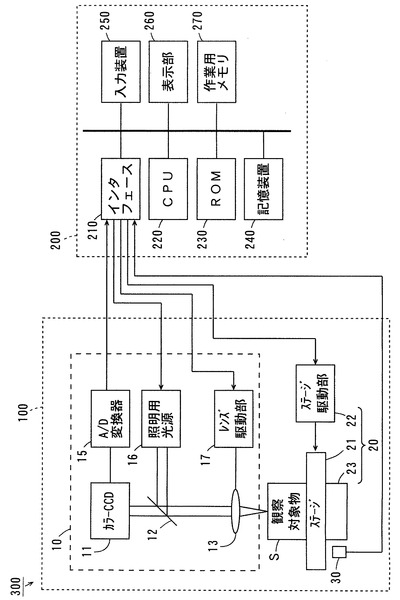
図1は、本発明の一実施の形態に係る拡大観察装置の構成を示すブロック図である。図1に示すように、拡大観察装置300は、顕微鏡100および画像処理装置200を備える。
【0037】
顕微鏡100は、撮像装置10、ステージ装置20および回転角度センサ30を含む。撮像装置10は、カラーCCD(電荷結合素子)11、ハーフミラー12、対物レンズ13、A/D変換器(アナログ/デジタル変換器)15、照明用光源16およびレンズ駆動部17を含む。ステージ装置20は、ステージ21、ステージ駆動部22およびステージ支持部23を含む。ステージ21上には、観察対象物Sが載置される。
【0038】
顕微鏡100において、水平面内で直交するX軸およびY軸、ならびにX軸およびY軸に垂直をZ軸(鉛直方向)が定義される。以下の説明では、X軸に平行な方向をX軸方向と呼び、Y軸に平行な方向をY軸方向と呼び、Z軸に平行な方向をZ軸方向と呼ぶ。
【0039】
照明用光源16は、例えば白色光を発生するハロゲンランプまたは白色LED(発光ダイオード)である。照明用光源16により発生された白色光は、ハーフミラー12により反射された後、対物レンズ13によりステージ21上の観察対象物Sに集光される。
【0040】
観察対象物Sにより反射された白色光は、対物レンズ13およびハーフミラー12を透過してカラーCCD11に入射する。カラーCCD11は、赤色波長の光を受光する複数の赤色用画素、緑色波長の光を受光する複数の緑色用画素、および青色波長の光を受光する複数の青色用画素を有する。複数の赤色用画素、複数の緑色用画素および複数の青色用画素は二次元的に配列される。カラーCCD11の各画素からは、受光量に対応する電気信号が出力される。カラーCCD11の出力信号は、A/D変換器15によりデジタル信号に変換される。A/D変換器15から出力されるデジタル信号は、画像データとして画像処理装置200に順次与えられる。カラーCCD11に代えてCMOS(相補性金属酸化膜半導体)イメージセンサ等の撮像素子が用いられてもよい。
【0041】
対物レンズ13は、例えばズームレンズであり、手動または自動で倍率を変更可能に構成される。対物レンズ13の倍率は、図示しない倍率検出部により検出される。また、対物レンズ13は、Z軸方向に移動可能に設けられる。レンズ駆動部17は、画像処理装置200の制御により対物レンズ13をZ軸方向に移動させる。それにより、撮像装置10の焦点の位置がZ軸方向において移動する。
【0042】
ステージ21は、Z軸に平行な回転軸の周りで回転可能にステージ支持部23上に設けられる。ステージ駆動部22は、画像処理装置200から与えられる移動指令信号(駆動パルス)に基づいてステージ21を撮像装置10に関して相対的に後述するx軸およびy軸に沿って移動させる。また、ステージ駆動部22は、画像処理装置200から与えられる回転指令信号(駆動パルス)に基づいてステージ21を撮像装置10に関して相対的にZ軸に平行な回転軸の周りで回転させる。ステージ21の回転軸の位置は、ステージ支持部23に関して一定である。ステージ駆動部22には、ステッピングモータが用いられる。回転角度センサ30は、ステージ21の回転角度を検出し、検出した角度を示す角度検出信号を画像処理装置200に与える。
【0043】
画像処理装置200は、インタフェース210、CPU(中央演算処理装置)220、ROM(リードオンリメモリ)230、記憶装置240、入力装置250、表示部260および作業用メモリ270を含む。
【0044】
ROM230には、システムプログラムが記憶される。記憶装置240は、ハードディスク等からなる。記憶装置240には、種々の制御プログラムおよびプログラムが記憶されるとともに、顕微鏡100からインタフェース210を通して与えられる画像データ等の種々のデータを記憶する。入力装置250は、キーボードおよびポインティングデバイスを含み、ユーザまたは外部装置からのステージ21の移動指示および回転指示を受け付け可能に構成される。本実施の形態では、移動指示は、移動方向および移動量を含み、回転指示は回転方向および回転角度を含む。ポインティングデバイスとしては、マウスまたはジョイスティック等が用いられる。
【0045】
表示部260は、例えば液晶ディスプレイパネルまたは有機EL(エレクトロルミネッセンス)パネルにより構成される。後述のように、表示部260には、互いに直交するxd軸およびyd軸が設定される。xd軸は、表示部260の画面の横方向に対応し、yd軸は、表示部260の画面の縦方向に対応する。
【0046】
作業用メモリ270は、RAM(ランダムアクセスメモリ)からなり、種々のデータの処理のために用いられる。CPU220は、記憶装置240に記憶された制御プログラムを実行することにより作業用メモリ270を用いて種々の処理を行うとともに、画像データに基づく画像を表示部260に表示させる。また、CPU220は、インタフェース210を通して顕微鏡100のカラーCCD11、照明用光源16、レンズ駆動部17およびステージ駆動部22を制御する。
【0047】
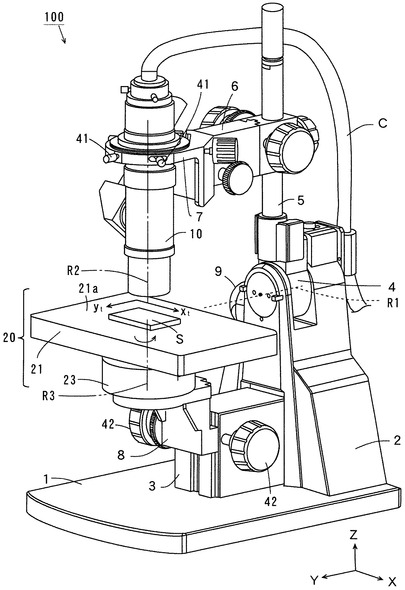
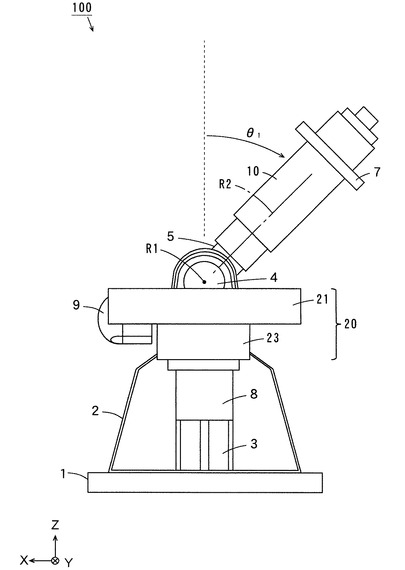
図2は、本発明の一実施の形態に係る拡大観察装置300の顕微鏡100を示す斜視図である。図2においては、X軸、Y軸およびZ軸が矢印で示される。
【0048】
図2に示すように、顕微鏡100はベース1を有する。ベース1上には、第1の支持台2が取り付けられるとともに、この第1の支持台2の前面に嵌め込まれるように第2の支持台3が取り付けられる。
【0049】
第1の支持台2の上端部には、連結部4がY軸方向に延びる回動軸R1の周りに回動可能に取り付けられる。連結部4には回動支柱5が取り付けられる。それにより、回動支柱5は連結部4の回動に伴って回動軸R1を支点としてZ軸に平行な垂直面内で傾斜可能である。使用者は、固定つまみ9により連結部4を第1の支持台2に対して固定することができる。
【0050】
連結部6の前面には環状の支持部7が取り付けられる。支持部7には、略円筒状の撮像装置10が取り付けられる。図2の状態では、撮像装置10の光軸R2はZ軸に平行である。支持部7は、撮像装置10を水平面内で移動させるための複数の調整ネジ41を有する。複数の調整ネジ41を用いて撮像装置10の光軸R2が回動軸R1に垂直に交差するように撮像装置10の位置を調整することができる。
【0051】
ベース1上の第2の支持台3の前面には、Z軸方向に摺動可能にスライダ8が取り付けられる。第2の支持台3の側面には、調整つまみ42が設けられる。スライダ8のZ軸方向(高さ方向)の位置は、調整つまみ42により調整可能である。
【0052】
ステージ装置20の支持部23は、スライダ8上に取り付けられる。ステージ21は、支持部23に対してZ軸に平行な回転軸R3の周りに回転可能に設けられる。ステージ21は、観察対象物Sが載置される載置面21aを有する。ステージ21には、水平面内で互いに直交するxt軸およびyt軸が設定される。ステージ21は、図1のステージ駆動部22によりxt軸およびyt軸に沿って移動可能に設けられる。ステージ21が回転軸R3の周りに回転すると、ステージ21のxt軸およびyt軸も回転する。それにより、ステージ21のxt軸およびyt軸は、X軸およびY軸に対して水平面内で傾斜する。
【0053】
ステージ21の載置面21a上における撮像装置10の撮像範囲(視野範囲)は、撮像装置10の倍率(対物レンズ13の倍率)により異なる。以下、撮像装置10の撮像範囲を撮像領域と呼ぶ、後述のように、撮像領域には、互いに直交するxr軸およびyr軸が設定される。撮像領域のxr軸およびyr軸は、表示部260のxd軸およびyd軸にそれぞれ対応する。
【0054】
撮像領域の画像データに基づいて、図1の表示部260に観察対象物Sの画像が表示される。以下、表示部260に表示される観察対象物Sの画像を観察画像と呼ぶ。後述のように、観察画像には、互いに直交するxi軸およびyi軸が設定される。観察画像のxi軸はステージ21のxt軸およびyt軸にそれぞれ対応する。
【0055】
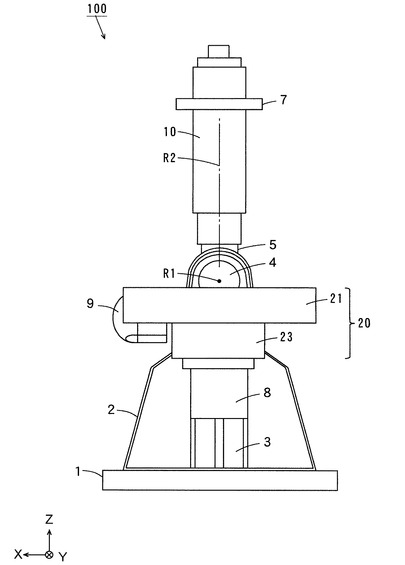
図3は顕微鏡100の撮像装置10がZ軸と平行に固定されている状態を示す模式図である。また、図4は顕微鏡100の撮像装置10がZ軸に対して所望の角度まで傾斜された状態を示す模式図である。
【0056】
図3に示すように、回動支柱5がZ軸に平行な状態で固定つまみ9を締めることにより連結部4が第2の支持台3に固定される。それにより、撮像装置10の光軸R2がZ軸に平行な状態で回動軸R1に垂直に交差する。この場合、撮像装置10の光軸R2はステージ21の表面に垂直となる。
【0057】
固定つまみ9を緩めることにより連結部4が回動軸R1の周りに回動可能となり、回動支柱5が回動軸R1を支点として傾斜可能となる。それにより、図4に示すように、撮像装置10の光軸R2をZ軸に対して任意の角度θ1傾斜させることができる。この場合、撮像装置10の光軸R2は回動軸R1に垂直に交差する。同様にして、撮像装置10の光軸R2をZ軸に対して図4と逆側に任意の角度傾斜させることができる。
【0058】
したがって、ステージ21上の観察対象物Sの表面の高さを回動軸R1の高さに一致させることにより、観察対象物の同じ部分を垂直な方向および斜め方向から観察することができる。
【0059】
(2)ステージ装置の動作
ユーザまたは外部装置から画像処理装置200(図1)の入力装置250にステージ21の移動指示またはステージ21の回転指示が与えられると、CPU220がステージ駆動部22に移動指令信号または回転指令信号を与える。ステージ駆動部22は、CPU220からの移動指令信号に基づいてステージ21をxt軸およびyt軸に沿って移動させ、CPU220からの回転指令信号に基づいてステージ21を回転軸R3の周りで回転させる。
【0060】
本実施の形態では、CPU22からの移動指令信号は、xt軸に沿ったステージ21の移動量(以下、xt移動量と呼ぶ)およびyt軸に沿ったステージ21の移動量(以下、yt移動量と呼ぶ)を含む。CPU22からの回転指令信号は、ステージ21の回転方向および回転角度を含む。
【0061】
ここで、上記のように、ステージ21が回転軸R3の周りで回転されると、ステージ21のxt軸およびyt軸がX軸およびY軸に対して傾斜する。そのため、移動指示として与えられる移動方向にステージ21を移動させるためには、ステージ21の回転角度に応じてxt移動量およびyt移動量を制御する必要がある。本実施の形態では、回転角度センサ30により検出されたステージ21の回転角度に基づいて、移動指示として与えられる移動方向と実際のステージ21の移動方向とが一致するようにxt移動量およびyt移動量が算出される。
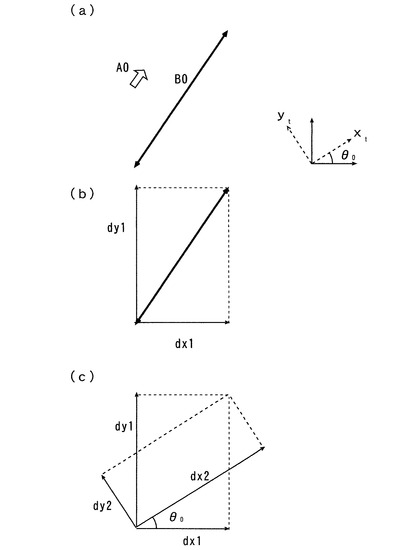
【0062】
図5は、xt移動量およびyt移動量の算出方法の一例を示す模式図である。図5の例では、xt軸およびyt軸がX軸およびY軸に対して角度θ0傾斜している。図5(a)に示すように、入力装置250に移動指示として移動方向A0および移動量B0が与えられる。この場合、図5(b)に示すように、移動方向A0および移動量B0に基づいて、X軸に沿った移動量dx1およびY軸に沿った移動量dy1が算出される。さらに、図5(c)に示すように、算出された移動量dx1,dy1および回転角度センサ30により検出されたステージ21の回転角度θ0に基づいて、xt移動量dx2およびyt移動量dy2が算出される。
【0063】
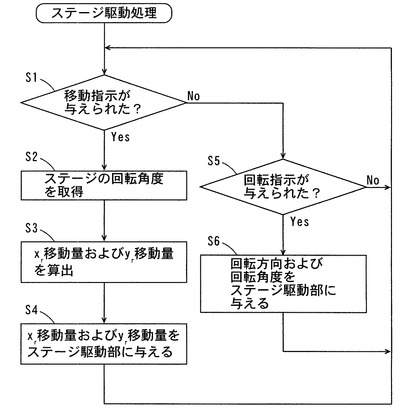
図6は、CPU220によるステージ駆動処理のフローチャートである。CPU220は、記憶装置240に記憶される制御プログラムに基づいて、図6のステージ駆動処理を行う。
【0064】
図6に示すように、まず、CPU220は、入力装置250にステージ21の移動指示が与えられたか否かを判定する(ステップS1)。ステージ21の移動指示が与えられた場合、CPU220は、回転角度センサ30からの角度検出信号に基づいて、ステージ21の回転角度を取得する(ステップS2)。次に、CPU220は、与えられた移動指示および取得された回転角度に基づいて、上記のように、xt移動量およびyt移動量を算出する(ステップS3)。次に、CPU220は、算出されたxt移動量およびyt移動量を移動指令信号としてステージ駆動部22に与える(ステップS4)。その後、CPU220は、ステップS1の処理に戻る。
【0065】
ステップS1において、ステージ21の移動指示が与えられていない場合、CPU220は、入力装置250にステージ21の回転指示が与えられたか否かを判定する(ステップS5)。ステージ21の回転指示が与えられていない場合、CPU220は、ステップS1の処理に戻る。ステージ21の回転指示が与えられた場合、CPU220は与えられた回転指示に基づいて、回転方向および回転角度を回転指令信号としてステージ駆動部22に与える(ステップS6)。その後、CPU220は、ステップS1の処理に戻る。
【0066】
このように、入力装置250に与えられた移動指示および回転角度センサ30により検出された回転角度に基づいてxt移動量およびyt移動量が算出され、算出されたxt移動量およびyt移動量がステージ駆動部22に与えられる。そのxt移動量およびyt移動量に基づいて、ステージ駆動部22によりステージ21がxt軸およびyt軸に沿って移動される。これにより、ステージ21が回転された場合でも、撮像領域において観察対象物Sを所望の方向に移動させることができる。
【0067】
なお、回転角度センサ30により検出されたステージ21の回転角度が、表示部260により表示されてもよい。この場合、ユーザが、ステージ21の回転角度を容易に認識することができる。
【0068】
本例では、移動指示として移動量および移動方向が与えられるが、これに限らない。例えば、移動すべき位置を示す座標(以下、目標座標と呼ぶ)が移動指示として与えられてもよい。例えば、X軸およびY軸を座標軸とするXY座標系およびxt軸およびyt軸を座標軸とするxtyt座標系が設定される。この場合、XY座標系における目標座標が移動指示として与えられる。与えられた目標座標が、ステージ21の回転角度に基づいてxtyt座標系における座標に変換される。変換された目標座標に基づいて、xt移動量およびyt移動量を算出することができる。
【0069】
また、移動指示として移動量および移動方向が与えられた場合でも、上記同様に、XY座標系およびxtyt座標系を用いて、xt移動量およびyt移動量が算出されてもよい。例えば、与えられた移動量および移動方向に基づいて、XY座標系における目標座標が算出される。算出された目標座標が、ステージ21の回転角度に基づいてxtyt座標系における座標に変換される。変換された目標座標に基づいて、xt移動量およびyt移動量を算出することができる。
【0070】
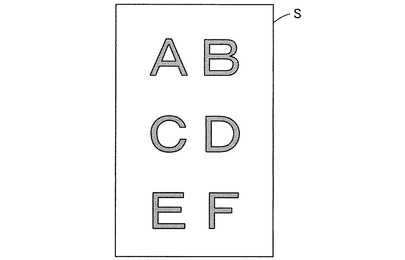
(3)ステージ装置の動作と観察画像との関係
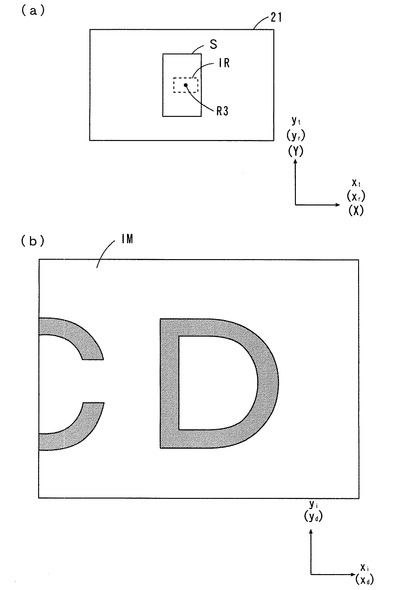
以下、ステージ装置20の動作と表示部260に表示される観察画像との関係について説明する。図7は、ステージ21の載置面21aに載置される観察対象物Sの一例を示す平面図である。図8〜図10は、ステージ装置20の動作と表示部260に表示される観察画像との関係を示す図である。図8〜図10の(a)には、ステージ21と撮像領域との位置関係が示され、図8〜図10の(b)には、表示部260に表示される観察画像が示される。また、図8〜10の(a)には、X軸およびY軸、ステージ21のxt軸およびyt軸、ならびに撮像領域のxr軸およびyr軸が示され、図8〜図10の(b)には、表示部260のxd軸およびyd軸、ならびに観察画像のxi軸およびyi軸が示される。
【0071】
以下の説明において、方向An(nは自然数)は、ステージ21の移動または回転の方向であり、方向Cnは、観察画像IMの移動または回転の方向である。X軸およびY軸に関して相対的な方向Anは、表示部260のxd軸およびyd軸に関して相対的な方向Cnと一致する。また、移動量Bnは、ステージ21の移動量であり、移動量Dnは観察画像の移動量である。本例では、移動量Bnと移動量Dnとの比が一定である。
【0072】
図8(a)の状態では、ステージ21のxt軸およびyt軸がX軸およびY軸とそれぞれ一致している。また。撮像領域IRのxr軸およびyr軸がX軸およびY軸とそれぞれ一致している。この場合、図8(b)に示すように、観察画像IMのxi軸およびyi軸が表示部260のxd軸およびyd軸とそれぞれ一致する。
【0073】
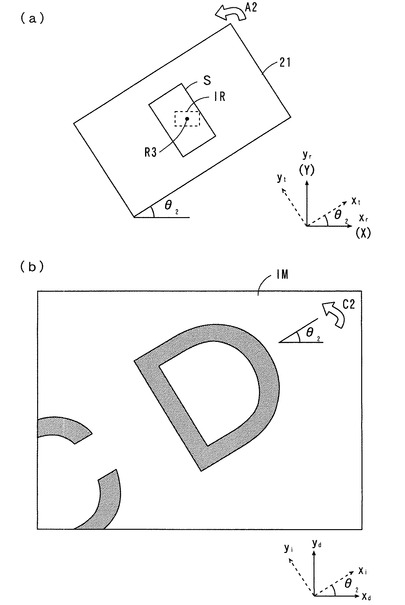
図9(a)に示すように、回転方向A2および回転角度θ2が回転指示として入力装置250に与えられると、ステージ21が回転軸R3の周りでA2方向に角度θ2だけ回転される。この場合、図9(b)に示すように、観察画像IMが回転方向C2に角度θ2だけ回転する。
【0074】
なお、本例では、回転軸R3が撮像領域IRの中心部に位置するように、撮像装置10の位置が調整される。そのため、ステージ21が回転軸R3の周りで回転されても、観察対象物Sの所望の領域が撮像領域IRから外れることが防止される。したがって、観察対象物Sの所望の領域を撮像装置10により撮像しつつ観察対象物Sを回転させることができる。
【0075】
特に、図4の例のように、撮像装置10がZ軸に対して傾斜する状態で、ステージ21が回転された場合、観察対象物Sの所望の領域が種々の角度から撮像される。それにより、ユーザは、観察対象物Sの所望の領域を立体的に観察することができる。
【0076】
また、本例では、ステージ21の回転軸R3の位置がステージ支持部23に関して固定されるが、これに限らず、ステージ21の回転軸R3の位置がステージ支持部23に関して変更可能であってもよい。この場合、回転軸R3が撮像領域IRの中心部に位置するように、ステージ21の回転軸R3の位置を調整することができる。
【0077】
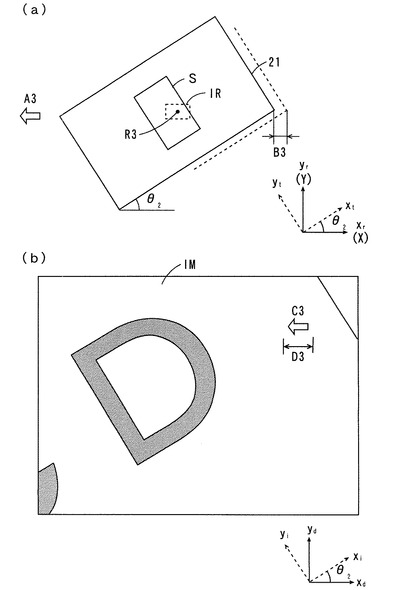
図10(a)に示すように、移動方向A3および移動量B3が移動指示として入力装置250に与えられると、ステージ21が移動方向A3に移動量B3だけ移動する。この場合、上記のように、移動方向A3、移動量B3および角度θ2に基づいてxt移動量およびyt移動量が算出され、そのxt移動量およびyt移動量に基づいてステージ21が移動される。図10(b)に示すように、観察画像IMは方向C3に移動量D3だけ移動する。
【0078】
(4)撮像装置のずれ
図8および図9の例では、撮像領域IRのxr軸およびyr軸がX軸およびY軸とそれぞれ一致しているため、X軸およびY軸に対するステージ21の移動方向と表示部260のxd軸およびyd軸に対する観察画像IMの移動方向とが一致する。実際には、組み付け誤差等により撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれる場合がある。また、撮像装置10が支持部7に着脱可能に設けられる場合には、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれた状態で撮像装置10が支持部7に取り付けられることがある。撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれている場合には、次のような問題が生じる。
【0079】
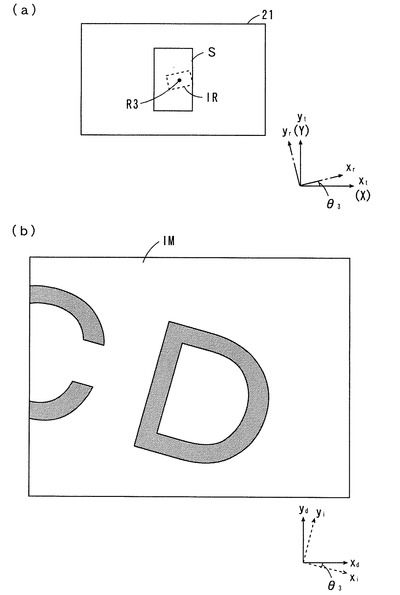
図11および図12は、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれている場合のステージ装置20の動作と表示部260に表示される観察画像との関係を示す図である。
【0080】
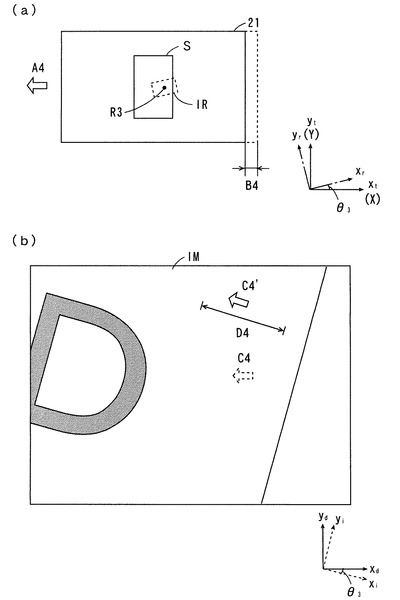
図11(a)の状態では、ステージ21のxt軸およびyt軸がX軸およびY軸とそれぞれ一致し、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してそれぞれ角度θ3だけ傾斜している。この場合、図11(b)に示すように、観察画像IMのxi軸およびyi軸が表示部260のxd軸およびyd軸に対してそれぞれ角度θ3だけ傾斜する。
【0081】
図12(a)に示すように、移動方向A4および移動量B4が移動指示として入力装置250に与えられると、ステージ21が移動方向A4に移動量B4だけ移動する。この場合、図12(b)に示すように、観察画像IMが方向C4と異なる方向C4’に移動量D4だけ移動する。
【0082】
このように、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれている場合、X軸およびY軸に対するステージ21の移動方向と表示部260のxd軸およびyd軸に対する観察画像IMの移動方向とが異なる。そのため、観察画像IMが所望の方向と異なる方向に移動する場合がある。そこで、本実施の形態では、観察画像IMの移動方向に基づいて、ステージ21のxt軸およびyt軸に対する撮像領域IRのxr軸およびyr軸の角度が検出される。検出された角度に基づいて、X軸およびY軸に対する撮像領域のxr軸およびyr軸の角度(以下、撮像領域傾斜角度と呼ぶ)が算出され、算出された撮像領域傾斜角度に基づいてステージ21の移動方向が補正される。
【0083】
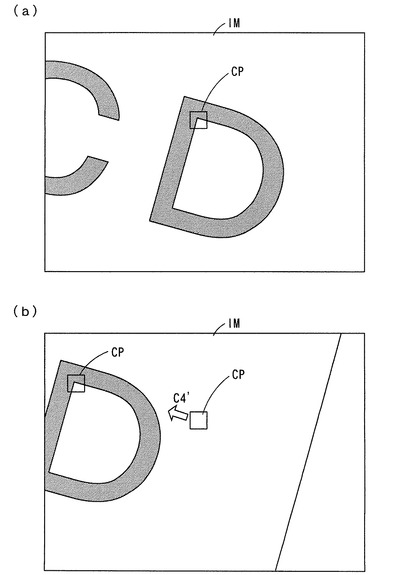
図13および図14は、ステージ21の移動方向の補正について説明するための図である。ここでは、図11および図12の例における観察画像IMの移動方向に基づいてステージ21の移動方向が補正される例を説明する。図13(a)の観察画像IMは、図11(b)の観察画像IMに相当し、図14(b)の観察画像IMは、図12(b)の観察画像IMに相当する。また、本例では、ステージ21のxt軸およびyt軸がX軸およびY軸とそれぞれ一致するので、ステージ21のxt軸およびyt軸に対する撮像領域IRのxr軸およびyr軸の角度が撮像領域傾斜角度と等しい。
【0084】
まず、図13(a)に示すように、移動前の観察画像IMから特徴点CPが検出される。例えば、コントラストの変化が相対的に大きい部分等が特徴点CPとして検出される。続いて、ステージ21が移動される。この場合、特徴点CPが表示部260の画面から外れないように、撮像装置10の倍率に応じてステージ21の移動量が設定される。本例では、上記のように、ステージ21が移動方向A4に移動量B4だけ移動される。続いて、図13(b)に示すように、移動後の観察画像IMから例えばパターンマッチングにより特徴点CPが検出される。
【0085】
移動前の観察画像IMにおける特徴点CPの位置および移動後の観察画像IMにおける特徴点CPの位置に基づいて、特徴点CPの移動方向C4’が観察画像IMの移動方向として特定される。特定された移動方向C4’に基づいて、撮像領域傾斜角度θ3(図12)が取得される。
【0086】
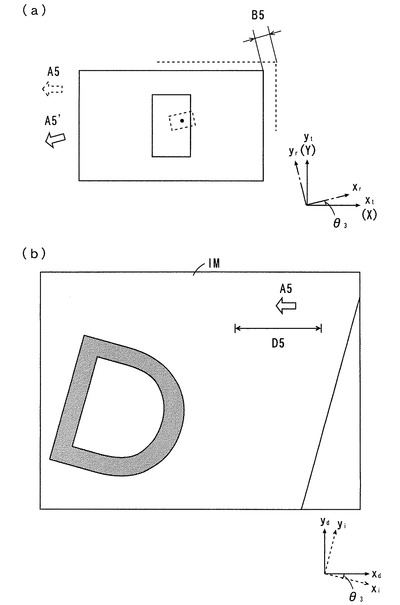
取得された撮像領域傾斜角度θ3に基づいて、所望の方向に観察画像IMが移動するように、ステージ21の移動方向が制御される。具体的には、図14(b)に示すように、観察画像IMを方向C5に移動量D5だけ移動させたい場合、図14(a)に示すように、移動方向A5から撮像領域傾斜角度θ3だけずれた方向A5’に移動量B5だけステージ21が移動されるように、xt移動量およびyt移動量が算出される。算出されたxt移動量およびyt移動量に基づいて、ステージ21が移動される。これにより、所望の方向に観察画像IMが移動する。それにより、ユーザが、観察画像IMを見ながら容易に観察対象物Sの所望の領域を撮像領域IRに位置合わせすることができる。
【0087】
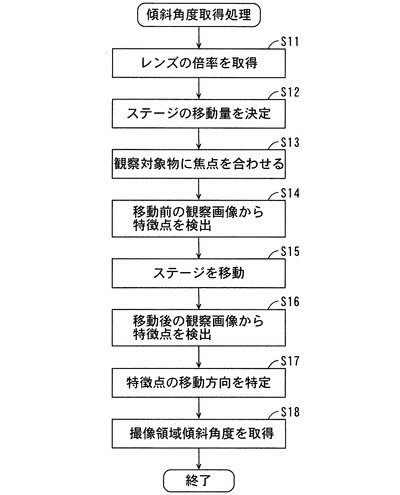
撮像領域傾斜角度の取得は、画像処理装置200のCPU220が、記憶装置240に記憶される制御プログラムに基づいて傾斜角度取得処理を行うことによって実現される。図15は、CPU220による傾斜角度取得処理のフローチャートである。傾斜角度取得処理が行われるタイミングは特に限定されない。例えば、画像処理装置200の起動時に傾斜角度取得処理が行われてもよく、またはユーザによる指示に応じて傾斜角度取得処理が行われてもよい。
【0088】
図15に示すように、まず、CPU220は、図示しない倍率検出部から撮像装置10の倍率(対物レンズ13の倍率)を取得する(ステップS11)。次に、CPU220は、取得された撮像装置10の倍率に基づいて、XY平面上におけるステージ21の移動量を決定する(ステップS12)。次に、CPU220は、撮像装置10の焦点が観察対象物Sの表面に一致するように、レンズ駆動部17により撮像装置10をZ方向に移動させる(ステップS13)。
【0089】
次に、CPU220は、図13(a)に示したように、移動前の観察画像IMから特徴点CPを検出する(ステップS14)。次に、CPU220は、ステップS12で決定された移動量だけステージ21を移動させる(ステップS15)。ステージ21の移動方向は、予め定められてもよく、検出される特徴点の位置に応じて適宜設定されてもよい。
【0090】
次に、CPU220は、移動後の観察画像IMから例えばパターンマッチングによりステップS13で検出された特徴点CPを検出する(ステップS16)。次に、CPU220は、ステップS13,S14で検出された特徴点CPの位置に基づいて、特徴点CPの移動方向を特定する(ステップS17)。次に、CPU220は、算出された移動方向に基づいて、撮像領域傾斜角度を取得し(ステップS18)、処理を終了する。
【0091】
取得された撮像領域傾斜角度は、記憶装置240または作業用メモリ270に記憶される。以後、入力装置250にステージ21の移動指示が与えられると、CPU220は、記憶された撮像領域傾斜角度を用いて、所望の方向に観察画像IMが移動するように、xt移動量およびyt移動量を算出する。
【0092】
このように、本実施の形態では、所定の校正時(傾斜角度取得処理時)に、観察画像IMの移動方向に基づいて、撮像領域傾斜角度が算出され、その後の通常時に、算出された撮像領域傾斜角度に基づいてステージ21の移動方向が補正される。それにより、観察画像IMが所望の方向に移動するように、ステージ21の移動を制御することができる。したがって、ユーザが、観察画像IMを見ながら容易に観察対象物Sの所望の領域を撮像領域IRに位置合わせすることができる。また、操作性を損なうことなく、観察目的またはユーザの好み等に応じて撮像領域傾斜角度を適宜変更することができる。
【0093】
(5)位置特定画像
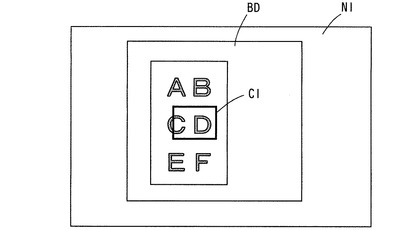
本実施の形態では、表示部160がステージ21における撮像領域IRの位置を示す位置特定画像を表示することができる。図16は、位置特定画像の一例を示す図である。図16の位置特定画像NIは、ステージ21における現在の撮像領域IRよりも広い領域を表す広域画像BDおよび撮像領域IRに対応する撮像領域対応画像CIを含む。
【0094】
本例において、広域画像BDは、撮像装置10により取得された画像データに基づいて表示される。例えば、予め撮像装置10により現在よりも低倍率で撮像対象物Sが撮像されることにより、高視野の画像データが取得され、その画像データに基づいて広域画像BDが表示される。または、ステージ21がxt軸およびyt軸に沿って順次移動されるとともに、撮像装置10により撮像領域IRの画像データが順次取得される。取得された複数の画像データに基づく複数の画像が連結されることにより広域画像BDが表示される。
【0095】
また、広域画像BDは、ステージ21における撮像領域IRの相対的な移動可能範囲に対応することが好ましい。この場合、ユーザが、ステージ21における撮像領域IRの相対的な移動可能範囲を容易に認識することができる。それにより、ユーザが観察対象物Sの所望の領域を効率よく撮像領域IRに位置合わせすることができる。
【0096】
また、広域画像BDが、ステージ21における現在の撮像領域IRよりも広い領域を表す図形であってもよい。図形は、直線または曲線等によって構成され、例えば、矩形、円形、括弧および矢印等を含む。この場合、CPU220の処理負担を増大させることなく、広域画像BDを表示することができる。
【0097】
本例において、撮像領域対応画像CIは、矩形の図形である。広域画像BD内における撮像領域対応画像CIの位置が、ステージ21上における撮像領域IRの位置に対応する。
【0098】
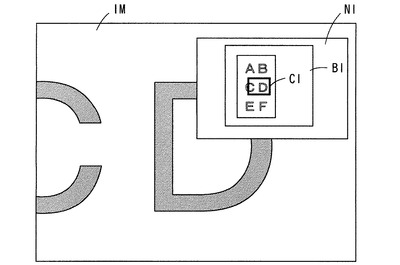
図17〜図19は、表示部260による位置特定画像NIの表示例を示す図である。図17の例では、観察画像IMの一部と重なるように位置特定画像NIが表示される。この場合、ユーザは、位置特定画像NIに基づいてステージ21と撮像領域IRとの位置関係を容易に認識することができる。また、観察すべき観察対象物Sの部分が観察画像IMとして表示されていない場合、ユーザは、位置特定画像NIに基づいてステージ21を移動させるべき方向および移動量を容易に認識することができる。
【0099】
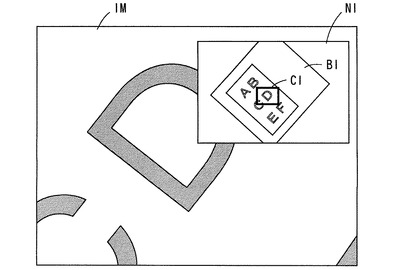
図17の状態でステージ21が回転されると、図18に示すように、観察画像IMが回転されるとともに、位置特定画像NIも回転される。これにより、ユーザは、撮像領域IRに対するステージ21の回転角度を容易に認識することができる。
【0100】
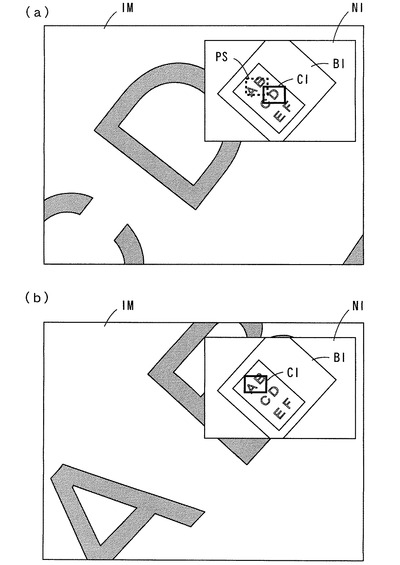
本実施の形態において、入力装置250は、位置特定画像NIにおける任意の位置の指定を受け付け可能に構成される。CPU220は、入力装置250により指定された位置に対応するステージ21上の位置が撮像領域IRとなるように、ステージ駆動部22によるステージ21の移動を制御する。
【0101】
例えば、図19(a)の位置特定画像NIにおいて、ユーザが入力装置250を操作することにより位置PSを指定する。この場合、図19(b)に示すように、位置PSに対応するステージ21上の位置が撮像領域IRとなるように、ステージ21が移動される。
【0102】
具体的には、CPU220が、入力装置250により指定された位置特定画像NI上の位置に基づいてxt移動量およびyt移動量を算出し、そのxt移動量およびyt移動量を移動指示としてステージ駆動部22に与える。ステージ駆動部22が、与えられた移動指示に基づいて、ステージ21を移動させる。これにより、ユーザは、観察対象物Sの所望の領域を撮像領域IRに効率よく位置合わせすることができる。
【0103】
CPU220は、ステージ21が移動された場合の観察画像IMの移動量に基づいて位置特定画像NIにおける画素単位の移動量と実際のステージ21の移動量との関係を算出し、算出された関係に基づいてステージ駆動部22に与えるxt移動量およびyt移動量を補正してもよい。
【0104】
例えば、図13に示したように、移動前後の観察画像IMから共通の特徴点CPを検出することにより、特徴点CPの移動量を画素単位で取得することができる。これにより、観察画像IMにおける画素単位の移動量と実際のステージ21の移動量との関係を算出することができる。また、撮像装置10の倍率および位置特定画像NIの倍率に基づいて、観察画像IMにおける画素単位の移動量と位置特定画像NIにおける画素単位の移動量との関係を算出することができる。その結果、位置特定画像NIにおける画素単位の移動量と実際のステージ21の移動量との関係を算出することができる。このようにして算出された関係に基づいてxt移動量およびyt移動量が補正されることにより、ステージ21の移動精度が向上される。
【0105】
本例では、位置特定画像NIにおいて位置が指定されることによりステージ21が移動されるが、これに限らず、観察画像IM上で所望の位置が指定されることによりステージ21が移動されてもよい。例えば、観察画像IM上の任意の位置が指定されると、その指定された位置に対応するステージ21上の位置が撮像領域IRの中心に移動するようにステージ21が移動される。
【0106】
この場合も、上記同様に、CPU220が、ステージ21が移動された場合の観察画像IMの移動量に基づいて観察画像IMにおける画素単位の移動量と実際のステージ21の移動量との関係を算出し、算出された関係に基づいてステージ駆動部22に与えるxt移動量およびyt移動量を補正してもよい。
【0107】
(6)他の実施の形態
上記実施の形態では、回転角度センサ30によりステージ30の回転角度が検出されるが、これに限らず、他の方法でステージ30の回転角度が検出されてもよい。例えば、ステージ30の載置面30aに、X軸またはY軸の少なくとも一方を表す線が付され、この線が撮像装置10により撮像されてもよい。この場合、観察画像IMにおける線の傾きに基づいて、ステージ30の回転角度を検出することができる。
【0108】
また、上記実施の形態では、観察画像IMの移動方向に基づいて、撮像領域傾斜角度が算出され、算出された撮像領域傾斜角度に基づいてステージ21の移動方向が補正されるが(図13〜図15参照)、他の方法でステージ21の移動方向が補正されてもよい。例えば、ステージ30の載置面30aにX軸またはY軸の方向を特定するための方向特定部が設けられ、観察画像IMに含まれる方向特定部の画像に基づいて撮像領域IRのxr軸およびyr軸に対するステージ21のxt軸およびyt軸の角度が検出され、検出された角度に基づいてステージ21の移動方向が補正されてもよい。方向特定部は、例えば、X軸またはY軸の少なくとも一方を表す線、突起または溝等である。
【0109】
具体的には、所定の校正時(例えば、画像処理装置200の起動時)に、ステージ30上の方向特定部が撮像され、観察画像IM中の方向特定部により示される方向に基づいて、撮像領域IRのxr軸およびyr軸に対するステージ21のxt軸およびyt軸の角度が検出される。これにより、初期状態における撮像領域IRとステージ21との相対的な角度が検出される。その後の通常時には、検出された角度を用いて、上記の例と同様にして、観察画像IMが所望の方向に移動するようにステージ21の移動方向を補正することができる。
【0110】
また、上記実施の形態では、移動指示としてステージ21の移動方向および移動量が与えられるが、これに限らず、ステージ21に関して相対的な撮像領域IRの移動方向および移動量が与えられてもよい。この場合、例えば撮像領域IRの移動方向および移動量が、ステージ21の移動方向および移動量に変換され、変換された移動方向および移動量に基づいて、上記同様に、xt移動量およびyt移動量が算出される。
【0111】
また、上記実施の形態では、ステージ駆動部22がCPU220からの回転指令信号に基づいてステージ21を回転させるが、これに限らず、手動でステージ21を回転させてもよい。
【0112】
(7)請求項の各構成要素と実施の形態の各部との対応関係
以下、請求項の各構成要素と実施の形態の各部との対応の例について説明するが、本発明は下記の例に限定されない。
【0113】
上記実施の形態においては、撮像装置10が撮像部の例であり、表示部260が表示部の例であり、ステージ21がステージの例であり、載置面21aが載置面の例であり、回転角度センサ30が回転角度検出部の例であり、ステージ駆動部22がステージ駆動部の例であり、入力装置250が指示受付部の例であり、CPU220が制御部の例である。
【0114】
また、支持部7が支持部の例であり、広域画像BDが第1の画像の例であり、撮像領域対応画像CIが第2の画像の例であり、xt軸およびyt軸が第1および第2の軸の例であり、xr軸およびyr軸が第3および第4の軸の例であり、X軸およびY軸が第5および第6の軸の例である。
【0115】
請求項の各構成要素として、請求項に記載されている構成または機能を有する他の種々の要素を用いることもできる。
【産業上の利用可能性】
【0116】
本発明は、種々の拡大観察装置に利用可能である。
【符号の説明】
【0117】
10 撮像装置
11 カラーCCD
12 ハーフミラー
13 対物レンズ
15 A/D変換器
16 照明用光源
17 レンズ駆動部
20 ステージ装置
21 ステージ
22 ステージ駆動部
23 ステージ支持部
30 回転角度センサ
100 顕微鏡
210 インタフェース
220 CPU
230 ROM
240 記憶装置
250 入力装置
260 表示部
270 作業用メモリ
300 拡大観察装置
BD 広域画像
CI 撮像領域対応画像
IM 観察画像
IR 撮像領域
NI 位置特定画像
S 観察対象物
【技術分野】
【0001】
本発明は、拡大観察装置に関する。
【背景技術】
【0002】
従来より、観察対象物を観察するために、顕微鏡を備えた拡大観察装置が用いられる。顕微鏡は、観察対象物を撮像するための撮像装置を含む。撮像装置により撮像された観察対象物の画像が、表示部により表示される。ユーザは、表示部により表示される画像に基づいて、観察対象物の詳細な情報を取得することができる。
【0003】
特許文献1に記載される顕微鏡は、観察対象物を測定するためのカメラおよび観察対象物が載置されるステージを有する。カメラは、Z軸方向(鉛直方向)に沿うようにカメラ取付部に取り付けられる。カメラの下方において、回転可能にステージが設けられる。ステージは、X軸方向およびY軸方向に移動可能なX−Yステージからなる。ステージがX軸方向およびY軸方向に沿って移動されることにより、カメラの撮像領域に対する観察対象物の位置合わせが行われる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−337470号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の顕微鏡においては、ステージの回転軸が固定され、ステージの回転に伴いステージのX軸およびY軸が回転する。この場合、ステージのX軸およびY軸が回転することにより、ステージの移動方向の制御が困難であり、観察対象物を所望の方向に移動させることができない。
【0006】
一方、ステージのX軸およびY軸が固定され、ステージのX軸方向およびY軸方向への移動に伴いステージの回転軸が移動する構成も考えられる。しかしながら、カメラの撮像領域からステージの回転軸が外れると、ステージの回転により、撮像領域に対する観察対象物の移動量が大きくなる。それにより、観察対象物の所望の領域が撮像領域から外れやすくなる。
【0007】
本発明の目的は、ステージが回転された場合でも観察対象物を所望の方向に容易に移動させることが可能でかつステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止可能な拡大観察装置を提供することである。
【課題を解決するための手段】
【0008】
(1)本発明に係る拡大観察装置は、観察対象物を撮像することにより撮像領域の画像データを取得する撮像部と、撮像部により取得される画像データに基づいて観察対象物の画像を観察画像として表示する表示部と、観察対象物が載置される載置面を有し、載置面に対して略垂直な回転軸の周りで撮像部に関して相対的に回転可能でかつ載置面に略平行な面内で互いに交差する第1および第2の軸に沿って移動可能に設けられたステージと、ステージの回転角度を検出する回転角度検出部と、第1および第2の軸に沿ってステージを撮像部に関して相対的に移動させるステージ駆動部と、ステージの移動方向の指示を受け付ける指示受付部と、ステージ駆動部に第1および第2の軸に沿ったステージの移動量を与えることによりステージの移動を制御する制御部とを備え、ステージの第1および第2の軸は、ステージと一体的に回転軸の周りで回転し、制御部は、回転角度検出部により検出された回転角度に基づいて、撮像部の撮像領域における観察対象物の移動方向が指示受付部により受け付けられた方向に一致するようにステージ駆動部に与える第1および第2の軸に沿った移動量を制御するように構成されたものである。
【0009】
その拡大観察装置においては、載置面に対して略垂直な回転軸の周りで撮像部に関して相対的に回転可能でかつ載置面に略平行な面内で互いに交差する第1および第2の軸に沿って移動可能にステージが設けられる。ステージの載置面上に観察対象物が載置される。撮像部によって観察対象物が撮像されることにより撮像領域の画像データが取得される。撮像部により取得される画像データに基づいて観察対象物の画像が観察画像として表示部により表示される。
【0010】
ステージの移動方向の指示が指示受付部により受け付けられることにより、制御部からステージ駆動部に第1および第2の軸に沿ったステージの移動量が与えられる。与えられる移動量に基づいて、ステージ駆動部により第1および第2の軸に沿って撮像部に関して相対的にステージが移動される。それにより、撮像領域に対して相対的に観察対象物が移動する。
【0011】
ステージの第1および第2の軸は、ステージと一体的に回転軸の周りで回転する。この場合、撮像部に関してステージの回転軸を移動させることなくステージを移動させることができる。そのため、ステージの回転軸上に撮像領域を配置することにより、ステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止することができる。それにより、撮像対象物の所望の領域を撮像しつつ観察対象物の向きを変更することができる。
【0012】
ステージが回転された場合には、回転角度検出部により検出される回転角度に基づいて撮像部の撮像領域における観察対象物の移動方向が指示受付部により受け付けられた方向と一致するようにステージ駆動部に与えられる第1および第2の軸に沿った移動量が制御される。これにより、ステージが回転された場合でも、撮像領域において観察対象物を所望の方向に容易に移動させることができる。
【0013】
(2)撮像部の撮像領域には、互いに交差する第3および第4の軸が設定され、制御部は、所定の校正時に、ステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を検出し、通常時に、検出された角度差に基づいてステージ駆動部に与えるステージの第1および第2の軸に沿った移動量を補正するように構成されてもよい。
【0014】
この場合、撮像領域の第3および第4の軸が予め定められた状態からずれても、撮像領域の第3および第4の軸を基準に観察対象物を移動させることができる。それにより、ユーザは、撮像部の向きを認識することなく表示部に表示される観察対象物を見ながら撮像領域において観察対象物を容易に移動させることができる。
【0015】
(3)制御部は、ステージ駆動部によりステージが移動された場合の観察画像の移動方向に基づいてステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を検出するように構成されてもよい。
【0016】
この場合、ステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を容易に検出することができ、検出された角度差を用いてステージの第1および第2の軸に沿った移動量を補正することができる。
【0017】
(4)ステージに第1および第2の軸の方向を特定するための方向特定部が設けられ、制御部は、観察画像に含まれる方向特定部の画像に基づいてステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を検出するように構成されてもよい。
【0018】
この場合、ステージの第1および第2の軸と撮像領域の第3および第4の軸との角度差を容易に検出することができ、検出された角度差を用いてステージの第1および第2の軸に沿った移動量を補正することができる。
【0019】
(5)表示部は、ステージにおける撮像領域の位置を示す位置特定画像を表示してもよい。
【0020】
この場合、ユーザがステージにおける撮像領域の位置を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0021】
(6)位置特定画像は、ステージにおける撮像領域よりも広い領域を表す第1の画像および撮像領域に対応する第2の画像とを含み、制御部は、回転角度検出部により検出された回転角度に基づいて第1の画像を第2の画像に対して相対的に回転させてもよい。
【0022】
この場合、ユーザがステージと撮像領域との位置関係および撮像領域に対するステージの回転角度を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0023】
(7)撮像部は、撮像領域よりも広い領域を撮像可能に構成され、表示部は、撮像部により広い範囲の撮像時に得られる画像データに基づいて第1の画像を表示してもよい。
【0024】
この場合、ユーザがステージ上の観察対象物と撮像領域との位置関係を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0025】
(8)第1の画像は、ステージにおける撮像領域よりも広い領域を特定するための図形を示してもよい。
【0026】
この場合、制御部の処理負担を増大させることなく容易に第1の画像を表示部に表示させることができる。
【0027】
(9)第1の画像は、ステージにおける撮像領域の相対的な移動可能範囲に対応してもよい。
【0028】
この場合、ユーザがステージにおける撮像領域の相対的な移動可能範囲を容易に認識することができる。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0029】
(10)指示受付部は、位置特定画像における任意の位置の指定を受け付け可能に構成され、制御部は、ステージにおいて指示受付部により指定された位置に対応する位置に撮像領域が移動するようにステージ駆動部によるステージの移動を制御してもよい。
【0030】
この場合、ユーザが位置特定画像上で所望の位置を指定することにより、その位置に対応するステージ上の位置が撮像領域となるようにステージが移動する。それにより、ユーザが観察対象物の所望の領域を撮像領域に効率よく位置合わせすることができる。
【0031】
(11)制御部は、ステージが移動された場合の観察画像の移動量を検出し、検出された移動量に基づいて観察画像の移動量とステージの移動量との関係を算出し、算出された関係に基づいてステージ駆動部に与える移動量を補正するように構成されてもよい。
【0032】
この場合、観察画像の移動量とステージの移動量との関係に誤差が生じることが防止される。それにより、観察画像に基づいてステージの移動を正確に制御することができる。
【発明の効果】
【0033】
本発明によれば、ステージが回転された場合でも、観察対象物を所望の方向に容易に移動させることが可能になるとともに、ステージの回転によって観察対象物の所望の領域が撮像領域から外れることを防止することが可能になる。
【図面の簡単な説明】
【0034】
【図1】本発明の一実施の形態に係る拡大観察装置の構成を示すブロック図である。
【図2】本発明の一実施の形態に係る拡大観察装置の顕微鏡を示す斜視図である。
【図3】顕微鏡の撮像装置がZ軸と平行に固定されている状態を示す模式図である。
【図4】顕微鏡の撮像装置がZ軸から所望の角度まで傾斜された状態を示す模式図である。
【図5】xt移動量およびyt移動量の算出方法の一例を示す模式図である。
【図6】CPUによるステージ駆動処理のフローチャートである。
【図7】ステージの載置面に載置される観察対象物の一例を示す平面図である。
【図8】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図9】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図10】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図11】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図12】ステージ装置の動作と表示部に表示される観察画像との関係を示す図である。
【図13】ステージの移動方向の補正について説明するための図である。
【図14】ステージの移動方向の補正について説明するための図である。
【図15】CPUによる傾斜角度取得処理のフローチャートである。
【図16】位置特定画像の一例を示す図である。
【図17】表示部による位置特定画像の表示例を示す図である。
【図18】表示部による位置特定画像の表示例を示す図である。
【図19】表示部による位置特定画像の表示例を示す図である。
【発明を実施するための形態】
【0035】
以下、本発明の一実施の形態に係る拡大観察装置について図面を参照しながら説明する。
【0036】
(1)拡大観察装置の構成
図1は、本発明の一実施の形態に係る拡大観察装置の構成を示すブロック図である。図1に示すように、拡大観察装置300は、顕微鏡100および画像処理装置200を備える。
【0037】
顕微鏡100は、撮像装置10、ステージ装置20および回転角度センサ30を含む。撮像装置10は、カラーCCD(電荷結合素子)11、ハーフミラー12、対物レンズ13、A/D変換器(アナログ/デジタル変換器)15、照明用光源16およびレンズ駆動部17を含む。ステージ装置20は、ステージ21、ステージ駆動部22およびステージ支持部23を含む。ステージ21上には、観察対象物Sが載置される。
【0038】
顕微鏡100において、水平面内で直交するX軸およびY軸、ならびにX軸およびY軸に垂直をZ軸(鉛直方向)が定義される。以下の説明では、X軸に平行な方向をX軸方向と呼び、Y軸に平行な方向をY軸方向と呼び、Z軸に平行な方向をZ軸方向と呼ぶ。
【0039】
照明用光源16は、例えば白色光を発生するハロゲンランプまたは白色LED(発光ダイオード)である。照明用光源16により発生された白色光は、ハーフミラー12により反射された後、対物レンズ13によりステージ21上の観察対象物Sに集光される。
【0040】
観察対象物Sにより反射された白色光は、対物レンズ13およびハーフミラー12を透過してカラーCCD11に入射する。カラーCCD11は、赤色波長の光を受光する複数の赤色用画素、緑色波長の光を受光する複数の緑色用画素、および青色波長の光を受光する複数の青色用画素を有する。複数の赤色用画素、複数の緑色用画素および複数の青色用画素は二次元的に配列される。カラーCCD11の各画素からは、受光量に対応する電気信号が出力される。カラーCCD11の出力信号は、A/D変換器15によりデジタル信号に変換される。A/D変換器15から出力されるデジタル信号は、画像データとして画像処理装置200に順次与えられる。カラーCCD11に代えてCMOS(相補性金属酸化膜半導体)イメージセンサ等の撮像素子が用いられてもよい。
【0041】
対物レンズ13は、例えばズームレンズであり、手動または自動で倍率を変更可能に構成される。対物レンズ13の倍率は、図示しない倍率検出部により検出される。また、対物レンズ13は、Z軸方向に移動可能に設けられる。レンズ駆動部17は、画像処理装置200の制御により対物レンズ13をZ軸方向に移動させる。それにより、撮像装置10の焦点の位置がZ軸方向において移動する。
【0042】
ステージ21は、Z軸に平行な回転軸の周りで回転可能にステージ支持部23上に設けられる。ステージ駆動部22は、画像処理装置200から与えられる移動指令信号(駆動パルス)に基づいてステージ21を撮像装置10に関して相対的に後述するx軸およびy軸に沿って移動させる。また、ステージ駆動部22は、画像処理装置200から与えられる回転指令信号(駆動パルス)に基づいてステージ21を撮像装置10に関して相対的にZ軸に平行な回転軸の周りで回転させる。ステージ21の回転軸の位置は、ステージ支持部23に関して一定である。ステージ駆動部22には、ステッピングモータが用いられる。回転角度センサ30は、ステージ21の回転角度を検出し、検出した角度を示す角度検出信号を画像処理装置200に与える。
【0043】
画像処理装置200は、インタフェース210、CPU(中央演算処理装置)220、ROM(リードオンリメモリ)230、記憶装置240、入力装置250、表示部260および作業用メモリ270を含む。
【0044】
ROM230には、システムプログラムが記憶される。記憶装置240は、ハードディスク等からなる。記憶装置240には、種々の制御プログラムおよびプログラムが記憶されるとともに、顕微鏡100からインタフェース210を通して与えられる画像データ等の種々のデータを記憶する。入力装置250は、キーボードおよびポインティングデバイスを含み、ユーザまたは外部装置からのステージ21の移動指示および回転指示を受け付け可能に構成される。本実施の形態では、移動指示は、移動方向および移動量を含み、回転指示は回転方向および回転角度を含む。ポインティングデバイスとしては、マウスまたはジョイスティック等が用いられる。
【0045】
表示部260は、例えば液晶ディスプレイパネルまたは有機EL(エレクトロルミネッセンス)パネルにより構成される。後述のように、表示部260には、互いに直交するxd軸およびyd軸が設定される。xd軸は、表示部260の画面の横方向に対応し、yd軸は、表示部260の画面の縦方向に対応する。
【0046】
作業用メモリ270は、RAM(ランダムアクセスメモリ)からなり、種々のデータの処理のために用いられる。CPU220は、記憶装置240に記憶された制御プログラムを実行することにより作業用メモリ270を用いて種々の処理を行うとともに、画像データに基づく画像を表示部260に表示させる。また、CPU220は、インタフェース210を通して顕微鏡100のカラーCCD11、照明用光源16、レンズ駆動部17およびステージ駆動部22を制御する。
【0047】
図2は、本発明の一実施の形態に係る拡大観察装置300の顕微鏡100を示す斜視図である。図2においては、X軸、Y軸およびZ軸が矢印で示される。
【0048】
図2に示すように、顕微鏡100はベース1を有する。ベース1上には、第1の支持台2が取り付けられるとともに、この第1の支持台2の前面に嵌め込まれるように第2の支持台3が取り付けられる。
【0049】
第1の支持台2の上端部には、連結部4がY軸方向に延びる回動軸R1の周りに回動可能に取り付けられる。連結部4には回動支柱5が取り付けられる。それにより、回動支柱5は連結部4の回動に伴って回動軸R1を支点としてZ軸に平行な垂直面内で傾斜可能である。使用者は、固定つまみ9により連結部4を第1の支持台2に対して固定することができる。
【0050】
連結部6の前面には環状の支持部7が取り付けられる。支持部7には、略円筒状の撮像装置10が取り付けられる。図2の状態では、撮像装置10の光軸R2はZ軸に平行である。支持部7は、撮像装置10を水平面内で移動させるための複数の調整ネジ41を有する。複数の調整ネジ41を用いて撮像装置10の光軸R2が回動軸R1に垂直に交差するように撮像装置10の位置を調整することができる。
【0051】
ベース1上の第2の支持台3の前面には、Z軸方向に摺動可能にスライダ8が取り付けられる。第2の支持台3の側面には、調整つまみ42が設けられる。スライダ8のZ軸方向(高さ方向)の位置は、調整つまみ42により調整可能である。
【0052】
ステージ装置20の支持部23は、スライダ8上に取り付けられる。ステージ21は、支持部23に対してZ軸に平行な回転軸R3の周りに回転可能に設けられる。ステージ21は、観察対象物Sが載置される載置面21aを有する。ステージ21には、水平面内で互いに直交するxt軸およびyt軸が設定される。ステージ21は、図1のステージ駆動部22によりxt軸およびyt軸に沿って移動可能に設けられる。ステージ21が回転軸R3の周りに回転すると、ステージ21のxt軸およびyt軸も回転する。それにより、ステージ21のxt軸およびyt軸は、X軸およびY軸に対して水平面内で傾斜する。
【0053】
ステージ21の載置面21a上における撮像装置10の撮像範囲(視野範囲)は、撮像装置10の倍率(対物レンズ13の倍率)により異なる。以下、撮像装置10の撮像範囲を撮像領域と呼ぶ、後述のように、撮像領域には、互いに直交するxr軸およびyr軸が設定される。撮像領域のxr軸およびyr軸は、表示部260のxd軸およびyd軸にそれぞれ対応する。
【0054】
撮像領域の画像データに基づいて、図1の表示部260に観察対象物Sの画像が表示される。以下、表示部260に表示される観察対象物Sの画像を観察画像と呼ぶ。後述のように、観察画像には、互いに直交するxi軸およびyi軸が設定される。観察画像のxi軸はステージ21のxt軸およびyt軸にそれぞれ対応する。
【0055】
図3は顕微鏡100の撮像装置10がZ軸と平行に固定されている状態を示す模式図である。また、図4は顕微鏡100の撮像装置10がZ軸に対して所望の角度まで傾斜された状態を示す模式図である。
【0056】
図3に示すように、回動支柱5がZ軸に平行な状態で固定つまみ9を締めることにより連結部4が第2の支持台3に固定される。それにより、撮像装置10の光軸R2がZ軸に平行な状態で回動軸R1に垂直に交差する。この場合、撮像装置10の光軸R2はステージ21の表面に垂直となる。
【0057】
固定つまみ9を緩めることにより連結部4が回動軸R1の周りに回動可能となり、回動支柱5が回動軸R1を支点として傾斜可能となる。それにより、図4に示すように、撮像装置10の光軸R2をZ軸に対して任意の角度θ1傾斜させることができる。この場合、撮像装置10の光軸R2は回動軸R1に垂直に交差する。同様にして、撮像装置10の光軸R2をZ軸に対して図4と逆側に任意の角度傾斜させることができる。
【0058】
したがって、ステージ21上の観察対象物Sの表面の高さを回動軸R1の高さに一致させることにより、観察対象物の同じ部分を垂直な方向および斜め方向から観察することができる。
【0059】
(2)ステージ装置の動作
ユーザまたは外部装置から画像処理装置200(図1)の入力装置250にステージ21の移動指示またはステージ21の回転指示が与えられると、CPU220がステージ駆動部22に移動指令信号または回転指令信号を与える。ステージ駆動部22は、CPU220からの移動指令信号に基づいてステージ21をxt軸およびyt軸に沿って移動させ、CPU220からの回転指令信号に基づいてステージ21を回転軸R3の周りで回転させる。
【0060】
本実施の形態では、CPU22からの移動指令信号は、xt軸に沿ったステージ21の移動量(以下、xt移動量と呼ぶ)およびyt軸に沿ったステージ21の移動量(以下、yt移動量と呼ぶ)を含む。CPU22からの回転指令信号は、ステージ21の回転方向および回転角度を含む。
【0061】
ここで、上記のように、ステージ21が回転軸R3の周りで回転されると、ステージ21のxt軸およびyt軸がX軸およびY軸に対して傾斜する。そのため、移動指示として与えられる移動方向にステージ21を移動させるためには、ステージ21の回転角度に応じてxt移動量およびyt移動量を制御する必要がある。本実施の形態では、回転角度センサ30により検出されたステージ21の回転角度に基づいて、移動指示として与えられる移動方向と実際のステージ21の移動方向とが一致するようにxt移動量およびyt移動量が算出される。
【0062】
図5は、xt移動量およびyt移動量の算出方法の一例を示す模式図である。図5の例では、xt軸およびyt軸がX軸およびY軸に対して角度θ0傾斜している。図5(a)に示すように、入力装置250に移動指示として移動方向A0および移動量B0が与えられる。この場合、図5(b)に示すように、移動方向A0および移動量B0に基づいて、X軸に沿った移動量dx1およびY軸に沿った移動量dy1が算出される。さらに、図5(c)に示すように、算出された移動量dx1,dy1および回転角度センサ30により検出されたステージ21の回転角度θ0に基づいて、xt移動量dx2およびyt移動量dy2が算出される。
【0063】
図6は、CPU220によるステージ駆動処理のフローチャートである。CPU220は、記憶装置240に記憶される制御プログラムに基づいて、図6のステージ駆動処理を行う。
【0064】
図6に示すように、まず、CPU220は、入力装置250にステージ21の移動指示が与えられたか否かを判定する(ステップS1)。ステージ21の移動指示が与えられた場合、CPU220は、回転角度センサ30からの角度検出信号に基づいて、ステージ21の回転角度を取得する(ステップS2)。次に、CPU220は、与えられた移動指示および取得された回転角度に基づいて、上記のように、xt移動量およびyt移動量を算出する(ステップS3)。次に、CPU220は、算出されたxt移動量およびyt移動量を移動指令信号としてステージ駆動部22に与える(ステップS4)。その後、CPU220は、ステップS1の処理に戻る。
【0065】
ステップS1において、ステージ21の移動指示が与えられていない場合、CPU220は、入力装置250にステージ21の回転指示が与えられたか否かを判定する(ステップS5)。ステージ21の回転指示が与えられていない場合、CPU220は、ステップS1の処理に戻る。ステージ21の回転指示が与えられた場合、CPU220は与えられた回転指示に基づいて、回転方向および回転角度を回転指令信号としてステージ駆動部22に与える(ステップS6)。その後、CPU220は、ステップS1の処理に戻る。
【0066】
このように、入力装置250に与えられた移動指示および回転角度センサ30により検出された回転角度に基づいてxt移動量およびyt移動量が算出され、算出されたxt移動量およびyt移動量がステージ駆動部22に与えられる。そのxt移動量およびyt移動量に基づいて、ステージ駆動部22によりステージ21がxt軸およびyt軸に沿って移動される。これにより、ステージ21が回転された場合でも、撮像領域において観察対象物Sを所望の方向に移動させることができる。
【0067】
なお、回転角度センサ30により検出されたステージ21の回転角度が、表示部260により表示されてもよい。この場合、ユーザが、ステージ21の回転角度を容易に認識することができる。
【0068】
本例では、移動指示として移動量および移動方向が与えられるが、これに限らない。例えば、移動すべき位置を示す座標(以下、目標座標と呼ぶ)が移動指示として与えられてもよい。例えば、X軸およびY軸を座標軸とするXY座標系およびxt軸およびyt軸を座標軸とするxtyt座標系が設定される。この場合、XY座標系における目標座標が移動指示として与えられる。与えられた目標座標が、ステージ21の回転角度に基づいてxtyt座標系における座標に変換される。変換された目標座標に基づいて、xt移動量およびyt移動量を算出することができる。
【0069】
また、移動指示として移動量および移動方向が与えられた場合でも、上記同様に、XY座標系およびxtyt座標系を用いて、xt移動量およびyt移動量が算出されてもよい。例えば、与えられた移動量および移動方向に基づいて、XY座標系における目標座標が算出される。算出された目標座標が、ステージ21の回転角度に基づいてxtyt座標系における座標に変換される。変換された目標座標に基づいて、xt移動量およびyt移動量を算出することができる。
【0070】
(3)ステージ装置の動作と観察画像との関係
以下、ステージ装置20の動作と表示部260に表示される観察画像との関係について説明する。図7は、ステージ21の載置面21aに載置される観察対象物Sの一例を示す平面図である。図8〜図10は、ステージ装置20の動作と表示部260に表示される観察画像との関係を示す図である。図8〜図10の(a)には、ステージ21と撮像領域との位置関係が示され、図8〜図10の(b)には、表示部260に表示される観察画像が示される。また、図8〜10の(a)には、X軸およびY軸、ステージ21のxt軸およびyt軸、ならびに撮像領域のxr軸およびyr軸が示され、図8〜図10の(b)には、表示部260のxd軸およびyd軸、ならびに観察画像のxi軸およびyi軸が示される。
【0071】
以下の説明において、方向An(nは自然数)は、ステージ21の移動または回転の方向であり、方向Cnは、観察画像IMの移動または回転の方向である。X軸およびY軸に関して相対的な方向Anは、表示部260のxd軸およびyd軸に関して相対的な方向Cnと一致する。また、移動量Bnは、ステージ21の移動量であり、移動量Dnは観察画像の移動量である。本例では、移動量Bnと移動量Dnとの比が一定である。
【0072】
図8(a)の状態では、ステージ21のxt軸およびyt軸がX軸およびY軸とそれぞれ一致している。また。撮像領域IRのxr軸およびyr軸がX軸およびY軸とそれぞれ一致している。この場合、図8(b)に示すように、観察画像IMのxi軸およびyi軸が表示部260のxd軸およびyd軸とそれぞれ一致する。
【0073】
図9(a)に示すように、回転方向A2および回転角度θ2が回転指示として入力装置250に与えられると、ステージ21が回転軸R3の周りでA2方向に角度θ2だけ回転される。この場合、図9(b)に示すように、観察画像IMが回転方向C2に角度θ2だけ回転する。
【0074】
なお、本例では、回転軸R3が撮像領域IRの中心部に位置するように、撮像装置10の位置が調整される。そのため、ステージ21が回転軸R3の周りで回転されても、観察対象物Sの所望の領域が撮像領域IRから外れることが防止される。したがって、観察対象物Sの所望の領域を撮像装置10により撮像しつつ観察対象物Sを回転させることができる。
【0075】
特に、図4の例のように、撮像装置10がZ軸に対して傾斜する状態で、ステージ21が回転された場合、観察対象物Sの所望の領域が種々の角度から撮像される。それにより、ユーザは、観察対象物Sの所望の領域を立体的に観察することができる。
【0076】
また、本例では、ステージ21の回転軸R3の位置がステージ支持部23に関して固定されるが、これに限らず、ステージ21の回転軸R3の位置がステージ支持部23に関して変更可能であってもよい。この場合、回転軸R3が撮像領域IRの中心部に位置するように、ステージ21の回転軸R3の位置を調整することができる。
【0077】
図10(a)に示すように、移動方向A3および移動量B3が移動指示として入力装置250に与えられると、ステージ21が移動方向A3に移動量B3だけ移動する。この場合、上記のように、移動方向A3、移動量B3および角度θ2に基づいてxt移動量およびyt移動量が算出され、そのxt移動量およびyt移動量に基づいてステージ21が移動される。図10(b)に示すように、観察画像IMは方向C3に移動量D3だけ移動する。
【0078】
(4)撮像装置のずれ
図8および図9の例では、撮像領域IRのxr軸およびyr軸がX軸およびY軸とそれぞれ一致しているため、X軸およびY軸に対するステージ21の移動方向と表示部260のxd軸およびyd軸に対する観察画像IMの移動方向とが一致する。実際には、組み付け誤差等により撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれる場合がある。また、撮像装置10が支持部7に着脱可能に設けられる場合には、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれた状態で撮像装置10が支持部7に取り付けられることがある。撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれている場合には、次のような問題が生じる。
【0079】
図11および図12は、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれている場合のステージ装置20の動作と表示部260に表示される観察画像との関係を示す図である。
【0080】
図11(a)の状態では、ステージ21のxt軸およびyt軸がX軸およびY軸とそれぞれ一致し、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してそれぞれ角度θ3だけ傾斜している。この場合、図11(b)に示すように、観察画像IMのxi軸およびyi軸が表示部260のxd軸およびyd軸に対してそれぞれ角度θ3だけ傾斜する。
【0081】
図12(a)に示すように、移動方向A4および移動量B4が移動指示として入力装置250に与えられると、ステージ21が移動方向A4に移動量B4だけ移動する。この場合、図12(b)に示すように、観察画像IMが方向C4と異なる方向C4’に移動量D4だけ移動する。
【0082】
このように、撮像領域IRのxr軸およびyr軸がX軸およびY軸に対してずれている場合、X軸およびY軸に対するステージ21の移動方向と表示部260のxd軸およびyd軸に対する観察画像IMの移動方向とが異なる。そのため、観察画像IMが所望の方向と異なる方向に移動する場合がある。そこで、本実施の形態では、観察画像IMの移動方向に基づいて、ステージ21のxt軸およびyt軸に対する撮像領域IRのxr軸およびyr軸の角度が検出される。検出された角度に基づいて、X軸およびY軸に対する撮像領域のxr軸およびyr軸の角度(以下、撮像領域傾斜角度と呼ぶ)が算出され、算出された撮像領域傾斜角度に基づいてステージ21の移動方向が補正される。
【0083】
図13および図14は、ステージ21の移動方向の補正について説明するための図である。ここでは、図11および図12の例における観察画像IMの移動方向に基づいてステージ21の移動方向が補正される例を説明する。図13(a)の観察画像IMは、図11(b)の観察画像IMに相当し、図14(b)の観察画像IMは、図12(b)の観察画像IMに相当する。また、本例では、ステージ21のxt軸およびyt軸がX軸およびY軸とそれぞれ一致するので、ステージ21のxt軸およびyt軸に対する撮像領域IRのxr軸およびyr軸の角度が撮像領域傾斜角度と等しい。
【0084】
まず、図13(a)に示すように、移動前の観察画像IMから特徴点CPが検出される。例えば、コントラストの変化が相対的に大きい部分等が特徴点CPとして検出される。続いて、ステージ21が移動される。この場合、特徴点CPが表示部260の画面から外れないように、撮像装置10の倍率に応じてステージ21の移動量が設定される。本例では、上記のように、ステージ21が移動方向A4に移動量B4だけ移動される。続いて、図13(b)に示すように、移動後の観察画像IMから例えばパターンマッチングにより特徴点CPが検出される。
【0085】
移動前の観察画像IMにおける特徴点CPの位置および移動後の観察画像IMにおける特徴点CPの位置に基づいて、特徴点CPの移動方向C4’が観察画像IMの移動方向として特定される。特定された移動方向C4’に基づいて、撮像領域傾斜角度θ3(図12)が取得される。
【0086】
取得された撮像領域傾斜角度θ3に基づいて、所望の方向に観察画像IMが移動するように、ステージ21の移動方向が制御される。具体的には、図14(b)に示すように、観察画像IMを方向C5に移動量D5だけ移動させたい場合、図14(a)に示すように、移動方向A5から撮像領域傾斜角度θ3だけずれた方向A5’に移動量B5だけステージ21が移動されるように、xt移動量およびyt移動量が算出される。算出されたxt移動量およびyt移動量に基づいて、ステージ21が移動される。これにより、所望の方向に観察画像IMが移動する。それにより、ユーザが、観察画像IMを見ながら容易に観察対象物Sの所望の領域を撮像領域IRに位置合わせすることができる。
【0087】
撮像領域傾斜角度の取得は、画像処理装置200のCPU220が、記憶装置240に記憶される制御プログラムに基づいて傾斜角度取得処理を行うことによって実現される。図15は、CPU220による傾斜角度取得処理のフローチャートである。傾斜角度取得処理が行われるタイミングは特に限定されない。例えば、画像処理装置200の起動時に傾斜角度取得処理が行われてもよく、またはユーザによる指示に応じて傾斜角度取得処理が行われてもよい。
【0088】
図15に示すように、まず、CPU220は、図示しない倍率検出部から撮像装置10の倍率(対物レンズ13の倍率)を取得する(ステップS11)。次に、CPU220は、取得された撮像装置10の倍率に基づいて、XY平面上におけるステージ21の移動量を決定する(ステップS12)。次に、CPU220は、撮像装置10の焦点が観察対象物Sの表面に一致するように、レンズ駆動部17により撮像装置10をZ方向に移動させる(ステップS13)。
【0089】
次に、CPU220は、図13(a)に示したように、移動前の観察画像IMから特徴点CPを検出する(ステップS14)。次に、CPU220は、ステップS12で決定された移動量だけステージ21を移動させる(ステップS15)。ステージ21の移動方向は、予め定められてもよく、検出される特徴点の位置に応じて適宜設定されてもよい。
【0090】
次に、CPU220は、移動後の観察画像IMから例えばパターンマッチングによりステップS13で検出された特徴点CPを検出する(ステップS16)。次に、CPU220は、ステップS13,S14で検出された特徴点CPの位置に基づいて、特徴点CPの移動方向を特定する(ステップS17)。次に、CPU220は、算出された移動方向に基づいて、撮像領域傾斜角度を取得し(ステップS18)、処理を終了する。
【0091】
取得された撮像領域傾斜角度は、記憶装置240または作業用メモリ270に記憶される。以後、入力装置250にステージ21の移動指示が与えられると、CPU220は、記憶された撮像領域傾斜角度を用いて、所望の方向に観察画像IMが移動するように、xt移動量およびyt移動量を算出する。
【0092】
このように、本実施の形態では、所定の校正時(傾斜角度取得処理時)に、観察画像IMの移動方向に基づいて、撮像領域傾斜角度が算出され、その後の通常時に、算出された撮像領域傾斜角度に基づいてステージ21の移動方向が補正される。それにより、観察画像IMが所望の方向に移動するように、ステージ21の移動を制御することができる。したがって、ユーザが、観察画像IMを見ながら容易に観察対象物Sの所望の領域を撮像領域IRに位置合わせすることができる。また、操作性を損なうことなく、観察目的またはユーザの好み等に応じて撮像領域傾斜角度を適宜変更することができる。
【0093】
(5)位置特定画像
本実施の形態では、表示部160がステージ21における撮像領域IRの位置を示す位置特定画像を表示することができる。図16は、位置特定画像の一例を示す図である。図16の位置特定画像NIは、ステージ21における現在の撮像領域IRよりも広い領域を表す広域画像BDおよび撮像領域IRに対応する撮像領域対応画像CIを含む。
【0094】
本例において、広域画像BDは、撮像装置10により取得された画像データに基づいて表示される。例えば、予め撮像装置10により現在よりも低倍率で撮像対象物Sが撮像されることにより、高視野の画像データが取得され、その画像データに基づいて広域画像BDが表示される。または、ステージ21がxt軸およびyt軸に沿って順次移動されるとともに、撮像装置10により撮像領域IRの画像データが順次取得される。取得された複数の画像データに基づく複数の画像が連結されることにより広域画像BDが表示される。
【0095】
また、広域画像BDは、ステージ21における撮像領域IRの相対的な移動可能範囲に対応することが好ましい。この場合、ユーザが、ステージ21における撮像領域IRの相対的な移動可能範囲を容易に認識することができる。それにより、ユーザが観察対象物Sの所望の領域を効率よく撮像領域IRに位置合わせすることができる。
【0096】
また、広域画像BDが、ステージ21における現在の撮像領域IRよりも広い領域を表す図形であってもよい。図形は、直線または曲線等によって構成され、例えば、矩形、円形、括弧および矢印等を含む。この場合、CPU220の処理負担を増大させることなく、広域画像BDを表示することができる。
【0097】
本例において、撮像領域対応画像CIは、矩形の図形である。広域画像BD内における撮像領域対応画像CIの位置が、ステージ21上における撮像領域IRの位置に対応する。
【0098】
図17〜図19は、表示部260による位置特定画像NIの表示例を示す図である。図17の例では、観察画像IMの一部と重なるように位置特定画像NIが表示される。この場合、ユーザは、位置特定画像NIに基づいてステージ21と撮像領域IRとの位置関係を容易に認識することができる。また、観察すべき観察対象物Sの部分が観察画像IMとして表示されていない場合、ユーザは、位置特定画像NIに基づいてステージ21を移動させるべき方向および移動量を容易に認識することができる。
【0099】
図17の状態でステージ21が回転されると、図18に示すように、観察画像IMが回転されるとともに、位置特定画像NIも回転される。これにより、ユーザは、撮像領域IRに対するステージ21の回転角度を容易に認識することができる。
【0100】
本実施の形態において、入力装置250は、位置特定画像NIにおける任意の位置の指定を受け付け可能に構成される。CPU220は、入力装置250により指定された位置に対応するステージ21上の位置が撮像領域IRとなるように、ステージ駆動部22によるステージ21の移動を制御する。
【0101】
例えば、図19(a)の位置特定画像NIにおいて、ユーザが入力装置250を操作することにより位置PSを指定する。この場合、図19(b)に示すように、位置PSに対応するステージ21上の位置が撮像領域IRとなるように、ステージ21が移動される。
【0102】
具体的には、CPU220が、入力装置250により指定された位置特定画像NI上の位置に基づいてxt移動量およびyt移動量を算出し、そのxt移動量およびyt移動量を移動指示としてステージ駆動部22に与える。ステージ駆動部22が、与えられた移動指示に基づいて、ステージ21を移動させる。これにより、ユーザは、観察対象物Sの所望の領域を撮像領域IRに効率よく位置合わせすることができる。
【0103】
CPU220は、ステージ21が移動された場合の観察画像IMの移動量に基づいて位置特定画像NIにおける画素単位の移動量と実際のステージ21の移動量との関係を算出し、算出された関係に基づいてステージ駆動部22に与えるxt移動量およびyt移動量を補正してもよい。
【0104】
例えば、図13に示したように、移動前後の観察画像IMから共通の特徴点CPを検出することにより、特徴点CPの移動量を画素単位で取得することができる。これにより、観察画像IMにおける画素単位の移動量と実際のステージ21の移動量との関係を算出することができる。また、撮像装置10の倍率および位置特定画像NIの倍率に基づいて、観察画像IMにおける画素単位の移動量と位置特定画像NIにおける画素単位の移動量との関係を算出することができる。その結果、位置特定画像NIにおける画素単位の移動量と実際のステージ21の移動量との関係を算出することができる。このようにして算出された関係に基づいてxt移動量およびyt移動量が補正されることにより、ステージ21の移動精度が向上される。
【0105】
本例では、位置特定画像NIにおいて位置が指定されることによりステージ21が移動されるが、これに限らず、観察画像IM上で所望の位置が指定されることによりステージ21が移動されてもよい。例えば、観察画像IM上の任意の位置が指定されると、その指定された位置に対応するステージ21上の位置が撮像領域IRの中心に移動するようにステージ21が移動される。
【0106】
この場合も、上記同様に、CPU220が、ステージ21が移動された場合の観察画像IMの移動量に基づいて観察画像IMにおける画素単位の移動量と実際のステージ21の移動量との関係を算出し、算出された関係に基づいてステージ駆動部22に与えるxt移動量およびyt移動量を補正してもよい。
【0107】
(6)他の実施の形態
上記実施の形態では、回転角度センサ30によりステージ30の回転角度が検出されるが、これに限らず、他の方法でステージ30の回転角度が検出されてもよい。例えば、ステージ30の載置面30aに、X軸またはY軸の少なくとも一方を表す線が付され、この線が撮像装置10により撮像されてもよい。この場合、観察画像IMにおける線の傾きに基づいて、ステージ30の回転角度を検出することができる。
【0108】
また、上記実施の形態では、観察画像IMの移動方向に基づいて、撮像領域傾斜角度が算出され、算出された撮像領域傾斜角度に基づいてステージ21の移動方向が補正されるが(図13〜図15参照)、他の方法でステージ21の移動方向が補正されてもよい。例えば、ステージ30の載置面30aにX軸またはY軸の方向を特定するための方向特定部が設けられ、観察画像IMに含まれる方向特定部の画像に基づいて撮像領域IRのxr軸およびyr軸に対するステージ21のxt軸およびyt軸の角度が検出され、検出された角度に基づいてステージ21の移動方向が補正されてもよい。方向特定部は、例えば、X軸またはY軸の少なくとも一方を表す線、突起または溝等である。
【0109】
具体的には、所定の校正時(例えば、画像処理装置200の起動時)に、ステージ30上の方向特定部が撮像され、観察画像IM中の方向特定部により示される方向に基づいて、撮像領域IRのxr軸およびyr軸に対するステージ21のxt軸およびyt軸の角度が検出される。これにより、初期状態における撮像領域IRとステージ21との相対的な角度が検出される。その後の通常時には、検出された角度を用いて、上記の例と同様にして、観察画像IMが所望の方向に移動するようにステージ21の移動方向を補正することができる。
【0110】
また、上記実施の形態では、移動指示としてステージ21の移動方向および移動量が与えられるが、これに限らず、ステージ21に関して相対的な撮像領域IRの移動方向および移動量が与えられてもよい。この場合、例えば撮像領域IRの移動方向および移動量が、ステージ21の移動方向および移動量に変換され、変換された移動方向および移動量に基づいて、上記同様に、xt移動量およびyt移動量が算出される。
【0111】
また、上記実施の形態では、ステージ駆動部22がCPU220からの回転指令信号に基づいてステージ21を回転させるが、これに限らず、手動でステージ21を回転させてもよい。
【0112】
(7)請求項の各構成要素と実施の形態の各部との対応関係
以下、請求項の各構成要素と実施の形態の各部との対応の例について説明するが、本発明は下記の例に限定されない。
【0113】
上記実施の形態においては、撮像装置10が撮像部の例であり、表示部260が表示部の例であり、ステージ21がステージの例であり、載置面21aが載置面の例であり、回転角度センサ30が回転角度検出部の例であり、ステージ駆動部22がステージ駆動部の例であり、入力装置250が指示受付部の例であり、CPU220が制御部の例である。
【0114】
また、支持部7が支持部の例であり、広域画像BDが第1の画像の例であり、撮像領域対応画像CIが第2の画像の例であり、xt軸およびyt軸が第1および第2の軸の例であり、xr軸およびyr軸が第3および第4の軸の例であり、X軸およびY軸が第5および第6の軸の例である。
【0115】
請求項の各構成要素として、請求項に記載されている構成または機能を有する他の種々の要素を用いることもできる。
【産業上の利用可能性】
【0116】
本発明は、種々の拡大観察装置に利用可能である。
【符号の説明】
【0117】
10 撮像装置
11 カラーCCD
12 ハーフミラー
13 対物レンズ
15 A/D変換器
16 照明用光源
17 レンズ駆動部
20 ステージ装置
21 ステージ
22 ステージ駆動部
23 ステージ支持部
30 回転角度センサ
100 顕微鏡
210 インタフェース
220 CPU
230 ROM
240 記憶装置
250 入力装置
260 表示部
270 作業用メモリ
300 拡大観察装置
BD 広域画像
CI 撮像領域対応画像
IM 観察画像
IR 撮像領域
NI 位置特定画像
S 観察対象物
【特許請求の範囲】
【請求項1】
観察対象物を撮像することにより撮像領域の画像データを取得する撮像部と、
前記撮像部により取得される画像データに基づいて観察対象物の画像を観察画像として表示する表示部と、
前記観察対象物が載置される載置面を有し、前記載置面に対して略垂直な回転軸の周りで前記撮像部に関して相対的に回転可能でかつ前記載置面に略平行な面内で互いに交差する第1および第2の軸に沿って移動可能に設けられたステージと、
前記ステージの回転角度を検出する回転角度検出部と、
前記第1および第2の軸に沿って前記ステージを前記撮像部に関して相対的に移動させるステージ駆動部と、
前記ステージの移動方向の指示を受け付ける指示受付部と、
前記ステージ駆動部に前記第1および第2の軸に沿った前記ステージの移動量を与えることにより前記ステージの移動を制御する制御部とを備え、
前記ステージの前記第1および第2の軸は、前記ステージと一体的に前記回転軸の周りで回転し、
前記制御部は、前記回転角度検出部により検出された回転角度に基づいて、前記撮像部の撮像領域における観察対象物の移動方向が前記指示受付部により受け付けられた方向に一致するように前記ステージ駆動部に与える前記第1および第2の軸に沿った移動量を制御するように構成された、拡大観察装置。
【請求項2】
前記撮像部の前記撮像領域には、互いに交差する第3および第4の軸が設定され、
前記制御部は、所定の校正時に、前記ステージの前記第1および第2の軸と前記撮像領域の前記第3および第4の軸との角度差を検出し、通常時に、検出された角度差に基づいて前記ステージ駆動部に与える前記ステージの前記第1および第2の軸に沿った移動量を補正するように構成された、請求項1記載の拡大観察装置。
【請求項3】
前記制御部は、前記ステージ駆動部により前記ステージが移動された場合の前記観察画像の移動方向に基づいて前記ステージの前記第1および第2の軸と前記撮像領域の前記第3および第4の軸との角度差を検出するように構成された、請求項2記載の拡大観察装置。
【請求項4】
前記ステージに前記第1および第2の軸の方向を特定するための方向特定部が設けられ、
前記制御部は、前記観察画像に含まれる前記方向特定部の画像に基づいて前記ステージの前記第1および第2の軸と前記撮像領域の前記第3および第4の軸との角度差を検出するように構成された、請求項2記載の拡大観察装置。
【請求項5】
前記表示部は、前記ステージにおける前記撮像領域の位置を示す位置特定画像を表示する、請求項1〜4のいずれかに記載の拡大観察装置。
【請求項6】
前記位置特定画像は、前記ステージにおける前記撮像領域よりも広い領域を表す第1の画像および前記撮像領域に対応する第2の画像とを含み、
前記制御部は、前記回転角度検出部により検出された回転角度に基づいて前記第1の画像を前記第2の画像に対して相対的に回転させる、請求項5記載の拡大観察装置。
【請求項7】
前記撮像部は、前記撮像領域よりも広い領域を撮像可能に構成され、
前記表示部は、前記撮像部により前記広い領域の撮像時に得られる画像データに基づいて前記第1の画像を表示する、請求項6記載の拡大観察装置。
【請求項8】
前記第1の画像は、前記ステージにおける前記撮像領域よりも広い領域を特定するための図形を示す、請求項6記載の拡大観察装置。
【請求項9】
前記第1の画像は、前記ステージにおける撮像領域の相対的な移動可能範囲に対応する、請求項6〜8のいずれかに記載の拡大観察装置。
【請求項10】
前記指示受付部は、前記位置特定画像における任意の位置の指定を受け付け可能に構成され、
前記制御部は、前記ステージにおいて前記指示受付部により指定された位置に対応する位置に前記撮像領域が移動するように前記ステージ駆動部による前記ステージの移動を制御する、請求項5〜9のいずれかに記載の拡大観察装置。
【請求項11】
前記制御部は、前記ステージが移動された場合の前記観察画像の移動量を検出し、検出された移動量に基づいて前記観察画像の移動量と前記ステージの移動量との関係を算出し、算出された前記関係に基づいて前記ステージ駆動部に与える移動量を補正するように構成された、請求項1〜10のいずれかに記載の拡大観察装置。
【請求項1】
観察対象物を撮像することにより撮像領域の画像データを取得する撮像部と、
前記撮像部により取得される画像データに基づいて観察対象物の画像を観察画像として表示する表示部と、
前記観察対象物が載置される載置面を有し、前記載置面に対して略垂直な回転軸の周りで前記撮像部に関して相対的に回転可能でかつ前記載置面に略平行な面内で互いに交差する第1および第2の軸に沿って移動可能に設けられたステージと、
前記ステージの回転角度を検出する回転角度検出部と、
前記第1および第2の軸に沿って前記ステージを前記撮像部に関して相対的に移動させるステージ駆動部と、
前記ステージの移動方向の指示を受け付ける指示受付部と、
前記ステージ駆動部に前記第1および第2の軸に沿った前記ステージの移動量を与えることにより前記ステージの移動を制御する制御部とを備え、
前記ステージの前記第1および第2の軸は、前記ステージと一体的に前記回転軸の周りで回転し、
前記制御部は、前記回転角度検出部により検出された回転角度に基づいて、前記撮像部の撮像領域における観察対象物の移動方向が前記指示受付部により受け付けられた方向に一致するように前記ステージ駆動部に与える前記第1および第2の軸に沿った移動量を制御するように構成された、拡大観察装置。
【請求項2】
前記撮像部の前記撮像領域には、互いに交差する第3および第4の軸が設定され、
前記制御部は、所定の校正時に、前記ステージの前記第1および第2の軸と前記撮像領域の前記第3および第4の軸との角度差を検出し、通常時に、検出された角度差に基づいて前記ステージ駆動部に与える前記ステージの前記第1および第2の軸に沿った移動量を補正するように構成された、請求項1記載の拡大観察装置。
【請求項3】
前記制御部は、前記ステージ駆動部により前記ステージが移動された場合の前記観察画像の移動方向に基づいて前記ステージの前記第1および第2の軸と前記撮像領域の前記第3および第4の軸との角度差を検出するように構成された、請求項2記載の拡大観察装置。
【請求項4】
前記ステージに前記第1および第2の軸の方向を特定するための方向特定部が設けられ、
前記制御部は、前記観察画像に含まれる前記方向特定部の画像に基づいて前記ステージの前記第1および第2の軸と前記撮像領域の前記第3および第4の軸との角度差を検出するように構成された、請求項2記載の拡大観察装置。
【請求項5】
前記表示部は、前記ステージにおける前記撮像領域の位置を示す位置特定画像を表示する、請求項1〜4のいずれかに記載の拡大観察装置。
【請求項6】
前記位置特定画像は、前記ステージにおける前記撮像領域よりも広い領域を表す第1の画像および前記撮像領域に対応する第2の画像とを含み、
前記制御部は、前記回転角度検出部により検出された回転角度に基づいて前記第1の画像を前記第2の画像に対して相対的に回転させる、請求項5記載の拡大観察装置。
【請求項7】
前記撮像部は、前記撮像領域よりも広い領域を撮像可能に構成され、
前記表示部は、前記撮像部により前記広い領域の撮像時に得られる画像データに基づいて前記第1の画像を表示する、請求項6記載の拡大観察装置。
【請求項8】
前記第1の画像は、前記ステージにおける前記撮像領域よりも広い領域を特定するための図形を示す、請求項6記載の拡大観察装置。
【請求項9】
前記第1の画像は、前記ステージにおける撮像領域の相対的な移動可能範囲に対応する、請求項6〜8のいずれかに記載の拡大観察装置。
【請求項10】
前記指示受付部は、前記位置特定画像における任意の位置の指定を受け付け可能に構成され、
前記制御部は、前記ステージにおいて前記指示受付部により指定された位置に対応する位置に前記撮像領域が移動するように前記ステージ駆動部による前記ステージの移動を制御する、請求項5〜9のいずれかに記載の拡大観察装置。
【請求項11】
前記制御部は、前記ステージが移動された場合の前記観察画像の移動量を検出し、検出された移動量に基づいて前記観察画像の移動量と前記ステージの移動量との関係を算出し、算出された前記関係に基づいて前記ステージ駆動部に与える移動量を補正するように構成された、請求項1〜10のいずれかに記載の拡大観察装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−83743(P2013−83743A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−222575(P2011−222575)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
[ Back to top ]