
拡張プライヤ
【課題】配管の接続部又は継手の2つの作用表面の距離を変更させるプライヤを提供する。
【解決手段】距離の変更は、半径方向圧着工程を含む継手の少なくとも1つの部品の弾性変形又は塑性変形に相関する。2つの拡張顎を備える伝達機構によって結合される2つのハンドレバーを備え、ハンドレバーが閉じるように移動すると、拡張顎の拡張移動が生じる。拡張顎のこのような拡張移動が、半径方向圧着工程によって接続部の部品のうちの少なくとも1つを塑性変形させるために使用される。
【解決手段】距離の変更は、半径方向圧着工程を含む継手の少なくとも1つの部品の弾性変形又は塑性変形に相関する。2つの拡張顎を備える伝達機構によって結合される2つのハンドレバーを備え、ハンドレバーが閉じるように移動すると、拡張顎の拡張移動が生じる。拡張顎のこのような拡張移動が、半径方向圧着工程によって接続部の部品のうちの少なくとも1つを塑性変形させるために使用される。
【発明の詳細な説明】
【優先権主張】
【0001】
関連出願の相互参照
本願は、2008年2月2日に出願された「Spreizzange」という名称の同時係属の独国特許出願第10 2008 007 303.2号明細書の優先権を主張するものである。
【技術分野】
【0002】
本発明は、概括的には、配管、パイプ、又は管(以下では「配管」)を別の配管、ポート、又はコネクタに、適切な継手を介して接続することができる配管の接続に使用されるプライヤに関する。
【背景技術】
【0003】
2つの作用表面を備えた部品を有する配管の接続部が知られている。これら作用表面が互いに向けて圧縮されて接続部を構築する。接続部の円錐状又は楔状の表面が、互いに向けて圧縮される部品の軸方向移動を接続部の少なくとも1つの部品の塑性変形に変換する。このような塑性変形は、接続部の部品を半径方向に圧縮して、固定又は封止された接続部を構築するために使用することができる。
【0004】
(特許文献1)に対応する(特許文献2)に、2つの部分、すなわち支持スリーブ及びクランプスリーブを有するクランプ継手が開示されている。配管の各端部を互いに接続するために、配管の一端部が拡径され、クランプ継手を収容する。拡径工程は追加のコストのかかるステップを表す。装置が、クランプスリーブがクランプ継手に当接する最終位置までクランプスリープを軸方向に圧縮する。別のクランプ技法は、配管上を通されるクランプリング及びスクイーズリングを使用する。支持スリーブが配管内に導入される。装置は、支持スリーブから構築されるストップ要素に達するまで、クランプリングをスクイーズリングに対して軸方向に圧縮する。このような変更形態では、配管の拡径化は必要ない。
【0005】
配管の別の接続は、ウェブサイトである(非特許文献1)に開示されており、この接続は衛生設備又は加熱装置に使用される。使用される配管は、高分子ポリエチレンで作ってよい。配管は、いかなるフラッシュ又はばりもなく製造される。さらに、配管を準備するために、各配管は所望の長さに切断され、切断は配管の縦軸に厳密に垂直である。スリーブが配管上に通される。特殊な拡径工具が配管の開口内に挿入される。拡径工具の使用後、継手が配管の拡径された開口断面内に挿入される。拡径された配管内の継手の最終位置は、配管の前表面が継手のストップ要素に当接することによって得られる。電気駆動ユニットを有する圧縮工具が、スリーブをストップ要素に対して軸方向に圧縮して、クランプ工程又は圧着工程を終える。
【0006】
金属製圧力封止接続のさらなる実施形態は、ウェブサイトである(非特許文献2)から取り入れることができ、開示されている製品は商標MapressMAMの下で流通している。この接続部は、厳しい条件下での、すなわち高圧、圧力変化、厳しい温度条件、及び起伏の下での業界用途に使用されている。分離不能の接続部を構築するために、ステンレス鋼製のリングが継手の円錐形外端領域上に通される。配管、継手、及びリングが、これら部品を互いに対して軸方向に圧縮することによって接続される。この接続は、いかなる封止要素も追加せずに構築することができる。継手は、5つの画定された圧力ゾーンを提供して、永久的に封止された接続を生み出すことができる。
【0007】
(特許文献3)では、圧力媒体によって動作して、接続部の部品を軸方向に移動させる圧縮工具の使用が提案されている。
【0008】
軸方向移動の適用は、手動操作工具の使用によって簡易化することができる。独国の(特許文献4)には、ピボットボルトを中心に旋回するハンドレバーを有する圧力プライヤが開示されている。ユーザが手で握る端部領域とは逆のハンドレバーの端部領域は、底部顎要素と旋回可能に結合される。底部顎要素は、圧縮方向を横断する方向に向けられた溝を備える。圧縮顎は、溝と係合するD字形の摺動ブロックを備える。圧縮顎は開口を構築するU字形であってよく、開口の幅は配管、スリーブ、又は摺動スリーブの端部の直径におおよそ相関する。外側から、圧縮顎は、スリーブのカラー及び摺動スリーブの前部外表面によって構築される作用表面をグリップする。ハンドレバーの互いに対する旋回移動により、底部顎要素及び圧縮顎は互いに対して旋回する。このような旋回移動は、一方の圧縮顎に接触するカラーと他方の圧縮顎に接触する摺動スリーブとの相対移動に相関する。底部顎要素とのハンドレバーの端部領域の旋回可能な結合により、軸方向移動中、圧縮顎は平行する向きに自動的に保持されて、圧縮顎と作用表面との均一の接触を提供する。(特許文献5)も同様の圧縮顎を開示している。
【0009】
手で適用されるさらなるプレスプライヤが、(特許文献6)から既知である。
【0010】
(特許文献4)には、ボルトによってX字形に旋回可能に結合されたハンドレバーを有するプレスプライヤが開示されている。工作物に面するハンドレバーの端部領域は、スリーブのためのU字形ネストを有する基部に旋回可能に結合される。これらスリーブは、ハンドレバーの互いに対する旋回移動により、軸方向に互いに対してプレスされる。U字形ネストはT溝を介して基部に取り外し可能に固定される。U字形ネストは、プレス移動中に平行する向きに保持される。これは、基部を第1のハンドレバーの一端部領域及び基部を第2のハンドレバーに固定されたピンに対してプレスするバネの両方と結合することによって行われる。(特許文献7)に対応する(特許文献5)及び(特許文献8)には、ネストを平行する向きに保持する同じ機構に基づくプレス工具の実施形態が開示されている。
【0011】
独国の(特許文献9)には、張力下で独国基準DIN471/472に従って保持リングを取り付けるとともに、これら保持リングを取り外すためのプライヤが開示されている。これらプライヤでは、閉じられた状態の2つのハンドレバーが、Hの輪郭におおよそ近似するように構築され、Hの横脚が2本の縦脚の上端部領域に対してシフトされ、2つのハンドレバーが横脚の中央に旋回可能に結合される。工作物に面するハンドレバーの端部領域は、ジョーの端部領域と旋回可能に結合する。ジョーは互いに交差して、交差点にジョイントを有するXを構築する。開いたハンドレバーでは、ジョーのネストが平行する向きで最小距離を有する。しかし、ハンドレバーの閉移動により、2つのネストによって成される角度が大きくなるにつれて、ネストは互いに離れる。
【0012】
(特許文献10)には、手で駆動され、ピストルのようなデザインを有し、管又は継手にスリーブをプレスするプレスプライヤが開示されている。ピストルのトリガは可動ハンドレバーを構築するのに対して、ピストルのハンドルは固定ハンドレバーを構築する。前部ネストはピストルの銃身の端部に固定される。別のネストが、ピストルの銃身に沿って移動するように案内される。ハンドレバーを繰り返し閉じる運動が、偏心駆動機構及び爪車結合によって可動ネストと固定前部ネストとのプレス運動に変換される。
【0013】
(特許文献11)には、マルチパーツハンドレバーが互いに結合されてXを構築するプライヤが開示されている。U字形ネストを構築する支持本体が、工作物に面するハンドレバーの端部領域と結合される。U字形ネストは、ハンドレバーの閉移動による分離移動中に平行する向きに保持される。そのために、各支持本体は、広がり軸を横断する向きを有するピンを備える。各ピンは、広がり軸に平行する内径を有する。ガイドロッドが、2つの支持本体の上記内径を貫通する。
【0014】
(特許文献12)には、ドリルマシンによって構築される外部駆動装置を有するプレス工具が開示されている。スピンドル駆動により、ドリルマシンの駆動運動は2つのプレートの並進平行移動に変換される。周縁にある各プレートは複数のU字形ネストを備える。異なる寸法を有するプレス工具を工作物又は管に使用するために、プレートの複数のネストは異なる開口サイズを有する。プレートを、プレス軸を中心として回転させて、異なるネストを動作位置に持ってくることが可能である。
【0015】
(特許文献13)に対応する(特許文献14)には、電気油圧式駆動装置を有するピストルのようなプレス工具が開示されている。クレードルに対して作用する油圧圧力が、並進自由度を有するネストを固定ネストに対して移動させて、工作物をプレスする。
【0016】
(特許文献15)には、L字形ハンドレバーを有するクリンププライヤが開示されている。別のハンドレバーが、Lの短い方の横脚に旋回可能に結合される。工作物用のネストがL字形ハンドレバーに固定される。別のネストが、プレス方向においてLの縦脚によって案内される。旋回可能なハンドレバーの湾曲した前表面が、ハンドレバーの旋回移動が2つのネストの並進相対移動に相関するように、可動ネストの線形歯と噛み合う歯を備える。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】米国特許第6,415,641号明細書
【特許文献2】欧州特許第1 055 488 B1号明細書
【特許文献3】独国特許第44 46 503 C1号明細書
【特許文献4】独国特許第93 07 957 U1号明細書、"Gebrauchsmuster"
【特許文献5】独国特許第28 51 282号明細書
【特許文献6】独国特許第36 17 529 A1号明細書
【特許文献7】米国特許第4,257,135号明細書
【特許文献8】独国特許第36 17 529 C2号明細書
【特許文献9】独国特許第20 2004 008 603 U1号明細書、"Gebrauchsmuster"
【特許文献10】独国特許第196 21 877 C2号明細書
【特許文献11】独国特許第10 2006 022 999 A1号明細書
【特許文献12】欧州特許第0 598 173 B1号明細書
【特許文献13】米国特許第6,415,641号明細書
【特許文献14】欧州特許第1 055 488 B1号明細書
【特許文献15】日本国特許出願第2000117655A号明細書
【非特許文献】
【0018】
【非特許文献1】www.schell−armaturen.de/deutsch/downloads/pex_bosch.pdf
【非特許文献2】www.mapress.de/geberit
【発明の概要】
【発明が解決しようとする課題】
【0019】
本発明の目的は、複数の作業分野及び/又は異なる用途若しくは幾何学的形状の異なる工作物において様々な用途を提供するプライヤを提供することである。
【課題を解決するための手段】
【0020】
本発明によれば、プライヤは、プライヤの作業移動中に分離して離れる2つの拡張顎を備える。ハンドレバーの閉移動は、拡張顎間及び拡張顎の作用表面間の距離の増大に一致する。拡張顎の距離のこのような増大は、接続部の半径方向クランプ又はクリンプと一致して接続部の少なくとも1つの部品の塑性変形を生じさせる。
【0021】
所望量の拡張力を生み出すために、プライヤは第1の伝達機構を備える。第1の伝達機構は、ハンドレバーに手で適用された作用力を拡張顎に伝達し、第1の伝達機構は、拡張顎に対して経路上で作用力を増大させる伝達比を含む。
【0022】
一実施形態によれば、適した第1の伝達機構の使用により、片手又は両手で力がハンドレバーに適用される際に、10,000、20,000、30,000、40,000、50,000、60,000、又は最高で70,000ニュートンの範囲内の拡張力が生み出される。
【0023】
従来技術から既知の任意の伝達機構を本発明のプライヤに使用することができ、本出願人の上記公開物も参照のこと。しかし、一実施形態によれば、第1の伝達機構はトグル機構を含む。トグル機構は、少数の部品及び単純な設計で必要とされる拡張力を提供する。複数のトグル機構をプレイヤに統合することも可能であり、複数のトグルレバー機構を並列構成で使用してもよく、又は順次に(直列構成で)使用してもよい。
【0024】
本発明によれば、拡張要素が提供される。これら拡張要素は、接続部又は継手の部品と相互作用又は係合するように設計され構成される。拡張要素は、第2の伝達機構を介して拡張顎に接続される。第2の伝達機構は、拡張顎の旋回移動を拡張軸に沿った拡張要素の(多少なりとも)並進する移動に変換する。この実施形態は、拡張顎の旋回移動が接続部との拡張顎の接触点の円上の移動に相関するという発見に基づく。拡張顎との作用表面の剛性結合の結果として、作用表面の接触点及びその向きが、拡張移動中に変化する。第2の伝達機構の使用は、拡張移動への作用表面及び向きの接触点のこのような従属性をなくす。第2の伝達機構には、任意の既知の運動学及び伝達又は伝動システムを使用することができる。
【0025】
拡張要素の案内及び位置合わせは、拡張軸に沿って互いに直接拡張要素を案内することによって改良することができる。
【0026】
本発明によれば、拡張要素が拡張軸に対して回転可能であることにより、1つの同じネストをプライヤの他の部品に対して異なる相対位置に使用することが可能である。
【0027】
本発明の別の実施形態では、トグル機構内に、トグルレバージョイントが、ハンドレバーが開かれ、拡張顎が閉じられる際に第1の角度を構築する。この角度は、ハンドレバーが閉じられる移動に伴ってトグルレバージョイントの第2の角度まで増大し、第2の角度は第1の角度より大きい。この実施形態は、拡張工程中、拡張顎の拡張移動が拡張力の増大を必要とするという発見に基づく。拡張動作の開始時に、接続部の部品は軸方向摺動移動においてのみ移動することができる。続く拡張段階中に、接続部の一部品が変形して、接続部の別の部品に接触することができる。さらに続く拡張段階中に、拡張顎の拡張移動により、複数の部品が半径方向に変形する。したがって、必要とされる拡張力は、拡張工程全体を通して増大する。このような発見は、拡張工程全体を通してのトグルレバージョイント角度の上記増大によって考慮される。このような角度の増大は、拡張顎に向けてハンドレバーに手で与えられる力の伝達を通して伝達比の増大に繋がる。一方、このような伝達比の「自動的に適合される」変更は、運動学に対して以下の影響を有する。拡張移動の開始時に、互いに対するハンドレバーの小さな移動が、第1の拡張段階での拡張顎の大きな拡張移動に相関する。したがって、伝達比の自動的に適合される変更は、容易で高速な第1の拡張段階を保証することができる。それに代えて、より大きな拡張力を必要とする続く拡張段階では、拡張力は、より大きな伝達比を含み、圧着工程の高感度のフィードバックをユーザに与えるハンドレバーのより大きな移動に相関することができる。
【0028】
本発明のプライヤの特別な実施形態によれば、トグルレバージョイントの第2の角度は、拡張移動の終わりに対して、トグルレバー結合の最適な伝達比が使用されるように170度〜179度の範囲内である。
【0029】
本発明のプレイヤの別の実施形態によれば、プライヤは、第1の拡張顎に固く接続される第1のハンドレバーを有する「固定」部を備える。固定部は、圧力ロッドを軸受けする役割を果たす。さらに、第2の拡張顎は固定部に旋回可能に結合される。プライヤの可動部は、端部領域において、第2の拡張顎の端部領域に旋回可能に結合されるのに対して、プライヤの可動部の他端部領域は第2のハンドレバーを構築する。さらに、プライヤの可動部は圧力ロッドに旋回可能に結合される。結合点は、ハンドレバーと第2の拡張顎に結合された端部領域との間に配置される。このような設計で構築されるプライヤは、単純であるが、ハンドレバーの閉移動に伴って作用表面の拡張移動に繋がる効率的な構造を有する。
【0030】
本発明の一実施形態では、第2の伝達機構が各拡張顎に配置されるジョイントによって構築される。
【0031】
さらに、本発明は、各拡張要素に部品又は工作物用のネストを構築することを示唆する。拡張要素が取り外し可能又は交換可能な場合、異なる拡張要素を同じプライヤに使用して、異なる接続部を構築することができる。したがって、複数の拡張要素でプレイヤを構成する工具セットを提供することができる。しかし、1つの同じ拡張要素が複数の交換可能なネストを備えることも可能である。
【0032】
さらに、本発明は、拡張要素が円周方向に等距離で配置された複数のネストを備える、多機能用途用のプライヤを示唆する。拡張要素が拡張軸に対して回転可能なことにより、1つの同じネストをプライヤのその他の部品に対する異なる相対位置で使用することが可能である。したがって、例えば、同じ1つのネストを異なる動作位置で使用することができる。拡張要素の回転自由度は、複数のネストが回転を介して単一の動作位置に運ぶことができるように、拡張要素のネストがある位置から別の位置に回転する機会を与える。
【0033】
さらに、プライヤは、固定ユニット、静止ユニット、又は固定ユニットを備えることができる。このようなユニットは、拡張軸に対して規定の回転角度で拡張要素を固定するために使用される。
【0034】
本発明のさらなる実施形態では、ユニットは、バネ付勢静止ユニット、磁気静止ユニット、又は固定ユニットを使用して構築される。ここで、「静止ユニット」は、安定位置から移動するために向けられる規定の力レベルよりも低い力が、安定位置が維持されるような対応する戻る力を発生させるような、位置を安定化するユニットを説明している。それに代えて、規定の力レベルを超える場合、安定位置から出る。たった1つの例を与えると、相対移動した部品の溝、内径等に対してバネによって付勢される静止球を使用して静止ユニットを構築することができる。球としての静止要素の直径及び溝、内径等の幾何学的形状又は外形の選択によって、静止特徴及び上記規定の力レベルが決まる。別の実施形態では、静止ユニットは、磁石によって生じる戻り力を使用することができ、規定の力レベルは、永久磁石の寸法及び磁気特性に依存する。しかし、本発明によれば、「固定ユニット」は、相対位置が正固定下で固定されるユニットを説明している。ユーザの手での作動なしでは、固定ユニットによって固定された部品を固定位置から、固定ユニットの少なくとも1つの部品の塑性変形又は破壊なしで移動させることは不可能である。
【0035】
リセスを有するか、又はスリーブとして1つの拡張要素を設計する際に、簡単で効率的な案内が与えられ、スリーブ又はリセスの内径は他方の拡張要素の突起を収容する。突起とスリーブのリセス又は内径との係合により、拡張軸に沿った拡張要素の相対移動の案内を保証する。突起及びスリーブのリセス又は内径が円形の断面を有する場合、案内により、拡張軸に沿った並進自由度及び拡張軸を中心とした互いに対する拡張要素の回転自由度の両方が保証される。回転自由度に関心がない場合、このような回転度は、突起及びスリーブのリセス又は内径の外形に非円形に対応する断面を与えることによって阻止することができる。
【0036】
本発明によるプライヤ(ハンドレバーの閉移動に伴った拡張顎の拡張移動を含む)は、配管又は管の接続に使用される。このプレイヤを使用する場合、接続部の2つの部品が拡張顎又は拡張要素に直接又は間接的に接触する。プライヤのハンドレバーの閉移動及び拡張顎の拡張移動に伴い、接続部の少なくとも1つの部品が半径方向に塑性変形する。
【0037】
本発明の他の特徴及び利点は、以下の図面及び詳細な説明を吟味することによって当業者には明らかになろう。本明細書において、このような追加の特徴及び利点はすべて特許請求の範囲によって規定される本発明の範囲内に含まれることが意図される。
【0038】
本発明を以下の図面を参照してよりよく理解することができる。図面内の部品は必ずしも一定の縮尺で描かれておらず、それに代えて本発明の原理を明らかに示すことに重点が置かれている。図面中、同様の参照番号はいくつかの図を通して対応するパーツを示す。
【図面の簡単な説明】
【0039】
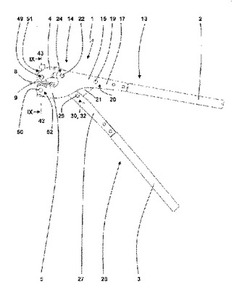
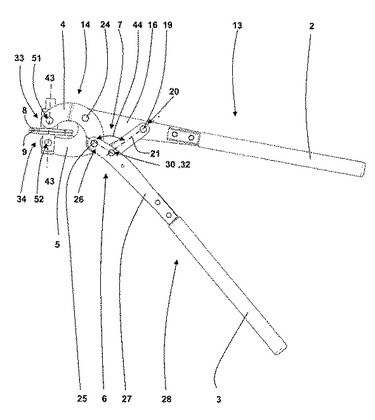
【図1】ハンドレバーが開かれた状態の本発明のプライヤの平面図である。
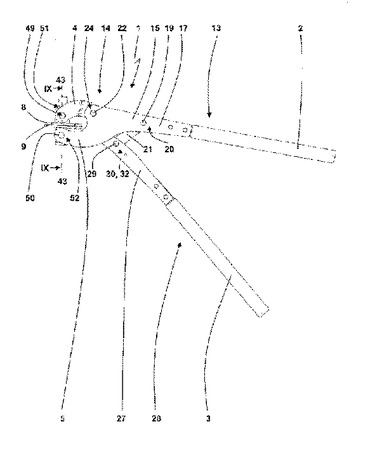
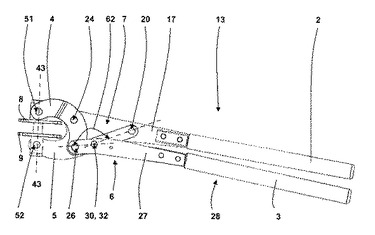
【図2】ハンドレバーが部分的に閉じられた状態の図1による本発明のプライヤの平面図である。
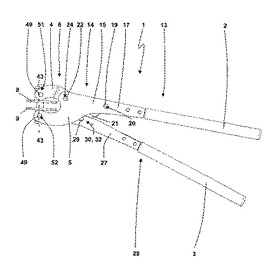
【図3】ハンドレバーが完全に閉じられた状態の図1及び図2による本発明のプライヤの平面図である。
【図4】プライヤの変換機構を有する内部を示すために、プライヤの固定の支持プレートが除去された、図1に対応するプライヤの平面図である。
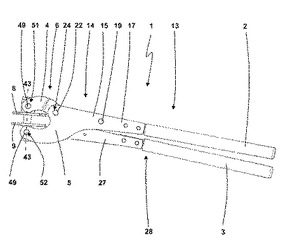
【図5】プライヤの変換機構を有する内部を示すために、プライヤの固定の支持プレートが除去された、図3に対応するプライヤの平面図である。
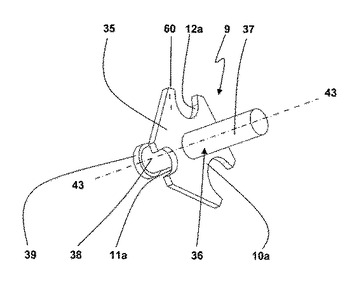
【図6】3次元図での本発明のプライヤの第1の拡張顎に関連する第1の拡張要素である。
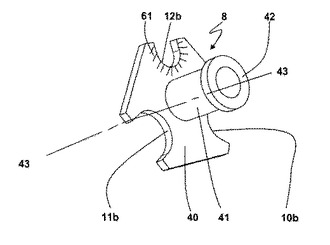
【図7】3次元図での本発明のプライヤの第2の拡張顎に関連する第2の拡張要素である。
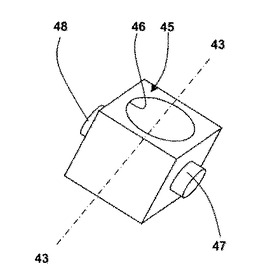
【図8】拡張顎と拡張要素との間に配置される変換機構の軸受体を3次元図で示す。
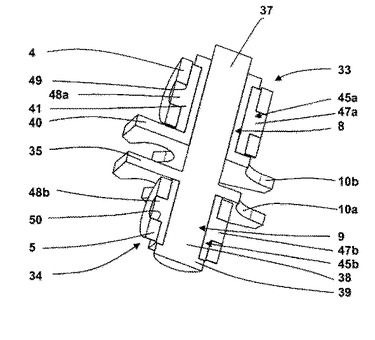
【図9】互いに手動可能に案内される、軸受体に配置される2つの拡張要素を有する本発明のプライヤの組み立て群の3次元図である。
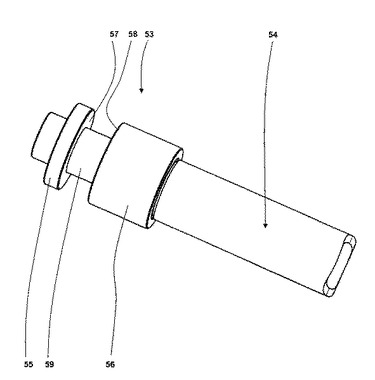
【図10】本発明のプライヤを使用して作用表面を拡張することによって半径方向にクリンプすることができる、配管の接続部を示す。
【発明を実施するための形態】
【0040】
これより図面をさらに詳細に参照すると、図面は本発明のプライヤ1の実施形態を示し、第1の変換機構6がハンドレバー2、3と拡張顎4、5との間に配置される。変換機構6はトグル機構7を含む。しかし、本発明の基本原理、特に、
−ハンドレバー2、3の閉移動に伴う拡張顎4、5の拡張移動、
−複数のネスト10、11、12を有する拡張要素8、9の使用、及び/又は
−拡張要素8、9と拡張顎4、5との回転可能又はリボルバーのような結合
は、トグル機構7を有する変換機構6を必ずしも必要とするわけではない。異なるトグル機構、カム駆動、伝動ユニット、結合バー駆動等を有する任意の変換機構6を使用することも可能である。さらに、本発明は、ハンドレバー2、3の互いに向けての旋回移動又は並進移動が拡張顎4、5の並進移動をもたらす原理に基づくプライヤも含む。
【0041】
図1によるプライヤ1は、ハンドレバー2を構築する固定部13を備える。固定部3は、プライヤのヘッド14に面する端部領域において2つの平行する支持プレート15、16を担持する。支持プレート15、16は、ネジ又はリベットを使用して固定部13に固定される。支持プレート15、16は、プライヤのハンドレバー2とヘッド14との間に延びる延在部に一体的に構築される。さらに、支持プレート15、16は、第1の近似ではC字形の拡張顎5を一体的に構築する。C字形拡張顎5は、プライヤのヘッド14に面する延在部17の端部領域から延びる。C字形拡張顎5の両端部領域とハンドレバー2の縦軸とを結ぶ仮想接続線は、延在部17に対して約135度±20度の角度を成す。
【0042】
延在部17の両端部領域間のおおよそ中間において、支持プレート15、16は、支持プレート15、16の平面を横断すると共に、図1〜図5の図平面を横断する向きを有する旋回ボルト19を担持する。旋回ボルト19は、旋回ボルト19を中心にして旋回自由度を有して圧力ロッド21の端部領域を保持するジョイント20を構築する役割を果たす。
【0043】
別の旋回ボルト22が、プライヤのヘッド14に面する延在部17の端部領域に配置され、旋回ボルト19に平行する向きを有する。旋回ボルト22が支持プレート15、16によって保持される。旋回ボルト22は、拡張顎4のジョイント24を構築する役割を果たす。拡張顎4は第1の近似においてC字形であるか、又は円周角150度〜180度を有する円環のセグメントの形状を含む。延在部27に面する拡張顎4の端部領域は、図1〜図5による図平面を横断する向きを有するピボットボルト25に結合されて、ジョイント26を構築する。ピボットボルト25は、支持プレート15、16によって回転可能に支持される。ハンドレバー3に固定される延在部27及びハンドレバー3は、プライヤの可動部28を構築する。
【0044】
図1及び図4はハンドレバー2、3が開かれた状態のプライヤを示す。開状態では、拡張顎4、5の外端部領域は最小距離を有する。ジョイント20に対向する圧力ロッド21の端部領域は、図1〜図5の図平面に垂直な向きを有するピボットボルト29を介してプライヤの可動部28に旋回可能に結合する。ピボットボルト29と共に構築されるジョイント30は、延在部27、特にジョイント26に隣接して配置される。ジョイント26、30の距離はプライヤの可動部28の長さの1/10又は1/20の間であることが可能である。
【0045】
トグル機構7はプライヤの可動部28及び圧力ロッド21と共に構築され、ジョイント30はトグルレバージョイント32を構築する。図1及び図4に示すプライヤ1の状態では、圧力ロッド21及びジョイント26と30との間の可動部28の領域は、トグル機構の第1の角度44を構築する。第1の角度44は90度〜140度の範囲内にあってよく、特に100度〜120度の範囲内にあってよい。図2に示すプライヤの部分的に閉じられた状態では、拡張顎4、5の外端部領域の距離は、ジョイント24を中心とした時計回り方向での拡張顎4の旋回移動と共に増大する。図3及び図5によるプライヤ1の完全に閉じた状態では、ハンドレバー2、3は最小距離に達しており、ハンドレバーはおおよそ平行する向きを有する。このような状態は、最大距離に達した拡張顎4、5の外端部領域に対応する。このような状態では、トグル機構は第2の角度62を構成する。
【0046】
拡張顎4、5が作用表面を直接構築することが可能である。このような場合、作用表面を、拡張顎4、5の外端部の、互いに離れる方向を向いた拡張顎4、5の側に構築することが可能である。接続部の部品の作用表面は拡張顎4、5のこれら作用表面に接触して、拡張力を伝動する。しかし、示される実施形態では、プライヤは追加の拡張要素8、9を備える。拡張要素8、9は、第2の変換機構33、34を介して拡張顎4、5に結合される。図6及び図7では、拡張要素8、9は単一の部品として示される。拡張要素9は剛性三角形プレート35を使用して構築される。ガイドボルト36がプレート35の中央を貫通して延びる。ガイドボルト36はプレート35の各側に突起37、38を構築し、突起38はその端部領域にカラー39を構築する。プレート35の隅には、ネスト10a〜12aを構築するリセスが備えられる。ネスト10a〜12aは半円形を有してもよく、又はU字若しくはフォークのような形状であってもよく、異なる開口幅を有することができる。
【0047】
拡張要素8は、プレート35の形状と同様の形状を有するプレート40を使用して構築される。プレート40はネスト10b〜12bを構築するリセスを備える。拡張顎4に面するプレート40の側において、プレート40の中央に、外端部領域にカラー42を有する中空スリーブ41が担持される。
【0048】
拡張要素8、9が同軸に位置合わせされた場合、貫通穴を構築するスリーブ41を有する拡張要素8は、拡張軸43−43に沿った縦方向において案内を構築する拡張要素9の突起37に通される。突起37並びに図6及び図7に示されるスリーブ41の内径が円形断面であるため、拡張要素8、9はさらなる回転自由度を含む。代替の実施形態では、非円形断面を使用して回転自由度をなくし、拡張軸43−43に沿った並進自由度を残してもよい。さらに、円形の外形と異なる断面の外形が、組み立てられた状態でのネスト10〜12の向きの固定位置を決定することができる。
【0049】
軸受体45が、第1の近似では立方体形状を有する。図8参照。軸受体45は内部貫通穴46を備える。さらに、軸受体45は、両側に配置され、拡張軸43−43及び内径46の縦軸を横断して延びる軸受ピン47、48を備える。
【0050】
図9は、拡張軸43−43を備える平面を通るプライヤ1の断面図を示す。図9から見て取れるように、軸受体45bは、プレート35とカラー39との間にぴったりと合って入り、突起38は内径46を通って延びる。別の対応する軸受体45aは、拡張要素8のプレート40とカラー42との間にぴったり合って入る。突起41は、軸受体45bの内径46の直径よりも大きな直径を有する内径46を通って延びる。しかし、拡張要素8、9が、突起38の外径が、軸受体45a、45bの両方の内径46が同じ直径を備えるようにスリーブ41の外径に対応するように設計されることも可能である。
【0051】
軸受体45aのピン47、48は拡張顎4の内径49内に旋回可能に取り付けられ、図1〜図5の図面平面に垂直する旋回軸を構築する。内径49は、拡張顎4の外端部領域に配置される。示される実施形態では、拡張顎4は、平行する向きの拡張顎の2つの部分で構築される。2つの部分はそれぞれ内径49を有し、軸受体45aは拡張顎の2つの部分の間に収容される。他方の軸受体45bの軸受ピン47、48は拡張顎5の内径50内に支持され、内径50は、軸受体45bは支持プレート15と16との間に保持されるように両支持プレート15、16内に設けることができる。軸受体47、48は内径49、50と一緒に、拡張顎4、5に対して旋回自由度を有して軸受体45及び拡張要素8、9を保持するジョイント51、52を構築する。したがって、第2の変換機構33、34が、軸受体45a、45b、内径49、50、及びジョイント51、52を使用して構築される。
【0052】
図示されていない固定ユニットを使用して、拡張軸43、44を中心とした拡張要素8、9の回転自由度を固定することができる。このような固定ユニットは、軸受体45の上面又は下面とカラー39、42又はプレート35、40との間に静止接続を提供する静止球又は静止要素を使用して構築することができる。
【0053】
ハンドレバー2の旋回移動中、拡張軸43−43は、図1において水平方向にわずかに移動する。これは、ジョイント51がプライヤの固定部13とジョイント52との円形経路上での相対的に移動することによる。したがって、第2の変換機構が拡張軸に沿った拡張要素の並進移動を生み出すという特許請求の特徴は、許容範囲内の角度又はわずかな湾曲を有する実質的な並進移動を含む必要がある。いずれの場合でも、変換機構33、34は、拡張要素8、9がハンドルレバー2、3の移動中に平行する向きに保持されることを保証する。
【0054】
図10は、配管54の軸方向において2つの部品55、56を軸方向に拡張することによって半径方向にプレスされる配管54の接続部53を示す。部品55、56は、互いに面する作用表面57、58を備える。図10に示される実施形態では、作用表面57、58はリング形である。接続部53は、プライヤ1の使用によって作用表面57、58を軸方向に拡張し、離れるように軸方向にプレスすることによってクリンプされる。部品55、56を拡張するために、プライヤ2は、ハンドレバー2、3が完全に開かれた図1に示される開始状態になる。拡張要素8、9は、接続部53に適した10〜12が互いに位置合わせされて、特にプライヤ1の外側又は前側に配置されるように回転する。ネスト10〜12の開き幅は、ネストが接続部53の円筒形セクション59上に通されるのに適したように選択される。続く拡張ステップにおいて、プライヤは、プレート35、40が作用表面57と58との間に導入されるように、接続部53に向かって移動する。セクション59はネスト10〜12のうちの1つの中に入る。
【0055】
これは、選択されるネスト12について説明される例としてであり、互いに離れる方向のプレート35、40の側に、拡張要素8、9の作用表面60、61が構築される。図6及び図7に示される実施形態では、作用表面60、61はU字形である。互いに向かってのハンドレバー2、3の旋回移動により、プレート35、40は、作用表面60、61が作用表面57、58と接触するように互いに拡張される。ユーザによる作用力の適用と一緒に互いに向けてのハンドレバー2、3のさらなる旋回移動により、作用表面60、57と61、58との間に拡張力を生み出し、部品55、56の拡張移動を生じさせる。拡張移動は、半径方向圧着工程並びに弾性変形及び/又は塑性変形の生成に相関する。
【0056】
プライヤ2が接触している作用表面は、継手の部品によって構築される。しかし、作用表面57、58のうちの少なくとも一方を配管又は管の端部によって構築されることも可能である。接続部の組立体は、継手の部品及び/又は管両端の弾性変形及び/又は塑性変形を含み得る。
【0057】
本発明の主旨及び原理から実質的に逸脱することなく、多くの変形形態及び変更形態を本発明の好ましい実施形態に対して行うことができる。このような変更形態及び変形形態はすべて、以下の特許請求の範囲によって規定される本発明の範囲内に含まれるものと本明細書では意図される。
【優先権主張】
【0001】
関連出願の相互参照
本願は、2008年2月2日に出願された「Spreizzange」という名称の同時係属の独国特許出願第10 2008 007 303.2号明細書の優先権を主張するものである。
【技術分野】
【0002】
本発明は、概括的には、配管、パイプ、又は管(以下では「配管」)を別の配管、ポート、又はコネクタに、適切な継手を介して接続することができる配管の接続に使用されるプライヤに関する。
【背景技術】
【0003】
2つの作用表面を備えた部品を有する配管の接続部が知られている。これら作用表面が互いに向けて圧縮されて接続部を構築する。接続部の円錐状又は楔状の表面が、互いに向けて圧縮される部品の軸方向移動を接続部の少なくとも1つの部品の塑性変形に変換する。このような塑性変形は、接続部の部品を半径方向に圧縮して、固定又は封止された接続部を構築するために使用することができる。
【0004】
(特許文献1)に対応する(特許文献2)に、2つの部分、すなわち支持スリーブ及びクランプスリーブを有するクランプ継手が開示されている。配管の各端部を互いに接続するために、配管の一端部が拡径され、クランプ継手を収容する。拡径工程は追加のコストのかかるステップを表す。装置が、クランプスリーブがクランプ継手に当接する最終位置までクランプスリープを軸方向に圧縮する。別のクランプ技法は、配管上を通されるクランプリング及びスクイーズリングを使用する。支持スリーブが配管内に導入される。装置は、支持スリーブから構築されるストップ要素に達するまで、クランプリングをスクイーズリングに対して軸方向に圧縮する。このような変更形態では、配管の拡径化は必要ない。
【0005】
配管の別の接続は、ウェブサイトである(非特許文献1)に開示されており、この接続は衛生設備又は加熱装置に使用される。使用される配管は、高分子ポリエチレンで作ってよい。配管は、いかなるフラッシュ又はばりもなく製造される。さらに、配管を準備するために、各配管は所望の長さに切断され、切断は配管の縦軸に厳密に垂直である。スリーブが配管上に通される。特殊な拡径工具が配管の開口内に挿入される。拡径工具の使用後、継手が配管の拡径された開口断面内に挿入される。拡径された配管内の継手の最終位置は、配管の前表面が継手のストップ要素に当接することによって得られる。電気駆動ユニットを有する圧縮工具が、スリーブをストップ要素に対して軸方向に圧縮して、クランプ工程又は圧着工程を終える。
【0006】
金属製圧力封止接続のさらなる実施形態は、ウェブサイトである(非特許文献2)から取り入れることができ、開示されている製品は商標MapressMAMの下で流通している。この接続部は、厳しい条件下での、すなわち高圧、圧力変化、厳しい温度条件、及び起伏の下での業界用途に使用されている。分離不能の接続部を構築するために、ステンレス鋼製のリングが継手の円錐形外端領域上に通される。配管、継手、及びリングが、これら部品を互いに対して軸方向に圧縮することによって接続される。この接続は、いかなる封止要素も追加せずに構築することができる。継手は、5つの画定された圧力ゾーンを提供して、永久的に封止された接続を生み出すことができる。
【0007】
(特許文献3)では、圧力媒体によって動作して、接続部の部品を軸方向に移動させる圧縮工具の使用が提案されている。
【0008】
軸方向移動の適用は、手動操作工具の使用によって簡易化することができる。独国の(特許文献4)には、ピボットボルトを中心に旋回するハンドレバーを有する圧力プライヤが開示されている。ユーザが手で握る端部領域とは逆のハンドレバーの端部領域は、底部顎要素と旋回可能に結合される。底部顎要素は、圧縮方向を横断する方向に向けられた溝を備える。圧縮顎は、溝と係合するD字形の摺動ブロックを備える。圧縮顎は開口を構築するU字形であってよく、開口の幅は配管、スリーブ、又は摺動スリーブの端部の直径におおよそ相関する。外側から、圧縮顎は、スリーブのカラー及び摺動スリーブの前部外表面によって構築される作用表面をグリップする。ハンドレバーの互いに対する旋回移動により、底部顎要素及び圧縮顎は互いに対して旋回する。このような旋回移動は、一方の圧縮顎に接触するカラーと他方の圧縮顎に接触する摺動スリーブとの相対移動に相関する。底部顎要素とのハンドレバーの端部領域の旋回可能な結合により、軸方向移動中、圧縮顎は平行する向きに自動的に保持されて、圧縮顎と作用表面との均一の接触を提供する。(特許文献5)も同様の圧縮顎を開示している。
【0009】
手で適用されるさらなるプレスプライヤが、(特許文献6)から既知である。
【0010】
(特許文献4)には、ボルトによってX字形に旋回可能に結合されたハンドレバーを有するプレスプライヤが開示されている。工作物に面するハンドレバーの端部領域は、スリーブのためのU字形ネストを有する基部に旋回可能に結合される。これらスリーブは、ハンドレバーの互いに対する旋回移動により、軸方向に互いに対してプレスされる。U字形ネストはT溝を介して基部に取り外し可能に固定される。U字形ネストは、プレス移動中に平行する向きに保持される。これは、基部を第1のハンドレバーの一端部領域及び基部を第2のハンドレバーに固定されたピンに対してプレスするバネの両方と結合することによって行われる。(特許文献7)に対応する(特許文献5)及び(特許文献8)には、ネストを平行する向きに保持する同じ機構に基づくプレス工具の実施形態が開示されている。
【0011】
独国の(特許文献9)には、張力下で独国基準DIN471/472に従って保持リングを取り付けるとともに、これら保持リングを取り外すためのプライヤが開示されている。これらプライヤでは、閉じられた状態の2つのハンドレバーが、Hの輪郭におおよそ近似するように構築され、Hの横脚が2本の縦脚の上端部領域に対してシフトされ、2つのハンドレバーが横脚の中央に旋回可能に結合される。工作物に面するハンドレバーの端部領域は、ジョーの端部領域と旋回可能に結合する。ジョーは互いに交差して、交差点にジョイントを有するXを構築する。開いたハンドレバーでは、ジョーのネストが平行する向きで最小距離を有する。しかし、ハンドレバーの閉移動により、2つのネストによって成される角度が大きくなるにつれて、ネストは互いに離れる。
【0012】
(特許文献10)には、手で駆動され、ピストルのようなデザインを有し、管又は継手にスリーブをプレスするプレスプライヤが開示されている。ピストルのトリガは可動ハンドレバーを構築するのに対して、ピストルのハンドルは固定ハンドレバーを構築する。前部ネストはピストルの銃身の端部に固定される。別のネストが、ピストルの銃身に沿って移動するように案内される。ハンドレバーを繰り返し閉じる運動が、偏心駆動機構及び爪車結合によって可動ネストと固定前部ネストとのプレス運動に変換される。
【0013】
(特許文献11)には、マルチパーツハンドレバーが互いに結合されてXを構築するプライヤが開示されている。U字形ネストを構築する支持本体が、工作物に面するハンドレバーの端部領域と結合される。U字形ネストは、ハンドレバーの閉移動による分離移動中に平行する向きに保持される。そのために、各支持本体は、広がり軸を横断する向きを有するピンを備える。各ピンは、広がり軸に平行する内径を有する。ガイドロッドが、2つの支持本体の上記内径を貫通する。
【0014】
(特許文献12)には、ドリルマシンによって構築される外部駆動装置を有するプレス工具が開示されている。スピンドル駆動により、ドリルマシンの駆動運動は2つのプレートの並進平行移動に変換される。周縁にある各プレートは複数のU字形ネストを備える。異なる寸法を有するプレス工具を工作物又は管に使用するために、プレートの複数のネストは異なる開口サイズを有する。プレートを、プレス軸を中心として回転させて、異なるネストを動作位置に持ってくることが可能である。
【0015】
(特許文献13)に対応する(特許文献14)には、電気油圧式駆動装置を有するピストルのようなプレス工具が開示されている。クレードルに対して作用する油圧圧力が、並進自由度を有するネストを固定ネストに対して移動させて、工作物をプレスする。
【0016】
(特許文献15)には、L字形ハンドレバーを有するクリンププライヤが開示されている。別のハンドレバーが、Lの短い方の横脚に旋回可能に結合される。工作物用のネストがL字形ハンドレバーに固定される。別のネストが、プレス方向においてLの縦脚によって案内される。旋回可能なハンドレバーの湾曲した前表面が、ハンドレバーの旋回移動が2つのネストの並進相対移動に相関するように、可動ネストの線形歯と噛み合う歯を備える。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】米国特許第6,415,641号明細書
【特許文献2】欧州特許第1 055 488 B1号明細書
【特許文献3】独国特許第44 46 503 C1号明細書
【特許文献4】独国特許第93 07 957 U1号明細書、"Gebrauchsmuster"
【特許文献5】独国特許第28 51 282号明細書
【特許文献6】独国特許第36 17 529 A1号明細書
【特許文献7】米国特許第4,257,135号明細書
【特許文献8】独国特許第36 17 529 C2号明細書
【特許文献9】独国特許第20 2004 008 603 U1号明細書、"Gebrauchsmuster"
【特許文献10】独国特許第196 21 877 C2号明細書
【特許文献11】独国特許第10 2006 022 999 A1号明細書
【特許文献12】欧州特許第0 598 173 B1号明細書
【特許文献13】米国特許第6,415,641号明細書
【特許文献14】欧州特許第1 055 488 B1号明細書
【特許文献15】日本国特許出願第2000117655A号明細書
【非特許文献】
【0018】
【非特許文献1】www.schell−armaturen.de/deutsch/downloads/pex_bosch.pdf
【非特許文献2】www.mapress.de/geberit
【発明の概要】
【発明が解決しようとする課題】
【0019】
本発明の目的は、複数の作業分野及び/又は異なる用途若しくは幾何学的形状の異なる工作物において様々な用途を提供するプライヤを提供することである。
【課題を解決するための手段】
【0020】
本発明によれば、プライヤは、プライヤの作業移動中に分離して離れる2つの拡張顎を備える。ハンドレバーの閉移動は、拡張顎間及び拡張顎の作用表面間の距離の増大に一致する。拡張顎の距離のこのような増大は、接続部の半径方向クランプ又はクリンプと一致して接続部の少なくとも1つの部品の塑性変形を生じさせる。
【0021】
所望量の拡張力を生み出すために、プライヤは第1の伝達機構を備える。第1の伝達機構は、ハンドレバーに手で適用された作用力を拡張顎に伝達し、第1の伝達機構は、拡張顎に対して経路上で作用力を増大させる伝達比を含む。
【0022】
一実施形態によれば、適した第1の伝達機構の使用により、片手又は両手で力がハンドレバーに適用される際に、10,000、20,000、30,000、40,000、50,000、60,000、又は最高で70,000ニュートンの範囲内の拡張力が生み出される。
【0023】
従来技術から既知の任意の伝達機構を本発明のプライヤに使用することができ、本出願人の上記公開物も参照のこと。しかし、一実施形態によれば、第1の伝達機構はトグル機構を含む。トグル機構は、少数の部品及び単純な設計で必要とされる拡張力を提供する。複数のトグル機構をプレイヤに統合することも可能であり、複数のトグルレバー機構を並列構成で使用してもよく、又は順次に(直列構成で)使用してもよい。
【0024】
本発明によれば、拡張要素が提供される。これら拡張要素は、接続部又は継手の部品と相互作用又は係合するように設計され構成される。拡張要素は、第2の伝達機構を介して拡張顎に接続される。第2の伝達機構は、拡張顎の旋回移動を拡張軸に沿った拡張要素の(多少なりとも)並進する移動に変換する。この実施形態は、拡張顎の旋回移動が接続部との拡張顎の接触点の円上の移動に相関するという発見に基づく。拡張顎との作用表面の剛性結合の結果として、作用表面の接触点及びその向きが、拡張移動中に変化する。第2の伝達機構の使用は、拡張移動への作用表面及び向きの接触点のこのような従属性をなくす。第2の伝達機構には、任意の既知の運動学及び伝達又は伝動システムを使用することができる。
【0025】
拡張要素の案内及び位置合わせは、拡張軸に沿って互いに直接拡張要素を案内することによって改良することができる。
【0026】
本発明によれば、拡張要素が拡張軸に対して回転可能であることにより、1つの同じネストをプライヤの他の部品に対して異なる相対位置に使用することが可能である。
【0027】
本発明の別の実施形態では、トグル機構内に、トグルレバージョイントが、ハンドレバーが開かれ、拡張顎が閉じられる際に第1の角度を構築する。この角度は、ハンドレバーが閉じられる移動に伴ってトグルレバージョイントの第2の角度まで増大し、第2の角度は第1の角度より大きい。この実施形態は、拡張工程中、拡張顎の拡張移動が拡張力の増大を必要とするという発見に基づく。拡張動作の開始時に、接続部の部品は軸方向摺動移動においてのみ移動することができる。続く拡張段階中に、接続部の一部品が変形して、接続部の別の部品に接触することができる。さらに続く拡張段階中に、拡張顎の拡張移動により、複数の部品が半径方向に変形する。したがって、必要とされる拡張力は、拡張工程全体を通して増大する。このような発見は、拡張工程全体を通してのトグルレバージョイント角度の上記増大によって考慮される。このような角度の増大は、拡張顎に向けてハンドレバーに手で与えられる力の伝達を通して伝達比の増大に繋がる。一方、このような伝達比の「自動的に適合される」変更は、運動学に対して以下の影響を有する。拡張移動の開始時に、互いに対するハンドレバーの小さな移動が、第1の拡張段階での拡張顎の大きな拡張移動に相関する。したがって、伝達比の自動的に適合される変更は、容易で高速な第1の拡張段階を保証することができる。それに代えて、より大きな拡張力を必要とする続く拡張段階では、拡張力は、より大きな伝達比を含み、圧着工程の高感度のフィードバックをユーザに与えるハンドレバーのより大きな移動に相関することができる。
【0028】
本発明のプライヤの特別な実施形態によれば、トグルレバージョイントの第2の角度は、拡張移動の終わりに対して、トグルレバー結合の最適な伝達比が使用されるように170度〜179度の範囲内である。
【0029】
本発明のプレイヤの別の実施形態によれば、プライヤは、第1の拡張顎に固く接続される第1のハンドレバーを有する「固定」部を備える。固定部は、圧力ロッドを軸受けする役割を果たす。さらに、第2の拡張顎は固定部に旋回可能に結合される。プライヤの可動部は、端部領域において、第2の拡張顎の端部領域に旋回可能に結合されるのに対して、プライヤの可動部の他端部領域は第2のハンドレバーを構築する。さらに、プライヤの可動部は圧力ロッドに旋回可能に結合される。結合点は、ハンドレバーと第2の拡張顎に結合された端部領域との間に配置される。このような設計で構築されるプライヤは、単純であるが、ハンドレバーの閉移動に伴って作用表面の拡張移動に繋がる効率的な構造を有する。
【0030】
本発明の一実施形態では、第2の伝達機構が各拡張顎に配置されるジョイントによって構築される。
【0031】
さらに、本発明は、各拡張要素に部品又は工作物用のネストを構築することを示唆する。拡張要素が取り外し可能又は交換可能な場合、異なる拡張要素を同じプライヤに使用して、異なる接続部を構築することができる。したがって、複数の拡張要素でプレイヤを構成する工具セットを提供することができる。しかし、1つの同じ拡張要素が複数の交換可能なネストを備えることも可能である。
【0032】
さらに、本発明は、拡張要素が円周方向に等距離で配置された複数のネストを備える、多機能用途用のプライヤを示唆する。拡張要素が拡張軸に対して回転可能なことにより、1つの同じネストをプライヤのその他の部品に対する異なる相対位置で使用することが可能である。したがって、例えば、同じ1つのネストを異なる動作位置で使用することができる。拡張要素の回転自由度は、複数のネストが回転を介して単一の動作位置に運ぶことができるように、拡張要素のネストがある位置から別の位置に回転する機会を与える。
【0033】
さらに、プライヤは、固定ユニット、静止ユニット、又は固定ユニットを備えることができる。このようなユニットは、拡張軸に対して規定の回転角度で拡張要素を固定するために使用される。
【0034】
本発明のさらなる実施形態では、ユニットは、バネ付勢静止ユニット、磁気静止ユニット、又は固定ユニットを使用して構築される。ここで、「静止ユニット」は、安定位置から移動するために向けられる規定の力レベルよりも低い力が、安定位置が維持されるような対応する戻る力を発生させるような、位置を安定化するユニットを説明している。それに代えて、規定の力レベルを超える場合、安定位置から出る。たった1つの例を与えると、相対移動した部品の溝、内径等に対してバネによって付勢される静止球を使用して静止ユニットを構築することができる。球としての静止要素の直径及び溝、内径等の幾何学的形状又は外形の選択によって、静止特徴及び上記規定の力レベルが決まる。別の実施形態では、静止ユニットは、磁石によって生じる戻り力を使用することができ、規定の力レベルは、永久磁石の寸法及び磁気特性に依存する。しかし、本発明によれば、「固定ユニット」は、相対位置が正固定下で固定されるユニットを説明している。ユーザの手での作動なしでは、固定ユニットによって固定された部品を固定位置から、固定ユニットの少なくとも1つの部品の塑性変形又は破壊なしで移動させることは不可能である。
【0035】
リセスを有するか、又はスリーブとして1つの拡張要素を設計する際に、簡単で効率的な案内が与えられ、スリーブ又はリセスの内径は他方の拡張要素の突起を収容する。突起とスリーブのリセス又は内径との係合により、拡張軸に沿った拡張要素の相対移動の案内を保証する。突起及びスリーブのリセス又は内径が円形の断面を有する場合、案内により、拡張軸に沿った並進自由度及び拡張軸を中心とした互いに対する拡張要素の回転自由度の両方が保証される。回転自由度に関心がない場合、このような回転度は、突起及びスリーブのリセス又は内径の外形に非円形に対応する断面を与えることによって阻止することができる。
【0036】
本発明によるプライヤ(ハンドレバーの閉移動に伴った拡張顎の拡張移動を含む)は、配管又は管の接続に使用される。このプレイヤを使用する場合、接続部の2つの部品が拡張顎又は拡張要素に直接又は間接的に接触する。プライヤのハンドレバーの閉移動及び拡張顎の拡張移動に伴い、接続部の少なくとも1つの部品が半径方向に塑性変形する。
【0037】
本発明の他の特徴及び利点は、以下の図面及び詳細な説明を吟味することによって当業者には明らかになろう。本明細書において、このような追加の特徴及び利点はすべて特許請求の範囲によって規定される本発明の範囲内に含まれることが意図される。
【0038】
本発明を以下の図面を参照してよりよく理解することができる。図面内の部品は必ずしも一定の縮尺で描かれておらず、それに代えて本発明の原理を明らかに示すことに重点が置かれている。図面中、同様の参照番号はいくつかの図を通して対応するパーツを示す。
【図面の簡単な説明】
【0039】
【図1】ハンドレバーが開かれた状態の本発明のプライヤの平面図である。
【図2】ハンドレバーが部分的に閉じられた状態の図1による本発明のプライヤの平面図である。
【図3】ハンドレバーが完全に閉じられた状態の図1及び図2による本発明のプライヤの平面図である。
【図4】プライヤの変換機構を有する内部を示すために、プライヤの固定の支持プレートが除去された、図1に対応するプライヤの平面図である。
【図5】プライヤの変換機構を有する内部を示すために、プライヤの固定の支持プレートが除去された、図3に対応するプライヤの平面図である。
【図6】3次元図での本発明のプライヤの第1の拡張顎に関連する第1の拡張要素である。
【図7】3次元図での本発明のプライヤの第2の拡張顎に関連する第2の拡張要素である。
【図8】拡張顎と拡張要素との間に配置される変換機構の軸受体を3次元図で示す。
【図9】互いに手動可能に案内される、軸受体に配置される2つの拡張要素を有する本発明のプライヤの組み立て群の3次元図である。
【図10】本発明のプライヤを使用して作用表面を拡張することによって半径方向にクリンプすることができる、配管の接続部を示す。
【発明を実施するための形態】
【0040】
これより図面をさらに詳細に参照すると、図面は本発明のプライヤ1の実施形態を示し、第1の変換機構6がハンドレバー2、3と拡張顎4、5との間に配置される。変換機構6はトグル機構7を含む。しかし、本発明の基本原理、特に、
−ハンドレバー2、3の閉移動に伴う拡張顎4、5の拡張移動、
−複数のネスト10、11、12を有する拡張要素8、9の使用、及び/又は
−拡張要素8、9と拡張顎4、5との回転可能又はリボルバーのような結合
は、トグル機構7を有する変換機構6を必ずしも必要とするわけではない。異なるトグル機構、カム駆動、伝動ユニット、結合バー駆動等を有する任意の変換機構6を使用することも可能である。さらに、本発明は、ハンドレバー2、3の互いに向けての旋回移動又は並進移動が拡張顎4、5の並進移動をもたらす原理に基づくプライヤも含む。
【0041】
図1によるプライヤ1は、ハンドレバー2を構築する固定部13を備える。固定部3は、プライヤのヘッド14に面する端部領域において2つの平行する支持プレート15、16を担持する。支持プレート15、16は、ネジ又はリベットを使用して固定部13に固定される。支持プレート15、16は、プライヤのハンドレバー2とヘッド14との間に延びる延在部に一体的に構築される。さらに、支持プレート15、16は、第1の近似ではC字形の拡張顎5を一体的に構築する。C字形拡張顎5は、プライヤのヘッド14に面する延在部17の端部領域から延びる。C字形拡張顎5の両端部領域とハンドレバー2の縦軸とを結ぶ仮想接続線は、延在部17に対して約135度±20度の角度を成す。
【0042】
延在部17の両端部領域間のおおよそ中間において、支持プレート15、16は、支持プレート15、16の平面を横断すると共に、図1〜図5の図平面を横断する向きを有する旋回ボルト19を担持する。旋回ボルト19は、旋回ボルト19を中心にして旋回自由度を有して圧力ロッド21の端部領域を保持するジョイント20を構築する役割を果たす。
【0043】
別の旋回ボルト22が、プライヤのヘッド14に面する延在部17の端部領域に配置され、旋回ボルト19に平行する向きを有する。旋回ボルト22が支持プレート15、16によって保持される。旋回ボルト22は、拡張顎4のジョイント24を構築する役割を果たす。拡張顎4は第1の近似においてC字形であるか、又は円周角150度〜180度を有する円環のセグメントの形状を含む。延在部27に面する拡張顎4の端部領域は、図1〜図5による図平面を横断する向きを有するピボットボルト25に結合されて、ジョイント26を構築する。ピボットボルト25は、支持プレート15、16によって回転可能に支持される。ハンドレバー3に固定される延在部27及びハンドレバー3は、プライヤの可動部28を構築する。
【0044】
図1及び図4はハンドレバー2、3が開かれた状態のプライヤを示す。開状態では、拡張顎4、5の外端部領域は最小距離を有する。ジョイント20に対向する圧力ロッド21の端部領域は、図1〜図5の図平面に垂直な向きを有するピボットボルト29を介してプライヤの可動部28に旋回可能に結合する。ピボットボルト29と共に構築されるジョイント30は、延在部27、特にジョイント26に隣接して配置される。ジョイント26、30の距離はプライヤの可動部28の長さの1/10又は1/20の間であることが可能である。
【0045】
トグル機構7はプライヤの可動部28及び圧力ロッド21と共に構築され、ジョイント30はトグルレバージョイント32を構築する。図1及び図4に示すプライヤ1の状態では、圧力ロッド21及びジョイント26と30との間の可動部28の領域は、トグル機構の第1の角度44を構築する。第1の角度44は90度〜140度の範囲内にあってよく、特に100度〜120度の範囲内にあってよい。図2に示すプライヤの部分的に閉じられた状態では、拡張顎4、5の外端部領域の距離は、ジョイント24を中心とした時計回り方向での拡張顎4の旋回移動と共に増大する。図3及び図5によるプライヤ1の完全に閉じた状態では、ハンドレバー2、3は最小距離に達しており、ハンドレバーはおおよそ平行する向きを有する。このような状態は、最大距離に達した拡張顎4、5の外端部領域に対応する。このような状態では、トグル機構は第2の角度62を構成する。
【0046】
拡張顎4、5が作用表面を直接構築することが可能である。このような場合、作用表面を、拡張顎4、5の外端部の、互いに離れる方向を向いた拡張顎4、5の側に構築することが可能である。接続部の部品の作用表面は拡張顎4、5のこれら作用表面に接触して、拡張力を伝動する。しかし、示される実施形態では、プライヤは追加の拡張要素8、9を備える。拡張要素8、9は、第2の変換機構33、34を介して拡張顎4、5に結合される。図6及び図7では、拡張要素8、9は単一の部品として示される。拡張要素9は剛性三角形プレート35を使用して構築される。ガイドボルト36がプレート35の中央を貫通して延びる。ガイドボルト36はプレート35の各側に突起37、38を構築し、突起38はその端部領域にカラー39を構築する。プレート35の隅には、ネスト10a〜12aを構築するリセスが備えられる。ネスト10a〜12aは半円形を有してもよく、又はU字若しくはフォークのような形状であってもよく、異なる開口幅を有することができる。
【0047】
拡張要素8は、プレート35の形状と同様の形状を有するプレート40を使用して構築される。プレート40はネスト10b〜12bを構築するリセスを備える。拡張顎4に面するプレート40の側において、プレート40の中央に、外端部領域にカラー42を有する中空スリーブ41が担持される。
【0048】
拡張要素8、9が同軸に位置合わせされた場合、貫通穴を構築するスリーブ41を有する拡張要素8は、拡張軸43−43に沿った縦方向において案内を構築する拡張要素9の突起37に通される。突起37並びに図6及び図7に示されるスリーブ41の内径が円形断面であるため、拡張要素8、9はさらなる回転自由度を含む。代替の実施形態では、非円形断面を使用して回転自由度をなくし、拡張軸43−43に沿った並進自由度を残してもよい。さらに、円形の外形と異なる断面の外形が、組み立てられた状態でのネスト10〜12の向きの固定位置を決定することができる。
【0049】
軸受体45が、第1の近似では立方体形状を有する。図8参照。軸受体45は内部貫通穴46を備える。さらに、軸受体45は、両側に配置され、拡張軸43−43及び内径46の縦軸を横断して延びる軸受ピン47、48を備える。
【0050】
図9は、拡張軸43−43を備える平面を通るプライヤ1の断面図を示す。図9から見て取れるように、軸受体45bは、プレート35とカラー39との間にぴったりと合って入り、突起38は内径46を通って延びる。別の対応する軸受体45aは、拡張要素8のプレート40とカラー42との間にぴったり合って入る。突起41は、軸受体45bの内径46の直径よりも大きな直径を有する内径46を通って延びる。しかし、拡張要素8、9が、突起38の外径が、軸受体45a、45bの両方の内径46が同じ直径を備えるようにスリーブ41の外径に対応するように設計されることも可能である。
【0051】
軸受体45aのピン47、48は拡張顎4の内径49内に旋回可能に取り付けられ、図1〜図5の図面平面に垂直する旋回軸を構築する。内径49は、拡張顎4の外端部領域に配置される。示される実施形態では、拡張顎4は、平行する向きの拡張顎の2つの部分で構築される。2つの部分はそれぞれ内径49を有し、軸受体45aは拡張顎の2つの部分の間に収容される。他方の軸受体45bの軸受ピン47、48は拡張顎5の内径50内に支持され、内径50は、軸受体45bは支持プレート15と16との間に保持されるように両支持プレート15、16内に設けることができる。軸受体47、48は内径49、50と一緒に、拡張顎4、5に対して旋回自由度を有して軸受体45及び拡張要素8、9を保持するジョイント51、52を構築する。したがって、第2の変換機構33、34が、軸受体45a、45b、内径49、50、及びジョイント51、52を使用して構築される。
【0052】
図示されていない固定ユニットを使用して、拡張軸43、44を中心とした拡張要素8、9の回転自由度を固定することができる。このような固定ユニットは、軸受体45の上面又は下面とカラー39、42又はプレート35、40との間に静止接続を提供する静止球又は静止要素を使用して構築することができる。
【0053】
ハンドレバー2の旋回移動中、拡張軸43−43は、図1において水平方向にわずかに移動する。これは、ジョイント51がプライヤの固定部13とジョイント52との円形経路上での相対的に移動することによる。したがって、第2の変換機構が拡張軸に沿った拡張要素の並進移動を生み出すという特許請求の特徴は、許容範囲内の角度又はわずかな湾曲を有する実質的な並進移動を含む必要がある。いずれの場合でも、変換機構33、34は、拡張要素8、9がハンドルレバー2、3の移動中に平行する向きに保持されることを保証する。
【0054】
図10は、配管54の軸方向において2つの部品55、56を軸方向に拡張することによって半径方向にプレスされる配管54の接続部53を示す。部品55、56は、互いに面する作用表面57、58を備える。図10に示される実施形態では、作用表面57、58はリング形である。接続部53は、プライヤ1の使用によって作用表面57、58を軸方向に拡張し、離れるように軸方向にプレスすることによってクリンプされる。部品55、56を拡張するために、プライヤ2は、ハンドレバー2、3が完全に開かれた図1に示される開始状態になる。拡張要素8、9は、接続部53に適した10〜12が互いに位置合わせされて、特にプライヤ1の外側又は前側に配置されるように回転する。ネスト10〜12の開き幅は、ネストが接続部53の円筒形セクション59上に通されるのに適したように選択される。続く拡張ステップにおいて、プライヤは、プレート35、40が作用表面57と58との間に導入されるように、接続部53に向かって移動する。セクション59はネスト10〜12のうちの1つの中に入る。
【0055】
これは、選択されるネスト12について説明される例としてであり、互いに離れる方向のプレート35、40の側に、拡張要素8、9の作用表面60、61が構築される。図6及び図7に示される実施形態では、作用表面60、61はU字形である。互いに向かってのハンドレバー2、3の旋回移動により、プレート35、40は、作用表面60、61が作用表面57、58と接触するように互いに拡張される。ユーザによる作用力の適用と一緒に互いに向けてのハンドレバー2、3のさらなる旋回移動により、作用表面60、57と61、58との間に拡張力を生み出し、部品55、56の拡張移動を生じさせる。拡張移動は、半径方向圧着工程並びに弾性変形及び/又は塑性変形の生成に相関する。
【0056】
プライヤ2が接触している作用表面は、継手の部品によって構築される。しかし、作用表面57、58のうちの少なくとも一方を配管又は管の端部によって構築されることも可能である。接続部の組立体は、継手の部品及び/又は管両端の弾性変形及び/又は塑性変形を含み得る。
【0057】
本発明の主旨及び原理から実質的に逸脱することなく、多くの変形形態及び変更形態を本発明の好ましい実施形態に対して行うことができる。このような変更形態及び変形形態はすべて、以下の特許請求の範囲によって規定される本発明の範囲内に含まれるものと本明細書では意図される。
【特許請求の範囲】
【請求項1】
配管の接続部の2つの要素の2つ動作エリアの距離を変更させるプライヤであって、前記距離の変更は、前記要素のうちの少なくとも一方の半径方向塑性変形に一致し、前記プライヤは、
a)2つのハンドレバーと、
b)2つの拡張顎と、
c)ある伝達比でもって前記ハンドレバーへのユーザによって与えられる手の力を前記拡張顎に対して作用する拡張力に変換する第1の伝達機構と、
d)前記第1の伝達機構は、前記ハンドレバーの閉移動に伴い、前記拡張顎の距離が増大し、前記拡張顎の距離の増大により、前記接続部の少なくとも1つの要素の半径方向塑性変形が生じるように設計され構成され、
e)前記拡張顎と拡張要素との間に配置され、前記拡張顎の旋回移動を拡張軸に沿った前記拡張要素の並進移動又は前記拡張要素の平行移動に変換する第2の伝達機構と
を備え、
f)前記拡張要素は、並進自由度を有して前記拡張軸に沿って互いに対して直接案内され、
g)前記拡張要素は、前記拡張軸に対して回転可能である、
プライヤ。
【請求項2】
前記拡張要素は、前記拡張要素の外周に配置される複数のネストを備える、請求項1に記載のプライヤ。
【請求項3】
前記第1の伝達機構はトグル機構を含む、請求項1に記載のプライヤ。
【請求項4】
前記第1の伝達機構はトグル機構を含む、請求項2に記載のプライヤ。
【請求項5】
a)前記トグル機構はトグルレバージョイントを備え、
b)前記ハンドレバーが、閉位置にある前記拡張顎に一致する開状態にある場合、前記トグルレバージョイントが前記トグルバージョイントの第1の角度を構築し、
c)前記ハンドレバーが互いに向かって移動する場合、前記トグルレバージョイントの前記角度は前記トグルレバージョイントの第2の角度まで増大する、請求項4に記載のプライヤ。
【請求項6】
前記トグルレバージョイントの第2の角度は170度〜179度である、請求項5に記載のプライヤ。
【請求項7】
a)前記プライヤの固定部において、前記ハンドレバーのうちの第1のハンドレバーは、前記拡張顎の第1の拡張顎に固定して接続され、
b)圧力ロッドが一端部領域において前記プライヤの前記固定部と旋回可能に結合され、
c)前記プライヤの可動部が、一端部領域において、前記拡張顎の第2の拡張顎と旋回可能に結合されたジョイント状態にあり、前記他方の端部領域内の前記プライヤの前記可動部は、前記ハンドレバーのうちの第2のハンドレバーを構築し、前記プライヤの前記可動部は、前記第2のハンドレバーと前記第2の拡張顎に接続された前記端部領域との間の位置において前記圧力ロッドに旋回可能に結合され、
d)前記第2の拡張顎は、前記ジョイントと前記ジョイントに対向する前記端部領域との間の位置において前記プライヤの前記固定部と旋回可能に結合される、請求項1に記載のプライヤ。
【請求項8】
a)前記プライヤの固定部において、前記ハンドレバーのうちの第1のハンドレバーは、前記拡張顎の第1の拡張顎に固定して接続され、
b)圧力ロッドが一端部領域において前記プライヤの前記固定部と旋回可能に結合され、
c)前記プライヤの可動部が、一端部領域において、前記拡張顎の第2の拡張顎と旋回可能に結合されたジョイント状態にあり、前記他方の端部領域内の前記プライヤの前記可動部は、前記ハンドレバーのうちの第2のハンドレバーを構築し、前記プライヤの前記可動部は、前記第2のハンドレバーと前記第2の拡張顎に接続された前記端部領域との間の位置において前記圧力ロッドに旋回可能に結合され、
d)前記第2の拡張顎は、前記ジョイントと前記ジョイントに対向する前記端部領域との間の位置において前記プライヤの前記固定部と旋回可能に結合される、請求項2に記載のプライヤ。
【請求項9】
前記第2の伝達機構はジョイントである、請求項1に記載のプライヤ。
【請求項10】
前記拡張軸を中心として所定の回転角度で前記拡張要素を固定するように設計され構成される固定ユニットが提供される、請求項1に記載のプライヤ。
【請求項11】
前記拡張軸を中心として所定の回転角度で前記拡張要素を固定するように設計され構成される固定ユニットが提供される、請求項2に記載のプライヤ。
【請求項12】
前記固定ユニットは、バネ及び磁石の群から選択された1つの要素によって作動又は作動停止される静止ユニット又は固定ユニットを使用して構築される、請求項10に記載のプライヤ。
【請求項13】
前記固定ユニットは、バネ及び磁石の群から選択された1つの要素によって作動又は作動停止される静止ユニット又は固定ユニットを使用して構築される、請求項11に記載のプライヤ。
【請求項14】
前記拡張要素のうちの1つは、前記拡張軸に沿って互いに対して前記拡張要素を案内する前記拡張要素のうちの他方の突起を収容するリセス又はスリーブを備える、請求項1に記載のプライヤ。
【請求項1】
配管の接続部の2つの要素の2つ動作エリアの距離を変更させるプライヤであって、前記距離の変更は、前記要素のうちの少なくとも一方の半径方向塑性変形に一致し、前記プライヤは、
a)2つのハンドレバーと、
b)2つの拡張顎と、
c)ある伝達比でもって前記ハンドレバーへのユーザによって与えられる手の力を前記拡張顎に対して作用する拡張力に変換する第1の伝達機構と、
d)前記第1の伝達機構は、前記ハンドレバーの閉移動に伴い、前記拡張顎の距離が増大し、前記拡張顎の距離の増大により、前記接続部の少なくとも1つの要素の半径方向塑性変形が生じるように設計され構成され、
e)前記拡張顎と拡張要素との間に配置され、前記拡張顎の旋回移動を拡張軸に沿った前記拡張要素の並進移動又は前記拡張要素の平行移動に変換する第2の伝達機構と
を備え、
f)前記拡張要素は、並進自由度を有して前記拡張軸に沿って互いに対して直接案内され、
g)前記拡張要素は、前記拡張軸に対して回転可能である、
プライヤ。
【請求項2】
前記拡張要素は、前記拡張要素の外周に配置される複数のネストを備える、請求項1に記載のプライヤ。
【請求項3】
前記第1の伝達機構はトグル機構を含む、請求項1に記載のプライヤ。
【請求項4】
前記第1の伝達機構はトグル機構を含む、請求項2に記載のプライヤ。
【請求項5】
a)前記トグル機構はトグルレバージョイントを備え、
b)前記ハンドレバーが、閉位置にある前記拡張顎に一致する開状態にある場合、前記トグルレバージョイントが前記トグルバージョイントの第1の角度を構築し、
c)前記ハンドレバーが互いに向かって移動する場合、前記トグルレバージョイントの前記角度は前記トグルレバージョイントの第2の角度まで増大する、請求項4に記載のプライヤ。
【請求項6】
前記トグルレバージョイントの第2の角度は170度〜179度である、請求項5に記載のプライヤ。
【請求項7】
a)前記プライヤの固定部において、前記ハンドレバーのうちの第1のハンドレバーは、前記拡張顎の第1の拡張顎に固定して接続され、
b)圧力ロッドが一端部領域において前記プライヤの前記固定部と旋回可能に結合され、
c)前記プライヤの可動部が、一端部領域において、前記拡張顎の第2の拡張顎と旋回可能に結合されたジョイント状態にあり、前記他方の端部領域内の前記プライヤの前記可動部は、前記ハンドレバーのうちの第2のハンドレバーを構築し、前記プライヤの前記可動部は、前記第2のハンドレバーと前記第2の拡張顎に接続された前記端部領域との間の位置において前記圧力ロッドに旋回可能に結合され、
d)前記第2の拡張顎は、前記ジョイントと前記ジョイントに対向する前記端部領域との間の位置において前記プライヤの前記固定部と旋回可能に結合される、請求項1に記載のプライヤ。
【請求項8】
a)前記プライヤの固定部において、前記ハンドレバーのうちの第1のハンドレバーは、前記拡張顎の第1の拡張顎に固定して接続され、
b)圧力ロッドが一端部領域において前記プライヤの前記固定部と旋回可能に結合され、
c)前記プライヤの可動部が、一端部領域において、前記拡張顎の第2の拡張顎と旋回可能に結合されたジョイント状態にあり、前記他方の端部領域内の前記プライヤの前記可動部は、前記ハンドレバーのうちの第2のハンドレバーを構築し、前記プライヤの前記可動部は、前記第2のハンドレバーと前記第2の拡張顎に接続された前記端部領域との間の位置において前記圧力ロッドに旋回可能に結合され、
d)前記第2の拡張顎は、前記ジョイントと前記ジョイントに対向する前記端部領域との間の位置において前記プライヤの前記固定部と旋回可能に結合される、請求項2に記載のプライヤ。
【請求項9】
前記第2の伝達機構はジョイントである、請求項1に記載のプライヤ。
【請求項10】
前記拡張軸を中心として所定の回転角度で前記拡張要素を固定するように設計され構成される固定ユニットが提供される、請求項1に記載のプライヤ。
【請求項11】
前記拡張軸を中心として所定の回転角度で前記拡張要素を固定するように設計され構成される固定ユニットが提供される、請求項2に記載のプライヤ。
【請求項12】
前記固定ユニットは、バネ及び磁石の群から選択された1つの要素によって作動又は作動停止される静止ユニット又は固定ユニットを使用して構築される、請求項10に記載のプライヤ。
【請求項13】
前記固定ユニットは、バネ及び磁石の群から選択された1つの要素によって作動又は作動停止される静止ユニット又は固定ユニットを使用して構築される、請求項11に記載のプライヤ。
【請求項14】
前記拡張要素のうちの1つは、前記拡張軸に沿って互いに対して前記拡張要素を案内する前記拡張要素のうちの他方の突起を収容するリセス又はスリーブを備える、請求項1に記載のプライヤ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−196079(P2009−196079A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−20576(P2009−20576)
【出願日】平成21年1月30日(2009.1.30)
【出願人】(508244382)ウェザッグ ゲーエムベーハー ウェルクゼウグファブリック (5)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2009−20576(P2009−20576)
【出願日】平成21年1月30日(2009.1.30)
【出願人】(508244382)ウェザッグ ゲーエムベーハー ウェルクゼウグファブリック (5)
【Fターム(参考)】
[ Back to top ]