
持ち上げ補助装置
【課題】対象物を大きく移動する際に作業者の負担を軽減することが可能で、且つ耐久性に優れた持ち上げ補助装置を提供する。
【解決手段】 鉛直方向に立てられた四節のリンク機構の静止節となり、一方の連結点Pが鉛直方向上位、他方の連結点Qが鉛直方向下位にあって、水平面上で安定な姿勢をとりうる脚2と、連結点Pにおいて脚と回り対偶をなす一つの節となる腰3と、連結点Qにおいて脚と回り対偶をなすもう一つの節となる第一レバー7と、前記リンク機構において腰と第一レバーとの間の中間節となる第二レバー8と、脚に固定されて連結点Qを中心として第一レバーを回転駆動するか、又は腰に固定されて腰と第二レバーとの連結点Sを中心として第二レバーを回転駆動するモータ4と、腰に連なって上方に延びる背骨と、背骨の上端に鉛直面内で回転可能に連結された腕6とを備えることを特徴とする。
【解決手段】 鉛直方向に立てられた四節のリンク機構の静止節となり、一方の連結点Pが鉛直方向上位、他方の連結点Qが鉛直方向下位にあって、水平面上で安定な姿勢をとりうる脚2と、連結点Pにおいて脚と回り対偶をなす一つの節となる腰3と、連結点Qにおいて脚と回り対偶をなすもう一つの節となる第一レバー7と、前記リンク機構において腰と第一レバーとの間の中間節となる第二レバー8と、脚に固定されて連結点Qを中心として第一レバーを回転駆動するか、又は腰に固定されて腰と第二レバーとの連結点Sを中心として第二レバーを回転駆動するモータ4と、腰に連なって上方に延びる背骨と、背骨の上端に鉛直面内で回転可能に連結された腕6とを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、作業者が物体を持ち上げる動作を援助するための持ち上げ補助装置に関し、特に介護者が被介護者を持ち上げる際に介護補助装置として好適に利用されうる。
【背景技術】
【0002】
寝たきりの高齢者や患者(以下、被介護者という。)を介護する際には、被介護者を持ち上げなければならないことがあり、介護者に多大の肉体的負担がかかる。また、そのような介護現場に限らず、重い物体を持ち上げる作業は、腰痛などのけがを引き起こす原因となる。そこで、このような持ち上げ作業を補助する装置が、種々提案されている。このうち、作業者の姿勢に倣って作業者の動作を補助するタイプのものは、ベッドの上方等に設けた枠より吊り下げるタイプなどに比べて、一般的に設置面積が小さく操作が簡単であって、しかも被介護者に安心感を与える点で好ましい。
【0003】
従来、介護補助装置等の持ち上げ補助装置として、特許文献1は、前傾姿勢から直立姿勢に戻るための駆動源に加圧流体の適用によって収縮する弾性体や流体圧シリンダを用いた構造を開示している。特許文献2は、モータによって駆動するねじ軸の回転に伴ってアームを昇降させる構造を開示している。特許文献3は、上下に連結した2組の平行リンクの原節にそれぞれモータを連結した構造を開示している。特許文献4は、モータによって駆動する巻き取りワイヤの張力によってアームを揺動させる構造を開示している。
【特許文献1】特開平03−165765号公報
【特許文献2】特開平11−309184号公報
【特許文献3】特開2000−84012号公報
【特許文献4】特開2000−70312号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、持ち上げ作業時の作業者の主な動きが、腰を中心とする背骨の回転であるにもかかわらず、特許文献1に記載の装置は、駆動源の出力が直線運動するものであることから、背骨の前掲範囲が限られ、対象物を大きく移動できないうえ、駆動源に無理が生じて早期に故障しやすい。特許文献2に記載の装置は、そもそも背骨の前掲姿勢に対応していない。特許文献3に記載の装置は、いずれのモータも単に脚の屈伸に倣って平行リンクを屈伸させるための駆動源に過ぎず、前掲から直立に戻る際の背骨の負担を軽減するものでない。特許文献4に記載の装置は、巻き取りワイヤが切れる可能性が高く、非現実的である。
それ故、この発明の課題は、対象物を大きく移動する際に作業者の負担を軽減することが可能で、且つ耐久性に優れた持ち上げ補助装置を提供することにある。
【課題を解決するための手段】
【0005】
その課題を解決するために、この発明の持ち上げ補助装置は、
鉛直方向に立てられた四節のリンク機構の静止節となり、一方の連結点Pが鉛直方向上位、他方の連結点Qが鉛直方向下位にあって、水平面上で安定な姿勢をとりうる脚と、
連結点Pにおいて脚と回り対偶をなす一つの節となる腰と、
連結点Qにおいて脚と回り対偶をなすもう一つの節となる第一レバーと、
前記リンク機構において腰と第一レバーとの間の中間節となる第二レバーと、
脚に固定されて連結点Qを中心として第一レバーを回転駆動するか、又は腰に固定されて腰と第二レバーとの連結点Sを中心として第二レバーを回転駆動するモータと、
腰に連なって上方に延びる背骨と、
背骨の上端に鉛直面内で回転可能に連結された腕とを備えることを特徴とする。
【0006】
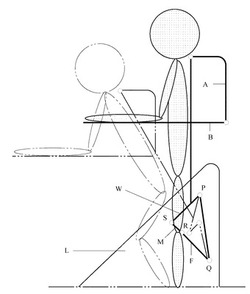
すなわち、図1に模式的に示すように、脚Lは水平面上で安定な姿勢をとりうる適宜の形状を有し、上方の適当な位置に連結点P、下方に連結点Qを有する。連結点Pに腰W、連結点Qに第一レバーFが回転可能に連結され、腰Wの他方の連結点Sと第一レバーFの他方の連結点Rとを第二レバーMが結んでいる。これによりPQRS間がPQ間を静止節とする四節のリンク機構を構成し、腰W、第一レバーF及び第二レバーMのいずれか一つの節の動きに従って他の二節が一定の動きをする。腰Wには図略のモータが固定され、その出力で連結点Sを中心として第二レバーMが回転し、腰W及び第一レバーFがそれに伴う。
【0007】
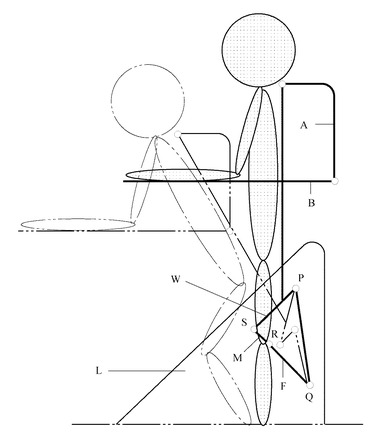
腰Wには背骨Bが連なっており、大きな荷重がかかるが、連結点Pを支点とするてこの原理により小さなトルクで背骨Bを想像線で示すように前掲させることができる。前傾姿勢から直立姿勢に戻る場合も同様である。モータの出力は連結点Sに直結していてもよいし、歯車を介していてもよい。いずれにしても駆動源から作用点である腕に至るまでの間の各要素の動きは、全て回転運動である。従って、動力伝達機構や関節の摩擦は少なく、全体が頑丈である。尚、PS間の距離を長くすると腰の回転角度が小さくなり腕の動作範囲が狭められるが、より大きな荷重を支持することができる。他方、PS間の距離を短くすると支持可能な荷重は小さくなるが、腕の動作範囲をより広げることができる。
【0008】
前記モータは、脚Lに固定されて連結点Qを中心として第一レバーを回転駆動するものであってもよいが、図示のように腰Wに固定されるほうが、装置全体の占有体積を増やさなくてすむうえ、モータの位置が高いので、塵埃によるモータの汚染を抑制することができて好ましい。腰Wに固定されるときは、第一レバーFが第二レバーMの2倍以上の長さを有すると、各節が滑らかに動くので好ましい。
【0009】
前記腕として好ましい一つの構成は、
背骨の上端に連結され、後方に延びる肩、
肩の端部より下方に延びる上腕部、及び
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部からなり、
前腕部はラチェットホイール機構により上腕部とのなす角度が大きくなる方向の動きが規制されているものである。
肩が後方に延び、前腕部が肩よりも長く前方に延びているので、腕全体が背骨の上端より後方部分と前方部分とで力学的に均衡し、直立姿勢であると前掲姿勢であるとに関わらず、前腕部がほぼ水平を保ち、対象物を載せることができる。そして、腕が背骨に対して回転可能であるから、前傾姿勢で対象物を載せた後、持ち上げるために直立姿勢に戻ろうとするに連れて対象物と腕との合成重量の中心も後方に移動する。従って、倒れることはない。
【0010】
前記腕として好ましいもう一つの構成は、
背骨の上端に連結され、後方に延びる肩、
肩の回転軸と捻れの位置関係にある軸を中心として回転可能に肩の端部に固定され、下方に延びる上腕部、
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部、及び
上腕部に固定され、前腕部を上腕部に対して回転駆動する動力源からなるものである。
前記構成と同じく倒れることは無いうえ、前腕部が上腕部に対して動力源によって回転するので、対象物を載せやすい角度に前腕部を固定することができる。
【0011】
いずれの場合も前記前腕部が、1以上の関節を有すると更に好ましい。持ち上げ対象物の形状に前腕部を沿わせて対象物を安定させることができるからである。
前記腕の二つの好ましい構成のうち後者において、更に、前記肩の適所と脚の適所との間を一つの支持棒で連結すると特に好ましい。
【発明の効果】
【0012】
以上のように、この発明の装置は、リンク機構の作用で小さな駆動源から大きな力を取り出すことができ、しかも各要素の動きが全て回転運動であって、動力伝達機構や関節の摩擦は少ないから、全体が頑丈である。よって、吊り下げタイプと持ち上げタイプの双方の利点を併有し、重い対象物を大きく移動する際に作業者の負担を軽減することができる。
【発明を実施するための最良の形態】
【0013】
−実施形態1−
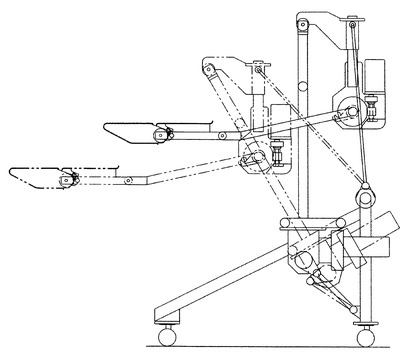
この発明の第一の実施形態に係る持ち上げ補助装置を図面と共に説明する。図2は持ち上げ補助装置の実施形態を示す正面図、図3は同じく右側面図、図4は同じく動作状態を示す正面図である。尚、背面図は正面図とほぼ対称に表れる。
【0014】
持ち上げ補助装置1(以下、装置1という。)は、介護者が被介護者を持ち上げる際に介護者の持ち上げ力を補助するもので、使用時は正面視で左側が介護者の前方、右側が後方となる。以下、特に断らない限り、左側を前方、右側を後方とする。
装置1は、正面視で非二等辺直角三角形の直角の対辺と短い方の他の一辺からなる脚2、脚2に回転可能に固定された腰3、モータ4、腰3と一体的に連なる背骨5及び二本の腕6、6を備える。
【0015】
脚2は、右側面視で長方形をなして鉛直方向に立てられた後脚部2aと、後脚部2aの幅方向両側の上端より各々前方に延びながら着地する前脚部2b、2bとからなる。前脚部2bが前記直角三角形の対辺、後脚部2aが他の一辺に相当する。後脚部2aにおける幅方向両側の下端、及び前脚部2bの下端にはキャスター2cが取り付けられている。また、後脚部2aの下辺(連結点Q)中央には互いに間隔を開けて第一レバー7、7が鉛直方向の面内で回転可能に取り付けられている。
【0016】
腰3は板状をなし、その後端が前脚部2bの上端付近で両前脚部2b、2b間を渡る回転軸3a(連結点P)に固定されている。モータ4は腰3の下面中央に固定されている。モータ4の出力は、出力軸上に取り付けられた歯車(図示省略)、及びそれと噛み合う傘歯車4a、4aによりモータ4の両側に均等に分けられる。そして、傘歯車4a、4aの回転軸3a、3a(連結点S)上に第二レバー8、8が取り付けられている。各第二レバー8の自由端(連結点R)は、第一レバー7の自由端(連結点R)と連結している。第一レバー7は、第二レバー8の2.5倍の長さを有する。背骨5は、腰3の上面の両側に立てられた二本の支柱5a、5aと、その上端に上向きに固定されて支柱5a、5aの間隔よりも広い幅を有するU字形のフレーム5bとからなる。
【0017】
腕6、6は、それぞれフレーム5bの両側の上端に回転軸3aと平行な軸を中心として回転可能に取り付けられており、フレーム5bとの連結点より後方に延びる肩6a、肩6aの端部より下方に延びる上腕部6b、上腕部6bの下端にヒンジ結合されて前方に延びる前腕部6cを有する。前腕部6cは、上腕部6bとの連結点を含めて先端の手首6dに至るまでの間に3つの関節を有し、各関節は図5に示すように上腕部6bとのなす角度が小さくなる方向の回転を自由とし、大きくなる方向の回転はラチェットホイール機構の爪(図示省略)を解除したときのみ許容している。前腕部6cの長さは、肩6aの3〜4倍である。
【0018】
装置1において、脚2、腰3、第二レバー8及び第一レバー7は、鉛直方向の面内における四節のリンク機構を構成する。すなわち、脚2における連結点PQ間を静止節、腰3及びそれと一体のモータ4における連結点PS間を静止節と回り対偶をなす節、第一レバー7を静止節と回り対偶をなすもう一つの節、第二レバー8を中間節とする四節のてこクランク機構を構成する。
【0019】
装置1を用いて介護者が例えばベッドに寝たきりの被介護者を持ち上げるときは、介護者が前脚部2b、2b間に立ち、モータ4の電源をオンにする。すると図4に想像線で示すようにモータ4の出力で連結点Sを中心として第二レバー8が回転し、腰3及び第一レバー7がそれに伴う。同時に背骨5が前掲し、腕6が下方に変位する。手6dを被介護者の下に差し込んで被介護者を手6dに載せた後、モータ4を逆転させる。背骨5が直立姿勢に復帰しようとし、それに伴って前腕部6cが後方に水平移動する。従って、被介護者を載せた腕6全体の重心も後方に移動し、倒れることはない。更に背骨5が立ち上がると、前腕部6cが上昇し、被介護者を持ち上げる。
【0020】
背骨5は、回転軸3aを支点とするてこの原理で揺動させられるので、モータ4のトルクは小さくて足りる。しかもモータ4から腕6に至るまでの間の各要素の動きは、全て回転運動である。従って、動力伝達機構や関節の摩擦は少なく、全体が頑丈である。また、モータ4は、腰3の下面に固定されているので、前脚部2b、2bと後脚部2aとで囲まれる空間にほぼ収まり、モータ4の存在故に装置1全体の占有体積を増やす必要はないうえ、モータの位置が高いので、塵埃によるモータの汚染を抑制することができる。
【0021】
−実施形態2−
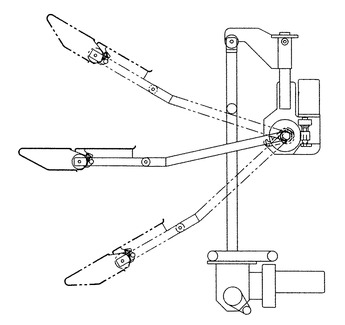
図6は持ち上げ補助装置の第二の実施形態を示す正面図、図7は同じく右側面図、図8は同じく動作状態を示す正面図である。尚、背面図は正面図とほぼ対称に表れる。この実施形態の持ち上げ補助装置11は、腕16の構造及び動きが実施形態1における腕6のそれらと異なる。その他の点では実施形態1と同じであるので、説明を省略し、同じ符号をもって示すだけに止める。以下、実施形態1との異なる点を詳述する。
【0022】
腕16、16は、それぞれフレーム5bの両側の上端に回転軸3aと平行な軸Tを中心として回転可能に取り付けられており、肩16a、上腕部16b及び前腕部16cを有する。肩16aは、フレーム5bとの連結点より後方に延びており、後方に至るほど上下方向に広くなる板状をなしている。上腕部16bは、肩16aの回転軸Tと捻れの位置関係にある軸16eを中心として回転可能に肩16aの端部に固定され、下方に延びている。上腕部16bには軸16eとほぼ平行な出力軸を有するモータ9が固定されている。前腕部16cは、上腕部16bの下端にヒンジ結合されて前方に延びている。前腕部16cは、上腕部16bとの結合部にウォーム歯車16fを有する以外は実施形態1の前腕部6cと同じ形状を有する。ウォーム歯車16fは、モータ9の出力軸上のウォーム16gと噛み合っている。
【0023】
一方、後脚部2aの上辺における両端付近U、Uには、それぞれ支持棒10、10の一端が回転可能に連結されている。支持棒10の他端は、肩16aの後方上端Vに連結されている。従って、支持棒10は、脚2、腰3及び背骨5、並びに肩16aとともに脚2におけるUP間を静止節とするもう一つの四節リンク機構を構成する。このため肩16aは、手16dに持ち上げ対象が載せられているか否かに関わらず、背骨5及び支持棒10の角度によって定まる軌跡を描く。ただし、前腕部16cは、モータ9の出力の応じて図9に示すように上下方向に揺動可能である。
【0024】
装置11を用いて介護者が例えばベッドに寝たきりの被介護者を持ち上げるときも、実施形態1と同じく、図8に想像線で示すようにモータ4の出力で背骨5が前掲し、腕16が下方に変位する。手16dを被介護者の下に差し込んで被介護者を手16dに載せる。被介護者の身長に応じて軸16eを支点として前腕部16c、16cを広げもしくは狭めた後、モータ4を逆転させる。背骨5が直立姿勢に復帰しようとし、それに伴って前腕部6cが後方に水平移動する。従って、被介護者を載せた腕6全体の重心も後方に移動し、倒れることはない。更に背骨5が立ち上がると、前腕部16cが上昇し、被介護者を持ち上げる。途中、被介護者の体重や体型に応じてモータ9をオンにして前腕部16cを上腕部16bに対して揺動させ、前腕部16cの水平を保つ。
【0025】
装置11によれば、実施形態1と同様の作用効果を生じる他、被介護者の体重を連結点Pと連結点Uの二点で支えているので、実施形態1よりも体重の大きい被介護者を持ち上げることができる。
【図面の簡単な説明】
【0026】
【図1】持ち上げ補助装置の作用を示す模式図である。
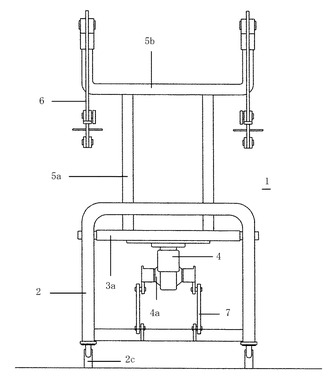
【図2】持ち上げ補助装置の実施形態を示す正面図である。
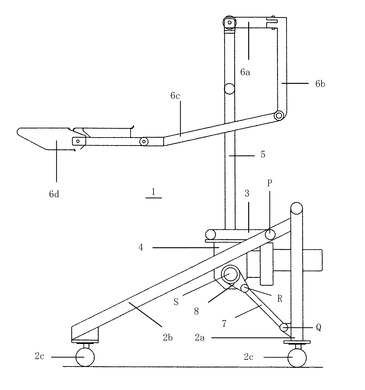
【図3】同じく右側面図
【図4】同じく動作状態を示す正面図である。
【図5】同装置の腕の関節の動きを示す正面図である。
【図6】持ち上げ補助装置の第二の実施形態を示す正面図である。
【図7】同じく右側面図である。
【図8】同じく動作状態を示す正面図である。
【図9】同装置の前腕部の動きを示す正面図である。
【符号の説明】
【0027】
1、11 持ち上げ補助装置
2 脚
3 腰
4 モータ
5 背骨
6、16 腕
【技術分野】
【0001】
この発明は、作業者が物体を持ち上げる動作を援助するための持ち上げ補助装置に関し、特に介護者が被介護者を持ち上げる際に介護補助装置として好適に利用されうる。
【背景技術】
【0002】
寝たきりの高齢者や患者(以下、被介護者という。)を介護する際には、被介護者を持ち上げなければならないことがあり、介護者に多大の肉体的負担がかかる。また、そのような介護現場に限らず、重い物体を持ち上げる作業は、腰痛などのけがを引き起こす原因となる。そこで、このような持ち上げ作業を補助する装置が、種々提案されている。このうち、作業者の姿勢に倣って作業者の動作を補助するタイプのものは、ベッドの上方等に設けた枠より吊り下げるタイプなどに比べて、一般的に設置面積が小さく操作が簡単であって、しかも被介護者に安心感を与える点で好ましい。
【0003】
従来、介護補助装置等の持ち上げ補助装置として、特許文献1は、前傾姿勢から直立姿勢に戻るための駆動源に加圧流体の適用によって収縮する弾性体や流体圧シリンダを用いた構造を開示している。特許文献2は、モータによって駆動するねじ軸の回転に伴ってアームを昇降させる構造を開示している。特許文献3は、上下に連結した2組の平行リンクの原節にそれぞれモータを連結した構造を開示している。特許文献4は、モータによって駆動する巻き取りワイヤの張力によってアームを揺動させる構造を開示している。
【特許文献1】特開平03−165765号公報
【特許文献2】特開平11−309184号公報
【特許文献3】特開2000−84012号公報
【特許文献4】特開2000−70312号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、持ち上げ作業時の作業者の主な動きが、腰を中心とする背骨の回転であるにもかかわらず、特許文献1に記載の装置は、駆動源の出力が直線運動するものであることから、背骨の前掲範囲が限られ、対象物を大きく移動できないうえ、駆動源に無理が生じて早期に故障しやすい。特許文献2に記載の装置は、そもそも背骨の前掲姿勢に対応していない。特許文献3に記載の装置は、いずれのモータも単に脚の屈伸に倣って平行リンクを屈伸させるための駆動源に過ぎず、前掲から直立に戻る際の背骨の負担を軽減するものでない。特許文献4に記載の装置は、巻き取りワイヤが切れる可能性が高く、非現実的である。
それ故、この発明の課題は、対象物を大きく移動する際に作業者の負担を軽減することが可能で、且つ耐久性に優れた持ち上げ補助装置を提供することにある。
【課題を解決するための手段】
【0005】
その課題を解決するために、この発明の持ち上げ補助装置は、
鉛直方向に立てられた四節のリンク機構の静止節となり、一方の連結点Pが鉛直方向上位、他方の連結点Qが鉛直方向下位にあって、水平面上で安定な姿勢をとりうる脚と、
連結点Pにおいて脚と回り対偶をなす一つの節となる腰と、
連結点Qにおいて脚と回り対偶をなすもう一つの節となる第一レバーと、
前記リンク機構において腰と第一レバーとの間の中間節となる第二レバーと、
脚に固定されて連結点Qを中心として第一レバーを回転駆動するか、又は腰に固定されて腰と第二レバーとの連結点Sを中心として第二レバーを回転駆動するモータと、
腰に連なって上方に延びる背骨と、
背骨の上端に鉛直面内で回転可能に連結された腕とを備えることを特徴とする。
【0006】
すなわち、図1に模式的に示すように、脚Lは水平面上で安定な姿勢をとりうる適宜の形状を有し、上方の適当な位置に連結点P、下方に連結点Qを有する。連結点Pに腰W、連結点Qに第一レバーFが回転可能に連結され、腰Wの他方の連結点Sと第一レバーFの他方の連結点Rとを第二レバーMが結んでいる。これによりPQRS間がPQ間を静止節とする四節のリンク機構を構成し、腰W、第一レバーF及び第二レバーMのいずれか一つの節の動きに従って他の二節が一定の動きをする。腰Wには図略のモータが固定され、その出力で連結点Sを中心として第二レバーMが回転し、腰W及び第一レバーFがそれに伴う。
【0007】
腰Wには背骨Bが連なっており、大きな荷重がかかるが、連結点Pを支点とするてこの原理により小さなトルクで背骨Bを想像線で示すように前掲させることができる。前傾姿勢から直立姿勢に戻る場合も同様である。モータの出力は連結点Sに直結していてもよいし、歯車を介していてもよい。いずれにしても駆動源から作用点である腕に至るまでの間の各要素の動きは、全て回転運動である。従って、動力伝達機構や関節の摩擦は少なく、全体が頑丈である。尚、PS間の距離を長くすると腰の回転角度が小さくなり腕の動作範囲が狭められるが、より大きな荷重を支持することができる。他方、PS間の距離を短くすると支持可能な荷重は小さくなるが、腕の動作範囲をより広げることができる。
【0008】
前記モータは、脚Lに固定されて連結点Qを中心として第一レバーを回転駆動するものであってもよいが、図示のように腰Wに固定されるほうが、装置全体の占有体積を増やさなくてすむうえ、モータの位置が高いので、塵埃によるモータの汚染を抑制することができて好ましい。腰Wに固定されるときは、第一レバーFが第二レバーMの2倍以上の長さを有すると、各節が滑らかに動くので好ましい。
【0009】
前記腕として好ましい一つの構成は、
背骨の上端に連結され、後方に延びる肩、
肩の端部より下方に延びる上腕部、及び
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部からなり、
前腕部はラチェットホイール機構により上腕部とのなす角度が大きくなる方向の動きが規制されているものである。
肩が後方に延び、前腕部が肩よりも長く前方に延びているので、腕全体が背骨の上端より後方部分と前方部分とで力学的に均衡し、直立姿勢であると前掲姿勢であるとに関わらず、前腕部がほぼ水平を保ち、対象物を載せることができる。そして、腕が背骨に対して回転可能であるから、前傾姿勢で対象物を載せた後、持ち上げるために直立姿勢に戻ろうとするに連れて対象物と腕との合成重量の中心も後方に移動する。従って、倒れることはない。
【0010】
前記腕として好ましいもう一つの構成は、
背骨の上端に連結され、後方に延びる肩、
肩の回転軸と捻れの位置関係にある軸を中心として回転可能に肩の端部に固定され、下方に延びる上腕部、
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部、及び
上腕部に固定され、前腕部を上腕部に対して回転駆動する動力源からなるものである。
前記構成と同じく倒れることは無いうえ、前腕部が上腕部に対して動力源によって回転するので、対象物を載せやすい角度に前腕部を固定することができる。
【0011】
いずれの場合も前記前腕部が、1以上の関節を有すると更に好ましい。持ち上げ対象物の形状に前腕部を沿わせて対象物を安定させることができるからである。
前記腕の二つの好ましい構成のうち後者において、更に、前記肩の適所と脚の適所との間を一つの支持棒で連結すると特に好ましい。
【発明の効果】
【0012】
以上のように、この発明の装置は、リンク機構の作用で小さな駆動源から大きな力を取り出すことができ、しかも各要素の動きが全て回転運動であって、動力伝達機構や関節の摩擦は少ないから、全体が頑丈である。よって、吊り下げタイプと持ち上げタイプの双方の利点を併有し、重い対象物を大きく移動する際に作業者の負担を軽減することができる。
【発明を実施するための最良の形態】
【0013】
−実施形態1−
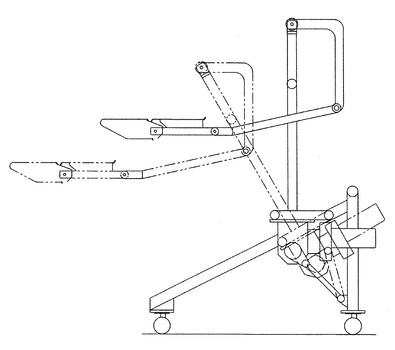
この発明の第一の実施形態に係る持ち上げ補助装置を図面と共に説明する。図2は持ち上げ補助装置の実施形態を示す正面図、図3は同じく右側面図、図4は同じく動作状態を示す正面図である。尚、背面図は正面図とほぼ対称に表れる。
【0014】
持ち上げ補助装置1(以下、装置1という。)は、介護者が被介護者を持ち上げる際に介護者の持ち上げ力を補助するもので、使用時は正面視で左側が介護者の前方、右側が後方となる。以下、特に断らない限り、左側を前方、右側を後方とする。
装置1は、正面視で非二等辺直角三角形の直角の対辺と短い方の他の一辺からなる脚2、脚2に回転可能に固定された腰3、モータ4、腰3と一体的に連なる背骨5及び二本の腕6、6を備える。
【0015】
脚2は、右側面視で長方形をなして鉛直方向に立てられた後脚部2aと、後脚部2aの幅方向両側の上端より各々前方に延びながら着地する前脚部2b、2bとからなる。前脚部2bが前記直角三角形の対辺、後脚部2aが他の一辺に相当する。後脚部2aにおける幅方向両側の下端、及び前脚部2bの下端にはキャスター2cが取り付けられている。また、後脚部2aの下辺(連結点Q)中央には互いに間隔を開けて第一レバー7、7が鉛直方向の面内で回転可能に取り付けられている。
【0016】
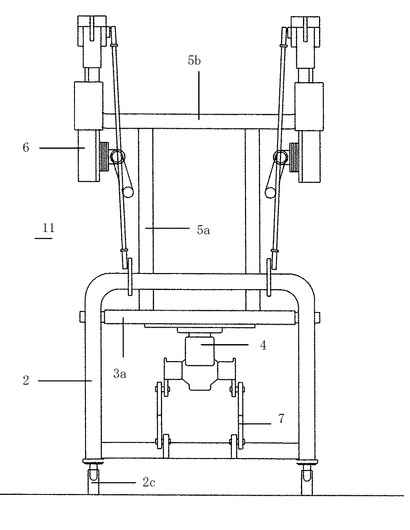
腰3は板状をなし、その後端が前脚部2bの上端付近で両前脚部2b、2b間を渡る回転軸3a(連結点P)に固定されている。モータ4は腰3の下面中央に固定されている。モータ4の出力は、出力軸上に取り付けられた歯車(図示省略)、及びそれと噛み合う傘歯車4a、4aによりモータ4の両側に均等に分けられる。そして、傘歯車4a、4aの回転軸3a、3a(連結点S)上に第二レバー8、8が取り付けられている。各第二レバー8の自由端(連結点R)は、第一レバー7の自由端(連結点R)と連結している。第一レバー7は、第二レバー8の2.5倍の長さを有する。背骨5は、腰3の上面の両側に立てられた二本の支柱5a、5aと、その上端に上向きに固定されて支柱5a、5aの間隔よりも広い幅を有するU字形のフレーム5bとからなる。
【0017】
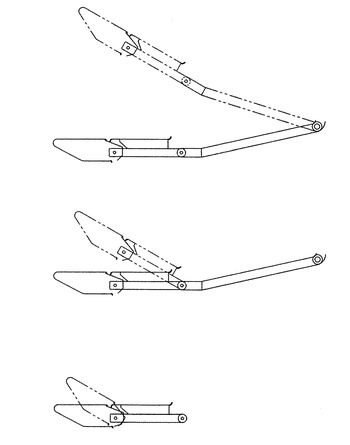
腕6、6は、それぞれフレーム5bの両側の上端に回転軸3aと平行な軸を中心として回転可能に取り付けられており、フレーム5bとの連結点より後方に延びる肩6a、肩6aの端部より下方に延びる上腕部6b、上腕部6bの下端にヒンジ結合されて前方に延びる前腕部6cを有する。前腕部6cは、上腕部6bとの連結点を含めて先端の手首6dに至るまでの間に3つの関節を有し、各関節は図5に示すように上腕部6bとのなす角度が小さくなる方向の回転を自由とし、大きくなる方向の回転はラチェットホイール機構の爪(図示省略)を解除したときのみ許容している。前腕部6cの長さは、肩6aの3〜4倍である。
【0018】
装置1において、脚2、腰3、第二レバー8及び第一レバー7は、鉛直方向の面内における四節のリンク機構を構成する。すなわち、脚2における連結点PQ間を静止節、腰3及びそれと一体のモータ4における連結点PS間を静止節と回り対偶をなす節、第一レバー7を静止節と回り対偶をなすもう一つの節、第二レバー8を中間節とする四節のてこクランク機構を構成する。
【0019】
装置1を用いて介護者が例えばベッドに寝たきりの被介護者を持ち上げるときは、介護者が前脚部2b、2b間に立ち、モータ4の電源をオンにする。すると図4に想像線で示すようにモータ4の出力で連結点Sを中心として第二レバー8が回転し、腰3及び第一レバー7がそれに伴う。同時に背骨5が前掲し、腕6が下方に変位する。手6dを被介護者の下に差し込んで被介護者を手6dに載せた後、モータ4を逆転させる。背骨5が直立姿勢に復帰しようとし、それに伴って前腕部6cが後方に水平移動する。従って、被介護者を載せた腕6全体の重心も後方に移動し、倒れることはない。更に背骨5が立ち上がると、前腕部6cが上昇し、被介護者を持ち上げる。
【0020】
背骨5は、回転軸3aを支点とするてこの原理で揺動させられるので、モータ4のトルクは小さくて足りる。しかもモータ4から腕6に至るまでの間の各要素の動きは、全て回転運動である。従って、動力伝達機構や関節の摩擦は少なく、全体が頑丈である。また、モータ4は、腰3の下面に固定されているので、前脚部2b、2bと後脚部2aとで囲まれる空間にほぼ収まり、モータ4の存在故に装置1全体の占有体積を増やす必要はないうえ、モータの位置が高いので、塵埃によるモータの汚染を抑制することができる。
【0021】
−実施形態2−
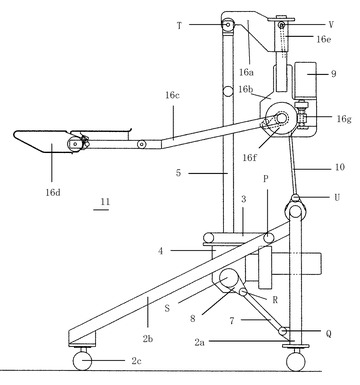
図6は持ち上げ補助装置の第二の実施形態を示す正面図、図7は同じく右側面図、図8は同じく動作状態を示す正面図である。尚、背面図は正面図とほぼ対称に表れる。この実施形態の持ち上げ補助装置11は、腕16の構造及び動きが実施形態1における腕6のそれらと異なる。その他の点では実施形態1と同じであるので、説明を省略し、同じ符号をもって示すだけに止める。以下、実施形態1との異なる点を詳述する。
【0022】
腕16、16は、それぞれフレーム5bの両側の上端に回転軸3aと平行な軸Tを中心として回転可能に取り付けられており、肩16a、上腕部16b及び前腕部16cを有する。肩16aは、フレーム5bとの連結点より後方に延びており、後方に至るほど上下方向に広くなる板状をなしている。上腕部16bは、肩16aの回転軸Tと捻れの位置関係にある軸16eを中心として回転可能に肩16aの端部に固定され、下方に延びている。上腕部16bには軸16eとほぼ平行な出力軸を有するモータ9が固定されている。前腕部16cは、上腕部16bの下端にヒンジ結合されて前方に延びている。前腕部16cは、上腕部16bとの結合部にウォーム歯車16fを有する以外は実施形態1の前腕部6cと同じ形状を有する。ウォーム歯車16fは、モータ9の出力軸上のウォーム16gと噛み合っている。
【0023】
一方、後脚部2aの上辺における両端付近U、Uには、それぞれ支持棒10、10の一端が回転可能に連結されている。支持棒10の他端は、肩16aの後方上端Vに連結されている。従って、支持棒10は、脚2、腰3及び背骨5、並びに肩16aとともに脚2におけるUP間を静止節とするもう一つの四節リンク機構を構成する。このため肩16aは、手16dに持ち上げ対象が載せられているか否かに関わらず、背骨5及び支持棒10の角度によって定まる軌跡を描く。ただし、前腕部16cは、モータ9の出力の応じて図9に示すように上下方向に揺動可能である。
【0024】
装置11を用いて介護者が例えばベッドに寝たきりの被介護者を持ち上げるときも、実施形態1と同じく、図8に想像線で示すようにモータ4の出力で背骨5が前掲し、腕16が下方に変位する。手16dを被介護者の下に差し込んで被介護者を手16dに載せる。被介護者の身長に応じて軸16eを支点として前腕部16c、16cを広げもしくは狭めた後、モータ4を逆転させる。背骨5が直立姿勢に復帰しようとし、それに伴って前腕部6cが後方に水平移動する。従って、被介護者を載せた腕6全体の重心も後方に移動し、倒れることはない。更に背骨5が立ち上がると、前腕部16cが上昇し、被介護者を持ち上げる。途中、被介護者の体重や体型に応じてモータ9をオンにして前腕部16cを上腕部16bに対して揺動させ、前腕部16cの水平を保つ。
【0025】
装置11によれば、実施形態1と同様の作用効果を生じる他、被介護者の体重を連結点Pと連結点Uの二点で支えているので、実施形態1よりも体重の大きい被介護者を持ち上げることができる。
【図面の簡単な説明】
【0026】
【図1】持ち上げ補助装置の作用を示す模式図である。
【図2】持ち上げ補助装置の実施形態を示す正面図である。
【図3】同じく右側面図
【図4】同じく動作状態を示す正面図である。
【図5】同装置の腕の関節の動きを示す正面図である。
【図6】持ち上げ補助装置の第二の実施形態を示す正面図である。
【図7】同じく右側面図である。
【図8】同じく動作状態を示す正面図である。
【図9】同装置の前腕部の動きを示す正面図である。
【符号の説明】
【0027】
1、11 持ち上げ補助装置
2 脚
3 腰
4 モータ
5 背骨
6、16 腕
【特許請求の範囲】
【請求項1】
鉛直方向に立てられた四節のリンク機構の静止節となり、一方の連結点Pが鉛直方向上位、他方の連結点Qが鉛直方向下位にあって、水平面上で安定な姿勢をとりうる脚と、
連結点Pにおいて脚と回り対偶をなす一つの節となる腰と、
連結点Qにおいて脚と回り対偶をなすもう一つの節となる第一レバーと、
前記リンク機構において腰と第一レバーとの間の中間節となる第二レバーと、
脚に固定されて連結点Qを中心として第一レバーを回転駆動するか、又は腰に固定されて腰と第二レバーとの連結点Sを中心として第二レバーを回転駆動するモータと、
腰に連なって上方に延びる背骨と、
背骨の上端に鉛直面内で回転可能に連結された腕とを備えることを特徴とする持ち上げ補助装置。
【請求項2】
前記モータが、腰に固定されて腰と第二レバーとの連結点Sを回転中心として第二レバーを回転駆動する請求項1に記載の持ち上げ補助装置。
【請求項3】
前記第一レバーが第二レバーの2倍以上の長さを有する請求項2に記載の持ち上げ補助装置。
【請求項4】
前記腕が、
背骨の上端に連結され、後方に延びる肩、
肩の端部より下方に延びる上腕部、及び
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部からなり、
前腕部はラチェットホイール機構により上腕部とのなす角度が大きくなる方向の動きが規制されている請求項1に記載の持ち上げ補助装置。
【請求項5】
前記腕が、
背骨の上端に連結され、後方に延びる肩、
肩の回転軸と捻れの位置関係にある軸を中心として回転可能に肩の端部に固定され、下方に延びる上腕部、
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部、及び
上腕部に固定され、前腕部を上腕部に対して回転駆動する動力源からなる請求項1に記載の持ち上げ補助装置。
【請求項6】
前記前腕部が、1以上の関節を有する請求項4又は5に記載の持ち上げ補助装置。
【請求項7】
更に、前記肩と脚との間に連結された支持棒を備えている請求項5に記載の持ち上げ補助装置。
【請求項1】
鉛直方向に立てられた四節のリンク機構の静止節となり、一方の連結点Pが鉛直方向上位、他方の連結点Qが鉛直方向下位にあって、水平面上で安定な姿勢をとりうる脚と、
連結点Pにおいて脚と回り対偶をなす一つの節となる腰と、
連結点Qにおいて脚と回り対偶をなすもう一つの節となる第一レバーと、
前記リンク機構において腰と第一レバーとの間の中間節となる第二レバーと、
脚に固定されて連結点Qを中心として第一レバーを回転駆動するか、又は腰に固定されて腰と第二レバーとの連結点Sを中心として第二レバーを回転駆動するモータと、
腰に連なって上方に延びる背骨と、
背骨の上端に鉛直面内で回転可能に連結された腕とを備えることを特徴とする持ち上げ補助装置。
【請求項2】
前記モータが、腰に固定されて腰と第二レバーとの連結点Sを回転中心として第二レバーを回転駆動する請求項1に記載の持ち上げ補助装置。
【請求項3】
前記第一レバーが第二レバーの2倍以上の長さを有する請求項2に記載の持ち上げ補助装置。
【請求項4】
前記腕が、
背骨の上端に連結され、後方に延びる肩、
肩の端部より下方に延びる上腕部、及び
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部からなり、
前腕部はラチェットホイール機構により上腕部とのなす角度が大きくなる方向の動きが規制されている請求項1に記載の持ち上げ補助装置。
【請求項5】
前記腕が、
背骨の上端に連結され、後方に延びる肩、
肩の回転軸と捻れの位置関係にある軸を中心として回転可能に肩の端部に固定され、下方に延びる上腕部、
上腕部の下端にヒンジ結合されて肩よりも長く前方に延びる前腕部、及び
上腕部に固定され、前腕部を上腕部に対して回転駆動する動力源からなる請求項1に記載の持ち上げ補助装置。
【請求項6】
前記前腕部が、1以上の関節を有する請求項4又は5に記載の持ち上げ補助装置。
【請求項7】
更に、前記肩と脚との間に連結された支持棒を備えている請求項5に記載の持ち上げ補助装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−105818(P2008−105818A)
【公開日】平成20年5月8日(2008.5.8)
【国際特許分類】
【出願番号】特願2006−291422(P2006−291422)
【出願日】平成18年10月26日(2006.10.26)
【特許番号】特許第3974159号(P3974159)
【特許公報発行日】平成19年9月12日(2007.9.12)
【出願人】(506019153)東伸貿易株式会社 (1)
【Fターム(参考)】
【公開日】平成20年5月8日(2008.5.8)
【国際特許分類】
【出願日】平成18年10月26日(2006.10.26)
【特許番号】特許第3974159号(P3974159)
【特許公報発行日】平成19年9月12日(2007.9.12)
【出願人】(506019153)東伸貿易株式会社 (1)
【Fターム(参考)】
[ Back to top ]