
拡張SPS軌道情報を用いた位置特定のための方法および装置
【課題】移動局が衛星の場所を突き止めるのを支援する方法およびシステムの提供。
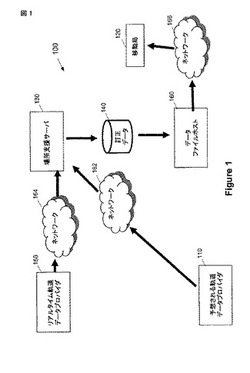
【解決手段】システム100は、場所支援サーバ130,データプロバイダ150,データプロバイダ110,データホスト160から構成される。場所支援サーバ130は、ネットワーク164を介して、リアルタイム軌道をデータプロバイダ150から受信する。また、ネットワーク162を介して、予想される軌道をデータプロバイダ110から受信する。サーバ130は、リアルタイム軌道及び予想される軌道から訂正データ140を作成する。訂正データ140は、データホスト160からネットワーク166を介して移動局120への送信する。
【解決手段】システム100は、場所支援サーバ130,データプロバイダ150,データプロバイダ110,データホスト160から構成される。場所支援サーバ130は、ネットワーク164を介して、リアルタイム軌道をデータプロバイダ150から受信する。また、ネットワーク162を介して、予想される軌道をデータプロバイダ110から受信する。サーバ130は、リアルタイム軌道及び予想される軌道から訂正データ140を作成する。訂正データ140は、データホスト160からネットワーク166を介して移動局120への送信する。
【発明の詳細な説明】
【関連出願】
【0001】
本出願は、「Bit Efficient Support Of Extended Orbit For GNSS」と題する2006年11月10日に出願された米国特許出願第60/857,972号、「Efficient Range Correction Messages For Accurate Position Determination With Assisted GPS」と題する2007年1月23日に出願された米国特許出願第60/886,230号、「Bit Efficient Support Of Extended Orbit For GNSS」と題する2007年2月7日に出願された米国特許出願第60/888,738号、「Method And Apparatus For Position Determination With Extended SPS Orbit Information」と題する2007年3月22日に出願された米国特許出願第60/896,493号、「Method And Apparatus For Position Determination With Extended SPS Orbit Information」と題する2007年5月11日に出願された米国特許出願第60/917,622号、および「Method And Apparatus For Position Determination With Extended SPS Orbit Information」と題する2007年5月24日に出願された米国特許出願第60/939,964号の出願日の利益を主張し、上記のすべては、全体として参照により本明細書に組み込まれ、本明細書の譲受人に譲渡される。
【技術分野】
【0002】
本発明は、一般に、衛星測位システム(SPS)に関し、より具体的には、移動局が拡張SPS軌道訂正情報を含む効果的なメッセージフォーマットを用いて衛星の場所を突き止めるのを支援することに関する。
【背景技術】
【0003】
衛星測位システム(SPS)受信機は、通常、複数の衛星から同時に伝送される信号の到着時間を計算することによってその位置を特定する。これらの衛星は、そのメッセージの一部として、衛星位置データと衛星クロックタイミングデータの両方を送信する。衛星の位置およびクロックタイミングは、典型的には、アルマナックデータまたはエフェメリスデータによって表される。エフェメリスデータは、衛星位置およびクロックバイアスのきわめて正確な推定(約1メートルの誤差(error))を提供する。しかし、衛星信号の探索および取得、衛星によって伝送されたエフェメリスデータの読み取り、ならびにこのデータによる受信機の場所の計算の処理は時間がかかり、数分を要することが多い。多くの場合、この長い処理時間は受け入れられず、さらに、小型化された携帯用アプリケーションの電池寿命を大きく限定する。
【0004】
たとえば、全地球測位システム(GPS)は、周回軌道衛星からブロードキャストされたGPS信号がGPS受信機のアンテナに到着した時間の測定に基づき、位置を特定する。前述のとおり、こうしたシステムの1つの弱点は、一定の条件のもとで信号取得を行うのに必要な比較的長い時間である。衛星信号は、次元が符号位相遅延および観測のドップラー周波数偏移である2次元の探索「空間」において探索することによって最初に場所が突き止められるまで、追跡することができない。衛星信号を探索、取得および復調するSPS受信機の処理は、「独立」モードのオペレーションと呼ばれることがあり、「支援」モードのオペレーションと対比することができる。
【0005】
独立モードのオペレーションに伴う遅れを減らすために、情報を提供してSPSまたはGPS受信機による特定の信号の取得を援助することができる。このような支援情報は、符号および周波数次元を限定することにより、受信機が信号の場所を突き止めるために探索しなければならない探索空間を狭めることを可能にする。外部から供給されたGPS支援データで補強されたGPS受信機を用いるシステムは、一般に支援型全地球測位システム(AGPS)と呼ばれる。
【0006】
AGPSシステムの1つの例は、GPS受信機を備えるかGPS受信機と通信し、無線通信ネットワークの基地伝送局(BTS)またはノードBとも呼ばれる1つまたは複数の基地局(BS)と通信し、ひいては、通信電波インターフェースプロトコルにより位置特定エンティティ(PDE)、サービス移動位置センター(SMLC)などと呼ばれることがある1つまたは複数の場所支援サーバと通信する(携帯電話などの)無線移動局(MS)を含む。AGPSシステムの他の例は、GPS受信機を備えるかGPS受信機と通信し、インターネットなどの通信ネットワークとの通信が可能で、かかる通信ネットワークを介して最終的に場所支援サーバと通信するMSまたはラップトップ型コンピュータを含む。
【0007】
場所支援サーバは、1つまたは複数のGPS基準受信機(reference receivers)からGPS支援情報を導出する。場所支援サーバはまた、移動局のおおよその位置を特定する手段にアクセスすることができる。場所支援サーバは、基準時間(reference time)、衛星軌道のアルマナックおよびエフェメリス情報、電離層情報ならびに衛星活動状態(「健康状態(health)」)情報を含むGPSデータベースを維持する。場所支援サーバはまた、移動局のおおよその位置を対象にカスタマイズされた支援情報を計算する。
【0008】
AGSPシステムにおけるMSの位置は、場所支援サーバの力を借りて(MSベースの測位モードと呼ばれることがある)MSにおいて特定することができる。MSベースの測位モードの間、GPSエンジンが、衛星もしくは基地局の場所、基地局および/もしくは衛星に関するタイミング情報、またはシード位置(アドバンストフォワードリンクトリラテレーション(AFLT)によって特定されるものなどだが、これに限定されない)などに関する、エフェメリスデータ、アルマナックデータなどの最新の援助データを要求した場合、次の位置固定(position fix)の結果として移動局がデータを求めて通信ネットワークと接触し、それにより、ネットワークに負担をかけ(taxing)、MSのバッテリー容量を使用することになる。あるいは、AGPSシステムにおけるMSの位置は、場所支援サーバで特定し、(MS支援型測位モードと呼ばれることがある)MSが取得した情報を用いてMSに戻すことができる。GPSにおける衛星軌道は、さまざまな摂動を考慮して訂正項(correction terms)により修正楕円軌道として作ることができる。比較的短期のエフェメリスデータは、衛星の軌道を非常に正確に表す。たとえば、GPSサブフレーム2のワード10のビット17は、「0」が4時間のフィット、「1」が「4時間超」のフィットを表す、エフェメリスのパラメータを特定する際にGPS制御セグメントが用いるカーブフィット間隔を示す「フィット間隔」フラグである。さらに、ブロックII/IIA GPS衛星の拡張ナビゲーションモードは、短期の拡張オペレーションをサポートするため、14日間正しいエフェメリスパラメータの伝送を保証する。通常のオペレーション中は、制御セグメントは各衛星に対して、16メートルの確率誤差球(SEP)の測位の精度をサポートするために、ナビゲーション(軌道の)データの日次のアップロードを提供する。
【0009】
前述のとおり、場所支援サーバは、入手可能な正確な軌道情報を有する。場所支援サーバがアップロードする各エフェメリスおよびクロック訂正モデルは通常、非常に高い精度で4時間のタイムスパンをカバーする。24時間など、これよりも長い時間をカバーするために、場所支援サーバは機器に対して、一連のN個の衛星(N satellites in the constellation)の各々につき、複数の4時間のエフェメリスおよびクロック訂正モデルを送信することができる。しかし、これは、一連の衛星すべて(たとえば27個の衛星)について衛星位置およびクロック誤差を示すために大量のオクテットを必要とする。これらの長いメッセージは長い処理時間につながり、そのため、大半のモバイル機器アプリケーションにとって受け入れられないものである。これはまた、通信ネットワークに負担をかけることにもなる。
【0010】
エフェメリスデータに加えて、SPSの衛星は、衛星位置およびクロックバイアスを特定するために使用することができるアルマナックデータも伝送する。アルマナックデータは、切り捨てられた低精度の(大まかな)一連のエフェメリスパラメータのほか、大まかなクロック訂正パラメータを提供する。結果的に、アルマナックデータから導出される生の衛星位置の精度(約1キロメートル)は、詳細なエフェメリスデータから導出される衛星位置の精度(約1メートル)よりもはるかに低い傾向にある。一般に、衛星軌道は、一連の大まかな(たとえばアルマナック)または一連の正確な(たとえばエフェメリス)軌道および衛星クロックパラメータによって表されることに留意されたい。
【発明の概要】
【0011】
じかに衛星からまたは場所支援サーバから必要なアルマナックおよび/またはエフェメリスをダウンロードする頻度を減らすため、SPS受信機に拡張軌道データを提供するシステムおよび方法が必要である。
【0012】
移動局が効果的なメッセージフォーマットを用いて衛星の場所を突き止めるのを支援する方法およびシステムを説明する。サーバが、衛星の大まかな軌道データと衛星の正確な軌道データとの間の訂正を計算する。訂正の変化が時間を通じて大幅に滑らかになるよう座標系を選択する。サーバはさらに、移動局への伝送に必要なビット数を減らすために、数学関数を用いて訂正を概算する。移動局は、係数を受信すると、係数および適用時間(たとえば現在の時間)を用いて数学関数を評価し、評価した結果を標準的な座標系に変換し、変換結果を大まかな軌道データに適用して正確な軌道データを取得する。
【0013】
本明細書で述べる方法およびシステムは、長期の衛星軌道データに関する問題を解決する固有の仕方を提供する。この方法およびシステムの利点には、移動局へ送信するファイルのサイズ縮小およびメッセージ減少のほか、衛星位置およびタイミングの精度向上が含まれる。衛星位置およびタイミングの予測を改善するために、ハイブリッドモードのオペレーションも導入する。
【0014】
本発明の他の特徴は、添付の図面と以降の詳細な説明により明らかになろう。
【0015】
本発明は、同様の参照は類似の要素を含む添付の図面の各図で例として示しており、限定して示していない。本開示における「1つの(a、one)」実施形態への言及は、当該実施形態への言及とは限らず、かかる言及は少なくとも1つを意味することに留意されたい。
【図面の簡単な説明】
【0016】
【図1】移動局が衛星の場所を突き止めるのを支援するサーバを含む通信システムの例を示す図。
【図2】本発明の態様による座標系を示す図。
【図3】移動局が実行する方法の例を示す流れ図。
【図4】サーバが実行する方法の例を示す流れ図。
【図5】図4の方法のさらなる詳細を示す流れ図。
【図6A】場所支援サーバの構成要素の例を示すブロック図。
【図6B】移動局の構成要素の例を示すブロック図。
【発明を実施するための形態】
【0017】
移動局が衛星位置および衛星クロック誤差(clock error)を特定するのを支援する方法およびシステムを説明する。衛星位置および衛星クロック誤差は、拡張SPS軌道訂正情報を含む効果的なメッセージフォーマットを用いて特定される。本明細書で説明する方法およびシステムは、長期の衛星軌道データに関する問題を解決する固有の仕方を提供する。本発明の1つの態様では、本方法は、移動局へ送信するファイルのサイズおよびメッセージを縮める。本方法はまた、移動局における衛星位置およびタイミングの特定の精度を高める。本発明の他の態様では、衛星位置およびタイミングの予測を改善するためにハイブリッドモードのオペレーションを導入する。
【0018】
拡張軌道およびクロックの訂正をサポートするために必要なビット数は、場所支援サーバで計算する訂正データおよび移動局で受信する大まかな軌道データを使用することにより大幅に減る。訂正データは、衛星軌道の大まかな表示(たとえばアルマナックだがこれに限定されない)から計算される衛星位置と、予想される正確な軌道データ(たとえば、6時間以上といった、衛星機から得られる時間よりも長い、長時間の軌道データ)から計算される衛星位置との差である。訂正データはまた、大まかな軌道データから計算されるクロック訂正と、予想される衛星クロックデータから計算されるクロック訂正との差を含む。これらの訂正は、一般に、時間を通じて変化し、各衛星に固有である。しかし、座標系を正しく選択すれば、変化を比較的滑らかにすることができる。そして、訂正は時間の数学関数(たとえば多項式だがこれに限定されない)を特徴とし、その係数のみが場所支援サーバによって移動局に提供される。
【0019】
本明細書で使用する、移動局(MS)は、SPS信号の受信および処理が可能な、セルラ方式や他の無線通信機器、パーソナル移動通信システム(PCS)機器、パーソナルナビゲーション機器、ラップトップ型コンピュータや他の適切なモバイル機器などの機器を指す。用語「移動局」はまた、衛星信号受信、支援データ受信および/または位置に関係する処理が当該機器でまたはパーソナルナビゲーション機器(PND)で発生するかにかかわりなく、短距離無線、赤外線、有線接続または他の接続などによる、PNDと通信する機器を含むことも意図している。また、「移動局」は、インターネット、WiFiまたは他のネットワークなどを介してサーバとの通信が可能で、衛星信号受信、支援データ受信および/または位置に関係する処理が当該機器で、サーバでまたはネットワークに結び付いた他の機器で発生するかに関係なく、無線通信機器、コンピュータ、ラップトップ型コンピュータなどを含むすべての機器を含むことを意図している。前記の実施可能な組合せも、すべて「移動局」と考えられる。
【0020】
本明細書における用語「大まかな軌道データ」は、アルマナックなど、衛星から伝送される衛星位置およびクロックデータの大まかな推定を指す。用語「リアルタイム軌道データ」は、エフェメリスなど、衛星から伝送される衛星位置およびタイミングの正確な表示を指す。用語「予想される軌道データ」または「正確な軌道データ」は、リアルタイムの正確な軌道データと比べて比較的長時間有効な、衛星位置およびタイミングの正確な推定を指す。予想される軌道データは、場所支援サーバで入手することができる。しかし、移動局に予想される軌道データを伝送する際は、一般に、相当な帯域幅を使うことになる。そのため、訂正データまたはその概算を伝送すると、伝送効率が大幅に向上することが多い。
【0021】
図1は、本発明の態様による通信システム100のブロック図である。システム100は、1つまたは複数のMS120と通信上結合した場所支援サーバ130を含む。場所支援サーバ130は、大まかな軌道データならびに正確な軌道データおよび/または予想される軌道データを含む予想される軌道パラメータファイルを受信する。1つのシナリオでは、場所支援サーバ130は、予想される軌道データプロバイダ110からネットワーク162を介して予想される軌道データを受信する。ネットワーク162は、インターネットプロトコル(IP)接続をサポートするネットワーク(たとえば、インターネット)であり得る。場所支援サーバ130は、予想される軌道データプロバイダ110からの予想される軌道データの安全な転送を目的としたインターフェース、たとえば安全なファイル転送プログラム(SFTP)を含むことができる。
【0022】
1つの態様では、予想される軌道データプロバイダ110は、長時間(たとえば6時間以上)有効な軌道データを作成するために、数時間(たとえば4時間)ごとに予想される軌道データを生成する。場所支援サーバ130は、より短い間隔で(たとえば毎時)新たなデータをチェックする。予想される軌道データはまた、予想される衛星の座標の3次元の不確定性値、予想される衛星のクロック訂正の不確定性および予想される機能不全の表示を含むことができる。この不確定性および機能不全の情報に基づき、利用者活動範囲誤差(URE)を場所支援サーバ130が計算してMS120に提供することができる。
【0023】
場所支援サーバ130は、ネットワーク164を介してリアルタイム軌道データプロバイダ150から大まかな軌道データを受信する。リアルタイム軌道データプロバイダ150は、パケットベースのSPS参照データ、ナビゲーションメッセージ、健康状態ページ情報(health page information)、アルマナックおよびエフェメリスなど、リアルタイムの衛星情報を受信するグローバルレファレンスネットワーク(GRN)ゲートウェイまたはワイドアリアレファレンスネットワーク(WARN)ゲートウェイであり得る。1つのシナリオでは、ネットワーク164は、IP接続をサポートするネットワークであり、場所支援サーバ130は、IPマルチキャストメッセージでリアルタイム軌道データプロバイダ150からリアルタイム衛星情報を受信することができる。
【0024】
場所支援サーバ130は、予想される軌道データおよび大まかな軌道データから訂正データ140を生成する。訂正データ140を、直接MSへ、またはMSがアクセス可能な記憶場所へ伝送することができる。たとえば、訂正データ140は、場所支援サーバ130と局所的または遠隔的に結合した記憶装置に格納することができる。MS120は、FTP、HTTPなどのファイル転送プロトコルや他の適切なネットワークプロトコルを用いて、ネットワーク166を介してデータホスト160から訂正データ140を受信することができる。
【0025】
本明細書での話を単純化するため、用語「訂正データ」140は、データ通信の任意の手段による二地点間の伝送、ファイルの転送、ブロードキャスト、またはある場所から別の場所への送信が可能な衛星軌道の訂正を指す。場所支援サーバ130によって生成されるメッセージは、MS120が長時間にわたり少ないビット数で衛星位置およびクロックタイミングを特定することを可能にする効果的なメッセージフォーマットを有する。このメッセージはMS120に対して、大まかな軌道データを訂正するための情報を提供し、それにより訂正された衛星位置が数メートルの範囲内で正確になるようにする。
【0026】
他の態様では、場所支援サーバ130はまた、推定される精度(利用者活動範囲誤差(URE))、電離層訂正モデル、協定世界時(UTC)モデルおよび衛星の健康状態/有用性情報をMS120に送信する。これは、衛星データの完全性を確保し、無線で(over the air)衛星によって伝送されるデータを受信および復号する必要のない移動体のオペレーションを可能にするためである。これはまた、場所支援サーバ130が使用するのと同一の大まかな軌道データをMS120が必ず使用するようにする。
【0027】
前述のシステムは説明のためのみ示しており、他の構成も存在し得ることに留意すべきである。あるいは、たとえば、ネットワーク162、164および166は、データ通信またはファイル転送をサポートする、二地点間接続、ローカルエリアネットワーク、ワイドエリアネットワーク、ブロードキャストネットワーク、あらゆる適切な有線もしくは無線ネットワーク、コンピュータもしくはコンピュータネットワークまたはこれらの組合せであり得る。
【0028】
当業者は、衛星位置の大まかな推定を提供する大まかな衛星データが広範囲の形態を含むことを理解されよう。以降の説明では、本発明の概念の理解を容易にするため、GPSブロードキャストのアルマナックの最近のコピーが、衛星位置およびクロックタイミングの大まかな推定として使用に供されることが示唆されている。しかし、以下のすべては、代替的な大まかな軌道データの例である。GPSブロードキャストのエフェメリスの早い段階のコピー、ブロードキャストのGalileoまたはGLONASSのアルマナックまたはエフェメリスの最近のコピー、GPS、GalileoまたはGLONASSのアルマナックまたはエフェメリスと同じ形態の、衛星位置の非ブロードキャストの大まかなモデル、GPS、GalileoおよびGLONASSのアルマナックおよびエフェメリスのフォーマットで使用するケプラー型パラメータのサブセットまたは改良形態、衛星軌道の非ケプラー型の表示、および時間を通じて精度が低下した他の予想される軌道データ。また、他の衛星ナビゲーションシステムに関する対応する情報を、開示する方法論の範囲内で利用できることも理解されよう。本発明は、大まかな軌道を示すあらゆる方法を含む。当業者は、その大まかな推定がどんな形態であっても、この方法論が適用されることを理解されよう。
【0029】
いくつかのシナリオでは、大まかな軌道データを、場所支援サーバ130によってMS120に供給することができる。衛星位置の大まかな推定をMS120に送信することに加えて、場所支援サーバ130は、移動局への支援メッセージに基準時間を含める能力を有する。本発明のこの態様では、場所支援サーバ130は、ネットワークタイムサーバから、または個々の基準受信機(たとえば、ワイドエリアレファレンスネットワークまたはグローバルレファレンスネットワーク)から受信したGPSデータから基準時間を取得する。この基準時間情報は、衛星位置の大まかな推定を含む、MS120に伝送されるメッセージに追加することができる。場所支援サーバ130はまた、ネットワークタイムサーバによって提供された基準時間のタイミングの精度を高め、このより精度の高い時間をMS120に伝送することができるアルゴリズムを実施することもできる。
【0030】
MS120は、GPS時間と同期されてもよい、または同期されていなくともよいパケット交換データネットワーク(たとえば、ネットワークタイムサーバまたはCDMA通信ネットワーク)から、場所支援サーバ130とは関係なく、基準時間を直接入手することができることに留意されたい。このようにして、MS120は、GPS時間、協定世界時(UTC)時間、(WWO)時間など、世界時間の基準の推定を取得する。
【0031】
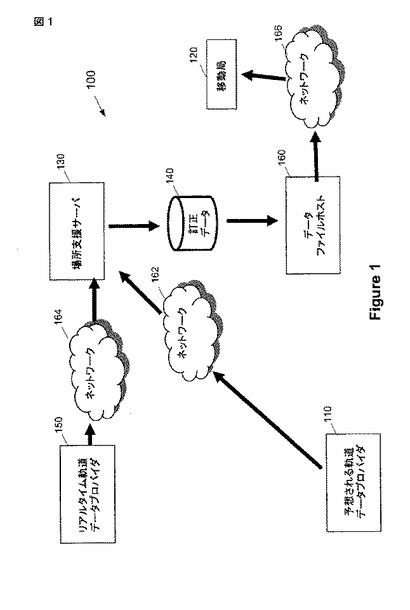
図2は、訂正データ140を計算する際に依拠する座標系の例を示す。トラック21は、正確な軌道予想によってかなり推定することができる実際の衛星軌道トラックを表す。トラック22は、ブロードキャストのアルマナックなど、大まかな軌道データによって推定される軌道トラックを表す。どの瞬間においても、ブロードキャストのアルマナックが示す衛星の場所と正確な軌道予想が示す衛星の場所との間には空間的差がある。この差は、衛星本体と共に動く起点および軸を有する座標系である座標系23で符号化することができる。正確に予想される衛星位置とアルマナックに基づく衛星位置との差である「誤り信号(error signal)」は、直交座標系23で表すことにより、かなり滑らかな曲線となる。誤り信号の変化は、時間の関数として表されるときに誤り信号の中断または急激な変化がないよう、時間を通じてかなり滑らかである。図1の実施形態では、誤り信号は訂正データ140を構成する。選択された座標系において誤り信号を表す基本的な手法は、所与の精度に対するこれらの「誤り信号」を表すのに必要な多項式の次数(order)を効果的に最小化する。
【0032】
1つの態様では、訂正データ140は、衛星位置の誤差を示す(座標系の3つの軸によって表される)3つの空間次元と、衛星クロックのクロック訂正を示す時間次元(4番目の次元)の4つの次元の情報からなる。
【0033】
座標系23の3つの軸のうち、Raは、大まかな衛星位置(たとえば、ブロードキャストのアルマナックから特定される衛星位置)から基準位置(reference location)を指す単位ベクトルである。典型的な状況での基準位置は、地球の中心であるため、この軸は「動径」と解釈される。当業者は、基準場所が、十分正確に特定することができるあらゆる場所(たとえば、地球の内部、地球の上、地球上、または、地球の表面の近く)であり得ることを理解されよう。
【0034】
他の軸のXtは「クロストラック」であり、Xt=Ra×Vel/|Ra×Vel|と定義される。Velはアルマナックに基づく衛星速度ベクトルであり、「×」はベクトル外積を示す。よって、Xtベクトルは、動径ベクトルRaおよび衛星の移動方向の両方と直角になっている。
【0035】
3番目の軸のAtは、「アロングトラック」であり、これは、At=Xt×Raと定義される。Atベクトルは衛星の速度ベクトル(Vel)とほぼ平行であるが、完全に平行ではない。これは、衛星の速度ベクトルが軌道の偏心(たとえば、衛星の軌道は、その性質上楕円形であり、円ではない)によりRaと完全には直交しないためである。衛星軌道の範囲が時間と共に増減する中、衛星速度ベクトルVelには、一般に、動径方向Raに従う構成要素がある。
【0036】
上で定義した座標系23の3つの軸は、軌道上の衛星のその時々の位置に左右されるため、時間の関数である。他の動きの中で、衛星が地球の周りを回る中、動径ベクトルRaおよびアロングトラックベクトルAtは、地球中心地球固定(ECEF)XYZ座標系24で表される場合、全360度回転する。これらの軸は、衛星位置のアルマナックに基づく推定を用いて計算されることに留意されたい。これにより、アルマナックの訂正を計算する前に、座標系23の軸を場所支援サーバ130によって計算することができる。座標系23の例では、軸が計算される順番は、座標系の適切な方向付けのために不可欠である。よって、動径ベクトルRaが最初に計算され、クロストラックベクトルXtが2番目に計算され、アロングトラックベクトルAtが最後に計算される。
【0037】
上で定義した軸の方向付けは、衛星ごとに異なる。単位ベクトルをRa(PRN,t)、At(PRN,t)、Xt(PRN,t)と記述し、明確に衛星および現在時間をそれぞれ指し示す(index)衛星の擬似乱数(PRN)およびtに依存することができよう。しかし、記述を簡単にするため、以降の説明ではこれらの依存は暗黙のものとする。
【0038】
動径/クロストラック/速度座標系(上述の(Ra,At,Xt)と異なる)、すなわち、差異のための3次元ECEFXYZ座標系または配列/高さ/方位(極)座標系など、大まかな軌道データの訂正のために他の座標系を用いることもできる。
【0039】
当業者は、(従来の左手の法則に従う)(Ra,At,Xt)座標系が例示されており、1つの好ましいアプローチであるが、広範な他の軸システムが本発明によって含まれることを理解されよう。これらの軸システムの顕著な特徴は、精度要件が3番目と比べてかなり緩やかな2つの空間次元を有する傾向がこれらにあることである。(Ra,At,Xt)座標系23の例では、AtおよびXtは通常、精度要件がRaに比べてより緩やか(たとえば、1/7)である。座標系は直交型または斜交型である。斜交座標系は、大まかな軌道データを訂正するために、軸の1つが、(Ra,At,Xt)座標系23と異なる起点を有する場合でも、Ra軸に対して比較的浅い角度を常に作る、任意の軸システムであり得る。これは、たとえば、1つの軸はRaだが、他の2つの軸は衛星の方位および高さ、ならびに他の2つの軸に関してはその他を選択する座標系を含む。
【0040】
さらに、ある軸が、衛星場所の推定に近いある地点から、地球上の受信機の場所に近いある地点まで引かれた線と平行である、あらゆる軸システムが、本発明の範囲に入る。図2は、地球の中心を指すRa軸を示しているが、地上の受信機の近くの地点または他の特定可能な場所(reference location)を指す軸が、本発明の範囲に入る。
【0041】
さらに、(Ra,At,Xt)座標系23の起点の場所は、本発明の範囲内で変更することができる。衛星場所の起点は、数学上の利便性の問題である。特に、((Ra,At,Xt)座標系23におけるような衛星場所の推定ではなく)実際のまたは正確に予想された衛星場所に定められた起点は、本発明の範囲内である。
【0042】
所定の時間(たとえば6時間)において、訂正データの3つの空間次元の各々は、(Ra,At,Xt)座標系23などの選択された座標系において、時間の関数として表すことができる。理論的に、訂正データは、無限の次数を有する多項式によって正確に表すことができる。しかし実際は、訂正データは、比較的低い次数、たとえば、6次、7次またはこれより低い次数の多項式によって概算することができる。よって、多項式の項およびそれに伴う係数の多くは切り捨てられ、多項式の項およびそれに伴う係数の一部のみが、訂正データの概算として使用される。空間訂正に加えて、低い次数(たとえば、1次または任意の適切な低い次数)の多項式を使用して、大まかな軌道データのクロックタイミングと予想されるクロックバイアスとの差の概算を表すクロック訂正パラメータを記述することができる。また、入手可能な場合のリアルタイムの軌道データのクロック情報など、場所支援サーバ130で入手可能な他の正確なクロック予想を、予想されるクロックバイアスとして使用することもできる。
【0043】
当業者は、本発明が関数列の訂正データの拡大を備え、より多くの関数が使用されるに伴い、かかる拡大の中で精度が高まる可能性があることを理解されよう。訂正データを多項式として表すために関数列がxの指数を増やす必要はない。当業者は、データ訂正を、調和関数(harmonics)、エルミート多項式、ルジャンドル多項式、コサインおよびサイン関数(フーリエ展開)、ケプラーの軌道関数の係数を含む他の関数列に広げることができることも理解しよう。このリストは例示的であり、網羅的ではない。関数列に訂正データを広げることは、本発明の範囲内である。
【0044】
4つの空間および時間の多項式係数列が、これらの係数を特定の衛星、特定の時間間隔および大まかな軌道データの特定のコピーと結び付ける情報と共に、MS120に送信される。MS120は、所定の間隔(たとえば1週間に約1回または他の適切な時間間隔)で大まかな軌道データの新たなコピーを受信する。場所支援サーバ130は、MS120が使用するバージョンと同じバージョンの大まかな軌道データを使って訂正データを計算する。よって、MS120は、場所支援サーバ130が訂正を特定する際に使用した対応する大まかな軌道データに訂正データが適用される限り、取得した大まかな軌道データ、または場所支援サーバ130によって伝送された大まかな軌道データのいずれかを使用することができる。
【0045】
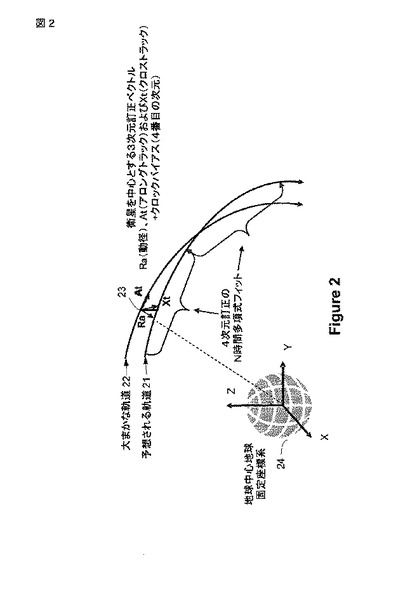
図3は、MS120によって実行されるオペレーションの例を示している。図3に示す処理を、ソフトウェア、ハードウェアまたは両者の組合せを含むことができる処理論理によって実行できることに留意されたい。MS120が多項式の係数および適用時間を有すると、この移動体は、衛星位置およびクロックバイアスの正確な予想を再構成する。係数の適用期間における特定の時間において、MS120は所定の精度範囲内で衛星位置およびクロックバイアスを見つけることができる。
【0046】
ブロック31において、MS120は、視野にある衛星から、または場所支援サーバ130から大まかな軌道データ(たとえば、アルマナックデータ)を受信する。MS120にとって、大まかな軌道データを衛星からダウンロードするには何分もかかる場合があるため、かかるデータを場所支援サーバ130から受信するのが好ましく、その方がより効率的であることが多い。場所支援サーバ130はMS120に対して、メッセージ/ファイルで大まかな軌道データを訂正データと共に提供することができる。MS120で言及される「訂正データ」は、場所支援サーバ130で計算される訂正の概算であり得ることを理解されたい。ブロック32において、MS120は、大まかな軌道データのコピーを用いてECEF座標における衛星位置を生成する。大まかな軌道データから計算され、ECEF座標のような標準的な座標系で表される衛星位置を、PosAlm(ここでは、アルマナックを意味する下付き文字「alm」を、大まかな軌道データの例として使用する)と呼ぶ。ブロック33において、MS120は、1つまたは複数の数学関数列の係数を場所支援サーバ130から受信する。ブロック34において、MS120は、適用時間(たとえば、現在時間)の大まかな軌道データの空間訂正データを、受信した係数を用いて、現在時間の数学関数を評価することによって再構成する。ブロック35において、MS120は、ブロック34で発見された空間訂正を1つの座標系(たとえば、図2の(Ra,At,Xt)座標系23)からECEF座標に変換する。この変換された訂正をPosCorと呼ぶ。続いて、ブロック36において、MS120は、ECEF座標における衛星位置(PosSat)を、PosSat=PosAlm+PosCorを計算することによって計算する。ブロック37において、MS120は、正確なクロックバイアスを特定するために、ブロック34および36と同じオペレーションを実行する。移動体のオペレーションが前記と異なる順番で発生する場合や、追加のオペレーションが実行される場合もあることを理解されたい。たとえば、ブロック36において、PosSat=PosAlm+PosCorを計算する代わりに、MS120は、RがMS120から衛星までの計算された距離を表す範囲区域RSat=RAlm+RCorにPosCorを適用することを選択することができる。
【0047】
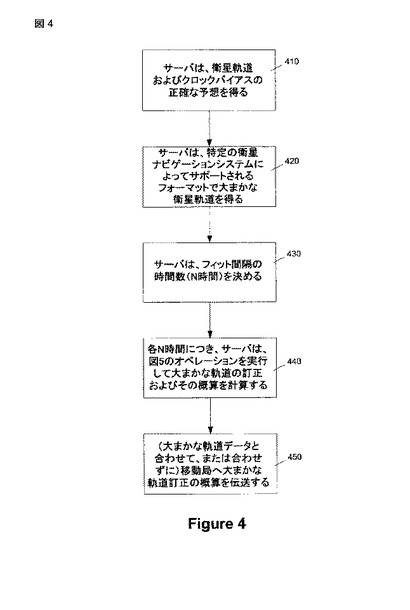
図4は、場所支援サーバ130によって実行されるオペレーションの例を示している。図4で示す処理を、ソフトウェア、ハードウェアまたは両者の組合せを含むことができる処理論理によって実行できることに留意されたい。場所支援サーバ130は、以降のオペレーションにおいて訂正データを記述する多項式係数を計算する。
【0048】
ブロック410において、場所支援サーバ130は、衛星軌道およびクロックバイアスの正確な軌道データを、たとえば、衛星からのブロードキャスト信号から、または外部のデータプロバイダから取得する。正確な軌道データは、所定の有効時間において有効である。ブロック420において、場所支援サーバ130は、特定の衛星ナビゲーションシステムによってサポートされるフォーマットで大まかな軌道データを取得する。ブロック430において、場所支援サーバ130は、有効時間を複数のN時間のフィット間隔に分割するか、1つのフィット間隔として有効時間全体を使用するか決定する。本明細書におけるフィット間隔は、ある時間の訂正データを記述するために多項式係数を計算する際の当該時間を指す。フィット間隔の例は4〜6時間であるが、他の時間を用いることもできる。場所支援サーバ130が長い有効時間にわたり正確な軌道データを有する場合、場所支援サーバは、フィットの精度を高めるために、正確な軌道データを複数のフィット間隔に分割することができる。ブロック440において、各々のN時間のフィット間隔につき、場所支援サーバ130は、訂正データおよびその概算を計算するために、以下の図5で示すオペレーションを実行する。ブロック450において、場所支援サーバ130は、訂正データの概算をMS120に伝送する。
【0049】
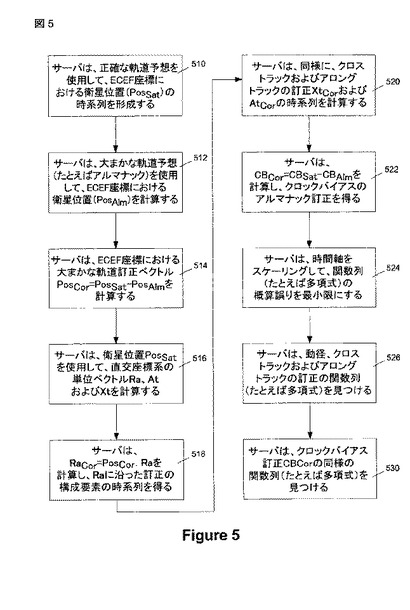
図5を参照すると、ブロック510において、場所支援サーバ130は、正確な軌道データを用いてECEF座標における衛星位置の時系列を形成する。これらの衛星位置をPosSatと定義する。ブロック512において、場所支援サーバ130は、大まかな軌道データを用いてECEF座標における衛星位置を計算する。これらの衛星位置をPosAlmと定義する。ブロック514において、場所支援サーバ130は、PosCor=PosSat−PosAlmを計算することによって、ECEF座標における訂正データベクトル(PosCor)を計算する。ブロック516において、場所支援サーバ130は、衛星位置PosSatを用いて、直交座標系23または上述の他の座標系におけるRa、XtおよびAtの単位ベクトルを計算する。ブロック518において、動径軸Raに沿った訂正構成要素の時系列が、ドット積:RaCor=PosCor・Raを計算することによって得られる。ブロック520において、クロストラックおよびアロングトラックの訂正XtCorおよびAtCorの時系列が同様に計算される。ブロック522において、クロックバイアスの訂正データは、CBCor=CBSat−CBAlmとして計算され、ここでCBSatおよびCBAlmはクロック訂正であり、それぞれ正確なクロックモデルおよびクロックモデルの大まかな推定を用いる。
【0050】
ブロック524において、場所支援サーバ130は、多項式補間の時間軸をスケーリングおよび/または正規化して、補間パフォーマンスを向上させることができる。場所支援サーバ130はおよびMS120は、モバイルソフトウェアにおける訂正データを適切に再構成するために、同じスケーリングおよび/または正規化因子を用いることが期待されている。
【0051】
ブロック526において、場所支援サーバ130は、動径、アロングトラックおよびクロストラックの訂正RaCor、AtCorおよびXtCorを補間するための多項式係数を見つける。RaCorの多項式係数(Ra0、Ra1、...Raj)が、dを訂正データポイントとし、f0、f1、...fjを補間係数とする、Ra0f0(d)+Ra1f1(d)+..+Rajfj(d)がRaCorの優れた概算となるよう、選択される。係数は、多項式が最小平均2乗誤差を伴いRaCorを概算するよう選択され得る。場所支援サーバ130は、XtCorおよびAtCorの多項式係数を、これらの係数Xt0、Xt1、Xt2..Xtk、At0、At1、..、AtmがXtCorおよびAtCorの優れた概算になるよう、同様に見つける。最後に、ブロック530において、場所支援サーバ130は、クロックバイアス訂正CBCorの補間関数の係数を見つける。空間および時間次元の各々における訂正を表すための係数項の数が同じでない場合があることを理解されたい。1つの次元の係数が増すと、通常、その次元における訂正データの表示精度が高くなる。
【0052】
ブロック510〜530のオペレーションは、有効時間において複数のN時間のフィット間隔がある場合、繰り返される。オペレーションの順番は上記と異なってよく、さらなるオペレーションを含めることができる。
【0053】
図1の場所支援サーバ130によって生成される訂正データは、グローバルなものでもローカルなものでもよい。MS120の場所が全く知られていないか、その場所を数百キロメートルの精度範囲内で推定できない場合、場所支援サーバ130は、MSのためにグローバルメッセージを生成する。グローバルメッセージは、正確な衛星位置を割り出すため、地球上のあらゆる場所にある移動局へ送信することができる。ローカルメッセージは、より短いが、地球の表面上のある意図された基準地点(reference point)から数百キロメートルの範囲内でのみ正確である。よって、より短いローカルメッセージは、移動局の位置が数百キロメートルの範囲内で前もって知られている場合に送信することができる。移動局の場所が知られていない場合、グローバルメッセージを移動局に送信することができる。以下、グローバルメッセージとローカルメッセージとの違いについて説明する。
【0054】
グローバルメッセージは、地球の中心を(Ra,At,Xt)座標系の基準場所として用いる。アルマナックの誤差には4つの独立した次元(3つの空間次元およびクロックバイアス)があるため、グローバルメッセージは4つの多項式を含み、3つは衛星位置の誤差の直交空間構成要素(orthogonal spatial components)に合わせるため、4つ目の多項式はより正確なクロックバイアスを記述するためにある。
【0055】
ローカルメッセージは、地球表面のある地点を(Ra,At,Xt)座標系の基準場所として用いる。典型的には、場所支援サーバ130は、移動局の現在の場所の推定を基準場所(たとえば、移動体と通信しているセルラータワーの場所)として用いる。ローカルメッセージは、訂正に適した単一の多項式を含む。1次元の訂正は、衛星の空間範囲(擬似距離とも呼ばれる)の訂正およびクロックバイアスの訂正の両方を含む。ただ1つの多項式が送信されるため、ローカルメッセージはグローバルメッセージよりもはるかに短い。
【0056】
擬似距離訂正は、理想としては移動局が実際にある場所にできるだけ近い基準場所を対象に計算される。移動局が推定される基準場所から約100キロメートルの範囲内にある限り、測位結果は極めて正確である。移動局の真の位置が推定される基準場所から100キロメートルを超えて離れるにつれて、精度は徐々に低下する。移動局は、最初にその場所を計算し、次にそれを訂正データの基準場所と比較することによって、測位精度の低下度合いを判断することができる。
【0057】
他の態様では、図1のMS120は、軌道データの組合せを用いて、衛星位置およびクロックを特定することができる。いくつかのシナリオでは、MS120は、訂正データに加えてリアルタイムの軌道データ(たとえばエフェメリス)を受信する。単一の衛星では、MS120は、ある時間においてリアルタイムの軌道データ、別の時間において(大まかな軌道データに適用される訂正データを備える)訂正された軌道データ、さらに別の時間において両方の組合せ(たとえば加重平均)を使用することができる。複数の衛星からその場所を特定するために、MS120は、ある衛星にはリアルタイムの軌道データ、別の衛星には訂正された軌道データ、さらに別の衛星には両方の組合せを使用することができる。当業者は、上述の各種組合せが一例にすぎないことを理解されよう。リアルタイムの軌道データおよび訂正された軌道データの、時間またはさまざま衛星のあらゆる組合せを、MS120は用いることができる。
【0058】
1つの態様では、MS120は、衛星からの復号されたリアルタイムの軌道データを、かかるリアルタイムの軌道データが入手可能なときはいつでも使用することができる。リアルタイムの軌道データは一般に、時間の経過と共に徐々に精度が低下することのある、これより早い段階の予想される軌道データより正確である。よって、予想される軌道データを概算する訂正された軌道データも、時間と共に徐々に精度が低下する。また、リアルタイムの軌道データは、予想時には知られていなかった、衛星に関する新たな情報(たとえば、衛星の健康状態および完全性の情報)を含んでいることがある。しかし、リアルタイムの軌道データは、視野方向の欠如、影や、MS120による衛星からのブロードキャストの受信を妨げる他の受信上の問題により、MS120が入手できないことがある。リアルタイムの軌道データを入手できない場合、MS120は、衛星の場所を突き止めるため、上記の図2〜5で述べた訂正データに切り替えることができる。よって、MS120は、リアルタイムの軌道データの入手可能性に応じて、ある時間において訂正された軌道データ、別の時間においてリアルタイムの軌道データを利用することができる。MS120は、いつでも即座に自身の位置を特定するために、1つまたは複数の衛星の訂正された軌道データおよび1つまたはさらなる衛星のリアルタイムの軌道データを利用することができる。
【0059】
前段落では、リアルタイムの軌道データが有効な間、入手可能なリアルタイムの軌道データが訂正された軌道データに取って代わる場合について説明した。たとえば、エフェメリスが有効(エフェメリスの時間、すなわち、TOEから+/−2時間)ではなくなった後、MS120は、訂正された軌道データに戻すことができる。あるいは、早い時間のリアルタイムの軌道データは、訂正された軌道データの精度を高めるために使用することができる。たとえば、MS120は、リアルタイムの軌道データを使用して、リアルタイムの軌道データを入手できない(または無効の)ときに使用できる訂正された軌道データの将来の時間に適用する調整の量を決めることができる。クロックタイミングは一般に衛星進路より予想が難しいため、これは特に衛星クロックにとって有益である。1つの単純なケースでは、訂正された衛星機のクロックは、訂正されたクロックの調整量を決めるために(たとえば、GPSナビゲーションのサブフレーム1から)リアルタイムでブロードキャストされる衛星クロックのパラメータと比較して評価することができる。調整(たとえば、差のオフセットおよびスロープ(differential offset and slope)など)は、リアルタイムのクロックが入手できないときの利用を目的として、訂正されたクロック情報に施すことができる。進んだケースでは、3つの空間次元および衛星クロックの衛星位置を含む、訂正された軌道データ全体に対して調整を行うことができる。
【0060】
さらに、リアルタイムの軌道データおよび予想される軌道データに対し、それぞれの精度の推定にしたがって加重することができる。MS120は、その位置を明らかにする上で使用している衛星の測定に適切に加重し、予想されるデータの低い精度を考慮することができる。リアルタイムの軌道データおよび予想される軌道データの精度の推定を、それぞれ「正確なまたは短期の予想されるデータの誤差推定」および「長期の予想されるデータの誤差推定」と言う。たとえば、アルマナックは、(場所支援サーバ13によって計算または提供される)UREの形態による不確定性の推定を含み、リアルタイムのエフェメリスデータは、URA(たとえば、GPS制御セグメントによって提供される利用者精度範囲(User Accuracy Range))の形態による不確定性の推定を含む。URAは通常、数メートルであり、UREは数日後に数十メートルになることがある。たとえば、いずれの誤差推定も、加重最小2乗(WLS)モデルで重みとして使用することができる。この重みは、次のように計算することができる。W(短期の予想される軌道)=1/URA2およびW(長期の予想される軌道)=1/URE2
具体的には、(上の例でURAによって表される)衛星位置の誤差がより小さい衛星測定は、(上の例でUREによって表される)予想される衛星位置の誤差がより大きい衛星測定より大きく加重される。位置、速度、タイムソリューションまたは位置/速度/タイムソリューションの組合せにおいて、衛星測定に加重することができる。加重された位置/速度/タイムソリューションは、加重最小2乗モデル(WLS)またはカルマンフィルターまたは他の線形の、線形化したもしくは非線形の推定方法により、衛星測定から計算することができる。
【0061】
MS120では、位置/速度/時間の計算過程で、すべての測定誤差を計算するために、衛星測位誤差(リアルタイムのエフェメリス(URA)または予想される軌道誤差(URE))の誤差推定が、(信号の強度、空気、量子化、RF信号のデジタル変換などによる)測定される擬似距離誤差と組み合わされる。つまり、MS120では、擬似距離誤差全体:
Variance_total_means_error=variance_satellite_positioning_error+variance_meas_error。
【0062】
さらに、MS120は、自身の場所を特定するために複数の衛星からのリアルタイムおよび予想される軌道情報のミックスを用いる場合、予想される衛星クロック誤差を解決するために追加の衛星測定を用いることができる。この追加の衛星測定は、ある衛星のリアルタイムの軌道データであってよく、当該衛星の予想されるクロック誤差を推定するために使用することができる。あるいは、この追加の衛星測定は、第1の衛星のリアルタイムの軌道データであってよく、第2の衛星の予想されるクロック誤差を推定するために使用することができる。予想されるクロック誤差を、訂正されたクロックから除去することで、移動体で計算される訂正されたクロックの精度を高めることができる。こうして、リアルタイムの軌道データおよび衛星クロック訂正データを使用して、予想される衛星クロック情報のリアルタイムの調整を行うことができる。
【0063】
予想される衛星クロックは、予想される衛星位置よりも速く精度が低下するため、予想される衛星の位置と合わせて追加の衛星測定を使用して、予想される衛星のクロック誤差を計算し、予想されるクロックを将来の使用に備えて調整することができる。同様に、視野にある少なくとも1つの追加の衛星について、現在のリアルタイムの軌道データが入手できる場合、このリアルタイムデータをこの衛星の擬似距離および距離変化率測定と合わせて使用して、視野にある他の衛星の予想される衛星クロック誤差を計算することができる。2次元の位置の推定では(高度に関する知識を利用することができる)、視野にある少なくとも4つの衛星が、1つの衛星の予想される衛星クロック誤差を推定するために必要である。3次元の位置の推定では、視野にある少なくとも5つの衛星が、1つの衛星の予想される衛星クロック誤差を推定するために必要である。使用する衛星を追加するごとに、さらなる予想される衛星クロック誤差を推定することができる。3次元の場合(4つは未知)、たとえば、7つの衛星からの測定が可能な場合、3つの衛星について、予想される衛星クロック誤差を推定することができる。
【0064】
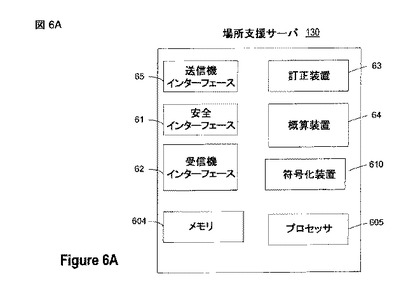
図6Aは、図1の場所支援サーバ130のブロック図の例を示している。場所支援サーバ130は、メモリ604およびプロセッサ605を含む。場所支援サーバ130はまた、外部のデータプロバイダから予想される軌道データを安全に受信するための安全インターフェース61、ブロードキャストデータ(たとえば、アルマナック)およびネットワーク上で送信される情報(たとえば、予想される軌道データ)を受信するための受信機インターフェース62、および予想される衛星軌道データを特定するため係数をMS120に伝送するための送信機インターフェース65を含む。送信機インターフェース65は、有線または無線のネットワーク、ブロードキャスト媒体、またはあらゆる適切な伝送手段を介して係数を送信することができる。
【0065】
1つのシナリオでは、場所支援サーバ130はまた、大まかな軌道データと予想される軌道データとの差(「訂正」)を計算するための訂正装置63を含むことができる。場所支援サーバ130はまた、訂正の変化が時間の経過でかなり滑らかになるよう選択された座標系(たとえば、図2の(Ra,At,Xt)座標系23)を用いて訂正の概算を計算するための概算装置64を含むことができる。1つのシナリオでは、概算は、1つまたは複数の低次数の数学関数を用いて訂正データポイントを補間することによって計算される。符号化装置610は、MS120へ伝送するための概算を符号化する。
【0066】
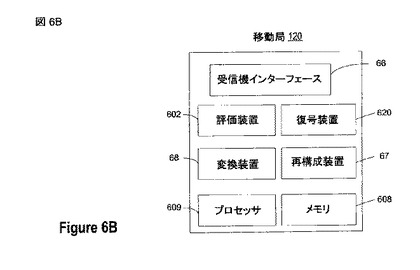
図6Bは、MS120の構成要素のブロック図の例を示している。MS120は、メモリ608およびプロセッサ609を含む。MS120はまた、場所支援サーバ130から係数列を受信するための受信機インターフェース66を含む。受信機インターフェース66はまた、衛星ブロードキャストから、場所支援サーバ130から、または他のデータソースから、大まかな軌道データおよび/もしくはリアルタイムの軌道データ、たとえば、アルマナック、エフェメリス、ならびに/または他の衛星位置およびタイミング情報を受信する。受信機インターフェース66は、有線もしくは無線のネットワーク、ブロードキャスト媒体、またはあらゆる適切なデータ伝送手段を介して係数を受信することができる。MS120は、場所支援サーバ130から送信される係数列を復号する復号装置620を含む。1つのシナリオでは、MS120はまた、評価装置602、変換装置68および再構成装置67を含むことができる。評価装置602は、係数および適用時間(現在時間)を用いて数学関数を評価する。変換装置68は、評価結果を、場所支援サーバ130によって使用される座標系(たとえば、図2の(Ra,At,Xt)座標系23)からECEF座標系に変換する。次いで、再構成装置67は、変換結果を大まかな軌道データに適用することによって、予想される軌道データを再構成する。
【0067】
本明細書で説明する方法論は、アプリケーションに応じてさまざまな手段により実施することができる。たとえば、場所支援サーバ130およびMS120の上記の構成要素は、ハードウェア、ファームウェア、ソフトウェアまたはその組合せに実装することができる。ハードウェア実装の場合、処理装置は、1つまたは複数のアプリケーション専用集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理装置(DSPD)、プログラマブル論理回路(PLD)、フィールドプログラマブルゲートアレー(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子機器、本明細書で説明する機能を実行するように設計された他の電子装置、またはこれらの組合せの範囲内で実装することができる。
【0068】
ファームウェアおよび/またはソフトウェア実装の場合、この方法論は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)内で実施することができる。指示を目に見える形で具現化する任意の機械可読媒体を、本明細書で説明する方法論を実施する際に使用することができる。たとえば、図6Aおよび6Bを再び参照すると、ソフトウェアコードをメモリ(たとえば、場所支援サーバ130のメモリ604およびMS120のメモリ608)に格納し、プロセッサ(場所支援サーバのプロセッサ605およびMS120のプロセッサ609)によって実行することができる。メモリは、プロセッサの中または外に実装することができる。本明細書で使用する用語「メモリ」は、あらゆる種類の長期、短期、揮発性、不揮発性、または他のメモリを意味し、特定の種類のメモリもしくは特定の数のメモリ、またはメモリが格納されている特定の種類の媒体に限定されない。
【0069】
本明細書で説明する方法および装置は、さまざまな衛星測位システム(SPS)または全地球ナビゲーション衛星システム(GNSS)、たとえば、米国の全地球測位システム(GPS)、ロシアのGlonassシステム、欧州のGalileoシステムなど、複数の衛星システムの組合せにより衛星を使用するシステム、または将来開発される衛星システムと共に使用することができる。さらに、開示する方法および装置は、スードライトまたは衛星とスードライトとの組合せを利用する位置特定システムと共に使用することができる。スードライトは、GPS時間と同期を取ることができる、Lバンド(または他の周波数)の搬送波信号で変調されるPNコードまたは他のレンジングコード(GPSまたはCDMAセルラ信号に似たもの)をブロードキャストする地上ベースの送信機である。遠隔送信機による識別を可能にするため、各々の当該送信機に固有のPNコードを割り当てることができる。スードライトは、トンネル、鉱山、建物、都市の谷間や他の閉ざされた領域など、周回軌道衛星からのGSPシグナルが入手できない可能性のある状況では、有益である。スードライトの別の実装形態は、ラジオビーコンとして知られている。本明細書で使用する用語「衛星」は、スードライト、スードライトと同等のものや、場合によってはその他を含むことを意図している。本明細書で使用する「SPS信号」は、スードライトまたはスードライトと同等のものからのSPSのような信号を含むことを意図している。
【0070】
本明細書で開示する位置特定手法は、無線ワイドエリアネットワーク(WWAN)、無線ローカルエリアネットワーク(WLAN)、無線パーソナルエリアネットワーク(WPAN)など、さまざまな無線通信ネットワークで使用することができる。用語「ネットワーク」および「システム」は、しばしば交換可能な形で使用される。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一搬送周波数分割多元接続(SC−FDMA)ネットワークなどであり得る。CDMAネットワークは、cdma2000、広帯域CDMA(W−CDMA)など、1つまたは複数のラジオアクセス技術(RAT)を実施することができる。cdma2000は、IS−95、IS−2000およびIS−856の標準規格を含む。TDMAネットワークは、移動通信用グローバルシステム(GSM(登録商標))、デジタル先進移動電話システム(D−AMPS)または他のRATを実施することができる。GSMおよびW−CDMAは、「第3世代パートナーシッププロジェクト」(3GPP)という名の団体による文書で説明されている。CDMA2000は、「第3世代パートナーシッププロジェクト2」(3GPP2)という名の団体による文書で説明されている。3GPPおよび3GPP2の文書は、一般に入手できる。WLANは、IEEE802.11xネットワークであってよく、WPANは、ブルートゥースネットワーク、IEEE802.15x、または他の種類のネットワークであり得る。この手法は、WWAN、WLANおよび/またはWPANの組合せで使用することもできる。
【0071】
本発明は、特定の例示的特徴に言及して説明しているが、特許請求の範囲で述べる本発明のより広い精神および範囲から離れることなく、これらの特徴にさまざまな訂正および変更を行うことができることが明らかである。したがって、明細書および図面は限定的なものではなく例示的なものと見なすべきである。
【関連出願】
【0001】
本出願は、「Bit Efficient Support Of Extended Orbit For GNSS」と題する2006年11月10日に出願された米国特許出願第60/857,972号、「Efficient Range Correction Messages For Accurate Position Determination With Assisted GPS」と題する2007年1月23日に出願された米国特許出願第60/886,230号、「Bit Efficient Support Of Extended Orbit For GNSS」と題する2007年2月7日に出願された米国特許出願第60/888,738号、「Method And Apparatus For Position Determination With Extended SPS Orbit Information」と題する2007年3月22日に出願された米国特許出願第60/896,493号、「Method And Apparatus For Position Determination With Extended SPS Orbit Information」と題する2007年5月11日に出願された米国特許出願第60/917,622号、および「Method And Apparatus For Position Determination With Extended SPS Orbit Information」と題する2007年5月24日に出願された米国特許出願第60/939,964号の出願日の利益を主張し、上記のすべては、全体として参照により本明細書に組み込まれ、本明細書の譲受人に譲渡される。
【技術分野】
【0002】
本発明は、一般に、衛星測位システム(SPS)に関し、より具体的には、移動局が拡張SPS軌道訂正情報を含む効果的なメッセージフォーマットを用いて衛星の場所を突き止めるのを支援することに関する。
【背景技術】
【0003】
衛星測位システム(SPS)受信機は、通常、複数の衛星から同時に伝送される信号の到着時間を計算することによってその位置を特定する。これらの衛星は、そのメッセージの一部として、衛星位置データと衛星クロックタイミングデータの両方を送信する。衛星の位置およびクロックタイミングは、典型的には、アルマナックデータまたはエフェメリスデータによって表される。エフェメリスデータは、衛星位置およびクロックバイアスのきわめて正確な推定(約1メートルの誤差(error))を提供する。しかし、衛星信号の探索および取得、衛星によって伝送されたエフェメリスデータの読み取り、ならびにこのデータによる受信機の場所の計算の処理は時間がかかり、数分を要することが多い。多くの場合、この長い処理時間は受け入れられず、さらに、小型化された携帯用アプリケーションの電池寿命を大きく限定する。
【0004】
たとえば、全地球測位システム(GPS)は、周回軌道衛星からブロードキャストされたGPS信号がGPS受信機のアンテナに到着した時間の測定に基づき、位置を特定する。前述のとおり、こうしたシステムの1つの弱点は、一定の条件のもとで信号取得を行うのに必要な比較的長い時間である。衛星信号は、次元が符号位相遅延および観測のドップラー周波数偏移である2次元の探索「空間」において探索することによって最初に場所が突き止められるまで、追跡することができない。衛星信号を探索、取得および復調するSPS受信機の処理は、「独立」モードのオペレーションと呼ばれることがあり、「支援」モードのオペレーションと対比することができる。
【0005】
独立モードのオペレーションに伴う遅れを減らすために、情報を提供してSPSまたはGPS受信機による特定の信号の取得を援助することができる。このような支援情報は、符号および周波数次元を限定することにより、受信機が信号の場所を突き止めるために探索しなければならない探索空間を狭めることを可能にする。外部から供給されたGPS支援データで補強されたGPS受信機を用いるシステムは、一般に支援型全地球測位システム(AGPS)と呼ばれる。
【0006】
AGPSシステムの1つの例は、GPS受信機を備えるかGPS受信機と通信し、無線通信ネットワークの基地伝送局(BTS)またはノードBとも呼ばれる1つまたは複数の基地局(BS)と通信し、ひいては、通信電波インターフェースプロトコルにより位置特定エンティティ(PDE)、サービス移動位置センター(SMLC)などと呼ばれることがある1つまたは複数の場所支援サーバと通信する(携帯電話などの)無線移動局(MS)を含む。AGPSシステムの他の例は、GPS受信機を備えるかGPS受信機と通信し、インターネットなどの通信ネットワークとの通信が可能で、かかる通信ネットワークを介して最終的に場所支援サーバと通信するMSまたはラップトップ型コンピュータを含む。
【0007】
場所支援サーバは、1つまたは複数のGPS基準受信機(reference receivers)からGPS支援情報を導出する。場所支援サーバはまた、移動局のおおよその位置を特定する手段にアクセスすることができる。場所支援サーバは、基準時間(reference time)、衛星軌道のアルマナックおよびエフェメリス情報、電離層情報ならびに衛星活動状態(「健康状態(health)」)情報を含むGPSデータベースを維持する。場所支援サーバはまた、移動局のおおよその位置を対象にカスタマイズされた支援情報を計算する。
【0008】
AGSPシステムにおけるMSの位置は、場所支援サーバの力を借りて(MSベースの測位モードと呼ばれることがある)MSにおいて特定することができる。MSベースの測位モードの間、GPSエンジンが、衛星もしくは基地局の場所、基地局および/もしくは衛星に関するタイミング情報、またはシード位置(アドバンストフォワードリンクトリラテレーション(AFLT)によって特定されるものなどだが、これに限定されない)などに関する、エフェメリスデータ、アルマナックデータなどの最新の援助データを要求した場合、次の位置固定(position fix)の結果として移動局がデータを求めて通信ネットワークと接触し、それにより、ネットワークに負担をかけ(taxing)、MSのバッテリー容量を使用することになる。あるいは、AGPSシステムにおけるMSの位置は、場所支援サーバで特定し、(MS支援型測位モードと呼ばれることがある)MSが取得した情報を用いてMSに戻すことができる。GPSにおける衛星軌道は、さまざまな摂動を考慮して訂正項(correction terms)により修正楕円軌道として作ることができる。比較的短期のエフェメリスデータは、衛星の軌道を非常に正確に表す。たとえば、GPSサブフレーム2のワード10のビット17は、「0」が4時間のフィット、「1」が「4時間超」のフィットを表す、エフェメリスのパラメータを特定する際にGPS制御セグメントが用いるカーブフィット間隔を示す「フィット間隔」フラグである。さらに、ブロックII/IIA GPS衛星の拡張ナビゲーションモードは、短期の拡張オペレーションをサポートするため、14日間正しいエフェメリスパラメータの伝送を保証する。通常のオペレーション中は、制御セグメントは各衛星に対して、16メートルの確率誤差球(SEP)の測位の精度をサポートするために、ナビゲーション(軌道の)データの日次のアップロードを提供する。
【0009】
前述のとおり、場所支援サーバは、入手可能な正確な軌道情報を有する。場所支援サーバがアップロードする各エフェメリスおよびクロック訂正モデルは通常、非常に高い精度で4時間のタイムスパンをカバーする。24時間など、これよりも長い時間をカバーするために、場所支援サーバは機器に対して、一連のN個の衛星(N satellites in the constellation)の各々につき、複数の4時間のエフェメリスおよびクロック訂正モデルを送信することができる。しかし、これは、一連の衛星すべて(たとえば27個の衛星)について衛星位置およびクロック誤差を示すために大量のオクテットを必要とする。これらの長いメッセージは長い処理時間につながり、そのため、大半のモバイル機器アプリケーションにとって受け入れられないものである。これはまた、通信ネットワークに負担をかけることにもなる。
【0010】
エフェメリスデータに加えて、SPSの衛星は、衛星位置およびクロックバイアスを特定するために使用することができるアルマナックデータも伝送する。アルマナックデータは、切り捨てられた低精度の(大まかな)一連のエフェメリスパラメータのほか、大まかなクロック訂正パラメータを提供する。結果的に、アルマナックデータから導出される生の衛星位置の精度(約1キロメートル)は、詳細なエフェメリスデータから導出される衛星位置の精度(約1メートル)よりもはるかに低い傾向にある。一般に、衛星軌道は、一連の大まかな(たとえばアルマナック)または一連の正確な(たとえばエフェメリス)軌道および衛星クロックパラメータによって表されることに留意されたい。
【発明の概要】
【0011】
じかに衛星からまたは場所支援サーバから必要なアルマナックおよび/またはエフェメリスをダウンロードする頻度を減らすため、SPS受信機に拡張軌道データを提供するシステムおよび方法が必要である。
【0012】
移動局が効果的なメッセージフォーマットを用いて衛星の場所を突き止めるのを支援する方法およびシステムを説明する。サーバが、衛星の大まかな軌道データと衛星の正確な軌道データとの間の訂正を計算する。訂正の変化が時間を通じて大幅に滑らかになるよう座標系を選択する。サーバはさらに、移動局への伝送に必要なビット数を減らすために、数学関数を用いて訂正を概算する。移動局は、係数を受信すると、係数および適用時間(たとえば現在の時間)を用いて数学関数を評価し、評価した結果を標準的な座標系に変換し、変換結果を大まかな軌道データに適用して正確な軌道データを取得する。
【0013】
本明細書で述べる方法およびシステムは、長期の衛星軌道データに関する問題を解決する固有の仕方を提供する。この方法およびシステムの利点には、移動局へ送信するファイルのサイズ縮小およびメッセージ減少のほか、衛星位置およびタイミングの精度向上が含まれる。衛星位置およびタイミングの予測を改善するために、ハイブリッドモードのオペレーションも導入する。
【0014】
本発明の他の特徴は、添付の図面と以降の詳細な説明により明らかになろう。
【0015】
本発明は、同様の参照は類似の要素を含む添付の図面の各図で例として示しており、限定して示していない。本開示における「1つの(a、one)」実施形態への言及は、当該実施形態への言及とは限らず、かかる言及は少なくとも1つを意味することに留意されたい。
【図面の簡単な説明】
【0016】
【図1】移動局が衛星の場所を突き止めるのを支援するサーバを含む通信システムの例を示す図。
【図2】本発明の態様による座標系を示す図。
【図3】移動局が実行する方法の例を示す流れ図。
【図4】サーバが実行する方法の例を示す流れ図。
【図5】図4の方法のさらなる詳細を示す流れ図。
【図6A】場所支援サーバの構成要素の例を示すブロック図。
【図6B】移動局の構成要素の例を示すブロック図。
【発明を実施するための形態】
【0017】
移動局が衛星位置および衛星クロック誤差(clock error)を特定するのを支援する方法およびシステムを説明する。衛星位置および衛星クロック誤差は、拡張SPS軌道訂正情報を含む効果的なメッセージフォーマットを用いて特定される。本明細書で説明する方法およびシステムは、長期の衛星軌道データに関する問題を解決する固有の仕方を提供する。本発明の1つの態様では、本方法は、移動局へ送信するファイルのサイズおよびメッセージを縮める。本方法はまた、移動局における衛星位置およびタイミングの特定の精度を高める。本発明の他の態様では、衛星位置およびタイミングの予測を改善するためにハイブリッドモードのオペレーションを導入する。
【0018】
拡張軌道およびクロックの訂正をサポートするために必要なビット数は、場所支援サーバで計算する訂正データおよび移動局で受信する大まかな軌道データを使用することにより大幅に減る。訂正データは、衛星軌道の大まかな表示(たとえばアルマナックだがこれに限定されない)から計算される衛星位置と、予想される正確な軌道データ(たとえば、6時間以上といった、衛星機から得られる時間よりも長い、長時間の軌道データ)から計算される衛星位置との差である。訂正データはまた、大まかな軌道データから計算されるクロック訂正と、予想される衛星クロックデータから計算されるクロック訂正との差を含む。これらの訂正は、一般に、時間を通じて変化し、各衛星に固有である。しかし、座標系を正しく選択すれば、変化を比較的滑らかにすることができる。そして、訂正は時間の数学関数(たとえば多項式だがこれに限定されない)を特徴とし、その係数のみが場所支援サーバによって移動局に提供される。
【0019】
本明細書で使用する、移動局(MS)は、SPS信号の受信および処理が可能な、セルラ方式や他の無線通信機器、パーソナル移動通信システム(PCS)機器、パーソナルナビゲーション機器、ラップトップ型コンピュータや他の適切なモバイル機器などの機器を指す。用語「移動局」はまた、衛星信号受信、支援データ受信および/または位置に関係する処理が当該機器でまたはパーソナルナビゲーション機器(PND)で発生するかにかかわりなく、短距離無線、赤外線、有線接続または他の接続などによる、PNDと通信する機器を含むことも意図している。また、「移動局」は、インターネット、WiFiまたは他のネットワークなどを介してサーバとの通信が可能で、衛星信号受信、支援データ受信および/または位置に関係する処理が当該機器で、サーバでまたはネットワークに結び付いた他の機器で発生するかに関係なく、無線通信機器、コンピュータ、ラップトップ型コンピュータなどを含むすべての機器を含むことを意図している。前記の実施可能な組合せも、すべて「移動局」と考えられる。
【0020】
本明細書における用語「大まかな軌道データ」は、アルマナックなど、衛星から伝送される衛星位置およびクロックデータの大まかな推定を指す。用語「リアルタイム軌道データ」は、エフェメリスなど、衛星から伝送される衛星位置およびタイミングの正確な表示を指す。用語「予想される軌道データ」または「正確な軌道データ」は、リアルタイムの正確な軌道データと比べて比較的長時間有効な、衛星位置およびタイミングの正確な推定を指す。予想される軌道データは、場所支援サーバで入手することができる。しかし、移動局に予想される軌道データを伝送する際は、一般に、相当な帯域幅を使うことになる。そのため、訂正データまたはその概算を伝送すると、伝送効率が大幅に向上することが多い。
【0021】
図1は、本発明の態様による通信システム100のブロック図である。システム100は、1つまたは複数のMS120と通信上結合した場所支援サーバ130を含む。場所支援サーバ130は、大まかな軌道データならびに正確な軌道データおよび/または予想される軌道データを含む予想される軌道パラメータファイルを受信する。1つのシナリオでは、場所支援サーバ130は、予想される軌道データプロバイダ110からネットワーク162を介して予想される軌道データを受信する。ネットワーク162は、インターネットプロトコル(IP)接続をサポートするネットワーク(たとえば、インターネット)であり得る。場所支援サーバ130は、予想される軌道データプロバイダ110からの予想される軌道データの安全な転送を目的としたインターフェース、たとえば安全なファイル転送プログラム(SFTP)を含むことができる。
【0022】
1つの態様では、予想される軌道データプロバイダ110は、長時間(たとえば6時間以上)有効な軌道データを作成するために、数時間(たとえば4時間)ごとに予想される軌道データを生成する。場所支援サーバ130は、より短い間隔で(たとえば毎時)新たなデータをチェックする。予想される軌道データはまた、予想される衛星の座標の3次元の不確定性値、予想される衛星のクロック訂正の不確定性および予想される機能不全の表示を含むことができる。この不確定性および機能不全の情報に基づき、利用者活動範囲誤差(URE)を場所支援サーバ130が計算してMS120に提供することができる。
【0023】
場所支援サーバ130は、ネットワーク164を介してリアルタイム軌道データプロバイダ150から大まかな軌道データを受信する。リアルタイム軌道データプロバイダ150は、パケットベースのSPS参照データ、ナビゲーションメッセージ、健康状態ページ情報(health page information)、アルマナックおよびエフェメリスなど、リアルタイムの衛星情報を受信するグローバルレファレンスネットワーク(GRN)ゲートウェイまたはワイドアリアレファレンスネットワーク(WARN)ゲートウェイであり得る。1つのシナリオでは、ネットワーク164は、IP接続をサポートするネットワークであり、場所支援サーバ130は、IPマルチキャストメッセージでリアルタイム軌道データプロバイダ150からリアルタイム衛星情報を受信することができる。
【0024】
場所支援サーバ130は、予想される軌道データおよび大まかな軌道データから訂正データ140を生成する。訂正データ140を、直接MSへ、またはMSがアクセス可能な記憶場所へ伝送することができる。たとえば、訂正データ140は、場所支援サーバ130と局所的または遠隔的に結合した記憶装置に格納することができる。MS120は、FTP、HTTPなどのファイル転送プロトコルや他の適切なネットワークプロトコルを用いて、ネットワーク166を介してデータホスト160から訂正データ140を受信することができる。
【0025】
本明細書での話を単純化するため、用語「訂正データ」140は、データ通信の任意の手段による二地点間の伝送、ファイルの転送、ブロードキャスト、またはある場所から別の場所への送信が可能な衛星軌道の訂正を指す。場所支援サーバ130によって生成されるメッセージは、MS120が長時間にわたり少ないビット数で衛星位置およびクロックタイミングを特定することを可能にする効果的なメッセージフォーマットを有する。このメッセージはMS120に対して、大まかな軌道データを訂正するための情報を提供し、それにより訂正された衛星位置が数メートルの範囲内で正確になるようにする。
【0026】
他の態様では、場所支援サーバ130はまた、推定される精度(利用者活動範囲誤差(URE))、電離層訂正モデル、協定世界時(UTC)モデルおよび衛星の健康状態/有用性情報をMS120に送信する。これは、衛星データの完全性を確保し、無線で(over the air)衛星によって伝送されるデータを受信および復号する必要のない移動体のオペレーションを可能にするためである。これはまた、場所支援サーバ130が使用するのと同一の大まかな軌道データをMS120が必ず使用するようにする。
【0027】
前述のシステムは説明のためのみ示しており、他の構成も存在し得ることに留意すべきである。あるいは、たとえば、ネットワーク162、164および166は、データ通信またはファイル転送をサポートする、二地点間接続、ローカルエリアネットワーク、ワイドエリアネットワーク、ブロードキャストネットワーク、あらゆる適切な有線もしくは無線ネットワーク、コンピュータもしくはコンピュータネットワークまたはこれらの組合せであり得る。
【0028】
当業者は、衛星位置の大まかな推定を提供する大まかな衛星データが広範囲の形態を含むことを理解されよう。以降の説明では、本発明の概念の理解を容易にするため、GPSブロードキャストのアルマナックの最近のコピーが、衛星位置およびクロックタイミングの大まかな推定として使用に供されることが示唆されている。しかし、以下のすべては、代替的な大まかな軌道データの例である。GPSブロードキャストのエフェメリスの早い段階のコピー、ブロードキャストのGalileoまたはGLONASSのアルマナックまたはエフェメリスの最近のコピー、GPS、GalileoまたはGLONASSのアルマナックまたはエフェメリスと同じ形態の、衛星位置の非ブロードキャストの大まかなモデル、GPS、GalileoおよびGLONASSのアルマナックおよびエフェメリスのフォーマットで使用するケプラー型パラメータのサブセットまたは改良形態、衛星軌道の非ケプラー型の表示、および時間を通じて精度が低下した他の予想される軌道データ。また、他の衛星ナビゲーションシステムに関する対応する情報を、開示する方法論の範囲内で利用できることも理解されよう。本発明は、大まかな軌道を示すあらゆる方法を含む。当業者は、その大まかな推定がどんな形態であっても、この方法論が適用されることを理解されよう。
【0029】
いくつかのシナリオでは、大まかな軌道データを、場所支援サーバ130によってMS120に供給することができる。衛星位置の大まかな推定をMS120に送信することに加えて、場所支援サーバ130は、移動局への支援メッセージに基準時間を含める能力を有する。本発明のこの態様では、場所支援サーバ130は、ネットワークタイムサーバから、または個々の基準受信機(たとえば、ワイドエリアレファレンスネットワークまたはグローバルレファレンスネットワーク)から受信したGPSデータから基準時間を取得する。この基準時間情報は、衛星位置の大まかな推定を含む、MS120に伝送されるメッセージに追加することができる。場所支援サーバ130はまた、ネットワークタイムサーバによって提供された基準時間のタイミングの精度を高め、このより精度の高い時間をMS120に伝送することができるアルゴリズムを実施することもできる。
【0030】
MS120は、GPS時間と同期されてもよい、または同期されていなくともよいパケット交換データネットワーク(たとえば、ネットワークタイムサーバまたはCDMA通信ネットワーク)から、場所支援サーバ130とは関係なく、基準時間を直接入手することができることに留意されたい。このようにして、MS120は、GPS時間、協定世界時(UTC)時間、(WWO)時間など、世界時間の基準の推定を取得する。
【0031】
図2は、訂正データ140を計算する際に依拠する座標系の例を示す。トラック21は、正確な軌道予想によってかなり推定することができる実際の衛星軌道トラックを表す。トラック22は、ブロードキャストのアルマナックなど、大まかな軌道データによって推定される軌道トラックを表す。どの瞬間においても、ブロードキャストのアルマナックが示す衛星の場所と正確な軌道予想が示す衛星の場所との間には空間的差がある。この差は、衛星本体と共に動く起点および軸を有する座標系である座標系23で符号化することができる。正確に予想される衛星位置とアルマナックに基づく衛星位置との差である「誤り信号(error signal)」は、直交座標系23で表すことにより、かなり滑らかな曲線となる。誤り信号の変化は、時間の関数として表されるときに誤り信号の中断または急激な変化がないよう、時間を通じてかなり滑らかである。図1の実施形態では、誤り信号は訂正データ140を構成する。選択された座標系において誤り信号を表す基本的な手法は、所与の精度に対するこれらの「誤り信号」を表すのに必要な多項式の次数(order)を効果的に最小化する。
【0032】
1つの態様では、訂正データ140は、衛星位置の誤差を示す(座標系の3つの軸によって表される)3つの空間次元と、衛星クロックのクロック訂正を示す時間次元(4番目の次元)の4つの次元の情報からなる。
【0033】
座標系23の3つの軸のうち、Raは、大まかな衛星位置(たとえば、ブロードキャストのアルマナックから特定される衛星位置)から基準位置(reference location)を指す単位ベクトルである。典型的な状況での基準位置は、地球の中心であるため、この軸は「動径」と解釈される。当業者は、基準場所が、十分正確に特定することができるあらゆる場所(たとえば、地球の内部、地球の上、地球上、または、地球の表面の近く)であり得ることを理解されよう。
【0034】
他の軸のXtは「クロストラック」であり、Xt=Ra×Vel/|Ra×Vel|と定義される。Velはアルマナックに基づく衛星速度ベクトルであり、「×」はベクトル外積を示す。よって、Xtベクトルは、動径ベクトルRaおよび衛星の移動方向の両方と直角になっている。
【0035】
3番目の軸のAtは、「アロングトラック」であり、これは、At=Xt×Raと定義される。Atベクトルは衛星の速度ベクトル(Vel)とほぼ平行であるが、完全に平行ではない。これは、衛星の速度ベクトルが軌道の偏心(たとえば、衛星の軌道は、その性質上楕円形であり、円ではない)によりRaと完全には直交しないためである。衛星軌道の範囲が時間と共に増減する中、衛星速度ベクトルVelには、一般に、動径方向Raに従う構成要素がある。
【0036】
上で定義した座標系23の3つの軸は、軌道上の衛星のその時々の位置に左右されるため、時間の関数である。他の動きの中で、衛星が地球の周りを回る中、動径ベクトルRaおよびアロングトラックベクトルAtは、地球中心地球固定(ECEF)XYZ座標系24で表される場合、全360度回転する。これらの軸は、衛星位置のアルマナックに基づく推定を用いて計算されることに留意されたい。これにより、アルマナックの訂正を計算する前に、座標系23の軸を場所支援サーバ130によって計算することができる。座標系23の例では、軸が計算される順番は、座標系の適切な方向付けのために不可欠である。よって、動径ベクトルRaが最初に計算され、クロストラックベクトルXtが2番目に計算され、アロングトラックベクトルAtが最後に計算される。
【0037】
上で定義した軸の方向付けは、衛星ごとに異なる。単位ベクトルをRa(PRN,t)、At(PRN,t)、Xt(PRN,t)と記述し、明確に衛星および現在時間をそれぞれ指し示す(index)衛星の擬似乱数(PRN)およびtに依存することができよう。しかし、記述を簡単にするため、以降の説明ではこれらの依存は暗黙のものとする。
【0038】
動径/クロストラック/速度座標系(上述の(Ra,At,Xt)と異なる)、すなわち、差異のための3次元ECEFXYZ座標系または配列/高さ/方位(極)座標系など、大まかな軌道データの訂正のために他の座標系を用いることもできる。
【0039】
当業者は、(従来の左手の法則に従う)(Ra,At,Xt)座標系が例示されており、1つの好ましいアプローチであるが、広範な他の軸システムが本発明によって含まれることを理解されよう。これらの軸システムの顕著な特徴は、精度要件が3番目と比べてかなり緩やかな2つの空間次元を有する傾向がこれらにあることである。(Ra,At,Xt)座標系23の例では、AtおよびXtは通常、精度要件がRaに比べてより緩やか(たとえば、1/7)である。座標系は直交型または斜交型である。斜交座標系は、大まかな軌道データを訂正するために、軸の1つが、(Ra,At,Xt)座標系23と異なる起点を有する場合でも、Ra軸に対して比較的浅い角度を常に作る、任意の軸システムであり得る。これは、たとえば、1つの軸はRaだが、他の2つの軸は衛星の方位および高さ、ならびに他の2つの軸に関してはその他を選択する座標系を含む。
【0040】
さらに、ある軸が、衛星場所の推定に近いある地点から、地球上の受信機の場所に近いある地点まで引かれた線と平行である、あらゆる軸システムが、本発明の範囲に入る。図2は、地球の中心を指すRa軸を示しているが、地上の受信機の近くの地点または他の特定可能な場所(reference location)を指す軸が、本発明の範囲に入る。
【0041】
さらに、(Ra,At,Xt)座標系23の起点の場所は、本発明の範囲内で変更することができる。衛星場所の起点は、数学上の利便性の問題である。特に、((Ra,At,Xt)座標系23におけるような衛星場所の推定ではなく)実際のまたは正確に予想された衛星場所に定められた起点は、本発明の範囲内である。
【0042】
所定の時間(たとえば6時間)において、訂正データの3つの空間次元の各々は、(Ra,At,Xt)座標系23などの選択された座標系において、時間の関数として表すことができる。理論的に、訂正データは、無限の次数を有する多項式によって正確に表すことができる。しかし実際は、訂正データは、比較的低い次数、たとえば、6次、7次またはこれより低い次数の多項式によって概算することができる。よって、多項式の項およびそれに伴う係数の多くは切り捨てられ、多項式の項およびそれに伴う係数の一部のみが、訂正データの概算として使用される。空間訂正に加えて、低い次数(たとえば、1次または任意の適切な低い次数)の多項式を使用して、大まかな軌道データのクロックタイミングと予想されるクロックバイアスとの差の概算を表すクロック訂正パラメータを記述することができる。また、入手可能な場合のリアルタイムの軌道データのクロック情報など、場所支援サーバ130で入手可能な他の正確なクロック予想を、予想されるクロックバイアスとして使用することもできる。
【0043】
当業者は、本発明が関数列の訂正データの拡大を備え、より多くの関数が使用されるに伴い、かかる拡大の中で精度が高まる可能性があることを理解されよう。訂正データを多項式として表すために関数列がxの指数を増やす必要はない。当業者は、データ訂正を、調和関数(harmonics)、エルミート多項式、ルジャンドル多項式、コサインおよびサイン関数(フーリエ展開)、ケプラーの軌道関数の係数を含む他の関数列に広げることができることも理解しよう。このリストは例示的であり、網羅的ではない。関数列に訂正データを広げることは、本発明の範囲内である。
【0044】
4つの空間および時間の多項式係数列が、これらの係数を特定の衛星、特定の時間間隔および大まかな軌道データの特定のコピーと結び付ける情報と共に、MS120に送信される。MS120は、所定の間隔(たとえば1週間に約1回または他の適切な時間間隔)で大まかな軌道データの新たなコピーを受信する。場所支援サーバ130は、MS120が使用するバージョンと同じバージョンの大まかな軌道データを使って訂正データを計算する。よって、MS120は、場所支援サーバ130が訂正を特定する際に使用した対応する大まかな軌道データに訂正データが適用される限り、取得した大まかな軌道データ、または場所支援サーバ130によって伝送された大まかな軌道データのいずれかを使用することができる。
【0045】
図3は、MS120によって実行されるオペレーションの例を示している。図3に示す処理を、ソフトウェア、ハードウェアまたは両者の組合せを含むことができる処理論理によって実行できることに留意されたい。MS120が多項式の係数および適用時間を有すると、この移動体は、衛星位置およびクロックバイアスの正確な予想を再構成する。係数の適用期間における特定の時間において、MS120は所定の精度範囲内で衛星位置およびクロックバイアスを見つけることができる。
【0046】
ブロック31において、MS120は、視野にある衛星から、または場所支援サーバ130から大まかな軌道データ(たとえば、アルマナックデータ)を受信する。MS120にとって、大まかな軌道データを衛星からダウンロードするには何分もかかる場合があるため、かかるデータを場所支援サーバ130から受信するのが好ましく、その方がより効率的であることが多い。場所支援サーバ130はMS120に対して、メッセージ/ファイルで大まかな軌道データを訂正データと共に提供することができる。MS120で言及される「訂正データ」は、場所支援サーバ130で計算される訂正の概算であり得ることを理解されたい。ブロック32において、MS120は、大まかな軌道データのコピーを用いてECEF座標における衛星位置を生成する。大まかな軌道データから計算され、ECEF座標のような標準的な座標系で表される衛星位置を、PosAlm(ここでは、アルマナックを意味する下付き文字「alm」を、大まかな軌道データの例として使用する)と呼ぶ。ブロック33において、MS120は、1つまたは複数の数学関数列の係数を場所支援サーバ130から受信する。ブロック34において、MS120は、適用時間(たとえば、現在時間)の大まかな軌道データの空間訂正データを、受信した係数を用いて、現在時間の数学関数を評価することによって再構成する。ブロック35において、MS120は、ブロック34で発見された空間訂正を1つの座標系(たとえば、図2の(Ra,At,Xt)座標系23)からECEF座標に変換する。この変換された訂正をPosCorと呼ぶ。続いて、ブロック36において、MS120は、ECEF座標における衛星位置(PosSat)を、PosSat=PosAlm+PosCorを計算することによって計算する。ブロック37において、MS120は、正確なクロックバイアスを特定するために、ブロック34および36と同じオペレーションを実行する。移動体のオペレーションが前記と異なる順番で発生する場合や、追加のオペレーションが実行される場合もあることを理解されたい。たとえば、ブロック36において、PosSat=PosAlm+PosCorを計算する代わりに、MS120は、RがMS120から衛星までの計算された距離を表す範囲区域RSat=RAlm+RCorにPosCorを適用することを選択することができる。
【0047】
図4は、場所支援サーバ130によって実行されるオペレーションの例を示している。図4で示す処理を、ソフトウェア、ハードウェアまたは両者の組合せを含むことができる処理論理によって実行できることに留意されたい。場所支援サーバ130は、以降のオペレーションにおいて訂正データを記述する多項式係数を計算する。
【0048】
ブロック410において、場所支援サーバ130は、衛星軌道およびクロックバイアスの正確な軌道データを、たとえば、衛星からのブロードキャスト信号から、または外部のデータプロバイダから取得する。正確な軌道データは、所定の有効時間において有効である。ブロック420において、場所支援サーバ130は、特定の衛星ナビゲーションシステムによってサポートされるフォーマットで大まかな軌道データを取得する。ブロック430において、場所支援サーバ130は、有効時間を複数のN時間のフィット間隔に分割するか、1つのフィット間隔として有効時間全体を使用するか決定する。本明細書におけるフィット間隔は、ある時間の訂正データを記述するために多項式係数を計算する際の当該時間を指す。フィット間隔の例は4〜6時間であるが、他の時間を用いることもできる。場所支援サーバ130が長い有効時間にわたり正確な軌道データを有する場合、場所支援サーバは、フィットの精度を高めるために、正確な軌道データを複数のフィット間隔に分割することができる。ブロック440において、各々のN時間のフィット間隔につき、場所支援サーバ130は、訂正データおよびその概算を計算するために、以下の図5で示すオペレーションを実行する。ブロック450において、場所支援サーバ130は、訂正データの概算をMS120に伝送する。
【0049】
図5を参照すると、ブロック510において、場所支援サーバ130は、正確な軌道データを用いてECEF座標における衛星位置の時系列を形成する。これらの衛星位置をPosSatと定義する。ブロック512において、場所支援サーバ130は、大まかな軌道データを用いてECEF座標における衛星位置を計算する。これらの衛星位置をPosAlmと定義する。ブロック514において、場所支援サーバ130は、PosCor=PosSat−PosAlmを計算することによって、ECEF座標における訂正データベクトル(PosCor)を計算する。ブロック516において、場所支援サーバ130は、衛星位置PosSatを用いて、直交座標系23または上述の他の座標系におけるRa、XtおよびAtの単位ベクトルを計算する。ブロック518において、動径軸Raに沿った訂正構成要素の時系列が、ドット積:RaCor=PosCor・Raを計算することによって得られる。ブロック520において、クロストラックおよびアロングトラックの訂正XtCorおよびAtCorの時系列が同様に計算される。ブロック522において、クロックバイアスの訂正データは、CBCor=CBSat−CBAlmとして計算され、ここでCBSatおよびCBAlmはクロック訂正であり、それぞれ正確なクロックモデルおよびクロックモデルの大まかな推定を用いる。
【0050】
ブロック524において、場所支援サーバ130は、多項式補間の時間軸をスケーリングおよび/または正規化して、補間パフォーマンスを向上させることができる。場所支援サーバ130はおよびMS120は、モバイルソフトウェアにおける訂正データを適切に再構成するために、同じスケーリングおよび/または正規化因子を用いることが期待されている。
【0051】
ブロック526において、場所支援サーバ130は、動径、アロングトラックおよびクロストラックの訂正RaCor、AtCorおよびXtCorを補間するための多項式係数を見つける。RaCorの多項式係数(Ra0、Ra1、...Raj)が、dを訂正データポイントとし、f0、f1、...fjを補間係数とする、Ra0f0(d)+Ra1f1(d)+..+Rajfj(d)がRaCorの優れた概算となるよう、選択される。係数は、多項式が最小平均2乗誤差を伴いRaCorを概算するよう選択され得る。場所支援サーバ130は、XtCorおよびAtCorの多項式係数を、これらの係数Xt0、Xt1、Xt2..Xtk、At0、At1、..、AtmがXtCorおよびAtCorの優れた概算になるよう、同様に見つける。最後に、ブロック530において、場所支援サーバ130は、クロックバイアス訂正CBCorの補間関数の係数を見つける。空間および時間次元の各々における訂正を表すための係数項の数が同じでない場合があることを理解されたい。1つの次元の係数が増すと、通常、その次元における訂正データの表示精度が高くなる。
【0052】
ブロック510〜530のオペレーションは、有効時間において複数のN時間のフィット間隔がある場合、繰り返される。オペレーションの順番は上記と異なってよく、さらなるオペレーションを含めることができる。
【0053】
図1の場所支援サーバ130によって生成される訂正データは、グローバルなものでもローカルなものでもよい。MS120の場所が全く知られていないか、その場所を数百キロメートルの精度範囲内で推定できない場合、場所支援サーバ130は、MSのためにグローバルメッセージを生成する。グローバルメッセージは、正確な衛星位置を割り出すため、地球上のあらゆる場所にある移動局へ送信することができる。ローカルメッセージは、より短いが、地球の表面上のある意図された基準地点(reference point)から数百キロメートルの範囲内でのみ正確である。よって、より短いローカルメッセージは、移動局の位置が数百キロメートルの範囲内で前もって知られている場合に送信することができる。移動局の場所が知られていない場合、グローバルメッセージを移動局に送信することができる。以下、グローバルメッセージとローカルメッセージとの違いについて説明する。
【0054】
グローバルメッセージは、地球の中心を(Ra,At,Xt)座標系の基準場所として用いる。アルマナックの誤差には4つの独立した次元(3つの空間次元およびクロックバイアス)があるため、グローバルメッセージは4つの多項式を含み、3つは衛星位置の誤差の直交空間構成要素(orthogonal spatial components)に合わせるため、4つ目の多項式はより正確なクロックバイアスを記述するためにある。
【0055】
ローカルメッセージは、地球表面のある地点を(Ra,At,Xt)座標系の基準場所として用いる。典型的には、場所支援サーバ130は、移動局の現在の場所の推定を基準場所(たとえば、移動体と通信しているセルラータワーの場所)として用いる。ローカルメッセージは、訂正に適した単一の多項式を含む。1次元の訂正は、衛星の空間範囲(擬似距離とも呼ばれる)の訂正およびクロックバイアスの訂正の両方を含む。ただ1つの多項式が送信されるため、ローカルメッセージはグローバルメッセージよりもはるかに短い。
【0056】
擬似距離訂正は、理想としては移動局が実際にある場所にできるだけ近い基準場所を対象に計算される。移動局が推定される基準場所から約100キロメートルの範囲内にある限り、測位結果は極めて正確である。移動局の真の位置が推定される基準場所から100キロメートルを超えて離れるにつれて、精度は徐々に低下する。移動局は、最初にその場所を計算し、次にそれを訂正データの基準場所と比較することによって、測位精度の低下度合いを判断することができる。
【0057】
他の態様では、図1のMS120は、軌道データの組合せを用いて、衛星位置およびクロックを特定することができる。いくつかのシナリオでは、MS120は、訂正データに加えてリアルタイムの軌道データ(たとえばエフェメリス)を受信する。単一の衛星では、MS120は、ある時間においてリアルタイムの軌道データ、別の時間において(大まかな軌道データに適用される訂正データを備える)訂正された軌道データ、さらに別の時間において両方の組合せ(たとえば加重平均)を使用することができる。複数の衛星からその場所を特定するために、MS120は、ある衛星にはリアルタイムの軌道データ、別の衛星には訂正された軌道データ、さらに別の衛星には両方の組合せを使用することができる。当業者は、上述の各種組合せが一例にすぎないことを理解されよう。リアルタイムの軌道データおよび訂正された軌道データの、時間またはさまざま衛星のあらゆる組合せを、MS120は用いることができる。
【0058】
1つの態様では、MS120は、衛星からの復号されたリアルタイムの軌道データを、かかるリアルタイムの軌道データが入手可能なときはいつでも使用することができる。リアルタイムの軌道データは一般に、時間の経過と共に徐々に精度が低下することのある、これより早い段階の予想される軌道データより正確である。よって、予想される軌道データを概算する訂正された軌道データも、時間と共に徐々に精度が低下する。また、リアルタイムの軌道データは、予想時には知られていなかった、衛星に関する新たな情報(たとえば、衛星の健康状態および完全性の情報)を含んでいることがある。しかし、リアルタイムの軌道データは、視野方向の欠如、影や、MS120による衛星からのブロードキャストの受信を妨げる他の受信上の問題により、MS120が入手できないことがある。リアルタイムの軌道データを入手できない場合、MS120は、衛星の場所を突き止めるため、上記の図2〜5で述べた訂正データに切り替えることができる。よって、MS120は、リアルタイムの軌道データの入手可能性に応じて、ある時間において訂正された軌道データ、別の時間においてリアルタイムの軌道データを利用することができる。MS120は、いつでも即座に自身の位置を特定するために、1つまたは複数の衛星の訂正された軌道データおよび1つまたはさらなる衛星のリアルタイムの軌道データを利用することができる。
【0059】
前段落では、リアルタイムの軌道データが有効な間、入手可能なリアルタイムの軌道データが訂正された軌道データに取って代わる場合について説明した。たとえば、エフェメリスが有効(エフェメリスの時間、すなわち、TOEから+/−2時間)ではなくなった後、MS120は、訂正された軌道データに戻すことができる。あるいは、早い時間のリアルタイムの軌道データは、訂正された軌道データの精度を高めるために使用することができる。たとえば、MS120は、リアルタイムの軌道データを使用して、リアルタイムの軌道データを入手できない(または無効の)ときに使用できる訂正された軌道データの将来の時間に適用する調整の量を決めることができる。クロックタイミングは一般に衛星進路より予想が難しいため、これは特に衛星クロックにとって有益である。1つの単純なケースでは、訂正された衛星機のクロックは、訂正されたクロックの調整量を決めるために(たとえば、GPSナビゲーションのサブフレーム1から)リアルタイムでブロードキャストされる衛星クロックのパラメータと比較して評価することができる。調整(たとえば、差のオフセットおよびスロープ(differential offset and slope)など)は、リアルタイムのクロックが入手できないときの利用を目的として、訂正されたクロック情報に施すことができる。進んだケースでは、3つの空間次元および衛星クロックの衛星位置を含む、訂正された軌道データ全体に対して調整を行うことができる。
【0060】
さらに、リアルタイムの軌道データおよび予想される軌道データに対し、それぞれの精度の推定にしたがって加重することができる。MS120は、その位置を明らかにする上で使用している衛星の測定に適切に加重し、予想されるデータの低い精度を考慮することができる。リアルタイムの軌道データおよび予想される軌道データの精度の推定を、それぞれ「正確なまたは短期の予想されるデータの誤差推定」および「長期の予想されるデータの誤差推定」と言う。たとえば、アルマナックは、(場所支援サーバ13によって計算または提供される)UREの形態による不確定性の推定を含み、リアルタイムのエフェメリスデータは、URA(たとえば、GPS制御セグメントによって提供される利用者精度範囲(User Accuracy Range))の形態による不確定性の推定を含む。URAは通常、数メートルであり、UREは数日後に数十メートルになることがある。たとえば、いずれの誤差推定も、加重最小2乗(WLS)モデルで重みとして使用することができる。この重みは、次のように計算することができる。W(短期の予想される軌道)=1/URA2およびW(長期の予想される軌道)=1/URE2
具体的には、(上の例でURAによって表される)衛星位置の誤差がより小さい衛星測定は、(上の例でUREによって表される)予想される衛星位置の誤差がより大きい衛星測定より大きく加重される。位置、速度、タイムソリューションまたは位置/速度/タイムソリューションの組合せにおいて、衛星測定に加重することができる。加重された位置/速度/タイムソリューションは、加重最小2乗モデル(WLS)またはカルマンフィルターまたは他の線形の、線形化したもしくは非線形の推定方法により、衛星測定から計算することができる。
【0061】
MS120では、位置/速度/時間の計算過程で、すべての測定誤差を計算するために、衛星測位誤差(リアルタイムのエフェメリス(URA)または予想される軌道誤差(URE))の誤差推定が、(信号の強度、空気、量子化、RF信号のデジタル変換などによる)測定される擬似距離誤差と組み合わされる。つまり、MS120では、擬似距離誤差全体:
Variance_total_means_error=variance_satellite_positioning_error+variance_meas_error。
【0062】
さらに、MS120は、自身の場所を特定するために複数の衛星からのリアルタイムおよび予想される軌道情報のミックスを用いる場合、予想される衛星クロック誤差を解決するために追加の衛星測定を用いることができる。この追加の衛星測定は、ある衛星のリアルタイムの軌道データであってよく、当該衛星の予想されるクロック誤差を推定するために使用することができる。あるいは、この追加の衛星測定は、第1の衛星のリアルタイムの軌道データであってよく、第2の衛星の予想されるクロック誤差を推定するために使用することができる。予想されるクロック誤差を、訂正されたクロックから除去することで、移動体で計算される訂正されたクロックの精度を高めることができる。こうして、リアルタイムの軌道データおよび衛星クロック訂正データを使用して、予想される衛星クロック情報のリアルタイムの調整を行うことができる。
【0063】
予想される衛星クロックは、予想される衛星位置よりも速く精度が低下するため、予想される衛星の位置と合わせて追加の衛星測定を使用して、予想される衛星のクロック誤差を計算し、予想されるクロックを将来の使用に備えて調整することができる。同様に、視野にある少なくとも1つの追加の衛星について、現在のリアルタイムの軌道データが入手できる場合、このリアルタイムデータをこの衛星の擬似距離および距離変化率測定と合わせて使用して、視野にある他の衛星の予想される衛星クロック誤差を計算することができる。2次元の位置の推定では(高度に関する知識を利用することができる)、視野にある少なくとも4つの衛星が、1つの衛星の予想される衛星クロック誤差を推定するために必要である。3次元の位置の推定では、視野にある少なくとも5つの衛星が、1つの衛星の予想される衛星クロック誤差を推定するために必要である。使用する衛星を追加するごとに、さらなる予想される衛星クロック誤差を推定することができる。3次元の場合(4つは未知)、たとえば、7つの衛星からの測定が可能な場合、3つの衛星について、予想される衛星クロック誤差を推定することができる。
【0064】
図6Aは、図1の場所支援サーバ130のブロック図の例を示している。場所支援サーバ130は、メモリ604およびプロセッサ605を含む。場所支援サーバ130はまた、外部のデータプロバイダから予想される軌道データを安全に受信するための安全インターフェース61、ブロードキャストデータ(たとえば、アルマナック)およびネットワーク上で送信される情報(たとえば、予想される軌道データ)を受信するための受信機インターフェース62、および予想される衛星軌道データを特定するため係数をMS120に伝送するための送信機インターフェース65を含む。送信機インターフェース65は、有線または無線のネットワーク、ブロードキャスト媒体、またはあらゆる適切な伝送手段を介して係数を送信することができる。
【0065】
1つのシナリオでは、場所支援サーバ130はまた、大まかな軌道データと予想される軌道データとの差(「訂正」)を計算するための訂正装置63を含むことができる。場所支援サーバ130はまた、訂正の変化が時間の経過でかなり滑らかになるよう選択された座標系(たとえば、図2の(Ra,At,Xt)座標系23)を用いて訂正の概算を計算するための概算装置64を含むことができる。1つのシナリオでは、概算は、1つまたは複数の低次数の数学関数を用いて訂正データポイントを補間することによって計算される。符号化装置610は、MS120へ伝送するための概算を符号化する。
【0066】
図6Bは、MS120の構成要素のブロック図の例を示している。MS120は、メモリ608およびプロセッサ609を含む。MS120はまた、場所支援サーバ130から係数列を受信するための受信機インターフェース66を含む。受信機インターフェース66はまた、衛星ブロードキャストから、場所支援サーバ130から、または他のデータソースから、大まかな軌道データおよび/もしくはリアルタイムの軌道データ、たとえば、アルマナック、エフェメリス、ならびに/または他の衛星位置およびタイミング情報を受信する。受信機インターフェース66は、有線もしくは無線のネットワーク、ブロードキャスト媒体、またはあらゆる適切なデータ伝送手段を介して係数を受信することができる。MS120は、場所支援サーバ130から送信される係数列を復号する復号装置620を含む。1つのシナリオでは、MS120はまた、評価装置602、変換装置68および再構成装置67を含むことができる。評価装置602は、係数および適用時間(現在時間)を用いて数学関数を評価する。変換装置68は、評価結果を、場所支援サーバ130によって使用される座標系(たとえば、図2の(Ra,At,Xt)座標系23)からECEF座標系に変換する。次いで、再構成装置67は、変換結果を大まかな軌道データに適用することによって、予想される軌道データを再構成する。
【0067】
本明細書で説明する方法論は、アプリケーションに応じてさまざまな手段により実施することができる。たとえば、場所支援サーバ130およびMS120の上記の構成要素は、ハードウェア、ファームウェア、ソフトウェアまたはその組合せに実装することができる。ハードウェア実装の場合、処理装置は、1つまたは複数のアプリケーション専用集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理装置(DSPD)、プログラマブル論理回路(PLD)、フィールドプログラマブルゲートアレー(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子機器、本明細書で説明する機能を実行するように設計された他の電子装置、またはこれらの組合せの範囲内で実装することができる。
【0068】
ファームウェアおよび/またはソフトウェア実装の場合、この方法論は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)内で実施することができる。指示を目に見える形で具現化する任意の機械可読媒体を、本明細書で説明する方法論を実施する際に使用することができる。たとえば、図6Aおよび6Bを再び参照すると、ソフトウェアコードをメモリ(たとえば、場所支援サーバ130のメモリ604およびMS120のメモリ608)に格納し、プロセッサ(場所支援サーバのプロセッサ605およびMS120のプロセッサ609)によって実行することができる。メモリは、プロセッサの中または外に実装することができる。本明細書で使用する用語「メモリ」は、あらゆる種類の長期、短期、揮発性、不揮発性、または他のメモリを意味し、特定の種類のメモリもしくは特定の数のメモリ、またはメモリが格納されている特定の種類の媒体に限定されない。
【0069】
本明細書で説明する方法および装置は、さまざまな衛星測位システム(SPS)または全地球ナビゲーション衛星システム(GNSS)、たとえば、米国の全地球測位システム(GPS)、ロシアのGlonassシステム、欧州のGalileoシステムなど、複数の衛星システムの組合せにより衛星を使用するシステム、または将来開発される衛星システムと共に使用することができる。さらに、開示する方法および装置は、スードライトまたは衛星とスードライトとの組合せを利用する位置特定システムと共に使用することができる。スードライトは、GPS時間と同期を取ることができる、Lバンド(または他の周波数)の搬送波信号で変調されるPNコードまたは他のレンジングコード(GPSまたはCDMAセルラ信号に似たもの)をブロードキャストする地上ベースの送信機である。遠隔送信機による識別を可能にするため、各々の当該送信機に固有のPNコードを割り当てることができる。スードライトは、トンネル、鉱山、建物、都市の谷間や他の閉ざされた領域など、周回軌道衛星からのGSPシグナルが入手できない可能性のある状況では、有益である。スードライトの別の実装形態は、ラジオビーコンとして知られている。本明細書で使用する用語「衛星」は、スードライト、スードライトと同等のものや、場合によってはその他を含むことを意図している。本明細書で使用する「SPS信号」は、スードライトまたはスードライトと同等のものからのSPSのような信号を含むことを意図している。
【0070】
本明細書で開示する位置特定手法は、無線ワイドエリアネットワーク(WWAN)、無線ローカルエリアネットワーク(WLAN)、無線パーソナルエリアネットワーク(WPAN)など、さまざまな無線通信ネットワークで使用することができる。用語「ネットワーク」および「システム」は、しばしば交換可能な形で使用される。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一搬送周波数分割多元接続(SC−FDMA)ネットワークなどであり得る。CDMAネットワークは、cdma2000、広帯域CDMA(W−CDMA)など、1つまたは複数のラジオアクセス技術(RAT)を実施することができる。cdma2000は、IS−95、IS−2000およびIS−856の標準規格を含む。TDMAネットワークは、移動通信用グローバルシステム(GSM(登録商標))、デジタル先進移動電話システム(D−AMPS)または他のRATを実施することができる。GSMおよびW−CDMAは、「第3世代パートナーシッププロジェクト」(3GPP)という名の団体による文書で説明されている。CDMA2000は、「第3世代パートナーシッププロジェクト2」(3GPP2)という名の団体による文書で説明されている。3GPPおよび3GPP2の文書は、一般に入手できる。WLANは、IEEE802.11xネットワークであってよく、WPANは、ブルートゥースネットワーク、IEEE802.15x、または他の種類のネットワークであり得る。この手法は、WWAN、WLANおよび/またはWPANの組合せで使用することもできる。
【0071】
本発明は、特定の例示的特徴に言及して説明しているが、特許請求の範囲で述べる本発明のより広い精神および範囲から離れることなく、これらの特徴にさまざまな訂正および変更を行うことができることが明らかである。したがって、明細書および図面は限定的なものではなく例示的なものと見なすべきである。
【特許請求の範囲】
【請求項1】
移動局が衛星の軌道情報を取得するのを支援する方法であって、
前記衛星の大まかな軌道データと前記衛星の正確な軌道データとの間の訂正を計算することと、
前記訂正の空間構成要素を、使用している第1の座標系から第2の座標系に変換することを表すことであって、前記第2の座標系における前記訂正が、時間を通じての前記訂正の変化を大幅に滑らかにするために選択される、表すこととを備える方法。
【請求項2】
前記第2の座標系における前記訂正を概算して、前記移動局への伝送に必要なビット数を減らすことをさらに備える、請求項1に記載の方法。
【請求項3】
前記訂正を概算することは、
1つまたは複数の数学関数列によって前記訂正を表すことと、
前記概算された訂正として前記数学関数の係数を使用することとを備える、請求項1に記載の方法。
【請求項4】
前記数学関数列は、
調和関数、エルミート多項式、ルジャンドル多項式、コサインおよびサイン関数、またはケプラーの軌道関数のうち1つを備える請求項3に記載の方法。
【請求項5】
前記第2の座標系は前記衛星と共に動く軸を有する、請求項1に記載の方法。
【請求項6】
前記第2の座標系は動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項5に記載の方法。
【請求項7】
前記第2の座標系は、前記動径軸および衛星移動の方向と直角なクロストラック軸をさらに含む、請求項6に記載の方法。
【請求項8】
前記訂正を概算することは、
前記第2の座標系の基準場所として前記移動局の場所を使用することと、
1次元データとして前記概算された訂正を伝送することであって、前記訂正はクロック訂正と結び付いた空間次元を含む、伝送することとを備える、請求項1に記載の方法。
【請求項9】
前記訂正を概算することは、
前記第2の座標系の基準場所として地球の中心を使用することと、
4つの次元データとして前記概算された訂正を伝送することであって、前記訂正は前記第2の座標系の3つの空間次元およびクロック訂正のための1つの時間次元を含む、伝送することとを備える、請求項1に記載の方法。
【請求項10】
1つの空間次元における前記訂正は、他の空間次元におけるよりもはるかに正確である、請求項1に記載の方法。
【請求項11】
タイムサーバから基準時間を取得することと、
前記基準時間を衛星位置の大まかな推定と合わせて前記移動局へ伝送することとをさらに備える、請求項1に記載の方法。
【請求項12】
前記タイムサーバから取得された前記基準時間の精度を高めることと、
前記基準時間を衛星位置の前記大まかな推定に付加して、前記移動局へ伝送するためのメッセージを作成することとをさらに備える、請求項11に記載の方法。
【請求項13】
衛星タイミングの前記訂正を概算することと、
前記衛星のクロックバイアスを特定するために、前記概算された訂正を前記移動局へ伝送することとをさらに備える、請求項1に記載の方法。
【請求項14】
前記概算された訂正を、前記移動局がアクセスできるよう記憶装置へ伝送することをさらに備える、請求項1に記載の方法。
【請求項15】
衛星軌道データの訂正を第1の座標系から第2の座標系へ変換することと、
前記衛星の軌道情報を特定するために、大まかな軌道データに前記変換された衛星軌道データを適用することとを備える方法。
【請求項16】
前記第1の座標系における前記訂正は、時間を通じて大幅に滑らかな変化を有する、請求項15に記載の方法。
【請求項17】
前記第1の座標系における前記訂正は、1つの空間次元において他の空間次元におけるよりも高い精度を有する、請求項15に記載の方法。
【請求項18】
前記第1の座標系の軸は、前記衛星の動きに合わせて回転する、請求項15に記載の方法。
【請求項19】
前記第1の座標系の軸は、前記衛星の位置および移動により定められる、請求項15に記載の方法。
【請求項20】
前記変換および前記適用のオペレーションは、移動局によって実行される、請求項15に記載の方法。
【請求項21】
サーバで前記衛星軌道データの前記訂正を計算することと、
前記サーバで前記訂正を前記第2の座標系から前記第1の座標系へ変換することとをさらに備える、請求項15に記載の方法。
【請求項22】
移動局の方法であって、
衛星の大まかな軌道データの訂正を受信することと、
前記訂正を第1の座標系から第2の座標系へ変換することであって、前記第1の座標系で表される前記訂正は、1つの空間次元において他の空間次元におけるよりも高い精度を有する、変換することと、
前記衛星の軌道情報を特定するために、前記大まかな軌道データに前記訂正を適用することとを備える方法。
【請求項23】
前記第1の座標系は、3つの直交軸を含む、請求項22に記載の方法。
【請求項24】
前記第1の座標系は、斜交軸を含む、請求項22に記載の方法。
【請求項25】
前記第1の座標系は、動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項22に記載の方法。
【請求項26】
前記基準場所は、地球の中心である、請求項25に記載の方法。
【請求項27】
前記基準場所は、前記移動局の推定される場所である、請求項25に記載の方法。
【請求項28】
前記訂正は、前記空間次元の各々につき、数学関数列の係数によって表される、請求項11に記載の方法。
【請求項29】
移動局の方法であって、
衛星の大まかな軌道データを受信することと、
前記衛星の前記大まかな軌道データの訂正データを受信することと、
前記訂正データを第1の座標系から第2の座標系へ変換することであって、前記第1の座標系は、時間を通じての前記訂正の変化を滑らかにするために選択される、変換することと、
前記衛星の軌道情報を特定するために、前記大まかな軌道データに前記訂正データを適用することとを備える方法。
【請求項30】
前記訂正データに基づいて前記衛星の位置およびタイミングを特定することをさらに備える、請求項29に記載の方法。
【請求項31】
前記訂正データを受信することは、
前記座標系の少なくとも1つの軸のための数学関数列の係数列を受信することと、
前記訂正データを取得するために、前記係数列および適用時間を使用して前記数学関数を評価することとを備える、請求項29に記載の方法。
【請求項32】
前記係数列は、
調和関数、エルミート多項式、ルジャンドル多項式、コサインおよびサイン関数、またはケプラーの軌道関数のうちの1つの係数を備える、請求項31に記載の方法。
【請求項33】
前記第1の座標系は、前記衛星とともに動く軸を有する、請求項29に記載の方法。
【請求項34】
前記第1の座標系は、動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項33に記載の方法。
【請求項35】
前記第1の座標系は、前記動径軸および衛星移動の方向と直角なクロストラック軸をさらに含む、請求項29に記載の方法。
【請求項36】
前記第1の座標系の基準場所として前記移動局の場所を使用することと、
数学関数列の係数を受信することであって、前記係数は、クロック訂正と結び付いた空間次元を含む1次元データを表す、受信することとをさらに備える、請求項29に記載の方法。
【請求項37】
前記第1の座標系の基準場所として地球の中心を使用することと、
4つの数学関数列の係数を受信することであって、前記係数は、前記第1の座標系の3つの空間次元およびクロック訂正のための時間次元を含む4つの次元データを表す、受信することとをさらに備える、請求項29に記載の方法。
【請求項38】
前記訂正データは、1つの空間次元において他の空間次元におけるよりも高い精度を有する前記第1の座標系で表される、請求項29に記載の方法。
【請求項39】
ネットワークタイムサーバ、場所支援サーバ、パケット交換データネットワーク、または基準受信機から受信するGPSデータのうちの1つから基準時間を受信することをさらに備える、請求項29に記載の方法。
【請求項40】
移動局が衛星の軌道情報を取得するのを支援するサーバシステムであって、
前記衛星の大まかな軌道データと前記衛星の正確な軌道データとの間の訂正を計算し、前記衛星とともに動く軸を有する座標系を使用して前記訂正の空間構成要素を表す訂正装置を備えるサーバシステム。
【請求項41】
前記移動局への伝送に必要なビット数を減らすために、前記座標系における前記訂正を概算する概算装置をさらに備える、請求項40に記載のサーバシステム。
【請求項42】
前記概算装置は、1つまたは複数の数学関数列によって前記訂正を表し、前記数学関数の係数を使用して前記訂正を概算する、請求項41に記載のサーバシステム。
【請求項43】
前記サーバシステムは、前記移動局による使用のために前記概算された訂正を記憶するデータ記憶装置と結び付いている、請求項40に記載のサーバシステム。
【請求項44】
ネットワークを介して前記移動局に前記概算された訂正を伝送する伝送装置をさらに備える、請求項40に記載のサーバシステム。
【請求項45】
前記移動局へ前記概算された訂正をブロードキャストする伝送装置をさらに備える、請求項40に記載のサーバシステム。
【請求項46】
前記座標系は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する動径軸を含む、請求項40に記載のサーバシステム。
【請求項47】
前記概算装置は、1つまたは複数の数学関数列によって前記訂正を表し、前記概算された訂正として前記数学関数の係数を使用する、請求項40に記載のサーバシステム。
【請求項48】
前記訂正装置は、前記衛星のクロック訂正を計算する論理を備える、請求項40に記載のサーバシステム。
【請求項49】
前記クロック訂正は、1つの数学関数列の少なくとも1つの係数によって概算される、請求項48に記載のサーバシステム。
【請求項50】
タイムサーバから基準時間を取得するインターフェース装置と、
前記基準時間を衛星位置の大まかな推定と合わせて前記移動局へ伝送する伝送装置とをさらに備える、請求項40に記載のサーバシステム。
【請求項51】
命令を記憶しているコンピュータ可読媒体であって、
前記衛星の大まかな軌道データと前記衛星の正確な軌道データとの間の訂正を計算する命令と、
前記訂正の空間構成要素を第1の座標系から第2の座標系へ変換することを表し、それにより、時間を通じての前記訂正の変化を滑らかにするために選択された座標系を使用して、前記第2の座標系における前記訂正が時間を通じて大幅に滑らかな変化を有する命令とを備えるコンピュータ可読媒体。
【請求項52】
前記移動局への伝送に必要なビット数を減らすため項を切り捨てた数学関数を使用して、前記第2の座標系における前記訂正を補間する命令をさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項53】
前記第2の座標系は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する動径軸、ならびに前記動径軸および衛星移動の方向と直角なクロストラック軸を含む、請求項51に記載のコンピュータ可読媒体。
【請求項54】
少なくとも1つの空間次元において他の空間次元より多くの係数を有する前記訂正を概算する命令をさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項55】
前記衛星のクロック訂正を計算する命令をさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項56】
タイムサーバから基準時間を取得する命令と、
前記基準時間を衛星位置の大まかな推定と合わせて前記移動局へ伝送する命令とをさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項57】
移動局のシステムであって、
インプットを受信する受信機インターフェースと、
前記インプットに基づき、衛星の大まかな軌道データの訂正データを計算する評価装置と、
前記訂正データを、時間を通じての前記訂正データの変化を滑らかにするために選択された第1の座標系から、第2の座標系へ変換する変換装置と、
前記衛星の軌道情報を特定するために、前記大まかな軌道データに前記訂正データを適用する再構成装置とを備えるシステム。
【請求項58】
前記第1の座標系の軸は、動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項57に記載のシステム。
【請求項59】
前記再構成装置は、前記衛星の位置およびタイミングを特定するために訂正された軌道データを生成する、請求項57に記載のシステム。
【請求項60】
前記インプットは、前記座標系の少なくとも1つの軸の数学関数の係数を含む、請求項57に記載のシステム。
【請求項61】
前記評価装置は、前記訂正データを取得するために前記係数および適用時間を使用して前記数学関数を評価する論理を含む、請求項60に記載のシステム。
【請求項62】
前記受信機インターフェースは、データ記憶装置からファイル転送を介して前記インプットを受信する、請求項57に記載のシステム。
【請求項63】
前記受信機インターフェースは、サーバから伝送されたメッセージで前記インプットを受信する、請求項57に記載のシステム。
【請求項64】
前記訂正データは、1つの空間次元において他の空間次元におけるよりも高い精度を有する前記第1の座標系で表される、請求項57に記載のシステム。
【請求項65】
命令を記憶しているコンピュータ可読媒体であって、
訂正データを、時間を通じての前記訂正データの変化を滑らかにするために選択された第1の座標系から、第2の座標系へ変換する命令と、
前記衛星の軌道情報を特定するために大まかな軌道データに前記訂正データを適用する命令とを備えるコンピュータ可読媒体。
【請求項66】
前記訂正データに基づいて前記衛星の位置およびタイミングを特定する命令をさらに備える、請求項65に記載のコンピュータ可読媒体。
【請求項67】
前記第1の座標系は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する動径軸、ならびに前記動径軸および衛星移動の方向と直角なクロストラック軸を含む、請求項65に記載のコンピュータ可読媒体。
【請求項68】
前記訂正データは、1つの空間次元において他の空間次元におけるよりも高い精度を有する前記第1の座標系で表される、請求項65に記載のコンピュータ可読媒体。
【請求項69】
前記座標系の少なくとも1つの軸のための数学関数の係数を受信する命令と、
前記係数および適用時間を使用して前記数学関数を評価する命令とをさらに含む、請求項65に記載のコンピュータ可読媒体。
【請求項1】
移動局が衛星の軌道情報を取得するのを支援する方法であって、
前記衛星の大まかな軌道データと前記衛星の正確な軌道データとの間の訂正を計算することと、
前記訂正の空間構成要素を、使用している第1の座標系から第2の座標系に変換することを表すことであって、前記第2の座標系における前記訂正が、時間を通じての前記訂正の変化を大幅に滑らかにするために選択される、表すこととを備える方法。
【請求項2】
前記第2の座標系における前記訂正を概算して、前記移動局への伝送に必要なビット数を減らすことをさらに備える、請求項1に記載の方法。
【請求項3】
前記訂正を概算することは、
1つまたは複数の数学関数列によって前記訂正を表すことと、
前記概算された訂正として前記数学関数の係数を使用することとを備える、請求項1に記載の方法。
【請求項4】
前記数学関数列は、
調和関数、エルミート多項式、ルジャンドル多項式、コサインおよびサイン関数、またはケプラーの軌道関数のうち1つを備える請求項3に記載の方法。
【請求項5】
前記第2の座標系は前記衛星と共に動く軸を有する、請求項1に記載の方法。
【請求項6】
前記第2の座標系は動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項5に記載の方法。
【請求項7】
前記第2の座標系は、前記動径軸および衛星移動の方向と直角なクロストラック軸をさらに含む、請求項6に記載の方法。
【請求項8】
前記訂正を概算することは、
前記第2の座標系の基準場所として前記移動局の場所を使用することと、
1次元データとして前記概算された訂正を伝送することであって、前記訂正はクロック訂正と結び付いた空間次元を含む、伝送することとを備える、請求項1に記載の方法。
【請求項9】
前記訂正を概算することは、
前記第2の座標系の基準場所として地球の中心を使用することと、
4つの次元データとして前記概算された訂正を伝送することであって、前記訂正は前記第2の座標系の3つの空間次元およびクロック訂正のための1つの時間次元を含む、伝送することとを備える、請求項1に記載の方法。
【請求項10】
1つの空間次元における前記訂正は、他の空間次元におけるよりもはるかに正確である、請求項1に記載の方法。
【請求項11】
タイムサーバから基準時間を取得することと、
前記基準時間を衛星位置の大まかな推定と合わせて前記移動局へ伝送することとをさらに備える、請求項1に記載の方法。
【請求項12】
前記タイムサーバから取得された前記基準時間の精度を高めることと、
前記基準時間を衛星位置の前記大まかな推定に付加して、前記移動局へ伝送するためのメッセージを作成することとをさらに備える、請求項11に記載の方法。
【請求項13】
衛星タイミングの前記訂正を概算することと、
前記衛星のクロックバイアスを特定するために、前記概算された訂正を前記移動局へ伝送することとをさらに備える、請求項1に記載の方法。
【請求項14】
前記概算された訂正を、前記移動局がアクセスできるよう記憶装置へ伝送することをさらに備える、請求項1に記載の方法。
【請求項15】
衛星軌道データの訂正を第1の座標系から第2の座標系へ変換することと、
前記衛星の軌道情報を特定するために、大まかな軌道データに前記変換された衛星軌道データを適用することとを備える方法。
【請求項16】
前記第1の座標系における前記訂正は、時間を通じて大幅に滑らかな変化を有する、請求項15に記載の方法。
【請求項17】
前記第1の座標系における前記訂正は、1つの空間次元において他の空間次元におけるよりも高い精度を有する、請求項15に記載の方法。
【請求項18】
前記第1の座標系の軸は、前記衛星の動きに合わせて回転する、請求項15に記載の方法。
【請求項19】
前記第1の座標系の軸は、前記衛星の位置および移動により定められる、請求項15に記載の方法。
【請求項20】
前記変換および前記適用のオペレーションは、移動局によって実行される、請求項15に記載の方法。
【請求項21】
サーバで前記衛星軌道データの前記訂正を計算することと、
前記サーバで前記訂正を前記第2の座標系から前記第1の座標系へ変換することとをさらに備える、請求項15に記載の方法。
【請求項22】
移動局の方法であって、
衛星の大まかな軌道データの訂正を受信することと、
前記訂正を第1の座標系から第2の座標系へ変換することであって、前記第1の座標系で表される前記訂正は、1つの空間次元において他の空間次元におけるよりも高い精度を有する、変換することと、
前記衛星の軌道情報を特定するために、前記大まかな軌道データに前記訂正を適用することとを備える方法。
【請求項23】
前記第1の座標系は、3つの直交軸を含む、請求項22に記載の方法。
【請求項24】
前記第1の座標系は、斜交軸を含む、請求項22に記載の方法。
【請求項25】
前記第1の座標系は、動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項22に記載の方法。
【請求項26】
前記基準場所は、地球の中心である、請求項25に記載の方法。
【請求項27】
前記基準場所は、前記移動局の推定される場所である、請求項25に記載の方法。
【請求項28】
前記訂正は、前記空間次元の各々につき、数学関数列の係数によって表される、請求項11に記載の方法。
【請求項29】
移動局の方法であって、
衛星の大まかな軌道データを受信することと、
前記衛星の前記大まかな軌道データの訂正データを受信することと、
前記訂正データを第1の座標系から第2の座標系へ変換することであって、前記第1の座標系は、時間を通じての前記訂正の変化を滑らかにするために選択される、変換することと、
前記衛星の軌道情報を特定するために、前記大まかな軌道データに前記訂正データを適用することとを備える方法。
【請求項30】
前記訂正データに基づいて前記衛星の位置およびタイミングを特定することをさらに備える、請求項29に記載の方法。
【請求項31】
前記訂正データを受信することは、
前記座標系の少なくとも1つの軸のための数学関数列の係数列を受信することと、
前記訂正データを取得するために、前記係数列および適用時間を使用して前記数学関数を評価することとを備える、請求項29に記載の方法。
【請求項32】
前記係数列は、
調和関数、エルミート多項式、ルジャンドル多項式、コサインおよびサイン関数、またはケプラーの軌道関数のうちの1つの係数を備える、請求項31に記載の方法。
【請求項33】
前記第1の座標系は、前記衛星とともに動く軸を有する、請求項29に記載の方法。
【請求項34】
前記第1の座標系は、動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項33に記載の方法。
【請求項35】
前記第1の座標系は、前記動径軸および衛星移動の方向と直角なクロストラック軸をさらに含む、請求項29に記載の方法。
【請求項36】
前記第1の座標系の基準場所として前記移動局の場所を使用することと、
数学関数列の係数を受信することであって、前記係数は、クロック訂正と結び付いた空間次元を含む1次元データを表す、受信することとをさらに備える、請求項29に記載の方法。
【請求項37】
前記第1の座標系の基準場所として地球の中心を使用することと、
4つの数学関数列の係数を受信することであって、前記係数は、前記第1の座標系の3つの空間次元およびクロック訂正のための時間次元を含む4つの次元データを表す、受信することとをさらに備える、請求項29に記載の方法。
【請求項38】
前記訂正データは、1つの空間次元において他の空間次元におけるよりも高い精度を有する前記第1の座標系で表される、請求項29に記載の方法。
【請求項39】
ネットワークタイムサーバ、場所支援サーバ、パケット交換データネットワーク、または基準受信機から受信するGPSデータのうちの1つから基準時間を受信することをさらに備える、請求項29に記載の方法。
【請求項40】
移動局が衛星の軌道情報を取得するのを支援するサーバシステムであって、
前記衛星の大まかな軌道データと前記衛星の正確な軌道データとの間の訂正を計算し、前記衛星とともに動く軸を有する座標系を使用して前記訂正の空間構成要素を表す訂正装置を備えるサーバシステム。
【請求項41】
前記移動局への伝送に必要なビット数を減らすために、前記座標系における前記訂正を概算する概算装置をさらに備える、請求項40に記載のサーバシステム。
【請求項42】
前記概算装置は、1つまたは複数の数学関数列によって前記訂正を表し、前記数学関数の係数を使用して前記訂正を概算する、請求項41に記載のサーバシステム。
【請求項43】
前記サーバシステムは、前記移動局による使用のために前記概算された訂正を記憶するデータ記憶装置と結び付いている、請求項40に記載のサーバシステム。
【請求項44】
ネットワークを介して前記移動局に前記概算された訂正を伝送する伝送装置をさらに備える、請求項40に記載のサーバシステム。
【請求項45】
前記移動局へ前記概算された訂正をブロードキャストする伝送装置をさらに備える、請求項40に記載のサーバシステム。
【請求項46】
前記座標系は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する動径軸を含む、請求項40に記載のサーバシステム。
【請求項47】
前記概算装置は、1つまたは複数の数学関数列によって前記訂正を表し、前記概算された訂正として前記数学関数の係数を使用する、請求項40に記載のサーバシステム。
【請求項48】
前記訂正装置は、前記衛星のクロック訂正を計算する論理を備える、請求項40に記載のサーバシステム。
【請求項49】
前記クロック訂正は、1つの数学関数列の少なくとも1つの係数によって概算される、請求項48に記載のサーバシステム。
【請求項50】
タイムサーバから基準時間を取得するインターフェース装置と、
前記基準時間を衛星位置の大まかな推定と合わせて前記移動局へ伝送する伝送装置とをさらに備える、請求項40に記載のサーバシステム。
【請求項51】
命令を記憶しているコンピュータ可読媒体であって、
前記衛星の大まかな軌道データと前記衛星の正確な軌道データとの間の訂正を計算する命令と、
前記訂正の空間構成要素を第1の座標系から第2の座標系へ変換することを表し、それにより、時間を通じての前記訂正の変化を滑らかにするために選択された座標系を使用して、前記第2の座標系における前記訂正が時間を通じて大幅に滑らかな変化を有する命令とを備えるコンピュータ可読媒体。
【請求項52】
前記移動局への伝送に必要なビット数を減らすため項を切り捨てた数学関数を使用して、前記第2の座標系における前記訂正を補間する命令をさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項53】
前記第2の座標系は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する動径軸、ならびに前記動径軸および衛星移動の方向と直角なクロストラック軸を含む、請求項51に記載のコンピュータ可読媒体。
【請求項54】
少なくとも1つの空間次元において他の空間次元より多くの係数を有する前記訂正を概算する命令をさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項55】
前記衛星のクロック訂正を計算する命令をさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項56】
タイムサーバから基準時間を取得する命令と、
前記基準時間を衛星位置の大まかな推定と合わせて前記移動局へ伝送する命令とをさらに備える、請求項51に記載のコンピュータ可読媒体。
【請求項57】
移動局のシステムであって、
インプットを受信する受信機インターフェースと、
前記インプットに基づき、衛星の大まかな軌道データの訂正データを計算する評価装置と、
前記訂正データを、時間を通じての前記訂正データの変化を滑らかにするために選択された第1の座標系から、第2の座標系へ変換する変換装置と、
前記衛星の軌道情報を特定するために、前記大まかな軌道データに前記訂正データを適用する再構成装置とを備えるシステム。
【請求項58】
前記第1の座標系の軸は、動径軸を含み、前記動径軸は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する、請求項57に記載のシステム。
【請求項59】
前記再構成装置は、前記衛星の位置およびタイミングを特定するために訂正された軌道データを生成する、請求項57に記載のシステム。
【請求項60】
前記インプットは、前記座標系の少なくとも1つの軸の数学関数の係数を含む、請求項57に記載のシステム。
【請求項61】
前記評価装置は、前記訂正データを取得するために前記係数および適用時間を使用して前記数学関数を評価する論理を含む、請求項60に記載のシステム。
【請求項62】
前記受信機インターフェースは、データ記憶装置からファイル転送を介して前記インプットを受信する、請求項57に記載のシステム。
【請求項63】
前記受信機インターフェースは、サーバから伝送されたメッセージで前記インプットを受信する、請求項57に記載のシステム。
【請求項64】
前記訂正データは、1つの空間次元において他の空間次元におけるよりも高い精度を有する前記第1の座標系で表される、請求項57に記載のシステム。
【請求項65】
命令を記憶しているコンピュータ可読媒体であって、
訂正データを、時間を通じての前記訂正データの変化を滑らかにするために選択された第1の座標系から、第2の座標系へ変換する命令と、
前記衛星の軌道情報を特定するために大まかな軌道データに前記訂正データを適用する命令とを備えるコンピュータ可読媒体。
【請求項66】
前記訂正データに基づいて前記衛星の位置およびタイミングを特定する命令をさらに備える、請求項65に記載のコンピュータ可読媒体。
【請求項67】
前記第1の座標系は、基準場所を前記衛星の推定される位置とつなぐ線と平行なまたは一致する動径軸、ならびに前記動径軸および衛星移動の方向と直角なクロストラック軸を含む、請求項65に記載のコンピュータ可読媒体。
【請求項68】
前記訂正データは、1つの空間次元において他の空間次元におけるよりも高い精度を有する前記第1の座標系で表される、請求項65に記載のコンピュータ可読媒体。
【請求項69】
前記座標系の少なくとも1つの軸のための数学関数の係数を受信する命令と、
前記係数および適用時間を使用して前記数学関数を評価する命令とをさらに含む、請求項65に記載のコンピュータ可読媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【公開番号】特開2013−50459(P2013−50459A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−233924(P2012−233924)
【出願日】平成24年10月23日(2012.10.23)
【分割の表示】特願2009−536403(P2009−536403)の分割
【原出願日】平成19年11月2日(2007.11.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−233924(P2012−233924)
【出願日】平成24年10月23日(2012.10.23)
【分割の表示】特願2009−536403(P2009−536403)の分割
【原出願日】平成19年11月2日(2007.11.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]